optimizaciÓn por enjambre de partÍculas de edificios de
TRANSCRIPT

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
OPTIMIZACIÓN POR ENJAMBRE DE PARTÍCULAS DE EDIFICIOS DE ACERO
SOMETIDOS A FUERZAS SÍSMICAS
Manuel Barraza (1)
, Edén Bojórquez Mora (1)
, Eduardo R. Fernández González (1)
1 Facultad de Ingeniería Culiacán, Universidad Autónoma de Sinaloa, Calzada de las Américas y Blvd. Universitarios, Culiacán,
Sinaloa. Cp 80040
[email protected], [email protected], [email protected]
RESUMEN
Se muestra la aplicación de la Optimización por Enjambre de Partículas (OEP) aplicada al diseño sísmico de
edificios de acero. Para ello se diseñan marcos de acero usando OEP con la finalidad de controlar tres parámetros
objetivos: i) minimizar el peso total de la estructura (el cual está relacionado con el costo), ii) controlar la distorsión
máxima de entrepiso, y iii) satisfacer los requerimientos de resistencia. Adicionalmente, se garantiza que los diseños
sean aceptables en términos constructivos. Se observa que la técnica de OEP es una herramienta útil para el diseño
sismo-resistente de edificios seguros y económicos.
ABSTRACT
The application of Particle Swarm Optimization (PSO) for the seismic design of steel buildings is illustrated. For this
aim, steel frames are designed using PSO in order to control three objectives parameters: i) minimize the total weight
of the structure (which is related to the cost), ii) control of the maximum inter-story drift, and iii) to satisfy the
strength requirements. In addition, the final designs obtained are acceptable in constructive terms. It is observed that
the PSO technique is a useful tool for the earthquake-resistant design of safety and economy buildings.
INTRODUCCIÓN
Los grandes descubrimientos en la inteligencia artificial han dado lugar al hallazgo de distintos métodos de
optimización, tal es el caso de las técnicas Bio-inspiradas, de las cuales destaca el grupo que integran la Inteligencia
de Enjambres (IE): Optimización de Colonia de Hormigas (OCH), Algoritmo de Colonia de Abejas (ACA),
Optimización por Enjambre de Partículas (OEP), etc. Las técnicas basadas en la inteligencia de enjambres están
inspiradas en la naturaleza, especialmente por ciertos sistemas biológicos. Los sistemas de inteligencia de enjambre
están típicamente formados por una población de agentes simples que interactúan localmente entre ellos y con su
medio ambiente. Los agentes siguen reglas simples y, aunque no existe una estructura de control centralizado que
dictamine el comportamiento de cada uno de ellos, las interacciones locales entre los agentes conducen a la
emergencia de un comportamiento global complejo.
La OEP es un creciente campo de investigación bastante activo y sus aplicaciones van desde algo tan general como
el problema del agente viajero, hasta la asignación de tareas para los robots de una fábrica. En el campo de la
ingeniería sísmica y estructural, existen varios trabajos orientados en la optimización de estructuras utilizando
inteligencia de enjambres, aunque la mayoría de ellos se han desarrollado para el análisis de armaduras de acero
(Perez et al., 2007; Gomes, 2011 y Sonmez, 2011) y pocos se han desarrollado para el diseño sísmico de edificios.
Por tal motivo, el objetivo del presente trabajo es demostrar el potencial de la inteligencia de enjambres mediante la
técnica OEP a través del diseño sísmico óptimo de edificaciones estructurales de acero formadas a base de marcos.
Para ello, se supone que las estructuras están constituidas por secciones tipo W (256 perfiles) tomadas de la base de

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
datos del manual AISC-LRFD (2010). Para diseñar los edificios se considera como principal objetivo minimizar el
peso estructural de los edificios, ya que dicho parámetro está directamente relacionado con el costo de la edificación.
Es importante mencionar que se satisfacen la distorsión máxima de entrepiso y los requerimientos de resistencia del
LRFD-AISC a partir de penalizar la función objetivo por una función que depende de la capacidad de cada elemento
para resistir la acciones a las que son sometidos. Se utilizó como método de análisis estructural, el método estático de
análisis sísmico; Por otro lado, se debe resaltar que en el presente estudio también se verificó que el diseño final
objetivo sea útil para fines prácticos; es decir, que el ensamble de las secciones obtenidas para la edificación sea
posible en la práctica de la ingeniería. Para lograr lo anterior, se penalizaron aquellas estructuras que no cumplían
con el ensamble adecuado para formar el edificio, note que esta consideración generalmente no se toma en cuenta en
problemas relacionados con la optimización de estructuras que involucran minimizar el peso estructural.
BREVE DESCRIPCIÓN DE LA OPTIMIZACIÓN POR ENJAMBRE DE PARTICULAS (OEP)
En la naturaleza algunas especies de aves, peces e insectos coexisten en grupos dentro de los cuales puede observarse
un comportamiento social que permite a un individuo comunicar su suceso a los demás componentes del grupo, lo
cual resulta en un proceso colectivo que ayuda a todos los individuos a satisfacer de la mejor manera posible sus
necesidades más inmediatas. Las aves por ejemplo, realizan una exploración en grupo de la zona en que se
encuentran, durante la cual cada una trata de mantenerse próxima a las demás (Reynolds et al., 1987). Así, cuando
cierta ave decide aterrizar o cambiar de dirección por haber detectado alimentos o por otro motivo, ella puede atraer
consigo a algunas o a todas las demás transmitiendo de esta forma la información. La metaheurística de OEP,
desarrollada por Kennedy y Eberhart (Kennedy et al., 1995), se inspira en el comportamiento social de estos grupos
de individuos. Esta metaheurística surge a partir de las observaciones realizadas por sus autores sobre sistemas de
simulación del movimiento de parvadas de pájaros y bancos de peces propuestos por Reynolds y Heppner (Heppner
et al., 1990). En el modelo de Heppner se incluye un punto de atracción hacia el cual todos los agentes (aves
artificiales) son atraídos. Los agentes inicialmente vuelan sin dirección fija, más tarde empiezan a formar grupos que
posteriormente son atraídos hacia el punto de atracción y en el cual todos terminan ubicados luego de un cierto
tiempo. Kennedy y Eberhart notaron el hecho de que en este modelo los agentes conocen la ubicación exacta del
punto de atracción, mientras que en la realidad las aves no tienen idea del lugar exacto en donde existen alimentos
(punto de atracción); así fue que ellos modificaron el sistema de simulación para que los agentes no tuvieran
conocimiento de la posición exacta del punto de atracción, pero que fuesen capaces de evaluar su posición actual de
manera a determinar qué tan buena es esta con respecto a la ubicación del punto de atracción. También dotaron a las
aves artificiales con una pequeña memoria que les permite recordar la mejor posición en la que se han encontrado y
con la habilidad de conocer la mejor posición encontrada por cada individuo del grupo. De esta forma, los agentes
artificiales pueden determinar con base en estas informaciones la dirección a seguir para localizar el punto de
atracción sin conocer realmente su ubicación exacta.
