criterio de estabilidad de routh-hurwitz - d e a ...dea.unsj.edu.ar/control2/03-criterio de...
TRANSCRIPT

Criterio de Estabilidad de Routh-Hurwitz
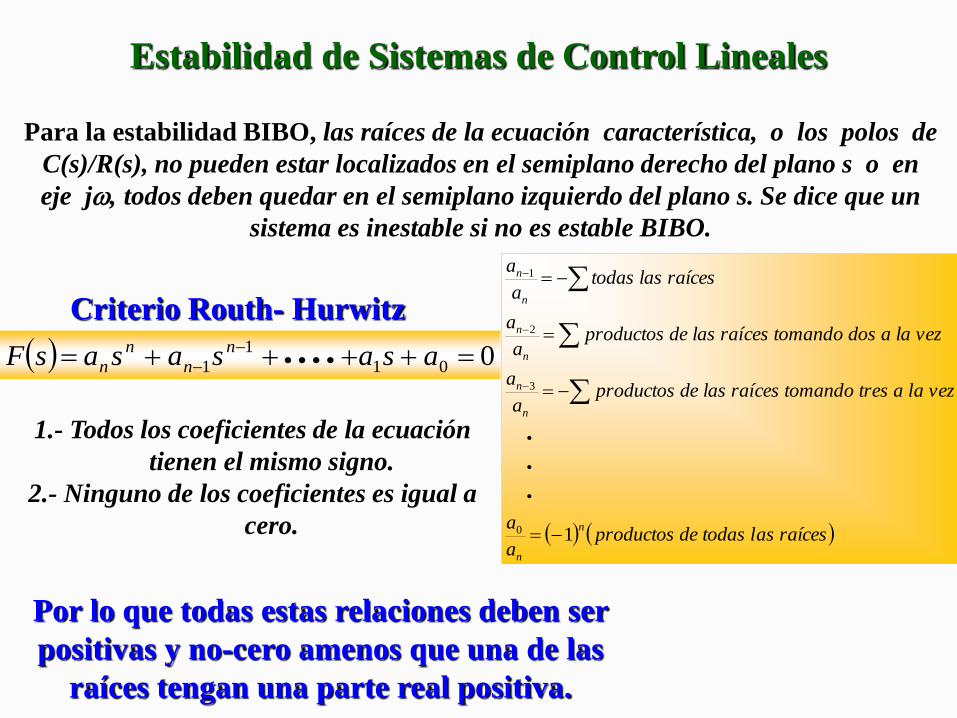
Para la estabilidad BIBO, las raíces de la ecuación característica, o los polos de
C(s)/R(s), no pueden estar localizados en el semiplano derecho del plano s o en
eje j, todos deben quedar en el semiplano izquierdo del plano s. Se dice que un
sistema es inestable si no es estable BIBO.
Criterio Routh- Hurwitz
001
1
1
asasasasF n
n
n
n
1.- Todos los coeficientes de la ecuación
tienen el mismo signo.
2.- Ninguno de los coeficientes es igual a
cero. as raícesde todas lproductos a
a
a vezo tres a lces tomandde las raíproductos a
a
vezo dos a laces tomandde las raíproductos a
a
raícestodas las a
a
n
n
n
n
n
n
n
n
1
0
3
2
1
Por lo que todas estas relaciones deben ser
positivas y no-cero amenos que una de las
raíces tengan una parte real positiva.
Estabilidad de Sistemas de Control Lineales
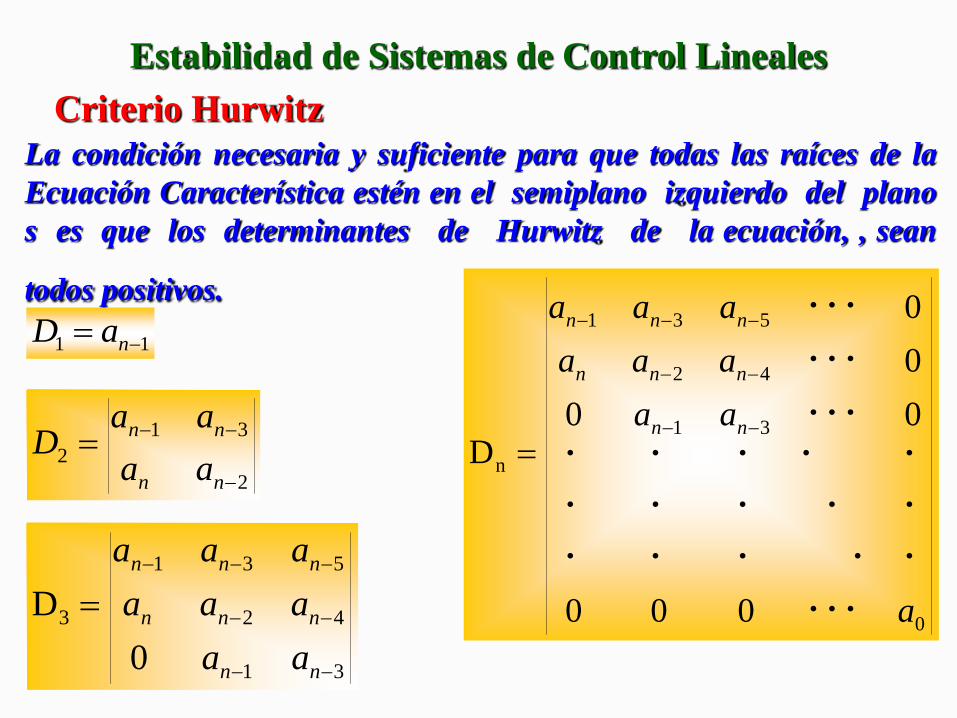
La condición necesaria y suficiente para que todas las raíces de la
Ecuación Característica estén en el semiplano izquierdo del plano
s es que los determinantes de Hurwitz de la ecuación, , sean
todos positivos.
