modelo simplificado para el anÁlisis...
TRANSCRIPT
REPUBLICA DE VENEZUELA
UNIVERSIDAD DEL ZULIA FACULTAD DE INGENIERIA DIVISION DE POSTGRADO
MODELO SIMPLIFICADO PARA EL ANÁLISIS
DINAMICO DE EDIFICIOS CON DIAFRAGMAS
FLEXIBLES SOMETIDOS A MOVIMIENTO
SISMICO
TRABAJO PRESENTADO COMO REQUISITO PARCIAL PARA OPTAR AL TITULO DE MAGISTER SCIENTIARUM EN
INGENIERIA ESTRUCTURAL
Autor : ING. Otto J. Rojas V..
Asesor: Prof. Antonio Sarcos
MARACIBO, NOVIEMBRE 2002
REPUBLICA DE VENEZUELA UNIVERSIDAD DEL ZULIA
FACULTAD DE INGENIERIA DIVISION DE POSTGRADO
MODELO SIMPLIFICADO PARA EL ANÁLISIS
DINAMICO DE EDIFICIOS CON DIAFRAGMAS
FLEXIBLES SOMETIDOS A MOVIMIENTO
SISMICO
Trabajo de grado para optar al título de Magíster Scientiarum en Ingeniería Estructural. Presentado por:
ING. Otto J. Rojas V.
Asesor: Prof. Antonio Sarcos
MARACIBO, NOVIEMBRE 2002

Este jurado aprueba la tesis de Maestría “MODELO SIMPLIFICADO
PARA EL ANÁLISIS DINAMICO DE EDIFICIOS CON
DIAFRAGMAS FLEXIBLES SOMETIDOS A MOVIMIENTO
SISMICOS” que el Ingeniero Otto José Rojas Vera, presenta ante el
Consejo Técnico de la División de Postgrado de la Facultad de Ingeniería
de la Universidad del Zulia, como requisito parcial exigido por el
Reglamento de Estudios de Postgrado en su Artículo 35, capítulo IX, literal
d, para optar al título de Magíster Scientiarum en Ingeniería Estructural.
Maracaibo, 08 de Noviembre de 2002
Jurado Examinador:
_______________________ Prof. Antonio Sarcos
_______________________ Prof. Cesar Vezga
_______________________ Prof. Antonio Cova
____________________ Director Prof. Carlos Rincón
DEDICATORIA
A Diana y mis hijos, que por segunda vez he tenido que quitarles tiempo de atención. A mis estudiantes, razón por la cual el espíritu de un docente asume el reto de estudiar igual que ellos.
AGRADECIMIENTO Expreso mis más profundo agradecimiento, Al compañero de estudios, compañero de oficina, profesor, asesor y amigo, Prof. Antonio Sarcos. El que una vez creyó que si podíamos abrir el postgrado y que hoy casi siete años después de comenzar su creación obtiene frutos de la cosecha mas importante de su vida. A mis profesores de pregrado y postgrado, en especial Antonio y Cesar, quienes creyeron en nosotros y sin ningún interés colaboraron en el inicio y creación de esta maestría, sin ustedes no lo hubiéramos logrado. A todos mis compañeros de clase con los que compartí momentos duros y alegres, en especial: Sebastián el amigo incondicional de todos, Xiomara la que me dio una lección de perseverancia y Rafael que trabajando a su lado me hizo recordar mis días de recién graduado.
RESUMEN ROJAS VERA, Otto José. Modelo Simplificado Para el Análisis Dinámico De Edificios Con Diafragmas Flexibles Sometidos A Movimientos Sísmicos. Tesis de Magíster. Maracaibo, Universidad del Zulia, Facultad de Ingeniería, 2002. El presente trabajo tuvo como objetivo: desarrollar un modelo matemático computacional capaz de realizar análisis sísmicos unidireccionales en tiempo real para edificios aporticados con diafragmas flexibles sometidos a acciones sísmicas. Para ello se elaboró un estudio y posterior implementación del análisis dinámico de estructuras, usando la base de datos de un registro de acelerograma del sismo del CENTRO.
El planteamiento de la matriz de rigidez espacial asociada a los grados de libertad dinámicos unidireccionales, se desarrollo usando un programa de análisis matricial de pórticos planos presentes en la literatura y desarrollado previamente. La estrategia matricial se efectuó haciendo una interconexión de pórticos planos a través de resortes que simulan la rigidez traslacional coplanar de los diafragmas. El lenguaje de programación utilizado fue el MATLAB, el cual permitió solucionar el sistema de ecuaciones dinámicas por el método del determinante en forma directa a través instrucciones que resuelven el problema de valores propios y vectores propios. Por otro lado, adicional a la ventaja de ser un lenguaje sencillo y avanzado en el área matemática, posee facilidades en el área de computación gráfica que permite visualizar rápidamente las deformaciones y desplazamientos tanto para los modos de vibración como el movimiento real de la estructura. Finalmente los resortes que modelan los diafragmas fueron evaluados a través del programa estructural SAP-2000 usando las técnicas de elementos finitos. Así mismo los edificios fueron modelados con este programa para ser utilizado como patrón de comparación con los resultados obtenidos del modelo planteado en este trabajo.

ABSTRACT ROJAS VERA, Otto José. SIMPLIFIED MODEL FOR DYNAMIC ANALYSIS OF BUILDINGS WITH FLEXIBLE DIAPHRAGMS UNDER SEISMIC ACTIONS. Master’s Thesis. Maracaibo, Universidad del Zulia, Facultad de Ingeniería, 2002
The objective of this research was to develop a mathematical model for unidirectional seismic analysis at real time for framed buildings with flexible diaphragm under seismic actions. Using the data base of a accelerogram register from the EL CENTRO earthquake, a study and implementation of the structural analysis was made.
The matrix of spatial rigidity associated to the unidirectional degree of dynamic freedom was developed using a program for matrix analysis of plane frame previously developed. The matrix strategy was arranged by making interconnection of the plane frame through springs that simulated the diaphragms coplanar translational rigidity.
MATLAB was used as software to solve the dynamic equations system by the method of determinant in direct form through instructions that resolve the eigenvalue problem and eigenvector problem. In addition to the easy use of the software as a mathematical language, MATLAB also is a helpful tool in graphic computation. It allows easy and fast visualization of the deformations and displacement for the vibration mode and for the real movement of the structure.
Finally, the springs that model the diaphragms were evaluated by the structural program SAP-2000 using the finite elements method. Also, the buildings were modeled with this program and were used to compare with results obtained with the model developed in this thesis.
vii
INTRODUCCION Las normas venezolanas COVENIN-MINDUR 1756-98, proponen en su articulado tomar
en consideración el Método de Análisis Dinámico Espacial con diafragma flexible para ciertos
casos de irregularidad en edificios o cuando no se garantice el comportamiento rígido del
diafragma, dicho tipo de análisis se escapa de la mayoría de los proyectista debido a lo
complicado y complejo del problema. En las mismas normas se establece que el modelo
matemático deberá usar la técnica de elementos finitos o algo similar, el cual para edificaciones
relativamente grandes con placas irregulares, se hace incomodo y laboriosos, consumiendo una
cantidad de esfuerzo y tiempo que hace poco atractivo su uso. Pues bien, este trabajo contempla
la elaboración de un modelo mas simple que la técnica de elementos finitos, capaz de resolver el
sistema dinámico espacial unidireccional tomando en cuenta la rigidez traslacional entre
pórticos. Para ello se desarrollaran dos aspectos fundamentales: el primero es modelar el
diafragma flexible como un elemento que simule la rigidez traslacional entre pórticos, y el
segundo incorporar dicho elemento a un sistema matricial y dinámico que se resuelva por algún
método numérico. Evidentemente conseguir resolver este problema por un modelo más simple,
ayudaría a estudiar con mayor facilidad la necesidad de la implementación de dicha normativa o
en su defecto la incorporación del un análisis espacial unidireccional en las normas de
edificaciones sismo resistentes.
Para lograr exponer los objetivos propuestos en este trabajo, el texto se organizó en seis
capítulos que contemplan el siguiente contenido:
En el capítulo 1, se presentan algunos aspectos generales del problema, se hace mención
de la incorporación de la flexibilidad de los diafragmas en problema dinámico, las normas
venezolanas y la estrategia a seguir para el modelo aproximado en la búsqueda de la solución.
En el capítulo 2, se expone el planteamiento dinámico y estructural. Se hace un pequeño
resumen que simplifica el conocimiento de los sistemas de uno y varios grados de libertad
dinámicos que se toman en cuenta para edificios. Se desarrolla la estrategia teórica para el
análisis en tiempo real y la determinación de la matriz de rigidez espacial unidireccional asociada
con los grados de libertad dinámicos.
viii
En el capítulo 3, se presenta los aspectos fundamentales usados en el desarrollo
computacional de los programas y archivos a utilizar para la simulación de los modelos. Se
describen en forma general la estructura y presentación de los programas y archivos, así como la
secuencia de aplicación de los mismos.
En el capítulo 4, se hace una pequeña síntesis del análisis de rigidez de un diafragma. Se
establece una modalidad de la obtención de la rigidez de los diafragmas que se incorporan en la
base de datos de los archivos de trabajo.
En el capítulo 5, se presentan los diferentes tipos o modelos de edificios a analizar, así
como el sismo a utilizar en la evaluación de la integración numérica. En este se describen las
características geométricas y de cargas de los edificios, tanto para el modelo propuesto como para
el SAP. Adicionalmente se presentan los resultados de los periodos y porcentajes de masa
participativa obtenidos de ambos análisis.
En el capítulo 6, se hace un análisis comparativo de las graficas de respuestas de
aceleraciones y desplazamientos del modelo propuesto y el patrón. Se trata de establecer alguna
explicación de las posibles distorsiones de los resultados observados para algunos modelos cuya
asimetría presento diferencias apreciables.
1
CAPITULO I: PLANTEAMIENTO DEL PROBLEMA
2
I- PLANTEAMIENTO DEL PROBLEMA
1.1.Diafragmas en estructuras de edificios.
Uno de los aspectos fundamentales que condiciona el comportamiento de la estructura en
el cálculo de las edificaciones, es el grado de conectividad que existe entre los diferentes
elementos que lo conforman. En especial, la placa es uno de los elementos cuyas características
elásticas y de conectividad define el comportamiento general de la estructura en cuanto a la forma
de distribución de las cargas verticales y horizontales. Para este trabajo, la investigación conlleva
a estudiar, analizar y desarrollar una propuesta de calculo simple de la distribución de fuerzas
producidas por los movimientos sísmicos, suponiendo discretización de masas en cada nivel de
un edificio cuyo diafragma tenga como característica principal, el poder deformarse en su propio
plano.
La conectividad a la que se hace referencia puede incidir en dos aspectos muy
importantes a la hora de la idealización del modelo de cálculo. El primero es que la placa
proporcione rigidez a flexión transversalmente, esto es, incorpora rigidez a flexión contra el
movimiento horizontal como una viga aporticada; y el segundo genera una conectividad axial y
flexión en su mismo plano. Estos dos aspectos pueden según el proyectista ser usados a su
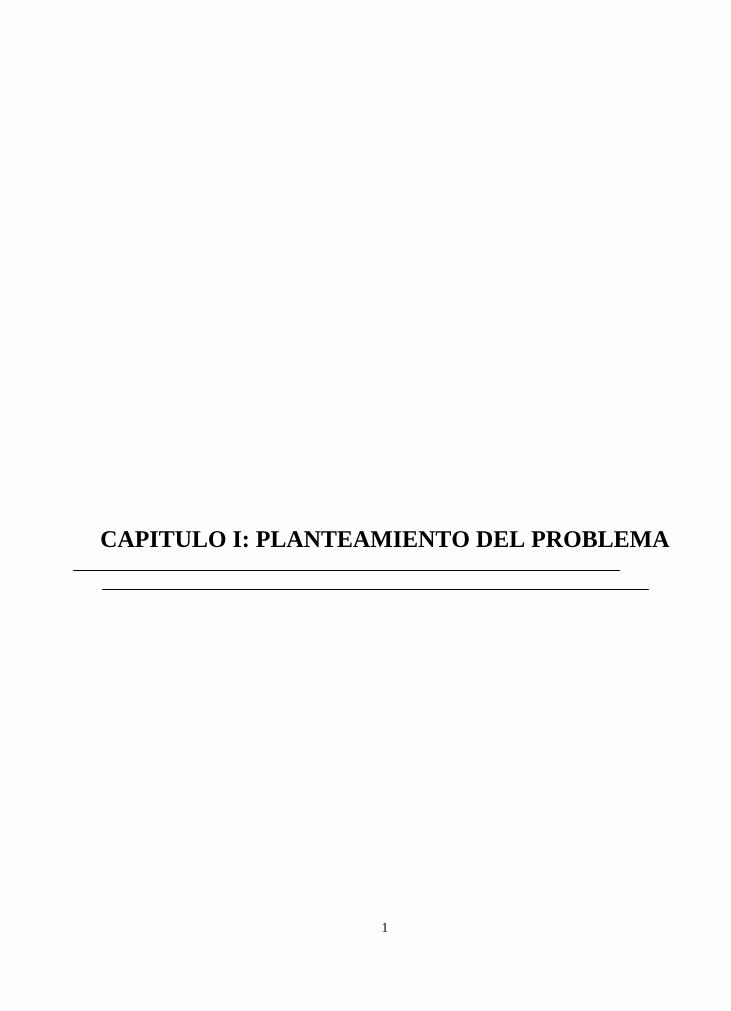
discreción, lo cual variaría el modelo de idealización del sistema sismorresistente del edificio.
CM qy
qx
qθ
CM
Fig. 1.1 (a) Modelo con diafragma infinitamente rígido, tres grados de libertad por nivel . (b) Movimiento de piso como cuerpo rígido.
X
Y
Z
qx1 qy1
qθ1
qx2 qy2
qθ2
qx3 qy3
qθ3
(a) (b)
Y
X
3
El modelo mas sencillo y usualmente empleado en el análisis de edificios, es considerar el
diafragma infinitamente flexible transversalmente, e infinitamente rígido en su plano de tal forma
que la masa en movimiento se puede concentrar en un punto de dicho plano. De esta manera el
análisis dinámico espacial que toma en cuenta el acoplamiento de vibraciones transversales y
torsionales se reduce ya que solo se definen tres grados de libertad por cada nivel (Fig.1.1).
La respuesta dinámica se obtiene de la solución del sistema de ecuaciones diferenciales
que describen el movimiento dinámico de la estructura. El tamaño del sistema depende de los
grados de libertad totales considerados en el modelo. Matricialmente el sistema de ecuaciones se
puede expresar en forma condensada de la siguiente manera,
QqKqCqM =++ *** &&& Ec. 1.1
Donde M , C y K son las matrices de masa, amortiguación y rigidez asociadas a los
grados de libertad establecidos en el modelo. Q y q , son los vectores de carga y
desplazamiento correspondientes de los grados de libertad. q&& y q& son los vectores de
aceleración y velocidad. Para estos casos el número de grados de libertad total será tres veces el
numero de pisos de la edificación. Resolver el sistema de ecuaciones Ec.1.1 y obtener la solución
final, en cierta forma es obtener la combinación lineal de los diferentes modos de vibración para
una determinada excitación estructural. Para la obtención de los modos y sus respectivas
frecuencias de vibración, la influencia de la amortiguación se pudiera decir que no es
determinante, en tal sentido el aspecto mas importante será como plantear la matriz de masa y
rigidez, mientras que la incorporación de la matriz de amortiguamiento se hará en la solución
final.
Una vez establecido la solución del sistema, esta conlleva a obtener las fuerzas inerciales
producidas por el movimiento acelerado de las masas concentradas en los pisos, esta a su vez se
distribuyen entre los elementos verticales sismorresistentes por compatibilidad de
desplazamiento del diafragma como cuerpo rígido. Esto último es un problema de orden
netamente estructural que se puede resolver matricialmente.

4
El modelo de análisis dinámico espacial con diafragma flexible puede producir una
distribución de fuerzas distintas. Si se considera que cada junta rígida viga-columna contenida en
el plano del diafragma se pudiera mover en forma independiente en cualquier dirección
respetando las leyes de deformación elásticas, esto es, el plano que las contiene es deformable
elásticamente y cada junta con una concentración de masa representaría un grado de libertad en
cada dirección. Esta situación además de complicar el planteamiento de las matrices de rigidez y
masa, haría que el número de grados de libertad y por consiguiente el tamaño del sistema de
ecuaciones aumente. Por ejemplo, para idealizar el sistema dinámico despreciando deformaciones
axiales en columnas, cada junta donde se concentrarán las masas habrá por lo menos dos grado de
libertad traslacionales (Fig.1.2).
La respuesta dinámica de este problema sigue siendo representado por el sistema de
ecuaciones diferenciales Ec.1.1, como ya se mencionó, la diferencia estriba en la forma de como
se obtienen y plantean las matrices de rigidez y de masa del sistema, y sobre todo, como se
incorpora la rigidez coplanar del diafragma dentro de la matriz de rigidez de la estructura.
X
Y
Z
qi i=1,2,.....24
(a) (b)
X
Y
Fig. 1.2 (a) Modelo con diafragma flexible, dos grados de libertad por junta . (b) Movimiento de piso con flexibilidad en el plano.

5
La determinación de rigidez coplanar de los diafragmas es un problema complejo y no
completamente resuelto. La estrategia usual es definir su rigidez aproximada o equivalente a
través de la teoría de placas o programas avanzados de elementos finitos. En este otro problema,
el grado de aproximación aumenta o disminuye dependiendo de la discretización del modelo
(número de elementos de una malla de elementos finitos ), la idealización de un modelo
isotrópico equivalente en placas nervadas, cambios geométricos, incorporación de elementos
secundarios como vigas, aberturas en las placas, aparición de diferentes materiales, etc.
1.2.La normativa y su influencia en los procesos de cálculo estructural. La incorporación de la flexibilidad de los diafragmas en el sistema dinámico, es un punto
nuevo exigido en las normas COVENIN-MINDUR 1756-98. A pesar de que la solución del
problema esta resuelto por algunos programas de computación avanzados, la complejidad de su
estudio y el costo de estos software, limitan el campo de trabajo de muchos profesionales. Por
otro lado, la inclusión normativa de la flexibilidad del diafragma, muchas veces se convierte en
un simple caso de investigación de comportamiento, ya que los diafragmas para los edificios mas
usuales por muy delgados que sean, por lo general sigue siendo muy rígido comparado con la
flexibilidad vertical de las estructuras, cuyas posibilidades de deformación (modos de vibración
vertical) gobiernan en su mayoría de las veces sobre la solución final.
La selección del método de análisis según las normas venezolanas, dependen de la
irregularidad del edificio y su altura. Dentro de las alternativas de análisis se tiene el método
estático equivalente y el método de superposición modal con un grado de libertad por nivel para
edificios de hasta diez pisos y mas respectivamente. La definición de irregularidad en las nuevas
normas ahora toma dos condiciones diferentes, la irregularidad vertical y la irregularidad en
planta. En ambos casos el análisis exigido es siempre dinámico espacial, e inclusive para algunos
casos de irregularidad en planta la norma exige a la incorporación de la flexibilidad del
diafragma. Esta normativa, a pesar de su modernidad no menciona la posibilidad de un análisis
dinámico plano con varios grados de libertad en planta, esto es, un grado de libertad
independiente por pórtico en cada piso o lo que pudiera llamarse un análisis espacial con
movimiento unidireccional de las masas.
6
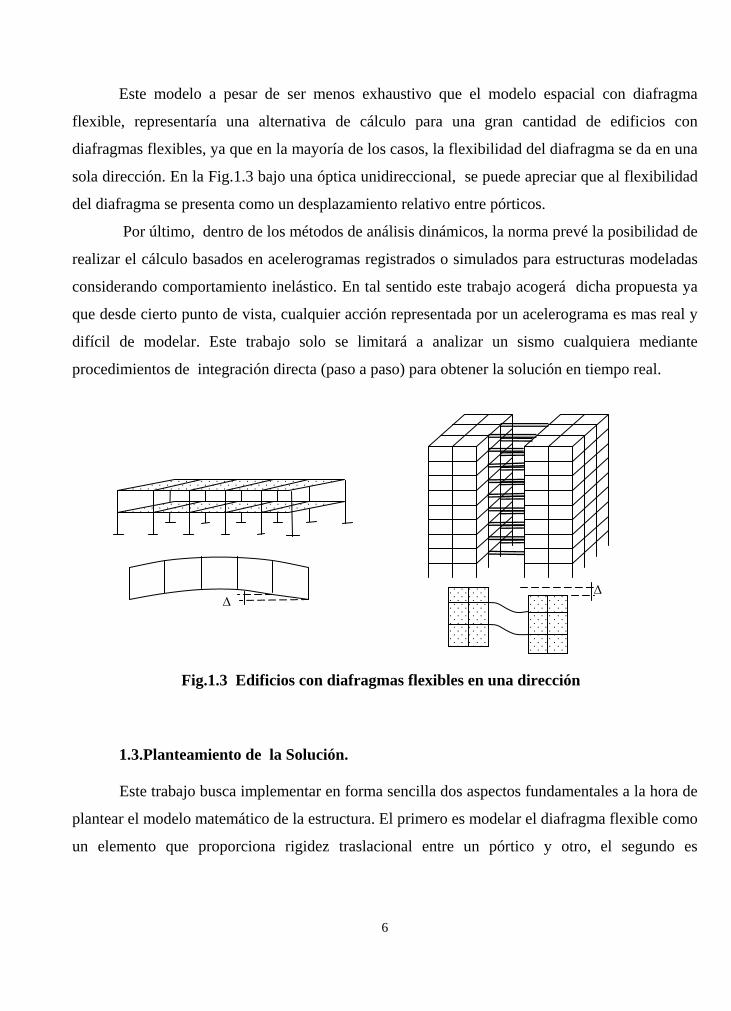
Este modelo a pesar de ser menos exhaustivo que el modelo espacial con diafragma
flexible, representaría una alternativa de cálculo para una gran cantidad de edificios con
diafragmas flexibles, ya que en la mayoría de los casos, la flexibilidad del diafragma se da en una
sola dirección. En la Fig.1.3 bajo una óptica unidireccional, se puede apreciar que al flexibilidad
del diafragma se presenta como un desplazamiento relativo entre pórticos.
Por último, dentro de los métodos de análisis dinámicos, la norma prevé la posibilidad de
realizar el cálculo basados en acelerogramas registrados o simulados para estructuras modeladas
considerando comportamiento inelástico. En tal sentido este trabajo acogerá dicha propuesta ya
que desde cierto punto de vista, cualquier acción representada por un acelerograma es mas real y
difícil de modelar. Este trabajo solo se limitará a analizar un sismo cualquiera mediante
procedimientos de integración directa (paso a paso) para obtener la solución en tiempo real.
1.3.Planteamiento de la Solución. Este trabajo busca implementar en forma sencilla dos aspectos fundamentales a la hora de
plantear el modelo matemático de la estructura. El primero es modelar el diafragma flexible como
un elemento que proporciona rigidez traslacional entre un pórtico y otro, el segundo es
Fig.1.3 Edificios con diafragmas flexibles en una dirección
Δ Δ

7
incorporar dicha rigidez dentro de la matriz de rigidez de la estructura para usarla en el
planeamiento de las ecuaciones diferenciales descritas en la Ec.1.1.
De estos dos aspectos, el modelar la flexibilidad del diafragma solo se tratará ligeramente
en este trabajo. Su inclusión en el problema es definirlo como un elemento simple, en este caso,
se tratará de definir como un resorte de conectividad equivalente entre pórticos.
La aproximación de la rigidez del diafragma como un resorte, es un trabajo complejo que
amerita un estudio mayor debido a los diferentes casos que pudieran presentarse como placas. Sin
embargo, si el modelo matemático para la estructura con un caso sencillo de diafragma simula
bien la respuesta dinámica, se pudiera decir que dicha propuesta se puede considerar como
solución alternativa aproximada y aceptable. De esta manera el problema que queda por resolver
será como modelar el resorte equivalente de conectividad entre pórticos.
Adicionalmente, la implementación de este modelo solventaría la limitación del campo de
trabajo de algunos profesionales como se mencionó anteriormente, ya que representa una
alternativa posiblemente fácil de desarrollar por ingenieros que manejen conocimientos básicos
del análisis dinámico y matricial.
Finalmente, el problema planteado es desarrollar y verificar un modelo matemático de
análisis dinámico plano que tome en cuenta la flexibilidad unidireccional del diafragma para
edificios sometidos a acciones sísmicas.
(a) (b)
Fig.1.4. Modelo estructural de edificio de tres pisos con tres pórticos en la dirección analizada (a) El modelo usual con diafragma infinitamente rígido y
tres grados de libertad total (b) Modelo propuesto con diafragma flexible unidireccional y nueve grados de libertad total
q3
q2
q1
q3
q2
q1
q6
q5
q4
q9
q8
q7
K=∞ Grados de libertad
8
CAPITULO II: DESARROLLO TEORICO DEL MODELO
DINAMICO ESTRUCTURAL

9
II- DESARROLLO TEORICO DEL MODELO DINAMICO ESTRUCTURAL
2.1. Planteamiento Dinámico.
2.1.1. Vibración forzada amortiguada producida por movimiento de terreno en estructura de un grado de libertad.
Para el planteamiento dinámico en este trabajo, se seguirá una secuencia de desarrollo de
expresiones de las cuales gran parte de ellas son consideradas conocidas y comúnmente tratadas
por la bibliografía del tema.
La ecuación del movimiento de una estructura con amortiguamiento de un grado de
libertad sometido a movimiento de terreno viene dado por,
u*mq*kq*cq*m &&&&& −=++ (2.1)
Con, mk2 =ω ;
m*k2c
=ξ (2.2)
uq*q*2q 2 &&&&& −=ω+ξω+ (2.3)
u(t)
q(t)
m
kAceleración absoluta = tt uq &&&& +
c
Fig.2.1 Estructura con un grado de libertad con amortiguamiento sometido a movimiento de terreno
10
Bajo condiciones iniciales nulas q(0)=0, la solución de la ecuación diferencial Ec.(2.3 )
viene dada por la expresión llamada integral de DUHAMEL,
ττ−ωω
−= τ−ξω−∫ d))t(d(sene*)t(ud
1)t(q )t(t
0
&& (2.4)
21*d ξ−ω=ω (2.5)
Conocido que en general ξ<<1 entonces se puede aceptar la siguiente aproximación,
11 2 ≡ξ− => ωd=ω (2.6)
Considerando esta aproximación, la expresión de desplazamiento, velocidad y
aceleración en un tiempo t viene dado por,
ττ−ωτω
−= τ−ξω−∫ d))t((sene*)(u1)t(q )t(t
0
&& (2.7)
τϕ+τ−ωτ−= τ−ξω−∫ d))t(cos(e*)(u)t(q )t(t
0
&&& (2.8)
21 ξξϕ
−= (2.9)
ττ−ωτω=+ τ−ξω−∫ d))t((sene*)(u)uq( )t(t
0)t( &&&&&& (2.10)
2.1.2. Sistema con varios grados de libertad. 2.1.2.1 Obtención de la matriz modal
Para el caso de una estructura con n grados de libertad, la solución del sistema se rige por
la solución simultanea de n ecuaciones diferenciales ordinarias de segundo orden. En el
planteamiento de este problema, escogiendo un sistema de coordenadas que genere acoplamiento
estático, la matriz de masa queda diagonal cuando se define una coordenada q o grado de
libertad que representa el desplazamiento de cada masa discretizada.
Matricialmente las expresiones de las ecuaciones de movimiento libre y forzado sin
amortiguamiento se expresan respectivamente por,
11
0** =+ qKqM && (2.11)
QqKqM =+ ** && (2.12)
Con amortiguamiento se tiene,
0*** =++ qKqCqM &&& (2.13)
QqKqCqM =++ *** &&& (2.14)
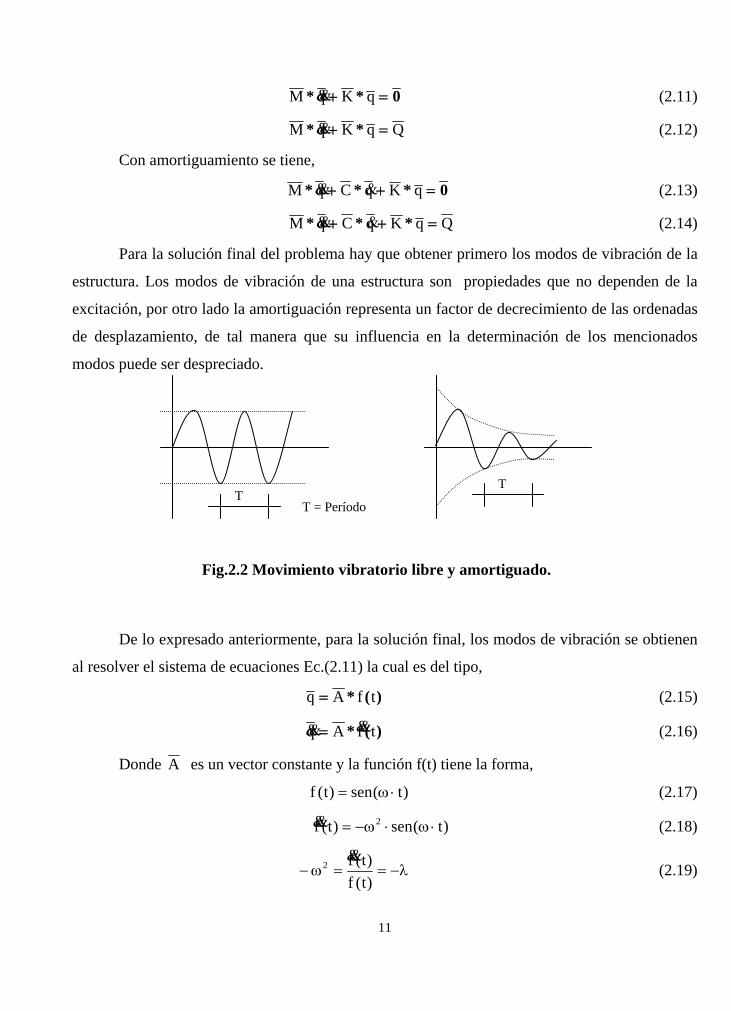
Para la solución final del problema hay que obtener primero los modos de vibración de la
estructura. Los modos de vibración de una estructura son propiedades que no dependen de la
excitación, por otro lado la amortiguación representa un factor de decrecimiento de las ordenadas
de desplazamiento, de tal manera que su influencia en la determinación de los mencionados
modos puede ser despreciado.
De lo expresado anteriormente, para la solución final, los modos de vibración se obtienen
al resolver el sistema de ecuaciones Ec.(2.11) la cual es del tipo,
)(* tfAq = (2.15)
)(* tfAq &&&&= (2.16)
Donde A es un vector constante y la función f(t) tiene la forma,
)t(sen)t(f ⋅ω= (2.17)
)t(sen)t(f 2 ⋅ω⋅ω−=&& (2.18)
λ−==ω−)t(f)t(f2
&& (2.19)
T T
Fig.2.2 Movimiento vibratorio libre y amortiguado.
T = Período

12
Sustituyendo la Ec.(2.15) y Ec.(2.16) en la Ec.(2.11) se obtiene,
0)(**)(** =+ tfAKtfAM && (2.20)
0**)()(** =+ AK
tftfAM
&& (2.21)
0**** =+− AKAM λ (2.22)
Ordenado se tiene,
0*)( =− AMK λ (2.23)
La ecuación Ec.(2.23) represente un sistema lineal homogéneo de n ecuaciones con n
incógnitas, el cual se conoce como problema de autovalores y autovectores propios. Para que el
sistema tenga vector solución diferente de cero )0A( ≠ , es necesario que el determinante de la
matriz )*( MK λ− sea nulo. La expresión del determinante genera lo que se conoce como
polinomio característico, donde sus raíces son los valores propios λi y por consiguiente las
frecuencias circulares de cada modo (ωi) serán iλ . Una vez calculado los valores propios, los
vectores propios (forma modal) se obtienen para cada λi despejando de la Ec.(2.23) el vector A .
Como el sistema de ecuaciones no es linealmente independiente, existen infinitas soluciones
proporcionales, esto es, para cada λi existe una forma modal A y todos los vectores
proporcionales a este cumplen también la solución. Un procedimiento aplicable para obtener iA ,
es darle un valor a un elemento del vector (An) para un determinado λi, y luego despejar el
resto de los valore modales. Otro método mas práctico es convertir el problema, en un problema
standard de autovalores y autovectores, y luego calcular por procedimientos numéricos los
valores propios y vectores propios de la matriz del sistema standard.
0*)( =− AMK λ => 0*)*( 1 =−− AIKM λ => 0*)( =− AIB λ (2.24)
La matriz del sistema standard queda,
)*( 1 KMB −= (2.25)
Como ya se mencionó, cuando la solución proviene de un sistema homogéneo, los
vectores propios no están definidos en forma única, en tal sentido por razones practicas es
conveniente normalizarlos usando el siguiente procedimiento:
13
iA*Cii =φ (2.26)
iAMiACi T **
μ= , tomando μ=1 ,
iA*M*iA1Ci T= (2.27)
La matriz modal para una estructura con n grados de libertad tendrá la forma,
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
nnnin
iniii
ni
φφφ
φφφ
φφφφφφ
φ
ΛΛΛΜΟΜ
ΜΟΜΜ
ΛΛ
1
1
2221
111211
(2.28)
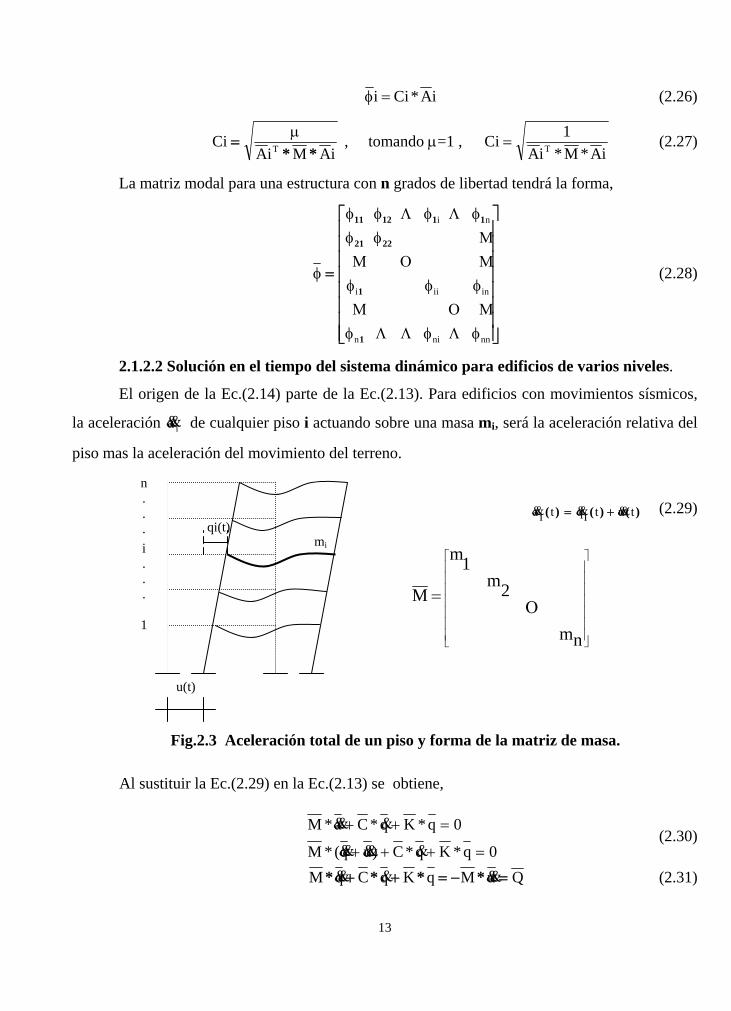
2.1.2.2 Solución en el tiempo del sistema dinámico para edificios de varios niveles.
El origen de la Ec.(2.14) parte de la Ec.(2.13). Para edificios con movimientos sísmicos,
la aceleración ia&& de cualquier piso i actuando sobre una masa mi, será la aceleración relativa del
piso mas la aceleración del movimiento del terreno.
(2.29)
Al sustituir la Ec.(2.29) en la Ec.(2.13) se obtiene,
0q*Kq*C)uq(*M
0q*Kq*Ca*M
=+++
=++
&&&&&
&&& (2.30)
QuMqKqCqM =−=++ &&&&& **** (2.31)
Fig.2.3 Aceleración total de un piso y forma de la matriz de masa.
)()()( tutiqtia &&&&&& +=qi(t)
u(t)
n . . . i . . .
1
mi
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
nm
2m1m
MΟ

