robotica de enjambre
DESCRIPTION
Equipo UPM (Universidad Politécnica de Madrid)TRANSCRIPT
IntroducciónPrincipales modelos
Robótica de enjambre
ROBÓTICA DE ENJAMBREIntroducción a la Robótica Inteligente
Universidad Politécnica de Madrid
Manuel Castillo Cagigal
Estudiante de DoctoradoTEAT - ETSIT - UPM
www.robolabo.etsit.upm.es/∼manuel([email protected])
8 de Abril de 2015
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Indice1 Introducción
Robótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
¿Qué es la robótica colectiva?
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
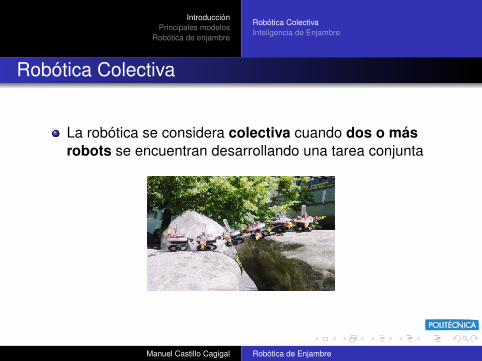
Robótica Colectiva
La robótica se considera colectiva cuando dos o másrobots se encuentran desarrollando una tarea conjunta
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
Detrás de esta simple definición se esconde un problemamás complejo
¿Cómo se organiza cada robot?¿Cual debe ser su función dentro del grupo?
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
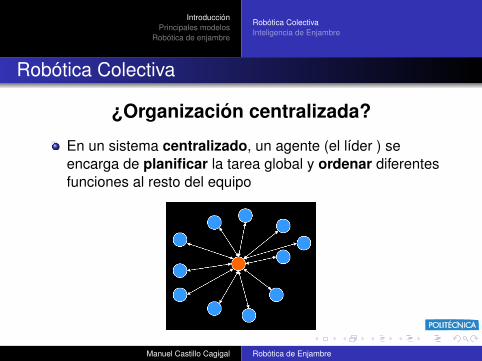
¿Organización centralizada?
En un sistema centralizado, un agente (el líder ) seencarga de planificar la tarea global y ordenar diferentesfunciones al resto del equipo
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
¿Organización descentralizada?En un sistema descentralizado, cada agente decide supropio comportamiento de una forma autónoma acordecon la información que obtiene localmente
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
¿Cómo diseñar un sistema descentralizado?
Inspirarnos en la naturaleza
Inteligencia de Enjambre
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
¿Cómo diseñar un sistema descentralizado?
Inspirarnos en la naturaleza
Inteligencia de Enjambre
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Robótica Colectiva
¿Cómo diseñar un sistema descentralizado?
Inspirarnos en la naturaleza
Inteligencia de Enjambre
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
¿Qué es la inteligencia de enjambre?
Cualquier intento de diseñar algoritmos o soluciones aproblemas distribuidos inspirados en el comportamientocoletivo de colonias de insectos sociales y otrassociedades animales
Bonabeau, Dorigo & Theraulaz. Swarm Intelligence: From Natural to Artificial Systems.
1999
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Auto-Organización
¿Cómo se coordinan?
Auto-organizaciónEmerge un comportamiento a nivel global como resultadode interacciones entre componentes de nivel inferiorLas reglas que especifican las interacciones en el nivelinferior se basan exclusivamente en información local, sinque exista la referencia a un patrón globalEs una propiedad emergente en vez de una propiedadimpuesta por un agente externo
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Auto-Organización
Múltiples interaccionesAleatoriedadRealimentación positiva
ReclutamientoRealimentación negativa
Limitar el número detrabajadores
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Comunicación
¿Hay Comunicación?
La comunicación es necesaria2 tipos:
Directa: Antenas, trofalaxis, contacto visual, substanciasquímicas, etcIndirecta: Comunicación a través del entorno
Estigmergia
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Estigmergia
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
¿Qué es la inteligencia de enjambre?
La inteligencia de enjambre es una técnica de la inteligenciaartificial basado en el estudio de comportamientos colectivosen sistemas descentralizados y auto-organizados
En la inteligencia de enjambre los individuos son simples einteraccionan localmente entre ellos y con el entorno.
