clases de estatica
TRANSCRIPT

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 1 (09/03/07)
Unidad 1 Introducción
1.1 Definición
La estática es el estudio de los sistemas inmóviles o los que se mueven con velocidad
constante, y es parte de la mecánica, que es la ciencia que considera la respuesta de un
cuerpo bajo la acción de cargas.
1.2 Antecedentes Históricos
Muchos historiadores asocian el nacimiento de la mecánica con las investigaciones del
matemático griego Arquímedes (287-212 a.C.), quien desarrolló los principios para el
análisis de las fuerzas paralelas y los aplicó a la estática de palancas simples, los
sistemas de poleas, los cuerpos flotantes y los centros de gravedad de los cuerpos.
El análisis de fuerzas no paralelas no fue realizado sino hasta casi 2000 años después
de la muerte de Arquímedes, cuando el matemático e inventor flamenco Simon Stevin
(1548-1620) resolvió el problema del plano inclinado (el cual comprende fuerzas no
paralelas). Stevin también usó segmentos rectilíneos dirigidos para representar las
fuerzas, e incluyó una punta de flecha a un segmento rectilíneo para indicar el sentido
de la fuerza a lo largo de la recta (Fig. 1.1). Mostró como sumar dos fuerzas para
obtener su resultante, construyendo un paralelogramo de fuerzas con éstas (flechas)
como los lados. Así, la diagonal del paralelogramo representa la suma, o resultante, de
las dos fuerzas (Fig. 1.2).
Fig. 1.1 Fig. 1.2
2
Las cantidades que se suman como fuerzas se llaman vectores. El científico francés
René Descartes (1596-1650) desarrolló la idea de resolver los vectores en proyecciones
paralelas a ejes de coordenadas (origen de las coordenadas cartesianas). Al
complementar la ley del paralelogramo de Stevin, esta idea facilita mucho los cálculos
tanto en dos como en tres dimensiones, en términos de proyecciones de vectores. Las
cantidades vectoriales se distinguen de las escalares (por ejemplo, la temperatura) en
cuanto a que estas últimas sólo poseen magnitud.
Stevin también ideó el principio del trabajo virtual. Este principio condujo a una teoría
alternativa del equilibrio: el método del trabajo virtual.
Los antiguos sabios griegos, en particular Aristóteles (384-322 a.C.), intentaron
explicar el movimiento de los cuerpos bajo la acción de fuerzas. Sin embargo, debido
a una incapacidad para medir la distancia o el tiempo con exactitud y una creencia falsa
de que la fuerza era necesaria para mantener el movimiento, estos intentos condujeron
a conclusiones erróneas. Un ejemplo de estos errores es la teoría aristotélica de que los
cuerpos pesados caen más rápido en un campo de gravedad que los ligeros.
Después de estos antiguos estudios, el campo de la mecánica se desarrolló de manera
gradual hacia tres divisiones principales: estática, cinemática y cinética. La estática se
refiere a los sistemas inmóviles o los que se mueven con velocidad constante en línea
recta y a las fuerzas que actúan para establecer estos estados del movimiento. Por
ejemplo, un libro colocado sobre el escritorio del lector o su automóvil viajando a lo
largo de un camino recto a velocidad constante son sujetos para las leyes de la estática
y se analizan con éstas. La cinemática se refiere a las razones de cambio en las
cantidades geométricas de un sistema en movimiento; no comprende el concepto de
fuerza. La cinética trata las causas y la naturaleza del movimiento que resulta a partir
de fuerzas especificadas. La cinemática y la cinética forman el campo de la dinámica.
Las relaciones entre la posición, la velocidad y la aceleración de un cuerpo en
movimiento (por ejemplo, una pelota lanzada) son definidas por la cinemática. La
relación entre las fuerzas que actúan sobre el cuerpo (por ejemplo, el viento y la
gravedad) y el movimiento de éste comprende la cinética.
No fue sino hasta el siglo XVII en que Galileo (1564-1642) expuso el fundamento para
la ciencia de la dinámica por medio de experimentos y análisis cuidadosos. Galileo

3
hizo contribuciones a la teoría del equilibrio (estática) y a la cinemática. Sin embargo,
se le conoce más por sus contribuciones a la cinética. El trabajo de Galileo fue el
primer esfuerzo con éxito para desvanecer las falsas doctrinas de la dinámica de
Aristóteles, la cual se había estado enseñando sin cuestionarse con seriedad ni
conformarse durante casi 2000 años. Galileo comprendió la ley de la inercia, según se
manifiesta en su afirmación de que un cuerpo en movimiento sin fuerzas externas
aplicadas seguirá moviéndose a velocidad constante en línea recta. Comprendió que la
aceleración (la razón de cambio de la velocidad) de un cuerpo queda determinada por
las fuerzas externas y que, por lo tanto, la aceleración depende de las fuerzas aplicadas
al cuerpo y a la inercia (masa) del mismo.
El estudio de la mecánica también puede clasificarse según la clase de sistema físico
que se esté considerando. El sistema mecánico más sencillo es la partícula. Una
partícula se define como un cuerpo cuyo tamaño, en una situación física dada, no tiene
influencia sobre las reacciones a las fuerzas que actúan sobre él. En otras palabras, el
cuerpo puede modelarse como un punto de masa concentrada, y se puede ignorar el
movimiento de rotación de ese cuerpo. En una situación física en la que no puede
ignorarse el tamaño o la rotación de un cuerpo, este último no puede tratarse como una
partícula.
Un sistema más complicado es el de dos o más partículas que interactúan (ejercen
fuerzas sobre cada una de las otras). Las partículas también pueden estar sujetas a
fuerzas causadas por cuerpos que están fuera del sistema. Newton usó este tipo de
modelo para estudiar el movimiento de los planetas.
En algunas situaciones físicas, la deformación de un cuerpo tiene un efecto
significativo sobre el movimiento (o equilibrio) de ese cuerpo debido a las fuerzas que
actúan sobre él; ésa deformación no se puede ignorar. Por otra parte, si la deformación
de un cuerpo es muy pequeña y tiene poco efecto sobre su movimiento o equilibrio, esa
deformación se puede ignorar al considerar el movimiento o el equilibrio del cuerpo.
Entonces, se puede dar por hecho que el cuerpo es rígido, y referirnos a él en efecto
como cuerpo rígido. Cada punto de un cuerpo rígido siempre está a una distancia
constante de cualquier otro punto del mismo cuerpo.

4
Dependiendo de la situación física, un cuerpo dado se puede tratar como una partícula,
como un cuerpo rígido o como un cuerpo deformable. Por ejemplo, en el cálculo del
movimiento de la Tierra alrededor del Sol, aquélla puede modelarse con exactitud
como una partícula, ya que la rotación de la Tierra tiene un efecto muy pequeño sobre
su movimiento alrededor del Sol. De manera semejante, con respecto a la rotación de
la Tierra alrededor de su propio eje, aquélla puede modelarse como un cuerpo rígido,
ya que la deformación de la Tierra tiene un efecto muy pequeño sobre su rotación. Sin
embargo, en la determinación de la forma de la Tierra deben considerarse las
deformaciones elásticas y plásticas de ésta; es decir, ya no se puede suponer que a
Tierra sea rígida.
Conjuntamente, el estudio de la estática y la dinámica se denomina mecánica clásica.
La mecánica clásica trata del movimiento de los cuerpos de tamaño “ordinario” que se
mueven a velocidades pequeñas en comparación con la de la luz. Incluye el caso
especial de la estática (el equilibrio) en el que un cuerpo se encuentra en reposo o se
mueve en línea recta con velocidad constante, así como el caso en el cual un cuerpo es
suficientemente rígido de manera al que su deformación no tiene efecto sobre su
movimiento.
Sir Isaac Newton (1642-1727), quién nació el año en que Galileo murió, resumió,
aclaró y extendió el trabajo de este último. Además, formuló la ley de la gravitación
universal y las matemáticas del cálculo. Newton introdujo y aclaró los conceptos de
fuerza y masa. También formuló las tres leyes del movimiento que constituyen la base
de las aplicaciones a la ingeniería de la mecánica. Aún cuando estas tres leyes habían
sido descubiertas en forma experimental por Galileo alrededor de cuatro años antes que
Newton naciera, éste fue el primero en sistematizarlas. La gran importancia de las
contribuciones de Newton a la mecánica se manifiesta por el hecho de que, a menudo,
a la mecánica clásica se le llama mecánica newtoniana.
Las teorías de la relatividad y de la mecánica cuántica hacen ver que la mecánica
newtoniana es inexacta cuando las velocidades se aproximan a la de la luz o cuando se
considera el movimiento de partículas subatómicas. Sin embargo, la mecánica
newtoniana es en extremo precisa para todos los demás casos. Como consecuencia, la
5
mecánica newtoniana constituye la base para el análisis de la vasta mayoría de los
problemas modernos de la ingeniería.
1.3 Leyes de Newton del Movimiento
Isaac Newton, en su tratado Principia, enunció tres leyes principales que describen el
movimiento de una partícula. Newton estableció estas leyes del movimiento a partir de
su estudio del movimiento de los planetas. Ya que los tamaños de los planetas son en
extremo pequeños en comparación con las distancias que intervienen, el movimiento
de un planeta se predice con exactitud al considerarlo como una partícula; es decir, un
cuerpo que puede tratarse como una masa puntual. Las leyes de Newton se pueden
enunciar, en términos de una partícula, como sigue:
Primera ley: En ausencia de fuerzas aplicadas, una partícula originalmente en reposo
o moviéndose con velocidad constante en línea recta, permanecerá en reposo o
seguirá moviéndose con velocidad constante en línea recta.
Segunda ley: Si una partícula se sujeta a una fuerza, esa partícula será acelerada (es
decir, su velocidad cambiará). La aceleración de la partícula será en la dirección de
la fuerza y la magnitud de esa aceleración será proporcional a la magnitud de la
fuerza e inversamente proporcional a la masa de la partícula.
Tercera ley: Para toda acción, se tiene una reacción igual y opuesta. Es decir, las
fuerzas mutuas ejercidas por las partículas, una sobre la otra, poseen la misma
magnitud, dirección y sentido opuestos.
La primera ley de Newton es un caso especial de la segunda. Implica las condiciones
en que una partícula se encuentra en un estado de equilibrio estático. También implica
que una partícula se resiste a los cambios en su movimiento; es decir, posee masa (o
inercia). La segunda ley de Newton es una ley cuantitativa que se expresa
matemáticamente en la forma
amF o m
Fa (1.1)

6
donde F es la fuerza, m la masa y a la aceleración.
La ecuación (1.1) indica que la aceleración es proporcional a la fuerza e inversamente
proporcional a la masa (inercia). Por consiguiente, entre mayor sea la masa de la
partícula, mayor será la fuerza requerida para producir una aceleración dada.
En la segunda ley se supone que una sola fuerza (resultante) actúa sobre una sola
partícula. Sin embargo, la tercera ley hace notar que una sola fuerza, o acción, no existe
sola; por el contrario, siempre se le opone una reacción. La importancia de la tercera
ley de Newton es que permite que su segunda ley, la cual se aplica a una sola partícula,
se extienda hacia un sistema de dos o más partículas sobre las que actúa un sistema de
fuerzas.
1.4 Unidades de Medida y Magnitudes Físicas
En los cálculos de ingeniería se usan unidades de medida para describir magnitudes
físicas como las fuerzas. En la actualidad, en casi todas las naciones industrializadas se
usa el Sistema Internacional de Unidades, abreviado SI Una versión moderna del
sistema métrico, el SI fue adoptado en 1960 por los delegados de la Undécima
Conferencia General sobre Pesas y Medidas. Aun cuando Estados Unidos participó en
esta conferencia, el SI todavía no se ha adaptado por completo. El alumno tendrá que
ser experto no sólo en el SI, sino también en el sistema usado en Estados Unidos, por
lo que se enseñarán ambos sistemas.
El campo de la mecánica para ingeniería se apoya en el estudio de fenómenos físicos y
en resultados experimentales. Los ingenieros usamos números para cuantificar ésos
fenómenos y resultados. Estos números se llaman magnitudes físicas, y a cada
magnitud se le asigna una unidad. Una medición de una magnitud en realidad es una
comparación con un estándar de referencia.
Cuando en una pista se menciona, por ejemplo, una carrera de 400 metros, significa
que la distancia de carrera tiene una longitud igual a 400 veces el metro, la unidad
estándar internacional de longitud.
Para garantizar mediciones precisas, los ingenieros necesitan unidades estándar de
medición que no cambien y que puedan ser duplicadas por quienes hacen
7
experimentos. Cuando la Academia de Ciencias de París estableció el sistema métrico
de medición en 1791, el metro (m) se definió como la distancia (a cero grados Celsius)
entre dos marcas en una barra de platino e iridio que se conserva en la Oficina
Internacional de Pesas y Medidas, en Sèvres, Francia (cerca de París). Esta distancia
era equivalente a la diezmillonésima (1x10-7
) parte de la distancia del Ecuador al Polo
Norte, medida a lo largo del meridiano que pasa por París. Desde 11, se han usado
otras varias definiciones del metro. En la definición actual, establecida en noviembre
de 1983, se define el metro como la distancia que recorre la luz en un vacío en
1/299792458 segundo. Esta definición tiene el efecto de definir la velocidad de la luz
con precisión como 299792458 metros por segundo. Un segundo (s) se define como el
tiempo requerido para que se emitan 919263170 ciclos de radiación por el átomo de
cesio cuando realiza la transición entre sus dos estados más bajos de energía (Young,
1992). Estas definiciones del metro y del segundo son inútiles en un taller mecánico,
pero hacen que las unidades básicas de longitud y tiempo sean accesibles a los físicos
en todo el mundo, sin tener que recurrir a una barra estándar que mida un metro.
Unidades de Masa y Fuerza
La masa de un objeto se puede medir con una balanza. En la terminología científica,
una balanza mide la masa en campo gravitacional. Un cuerpo cuya masa se va a medir
se coloca e uno de los platillos de la balanza. La fuerza gravitacional de la Tierra que
actúa sobre la masa del cuerpo se equilibra por la fuerza gravitacional de la Tierra que
actúa sobre las masas conocidas que se colocan en el otro platillo. En estas
condiciones, la masa del cuerpo es igual a la de las masas conocidas.
La unidad estándar de masa es el kilogramo (kg). En un principio se pretendió que el
kilogramo fuera igual a la masa de 1000 centímetros cúbicos de agua (1 litro), siendo
un centímetro igual a 0.01 metro. En la actualidad, el kilogramo es la masa de un
cilindro de platino de 39 milímetros de largo y 39 milímetros de diámetro, siendo un
milímetro (mm) igual a 0.01 metro. El kilogramo estándar está almacenado en la
Oficina Internacional de Pesas y Medidas. La masa de un objeto es de 1 kilogramo si
ese objeto es equilibrado con exactitud por el kilogramo estándar en una balanza, con
el indicador en el centro del brazo de ésta.

8
En el comercio se usan balanzas para medir masa porque éstas no se ven afectadas por
las diferencias en la fuerza de gravedad (la atracción de la Tierra sobre el cuerpo) en
diferentes ubicaciones geográficas. En un lugar dado, la atracción gravitacional de la
Tierra actúa por igual sobre el cuerpo cuya masa se va a medir y sobre las masas
conocidas que están en el otro platillo.
Como señaló Newton, todos los cuerpos se atraen entre sí. Sin embargo, dado que las
atracciones entre cuerpos pequeños son muy pequeñas, sólo se pueden detectar con
instrumentos de alta sensibilidad. Sin embargo, una persona puede sentir la fuerza de
atracción entre un cuerpo de tamaño grande y la Tierra cuando levanta ese cuerpo.
Esta fuerza es tan familiar que se le ha dado un nombre especial: el peso del cuerpo.
Con una balanza no se mide el peso, ya que el peso de un cuerpo depende de la
ubicación del cuerpo con respecto a la Tierra. Por ejemplo, si una nave espacial
estuviera alejándose de la Tierra con velocidad constante, los pesos de los objetos en la
nave disminuirían paulatinamente. Los propios viajeros en la nave se sentirían cada
vez más ligeros y podrían levantar grandes objetos que no podrían mover sobre la
Tierra. Una balanza en equilibrio e la nave espacial no detectaría este fenómeno en lo
absoluto. Permanecería en equilibrio, ya que las masas en los dos platillos seguirían
siendo iguales entre sí.
A diferencia de la balanza, que mide masa, el dinamómetro es un aparato con el que se
mide fuerza. Los experimentos de Robert Hooke (1635-1703) demostraron que la
extensión de un resorte elástico es proporcional a la fuerza que se aplica al mismo. El
dinamómetro opera con este principio. En un dinamómetro, un objeto de masa fija
tendrá un peso variable, dependiendo del campo gravitacional en el que se encuentre.
Por ejemplo, una masa de 1 kilogramo no tendrá peso en el espacio; pesará alrededor
de 1.6 newton sobre la luna y pesará más o menos 9.8 newton sobre la Tierra.
La unidad de fuerza en el SI es el newton (N). Por definición, un newton es la fuerza
que origina una aceleración de 1 metro por segundo al cuadrado (m/s2) al kilogramo
estándar. La razón para determinar esta convención se discute en el estudio de la
cinética.
El kilogramo estándar pesa 9.806 N en un punto sobre la Tierra en donde la aceleración
de la gravedad tenga el valor estándar, g = 9.806 m/s2. Esto se deduce a partir de la

9
segunda ley de Newton, ecuación 1.1. Si la masa es de 1kg y la aceleración de la
gravedad sobre la superficie de la Tierra es de 9.806 m/s2, la ecuación 1.1 da
NsmkgsmkgamF 806.9806.9806.91 22
donde 1kg∙m/s2 se define como un newton. Por tanto, en el SI, la unidad de fuerza, el
newton (N), se obtiene a partir de la segunda ley de Newton en términos de las
unidades básicas del SI: kilogramo (kg), metro (m) y segundo (s).
El peso de un cuerpo es la fuerza con la cual la Tierra atrae a ese cuerpo. La fuerza de
atracción se llama fuerza de gravedad. Ya que el peso es una fuerza, se expresa en
newtons. Por la ecuación 1.1, con a = g, el peso W de un cuerpo con masa de 1kg, en
un lugar en donde g = 9.806 m/s2, es
NsmkgmgW 806.9806.91 2
De modo más general, si en unidades coherentes, se establece m = 1 en la ecuación W
= mg, se obtiene W = g. Este resultado tiene el significado siguiente:
Para ser coherentes con la ecuación F = ma, el peso de una unidad de masa debe ser
exactamente g unidades de fuerza.
Esta condición es independiente de la aceleración local de la gravedad, porque si g
varía, el peso de un objeto varía en forma proporcional.
Ha surgido una gran confusión porque, en el uso cotidiano, los conceptos y unidades de
peso y masa se han entremezclado, incluso en los círculos científicos y de ingeniería.
La adopción del SI es un esfuerzo supremo para terminar con esa confusión.
El Sistema Internacional de Unidades (SI)
Las siguientes cuatro cantidades físicas: longitud, tiempo, masa y fuerza, tienen
unidades asociadas que se denominan unidades cinéticas (metro, segundo, kilogramo,
newton), ya que forman un conjunto coherente de unidades que satisfacen la ecuación
1.1. Las tres primeras unidades son las unidades básicas o unidades fundamentales; es

10
decir, se definen de modo independiente de cualquier otra unidad. La cuarta unidad, el
newton, es una unidad derivada; es decir, se define en términos de las unidades básicas.
En el SI, las unidades básicas se definen de tal modo que no dependen del lugar, como
se vio en el caso del kilogramo. Por esta razón se dice que el SI es un sistema absoluto.
En el sistema de uso común en EUA, las unidades básicas elegidas para la longitud, el
tiempo y la fuerza son el pie(ft), el segundo (s) y la libra (lb), respectivamente. La
unidad de masa, llamada slug, es una unidad derivada. En este sistema, la definición
de la libra depende del lugar y, por lo tanto, de la fuerza de gravedad en ese lugar. Por
esta razón, se dice que el sistema de so común en EUA es un sistema gravitacional.
La sencillez del SI se acrecienta por el hecho de que sólo existe una unidad básica para
cada magnitud física; no se tienen factores de conversión ni constantes adicionales que
recordar. Por ejemplo, en el SI, el metro es la unidad única de longitud; en tanto que
en el sistema de uso común en EUA, la pulgada, el pie, la yarda, la braza, y la milla se
usan como unidades de longitud.
Otro sistema decimal que aún se utiliza es el sistema cgs, basado en el centímetro, el
gramo y el segundo.
Las unidades SI se dividen en tres clases: unidades básicas, unidades suplementarias y
unidades derivadas. Como se izo notar con anterioridad, en el estudio de la cinética se
usan tres unidades básicas. En otros campos científicos y de ingeniería, cuatro
unidades básicas adicionales se consideran como dimensionalmente independientes.
Éstas son el ampere (A), el kelvin (K), el mol (mol) y la candela (cd). Por tanto, el SI
se basa en siete unidades bien definidas que, por convención, se consideran como
dimensionalmente independientes. La clase de unidades suplementarias sólo contienen
dos unidades: el radián (rad) y el estereorradián (sr). Sin embargo, ya que el radián se
define como la razón entre dos longitudes y el estereorradián como una razón entre un
área y el cuadrado de una longitud, estas unidades también pueden considerarse como
unidades derivadas adimensionales.
Homogeneidad Dimensional
El matemático francés Fourier observó que las leyes de la naturaleza son
independientes de los sistemas humanos de medición. Por lo tanto, las ecuaciones que

11
representan fenómenos naturales deben ser independientes de las unidades; es decir,
estas ecuaciones deben ser válidas para el SI, para el sistema de uso común en EUA o
para cualquier otro sistema de medición. Esta propiedad de una ecuación se llama
homogeneidad dimensional. Por ejemplo, la forma escalar de la segunda ley de
Newton, F = m∙a, es válida si las unidades de sus cantidades son el metro, el kilogramo
y el segundo, o bien, el pie, el slug y el segundo. Por lo tanto, se dice que F = m∙a es
dimensionalmente homogénea.
El concepto de homogeneidad dimensional conduce a una extensa teoría llamada
análisis dimensional (Langhaar, 1980). Esta teoría ha probado su utilidad para muchos
tipos de estudios físicos. Por ejemplo, un teorema de análisis dimensional expresa que
una ecuación del tipo x = a + b + c es dimensionalmente homogénea si, y sólo si, las
variables x, a, b y c tienen las mismas dimensiones. Este teorema resulta útil para
comprobar ecuaciones algebraicas. Si una ecuación deducida contiene una suma o
diferencia de dos o más términos que tienen dimensiones diferentes, se ha cometido un
error. En términos comunes, no se pueden sumar manzanas con naranjas y obtener
manzanas como suma. Por ejemplo, considere un problema para el cual se ha obtenido
la ecuación F – mv2 = 0, donde F denota fuerza, m masa y v velocidad. Si se
comprueban las dimensiones de los términos, se descubre que la ecuación no es
dimensionalmente homogénea, ya que la expresión mv2 no tiene las dimensiones de
fuerza. De hecho, se ve que
FFLTLTFLmv 22212
Como consecuencia, la relación F – mv2
= 0 no puede representar una ley física.
La homogeneidad dimensional es una condición necesaria, pero no suficiente, para que
una ecuación describa correctamente un fenómeno físico. Una ecuación puede tener
las mismas dimensiones en cada término y todavía no tener un significado físico. Por
ejemplo, la ecuación FL = mv2 es dimensionalmente homogénea, pero no representa un
fenómeno físico.

12
1.5 Cálculos Numéricos en Ingeniería y Modelos
Una solución realista y con éxito para un problema de ingeniería suele iniciarse con un
modelo exacto de ese problema y la comprensión de las hipótesis aplicadas. Los
físicos y los ingenieros definen un modelo como una aproximación de un sistema que
sea suficientemente exacto para los fines del análisis físico. Por ejemplo, suponga que
se tiene el problema de calcular el movimiento de una pelota de béisbol lanzada en el
aire con una velocidad dada. La pelota suele modelarse como una partícula; es decir,
como una masa puntual. ¿Es bueno este modelo para la pelota de béisbol?. Para dar
respuesta a esta pregunta, debe considerarse una pelota real de béisbol: ¿Es un punto de
masa concentrada? ¡No! ¿Es importante este hecho? Podría ser, ¡si la rotación de la
pelota es importante!
Una reproducción en video de la pelota en vuelo mostraría que gira. Recuerde que una
partícula no gira; es decir, su rotación tiene un efecto insignificante sobre su
movimiento. Sin embargo, como todo fanático del béisbol sabe, el giro impartido a
una pelota por un lanzador tiene un efecto significativo en el movimiento de esa pelota.
La velocidad de la pelota, su giro y su interacción con el aire influyen en su
movimiento. (Debido a estas complicaciones, los físicos aún están desconcertados
sobre por qué algunos lanzadores lanzan mejores pelotas curvas que otros). Otro factor
que debe considerarse es el efecto de la gravedad. ¿Es constante la fuerza de gravedad
que actúa sobre la pelota? No; la fuerza de gravedad cambia con la altitud de la pelota.
¿Es significativo este cambio para este problema? Es probable que no. ¿Influye la
rotación de la Tierra sobre el movimiento de la pelota? ¡Sí! ¿Será importante este
efecto en este problema? ¿Existen otros factores que influyan sobre el movimiento de
la pelota?.
En pocas palabras, si se intenta incluir todos los efectos en el análisis, el problema se
vuelve extremadamente complejo. Por tanto, ¿qué se hace? Se simplifica el problema
de modo que permita obtener una aproximación suficientemente exacta a la solución
del problema real. En primer lugar, se ignora el tamaño y forma de la pelota; es decir,
se le considera como una partícula. En seguida, se desprecia la resistencia del aire y
los efectos del viento y se da por hecho que la pelota se mueve en el vacío. Por último,
se desprecian los cambios en la fuerza de gravedad y el efecto de la rotación de la

13
Tierra. Ahora se cuenta con un modelo del problema: una partícula en un campo de
gravedad constante moviéndose en el vacío con una velocidad inicial. Con este
modelo simplificado, el problema se puede manejar. La solución es que la pelota se
mueve a lo largo de un arco parabólico. ¿Pero con cuánta exactitud esta solución
modelo representa la solución real? Lo veremos más adelante.
La búsqueda de respuestas para cuestiones como la antes planteada es el arte de la
ingeniería. Un componente propio de la buena ingeniería es el arte de modelar bien.
En general, el objetivo de un buen modelo es conservar los efectos más importantes en
un problema y descartar los menos importantes. Por supuesto, no deben descartarse
demasiados. Por ejemplo, si, además de las simplificaciones antes discutidas, se
despreciara por completo la fuerza de gravedad (en lugar de tomarla como constante),
la solución del problema de la pelota de béisbol sería que ésta viajaría a velocidad
constante en línea recta, ya que ninguna fuerza actúa sobre ella (primera ley de
Newton). ¡Seguiría viajando en línea recta hacia el espacio exterior y nunca regresaría
a la Tierra! Es obvio que ésta es una mala solución para e problema real.
1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 2 (13/03/07)
Unidad 1 (continuación)
1.6 Características de las Fuerzas
Se explorarán las características de las fuerzas y se analizarán las reglas de adición,
sustracción y proyección de fuerzas. Las reglas para manipular fuerzas también se
aplican a otras cantidades físicas llamadas cantidades vectoriales, o vectores. Ya que
comprender las características de las fuerzas y las reglas mediante las que se combinan
es esencial para el estudio de sus efectos sobre los sistemas físicos, aquí se establece un
fundamento para las discusiones del equilibrio que se estudiarán posteriormente.
En primer lugar, se discuten las fuerzas resultantes y las componentes de las fuerzas en
términos de representaciones gráficas. Se consideran la ley del paralelogramo y la
construcción del polígono para la composición (adición) y la resolución de fuerzas.
Este procedimiento gráfico demuestra que las operaciones sobre las fuerzas son
independientes de un sistema de coordenadas. Con este enfoque, los conceptos se
visualizan con facilidad y, por consiguiente, se comprenden. Después, se examinan los
conceptos de ejes y proyecciones de las fuerzas sobre ejes de coordenadas cartesianas
rectangulares. Este segundo procedimiento es aplicable de modo más general que el
gráfico, en particular para los problemas tridimensionales. Por último, se consideran el
concepto de vectores unitarios y su uso en las operaciones con vectores. Este tercer
enfoque resulta útil para considerar el equilibrio de los cuerpos rígidos.
Una fuerza se crea por la interacción entre dos cuerpos. A menudo, utilizaremos la
nomenclatura usada en los libros para referirnos a una fuerza, es decir, F representa el
carácter vectorial de una fuerza (magnitud y dirección) y F solo la magnitud. También
se usa F con una flecha superior para la representación manual de una fuerza.
Cuando dos cuerpos interactúan, se supone que uno ejerce la fuerza y el otro la resiste
(por ejemplo, la Tierra y la manzana), siendo cualquiera de las dos fuerzas acción o
reacción, dependiendo del sistema de referencia (tercera ley de Newton).
2
La fuerza de gravedad suele expresarse en términos de su magnitud (peso), porque su
dirección es conocida (centro de masa de la Tierra). En general, toda fuerza debe
expresarse en términos de su magnitud, dirección y sentido.
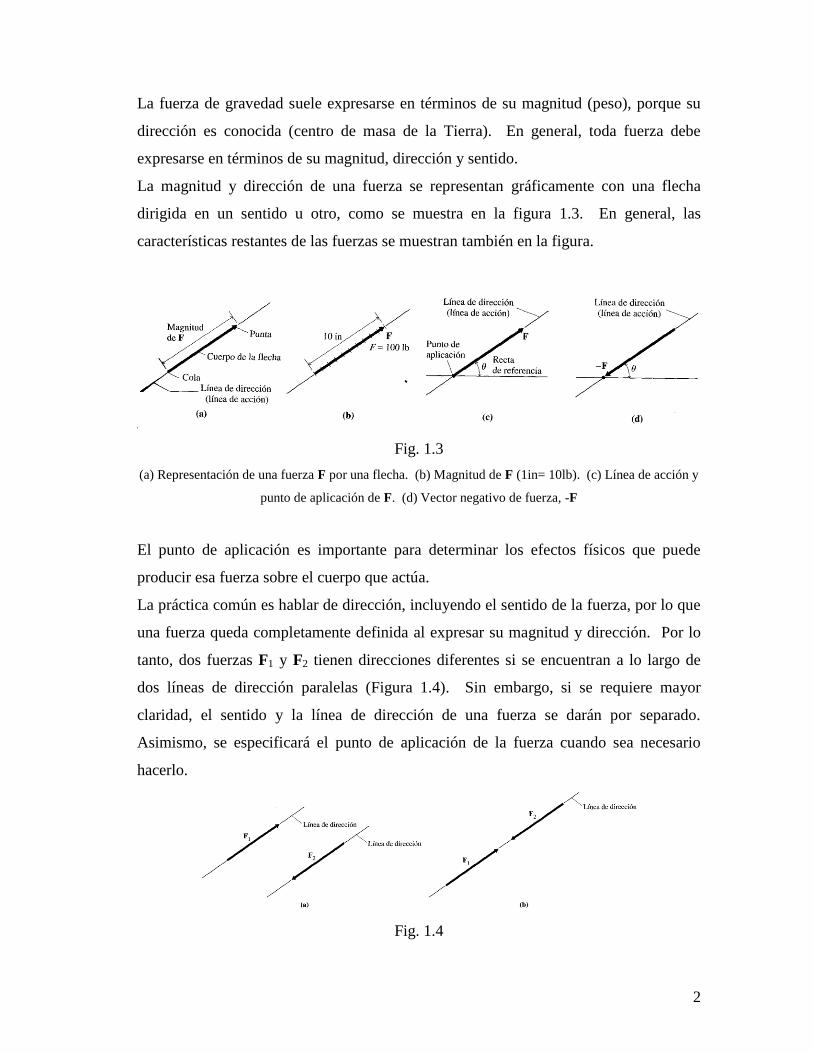
La magnitud y dirección de una fuerza se representan gráficamente con una flecha
dirigida en un sentido u otro, como se muestra en la figura 1.3. En general, las
características restantes de las fuerzas se muestran también en la figura.
Fig. 1.3
(a) Representación de una fuerza F por una flecha. (b) Magnitud de F (1in= 10lb). (c) Línea de acción y
punto de aplicación de F. (d) Vector negativo de fuerza, -F
El punto de aplicación es importante para determinar los efectos físicos que puede
producir esa fuerza sobre el cuerpo que actúa.
La práctica común es hablar de dirección, incluyendo el sentido de la fuerza, por lo que
una fuerza queda completamente definida al expresar su magnitud y dirección. Por lo
tanto, dos fuerzas F1 y F2 tienen direcciones diferentes si se encuentran a lo largo de
dos líneas de dirección paralelas (Figura 1.4). Sin embargo, si se requiere mayor
claridad, el sentido y la línea de dirección de una fuerza se darán por separado.
Asimismo, se especificará el punto de aplicación de la fuerza cuando sea necesario
hacerlo.
Fig. 1.4

3
Por lo general, las fuerzas se aplican en puntos específicos de los cuerpos; es decir, se
considera que son fuerzas concentradas o puntuales. Sin embargo, estas situaciones
están idealizadas. En el mundo real no se tienen fuerzas concentradas. Por ejemplo, una
rueda del vagón de un ferrocarril que se apoya sobre un riel se deforma ligeramente en
la zona de contacto. Como consecuencia, la fuerza que la rueda transmite al riel se
distribuye sobre una pequeña área de contacto en la superficie del riel. Por lo que, la
fuerza debida a la rueda podría considerarse una fuerza distribuida.
Si una fuerza pudiera concentrarse en un punto de un cuerpo, perforaría ese cuerpo. Sin
embargo, en muchos casos, las áreas sobre las que se distribuyen las fuerzas son
relativamente pequeñas y, por consiguiente, pueden considerarse de forma aproximada
como puntos. Asimismo, la teoría de las fuerzas puntuales es un estudio preliminar para
el fundamento de la teoría de las fuerzas distribuidas.
Fuerzas Concurrentes
Dos o más fuerzas que actúan en un mismo punto se llaman fuerzas concurrentes. Estas
fuerzas no necesitan tener la misma dirección (simplemente actúan e el punto). Si, de
hecho, tienen la misma dirección, son fuerzas colineales. Sin embargo, dos fuerzas
colineales no necesitan ser concurrentes; pueden tener puntos diferentes de aplicación a
lo largo de la misma recta.
Fuerzas Coplanares
Dos o más fuerzas cuya recta de acción se encuentre en el mismo plano se llaman
fuerzas coplanares. Ya que dos fuerzas concurrentes siempre se encuentran en el
mismo plano, siempre son coplanares. Tres o más fuerzas concurrentes no tienen que
ser necesariamente coplanares. Por el contrario, las fuerzas coplanares no son
necesariamente concurrentes. Sin embargo, con frecuencia, las fuerzas son tanto
coplanares como concurrentes.
Ejemplo 1. Características de un sistema de fuerzas

4
Determine el tipo de sistema para cada uno de los sistemas que se muestran en las
figuras 1.5(a) hasta 1.5(b).
(a) (b) (c) (d)
Fig. 1.5 Sistemas de fuerzas
En la figura (a), el sistema de fuerzas es concurrente y coplanar. El sistema de la figura
(b) es colineal, y por consiguiente, coplanar. En la figura (c), el sistema de fuerzas es
coplanar. El sistema de fuerzas de la figura (d) es concurrente pero no coplanar (o
tridimensional).
1.7 Tercera Ley de Newton
La tercera ley de Newton (ley de acción y reacción) se puede expresar como sigue:
Para toda acción, existe una reacción igual y opuesta. O bien, las fuerzas mutuas de
dos cuerpos (partículas), de uno sobre el otro, siempre son iguales y en magnitud,
dirección y sentido opuesto.
Para explicar esta ley, Newton escribió: “Todo lo que tire del otro o lo oprima, será
igualmente tirado u oprimido por ese otro. Si oprime una piedra con su dedo, el dedo
también es oprimido por la piedra”.
Si una fuerza F actúa sobre un sistema, su reacción actúa sobre otra parte del mismo
sistema o sobre un cuerpo fuera de éste. En el primer caso, la fuerza se llama fuerza
interna (reacción de un cable que sostiene un peso); en el segundo caso se llama fuerza
externa (la rueda del vagón sobre el riel, si la rueda es el sistema).

5
El análisis de estructuras o de máquinas a menudo se interesa en la fuerza que cierta
parte del miembro ejerce sobre otra parte. Por ejemplo, considere el miembro AB de la
figura 1.6, con las fuerzas de igual magnitud FA=FB actuando sobre sus extremos. Si el
miembro se separa en dos partes, AC y DB, y entre las dos partes actúan las dos fuerzas
FC y FD en C y D, siguen siendo dos partes del mismo miembro. En este contexto, con
respecto al miembro AB, FA y FB son fuerzas externas, y FC y FD son fuerzas internas.
1.8 Resultantes de Fuerzas y Componentes de Fuerzas
Las investigaciones de Stevin, Descartes, Newton y otros científicos del siglo XVII
condujeron a la conclusión de que los efectos de varias fuerzas que actúan en un punto
común P de un cuerpo pueden ser producidas invariablemente por una sola fuerza que
actúe en el punto P. La fuerza única que es equivalente a varias fuerzas se llama fuerza
resultante o, sencillamente, resultante.
Ley del Paralelogramo y la Composición de Fuerzas
Dos fuerzas F y G que actúan en un punto P de un cuerpo se representan por dos flechas
trazadas hacia fuera del punto P (figura 1.6). Estas flechas forman dos lados de un
paralelogramo. La diagonal R del paralelogramo, trazada desde el punto P, representa la
resultante de las fuerzas F y G, y es en todos los aspectos equivalente. Este proceso se
denomina composición de fuerzas
Fig. 1.6
Ley del Paralelogramo y Resolución de Fuerzas
El proceso inverso de la composición de fuerzas se llama resolución de fuerzas. Es
decir, la fuerza R se descompone en dos fuerzas F y G, las que conocen como
componentes de R. Para llevar a cabo la operación de resolución, se traza un segmento

6
rectilíneo PA que represente la fuerza R. Sean PM y PN dos rectas que pasan por P, de
tal modo que las rectas PM, PN y PA se encuentran en un plano, y trace los segmentos
AB y AC paralelas a los segmentos PN y PM, respectivamente. Entonces, por la ley del
paralelogramo, los dos segmentos rectilíneos PB y PC representan las fuerzas F y G,
cuya resultante es R. Es decir, la fuerza dada R se ha resuelto en las componentes F y
G. En todos los aspectos, las dos fuerzas F y G juntas son equivalentes a la fuerza dada
R. Las fuerzas R, F y G son coplanares y concurrentes.
Las direcciones de las rectas PM y PN son arbitrarias, sin embargo, es más conveniente
elegir estos segmentos de modo que se encuentren a o largo de ejes de coordenadas
rectangulares que resulten apropiadas para resolver un problema en particular.
Ley del Polígono de Fuerzas
La figura 1.6 mostró la construcción del paralelogramo de la resultante R de dos fuerzas
concurrentes F y G. Esta construcción se puede simplificar trazando sólo el triángulo
PBA (figura 1.7 a). El lado BA representa la fuerza F, aún cuando no designa la línea
real de acción de F. De modo alternativo, se puede obtener la resultante por el
desplazamiento del segmento PB, que representa la fuerza G, hasta que coincida con
CA (figura 1.7 b). Este método se llama construcción del triángulo de la fuerza
resultante.
(a) (b)
Fig. 1.7
La construcción del triángulo se generaliza con facilidad al caso donde se tienen más de
dos fuerzas concurrentes. Por ejemplo, suponga tres fuerzas F, G y H actuando en un
punto P (figura 1.8 a)

7
(a) (b)
Fig. 1.8
La construcción del triángulo produce en primer lugar la resultante R’ de las dos fuerzas
F y G. La aplicación, una vez más, de la construcción del triángulo con las fuerzas R’ y
H da la resultante R de las tres fuerzas. La resultante intermedia R’ sólo se muestra con
fines ilustrativos. Este método se aplica a cualquier número de fuerzas concurrentes, y
se denomina construcción del polígono de la resultante de varias fuerzas concurrentes.
1.9 Vectores y Cantidades Vectoriales
Las fuerzas no son las únicas cantidades vectoriales que se pueden representar por
flechas y combinarse por la construcción del paralelogramo o del polígono. Otras
cantidades físicas también se pueden representar como vectores (desplazamientos,
velocidades y aceleraciones de partículas), es decir tienen magnitud, dirección y
sentido. Una cantidad física que sólo tiene magnitud se llama cantidad escalar
(temperatura).
Tipos de Vectores
Si no se puede cambiar el punto de aplicación de un vector sin cambiar el significado
físico o el efecto físico del mismo, se dice que el vector es fijo. Una fuerza que actúa
sobre un cuerpo se representa por un vector fijo cuando la deformación y los esfuerzos
producidos por esa fuerza dependen del punto en el que ésta actúa. Por ejemplo, el
peso de un clavadista se puede considerar como un vector fijo con respecto al
trampolín, ya que la deformación depende de la posición del clavadista.
8
S un vector no se puede trasladar sobre su recta de acción se dice que es un vector
libre. Por ejemplo, un vector que representa la velocidad de un cuerpo, como un
automóvil en movimiento, es un vector libre.
También hay vectores que se pueden desplazar de manera arbitraria a lo largo de la
recta sobre la cual se encuentran, pero no pueden desplazarse respecto de esas rectas
sin cambiar sus efectos físicos. Estos se conocen como vectores deslizantes.
Cantidades No Vectoriales
No todas las cantidades físicas que se pueden representar por flechas son vectores (o
cantidades vectoriales). Por ejemplo, una rotación finita de un cuerpo rígido alrededor
de un eje (una recta con una orientación y un sentido dados) se puede representar por
un segmento rectilíneo dirigido (una flecha) que se encuentre sobre el eje de rotación y
que tenga una magnitud igual al desplazamiento angular. El sentido de la rotación
puede definirse por la regla de la mano derecha. Es decir, el cuerpo se gira en el
sentido que haría que un tornillo derecho avanzara en la dirección de la flecha. Si
imaginamos que sostenemos una flecha en la mano derecha con el pulgar apuntando en
la dirección de la punta, los otros dedos se enroscarían alrededor de la flecha en el
sentido positivo de la rotación.
Podría esperarse que una rotación finita de un cuerpo rígido fuera una cantidad
vectorial. La determinación de si esto es verdadero comprende la determinación de si
las rotaciones se combinan o no por la construcción del polígono. Un experimento
sencillo muestra que los desplazamientos angulares finitos no se combinan de la misma
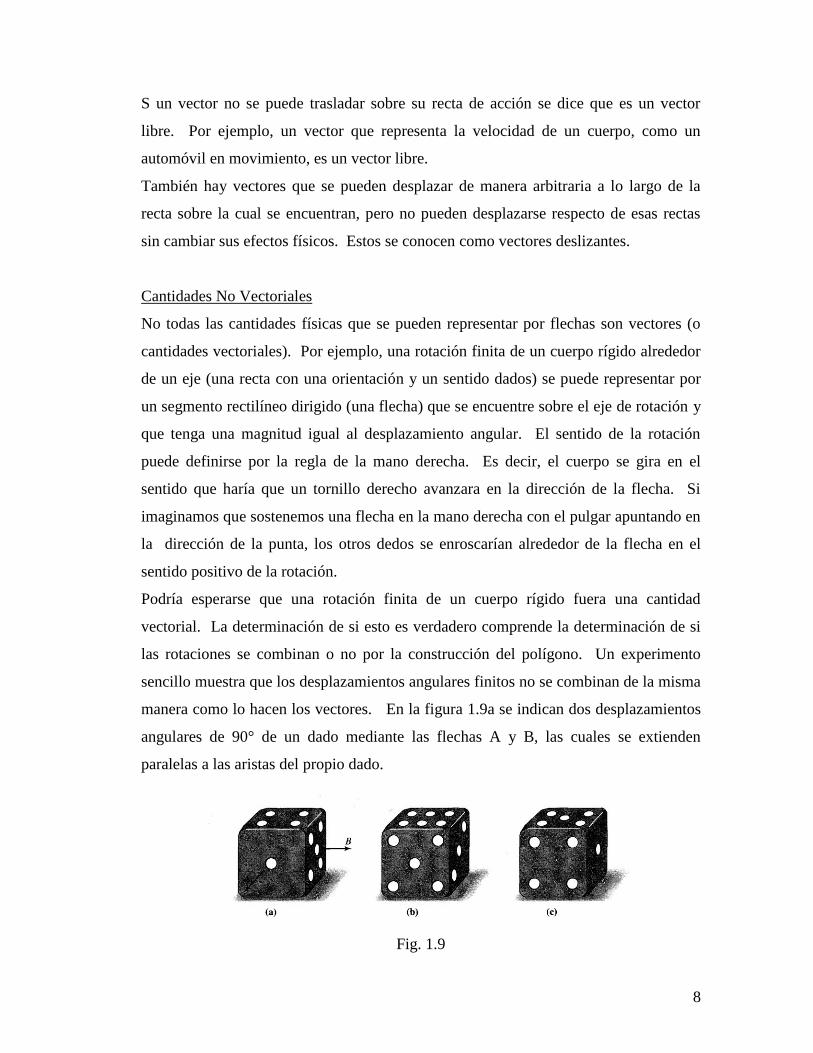
manera como lo hacen los vectores. En la figura 1.9a se indican dos desplazamientos
angulares de 90° de un dado mediante las flechas A y B, las cuales se extienden
paralelas a las aristas del propio dado.
Fig. 1.9

9
En la figura 1.9b se muestra la posición del dado después de haberse realizado las
rotaciones en el orden A, B. En la figura 1.9c se muestra la posición del mismo dado
después de que se han realizado esas rotaciones en el orden B, A. Es evidente que la
posición final del dado depende del orden en el cual se realicen las dos rotaciones.
Este comportamiento no es coherente con el hecho de que el vector resultante obtenido
por la construcción del triángulo es independiente del orden de los vectores en éste.
Por tanto, un desplazamiento angular finito de un cuerpo rígido no es una cantidad
vectorial, aun cuando puede representarse por una flecha. Siempre deben mirarse los
principios físicos para determinar si una cantidad que puede representarse por una
flecha es una cantidad vectorial.
Aritmética Vectorial
Igualdad de vectores La ecuación vectorial A=B significa que os vectores A y B
tienen la misma magnitud y la misma dirección, pero necesariamente el mismo punto
de aplicación o la misma línea de acción. La ecuación A=B implica que A=B.
Vector negativo El vector -F se define como el que tiene la misma magnitud que el
vector F pero el sentido opuesto. Si F denota una fuerza que actúa sobre un cuerpo, su
reacción es –F.
Suma vectorial, adición vectorial La resultante R de varios vectores F1, F2,…se
llama suma de los vectores, representada simbólicamente como R = F1 + F2 +…El
proceso de obtener la suma por la construcción del polígono u otros medios se llama
adición vectorial. Las expresiones “adición vectorial” y “composición de vectores”
tienen el mismo significado. Puede parecer extraño que se usa el símbolo + para una
operación que es diferente de la adición escalar. Sin embargo, como se verá, la adición
vectorial tiene ciertas características en común con la adición escalar y el símbolo +
sirve para destacar aspectos comunes. También existen diferencias distintivas. Por
ejemplo, la relación R = F + G no implica que R = F + G. La expresión F + G denota
la suma escalar de las magnitudes F y G, pero, en general, F + G es mayor que R, ya
que los tres vectores R, F y G forman los lados de un triángulo.
Sustracción de vectores La sustracción de un vector se define como la adición del
vector negativo: A - B = A + (-B). Es decir, para restar un vector B de un vector A,

10
súmese -B a A. Se puede restar el mismo vector de ambos miembros de una ecuación
vectorial. Por ejemplo, si A + B = F, entonces, de modo análogo a la sustracción
escalar, A + B - B = F - B, por lo que A = F – B. Estas relaciones se ilustran en la
figura 1.10
Fig.1.10 Sustracción de un vector
Producto de un escalar y un vector De modo semejante a la adición escalar, resulta
natural escribir F + F = 2F, 2F + F = 3F, y así sucesivamente. En consecuencia, si k es
un número no negativo, el producto de un escalar y un vector, se define como un vector
con la dirección F y de magnitud kF. En vista de la definición de un vector negativo, el
producto de un número negativo k y vector F se define como un vector con magnitud
|k|F y sentido opuesto al del vector F. La notación |k| designa el valor absoluto de k.
El efecto de multiplicar un vector por un escalar es cambiar la magnitud o el sentido, o
ambos, de ese vector, en tanto que su dirección se deja sin alteración. Por ejemplo, la
multiplicación de un vector por el escalar -1 invierte el sentido del vector sin alterar su
magnitud. En la figura 1.11 se ilustran estos efectos.
Fig. 1.11 Producto de un escalar y un vector

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 3 (16/03/07)
Unidad II Vectores
2.1 Componentes Rectangulares de un Vector
Ejes
Un eje es una recta con una orientación en el espacio y un sentido dados (Fig. 2.1). Los ejes
se usan para establecer direcciones con respecto a cierto sistema fijo. Para la mayoría de los
fines de la ingeniería, las direcciones se establecen con respecto a cierta posición fija sobre
la Tierra. El sentido de un eje se indica por medio de una punta de flecha sobre la recta. El
sentido positivo del eje corresponde a la dirección hacia la cual se orienta la punta de
flecha; el sentido negativo es la dirección opuesta. Un eje no es un vector, ya que no tiene
magnitud, sólo dirección. Por comodidad, en los diagramas a veces se omite la punta de
flecha cuando no se corre el sentido positivo del eje.
Fig. 2.1 Fig. 2.2
Un punto dado sobre un eje, conocido como origen, separa el eje en dos partes: la parte
positiva y la parte negativa. Estas partes se extienden en el sentido positivo y en el sentido
negativo a partir del origen, respectivamente.
Para definir el ángulo entre dos ejes, se trasladan estos ejes (es decir, se desplazan sin
cambiar de dirección), si es necesario, de modo que se intercepten en el punto P. El ángulo
positivo entre los ejes es aquél que se encuentra entre sus partes positivas. En los problemas

