algebra de boole
DESCRIPTION
BooleTRANSCRIPT
Algebra De los Diagramas de Bloques y Comportamiento en el Dominio del tiempo
Contenido:
Álgebra de los diagrama de bloques, repuesta transitoria de sistemas LTI –de Primer, Segundo y orden superior
Parámetros en Comportamiento en el domino del tiempo Significado de la ubicación de los polos Sensibilidad de los parámetros Varias reglas para simplificar un diagrama de bloques complejo Reduce el trabajo algebraico necesario para analizar un sistema. El objetivo general es reducir el sistema a un solo bloque simple. Ya se a visto como un sistema de lazo cerrado puede ser reducido
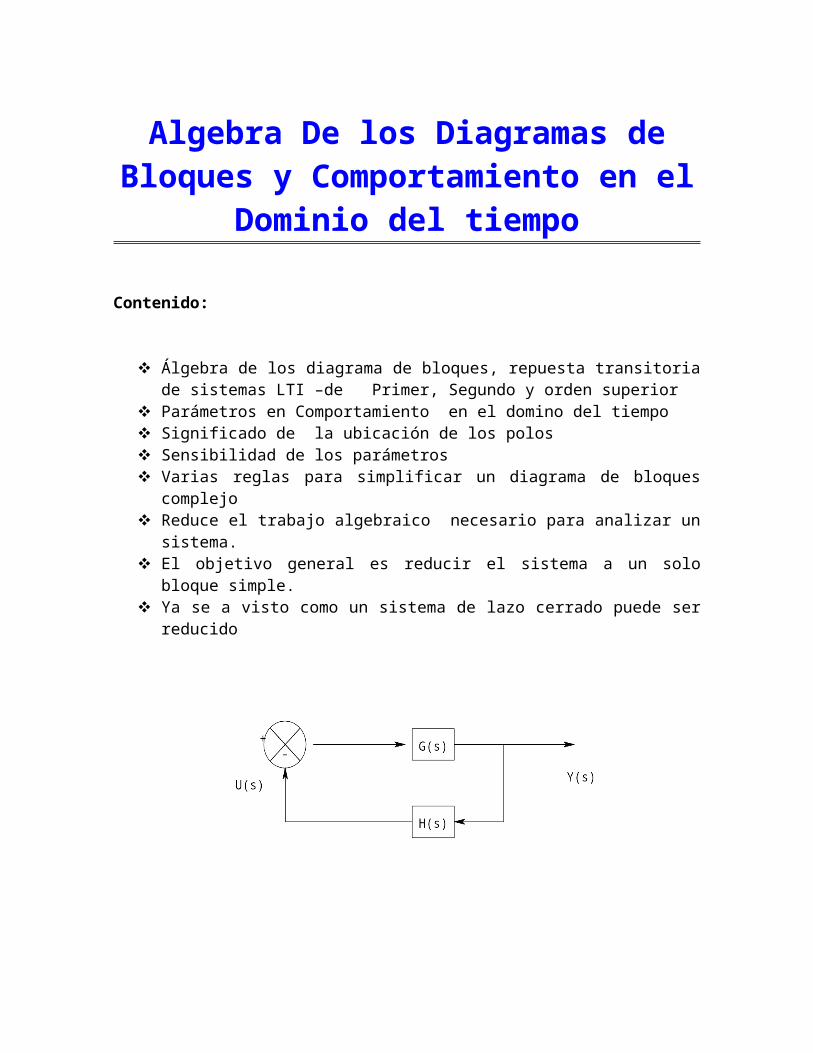
Sistema de lazo cerrado