Las interacciones locales producen comportamientosglobales emergentes
Encontramos comportamientos similares en la naturaleza:colonias de hormigas, movimiento de pájaros, bancos de peces,pastoreo de animales, etc
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
¿Qué es la inteligencia de enjambre?
La inteligencia de enjambre estudia grupos de muchosindividuos que:
son relativamente simples (comparados con la tarea quequieren resolver)se coordinan mediante un control distribuidosensan localmente el entornose pueden comunicar directamente sólo con sus vecinosse pueden comunicar indirectamente a través del entornotienen un comportamiento estocásticoexplotan mecanismos de realimentación positiva y negativa
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
Distinguir entre:Inteligencia de enjambre científicaInteligencia de enjambre ingenieril
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
Distinguir entre:Inteligencia de enjambre científicase referie al estudio de enjambres naturales
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
Distinguir entre:Inteligencia de enjambre ingenierilse refiere al diseño e implementación de enjambresartificiales
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inteligencia de Enjambre
La inteligencia de enjambre ingenieril se inspira en losestudios de la Inteligencia de enjambre científica pararesolver problemas colectivos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inspiración vs. Imitación
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inspiración vs. Imitación
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Robótica ColectivaInteligencia de Enjambre
Inspiración vs. Imitación
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Diferentes tipos de modelos estudian comportamientosconcretos:
Trazado de caminos - Recolección de alimentoDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
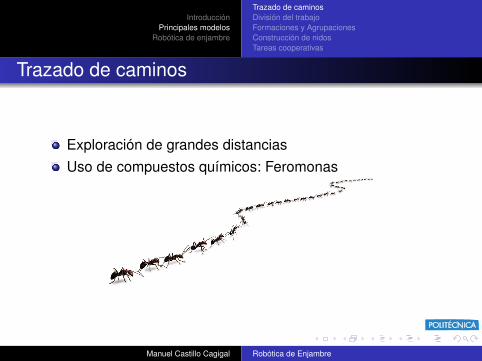
Trazado de caminos
Exploración de grandes distanciasUso de compuestos químicos: Feromonas
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
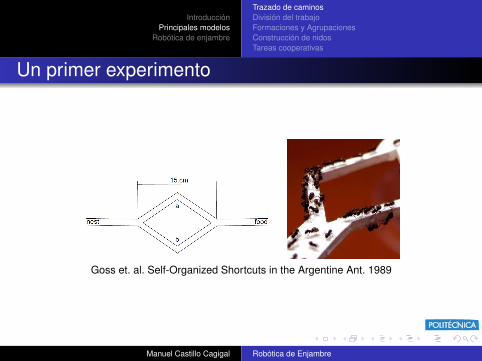
Un primer experimento
Goss et. al. Self-Organized Shortcuts in the Argentine Ant. 1989
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
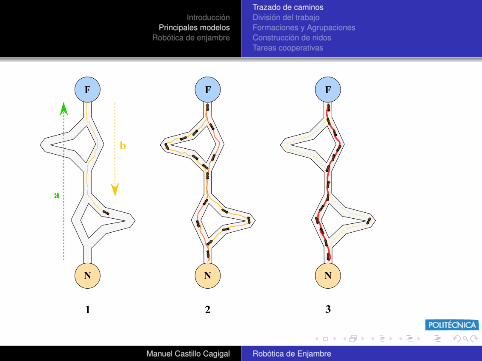
Un primer experimento
PA =(k + A)n
(k + A)n + (k + B)n = 1− PB
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
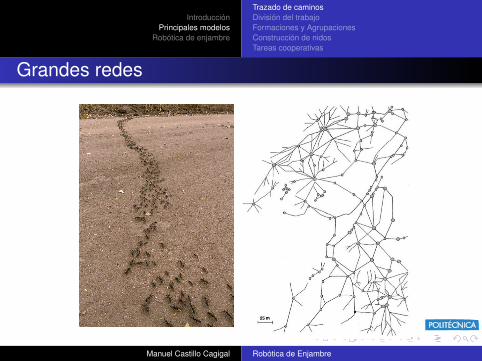
Grandes redes
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
División del trabajo
Distribución de individuos entre tareasAdaptación del enjambre→ elasticidad de los individuos
Principales modelos→ Umbral de Respuesta
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
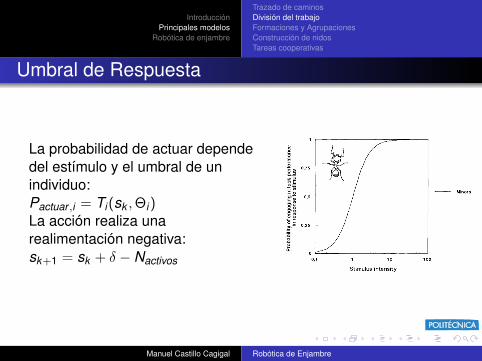
Umbral de Respuesta
La probabilidad de actuar dependedel estímulo y el umbral de unindividuo:Pactuar ,i = Ti(sk ,Θi)La acción realiza unarealimentación negativa:sk+1 = sk + δ − Nactivos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Especialización
