4 vectores y geometría
TRANSCRIPT

VECTORES Y GEOMETRÍA
VECTORES FIJOS EN EL PLANO
Vector fijo
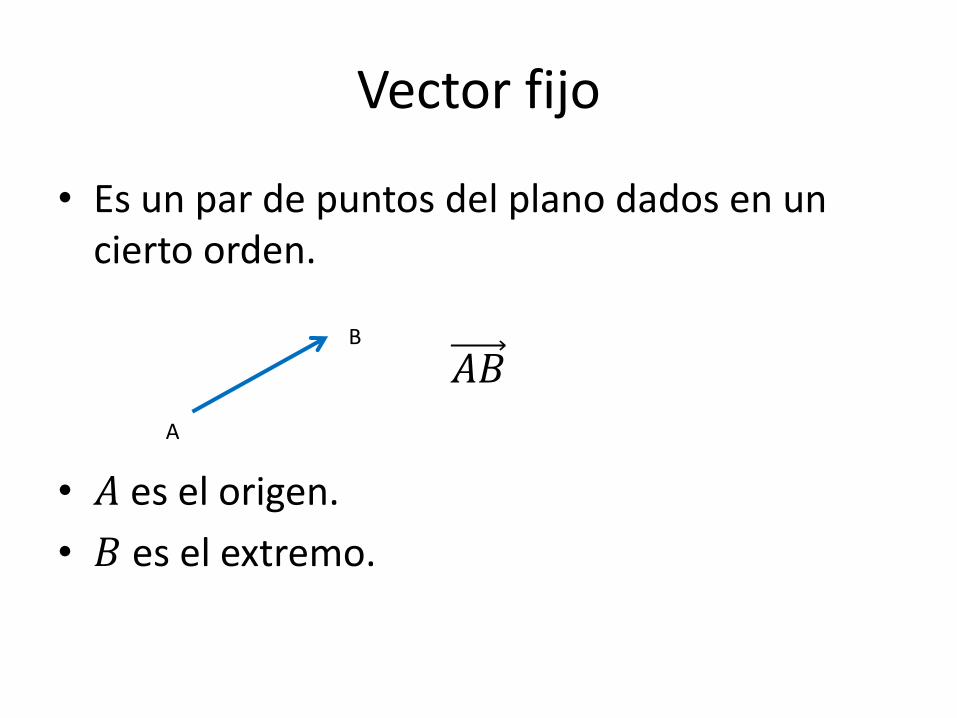
• Es un par de puntos del plano dados en un cierto orden.
𝐴𝐵
• 𝐴 es el origen.
• 𝐵 es el extremo.
A
B

• Dos puntos diferentes del plano A y B permiten definir dos vectores distintos:
𝐴𝐵
𝐵𝐴A
B
B
A

• Los vectores fijos, 𝐴𝐴, 𝐵𝐵,… en los que el origen coincide con el extremo, se llaman vectores fijos nulos y sus representaciones gráficas son los puntos: A, B, C,….

Características de un vector fijo

• Un vector fijo queda determinado si se conoce su origen y su extremo. Pero también si se conocen sus características:
• Módulo.• Dirección.• Sentido.• Punto de aplicación.

Módulo
• Se llama módulo del vector fijo 𝐴𝐵, y se
denota por 𝐴𝐵 , a la longitud del segmento
𝐴𝐵.

Dirección
• Se llama dirección del vector fijo no nulo 𝐴𝐵, a la definida por la recta 𝐴𝐵, o cualquiera de sus paralelas.
• Si dos vectores fijos no nulos 𝐴𝐵 y 𝐶𝐷, tienen
la misma dirección, se escribe: 𝐴𝐵 𝐶𝐷; y si
no, 𝐴𝐵 𝐶𝐷
Sentido
• Se llama sentido del vector fijo no nulo 𝐴𝐵,al definido por el movimiento de A a B.
• Si dos vectores no nulos del mismo sentido de
la misma dirección 𝐴𝐵 𝑦 𝐶𝐵, tienen el mismo
sentido, se expresa 𝐴𝐵 ↑ 𝐶𝐷, y si tienen
sentido contrario, 𝐴𝐵 ↓ 𝐶𝐷.
• Los vectores fijos nulos, tienen por convenio, el mismo sentido.
Punto de aplicación
• El punto de aplicación de un vector fijo es su origen.
Equipolencia de vectores

Definición
• Dos vectores fijos 𝐴𝐵 𝑦 𝐶𝐷, son equipolentes si tienen el mismo módulo, dirección y sentido.
• Esto se expresa 𝐴𝐵~ 𝐶𝐷.
• Si no son equipolentes, 𝐴𝐵~ 𝐶𝐷.