Criterio Hurwitz
Estabilidad de Sistemas de Control Lineales
11 naD
2
31
2
nn
nn
aa
aaD
31
42
531
3
0
D
nn
nnn
nnn
aa
aaa
aaa
0
31
42
531
n
000
00
0
0
D
a
aa
aaa
aaa
nn
nnn
nnn
0............ 0
1
1
2
2
1
1
asasasasa n
n
n
n
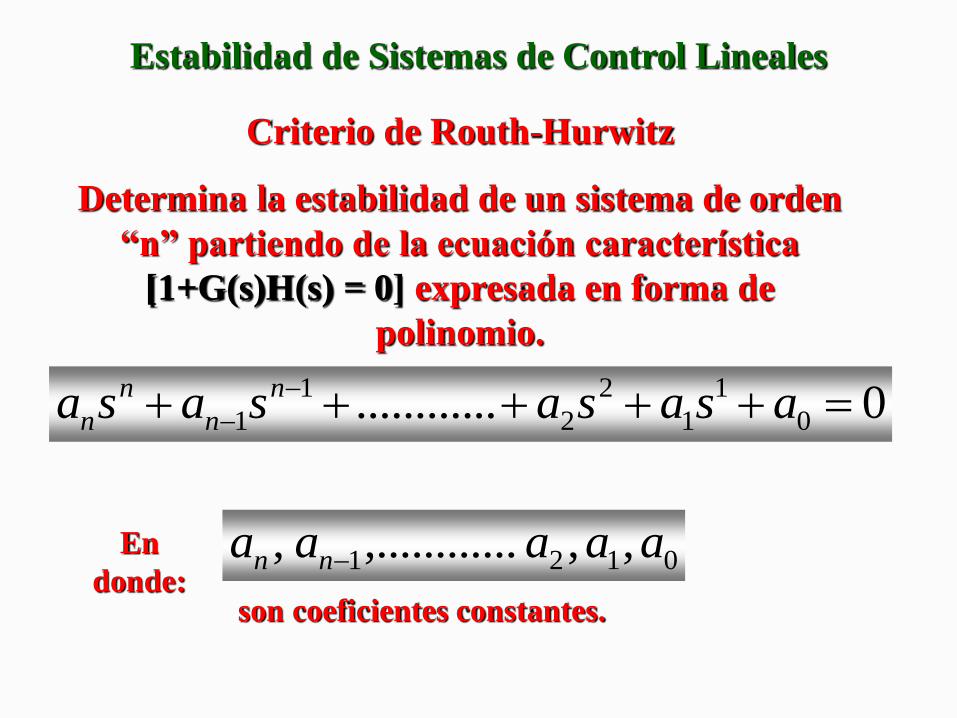
Criterio de Routh-Hurwitz
Determina la estabilidad de un sistema de orden
“n” partiendo de la ecuación característica
[1+G(s)H(s) = 0] expresada en forma de
polinomio.
Estabilidad de Sistemas de Control Lineales
En
donde: 0121 ,,...,........., aaaaa nn
son coeficientes constantes.
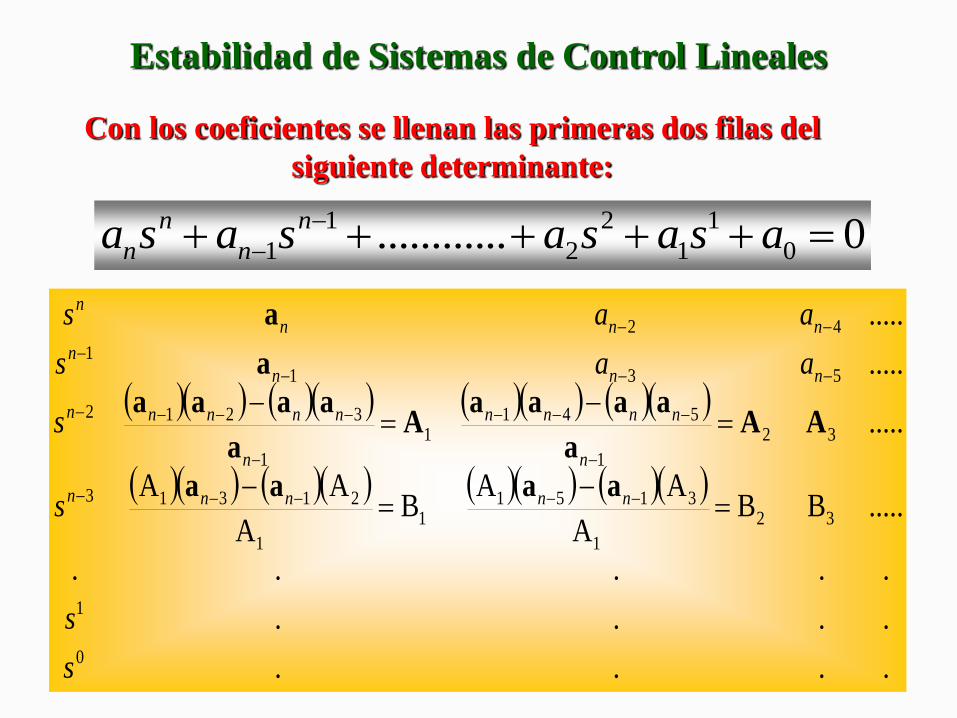
Con los coeficientes se llenan las primeras dos filas del
siguiente determinante:
Estabilidad de Sistemas de Control Lineales
....
....
.....
.....BBA
AAB
A
AA
.....
.....
.....
0
1
32
1
31511
1
21313
32
1
5411
1
3212
531
1
42
s
s
s
s
aas
aas
nnnnn
n
nnnn
n
nnnnn
nnn
n
nnn
n
aaaa
AAa
aaaaA
a
aaaa
a
a
0............ 0
1
1
2
2
1
1
asasasasa n
n
n
n
00
1
1
2
2
3
3
4
4
5
5
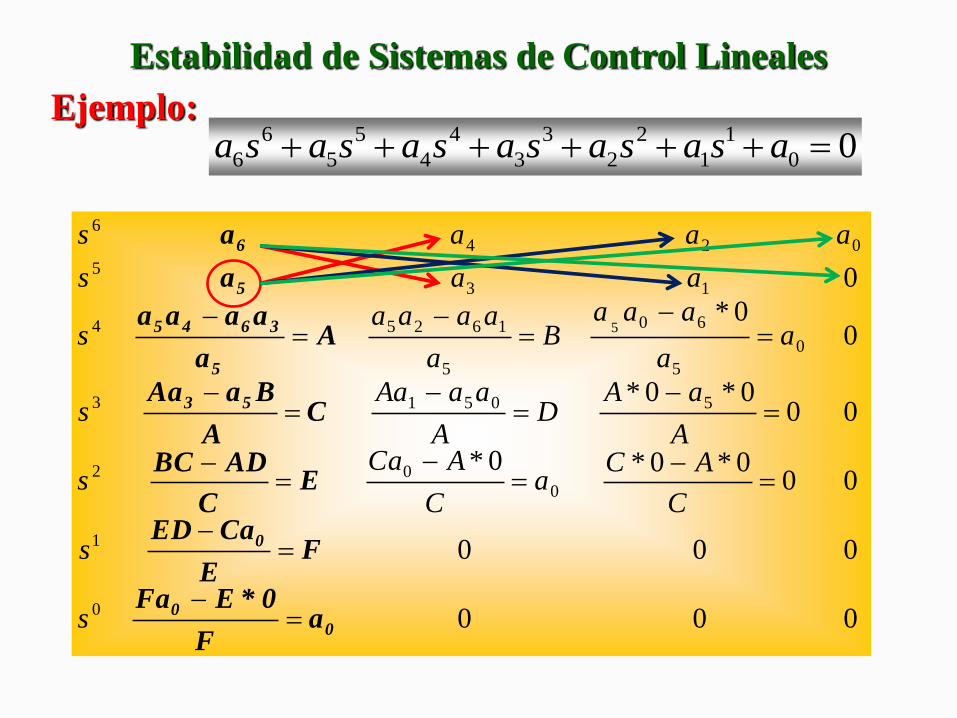
6
6 asasasasasasaEjemplo:
Estabilidad de Sistemas de Control Lineales
000
000
000*0*0*
000*0*
00*
0
0
1
0
02
50513
0
5
60
5
16254
13
5
024
6
5
0
0
0
53
5
3645
5
6
aF
0*EFa
FE
CaED
EC
ADBC
CA
BaAa
Aa
aaaa
a
a
s
s
C
ACa
C
ACas
A
aAD
A
aaAas
aa
aaaB
a
aaaas
aas
aaas
El Criterio de Estabilidad de Routh-Hurwitz establece lo
siguiente:
Cada cambio de signo en la primera columna del
determinante denota la presencia de un polo en el
semiplano derecho del Plano “s”, siendo el sistema
inestable.
