trabajo de diploma ok
TRANSCRIPT
Facultad de Ingeniería Mecánica
Departamento de Ingeniería Mecánica
Trabajo de Diploma
Título: Diseño y análisis de la estructura mecánica de un exoesqueleto para la rehabilitación de miembros inferiores.
Autor: Lianny Pardo Pérez
Tutor: Dr.Ing.Yamill Campos Pérez
Año 52 de la Revolución
Curso: 2009-2010
Pensamiento En la ciencia no existen calzadas reales, y quien aspire a remontar sus luminosas cumbres; ha de estar dispuesto a escalar la montaña por senderos escabrosos.
Karl Marx.
Dedicatoria Dedico estas páginas a mi familia y en especial a mis padres.
Agradecimientos En primer lugar le agradezco a mis padres Grisel y Nelson por su apoyo y dedicación en estos cinco años. A mi tutor Yamill por la orientación y ayuda brindada. A mi novia Marlis por ayudarme en las revisiones del trabajo y traducciones bibliográficas de este tema. A mis amigos Daniel, Aldo, Linet, Lisdel, Nosley, por su colaboración y ayuda en las traducciones de este tema. A mis compañeros y amigos Livan, Raúl, Osmany, Francisco, Sergio por tantos momentos compartidos dentro y fuera de la universidad. A mis abuelos Carmen y Andito por estar presente en mi vida y además por su cariño y amor. A mi suegra Silvia por su cariño y generosidad, además de su ayuda incondicional.

Resumen En el presente trabajo se pretende realizar el diseño de la estructura mecánica de un exoesqueleto
robótico, partiendo de la necesidad de complementar un dispositivo capaz de rehabilitar personas que
presenten discapacidad en sus miembros inferiores producto de lesiones o trastornos cerebrales, los
cuales se vean imposibilitados en realizar algún tipo de movimiento como caminar. También se pretende
utilizar como objeto de diagnóstico y medición que permita trazar nuevas estrategias en cuanto a la
rehabilitación de cada paciente, además de elevar considerablemente la autoestima en personas que
por razones mayores ya no puedan realizar ningún tipo de movimiento. El trabajo consta de una primera
parte donde se realiza un estudio sobre el estado del arte de los exoesqueletos, posteriormente se
aborda un análisis sobre la biomecánica de los miembros inferiores del cuerpo humano y la biomecánica
de la marcha humana normal, luego se lleva a cabo la obtención de los parámetros cinéticos y
cinemáticos que actúan en la marcha humana, así como el diseño y cálculo por elementos finitos de
dicha estructura mecánica.
Abstract In this paper we are trying to design the mechanical structure of a robotic exoskeleton, based on the
need to complement a device capable of rehabilitating people who have disabilities in their lower limbs,
which are caused by injuries or brain disorders, including being prevented in some kind of movement
such as walking. It is also intended to use as an object of measurement and diagnosis that allows
charting new strategies on the rehabilitation of each patient, and also to raise people’s self-esteem
considerably, taking into account the reasons that no longer allow them to perform any motion. The paper
consists of a first part in which is done a study based on the state of the art of the exoskeletons, later an
analysis of the biomechanics of the lower limbs of the human body and biomechanics of the normal
human gait is done, then comes the obtaining of the kinetic and kinematic parameters that act in human
walking, as well as the design and finite element calculation of the mechanical structure of the
exoskeleton.
Índice
Introducción .................................................................................................................................................1
Capítulo I. Estado del arte sobre los exoesqueletos para miembros inferiores...........................................5
1.1. Introducción. .....................................................................................................................................5
1.2. Desarrollo de exoesqueletos para potenciar el rendimiento humano. ..............................................6
1.2.1. Exoesqueleto BLEEX.................................................................................................................8
1.2.2. Exoesqueleto ExoHiker..............................................................................................................9
1.2.3. Exoesqueleto ExoClimber........................................................................................................10
1.2.4. Exoesqueleto HULC.................................................................................................................10
1.2.5. Exoesqueleto para potenciar la fuerza humana.......................................................................11
1.2.6. Exoesqueleto Sarcos. ..............................................................................................................12
1.2.7. Exoesqueleto MIT. ...................................................................................................................13
1.3. Otros tipos de exoesqueletos. ........................................................................................................14
1.3.1. Exoesqueleto HAL- 5. ..............................................................................................................14
1.3.2. Exoesqueleto para asistencia médica......................................................................................15
1.3.3. Exoesqueleto de rodilla robotizada. .........................................................................................16
1.3.4. Dispositivo de asistencia para la marcha.................................................................................17
1.3.5. Exoesqueleto del Instituto de Mihailo Pupin. ...........................................................................17
1.3.6. Exoesqueleto de la Universidad de Wisconsin. .......................................................................18
1.4. Ortesis Activa. .............................................................................................................................19
1.4.1. Ortesis activa de la pierna........................................................................................................19
1.4.2. Ortesis para potenciar la macha. .............................................................................................20
1.4.3. Ortesis activa de la articulación simple. ...................................................................................20
1.4.4. Ortesis activa de tobillo. ...........................................................................................................21
1.4.5. Ortesis de rodilla. .....................................................................................................................23
1.5. Conclusiones Parciales.......................................................................................................................25
Capitulo II: Biomecánica de los miembros inferiores. ............................................................................27
2.1. Introducción. ...................................................................................................................................27
2.2. Planos y ejes anatómicos. ..............................................................................................................27
2.3. Tipos de movimientos de los segmentos del cuerpo humano. .......................................................28
2.3.1. Términos especializados para describir otros movimientos.....................................................28
2.4. Sistema óseo. .................................................................................................................................29
2.5. Sistema articular. ............................................................................................................................29
2.6. Movilidad articular y grados de libertad de las extremidades inferiores. ........................................31
2.6.1. La articulación de la cadera. ...................................................................................................31
2.6.2. La articulación de la rodilla.......................................................................................................32
2.6.3. La articulación del tobillo..........................................................................................................32
2.7. Biomecánica de la marcha humana normal....................................................................................33
2.7.1. Descripción de las diferentes etapas de la marcha. ...............................................................34
2.7.2. Períodos en que se divide el ciclo de marcha.........................................................................35
2.7.3. Subdivisiones de la fase de balanceo (oscilación)...................................................................36
2.7.4. Descripción de las acciones articulares en la marcha. ............................................................36
2.8. Parámetros cinéticos y cinemáticos en un ciclo de marcha. ..........................................................38
2.9. Obtención de los modelos matemáticos para determinar la posición de los segmentos de los
miembros inferiores. ..............................................................................................................................40
2.9.1. El spline cúbico de interpolación..............................................................................................41
2.10. Obtención de los intervalos y polinomios mediante las ecuaciones de spline..............................43
2.11. Cálculo de la potencia para la selección de los actuadores. ........................................................46
Conclusiones Parciales..............................................................................................................................49
Capítulo III Diseño de la estructura mecánica del exoesqueleto y cálculo por el método de los elementos
finitos..........................................................................................................................................................50
3.1. Introducción ....................................................................................................................................50
3.1.1. Diseño estructural. ...................................................................................................................50
3.1.2. Diseño electrónico....................................................................................................................51
3.1.3. Diseño del sistema de control y mando. ..................................................................................51
3.1.4. Diseño de la interfaz de usuario...............................................................................................52
3.2. Propuesta del diseño preliminar de la estructura metálica del exoesqueleto. ................................52
3.3. Descripción de las principales características geométricas y funcionales del exoesqueleto..........53
3.4. Descripción de las principales características geométricas y funcionales de las piezas que
componen la estructura metálica del exoesqueleto. ..............................................................................53
3.5. Selección del material a utilizar en la construcción de la estructura metálica. ...............................59
3.6. Selección del proceso de soldadura. ..............................................................................................61
3.7. Selección del material de aporte para aluminios 1060-O. ..............................................................62
3.8. Cálculo de Resistencia de las piezas de la estructura mecánica. ..................................................62
3.8.1. Análisis mediante el Método de elementos finitos de la estructura del exoesqueleto. ............62
3.8.2. Creación del modelo geométrico de los subconjuntos a analizar. ...........................................63
3.8.3. Definición de las propiedades mecánicas del material a utilizar..............................................63
3.8.4. Generación de la malla de elementos finitos. ..........................................................................64
3.8.5. Determinación de la carga sobre el exoesqueleto. ..................................................................64
3.8.6. Definición de las condiciones de contorno o apoyos. ..............................................................65
3.8.7. Realización del análisis o cálculo.............................................................................................65
3.8.8. Visualización y análisis de los resultados. ...............................................................................65
3.8.8.1 Análisis de los resultados del soporte superior. .................................................................65
3.8.8.2 Análisis de los resultados de la barra del fémur. ...............................................................67
3.8.8.3 Análisis de los resultados de la barra de la pierna.............................................................68
Conclusiones Generales............................................................................................................................70
Recomendaciones .....................................................................................................................................72
Bibliografía .................................................................................................................................................73
Anexos .......................................................................................................................................................76
1
Introducción
“La biomecánica busca la vía para una ejecución del movimiento donde se equilibren el ahorro de
energía, el menor daño físico y la belleza del cuerpo humano.” Constituye la ciencia que utiliza los
principios y métodos de la mecánica, que forma parte de la física, para el estudio de los movimientos del
cuerpo humano. Esta trabaja de dos formas, Analítica: Donde se analizan los movimientos de la
destreza motriz y Constructiva: por medio de la creación de nuevos aparatos deportivos, prótesis y otros.
Si bien se conoce con este nombre a partir de la segunda mitad del siglo XX, etapa en que se desarrolla
de manera acelerada, sus orígenes son tan antiguos como el propio hombre, quien en su actividad diaria
se ve obligado, de manera consciente o intuitiva, a perfeccionar los movimientos de su cuerpo. Varios
filósofos y científicos reconocidos aportaron sus conocimientos a esta ciencia, entre los que se
encontraban: [1, 2]
La Biomecánica en la actualidad se encuentra dividida en tres ramas principales que son: 1. La biomecánica médica para el análisis clínico del movimiento en diversas patologías, el diseño de
ortesis y prótesis, y el diseño de equipos para la rehabilitación y discapacitados.
2. La biomecánica deportiva en el perfeccionamiento de las técnicas deportivas para mejorar los
resultados, en diseño de equipos e implementos deportivos, y en la prevención de daños y lesiones a
los atletas.
3. La biomecánica ocupacional, que estudia desde el punto de vista ergonómico el diseño de espacios,
mobiliario, herramientas, máquinas y aparatos empleados por el hombre, sin sobrepasar valores que
pudieran originar daños, y en la interacción física del hombre con sus condiciones de trabajo para
ampliar el rendimiento y minimizar los riesgos al sistema músculo esquelético.
En la actualidad los seres humanos, debido a fenómenos asociados con el estrés, los malos hábitos
alimenticios y los efectos económicos, son propensos en un alto porcentaje, a desarrollar
enfermendades neurológicas de tipo cerebro vascular, lesiones medulares o daños cerebrales
traumáticos.
Las enfermedades neuromusculares causan, dependiendo del grado de afectación, una discapacidad
motora, la cual puede acarrear graves problemas en la marcha incluso haciendo imposible el caminar o
mantenerse en posición de equilibrio vertical. Hoy en día, la rehabilitación de la marcha se basa en
fisioterapia manual y ejercicios musculares específicos. El uso de terapia mediante robot ha mejorado
los procedimientos de rehabilitación actuales, permitiendo así una rehabilitación de mayor calidad y
aumentando también la motivación del paciente, quien se sentirá más independiente de la disponibilidad
de fisioterapeuta, mejorando repetitividad y motivación.
En los últimos años se han abierto varias líneas de investigación de plataformas robóticas, dispositivos
ortopédicos electromecánicos, llamados por algunos científicos como ortesis activas o exoesqueletos,
2
para la rehabilitación de la marcha, algunas de ellas han tenido éxitos, y se caracterizan por ser
portables y autónomas, entregando la posibilidad de aplicación real en casos de rehabilitación funcional.
A nivel internacional las investigaciones en el campo de la biomecánica basados en el estudio de los
exoesqueletos están integrados varias instituciones, como por ejemplo la General Electric de
Investigación (Schenectady, NY), Instituto de Tecnología de Kanagawa en Japón, los cuáles se han
destacado en el desarrollo y diseño de exoesqueletos. El diseño más completo que existe, en la
actualidad, fue desarrollado por la empresa japonesa Cyberdyne. Este robot-traje es nombrado HAL
(Hybrid Assistive Limb), una especie de esqueleto biónico que facilitará los movimientos de ancianos y
disminuidos físicos, permitiendo a la persona que lo use, aumentar su capacidad y fuerzas
permitiendoles levantar y mover elevados pesos, que sin la ayuda del exoesqueleto serían imposibles.
Problema científico. Se necesita diseñar la estructura mecánica de un exoesqueleto para llevar a cabo la rehabilitación de
personas con discapacidad en sus miembros inferiores.
Hipótesis. Es posible realizar el diseño de la estructura mecánica de un exoesqueleto para miembros inferiores,
para la rehabilitación de personas con discapacidad. Objetivo general. Desarrollar el diseño preliminar de un prototipo de estructura mecánica de un exoesqueleto para la
rehabilitación de los miembros inferiores en personas con discapacidad, mediante la aplicación de
técnicas avanzadas de simulación y modelación por computadoras CAD-CAE.
Objetivos específicos. 1. Realizar un estudio sobre lo desafíos y el estado del arte de los exoesqueletos para miembros
inferiores.
2. Realizar un estudio de la biomecánica de los miembros inferiores.
3. Realizar un estudio sobre la biomecánica de la marcha humana normal.
4. Desarrollar el diseño preliminar de un prototipo de estructura mecánica de un exoesqueleto.
5. Realizar el análisis por elementos finitos de algunas de las piezas que forman la estructura de
mecánica del exoesqueleto.
3
Justificación. El objetivo de la presente investigación está fundamentado por la necesidad de introducir en el sector de
la salud cubana, un dispositivo electromecánico para ayudar y facilitar la rehabilitación a pacientes con
discapacidad en los miembros inferiores. En un diagnóstico aplicado en el 2010, en conjunto entre
trabajadores sociales y el Ministerio de Salud Publica (MINSAP), en los 10 municipios de la provincia de
Ciego de Ávila, se obtuvo como resultado que de los 12301 discapacitados que existen en el municipio
3231 son personas que presentan discapacidad en sus miembros inferiores, ver tabla del anexos I.
Novedad tecnológica.
Este proyecto supone un reto importante en la aplicación de la Biomecánica y Mecatrónica para el
ámbito de la salud, donde aspectos como la interacción hombre-máquina y la caracterización
biomecánica de la marcha humana se convierten en aspectos cruciales. Además del estudio cinemático,
dinámico, mecánico y control del exoesqueleto que supone una importante novedad tecnológica para el
desarrollo de este diseño.
Aplicación industrial. Beneficio social
La aplicación directa del estudio y diseño del dispositivo exoesqueleto se manifiesta en la rama de la
salud, tanto para compensar la debilidad muscular en personas con problemas de origen neurológico,
como para personas en proceso de rehabilitación tras una enfermedad, traumatismo o post-operatorio.
En este sentido se trata de una solución que tiene como objetivo final aportar mayor autonomía a
personas con imposibilidad de andar debido a fragilidad muscular y por otro lado, acelerar el proceso de
recuperación de personas en rehabilitación, intensificando y automatizando dicho proceso. Así como
elevar la autoestima personal en aquellos pacientes que no tengan ninguna posibilidad de caminar.
Beneficio industrial
Paralelamente a su aplicación y beneficios que pueda tener la aplicación de este dispositvo en el sector
de la salud, el exoesqueleto tiene otras aplicaciones industriales tales como la construcción, almacenaje,
militar. En definitiva, puede aplicarse en cualquier ámbito donde se requiera potenciar la marcha
humana.
4
La incursión de la ingeniería mecánica en la solución de problemas relacionados con la biomecánica
médica, constituye un campo de investigación en crecimiento que tiene una importante repercusión
social. El presente trabajo constituye una primera aproximación que brinda una pequeña contribución en
ese sentido, con el diseño preliminar de un prototipo de exoesqueleto para la rehabilitación de
miembros inferiores en pacientes con discapacidad. Para ello, se empleó la técnica del diseño asistido
por computadora, conocida como sistema CAD.
El trabajo está dividido en tres capítulo, en el primero se realiza un análisis del estado del arte de los
exosqueletos. En el segundo capítulo se realiza un análisis de la biomecánica de los miembros inferiores
especificamente en el estudio del sistema óseo y articular y de la biomecánica de la marcha normal. Así
como el cálculo del momento torsor necesario para seleccionar los actuadores que serán usados en las
articulaciones del exoesqueleto. Por último en el tercer capítulo, se desarrolla el diseño tridimensional
del prototipo de la estructura mecánica del exoesqueleto, así como, el cálculo por el método de los
elementos finitos de algunas de las piezas que conforman la estructura.
5
Capítulo I. Estado del arte sobre los exoesqueletos para miembros inferiores.
1.1. Introducción.
Las investigaciones sobre los exoesqueletos se iniciaron a finales de 1960, casi en paralelo entre una
serie de investigaciones en los Estados Unidos y en la ex-Yugoslavia. Sin embargo, las investigaciones
desarrolladas por los investigadores estadounidenses se centraron principalmente en el desarrollo de
tecnologías para fines militares con el objetivo de aumentar las capacidades de los seres humanos
sanos, mientras que los investigadores de la ex-Yugoslavia tenían la intención de desarrollar las
tecnologías para personas con discapacidad física. A pesar de las diferencias en el uso, los
investigadores de ambos países se enfrentaron a los mismos desafíos y limitaciones, en particular, lo
relacionado con la portabilidad y la interconexión hombre-exoesqueleto. [3]
En la actualidad los seres humanos, debido a fenómenos asociados con el estrés, malos hábitos
alimenticios, etc., son propensos en un alto porcentaje a desarrollar enfermedades neurológicas de tipo
cerebro vascular, lecciones medulares o daños cerebrales traumáticos. La enfermedades
neuromusculares causan, dependiendo del grado de afectación, una discapacidad motora, la cual puede
acarrear graves problemas en la marcha incluso haciendo imposible el caminar o mantener la posición
de equilibrio vertical.
Hoy en día, la rehabilitación de la marcha y las extremidades inferiores se basa en fisioterapia manual y
ejercicios musculares específicos. El uso de terapias mediante robots ha mejorado los procedimientos
de rehabilitación actuales permitiendo así una rehabilitación de mayor calidad y aumentando también la
motivación del paciente quien se sentirá más independiente de la disponibilidad de fisioterapeutas,
mejorando la repetitividad y motivación.
En los últimos años se han desarrollado varias líneas de investigación sobre ortesis activas. Las ortesis
activas yacen de un concepto que actualmente se acuña a nivel mundial para los trabajos con
exoesqueletos, los cuales involucran temas claves de automatización y robótica para diferentes fines,
como por ejemplo para la rehabilitación de la marcha. Los exoesqueletos son una estructura
electromecánica externa de cierta rigidez que es acoplada al cuerpo humano para restaurar, rehabilitar o
potenciar la función motora humana. El exoesqueleto, como dispositivo de aplicación médica, no tiene
como objetivo pacientes de alguna patología determinada, sino pacientes que como consecuencias de
diferentes patologías tienen una discapacidad motora con problemas de coordinación muscular que
impide el control de equilibrio o que tiene problemas en movimientos básicos de la vida cotidiana como
flexión y extensión de una determinada articulación de su cuerpo.
6
1.2. Desarrollo de exoesqueletos para potenciar el rendimiento humano.
Los primeros trabajos realizados sobre exoesqueletos con la finalidad de aumentar el rendimiento
humano fueron objeto de estudio de varios investigadores. Los pocos prototipos de estos primeros
conceptos, fueron construidos pero mal probados. La primera mención de un dispositivo parecido a un
exoesqueleto fue concebido en 1890 por el científico estadounidense de nombre Yagn [3, 4]. Su invento
consistía en un arco largo, paralelo a las piernas y que tenía la intención de aumentar la marcha y el
salto. Este dispositivo nunca fue construido, ni probado experimentalmente, figura 1.1.
Figura 1.1. Exoesqueleto desarrollado por Yagn.
En 1963, Zaroodny miembro del Laboratorio de Balística Exterior del Ejército de los Estados Unidos
publicó un informe técnico que detallaba los resultados de sus investigaciones, iniciadas en 1951 [3, 5].
En el mismo proponía un diseño de exoesqueleto capaz de aumentar la capacidad de carga de un
usuario sano. En su trabajo Zaroodny identificó y comenzó a abordar muchos de los aspectos
fundamentales de la difícil aplicación de dicho dispositivo, como fue el empleo de una fuente de
alimentación portátil, detección y control de la intención, la interfaz física con los humanos, y la
afectación de la biomecánica de la locomoción.
El documento finaliza con la descripción de los resultados de una evaluación informal a un prototipo de
exoesqueleto neumáticamente potenciado. Este dispositivo entre sus características principales
presentaba 3 grados de libertad, portando un gran cilindro neumático, colocado en un soporte situado
sobre la cadera y con un calzado diseñado de manera especial. Aunque su propuesta no tuvo éxito por
falta de financiamiento, este informe es, la primera publicación donde los inconvenientes, del uso de
exoesqueletos para aumentar el rendimiento humano, eran tomados en consideración.
A fines de 1960, la empresa ‘’General Electric’’ de Investigación (Schenectady, NY), en cooperación con
investigadores de la Universidad de Cornell y con el apoyo financiero de la Oficina de Investigación
Naval de los Estados Unidos, construyó un prototipo de exoesqueleto potenciado de cuerpo entero
denominado "Hardiman" [3, 6, 7]. Este tipo de exoesqueleto consistía en una enorme máquina de
potencia hidráulica de 680 Kg. de peso y 30 grados de libertad, incluyendo los componentes para
7
amplificar la fuerza de las armas (incluidas las manos, pero sin las muñecas) y las piernas para cualquier
usuario, figura 1.2.
Figura 1.2. Proyecto “Hardiman” de la empresa General Electric.
En comparación con muchos otros exoesqueletos, la intención del proyecto "Hardiman" era aumentar
drásticamente las capacidades de fuerza del usuario. La investigación realizada estaba destinada
principalmente para permitir que las personas sanas pudiesen llevar a cabo tareas difíciles más
fácilmente, o que pudiesen realizar tareas que son, de otro modo imposible, utilizando solamente la
fuerza o habilidad humana. Tal vez, la contribución más importante del proyecto "Hardiman" fue la
identificación de muchos de los aspectos difíciles del diseño del exoesqueleto, como es, la fuente de
alimentación, así como convencer a la comunidad de investigadores de que la creación de los
exoesqueletos era sumamente difícil. [3]
A mediados de la década de 1980, Jeffrey Moore del Laboratorio Nacional “Los Álamos”, escribió un
artículo sobre un concepto de exoesqueleto, para aumentar la capacidad de los soldados, inspirado por
el concepto de Heinlein, al cual denominó “Pitman” [8, 9]. Aunque dicho trabajo no estaba dirigido a
solucionar problemas tales como la implementación de la fuente de energía. El concepto nunca fue
fabricado y evaluado debido a falta de financiamiento. Esta investigación constituyó el inicio de futuros
trabajos dentro de la Agencia de Proyectos de Investigación Avanzados para la Defensa de los Estados
Unidos (DARPA, por sus siglas en inglés). Un investigador independiente llamado Mark Rosheim, amplió
sobre los trabajos de los proyectos Hardiman y Pitman, con el propósito de desarrollar un exoesqueleto
de cuerpo completo, que incluyera 26 grados de libertad, sin incluir las manos. [3, 10]
Con el objetivo de aumentar el rendimiento y capacidad del ser humano, la Agencia de Proyectos de
Investigación Avanzados para la Defensa de los Estados Unidos, DARPA, desarrollo un proyecto
llamado “Exoesqueleto para el aumento del rendimiento humano (EHPA) [3, 11]. La meta del programa
consistía en elevar las capacidades de los soldados en tierra, más allá de la del ser humano,
permitiéndole recorrer grandes distancias, transportando elevadas cargas, reduciendo la fatiga del
soldado durante dichas tareas de carga. El programa comenzó en 2001 y fue trasladado al Programa de
la Oficina Ejecutiva del Ejército (Soldado OPE) en el año 2008.
8
Durante el programa EHPA, tres instituciones demostraron estar trabajando en los exoesqueletos y un
número de otras instituciones lograron avances en el desarrollo de nuevas tecnologías, como es el caso
de nuevas fuentes de energía portátiles. Como parte del programa EHPA se desarrollaron varios tipos
de exoesqueleto como son: Exoesqueleto Berkeley (BLEEX), Exoesqueleto ExoHiker, Exoesqueleto
ExoClimber, Exoesqueleto HULC, Exoesqueleto para potenciar la fuerza humana, Exoesqueleto Sarcos,
y el Exoesqueleto MIT.
1.2.1. Exoesqueleto BLEEX.
El exoesqueleto BLEEX para extremidades inferiores es un de los trabajos más recientes desarrollados
dentro de los programas de exoesqueletos DARPA. El aparato es fruto de un proyecto del sector
defensa de EE.UU. y fue diseñado principalmente para ser usado por soldados de infantería, figura 1.3.
Figura 1.3. Exoesqueleto BLEEX por la Universidad de California.
Uno de los rasgos distintivos de este diseño es que es energéticamente autónomo, lo cual significa que
lleva su propia fuente de energía. En realidad, sus diseñadores plantean que es el primer exoesqueleto
con carga soportada y energéticamente autónomo. Como principales características, presenta tres
grados de libertad a la altura de la cadera, uno a la altura de la rodilla, y tres a la altura del tobillo. De
estos, cuatros son accionados en la flexión-extensión de la cadera, abducción-aducción de la cadera,
flexión-extensión de la rodilla y flexión-extensión del tobillo. De las articulaciones actuantes, la inversión-
eversión del tobillo y rotación de las articulaciones de la cadera son de resorte. Los requerimientos
cinemáticos y de actuación del exoesqueleto se diseñaron asumiendo un comportamiento similar al de
un humano de 75 kilogramos de peso y utilizando datos de análisis clínicos de movimientos para
caminar. [12-14]
Algunos rasgos interesantes del diseño cinemático incluyen una unión de rotación de la cadera que es
compartida por las dos piernas del exoesqueleto y por tanto no intercepta con la articulación de las
caderas de quien lo lleva. De igual modo la articulación en inversión-eversión del tobillo no está en
combinación con la articulación humana sino que esta colocada a un lado del pie para lograr sencillez.
Los otros 5 grados de libertad rotacionales del exoesqueleto coinciden con las articulaciones del usuario.
9
El exoesqueleto es accionado bidireccionalmente a través de cilindros hidráulicos lineales montados en
una configuración triangular con la articulación rotativa, resultando efectivo en un brazo, el momento que
varía con el ángulo de la articulación. BLEEX consume un promedio de 1143 W de potencia hidráulica
durante el caminar a nivel del terreno, así como de 200 W de energía eléctrica producto de los
componentes electrónicos y el control. BLEEX fue diseñado con actuadores hidráulicos lineales, ya que
fueron la opción más pequeña de actuación disponible sobre la base de su elevada potencia específica,
relacionando la potencia del actuador con el peso del mismo. Sin embargo, un estudio determinó que un
motor eléctrico de accionamiento, disminuye significativamente el consumo de energía durante la
caminata de nivel en comparación con el accionamiento hidráulico.
El régimen de control de BLEEX, pretende reducir al mínimo el uso de la información sensorial de la
interacción humana y el exoesqueleto, y en su lugar, utiliza principalmente información sensorial del
exoesqueleto. Al igual que un robot bípedo, el exoesqueleto puede equilibrarse por sí solo, pero el
usuario humano debe proporcionar una fuerza de avance de guía para dirigir el sistema durante la
marcha. El sistema de control utiliza la información de 8 codificadores y 16 acelerómetros lineal para
determinar el ángulo, velocidad angular y aceleración angular de cada una de las ocho articulaciones de
accionamiento, un interruptor de pie, y el sensor de distribución de la carga por metro para determinar el
contacto con el suelo y la distribución de la fuerza entre los pies en posición doble, ocho de un solo eje
de la fuerza para su uso en sensores de control de la fuerza de cada uno de los actuadores, y un
inclinómetro para determinar la orientación de la mochila con respecto a la gravedad.
En términos de rendimiento, los usuarios de BLEEX pueden soportar una carga de hasta Kg75 ,
mientras que pueden caminar a 0,9 m/s, y puede andar a velocidades de hasta sm /3.1 sin la carga. Una
segunda generación del exoesqueleto de Berkeley se encuentra actualmente en pruebas. El nuevo
dispositivo es de aproximadamente la mitad del peso del esqueleto original (≈14 kg.), en parte se debe
a la aplicación de accionamiento eléctrico con un sistema de transmisión hidráulica. Un subproducto de
laboratorio llamado Berkeley Bionics (Berkeley, CA) ha sido formado para comercializar la tecnología
exoesqueleto. [3, 14]
1.2.2. Exoesqueleto ExoHiker.
El exoesqueleto ExoHiker fue diseñado por Berkeley Bionics para llevar cargas pesadas durante largas
misiones, figura 1.4. El peso del exoesqueleto es de Kg14 , incluyendo la unidad de energía, baterías y
ordenador de a bordo. La carga útil es de Kg70 mientras que el usuario no siente la carga. También
este exoesqueleto puede mantenerse en misión sin panel solar por Km90 a una velocidad promedio de
hKm /6 . Debemos destacar que con un pequeño panel solar, su tiempo de misión será ilimitado. Por
ejemplo, debido a una actuación sin precedentes y la tecnología de entrega de potencia, una batería de
10
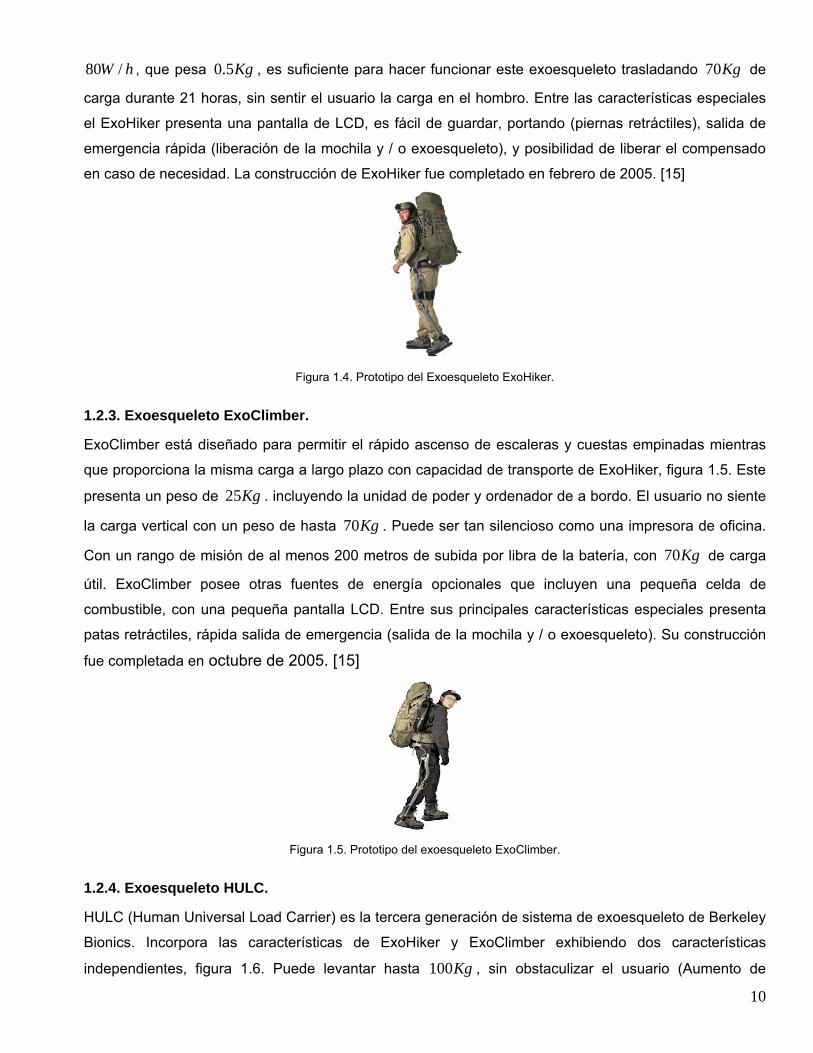
hW /80 , que pesa Kg5.0 , es suficiente para hacer funcionar este exoesqueleto trasladando Kg70 de
carga durante 21 horas, sin sentir el usuario la carga en el hombro. Entre las características especiales
el ExoHiker presenta una pantalla de LCD, es fácil de guardar, portando (piernas retráctiles), salida de
emergencia rápida (liberación de la mochila y / o exoesqueleto), y posibilidad de liberar el compensado
en caso de necesidad. La construcción de ExoHiker fue completado en febrero de 2005. [15]
Figura 1.4. Prototipo del Exoesqueleto ExoHiker.
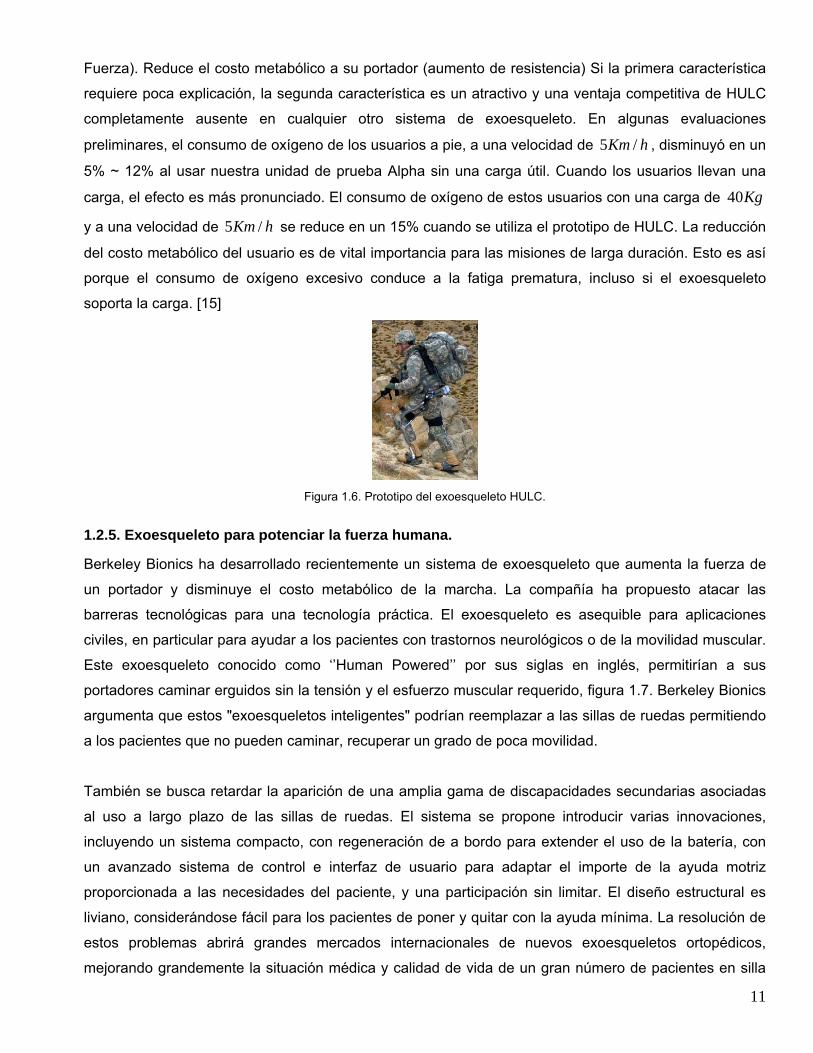
1.2.3. Exoesqueleto ExoClimber.
ExoClimber está diseñado para permitir el rápido ascenso de escaleras y cuestas empinadas mientras
que proporciona la misma carga a largo plazo con capacidad de transporte de ExoHiker, figura 1.5. Este
presenta un peso de Kg25 . incluyendo la unidad de poder y ordenador de a bordo. El usuario no siente
la carga vertical con un peso de hasta Kg70 . Puede ser tan silencioso como una impresora de oficina.
Con un rango de misión de al menos 200 metros de subida por libra de la batería, con Kg70 de carga
útil. ExoClimber posee otras fuentes de energía opcionales que incluyen una pequeña celda de
combustible, con una pequeña pantalla LCD. Entre sus principales características especiales presenta
patas retráctiles, rápida salida de emergencia (salida de la mochila y / o exoesqueleto). Su construcción
fue completada en octubre de 2005. [15]
Figura 1.5. Prototipo del exoesqueleto ExoClimber.
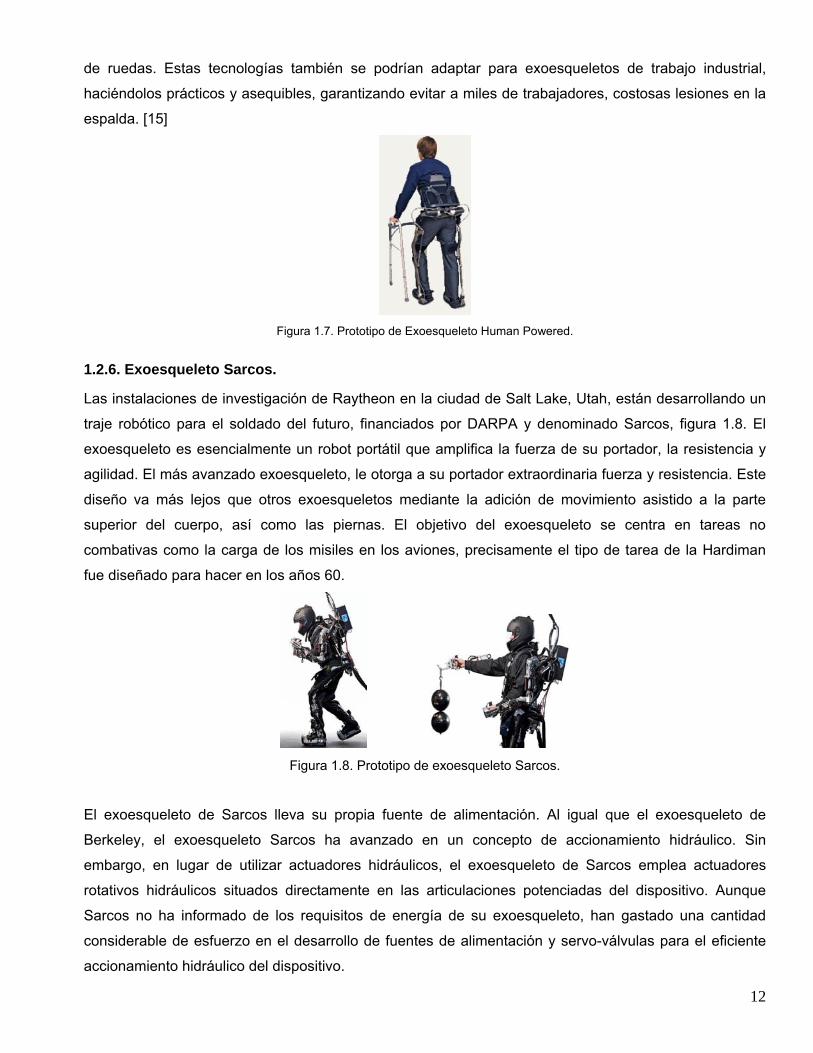
1.2.4. Exoesqueleto HULC.
HULC (Human Universal Load Carrier) es la tercera generación de sistema de exoesqueleto de Berkeley
Bionics. Incorpora las características de ExoHiker y ExoClimber exhibiendo dos características
independientes, figura 1.6. Puede levantar hasta Kg100 , sin obstaculizar el usuario (Aumento de
11
Fuerza). Reduce el costo metabólico a su portador (aumento de resistencia) Si la primera característica
requiere poca explicación, la segunda característica es un atractivo y una ventaja competitiva de HULC
completamente ausente en cualquier otro sistema de exoesqueleto. En algunas evaluaciones
preliminares, el consumo de oxígeno de los usuarios a pie, a una velocidad de hKm /5 , disminuyó en un
5% ~ 12% al usar nuestra unidad de prueba Alpha sin una carga útil. Cuando los usuarios llevan una
carga, el efecto es más pronunciado. El consumo de oxígeno de estos usuarios con una carga de Kg40
y a una velocidad de hKm /5 se reduce en un 15% cuando se utiliza el prototipo de HULC. La reducción
del costo metabólico del usuario es de vital importancia para las misiones de larga duración. Esto es así
porque el consumo de oxígeno excesivo conduce a la fatiga prematura, incluso si el exoesqueleto
soporta la carga. [15]
Figura 1.6. Prototipo del exoesqueleto HULC.
1.2.5. Exoesqueleto para potenciar la fuerza humana.
Berkeley Bionics ha desarrollado recientemente un sistema de exoesqueleto que aumenta la fuerza de
un portador y disminuye el costo metabólico de la marcha. La compañía ha propuesto atacar las
barreras tecnológicas para una tecnología práctica. El exoesqueleto es asequible para aplicaciones
civiles, en particular para ayudar a los pacientes con trastornos neurológicos o de la movilidad muscular.
Este exoesqueleto conocido como ‘’Human Powered’’ por sus siglas en inglés, permitirían a sus
portadores caminar erguidos sin la tensión y el esfuerzo muscular requerido, figura 1.7. Berkeley Bionics
argumenta que estos "exoesqueletos inteligentes" podrían reemplazar a las sillas de ruedas permitiendo
a los pacientes que no pueden caminar, recuperar un grado de poca movilidad.
También se busca retardar la aparición de una amplia gama de discapacidades secundarias asociadas
al uso a largo plazo de las sillas de ruedas. El sistema se propone introducir varias innovaciones,
incluyendo un sistema compacto, con regeneración de a bordo para extender el uso de la batería, con
un avanzado sistema de control e interfaz de usuario para adaptar el importe de la ayuda motriz
proporcionada a las necesidades del paciente, y una participación sin limitar. El diseño estructural es
liviano, considerándose fácil para los pacientes de poner y quitar con la ayuda mínima. La resolución de
estos problemas abrirá grandes mercados internacionales de nuevos exoesqueletos ortopédicos,
mejorando grandemente la situación médica y calidad de vida de un gran número de pacientes en silla
12
de ruedas. Estas tecnologías también se podrían adaptar para exoesqueletos de trabajo industrial,
haciéndolos prácticos y asequibles, garantizando evitar a miles de trabajadores, costosas lesiones en la
espalda. [15]
Figura 1.7. Prototipo de Exoesqueleto Human Powered.
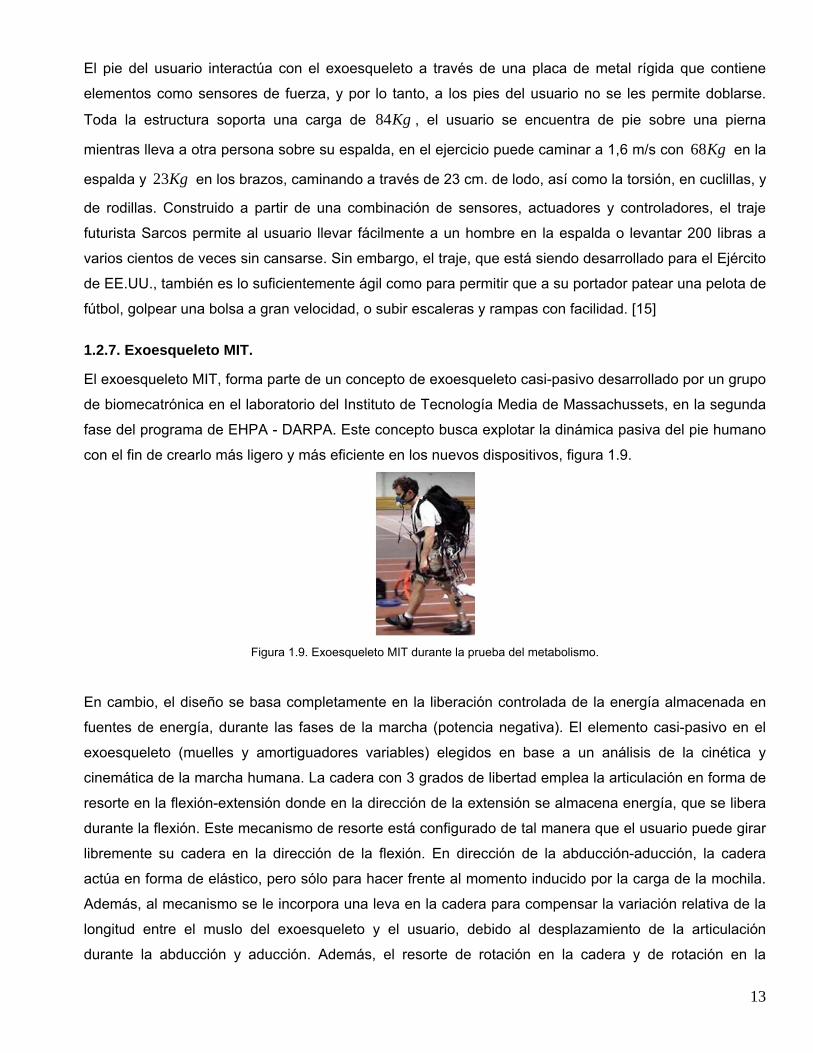
1.2.6. Exoesqueleto Sarcos.
Las instalaciones de investigación de Raytheon en la ciudad de Salt Lake, Utah, están desarrollando un
traje robótico para el soldado del futuro, financiados por DARPA y denominado Sarcos, figura 1.8. El
exoesqueleto es esencialmente un robot portátil que amplifica la fuerza de su portador, la resistencia y
agilidad. El más avanzado exoesqueleto, le otorga a su portador extraordinaria fuerza y resistencia. Este
diseño va más lejos que otros exoesqueletos mediante la adición de movimiento asistido a la parte
superior del cuerpo, así como las piernas. El objetivo del exoesqueleto se centra en tareas no
combativas como la carga de los misiles en los aviones, precisamente el tipo de tarea de la Hardiman
fue diseñado para hacer en los años 60.