Reducción del sistema de lazo cerrado
Reglas básicas
o El producto de la función de transferencia en la dirección de alimentación debe permanecer igual durante la operación de reducción.
o El producto de las funciones de transferencia alrededor de cualquier lazo debe permanecer igual.
o Recorriendo un punto de suma detrás del bloque
o Recorriendo un punto de unión detrás del bloque
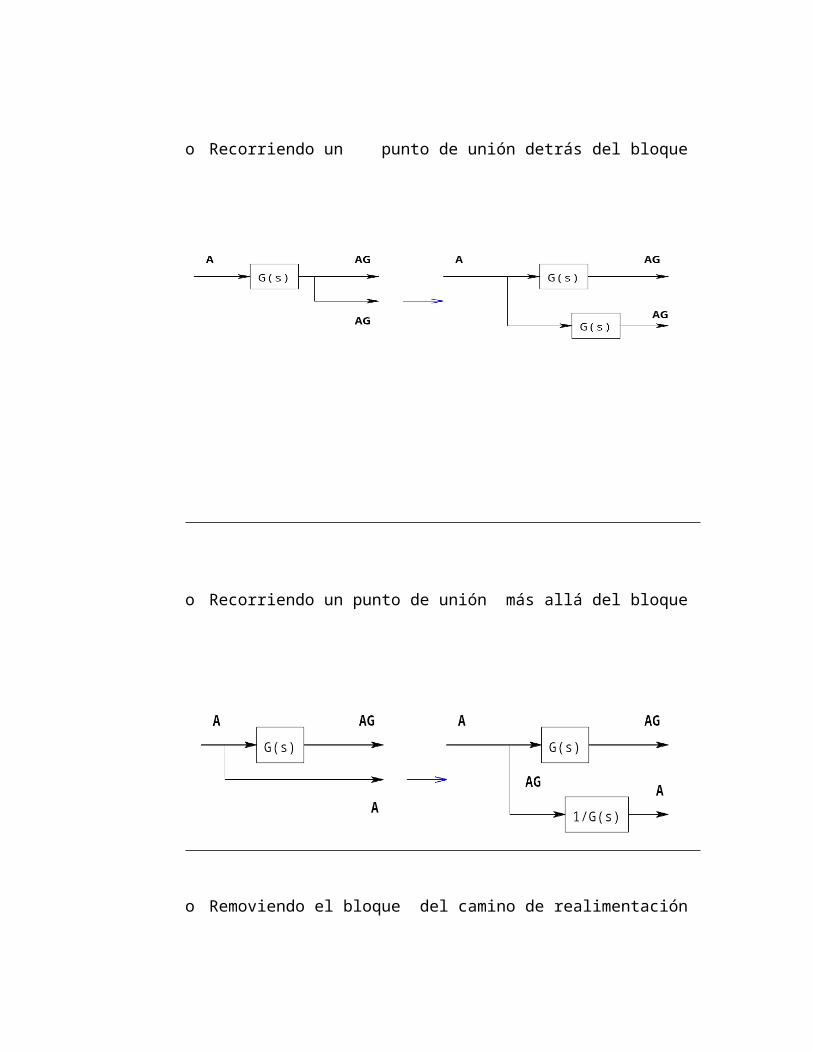
o Recorriendo un punto de unión más allá del bloque
o Removiendo el bloque del camino de realimentación
Para ejemplos ver Ogata p. 69 y 117
o Considerando un sistema de lazo cerrado simple con un integrador en el camino de retroalimentación