Kennedy y Eberhart descubrieron que su nuevo modelo de simulación podía ser aplicado como un optimizador para
la resolución de problemas de optimización de funciones matemáticas continuas al cual denominaron Optimización
de Enjambre de Partículas. Básicamente, la OEP consiste en un algoritmo iterativo basado en una población de
individuos denominada enjambre, en la que cada individuo denominado partícula, se dice que sobrevuela el espacio
de decisión en busca de soluciones óptimas. En un espacio de búsqueda N-dimensional, cada partícula i del enjambre
conoce su posición actual iNiii XXXX ,......,, 21 , la velocidad iNiii VVVV ,......,, 21 con la cual ha llegado a dicha
posición y la mejor posición iNiii PPPP ,......,, 21 en la que se ha encontrado, denominada mejor posición personal.
Además, todas las partículas conocen la mejor de entre todas las mejores posiciones personales en el enjambre
Nj GGGG ,......,, 21 , a la cual se denomina mejor posición global. En cada iteración t del algoritmo, cada
componente j de la velocidad y la posición de cada partícula i del enjambre se actualiza conforme a las siguientes
ecuaciones:
t - XtGbest x . x Rand C t - XtPbest x . x Rand C tw x VtV ijjijijijij 211 (1)
11 kVkXkX ii (2)

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
donde iNiii VVVV ,......,, 21 llamada la velocidad de la partícula i, que representa la distancia a recorrer de esta
partícula desde la posición actual iNiii XXXX ,......,, 21 , Pbest representa la mejor posición anterior de la partícula
i (es decir, la mejor posición de su experiencia), Gbest representa la mejor posición entre todas las Pbest en la
población (mejor posición global), w es el parámetro de inercia, 1C es el parámetro cognitivo, 2C es el parámetro
social y .Rand es una función que retorna un número aleatorio en el intervalo [0, 1].
La ecuación (1) calcula un nuevo vector de velocidad para la i-ésima partícula a partir de su velocidad actual, la
distancia euclidiana a su mejor posición personal y la distancia euclidiana a la mejor posición global. En la ecuación
(2) las componentes del vector de posición de la i-ésima partícula se actualizan de acuerdo con cada componente de
su nueva velocidad.
El rol de la distancia a la mejor posición personal en la ecuación (1) es influir en la dirección de la partícula para que
esta vuelva hacia dicha mejor posición en la cual ha encontrado mayor provecho, luego de que por largo tiempo la
partícula haya estado explorando zonas del espacio de búsqueda en la cual no ha hallado mejoría. A esta distancia se
denomina factor cognitivo, el cual representa un conocimiento previo que la partícula ha determinado con base en
sus experiencias individuales. Por otra parte, el papel de la componente que representa la distancia a la mejor
posición global es dirigir a las partículas hacia la posición más favorable hallada por el grupo. Tal distancia se
denomina factor social, debido a que se trata de una información compartida dentro del enjambre de partículas que
representa un modelo generalmente aceptado a seguir. Los parámetros 1C y 2C llamados parámetro cognitivo y
parámetro social, son constantes de aceleración hacia las mejores posiciones encontradas cuyos valores determinan la
influencia máxima de las distancias a estas mejores posiciones en el cálculo de la nueva velocidad de las partículas.
Los valores aleatorios retornados en las distintas llamadas a la función .Rand son utilizados para determinar la
influencia real de las distancias a las mejores posiciones, cuyo efecto aleatorio ayuda a preservar la diversidad en la
población (Kennedy et al., 1995).
El parámetro de inercia w , introducido por Eberhart y Shi (Shi et al., 1998) ese utiliza para controlar el impacto de
las velocidades anteriores en el cálculo de la nueva velocidad de las partículas. Este parámetro controla el balance
entre la exploración global y local del espacio de búsqueda. Un valor grande para este parámetro permite que se
exploren nuevas áreas del espacio de búsqueda (exploración), mientras que un valor pequeño fomenta la exploración
del área cercana a la posición actual de la partícula (explotación).