Esto significa lo siguiente: Para que un sistema sea estable,
no debe haber cambios de signo en la primera columna.
Estabilidad de Sistemas de Control Lineales
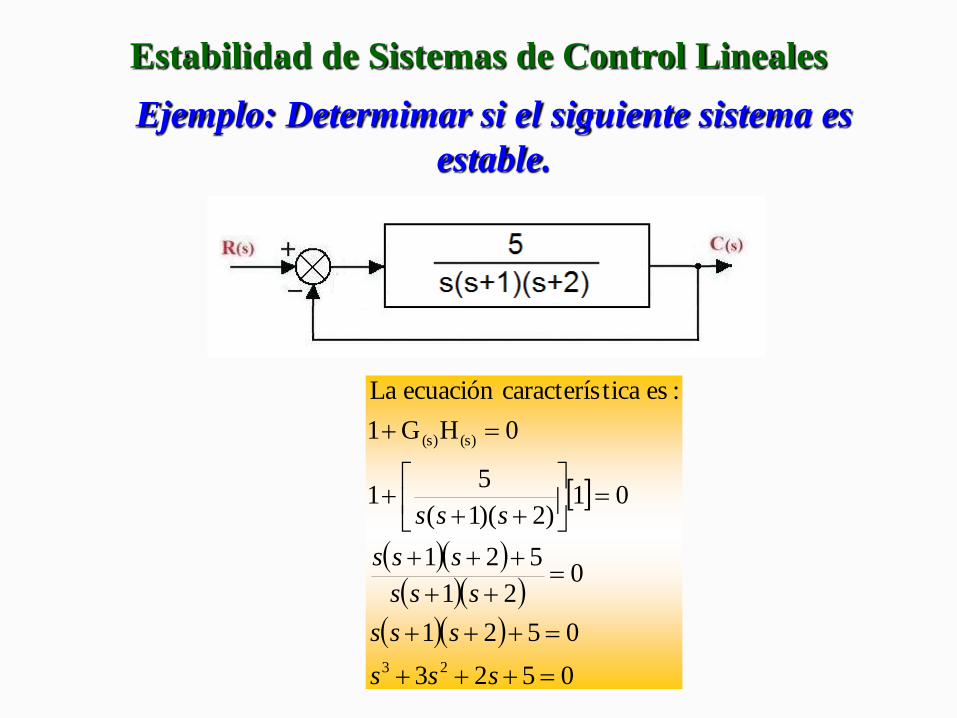
Ejemplo: Determimar si el siguiente sistema es
estable.
0523
0521
021
521
01)2)(1(
51
0HG1
:es ticacaracterísecuación La
23
(s)(s)
sss
sss
sss
sss
sss
Estabilidad de Sistemas de Control Lineales
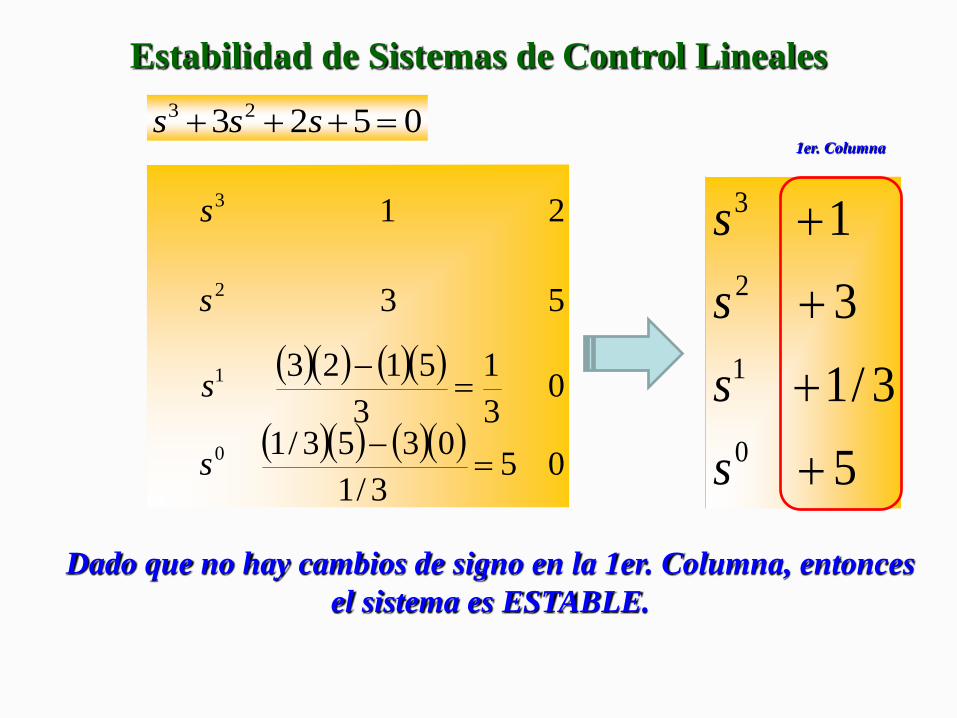
0523 23 sss
Estabilidad de Sistemas de Control Lineales
05
3/1
0353/1
03
1
3
5123
53
21
0
1
2
3
s
s
s
s
Dado que no hay cambios de signo en la 1er. Columna, entonces
el sistema es ESTABLE.