Respuesta Transitoria En Sistemas de Primer Orden
o Respuesta escalón unitario
Pendiente inicial=1/T
Tiempo c(t)T 0.6322T 0.8653T 0.954T 0.9825T 0.993
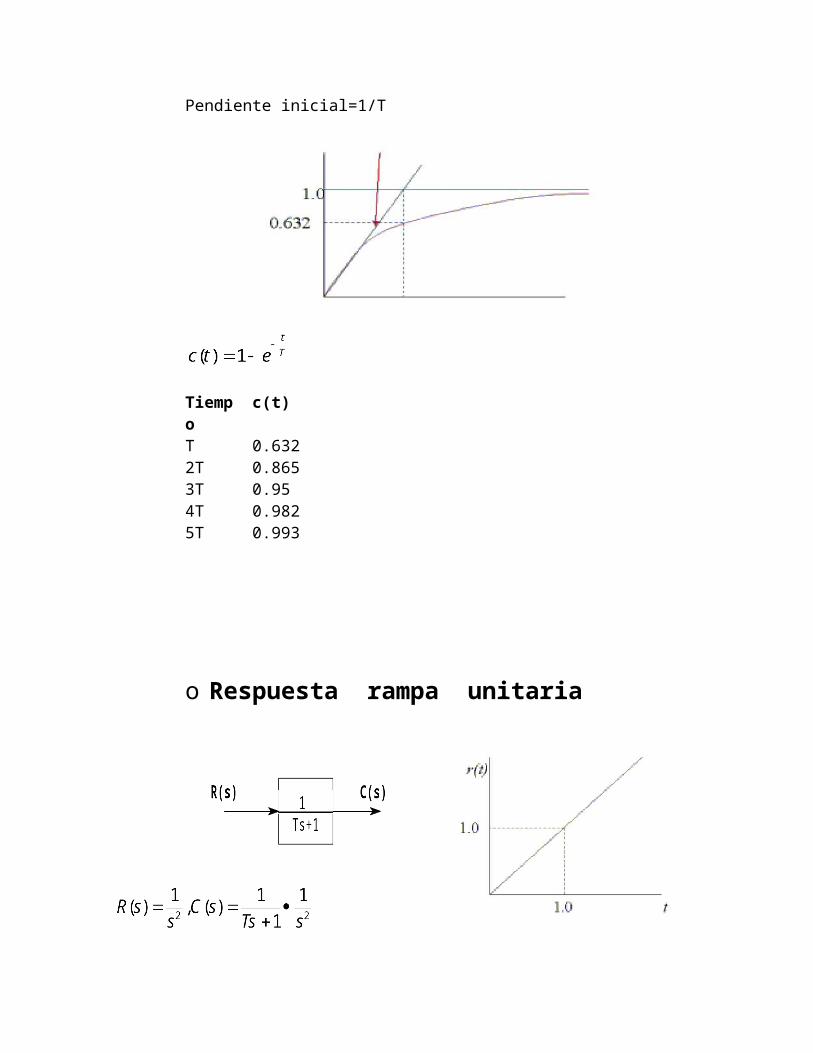
o Respuesta rampa unitaria
Error de tracking1 en la entrada de rampa
El error se define como:
Error en estado estable
Siempre habrá un pequeño desplazamiento determinado por la constante de tiempo del sistema
1 - ¿Qué es el "tracking"?Se trata de una tarea genérica que consiste en hacer que el resultado (output) deun sistema se corresponda en el tiempo y el espacio con un input (o información deentrada) elegido, que varía con el tiempo.

