eprints.uanl.mxeprints.uanl.mx/12034/1/ciencia uanl 19,81.pdf · dra. teresa elizabeth cueva-luna /...
TRANSCRIPT


CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 20162
Mtro. Rogelio Garza RiveraRector
M.A. Carmen del Rosario de la Fuente GarcíaSecretaria general
Dr. Sergio S. Fernández DelgadilloSecretario de investigación, innovación y sustentabilidad
Directora: Dra. Patricia del Carmen Zambrano RobledoEditor responsable: Lic. José Eduardo Estrada Loyo
Consejo EditorialDr. Sergio Estrada Parra / Dr. Jorge Flores Valdés /
Dr. Miguel José Yacamán / Dr. Juan Manuel Alcocer González /Dr. Ruy Pérez Tamayo / Dr. Bruno A. Escalante Acosta /
Dr. José Mario Molina-Pasquel Henríquez
Asistente editorial:Jessica Yadira Martínez Flores
Diseño: Rodolfo Tono LealCorrección y revisión bibliográfica:
Luis Enrique Gómez VanegasAbstracts: José Ángel Garza Cantú
Coeditora: Melissa del Carmen Martínez Torres
Ciencia UANL Revista de divulgación científica y tecnológica Universidad Autónoma de Nuevo León, Año 19, Nº 81, septiembre-octubre de 2016. Es una publicación bimestral, editada por la Universidad Autónoma de Nuevo León, a través de la Dirección de Investigación. Domicilio de la publicación: Biblioteca Universitaria Raúl Rangel Frías, Alfonso Reyes 4000 norte, 5º piso, Monterrey, Nuevo León, México, C.P. 64290. Teléfono: + 52 81 83294236. Fax: + 52 81 83296623. Editor responsable: Lic. José Eduardo Estrada Loyo. Reserva de derechos al uso exclusivo No. 04-2013-062514034400-102. ISSN: 2007-1175 ambos otorgados por el Instituto Nacional del Derecho de Autor, Licitud de Título y Contenido No. 16547. Registro de marca ante el Instituto Mexicano de la Propiedad Industrial: 1437043. Impresa por: Serna Impresos, S.A. de C.V., Vallarta 345 Sur, Centro, C.P. 64000, Monterrey, Nuevo León, México. Fecha de terminación de impresión: 9 de septiembre de 2016, tiraje: 2,500 ejemplares. Distribuido por: Universidad Autónoma de Nuevo León, a través de la Dirección de Investigación, Alfonso Reyes 4000 norte, 5º piso, Monterrey, Nuevo León, México, C.P. 64290.
Las opiniones y contenidos expresados en los artículos son responsabilidad exclusiva de los autores y no necesariamente reflejan la postura del editor de la publicación.Prohibida su reproducción total o parcial, en cualquier forma o medio, del contenido editorial de este número.Publicación indexada al Consejo Nacional de Ciencia y Tecnología, LATINDEX, CUIDEN, PERIÓDICA, Actualidad Iberoamericana, Biblat.
Impreso en MéxicoTodos los derechos reservados
© Copyright 2016
Una publicación de la Universidad Autónoma de Nuevo León
Coedición electrónica: Ma. Rosaura González de la RosaPortada: Francisco Barragán CodinaWebmaster: Mayra Silva AlmanzaAsistente administrativo: Claudia I. Moreno AlcocerArte y diseño página web: Rodrigo Soto MorenoServicio social: Elizabeth Sauceda Mora, Emily Monserrat Vázquez Cano
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 3
Comité editorial CiENCiAUANL
COMITÉ CIENCIAS DE LA SALUD COORDINADORA: Dra. Lourdes Garza Ocañas /
UANL MIEMBROS: Dr. César González Bonilla / CVEACDr. Fernando Larrea Gallo / Instituto Nacional de
Ciencias Médicas y Nutrición Salvador ZubiránDr. Félix Recillas-Targa / UNAM Dr. Ruy Pérez Monfort / UNAM Dra. Noemí Waksman de Torres / UANLDr. José Carlos Jaime Pérez / UANL Joseph Varon / The University of Texas Health Science
Center- EUA Dra. Rocío Castro Ríos/ UANL Carlos López Otín / Universidad de Oviedo-
España María E. Magallanes Lundback / Michigan State Uni-
versity, EUADr. Maximiliano Asomoza Palacios / UAM
COMITÉ CIENCIAS EXACTAS COORDINADORA: Dra. Ma. Aracelia Alcorta García / UANL MIEMBROS:Dr. Gerardo Romero Galván / UAT Dr. Ricardo Rangel Segura /Universidad Michoacana
de San Nicolás de Hidalgo, Morelia Dr. Rodolfo Cortes Martínez / CICESE, Unidad
Monterrey Dr. Víctor Coello / CICESE, Unidad Monterrey Dr. Enrique Raúl Villa Diharce / CIMAT, Guanajuato Dr. Óscar Susano Dalmau Cedeño / CIMAT,
Guanajuato Dr. Martín Eduardo Frías Armenta / Universidad de
SonoraDra. Nora Elizondo Villarreal / UANLDr. Jorge X. Velasco Hernández / UNAM
COMITÉ CIENCIAS AGROPECUARIAS
CiENCiAUANL
COORDINADOR: Dr. Roque Gonzalo Ramírez Lozano / UANL
MIEMBROS:Dr. Jairo Iván Aguilera Soto / UAZDr. Miguel Mellado Bosque / Universidad Autónoma
Agraria Antonio Narro Dr. Luis Ángel Rodríguez Del Bosque / INIFAPDr. Manuel González Ronquillo / UAEMDr. Rafael Ramírez Romero / UANLDra. Katiushka Arévalo Niño / UANLDr. Luis Edgar Rodríguez Tovar / UANL
COMITÉ HUMANIDADES Y DIVULGACIÓN DE LA CIENCIA
COORDINADOR: Dr. Óscar Flores Torres / Universidad Autónoma de CoahuilaMIEMBROS:Dra. Magda Yadira Robles Garza / UDEMDr. Francisco Xavier Moyssén Lechuga / Asociación
Internacional de Críticos de Arte, Capítulo MéxicoDr. José Javier Villarreal Álvarez Tostado/ UANLDr. José Roberto Mendirichaga Dalzell / Grupo
Milenio MonterreyDr. Víctor Zorrilla Garza / Universidad Panamericana,
Liceo MonterreyRoberto Rebolloso / UANLDra. Lilia López Vera / UANLLic. José Lorenzo Encinas Garza / Grupo MilenioM.L.E. Minerva M. Villarreal Rodríguez / UANL
COMITÉ CIENCIAS NATURALES COORDINADOR: Dr. Rahim Foroughbakhch
Pournavab / UANLMIEMBROS:Dra. Lorena Ruiz Montoya / Ecosur Dra. Paula Lidia Enríquez Rocha / Ecosur Dr. Juan Carlos Noa-Carrazana / Universidad
VeracruzanaDr. Adalberto Benavides Mendoza / UANL
Dr. Juan Antonio Villanueva Jiménez / Colegio de Posgraduados
Dr. Joel David Flores Rivas / Instituto Potosino de Investigación Científica y Tecnológica
Dra. Patricia Tamez Guerra / UANL Dr. José Ma. Viader Salvadó / UANLDr. José Santos García Alvarado / UANL Dr. Enrique Jurado Ybarra / UANL Dr. Glafiro Alanís Flores / UANL Dr. David Lazcano / UANL Dr. Javier Jiménez Pérez / UANL COMITÉ CIENCIAS SOCIALES COORDINADORA: Dra. Veronika Sieglin / UANL MIEMBROS:Dra. Rosa María Chávez Dagostino / Universidad de
Guadalajara Dra. Irma Lorena Acosta Reveles / UAZDr. Daniel González / Universidad de Guadalajara Dra. Georgina Sánchez Ramírez / CFSDr. Mario Italo Cerutti Pignat / UANLDra. Teresa Elizabeth Cueva-Luna / CFN Dr. Pedro César Cantú Martínez / UANL Dr. Armando V. Flores Salazar / UANLDra. Guadalupe Ruiz Cuéllar / Universidad Autónoma
de AguascalientesDr. Héctor Manuel Jacobo García / Universidad
Autónoma de Sinaloa Dr. Cirilo Humberto García Cadena / UANL Dr. José Antonio Padilla Arroyo / UAEMDra. Lya Margarita Niño Contreras / UABCDra. María Guadalupe Rodríguez Bulnes / UANLDra. Leticia Romero / Universidad Autónoma de
TabascoCOMITÉ INGENIERÍA Y TECNOLOGÍA COORDINADORA: Dra. María Idalia del Consuelo
Gómez de la Fuente / UANLMIEMBROS:Dr. Raymundo Arroyave / Texas A&M University, EUA
Dr. Lucio Iurman / Universidad Nacional del Sur, Argentina
Dr. José María Cabrera Marrero / Centro Tecnológico de Manresa, España
Dr. Dionisio Antonio Laverde Catano / Universidad Industrial de Santander, Colombia
Dr. Héctor D. Mansilla González / Universidad de Concepción, Chile
Dr. Jesús de León Morales / UANL Dr. Mikhail Valentinovich Basin / UANLDr. Juan Antonio Aguilar Garib / UANLDr. Rafael Colás Ortiz / UANL Dra. Leticia Myriam Torres Guerra / UANL Dr. Konstantin Sobolev / UANL Dr. Maximiliano Asomoza Palacios / UANL Dr. Boris Ildusovich Kharissov / UANL Dr. Azael Martínez de la Cruz / UANLDr. Héctor de León Gómez / UANLDra. Yolanda Peña Méndez / UANL
COMITÉ CIENCIAS DE LA TIERRACOORDINADOR: Dr. Carlos Gilberto Aguilar Madera / UANLMIEMBROS:Dr. Yam Zul Ernesto Ocampo Díaz / UASLPDr. Gabriel Valdéz Moreno / Universidad Autónoma
de GuerreroDr. Antonio Cardona Benavides / UASLPDr. Martin Alberto Díaz Viera / IMPDr. Alberto Blanco Piñón / UAEHDr. Juan Martin Gómez González / UNAMDra. Elizabeth Chacón Baca / UANLDr. Fernando Velazco Tapia / UANLDr. Gabriel Chávez Cabello / UANLDr. Javier Aguilar Pérez / UANLDr. Uwe Jenchen / UANLDra. Yolanda Pichardo Barrón / UANL
Comité editorial CiENCiAUANL
CiENCiAUANL
CONTENIDO 81
Editorial /79/ CienCia y soCiedad:Picosatélites cansat, una herramienta para la educación en ciencias del espacio, Ángel Colín.
17/ Línea deL tiempo
Historia de la industria aeroespacial en México y su vínculo con la industria aeronáutica, Rodri-go Nava Amezcua.
26/ opinión
Red Temática de Ciencia y Tecnología del Espa-cio, Carlos Romo Fuentes.
30/ sustentabiLidad
Basura espacial, Hermes Moreno Álvarez, María Poliakova y Antonio Gómez Roa.
34/ tendenCias eduCativas
Construcción de un picosatélite cansat, Ángel Colín, Bárbara Bermúdez Reyes, Gorki Encarna-ción Morrobel, Gerardo Lira Ibarra, Darío Zúñiga Rosales, Luis Ávalos de la Cruz, Marcelo Villarreal Méndez, Jocelyn Mendoza Martínez y Brenda Álvarez Arce.
