tema 5. anÁlisis de respuesta en frecuencia...
TRANSCRIPT
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
TEMA 5. ANÁLISIS DE RESPUESTA EN TEMA 5. ANÁLISIS DE RESPUESTA EN FRECUENCIAFRECUENCIA
CONTENIDOCONTENIDO
RESPUESTA EN FRECUENCIA DE FUNCIONES DETRANSFERENCIACRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUISTDIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS DE BODE
ÓESTABILIDAD RELATIVA. DEFINICIÓN DEL MARGEN DEGANANCIA Y DE FASE
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 1
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES DE TRANSFERENCIADE TRANSFERENCIA
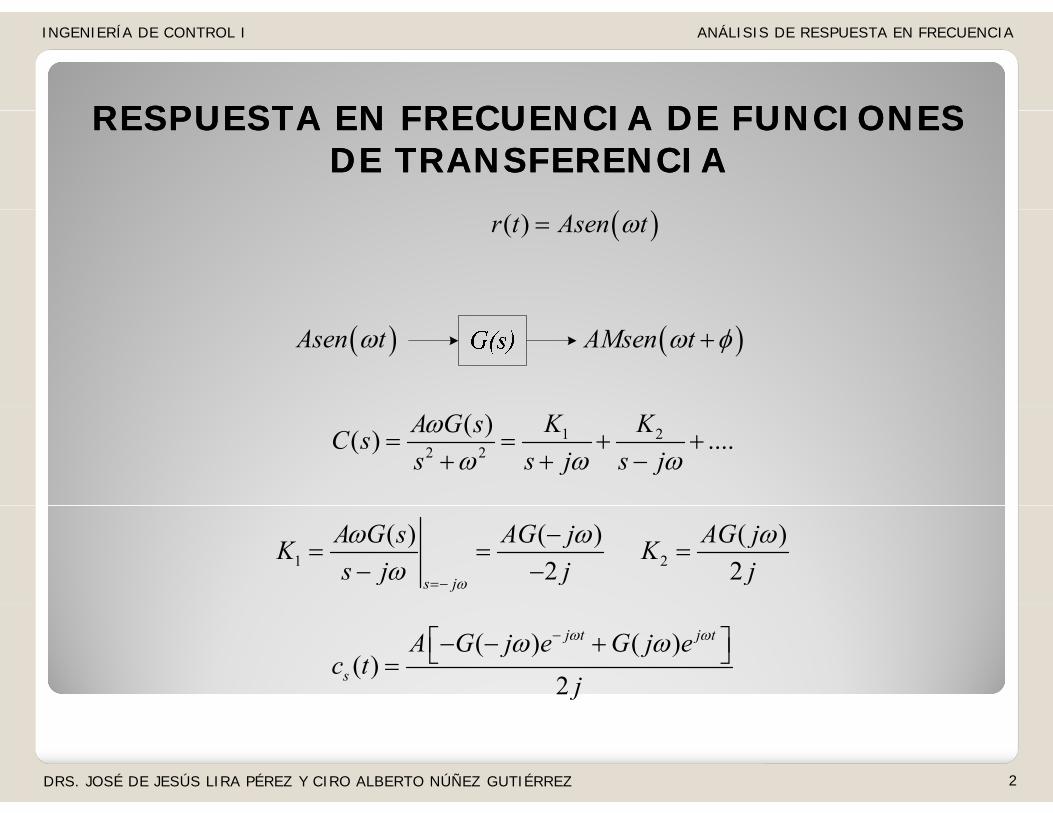
( )( )r t Asen tω=
( )Asen tω ( )AMsen tω φ+
1 22 2
( )( ) ....K KA G sC ss s j s jω
ω ω ω= = + +
+ + −
1 2( ) ( ) ( )
2 2s j
A G s AG j AG jK Ks j j jω
ω ω ωω =−
−= = =
− −
( ) ( )( )
2
j t j t
s
A G j e G j ec t
j
ω ωω ω−⎡ ⎤− − +⎣ ⎦=
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 2

RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES DE TRANSFERENCIADE TRANSFERENCIA
( )( ) ( ) ( ) ( ) jG j a jb M e φ ωω ω ω ω= + =
2 2( ) ( ) ( ) ( )M G j a bω ω ω ω+
1
( ) ( ) ( ) ( )( ) ( ) tan( )
M G j a bba
ω ω ω ωωφ ωω
−
= = +
=
( )( ) ( ) jG j M e φ ωω ω −− =
( ) [ ]( ) ( )( )
( ) ( ) ( )2
j t j t
s
AM e ec t AM sen t
j
ω φ ω φωω ω φ ω
+ − +−= = +
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 3
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES DE TRANSFERENCIADE TRANSFERENCIA
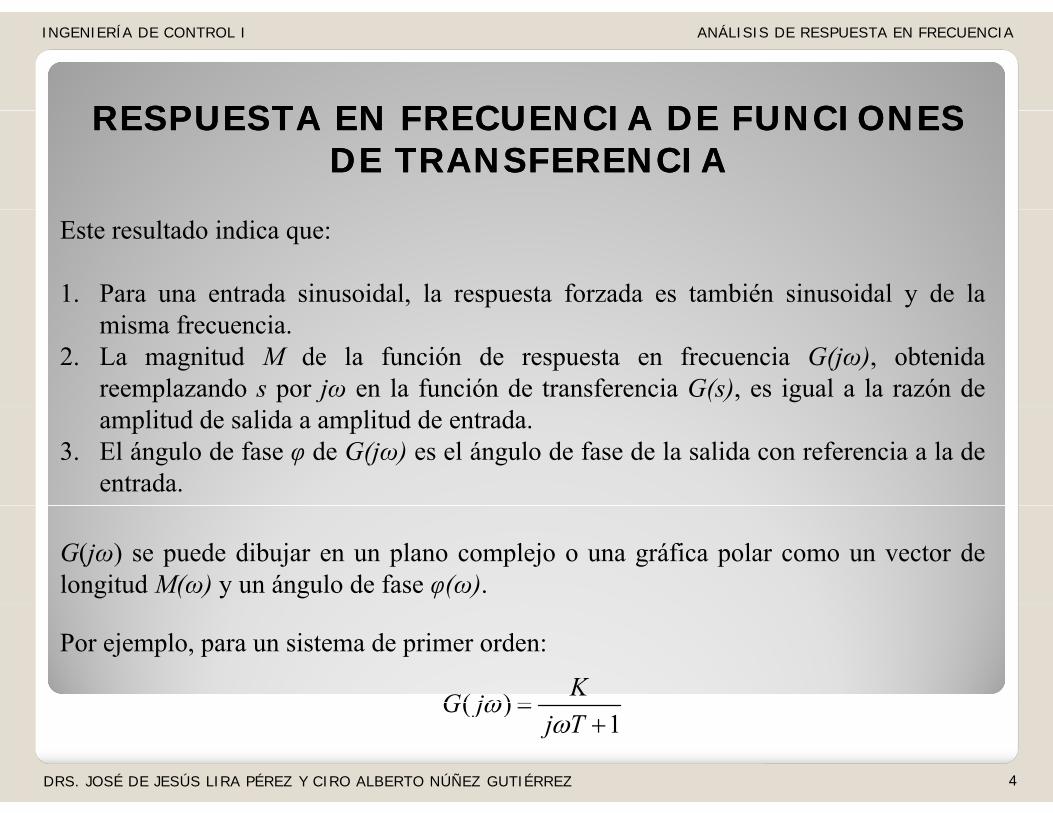
Este resultado indica que:
1. Para una entrada sinusoidal, la respuesta forzada es también sinusoidal y de lamisma frecuencia.
2. La magnitud M de la función de respuesta en frecuencia G(jω), obtenidareemplazando s por jω en la función de transferencia G(s), es igual a la razón deamplitud de salida a amplitud de entrada.
3. El ángulo de fase φ de G(jω) es el ángulo de fase de la salida con referencia a la deentrada.
G(jω) se puede dibujar en un plano complejo o una gráfica polar como un vector delongitud M(ω) y un ángulo de fase φ(ω).