14
El término del lado derecho de la Ec.(2.31) se conoce como el vector excitación de un
movimiento forzado. Para convertir la aceleración del terreno en un vector se utiliza el siguiente
artificio,
uubu &&Μ
&&&& *
1
11
*
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
== => ubMQ &&**= (2.32)
Para resolver este problema, primero habrá que obtener la matriz modal φ con
movimiento libre como se describió anteriormente. Sin embargo, el problema con el
amortiguamiento complica la solución, de hecho, para poderlo resolver se requiere de un cambio
de variable o sistema de coordenadas para desacoplar el sistema de ecuaciones.
ηφ= *q => ηφ= && *q => ηφ= &&&& *q (2.33)
Sustituyendo la Ec.(2.33) en la Ec.(2.31) se tiene,
Q**K**C**M =ηφ+ηφ+ηφ &&& (2.34)
Premultiplicando por Tφ queda,
Q**)*K*(*)*C*(*)*M*(TTTTφ=ηφφ+ηφφ+ηφφ &&& (2.35)
Conocido que,
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
μ
μμ
=μ=φφ
000000000000
I**M*T
Ο (2.36)
2
2n
22
21
T*
000000000000
**K* ωμ=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ω
ωω
μ=φφΟ (2.37)

15
ξωμ=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ωξ
ωξωξ
μ=φφ **2
000000000000
**2*C*
nn
22
11
T
Ο (2.38)
La Ec.(2.35) se transforma en n ecuaciones diferenciales desacopladas con nuevas
coordenadas η y cargas generalizadas Q*Tφ . Sustituyendo la Ec.(2.32) en la Ec.(2.35) se tiene,
u*)b*M*(*)*K*(*)*C*(*)*M*(TTTT
&&&&& φ−=ηφφ+ηφφ+ηφφ (2.39)
De este planteamiento se obtiene la ecuación genérica para cada modo i de frecuencia ωi ,
u*)b*M*(*)*(*)***2(*)( Tii
2iiiii &&&&& φ−=ηωμ+ηωξμ+ημ (2.40)
Dividiendo todo por μ,
μφ
−=ηω+ηωξ+η)b*M*(u*)(*)**2(
Ti
i2iiiii &&&&& (2.41)
De la Ec.(2.36) se deduce,
i
T
i *M* φφ=μ (2.42)
Sustituyendo la Ec.(2.42) en la Ec.(2.41),
i
T
i
Ti
i2iiiii
*M*
)b*M*(u*)(*)**2(φφ
φ−=ηω+ηωξ+η &&&&& (2.43)
Donde se llamará γi y βi al coeficiente de participación modal y coeficiente de masa
participativa respectivamente,
2
1
1
)(*
**
**)**(
∑
∑
=
=== n
jjij
j
n
jjij
iT
i
Ti
i
m
bm
MbM
φ
φ
φφφ
γ (2.44)

16
Mem
bm
MeMbM
n
jjij
j
n
jjij
iT
i
Ti
i
*)(*
**
*)**()**(
2
1
2
12
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
==
∑
∑
=
=
φ
φ
φφφ
β (2.45)
La Ec.(2.41) queda,
ii2iiiii *u*)(*)**2( γ−=ηω+ηωξ+η &&&&& (2.46)
Haciendo de nuevo el siguiente cambio de variable se tiene,
iii o*ηγ=η , iii o*ηγ=η &&&& (2.47)
ii2iiiii uo*)(o*)**2(o &&&&& −=ηω+ηωξ+η (2.48)
La solución de la Ec.(2.48) es idéntica al caso de un sistema de un grado de libertad con
amortiguamiento Ec.(2.7), la solución viene dado por,
∫ ττ−ωτω
−=η τ−ωξ−t
0i
ii d))t((sen*)(ue1)t(o )t(ii && (2.49)
La solución general ó respuesta dinámica del movimiento de la Ec.(2.31) de acuerdo al
cambio de variable Ec.(2.33) y Ec.(2.47) es,
i
n
i
n
iiiii tottq φηγφηηφ ∑ ∑
= =
===1 1
*)(**)(*)( (2.50)
Esta ecuación representa una combinación lineal de n modos de vibración en un
determinado tiempo t.
Para el caso de la aceleración absoluta en la variable oη la respuesta será similar a la
Ec.(2.10)
∫ ττ−ωτω=η τ−ωξ−t
0iii d))t((sen*)(ue)t(o )t(ii &&&& (2.51)
La respuesta general de la aceleración dinámica será,
i
n
1i
n
1iiiii *)t(o**)t(*)t(q φηγ=φη=ηφ= ∑ ∑
= =
&&&&&&&& (2.52)
17
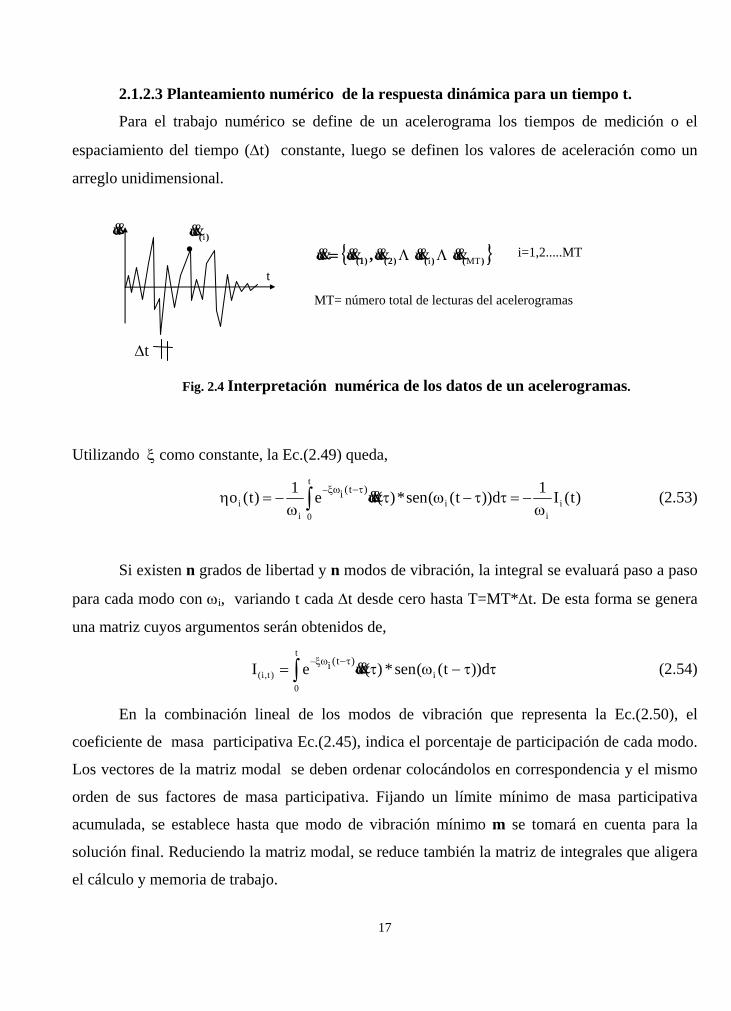
2.1.2.3 Planteamiento numérico de la respuesta dinámica para un tiempo t.
Para el trabajo numérico se define de un acelerograma los tiempos de medición o el
espaciamiento del tiempo (Δt) constante, luego se definen los valores de aceleración como un
arreglo unidimensional.
Utilizando ξ como constante, la Ec.(2.49) queda,
)t(I1d))t((sen*)(ue1)t(o ii
t
0i
ii
)t(iω
−=ττ−ωτω
−=η ∫τ−ξω− && (2.53)
Si existen n grados de libertad y n modos de vibración, la integral se evaluará paso a paso
para cada modo con ωi, variando t cada Δt desde cero hasta T=MT*Δt. De esta forma se genera
una matriz cuyos argumentos serán obtenidos de,
∫ ττ−ωτ= τ−ξω−t
0i)t,i( d))t((sen*)(ueI )t(i && (2.54)
En la combinación lineal de los modos de vibración que representa la Ec.(2.50), el
coeficiente de masa participativa Ec.(2.45), indica el porcentaje de participación de cada modo.
Los vectores de la matriz modal se deben ordenar colocándolos en correspondencia y el mismo
orden de sus factores de masa participativa. Fijando un límite mínimo de masa participativa
acumulada, se establece hasta que modo de vibración mínimo m se tomará en cuenta para la
solución final. Reduciendo la matriz modal, se reduce también la matriz de integrales que aligera
el cálculo y memoria de trabajo.
u&&
t
Δt
{ })()()2()1( , MTi uuuuu &&Λ&&Λ&&&&&&= i=1,2.....MT
MT= número total de lecturas del acelerogramas
Fig. 2.4 Interpretación numérica de los datos de un acelerogramas.
)(iu&&
18
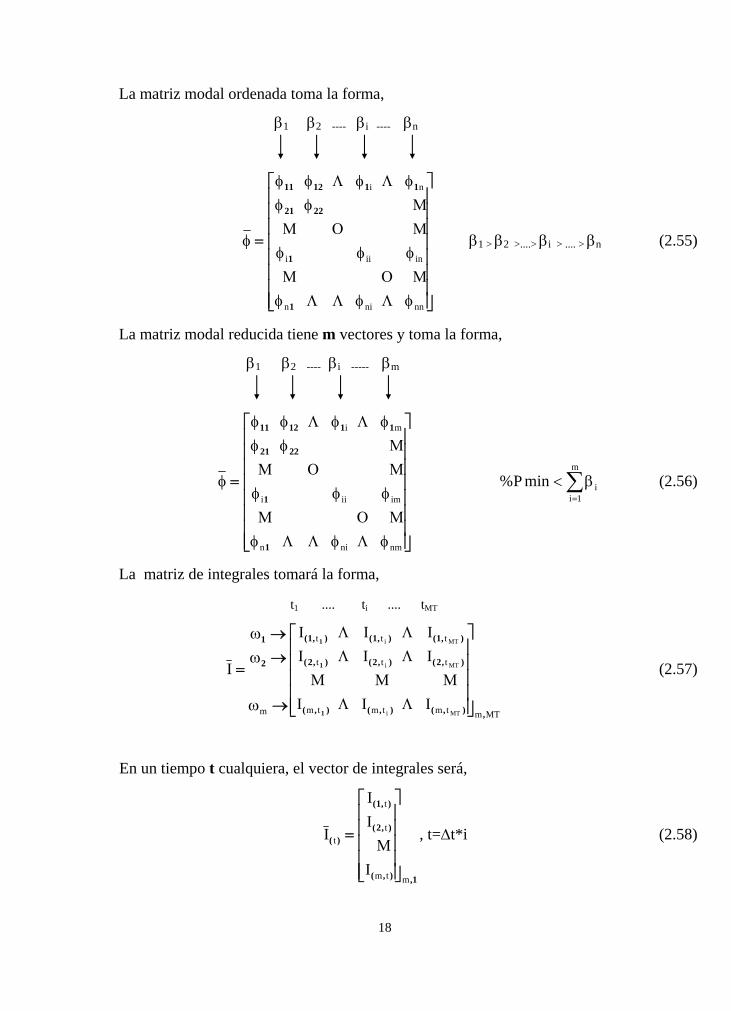
La matriz modal ordenada toma la forma,
β1 β2 ---- βi ---- βn
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
nnnin
iniii
ni
φφφ
φφφ
φφφφφφ
φ
ΛΛΛΜΟΜ
ΜΟΜΜ
ΛΛ
1
1
2221
111211
β1 > β2 >....> βi > .... > βn (2.55)
La matriz modal reducida tiene m vectores y toma la forma,
β1 β2 ---- βi ----- βm
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
nmnin
imiii
mi
φφφ
φφφ
φφφφφφ
φ
ΛΛΛΜΟΜ
ΜΟΜΜ
ΛΛ
1
1
2221
111211
∑=
β<m
1iiminP% (2.56)
La matriz de integrales tomará la forma,
MTmtmtmtm
ttt
ttt
m MTi
MTi
MTi
III
IIIIII
I
,),(),(),(
),2(),2(),2(
),1(),1(),1(
2
1
1
1
1
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
→
→→
=
ΛΛΜΜΜ
ΛΛΛΛ
ω
ωω
(2.57)
En un tiempo t cualquiera, el vector de integrales será,
1,),(
),2(
),1(
)(
mtm
t
t
t
I
II
I
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=Μ
, t=Δt*i (2.58)
t1 .... ti .... tMT
19
En un tiempo t cualquiera, el valor de la respuesta en al variable ηo Ec.(2.53), y η según
el cambio de variable Ec.(2.47) será ,
1,mm
)t,m(
2
)t,2(
1
)t,1(
1,mmt
t2
t1
I
I
I
o
oo
)t(o
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ω
ω
ω
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
η
ηη
=ηΜΜ
,
1,mm
m)t,m(
2
2)t,2(
1
1)t,1(
1,mmt
t2
t1
*I
*I
*I
)t(
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ωγ
ωγω
γ
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
η
ηη
=ηΜΜ
(2.59)
En un tiempo t cualquiera, el valor de la respuesta en la variable real q según la Ec.(2.50)
será,
1,mmt
it
t2
t1
nmni1n
imii1i
2221
m1i11211
*)t(*)t(q
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
η
η
ηη
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
φφφ
φφφ
φφφφφφ
=ηφ=
Μ
Μ
ΛΛΛΜΟΜ
ΜΟΜΜ
ΛΛ
(2.60)
Para el grado de libertad i en un instante de tiempo t, el valor del desplazamiento se
obtiene de sustituir la Ec.(2.58) en la Ec.(2.60). Expresado en forma de sumatoria esta ecuación
queda,
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛
ω
φγ−=
m
1j j
)j,i()t,j(j *I*)t,i(q (2.61)
Para la aceleración en un instante t según la Ec.(2.33) se tiene,
1,mmt
it
t2
t1
nmni1n
imii1i
2221
m1i11211
*)t(*)t(q
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
η
η
ηη
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
φφφ
φφφ
φφφφφφ
=ηφ=
&&Μ
&&Μ
&&&&
ΛΛΛΜΟΜ
ΜΟΜΜ
ΛΛ
&&&& (2.62)
Haciendo el respectivo cambio de variable Ec.(2.47) , Ec.(2.51) y la Ec.(2.54) en la
Ec.(2.62) se tiene,

20
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
),(
),(
),2(22
),1(11
**
**
****
)(
tmmm
tiii
t
t
I
I
II
t
ωγ
ωγ
ωγωγ
η
Μ
Μ&& ,
1,),(
),(
),2(22
),1(11
1
1
2221
111211
**
**
****
*)(
mtmmm
tiii
t
t
nmnin
imiii
mi
I
I
II
tq
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
ωγ
ωγ
ωγωγ
φφφ
φφφ
φφφφφφ
Μ
Μ
ΛΛΛΜΟΜ
ΜΟΜΜ
ΛΛ
&& (2.63)
Expresado en forma de sumatoria la aceleración absoluta para el grado de libertad i en un
instante t queda,
( )∑=
φωγ=m
1j)j,i()t,j(jj *I**)t,i(q&& (2.64)
2.2. Planteamiento Estructural.
2.2.1. Modelo Estructural con un grado de libertad dinámico.
Para la obtención de la matriz modal φ Ec.(2.28) partiendo de los valores propios y
vectores propios de la matriz B Ec.(2.25), se requiere definir la matriz de rigidez K en
correspondencia con el sistema de coordenadas generalizadas de carga y desplazamiento (q y Q)
para los n grados de libertad que se definen en el sistema dinámico.
X1
X2
X3
X4X5
X6
[ ]66 x
K
(a)
q
[ ]1x1
K
m
(b)
Fig. 2.5 (a) Estructura en el sistema global con seis grados de libertad Xi. (b) Estructura equivalente en el sistema dinámico con un grado de libertad q
21
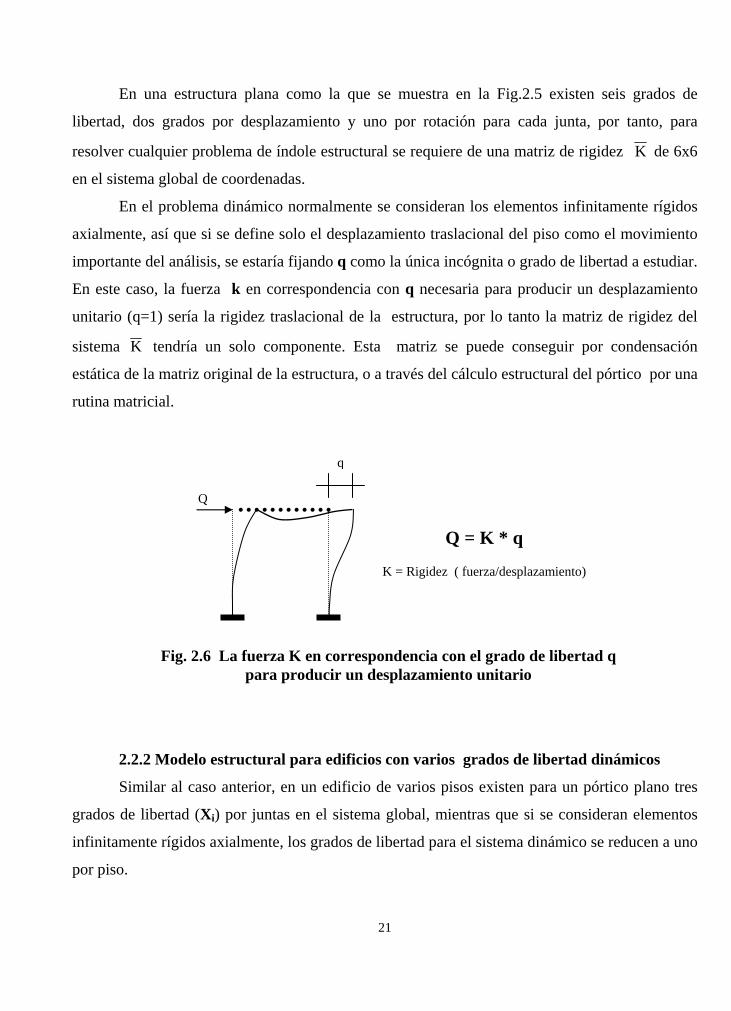
En una estructura plana como la que se muestra en la Fig.2.5 existen seis grados de
libertad, dos grados por desplazamiento y uno por rotación para cada junta, por tanto, para
resolver cualquier problema de índole estructural se requiere de una matriz de rigidez K de 6x6
en el sistema global de coordenadas.
En el problema dinámico normalmente se consideran los elementos infinitamente rígidos
axialmente, así que si se define solo el desplazamiento traslacional del piso como el movimiento
importante del análisis, se estaría fijando q como la única incógnita o grado de libertad a estudiar.
En este caso, la fuerza k en correspondencia con q necesaria para producir un desplazamiento
unitario (q=1) sería la rigidez traslacional de la estructura, por lo tanto la matriz de rigidez del
sistema K tendría un solo componente. Esta matriz se puede conseguir por condensación
estática de la matriz original de la estructura, o a través del cálculo estructural del pórtico por una
rutina matricial.
2.2.2 Modelo estructural para edificios con varios grados de libertad dinámicos
Similar al caso anterior, en un edificio de varios pisos existen para un pórtico plano tres
grados de libertad (Xi) por juntas en el sistema global, mientras que si se consideran elementos
infinitamente rígidos axialmente, los grados de libertad para el sistema dinámico se reducen a uno
por piso.
Fig. 2.6 La fuerza K en correspondencia con el grado de libertad q para producir un desplazamiento unitario
q
Q
Q = K * q
K = Rigidez ( fuerza/desplazamiento)
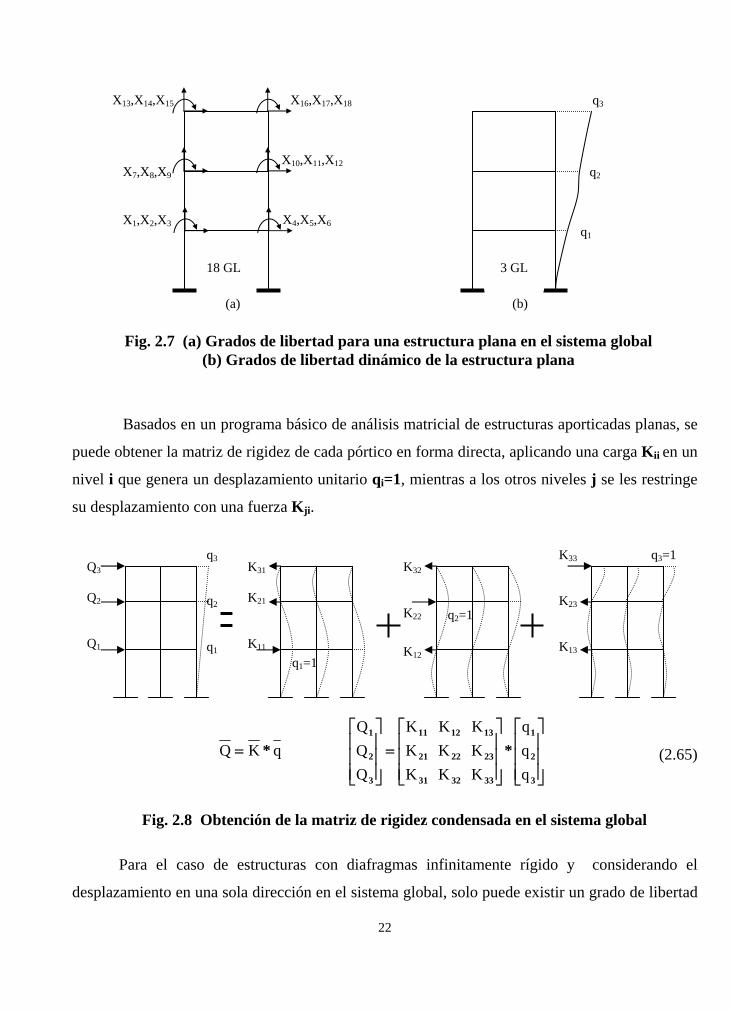
22
Basados en un programa básico de análisis matricial de estructuras aporticadas planas, se
puede obtener la matriz de rigidez de cada pórtico en forma directa, aplicando una carga Kii en un
nivel i que genera un desplazamiento unitario qi=1, mientras a los otros niveles j se les restringe
su desplazamiento con una fuerza Kji.
(2.65)
Para el caso de estructuras con diafragmas infinitamente rígido y considerando el
desplazamiento en una sola dirección en el sistema global, solo puede existir un grado de libertad
X1,X2,X3 X4,X5,X6
X7,X8,X9 X10,X11,X12
X13,X14,X15 X16,X17,X18
(a)
q1
q2
q3
(b)
Fig. 2.7 (a) Grados de libertad para una estructura plana en el sistema global (b) Grados de libertad dinámico de la estructura plana
18 GL 3 GL
Fig. 2.8 Obtención de la matriz de rigidez condensada en el sistema global
q3 q2 q1
Q3 Q2 Q1
q1=1
K31
K21
K11
q2=1
K32
K22
K12
q3=1 K33
K23
K13
qKQ *=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
3
2
1
333231
232221
131211
3
2
1
*qqq
KKKKKKKKK
QQQ
23
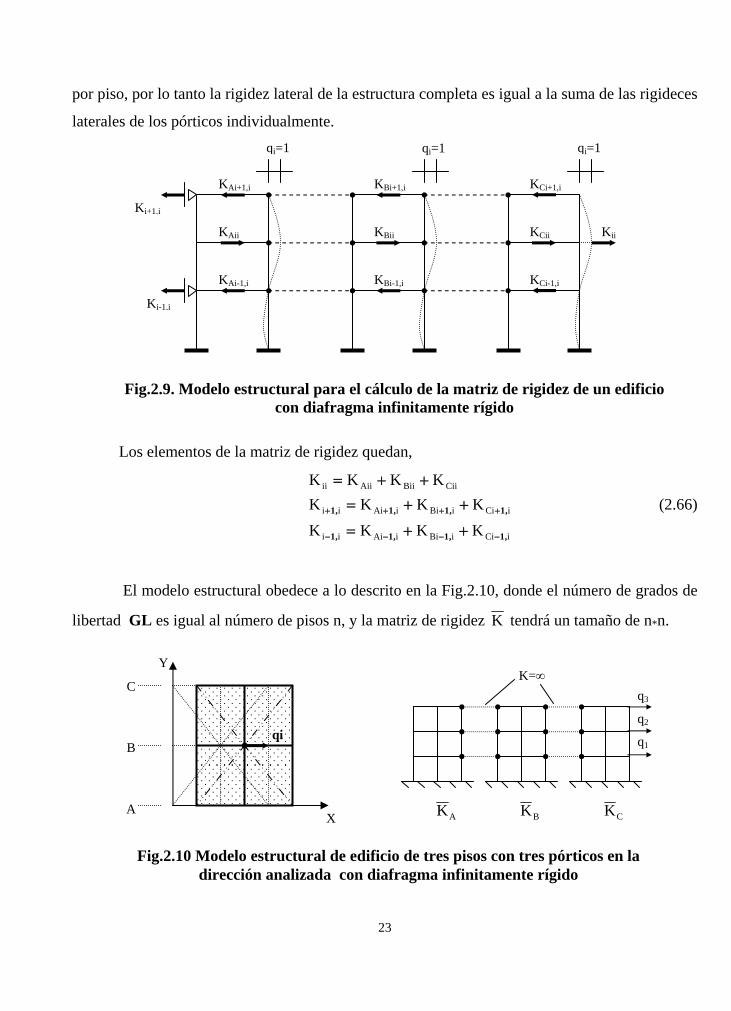
por piso, por lo tanto la rigidez lateral de la estructura completa es igual a la suma de las rigideces
laterales de los pórticos individualmente.
Los elementos de la matriz de rigidez quedan,
iCiiBiiAiii
iCiiBiiAiii
CiiBiiAiiii
KKKKKKKK
KKKK
,1,1,1,1
,1,1,1,1
−−−−
++++
++=
++=
++=
(2.66)
El modelo estructural obedece a lo descrito en la Fig.2.10, donde el número de grados de
libertad GL es igual al número de pisos n, y la matriz de rigidez K tendrá un tamaño de n*n.
Fig.2.10 Modelo estructural de edificio de tres pisos con tres pórticos en la dirección analizada con diafragma infinitamente rígido
q3
q2
q1
K=∞
AK BK CK
qi
C
B
A X
Y
qi=1 qi=1 qi=1
KAii KBii KCii Kii
KAi+1,i KBi+1,i KCi+1,i
KAi-1,i KBi-1,i KCi-1,i
Ki+1,i
Ki-1,i
Fig.2.9. Modelo estructural para el cálculo de la matriz de rigidez de un edificio con diafragma infinitamente rígido
24
La matriz de rigidez de un pórtico j tiene la forma,
3,3333231
232221
131211
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
KKKKKKKKK
K j (2.67)
La rigidez total de la estructura será,
∑=
=++=C
AjjCBA KKKKK (2.68)
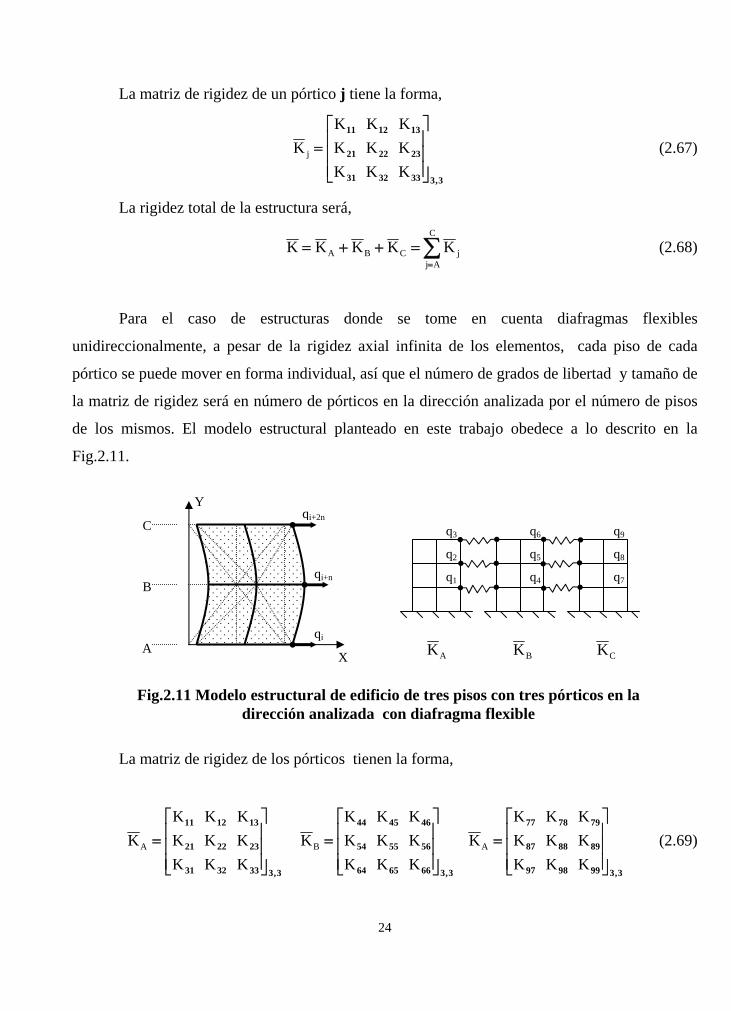
Para el caso de estructuras donde se tome en cuenta diafragmas flexibles
unidireccionalmente, a pesar de la rigidez axial infinita de los elementos, cada piso de cada
pórtico se puede mover en forma individual, así que el número de grados de libertad y tamaño de
la matriz de rigidez será en número de pórticos en la dirección analizada por el número de pisos
de los mismos. El modelo estructural planteado en este trabajo obedece a lo descrito en la
Fig.2.11.
La matriz de rigidez de los pórticos tienen la forma,
3,3333231
232221
131211
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
KKKKKKKKK
KA
3,3666564
565554
464544
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
KKKKKKKKK
KB
3,3999897
898887
797877
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
KKKKKKKKK
KA (2.69)
Fig.2.11 Modelo estructural de edificio de tres pisos con tres pórticos en la dirección analizada con diafragma flexible
AK BK CK qi
C
B
A
qi+n
qi+2n
X
Y
q3
q2
q1
q6
q5
q4
q9
q8
q7
25
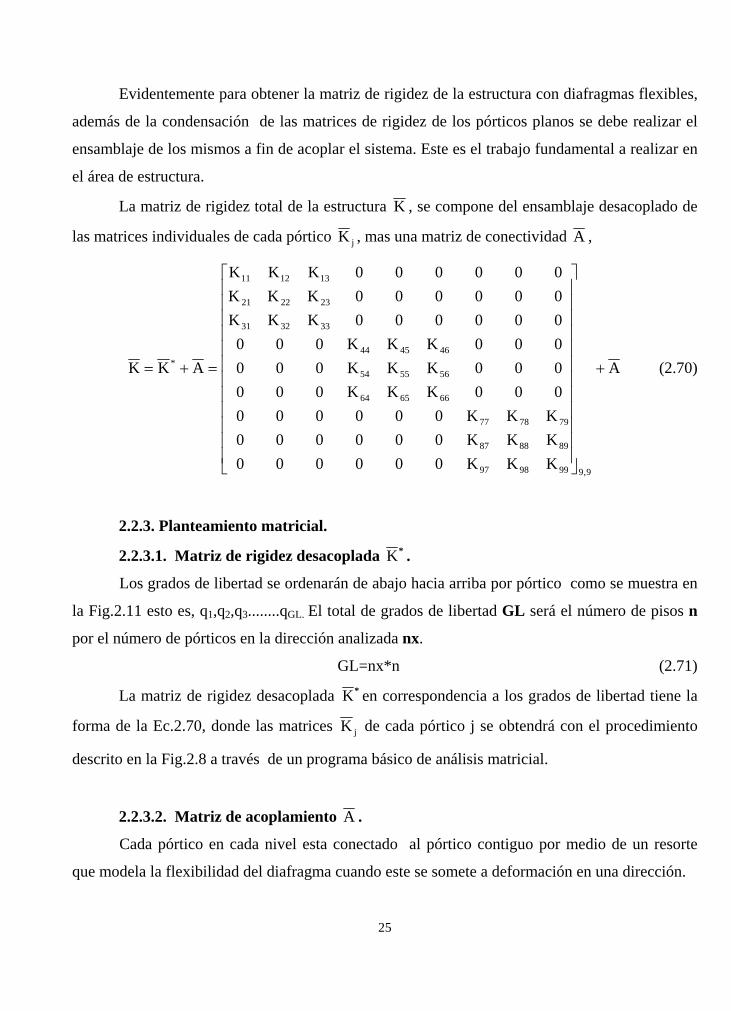
Evidentemente para obtener la matriz de rigidez de la estructura con diafragmas flexibles,
además de la condensación de las matrices de rigidez de los pórticos planos se debe realizar el
ensamblaje de los mismos a fin de acoplar el sistema. Este es el trabajo fundamental a realizar en
el área de estructura.
La matriz de rigidez total de la estructura K , se compone del ensamblaje desacoplado de
las matrices individuales de cada pórtico jK , mas una matriz de conectividad A ,
A
KKK000000KKK000000KKK000000
000KKK000000KKK000000KKK000000000KKK000000KKK000000KKK
AKK
9,9999897
898887
797877
666564
565554
464544
333231
232221
131211
* +
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=+= (2.70)
2.2.3. Planteamiento matricial.
2.2.3.1. Matriz de rigidez desacoplada *K .
Los grados de libertad se ordenarán de abajo hacia arriba por pórtico como se muestra en
la Fig.2.11 esto es, q1,q2,q3........qGL. El total de grados de libertad GL será el número de pisos n
por el número de pórticos en la dirección analizada nx.
GL=nx*n (2.71)
La matriz de rigidez desacoplada *K en correspondencia a los grados de libertad tiene la
forma de la Ec.2.70, donde las matrices jK de cada pórtico j se obtendrá con el procedimiento
descrito en la Fig.2.8 a través de un programa básico de análisis matricial.
2.2.3.2. Matriz de acoplamiento A .
Cada pórtico en cada nivel esta conectado al pórtico contiguo por medio de un resorte
que modela la flexibilidad del diafragma cuando este se somete a deformación en una dirección.
26
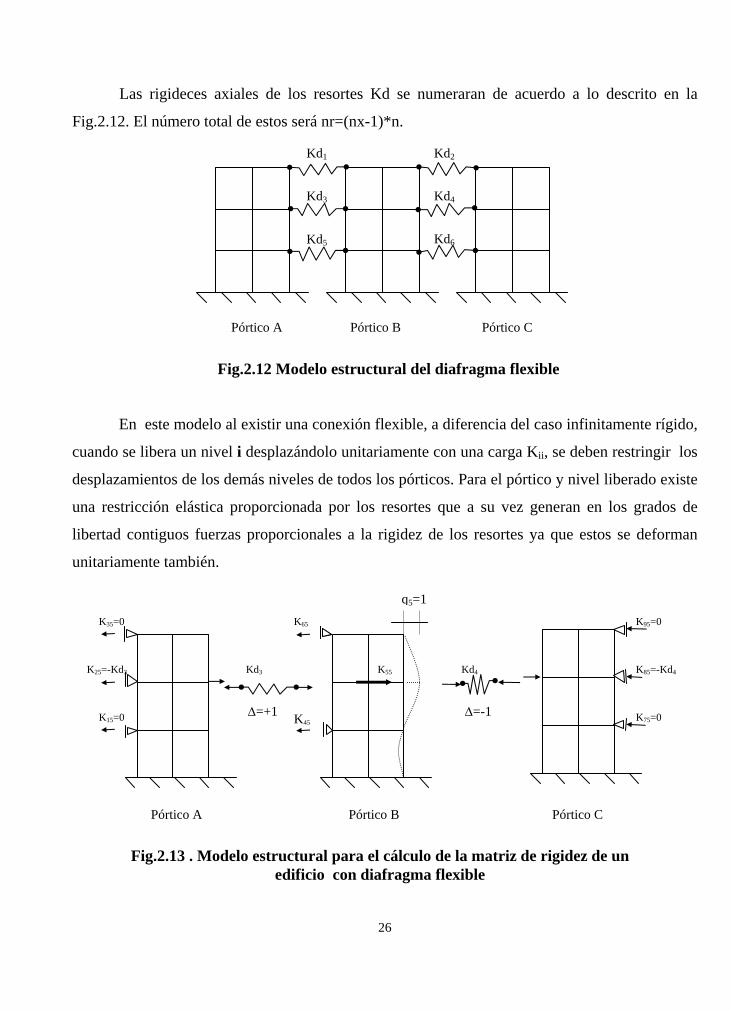
Las rigideces axiales de los resortes Kd se numeraran de acuerdo a lo descrito en la
Fig.2.12. El número total de estos será nr=(nx-1)*n.
En este modelo al existir una conexión flexible, a diferencia del caso infinitamente rígido,
cuando se libera un nivel i desplazándolo unitariamente con una carga Kii, se deben restringir los
desplazamientos de los demás niveles de todos los pórticos. Para el pórtico y nivel liberado existe
una restricción elástica proporcionada por los resortes que a su vez generan en los grados de
libertad contiguos fuerzas proporcionales a la rigidez de los resortes ya que estos se deforman
unitariamente también.
Fig.2.12 Modelo estructural del diafragma flexible
Kd1
Kd3
Kd5
Kd2
Kd4
Kd6
Pórtico A Pórtico B Pórtico C
Fig.2.13 . Modelo estructural para el cálculo de la matriz de rigidez de un edificio con diafragma flexible
Pórtico A Pórtico B Pórtico C
K35=0
K15=0
K25=-Kd3
K95=0
K75=0
K85=-Kd4 K55
K65
K45
q5=1
Kd3
Δ=+1
Kd4
Δ=-1
27
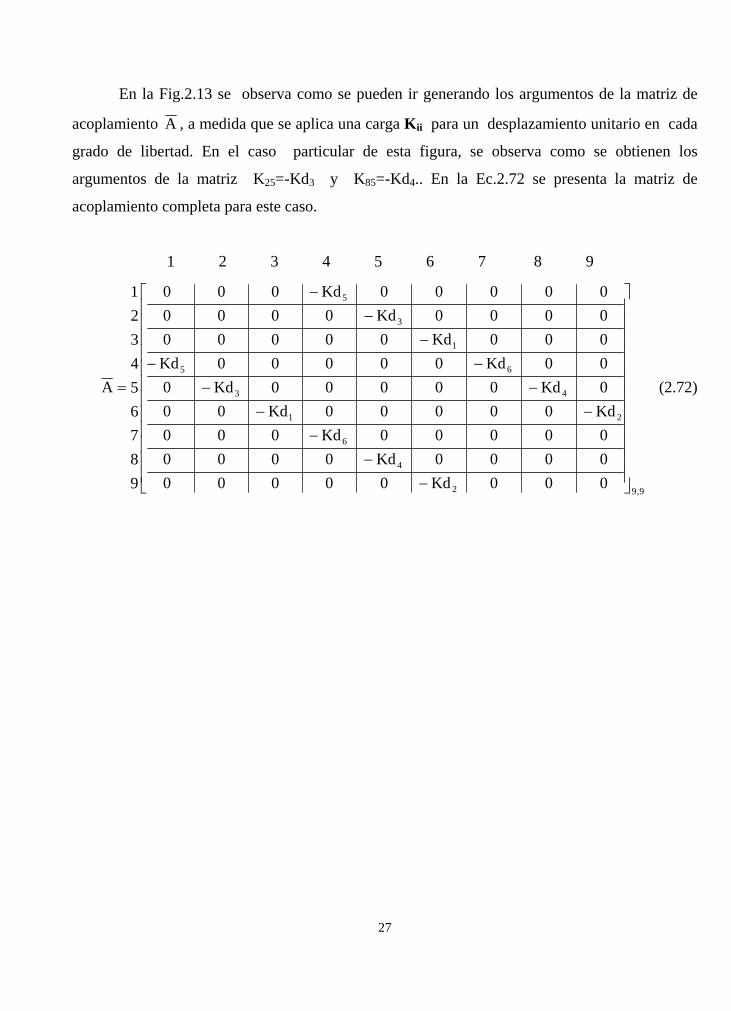
En la Fig.2.13 se observa como se pueden ir generando los argumentos de la matriz de
acoplamiento A , a medida que se aplica una carga Kii para un desplazamiento unitario en cada
grado de libertad. En el caso particular de esta figura, se observa como se obtienen los
argumentos de la matriz K25=-Kd3 y K85=-Kd4.. En la Ec.2.72 se presenta la matriz de
acoplamiento completa para este caso.
1 2 3 4 5 6 7 8 9
9,92
4
6
21
43
65
1
3
5
000Kd000000000Kd000000000Kd000Kd00000Kd000Kd00000Kd000Kd00000Kd000Kd000000000Kd000000000Kd000
987654321
A
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−−
−−−−
−−
−
= (2.72)