Figura 1.8. Prototipo de exoesqueleto Sarcos.
El exoesqueleto de Sarcos lleva su propia fuente de alimentación. Al igual que el exoesqueleto de
Berkeley, el exoesqueleto Sarcos ha avanzado en un concepto de accionamiento hidráulico. Sin
embargo, en lugar de utilizar actuadores hidráulicos, el exoesqueleto de Sarcos emplea actuadores
rotativos hidráulicos situados directamente en las articulaciones potenciadas del dispositivo. Aunque
Sarcos no ha informado de los requisitos de energía de su exoesqueleto, han gastado una cantidad
considerable de esfuerzo en el desarrollo de fuentes de alimentación y servo-válvulas para el eficiente
accionamiento hidráulico del dispositivo.
13
El pie del usuario interactúa con el exoesqueleto a través de una placa de metal rígida que contiene
elementos como sensores de fuerza, y por lo tanto, a los pies del usuario no se les permite doblarse.
Toda la estructura soporta una carga de Kg84 , el usuario se encuentra de pie sobre una pierna
mientras lleva a otra persona sobre su espalda, en el ejercicio puede caminar a 1,6 m/s con Kg68 en la
espalda y Kg23 en los brazos, caminando a través de 23 cm. de lodo, así como la torsión, en cuclillas, y
de rodillas. Construido a partir de una combinación de sensores, actuadores y controladores, el traje
futurista Sarcos permite al usuario llevar fácilmente a un hombre en la espalda o levantar 200 libras a
varios cientos de veces sin cansarse. Sin embargo, el traje, que está siendo desarrollado para el Ejército
de EE.UU., también es lo suficientemente ágil como para permitir que a su portador patear una pelota de
fútbol, golpear una bolsa a gran velocidad, o subir escaleras y rampas con facilidad. [15]
1.2.7. Exoesqueleto MIT.
El exoesqueleto MIT, forma parte de un concepto de exoesqueleto casi-pasivo desarrollado por un grupo
de biomecatrónica en el laboratorio del Instituto de Tecnología Media de Massachussets, en la segunda
fase del programa de EHPA - DARPA. Este concepto busca explotar la dinámica pasiva del pie humano
con el fin de crearlo más ligero y más eficiente en los nuevos dispositivos, figura 1.9.
Figura 1.9. Exoesqueleto MIT durante la prueba del metabolismo.
En cambio, el diseño se basa completamente en la liberación controlada de la energía almacenada en
fuentes de energía, durante las fases de la marcha (potencia negativa). El elemento casi-pasivo en el
exoesqueleto (muelles y amortiguadores variables) elegidos en base a un análisis de la cinética y
cinemática de la marcha humana. La cadera con 3 grados de libertad emplea la articulación en forma de
resorte en la flexión-extensión donde en la dirección de la extensión se almacena energía, que se libera
durante la flexión. Este mecanismo de resorte está configurado de tal manera que el usuario puede girar
libremente su cadera en la dirección de la flexión. En dirección de la abducción-aducción, la cadera
actúa en forma de elástico, pero sólo para hacer frente al momento inducido por la carga de la mochila.
Además, al mecanismo se le incorpora una leva en la cadera para compensar la variación relativa de la
longitud entre el muslo del exoesqueleto y el usuario, debido al desplazamiento de la articulación
durante la abducción y aducción. Además, el resorte de rotación en la cadera y de rotación en la
14
articulación del tobillo se ha incluido para permitir movimientos de las extremidades en el plano sagital.
La rodilla en el exoesqueleto MIT consiste en un amortiguador magneto-variable (movimiento en
dirección de la flexión-extensión) que es controlado para disipar la energía en los niveles adecuados
durante todo el ciclo de la marcha. Para el tobillo, se utilizan muelles distintos en la flexión dorsal y
flexión plantar que se implementan a fin de captar los diferentes comportamientos durante estas dos
etapas del movimiento, así como almacenar o liberar la cantidad óptima de energía.
El tobillo también cuenta con una placa de fibra de carbono que se une a la bota mediante un muelle y
funciona también como una articulación subastragalina en inversión-eversión. Además, hay una fuente
de fibra de carbono en el talón que reduce las pérdidas por impacto y ayuda a potenciar el levantamiento
del talón al comienzo de la flexión plantar. Por último, una columna vertebral elástica artificial atribuye a
la mochila que permite los movimientos de plano coronal y sagital a la columna vertebral humana. El
exoesqueleto es controlado simplemente utilizando la información sensorial que proporciona un conjunto
completo de sensores de deformación y un potenciómetro en la articulación de la rodilla.
La interfaces del exoesqueleto MIT con el usuario es a través de correas en los hombros, un cinturón en
la cintura, los puños y los muslos, y zapatos especializados. Sin una carga útil, el exoesqueleto pesa
Kg7.11 y requiere sólo W2 de energía eléctrica durante el comienzo de la marcha. Este utiliza la
potencia principalmente para controlar la variable del amortiguador en la rodilla. Los ensayos
experimentales han demostrado que el dispositivo logra soportar una carga de Kg36 durante la marcha
a sm /1 . También se demostró que la estructura del exoesqueleto transfiere un promedio del 80% del
peso de Kg36 de carga útil en el suelo durante la fase de apoyo en un solo pie. [3, 16, 17]
1.3. Otros tipos de exoesqueletos.
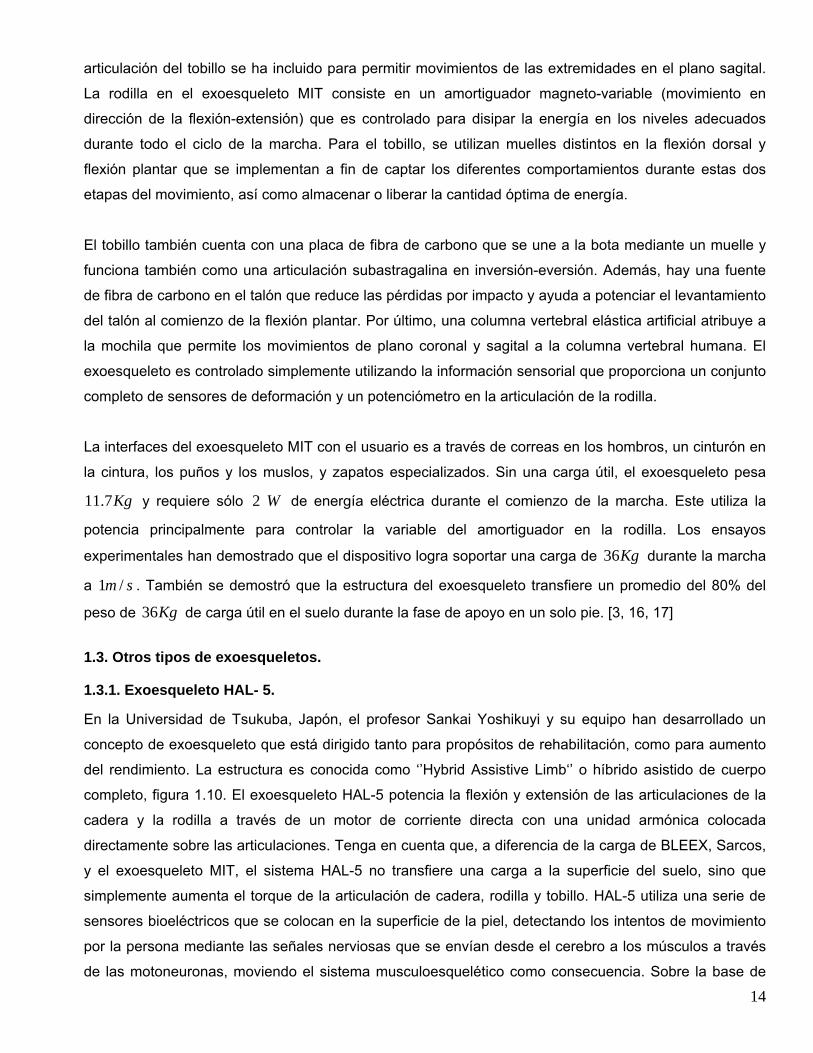
1.3.1. Exoesqueleto HAL- 5.
En la Universidad de Tsukuba, Japón, el profesor Sankai Yoshikuyi y su equipo han desarrollado un
concepto de exoesqueleto que está dirigido tanto para propósitos de rehabilitación, como para aumento
del rendimiento. La estructura es conocida como ‘’Hybrid Assistive Limb‘’ o híbrido asistido de cuerpo
completo, figura 1.10. El exoesqueleto HAL-5 potencia la flexión y extensión de las articulaciones de la
cadera y la rodilla a través de un motor de corriente directa con una unidad armónica colocada
directamente sobre las articulaciones. Tenga en cuenta que, a diferencia de la carga de BLEEX, Sarcos,
y el exoesqueleto MIT, el sistema HAL-5 no transfiere una carga a la superficie del suelo, sino que
simplemente aumenta el torque de la articulación de cadera, rodilla y tobillo. HAL-5 utiliza una serie de
sensores bioeléctricos que se colocan en la superficie de la piel, detectando los intentos de movimiento
por la persona mediante las señales nerviosas que se envían desde el cerebro a los músculos a través
de las motoneuronas, moviendo el sistema musculoesquelético como consecuencia. Sobre la base de
15
las señales obtenidas, la unidad de control mueve el conjunto con el movimiento muscular del usuario,
que permite apoyar las actividades diarias del usuario.
Figura 1.10. Exoesqueleto HAL-5 de la Universidad de Tsukuba, Japón.
Este exoesqueleto está actualmente en proceso de ser preparado para su comercialización. Las
modificaciones de las versiones anteriores incluyen extremidades superiores del cuerpo, más ligero y
más compacto de las unidades de energía, mayor duración de la batería (aproximadamente 160 min. de
funcionamiento continuo), y una base estética. El peso total del dispositivo de cuerpo completo es de
Kg21 . Cyberdyne en Tsukuba, Japón y una compañía del laboratorio de Sankai, son los responsable
de la comercialización del producto. Sus diseñadores afirman que un operador usando HAL puede
cargar hasta Kg40 en los brazos y aumentar la capacidad del usuario con empuje de las piernas de
100 a Kg180 . [3, 15]
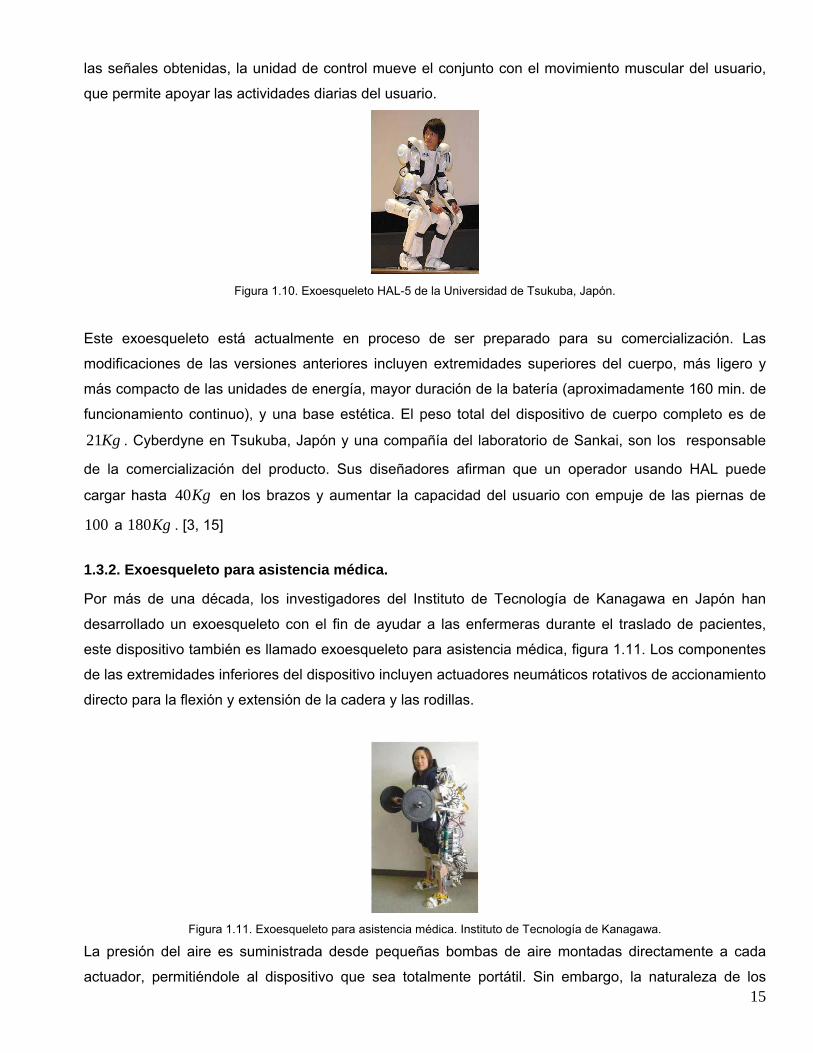
1.3.2. Exoesqueleto para asistencia médica.
Por más de una década, los investigadores del Instituto de Tecnología de Kanagawa en Japón han
desarrollado un exoesqueleto con el fin de ayudar a las enfermeras durante el traslado de pacientes,
este dispositivo también es llamado exoesqueleto para asistencia médica, figura 1.11. Los componentes
de las extremidades inferiores del dispositivo incluyen actuadores neumáticos rotativos de accionamiento
directo para la flexión y extensión de la cadera y las rodillas.
Figura 1.11. Exoesqueleto para asistencia médica. Instituto de Tecnología de Kanagawa.
La presión del aire es suministrada desde pequeñas bombas de aire montadas directamente a cada
actuador, permitiéndole al dispositivo que sea totalmente portátil. Sin embargo, la naturaleza de los
16
grados de libertad no actuantes y los métodos de fijación al usuario, no están claro. La intención del
usuario se determina a través de sensores que miden las fuerzas de resistencias sensitivas (FSRs) del
músculo, por ejemplo: el femoral recto en la rodilla, a través de una banda elástica, a medida que la
rodilla se flexiona y el músculo se contrae, la fuerza sobre el FSRs aumenta, lo que junto con la
información del ángulo de la articulación de los potenciómetros, se utiliza para determinar el momento de
torsión necesario en la articulación. Uno de los aspectos interesantes del diseño mecánico del diseño del
traje para cuerpo completo de Kanagawa es que no hay ningún componente mecánico en la parte frontal
del usuario, permitiéndole a la enfermera que tenga un contacto directo con el paciente. [3, 15, 18, 19]
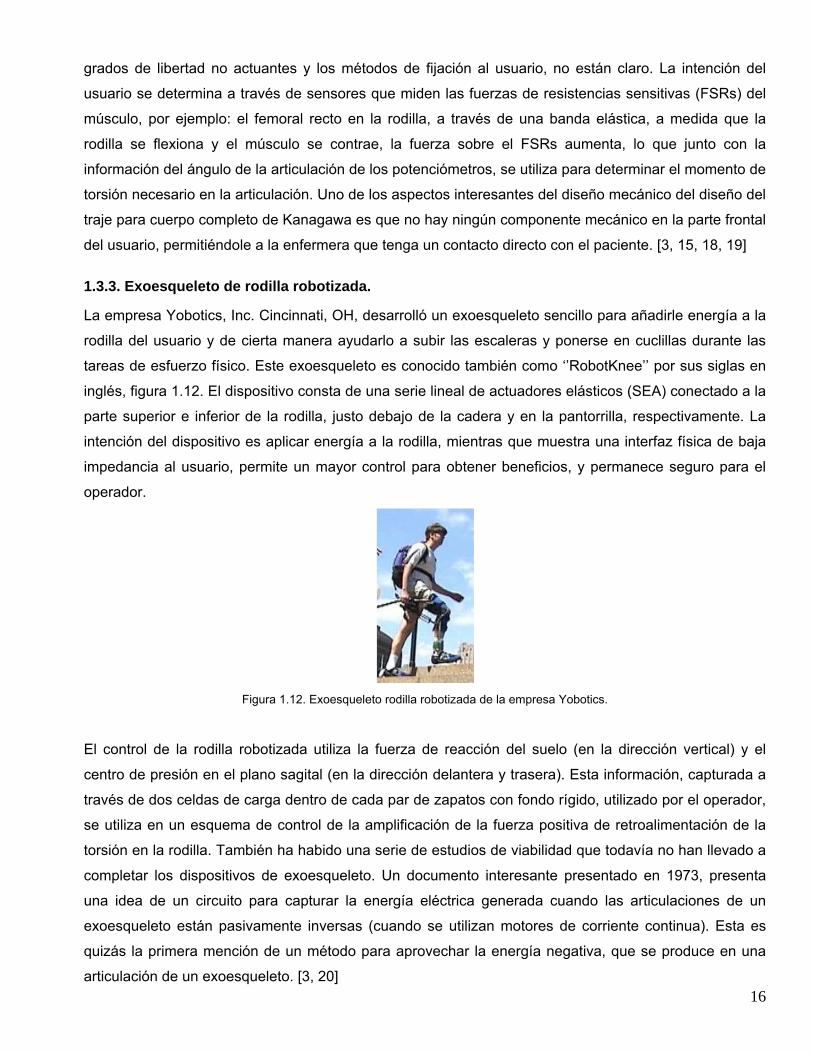
1.3.3. Exoesqueleto de rodilla robotizada.
La empresa Yobotics, Inc. Cincinnati, OH, desarrolló un exoesqueleto sencillo para añadirle energía a la
rodilla del usuario y de cierta manera ayudarlo a subir las escaleras y ponerse en cuclillas durante las
tareas de esfuerzo físico. Este exoesqueleto es conocido también como ‘’RobotKnee’’ por sus siglas en
inglés, figura 1.12. El dispositivo consta de una serie lineal de actuadores elásticos (SEA) conectado a la
parte superior e inferior de la rodilla, justo debajo de la cadera y en la pantorrilla, respectivamente. La
intención del dispositivo es aplicar energía a la rodilla, mientras que muestra una interfaz física de baja
impedancia al usuario, permite un mayor control para obtener beneficios, y permanece seguro para el
operador.
Figura 1.12. Exoesqueleto rodilla robotizada de la empresa Yobotics.
El control de la rodilla robotizada utiliza la fuerza de reacción del suelo (en la dirección vertical) y el
centro de presión en el plano sagital (en la dirección delantera y trasera). Esta información, capturada a
través de dos celdas de carga dentro de cada par de zapatos con fondo rígido, utilizado por el operador,
se utiliza en un esquema de control de la amplificación de la fuerza positiva de retroalimentación de la
torsión en la rodilla. También ha habido una serie de estudios de viabilidad que todavía no han llevado a
completar los dispositivos de exoesqueleto. Un documento interesante presentado en 1973, presenta
una idea de un circuito para capturar la energía eléctrica generada cuando las articulaciones de un
exoesqueleto están pasivamente inversas (cuando se utilizan motores de corriente continua). Esta es
quizás la primera mención de un método para aprovechar la energía negativa, que se produce en una
articulación de un exoesqueleto. [3, 20]
17
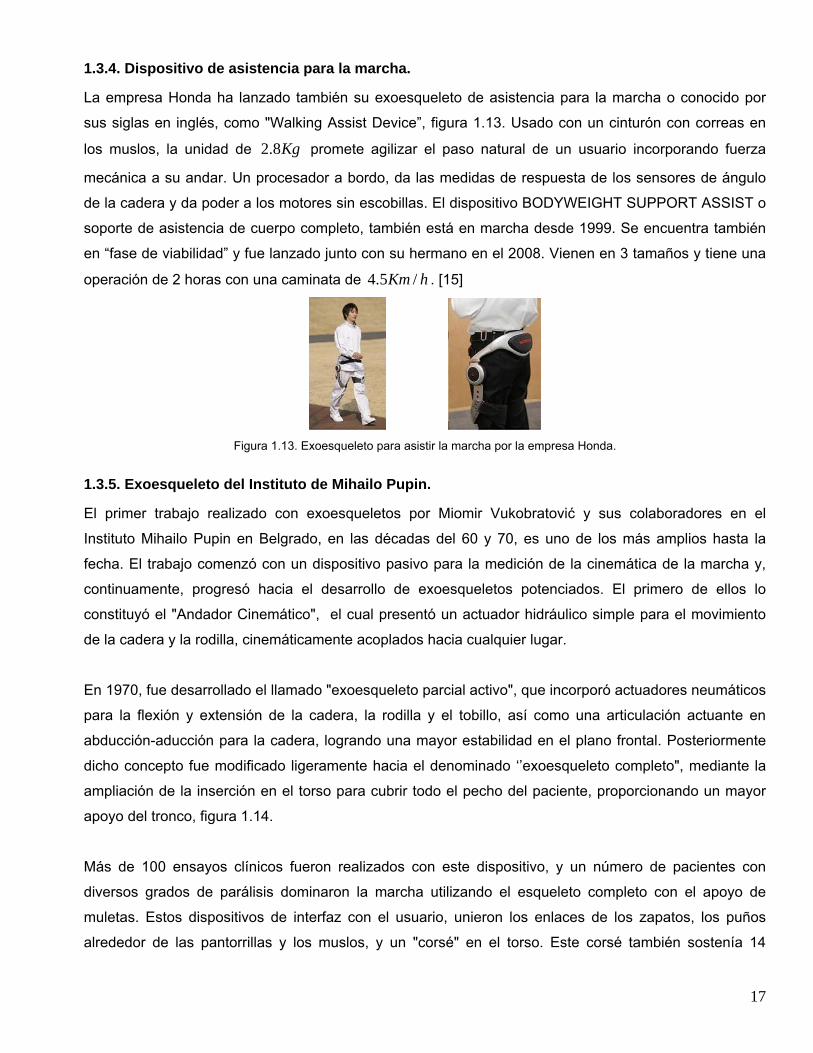
1.3.4. Dispositivo de asistencia para la marcha.
La empresa Honda ha lanzado también su exoesqueleto de asistencia para la marcha o conocido por
sus siglas en inglés, como "Walking Assist Device”, figura 1.13. Usado con un cinturón con correas en
los muslos, la unidad de Kg8.2 promete agilizar el paso natural de un usuario incorporando fuerza
mecánica a su andar. Un procesador a bordo, da las medidas de respuesta de los sensores de ángulo
de la cadera y da poder a los motores sin escobillas. El dispositivo BODYWEIGHT SUPPORT ASSIST o
soporte de asistencia de cuerpo completo, también está en marcha desde 1999. Se encuentra también
en “fase de viabilidad” y fue lanzado junto con su hermano en el 2008. Vienen en 3 tamaños y tiene una
operación de 2 horas con una caminata de hKm /5.4 . [15]
Figura 1.13. Exoesqueleto para asistir la marcha por la empresa Honda.
1.3.5. Exoesqueleto del Instituto de Mihailo Pupin.
El primer trabajo realizado con exoesqueletos por Miomir Vukobratović y sus colaboradores en el
Instituto Mihailo Pupin en Belgrado, en las décadas del 60 y 70, es uno de los más amplios hasta la
fecha. El trabajo comenzó con un dispositivo pasivo para la medición de la cinemática de la marcha y,
continuamente, progresó hacia el desarrollo de exoesqueletos potenciados. El primero de ellos lo
constituyó el "Andador Cinemático", el cual presentó un actuador hidráulico simple para el movimiento
de la cadera y la rodilla, cinemáticamente acoplados hacia cualquier lugar.
En 1970, fue desarrollado el llamado "exoesqueleto parcial activo", que incorporó actuadores neumáticos
para la flexión y extensión de la cadera, la rodilla y el tobillo, así como una articulación actuante en
abducción-aducción para la cadera, logrando una mayor estabilidad en el plano frontal. Posteriormente
dicho concepto fue modificado ligeramente hacia el denominado ‘’exoesqueleto completo", mediante la
ampliación de la inserción en el torso para cubrir todo el pecho del paciente, proporcionando un mayor
apoyo del tronco, figura 1.14.
Más de 100 ensayos clínicos fueron realizados con este dispositivo, y un número de pacientes con
diversos grados de parálisis dominaron la marcha utilizando el esqueleto completo con el apoyo de
muletas. Estos dispositivos de interfaz con el usuario, unieron los enlaces de los zapatos, los puños
alrededor de las pantorrillas y los muslos, y un "corsé" en el torso. Este corsé también sostenía 14
18
válvulas de solenoide para el control de los pistones neumáticos. El peso total del "exoesqueleto
completo", después de la incorporación de válvulas más ligeras, fue de Kg12 .
Figura 1.14 Exoesqueleto completo del Instituto Mihailo Pupin.
Este valor no incluye la fuente de alimentación y la computadora de control, que no se encuentran en el
dispositivo. Durante la operación, todos los dispositivos de exoesqueletos mencionados fueron
conducidos a través de un movimiento de intercambio predeterminado unido a un "diodo electrónico" con
función de generador. Sin embargo, un conjunto de tres sensores piezo-cerámicos fueron incorporados
dentro de la planta del pie del "exoesqueleto completo" para usarse en la determinación de la ubicación
y magnitud de la fuerza de reacción en el suelo. Con el fin de comenzar a abordar el problema de ser
energéticamente autónomos, fue desarrollada una versión del exoesqueleto accionado por motores de
corriente continua. Aunque el estado del motor, la batería y la tecnología informática limitaba la
verdadera portabilidad del dispositivo, este plan de actuación ofrece nuevas mejoras, como un
movimiento más suave y mejor capacidad de seguimiento. [3, 21, 22]
1.3.6. Exoesqueleto de la Universidad de Wisconsin.
A partir de 1968 la Universidad de Wisconsin desarrolló un prototipo de exoesqueleto completo de los
miembros inferiores, similares a los exoesqueletos del Instituto Pupin, figura 1.15. Con este dispositivo
se pretendía ayudar a los parapléjicos reambulantes que tenían plena capacidad de la parte superior del
cuerpo. El diseño cinemático del exoesqueleto aparece en los puntos de la articulación de la cadera y el
tobillo (tres grados de libertad, cada uno de rotación), así como un conjunto único de rotación de la
rodilla.
Figura 1.15 Exoesqueleto completo de la Universidad de Wisconsin.
19
El exoesqueleto de Wisconsin tenía por objeto proporcionar al usuario la capacidad de sentarse y
ponerse de pie, además de caminar a la mitad de la velocidad normal. El operador necesitaba usar un
par de muletas para la estabilización. El dispositivo fue programado para seguir los datos registrados de
la trayectoria de las articulaciones en un individuo sin discapacidad de tamaño similar. Se desconoce si
las pruebas con un operador parapléjico alguna vez se hayan realizado. Sin embargo, los experimentos
realizados con un usuario sin discapacidad que utilizan dos bastones de apoyo se mostraron estables,
en la operación de parecido natural. Además, el operador habría sido capaz de usar el dispositivo
durante varias horas sin molestias. [3, 23, 24]
1.4. Ortesis Activa.
En esta sección, se describe el trabajo realizado en el desarrollo de dispositivos ortopédicos que
mejoran los apoyos pasivos tradicionales por alguna combinación de añadir o disipar energía en las
articulaciones del aparato, y la liberación controlada de la energía almacenada en los muelles durante
las fases adecuadas de la marcha. Solo en los Estados Unidos, alrededor de 4,7 millones de personas
se beneficiarían de una ortesis activa de los miembros inferiores debido a los efectos de accidentes
cerebrovasculares, 1 millón post-operatorio, 400 000 debido a la esclerosis múltiple, 200 000, debido a
una lesión de la médula espinal, y 100 000 debido a parálisis cerebral. [3]
1.4.1. Ortesis activa de la pierna.
Las ortesis activas fueron esencialmente aparatos estándar que se modificaron para ofrecer algún tipo
de ayuda activa. La primera mención de tal dispositivo que se pudo encontrar es una patente de EE.UU.
que data de 1935, figura 1.16. El dispositivo era esencialmente una pierna ortopédica de movimiento
recíproco en la rodilla. Una manivela ubicada en la cadera fue usada para cerrar un resorte de torsión
que se encuentra en la articulación de la rodilla, que llevó a la articulación a través de un movimiento
predefinido, mediante el uso de una leva y un seguidor. El aparato se relaciona con el usuario a través
de una conexión de pie, las correas alrededor de los muslos, y una correa en el torso.
Figura 1.16. Ortesis activa de la pierna con movimiento recíproco en la rodilla 1935.
La primera ortesis activa controlable que se pudo encontrar es una patente para un dispositivo de
accionamiento hidráulico de 1942, para darle energía a la cadera y a la rodilla. Sin embargo, debido al
20
estado de la tecnología de punta en los controles en la época, el dispositivo fue controlado por la
apertura física y el cierre de las válvulas hidráulicas, por un cable y un sistema de vinculación que se
activa en determinados ángulos de la articulación en el ciclo de la marcha. Otra patente de 1951
describe un dispositivo pasivo similar que utiliza pasadores de muelle de carga para bloquear y
desbloquear las articulaciones del aparato en las distintas etapas de la marcha del usuario. [3]
1.4.2. Ortesis para potenciar la macha.
Otra idea novedosa propuesta en la literatura es una combinación de la ortesis potenciada, y muletas
telescópicas potenciadas, con un patín de ruedas como plataformas móviles bajo los pies del usuario,
figura 1.17. La ortesis y las muletas se diseñan para ayudar estando de pie y sentado, así como subir y
bajar escaleras. Las plataformas móviles sólo están destinadas a ser utilizadas para ayudar el
movimiento en el nivel del suelo, durante el cuál las articulaciones de la ortesis de bloqueo mantienen al
usuario en una postura erguida.
Figura 1.17 Ortesis potenciada de la Universidad de Sogang.
Uno puede imaginar, sin embargo, que esta estrategia puede conducir a problemas con la estabilidad
del usuario. Investigadores del Tecnológico de Michigan desarrollaron un experimento que potenciaba la
ortesis de la marcha consistiendo en 1 grado de Libertad por la pierna, actuando la articulación de la
cadera y la rodilla, accionada por enlaces. El aparato también fue utilizado para estudiar la potencia que
necesitaba el dispositivo para actuar a fondo, así como para determinar la cantidad de fuerza requerida
por el dispositivo para apoyar al operador durante la marcha. [3, 25]
1.4.3. Ortesis activa de la articulación simple.
Una de las primeras ortesis activas de tobillo fue presentado en 1981 por Jaukovic en la Universidad de
Titograd en la ex Yugoslavia, conocida como Ortesis Activa de tobillo-pie (OTP). El dispositivo consistía
en un motor de corriente montado sobre la pantorrilla del usuario que colabora en la flexión y extensión
del tobillo. También se incluía un diseño especial de "unión" que permitía el libre movimiento de los
tobillos. La ortesis fue controlada basándose en la información de los interruptores de las plantas de los
pies.
21
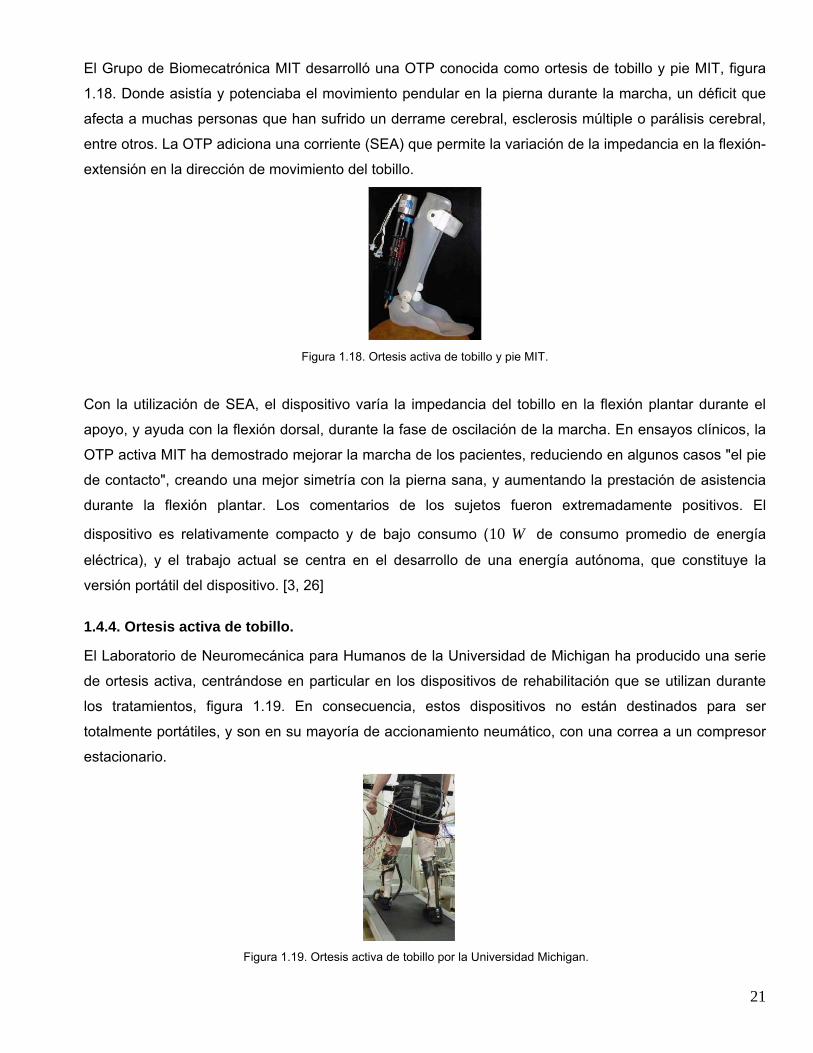
El Grupo de Biomecatrónica MIT desarrolló una OTP conocida como ortesis de tobillo y pie MIT, figura
1.18. Donde asistía y potenciaba el movimiento pendular en la pierna durante la marcha, un déficit que
afecta a muchas personas que han sufrido un derrame cerebral, esclerosis múltiple o parálisis cerebral,
entre otros. La OTP adiciona una corriente (SEA) que permite la variación de la impedancia en la flexión-
extensión en la dirección de movimiento del tobillo.
Figura 1.18. Ortesis activa de tobillo y pie MIT.
Con la utilización de SEA, el dispositivo varía la impedancia del tobillo en la flexión plantar durante el
apoyo, y ayuda con la flexión dorsal, durante la fase de oscilación de la marcha. En ensayos clínicos, la
OTP activa MIT ha demostrado mejorar la marcha de los pacientes, reduciendo en algunos casos "el pie
de contacto", creando una mejor simetría con la pierna sana, y aumentando la prestación de asistencia
durante la flexión plantar. Los comentarios de los sujetos fueron extremadamente positivos. El
dispositivo es relativamente compacto y de bajo consumo ( W10 de consumo promedio de energía
eléctrica), y el trabajo actual se centra en el desarrollo de una energía autónoma, que constituye la
versión portátil del dispositivo. [3, 26]
1.4.4. Ortesis activa de tobillo.
El Laboratorio de Neuromecánica para Humanos de la Universidad de Michigan ha producido una serie
de ortesis activa, centrándose en particular en los dispositivos de rehabilitación que se utilizan durante
los tratamientos, figura 1.19. En consecuencia, estos dispositivos no están destinados para ser
totalmente portátiles, y son en su mayoría de accionamiento neumático, con una correa a un compresor
estacionario.
Figura 1.19. Ortesis activa de tobillo por la Universidad Michigan.
22
Los actuadores neumáticos utilizados son músculos neumáticos artificiales (Músculos McKibbon) que se
montan en fibras de carbono y depósitos de polipropileno, resultando dispositivos que son
extremadamente ligeros. Además, la impedancia baja de los actuadores produce dispositivos más
seguros. La ortesis de la Universidad de Michigan está diseñada principalmente para la parte inferior de
la pierna, tobillo con ambos pies y la rodilla-tobillo-pie.
Para todos los productos, la fibra de carbono y los depósitos de polipropileno son personalizados y
construidos para cada materia, eliminando la necesidad de mecanismos de ajuste mecánicamente
complejos. Sin embargo, la naturaleza de construir por encargos estos dispositivos tiene sus negativas
en las aplicaciones clínicas, partiendo de que es un dispositivo independiente que tiene que ser
construido para cada paciente, con una visita necesaria por separado a la instalación antes de comenzar
la terapia.
El Laboratorio de Neuromecánica para Humanos ha construido una OTP incluyendo un torque actuador,
así como un único actuador de flexión plantar. El último dispositivo fue probado en seis pacientes con
lesión crónica incompleta de la médula espinal, caminando a baja velocidad (0,54 m/s), bajo el apoyo
parcial del peso corporal (30% o 50% dependiendo de las capacidades de la persona), siempre a través
de arreos. Los resultados mostraron que, al tiempo que aumentó la flexión plantar en la final de la fase
de apoyo, la OTP no disminuyó la contratación muscular medida por EMG de superficie en los músculos
sóleo y gemelo.
También fueron presentadas variados tipos de ortesis de tobillo y pie por la Universidad Estatal de
Arizona, donde los investigadores han presentado un novedoso diseño de una OTP activa con un
resorte de dos o más músculos actuando unidos al lado izquierdo y derecho del pie, en los dedos del
pie, formando un trípode con el talón. Estos actuadores neumáticos son esencialmente los músculos con
un resorte interno que tiende a ampliar el músculo, permitiendo que la fuerza pueda ser aplicada en
ambos sentidos de dirección, flexión dorsal y plantar.
La configuración del trípode permite al tobillo ser accionado en flexión y extensión (coactivación) y la
inversión-eversión (activación individual). Además, el grupo también ha explorado el uso de las
articulaciones EAE ortesis de energía. Los investigadores de los Departamentos de Ingeniería Mecánica
y Terapia Física en la Universidad de Delaware han propuesto también un diseño de una ortesis activa
de tobillo que añada potencia al usuario, tanto en las direcciones flexión-extensión como en inversión-
eversión. [3, 27, 28]
23
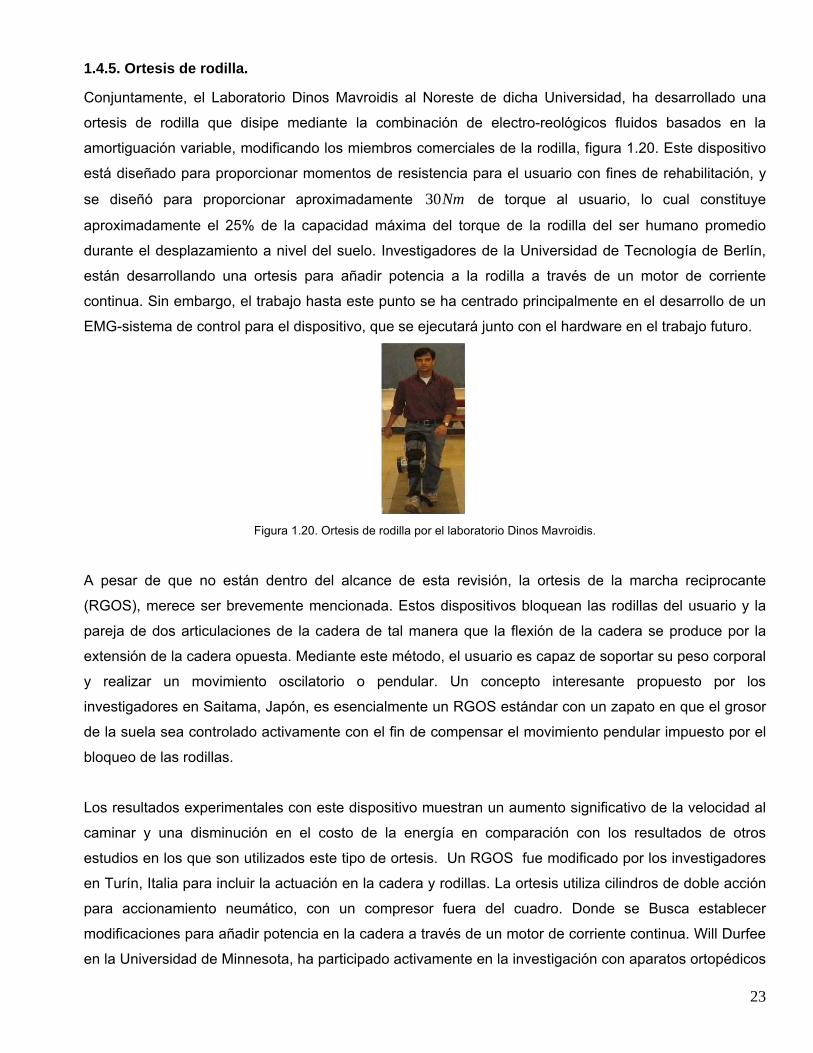
1.4.5. Ortesis de rodilla.
Conjuntamente, el Laboratorio Dinos Mavroidis al Noreste de dicha Universidad, ha desarrollado una
ortesis de rodilla que disipe mediante la combinación de electro-reológicos fluidos basados en la
amortiguación variable, modificando los miembros comerciales de la rodilla, figura 1.20. Este dispositivo
está diseñado para proporcionar momentos de resistencia para el usuario con fines de rehabilitación, y
se diseñó para proporcionar aproximadamente Nm30 de torque al usuario, lo cual constituye
aproximadamente el 25% de la capacidad máxima del torque de la rodilla del ser humano promedio
durante el desplazamiento a nivel del suelo. Investigadores de la Universidad de Tecnología de Berlín,
están desarrollando una ortesis para añadir potencia a la rodilla a través de un motor de corriente
continua. Sin embargo, el trabajo hasta este punto se ha centrado principalmente en el desarrollo de un
EMG-sistema de control para el dispositivo, que se ejecutará junto con el hardware en el trabajo futuro.
Figura 1.20. Ortesis de rodilla por el laboratorio Dinos Mavroidis.
A pesar de que no están dentro del alcance de esta revisión, la ortesis de la marcha reciprocante
(RGOS), merece ser brevemente mencionada. Estos dispositivos bloquean las rodillas del usuario y la
pareja de dos articulaciones de la cadera de tal manera que la flexión de la cadera se produce por la
extensión de la cadera opuesta. Mediante este método, el usuario es capaz de soportar su peso corporal
y realizar un movimiento oscilatorio o pendular. Un concepto interesante propuesto por los
investigadores en Saitama, Japón, es esencialmente un RGOS estándar con un zapato en que el grosor
de la suela sea controlado activamente con el fin de compensar el movimiento pendular impuesto por el
bloqueo de las rodillas.
Los resultados experimentales con este dispositivo muestran un aumento significativo de la velocidad al
caminar y una disminución en el costo de la energía en comparación con los resultados de otros
estudios en los que son utilizados este tipo de ortesis. Un RGOS fue modificado por los investigadores
en Turín, Italia para incluir la actuación en la cadera y rodillas. La ortesis utiliza cilindros de doble acción
para accionamiento neumático, con un compresor fuera del cuadro. Donde se Busca establecer
modificaciones para añadir potencia en la cadera a través de un motor de corriente continua. Will Durfee
en la Universidad de Minnesota, ha participado activamente en la investigación con aparatos ortopédicos
24
durante muchos años. Un dispositivo de ortesis completo de los miembros inferiores incorpora frenos
controlables en la cadera y la rodilla (flexión-extensión) con un método de FES. Mediante la activación
de los frenos hay un endurecimiento de la ortesis en el pie, donde el dispositivo sólo requiere los
músculos del paciente para ser utilizados durante el movimiento. Esto permite a la FES, ser utilizado
con mucha más frecuencia (ciclo de destino más corto), y también reduce la fatiga muscular.
