conceptos vibraciones
DESCRIPTION
Conceptos VibracionesTRANSCRIPT
1.-Como se miden las vibraciones?
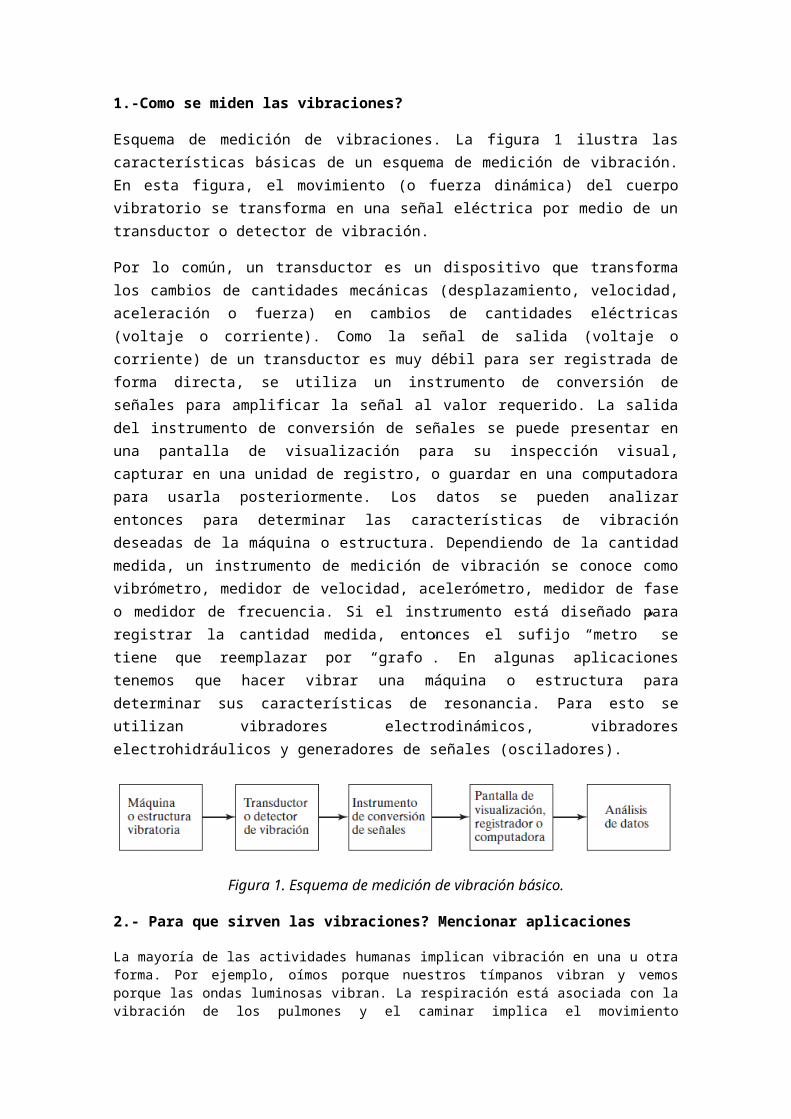
Esquema de medición de vibraciones. La figura 1 ilustra las características básicas de un esquema de medición de vibración. En esta figura, el movimiento (o fuerza dinámica) del cuerpo vibratorio se transforma en una señal eléctrica por medio de un transductor o detector de vibración.
Por lo común, un transductor es un dispositivo que transforma los cambios de cantidades mecánicas (desplazamiento, velocidad, aceleración o fuerza) en cambios de cantidades eléctricas (voltaje o corriente). Como la señal de salida (voltaje o corriente) de un transductor es muy débil para ser registrada de forma directa, se utiliza un instrumento de conversión de señales para amplificar la señal al valor requerido. La salida del instrumento de conversión de señales se puede presentar en una pantalla de visualización para su inspección visual, capturar en una unidad de registro, o guardar en una computadora para usarla posteriormente. Los datos se pueden analizar entonces para determinar las características de vibración deseadas de la máquina o estructura. Dependiendo de la cantidad medida, un instrumento de medición de vibración se conoce como vibrómetro, medidor de velocidad, acelerómetro, medidor de fase o medidor de frecuencia. Si el instrumento está diseñado para registrar la cantidad medida, entonces el sufijo “metro” se tiene que reemplazar por “grafo”. En algunas aplicaciones tenemos que hacer vibrar una máquina o estructura para determinar sus características de resonancia. Para esto se utilizan vibradores electrodinámicos, vibradores electrohidráulicos y generadores de señales (osciladores).
Figura 1. Esquema de medición de vibración básico.