28
CAPITULO III: DESARROLLO COMPUTACIONAL DEL
MODELO DINAMICO ESTRUCTURAL
29
III- DESARROLLO COMPUTACIONAL DEL MODELO DINAMICO ESTRUCTURAL
3.1. Lenguaje de programación
Para el desarrollo de los programas de computación en este tipo de trabajo existen varios
lenguajes algorítmicos útiles como el BASIC, FORTRAN, PASCAL, “C” , etc., cualquiera de
estos son hoy en día necesarios para realizar los modernos análisis matriciales de estructuras, que
involucran un alto volumen de operaciones matemáticas. Estos lenguajes son de fácil manejo
gracias a los novedosos compiladores que convierten el lenguaje fuente a lenguaje de maquina, y
a la constante adecuación a los modernos y universales sistemas operativos que imperan el
mundo de la computación, como lo es el WINDOWS. Sin embargo paralelo a estos se han creado
otros programas-lenguajes como el MATLAB, cuyas instrucciones guardan cierta similitud con
el FORTRAN y BASIC, rico en rutinas de resolución de problemas matemáticos, numéricos,
operadores matriciales, integración y graficación entre otros, las cuales son utilizadas como si
fuese una simple operación matemática. Otra de las ventajas es la facilidad con la que el diseño
de una rutina, con un archivo de extensión _.m se convierte en parte de una librería o una
instrucción que se ejecuta cada vez que introduce en el programa base.
En este lenguaje no es necesario declarar el nombre ni el tipo de variables, siempre y
cuando no se use textualmente nombre de funciones o comandos. Todo nombre de variable puede
contener un arreglo de tamaño flexible (un escalar es un vector o matriz de un solo elemento) y
las operaciones sobre estas actúan sobre todos los elementos de dichos arreglos.
Para el caso particular de este trabajo, existen en la librería del MATLAB varias
instrucciones útiles como por ejemplo, para la determinación de la matriz modal se puede utilizar
directamente una instrucción eig( ), que resuelve el problema de valores propios y vectores
propios de la matriz B de la Ec.2.25, así mismo la inversión de la matriz de masa de la misma
ecuación se obtiene con la instrucción inv( ) como se muestra en la siguiente sentencia.
Μ
[mmodal,lan]=eig(inv(masa)*kkr) (3.1)
Μ

30
El comando eig( ) asigna a la variable mmodal, una matriz compuesta de los vectores
propios de la matriz que se obtiene de, la multiplicación después de invertir con la instrucción
inv( ) la matriz de masa y la matriz de rigidez kkr, esto es, la matriz modal. A su vez asigna a la
variable lan el vector compuesto de los valores propios de la matriz, esto es, los valores de las
frecuencias ω2 del problema dinámico.
Esta es una demostración de lo atractivo del uso de este lenguaje para resolver problemas
de ingeniería con rutinas matemáticas ya disponibles.
3.2. Estructura de programación.
La estructura de la programación dirigida a este tipo de problemas se compone de varias
rutinas entre las cuales se contemplan la introducción de datos, procesamiento de datos,
obtención de resultados y manipulación de resultados, todos ellos se enmarcan dentro del
conocimiento de la ciencia de la matemática, análisis matricial de estructura y análisis dinámico
de estructuras.
Para este trabajo, en líneas generales la programación se divide en cinco grandes bloques;
el primero es la introducción y revisión de datos de la estructura y el sismo, el segundo es la
construcción de la matriz de rigidez del sistema dinámico, el tercero construye la matriz de masa
DATOS GENERALES
DETERMINACIÓN DE LA MATRIZ DE
RIGIDEZ DEL SISTEMA
DETERMINACIÓN DE LA MATRIZ MODAL, FRECUENCIAS, %DE
MASA PARTICIPATIVA
PROCESAMIENTO DEL SISMO, INTEGRACIÓN
PASO A PASO, SOLUCION EN TIEMPO REAL
INTERPRETACIÓN GRAFICA DE RESULTADOS
Fig. 3.1 Macro diagrama de flujo.
31
y resuelve en forma directa el problema de autovalores y autovectores, el cuarto se refiere al
procesamiento y cálculo de la respuesta en el tiempo utilizando integración paso a paso, el quinto
es la determinación discreta y gráfica en términos de movimiento y aceleración por grado de
libertad.
3.2.1. Introducción de datos.
Los datos incluyen toda la información que caracteriza la edificación, necesaria para la
construcción de la matriz de rigidez y masa, entre estos están las dimensiones de luces y altura,
número de pisos y pórticos, áreas e inercias de los elementos, rigideces de resortes que modelan
el diafragma, pesos de los pisos, también se incluyen parámetros como amortiguamiento modulo
de elasticidad y porcentaje mínimo de masa participativa entre otros.
Los datos se introducen dentro del sistema computarizado creando un archivo con
extensión _.m donde se definen los valores de las variables-datos, este al ser invocado por el
programa principal lo reconoce como un programa, lo ejecuta e inmediatamente quedan definido
los valores de la variables. Todas las variables deben ser definidas en unidades consistentes.
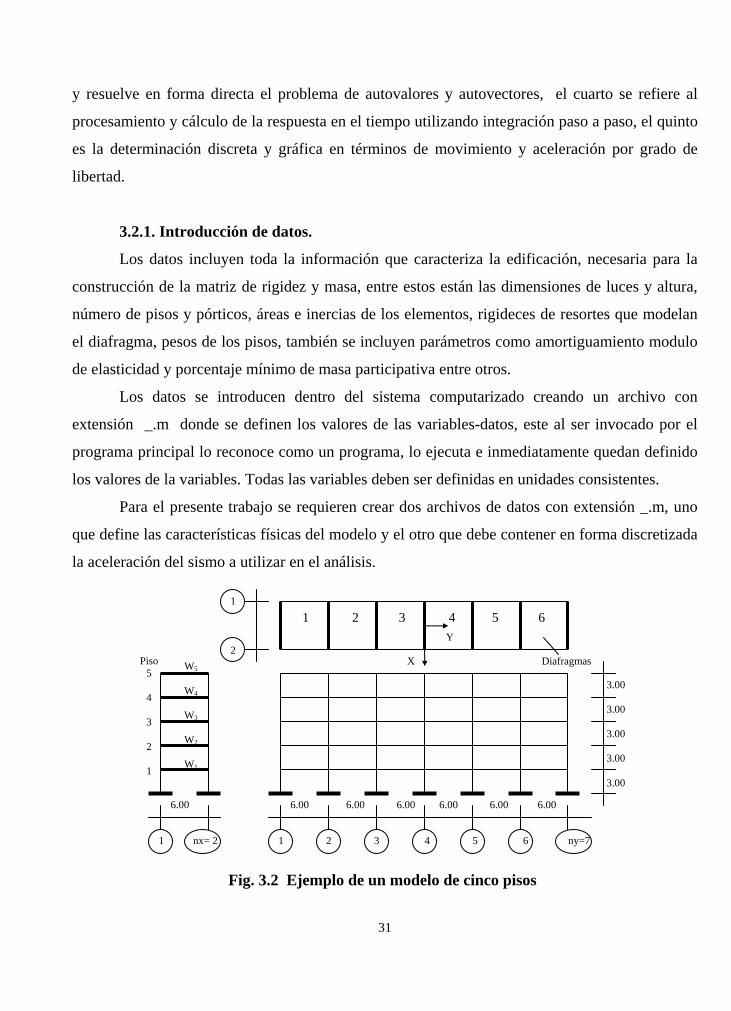
Para el presente trabajo se requieren crear dos archivos de datos con extensión _.m, uno
que define las características físicas del modelo y el otro que debe contener en forma discretizada
la aceleración del sismo a utilizar en el análisis.
Fig. 3.2 Ejemplo de un modelo de cinco pisos
1 2
1 2 3 4 5 6
Diafragmas X
Y
1 2 3 4 5 6 ny=7
3.00
3.00
3.00
3.00
3.00
6.00 6.00 6.00 6.00 6.00 6.00
1 nx= 2
Piso 5
4
3
2
1
W5
W4
W3
W2
W1
6.00
32
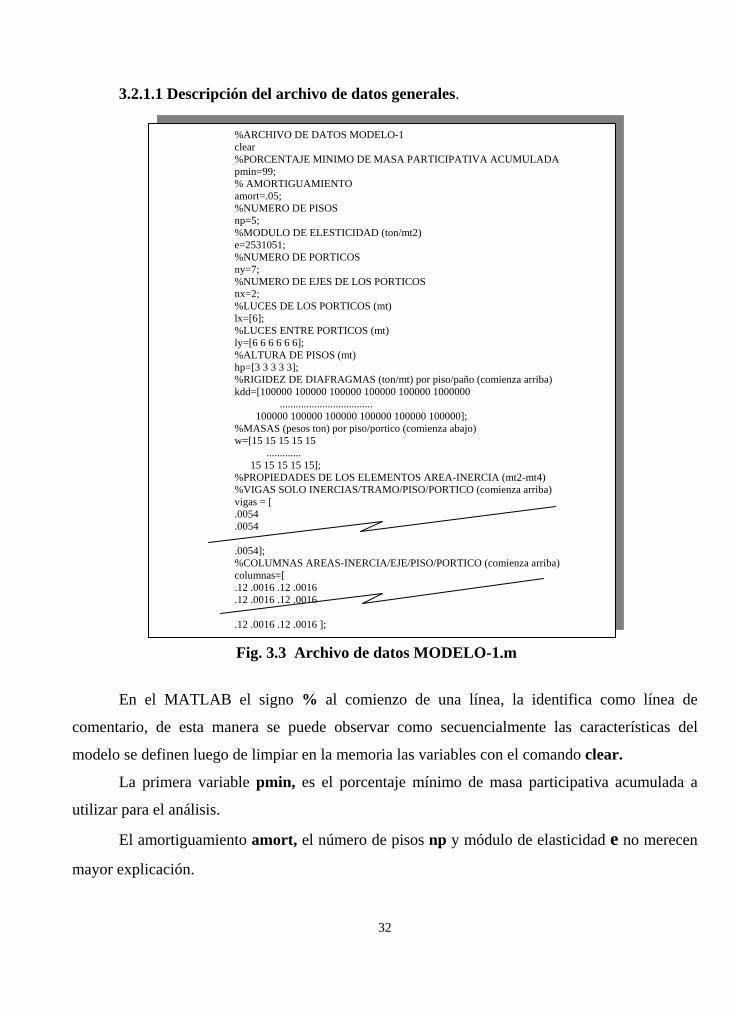
3.2.1.1 Descripción del archivo de datos generales.
En el MATLAB el signo % al comienzo de una línea, la identifica como línea de
comentario, de esta manera se puede observar como secuencialmente las características del
modelo se definen luego de limpiar en la memoria las variables con el comando clear.
La primera variable pmin, es el porcentaje mínimo de masa participativa acumulada a
utilizar para el análisis.
El amortiguamiento amort, el número de pisos np y módulo de elasticidad e no merecen
mayor explicación.
%ARCHIVO DE DATOS MODELO-1 clear %PORCENTAJE MINIMO DE MASA PARTICIPATIVA ACUMULADA pmin=99; % AMORTIGUAMIENTO amort=.05; %NUMERO DE PISOS np=5; %MODULO DE ELESTICIDAD (ton/mt2) e=2531051; %NUMERO DE PORTICOS ny=7; %NUMERO DE EJES DE LOS PORTICOS nx=2; %LUCES DE LOS PORTICOS (mt) lx=[6]; %LUCES ENTRE PORTICOS (mt) ly=[6 6 6 6 6 6]; %ALTURA DE PISOS (mt) hp=[3 3 3 3 3]; %RIGIDEZ DE DIAFRAGMAS (ton/mt) por piso/paño (comienza arriba) kdd=[100000 100000 100000 100000 100000 1000000 ................................... 100000 100000 100000 100000 100000 100000]; %MASAS (pesos ton) por piso/portico (comienza abajo) w=[15 15 15 15 15 ............. 15 15 15 15 15]; %PROPIEDADES DE LOS ELEMENTOS AREA-INERCIA (mt2-mt4) %VIGAS SOLO INERCIAS/TRAMO/PISO/PORTICO (comienza arriba) vigas = [ .0054 .0054 .0054]; %COLUMNAS AREAS-INERCIA/EJE/PISO/PORTICO (comienza arriba) columnas=[ .12 .0016 .12 .0016 .12 .0016 .12 .0016 .12 .0016 .12 .0016 ];
Fig. 3.3 Archivo de datos MODELO-1.m
33
Considerando que el análisis es en dirección X, ny es la variable que define el número de
pórticos mientras que nx define el número de ejes de columnas de cada pórticos.
La variable lx=[6], es el vector que contiene las luces de los tramos de vigas de los
pórticos, se ordenan de derecha a izquierda según Fig.3.2, separando cada dato por un espacio en
blanco, en este caso hay un solo argumento por haber un solo tramo.
La variable ly=[6 6 6 6 6 6], es el arreglo de luces entre cada pórtico y se ordena igual a la
variable lx.
La variable hp=[3 3 3 3 3], define las alturas de los pisos de abajo hacia arriba.
La variable kdd=[100000.........100000], es el arreglo vector que contiene las rigideces de
los diafragmas o resortes. Se introduce como una matriz, por fila secuencialmente todo el piso de
izquierda a derecha (según la Fig.3.2 del 1 hasta 6) empezando por el piso superior.
Las masa se consideran concentradas por piso y por pórtico definiendo así los grados de
libertad, se introducen como pesos en la variable w=[15 15 .......15], se ordenan también como
una matriz colocando el peso de cada piso de abajo hacia arriba por fila (según la Fig.3.2 de w1 al
w5) y por pórticos de izquierda a derecha (según la Fig.3.2 del pórtico 1 hasta el pórtico 7).
Las propiedades de los elementos van por separados, para las vigas se introducen en la
variable arreglo vigas=[.0054...... ] solo las inercias, en cada línea van todas las vigas del piso
separados por un espacio en blanco, ordenado los tramos de izquierda a derecha, de arriba hacia
abajo, y por pórtico de izquierda hacia la derecha.
El arreglo de columnas=[.12 .0016 .12 .0016 ......] es similar al de vigas en el
ordenamiento, pero en el se incluyen el área e inercia a la vez separado por un espacio en blanco.
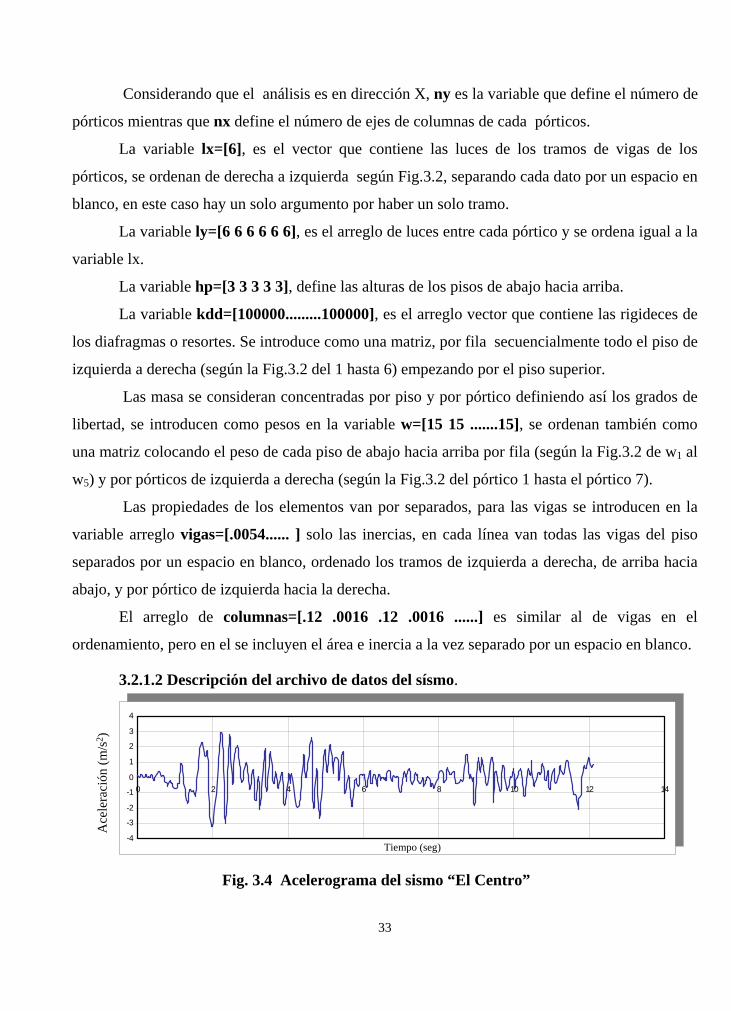
3.2.1.2 Descripción del archivo de datos del sísmo.
Fig. 3.4 Acelerograma del sismo “El Centro”
-4
-3
-2
-1
0
1
2
3
4
0 2 4 6 8 10 12 14
-4
-3
-2
-1
0
1
2
3
4
0 2 4 6 8 10 12 14
Ace
lera
ción
(m/s
2 )
Tiempo (seg)
34
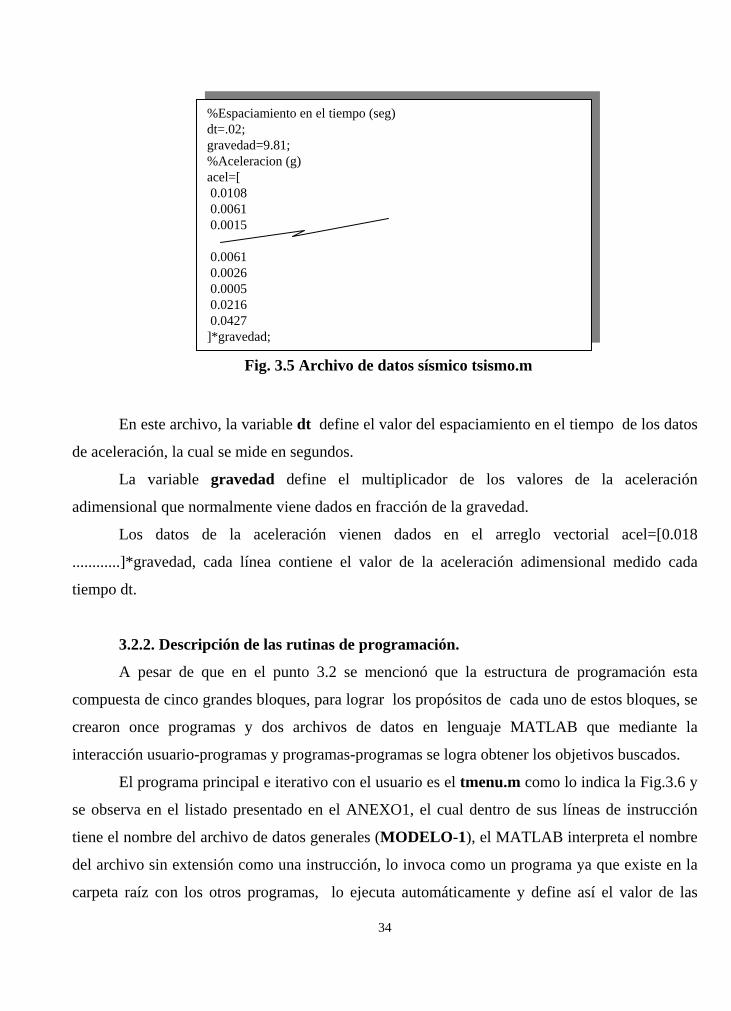
En este archivo, la variable dt define el valor del espaciamiento en el tiempo de los datos
de aceleración, la cual se mide en segundos.
La variable gravedad define el multiplicador de los valores de la aceleración
adimensional que normalmente viene dados en fracción de la gravedad.
Los datos de la aceleración vienen dados en el arreglo vectorial acel=[0.018
............]*gravedad, cada línea contiene el valor de la aceleración adimensional medido cada
tiempo dt.
3.2.2. Descripción de las rutinas de programación.
A pesar de que en el punto 3.2 se mencionó que la estructura de programación esta
compuesta de cinco grandes bloques, para lograr los propósitos de cada uno de estos bloques, se
crearon once programas y dos archivos de datos en lenguaje MATLAB que mediante la
interacción usuario-programas y programas-programas se logra obtener los objetivos buscados.
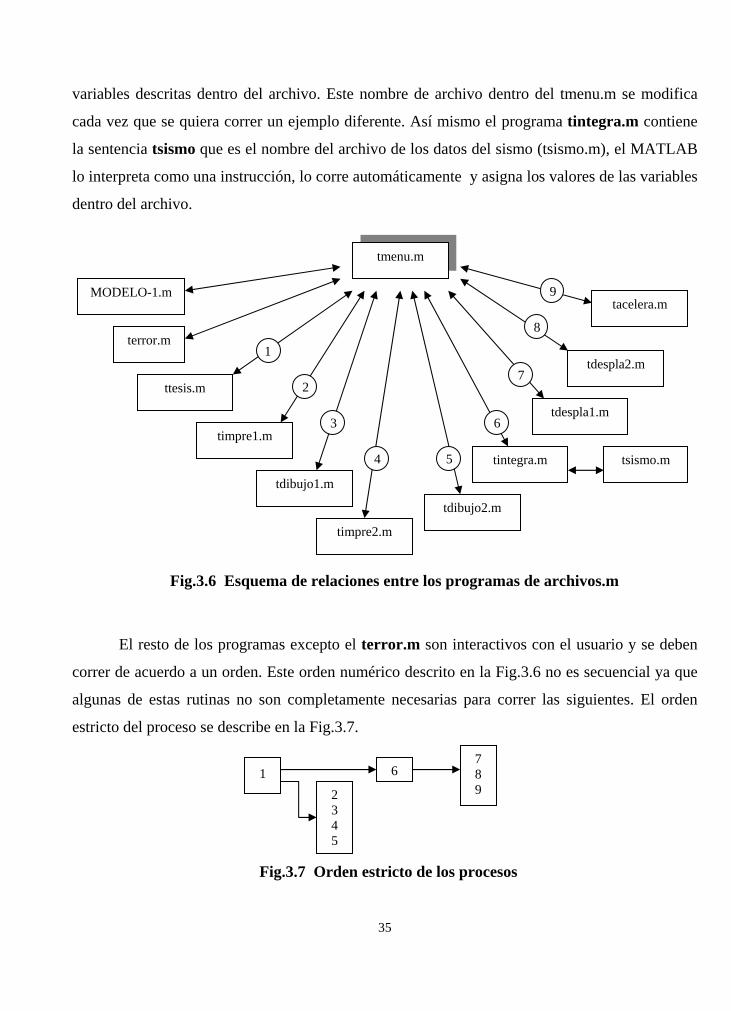
El programa principal e iterativo con el usuario es el tmenu.m como lo indica la Fig.3.6 y
se observa en el listado presentado en el ANEXO1, el cual dentro de sus líneas de instrucción
tiene el nombre del archivo de datos generales (MODELO-1), el MATLAB interpreta el nombre
del archivo sin extensión como una instrucción, lo invoca como un programa ya que existe en la
carpeta raíz con los otros programas, lo ejecuta automáticamente y define así el valor de las
%Espaciamiento en el tiempo (seg) dt=.02; gravedad=9.81; %Aceleracion (g) acel=[ 0.0108 0.0061 0.0015 0.0061 0.0026 0.0005 0.0216 0.0427 ]*gravedad;
Fig. 3.5 Archivo de datos sísmico tsismo.m
35
variables descritas dentro del archivo. Este nombre de archivo dentro del tmenu.m se modifica
cada vez que se quiera correr un ejemplo diferente. Así mismo el programa tintegra.m contiene
la sentencia tsismo que es el nombre del archivo de los datos del sismo (tsismo.m), el MATLAB
lo interpreta como una instrucción, lo corre automáticamente y asigna los valores de las variables
dentro del archivo.
El resto de los programas excepto el terror.m son interactivos con el usuario y se deben
correr de acuerdo a un orden. Este orden numérico descrito en la Fig.3.6 no es secuencial ya que
algunas de estas rutinas no son completamente necesarias para correr las siguientes. El orden
estricto del proceso se describe en la Fig.3.7.
tmenu.m
terror.m
ttesis.m
timpre1.m
tdibujo1.m
timpre2.m
tdibujo2.m
tintegra.m
tdespla1.m
tdespla2.m
tacelera.m
tsismo.m
MODELO-1.m
Fig.3.6 Esquema de relaciones entre los programas de archivos.m
1
2
3
4 5
6
7
8
9
1 2 3 4 5
67 8 9
Fig.3.7 Orden estricto de los procesos