Investigación / 3940/ SONDA ESPACIAL
Jordan Sombrerero Espinoza, Telma Saraí Encarnación Cortés, José Raúl Flores Machorro, Mayra Báez Landa, Mariela Serrano Centeno y Josué Mancilla Cerezo.
45/ CAPTEUR-SATRodrigo Santiago Flores, Homero Domínguez Barranco, Diego Mckinnon Govela, Alfredo Chimely Castillo, Mario O. Meraz Espinoza y Óscar Martínez Hernández.
10
26 26
19
w w w . c i e n c i a u a n l . m x
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 20166 CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 20166
50/ IGNICIÓN 2.0Juan Julio César Campas Buitimea, Gustavo Adolfo Castillón Ramírez, German Garzón Manjarrez, Erick Alberto Méndez Mendoza, Christian Arturo Saavedra Ceballos y Silvia Karina Reyes Lio.
56/ KANZATÓscar Martínez Hernández, Gerardo Antonio Lira Ibarra, Luis Ángel Avalos De La Cruz, José Guadalupe Nava Zavala, Darío Manuel Zúñiga Rosales y José Santos Tienda Bazaldúa.
61/ ICARUSNoel del Ángel Polanco, Eril A . Paulín Rodríguez, Pablo Nieto Martínez, Eliu Benítez Hernández y Ricardo Castillo Pérez.
67/ OLIXTELGerardo Carrasco Lozada, David Emmanuel Coca Guevara, Rafael Morales Ramírez, Arturo Sánchez Mendoza, Gerardo Vera Castelán y Rosa María Martínez Galván.
71/ Curiosidad
Cansat: lata-satélite, Bárbara Bermúdez Reyes.
76/ ejes
CanSat Leader Training Program -Past, Present and Future-, Rei Kawashima.
83/ tópiCos
Monitoreo de la humedad de suelo superficial a partir de observaciones satelitales de microondas activas y pasivas, Juan Carlos Hernández Sánchez, Enrique Zempoaltecatl Ramírez, José Carlos Jiménez Escalona, Alejandro Monsiváis Huertero y Antonio Mosqueda Sánchez
89/ CienCia en breve95/ Colaboradores
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016
72
43
72
14
CONTENIDO 81
Nuestra portada
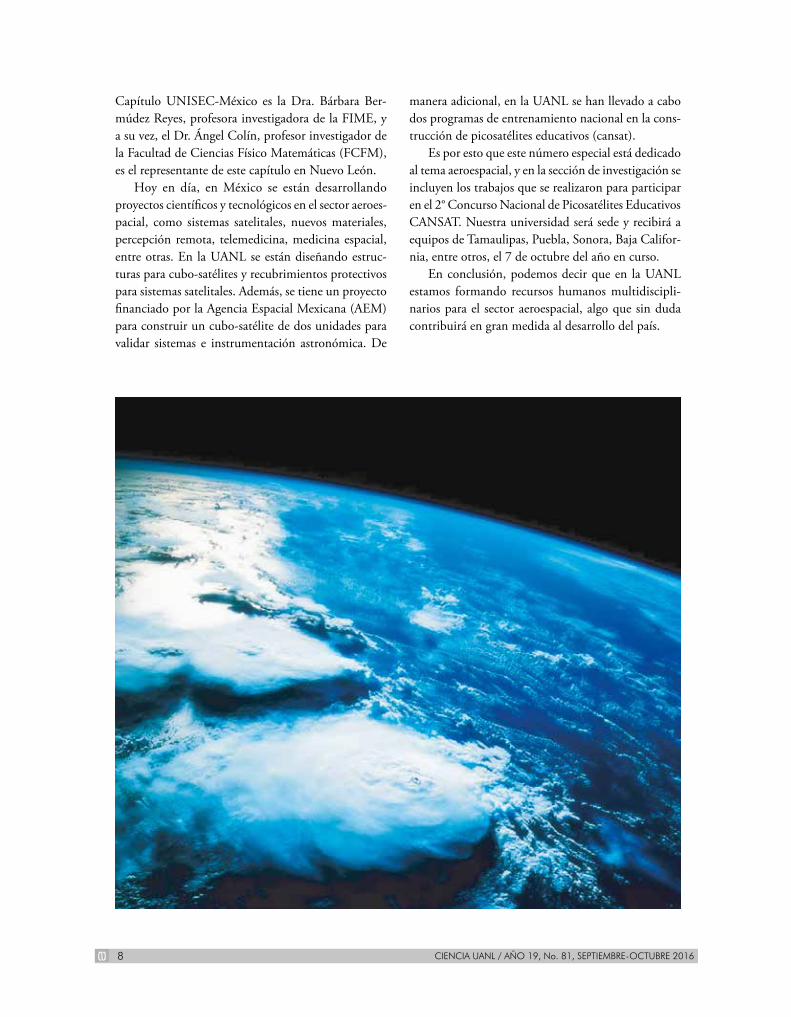
Vista de la Tierra desde el espacio, así como algunos satélites artificiales que orbitan alrededor de ella. En la contraportada,
imagen de Marte. Diseño: Francisco Barragán Codina.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 7
Patricia Zambrano robledo* Jaime arturo castillo eliZondo*
rogelio Juvenal sePúlveda guerrero* EDITORIAL
*Universidad Autónoma de Nuevo León.Contacto: [email protected]
n la actualidad es inconcebible plantearnos la vida sin el uso de sistemas de comunica-ción celular, Internet o televisión digital. A pesar de ello, sólo una minoría de la
población mundial tiene conocimiento de que estos servicios se proveen desde fuera de la atmósfera terrestre por medio de satélites que se encuentran orbitando en el espacio.
Hasta ahora es muy poco lo que se conoce de los avances científicos y tecnológicos en materia del espacio que se han realizado o que se están llevando a cabo en las principales universidades de nuestro país. Sabemos que la historia aeronáutica y espacial mexicana data de 1910, cuando el presidente Porfirio Díaz compró el pri-mer avión para México con motivo de conmemorar el centenario de la Independencia. Cuatro años después, en 1914, se llevó a cabo la primera batalla aeronaval del mundo en el puerto de Topolobampo, Sinaloa.
Durante esta época se diseñaron aeronaves, hélices y motores en los pocos talleres aeronáuticos que se habían establecido en México.
En 1956, en la Universidad Autónoma de San Luis Potosí (UASL), comenzaron a diseñar los primeros cohetes, lanzados desde la plataforma de lanzamiento en Cabo Tuna. Es importante señalar que en 1961, la Universidad Autónoma de Nuevo León (UANL) lanzó un cohete diseñado por profesores de la Facultad de
Ingeniería Mecánica y Eléctrica (FIME) en conjunto con la Escuela Industrial “Álvaro Obregón”. Podría decirse que éstas fueron de las últimas actividades que se hicieron en nuestro país, debido a que por muchos años la investigación y el desarrollo espacial se reduje-ron de manera muy considerable. Sin embargo, algu-nas universidades y centros de investigación, como la Universidad Nacional Autónoma de México (UNAM) y el Centro de Investigación Científica y de Educación Superior de Ensenada (CICESE) pudieron mantener sus programas para el desarrollo de satélites.
Podría considerarse que la actividad espacial se rea-nuda de manera nacional en la segunda década del siglo XXI. En 2010 se creó la Agencia Espacial Mexicana (AEM), que trajo consigo nuevos progra-mas y proyectos innovadores. Asimismo, en 2011 se formalizó la Red Temática Nacional de Ciencia y Tecnología del Espacio (Redcyte), a la que pertenecen dos profesores de la UANL.
En 2014 México ingresó al Consorcio Internacional para la Ingeniería del Espacio (UNISEC, por sus siglas en inglés), que engloba todas las universidades del mun-do que realizan investigación y desarrollo en materia del espacio. Cabe señalar que la representante general del
E
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 20168
Capítulo UNISEC-México es la Dra. Bárbara Ber-múdez Reyes, profesora investigadora de la FIME, y a su vez, el Dr. Ángel Colín, profesor investigador de la Facultad de Ciencias Físico Matemáticas (FCFM), es el representante de este capítulo en Nuevo León.
Hoy en día, en México se están desarrollando proyectos científicos y tecnológicos en el sector aeroes-pacial, como sistemas satelitales, nuevos materiales, percepción remota, telemedicina, medicina espacial, entre otras. En la UANL se están diseñando estruc-turas para cubo-satélites y recubrimientos protectivos para sistemas satelitales. Además, se tiene un proyecto financiado por la Agencia Espacial Mexicana (AEM) para construir un cubo-satélite de dos unidades para validar sistemas e instrumentación astronómica. De
manera adicional, en la UANL se han llevado a cabo dos programas de entrenamiento nacional en la cons-trucción de picosatélites educativos (cansat).
Es por esto que este número especial está dedicado al tema aeroespacial, y en la sección de investigación se incluyen los trabajos que se realizaron para participar en el 2° Concurso Nacional de Picosatélites Educativos CANSAT. Nuestra universidad será sede y recibirá a equipos de Tamaulipas, Puebla, Sonora, Baja Califor-nia, entre otros, el 7 de octubre del año en curso.
En conclusión, podemos decir que en la UANL estamos formando recursos humanos multidiscipli-narios para el sector aeroespacial, algo que sin duda contribuirá en gran medida al desarrollo del país.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 9
Picosatélites cansat:una herramienta para la educación
en ciencias del espacioÁngel colín*
ace aproximadamente seis décadas que el primer satélite artificial, el Sputnik I, fue lanzado al espacio y puesto en órbita (NASA, 2007). Toda su electrónica e instrumentación estaba contenida en una esfera de aluminio de unos 60 cm de diámetro, cuya masa total era de alrededor de 80 kg. Lo más destacado en su misión fue la caracterización física de las capas altas de la atmósfera, así como la propagación de ondas de
radio en la ionósfera. Logró transmitir datos de temperatura y presión por medio de telemetría a las frecuencias de 20 y 40 MHz.
H
CIENCIA Y SOCIEDAD
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201610
Aunque su tiempo de operación fue de apenas tres meses, dejó marcado en la historia el comienzo de una nueva era para las actividades espaciales. Desde entonces, muchos han sido los avances en materia de tecnología espacial.
Hoy en día, se encuentran miles de satélites artifi-ciales orbitando nuestro planeta, realizando una gran variedad de misiones específicas. El mercado de las te-lecomunicaciones es la principal aplicación comercial de estos satélites, pero también hay otros que han sido cons-truidos para realizar investigaciones científicas: estudios meteorológicos, exploración y observación de la Tierra y muchos más en astronomía. De igual manera, otros han sido construidos para fines militares y de defensa.
La inversión económica en la planeación, diseño y construcción de un satélite artificial es bastante elevada, debido a que, para su desarrollo, se requiere la mejor tecnología de vanguardia y de un personal altamente calificado. Tanto la Unión Europea como los Estados Unidos de América, así como el resto de los países desarrollados, cuentan con un gran número de satélites puestos en órbita y se han preocupado por establecer programas de capacitación para sus futuras generacio-nes de ingenieros (Walker et al., 2010). En contraste,
los países en vías de desarrollo apenas tienen algunas instituciones que cuentan con oferta educativa para la formación de recursos humanos en el sector espacial, mientras tanto, las tecnologías emergentes utilizadas en esta rama siguen creciendo de manera exponencial.