A modo de resumen se pude decir que, la ciencia proporciona los antecedentes necesarios para el
diseño de dispositivos que imitan la dinámica del movimiento del operador. La tecnología del motor de
corriente continua con batería se ha desarrollado mucho en los últimos años, aunque todavía no
satisfacen las demandas de las aplicaciones en muchos de los exoesqueletos. El estado de la técnica en
informática, detección y control, por supuesto ha avanzado de manera tan dramática que estas áreas ya
no son los principales obstáculos para la aplicación del hardware de la robótica.
Se puede decir, que los sistemas de exoesqueletos completos y autónomos son en gran medida
anecdóticos. De hecho, existe una marcada falta de publicación de los resultados cuantitativos sobre el
desempeño de los dispositivos de exoesqueleto que atenta contra el desarrollo de estas nuevas
tecnologías en países del tercer mundo. Sin embargo, los exoesqueletos han demostrado que son de
vital importancia porque además de potenciar la locomoción humana, también intentan facilitar las tareas
destinadas, que de otro modo no podrían ser realizadas por el usuario. [3, 29, 30]
25
1.5. Conclusiones Parciales.
1. Las investigaciones sobre los exoesqueletos comenzaron a finales de 1960 y tenían como objetivo
aumentar las capacidades y el rendimiento de los seres humanos, es decir permitir que personas sanas
pudieran llevar a cabo tareas difíciles.
2. Los primeros diseños de exoesqueleto estaban destinados fundamentalmente para uso militar,
permitiendo que los soldados pudieran desplazarse grandes distancias llevando en sus espaldas
elevadas cargas. Como por ejemplo el exoesqueleto SACROS el cual es capaz de caminar, saltar,
correr, cargar, mover grandes pesos, encontrar armas de destrucción masiva, etc. Posteriormente,
comenzaron aplicarse en el sector de la salud para la rehabilitación en personas con discapacidad.
4. Los elementos potenciadores en los exoesqueletos son muy diversos como por ejemplos: sistemas
hidráulicos y neumáticos, polímeros electroactivos, fluidos electro y magneto reológicos, motores de
corriente continua, materiales con memoria de forma, músculos neumáticos, motores ultrasónicos entre
otros. Sin embargo los estudios han demostrado que los motores ultrasónicos y los motores de corriente
continua son las mejores soluciones para ser usados en los exoesqueletos.
5. La tecnología del motor de corriente continua con batería se ha desarrollado mucho en los últimos
años, aunque todavía no satisfacen las demandas de las aplicaciones en muchos de los exoesqueletos.
El estado de la técnica en informática, detección y control, por supuesto ha avanzado de manera tan
dramática que estas áreas ya no son los principales obstáculos para la aplicación en del hardware de la
robótica.
6. Los exoesqueletos han demostrado que son de vital importancia para las personas sanas y con
discapacidad, porque además de potenciar la locomoción humana, disminuyen la posibilidad de una
lesión en las piernas o en la espalda, mejoran la economía de movimiento y el metabolismo, y reducen
el nivel percibido de dificultad, también intentan facilitar las tareas destinadas, que de otro modo no
podrían ser realizadas por el usuario (por ejemplo, aumenta la capacidad de carga).
7. La falta de resultados cuantitativos con los exoesqueletos pone de relieve los numerosos retos
relacionados con la creación de ellos. Hay, por supuesto, muchos problemas de diseño que pueden
conducir a resultados pobres, como son la desalineación de las articulaciones entre el operador y el
exoesqueleto, las limitaciones cinemáticas, entre otras. Pero de lo que si puede asegurar que los
exoesqueletos brindan a las disímiles personas con discapacidad la oportunidad de continuar con una
vida normal y segura.
26
8. El desarrollo de un conjunto de disciplinas, tales como: la mecánica, la electrónica, la informática,
robótica y el desarrollo de nuevos tipos de sensores y actuadores están permitiendo crear y obtener todo
un conjunto de soluciones tecnológicas para aliviar estas deficiencias y conseguir un mayor grado de
autonomía y satisfacción en las personas que presentan problema de discapacidad motora.
9. En la actualidad, la rehabilitación de la marcha se basa en la fisioterapia manual con ejercicios
musculares repetitivos involucrando rutinas de movimientos en las que se requiere esfuerzo físico por
parte del fisioterapeuta, lo que puede provocar que al final de una jornada de fisioterapia, por los efectos
del cansancio físico, no se realice los procedimientos adecuadamente. Mediante este tipo de
rehabilitación manual no se pude obtener datos, ni información del proceso de rehabilitación, lo cual no
da la posibilidad de llevar un control de la evolución del paciente, que permita definir nuevas estrategias
de rehabilitación.
10. El uso de terapia mediante robot mejora los procedimientos de rehabilitación actuales, permitiendo
así una rehabilitación de mayor calidad y aumentando también la motivación del paciente, quien se
sentirá más independiente de la disponibilidad del fisioterapeuta, mejorando la repetitividad y motivación.
El empleo de robot permitirá definir y controlar los movimientos de los miembros del paciente, mantener
la repetitividad de una terapia, independientemente del tiempo que dure la misma y del gasto energético
que está implique, y obtener los datos e información del proceso de rehabilitación permitiendo de está
forma llevar un control de la evolución del paciente, con un pequeño margen de error.
11. La caracterización de la anatomía de los miembros inferiores fundamentalmente o referente al
sistema óseo y articular, la caracterización de la biomecánica de la marcha humana normal y la
interacción hombre – maquina, son los aspectos cruciales y más importante a la hora de llevar a cabo un
diseño de exoesqueleto para miembros inferiores en personas con discapacidad.
27
Capitulo II: Biomecánica de los miembros inferiores.
2.1. Introducción.
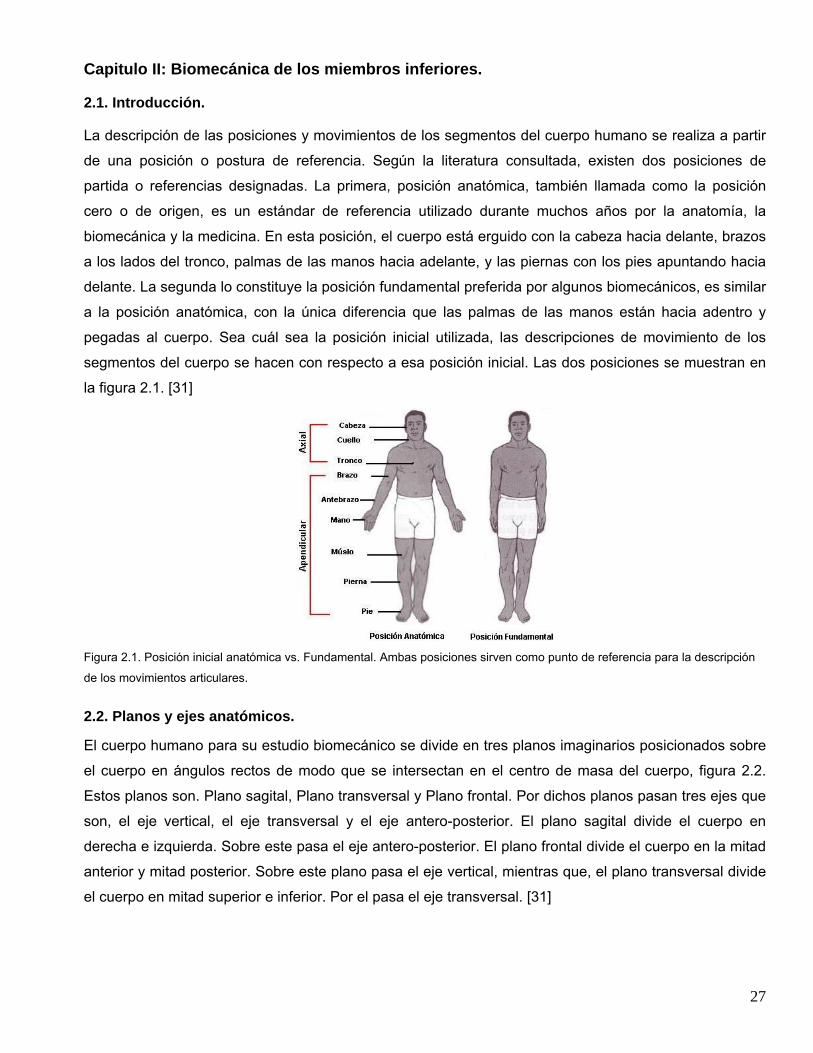
La descripción de las posiciones y movimientos de los segmentos del cuerpo humano se realiza a partir
de una posición o postura de referencia. Según la literatura consultada, existen dos posiciones de
partida o referencias designadas. La primera, posición anatómica, también llamada como la posición
cero o de origen, es un estándar de referencia utilizado durante muchos años por la anatomía, la
biomecánica y la medicina. En esta posición, el cuerpo está erguido con la cabeza hacia delante, brazos
a los lados del tronco, palmas de las manos hacia adelante, y las piernas con los pies apuntando hacia
delante. La segunda lo constituye la posición fundamental preferida por algunos biomecánicos, es similar
a la posición anatómica, con la única diferencia que las palmas de las manos están hacia adentro y
pegadas al cuerpo. Sea cuál sea la posición inicial utilizada, las descripciones de movimiento de los
segmentos del cuerpo se hacen con respecto a esa posición inicial. Las dos posiciones se muestran en
la figura 2.1. [31]
Figura 2.1. Posición inicial anatómica vs. Fundamental. Ambas posiciones sirven como punto de referencia para la descripción
de los movimientos articulares.
2.2. Planos y ejes anatómicos.
El cuerpo humano para su estudio biomecánico se divide en tres planos imaginarios posicionados sobre
el cuerpo en ángulos rectos de modo que se intersectan en el centro de masa del cuerpo, figura 2.2.
Estos planos son. Plano sagital, Plano transversal y Plano frontal. Por dichos planos pasan tres ejes que
son, el eje vertical, el eje transversal y el eje antero-posterior. El plano sagital divide el cuerpo en
derecha e izquierda. Sobre este pasa el eje antero-posterior. El plano frontal divide el cuerpo en la mitad
anterior y mitad posterior. Sobre este plano pasa el eje vertical, mientras que, el plano transversal divide
el cuerpo en mitad superior e inferior. Por el pasa el eje transversal. [31]

28
Figura 2.2. Planos y ejes del cuerpo humano.
2.3. Tipos de movimientos de los segmentos del cuerpo humano.
El cuerpo humano está formado por huesos, los cuales están unidos a través de las articulaciones, las
cuales permiten el movimiento relativo entre los diferentes segmentos del cuerpo humano. Existen seis
movimientos básicos que ocurren en combinaciones variadas entre las articulaciones del cuerpo
humano. Los dos primeros movimientos, flexión y extensión. La flexión es la acción y efecto de doblar el
cuerpo o alguno de sus miembros. Se trata de un movimiento de aproximación entre partes del cuerpo
mediante la acción de los músculos. Mientras que el movimiento opuesto a la flexión se conoce como
extensión. En este caso, se produce un distanciamiento entre los huesos o las partes del cuerpo. El
segundo par de movimientos, abducción y adución. La abducción es el movimiento donde la extremidad
del cuerpo se aleja de su plano medio. Mientras que la adución es el movimiento contrario donde la
extremidad del cuerpo se acerca a su plano medio. Los dos últimos movimientos básicos lo constituyen
las rotaciones, que pueden ser, rotación media también conocida como rotación interna, así como la
rotación lateral, también conocida como rotación externa, figura 2.3. [31]
Figura 2.3. Movimientos básicos realizados por diferentes articulaciones del cuerpo humano.
2.3.1. Términos especializados para describir otros movimientos.
Existen diferentes nombres especializados que se refieren a varios movimientos realizados por las
articulaciones que están dentro de los seis movimientos básicos descritos anteriormente. Estos
movimientos son comúnmente usados por los profesionales entre los que sobresalen, la supinación y
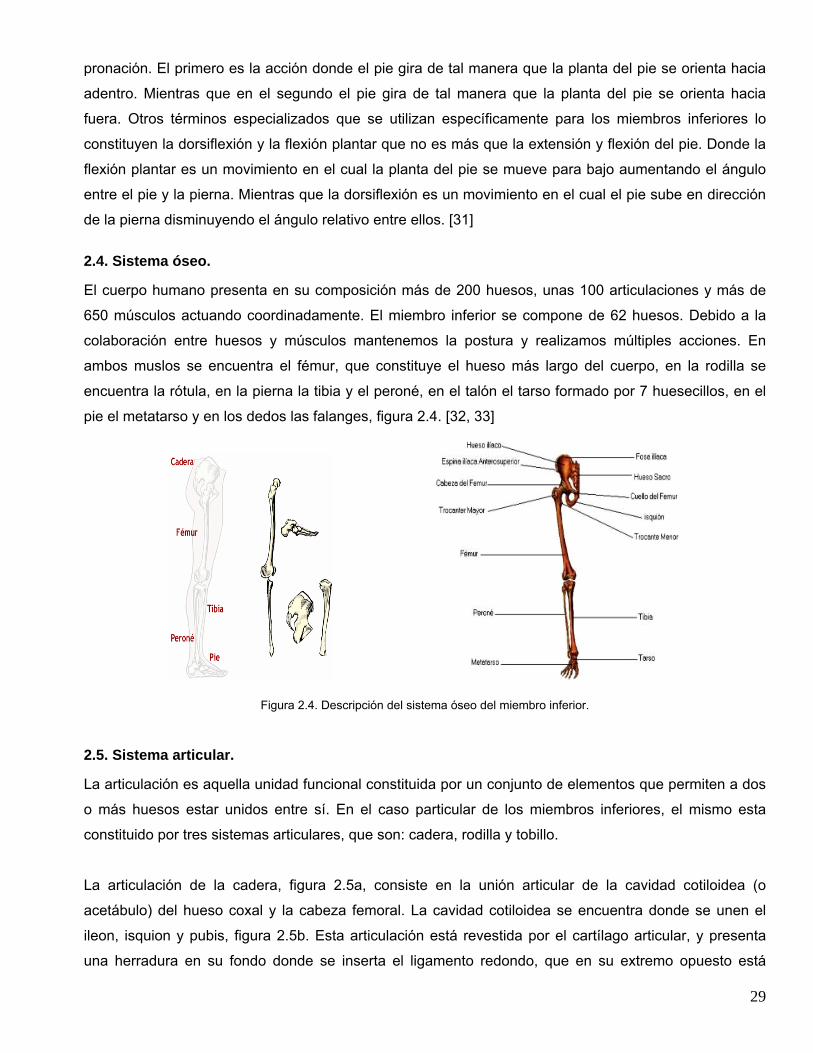
29
pronación. El primero es la acción donde el pie gira de tal manera que la planta del pie se orienta hacia
adentro. Mientras que en el segundo el pie gira de tal manera que la planta del pie se orienta hacia
fuera. Otros términos especializados que se utilizan específicamente para los miembros inferiores lo
constituyen la dorsiflexión y la flexión plantar que no es más que la extensión y flexión del pie. Donde la
flexión plantar es un movimiento en el cual la planta del pie se mueve para bajo aumentando el ángulo
entre el pie y la pierna. Mientras que la dorsiflexión es un movimiento en el cual el pie sube en dirección
de la pierna disminuyendo el ángulo relativo entre ellos. [31]
2.4. Sistema óseo.
El cuerpo humano presenta en su composición más de 200 huesos, unas 100 articulaciones y más de
650 músculos actuando coordinadamente. El miembro inferior se compone de 62 huesos. Debido a la
colaboración entre huesos y músculos mantenemos la postura y realizamos múltiples acciones. En
ambos muslos se encuentra el fémur, que constituye el hueso más largo del cuerpo, en la rodilla se
encuentra la rótula, en la pierna la tibia y el peroné, en el talón el tarso formado por 7 huesecillos, en el
pie el metatarso y en los dedos las falanges, figura 2.4. [32, 33]
Figura 2.4. Descripción del sistema óseo del miembro inferior.
2.5. Sistema articular.
La articulación es aquella unidad funcional constituida por un conjunto de elementos que permiten a dos
o más huesos estar unidos entre sí. En el caso particular de los miembros inferiores, el mismo esta
constituido por tres sistemas articulares, que son: cadera, rodilla y tobillo.
La articulación de la cadera, figura 2.5a, consiste en la unión articular de la cavidad cotiloidea (o
acetábulo) del hueso coxal y la cabeza femoral. La cavidad cotiloidea se encuentra donde se unen el
ileon, isquion y pubis, figura 2.5b. Esta articulación está revestida por el cartílago articular, y presenta
una herradura en su fondo donde se inserta el ligamento redondo, que en su extremo opuesto está
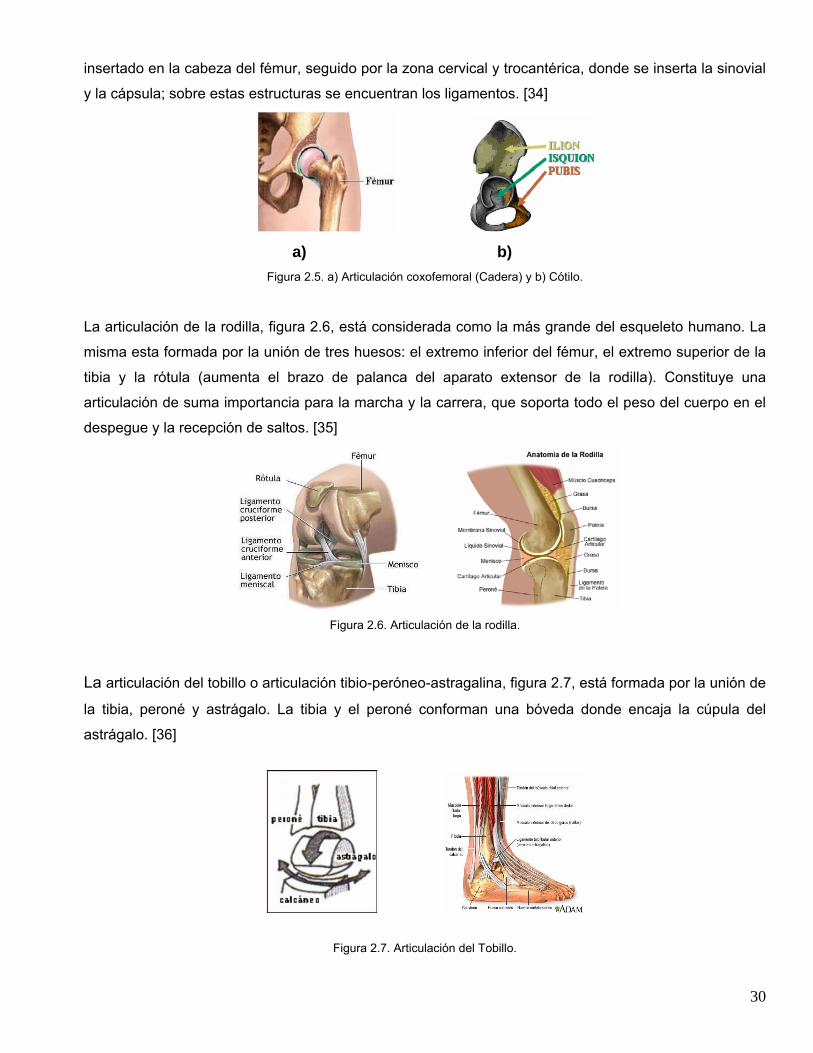
30
insertado en la cabeza del fémur, seguido por la zona cervical y trocantérica, donde se inserta la sinovial
y la cápsula; sobre estas estructuras se encuentran los ligamentos. [34]
a) b)
Figura 2.5. a) Articulación coxofemoral (Cadera) y b) Cótilo.
La articulación de la rodilla, figura 2.6, está considerada como la más grande del esqueleto humano. La
misma esta formada por la unión de tres huesos: el extremo inferior del fémur, el extremo superior de la
tibia y la rótula (aumenta el brazo de palanca del aparato extensor de la rodilla). Constituye una
articulación de suma importancia para la marcha y la carrera, que soporta todo el peso del cuerpo en el
despegue y la recepción de saltos. [35]
Figura 2.6. Articulación de la rodilla.
La articulación del tobillo o articulación tibio-peróneo-astragalina, figura 2.7, está formada por la unión de
la tibia, peroné y astrágalo. La tibia y el peroné conforman una bóveda donde encaja la cúpula del
astrágalo. [36]
Figura 2.7. Articulación del Tobillo.
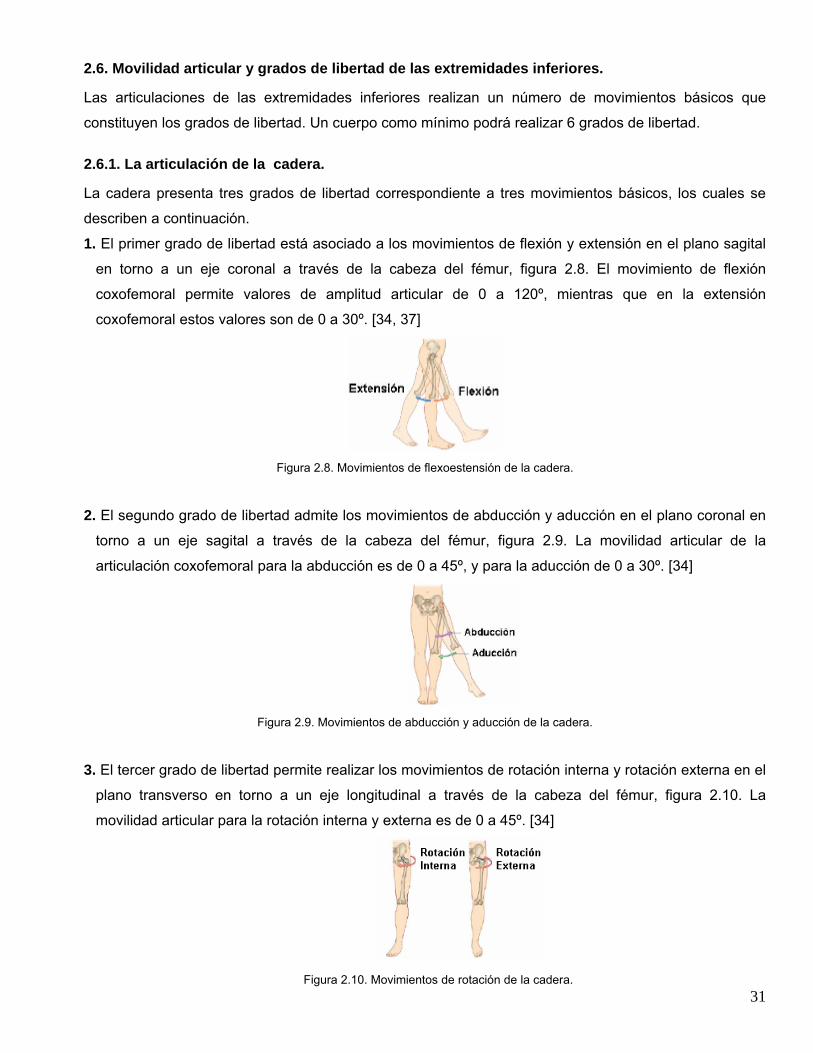
31
2.6. Movilidad articular y grados de libertad de las extremidades inferiores.
Las articulaciones de las extremidades inferiores realizan un número de movimientos básicos que
constituyen los grados de libertad. Un cuerpo como mínimo podrá realizar 6 grados de libertad.
2.6.1. La articulación de la cadera.
La cadera presenta tres grados de libertad correspondiente a tres movimientos básicos, los cuales se
describen a continuación. 1. El primer grado de libertad está asociado a los movimientos de flexión y extensión en el plano sagital
en torno a un eje coronal a través de la cabeza del fémur, figura 2.8. El movimiento de flexión
coxofemoral permite valores de amplitud articular de 0 a 120º, mientras que en la extensión
coxofemoral estos valores son de 0 a 30º. [34, 37]
Figura 2.8. Movimientos de flexoestensión de la cadera.
2. El segundo grado de libertad admite los movimientos de abducción y aducción en el plano coronal en
torno a un eje sagital a través de la cabeza del fémur, figura 2.9. La movilidad articular de la
articulación coxofemoral para la abducción es de 0 a 45º, y para la aducción de 0 a 30º. [34]
Figura 2.9. Movimientos de abducción y aducción de la cadera.
3. El tercer grado de libertad permite realizar los movimientos de rotación interna y rotación externa en el
plano transverso en torno a un eje longitudinal a través de la cabeza del fémur, figura 2.10. La
movilidad articular para la rotación interna y externa es de 0 a 45º. [34]
Figura 2.10. Movimientos de rotación de la cadera.
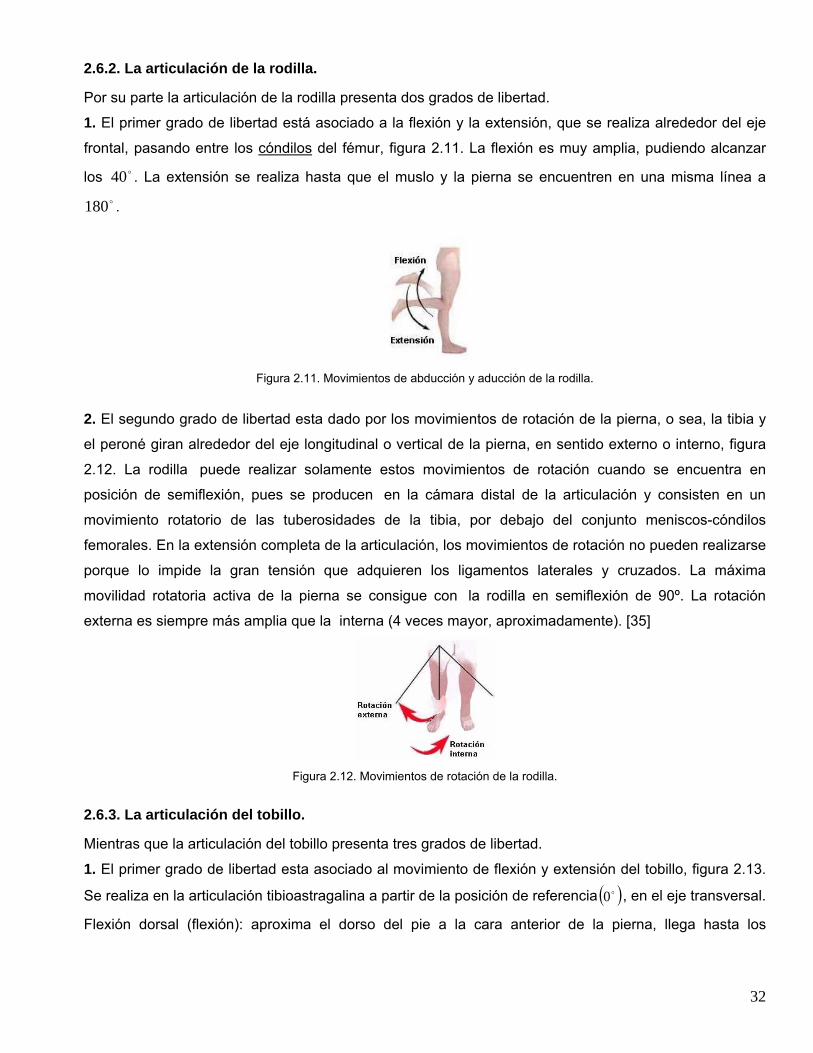
32
2.6.2. La articulación de la rodilla.
Por su parte la articulación de la rodilla presenta dos grados de libertad.
1. El primer grado de libertad está asociado a la flexión y la extensión, que se realiza alrededor del eje
frontal, pasando entre los cóndilos del fémur, figura 2.11. La flexión es muy amplia, pudiendo alcanzar
los o40 . La extensión se realiza hasta que el muslo y la pierna se encuentren en una misma línea a o180 .
Figura 2.11. Movimientos de abducción y aducción de la rodilla.
2. El segundo grado de libertad esta dado por los movimientos de rotación de la pierna, o sea, la tibia y
el peroné giran alrededor del eje longitudinal o vertical de la pierna, en sentido externo o interno, figura
2.12. La rodilla puede realizar solamente estos movimientos de rotación cuando se encuentra en
posición de semiflexión, pues se producen en la cámara distal de la articulación y consisten en un
movimiento rotatorio de las tuberosidades de la tibia, por debajo del conjunto meniscos-cóndilos
femorales. En la extensión completa de la articulación, los movimientos de rotación no pueden realizarse
porque lo impide la gran tensión que adquieren los ligamentos laterales y cruzados. La máxima
movilidad rotatoria activa de la pierna se consigue con la rodilla en semiflexión de 90º. La rotación
externa es siempre más amplia que la interna (4 veces mayor, aproximadamente). [35]
Figura 2.12. Movimientos de rotación de la rodilla.
2.6.3. La articulación del tobillo.
Mientras que la articulación del tobillo presenta tres grados de libertad. 1. El primer grado de libertad esta asociado al movimiento de flexión y extensión del tobillo, figura 2.13.
Se realiza en la articulación tibioastragalina a partir de la posición de referencia ( )o0 , en el eje transversal.
Flexión dorsal (flexión): aproxima el dorso del pie a la cara anterior de la pierna, llega hasta los
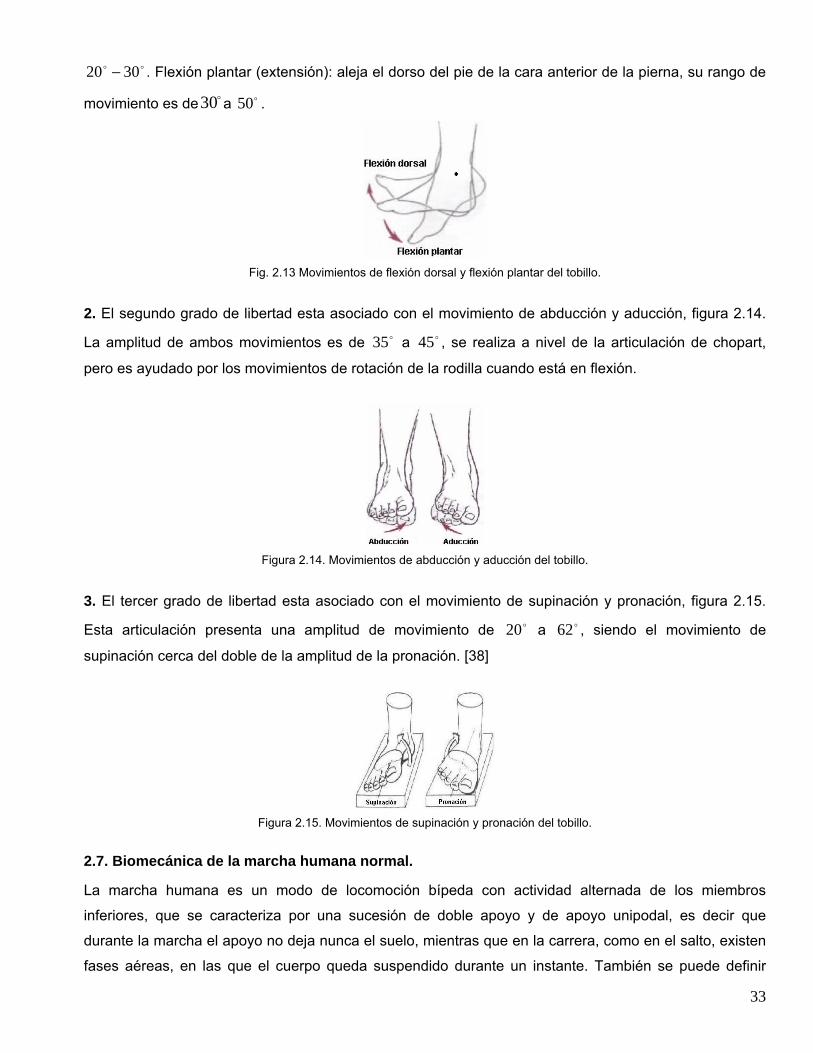
33
oo 3020 − . Flexión plantar (extensión): aleja el dorso del pie de la cara anterior de la pierna, su rango de
movimiento es de o30 a o50 .
Fig. 2.13 Movimientos de flexión dorsal y flexión plantar del tobillo.
2. El segundo grado de libertad esta asociado con el movimiento de abducción y aducción, figura 2.14.
La amplitud de ambos movimientos es de o35 a o45 , se realiza a nivel de la articulación de chopart,
pero es ayudado por los movimientos de rotación de la rodilla cuando está en flexión.
Figura 2.14. Movimientos de abducción y aducción del tobillo.
3. El tercer grado de libertad esta asociado con el movimiento de supinación y pronación, figura 2.15.
Esta articulación presenta una amplitud de movimiento de o20 a o62 , siendo el movimiento de
supinación cerca del doble de la amplitud de la pronación. [38]
Figura 2.15. Movimientos de supinación y pronación del tobillo.
2.7. Biomecánica de la marcha humana normal.
La marcha humana es un modo de locomoción bípeda con actividad alternada de los miembros
inferiores, que se caracteriza por una sucesión de doble apoyo y de apoyo unipodal, es decir que
durante la marcha el apoyo no deja nunca el suelo, mientras que en la carrera, como en el salto, existen
fases aéreas, en las que el cuerpo queda suspendido durante un instante. También se puede definir
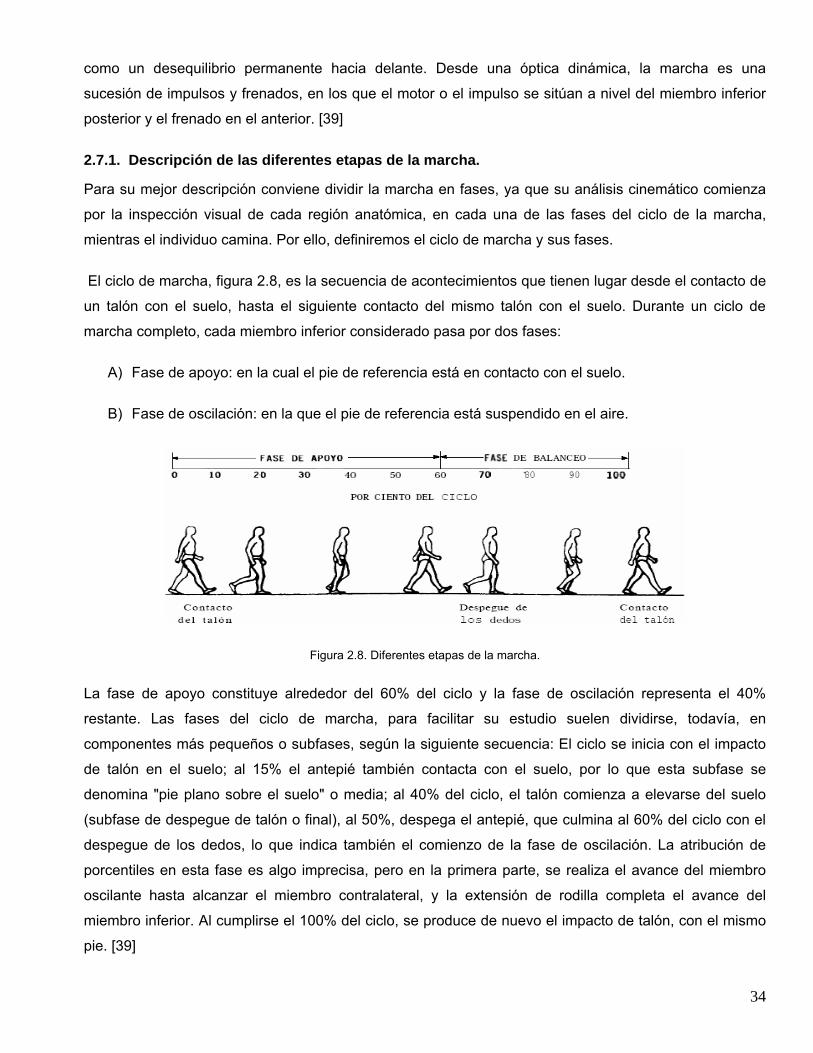
34
como un desequilibrio permanente hacia delante. Desde una óptica dinámica, la marcha es una
sucesión de impulsos y frenados, en los que el motor o el impulso se sitúan a nivel del miembro inferior
posterior y el frenado en el anterior. [39]
2.7.1. Descripción de las diferentes etapas de la marcha.
Para su mejor descripción conviene dividir la marcha en fases, ya que su análisis cinemático comienza
por la inspección visual de cada región anatómica, en cada una de las fases del ciclo de la marcha,
mientras el individuo camina. Por ello, definiremos el ciclo de marcha y sus fases.
El ciclo de marcha, figura 2.8, es la secuencia de acontecimientos que tienen lugar desde el contacto de
un talón con el suelo, hasta el siguiente contacto del mismo talón con el suelo. Durante un ciclo de
marcha completo, cada miembro inferior considerado pasa por dos fases:
A) Fase de apoyo: en la cual el pie de referencia está en contacto con el suelo.
B) Fase de oscilación: en la que el pie de referencia está suspendido en el aire.
Figura 2.8. Diferentes etapas de la marcha.
La fase de apoyo constituye alrededor del 60% del ciclo y la fase de oscilación representa el 40%
restante. Las fases del ciclo de marcha, para facilitar su estudio suelen dividirse, todavía, en
componentes más pequeños o subfases, según la siguiente secuencia: El ciclo se inicia con el impacto
de talón en el suelo; al 15% el antepié también contacta con el suelo, por lo que esta subfase se
denomina "pie plano sobre el suelo" o media; al 40% del ciclo, el talón comienza a elevarse del suelo
(subfase de despegue de talón o final), al 50%, despega el antepié, que culmina al 60% del ciclo con el
despegue de los dedos, lo que indica también el comienzo de la fase de oscilación. La atribución de
porcentiles en esta fase es algo imprecisa, pero en la primera parte, se realiza el avance del miembro
oscilante hasta alcanzar el miembro contralateral, y la extensión de rodilla completa el avance del
miembro inferior. Al cumplirse el 100% del ciclo, se produce de nuevo el impacto de talón, con el mismo
pie. [39]
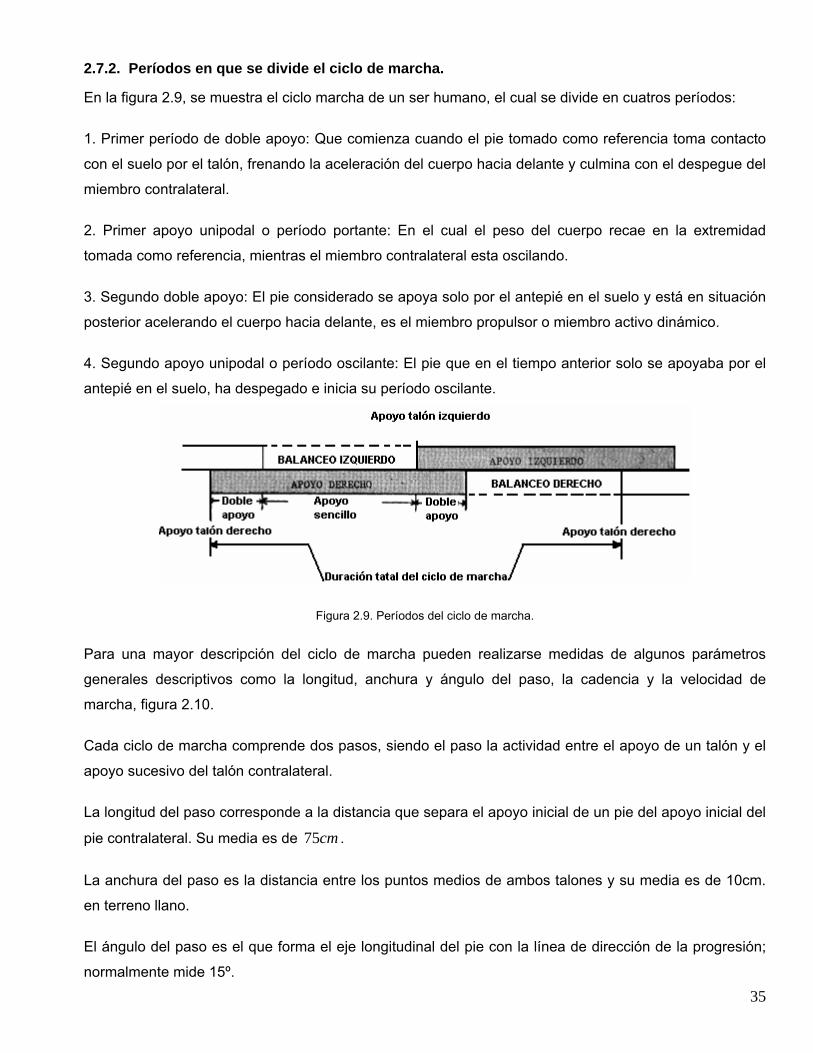
35
2.7.2. Períodos en que se divide el ciclo de marcha.
En la figura 2.9, se muestra el ciclo marcha de un ser humano, el cual se divide en cuatros períodos:
1. Primer período de doble apoyo: Que comienza cuando el pie tomado como referencia toma contacto
con el suelo por el talón, frenando la aceleración del cuerpo hacia delante y culmina con el despegue del
miembro contralateral.
2. Primer apoyo unipodal o período portante: En el cual el peso del cuerpo recae en la extremidad
tomada como referencia, mientras el miembro contralateral esta oscilando.
3. Segundo doble apoyo: El pie considerado se apoya solo por el antepié en el suelo y está en situación
posterior acelerando el cuerpo hacia delante, es el miembro propulsor o miembro activo dinámico.
4. Segundo apoyo unipodal o período oscilante: El pie que en el tiempo anterior solo se apoyaba por el
antepié en el suelo, ha despegado e inicia su período oscilante.
Figura 2.9. Períodos del ciclo de marcha.
Para una mayor descripción del ciclo de marcha pueden realizarse medidas de algunos parámetros
generales descriptivos como la longitud, anchura y ángulo del paso, la cadencia y la velocidad de
marcha, figura 2.10.
Cada ciclo de marcha comprende dos pasos, siendo el paso la actividad entre el apoyo de un talón y el
apoyo sucesivo del talón contralateral.
La longitud del paso corresponde a la distancia que separa el apoyo inicial de un pie del apoyo inicial del
pie contralateral. Su media es de cm75 .
La anchura del paso es la distancia entre los puntos medios de ambos talones y su media es de 10cm.
en terreno llano.
El ángulo del paso es el que forma el eje longitudinal del pie con la línea de dirección de la progresión;
normalmente mide 15º.
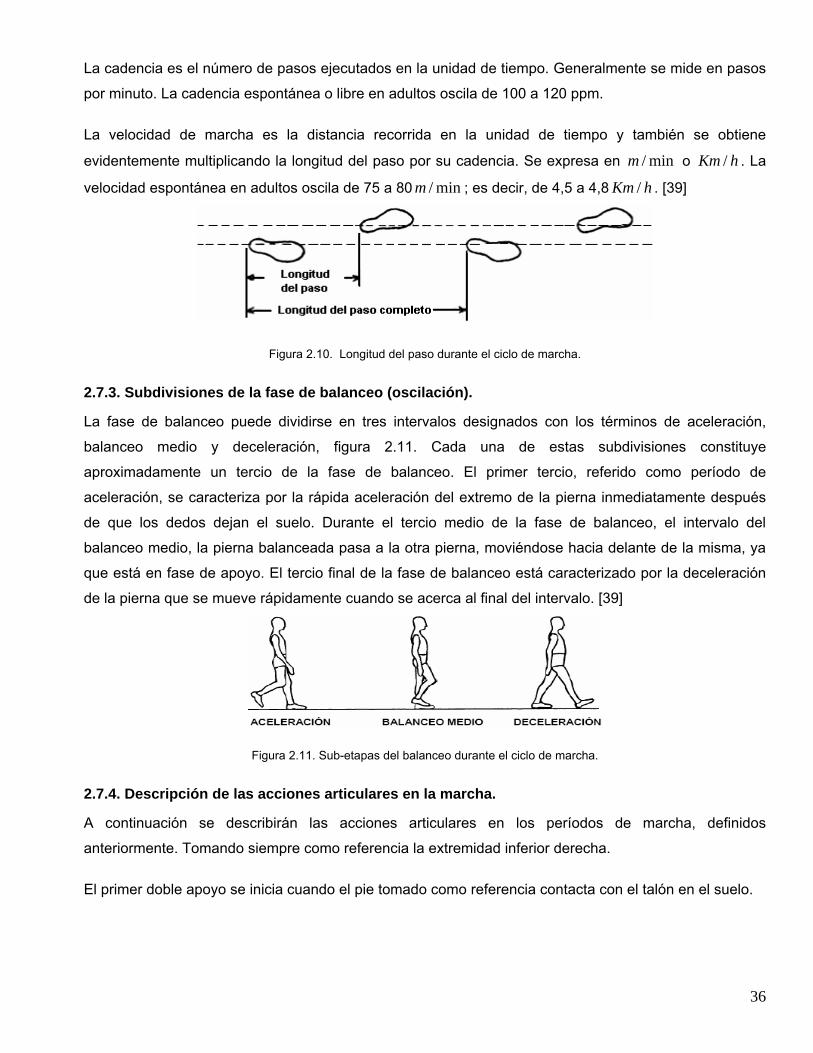
36
La cadencia es el número de pasos ejecutados en la unidad de tiempo. Generalmente se mide en pasos
por minuto. La cadencia espontánea o libre en adultos oscila de 100 a 120 ppm.