36
El programa terror.m es una rutina que se corre automáticamente para verificar cierta
compatibilidad de la data, esto es, verifica si la longitud de los arreglos de datos como luces,
alturas, rigideces de los diafragmas, pesos, inercias y áreas de las vigas y columnas coinciden con
la cantidad de información necesaria de acuerdo al dimensionamiento general de la estructura.
3.2.2.1. Programa ttesis.m
Este programa es el mas extenso, y se encarga del cálculo de la matriz modal,
frecuencias, periodos y masas participativas, para lo cual se requiere con anticipación la matriz
de rigidez y masa de toda la estructura.
Observando el diagrama de flujo de la Fig.3.9, para el cálculo de la matriz de rigidez se
creó una rutina que genera la configuración general de los pórticos, esto es, se determinan las
coordenadas, apoyos fijos en bases de columnas e incidencias de los elementos siguiendo el
orden descrito en la Fig.3.8.
Siguiendo el diagrama, para el cálculo de la matriz de rigidez se creó una rutina iterativa
que toma en cuenta cada pórtico designando áreas e inercias, internamente entra en otro ciclo
iterativo que va calculando para cada pórtico la estructura arriostrada lateralmente liberando cada
piso (según Fig.2.8) usando para ello una rutina de análisis matricial de estructura ya existente.
Esta rutina a medida que calcula la estructura para cada condición de libertad de piso, va
calculando y ensamblando los componentes de la matriz de rigidez desacoplada según la Ec.2.7.
1 2 3
4 5 6
7 8 9
10 11 12 1 2
3 4 5
6 7
8 9 10
11 12
13 14 15
Fig. 3.8 Ordenamiento de los nodos y elementos de las estructuras
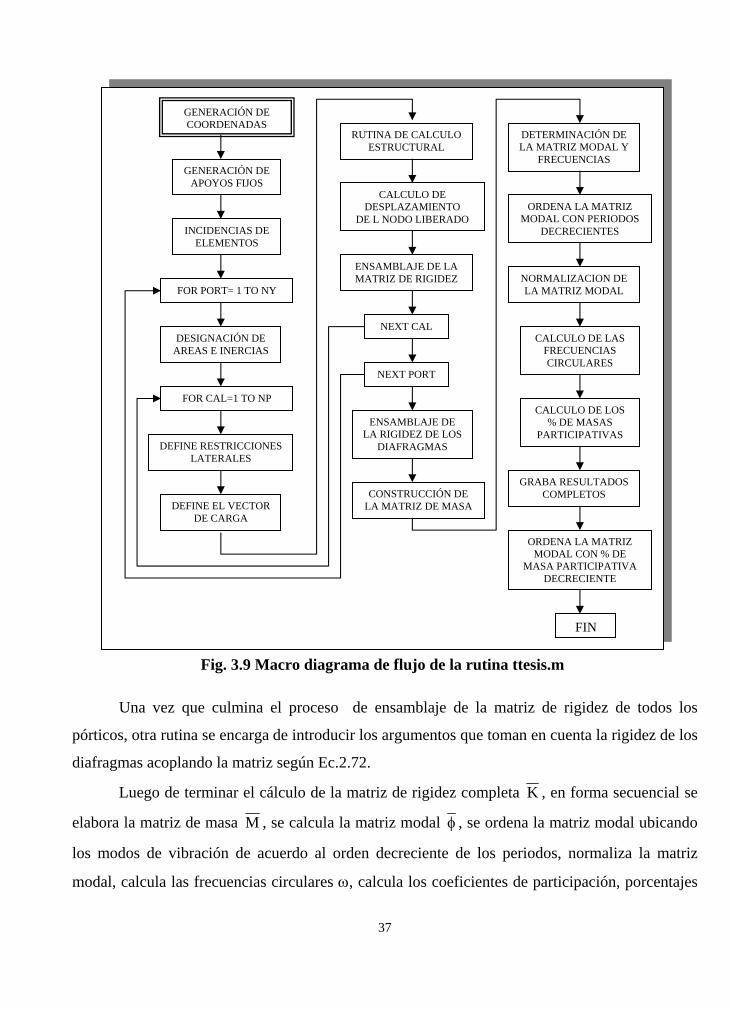
37
Una vez que culmina el proceso de ensamblaje de la matriz de rigidez de todos los
pórticos, otra rutina se encarga de introducir los argumentos que toman en cuenta la rigidez de los
diafragmas acoplando la matriz según Ec.2.72.
Luego de terminar el cálculo de la matriz de rigidez completa K , en forma secuencial se
elabora la matriz de masa M , se calcula la matriz modal φ , se ordena la matriz modal ubicando
los modos de vibración de acuerdo al orden decreciente de los periodos, normaliza la matriz
modal, calcula las frecuencias circulares ω, calcula los coeficientes de participación, porcentajes
GENERACIÓN DE COORDENADAS
GENERACIÓN DE APOYOS FIJOS
INCIDENCIAS DE ELEMENTOS
FOR PORT= 1 TO NY
DESIGNACIÓN DE AREAS E INERCIAS
FOR CAL=1 TO NP
DEFINE RESTRICCIONES LATERALES
DEFINE EL VECTOR DE CARGA
RUTINA DE CALCULO ESTRUCTURAL
CALCULO DE DESPLAZAMIENTO
DE L NODO LIBERADO
ENSAMBLAJE DE LA MATRIZ DE RIGIDEZ
NEXT CAL
NEXT PORT
ENSAMBLAJE DE LA RIGIDEZ DE LOS
DIAFRAGMAS
CONSTRUCCIÓN DE LA MATRIZ DE MASA
DETERMINACIÓN DE LA MATRIZ MODAL Y
FRECUENCIAS
ORDENA LA MATRIZ MODAL CON PERIODOS
DECRECIENTES
NORMALIZACION DE LA MATRIZ MODAL
CALCULO DE LAS FRECUENCIAS CIRCULARES
CALCULO DE LOS % DE MASAS
PARTICIPATIVAS
GRABA RESULTADOS COMPLETOS
ORDENA LA MATRIZ MODAL CON % DE
MASA PARTICIPATIVA DECRECIENTE
FIN
Fig. 3.9 Macro diagrama de flujo de la rutina ttesis.m
38
de masa participativa, graba en un archivo los resultados completos, ordena y reduce la matriz
modal de acuerdo al porcentaje de masa participativa en forma decreciente hasta acumular el
porcentaje mínimo acumulado prefijado en la data.
3.2.2.2. Programas timpre1.m, tdibujo1.m, timpre2.m y tdibujo2.m
Estos cuatros programas son alternativos, no son necesarios procesarlos para obtener la
respuesta dinámica en el tiempo. Su objetivo principal es verificar en pantalla los resultados del
programa ttesis.m, tanto los datos de las matrices como la forma grafica de los modos de
vibración.
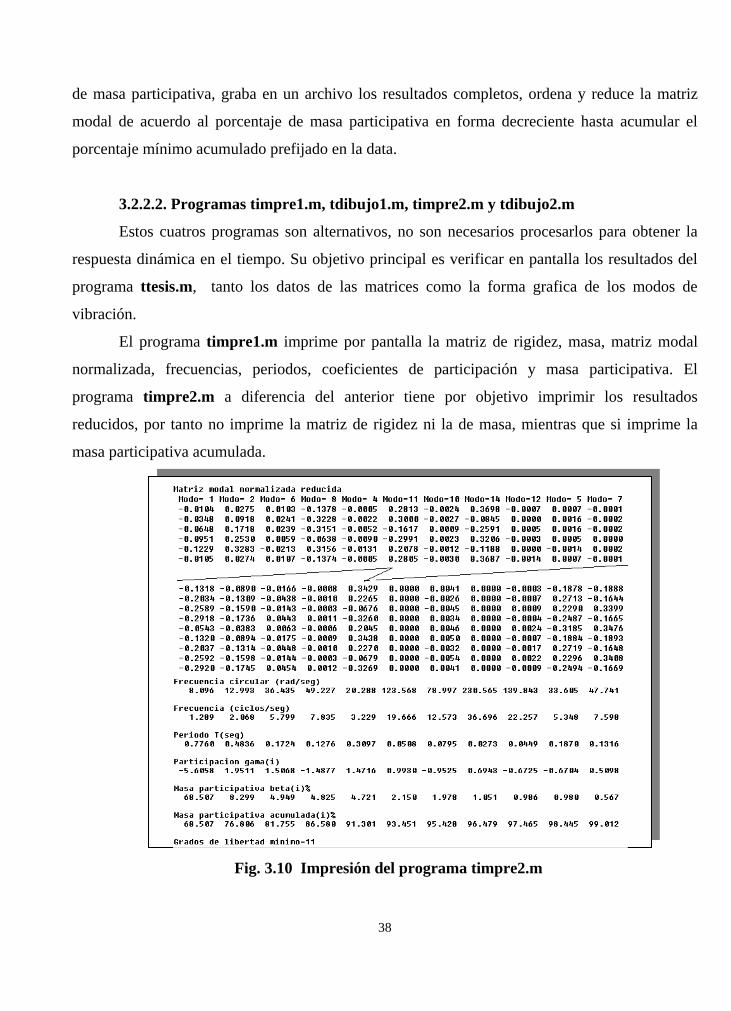
El programa timpre1.m imprime por pantalla la matriz de rigidez, masa, matriz modal
normalizada, frecuencias, periodos, coeficientes de participación y masa participativa. El
programa timpre2.m a diferencia del anterior tiene por objetivo imprimir los resultados
reducidos, por tanto no imprime la matriz de rigidez ni la de masa, mientras que si imprime la
masa participativa acumulada.
Fig. 3.10 Impresión del programa timpre2.m
39
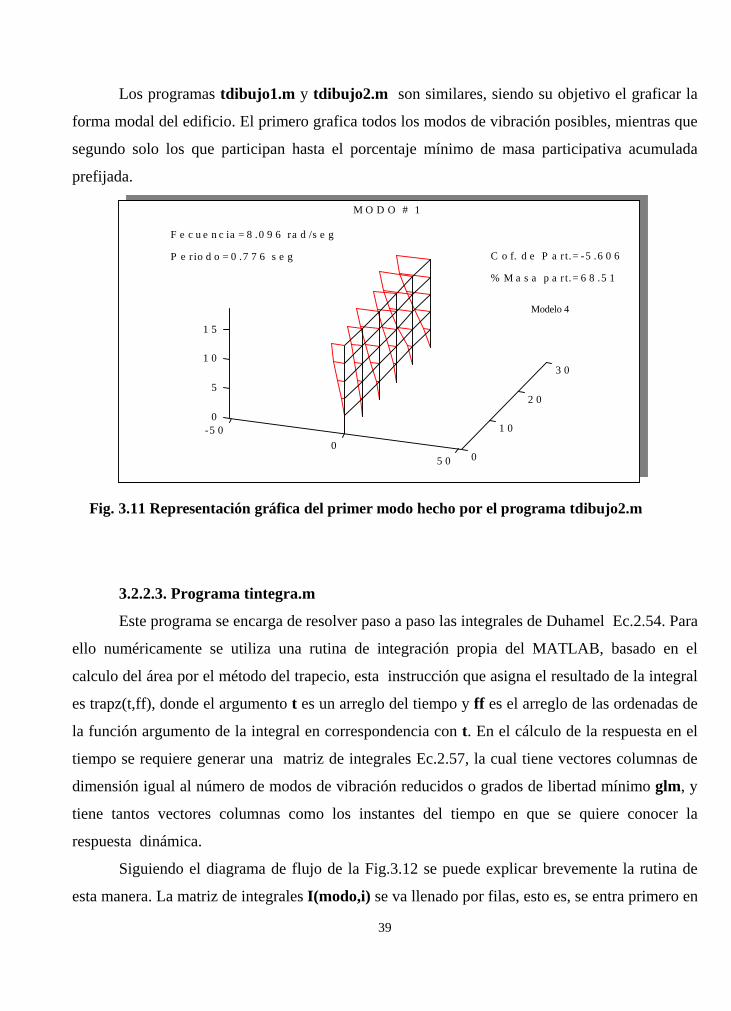
Los programas tdibujo1.m y tdibujo2.m son similares, siendo su objetivo el graficar la
forma modal del edificio. El primero grafica todos los modos de vibración posibles, mientras que
segundo solo los que participan hasta el porcentaje mínimo de masa participativa acumulada
prefijada.
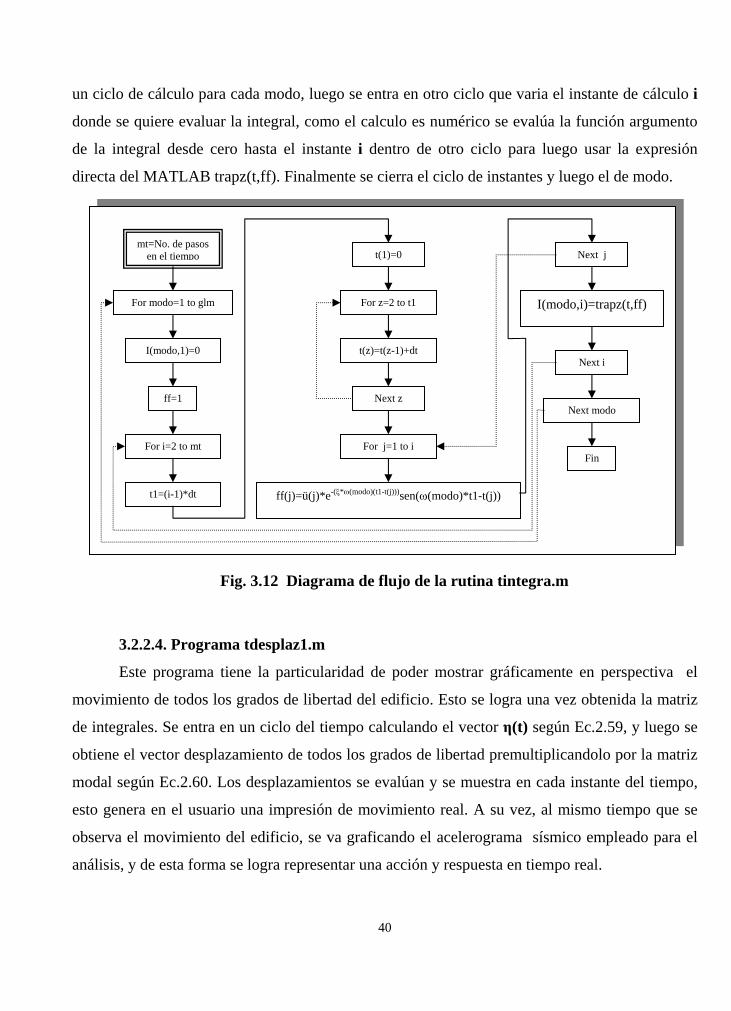
3.2.2.3. Programa tintegra.m
Este programa se encarga de resolver paso a paso las integrales de Duhamel Ec.2.54. Para
ello numéricamente se utiliza una rutina de integración propia del MATLAB, basado en el
calculo del área por el método del trapecio, esta instrucción que asigna el resultado de la integral
es trapz(t,ff), donde el argumento t es un arreglo del tiempo y ff es el arreglo de las ordenadas de
la función argumento de la integral en correspondencia con t. En el cálculo de la respuesta en el
tiempo se requiere generar una matriz de integrales Ec.2.57, la cual tiene vectores columnas de
dimensión igual al número de modos de vibración reducidos o grados de libertad mínimo glm, y
tiene tantos vectores columnas como los instantes del tiempo en que se quiere conocer la
respuesta dinámica.
Siguiendo el diagrama de flujo de la Fig.3.12 se puede explicar brevemente la rutina de
esta manera. La matriz de integrales I(modo,i) se va llenado por filas, esto es, se entra primero en
-5 00
5 0 0
1 0
2 0
3 0
0
5
1 0
1 5
M O D O # 1
P e rio d o = 0 .7 7 6 s e g
F e c u e n c ia = 8 .0 9 6 ra d /s e g
% M a s a p a r t.= 6 8 .5 1
C o f. d e P a r t.= -5 .6 0 6
-5 00
5 0 0
1 0
2 0
3 0
0
5
1 0
1 5
M O D O # 1
P e r io d o = 0 .7 7 6 s e g
F e c u e n c ia = 8 .0 9 6 ra d /s e g
% M a s a p a r t.= 6 8 .5 1
C o f. d e P a r t.= -5 .6 0 6
Fig. 3.11 Representación gráfica del primer modo hecho por el programa tdibujo2.m
Modelo 4
40
un ciclo de cálculo para cada modo, luego se entra en otro ciclo que varia el instante de cálculo i
donde se quiere evaluar la integral, como el calculo es numérico se evalúa la función argumento
de la integral desde cero hasta el instante i dentro de otro ciclo para luego usar la expresión
directa del MATLAB trapz(t,ff). Finalmente se cierra el ciclo de instantes y luego el de modo.
3.2.2.4. Programa tdesplaz1.m
Este programa tiene la particularidad de poder mostrar gráficamente en perspectiva el
movimiento de todos los grados de libertad del edificio. Esto se logra una vez obtenida la matriz
de integrales. Se entra en un ciclo del tiempo calculando el vector η(t) según Ec.2.59, y luego se
obtiene el vector desplazamiento de todos los grados de libertad premultiplicandolo por la matriz
modal según Ec.2.60. Los desplazamientos se evalúan y se muestra en cada instante del tiempo,
esto genera en el usuario una impresión de movimiento real. A su vez, al mismo tiempo que se
observa el movimiento del edificio, se va graficando el acelerograma sísmico empleado para el
análisis, y de esta forma se logra representar una acción y respuesta en tiempo real.
Fig. 3.12 Diagrama de flujo de la rutina tintegra.m
mt=No. de pasos en el tiempo
For modo=1 to glm
I(modo,1)=0
ff=1
For i=2 to mt
t(1)=0
For z=2 to t1
t(z)=t(z-1)+dt
For j=1 to i
ff(j)=ü(j)*e-(ξ*ω(modo)(t1-t(j)))sen(ω(modo)*t1-t(j))
Next j
t1=(i-1)*dt
I(modo,i)=trapz(t,ff)
Next i
Next modo
Fin
Next z

41
3.2.2.5. Programa tdesplaz2.m
Similar al programa anterior, este programa tiene la particularidad de poder mostrar
gráficamente en el plano del diafragma el movimiento de todos los grados de libertad contenidos
en el. Los desplazamientos se evalúan y se muestra en cada instante del tiempo generando una
impresión de movimiento real.
Fig. 3.13 Respuesta de desplazamiento del edificio en el tiempo=2.5 seg. Programa tdesplaz1.m
0 5 1 0-4
-3
-2
-1
0
1
2
3
-50
5 0
1 0
2 0
3 0
0
5
1 0
1 5
T ie m p o = 2 .5 s e g
0 5 1 0-4
-3
-2
-1
0
1
2
3
-50
5 0
1 0
2 0
3 0
0
5
1 0
1 5
T ie m p o = 2 .5 s e g
Aceleración en t=2.5
Acelerograma
Modelo 1
5
1 0
1 5
2 0
2 5
3 0
3 5
4 0
T ie m p o = 5 .1 4
P is o = 5
1 0
1 5
2 0
2 5
3 0
3 5
4 0
T ie m p o = 5 .1 4
P is o = 5
Fig. 3.14 Respuesta de desplazamiento del piso en el tiempo=5.14 seg.Programa tdesplaz2.m
Piso 5 Modelo 2
42
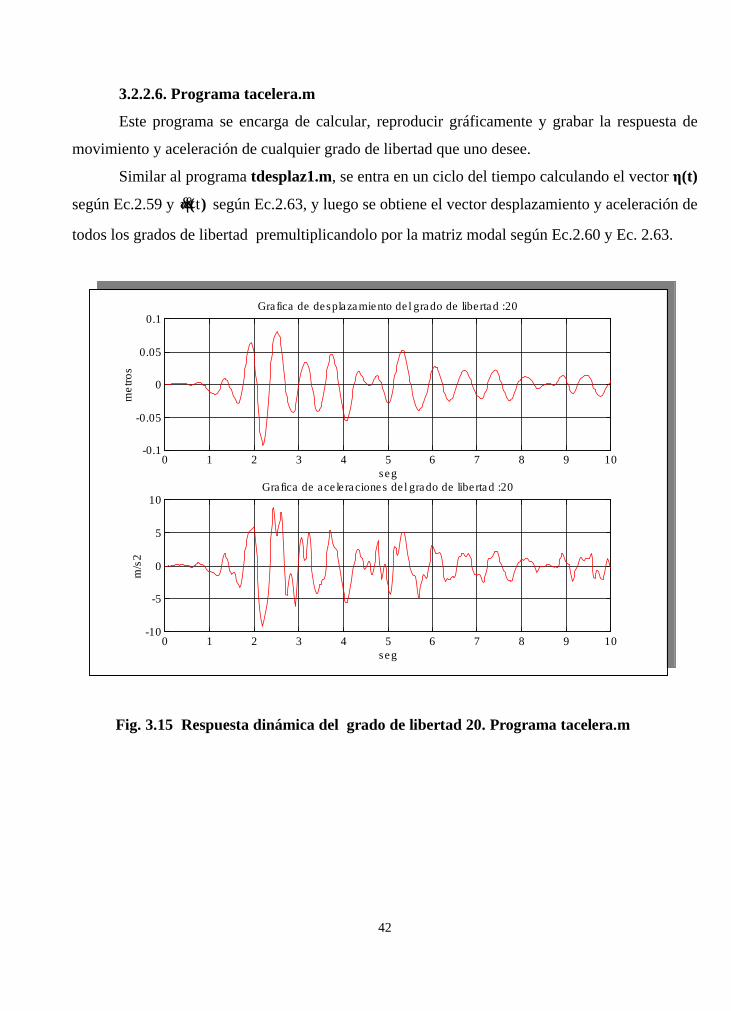
3.2.2.6. Programa tacelera.m
Este programa se encarga de calcular, reproducir gráficamente y grabar la respuesta de
movimiento y aceleración de cualquier grado de libertad que uno desee.
Similar al programa tdesplaz1.m, se entra en un ciclo del tiempo calculando el vector η(t)
según Ec.2.59 y )(tη&& según Ec.2.63, y luego se obtiene el vector desplazamiento y aceleración de
todos los grados de libertad premultiplicandolo por la matriz modal según Ec.2.60 y Ec. 2.63.
Fig. 3.15 Respuesta dinámica del grado de libertad 20. Programa tacelera.m
0 1 2 3 4 5 6 7 8 9 10-0.1
-0.05
0
0.05
0.1Grafica de de splazamiento de l grado de libe rtad :20
seg
met
ros
0 1 2 3 4 5 6 7 8 9 10-10
-5
0
5
10Grafica de ace le raciones de l grado de libe rtad :20
seg
m/s
2
0 1 2 3 4 5 6 7 8 9 10-0.1
-0.05
0
0.05
0.1Grafica de desplazamiento de l grado de libe rtad :20
seg
met
ros
0 1 2 3 4 5 6 7 8 9 10-10
-5
0
5
10Grafica de ace le raciones de l grado de libe rtad :20
seg
m/s
2

43
CAPITULO IV: MODELO ESTRUCTURAL DE LOS DIAFRAGMAS
44
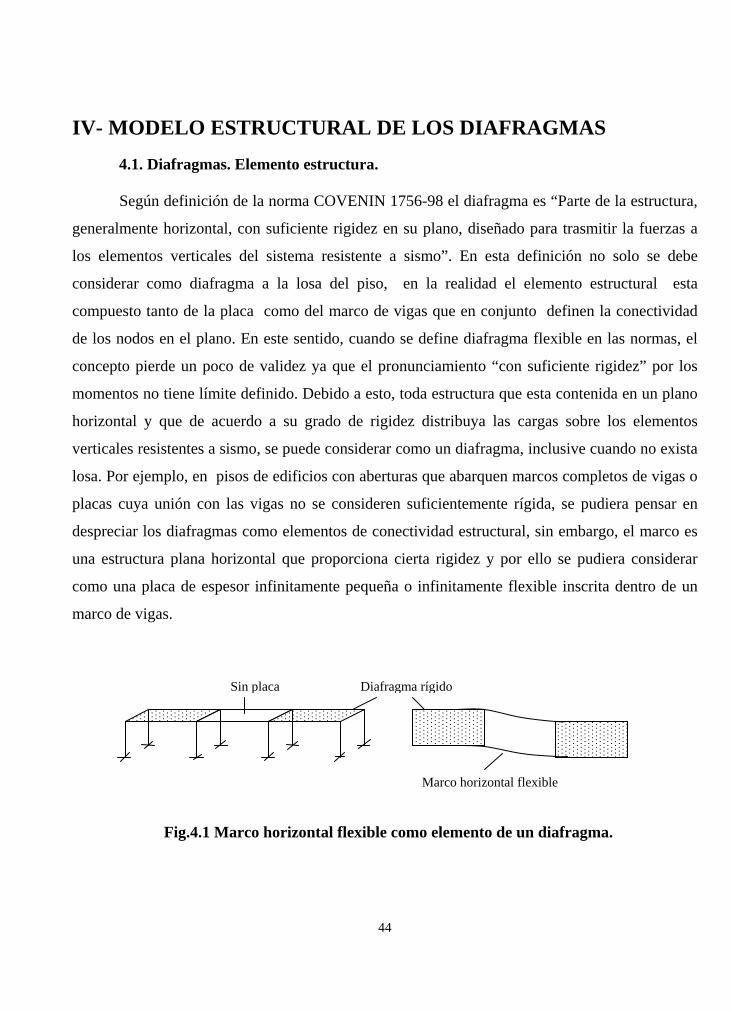
IV- MODELO ESTRUCTURAL DE LOS DIAFRAGMAS
4.1. Diafragmas. Elemento estructura. Según definición de la norma COVENIN 1756-98 el diafragma es “Parte de la estructura,
generalmente horizontal, con suficiente rigidez en su plano, diseñado para trasmitir la fuerzas a
los elementos verticales del sistema resistente a sismo”. En esta definición no solo se debe
considerar como diafragma a la losa del piso, en la realidad el elemento estructural esta
compuesto tanto de la placa como del marco de vigas que en conjunto definen la conectividad
de los nodos en el plano. En este sentido, cuando se define diafragma flexible en las normas, el
concepto pierde un poco de validez ya que el pronunciamiento “con suficiente rigidez” por los
momentos no tiene límite definido. Debido a esto, toda estructura que esta contenida en un plano
horizontal y que de acuerdo a su grado de rigidez distribuya las cargas sobre los elementos
verticales resistentes a sismo, se puede considerar como un diafragma, inclusive cuando no exista
losa. Por ejemplo, en pisos de edificios con aberturas que abarquen marcos completos de vigas o
placas cuya unión con las vigas no se consideren suficientemente rígida, se pudiera pensar en
despreciar los diafragmas como elementos de conectividad estructural, sin embargo, el marco es
una estructura plana horizontal que proporciona cierta rigidez y por ello se pudiera considerar
como una placa de espesor infinitamente pequeña o infinitamente flexible inscrita dentro de un
marco de vigas.
Diafragma rígido
Marco horizontal flexible
Sin placa
Fig.4.1 Marco horizontal flexible como elemento de un diafragma.

45
En las normas se establecen los criterios que definen a un diafragma flexible, todos ellos
se enmarcan dentro de los aspectos de rigidez, porcentajes de aberturas, rectangularidad de la
planta y conectividad del diafragma. Cada uno de estos aspectos debe ser modelado si se quiere
tomar en cuenta la influencia de su flexibilidad, sin embargo, muchas veces es difícil, laborioso y
poco eficiente o rentable modelar estas irregularidades en cada uno de los pisos de un edificio.
Este trabajo abre la posibilidad de poder incorporar un modelo sencillo de rigidez de los
diafragmas en un sistema matricial. Este modelo debe ser analizado previamente por otro medio
mas especifico en forma individual, en el cual se establecerá la rigidez traslacional que
proporciona el diafragma entre pórticos. Este criterio en cierta forma también obedece al hecho
de que la norma no establece, a que rigidez se refiere cuando uno de los aspectos de definición de
flexibilidad, plantea la comparación con una losa de ocho cm de espesor para poder considerar
dicha flexibilidad.
Por otro lado adicional a las posibles irregularidades de la planta, se tiene el hecho de en
la mayoría de los casos, las placas están constituidas por losas nervadas cuya variedad de
Fig. 4.2 Modelo estructural de un piso para la determinación de la rigidez traslacional
Δ=1
K= Rigidez (Ton/m)
Entrepiso real Modelo de cálculo
Placa
Vigas
46
geometría en el espacio y orientación de los nervios dificulta establecer un modelo aproximado
aceptable.
4.2. Modelo de Rigidez Traslacional Equivalente. El planteamiento expuesto en este trabajo consiste en probar si un modelo equivalente que
toma en cuenta la rigidez traslacional entre pórticos despreciando las deformaciones axiales es
capaz de reproducir la respuesta dinámica de una estructura real con bastante aproximación.
Como se muestra en la Fig.4.2, una conectividad entre pórticos adyacentes está
compuesto un enrejado de vigas y losa que en conjunto restringen el desplazamiento relativo
entre dichos pórticos. La tarea en sí no consistirá en modelar y determinar la rigidez del
diafragma, sino mas bien en estudiar el comportamiento del sistema si se incorpora dicha rigidez.
A pesar que el modelaje y análisis de la placa no es el tema fundamental, a manera de
poder hacer las comprobaciones y comparaciones necesarias, este aspecto se tratara por encima
para conocer algunas bases teóricas del modelo patrón que se empleará.
4.2.1. Modelo Isótropo y discretizado de un diafragma.
Determinar el comportamiento de una placa irregular sometida a fuerzas en su mismo
plano no es un tema completamente resuelto. Para este estudio supondremos el caso mas simple
como es el de una placa con características elásticas iguales en todas la direcciones (material
isótropo), unido a un marco de vigas por juntas que trasmiten de alguna manera fuerzas.
En métodos de cálculo numéricos donde se discretiza la estructura en elementos de
tamaño finito, la estrategia principal es determinar en forma local la matriz de rigidez de cada
elemento para luego hacer un ensamblaje en un sistema global.
Para una placa, el modelo con el cual se puede determinar los coeficientes de rigidez para
un elemento rectangular sigue un procedimiento similar al utilizado para los pórticos. El
elemento rectangular se define por cuatro nodos interconectados por una membrana, cada nodo
tendrá dos grados de libertad en las direcciones del sistema local en su plano. A cada nodo se le
introducirá un desplazamiento unitario según cada grado de libertad mientras los otros posibles
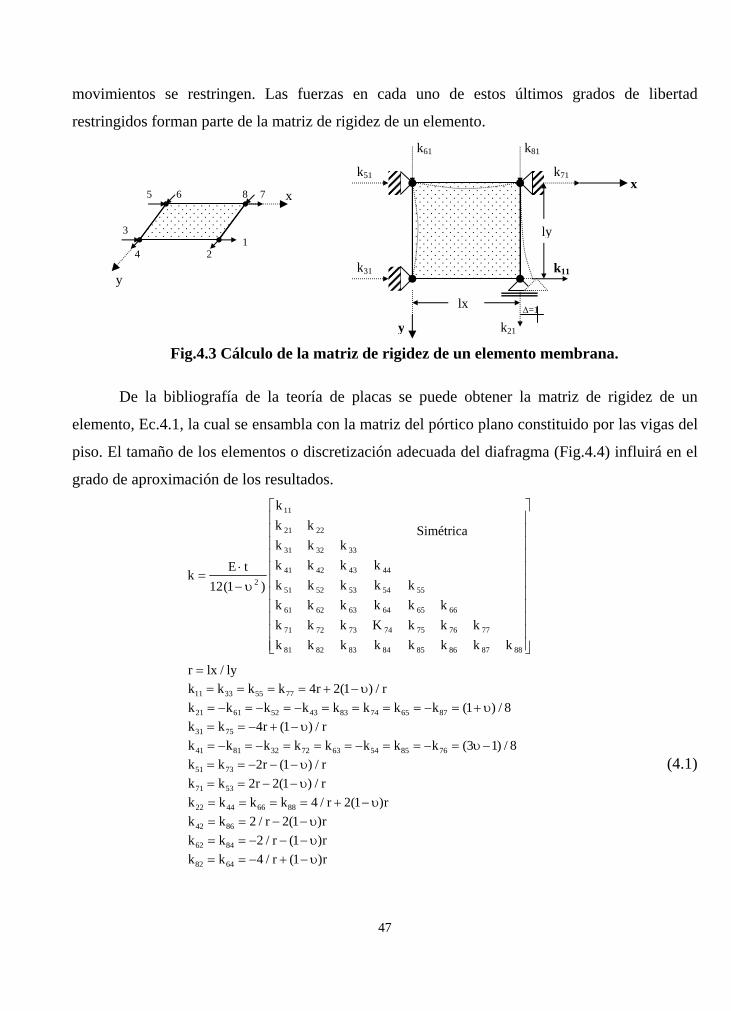
47
movimientos se restringen. Las fuerzas en cada uno de estos últimos grados de libertad
restringidos forman parte de la matriz de rigidez de un elemento.
De la bibliografía de la teoría de placas se puede obtener la matriz de rigidez de un
elemento, Ec.4.1, la cual se ensambla con la matriz del pórtico plano constituido por las vigas del
piso. El tamaño de los elementos o discretización adecuada del diafragma (Fig.4.4) influirá en el
grado de aproximación de los resultados.
r)1(r/4kkr)1(r/2kkr)1(2r/2kk
r)1(2r/4kkkkr/)1(2r2kkr/)1(r2kk
8/)13(kkkkkkkkr/)1(r4kk
8/)1(kkkkkkkkr/)1(2r4kkkk
ly/lxr
6482
8462
8642
88664422
5371
7351
7685546372328141
7531
8765748343526121
77553311
υ−+−==υ−−−==υ−−==
υ−+====υ−−==υ−−−==
−υ=−==−===−=−=υ−+−==
υ+=−====−=−=−=υ−+====
=
(4.1)
Simétrica
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
υ−⋅
=
8887868584838281
77767574737271
666564636261
5554535251
44434241
333231
2221
11
2
kkkkkkkkkkkKkkk
kkkkkkkkkkk
kkkkkkk
kkk
)1(12tEk
x
2 1
7 8
4
3
6 5
y
Fig.4.3 Cálculo de la matriz de rigidez de un elemento membrana.
k11
k21
k71
k81 k61
k51
k31
lx
ly
x
y Δ=1
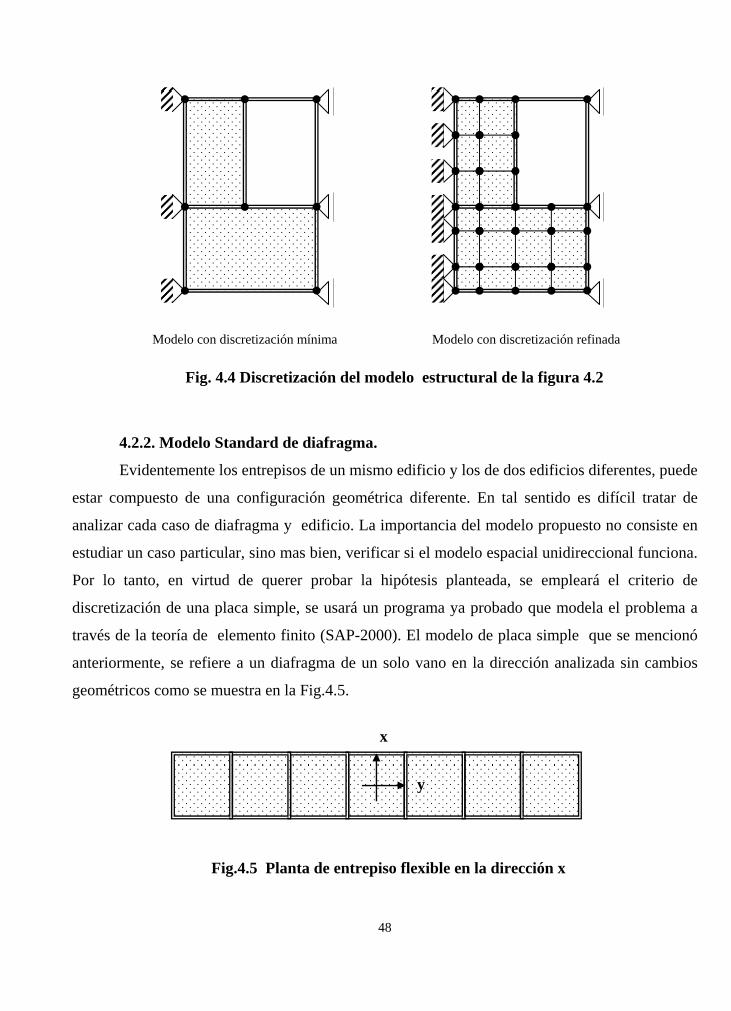
48
4.2.2. Modelo Standard de diafragma.
Evidentemente los entrepisos de un mismo edificio y los de dos edificios diferentes, puede
estar compuesto de una configuración geométrica diferente. En tal sentido es difícil tratar de
analizar cada caso de diafragma y edificio. La importancia del modelo propuesto no consiste en
estudiar un caso particular, sino mas bien, verificar si el modelo espacial unidireccional funciona.
Por lo tanto, en virtud de querer probar la hipótesis planteada, se empleará el criterio de
discretización de una placa simple, se usará un programa ya probado que modela el problema a
través de la teoría de elemento finito (SAP-2000). El modelo de placa simple que se mencionó
anteriormente, se refiere a un diafragma de un solo vano en la dirección analizada sin cambios
geométricos como se muestra en la Fig.4.5.
Fig. 4.4 Discretización del modelo estructural de la figura 4.2
Modelo con discretización mínima Modelo con discretización refinada
Fig.4.5 Planta de entrepiso flexible en la dirección x
x
y

49
Como modelo académico para el estudio a realizar, cada paño de losa circunscrita por
vigas se dimensionará de 6*6 mt., se discretizará cada metro para un cálculo por elemento finito
con el SAP, y se fijará un espesor de 5 cm para obtener un diafragma mas delgado del
establecido según las limitaciones de las normas para considerar su flexibilidad. En algunos casos
se eliminará el diafragma para aumentar la flexibilidad ya que a pesar del poco espesor de la
placa, la rigidez sigue siendo grande. Para el marco de vigas a utilizaran vigas altas de 30*40 cm
unidas al diafragma según la discretización establecida anteriormente. Un modelo de cálculo de
estos diafragmas con el SAP se presenta en la Fig.4.6
En forma similar y dependiendo de las condiciones de borde del marco de vigas, se
calcularon las rigideces para los diferentes casos como se describen en la Fig. 4.7.
Fig. 4.6 Modelo y Cálculo de rigidez (k) de un diafragma con el SAP
6874 ton/nodo
(48118 ton)
Δ=1 mt
k=48118 ton/m
.30 .40
.05
Corte de la placa
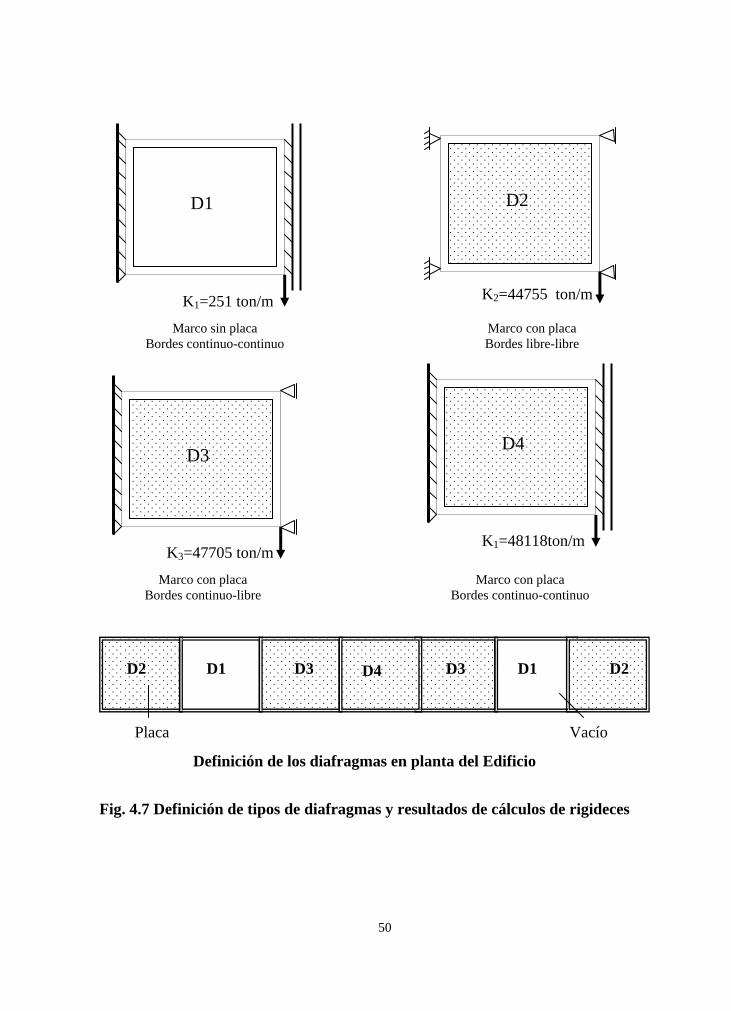
50
Definición de los diafragmas en planta del Edificio
K1=251 ton/m
D1
Marco sin placa Bordes continuo-continuo
K2=44755 ton/m
D2
Marco con placa Bordes libre-libre
K3=47705 ton/m
D3
Marco con placa Bordes continuo-libre
K1=48118ton/m
D4
Marco con placa Bordes continuo-continuo
Placa Vacío
D1 D2 D2 D3 D3 D1 D4
Fig. 4.7 Definición de tipos de diafragmas y resultados de cálculos de rigideces