2.- Para que sirven las vibraciones? Mencionar aplicaciones
La mayoría de las actividades humanas implican vibración en una u otra forma. Por ejemplo, oímos porque nuestros tímpanos vibran y vemos porque las ondas luminosas vibran. La respiración está asociada con la vibración de los pulmones y el caminar implica el movimiento oscilatorio (periódico) de piernas y manos. El habla humana requiere el movimiento oscilatorio de la laringe (y la lengua) [1.17]. Los eruditos antiguos en el campo de la vibración concentraron sus esfuerzos en la comprensión de los fenómenos naturales y el desarrollo de las teorías matemáticas para describir la vibración de sistemas físicos. En años recientes, muchas aplicaciones de la vibración en el campo de la ingeniería han motivado a los investigadores, entre ellas el diseño de máquinas, cimientos, estructuras, motores, turbinas y sistemas de control.La mayoría de los propulsores principales experimentan problemas vibratorios debido al desequilibrio inherente en los motores. El desequilibrio puede deberse al diseño defectuoso o a una fabricación deficiente. El desequilibrio en motores diesel, por ejemplo, puede provocar ondas terrestres suficientemente poderosas como para provocar molestias en áreas urbanas. Las ruedas de algunas locomotoras pueden alzarse más de un centímetro de la vía a altas velocidades debido al desequilibrio. En turbinas, las vibraciones provocan fallas mecánicas espectaculares. Los ingenieros aún no han sido capaces de evitar las fallas a consecuencia de las vibraciones de aspas y discos en turbinas. Naturalmente, las
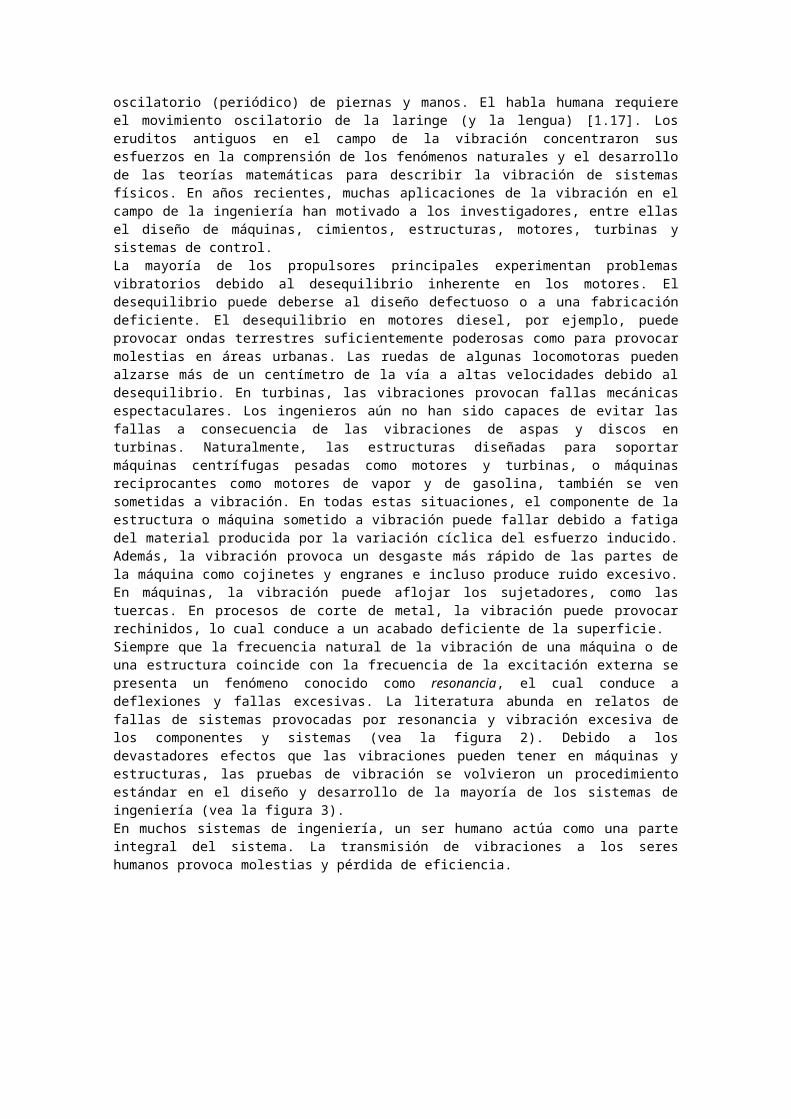
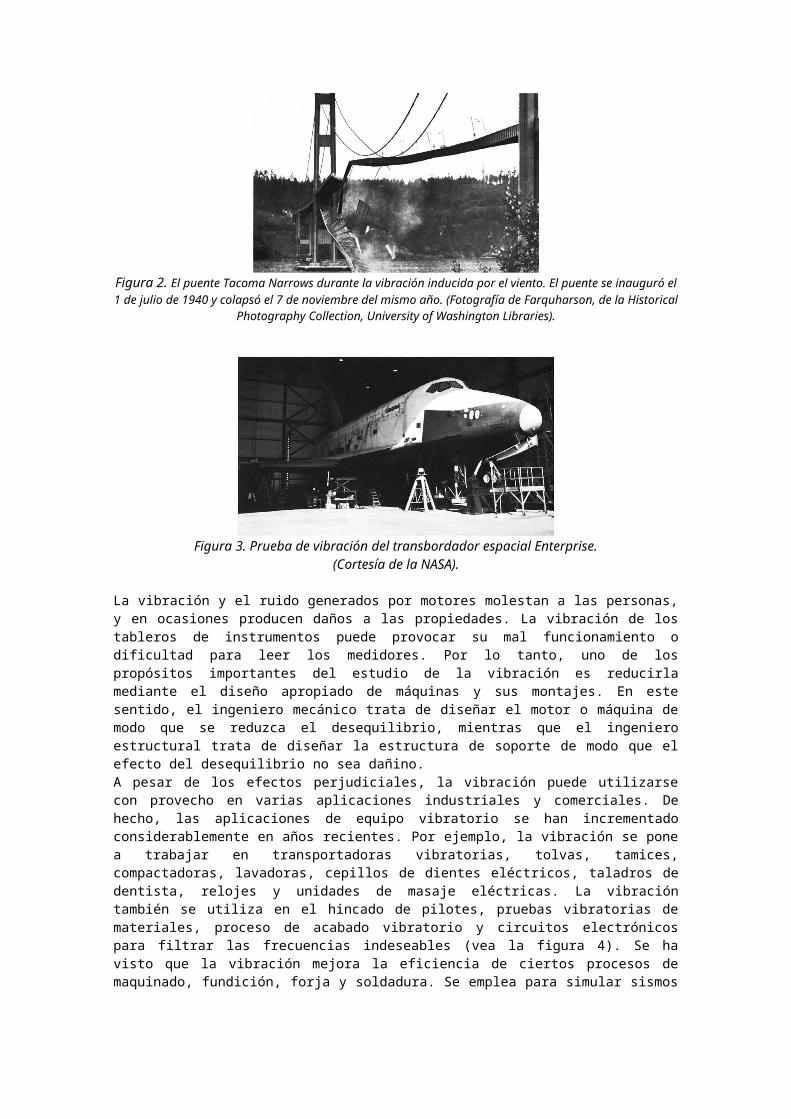