La velocidad de marcha es la distancia recorrida en la unidad de tiempo y también se obtiene
evidentemente multiplicando la longitud del paso por su cadencia. Se expresa en min/m o hKm / . La
velocidad espontánea en adultos oscila de 75 a 80 min/m ; es decir, de 4,5 a 4,8 hKm / . [39]
Figura 2.10. Longitud del paso durante el ciclo de marcha.
2.7.3. Subdivisiones de la fase de balanceo (oscilación).
La fase de balanceo puede dividirse en tres intervalos designados con los términos de aceleración,
balanceo medio y deceleración, figura 2.11. Cada una de estas subdivisiones constituye
aproximadamente un tercio de la fase de balanceo. El primer tercio, referido como período de aceleración, se caracteriza por la rápida aceleración del extremo de la pierna inmediatamente después
de que los dedos dejan el suelo. Durante el tercio medio de la fase de balanceo, el intervalo del
balanceo medio, la pierna balanceada pasa a la otra pierna, moviéndose hacia delante de la misma, ya
que está en fase de apoyo. El tercio final de la fase de balanceo está caracterizado por la deceleración
de la pierna que se mueve rápidamente cuando se acerca al final del intervalo. [39]
Figura 2.11. Sub-etapas del balanceo durante el ciclo de marcha.
2.7.4. Descripción de las acciones articulares en la marcha.
A continuación se describirán las acciones articulares en los períodos de marcha, definidos
anteriormente. Tomando siempre como referencia la extremidad inferior derecha.
El primer doble apoyo se inicia cuando el pie tomado como referencia contacta con el talón en el suelo.
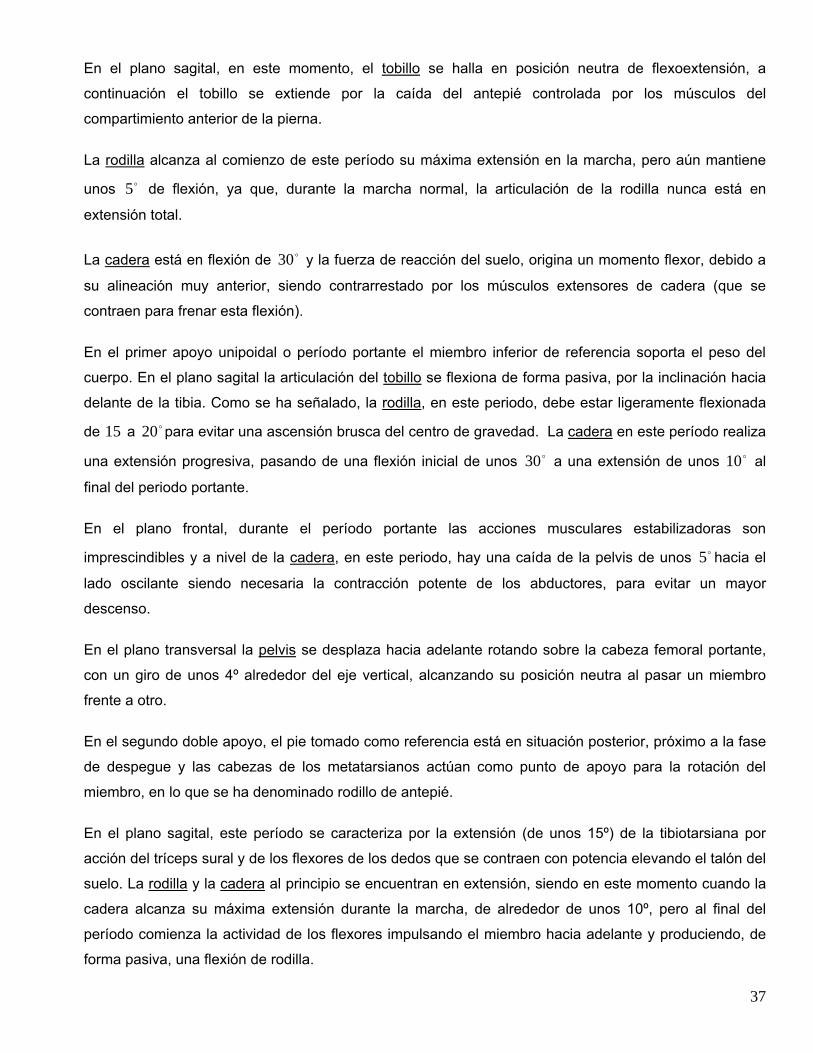
37
En el plano sagital, en este momento, el tobillo se halla en posición neutra de flexoextensión, a
continuación el tobillo se extiende por la caída del antepié controlada por los músculos del
compartimiento anterior de la pierna.
La rodilla alcanza al comienzo de este período su máxima extensión en la marcha, pero aún mantiene
unos o5 de flexión, ya que, durante la marcha normal, la articulación de la rodilla nunca está en
extensión total.
La cadera está en flexión de o30 y la fuerza de reacción del suelo, origina un momento flexor, debido a
su alineación muy anterior, siendo contrarrestado por los músculos extensores de cadera (que se
contraen para frenar esta flexión).
En el primer apoyo unipoidal o período portante el miembro inferior de referencia soporta el peso del
cuerpo. En el plano sagital la articulación del tobillo se flexiona de forma pasiva, por la inclinación hacia
delante de la tibia. Como se ha señalado, la rodilla, en este periodo, debe estar ligeramente flexionada
de 15 a o20 para evitar una ascensión brusca del centro de gravedad. La cadera en este período realiza
una extensión progresiva, pasando de una flexión inicial de unos o30 a una extensión de unos o10 al
final del periodo portante.
En el plano frontal, durante el período portante las acciones musculares estabilizadoras son
imprescindibles y a nivel de la cadera, en este periodo, hay una caída de la pelvis de unos o5 hacia el
lado oscilante siendo necesaria la contracción potente de los abductores, para evitar un mayor
descenso.
En el plano transversal la pelvis se desplaza hacia adelante rotando sobre la cabeza femoral portante,
con un giro de unos 4º alrededor del eje vertical, alcanzando su posición neutra al pasar un miembro
frente a otro.
En el segundo doble apoyo, el pie tomado como referencia está en situación posterior, próximo a la fase
de despegue y las cabezas de los metatarsianos actúan como punto de apoyo para la rotación del
miembro, en lo que se ha denominado rodillo de antepié.
En el plano sagital, este período se caracteriza por la extensión (de unos 15º) de la tibiotarsiana por
acción del tríceps sural y de los flexores de los dedos que se contraen con potencia elevando el talón del
suelo. La rodilla y la cadera al principio se encuentran en extensión, siendo en este momento cuando la
cadera alcanza su máxima extensión durante la marcha, de alrededor de unos 10º, pero al final del
período comienza la actividad de los flexores impulsando el miembro hacia adelante y produciendo, de
forma pasiva, una flexión de rodilla.
38
En el segundo apoyo unilateral, el pie tomado como referencia ha despegado e inicia su período
oscilante. El peso del cuerpo, por tanto, recae en la extremidad contralateral. Como se ha descrito, este
periodo está dividido en dos fases, separadas por el momento del cruce de ambos miembros inferiores.
En ambas fases, las principales acciones musculares que se desarrollan tienen lugar: En el plano sagital
En la fase inicial de la oscilación se produce la flexión en masa de todo el miembro inferior. La rodilla
aumenta su flexión alcanzando unos 65º en la mitad de la fase de oscilación, que corresponde al
máximo valor de la flexión en todo el ciclo de marcha, a cadencia alta no se necesita acción muscular
alguna para flexionar la rodilla ya que sigue un movimiento pendular. También la cadera alcanza su
máxima flexión en el ciclo, alrededor de 35º, hacia la mitad del período oscilante y se debe
principalmente al psoas iliaco ayudado por los aductores y el sartorio.
En la fase final de la oscilación, los objetivos son desacelerar la pierna y posicionar correctamente el pie
para establecer contacto con el suelo. Es necesaria una posición neutra del tobillo mantenida por los
flexores. La rodilla debe pasar de una flexión necesaria para la oscilación a una postura de extensión al
final de esta fase, que se va a completar por la acción de los vastos y el crural, mientras la contracción
antagonista de los isquiotibioperoneos impide una extensión de rodilla demasiado violenta, al tiempo que
desaceleran la flexión de cadera. [39]
2.8. Parámetros cinéticos y cinemáticos en un ciclo de marcha.
La biomecánica de la marcha "normal" a un ritmo natural está bien establecida en [40]. Los datos de los
tres planos de movimiento se dan en el Anexos II, figuras A-1, A-2, y A-3 para la cadera, la rodilla y
tobillo, respectivamente. Al examinar los datos de los ángulos para las tres articulaciones, se puede
observar que la mayor amplitud de movimiento se produce en la rodilla, en el plano sagital ( )o60≈ ,
seguida de la cadera ( )o40≈ , y finalmente, el tobillo ( )o25≈ . En el plano frontal, sin embargo, la cadera
presenta la mayor amplitud de movimiento ( )o10≈ , mientras que el movimiento de la rodilla es de
alrededor de o6 y el del tobillo es casi cero. [41]
El rango de movimiento para las tres articulaciones en el plano transversal es de aproximadamente o10 .
Con respecto al momento de la articulación en el plano sagital, el pico más grande del momento
extensor se produce en el tobillo antes del despegue de los dedos ( %47≈ ciclo de la marcha), por su
parte, el mayor pico del momento flexor se produce casi simultáneamente en la cadera ( %50 ciclo de la
marcha). Durante esta fase del ciclo de la locomoción, el pie se empuja desde el suelo y los músculos
del flexor plantar del tobillo están proporcionando un empuje hacia adelante. Los momentos de la
articulación del tobillo en el plano frontal, así como los momentos de la articulación en el plano
transversal para las tres articulaciones, parecen ser muy pequeños en comparación con los del plano
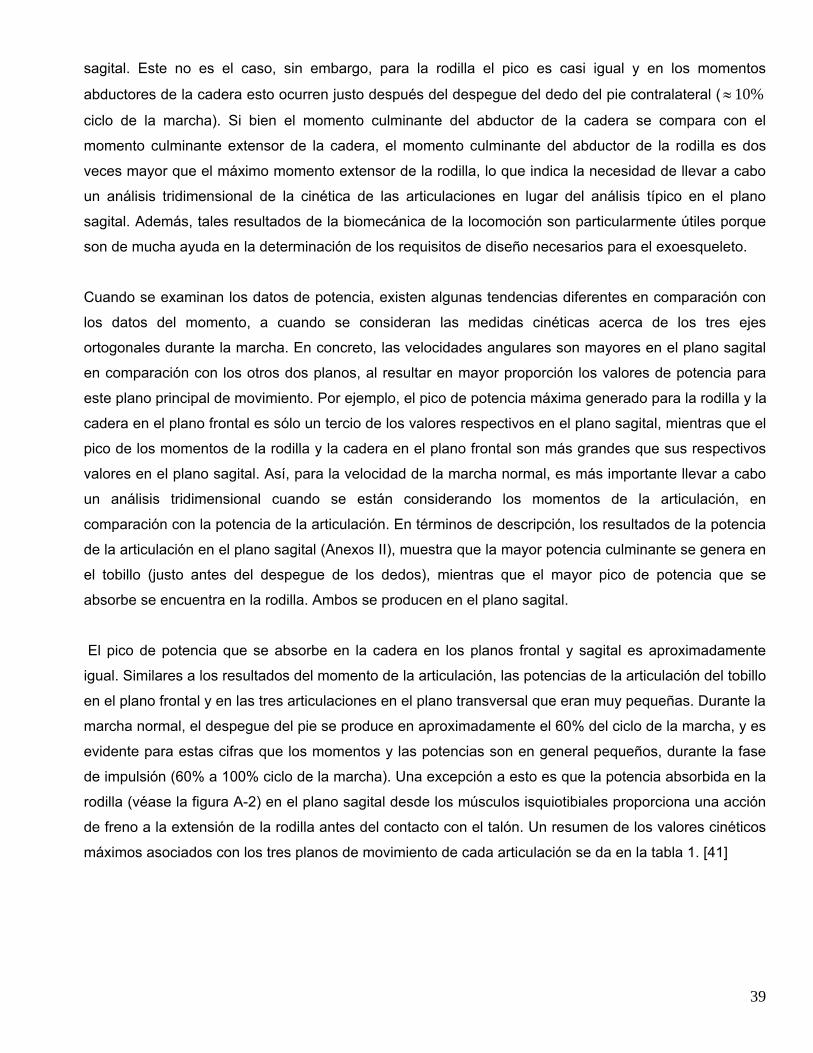
39
sagital. Este no es el caso, sin embargo, para la rodilla el pico es casi igual y en los momentos
abductores de la cadera esto ocurren justo después del despegue del dedo del pie contralateral ( %10≈
ciclo de la marcha). Si bien el momento culminante del abductor de la cadera se compara con el
momento culminante extensor de la cadera, el momento culminante del abductor de la rodilla es dos
veces mayor que el máximo momento extensor de la rodilla, lo que indica la necesidad de llevar a cabo
un análisis tridimensional de la cinética de las articulaciones en lugar del análisis típico en el plano
sagital. Además, tales resultados de la biomecánica de la locomoción son particularmente útiles porque
son de mucha ayuda en la determinación de los requisitos de diseño necesarios para el exoesqueleto.
Cuando se examinan los datos de potencia, existen algunas tendencias diferentes en comparación con
los datos del momento, a cuando se consideran las medidas cinéticas acerca de los tres ejes
ortogonales durante la marcha. En concreto, las velocidades angulares son mayores en el plano sagital
en comparación con los otros dos planos, al resultar en mayor proporción los valores de potencia para
este plano principal de movimiento. Por ejemplo, el pico de potencia máxima generado para la rodilla y la
cadera en el plano frontal es sólo un tercio de los valores respectivos en el plano sagital, mientras que el
pico de los momentos de la rodilla y la cadera en el plano frontal son más grandes que sus respectivos
valores en el plano sagital. Así, para la velocidad de la marcha normal, es más importante llevar a cabo
un análisis tridimensional cuando se están considerando los momentos de la articulación, en
comparación con la potencia de la articulación. En términos de descripción, los resultados de la potencia
de la articulación en el plano sagital (Anexos II), muestra que la mayor potencia culminante se genera en
el tobillo (justo antes del despegue de los dedos), mientras que el mayor pico de potencia que se
absorbe se encuentra en la rodilla. Ambos se producen en el plano sagital.
El pico de potencia que se absorbe en la cadera en los planos frontal y sagital es aproximadamente
igual. Similares a los resultados del momento de la articulación, las potencias de la articulación del tobillo
en el plano frontal y en las tres articulaciones en el plano transversal que eran muy pequeñas. Durante la
marcha normal, el despegue del pie se produce en aproximadamente el 60% del ciclo de la marcha, y es
evidente para estas cifras que los momentos y las potencias son en general pequeños, durante la fase
de impulsión (60% a 100% ciclo de la marcha). Una excepción a esto es que la potencia absorbida en la
rodilla (véase la figura A-2) en el plano sagital desde los músculos isquiotibiales proporciona una acción
de freno a la extensión de la rodilla antes del contacto con el talón. Un resumen de los valores cinéticos
máximos asociados con los tres planos de movimiento de cada articulación se da en la tabla 1. [41]
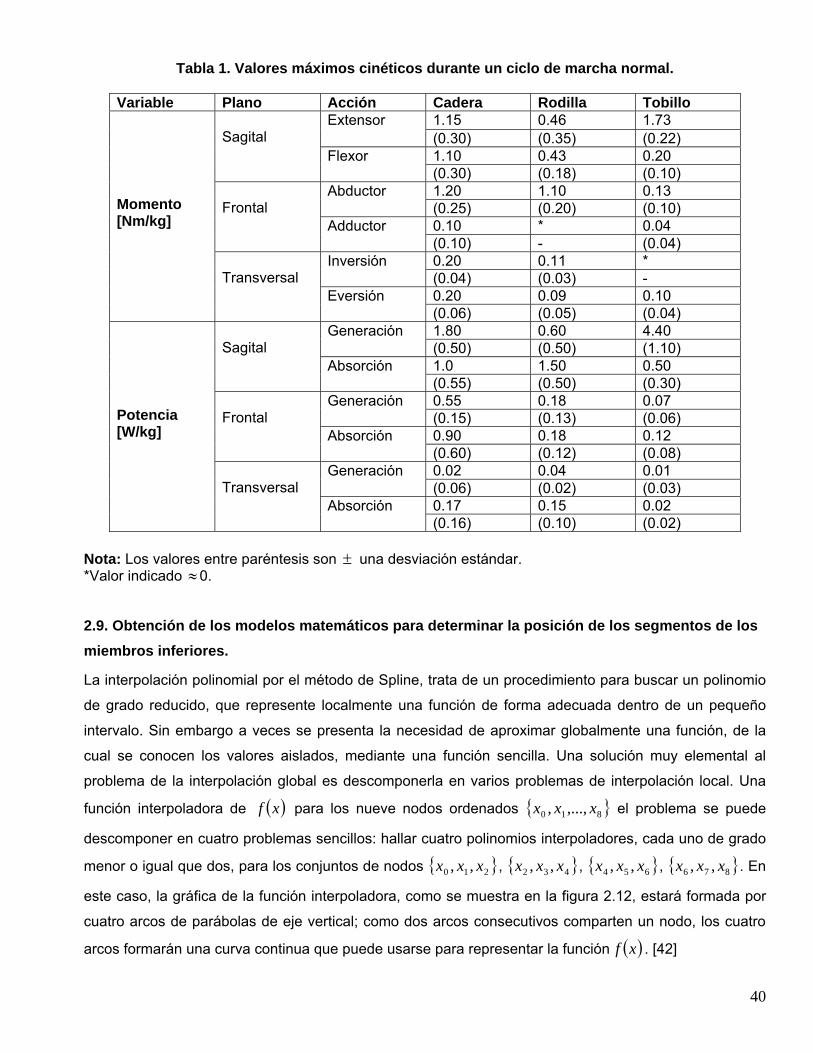
40
Tabla 1. Valores máximos cinéticos durante un ciclo de marcha normal.
Variable Plano Acción Cadera Rodilla Tobillo 1.15 0.46 1.73 Extensor (0.30) (0.35) (0.22) 1.10 0.43 0.20
Sagital
Flexor (0.30) (0.18) (0.10) 1.20 1.10 0.13 Abductor (0.25) (0.20) (0.10) 0.10 * 0.04
Frontal
Adductor (0.10) - (0.04) 0.20 0.11 * Inversión (0.04) (0.03) - 0.20 0.09 0.10
Momento [Nm/kg]
Transversal
Eversión (0.06) (0.05) (0.04) 1.80 0.60 4.40 Generación (0.50) (0.50) (1.10) 1.0 1.50 0.50
Sagital
Absorción (0.55) (0.50) (0.30) 0.55 0.18 0.07 Generación (0.15) (0.13) (0.06) 0.90 0.18 0.12
Frontal
Absorción (0.60) (0.12) (0.08) 0.02 0.04 0.01 Generación (0.06) (0.02) (0.03) 0.17 0.15 0.02
Potencia [W/kg]
Transversal
Absorción (0.16) (0.10) (0.02)
Nota: Los valores entre paréntesis son ± una desviación estándar. *Valor indicado ≈0.
2.9. Obtención de los modelos matemáticos para determinar la posición de los segmentos de los miembros inferiores.
La interpolación polinomial por el método de Spline, trata de un procedimiento para buscar un polinomio
de grado reducido, que represente localmente una función de forma adecuada dentro de un pequeño
intervalo. Sin embargo a veces se presenta la necesidad de aproximar globalmente una función, de la
cual se conocen los valores aislados, mediante una función sencilla. Una solución muy elemental al
problema de la interpolación global es descomponerla en varios problemas de interpolación local. Una
función interpoladora de ( )xf para los nueve nodos ordenados { }810 ,...,, xxx el problema se puede
descomponer en cuatro problemas sencillos: hallar cuatro polinomios interpoladores, cada uno de grado
menor o igual que dos, para los conjuntos de nodos { }210 ,, xxx , { }432 ,, xxx , { }654 ,, xxx , { }876 ,, xxx . En
este caso, la gráfica de la función interpoladora, como se muestra en la figura 2.12, estará formada por
cuatro arcos de parábolas de eje vertical; como dos arcos consecutivos comparten un nodo, los cuatro
arcos formarán una curva continua que puede usarse para representar la función ( )xf . [42]
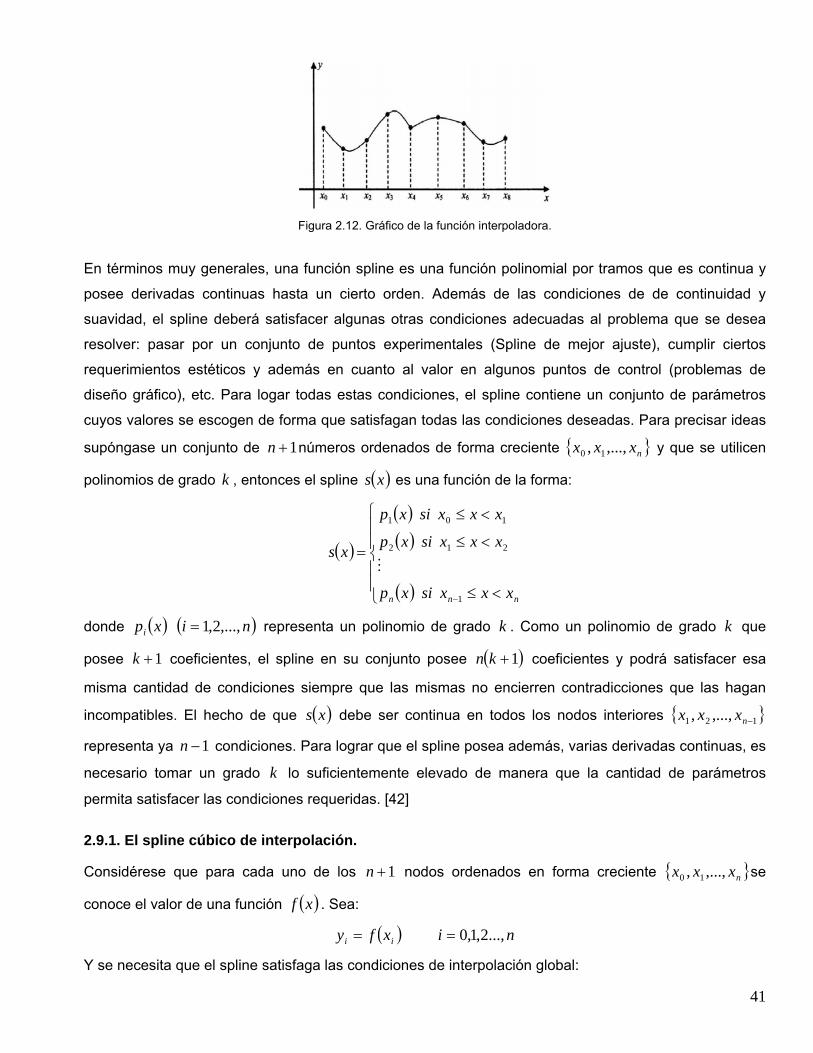
41
Figura 2.12. Gráfico de la función interpoladora.
En términos muy generales, una función spline es una función polinomial por tramos que es continua y
posee derivadas continuas hasta un cierto orden. Además de las condiciones de de continuidad y
suavidad, el spline deberá satisfacer algunas otras condiciones adecuadas al problema que se desea
resolver: pasar por un conjunto de puntos experimentales (Spline de mejor ajuste), cumplir ciertos
requerimientos estéticos y además en cuanto al valor en algunos puntos de control (problemas de
diseño gráfico), etc. Para logar todas estas condiciones, el spline contiene un conjunto de parámetros
cuyos valores se escogen de forma que satisfagan todas las condiciones deseadas. Para precisar ideas
supóngase un conjunto de 1+n números ordenados de forma creciente { }nxxx ,...,, 10 y que se utilicen
polinomios de grado k , entonces el spline ( )xs es una función de la forma:
( )
( )( )
( )⎪⎪
⎩
⎪⎪
⎨
⎧
<≤
<≤
<≤
=
− nnn xxxsixp
xxxsixp
xxxsixp
xs
1
212
101
M
donde ( )xpi ( )ni ,...,2,1= representa un polinomio de grado k . Como un polinomio de grado k que
posee 1+k coeficientes, el spline en su conjunto posee ( )1+kn coeficientes y podrá satisfacer esa
misma cantidad de condiciones siempre que las mismas no encierren contradicciones que las hagan
incompatibles. El hecho de que ( )xs debe ser continua en todos los nodos interiores { }121 ,...,, −nxxx
representa ya 1−n condiciones. Para lograr que el spline posea además, varias derivadas continuas, es
necesario tomar un grado k lo suficientemente elevado de manera que la cantidad de parámetros
permita satisfacer las condiciones requeridas. [42]
2.9.1. El spline cúbico de interpolación.
Considérese que para cada uno de los 1+n nodos ordenados en forma creciente { }nxxx ,...,, 10 se
conoce el valor de una función ( )xf . Sea:
( )ii xfy = ni ...,2,1,0=
Y se necesita que el spline satisfaga las condiciones de interpolación global:
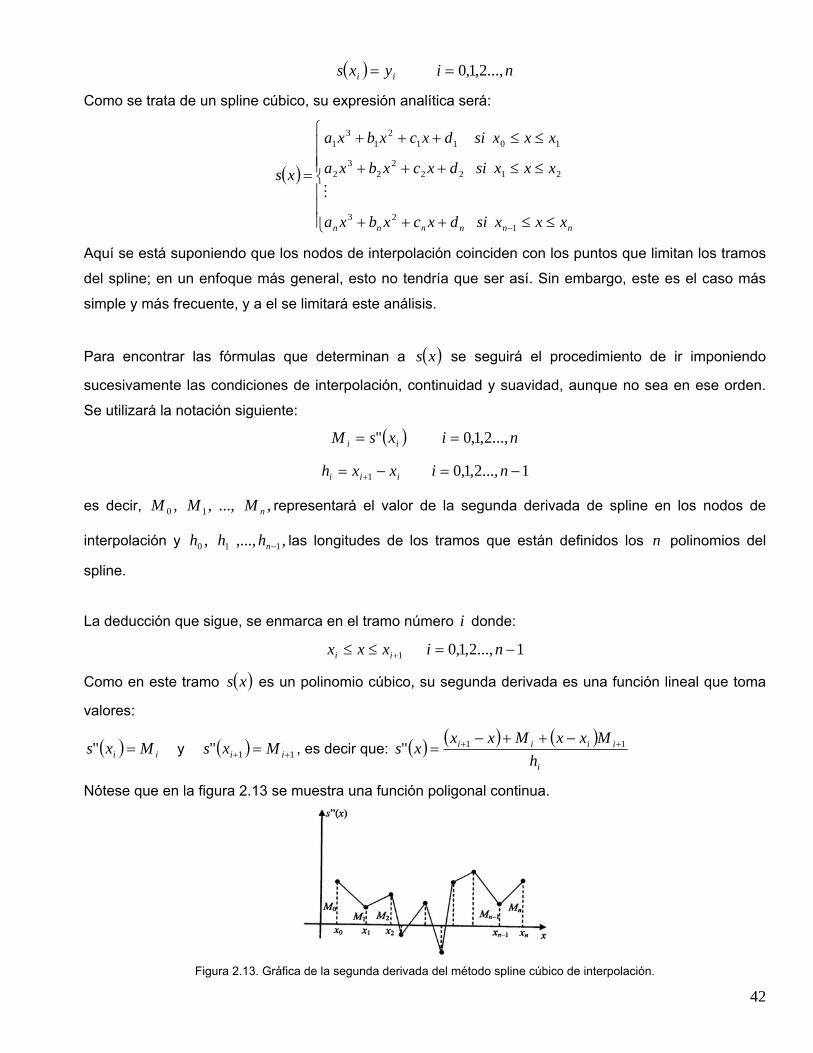
42
( ) ii yxs = ni ...,2,1,0=
Como se trata de un spline cúbico, su expresión analítica será:
( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
≤≤+++
≤≤+++
≤≤+++
=
− nnnnnn xxxsidxcxbxa
xxxsidxcxbxa
xxxsidxcxbxa
xs
123
21222
23
2
10112
13
1
M
Aquí se está suponiendo que los nodos de interpolación coinciden con los puntos que limitan los tramos
del spline; en un enfoque más general, esto no tendría que ser así. Sin embargo, este es el caso más
simple y más frecuente, y a el se limitará este análisis.
Para encontrar las fórmulas que determinan a ( )xs se seguirá el procedimiento de ir imponiendo
sucesivamente las condiciones de interpolación, continuidad y suavidad, aunque no sea en ese orden.
Se utilizará la notación siguiente:
( )ii xsM "= ni ...,2,1,0=
iii xxh −= +1 1...,2,1,0 −= ni
es decir, ,...,,, 10 nMMM representará el valor de la segunda derivada de spline en los nodos de
interpolación y ,,...,, 110 −nhhh las longitudes de los tramos que están definidos los n polinomios del
spline.
La deducción que sigue, se enmarca en el tramo número i donde:
1+≤≤ ii xxx 1...,2,1,0 −= ni
Como en este tramo ( )xs es un polinomio cúbico, su segunda derivada es una función lineal que toma
valores:
( ) ii Mxs =" y ( ) 11" ++ = ii Mxs , es decir que: ( ) ( ) ( )i
iiii
hMxxMxx
xs 11" ++ −++−=
Nótese que en la figura 2.13 se muestra una función poligonal continua.
Figura 2.13. Gráfica de la segunda derivada del método spline cúbico de interpolación.
43
Luego de sustituir y agrupar varios términos se llega a la siguiente expresión:
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]66
1111133
1 ++++++ −+−−
−+−+
−+−= iiiii
i
iiii
i
iiii MxxMxxhh
yxxyxxh
MxxMxxxs
A los efectos de la evaluación de ( )xs es preferible, para disminuir el número de operaciones, definir las
variables u y v como:
ixxu −= y xxv i −= +1 , por tanto, en esta forma es más compacta:
( ) ( )66
11133
+++ +−
++
+= iii
i
ii
i
ii uMvMhhuyvy
hMuMv
xs
Calculando en forma matricial resulta:
H*M=Y donde:
H=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+
+
+
−−−
−
36
6
36
636
63
122
2
322
2211
110
nnn
n
hhh
h
hhh
hhhh
hhh
OO
O M=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−1
3
2
1
nM
MMM
M
Y=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−
−−
−
−−
−
−−
−
−
−−
−
−
2
21
1
1
2
23
3
34
1
12
2
23
0
01
1
12
n
nn
n
nn
hyy
hyy
hyy
hyy
hyy
hyy
hyy
hyy
M
El sistema que se obtiene es tridiagonal y con diagonal predominante, por tanto, puede ser resuelto con
gran eficiencia por el método de Gauss especializado en sistemas tridiagonales. [42]
2.10. Obtención de los intervalos y polinomios mediante las ecuaciones de spline.
Para obtener los valores angulares de los segmentos de los miembros inferiores, en función del
porciento del ciclo de marcha, a partir de las curvas obtenidas de [40], figura 2.14. Se aplicó, el método
numérico spline cúbico de interpolación, donde se obtuvo los polinomios para cada intervalo, tablas 2, 3
y 4.
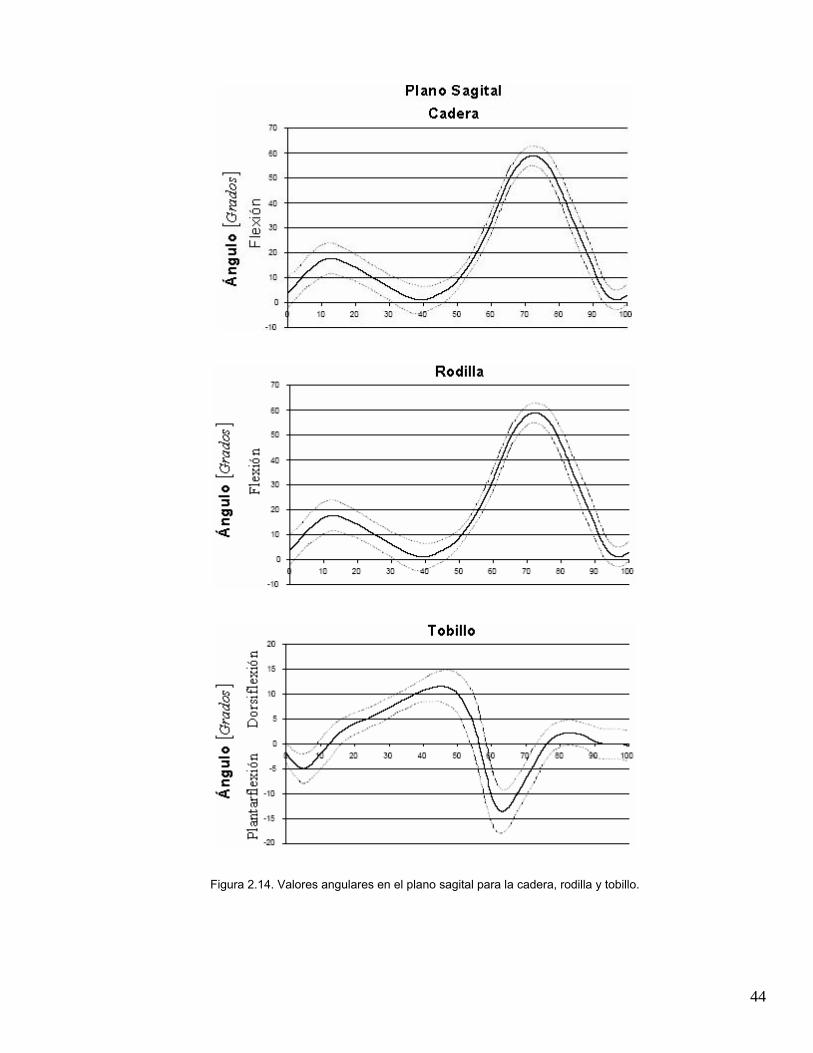
44
Figura 2.14. Valores angulares en el plano sagital para la cadera, rodilla y tobillo.
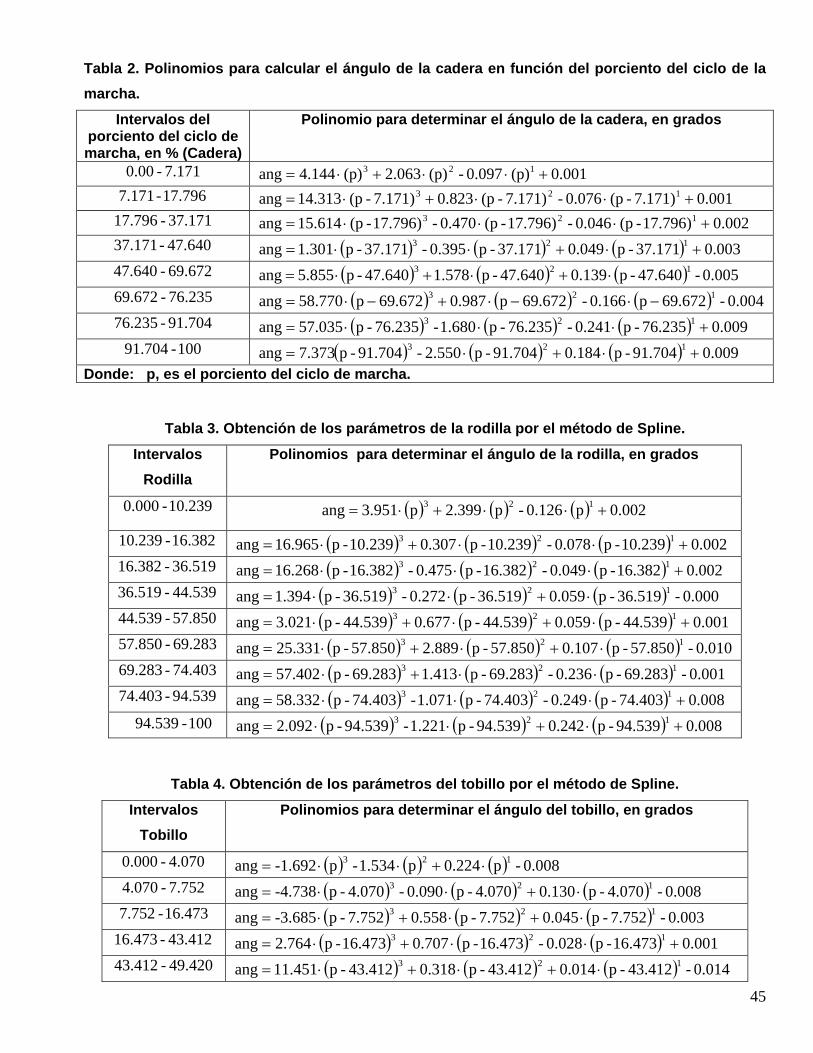
45
Tabla 2. Polinomios para calcular el ángulo de la cadera en función del porciento del ciclo de la marcha.
Intervalos del porciento del ciclo de marcha, en % (Cadera)
Polinomio para determinar el ángulo de la cadera, en grados
7.171-0.00 0.001(p)0.097-(p)2.063(p)4.144ang 123 +⋅⋅+⋅= 17.796-7.171 0.0017.171)-(p0.076-7.171)-(p0.8237.171)-(p14.313ang 123 +⋅⋅+⋅= 37.171-17.796 0.00217.796)-(p0.046-17.796)-(p0.470-17.796)-(p15.614ang 123 +⋅⋅⋅= 47.640-37.171 ( ) ( ) ( ) 0.00337.171-p0.04937.171-p0.395-37.171-p1.301ang 123 +⋅+⋅⋅= 69.672-47.640 ( ) ( ) ( ) 0.005-47.640-p0.13947.640-p1.57847.640-p5.855ang 123 ⋅+⋅+⋅= 76.235-69.672 ( ) ( ) ( ) 0.004-672.69p0.166-672.69p0.987672.69p58.770ang 123 −⋅−⋅+−⋅=91.704-76.235 ( ) ( ) ( ) 0.00976.235-p0.241-76.235-p1.680-76.235-p57.035ang 123 +⋅⋅⋅=
100-91.704 ( ) ( ) ( ) 0.00991.704-p0.18491.704-p2.550-91.704-p7.373ang 123 +⋅+⋅= Donde: p, es el porciento del ciclo de marcha.
Tabla 3. Obtención de los parámetros de la rodilla por el método de Spline.
Tabla 4. Obtención de los parámetros del tobillo por el método de Spline.
Intervalos Tobillo
Polinomios para determinar el ángulo del tobillo, en grados
4.070-0.000 ( ) ( ) ( ) 0.008-p0.224p1.534-p-1.692ang 123 ⋅+⋅⋅= 7.752-4.070 ( ) ( ) ( ) 0.008-4.070-p0.1304.070-p0.090-4.070-p-4.738ang 123 ⋅+⋅⋅=
16.473-7.752 ( ) ( ) ( ) 0.003-7.752-p0.0457.752-p0.5587.752-p-3.685ang 123 ⋅+⋅+⋅= 43.412-16.473 ( ) ( ) ( ) 0.00116.473-p0.028-16.473-p0.70716.473-p2.764ang 123 +⋅⋅+⋅= 49.420-43.412 ( ) ( ) ( ) 0.014-43.412-p0.01443.412-p0.31843.412-p11.451ang 123 ⋅+⋅+⋅=
Intervalos Rodilla
Polinomios para determinar el ángulo de la rodilla, en grados
10.239-0.000 ( ) ( ) ( ) 0.002 p0.126- p2.399p3.951ang 123 +⋅⋅+⋅= 16.382-10.239 ( ) ( ) ( ) 0.00210.239-p0.078-10.239-p0.30710.239-p16.965ang 123 +⋅⋅+⋅= 36.519-16.382 ( ) ( ) ( ) 0.00216.382-p0.049-16.382-p0.475-16.382-p16.268ang 123 +⋅⋅⋅= 44.539-36.519 ( ) ( ) ( ) 0.000-36.519-p0.05936.519-p0.272-36.519-p1.394ang 123 ⋅+⋅⋅= 57.850-44.539 ( ) ( ) ( ) 0.00144.539-p0.05944.539-p0.67744.539-p3.021ang 123 +⋅+⋅+⋅= 69.283-57.850 ( ) ( ) ( ) 0.010-57.850-p0.10757.850-p2.88957.850-p25.331ang 123 ⋅+⋅+⋅=74.403-69.283 ( ) ( ) ( ) 0.001-69.283-p0.236-69.283-p1.41369.283-p57.402ang 123 ⋅⋅+⋅= 94.539-74.403 ( ) ( ) ( ) 0.00874.403-p0.249-74.403-p1.071-74.403-p58.332ang 123 +⋅⋅⋅=
100-94.539 ( ) ( ) ( ) 0.00894.539-p0.24294.539-p1.221-94.539-p2.092ang 123 +⋅+⋅⋅=
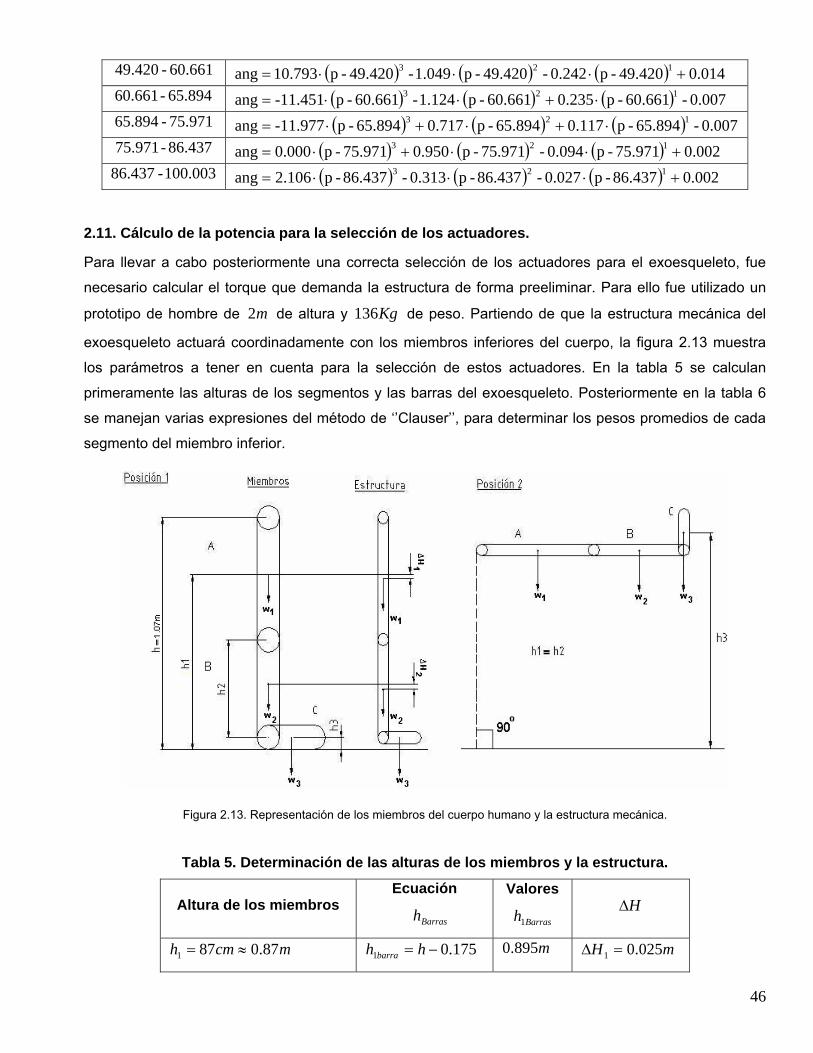
46
60.661-49.420 ( ) ( ) ( ) 0.01449.420-p0.242-49.420-p1.049-49.420-p10.793ang 123 +⋅⋅⋅= 65.894-60.661 ( ) ( ) ( ) 0.007-60.661-p0.23560.661-p1.124-60.661-p-11.451ang 123 ⋅+⋅⋅= 75.971-65.894 ( ) ( ) ( ) 0.007-65.894-p0.11765.894-p0.71765.894-p-11.977ang 123 ⋅+⋅+⋅=86.437-75.971 ( ) ( ) ( ) 0.00275.971-p0.094-75.971-p0.95075.971-p0.000ang 123 +⋅⋅+⋅=
100.003-86.437 ( ) ( ) ( ) 0.00286.437-p0.027-86.437-p0.313-86.437-p2.106ang 123 +⋅⋅⋅=
2.11. Cálculo de la potencia para la selección de los actuadores.
Para llevar a cabo posteriormente una correcta selección de los actuadores para el exoesqueleto, fue
necesario calcular el torque que demanda la estructura de forma preeliminar. Para ello fue utilizado un
prototipo de hombre de m2 de altura y Kg136 de peso. Partiendo de que la estructura mecánica del
exoesqueleto actuará coordinadamente con los miembros inferiores del cuerpo, la figura 2.13 muestra
los parámetros a tener en cuenta para la selección de estos actuadores. En la tabla 5 se calculan
primeramente las alturas de los segmentos y las barras del exoesqueleto. Posteriormente en la tabla 6
se manejan varias expresiones del método de ‘’Clauser’’, para determinar los pesos promedios de cada
segmento del miembro inferior.
