mmmmaaannnnuuuuaaallll dddeeee llllaaaa de asignatura/plan 2006/primer... · el algebra lineal es...
TRANSCRIPT

MTMTMTMT----SUPSUPSUPSUP----XXXXXXXXXXXX REV00REV00REV00REV00
MMMMMMMMAAAAAAAANNNNNNNNUUUUUUUUAAAAAAAALLLLLLLL DDDDDDDDEEEEEEEE LLLLLLLLAAAAAAAA AAAAAAAASSSSSSSSIIIIIIIIGGGGGGGGNNNNNNNNAAAAAAAATTTTTTTTUUUUUUUURRRRRRRRAAAAAAAA
ALGEBRA LINEAL
INGENIERÍA MECATRÓNICA
=101
101
110
.
101
100
011
A

1
FFFF----RPRPRPRP----CUPCUPCUPCUP----17/REV:0017/REV:0017/REV:0017/REV:00
DIRECTORIODIRECTORIODIRECTORIODIRECTORIO
Secretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación Pública
Dr. Reyes Taméz Guerra
Subsecretario de Educación Superior Dr. Julio Rubio Oca Coordinador de Universidades Politécnicas
Dr. Enrique Fernández Fassnacht

2
PAGINA LEGALPAGINA LEGALPAGINA LEGALPAGINA LEGAL
Víctor Manuel Rodríguez Velásquez (UPSIN) Primera Edición: 200_ DR 2005 Secretaría de Educación Pública México, D.F. ISBN-----------------

3
ÍNDICEÍNDICEÍNDICEÍNDICE
Introducción.............................................................................
4444
Ficha Técnica............................................................................. 5555
Identificación de resultados de aprendizaje .......................
7777
Planeación del aprendizaje........................................................
11114444
Desarrollo de prácticas..........................................................
26262626
Instrumentos de Evaluación Diagnóstica.……………………………………………………………………… Formativa.………………………………………………………………………… Sumativa.………………………………………………………………………….
Glosario....................................................................................... 33330000
Bibliografía.................................................................................
44440000
4
INTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓN
El presente manual es una guía para la asignatura denominada Algebra Lineal II, su finalidad es conformar un instrumento de referencia práctica, y su contenido está constituido de la información necesaria de cómo administrar y facilitar el curso, todo esto bajo un enfoque de Educación Basada en Competencias (EBC). El Algebra Lineal es una herramienta poderosa, es base para el diseño, cálculo y caracterización de parámetros en sistemas mecatrónicos. Sus aplicaciones van desde la transformación de espacio de estado a funciones de transferencia en sistemas de control, el cálculo de los parámetros de un motor de CD mediante la aplicación de regresión lineal en el Control de Máquinas Eléctricas, el análisis de estabilidad y control de Sistemas Mecatrónicos, la caracterización del torque de motores de CD, la relación entre el espacio operacional de la posición de un Robot Manipulador con respecto al espacio articular de cada uno de sus eslabones, entre otras aplicaciones de importancia. Por otra parte, la asignatura de Algebra lineal, provee un antecedente matemático y constituye un pre-requisito para materias relacionadas con la independencia lineal en soluciones de ecuaciones diferenciales, los diferentes métodos analíticos y gráficos para la resolución de sistemas de ecuaciones lineales, las transformaciones lineales para su aplicación en el área de Visión Artificial y teoría de los Robots. El objetivo de la asignatura es “que el alumno desarrolle la capacidad de analizar y solucionar problemas de aplicación relacionados con transformaciones lineales, valores y vectores propios, así como, aplicar tensores a situaciones de ingeniería.” Esta asignatura contribuye con sus conocimientos y habilidades a varias de las materias posteriores tales como: Cálculo Vectorial, Física I, Ecuaciones Diferenciales, Variable Compleja y Series de Fourier, entre otras. Además, contribuye al perfil de egreso al proporcionar las bases para el análisis y soluciones de los requerimientos de sistemas mecatrónicos.

5
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA
Nombre: Algebra Lineal
Clave:
Justificación:
Esta asignatura es una herramienta fundamental para el diseño, cálculo y caracterización de parámetros en sistemas mecatrónicos, tales como: transformaciones lineales, cálculo de parámetros, caracterización de elementos mecatrónicos, entre otras aplicaciones de importancia. Por lo tanto constituye un pre-requisito para materias como: estática, análisis de circuitos eléctricos, modelado y simulación de sistemas, control, robótica I y II.
Objetivo:
Desarrollar la capacidad en el alumno para analizar y resolver problemas de aplicación relacionados con el álgebra matricial, soluciones de sistemas de ecuaciones lineales, espacios vectoriales, transformaciones lineales, valores y vectores propios.
Pre requisitos: Perfil de ingreso
Capacidades
• Analizar problemas de aplicación relacionadas con matrices y vectores • Solucionar problemas de aplicación relacionadas Sistemas de ecuaciones lineales • Solucionar problemas de aplicación en ingeniería relacionadas con valores y vectores propios
Estimación de tiempo (horas) necesario para el aprendizaje al alumno, por Unidad de Aprendizaje:
UNIDADES DE APRENDIZAJE
TEORÍA PRÁCTICA
presencial No
presencial
presencial No
presencial
ECUACIONES LINEALES 6 0 4 2
MATRICES 11 3 8 1
SISTEMAS DE ECUACIONES LINEALES
10 0 7 6
DETERMINANTES 7 0 4 2
ESPACIOS VECTORIALES
9 1 6 3
TRANSFORMACIONES LINEALES
7 1 5 2
VALORES Y VECTORES PROPIOS
7 0 6 2
Total de horas por cuatrimestre: 120 Total de horas por semana: 8 Créditos:
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA

6
Bibliografía:
1. Harvey Gerber, Algebra LinealAlgebra LinealAlgebra LinealAlgebra Lineal, Segunda Edición, Grupo Editorial
Iberoamericana, México, 2001, ISBN: 968-7270-63-2 2. Howard Antón, Algebra LinealAlgebra LinealAlgebra LinealAlgebra Lineal, Tercera Edición, Limusa Wiley,
México, 2004, ISBN: 968-18-6317-8. 3. Grossman Stanley I., Algebra LinealAlgebra LinealAlgebra LinealAlgebra Lineal, Quinta Edición, Mc. Graw Hill,
México, 2004, ISBN: 968-422-984-4. 4. Williams Gareth, Algebra Lineal con AplicacionesAlgebra Lineal con AplicacionesAlgebra Lineal con AplicacionesAlgebra Lineal con Aplicaciones, Segunda
Edición, Mc. Graw Hill, México, 2001, ISBN: 970-10-3838-X. 5. Poole David, Algebra Lineal: Una introducción ModernaAlgebra Lineal: Una introducción ModernaAlgebra Lineal: Una introducción ModernaAlgebra Lineal: Una introducción Moderna, Cuarta
Edición, Thompson-Learning, México, 2004, ISBN: 970-686-272-2.
6. Nakos George y Joyner David, Algebra Lineal con AplicacionesAlgebra Lineal con AplicacionesAlgebra Lineal con AplicacionesAlgebra Lineal con Aplicaciones, Segunda Edición, México, 1998, ISBN: 968-7529-86-5.
7. Ben Noble, James W. Daniel, Algebra Lineal AplicadaAlgebra Lineal AplicadaAlgebra Lineal AplicadaAlgebra Lineal Aplicada, Tercera Edición, México, 1998, Mc. Graw Hill, ISBN:968-880-173-9.