Un esquema General de un enjambre de partículas es el siguiente:
INTELIGENCIA DE ENJAMBRE APLICADO AL DISEÑO SÍSMICO DE EDIFICACIONES DE ACERO
ATRAVES DEL MÉTODO ENJAMBRE DE PARTÍCULAS (METODOLOGÍA)
Para demostrar el potencial que tiene la Inteligencia de Enjambre como una herramienta en el diseño sísmico de
marcos planos estructurales de acero se mostrara el procedimiento mediante la Optimización por Enjambre de
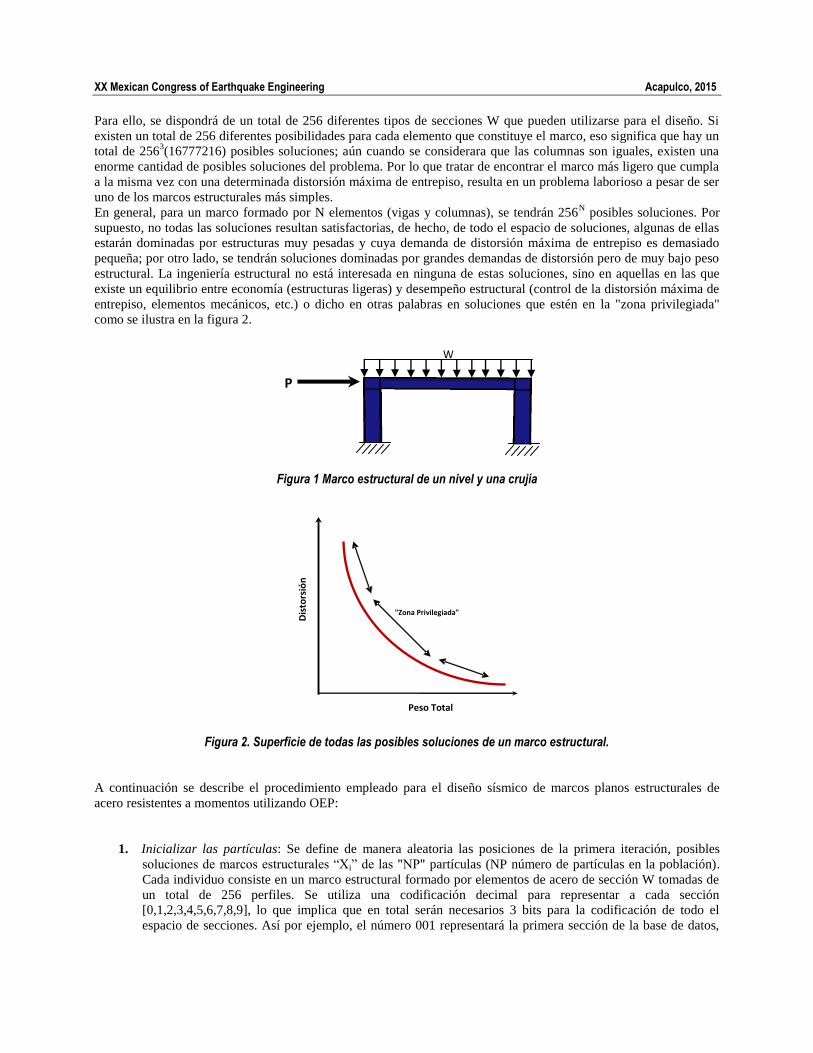
Partícula. Para ello, suponga que desea diseñar el marco de un nivel y una crujía mostrado en la figura 1 sometido a
la carga puntual p y distribuida w. El objetivo de diseño es minimizar el peso total WT de la estructura además de
satisfacer la distorsión máxima de entrepiso (γ) y los requerimientos de resistencia mediante funciones de restricción.
Comienzo
Inicializar (Partículas)
Iteración (0)
Mientras (no criterio parada) hacer:
Evaluar (Partículas)
Actualizar: Pbest y Gbest
Actualizar Velocidad y nueva Posición
Iteración + +
Retornar mejor solución encontrada.
XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Para ello, se dispondrá de un total de 256 diferentes tipos de secciones W que pueden utilizarse para el diseño. Si
existen un total de 256 diferentes posibilidades para cada elemento que constituye el marco, eso significa que hay un
total de 2563(16777216) posibles soluciones; aún cuando se considerara que las columnas son iguales, existen una
enorme cantidad de posibles soluciones del problema. Por lo que tratar de encontrar el marco más ligero que cumpla
a la misma vez con una determinada distorsión máxima de entrepiso, resulta en un problema laborioso a pesar de ser
uno de los marcos estructurales más simples.
En general, para un marco formado por N elementos (vigas y columnas), se tendrán 256N posibles soluciones. Por
supuesto, no todas las soluciones resultan satisfactorias, de hecho, de todo el espacio de soluciones, algunas de ellas
estarán dominadas por estructuras muy pesadas y cuya demanda de distorsión máxima de entrepiso es demasiado
pequeña; por otro lado, se tendrán soluciones dominadas por grandes demandas de distorsión pero de muy bajo peso
estructural. La ingeniería estructural no está interesada en ninguna de estas soluciones, sino en aquellas en las que
existe un equilibrio entre economía (estructuras ligeras) y desempeño estructural (control de la distorsión máxima de
entrepiso, elementos mecánicos, etc.) o dicho en otras palabras en soluciones que estén en la "zona privilegiada"
como se ilustra en la figura 2.
W
P
Figura 1 Marco estructural de un nivel y una crujía
Dis
tors
ión
"Zona Privilegiada"
Peso Total
Figura 2. Superficie de todas las posibles soluciones de un marco estructural.
A continuación se describe el procedimiento empleado para el diseño sísmico de marcos planos estructurales de
acero resistentes a momentos utilizando OEP:
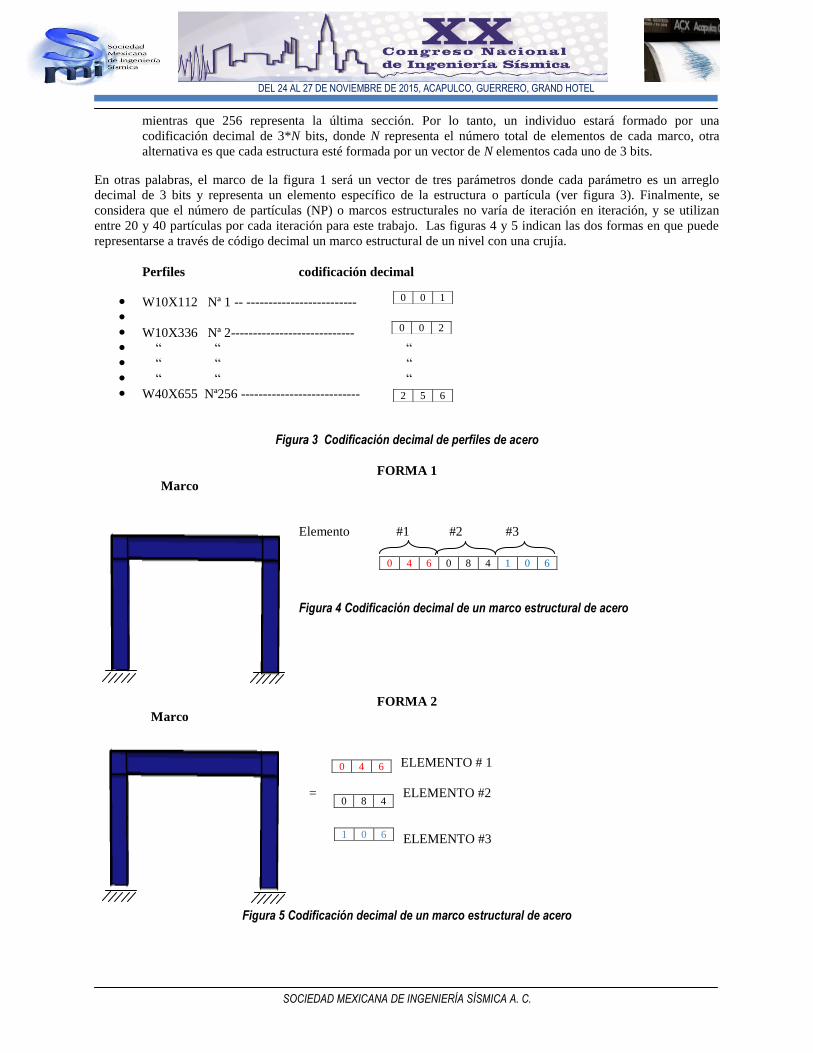
1. Inicializar las partículas: Se define de manera aleatoria las posiciones de la primera iteración, posibles
soluciones de marcos estructurales “Xi” de las "NP" partículas (NP número de partículas en la población).
