ecuaciones integrales lineales - ajhernan.webs.ull.es · el personal utiliza aproximaciones que...
TRANSCRIPT
Ecuaciones Integrales Lineales
Antonio Hernández CabreraDepartamento de Física BásicaUniversidad de La LagunaTenerife. Islas Canarias
6 de febrero de 2008

2

Índice general
1. Ecuaciones integrales lineales 71.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2. De�niciones simbólicas . . . . . . . . . . . . . . . . . . . . . . 7
1.2.1. 1. Fredholm 1a clase . . . . . . . . . . . . . . . . . . . 71.2.2. 2. Fredholm 2a clase . . . . . . . . . . . . . . . . . . . 81.2.3. 3. Volterra 1a clase . . . . . . . . . . . . . . . . . . . . 81.2.4. 4. Voterra 2a clase . . . . . . . . . . . . . . . . . . . . 81.2.5. Ejemplo: Teoría del transporte de neutrones. Ecuación
de Boltzmann. . . . . . . . . . . . . . . . . . . . . . . . 91.2.6. Ejemplo: Representación momento en mecánica cuántica. 111.2.7. Ejemplo. Ecuación diferencial. . . . . . . . . . . . . . . 13
1.3. Transformadas integrales . . . . . . . . . . . . . . . . . . . . . 161.3.1. Fredholm de 1o clase . . . . . . . . . . . . . . . . . . . 161.3.2. Fedholm 2a clase. . . . . . . . . . . . . . . . . . . . . . 171.3.3. Volterra 1a clase. . . . . . . . . . . . . . . . . . . . . . 171.3.4. Volterra 2a clase. . . . . . . . . . . . . . . . . . . . . . 171.3.5. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4. Núcleo como función generatriz. . . . . . . . . . . . . . . . . . 181.5. Teoremas de Fredholm . . . . . . . . . . . . . . . . . . . . . . 20
1.5.1. Teorema I: . . . . . . . . . . . . . . . . . . . . . . . . . 221.5.2. Teorema II:
231.5.3. Teorema III: . . . . . . . . . . . . . . . . . . . . . . . . 23
1.6. Ecuaciones integrales con núcleos separables o degenerados. . . 231.7. Series de Neumann. Núcleos pequeños . . . . . . . . . . . . . . 27
1.7.1. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . 291.8. Método de la resolvente de Fredholm . . . . . . . . . . . . . . 30
3
4 ÍNDICE GENERAL
1.8.1. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . 311.9. Método de Hilbert-Schmidt. Núcleos simétricos . . . . . . . . 34
1.9.1. Norma de una función . . . . . . . . . . . . . . . . . . 351.9.2. Convergencia de funciones . . . . . . . . . . . . . . . . 351.9.3. Producto escalar de dos funciones . . . . . . . . . . . . 351.9.4. Conjunto de funciones ortonormales . . . . . . . . . . . 361.9.5. Coe�cientes de Fourier de f(x) . . . . . . . . . . . . . 361.9.6. Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . 361.9.7. Teorema: . . . . . . . . . . . . . . . . . . . . . . . . . . 381.9.8. Aplicación a las ecuaciones integrales . . . . . . . . . . 381.9.9. Teorema de Hilbert-Schmidt . . . . . . . . . . . . . . . 401.9.10. Teorema del desarrollo del núcleo . . . . . . . . . . . . 401.9.11. Método de Hilbert-Schmidt: Ec. inhomogéneas . . . . . 41
1.10. Ecuaciones de Volterra . . . . . . . . . . . . . . . . . . . . . . 47

ÍNDICE GENERAL 5
PREÁMBULOCuando estudiaba físicas, hace ya unas cuantas décadas, las ecuaciones
integrales llamaron mi atención por su potencial aplicabilidad. Sin embargo,hasta mucho tiempo después, trabajando con problemas de fotoexcitación,no tuve que utilizarlas. Mi experiencia en resolver problemas basados en laecuación matricial de Liouville ha hecho que encuentre un sinfín de posibili-dades para aplicar la teoría de las ecuaciones integrales. Sin embargo, estosson unos simples apuntes, restringidos a las ecuaciones lineales. Escribir un li-bro de ecuaciones integrales es un trabajo mucho más complejo y que requiereaños de dedicación. Aquí me centraré en unir generalidad con simplicidad da-do que tan solo tenemos poco más de quince días de curso académico paradesarrollar el temario.Estos apuntes están dedicados a todos los profesores que son víctimas de
la extorsión intelectual de esa nueva modalidad de charlatán de feria llamadapedagogo.

6 ÍNDICE GENERAL
Capítulo 1
Ecuaciones integrales lineales
1.1. Introducción
Las ecuaciones integrales lineales son aquellas que contienen a la funciónincógnita bajo el signo integral. Es decir, la incógnita forma también partedel integrando. Se suelen clasi�car de dos formas: por el tipo de límites deintegración y por la ocurrencia de la función incógnita. El primer tipo declasi�cación sería:1. Ecuaciones de Fredholm, cuando los límites de integración son
de�nidos.2. Ecuaciones de Volterra, si alguno de los límites es variable.Ateniéndonos a la función incógnita, la clasi�cación será:1. Primera clase, cuando la función incógnita sólo aparece en el inte-
grando.2. Segunda clase, si la función incógnita aparece dentro y fuera de la
integral.
1.2. De�niciones simbólicas
1.2.1. 1. Fredholm 1a clase
f(x) =
Z b
a
K(x; t)y(t)dt: (1.1)
7

8 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
1.2.2. 2. Fredholm 2a clase
y(x) = f(x) + �
Z b
a
K(x; t)y(t)dt: (1.2)
1.2.3. 3. Volterra 1a clase
f(x) =
Z x
a
K(x; t)y(t)dy: (1.3)
1.2.4. 4. Voterra 2a clase
y(x) = f(x) + �
Z b
a
k(x; t)y(t)dt: (1.4)
Caso de que f(x) = 0 estaríamos en el caso de las ecuaciones homogéneas. Sif(x) 6= 0, tendríamos las inhomogéneas. El todos los casos la única funcióndesconocida es y(x). La función de dos variable K(x; t) recibe el nombre deN�UCLEO (Kernel).Las ecuaciones integrales suelen aparecer en determinados problemas físi-
cos, como veremos. Conviene analizar sus métodos de resolución por dosrazones fundamentales:1. Para resolver ecuaciones diferenciales con determinadas condiciones
particulares de contorno. Recordemos que, en las ecuaciones de Bessel, lacondición r = 0 determinaba si existía o no la función de Neumann Nn(r)como solución. En la ecuaciones de Bessel modi�cadas, la condición r �!1 determinaba la existencia de la solución In(r). Las ecuaciones integralesrelacionan a la función incógnita no sólo con sus valores en la frontera através de las derivadas, sino también en toda una región que incluye dichafrontera. Los límites de integración determinan ya de por sí una región conunas condiciones previas, sin tener que añadir al �nal condiciones adicionales.2. La forma de los núcleos depende de los valores de contorno. Por lo
tanto, las ecuaciones integrales son compactas (autoconsistentes) y puedenser una forma más poderosa o conveniente para resolver problemas que lasecuaciones diferenciales. Además, existen problemas como los fenómenos detransporte o difusión que no admiten una forma explícita como ecuacióndiferencial.
1.2. DEFINICIONES SIMBÓLICAS 9
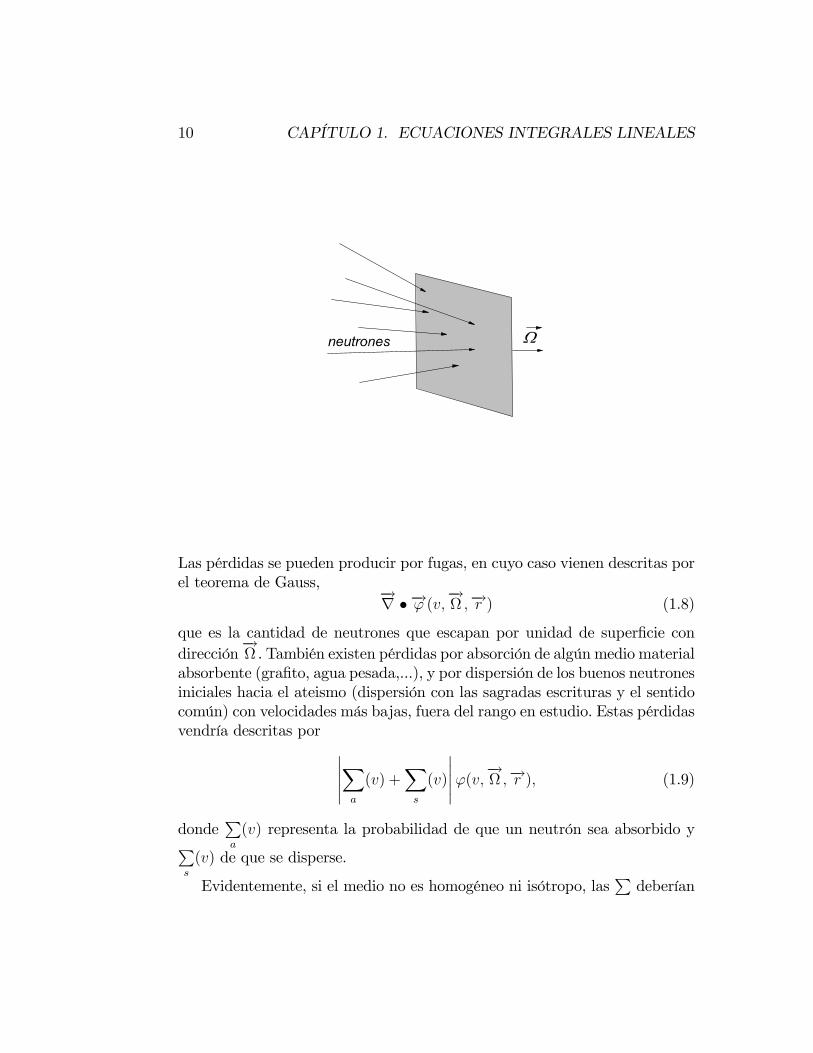
1.2.5. Ejemplo: Teoría del transporte de neutrones. Ecuaciónde Boltzmann.
La ecuación fundamental del transporte de neutrones se obtiene a travésde la ecuación de la continuidad de neutrones. Es decir,
Producción=Pérdidas+Fugas.
En la parte de producción de neutrones tendremos esencialmente las fuentes:
S(v;�! ;�!r )dvd�! ; (1.5)
que representa a S neutrones generados por cm3 y segundo, con velocidadescomprendidas entre v y v + dv, moviéndose en la dirección
�! , comprendida
dentro de un ángulo sólido�!d. Otra fuente adicional de neutrones es la
proporcionada por las colisiones que dispersan a aquellos neutrones que, enprincipio, se movían dentro de otros márgenes pero pasan a estar dentro delos parámetros v;
�! ;�!r adecuados después de la dispersión. Es decir, que iban
descarriados pero que, después de colisionar con la fe verdadera, se agrupanen el redil pertinente.La proporción debida al scattering (dispersión) viene dada porX
s
(v; v0;�! ;�!0)'(v0;
�!0;�!r ): (1.6)
dondePs
es la probabilidad (macroscópica) de que un neutrón con velocidad
v0 y dirección�!0 se disperse pasando a tener velocidad �!v y dirección �! . La
cantidad '(v0;�!0;�!r ) representa al �ujo total de neutrones (neutrones que
atraviesan determinada área en cierto tiempo).El �ujo vectorial lo podemos poner como �!' =
�!', con la dirección de la
velocidad neutrónica y magnitud igual al número de neutrones con velocidadv que atraviesan, por segundo, una unidad de área situada a la posición �!r ,y en una dirección
�! .Integrando sobre todas las velocidades iniciales (v0)
y sobre todas las direcciones��!0�, obtenemos el término de producción de
neutrones debido a los procesos dispersivosZ Z Xs
(v; v0;�! ;�!0)'(v0;
�!0;�!r )dv0d
�!0: (1.7)
10 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
Las pérdidas se pueden producir por fugas, en cuyo caso vienen descritas porel teorema de Gauss, �!r � �!' (v;�! ;�!r ) (1.8)
que es la cantidad de neutrones que escapan por unidad de super�cie condirección
�! . También existen pérdidas por absorción de algún medio material
absorbente (gra�to, agua pesada,...), y por dispersión de los buenos neutronesiniciales hacia el ateismo (dispersión con las sagradas escrituras y el sentidocomún) con velocidades más bajas, fuera del rango en estudio. Estas pérdidasvendría descritas por �����X
a
(v) +Xs
(v)
�����'(v;�! ;�!r ); (1.9)
dondePa
(v) representa la probabilidad de que un neutrón sea absorbido yPs
(v) de que se disperse.
Evidentemente, si el medio no es homogéneo ni isótropo, lasPdeberían