estructuras diseñadas para soportar máquinas centrífugas pesadas como motores y turbinas, o máquinas reciprocantes como motores de vapor y de gasolina, también se ven sometidas a vibración. En todas estas situaciones, el componente de la estructura o máquina sometido a vibración puede fallar debido a fatiga del material producida por la variación cíclica del esfuerzo inducido. Además, la vibración provoca un desgaste más rápido de las partes de la máquina como cojinetes y engranes e incluso produce ruido excesivo. En máquinas, la vibración puede aflojar los sujetadores, como las tuercas. En procesos de corte de metal, la vibración puede provocar rechinidos, lo cual conduce a un acabado deficiente de la superficie. Siempre que la frecuencia natural de la vibración de una máquina o de una estructura coincide con la frecuencia de la excitación externa se presenta un fenómeno conocido como resonancia, el cual conduce a deflexiones y fallas excesivas. La literatura abunda en relatos de fallas de sistemas provocadas por resonancia y vibración excesiva de los componentes y sistemas (vea la figura 2). Debido a los devastadores efectos que las vibraciones pueden tener en máquinas y estructuras, las pruebas de vibración se volvieron un procedimiento estándar en el diseño y desarrollo de la mayoría de los sistemas de ingeniería (vea la figura 3).En muchos sistemas de ingeniería, un ser humano actúa como una parte integral del sistema. La transmisión de vibraciones a los seres humanos provoca molestias y pérdida de eficiencia.
Figura 2. El puente Tacoma Narrows durante la vibración inducida por el viento. El puente se inauguró el 1 de julio de 1940 y colapsó el 7 de noviembre del mismo año. (Fotografía de Farquharson, de la Historical Photography Collection, University of Washington Libraries).
Figura 3. Prueba de vibración del transbordador espacial Enterprise.(Cortesía de la NASA).
