gabriela peretti famaf - departamento de electrónica y ...dea.unsj.edu.ar/control2/control de...
TRANSCRIPT

Control de sistemas lineales
Gabriela PerettiFaMAF
TemasEstabilidad
Criterio de estabilidad de RouthAnálisis en el dominio temporal
Errores en estado estableEspecificaciones en el dominio del tiempo
Análisis del lugar geométrico de las raícesAnálisis en el dominio de la frecuencia
Trazas de BodeEstabilidad en el dominio de la frecuencia
Diseño de sistemas de control Controlador proporcional derivativo
Controlador proporcional-integralControlador proporcional-integral-derivativo
Compensador de adelantoCompensador de atraso

IntroducciónDiseño de sistemas de control (sistemas lineales)
Consiste en arreglar la localización de polos y ceros de la función de transferencia del sistema, para que se comporte de acuerdo con especificaciones preestablecidas
Un requisito básico:Asegurar la estabilidad del sistema
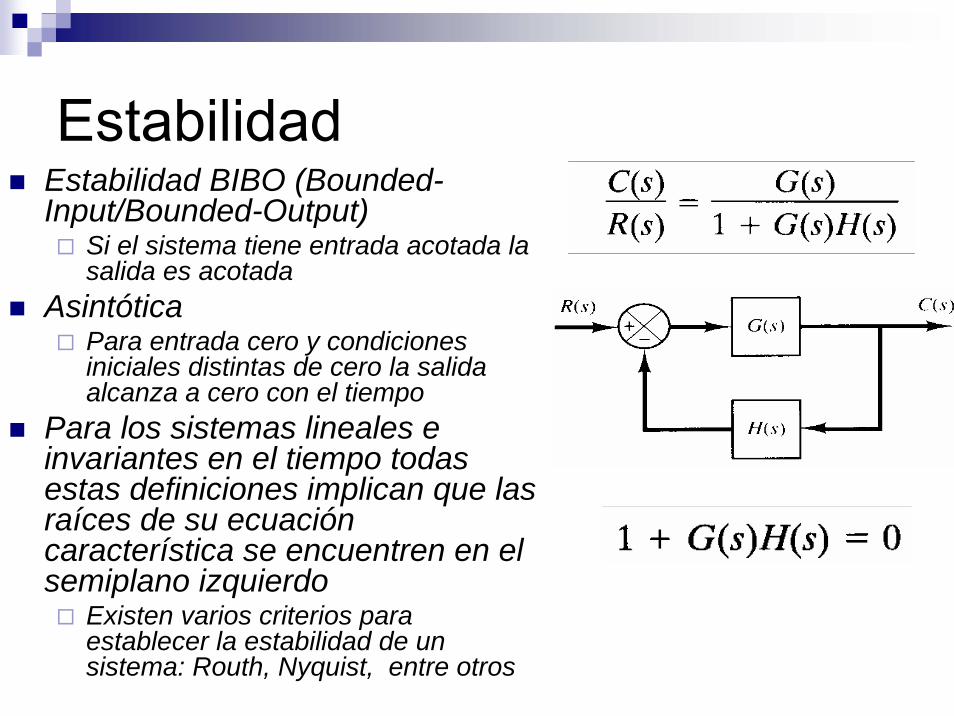
EstabilidadEstabilidad BIBO (Bounded-Input/Bounded-Output)
Si el sistema tiene entrada acotada la salida es acotada
AsintóticaPara entrada cero y condiciones iniciales distintas de cero la salida alcanza a cero con el tiempo
Para los sistemas lineales e invariantes en el tiempo todas estas definiciones implican que las raíces de su ecuación característica se encuentren en el semiplano izquierdo
Existen varios criterios para establecer la estabilidad de un sistema: Routh, Nyquist, entre otros

Estabilidad Efectos sobre la respuesta transitoria de los polos de lazo cerrado

Estabilidad
La estabilidad es una propiedad del sistema, no depende de la entradaEstabilidad absoluta: sistema estable o no estableEstabilidad relativa: Si el sistema es estable, qué tan estable es (grado de estabilidad)

Criterio de estabilidad de Routh
Permite establecer la cantidad de polos de lazo cerrado con parte real positiva sin factorizar el polinomio característico
Función de transferencia de lazo cerrado:
Polinomio característico: A(s)

Criterio de estabilidad de RouthDado el polinomio característico
Se ordenan los coeficientes (arreglo triangular):
El número de raíces de A(s)con parte real positiva es igual al número de cambios de signo de la primera columna
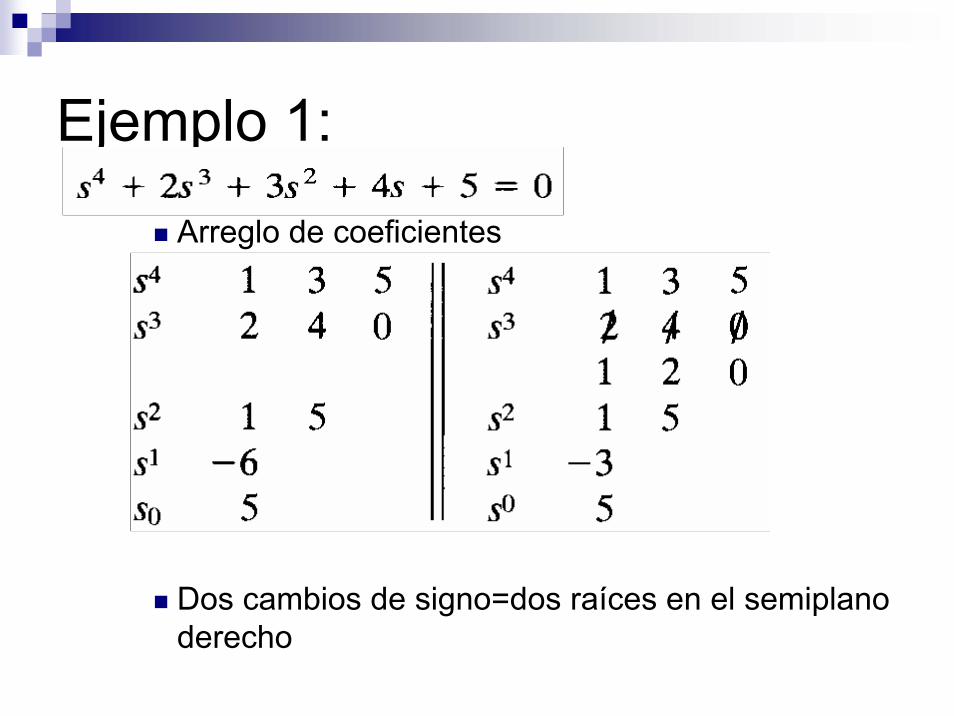
Ejemplo 1:
Arreglo de coeficientes
Dos cambios de signo=dos raíces en el semiplano derecho
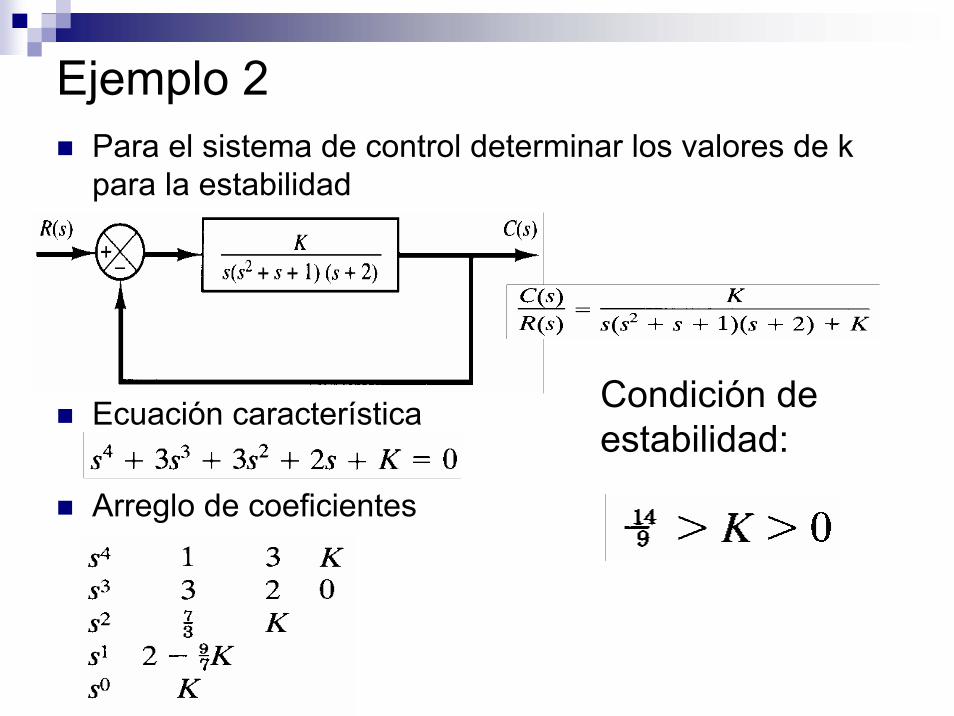
Ejemplo 2Para el sistema de control determinar los valores de k para la estabilidad
Ecuación característica
Arreglo de coeficientes
Condición de estabilidad:
Análisis en el dominio temporal
Para el diseño de sistemas de control, no solo es necesario asegurar la estabilidad
Se deben cumplir especificaciones normalmente relacionadas con el desempeño del sistema en el dominio del tiempo

Respuesta en el tiempo de un sistema de control
Respuesta transitoriaTiende a cero cuando el tiempo es muy grandeDepende sólo de la dinámica del sistema
Respuesta en estado estableOcurre cuando el transitorio ha desaparecido
Errores en estado estable
No son provocados por imperfecciones en el sistemaSurgen por la incapacidad del sistema para seguir determinados tipos de entradaSe establece principalmente para señales de entrada escalón, rampa y parábola

Clasificación de los sistemas de control
Para el sistema con realimentación unitaria
Dado
Se defineSistema tipo 0 si N=0, tipo1 si N=1….