1.2. DEFINICIONES SIMBÓLICAS 11
incluir la dependencia con la posición y dirección, además de la dependenciacon la velocidad.La ecuación de continuidad queda entonces comoZ Z X
s
(v; v0;�! ;�!0)'(v0;
�!0;�!r )dv0d
�!0 + S(v;
�! ;�!r ) = (1.10)
�!r � �!' (v;�! ;�!r ) +�����Xa
(v) +Xs
(v)
�����'(v;�! ;�!r );con �!' =
�!'. Esta es la ecuación de Boltzmann para el estado estacionario,
donde se equilibran la producción y pérdidas de neutrones. Como vemos, esuna ecuación integral. En la anterior forma la ecuación es casi imposible detratar. El personal utiliza aproximaciones que lleguen a soluciones de com-promiso entre la exactitud física y la posibilidad matemáticas de resolverlas.Las integrales anteriores se extienden a todo el volumen del reactor nu-
clear correspondiente. La ecuación es una de Fredholm de 2a clase.
1.2.6. Ejemplo: Representación momento en mecánicacuántica.
La ecuación de Schrödinger, en la representación en el espacio ordinario,es
� ~2
2mr2 (�!r ) + V (�!r ) (�!r ) = E (�!r ); (1.11)
o, de forma más simpli�cada,
(�r2 + a2) (�!r ) = v(�!r ) (�!r ); (1.12)
siendo a2 = �2m~2 E y v(�!r ) = �2m
~2 V (�!r ). La anterior ecuación puede gener-
alizarse como
(�r2 + a2) (�!r ) =Zv(�!r ;
�!r0 ) (
�!r0 )d3
�!r0 ; (1.13)
siempre que el potencial sea puntual, es decir, v(�!r ;�!r0 ) = v(�!r )�
��!r ��!r0 � :Es decir, cuando trabajamos con una interacción de tipo local. Transforman-
12 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
do por Fourier,
���!k�=
1
(2�)3=2
Z (�!r ) e�i
�!k ��!r d3�!r ;
(�!r ) = 1
(2�)3=2
Z���!k�ei�!k ��!r d3
�!k : (1.14)
Recordemos que�!k =
�!p~ = 2� n
o de onda. Transformando la ecuación inte-gral,Z
(�r2 + a2) (�!r )e�i�!k ��!r d3�!r =
Z Zv(�!r ;
�!r0 ) (
�!r0 )e�i
�!k ��!r d3�!r d3
�!r0 ;
(1.15)
donde r2 sólo actúa sobre (�!r0 ): Integrando por partes el miembro de la
izquierda,Z(k2 + a2) (�!r )e�i
�!k ��!r d3�!r = (2�)3=2
�k2 + a2
��(�!k ): (1.16)
Sustituyendo (�!r ) por su transformada
(2�)3=2�k2 + a2
��(�!k ) =
1
(2�)3=2
Z Z Zv(�!r ;
�!r0 )�(
�!k0 )e
�i��!k ��!r �
�!k0 ��!r0�d3�!r d3
�!r0 d3
�!k0 : (1.17)
Si llamamos
f(�!k ;�!k0 ) =
1
(2�)3
Z Z Zv(�!r ;
�!r0 )e
�i��!k ��!r �
�!k0 ��!r0�d3�!r d3
�!r0 (1.18)
llegamos a que �k2 + a2
��(�!k ) =
Zf(�!k ;�!k0 )�(
�!k0 )d3
�!k0 ; (1.19)
que es una ecuación homogénea de Fredholm de 2a clase, en la cual a2 corre-sponde al autovalor.En el caso de interacciones locales, f(
�!k ;�!k0 ) = f(
�!k �
�!k0 ), lo cual facili-
tará la resolución del problema. Para hacer el anterior planteamiento hemossupuesto que la función y el potencial admite transformada de Fourier (TF).Para el potencial de un oscilador lineal, V (�!r ) = r2, no existen las integralesnecesarias, ya que las TF conducen a oscilaciones divergentes.

1.2. DEFINICIONES SIMBÓLICAS 13
1.2.7. Ejemplo. Ecuación diferencial.
Existen casos donde ha de decidirse si es más conveniente resolver unaecuación integral (EI) que una diferencial (ED). Ambas son autotransformablesentre sí. Supongamos que tenemos una ED genérica de 2o grado
y00(x) + A(x)y0(x) +B(x)y(x) = g(x); (1.20)
con las condiciones de contorno y(a) = y0, y0(a) = y00. Integrando obtenemos
y0 = �Z x
a
Ay0dx�Z x
a
Bydx+
Z x
a
gdx+ y00: (1.21)
Integrando por partes la primera integral de la derecha,
y0 = �Ay �Z x
a
(B � A0)ydx+
Z x
a
gdx+ A(a)y0 + y00; (1.22)
domde hemos ido absorbiendo las condiciones de contorno. Integrando nue-vamente,
y0 = �Z x
a
Aydx�Z x
a
Z x
a
[B(t)� A0(t)] y(t)dydx+Z x
a
Z x
a
g(t)dtdx+ [A(a)y0 + y00] (x� a) + y0: (1.23)
Conviene reescribir la ecuación integral de forma más clara. Para ello apro-vechamos la relaciónZ x
a
Z x
a
f(t)dtdx =
Z x
a
(x� t)f(t)dt (1.24)
igualdad que puede comprobarse diferenciando ambos miembros. La únicadiferencia está en una constante que desaparece si x! a. Por lo tanto,
y(x) = �Z b
a
fA(t) + (x� t) [B(t)� A0(t)]g y(t)dt+Z x
a
(x� t)g(t) + [A(a)y0 + y00] (x� a) + y0: (1.25)
Introduciremos la siguiente abreviación:
K(x; t) = (x� t) [B(t)� A0(t)]� A(t);
f(x) =
Z x
a
(x� t)g(t) + [A(a)y0 + y00] (x� a) + y0: (1.26)