o Respuesta impulso unitario
Nota: La respuesta al impulso unitario de un sistema LTI el simplemente la transformada inversa de laplace de la función de transferencia
Respuesta escalón unitario = derivada de la respuesta rampa unitaria Respuesta de impulso unitario =derivada de la respuesta escalón unitario
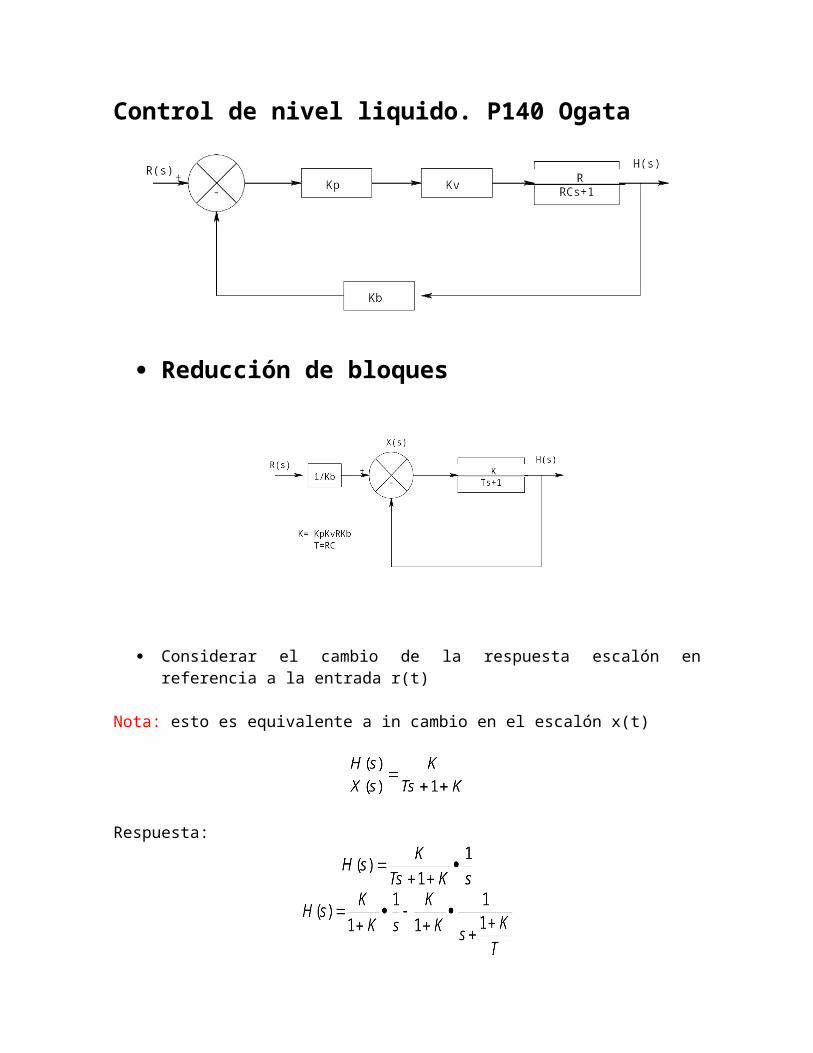
Control de nivel liquido. P140 Ogata

Reducción de bloques
Considerar el cambio de la respuesta escalón en referencia a la entrada r(t)
Nota: esto es equivalente a in cambio en el escalón x(t)
Respuesta:
Valor del estado estable
Nota: Esto se puede encontrar también del teorema del valor final o transformada de Laplace
Utilizando el teorema del valor final
Desde Error de estado estable u offset
Nota: Esto puede ser eliminado colocando un integrador (K/s) en el camino de alimentación.
Sistemas de Segundo Orden
Forma general de las funciones de segundo orden

ζ = Coeficiente de amortiguamientown=Frecuencia natural del sistema
Efecto del coeficiente de amortiguamiento
0< ζ<1 Caso Subamortiguado
los polos son complejos y conjugados respuesta oscilatoria amortiguada Respuesta de escalón unitario
Definimos: = frecuencia natural amortiguada
,
Señal de error =1-c(t)
Nota: Si el coeficiente de amortiguamiento es cero el sistema se mantendrá No amortiguado oscilando
ζ =0 c(t)=1-cos wnt
Nota: Si el coeficiente de amortiguamiento >1 entonces la respuesta será sobreamortiguada y el sistema no oscilará.
Respuesta Críticamente amortiguada
Críticamente amortiguado ζ=1
Los polos son iguales y reales T.L. de la respuesta escalón untario:
Respuesta sobreamortiguada
Sobreamortiguado ζ >1
Polos reales y distintos La respuesta es:
POLOS
La respuesta es la suma de dos exponenciales negativas, (en descenso)Cuando el exponencial decae rápidamente la respuesta es parecida a un sistema de primer orden.

El sistema subamortiguado responde más rapido pero oscila en un valor de estado estable.
El sistema sobreamortiguado tiene una respuesta lenta y carece de oscilación.
Especificaciones de la respuesta transitoria
Controlar un comportamiento especifico de un sistema de control Frecuentemente especificado en términos de respuesta escalón unitario
Términos:
Tiempo de retraso, td
Tiempo de levantamiento tr
Tiempo Pico tp
Máximo sobreimpulso Mp
Tiempo de asentamiento ts

Tiempo de retraso
-Tiempo que tarda en llegar al 50% del valor final la primera vez.
Tiempo de levantamiento
Tiempo en el que el sistema va del 0-100% del valor final, o 10-90%, o 5-95%

Tiempo Pico
Tiempo que tarda el sistema en alcanzar el primer pico
Máximo Porcentaje de sobreimpulso
Es el máximo valor porcentual de respuesta de el valor del estado estable.