Por ejemplo, para un sistema de primer orden:
( ) KG jω =
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 4
( )1
G jj T
ωω
=+
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
RESPUESTA EN FRECUENCIA DE FUNCIONES RESPUESTA EN FRECUENCIA DE FUNCIONES DE TRANSFERENCIADE TRANSFERENCIA
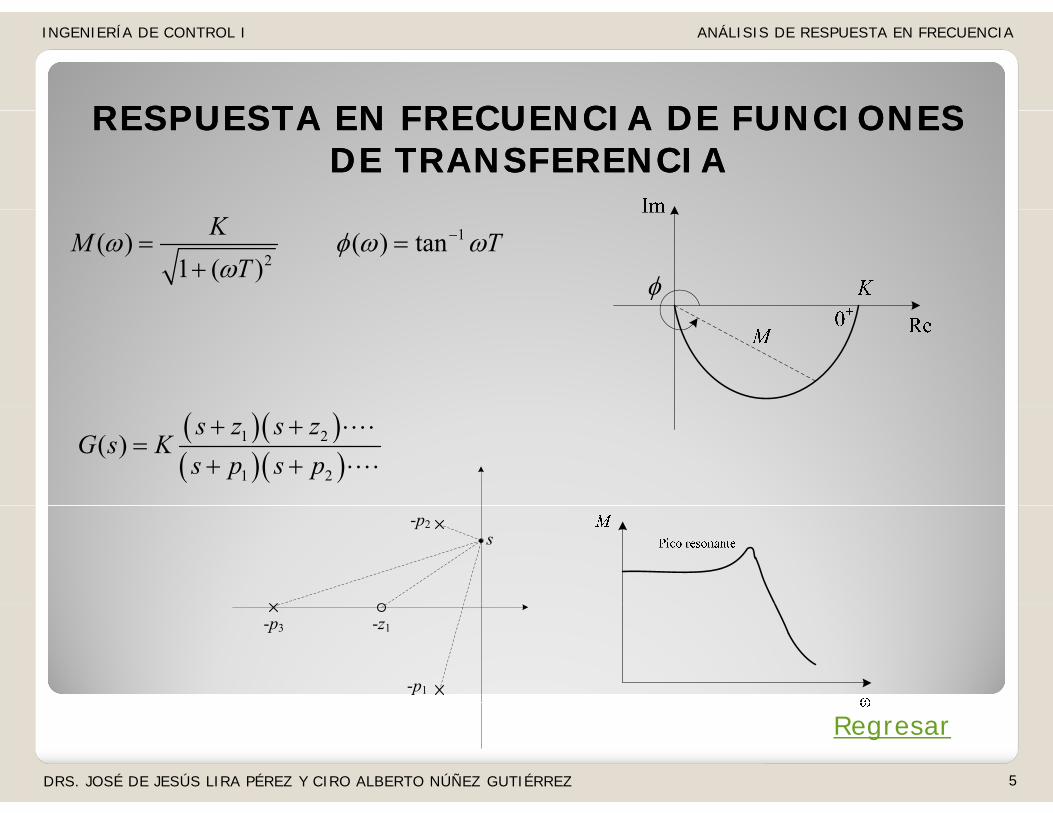
1
2( ) ( ) tan
1 ( )KM T
Tω φ ω ω
ω−= =
+φ
( )( )( )( )
1 2
1 2
( )s z s z
G s Ks p s p+ + ⋅⋅⋅⋅
=+ + ⋅⋅⋅⋅
-p2s
-p1
-p3 -z1
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 5
Regresar
CRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
CRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUIST
( )( )1 2 ...1
s z s zG GH K
+ ++ =
( )( )1 2
1...cG GH K
s p s p+ =
+ +
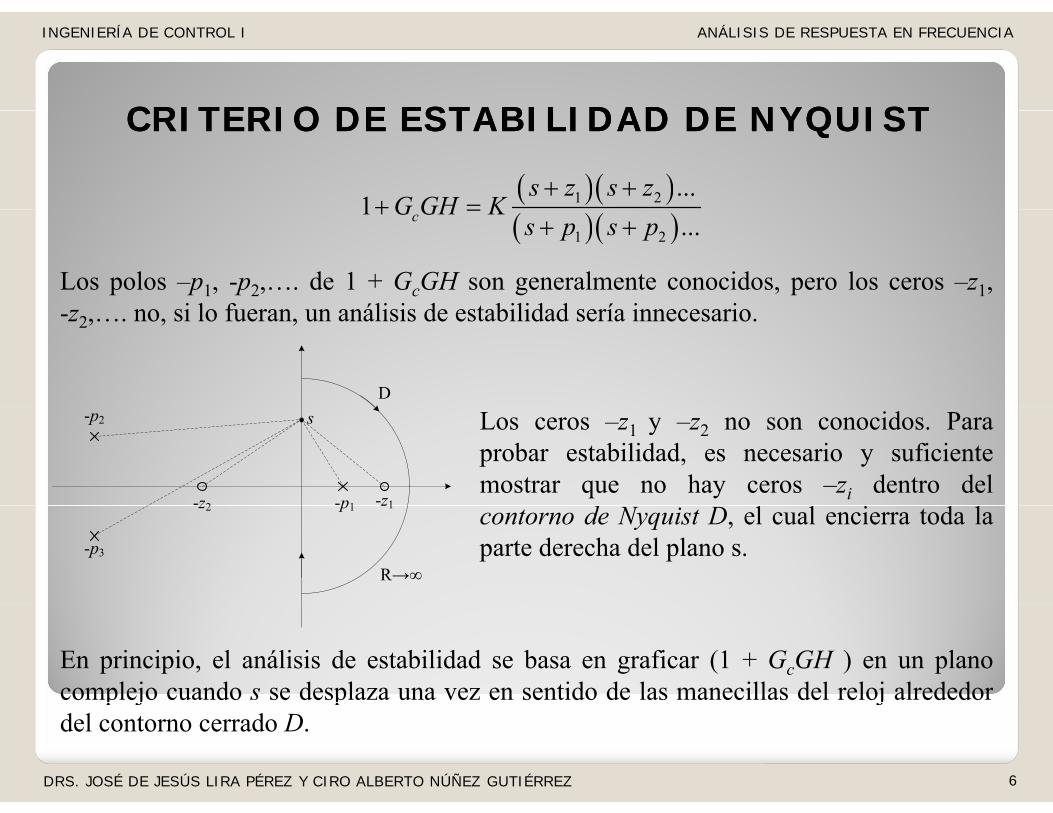
Los polos –p1, -p2,…. de 1 + GcGH son generalmente conocidos, pero los ceros –z1,i l f áli i d t bilid d í i i-z2,…. no, si lo fueran, un análisis de estabilidad sería innecesario.
D
Los ceros –z1 y –z2 no son conocidos. Paraprobar estabilidad, es necesario y suficientemostrar que no hay ceros –zi dentro del
-p1-z2
s-p2
-z1 contorno de Nyquist D, el cual encierra toda laparte derecha del plano s.
p1
-p3
z2 z1
R→∞
En principio, el análisis de estabilidad se basa en graficar (1 + GcGH ) en un planocomplejo cuando s se desplaza una vez en sentido de las manecillas del reloj alrededor
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 6
p j p jdel contorno cerrado D.
CRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
CRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUIST
PRINCIPIO DEL ARGUMENTO
Si (1 + GcGH) tiene Z ceros y P polos dentro del contorno de Nyquist D, una gráfica de(1 + GcGH) cuando s se desplaza en sentido de las manecillas del reloj una vezalrededor de D, encerrará al origen del plano complejo en el cual se grafica N = Z – Pg p p j gveces en dirección de las manecillas del reloj.
La gráfica de GcGH cuando s se desplaza una vez alrededor de D se le llama diagramade Nyquistde Nyquist.
CRITERIO DE ESTABILIDAD DE NYQUIST Un sistema retroalimentado es estable si y sólo si el número de veces que se encierra ensentido inverso de la manecillas del reloj en un diagrama de Nyquist el punto -1 es igualal número de polos de GcGH dentro del semiplano derecho, llamados polos inestablesde lazo abierto.Usualmente, los sistemas son estables en lazo abierto, esto es, P = 0. En este caso elcriterio viene a ser:Un sistema estable de lazo abierto retroalimentado es estable si y sólo si el diagrama de
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 7
Nyquist no encierra el punto -1.
CRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
CRITERIO DE ESTABILIDAD DE NYQUISTCRITERIO DE ESTABILIDAD DE NYQUIST
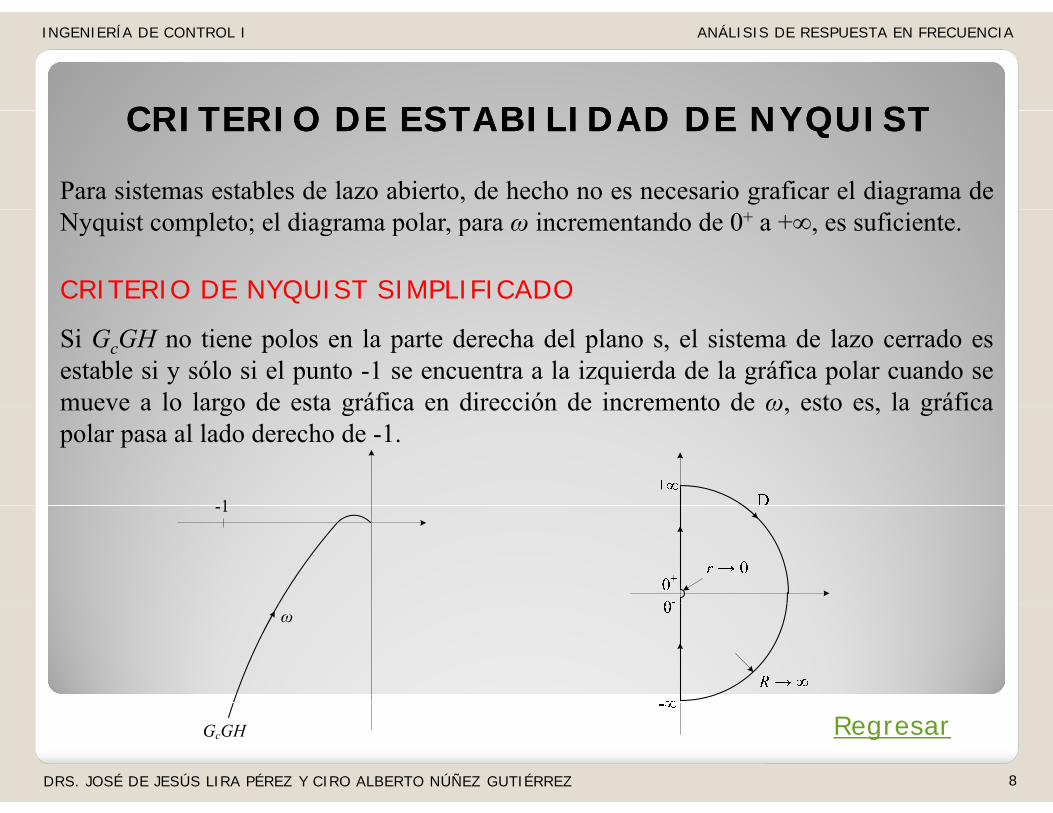
Para sistemas estables de lazo abierto, de hecho no es necesario graficar el diagrama deNyquist completo; el diagrama polar, para ω incrementando de 0+ a +∞, es suficiente.
CRITERIO DE NYQUIST SIMPLIFICADO
Si GcGH no tiene polos en la parte derecha del plano s, el sistema de lazo cerrado esestable si y sólo si el punto -1 se encuentra a la izquierda de la gráfica polar cuando semueve a lo largo de esta gráfica en dirección de incremento de ω esto es la gráficamueve a lo largo de esta gráfica en dirección de incremento de ω, esto es, la gráficapolar pasa al lado derecho de -1.
1-1
ω
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 8
GcGH Regresar

DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
DIAGRAMAS POLARES Y ESTABILIDAD
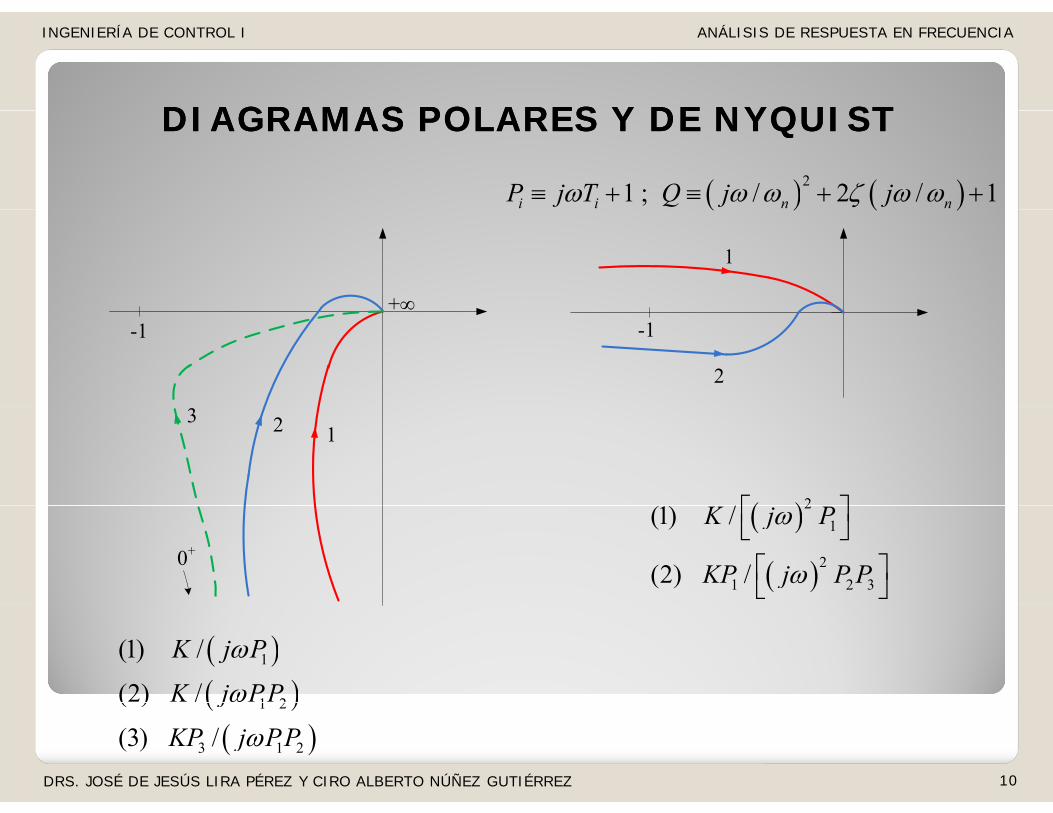
( ) ( )21 ; / 2 / 1i i n nP j T Q j jω ω ω ζ ω ω≡ + ≡ + +
( )( )
1 1 2
2 1 2 3
(1) /
(2) /(3) /
K PP
K PP PK Q
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 9
1(3) /K Q
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
( ) ( )21 ; / 2 / 1i i n nP j T Q j jω ω ω ζ ω ω≡ + ≡ + +
+∞
( ) ( )
1
+∞-1
2
-1
123
( )2⎡ ⎤
0+
( )
( )
21
21 2 3
(1) /
(2) /
K j P
KP j P P
ω
ω
⎡ ⎤⎣ ⎦⎡ ⎤⎣ ⎦
( )( )
1
1 2
(1) /
(2) /
K j P
K j PP
ω
ω