2
tridimensionales, se entiende que el ángulo entre la pareja de ejes no debe ser mayor que
180°. Por ejemplo, el ángulo entre la pareja de ejes que se muestran en la figura 2.2 se
denota por α. Sin embargo, en los problemas bidimensionales a veces se considera que el
ángulo entre dos ejes es un ángulo reflejo (un ángulo mayor que 180°), como se indica
mediante el ángulo β en la figura 2.2. En cualquier caso, se atribuye un significado al
ángulo entre dos ejes, aun cuando éstos podrían no interceptarse. El ángulo entre dos
vectores o el ángulo entre un vector y un eje se definen de la misma manera que el ángulo
entre dos ejes.
Sistemas de Coordenadas Cartesianas Rectangulares
Un sistema de coordenadas cartesianas rectangulares en el espacio se compone de tres ejes
mutuamente perpendiculares que se intersecan en un punto común, llamado origen. Los
ejes se designan por tres símbolos diferentes, por lo común x, y y z. Existen dos tipos de
sistemas de coordenadas cartesianas rectangulares: sistemas derechos y sistemas izquierdos.
Éstos se ilustran en la figura 2.3. Estos sistemas difieren en que no pueden llevarse a que
uno y otros sean congruentes entre sí, de tal modo que los ejes con las mismas letras tengan
el mismo sentido. Con el sistema derecho, si se toma el eje z con la mano derecha, con el
pulgar apuntando en el sentido positivo del eje, los otros dedos se enroscarán alrededor del
eje z, yendo del eje x hacia el eje y (Fig. 2.3a). La mano izquierda guarda la misma relación
con el sistema coordenado izquierdo (Fig. 2.3b).
Fig. 2.3

3
En dos dimensiones, también existe la distinción entre los sistemas de coordenadas
derechos e izquierdos. Si los sistemas coordenados que se muestran en la figura 2.4
permanecen en el plano del papel, no pueden llevarse a la congruencia entre ambos de tal
modo que los ejes con el mismo símbolo tengan el mismo sentido. Si se imagina que existe
un eje z perpendicular al plano del papel, apuntando hacia afuera, el sistema que se muestra
en la figura 2.4a es derecho y el que se muestra en la 2.4b es izquierdo. Para evitar
confusión, usaremos las coordenadas derechas tanto para los sistemas bidimensionales
como para los tridimensionales.
(a) (b)
Fig. 4
Sistemas de coordenadas cartesianas en el plano: (a) sistema derecho; (b) sistema izquierdo
Proyección Ortogonal de un Vector sobre un Eje
Algunas de las propiedades más importantes de los vectores están relacionadas con las
proyecciones ortogonales de éstos sobre ejes fijos (Fig. 2.5). Se construye una proyección
ortogonal de un vector de un vector A sobre un eje L al trazar rectas de proyección
(mostradas como líneas punteadas en la figura 2.5), del eje hacia la cola y la punta del
vector; estas rectas de proyección son perpendiculares (ortogonales) al eje. La proyección
tiene una magnitud definida por la distancia entre las dos rectas de proyección. La
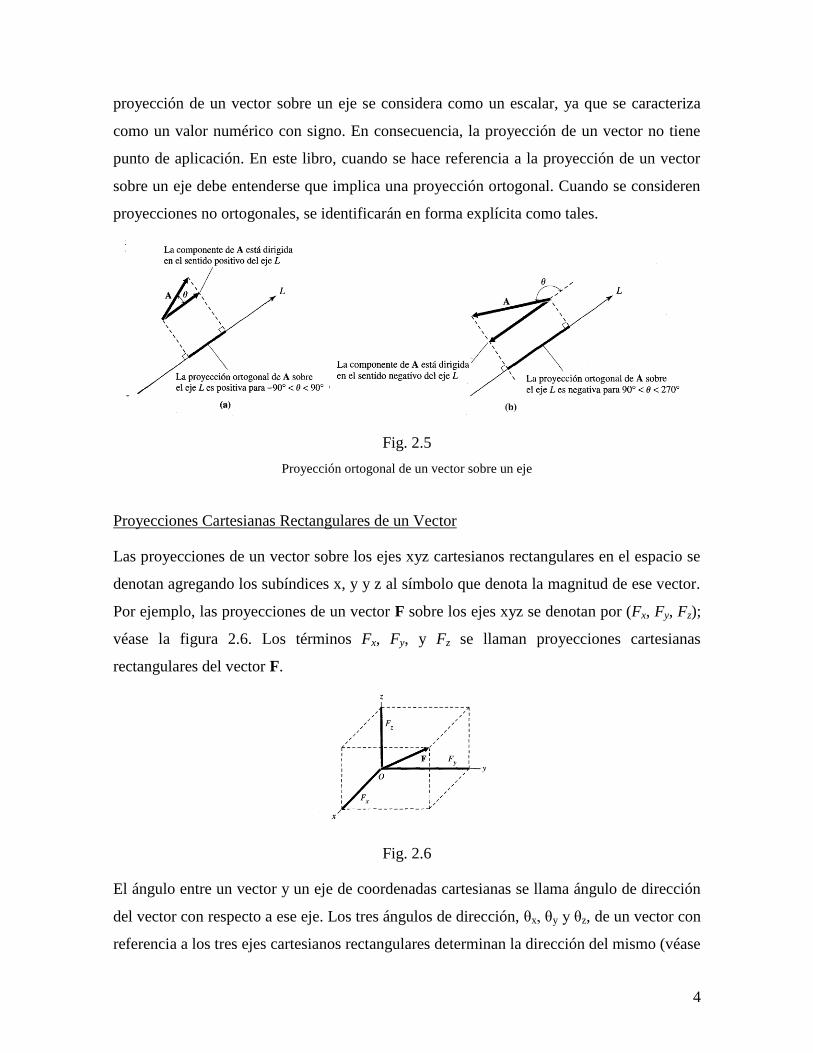
proyección tiene un signo determinado por la orientación del vector A con respecto al eje L.
El signo de la proyección es positivo si la componente de A paralela a L tiene el mismo
sentido que el eje; de lo contrario, el signo de la proyección es negativo (véase la figura
2.5). Si el vector es perpendicular al eje, su proyección sobre éste es cero. Si un vector de
magnitud A forma un ángulo θ con un eje, la proyección de ese vector sobre tal eje se
representa en magnitud y en signo por A cosθ . Esto es verdadero si se interpreta θ como el
ángulo menor o el ángulo reflejo que el vector forma con el eje (Fig. 2.2). Por lo tanto, la
4
proyección de un vector sobre un eje se considera como un escalar, ya que se caracteriza
como un valor numérico con signo. En consecuencia, la proyección de un vector no tiene
punto de aplicación. En este libro, cuando se hace referencia a la proyección de un vector
sobre un eje debe entenderse que implica una proyección ortogonal. Cuando se consideren
proyecciones no ortogonales, se identificarán en forma explícita como tales.
Fig. 2.5
Proyección ortogonal de un vector sobre un eje
Proyecciones Cartesianas Rectangulares de un Vector
Las proyecciones de un vector sobre los ejes xyz cartesianos rectangulares en el espacio se
denotan agregando los subíndices x, y y z al símbolo que denota la magnitud de ese vector.
Por ejemplo, las proyecciones de un vector F sobre los ejes xyz se denotan por (Fx, Fy, Fz);
véase la figura 2.6. Los términos Fx, Fy, y Fz se llaman proyecciones cartesianas
rectangulares del vector F.
Fig. 2.6
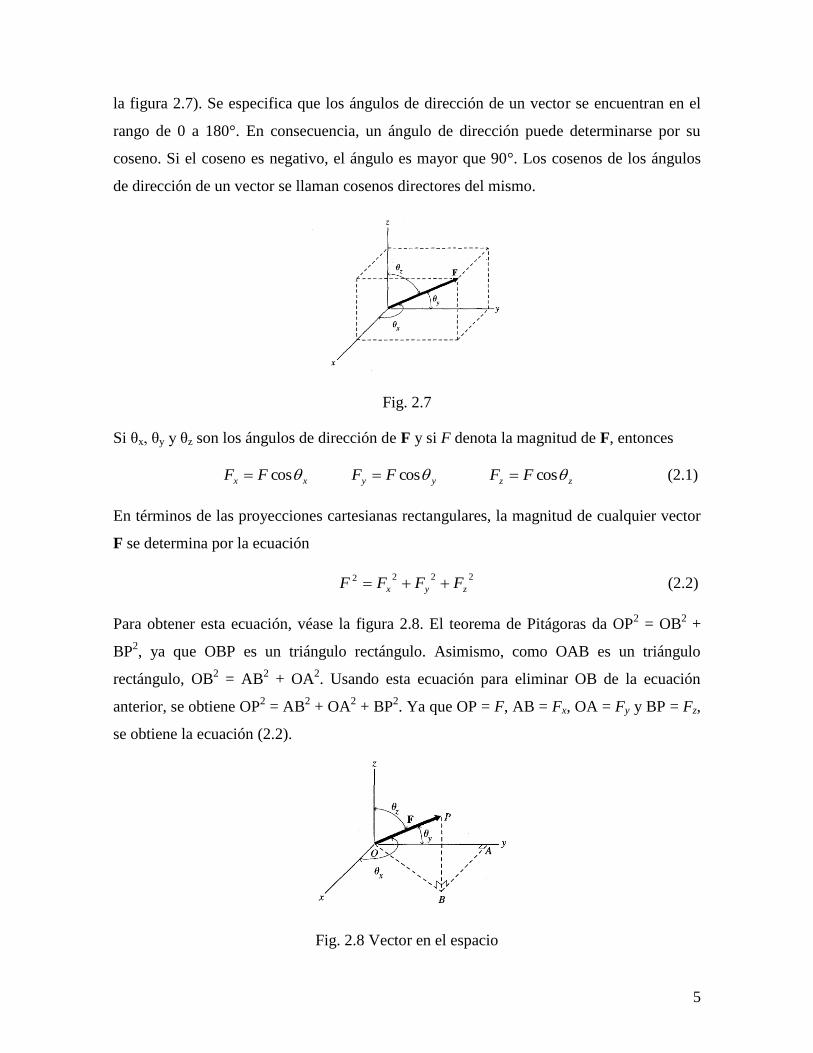
El ángulo entre un vector y un eje de coordenadas cartesianas se llama ángulo de dirección
del vector con respecto a ese eje. Los tres ángulos de dirección, θx, θy y θz, de un vector con
referencia a los tres ejes cartesianos rectangulares determinan la dirección del mismo (véase
5
la figura 2.7). Se especifica que los ángulos de dirección de un vector se encuentran en el
rango de 0 a 180°. En consecuencia, un ángulo de dirección puede determinarse por su
coseno. Si el coseno es negativo, el ángulo es mayor que 90°. Los cosenos de los ángulos
de dirección de un vector se llaman cosenos directores del mismo.
Fig. 2.7
Si θx, θy y θz son los ángulos de dirección de F y si F denota la magnitud de F, entonces
xx FF cos yy FF cos zz FF cos (2.1)
En términos de las proyecciones cartesianas rectangulares, la magnitud de cualquier vector
F se determina por la ecuación
2222
zyx FFFF (2.2)
Para obtener esta ecuación, véase la figura 2.8. El teorema de Pitágoras da OP2 = OB
2 +
BP2, ya que OBP es un triángulo rectángulo. Asimismo, como OAB es un triángulo
rectángulo, OB2 = AB
2 + OA
2. Usando esta ecuación para eliminar OB de la ecuación
anterior, se obtiene OP2 = AB
2 + OA
2 + BP
2. Ya que OP = F, AB = Fx, OA = Fy y BP = Fz,
se obtiene la ecuación (2.2).
Fig. 2.8 Vector en el espacio

6
Del mismo modo, al sustituir las ecuaciones (2.1) en la (2.2) y cancelando F2, se tiene
1coscoscos 222 zyx (2.3)
La ecuación (2.3) muestra que los tres cosenos directores de un vector en el espacio no son
independientes entre sí; cualquiera se puede determinar, excepto por el signo, por medio de
los otros dos.
En los problemas bidimensionales sólo se necesitan considerar los ejes x y y, ya que θz =
90° y, por lo tanto, Fz = 0. En el análisis de fuerzas coplanares por lo general se emplean las
coordenadas cartesianas en el plano (x, y) en un sistema derecho. Entonces se puede
especificar la dirección de una vector F por el ángulo único θ que ese vector forma con el
eje x (véase la figura 2.9). Por lo común, θ va desde 0 hasta 360° y se mide en sentido
contrario al del movimiento de las manecillas del reloj.
Fig. 2.9
(a) Dirección de un vector F en un plano. (b) Signo de la proyección de F en cada uno de los cuadrantes del
plano xy
Las proyecciones de un vector F sobre los ejes x y y son
cosFFx FsenFy (2.4)
donde, como es costumbre, F denota la magnitud del vector F. En la figura 2.9b se dan los
signos de las proyecciones (Fx, Fy) de F en cada uno de los cuadrantes del plano xy. Por la
ecuación (2.4), también se puede ver que
222
yx FFF (2.5)

7
Adición Vectorial usando Proyecciones Cartesianas Rectangulares
En la figura 2.10 se muestra la construcción del polígono de la resultante de varios
vectores. En la figura 2.10 se puede ver que la proyección AE de la resultante R sobre el eje
x es igual a la suma algebraica de las proyecciones AB, BC, CD y DE de los vectores F, G,
H y J sobre ese eje. En otras palabras, Rx = Fx + Gx + Hx + Jx, donde Fx, Gx, Hx y Jx son las
proyecciones de los vectores F, G, H y J sobre el eje x, respectivamente. En el caso de los
ejes xyz cartesianos rectangulares, la expresión para Rx puede complementarse mediante
relaciones semejantes Ry, y Rz para las proyecciones sobre los ejes y y z. El conjunto
completo de relaciones es
xxxxx JHGFR
yyyyy JHGFR (2.6)
zzzzz JHGFR
o, en una notación vectorial más concisa,
R = F + G + H + J (2.7)
Fig. 2.10
Proyección del vector resultante, representado como la suma algebraica de las proyecciones de las
componentes
Por tanto, las proyecciones de un vector resultante sobre los ejes de coordenadas xyz son
iguales a las sumas de las proyecciones de cada uno de los vectores sobre los mismos ejes
xyz. Esto conduce al teorema siguiente.

8
Teorema
La resultante de varios vectores es un vector cuya proyección sobre cualquiera de los ejes
es la suma algebraica de las proyecciones de los vectores originales sobre ese eje.
Este teorema afirma que se puede obtener la resultante de varios vectores al proyectar cada
uno de éstos sobre los ejes rectangulares xyz y, para cada eje, sumar las proyecciones
correspondientes a fin de obtener las proyecciones (x, y, z), (Rx, Ry, Rz), de la resultante R.
Por el teorema de Pitágoras con (Rx, Ry, Rz), se puede obtener la magnitud R de la resultante
R. Entonces, por la ecuación (2.1), se pueden calcular los cosenos directores (cosθx, cosθy,
cosθz) y, por consiguiente, los ángulos (θx, θy, θz) que forma R con los ejes xyz. En vista de
la ecuación (2.7), R se llama suma vectorial de F, G, H y J. Las expresiones “suma
vectorial” y “resultante” se usan de manera intercambiable. La ecuación (2.7) sugiere el uso
de la construcción del polígono para hallar el vector resultante R. Sin embargo, las
ecuaciones de las proyecciones (2.6) y la ecuación vectorial (2.7) son equivalentes. La
construcción del polígono es útil en el trabajo visual (gráfico), pero las proyecciones
cartesianas a menudo son más convenientes para el trabajo analítico (algebraico).
Ley Asociativa de la Adición Vectorial
La suma de varios vectores se puede determinar por la construcción del polígono. Si se
varía el orden en el cual se combinan los vectores, no se cambia el vector resultante. Para
demostrar que esto es cierto, se debe probar que
F + G + (H + J) = (F + G) + H + J = F + (G + H) + J (2.8)
y así sucesivamente. La demostración de la ecuación (2.8) se deduce de inmediato a partir
de las ecuaciones (2.6), ya que las proyecciones (escalares) se suman en forma algebraica.
Por tanto,
xxxxxxxxxxxx JHGFJHGFJHGF )()()(
yyyyyyyyyyyy JHGFJHGFJHGF )()()( (2.9)

9
zzzzzzzzzzzz JHGFJHGFJHGF )()()(
y así sucesivamente. La ecuación (2.8) expresa la ley asociativa de la adición vectorial. En
vista de la ley asociativa, los paréntesis no son necesarios en la adición vectorial. Como
consecuencia, la suma vectorial de F, G, H y J se representa por F + G + H + J, como en la
ecuación (2.7). Esta conclusión se expresa por el planteamiento de que la adición vectorial
es asociativa.
Ley Conmutativa de la Adición Vectorial
La ecuación (2.6) también sirve para verificar que
F + G + H + J = F + H + G + J = H + G + J + F (2.10)
y así sucesivamente. Esto se puede demostrar de inmediato a partir del hecho de que las
proyecciones cartesianas (2.6) de los vectores obedecen la ley conmutativa:
xxxxxxxxxxxx FJGHJGHFJHGF
yyyyyyyyyyyy FJGHJGHFJHGF (2.11)
zzzzzzzzzzzz FJGHJGHFJHGF
Por lo tanto, el cambio del orden de los vectores en el polígono de la figura 2.10 hacia G, J,
H, F da R = G + J + H + F, lo cual es equivalente a la ecuación (2.7). La ecuación (2.10)
expresa la ley conmutativa de la adición vectorial. Como consecuencia, el orden de los
vectores en la construcción del polígono no influye sobre la resultante que se obtiene. Esta
conclusión se expresa por el planteamiento de que la adición vectorial es conmutativa.
Vector General en el Espacio
Considérense dos vectores A y B que se extienden desde el origen hasta los puntos A: (Ax,
Ay, Az) y B: (Bx, By, Bz), respectivamente. Considérese que el vector L se extiende desde A
hasta B (ver figura 2.11). De donde, L = B - A. La magnitud (o longitud) de L se determina
por la ecuación (2.2):

10
2/1222
zyx LLLL (2.12)
donde Lx = Bx – Ax, Ly = By – Ay, y Lz = Bz – Az son las proyecciones del vector L sobre
los ejes x, y y z. Por las ecuaciones (2.1), los cosenos directores de L son
L
AB
L
L xxx
x
cos
L
AB
L
L yyy
y
cos (2.13)
L
AB
L
L zzzz
cos

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 4 (20/03/07)
Unidad II Vectores
2.1 Vectores Unitarios
Un vector unitario n es un vector que tiene una magnitud n = 1. La magnitud n es
adimensional; no tiene unidades físicas. La finalidad principal de un vector unitario es
denotar una dirección en el espacio. Como se verá, los vectores unitarios resultan una
herramienta conveniente para expresar la composición de vectores en términos de
proyecciones.
Vectores Tridimensionales
Para los problemas tridimensionales (no coplanares) se pueden definir los vectores unitarios
i, j y k que se encuentran en las direcciones positivas de los ejes cartesianos rectangulares
(véase la figura 2.11a). Entonces, si se expresa un vector A en términos de sus proyecciones
(Ax, Ay, Az) (Fig. 2.11a) y también en términos de sus componentes cartesianos (Ax, Ay, Az)
(Fig. 2.11b), se pueden relacionar los componentes con las proyecciones como sigue:
Ax = Ax i Ay = Ay j Az = Az k (2.14)
Entonces el vector A se puede expresar en la forma
A = Ax i + Ay j + Az k (2.15)
De esta forma, se pueden concebir las proyecciones (Ax, Ay, Az) como factores de escala que
multiplican los vectores unitarios i, j y k, respectivamente. Entonces, el vector dado A se
describe como la suma (resultante) de los vectores unitarios multiplicados por el factor de
escala (ecuación 2.15)

2
Fig. 2.11
Vectores unitarios a lo largo de los ejes de coordenadas: (a) proyecciones del vector A; (b) componentes del
vector A
También se puede definir la dirección de una recta o un vector arbitrario en el espacio por
un vector unitario n (Fig. 2.12). Por ejemplo, ya que n = 1, por las ecuaciones (2.1), el
vector unitario n se puede expresar como
n = (cosθx)i + (cosθy)j + (cosθz)k (2.16)
Por tanto, las proyecciones (nx, ny, nz) del vector unitario n sobre los ejes de coordenadas
xyz son
nx = cosθx ny = cosθy nz = cosθz (2.17)
Es decir, las proyecciones (nx, ny, nz) son idénticas a los cosenos directores de n.
Ya que la magnitud de n es n = 1, se tiene, por las ecuaciones (2.16) y (2.17),
n2 = nx
2 + ny
2 + nz
2 = 1 (2.18)
Fig. 2.12
Dirección en el espacio definida por un vector unitario n

3
o sea, cos2θx + cos
2θy + cos
2θz = 1 (2.19)
La ecuación (2.19) concuerda con el resultado obtenido con anterioridad; véase la ecuación
(2.3). Si la dirección del vector unitario n coincide con la del vector F, entonces este último
se puede representar como el producto de su magnitud F y n. Es decir, F es un vector con
magnitud F y dirección correspondiente a la de n (Fig. 2.13). Por tanto, se puede escribir
F = F n (2.20)
La sustitución de la ecuación (2.16) en la (2.20) da
F = (F cosθx)i + (F cosθy)j + (F cosθz)k (2.21)
donde, por las ecuaciones (2.1),
F cosθx = Fx F cosθy = Fy F cosθz = Fz (2.22)
Las magnitudes escalares (F cosθx, F cosθy, F cosθz) son las proyecciones (Fx, Fy, Fz) de F
sobre los ejes de coordenadas xyz. En consecuencia, por las ecuaciones (2.22), los cosenos
directores de F se expresan por las relaciones
F
Fx
x cos F
Fy
y cos F
Fzz cos (2.23)
Fig. 2.13
Vector unitario n en la dirección del vector F
Por las ecuaciones (2.21) y (2.22), el vector unitario n en la dirección de F es
n = F/F = Fx/F i + Fy/F j + Fz/F k (2.24)

4
Varias operaciones aritméticas que se llevan a cabo sobre los vectores (ítem 2.4) se pueden
expresar con los vectores unitarios, usando la ecuación (2.2 1). Considérense dos vectores
Ay B con magnitudes A y B y cosenos directores (cos αx, cos αy, cos αz) y (cos βx, cos βy,
cos βz), respectivamente. Entonces, por la ecuación (2.21), A y B se pueden representar por
A = (A cos αx)i + (A cos αy)j + (A cos αz)k (2.25a)
B = (B cos βx)i + (B cos βy)j + (B cos βz)k (2.25b)
o, en términos de las proyecciones,
A = Axi + Ayj + Azk (2.26)
B = Bxi+ Byj + Bzk
donde Ax = A cos αx Ay = A cos αy Az = A cos αz
Bx = B cos βx By = B cos βy Bz = B cos βz (2.27)
De manera semejante a la discusión realizada en el ítem 2.4, la igualdad de A y B requiere
que
A cos αx = B cos βx
A cos αy = B cos βy (2.28)
A cos αz = B cos βz
o bien
Ax = Bx Ay = By Az = Bz (2.29)
Del mismo modo, a partir de la ecuación (2.25a), el negativo de un vector A es
-A = - (A cos αx)i - (A cos αy)j - (A cos αz)k (2.30)
o bien -A = -Axi - Ayj - Azk (2.31)
La resultante R de los vectores A y B es, con las ecuaciones (2.25),
R = (A cosαx + B cosβx)i + (A cosαy + B cosβy)j + (A cosαz + B cosβz)k (2.32)
o bien

5
R = (Ax + Bx)i + (Ay + By)j + (Az + Bz)k (2.33)
Como consecuencia, las proyecciones (Rx, Ry, Rz) de R son
Rx = A cosαx + B cosβx = Ax + Bx
Ry = A cosαy + B cosβy = Ay + By (2.34)
Rz = A cosαz + B cosβz = Az + Bz
Vectores Bidimensionales
Para los vectores bidimensionales (coplanares) en el plano xy, la proyección de z de
cualquier vector A es cero; es decir, Az=0. Así pues, las componentes vectoriales (Ax, Ay)
de A son, en términos de los vectores unitarios i y j (ver ecuaciones 2.14)
Ax = Ax i Ay = Ay j (2.35)
Donde (Ax, Ay) son las proyecciones (x, y) de A.
De manera semejante al caso de los vectores no coplanares, un vector unitario n, con
ángulo de dirección θ con relación al eje x positivo, es (ver figura 2.14)
n = (cosθ)i + (senθ)j (2.36)
Fig. 2.14
Dirección en un plano definido por un vector unitario n
Por lo tanto, las proyecciones (x, y) de n son
nx = cosθ ny = senθ (2.37)
En consecuencia, la magnitud de n es n=1, por las ecuaciones (2.37),
n2 = nx
2 + ny
2 = cos
2θ + sen
2θ = 1 (2.38)

6
Si la dirección y el sentido del vector unitario n coinciden con los del vector A, entonces
(ver ecuación 2.20)
A = An (2.39)
Las ecuaciones (2.36) y (2.39) dan
A = (A cosθ)i + (A senθ)j (2.40)
o bien A = Axi + Ayj (2.41)
donde los factores de escala de los vectores unitarios i y j, a saber,
Ax = A cosθ Ay = A senθ (2.42)
son las proyecciones (x, y) de A. Como consecuencia, por las ecuaciones (2.42), los
cosenos directores de A son
cosθx = cosθ = Ax/A (2.43)
cosθy = senθ = Ay/A
Por las ecuaciones (2.39) y (2.41), el vector unitario n en la dirección de A es
n = A/A = Ax/A i + Ay/A j (2.44)
De manera semejante al caso de los vectores no coplanares (ecuación 2.33), la resultante R
de dos vectores A y B es
R = (Ax + Bx)i + (Ay + By)j (2.45)
y las proyecciones (Rx, Ry) de R son
Rx = Ax + Bx Ry = Ay + By (2.46)
En las tablas 2.1 y 2.2 se resumen las propiedades generales de las fuerzas (y de otras
cantidades vectoriales) discutidas en esta unidad.

7
Tabla 2.1 Resumen de las propiedades de las fuerzas (vectores)

8
Tabla 2.2 Resumen de los vectores unitarios y los cosenos directores

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 5 (03/04/07)
Unidad III Estática o Equilibro de la Partícula
3.1 Generalidades
En esta unidad se desarrollan las condiciones bajo las cuales una partícula está en
equilibrio. El concepto de equilibrio se interpreta a partir de la primera ley de Newton del
movimiento y se emplea para determinar las fuerzas que actúan sobre cuerpos que están en
reposo. Se discute la necesidad crítica de diagramas apropiados de cuerpo libre y se
muestran algunos ejemplos de aplicación. Se utiliza el equilibrio de la partícula para
resolver muchos problemas prácticos en la mecánica, incluyendo aquellos que comprenden
brazos de grúas, sistemas de cables y cuerpos rígidos sujetos a fuerzas concurrentes. Con
cierta amplitud, incluso se puede usar para formar la base analítica para el análisis de
reticulados.
Luego del estudio de esta unidad, el alumno debe haber comprendido el concepto de
equilibrio de una partícula y cómo interpretar el equilibrio en diferentes situaciones. Debe
saber cuándo y cómo aplicar los conceptos de equilibrio de partículas a una situación en
particular y debe ser capaz de despejar las fuerzas en sistemas estáticamente determinados a
los cuales pueda aplicarse ese tipo de equilibrio. También debe ser capaz de aplicar el
concepto de equilibrio de partículas a un cuerpo rígido sujeto a fuerzas concurrentes.
3.2 Concepto de equilibrio de una partícula
El concepto de equilibrio de una partícula se deduce de la primera ley de Newton
(estudiada en las unidades anteriores):

2
En ausencia de fuerzas aplicadas, una partícula originalmente en reposo o
moviéndose con velocidad constante en línea recta, permanecerá en reposo, o
seguirá moviéndose con velocidad constante en línea recta.
Por tanto, la primera ley de Newton no establece distinción entre una partícula que está en
reposo y una que se mueve con velocidad constante. Se dice que una partícula que se
encuentra en reposo o que se mueve con velocidad constante está en equilibrio. La primera
ley de Newton implica que no existe fuerza que esté actuando sobre la partícula o que las
fuerzas que están actuando sobre ella tienen una resultante cero.
En un sentido limitado, se puede considerar una partícula como un punto de masa
concentrada; es decir, como un cuerpo de tamaño infinitesimal. Sin embargo, en muchas
situaciones, un cuerpo de tamaño finito puede tratarse como una partícula. Por lo tanto, las
fuerzas que actúan sobre una partícula son concurrentes; actúan en el punto de masa
concentrada. El concepto de equilibrio de una partícula se puede interpretar de dos
maneras, pero es importante recordar que estas interpretaciones son tan sólo
representaciones diferentes de la primera ley de Newton.
Interpretación 1: Las fuerzas que actúan sobre una partícula tienen resultante cero. Si la
resultante de varias fuerzas que actúan sobre una partícula es cero, el polígono de fuerzas se
cierra. En consecuencia, las fuerzas no producen cambio en el movimiento de la partícula y
se dice que ésta se encuentra en equilibrio bajo la acción de estas fuerzas.
Interpretación 2: Las fuerzas que actúan sobre una partícula no producen cambio en su
movimiento. Por el contrario, si varias fuerzas, incluyendo el peso de la partícula, actúan
sobre ésta pero no producen cambio en el movimiento de ella, su resultante es cero. De
nuevo, se dice que la partícula se encuentra en equilibrio bajo la acción de estas fuerzas.
El tema de si un cuerpo está en reposo o moviéndose con velocidad constante depende del
marco de referencia en el cual se observa el movimiento de ese cuerpo. En otras palabras, la

3
primera ley Newton sólo es válida con relación a cierto marco de referencia. Por lo general,
los ingenieros se refieren al marco de referencia en el cual las leyes de Newton son válidas
como marco newtoniano; los físicos suelen referirse a un marco de este tipo como marco
inercial. La definición de marcos de referencia se examina cuando se estudia la cinemática
de una partícula. En el presente análisis se supone que el marco de referencia es aquel en el
cual se cumple la primera ley de Newton.
El estudio de la estática trata de los cuerpos que están inmóviles. Por lo tanto, para los
problemas de la estática, las interpretaciones antes dadas se resumen por el teorema
siguiente.
Teorema 3.1
Una partícula que inicialmente está inmóvil se encuentra en equilibrio si, y sólo si, la suma
vectorial de las fuerzas que actúan sobre ella es cero.
En el estudio de la Dinámica se puede ver, que una partícula que se mueve con una
velocidad constante sigue moviéndose con esa velocidad constante si, y sólo si, la suma
vectorial de las fuerzas que actúan sobre ella es cero. Éste es un enunciado más general del
equilibrio de partículas; una partícula inmóvil es sencillamente un caso especial para el cual
la velocidad es cero.
En general, con la palabra “partícula” reemplazada por “cuerpo”, las afirmaciones
anteriores siguen siendo verdaderas para un cuerpo sujeto a fuerzas concurrentes, sin
considerar su tamaño, forma y propiedades físicas. En particular, estas proposiciones siguen
siendo verdaderas para un cuerpo rígido sujeto a fuerzas concurrentes, incluyendo el peso
del cuerpo; es decir, un cuerpo rígido sujeto a fuerzas concurrentes puede tratarse como una
partícula en relación con su equilibrio.
Por lo general, el objetivo en el estudio de la estática es determinar ciertas fuerzas
desconocidas que actúan sobre un sistema que está en equilibrio, o dentro de éste. En el
presente capítulo se estudian sistemas compuestos de una o más partículas a los cuales es
posible aplicar cualquiera de las dos interpretaciones del equilibrio de partículas. Se supone

4
que el sistema está en equilibrio y, a continuación, se emplean las ecuaciones de equilibrio
para determinar las cantidades desconocidas (fuerzas o cantidades geométricas) que
garantizan el equilibrio.
Como un ejemplo, considere una partícula P que está en equilibrio bajo la acción de dos
fuerzas A y B. Suponga que las fuerzas tienen la misma magnitud (A = B) y la misma línea
de acción L, pero sentidos opuestos (Fig. 3.1). El polígono de fuerzas degenera en dos
fuerzas iguales y con direcciones opuestas (Fig. 3.2). Por lo tanto, su resultante es cero.
Fig. 3.1 Fig. 3.2
Partícula sujeta a fuerzas colineales Paralelogramo de fuerzas para fuerzas colineales
Si una partícula está en equilibrio bajo la acción de más de dos fuerzas, el polígono de
fuerzas debe cerrarse de nuevo; es decir, la resultante de las fuerzas es cero. Esto es
verdadero para los sistemas de fuerzas no coplanares así como para las coplanares. Ya que
la fuerza resultante es cero, la suma de las proyecciones de las fuerzas sobre cualquier recta
es cero. Por tanto, las sumas de las proyecciones sobre los ejes cartesianos rectangulares
xyz son cero. Por ejemplo, para fuerzas coplanares que se mencionan como ejes de
coordenadas rectangulares xy (Fig. 3.3), las condiciones necesarias y suficientes para el
equilibrio de una partícula que recibe la acción de esas fuerzas se expresan por las
ecuaciones
0xF 0yF (3.1)
donde Fx y Fy son las proyecciones x y y, respectivamente, de las fuerzas que actúan sobre
la partícula. La letra griega (sigma mayúscula) denota la sumatoria, o suma, de las
proyecciones.

5
Fig. 3.3
Partícula sujeta a fuerzas coplanares
Para fuerzas no coplanares, las condiciones necesarias y suficientes para el equilibrio de la
partícula son
0xF 0yF 0zF (3.2)
donde Fx, Fy, y Fz son las proyecciones x, y y z, respectivamente, de las fuerzas que actúan
sobre la partícula. Las ecuaciones (3.1) y (3.2) pueden expresarse en forma vectorial como
F=0. Para las fuerzas coplanares, se puede escribir
F = (Fx)i + (Fy)j = 0 (3.3)
ya que Fx = 0 y Fy = 0. De modo semejante, para las fuerzas no coplanares,
F = (Fx)i + (Fy)j + (Fz)k (3.4)
donde i, j y k denotan vectores unitarios en las direcciones x, y y z positivas.
Si varias fuerzas no equilibradas actúan sobre una partícula, la fuerza que se requiere para
establecer el equilibrio de esa partícula se llama la equilibrante de las fuerzas no
equilibradas. Por tanto, la equilibrante es una fuerza que tiene igual magnitud que la
resultante de las otras fuerzas pero cuyo sentido es opuesto. En otras palabras, la
equilibrante es la fuerza -R que se requiere para cerrar el polígono de fuerzas de las fuerzas
no equilibradas.

6
Fig. 3.4
La equilibrante –R de las fuerzas no equilibradas A, B, y C es colineal con su resultante R, con igual
magnitud pero con sentido opuesto a ésta.
3.3 Diagramas de cuerpo libre
En la unidad 2 se analizó cómo obtener la resultante de un sistema de fuerzas concurrentes
que actúan en un punto (o sobre una partícula). En algunos casos, una parte de un sistema
físico se puede modelar como una partícula que tiene masa o como una que no la tiene.
Entonces, pueden aplicarse las leyes de Newton. La primera ley de Newton puede aplicarse
al equilibrio de una partícula. Por lo tanto, puede aplicarse a cada partícula por separado de
un sistema que esté en equilibrio. En un problema en particular, debe decidirse qué parte (o
partícula) de un sistema se desea examinar. En algunos casos, la solución completa para el
problema requerirá el examen de dos o más partículas. La elección de una partícula es el
primer paso esencial en el proceso de resolución para las condiciones de equilibrio del
sistema. Una vez que se ha elegido una partícula en el sistema, deben identificarse todas las
fuerzas que actúan sobre ella. Esta identificación no es asunto trivial, ya que es fácil
confundirse entre las fuerzas que actúan sobre una partícula y aquéllas que la partícula
ejerce sobre alguna otra parte del sistema; es decir, entre las acciones y las reacciones.
A menos que se siga un procedimiento sistemático, podrían pasarse por alto con facilidad
algunas fuerzas que actúan sobre una partícula. Para ayudarse a identificar las fuerzas que
actúan sobre una partícula, debe construirse el diagrama de cuerpo libre. Un diagrama de
cuerpo libre es un esquema de la partícula en el que se muestran ésta (por sí misma, libre de
las demás partes del sistema) y todas las fuerzas que se aplican a ella; es decir, todas las
fuerzas ejercidas sobre ella por las demás partes del sistema. Debe tenerse cuidado en
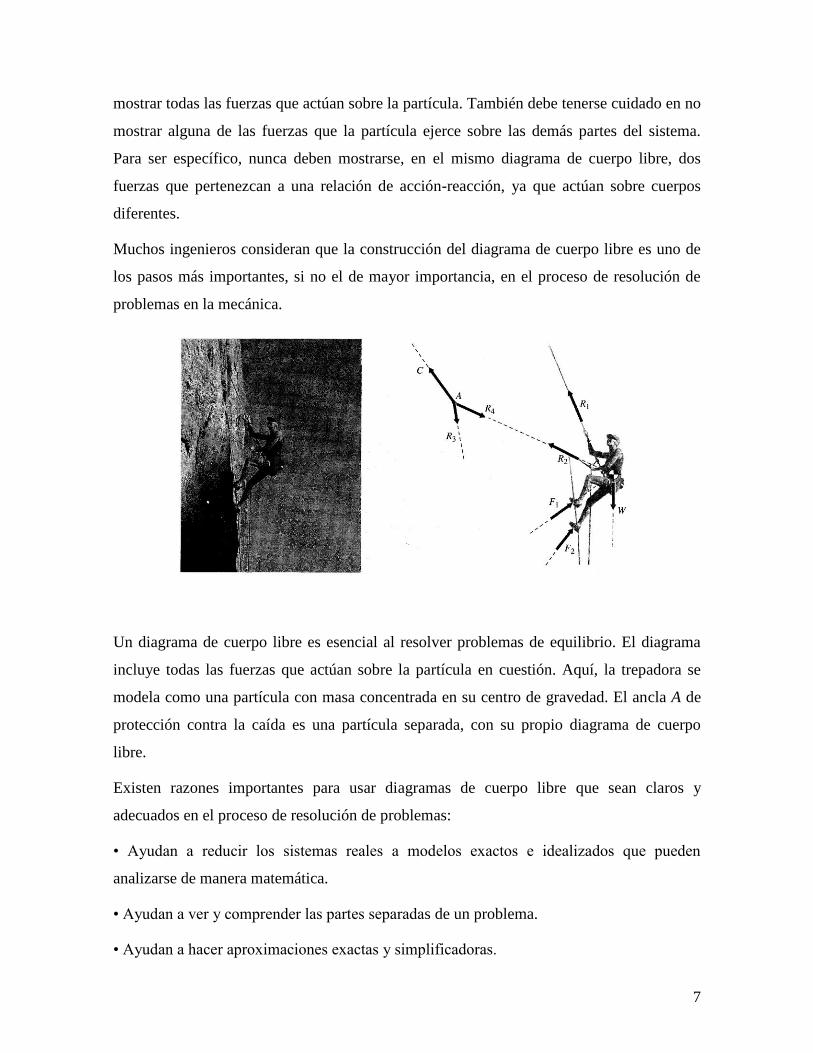
7
mostrar todas las fuerzas que actúan sobre la partícula. También debe tenerse cuidado en no
mostrar alguna de las fuerzas que la partícula ejerce sobre las demás partes del sistema.
Para ser específico, nunca deben mostrarse, en el mismo diagrama de cuerpo libre, dos
fuerzas que pertenezcan a una relación de acción-reacción, ya que actúan sobre cuerpos
diferentes.
Muchos ingenieros consideran que la construcción del diagrama de cuerpo libre es uno de
los pasos más importantes, si no el de mayor importancia, en el proceso de resolución de
problemas en la mecánica.
Un diagrama de cuerpo libre es esencial al resolver problemas de equilibrio. El diagrama
incluye todas las fuerzas que actúan sobre la partícula en cuestión. Aquí, la trepadora se
modela como una partícula con masa concentrada en su centro de gravedad. El ancla A de
protección contra la caída es una partícula separada, con su propio diagrama de cuerpo
libre.
Existen razones importantes para usar diagramas de cuerpo libre que sean claros y
adecuados en el proceso de resolución de problemas:
• Ayudan a reducir los sistemas reales a modelos exactos e idealizados que pueden
analizarse de manera matemática.
• Ayudan a ver y comprender las partes separadas de un problema.
• Ayudan a hacer aproximaciones exactas y simplificadoras.

8
• Ayudan a avanzar paso a paso hasta llegar a una solución.
• Hacen más fácil presentar y explicar la solución a otros, en particular al profesor o al
empleador.
Como se vio en el ítem 3.2, para tener el equilibrio de una partícula, la suma vectorial de
todas las fuerzas que actúan sobre ella debe ser cero; es decir, F=0. Por lo tanto, es
esencial la identificación de todas las fuerzas que actúan sobre la partícula (no se olvide su
peso). Esta identificación se facilita mucho mediante el uso de un diagrama de cuerpo libre
de la partícula. Por ejemplo, considere una partícula P, sin peso, en equilibrio, sujeta a las
tres fuerzas concurrentes A, B y C de magnitud F igual (Fig. 3.5). La partícula se
representa por un punto grande y las fuerzas concurrentes se muestran con sus magnitudes
y direcciones apropiadas. La condición de equilibrio de la partícula se determina en forma
gráfica por el hecho de que el polígono de fuerzas cierra (Fig. 3.6).
Fig. 3.5 Fig. 3.6 Fig. 3.7
Tres fuerzas concurrentes Polígono de las tres fuerzas Proyecciones de las tres fuerzas
de magnitudes iguales en equilibrio de la figura 3.5 de la figura 3.5 sobre los ejes xy
De modo alternativo, se puede mostrar el equilibrio de la partícula al sumar las
proyecciones de las fuerzas sobre los ejes x y y, como se muestra en la figura 3.7. Por tanto,
para el equilibrio de la partícula P, donde F denota la magnitud de cada una de las fuerzas
A, B y C, se tiene
xxxx CBAF

9
= Fcos30° - Fcos30° + Fcos90°
= 0.866F - 0.866F + 0 = 0
yyyy CBAF
= Fsen30° - Fsen30° + Fsen90°
= -0.5F - 0.5F + F = 0
La construcción apropiada del diagrama de cuerpo libre de una partícula depende de la
tercera ley de Newton, ya que las fuerzas (acciones) que actúan sobre la partícula son
producidas por los demás cuerpos en el sistema. Las reacciones son las fuerzas que la
partícula ejerce sobre estos otros cuerpos.
Es esencial que se decida de manera correcta cuál partícula, o cuáles partículas, de un
sistema deben considerarse al resolver un problema en particular. Para algunos problemas,
la selección de una partícula puede ser obvia; para otros, puede no serlo tanto. En cualquier
caso, una vez que se ha seleccionado un cuerpo, deben identificarse todas las fuerzas que
actúan sobre él. Para que exista equilibrio, la suma vectorial de estas fuerzas debe ser cero.
En algunos casos, no se conocen las magnitudes y las direcciones de todas las fuerzas que
actúan sobre una partícula. En esos casos, se puede emplear la ecuación de equilibrio F=0
para ayudarse a determinar las incógnitas. Dependiendo de cuántas incógnitas existen en un
problema, pueden requerirse diagramas de cuerpo libre de más de una partícula del sistema
a fin de obtener un número suficiente de ecuaciones para despejar las incógnitas. Cuando el
número de ecuaciones independientes (cada una de las cuales contiene una o más de las
incógnitas y que, en conjunto, incluyen todas éstas) obtenidas a partir de las condiciones de
equilibrio es igual al número de incógnitas, se dice que el sistema es estáticamente
determinado. Se pueden despejar las incógnitas de esas ecuaciones; es decir, las ecuaciones
de equilibrio son suficientes para analizar un sistema estáticamente determinado. Un
sistema que es estáticamente indeterminado tiene más incógnitas que ecuaciones
independientes de equilibrio. No es posible despejar todas las incógnitas de las ecuaciones.
El análisis de esos sistemas requiere la aplicación de principios adicionales de la mecánica.

10
Técnica de Resolución de Problemas
Equilibrio de una partícula; problemas estáticamente determinados
Para resolver un problema relacionado con el equilibrio de la partícula:
1. Dibuje un esquema adecuado del sistema o estructura mecánico descrito en el problema,
en el que se muestren todas las dimensiones importantes, incluyendo los ángulos.
2. Seleccione la partícula de interés. Si deben considerarse varias partículas, las condiciones
de equilibrio se aplican a cada partícula por separado. Recuerde que, para cada partícula,
las ecuaciones de equilibrio dan lugar a la determinación de sólo dos incógnitas en los
problemas bidimensionales coplanares (ecuaciones 3.1) y sólo de tres en los problemas
tridimensionales (ecuaciones 3.2). Si se tienen varias partículas, puede resultar conveniente
escribir las ecuaciones para las partículas en una secuencia que permita evaluar de
inmediato una o más de las incógnitas, en lugar de reunir todas las ecuaciones de todas las
partículas y despejarlas de manera simultánea. Para problemas más o menos sencillos, este
método a menudo resulta conveniente. Para problemas más complejos, puede ser que las
ecuaciones tengan que resolverse de manera simultánea.
3. Seleccione ejes apropiados de referencia y dibuje un diagrama de cuerpo libre para la
partícula; es decir, haga un esquema de la partícula e identifique las fuerzas conocidas y las
desconocidas. Señale las fuerzas conocidas con sus magnitudes y sentidos. Marque las
fuerzas desconocidas con un símbolo vectorial como F, o F. Si se desconoce la magnitud
de una fuerza pero se conoce su dirección, utilice una letra como F para denotar su
magnitud. Si se desconocen tanto la magnitud como la dirección de una fuerza, muestre
esta última como una flecha de magnitud F con una línea de acción y un sentido supuestos
con relación a los ejes de referencia. Recuerde que se supone que la magnitud F de una
fuerza es un número positivo. Entonces, si en la solución F es negativa, la fuerza en
realidad actúa en el sentido opuesto al que se supuso
4. Utilice la ecuación F=0 con el método de la construcción del polígono para definir las
condiciones de equilibrio de la partícula. De modo alternativo, con los ejes apropiados, use
Fx=0 y Fy=0 con el método de proyección de las fuerzas para definir el equilibrio de las
fuerzas coplanares. Para las fuerzas no coplanares, utilice las ecuaciones Fx=0, Fy=0 y

11
Fz=0. Para cada partícula, se pueden usar estas ecuaciones para despejar dos incógnitas
en un problema coplanar, y tres incógnitas en uno no coplanar.
5. Con el método de proyección de las fuerzas, la selección apropiada de un sistema de
coordenadas, en el que se muestren el origen y las direcciones positivas de los ejes, con
frecuencia simplifica la solución. Por ejemplo, si un problema se relaciona con un cuerpo
que se apoya sobre un plano inclinado, puede resultar más sencillo hacer que dos de los ejes
de coordenadas sean uno paralelo y el otro perpendicular al plano. Debe existir coherencia
en los signos de las proyecciones. Una vez que se hayan definido las direcciones positivas
de los ejes, la proyección de una fuerza sobre un eje es positiva si esa fuerza tiene un
componente que apunta en el sentido positivo del eje; de lo contrario, la proyección es
negativa. Si una fuerza es perpendicular a un eje, su proyección sobre ese eje es cero.
6. Si existen más incógnitas que ecuaciones (desde el paso 4), se necesitará considerar otros
cuerpos en el sistema y repetir los pasos del 2 al 5. Si 1os cuerpos interactúan entre sí,
utilice la tercera ley de Newton a fin de relacionar las fuerzas que ejercen uno sobre el otro.
Para despejar las incógnitas en un problema estáticamente determinado, se necesitan
escribir tantas ecuaciones independientes (cada una de las cuales contiene una o más de las
incógnitas y que, en conjunto, incluyen todas éstas) como incógnitas se tengan. En seguida,
despeje las incógnitas de estas ecuaciones.
7. Una vez que se hayan evaluado las incógnitas, examine los resultadas para ver si tienen
lógica. Por ejemplo, ¿los resultados satisfacen las condiciones de equilibrio? ¿Las unidades
son coherentes ¿Son razonables los órdenes de magnitud, es decir, se ha evitado colocar
mal el punto decimal?
3.4 Tipos de fuerzas
Las fuerzas se pueden clasificar como internas o externas. Pero también pueden clasificarse
de otras maneras. Por ejemplo, en el ejemplo 3.1, la fuerza T es resultado del contacto entre
el armazón suspendido y el cable. En consecuencia, se llama fuerza de contacto. Por otra
parte, la fuerza gravitacional W se transmite a través del espacio. No se requiere el contacto
físico entre los cuerpos para que esta fuerza exista. Otras clases de fuerzas se ejercen sin

12
contacto físico; son notables las fuerzas producidas por efectos electromagnéticos. Las
fuerzas que se ejercen sin contacto físico se llaman fuerzas sobre la totalidad del cuerpo, ya
que se distribuyen en todo el cuerpo sobre el cual actúan.
En general, si un cuerpo se oprime contra otro, las fuerzas de contacto que existen entre
esos cuerpos no son únicamente fuerzas normales (fuerzas dirigidas de modo perpendicular
a la superficie de contacto). En general, tienen componentes que son tanto normales a la
superficie como tangenciales a ésta. La componente tangencial de la fuerza de contacto se
llama fuerza de fricción. Sin embargo, en un punto de contacto entre dos cuerpos sin
fricción, la fuerza que uno de los cuerpos ejerce sobre el otro es normal a la superficie de
contacto.
La fuerza de gravedad que actúa sobre un sistema es la resultante de los pesos de todas las
partículas de ese sistema. Esta resultante se representa por un vector que pasa por un punto
del sistema llamado centro de gravedad.
El centro de gravedad de un cuerpo homogéneo con tres planos de simetría mutuamente
perpendiculares coincide con el punto de intersección de estos planos. Por tanto, el centro
de gravedad de una esfera homogénea se localiza en su centro. De modo semejante, el
centro de gravedad de un disco circular homogéneo se localiza en su centro. En la figura
3.8 se muestran los centros de gravedad de varias formas geométricas simples. Consulte
esta figura cuando se resuelvan problemas en los que intervengan los pesos de objetos con
estas configuraciones.
Fig. 3.8 Centro de gravedad para algunas formas geométricas simples

13
Con frecuencia, un cuerpo está sujeto a apoyos que restringen su movimiento. En este curso
se usan símbolos especiales para representar el método por el cual un cuerpo se sujeta a sus
apoyos:
En estos símbolos, la base sombreada representa una superficie rígida de apoyo. Los dos
primeros símbolos son representaciones diferentes de un apoyo de rodillos; el tercer
símbolo representa un pasador o articulación sin fricción.
En la figura 3.9 se ilustran estos símbolos y las correspondientes reacciones en los apoyos.
En este curso se sigue la convención (común en el análisis estructural) de que un apoyo de
rodillo no puede oponerse a una fuerza que esté dirigida paralela a la superficie rígida de
apoyo (Figs. 3.9a y 3.9b). Esta fuerza perpendicular puede tener un sentido hacia la
superficie o hacia afuera de ésta. Por lo tanto, un símbolo de rodillo representa un apoyo
que puede oponerse a un empuje contra la superficie rígida de apoyo o a una tensión hacia
afuera de ésta. Un símbolo de pasador o articulación representa un apoyo que puede
oponerse a una fuerza en cualquier dirección (Fig. 3.9c).
Fig. 3.9 Símbolos de apoyos: a) y b) rodillo; c) pasador (articulado); d) apoyo inclinado de rodillo