Vectores libres

Definición
• Vector libre es el conjunto formado por un vector fijo y todos sus equipolentes.
• Se llama representante del vector libre a cualquiera de los elementos del conjunto.
• El vector libre, de representante el vector fijo
𝐴𝐵, se expresa:
𝐴𝐵 = 𝑋𝑌 𝑋𝑌~𝐴𝐵

• El vector formado por todos los vectores fijos
nulos, se llama vector ceroy se denota por 0.
0 = 𝐴𝐴, 𝐵𝐵,… . .

• Si no se desea especificar ningún representante, podemos designar a los
vectores libres con letras minúsculas: 𝑎, 𝑏, 𝑐, …
• Dos vectores libres son iguales si tienen representantes equipolentes.
𝐴𝐵 = 𝐶𝐷 ↔ 𝐴𝐵~𝐶𝐷

Características de un vector libre
• Un vector libre queda determinado si se conocen:
– Módulo.
– Dirección.
– Sentido.

Operaciones con vectores libres
Suma de vectores libres
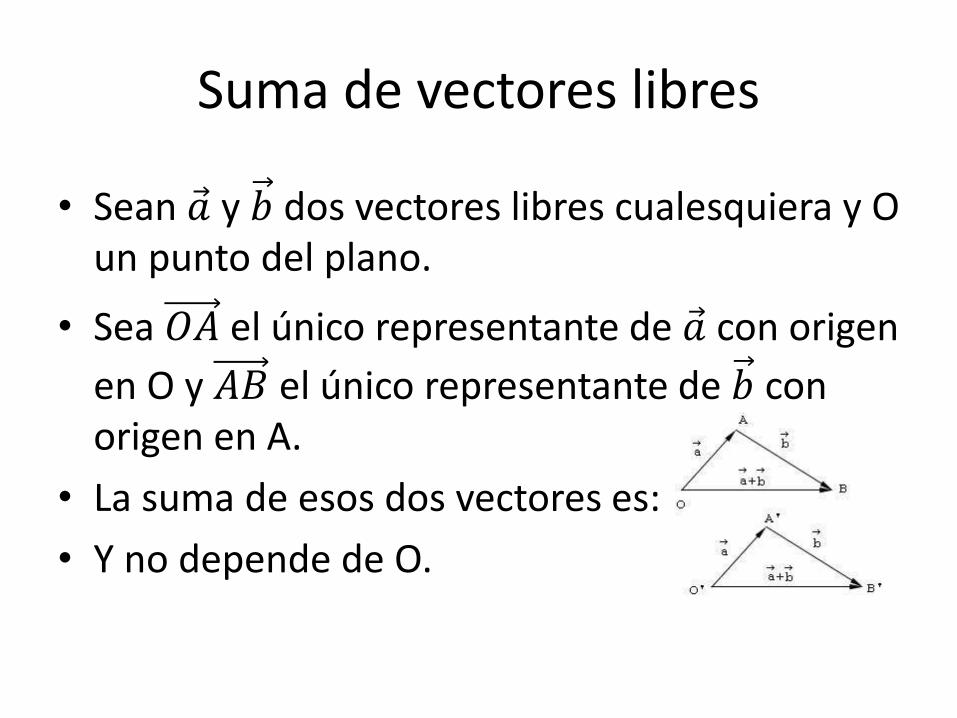
• Sean 𝑎 y 𝑏 dos vectores libres cualesquiera y O un punto del plano.
• Sea 𝑂𝐴 el único representante de 𝑎 con origen
en O y 𝐴𝐵 el único representante de 𝑏 con origen en A.
• La suma de esos dos vectores es:
• Y no depende de O.