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 10
( )( )
1 2
3 1 2
( )
(3) /
j
KP j PPω
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
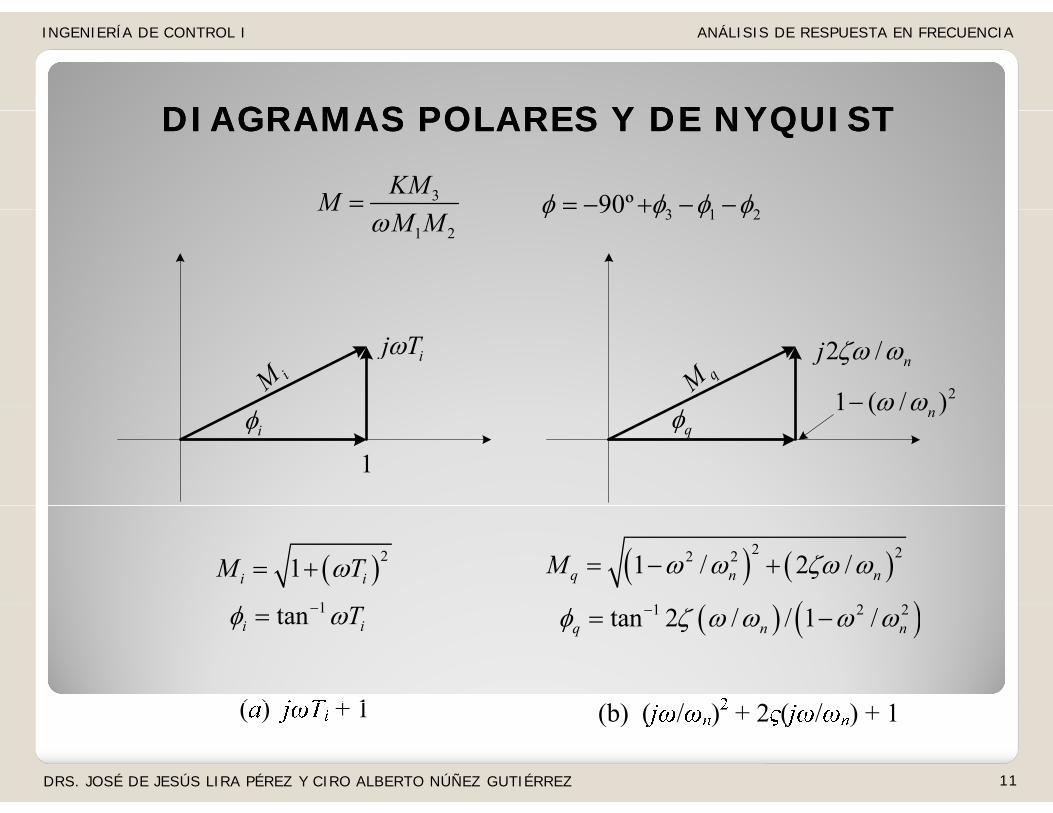
3KMM = 3 1 290ºφ φ φ φ= − + − −1 2
MM Mω 3 1 290φ φ φ φ+
iM
ij TωqM
2 / nj ζω ω21 ( / )ω ω−
iφ qφ1 ( / )nω ω
( )2
1
1i iM Tω= + ( ) ( )
( )
2 22 2
1 2 2
1 / 2 /q n nM ω ω ζω ω= − +1 tani iTφ ω−= ( ) ( )1 2 2 tan 2 / / 1 /q n nφ ζ ω ω ω ω−= −
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 11

DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
DIAGRAMAS DE NYQUIST Y ESTABILIDAD
1i iP j Tω≡ +
0-
-1 -∞+∞
0+
( )1 2 3/K PP P ( )1 2/K j PPω ( )21/K j Pω⎡ ⎤
⎣ ⎦
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 12

DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS POLARES Y DE NYQUISTDIAGRAMAS POLARES Y DE NYQUIST
1P j Tω≡ +1i iP j Tω≡ +
0+ 0+
0-
0
1
0
-1
0
0+ -∞+∞
-1 -∞+∞ -1
-∞+∞
0-0-
( )21 2 3/KP j P Pω⎡ ⎤⎣ ⎦ ( )1/ 1K j j Tω ω −⎡ ⎤⎣ ⎦ ( )2 1/ 1KP j j Tω ω −⎡ ⎤⎣ ⎦
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 13
Regresar
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
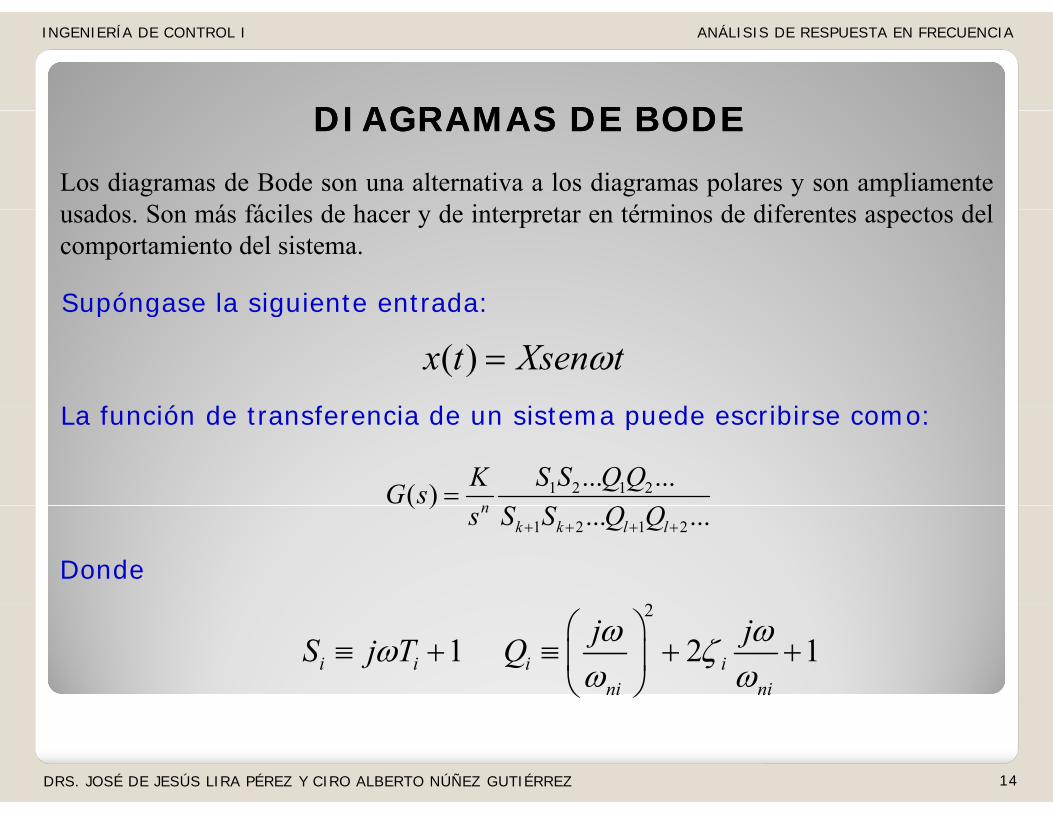
Los diagramas de Bode son una alternativa a los diagramas polares y son ampliamented S á fá il d h d i t t té i d dif t t d l
Supóngase la siguiente entrada:
usados. Son más fáciles de hacer y de interpretar en términos de diferentes aspectos delcomportamiento del sistema.