Las pequeñas dimensiones de los componentes eléctricos y electrónicos, que ahora se fabrican, cada vez son más solicitados en la mayoría de las tecnologías presentes. En particular, la construcción de satélites miniaturizados exige una gran demanda de ellos, pero exige también que dichos componentes sean sometidos a las pruebas correspondientes, según los estándares, para validar su desempeño en el espacio. Tales prue-bas pueden comprender: alto vacío, choque térmico, radiación electromagnética, etcétera.
Estos pequeños satélites juegan un papel muy importante no sólo en el sector académico, también en proyectos de investigación, en los que algunos instrumentos compactos pueden ser integrados en su carga útil. Pero, sobre todo, son importantes porque el tiempo y costo para construirlos es muy reducido en comparación con los satélites de tamaño estándar.
La sustitución de los satélites de gran tamaño por constelaciones de satélites pequeños se está convirtien-
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 11
do en una alternativa de mucho interés tanto para las agencias espaciales como para las instituciones acadé-micas y las empresas dedicadas al sector espacial, por lo que, ahora, destinan parte de sus recursos económicos a la miniaturización de los satélites para llevar a cabo sus misiones.
CLASIFICACIÓN DE SATÉLITES ARTIFICIALES
Los satélites artificiales pueden ser clasificados de diferentes maneras: tamaño, costo, función, tipo de órbita, etcétera, pero su clasificación por masa casi siempre suele estar relacionada directamente con los costos de lanzamiento para la puesta en órbita. En la tabla I se muestra una clasificación general adoptada en los últimos años.
Tabla I. Clasificación de los satélites por masa.
Tipo Masa en [kg]
Grandes satélites Mayor que 1000 Medianos satélites 500 a 1000 Minisatélites 100 a 500 Microsatélites 10 a 100 Nanosatélites 1 a 10 Picosatélites 0.1 a 1 Femtosatélites Menor que 0.1
PICOSATÉLITES CANSAT
El concepto cansat (Can-Satellite, por sus siglas en inglés) fue propuesto en 1999 por el profesor Robert Twiggs, del Laboratorio de Desarrollo Espacial de la Universidad de Stanford (Twiggs, 1998). Su principal objetivo era transmitir a los estudiantes los conceptos básicos para el diseño y construcción de satélites.
Un cansat consiste en una plataforma que simula un sistema espacial; en este caso, es un picosatélite que cabe en una lata de refresco.
El conocimiento de estos simuladores se ha di-
fundido en muchos países del mundo, por lo que sus instituciones educativas lo tienen establecido como un modelo complementario para la formación de sus alumnos (Wang y Grande, 2011; Carrasco y Vázquez, 2014; Nylund y Antonsen, 2007), porque a través de su diseño, construcción y pruebas, se les proporcionan los conceptos operacionales de una misión espacial y, en la práctica, estos dispositivos pueden ser utilizados como una herramienta poderosa, si se combinan e integran con instrumentos científicos para realizar experimentos profesionales de mayor envergadura (Colín, 2015).
Los cansat no son puestos en órbita, pero pueden lanzarse a diferentes alturas mediante un cohete, un globo sonda, un avión a escala o un multirotor de control remoto. Para completar su misión, deben ser completamente autónomos. Durante su descenso (que puede ser en paracaídas u otro medio), deben transmitir información por telemetría hacia una estación terrena conectada a una computadora portátil. La misión pue-de consistir únicamente en transmitir datos, efectuar retornos controlados o probar pequeños mecanismos de despliegue. Los cansat se utilizan como una intro-ducción a la tecnología espacial debido al bajo costo, corto tiempo de preparación y la simplicidad de sus diseños, comparados con otros proyectos que pueden resultar largos y costosos.
DESCRIPCIÓN FÍSICA DE UN CANSAT
Los diseños y configuraciones de un cansat son muy variados, ya que dependen sobre todo de las misiones que se realizarán. Como un ejemplo, se describe un prototipo construido en diciembre de 2014, durante un curso patrocinado por la Agencia Espacial Mexicana (2016) en uno de sus proyectos para la formación y capacitación de profesores mexicanos.
En la figura 1 se muestran los componentes princi-pales que constituyen los subsistemas de un cansat. El
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201612
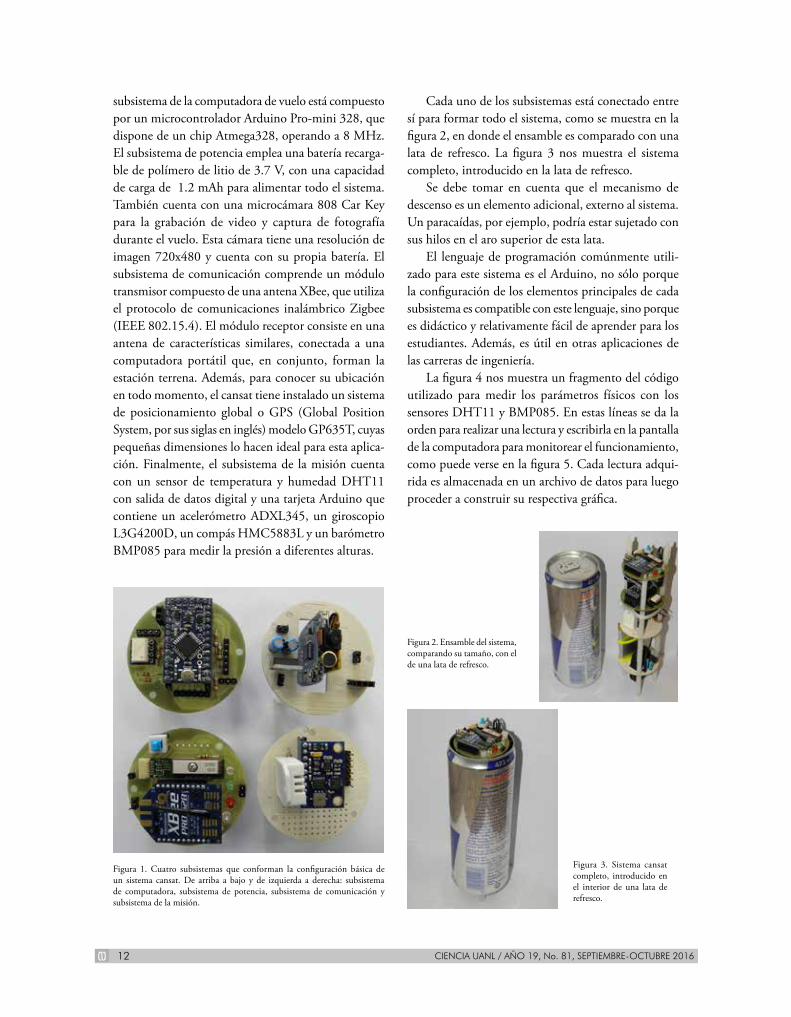
subsistema de la computadora de vuelo está compuesto por un microcontrolador Arduino Pro-mini 328, que dispone de un chip Atmega328, operando a 8 MHz. El subsistema de potencia emplea una batería recarga-ble de polímero de litio de 3.7 V, con una capacidad de carga de 1.2 mAh para alimentar todo el sistema. También cuenta con una microcámara 808 Car Key para la grabación de video y captura de fotografía durante el vuelo. Esta cámara tiene una resolución de imagen 720x480 y cuenta con su propia batería. El subsistema de comunicación comprende un módulo transmisor compuesto de una antena XBee, que utiliza el protocolo de comunicaciones inalámbrico Zigbee (IEEE 802.15.4). El módulo receptor consiste en una antena de características similares, conectada a una computadora portátil que, en conjunto, forman la estación terrena. Además, para conocer su ubicación en todo momento, el cansat tiene instalado un sistema de posicionamiento global o GPS (Global Position System, por sus siglas en inglés) modelo GP635T, cuyas pequeñas dimensiones lo hacen ideal para esta aplica-ción. Finalmente, el subsistema de la misión cuenta con un sensor de temperatura y humedad DHT11 con salida de datos digital y una tarjeta Arduino que contiene un acelerómetro ADXL345, un giroscopio L3G4200D, un compás HMC5883L y un barómetro BMP085 para medir la presión a diferentes alturas.
Figura 1. Cuatro subsistemas que conforman la configuración básica de un sistema cansat. De arriba a bajo y de izquierda a derecha: subsistema de computadora, subsistema de potencia, subsistema de comunicación y subsistema de la misión.
Cada uno de los subsistemas está conectado entre sí para formar todo el sistema, como se muestra en la figura 2, en donde el ensamble es comparado con una lata de refresco. La figura 3 nos muestra el sistema completo, introducido en la lata de refresco.
Se debe tomar en cuenta que el mecanismo de descenso es un elemento adicional, externo al sistema. Un paracaídas, por ejemplo, podría estar sujetado con sus hilos en el aro superior de esta lata.
El lenguaje de programación comúnmente utili-zado para este sistema es el Arduino, no sólo porque la configuración de los elementos principales de cada subsistema es compatible con este lenguaje, sino porque es didáctico y relativamente fácil de aprender para los estudiantes. Además, es útil en otras aplicaciones de las carreras de ingeniería.
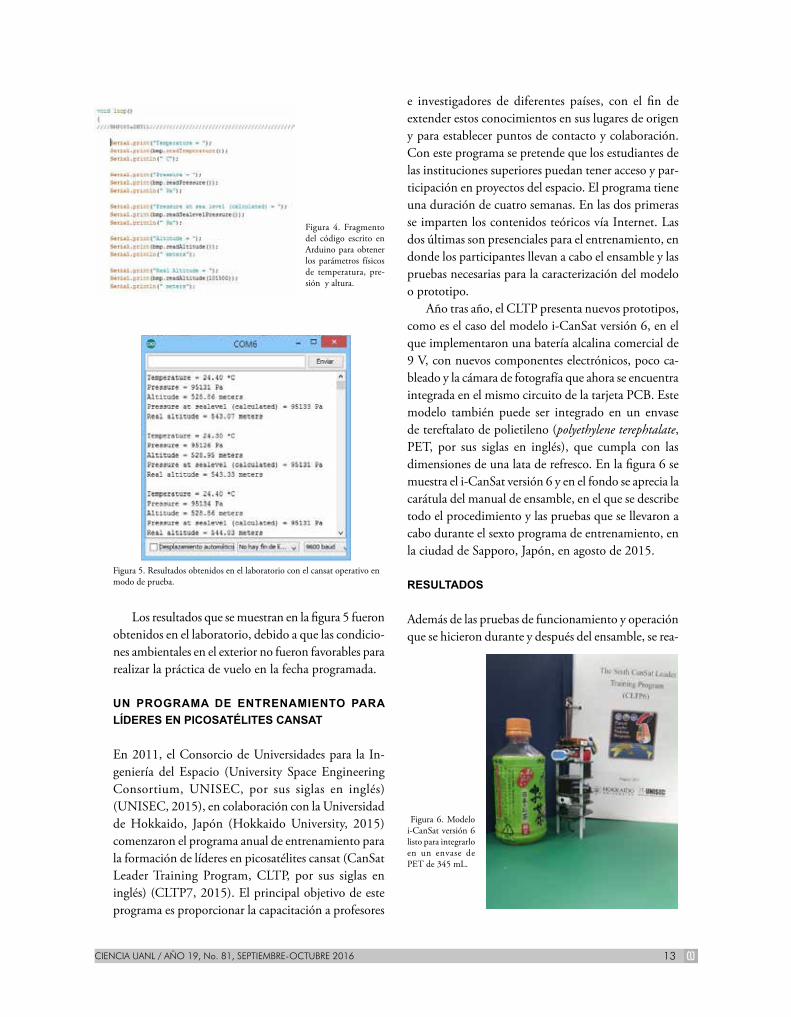
La figura 4 nos muestra un fragmento del código utilizado para medir los parámetros físicos con los sensores DHT11 y BMP085. En estas líneas se da la orden para realizar una lectura y escribirla en la pantalla de la computadora para monitorear el funcionamiento, como puede verse en la figura 5. Cada lectura adqui-rida es almacenada en un archivo de datos para luego proceder a construir su respectiva gráfica.