Figura 2.13. Representación de los miembros del cuerpo humano y la estructura mecánica.
Tabla 5. Determinación de las alturas de los miembros y la estructura.
Altura de los miembros Ecuación
Barrash Valores
Barrash1 HΔ
mcmh 87.0871 ≈= 175.01 −= hh barra m895.0 mH 025.01 =Δ
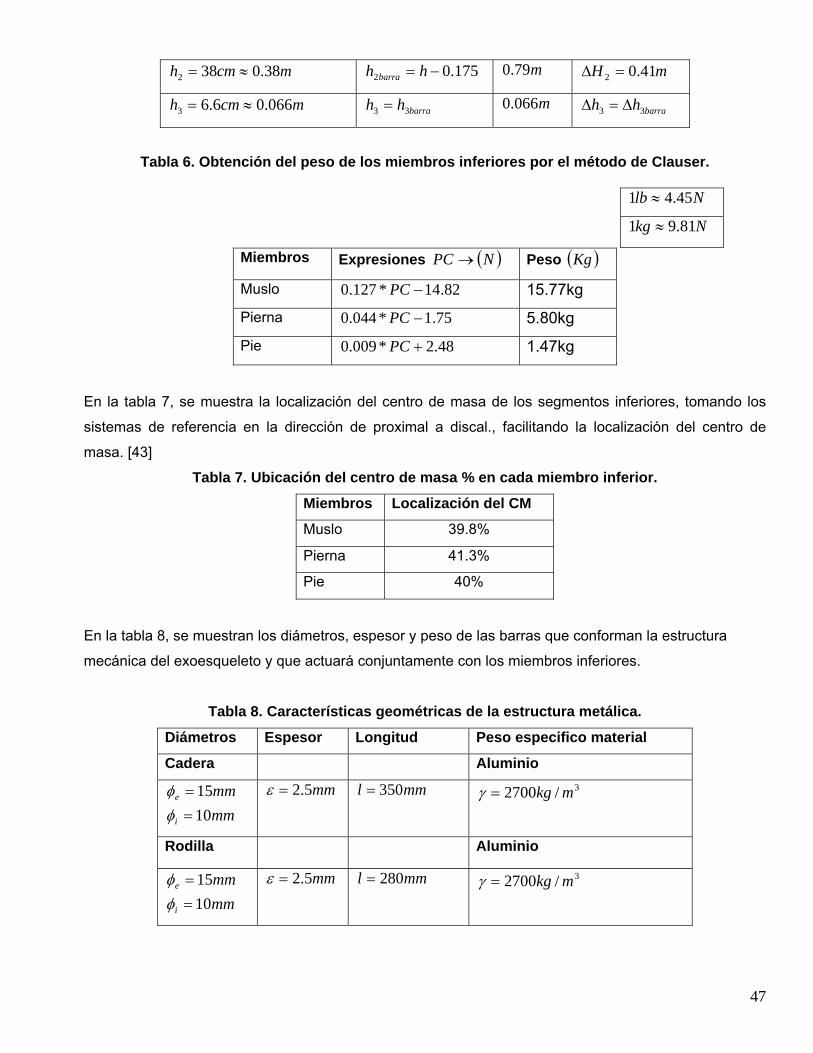
47
mcmh 38.0382 ≈= 175.02 −= hh barra m79.0 mH 41.02 =Δ
mcmh 066.06.63 ≈= barrahh 33 = m066.0 barrahh 33 Δ=Δ
Tabla 6. Obtención del peso de los miembros inferiores por el método de Clauser.
Miembros Expresiones ( )NPC → Peso ( )Kg
Muslo 82.14*127.0 −PC 15.77kg
Pierna 75.1*044.0 −PC 5.80kg
Pie 48.2*009.0 +PC 1.47kg
En la tabla 7, se muestra la localización del centro de masa de los segmentos inferiores, tomando los
sistemas de referencia en la dirección de proximal a discal., facilitando la localización del centro de
masa. [43]
Tabla 7. Ubicación del centro de masa % en cada miembro inferior.
Miembros Localización del CM
Muslo 39.8%
Pierna 41.3%
Pie 40%
En la tabla 8, se muestran los diámetros, espesor y peso de las barras que conforman la estructura
mecánica del exoesqueleto y que actuará conjuntamente con los miembros inferiores.
Tabla 8. Características geométricas de la estructura metálica.
Diámetros Espesor Longitud Peso especifico material
Cadera Aluminio
mmmm
i
e
1015
==
φφ
mm5.2=ε mml 350= 3/2700 mkg=γ
Rodilla Aluminio
mmmm
i
e
1015
==
φφ
mm5.2=ε mml 280= 3/2700 mkg=γ
Nlb 45.41 ≈
Nkg 81.91 ≈

48
Posteriormente se procede al cálculo de los volúmenes de las barras de la estructura donde fueron
utilizadas algunas expresiones, obteniendo los resultados que se muestran a continuación (tabla 9).
Tabla 9. Cálculo de los volúmenes de las barras.
Una vez de obtenido los volúmenes totales de las barras en 3m , lo multiplicamos el peso específico del
material en 3/ mkg y así se obtiene el peso de cada unas de las barras como se muestra en la tabla 10.
Tabla 10. Obtención de los pesos de la estructura metálica.
Expresión General Resultados
kgw 108.01 = kgw 054.02 =
kgw 45.03 =
Tbarras Vw *
kgwmotor 23.0= Nota: El volumen 3w referido al peso del zapato y el motorw fueron tomados específicamente como un dato de estimación.
Por último se procede a calcular torque necesario para levantar el pie de 0 a o90 por el principio de
Trabajo y Energía donde fueron utilizadas las siguientes expresiones de cálculo.
2211
22221111
2211
EpgWEpgEcEpeEpgWEcEpeEpg
EmWEm
a
a
a
=+++=+++
=+ Donde: 0,,,, 22111 =EcEpeEcEpeEpe
111111 ***** ZapZapEstEstBBEstEstAA hwhwhwhwhwEpg ++++=
2222222 ***** ZapZapEstEstBBEstEstAA hwhwhwhwhwEpg ++++= Por tanto, despejando las expresiones se obtiene:
122121 * EpgEpgMW aa −=Δ= θ hgmEpg **=
Cilindro (Muslo) Total Resultado
hAVhAV
I
E
**
2
1
==
hrV
hrV
**
**2
2
21
π
π
=
= 12 VVVT −= 300004.0 mV =
Cilindro (Pierna)
hAVhAV
I
E
**
2
1
==
hrV
hrV
**
**2
2
21
π
π
=
= 12 VVVT −= 300002.0 mV =
49
21
1221
aa
EpgEpgMθΔ−
= ,
Calculando mediante la expresión anterior se pudo obtener que el momento, mKgM a *036.021 = , y multiplicado por N81.9 que tiene un kg , finalmente se obtiene que el momento, NmM a 35.021 = .
Conclusiones Parciales.
1. Para llevar a cabo un estudio biomecánico del cuerpo humano, primeramente podemos decir que el
mismo está dividido en tres planos, que son: plano Sagital, Frontal y Transversal y tres ejes que se
encuentra situados sobre dichos planos, y son: eje vertical, transversal y antero – posterior.
2. El sistema óseo de los miembros inferiores presenta una composición de 62 huesos, en el muslo se
encuentra el fémur, que constituye el hueso más largo del cuerpo humano, en la rodilla se encuentra
la rótula, y en la pierna la tibia y el peroné.
3. El sistema articular de los miembros inferiores del cuerpo humano está formado por tres
articulaciones que son: la articulación de la cadera que presenta tres grados de libertad. La
articulación de la rodilla presenta dos grados de libertad; por último la articulación del tobillo presenta
tres grados de libertad.
4. Los grados de libertad más importantes a tener en cuenta en el diseño de un exoesqueleto son los
grados de libertad que se encuentran sobre el plano sagital, ya que sobre este plano se realizan los
movimientos más importantes que se ejecutan durante la marcha. Por tanto, el diseño de un
exoesqueleto constará, como mínimo, con tres grados de libertad. Uno en la articulación de la
cadera, otro en la articulación de la rodilla, y el tercero en la articulación del tobillo.
5. La cadera permite movimiento de flexión en una amplitud de 0 a 120 grados mientras que en
extensión es de 0 a 30 grados. La rodilla alcanza una máxima extensión de 180 grados y una flexión
de 40 grados. Finalmente el tobillo alcanza valores de 20 a 30 grados en la flexión y de 30 a 50
grados en la extensión.
6. El ciclo de marcha se divide en dos fases, la fase de apoyo en la cual el pie de referencia está en
contacto con el suelo y la fase de balanceo en la que el pie de referencia está suspendido en el aire.
Esta última a su vez se divide en tres intervalos designados con los términos de aceleración,
balanceo medio y deceleración.
7. Se obtuvieron los polinomios para determinar la posición angular del fémur, la pierna y el pie en
función del porciento del ciclo de marcha. Estos polinomios fueron obtenidos mediante la aplicación
50
de la interpolación de spline a las curvas obtenidas por Kadaba, M.P. en su articulo “Measurement of
lower extremity kinematics during level walking”
8. Para determinar el torque necesario para la selección de los actuadores, se aplicó el método de
trabajo-energía a un prototipo de persona de 2 m de altura y 136 Kg. (aproximadamente 300 libras)
de peso, obteniéndose como resultado un torque de 0.35 Nm.
Capítulo III Diseño de la estructura mecánica del exoesqueleto y cálculo por el método de los elementos finitos.
3.1. Introducción
El diseño de un exoesqueleto para la rehabilitación de los miembros inferiores de pacientes con
disparidad consta de las siguientes etapas o fases de trabajo e investigación:
1. Diseño estructural, es decir, diseño de la estructura mecánica del exoesqueleto.
2. Diseño electrónico.
3. Diseño del sistema de control.
4. Diseño de la interfaz del usuario.
3.1.1. Diseño estructural.
Para el diseño estructural se considera que el exoesqueleto debe ser lo suficientemente adaptable, para
poder aplicarse al mayor número posible de pacientes. Por lo tanto el exoesqueleto debe contar con
segmentos laterales de longitud regulable, los cuales corresponden a las partes del muslo y las piernas.
Otro elemento a considerar son los grados de libertad de cada articulación, así como, los rangos
angulares que poseen las articulaciones que son las que definen los valores sobre los que trabajarán los
actuadores. Al desarrollar el diseño del exoesqueleto es necesario tener en cuenta topes mecánicos
para evitar luxaciones el paciente.
Un elemento importante a la hora del diseño estructural, es el material a usar para la fabricación de la
estructura. Este debe ser un material de bajo peso específico, con el objetivo de que la estructura sea lo
más liviana posible y a su vez, lo más rígida, para lo cual pueden emplear fibras de carbón o aluminio.
Además, de que el diseño sea lo más funcional y a la vez debe otorgarle comodidad y estética.
La sujeción de la estructura del exoesqueleto al paciente, se realiza a través de anillos, los cuales deben
ser de un material plástico o polipropileno, ya que este material es liviano pero a la vez resistente. La
parte interior de estos estaría recubierta con espuma de baja densidad, la cual actuaría de medio
51
amortiguador para que la estructura no lastime al paciente. A esto se le sumaría una correa de velcro
para sujetar el exoesqueleto a la medida de la pierna del paciente.
En esta etapa de diseño, se debe realizar la selección de los actuadores, los cuales deben ser livianos,
silenciosos, rápidos, de bajo consumo, robustos en cuanto a control, confiables y seguros. Los grados
de libertad en los que se propone actuar son tres: flexión-extensión de la cadera, flexión-extensión de la
rodilla y flexión plantar y dorsal del tobillo, debido a que los pares más exigentes durante la marcha se
encuentran en el plano sagital.
Teniendo en cuenta la información de ángulos, torque, potencia y velocidad en las articulaciones,
requeridas para un funcionamiento correcto, se procedió a realizar un sondeo de la disponibilidad en el
mercado de motores que satisfagan dichas necesidades. De dicha búsqueda, y teniendo en cuenta las
consignas del diseño propuesto, se propone la utilización de componentes de las empresas ‘’Robodrive’’
y ‘’Harmonic Drive’’, debido a sus características de pequeño tamaño y peso reducido.
3.1.2. Diseño electrónico.
En esta etapa del diseño se realiza la selección del sistema de medición y adquisición de datos, lo cual
es muy importante para el control del exoesqueleto. La medición de las variables cinemáticas y cinéticas
son muy importantes para predecir y controlar la trayectoria de las articulaciones en el exoesqueleto. El
sistema de medición está compuesto por un conjunto de sensores y transductores encargados de
adquirir las variables cinemáticas y cinéticas. En esta etapa también se lleva a cabo el diseño de los
circuitos.
3.1.3. Diseño del sistema de control y mando.
El objetivo del sistema de control es mover el exoesqueleto de tal manera que sea útil para la
rehabilitación de pacientes, mediante el re-aprendizaje de patrones neuromusculares. Teniendo en
cuenta que los pacientes que utilizarán este exoesqueleto no pueden realizar movimientos de la vida
cotidiana, ni movimientos de rehabilitación por sí solos, el exoesqueleto deberá mover las extremidades
inferiores sobre trayectorias predefinidas en el tiempo. Este exoesqueleto puede entenderse más como
un asistente de movimiento, que como un aumentador de fuerza.
El control se puede realizar basado en la detección de intención del paciente, con árboles de decisión de
patrones de reconocimiento modificados y dependiendo de la afección del paciente. En caso de
discapacidad motora severa, la detección de intención se realizaría de forma secundaria, pero siempre
fomentando la interactuación del paciente con el exoesqueleto.
La señal EMG paciente constituye uno de los métodos que se utiliza como estrategia de control y
detección de intención, durante la rehabilitación. Otra forma capaz de realizar el control, es de forma
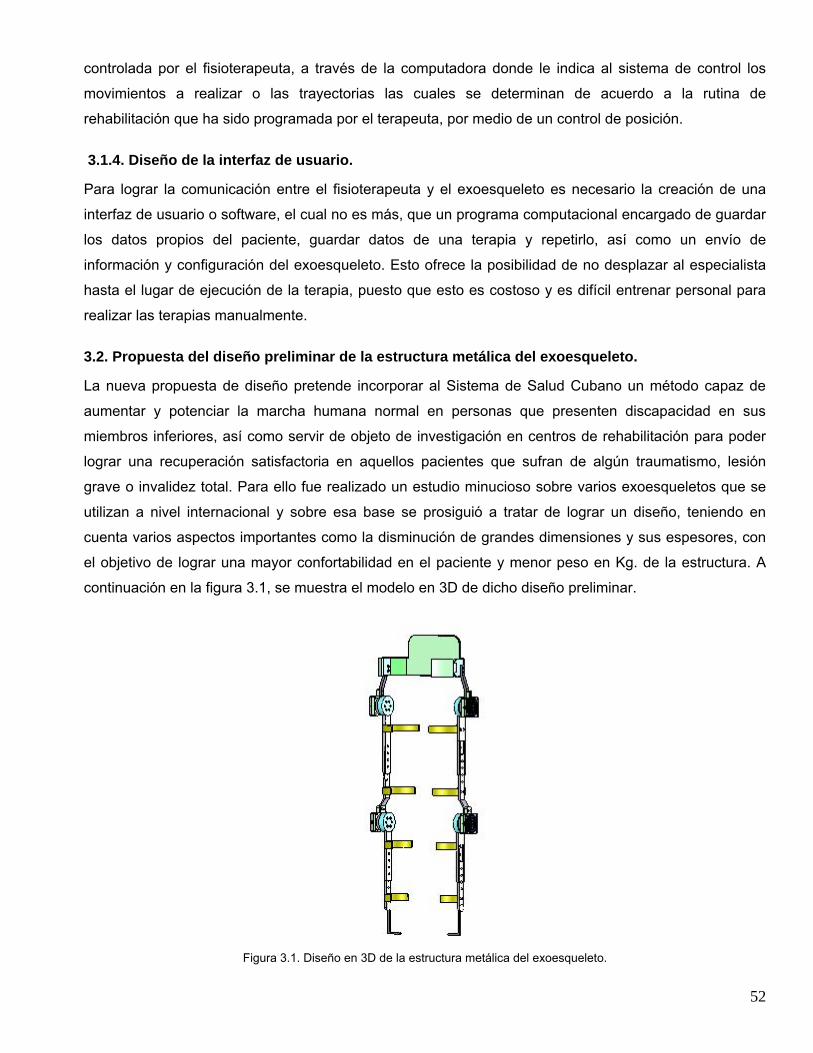
52
controlada por el fisioterapeuta, a través de la computadora donde le indica al sistema de control los
movimientos a realizar o las trayectorias las cuales se determinan de acuerdo a la rutina de
rehabilitación que ha sido programada por el terapeuta, por medio de un control de posición.
3.1.4. Diseño de la interfaz de usuario.
Para lograr la comunicación entre el fisioterapeuta y el exoesqueleto es necesario la creación de una
interfaz de usuario o software, el cual no es más, que un programa computacional encargado de guardar
los datos propios del paciente, guardar datos de una terapia y repetirlo, así como un envío de
información y configuración del exoesqueleto. Esto ofrece la posibilidad de no desplazar al especialista
hasta el lugar de ejecución de la terapia, puesto que esto es costoso y es difícil entrenar personal para
realizar las terapias manualmente.
3.2. Propuesta del diseño preliminar de la estructura metálica del exoesqueleto.
La nueva propuesta de diseño pretende incorporar al Sistema de Salud Cubano un método capaz de
aumentar y potenciar la marcha humana normal en personas que presenten discapacidad en sus
miembros inferiores, así como servir de objeto de investigación en centros de rehabilitación para poder
lograr una recuperación satisfactoria en aquellos pacientes que sufran de algún traumatismo, lesión
grave o invalidez total. Para ello fue realizado un estudio minucioso sobre varios exoesqueletos que se
utilizan a nivel internacional y sobre esa base se prosiguió a tratar de lograr un diseño, teniendo en
cuenta varios aspectos importantes como la disminución de grandes dimensiones y sus espesores, con
el objetivo de lograr una mayor confortabilidad en el paciente y menor peso en Kg. de la estructura. A
continuación en la figura 3.1, se muestra el modelo en 3D de dicho diseño preliminar.
Figura 3.1. Diseño en 3D de la estructura metálica del exoesqueleto.
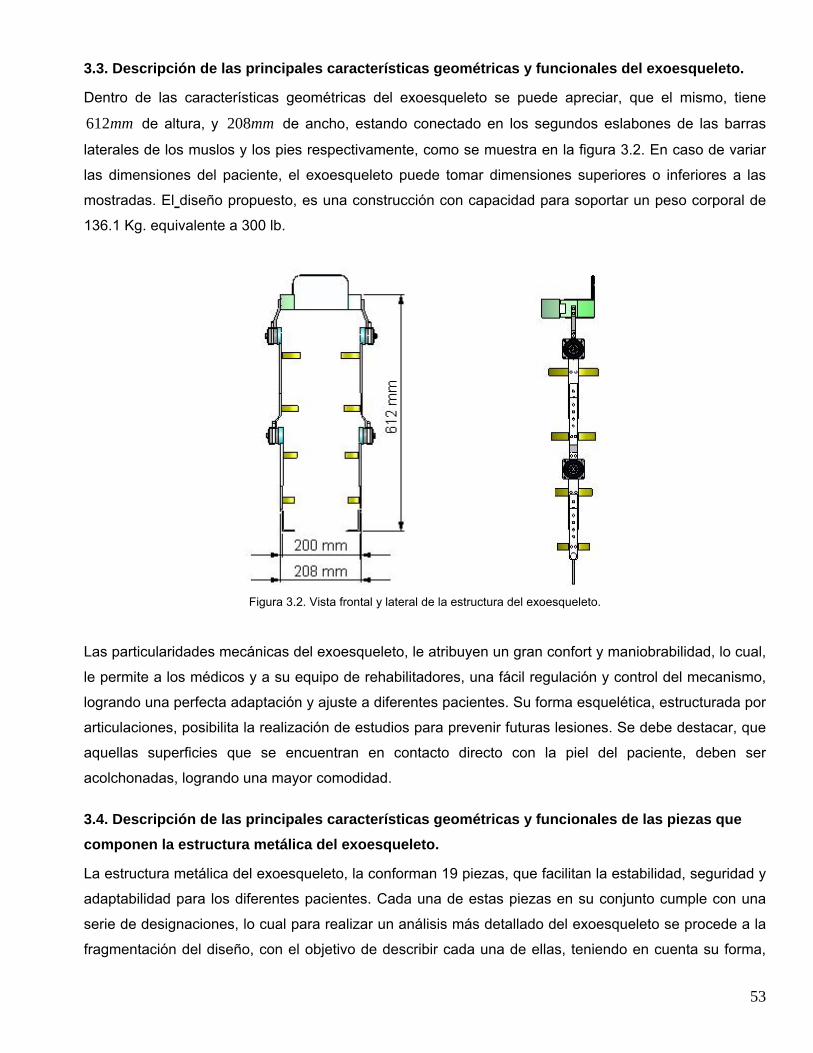
53
3.3. Descripción de las principales características geométricas y funcionales del exoesqueleto.
Dentro de las características geométricas del exoesqueleto se puede apreciar, que el mismo, tiene
mm612 de altura, y mm208 de ancho, estando conectado en los segundos eslabones de las barras
laterales de los muslos y los pies respectivamente, como se muestra en la figura 3.2. En caso de variar
las dimensiones del paciente, el exoesqueleto puede tomar dimensiones superiores o inferiores a las
mostradas. El diseño propuesto, es una construcción con capacidad para soportar un peso corporal de
136.1 Kg. equivalente a 300 lb.
Figura 3.2. Vista frontal y lateral de la estructura del exoesqueleto.
Las particularidades mecánicas del exoesqueleto, le atribuyen un gran confort y maniobrabilidad, lo cual,
le permite a los médicos y a su equipo de rehabilitadores, una fácil regulación y control del mecanismo,
logrando una perfecta adaptación y ajuste a diferentes pacientes. Su forma esquelética, estructurada por
articulaciones, posibilita la realización de estudios para prevenir futuras lesiones. Se debe destacar, que
aquellas superficies que se encuentran en contacto directo con la piel del paciente, deben ser
acolchonadas, logrando una mayor comodidad.
3.4. Descripción de las principales características geométricas y funcionales de las piezas que componen la estructura metálica del exoesqueleto.
La estructura metálica del exoesqueleto, la conforman 19 piezas, que facilitan la estabilidad, seguridad y
adaptabilidad para los diferentes pacientes. Cada una de estas piezas en su conjunto cumple con una
serie de designaciones, lo cual para realizar un análisis más detallado del exoesqueleto se procede a la
fragmentación del diseño, con el objetivo de describir cada una de ellas, teniendo en cuenta su forma,
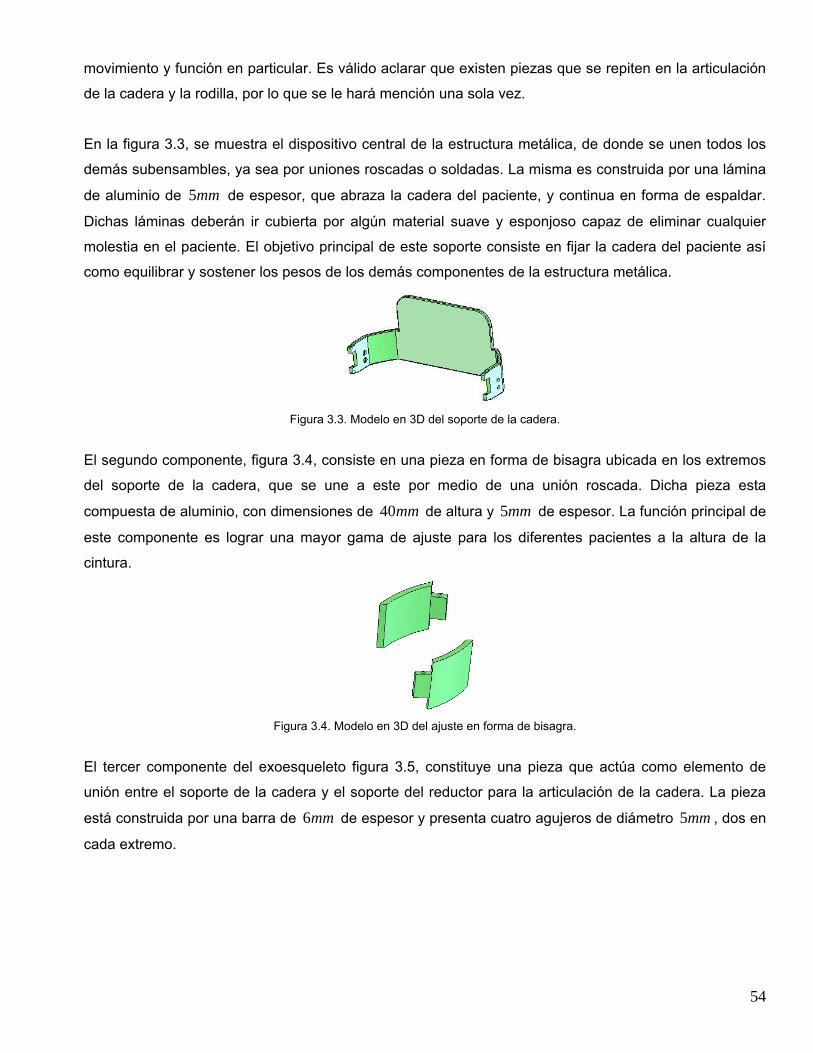
54
movimiento y función en particular. Es válido aclarar que existen piezas que se repiten en la articulación
de la cadera y la rodilla, por lo que se le hará mención una sola vez.
En la figura 3.3, se muestra el dispositivo central de la estructura metálica, de donde se unen todos los
demás subensambles, ya sea por uniones roscadas o soldadas. La misma es construida por una lámina
de aluminio de mm5 de espesor, que abraza la cadera del paciente, y continua en forma de espaldar.
Dichas láminas deberán ir cubierta por algún material suave y esponjoso capaz de eliminar cualquier
molestia en el paciente. El objetivo principal de este soporte consiste en fijar la cadera del paciente así
como equilibrar y sostener los pesos de los demás componentes de la estructura metálica.
Figura 3.3. Modelo en 3D del soporte de la cadera.
El segundo componente, figura 3.4, consiste en una pieza en forma de bisagra ubicada en los extremos
del soporte de la cadera, que se une a este por medio de una unión roscada. Dicha pieza esta
compuesta de aluminio, con dimensiones de mm40 de altura y mm5 de espesor. La función principal de
este componente es lograr una mayor gama de ajuste para los diferentes pacientes a la altura de la
cintura.
Figura 3.4. Modelo en 3D del ajuste en forma de bisagra.
El tercer componente del exoesqueleto figura 3.5, constituye una pieza que actúa como elemento de
unión entre el soporte de la cadera y el soporte del reductor para la articulación de la cadera. La pieza
está construida por una barra de mm6 de espesor y presenta cuatro agujeros de diámetro mm5 , dos en
cada extremo.
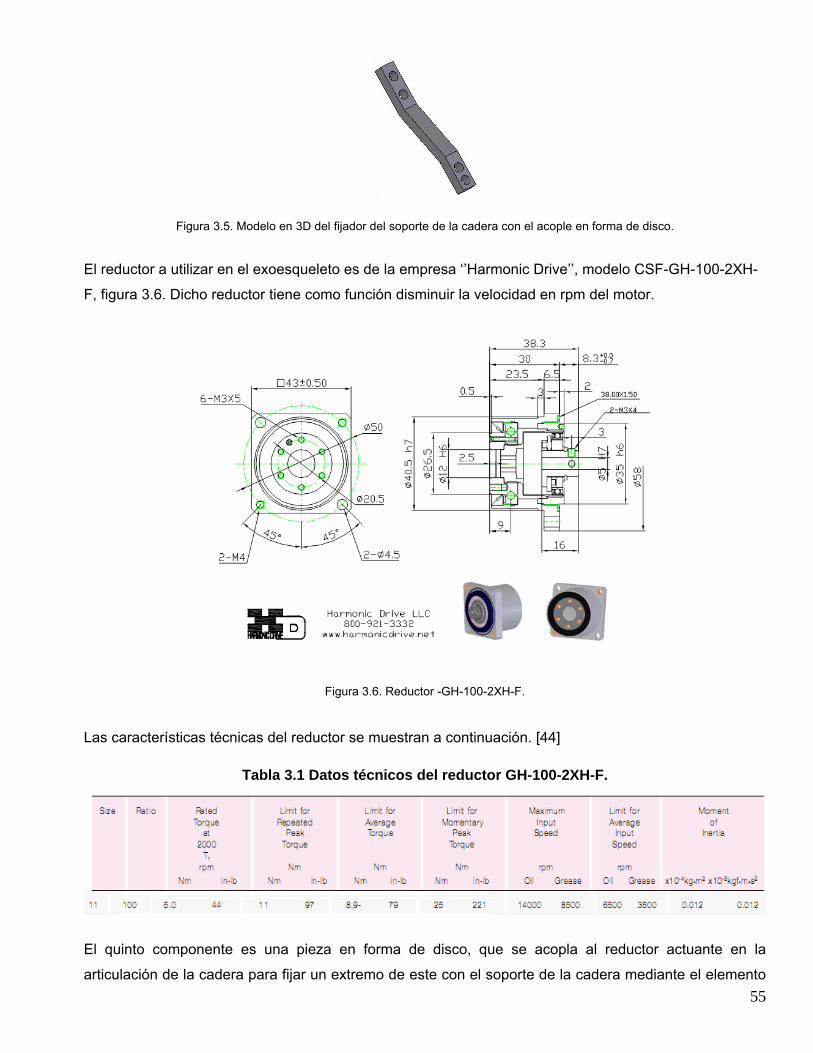
55
Figura 3.5. Modelo en 3D del fijador del soporte de la cadera con el acople en forma de disco.
El reductor a utilizar en el exoesqueleto es de la empresa ‘’Harmonic Drive’’, modelo CSF-GH-100-2XH-
F, figura 3.6. Dicho reductor tiene como función disminuir la velocidad en rpm del motor.
Figura 3.6. Reductor -GH-100-2XH-F.
Las características técnicas del reductor se muestran a continuación. [44]
Tabla 3.1 Datos técnicos del reductor GH-100-2XH-F.
El quinto componente es una pieza en forma de disco, que se acopla al reductor actuante en la
articulación de la cadera para fijar un extremo de este con el soporte de la cadera mediante el elemento
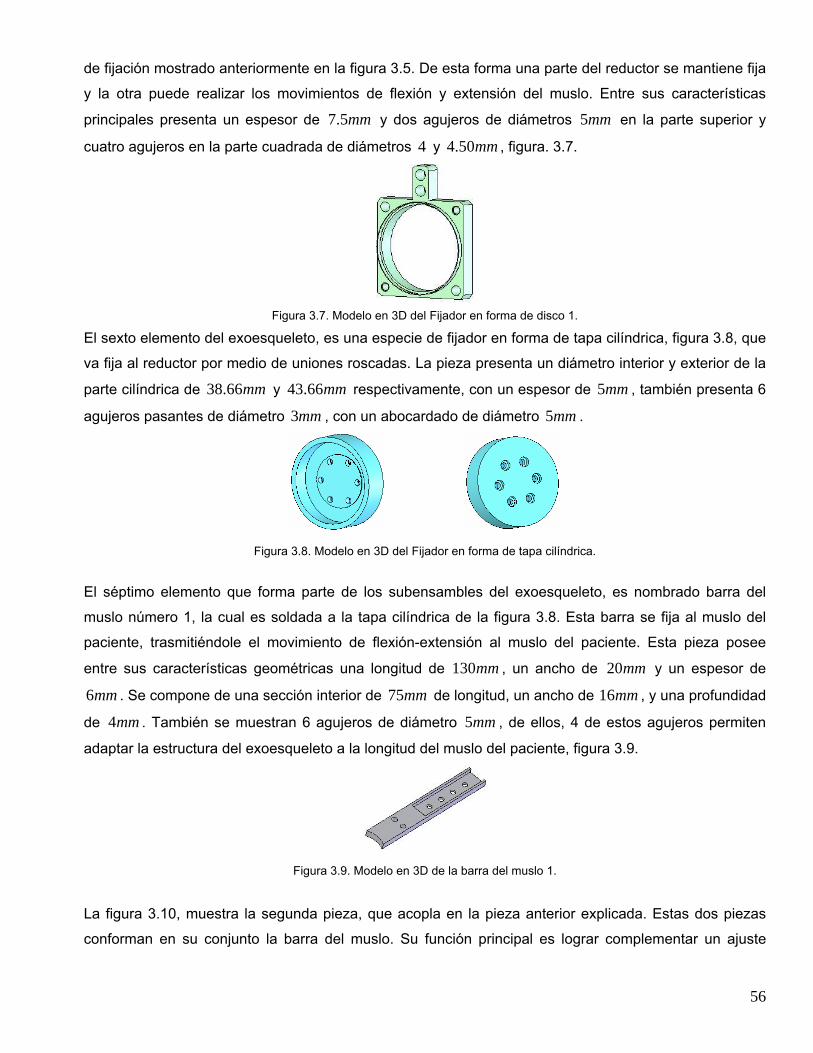
56
de fijación mostrado anteriormente en la figura 3.5. De esta forma una parte del reductor se mantiene fija
y la otra puede realizar los movimientos de flexión y extensión del muslo. Entre sus características
principales presenta un espesor de mm5.7 y dos agujeros de diámetros mm5 en la parte superior y
cuatro agujeros en la parte cuadrada de diámetros 4 y mm50.4 , figura. 3.7.
Figura 3.7. Modelo en 3D del Fijador en forma de disco 1.
El sexto elemento del exoesqueleto, es una especie de fijador en forma de tapa cilíndrica, figura 3.8, que
va fija al reductor por medio de uniones roscadas. La pieza presenta un diámetro interior y exterior de la
parte cilíndrica de mm66.38 y mm66.43 respectivamente, con un espesor de mm5 , también presenta 6
agujeros pasantes de diámetro mm3 , con un abocardado de diámetro mm5 .
Figura 3.8. Modelo en 3D del Fijador en forma de tapa cilíndrica.
El séptimo elemento que forma parte de los subensambles del exoesqueleto, es nombrado barra del
muslo número 1, la cual es soldada a la tapa cilíndrica de la figura 3.8. Esta barra se fija al muslo del
paciente, trasmitiéndole el movimiento de flexión-extensión al muslo del paciente. Esta pieza posee
entre sus características geométricas una longitud de mm130 , un ancho de mm20 y un espesor de
mm6 . Se compone de una sección interior de mm75 de longitud, un ancho de mm16 , y una profundidad
de mm4 . También se muestran 6 agujeros de diámetro mm5 , de ellos, 4 de estos agujeros permiten
adaptar la estructura del exoesqueleto a la longitud del muslo del paciente, figura 3.9.
Figura 3.9. Modelo en 3D de la barra del muslo 1.
La figura 3.10, muestra la segunda pieza, que acopla en la pieza anterior explicada. Estas dos piezas
conforman en su conjunto la barra del muslo. Su función principal es lograr complementar un ajuste
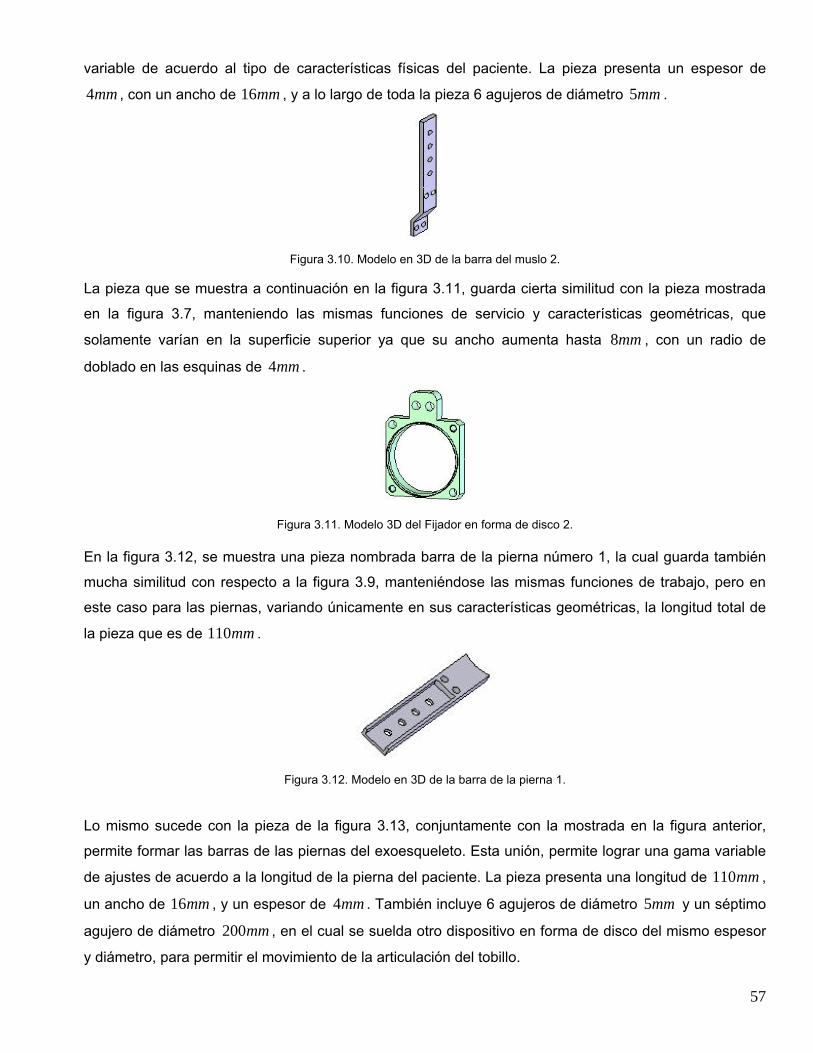
57
variable de acuerdo al tipo de características físicas del paciente. La pieza presenta un espesor de
mm4 , con un ancho de mm16 , y a lo largo de toda la pieza 6 agujeros de diámetro mm5 .
Figura 3.10. Modelo en 3D de la barra del muslo 2.
La pieza que se muestra a continuación en la figura 3.11, guarda cierta similitud con la pieza mostrada
en la figura 3.7, manteniendo las mismas funciones de servicio y características geométricas, que
solamente varían en la superficie superior ya que su ancho aumenta hasta mm8 , con un radio de
doblado en las esquinas de mm4 .
Figura 3.11. Modelo 3D del Fijador en forma de disco 2.
En la figura 3.12, se muestra una pieza nombrada barra de la pierna número 1, la cual guarda también
mucha similitud con respecto a la figura 3.9, manteniéndose las mismas funciones de trabajo, pero en
este caso para las piernas, variando únicamente en sus características geométricas, la longitud total de
la pieza que es de mm110 .
Figura 3.12. Modelo en 3D de la barra de la pierna 1.
Lo mismo sucede con la pieza de la figura 3.13, conjuntamente con la mostrada en la figura anterior,
permite formar las barras de las piernas del exoesqueleto. Esta unión, permite lograr una gama variable
de ajustes de acuerdo a la longitud de la pierna del paciente. La pieza presenta una longitud de mm110 ,
un ancho de mm16 , y un espesor de mm4 . También incluye 6 agujeros de diámetro mm5 y un séptimo
agujero de diámetro mm200 , en el cual se suelda otro dispositivo en forma de disco del mismo espesor
y diámetro, para permitir el movimiento de la articulación del tobillo.
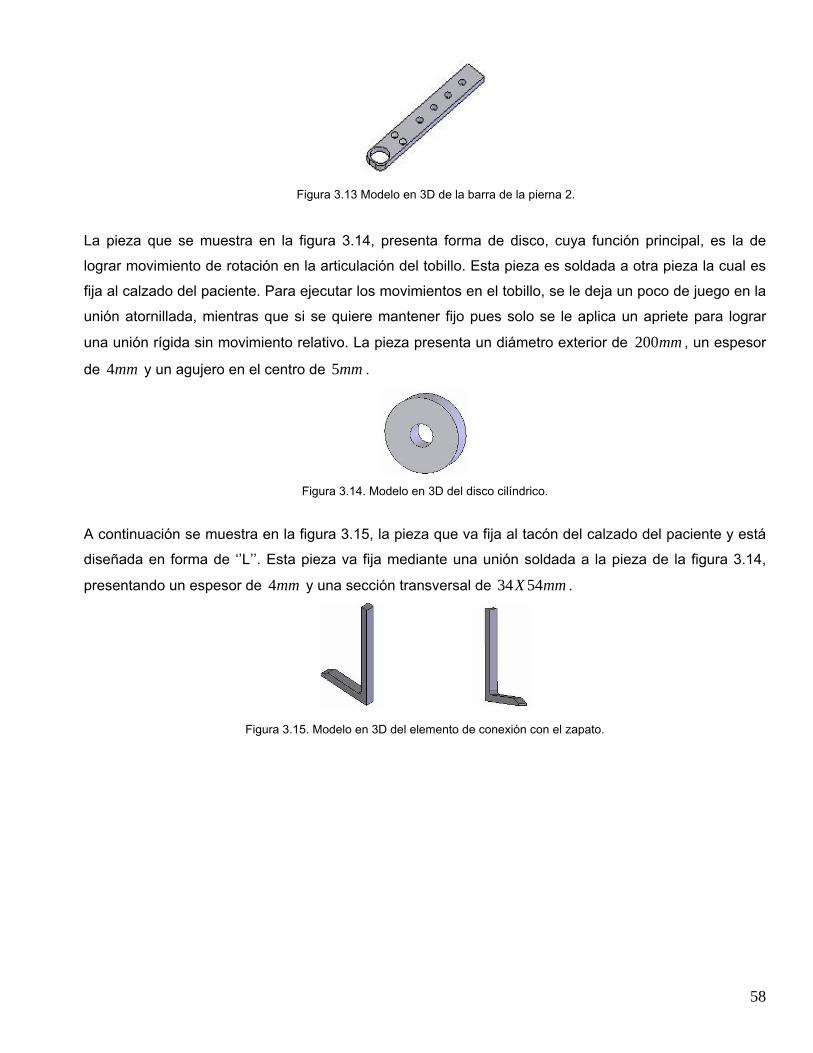
58
Figura 3.13 Modelo en 3D de la barra de la pierna 2.