5
3/1
3
1
0
1
2
3
s
s
s
s
1er. Columna
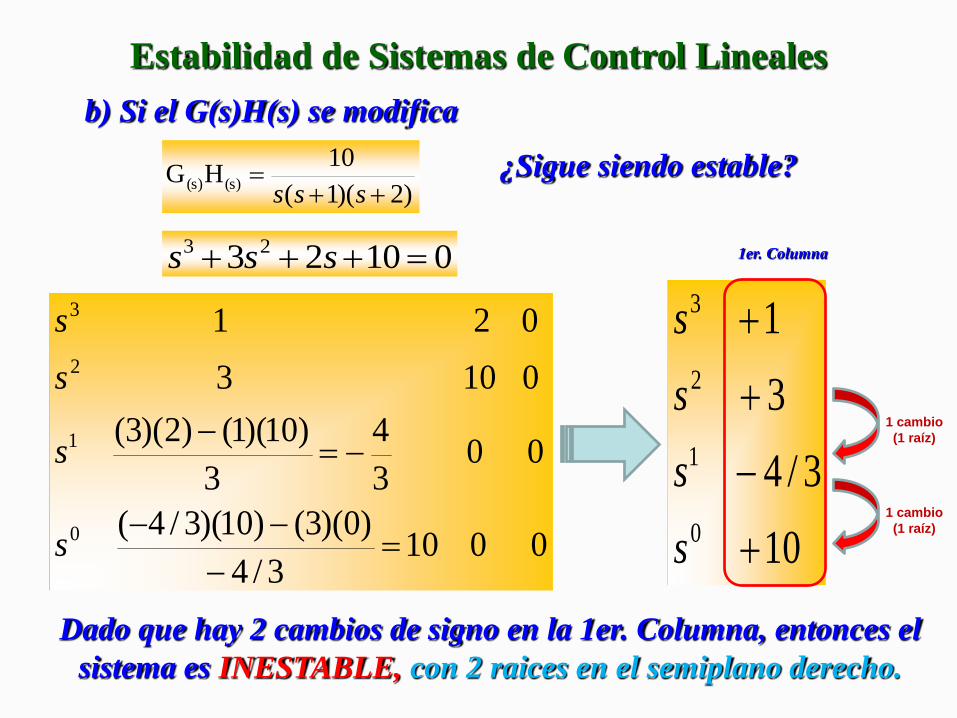
01023 23 sss
Estabilidad de Sistemas de Control Lineales
00103/4
)0)(3()10)(3/4(
003
4
3
)10)(1()2)(3(
0103
021
0
1
2
3
s
s
s
s
10
3/4
3
1
0
1
2
3
s
s
s
s
1er. Columna
b) Si el G(s)H(s) se modifica
)2)(1(
10HG (s)(s)
sss¿Sigue siendo estable?
Dado que hay 2 cambios de signo en la 1er. Columna, entonces el
sistema es INESTABLE, con 2 raices en el semiplano derecho.
1 cambio
(1 raíz)
1 cambio
(1 raíz)
Casos especiales temas de Control Lineales
Qué ocurre si en los cálculos, nos aparece un 0 en la primera
columna?.
En este caso se presentan dos problemas:
1- No podremos calcular los coeficientes de la siguiente fila, ya que
habrá que dividir por 0.
2- ¿Es posible considerar que hay un cambio de signo cuando un
número se compara con el 0?.
El hecho de que aparezca un cero en la primera columna (siendo el
resto de la fila no nulo), se debe, por así decirlo, al azar.