Figura 3. Sistema cansat completo, introducido en el interior de una lata de refresco.
Figura 2. Ensamble del sistema, comparando su tamaño, con el de una lata de refresco.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 13
Figura 5. Resultados obtenidos en el laboratorio con el cansat operativo en modo de prueba.
Los resultados que se muestran en la figura 5 fueron obtenidos en el laboratorio, debido a que las condicio-nes ambientales en el exterior no fueron favorables para realizar la práctica de vuelo en la fecha programada.
UN PROGRAMA DE ENTRENAMIENTO PARA LÍDERES EN PICOSATÉLITES CANSAT
En 2011, el Consorcio de Universidades para la In-geniería del Espacio (University Space Engineering Consortium, UNISEC, por sus siglas en inglés) (UNISEC, 2015), en colaboración con la Universidad de Hokkaido, Japón (Hokkaido University, 2015) comenzaron el programa anual de entrenamiento para la formación de líderes en picosatélites cansat (CanSat Leader Training Program, CLTP, por sus siglas en inglés) (CLTP7, 2015). El principal objetivo de este programa es proporcionar la capacitación a profesores
e investigadores de diferentes países, con el fin de extender estos conocimientos en sus lugares de origen y para establecer puntos de contacto y colaboración. Con este programa se pretende que los estudiantes de las instituciones superiores puedan tener acceso y par-ticipación en proyectos del espacio. El programa tiene una duración de cuatro semanas. En las dos primeras se imparten los contenidos teóricos vía Internet. Las dos últimas son presenciales para el entrenamiento, en donde los participantes llevan a cabo el ensamble y las pruebas necesarias para la caracterización del modelo o prototipo.
Año tras año, el CLTP presenta nuevos prototipos, como es el caso del modelo i-CanSat versión 6, en el que implementaron una batería alcalina comercial de 9 V, con nuevos componentes electrónicos, poco ca-bleado y la cámara de fotografía que ahora se encuentra integrada en el mismo circuito de la tarjeta PCB. Este modelo también puede ser integrado en un envase de tereftalato de polietileno (polyethylene terephtalate, PET, por sus siglas en inglés), que cumpla con las dimensiones de una lata de refresco. En la figura 6 se muestra el i-CanSat versión 6 y en el fondo se aprecia la carátula del manual de ensamble, en el que se describe todo el procedimiento y las pruebas que se llevaron a cabo durante el sexto programa de entrenamiento, en la ciudad de Sapporo, Japón, en agosto de 2015.
RESULTADOS
Además de las pruebas de funcionamiento y operación que se hicieron durante y después del ensamble, se rea-
Figura 6. Modelo i-CanSat versión 6 listo para integrarlo en un envase de PET de 345 mL.
Figura 4. Fragmento del código escrito en Arduino para obtener los parámetros físicos de temperatura, pre-sión y altura.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201614
lizaron dos pruebas complementarias para verificar la operatividad del i-CanSat bajo condiciones extremas: la primera, sometiéndolo a un ambiente de vacío térmico a temperaturas de 0 hasta 40°C durante dos horas y la segunda sobre una mesa vibratoria, sometido a frecuencias de 5 a 2000 Hz, con aceleración media de 1.4 G en un lapso de 7 s. Para verificar el despliegue del paracaídas se realizó una tercera prueba, lanzando el i-CanSat por la ventana de un edificio a una altura de nueve metros.
Todas las pruebas fueron superadas con éxito. Lue-go procedimos a preparar el lanzamiento mediante un cohete basado en un modelo de papel, diseñado por la empresa Uematsu Electric Co. Ltd., especializada en la fabricación de cohetes profesionales. Este cohete fue armado y ensamblado por cada participante, ya que forma parte del programa de entrenamiento.
En la figura 7 se observa el i-CanSat, antes de ser introducido como elemento de carga del cohete. Se aprecia, también, el momento de despegue en la plata-forma, donde es propulsado por un cartucho comercial de propelente sólido
La figura 8 nos muestra el momento de separación del cohete, cuando ha alcanzado su máxima altura (100 m aproximadamente). Se aprecia el despliegue completo de los tres paracaídas y el descenso hasta unos instantes justo antes del aterrizaje.
En la figura 9 se muestran cuatro fotografías toma-das a diferentes alturas durante el descenso. Nótese que el lugar es un área restringida en un campo despejado, con escasa circulación vehicular.
Figura 7. Izquierda: i-CanSat antes de introducirlo en el cohete. Derecha: momento del lanzamiento del cohete.
Figura 8. Etapa de separación del cohete a una altura aproximada de 100 m. Aquí se aprecia el despliegue de los tres paracaídas y el descenso del i-CanSat hasta unos instantes justo antes del aterrizaje.
Figura 9. Fotografías obtenidas a diferentes alturas durante el descenso.
Esta prueba se realizó en las instalaciones de la empresa patrocinadora del cohete, ubicada a unos 100 km fuera de la ciudad.
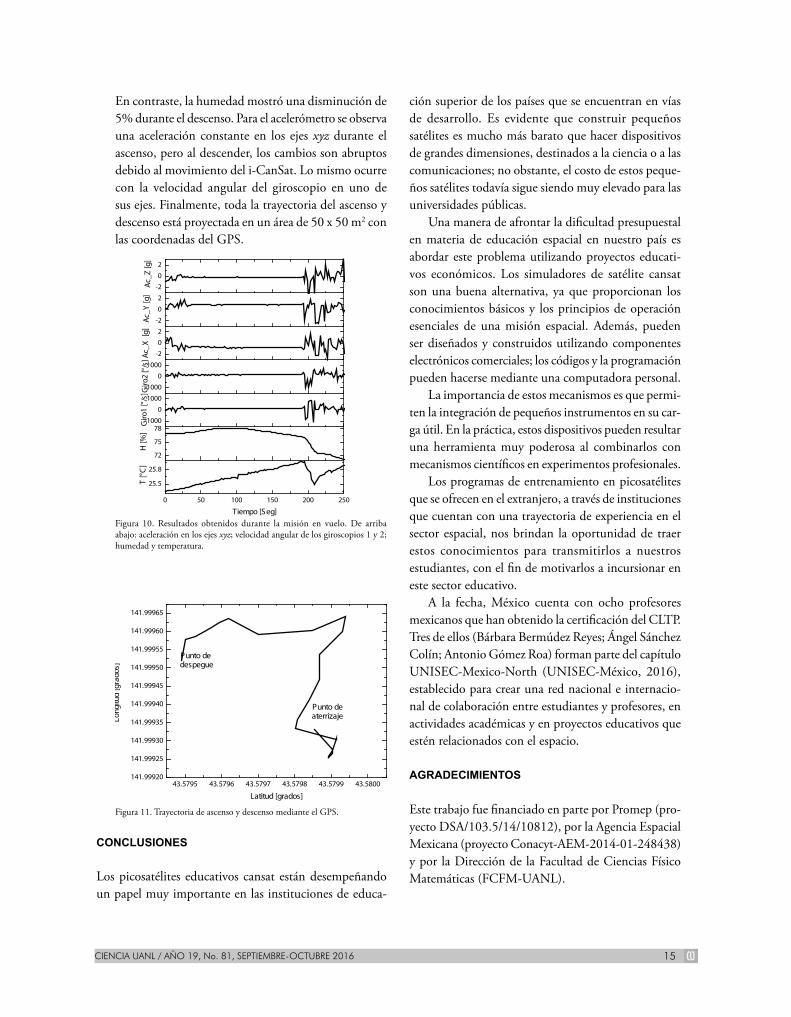
La misión en vuelo tuvo una duración de 250 segundos, contando desde la preparación de la pla-taforma hasta el punto de aterrizaje. Los resultados obtenidos se muestran en las fotografías de la figura 9 y en las gráficas de las figuras 10 y 11. En estas gráficas se observa un cambio abrupto en las curvas cuando transcurrieron 200 segundos; esto corresponde con el momento de separación del cohete y descenso del i-CanSat.
Durante el descenso, en los últimos 50 segundos, se observa un cambio de temperatura de poco más de medio grado centígrado, lo que nos indica la diferencia de temperaturas entre el interior y el exterior del cohete.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 15
0 50 100 150 200 250
25.5
25.8
72
75
78-1000
0
1000
-1000
0
1000
-2
0
2
-2
0
2
-2
0
2
T [°
C]
Tiempo [Seg]
H [%
]
Giro
1 [°
/s]
Giro
2 [°
/s]
Ac_
X [
g]
Ac_
Y [g
]
Ac_
Z [g
]
Figura 10. Resultados obtenidos durante la misión en vuelo. De arriba abajo: aceleración en los ejes xyz; velocidad angular de los giroscopios 1 y 2; humedad y temperatura.
43.5795 43.5796 43.5797 43.5798 43.5799 43.5800141.99920
141.99925
141.99930
141.99935
141.99940
141.99945
141.99950
141.99955
141.99960
141.99965
Punto deaterrizaje
Punto de despegue
Long
itud
[gra
dos]
Latitud [grados]
Figura 11. Trayectoria de ascenso y descenso mediante el GPS.
En contraste, la humedad mostró una disminución de 5% durante el descenso. Para el acelerómetro se observa una aceleración constante en los ejes xyz durante el ascenso, pero al descender, los cambios son abruptos debido al movimiento del i-CanSat. Lo mismo ocurre con la velocidad angular del giroscopio en uno de sus ejes. Finalmente, toda la trayectoria del ascenso y descenso está proyectada en un área de 50 x 50 m2 con las coordenadas del GPS.
ción superior de los países que se encuentran en vías de desarrollo. Es evidente que construir pequeños satélites es mucho más barato que hacer dispositivos de grandes dimensiones, destinados a la ciencia o a las comunicaciones; no obstante, el costo de estos peque-ños satélites todavía sigue siendo muy elevado para las universidades públicas.
Una manera de afrontar la dificultad presupuestal en materia de educación espacial en nuestro país es abordar este problema utilizando proyectos educati-vos económicos. Los simuladores de satélite cansat son una buena alternativa, ya que proporcionan los conocimientos básicos y los principios de operación esenciales de una misión espacial. Además, pueden ser diseñados y construidos utilizando componentes electrónicos comerciales; los códigos y la programación pueden hacerse mediante una computadora personal.