51
CAPITULO V: ANÁLISIS DE LOS MODELOS

52
V- ANÁLISIS DE LOS MODELOS
5.1. Configuración de los Modelos.
5.1.1. Modelo estructural.
Como se describió en el capítulo anterior, el modelo del edificio estará constituido por
diafragmas de acuerdo al modelo standard, dispuestos en forma similar al entrepiso de la Fig.4.5
y con un número de pisos igual a lo establecido en la Fig.5.1. Los marcos de vigas serán fijos de
30*40 cm para todos los pisos excepto el Modelo-1.
Para establecer diferentes comportamientos se variaran algunas condiciones como la
rigidez del diafragma. Para ello se analizarán estructuras con diafragma de rigidez infinita,
estructura con diafragma de rigidez obtenida del modelo standard equivalente a los cuales se
llamarán diafragmas fuertes, y estructuras con algunos marcos sin losa a los cuales se le llamará
diafragma débiles.
En algunos casos se empleará cambios de rigidez de columnas en planta, lo que permite
simular edificios con rigidez lateral no constante, esto es, edificios con plantas en forma de H o
L. De esta manera, adicionalmente la distribución asimétrica de los elementos verticales con
diferente rigidez también permitirá estudiar la influencia de la excentricidad en el
comportamiento. El resumen de los tipos de plantas se puede observar en la Fig.5.1.
A pesar que el objetivo principal no es analizar un ejemplo real, para establecer el orden
de las cargas con la cuales se trabajará se presenta la siguiente descripción:
Placa de espesor 5 cm de concreto ................................................120 kg/m2
Acabados ......................................................................................130 kg/m2
Tabiquería .....................................................................................100 kg/m2
Sobrecarga (25% del total) ........................................................... 50 kg/m2
Total .............................................................................................400 kg/m2
Por viga ( Área tributaria 6m*6m ) ...............................................14.400 kg
Para los efectos del análisis se redondeará a 15 ton para todas la vigas ( pórticos internos y
externos), pudiéndose aumentar o disminuir en algunos pórticos donde se quiera aumentar la
fuerza y desplazamiento relativos entre ellos.
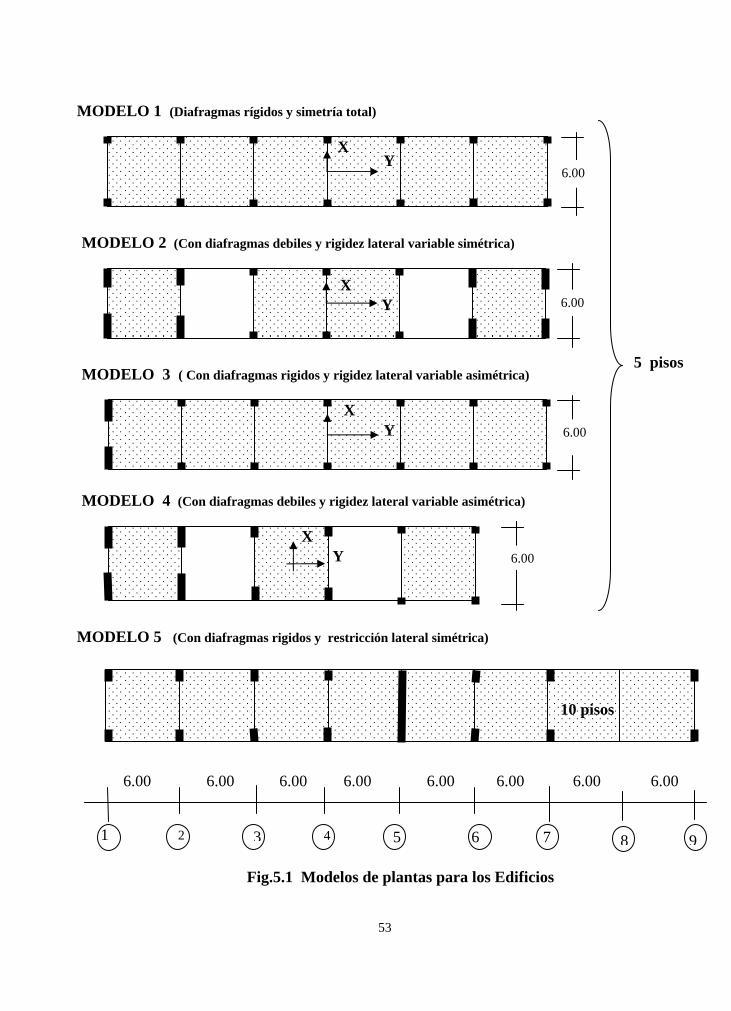
53
MODELO 1 (Diafragmas rígidos y simetría total)
6.00 Y
X
6.00 Y X
MODELO 2 (Con diafragmas debiles y rigidez lateral variable simétrica)
6.00 Y X
MODELO 3 ( Con diafragmas rigidos y rigidez lateral variable asimétrica)
6.00 Y X
MODELO 4 (Con diafragmas debiles y rigidez lateral variable asimétrica)
Fig.5.1 Modelos de plantas para los Edificios
1 4 5 6
6.00 6.00 6.00 6.00 6.00 6.00
2 3 7
6.00 6.00
8 9
MODELO 5 (Con diafragmas rigidos y restricción lateral simétrica)
5 pisos
10 pisos
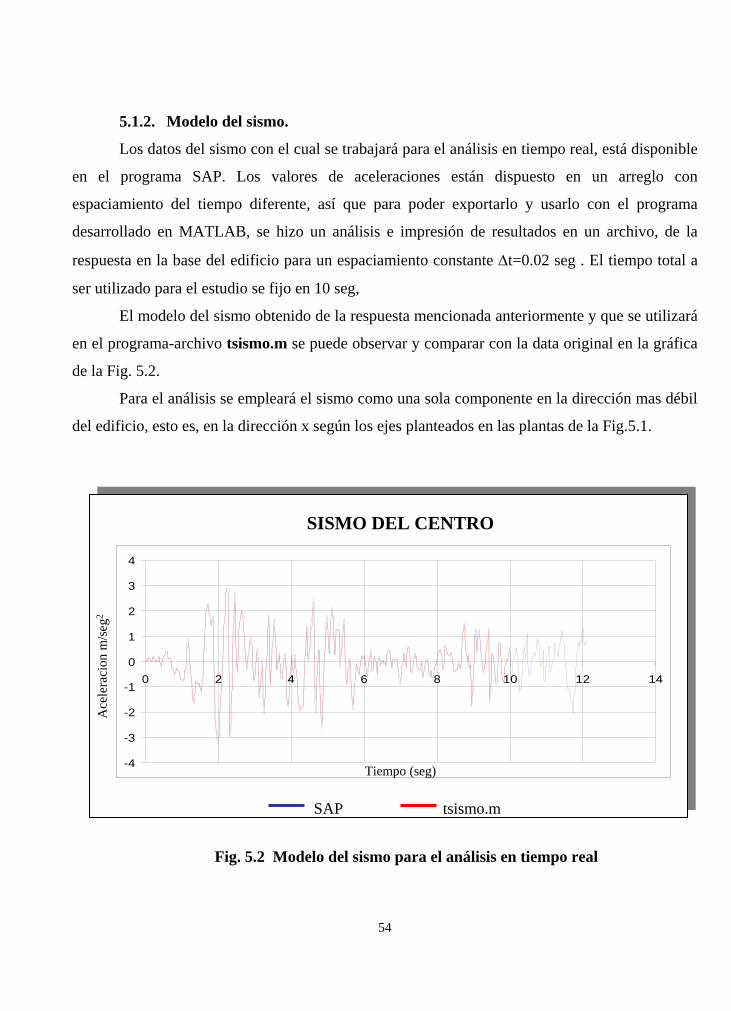
54
5.1.2. Modelo del sismo.
Los datos del sismo con el cual se trabajará para el análisis en tiempo real, está disponible
en el programa SAP. Los valores de aceleraciones están dispuesto en un arreglo con
espaciamiento del tiempo diferente, así que para poder exportarlo y usarlo con el programa
desarrollado en MATLAB, se hizo un análisis e impresión de resultados en un archivo, de la
respuesta en la base del edificio para un espaciamiento constante Δt=0.02 seg . El tiempo total a
ser utilizado para el estudio se fijo en 10 seg,
El modelo del sismo obtenido de la respuesta mencionada anteriormente y que se utilizará
en el programa-archivo tsismo.m se puede observar y comparar con la data original en la gráfica
de la Fig. 5.2.
Para el análisis se empleará el sismo como una sola componente en la dirección mas débil
del edificio, esto es, en la dirección x según los ejes planteados en las plantas de la Fig.5.1.
-4
-3
-2
-1
0
1
2
3
4
0 2 4 6 8 10 12 14
Tiempo (seg)
Ace
lera
cion
m/s
eg2
SAP tsismo.m
Fig. 5.2 Modelo del sismo para el análisis en tiempo real
SISMO DEL CENTRO
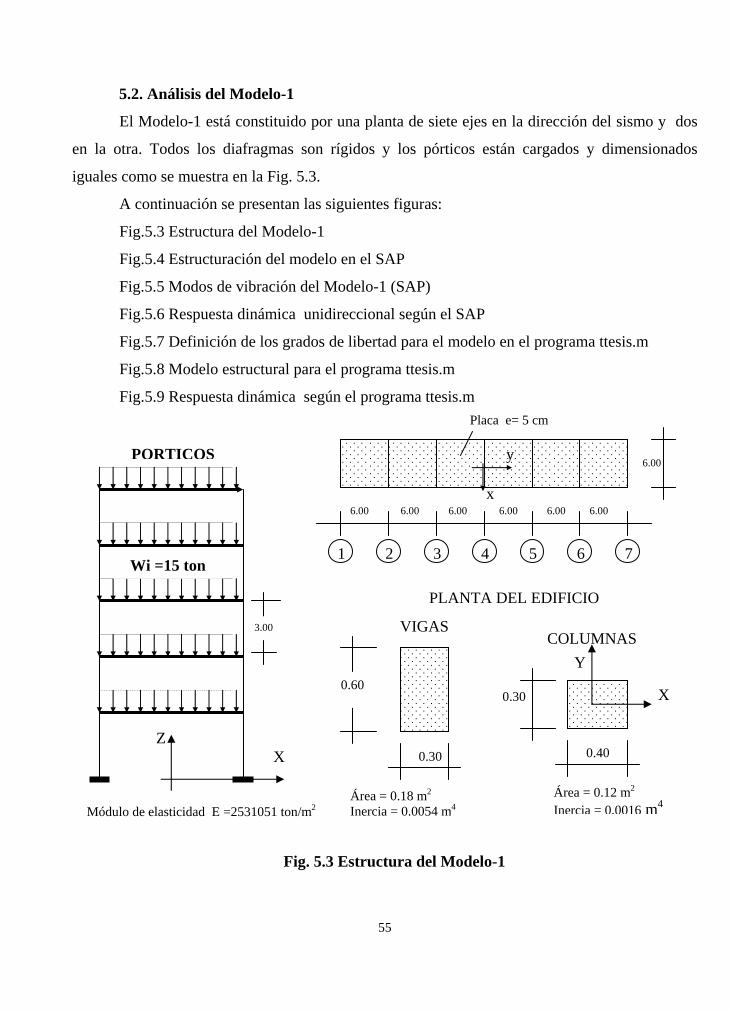
55
5.2. Análisis del Modelo-1
El Modelo-1 está constituido por una planta de siete ejes en la dirección del sismo y dos
en la otra. Todos los diafragmas son rígidos y los pórticos están cargados y dimensionados
iguales como se muestra en la Fig. 5.3.
A continuación se presentan las siguientes figuras:
Fig.5.3 Estructura del Modelo-1
Fig.5.4 Estructuración del modelo en el SAP
Fig.5.5 Modos de vibración del Modelo-1 (SAP)
Fig.5.6 Respuesta dinámica unidireccional según el SAP
Fig.5.7 Definición de los grados de libertad para el modelo en el programa ttesis.m
Fig.5.8 Modelo estructural para el programa ttesis.m
Fig.5.9 Respuesta dinámica según el programa ttesis.m
0.30
VIGAS
0.60
Área = 0.18 m2 Inercia = 0.0054 m4
0.30
Y
X
0.40
COLUMNAS
Área = 0.12 m2 Inercia = 0.0016 m4
PLANTA DEL EDIFICIO
Fig. 5.3 Estructura del Modelo-1
3.00
Módulo de elasticidad E =2531051 ton/m2
PORTICOS
X Z
Wi =15 ton
x
6.00
6.00 6.00 6.00 6.00 6.00 6.00
y
Placa e= 5 cm
1 2 3 4 5 6 7

56
Fig. 5.4 Estructuración del Modelo-1 (SAP)
6 GL POR JUNTA Ux,Uy,Uz,Rx,Ry,Rz6 GL POR JUNTA Ux,Uy,Uz,Rx,Ry,Rz
Fig.5.5 Modos de vibración del Modelo-1 (SAP). Ordenado por Modo.
MODO 1 Período=0.6563 Masa Part.=83.98%
MODO 3 Período=0.2127 Masa Part.=10.49%
MODO 4 Período=0.2063 Masa Part.=0.0009%
MODO 5 Período=0.1225 Masa Part.=3.6%
MODO 6 Período=0.1195 Masa Part.=0.0005%
MODO 2 Período=0.6344 Masa Part.=0.0059%
Centro de rotación
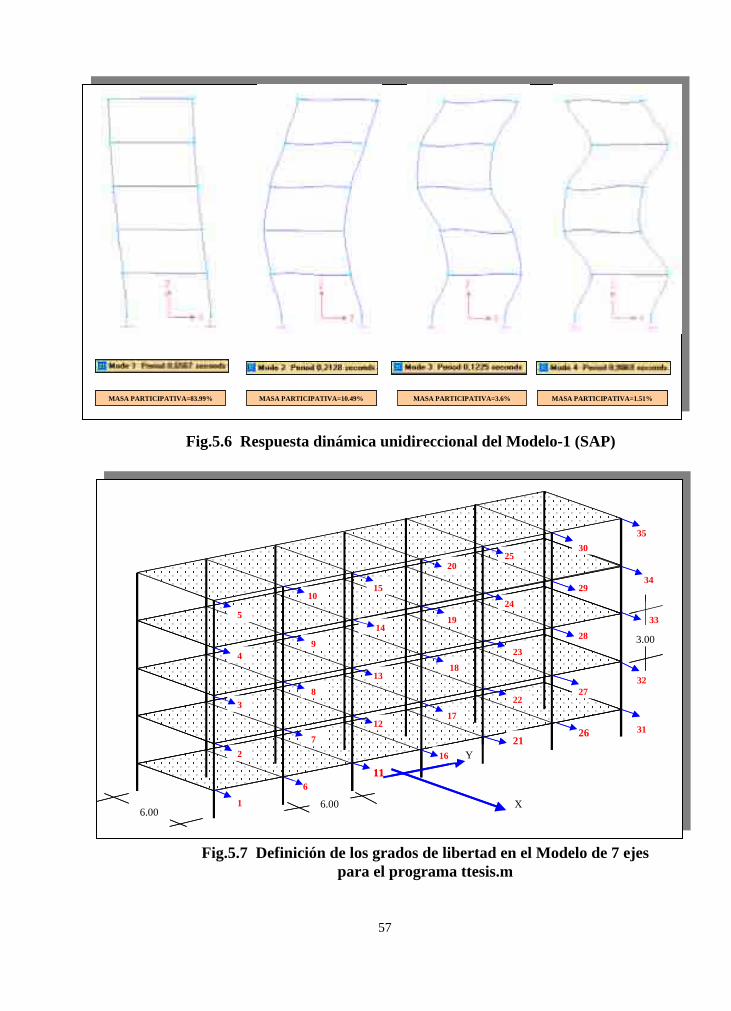
57
33
31
32
35
6
1
Y
X 6.00 6.00
3.00
2
5
3
7
20
8
9
10
11
12
13
14
15
16
17
18
19
21
22
23
24
25
26
27
28
29 34
4
33
31
32
35
6
1
Y
X 6.00 6.00
3.00
2
5
3
7
20
8
9
10
11
12
13
14
15
16
17
18
19
21
22
23
24
25
26
27
28
29
30
34
4
Fig.5.7 Definición de los grados de libertad en el Modelo de 7 ejes para el programa ttesis.m
Fig.5.6 Respuesta dinámica unidireccional del Modelo-1 (SAP)
MASA PARTICIPATIVA=83.99% MASA PARTICIPATIVA=10.49% MASA PARTICIPATIVA=3.6% MASA PARTICIPATIVA=1.51%MASA PARTICIPATIVA=83.99% MASA PARTICIPATIVA=10.49% MASA PARTICIPATIVA=3.6% MASA PARTICIPATIVA=1.51%

58
Rigidez de los Resortes K= ∞
K K K KK K
P-1 P-2 P-3 P-4 P-5 P-6 P-7
Fig. 5.8 Modelo estructural con diafragma infinitamente rígido para el programa ttesis.m
F r e c u e n c i a c i r c u l a r ( r a d / s e g )
F r e c u e n c i a ( c i c l o s / s e g )
P e r i o d o T ( s e g . )
P a r t i c i p a c i ó n δ
M a s a p a r t i c i p a t i v a β %
M a s a p a r t i c i p a t i v a a c u m u l a d a %
9 . 7 4 6 3 0 . 1 0 6 5 2 . 3 8 5 7 3 . 9 7 2
1 . 5 5 1 4 . 7 9 1 8 . 3 3 7 1 1 . 7 7 3
0 . 6 4 4 7 0 . 2 0 8 7 0 . 1 1 9 9 0 . 0 8 4 9
6 . 7 0 2 1 2 . 3 7 2 5 1 . 3 9 1 5 - 0 . 9 0 2 6
8 3 . 9 3 3 1 0 . 5 1 8 3 . 6 1 8 1 . 5 2 2
8 3 . 9 3 3 9 4 . 4 5 0 9 8 . 0 6 8 9 9 . 5 9 0
M o d o - 1 M o d o - 2 M o d o - 3 M o d o - 4
F r e c u e n c i a c i r c u l a r ( r a d / s e g )
F r e c u e n c i a ( c i c l o s / s e g )
P e r i o d o T ( s e g . )
P a r t i c i p a c i ó n δ
M a s a p a r t i c i p a t i v a β %
M a s a p a r t i c i p a t i v a a c u m u l a d a %
F r e c u e n c i a c i r c u l a r ( r a d / s e g )
F r e c u e n c i a ( c i c l o s / s e g )
P e r i o d o T ( s e g . )
P a r t i c i p a c i ó n δ
M a s a p a r t i c i p a t i v a β %
M a s a p a r t i c i p a t i v a a c u m u l a d a %
9 . 7 4 6 3 0 . 1 0 6 5 2 . 3 8 5 7 3 . 9 7 2
1 . 5 5 1 4 . 7 9 1 8 . 3 3 7 1 1 . 7 7 3
0 . 6 4 4 7 0 . 2 0 8 7 0 . 1 1 9 9 0 . 0 8 4 9
6 . 7 0 2 1 2 . 3 7 2 5 1 . 3 9 1 5 - 0 . 9 0 2 6
8 3 . 9 3 3 1 0 . 5 1 8 3 . 6 1 8 1 . 5 2 2
8 3 . 9 3 3 9 4 . 4 5 0 9 8 . 0 6 8 9 9 . 5 9 0
M o d o - 1 M o d o - 2 M o d o - 3 M o d o - 4
Modo=1 Modo=2 Modo=3 Modo=4
0.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.1087
GL
123456789
1011121314151617
Modo=1 Modo=2 Modo=3 Modo=4
0.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.1087
GL
123456789
1011121314151617
Modo=1 Modo=2 Modo=3 Modo=4
0.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.0906
GL
181920212223242526272829303132333435
Modo=1 Modo=2 Modo=3 Modo=4
0.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.09060.0391 0.1158 0.1728 -0.18300.0905 0.1873 0.0922 0.10870.1360 0.1224 -0.1508 0.08170.1703 -0.0342 -0.1190 -0.18230.1904 -0.1697 0.1349 0.0906
GL
181920212223242526272829303132333435
Matriz Modal Normalizada Reducida
Fig. 5.9 Respuesta del Modelo-1 (ttesis.m)
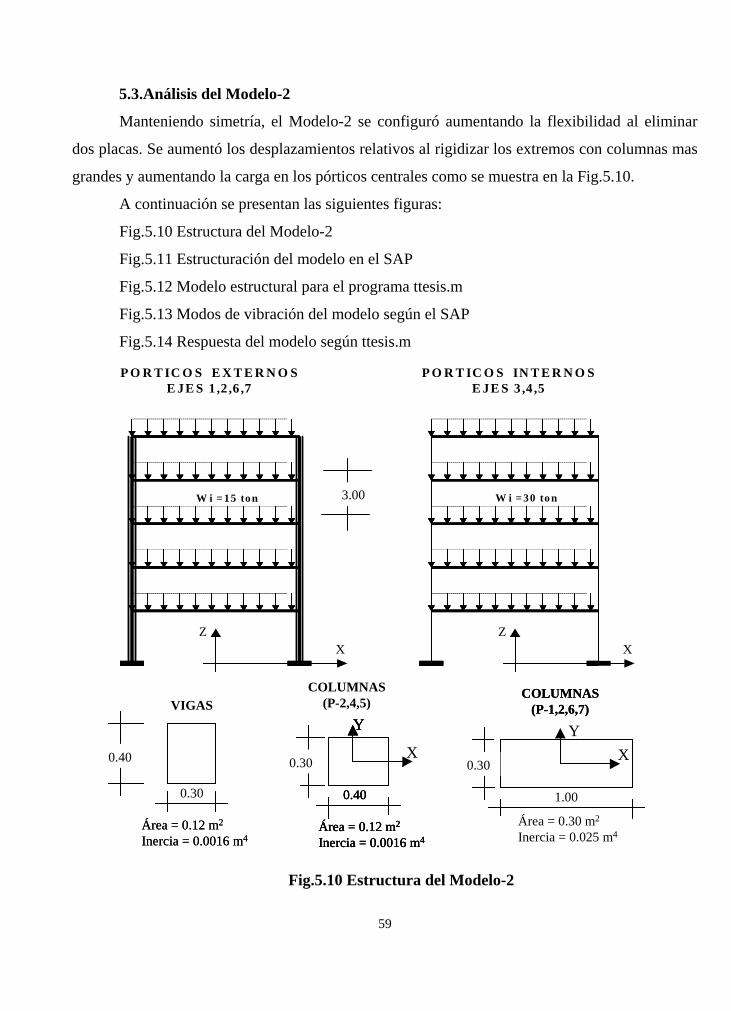
59
5.3.Análisis del Modelo-2
Manteniendo simetría, el Modelo-2 se configuró aumentando la flexibilidad al eliminar
dos placas. Se aumentó los desplazamientos relativos al rigidizar los extremos con columnas mas
grandes y aumentando la carga en los pórticos centrales como se muestra en la Fig.5.10.
A continuación se presentan las siguientes figuras:
Fig.5.10 Estructura del Modelo-2
Fig.5.11 Estructuración del modelo en el SAP
Fig.5.12 Modelo estructural para el programa ttesis.m
Fig.5.13 Modos de vibración del modelo según el SAP
Fig.5.14 Respuesta del modelo según ttesis.m
0.30
VIGAS
0.40
Área = 0.12 m2
Inercia = 0.0016 m4
0.30
VIGAS
0.40
Área = 0.12 m2
Inercia = 0.0016 m4
1.00
Área = 0.30 m2
Inercia = 0.025 m4
Y
0.30
COLUMNAS(P-1,2,6,7)
X
1.00
Área = 0.30 m2
Inercia = 0.025 m4
Y
0.30
COLUMNAS(P-1,2,6,7)
X
COLUMNAS(P-2,4,5)
Y
X
0.40
0.30
Área = 0.12 m2
Inercia = 0.0016 m4
COLUMNAS(P-2,4,5)
Y
X
0.40
0.30
Área = 0.12 m2
Inercia = 0.0016 m4
Y
X
0.40
0.30
Área = 0.12 m2
Inercia = 0.0016 m4
P O R T IC O S E X T E R N O S E JE S 1 ,2 ,6 ,7
W i = 15 ton
ZX
P O R T IC O S E X T E R N O S E JE S 1 ,2 ,6 ,7
W i = 15 ton
ZX
W i = 15 ton
ZX
W i = 30 ton
ZX
P O R T IC O S IN T E R N O SE JE S 3 ,4 ,5
W i = 30 ton
ZX
W i = 30 ton
ZX
P O R T IC O S IN T E R N O SE JE S 3 ,4 ,5
Fig.5.10 Estructura del Modelo-2
3.00

60
6 GL POR JUNTA Ux,Uy,Uz,Rx,Ry,Rz
Fig.5.11 Estructuración del Modelo-2 (SAP)
K2 K1 K3K2K1K3
P-1 P-3 P-4 P-5 P-6 P-7P-2
K2 K1 K3K2K1K3
P-1 P-3 P-4 P-5 P-6 P-7P-2
Fig. 5.12 Modelo estructural con diafragma flexible para el programa ttesis.m
D1D2 D2D3 D3 D1D1D2 D2D3 D3 D1Placa
Vacio Planta del edificio
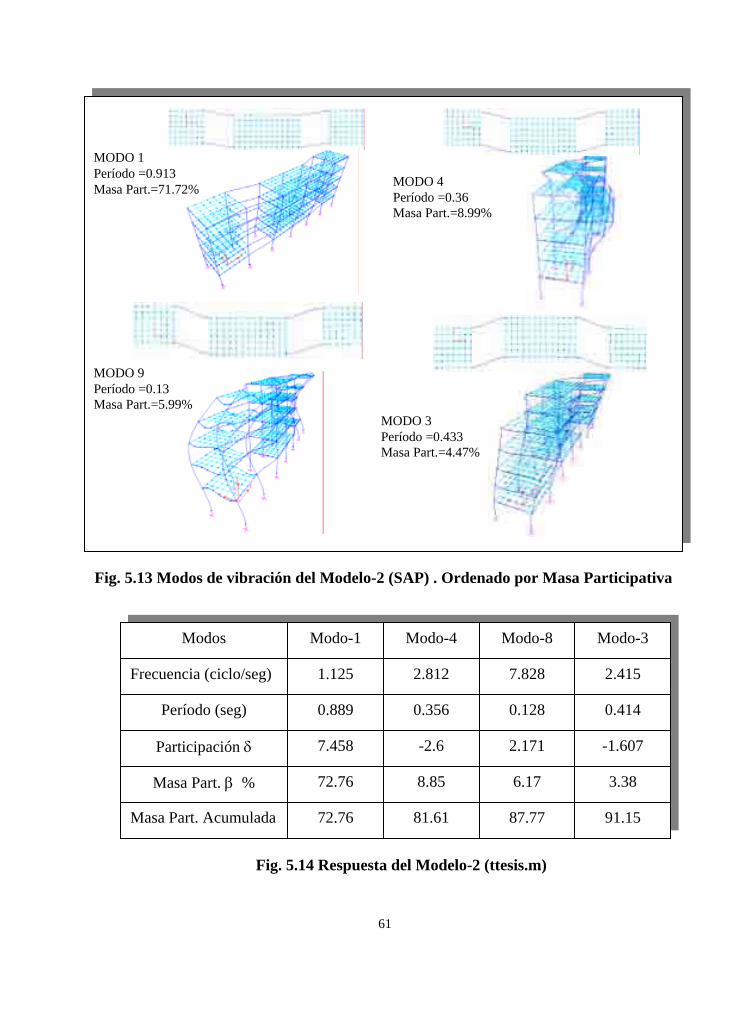
61
MODO 1 Período =0.913 Masa Part.=71.72% MODO 4
Período =0.36 Masa Part.=8.99%
MODO 9 Período =0.13 Masa Part.=5.99%
MODO 3 Período =0.433 Masa Part.=4.47%
Fig. 5.13 Modos de vibración del Modelo-2 (SAP) . Ordenado por Masa Participativa
Modo-1 Modo-4 Modo-8 Modo-3 Modos
Frecuencia (ciclo/seg)
Período (seg)
Participación δ
Masa Part. β %
Masa Part. Acumulada
1.125 2.812 7.828 2.415
0.889 0.356 0.128 0.414
7.458 -2.6 2.171 -1.607
72.76 8.85 6.17 3.38
72.76 81.61 87.77 91.15
Fig. 5.14 Respuesta del Modelo-2 (ttesis.m)

62
5.4.Análisis del Modelo-3
El Modelo-3 trata de tomar en cuenta la influencia de la torsión producto de la asimetría
en la distribución la rigidez lateral de la estructura como se muestra en la Fig.5.14.
A continuación se presentan las siguientes figuras:
Fig.5.15 Estructura del Modelo-3
Fig.5.16 Modelo estructural para el programa ttesis.m
Fig.5.17 Respuesta del modelo según ttesis.m
Fig.5.18 Modos de vibración del Modelo-3 (SAP-6GL)
Fig.5.19 Modos de vibración del Modelo-3 (SAP-3GL)
0.30
VIGAS
0.40
Área = 0.12 m2 Inercia = 0.0016 m4
Área = 0.30 m2 Inercia = 0.025 m4
Y
1.00
0.30
COLUMNAS (P-1)
X
Área = 0.12 m2 Inercia = 0.0016 m4
0.30
Y
X
COLUMNAS (P-2,3,4,5,6,7)
0.40
Fig. 5.15 Estructura del Modelo-3
PORTICOS
Wi =15 ton
ZX
PORTICOS
Wi =15 ton
ZX
Wi =15 ton
ZX
3.00PLANTA DEL EDIFICIO
6.00
6.00 6.00 6.00 6.00 6.00 6.00
y
x
6.00y
2 1 3 4 5 6 7

63
Fig. 5.16 Modelo estructural con diafragma flexible para el programa ttesis.m
K3
P-1
K3K4 K4 K4 K4
P-2 P-3 P-4 P-5 P-6 P-7
Planta del Edificio
D4D3 D3 D4 D4 D4 D4D3 D3 D4 D4 D4
Modo-1 Modo-2 Modo-3 Modo-4 Modos
Frecuencia (ciclo/seg)
Período (seg)
Participación δ
Masa Part. β %
Masa Part. Acumulada
1.251 4.40 8.50 12.34
0.799 0.227 0.118 0.08
6.45 -2.67 -1.65 -1.02
77.75 13.33 5.08 1.94
77.75 91.08 96.16 98.10
Fig. 5.17 Respuesta del Modelo-3 (ttesis.m)

64
Fig.5.19 Modos de vibración del Modelo-3 (SAP-3GL)
MODO 1 PERIODO = 0.806 MASA PART. =77.82%
MODO 3 PERIODO = 0.116 MASA PART. =5.33%
MODO 4 PERIODO = 0.079 MASA PART. =2.12%
MODO 2 PERIODO = 0.229 MASA PART. =13.33%
M O D O 1PE R IO D O = 0 .898M A S A PA R T .= 60 .8%
M O D O 2PE R IO D O = 0 .669M A S A PA R T .= 18 .5%
M O D O 3PE R IO D O = 0 .276M A S A PA R T .= 8 .18%
M O D O 4P E R IO D O = 0 .177M A SA PA R T .= 4 .2%
M O D O 8P E R IO D O = 0 .094M A SA PA R T .= 0 .0056%
M O D O 10P E R IO D O = 0 .074M A SA PA R T .= 0 .264%
Fig.5.18 Modos de vibración del Modelo-3 (SAP-6GL)
Centro de rotación
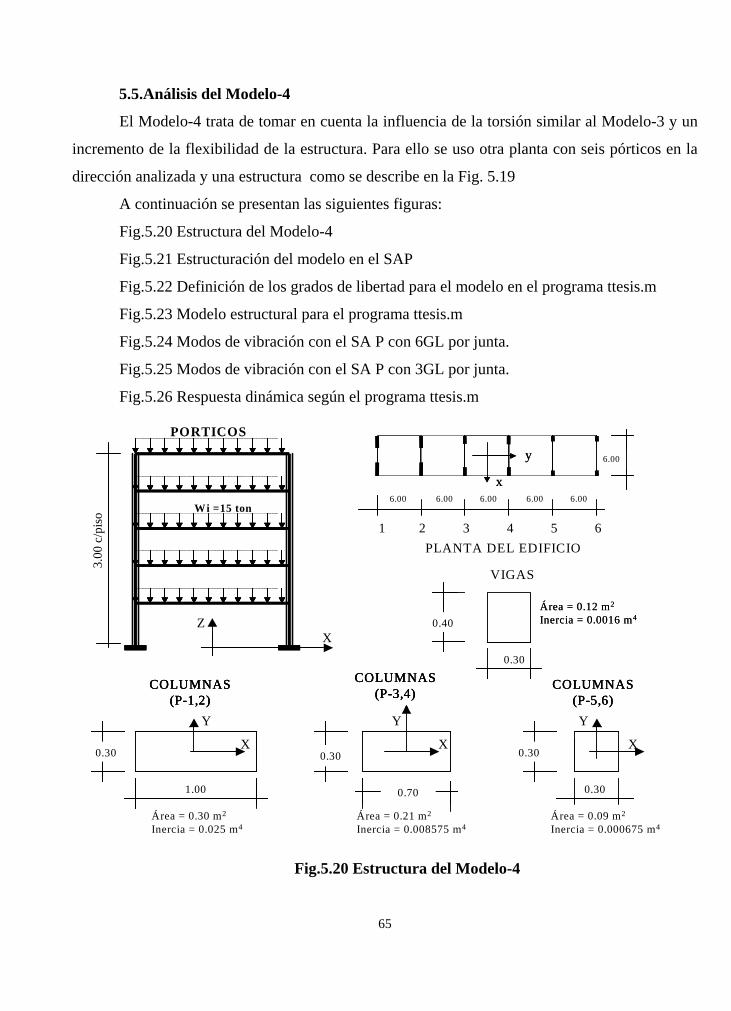
65
5.5.Análisis del Modelo-4
El Modelo-4 trata de tomar en cuenta la influencia de la torsión similar al Modelo-3 y un
incremento de la flexibilidad de la estructura. Para ello se uso otra planta con seis pórticos en la
dirección analizada y una estructura como se describe en la Fig. 5.19
A continuación se presentan las siguientes figuras:
Fig.5.20 Estructura del Modelo-4
Fig.5.21 Estructuración del modelo en el SAP
Fig.5.22 Definición de los grados de libertad para el modelo en el programa ttesis.m
Fig.5.23 Modelo estructural para el programa ttesis.m
Fig.5.24 Modos de vibración con el SA P con 6GL por junta.
Fig.5.25 Modos de vibración con el SA P con 3GL por junta.
Fig.5.26 Respuesta dinámica según el programa ttesis.m
0.30
VIGAS
0.40Área = 0.12 m2
Inercia = 0.0016 m4
0.300.30
VIGAS
0.40Área = 0.12 m2
Inercia = 0.0016 m4
PORTICOS
Wi =15 ton
ZX
PORTICOS
Wi =15 ton
ZX
Wi =15 ton
ZX
6.00
6.00 6.00 6.00 6.00 6.00
1 2 3 4 5 6
y
PLANTA DEL EDIFICIO
x
6.00
6.00 6.00 6.00 6.00 6.00
1 2 3 4 5 6
y
PLANTA DEL EDIFICIO
x
0.30
Área = 0.30 m2
Inercia = 0.025 m4
Y
1.00
COLUMNAS(P-1,2)
X
Área = 0.21 m2
Inercia = 0.008575 m4
Y
0.70
COLUMNAS(P-3,4)
X0.30
Y
X
0.30
0.30
COLUMNAS(P-5,6)
Área = 0.09 m2
Inercia = 0.000675 m4
0.30
Área = 0.30 m2
Inercia = 0.025 m4
Y
1.00
COLUMNAS(P-1,2)
X0.30
Área = 0.30 m2
Inercia = 0.025 m4
Y
1.00
COLUMNAS(P-1,2)
X
Área = 0.21 m2
Inercia = 0.008575 m4
Y
0.70
COLUMNAS(P-3,4)
X0.30
Área = 0.21 m2
Inercia = 0.008575 m4
Y
0.70
COLUMNAS(P-3,4)
X0.30
Y
X
0.30
0.30
COLUMNAS(P-5,6)
Área = 0.09 m2
Inercia = 0.000675 m4
Y
X
0.30
0.30
COLUMNAS(P-5,6)
Área = 0.09 m2
Inercia = 0.000675 m4
Fig.5.20 Estructura del Modelo-4
3.00
c/p
iso
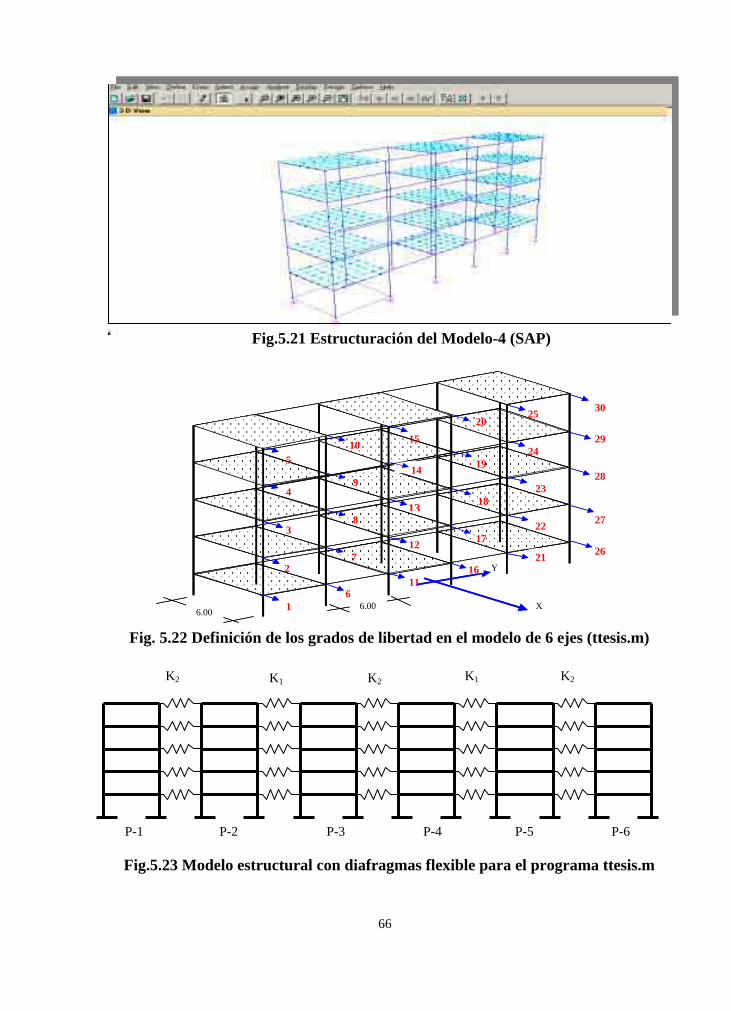
66
Fig.5.21 Estructuración del Modelo-4 (SAP)
61
Y
X 6.00 6.00
2
3
7
20
8
9
10
12
13
14
16
17
18
19
21
22
23
24
25
26
27
28
29
30
4
Y
X 6.00 6.00
7
20
8
9
10
14
16
17
18
19
21
22
23
26
27
29
5
15
11
Fig. 5.22 Definición de los grados de libertad en el modelo de 6 ejes (ttesis.m)
K2 K1 K2 K2 K1
P-1 P-3 P-4 P-5 P-6 P-2
Fig.5.23 Modelo estructural con diafragmas flexible para el programa ttesis.m