Función de transferencia de lazo cerrado
Función de transferencia entre la señal de error y la señal de entrada
Error en estado estable
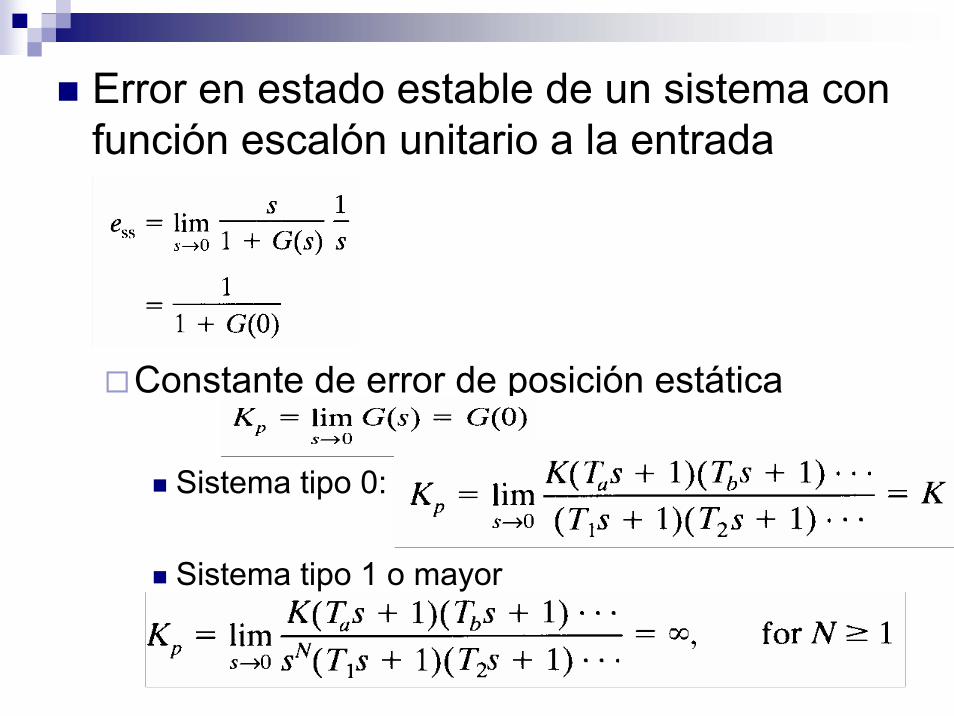
Error en estado estable de un sistema con función escalón unitario a la entrada
Constante de error de posición estática
Sistema tipo 0:
Sistema tipo 1 o mayor

Para una entrada en escalón
Si no hay integrador, la respuesta al escalón implica un error en estado estableSi se pretende error cero, entonces el sistema debe ser tipo 1 o mayor

Error en estado estable de un sistema con función rampa unitaria a la entrada
Constante de error de velocidad estática
Sistema tipo 0:
Sistema tipo 1:
Sistema tipo 2 o mayor:

Para una entrada en rampa
Si no hay integrador, el sistema es incapaz de seguir una entrada rampa en estado estableSistema tipo 1 presenta error
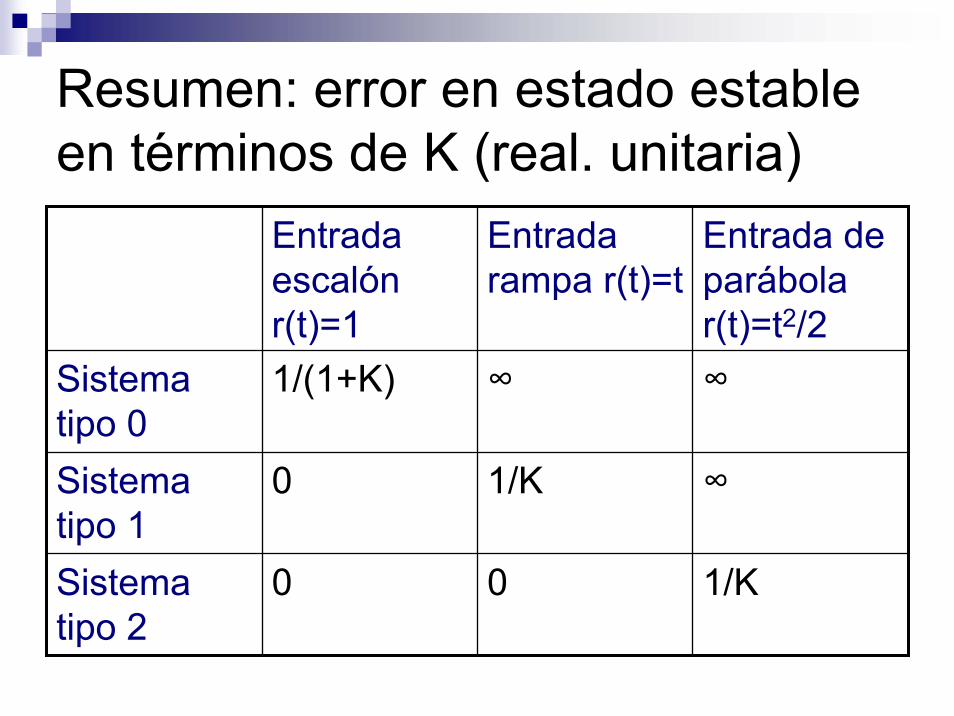
Resumen: error en estado estable en términos de K (real. unitaria)
Entrada escalón r(t)=1
Entrada rampa r(t)=t
Entrada de parábola r(t)=t2/2
Sistema tipo 0
1/(1+K) ∞ ∞
Sistema tipo 1
0 1/K ∞
Sistema tipo 2
0 0 1/K
Especificaciones en el dominio del tiempo
En muchos casos, las características de desempeño deseadas se especifican en cantidades que están en el dominio del tiempo.Generalmente se utiliza como entrada un escalón unitario, con condiciones iniciales cero
Presenta una discontinuidad en t=0, dificultad de seguimientoPara sistemas de segundo orden existen expresiones cerradas para evaluar la respuesta
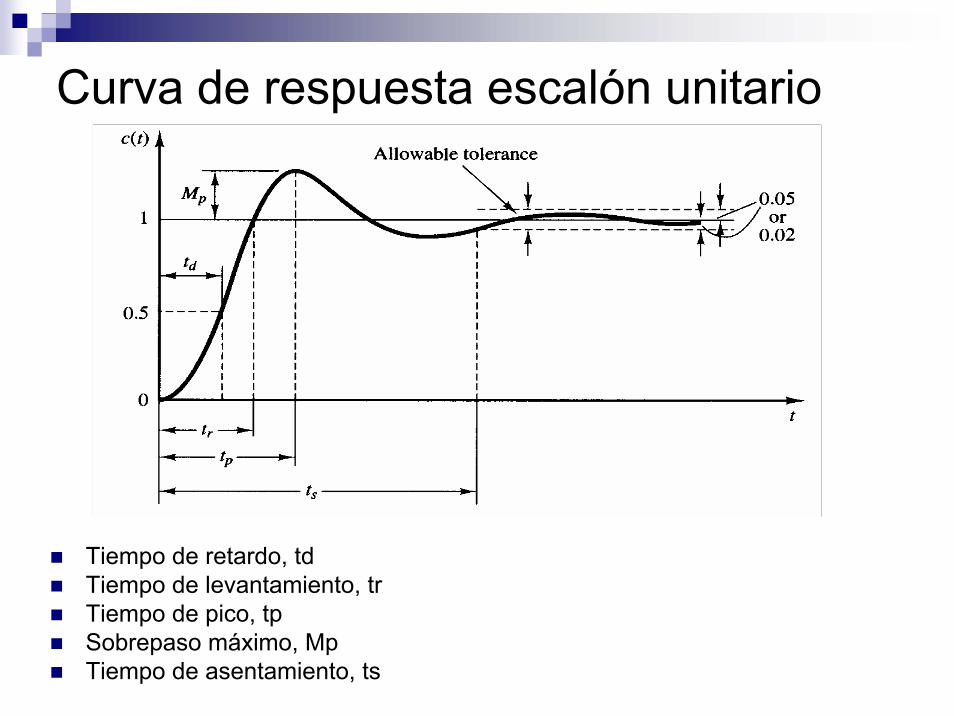
Curva de respuesta escalón unitario
Tiempo de retardo, tdTiempo de levantamiento, trTiempo de pico, tpSobrepaso máximo, MpTiempo de asentamiento, ts

Respuesta transitoria de sistemas de segundo orden
El comportamiento dinámico de este sistema queda definido en función de ζ y ωn
ζ: factor de amortiguamiento relativo del sistemaωn:frecuencia natural no amortiguada
Estas especificaciones brindan aproximaciones cuando hay polos complejos conjugados dominantes en lazo cerrado
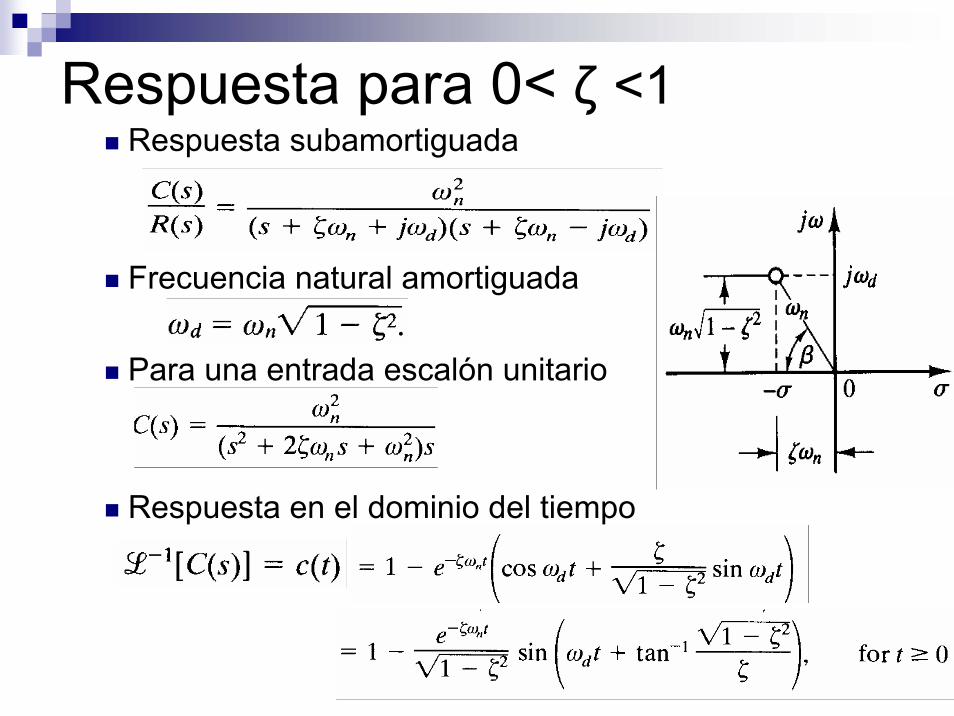
Respuesta para 0< ζ <1Respuesta subamortiguada
Frecuencia natural amortiguada
Para una entrada escalón unitario
Respuesta en el dominio del tiempo