Supóngase la siguiente entrada:
tXsentx ω=)(L f ió d t f i d i t d ibi La función de transferencia de un sistema puede escribirse como:
1 2 1 2... ...( ) n
S S Q QKG s =1 2 1 2
( )... ...n
k k l ls S S Q Q+ + + +
Donde22
1 2 1i i i ini ni
j jS j T Q ω ωω ζω ω⎛ ⎞
≡ + ≡ + +⎜ ⎟⎝ ⎠
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 14
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
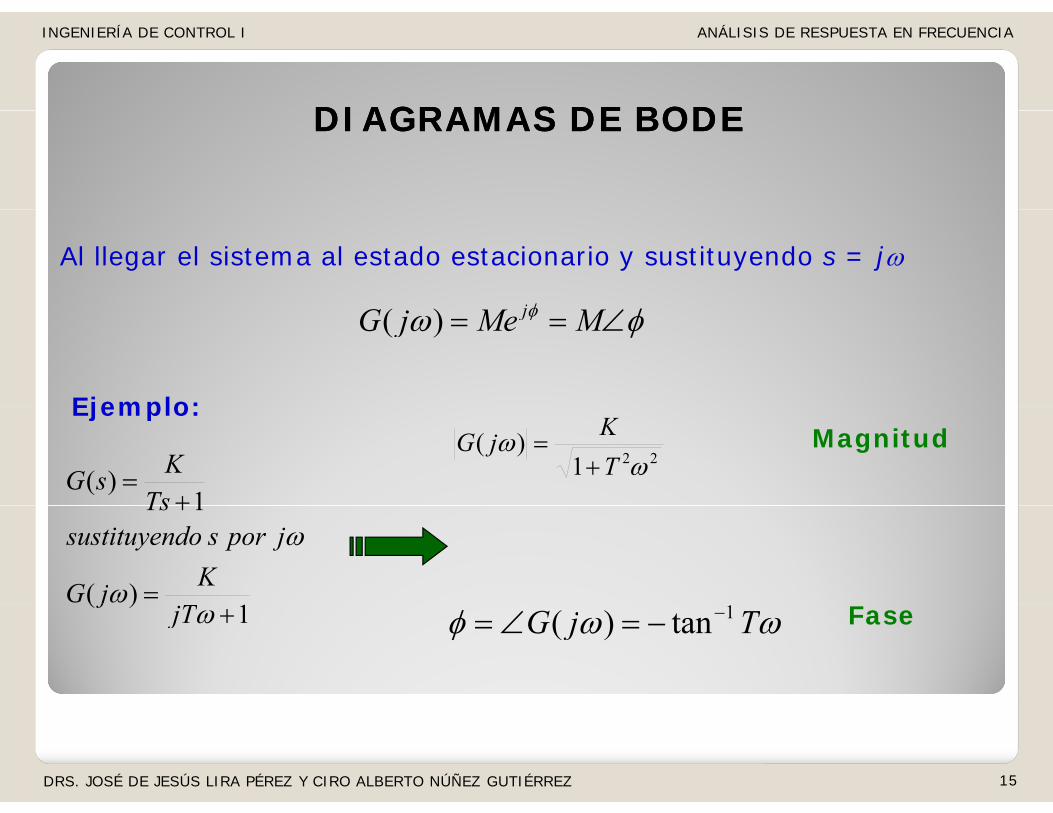
Al llegar el sistema al estado estacionario y sustituyendo s = jω
φj φω φ ∠== MMejG j)(
Ejemplo:Ejemplo:
1)(
+=
TsKsG
221)(
ωω
TKjG+
= Magnitud
)(
1
=
+
ω
ωKjG
j por sdosustituyenTs
1)(
+ωjTj
ωωφ TjG 1tan)( −−=∠= Fase
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 15
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
Un diagrama de Bode está formado por dos gráficas: unal áfi d l l it d l it d d l f ió des la gráfica del logaritmo de la magnitud de la función de
transferencia y la otra es la gráfica del ángulo de fase; ambasse dibujan contra la frecuencia en escala logarítmica
La representación logarítmica se obtiene como:
10 es logaritmo del base la donde jG es jG )(log20)( ωω
dB por usualmente dorepresentadecibelioel es ciónrepresentadeunidad La
• Multiplicaciones de magnitudes se convierten en sumas
• Se pueden usar asíntotas para aproximar el resultado
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 16
• No se puede graficar la respuesta a frecuencia 0
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
F bá i id b áfi d B dFactores básicos a considerar para obtener una gráfica de Bode
1 La ganancia K1. La ganancia K
2. Los factores integrales y derivativos (jω)±1
3. Los factores de primer orden
4 Los factores de segundo orden
1)1( ±+ Tjω
[ ] 12)()(21 ±++ jj ωωωωζ4. Los factores de segundo orden [ ]2)()(21 ++ nn jj ωωωωζ
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 17

DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
1. La ganancia K1. La ganancia KSu comportamiento se
obtiene mediante:
30
40120log 20logKK
= −
0
10
20
-30
-20
-10
10-2
10-1
100
101-40
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 18

DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
2. Factores integrales y derivativos (jω)±1g y (j )
dB jG ωω log201log20)(log20 −==
dB nj
caso el para
jjG
n ωω
ωω
ω
log20)(
1log20
gg)(g
−=Para G(jω)-1
jω )(
dB nj caso el para
dB jjGn ωω
ωωω
log20)(log20
log20)(log20)(log20
=
==Para G(jω)+1
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 19