La pieza que se muestra en la figura 3.14, presenta forma de disco, cuya función principal, es la de
lograr movimiento de rotación en la articulación del tobillo. Esta pieza es soldada a otra pieza la cual es
fija al calzado del paciente. Para ejecutar los movimientos en el tobillo, se le deja un poco de juego en la
unión atornillada, mientras que si se quiere mantener fijo pues solo se le aplica un apriete para lograr
una unión rígida sin movimiento relativo. La pieza presenta un diámetro exterior de mm200 , un espesor
de mm4 y un agujero en el centro de mm5 .
Figura 3.14. Modelo en 3D del disco cilíndrico.
A continuación se muestra en la figura 3.15, la pieza que va fija al tacón del calzado del paciente y está
diseñada en forma de ‘’L’’. Esta pieza va fija mediante una unión soldada a la pieza de la figura 3.14,
presentando un espesor de mm4 y una sección transversal de mmX 5434 .
Figura 3.15. Modelo en 3D del elemento de conexión con el zapato.
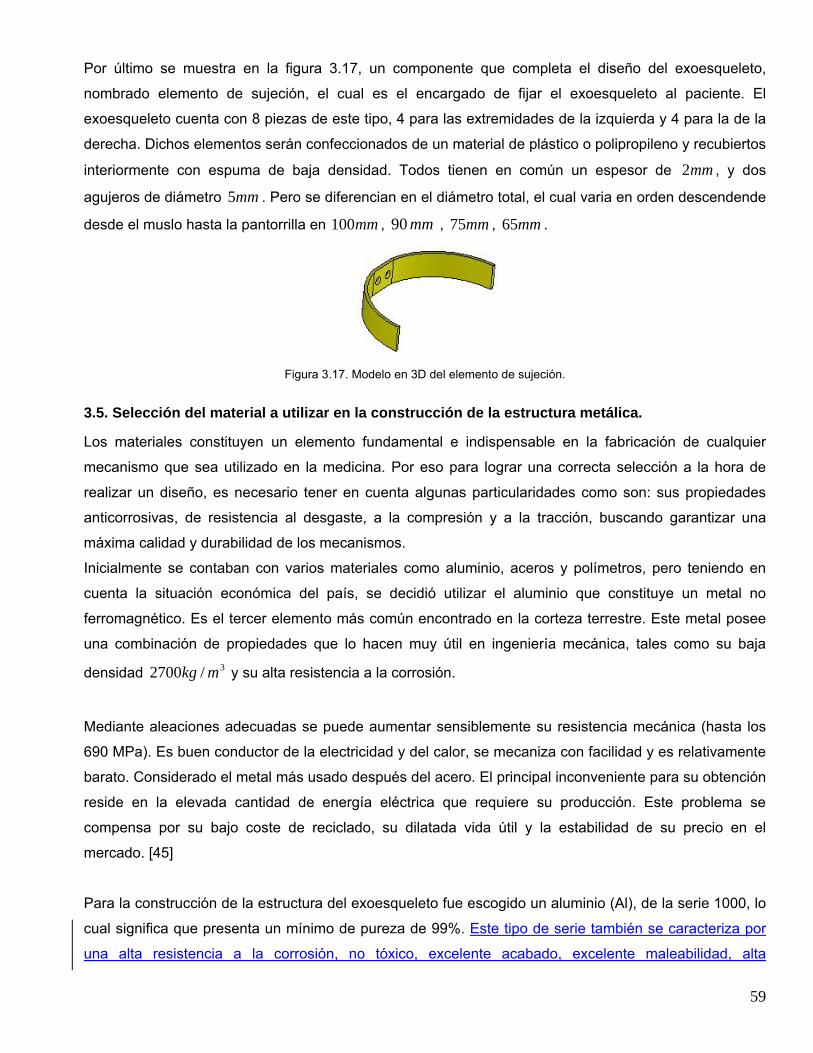
59
Por último se muestra en la figura 3.17, un componente que completa el diseño del exoesqueleto,
nombrado elemento de sujeción, el cual es el encargado de fijar el exoesqueleto al paciente. El
exoesqueleto cuenta con 8 piezas de este tipo, 4 para las extremidades de la izquierda y 4 para la de la
derecha. Dichos elementos serán confeccionados de un material de plástico o polipropileno y recubiertos
interiormente con espuma de baja densidad. Todos tienen en común un espesor de mm2 , y dos
agujeros de diámetro mm5 . Pero se diferencian en el diámetro total, el cual varia en orden descendende
desde el muslo hasta la pantorrilla en mm100 , mm90 , mm75 , mm65 .
Figura 3.17. Modelo en 3D del elemento de sujeción.
3.5. Selección del material a utilizar en la construcción de la estructura metálica.
Los materiales constituyen un elemento fundamental e indispensable en la fabricación de cualquier
mecanismo que sea utilizado en la medicina. Por eso para lograr una correcta selección a la hora de
realizar un diseño, es necesario tener en cuenta algunas particularidades como son: sus propiedades
anticorrosivas, de resistencia al desgaste, a la compresión y a la tracción, buscando garantizar una
máxima calidad y durabilidad de los mecanismos.
Inicialmente se contaban con varios materiales como aluminio, aceros y polímetros, pero teniendo en
cuenta la situación económica del país, se decidió utilizar el aluminio que constituye un metal no
ferromagnético. Es el tercer elemento más común encontrado en la corteza terrestre. Este metal posee
una combinación de propiedades que lo hacen muy útil en ingeniería mecánica, tales como su baja
densidad 3/2700 mkg y su alta resistencia a la corrosión.
Mediante aleaciones adecuadas se puede aumentar sensiblemente su resistencia mecánica (hasta los
690 MPa). Es buen conductor de la electricidad y del calor, se mecaniza con facilidad y es relativamente
barato. Considerado el metal más usado después del acero. El principal inconveniente para su obtención
reside en la elevada cantidad de energía eléctrica que requiere su producción. Este problema se
compensa por su bajo coste de reciclado, su dilatada vida útil y la estabilidad de su precio en el
mercado. [45]
Para la construcción de la estructura del exoesqueleto fue escogido un aluminio (Al), de la serie 1000, lo
cual significa que presenta un mínimo de pureza de 99%. Este tipo de serie también se caracteriza por
una alta resistencia a la corrosión, no tóxico, excelente acabado, excelente maleabilidad, alta
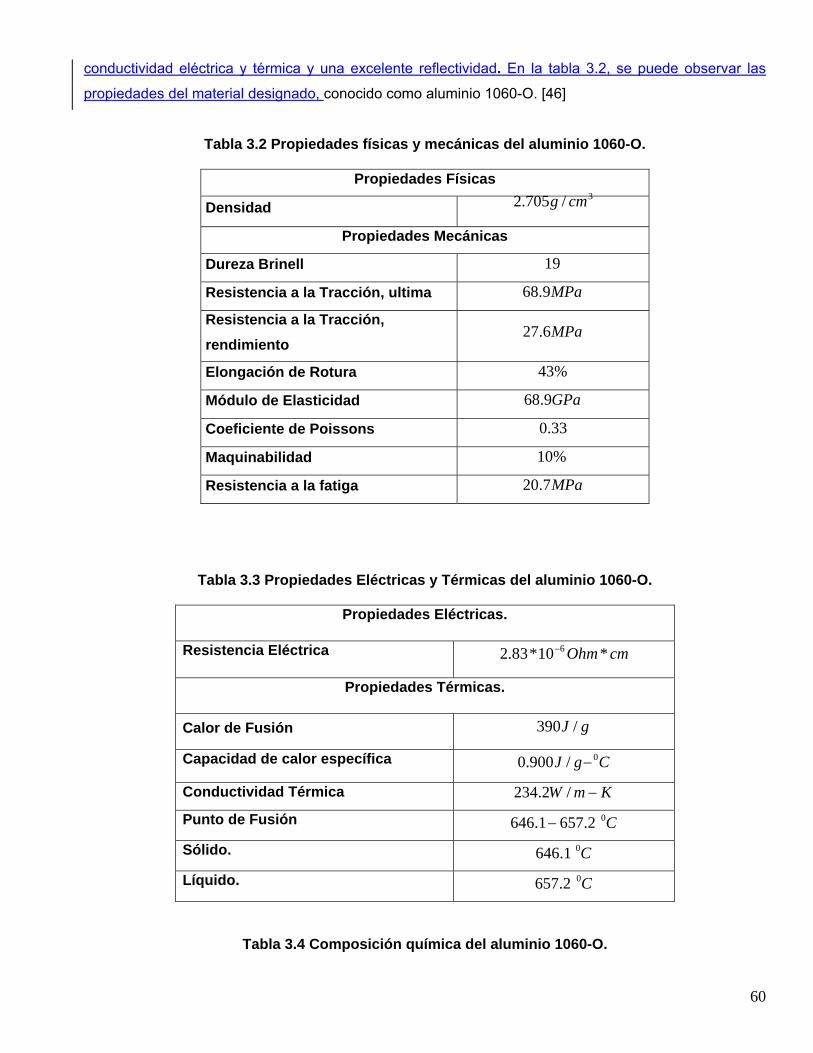
60
conductividad eléctrica y térmica y una excelente reflectividad. En la tabla 3.2, se puede observar las
propiedades del material designado, conocido como aluminio 1060-O. [46]
Tabla 3.2 Propiedades físicas y mecánicas del aluminio 1060-O.
Propiedades Físicas
Densidad 3/705.2 cmg
Propiedades Mecánicas
Dureza Brinell 19
Resistencia a la Tracción, ultima MPa9.68
Resistencia a la Tracción, rendimiento
MPa6.27
Elongación de Rotura %43
Módulo de Elasticidad GPa9.68
Coeficiente de Poissons 33.0
Maquinabilidad %10
Resistencia a la fatiga MPa7.20
Tabla 3.3 Propiedades Eléctricas y Térmicas del aluminio 1060-O.
Propiedades Eléctricas.
Resistencia Eléctrica cmOhm*10*83.2 6−
Propiedades Térmicas.
Calor de Fusión gJ /390
Capacidad de calor específica CgJ 0/900.0 −
Conductividad Térmica KmW −/2.234
Punto de Fusión 2.6571.646 − C0
Sólido. 1.646 C0
Líquido. 2.657 C0
Tabla 3.4 Composición química del aluminio 1060-O.
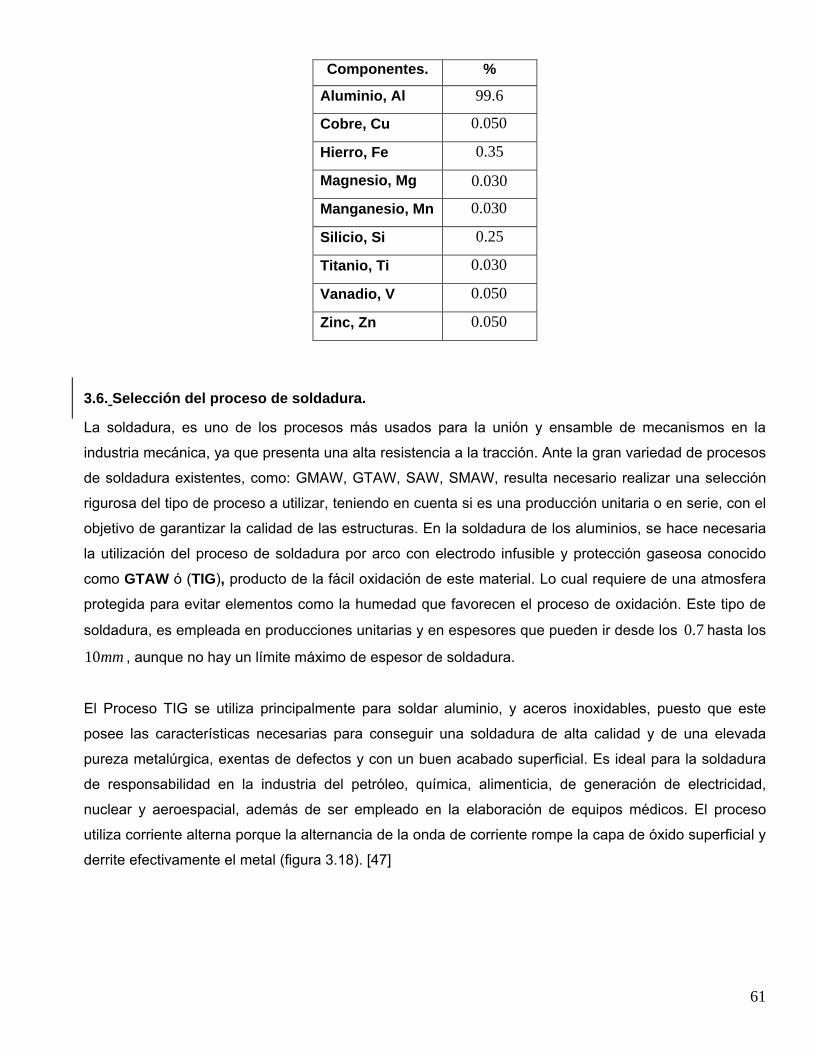
61
Componentes. %
Aluminio, Al 6.99
Cobre, Cu 050.0
Hierro, Fe 35.0
Magnesio, Mg 030.0
Manganesio, Mn 030.0
Silicio, Si 25.0
Titanio, Ti 030.0
Vanadio, V 050.0
Zinc, Zn 050.0
3.6. Selección del proceso de soldadura.
La soldadura, es uno de los procesos más usados para la unión y ensamble de mecanismos en la
industria mecánica, ya que presenta una alta resistencia a la tracción. Ante la gran variedad de procesos
de soldadura existentes, como: GMAW, GTAW, SAW, SMAW, resulta necesario realizar una selección
rigurosa del tipo de proceso a utilizar, teniendo en cuenta si es una producción unitaria o en serie, con el
objetivo de garantizar la calidad de las estructuras. En la soldadura de los aluminios, se hace necesaria
la utilización del proceso de soldadura por arco con electrodo infusible y protección gaseosa conocido
como GTAW ó (TIG), producto de la fácil oxidación de este material. Lo cual requiere de una atmosfera
protegida para evitar elementos como la humedad que favorecen el proceso de oxidación. Este tipo de
soldadura, es empleada en producciones unitarias y en espesores que pueden ir desde los 7.0 hasta los
mm10 , aunque no hay un límite máximo de espesor de soldadura.
El Proceso TIG se utiliza principalmente para soldar aluminio, y aceros inoxidables, puesto que este
posee las características necesarias para conseguir una soldadura de alta calidad y de una elevada
pureza metalúrgica, exentas de defectos y con un buen acabado superficial. Es ideal para la soldadura
de responsabilidad en la industria del petróleo, química, alimenticia, de generación de electricidad,
nuclear y aeroespacial, además de ser empleado en la elaboración de equipos médicos. El proceso
utiliza corriente alterna porque la alternancia de la onda de corriente rompe la capa de óxido superficial y
derrite efectivamente el metal (figura 3.18). [47]
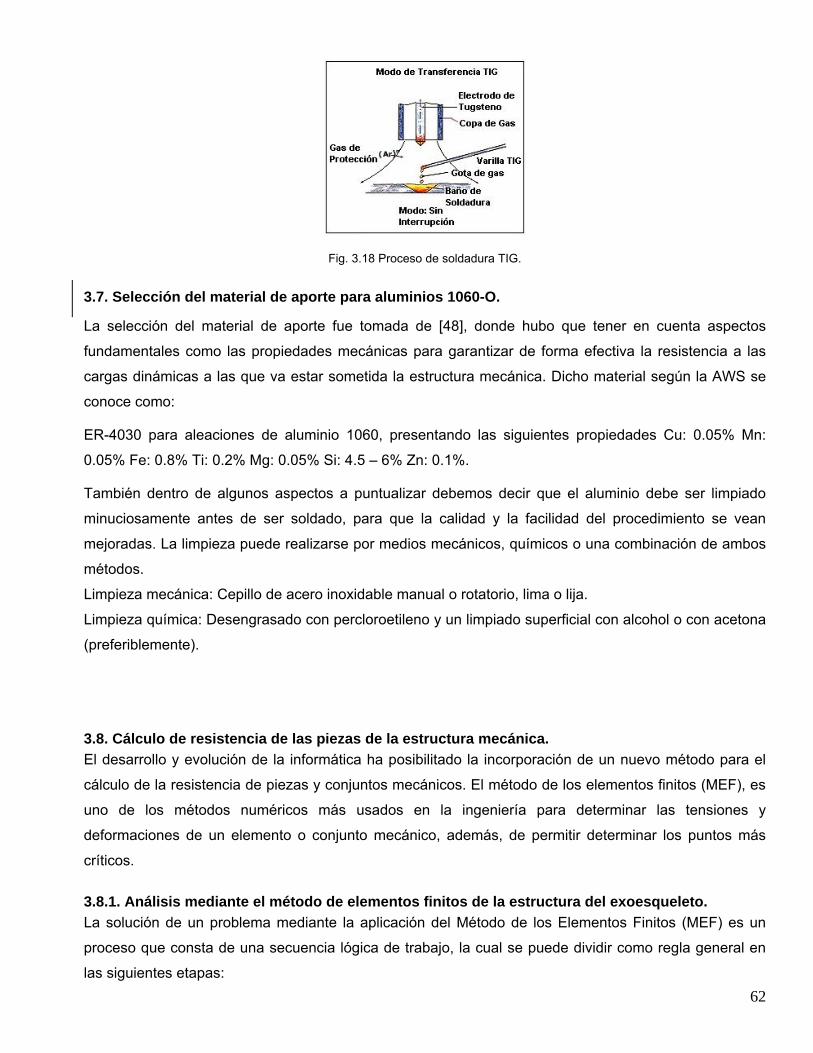
62
Fig. 3.18 Proceso de soldadura TIG.
3.7. Selección del material de aporte para aluminios 1060-O.
La selección del material de aporte fue tomada de [48], donde hubo que tener en cuenta aspectos
fundamentales como las propiedades mecánicas para garantizar de forma efectiva la resistencia a las
cargas dinámicas a las que va estar sometida la estructura mecánica. Dicho material según la AWS se
conoce como:
ER-4030 para aleaciones de aluminio 1060, presentando las siguientes propiedades Cu: 0.05% Mn:
0.05% Fe: 0.8% Ti: 0.2% Mg: 0.05% Si: 4.5 – 6% Zn: 0.1%.
También dentro de algunos aspectos a puntualizar debemos decir que el aluminio debe ser limpiado
minuciosamente antes de ser soldado, para que la calidad y la facilidad del procedimiento se vean
mejoradas. La limpieza puede realizarse por medios mecánicos, químicos o una combinación de ambos
métodos. Limpieza mecánica: Cepillo de acero inoxidable manual o rotatorio, lima o lija.
Limpieza química: Desengrasado con percloroetileno y un limpiado superficial con alcohol o con acetona (preferiblemente).
3.8. Cálculo de resistencia de las piezas de la estructura mecánica. El desarrollo y evolución de la informática ha posibilitado la incorporación de un nuevo método para el
cálculo de la resistencia de piezas y conjuntos mecánicos. El método de los elementos finitos (MEF), es
uno de los métodos numéricos más usados en la ingeniería para determinar las tensiones y
deformaciones de un elemento o conjunto mecánico, además, de permitir determinar los puntos más
críticos.
3.8.1. Análisis mediante el método de elementos finitos de la estructura del exoesqueleto. La solución de un problema mediante la aplicación del Método de los Elementos Finitos (MEF) es un
proceso que consta de una secuencia lógica de trabajo, la cual se puede dividir como regla general en
las siguientes etapas:
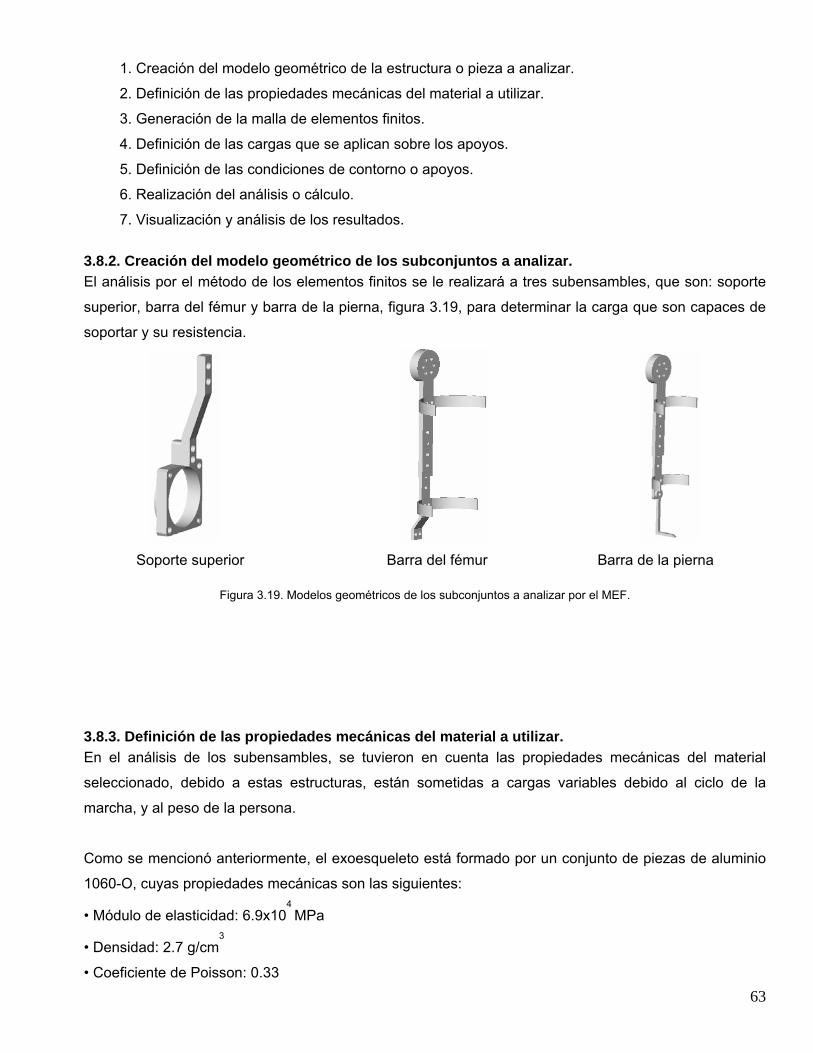
63
1. Creación del modelo geométrico de la estructura o pieza a analizar.
2. Definición de las propiedades mecánicas del material a utilizar.
3. Generación de la malla de elementos finitos.
4. Definición de las cargas que se aplican sobre los apoyos.
5. Definición de las condiciones de contorno o apoyos.
6. Realización del análisis o cálculo.
7. Visualización y análisis de los resultados.
3.8.2. Creación del modelo geométrico de los subconjuntos a analizar. El análisis por el método de los elementos finitos se le realizará a tres subensambles, que son: soporte
superior, barra del fémur y barra de la pierna, figura 3.19, para determinar la carga que son capaces de
soportar y su resistencia.
Soporte superior Barra del fémur Barra de la pierna
Figura 3.19. Modelos geométricos de los subconjuntos a analizar por el MEF.
3.8.3. Definición de las propiedades mecánicas del material a utilizar. En el análisis de los subensambles, se tuvieron en cuenta las propiedades mecánicas del material
seleccionado, debido a estas estructuras, están sometidas a cargas variables debido al ciclo de la
marcha, y al peso de la persona.
Como se mencionó anteriormente, el exoesqueleto está formado por un conjunto de piezas de aluminio
1060-O, cuyas propiedades mecánicas son las siguientes:
• Módulo de elasticidad: 6.9x104 MPa
• Densidad: 2.7 g/cm3
• Coeficiente de Poisson: 0.33
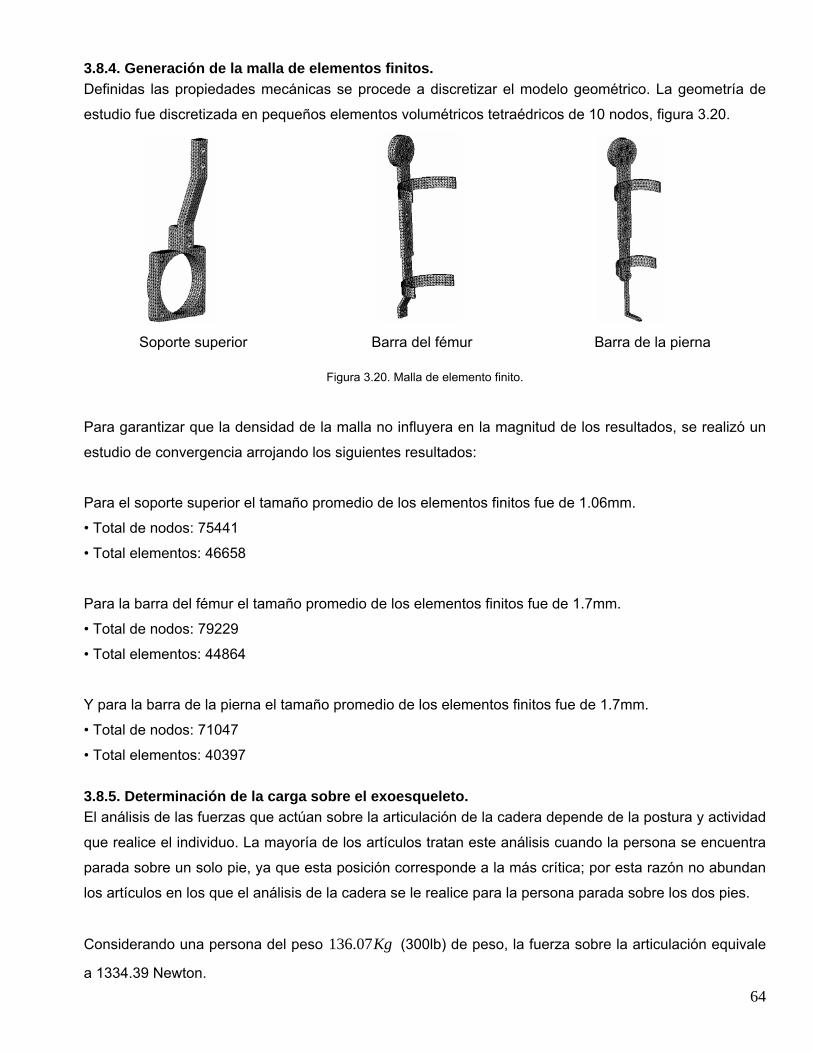
64
3.8.4. Generación de la malla de elementos finitos. Definidas las propiedades mecánicas se procede a discretizar el modelo geométrico. La geometría de
estudio fue discretizada en pequeños elementos volumétricos tetraédricos de 10 nodos, figura 3.20.
Soporte superior Barra del fémur Barra de la pierna
Figura 3.20. Malla de elemento finito.
Para garantizar que la densidad de la malla no influyera en la magnitud de los resultados, se realizó un
estudio de convergencia arrojando los siguientes resultados:
Para el soporte superior el tamaño promedio de los elementos finitos fue de 1.06mm.
• Total de nodos: 75441
• Total elementos: 46658
Para la barra del fémur el tamaño promedio de los elementos finitos fue de 1.7mm.
• Total de nodos: 79229
• Total elementos: 44864
Y para la barra de la pierna el tamaño promedio de los elementos finitos fue de 1.7mm.
• Total de nodos: 71047
• Total elementos: 40397
3.8.5. Determinación de la carga sobre el exoesqueleto. El análisis de las fuerzas que actúan sobre la articulación de la cadera depende de la postura y actividad
que realice el individuo. La mayoría de los artículos tratan este análisis cuando la persona se encuentra
parada sobre un solo pie, ya que esta posición corresponde a la más crítica; por esta razón no abundan
los artículos en los que el análisis de la cadera se le realice para la persona parada sobre los dos pies.
Considerando una persona del peso Kg07.136 (300lb) de peso, la fuerza sobre la articulación equivale
a 1334.39 Newton.
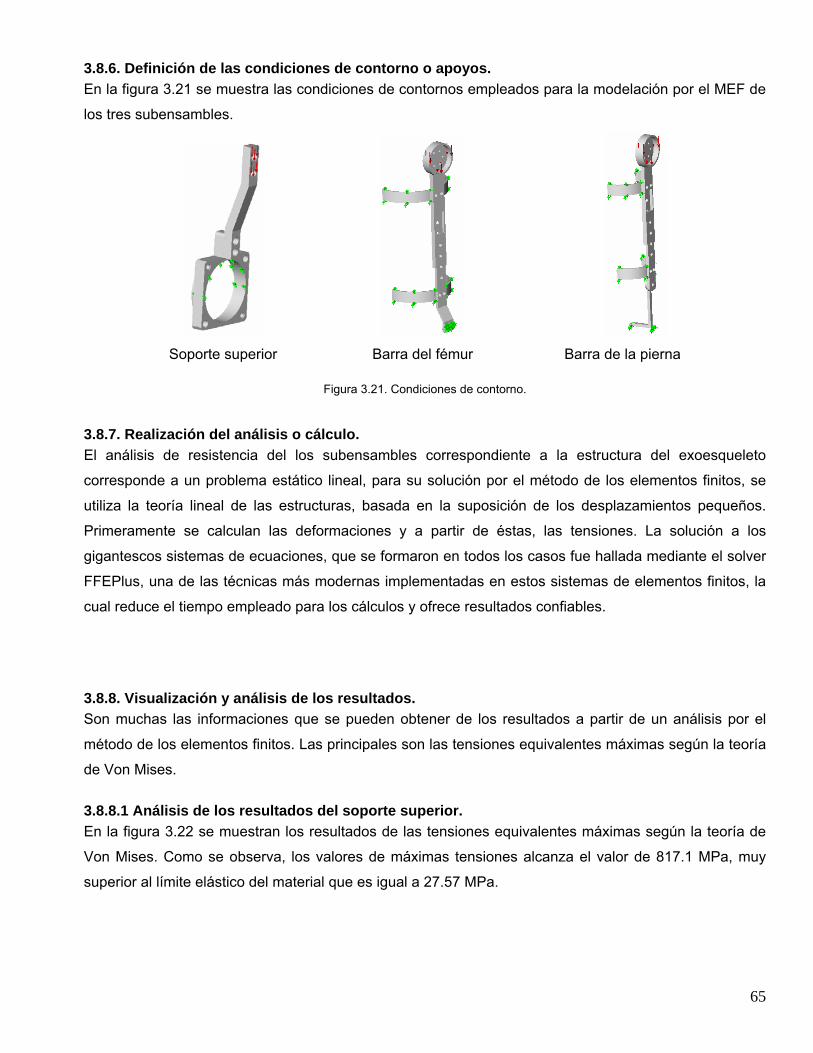
65
3.8.6. Definición de las condiciones de contorno o apoyos. En la figura 3.21 se muestra las condiciones de contornos empleados para la modelación por el MEF de
los tres subensambles.
Soporte superior Barra del fémur Barra de la pierna
Figura 3.21. Condiciones de contorno.
3.8.7. Realización del análisis o cálculo. El análisis de resistencia del los subensambles correspondiente a la estructura del exoesqueleto
corresponde a un problema estático lineal, para su solución por el método de los elementos finitos, se
utiliza la teoría lineal de las estructuras, basada en la suposición de los desplazamientos pequeños.
Primeramente se calculan las deformaciones y a partir de éstas, las tensiones. La solución a los
gigantescos sistemas de ecuaciones, que se formaron en todos los casos fue hallada mediante el solver
FFEPlus, una de las técnicas más modernas implementadas en estos sistemas de elementos finitos, la
cual reduce el tiempo empleado para los cálculos y ofrece resultados confiables.
3.8.8. Visualización y análisis de los resultados. Son muchas las informaciones que se pueden obtener de los resultados a partir de un análisis por el
método de los elementos finitos. Las principales son las tensiones equivalentes máximas según la teoría
de Von Mises.
3.8.8.1 Análisis de los resultados del soporte superior. En la figura 3.22 se muestran los resultados de las tensiones equivalentes máximas según la teoría de
Von Mises. Como se observa, los valores de máximas tensiones alcanza el valor de 817.1 MPa, muy
superior al límite elástico del material que es igual a 27.57 MPa.
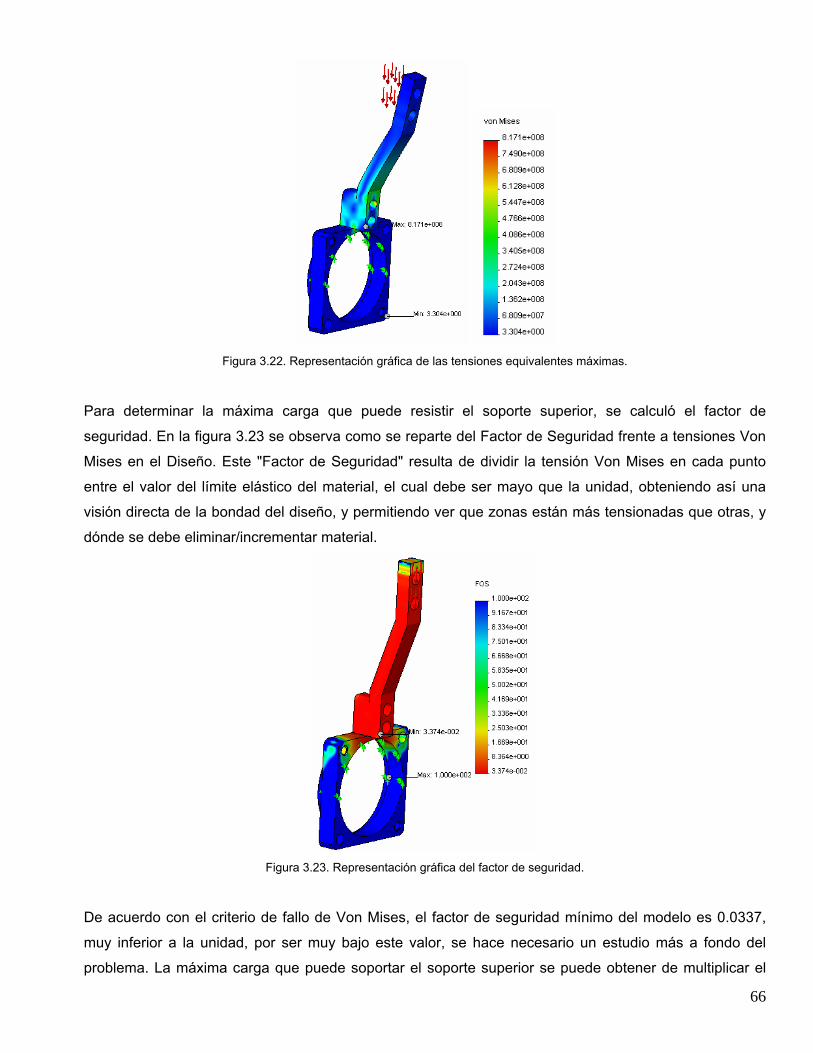
66
Figura 3.22. Representación gráfica de las tensiones equivalentes máximas.
Para determinar la máxima carga que puede resistir el soporte superior, se calculó el factor de
seguridad. En la figura 3.23 se observa como se reparte del Factor de Seguridad frente a tensiones Von
Mises en el Diseño. Este "Factor de Seguridad" resulta de dividir la tensión Von Mises en cada punto
entre el valor del límite elástico del material, el cual debe ser mayo que la unidad, obteniendo así una
visión directa de la bondad del diseño, y permitiendo ver que zonas están más tensionadas que otras, y
dónde se debe eliminar/incrementar material.
Figura 3.23. Representación gráfica del factor de seguridad.
De acuerdo con el criterio de fallo de Von Mises, el factor de seguridad mínimo del modelo es 0.0337,
muy inferior a la unidad, por ser muy bajo este valor, se hace necesario un estudio más a fondo del
problema. La máxima carga que puede soportar el soporte superior se puede obtener de multiplicar el
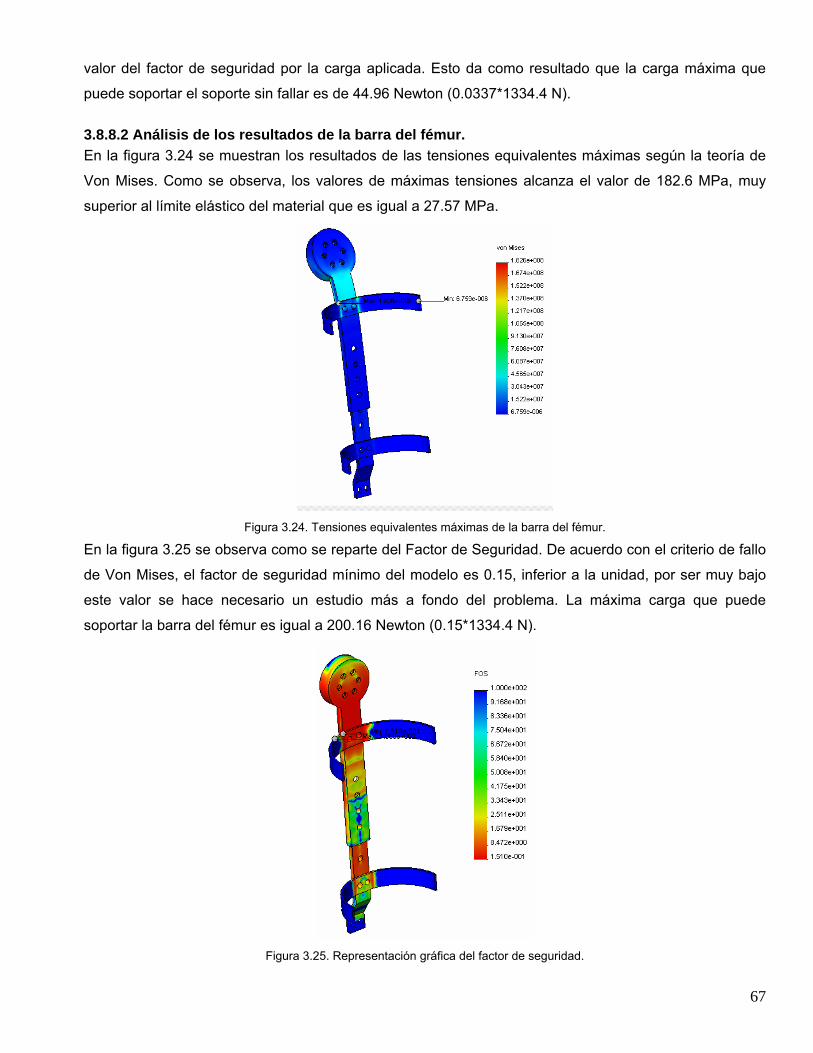
67
valor del factor de seguridad por la carga aplicada. Esto da como resultado que la carga máxima que
puede soportar el soporte sin fallar es de 44.96 Newton (0.0337*1334.4 N).
3.8.8.2 Análisis de los resultados de la barra del fémur. En la figura 3.24 se muestran los resultados de las tensiones equivalentes máximas según la teoría de
Von Mises. Como se observa, los valores de máximas tensiones alcanza el valor de 182.6 MPa, muy
superior al límite elástico del material que es igual a 27.57 MPa.
Figura 3.24. Tensiones equivalentes máximas de la barra del fémur.
En la figura 3.25 se observa como se reparte del Factor de Seguridad. De acuerdo con el criterio de fallo
de Von Mises, el factor de seguridad mínimo del modelo es 0.15, inferior a la unidad, por ser muy bajo
este valor se hace necesario un estudio más a fondo del problema. La máxima carga que puede
soportar la barra del fémur es igual a 200.16 Newton (0.15*1334.4 N).
Figura 3.25. Representación gráfica del factor de seguridad.
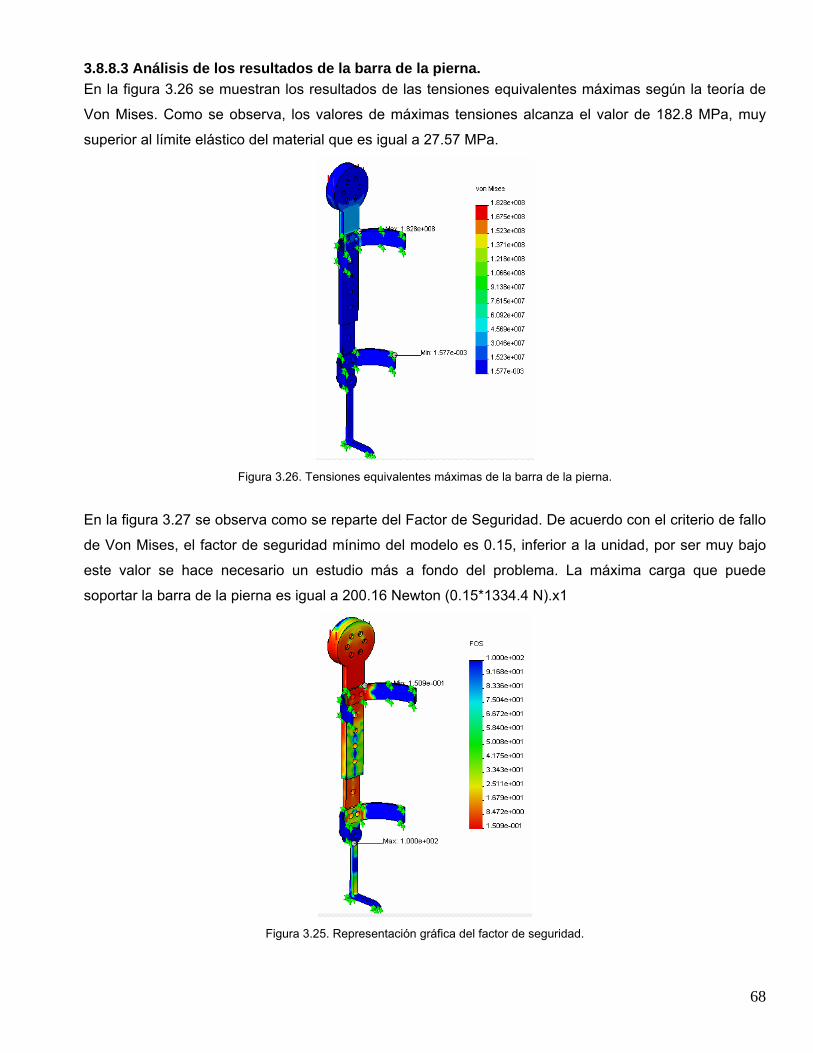
68
3.8.8.3 Análisis de los resultados de la barra de la pierna. En la figura 3.26 se muestran los resultados de las tensiones equivalentes máximas según la teoría de
Von Mises. Como se observa, los valores de máximas tensiones alcanza el valor de 182.8 MPa, muy
superior al límite elástico del material que es igual a 27.57 MPa.
Figura 3.26. Tensiones equivalentes máximas de la barra de la pierna.
En la figura 3.27 se observa como se reparte del Factor de Seguridad. De acuerdo con el criterio de fallo
de Von Mises, el factor de seguridad mínimo del modelo es 0.15, inferior a la unidad, por ser muy bajo
este valor se hace necesario un estudio más a fondo del problema. La máxima carga que puede
soportar la barra de la pierna es igual a 200.16 Newton (0.15*1334.4 N).x1
Figura 3.25. Representación gráfica del factor de seguridad.
69
3.9. Conclusiones Parciales. 1. El diseño de un exoesqueleto para la rehabilitación de miembros inferiores de pacientes con
disparidad consta de 4 etapas que son: Diseño estructural mecánico, Diseño electrónico, Diseño del
sistema de control y mando y diseño de la interfaz de usuario.
2. El material escogido, aluminio 1060-O, satisface las exigencias para la fabricación de la estructura
mecánica. Es un material de bajo peso especifico, con el objetivo de que la estructura sea lo más liviana
posible y a su vez lo más rígida.
3. La estructura metálica del exoesqueleto, esta conformado por 19 piezas, que facilitan la estabilidad,
seguridad y adaptabilidad a los pacientes. Dentro de las características técnicas del prototipo de
exoesqueleto se puede mencionar que el mismo, tiene una altura de 612mm, y un ancho de 208mm.
4. El proceso de soldadura usado para las uniones soldadas es el proceso de soldadura por arco con
electrodo infusible y protección gaseosa (TIG), producto de la fácil oxidación de este material. El
electrodo empleado será de tungsteno y el material de aporte ER-4030.
70
5. Los valores de las tensiones equivalentes en los tres subensambles analizados son muy superiores a
los valores del límite elástico del material. A partir del cálculo del factor de seguridad se puede
determinar las zonas más criticas, permitiendo incrementar material en las mismas, aumentando su
resistencia.
6. El diseñó de exoesqueleto propuesto constituye una primera aproximación susceptible de futuras
modificaciones, como puede ser: la potencia, velocidad de los motores, geometría de la estructura
mecánica, hasta arribar a la versión definitiva.