Diferentes tipos:MorfológicoEdadSituación y/o experiencia
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Formaciones y Agrupaciones
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Formaciones
Diferentes tipos de formaciones
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Agrupaciones
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
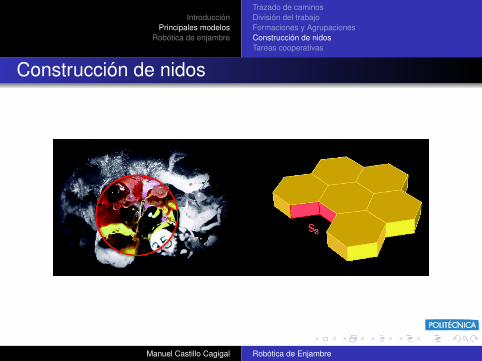
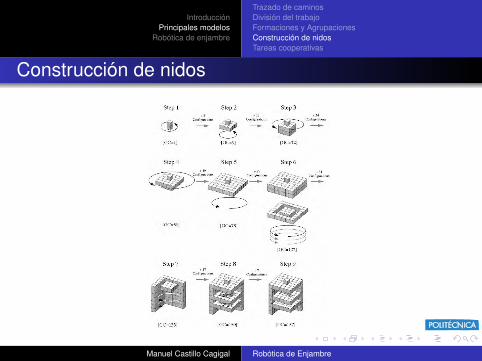
Contrucción de nidos
Estructuras muy complejasCampo poco conocidoEntorno y relación entreindividuos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Construcción de nidos
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Construcción de nidos
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Construcción de nidos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Construcción de nidos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
Construcción de nidos
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
Trazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
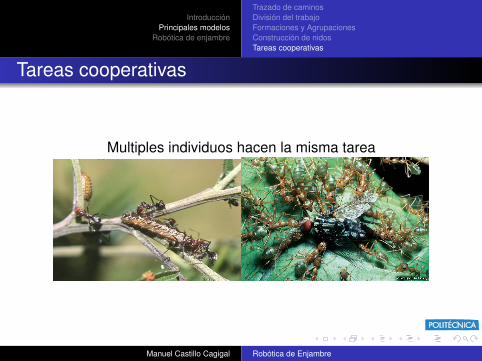
Tareas cooperativas
Multiples individuos hacen la misma tarea
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Enfoques
CoordinaciónCooperaciónDeliberación
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Coordinación
La organización apropiada en espacio y tiempo de lastareas requeridas para complementar el comportamientocolectivo deseado
Construcción de nidos Movimiento colectivo
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Movimiento colectivo
Ejemplo de coordinación: Movimiento Colectivo
Usos:Transporte colectivoExploración
Posibles implementaciones:ContactoSin contacto
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Movimiento colectivo
Movimiento en paralelo
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Movimiento colectivo
Movimiento en conjunto
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Movimiento colectivo
Movimientos complejos:
Huir de un cazador
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Cooperación
La organización para conseguir una tarea que no pudieraser conseguida por un único individuo
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Cooperación
Ijspeert et al, Collaboration through the explotation of local Interations in autonomous
collective robotics: The stick pulling experiment, 2001
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Cooperación
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Cooperación
Ayuda para subir escalones
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Cooperación
Ayuda para evitar obstáculos
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Transporte coordinado
Transporte de objetos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Transporte coordinado
Transporte de objetos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Transporte coordinado
Transporte de personas
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Reparación
Reparación¿Cómo saber que un miembro del grupo tiene unproblema?¿Cómo repararlo?