14 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
con lo que
y(x) = f(x) +
Z x
a
K(x; t)y(t)dt; (1.27)
que es una ecuación de Volterra de 2a clase.Un ejemplo clásico de lo arriba expuesto es el oscilador armónico:
y00 + !2y = 0; con�
y(0) = 0y0(0) = 1:
(1.28)
En este caso, A(x) = 0, B(x) = !2, g(x) = 0, con lo que K(x; t) = (t� x)!2y f(x) =
R x0(x� t) � 0 � dt+x = 0 y la ecuación integral correspondiente sería
y(x) = x+ !2Z x
0
(t� x)y(t)dt; (1.29)
Volterra de 2a clase. Parece fácil ver que satisface y(x) = sin!x!. Si se dieran
dos condiciones de contornoy(a) = 0y(b) = 0
(1.30)
tendríamos que modi�car el procedimiento ya que desconocemos y0(0). Laprimera integral conduce a
y0 = �!2Z x
0
ydx+ y0: (1.31)
Volviendo a integrar,
y = �!2Z x
0
(x� t)y(t)dt+ y0(0)x: (1.32)
Si imponemos que y(b) = 0 =)
!2Z b
0
(b� t)y(t)dt = by0(0))
y0(0) =!2
b
Z b
0
(b� t)y(t)dt
) y0 = �!2Z b
0
(x� t)y(t)dt+
!2
b
Z b
0
(b� t)y(t)dt; (1.33)
1.2. DEFINICIONES SIMBÓLICAS 15
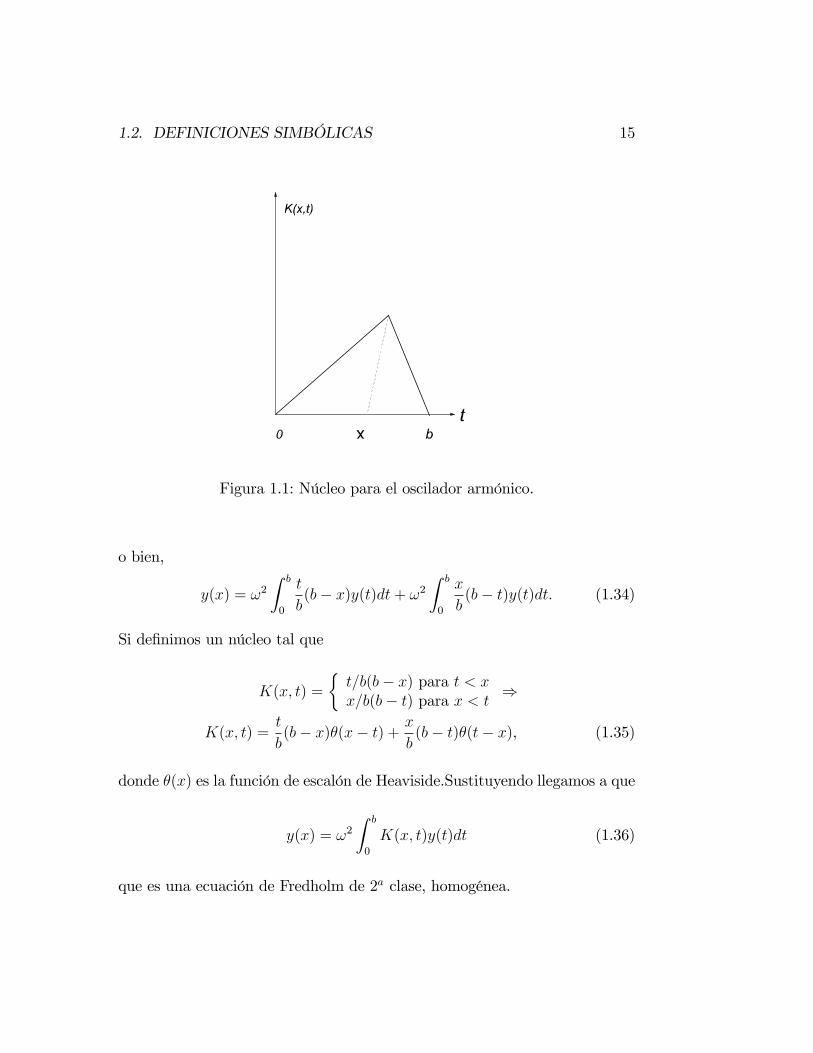
Figura 1.1: Núcleo para el oscilador armónico.
o bien,
y(x) = !2Z b
0
t
b(b� x)y(t)dt+ !2
Z b
0
x
b(b� t)y(t)dt: (1.34)
Si de�nimos un núcleo tal que
K(x; t) =
�t=b(b� x) para t < xx=b(b� t) para x < t
)
K(x; t) =t
b(b� x)�(x� t) +
x
b(b� t)�(t� x), (1.35)
donde �(x) es la función de escalón de Heaviside.Sustituyendo llegamos a que
y(x) = !2Z b
0
K(x; t)y(t)dt (1.36)
que es una ecuación de Fredholm de 2a clase, homogénea.
16 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
1.3. Transformadas integrales
Toda ecuación que su núcleo tenga la forma K(x; t) = K(x� t) es abor-dable mediante transformadas integrales, siempre y cuando tanto f(x) comok(x; t) admitan transformada. Si los límites son entre �1 e1, lo apropiadoes recurrir a Fourier. Si no, a Laplace.
1.3.1. Fredholm de 1o clase
f(x) =
Z 1
�1K(x� t)'(t)dt; (1.37)
donde '(x) es la incógnita. Empezamos aplicando el teorema de convolución:
f(x) =
Z 1
�1�(t)�(t)e�ixtdt; (1.38)
donde �(t) y �(t) son las transformadas de Fourier de K(x) y '(t): Desha-ciendo la transformación,
�(t)�(t) =1p2�
Z 1
�1f(x)eixtdx = F (t); (1.39)
donde hemos usado
�(t) =1p2�
Z 1
�1K(x)eixtdx;
�(t) =1p2�
Z 1
�1'(x)eixtdx: (1.40)
junto al teorema de convolución. Así,
�(t) =F (t)
�(t)(1.41)
y
'(x) =1p2�
Z 1
�1
F (t)
�(t)e�ixtdt; (1.42)
salvo constante.

1.3. TRANSFORMADAS INTEGRALES 17
1.3.2. Fedholm 2a clase.
'(x) = f(x) + �
Z 1
�1K(x� t)'(t)dt: (1.43)
Siguiendo el mismo procedimiento llegamos a que
'(x) =1p2�
Z 1
�1
F (t)
1�p2��(t)
e�ixtdt: (1.44)
1.3.3. Volterra 1a clase.
Cuando alguno de los límites es inde�nido, tenemos una ecuación deVolterra. En dicho caso es aconsejable recurrir a las transformadas de Laplace.Partimos de
f(x) =
Z x
0
'(t)K(x� t)dt: (1.45)
Aplicamos la transformada de Laplace a la ecuación y el teorema de convolu-ción:
L [f(x)] = L�Z x
0
'(t)K(x� t)dt
�= L ['(x)]L [K(x)] ; (1.46)
por lo que
F (x) = �(s)�(s) =) �(s) =F (s)
�(s): (1.47)
Deshaciendo la transformada,
'(x) = L�1�F (s)
�(s)
�=
1
2�i
Z "+i1
"�i1exs
F (s)
�(s)ds: (1.48)
1.3.4. Volterra 2a clase.
'(x) = f(x) + �
Z x
0
K(x; t)'(t)dt: (1.49)
Sólo hay que repetir el proceso anterior:
L ['(x)] = �(s) = L [f(x)] + �L�Z x
0
'(t)K(x� t)dt
�=
F (s) + ��(s)�(s); (1.50)
18 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
debido al teorema de convolución.
�(s) [1� ��(s)] = F (s) =)
�(s) =F (s)
1� ��(s): (1.51)
Deshaciendo la transformada,
'(x) = L�1 [�(x)] = 1
2�i
Z "+i1
"�i1esx
F (s)
1� ��(s)ds: (1.52)
1.3.5. Ejemplo
Vamos a resolver la ecuación
'(x) = x� �
Z x
0
(t� x)'(t)dt; (1.53)
donde f(x) = x =) F (s) = L [f(x)] =R10e�sxf(x)dx = 1
s2; K(x) = x =)
�(s) = 1s2, � = 1. Por lo tanto,
�(s) =1=s2
1� 1=s2 =1
2
�1
s� 1 �1
s+ 1
�: (1.54)
Buscamos la antitransformada en unas buenas tablas, si no se nos apeteceintegrar, y
'(x) =1
2
�ex � e�x
�= sinh(x): (1.55)
1.4. Núcleo como función generatriz.
En algunas ocasiones el núcleo de las ecuaciones integrales es función gen-eratriz de alguna función especial conocida. Estos casos son para espabiladose individuos con memoria bien desarrollada. Estas ecuaciones son muy pecu-liares y nunca se puede generalizar el método. Supongamos que una ecuaciónintegral nos aparece con el siguiente aspecto:
f(x) =
Z 1
�1
'(t)p1� 2xt+ x2
dt, con � 1 � x � 1. (1.56)

1.4. NÚCLEO COMO FUNCIÓN GENERATRIZ. 19
Esta es una ecuación inhomogénea de Fredholm de 1a clase. Lo normal es nolocalizar qué es lo que genera al núcleo, por lo que el procedimiento no esnada práctico. Afortunadamente, nuestro ejemplo es fácil (lo hemos escogidoasí) y
1p1� 2xt+ x2
=1Xl=0
Pl(t)xl; (1.57)
combinación de polinomios de Legendre. Automáticamente a uno se le ocurredesarrollar todo en serie de dichos polinomios, en particular
'(x) =
1Xn=0
anPn(x): (1.58)
Así,
f(x) =
Z 1
�1dt
1Xl=0
Pl(t)xl
1Xn=0
anPn(t): (1.59)
Usando la relación de ortogonalidad de las funciones de Legendre,
f(x) =1Xn=0
xnan2
2n+ 1: (1.60)
Derivando obtenemos que
f 0(x) =1Xn=0
nxn�1an2
2n+ 1=) f 0(x = 0) =
1Xn=0
nan2
2n+ 1; (1.61)
que no depende de x. Derivando n veces y tomando el punto x = 0, vemosque
f (n)(x) =1Xn=0
n!2an2n+ 1
= f (n)(0) =) an =2n+ 1
2n!f (0)(0); (1.62)
con lo que f(0) = a02y el término general sería
an =2n+ 1
2n!f (n)(0) (1.63)
y la solución puede escribirse como
'(t) =
1Xn=0
2n+ 1
2
f (n)(0)
n!Pn(t): (1.64)

20 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
1.5. Teoremas de Fredholm
Son aplicables a las ecuaciones integrales de Fredholm inhomogéneas.Tomemos
y(x) = f(x) +
Z b
a
K(x; t)y(t)dt (1.65)
con � = 1. Introducimos el intervalo �x = �t = b�an. Si a = b = 1, no
habría forma de aplicar el procedimiento que vamos a contar. Sólo es posiblepara intervalos �nitos.Llamemos Kpq = K(a+ p�x; a+ q�t), donde p; q = 1; � � � ; n. La integral
anterior puede expresarse como
nXq=1
Kpqyq�t; (1.66)
ya que, a un p �jo determinado, t dependerá de q. En la expresión anterioryp debe ser tal que
y(x) =nXp=1
yp: (1.67)
Lo mismo podemos hacer con la inhomogeneidad, descomponiéndola en in-tervalos in�nitesimales.
f(x) =nXp=1
fp: (1.68)
Así, la ecuación puede reescribirse como
y1 = f1 +nXq=1
K1qyq�t; para p = 1;
y2 = f2 +nXq=1
K2qyq�t; para p = 2;
...
yn = fn +
nXq=1
Knqyn�t; para p = n; (1.69)