Respuestas del sistema en función de ζ0< ζ <1 subamortiguadoζ=1 críticamente amortiguadoζ>1 sobreamortiguado
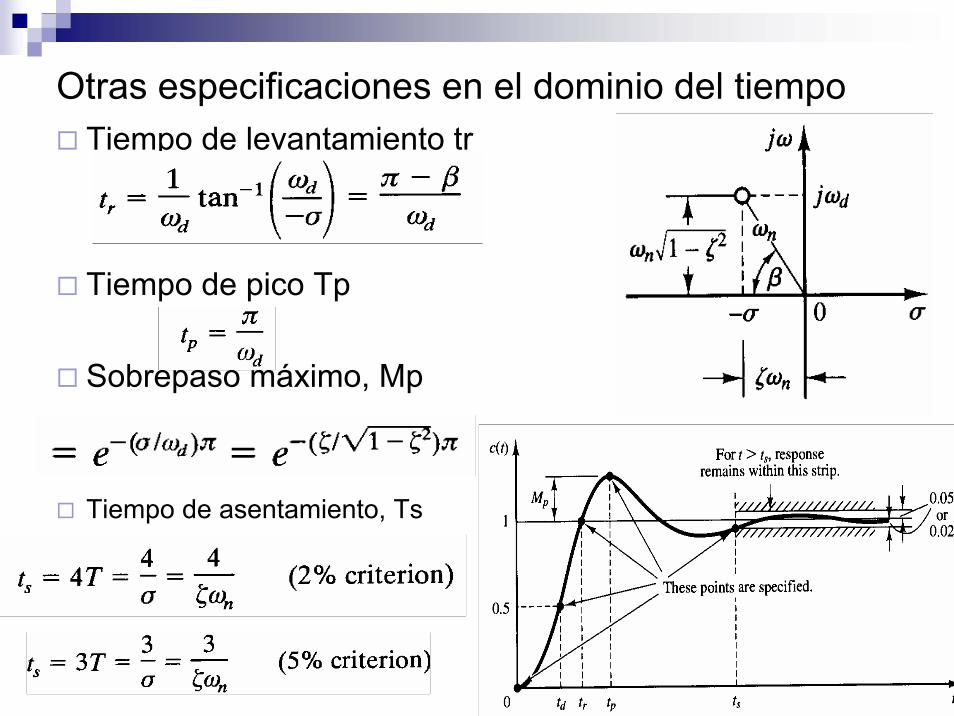
Otras especificaciones en el dominio del tiempoTiempo de levantamiento tr
Tiempo de pico Tp
Sobrepaso máximo, Mp
Tiempo de asentamiento, Ts

Análisis del lugar geométrico de las raíces
La respuesta transitoria de un sistema en lazo cerrado se relaciona estrechamente con la ubicación de los polos en lazo cerradoSi el sistema tiene una ganancia de lazo variable, entonces se puede conocer cómo se mueven los polos en lazo cerradoPara el diseñador, importa ajustar la ganancia para mover los polos de lazo cerrado a una posición deseada
W.R. Evans diseñó un método sencillo para encontrar las raíces de la ecuación característica.Con este método se puede predecir los efectos de variar el valorde la ganancia o agregar polos y ceros en lazo abiertoSe puede generar por computadora (Matlab)

Condición de ángulo y magnitudPara una función de transferencia de lazo cerrado
Ecuación característica
O bien
Condición de ángulo:
Condición de magnitud:
Si G(s)H(s) contiene un parámetro de ganancia K:
El lugar de las raíces es el lugar geométrico de los polos en lazo cerrado conforme K varía de cero a infinito
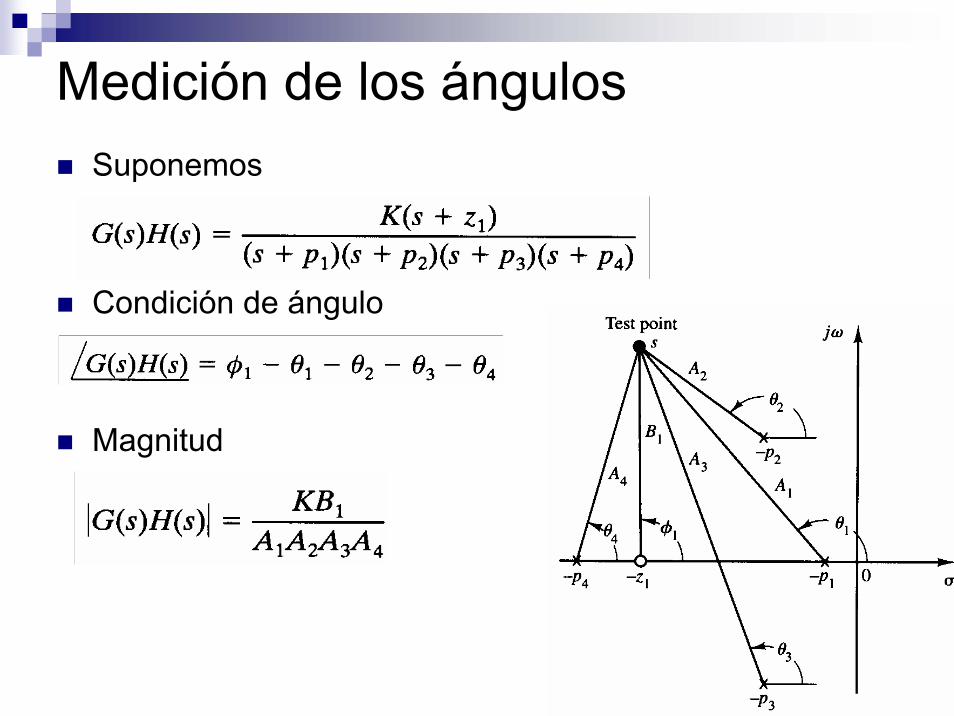
Medición de los ángulosSuponemos
Condición de ángulo
Magnitud

Ejemplo
Condición de ángulo:
Condición de magnitud

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del lugar sobre el eje realPunto inicial K=0 polos de lazo abierto
Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
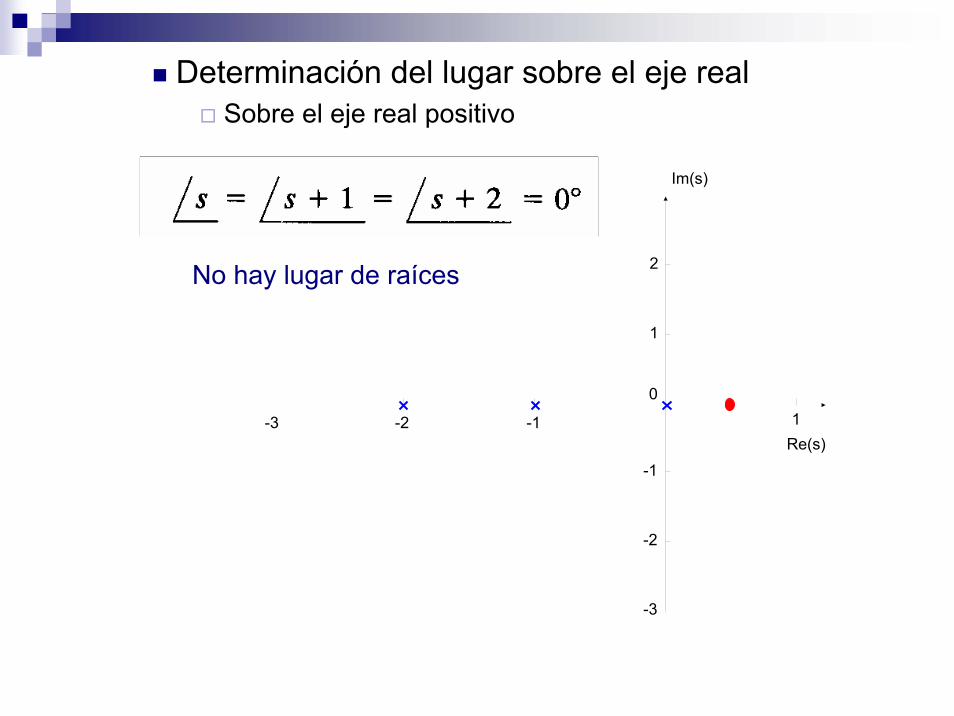
Determinación del lugar sobre el eje realSobre el eje real positivo
No hay lugar de raíces

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del lugar sobre el eje realEntre 0 y -1

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del lugar sobre el eje realEntre 0 y -1
Hay lugar de raíces

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del lugar sobre el eje realEntre -1 y -2