7
IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Introducción a Introducción a Introducción a Introducción a las ecuaciones las ecuaciones las ecuaciones las ecuaciones
linealeslinealeslinealeslineales
El alumno definirá el concepto de ecuación lineal
Define una ecuación de una línea recta EC: Ecuación lineal, línea
recta, punto-pendiente 6
Represente una ecuación lineal gráficamente
El alumno distinguirá la
ecuación de una línea recta
Distingue una ecuación lineal de una no lineal
EC: Forma general y reducida de una ecuación lineal
6
Define la forma general de una ecuación lineal
El alumno obtendrá
soluciones analíticas y
geométricas de sistemas de ecuaciones
lineales
Distingue las diferentes soluciones de un sistema de ecuaciones lineales
simultaneas
EC: Solución de sistemas de ecuaciones lineales simultáneas EC: Resuelve 3 Sistemas de ecuaciones de 2X2 con distintos tipos de soluciones
EC: Resuelve 5 Sistemas de ecuaciones de 3X3 con distintos tipos de soluciones
MatricesMatricesMatricesMatrices
El alumno definirá los conceptos
básicos de matrices
Define el concepto de matriz
EC: Terminología básica de matrices
3
Define el orden de una matriz
El alumno definirá la
clasificación de matrices y sus propiedades
Define la clasificación de matrices según su arreglo y tipo de elementos EC. Clasificación de matrices:
Matriz escalonada, inversa, transpuesta, diagonal, triangular y simétrica. 5
Identifique los diferentes tipos de matrices de acuerdo a su arreglo y tipo de elementos
Calcule la inversa de una matriz de nxn por operaciones por renglones
EC: 5 ejercicios de Inversa de una matriz de nxn
IDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJE

8
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
El alumno realizará
operaciones algebraicas entre
matrices
Define las operaciones básicas entre matrices EC: Algebra de matrices
15
Demuestre las propiedades de la suma y múltiplo escalar de matrices
Determina si las operaciones de suma, resta y múltiplo escalar entre matrices está definida
EC: Suma, y multiplicación escalar de matrices (5 ejercicios)
Realice operaciones de suma ,resta y múltiplo escalar entre matrices Determina si el producto matricial entre dos o más matrices está definido.
EC: Producto de matrices (5 ejercicios)
Realice operaciones de producto matricial entre 2 ó más matrices
El alumno realizará
operaciones de potenciación de
matrices
Realice operaciones de potencia entre matrices
EC: Potencia de matrices ( 2ejercicios)
Identifique matrices resultantes de la potenciación de matrices
EC: Matriz nilpotente, idempotente e involutiva
El alumno realizará
operaciones entre matrices utilizando
herramientas de cómputo
Realice operaciones de matriciales utilizando software de aplicación
EC: Operaciones de suma, resta ,multiplicación e inversión de matrices mediante software EP: Reporte de práctica de acuerdo al formato establecido

9
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Sistema Sistema Sistema Sistema de de de de ecuaciones ecuaciones ecuaciones ecuaciones
linealeslinealeslinealeslineales
El alumno obtendrá la solución de un sistema de ecuaciones lineales de nxn por métodos matriciales.
Interprete geométricamente la solución de un sistema de ecuaciones lineales de 3x3
EC: Interpretación gráfica de un sistema de ecuaciones
14
Obtiene la solución de un sistema de ecuaciones mediante el Método de la matriz escalonada
EC: Solución de sistemas de ecuaciones lineales( 2ejercicios)
Obtiene la solución de un sistema de ecuaciones mediante de nxn el Método de eliminación Gaussiana
EC: Eliminación Gaussiana (3 ejercicios)
Obtiene la solución de un sistema de ecuaciones mediante el Método de eliminación de Gauss-Jordan
EC: Eliminación de Gauss-Jordan (3 ejercicios)
Obtiene la solución de un sistema de ecuaciones mediante el Método de la matriz inversa
EC: Método de la inversa para sistemas de ecuaciones(2 ejercicios)
El alumno planteará sistemas de ecuaciones lineales que surgen en las distintas áreas de la ingeniería mecatrónica
Obtiene el modelo matemático en forma de sistemas de ecuaciones lineales de una situación real.
EC: Aplicaciones de los sistemas de ecuaciones ( 5 problemas)
6
El alumno obtendrá la solución de un sistema de ecuaciones lineales de nxn(n< / =10) mediante herramientas de cómputo
Obtiene la solución de un sistema de ecuaciones usando herramientas computacionales
EC: Solución de sistemas de ecuaciones lineales
mediante software
2
EP: Reporte de práctica de acuerdo al formato establecido

10
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
DeteDeteDeteDeterrrrminantesminantesminantesminantes
El alumno definirá los conceptos básicos de determinantes
Define la función permutación
EC: Determinantes mediante propiedades
1 Define el concepto de determinante Define el concepto de función determinante
El alumno definirá las propiedades básicas de los determinantes
Define las propiedades básicas de los determinantes
EC: Determinantes mediante propiedades
2 Calcule determinantes de matrices triangulares
Calcule determinantes por renglones y columnas
El alumno calculará el determinante de una matriz de nxn por distintos métodos
Calcule el determinante de una matriz de 2x2 por fórmula general
EC: Determinantes de matrices de 2x2
7
Define el concepto de Menor EC: Desarrollo de Laplace o
por Cofactores (4 ejercicios) Define el concepto de Cofactor
Calcula el determinante de una matriz de 3x3 ó mayor por desarrollo de Laplace o cofactores
EC: Esquema de Sarrus (2 ejercicios)
El alumno resolverá problemas relacionados con la aplicación de determinantes
Obtiene soluciones de sistemas de ecuaciones mediante la regla de Cramer.
EC; Regla de Cramer (2 ejercicios)
3 Calcule la adjunta de una matriz EC: Matriz adjunta ( 3 ejercicios)
Calcule la inversa de una matriz por el Método de la adjunta
Interpreta geométrica y algebraicamente un vector
EC: Vectores en Rn

11
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Espacios Espacios Espacios Espacios
vectorialesvectorialesvectorialesvectoriales
El alumno definirá los conceptos básicos de vectores y sus propiedades
Define las propiedades básicas de un vector
1
El alumno realizará operaciones básicas entre vectores en Rn
Define las operaciones básicas entre vectores
EC: Suma ,resta, multiplicación escalar y norma de vectores en Rn
8
Realice operaciones básicas entre vectores en Rn Calcule la norma de un vector en Rn Interprete el producto escalar o punto entre 2 vectores EC: Producto Punto
( 3 ejercicios) Calcule el producto escalar entre 2 vectores. Interprete el producto vectorial o cruz entre 2 vectores. EC: Producto Cruz
( 3 ejercicios) Calcule el producto vectorial o cruz entre 2 vectores. Interprete el triple producto escalar o mixto entre 3 vectores. EC: Triple producto escalar
( 3 ejercicios) Calcule el triple producto escalar o mixto entre 2 vectores
El alumno determinará si un conjunto dado de vectores representa espacio vectorial
Distingue si un conjunto de valores es un espacio vectorial
EC: Espacios vectoriales y subespacios (10 ejercicios)
10
Distingue si un conjunto de valores representa un subespacio vectorial
El alumno calculará combinaciones lineales entre vectores en Rn.
Define el concepto de combinación lineal de vectores
EC: Combinaciones lineales y generación de espacios
Calcule combinaciones lineales de vectores en Rn
Obtiene espacios vectoriales generados por un conjunto de vectores en Rn
EL alumno definirá la
Define los criterios de dependencia e independencia lineal de vectores
EC: Dependencia e independencia lineal (5 ejercicios)