Cada individuo consiste en un marco estructural formado por elementos de acero de sección W tomadas de
un total de 256 perfiles. Se utiliza una codificación decimal para representar a cada sección
[0,1,2,3,4,5,6,7,8,9], lo que implica que en total serán necesarios 3 bits para la codificación de todo el
espacio de secciones. Así por ejemplo, el número 001 representará la primera sección de la base de datos,
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
mientras que 256 representa la última sección. Por lo tanto, un individuo estará formado por una
codificación decimal de 3*N bits, donde N representa el número total de elementos de cada marco, otra
alternativa es que cada estructura esté formada por un vector de N elementos cada uno de 3 bits.
En otras palabras, el marco de la figura 1 será un vector de tres parámetros donde cada parámetro es un arreglo
decimal de 3 bits y representa un elemento específico de la estructura o partícula (ver figura 3). Finalmente, se
considera que el número de partículas (NP) o marcos estructurales no varía de iteración en iteración, y se utilizan
entre 20 y 40 partículas por cada iteración para este trabajo. Las figuras 4 y 5 indican las dos formas en que puede
representarse a través de código decimal un marco estructural de un nivel con una crujía.
Perfiles codificación decimal
W10X112 Nª 1 -- -------------------------
W10X336 Nª 2----------------------------
“ “ “
“ “ “
“ “ “
W40X655 Nª256 ---------------------------
Figura 3 Codificación decimal de perfiles de acero
FORMA 1 Marco
Elemento #1 #2 #3
Figura 4 Codificación decimal de un marco estructural de acero
FORMA 2
Marco
ELEMENTO # 1
= ELEMENTO #2
ELEMENTO #3
Figura 5 Codificación decimal de un marco estructural de acero
0 0 1
0 0 2
2 5 6
0 4 6 0 8 4 1 0 6
0 4 6
0 8 4
1 0 6

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
2. Evaluación de las partículas: En este paso se hace el análisis de los marcos estructurales, se determinan las
cargas gravitatorias y las cargas debidas a sismo mediante el método estático de análisis sísmico, y se
realiza un análisis elástico lineal de cada una de las (NP) posibles soluciones.
3. Funciones objetivo o de adaptación: Las expresiones matemáticas que se utilizan para medir la capacidad
de adaptación de una partícula o estructura son las siguientes:
Minimizar pTu FWF * (3)
Sujeto a: c (4)
donde:
0.19
8
cy
ry
cx
rx
c
r
M
M
M
M
P
P Para 2.0
c
r
P
P (5)
0.12
cy
ry
cx
rx
c
r
M
M
M
M
P
P Para 2.0
c
r
P
P
si
si
k
F
i
p
1
(6)
donde uF es la función objetivo; pF la función de penalización para aquellas soluciones que violan la limitación
impuesta a la distorsión máxima de entrepiso y a los requerimientos de resistencia (ecuaciones 4 y 5); i es la
densidad del acero; iL la longitud del elemento i; iA el área de la sección i; es la demanda distorsión máxima de
entrepiso, c es la capacidad de distorsión máxima. rP y rM son las resistencias requeridas por tensión y por
flexión, cP y cM son las resistencias disponibles por tensión y flexión y ik es una constante de penalización, los
marcos de acero seleccionados serán aquellos con los menores valores de la función objetivo dada.
4. Actualizar Pbestij y Gbestj: Pbest representa la posición (los elementos o secciones del marco) que ha tenido
mejor función objetivo de la partícula i, Gbest representa la posición (los elementos o secciones del marco)
de la mejor función objetivo de entre todas las Pbest en la población. Una vez que se evaluaron todas las
partículas se actualiza la mejor posición personal (Pbestij), comparándose la función objetivo de la posición
actual de la partícula con Pbestij-1, si es menor entonces Pbestij será la posición actual de la partícula, de lo
contrario Pbestij= Pbestij-1 (en el caso de ser la primera iteración automáticamente será la mejor posición
personal puesto que no existe antecedente). La mejor posición global (Gbesti) será la mejor posición de
entre todas las mejores posiciones personales.
Se satisfacen las ecs. 4 y 5.
No se satisfacen las ecs. 4 y 5.
ii
Ni
i
iT ALW
1

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
5. Creación de la nueva iteración: Para crear la nueva iteración es necesario actualizar Vij (t+1) y Xij (t+1). La
velocidad es la que determinará el movimiento de la partícula (cambio de elementos o secciones del marco)
y representa la distancia a recorrer de esta partícula desde la posición actual (secciones actuales), se calcula
con la ecuación 1, y la posición nueva de la partícula con la ecuación 2, y se regresa al paso 2.
Se hace este procedimiento hasta que se satisfaga el criterio de “convergencia”, que significa que el objetivo ya no
puede mejorarse, por lo que el mismo marco tiende a repetirse cuando se presenta la convergencia y se prosigue con
las iteraciones o hasta que se alcance un determinado número de iteraciones deseadas.