La importancia de estos mecanismos es que permi-ten la integración de pequeños instrumentos en su car-ga útil. En la práctica, estos dispositivos pueden resultar una herramienta muy poderosa al combinarlos con mecanismos científicos en experimentos profesionales.
Los programas de entrenamiento en picosatélites que se ofrecen en el extranjero, a través de instituciones que cuentan con una trayectoria de experiencia en el sector espacial, nos brindan la oportunidad de traer estos conocimientos para transmitirlos a nuestros estudiantes, con el fin de motivarlos a incursionar en este sector educativo.
A la fecha, México cuenta con ocho profesores mexicanos que han obtenido la certificación del CLTP. Tres de ellos (Bárbara Bermúdez Reyes; Ángel Sánchez Colín; Antonio Gómez Roa) forman parte del capítulo UNISEC-Mexico-North (UNISEC-México, 2016), establecido para crear una red nacional e internacio-nal de colaboración entre estudiantes y profesores, en actividades académicas y en proyectos educativos que estén relacionados con el espacio.
AGRADECIMIENTOS
Este trabajo fue financiado en parte por Promep (pro-yecto DSA/103.5/14/10812), por la Agencia Espacial Mexicana (proyecto Conacyt-AEM-2014-01-248438) y por la Dirección de la Facultad de Ciencias Físico Matemáticas (FCFM-UANL).
CONCLUSIONES
Los picosatélites educativos cansat están desempeñando un papel muy importante en las instituciones de educa-

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201616
El autor agradece al Prof. Tsuyoshi Totani, al Dr. Kim Sangkyun y a los asistentes del CLTP6 por su apoyo durante el entrenamiento.
REFERENCIAS
Agencia Espacial Mexicana. (2016). Consultado el 29 de septiem-bre de 2016, http://www.educacionespacial. aem. gob.mx/cansat.html
Carrasco D., R. y Vázquez H., S. (2014) Nanosatélite basado en microcontroladores PIC: CanSat, 3er. Congreso Virtual, Mi-crocontoladores y sus aplicaciones, Cuba.
CLTP7. (2015). The 7th CanSat Leader Training Program. Consultado el 20 de noviembre de 2015 http://cltp.info/
Colín, A. (2015). CanSat technology for climate monitoring in small regions at altitudes below 1 km, IAA Climate change & Disaster management. Conference, México City, September 17.
Hokkaido University. (2015). Consultado el 19 de noviembre de 2015, https://www.oia.hokudai.ac.jp/
NASA. (2007). Sputnik and The Dawn of the Space Age. Consultado el 10 de noviembre de 2015, http://history .nasa.gov/sputnik/
Nylund, A., y Antonsen, J. (2007). CanSat–General introduction and educational advantages. Consultado el 20 de noviembre de 2015. https://www.narom.no/wp-content/uploads/2016/08/CANSAT-General-introduction-and-educational-advantages.pdf
Twiggs R. (1998). University Space System Symposium (USSS), Hawaii, USA. UNISEC. (2015). The Fourth UNISEC-Global Meeting. Consultado
el 19 de noviembre de 2015. http://www.unisec-global.org/UNISEC-México. (2016). Consultado el 29 de septiembre de 2016,
http://www.unisec.mx/#ourteamWalker, R., et al. (2010). ESA hands-on space education project
activities for university students: Attracting and training the next generation of space engineers. IEEE EDUCON Conference, Ma-drid. Consultado el 19 de noviembre de 2015 http://ieeexplore.ieee.org/stamp/stamp.jsp ?tp=&arnumber=5492406&isnum-ber=5492336
Wang, T., y Grande, J. (2011). The first European CanSat competition for high school students, Proc. 20th ESA Symposium on European rocket and balloom programmes and related research, Heyré, France, 22-26 May.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 17
y su vínculo con la aeronáutica
Historia de la industria aeroespacial en México
L
rodrigo nava ameZcua*LÍNEA DEL TIEMPO
a fascinación del hombre por el espacio y las estrellas siempre ha estado presente; ya desde la antigüedad, en diferentes culturas, se pueden observar leyendas como la de
Dédalo e Ícaro en Grecia, donde el afán de volar y querer alcanzar el Sol le costó la vida a este último. En la culturas originarias de nuestro país, podemos encontrar, dentro de las crónicas y códices mexicas y mayas, un sinnúmero de leyendas y estudios sobre el espacio, desde las leyendas de Quetzalcóatl y Kukulkán, que bajaban del espacio a la Tierra en el equinoccio de primavera (Esquivelzeta, 2008: pp. 18-19), hasta
los avanzados estudios astronómicos plasmados en la arquitectura y en el arte prehispánico.
Para hablar de la historia de la industria aeroespacial es necesario identificar que ésta es el resultado conjunto de las industrias aeronáutica y espacial: la primera tiene su campo de estudio en la troposfera –la primera capa de la atmosfera– donde se llevan a cabo la mayor parte de los vuelos de las aeronaves, y la segunda va más allá de la termosfera, incluso en el espacio exterior, y su principal campo son las comunicaciones con los satélites. Sin em
* Fuerza Aérea Mexicana.Contacto: [email protected]
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201618
bargo, como es evidente, estas dos industrias van de la mano, debido a que, primeramente hay que pasar por la troposfera y por el estudio de la aeronáutica para poder llegar al espacio exterior.
El presente trabajo tiene la finalidad de hacer un breve recuento histórico, hasta nuestros días, de los aspectos más relevantes de la aeronáutica y de la indus-tria espacial en México, a fin de obtener un panorama general del estado de la industria aeroespacial nacional y conocer sus altas y bajas a través de los años.
LOS ORÍGENES DE LA AERONÁUTICA EN MÉXICO
Para poder a hablar de la historia de la industria aeroespacial en México, es necesario hablar también de sus orígenes aeronáuticos, que se remontan a los estudios de aerostación desde las épocas del Virreinato de la Nueva España, cuyo registro más antiguo data de 1784. Muchos de esos estudios llegaron a nuestro país por medio de espectáculos extranjeros, sin embargo, en 1842, siendo presidente de la nación Antonio López de Santa Anna, el ingeniero Benito León Acosta inicia sus primeros ascensos en un globo aerostático. Asimismo, son relevantes los estudios de aerostación que realizó el ingeniero Joaquín de la Cantolla y Rico, quien, en 1863, durante el Segundo Imperio Mexicano, construyó tres globos aerostáticos: el Moctezuma I, Moctezuma II y el Vulcano. Incluso hoy en día, muchos mexicanos, al referirse a un globo de aire caliente de cualquier tamaño, lo suelen llamar globo de Cantolla (Nava, 2016). Posteriormente, a finales del siglo XIX e inicios del XX, en nuestro país la aerostación fue considerada como un simple espectáculo; en cambio, países como Francia, Italia, Alemania y Estados Unidos lograron grandes avances en aerostación y su empleo para fines militares.
No fue sino hasta finales del gobierno de Porfirio
Díaz que se comenzó a reconocer en los estudios aeronáu-ticos una verdadera utilidad para fines militares. El 17 de diciembre de 1909 se nombró al teniente del Cuerpo de Ingenieros Constructores, Federico Cervantes Muñozca-no, para que marchara a Francia a realizar estudios sobre aerostación militar y los necesarios para la organización de una compañía de señales en el ejército (Cámara de Diputados et al., citada en Hernández 2015).
Con estos hechos y otros más, se sembró la semilla de los estudios en materia aeronáutica en México, al inicio con fines demostrativos y de espectáculo, pero siempre bajo la consigna de un empleo para fines militares, como el de Alberto Braniff que, en 1910, realizó el primer vuelo motorizado en México y Améri-ca Latina, seguido por entusiastas de la aviación como Miguel Lebrija (Cámara de Diputados et al., citada en Hernández 2015).
El éxito de los espectáculos aéreos, en todo el mundo, propició que, el 19 de febrero de 1911, la empresa Moi-sant International Aviators realizara una gira en México, a fin de promocionar la comercialización de sus aviones. Se hicieron demostraciones enfocadas a exponer la efica-cia de los medios aéreos en campañas militares (Cámara de Diputados et al., citada en Hernández 2015).
Por las mismas fechas, durante el periodo posterior a la salida de Porfirio Díaz, durante el gobierno interino de Francisco León de la Barra, se registró un intento de formar un cuerpo de aeronáutica militar con una escuadrilla de aviones y la primera Escuela Militar de Aviación, sin éxito por falta de tiempo y presupuesto. Sin embargo, no fue hasta el gobierno de Francisco I. Madero, cuando, el 30 de noviembre de 1911, éste fue invitado a participar en un vuelo de exhibición, a bordo de un avión Deperdussin de dos plazas, convirtiéndose en el primer mandatario en funciones en volar un aeroplano. Así, Madero quedó impresionado y decidió autorizar la compra de cinco aviones, por lo cual mandó a estudiar a cinco mexicanos a la escuela Moisant Avia-

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 19
tion School en Nueva York, que luego serían conocidos como los “primeros cinco” (Nava, 2016).
Posteriormente, se presentaron nuevos proyectos ante la Secretaría de Guerra y Marina para formar el cuerpo de aviadores militares, algunos incluían la construcción de aeronaves en México; por asuntos presupuestales, dichos proyectos no prosperaron. Sin embargo, estos hechos tuvieron un impacto en muchos entusiastas como los hermanos Juan Pablo y Eduardo Aldasoro, quienes, en 1912, lograron construir el primer motor de explosión interna para un avión en México (Secretaría de la Defensa Nacional y Secretaría de Marina Armada de México, 2013).
Después del asesinato de Madero, el 19 de febrero de 1913, la nación se convulsionó en una lucha armada entre el usurpador Victoriano Huerta y las Fuerzas Constitucionalistas lideradas por Venustiano Carranza, por lo que el destino de la aviación mexicana tomó un nuevo camino (Cámara de Diputados et al., citada en Hernández 2015).
Victoriano Huerta, consciente de la importancia de contar con esta nueva tecnología, el 7 de abril de 1913, reunió en los llanos de Balbuena a Miguel Lebrija, Ho-racio Ruiz Gabiño, Juan Guillermo Villasana y Antonio Sánchez Saldaña, a fin de llevar a cabo unas pruebas aéreas, conformando la primera Escuadrilla Aérea de la
Milicia Auxiliar del Ejército Federal. Asimismo, mandó a estudiar aviación en Francia a treinta alumnos de la Escuela Militar de Aspirantes. Este hecho es de gran importancia para la aeronáutica nacional, ya que algunos de estos primeros pilotos militares mexicanos fueron los pioneros de la aviación civil en México (Nava, 2016).