12
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
independencia y la dependencia lineal de vectores en Rn
Determine si un conjunto de vectores son linealmente dependientes o independientes
El alumno determinará los vectores base y dimensión de un espacio vectorial
El alumno calcula la base de un espacio o subespacio vectorial
EC: Dimensión y base de un espacio vectorial ( 3 ejercicios)
El alumno define la dimensión de un espacio o subespacio vectorial.
TransformacioneTransformacioneTransformacioneTransformaciones s s s LinealesLinealesLinealesLineales
El alumno definirá los conceptos básicos de las Transformaciones lineales y sus propiedades
El alumno define el concepto de Transformación lineal
EC: Transformaciones lineales, núcleo e imagen (5 ejercicios)
6
El alumno identifique las propiedades de las transformaciones lineales
Define el concepto de núcleo e imagen
El alumno realizará transformaciones lineales entre espacios vectoriales
Obtiene la representación matricial de una transformación lineal
EC: Operaciones con transformaciones lineales entre espacios (5 ejercicios)
9
Defina el producto de transformaciones lineales Calcule el producto de transformaciones lineales
Define la inversa de una transformación lineal
Calcule la inversa de una transformación lineal
ValoresValoresValoresValores y y y y vectores propiosvectores propiosvectores propiosvectores propios
El alumno determinará los valores y vectores propios de una matriz (eigenvalues y eigenvectores)
Define el valor propio y vector propio de una matriz de nxn
EC: Valores y vectores propio (3 ejercicios)
8
Calcule los valores y vectores propios de una matriz de nxn
El realizará la diagonalización de matrices de nxn
Obtiene la matriz semejante de una matriz cuadrada
EC: Diagonalización de matrices (5 ejercicios) EP: Reporte de práctica de acuerdo a formato establecido
7
Diagonalice una matriz en base a los valores y vectores propios

13
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Resuelve problemas de aplicaciones de ingeniería utilizando valores y vectores propios
El alumno obtendrá los valores y vectores propios de una matriz utilizando un programa de cómputo
Obtiene los valores propios de una matriz de nxn mediante herramienta de cómputo
EC: eigenvalues y eigenvectores mediante software EP: Reporte de práctica de acuerdo a formato establecido

14
PLANEACIÓN DEL APRENDIZAJE
Resultados de aprendizaje
Criterios de desempeño
Evidencias (EC, EP, ED, EA)
Instrumento
de evaluación
Técnicas de aprendizaje
Espacio educativo Total de Horas
Aula Lab Otro Teórica Práctica
HP HNP P NP
El alumno definirá el concepto de ecuación lineal
Define una ecuación de una línea recta
EC: Ecuación lineal, línea recta, punto-pendiente
Cuestionario
Exposición Taller y práctica
mediante la acción
x
3 0 2 1
Represente una ecuación lineal gráficamente
El alumno distinguirá la ecuación de una linea recta
Distingue una ecuación lineal de una no lineal EC: Forma general
y reducida de una ecuación lineal
Define la forma general de una ecuación lineal
El alumno obtendrá soluciones analíticas y geométricas de sistemas de ecuaciones lineales
Distingue las diferentes soluciones de un sistema de ecuaciones lineales simultaneas
EC: Solución de sistemas de ecuaciones lineales simultáneas
Cuestionario Lista de cotejo
Práctica mediante la
acción x 3 0 2 1 EC: Resuelve 3
Sistemas de ecuaciones de 2X2 con distintos tipos de soluciones
PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE

15
EC: Resuelve 5 Sistemas de ecuaciones de 3X3 con distintos tipos de soluciones
El alumno definirá los conceptos básicos de matrices
Define el concepto de matriz EC: Terminología
básica de matrices
Cuestionario Cuestionario
Discusión dirigida x 1 1 1 0
Define el orden de una matriz
El alumno definirá la clasificación de matrices y sus propiedades
Define la clasificación de matrices según su arreglo y tipo de elementos
EC. Clasificación de matrices: Matriz escalonada, inversa, transpuesta, diagonal, triangular y simétrica.
Identifique los diferentes tipos de matrices de acuerdo a su arreglo y tipo de elementos Calcule la inversa de una matriz de nxn por operaciones pos renglones
EC: Inversa de una matriz
Lista de cotejo
Exposición x 3 0 2 0
Define las operaciones bàsicas entre matrices
EC: Algebra de matrices
Demuestre las propiedades de la suma y múltiplo escalar de matrices Determina si las operaciones de suma,
EC: Suma, y mutilplicación escalar de matrices (10 ejercicios)

16
El alumno realizará operaciones algebraicas entre matrices
resta y múltiplo escalar entre matrices está definida
Cuestionario Lista de cotejo
Exposición Taller y Práctica mediante la acción
x
7
2
5
1 Realice operaciones de suma ,resta y múltiplo escalar entre matrices Determina si el producto matricial entre dos o más matrices está definido EC: Producto de
matrices (5 ejercicios)
Realice operaciones de producto matricial entre 2 0 más matrices
El alumno realizará operaciones de potenciación de matrices
Realice operaciones de potencia entre matrices
EC: Potencia de matrices ( 2ejercicios)
Identifique matrices resultantes de la potenciación de matrices
EC: Matriz nilpotente, idempotente e involutiva
El alumno realizará operaciones entre matrices utilizando herramientas de cómputo
Realice operaciones de matriciales utilizando software de aplicación
EC: Operaciones de suma, resta ,multiplicación e inversión de matrices mediante software EP: Reporte de práctica de acuerdo al formato establecido

17
Resultados de aprendizaje
Criterios de desempeño
Evidencias (EC, EP, ED, EA)
Instrumento
de evaluación
Técnicas de aprendizaje
Espacio educativo Total de Horas
Aula Lab Otro Teórica Práctica
HP HNP P NP
El alumno obtendrá la solución de un sistema de ecuaciones lineales de nxn ( 4≤ ) por métodos matriciales
Interprete geométricamente la solución de un sistema de ecuaciones lineales de 3x3
EC: Interpretación gráfica de un sistema de ecuaciones
Cuestionario
Exposición Taller y práctica
mediante la acción
x
1 0 0 0
Obtiene la solución de un sistema de ecuaciones mediante el Método de la matriz escalonada
EC: Solución de sistemas de ecuaciones lineales( 2ejercicios)
Lista de cotejo
Exposición Estudio de
casos x 7 0 4 3
Obtiene la solución de un sistema de ecuaciones mediante de nxn el Método de eliminación Gaussiana.
EC: Eliminación Gaussiana (3 ejercicios)
Obtiene la solución de un sistema de ecuaciones mediante el Método de
EC: Eliminación de Gauss-Jordan (3 ejercicios)
Lista de cotejo

18
eliminación de Gauss-Jordan
Obtiene la solución de un sistema de ecuaciones mediante el Método de la matriz inversa
EC: Método de la inversa para sistemas de ecuaciones (2 ejercicios)
El alumno planteará sistemas de ecuaciones lineales que surgen en las distintas áreas de la ingeniería mecatrónica
Obtiene el modelo matemático en forma de sistemas de ecuaciones lineales de una situación real
EC: Aplicaciones de los sistemas de
ecuaciones ( 5 problemas)
Lista de cotejo
Estudio de casos x 2 0 2 2
El alumno obtendrá la solución de un sistema de ecuaciones lineales de nxn(n< / =10) mediante herramientas de cómputo
Obtiene la solución de
un sistema de ecuaciones
usando herramientas computaciona
les
EC: Solución de sistemas de ecuaciones lineales mediante software
Guía de observación
Lista de cotejo
Taller y práctica mediante la
acción x x 0 0 1 1
EP: Reporte de práctica de acuerdo al formato establecido

19
Resultados de aprendizaje
Criterios de desempeño
Evidencias (EC, EP, ED, EA)
Instrumento
de evaluación
Técnicas de aprendizaje
Espacio educativo Total de Horas
Aula Lab Otro Teórica Práctica
HP HNP P NP
El alumno definirá los conceptos básicos de determinantes
Define la función permutación
EC: permutación, determinante
y Función determinante
Cuestionario
Exposición x
1 0 0 0
Define el concepto de determinante
Define el concepto de función determinante
El alumno definirá las propiedades básicas de los determinantes
Define las propiedades básicas de los determinantes
EC: Determinantes
mediante propiedades
Exposición x 1 0 1 0
Calcule determinantes de matrices triangulares Calcule determinantes por renglones y columnas
El alumno calculará el determinante de una matriz de nxn por distintos métodos
Calcule el determinante de una matriz de 2x2 por fórmula general
EC: Determinantes de matrices de 2x2
Lista de cotejo
Exposición Taller y práctica
mediante la acción
x 3 0 3 1
Define el concepto de Menor
EC: Desarrollo de Laplace o Cofactores
( 4 ejercicios)
EC: Esquema de Sarrus
(2 ejercicios)
Define el concepto de Cofactor Calcula el determinante de una matriz de 3x3 ó mayor por Cofactores