RESULTADOS NUMÉRICOS
En la sección anterior se mostró el procedimiento para aplicar la Optimización por Enjambre de Partículas al diseño
sismo-resistente de edificaciones de acero. En este capítulo, se aplica el procedimiento descrito para diseñar dos
marcos planos de acero estructural. La primera estructura consiste en una edificación de dos niveles con dos crujías,
la segunda de cuatro niveles con dos crujías. Se procede a buscar el diseño óptimo por medio de la técnica OEP, esto
con el fin de mostrar el gran potencial que tiene el método en el diseño sísmico de marcos estructurales, o en general
para la solución de problemas de ingeniería.
EJEMPLO 1: Marco de 2 niveles con 2 crujías.
El primer ejemplo de diseño que se pretende optimizar se ilustra en la figura 6, que consiste en un marco estructural
de acero de dos niveles y dos crujías con las dimensiones que se indican. Para simular el efecto de un sismo se
colocaron dos cargas laterales de 4 y 8 toneladas respectivamente. Por otro lado, las cargas distribuidas son
representativas de cargas muertas y vivas. El ejemplo consiste en encontrar los perfiles de acero que satisfagan los
requerimientos de resistencia del LRFD (2010), así como controlar una distorsión máxima de entrepiso igual a 0.01,
los mismos requerimientos se utilizan para el diseño de la edificación de 4 niveles plana que se muestra en la figura
7.
7 m 7m
Figura 6 Características geométricas y cargas sobre un marco estructural de dos niveles y dos crujías
2.5 t/m
8.00 ton
C2
C1
C6
C5
C4
C3
4.00 ton
2.5t/m V3 V4
V2 V1
2.5t/m
XX Mexican Congress of Earthquake Engineering Acapulco, 2015
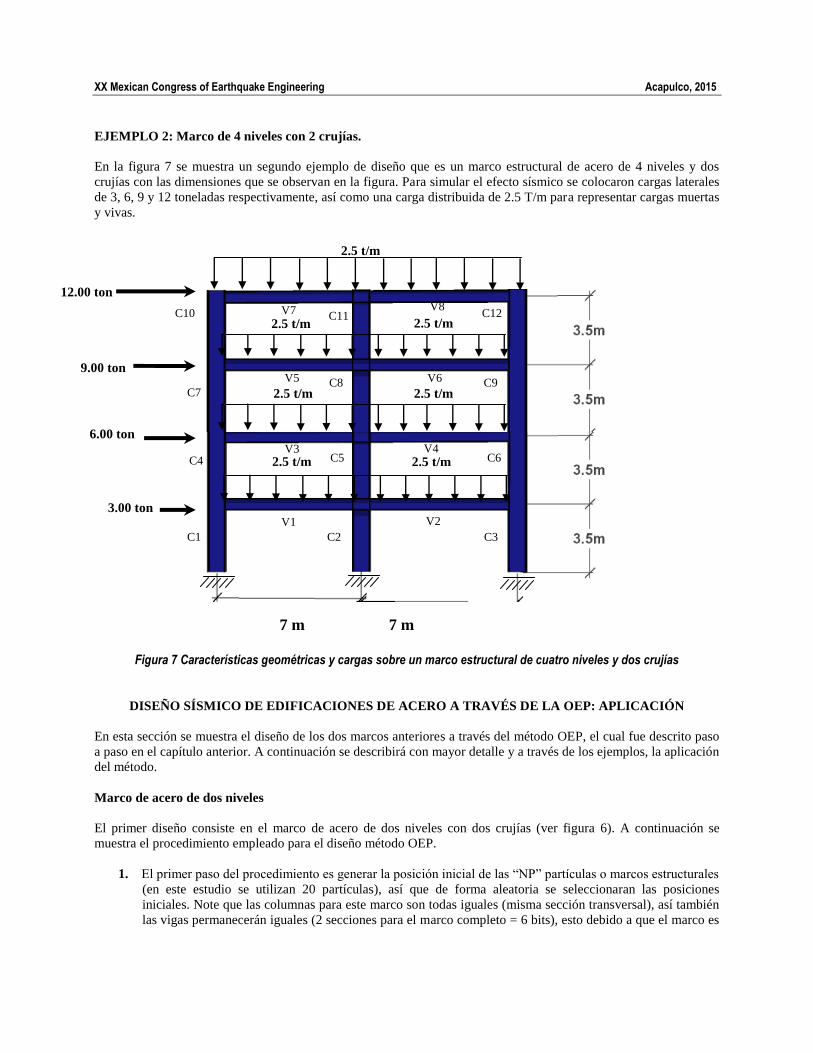
EJEMPLO 2: Marco de 4 niveles con 2 crujías.
En la figura 7 se muestra un segundo ejemplo de diseño que es un marco estructural de acero de 4 niveles y dos
crujías con las dimensiones que se observan en la figura. Para simular el efecto sísmico se colocaron cargas laterales
de 3, 6, 9 y 12 toneladas respectivamente, así como una carga distribuida de 2.5 T/m para representar cargas muertas
y vivas.
7 m 7 m
Figura 7 Características geométricas y cargas sobre un marco estructural de cuatro niveles y dos crujías
DISEÑO SÍSMICO DE EDIFICACIONES DE ACERO A TRAVÉS DE LA OEP: APLICACIÓN
En esta sección se muestra el diseño de los dos marcos anteriores a través del método OEP, el cual fue descrito paso
a paso en el capítulo anterior. A continuación se describirá con mayor detalle y a través de los ejemplos, la aplicación
del método.
Marco de acero de dos niveles
El primer diseño consiste en el marco de acero de dos niveles con dos crujías (ver figura 6). A continuación se
muestra el procedimiento empleado para el diseño método OEP.
1. El primer paso del procedimiento es generar la posición inicial de las “NP” partículas o marcos estructurales
(en este estudio se utilizan 20 partículas), así que de forma aleatoria se seleccionaran las posiciones
iniciales. Note que las columnas para este marco son todas iguales (misma sección transversal), así también
las vigas permanecerán iguales (2 secciones para el marco completo = 6 bits), esto debido a que el marco es
9.00 ton
12.00 ton
C1
3.00 ton
6.00 ton
2.5 t/m
2.5 t/m 2.5 t/m
2.5 t/m 2.5 t/m
2.5 t/m 2.5 t/m
V1
C2 C3
C4 C5 C6
C7 C8 C9
C10 C11 C12
V2
V3 V4
V5 V6
V7 V8
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
pequeño y también con el fin de tener facilidad constructiva. En otras palabras por simplicidad el perfil para
los elementos C1 a C6 seleccionado será idéntico, lo mismo sucede para el caso de los elementos V1 a V4
(vigas).