Qué ocurre si en los cálculos, nos aparece un 0 en la primera columna?. En este caso se presentan dos problemas: 1- No podremos calcular los coeficientes de la siguiente fila, ya que habrá que dividir por 0. 2- ¿Es posible considerar que hay un cambio de signo cuando un número se compara con el 0?. El hecho de que aparezca un cero en la primera columna (siendo el resto de la fila no nulo), se debe, por así decirlo, al azar.
Casos Especiales
Teorema 1: División de una fila. Los coeficientes de cualquier fila pueden ser multiplicados o divididos por un número positivo sin cambiar los signos de la primera columna. Esto facilita evaluar los coeficientes del arreglo al convertir números fraccionales en enteros.
Casos Especiales
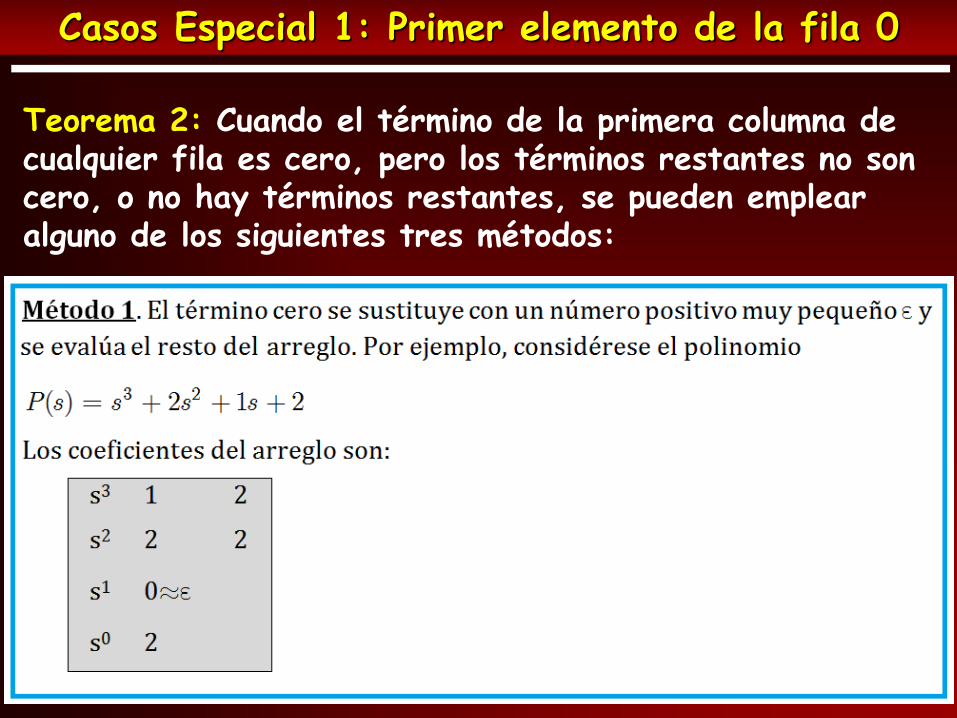
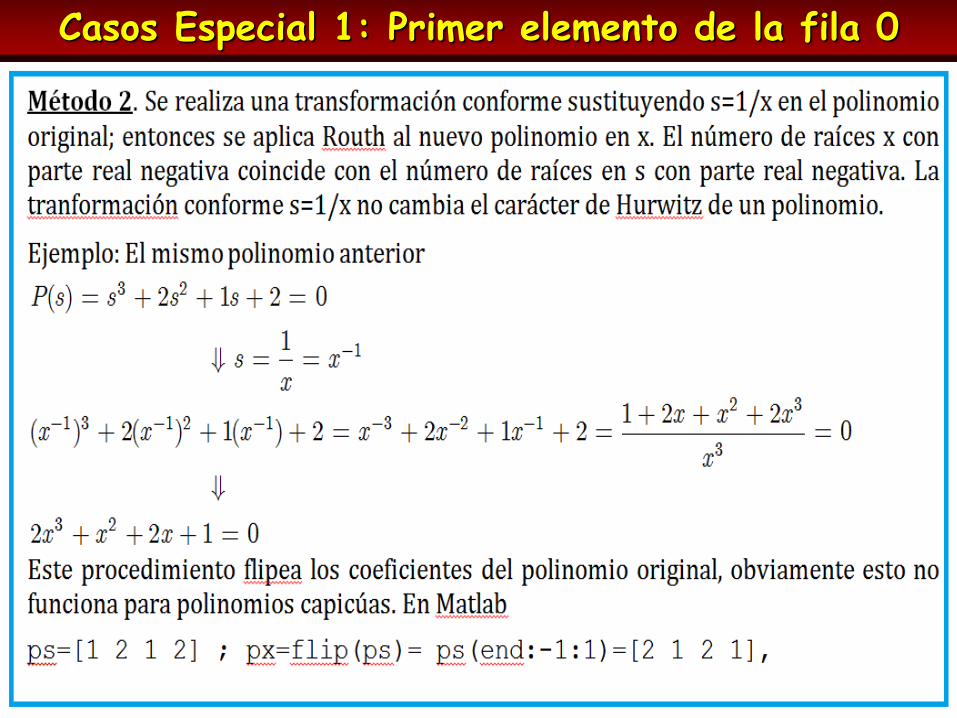
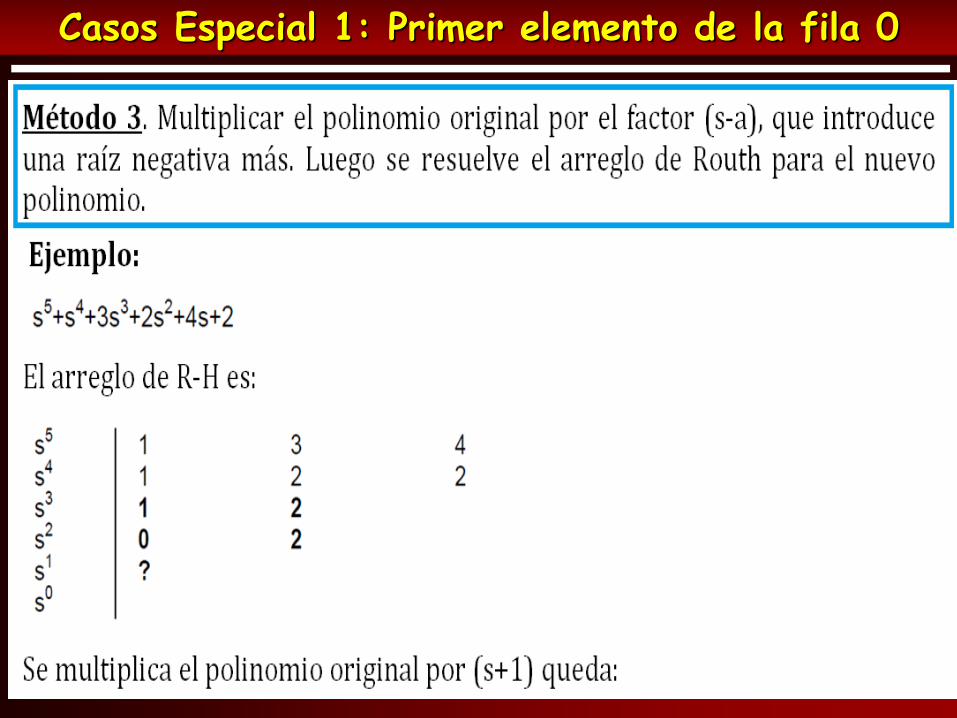
Teorema 2: Cuando el término de la primera columna de cualquier fila es cero, pero los términos restantes no son cero, o no hay términos restantes, se pueden emplear alguno de los siguientes tres métodos:
Casos Especial 1: Primer elemento de la fila 0
Casos Especial 1: Primer elemento de la fila 0
Casos Especial 1: Primer elemento de la fila 0

Casos Especial 1: Primer elemento de la fila 0
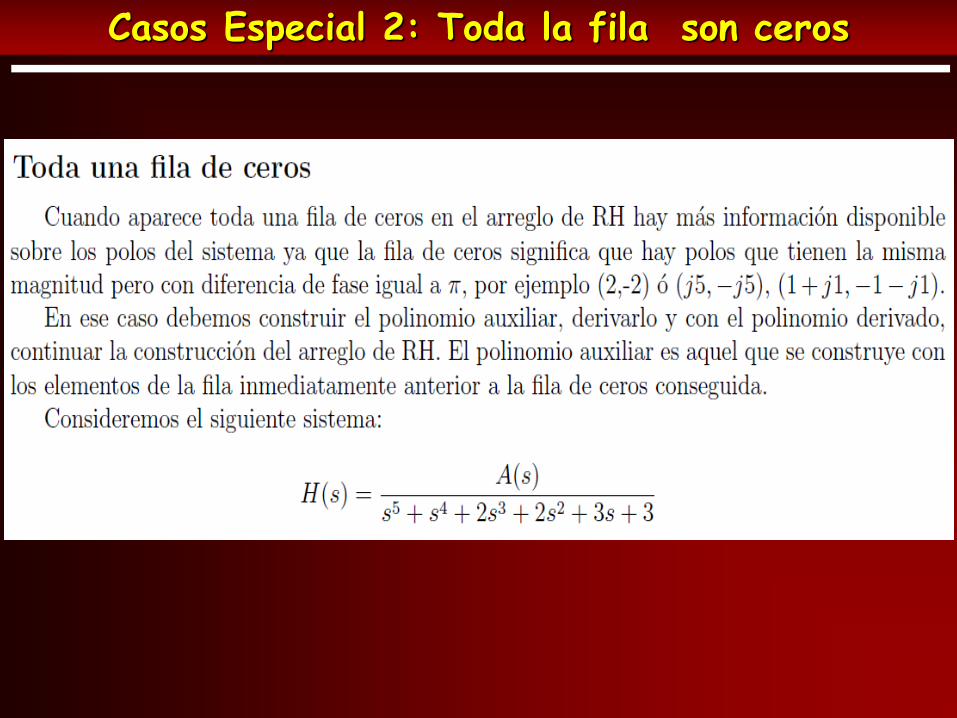
Casos Especial 2: Toda la fila son ceros
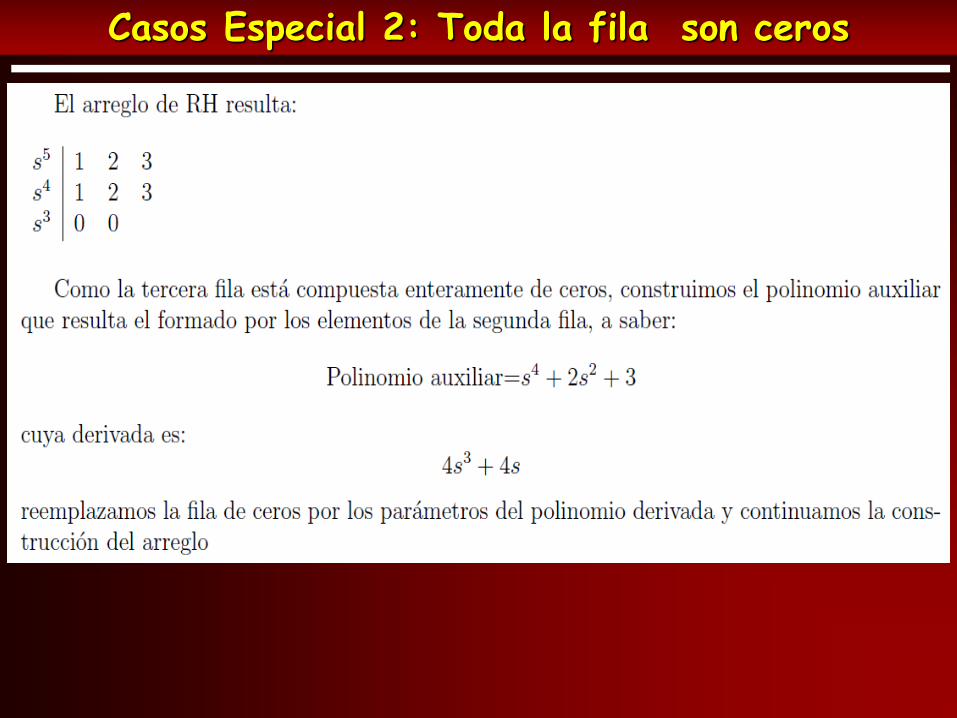
Casos Especial 2: Toda la fila son ceros
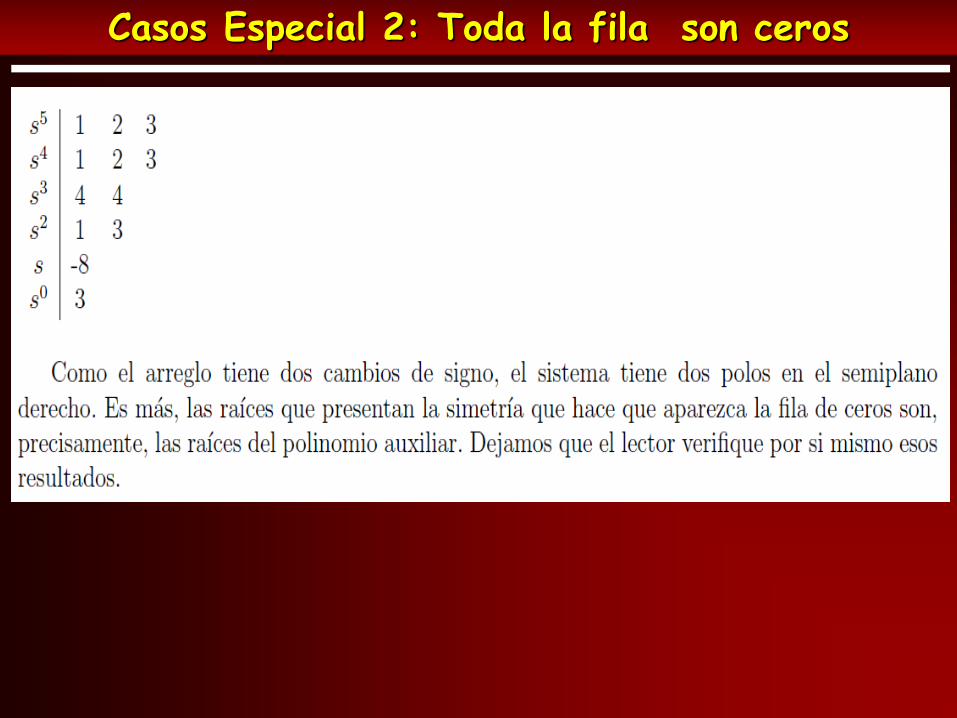
Casos Especial 2: Toda la fila son ceros
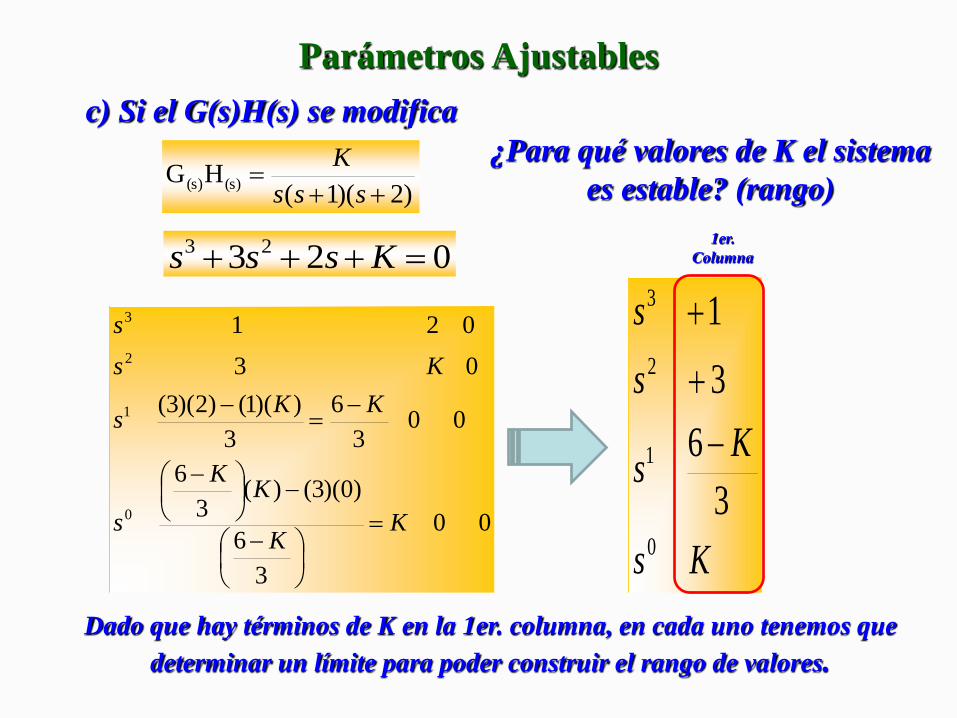
023 23 Ksss
Parámetros Ajustables
00
3
6
)0)(3()(3
6
003
6
3
))(1()2)(3(
03
021
0
1
2
3
KK
KK
s
KKs
Ks
s
Ks
Ks
s
s
0
1
2
3
3
6
3
1
1er.
Columna
c) Si el G(s)H(s) se modifica
)2)(1(HG (s)(s)
sss
K ¿Para qué valores de K el sistema
es estable? (rango)
Dado que hay términos de K en la 1er. columna, en cada uno tenemos que
determinar un límite para poder construir el rango de valores.
0
03
6
3
1
0
1
2
3
Ks
Ks
s
s
1er.