1.5. TEOREMAS DE FREDHOLM 21
o bieny1 �
nPq=1
K1qyq�t = f1; � � � p = 1... � � � ...
yn �nPq=1
K1qyq�t = fn; � � � p = n
(1.70)
es decir, hemos generado un sistema de n ecuaciones con n incógnitas, cuyodescriminante es
Dn =
���������1�K11�t �K12�t � � � �K1n�t�K21�t 1�K22�t � � � �K2n�t
......
......
�Kn1�t �Kn2�t � � � 1�Knn�t
��������� : (1.71)
Este sistema tendrá solución para cualquier valor de las fp siempre y cuandohaya alguna de ellas no nula. Es decir, sólo habrá solución para la ecuacióninhomogénea, dondeDn 6= 0. En este caso podemos de�nir el sistema adjuntocomo
zp = f �p +nXq=1
Kqpzq�t; (1.72)
que se diferencia del original por la trasposición de la matrizDn. Este sistematambién tendrá solución, de forma que1.- Si Dn 6= 0 la solución es única para yn y para el traspuesto zn.2.- Si Dn = 0, el sistema es homogéneo y tratable por otro método, o
inhomogéneo y difícil de tratar. Vayamos al homogéneo
yp �nXq=1
Kpqyq�t = 0: (1.73)
En este caso puede haber solución del sistema traspuesto también. Ahorabien, el número de soluciones linealmente independientes, para el sistemahomogéneo, es n� r, siendo r el rango de la matriz Dn. Es decir, tiene unabase de autoestados de dimensión n � r. Puede que existan soluciones delinhomogéneo con Dn = 0, pero sólo para ciertas inhomogeneidades f(x) muydeterminadas. Veámos cuales.La ecuación adjunta de la homogénea la habíamos de�nido como
zp �nXq=1
Kqpzq�t = 0; (1.74)

22 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
con una familia de soluciones o espectro �!z p. Multiplicando por (4.9) ysumando todas las posibles soluciones,X
p
ypzp �Xp
Xq
Kpqzpyq�t = 0; (1.75)
puesto queXp
ypzp �Xp
zpXq
Kpqyq�t�Xp
ypXq
Kqpzq�t+
Xp
"Xq
Kpqyq�t
#"Xq
Kqpzq�t
#= 0: (1.76)
Como quiera queP
qKqpzq�t = zp yP
qKpqyq�t = yq, sustituyendo lleg-amos a la igualdad (4.11).Por otro lado, la inhomogénea es
yp =nXq=1
Kpqyq�t+ fp; (1.77)
a la que multiplicaremos por zq y sumaremos a todos los p:
nXp=1
(yp �nXq=1
Kpqyq�t)zp =nXp=1
fpzp: (1.78)
Para que el sistema homogéneo e inhomogéneo sean compatibles,
yp �nXq=1
Kpqyq�t = 0 =)nXp=1
fpzp = 0: (1.79)
Es decir, las inhomogeneidades fp han de ser ortogonales a las soluciones dela adjunta de la homogénea, siempre que Dn = 0, para poder tener soluciónde la inhomogénea. Así, podemos ya enunciar los tres teoremas de Fredholm:
1.5.1. Teorema I:
O la ecuación integral lineal de 2a especie, no homogénea, y(x) = f(x) +R baK(x; t)y(t)dt tiene solución única (Dn 6= 0), para una amplia clase de
funciones f(x), ó la ecuación integral homogénea tiene, al menos, una soluciónno trivial.
1.6. ECUACIONES INTEGRALES CONNÚCLEOS SEPARABLESODEGENERADOS.23
1.5.2. Teorema II:
Si para la ecuación integral dada ocurre la primera alternativa, entoncestambién se produce para la traspuesta z(x) = g(x) +
R baK(t; x)z(t)dt.
1.5.3. Teorema III:
En el caso de que se produzca la segunda alternativa, la condición nece-saria y su�ciente para que exista solución de la inhomogénea es que
R bazh(x)f(x)dx =
0, es decir, la inhomogeneidad ha de ser ortogonal a la traspuesta de la ho-mogénea. En este caso no existe solución única, pues y(x)+�h(x) es tambiénsolución siempre que y(x) lo sea de la inhomogénea y h(x) de la homogénea.
1.6. Ecuaciones integrales con núcleos sepa-rables o degenerados.
Cuando el núcleo puede escribirse comoK(x; t) =nPj=1
Nj(x)Mj(t), la inte-
gral puede reemplazarse por un sistema de ecuaciones algebraicas. Para ellon ha de ser �nito. Partamos de una ecuación integral genérica
y(x) = f(x) + �
Z b
a
K(x; t)y(t)dt; (1.80)
cuyo núcleo es separable en polinomios o ecuaciones trascendentales, tal co-mo pueda ser sin(x � t) = sinx cos t � cosx sin t. Siempre existen métodosaproximados para reducir cualquier función a una de variables separadas. Enel caso general,
y(x) = f(x) + �
nXj=1
Nj(x)Mj(t)y(t)dt
= f(x) + �
nXj=1
Nj(x)
Z b
a
Mj(t)y(t)dt
= f(x) + �nXj=1
Nj(x)yj; (1.81)

24 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
puesto que yj =R baMj(t)y(t)dt es una constante. Premultiplicamos porMi(x)
e integramos entre a y b:Z b
a
Mi(x)y(x)dx = yi =
Z b
a
Mi(x)f(x)dx+ �nXj=1
Z b
a
Mi(x)Nj(x)yjdx;
(1.82)que podemos escribir en forma vectorial como
yi = fi + �nXj=1
yjaij =)
�!y = (I � �A)�1�!f ; (1.83)
siendo I la matriz identidad n� n, y la matriz A es conocida.Evidentemente, la condición necesaria y su�ciente para que el sistema
tenga solución (no trivial) y que ésta sea única es que
det(I � �A) 6= 0: (1.84)
Esta condición se cumple siempre para las ecuaciones de Fredholm, siemprey cuando la � no coincida con ningún autovalor de la ecuación homogénea.En el caso en que det(I � �A) = 0, la ecuación homogénea (I � �A)�!y = 0tiene solución, aunque no la tenga la completa.Consideremos una ecuación homogénea y su traspuesta:
y(x) = �
Z b
a
K(x; t)y(t)dt; con K(x; t) =nXj=1
Nj(x)Mj(t);
z(x) = �
Z b
a
K(t; x)z(t)dt; con K(t; x) =nXj=1
Nj(t)Mj(x); (1.85)
donde sólo hemos traspuesto el núcleo. Para z(x) la matriz A quedaríatraspuesta. Es decir,
�I � �hAT
�= (I � �hA)T y det (I � �hA)T si det (I � �hA) =
0, por lo que esta ecuación homogenea traspuesta tendrá, al menos, una solu-ción. Creamos el vector
zi =
Z b
a
z(t)Ni(t)dt:
Si el determinante det (I � �hA) es nulo pueden existir ciertas funciones f(x)determinadas de forma que también tenga solución la ecuación inhomogénea,

1.6. ECUACIONES INTEGRALES CONNÚCLEOS SEPARABLESODEGENERADOS.25
por aplicación inmediata del 2o teorema de Fredholm. La condición para ello
es quenPi=1
zifi = 0: Con esto
0 =nXi=1
Z b
a
Ni(t)z(t)dt
Z b
a
Mi(x)f(x)dx =
=nXi=1
Z b
a
f(x)
�Z b
a
Ni(t)z(t)Mi(x)dt
�dx
=nXi=1
Z b
a
f(x)
�Z b
a
K(x; t)z(t)dt
�dx
=1
�
Z b
a
f(x)z(x)dx
=)Z b
a
f(x)z(x)dx = 0: (1.86)
condición para que la inhomogénea tenga solución, Es decir,�!f ha de ser
ortogonal a �!z .
Ejemplo:
Tengamos la ecuación homogénea de Fredholm
y(x) = �
Z +1
�1(x+ t) y(t)dt; (1.87)
conN1(x) = x; N2(x) = 1;M1(t) = 1; M2(t) = t:
(1.88)
La matriz A tendrá por elementos a
a11 =
Z +1
�1M1(x)N1(x)dx =
Z +1
�1xdx = 0;
a12 =
Z +1
�1M1(x)N2(x)dx =
Z +1
�1dx = 2;
a21 =
Z +1
�1M2(x)N1(x)dx =
Z +1
�1x2dx = 2=3;
a22 =
Z +1
�1M2(x)N2(x)dx =
Z +1
�1xdx = 0; (1.89)

26 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
y, por tanto,
(I � �hA) =�
1 �2�h�23�h 1
�; (1.90)
cuyo determinante es det (I � �hA) = 1� 43�2h. Para la ecuación homogénea
que tenemos, det (I � �hA) = 0 nos determina sus autovalores. Así, 1 �43�2h = 0 =) �h = �
p32. Con los autovalores en la mano determinamos los
autovectores de la homogénea que, para �h1 =p32, sería�
1�p3
�p331
� �y1y1
�=
�00
�; (1.91)
que nos conduce a que y1 =p3y2 =) y2 = C1; y1 =
p3C1. El autovector
seríay1h(x) =
XyiNi(x) = C1(
p3x+ 1) (1.92)
Repitiendo el proceso para el otro autovalor �h2 =p32, obtenemos el otro
autovalory2h(x) = C2(�
p3x+ 1): (1.93)
En general, y para problemas de física, resulta conveniente normalizar estosautovalores, determinando las constantes Ci. Cualquier combinación y(x) =�y1h(x) + �y2h(x) es solución del problema.Vamos a completar el problema resolviendo una inhomogénea cuya parte
homogénea sea la anterior:
y(x) = f(x) +
p3
2
Z +1
�1(x+ t) y(t)dt: (1.94)
En principio dejamos libre la inhomogeneidad, pero hemos de tener presenteque la constante � coincide con uno de los autovalores de la homogénea. Estacircunstancia nos va a condicionar f(x). Para que la inhomogénea tengasolución
R baf(x)zi(x)dx = 0; correspondiendo la zi(x) a la autofunción cuyo
autovalor es el problemático. Vamos a calcular las autofunciones para lamatriz AT . En nuestro caso
AT = aji =
�0 2
3
2 0
�=)
�I � �hAT
�=
�1� 2
3�
�2�1
�=) 1� 4
3�2 = 0 =)
�z+ = y1 = 1 +
p3x
z� = y2 = 1�p3x
: (1.95)