2. Evaluación de las partículas iniciales: Se determinan las cargas gravitatorias y las cargas debidas a sismo
mediante el método estático de análisis sísmico, las cuales se indicaron en la figura 6, y se realizó el análisis
estructural de cada una de las 20 posibles soluciones. Los resultados se indican en el siguiente paso
considerando el diseño y la función objetivo.
3. Una vez que los marcos tienen asignados las cargas y secciones y se realizaron los análisis, se utilizan las
formulas del paso 3 del proceso explicado anteriormente para estimar la función objetivo.
4. Una vez evaluadas las funciones objetivo se procede a actualizar la mejor posición personal Pbestij (posición
de la mejor función objetivo hasta el momento), comparándose la función objetivo de la posición actual de
la partícula con Pbestij-1, si es menor entonces Pbesti será la posición actual de la partícula, de lo contrario
Pbestij= Pbestij-1(en el caso de ser la primera iteración automáticamente será la mejor posición personal
puesto que no existe antecedente). La mejor posición global (Gbestj) será la mejor posición de entre todas
las mejores posiciones personales.
5. Creación de la nueva iteración: Para crear la nueva iteración es necesario actualizar Vij (t+1) y Xij (t+1), La
velocidad es la que determinará el movimiento de la partícula y representa la distancia a recorrer de esta
partícula desde la posición actual, se calcula con la ecuación 1, y la posición nueva de la partícula con la
ecuación 2, y se regresa al paso 2.
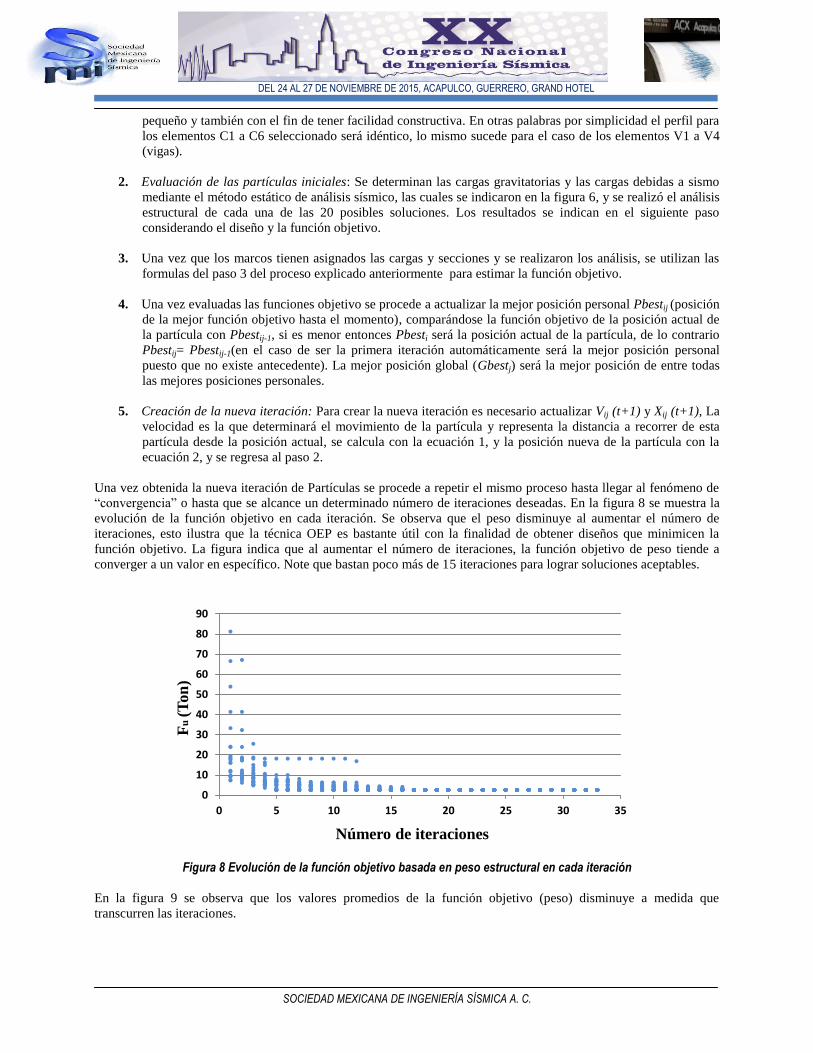
Una vez obtenida la nueva iteración de Partículas se procede a repetir el mismo proceso hasta llegar al fenómeno de
“convergencia” o hasta que se alcance un determinado número de iteraciones deseadas. En la figura 8 se muestra la
evolución de la función objetivo en cada iteración. Se observa que el peso disminuye al aumentar el número de
iteraciones, esto ilustra que la técnica OEP es bastante útil con la finalidad de obtener diseños que minimicen la
función objetivo. La figura indica que al aumentar el número de iteraciones, la función objetivo de peso tiende a
converger a un valor en específico. Note que bastan poco más de 15 iteraciones para lograr soluciones aceptables.
0
10
20
30
40
50
60
70
80
90
0 5 10 15 20 25 30 35
Fu
(T
on
)
Número de iteraciones
Figura 8 Evolución de la función objetivo basada en peso estructural en cada iteración
En la figura 9 se observa que los valores promedios de la función objetivo (peso) disminuye a medida que
transcurren las iteraciones.

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
0
20
40
60
80
100
120
140
0 5 10 15 20 25 30
Fu
(Ton
)
Número de iteraciones
Figura 9 Valores promedios Fu de cada iteración (marco 2 niveles)
DISEÑO ESTRUCTURAL OBTENIDO CON OEP
Después de hacer varias iteraciones en el marco que se obtuvo (viga-W14x34, columna–W14x34) la viga ensambla
perfectamente en la columna, y se puede observar que el factor de resistencia de cada elemento (ver ecuación 5) no
sobrepasa de la unidad, por lo que el diseño es aceptable en términos de resistencia y seguridad ya que los elementos
utilizan en promedio entre 80% y 99% de su capacidad total de resistencia, lo cual es un buen indicador de que el
diseño es bastante atractivo. Por todo lo anterior, el diseño final obtenido a través del método OEP representa en
términos de economía una solución razonable. Es importante mencionar que la distorsión es menor que 0.01.