Columna
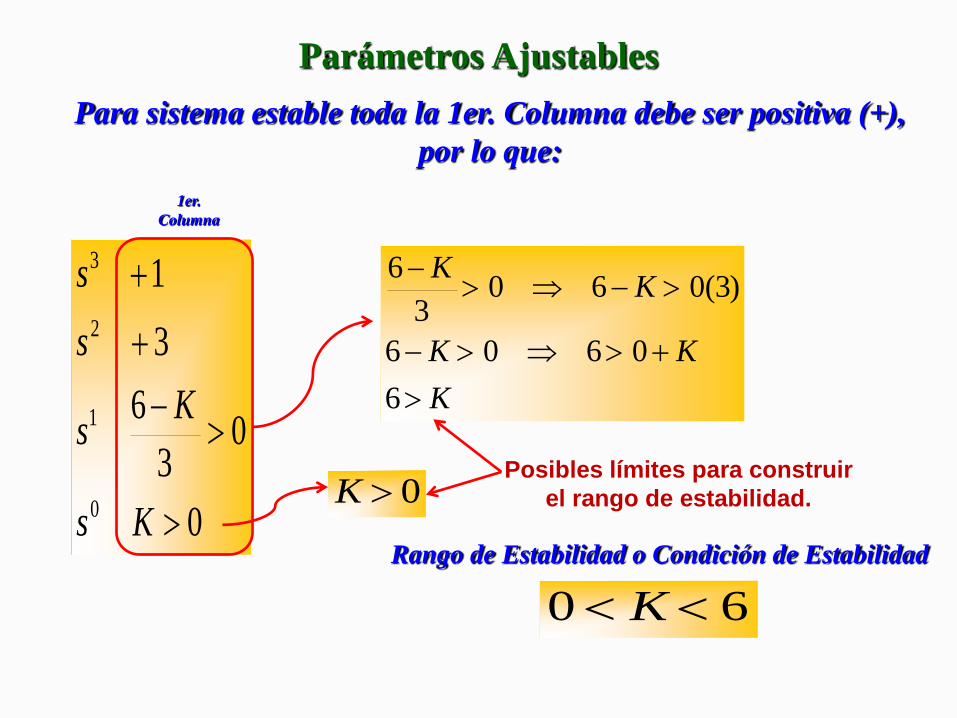
Para sistema estable toda la 1er. Columna debe ser positiva (+),
por lo que:
K
KK
KK
6
0606
)3(0603
6
0K
Rango de Estabilidad o Condición de Estabilidad
60 K
Posibles límites para construir
el rango de estabilidad.
Parámetros Ajustables
Sistemas con
Retardo de Transporte
o
Tiempo Muerto

21/08/2015 INAUT, Facultad de Ingeniería, UNSJ.
CONTROL DE NIVEL
El modelo se obtiene a partir de las leyes de conservación de la masa y de Bernoulli
Donde A es la sección del tanque, a es la sección del orificio de salida, g es la aceleración de la gravedad, qi es el caudal de entrada y h es el nivel del tanque (variable a controlar).
CONTROL DE NIVEL (1)
2i
dhA q gh
dt a

21/08/2015 INAUT, Facultad de Ingeniería, UNSJ.
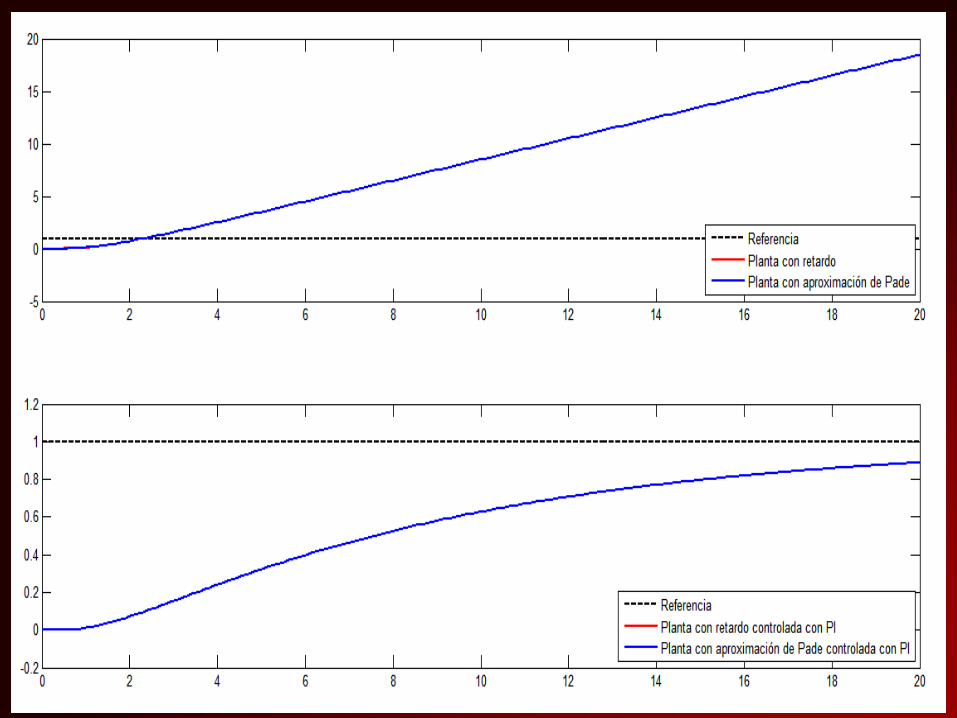