Otro dato relevante es que, para el 15 de noviembre de 1915, se crea la Escuela Nacional de Aviación (ENA) y los Talleres Nacionales de Construcciones Aeronáuti-cas (TNCA), impulsados por el piloto aviador militar Alberto Salinas, quien en tan sólo cinco años –y a pesar de lo convulsionado que se encontraba el país y con las carencias materiales que originó la Primera Guerra Mundial– logró crear una industria aeronáutica de cali-dad. La aviación militar mexicana se volvió totalmente autosuficiente; se construyeron aeronaves y refacciones para la conservación y mantenimiento de la flota aérea, la cual contaba ya con 58 naves, la mayor parte de cons-
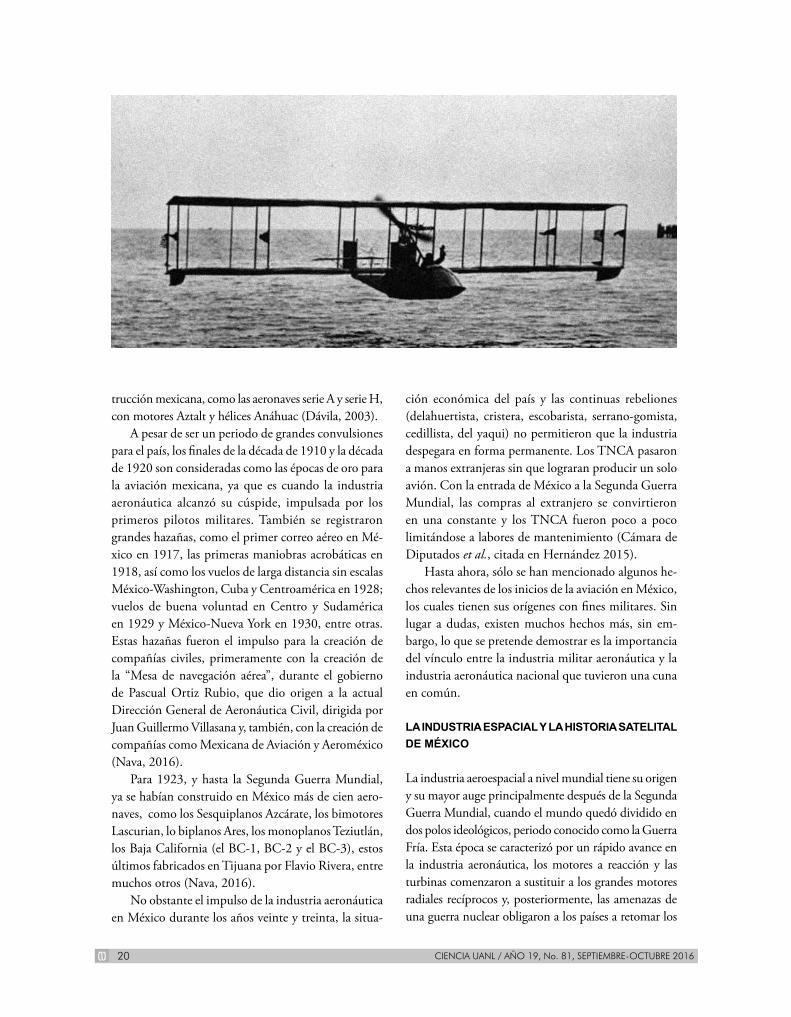
Figura 1. Juan Guillermo Villasana a bordo de un prototipo de helicóptero que él mismo diseñó (Cámara de Diputados, LXII Legíslatura et al., citada en Hernández, 2014).
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201620
trucción mexicana, como las aeronaves serie A y serie H, con motores Aztalt y hélices Anáhuac (Dávila, 2003).
A pesar de ser un periodo de grandes convulsiones para el país, los finales de la década de 1910 y la década de 1920 son consideradas como las épocas de oro para la aviación mexicana, ya que es cuando la industria aeronáutica alcanzó su cúspide, impulsada por los primeros pilotos militares. También se registraron grandes hazañas, como el primer correo aéreo en Mé-xico en 1917, las primeras maniobras acrobáticas en 1918, así como los vuelos de larga distancia sin escalas México-Washington, Cuba y Centroamérica en 1928; vuelos de buena voluntad en Centro y Sudamérica en 1929 y México-Nueva York en 1930, entre otras. Estas hazañas fueron el impulso para la creación de compañías civiles, primeramente con la creación de la “Mesa de navegación aérea”, durante el gobierno de Pascual Ortiz Rubio, que dio origen a la actual Dirección General de Aeronáutica Civil, dirigida por Juan Guillermo Villasana y, también, con la creación de compañías como Mexicana de Aviación y Aeroméxico (Nava, 2016).
Para 1923, y hasta la Segunda Guerra Mundial, ya se habían construido en México más de cien aero-naves, como los Sesquiplanos Azcárate, los bimotores Lascurian, lo biplanos Ares, los monoplanos Teziutlán, los Baja California (el BC-1, BC-2 y el BC-3), estos últimos fabricados en Tijuana por Flavio Rivera, entre muchos otros (Nava, 2016).
No obstante el impulso de la industria aeronáutica en México durante los años veinte y treinta, la situa-
ción económica del país y las continuas rebeliones (delahuertista, cristera, escobarista, serrano-gomista, cedillista, del yaqui) no permitieron que la industria despegara en forma permanente. Los TNCA pasaron a manos extranjeras sin que lograran producir un solo avión. Con la entrada de México a la Segunda Guerra Mundial, las compras al extranjero se convirtieron en una constante y los TNCA fueron poco a poco limitándose a labores de mantenimiento (Cámara de Diputados et al., citada en Hernández 2015).
Hasta ahora, sólo se han mencionado algunos he-chos relevantes de los inicios de la aviación en México, los cuales tienen sus orígenes con fines militares. Sin lugar a dudas, existen muchos hechos más, sin em-bargo, lo que se pretende demostrar es la importancia del vínculo entre la industria militar aeronáutica y la industria aeronáutica nacional que tuvieron una cuna en común.
LA INDUSTRIA ESPACIAL Y LA HISTORIA SATELITAL DE MÉXICO
La industria aeroespacial a nivel mundial tiene su origen y su mayor auge principalmente después de la Segunda Guerra Mundial, cuando el mundo quedó dividido en dos polos ideológicos, periodo conocido como la Guerra Fría. Esta época se caracterizó por un rápido avance en la industria aeronáutica, los motores a reacción y las turbinas comenzaron a sustituir a los grandes motores radiales recíprocos y, posteriormente, las amenazas de una guerra nuclear obligaron a los países a retomar los

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 21
estudios en lanzamiento de cohetes balísticos, lo que dio origen a la llamada “carrera espacial”, en la que la Unión Soviética se disputó la supremacía espacial con Estados Unidos por décadas (Dávila, 2003).
El Año Geofísico Internacional, que se celebró en 1957-1958, fue el punto de partida para que la comunidad internacional formulara el programa de actividades espaciales más ambicioso en la historia, que incluyó la puesta en órbita del primer satélite artificial en 1957, el lanzamiento de más de mil objetos al es-pacio ultraterrestre con fines de estudio y el arribo del hombre a la luna en 1969 (Dávila, 2003).
La carrera espacial también logró impactar a nues-tro país, y el 10 de agosto de 1962, durante el gobierno de Adolfo López Mateos, se crea la Comisión Nacional del Espacio Exterior (CNEE), cuyo principal objetivo fue controlar y fomentar, en México, todo lo relacio-nado con la investigación, exploración y utilización con fines pacíficos del espacio exterior (Dávila, 2003).
La misión fundamental que se le asignó a este organismo gubernamental fue utilizar con finalidades prácticas los beneficios que se derivan de la tecnología espacial, como las comunicaciones, meteorología, estu-dios de la Tierra, percepción remota, entre otros. Uno de sus principales estudios consistió en el desarrollo de cohetes-sonda para fines meteorológicos, como el MITL I, que podía levantar una carga útil de ocho kilogramos y volar a más de 55 kilómetros, el HULTE I, cohete que tenía dos etapas y el MITL II, con más capacidad de peso que su predecesor (Dávila, 2003).
En ese mismo año, 1962, la Universidad Nacional Autónoma de México (UNAM), a través de su Insti-tuto de Geofísica, creó el Departamento del Espacio Exterior, hoy Departamento de Ciencias Espaciales (Dávila, 2003).
Para 1968, la necesidad de contar con un sistema satelital para la transmisión mundial de los juegos olímpicos, obligó al gobierno a afiliarse al sistema satelital Intelsat y se construyó, en el estado de Hi-dalgo, la primera estación terrena del país, rentando un satélite ATS-3, propiedad de la NASA. Dos años después se inició el uso del satélite para fines domésticos (Cinvestav, 2015).
Cuando todo parecía indicar que nuestro país entraba de lleno en la carrera espacial, y a pesar de los éxitos obtenidos, la CNEE, desafortunadamen-te, desaparece en 1977, durante el gobierno de José
López Portillo, cuando nuestro país vivía una de las crisis económicas más fuertes hasta ese momento, y la investigación en materia espacial entró en aislamiento por muchos años, con proyectos autónomos pero sin coordinación ni participación del Gobierno Federal (Dávila, 2003; Cinvestav, 2015).
En 1982, México adquiere su primer paquete de satélites propios, conocido como Sistema Morelos. Los satélites Morelos I y Morelos II fueron puestos en órbita en 1985, para su manejo se creó Telecomunicaciones de México (Telecomm). Durante la puesta en órbita del Morelos II, el Ing. Rodolfo Neri Vela, a bordo del transbordador Atlantis, se convierte en el primer y único astronauta mexicano1 (Cinvestav, 2015).
El mencionado organismo descentralizado (Te-lecomm), en 1993, obtiene un segundo paquete de satélites, llamado Sistema Solidaridad. Ese mismo año se lleva a cabo la puesta en órbita del Solidaridad I y en 1994 el Solidaridad II, al tiempo que se daba de baja al Morelos I (Cinvestav, 2015).
Sin embargo, a pesar del impulso del gobierno y la fuerte inversión que se hizo para la adquisición de estos sistemas, la tecnología seguía dependiendo del extranje-ro. De manera simultánea, la UNAM crea el Programa Universitario de Investigación y Desarrollo Espacial (PUIDE), que, en 1991, inicia con la construcción y el diseño del primer satélite, 100% construido en México, el UNAMSAT-1, destruido en su lanzamiento en 1995. Un año después se pone en órbita el UNAMSAT-B, que funcionó aproximadamente un año (Secretaría de Comunicaciones y Transportes, 2011).
Figura 2. UNAMSAT-1 (UNAM, 2016).
1 Existen otros astronautas de ascendencia mexicana como José Hernández, sin embargo, éste nació en Estados Unidos y es de nacionalidad estadounidense, por lo que no se considera como astronauta mexicano
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201622
En 1990 se fundó la Sociedad Espacial Mexicana, A.C. (SEM), que trabajó para impulsar el sector en algunas escuelas mexicanas y en proyectos de cohetes de aficionados, pero con poco impacto en el resto del país y de la sociedad.
Existieron otros proyectos satelitales mexicanos como el SATEX-1, que comenzó en 1994, desarrolla-dos por un consorcio de instituciones mexicanas con el patrocinio y la coordinación del extinto Instituto Mexicano de Telecomunicaciones, participaron: el Centro de Investigación Científica y de Educación Superior de Ensenada (CICESE), el Centro de In-vestigación y Estudios Avanzados (Cinvestav) del Instituto Politécnico Nacional (IPN), el Instituto de Investigaciones Eléctricas (IEE), el Instituto Nacional de Astrofísica, Óptica y Electrónica (INAOE), el Ins-tituto de Ingeniería de la UNAM, la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) unidad Zacatenco y unidad Ticomán del IPN y la Benemérita Universidad Autónoma de Puebla (BUAP). Éste ha sido uno de los proyectos interinstitucionales más ambiciosos por la cantidad de científicos e institucio-nes involucradas, sin embargo, nuevamente la falta de apoyos económicos y la desaparición del Instituto Mexicano de Telecomunicaciones originaron que el proyecto se detuviera cuando llevaba más de 80% de avance (Secretaría de Comunicaciones y Transportes, 2011).