20
Resultados de aprendizaje
Criterios de desempeño
Evidencias (EC, EP, ED, EA)
Instrumento
de evaluación
Técnicas de aprendizaje
Espacio educativo Total de Horas
Aula Lab Otro Teórica Práctica
HP HNP P NP
El alumno resolverá problemas relacionados con la aplicación de los determinantes
Obtiene soluciones de sistemas de ecuaciones mediante la regla de Cramer
EC; Regla de cramer (2 ejercicios)
Lista de cotejo
Exposición Taller y práctica
mediante la acción
x 2 0 0 1 Calcule la adjunta de una matriz
EC: Matriz adjunta ( 3 ejercicios)
Calcule la inversa de una matriz por el Método de la adjunta
El alumno definirá los conceptos básicos de vectores y sus propiedades
Interpreta geométrica y algebraicamente un vector EC: Vectores
en Rn Cuestionario Exposición x
1 0 0 0 Define las propiedades básicas de un vector
El alumno realizará operaciones básicas entre vectores en Rn
Define las operaciones básicas entre vectores
EC: Suma ,resta,
multiplicación escalar y norma de
vectores en Rn
Lista de cotejo Exposición
Taller y práctica mediante la
acción
x
Realice operaciones básicas entre vectores en Rn Calcule la norma de un vector en Rn Interprete el producto escalar o punto entre 2 vectores
EC: Producto Punto( 3
ejercicios)
Lista de cotejo

21
Calcule el producto escalar entre 2 vectores
Lista de cotejo
Exposición Taller y práctica
mediante la acción
x 4 0 1 3
Interprete el producto vectorial o cruz entre 2 vectores EC: Producto
Cruz( 3 ejercicios) Calcule el
producto vectorial o cruz entre 2 vectores Interprete el triple producto escalar o mixto entre 3 vectores
EC: Triple producto escalar( 3 ejercicios)
Calcule el triple producto escalar o mixto entre 2 vectores
El alumno determinará si un conjunto dado de vectores representa un espacio vectorial
Distingue si un conjunto de valores es un espacio vectorial
EC: Espacios vectoriales y subespacios ( 10 ejercicios)
Lista de cotejo
Distingue si un conjunto de valores representa un subespacio vectorial
El alumno calculará combinaciones lineales entre vectores en Rn
Define el concepto de combinación lineal de vectores
EC: Combinaciones
lineales y generación de
espacios
Cuestionario Lista de cotejo Calcule
combinaciones lineales de vectores en Rn

22
Resultados de aprendizaje
Criterios de desempeño
Evidencias (EC, EP, ED, EA)
Instrumento
de evaluación
Técnicas de aprendizaje
Espacio educativo Total de Horas
Aula Lab Otro Teórica Práctica
HP HNP P NP
Obtiene espacios vectoriales generados por un conjunto de vectores en Rn
Estudio de casos Exposición Taller y práctica mediante la acción
x 4 1 3 2
EL alumno definirá la independencia y la dependencia lineal de vectores en Rn
Define los criterios de dependencia e independencia lineal de vectores EC:
Dependencia e independencia lineal (5 ejercicios)
Cuestionario Lista de cotejo
Determine si un conjunto de vectores son linealmente dependientes o independientes
El alumno determinará los vectores base y dimensión de un espacio vectorial
El alumno calcule la base de un espacio o subespacio vectorial
EC: Dimensión y base de un espacio vectorial( 3 ejercicios)
El alumno define la dimensión de un espacio o subespacio vectorial
EP: Reporte de práctica de acuerdo al formato establecido

23
Resultados de aprendizaje
Criterios de desempeño
Evidencias (EC, EP, ED, EA)
Instrumento
de evaluación
Técnicas de aprendizaje
Espacio educativo Total de Horas
Aula Lab Otro Teórica Práctica
HP HNP P NP
El alumno definirá los conceptos básicos de las Transformaciones lineales y sus propiedades
Define el concepto de Transformación lineal
EC: Transformacion
es lineales, nucleo e imagen
(5 ejercicios)
Lista de cotejo Exposición x
3 1 2
identifique las propiedades de las transformaciones lineales Define el concepto de nucleo e imagen
El alumno realizará transformaciones lineales entre espacios vectoriales
Obtiene la representación matricial de una transformación lineal
EC: operaciones
con transformacion
es lineales entre espacios (5 ejercicios)
Lista de cotejo
Exposición Taller y práctica
mediante la acción
x 4 0 3 2
Defina el producto de transformaciones lineales Calcule el producto de transformaciones lineales Define la inversa de una transformación lineal Calcule la inversa de una transformación lineal

24
El alumno determinará los valores y vectores propios de una matriz (eigenvalues y eigenvectores)
Define el valor propio y vector propio de una matriz de nxn EC: Valores y
vectores propios
(3 ejercicios)
Cuestionario Lista de cotejo
Exposición Taller y práctica
mediante la acción
x
4 0 3 1 Calcule los valores y vectores propios de una matriz de nxn
El alumno Diagonalizará matrices de orden nxn
Obtiene la matriz semejante de una matriz cuadrada
EC: Diagonalización
de matrices (5 ejercicios)
Cuestionario Lista de cotejo
Exposición Taller y práctica
mediante la acción
x
3 0 3 1
Diagonal ice una matriz en base a los valores y vectores propios Resuelve problemas de aplicaciones de ingeniería utilizando valores y vectores propios
El alumno obtendrá los valores y vectores propios de una matriz utilizando un programa de cómputo
Obtiene los valores propios de una matriz de nxn mediante herramienta de cómputo
EC: eigenvalues y eigenvectores mediante software EP: Reporte de práctica de acuerdo a formato establecido


26
DESARROLLO DE PRÁCTICA
Fecha:
Nombre de la asignatura:
Algebra Lineal
Nombre: Operaciones Matriciales
Número :
1
Duración (horas) :
2
Resultado de aprendizaje:
El alumno realizará operaciones entre matrices utilizando herramientas de cómputo
Justificación
La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos de operaciones algebraicas entre matrices, utilizando una herramienta computacional.
Sector o subsector para el desarrollo de la práctica:
Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos) -Realizar operaciones matriciales mediante el software: suma, resta, múltiplo escalar, producto e inversa de una matriz. Evidencia a generar en el desarrollo de la práctica:
EC: Operaciones de suma, resta ,multiplicación e inversión de matrices mediante software EP: Reporte de práctica de acuerdo al formato establecido:
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA


28
Fecha:
Nombre de la asignatura:
Algebra Lineal
Nombre: Solución de Sistemas de ecuaciones lineales
Número :
2
Duración (horas) :
2
Resultado de aprendizaje:
El alumno obtendrá la solución de un sistema de ecuaciones lineales de nxn ( 10≤n ) mediante herramientas de cómputo
Justificación
La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos en la solución de sistemas de ecuaciones lineales mediante métodos matriciales, utilizando una herramienta computacional
Sector o subsector para el desarrollo de la práctica:
Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos)
-Obtener la solución de 5 sistemas de ecuaciones lineales de orden 10≤ mediante el software. Evidencia a generar en el desarrollo de la práctica:
EC: Solución de 5 sistemas de ecuaciones lineales mediante software EP: Reporte de práctica de acuerdo al formato establecido
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