Linealizando el modelo en el punto de operación qi0 y h0 se obtiene la función de transferencia El sistema se controla satisfactoriamente con un controlador PI de parámetros
que lleva a un sistema a lazo cerrado de segundo orden con frecuencia natural w y amortiguamiento relativo z.
CONTROL DE NIVEL (2)
( )G ss
1
A
0
0
2
2
a gh
Ah
2
2i
K A
T
21/08/2015 INAUT, Facultad de Ingeniería, UNSJ.
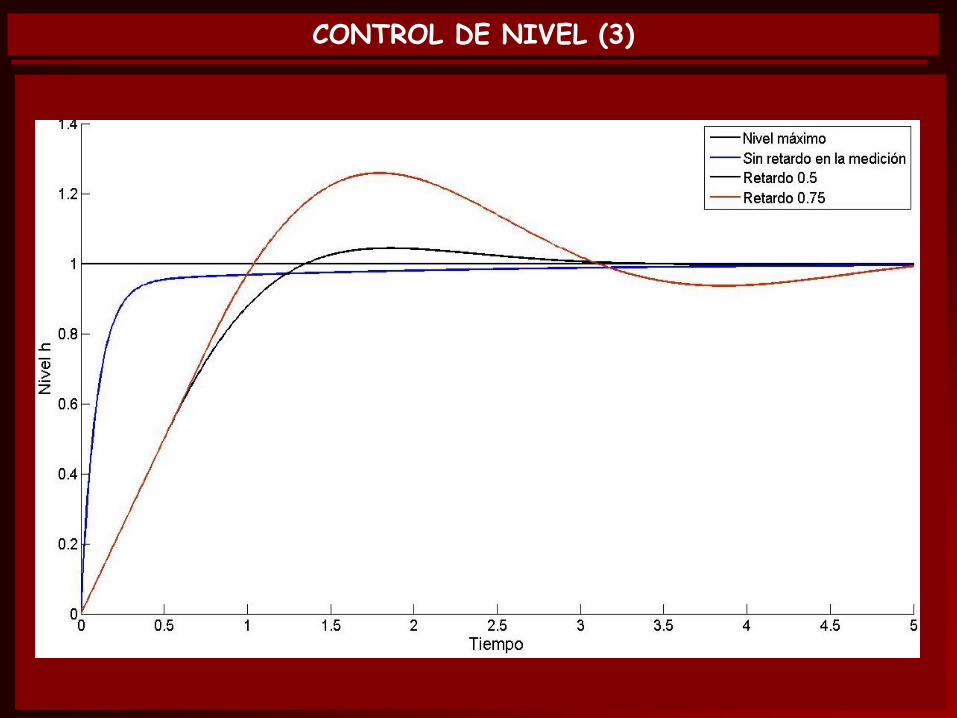
CONTROL DE NIVEL (3)
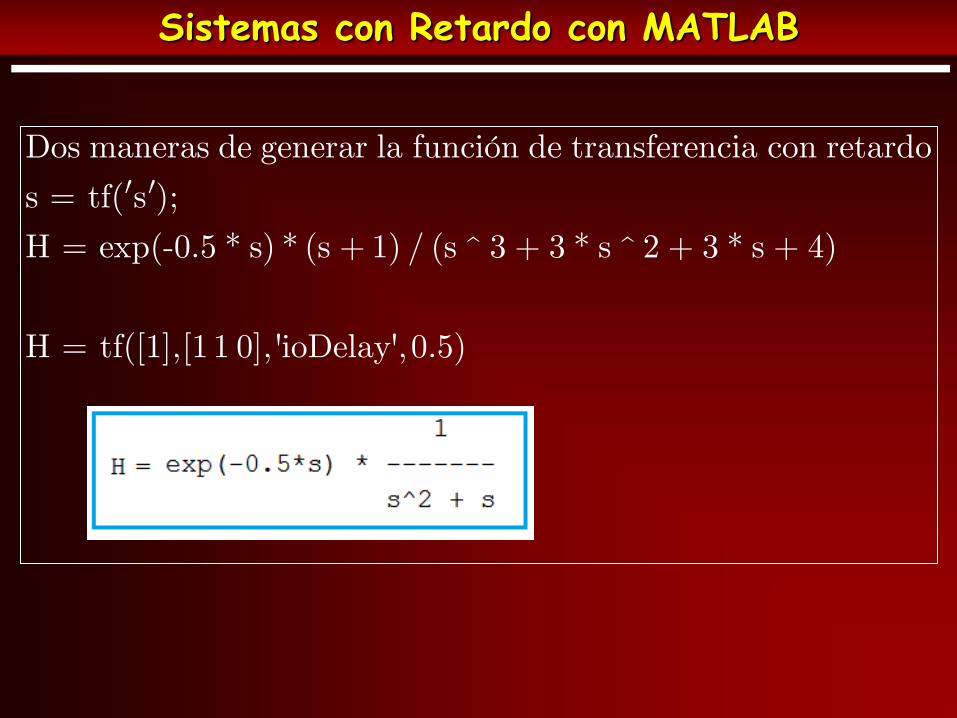
Dos maneras de generar la función de transferencia con retardo
s = tf( s );
H = exp(-0.5 * s) * (s + 1) / (s ^ 3 + 3 * s ^2 + 3 * s + 4)
H = tf([1],[1 1 0], 'ioDelay', 0.5)
Sistemas con Retardo con MATLAB
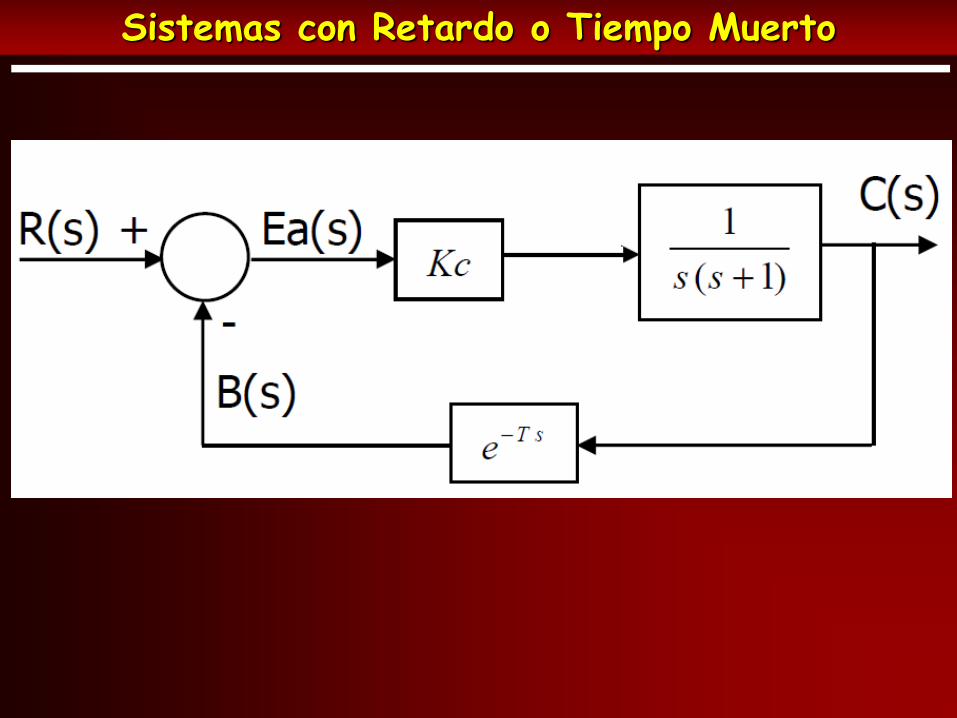
Sistemas con Retardo o Tiempo Muerto
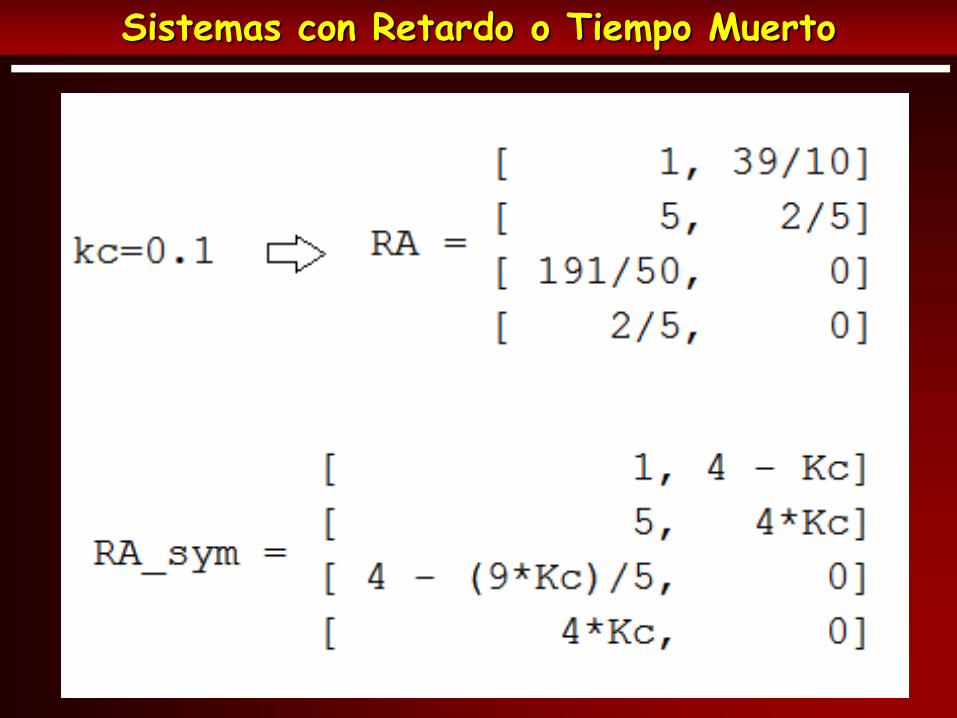
Sistemas con Retardo o Tiempo Muerto