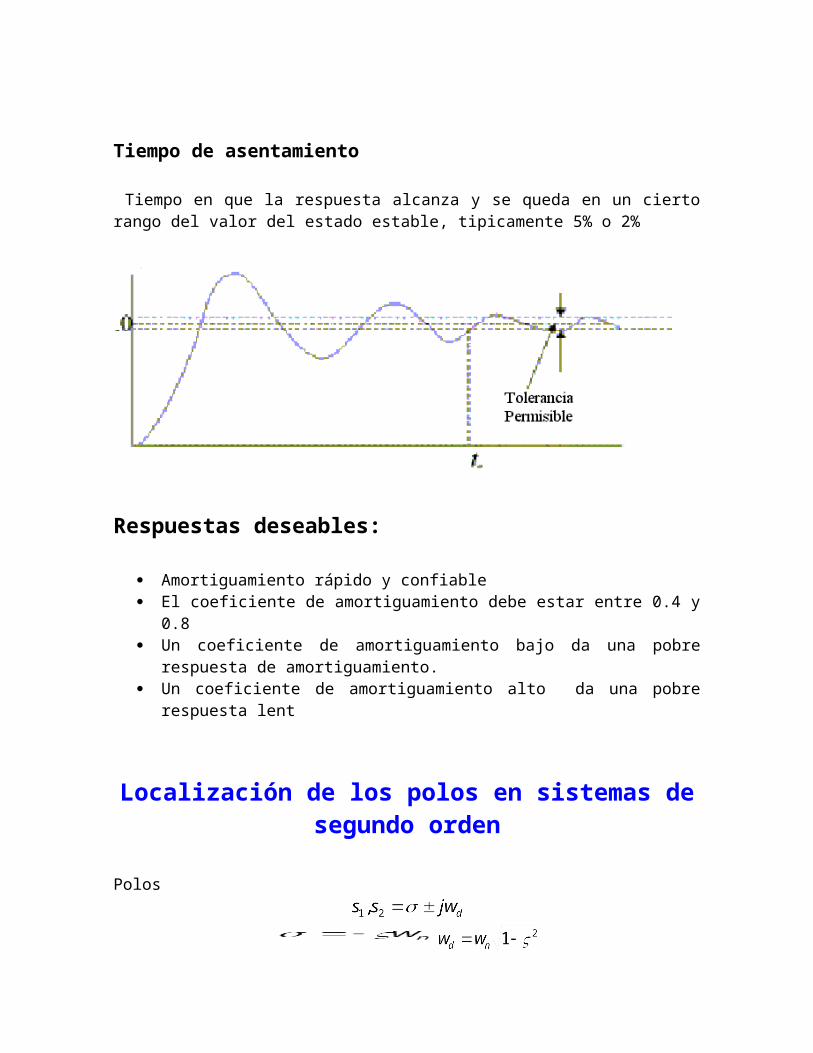
Tiempo de asentamiento
Tiempo en que la respuesta alcanza y se queda en un cierto rango del valor del estado estable, tipicamente 5% o 2%
Respuestas deseables:
Amortiguamiento rápido y confiable El coeficiente de amortiguamiento debe estar entre 0.4 y 0.8 Un coeficiente de amortiguamiento bajo da una pobre respuesta de
amortiguamiento. Un coeficiente de amortiguamiento alto da una pobre respuesta lent
Localización de los polos en sistemas de segundo orden
Polos
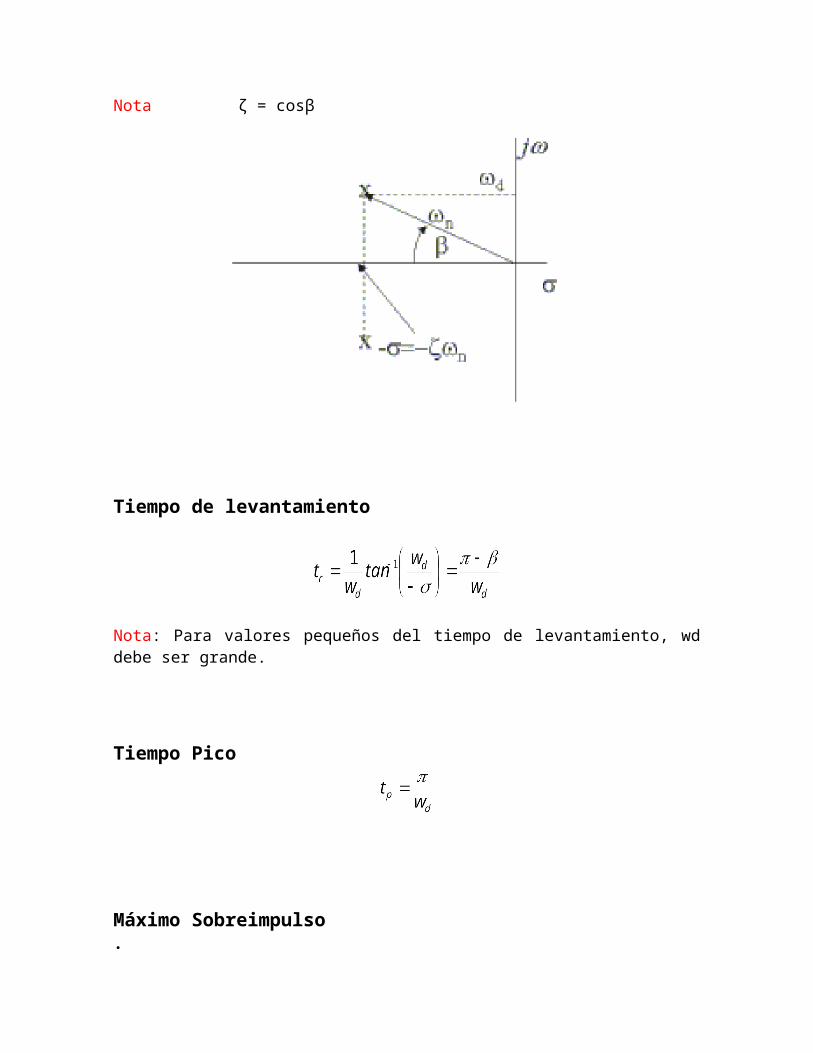
Nota ζ = cosβ