67
Fig.5.24 Modos de vibración del Modelo-4(SAP-6GL). Ordenado por modo
MODO-1 PERÍODO =0.922 MASA PART. =43.34%
MODO-2 PERÍODO =0.591 MASA PART. =33.72%
MODO-3 PERÍODO =0.367 MASA PART. =0.0668%
MODO-4 PERÍODO =0.922 MASA PART. =4.46%
Fig.5.25 Modos de vibración del Modelo-4(SAP-3GL)
MODO-1 PERÍODO =0.781 MASA PART. =68.95%
MODO-2 PERÍODO =0.483 MASA PART. =7.91%
MODO-6 PERÍODO =0.172 MASA PART. =5.26%
MODO-8 PERÍODO =0.129 MASA PART. =4.56%

68
5.6.Análisis del Modelo-5
El Modelo-5 trata de evaluar el comportamiento de un edificio muy alargado y alto, con
una restricción lateral fuerte y simétrica, tratando de generar como resultado un alto grado de
participación del modo de vibración donde se produce la deformación del piso.
A continuación se presentan las siguientes figuras:
Fig. 5.27 Estructura del Modelo-5
Fig. 5.28 Definición de los grados de libertad para el modelo en el programa ttesis.m
Fig. 5.29 Respuesta del modelo según el programa ttesis.m
Fig. 5.30 Estructuración del modelo en el SAP
Fig. 5.31 Modos de vibración según el SAP
Modo-1 Modo-2 Modo-6 Modo-8 Modos
Frecuencia (ciclo/seg)
Período (seg)
Participación δ
Masa Part. β %
Masa Part. Acumulada
1.289 2.068 5.799 7.835
0.776 0.484 0.172 0.128
-5.61 1.95 1.51 -1.49
68.51 8.30 4.95 4.83
68.51 76.81 81.75 86.58
Fig. 5.26 Respuesta del Modelo-4 (ttesis.m)

69
PLANTA DEL EDIFICIO DE 10 PISOS
Fig. 5.27 Estructura del Modelo-5
0.300.30
0.40
Área = 0.12 m2 Inercia = 0.0016 m4
0.40
030
VIGAS COLUMNAS
X
10.00
X
Área = 10 m2 Inercia =83.33 m4
Y X 1.00
COLUMNAS DEL PORTICO 5
6.00
1 4 5 6
6.00 6.00 6.00 6.00 6.00 6.00
2 3 7
6.00 6.00
8 9
Wi =15 ton
3.00
Módulo de elasticidad E =2531051 ton/m2
PORTICOS
X Z
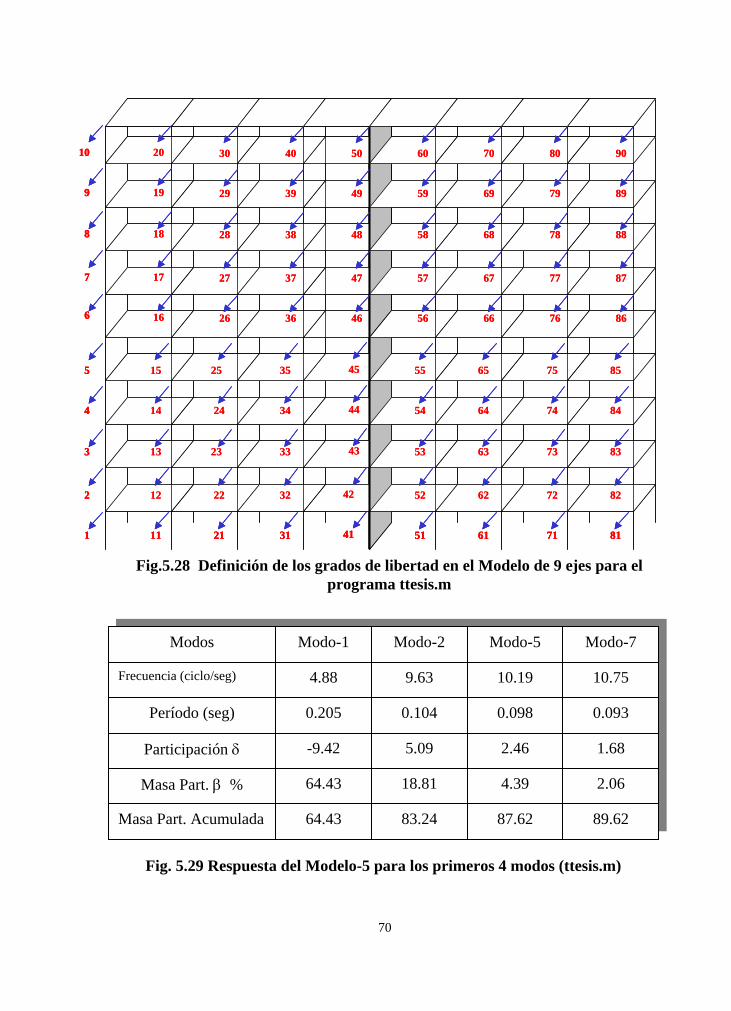
70
Modo-1 Modo-2 Modo-5 Modo-7 Modos
Frecuencia (ciclo/seg)
Período (seg)
Participación δ
Masa Part. β %
Masa Part. Acumulada
4.88 9.63 10.19 10.75
0.205 0.104 0.098 0.093
-9.42 5.09 2.46 1.68
64.43 18.81 4.39 2.06
64.43 83.24 87.62 89.62
Fig. 5.29 Respuesta del Modelo-5 para los primeros 4 modos (ttesis.m)
Fig.5.28 Definición de los grados de libertad en el Modelo de 9 ejes para el programa ttesis.m
1
2
3
4
5
11
12
13
14
15
21
22
23
24
25
31
32
33
34
35
41
42
43
44
45
51
52
53
54
55
61
62
63
64
65
71
72
73
74
75
81
82
83
84
85
6
7
8
9
10
16
17
18
19
20
26
27
28
29
30
36
37
38
39
40
46
47
48
49
50
56
57
58
59
60
66
67
68
69
70
76
77
78
79
80
86
87
88
89
90
1
2
3
4
5
1
2
3
4
5
11
12
13
14
15
11
12
13
14
15
21
22
23
24
25
21
22
23
24
25
31
32
33
34
35
31
32
33
34
35
41
42
43
44
45
41
42
43
44
45
51
52
53
54
55
51
52
53
54
55
61
62
63
64
65
61
62
63
64
65
71
72
73
74
75
71
72
73
74
75
81
82
83
84
85
81
82
83
84
85
6
7
8
9
10
6
7
8
9
10
16
17
18
19
20
16
17
18
19
20
26
27
28
29
30
26
27
28
29
30
36
37
38
39
40
36
37
38
39
40
46
47
48
49
50
46
47
48
49
50
56
57
58
59
60
56
57
58
59
60
66
67
68
69
70
66
67
68
69
70
76
77
78
79
80
76
77
78
79
80
86
87
88
89
90
86
87
88
89
90
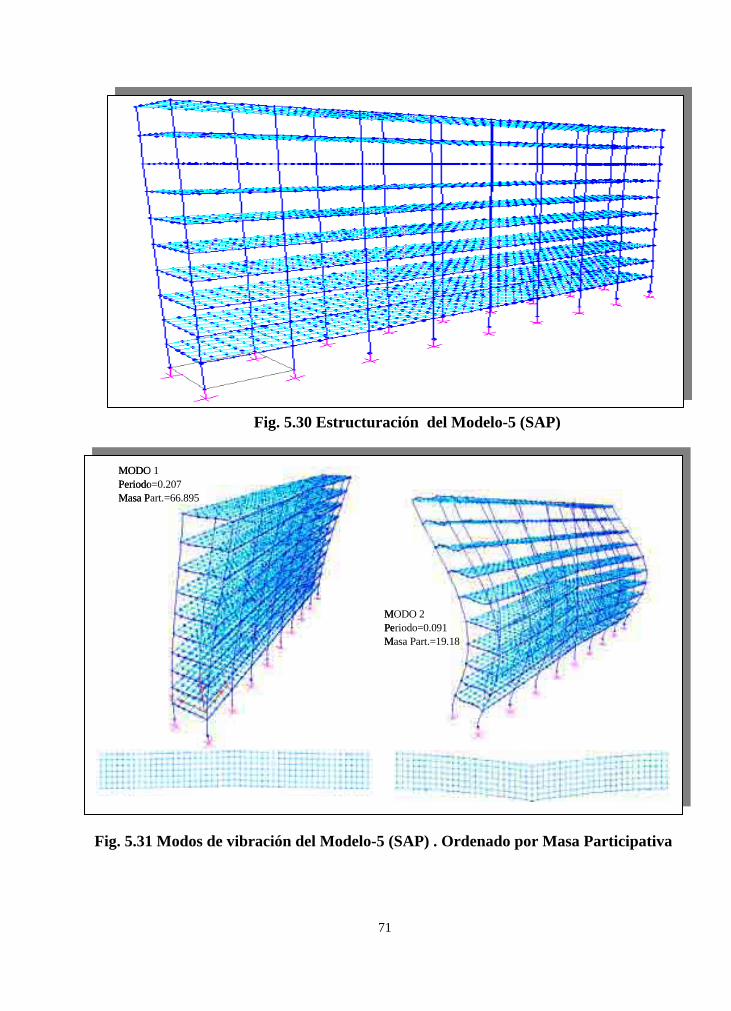
71
Fig. 5.30 Estructuración del Modelo-5 (SAP)
Fig. 5.31 Modos de vibración del Modelo-5 (SAP) . Ordenado por Masa Participativa
MODO 2Periodo=0.091Masa Part.=19.18
MODO 1Periodo=0.207Masa Part.=66.895
MODO 2Periodo=0.091Masa Part.=19.18
MODO 1Periodo=0.207Masa Part.=66.895

72
CAPITULO VI: ANÁLISIS DE RESULTADOS
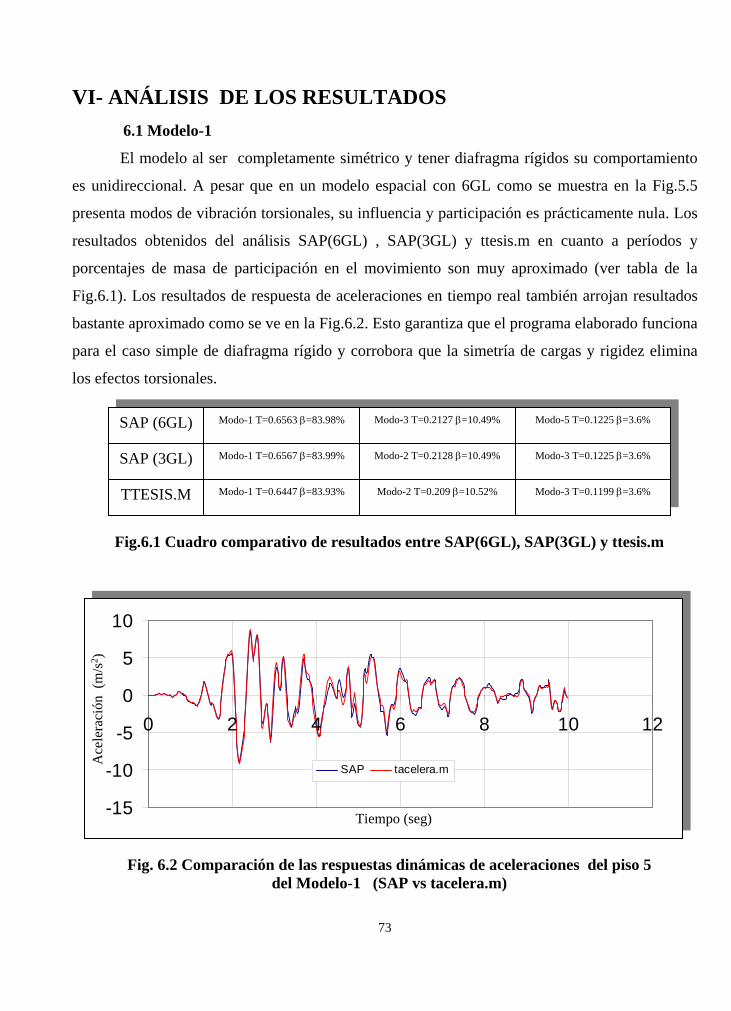
73
VI- ANÁLISIS DE LOS RESULTADOS 6.1 Modelo-1
El modelo al ser completamente simétrico y tener diafragma rígidos su comportamiento
es unidireccional. A pesar que en un modelo espacial con 6GL como se muestra en la Fig.5.5
presenta modos de vibración torsionales, su influencia y participación es prácticamente nula. Los
resultados obtenidos del análisis SAP(6GL) , SAP(3GL) y ttesis.m en cuanto a períodos y
porcentajes de masa de participación en el movimiento son muy aproximado (ver tabla de la
Fig.6.1). Los resultados de respuesta de aceleraciones en tiempo real también arrojan resultados
bastante aproximado como se ve en la Fig.6.2. Esto garantiza que el programa elaborado funciona
para el caso simple de diafragma rígido y corrobora que la simetría de cargas y rigidez elimina
los efectos torsionales.
-15
-10
-5
0
5
10
0 2 4 6 8 10 12
SAP tacelera.m
Tiempo (seg)
Ace
lera
ción
(m
/s2 )
Fig. 6.2 Comparación de las respuestas dinámicas de aceleraciones del piso 5 del Modelo-1 (SAP vs tacelera.m)
SAP (6GL)
SAP (3GL)
TTESIS.M
Modo-1 T=0.6563 β=83.98% Modo-3 T=0.2127 β=10.49%
Modo-5 T=0.1225 β=3.6%
Modo-1 T=0.6567 β=83.99% Modo-2 T=0.2128 β=10.49% Modo-3 T=0.1225 β=3.6%
Modo-1 T=0.6447 β=83.93% Modo-2 T=0.209 β=10.52% Modo-3 T=0.1199 β=3.6%
Fig.6.1 Cuadro comparativo de resultados entre SAP(6GL), SAP(3GL) y ttesis.m

74
6.2 Modelo-2
Buscando un diafragma flexible (deformable) se eliminaron las placas de dos paños en
forma simétrica, de esta manera el diafragma en este sector de los entrepisos quedan constituidos
por el marco de vigas simulando un edificio de tres torres. Para aumentar los desplazamientos
relativos manteniendo la simetría se aumentó la carga en los pórticos de la torre central y se
aumentó la rigidez de los pórticos en las torres laterales.
Los resultados obtenidos al igual que el modelo anterior son bastante aproximado como se
observa en la tabla de la Fig.6.4. En la Fig.6.5 se observa la respuesta de aceleraciones de dos
puntos o Gl ubicados en pórticos de comportamiento diferente. Al analizar las dos primeras
gráficas se puede observar la diferencia de respuesta de los dos puntos para un mismo programa.
En las otras dos gráficas se puede observar como el programa tacelera.m arrojas resultados
prácticamente iguales al programa SAP, lo que ratifica su aceptabilidad.
Fig. 6.3 Configuración estructural del Modelo-2
Torre lateral Torre central
GL5
GL20
Fig.6.4 Cuadro comparativo de resultados entre SAP y ttesis.m Modelo-2
SAP
TTESIS.M
Modo-1 T=0.913 β=71.72%
Modo-4 T=0.36 β=8.99%
Modo-9 T=0.13 β=5.99%
Modo-1 T=0.889 β=72.76%
Modo-4 T=0.356 β=8.85%
Modo-8 T=0.128 β=6.17%
Modo-3 T=0.433 β=4.47%
Modo-3 T=0.414 β=3.38%
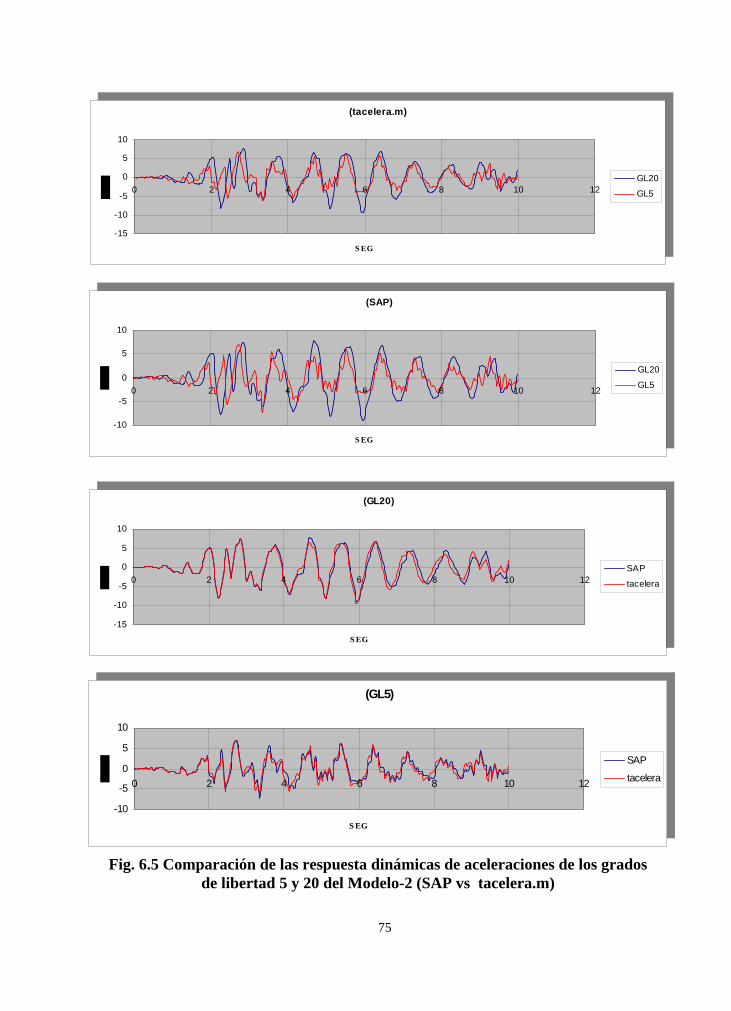
75
(tacelera.m)
-15
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
GL20
GL5
(SAP)
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
GL20
GL5
(GL20)
-15
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
SAP
tacelera
(GL5)
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
SAP
tacelera
(tacelera.m)
-15
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
GL20
GL5
(SAP)
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
GL20
GL5
(GL20)
-15
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
SAP
tacelera
(GL5)
-10
-5
0
5
10
0 2 4 6 8 10 12
S EG
SAP
tacelera
Fig. 6.5 Comparación de las respuesta dinámicas de aceleraciones de los grados de libertad 5 y 20 del Modelo-2 (SAP vs tacelera.m)
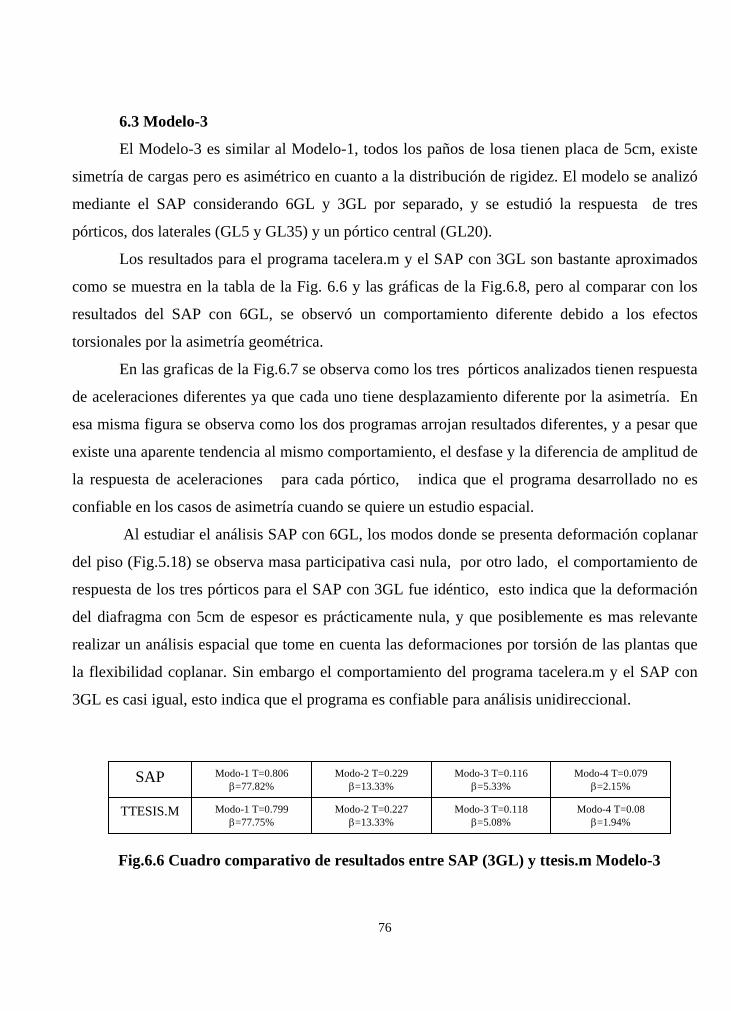
76
6.3 Modelo-3
El Modelo-3 es similar al Modelo-1, todos los paños de losa tienen placa de 5cm, existe
simetría de cargas pero es asimétrico en cuanto a la distribución de rigidez. El modelo se analizó
mediante el SAP considerando 6GL y 3GL por separado, y se estudió la respuesta de tres
pórticos, dos laterales (GL5 y GL35) y un pórtico central (GL20).
Los resultados para el programa tacelera.m y el SAP con 3GL son bastante aproximados
como se muestra en la tabla de la Fig. 6.6 y las gráficas de la Fig.6.8, pero al comparar con los
resultados del SAP con 6GL, se observó un comportamiento diferente debido a los efectos
torsionales por la asimetría geométrica.
En las graficas de la Fig.6.7 se observa como los tres pórticos analizados tienen respuesta
de aceleraciones diferentes ya que cada uno tiene desplazamiento diferente por la asimetría. En
esa misma figura se observa como los dos programas arrojan resultados diferentes, y a pesar que
existe una aparente tendencia al mismo comportamiento, el desfase y la diferencia de amplitud de
la respuesta de aceleraciones para cada pórtico, indica que el programa desarrollado no es
confiable en los casos de asimetría cuando se quiere un estudio espacial.
Al estudiar el análisis SAP con 6GL, los modos donde se presenta deformación coplanar
del piso (Fig.5.18) se observa masa participativa casi nula, por otro lado, el comportamiento de
respuesta de los tres pórticos para el SAP con 3GL fue idéntico, esto indica que la deformación
del diafragma con 5cm de espesor es prácticamente nula, y que posiblemente es mas relevante
realizar un análisis espacial que tome en cuenta las deformaciones por torsión de las plantas que
la flexibilidad coplanar. Sin embargo el comportamiento del programa tacelera.m y el SAP con
3GL es casi igual, esto indica que el programa es confiable para análisis unidireccional.
Fig.6.6 Cuadro comparativo de resultados entre SAP (3GL) y ttesis.m Modelo-3
SAP
TTESIS.M
Modo-1 T=0.806 β=77.82%
Modo-2 T=0.229 β=13.33%
Modo-3 T=0.116 β=5.33%
Modo-1 T=0.799 β=77.75%
Modo-2 T=0.227 β=13.33%
Modo-3 T=0.118 β=5.08%
Modo-4 T=0.079 β=2.15%
Modo-4 T=0.08 β=1.94%
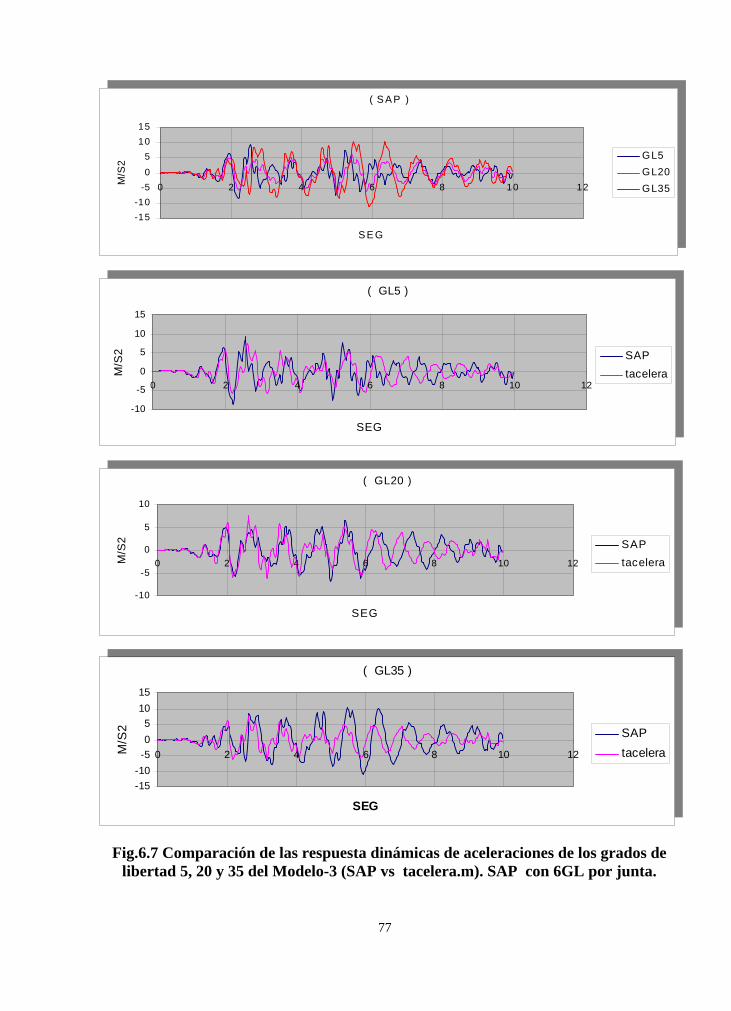
77
Fig.6.7 Comparación de las respuesta dinámicas de aceleraciones de los grados de libertad 5, 20 y 35 del Modelo-3 (SAP vs tacelera.m). SAP con 6GL por junta.
( GL20 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL35 )
-15-10-505
1015
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL5 )
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( S A P )
-15-10
-505
1015
0 2 4 6 8 10 12
S E G
M/S
2
GL5GL20GL35
( GL20 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL35 )
-15-10-505
1015
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL5 )
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( S A P )
-15-10
-505
1015
0 2 4 6 8 10 12
S E G
M/S
2
GL5GL20GL35
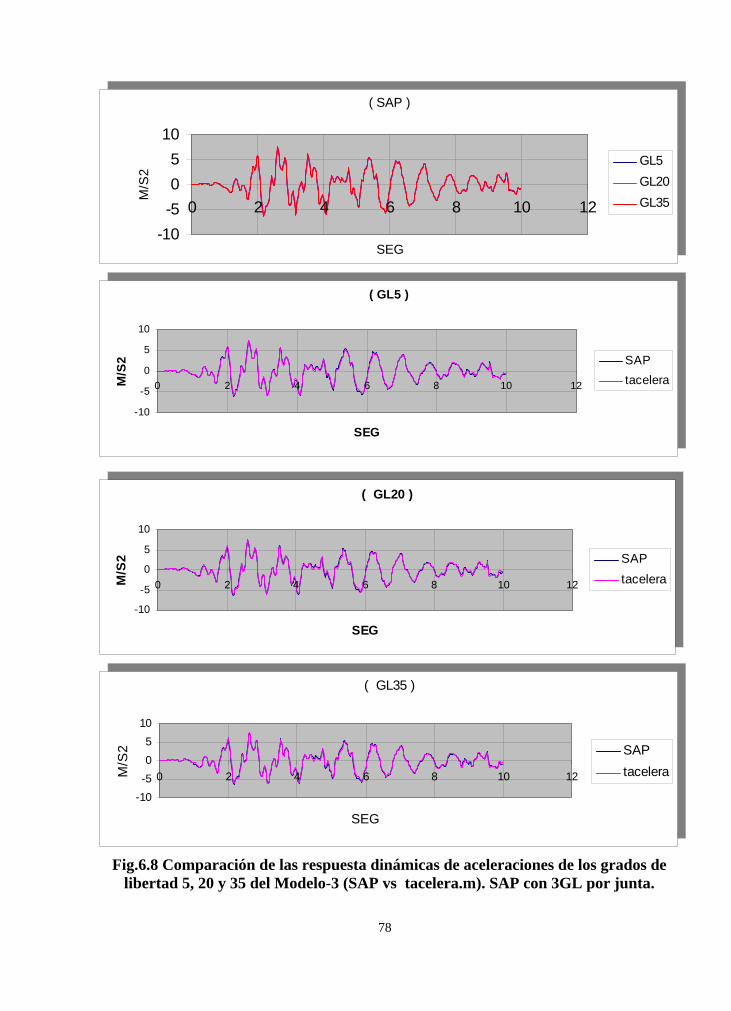
78
( GL5 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL20 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL35 )
-10-505
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( SAP )
-10-505
10
0 2 4 6 8 10 12
SEG
M/S
2GL5GL20GL35
( GL5 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL20 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL35 )
-10-505
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( SAP )
-10-505
10
0 2 4 6 8 10 12
SEG
M/S
2GL5GL20GL35
Fig.6.8 Comparación de las respuesta dinámicas de aceleraciones de los grados de libertad 5, 20 y 35 del Modelo-3 (SAP vs tacelera.m). SAP con 3GL por junta.
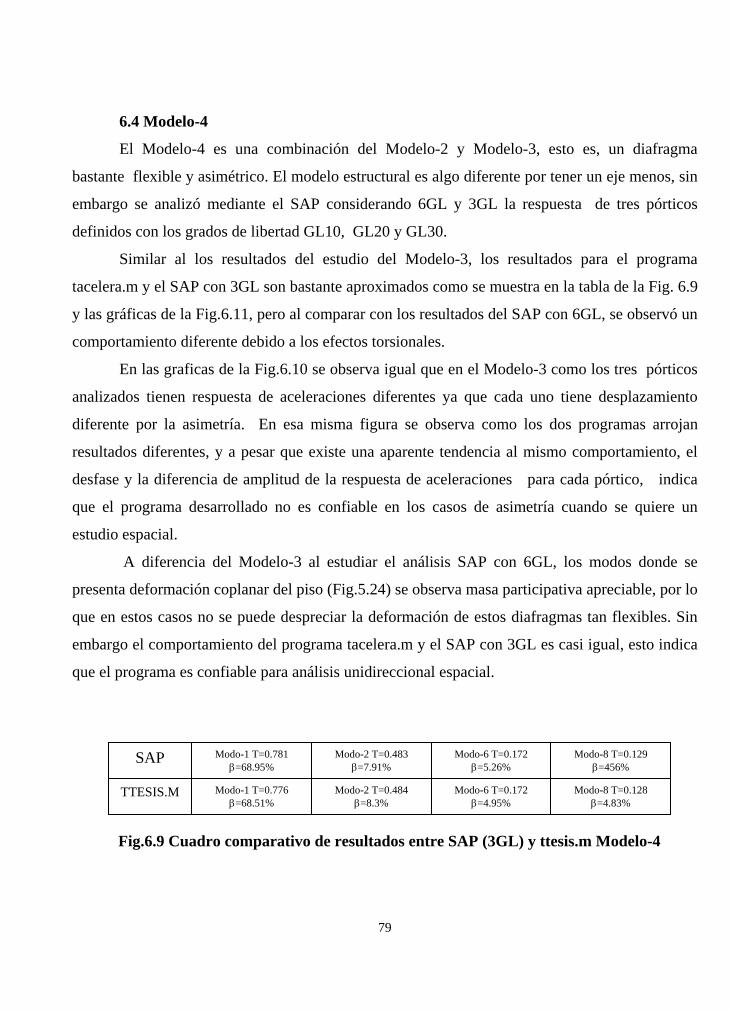
79
6.4 Modelo-4
El Modelo-4 es una combinación del Modelo-2 y Modelo-3, esto es, un diafragma
bastante flexible y asimétrico. El modelo estructural es algo diferente por tener un eje menos, sin
embargo se analizó mediante el SAP considerando 6GL y 3GL la respuesta de tres pórticos
definidos con los grados de libertad GL10, GL20 y GL30.
Similar al los resultados del estudio del Modelo-3, los resultados para el programa
tacelera.m y el SAP con 3GL son bastante aproximados como se muestra en la tabla de la Fig. 6.9
y las gráficas de la Fig.6.11, pero al comparar con los resultados del SAP con 6GL, se observó un
comportamiento diferente debido a los efectos torsionales.
En las graficas de la Fig.6.10 se observa igual que en el Modelo-3 como los tres pórticos
analizados tienen respuesta de aceleraciones diferentes ya que cada uno tiene desplazamiento
diferente por la asimetría. En esa misma figura se observa como los dos programas arrojan
resultados diferentes, y a pesar que existe una aparente tendencia al mismo comportamiento, el
desfase y la diferencia de amplitud de la respuesta de aceleraciones para cada pórtico, indica
que el programa desarrollado no es confiable en los casos de asimetría cuando se quiere un
estudio espacial.
A diferencia del Modelo-3 al estudiar el análisis SAP con 6GL, los modos donde se
presenta deformación coplanar del piso (Fig.5.24) se observa masa participativa apreciable, por lo
que en estos casos no se puede despreciar la deformación de estos diafragmas tan flexibles. Sin
embargo el comportamiento del programa tacelera.m y el SAP con 3GL es casi igual, esto indica
que el programa es confiable para análisis unidireccional espacial.
Fig.6.9 Cuadro comparativo de resultados entre SAP (3GL) y ttesis.m Modelo-4
SAP
TTESIS.M
Modo-1 T=0.781 β=68.95%
Modo-2 T=0.483 β=7.91%
Modo-6 T=0.172 β=5.26%
Modo-1 T=0.776 β=68.51%
Modo-2 T=0.484 β=8.3%
Modo-6 T=0.172 β=4.95%
Modo-8 T=0.129 β=456%
Modo-8 T=0.128 β=4.83%
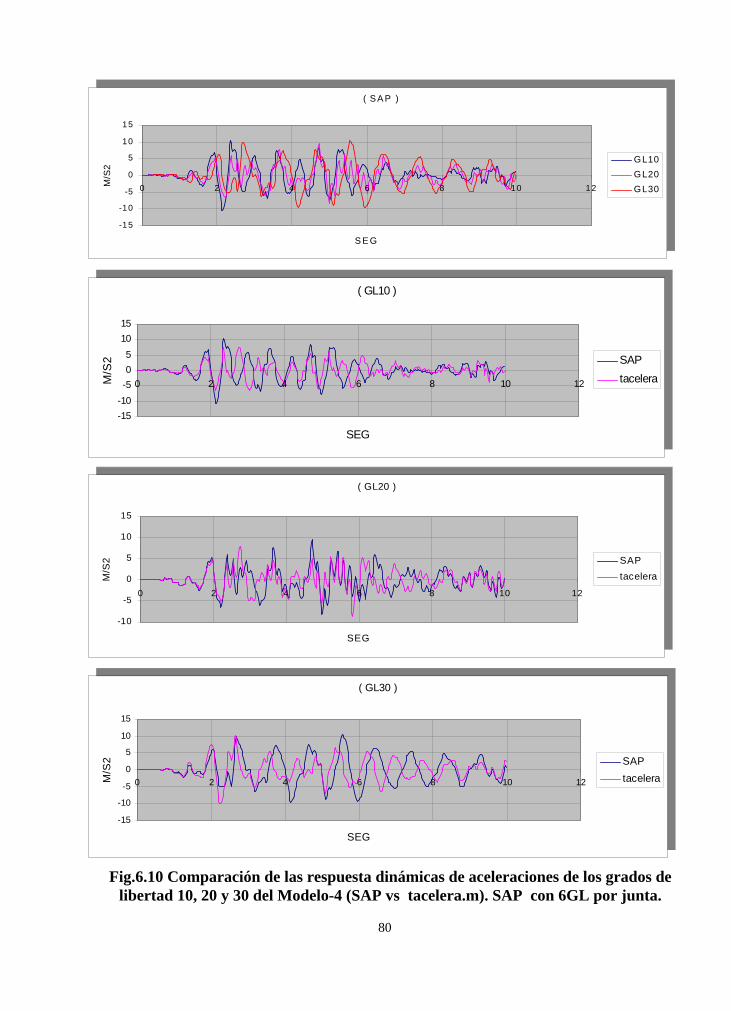
80
( S A P )
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
S E G
M/S
2
GL10GL20GL30
( GL10 )
-15-10-505
1015
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL20 )
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL30 )
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( S A P )
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
S E G
M/S
2
GL10GL20GL30
( GL10 )
-15-10-505
1015
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL20 )
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL30 )
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
Fig.6.10 Comparación de las respuesta dinámicas de aceleraciones de los grados de libertad 10, 20 y 30 del Modelo-4 (SAP vs tacelera.m). SAP con 6GL por junta.
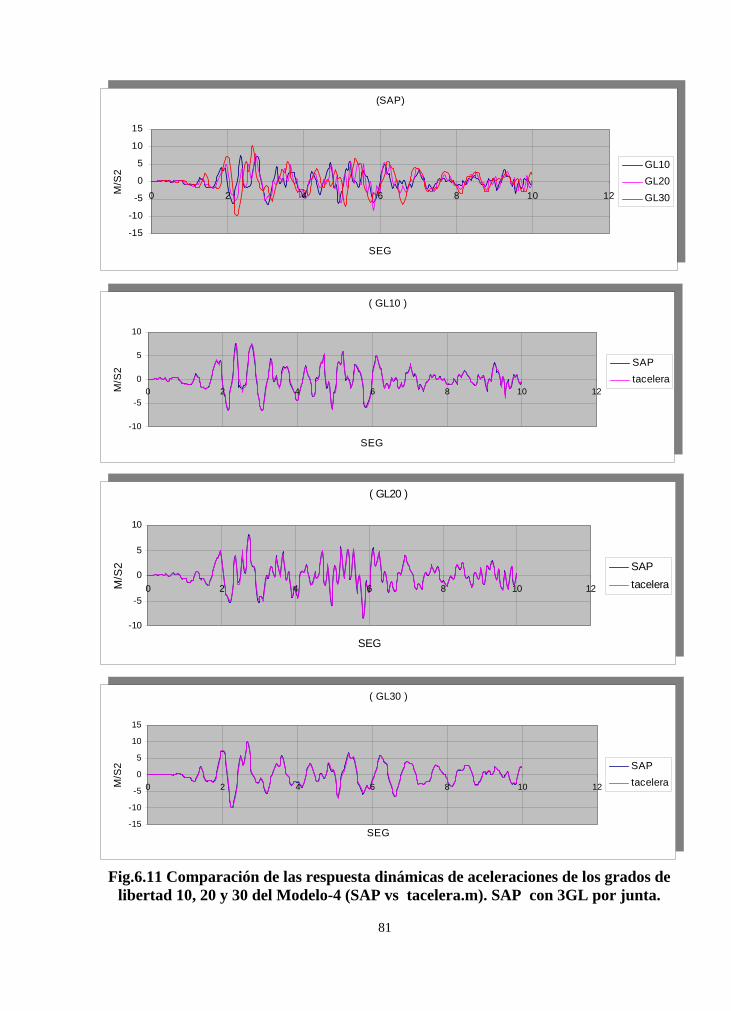
81
(SAP)
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2
GL10GL20GL30
( GL10 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2
SAPtacelera
( GL20 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL30 )
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
(SAP)
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2
GL10GL20GL30
( GL10 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2
SAPtacelera
( GL20 )
-10
-5
0
5
10
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
( GL30 )
-15
-10
-5
0
5
10
15
0 2 4 6 8 10 12
SEG
M/S
2 SAPtacelera
Fig.6.11 Comparación de las respuesta dinámicas de aceleraciones de los grados de libertad 10, 20 y 30 del Modelo-4 (SAP vs tacelera.m). SAP con 3GL por junta.
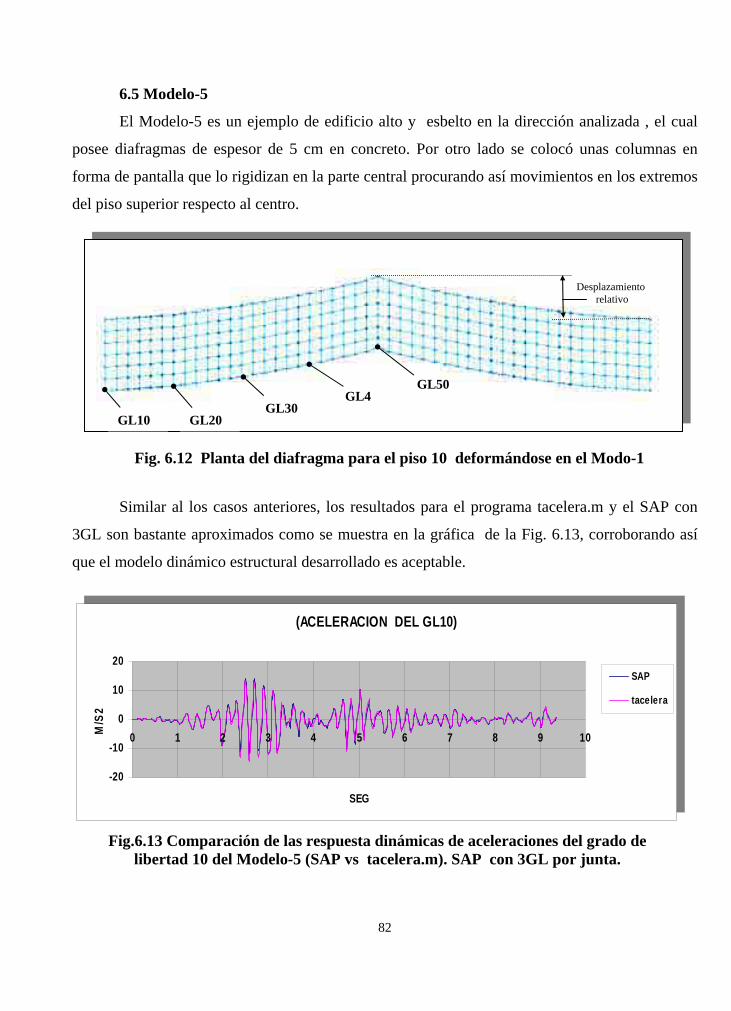
82
6.5 Modelo-5
El Modelo-5 es un ejemplo de edificio alto y esbelto en la dirección analizada , el cual
posee diafragmas de espesor de 5 cm en concreto. Por otro lado se colocó unas columnas en
forma de pantalla que lo rigidizan en la parte central procurando así movimientos en los extremos
del piso superior respecto al centro.
Similar al los casos anteriores, los resultados para el programa tacelera.m y el SAP con
3GL son bastante aproximados como se muestra en la gráfica de la Fig. 6.13, corroborando así
que el modelo dinámico estructural desarrollado es aceptable.
Fig.6.13 Comparación de las respuesta dinámicas de aceleraciones del grado de libertad 10 del Modelo-5 (SAP vs tacelera.m). SAP con 3GL por junta.
(ACELERACION DEL GL10)
-20
-10
0
10
20
0 1 2 3 4 5 6 7 8 9 10
SEG
M/S
2
SAP
tacelera
(ACELERACION DEL GL10)
-20
-10
0
10
20
0 1 2 3 4 5 6 7 8 9 10
SEG
M/S
2
SAP
tacelera
GL50
GL10
Desplazamiento relativo
Fig. 6.12 Planta del diafragma para el piso 10 deformándose en el Modo-1
GL20 GL30
GL4