Tabla 1 Resultados finales de peso y distorsión del marco de 2 niveles con dos crujías diseñado por el método OEP
Peso (ton) Distorsión
2.4813 0.00646
Análisis del marco de acero de cuatro niveles
De la misma forma en que se realizó el diseño para el marco de dos niveles, se hace para el marco de cuatro niveles,
con la excepción de que se omitirán algunos pasos por simplicidad. El marco a diseñar corresponde al mostrado en la
figura 7. Para este marco se utilizaron 4 secciones distintas 2 para columnas (C1 a C6 = Columna 1 y de C7 a C12 =
Columna 2) y 2 para vigas (V1 a V4 = Viga 1 y de V5 a V8 = Viga 2) por lo tanto, se utilizaron 12 bits para la
codificación. Esto concluye que ahora el proceso requerirá mayor tiempo de cómputo, debido a que el problema es
un poco más complejo.
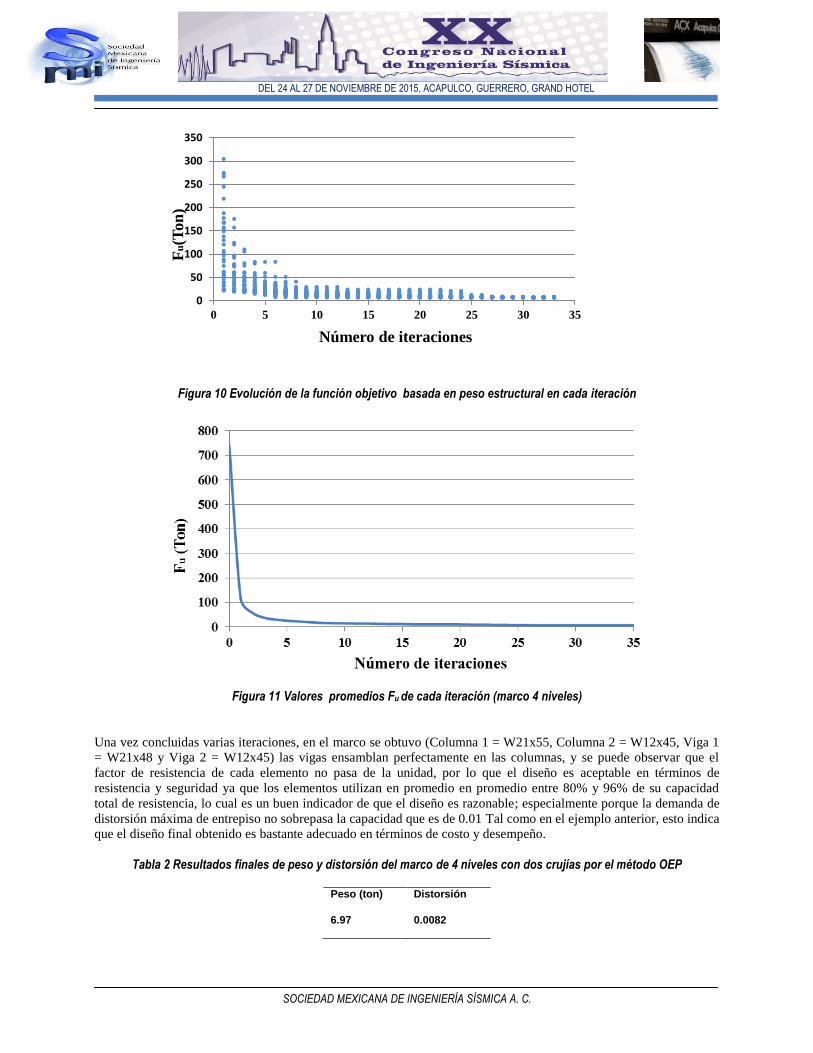
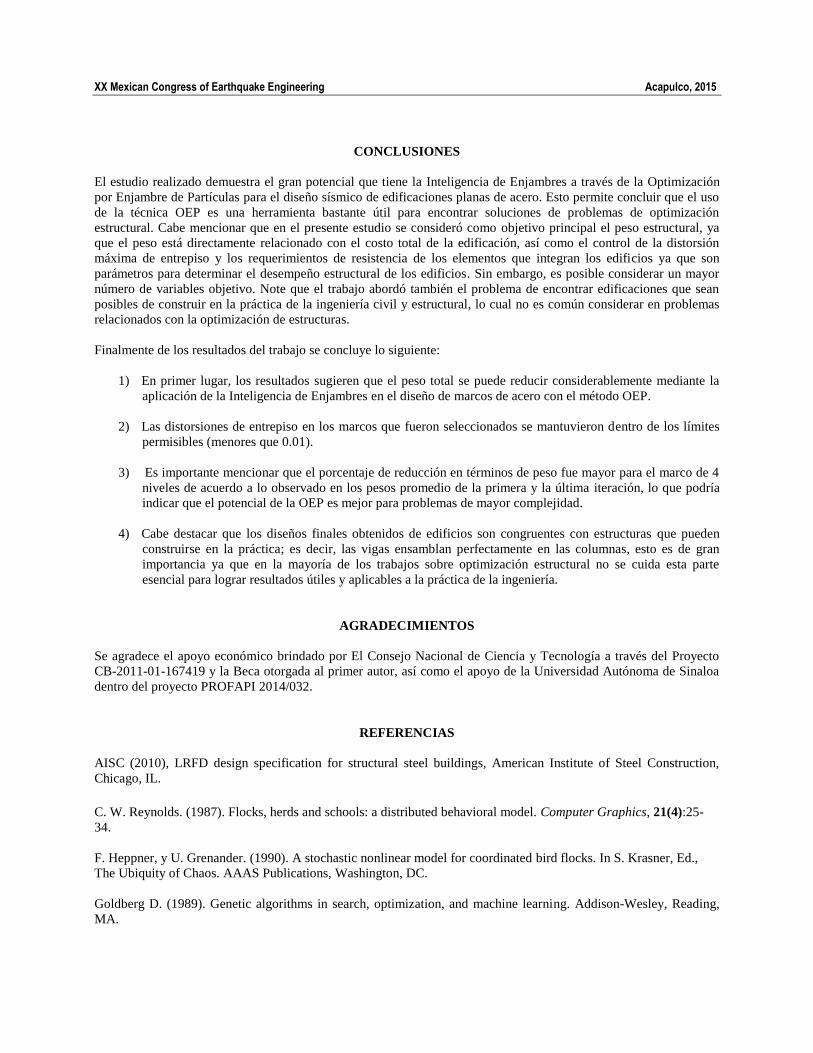
En las figuras 10 y 11 se pueden apreciar los resultados finales de la función objetivo (peso). Los resultados
muestran que la función objetivo va disminuyendo conforme el número de iteraciones aumenta, también se puede
apreciar que existe convergencia.