Tiempo de levantamiento
Nota: Para valores pequeños del tiempo de levantamiento, wd debe ser grande.
Tiempo Pico
Máximo Sobreimpulso.
Tiempo de asentamiento
La velocidad de decaimiento depende del valor de la constante de tiempo
Después de tres constantes de tiempo el sistema estará en el 5% de su valor final
Después de 4 constantes de tiempo el sistema estará en el 2% de su valor final
Características del tiempo de asentamiento
Es inversamente proporcional del producto de la frecuencia natural por el coeficiente de amortiguamiento
El coeficiente de amortiguamiento esta relacionado con el máximo sobreimpulso
El tiempo de asentamiento se determina escogiendo wn
Ejemplo:
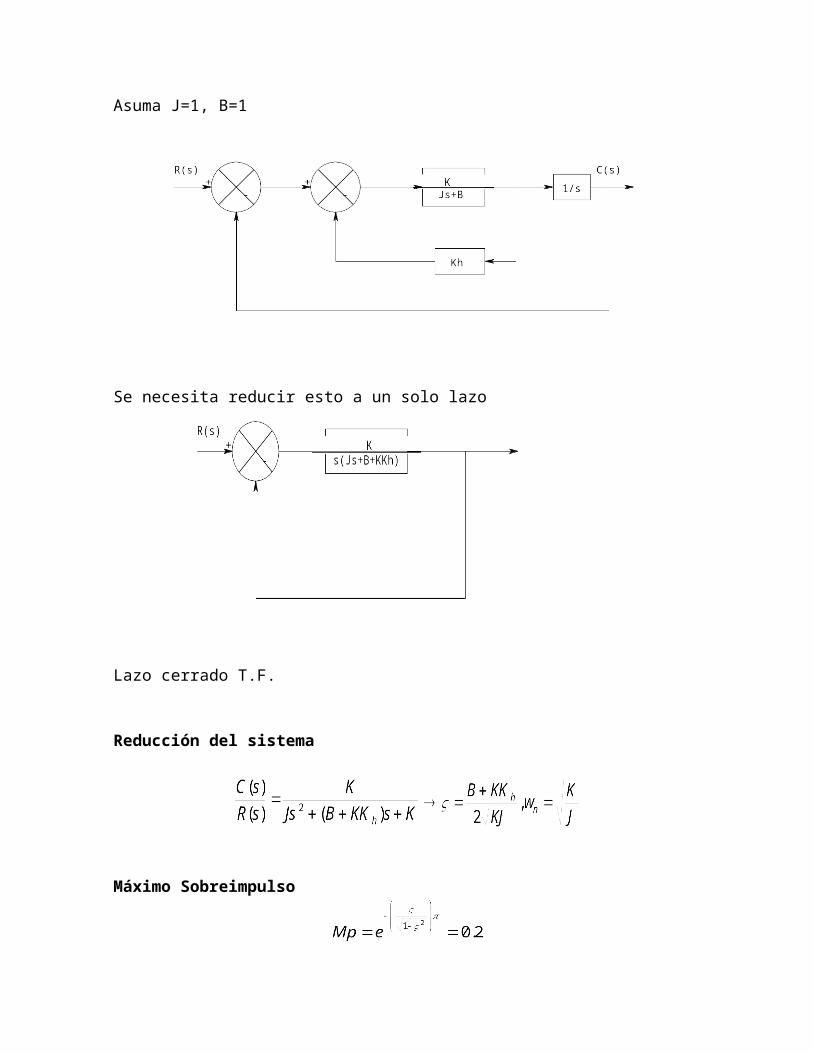
Considere el sistema de lazo cerrado presentado en la parte inferior. Determine los valores de Kh & K que harán que el máximo sobreimpulso sea 0.2 y el tiempo pico 1 segundo. También determine el tiempo de levantamiento y el tiempo de asentamiento.
Asuma J=1, B=1
Se necesita reducir esto a un solo lazo
Lazo cerrado T.F.
Reducción del sistema
Máximo Sobreimpulso
ζ=0.456
Tiempo Pico
Wd=3.14
Ahora la frecuencia natural es:

Tiempo de levantamiento
Tiempo de asentamiento
2% tiempo de asentamiento = 4/σ =2.48 seg.5% tiempo de asentamiento =3/ σ =1.86 seg.
Respuesta de impulso en los sistemas de segundo orden
Transformada inversa simple de la función de transferencia Derivar de la función escalón Diferentes expresiones para máximo sobreimpulso
Significado de la localización de los polos:
Real y negativo
La respuesta al impulso es una exponencial estable negativa
Real y positivo
Respuesta al impulso en una exponencial inestable positiva
Complejos con partes reales negativas
Respuesta al impulso es oscilatoria y estable
Oscilación amortiguada
Complejos con partes reales positivas
La respuesta al impulso es oscilatoria e inestableOscilación subarmotiguada
Angulo del polo complejo w.r.t. es negativo y real los ejes = coseno del coeficiente de amortiguamiento
Magnitud de un polo complejo = frecuencia natural
Nota: Los polos complejos SIEMPRE están en pares conjugados.
Sistemas de orden superior
Considere la función de transferencia general de la forma:
M son ceros, q al menos polos reales y la mayor parte de polos complejos conjugados es r.
La respuesta a un escalón unitario esta determinada por:
Esta fórmula se puede expandir por el método de fracciones parciales.

Sumario de los cuatro casos de respuesta en sistemas de segundo orden.
1.Caso no amortiguado ζ=0; c(t)=1-cos(Wnt)
2.Caso subamortiguado
3.Caso críticamente amortiguado

4.Caso sobreamortiguado.