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del lugar sobre el eje realEntre -1 y -2
No hay lugar de raíces
Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
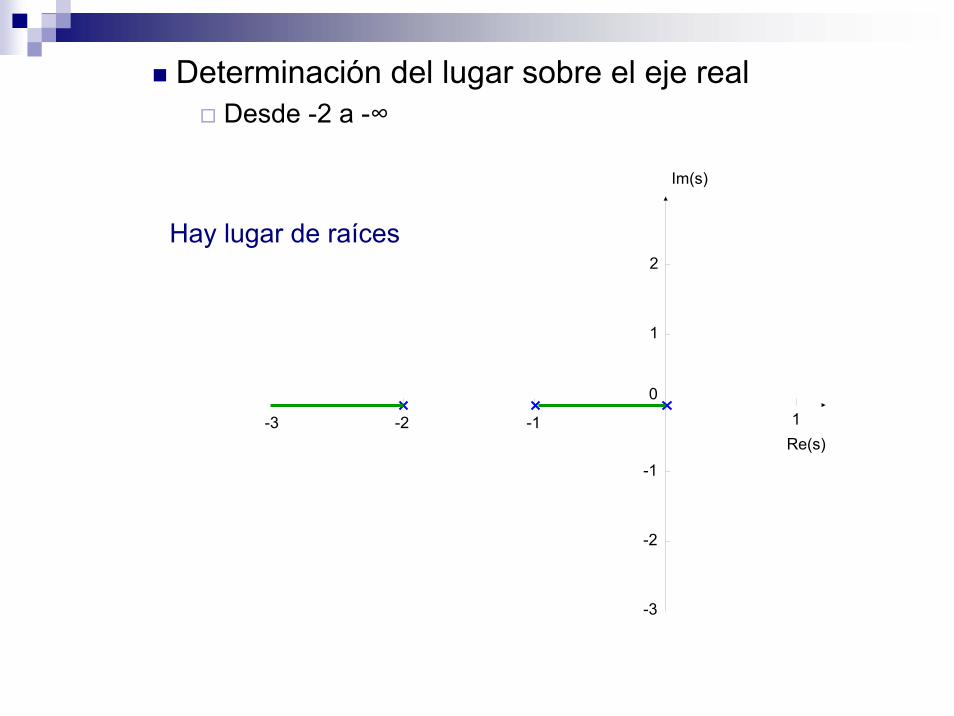
Determinación del lugar sobre el eje realDesde -2 a -∞
Hay lugar de raíces
Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
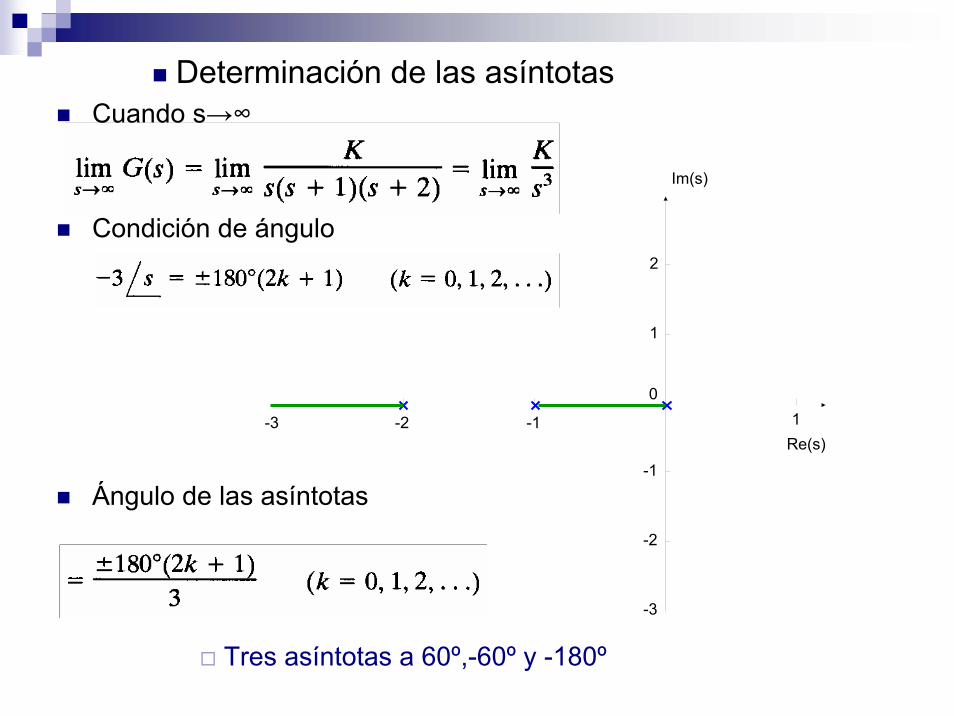
Determinación de las asíntotasCuando s→∞
Condición de ángulo
Ángulo de las asíntotas
Tres asíntotas a 60º,-60º y -180º

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación de las asíntotasIntersección de las asíntotas?
1−=
−−
=
a
a mncerosdesumapolosdesuma
σ
σ
Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
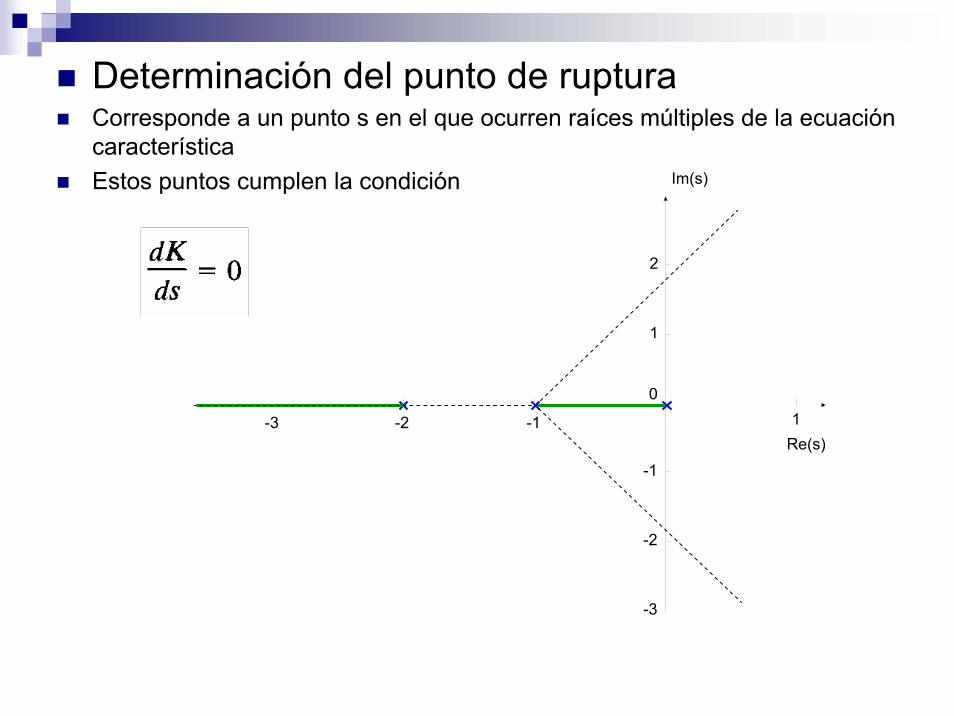
Determinación del punto de rupturaCorresponde a un punto s en el que ocurren raíces múltiples de la ecuación característicaEstos puntos cumplen la condición

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del punto de rupturaDe la ecuación característica
Puntos de ruptura

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del punto de rupturaDe la ecuación característica
Puntos de ruptura

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación del punto de rupturaDe la ecuación característica
Puntos de ruptura
Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
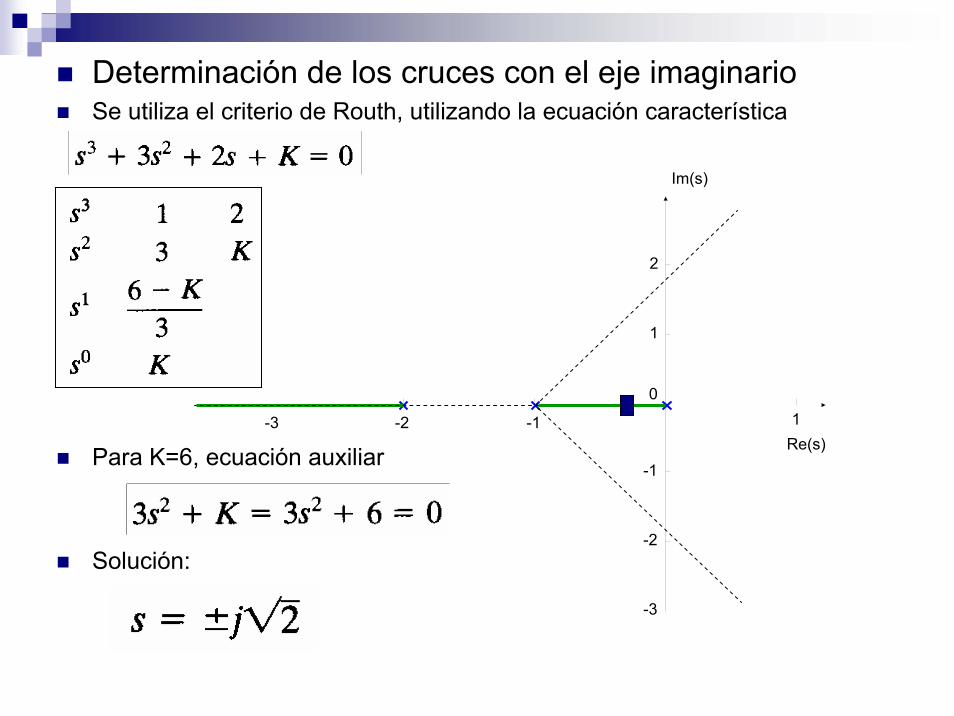
Determinación de los cruces con el eje imaginarioSe utiliza el criterio de Routh, utilizando la ecuación característica
Para K=6, ecuación auxiliar
Solución:

Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
Determinación de los cruces con el eje imaginarioSe utiliza el criterio de Routh, utilizando la ecuación característica
Para K=6, ecuación auxiliar
Solución:
Re(s)
Im(s)
-3 -2 -1 1
-3
-2
-1
0
1
2
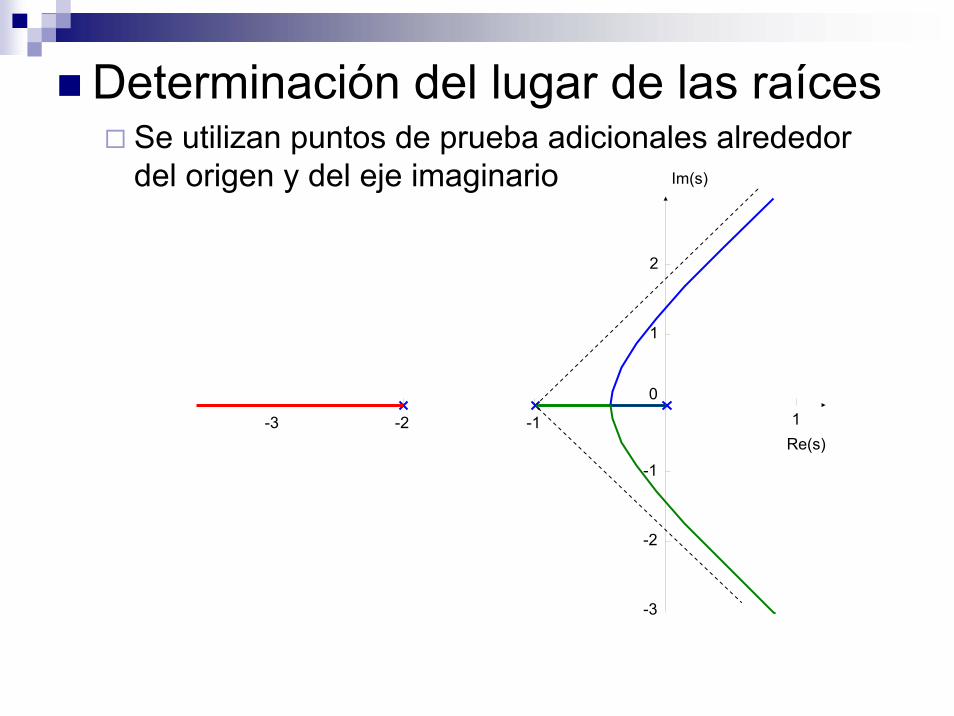
Determinación del lugar de las raícesSe utilizan puntos de prueba adicionales alrededor del origen y del eje imaginario
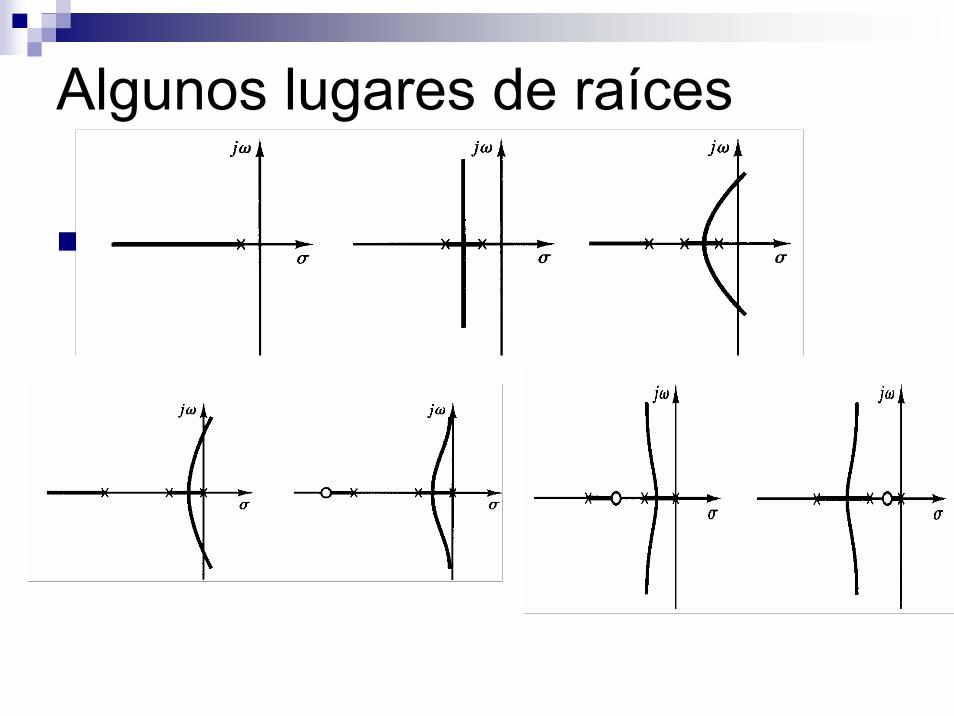
Algunos lugares de raíces
a

Análisis en el dominio de la frecuencia
Para el diseño de sistemas de controlSe realiza el estudio en frecuencia pero se debe cumplir con especificaciones en el tiempo
La correlación entre los dos dominios es indirectaEs más sencillo realizar pruebas con generadores senoidalesExisten herramientas más sencillas para trabajar con sistemas de alto ordenConveniente para mediciones de sensibilidad al ruido y variaciones de parámetros
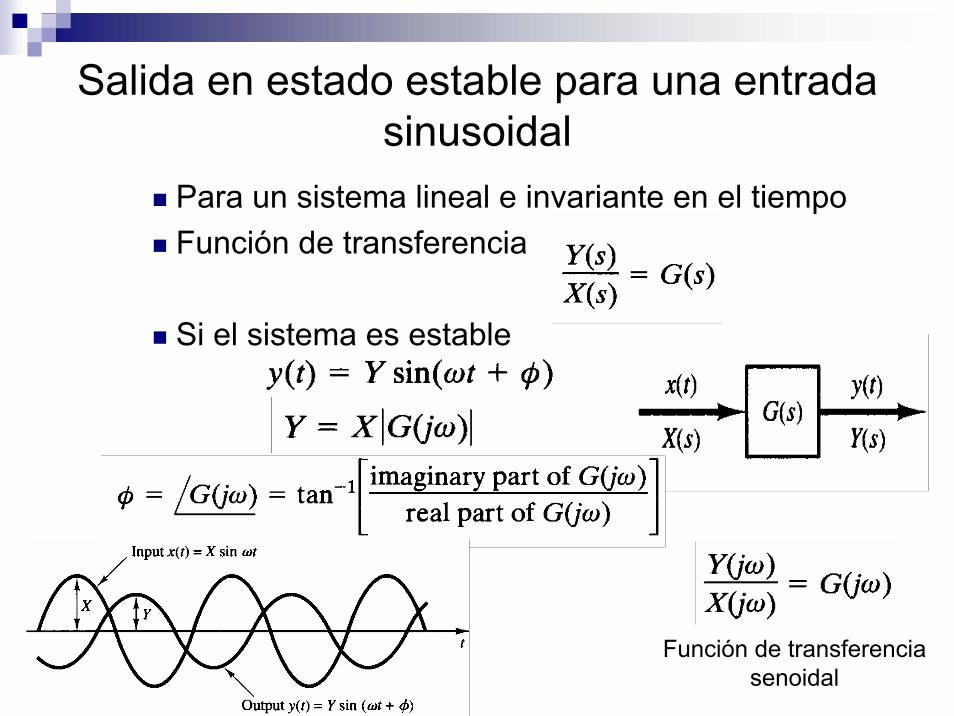
Salida en estado estable para una entrada sinusoidal
Para un sistema lineal e invariante en el tiempoFunción de transferencia
Si el sistema es estable
Función de transferencia senoidal

Trazas de Bode
Presenta dos gráficas para la función de transferencia senoidal
Logaritmo de la magnitud versus frecuencia en escala logarítmicaFase versus frecuencia en escala logarítmica
VentajasLa multiplicación de magnitudes se convierte en sumaMétodo simple cuando se trazan magnitudes asintóticas (fácil corrección)Se puede realizar mediante computadora

Factores básicos de G(jω)
Ganancia KFactores de derivada e integral (jω)±1
Factores de primer orden (1+jωT) ±1
Factores cuadráticos [1+2ζ(jω/ωn)+(jω/ωn)2] ±1
Una vez establecido cada factor se suman entre sí
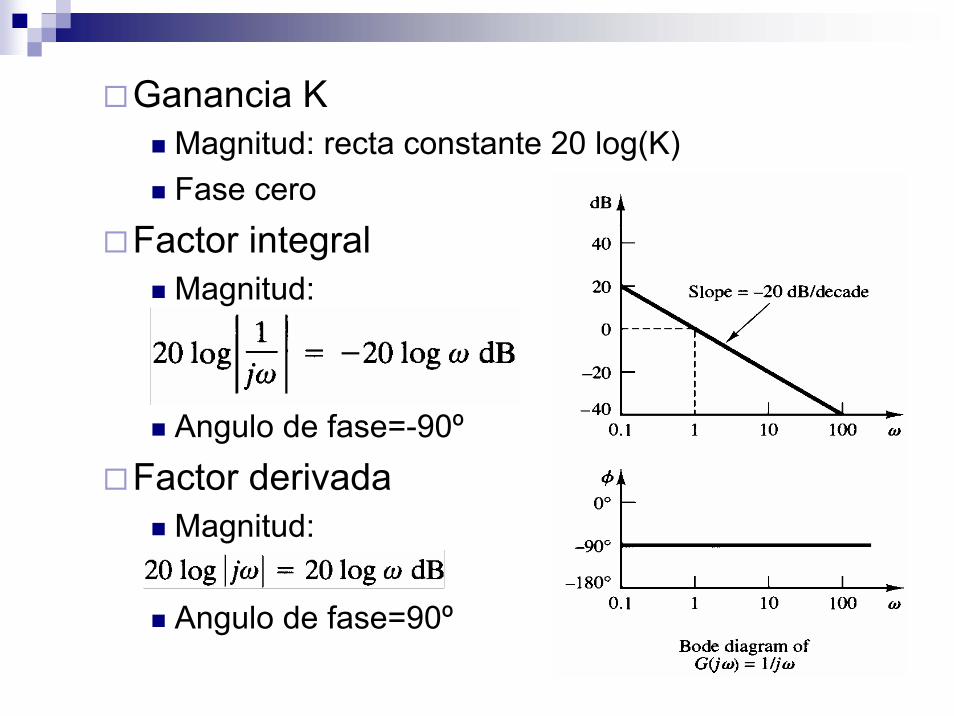
Ganancia KMagnitud: recta constante 20 log(K)Fase cero
Factor integralMagnitud:
Angulo de fase=-90ºFactor derivada
Magnitud:
Angulo de fase=90º