1.7. SERIES DE NEUMANN. NÚCLEOS PEQUEÑOS 27
Este resultado era previsible dada la simetría del núcleo. Si se cumple queZ 1
�1f(x)
�1 +
p3x�dx = 0;
el problema inhomogéneo tiene solución. Las inhomogeneidades más sencillasserán del tipo f(x) = ax2+b, con a = �3b. Un caso podría ser f(x) = 3x2�1.Esta función es ortonormal a las soluciones de la traspuesta de la homogénea.Resolvamos
y(x) = 3x2 � 1 +p3
2
Z +1
�1(x+ t) y(t)dt: (1.96)
Recordemos que, para �h =p32, yh(x) = C1(1 +
p3x), y que
y(x) = f(x) + �2Xj=1
Nj(x)yj:
Habría que calcular el valor de las yj a través de la ecuación matricial de lainhomogénea
�!y = (I � �A)�1�!f :Es decir, �
y1y2
�=
�1�
p3
�p321
��1 �f1f2
�;
donde fi =R +1�1 f(x)Mi(x)dx. En nuestro caso f1 =
R +1�1 (3x
2 � 1) dx =
x3 � xj1�1 = 0 y f2 =R +1�1 (3x
2 � 1)xdx = 34x4 � 1
2x2��1�1 = 0. Es decir, yi
quedarían como dos constantes indeterminadas que llamaremos a y b =p3a:
Por lo tanto,
y(x) =�3x2 � 1
�+
p3
2
�ax+
p3a�=�3x2 � 1
�+
p3
2a(x+
p3):
1.7. Series de Neumann. Núcleos pequeños
El método de Neumann es un procedimiento iterativo que sólo es válidopara núcleos pequeños. Partimos de una ecuación inhomogénea de Fredholmde 2a clase
y(x) = f(x) + �
Z b
a
K(x; t)y(t)dt;
28 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
y el primer paso consiste en reemplazar la incógnita del integrando por lainhomogeneidad, y0(x) = f(x) =)
y1(x) = f(x) + �
Z b
a
K(x; t)f(t)dt: (1.97)
Volvemos a repetir el proceso,
y2(x) = f(x) + �
Z b
a
K(x; t) [y1(t)] dt
= f(x) + �
Z b
a
K(x; t)
�f(t) + �
Z b
a
K(t; t1)f(t1)dt1
�dt
= f(x) + �
Z b
a
K(x; t)f(t)dt+ �2Z b
a
dt1
Z b
a
dt2K(x; t1)K(t1; t2)f(t2)
= u0(x) + u1(x) + u2(x);(1.98)
con lo que
y0(x) = u0(x) = f(x);
y1(x) = u0(x) + �
Z b
a
K(x; t)f(t)dt = u0(x) + u1(x);
y2(x) = u0(x) + u1(x) + u2(x);
yn(x) = u0(x) + � � �+ un(x) =1Xn=1
un(x):
Caso de que exista solución, y esta sea única, hay que demostrar que l��mn�!1
yn(x) =
y(x), donde y(x) es la solución de la ecuación integral. Es decir, y(x) =1Pn=1
un(x). Si no de hubieran incluído las ��s en los desarrollos podríamos
haber escrito que y(x) = �n1Pn=1
un(x). Aplicando el teorema de convergencia
de Cauchy,j�nun(x)j = j�jn jM jn jb� ajn ; (1.99)
siendo M el máximo valor que alcanza K(x; t) en el recinto acotado [a; b].Es decir, jK(x; tj < M . Podemos hacer lo mismo para el término de ordenn+ 1. Dividiéndolo por el de orden n,
j�j jM j jb� aj < 1; (1.100)

1.7. SERIES DE NEUMANN. NÚCLEOS PEQUEÑOS 29
que es la condición su�ciente para que converja la serie. La condición nece-saria puede resumirse en que, si utilizamos la ecuación homogénea asociada,j�j < j�ej ; siendo �e el menor de los autovalores de la homogénea.
1.7.1. Ejemplo
y(x) = x+1
2
Z 1
�1(t� x)y(t)dt:
Tomamos
y0(x) = x;
y1(x) = x+1
2
Z 1
�1(t� x)tdt = x+
1
3;
y2(x) = x+1
3+1
4
Z 1
�1dt1
Z 1
�1dt2(t1 � x)(t1 � t2)t2 = (1.101)
x+1
3� 13x;
y3(x) = x+1
3� 13x� 1
9: (1.102)
y así sucesivamente. Por recurrencia se puede observar (por un muy buenobservador, por lo menos de Naciones Unidas) cómo va a ser el términogeneral de la serie:
y(x) = x+nXj=1
(�1)j�1 13j� x
nXj=1
(�1)j�1 13j; (1.103)
que son dos progresiones geométricas. Nuestra solución sería
y(x) = l��mn�!1
yn(x) = x+1=3
4=3� x
1=3
4=3=3
4x+
1
4: (1.104)
En este caso la solución es exacta, puesto que hemos sido tan listos que hemoslocalizado una serie buena y se cumple que m�ax jK(x; t)j = 2, b � a = 2,� = 1=2 con lo que j�j jM j jb� aj = 2 que es mayor que 1, no cumpliéndosela condicioón su�ciente. Pero existe solución ya que los autovalores de lahomogénea son �h = �i
p32. Como 1
2<
p32, se cumple la condición necesaria
y, evidentemente, hay solución.

30 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
1.8. Método de la resolvente de Fredholm
Toda ecuación integral de Fredholm
y(x) = f(x) + �
Z b
a
k(x; t)y(t)dt (1.105)
puede reescribirse como
y(x) = f(x) + �
Z b
a
1Xn=0
Kn+1(x; t)�nf(t)dt; (1.106)
siendo
K1(x; t) = k(x; t);
K2(x; t) =
Z b
a
k(x; t)k(t1; t)dt1;
...
Kn(x; t) =
Z b
a
k(x; t)k(t1; t) � � � k(tn; t)dt1 � � � dtn; (1.107)
que es el mismo desarrollo que se ha hecho ya para las series de Neumann, ycon las mismas condiciones. También existe la posibilidad de escribir
y(x) = f(x) + �
Z b
a
R(x; t; �)f(t)dt; (1.108)
donde R(x; t) recibe el nombre de resolvente, siendo
R(x; t; �) =
1Xn=0
Kn+1(x; t)�n; (1.109)
y el método de Neuman no sería más que la aplicación paso a paso de estemétodo. Resumiendo, se descompone la integral en una serie de sumandos,siendo el número de éstos in�nito. Posteriormente se calcula el límite de lasuma.Después de la aplicación del método de Fredholm se llega a expresiones
tales como
R(x; t; �) =D(x; t; �)
D(�): (1.110)