La vibración y el ruido generados por motores molestan a las personas, y en ocasiones producen daños a las propiedades. La vibración de los tableros de instrumentos puede provocar su mal funcionamiento o dificultad para leer los medidores. Por lo tanto, uno de los propósitos importantes del estudio de la vibración es reducirla mediante el diseño apropiado de máquinas y sus montajes. En este sentido, el ingeniero mecánico trata de diseñar el motor o máquina de modo que se reduzca el desequilibrio, mientras que el ingeniero estructural trata de
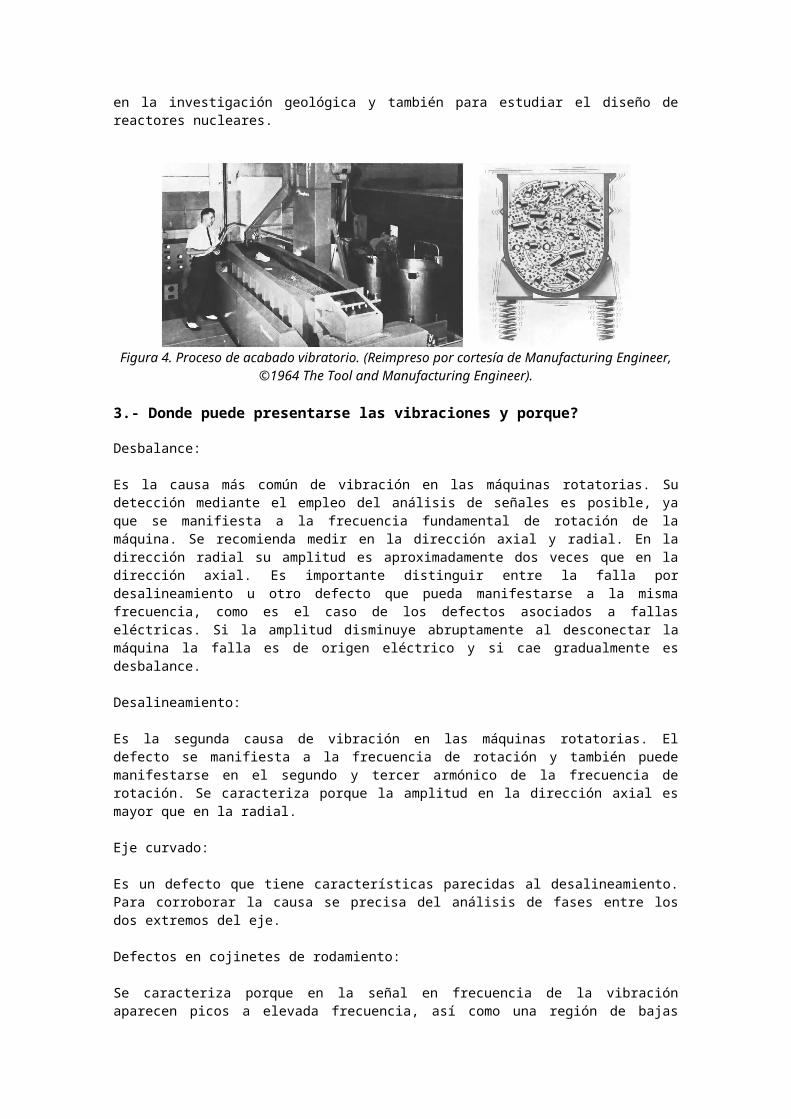
diseñar la estructura de soporte de modo que el efecto del desequilibrio no sea dañino.A pesar de los efectos perjudiciales, la vibración puede utilizarse con provecho en varias aplicaciones industriales y comerciales. De hecho, las aplicaciones de equipo vibratorio se han incrementado considerablemente en años recientes. Por ejemplo, la vibración se pone a trabajar en transportadoras vibratorias, tolvas, tamices, compactadoras, lavadoras, cepillos de dientes eléctricos, taladros de dentista, relojes y unidades de masaje eléctricas. La vibración también se utiliza en el hincado de pilotes, pruebas vibratorias de materiales, proceso de acabado vibratorio y circuitos electrónicos para filtrar las frecuencias indeseables (vea la figura 4). Se ha visto que la vibración mejora la eficiencia de ciertos procesos de maquinado, fundición, forja y soldadura. Se emplea para simular sismos en la investigación geológica y también para estudiar el diseño de reactores nucleares.
Figura 4. Proceso de acabado vibratorio. (Reimpreso por cortesía de Manufacturing Engineer, ©1964 The Tool and Manufacturing Engineer).
3.- Donde puede presentarse las vibraciones y porque?
Desbalance:
Es la causa más común de vibración en las máquinas rotatorias. Su detección mediante el empleo del análisis de señales es posible, ya que se manifiesta a la frecuencia fundamental de rotación de la máquina. Se recomienda medir en la dirección axial y radial. En la dirección radial su amplitud es aproximadamente dos veces que en la dirección axial. Es importante distinguir entre la falla por desalineamiento u otro defecto que pueda manifestarse a la misma frecuencia, como es el caso de los defectos asociados a fallas eléctricas. Si la amplitud disminuye abruptamente al desconectar la máquina la falla es de origen eléctrico y si cae gradualmente es desbalance.