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
E di d B d l ó d bi d f iEn diagramas de Bode, la razón de cambio de frecuencia seexpresa en términos de octava o bien de décadas.
Octava: es una razón de cambio de frecuencia de ω a 2 ω, 3 ω,etc.
Década: es una razón de cambio de frecuencia de ω a 10 ω, 100 ω,etc.etc.
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 20
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
La razón de cambio entonces para (1/j ω)n y (j ω)n son-20n dB/década y 20n dB/década, respectivamente.
¿Cómo es la razón de cambio de fase?
( )1tan 90ºjθ ω−= = ( )1 11tan tan 90ºjj
θ ωω
− −⎛ ⎞= = − =−⎜ ⎟
⎝ ⎠1para )(jω +
1para ( )
j
j
ω
ω −
⎝ ⎠
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 21
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
30
40
-20
0
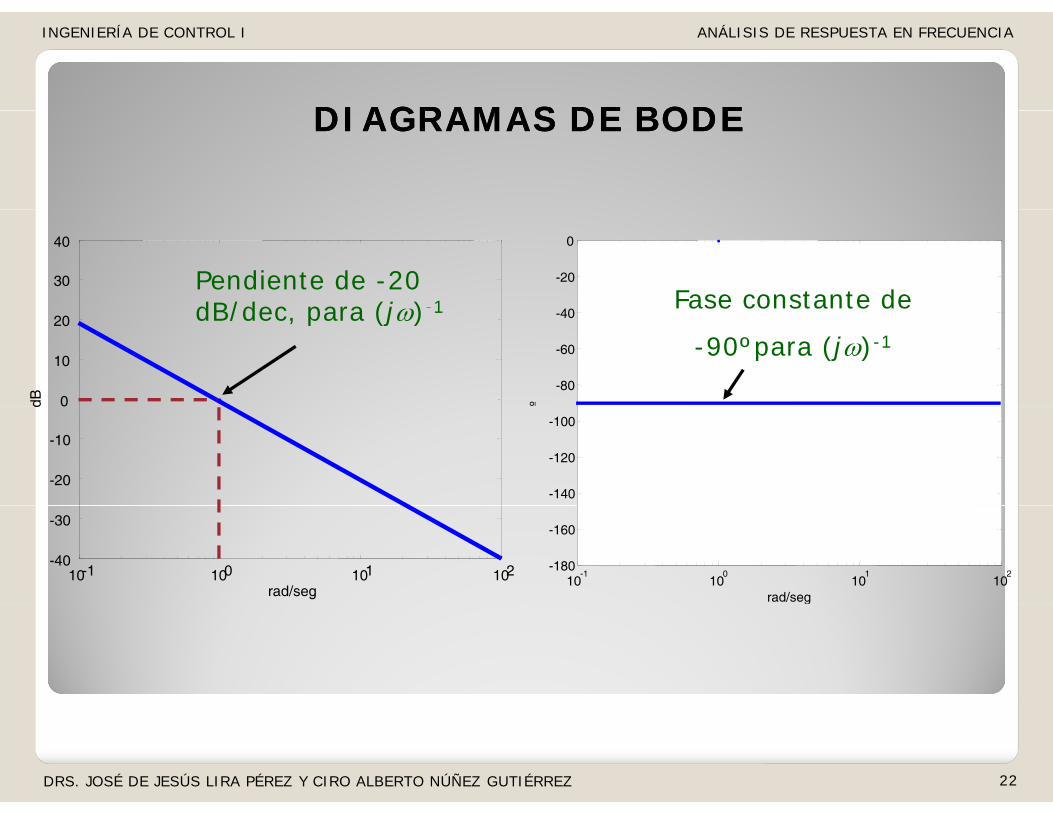
Pendiente de -20 dB/dec para (j )-1 Fase constante de
0
10
20
dB
-80
-60
-40
º
dB/dec, para (jω) 1 Fase constante de
-90ºpara (jω)-1
-20
-10
d
-140
-120
-100
10-1 100 101 102-40
-30
rad/seg10
-110
010
110
2-180
-160
rad/segg
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 22
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
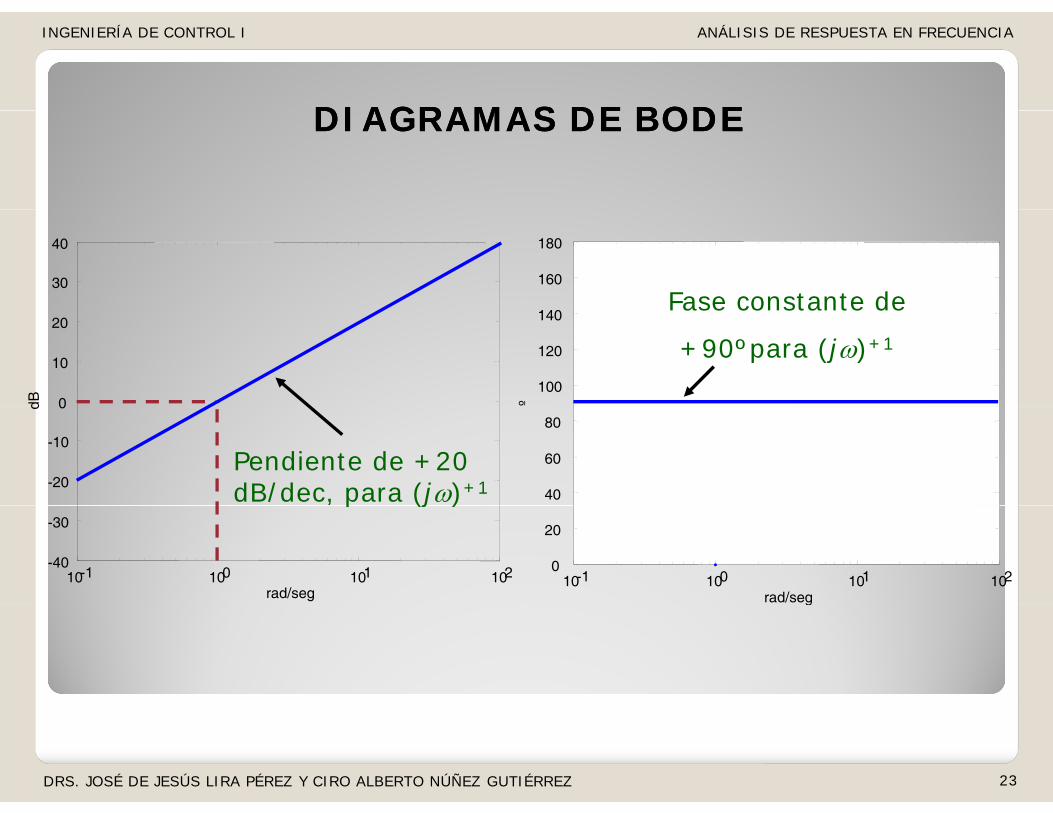
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
30
40
160
180
Fase constante de
0
10
20
dB
100
120
140
º
Fase constante de
+90ºpara (jω)+1
-20
-10
0d
Pendiente de +20 dB/dec, para (jω)+1 40
60
80
10-1 100 101 102-40
-30
rad/seg
, p (j )
10-1 100 101 1020
20
rad/segg
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 23
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
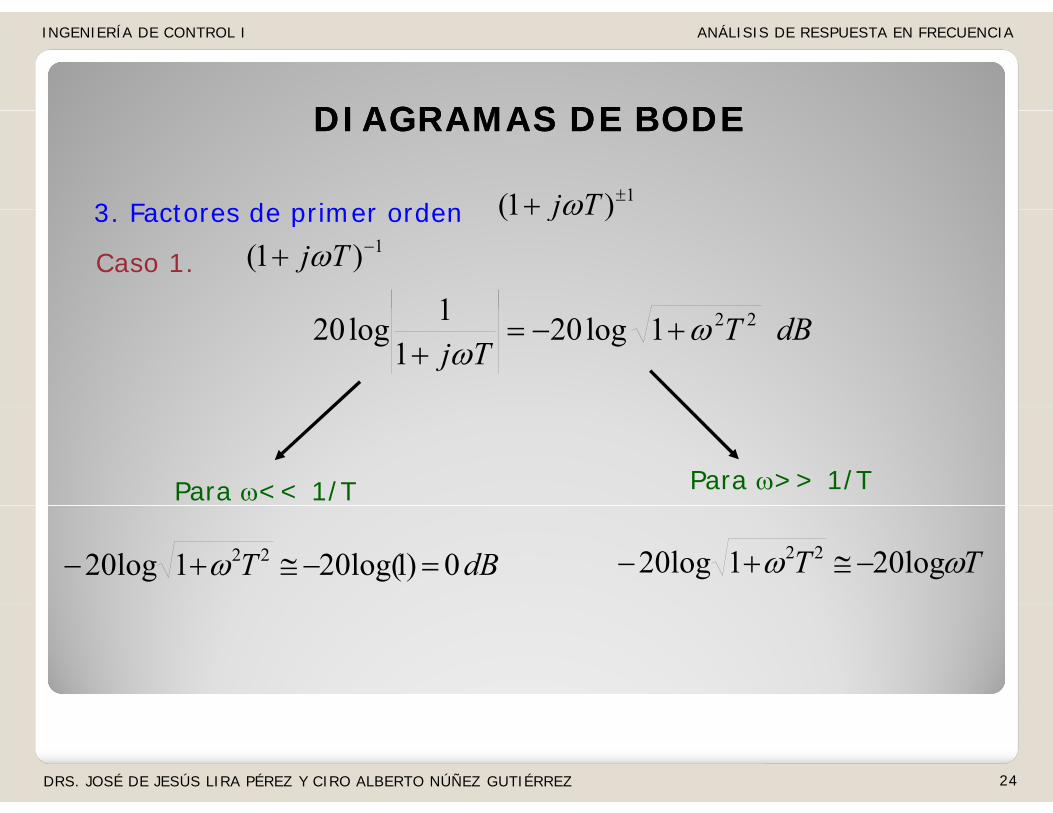
3 Factores de primer orden1)1( ±+ Tjω3. Factores de primer orden )1( + Tjω
Caso 1.1)1( −+ Tjω
1 dB TTj
221log201
1log20 ωω
+−=+
Para ω<< 1/T Para ω>> 1/T
dB T 0)1log(201log20 22 =−≅+− ω TT ωω log201log20 22 −≅+−
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 24
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
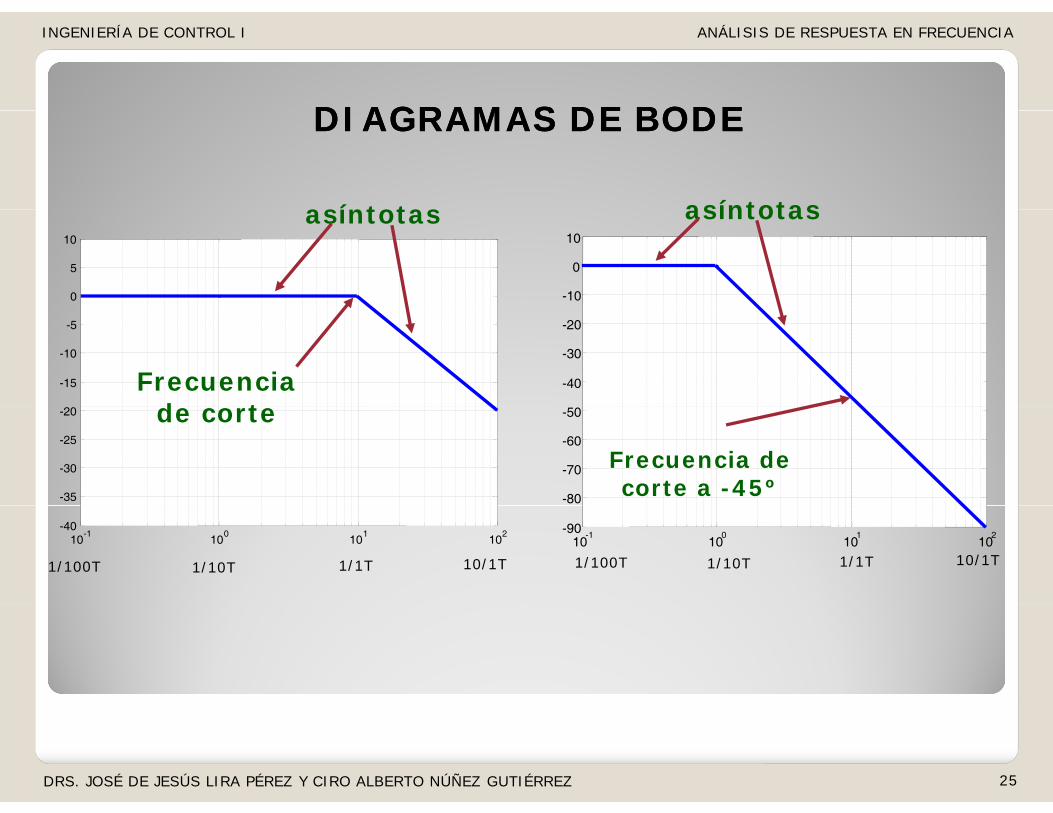
asíntotas asíntotas
0
5
10
asíntotas
-10
0
10
asíntotas
-15
-10
-5
Frecuencia d t
-40
-30
-20
-35
-30
-25
-20 de corte
-80
-70
-60
-50
Frecuencia de corte a -45º
10-1
100
101
102
-40
1/100T 1/10T 1/1T 10/1T
10-1
100
101
102
-90
1/100T 1/10T 1/1T 10/1T
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 25
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
Preguntas:
a) ¿Cuál es el error máximo con respecto a la curva exacta?