83
Para analizar el posible caso de deformación del plano del diafragma, se graficaron los
registros de aceleración y desplazamiento de GL10 y GL50, observándose poca variación entre
dichos grados de libertad como se observa en las graficas de la Fig. 6.14 y Fig.6.15.
Para detallar mejor la deformación relativa en el tiempo y su valor máximo, se graficó el
valor absoluto de la diferencia de desplazamientos entre GL10 y GL50 obteniéndose el valor
máximo de 2.8*10-3 mt. en el instante 2.7 seg. como se observa en la Fig.6.16.
(DESPLAZAMIENTOS DE LOS GL10 y GL50 SEGÚN SAP)
-0,02
-0,01
0
0,01
0,02
0 1 2 3 4 5 6 7 8 9 10
SEG
M
GL50
GL10
(DESPLAZAMIENTOS DE LOS GL10 y GL50 SEGÚN SAP)
-0,02
-0,01
0
0,01
0,02
0 1 2 3 4 5 6 7 8 9 10
SEG
M
GL50
GL10
Fig.6.15 Comparación de las respuesta dinámicas de los desplazamientos de los grados de libertad 10 y 50 del Modelo-5 según SAP.
Fig.6.14 Comparación de las respuesta dinámicas de las aceleraciones de los grados de libertad 10 y 50 del Modelo-5 según SAP.
(ACELERACION DEL GL10 Y GL50 SAP)
-15-10
-505
101520
0 1 2 3 4 5 6 7 8 9 10
SEG
M/S
2
GL10
GL50
(ACELERACION DEL GL10 Y GL50 SAP)
-15-10
-505
101520
0 1 2 3 4 5 6 7 8 9 10
SEG
M/S
2
GL10
GL50
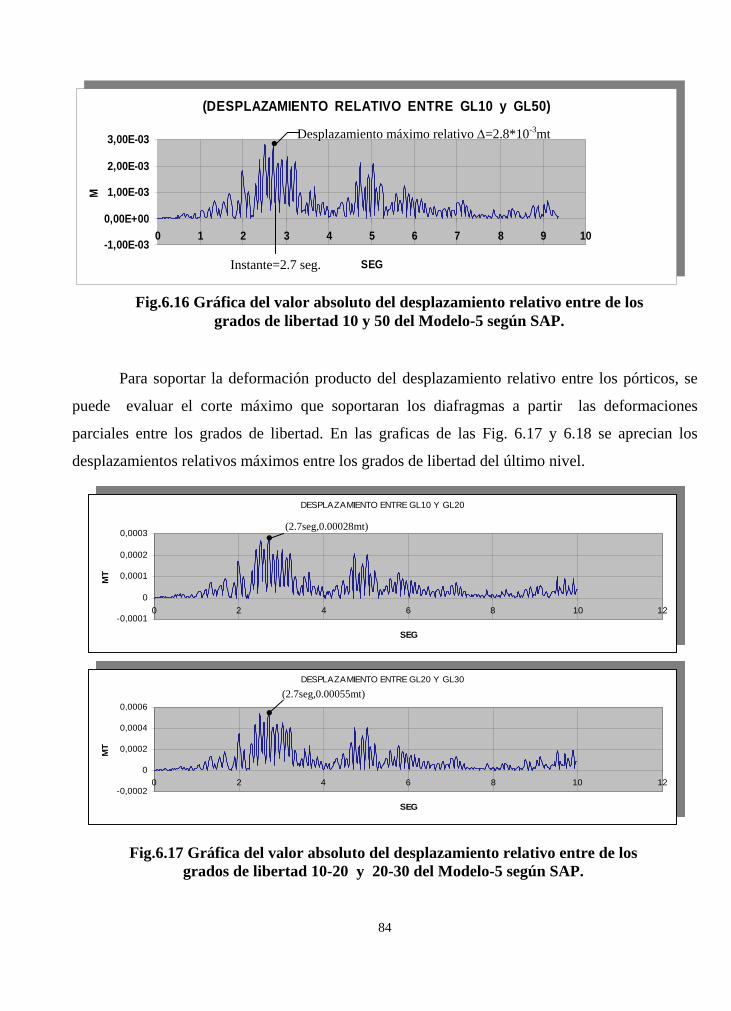
84
Para soportar la deformación producto del desplazamiento relativo entre los pórticos, se
puede evaluar el corte máximo que soportaran los diafragmas a partir las deformaciones
parciales entre los grados de libertad. En las graficas de las Fig. 6.17 y 6.18 se aprecian los
desplazamientos relativos máximos entre los grados de libertad del último nivel.
(DESPLAZAMIENTO RELATIVO ENTRE GL10 y GL50)
-1,00E-03
0,00E+00
1,00E-03
2,00E-03
3,00E-03
0 1 2 3 4 5 6 7 8 9 10
SEG
M(DESPLAZAMIENTO RELATIVO ENTRE GL10 y GL50)
-1,00E-03
0,00E+00
1,00E-03
2,00E-03
3,00E-03
0 1 2 3 4 5 6 7 8 9 10
SEG
M
Desplazamiento máximo relativo Δ=2.8*10-3mt
Instante=2.7 seg.
Fig.6.16 Gráfica del valor absoluto del desplazamiento relativo entre de los grados de libertad 10 y 50 del Modelo-5 según SAP.
DESPLAZAMIENTO ENTRE GL10 Y GL20
-0,0001
0
0,0001
0,0002
0,0003
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO ENTRE GL10 Y GL20
-0,0001
0
0,0001
0,0002
0,0003
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO ENTRE GL20 Y GL30
-0,0002
0
0,0002
0,0004
0,0006
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO ENTRE GL20 Y GL30
-0,0002
0
0,0002
0,0004
0,0006
0 2 4 6 8 10 12
SEG
MT
Fig.6.17 Gráfica del valor absoluto del desplazamiento relativo entre de los grados de libertad 10-20 y 20-30 del Modelo-5 según SAP.
(2.7seg,0.00028mt)
(2.7seg,0.00055mt)
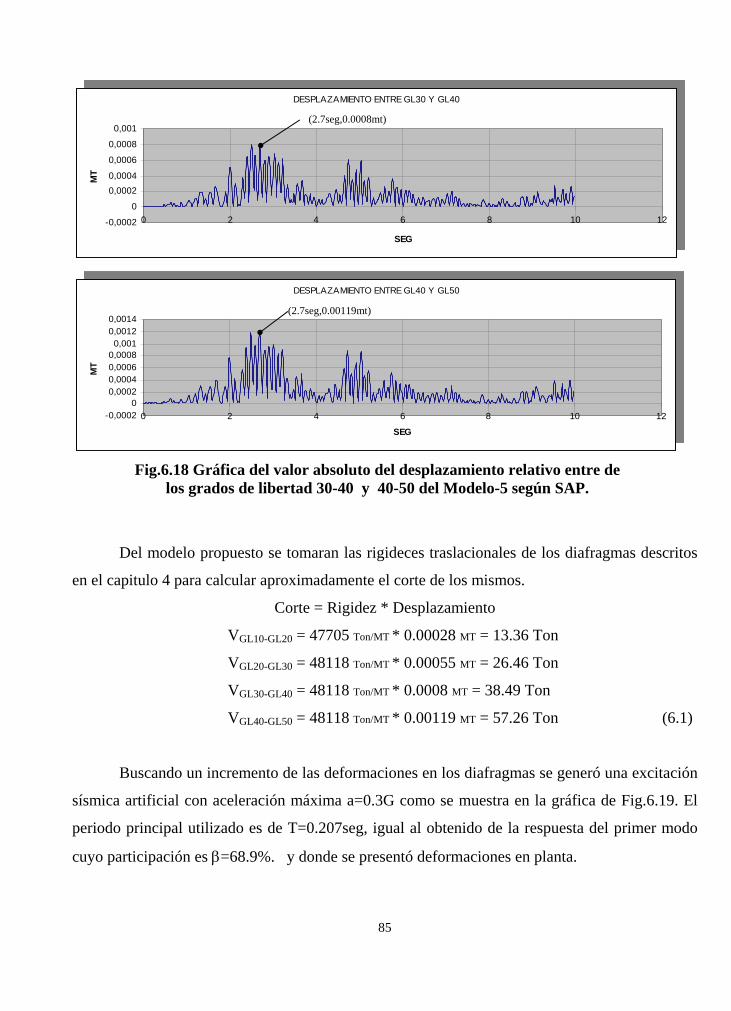
85
Del modelo propuesto se tomaran las rigideces traslacionales de los diafragmas descritos
en el capitulo 4 para calcular aproximadamente el corte de los mismos.
Corte = Rigidez * Desplazamiento
VGL10-GL20 = 47705 Ton/MT * 0.00028 MT = 13.36 Ton
VGL20-GL30 = 48118 Ton/MT * 0.00055 MT = 26.46 Ton
VGL30-GL40 = 48118 Ton/MT * 0.0008 MT = 38.49 Ton
VGL40-GL50 = 48118 Ton/MT * 0.00119 MT = 57.26 Ton (6.1)
Buscando un incremento de las deformaciones en los diafragmas se generó una excitación
sísmica artificial con aceleración máxima a=0.3G como se muestra en la gráfica de Fig.6.19. El
periodo principal utilizado es de T=0.207seg, igual al obtenido de la respuesta del primer modo
cuyo participación es β=68.9%. y donde se presentó deformaciones en planta.
DESPLAZAMIENTO ENTRE GL30 Y GL40
-0,0002
0
0,00020,0004
0,0006
0,0008
0,001
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO ENTRE GL30 Y GL40
-0,0002
0
0,00020,0004
0,0006
0,0008
0,001
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO ENTRE GL40 Y GL50
-0,00020
0,00020,00040,00060,0008
0,0010,00120,0014
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO ENTRE GL40 Y GL50
-0,00020
0,00020,00040,00060,0008
0,0010,00120,0014
0 2 4 6 8 10 12
SEG
MT
(2.7seg,0.0008mt)
(2.7seg,0.00119mt)
Fig.6.18 Gráfica del valor absoluto del desplazamiento relativo entre de los grados de libertad 30-40 y 40-50 del Modelo-5 según SAP.
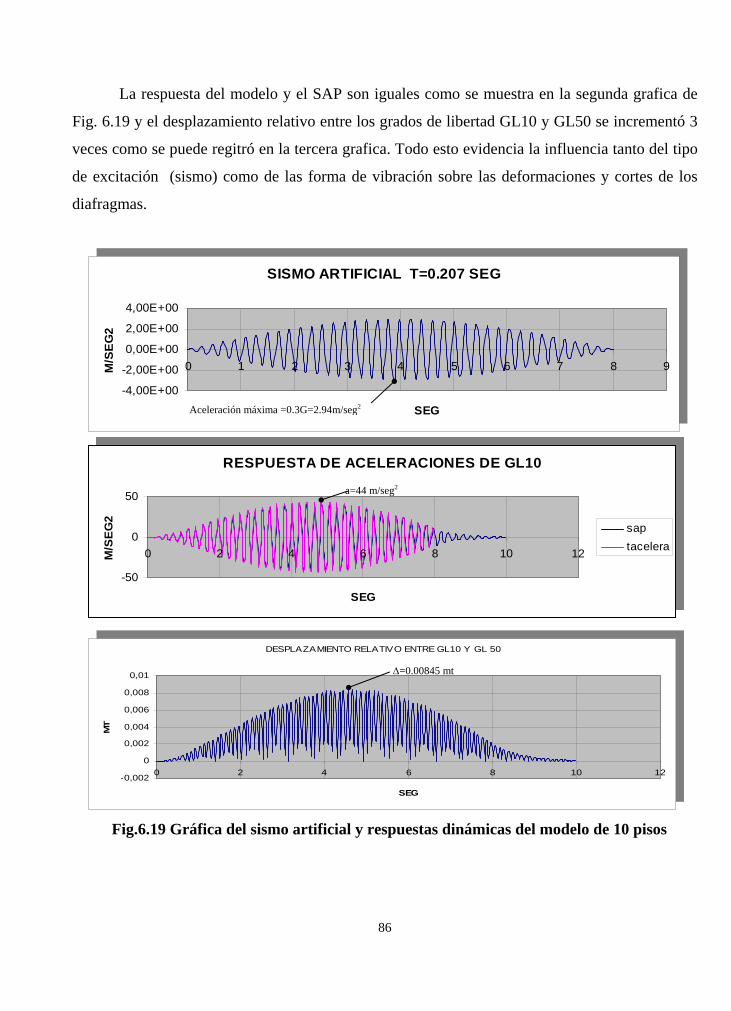
86
La respuesta del modelo y el SAP son iguales como se muestra en la segunda grafica de
Fig. 6.19 y el desplazamiento relativo entre los grados de libertad GL10 y GL50 se incrementó 3
veces como se puede regitró en la tercera grafica. Todo esto evidencia la influencia tanto del tipo
de excitación (sismo) como de las forma de vibración sobre las deformaciones y cortes de los
diafragmas.
Fig.6.19 Gráfica del sismo artificial y respuestas dinámicas del modelo de 10 pisos
DESPLAZAMIENTO RELATIVO ENTRE GL10 Y GL 50
-0,002
0
0,002
0,004
0,006
0,008
0,01
0 2 4 6 8 10 12
SEG
MT
DESPLAZAMIENTO RELATIVO ENTRE GL10 Y GL 50
-0,002
0
0,002
0,004
0,006
0,008
0,01
0 2 4 6 8 10 12
SEG
MT
SISMO ARTIFICIAL T=0.207 SEG
-4,00E+00
-2,00E+00
0,00E+00
2,00E+00
4,00E+00
0 1 2 3 4 5 6 7 8 9
SEG
M/S
EG
2
SISMO ARTIFICIAL T=0.207 SEG
-4,00E+00
-2,00E+00
0,00E+00
2,00E+00
4,00E+00
0 1 2 3 4 5 6 7 8 9
SEG
M/S
EG
2
Aceleración máxima =0.3G=2.94m/seg2
RESPUESTA DE ACELERACIONES DE GL10
-50
0
50
0 2 4 6 8 10 12
SEG
M/S
EG2
saptacelera
RESPUESTA DE ACELERACIONES DE GL10
-50
0
50
0 2 4 6 8 10 12
SEG
M/S
EG2
saptacelera
a=44 m/seg2
Δ=0.00845 mt
88
BIBLIOGRAFIA
• Antonio Sarcos. Análisis Dinámico de Pórticos y Edificios por los Métodos de Rayleig, Stodola y Determinante a través del Computador. Trabajo de Ascenso para Agregado. LUZ. 1992.
• Beles, Ifrim y Yague. Elementos de Ingeniería Sísmica. Omega. 1975
• Bray, Croxton y Martín. Análisis Matricial de Estructuras. PARANINFO. 1979.
• Edgar Fortul. Aspectos Importantes de la Idealización Usualmente Empleada en el
Proyecto de Edificios Sismo Resistentes.SOVINCIV.1999.
• Grases, López y Hernández. Edificaciones Sismo Resistentes. Fondo Editorial Colegio de Ingenieros de Venezuela. 1987.
• J. E. Hurtado. Dinámica de Estructuras. Centro Internacional de Métodos Numéricos en
Ingeniería. 2000.
• Maria G. Fratelli. Estructuras Sismo Resistentes. Ediciones UNIVE srl. 1999.
• M. Rodríguez. Modelaje de la Flexibilidad en el Plano de los Sistemas de Piso en Edificios Sujetos a Sismos. UCV, 1997.
• Mario Paz. Dinámica Estructural. 1992.
• Normas COVENIN-MINDUR 1756-1998. Edificaciones Sismo Resistentes.
• Richard L.Burden, J. Douglas Faires. Análisis Numérico. Grupo Editorial Iberoamérica-
1985.
• SAP-2000. Manual. 1997
• Shoichiro Nakamura. Análisis Numérico y Visualización Grafica con MATLAB. Prentice Hall. 1997.
• Szilard. Theory and Analisys of Plates. Classical and Numerical Methods.1995.
89
APENDICE A
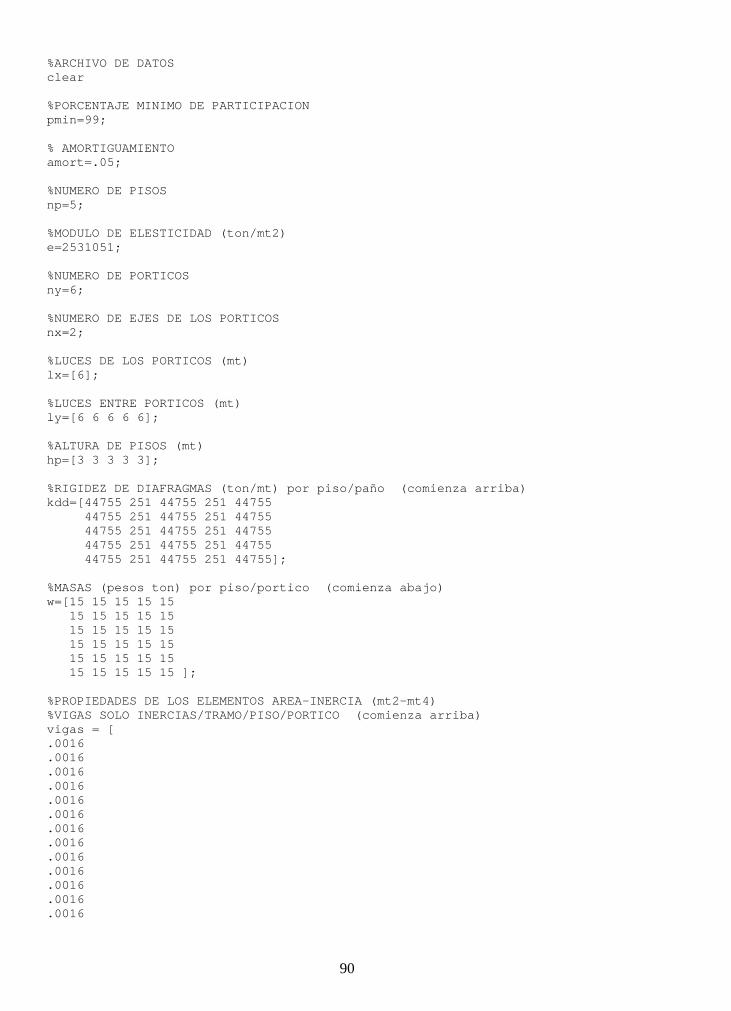
90
%ARCHIVO DE DATOS clear %PORCENTAJE MINIMO DE PARTICIPACION pmin=99; % AMORTIGUAMIENTO amort=.05; %NUMERO DE PISOS np=5; %MODULO DE ELESTICIDAD (ton/mt2) e=2531051; %NUMERO DE PORTICOS ny=6; %NUMERO DE EJES DE LOS PORTICOS nx=2; %LUCES DE LOS PORTICOS (mt) lx=[6]; %LUCES ENTRE PORTICOS (mt) ly=[6 6 6 6 6]; %ALTURA DE PISOS (mt) hp=[3 3 3 3 3]; %RIGIDEZ DE DIAFRAGMAS (ton/mt) por piso/paño (comienza arriba) kdd=[44755 251 44755 251 44755 44755 251 44755 251 44755 44755 251 44755 251 44755 44755 251 44755 251 44755 44755 251 44755 251 44755]; %MASAS (pesos ton) por piso/portico (comienza abajo) w=[15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 15 ]; %PROPIEDADES DE LOS ELEMENTOS AREA-INERCIA (mt2-mt4) %VIGAS SOLO INERCIAS/TRAMO/PISO/PORTICO (comienza arriba) vigas = [ .0016 .0016 .0016 .0016 .0016 .0016 .0016 .0016 .0016 .0016 .0016 .0016 .0016
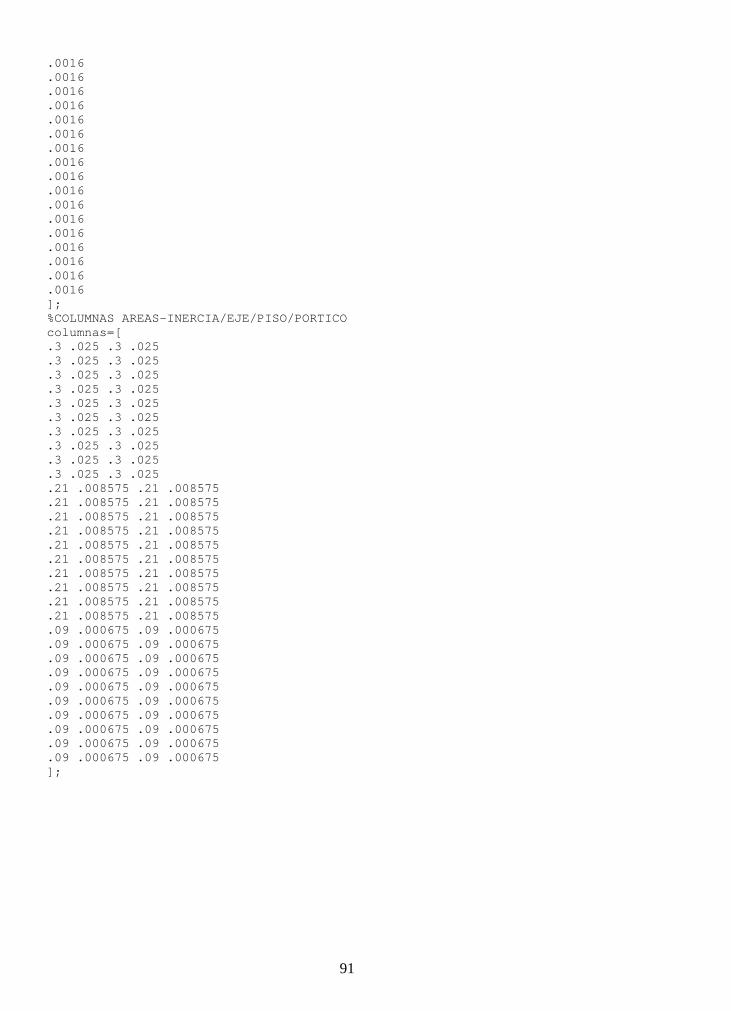
91
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016
.0016 ]; %COLUMNAS AREAS-INERCIA/EJE/PISO/PORTICO columnas=[ .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .3 .025 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .21 .008575 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 .09 .000675 ];
92
APENDICE B
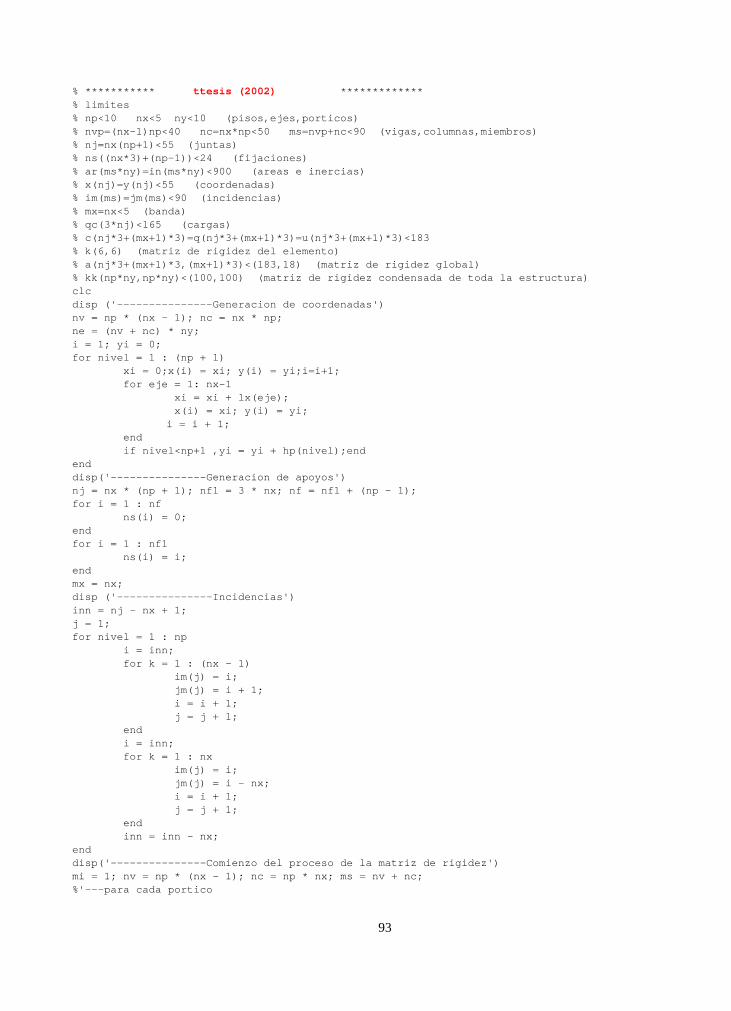
93
% *********** ttesis (2002) ************* % limites % np<10 nx<5 ny<10 (pisos,ejes,porticos) % nvp=(nx-1)np<40 nc=nx*np<50 ms=nvp+nc<90 (vigas,columnas,miembros) % nj=nx(np+1)<55 (juntas) % ns((nx*3)+(np-1))<24 (fijaciones) % ar(ms*ny)=in(ms*ny)<900 (areas e inercias) % x(nj)=y(nj)<55 (coordenadas) % im(ms)=jm(ms)<90 (incidencias) % mx=nx<5 (banda) % qc(3*nj)<165 (cargas) % c(nj*3+(mx+1)*3)=q(nj*3+(mx+1)*3)=u(nj*3+(mx+1)*3)<183 % k(6,6) (matriz de rigidez del elemento) % a(nj*3+(mx+1)*3,(mx+1)*3)<(183,18) (matriz de rigidez global) % kk(np*ny,np*ny)<(100,100) (matriz de rigidez condensada de toda la estructura) clc disp ('---------------Generacion de coordenadas') nv = np * (nx - 1); nc = nx * np; ne = (nv + nc) * ny; i = 1; yi = 0; for nivel = 1 : (np + 1) xi = 0;x(i) = xi; y(i) = yi;i=i+1; for eje = 1: nx-1 xi = xi + lx(eje); x(i) = xi; y(i) = yi; i = i + 1; end if nivel<np+1 ,yi = yi + hp(nivel);end end disp('---------------Generacion de apoyos') nj = nx * (np + 1); nf1 = 3 * nx; nf = nf1 + (np - 1); for i = 1 : nf ns(i) = 0; end for i = 1 : nf1 ns(i) = i; end mx = nx; disp ('---------------Incidencias') inn = nj - nx + 1; j = 1; for nivel = 1 : np i = inn; for k = 1 : (nx - 1) im(j) = i; jm(j) = i + 1; i = i + 1; j = j + 1; end i = inn; for k = 1 : nx im(j) = i; jm(j) = i - nx; i = i + 1; j = j + 1; end inn = inn - nx; end disp('---------------Comienzo del proceso de la matriz de rigidez') mi = 1; nv = np * (nx - 1); nc = np * nx; ms = nv + nc; %'---para cada portico