Desalineamiento:
Es la segunda causa de vibración en las máquinas rotatorias. El defecto se manifiesta a la frecuencia de rotación y también puede manifestarse en el segundo y tercer armónico de la frecuencia de rotación. Se caracteriza porque la amplitud en la dirección axial es mayor que en la radial.
Eje curvado:
Es un defecto que tiene características parecidas al desalineamiento. Para corroborar la causa se precisa del análisis de fases entre los dos extremos del eje.
Defectos en cojinetes de rodamiento:
Se caracteriza porque en la señal en frecuencia de la vibración aparecen picos a elevada frecuencia, así como una región de bajas frecuencias. Estas frecuencias no son múltiplos de la frecuencia fundamental de la máquina, pero pueden ser calculadas mediante las recomendaciones dadas por las normas establecidas al efecto.
Desajuste mecánico:
La vibración tiene lugar porque existe holgura entre la máquina y los apoyos u otra parte estructural, por ejemplo tornillos sueltos. Se manifiesta con un pico al segundo armónico de la frecuencia fundamental de rotación.
Defectos en transmisiones por correas:
El defecto puede tener lugar cuando existe desajuste entre la correa y la polea. Este desajuste puede venir dado por exceso en el apriete o por holgura entre la polea y la correa. Esto último provoca el deslizamiento de la correa sobre la superficie de la polea.
4.- Cuales son los efectos de las vibraciones cuerpo humano, máquinas, terrestres?
La respuesta del cuerpo humano o segmentos del cuerpo difiere grandemente con la dirección del estímulo vibrante y la vibración raramente es unidireccional, por eso es necesario definir los axes de medición para cuantificar la exposición a la vibración. El sistema de coordenadas ortogonales para cuerpo humano total está centrado en el torso (x, y, z) y para la mano existen dos sistemas de coordenadas, un sistema basicéntrico centrado en la superficie de contacto entre la mano y la herramienta vibrante y el otro sistema es biodinámico centrado en el tercer metacarpiano de la mano.
Las vibraciones mecánicas procedentes de herramientas o procesos motorizados que entran en el cuerpo a través de las manos se denominan Vibraciones transmitidas a la mano o Vibraciones Mano-Brazo, y su efecto se denomina “SINDROME DE LA VIBRACION MANO-BRAZO” referido a un grupo de signos y síntomas que causan trastornos vasculares, neurológicos, musculo-esqueléticos y otros. El más conocido es el fenómeno de Raynaud o Dedo Blanco Inducido por Vibración.
Cuando una gran parte del peso del cuerpo humano descansa en una superficie vibrante se define la VIBRACIÓN DEL CUERPO COMPLETO, puede ser en posición sentado, de pie o yacente. Una exposición prolongada está fuertemente asociada con Lumbalgias, HDIV, Espondilosis, Osteocondritis y Artrosis.
5.- ¿Cómo se genera la vibración?
Vibraciones producidas en procesos de transformación
De la maquinaria y los elementos que van a ser transformados, generan choques repetidos que se traducen en vibraciones materiales y estructuras, su transmisión se efectuará directamente o a través de medios de propagación adecuados. Ejemplos de este tipo son las originadas por prensas, tronzadoras, martillos neumáticos y algunas herramientas manuales.
Vibraciones generadas por el funcionamiento de la maquinaria o los materiales
Dentro de este grupo encontramos las producidas como consecuencia de fuerzas alternativas no equilibradas como motores, alternadores, útiles percutores y las provenientes de irregularidades del terreno sobre el que circulan los medios de transporte.
Vibraciones debidas a fallos de la maquina
Ejemplos son fallos de concepción, de utilización de funcionamiento o de mantenimiento generadores de fuerzas dinámicas, susceptibles de generar vibraciones. Las más frecuentes se producen pro tolerancias de fabricación, desgastes de superficies, desequilibrios de elementos giratorios, cojinetes defectuosos, falta de lubricación, etc.
Dependiendo de ciertos factores, las vibraciones pueden causar sensaciones diversas que pueden ir desde un simple no confort hasta graves alteraciones de salud. Los efectos más significativos que las vibraciones producen en el cuerpo humano son del tipo vascular, osteomuscular y neurológico.
6.- Que son vibraciones finas y robustas?
7.- Cuales son los parámetros de vibración?
Desplazamiento, velocidad, aceleración, frecuencia, periodo, amplitud, fase.
8.- Modelo físico, modelo matemático, simulación.