Factor (1+jωT)-1
Magnitud:
Para frecuencias bajas ω<<1/T
Para frecuencias altas ω>>1/T
Frecuencia de corte: 1/T
Faseω=0 , φ=0ºω=1/T , φ=-45ºω→∞ , φ=-90º
Filtro pasa-bajos

Factor (1+jωT)Magnitud:
Fase

Factor cuadráticoMagnitud:
Para frecuencias bajas
Para frecuencias altas
Frecuencia de cruce: ω=ωnCerca de ωn ocurre un pico de resonancia que depende del valor de ζHay que corregir la traza de las asíntotas

Factor cuadráticoFase
Para ω=0, φ=0ºω= ωn , φ=-90ºω→∞ , φ=-180º
Frecuencia de resonancia
Mangnitud pico resonancia
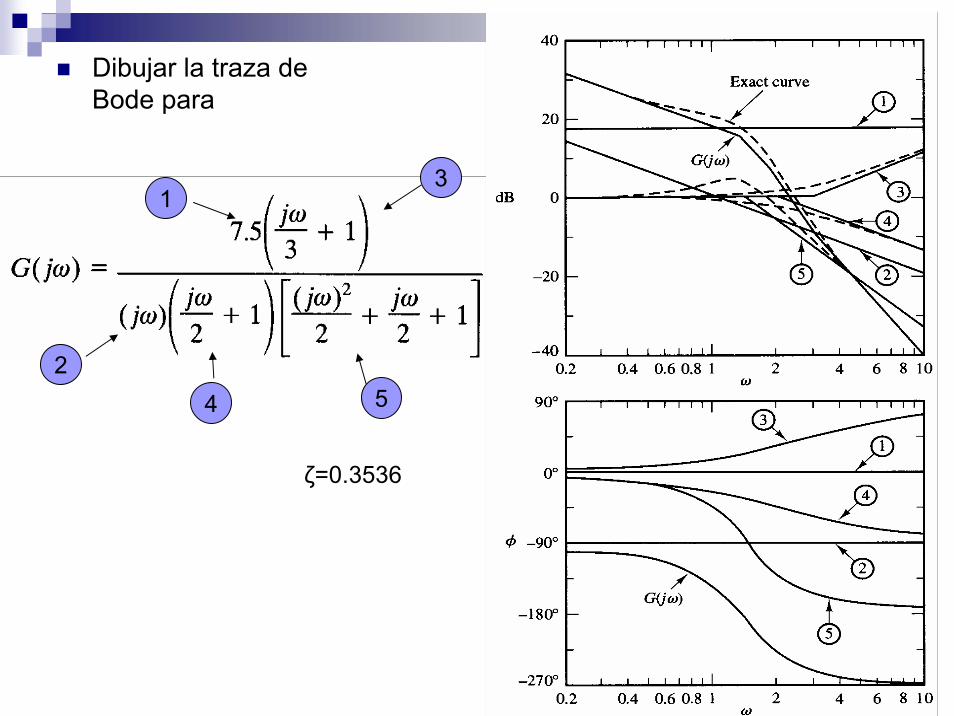
Dibujar la traza de Bode para
1
2
3
4 5
ζ=0.3536

Estabilidad en el dominio de la frecuencia
Criterio de estabilidad de Nyquist:Establece la cantidad de ceros y polos de la función 1+G(s)H(s) con parte real positiva, Z=N+P
Z= número de ceros con parte real positivaN=número de encierros en sentido horario de -1+j0P=número de polos con parte real positiva de 1+G(s)H(s) =número de polos de G(s) H(s)
Si G(jω)H(jω) es de fase mínima, entonces la gráfica polar no encierra al punto (-1,0)
Sistema de fase mínima: tiene todos sus polos y ceros en el semiplano izquierdo (con la excepción de un polo en el origen)
Diagrama de Nyquistes un gráfico polar de G(jω)H(jω) para -∞< ω <∞Mapea el semiplano derecho del plano s en el interior del contorno
que realiza G(jω)H(jω)

Estabilidad en el dominio de la frecuenciaMargen de ganancia: es el recíproco de la magnitud |G(jω)| en la frecuencia con ángulo de fase -180º
Margen de fase: es 180º más el ángulo de fase φ de G(jω) en la frecuencia de cruce de ganancia
Frecuencia de cruce de ganancia se da para |G(jω)|=1

Correlación entre la respuesta transitoria al escalón y la respuesta en frecuencia
Margen de fase sistema de segundo orden
Para 0≤ ζ ≤0.6
Frecuencia de cruce ωc: Se da cuando |G(jω)| cruza la línea de 0dB
Para sistemas de segundo orden, el tiempo que toma al sistema de lazo cerrado elevarse al 63% de su valor final es aproximadamente igual a ωcMientras más grande es ωc, más rápida es la respuesta en lazo cerrado
Esta condición se puede extender a sistemas de orden superior siempre que exista un par de polos dominantes en lazo cerrado

Diseño de sistemas de control Especificaciones de desempeño
Los sistemas de control se diseñan para cumplir requerimientos del sistema
Precisión en estado estable, estabilidad relativa, respuesta transitoria, características de respuesta en frecuenciaSensibilidad a variaciones de parámetros
Robustez, rechazo a perturbaciones
Compensación del sistemaEl solo ajuste de la ganancia de lazo puede que no satisfaga todas las especificacionesEs necesario volver a diseñar el sistema
Modificación de la estructura o agregado de componentes adicionales (Compensación)Elemento insertado en el sistema: compensadorProcedimiento de diseño iterativo

Compensadores
Clases:Proporcional, proporcional-derivativa, proporcional-integral, proporcional-derivativa-integralDe adelanto, atraso, atraso-adelanto
TipoElectrónico
Amplificadores operacionales
RedesEléctricas, mecánicas, neumáticas o hidráulicas

Controlador proporcional derivativo
Su acción de control se define:
Función de transferencia:
Controlador proporcional derivativoLa acción de control derivativa ocurre donde la magnitud de la salida del controlador es proporcional a la velocidad de cambio de la señal de error
Eficaz en periodos transitoriosControl anticipatorioAmplifica las señales de ruido y puede provocar un efecto de saturación en el actuadorNo tiene efecto en el error en estado estable (si es constante)

Controlador proporcional derivativo

Controlador proporcional-integral
Su acción de control se define
Función de transferencia
Controlador proporcional-integral
Incrementa el tipo de sistema Agrega un polo en s=0Mejora en un orden el error en estado estable del sistema original
Ej.: si el error para una entrada dada es constante, lo reduce a cero
Puede volver inestable al sistema