14
La superficie rígida de apoyo, representada por la base sombreada, no es necesario que sea
horizontal. En ocasiones está inclinada, formando algún ángulo con relación a la horizontal.
En ese caso, el símbolo para el apoyo se inclina formando el mismo ángulo, como se
muestra en la fig. 3.9d.
Para un apoyo de rodillo, la reacción en el apoyo (la fuerza que el apoyo ejerce sobre el
cuerpo) tiene dirección conocida, pero magnitud desconocida. De modo que la reacción en
un apoyo de rodillo se puede expresar como una sola cantidad desconocida, como R. Para
un apoyo de pasador o articulado, se desconocen tanto la magnitud R como la dirección θ
de la reacción del apoyo. De modo alternativo, estas dos cantidades desconocidas se
pueden expresar como dos componentes rectangulares de la fuerza, Rx y Ry. A menudo se
dice que un apoyo de rodillo ejerce una sola reacción sobre la estructura y que uno de
pasador o articulado puede ejercer dos reacciones.
3.5 Concepto de cuerpo rígido
Se dice que un cuerpo es un cuerpo rígido si no se deforma bajo la acción de fuerzas. En
otras palabras, las distancias entre las partículas de un cuerpo rígido permanecen
constantes, sin importar las fuerzas que actúan sobre él. En realidad, un cuerpo rígido,
como una partícula, es una idealización. Todos los cuerpos se deforman bajo la acción de
las cargas. Sin embargo, la deformación de un cuerpo a menudo es tan pequeña que no
influye de manera significativa sobre el equilibrio del mismo. En esos casos, el cuerpo se
puede tratar como si fuera rígido. Por ejemplo, a veces, una flecha de acero, una viga de
madera, un cable o una hoja de vidrio se pueden considerar como rígidos dependiendo de la
aplicación. Sin embargo, se debe tener cuidado de no aplicar la idea de rígido de manera
negligente. Algunos de los primeros estudios de las fuerzas internas en las vigas fueron
erróneos porque los científicos pasaron por alto los efectos de las deformaciones elásticas.
Lo apropiado de la aproximación del cuerpo rígido depende de la situación.
3.6 Equilibrio de un miembro de dos fuerzas
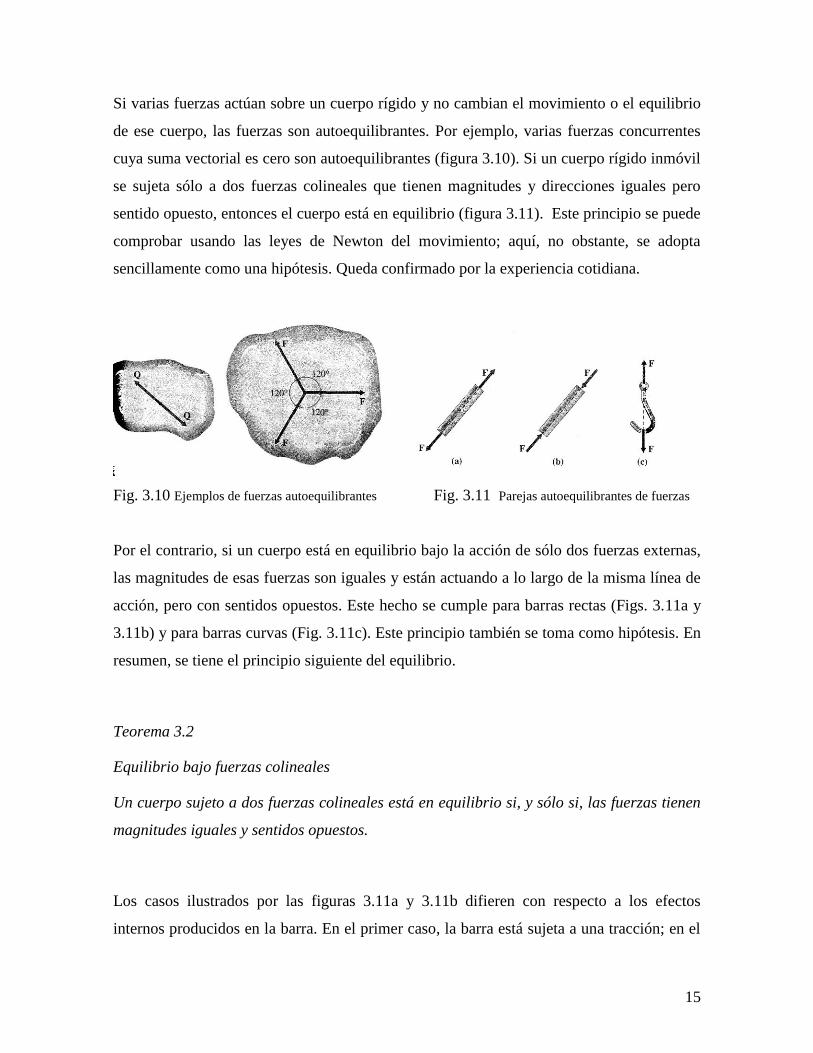
15
Si varias fuerzas actúan sobre un cuerpo rígido y no cambian el movimiento o el equilibrio
de ese cuerpo, las fuerzas son autoequilibrantes. Por ejemplo, varias fuerzas concurrentes
cuya suma vectorial es cero son autoequilibrantes (figura 3.10). Si un cuerpo rígido inmóvil
se sujeta sólo a dos fuerzas colineales que tienen magnitudes y direcciones iguales pero
sentido opuesto, entonces el cuerpo está en equilibrio (figura 3.11). Este principio se puede
comprobar usando las leyes de Newton del movimiento; aquí, no obstante, se adopta
sencillamente como una hipótesis. Queda confirmado por la experiencia cotidiana.
Fig. 3.10 Ejemplos de fuerzas autoequilibrantes Fig. 3.11 Parejas autoequilibrantes de fuerzas
Por el contrario, si un cuerpo está en equilibrio bajo la acción de sólo dos fuerzas externas,
las magnitudes de esas fuerzas son iguales y están actuando a lo largo de la misma línea de
acción, pero con sentidos opuestos. Este hecho se cumple para barras rectas (Figs. 3.11a y
3.11b) y para barras curvas (Fig. 3.11c). Este principio también se toma como hipótesis. En
resumen, se tiene el principio siguiente del equilibrio.
Teorema 3.2
Equilibrio bajo fuerzas colineales
Un cuerpo sujeto a dos fuerzas colineales está en equilibrio si, y sólo si, las fuerzas tienen
magnitudes iguales y sentidos opuestos.
Los casos ilustrados por las figuras 3.11a y 3.11b difieren con respecto a los efectos
internos producidos en la barra. En el primer caso, la barra está sujeta a una tracción; en el

16
segundo caso, a una compresión. El primer tipo de carga se llama tensión, o fuerza de
tensión; el segundo tipo, compresión, o fuerza de compresión. Por ejemplo, un tirón que se
transmite a lo largo de un cable o alambre tensos es una tensión. Un alambre o un cable no
pueden transmitir una fuerza apreciable de compresión, ya que su flexibilidad los hace
inestables (se pandean) bajo cargas pequeñas de compresión. Sin embargo, una fuerza de
compresión puede ser transmitida por un miembro rígido, como una barra de acero. Un
miembro que soporta principalmente cargas de compresión se llama montante o columna
(Fig. 3.11b). La carga sobre el gancho que se muestra en la figura 3.11c no es un caso de
tensión o compresión simples, ya que las fuerzas causan flexión en la parte curva del
gancho.
Considere una barra recta AB que está cargada en sus extremos por fuerzas de tensión que
tienen magnitudes iguales y sentido opuesto (Fig. 3.12a). La barra está en equilibrio bajo la
acción estas fuerzas. Si se pasa un plano imaginario a-a a través de la sección transversal de
la barra en C, las partes de la barra hacia arriba y hacia abajo del plano a-a están en
equilibrio. Se puede imaginar que la barra se separa en dos barras, AC y BC, las cuales
están en equilibrio (Fig. 3.12b). Por lo tanto, la fuerza de tensión en C tiene magnitud F. Si
pudiéramos pasar el plano imaginario a-a en forma transversal a través de cualquier punto
de la barra AB, quedaría claro que la fuerza de tensión interna tiene magnitud F en
cualquier corte transversal de la barra. Esta fuerza interna se llama tensión en el miembro.
Si el sentido de las fuerzas en los extremos de la barra se invierten (Fig. 3.12c), ésta se
sujeta a compresión. Una fuerza de compresión de este tipo también se menciona como
empuje en el miembro. De modo alternativo, se puede decir que una tensión o un empuje en
la barra son una fuerza interna o acción interna.
(a) (b) (c)
Fig. 3.12 Barra con una pareja de fuerzas colineales: a) tensión; b) barra en dos partes; c) compresión

17
La fuerza interna en la barra en realidad se distribuye sobre su área de sección transversal.
La razón de la magnitud F de la fuerza al área A de la sección transversal de la barra se
llama esfuerzo sobre la barra:
A
F (3.5)
Como la fuerza interna en la barra, el esfuerzo puede ser de tensión o de compresión.
Un miembro estructural que se sujeta a las acciones de sólo dos fuerzas, las cuales actúan
en puntos separados, se llama miembro de dos fuerzas. Si un miembro de dos fuerzas está
en equilibrio, la resultante de las dos fuerzas debe ser cero, Por lo tanto, las fuerzas tienen
magnitudes iguales, la misma línea de acción y sentidos opuestos. Muchos sistemas
estructurales, en particular las armaduras, contienen miembros de dos fuerzas. Observe que
la definición de miembro de dos fuerzas es un recurso conveniente que permite que los
principios del equilibrio de una partícula se apliquen a los miembros estructurales. Si se
pasa por alto un miembro de dos fuerzas y se le trata como un cuerpo rígido en general, se
pueden aplicar los principios del equilibrio de los cuerpos rígidos (unidad 4) para resolver
el problema. Observe también que un miembro de dos fuerzas no necesita ser recto. Por
ejemplo, el gancho de la figura 3.11c es un miembro de dos fuerzas en equilibrio cuando se
carga como se muestra.
Técnica de Resolución de Problemas
Miembros de dos fuerzas
Para resolver un problema que comprenda miembros de dos fuerzas en equilibrio:
1. Identifique todos los miembros de dos fuerzas. Es decir, identifique cada miembro que
sólo tenga dos fuerzas actuando sobre él en puntos separados. A menudo, un miembro de
dos fuerzas es una varilla recta, un montante o un cable, aunque no es necesario que lo sea
(figura 3.11c).
2. Recuerde que la línea de acción de las dos fuerzas que actúan sobre un miembro de dos
fuerzas en equilibrio son colineales y pasan por los dos puntos en los cuales actúan las

18
fuerzas. Para un miembro recto, la línea de acción de las fuerzas se encuentra a lo largo del
miembro.
3. Represente la fuerza de contacto que existe entre el miembro y otra parte del sistema
(como un apoyo u otro miembro) como una sola fuerza, en lugar de hacerlo como dos o tres
componentes rectangulares. De lo contrario, podría no identificarse el miembro como un
miembro de dos fuerzas.
4. Reconozca que se puede tratar el miembro de dos fuerzas usando los principios del
equilibrio de una partícula sujeta a fuerzas colineales. Asimismo, los puntos de aplicación
de las cargas sobre un miembro de dos fuerzas se pueden considerar como partículas. Por
tanto se puede seguir la técnica de resolución de problemas para el equilibrio de una
partícula.
3.7 Transmisibilidad de las fuerzas que actúan sobre un cuerpo rígido
Dos conjuntos diferentes de fuerzas que actúan sobre un cuerpo rígido son dinámicamente
equivalentes si producen efectos idénticos sobre el movimiento o el equilibrio del cuerpo.
Por ejemplo, varias fuerzas concurrentes son dinámicamente equivalentes a su resultante.
La frase “dinámicamente equivalentes” es preferible a la expresión más convencional de
estáticamente equivalentes, ya que el reemplazo de un conjunto de fuerzas por su resultante
es válido tanto para la estática como para la dinámica de los cuerpos rígidos.
En la figura 3.13a se representa un cuerpo rígido cargado por varias fuerzas externas.
Considere la fuerza F que actúa en el punto P. Nada se altera si se introducen dos fuerzas
autoequilibrantes en otro punto Q que se encuentre sobre la línea de acción de F. Suponga
que las fuerzas en el punto Q también tienen la magnitud F y considere que son colineales
con la fuerza en el punto P (figura 3.13b). Entonces la fuerza en el punto P y la fuerza de la
derecha en Q son autoequilibrantes. Como estas fuerzas se cancelan entre sí, se les descarta.
Entonces, se queda con la carga que se muestra en la figura 3.13c. En consecuencia, los
sistemas de fuerzas que se muestran en las figuras 3.13a y 3.13c son dinámicamente
equivalentes. Por lo tanto, se obtiene el resultado siguiente:

19
Teorema 3.3
Principio de Transmisibilidad
El equilibro (o el movimiento) de un cuerpo rígido no se altera si el punto de aplicación de
cualquiera de las fuerzas que actúan sobre él se desplaza a lo largo de la línea de acción
de la propia fuerza.
Fig. 3.13 Demostración de la transmisibilidad
Este resultado se conoce como el principio de transmisibilidad de las fuerzas. Significa que
una fuerza que actúa sobre un cuerpo rígido se puede representar por un vector deslizante.
El principio de transmisibilidad permite transferir el punto de aplicación de una fuerza a un
lugar fuera del cuerpo sobre el cual ésta actúa. Es deseable hacer esto, por ejemplo, cuando
varias fuerzas actúan sobre un cuerpo y se quiere mostrar que son concurrentes. Por
ejemplo, en la figura 3.14a se ilustran dos fuerzas autoequilibrantes, F y -F, actuando sobre
un bloque rígido. Si se quiere transferir la fuerza de la izquierda más alejada hacia la
izquierda, podría proporcionarse una varilla para transmitir la fuerza, como se muestra en la
figura 3.14b. Sin embargo, se puede transmitir la fuerza sin proporcionar la varilla o
cualquier otra estructura equivalente. Las estructuras suplementarias de este tipo son
innecesarias, ya que en realidad no se están transfiriendo las fuerzas. Sencillamente, se está
imaginando su transferencia para simplificar el análisis de sus efectos.
Fig. 3.14 Transmisión de una fuerza hacia un punto fuera de un cuerpo

20
El principio de transmisibilidad no se puede aplicar a un cuerpo para el cual se van a
determinar las fuerzas o deformaciones internas.
Siempre se debe recordar que el principio de transmisibilidad sólo afirma que al mover el
punto de aplicación de una fuerza a lo largo de su línea de acción no se altera el
movimiento o el equilibrio de un cuerpo rígido. En general, el movimiento del punto de
aplicación de una fuerza altera la distribución de las fuerzas y los esfuerzos internos en un
cuerpo. Por ejemplo, una armadura de puente se puede considerar a veces como un cuerpo
rígido. Si una fuerza externa que actúa sobre la armadura se desplaza a lo largo de su línea
de acción, desde un nodo hasta otro, no se afecta el equilibrio global de la armadura. Sin
embargo, las fuerzas internas en los miembros de la armadura sí cambian.
Para los efectos internos, se pueden considerar las barras rígidas que se muestran en las
figuras 3.11a y 3.11b. La figura 3.11b se puede obtener a partir de la 3.11a, al deslizar las
fuerzas en los extremos a lo largo de la barra hasta los extremos opuestos. En ambas
figuras, las barras están en equilibrio, y se cumple todavía el teorema 3.3. Sin embargo, la
fuerza interna es una tensión en la figura 3.11a, en tanto que en la figura 3.11b es una
compresión. Para las deformaciones, considere un globo de juguete que se encuentra en
equilibrio bajo la acción de dos fuerzas diametralmente opuestas (Fig. 3.l5a). Estas fuerzas
producen cúspides pronunciadas de las deformaciones en sus puntos de aplicación. Si la
fuerza que actúa sobre el lado izquierdo del globo se transfiere hasta el punto de aplicación
de la fuerza de la derecha, se elimina la deformación (Fig. 3.15b). Por consiguiente, la
deformación del globo causada por el sistema verdadero de fuerzas no está relacionada con
la deformación causada por el sistema transferido de fuerzas. En otras palabras, los efectos
y las deformaciones internas deben evaluarse usando el sistema verdadero de fuerzas.
Fig. 3.15 Transmisibilidad de fuerzas que altera las deformaciones de un cuerpo

21
3.8 Equilibrio de un Cuerpo Rígido Sujeto a Fuerzas Concurrentes
Considere un cuerpo rígido que está sujeto a varias fuerzas cuyas líneas de acción se
interceptan en el punto P (figura 3.16a). Por el principio de transmisibilidad, los puntos de
aplicación de estas fuerzas se pueden transferir hasta el punto P sin alterar el equilibrio o el
movimiento del cuerpo (figura 3.16b). Ya que las fuerzas son concurrentes después de que
se transfieren hasta el punto P se pueden combinar en una sola fuerza resultante R, por
adición vectorial. La línea de acción de la fuerza resultante R que pasa por el punto P se
llama eje resultante (figura 3.16c). Por tanto, el principio de transmisibilidad, junto con
geometría plana sencilla, conduce a la siguiente observación:
Fig. 3.16 Fuerzas con líneas concurrentes de acción
Teorema 3.4
Dos fuerzas coplanares no paralelas cualesquiera que actúen sobre un cuerpo rígido se
pueden combinar en una sola fuerza resultante, ya que las líneas de acción de esas dos
fuerzas debe interceptarse.
En el caso más general (para más de dos fuerzas), el principio de transmisibilidad puede
combinarse con el concepto de equilibrio.
Teorema 3.5
Si las líneas de acción de todas las fuerzas que actúan sobre un cuerpo rígido inmóvil se
interceptan en el mismo punto, existe el equilibrio si, y sólo si, la suma vectorial de las
fuerzas es cero.

22
Por tanto, los requisitos para que exista el equilibrio de un cuerpo rígido sujeto a fuerzas
con líneas concurrentes de acción son los mismos que aquellos para que exista el equilibrio
de una partícula. Este resultado es un caso especial de la teoría general tridimensional del
equilibrio (se verá en las unidades posteriores).
Equilibrio de un miembro de tres fuerzas
Con base en la discusión anterior, se puede plantear el teorema siguiente:
Teorema 3.6
Si un cuerpo rígido está en equilibrio bajo la acción de tres fuerzas no paralelas, las
fuerzas son coplanares y sus líneas de acción son concurrentes; es decir, sus líneas de
acción se interceptan en un punto común.
Para probar este teorema, considere las tres fuerzas F, G y H. La condición de equilibrio F
+ G + H = 0 permite ver que las fuerzas son coplanares, ya que esta ecuación vectorial
significa que los tres vectores de fuerza forman un triángulo. Si dos de las fuerzas
cualesquiera (digamos, F y G) no son paralelas, pueden desplazarse hasta el punto de
intersección de sus líneas de acción y, allí, se pueden combinar por la construcción del
paralelogramo en una sola resultante R (Fig. 3.17). Puesto que la fuerza R es equilibrada
sólo por la fuerza H, es equivalente a -H. En consecuencia, las líneas de acción de las
fuerzas F, G y H son concurrentes.
Fig. 3.17 Tres fuerzas concurrentes: F, G y H

23
Un cuerpo rígido bajo la acción de tres fuerzas no paralelas suele conocerse como un
miembro de tres fuerzas. La palabra “miembro” podría no ser por completo exacta para
describir un cuerpo rígido de este tipo, ya que tiende a sugerir una parte de una estructura,
como una armadura o un armazón. En ciertos casos, un componente mecánico de un
sistema (como una rueda) se puede tratar como un miembro de tres fuerzas. Sin embargo,
en la resolución de problemas de equilibrio puede resultar útil la identificación de
miembros de tres fuerzas, ya que los principios del equilibrio de partículas se pueden
aplicar a ellos.
Como la de miembro de dos fuerzas, la definición de miembro de tres fuerzas se establece
manera conveniente en la aplicación de los principios del equilibrio de partículas a un
cuerpo rígido. Si se prefiere tratar un miembro de tres fuerzas como un cuerpo rígido
general, se pueden aplicar las condiciones de equilibrio de los cuerpos rígidos para resolver
el problema.
Técnica de Resolución de Problemas
Miembros de tres fuerzas
Para resolver un problema en el que intervienen miembros de tres fuerzas en equilibrio:
1. Identifique todos los miembros de tres fuerzas. No se debe olvidar la inclusión del peso
de un miembro, si éste es significativo. Asimismo, recuerde que cualquier fuerza de
contacto debe representarse como una sola fuerza (véase la Técnica de Resolución de
Problemas de la sección 3.6)
2. Para cada miembro de tres fuerzas, aplique el principio de transmisibilidad para localizar
el punto de intersección de las tres líneas de acción de las fuerzas.
3. Ubique una partícula en la intersección de las líneas de acción de las tres fuerzas que
actúan sobre el miembro. A continuación, aplique los principios del equilibrio a la partícula
(véase la Técnica de Resolución de Problemas de la sección 3.3).
1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 6 y 7 (13/04/07 y 17/04/07)
Unidad IV Fuerzas Bidimensionales, Pares y Equilibrio del Cuerpo Rígido
En la unidad 3 se consideraron los principios del equilibrio de una partícula. Ese análisis
incluyó un estudio del equilibrio de cuerpos rígidos sujetos a fuerzas concurrentes. En este
capítulo se ampliará el concepto de equilibrio de cuerpos rígidos bajo la acción de fuerzas
coplanares que no son concurrentes.
De forma intuitiva se sabe que una fuerza puede hacer que un cuerpo se traslade (se mueva
en la dirección de la fuerza). Sin embargo, dependiendo de cómo se aplique una fuerza a un
cuerpo, también puede hacer que el cuerpo gire. La acción que causa la rotación se llama
momento. En la primera parte de esta unidad se define el concepto de momento de una
fuerza. El alumno aprenderá cómo calcular el momento de una fuerza alrededor de un eje y
cómo determinar el momento resultante de varias fuerzas coplanares. Dos fuerzas paralelas
no colineales con magnitudes iguales pero sentidos opuestos forman un par. Para un par, la
fuerza resultante es cero, pero el momento es diferente de cero.
Después de analizar los efectos de las fuerzas coplanares sobre los cuerpos rígidos se
establecerán las condiciones en las cuales un cuerpo rígido se encuentra en equilibrio bajo
la acción de fuerzas coplanares. En seguida, se considerará el caso especial de equilibrio
tridimensional de un cuerpo rígido sujeto a fuerzas paralelas no coplanares.
Cuando se lleve a cabo el análisis de equilibrio para cuerpos rígidos sujetos a fuerzas
coplanares no paralelas, podrá obtener un conjunto de ecuaciones, cuya solución determina
las cantidades desconocidas en el problema.
4.1 Momento de Fuerzas Coplanares con Respecto a un Eje
Concepto Clave

2
Una fuerza F que se encuentra en un plano Q produce un momento M con respecto a un eje
que es perpendicular a ese plano Q. La magnitud M del momento M es Fr, en donde F es
la magnitud de F y r es la distancia perpendicular del eje a la línea de acción de F.
Considere una fuerza F que se encuentra en un plano dado Q (digamos, el plano xy del
cuerpo de figura 4.1a). La fuerza F actúa en el punto P. Suponga que el eje z es
perpendicular al plano Q y se intercepta con éste en el punto O. Entonces, los ejes x, y y z
forman un sistema de coordenadas rectangulares, con origen O. Los vectores i, j y k son
vectores unitarios a lo largo de los ejes x, y y z, respectivamente.
De modo intuitivo, se puede ver que la fuerza F tendería a hacer que el cuerpo de la figura
4.1a girara alrededor del eje z (ver figura 4.1b). La acción de una fuerza que tiende a hacer
girar un cuerpo alrededor de un eje se llama momento. La fuerza F causa un momento M
con respecto al eje z, definido por la ecuación
M = Mk = Frk (4.1)
donde M = Fr es la magnitud del momento M, F es la magnitud de la fuerza F y r es la
distancia perpendicular de la línea de acción de F al eje z (punto O). La distancia r se llama
brazo del momento de la fuerza F con respecto al eje z.
Fig. 4.1 a) Brazo del momento de una fuerza. b) Momento positivo alrededor del eje z. c) Momento
negativo alrededor del eje z. d) Representación del momento con una flecha curva

3
Pasa establecer el signo en la ecuación (4.1), se especifica de modo arbitrario que el
momento es positivo si tiene un sentido de rotación contrario al del movimiento de las
agujas del reloj, alrededor del punto O (Fig. 4.1b). Entonces, M = +Frk, y el vector de
momento M está dirigido en la dirección z positiva; tiene el mismo sentido que el vector
unitario k. El momento M se representa por una flecha con punta doble, para distinguirlo
de un vector de fuerza (ver figura 4.1b). Por tanto, para un momento positivo, la flecha con
punta doble tiene el mismo sentido que k (la dirección positiva del eje z). Si el momento M
es negativo, tiene un sentido de rotación igual al del movimiento de las agujas del reloj,
alrededor del punto O (Fig. 4.1c). Entonces, por la ecuación (4.1), M = -Frk, y la flecha de
punta doble tiene la dirección -k.
Hablando en términos generales, si un cuerpo rígido se sujeta a una fuerza F que se
encuentra en el plano xy y produce un momento positivo alrededor del punto O (o sea, el
eje z), la fuerza F tiende a causar una rotación del cuerpo en sentido contrario al
movimiento de las agujas del reloj, alrededor del eje z, cuando el cuerpo se ve desde arriba;
es decir, desde la parte positiva del eje z (Fig. 4.1b). Si F produce un momento negativo
alrededor del punto O, tiende a producir una rotación del cuerpo en el sentido del
movimiento de las agujas del reloj, cuando se ve desde la parte positiva del eje z (Fig. 4.lc).
Para problemas coplanares, el eje z se representa de manera adecuada por el punto P,
considerado como una vista desde el extremo del eje z positivo (Fig. 4.1d). En
consecuencia, en lugar de referirse al eje z y al vector unitario k, sencillamente se dice que
la ecuación (4.1) representa el momento de la fuerza F alrededor del punto O. Asimismo,
para simplificar, en el caso coplanar, la ecuación (4.1) se puede escribir como
M = ±Fr (4.2)
en el entendido de que M representa un momento, con magnitud Fr y con el sentido
positivo (signo más) o el sentido negativo (signo menos). Asimismo, el vector M se puede
representar por una flecha curva Mo, en el plano Q (Fig. 4.1 d). El subíndice O significa que
el momento es con respecto al punto O.
Concepto Clave
4
Cuando actúan varias fuerzas coplanares concurrentes, la suma de los momentos de las
fuerzas, alrededor del punto O, es igual al momento de la fuerza resultante, alrededor de O.
Cuando actúan varias fuerzas coplanares, cada una puede producir un momento alrededor
de un punto O. En un caso de ese tipo, se aplica la definición siguiente:
Definición El momento de varias fuerzas coplanares alrededor de un punto O que se
encuentra en su plano se define como la suma algebraica de los momentos de cada una de
las fuerzas, alrededor de O.
Observe que no se cambia el momento de cualquiera de las fuerzas coplanares alrededor de
un eje dado (punto O) si la fuerza se desplaza a lo largo de su línea de acción. En otras
palabras, no se afectan los momentos de las fuerzas que actúan sobre un cuerpo rígido
cuando se aplica el principio de transmisibilidad.
El concepto de momento de una fuerza adquiere su utilidad con base en el teorema
siguiente conocido como teorema de Varignon.
Teorema .4.1
Teorema de Varignon: el momento de varias fuerzas coplanares concurrentes alrededor de
cualquier punto O en su plano es igual al momento de su resultante alrededor del punto O.
Para probar este teorema, suponga que el punto O es el origen de un sistema de
coordenadas rectangulares xy que se encuentran en el plano Q (ver figura 4.2). La fuerza F
actúa en el punto P: (x, y) y se encuentra en el plano Q. Suponga que el segmento rectilíneo
ON es perpendicular a la línea de acción de F. La recta PS es perpendicular al eje x, la RS
es perpendicular a la prolongación de la ON y la PT es perpendicular a la prolongación de
la RS. Por tanto, el brazo del momento r de la línea de acción de F al punto O es
PTORONr
en donde, de la figura 4.2
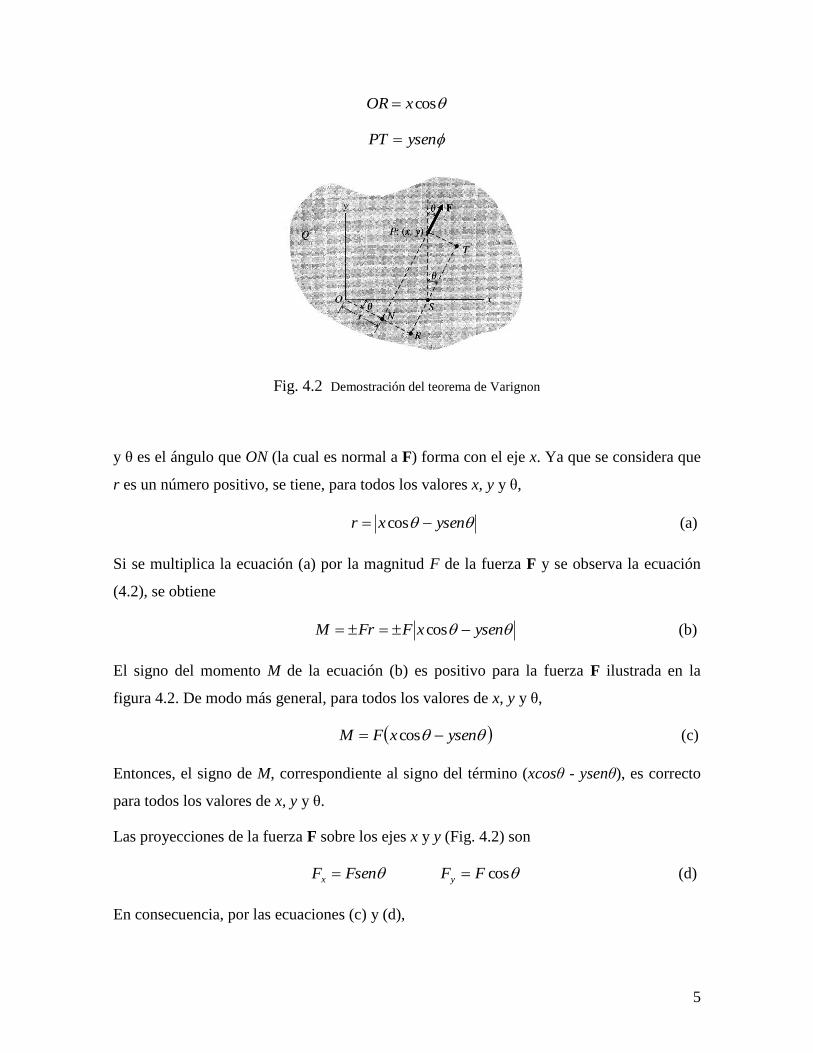
5
cosxOR
ysenPT
Fig. 4.2 Demostración del teorema de Varignon
y θ es el ángulo que ON (la cual es normal a F) forma con el eje x. Ya que se considera que
r es un número positivo, se tiene, para todos los valores x, y y θ,
ysenxr cos (a)
Si se multiplica la ecuación (a) por la magnitud F de la fuerza F y se observa la ecuación
(4.2), se obtiene
ysenxFFrM cos (b)
El signo del momento M de la ecuación (b) es positivo para la fuerza F ilustrada en la
figura 4.2. De modo más general, para todos los valores de x, y y θ,
ysenxFM cos (c)
Entonces, el signo de M, correspondiente al signo del término (xcosθ - ysenθ), es correcto
para todos los valores de x, y y θ.
Las proyecciones de la fuerza F sobre los ejes x y y (Fig. 4.2) son
FsenFx cosFFy (d)
En consecuencia, por las ecuaciones (c) y (d),

6
xy yFxFM (4.3)
La ecuación (4.3) es válida independientemente del sentido de la fuerza F y del cuadrante
del sistema de coordenadas xy en el cual se encuentre el punto P; es decir, el signo del
momento M se determina de manera automática por los signos de x, y, Fx y Fy. La
magnitud del momento es |M| = |xFy – yFx|.
Para interpretar la ecuación (4.3), se resuelve la fuerza F en las componentes Fxi y Fyj,
donde i y j son vectores unitarios a lo largo de los ejes de coordenadas (ver figura 4.3). El
brazo del momento de la fuerza Fxi con respecto al origen es y, si el punto P se encuentra
en el primer cuadrante. Entonces, el momento de la fuerza Fxi alrededor del origen es
negativo. Por tanto, por la ecuación (4.2), el momento de la fuerza Fxi alrededor del origen
es –yFx. De modo semejante, el momento de la fuerza Fyj alrededor del origen es +xFy.
Por lo tanto, la ecuación (4.3) significa que el momento de la fuerza F alrededor del origen
es igual al momento de sus componentes Fxi y Fyj, alrededor del origen. Esta conclusión es
un caso especial importante del teorema de Varignon.
Fig. 4.3 Componentes de una fuerza F
Para generalizar el resultado, suponga que varias fuerzas coplanares, F1, F2,…, actúan en el
punto P (Fig. 4.4). La resultante de estas fuerzas es F. Las proyecciones x y y de estas
fuerzas se denotan por (F1x, F1y), (F2x, F2y),….. Entonces, por la ecuación (4.3), se obtiene
la fórmula siguiente para el momento de todas las fuerzas, alrededor del origen:
....2211 xyxy yFxFyFxFM

7
Fig. 4.4 Resultante de fuerzas coplanares concurrentes
Esta ecuación se puede escribir como
........ 2121 xxyy FFyFFxM (e)
Dado que las proyecciones (Fx, Fy) de la fuerza resultante se determinan por las ecuaciones
.....21 xxx FFF
.....21 yyy FFF
la ecuación (e) da
xy yFxFM (f)
Esta conclusión verifica el teorema de Varignon ya que, por la ecuación (4.3), el segundo
miembro de la ecuación (f) representa el momento de la fuerza resultante F, alrededor del
origen (Fig. 4.4). Este momento es igual a M, el momento de las componentes de la fuerza
F, según la ecuación (e).
Ejemplo 1 Momento ejercido sobre una tuerca
Planteamiento del problema Se usa una llave para apretar una tuerca sobre una parte de
una máquina (ver figura a). Determine el momento ejercido alrededor del centro O de la
tuerca por la fuerza F.

8
(a)
Solución Empleando la definición de momento dada en la ecuación (4.1), se necesita
determinar el brazo del momento, r, de la fuerza F, con relación al punto O. Con base en la
figura (b), el brazo del momento es
r = a senθ
Puesto que el sentido del momento de F es el del movimiento de las agujas del reloj, por las
ecuaciones (4.1) y (a), el momento alrededor del punto O es
Mo = -Frk
= -(Fa senθ)k
donde F es la magnitud de F, Mo = Fa |senθ| es la magnitud de Mo y k es un vector unitario
dirigido perpendicular al plano de la llave en O.
(b)
De modo alternativo, se puede calcular el momento al considerar las proyecciones (Fx, Fy)
de la fuerza F (figura c). Entonces, como el problema es coplanar, por la ecuación (4.3) y
la figura (c), se obtiene el momento Mo como

9
xyo yFxFM
cos)0()( FFsena
Fasen
La magnitud del momento es Mo = Fa |senθ|, como antes.
(c)
4.2 Resultante de Fuerzas Coplanares que actúan sobre un Cuerpo Rígido
A veces, varias fuerzas distintas actúan sobre un cuerpo rígido. Para determinar la respuesta
del cuerpo a las fuerzas, puede resultar conveniente determinar en primer lugar la resultante
del sistema de fuerzas. En particular, en algunas condiciones, cualquier número de fuerzas
coplanares que actúen sobre un cuerpo rígido pueden combinarse por la ley del
paralelogramo en una sola fuerza resultante con una línea específica de acción. Considérese
un caso con cinco fuerzas coplanares. El procedimiento más obvio es deslizar en primer
lugar cualesquiera dos vectores de fuerza no paralelos a lo largo de sus líneas de acción
hasta el punto de intersección de estas líneas, por el principio de transmisibilidad y, en
seguida, combinar las dos fuerzas por la construcción del paralelogramo. Este proceso se
puede repetir con cualesquiera dos de las fuerzas restantes, para llegar a un sistema de tres
fuerzas, y así sucesivamente. Si el sistema no se reduce a un conjunto de fuerzas paralelas,
llegará el momento en que se obtendrá una sola fuerza resultante. (Dado que las líneas de
acción de fuerzas paralelas no se intersecan, estas fuerzas requieren una considera especial.)
Un método alternativo para hallar el vector de fuerza resultante es sumar las proyecciones
de los vectores de fuerza sobre ejes de coordenadas rectangulares xy, puesto que éste
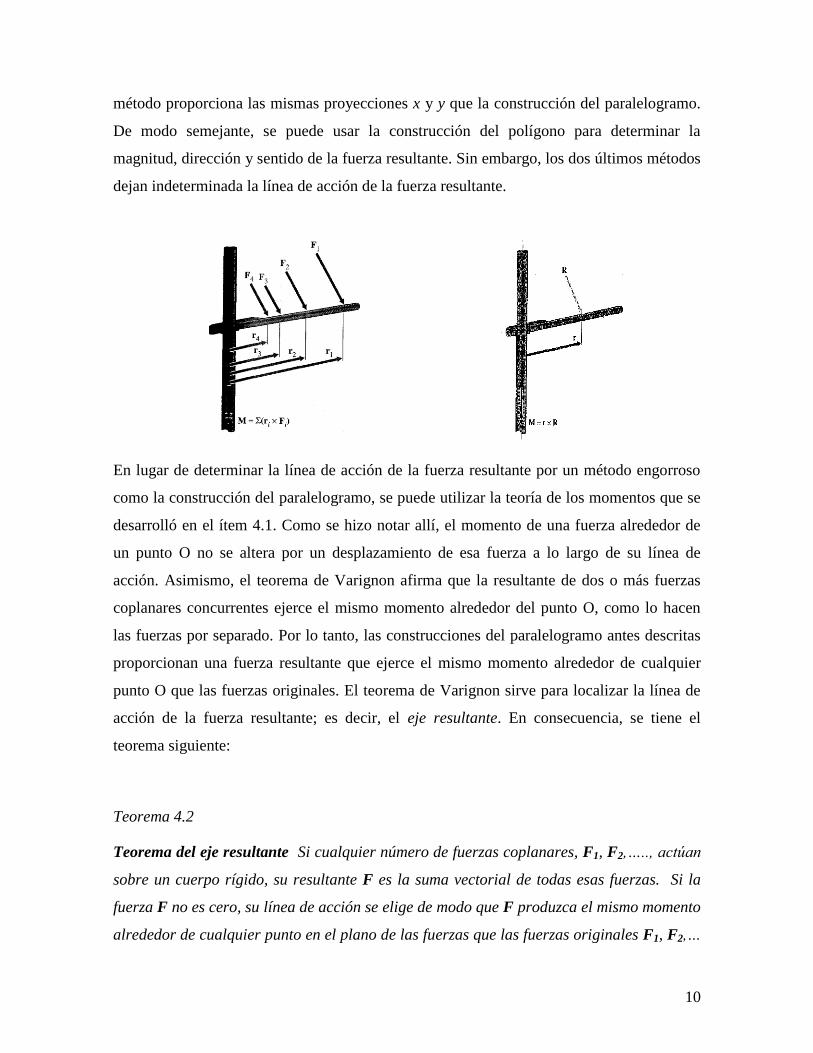
10
método proporciona las mismas proyecciones x y y que la construcción del paralelogramo.
De modo semejante, se puede usar la construcción del polígono para determinar la
magnitud, dirección y sentido de la fuerza resultante. Sin embargo, los dos últimos métodos
dejan indeterminada la línea de acción de la fuerza resultante.
En lugar de determinar la línea de acción de la fuerza resultante por un método engorroso
como la construcción del paralelogramo, se puede utilizar la teoría de los momentos que se
desarrolló en el ítem 4.1. Como se hizo notar allí, el momento de una fuerza alrededor de
un punto O no se altera por un desplazamiento de esa fuerza a lo largo de su línea de
acción. Asimismo, el teorema de Varignon afirma que la resultante de dos o más fuerzas
coplanares concurrentes ejerce el mismo momento alrededor del punto O, como lo hacen
las fuerzas por separado. Por lo tanto, las construcciones del paralelogramo antes descritas
proporcionan una fuerza resultante que ejerce el mismo momento alrededor de cualquier
punto O que las fuerzas originales. El teorema de Varignon sirve para localizar la línea de
acción de la fuerza resultante; es decir, el eje resultante. En consecuencia, se tiene el
teorema siguiente:
Teorema 4.2
Teorema del eje resultante Si cualquier número de fuerzas coplanares, F1, F2,….., actúan
sobre un cuerpo rígido, su resultante F es la suma vectorial de todas esas fuerzas. Si la
fuerza F no es cero, su línea de acción se elige de modo que F produzca el mismo momento
alrededor de cualquier punto en el plano de las fuerzas que las fuerzas originales F1, F2,…

11
Entonces la fuerza resultante F es dinámicamente equivalente a sus componentes F1, F2,….
Si la fuerza resultante es cero, no existe un eje resultante.
En el ítem 4.3 se verá que si las construcciones del paralelogramo reducen varias fuerzas a
dos fuerzas paralelas que son no colineales, tienen igual magnitud y sentido opuesto, la
fuerza resultante F es cero, pero el momento de las fuerzas es diferente de cero. En ese
caso, la construcción del paralelogramo no proporciona un eje resultante. Por lo tanto, este
caso requiere un tratamiento especial.
4.3 Fuerzas Coplanares Paralelas y Pares
Fuerzas coplanares paralelas
Las construcciones del paralelogramo discutidas en el ítem 4.2 no se pueden llevar a cabo
en forma directa si el sistema de fuerzas se reduce a dos fuerzas paralelas. Por tanto, no se
puede obtener una resultante de fuerzas paralelas a través de la construcción del
paralelogramo. Sin embargo, excepto para un caso, las fuerzas paralelas pueden convertirse
en fuerzas no paralelas, para la cual se puede determinar una resultante. La siguiente
técnica gráfica ilustra cómo se realiza esto.
Suponga que las fuerzas paralelas F1 y F2 actúan en los puntos P1 y P2 de un cuerpo rígido,
donde el segmento rectilíneo P1P2 es perpendicular a los vectores de fuerza (figura 4.5)
Para combinar F1 y F2 en una sola fuerza resultante, imagine que las fuerzas
autoequilibrantes f y -f actúan en los puntos P1 y P2 y son tales que la línea de acción de
estas fuerzas es la recta P1P2. La magnitud f de las fuerzas imaginarias f y -f es arbitraria.
La adición de estas fuerzas es admisible, ya que las fuerzas autoequilibrantes no producen
efectos dinámicos sobre un cuerpo rígido. La resultante R1 y R2 de las parejas concurrentes
se forman por la construcción del paralelogramo (Fig. 4.5). Dado que las fuerzas f y -f se
cancelan entre sí, las fuerzas R1 y R2 son dinámicamente equivalentes a las fuerzas F1 y F2
Por tanto, las fuerzas paralelas F1 y F2 se reemplazan por las fuerzas no paralelas
equivalentes R1 y R2.
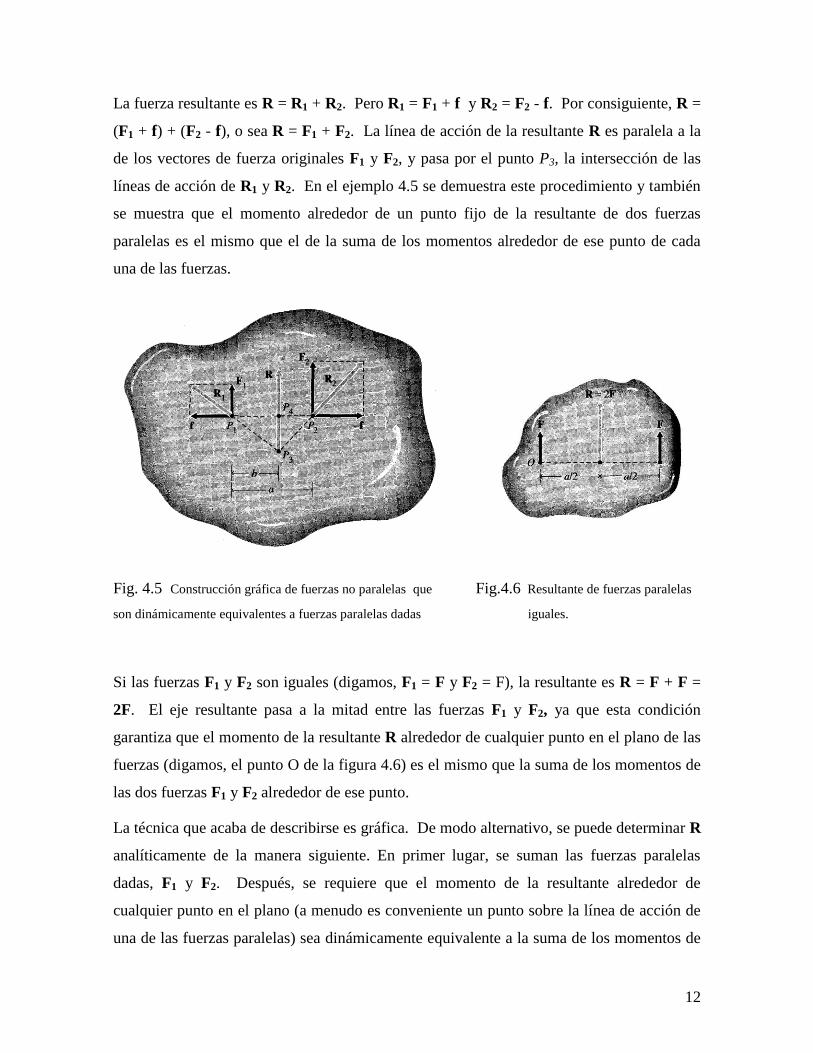
12
La fuerza resultante es R = R1 + R2. Pero R1 = F1 + f y R2 = F2 - f. Por consiguiente, R =
(F1 + f) + (F2 - f), o sea R = F1 + F2. La línea de acción de la resultante R es paralela a la
de los vectores de fuerza originales F1 y F2, y pasa por el punto P3, la intersección de las
líneas de acción de R1 y R2. En el ejemplo 4.5 se demuestra este procedimiento y también
se muestra que el momento alrededor de un punto fijo de la resultante de dos fuerzas
paralelas es el mismo que el de la suma de los momentos alrededor de ese punto de cada
una de las fuerzas.
Fig. 4.5 Construcción gráfica de fuerzas no paralelas que Fig.4.6 Resultante de fuerzas paralelas
son dinámicamente equivalentes a fuerzas paralelas dadas iguales.
Si las fuerzas F1 y F2 son iguales (digamos, F1 = F y F2 = F), la resultante es R = F + F =
2F. El eje resultante pasa a la mitad entre las fuerzas F1 y F2, ya que esta condición
garantiza que el momento de la resultante R alrededor de cualquier punto en el plano de las
fuerzas (digamos, el punto O de la figura 4.6) es el mismo que la suma de los momentos de
las dos fuerzas F1 y F2 alrededor de ese punto.
La técnica que acaba de describirse es gráfica. De modo alternativo, se puede determinar R
analíticamente de la manera siguiente. En primer lugar, se suman las fuerzas paralelas
dadas, F1 y F2. Después, se requiere que el momento de la resultante alrededor de
cualquier punto en el plano (a menudo es conveniente un punto sobre la línea de acción de
una de las fuerzas paralelas) sea dinámicamente equivalente a la suma de los momentos de
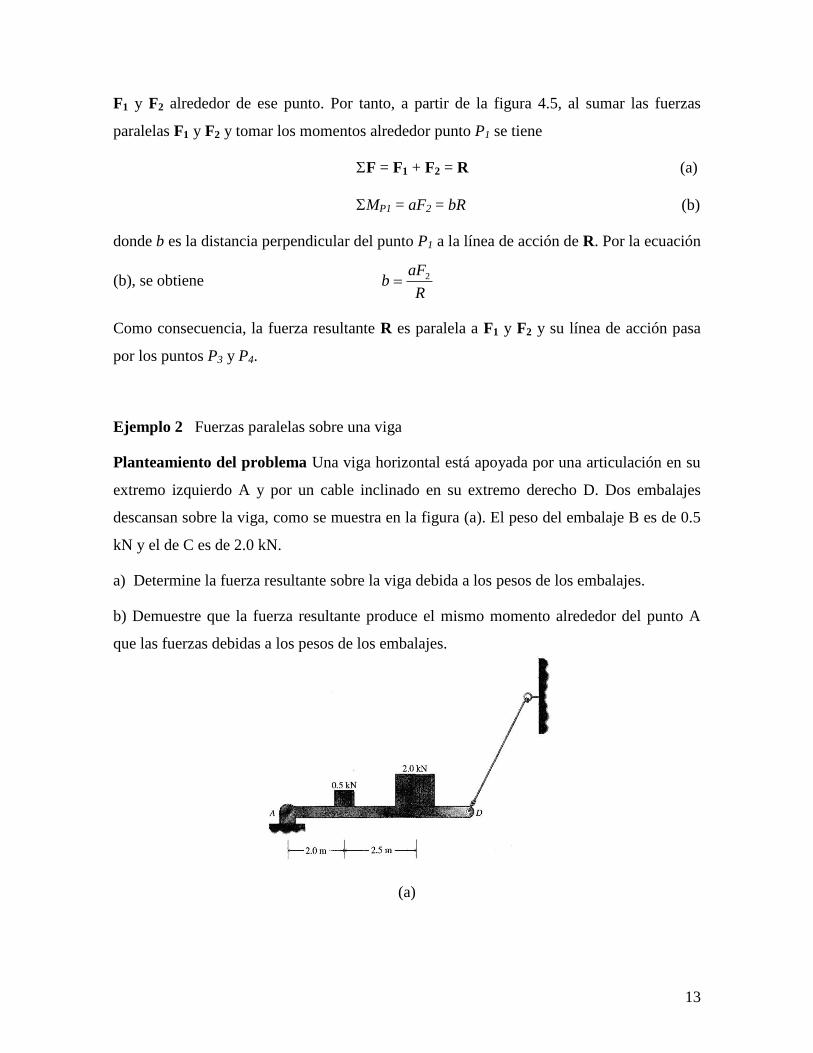
13
F1 y F2 alrededor de ese punto. Por tanto, a partir de la figura 4.5, al sumar las fuerzas
paralelas F1 y F2 y tomar los momentos alrededor punto P1 se tiene
F = F1 + F2 = R (a)
MP1 = aF2 = bR (b)
donde b es la distancia perpendicular del punto P1 a la línea de acción de R. Por la ecuación
(b), se obtiene R
aFb 2
Como consecuencia, la fuerza resultante R es paralela a F1 y F2 y su línea de acción pasa
por los puntos P3 y P4.
Ejemplo 2 Fuerzas paralelas sobre una viga
Planteamiento del problema Una viga horizontal está apoyada por una articulación en su
extremo izquierdo A y por un cable inclinado en su extremo derecho D. Dos embalajes
descansan sobre la viga, como se muestra en la figura (a). El peso del embalaje B es de 0.5
kN y el de C es de 2.0 kN.
a) Determine la fuerza resultante sobre la viga debida a los pesos de los embalajes.
b) Demuestre que la fuerza resultante produce el mismo momento alrededor del punto A
que las fuerzas debidas a los pesos de los embalajes.
(a)

14
Solución a). En la figura (b) se muestran las fuerzas verticales, debidas a los pesos de los
embalajes, sobre la viga aislada; no se muestran los efectos del apoyo de articulación y del
cable. En los puntos B y C se aplican cargas imaginarias de 0.5 kN dirigidas hacia la
izquierda y hacia la derecha, respectivamente. Se usa la construcción del paralelogramo
para hallar las líneas de acción de las fuerzas resultantes en B y C. Las líneas de acción de
estas resultantes se interceptan en el punto E (Fig. b). Dado que las componentes
horizontales se cancelan, la fuerza resultante R está dirigida verticalmente pasando por el
punto E. Su magnitud es R = 2.0 + 0.5 = 2.5 kN. Por construcción gráfica, se encuentra que
la línea de acción de R está 0.5 m hacia la izquierda del punto C.
(b)
b. El momento en el sentido del movimiento de las agujas del reloj de las dos fuerzas de
peso, alrededor del punto A, es
MA = (2.0)(0.5) + (4.5)(2.0) = 10.0 kNm
De modo semejante, el momento en el sentido del movimiento de las agujas del reloj de la
resultante R, alrededor de A, está dado por
MA = (4.0)(2.5) = 10.0 kNm
Por tanto, queda demostrada la equivalencia del momento de la pareja de fuerzas al de su
resultante.
De modo alternativo, se puede determinar R en forma analítica, sumando las fuerzas y los
momentos. Por tanto, de la figura (b), se tiene
R = 0.5 + 2.0 = 2.5 kN

15
rR = MC = (0.5)(2.5) = 1.25 kNm (a)
donde r es la distancia perpendicular del punto C a la línea de acción de R. Entonces, por
las ecuaciones (a), se obtiene
R = 2.5 kN
r = 0.5 m
Por consiguiente, una vez más, la línea de acción pasa por el punto E.
Pares
Concepto clave
Un par consta de dos fuerzas paralelas no colineales de magnitudes iguales y sentidos
opuestos.
Existe un caso en el cual el uso de las fuerzas imaginarias f y -f (Fig. 4.5) no es eficaz para
hallar la resultante de dos fuerzas paralelas. Esto ocurre cuando las fuerzas no colineales F1
y F2 tienen magnitudes iguales y sentidos opuestos (es decir, cuando F1 = F y F2 = -F).
Entonces, las fuerzas R1 y R2 también son paralelas (figura 4.7). En este caso, se dice que
las fuerzas F1 y F2 constituyen un par de fuerzas o, sencillamente, un par. Para un par, la
fuerza resultante tiene magnitud cero. Puesto que R = F1 + F2 = F - F = 0. Sin embargo, un
par produce un momento constante diferente de cero alrededor de cualquier punto fijo en el
plano.
Fig. 4.7 Demostración de la imposibilidad de reemplazar un par por fuerzas no paralelas
dinámicamente equivalentes

16
Si las fuerzas que forman un par no actúan en los puntos P y Q de la figura 4.7, por el
teorema de transmisibilidad de la fuerza, se pueden desplazar las fuerzas a lo largo de sus
líneas de acción de modo que actúen en esos puntos y que el segmento rectilíneo PQ sea
perpendicular a los vectores de fuerza. Entonces, el segmento rectilíneo PQ se llama brazo
del par.
Debe verse que un par tiende a hacer girar un cuerpo rígido sobre el cual actúa. Pero,
contrario a lo que podría esperarse, por lo común el centro de rotación no es el punto medio
del brazo del par. En lugar de ello, el centro de rotación es un punto especial en el cuerpo
llamado centro de masa. La ubicación de este punto sólo depende de la distribución de la
materia en el cuerpo; es independiente del propio par.
Las alas de una viga de acero están soldadas a las alas de una columna. Las fuerzas iguales y puestas T y C en
las alas de la viga forman un par con momento M que se transfiere a la columna
Louis Poinsot (1777-1859) fue quien originó la teoría de los pares. El tratamiento siguiente
de los pares se acerca a lo presentado en su libro Elements de Statique, publicado en 1803.
Desplazamiento de un par en la dirección de una de sus fuerzas El teorema de
transmisibilidad de la fuerza permite que un par se desplace en cualquiera de las dos
direcciones de sus fuerzas. Por ejemplo, en la figura 4.8, las fuerzas F y -F de los puntos P
y Q están desplazadas hasta los puntos R y S, respectivamente. El par con brazo RS es
dinámicamente equivalente al par con brazo PQ.