29
Fecha:
Nombre de la asignatura:
Algebra Lineal
Nombre: Eigenvalues-Eigenvectores de una matriz
Número :
3
Duración (horas) :
1.5
Resultado de aprendizaje:
El alumno obtendrá los valores y vectores propios de una matriz utilizando un programa de cómputo
Justificación
La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos para la obtención de los valores y vectores propios de una matriz y su diagonalización, utilizando una herramienta computacional.
Sector o subsector para el desarrollo de la práctica:
Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos) -Obtener los valores y vectores propios de una 5 matrices de nxn asi como su diagonalización mediante software. Evidencia a generar en el desarrollo de la práctica:
EC: eigenvalues y eigenvectores mediante software EP: Reporte de práctica de acuerdo a formato establecido
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

30
ECUACIONES LINEALES. PENDIENTE DE LA RECTA (XXXXXXXXXXX) CUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA:
FECHA:
ALGEBRA LINEAL. PRIMER CUATRIMESTRE XXXXXXXXX
NOMBRE DEL EVALUADOR
INSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO Identifica y subraya cuál de las siguientes expresiones representan una ecuación
lineal
Expresiones
CUMPLE : SI NO
La _______________ es la gráfica representativa de una ecuación lineal
A) LÍNEA RECTA C) PENDIENTE
B) TANGENTE D) SECANTE
CUMPLE : SI NO
D)
E)
A) B) C)
31
¿Cuál(es) del(os) siguiente(s) puntos quedan en la recta cuya ecuación es
01043 =−+ yx
A) (1,2) C) (10,-5)
B) (-2,4) D) NINGUNO
CUMPLE : SI NO
Buscar el intercepto de x y y de las siguientes ecuaciones:
A) 64 += xy B) 73 += xy
CUMPLE : SI NO
Buscar la ecuación de los puntos dados. B). (5,0) y (2,-1) A). (-3, -4) y (6,0)
CUMPLE : SI NO

32
Buscar la ecuación de los puntos dados. B). (5,0) y (2,-1) A). (-3, -4) y (6,0)
CUMPLE : SI NO
Encuentre la ecuación de la recta perpendicular a la mediatriz del segmento (-2,1), (4,-7).
CUMPLE : SI NO
Firma del Alumno Firma del Evaluador

33
ECUACIONES LINEALES. SOLUCIÓN DE SISTEMASLINEALES (XXXXXXXXXXX) CUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA:
FECHA:
ALGEBRA LINEAL. PRIMER CUATRIMESTRE XXXXXXXXX
NOMBRE DEL EVALUADOR
INSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
Subraye la(s) respuesta(s) correcta(s)
1. Los sistemas −=−
.......................
146 xyx y
=+−=−
5
224
yx
yx son equivalentes si la
ecuación faltante es:
A) 1−=− yx B) 52 =+ yx C) 02044 =+−− yx
2.El sistema
=−−=−
caxby
cbyax
222 tiene
A) Solución única B) Infinitas soluciones C) No tiene solución
CUMPLE : SI NO

34
Resuelve si es posible ,cada sistema de ecuaciones utilizando el método de
sustitución y método gráfico
A)
=+=−
827
1223
yx
yx B)
−=+−=−
93
1826
yx
yx
CUMPLE : SI NO
Resuelve si es posible ,cada sistema de ecuaciones utilizando el método de sustitución y método gráfico
A)
−=+−=−
93
1826
yx
yx B)
−=+=+
5106
1553
yx
yx
CUMPLE : SI NO
35
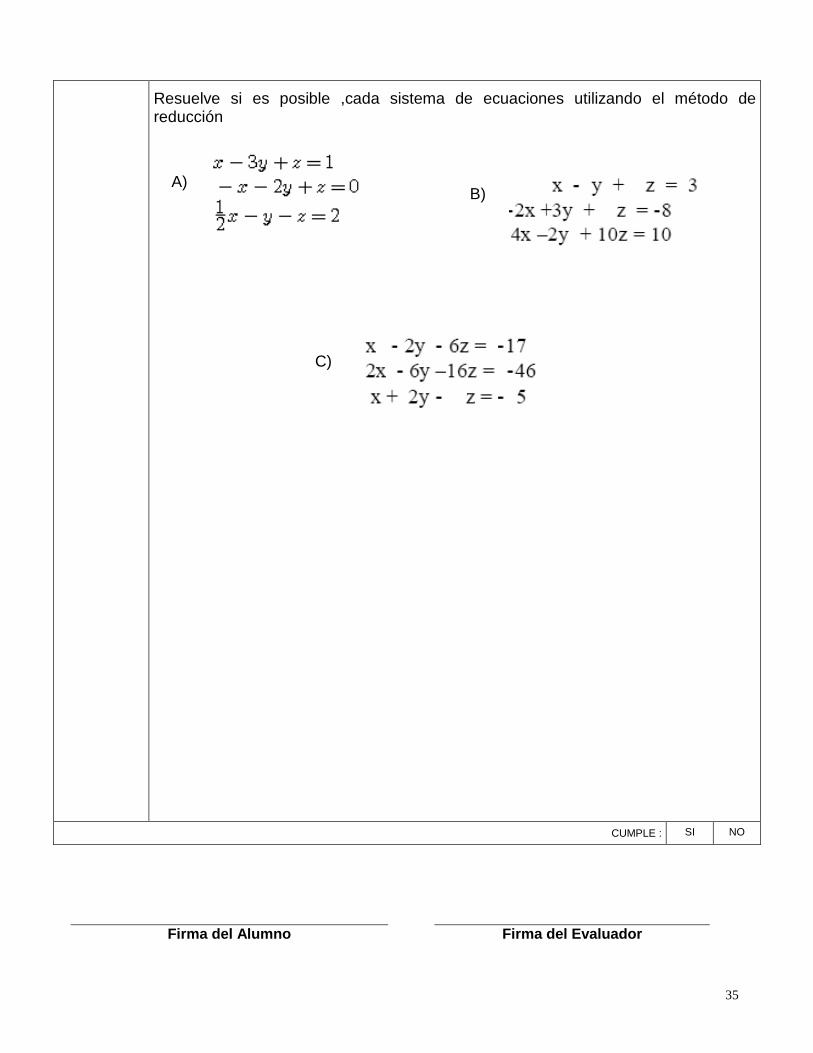
Resuelve si es posible ,cada sistema de ecuaciones utilizando el método de
reducción
CUMPLE : SI NO
Firma del Alumno Firma del Evaluador
A) B)
C)
36
MATRICES .CLASIFICACIÓN Y PROPIEDADES (XXXXXXXXXXX) CUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA:
FECHA:
ALGEBRA LINEAL. PRIMER CUATRIMESTRE XXXXXXXXX
NOMBRE DEL EVALUADOR
INSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
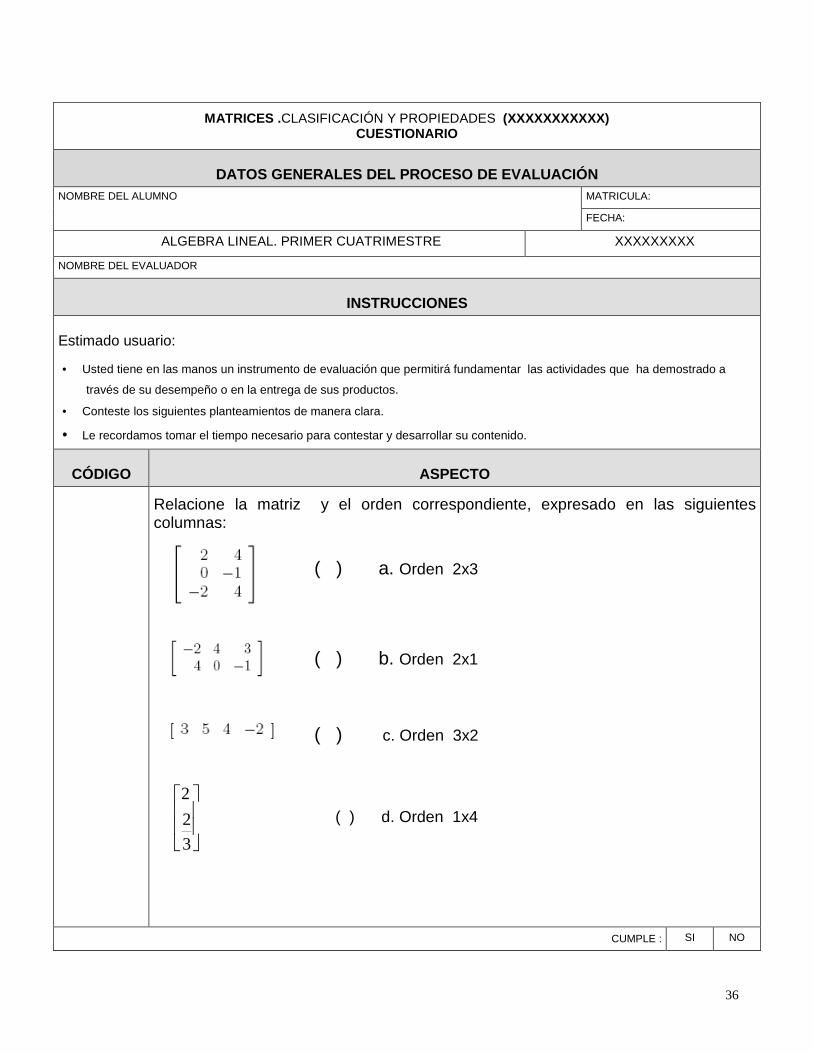
CÓDIGO ASPECTO Relacione la matriz y el orden correspondiente, expresado en las siguientes
columnas:
c. Orden 3x2
3
2
2 ( ) d. Orden 1x4
CUMPLE : SI NO
( ) a. Orden 2x3
( ) b. Orden 2x1
( )