Todo parecía indicar que, en la década de los noven-ta, la industria espacial mexicana volvía a renacer, pero en 1997 recibe un nuevo golpe, cuando el gobierno mexicano pone a la venta el sistema satelital del país a través de Satélites Mexicanos, S.A. de C.V. (Satmex), el cual queda bajo el control de la compañía nortea-mericana Principia Loral Space & Communications.
No fue hasta 2010 cuando el gobierno mexicano anunció la creación de un nuevo sistema satelital para seguridad nacional, llamado Mexsat, que consta de tres satélites: el Bicentenario, puesto en órbita exitosamente el 19 de diciembre de 2012; el Centenario, destruido
Figura 3. Mapa de las ubicaciones de los clúster aeronáuticos (elaboración del autor).

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 23
durante su lanzamiento el 16 de mayo de 2015, y el Morelos III, funcionando desde el 2 de octubre del mis-mo año. Este sistema es administrado por Telecomunica-ciones de México (Telecomm-Telégrafos). Cabe señalar que el nuevo sistema satelital está nuevamente en manos del Gobierno Federal, la tecnología se vuelve a adquirir en el extranjero –son construidos por la Boeing Satellite Systems International, Inc.– (Mendieta et al. 2002).
A pesar de la falta de apoyo económico, la industria aeroespacial sigue creciendo a grandes pasos en nuestro país. En la última década, México se ha colocado en-tre las naciones líderes en manufactura aeronáutica y aeroespacial con más de 287 empresas, en su mayoría extranjeras, que generan una gran cantidad de empleos, pero, sobre todo y más importante, que crean a su alre-dedor otras empresas nacionales vinculadas al sector, lo que convierte a las grandes compañías en organismos madre con empresas más pequeñas en su entorno. Este conjunto de industrias conforman los grandes clusters aeronáuticos en varios estados de la república. Como consecuencia, se ha generado la necesidad de que estas entidades transformen sus sistemas educativos y creen carreras relacionadas al medio aeronáutico para poder competir en el ramo y proveer a estos clusters de personal capacitado.
Así es como aparecen las escuelas aeronáuticas más importantes del país: el ESIME Ticomán del IPN; el Centro de Investigación e Innovación en Ingeniería Aeronáutica (CIIIA) de la Universidad Autónoma de Nuevo León (UANL), uno de los centros de investiga-ción aeronáutica más modernos del país; la Universidad Aeronáutica de Querétaro (Unaq), entre otras. Todas ellas generan una gran cantidad de profesionales para la industria aeroespacial nacional.
De esta forma, nuestro país entra al siglo XXI con un nuevo impul-so en la industria aeroespacial, y con recursos humanos ca-pacitados. Así lo demuestra el proyecto Ulises I, que inició, en 2010, el Colectivo Espacial Mexicano, el cual consiste en la integración de un nanosatelite. Dicho proyecto atrajo la mirada tanto de instituciones nacionales como de extranjeras, ya que es pro-movido y patrocinado por un grupo
de ciudadanos que pretende demostrar que la realidad puede ser cambiada y que nuestro país puede avanzar en las tecnologías espaciales de bajo costo.
La historia de la industria aeroespacial en México cuenta con un sinnúmero de proyectos impulsados por entusiastas investigadores del desarrollo tecnoló-gico aeroespacial, proyectos como Satedu, que es un satélite educativo, diseñado y fabricado por el Insti-tuto de Ingeniería de la UNAM, para ser empleado en laboratorios escolares y aulas de clases; el proyecto Sensat, diseñado por el CICESE, que se basa en la investigación de microsatélites como una continuación del proyecto Satex; así como proyectos de muchos estudiantes universitarios que se aventuran a estudiar el espacio con globos aerostáticos, cohetes, aeronaves no tripuladas, estudios de astrofísica y astronómicos, entre otros, los cuales sería imposible mencionar en un trabajo como éste, sin embargo, existen y son el motor para el impulso de la investigación aeroespacial en México (Pacheco et al. 2013).
La relevancia de este último aspecto radica preci-samente en el vínculo que existe entre la aeronáutica y lo espacial, ya que una gran parte de los profesionistas egresados de las escuelas aeronáuticas se están especia-lizando en materia aeroespacial (Pacheco et al. 2013).
LA AGENCIA ESPACIAL MEXICANA (AEM)
Con la creación de la Agencia Espacial Mexicana en 2010, se abrió –para nuestro país– una nueva coyun-tura para desarrollar y consolidar una industria aeroes-pacial. Se abrieron, a su vez, áreas de oportunidad en electrónica, aviónica, telecomunicaciones, entre otras,
con metas como la fabricación de satélites con mano de obra y tecnología mexi-
cana, convirtiéndose esta agencia de la administración pública federal en un vinculador e impulsor del sector (Agencia Espacial Mexicana, 2015).
No fue fácil crear este organismo, tuvieron que pa-sar muchos años para que se lograra, ya que después de
la disolución del CNEE, en 1977, muchos investigadores
intentaron impulsar, sin éxito, la creación de un nuevo organismo que

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201624
diera dirección a las investigaciones aeroespaciales. No fue sino hasta 2005 que unos jóvenes entusiastas fundaron una sociedad llamada Aexa, para impulsar la creación de una agencia espacial en México. Pre-sentaron una iniciativa de ley ante la Cámara de Di-putados, la cual fue aprobada en 2006 y turnada a la Cámara de Senadores, en donde se organizaron foros de consulta nacionales para integrar a la comunidad científica. Después de una serie de modificaciones, la iniciativa fue aprobada por el Senado el 4 de noviem-bre de 2008. El proyecto fue regresado a la cámara de origen para someterse a un segundo análisis y ronda de votaciones (Agencia Espacial Mexicana, 2015).
Así es como, para el 31 de julio de 2010, la ley que crea la AEM fue promulgada, sin embargo, este orga-nismo no comenzó a funcionar de manera inmediata. Se conformó primero la Junta de Gobierno, integrada por secretarías de Estado e instituciones de educación superior, se crearon nuevos foros de consulta pública a nivel nacional, a los que se invitó otra vez a la co-munidad científica y se publicaron las líneas generales de política espacial de México. No fue hasta el 2 de noviembre de 2011 que se nombró a su primer direc-tor general, el Dr. Francisco Javier Mendieta Jiménez, quien tuvo que presentar un proyecto de programa nacional de actividades espaciales y un estatuto orgá-nico para la agencia, por lo que la Agencia Espacial Mexicana, prácticamente comenzó sus funciones reales el 1 de marzo de 2013 (ProMéxico, 2012).
Como se puede apreciar, la Agencia Espacial Mexicana es un organismo muy joven, con un pre-supuesto muy limitado y con menos de cuatro años de estar en funciones, sin embargo, ha logrado ser un gran impulsor del sector, creó el primer plan nacional para la industria aeroespacial del país, llamado Plan de Órbita que, junto con ProMéxico, promueve esta industria y la vincula al sector aeronáutico existente a través del llamado Plan de Vuelo. Estos dos planes representan las principales guías de la industria aeroes-pacial nacional. En la actualidad, cada año, la AEM promueve decenas de proyectos con universidades e instituciones de investigación, por lo cual se generó un fondo sectorial, en coordinación con Conacyt, y un fideicomiso público para poder financiar dichos proyectos (ProMéxico, 2012).
De igual forma, se ha impulsado el reconocimiento internacional de México como un gran sector dentro de la industria aeroespacial mundial, se han creado víncu-
los con las principales agencias espaciales del mundo. Tan sólo a un año de su funcionamiento como agencia espacial, se logró que México ganara la cede para el 67 Congreso Internacional de Astronáutica a celebrarse en Guadalajara en 2016, considerado como uno de los eventos internacionales más importantes dentro del sector aeroespacial internacional.
CONCLUSIONES
La industria espacial en México tiene sus orígenes en la industria aeronáutica, si bien en apariencia tienen objetivos distintos –una en el área de las telecomu-nicaciones y en el estudio del espacio exterior, la otra en el campo de la aeronáutica– están vinculadas y son inseparables, por lo que el término correcto es industria aeroespacial.
La historia de la industria aeroespacial en México es muy antigua y tiene sus orígenes en el virreinato, principalmente con fines militares. Sin embargo, ha tenido altas y bajas, y no se ha podido consolidar de manera fuerte, nacional e independiente. Por motivos presupuestales no se le ha permitido despegar de manera constante.
Desde finales de los años sesenta, hasta la década de los noventa, se logró un avance muy importante en estudios en el área satelital y de las comunicaciones. México ha logrado establecerse de manera exitosa en la producción manufacturera, lo que ha generado un capital humano de técnicos y profesionistas a nivel nacional que pueden competir con cualquier país en el ramo. No obstante, en la actualidad se sigue dependiendo de la tecnología extranjera.
Hoy en día, contamos con instituciones de educación superior dentro del sector aeroespacial y con organismos que impulsan el sector como la Agencia Espacial Mexicana, por lo que la industria está viviendo un resurgimiento; cada día se generan nuevos proyectos impulsados por jóvenes entusias-tas –egresados precisamente de estas instituciones–, por ello, es muy probable que en los próximos años podamos ver que nuestro país logre consolidarse y obtener cierta independencia tecnológica dentro del sector aeroespacial.
Pero, para poder ver este sueño hecho realidad, es necesario que todos los participantes en esta industria –instituciones educativas, estudiantes, ciudadanos, empresas, entidades paraestatales, así como los go-

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 25
biernos tanto federal como estatales– logren visualizar este nuevo resurgimiento y le ofrezcan todo el apoyo a este sector de manera sostenida, ya que la investigación y desarrollo no se hace de la noche a la mañana. Se requiere un impulso transexenal.
REFERENCIAS
Agencia Espacial Mexicana. (2015). Diario Oficial de la Federación de Acuerdo mediante el cual se expide el Plan Nacional de Acti-vidades Espaciales. Consultado el 14 de abril de 2014. http://www.dof.gob.mx/nota_detalle.php?codigo= 5388707&fe-cha=14/04/2015 (accesado).
Cámara de Diputados LXII Legíslatura, Secretaría de la Defensa Nacional. (2015). Fuerza Aerea Mexicana. La aviación militar. Un siglo de historia (1915-2015), en Hernández, G. R., Origen de la aviación militar en México. México. Cámara de Diputados LXII Legíslatura. Ciudad de México.
Centro de Investigación y Estudios Avanzados del Instituto Po-litécnico Nacional. (2015). White paper, Satélites México: CINVESTAV.
Dávila, H. (2014). El último mohicano. Historia de un biplanono-table, en América Vuela, número 153-154, diciembre-febrero 2014-2015, pp. 16-30.
Francisco Esquivelzeta Aguilera. (2008) En pleno vuelo (Los pájaros de acero). México: Edición.
Mendieta, F.J. et al. (2002). The SATEX Project, A Mexican Effort. The development of a micro-satellite platform for space techno-
logies knowledge and human resources preparation. Institute of Electrical and Electronics Engineers. DOI: 10.1109/AERO.2003.1235477.