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
0
50
100
150
200
250
300
350
0 5 10 15 20 25 30 35
Fu(T
on
)
Número de iteraciones
Figura 10 Evolución de la función objetivo basada en peso estructural en cada iteración
Figura 11 Valores promedios Fu de cada iteración (marco 4 niveles)
Una vez concluidas varias iteraciones, en el marco se obtuvo (Columna 1 = W21x55, Columna 2 = W12x45, Viga 1
= W21x48 y Viga 2 = W12x45) las vigas ensamblan perfectamente en las columnas, y se puede observar que el
factor de resistencia de cada elemento no pasa de la unidad, por lo que el diseño es aceptable en términos de
resistencia y seguridad ya que los elementos utilizan en promedio en promedio entre 80% y 96% de su capacidad
total de resistencia, lo cual es un buen indicador de que el diseño es razonable; especialmente porque la demanda de
distorsión máxima de entrepiso no sobrepasa la capacidad que es de 0.01 Tal como en el ejemplo anterior, esto indica
que el diseño final obtenido es bastante adecuado en términos de costo y desempeño.
Tabla 2 Resultados finales de peso y distorsión del marco de 4 niveles con dos crujías por el método OEP
Peso (ton) Distorsión
6.97 0.0082
XX Mexican Congress of Earthquake Engineering Acapulco, 2015
CONCLUSIONES
El estudio realizado demuestra el gran potencial que tiene la Inteligencia de Enjambres a través de la Optimización
por Enjambre de Partículas para el diseño sísmico de edificaciones planas de acero. Esto permite concluir que el uso
de la técnica OEP es una herramienta bastante útil para encontrar soluciones de problemas de optimización
estructural. Cabe mencionar que en el presente estudio se consideró como objetivo principal el peso estructural, ya
que el peso está directamente relacionado con el costo total de la edificación, así como el control de la distorsión
máxima de entrepiso y los requerimientos de resistencia de los elementos que integran los edificios ya que son
parámetros para determinar el desempeño estructural de los edificios. Sin embargo, es posible considerar un mayor
número de variables objetivo. Note que el trabajo abordó también el problema de encontrar edificaciones que sean
posibles de construir en la práctica de la ingeniería civil y estructural, lo cual no es común considerar en problemas
relacionados con la optimización de estructuras.
Finalmente de los resultados del trabajo se concluye lo siguiente:
1) En primer lugar, los resultados sugieren que el peso total se puede reducir considerablemente mediante la
aplicación de la Inteligencia de Enjambres en el diseño de marcos de acero con el método OEP.
2) Las distorsiones de entrepiso en los marcos que fueron seleccionados se mantuvieron dentro de los límites
permisibles (menores que 0.01).
3) Es importante mencionar que el porcentaje de reducción en términos de peso fue mayor para el marco de 4
niveles de acuerdo a lo observado en los pesos promedio de la primera y la última iteración, lo que podría
indicar que el potencial de la OEP es mejor para problemas de mayor complejidad.
4) Cabe destacar que los diseños finales obtenidos de edificios son congruentes con estructuras que pueden
construirse en la práctica; es decir, las vigas ensamblan perfectamente en las columnas, esto es de gran
importancia ya que en la mayoría de los trabajos sobre optimización estructural no se cuida esta parte
esencial para lograr resultados útiles y aplicables a la práctica de la ingeniería.
AGRADECIMIENTOS
Se agradece el apoyo económico brindado por El Consejo Nacional de Ciencia y Tecnología a través del Proyecto
CB-2011-01-167419 y la Beca otorgada al primer autor, así como el apoyo de la Universidad Autónoma de Sinaloa
dentro del proyecto PROFAPI 2014/032.
REFERENCIAS
AISC (2010), LRFD design specification for structural steel buildings, American Institute of Steel Construction,
Chicago, IL.
C. W. Reynolds. (1987). Flocks, herds and schools: a distributed behavioral model. Computer Graphics, 21(4):25-
34.
F. Heppner, y U. Grenander. (1990). A stochastic nonlinear model for coordinated bird flocks. In S. Krasner, Ed.,
The Ubiquity of Chaos. AAAS Publications, Washington, DC.
Goldberg D. (1989). Genetic algorithms in search, optimization, and machine learning. Addison-Wesley, Reading,
MA.

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
H. M. Gomes. (2011). Truss optimization with dynamic constraints using a particle swarm algorithm. Expert Systems
with Applications. 38: 957–968.
Holland, J.H. (1975). Adaptation in natural and artificial systems. University of Michigan Press, Ann Arbor, Mich.
M. Eslami, H. Shareef, M. Khajehzadeh, y A. Mohamed. (2012). A Survey of the State of the Art in Particle Swarm
Optimization. Research journal of Applied Sciences, Engineering and Technology 4(9): 1181-1197.
R. C. Eberhart, y J. Kennedy. (1995). A new optimizer using particle swarm theory. Proceedings of the Sixth
International Symposium on Micromachine and Human Science, Nagoya, Japan. pp. 39-43.
R.E. Perez a,y K. Behdinan. (2007). Particle swarm approach for structural design optimization. Computers and
Structures 85: 1579–1588.
Sonmez, M. (2011). Artificial bee colony algorithm for optimization of truss structures. Applied Soft Computing 11,
2406-2418.
Y. Shi, y R. C. Eberhart. (1998). A modified Particle Swarm Optimizer, IEEE International Conference on
Evolutionary Computation, Anchorage, Alaska.