37
Clasifique las siguientes matrices , colocando en el espacio en blanco la respuesta
correcta
A)
4 0
0 1Matriz________ B)
−
1- 0 0
0 1 - 0
0 0 1Matriz________ C)
8- 0 0 0
5 1 0 0
5 1- 2 0
5 4 3 1Matriz_______
D)
9 8 7
6 5 4
3 2 1Matriz ________ E)
1 0 0
0 1 0
0 0 1 Matriz_________
CUMPLE : SI NO
Obtenga AT para cada una de las siguientes matrices.
A)
=
1 0 3
5- 3 1A B)
−
=
6 3 0 1
5 0 1- 1-
7 3 4 3
5 0 5- 5
A C)
=
8 7
6 5-
3 2
0 1
A
CUMPLE : SI NO
Si
=8 6 1-
6 5 3
1- 3 1
A Encuentre una matriz que sea antisimétrica a A. Justifique su
respuesta.
CUMPLE : SI NO
Firma del Alumno Firma del Evaluador

38
MATRICES .OPERACIONES ALGEBRAICAS (XXXXXXXXXXX) CUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA:
FECHA:
ALGEBRA LINEAL. PRIMER CUATRIMESTRE XXXXXXXXX
NOMBRE DEL EVALUADOR
INSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
La suma de 2 matrices A y B esta definida siempre y cuando A y B : A) Tengan el mismo número de filas. B) Sean cuadradas. C) Sean del mismo orden.
CUMPLE : SI NO
La multiplicación de matrices A y B es posible se puede realizar si y solo si
A) el número de columnas de A es igual al número de renglones de B. B) B es un vector columna. C) A y B son matrices cuadradas.
CUMPLE : SI NO

39
Si A es una matriz de 4X5, el producto AB existe si y solo si :
A) B tiene 5 renglones y el resultado debe ser una matriz cuadrada. B) B tiene 4 renglones y el resultado tendrá 5 columnas. C) B tiene 5 renglones y el resultado tendrá cuatro renglones.
CUMPLE : SI NO
Una matriz cuadrada A tal que A2 = 0 se dice que es una matriz: A) Involutiva
B) Diagonal C) Nilpotente
CUMPLE : SI NO
Si A es una matriz de 1x y B una matriz de 1x2, la operación 2A-4B : A) Da como resultado (-8 -4). B) Da como resultado (16 -4 0). C) No se puede realizar.
CUMPLE : SI NO
Una matriz tal que IAA =−1 se denomina
A) Matriz singular B) Matriz No singular C) Matriz Identidad
CUMPLE: SI NO
Firma del Alumno Firma del Evaluador

40
MATRICES .OPERACIONES ALGEBRAICAS (XXXXXXXXXXX) CUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA:
FECHA:
ALGEBRA LINEAL. PRIMER CUATRIMESTRE XXXXXXXXX
NOMBRE DEL EVALUADOR
INSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
Si
=9 8 7
6 5 4
3 2 1
A ,
−=
1- 0 0
0 1 - 0
0 0 1
B y
=1 3- 2 0
1- 1 2 4
2 0 1 2
C encuentre si es posible las
siguientes operaciones.
A) A-2B
CUMPLE : SI NO
B) BAT
CUMPLE : SI NO

41
C) A2
CUMPLE : SI NO
D) BA + BC
CUMPLE : SI NO
Encuentre una matriz A tal que IA =
2 1
3 2
CUMPLE : SI NO

42
Si
=9 8 7
6 5 4
3 2 1
A encuentre ,si existe ,A-1
CUMPLE : SI NO
Resuelva el siguiente caso de aplicación.
CUMPLE : SI NO

43
CUMPLE : SI NO
Firma del Alumno Firma del Evaluador

44
GLOSARIOGLOSARIOGLOSARIOGLOSARIO
AAAA Adjunta. La matriz adj (A) formada a partir de una matriz cuadrada A reemplazando la entrada (i,j) de A por el cofactor (i,j),para todas las i y j, y transponiendo después la matriz resultante. Algoritmo por reducción por filas. Método sistemático que utiliza operaciones elementales de fila y que reduce una matriz a la forma escalonada o a la forma escalonada reducida. Algoritmo Gauss-Seidel. Método iterativo que produce una sucesión de vectores que en ciertos casos converge a una solución de una ecuación Ax=b; basado en la descomposición A=M-N, siendo M l aparte triangular inferior de A. BBBB Base. Para un subespacio no trivial H de un espacio vectorial, es el conjunto indizado { }pvvv ...,, 21=β en V tal que: (i) β es un
conjunto linealmente independiente y (ii) el subespacio generado por β coincide con H.
Base canónica. La base { }neeE ,...1= para nℜ que consiste en
las columnas de la matriz identidad nxn o la base { }ntt,,1 para nΡ Base de vectores propios. Una base que consiste enteramente en los vectores propios de una matriz dada. Base ortogonal. Una base que también es un conjunto ortogonal Base ortonormal. Una base que es un conjunto ortogonal de vectores. CCCC Cambio de base. Vea coordenadas de x relativas a la base β
Codominio. Para una transformación lineal mnT ℜ→ℜ= es el
conjunto mℜ que contiene al rango de T. En general, si T es una función de un espacio vectorial V en un espacio vectorial W, entonces W se llama el codominio de T.
Cofactor. Un número AijC jiij det)1( +−= llamado cofactor (i,j) de

45
A, donde Aij es la submatriz formada al eliminar la i-ésima fila y la j-ésima columna de A. Columna pivote. Una columna que contiene una posición pivote Combinación lineal. Una suma de múltiplos escalares de vectores. Los escalares con llamados pesos. Conjunto fundamental de solucione. Una base para el conjunto de de todas las soluciones de una ecuación lineal homogénea diferencial o en diferencias. Conjunto generado por { }pvv ,...1 . El conjunto Gen { }pvv ,...1 .
Conjunto generador. Para un subespacio vectorial H, cualquier conjunto { }pvv ,...1 en H tal que H= Gen { }pvv ,...1 .
Conjunto ortogonal. Un conjunto S de vectores tal que u.v= 0 para todo u.v distinto en S. Conjunto ortonormal. Conjunto ortogonal de vectores unitarios Conjunto solución. Conjunto de todas las posibles soluciones de un sistema lineal. DDDD Dimensión finita. Un espacio vectorial generado por un conjunto finito de vectores. Dimensión infinita. Un espacio vectorial V diferente de cero que no tiene base finita. Desarrollo por cofactores. Fórmula para determinar det A que utiliza los cofactores asociados a una fila o una columna, por ejemplo para la fila 1: det A= a11C11+…..+a1nC1n. Desarrollo por columna-fila. La expresión de un producto AB como una suma de productos externos: col1(A) fil1(B)+……..coln(A)filn(B), donde n es el número de columnas de A.
Desigualdad de Cauchy-Schwarz. vuvu ., ≤ para todos u, v.
Determinante. El número det A definido inductivamente por un desarrollo por cofactores a lo largo de la primera fila de A.