Propiedades
• Asociativa:
𝑎 + 𝑏 + 𝑐 = 𝑎 + 𝑏 + 𝑐
• Conmutativa:
𝑎 + 𝑏 = 𝑏 + 𝑎
• Elemento neutro:𝐸𝑠 𝑒𝑙 𝑣𝑒𝑐𝑡𝑜𝑟 𝑛𝑢𝑙𝑜 0
• Elemento opuesto:𝐸𝑙 𝑜𝑝𝑢𝑒𝑠𝑡𝑜 𝑑𝑒 𝑎 𝑒𝑠 − 𝑎

Producto de un número real por un vector libre
• Se llama producto de un número real x por un vector 𝑎, al vector libre 𝑥𝑎 que tiene las características:
• Módulo: 𝑥𝑎 = 𝑥 . 𝑎 .
• Dirección: 𝑥𝑎 𝑎.
• Sentido: 𝑥𝑎 ↑ 𝑎 si 𝑥 > 0𝑥𝑎 ↓ 𝑎 si 𝑥 < 0

Vectores colineales
• Dos vectores libres son colineales si sus representantes con origen común se encuentran en la misma recta.
𝑎 𝑦 𝑏 𝑛𝑜 𝑐𝑜𝑙𝑖𝑛𝑒𝑎𝑙𝑒𝑠 𝑎 𝑦 𝑏 𝑐𝑜𝑙𝑖𝑛𝑒𝑎𝑙𝑒𝑠

Observaciones
• El vector libre 0es colineal con cualquier vector libre.
• Decir de dos vectores libres distintos de 0 que son colineales equivale a decir que tienen la misma dirección.
• Decir de dos vectores libres que no son colineales equivale a decir que son distintos de cero y de distinta dirección.

Bases y coordenadas

Bases
• Una base es un par ordenado de vectores libres no colineales.
• Una base ortonormal o métrica es aquélla cuyos vectores son perpendiculares y unitarios. De módulo 1.

Observación
• A partir de ahora trabajaremos solo con este último tipo de bases, que denotaremos así: {i,j}.
• Como las bases del plano tienen dos vectores, se dice que la dimensión del plano es 2.

Propiedades
1. Todo vector 𝑎se puede descomponer según la base 𝑖, 𝑗 del siguiente modo: 𝑎 = 𝑥 𝑖 + 𝑦 𝑗
2. La descomposición del vector a en la base {𝑖, 𝑗} es única.
Coordenadas
• Se llaman coordenadas del vector 𝑎 = 𝑥 𝑖 +𝑦 𝑗 en la base { 𝑖, 𝑗} al par ordenado de números (𝑥, 𝑦).

• Observa que, fijada una base, un vector libre queda determinado si se conocen sus coordenadas en dicha base, ya que se puede dibujar fácilmente un representante.
• Recíprocamente, fijada una base y dibujado un representante de un vector libre hay que saber calcular sus coordenadas en dicha base. Para ello basta ir de su origen a su extremo por caminos paralelos a los vectores de la base.

Observaciones
• Fijada una base, el vector 𝑎 = 𝑥 𝑖 + 𝑦 𝑗 puede, pues, identificarse con sus coordenadas en dicha base, esto es: 𝑎 = (𝑥, 𝑦).
• A partir de ahora supondremos fijada una base métrica { 𝑖, 𝑗}.

Propiedades
Sean 𝑎 = (𝑥, 𝑦) y 𝑏 = (𝑥′, 𝑦′) dos vectores y 𝑡un número real:
Primera
𝑎 = 𝑏 ↔ 𝑥 = 𝑥′, 𝑦 = 𝑦′.
Es la segunda propiedad de las bases expresada de otro modo.

Segunda
• Las coordenadas del vector suma son la suma de las coordenadas de los vectores sumandos.
• Esto es:
𝑎 + 𝑏 = (𝑥 + 𝑥′, 𝑦 + 𝑦′)
Tercera
• Las coordenadas del vector producto t·a son las coordenadas del vector a multiplicadas por el número t. Esto es: 𝑡 𝑎 = (𝑡𝑥, 𝑡𝑦).