1.8. MÉTODO DE LA RESOLVENTE DE FREDHOLM 31
Calculando los ceros de D(�) conoceremos las singularidades de R(x; t; �).Este método es más poderoso que el de Neumann, pues sirve para todo elespacio excepto las singularidades. Tiene el inconveniente de ser enormementepesado y tedioso. Veámoslo:
D(x; t; �) = k(x; t)� �
Z b
a
dz
���� k(x; t) k(x; z)k(z; t) k(z; z)
����++�2
2!
Z b
a
Z b
a
dzdz0
������k(x; t) k(x; z) k(x; z0)k(z; t) k(z; z) k(z; z0)k(z0; t) k(z0; z) k(z0; z0)
������� � � � ;D(�) = 1� �
Z b
a
k(z; z)dz +
+�2
2!
Z b
a
Z b
a
���� k(z; z) k(z; z0)k(z; z0) k(z0; z0)
���� dzdz0 � � � � =1� �A:
Como vemos, se gana un orden de potencia respecto al método de Neumann,y tiene la ventaja de que puede verse su estructura analítica, así como lasolución, sin tener que calcularla previamente ni totalmente.
1.8.1. Ejemplo
y(x) = x+ �
Z 1
0
t(x+ t)y(t)dt: (1.111)
Hacemos el desarrollo de Fredholm hasta orden 3 (hasta �3). En este caso dala casualidad de que el resultado es exacto para ese orden.
y(x) = f(x) + �
Z b
a
R(x; t; �)f(t)dt; con k(x; t) = t(x+ t): (1.112)
La resolvente sería R(x; t; �) = D(x;t;�)D(�)
, donde
D(x; t; �) = k(x; t)��Z 1
0
����
���� dz+�22!Z 1
0
Z 1
0
������
������ dzdz0+� � � ;(1.113)
32 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
de donde ���� k(x; t) k(x; z)k(z; t) k(z; z)
���� = ���� t(x+ t) z(x+ z)t(z + t) z(z + z)
���� == �z3t+ z2t(x+ t)� zt2x =)(1.114)Z 1
0
��z3t+ z2t(x+ t)� zt2x
�dz = �1
4t+
1
3t(x+ t)� 1
2t2x:������
k(x; t) k(x; z) k(x; z0)k(z; t) k(z; z) k(z; z0)k(z0; t) k(z0; z) k(z0; z0)
������ =������t(x+ t) z(x+ z) z0(x+ z0)t(z + t) z(z + z) z(z + z0)t(z0 + t) z(z + z0) z0(z0 + z0)
������ == 0
=) D(x; t; �) = t(x+ t) + �
�t2x
2� t(x+ t)
3+t
4
�+ 0:(1.115)
Por otra parte, D(�), que ha de coincidir con el discriminante del sistema, es
D(�) = 1� �
Z 1
0
2z2dz +�2
2!
Z 1
0
Z 1
0
�4z2z02 � z02(z + z0)
�dzdz0 =
= 1� 23�� 1
72�2 + 0(1.116)
Por tanto, la resolvente será
R(x; t; �) =D(x; t; �)
D(�)=t(x+ t) + �
�t2x2� t(x+t)
3+ t
4
�1� 2
3�� 1
72�2
(1.117)
Con ella encontramos que
1
D(�)
Z 1
0
f(t)D(x; t; �)dt = (1.118)
1
D(�)
Z 1
0
�t2(x+ t) + �
�t3x
2� t2(x+ t)
3+t2
4
��dt
=) (1.119)
y(x) = x+�
D (�)
�1
3+
�
72
�x+
�
4D(�); (1.120)
donde ya hemos sustituido la integral. Esta es la solución hasta orden �2.
1.8. MÉTODO DE LA RESOLVENTE DE FREDHOLM 33
Utilizando el método de las series de Neumann el resultado sería:
y(x) = x
�1 +
�
3+17�2
72
�+�
4+�2
16+ � � � (1.121)
Dado que la ecuación es de núcleos separables, podemos resolverla exacta-mente a modo de comparación. Así,
N1(x) = x M1(t) = tN2(x) = 1 M2(t) = t2
�=) A =
�13
12
14
13
�: (1.122)
Por tanto, podemos calcular el discriminante y comprobar si se satisfacenlos teoremas de Fredholm:
D(�) = jI � �Aj =���� 1� �=3 ��=2��=4 1� �=3
���� = 1� 23�� 1
72�2: (1.123)
Las soluciones estarán ligadas con los valores de � que se obtengan de anularD(�). Es decir, �� = �18
p2�24. Para calcular la solución exacta completa,
dado que f(x) = x, obtenemos
f1 =
Z 1
0
f(x)M1(x)dx =
Z 1
0
x2dx =1
3;
f2 =
Z 1
0
f(x)M2(x)dx =
Z 1
0
x3dx =1
4: (1.124)
Así,
(1� �A)�1 =1
D(�)
�1� �=3 �=2�=4 1� �=3
�; (1.125)
de donde
�!y = (1� �A)�1�!f =
1
D(�)
�1� �=3 �=2�=4 1� �=3
� �1=31=4
�=
1
D(�)
�13� 1
9�+ 1
8�
112�+ 1
4� 1
12�
�=)
(y1 =
1D(�)
�13� �
72
�y2 =
1=4D(�)
)=)
y(x) = x+�
D(�)
��1
3+
�
72
�x+
1
4
�: (1.126)
Agrupando términos, podemos escribir
y(x) = x
�1 +
�
D(�)
�1
3+
�
72
��+
�
4D(�); (1.127)

34 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
resultado idéntico al obtenido por le método de la resolvente de Fredholm. Esdecir, en este caso el método de Fredholm tiene la máxima potencia siendoexacto. El anterior resultado puede reescribirse en serie de potencias de �; demodo que
y(x) = x+�
1� 2�3� �2
72
�x
3+1
4
�+
�2
72x
1� 2�3� �2
72
=
= x+ �
�1 +
2
3�
��x
3+1
4
�+�2
72x+ � � � (1.128)
donde hemos eliminado potencias superiores a �2 en los desarrollos en seriede los denominadores. Agrupando,
y(x) = x
�1 +
�
3+17�2
72
�+�2
2+ � � � ; (1.129)
cuyo principio se aproxima bastante al resultado de las series de Neumann.
1.9. Método de Hilbert-Schmidt. Núcleos simétri-cos
Este método es particularmente útil cuando los núcleos son simétricos,es decir, k(x; t) = k(t; x) ó casi-simétricos, como es k(x; t) = S(x; t)�(t),donde S(x; t) es simétrico. En Mecánica Cuántica, por ser los operadoresautoadjuntos, este método es general, ya que la extensión al campo complejoimplica que los núcleos han de ser autoadjuntos en lugar de simétricos.Los núcleos casi simétricos pueden simetrizarse. Sea la ecuación integral
'(x) = f(x) + �
Z b
a
s(x; t)�(t)'(t)dt: (1.130)
Creamos una función (x) =p�(x)'(x) =) '(x) = (x)p
�(x), con lo que
(x) =p�(x)f(x) + �
p�(x)
Z b
a
s(x; t)�(t) (x; t)p�(t)
dt
=p�(x)f(x) + �
Z b
a
s(x; t)p�(x)
p�(t) (x; t)dt; (1.131)
que ya es simétrica, con la nueva inhomogenidad g(x) =p�(x)f(x) y el
nuevo núcleo simétrico G(x; t) = s(x; t)p�(x)
p�(t)
1.9. MÉTODO DE HILBERT-SCHMIDT. NÚCLEOS SIMÉTRICOS 35
1.9.1. Norma de una función
La calcularemos de la forma habitual en un intervalo �nito y cerrado, conel núcleo contínuo y acotado. En realidad se puede generalizar a intervalosin�nitos, y a cualquier número de variables. Partimos de f(x) de�nida enel intervalo (a; b) :
kf(x)k =
sZ b
a
(f(x))2 dx (1.132)
Una vez de�nida la norma, pasamos a de�nir la distancia entre dos funcionescomo
d (f1; f2) =
sZ b
a
(f2(x)� f1(x))2dx (1.133)
Su cuadrado es la distancia cuadrática media, aunque algunos textos lade�nen como D = sup
(a;b)
jf1(x)� f2(x)j :
1.9.2. Convergencia de funciones
La serie o conjunto de funciones ffn(x)g converge a f(x) si el l��mn�!1
d [f(x); fn(x)] =
0. Por ejemplo, en el intervalo (0; 1), la función e�kx �! 0. Pero hete aquí queR 10e�kxdx = �e�kx
k
���10= �e�k
k+ 1
ky l��mk�!1
1�e�kxk
= 0. Hasta ahora bien. Pero
según algunos textos (Petrovski), para x muy pequeños, si k es muy grandepueden ocurrir graves accidentes como 1�e�1000=1000
1000= 1�1=e
10006= 0 (¿dónde está
el problema?). No logro entender la argumentación matemática pues, pormuy pequeño que sea x y muy grande que sea k, el resultado va a tendera cero siempre. Dicen que, por esta razón, no vale la última de�nición dedistancia arriba dada. Juzguen ustedes mismos.
1.9.3. Producto escalar de dos funciones
Se de�ne como
(f1; f2) = hf1jf2i =Z b
a
f1(x)f2(x)dx; (1.134)

36 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
ó, para el caso de complejos,
hf1jf2i =Z b
a
f �1 (x)f2(x)dx; (1.135)
A través de esta de�nición puede comprobarse la desigualdad triangular
d (f1; f2) + d (f2; f3) > d (f1; f3) ; (1.136)
y la desigualdad de Bunyakovsky
(f � ') 6 kfk2 k'k2 : (1.137)
El coseno entre dos funciones se de�ne por
cos (f1; f2) =(f1; f2)
kf1k kf2k(1.138)
1.9.4. Conjunto de funciones ortonormales
f'ng es un conjunto de funciones ortonormales si�'i'j
�= �ij, 8'i 2
f'ng :
1.9.5. Coe�cientes de Fourier de f(x)
Son los reales tales que
fk =
Z b
a
f(x)'k(x)dx = (f(x)'k(x)) = hf(x)j'k(x)i (1.139)
1.9.6. Teorema
Si f(x) es una función normada y c1; c2; � � � ; cm son los coe�cientes queminimizan a d
2[c1'1 + � � �+ cm'm; f(x)], con f'm(x)g conjunto de fun-
ciones ortonormales, las ci son necesariamente los coe�cientes de Fourier def(x). Veámoslo:

1.9. MÉTODO DE HILBERT-SCHMIDT. NÚCLEOS SIMÉTRICOS 37
Partimos de que la distancia entre funciones se de�nía como
d2[c1'1 + � � �+ cm'm; f(x)] =Z b
a
"Xk=1
ck'k(x)� f(x)
#2dx =Z b
a
f 2(x)dx� 2Xk=1
ck
Z b
a
f(x)'k(x)dx+
+
mXk0=1
mXk=1
ckck0
Z b
a
'k(x)'k0(x)dx =Z b
a
f 2(x)dx+mXk=1
c2k � 2mXk=1
ckfk =Z b
a
f 2(x)dx+
+mXk=1
(ck � fk)2 �
mXk=1
f 2k > 0; (1.140)
ya que la distancia siempre es positiva. Dado que existen tantoR baf 2(x)dx
comoPm
k=1 f2k y son valores calculables, para que la distancia sea mínima,
obligatoriamenteck = fk: (1.141)
De esta relación puede deducirse la desigualdad de Bessel d2 > 0. El valor
mínimo de la distancia será, por tanto,Z b
a
f 2(x)dx�mXk=1
f 2k ; (1.142)
con lo que la desigualdad de Bessel puede reescribirse comoR baf 2(x)dx >Pm
k=1 f2k . Caso de producirse la igualdad, esta es conocida como igualdad
de Parceval.Una sucesión se dice que es cerrada si se veri�ca la igualdad de Parceval.
Un sistema se llama completo cuando no existe una función ortonormal atodas las demás, simultáneamente, de la serie:
8'k(x) 2 f'm(x)g , con k = 1; � � � ;m =) @f = (f; 'k(x)) = 0 (1.143)