Conclusiones Generales
1. Las investigaciones sobre los exoesqueletos comenzaron a finales de 1960 con fines militares, lo
cuales tenían como objetivo aumentar la capacidad y el rendimiento de los soldados, permitiéndoles
desplazarse grandes distancias llevando en sus espaldas elevadas cargas. Posteriormente, comenzaron
aplicarse en el sector de la salud, para la rehabilitación y asistencia a personas con discapacidad.
2. Los tipos de actuadores usados en los exoesqueletos son muy diversos, como por ejemplos: sistemas
hidráulicos y neumáticos, polímeros electroactivos, fluidos electro y magneto reológicos, motores de
corriente continua, materiales con memoria de forma, músculos neumáticos, motores ultrasónicos, entre
otros. Sin embargo los estudios han demostrado que los motores ultrasónicos y los motores de corriente
continua son las mejores soluciones, estos últimos se han desarrollado mucho en los últimos años,
aunque todavía no satisfacen las demandas de las aplicaciones en muchos de los exoesqueletos.
3. La falta de resultados cuantitativos con los exoesqueletos pone de relieve los numerosos retos
relacionados con la creación de ellos. Hay, por supuesto, muchos problemas de diseño que pueden
conducir a resultados pobres, como son la desalineación de las articulaciones entre el usuario y el
exoesqueleto, las limitaciones cinemáticas, entre otras. Pero lo que si se puede asegurar, es que los
71
exoesqueletos brindan a las personas con discapacidad la oportunidad de continuar con una vida normal
y segura.
4. En la actualidad, la rehabilitación de la marcha se basa en fisioterapia manual y ejercicios musculares
repetitivos que requieren de esfuerzo físico por parte del fisioterapeuta, lo que puede provocar, por los
efectos del cansancio físico, que no se realicen los procedimientos adecuadamente. Mediante este tipo
de rehabilitación manual no se pude obtener datos, ni información del proceso de rehabilitación, lo cual
no da la posibilidad de llevar un control de la evolución del paciente, que permita definir nuevas
estrategias de rehabilitación. El uso de terapia mediante el uso de exoesqueletos mejora los
procedimientos de rehabilitación actuales, permitiendo así una rehabilitación de mayor calidad y
aumentando también la motivación del paciente, quien se sentirá más independiente de la disponibilidad
del fisioterapeuta, mejorando la repetitividad y motivación. El empleo de estos dispositivos electro-
mecánicos permitirá definir y controlar los movimientos de los miembros del paciente, obteniendo los
datos e información del proceso de rehabilitación, y permitiendo de está forma llevar un control de la
evolución del paciente, con un pequeño margen de error.
5. El sistema articular de los miembros inferiores del cuerpo humano está formado por tres articulaciones
que son: la articulación de la cadera que presenta tres grados de libertad. La articulación de la rodilla
que presenta dos grados de libertad. Y por último la articulación del tobillo que presenta tres grados de
libertad. Los grados de libertad más importantes a tener en cuenta en el diseño de un exoesqueleto son
los grados de libertad que se encuentran sobre el plano sagital, ya que sobre este plano se realizan los
movimientos más importantes que se ejecutan durante la marcha. Por tanto, el diseño de un
exoesqueleto constará, como mínimo, con tres grados de libertad. Uno en la articulación de la cadera,
otro en la articulación de la rodilla, y el tercero en la articulación del tobillo.
6. Se obtuvieron los polinomios para determinar la posición angular del fémur, la pierna y el pie en
función del porciento del ciclo de marcha. Estos polinomios fueron obtenidos mediante la aplicación de la
interpolación de spline a las curvas obtenidas por Kadaba, M.P. en su articulo “Measurement of lower
extremity kinematics during level walking”
7. Para determinar el torque necesario para la selección de los actuadores, se aplicó el método de
trabajo-energía a un prototipo de persona de 2m de altura y 136 Kg. (aproximadamente 300 libras) de
peso, obteniéndose como resultado un torque de Nm35.0 .
8. La estructura del exoesqueleto, está conformada por 19 piezas, que facilitan la estabilidad, seguridad
y adaptabilidad a los pacientes. Dentro de las características técnicas del prototipo de exoesqueleto se
puede mencionar que el mismo, tiene una altura de 612mm, y un ancho de 208mm. El material
72
seleccionado para su fabricación es el aluminio 1060-O, el cual es un material de bajo peso específico,
con lo que se logra que la que la estructura sea lo más liviana posible y a su vez rígida.
9. El proceso de soldadura usado para las uniones soldadas es el proceso de soldadura por arco con
electrodo infusible y protección gaseosa (TIG), producto de la fácil oxidación de este material. El
electrodo empleado será de tungsteno y el material de aporte ER-4030.
10. A partir del cálculo del factor de seguridad, mediante el uso del método de los elementos finitos se
determinaron las zonas más críticas, permitiendo incrementar material en las mismas, aumentando su
resistencia. Además, permitió calcular la carga máxima que puede soportar los tres subensambles.
11. El desarrollo de un conjunto de disciplinas, tales como: la mecánica, la electrónica, la informática,
robótica están permitiendo crear y obtener todo un conjunto de soluciones tecnológicas para aliviar estas
deficiencias y conseguir un mayor grado de autonomía y satisfacción en las personas que presentan
problema de discapacidad motora.
12. El diseñó de exoesqueleto propuesto constituye una primera aproximación susceptible de futuras
modificaciones, como puede ser: la potencia, velocidad de los motores, geometría de la estructura
mecánica, hasta arribar a la versión definitiva.
Recomendaciones
1. Continuar el estudio de este proyecto, con el fin de perfeccionar la estructura mecánica del
exoesqueleto, como por ejemplo incluir topes mecánicos para evitar luxaciones en el
paciente.
2. Continuar el estudio sobre los motores de corriente continua y motores paso a paso, con el
objetivo de seleccionar la variante más factible.
3. Continuar con un estudio sobre el sistema de carga que actúa sobre el esqueleto humano.

73
Bibliografía
1. Santos, I.L.P.d.l., ¿''Qué es Biomecánica”? : p. 551.
2. Yanes, R.E., Estudio biomecánico de las cargas que actúan sobre la articulación coxofemoral.
2007-2008, Universidad Central ''Marta Abreu'' de Las Villas: Santa Clara.
3. Aaron M. Dollar, M., IEEE, and Hugh Herr, Member, IEEE (FEBRUARY 2008) Lower Extremity
Exoskeletons and Active Orthoses: Challenges and State-of-the-Art. Volume,
4. N. Yagn, “Apparatus for facilitating walking, running, and jumping,”. 1890: U.S.
5. Zaroodny, S.J., “Bumpusher—A powered aid to locomotion,” L.A.B. Res., Editor. 1963: U.S.
6. Mosher, R.S. (1967) “Handyman to Hardiman,”. Volume,
74
7. Makinson, B.R.F.a.J.B., “Hardiman I prototype for machine augmentation of human strength and
endurance. 1971, General Electric Company, Schenectady, NY, GE Tech.
8. R. A. Heinlein, Starship Troopers. 1959.: New York.
9. J. A. Moore, “Pitman: A powered exoskeleton suit for the infantryman,” L.A. Los Alamos Nat. Lab.,
NM, Tech., Editor. 1986.
10. M. E. Rosheim, ed. “Man-amplifying exoskeleton,”. Vol. 1195. 1989. 402–411.
11. E. Garcia, J.M.S., and J. Main, “Exoskeletons for human performance augmentation (EHPA)“.
2002: U.S. p. 44-48.
12. H. Kazerooni and R. Steger, “The Berkeley Lower Extremity Exoskeleton,”. 2006.
13. A. B. Zoss, H.K., and A. Chu, ed. “Biomechanical design of the Berkeley Lower Extremity
Exoskeleton (BLEEX)”. Vol.1. 2006.
14. A. Chu, H.K., and A. Zozz,, “On the biomimetic design of the Berkeley Lower Extremity
Exoskeleton (BLEEX),” in Robot. Autom. 2005: Barcelona, Spain.
15. Clemotte, A. (2009) Exoesqueletos. Volume,
16. C. J. Walsh, K.P., and H. Herr. “An autonomous, underactuated exoskeleton for load-carrying
augmentation,”. 2006. Beijing, China.
17. C. J. Walsh, K.P., and H. Herr., “Biomimetic design of an underactuated leg exoskeleton for load-
carrying augmentation”, in Dept. Mech. febrero 2006, Massachusetts Inst. Technol.: Cambridge.
18. K. Yamamoto, K.H., M. Ishii, and T. Matsuo., ed. “Development of power assisting suit for
assisting nurse labor”. Vol. 45. 2002.
19. K. Yamamoto, M.I., K. Hyodo, T. Yoshimitsu, and T. Matsuo. (2003) “Development of power
assisting suit (miniaturization of supply system to realize wearable suit)”. Volume, 923–930
20. J. E. Pratt, B.T.K., C. J. Morse, and S. H. Collins. “The RoboKnee: An exoskeleton for enhancing
strength and endurance during walking,”. in Robot. Autom. 2004.
21. M. Vukobratovic, D.H., and Z. Stojiljkovic, “Development of active anthropomorphic
exoskeletons,”. Vol. 12. 1974.
22. D. Hristic, M.V., and M. Timotijevic,, “New model of autonomous ‘active suit’ for distrophic
patients,”. 1981.
23. Seireg., J.G.a.A. (1977) “Computer control of multi-task exoskeleton for paraplegics,”. Volume,
569–644.
24. A. Seireg and J. G. Grundmann (1981) “Design of a multitask exoskeletal walking device for
paraplegics,”. Volume, 569–644.
25. Jeon., K.K.a.D., “Design and control of an exoskeleton for the elderly and patients,”. 2006.
26. Jaukovic., N.D., “Active peroneal orthosis”. 1981.
27. D. P. Ferris, J.M.C., and B.Hannaford., ed. “An ankle–foot orthosism powered by artificial
muscles”. Vol. 21. 2005.
75
28. G. S. Sawicki, K.E.G., and D. P. Ferris., “Powered lower limb orthoses: Applications in motor
adaptation and rehabilitation,” in Rehabil. Robot. 2005.
29. J. Nikitczuk, B.W., and C. Mavroidis. “Rehabilitative knee orthosis driven by electro-rheological
fluid based actuators,”. 2005.
30. C. Mavroidis, J.N., B. Weinberg, G. Danaher, K. Jensen, P. Pelletier, J. Prugnarola, R. Stuart, R.
Arango, M. Leahey, R. Pavone, A. Provo, and D. Yasevac. (2005) “Smart portable rehabilitation
devices”. Volume,
31. Knutzen, J.H.y.K.M., ed. Bases Biomecânicas do Movimiento Humano. 1ra edición ed. 1999:
Brasil.
32. Sistema óseo, el esqueleto. [cited; Available from:
http://www.cuerpohumano.50megs.com/Cuerpo_humano/Oseo.htm.
33. Sistema óseo, Introducción a las ciencias de la salud. [cited.
34. Evelyn García Nieto, R.E.Y., Feliberto Fernández Castañeda, Miguel Ángel Martínez Hernández,
Francisco Urbay Ceballos BIOMECÁNICA DE LA CADERA. Volume, 11
35. Dra. Ledia H. Góngora García, D.C.M.R.G., Dra. Isabel González Fuentes and y.D.N.P. Victoria.
ARTICULACIÓN DE LA RODILLA Y SU MECÁNICA ARTICULAR. 2003 [cited.
36. Conceptos básicos del cuerpo humano. [cited; Available from:
www.elitearteydanza.com.ar/enciclopedia-anato...
37. Ueda, D.S.I. Semiología de la cadera,muslo y rodilla Volume, 6
38. Vega, D.A.P., Semiología de pierna, tobillo y pie. p. 10.
39. Dra. Marco Sanz, C.P.T.d.C., CINESIOLOGIA DE LA MARCHA HUMANA NORMAL.
40. Kadaba, M.P., Ramakrishnan, H.K., & Wootten., Measurement of lower extremity kinematics
during level walking. Journal of Orthopedic Research., 1990: p. 383-392.
41. Mungiole, H.P.C.I.A.C.B.M., Exoskeleton Power and Torque Requirements Based on Human
Biomechanics. NOVEMBER 2002, Army Research Laboratory.
42. Manuel Álvarez Blanco, A.G.H., Rogelio Lau Fernández, ed. Matemática Numérica. 2004,
Editorial Félix Varela. La Habana.
43. Remedios, E.T., Diseño de una mesa quirúrgica para realizar operaciones de la cadera. 2009,
Martha Abreu De Las Villas: Santa Clara.
44. Drive, H., Quick Connect Gearheads CSF-GH Series. 2009.
45. Autores, C.d. Aluminio. 2010 [cited; Available from: www.wikipedia.org/Laenciclopedialibre.htm.
46. Propiedades del Aluminio. [cited; Available from: http://www.matweb.com/.
47. Soldadura GTAW/TIG. 2006 [cited; Available from:
http://www.esab.com/es/sp/education/proceso-gtaw-tig.cfm.
48. Autores, C.d. El Aluminio. 2010 [cited; Available from: http://www.slideshare.net/tomate1987/el-
aluminio-presentation.
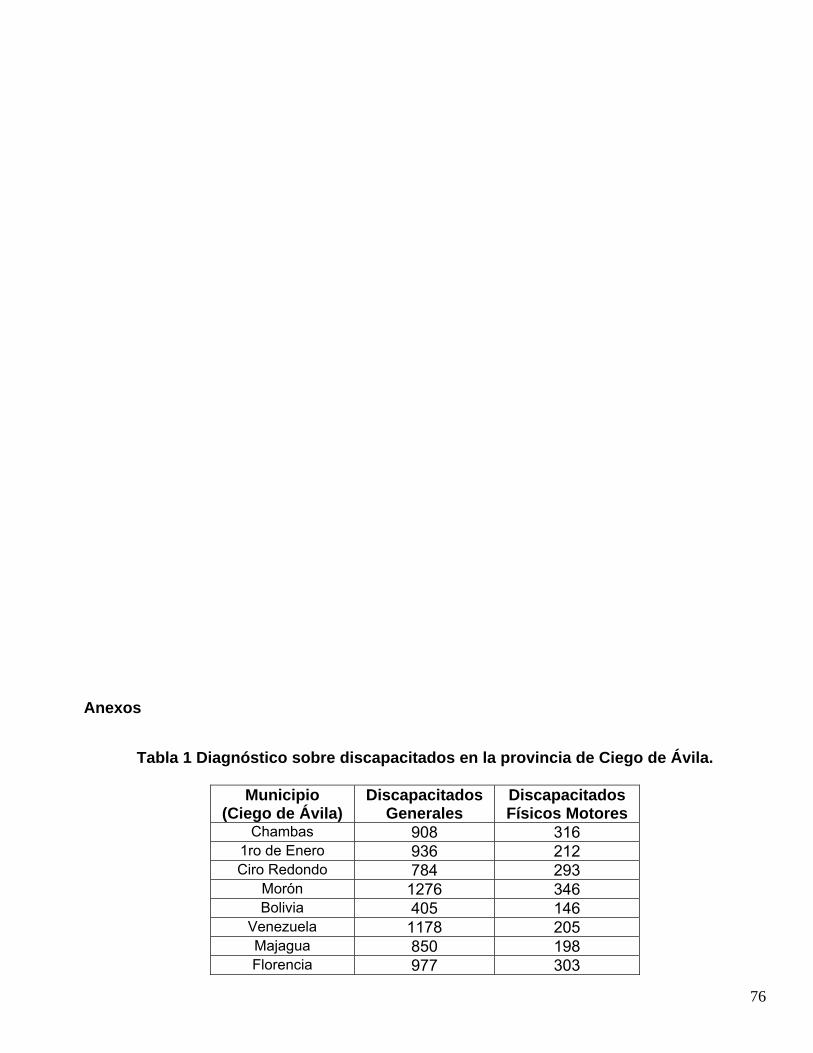
76
Anexos
Tabla 1 Diagnóstico sobre discapacitados en la provincia de Ciego de Ávila.
Municipio
(Ciego de Ávila) Discapacitados
Generales Discapacitados Físicos Motores
Chambas 908 316 1ro de Enero 936 212 Ciro Redondo 784 293
Morón 1276 346 Bolivia 405 146
Venezuela 1178 205 Majagua 850 198 Florencia 977 303

77
Ciego de Ávila 3941 945 Baraguá 1046 267 Total 12301 3231
Anexos II
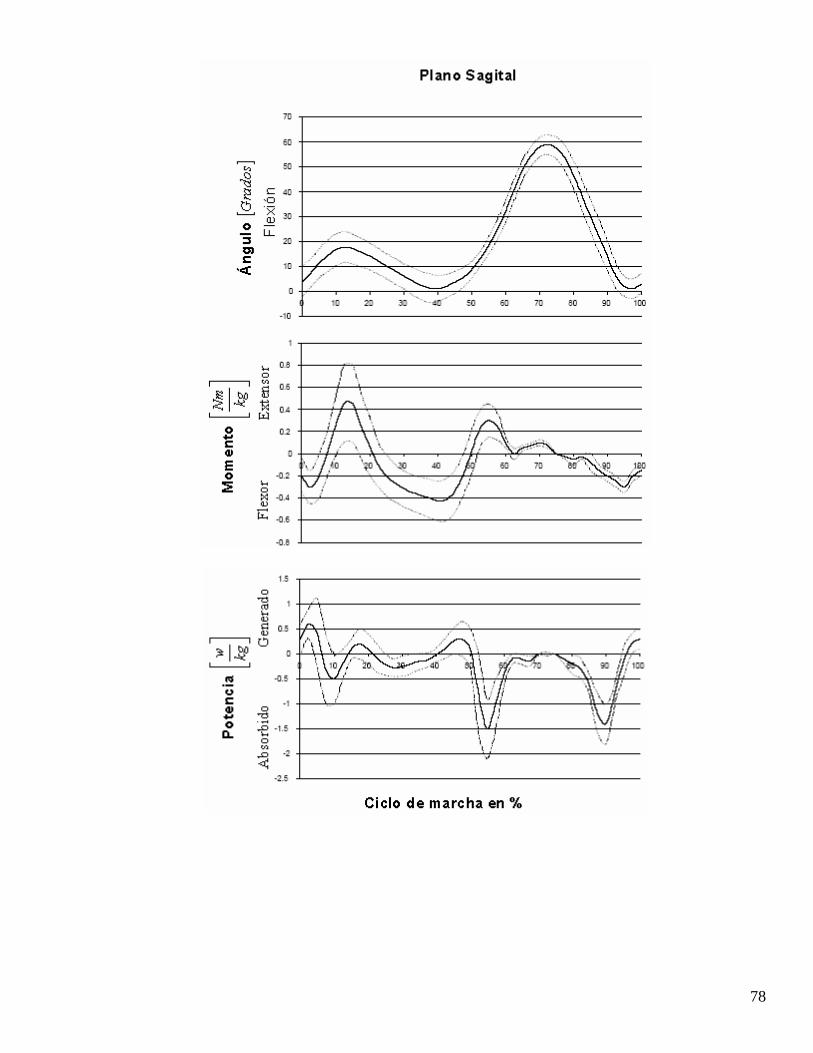
78
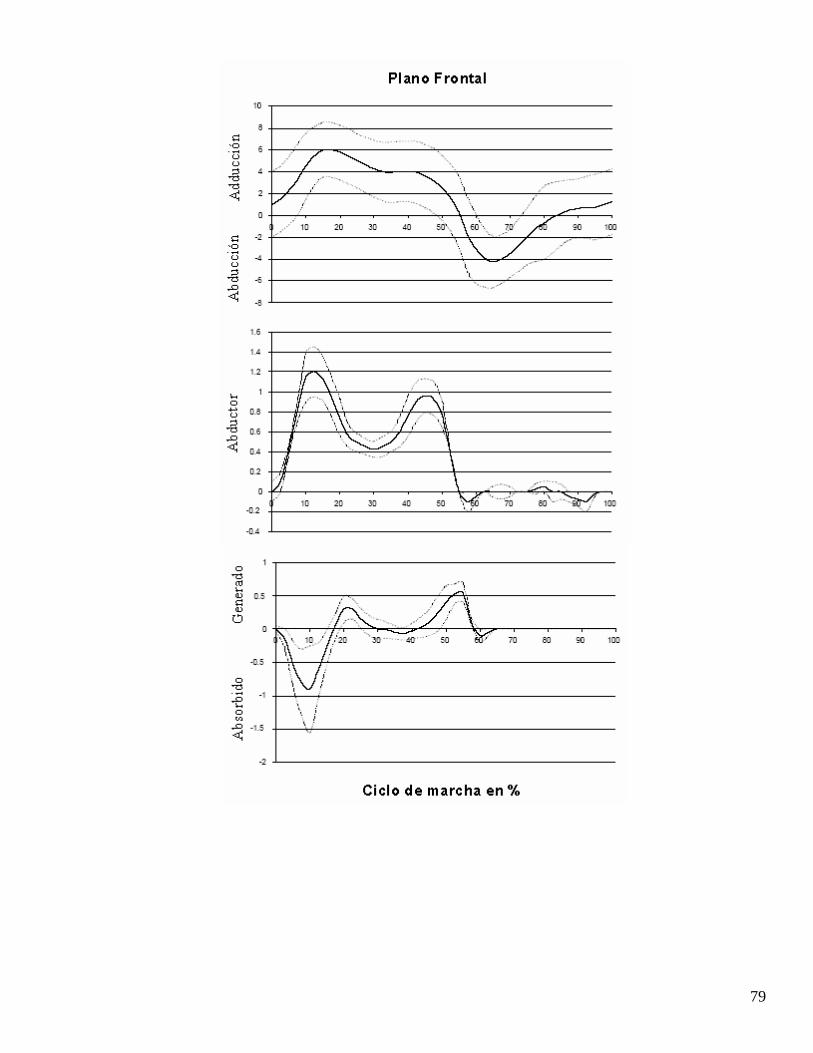
79
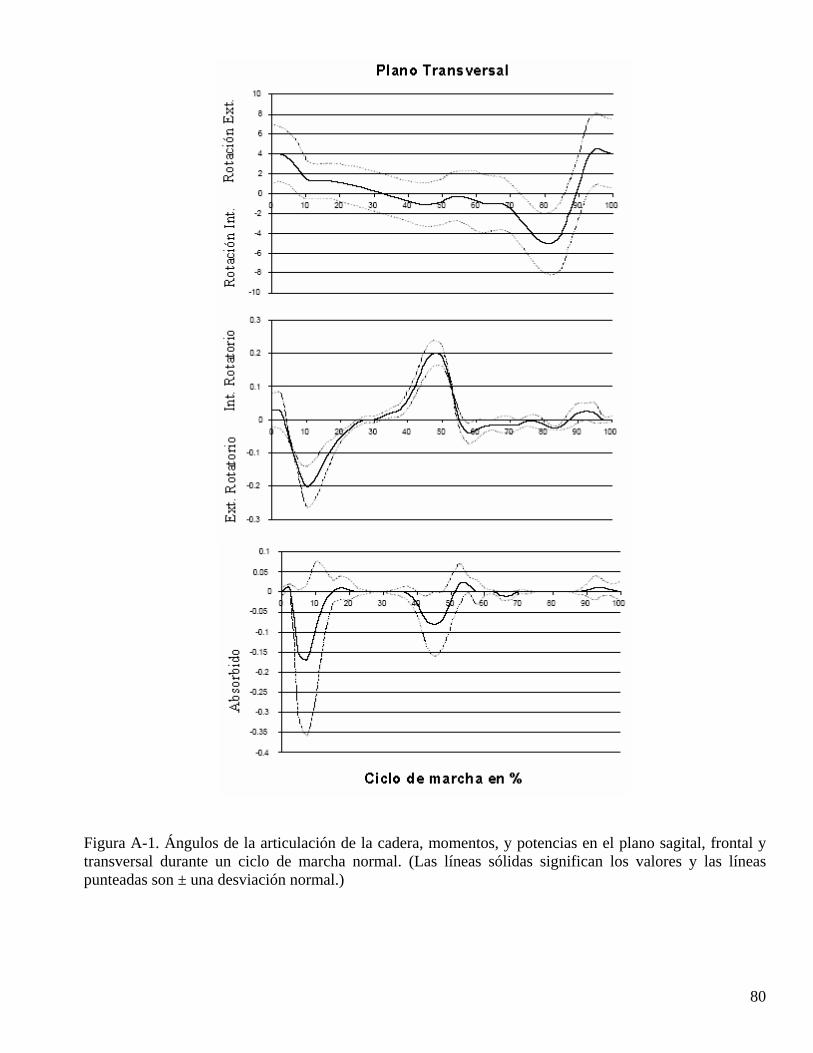
80
Figura A-1. Ángulos de la articulación de la cadera, momentos, y potencias en el plano sagital, frontal y transversal durante un ciclo de marcha normal. (Las líneas sólidas significan los valores y las líneas punteadas son ± una desviación normal.)
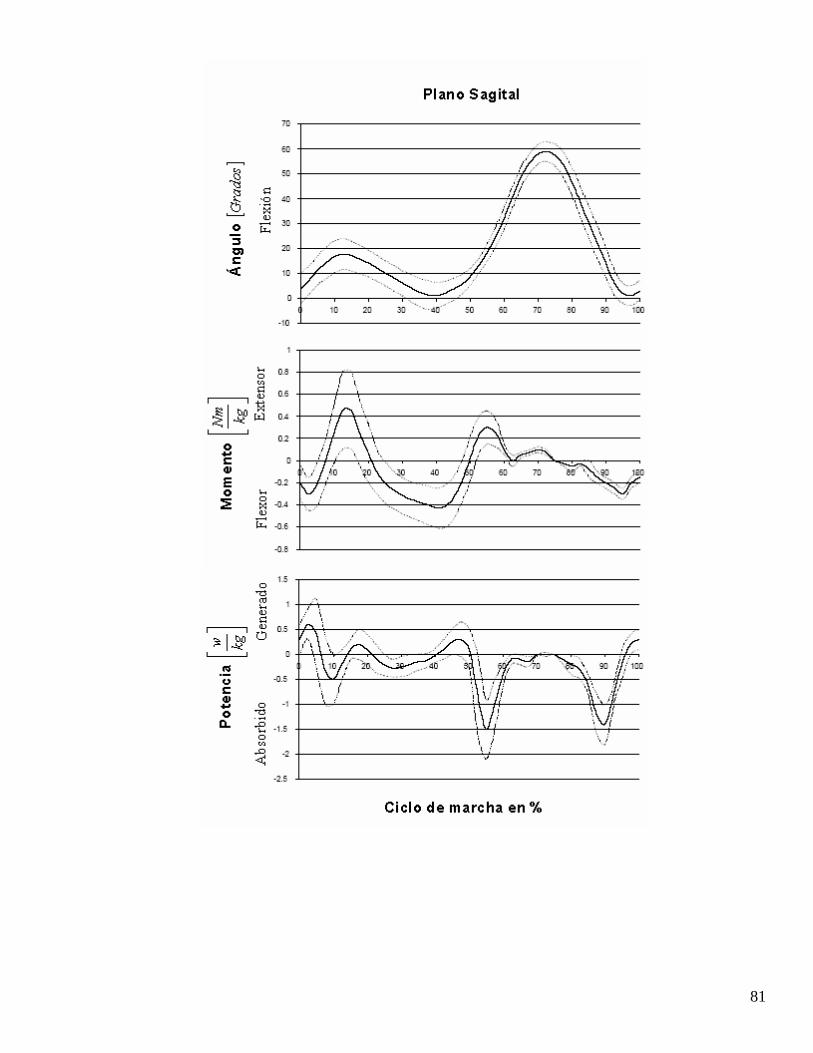
81
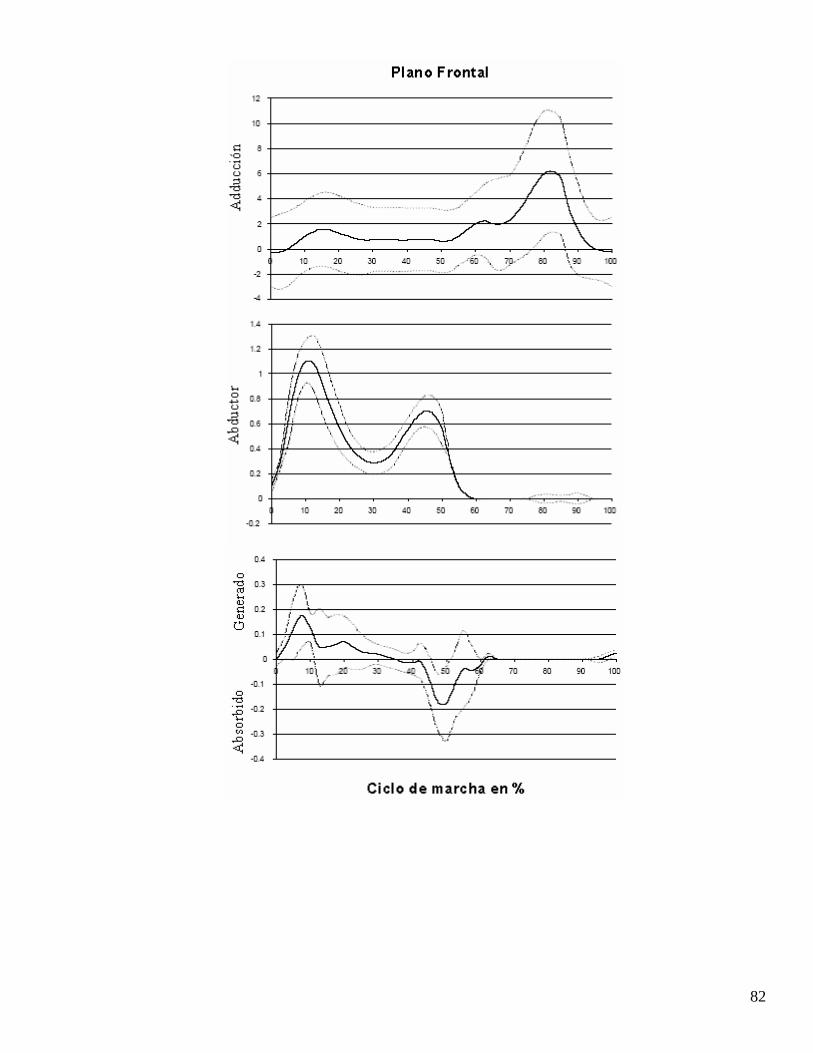
82
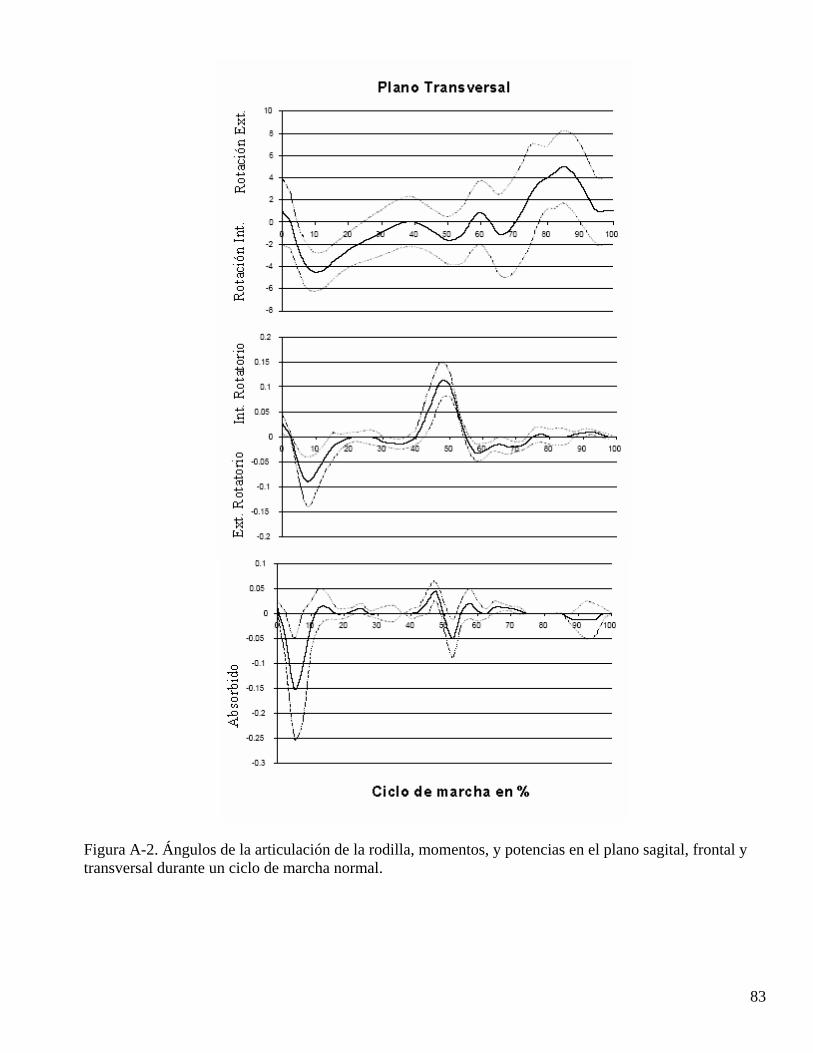
83
Figura A-2. Ángulos de la articulación de la rodilla, momentos, y potencias en el plano sagital, frontal y transversal durante un ciclo de marcha normal.
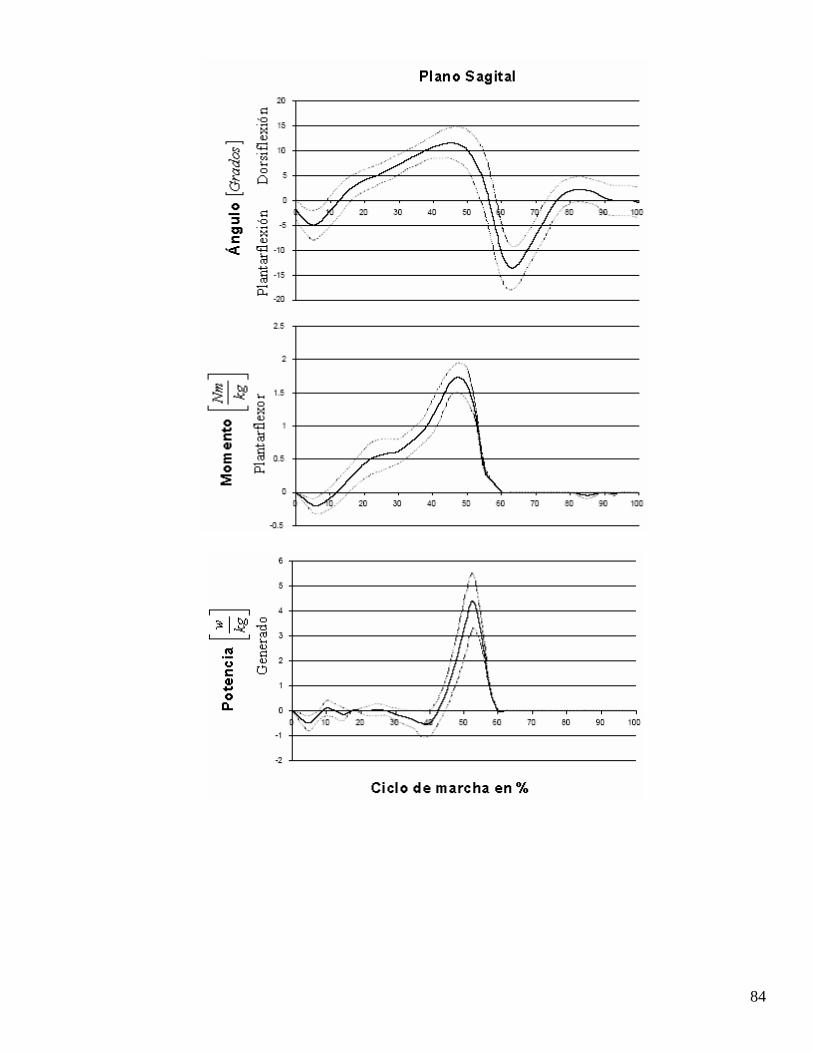
84
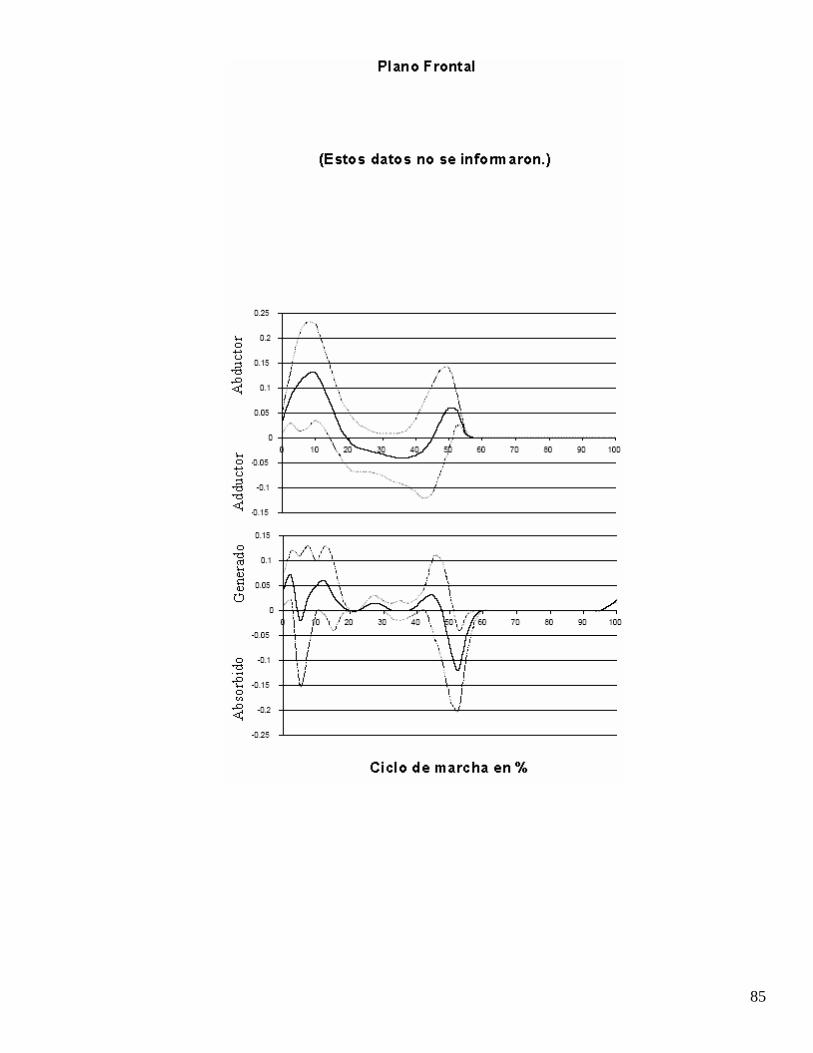
85
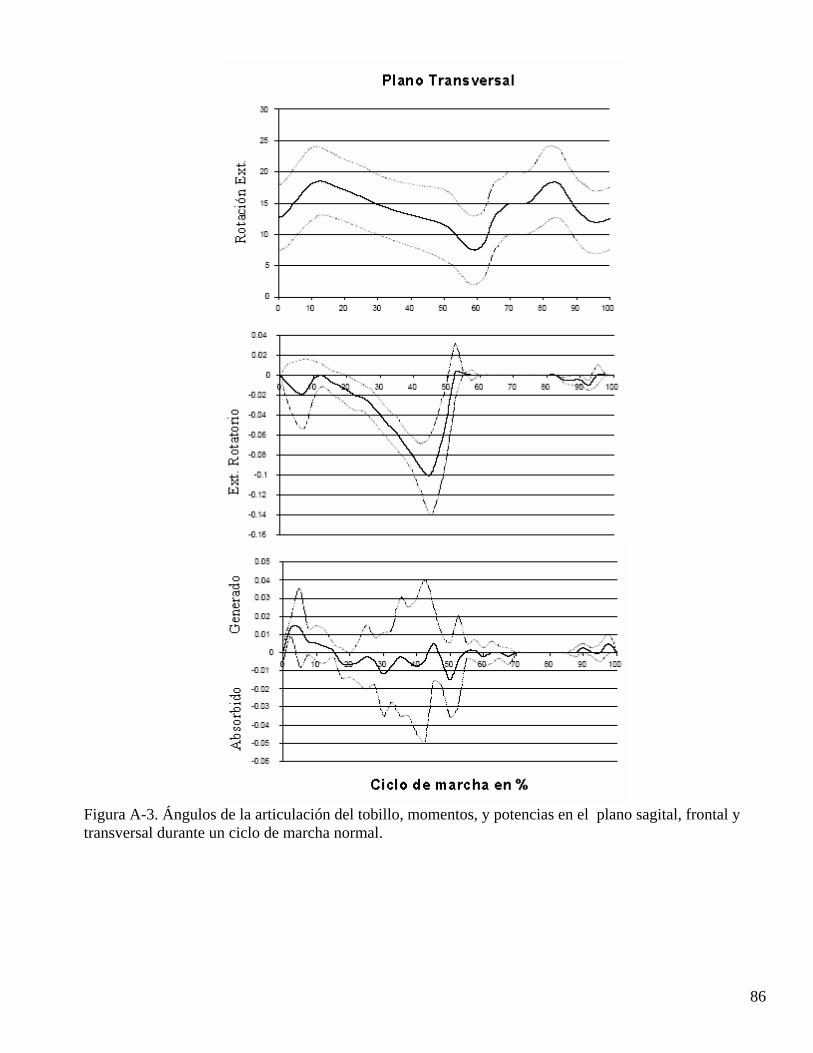
86
Figura A-3. Ángulos de la articulación del tobillo, momentos, y potencias en el plano sagital, frontal y transversal durante un ciclo de marcha normal.
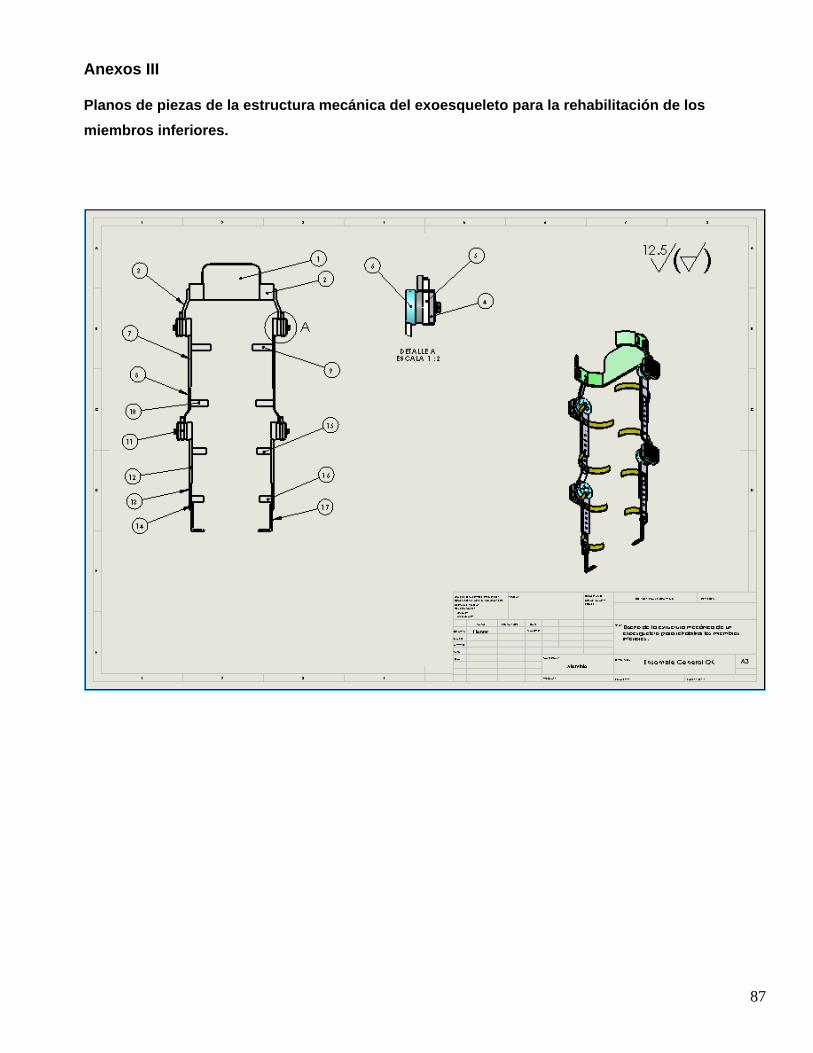
87
Anexos III Planos de piezas de la estructura mecánica del exoesqueleto para la rehabilitación de los miembros inferiores.