EL PLANO AFÍN

1.- Vector de posición de un punto
• Si fijamos un punto O en el plano, a cada punto de éste se le puede asociar un vector li-bre; y a cada vector libre, un punto. En efecto:
• Al punto A se le puede asociar el vector [𝑂𝐴].
• Al vector 𝑥se le puede asociar el punto X tal
que [𝑂𝑋] = 𝑥.

2.- Sistemas de referencia
• Un punto y una base definen un sistema de referencia.
• Si la base es ortonormal o métrica, el sistema se llama ortonormal o métrico .

• A partir de ahora supondremos fijado un sistema de referencia métrico {𝑂; 𝑖, 𝑗}.

• El punto O se llama origen de coordenadas.
• La recta que pasa por O y tiene la dirección de i se llama eje de abscisas o primer eje.
• La recta que pasa por O y tiene la dirección de j se llama eje de ordenadas o segundo eje.

• Las semirrectas OX y OX' se denominan, respectivamente, semieje positivo y semieje negativo de abscisas. Del mismo modo, las semirrectas OY y OY' se denominan semieje positivo y semieje negativo de ordenadas.

• Las cuatro regiones en las que los ejes dividen al plano se llaman cuadrantes: XOY es el primer cuadrante; YOX', el segundo; X'OY', el tercero; e Y'OX, el cuarto.

3.- Coordenadas de un punto
• Se llaman coordenadas del punto A en el sistema de referencia {𝑂; 𝑖, 𝑗} a las coordenadas de su vector de posición [𝑂𝐴] en la base { 𝑖, 𝑗}. Para indicar que el punto A tiene de coordenadas (x,y), se escribe A(x,y). Es decir:
𝐴(𝑥, 𝑦) ↔ [𝑂𝐴] = 𝑥 · 𝑖 + 𝑦 · 𝑗
• La primera coordenada del punto A se llama abscisa y la segunda, ordenada.

Aplicaciones

1.- Coordenadas de un vector libre determinado por dos puntos
• Si 𝐴(𝑥𝑎, 𝑦𝑎) 𝑦 𝐵(𝑥𝑏, 𝑦𝑏) son dos puntos cua-lesquiera, se verifica:
[𝐴𝐵] = (𝑥𝑏 − 𝑥𝑎, 𝑦𝑏 − 𝑦𝑎)

2.- Coordenadas del punto medio de un segmento
• Si 𝑀(𝑥𝑚, 𝑦𝑚) es el punto medio del segmento de extremos 𝐴(𝑥𝑎, 𝑦𝑎) 𝑦 𝐵(𝑥𝑏, 𝑦𝑏), se verifica:
𝑥𝑚 =𝑥𝑎 + 𝑥𝑏
2; 𝑦𝑚 =
𝑦𝑎 + 𝑦𝑏2

3.- Coordenadas del baricentro de un triángulo
• Si G(x,y) es el baricentro del triángulo que tiene por vértices los puntos 𝐴(𝑥𝑎, 𝑦𝑎), 𝐵(𝑥𝑏, 𝑦𝑏) 𝑦 𝐶(𝑥𝑐 , 𝑦𝑐), se verifica:
𝒙𝒈 =𝒙𝒂 + 𝒙𝒃 + 𝒙𝒄
𝟑; 𝒚𝒈 =
𝒚𝒂 + 𝒚𝒃 + 𝒚𝒄𝟑

Ecuaciones de la recta
1.- Vector direccional de una recta
• Se llaman vectores direccionales de una recta
a los vectores distintos de 0que tienen su misma dirección.

• Si de una recta solo se conoce un vector direccional, no queda determinada ya que todas las rectas paralelas comparten dichos vectores.

• Para que una recta quede determinada nos deben dar, además de un vector direccional, un punto por el que pasa dicha recta. Ambos datos juntos constituyen una determinación lineal de la recta.
2.- Ecuación vectorial
• Si 𝑋(𝑥, 𝑦) es un punto cualquiera del plano, es evidente que:
𝑋𝑟 ↔ 𝑃𝑋 𝑦 𝑣 𝑠𝑜𝑛 𝑐𝑜𝑙𝑖𝑛𝑒𝑎𝑙𝑒𝑠 ↔
[𝑃𝑋] = 𝑡 · 𝑣 ↔ [𝑃𝑂] + [𝑂𝑋] = 𝑡 · 𝑣 ↔
[𝑂𝑋] = [𝑂𝑃] + 𝑡 · 𝑣
Por las propiedades de los vectores colineales.