94
for port = 1: ny fprintf('---------------PORTICO # %2.0f\n',port) %---------------propiedades de los porticos ---------- i = mi; j = 1; for nivel = 1 : np for k = 1 : (nx - 1) sm(j) = in(i); am(j) = ar(i); i = i + 1; j = j + 1; end for k = 1 : nx sm(j) = in(i); am(j) = ar(i); i = i + 1; j = j + 1; end end %---------------calculo para cada grado de libertad for cal = 1 : np %---------------restricciones laterales ---------- j = nf1; for i = 1 : np if cal ~= i, j = j + 1; ns(j) = 3 * (i + 1) * nx - 2; end end %---------------vector de carga ---------------- for i = 1 : nj qc(3 * i - 2) = 0; qc(3 * i - 1) = 0; qc(3 * i) = 0; end qc((cal + 1) * nx * 3 - 2) = 1; %---------------analisis matricial ---------- %-------------- limpia matrices -------------') n3 = nj * 3; nw = (mx + 1) * 3; nt = n3 + nw; for i = 1 : nt for j = 1 : nw a(i, j) = 0; end q(i) = 0 ; cc(i) = 0; end for me = 1 : ms %---------------matriz de rigidez del elemento ----------- i = im(me); j = jm(me); sa = sm(me); ca = am(me); l = sqrt((x(j) - x(i)) ^ 2 + (y(j) - y(i)) ^ 2); c = (x(j) - x(i)) / l; s = (y(j) - y(i)) / l; i3 = 3 * i; i2 = i3 - 1; i1 = i3 - 2; j3 = 3 * j; j2 = j3 - 1; j1 = j3 - 2; c1 = 12 * e * sa * s ^ 2 / l ^ 3 + c ^ 2 * ca * e / l; c2 = 12 * e * sa * c * s / l ^ 3 - c * s * ca * e / l; c3 = 12 * e * sa * c ^ 2 / l ^ 3 + s ^ 2 * ca * e / l; c4 = 6 * e * sa * s / l ^ 2; c5 = 6 * e * sa * c / l ^ 2; c6 = 4 * e * sa / l; km(1, 1) = c1; km(4, 4) = c1; km(2, 1) = -c2; km(1, 2) = -c2; km(5, 4) = -c2; km(4, 5) = -c2; km(3, 1) = c4; km(1, 3) = c4; km(6, 1) = c4; km(1, 6) = c4; km(4, 1) = -c1; km(1, 4) = -c1; km(5, 1) = c2; km(1, 5) = c2; km(4, 2) = c2; km(2, 4) = c2; km(2, 2) = c3; km(5, 5) = c3; km(3, 2) = -c5; km(2, 3) = -c5; km(6, 2) = -c5; km(2, 6) = -c5;
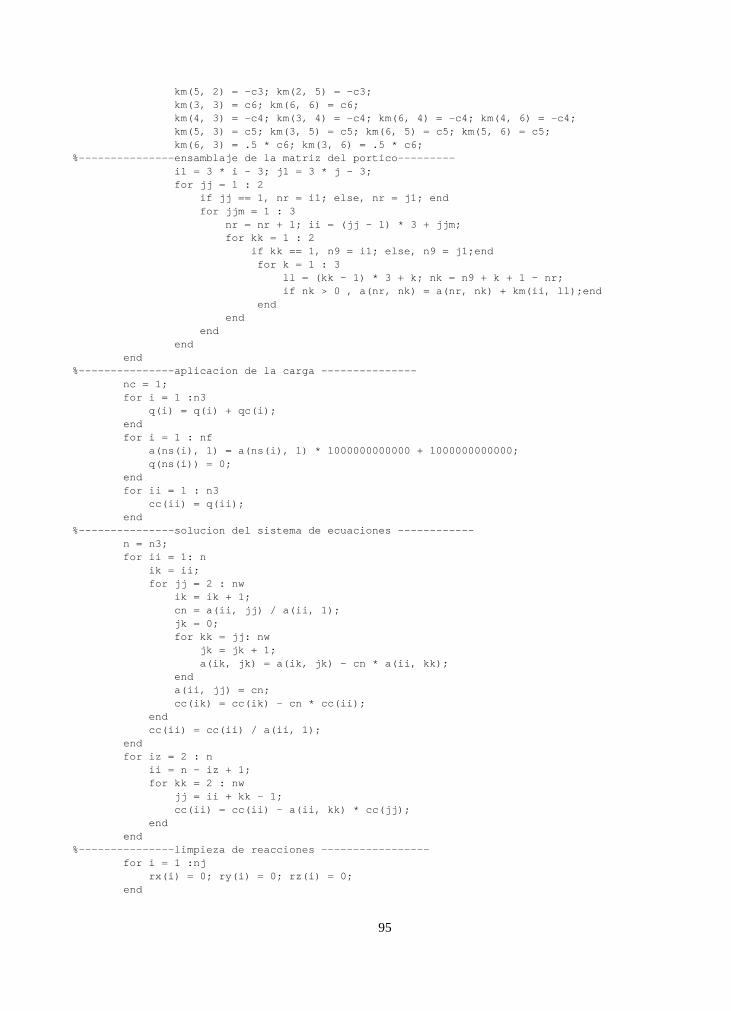
95
km(5, 2) = -c3; km(2, 5) = -c3; km(3, 3) = c6; km(6, 6) = c6; km(4, 3) = -c4; km(3, 4) = -c4; km(6, 4) = -c4; km(4, 6) = -c4; km(5, 3) = c5; km(3, 5) = c5; km(6, 5) = c5; km(5, 6) = c5; km(6, 3) = .5 * c6; km(3, 6) = .5 * c6; %---------------ensamblaje de la matriz del portico--------- i1 = 3 * i - 3; j1 = 3 * j - 3; for jj = 1 : 2 if jj == 1, nr = i1; else, nr = j1; end for jjm = 1 : 3 nr = nr + 1; ii = (jj - 1) * 3 + jjm; for kk = 1 : 2 if kk == 1, n9 = i1; else, n9 = j1;end for k = 1 : 3 ll = (kk - 1) * 3 + k; nk = n9 + k + 1 - nr; if nk > 0 , a(nr, nk) = a(nr, nk) + km(ii, ll);end end end end end end %---------------aplicacion de la carga --------------- nc = 1; for i = 1 :n3 q(i) = q(i) + qc(i); end for i = 1 : nf a(ns(i), 1) = a(ns(i), 1) * 1000000000000 + 1000000000000; q(ns(i)) = 0; end for ii = 1 : n3 cc(ii) = q(ii); end %---------------solucion del sistema de ecuaciones ------------ n = n3; for ii = 1: n ik = ii; for jj = 2 : nw ik = ik + 1; cn = a(ii, jj) / a(ii, 1); jk = 0; for kk = jj: nw jk = jk + 1; a(ik, jk) = a(ik, jk) - cn * a(ii, kk); end a(ii, jj) = cn; cc(ik) = cc(ik) - cn * cc(ii); end cc(ii) = cc(ii) / a(ii, 1); end for iz = 2 : n ii = n - iz + 1; for kk = 2 : nw jj = ii + kk - 1; cc(ii) = cc(ii) - a(ii, kk) * cc(jj); end end %---------------limpieza de reacciones ----------------- for i = 1 :nj rx(i) = 0; ry(i) = 0; rz(i) = 0; end
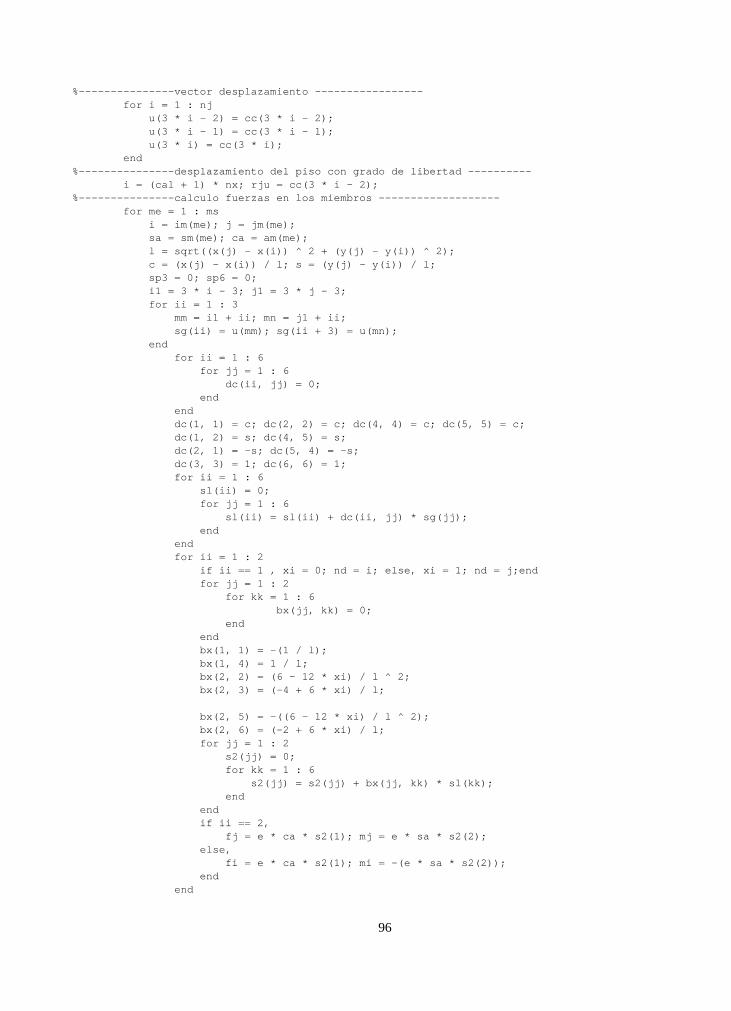
96
%---------------vector desplazamiento ----------------- for i = 1 : nj u(3 * i - 2) = cc(3 * i - 2); u(3 * i - 1) = cc(3 * i - 1); u(3 * i) = cc(3 * i); end %---------------desplazamiento del piso con grado de libertad ---------- i = (cal + 1) * nx; rju = cc(3 * i - 2); %---------------calculo fuerzas en los miembros ------------------- for me = 1 : ms i = im(me); j = jm(me); sa = sm(me); ca = am(me); l = sqrt((x(j) - x(i)) ^ 2 + (y(j) - y(i)) ^ 2); c = (x(j) - x(i)) / l; s = (y(j) - y(i)) / l; sp3 = 0; sp6 = 0; i1 = 3 * i - 3; j1 = 3 * j - 3; for ii = 1 : 3 mm = i1 + ii; mn = j1 + ii; sg(ii) = u(mm); sg(ii + 3) = u(mn); end for ii = 1 : 6 for jj = 1 : 6 dc(ii, jj) = 0; end end dc(1, 1) = c; dc(2, 2) = c; dc(4, 4) = c; dc(5, 5) = c; dc(1, 2) = s; dc(4, 5) = s; dc(2, 1) = -s; dc(5, 4) = -s; dc(3, 3) = 1; dc(6, 6) = 1; for ii = 1 : 6 sl(ii) = 0; for jj = 1 : 6 sl(ii) = sl(ii) + dc(ii, jj) * sg(jj); end end for ii = 1 : 2 if ii == 1 , xi = 0; nd = i; else, xi = 1; nd = j;end for jj = 1 : 2 for kk = 1 : 6 bx(jj, kk) = 0; end end bx(1, 1) = -(1 / l); bx(1, 4) = 1 / l; bx(2, 2) = (6 - 12 * xi) / l ^ 2; bx(2, 3) = (-4 + 6 * xi) / l; bx(2, 5) = -((6 - 12 * xi) / l ^ 2); bx(2, 6) = (-2 + 6 * xi) / l; for jj = 1 : 2 s2(jj) = 0; for kk = 1 : 6 s2(jj) = s2(jj) + bx(jj, kk) * sl(kk); end end if ii == 2, fj = e * ca * s2(1); mj = e * sa * s2(2); else, fi = e * ca * s2(1); mi = -(e * sa * s2(2)); end end

97
vi = -((mi + mj) / l); vj = -vi; %---------------equilibrio de juntas -------------------- rx(im(me)) = rx(im(me)) - fi * c - vi * s; ry(im(me)) = ry(im(me)) - fi * s + vi * c; rx(jm(me)) = rx(jm(me)) + fj * c - vj * s; ry(jm(me)) = ry(jm(me)) + fj * s + vj * c; rz(im(me)) = rz(im(me)) + mi; rz(jm(me)) = rz(jm(me)) + mj; end %---------------ensamblaje de la matriz de rigidez (porticos)---------- for nivel = 1 : np jun = (nivel + 1) * nx; fila = nivel + (port - 1) * np; col = cal + (port - 1) * np; kkr(fila, col) = rx(jun) / rju; end end mi = ms * port + 1; end disp('---------------Acoplamiento de la matriz de rigidez (diafragmas)') z=0; for j=1 : np for i=1 : ny-1 z=z+1; kd(z)=kdd(j,i); end end for port = 1 : ny if port == 1, for nivel = 1 : np j = nivel; i = j + np; z = (np + 1 - nivel) * (ny - 1) - ny + 2; kkr(i, j) = -kd(z); kkr(j,j)=kkr(j,j)+kd(z); end; end if port == ny, for nivel = 1 : np j = (ny * np) - np + nivel; i = j - np; z = (np + 1 - nivel) * (ny - 1); kkr(i, j) = -kd(z); kkr(j,j)=kkr(j,j)+kd(z); end; end if port ~= 1 & port ~= ny, for nivel = 1 : np j = (port - 1) * np + nivel; i1 = j - np; i2 = j + np; z1 = (np + 1 - nivel) * (ny - 1) - ny + port; z2 = (np + 1 - nivel) * (ny - 1) - ny + port + 1; kkr(i1, j) = -kd(z1); kkr(i2, j) = -kd(z2); kkr(j,j)=kkr(j,j)+kd(z1)+kd(z2); end; end end disp('---------------Fin del analisis matricial')

98
disp('---------------Matriz de masa') gl=np*ny; mtotal=0;z=0; for i=1:ny for j=1:np z=z+1; masa(z,z)=w(i,j)/9.81; mtotal=mtotal+w(i,j)/9.81; end end disp('---------------Calculo de la matriz modal-frecuencias-participacion') [mmodal,lan]=eig(inv(masa)*kkr); for i=1:gl land(i)=lan(i,i); end %-------------------ordena la matriz modal landa=sort(land); for j=1:gl for k=1:gl if landa(j)==land(k), modal(:,j)=mmodal(:,k);end end end %---------------- Normalizacion for modo=1:gl cnorma(modo)=1/(sqrt(modal(:,modo)'*masa*modal(:,modo))); modal(:,modo)=modal(:,modo)*cnorma(modo); end %-----------------frecuencia circular omega=sqrt(landa); %-----------------coeficiente de participacion for j=1 :gl b(j)=1; end for j=1:gl gama(j)=(modal(:,j)'*masa*b')/(modal(:,j)'*masa*modal(:,j)); end %-----------------masa parcitipativa for j=1:gl beta(j)=(modal(:,j)'*masa*b')^2/mtotal*100; modo(j)=j; end %--------------------grabacion de resultados--------------- save tresul1 gl ny np ly hp kkr masa modal gama beta omega %-----------------ordenamiento por acumulacion de masa participativa glmin=1; betf=-sort(-beta); betaa(1)=betf(1); for i=2:gl betaa(i)=betaa(i-1)+betf(i); if betaa(i)<pmin , glmin=i+1;end end for j=1:glmin for k=1:gl if betf(j)==beta(k), betaf(j)=betf(j); modalf(:,j)=modal(:,k); omegaf(j)=omega(k); gamaf(j)=gama(k); modof(j)=modo(k); end
99
end end %--------------------grabacion de resultados--------------- save tresul2 gl ny np ly hp modalf gamaf betaf betaa glmin modof amort omegaf clear clc opcion=1; %--------------------- timpre1 ------------------------------- %--------------------Impresiones ----------------------------- clc clear load tresul1 opcion=2; disp('Matriz de rigidez') for i=1 : gl for j=1 : gl fprintf(' %7.1f',kkr(i,j)) end fprintf('\n') end fprintf('\n') disp('Matriz de masa') for i=1 : gl for j=1 : gl fprintf(' %7.3f',masa(i,j)) end fprintf('\n') end fprintf('\n') disp('Matriz modal normalizada') for i=1 : gl fprintf(' Modo=%2.0f',i) end fprintf('\n') for i=1 : gl for j=1 : gl fprintf(' %7.4f',modal(i,j)) end fprintf('\n') end fprintf('\n') fprintf('\n') disp('Frecuencia circular (rad/seg)') for i=1 : gl fprintf(' %7.3f',omega(i)) end fprintf('\n') fprintf('\n') disp('Frecuencia (ciclos/seg)') for i=1 : gl fprintf(' %7.3f',omega(i)/2/pi) end fprintf('\n') fprintf('\n') disp('Periodo T(seg)') for i=1 : gl fprintf(' %7.4f',2*pi/omega(i)) end fprintf('\n') fprintf('\n')
100
disp('Participacion gama(i)') for i=1 : gl fprintf(' %7.4f',gama(i)) end fprintf('\n') fprintf('\n') disp('Masa participativa beta(i)%') for i=1 : gl fprintf(' %7.3f',beta(i)) end fprintf('\n') fprintf('\n') fprintf('\n') clc %---------------------- tdibujo1 --------------- clc clear load tresul1 opcion=3; %---------------------- coordenadas ---------------------- i = 1; zi = 0;nodos=ny*(np+1); for nivel = 1 : (np + 1) yi = 0;y(i) = yi; z(i) = zi;i=i+1; for eje = 1: ny-1 yi = yi + ly(eje); y(i) = yi; z(i) = zi; i = i + 1; end if nivel<np+1 ,zi = zi + hp(nivel);end end x(nodos)=0;lyt=y(ny); %---------------------- incidencias ---------------------- inn = nodos - ny + 1; j = 1; for nivel = 1 : np i = inn; for k = 1 : (ny - 1) im(j) = i; jm(j) = i + 1; i = i + 1; j = j + 1; end i = inn; for k = 1 : ny im(j) = i; jm(j) = i - ny; i = i + 1; j = j + 1; end inn = inn - ny; end %---------------------- dibujo ---------------------- ht=z(nodos);ne=np*(ny-1)+ny*np; for modo=1 : gl deltax=modal(:,modo); despl=max(abs(deltax)); esc=ht/despl; for port=1:ny nodo=port; xf(nodo)=x(nodo); for nivel=1 : np
101
nodo=nodo+ny; xf(nodo)=deltax(nivel+np*(port-1))*esc; end end for mi=1:ne xm(1)=x(im(mi)); ym(1)=y(im(mi)); zm(1)=z(im(mi)); xm(2)=x(jm(mi)); ym(2)=y(jm(mi)); zm(2)=z(jm(mi)); xmf(1)=xf(im(mi)); ymf(1)=y(im(mi)); zmf(1)=z(im(mi)); xmf(2)=xf(jm(mi)); ymf(2)=y(jm(mi)); zmf(2)=z(jm(mi)); if zmf(2)==zmf(1),ymf(2)=ymf(1);xmf(2)=xmf(1);end plot3(xm,ym,zm,':w',xmf,ymf,zmf,'r') hold on end for nodo=1:nodos xn(1)=x(nodo); yn(1)=y(nodo); zn(1)=z(nodo); xn(2)=xf(nodo); yn(2)=y(nodo); zn(2)=z(nodo); plot3(xn,yn,zn,':') end view([20,40]) axis([-esc,esc,0,lyt,0,ht*1.25]) axis('square') nmodo=num2str(modo); nfre=num2str(omega(modo)); nperi=num2str(2*pi/omega(modo)); ngam=num2str(gama(modo)); nbet=num2str(beta(modo)); title(['MODO # ',nmodo]) text(-esc*1.5,0,ht*2,['Fecuencia=',nfre,' rad/seg']) text(-esc*1.5,0,ht*1.75,['Periodo=',nperi,' seg']) text(esc*1.25,0,ht*2.25,['Cof. de Part.=',ngam]) text(esc*1.25,0,ht*2,['%Masa part.=',nbet]) pause clf end close %--------------------- timpre2 ------------------------------- %--------------------Impresiones ----------------------------- clc clear load tresul2 opcion=4; disp('Matriz modal normalizada reducida') for i=1 : glmin fprintf(' Modo=%2.0f',modof(i)) end fprintf('\n') for i=1 : gl for j=1 : glmin fprintf(' %7.4f',modalf(i,j))
102
end fprintf('\n') end fprintf('\n') fprintf('\n') disp('Frecuencia circular (rad/seg)') for i=1 : glmin fprintf(' %7.3f',omegaf(i)) end fprintf('\n') fprintf('\n') disp('Frecuencia (ciclos/seg)') for i=1 : glmin fprintf(' %7.3f',omegaf(i)/2/pi) end fprintf('\n') fprintf('\n') disp('Periodo T(seg)') for i=1 : glmin fprintf(' %7.4f',2*pi/omegaf(i)) end fprintf('\n') fprintf('\n') disp('Participacion gama(i)') for i=1 : glmin fprintf(' %7.4f',gamaf(i)) end fprintf('\n') fprintf('\n') disp('Masa participativa beta(i)%') for i=1 : glmin fprintf(' %7.3f',betaf(i)) end fprintf('\n') fprintf('\n') disp('Masa participativa acumulada(i)%') for i=1 : glmin fprintf(' %7.3f',betaa(i)) end fprintf('\n') fprintf('\n') fprintf('Grados de libertad minimo=%2.0f',glmin) fprintf('\n') clc %---------------------- tdibujo2 --------------- clc clear load tresul2 opcion=5; %---------------------- coordenadas ---------------------- i = 1; zi = 0;nodos=ny*(np+1); for nivel = 1 : (np + 1) yi = 0;y(i) = yi; z(i) = zi;i=i+1; for eje = 1: ny-1 yi = yi + ly(eje); y(i) = yi; z(i) = zi; i = i + 1; end if nivel<np+1 ,zi = zi + hp(nivel);end end
103
x(nodos)=0;lyt=y(ny); %---------------------- incidencias ---------------------- inn = nodos - ny + 1; j = 1; for nivel = 1 : np i = inn; for k = 1 : (ny - 1) im(j) = i; jm(j) = i + 1; i = i + 1; j = j + 1; end i = inn; for k = 1 : ny im(j) = i; jm(j) = i - ny; i = i + 1; j = j + 1; end inn = inn - ny; end %---------------------- dibujo ---------------------- ht=z(nodos);ne=np*(ny-1)+ny*np; for modo=1 : glmin deltax=modalf(:,modo); despl=max(abs(deltax)); esc=ht/despl; for port=1:ny nodo=port; xf(nodo)=x(nodo); for nivel=1 : np nodo=nodo+ny; xf(nodo)=deltax(nivel+np*(port-1))*esc; end end for mi=1:ne xm(1)=x(im(mi)); ym(1)=y(im(mi)); zm(1)=z(im(mi)); xm(2)=x(jm(mi)); ym(2)=y(jm(mi)); zm(2)=z(jm(mi)); xmf(1)=xf(im(mi)); ymf(1)=y(im(mi)); zmf(1)=z(im(mi)); xmf(2)=xf(jm(mi)); ymf(2)=y(jm(mi)); zmf(2)=z(jm(mi)); if zmf(2)==zmf(1),ymf(2)=ymf(1);xmf(2)=xmf(1);end plot3(xm,ym,zm,':w',xmf,ymf,zmf,'r') hold on end for nodo=1:nodos xn(1)=x(nodo); yn(1)=y(nodo); zn(1)=z(nodo); xn(2)=xf(nodo); yn(2)=y(nodo); zn(2)=z(nodo); plot3(xn,yn,zn,':') end view([20,40])
104
axis([-esc,esc,0,lyt,0,ht*1.25]) axis('square') nmodo=num2str(modof(modo)); nfre=num2str(omegaf(modo)); nperi=num2str(2*pi/omegaf(modo)); ngam=num2str(gamaf(modo)); nbet=num2str(betaf(modo)); title(['MODO # ',nmodo]) text(-esc*1.5,0,ht*2,['Fecuencia=',nfre,' rad/seg']) text(-esc*1.5,0,ht*1.75,['Periodo=',nperi,' seg']) text(esc*1.25,0,ht*2.25,['Cof. de Part.=',ngam]) text(esc*1.25,0,ht*2,['%Masa part.=',nbet]) pause clf end close %---------------------- tintegra --------------- clc clear tsismo load tresul2 opcion=6; mt=length(acel); fprintf(' CALCULO DE LAS INTEGRALES DE DUHAMEL\n') for modo=1:glmin fprintf(' Modo # %2.0f\n',modof(modo)) I(modo,1)=0; ff=1; for i=2:mt t1=(i-1)*dt; t=0:dt:t1; for j=1:i ff(j)=acel(j)*exp(-amort*omegaf(modo)*(t1-t(j)))*sin(omegaf(modo)*(t1-t(j))); end I(modo,i)=trapz(t,ff); end end save tresul3 I mt dt clc %---------------------- tdesplaz1 --------------- clc clear tsismo load tresul2 load tresul3 opcion=7; for tiempo=1:mt for i=1:glmin n(i)=I(i,tiempo)*gamaf(i)/omegaf(i); end q(:,tiempo)=modalf*n'; end ttotal=(mt-1)*dt; ttotal1=ttotal+10; clc %--------------------------------------------------------- opc1=0; fprintf('El tiempo de duracion del sismo es de %5.3f',ttotal) fprintf(' seg\n')
105
fprintf('\n') opc1=input('Si desea acortar el tiempo--->(1)'); if opc1==1, while ttotal1>=ttotal ttotal1=input('Introduzca el tiempo en seg='); end else ttotal1=ttotal; end clc ttotal=ttotal1; mt=ttotal/dt+1; %---------------------- coordenadas ---------------------- i = 1; zi = 0;nodos=ny*(np+1); for nivel = 1 : (np + 1) yi = 0;y(i) = yi; z(i) = zi;i=i+1; for eje = 1: ny-1 yi = yi + ly(eje); y(i) = yi; z(i) = zi; i = i + 1; end if nivel<np+1 ,zi = zi + hp(nivel);end end x(nodos)=0;lyt=y(ny); %---------------------- incidencias ---------------------- inn = nodos - ny + 1; j = 1; for nivel = 1 : np i = inn; for k = 1 : (ny - 1) im(j) = i; jm(j) = i + 1; i = i + 1; j = j + 1; end i = inn; for k = 1 : ny im(j) = i; jm(j) = i - ny; i = i + 1; j = j + 1; end inn = inn - ny; end %---------------------- dibujo ---------------------- ht=z(nodos);ne=np*(ny-1)+ny*np; despl=max(max(abs(q))); esc=ht/4/despl; tt=0:dt:dt*(mt-1); for i=1:mt ac(i)=acel(i); end SUBPLOT(1,2,2),plot(tt,ac,':y',[0,dt*mt],[0,0],':w') hold on acc(1)=0;ttt(1)=0; acc(2)=0;ttt(2)=0; SUBPLOT(1,2,1) view([20,30]) axis([-ht/2,ht/2,0,lyt,0,ht*1.25]) text(0,0,ht,'Agrande la pantalla') pause
106
hold on for tiempo=1:mt deltax=q(:,tiempo); for port=1:ny nodo=port; xf(nodo)=x(nodo); for nivel=1 : np nodo=nodo+ny; xf(nodo)=deltax(nivel+np*(port-1))*esc; end end for mi=1:ne xm(1)=x(im(mi)); ym(1)=y(im(mi)); zm(1)=z(im(mi)); xm(2)=x(jm(mi)); ym(2)=y(jm(mi)); zm(2)=z(jm(mi));
xmf(1)=xf(im(mi)); ymf(1)=y(im(mi)); zmf(1)=z(im(mi)); xmf(2)=xf(jm(mi)); ymf(2)=y(jm(mi)); zmf(2)=z(jm(mi)); if zmf(2)==zmf(1),ymf(2)=ymf(1);xmf(2)=xmf(1);end SUBPLOT(1,2,1),plot3(xm,ym,zm,':w',xmf,ymf,zmf,'r') hold on end for nodo=1:nodos xn(1)=x(nodo); yn(1)=y(nodo); zn(1)=z(nodo); xn(2)=xf(nodo); yn(2)=y(nodo); zn(2)=z(nodo); SUBPLOT(1,2,1),plot3(xn,yn,zn,':') end ntiempo=num2str((tiempo-1)*dt); title(['Tiempo=',ntiempo,' seg']) pause(dt*.1) if tiempo<mt ,cla;end SUBPLOT(1,2,2),plot(ttt,acc,'r') if tiempo<mt acc(1)=acc(2);ttt(1)=ttt(2); acc(2)=acel(tiempo+1);ttt(2)=ttt(1)+dt; end end pause close %---------------------- tdespla2 --------------- clc clear load tresul2 load tresul3 opcion=8; for tiempo=1:mt for i=1:glmin n(i)=I(i,tiempo)*gamaf(i)/omegaf(i); end q(:,tiempo)=modalf*n'; end
107
ttotal=(mt-1)*dt; ttotal1=ttotal+1; clc %--------------------------------------------------------- opc1=0; fprintf('El tiempo de duracion del sismo es de %5.3f',ttotal) fprintf(' seg\n') fprintf('\n') opc1=input('Si desea acortar el tiempo--->(1)'); if opc1==1, while ttotal1>=ttotal ttotal1=input('Introduzca el tiempo en seg='); end else ttotal1=ttotal; end clc ttotal=ttotal1; mt=ttotal/dt+1; nivel=1; while nivel~=0, clc fprintf('Para salir --->(0)') nivel=input('Piso que desea graficar--->(x)'); if nivel==0, clc,break,end if nivel<np+1 & nivel>0, piso=int2str(nivel); x(1)=0;y(1)=0;yf(1)=0; for i=2: ny x(i)=0; y(i)=y(i-1)+ly(i-1); yf(i)=y(i); end despl=max(max(abs(q))); esc=y(ny)/4/despl; for tiempo=1:mt grado=nivel; for i=1:ny xf(i)=q(grado,tiempo)*esc; grado=grado+np; end plot(x,y,':w',xf,yf,'r') hold on plot(xf,yf,'*y') hold on for nodo=1:ny xn(1)=x(nodo); yn(1)=y(nodo); xn(2)=xf(nodo); yn(2)=y(nodo); plot(xn,yn,':') end axis([-y(ny)/2,y(ny)/2,-.15*y(ny),y(ny)*1.15]) ntiempo=num2str((tiempo-1)*dt); title(['Tiempo=',ntiempo]) text(y(ny)/4,y(ny)*1.05,['Piso=',piso],'color','y') pause(.5) if tiempo==1, text(y(ny)/8,y(ny),'Agrande la pantalla') pause else
108
end if tiempo<mt ,clf ;end end else end pause close end close %---------------------- tacelera --------------- clear clc load tresul2 load tresul3 opcion=9; for tiempo=1:mt for i=1:glmin n(i)=I(i,tiempo)*gamaf(i)/omegaf(i); na(i)=I(i,tiempo)*gamaf(i)*omegaf(i); end q(:,tiempo)=modalf*n'; a(:,tiempo)=modalf*na'; end ttotal=mt*dt; clc %---------------------- coordenadas ---------------------- i = 1; zi = 0;nodos=ny*(np+1); for nivel = 1 : (np + 1) yi = 0;y(i) = yi; z(i) = zi;i=i+1; for eje = 1: ny-1 yi = yi + ly(eje); y(i) = yi; z(i) = zi; i = i + 1; end if nivel<np+1 ,zi = zi + hp(nivel);end end x(nodos)=0;lyt=y(ny); %---------------------- incidencias ---------------------- inn = nodos - ny + 1; j = 1; for nivel = 1 : np i = inn; for k = 1 : (ny - 1) im(j) = i; jm(j) = i + 1; i = i + 1; j = j + 1; end i = inn; for k = 1 : ny im(j) = i; jm(j) = i - ny; i = i + 1; j = j + 1; end inn = inn - ny; end %---------------------- dibujo ---------------------- ht=z(nodos);ne=np*(ny-1)+ny*np; for mi=1:ne
109
xm(1)=x(im(mi)); ym(1)=y(im(mi)); zm(1)=z(im(mi)); xm(2)=x(jm(mi)); ym(2)=y(jm(mi)); zm(2)=z(jm(mi)); plot3(xm,ym,zm,':w') hold on end i=1; for eje=1:ny for nivel=1:np nodo=nivel*ny+eje; nod=int2str(i); text(0,y(nodo),z(nodo),nod,'color','r') i=i+1; end end title('Definicion de grados de libertad') text(0,lyt*1.15,ht,'Escoja el grado') text(0,lyt*1.15,.9*ht,' a graficar') text(0,lyt*1.15,.7*ht,'Oprima enter') text(0,lyt*1.15,.6*ht,' para limpiar') text(0,lyt*1.15,.5*ht,' la pantalla') view([40,20]) axis([-ht,ht,0,lyt,0,ht]) pause close clc %*********************************************************** gll=1; while gll~=0, fprintf('Para salir --->(0)') gll=input('Grado de libertad que desea graficar--->(x)'); if gll<=gl & gll~=0, grado=int2str(gll); x=0+dt:dt:ttotal; ya=a(gll,:); yq=q(gll,:); SUBPLOT(2,1,1),plot(x,yq) title(['Grafica de desplazamiento del grado de libertad :',grado]) xlabel('seg'),ylabel('metros') grid on SUBPLOT(2,1,2),plot(x,ya) title(['Grafica de aceleraciones del grado de libertad :',grado]) xlabel('seg'),ylabel('m/s2') grid on pause close grab=input('Desea grabar aceleracion en el archivo "trespuesta.tmp" oprima--->(1)'); if grab==1 , y=ya'; save trespuesta.tmp y -ascii else end else end clc end

110
%------------------ terror ----------------------- %PROGRAMA QUE VERIFICA COMPATIBLIDAD DE DATOS if length(lx)~=(nx-1),error=1;disp('ERROR EN LUCES');end if length(hp)~=np,error=1;disp('ERROR EN ALTURAS');end [m,n]=size(kdd);longkdd=m*n; if longkdd~=(ny-1)*np,error=1;disp('ERROR EN DIAFRAGMAS');end [m,n]=size(w);longw=m*n; if longw~=np*ny,error=1;disp('ERROR EN LAS MASAS');end ne=np*(2*nx-1)*ny; if length(vigas(:,1))~=ny*np,error=1;disp('ERROR EN DATOS DE VIGAS');end if length(vigas(1,:))~=nx-1,error=1;disp('ERROR EN DATOS DE VIGAS');end if length(columnas(:,1))~=ny*np,error=1;disp('ERROR EN DATOS DE columnas');end if length(columnas(1,:))~=2*nx,error=1;disp('ERROR EN DATOS DE columnas');end ------------------ tmenu------------------------- clear clc %------------------- archivo de trabajo----------- % +----------+ % ! ! MODELO5 % ! ! % +----------+ %----------------- revision del archivo---------------- terror if error==1,break;end el=0; for i=1 :np*ny for j=1 :nx-1 el=el+1; ar(el)=10; in(el)=vigas(i,j); end for j=1 :nx el=el+1; ar(el)=columnas(i,2*j-1); in(el)=columnas(i,2*j); end end %---------------------menu opcion=0; while opcion<=9, clc fprintf(' Introduzca numero del proceso\n') fprintf('\n') fprintf('Procesar el sistema matricial dinamico------------------>(1)\n') fprintf('\n') fprintf('Impresion en pantalla del sistema matricial dinamico---->(2)\n') fprintf('Dibujo de los modos de vibracion dinamico--------------->(3)\n') fprintf('Impresion en pantalla del sistema reducido-------------->(4)\n') fprintf('Dibujo de los modos de vibracion reducido--------------->(5)\n') fprintf('\n') fprintf('Calculos de las integrales de Duhamel ------------------>(6)\n') fprintf('\n') fprintf('Movimiento del edificio -------------------------------->(7)\n') fprintf('Movimiento del piso ------------------------------------>(8)\n') fprintf('Grafico de desplazamiento y aceleraciones--------------->(9)\n')
111
fprintf('\n') fprintf('Salir----------------------------------------------->(enter)\n') fprintf('\n') opcion=input('Indique opcion='); if opcion==0, clc,break,end if opcion==1,ttesis;end if opcion==2,timpre1;end if opcion==3,tdibujo1;end if opcion==4,timpre2;end if opcion==5,tdibujo2;end if opcion==6,tintegra;end if opcion==7,tdespla1;end if opcion==8,tdespla2;end if opcion==9,tacelera;end clc end
112
APENDICE C
113
Abreviaturas y Símbolos
a&& :Aceleración absoluta
A :Matriz de acoplamiento
b :Vector de excitación unitario
C :Matriz de amortiguamiento Ci :Constante de normalización GL :Grado de libertad
I :Matriz de integrales Kd :Rigidez del diafragma o resorte
K :Matriz de rigidez *K :Matriz de rigidez desacoplada
mi :Masa
M :Matriz de masa q :Componente de desplazamiento q& :Componente de velocidad
q&& :Componente de aceleración
Q :Vector de carga
T :Tiempo u&& :Aceleración del terreno
βi :Coeficiente de masa participativa ξ :Factor de amortiguamiento δi :Coeficiente de participación φi :Vector modal λi :Valor propio ω :Frecuencia angular ωd : Frecuencia angular amortiguada
φ :Matriz modal
μ :Norma