b) ¿Cuánto es el error una octava antes de la frecuencia de corte?
c) ¿Cuánto es el error una octava después de la frecuencia de corte?corte?
d) ¿Qué ocurre en el caso de (1+jωT)+1
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 26
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
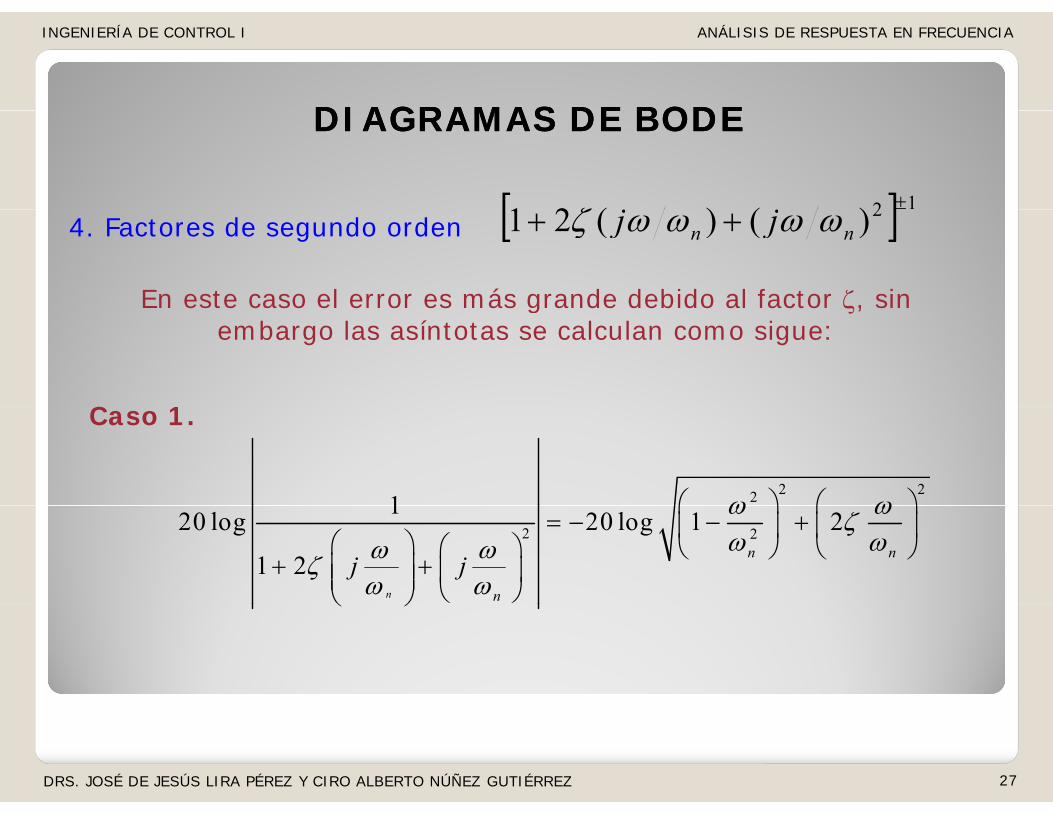
[ ] 12)()(21 ±ζ4. Factores de segundo orden [ ]2)()(21 ++ nn jj ωωωωζ
En este caso el error es más grande debido al factor ζ, sin este caso e e o es ás g a de deb do a acto ζ, sembargo las asíntotas se calculan como sigue:
C 1Caso 1.
2 221 ω ω⎛ ⎞ ⎛ ⎞2 2
120 log 20 log 1 2
1 2n
n n
n
j j
ω ωζω ωω ωζ
ω ω
⎛ ⎞ ⎛ ⎞= − − +⎜ ⎟ ⎜ ⎟
⎛ ⎞ ⎛ ⎞ ⎝ ⎠ ⎝ ⎠+ +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠⎝ ⎠
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 27

DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
2 22
2 2
12 0 lo g 2 0 lo g 1 2
1 2 n nj j
ω ωζω ωω ωζ
⎛ ⎞ ⎛ ⎞= − − +⎜ ⎟ ⎜ ⎟
⎛ ⎞ ⎛ ⎞ ⎝ ⎠ ⎝ ⎠+ +⎜ ⎟ ⎜ ⎟1 2
n n
j jζω ω
+ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Para ω >> ωnPara ω << ωn
dB 01log20 =−
n2
220 log 40 log dBn n
ω ωω ω
− = −
Las asíntotas cortan en ω = ωn
dB -n
n 01log40log40 ==−ωω
n
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 28
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
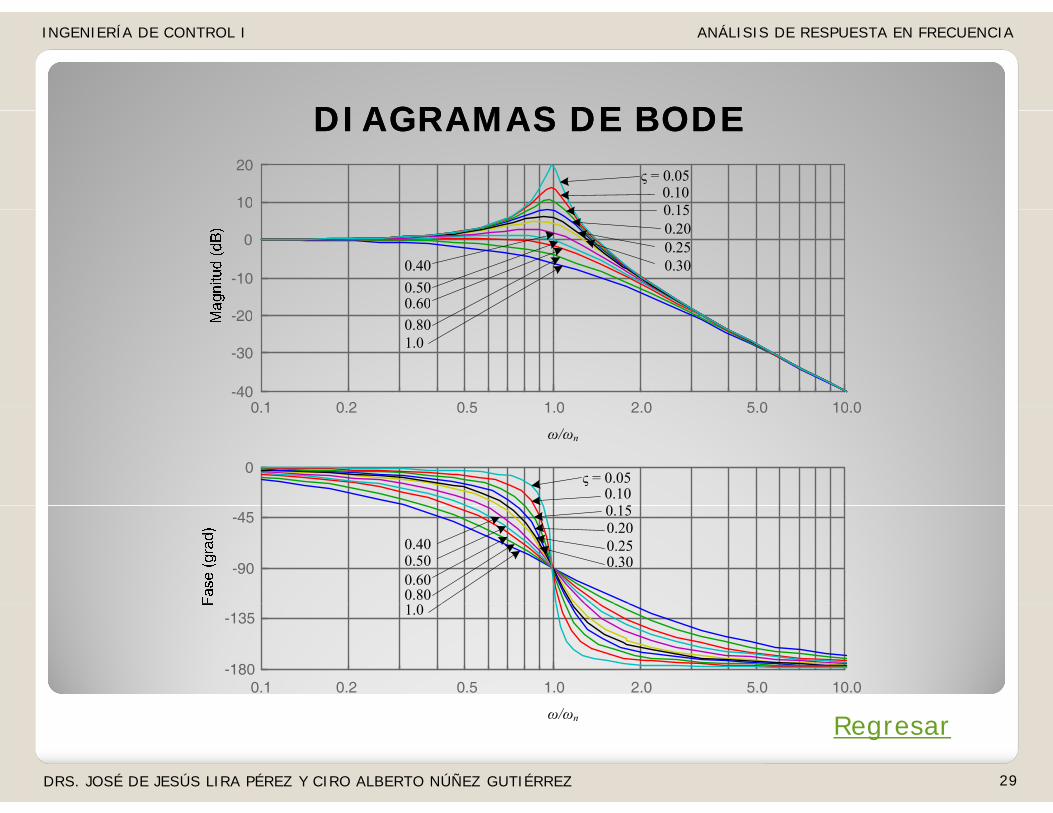
DIAGRAMAS DE BODEDIAGRAMAS DE BODE
10
20ς = 0.05
0.100 15
-10
0
0.150.200.250.300.40
0.500.60
-40
-30
-200.600.801.0
0 1 1 00 2 0 5 2 0 5 0 10 0
0 ς = 0.050.100 15
0.1 1.0
ω/ωn
0.2 0.5 2.0 5.0 10.0
-90
-45 0.150.200.250.30
0.400.500.600.80
0.1 1.0-180
-135 1.0
0.2 0.5 2.0 5.0 10.0
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 29