46
También (1)r veces el producto de las entradas diagonales de cualquier forma escalonada U obtenida de A por reemplazo de filas y r intercambio de filas( pero sin operaciones de escalamiento). Diagonal en bloque. Matriz partida de A=[ ]Aij tal que cada bloque
Aij es una matriz cero para ji ≠ . Diagonal principal. La entradas de una matriz con índices de fila y columna iguales. Diagonalizable. Matriz que se puede escribir de forma factorizada como PDP- 1, donde D es una matriz diagonal y P una matriz invertible. Diagonalizable ortogonalmente. Una matriz A que admite una factorización A=PDP- 1, siendo P una matriz ortogonal (P-1=PT) y D diagonal. Dimensión. De un espacio vectorial V es el número de vectores de una base de V; se escribe dim V. La dimensión del espacio cero es 0. Dominio. De una transformación T, es el conjunto de todos los vectores x por los cuales T(x) está definida. EEEE Ecuación característica. De una matriz A : det(A - Iλ )=0 Ecuación en diferencias. Una ecuación de la forma xk+1=axk( k=0,1,2…) cuya solución es una sucesión de vectores xo, x1,… Ecuación homogénea. Una ecuación de la forma Ax = 0, posiblemente escrita como una ecuación vectorial o como un sistema de ecuaciones lineales. Ecuación lineal. Ecuación que puede escribirse de la forma a1x1+a2x2+..anxn = b, donde b y los coeficientes a1,…an son números reales o complejos. Ecuación matricial. Ecuación en la que interviene por lo menos una matriz; por ejemplo , Ax = b Ecuación no homogénea. Ecuación de la forma Ax=b con 0≠b escrita posiblemente como una ecuación vectorial o como un sistema de ecuaciones lineales.

47
Ecuación vectorial. Ecuación en la que interviene una combinación lineal de vectores con pesos no determinados. Eliminación gaussiana. Vea algoritmo de reducción por filas. Entrada principal. La entrada más hacia la izquierda diferente de cero de una matriz. Entradas diagonales. De una matriz, son las entradas que tienen índices de fila y columna iguales. Escalar. Número (real) empleado para multiplicar un vector o una matriz. Espacio de filas. De una matriz, el conjunto de Fil A de todas las combinaciones lineales de los vectores formados a partir de las filas de A. Espacio propio. El conjunto de todas las soluciones de AX=λ X donde λ es un valor propio de A. Consiste en los valores cero y todos los vectores propios correspondientes a λ . Espacio vectorial. Conjunto de elementos, llamados vectores, en el cual están definidas dos operaciones, llamadas suma y multiplicación por escalares. FFFF Factorización LU. Representación de una matriz A , en la forma A=LU donde L es una matriz triangular inferior cuadrada con unos en la diagonal (matriz triangular inferior unitaria) y U es una forma escalonada de A. Función. Vea transformación. Funciones propias. De una ecuación diferencial )()´( tAxtx = es una
función tvetx λ=)( donde v es un vector propio de y λ es el valor propio correspondiente. GGGG Gen { }pvv .....1 . El conjunto de todas las combinaciones lineales de
v1,….,vp. También, es subespacio generado por v1,….vp
IIII Imagen. De un vector x bajo una transformación T, el vector T(x) que T asigna a x.

48
Inyectiva. Función T: mn ℜ→ℜ tal que cada b en
mℜ es la
imagen de a lo mas una x en nℜ .
Inversa. De una matriz de nxn, a una matriz A-1 nxn tal que AA-1 = A-1A = In.
Isomorfismo. Función lineal invectiva de un espacio vectorial sobre otro. LLLL Linealmente dependientes. Conjunto indizado { }pvv ,...1 con la
propiedad de que existen persos c1,….cp no todos ceros tales que c1v1+….+cpvp=0. Esto es , la ecuación vectorial c1v1+c2v2 ……+cpvp=0 tiene una solución no trivial. Linealmente independientes. Conjunto indizado { }pvv ,...1 con la
condición de que la ecuación vectorial c1v1+c2v2 ……+cpvp=0 tiene únicamente la solución trivial c1=….=cp=0 MMMM Mapeo. Vea transformación. Matriz. Un arreglo rectangular de números Matriz aumentada. Matriz constituída por uma matriz de coeficientes para un sistema lineal y una o más columnas a la derecha. Cada columna extra contiene lãs constantes del lado derecho. Matriz canônica. Para uma transformación lineal T, la matriz A tal que T(x)=AX para toda X en el domínio de T. Matriz de coeficientes. Matriz cuyas entradas son los coeficientes de um sistema de ecuaciones lineales. Matriz de covarianza. La matriz S de orden pxp definida por S=(N-1)-1 BBT . Donde B es una matriz de observaciones p x N en forma de desviación media. Matriz de Transferencia. Matriz A asociada a un circuito eléctrico que tiene terminales de entrada y salida, de manera que el vector de salida sea A veces el vector de entrada. Matriz diagonal. Matriz cuadrada cuyas entradas que no están sobre la diagonal principal son todas cero.

49
Matriz escalonada. Matriz rectangular que tiene tres propiedades: (1) Toda fila diferente de cero está arriba de cualquier fila de ceros. (2) Cada entrada principal de una fila está en una columna a la derecha de la entrada principal de la fila de arriba. (3) Todas las entradas debajo de la entrada en una columna son cero. Matriz escalonada reducida. Matriz rectangular en forma escalonada que tiene estas propiedades adicionales; la entrada principal de cada fila diferente de cero es 1 y cada 1 principal es la única entrada diferente de cero en su columna. Matriz identidad. Una matriz cuadrada con unos sobre la diagonal y ceros sobre las demás entradas. Matriz invertible. Matriz cuadrada que tiene un inverso. Matriz mxn. Una matriz con m filas y n columnas. Matriz ortogonal. Matriz U invertible cuadrada tal que U-1 = UT. Matriz simétrica. Matriz A tal que AT = A. Matriz triangular inferior. Matriz con ceros arriba de la diagonal principal. Matriz triangular superior. Matriz U con ceros debajo de las entradas diagonales u11, u22,…. Multiplicidad algebraica. La multiplicidad de un valor propio como raíz de la ecuación característica. Múltiplo escalar. El vector cu obtenido al multiplicar cada entrada de u por c. NNNN No singular. Una matriz invertible.
Norma de un vector. El escalar ),(. vvvvv =
Núcleo. El conjunto de los x en V tales que T(x) = 0. OOOO Operaciones elementales de fila. (1) (Reemplazo) Reemplazo de una
50
fila por la suma de sí misma y un múltiplo de otra fila. (2) Intercambio de dos filas. (3) (Escalamiento) Multiplicación de todas las entradas de una fila por una constante diferente de cero. Origen. El vector cero. PPPP Pesos. Los escalares usados en una combinación lineal. Pivote. Número diferente de cero que se usa ya sea en una posición pivote para crear ceros mediante operaciones por fila o se convierte en un 1 principal, que a su vez se usa para crear ceros.
Polinomio característico. ( )IA λ−det o, en algunos textos,
( )AI −λdet . Posición pivote. Posición de una matriz A que corresponde a una entrada principal en una forma escalonada de A. Producto Ax. La combinación lineal de las columnas A usando las entradas correspondientes de x como pesos.
Producto exterior. Producto de matrices Tvu donde u y v son
vectores en nℜ vistos como matrices n x 1. (El símbolo de transpuesta está “afuera” de los símbolos u y v .)
Producto interior. El escalar vu T , generalmente escrito como vu . ,
donde u y v son vectores en nℜ vistos como matrices n x 1. También se le llama producto punto de u y v . En general, una función en un espacio vectorial que asigna a cada par de vectores u y v un número ( )vu , , sujeto a ciertos axiomas. RRRR Rango de una matriz. La dimensión del espacio de columna de A, denotado por rango A. Rango de una trasformación. El conjunto de todos los vectores de la forma T(x) para alguna x en el dominio de T. Reemplazo de filas. Operación elemental de filas que reemplaza una fila de una matriz por la suma de la fila y un múltiplo de otra fila. Regla de Cramer. Fórmula para entrada de la solución x de la