17
Fig. 4.8 Desplazamiento de un par en la dirección de una de sus fuerzas.
Desplazamiento de un par en la dirección de su brazo No se cambia el efecto dinámico
de un par en un cuerpo rígido si el brazo del par se desplaza a lo largo de la recta sobre la
cual se encuentra. Para ver esto, considere un par que consta de las fuerzas F y -F y que
tiene un brazo PQ. Sea RS un segmento rectilíneo que es colineal con PQ y que tiene la
misma longitud que PQ (figura 4.9). Introduzca las parejas autoequilibrantes de fuerzas F y
-F en los puntos R y S. Las fuerzas F en los puntos P y S pueden reemplazarse por sus
resultantes 2F en el punto O, a la mitad entre los puntos P y S (figura 4.6). De modo
semejante, las fuerzas -F en los puntos Q y R pueden reemplazarse por su resultante -2F en
el punto O. Las fuerzas 2F y -2F en el punto O se cancelan entre sí. Por tanto, todas las
fuerzas se eliminan, excepto la fuerza F, en el punto R, y la fuerza -F, en el punto S. Estas
fuerzas constituyen un par que tiene un efecto idéntico al del par original. Entonces, en
efecto, el brazo del par original está desplazado desde PQ hasta RS.
Fig. 4.9 Desplazamiento de un par en la dirección de su brazo.

18
Rotación del brazo de un par No se cambia el efecto dinámico de un par sobre un cuerpo
rígido si se hace girar el brazo de ese par alrededor de su punto medio O en el plano del
mismo. En la figura 4.10, las fuerzas F y -F de magnitud F que actúan en los puntos P y Q
constituyen un par. El segmento rectilíneo RS se encuentra en el plano del par y tiene la
misma longitud que el segmento rectilíneo PQ. Los segmentos rectilíneos PQ y RS se
interceptan en sus puntos medios O. Se introducen las parejas autoequilibrantes de fuerzas
F1 y –F1 de magnitud F, en los puntos R y S. Estas fuerzas son perpendiculares al segmento
rectilíneo RS y se encuentran en el plano del par original. Por el teorema de
transmisibilidad, las fuerzas F, en P, y –F1, en R, pueden desplazarse hasta el punto M
sobre la bisectriz del ángulo θ. Allí, pueden combinarse por la construcción del
paralelogramo para formar su resultante F2. De modo semejante, las fuerzas -F, en Q, y F1
en S, tienen la resultante –F2 que actúa en el punto N. Las fuerzas F2 en M, y –F2 en N, son
autoequilibrantes. Por lo tanto, pueden descartarse, dejando sólo las fuerzas F1 en R, y –F1
en S. Estas fuerzas constituyen un par que tiene efecto idéntico al par original y que se ha
obtenido por la rotación del brazo de este último en el ángulo θ (Fig. 4.10).
Fig. 4.10 Rotación del brazo de un par en su plano
Desplazamiento de un par hasta un plano paralelo No se cambia el efecto dinámico de
un par sobre un cuerpo rígido si ese par se desplaza hasta otro plano que sea paralelo a su
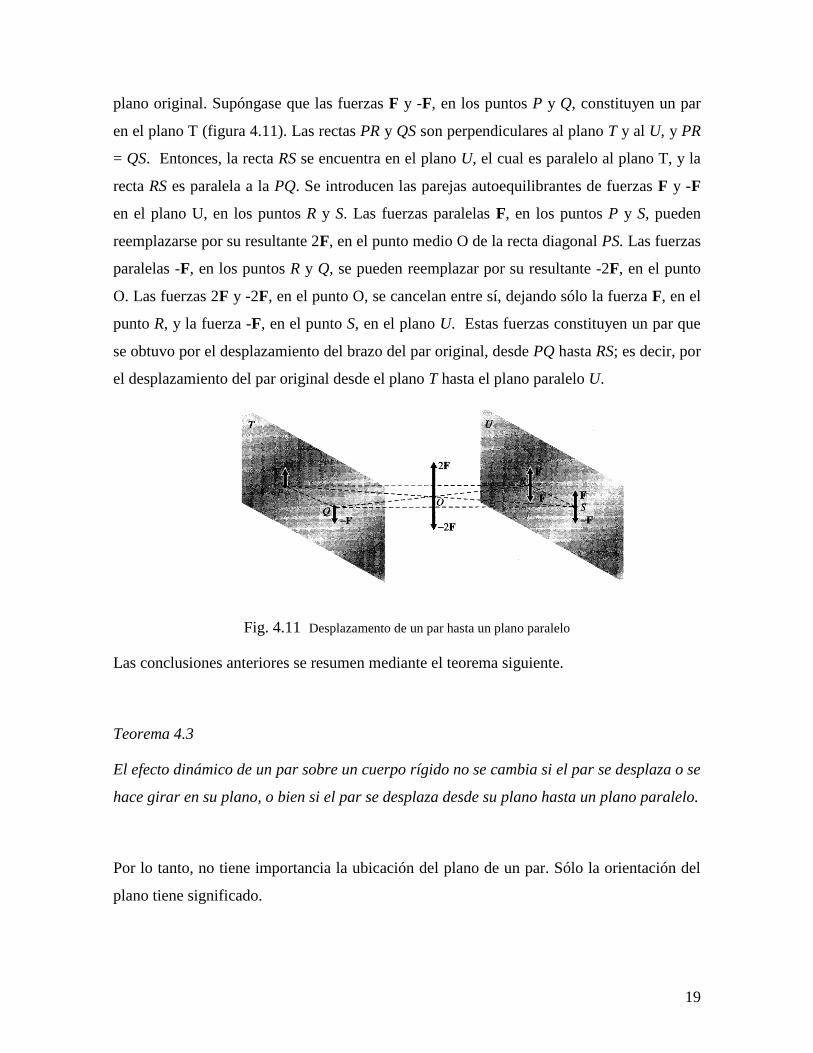
19
plano original. Supóngase que las fuerzas F y -F, en los puntos P y Q, constituyen un par
en el plano T (figura 4.11). Las rectas PR y QS son perpendiculares al plano T y al U, y PR
= QS. Entonces, la recta RS se encuentra en el plano U, el cual es paralelo al plano T, y la
recta RS es paralela a la PQ. Se introducen las parejas autoequilibrantes de fuerzas F y -F
en el plano U, en los puntos R y S. Las fuerzas paralelas F, en los puntos P y S, pueden
reemplazarse por su resultante 2F, en el punto medio O de la recta diagonal PS. Las fuerzas
paralelas -F, en los puntos R y Q, se pueden reemplazar por su resultante -2F, en el punto
O. Las fuerzas 2F y -2F, en el punto O, se cancelan entre sí, dejando sólo la fuerza F, en el
punto R, y la fuerza -F, en el punto S, en el plano U. Estas fuerzas constituyen un par que
se obtuvo por el desplazamiento del brazo del par original, desde PQ hasta RS; es decir, por
el desplazamiento del par original desde el plano T hasta el plano paralelo U.
Fig. 4.11 Desplazamento de un par hasta un plano paralelo
Las conclusiones anteriores se resumen mediante el teorema siguiente.
Teorema 4.3
El efecto dinámico de un par sobre un cuerpo rígido no se cambia si el par se desplaza o se
hace girar en su plano, o bien si el par se desplaza desde su plano hasta un plano paralelo.
Por lo tanto, no tiene importancia la ubicación del plano de un par. Sólo la orientación del
plano tiene significado.

20
4.4 Momento de un Par
Como se mencionó con anterioridad, el efecto de un par sobre un cuerpo rígido es la
rotación de éste. Ya que la resultante de las fuerzas de un par tiene magnitud cero, las
magnitudes de cada una las fuerzas suelen ser de poco interés. Por sí misma, la longitud del
brazo del par también tiene poca consecuencia. Dado que el efecto de un par es causar
rotación, la cantidad que interesa es el momento causado por ese par.
Concepto Clave
La magnitud del momento de un par es el producto Fa, donde F es la magnitud de
cualquiera de las dos fuerzas de ese par y a es la longitud del brazo de éste.
El efecto (el momento) de un par sobre un cuerpo rígido no se altera si se cambia la
magnitud de las fuerzas y, en consecuencia, la longitud del brazo de ese par. Considere el
par que consta de las fuerzas F y -F que actúan en los puntos P y Q (figura 4.12). Se
pueden introducir las fuerzas autoequilibrantes colineales -f y f, en los puntos P y Q. Sean
R y -R las resultantes de las parejas concurrentes de fuerzas en los puntos P y Q,
respectivamente. Desplace los vectores R y -R a lo largo de sus líneas de acción, hasta los
puntos M y N, donde el segmento rectilíneo MN es perpendicular a los vectores R y -R.
Entonces, las fuerzas R y -R, en los puntos M y N, constituyen un par que es
dinámicamente equivalente al par original. Las longitudes de los brazos de los dos pares
son a y b. En la figura 4.12 se muestra que b=acosθ y F=Rcosθ. En consecuencia, Rb = Fa.
Fig. 4.12 Transformación de un par en un par dinámicamente equivalente con una longitud de brazo
diferente
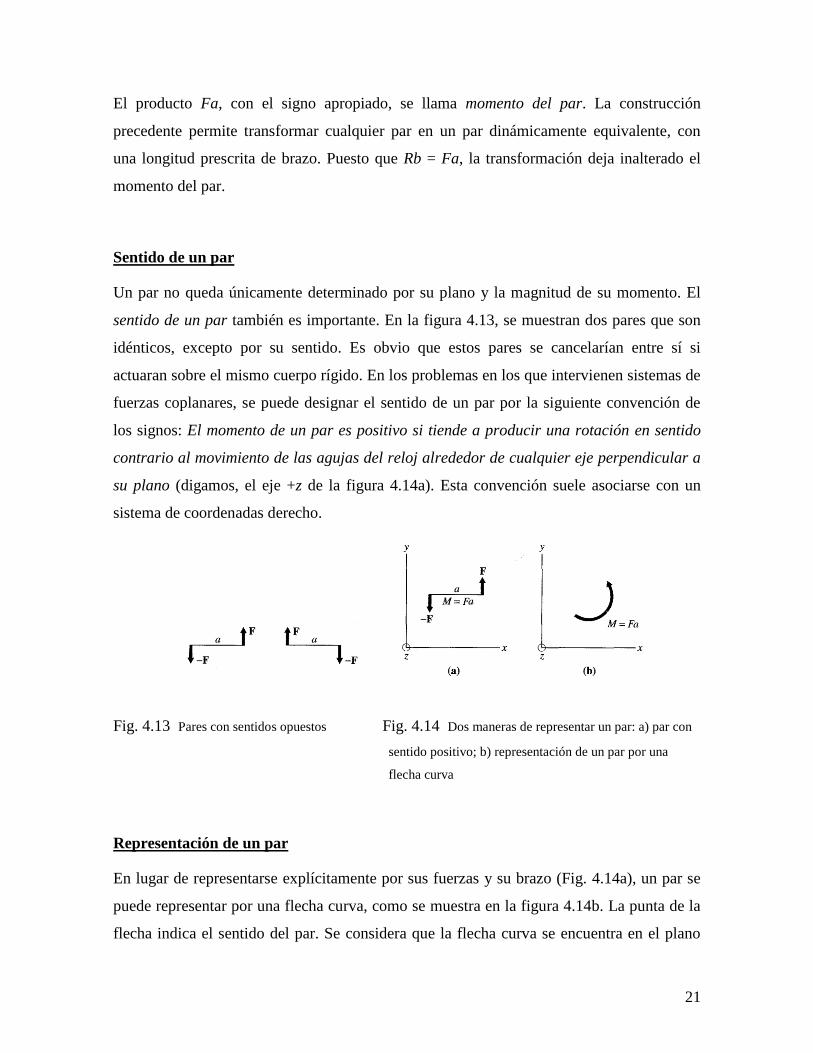
21
El producto Fa, con el signo apropiado, se llama momento del par. La construcción
precedente permite transformar cualquier par en un par dinámicamente equivalente, con
una longitud prescrita de brazo. Puesto que Rb = Fa, la transformación deja inalterado el
momento del par.
Sentido de un par
Un par no queda únicamente determinado por su plano y la magnitud de su momento. El
sentido de un par también es importante. En la figura 4.13, se muestran dos pares que son
idénticos, excepto por su sentido. Es obvio que estos pares se cancelarían entre sí si
actuaran sobre el mismo cuerpo rígido. En los problemas en los que intervienen sistemas de
fuerzas coplanares, se puede designar el sentido de un par por la siguiente convención de
los signos: El momento de un par es positivo si tiende a producir una rotación en sentido
contrario al movimiento de las agujas del reloj alrededor de cualquier eje perpendicular a
su plano (digamos, el eje +z de la figura 4.14a). Esta convención suele asociarse con un
sistema de coordenadas derecho.
Fig. 4.13 Pares con sentidos opuestos Fig. 4.14 Dos maneras de representar un par: a) par con
sentido positivo; b) representación de un par por una
flecha curva
Representación de un par
En lugar de representarse explícitamente por sus fuerzas y su brazo (Fig. 4.14a), un par se
puede representar por una flecha curva, como se muestra en la figura 4.14b. La punta de la
flecha indica el sentido del par. Se considera que la flecha curva se encuentra en el plano

22
del par. No importa la ubicación de la flecha curva en el plano, dado que un par se puede
desplazar con libertad en su plano. La letra M de la figura 4.14b representa el momento del
par. Como con el momento de una fuerza en los problemas bidimensionales (ítem 4.1), M =
Fa representa la magnitud del momento del par.
Momento de las fuerzas de un par con respecto a un punto
Calculemos el momento de las fuerzas de un par con respecto a cualquier punto O en el
mismo plano. El teorema de transmisibilidad permite reubicar el par de modo que el punto
O se encuentre sobre la recta prolongada del brazo del propio par (figura 4.15). Entonces, la
suma de los momentos de las dos fuerzas (el momento del par) alrededor del punto O es
M = F(a + b) - Fb
obien M = Fa
Este resultado conduce al teorema siguiente.
Teorema 4.4
Las fuerzas de un par ejercen el mismo momento (el momento del par) alrededor de todos
los puntos en su plano.
Fig. 4.15 Momento de lasa fuerzas de un par
Resultante de varios pares
Varios pares que se encuentran en el plano xy o en planos paralelos se pueden combinar en
un solo par resultante. El proceso es bastante semejante a la composición de fuerzas

23
concurrentes. Puesto que los pares se encuentran en el plano xy o en planos paralelos, todos
causan rotación alrededor del mismo eje, el eje z. Asimismo, ya que cualquier par se puede
mover con libertad en su plano y se puede transferir desde su plano hasta cualquier plano
paralelo (ítem 4.3), los pares se pueden colocar de modo que coincidan entre sí. Los
momentos M1, M2,… de los pares superpuestos se pueden sumar de manera algebraica, ya
que las fuerzas de los pares se combinan por adición algebraicamente. Por tanto, el
momento del par resultante es M = M1 + M2 + ….
Ejemplo 3 Resultante de una fuerza y un par
Planteamiento del problema Un cuerpo rígido cúbico está cargado por una fuerza y un
par, como se muestra en la figura (a). Determine la resultante de este sistema
Solución La fuerza se encuentra en el plano xy, y el par en un plano paralelo a aquél. El
momento del par es (100)(2) = 200 lbft y este par actúa en sentido contrario al movimiento
de la agujas del reloj, alrededor del eje z. El par de fuerzas está reemplazado por una flecha
curva en la figura (b). El momento de la fuerza de 50 lb alrededor del punto O es (50)(4.0)
= 200 lbft. Este momento actúa en el sentido de las agujas del reloj, alrededor del eje z.
Por consiguiente, como se muestra en la figura (c), se puede trasladar la fuerza de 50 lb
hasta el punto O y agregar un par de 200 lbft actuando en el sentido del movimiento de las
agujas del reloj. Puesto que los pares tienen magnitudes iguales y sentidos opuestos, y se
encuentran en planos paralelos, sus efectos se cancelan entre sí. Por lo tanto, el sistema de
fuerzas se puede reducir a una sola fuerza de 50 lb en O (figura d).
(a) (b)

24
(c) (d)
Conclusión En general, cualesquiera fuerza y par que se encuentren en el mismo plano o
en planos paralelos se pueden reducir a una sola fuerza que sea dinámicamente equivalente
a la pareja original fuerza-par, en tanto que la línea de acción de la fuerza única se ubique
de manera apropiada. Este principio se analiza en el ítem 4.5

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 8 (24/04/07)
Unidad IV (continuación)
4.5 Desplazamiento Lateral de Fuerzas
Concepto clave
Una fuerza se puede desplazar lateralmente desde su línea de acción si se agrega un par
compensador.
En el ejemplo 4.6, se combinaron una fuerza y un par que se encontraban en el mismo
plano para obtener una sola fuerza con una línea de acción diferente que la de la fuerza
original. En realidad, la fuerza original se desplazó en forma lateral (se movió de lado) de
modo que su nueva línea de acción permaneciera paralela a la línea original de acción para
contrarrestar (es decir, eliminar el efecto) el par. En general, una fuerza que actúa en un
punto dado de un cuerpo rígido puede moverse de lado hasta cualquier otro punto, siempre
que se introduzca un par de compensación. A continuación se demuestra esta
transformación.
Fig. 4.5.1
Considere un cuerpo rígido que se sujeta a una fuerza F en el punto P (Fig. 4.5.1a).
Introduzca las fuerzas autoequilibrantes F y -F en cualquier otro punto Q (Fig. 4.5.1b). La
fuerza F, en el punto P, y la fuerza -F, en el punto Q, constituyen un par con momento Fa,
en donde a es la distancia entre la línea de acción de esas fuerzas. En consecuencia, los

2
sistemas de fuerzas ilustrados por las figuras 4.5.1a, 4.5.1b y 4.5.1c son dinámicamente
equivalentes. La fuerza original F se ha desplazado hasta el punto Q y se ha introducido un
par compensador con momento M = Fa. Este momento es idéntico al momento de la fuerza
original F alrededor del punto Q. Esta conclusión conduce de inmediato al teorema
siguiente.
Teorema 4.5
Varias fuerzas coplanares F1, F2,…..que actúan sobre un cuerpo rígido son dinámicamente
equivalentes a su fuerza resultante F, que actúa en un punto arbitrario Q en el plano de las
fuerzas, y un par sencillo, donde la fuerza resultante F es la suma vectorial de las fuerzas
F1, F2,…..y el momento M del par asociado es la suma de os momentos de las fuerzas F1,
F2,…..alrededor del punto Q.
Para probar este teorema fundamental, se transfieren las fuerzas F1, F2, . . . hasta el punto Q
y se introducen pares de compensación con los momentos M1= ±F1a1, M2= ±F2a2,…, como
se explicó con anterioridad. Ya que las fuerzas en el punto Q son concurrentes, pueden
sumarse en forma vectorial, es decir, F = F1 + F2 +…. En otras palabras, la fuerza
resultante F se obtiene por la construcción del polígono o, de modo alternativo, por la
adición algebraica de las proyecciones de cada una de las fuerzas sobre ejes de coordenadas
cartesianas.
Asimismo, los momentos M1, M2,…. pueden combinarse en un solo momento por adición,
con la consideración apropiada del sentido (+ o -) de cada uno de los momentos (ver ítem
4.4). Es decir, el momento M del par que se asocia con la fuerza F en el punto Q es M = M1
+ M2 +….. En consecuencia, M es la suma de los momentos de las fuerzas originales
alrededor del punto Q. El teorema del eje resultante (teorema 4.2) es un caso especial del
teorema 4.5, el cual se obtiene si el punto Q se ubica de modo que M = O.
Se ha visto que a la resultante F de varias fuerzas coplanares F1, F2,… se le puede asignar
un punto arbitrario de acción Q en el plano de las fuerzas, pero que el momento M del par
asociado en general depende de la ubicación del punto Q. Ahora bien, se verá que si F = 0,
el par asociado no depende de la ubicación del punto Q.

3
Fig. 4.5.2
Supóngase que las coordenadas del punto Q son (x, y) y que las fuerzas F1, F2,…actúan en
los puntos respectivos (x1, y1), (x2, y2),…. con relación a los ejes xy (ver figura 4.5.2). Por
el teorema de Varignon, el momento M de todas las fuerzas alrededor del punto Q es
......22221111 xyxy FyyFxxFyyFxxM
o bien
............. 222211112121 xyxyyyxx FyFxFyFxFFxFFyM
Dado que, por hipótesis, F1 + F2 +… = 0, esto se reduce a
.....22221111 xyxy FyFxFyFxM
Sin embargo, por el teorema de Varignon, el segundo miembro de esta ecuación representa
el momento de todas las fuerzas alrededor del origen O, sin importar el punto Q. Este
resultado proporciona el teorema siguiente (el cual se generalizará para los sistemas de
fuerzas tridimensional en la unidad 5).
Teorema 4.6
Si la suma vectorial de un conjunto de fuerzas coplanares es cero, las fuerzas ejercen el
mismo momento alrededor de todos los puntos en su plano.
4.6 Equilibrio de un Cuerpo Rígido Sujeto a Fuerzas Coplanares
Concepto Clave

4
Un cuerpo rígido sujeto a fuerzas coplanares está en equilibrio si la fuerza neta sobre él es
cero y el momento neto alrededor de cualquier punto en el plano de las fuerzas es cero.
Una sola fuerza que actúa pasando por el centro de masa de un cuerpo tiende a hacer que
éste se traslade. En esos casos se pueden aplicar las condiciones de equilibrio para una
partícula, que se presentaron en la unidad 3, al cuerpo. Es decir el cuerpo está en equilibrio
si, y sólo si, la resultante de fuerzas es cero. Sin embargo, cuando un cuerpo rígido se sujeta
a una fuerza cuya línea de acción no pasa por el centro de masa, el cuerpo tiende a
trasladarse y girar. De modo semejante, cuando se aplica un par, un cuerpo rígido tiende a
girar alrededor de su centro de masa.
La resistencia a la flexión de una viga de madera se determina usando la carga P requerida para causar que el
material falle en un diagrama de cuerpo libre, con el fin de hallar el momento flexionante en la viga y, por
tanto, el esfuerzo a la flexión en la falla.
Por lo tanto, un cuerpo rígido debe de estar en equilibrio si, y sólo si, la fuerza y el
momento resultantes que actúan sobre él son cero. Esta conjetura puede verificarse usando
principios de la cantidad de movimiento.
Recuerde que el par resultante de un sistema coplanar de fuerzas es independiente del punto
de referencia Q si la fuerza resultante es cero (ítem 4.5). En el teorema siguiente se resume
la teoría completa del equilibrio de cuerpos rígidos sujetos a sistemas coplanares de fuerzas.

5
Teorema 4.7
Un cuerpo rígido que está sujeto a fuerzas coplanares está en equilibrio si, y sólo si, la
suma vectorial de todas las fuerzas externas es cero y el momento de todas esas fuerzas
externas, alrededor de cualquier punto en su plano, es cero.
Condiciones de equilibrio en relación con las coordenadas rectangulares
Concepto Clave
Las condiciones de equilibrio para un cuerpo rígido sujeto a fuerzas coplanares se puede
escribir en términos de dos ecuaciones independientes de fuerzas y una ecuación de
momentos, cada una de las cuales comprende las proyecciones rectangulares de esas
fuerzas coplanares.
El principio de equilibrio del teorema 4.7 se expresa por las ecuaciones
0F
0M (4.4)
donde F es la suma vectorial de todas las fuerzas externas que actúan sobre el cuerpo
rígido y ֶ M es el momento total de esas fuerzas, alrededor de cualquier punto en su plano.
Para aplicar este principio, se puede relacionar el cuerpo a ejes de coordenadas xy
rectangulares. Entonces, las ecuaciones (4.4) son equivalentes a las ecuaciones
0xF
0yF (4.5)
0M
donde Fx y Fy son las proyecciones x y y de la suma vectorial F. A su vez, Fx y Fy
quedan determinadas por las ecuaciones
.....321 xxxx FFFF

6
.....321 yyyy FFFF
donde F1x, F1y, F2x, F2y,….. son las proyecciones x y y de las diversas fuerzas externas, F1,
F2,…..que actúan sobre el cuerpo.
Ya que Fx y Fy se desvanecen para un cuerpo en equilibrio, las fuerzas externas
producen el mismo momento alrededor de todos los puntos en su plano (ítem 4.5). Por
consiguiente, al aplicar la condición M=0, pueden tomarse los momentos alrededor de
cualquier punto conveniente.
La expresión para el momento de las fuerzas externas alrededor del origen queda dado por
la ecuación (4.3). Las ecuaciones (4.5) pueden escribirse como sigue:
0ixx FF (4.6a)
0iyy FF (4.6b)
0ixiiyi FyFxM (4.6c)
donde i = 1, 2,…., N y N es el número de fuerzas que actúan. Asimismo, (xi, yi) es el punto
de aplicación de la i-ésima fuerza con las proyecciones (Fix, Fiy). Las ecuaciones (4.6)
indican que la suma de las N proyecciones de fuerzas y la suma de los momentos de las N
fuerzas que actúan sobre el cuerpo son iguales a cero.
Cuando se usa la ecuación M = (xiFiy – yiFix) = 0, debe determinarse el signo correcto
para cada una de las proyecciones de las fuerzas (Fix, Fiy) y para las coordenadas (xi, yi) de
los puntos de aplicación de esas fuerzas. El uso de tablas para organizar los cálculos, puede
resultar útil. Sin embargo, sin importar el procedimiento, se debe tener cuidado en evitar los
errores relacionados con los signos.
En la ecuación de momentos (4.6c) se usa la convención de signos establecida con
anterioridad: Un momento positivo tiende a causar rotación en sentido contrario al
movimiento de las agujas del reloj alrededor del punto O (el eje z) para las fuerzas y pares
que se encuentran en el plano xy. Pero no tiene que usarse esta convención particular
respecto a los signos. Puede ser que se desee tomar el momento positivo como aquel que
causa rotación en el sentido del movimiento de las agujas del reloj. Para que el equilibrio

7
exista, los momentos deben dar como suma cero, sin importar la convención de los signos.
Es decir, la elección de la convención de los signos (sentido positivo para la rotación) es
arbitraria. No obstante, una vez que se elige una convención respecto a los signos para los
momentos en un problema en particular, debe de usarse de manera uniforme en todo el
problema.
Información adicional A medida que el alumno desarrolle sus habilidades para resolver
problemas, podría preferir prescindir de la ecuación de equilibrio de momentos (4.6c) en
favor de un procedimiento que se base directamente en la definición de momento de una
fuerza. Por ejemplo, como una alternativa al uso de esa ecuación para el equilibrio de
momentos en problemas coplanares, considere el procedimiento que se da en seguida. En
primer lugar, elija un punto en el plano alrededor del cual se van a calcular los momentos.
Luego, para cada una de las fuerzas (o componentes de fuerzas), determine su brazo de
momento r. Encuentre la magnitud de su momento usando la ecuación (4.2). Establezca una
convención de signos de los momentos. Examine entonces cada una de las fuerzas (o
componentes de las fuerzas) para determinar si causa un momento positivo o negativo.
Asigne el signo correcto al momento de cada una de las fuerzas y sume en forma.
algebraica los momentos para obtener el equilibrio; es decir, forme la suma Mi=0. En este
procedimiento directo se emplea la definición de momento (fuerza multiplicada por una
distancia perpendicular; ver ecuación 4.2) y una comprensión del sentido en el cual la
fuerza hace girar el cuerpo.
Otros casos especiales
Si cualesquiera número de fuerzas coplanares que actúan sobre un cuerpo rígido tienen
líneas concurrentes de acción, como en la figura 4.5.3, la ecuación M=0 se satisface de
manera automática si los momentos se toman alrededor del punto de concurrencia P.
Asimismo, si la suma de las fuerzas concurrentes es cero, no se tiene momento alrededor de
cualquier punto. En este caso, la ecuación de momentos es superflua. Por tanto, una vez
más, pueden aplicarse los principios de equilibrio para una partícula.

8
Se tiene otra simplificación si un cuerpo rígido está sujeto a fuerzas coplanares paralelas. Si
todas las fuerzas son paralelas al eje y, entonces la condición Fix=0 se satisface de manera
automática. Por lo que las ecuaciones (4.6) se reducen a Fiy=0 y M=0.
Fig. 4.5.3
4.7 Formulaciones Alternativas del Equilibrio para Fuerzas Coplanares
Concepto Clave
Las condiciones de equilibrio para un cuerpo rígido sujeto a fuerzas coplanares se pueden
escribir en términos de una ecuación de fuerzas y dos ecuaciones independientes de
momentos.
La proposición fundamental de los criterios de equilibrio para un cuerpo rígido es que la
suma vectorial de las fuerzas externas sea cero y que el momento de esas fuerzas alrededor
de cualquier punto en su plano sea cero (teorema 4.7, ecuación 4.4 o 4.5). En ocasiones
resulta más conveniente expresar las ecuaciones de equilibrio en alguna forma diferente a la
de dos ecuaciones de fuerzas y una de momentos. En esta sección se consideran dos
proposiciones alternativas del principio del equilibrio que resultan útiles para ciertos
problemas. La primera de estas alternativas se expresa por el teorema siguiente.
Teorema 4.8

9
Un cuerpo rígido inmóvil que está sujeto a fuerzas coplanares se encuentran en equilibrio
si, y sólo si, se satisfacen las condiciones siguientes:
1. La suma algebraica de las proyecciones de las fuerzas sobre un eje L en el plano
de las fuerzas es cero.
2. Las fuerzas no producen momentos alrededor de dos puntos separados A y B que
se encuentran en el plano de las fuerzas sobre una recta que no es perpendicular al
eje L.
En forma de ecuaciones, las condiciones del teorema 4.8 pueden escribirse como
0LF
0AM (4.7)
0BM
donde L denota el eje sobre el cual se proyectan todas las fuerzas, y A y B identifican dos
puntos separados que se encuentran en el plano de las fuerzas sobre una recta AB que no es
perpendicular a L (fig. 4.5.4)
Fig. 4.5.4 Fig. 4.5.5
Para probar el teorema 4.8, se establece el argumento siguiente. En el ítem 4.5 se probó
que un sistema de fuerzas coplanares que actúan sobre un cuerpo rígido se puede reducir a
un sistema dinámicamente equivalente de fuerza y par. La fuerza resultante F se puede
aplicar en cualquier punto en el plano y el momento del par es igual al momento de todas
las fuerzas externas alrededor de ese punto. Del mismo modo, es posible mover la fuerza F
hasta un punto A en el plano, alrededor del cual el momento de todas las fuerzas externas es
cero. Suponga ahora que un cuerpo rígido en particular (Fig. 4.5.4) se sujeta a un sistema de

10
fuerzas coplanares. Como se hizo notar con anterioridad, el sistema de fuerzas se puede
reducir a una sola fuerza resultante que actúa en el punto A de la recta AB, tal que el par
resultante se desvanece; es decir, existe la condición descrita en el teorema 4.8 para el
punto A. Puesto que, por la primera condición del teorema 4.8, la suma de las proyecciones
de las fuerzas coplanares sobre la recta L es cero, el vector de fuerza F es perpendicular a
esta recta, o bien, F= 0. Ahora bien, ya que la recta AB no es perpendicular a la recta L, el
punto B no está sobre la línea de acción de la fuerza F. Por lo tanto, se satisfacen las
condiciones F=0 y M=0. Según las condiciones definidas por las ecuaciones (4.4), el
equilibrio debe existir. De este modo, queda probado el teorema 4.8 y las ecuaciones (4.7)
expresan las condiciones de equilibrio en una forma alternativa.
Concepto Clave
Las condiciones de equilibrio para un cuerpo rígido sujeto a fuerzas coplanares se pueden
escribir en términos de tres ecuaciones independientes de momentos.
Otra formulación del principio del equilibrio es el teorema siguiente.
Teorema 4.9
Un cuerpo inmóvil que está sujeto a fuerzas coplanares se encuentran en equilibrio si, y
sólo si, los momentos de las fuerzas alrededor de cualesquiera tres puntos no colineales, en
el plano de las fuerzas, son cero.
Expresadas en forma de ecuaciones, las condiciones del teorema 4.9 quedan así:
0OM
0PM
0QM
donde O, P y Q son puntos no colineales en el plano alrededor de los cuales se toman los
momentos (ver figura 4.5.5).
Para demostrar que estas condiciones son equivalentes a las de las ecuaciones (4.4),
suponga que los momentos de las fuerzas alrededor de los tres puntos no colineales O, P y

11
Q, que se encuentran en el plano de las fuerzas, son cero. Puesto que el momento alrededor
del punto O se anula, el sistema de fuerzas equivalente a una sola fuerza actúa en el punto
O (Fig. 4.5.5). Ya que el momento alrededor del punto P se anula, este punto se encuentra
sobre la línea de acción de la fuerza F, o bien, F=0. La misma observación se aplica al
punto Q. Puesto que los puntos O, P y Q no son colineales, los dos puntos P y Q no pueden
estar en la línea de acción de la fuerza F. Por lo tanto, la única posibilidad es F=0. Por
consiguiente, por la ecuación (4.4), el equilibrio existe. Por lo tanto, el teorema 4.9 queda
probado y las ecuaciones (4.8) expresan las condiciones de equilibrio en otra forma. Por
tanto, los teoremas (4.7), (4.8) y (4.9), y las ecuaciones correspondientes (4.5), (4.7) y (4.8),
constituyen tres representaciones equivalentes del equilibrio de un cuerpo rígido sujeto a
fuerzas coplanares.
Cada una de las formulaciones anteriores del principio del equilibrio conduce a tres
ecuaciones algebraicas. No es posible obtener más de tres ecuaciones independientes de
equilibrio para un solo cuerpo rígido que esté sujeto a fuerzas coplanares. Si se obtienen
más de tres ecuaciones, una o más de ellas son redundantes.
4.8 Teoría General de las Fuerzas Paralelas
En los ítemes anteriores de esta unidad se ha tratado el equilibrio de un cuerpo rígido bajo
la acción de un sistema de fuerzas coplanares. En este ítem se considera el equilibrio de un
cuerpo rígido bajo la acción de un sistema de fuerzas paralelas no coplanares. Aun cuando
este caso no es bidimensional, una vez más se pueden expresar las condiciones de
equilibrio del cuerpo en términos de tres ecuaciones de equilibrio. En la unidad 5 se dará un
tratamiento general completo de la estática de un cuerpo rígido en el espacio, lo que
conduce a seis ecuaciones independientes de equilibrio.
Desplazamiento lateral de una fuerza
Suponga que un cuerpo rígido está sujeto a una fuerza F que es paralela al eje z. Suponga
que el sentido positivo de F concuerda con el sentido positivo del eje z. Por el teorema de

12
transmisibilidad, puede considerarse que la fuerza F actúa en un punto P: (x, y) en el plano
xy (ver figura 4.5.6a). Sea Q un punto del eje x tal que la recta PQ es perpendicular al eje x.
En el punto Q, se introducen las fuerzas autoequilibrantes F y -F (Fig. 4.5.6a). Las tres
fuerzas en los puntos P y Q son equivalentes a una sola fuerza F en el punto Q y un par con
momento Mx= yF, el cual consta de la fuerza F en el punto P y la fuerza -F en el punto Q.
El plano del par se encuentra paralelo al plano yz. El momento del par es igual al momento
de la fuerza F en el punto P, alrededor del eje x.
Fig. 4.5.6
Al introducir las fuerzas autoequilibrantes F y -F en el origen O, se puede transferir F del
punto Q al O (Fig. 4.5.6b). El par de compensación para esta transformación se encuentra
en el plano xz. Su momento My = -xF es igual al momento de la fuerza original F alrededor
del eje y. En consecuencia, la fuerza dada F, en el punto P, es dinámicamente equivalente a
una fuerza F en el origen O y dos pares cuyos planos se encuentran paralelos a los planos yz
y xz. Los momentos Mx y My de los dos pares son, respectivamente, los momentos de la
fuerza original F alrededor de los ejes x y y. Esta conclusión es válida sin importar el
cuadrante en el cual se encuentre el punto P. Asimismo, sigue siendo válida si se invierte el
sentido de la fuerza F.
Composición de fuerzas paralelas
Suponga que un cuerpo rígido está sujeto a varias fuerzas, F1, F2,… que son paralelas al eje
z. Todas las fuerzas pueden transferirse hasta el origen, siempre que se introduzcan pares de
compensación. Así, las fuerzas pueden combinarse en una sola resultante:

13
....21 FFF
Puesto que todas las fuerzas tienen la misma dirección (aunque no necesariamente el
mismo sentido), su suma vectorial se reduce a una suma algebraica.
Además de la fuerza resultante F en el origen, el proceso de composición introduce dos
pares, Mx y My que se encuentran en los planos yz y xz. Los momentos de estos pares se
denotan por Mx y My, respectivamente. Éstos son las sumas de los momentos respectivos
de todas las fuerzas originales F1, F2,… alrededor de los ejes x y y:
iix FyM y iiy FxM
Eje resultante de un sistema de fuerzas paralelas
Como se mostró con anterioridad, varias fuerzas F1, F2,…..que son paralelas al eje z, se
pueden resolver en un sistema dinámicamente equivalente de una sola fuerza F en el origen
y dos pares con momentos Mx y My. Suponga que se ha realizado una operación de ese
tipo. Al invertir la transformación ilustrada en la figura 4.5.6, se puede desplazar la fuerza
F desde el origen hasta un punto (a, b) en el plano xy. Si F no es cero, se puede elegir el
punto (a, b) de tal forma que los momentos Mx y My se cancelen. Entonces, la fuerza F se
llama fuerza resultante R. La resultante R ejerce los mismos momentos alrededor de los
ejes x y y como todas las fuerzas originales F1, F2,….La línea de acción de R se llama eje
resultante del sistema de fuerzas.
Las conclusiones precedentes se resumen mediante el teorema siguiente:
Teorema 4.10
Si varias fuerzas F1, F2,…. que actúan sobre un cuerpo rígido, son paralelas al eje z y si su
suma vectorial R no es cero, las fuerzas dadas son dinámicamente equivalentes a la fueza
sencilla R, siempre que esta fuerza se ubique de modo que produzca los mismos momentos
alrededor de los ejes x y y como los de todas las fuerzas originales F1, F2,…..Entonces, la
fuerza R se llama fuerza resultante y se dice que se encuentra sobre el eje resultante del
sistema de fuerzas.

14
Equilibrio de un cuerpo rígido bajo la acción de fuerzas paralelas
Concepto Clave
Un cuerpo rígido que está sujeto a fuerzas paralelas se encuentra en equilibrio si, y sólo si,
la suma algebraica de las fuerzas es cero y las sumas de los momentos de las fuerzas,
alrededor de dos ejes cualesquiera que se intersequen y sean perpendiculares a las fuerzas,
son cero.
Considere un cuerpo rígido sujeto a fuerzas que son paralelas al eje z de un sistema de
coordenadas cartesianas rectangulares. Observe que el cuerpo no se restringe al plano xy;
en este caso, la forma del cuerpo no tiene importancia. Puesto que cada fuerza Fi que actúa
sobre el cuerpo es paralela al eje z, se puede expresar de manera única en términos de su
sentido (+ o -) y magnitud Fi. Entonces, las ecuaciones de equilibrio del cuerpo son
0iF
0iix FyM
0iiy FxM
donde (xi, yi) son las coordenadas en que la línea de acción de F se interseca con el plano
xy.
Este principio es un caso especial de la ley general del equilibrio para los cuerpos rígidos.
1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 9 (27/04/07)
Unidad V Fuerzas Tridimensionales, Pares y Equilibrio del Cuerpo Rígido
Los principios que rigen el equilibrio de cuerpos rígidos en sistemas no coplanares
(tridimensionales), es similar al caso estudiado en la unidad 4. Los conceptos de fuerza,
pares, composición de fuerzas y eje resultante son similares, sin embargo, el aspecto
geométrico de los problemas tridimensionales es más complejo. Esta complejidad se
supera hasta cierto punto con el uso del álgebra vectorial, facilitándose de esta manera el
análisis de equilibrio tridimensional de un cuerpo rígido.
5.1 Álgebra Vectorial
Es necesario hacer un repaso al álgebra vectorial para calcular el producto escalar y el
producto vectorial de dos vectores. También se emplearán algunas propiedades adicionales
del álgebra vectorial, y se usarán estos conceptos para representar fuerzas y pares en el
espacio tridimensional y para determinar el eje resultante de un sistema de fuerzas.
Producto escalar de dos vectores
Concepto clave
El producto escalar de dos vectores A y B se expresa por la ecuación escalar
AB = zzyyxx BABABABA cos
El producto escalar es una multiplicación de dos vectores A y B que da lugar a, como el
nombre lo implica, una cantidad escalar (un número). En notación vectorial, el producto
escalar se escribe AB y se define como la cantidad AB cos. Por tanto, se tiene
AB = ABcos (5.1)

2
donde A y B son las magnitudes de los vectores A y B, y es el ángulo entre estos últimos
(Fig. 5.la). Puesto que la notación AB se lee “A punto B”, el producto escalar también se
llama producto punto.
Figura 5.1 Producto escalar (punto) de dos vectores.
A partir de la ecuación (5.1), se ve que el producto escalar es cero si A o B son cero, o bien,
si el vector A es perpendicular al vector B (entonces cos = cos90° = 0). De modo que, para
A y B diferentes de cero, el producto escalar puede ser cero, un número positivo o un
número negativo, dependiendo del valor de .
Concepto clave
El producto escalar de dos vectores es conmutativo; es decir, A B = B A
Al manipular la ecuación (5.1), se ve que el producto escalar es conmutativo (ver figuras
5.1b y 5.1c). Es decir,
AB = AB cos = BA cos = BA (5.2)
El producto escalar también se puede expresar en términos de las proyecciones (Ax, Ay, Az)
y (Bx, By, Bz) de los vectores A y B sobre los ejes de coordenadas xyz. Puede escribirse en
la forma.
AB = AxBx + AyBy + AzBz (5.3)
Se puede demostrar que la ecuación (5.3) es la equivalente a la (5.2), como sigue: Se
trasladan los vectores A y B de modo que sus colas se coloquen en el origen O del sistema
de coordenadas xyz. Entonces, se unen las puntas de los vectores por el segmento rectilíneo

3
C. El triángulo resultante tiene los vértices en los puntos (0, 0, 0), (Ax, Ay, Az) y (Bx, By,
Bz) (ver figura 5.2). Por la ley de los cosenos de la trigonometría plana,
cos2222 ABBAC
se encuentran 222
2
1cos CBAAB (a)
Asimismo, por el teorema de Pitágoras,
2222
zyx AAAA
2222
zyx BBBB (b)
2222
zyx CCCC
2222
zzyyxx ABABABC
Ahora, si se sustituye la ecuación (b) en la (a) y se simplifica el resultado, se obtiene
zzyyxx BABABABA cos (5.4)
Fig. 5.2
Con la ecuación (5.1), esto verifica la ecuación (5.3).
Casos especiales del producto escalar: Varios casos especiales del producto escalar
merecen atención.
Caso 1. Si A y B son el mismo vector, la ecuación (5.3) da
AA =Ax2+Ay
2+Az
2 = A
2

4
En consecuencia, el teorema de Pitágoras, es un caso especial de la relación del producto
escalar. Con frecuencia, el producto escalar AA se denota por A2. Por consiguiente, A
2 =
A2, el producto escala de un vector por sí mismo es el cuadrado de su magnitud.
Caso2. Surge un caso importante si B es un vector unitario; es decir, si B = 1. Entonces,
Acos es la proyección del vector A sobre una recta en la dirección del vector B, y la
ecuación (5.4) conduce a la siguiente conclusión:
La proyección del vector A sobre una recta con la dirección y sentido de un vector unitario
B es AB = A cos (ver figura 5.lc, con B = 1).
Caso 3 Si tanto el vector A como el B son unitarios, sus proyecciones sobre los ejes xyz
quedan dadas por sus cosenos directores. Así, la ecuación (5.4) da
coscoscoscoscoscoscos BABABA (5.5)
donde A, A, A y B, B, B, son los ángulos de dirección de los vectores A y B. En la
ecuación (5.5) se expresa el ángulo entre dos rectas dirigidas cualesquiera en términos de
los cosenos directores de esas rectas.
La dirección de una recta queda determinada de manera única por sus ángulos de dirección
, y con relación a los ejes xyz. (Recuerde que cos2 + cos
2 + cos
2 = 1). Si la
dirección de una recta se especifica por tres números a, b y c, éstos se conocen como
números de dirección, o razones de dirección. En términos de los números de dirección, los
cosenos directores se dan por las fórmulas:
222cos
cba
a
222cos
cba
b
222cos
cba
c

5
Caso 4 Si los vectores A y B son perpendiculares entre sí, = 90°. Entonces, la ecuación
(5.4) da AxBx + AyBy + AzBz = 0, es decir AB = 0. En consecuencia, se tiene el teorema
siguiente:
Teorema 5.1
Si el ángulo entre dos vectores es de 90°, el producto escalar de esos vectores es cero.
Inversamente, si el producto escalar de dos vectores es cero y ninguno de éstos tiene
magnitud cero, el ángulo entre esos vectores es de 90°.
Productos escalares de vectores unitarios Dado que i, j y k son vectores unitarios,
tienen magnitud 1. Por consiguiente, por el caso 1, se tiene:
i i = j j = k k = 1 (c)
También, como los vectores i, j y k son mutuamente perpendiculares (ver caso 4),
i j = j k = k i = 0 (d)
Las ecuaciones (d) también se deducen inmediatamente a partir del teorema 5.1.
Como se hizo notar en unidades anteriores, se puede representar cualquier vector en
términos de los vectores unitarios i, j y k y las proyecciones (x, y, z) del propio vector. Así,
como un ejemplo del uso de las ecuaciones (c) y (d), se puede escribir
AB = (Axi + Ayj + Azk) (Bxi + Byj + Bzk) = AxBx + AyBy + AzBz
Otras propiedades del producto escalar El producto escalar de vectores tiene otras
propiedades en común con el producto de números. Por ejemplo, el producto escalar de
vectores obedece la ley distributiva:
A (B + C) = AB + AC (e)
Para verificar esta identidad, se usa la definición de producto escalar. Notando que las
proyecciones (x, y, z) del vector B + C son Bx + Cx, By + Cy, Bz + Cz respectivamente, por
la ecuación (5.3) se obtiene