38 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
1.9.7. Teorema:
Todo sistema cerrado es completo.Si suponemos un sistema cerrado pero no completo, existirá una tal
que ( 'k) = 0. Esto indica que todos los coe�cientes de Fourier de sonnulos, ya que la igualdad es para todo k. Es decir,
Pmk=1 f
2k = 0, ya que lo
son todos los fk. Usando la igualdad de Parceval,Z b
a
f 2(x)dx =mXk=1
f 2k = 0 = k k ; (1.144)
lo cual es imposible, ya que si tiene norma nula contradecimos el enunciadode partida. La argumentación inversa sólo es demostrable y cierta en sistemasacotados.
1.9.8. Aplicación a las ecuaciones integrales
Ecuaciones homogéneas
Sea k(x; t) un núcleo función de dos variables, con un número �nito dediscontinuidades o totalmente contínuo para ambas variables, en un sistemacerrado. Si �
R bak(x; t)'(t)dt = '(x), entonces, '(t) es autofunción de la
ecuación y � es un autovalor.Para núcleos simétricos y contínuos necesariamente han de existir, al
menos, un autovalor � y una autofunción '(x) distintos de los triviales. Esdecir, las ecuaciones de Fredholm tienen siempre, como mínimo, un autovalor.
Teorema
Si existiesen dos autovalores distintos de una ecuación integral, sus auto-funciones asociadas son ortogonales.Sean 'i(x) = �i
R bak(x; t)'i(t)dt y 'j(x) = �j
R bak(x; t)'j(t)dt dos auto-
funciones de la misma ecuación. Multiplicamos la primera por �j'j(x) y lasegunda por �i'i(x) e integramos al intervalo de de�nición:
�j
Z b
a
'j(x)'i(x)dx = �j�i
Z b
a
Z b
a
k(x; t)'j(x)'i(t)dxdt;
�i
Z b
a
'i(x)'j(x)dx = �j�i
Z b
a
Z b
a
k(x; t)'i(x)'j(t)dxdt: (1.145)
1.9. MÉTODO DE HILBERT-SCHMIDT. NÚCLEOS SIMÉTRICOS 39
En el segundo caso, dado que el núcleo es simétrico, podemos intercambiarlas variables x$ t sin alterar el resultado. Restando ambas igualdades,
(�j � �i)
Z b
a
'j(x)'i(x)dx = �i�j
Z b
a
Z b
a
k(x; t)�'j(x)'i(t)� 'i(t)'j(x)
�dxdt = 0:
(1.146)Dado que �i 6= �j, evidentemente 'j(x) es ortogonal a 'i(x).Todos los autovalores son reales.Pueden haber autovalores correspondientes a varias autofunciones lineal-
mente independientes. Es decir, a un sólo autovalor ligamos varias autofun-ciones. Este es el caso de degeneración. Estas funciones pueden que nosean ortogonales, pero se les puede ortogonalizar. Para ello suele utilizarse elmétodo de Schmidt.
Método de ortogonalización de Schmidt
Tengamos una serie u0 (x) ; u1 (x) ; � � � ; um (x) de autofunciones corre-spondientes al mismo autovalor �. Llamamos 0 (x) = u0 (x) y normal-izamos como '0 (x) =
0(x)k 0(x)k
. A continuación generamos a 1 (x) = u1 (x) +
a10'0 (x). Como 0 (x) ha de ser ortogonal a 1 (x) =) ( 1 (x) ; '0 (x)) =0 =) (u1 (x) , '0 (x)) + a10 ('0 (x) ; '0 (x)) = 0 y, por tanto,
a10 = �(u1; '0)
('0; '0)= � (u1; '0) = �
Z b
a
u1(x)'0(x)dx: (1.147)
Creamos '1(x) = 1(x)k 1(x)k
, continuando con el proceso. En general,
i(x) = ui(x) +
i�1Xj=0
aij'j(x); (1.148)
donde
'i(x) = i(x)
k i(x)k;
aij = �Z b
a
ui(x)'j(x)dx: (1.149)
40 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
1.9.9. Teorema de Hilbert-Schmidt
Toda función f(x) que sea intrínsecamente representable por una funcióncontínua normada (de cuadrado integrable) en el intervalo (a; b), es decir,
f(x) =
Z b
a
k(x; t)'(t)dt;
siendo '(t) arbitraria pero contínua, y siendo �nito el conjunto de estasfunciones f(x), todas ellas son desarrollables en serie por el conjunto defunciones propias 'n(x) = �n
R bak(x; t)'n(t)dt:
Además, las serie converge uniformemente. Es decir, f(x) =1Pn=1
bn'n(x) y
k(x; t) =1Pn=1
an'n(t) con an = an(x). El teorema puede enunciarse de forma
alternativa como: �Si f(x) puede escribirse en la forma f(x) =Rk(x; t)'(t)dt,
entonces f(x) puede también representarse por su serie de Fourier respecto
al sistema f'n(x)g de autofunciones de k(x; t), f(x) =1Pn=1
bn'n(x), con bn =Rf(x)'n(x)dx�.
1.9.10. Teorema del desarrollo del núcleo
Todo núcleo simétrico puede desarrollarse como
k(x; t) =1Xi=1
'i(x)'i(t)
�i(1.150)
siempre que este núcleo sea contínuo en el intervalo (a; b) : Si el desarrolloes �nito, los núcleos son separables. El anterior desarrollo no es necesari-amente uniformemente convergente (sí su media), pero su integral sí con-verge a cero
Rk(x; t)dt = 0. En el caso de que el núcleo sea separable,
k(x; t) = k1(x)k2(t), el teorema es rigurosamente cierto (extraño teoremaque no es rigurosamente cierto para un número in�nito de casos), y k1(x) esautovalor del sistema.Dado que k(x; t) es desarrollable por
k(x; t) =1Xn=1
an'n(t); (1.151)

1.9. MÉTODO DE HILBERT-SCHMIDT. NÚCLEOS SIMÉTRICOS 41
con an = an(x), podemos sustituir en la ecuación integral homogénea original:
'(x) = �
Z b
a
1Xn=1
an(x)'n(t)'(t)dt = �
1Xn=1
an(x)
Z b
a
'n(t)'(t)dt: (1.152)
Utilizando la ortogonalidad de las funciones 'n(t), y particularizando a unacualquiera de ellas
'i(x) = �i
1Xn=1
an(x)
Z b
a
'n(t)'i(t)dt = �iai(x)
=) ai(x) ='i(x)
�i: (1.153)
Por tanto, podemos reescribir el núcleo como
k(x; t) =1Xi=1
'i(x)'i(t)
�i; (1.154)
donde el cero no puede ser autovalor.
Es posible que no exista el desarrollo k(x; t) =1Pi=1
an(x)'n(t). Por ejem-
plo, en el caso patológico '(x) = �R10e�xt'(t)dt.
1.9.11. Método de Hilbert-Schmidt: Ec. inhomogéneas
Partimos de que ya sabemos resolver la homogénea con alguno de losmétodos analizados. La inhomogénea será
'(x) = f(x) + �
Z b
a
k(x; t)'(t)dt (1.155)
Tomando como base las soluciones (autofunciones) 'n(x) de la homogénea,desarrollamos en serie inhomogeneidad y función incógnita:
'(x) =
1Xn=1
an'n(x);
f(x) =
1Xn=1
bn'n(x); (1.156)
42 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
y sustituimos en la ecuación integral inhomogénea completa, usando el teo-rema del desarrollo del núcleo:
1Xn=1
an'n(x) =1Xn=1
bn'n(x) + �
Z b
a
k(x; t)1Xn=1
an'n(t)dt
=1Xn=1
bn'n(x) + �1Xn=1
an'n(x)
�n; (1.157)
ya que la homogénea es, para un autovalor �n,
'n(x) = �n
Z b
a
k(x; t)'n(t)dt: (1.158)
Si premultiplicamos por una 'i(x) e integramos,Z b
a
'i(x)1Xn=1
an'n(x)dx =
Z b
a
'i(x)1Xn=1
bn'n(x)dx+ �
Z b
a
'i(x)1Xn=1
an'n(x)
�ndx
=) ai = bi + �ai�i=) ai =
bi
1� ��i
=�ibi�i � �
= bi
�1� �
�� �i
�:(1.159)
Es decir, si conocemos las bi y las �i podemos calcular los coe�cientes ai.Dado que '(x) =
P1n=1 an'n(x),
'(x) =1Xn=1
an'n(x) =1Xn=1
�nbn�n � �
'n(x)
=1Xn=1
bn'n(x)�1Xn=1
�bn�� �n
'n(x) =)
'(x) = f(x) + �
1Xn=1
R baf(x)'n(x)dt
�n � �; (1.160)
ya que, si f(x) =1Pn=1
bn'n(x) =)R baf(x)'i(x)dt =
1Pn=1
bnR ba'i(x)'n(x)dt =
bi:Si el núcleo fuera in�nito tendríamos una suma in�nita. En dicho caso,
o sabemos sumar la serie, o tenemos que utilizar aproximaciones. Si fuera�nito, como además es simétrico, tendríamos núcleos separables.

1.9. MÉTODO DE HILBERT-SCHMIDT. NÚCLEOS SIMÉTRICOS 43
Siempre que la � genérica del problema sea distinta de las �n de la ho-mogénea, la ecuación integral tiene solución y esta es única.Si � = �p (es decir, a alguna de las �n), sólo hay solución para algunos
tipos de especiales de inhomogeneidades f(x), que son las que satisfacenZ b
a
f(x)'p(x)dx = 0: (1.161)
Es decir, f(x) ha de ser ortogonal a la autofunción correspondiente al autoval-or �p. En general las 'p(x) pueden ser varias, que es el caso de degeneración,y las f(x) han de ser ortogonales a todas ellas.A su vez, si f(x) = 0, caso homogéneo, sólo habrá solución cuando � = �p,
cosa que no se entiende pues, en las ecuaciones homogéneas � sólo es unfactor de proporcionalidad. Esto es una verdad de perogrullo. Si f(x) ha deser ortogonal a la autofunción 'p(x), correspondiente al autovalor �p, esto
ocurre siempre ya que f(x) = 0 =)R baf(x)'p(x)dx = 0: en el caso de núcleos
separables exigíamos la ortogonalidad a todas las autofunciones. Ahora no espreciso pues hemos exigido a �priori�la simetría del núcleo.Dado que, para � = �p,
1Xn=1
an'n(x) =1Xn=1
bn'n(x) + �1Xn=1
an'n(x)
�n
=)Xn6=p
an'n(x) + ap'p(x) =
=Xn6=p
bn'n(x) + bp'p(x) +Xn6=p
�
�nan'n(x) +
�
�pap'p(x): (1.162)
Como exigimos que, para � = �p,R baf(x)'p(x)dx = 0,X
n6=p
an'n(x) =Xn6=p
bn'n(x) +Xn6=p
�
�nan'n(x) (1.163)
para cualquier i 6= p. De aquí que ai = bi + �pai�ipara cualquier i, con lo que
ap queda indeterminada, no sirviendo bp para su cálculo. Por tanto,
'(x) = f(x) + ap'p(x) + �p
1Xi6=p
R baf(x)'i(x)dt
�i � �'i(x); (1.164)
quedando ap como constante de integración.