51
ecuación Ax = b cuando A es una matriz invertible. Regla fila-columna. Regla para calcular un producto AB por la cual la entrada (i,j) de AB es la suma de los productos de entradas correspondientes de la fila i de A y la columna j de B. Relación de dependencia lineal. Ecuación vectorial homogénea en la que todos los pesos están especificados y por lo menos un peso es diferente de cero. Resta vectorial. Calcular vu )1(−+= y escribir el resultado como
vu − . SSSS Señal en tiempo discreto. Sucesión doblemente infinita de números, { }Ky ; una función definida en los enteros; pertenece al espacio vectorial.
Semejantes ( Matrices). Matrices A y B tales que BBAP =−1 o de
manera equivalente, 1−= PBPA , para alguna matriz invertible P. Singular. Matriz que no tiene inverso. Sistema de ecuaciones lineales. Colección de una o más ecuaciones lineales en las que interviene el mismo conjunto de variables, digamos nxx ,...,1 . Sistema lineal consistente. Sistema lineal con por lo menos una solución. Sistema lineal inconsistente. Sistema lineal sin solución. Sistema lineal. Colección de una o más ecuaciones lineales en las que intervienen las mismas variables, digamos nxx ,...,1 . Sistema sobredeterminado. Sistema de ecuaciones con más ecuaciones que incógnitas. Sistemas equivalentes. Sistemas lineales con el mismo conjunto solución. Solución (de una sistema lineal). Lista ( )nsss ,...,, 21 de números que convierten cada ecuación del sistema en un enunciado verdadero cuando se sustituyen los valores nss ,...,1 por nxx ,...,1 .

52
Solución no trivial. Solución diferente de cero de una ecuación homogénea o de un sistema de ecuaciones homogénea. Solución trivial. La solución X = 0 de una ecuación homogénea Ax = 0. Subespacio cero. El subespacio { }0 que consiste únicamente en el vector cero. Subespacio propio. Cualquier subespacio de un espacio vectorial V distinto de V mismo. Submatriz. Cualquier matriz obtenida al eliminar algunas filas y/o columnas de A; también A misma. Suma de columnas. La suma de las entradas en una fila de una matriz. Suma de filas. La suma de las entradas en una fila de una matriz. Suma vectorial. Sumar vectores sumando las entradas correspondientes. Sustitución regresiva. La fase regresiva de la reducción por filas de una matriz aumentada que transforma una matriz escalonada en una matriz escalonada reducida; sirve para encontrar la(s) solución(es) de un sistema de ecuaciones lineales. TTTT Tamaño( de una matriz). Dos números, escritos en la forma m x n, que especifican el número de filas (m) y de columnas (n) de la matriz. Transformación( o función o mapeo). Regla que a cada vector x en
nℜ asigna un único vector T(x) en mℜ . Transformación de semejanza. Una transformación de una matriz,
PAPA 1−a .
Transformación lineal. Regla T que a cada vector x en V le asigna un
único vector T(x) en W, tal que (i) )()()( vTuTvuT +=+ para todos u, v en V y (ii) )()( ucTcuT = para todo u en V y todo escalar c.
Notación: WVT a: ; también, x Ax, cuando mnT ℜℜ a: y A es la
matriz estándar para T. Transformación matricial. Transformación o mapeo Axxa , donde

53
es una matriz m x n y x representa cualquier vector en nℜ . Transpuesta. La gráfica de una solución { }...,,, 21 xxxo de un sistema
dinámico kk AxA =+1 , a menudo conectada por una curva delgada, para poder ver la trayectoria más fácilmente. También, la gráfica x(t) para t ≥ 0, cuando x(t) es una solución de una ecuación diferencial
)()(' txAtx = . Traza ( de una matriz cuadrada). La suma de las entradas diagonales en A, denotada por tr A. VVVV Valor propio( de A). Escalar λ tal que la ecuación xAx λ= tiene una solución para algún vector x diferente de cero. Valor propio complejo. Raíz no real de la ecuación característica de una matriz n x n. Variable básica. Variable de un sistema lineal que corresponde a una columna pivote de la matriz de coeficientes. Variable libre. Cualquier variable de un sistema lineal que no sea una variable básica. Vector. Una lista de números; una matriz con sólo una columna. En general, cualquier elemento de un espacio vectorial. Vector cero. El vector único, denotado por 0, tal que uu =+ 0 para
todo u . En nℜ , 0 es el vector cuyas entradas son todas cero. Vector columna. Una matriz con sólo una columna o una única columna de una matriz que tiene varias columnas. Vector propio. Vector x diferente de cero tal que Ax = λx para algún escalar λ. Vector propio complejo. Vector diferente de cero x en Єn tal que
xxA λ= Vector fila. Una matriz con solamente una fila o una única fila de una matriz que tiene varias filas.
Vector unitario. Vector v tal que 1=v .
Vectores iguales. Vectores en nℜ cuyas entradas correspondientes son las mismas.

54
BIBLIOGRAFÌABIBLIOGRAFÌABIBLIOGRAFÌABIBLIOGRAFÌA
1. Harvey Gerber, Algebra LinealAlgebra LinealAlgebra LinealAlgebra Lineal, Segunda Edición, Grupo Editorial Iberoamericana, México, 2001, ISBN: 968-7270-63-2
2. Howard Antón, Algebra LinealAlgebra LinealAlgebra LinealAlgebra Lineal, Tercera Edición, Limusa Wiley,
México, 2004, ISBN: 968-18-6317-8.
3. Grossman Stanley I., Algebra LinealAlgebra LinealAlgebra LinealAlgebra Lineal, Quinta Edición, Mc. Graw Hill, México, 2004, ISBN: 968-422-984-4.
4. Williams Gareth, Algebra LiAlgebra LiAlgebra LiAlgebra Lineal con Aplicacionesneal con Aplicacionesneal con Aplicacionesneal con Aplicaciones, Segunda Edición,
Mc. Graw Hill, México, 2001, ISBN: 970-10-3838-X.
5. Poole David, Algebra Lineal: Una introducción ModernaAlgebra Lineal: Una introducción ModernaAlgebra Lineal: Una introducción ModernaAlgebra Lineal: Una introducción Moderna, Cuarta Edición, Thompson-Learning, México, 2004, ISBN: 970-686-272-2
. 6. Nakos George y Joyner David, Algebra Algebra Algebra Algebra Lineal con AplicacionesLineal con AplicacionesLineal con AplicacionesLineal con Aplicaciones,
Segunda Edición, México, 1998, ISBN: 968-7529-86-5. 7. Ben Noble, James W. Daniel, Algebra Lineal AplicadaAlgebra Lineal AplicadaAlgebra Lineal AplicadaAlgebra Lineal Aplicada, Tercera
Edición, México, 1998, Mc. Graw Hill, ISBN:968-880-173-9.