6
A (B + C) = Ax(Bx + Cx) + Ay(By + Cy) + Az(Bz + Cz)
De donde,
A (B + C) = (AxBx + AyBy + AzBz) + (AxCx +AyCy + AzCz)
Dado que la ecuación (5.3) permite observar que las sumas de la derecha son iguales a A B
y AC, se verifica la ecuación (e).
La ecuación (e) puede generalizarse como sigue:
(A + B) (C +D) = (A + B) C + (A + B) D
Por lo que,
(A + B) (C +D) = AC + BC + AD + BD (f)
Esta fórmula puede generalizarse todavía más para proporcionar desarrollos de expresiones
como (A + B + C + ...) (P + Q + R +… ). Las fórmulas son exactamente como las del
álgebra elemental. En particular, la ecuación (f) da
(A + B) (A – B) = A2 – B
2 = A
2 – B
2
Producto vectorial de dos vectores
La ecuación (5.4) proporciona una expresión para ABcos, en la cual A y B son las
magnitudes los dos vectores A y B que incluyen el ángulo . A continuación se considera
una importante transformación de esta ecuación; a saber, el producto vectorial C = A X B
de los dos vectores A y B. El producto vectorial también se menciona como el producto
cruz, porque la expresión A X B suele leerse “A cruz B”.
El producto vectorial es útil en la representación del momento de una fuerza (ver ítems 5.2
y 5.3) y de pares (ver ítems 5.4 y 5.5). Para interpretar el significado del producto vectorial,
se parte de la ecuación (5.4) y se obtienen expresiones para las proyecciones (x, y, z) de C,
en términos de las proyecciones (x, y, z) de A y B. Así se demuestra que C es perpendicular
al plano determinado por A y B. Por último, se demuestra que los vectores A, B y C forman
una triada de vectores ordenados de la misma manera que los ejes xyz de coordenadas

7
rectangulares. El resultado final de este proceso se expresa por el teorema siguiente, en el
cual se usa la regla de la mano derecha.
Teorema 5.2
Considere dos vectores A y B separados por un ángulo . El producto vectorial A X B es
un vector C, cuya magnitud es ABsen, cuya dirección es perpendicular a los vectores A y
B, y cuyo sentido es tal que un tornillo derecho, extendido a lo largo del vector C = A X B,
avanza en el sentido positivo de este vector C cuando se hace girar del vector A hacia el
vector B.
Para empezar, observe que la ecuación (5.4) se puede escribir como
AB
BABABA zzyyxx cos (a)
Por consiguiente, la identidad trigonométrica sen = 2cos1 y la ecuación (a) dan el
resultado
222 )( zzyyxx BABABABAABsen
Por lo tanto, por el teorema de Pitágoras,
2222222
zzyyxxzyxzyx BABABABBBAAAABsen
Al reagrupar los términos que se encuentran debajo del radical se obtiene
222
xyyxzxxzyzzy BABABABABABAABsen (b)
Suponga que las cantidades Cx, Cy, Cz se definen como sigue:
yzzyx BABAC
zxxzy BABAC (5.6)
xyyxz BABAC

8
Por el teorema de Pitágoras, se pueden considerar los términos Cx, Cy y Cz, como las
proyecciones (x, y, z) de un vector C, llamado producto vectorial de A y B. Dado que C =
222
zyx CCC , donde C es la magnitud de C, las ecuaciones (b) y (5.6) dan
ABsenC (5.7)
La ecuación (5.7) determina la magnitud del vector C.
También se puede demostrar que el vector C es perpendicular tanto al vector A como al B.
Esta relación se prueba con facilidad por medio de la ecuación (5.4). Si los vectores A y C
son perpendiculares, AC = 0 (caso 4, ítem 5.1), o bien,
AxCx + AyCy + AzCz = 0 (c)
Del mismo modo, si los vectores B y C son perpendiculares, B C = 0, o bien,
BxCx + ByCy + BzCz = 0 (d)
La sustitución de las expresiones para Cx, Cy y Cz, de las ecuaciones (5.6) en las ecuaciones
(c) y (d) satisface de forma idéntica estas dos últimas. De este modo, se verifica que el
vector C es perpendicular a los vectores A y B.
Ahora se ha determinado la magnitud y dirección del vector C. Por último, se puede
demostrar que el sentido del vector C es tal que los tres vectores, A, B y C, en este orden,
forman una triada derecha; es decir, A, B y C están orientados de la misma manera que los
xyz de coordenadas rectangulares.
Para probar esta relación, considere en primer lugar el caso en el cual los vectores A y B se
encuentran en el plano xy, con sus colas en el origen O. Suponga que las direcciones de
estos dos vectores se especifican por los ángulos y , medidos en sentido contrario al
movimiento de las agujas del reloj a partir del eje x positivo (ver figura 5.3). Entonces,
Ax = A cos Ay = A sen Az = 0
Bx = B cos By = B sen Bz = 0
Por tanto, las ecuaciones (5.6) dan
Cx = Cy = 0

9
Cz = AB sen ( - ) = AB sen (e)
Fig. 5.3
El signo de Cx, determinado por la ecuación (e), es tal que los tres vectores A, B y C
forman un sistema derecho. Este resultado se cumple para el caso en el cual los vectores A
y B son paralelos al plano xy. Si se desplazan A y B de cualquier manera, sin cambiar el
ángulo entre ellos, la magnitud de C permanece constante, según la ecuación (5.7). Dado
que el vector C permanece perpendicular a los vectores A y B, mantiene un sentido
constante con respecto a estos vectores. Por consiguiente, el resultado es válido en todos los
casos.
Para un sistema derecho de coordenadas, los resultados antes obtenidos se pueden resumir
por medio del teorema 5.2. Si el sistema de coordenadas xyz es izquierdo, el sentido del
vector C se determina por la regla de la mano izquierda.
Si los vectores A y B actúan en el mismo punto, forman dos de los lados de un
paralelogramo (ver figura 5.4). El vector C = A X B es perpendicular al plano del
paralelogramo. Por la ecuación (5.7), su magnitud es igual al área de ese paralelogramo.
Fig. 5.4 Producto vectorial C = A X B
En la notación de determinantes, las ecuaciones (5.6) se expresan como sigue

10
zy
zy
x BB
AAC
xz
xz
yBB
AAC
yx
yx
z BB
AAC (5.8)
Por consiguiente, si i, j y k son vectores unitarios a lo largo de los ejes xyz, el vector c se
puede expresar como sigue:
C = A X B =
zyx
zyx
BBB
AAA
kji
(5.9)
Concepto clave
El producto vectorial no es conmutativo. Es decir, A X B B X A; sino más bien A X B =
-B X A.
El producto vectorial no es conmutativo. De hecho, por la ecuación (5.9) o por la regla de
la mano izquierda, el vector C invierte su sentido cuando se invierte el orden de los
vectores A y B; es decir, A X B = C, en tanto B X A = -C (ver figuras 5.4 y 5.5)
Fig. 5.5 El producto vectorial B X A tiene sentido opuesto al de A X B
El producto vectorial de dos vectores paralelos es cero, porque si los vectores son paralelos,
= 0 y sen = 0 (ver ecuación 5.7). Inversamente, si el producto vectorial de dos vectores
es cero y ninguno de estos dos tiene magnitud cero, esos vectores son paralelos.
Ya que cualquier vector a es paralelo a sí mismo, a X a = 0. De igual forma, para los
vectores unitarios i, j y k, a lo largo de los ejes xyz de coordenadas rectangulares, se tienen
las relaciones

11
i X i = j X j = k X k = 0
También, por la ecuación (5.9), i X j =
010
001
kji
= +k y j X i =
001
010
kji
= -k
Se obtienen relaciones semejantes para los otros productos de los vectores unitarios
coordenados. En resumen,
i X j = k j X k = i k X i = j
j X i = -k k X j = -i i X k = -j (5.10)
i X i = 0 j X j = 0 k X k = 0
Estas relaciones también se deducen de inmediato a partir del teorema 5.2.
Como un ejemplo del uso de las ecuaciones (5.10), considere la identidad vectorial
A X B = (Axi + Ayj + Azk) X (Bxi + Byj + Bzk)
El desarrollo de esta identidad ectorial da, con las ecuaciones (5.10),
A X B = (AyBz – AzBy)i + (AzBx – AxBz)j + (AxBy – AyBx)k
Esta expresión es idéntica al determinante de la ecuación (5.9)

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 10 (04/05/07)
Unidad V (continuación)
Ejemplo 1 Productos vectoriales de sumas de vectores
Planteamiento del problema A pesar del hecho de que A X B = -B X A, el producto
vectorial tiene muchas propiedades semejantes a los productos escalares. Por ejemplo, el
producto vectorial es distributivo:
R X (A + B) = R X A + R X B (a)
y (A + B) X R = A X R + B X R (b)
Una generalización directa de la ecuación (a) es
(A + B) X (C + D) = (A + B) X C + (A + B) X D
= A X C + B X C + A X D + B X D
Se puede escribir una generalización semejante de la ecuación (b). Pruebe la ecuación (a).
Solución Por la ecuación (5.9) (ver apunte anterior) se puede escribir
R X (A + B) =
)()(( zzyyxx
zyx
BABABA
RRR
kji
(c)
Por un teorema de los determinantes, se puede escribir la ecuación (c) en la forma
R X (A + B) =
zyx
zyx
zyx
zyx
BBB
RRR
kji
AAA
RRR
kji
Entonces, por las ecuaciones (5.9) y (d), se tiene
R X (A + B) = R X A + R X B

2
Por tanto, queda probada la ecuación (a). La ecuación (b) se puede verificar de manera
semejante.
Observe que en estos desarrollos se mantiene el orden original de los términos, ya que, por
ejemplo, A X C C X A
5.2 Momento de una Fuerza alrededor de un Punto
Concepto Clave
El momento de una fuerza alrededor de un punto es un vector.
Sea a la distancia perpendicular de un punto de referencia O a la línea de acción de la
fuerza F (figura 5.6). El momento de la fuerza F alrededor del punto O se define como el
vector M con magnitud aF. El vector M se define como perpendicular al plano Q
determinado por la fuerza F y el punto O. El sentido del vector M se define por la regla de
la mano derecha.
Fig. 5.6
Denote por r el vector de posición del punto de referencia O al punto P sobre la línea de
acción de la fuerza F (Fig. 5.6). Entonces, las condiciones de la definición antes dada se
satisfacen por la ecuación vectorial
M = r X F (5.11)
Si se desliza la fuerza F a lo largo de su línea de acción, no se cambia su momento
alrededor del punto O (Fig. 5.6). En consecuencia, r puede definirse como el vector que va
del punto O a cualquier punto de la línea de acción de F.
En la teoría de las fuerzas coplanares (ítem 4.1), el momento de una fuerza alrededor de un
punto se define como un escalar. Esto resulta adecuado en los problemas en el plano porque

3
si el vector de fuerza F y el punto de referencia O se encuentran en el plano xy, el vector
momento M es perpendicular a ese plano. Su dirección siempre se conoce, de modo que
puede describirse por completo como un escalar. Sin embargo, en tres dimensiones, el
momento de una fuerza alrededor de un punto se interpreta como un vector. Por tanto, el
momento se especifica tanto por su magnitud como por su dirección.
Desde el punto de vista físico, el momento de una fuerza alrededor de un punto puede
considerarse como el efecto de rotación que la fuerza tiende a producir sobre un cuerpo
rígido que tiene fijo el punto O. La magnitud del momento es una medida de este efecto y
la dirección del mismo corresponde al eje y sentido de la rotación que tiende a producir.
Momento de una fuerza alrededor del origen
Si el punto de referencia O de la figura 5.6 es el origen de coordenadas rectangulares y las
coordenadas del punto P son (x, y, z), el vector r queda dado por r = xi + yj + zk. Entonces,
en vista de las ecuaciones (5.11) y (5.9), el vector momento M alrededor de O se determina
por la ecuación
M = r X F =
zyx FFF
zyx
kji
(5.12)
De modo alternativo, se puede escribir
M = Mxi + Myj + Mzk (5.13)
donde, por el desarrollo del determinante de la ecuación (5.12), las proyecciones Mx, My y
Mz de M sobre los ejes xyz quedan dadas por
Mx = yFz - zFy
My = zFx - xFz
Mz = xFy - yFx

4
Ejemplo 2 Momento de una fuerza alrededor de un punto
Planteamiento del problema La línea de acción de la fuerza
F = 10i – 10j + 20k (a)
Pasa por el punto P: (4, 2, -2), con relación a los ejes xyz (la fuerza en kips y las
dimensiones es pies).
a) Determine el momento MA de F alrededor del punto A: (2, 3, -1).
b) Determine las proyecciones de MA sobre los ejes xyz.
Solución a) En primer lugar, determínese el vector r que va del punto A al P:
r = 2i – j - k
Entonces, a partir de las ecuaciones (a) y (b),
MA = r X F (b)
201010
112
kji
(c)
= -30i – 50j – 10k
b) Por la ecuación (c), las proyecciones de MA sobre los ejes xyz son
Mx = -30 kip ft
My = -50 kip ft
Mz = -10 kip ft
5.3 Momento de una Fuerza alrededor de un Eje
Concepto Clave
El momento de una fuerza alrededor de un eje es una cantidad escalar

5
El momento de una fuerza alrededor de un eje perpendicular al plano de la fuerza se definió
en el ítem 4.1. Una generalización de esta idea hacia fuerzas no coplanares resulta útil. Esta
generalización se obtiene como sigue:
Sea F una fuerza que actúa sobre un cuerpo rígido. Sea z cualquier eje o recta dirigida en el
espacio. Si la línea de acción de la fuerza F no se intercepta con el eje z, existe un segmento
rectilíneo OP que es perpendicular tanto a la línea como al eje (figura 5.7a). La longitud r
del segmento rectilíneo OP es la distancia mínima entre la línea y el eje. Esta distancia se
llama brazo del momento de la fuerza F con respecto al eje z. Es un número no negativo.
Por el teorema de transmisibilidad, se puede desplazar la fuerza F a lo largo de su línea de
acción hasta el punto P. Allí, se puede resolver en dos componentes, Fz y Fn paralela y
perpendicular, respectivamente, al eje z (Fig. 5.7b). El momento Mz de la fuerza F
alrededor del eje z se define por la ecuación
Mz = rFn (5.14)
donde Fn es la magnitud de la fuerza Fn. Así, el momento de una fuerza alrededor de un eje
es un escalar; es decir, una magnitud con signo. Advierta que si r = 0, la fuerza F se
intercepta con el eje z. De esta manera, Mz = 0.
Fig. 5.7 Fig. 5.8 a) Regla del tornillo derecho. b) Regla
de la mano derecha demostrada con esa mano.
Por definición (ecuación 5.14), la fuerza Fz, la cual es paralela al eje z, no ejerce momento
alrededor de ese eje. Para establecer el signo en la ecuación (5.14), se especifica que Mz sea
positivo si el vector Fn causa una rotación alrededor del eje z en el sentido que se haría girar

6
un tornillo derecho, de modo que avance en la dirección z positiva. (ver teorema 5.2 y la
figura 5.8a). De modo alternativo, es posible visualizar la regla del tornillo derecho como
sigue: Imagine el alumno que agarra el eje z con su mano derecha, con el pulgar apuntando
en el sentido positivo del eje, como se muestra en la figura 5.8b. Sus otros dedos se
enrollarían entonces alrededor del eje z en el sentido positivo de la rotación.
Fig. 5.9
Considere ahora los momentos de la fuerza F alrededor de los ejes xyz. Denótense estos
momentos por Mx, My y Mz, respectivamente. La fuerza F puede resolverse en las
componentes (Fxi, Fyj, Fzk), paralelas a los ejes x, y y z, respectivamente. En la figura 5.9,
se ve que el momento de la fuerza Fzk alrededor del eje x es +yFz, donde P: (x, y, z) es el
punto de aplicación de la fuerza F. De modo semejante, el momento Fyj alrededor del eje x
es -zFy El momento de la fuerza Fxi, alrededor del eje x es cero, ya que el vector Fxi es
paralelo a ese eje. De manera que, por el teorema de Varignon, el momento de la fuerza F
alrededor del eje x es Mx = yFz – zFy Los momentos de la fuerza F alrededor de los ejes y y
z se deducen de manera similar. Por lo tanto, los momentos Mx, My y Mz de la fuerza F
alrededor de los ejes de coordenadas xyz se expresan por
Mx = yFz – zFy
My = zFx – xFz (5.15)
Mz = xFy – yFx
Al aplicar las ecuaciones (5.15), deben tomarse en cuenta los signos de las coordenadas (x,
y, z) del punto de aplicación de F y de las proyecciones Fx, Fy y Fz (Fig. 5.9). Las
ecuaciones (5.15) son las tridimensionales análogas de la ecuación (4.3).
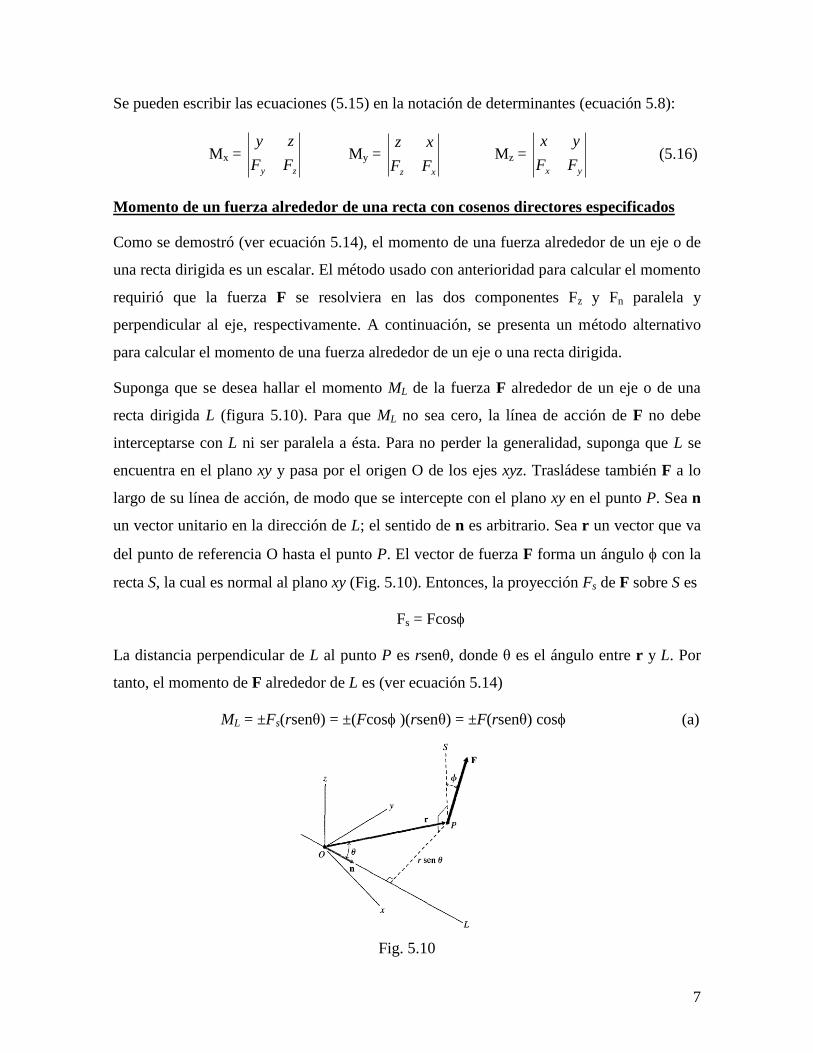
7
Se pueden escribir las ecuaciones (5.15) en la notación de determinantes (ecuación 5.8):
Mx = zy FF
zy My =
xz FF
xz Mz =
yx FF
yx (5.16)
Momento de un fuerza alrededor de una recta con cosenos directores especificados
Como se demostró (ver ecuación 5.14), el momento de una fuerza alrededor de un eje o de
una recta dirigida es un escalar. El método usado con anterioridad para calcular el momento
requirió que la fuerza F se resolviera en las dos componentes Fz y Fn paralela y
perpendicular al eje, respectivamente. A continuación, se presenta un método alternativo
para calcular el momento de una fuerza alrededor de un eje o una recta dirigida.
Suponga que se desea hallar el momento ML de la fuerza F alrededor de un eje o de una
recta dirigida L (figura 5.10). Para que ML no sea cero, la línea de acción de F no debe
interceptarse con L ni ser paralela a ésta. Para no perder la generalidad, suponga que L se
encuentra en el plano xy y pasa por el origen O de los ejes xyz. Trasládese también F a lo
largo de su línea de acción, de modo que se intercepte con el plano xy en el punto P. Sea n
un vector unitario en la dirección de L; el sentido de n es arbitrario. Sea r un vector que va
del punto de referencia O hasta el punto P. El vector de fuerza F forma un ángulo con la
recta S, la cual es normal al plano xy (Fig. 5.10). Entonces, la proyección Fs de F sobre S es
Fs = Fcos
La distancia perpendicular de L al punto P es rsenθ, donde θ es el ángulo entre r y L. Por
tanto, el momento de F alrededor de L es (ver ecuación 5.14)
ML = ±Fs(rsenθ) = ±(Fcos )(rsenθ) = ±F(rsenθ) cos (a)
Fig. 5.10

8
Se observa que el producto vectorial n X r es un vector que tiene la magnitud rsenθ y está
dirigido perpendicular al plano xy. Por lo tanto, en vista de la ecuación (a) y las propiedades
del producto escalar, el momento ML de la fuerza F alrededor de L es
ML= F (n X r) (5.17)
El signo de ML, determinado por la ecuación (5.17), es coherente con el signo especificado
al usar la regla del tornillo derecho.
La expresión F (n X r) se llama triple producto escalar de los vectores F, n y r. A veces
usa el término triple producto mixto para indicar que, en la ecuación (5.17), se tienen tanto
un producto vectorial como uno escalar. Con referencia a un sistema de coordenadas
cartesianas rectangulares, el vector n X r tiene las proyecciones siguientes sobre los ejes
xyz:
proyección x: nyrz – nzry
proyección y: nzrx – nxrz (b)
proyección z: nxry – nyrx
En consecuencia, con las ecuaciones (b) y (5.3), la ecuación (5.17) da
ML = Fx(nyrz – nzry) + Fy(nyrz – nzry) + Fz(nxry – nyrx) (c)
La ecuación (c) se expresa de manera más compacta por medio de la notación de
determinantes, como sigue:
ML= F (n X r)=
zyx
zyx
zyx
rrr
nnn
FFF
(5.18)
Formas alternativas para expresar el momento de una fuerza alrededor de una recta
Si se intercambian dos filas de un determinante, sólo se cambia el signo de éste. No se
afecta su magnitud. Por lo tanto, dos intercambios consecutivos de dos de las filas de un
determinante ¿no lo alteran? Por consiguiente, la ecuación (5.17) puede expresarse en
cualquiera de las diversas formas siguientes:

9
ML= F (n X r) (5.19a)
ML= r (F X r) (5.19b)
ML= n (r X F) (5.19c)
Las fórmulas para los momentos de una fuerza alrededor de los ejes de coordenadas
(ecuaciones 5.15) son casos especiales de las ecuaciones (5.18) y (5.19). Por ejemplo, si la
recta L es el eje x y si el punto O es el origen, entonces nx = 1, ny = nz = O, y rx = x, ry = y, rz
= z. De esta manera, por la ecuación (5.18) o la (5.19a),
yz
zyx
x zFyF
zyx
FFF
M 001
Este resultado concuerda con las ecuaciones (5.15). De modo alternativo, por la ecuación
(5. 19b),
yz
zyx
x zFyF
zyx
FFF
M 001
De modo análogo, la ecuación (5.19c) conduce al mismo resultado.
En el ítem 5.2, el momento de una fuerza F alrededor del punto O se definió por la
ecuación M = r X F. Entonces, por la ecuación (5.19c), el momento de la fuerza F
alrededor de L es
ML = n (r X F) = n M
Este resultado conduce al teorema siguiente.
Teorema 5.3
El momento de una fuerza F alrededor de una recta L es igual a la proyección del vector
momento M = r X F sobre L, donde M es el momento de la fuerza F alrededor de
cualquier punto sobre L.

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 11 (08/05/07)
Ejemplo 3 Momento de una fuerza alrededor de una recta
Planteamiento del problema Una fuerza (en kilonewtons) se define por F = 1.0i + 0.5j +
2.5k. Con el metro como la unidad de longitud, la fuerza F actúa en el punto Q: (2.0, 2.25,
1.0). Una recta L, con los cosenos directores (nx, ny, nz) = (0.316, -0.316, 0.895), pasa por
el punto P: (-1.25, 0.75, 0.50). Determine el momento ML de F alrededor de L.
Solución Sea r el vector que va del punto de referencia P sobre L hasta el punto Q.
Entonces, r = 3.25i + 1.50j + 0.50k. De esta manera, por la ecuación (5.18), se obtiene el
momento ML de F alrededor de L como
ML = F (n X r)
mkN 63.3
50.050.125.3
895.0316.0316.0
50.250.000.1
5.4 Representación Vectorial de Pares
En el ítem 4.3 se definió un par. En el ítem 4.4, se definieron las propiedades de los pares y
se obtuvo la resultante de varios pares que se encuentran en un plano o en planos paralelos.
En esta sección se ampliará el estudio de los pares hacia tres dimensiones. En particular,
una vez más se observa que un par se puede desplazar de modo arbitrario en su plano, a
diferencia del momento de una fuerza, el cual depende del punto O alrededor del cual se
toma (ver ítem 5.2). En el ítem 5.2, se demostró que el momento de una fuerza alrededor de
un punto O es un vector. En esta sección se demostrará que un par también es un vector.
La dirección de un par es la dirección perpendicular a su plano. Las propiedades de un par,
-su magnitud, dirección y sentido- se puede representar por una flecha con doble punta. En
la figura 5.11 se ilustra la representación vectorial de un par. El vector M que representa el
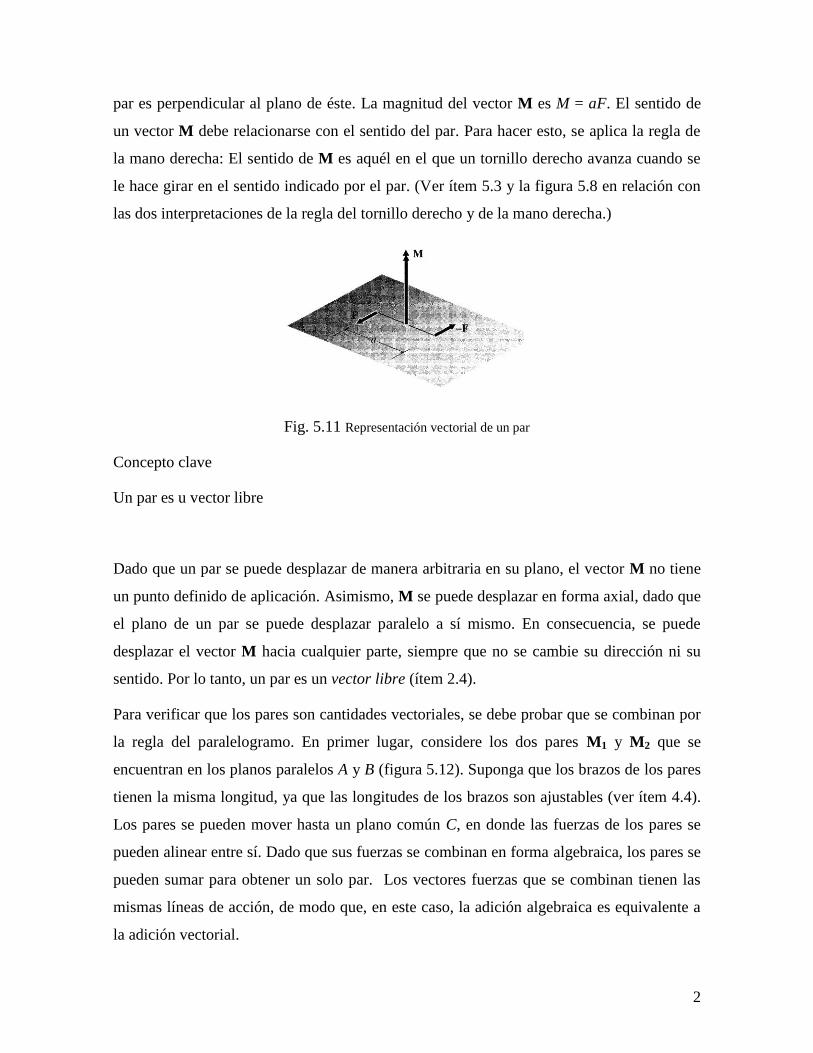
2
par es perpendicular al plano de éste. La magnitud del vector M es M = aF. El sentido de
un vector M debe relacionarse con el sentido del par. Para hacer esto, se aplica la regla de
la mano derecha: El sentido de M es aquél en el que un tornillo derecho avanza cuando se
le hace girar en el sentido indicado por el par. (Ver ítem 5.3 y la figura 5.8 en relación con
las dos interpretaciones de la regla del tornillo derecho y de la mano derecha.)
Fig. 5.11 Representación vectorial de un par
Concepto clave
Un par es u vector libre
Dado que un par se puede desplazar de manera arbitraria en su plano, el vector M no tiene
un punto definido de aplicación. Asimismo, M se puede desplazar en forma axial, dado que
el plano de un par se puede desplazar paralelo a sí mismo. En consecuencia, se puede
desplazar el vector M hacia cualquier parte, siempre que no se cambie su dirección ni su
sentido. Por lo tanto, un par es un vector libre (ítem 2.4).
Para verificar que los pares son cantidades vectoriales, se debe probar que se combinan por
la regla del paralelogramo. En primer lugar, considere los dos pares M1 y M2 que se
encuentran en los planos paralelos A y B (figura 5.12). Suponga que los brazos de los pares
tienen la misma longitud, ya que las longitudes de los brazos son ajustables (ver ítem 4.4).
Los pares se pueden mover hasta un plano común C, en donde las fuerzas de los pares se
pueden alinear entre sí. Dado que sus fuerzas se combinan en forma algebraica, los pares se
pueden sumar para obtener un solo par. Los vectores fuerzas que se combinan tienen las
mismas líneas de acción, de modo que, en este caso, la adición algebraica es equivalente a
la adición vectorial.

3
Fig. 5.12 Pares en los planos paralelos A y B
Si los dos pares M1 y M2 no se encuentran en planos paralelos, sus planos deben
interceptarse. Desplace los pares en sus planos respectivos de modo que tengan un brazo
común PQ que se encuentre sobre la línea de intersección de los dos planos (Fig. 5.13a).
Suponga que la longitud del brazo es a. Por tanto, el par M1 consta de las fuerzas F1 y –F1
con brazo de palanca a; del mismo modo, el par M2 consta de las fuerzas F2 y –F2 con
brazo de palanca a. Por la construcción del paralelogramo, las fuerzas F1 y F2 en el punto P
se combinan para formar una resultante F. Del mismo modo, las fuerzas –F1 y –F2 en el
punto Q proporcionan la resultante -F. Las fuerzas F y -F en los puntos P y Q,
respectivamente, constituyen el par resultante M.
Para ver que la resultante de pares no coplanares se obtiene por adición vectorial de los
pares, observe el paralelogramo de fuerzas ortogonalmente en el punto P, como se indica
por el ojo en la figura 5.13a. La vista ortogonal se representa por la figura 5.13b. Por
definición, los pares M1 y M2 (Fig. 5.l3b) son perpendiculares a los vectores fuerzas F1 y

4
F2. En consecuencia, los ángulos del paralelogramo PABC son respectivamente iguales a
los ángulos del paralelogramo PXYZ. También, por definición, las magnitudes de M1 y M2
son aF1 y aF2 respectivamente. Por lo tanto, los paralelogramos PABC y PXYZ son
semejantes. Por consiguiente, M es perpendicular al vector F y su magnitud M es aF. Por la
construcción del paralelogramo de los vectores (Fig. 5.13b), M = M1 + M2, y está formado
por las fuerzas F y –F, con un brazo del par a. Con esto queda demostrado que los pares
son cantidades vectoriales.
Fig. 5.13
Ejemplo 4 Pares coplanares y un trineo de propulsión a chorro
Planteamiento del problema Un trineo experimental de propulsión a chorro que pesa 14
kN se mueve a velocidad constante a lo largo de una vía (figura a). La fuerza de resistencia
D debida al viento y a la fricción es equilibrada por el empuje T del chorro, y el peso W del
trineo es equilibrado por la reacción vertical N de la vía. Si el empuje T requerido para
propulsar el trineo a velocidad constante es de 1.4 kN, determine el par de reacción MS que
la vía ejerce sobre dicho trineo.
Solución Puesto que el trineo se mueve a velocidad constante a lo largo de la vía, T = D =
1.4 kN y N = W = 14 kN. Los pares debidos a las fuerzas T y D y a las fuerzas N y W son
MTD = (0.30)(1.4)(-k) = -0.42k
MNW = (1.5)(14)(k) = 21.0k (a)
Por lo tanto, dado que el trineo está en equilibrio,

5
MS + MTD + MNW = 0 (b)
o bien, con las ecuaciones (a) y (b),
MS = -MTD – MNW = -20.58k kNm
(a)
Ejemplo 5 Resultante de un sistema de pares no coplanares
Planteamiento del problema Se diseña una barra rígida en T para transmitir cargas a una
estructura de apoyo O. Se aplican varias fuerzas a la barra en T, como se muestra en la
figura (a) (no se muestra la estructura de apoyo). Determine la fuerza y el par resultantes
transmitidos a la estructura O.
Fig. (a)

6
Solución Advierta que las fuerzas aplicadas en A, B, C y D son equivalentes a tres pares.
Las magnitudes de las fuerzas son F1 = 2 kips, F2 = 3 kips, F3 = 1.5 kips. Por lo tanto, las
magnitudes de los momentos de los tres pares son M1 = (10)(2) = 20 kipft, M2 = (20)(3) =
60 kipft, y M3 = (20)(1.5) = 30 kipft. Los vectores M1, M2 y M3 que representan los tres
pares tienen las magnitudes M1, M2 y M3 y están dirigidos a lo largo del eje x negativo, el
eje y positivo y el eje z positivo, respectivamente (Fig. b). Ya que los pares son vectores
libres, pueden moverse hasta un punto común; digamos, el origen O. Entonces, se pueden
sumar en forma vectorial. El vector resultante es M = M1 + M2 + M3 (Fig. c). Las
proyecciones (x, y, z) de este vector son Mx = 20 kipft, My = 60 kipft, Mz = 30 kipft. Por el
caso 1 del ítem 5.1, la magnitud del par resultante se calcula como sigue:
M M = M2 = (-20i + 60j + 30k) (-20i + 60j + 30k)
= (-20)2 + 60
2 + 30
2 = 4900
o M = 70 kipft. En forma vectorial, el par resultante es
M = -20i + 60j + 30k
(b) (c)
Los cosenos directores del par resultante son, por la ecuación (2.1),
28571.070
20cos
M
M x
85714.070
60cos
M
M y
42857.070
30cos
M
M z
1coscoscos 222

7
y los ángulos de dirección son α = 106.60°, β = 31.00° y = 64.62°.
Por último, por la figura (a), la fuerza resultante F es cero; es decir,
F = (0)i + (F3 – F3)j + (F1 – F1 + F2 – F2)k = 0
5.5 Representación de un Par como Producto Vectorial
Concepto clave
Un par M se puede representar por el producto vectorial M = r X F
Suponga que un par está determinado por las fuerzas -F y F que actúan en los puntos P y Q.
Denote por r el vector que va del punto de referencia P hasta el Q, como se muestra en la
figura 5.14a. A partir de la figura 5.14a, se ve que la magnitud del momento del par es
M = Fa = Fr senθ (a)
Fig. 5.14
En el ítem 5.4 se demostró que el par M es un vector, con magnitud igual al momento del
par y con dirección perpendicular al plano de las fuerzas de éste. El sentido de un par se
determina por la regla del tornillo derecho. Por lo que, en vista de la ecuación (a) y las
propiedades del producto vectorial (ítem 5.1), el par M representado en la figura 5.14a
queda determinado por la ecuación vectorial
M = r X F (5.20)

8
Observe que el vector r se traza desde el punto de aplicación de la fuerza -F (punto P) hasta
el de la fuerza F (punto Q). Este convenio se aplica sin importar las designaciones de los
signos de los vectores fuerzas. Si la figura 5.14a se reemplaza por la 5.14b, el sentido de M,
según se determina por la ecuación (5.20), no se altera. Note que, en la figura 5.14b, el
vector r se traza una vez más del punto de aplicación de -F (ahora punto Q) al de F (ahora
punto P). En general, los puntos P y Q pueden ubicarse en cualquier parte sobre las líneas
de acción de las fuerzas.
Puesto que un par es un vector, se puede resolver en componentes paralelas a los ejes de
coordenadas. Las proyecciones (x, y, z) de un par M se denotan por Mx, My y Mz. Por tanto,
M = Mxi + Myj + Mzk (b)
Por las ecuaciones (5.15) y (5.20) se demuestra con facilidad que Mx, My y Mz son idénticas
a los momentos de las fuerzas del par alrededor de los respectivos ejes de coordenadas. Por
ejemplo, si el punto P de la figura 5.14a se toma como el origen de los ejes de coordenadas
xyz y el punto Q se ubica en (x, y, z), r = xi + yj + zk. Entonces, la ecuación (5.20) en forma
de determinante es
M =
zyx FFF
zyx
kji
(5.21)
donde Fx, Fy y Fz son las proyecciones (x, y, z) de F. El desarrollo de la ecuación (5,21) da
M = (yFz — zFy)i + (zFx – xFz)j + (xFy – yFx)k (c)
Al comparar las ecuaciones (b) y (c) da (ver también ecuación 5.15)
Mx = yFz - zFy
My = zFx – xFz
Mx = xFy – yFx
Ejemplo 6 Representación de un par como producto vectorial
Planteamiento del problema Un par consta de una fuerza F que actúa en el punto (2, 9, 7)
y una –F que actúa en el punto (-5, 1, -2). La fuerza F se da por la ecuación F = 100i +
300j – 500k (unidades en libras y pies).

9
a) Defina el vector r que va del punto de referencia (-5, 1, -2) al punto (2, 9, 7).
b) Exprese el par formado por las fuerzas F y –F en forma de determinante.
c) Exprese el par en términos de los vectores unitarios i, j, k.
Solución a) El vector r se determina como sigue:
r = [2 – (-5)]i + (9-1)j + [7 – (-2)]k = 7i + 8j + 9k
b) Por la ecuación (5.20), el par es M = r X F. De manera que, por la ecuación (5.21),
M =
500300100
987
kji
(a)
c) El desarrollo de la ecuación (a) da
M = -6700i + 4400j + 1300k
O bien Mx = -6700 lbft
My = +4400 lbft
Mz = +1300 lbft
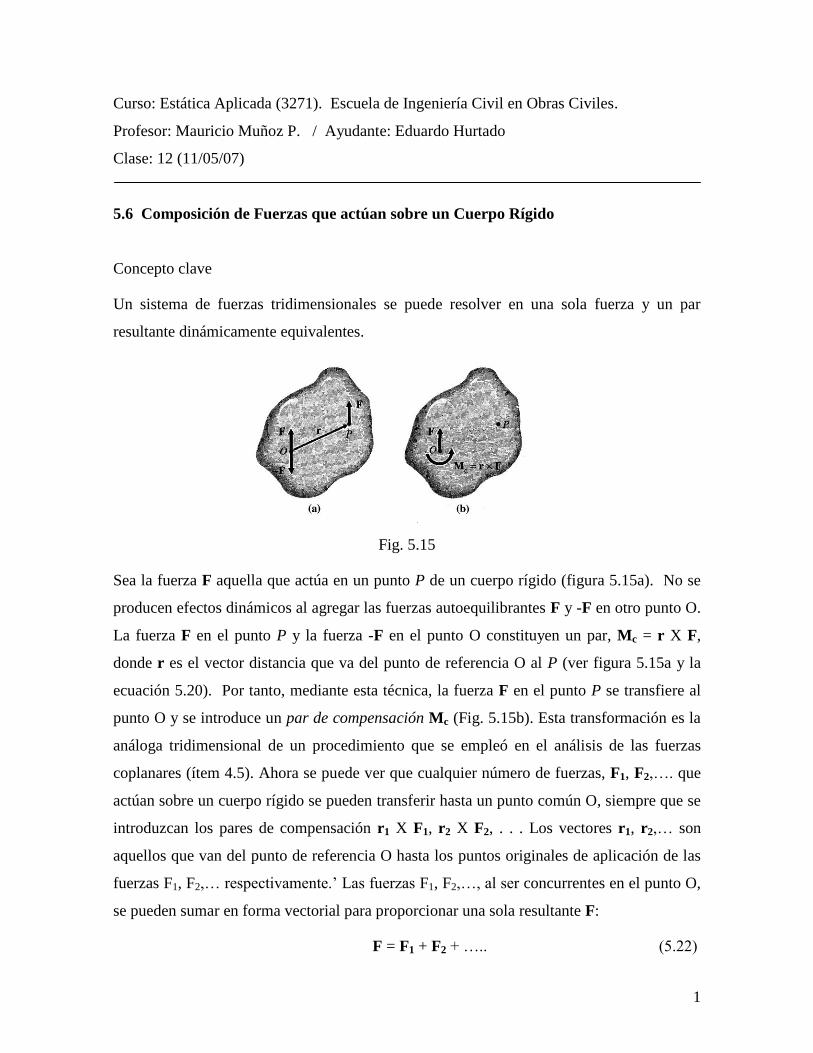
1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 12 (11/05/07)
5.6 Composición de Fuerzas que actúan sobre un Cuerpo Rígido
Concepto clave
Un sistema de fuerzas tridimensionales se puede resolver en una sola fuerza y un par
resultante dinámicamente equivalentes.
Fig. 5.15
Sea la fuerza F aquella que actúa en un punto P de un cuerpo rígido (figura 5.15a). No se
producen efectos dinámicos al agregar las fuerzas autoequilibrantes F y -F en otro punto O.
La fuerza F en el punto P y la fuerza -F en el punto O constituyen un par, Mc = r X F,
donde r es el vector distancia que va del punto de referencia O al P (ver figura 5.15a y la
ecuación 5.20). Por tanto, mediante esta técnica, la fuerza F en el punto P se transfiere al
punto O y se introduce un par de compensación Mc (Fig. 5.15b). Esta transformación es la
análoga tridimensional de un procedimiento que se empleó en el análisis de las fuerzas
coplanares (ítem 4.5). Ahora se puede ver que cualquier número de fuerzas, F1, F2,…. que
actúan sobre un cuerpo rígido se pueden transferir hasta un punto común O, siempre que se
introduzcan los pares de compensación r1 X F1, r2 X F2, . . . Los vectores r1, r2,… son
aquellos que van del punto de referencia O hasta los puntos originales de aplicación de las
fuerzas F1, F2,… respectivamente.’ Las fuerzas F1, F2,…, al ser concurrentes en el punto O,
se pueden sumar en forma vectorial para proporcionar una sola resultante F:
F = F1 + F2 + ….. (5.22)

2
En este caso, se supone que F 0. Los pares se pueden sumar vectorialmente para obtener
un solo par de compensación Mc:
Mc = r1 X F1 + r2 X F2 + … (5.23)
Por la ecuación (5.23), se ve que Mc depende del punto de referencia O, ya que los vectores
r1, r2, . . . emanan de este punto. En consecuencia, se tiene el siguiente teorema:
Teorema 5.4
Cualquier número de fuerzas, F1, F2,….., que actúan sobre un cuerpo rígido se pueden
transformar en un sistema equivalente, consistente en una sola fuerza F que actúe en un
punto arbitrario O y un solo par de compensación Mc. La fuerza F y el par de
compensación Mc se determinan por las ecuaciones (5.22) y (5.23), respectivamente. El
par Mc es el momento de las fuerzas F1, F2,…. Alrededor del punto O. Para F0, el
momento Mc depende del punto O.
Fuerzas con resultante cero
Al principio, en esta sección, se vio que a la resultante F de las fuerzas F1, F2,. . . que
actúan sobre un cuerpo rígido se le puede asignar un punto arbitrario de acción O, pero que
el par de compensación Mc depende de la ubicación de ese punto O, si F 0. Demostremos
ahora que, si F = 0, el par de compensación Mc no depende de la ubicación del punto O.
Fig. 5.16
3
Para demostrar esto, en primer lugar suponga que r1, r2,. . . son los vectores que van del
punto arbitrario de referencia O a los puntos de aplicación de las fuerzas F1, F2,…
Asimismo, suponga que R1, R2,…son los vectores que van de un segundo punto arbitrario
de referencia P a los puntos de las mismas fuerzas (ver figura 5.16). Denote por el vector
que va del punto de referencia O al P. Entonces, r1 = a + R1, r2 = a + R2,… También, el par
de compensación de las fuerzas con relación al punto de referencia O es Mc = r1 X F1 + r2
X F2 + ….De esta manera
Mc = (a + R1) X F1 + (a + R2) X F2 + ......
Al agrupar los términos, se puede escribir
Mc = a X (F1 + F2 +....) + (R1 X F1 + R2 X F2 +… .) (a)
Sin embargo, la hipótesis inicial fue que F = F1 + F2 +… = 0. Asimismo, el momento de las
fuerzas alrededor del punto P es Mp = R1 X F1 + R2 X F2 +…. Por consiguiente, por la
ecuación (a), Mc = Mp. Dado que el punto P es arbitrario, el par de compensación Mc es el
mismo para cualquier punto. En consecuencia, se tiene el teorema siguiente:
Teorema 5.5
Si la suma vectorial de un conjunto de fuerzas es cero, las fuerzas ejercen el mismo
momento alrededor de todos los puntos.
Ejemplo 7 Composición de fuerzas no coplanares
Planteamiento del problema Un cuerpo rígido se sujeta a las fuerzas F1 = 2i + 2j + 4k,
F2 = 7i + 6j - 4k y F3 = -5i - 4j + 7k en los puntos (8, 10, 4),(-5, 1, 7) y (6, -11, -2),
respectivamente. La unidad de fuerza es el kilonewton y la de longitud es el metro.
Determine la magnitud y la dirección de una sola fuerza F que actúe en el punto (4, 5, 6) y
un par de compensación Mc que sean dinámicamente equivalentes al sistema dado de
fuerzas.

4
Solución Para resolver este problema, se suman las fuerzas F1, F2 y F3 para obtener la
fuerza resultante F = +2i + 2j + 4k
F1 = +2i + 2j + 4k
F2 = +7i + 6j - 4k (a)
F3 = -5i - 4j + 7k
F = 4i + 4j + 7k (b)
Ahora, por la ecuación (b), se determinan la magnitud y la dirección de F como
F2 = 4
2 + 4
2 + 7
2 = 81
F = 9 kN
y cosα = 4/9 = 0.444 cosβ = 4/9 = 0.444 cos = 7/9 = 0.777
es decir, α = β = 63.61° y = 38.94°. Como comprobación, observe que cos2α + cos
2β +
cos2 = 1.
En seguida, se coloca F en el punto de referencia (4, 5, 6), manteniendo su magnitud y
dirección originales. Recuerde que el par Mc depende del punto de referencia del momento.
Por lo tanto, para determinar el momento Mc, se forman los vectores de distancia r1, r2 y r3,
que van del punto de referencia (4, 5, 6) hasta los puntos iniciales de aplicación de las
fuerzas F1, F2 y F3, y se suman los momentos de estas fuerzas para obtener el momento
resultante Mc. Por tanto,
r1 = +4i + 5j - 2k
r2 = -9i – 4j + k (c)
r3 = +2i – 16j – 8k
Entonces, por las ecuaciones (a), (c) y (5.23),
Mc = (r1 X F1 + (r2 X F2 + (r3 X F3) (d)
Por las ecuaciones (d) y (5.9), en flotación de determinantes, se tiene
5
Mc =
745
8162
467
149
422
254
kjikjikji
(e)
El desarrollo de la ecuación (e) da
Mc = -110i - 23j - 116k
Por lo tanto, Mx = -110kNm My = -23kNm Mz = -116kNm
5.7 Eje Resultante y la Llave
En ejemplos de la unidad 4, un sistema de fuerzas coplanares se redujo a una sola fuerza
que actúa en un punto en particular, de modo que el par resultante sea cero. En esta sección
se generaliza el concepto de eje resultante hacia tres dimensiones. Sin embargo, en los
problemas tridimensionales, en general no se puede hallar un eje resultante tal que el par
resultante sea cero. Lo mejor que se puede hacer es ubicar la fuerza resultante de modo que
la magnitud del par resultante sea un mínimo.
Varias fuerzas que actúan sobre un cuerpo rígido se pueden resolver en una fuerza F y un
par de compensación Mc dinámicamente equivalentes. Una vez que se ha seleccionado una
línea de acción de F, ésta se representa por un vector deslizante y el par de compensación
se representa un vector libre (ver ítem 5.4). Si F0, el par de compensación depende del
punto O arbitrariamente seleccionado sobre la línea de acción de F. Si F = O, el par de
compensación es independiente de O; es decir, las fuerzas ejercen el mismo momento
alrededor de todos los puntos (ver ítem 5.6 y el teorema 5.5).
Considere una situación en la que se ha resuelto un sistema de fuerzas en una fuerza
resultante F que actúa en un punto de referencia O y un par resultante M. Este par M es la
suma de todos los pares que se encuentran en el sistema más el par de compensación
requerido para transferir esas fuerzas en el sistema hacia el punto O. Puesto que M es un
vector libre, su línea de acción se puede mover hasta que se intercepte con la de F.
Entonces, el plano determinado por estas dos rectas contiene tanto a F como a M (figura
5.17). Se procede al resolver los pares en las dos componentes Mp y Mn las cuales son

6
paralela y normal a F, respectivamente. En el caso de los sistemas de fuerzas coplanares
(unidad 4), todas las fuerzas se encuentran en el plano y los vectores asociados de los pares
son normales a ese plano y, por lo tanto, normales a las fuerzas. En ese caso, sólo existió
Mn.
Por el teorema de transmisibilidad, el par M no se altera cuando la fuerza F se desplaza
largo de su línea de acción. Por ello, sólo los desplazamientos de la fuerza F influyen sobre
M.
Fig. 5.17 Fig. 5.18
Suponga que los vectores F y M se encuentran en el plano de la hoja (Fig. 5.18). Se puede
desplazar la fuerza F de modo lateral en el plano de la hoja introduciendo las fuerzas
autoequilibrantes F y -F en un punto arbitrario de referencia O en el propio plano (Fig.
5.18), como se explicó en el ítem 5.6. El par de compensación que se introduce por esta
transformación se representa por un vector perpendicular al plano de la hoja y, por tanto,
perpendicular a M. Si se combina vectorialmente este par con M, se obtiene un par de
magnitud mayor que la de M. Por lo tanto, no se puede reducir la magnitud del par M por
un desplazamiento lateral de la fuerza F en el plano de la hoja.
Si se desplaza la fuerza F lateralmente en la dirección perpendicular al plano de la hoja, el
par de compensación se representa por un vector en la misma dirección que la del vector
Mn. Se puede elegir el sentido del desplazamiento de modo que el par de compensación
contrarreste el par Mn (Para el caso ilustrado en la figura 5.17, la fuerza F debe de moverse
alejándose del lector, hacia adentro del plano de la página, para contrarrestar Mn.) Si la
magnitud del desplazamiento es r = Mn/F, el par Mn se cancela por completo y sólo queda
7
el par Mp Entonces, el vector M = Mp es paralelo a F y su magnitud es un mínimo, ya que
un desplazamiento de la fuerza F nunca puede cambiar el par Mp
Concepto clave
Cuando se ubica la línea de acción de la resultante F de un sistema de fuerzas de modo que
F y el par resultante M sean paralelos, se dice que F se encuentra sobre el eje resultante del
sistema de fuerzas
Con base en estas consideraciones, se concluye que se puede ubicar la línea de acción de la
fuerza F de modo que ésta y el par M sean paralelos. Entonces, la magnitud del par M es
un mínimo. Esto se conoce como condición de paralelismo. En esta condición, se dice que
la fuerza F se encuentra sobre el eje resultante del sistema de fuerzas. El sistema de fuerzas
paralelas (par M y fuerza F) se llama llave. Además, dado que M es un vector libre, se le
puede colocar de modo que su línea de acción coincida con la de F (ver figura 5.19).
Fig. 5.19
Se puede usar la técnica anterior para ubicar el eje resultante de un sistema de fuerzas con
relación a las coordenadas rectangulares (x, y, z). De modo alternativo, se puede determinar
el eje resultante por la ecuación vectorial F X M = 0, lo cual significa que el eje resultante
es paralelo al vector M.