Controlador proporcional-integral

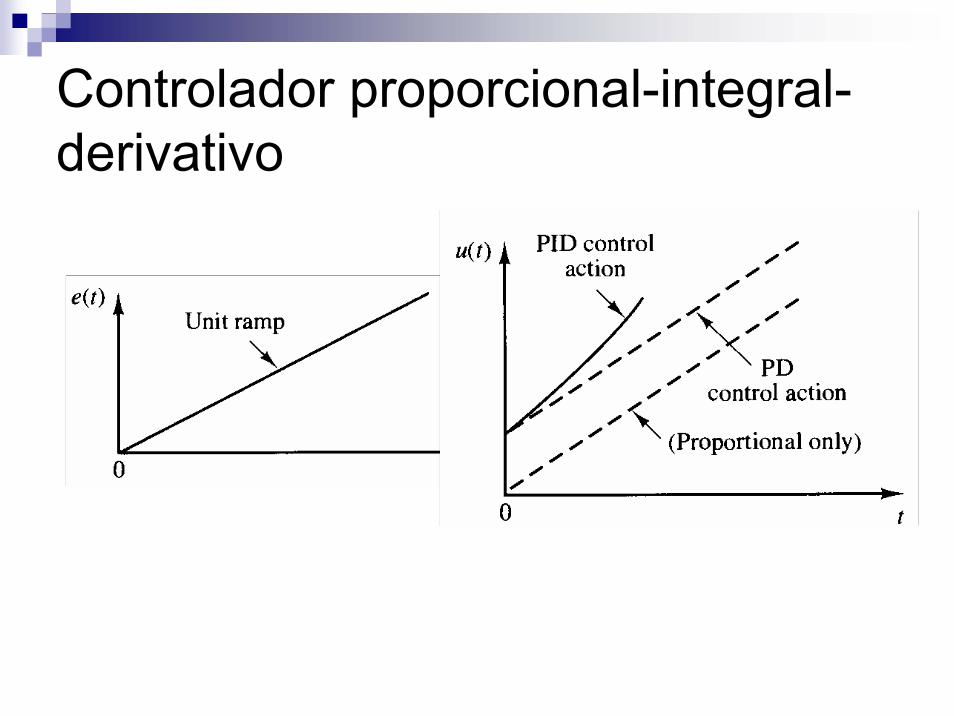
Controlador proporcional-integral-derivativo
Su acción de control se define
Función de transferencia
Controlador proporcional-integral-derivativo
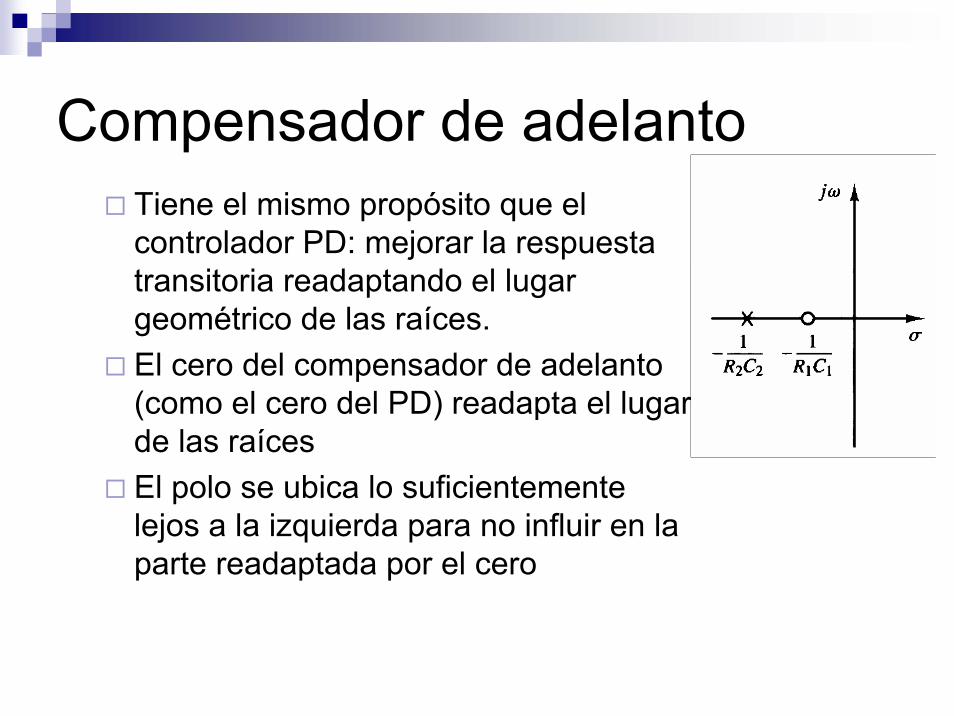
Compensador de adelantoTiene el mismo propósito que el controlador PD: mejorar la respuesta transitoria readaptando el lugar geométrico de las raíces.El cero del compensador de adelanto (como el cero del PD) readapta el lugar de las raícesEl polo se ubica lo suficientemente lejos a la izquierda para no influir en la parte readaptada por el cero
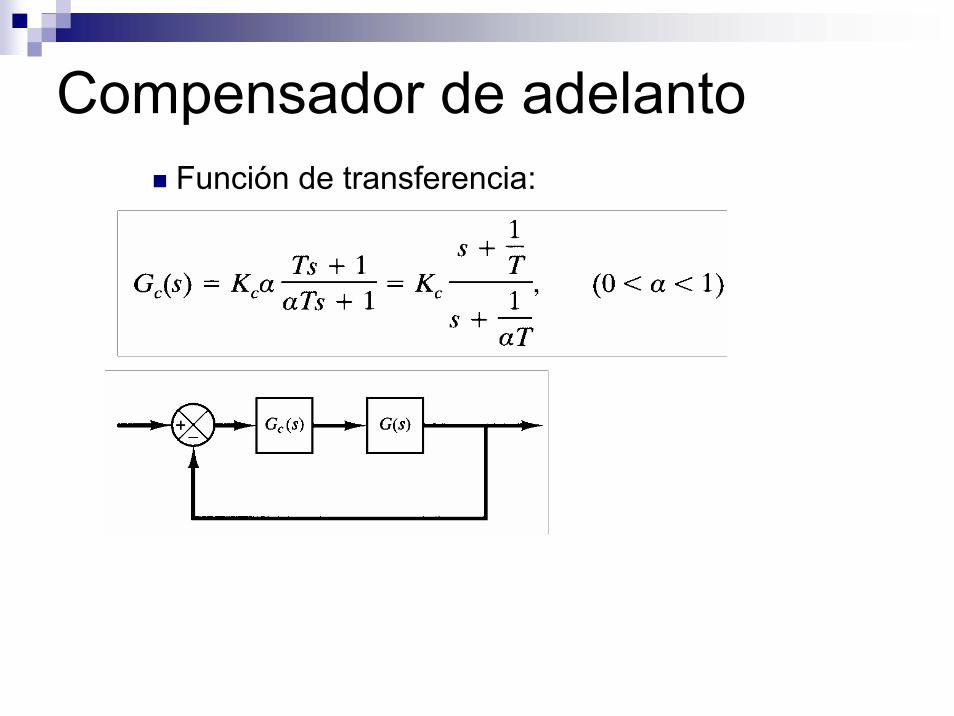
Compensador de adelantoFunción de transferencia:

Cálculo del compensador con el diagrama de raíces
Ejemplo: para el sistema dado, compensar para ζ=0.5 y ωn=4
ζ=0.5, ωn=2rad/s kv=2s-1
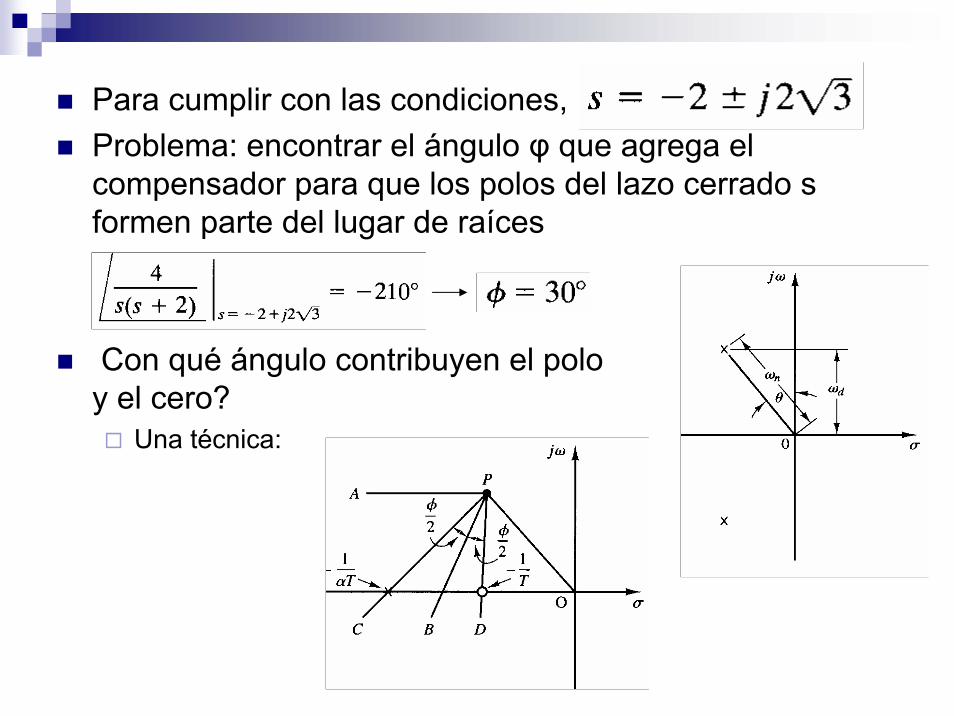
Para cumplir con las condiciones,Problema: encontrar el ángulo φ que agrega el compensador para que los polos del lazo cerrado s formen parte del lugar de raíces
Con qué ángulo contribuyen el polo y el cero?
Una técnica:
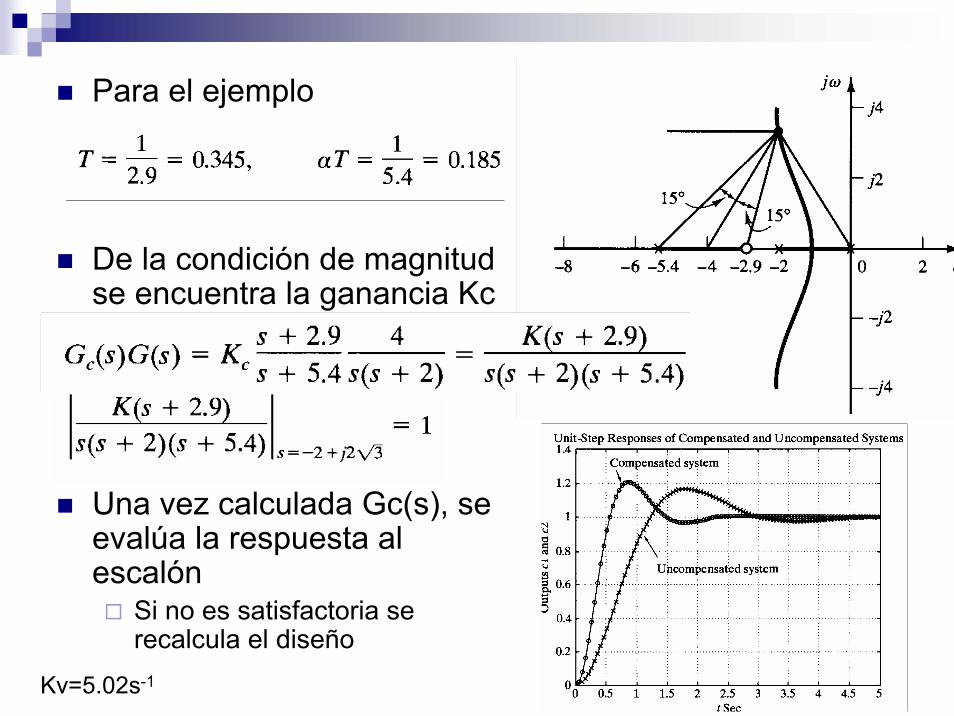
Para el ejemplo
De la condición de magnitud se encuentra la ganancia Kc
Una vez calculada Gc(s), se evalúa la respuesta al escalón
Si no es satisfactoria se recalcula el diseño
Kv=5.02s-1

Diseño del compensador de adelanto en el dominio de la frecuencia
Objetivo: reformar la respuesta en frecuencia ofreciendo un ángulo de adelanto de fase suficiente para compensar atrasos de fase del sistema Traza de Bode