La solución de muchos problemas en el área de vibraciones mecánicas y en ingeniería en general requiere de un proceso que consiste en representar el modelo del sistema en una expresión matemática para su análisis. El procedimiento de representar matemáticamente el comportamiento de un sistema se le conoce como modelo matemático.
El uso de la computadora para la simulación permite resolver diferentes problemas del análisis de vibración por ejemplo: Working Model, ANSYS, Matlab, Labview, EasyJava Simulation etc.
9.- Fallas más comunes debido a vibración.
La mayoría de los programas de mantenimiento predictivo utilizando análisis de vibraciones son puestos en marcha con la finalidad inicial de conocer el estado de los rodamientos. La tecnología moderna nos permite lograr este objetivo con mucha certeza. Cerca del 90% de las fallas en rodamientos pudieron ser detectadas meses antes de que esta se produjera, siempre y cuando los equipos hubieran sido monitoreados adecuadamente.
Sin embargo, existe todavía un 10% de fallas que son abruptas e imprevistas. De cualquier forma, ser capaz de poder predecir el 90 % de las fallas en rodamientos es una razón muy buena para invertir en un programa de Mantenimiento Predictivo, sin olvidar que con el análisis de vibraciones podemos diagnosticar este tipo de averías y muchas otras mas.
El porcentaje de rodamientos que vienen "dañados" de fábrica es muy bajo, debido a los sistemas de control de calidad de los fabricantes, por lo que una falla de fábrica, si bien es posible, es poco probable. Entre las causas más probables de fallas en rodamientos están:
Contaminación, incluyendo humedad (Algunos autores afirman que cerca del 40% de las fallas en rodamientos son causadas por contaminación).
Cargas dinámicas excesivas sobre el rodamiento, producto de una falla de diseño de la máquina ó de la presencia de fuerzas externas como desbalance y desalineamiento.
Falta de una adecuada lubricación.
Defectos originados en el proceso de montaje. Típicamente, la vida útil de un rodamiento en condiciones de servicio no alcanza ni el 10 % de su valor pronosticado en el manual.
10.- Con que principios básicos se pueden medir las vibraciones, como se pueden medir?
Galgas extensiométricas
Una galga extensiométrica o extensómetro es un sensor, para medir la deformación, presión, carga, torque, posición, entre otras cosas, que está basado en el efecto piezorresistivo, el cual es la propiedad que tienen ciertos materiales de cambiar el valor nominal de su resistencia cuando se le somete a ciertos esfuerzos y se deforman en dirección de los ejes mecánicos. Un esfuerzo que deforma la galga producirá una variación en su resistencia eléctrica, esta variación puede ser por el cambio de longitud, el cambio originado en la sección o el cambio generado en la resistividad. Inventado por los ingenieros Edward E. Simmons y Arthur C. Ruge en 1938. La galga extensiométrica hace una lectura directa de deformaciones longitudinales en cierto punto del material que se está analizando. La unidad que lo representa es épsilon, esta unidad es adimensional y expresa el cambio de la longitud sobre la longitud inicial.
En su forma más común, consiste en un estampado de una lámina metálica fijada a una base flexible y aislante. La galga se adhiere al objeto cuya deformación se quiere estudiar mediante un adhesivo, como el cianoacrilato. Según se deforma el objeto, también lo hace la lámina, provocando así una variación en su resistencia eléctrica. Habitualmente una galga extensiométrica consiste en un alambre muy fino, o más comúnmente un papel metálico, dispuesto en forma de rejilla, que se puede unir por medio de soldadura a un dispositivo que pueda leer la resistencia generada por la galga. Esta forma de rejilla permite aprovechar la máxima cantidad de material de la galga sujeto a la tensión a lo largo de su eje principal. Las galgas extensiométricas también pueden combinarse con muelles o piezas deformables para detectar de forma indirecta los esfuerzos.
Idealmente, las galgas deberían ser puntuales para así poder medir esfuerzos en puntos concretos. En la práctica las dimensiones de la galga son apreciables, por lo tanto se supone que el punto de medida es el centro geométrico de la galga. Si se pretenden medir vibraciones, es necesario que la longitud de las ondas de esas vibraciones sean bastante mayores que la
longitud de la galga. Las galgas pueden estar cementadas en un placa pequeña o dos elementos presionan el alambre que transporta la electricidad.
Las galgas tienen ciertas características, unas físicas y otras en cuanto a su funcionamiento. Entre las físicas se encuentra su tamaño, peso y materiales con los que fue fabricada; es pequeña y dura, lo que facilita la velocidad con que genera las respuestas; éstas son muy importantes, puesto que el resultado correcto depende de estos aspectos. Existen también características que dependen de la fabricación de la galga, por ejemplo, la temperatura del funcionamiento y el factor de la galga, éste indica la sensibilidad que tiene el sensor. También la resistencia de la galga, el coeficiente de temperatura, la prueba de fatiga y el coeficiente de expansión lineal; son características necesarias para conocer bajo qué circunstancias la galga arroja los resultados adecuados.