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 13 (15/05/07)
Unidad 5 (continuación)
Ejemplo 8 Eje resultante de un sistema de fuerzas
Planteamiento del problema La fuerza F = l0i - 5j + 8k actúa sobre un cuerpo rígido en
el punto (3, 2, -5). El cuerpo también está sujeto a un par Mo = l20i + 60j - 80k. Las
unidades son libras y pies.
a. Reemplace este sistema de fuerzas por un sistema dinámicamente equivalente que conste
de la fuerza F en el punto (a, b, 0) y un par M = Mo + Mc, en donde Mc es el par de
compensación requerido para transferir F del punto (3, 2, -5) hasta el punto (a, b, 0).
b. Escriba la forma determinada de la condición de paralelismo para los vectores F y M -a
saber, F X M = 0 -para obtener una ecuación vectorial que relacione a con b. Entonces,
determine los cosenos directores del eje resultante.
c. Transforme la ecuación vectorial obtenida en el inciso b en forma escalar y resuelva dos
de las tres ecuaciones algebraicas resultantes para las constantes a y b.
d. Demuestre que, de esta manera, la tercera ecuación se satisface automáticamente.
Solución a. Para resolver este problema, en primer lugar mueva la fuerza F hasta el punto
(a, b, 0). En seguida, determine el par de compensación requerido para este movimiento.
Para hacer esto, se forma el vector r que represente el brazo del momento de la fuerza F de
(a, b, 0) hasta (3, 2, -5) (ver ítem 5.6 y la figura 5.15a). A continuación se calcula el par de
compensación Mc= r X F. Por último se determina el par requerido M = Mo + Mc.
Si se sigue el método antes descrito, se encuentra r = (3-a)i + (2-b)j + (-5)k. Entonces, por
la ecuación (5.9)

2
Mc = r X F =
8510
5)2()3(
ba
kji
(a)
= -(8b+9)i + (8a-74)j + (5a + 10b -35)k
Por lo tanto, con Mo y la ecuación (a) se tiene
M = Mo + Mc = -(8b-111)i + (8a-14)j + (5a+10b-115)k (b)
De esta manera, el par M, dado por la ecuación (b), y la fuerza F en el punto (a, b, 0)
constituyen el sistema dinámicamente equivalente de fuerzas.
b) De la ecuación (b), con F, se tiene
F X M = 0
)115105()148()8111(
8510
baab
kji
(c)
O bien, por el desarrollo de la ecuación (c), se puede escribir
(687-89a-50b)i + (2038-50a-164b)j + (415+80a-40b)k = 0 (d)
La ecuación (d) representa la condición de paralelismo para los vectores F y M. Por tanto,
el eje resultante del sistema de fuerzas es paralelo al vector M y pasa por el punto (a, b, 0).
Los números de dirección del eje resultante quedan dados por las proyecciones (x, y, z) de
F; es decir, por (20, -5, 8). Por lo que, los cosenos directores y los ángulos de dirección del
eje resultante son
7274.08510
10cos
222
; α=43.33°
3637.08510
5cos
222
; β=111.33° (e)
3
5819.08510
8cos
222
; =54.41°
c) En forma escalar, la ecuación (d) es
89a + 50b = 687 (f)
50a + 164b = 2038 (g)
80a- 40b = -415 (h)
De las ecuaciones (f) y (g) se encuentra
a = 0.8902 ft
b = 12.155 ft (i)
Por lo tanto, el eje resultante pasa por el punto (0.8902, 12.155, 0) en la dirección dada por
α, β, y de las ecuaciones (e).
Por las ecuaciones (b) e (i), el par M es
M = 13.76i – 6.88j + 11.0k [lbft] (j)
Con la ecuación (j), se puede verificar que los cosenos directores de M son los mismos que
los de F [ecuaciones (e)], ya que M y F son paralelos.
d) La sustitución de las ecuaciones (i) en la (h) verifica, dentro del orden de exactitud del
cálculo, que esta última se satisface. Es decir,
80 (0.8902) – 40 (12.155) = -414.98 -415
5.8 El Principio Fundamental del Equilibrio de un Cuerpo Rígido.
Concepto Clave
Un cuerpo rígido inmóvil está en equilibrio si, y sólo si, la fuerza y el par resultantes que
actúan sobre el mismo son cero.

4
Recuerde que si la fuerza resultante es cero, el par resultante es independiente del punto de
referencia O (teorema 5.5). En consecuencia, se puede enunciar el principio fundamental
del equilibrio de cuerpo rígido en la forma del teorema siguiente:
Teorema 5.6
Un cuerpo rígido inmóvil está e equilibrio si, y sólo si, la suma vectorial de todas las
fuerzas externas es cero y el momento de esas fuerzas externas alrededor de cualquier
punto es cero.
Condiciones de equilibrio referidas a coordenadas rectangulares
El teorema 5.6 se expresa por las ecuaciones
F = 0, M = 0 (5.24)
donde F es la suma vectorial de todas las fuerzas externas que actúan sobre un cuerpo
rígido y M es el momento de esas fuerzas alrededor de cualquier punto. Para aplicar este
principio se puede trabajar con las proyecciones de F y M sobre los ejes de coordenadas
rectangulares xyz. Entonces, las ecuaciones (5.24) son equivalentes a las ecuaciones
Fx = 0 Fy = 0 Fz = 0
Mx = 0 My = 0 Mz = 0
donde Fx, Fy, Fz y Mx, My, Mz son las proyecciones de los vectores F y M sobre los ejes de
coordenadas xyz. Las proyecciones F F) y F de las fuerzas se determinan por las ecuaciones
Fx = F1x + F2x + …..
Fy = F1y + F2y + …..
Fz = F1z + F2z + …..
donde (F1x, F1y, F1z), (F2x, F2y, F2z) . . son las proyecciones (x, y, z) de las diversas fuerzas
externas que actúan sobre el cuerpo.

5
Si Fx, Fy y Fz se anulan, las fuerzas externas producen el mismo momento alrededor de
todos los puntos (ítem 5.6). Por consiguiente, al aplicar la condición M = 0, se pueden
tomar los momentos alrededor del origen. En otras palabras, las proyecciones Mx, My y Mz
del momento son idénticas a la suma de los momentos de las fuerzas originales alrededor
de los ejes respectivos. Los momentos de las fuerzas originales alrededor de los ejes de
coordenadas se determinan por las ecuaciones (5.15). Por lo tanto, si se designa la i-ésima
fuerza por (Fix, Fiy, Fiz) y su punto de aplicación por (xi, yi, zi), se tienen las seis condiciones
de equilibrio siguientes:
Fix = 0
Fiy = 0
Fiz = 0
Mix = (yiFiz – ziFiy) = 0 (5.25)
Miy = (ziFix – xiFiz) = 0
Miz = (xiFiy – yiFix) = 0
Las ecuaciones (5.25) y (5.26) son generalizaciones de los criterios de equilibrio que se
dedujeron para las fuerzas coplanares (ítem 4.6). Por el razonamiento del ítem 4.6, no sólo
son aplicables a los cuerpos rígidos aislados, sino también a sistemas de cuerpos rígidos y a
cuerpos deformables.
Apoyos tridimensionales
Para construir un diagrama tridimensional exacto de cuerpo libre, deben representarse con
exactitud las reacciones en los apoyos. En la práctica, los apoyos tridimensionales pueden
ser bastante complejos y pueden ejercer fuerzas distribuidas en lugar de fuerzas precisas
puntuales sobre un cuerpo. Sin embargo, los efectos principales de los apoyos sobre el
equilibrio de un cuerpo se pueden modelar al reemplazar esos apoyos por fuerzas puntuales
y momentos. Entonces, el modelo de la reacción más general en los apoyos consiste en una
fuerza F y un momento M, cada uno con magnitud y dirección desconocidas. De modo

6
alternativo, la fuerza y el momento se pueden representar por las tres componentes de
fuerzas Fx, Fy y Fz y los tres componentes de momentos Mx, My y Mz, con relación a los
ejes xyz.
En la tabla 1 se muestran varios tipos de apoyos que se usarán en este curso. A menudo, en
los problemas tridimensionales se usan tanto símbolos de apoyos bidimensionales como
tridimensionales. Por lo tanto, el alumno debe repasar los apoyos bidimensionales que se
muestran en la figura 3.9. Con frecuencia, en el enunciado de un problema de ejemplo o de
tarea se describen las características de un apoyo en particular con el fin de evitar la
ambigüedad en la interpretación del símbolo gráfico.
Observe que, como un apoyo tridimensional puede tener hasta tres componentes
independientes de fuerza y tres componentes independientes de momento, las condiciones
en los apoyos representadas en la tabla 1 sólo constituyen una pequeña selección de las
combinaciones posibles que existen en tres dimensiones.
Técnica de resolución de problemas
Equilibrio de sistemas estáticamente determinados de cuerpos rígidos
Como se ha mencionado, el dibujo de un diagrama de cuerpo libre es uno de los pasos más
importantes (si no el paso más importante) en la obtención de las soluciones en la mecánica
(ver ítem 3.2 para entender por qué los diagramas de cuerpo libre son tan importantes). En
la frase “diagrama de cuerpo libre”, la palabra “cuerpo” puede referirse a una estructura o
máquina completa, una parte de una estructura o máquina, un solo miembro o una sola
pieza, una partícula, etcétera. Asimismo, la palabra “libre” se refiere al hecho de que el
cuerpo se ha liberado (aislado) de sus partes circundantes, habiéndose reemplazado los
efectos de estas partes sobre el cuerpo por fuerzas y pares. Por tanto, el concepto
fundamental de diagrama de cuerpo libre es aislar una parte significativa de un sistema
(cuerpo sólido, partícula, cable, polea o cualquier combinación de estos objetos) y mostrar
las fuerzas y pares que actúan sobre ella. En pocas palabras,
En un diagrama de cuerpo libre, se debe aislar la parte significativa del sistema.

7
Para citar a W. F. Osgood (1937), la persona que concibió por primera vez esta idea merece
un monumentum aere (frase en latín que significa “monumento de bronce”).
Como una técnica general de resolución de problemas para aquellos en los que intervengan
sistemas de cuerpos rígidos, aplique los pasos siguientes. El alumno también debe repasar
la Técnica de resolución de problemas de partículas, en la unidad 3.
1. Construya los diagramas de cuerpo libre de las partes significativas del sistema. En
específico, construya diagramas de cuerpo libre de las partes que contengan las cantidades
deseadas que van a determinarse o que contienen cantidades que conducen a la solución
para las cantidades deseadas. Este paso requiere que, en primer lugar, se planee el
procedimiento para resolver el problema.
2. Asigne un sistema de coordenadas a cada uno de los diagramas de cuerpo libre de modo
que se puedan sumar las fuerzas y los momentos con eficiencia.
3. Aplique las condiciones de equilibrio a cada uno de los cuerpos libres con relación a los
sistemas de coordenadas asignados en el paso 2. En general, las condiciones de equilibrio
proporcionan un conjunto de ecuaciones algebraicas lineales simultáneas que deben
despejarse para encontrar las cantidades desconocidas.
4. Despeje las incógnitas del conjunto de ecuaciones simultáneas obtenido en el paso 3.
5. Sustituya las respuestas de nuevo en las ecuaciones de equilibrio para verificar que las
ecuaciones se satisfacen.
6. Para comprobar el problema, es buena idea resolverlo de dos maneras diferentes. Esta
comprobación da cierta confianza de que la solución es correcta.

8
Tabla 1
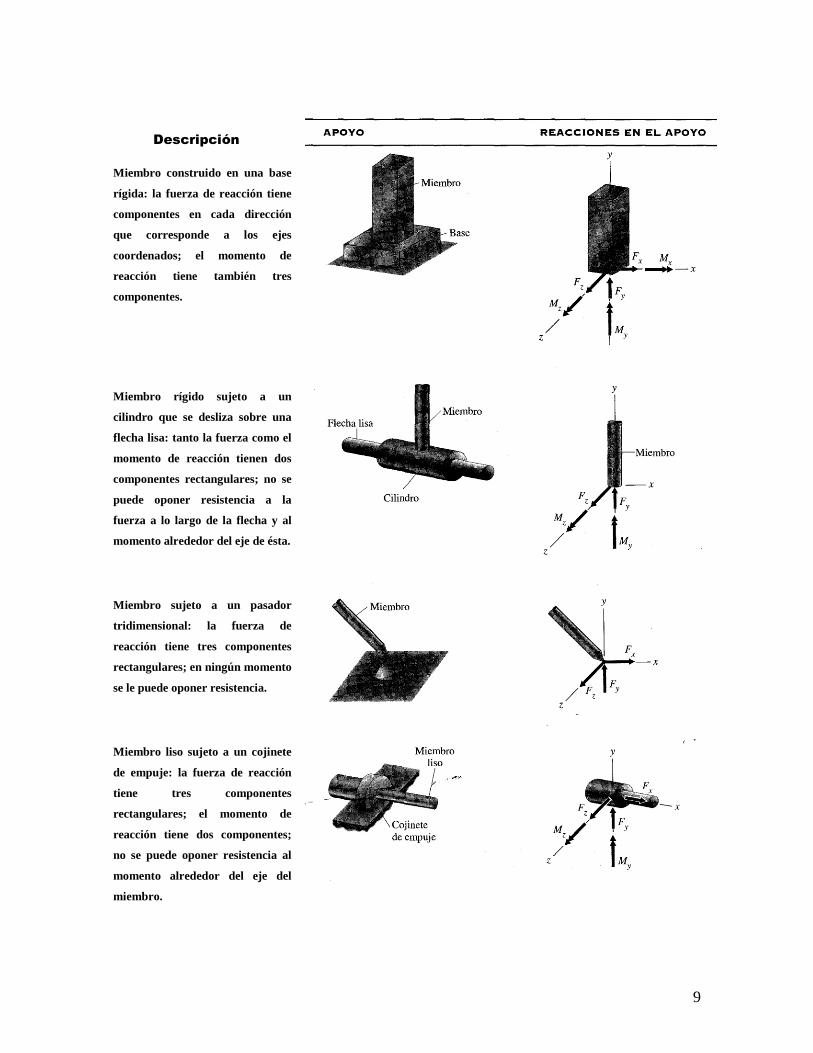
9
Descripción
Miembro construido en una base
rígida: la fuerza de reacción tiene
componentes en cada dirección
que corresponde a los ejes
coordenados; el momento de
reacción tiene también tres
componentes.
Miembro rígido sujeto a un
cilindro que se desliza sobre una
flecha lisa: tanto la fuerza como el
momento de reacción tienen dos
componentes rectangulares; no se
puede oponer resistencia a la
fuerza a lo largo de la flecha y al
momento alrededor del eje de ésta.
Miembro sujeto a un pasador
tridimensional: la fuerza de
reacción tiene tres componentes
rectangulares; en ningún momento
se le puede oponer resistencia.
Miembro liso sujeto a un cojinete
de empuje: la fuerza de reacción
tiene tres componentes
rectangulares; el momento de
reacción tiene dos componentes;
no se puede oponer resistencia al
momento alrededor del eje del
miembro.

10
Ejemplo 9 Reacciones en tres dimensiones
Planteamiento del problema Un bloque rígido de peso W está apoyado por un pasador en A
y por rodillos en B, C y D (ver figura a). El vector peso se encuentra a lo largo de la recta
vertical G que pasa por el centro de gravedad, ubicado como se muestra. El pasador
tridimensional en A opone resistencia a las fuerzas en las tres direcciones coordenadas. El
rodillo B opone resistencia a las fuerzas en la dirección z. Del mismo modo, los rodillos en
C y D oponen resistencia a las fuerzas en las direcciones x y y, respectivamente. Determine
las proyecciones (x, y, z) de las reacciones en los apoyos. Las unidades son newtons y
metros.
(a) (b)
Solución En la figura (b) se muestra el diagrama de cuerpo libre del bloque. Puesto que la
fuerza de reacción B es paralela al eje z, Bx = By = 0. Del mismo modo, Cy = Cz = Dx = Dz
= 0. Sólo se tienen seis proyecciones desconocidas de fuerzas; a saber, Ax, Ay, Az, Bz, Cx y
Dy. Las seis ecuaciones de equilibrio para un cuerpo rígido son suficientes para determinar
estas seis incógnitas. Las ecuaciones de equilibrio de fuerzas para el bloque son
(ecuaciones 5.25)
Fix = Ax + Cx = 0 (a)
Fiy = Ay + Cy = 0 (b)
Fiz = Az + Bz - W = 0 (c)

11
Por las ecuaciones (5.26), con referencia a la figura (b), las ecuaciones de equilibrio de
momentos alrededor de los ejes de coordenadas son
Mix = 5Az – 4Dy – 1.682W = 0 (d)
Miy = 4Cx + 1.591W – 3Az – 3Bz = 0 (e)
Miz = 3Ay – 5Ax – 2Cx = 0 (f)
Se puede resolver este conjunto de seis ecuaciones simultáneas como sigue: En primer
lugar, multiplique la ecuación (c) por 3 y sume el resultado a la (e). En seguida, despeje Cx,
para obtener Cx = 0.3523W. A continuación, sustituya este valor en la ecuación (a) para
obtener Ax = -0.3523W.
Las cantidades conocidas los sustituimos en las ecuaciones restantes, en el orden (f), (b),
(d) y (c), con el fin de determinar las reacciones restantes en los apoyos. De esta manera,
se obtiene la solución completa:
Ax = -0.3523W
Ay = -0.3523W
Az = 0.6182W (g)
Bz = 0.3818W
Cx = 0.3523W
Dy = 0.3523W
La sustitución de las ecuaciones (g) en las de equilibrio [ecuaciones (a) a la (f)] verificará
que se satisfacen estas últimas.
Información adicional Es conveniente realizar este tipo de verificación cuando se resuelve
un conjunto de ecuaciones simultáneas. De modo alternativo, se pudo haber resuelto el
conjunto de ecuaciones simultáneas usando un programa computacional para resolver
ecuaciones, o bien, una calculadora científica avanzada. Todavía como otro procedimiento,
para resolver este problema podría haberse tomado momentos alrededor de la recta AC (fig
b) y determinar Bz de manera directa. Tomar momentos alrededor de la recta AB permitiría

12
despejar Cx de modo directo, y si se toman momentos alrededor de la AE permitiría
despejar para Dy. Por último, sumando las fuerzas en las direcciones (x, y, z), se podría
resolver para Ax, Ay y Az.

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 14 (22/05/07)
Unidad 6 Armaduras
6.1 La Armadura: Un Sistema de Miembros de dos Fuerzas
Una armadura es una estructura de miembros delgados y rectos que soporta principalmente
cargas axiales (tensión o compresión) en esos miembros. La disposición de los miembros
en una armadura la hace un sistema eficiente para soportar cargas. Es decir, una armadura
puede soportar fuertes cargas en comparación con su propio peso. En la figura 6.1 se
muestran en forma esquemática varios tipos de armaduras usadas como soporte de techos y
en puentes de acero y madera para construcción. Estas armaduras se llaman planas porque
tanto los miembros como las cargas se encuentran en el mismo plano. Cada una de las
armaduras de la figura 6.1 tiene un nombre asociado a su configuración geométrica. Éstas y
otras configuraciones también se ven en las torres de radio, en estructuras especiales como
el domo Epcot en Disney World y en otras innumerables estructuras de ingeniería y
arquitectónicas.
Las armaduras se construyen de diversas maneras. Los materiales usados en las armaduras
incluyen madera para construcción, acero y aluminio. Los miembros de una armadura se
pueden unir por medio de pernos, placas metálicas para clavar (placas para armadura),
soldaduras, articulaciones en forma de un solo pasador de gran tamaño u otros medios. Las
uniones (nudos) de una armadura suelen ubicarse en los extremos de los miembros. Sin
embargo, a veces un miembro podrá ser continuo (sin división) mediante una unión. Por lo
general, las armaduras se diseñan de modo que las cargas (que no sean los pesos de cada
uno de los miembros) se concentren en los nudos.
La característica clave de una armadura que la distingue de otras formas estructurales es
que opone resistencia a las cargas, principalmente a través de fuerzas axiales en sus
miembros. Es decir, los miembros de una armadura se diseñan para soportar tensión o
compresión. Aunque podrían existir fuerzas flexionantes o cortantes (se estudiará en
unidad 7), su efecto sobre un miembro de una armadura suele tener una importancia
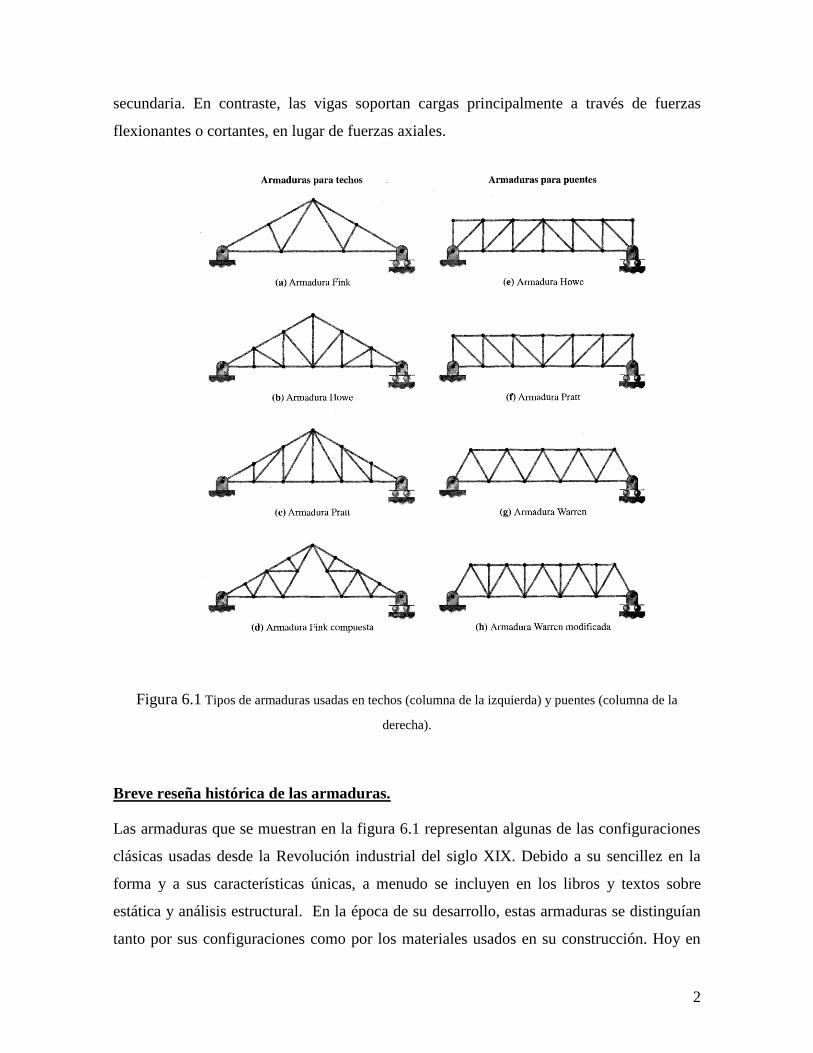
2
secundaria. En contraste, las vigas soportan cargas principalmente a través de fuerzas
flexionantes o cortantes, en lugar de fuerzas axiales.
Figura 6.1 Tipos de armaduras usadas en techos (columna de la izquierda) y puentes (columna de la
derecha).
Breve reseña histórica de las armaduras.
Las armaduras que se muestran en la figura 6.1 representan algunas de las configuraciones
clásicas usadas desde la Revolución industrial del siglo XIX. Debido a su sencillez en la
forma y a sus características únicas, a menudo se incluyen en los libros y textos sobre
estática y análisis estructural. En la época de su desarrollo, estas armaduras se distinguían
tanto por sus configuraciones como por los materiales usados en su construcción. Hoy en

3
día, las configuraciones de estas armaduras conservan los nombres de los individuos que las
desarrollaron, en tanto que no se especifican los materiales usados en su construcción. Para
ayudar al estudiante a reconocer el significado de los diversos diseños, se repasará con
brevedad el desarrollo de éstas y de otras armaduras utilizadas en los puentes.
Durante muchos siglos se han usado formas de armaduras para cubrir distancias más o
menos grandes. De hecho, el ingeniero romano Apolodoro construyó un puente del tipo de
armadura con tramos múltiples a través del río Danubio hacia el año 105. Cada tramo del
puente tomó una forma semejante a la de arco que se muestra en la figura 6.2 (Turner y
Goulden, 1981). Sin embargo, lo sorprendente es que el diseño de las armaduras para
puentes no se basó en principios matemáticos y físicos generales sino hasta la Revolución
industrial. Fue durante esta época que la disponibilidad del hierro forjado en Europa y la
expansión hacia el oeste de los ferrocarriles en EE.UU. presionaron a los ingenieros a
desarrollar diseños más racionales de armaduras para puentes ligeros y de tramos largos.
Fig. 6.2 Puente de Apolodoro a través del Danubio (adaptado por Turner y Goulden, 1981)
Fig. 6.3 Armadura Howe: a) armadura para puente; b) armadura de rigidez para puente colgante

4
Una de estas formas de armadura, la armadura Howe, fue patentada por William Howe en
1840 (Jacobs y Neville, 1968). El diseño de Howe fue un avance sobre un diseño previo en
el que se usaba un enrejado de piezas diagonales. Howe simplificó el diseño y agregó
miembros verticales de hierro forjado (figura 6.3a). Cuando las cargas se aplican a lo largo
de la cuerda de abajo de la armadura Howe, como en un puente de armadura con tablero
inferior, los miembros verticales se encuentran en tensión y los diagonales en compresión.
Howe fue el pionero en el uso del hierro forjado en los puentes debido a su capacidad
superior para soportar tensión (la madera de construcción es más adecuada bajo
compresión). La forma de la armadura Howe que se muestra en la figura 6.3b se usó con
amplitud en Europa, a principios del siglo XIX (antes de que Howe recibiera su patente),
para dar rigidez a las calzadas de los puentes colgantes (Peters, 1987). En las formas
estáticamente determinadas de la armadura de Howe (Figs. 6.lb y 6.le), los miembros
verticales se encuentran en tensión y los diagonales en compresión.
En 1844, Thomas Pratt y su padre Caleb modificaron el diseño de la armadura Howe para
crear la armadura Pratt (figuras 6.lc y 6.1f). En su diseño, la orientación de las diagonales
se invirtió, lo cual tuvo el efecto de poner tales miembros en tensión y los verticales en
compresión. Este cambio se dio como respuesta al incremento en el uso del hierro como
material de construcción para puentes completos. En la armadura Pratt, los miembros en
compresión (los verticales) son más cortos que en la armadura Howe, lo que conduce a una
mayor estabilidad inherente de esos miembros. Como la armadura Howe, hoy en día se
reconoce la Pratt por la orientación de sus miembros, no por el material usado para
construirla.
En 1848, James Warren y W. T. Manzoni patentaron en Inglaterra una armadura con
cuerdas superior e inferior horizontales y diagonales inclinadas a 60° (figura 6.lg) (Singer y
otros, 1958). La construcción de la armadura Warren comprendía el uso de fundiciones
para formar unidades triangulares que constan de la cuerda superior y dos diagonales de un
tramo. Entonces, estas unidades se unían con varillas roscadas de hierro forjado que
formaban la cuerda inferior. Se obtiene una modificación de la forma básica por la adición
de un miembro vertical en cada tramo (figura 6.lh), o bien, en tramos alternados. Estos
miembros verticales sirven para reforzar la cuerda superior contra el pandeo bajo fuerzas de
compresión.

5
Albert Fink, ingeniero nacido en Alemania y empresario de ferrocarriles, hizo
refinamientos adicionales a todos los puentes de acero de los ferrocarriles y logró un diseño
que sigue siendo popular en la actualidad. La configuración que patentó en 1851 se conoce
como armadura Fink (figura 6.4a). Esta configuración en realidad es una armadura
compuesta hecha de elementos simples (figura 6.4b). Fink se dio cuenta de que un montaje
de elementos de ese tipo hacían que la cuerda inferior de la armadura fuera superflua; el
tablero podía colocarse sencillamente sobre la cuerda superior de esa armadura. El
elemento básico del diseño de Fink es de uso común en las armaduras para techos para la
construcción residencial (fig. 6.la) e industrial (fig. 6.1d).
La armadura de cuerda y arco (Fig. 6.5) fue desarrollada por Squire Whipple, un
topógrafo, quien publicó el primer análisis matemático del diseño del puente en su libro de
1847, A Work on Bridge Building (Un trabajo sobre la construcción de puentes). En la
armadura de cuerda y arco de Whipple se combinan los principios del arco con los de la
armadura. La armadura que se muestra en la figura 6.5 también tiene una característica
conocida como contradiagonales (ver ítem 6.3).
Fig. 6.4 Armadura Fink: a) armadura Fink compuesta para tablero; b) elemento básico de la armadura
Fink
Fig. 6.5 Armadura de cuerda y arco

6
Idealización de las armaduras
Concepto clave
Una armadura real a menudo se puede analizar como una armadura ideal
Los diagramas a base de rectas, como se ilustran en la figura 6.1, son útiles para los fines de
análisis. En algunas armaduras, como aquellas que contienen contradiagonales, dos
miembros se pueden cruzar entre sí sin una conexión. Por lo tanto, los nudos (conexiones)
en los extremos de miembros se identifican mediante un punto negro grueso, como se
indica en la figura 6.1, para distinguirlos de los lugares en que los miembros se cruzan sin
existir conexión. Ya que el principio fundamental de las armaduras es el de soportar cargas
en la dirección axial en los miembros que la conforman, se acostumbra establecer ciertas
hipótesis sobre alguna armadura en particular para simplificar su análisis. Las hipótesis que
siguen permiten el uso de conceptos más o menos sencillos provenientes sólo de la estática
para analizar una armadura. Sin la aplicación de estas hipótesis, el análisis de las armaduras
requiere procedimientos complejos que no son prácticos sin la ayuda de un computador.
Hipótesis de la armadura ideal
1. Todos los miembros de una armadura son rectos y se pueden representar por medio de
rectas (las cuales pueden despreciar las dimensiones transversales de éstas).
2. Los nudos en los extremos de los miembros se pueden representar por medio de puntos
(en los cuales se desprecian sus dimensiones).
3. Todos los nudos se forman por pasadores sin fricción.
4. El peso de cada miembro se aplica en los extremos de éste, o bien, el peso de cada
miembro es despreciable. En esta unidad, se supondrá que el peso de cada miembro se
puede despreciar.
5. A una armadura sólo se le pueden aplicar cargas concentradas, y éstas se aplican en los
nudos.
6. Para una armadura plana (bidimensional), todos los miembros y caras se encuentran en el
mismo plano. Para una armadura espacial (tridimensional), los miembros no son coplanares
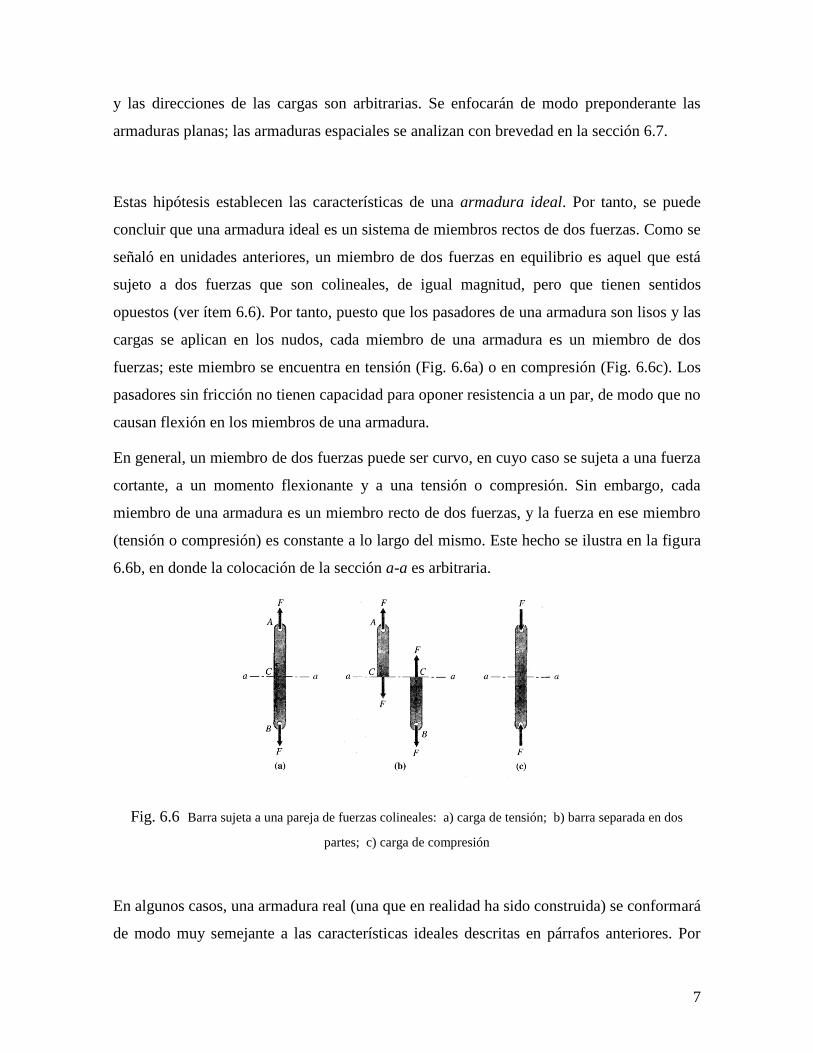
7
y las direcciones de las cargas son arbitrarias. Se enfocarán de modo preponderante las
armaduras planas; las armaduras espaciales se analizan con brevedad en la sección 6.7.
Estas hipótesis establecen las características de una armadura ideal. Por tanto, se puede
concluir que una armadura ideal es un sistema de miembros rectos de dos fuerzas. Como se
señaló en unidades anteriores, un miembro de dos fuerzas en equilibrio es aquel que está
sujeto a dos fuerzas que son colineales, de igual magnitud, pero que tienen sentidos
opuestos (ver ítem 6.6). Por tanto, puesto que los pasadores de una armadura son lisos y las
cargas se aplican en los nudos, cada miembro de una armadura es un miembro de dos
fuerzas; este miembro se encuentra en tensión (Fig. 6.6a) o en compresión (Fig. 6.6c). Los
pasadores sin fricción no tienen capacidad para oponer resistencia a un par, de modo que no
causan flexión en los miembros de una armadura.
En general, un miembro de dos fuerzas puede ser curvo, en cuyo caso se sujeta a una fuerza
cortante, a un momento flexionante y a una tensión o compresión. Sin embargo, cada
miembro de una armadura es un miembro recto de dos fuerzas, y la fuerza en ese miembro
(tensión o compresión) es constante a lo largo del mismo. Este hecho se ilustra en la figura
6.6b, en donde la colocación de la sección a-a es arbitraria.
Fig. 6.6 Barra sujeta a una pareja de fuerzas colineales: a) carga de tensión; b) barra separada en dos
partes; c) carga de compresión
En algunos casos, una armadura real (una que en realidad ha sido construida) se conformará
de modo muy semejante a las características ideales descritas en párrafos anteriores. Por

8
ejemplo, una armadura con miembros largos y delgados tiene poca fuerza cortante y poco
momento flexionante en ellos. En otros casos, existen diferencias significativas entre la
armadura real y el caso ideal. Las armaduras con miembros cortos, gruesos y conexiones
pesadas se comportan más como armazones (unidad 7) que como armaduras ideales. De
modo que si se analiza una armadura real aplicando las hipótesis que se aplican a una ideal,
los resultados que se obtengan serán aproximados. Aun así, a menudo se aplica el concepto
de armadura ideal con el fin de realizar un análisis y un diseño preliminar; más tarde, en el
proceso de diseño, se examinan los efectos secundarios de la fuerza cortante y el momento
flector en los miembros. En muchas situaciones prácticas, el error debido a esta
idealización tiene un efecto mínimo sobre el diseño global de la armadura. En el resto de
esta unidad, la palabra “armadura” tendrá el significado de armadura ideal, pero se entiende
que las armaduras ideales se representan en forma aproximada.
Fig. 6.7 Barras conectadas por un pasador, en equilibrio bajo la acción de dos fuerzas colineales.
Fig. 6.8 Diagramas de cuerpo libre de las barras y el pasador de la figura 6.7.
Si un pasador en el nudo de una armadura es liso (sin fricción), la fuerza que ejerce sobre
un miembro está dirigida a lo largo de su eje. Para visualizar esto, considere dos miembros
A y B unidos entre sí por un pasador y sujetos a fuerzas autoequilibrantes de magnitud F
(ver fig. 6.7). El pasador P sin fricción que une los miembros A y B transmite la fuerza F
de uno de los miembros (digamos, el miembro A) hacia el otro (el miembro B). Al hacerlo
el pasador queda sujeto a las fuerzas autoequilibrantes F. Se puede demostrar este hecho si
se separan los miembros del pasador y se construyen sus respectivos diagramas de cuerpo

9
libre, como se muestra en la figura 6.8. Las fuerzas FAP y FBP, que están en el extremo
derecho del miembro A y en el izquierdo del B son las fuerzas de contacto (acciones)
ejercidas por el pasador P sobre los miembros A y B. Las reacciones de estas fuerzas
actúan sobre el pasador. Éstas son las fuerzas FAP y FBP que los miembros A y B ejercen
sobre el pasador (figura 6.8b).
Dado que los miembros y el pasador están en equilibrio, por las condiciones del equilibrio y
la tercera ley de Newton que relaciona las acciones y las reacciones, se tiene
FFFFFF BPPBPAAP
En consecuencia, la fuerza ejercida por un pasador liso sobre un miembro en una armadura
está dirigida a lo largo del eje de ese miembro.
6.2 Estabilidad y Determinación Estática.
Considere un montaje de tres miembros, AB, BC y AC, que se encuentran conectados en sus
extremos para formar una armadura que consiste en un elemento triangular (figura 6.9a).
Este elemento consta de una armadura estable, es decir, no cambia su configuración bajo la
acción de la fuerza FB aplicada en el nudo B y las reacciones correspondientes en los
apoyos, en A y C. (También se usa la palabra “rígida” para describir una armadura estable.)
En contraste, un montaje de cuatro miembros conectados por pasadores con el fin de formar
un rectángulo no es estable (o rígido); ver figura 6.9b. Bajo la acción de la fuerza FA, este
sistema sufre un cambio en su conformación; sus miembros son sometidos a grandes
movimientos con relación a los otros. Al final, esto conducirá al aplastamiento del sistema.
En consecuencia, se dice que el sistema constituye una armadura inestable. De modo más
general, cualquier sistema de cuatro o más miembros conectados por pasadores que forman
un polígono no es estable; se aplastará bajo alguna combinación de cargas (ver también la
figura 6.9c).

10
Figura 6.9 Sistemas de barras conectadas para formar elementos geométricos: (a) elemento triangular; (b)
elemento rectangular; (c) elemento poligonal.
Si se parte del elemento triangular rígido fundamental que se muestra en la figura 6.9a, se
pueden añadir dos o más miembros no colineales para obtener un nuevo nudo (nudo D de la
figura 6.10). La armadura ABCD es rígida. Se puede continuar este proceso para obtener
una expansión adicional de la armadura triangular básica (Fig. 6.11). Una armadura que se
monta de esta manera se llama armadura simple. Cada una de las armaduras de las figuras
6.9a, 6.10 y 6.11 satisface ecuación
m + r = 2j (6.1)
donde m es el número de miembros, r es el número total de reacciones en los apoyos (dos
en un soporte de pasador, una en un rodillo) y j es el número total de nudos. Por ejemplo,
para la armadura de la figura 6.10, m = 5, r = 3 y j = 4. En la ecuación (6.1), m + r es el
número total de cantidades desconocidas (fuerzas en los miembros más reacciones) y 2j es
el número de ecuaciones independientes de equilibrio de las que se dispone para determinar
las incógnitas. El estudiante puede de ver que cualquier armadura montada de la manera
antes descrita será rígida y satisfará la ecuación (6.1).
Una armadura simple también es estáticamente determinada; es decir, las reacciones en los
apoyos y las fuerzas en los miembros se pueden determinar aplicando únicamente las
ecuaciones de equilibrio (estática). Si se agregan miembros a una armadura estáticamente
determinada sin agregar nudos, o bien, si se agregan reacciones de apoyos, la armadura se
vuelve estáticamente indeterminada. Una armadura estáticamente indeterminada es aquélla

11
para la cual no se pueden determinar todas las reacciones en los apoyos y todas las fuerzas
en los miembros con el solo uso de las ecuaciones de equilibrio. En el análisis de una
armadura estáticamente indeterminada deben considerarse las deformaciones (cambio en la
longitud) de los miembros. Por ejemplo, las dos armaduras que se muestran en la figura
6.12 son modificaciones de la armadura de la figura 6.10 y son estáticamente
indeterminadas. En la figura 6.12a se ha agregado un miembro de más (el miembro AD); en
la figura 6.12b se ha agregado un apoyo de más (el nudo D). Con estos cambios, se ve que
las armaduras de la figura 6.12 satisfacen la desigualdad
m + r > 2j (6.2)
Siendo específicos, en la figura 6.12a, m = 6, r = 3 y j = 4, lo cual da nueve incógnitas y
sólo ocho ecuaciones de equilibrio. Aun cuando las armaduras de la figura 6.12 son
estáticamente indeterminadas, también son estables (rígidas).
Fig. 6.10 Extensión del elemento Fig. 6.11 Armadura simple: combinación de
triangular básico elementos triangulares
Figura 6.12 Armaduras estáticamente indeterminadas.

12
La ecuación (6.1) es una condición necesaria para la estabilidad de las armaduras
estáticamente determinadas. Sin embargo, no es suficiente para garantizar la estabilidad de
cualquier armadura. Por ejemplo, los miembros también deben estar dispuestos de modo
apropiado para garantizar la rigidez de la armadura completa. Por ejemplo, la armadura de
la figura 6.13a satisface la ecuación (6.1), pero no es estable porque se podría aplastar la
parte superior cuando se apliquen las cargas. Además, los apoyos de la armadura deben
estar ubicados de manera adecuada. Por ejemplo, si los apoyos se disponen de modo que las
fuerzas de reacción sean concurrentes, no se puede satisfacer la ecuación para el equilibrio
de los momentos; la armadura girará bajo cargas arbitrarias. Si una armadura en particular
no tiene miembros o reacciones suficientes en los apoyos para impedir el movimiento de
los nudos, entonces esa armadura es inestable. Esta condición se expresa por la desigualdad
m + r < 2j
Las armaduras de las figuras 6.13b y 6.13c cumplen con esta condición. Expresado de
manera sencilla, el número de incógnitas (m + r) es menor que el número de ecuaciones
(2j). Con base en sus estudios de álgebra, el estudiante sabe que un sistema de ecuaciones
de este tipo es inconsistente. En general, un sistema de este tipo no tiene solución.
Se ha visto que el sistema de miembros de la figura 6.9b es inestable. Contiene m = 4
miembros y r = 3 reacciones en los apoyos (dos en D y uno en C), para tener un total de m
+ r = 7 cantidades desconocidas. Se tienen 2j = 8 ecuaciones de equilibrio (dos para cada
uno de los cuatro nudos A, B, C y D) que satisfacer. Del mismo modo, el sistema de
miembros de la figura 6.9c también es inestable. Para este sistema, se tienen 2j = 10
ecuaciones de equilibrio, pero m = 5 y r = 3 para un total de ocho incógnitas.
Fig. 6.13 Armaduras inestables: (a) configuración inapropiada; (b) número
inadecuado de miembros; (c) número inadecuado de reacciones en los apoyos.

13
El análisis de una armadura respecto a la determinación o indeterminación estáticas se
puede resumir como sigue:
Si las fuerzas en los miembros de una armadura se pueden determinar por las ecuaciones de
equilibrio, esa armadura es estáticamente determinada; de lo contrario, es estáticamente
indeterminada. Si una armadura tiene r reacciones desconocidas en los apoyos y m fuerzas
desconocidas en los miembros, se requieren m + r ecuaciones independientes de equilibrio
para despejar las incógnitas. Si una armadura tiene j nudos, se dispone de 2j ecuaciones de
equilibrio. Si m + r = 2j, se pueden determinar todas las incógnitas al resolver las
ecuaciones de equilibrio y la armadura es estáticamente determinada. Si m + r > 2j, no se
pueden determinar todas las incógnitas al resolver las ecuaciones de equilibrio y la
armadura es estáticamente indeterminada.
6.3 Métodos e Análisis de Armaduras
El análisis de una armadura comprende la determinación de las fuerzas en los miembros,
las fuerzas que actúan sobre los pasadores y las reacciones que surgen en la armadura
generada por sus apoyos. Este análisis se puede llevar a cabo de varias maneras. Dos
métodos en particular que se usan con frecuencia son el método de los nudos y el método
de las secciones. En el ítem 6.4 se describe el método de los nudos, en el cual se emplea el
concepto de equilibrio de una partícula. En el ítem 6.5 se discute el método de las
secciones, en el cual se requiere el uso del concepto de momentos (ítem 4.1) y del
equilibrio del cuerpo rígido.
Es común que, si se requieren las fuerzas en todos los miembros de una armadura
estáticamente determinada, el método de los nudos es más eficiente. Por otra parte, si se
requieren las fuerzas en sólo unos cuantos miembros interiores (digamos, los miembros BD
y CD de la figura 6.11), el método de las secciones puede ser más eficiente. Por otra parte,
el método de los nudos y el de las secciones no son mutuamente dependientes. El método
de resolución que se elija debe ajustarse a los objetivos del análisis. Se podría encontrar que
una combinación de los dos métodos resultara ser el procedimiento de resolución más

14
eficiente, o quizás con el empleo de uno de ellos es suficiente para la resolución del
problema.
Miembros de fuerza cero
Bajo la acción de un sistema de cargas aplicadas se producen cargas axiales en los
miembros de una armadura. Para un conjunto dado de cargas, puede ser que algunos
miembros no soporten fuerza interna; es decir, son miembros de fuerza nula. Por ejemplo,
para las cargas que se muestran en la figura 6.14a, los miembros BC y EF son miembros de
fuerza nula. Esto se puede ver al considerar el diagrama de cuerpo libre del nudo B que se
muestra en la figura 6.14b. Por conveniencia se elige un sistema de coordenadas tal que el
eje x sea paralelo a los miembros AB y BD; no es necesario alinear el miembro BC con el
eje y. La condición de equilibrio para el nudo B requiere que la suma de las proyecciones de
las fuerzas en la dirección y sea nulo. Por consiguiente, de la figura 6.14b, se tiene Fy =
TBCsenθ = 0; la fuerza TBC en el miembro BC es nula. En otras palabras, el miembro BC es
un miembro de fuerza nula. De manera semejante, se puede demostrar que el miembro EF
también es de fuerza nula. La identificación de los miembros de fuerza nula ayuda a
simplificar el análisis de una armadura.
Observe que los miembros de fuerza nula existen debido a la configuración geométrica de
la armadura y a la naturaleza de la carga aplicada a ella. Si a la armadura de la figura 6.14a
se le aplicara un patrón diferente de cargas —como cargas verticales en los nudos B y F—
los miembros BC y EF no serían de fuerza nula. También, a menudo se pueden identificar
los miembros de fuerza nula por inspección. Un examen visual de una armadura en
particular podría ser suficiente como para permitir la localización de esos miembros. En
otros casos, sólo se podrán identificar a través del análisis formal de la armadura
Fig. 6.14 (a) Armadura con miembros de fuerza nula. (b) Diagrama de cuerpo libre del nodo B.
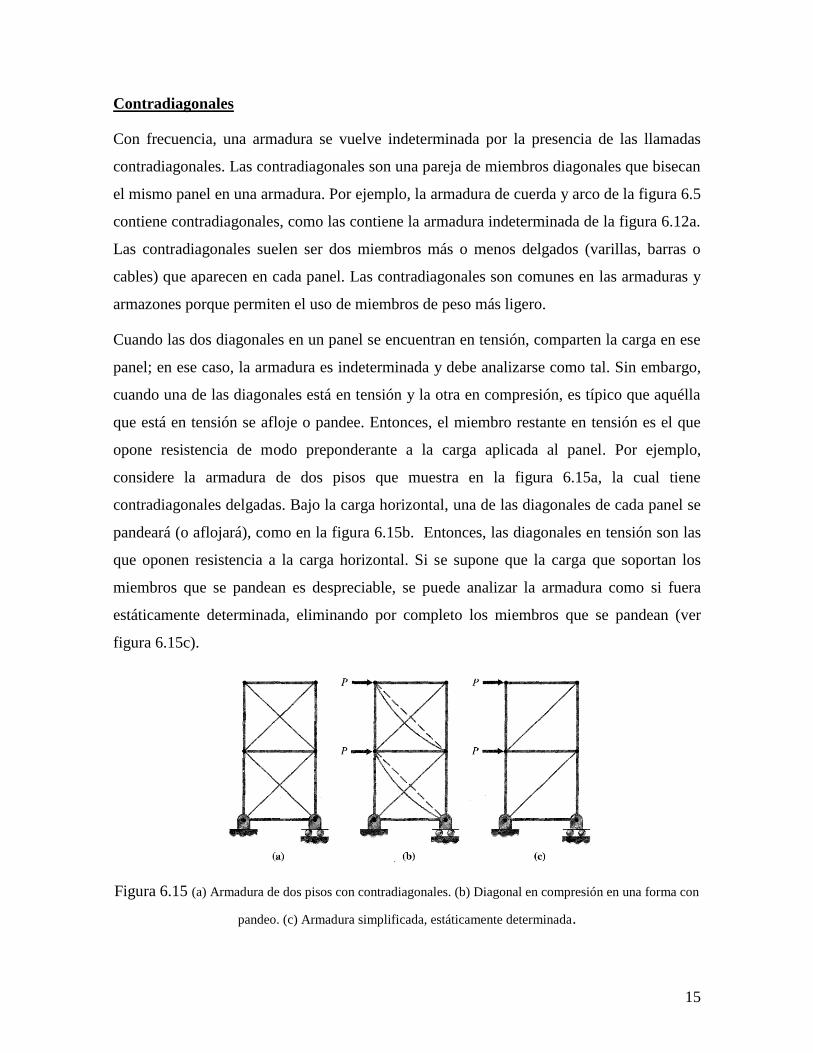
15
Contradiagonales
Con frecuencia, una armadura se vuelve indeterminada por la presencia de las llamadas
contradiagonales. Las contradiagonales son una pareja de miembros diagonales que bisecan
el mismo panel en una armadura. Por ejemplo, la armadura de cuerda y arco de la figura 6.5
contiene contradiagonales, como las contiene la armadura indeterminada de la figura 6.12a.
Las contradiagonales suelen ser dos miembros más o menos delgados (varillas, barras o
cables) que aparecen en cada panel. Las contradiagonales son comunes en las armaduras y
armazones porque permiten el uso de miembros de peso más ligero.
Cuando las dos diagonales en un panel se encuentran en tensión, comparten la carga en ese
panel; en ese caso, la armadura es indeterminada y debe analizarse como tal. Sin embargo,
cuando una de las diagonales está en tensión y la otra en compresión, es típico que aquélla
que está en tensión se afloje o pandee. Entonces, el miembro restante en tensión es el que
opone resistencia de modo preponderante a la carga aplicada al panel. Por ejemplo,
considere la armadura de dos pisos que muestra en la figura 6.15a, la cual tiene
contradiagonales delgadas. Bajo la carga horizontal, una de las diagonales de cada panel se
pandeará (o aflojará), como en la figura 6.15b. Entonces, las diagonales en tensión son las
que oponen resistencia a la carga horizontal. Si se supone que la carga que soportan los
miembros que se pandean es despreciable, se puede analizar la armadura como si fuera
estáticamente determinada, eliminando por completo los miembros que se pandean (ver
figura 6.15c).
Figura 6.15 (a) Armadura de dos pisos con contradiagonales. (b) Diagonal en compresión en una forma con
pandeo. (c) Armadura simplificada, estáticamente determinada.