Inspiración en las luciérnagasCada robot emite un flash como si fuese un latido delcorazónSi un robot se extropea deja de latirle el corazón
Christensen et. al, Fault Detection in Autonomous Robots Based on Fault Injection andLearning, 2008
Christensen et. al, From Fireflies to Fault Tolerant Swarms of Robots, 2009
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Reparación
Detección de fallos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
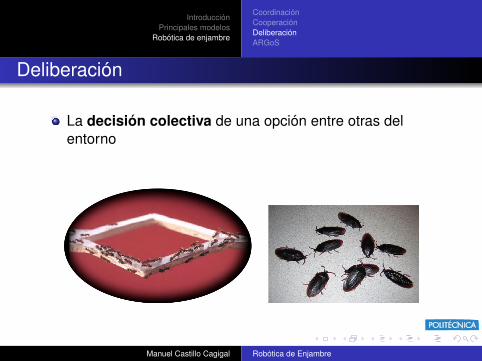
Deliberación
La decisión colectiva de una opción entre otras delentorno
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
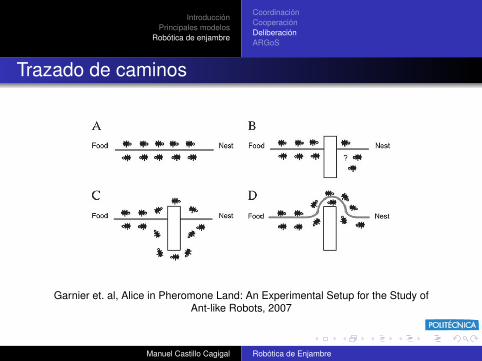
Trazado de caminos
Garnier et. al, Alice in Pheromone Land: An Experimental Setup for the Study ofAnt-like Robots, 2007
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
PREY
NEST
NEST
PREY
Los individuos no conocen lasposiciones del nido ni del alimentoAcabarán encontrando el nido o elalimentoUna vez encontrado tendrán quebuscar el otroTendrán que repetir este camino¡No hay feromonas en los robots!
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
NEST
PREY
NEST
PREY
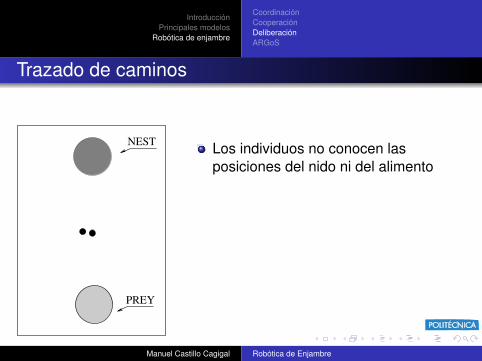
Los individuos no conocen lasposiciones del nido ni del alimento
Acabarán encontrando el nido o elalimentoUna vez encontrado tendrán quebuscar el otroTendrán que repetir este camino¡No hay feromonas en los robots!
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
NEST
PREY
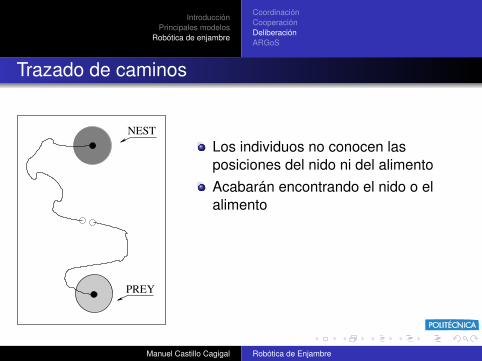
Los individuos no conocen lasposiciones del nido ni del alimentoAcabarán encontrando el nido o elalimento
Una vez encontrado tendrán quebuscar el otroTendrán que repetir este camino¡No hay feromonas en los robots!
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
NEST
PREY
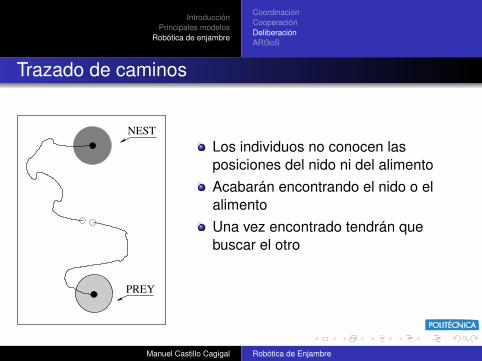
Los individuos no conocen lasposiciones del nido ni del alimentoAcabarán encontrando el nido o elalimentoUna vez encontrado tendrán quebuscar el otro
Tendrán que repetir este camino¡No hay feromonas en los robots!