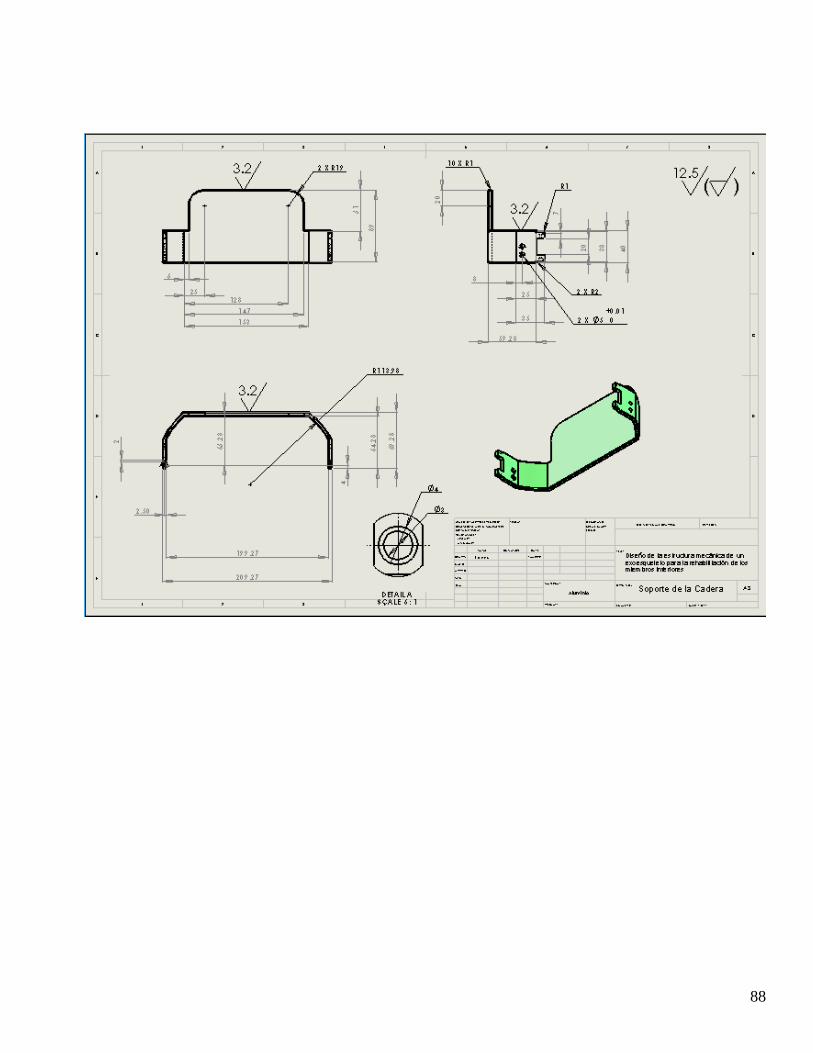
88
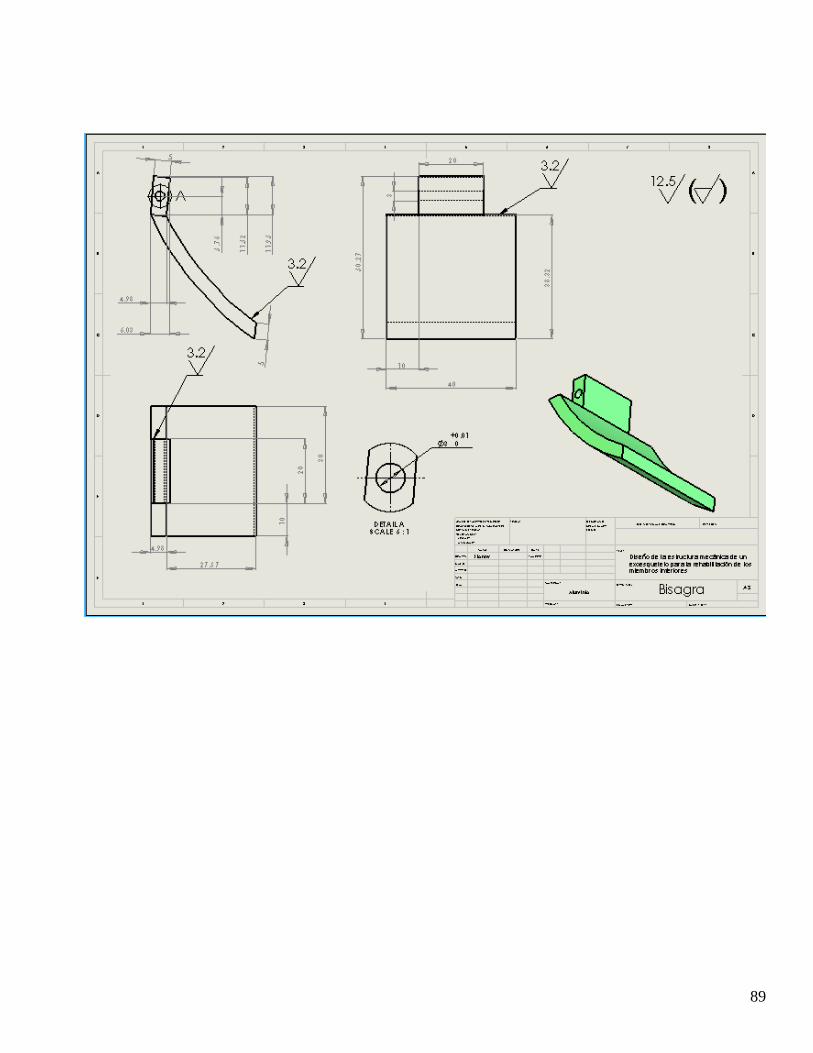
89
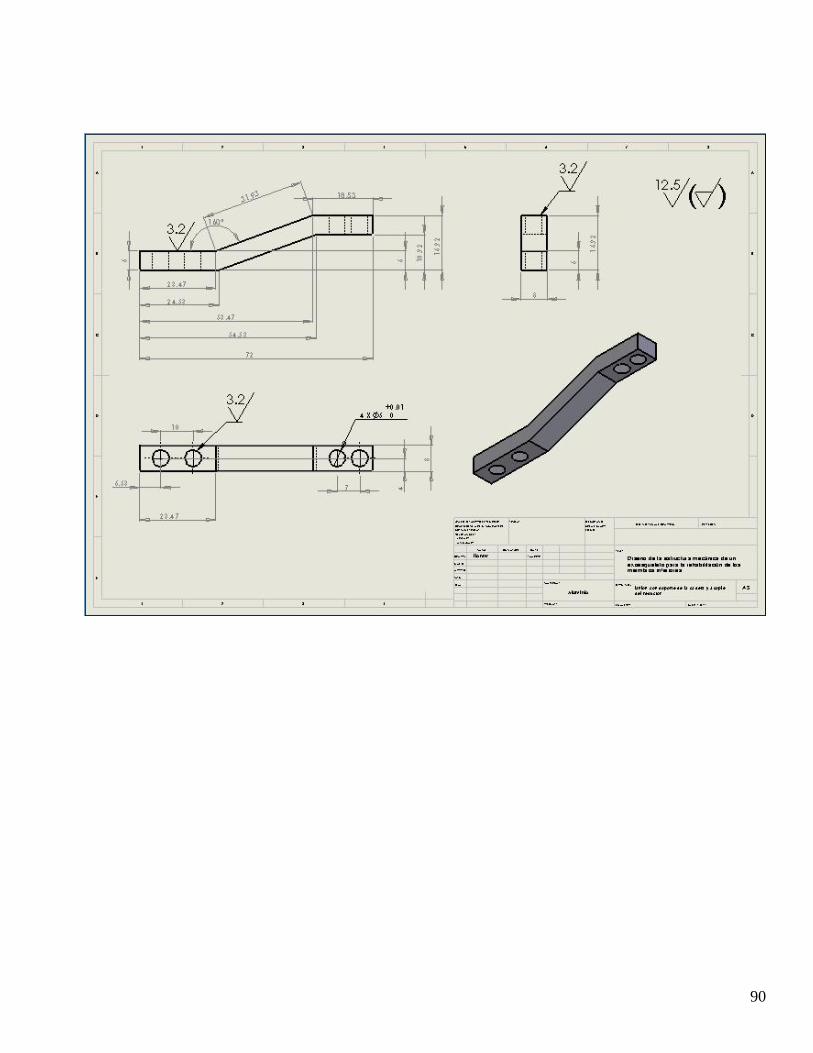
90
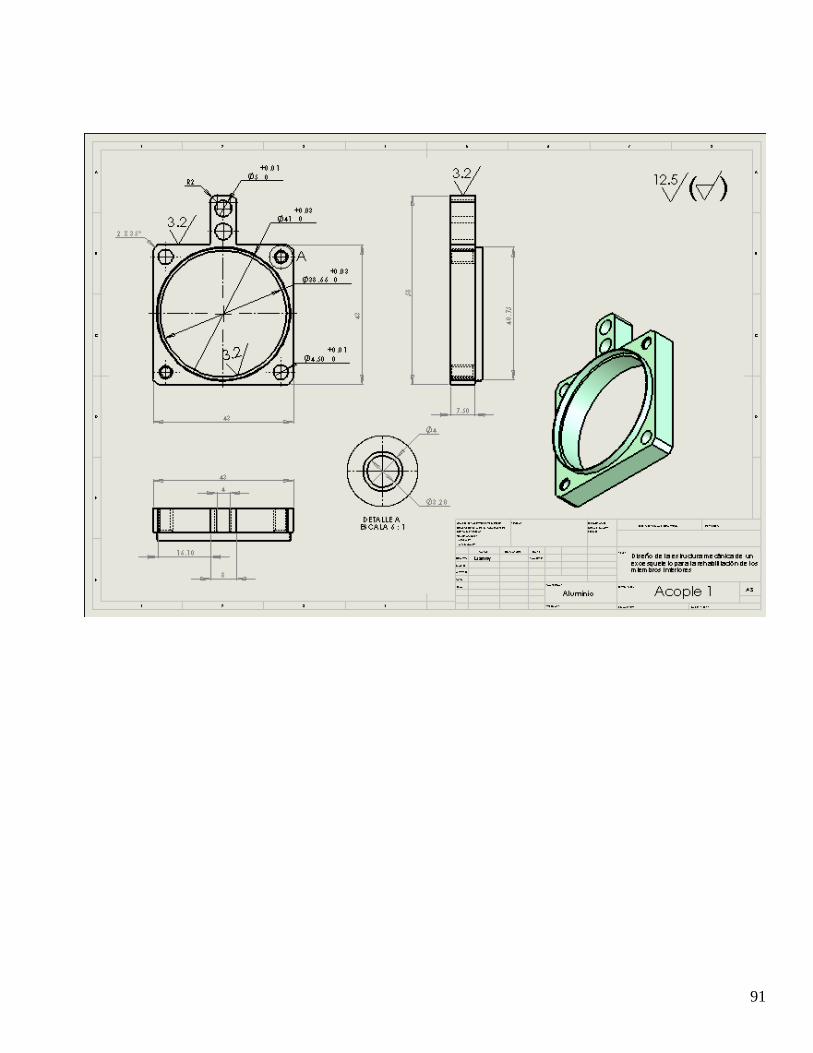
91
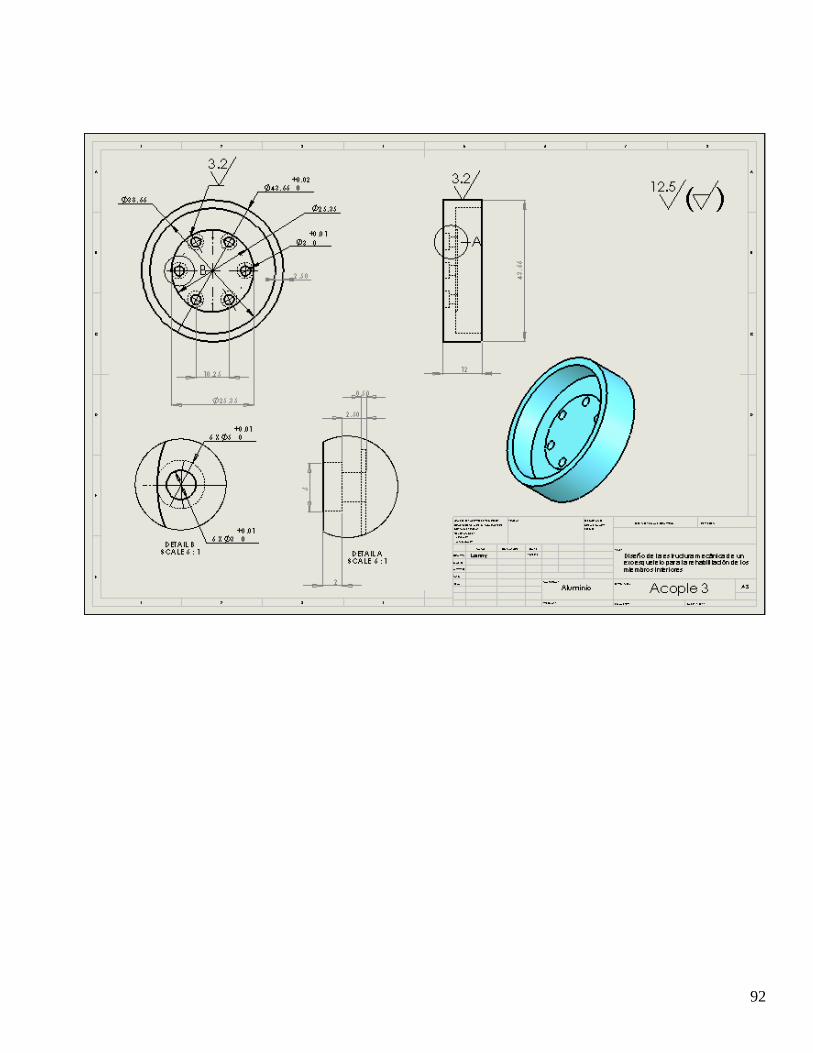
92
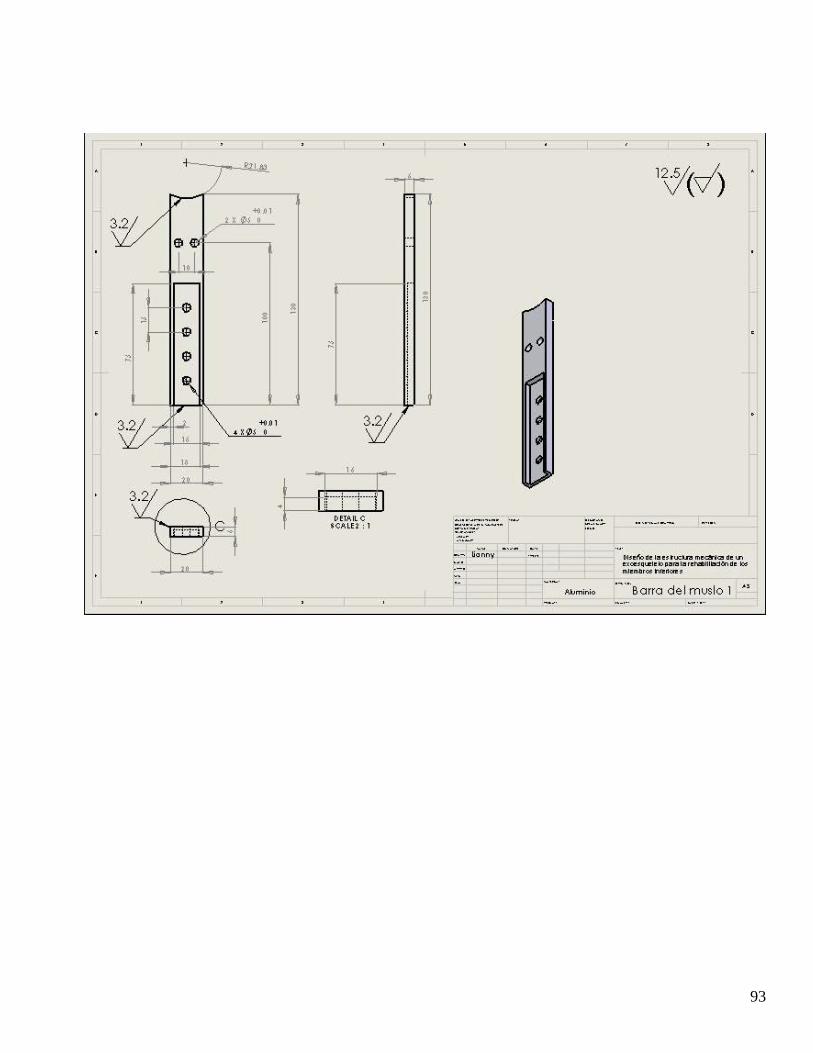
93
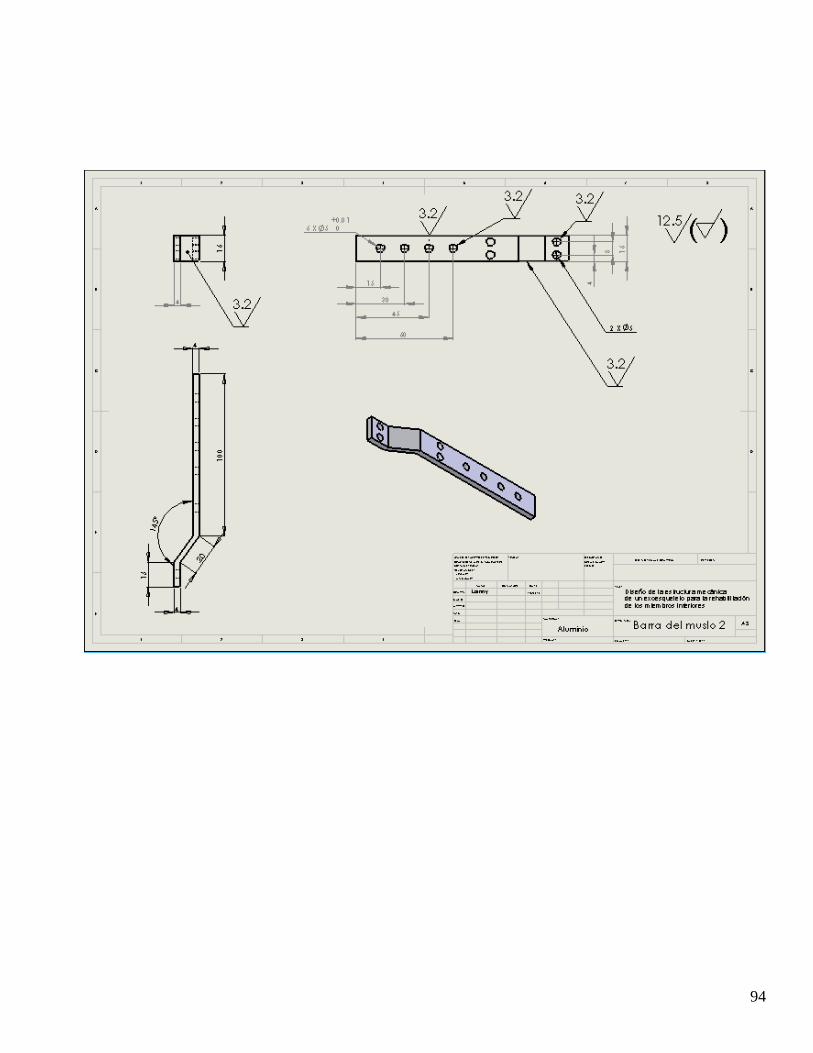
94
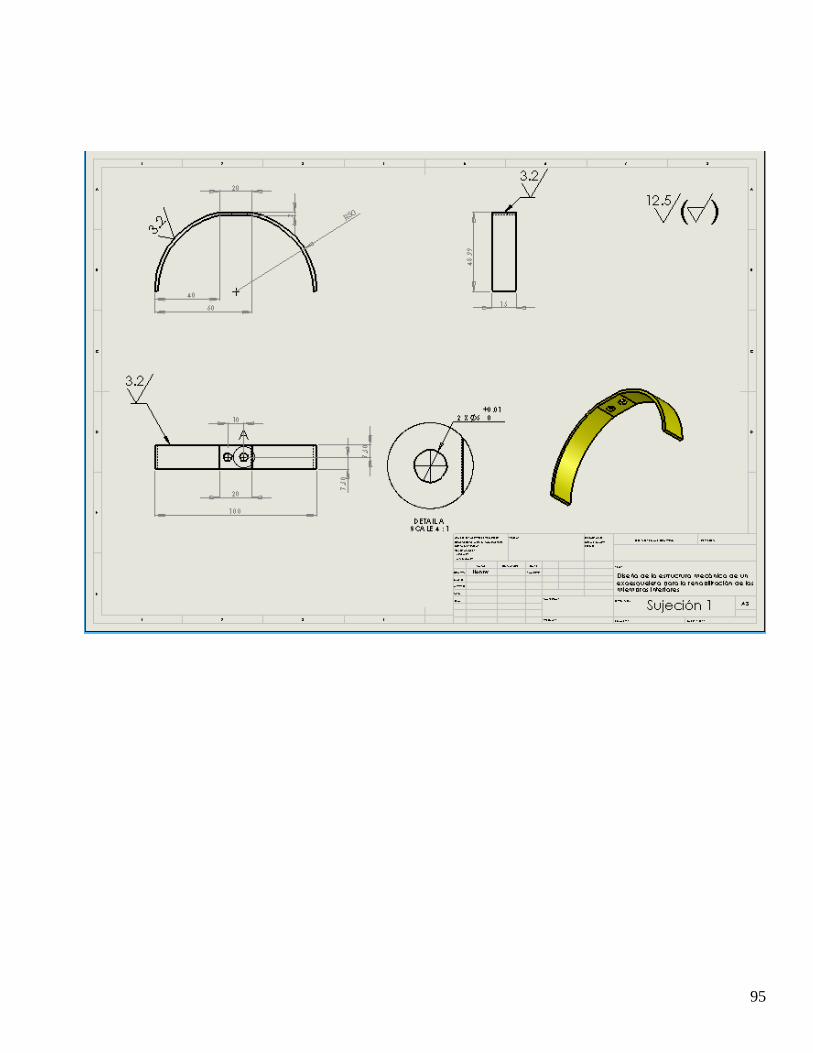
95
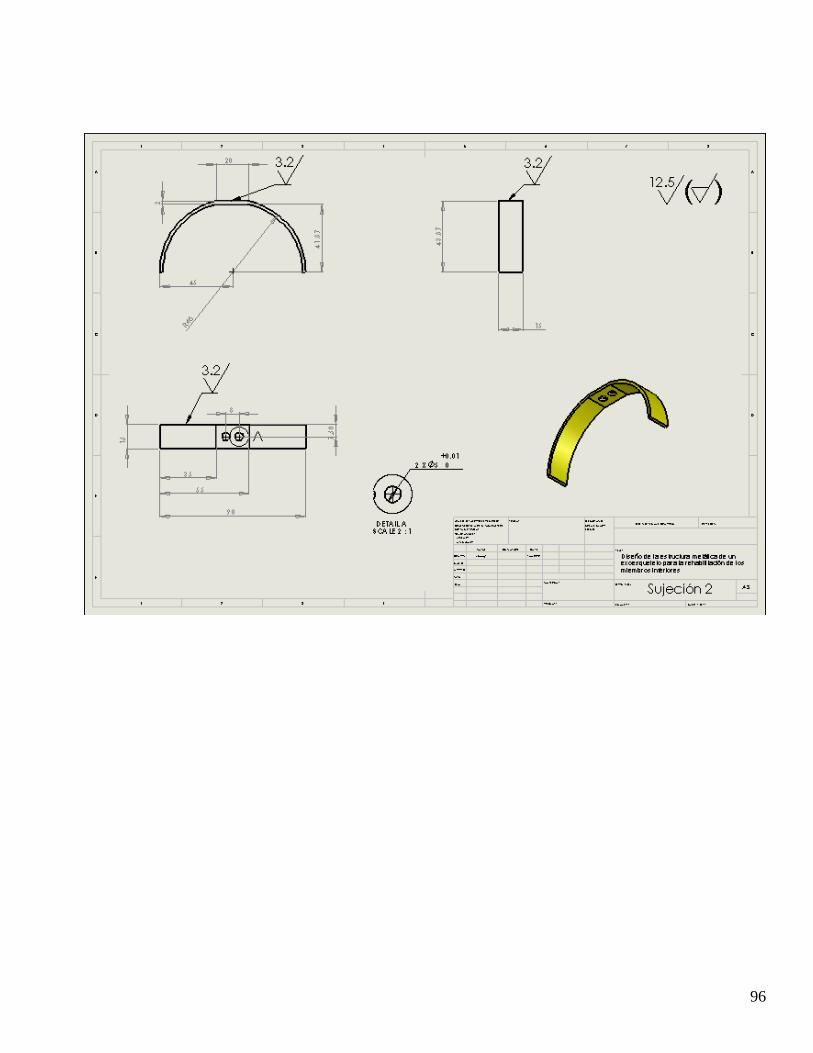
96
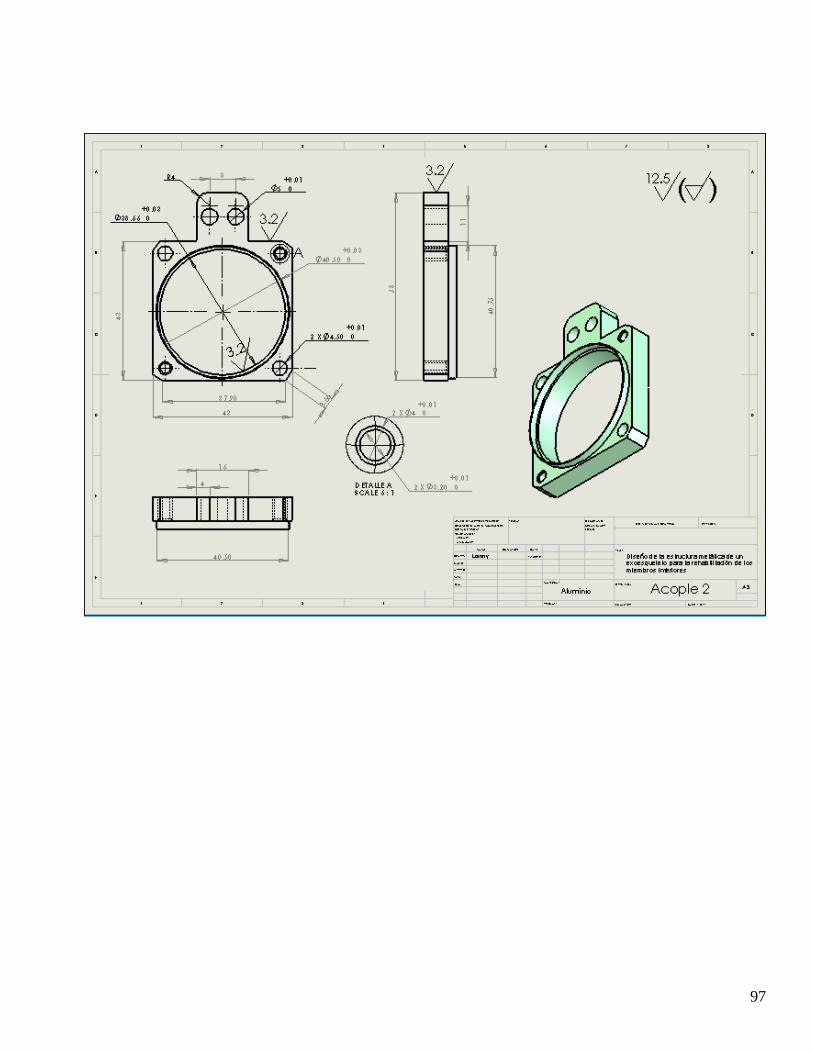
97
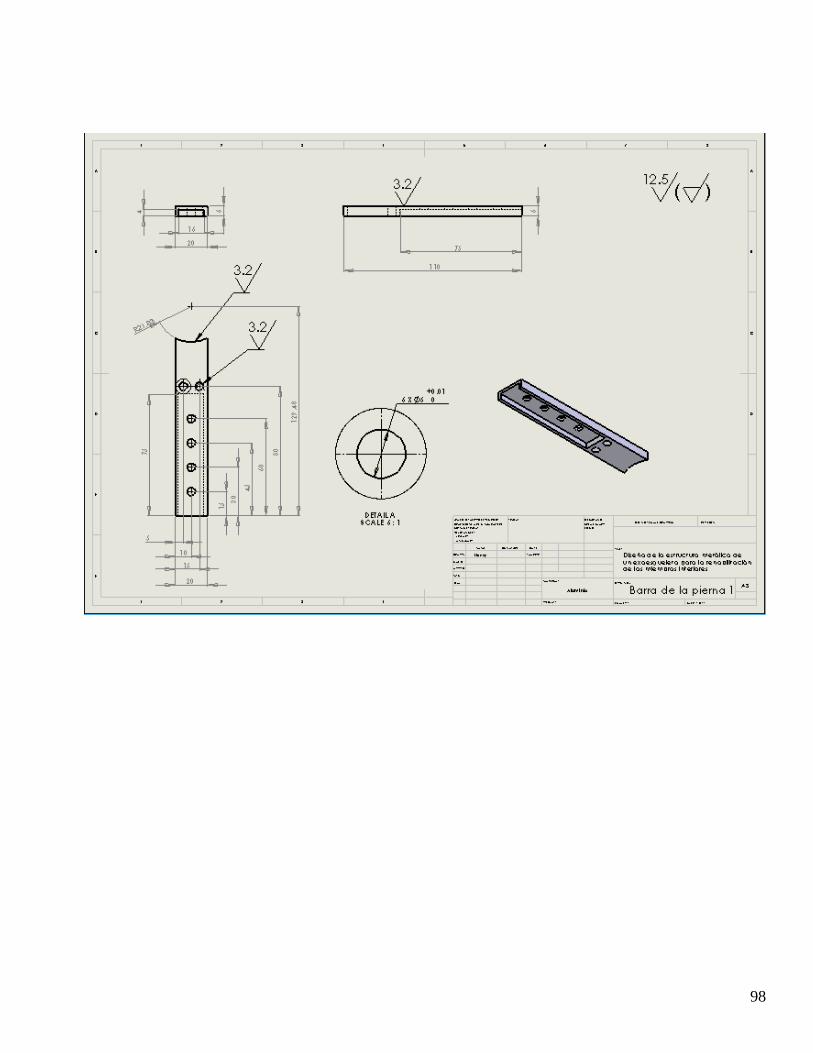
98
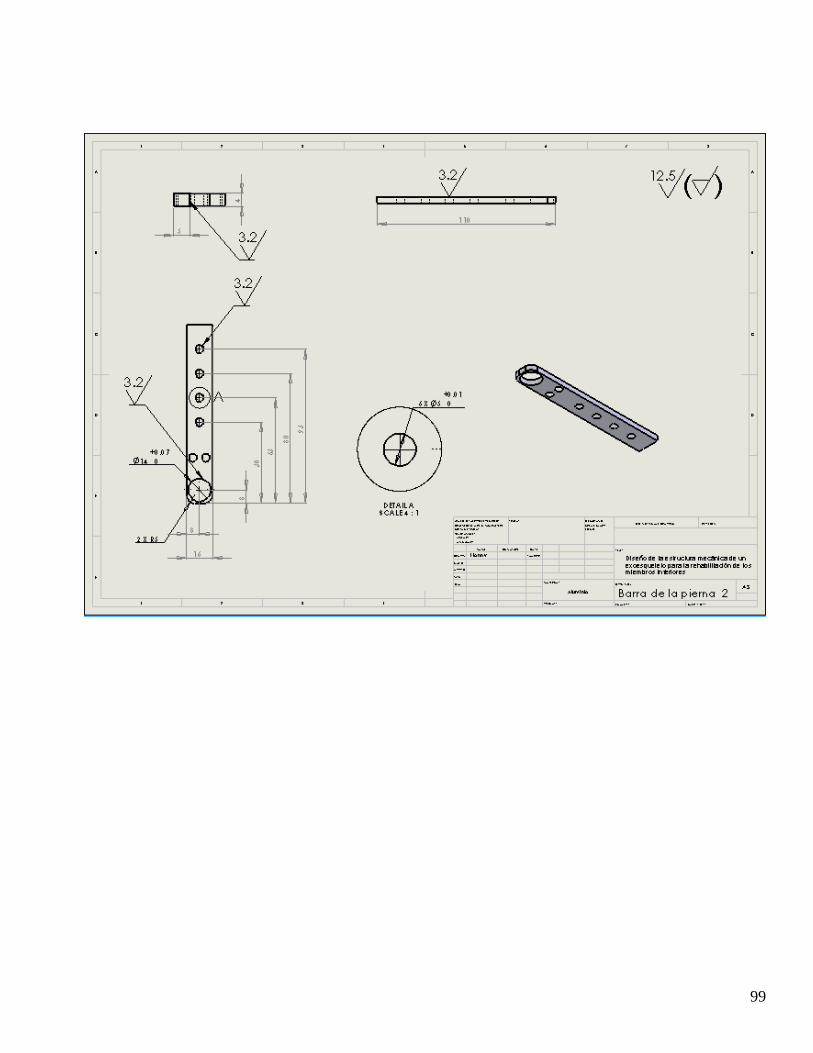
99
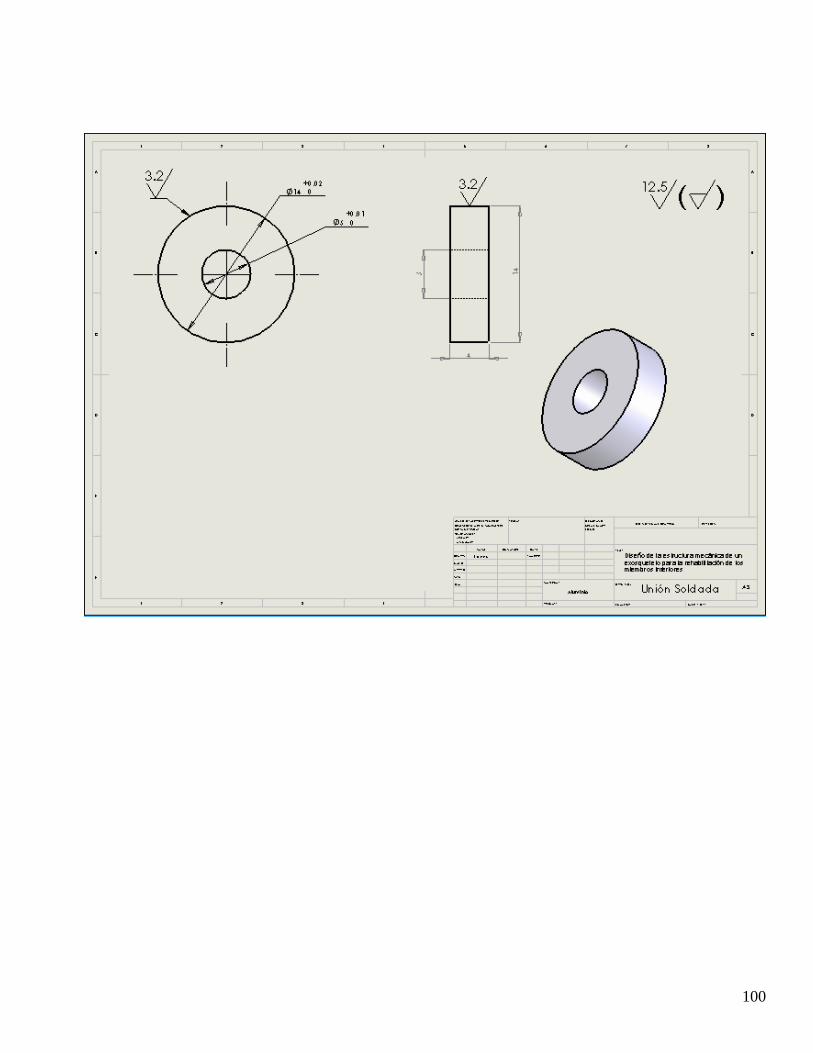
100
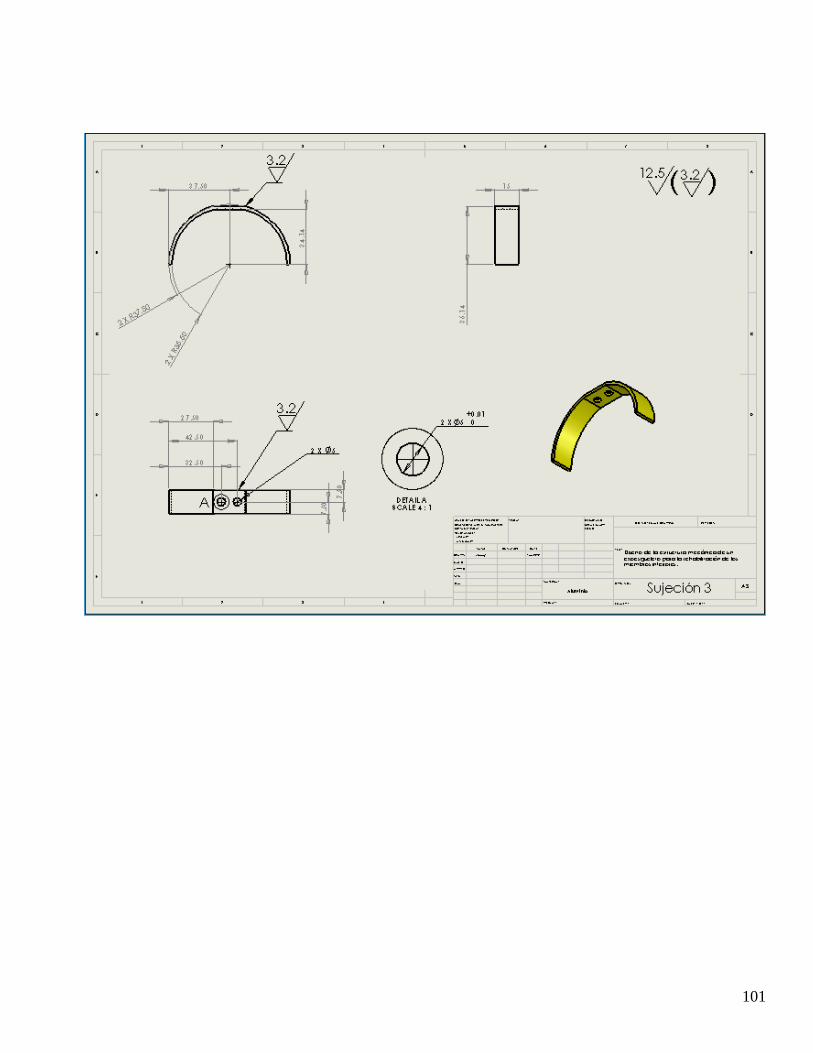
101
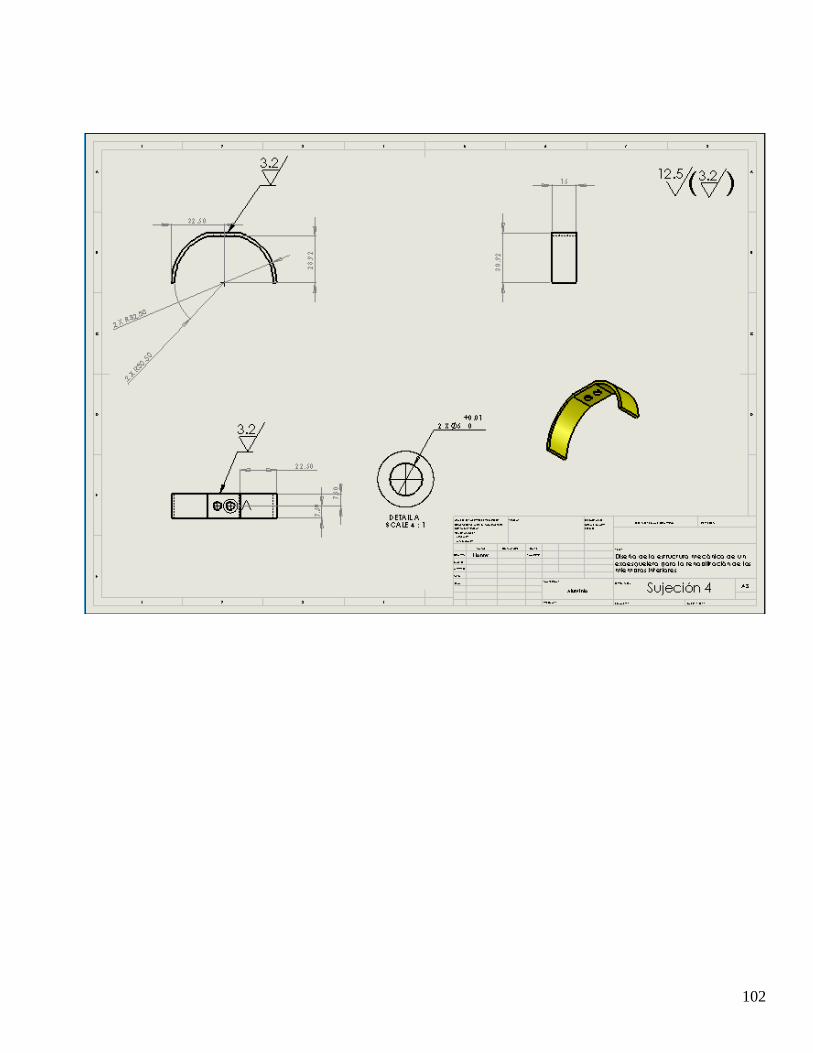
102
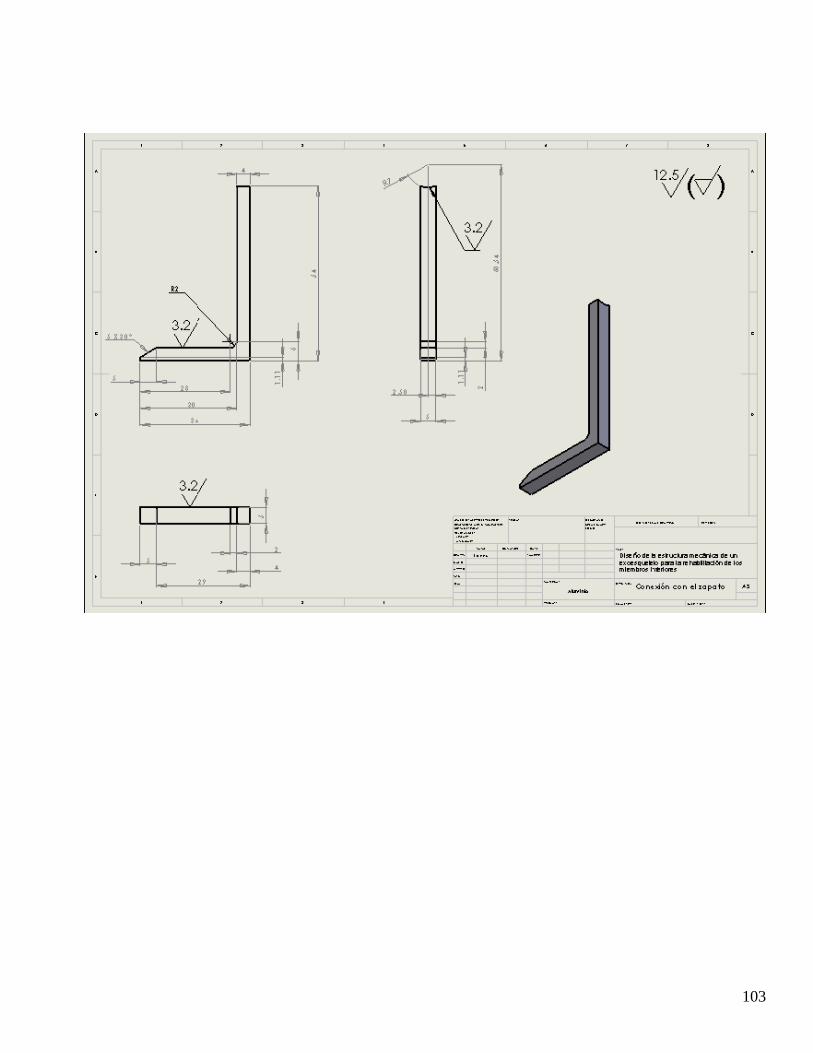
103