16
Si la carga horizontal puede cambiar de dirección, como en el caso de una carga del viento
sobre un edificio, la diagonal en compresión (la que se pandea) puede pasar a estar en
tensión, y la que se encuentra en tensión se puede pandear. Así, cada contradiagonal debe
poder soportar la carga de tensión aplicada.
6.4 Método de os Nudos
Concepto clave
El método de los nudos para el análisis de armaduras se basa en el equilibrio de las
partículas de los nudos de la armadura.
Las hipótesis usadas para modelar una armadura se analizan en el ítem 6.1. En esta sección
se estudia la aplicación de un importante método de análisis a una armadura simple,
estáticamente determinada. El método de los nudos es un método de análisis de una
armadura estáticamente determinada al escribir y resolver las ecuaciones de equilibrio para
los nudos de la misma. Como se observó con anterioridad, se tienen dos ecuaciones
independientes de equilibrio para cada nudo de una armadura simple. Si estas ecuaciones
son suficientes para determinar todas las fuerzas en los miembros y todas las reacciones en
los apoyos, la armadura es estáticamente determinada. Si no es así, la estructura es
estáticamente indeterminada.
En el método de los nudos, se dibujan los diagramas de cuerpo libre de los nudos de la
armadura y se escriben las ecuaciones de equilibrio para cada uno de esos nudos. En una
armadura estáticamente determinada, la resolución de estas ecuaciones proporciona todas
las fuerzas que actúan sobre los pasadores y, por consiguiente, en los miembros de esa
armadura. Recuerde que en el ítem 6.1 se demostró que la fuerza (de tensión o de
compresión) en un miembro de la armadura es constante en toda la longitud del miembro
(ver figura 6.6b). Asimismo, por la tercera ley de Newton, la fuerza que un miembro ejerce
sobre un pasador es igual y opuesta a la que el pasador ejerce sobre el miembro.
En el diagrama de cuerpo libre de un pasador, la fuerza que un miembro en tensión ejerce
sobre éste se dirige hacia fuera de ese pasador. Si un miembro está en compresión, la fuerza
17
ejercida sobre un pasador se dirige hacia él. Por tanto, si se sabe que un miembro está en
tensión (o en compresión), se puede mostrar en el diagrama de cuerpo libre la fuerza que
ejerce sobre el pasador, con el sentido correcto. Sin embargo, al analizar una armadura con
varios miembros, puede ser difícil conjeturar si un miembro está en tensión o en
compresión. Por lo tanto, al dibujar el diagrama de cuerpo libre de un pasador, se debe
suponer que cualquier fuerza desconocida es de tensión y nombrarla con un símbolo, como
F, que denote su magnitud. En seguida, se escriben las ecuaciones de equilibrio para el
pasador con la aplicación de esta hipótesis. Si en la solución de las ecuaciones de
equilibrio, F es un número positivo, la fuerza es de tensión, como se supuso. Si F es un
número negativo, la fuerza es de compresión.
Técnica de resolución de Problemas
Método de los nudos para el análisis de armaduras
El análisis de las armaduras por el método de los nudos comprende las mismas técnicas que
las usadas para resolver problemas relacionados con el equilibrio de partículas. Dado que
la fuerza en cada uno de los miembros está alineada con el eje del propio miembro, la
fuerza ejercida por un miembro sobre un pasador esta dirigida a lo largo del eje de aquel.
Las fuerzas que actúan sobre un pasador pueden ser resultado de las acciones de los
miembros, de la acción de un apoyo y de los efectos de las cargas concentradas.
Para analizar una armadura usando el método de los nudos:
1. Dibuje un esquema exacto de la armadura, en el que se muestren todas las dimensiones y
cantidades importantes, incluyendo los ángulos. Si es posible, identifique los miembros de
fuerza cero por inspección de la configuración geométrica de la armadura y de las cargas.
Consulte y repase la resolución de problemas en el que intervenga el equilibrio de
partículas.
2. Con base en los miembros que interesan, seleccione un nudo para empezar el análisis. Si
es posible, elija un nudo en el cual sólo actúen dos fuerzas desconocidas en los miembros.
Recuerde que, para cada nudo, las ecuaciones de equilibrio proporcionan la solución de
sólo dos incógnitas en los problemas bidimensionales. Por lo tanto, es conveniente

18
seleccionar los nodos en una secuencia que permita evaluar de inmediato una o más de las
incógnitas, en lugar de reunir ecuaciones para todos los nudos y resolverlas de manera
simultánea.
3. Si no se puede identificar un nudo adecuado con el cual iniciar el análisis, podría ayudar
la determinación de las reacciones en los apoyos para la armadura. Una vez que se conocen
las reacciones en los apoyos, uno de los nudos apoyados podría ser un punto adecuado de
partida.
4. Dibuje un diagrama de cuerpo libre para el nudo seleccionado. Utilice para escribir y
resolver las ecuaciones de equilibrio para ese nudo
5. Repita el paso 4 para cada uno de los nudos subsiguientes, hasta que se hayan
determinado las fuerzas en los miembros que interesan.
Nota: A menudo se requerirá hallar sólo unas cuantas de las fuerzas en los miembros de una
armadura. En esos casos, desarrolle una estrategia que siga el camino más eficiente hacia
la solución.

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 15 (29/05/07)
Unidad 6 Armaduras (continuación)
6.5 Método de las Secciones
Concepto clave
El método de las secciones para el análisis de armaduras se basa en el equilibrio de cuerpo
rígido de una parte de la armadura.
En la sección 6.4 se aplicó el método de los nudos para calcular las fuerzas en los miembros
de una armadura estáticamente determinada, y se examinó el equilibrio de cada nudo. Si
sólo se requieren las reacciones de los apoyos o las fuerzas en algunos miembros interiores,
el método de los nudos a menudo traerá consigo cálculos innecesarios de otras cantidades.
Si una armadura completa está en equilibrio bajo la acción de un conjunto de fuerzas
coplanares, cualquier parte de la misma también está en equilibrio. Así, se puede cortar la
armadura en dos o más partes, cada una de las cuales es un cuerpo rígido en equilibrio. En
seguida, se pueden dibujar los diagramas de cuerpo libre de las partes, en los que se
muestran las fuerzas en los miembros que actúan en el corte. Puesto que los miembros de
las armaduras son de dos fuerzas, las fuerzas en esos miembros están dirigidas a lo largo de
sus ejes. Como en el método de los nudos (ítem 6.4), se puede suponer que las fuerzas
desconocidas en los miembros son de tensión.
Técnica de resolución de problemas
Método de las secciones para el análisis de armaduras
Para analizar una armadura utilizando el método de las secciones:
1. Dibuje un diagrama de cuerpo libre de la armadura completa y escriba las ecuaciones de
equilibrio. Resuelva estas ecuaciones para determinar las reacciones en los apoyos. En
ocasiones se puede omitir este paso del procedimiento, pero suele ser necesario determinar
esas reacciones como parte de la solución del problema.
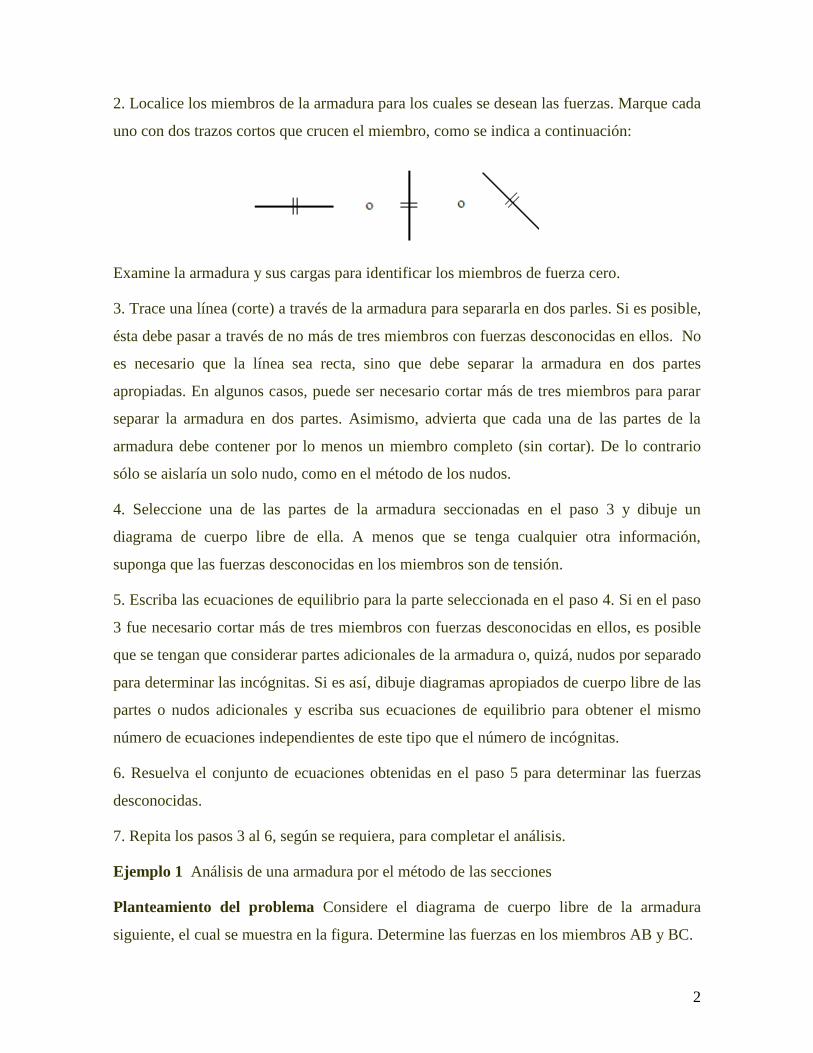
2
2. Localice los miembros de la armadura para los cuales se desean las fuerzas. Marque cada
uno con dos trazos cortos que crucen el miembro, como se indica a continuación:
Examine la armadura y sus cargas para identificar los miembros de fuerza cero.
3. Trace una línea (corte) a través de la armadura para separarla en dos parles. Si es posible,
ésta debe pasar a través de no más de tres miembros con fuerzas desconocidas en ellos. No
es necesario que la línea sea recta, sino que debe separar la armadura en dos partes
apropiadas. En algunos casos, puede ser necesario cortar más de tres miembros para parar
separar la armadura en dos partes. Asimismo, advierta que cada una de las partes de la
armadura debe contener por lo menos un miembro completo (sin cortar). De lo contrario
sólo se aislaría un solo nudo, como en el método de los nudos.
4. Seleccione una de las partes de la armadura seccionadas en el paso 3 y dibuje un
diagrama de cuerpo libre de ella. A menos que se tenga cualquier otra información,
suponga que las fuerzas desconocidas en los miembros son de tensión.
5. Escriba las ecuaciones de equilibrio para la parte seleccionada en el paso 4. Si en el paso
3 fue necesario cortar más de tres miembros con fuerzas desconocidas en ellos, es posible
que se tengan que considerar partes adicionales de la armadura o, quizá, nudos por separado
para determinar las incógnitas. Si es así, dibuje diagramas apropiados de cuerpo libre de las
partes o nudos adicionales y escriba sus ecuaciones de equilibrio para obtener el mismo
número de ecuaciones independientes de este tipo que el número de incógnitas.
6. Resuelva el conjunto de ecuaciones obtenidas en el paso 5 para determinar las fuerzas
desconocidas.
7. Repita los pasos 3 al 6, según se requiera, para completar el análisis.
Ejemplo 1 Análisis de una armadura por el método de las secciones
Planteamiento del problema Considere el diagrama de cuerpo libre de la armadura
siguiente, el cual se muestra en la figura. Determine las fuerzas en los miembros AB y BC.

3
(a)
Solución Los miembros que interesan, el AB y el BC, están marcados con dos trazos cortos
en el diagrama de cuerpo libre. Lo normal es comenzar la resolución de este problema por
la determinación de las reacciones en D y en E. Sin embargo, en este caso se observa que si
se traza un corte (mostrado como una línea discontinua en el diagrama de cuerpo libre de la
figura a) a través de tres miembros -en específico, los miembros AB, BC y CD- se puede
aislar la parte derecha de la armadura como un cuerpo libre y las reacciones desconocidas
en los apoyos no entran en los cálculos.
Por inspección, se ve que el miembro BC es de fuerza nula, ya que el nudo C lo conecta a
los miembros colineales AC y CD, y no hay cargas aplicadas en C (ver figura a). El
miembro DE también es de fuerza nula, ya que la reacción en E es perpendicular a DC.
En la figura (b) se muestra el diagrama de cuerpo libre de la parte aislada de la armadura.
Las fuerzas en los miembros seccionados están dirigidas a lo largo de sus ejes
longitudinales. Puesto que no es obvio si las fuerzas en el corte son de tensión o de
compresión, se supone que todos los miembros están en tensión.
(b)
La parte aislada de la armadura está en equilibrio bajo la acción de un sistema de fuerzas no
paralelas, no concurrentes y coplanares. Por consiguiente, puede aplicarse el equilibrio del
cuerpo rígido, con lo que se dispone de tres ecuaciones independientes de equilibrio. En

4
consecuencia, sólo se pueden determinar tres cantidades desconocidas (TAB, TBC y TCD) a
partir de las ecuaciones de equilibrio para la parte aislada. En este caso, sólo fueron
seccionados tres miembros. De modo que no será necesario tener otras partes o nudos para
despejar las incógnitas.
En primer lugar, para determinar la fuerza TBC, se consideran los momentos alrededor del
punto A, la intersección de las líneas de acción de las fuerzas TAB y TCD. La ecuación de
equilibrio de los momentos alrededor de este punto es
09.0 BCA TM
Esta ecuación da TBC = 0, lo cual confirma la observación inicial con base en la inspección
de la armadura.
Puesto que se sabe que el miembro BC es de fuerza nula, se puede obtener TAB por
cualquiera de las dos ecuaciones. Se pudo considerar el equilibrio de los momentos
alrededor del nudo C, o bien, el equilibrio de las fuerzas en la dirección y. Si se elige
considerar el equilibrio de las fuerzas, se tiene
030 BCABy TsenTF
Si se sustituye TBC = 0 en esta ecuación y se observa que senθ = 0.8, se tiene TAB = 37.5 kN.
Dado que el resultado es positivo, la hipótesis de que TBC es una fuerza de tensión es
correcta. Como era de esperar, estos resultados concuerdan con los valores que se pueden
obtener por el método de los nudos.
Información adicional Habiendo identificado al principio el miembro BC como uno de
fuerza nula, pudo hacerse usando el método de los nudos en el nudo A para encontrar la
fuerza en el miembro AB, con lo cual se habría completado la solución. En este caso, tal
procedimiento habría sido más rápido que el método de las secciones. Una vez que el lector
haya adquirido experiencia en el análisis de las armaduras, podrá identificar el método que
conduzca de modo más eficiente a la solución del problema.
Ejemplo 2 Análisis de una armadura Warren modificada
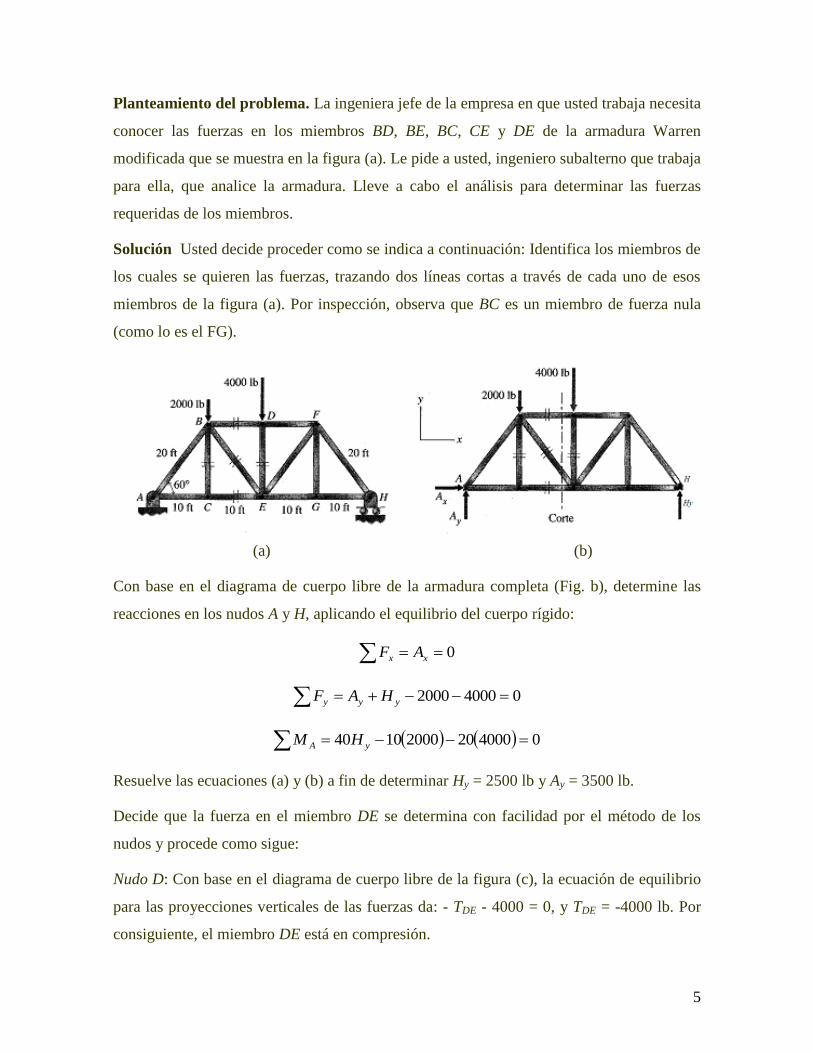
5
Planteamiento del problema. La ingeniera jefe de la empresa en que usted trabaja necesita
conocer las fuerzas en los miembros BD, BE, BC, CE y DE de la armadura Warren
modificada que se muestra en la figura (a). Le pide a usted, ingeniero subalterno que trabaja
para ella, que analice la armadura. Lleve a cabo el análisis para determinar las fuerzas
requeridas de los miembros.
Solución Usted decide proceder como se indica a continuación: Identifica los miembros de
los cuales se quieren las fuerzas, trazando dos líneas cortas a través de cada uno de esos
miembros de la figura (a). Por inspección, observa que BC es un miembro de fuerza nula
(como lo es el FG).
(a) (b)
Con base en el diagrama de cuerpo libre de la armadura completa (Fig. b), determine las
reacciones en los nudos A y H, aplicando el equilibrio del cuerpo rígido:
0xx AF
040002000yyy HAF
040002020001040 yA HM
Resuelve las ecuaciones (a) y (b) a fin de determinar Hy = 2500 lb y Ay = 3500 lb.
Decide que la fuerza en el miembro DE se determina con facilidad por el método de los
nudos y procede como sigue:
Nudo D: Con base en el diagrama de cuerpo libre de la figura (c), la ecuación de equilibrio
para las proyecciones verticales de las fuerzas da: - TDE - 4000 = 0, y TDE = -4000 lb. Por
consiguiente, el miembro DE está en compresión.

6
(c) (d)
Las fuerzas en los miembros BD, BE y CE siguen sin ser calculados. Observa que estos
miembros se pueden cortar mediante una sección vertical que cruce entre los nudos B y D.
La parte aislada que se muestra en la figura (d) se elige como el cuerpo libre. De modo que,
por las ecuaciones de equilibrio de la parte aislada, encuentra que
060cos ECEBDBx TTTF
02500400060senTF EBy (c)
025002032.17 DBE TM
Las ecuaciones (c) dan: TDB = -2887 lb, TEB = 1732 lb y TEC = 2021 lb. Puesto que TDB es
negativa, el miembro DB está en compresión; los miembros EB y EC están en tensión.
Esto completa su solución. Sin embargo, como es un ingeniero cauteloso, decide
comprobarla por el método alternativo siguiente:
Resolución alternativa Observa que se pueden determinar las fuerzas TDB, TEB y TEC con
la aplicación del teorema 4.8 y que las condiciones de equilibrio para la sección que se
muestra en la figura (d) pueden escribirse como
032.17250030400010 ECB TM
025002032.17 DBE TM
02500400060senTF EBy

7
en donde los subíndices B y E en la ecuación de momentos se refiere a los nudos B y E.
Entonces, resuelve estas ecuaciones para obtener TDB = -2887 lb, TEB = 1732 lb, y TEC =
2021 lb. Estos valores concuerdan con su solución anterior y se siente satisfecho con ello.
No obstante, como otra comprobación, decide verificar la suma de las fuerzas en la
dirección x:
05.017322021288730senTTTF EBECDBx
En verdad, esto es correcto.
Usted observa que la ventaja de esta solución alternativa sobre la anterior es que TDB, TEC y
TEB se determinan en forma independiente, a partir de una sola ecuación para cada una. De
este modo se evita la resolución de un conjunto de ecuaciones simultáneas. Asimismo, ya
que TDB, TEC y TEB se determinan en forma independiente, se puede usar la ecuación Fx =0
para comprobar las respuestas.
Información adicional Cuando se aplicó el método de las secciones para encontrar las
fuerzas en los miembros BD, BE y CE, se separó la armadura en dos partes mediante un
corte imaginario vertical. En general, el proceso de separar la armadura en dos partes no
requiere de un corte recto. Se puede trazar cualquier línea curva a través de una armadura
para separarla en dos partes. Tenga en cuenta que, no obstante, con cualquier línea, no
deben cortarse más de tres miembros con fuerzas desconocidas. También, advierta que se
puede seleccionar cualquiera de las dos partes de una armadura como el cuerpo libre para el
análisis por el método de las secciones. En este caso se usó la parte de la armadura que está
a la derecha del corte. Sin embargo, se pudo haber usado la parte izquierda para obtener
resultados equivalentes.
6.6 Armaduras Compuestas y Complejas
Como se examinó con anterioridad, una armadura simple es aquella que se puede montar
agregando sucesivamente dos miembros no colineales a un elemento triangular inicial. A
medida que agrega cada pareja de miembros, se añade otro nudo. No obstante, muchas
configuraciones de armadura no se pueden montar de esta manera. A menudo, estas

8
configuraciones se componen de dos o más armaduras simples que se unen entre sí. Esas
estructuras se conocen como armaduras compuestas. Para ser específicos, una armadura
compuesta está formada por dos o más armaduras simples unidas entre sí por uno o más
nudos comunes o por miembros adicionales.
En la figura 6.16 se muestran ejemplos de armaduras compuestas; las partes de armaduras
simples aparecen sombreadas. En la figura 6.16a, dos armaduras simples están unidas en un
nudo común, el A. Para lograr que la armadura resultante sea estable, se requieren dos
apoyos articulados (cuatro reacciones en los apoyos). En la figura 6.16b, dos armaduras
simples están unidas entre sí con tres miembros adicionales. La estabilidad queda asegurada
con las tres reacciones usuales en los apoyos.
Figura 6.16 Armaduras compuestas.
El análisis de una armadura compuesta se puede realizar con la aplicación del método de
los nudos o el de las secciones. Si se aplica el método de las secciones, se empieza por
dividir la armadura en sus componentes de armaduras simples. Por ejemplo, se puede
eliminar el pasador en el nudo A de la armadura compuesta de la figura 6.16a para separarla
en dos armaduras simples. Del mismo modo, se puede separar la armadura compuesta de la
figura 6.16b en dos partes al realizar un corte a lo largo de la línea punteada a trazos. A
continuación, se pueden analizar las armaduras simples usando el método de los nudos o el
de las secciones. Sin precisar el método que se use, es probable que tenga que resolver
ecuaciones simultáneas al analizar una armadura compuesta.
Las configuraciones de armaduras que no se pueden clasificar como simples o compuestas
se conocen como armaduras complejas. En general, una armadura compleja puede estar

9
compuesta por cualquier combinación de elementos triangulares, cuadriláteros y
poligonales. Con frecuencia, una armadura compleja tiene miembros que se cruzan uno
sobre el otro sin estar necesariamente unidos. En la figura 6.17 se muestran ejemplos de
armaduras complejas (en los dos ejemplos, los miembros se cruzan sin unirse). En el
análisis de una armadura compleja, se puede emplear el método de los nudos o el de las
secciones para generar ecuaciones de equilibrio, las cuales se resuelven entonces de manera
simultánea para obtener las fuerzas en los miembros. Observe que cada una de las
armaduras que se muestran en las figuras 6.16 y 6.17 es estáticamente determinada y
estable (ver ecuación 6.2).
Figura 6.17 Armaduras complejas, con miembros que sólo están unidos en los puntos.
6.7 Armaduras Espaciales
Concepto clave
Una armadura espacial se puede analizar por los mismos métodos usados para analizar una
armadura plana.
Hasta ahora, en esta unidad, el análisis se ha limitado a las armaduras planas
(bidimensionales). En esta sección se consideran con brevedad las armaduras espaciales
(tridimensionales). Una armadura espacial es un montaje de miembros rectos
bidimensionales en los cuales la disposición no se limita a las configuraciones planas.
Tanto el método de los nudos como el de las secciones, con sólo unas pequeñas
ampliaciones, se aplican al análisis de las armaduras espaciales (tridimensionales).

10
El elemento rígido fundamental de una armadura espacial es el tetraedro, el cual se muestra
en la figura 6.18a. Este elemento contiene seis miembros y cuatro nudos. La armadura
básica se amplía al agregar de manera sucesiva tres miembros no coplanares y un nudo
común (véanse las figuras 6.18b y 6.18c). Si una armadura espacial se monta de esta
manera y se restringe por seis reacciones en los apoyos (el número mínimo para el
equilibrio de un cuerpo tridimensional), entonces es estáticamente determinada y estable.
Como con las armaduras planas, una armadura es estáticamente determinada cuando el
número total de incógnitas (que consisten en m fuerzas desconocidas en los miembros más
r reacciones en los apoyos) es igual al número de ecuaciones independientes de equilibrio
para los nudos 3j; es decir,
m + r = 3j (6.3)
Figura 6.18 Armadura espacial simple: (a) elemento fundamental, un tetraedro; (b) primera
ampliación del elemento fundamental; (c) segunda ampliación del elemento fundamental.
Si se agregan más miembros a una armadura espacial, sin la adición de más nudos, esa
armadura se vuelve estáticamente indeterminada. Entonces se aplica la desigualdad:
m + r > 3j
Si se eliminan uno o más miembros de una armadura espacial estáticamente determinada,
no se satisface la ecuación (6.3), y la armadura se vuelve inestable.
Se puede aplicar el método de los nudos para analizar una armadura espacial, con la
predicción de que se deben satisfacer tres ecuaciones de equilibrio en cada nudo (tomado

11
como una partícula). Del mismo modo, se puede aplicar el método de las secciones (sección
6.5), entendiéndose que no deben cortarse más de seis miembros con fuerzas desconocidas
para aislar una parte, ya que, en tres dimensiones, se aplican seis ecuaciones de equilibrio a
un cuerpo rígido.

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 16 (01/06/07)
Unidad 6 Armaduras (continuación)
Ejemplo 1 Aguilón de carga para muelle
Planteamiento del problema Se usa una armadura giratoria que constituye un aguilón
para levantar la carga de los barcos y colocarla sobre un muelle (ver figura a). La armadura
puede girar tomando como pivote un eje vertical (paralelo al eje y) que pasa por el nudo A,
el cual está articulado al muelle. Los nudos B y C están apoyados por medio de rodillos al
propio muelle. Para una carga P = 50 kips, determine las fuerzas en los puntales en
compresión BE y CE y en el tirante en tensión AD.
(a)
Solución En primer lugar, se debe decidir qué estrategia de resolución emplear. Se puede
aplicar el método de los nudos, el método de las secciones, o una combinación de los dos.
Si se elige el método de los nudos, se podría empezar en el nudo E y hallar de inmediato las
fuerzas TBE y TCE, junto con TDE. En seguida, se podría avanzar hacia el nudo D para
obtener TAD. Por el método de las secciones, se pueden determinar las tres fuerzas en los
miembros que interesan, TBE, TCE, y TAD, con una sola sección que corte los miembros AD,
BD, CD, BE y CE para aislar el miembro DE. Con ambos procedimientos, tal parece que el
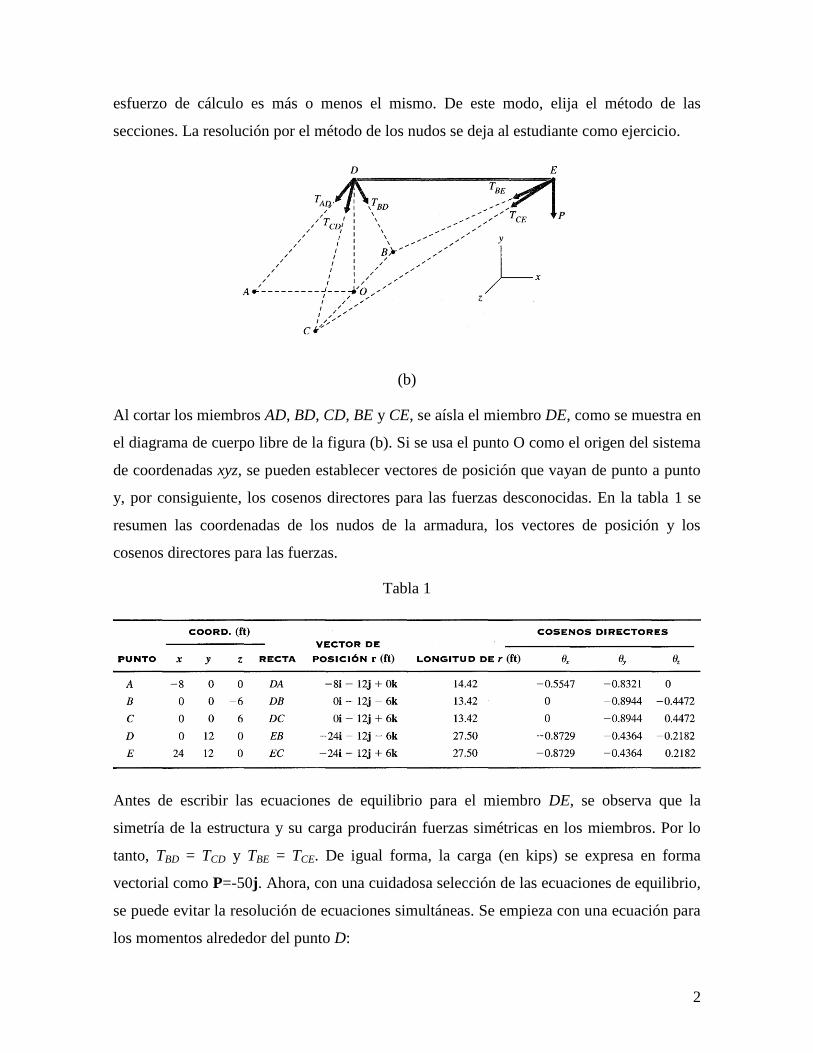
2
esfuerzo de cálculo es más o menos el mismo. De este modo, elija el método de las
secciones. La resolución por el método de los nudos se deja al estudiante como ejercicio.
(b)
Al cortar los miembros AD, BD, CD, BE y CE, se aísla el miembro DE, como se muestra en
el diagrama de cuerpo libre de la figura (b). Si se usa el punto O como el origen del sistema
de coordenadas xyz, se pueden establecer vectores de posición que vayan de punto a punto
y, por consiguiente, los cosenos directores para las fuerzas desconocidas. En la tabla 1 se
resumen las coordenadas de los nudos de la armadura, los vectores de posición y los
cosenos directores para las fuerzas.
Tabla 1
Antes de escribir las ecuaciones de equilibrio para el miembro DE, se observa que la
simetría de la estructura y su carga producirán fuerzas simétricas en los miembros. Por lo
tanto, TBD = TCD y TBE = TCE. De igual forma, la carga (en kips) se expresa en forma
vectorial como P=-50j. Ahora, con una cuidadosa selección de las ecuaciones de equilibrio,
se puede evitar la resolución de ecuaciones simultáneas. Se empieza con una ecuación para
los momentos alrededor del punto D:
3
MD = 0: rED X P + rED X TBE + rED X TCE = 0 (a)
donde rED es el vector de posición que va del nudo D al E; rED = 24i. Si se evalúa la
ecuación (a) y se observa que TBE = TCE, se obtiene
24(-50)k + 24[2TBE(-0.4364)]k + 24(0.2182TBE)j + 24(-0.2182TBE)j = 0
lo cual da TBE = TCE = -57.29 kips. Por tanto, los miembros BE y CE están en compresión.
Ahora bien, para hallar TAD, se observa que la ecuación escalar de equilibrio Fx = 0 para el
miembro DE sólo tendrá una incógnita, siendo ésta TAD. Esa ecuación toma la forma:
Fx = 0: 2TBE(-0.8729) + TAD(-0.5547) = 0 (b)
La resolución de la ecuación (b) da TAD = 180.31 kips (el miembro AD está en tensión).
1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 17 (05/06/07)
Unidad 7 Vigas
Definición
Una viga es una barra delgada, recta o curva, apoyada en uno o más puntos a todo su largo.
Las vigas se usan mucho en sistemas mecánicos y estructurales, como edificios, puentes y
aviones. Generalmente, las vigas se someten a cargas dirigidas perpendiculares a sus ejes
longitudinales. Estas cargas hacen que se deflecten en el sentido transversal. Sin embargo,
las vigas también pueden sujetarse a fuerzas axiales o a momentos de torsión. Las vigas se
apoyan de varias maneras; por ejemplo, por pasadores, rodillos y mordazas
(empotramientos). Se someten a cargas concentradas, a pares (ahora los llamaremos
momentos) y a fuerzas distribuidas.
En esta unidad, el estudiante aprenderá cómo determinar las fuerzas internas en las vigas
(fuerzas axiales, fuerzas cortantes, momentos flexionantes y momentos de torsión).
Aprenderá cómo trazar diagramas de fuerzas cortantes y de momentos flexionantes para las
vigas y cómo determinar la fuerza cortante máxima y el momento flexionante máximo en
éstas. Las magnitudes de estas fuerzas interiores son importantes en el diseño de las vigas.
7.1 Reacciones en los Apoyos: Vigas Sujetas a Fuerzas Concentradas y Momentos
Concepto Clave
Una viga es un miembro estructural largo y delgado que está apoyado en lugares discretos
ubicados a su largo y que se sujeta principalmente a cargas que causan flexión.
Una viga es un miembro sujeto principalmente a cargas que causan flexión. Por ejemplo,
una viga recta se vuelve curva o se deflecta bajo la acción de una fuerza que está dirigida

2
perpendicular al eje de ella (ver figura 7.1). En principio, una viga puede ser recta o curva.
En las estructuras de madera, a menudo se usan maderos rectos (con medidas
estandarizadas) como vigas. En los aviones, con frecuencia las vigas son curvas. En las
estructuras modernas de acero, se usan con amplitud vigas rectas con patines anchos, en las
cuales una gran parte del área de la sección transversal se localiza en estos últimos. Esta
forma de sección transversal de mejor inercia proporciona una alta resistencia a la flexión.
Fig. 7.1 Carga lateral sobre la viga Fig. 7.2 Sección transversal de una viga
Con patines anchos
Una viga que está apoyada sólo en uno de sus extremos se llama viga en voladizo. En la
figura 7.3a, se tiene una representación de una viga recta en voladizo. Se dice que el
extremo izquierdo de esta viga es el extremo empotrado, o extremo fijo, ya que se supone
que una viga en voladizo no tiene posibilidad de deslizarse ni girar en el extremo apoyado.
Se dice que el otro extremo de la viga en voladizo es el extremo libre, ya que no está
apoyado y puede trasladarse y girar.
Las fuerzas y los pares ejercidos sobre la viga por sus apoyos se llaman reacciones en los
apoyos. Son las reacciones a las fuerzas ejercidas sobre el apoyo por la viga. La estructura
de apoyo de una viga en voladizo ejerce en realidad fuerzas distribuidas sobre el extremo
de ella que son equivalentes a una fuerza transversal F y un momento M (ver figura 7.3b).
En lugar de mostrar una viga en voladizo empotrada en su estructura de apoyo, como en las
figuras 7.3a y 7.3b, en este curso se representa un apoyo fijo de una viga de ese tipo y su
sistema equivalente de fuerzas de modo más sencillo, como se muestra en la figura 7.3c.
Una viga recta que está apoyada en uno de sus extremos por un rodillo y en el otro por una
articulación se llama viga simple (ver figura 7.4). Como recordará, un apoyo de rodillos se
representa por cualquiera de estos símbolos: . La fuerza ejercida sobre un apoyo

3
de rodillos es perpendicular a la superficie sobre la cual actúa. Con el símbolo se
denota un apoyo de pasador o articulado. La reacción en el apoyo, en un pasador o una
articulación, es una fuerza que actúa formando un ángulo particular o, lo que es
equivalente, se tienen componentes horizontal y vertical de una fuerza.
Fig. 7.3 a) Viga en voladizo. b) Fuerzas sobre el extremo apoyado. c) Representación del apoyo fijo
Fig. 7.4 Viga simple estáticamente determinada
Por lo común, una viga recta se carga por fuerzas transversales paralelas. El análisis que
sigue se basa en esta situación; en cuyo caso, sólo se dispone de dos ecuaciones de
equilibrio para determinar las reacciones en los apoyos (ver ítem 4.6). Si el eje x es paralelo
al eje longitudinal de la viga y si el eje y es transversal a ésta, estas ecuaciones son Fy = 0
y M = 0, ya que sin la presencia de cargas en la dirección x, Fx = 0 se satisface de igual
manera. Si sólo se tienen dos reacciones desconocidas, estas ecuaciones son suficientes
para determinarlas. En este caso, la viga es estáticamente determinada. Si se tienen más de
dos reacciones desconocidas, estas ecuaciones no son suficientes para determinarlas.
Entonces, la viga es estáticamente indeterminada; es decir, sus reacciones no se pueden
determinar por medio de las ecuaciones del equilibrio estático. Por ejemplo, la viga simple
de la figura 7.4 es estáticamente determinada. Sin embargo, si se agrega otro apoyo de
rodillos, como se muestra en la figura 7.5, la viga se convierte en estáticamente
indeterminada.
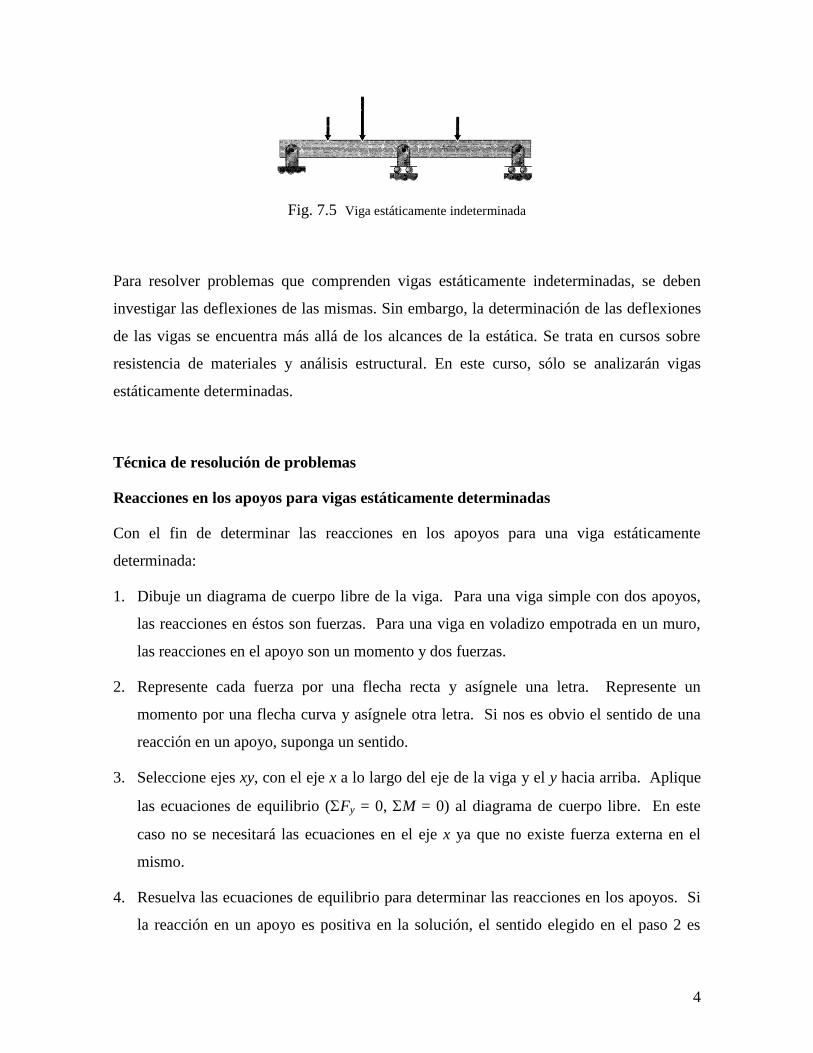
4
Fig. 7.5 Viga estáticamente indeterminada
Para resolver problemas que comprenden vigas estáticamente indeterminadas, se deben
investigar las deflexiones de las mismas. Sin embargo, la determinación de las deflexiones
de las vigas se encuentra más allá de los alcances de la estática. Se trata en cursos sobre
resistencia de materiales y análisis estructural. En este curso, sólo se analizarán vigas
estáticamente determinadas.
Técnica de resolución de problemas
Reacciones en los apoyos para vigas estáticamente determinadas
Con el fin de determinar las reacciones en los apoyos para una viga estáticamente
determinada:
1. Dibuje un diagrama de cuerpo libre de la viga. Para una viga simple con dos apoyos,
las reacciones en éstos son fuerzas. Para una viga en voladizo empotrada en un muro,
las reacciones en el apoyo son un momento y dos fuerzas.
2. Represente cada fuerza por una flecha recta y asígnele una letra. Represente un
momento por una flecha curva y asígnele otra letra. Si nos es obvio el sentido de una
reacción en un apoyo, suponga un sentido.
3. Seleccione ejes xy, con el eje x a lo largo del eje de la viga y el y hacia arriba. Aplique
las ecuaciones de equilibrio (Fy = 0, M = 0) al diagrama de cuerpo libre. En este
caso no se necesitará las ecuaciones en el eje x ya que no existe fuerza externa en el
mismo.
4. Resuelva las ecuaciones de equilibrio para determinar las reacciones en los apoyos. Si
la reacción en un apoyo es positiva en la solución, el sentido elegido en el paso 2 es

5
correcto. Si la reacción en un apoyo es negativa, su sentido correcto es opuesto al que
se eligió en el paso 2.
Ejemplo 1 Viga simple en un voladizo
Planteamiento del problema Determine las reacciones en los apoyos de la viga de madera
que se muestra en la figura (a).
(a)
Solución En la figura (b) se muestran el diagrama de cuerpo libre de la viga y los ejes xy.
Las reacciones en los apoyos se representan por R1 y R2. Puesto que no se tienen fuerzas en
la dirección x, no se muestran reacciones horizontales. La ecuación de equilibrio para las
fuerzas es
Fy = R1 + R2 - 1000 - 2000 - 1000 = 0 (a)
La ecuación de equilibrio para los momentos respecto al apoyo izquierdo es
M = 8R2 - 2(1000) - 4(2000) - 10(1000) = 0 (b)
Las ecuaciones (a) y (b) dan R1 = 1500 N y R2 = 2500 N.
(b)

6
Ejemplo 2 Viga simple sujeta a pares
Planteamiento del problema Determine las reacciones en los apoyos de la viga simple de
acero sujeta a momentos, como se muestra en la figura (a).
(a)
Solución En la figura (b) se muestran el diagrama de cuerpo libre de la viga y los ejes xy.
Las reacciones en los apoyos se representan por R1 y R2. Una vez más, no se muestran
reacciones horizontales, puesto que no se aplican fuerzas externas horizontales. La
ecuación de equilibrio para las fuerzas es
Fy = R1 + R2 = 0 (a)
La ecuación de equilibrio para los momentos respecto al apoyo izquierdo es
M = 20R2 + 6000 - 1000 = 0 (b)
(b)
Las ecuaciones (a y (b) dan R1 = +250 lb y R2 = -250 lb
Ya que R2 es negativa, el apoyo de la derecha tira hacia abajo sobre la viga (ver figura c)
(c)

7
Información adicional Observe que no fue necesario especificar las ubicaciones de los
pares o momentos para determinar las reacciones en los apoyos (efectos externos sobre la
viga), ya que el momento de un par que actúa sobre un cuerpo rígido plano es
independiente de la localización del par en el plano. Sin embargo, las fuerzas internas
(fuerzas cortantes y momentos fiexionantes en la viga) sí dependen de la ubicación del par
(lo veremos en el desarrollo de esta unidad). Asimismo, a pesar de su aspecto, se supone
que el apoyo de rodillos que está a la derecha de la viga opone resistencia a las fuerzas que
actúan hacia arriba o hacia abajo. Por consiguiente, la viga no se levantará separándose del
apoyo de rodillos.
7.2 Fuerzas Cortantes y Momentos Flexionantes en las Vigas
Concepto Clave
La fuerza cortante y el momento flexionante son fuerzas internas en las vigas. Son
causados por cargas transversales y pares exteriores.
Fig. 7.6 a) Viga en voladizo. b) Parte de una viga a la izquierda de a-a. c) Momento flexionante positivo.
d) Parte de una viga a la derecha de a-a
8
En el ítem anterior se dibujaron diagramas de cuerpo libre de vigas completas. En el
análisis de fuerzas interiores, también se usan con amplitud diagramas de cuerpo libre de
partes de las vigas. Como ejemplo, considere de nuevo la viga del ejemplo 7.1 (ver figura
7.6a). Separe la viga en dos partes, seccionándola en la sección a-a, a una distancia x del
apoyo izquierdo (x se encuentra en el intervalo 2m < x < 4m). En la figura 7.6b se muestra
el diagrama de cuerpo libre de la parte a la izquierda de la sección a-a. En el ejemplo 7.1 se
encontró la reacción en el apoyo de 1500 N. En general, para que esta parte esté en
equilibrio, deben actuar una fuerza V y un par cuyo momento sea M en el corte. La fuerza V
y el momento M son las resultantes de las fuerzas distribuidas sobre la sección transversal.
En el diagrama de cuerpo libre de la parte aislada de la viga (Fig. 7.6b), V y M se
consideran como fuerzas externas. Sin embargo, para la viga como un todo (Fig. 7.6a), son
fuerzas internas en la sección a-a.
La fuerza V es la resultante de las fuerzas transversales que están distribuidas sobre la
sección transversal en el corte. Ésta se conoce como la fuerza cortante (o, sencillamente, la
cortante) que actúa sobre la viga en la sección a-a. Puesto que V actúa sobre la sección a-a,
es una cortante interna. El momento del par M es resultante de la fuerza transversal
distribuida que actúa sobre la sección a-a. Se le llama momento flexionante que actúa sobre
la viga en la sección a-a. De modo semejante a V, es una fuerza interna y en este caso un
momento flector interno.
En la figura 7.6b se muestran cuáles sentidos de la fuerza cortante V y del par M suelen
considerarse como positivos. Un momento flexionante positivo tiende a doblar a un
elemento de la viga de tal manera que sea cóncava hacia arriba, con respecto al plano en el
cual se encuentra (ver figura 7.6c).
Equilibrio de la parte izquierda de la viga Se pueden determinar las cantidades V y M
por medio de las condiciones de equilibrio para la parte aislada de la viga (ver figura 7.6b).
La ecuación de equilibrio de las fuerzas es
+ Fy = 1500 – 1000 – V = 0 (a)
es decir, V = 500 N
La ecuación de equilibrio de los momentos respecto de la sección a-a es

9
+Ma-a = -1500x + l000(x - 2) + M = 0 (b)
esto es, M = 500x + 2000 [Nm]
Equilibrio de la parte derecha de la viga En lugar de determinar la fuerza cortante y el
momento flector usando las condiciones de equilibrio para la parte izquierda de la viga, se
les puede deducir si se considera el equilibrio de la parte derecha como sigue: En la figura
7.6d, se muestra el diagrama de cuerpo libre de la parte derecha de la viga. Por la tercera
ley de Newton, la fuerza cortante V y el momento flector M que actúan sobre la parte
derecha de la viga en la sección a-a son iguales, respectivamente, a la fuerza cortante y el
momento flector que actúan sobre la parte izquierda de la propia viga en la sección a-a,
pero sus sentidos son los contrarios. Para ser coherentes con las convenciones de los signos
que se adoptaron para la parte izquierda de la viga, se especifica que la fuerza cortante y el
momento flector sobre la parte derecha son positivos cuando actúan como se muestra en la
figura 7.6d. Entonces, se pueden calcular M y V al considera un diagrama de cuerpo libre
de la parte izquierda o de la derecha.
La ecuación de equilibrio de las fuerzas para la parte derecha de la viga es (ver figura 7.6d)
+ Fy = V - 2000 + 2500 - 1000 = 0 (c)
en donde la reacción en el apoyo de 2500 N se determinó en el ejemplo 1. En consecuencia,
V= 500 N, como antes. La ecuación de equilibrio para los momentos respecto a un punto en
la sección a-a es
+Ma-a = 2500(8 - x) - 1000(10 - x) - 2000(4 - x) - M = 0 (b)
De manera que, M = 500x + 2000 [Nm], como antes.
Punto de vista alternativo Considerando una vez más el diagrama de cuerpo libre de la
parte izquierda de la viga (Fig. 7.6b), se puede escribir la ecuación de equilibrio de las
fuerzas [ ecuación (a)] como sigue:
V = 1500 – 1000 = 500N
Por otra parte, la ecuación de equilibrio de las fuerzas para la parte derecha de la viga es
[ver ecuación (c)]
10
V = 2000 - 2500 + 1000 = 500N
Estas relaciones ilustran el teorema siguiente:
Teorema 7.1
La fuerza cortante V en cualquier sección transversal de una viga horizontal es la suma
algebraica de las proyecciones verticales de todas las fuerzas (incluyendo las reacciones en
los apoyos) a la izquierda de la sección transversal dada, en donde, en la suma, la
proyección de una fuerza es positiva si su sentido es hacia arriba y negativa si lo es hacia
abajo. De modo alternativo, la cortante V es la suma algebraica de las proyecciones
verticales de todas las fuerzas (incluyendo las reacciones en los apoyos) a la derecha de la
sección transversal dada. En este caso, la proyección de una fuerza es positiva si su sentido
es hacia arriba y negativa si lo es hacia abajo.
Se aplica un teorema semejante para los momentos flexionantes. Por ejemplo, considere los
diagramas de cuerpo libre para las partes izquierda y derecha de la viga (figuras 7.6b y
7.6d, respectivamente). Se puede escribir la ecuación de momentos como [ver figura 7.6b y
la ecuación (b)]
M = 150x - 1000(x - 2) = 500x + 2000 [Nm]
o bien [ver figura 7.6d y la ecuación (d)]
M = 2500(8 - x) - 1000(10 - x) - 2000(4 - x) = 500x + 2000 [Nm]
Estas relaciones ilustran el teorema siguiente:
Teorema 7.2
El momento flector M en cualquier sección transversal de una viga horizontal es la suma de
los momentos respecto a la sección transversal dada de todas las fuerzas (incluyendo las
reacciones en los apoyos) a la izquierda de dicha sección, en donde, en la suma, un
momento en el sentido contrario (antihorario) del movimiento de las agujas del reloj es

11
positivo y uno en sentido horario a favor de las agujas del reloj es negativo. De manera
alternativa, el momento flexionante M es la suma de los momentos respecto a la sección
transversal dada de todas las fuerzas (incluyendo las reacciones en los apoyos) a la derecha
de dicha sección. En este caso, un momento en sentido antihorario es positivo y uno en
sentido horario es negativo.
Estos teoremas son equivalentes a las ecuaciones de equilibrio para cada una de las partes
de la viga. Se pueden usar directamente para determinar la fuerza cortante y el momento
flector en cualquier sección de la viga sujeta a pares y a fuerzas concentradas transversales
o bien, se pueden usar para comprobar los resultados obtenidos de la consideración del
equilibrio de cada una de las partes de la viga por separado. Aunque estos teoremas sólo se
han ilustrado por un ejemplo numérico, se cumplen para cualquier viga que esté sujeta a
pares y a fuerzas concentradas transversales.
Técnica de resolución de problemas
Fuerzas cortantes y momentos flexionantes en vigas sujetas a fuerzas concentradas y
momentos.
Para determinar las fuerzas cortantes y los momentos flectores en una viga:
1. Determine las reacciones en los apoyos por medio de la técnica de resolución de
problemas descrita en el ítem 7.1.
2. Trace un plano de corte a través de la sección transversal en donde se deben determinar
la fuerza cortante y el momento flexionante.
3. Dibuje un diagrama de cuerpo libre de la parte de la viga a la izquierda (o a la derecha)
del corte y designe la fuerza cortante en éste con la letra V y el momento e el mismo
con la letra M. Seleccione los sentidos positivos de V y M, como se describió antes.
4. Seleccione los ejes xy y, usando el diagrama de cuerpo libre del paso 3, escriba las
ecuaciones de equilibrio para la parte de la viga.