44 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
Ejemplo
Sea la ecuación
'(x) = f(x) + �
Z 1
�1(x+ t)'(t)dt: (1.165)
La solución de la homogénea ya la calculamos en otro ejemplo por ser denúcleos separables. Recordemos que
'n(x) = �n
Z 1
�1(x+t)'(t)dt =)
(�1 = �
p32=) '1(x) =
1�p3x
2
�2 =p32=) '2(x) =
1+p3x
2
: (1.166)
Cuando � 6= �1; �2 la inhomogénea tendrá solución y esta será única. Tomem-os � = 1 con f(x) = x2. En este caso
b1 =
Z 1
�1x2'1(x)dx =
1
3;
b2 =
Z 1
�1x2'2(x)dx =
1
3=)
'(x) = x2 +1=3
�p32� 1
1�
p3x
2
!+
1=3p32� 1
1 +
p3x
2
!
= f(x) +2Xi=1
bi�i � �
'i(x) = x2 � 2x� 43: (1.167)
Si por un casual � = �2 =p32, entonces empiezan a surgir los problemas y
'(x) = x2 + ap
1 +
p3
2
!+
p3
2
R 1�1 x
2�1�p3x
2
�dx
�p32�
p32
1�
p3x
2
!
= x2 + x
p3� 6
p3
2
!+6ap � 112
= x2 � 5p3
2x+ Ap: (1.168)
Habrá solución con Ap indeterminada cuandoR 1�1 x
2'2(x)dx = 0, cosa quehemos visto que no es cierta. En este caso no tenemos solución.

1.9. MÉTODO DE HILBERT-SCHMIDT. NÚCLEOS SIMÉTRICOS 45
Ejemplo
Sea
'(x) = cos(x) + 2
Z �
��sin(x+ t)'(t)dt: (1.169)
Comenzamos por resolver la homogénea '(x) = 2R ��� sin(x + t)'(t)dt. Su
núcleo es separable: k(x; t) = sin(x+ t) = sin x cos t+ cosx sin t =)
N1(x) = sinx M1(t) = cos tN2(x) = cosx M2(t) = sin t;
(1.170)
con lo que
a11 =R ��� sin t cos tdt = 0 a12 =
R ��� cos
2 tdt = �
a21 =R ��� sin
2 tdt = � a22 =R ��� cos t sin tdt = 0:
(1.171)
Por tanto, para todo �,
I� �A =
�1 0� 2�
0� 2� 1
�(1.172)
Si nos �jamos, estas �i no coinciden con la � genérica del problema. Las �iserán los autovalores de la E. integral homogénea que se obtienen de resolver
det (I� �A) = 1� �2�2 =) �� = �1
�: (1.173)
La solución de la homogénea se obtendrá de�1 ������ 1
� �y1y2
�=
�00
�: (1.174)
Para �1 = 1�;=) y1 � y2 = 0 =) y1 = y2 = C1, degenerado. Entonces,
'1(x) =2Xi=1
yi(x)Ni(x) = C1 (sinx+ cosx) : (1.175)
Es fácil ver que
'2(x) =
2Xi=1
yi(x)Ni(x) = C2 (sinx� cosx) : (1.176)

46 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
Una vez obtenidas las autofunciones correspondientes a cada autovalor, senormalizan para barrer un espacio completo de funciones normadas:Z �
��'21(x)dx = C21
Z �
��
�sin2 x+ cos2 x+ 2 sin x cosx
�dx = 1
= C21 (2�) =) C1 =1p2�: (1.177)
Lo mismo ocurre para '2(x), con lo que
'1(x) =1p2�(sinx+ cosx) ;
'2(x) =1p2�(sinx� cosx) : (1.178)
La � = 2 sólo contribuye aquí como un factor de proporcionalidad.La inhomogénea se puede resolver por varios métodos. Sigamos con el
de núcleos separables calculando
(I� �A)�1 =
�1 �2��2� 1
��1=
1
1� 4�2
�1 2�2� 1
�; (1.179)
donde � va a jugar ahora un papel crucial. Evidentemente, éste aún seríamayor si � = �i, cosa que no ocurre en este caso.Dado que
fi =
Z �
��f(x)Mi(x)dx =)
�f1 =
R ��� cos
2 xdx = �
f2 =R ��� sin x cosxdx = 0
; (1.180)
por lo que
�!y = fM�!f = � 11�4�2
2�1�4�2
2�1�4�2
11�4�2
� ��0
�=
� �1�4�22�2
1�4�2
�(1.181)
Finalmente,
'(x) = f(x) + �Xi
yiNi(x) = cosx+2�
1� 4�2 sin x+2�2
1� 4�2 cosx
=2�2
1� 4�2 [cosx+ 2� sin x] :(1.182)

1.10. ECUACIONES DE VOLTERRA 47
En este problema es claro que la inhomogeneidad sólo afecta a las constantesde integración.Para resolver el problema por el método de Hilbert-Schmidt partimos
de las autofunciones de la homogénea normalizadas. Aplicando directamentela fórmula de Schmidt,
'(x) = f(x) + �Xn
R baf(x)'n(x)dx
�n � �'n(x)
= cos x+ 2
8<:R ���
1p2�(sinx+cosx) cosxdx
1��2
1p2�(sinx+ cosx)
+
R ���
1p2�(sinx�cosx) cosxdx� 1��2
1p2�(sinx� cosx)
9=;= cos x+ 2
(�=p2�p
2� 1�2��
(sinx+ cosx) +��=
p2�p
2��1�2��
(sinx� cosx))
=1
1� 4�2 [cosx+ 2� sin x] :(1.183)
Si, por lazos del demonio, � = �1 =1�, las cosas se complican un poco.
El problema no tiene solución en este caso. Si lo tendría para otras f(x)ortogonales a '1(x): Tomemos f(x) = a+ bx, por ejemplo. Ahora
1p2�
Z �
��(a+ bx) (sin x+ cosx) dx
=1p2�
�a
Z �
��sin xdx+ a
Z �
��cosxdx+ b
Z �
��x sin xdx+ b
Z �
��x cosxdx
�=
1p2�[2�b] = 0 =) b = 0;(1.184)
con a cualquiera. Tomando a = 1, por sencillez,
'(x) = f(x) + ap'p(x) = 1 + ap(sinx+ cosx)1p2�
= 1 + C (sinx+ cosx) : (1.185)
1.10. Ecuaciones de Volterra
y(x) = f(x) + �
Z x
0
k(x; t)y(t)dt: (1.186)
48 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
Estas ecuaciones son menos frecuentes que las de Fredholm, y de escaso in-terés es Física. Para resolverlas se considera acotado el recinto de integración.con 0 � x � a. También se supone que el núcleo es contínuo y acotado.
Teorema:
Las ecuaciones de Volterra no tienen valores propios. Es decir, y(x) =�R x0k(x; t)y(t)dt (homogénea) no tiene solución salvo la trivial y(x) = 0.Dado que x está acotada, 0 � x � a, entonces podemos generar B =
m�ax jy(x)j y M = m�ax jk(x; t)j. Sustituyendo en la ecuación integral ho-mogénea, acotamos la incógnita y(x):
y(x) � �
Z x
0
MBdt =) jy(x)j � j�jMB
Z x
0
dt = j�jMBx: (1.187)
Sustituimos y(x) en la ecuación integral, cambiando la variable x pot t:
y(x) � �
Z x
0
M j�jMBtdt =) jy(x)j � j�j2M2Bx2
2: (1.188)
Repitiendo el proceso n veces,
jy(x)j � j�jnMnBxn
n!� j�jnMnB
an
n!: (1.189)
En el límite n �!1;
jy(x)j � l��mn�!1
�j�jnMnB
an
n!
�= l��m
n�!1
j�Majn
n!= 0; (1.190)
que no es más que la solución trivial. Debido a ésto, la ecuación de Volterrainhomogénea tiene solución para cualquier f(x) y para cualquier núcleo.Las ecuaciones integrales de Volterra se resuelven por el método de
Neumann:
y(x) = y0(x) = f(x);
y1(x) =
Z x
0
k(x; t)f(t)dt;
... (1.191)
yn+1(x) =
Z x
0
k(x; t)yn(t)dt;

1.10. ECUACIONES DE VOLTERRA 49
y, �nalmente,
y(x) = y0(x) + �y1(x) + � � �+ �n+1yn+1(x): (1.192)
Calculamos
l��mn�!1
�n+1yn+1(x)
�nyn(x)= � l��m
n�!1Ma
n!
(n+ 1)!= � l��m
n�!1
Ma
n+ 1= 0: (1.193)
Es decir, la serie va a ser acotada. Llamemos N = m�ax jf(x)j =)
jy0(x)j � N;
jy1(x)j �MNx;... (1.194)
jyn(x)j �MnNxn
n!�MnN
an
n!:
Es decir, todos lo términos de la serie están acotados siempre que lo esté elrecinto de de�nición, razón por la que el método de Neumann es aplicable,conduciendo a una serie convergente.
50 CAPÍTULO 1. ECUACIONES INTEGRALES LINEALES
Bibliografía
[1] I. Petrovski, Lecciones de teoría de las ecuaciones integrales, Ed. Mir(Moscú, 1976).
[2] H. T. Davis, Introduction to nonlinear di¤erential and integral equations,Dover Pub. (Nueva York, 1962).
[3] F. G. Tricomi, Integral equations, Dover Pub. (Nueva York, 1985).
51