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
NEST
PREY
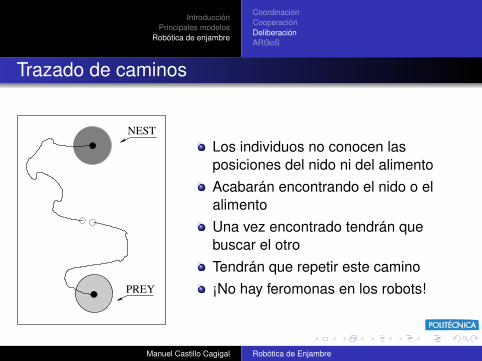
Los individuos no conocen lasposiciones del nido ni del alimentoAcabarán encontrando el nido o elalimentoUna vez encontrado tendrán quebuscar el otroTendrán que repetir este camino
¡No hay feromonas en los robots!
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
NEST
PREY
Los individuos no conocen lasposiciones del nido ni del alimentoAcabarán encontrando el nido o elalimentoUna vez encontrado tendrán quebuscar el otroTendrán que repetir este camino¡No hay feromonas en los robots!
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
Almacenan la posición relativa del nido ydel alimentoEn cada momento dos vectores: ~xnido y~xalimento
Intentan rehacer el caminoDemasiada imprecisión: problema deodometría
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
Error mayor conforme más distanciaCompartir conocimientoDar prioridad a los más cercanos
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Trazado de caminos
PREY NEST
PREY
AREA
INIT
Misma lógica permite encontrar caminosmás cortos
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Agregación
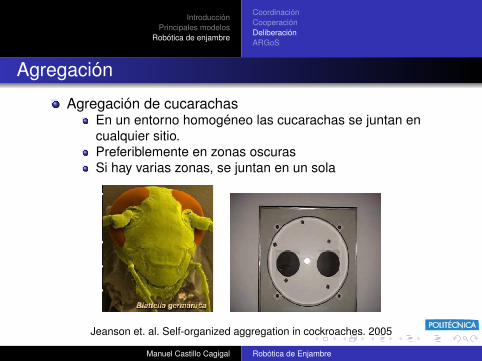
Agregación de cucarachasEn un entorno homogéneo las cucarachas se juntan encualquier sitio.Preferiblemente en zonas oscurasSi hay varias zonas, se juntan en un sola
Jeanson et. al. Self-organized aggregation in cockroaches. 2005
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Agregación
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Agregación
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Agregación
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Formación de cadenas
Formación de cadenas con contacto
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Formación de cadenas
Formación de cadenas sin contacto
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
1 IntroducciónRobótica ColectivaInteligencia de Enjambre
2 Principales modelosTrazado de caminosDivisión del trabajoFormaciones y AgrupacionesConstrucción de nidosTareas cooperativas
3 Robótica de enjambreCoordinaciónCooperaciónDeliberaciónARGoS
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
SwarmanoidEl simulador ARGoS nace del proyecto Swarmanoid:
Objetivo: Diseño, implementación y control de una nuevageneración de robots distribuidos.
Robost heterogéneos y autónomos
eye-bots, hand-bots y footbots
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
ARGoS
ARGoS: Simulador de software libre orientado a la simulaciónde grandes cantidades de robots heterogéneos.
Arquitectura modularArquitectura multi-hebraMúltiples motores físicosPrecisión configurable
http://iridia.ulb.ac.be/argos/
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
ARGoS
Ejemplo difusión con 10 robotsRobots evitan obstáculos mediante choques elásticos.
Manuel Castillo Cagigal Robótica de Enjambre

IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
ARGoS
Ejemplo de FlockingRobots mantienen una formación y se aproximan a una fuente
de luz.
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
ARGoS
Ejemplo de ForagingRobots buscan comida por el entorno y vuelven al nido
mediante phototaxis.
Manuel Castillo Cagigal Robótica de Enjambre
IntroducciónPrincipales modelos
Robótica de enjambre
CoordinaciónCooperaciónDeliberaciónARGoS
Gracias
¡GRACIAS!
Manuel Castillo Cagigal Robótica de Enjambre