12
5. Resuelva las ecuaciones de equilibrio para determinar la fuerza cortante V y el
momento flexionante M.
6. Repita los pasos 2 al 5 para cada una de las secciones de la viga para las cuales deban
determinarse V y M.
7. De modo alternativo, se pueden reemplazar los pasos 2 al 5 por la aplicación de los
teoremas 7.1 y 7.2.
Ejemplo 3 Fuerza cortante y momento flector en una viga simple
Planteamiento del problema Una viga simple de acero está sujeta a dos fuerzas
transversales y a un momento (ver figura a).
a. Determine las reacciones en los apoyos.
b. Determine la fuerza cortante y el momento flector en cada uno de los segmentos de la
viga AB, BC, CD y DE.
(a)
Solución Este problema se puede resolver por cualquiera de los dos métodos discutidos en
esta sección; es decir, considerando las ecuaciones de equilibrio (con los diagramas de
cuerpo libre) para cada una de las partes por separado de la viga o mediante la aplicación de
los teoremas 7.1 y 7.2. Cada uno de los métodos tiene sus ventajas. El procedimiento en el
que se utilizan los diagramas de cuerpo libre de las partes de la viga y las ecuaciones
correspondientes de equilibrio puede parecer más fundamental (y familiar). Sin embargo,
los teoremas 7.1 y 7.2 son fundamentales por igual, ya que se basan en la satisfacción de las
ecuaciones de equilibrio. En este ejemplo se usan los teoremas para resolver el problema.
Se le invita a que lo resuelva usando las ecuaciones de equilibrio para cada una de las

13
partes por separado de la viga y que compare ese procedimiento con el empleado. El primer
paso en cualquiera de los dos procedimientos es determinar las reacciones en los apoyos de
la viga.
a. Se considera el diagrama de cuerpo libre de la viga completa y se seleccionan los ejes xy
(ver figura b). Las ecuaciones de equilibrio para la viga son
Fx = Ax = 0
Fy = Ay - 6 + 8 + E = 0 (a)
MA = 8E + 6(8) + 12 - 2(6) = 0
La resolución de las ecuaciones (a) da
Ax = 0 Ay = 4 kN E = - 6kN
(b) (c)
Como E es negativa, su sentido está en la dirección y negativa. En la figura (c) se muestran
las reacciones con sus sentidos correctos.
b. Para determinar la fuerza cortante y el momento flector en cada segmento de la viga, se
usarán los teoremas 7.1 y 7.2. Por consiguiente, se consideran las secciones transversales
a-a, b-b, c-c y d-d en la viga (ver figura c). Aplicando el teorema 7.1, se obtiene lo
siguiente:
Segmento AB: 0m < x < 2m V = +4 kN
Segmento BC: 2m < x < 4m V = - 2kN
Segmento CD: 4m < x < 6m V = - 2kN
Segmento DE: 6m < x < 8m V = +6 kN

14
Del mismo modo, aplicando el teorema 7.2, se obtiene lo siguiente:
Segmento AB: 0m < x < 2m M = 4x
Segmento BC: 2m < x < 4m M = 4x - 6(x - 2) = - 2x + 12
Segrnento CD: 4m < x < 6m M = 4x - 6(x - 2) – 12 = - 2x
Segmento DE: 6m < x < 8m M = 4x - 6(x - 2) – 12 + 8(x - 6) = 6x – 48
1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 18 (12/06/07)
Unidad 7 Vigas (continuación)
7.3 Vigas Sujetas a Fuerzas Axiales y Momentos de Torsión
Concepto Clave
Las fuerzas axiales y los momentos de torsión (torques) son fuerzas internas en las vigas.
Pueden ser causados por una amplia variedad de fuerzas aplicadas externamente a un
sistema estructural.
Además de las fuerzas cortantes y los momentos flectores, fuerzas axiales y momentos de
torsión pueden actuar sobre miembros estructurales largos y delgados. Una fuerza axial
actúa normal a la sección transversal. Un momento de torsión es un momento que actúa en
torno al eje longitudinal de un miembro y que tiende a hacer girar a la sección transversal
de ese miembro alrededor del eje longitudinal de éste. Cuando la fuerza interna primaria en
un miembro es una fuerza axial o un momento de torsión, algunos autores le dan a este
miembro el nombre de flecha. En este curso se usará el término viga en todos los casos.
Fuerzas axiales
Para ver un ejemplo de una fuerza axial que actúa sobre una sección transversal de una
viga, seccione la viga en voladizo con forma de L que se muestra en la figura 7.7a por
medio del plano de la sección transversal a-a. En la figura 7.7b se muestra el diagrama de
cuerpo libre de la parte de la viga a la derecha de la sección a-a. El sistema de fuerzas que
actúa sobre la sección transversal se representa por una componente axial N, una
componente transversal V y un momento flector M. La fuerza N es la fuerza axial neta que
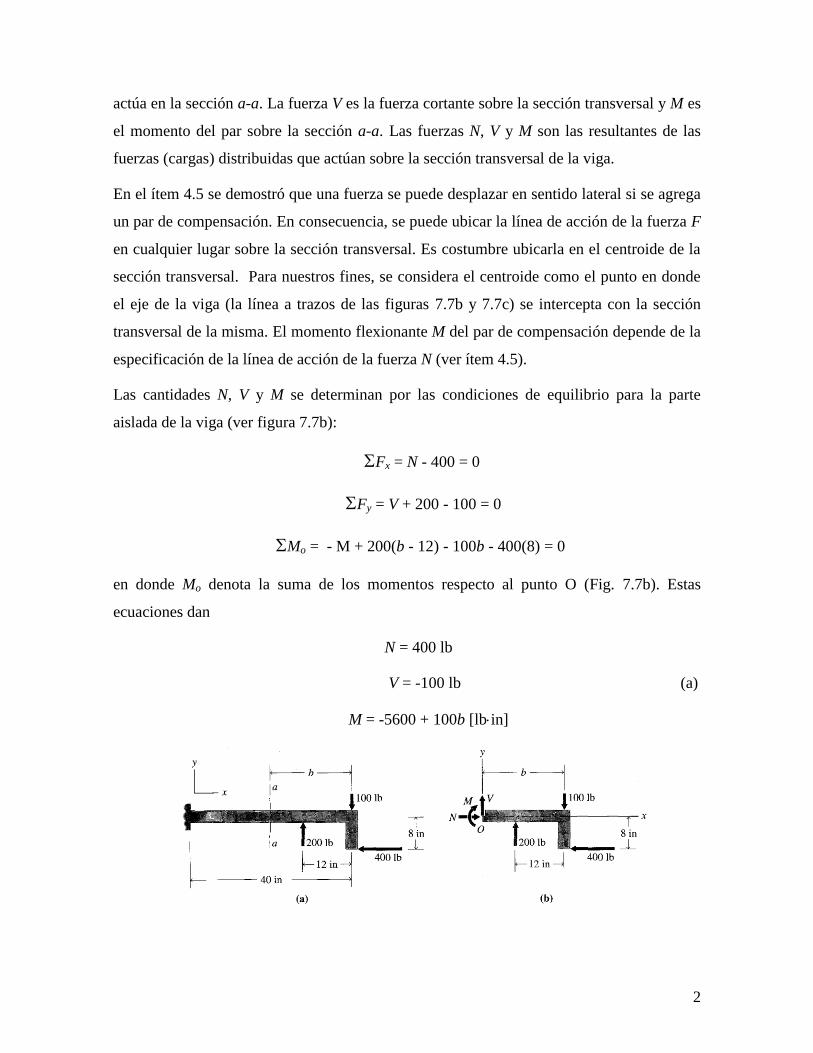
2
actúa en la sección a-a. La fuerza V es la fuerza cortante sobre la sección transversal y M es
el momento del par sobre la sección a-a. Las fuerzas N, V y M son las resultantes de las
fuerzas (cargas) distribuidas que actúan sobre la sección transversal de la viga.
En el ítem 4.5 se demostró que una fuerza se puede desplazar en sentido lateral si se agrega
un par de compensación. En consecuencia, se puede ubicar la línea de acción de la fuerza F
en cualquier lugar sobre la sección transversal. Es costumbre ubicarla en el centroide de la
sección transversal. Para nuestros fines, se considera el centroide como el punto en donde
el eje de la viga (la línea a trazos de las figuras 7.7b y 7.7c) se intercepta con la sección
transversal de la misma. El momento flexionante M del par de compensación depende de la
especificación de la línea de acción de la fuerza N (ver ítem 4.5).
Las cantidades N, V y M se determinan por las condiciones de equilibrio para la parte
aislada de la viga (ver figura 7.7b):
Fx = N - 400 = 0
Fy = V + 200 - 100 = 0
Mo = - M + 200(b - 12) - 100b - 400(8) = 0
en donde Mo denota la suma de los momentos respecto al punto O (Fig. 7.7b). Estas
ecuaciones dan
N = 400 lb
V = -100 lb (a)
M = -5600 + 100b [lbin]

3
Fig. 7.7
Las ecuaciones (a) se pueden usar para determinar la reacción del apoyo. Porque, si b = 40
in, la figura 7.7b se convierte en una diagrama de cuerpo libre de la viga completa.
Entonces N, V y M son las reacciones de la estructura de apoyo. A partir de las ecuaciones
(a), estas reacciones son
N = 400 lb
V = -100 lb
M = -1600 lbin
En la figura 7.7c, se tiene un diagrama de cuerpo libre de la viga completa, en el que se
muestran las reacciones con sus sentidos correctos.
Momento de torsión o torque
En los sistemas mecánicos, una flecha o una barra a menudo se sujetan a un momento
alrededor de su eje longitudinal. Este momento se conoce como momento de torsión o
torque. Como un ejemplo, considere una viga que se somete a torsión por un par cuyas
fuerzas tienen magnitud F y su brazo de palanca es a (ver figura 7.8a). Seccione la viga por
un plano A de sección transversal. Dado que las cargas aplicadas constituyen un par con
momento Fa, la reacción en la sección transversal A es un par con momento T = -Fa (figura
7.8b). El par de resistencia se encuentra en el plano A de la sección transversal. Éste se
conoce como momento de torsión, torque en la sección o, de manera más explícita, torque
de resistencia. El par que se aplica al brazo transversal se llama torque aplicado. En
general, un torque es un par que se encuentra en un plano de sección transversal de una
barra o de una viga sobre la cual actúa. Un par de este tipo se puede representar por una
flecha de doble punta que sea perpendicular a la sección transversal de la barra, como se

4
muestra en la figura 7.8c. (En general, un torque o momento de torsión se designa con T,
para distinguirlo de un momento flector.) Una viga se somete a torsión en torno a su eje
longitudinal por la acción de un torque. Esta acción en una viga se menciona sencillamente
como torsión.
Fig. 7.8 Torque aplicado a una flecha.
Técnica de resolución de problemas
Fuerza axial, fuerza cortante, momento flexionante y torque en una viga
estáticamente determinada.
Para determinar la fuerza axial, la fuerza cortante, el momento flector y el torque en una
viga:
1. Dibuje un diagrama de cuerpo libre de la viga completa.
2. Seleccione los ejes xy y, a partir del diagrama de cuerpo libre, escriba las ecuaciones de
equilibrio para la viga.
3. Resuelva las ecuaciones de equilibrio para las reacciones en los apoyos.
4. En seguida, haga un corte transversal de la viga. Dibuje un diagrama de cuerpo libre de
la parte de la viga, a la izquierda o a la derecha del corte, y seleccione los sentidos
positivos para la fuerza axial, la fuerza cortante, el momento flexionante y el torque que
actúan en el corte.
5. Elija los ejes xy y, a partir del diagrama de cuerpo libre de la parte, escriba las
ecuaciones de equilibrio.

5
6. Resuelva las ecuaciones de equilibrio para las incógnitas que actúan en el corte.
7. Repita los pasos 4, 5 y 6 para otras secciones en la viga, según se requiera.
Nota: Para una viga en voladizo, a menudo resulta ventajoso empezar en el extremo libre y
recortar una parte de ese extremo, dibujar un diagrama de cuerpo libre (DCL) de esa parte e
ir hacia el paso 5 (ver figuras 7.7a y 7.7b).
Ejemplo 4 Fuerzas internas en una viga recta
Planteamiento del problema Una viga recibe la acción de una fuerza aplicada a un brazo
rígido sobre saliente (figura a). Determine la fuerza axial, la fuerza cortante y el momento
flector en los segmentos AB y BC de la viga.
(a)
Solución Para iniciar la resolución, se dibuja un DCL de la parte recta de la viga sacada de
sus apoyos y se seleccionan los ejes xy (figura b). Para transferir la fuerza de 10 kN al
centroide de la sección transversal de la viga, en B, se debe introducir un par de
compensación con momento M = 5 kNm (ver ítem 4.5).
(b)
Las ecuaciones de equilibrio para la viga son
Fx = Ax - 10 = 0
Fy = Ay + C = 0

6
MA = 2C + 5 = 0
Si se resuelven estas ecuaciones, se obtiene
Ax = + 10 kN
Ay = + 2.5 kN
C = -2.5 kN
En seguida se considera el DCL de la viga a la izquierda de la sección a-a (0 < x < 1m),
mostrado en la figura c. Las ecuaciones de equilibrio para esta parte son
(c)
Fx = 10 – N = 0
Fy = 2.5 – V = 0
MA = M – Vx = 0
Al resolver estas ecuaciones, se obtiene
N = 10 kN 0m < x < 1m
V = 2.5 kN 0m < x < 1m (a)
M = 2.5x [kNm] 0m < x < 1m
Ya que N, V y M son todos positivos, sus sentidos son correctos como en la figura (c).
(d)

7
Por último, se considera el DCL de la parte de la viga a la izquierda de la sección b-b (1m <
x < 2m), mostrado en la figura d. (Nota: De modo alternativo, se pudo considerar el DCL
de la parte de la viga a la derecha de la sección b-b. Se deja esto para que lo haga usted).
Las ecuaciones de equilibrio para esta parte de la viga son
Fx = 10 -10 - N = 0
Fy = 2.5 - V = 0
MA = 5 + M - Vx = 0
La resolución de estas ecuaciones da
N = 0 1m < x < 2m
V = 2.5 kN 1m < x < 2m (b)
M = 2.5x - 5 [kNm] 1m < x < 2m
Como V es positiva, su sentido es correcto como se muestra en la figura d. Sin embargo,
que M es negativo en el rango 1m <x < 2m, el sentido correcto de M es el del movimiento
de las agujas del reloj (opuesto al sentido que se muestra en la figura d). A partir de la
última de las ecuaciones (b), se ve que M = 0 en x = 2m, como debe de ser, ya que un apoyo
de rodillos no puede oponer resistencia a un momento. Del mismo modo, se nota que la
fuerza axial N es constante (10 kN), en el segmento AB, y cero en el segmento BC. Este
resultado es coherente con el hecho de que el rodillo en C no puede oponer resistencia a
una fuerza horizontal.
Ejemplo 5 Viga curva en voladizo
Planteamiento del problema En la figura (a) se representa una viga en voladizo que es
curva con la forma de un arco circular de 90°. Determine las reacciones del soporte del
muro.

8
(a) (b)
Solución En el diagrama de cuerpo libre de la viga (Fig. b), las reacciones del apoyo son
las componentes horizontal y vertical de las fuerzas representadas por Rx y Ry
respectivamente, y el par con momento M1. Estas reacciones se deben a las fuerzas
distribuidas que ejerce el apoyo. En este caso, el apoyo también ejerce una reacción
horizontal para equilibrar la componente horizontal de la carga de 800N y la carga
horizontal de 200N. Se supone que las reacciones horizontal y vertical, Rx y Ry, son
positivas en las direcciones x y y, respectivamente, y el momento M1 se toma como positivo
en sentido contrario al del movimiento de las agujas del reloj.
Si se plantea la ecuación de equilibrio de los momentos, se toman los momentos respecto al
origen O de las coordenadas xy. Éste es un centro conveniente de momentos, ya que tres
fuerzas (la de 800N, la de 200N y Ry) pasan por O y, por lo tanto, los momentos de estas
fuerzas respecto de este punto son cero (ver figura b). Las ecuaciones de equilibrio son
Fx = Rx + 800 sen30° - 200 = 0
Fy = Ry + 800 cos30° - 500 = 0
Mo = M1 - 500(2 cos45°) - 2Rx = 0
Estas ecuaciones dan
Rx = -200 N
Ry = -l92.8N
M1 = +307.1 Nm
Las cantidades Rx, Ry y M1 son la fuerza axial, la fuerza cortante y el momento en el
extremo empotrado de la viga. Observe que como Rx y Ry son negativas, en realidad actúan

9
hacia la izquierda y hacia abajo, respectivamente. Asimismo, dado que Rx actúa hacia la
izquierda, se tiene una fuerza axial de tensión en el extremo empotrado.
Diagramas de Fuerzas Internas para Vigas Sujetas a Fuerzas Concentradas y
Pares
Concepto Clave
Los diagramas de fuerzas internas son herramientas importantes usadas en el diseño de
vigas y flechas.
La fuerza axial N, la fuerza cortante V, el momento flexionante M y el torque T en cualquier
sección de una viga se puede representar gráficamente. Las gráficas de estas cantidades,
llamadas diagramas de fuerzas internas, son útiles en la etapa del diseño de vigas. También
proporcionan un medio para visualizar los resultados de los cálculos. Para construir una
gráfica de este tipo, se determinan expresiones para N, V, M y T, como funciones de la
coordenada axial x del miembro. (Ver ítem 7.2 y 7.3, así como los ejemplos 3 y 4). A
continuación, se traza un esquema de cada función y se alinea con un esquema de la viga.
A partir de estos diagramas, se pueden leer con facilidad los valores de N, V, M y T, para
cualquier valor de x; es decir, para cualquier sección transversal de la viga. En los ejemplos
siguientes se analizan características importantes de estas gráficas.
Ejemplo 6 Diagramas de la cortante y del momento flexionante de una viga simple sujeta
a cargas concentradas
Planteamiento del problema Dibuje los diagramas de la fuerza cortante y del momento
flector para la viga del ejemplo 1, la cual se muestra de nuevo en la figura (a).

10
(a)
Solución La fuerza cortante en la viga se puede determinar por la aplicación del teorema
7.1. Aplicando este método, se obtienen las reacciones R1 = 1500N y R2 = 2500N, y las
cortantes internas
V = +1500N 0m < x < 2m
V = +500N 2m < x < 4m
V= -1500N 4m < x < 8m (a)
V = +1000N 8m < x < 10m
De manera semejante, se puede usar el teorema 7.2 para hallar el momento flector en la
viga. Este procedimiento da
M = +1500x [Nm] 0m < x < 2m
M = +500x + 2000 [Nm] 2m < x < 4m
M = -1500x + 10000 [Nm] 4m < x < 8m (b)
M = +1000x - 10000 [Nm] 8m < x < 10m
En la figura (b), se tienen las gráficas de los diagramas de la fuerza cortante y del momento
flector de las funciones definidas por las ecuaciones (a) y (b). Para el caso de una viga
sujeta a fuerzas verticales concentradas, la fuerza cortante V permanece constante entre
fuerzas adyacentes en el diagrama de fuerza cortante. En un punto en donde actúa una
fuerza concentrada, la cortante sufre un cambio igual en magnitud al de esa fuerza en el
diagrama de fuerza cortante. Asimismo, para una viga sujeta a fuerzas concentradas, el
momento flector M es una función lineal de la coordenada axial x, en cada intervalo entre
las fuerzas; es decir, el diagrama del momento flector consta de segmentos rectilíneos entre
las fuerzas. Por lo tanto, sólo es necesario situar en la gráfica los momentos en los puntos

11
extremos de los segmentos y dibujarse por medio de rectas. Asimismo, en una carga
concentrada, el momento cambia de pendiente pero no de magnitud.
(b)

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 19 (22/06/07)
Unidad 7 Vigas (continuación)
Relaciones cortante/momento
Como se ilustró en el ejemplo 6 (Fig. b), en el segmento de una viga recta entre dos cargas
transversales concentradas adyacentes, la fuerza cortante es constante y el momento flector
varía en forma lineal. Este hecho indica la existencia de una relación más general entre la
fuerza cortante y el momento flector en una viga recta. Con el fin de determinar esta
relación, considérese una viga sujeta a un sistema de cargas transversales concentradas
arbitrarias. Para relacionar la fuerza cortante V con el momento flector M, en primer lugar
se hace un corte a-a en el lugar x entre dos de las cargas concentradas y se construye un
diagrama de cuerpo libre de la parte de la viga a la derecha de ese corte (ver figura 7.9b).
En el corte a-a se muestran la fuerza cortante V y el momento flector M en sus sentidos
positivos. A continuación, se hace un segundo corte b-b, a la distancia infinitesimal dx a la
derecha del corte a-a y se dibuja un diagrama de cuerpo libre del elemento infinitesimal de
la viga, de longitud dx, entre los cortes (ver figura 7.9c). En el corte b-b se muestran la
fuerza cortante V + dV y el momento flector M + dM en sus sentidos positivos. Las
cantidades diferenciales dV y dM son los cambios en V y M que ocurren sobre el intervalo
dx.
La ecuación de equilibrio de las fuerzas en la dirección y (Fig. 7.9c) es
Fy = V - (V + dV) = 0
o bien dV = 0 (a)
La ecuación (a) indica que la fuerza cortante V es constante en el intervalo entre cargas
concentradas consecutivas, ya que su cambio dV en el intervalo dx, en cualquier posición x
entre las cargas, es cero.

2
Figura 7.9 (a) Viga cargada arbitrariamente. (b) Diagrama de cuerpo libre del segmento de la viga a la
derecha de la sección a-a. (c) Diagrama de cuerpo libre del segmento infinitesimal de la viga.
De manera semejante, la ecuación de equilibrio de los momentos, para el elemento dx (Fig.
7.9c), es
Mo = M + Vdx – (M + dM) = 0 (b)
donde Mo denota los momentos respecto al punto O, en el lugar x + dx. Después de la
cancelación de M, la ecuación (b) proporciona la relación siguiente entre V, dM y dx:
dx
dMV (7.1)
La integración de la ecuación (7.1) da
M2 – M1 =
2
1
12
x
x
xxVVdx (7.2)
3
donde x2 > x1 denota dos posiciones entre cargas concentradas consecutivas sobre la viga.
Las ecuaciones (7.1) y (7.2) se pueden interpretar en forma geométrica. Específicamente, a
partir de la ecuación (7.1), se obtiene la regla siguiente:
REGLA Pendiente del diagrama del momento flector: La razón de cambio dM/dx del
momento flector M, en el lugar x (la pendiente del diagrama del momento en x) es igual a la
fuerza cortante y en x. En otras palabras, la razón de cambio del momento flector en x es
igual a la cortante en x.
Se observa que un valor positivo de V denota una pendiente positiva del diagrama del
momento flector, y un valor negativo de V denota una pendiente negativa.
Del mismo modo, a partir de la ecuación (7.2), se obtiene la regla siguiente:
REGLA Cambio en el momento flector: El cambio en el diagrama del momento flector
entre x1 y x2 es igual al área debajo del diagrama de la cortante, desde la posición x1 hasta la
posición x2.
Con el fin de hacer una interpretación más profunda sobre esta regla, se observa que si V,
de la ecuación (7.2), es positiva, el cambio en M desde x1 hasta x2 es positivo; si V es
negativa, el cambio en M es negativo.
Dado el diagrama de la cortante, si se usan estas dos reglas, se puede dibujar el diagrama
del momento flector para una viga sujeta a cargas concentradas, sin tener que deducir
expresiones para M en cada intervalo de carga de esa viga (ver ejemplo 7). En el ítem 7.5 se
amplían estas reglas para aplicarse a vigas sujetas a cargas distribuidas.
Ejemplo 7 Construcción de un diagrama del momento flector usando las relaciones
cortante/momento.

4
(a)
Planteamiento del problema Determine las reacciones en los apoyos y dibuje los
diagramas de la fuerza cortante y del momento flector para la viga mostrada en la figura
(a), usando el teorema 7.1 y las dos reglas antes presentadas.
Solución En primer lugar, se dibuja el diagrama de cuerpo libre de la viga (Fig. b).
Entonces, las ecuaciones de equilibrio para la viga son
Fy = B + E – 30 – 45 – 25 = 0 (a)
MB = 45(3) + 25(5) - 30(2) - 8E (b)
Si se resuelven las ecuaciones (a) y (b) (ver figura b), se obtiene
E = 25 kN
B = 75 kN
Para construir el diagrama de la fuerza cortante, se usa el teorema 7.1. Partiendo del
extremo izquierdo de la viga, se observa que la fuerza cortante a la derecha del punto A es
V = -30 kN esta fuerza cortante permanece constante hasta el punto B (véase el diagrama de
la fuerza cortante de la figura b). A la derecha del punto B, la fuerza cortante es V = 45 kN
(75 kN - 30 kN) y permanece constante hasta el punto C, en donde cambia a V = 0 (45 kN -
45 kN). Esa fuerza cortante permanece constante hasta el punto D, en donde cambia a V = -
-25 kN (0 - 25 kN). Una vez más, desde el punto D hasta el E, la fuerza cortante permanece
constante. En el punto E, la fuerza cortante es igual a cero (V = -25 kN + 25 kN = 0).
Ahora se puede construir el diagrama del momento flector a partir del diagrama de la fuerza
cortante, usando las dos reglas antes dadas [ver también ecuaciones (7.1) y (7.2)]. Para
empezar, se observa que como no se aplica momento en el extremo izquierdo de la viga
(punto A), M = MA = 0. En el intervalo AB, por la ecuación (7.1) o la primera regla, la

5
pendiente del diagrama del momento flector queda dada por dM/dx = V= -30 kN. Por la
ecuación (7.2) o la segunda regla, el cambio en el momento flector desde A hasta B es igual
a la integral de V desde A hasta B (el área “debajo” del diagrama de la fuerza cortante), o
sea, MB - MA = (-30 kN)(2 m) = -60 kNm. El momento en el punto B queda dado por MB =
MA - 60 kNm = -60 kNm, ya que MA = 0 (ver el diagrama del momento en la figura b). Del
mismo modo, en el intervalo BC, la pendiente del diagrama del momento flector es +45 kN
(el valor de V) y el cambo en el momento desde B hasta C es MC - MB = (45kN)(3m) = 135
kNm. Por lo tanto, el momento en el punto C es MC = MB + 135 = -60 + 135 = 75 kNm.
Continuando de esta manera, se construye el diagrama completo del momento flector (ver
figura b). Una vez más, observe que aún cuando V es constante entre las cargas
concentradas, sufre un cambio en la carga concentrada igual a la magnitud de ésta.
Asimismo, observe que en una carga concentrada cambia la pendiente del diagrama del
momento flector, pero la magnitud del propio momento no cambia.
(b)

6
7.5 Diagramas de Cortante y Momento Flector para Vigas con Cargas Distribuidas
Concepto Clave
Las relaciones matemáticas entre la carga distribuida w, la fuerza cortante V y el momento
flector M conducen a reglas geométricas para construir los diagramas de la fuerza cortante
y del momento flector.
En esta sección se desarrollarán diagramas de fuerza cortante y del momento flector para
vigas sujetas a cargas distribuidas, como se hizo para las vigas sujetas a cargas
concentradas en el ítem 7.4. Para una carga distribuida, la relación entre la fuerza cortante
que actúa en una sección de una viga y el momento flector correspondiente en esa sección
tiene la misma forma que la de la ecuación (7.1). Además, dos relaciones entre la carga
distribuida que actúa sobre una viga y la fuerza cortante que actúa en ésta son útiles para
dibujar los diagramas de fuerza cortante y de momento flector.
Fig. 7.10
Con el fin de desarrollar la relación entre la carga distribuida y la fuerza cortante, considere
una porción de una viga sujeta sólo a una carga distribuida transversalmente que sea
función de x; a saber, w(x). La carga w(x) se mide en fuerza por unidad de longitud de la
viga y se toma como positiva cuando actúa hacia arriba (en la dirección del eje y positivo
de la figura 7.10a). Se corta una sección en x y se aísla un elemento infinitesimal de la viga,
con longitud dx, hacia la derecha de esa sección en x. En la figura 7.10b se muestra el
diagrama de cuerpo libre del elemento. Los sentidos positivos de las fuerzas cortantes y de
los momentos flectores se toman como se muestra, con la fuerza cortante V y el momento

7
M en el lado izquierdo del elemento y la fuerza cortante V + dV y el momento flexionante
M + dM a la derecha .
La ecuación de equilibrio para las fuerzas que actúan sobre el elemento dx en la dirección y
es
Fy = V + w(x)dx – (V + dV) = 0
o bien, w(x)dx = dV (a)
Al dividir los dos miembros de la ecuación (a) entre dx, se obtiene
w(x) = dx
dV (7.3)
La integración de la ecuación (7.3), desde x = x1 hasta x = x2, da
2
1
2
1
12 )(
x
x
V
V
dxxwVVdV (7.4)
donde V2 es la fuerza cortante en x = x2 y V1 es la fuerza cortante en x = x1 (Fig. 7.10c).
Las ecuaciones (7.3) y (7.4) se pueden interpretar geométricamente en la forma de dos
reglas para dibujar diagramas de cortantes. La primera regla se relaciona con la pendiente
del diagrama de la cortante [ver ecuación (7.3)]:
REGLA Pendiente del diagrama de la fuerza cortante: La razón de cambio dV/dx en x (la
pendiente del diagrama de la fuerza cortante en x) es igual al valor de la carga dstribuida
w(x) en x. La pendiente del diagrama de las fuerzas cortantes es positiva si el sentido de
w(x) es positivo [si w(x) está dirigida en la dirección y positiva (ver figura 7.l0a) y es
negativa si el sentido de w(x) es negativo [si w(x) está dirigida en la dirección y negativa].
En la segunda regla se relaciona un cambio en la fuerza cortante con la resultante de la
carga distribuida [ ver ecuación (7.4)]:
REGLA Cambio en la fuerza cortante: El área debajo de la curva de la carga distribuida
entre dos lugares cualesquiera, x1 y x2 sobre una viga (la integral de la carga distribuida
entre x1 y x2 es igual al cambio V2 – V1 en la fuerza cortante V entre x1 y x2.

8
Si la integral de la ecuación (7.4) es positiva, el cambio V2 – V1 en la fuerza cortante V,
desde x1 hasta x2 es positivo; si la integral es negativa, V2 – V1 es negativo.
Una vez que se han determinado las reacciones en los apoyos de un viga, se pueden aplicar
estas dos reglas y dibujar el diagrama de la fuerza cortante para una viga sujeta a cargas
distribuidas, directamente a partir del diagrama de cuerpo libre de esa viga, sin tener que
obtener una fórmula para V.
Para desarrollar la relación entre la fuerza cortante y el momento flector, se considera la
ecuación de equilibrio para los momentos que actúan sobre el elemento infinitesimal dx de
la viga (véase la figura 7.10b). Al sumar los momentos respecto al punto O, se encuentra
0)(2
)( dMMdx
dxxwVdxMMo (b)
Puesto que el término
2)(
dxdxxw de la ecuación (b) es pequeño en comparación con los
términos Vdx y dM (se dice que es un infinitesimal de orden superior), se puede despreciar.
Entonces, la ecuación de equilibrio para los momentos se reduce a
V = dx
dM (7.5)
donde V y dM/dx son la fuerza cortante y la pendiente del momento flector,
respectivamente, en la sección x. De modo análogo a las ecuaciones (7.3) y (7.4), por
integración, se puede escribir la ecuación (7.5) en la forma
2
1
12
x
x
VdxMM (7.6)
La ecuación (7.5) es equivalente a la (7.1). Sin embargo, en la (7.6), V es función de x.
Excepto por este hecho, la forma de la relación entre la fuerza cortante y el momento
flector en una viga sujeta a cargas distribuidas es la misma que para la correspondiente a
una viga sujeta a cargas concentradas. Por lo tanto, se puede usar el procedimiento descrito
en el ítem 7.4 para construir el diagrama del momento flector de una viga sujeta a cargas
distribuidas.
9
Con frecuencia, cuando se diseña una estructura, el ingeniero debe determinar la magnitud
momento máximo en una viga para garantizar que ésta sea capaz de soportar las cargas
exteriores. El momento máximo puede ser el momento positivo máximo o el momento
negativo máximo en la viga. Recuerde que una función de x alcanza un valor máximo (o
mínimo) cuando la derivada de esa función con respecto a x es igual a cero. Por lo tanto,
con referencia a la ecuación (7.5), se tiene la regla siguiente para determinar el momento
máximo (o el mínimo):
REGLA Ubicación del momento máximo (mínimo): El momento flector M alcanza un
valor máximo (o mínimo) en una sección en la viga en donde la fuerza cortante V = 0.

1
Curso: Estática Aplicada (3271). Escuela de Ingeniería Civil en Obras Civiles.
Profesor: Mauricio Muñoz P. / Ayudante: Eduardo Hurtado
Clase: 20 (26/06/07)
Unidad 8. Cables
Cables
Los cables de acero se usan para soportar cargas sobre grandes claros, por ejemplo, en
puentes colgantes, teleféricos, etc. Además se usan como tirantes en grúas, torres de
radio y estructuras similares. Los cables de acero se fabrican económicamente a partir de
alambre de acero de alta resistencia, tal vez con la relación más baja de costo a resistencia
de todos los elementos estructurales comunes. Ellos se manejan y montan fácilmente aún
en claros muy grandes.
En el análisis que sigue no se tomará en cuenta el peso del cable. Cuando un cable de
longitud dada se suspende entre dos apoyos, la forma que toma queda determinada por
las cargas aplicadas a él. De hecho, cuando las cargas aplicadas son verticales, el cable
tomará la forma del diagrama de momentos flexionantes de una viga simplemente
apoyada, del mismo claro, sujeta a las mismas cargas. Por ejemplo, si un cable se somete
a un grupo de cargas concentradas, los segmentos del cable formarán líneas rectas.
Un cable que soporte una carga uniforme horizontal formará una parábola. Los cables
que soportan la superficie de rodamiento de puentes colgantes toman aproximadamente
esta forma (las cargas están aplicadas a él en forma concentrada por medio de cables
colgantes). Un cable que soporta una carga uniforme a lo largo de su longitud (como en
el caso de una línea de transmisión), tomará la forma de una catenaria. A menos que la
flecha de un cable sea muy grande, en comparación con la longitud, puede suponerse que
su forma es parabólica, simplificándose así considerablemente el análisis.
Se supone que los cables son tan flexibles que éstos no resisten flexión o compresión. En
consecuencia, éstos trabajan a tensión directa y se dispone entonces para el análisis de la
ecuación de condición M=0, respecto a cualquier punto del cable. Si se conoce la
deflexión en un punto cualquiera de un cable, las reacciones en los extremos y la
deflexión en cualquier otro punto pueden determinarse con esas ecuaciones.
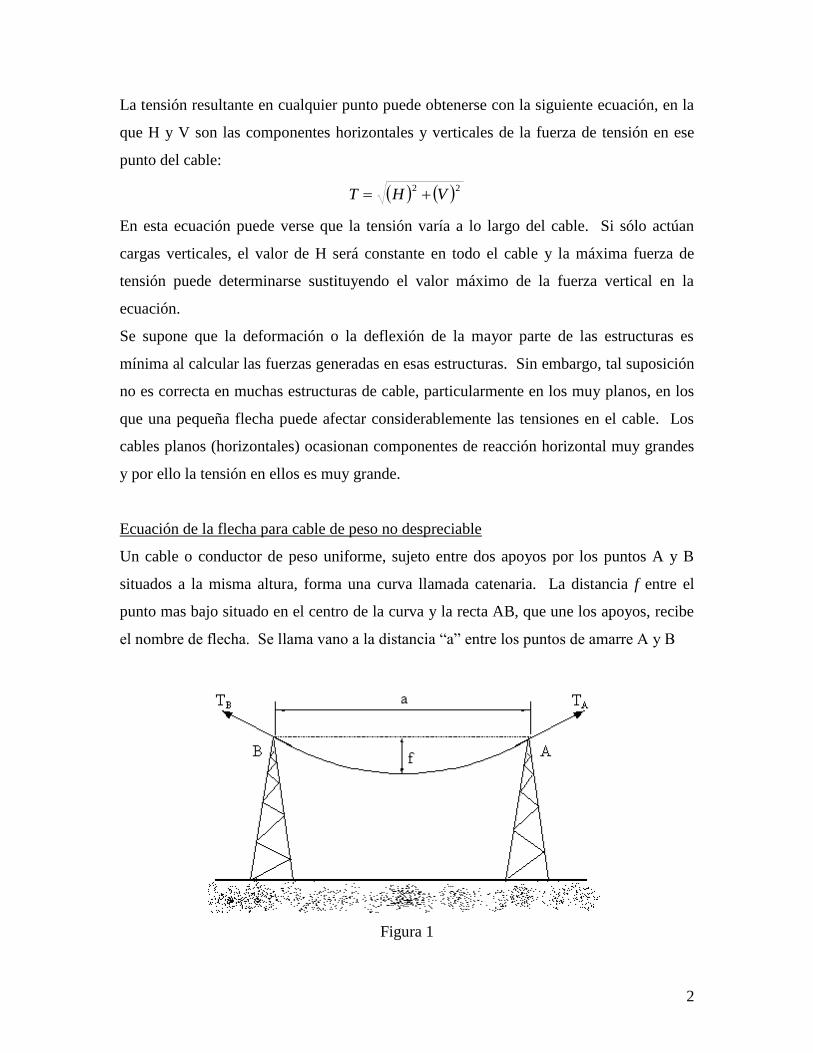
2
La tensión resultante en cualquier punto puede obtenerse con la siguiente ecuación, en la
que H y V son las componentes horizontales y verticales de la fuerza de tensión en ese
punto del cable:
22VHT
En esta ecuación puede verse que la tensión varía a lo largo del cable. Si sólo actúan
cargas verticales, el valor de H será constante en todo el cable y la máxima fuerza de
tensión puede determinarse sustituyendo el valor máximo de la fuerza vertical en la
ecuación.
Se supone que la deformación o la deflexión de la mayor parte de las estructuras es
mínima al calcular las fuerzas generadas en esas estructuras. Sin embargo, tal suposición
no es correcta en muchas estructuras de cable, particularmente en los muy planos, en los
que una pequeña flecha puede afectar considerablemente las tensiones en el cable. Los
cables planos (horizontales) ocasionan componentes de reacción horizontal muy grandes
y por ello la tensión en ellos es muy grande.
Ecuación de la flecha para cable de peso no despreciable
Un cable o conductor de peso uniforme, sujeto entre dos apoyos por los puntos A y B
situados a la misma altura, forma una curva llamada catenaria. La distancia f entre el
punto mas bajo situado en el centro de la curva y la recta AB, que une los apoyos, recibe
el nombre de flecha. Se llama vano a la distancia “a” entre los puntos de amarre A y B
Figura 1

3
Los postes deberán soportar las tensiones TA y TB que ejerce el conductor en los puntos
de amarre. La tensión T=TA=TB dependerá de la longitud del vano, del peso del
conductor, de la temperatura y de las condiciones atmosféricas.
Para vanos de hasta unos 500m podemos equiparar la forma de la catenaria a la de una
parábola, lo cual ahorra unos complejos cálculos matemáticos, obteniendo, sin embargo,
una exactitud más que suficiente.
La catenaria deberá emplearse necesariamente en vanos superiores a los 1000m de
longitud, ya que cuanto mayor es el vano menor es la similitud entre la catenaria y la
parábola.
Calculamos a continuación la relación que existe entre la flecha y la tensión. Para ello
representamos el conductor de un vano centrado en unos ejes de coordenadas:
Consideramos un trozo de cable OC que tendrá un peso propio PL aplicado en el punto
medio y estará sometido a las tensiones T0 y TC aplicadas en sus extremos. Tomando
momentos respecto al punto C tendremos:
yTx
PL 02
Por lo tanto el valor de y será:
02T
xPy L

4
Si llamamos P al peso propio unitario del conductor, el peso total del conductor en el
tramo OC, que hemos llamado PL, será igual al peso unitario por la longitud del
conductor, que cometiendo un pequeño error denominaremos x. Por lo tanto admitiendo
que:
PxPL
y sustituyendo esta expresión en la fórmula anterior del valor de y resulta:
0
2
2T
Pxy
Si ahora consideramos el punto A correspondiente al amarre del cable en vez del punto C,
tendremos que:
fy ; 2
ax
Por lo tanto al sustituir queda:
0
2
8T
Paf (1)
Podemos despejar el valor de la tensión T0 y tendremos que:
f
PaT
8
2
0
La ecuación (1) nos relaciona la flecha f en función de la tensión TO, del peso unitario del
conductor P y de la longitud del vano a. Si comparamos esta ecuación de la parábola
con la de la catenaria:

5
1
2cosh
0
0
T
aP
P
Tf
podremos observar la complejidad de ésta, y como demostraremos más adelante, los
resultados serán prácticamente iguales.
Nos interesa trabajar con la tensión TA en lugar de la empleada hasta ahora TO.
Observamos el triángulo de fuerzas compuesto por TO, TA y PL:
y aplicando el Teorema de Pitágoras tenemos:
2
2
0
2
2
aPTTA
En los casos prácticos que se nos presentan en las líneas aéreas de alta tensión, el valor
del ángulo a formado por TO y TA es muy pequeño, por lo que podemos asegurar que TO
TA, aproximación que emplearemos en cálculos posteriores. Esto equivale a afirmar
que la tensión a lo largo del conductor es constante.
Referente a TA, podemos decir que esta tensión no debe sobrepasar nunca el valor de la
carga de rotura del conductor Q , pues de lo contrario se rompería:
SQ
siendo el coeficiente de resistencia a la tracción del conductor utilizado y S la sección
del mismo.
Puesto que un conductor no debe trabajar nunca en condiciones próximas a las de rotura,
se deberá admitir un cierto coeficiente de seguridad n tal que:

6
n
Q
n
STA
max
En algunos Reglamentos de Líneas de Alta Tensión se admiten coeficientes de seguridad
mínimos de 2,5 y en algunos casos obliga que sea del orden de 5 ó 6.
Ejemplo. Comparación entre las tensiones TO y TA en un vano.
Sea un vano de 250 metros de longitud formado por cable LA-140. Hallar y comparar las
tensiones TO y TA en tres casos:
a) Flecha de 10 m.
b) Flecha de 0,5 m.
c) Flecha mínima.
El cable LA-140 tiene las siguientes características:
* Diámetro: D = 15,7 mm.
* Sección total: S = 146 mm2.
* Peso unitario: P = 0,543 kg/m.
* Tensión de rotura: Q = 5.470 kg.
a) Flecha de 10 metros
Partimos de la fórmula general:
Sustituyendo los valores resulta:
El valor de TA se obtiene de la fórmula:

7
Sustituyendo queda:
Comparando los valores de TO y TA obtenemos una diferencia de 5,39 kg. que supone un
1,25% de diferencia.
Podemos hallar el coeficiente de seguridad con el que trabajamos:
que es exageradamente alto.
b) Flecha de 0,5 metros
Partiendo de la fórmula general y sustituyendo los valores:
El valor de TA se obtiene de forma análoga:
Comparando los valores de TO y TA se obtiene una pequeña diferencia de 0,27 kg. que
supone un 0,003%. Observamos que como TO » TA > Q el cable se romperá.
Al comparar los resultados obtenidos en a) y b) podemos afirmar que cuanto menor es la
flecha mayor es la tensión que soporta el conductor.
c) Flecha mínima
La flecha mínima será la correspondiente a un coeficiente de seguridad de 2,5 y por lo
tanto:

8
La flecha mínima será:
Haciendo operaciones se obtiene una tensión TA de valor 2.189,05 kg.
Por lo tanto al comparar TA y TO se obtiene una diferencia de 1,05 kg que supone un
0,047%.
Ejemplo. Comparación entre la catenaria y la parábola
Con un conductor HAWK calculamos las flechas para distintos vanos con un coeficiente
de seguridad de 4. El conductor HAWK presenta una tensión de rotura de 8.820 kg y un
peso unitario de 0,975 kg/m. La flecha para la catenaria es:
La flecha para la parábola es:
Los valores que sustituimos son:
De esta forma elaboramos la tabla siguiente en la que aparece la longitud del vano en
metros, la flecha para la catenaria y para la parábola en metros y la diferencia entre los
dos valores expresada en tanto por ciento.

9
VANO CATENARIA PARABOLA %
100 0,553 0,553 0,005
200 2,213 2,213 0,017
400 8,857 8,852 0,065
600 19,945 19,916 0,146
800 35,499 35,406 0,261
1000 55,548 55,322 0,407
1200 80,133 79,664 0,585
1400 109,302 108,432 0,796
1600 143,111 141,625 1,038
1800 181,627 179,244 1,312
2000 224,925 221,289 1,616
Como podemos comprobar de la observación de la tabla, es suficiente aproximación el
empleo de la parábola, sobre todo para vanos inferiores a 1000 metros.
Longitud del Conductor
Dada la flecha que se produce en un vano, la longitud del conductor no es igual a la
distancia entre los postes. Por lo tanto, para hallar el valor exacto del conductor
empleado, obtendremos la expresión de la longitud del conductor en un vano, en función
de la flecha y de la distancia entre los postes.

10
Tomamos un elemento diferencial de longitud dl, para el que se verifica:
Podemos multiplicar y dividir por dx2:
Del apartado anterior sabemos que (T = TO = TA):
y derivando respecto a x podemos obtener el valor de dy/dx:
Por lo tanto al sustituir dx/dy en la expresión de dl2, nos queda:
Para no arrastrar expresiones llamamos α a:

11
y la expresión de dl resulta:
Para resolver el corchete empleamos la fórmula del binomio de Newton:
La longitud del conductor en la mitad del vano se obtiene integrando dl desde 0 hasta x:
Integrando cada sumando resulta:
Sustituyendo α por su valor (α = 2y / x²) queda:
Como x = a / 2 y la flecha es y = f queda:
La longitud del conductor en la totalidad del vano será el doble que en la mitad, por lo
tanto L=2l, es decir:
Para vanos normales, sólo se emplean los dos primeros términos, pues la aproximación es
más que suficiente:

12
Teniendo en cuenta la ecuación de la flecha:
la longitud total del conductor queda:
Ejemplo
Hallar la longitud de un conductor en un vano de 200 metros que presenta una flecha de 3
metros. Aplicamos la fórmula que nos relaciona la longitud del conductor con la luz del
vano y con la flecha:
y sustituyendo valores resulta:
Si hubiéramos empleado la fórmula con otro término más:
el resultado sería de 200,11993 m., con lo cual comprobamos que es suficiente
aproximación el empleo de los dos primeros términos.