Ejemplo: para el sistema anterior,se desea Kv=20s-1, MF≥50º, Mg ≥10dBSe encuentra K para cumplir con la especificación de desempeño en estado estable
Luego se traza el Bode de G1(jω)=KG(jω) y se calcula MF
Para obtener MF=50º sin disminuir K, el compensador debe contribuir con un adelanto φm de al menos 33º
Se elige φm =38º

Se puede demostrar que
Cuando la fase es φm, la frecuencia esY la magnitud se modifica en
Se establece la frecuencia a la que |G1(jω)| escomo la nueva frecuencia de cruce de gananciaLuego se calculan las frecuencias del cero y del polo y la constante Kc=K/αLuego se verifica el MG. Si no es aceptable, se modifica el compensador
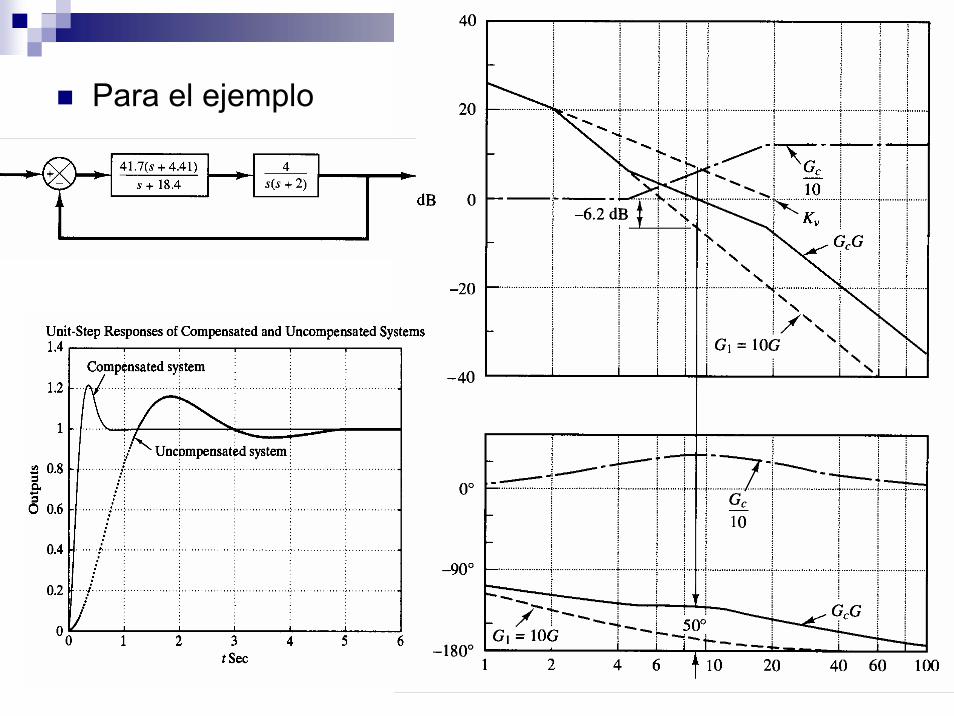
Para el ejemplo
Compensador de atrasoEs muy similar al controlador PI
En este compensador el polo se encuentra cerca pero no en el origen.
Se pretende mejorar la respuesta en estado estable sin modificar la respuesta transitoria
No debe cambiar el lugar de las raíces en la vecindad de los polos dominantes en lazo cerradoGeneralmente se ubican el polo y el cero próximos entre sí y cerca del origen
Función de transferencia

Un ejemploPara el sistema se pretende modificar la constante de error estático de velocidad Kv a 5s-1
Polos dominantes de lazo cerrado
s=-0.337±j0.5864
ζ=0.491 , ωn=0.673rad/s
Kv=0.53s-1 (sistema original)
Para cumplir la especificación, es necesario aumentar Kv 10 vecesSeleccionamos β=10Elegimos la ubicación del cero y el polo en s=-0.05 y s=-0.005 respectivamenteLa función del controlador es
Entonces
No se puede despreciar el ángulo de Gc cerca de un polo dominante, por lo que se rehace el lugar de las raíces para encontrar los nuevos polos que mantienen el ζ original
Se encuentran los nuevos polos en s1,2=-0.31±j0.55

Encontramos el valor de K y Kc:

Respuestas del sistema
Si la respuesta transitoria no es aceptable, utilizar un compensador de atraso-adelanto
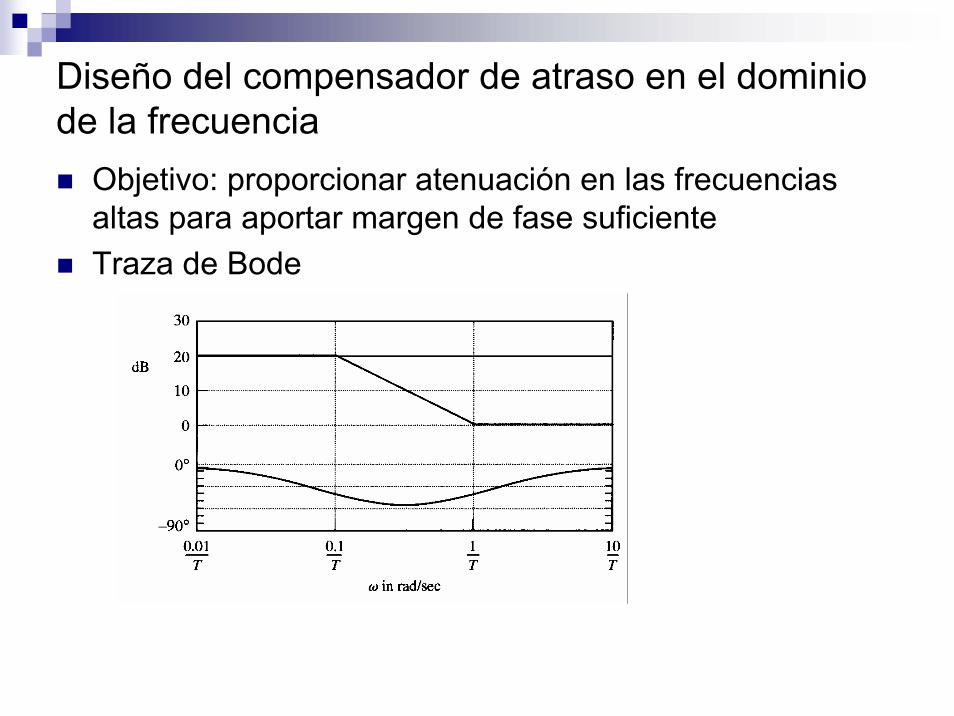
Diseño del compensador de atraso en el dominio de la frecuencia
Objetivo: proporcionar atenuación en las frecuencias altas para aportar margen de fase suficienteTraza de Bode

Un ejemploPara el sistema compensar para Kv=5s-1, MF=40º y MG=40dB
Se define
También se define
Y se ajusta la ganancia para cumplir con Kv

Se traza el Bode de
Se elige el valor de frecuencia que corresponde a un MF=40º más una tolerancia de 5º a 12º →MF=52º.Esta frecuencia es 0.5 rad/s, y será la nueva frecuencia de cruceSe elige el cero del compensador en una frecuencia menor y alejada de la anterior en 0.1 rad/sPara que el cruce se establezca en 0.5rad/s, el compensador debe atenuar 20dB, y por tanto
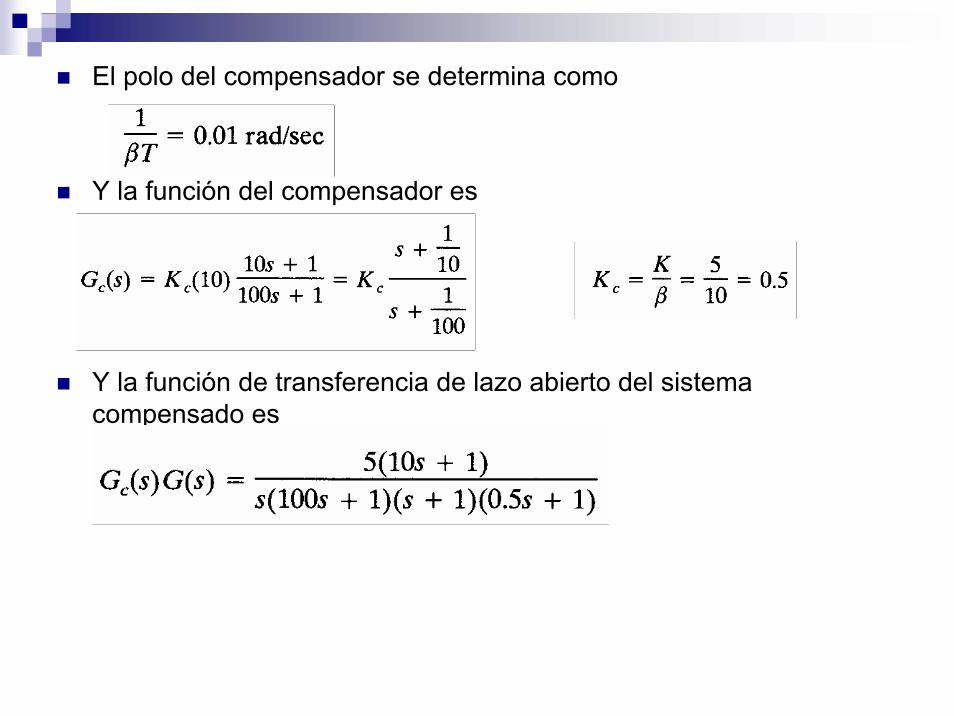
El polo del compensador se determina como
Y la función del compensador es
Y la función de transferencia de lazo abierto del sistema compensado es

Respuestas del sistema

Compensación de atraso-adelanto
Se utiliza para mejorar la respuesta transitoria y la de estado estableCombina las ventajas de los dos métodosPosee dos polos y dos cerosEl procedimiento de diseño implica realizar primero la compensación por adelanto y luego por atraso

Comparación
Sin compensar Adelanto Atraso Atraso-adelanto