Ecuación vectorial de la recta
𝒙, 𝒚 = 𝒙𝟎, 𝒚𝟎 + 𝒕 𝒗𝟏, 𝒗𝟐

3.- Ecuaciones paramétricas
• De la ecuación vectorial de la recta se deduce:𝑥, 𝑦 = 𝑥0, 𝑦0 + 𝑡 𝑣1, 𝑣2 →𝑥, 𝑦 = (𝑥0, 𝑦0) + (𝑡𝑣1, 𝑡𝑣2) →𝑥, 𝑦 = (𝑥0 + 𝑡𝑣1, 𝑦0 + 𝑡𝑣2)
• Y finalmente:
𝒙 = 𝒙𝟎 + 𝒕𝒗𝟏𝒚 = 𝒚𝟎 + 𝒕𝒗𝟐

4.- Ecuación continua
• Sea la recta r que pasa por el punto 𝑃 𝑥0, 𝑦0 y tiene por vector direccional a 𝑣 𝑣1, 𝑣2 . Si 𝑋 𝑥, 𝑦 es uno cualquiera de sus puntos:
𝑋 ∈ 𝑅 ↔ 𝑃𝑋 y 𝑣 son colineales.𝒙 − 𝒙𝟎𝒗𝟏
=𝒚 − 𝒚𝟎𝒗𝟐

5.- Ecuación general o implícita
• De la ecuación continua de la recta se deduce:𝑥 − 𝑥0𝑣1
=𝑦 − 𝑦0𝑣2
→ 𝑣2 𝑥 − 𝑥0 = 𝑣1 𝑦 − 𝑦0
𝑣2𝑥 − 𝑣2𝑥0 = 𝑣1𝑦 − 𝑣1𝑦0• Pasando todo al primer miembro:
𝑣2𝑥 − 𝑣1𝑦 − 𝑣2𝑥0 + 𝑣1𝑦0 = 0
𝑨𝒙 + 𝑩𝒚 + 𝑪 = 𝟎

Observaciones
• Observa que si 𝑣 = 𝑣1, 𝑣2 es un vector di-reccional de r, la ecuación de esta recta es 𝒗𝟐𝒙 −𝒗𝟏𝒚 +⋯ .= 𝟎.
• Recíprocamente, si la ecuación de la recta r es 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0, 𝒗 = −𝑩,𝑨 es un vector direccional de r.
• Es fácil ver también que las rectas paralelas a 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0, tienen de ecuación𝐴𝑥 + 𝐵𝑦 +⋯ = 0, ya que todas ellas tienen por vector direc-cional, 𝑣 −𝐵, 𝐴 .

6.- Ecuación punto-pendiente
• Si 𝑣es un vector direccional de la recta r, se llama pendiente de la recta r, y se denota por m, al cociente 𝑣2 𝑣1. Si 𝑣1 = 0, la recta, por definición, no tiene pendiente.

• Geométricamente, la pendiente indica la inclinación de la recta respecto del eje de abscisas.

Ecuación punto pendiente de la recta
• De la ecuación continua de la recta, si ésta no es paralela al eje de ordenadas, esto es, si 𝑣1 ≠ 0, se deduce:
•𝒙−𝒙𝟎
𝒗𝟏=
𝒚−𝒚𝟎
𝒗𝟐→ 𝒗𝟏 𝒚 − 𝒚𝟎 = 𝒗𝟐 𝒙 − 𝒙𝟎
𝒚 − 𝒚𝟎 =𝒗𝟐𝒗𝟏
𝒙 − 𝒙𝟎 = 𝒎 𝒙 − 𝒙𝟎
• que es la ecuación punto-pendiente de la recta que pasa por el punto 𝑃 𝑥0, 𝑦0 y tiene por pendiente m.

7.- Ecuación explícita
• De la ecuación punto pendiente:𝑦 − 𝑦0 = 𝑚 𝑥 − 𝑥0
• Desarrollando y despejando y:
𝒚 = 𝒎𝒙 + 𝒏
• que es la ecuación explícita de la recta r