Regresarω/ωn
ESTABILIDAD RELATIVA DEFINICIÓN DEL ESTABILIDAD RELATIVA DEFINICIÓN DEL
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
ESTABILIDAD RELATIVA. DEFINICIÓN DEL ESTABILIDAD RELATIVA. DEFINICIÓN DEL MARGEN DE GANANCIA Y DE FASEMARGEN DE GANANCIA Y DE FASE
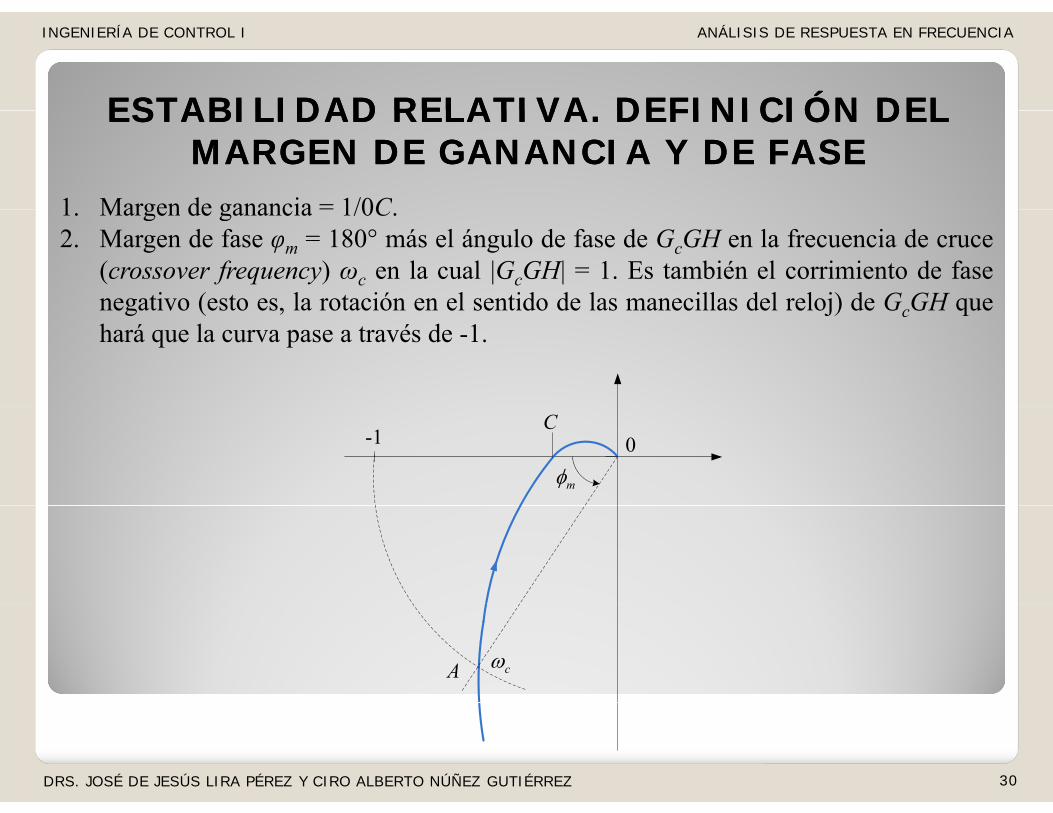
1 Margen de ganancia = 1/0C1. Margen de ganancia = 1/0C.2. Margen de fase φm = 180° más el ángulo de fase de GcGH en la frecuencia de cruce
(crossover frequency) ωc en la cual |GcGH| = 1. Es también el corrimiento de fasenegativo (esto es, la rotación en el sentido de las manecillas del reloj) de G GH quenegativo (esto es, la rotación en el sentido de las manecillas del reloj) de GcGH quehará que la curva pase a través de -1.
-1C
0
mφ
A cω
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 30
ESTABILIDAD RELATIVA DEFINICIÓN DEL ESTABILIDAD RELATIVA DEFINICIÓN DEL
INGENIERÍA DE CONTROL I ANÁLISIS DE RESPUESTA EN FRECUENCIA
ESTABILIDAD RELATIVA. DEFINICIÓN DEL ESTABILIDAD RELATIVA. DEFINICIÓN DEL MARGEN DE GANANCIA Y DE FASEMARGEN DE GANANCIA Y DE FASE
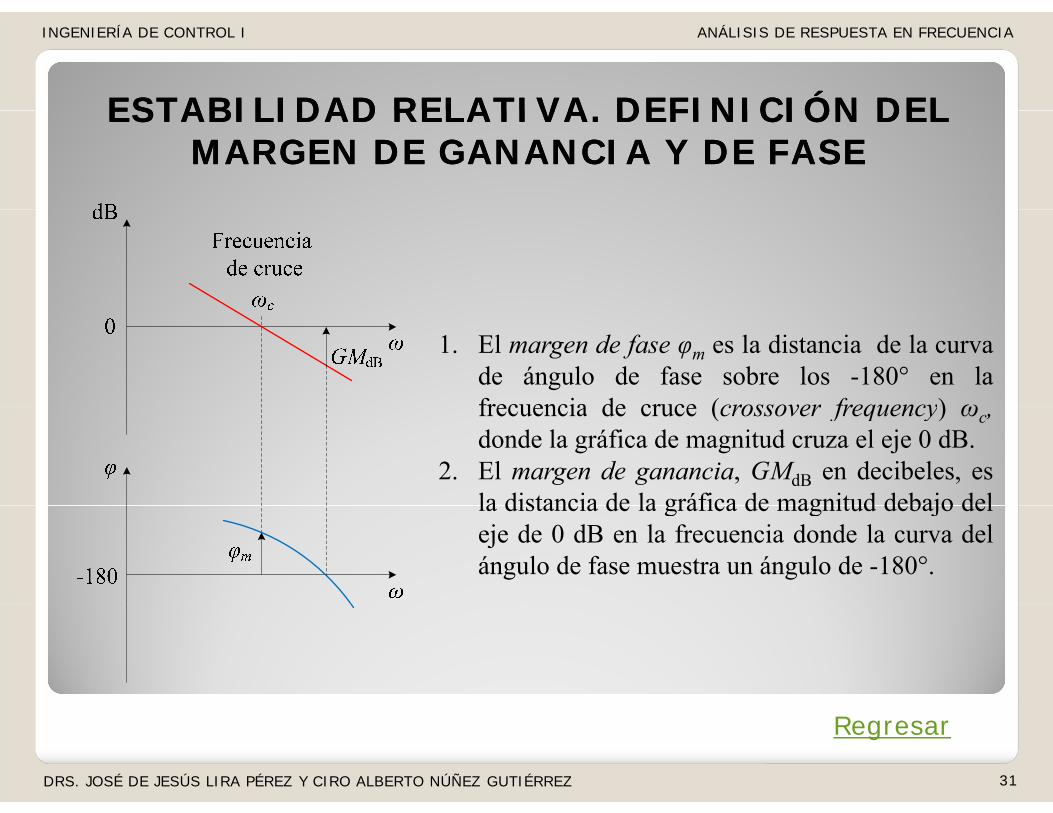
1. El margen de fase φm es la distancia de la curvade ángulo de fase sobre los -180° en lafrecuencia de cruce (crossover frequency) ωfrecuencia de cruce (crossover frequency) ωc,donde la gráfica de magnitud cruza el eje 0 dB.
2. El margen de ganancia, GMdB en decibeles, esla distancia de la gráfica de magnitud debajo della distancia de la gráfica de magnitud debajo deleje de 0 dB en la frecuencia donde la curva delángulo de fase muestra un ángulo de -180°.
DRS. JOSÉ DE JESÚS LIRA PÉREZ Y CIRO ALBERTO NÚÑEZ GUTIÉRREZ 31
Regresar