Los materiales que suelen utilizarse para fabricar galgas son alambres muy pequeños de aleaciones metálicas, como por ejemplo constantán (Níquel 60%-Cobre 40%), nicrom, Chromel (Níquel-Cromo), aleaciones (Hierro-Cromo-Aluminio), elementos semiconductores como el silicio y el germanio o grabado en laminillas metálicas delgadas. Es por ello que las galgas se clasifican en dos tipos: las metálicas y las semiconductoras
Solgel
Resortes
Cuarzo
Los indicadores típicos para realizar mediciones de sonido y vibración son los niveles de aceleración y presión de sonido, respectivamente. Estos indicadores se miden comúnmente utilizando dispositivos como los acelerómetros (choque y vibración) y micrófonos (sonido).
Muchos de los sensores para medir la aceleración y la presión se basan en el principio de generación piezoeléctrica. El efecto piezoeléctrico denota la habilidad de los cristales cerámicos o de cuarzo para generar un potencial eléctrico ante experiencias de estrés por compresión. Este estrés mecánico se dispara por fuerzas como la aceleración, restricción o presión. En el caso de micrófonos, las ondas de presión acústica causan que el diafragma, o membrana delgada, vibre y transfiera estrés a los cristales piezoeléctricos que se encuentran alrededor. Los acelerómetros, por otro lado, contienen una masa sísmica que aplica fuerza directamente a los cristales circunvecinos en respuesta al choque y sus vibraciones. El voltaje generado es proporcional al estrés interno en los cristales.
Una clase particular de sensores piezoeléctricos, conocidos como piezoeléctrico electrónico integral (IEPE), incorpora un amplificador en su diseño junto a los cristales piezoeléctricos. Debido a que la carga producida por un transductor piezoeléctrico es muy pequeña, la señal eléctrica producida por el sensor es susceptible al ruido, y debe utilizar electrónicos sensitivos para amplificar y acondicionar la señal y así reducir la impedancia de salida. El IEPE por tanto,

realiza el paso lógico de integrar los electrónicos sensitivos lo más cercano posible al transductor para asegurar una mejor inmunidad al ruido y un empacado mucho más conveniente. Un sensor típico IEPE es potenciado por una fuente externa de corriente constante con respecto a la carga variable en el cristal piezoeléctrico. El sensor IEPE utiliza solamente uno o dos cables tanto para la excitación del sensor (corriente) como para la salida de la señal (voltaje).
Metales (dilatación)
el principio de funcionamiento de un medidor de láminas vibrantes se indica en la figura 5. Cada lamina, debido a su peso, espesor, anchura, etc., tiene una frecuencia de resonancia mecánica a la cual vibra cuando se encorva y se suelta. La bobina atrae ligeramente y suelta cada lamina dos veces cada ciclo de la frecuencia aplicada. Si la frecuencia resonante de la lámina y la del voltaje aplicado son la misma, la vibración de la lámina se refuerza por la atracción de la bobina. El valor e la vibración de la lámina se incrementan. Si la frecuencia de aplicada y la frecuencia natural de la lámina son iguales, las vibraciones de la lámina serán opuestas por la bobina. Cuando la lámina tiende a encorvarse para efectuar su vibración natural, la bobina atrae. Así que el valor de la vibración esta rigurosamente limitada para las láminas con frecuencia diferentes de la recibida por la bobina.
Los frecuencímetros de láminas vibrantes son robustos y seguros. Pueden calibrarse dentro del 0.1% de la frecuencia especificadas, y son muy estables.
ConceptosVibración Cualquier movimiento que se repite después de un intervalo de tiempo
se llama vibración u oscilación.Frecuencia Es el número de ciclos completos de movimiento de una unidad de

tiempoPeriodo Es el lapso de tiempo que tarda en repetirse el mismo movimientoCiclo Es el movimiento que se completa durante un periodo.Amplitud Es el máximo desplazamiento que desarrolla el sistema de su posición
de equilibrio.Espectro de vibración
Un espectro de vibración es una imagen de cálculo de datos que nos muestra los datos de frecuencia / amplitud.
Rigidez Rigidez es la capacidad de un elemento estructural para soportar esfuerzos sin adquirir grandes deformaciones y/o desplazamientos.
Amortiguamiento Se define como la capacidad de un sistema o cuerpo para disipar energía cinética en otro tipo de energía. Típicamente los amortiguadores disipan la energía cinética en energía térmica y/o en energía plástica (e.g. atenuador de impactos).
Ángulo de fase El ángulo de fase f también puede interpretarsecomo el ángulo entre el origen y el primer pico.
Vibración libre Si se deja que un sistema vibre por sí mismo después de una perturbación inicial,la vibración resultante se conoce como vibracion libre. Ninguna fuerza externa actúa en el sistema.La oscilación de un péndulo simple es un ejemplo de vibración libre.
Vibración forzada Si un sistema se somete a una fuerza externa (a menudo, una fuerza repetitiva), la vibración resultante se conoce como vibración forzada. La oscilación que aparece en máquinas como motores diesel es un ejemplo de vibración forzada.Si la frecuencia de la fuerza externa coincide con una de las frecuencias naturales del sistema, ocurre una condición conocida como resonancia, y el sistema sufre oscilaciones peligrosamente grandes. Las fallas de estructuras como edificios, puentes, turbinas y alas de avión se han asociado a la ocurrencia de resonancia
Vibración amortiguada
Si no se pierde o disipa energía por fricción u otra resistencia durante la oscilación, la vibración se conoce como vibración no amortiguada. Sin embargo, si se pierde energía se llama vibración amortiguada. En muchos sistemas físicos, la cantidad de amortiguamiento es tan pequeña que puede ser ignorada en la mayoría de las aplicaciones de ingeniería. Sin embargo, la consideración del amortiguamiento se vuelve extremadamente importante al analizar sistemas vibratorios próximos a la resonancia.
Coeficiente de amortiguamiento
El coeficiente de amortiguamiento es una medida de la rapidez con que describe la decadencia oscilaciones de un rebote a la siguiente.
Factor de amortiguamiento
El factor de amortiguamiento ζ se define, para sistemas con amortiguamiento viscoso, como el cociente entre el coeficiente de amortiguamiento c y el amortiguamiento crítico cc.
Vibración armónica La vibración armónica puede describirse como una vibración periódica de forma sinusoidal.
Movimiento armónico simple
Es aquel movimiento en el cual la aceleración es proporcional a el desplazamiento de un punto fijo en la trayectoria de un movimiento y siempre dirigido alrededor del punto fijo.
Vibración aleatoria En algunos casos la excitación es no determinística o aleatoria; el valor de la excitación en un momento dado no se puede pronosticar. En estos casos, una recopilación de registros de la excitación puede presentar cierta regularidad estadística. Es posible estimar promedios como los
valores medios o medios al cuadrado de la excitación. Ejemplos de excitaciones aleatorias son la velocidad del viento, la aspereza del camino y el movimiento de tierra durante sismos. Si la excitación es aleatoria, la vibración resultante se llama vibración aleatoria.
Vibraciones discretas
Los sistemas con una cantidad finita de grados de libertad se conocen como sistemas discretos o de parámetro concentrado
Vibraciones continuas
Los que cuentan con una infinitud de grados de libertad se conocen como sistemas continuos o distribuidos.
PartículaCuerpo rígidoVibración transitoria Son causadas por una perturbación de corta duración. Baja frecuencia Baja frecuencia o LF (del inglés, iniciales de Low Frequency) se refiere a
la banda del espectro electromagnético, y más particularmente a la banda de radiofrecuencia, que ocupa el rango de frecuencias entre 30 kHz y 300 kHz. También es conocida como onda larga.
Alta frecuencia HF del inglés High Frequency (o altas frecuencias) o SW, son las siglas utilizadas para referirse a la banda del espectro electromagnético que ocupa el rango de frecuencias de 3 MHz a 30 MHz.
Grados de libertad El mínimo de coordenadas independientes requerido para determinar por completo todas las partes de un sistema en cualquier instante de tiempo define la cantidad de grados de libertad del sistema.
Resonancia Aumento dramático de la amplitud de la vibraciónQue son los mem´s Los Sistemas Microelectromecánicos (Micro-ElectroMechanical-
Systems)MEMS son la integración de elementos mecánicos, sensores, actuadores, y la propia electrónica en un substrato de silicio a través de tecnología de micro-fabricación.
Coordenadas generalizadas
Se denominan informalmente coordenadas generalizadas a un conjunto cualquiera de parámetros numéricos que sirven para determinar de manera unívoca la configuración de un mecanismo o sistema mecánico con un número finito de grados de libertad. Más formalmente, las coordenadas generalizadas se definen como un sistema de coordenadas curvilíneas sobre la variedad de configuración de un sistema físico como por ejemplo el espacio de configuración o el espacio de fases de la mecánica clásica.
El número mínimo de coordenadas generalizadas para definir el estado del sistema se conoce como: coordenadas independientes. En este contexto, las coordenadas pueden ser absolutas (referidas a un sólido inmóvil, respecto del cual el mecanismo "se mueve"); o bien pueden ser relativas a otro miembro del mecanismo.