Nava Amezcua, R. (2016). Los altos vuelos de la aviación militar, la Fuerza Aérea Mexicana: más de cien años de historia. Relatos e Historias en México, año VIII [91]. Pp. 1-17.
Pacheco, E., et al., (2013) Satellite and Space Communications Research in Mexico: Contributions to a National Program. American Insti-tute of Aeronautics and Astronautics, Inc. California: Pasadena.
ProMéxico. (2012). ProMéxico inversión y comercio. Plan de Orbita. Mapa de ruta de la industria aeroespacial mexicana. Consultado el 16 de marzo de 2016. http://www.promexico.gob.mx/es/mx/mapas-de-ruta
Secretaría de Comunicaciones y Transportes. (2011). Comisión Nacio-nal del Espacio Exterior 1965-1970. México: S.C.T. Consultado el 21 de septiembre de 2016. https://liniguez.files.wordpress.com/2011/11/lei_cmsionn aespcioext65_70.pdf
Secretaría de la Defensa Nacional y Secretaría de Marina Armada de México. (2013). El desarrollo de la aviación durante las operaciones militares de la Revolución Mexicana, en Perea, J.R., Las fuerzas armadas en la Revolución Mexicana. México: S.D.N., Semar.
Universidad Nacional Autónoma de México. (2016). Galería de fotos. Consultado el 21 de septiembre de 2016. http://www.historiadelcomputo.unam.mx/files/fotos/unamsat/unamsat.html#.V-K5YiHhDIX
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201626
*Universidad Nacional Autónoma de México, Redcyte.Contacto: [email protected]
Red Temática de Ciencia
y Tecnología del Espacio
OPINIÓN
La Red Temática de Ciencia y Tecnología del Espacio (Redcyte) surgió en 2011 como iniciativa de un grupo de investigadores que, desde hace varios años, desa-rrollan proyectos tecnológicos y científicos en el área espacial. Desde entonces se establecieron 23 proyectos con diferentes temas en tecnología espacial, orientados al desarrollo: materiales; aplicaciones sociales de la tecnología espacial; instrumentación espacial; misiones espaciales para demostraciones de tecnología; instru-mental y plataformas de pruebas de sistemas satelitales; infraestructura terrestre para prevención de desastres; estudios sobre aspectos legales y regulación interna-cional para realizar misiones espaciales; infraestructura para la integración y realización de pruebas de precer-tificación; estrategias para integrar y mitigar la basura espacial en misiones; infraestructura para observación de fenómenos espaciales y ciencia básica espacial.
En todos los proyectos, la red ha contribuido al establecimiento de programas educativos en el área,
carlos romo Fuentes*
en licenciatura y posgrado, en los que se ha realizado una intensa búsqueda de cooperación con instituciones nacionales e internacionales.
La Redcyte se enfrenta a un problema endémico del sistema de investigación y desarrollo mexicano. Se han identificado varios retos en esta área, como la falta de una vinculación efectiva con el sector productivo, una desconexión sistémica de los estímulos para el personal académico y una imagen contradictoria de la ciencia y la tecnología del espacio con los tomadores de decisiones a nivel gobierno; mientras que el reflejo condicionado, por muchos años, en la industria y el gobierno mexicano, ha sido el tomar decisiones a cero riesgo.
Debido a los sistemas de rendición de cuentas y a la concepción de que la inversión en investigación y desa

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 27
rrollo es un costo de alto riesgo, se han tomado deci-siones no muy adecuadas durante 35 años, sin atender la formación de recursos humanos especializados. En otras áreas, históricamente se ha preferido comprar servicios y sistemas al extranjero en los mercados de alta rentabilidad como fotografía satelital, monitoreo de clima y, en general, aplicaciones de tecnología satelital en el sector gubernamental y privado (Santillán, 2013).
Actualmente, México tiene una gran dependencia que causa un gasto constante de recursos que terminan en agencias extranjeras. Existe una gran carencia de especialistas, infraestructura y desarrollo mexicanos en un área que tiene un mercado mundial de cerca de $800 mil millones de dólares anuales.
Como ejemplo directo, no existen sistemas sateli-tales para prevención de desastres naturales. Hay una dependencia total de las instituciones del gobierno, de la investigación en geociencias, geomática, ciencias del mar, geografía, estadística, economía, etcétera, en la toma de imágenes satelitales del territorio nacional.
El círculo vicioso se debe romper, es necesario lo-grar credibilidad con el sector productivo, desarrollar misiones de corta duración con resultados favorables y establecer una estrategia nacional para la formación simultánea de una industria alrededor de las aplica-ciones espaciales; también es imprescindible crear infraestructura pública y privada para poder desarrollar tecnología y sistemas espaciales y aplicaciones en tierra.
La Redcyte tiene una misión muy clara: conjuntar esfuerzos multidisciplinarios y multiinstitucionales para cambiar una cultura que se basa en el desarrollo indi-
vidual, los proyectos aislados y en la descalificación de los esfuerzos en otras áreas y grupos del conocimiento o proyectos que no son compatibles con el de los auto-denominados investigadores reconocidos en el campo.
El avance en la compactación de componentes electrónicos, el desarrollo de nuevos materiales y el establecimiento de centros de investigación y desarrollo en industrias de alta tecnología como la automotriz, la aeronáutica y la electrónica en el país, están demandando cambios importantes en la educación superior y en el enfoque para desarrollar aplicaciones concretas con utili-dad social en los proyectos patrocinados por el Conacyt. En este contexto, la Redcyte plantea el objetivo claro de desarrollar una red de colaboración entre instituciones
académicas, centros de investigación, empresas y orga-nismos internacionales para fomentar el desarrollo de la ciencia y la tecnología espacial, a fin de que tengan un impacto positivo sobre la sociedad mexicana; también plantea atender la demanda industrial para desarrollar nuevos equipos y servicios satelitales para la población, así como establecer la colaboración con instituciones nacionales e internacionales para el desarrollo de mi-siones espaciales que tengan impacto científico y social.
Durante estos primeros periodos de operación de la Redcyte, hemos visto que México puede aprovechar la coyuntura que se ha creado con el uso de tecnología COTS (por sus siglas en in-glés Commercial Off-The-Shelf) y el desarrollo de satélites de bajo costo para uso en órbita baja, donde la percepción remota, el monitoreo y desa-
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201628
rrollo de micro y nanosatélites son posibles con presu-puestos desde $300 mil a los $12 millones de dólares en misiones para demostrar tecnología con costos razonables para una economía como la nuestra, en algu-nos casos con resultados sorprendentes. En este rubro podemos mencionar los proyectos para el desarrollo de plataformas satelitales que se tienen registrados en la red, como el Quetzal, Ulises, Cóndor, Aztecsat (Santillán, 2014).
Actualmente, existe un mercado de componentes de bajo costo en el área de nanosatélites que permite que universidades con financiamientos de $6 a $10 millones de dólares puedan desarrollar un satélite de hasta 50 kg en un periodo de tres años. Por esta razón, ahora surgen empresas, gobiernos y universidades que están desarrollando aplicaciones de comunicaciones, Internet, localización y monitoreo desde una órbita menor a los 1000 km.
También dentro de la red existen proyectos como el desarrollo de instrumentación de percepción remota como propuesta para sistemas de observación en pla-taformas de nanosatélites.
La articulación de Redcyte con la Agencia Espacial Mexicana (AEM) como un catalizador para desarrollar misiones científicas, aplicaciones sociales y programas para el establecimiento de infraestructura de investiga-ción y desarrollo en las ciencias y tecnologías espaciales
(CTE), requiere de esquemas que permitan tener una fuerte vinculación con el sector productivo, el sector social y el gubernamental a fin de poder detonar el desarrollo industrial en el área espacial.
Para lograrlo, la AEM es parte del Consejo Técnico Académico (CTA) de la red, donde se discuten las líneas de acción tanto de la red como de la agencia, a fin de tener siempre el rumbo claro en el desarrollo de los proyectos de red.
Por el lado de la ciencia espacial, se debe llevar a cabo una gran campaña de concientización para evitar los reclamos de cada área como la única que hace inves-tigación relevante en el espacio. La finalidad es poder conjuntar a los astrónomos, expertos en ciencias de la tierra, ciencias del mar, astrofísicos y físicos, y hacerles ver que el desarrollo de instrumentación, misiones sate-litales, pruebas en plataformas aéreas y otros elementos son fundamentales para el desarrollo de las CTE, lo que requiere de un trabajo conjunto con la comunidad de ingenieros de todas las áreas.
Esto se ha logrado a través del acercamiento de nuevos colegas de las ciencias espaciales a integrarse con nuevos proyectos a la red, así como para compartir conocimiento y desarrollar nuevas propuestas.
Por otra parte, la red debe desarrollar un área de regulación y derecho internacional, ya que todas las mi-

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 29
siones deben atender múltiples requerimientos, son multidisciplinarias y de alto riesgo. En este punto se identificará un grupo de colegas que tienen experien-cia en el tema de regulación espacial para permear los conocimientos en los demás proyectos.
La Redcyte deberá colaborar en la elaboración de proyectos que permitan el desarrollo de una nueva imagen de las CTE en el público en general, una nueva cultura de cooperación y, sobre todo, resultados concretos de proyectos que puedan ser comunicados y entendidos por la sociedad, atractivos para la inversión nacional y extranjera. Es también importante obtener financiamiento de entidades de gobierno y empresas privadas. Se pretende lograr el objetivo a través de una revista que se publicará, así como los posibles números consecuentes que se generen y su distribución a nivel nacional (Fuentes 2015).
La red debe buscar un paradigma que se concentre en aplicaciones sociales y comerciales de las CTE para los proyectos de investigación aplicada y desarrollo tecnológico en una dinámica de cooperación inter-nacional.
CONSEJO TÉCNICO ACADÉMICO
Saúl Daniel Santillán Gutiérrez – Academia de In-genieríaSergio Autrey Maza – GlobalstarJosé Guichard Romero – INAOEBeatriz Aguilar Salazar – Axon’s CableJosé Francisco Valdés Galicia – Itto. Geofísica UNAMSergio Viñals Padilla – IPNFrancisco Javier Mendieta Jiménez – Agencia Espacial Mexicana
REFERENCIAS
Fuentes Romo, C. et al. (2015). Red de Ciencia y Tecnología del Espacio (Redcyte): informe técnico Redcyte periodo 2015-2016. México. D.F.: Redcyte.
Santillán Gutiérrez, S.D. et al. (2013). Red de Ciencia y Tecnología del Espacio (Redcyte): documento del estado del arte de la industria espacial en México, México, D.F.: Redcyte.
Santillán Gutiérrez, S.D. et al. (2014). Red de Ciencia y Tecnología del Espacio (Redcyte): informe técnico Redcyte periodo 2011-2013, México, D.F.: Redcyte.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201630
Hermes moreno ÁlvareZ*, maría Poliakova* y antonio gómeZ roa**
SUSTENTABILIDAD
e s p a c i a lBasura
* Universidad Autónoma de Chihuahua.**Universidad Autónoma de Baja California.Contacto: [email protected]
Como si se tratara de una película de ciencia ficción, en la que hay héroes al rescate del universo, los científicos ahora deben pensar en resolver un problema de tamaño “cósmico”: ¿cómo limpiar nuestra casa de la basura espacial?
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 31
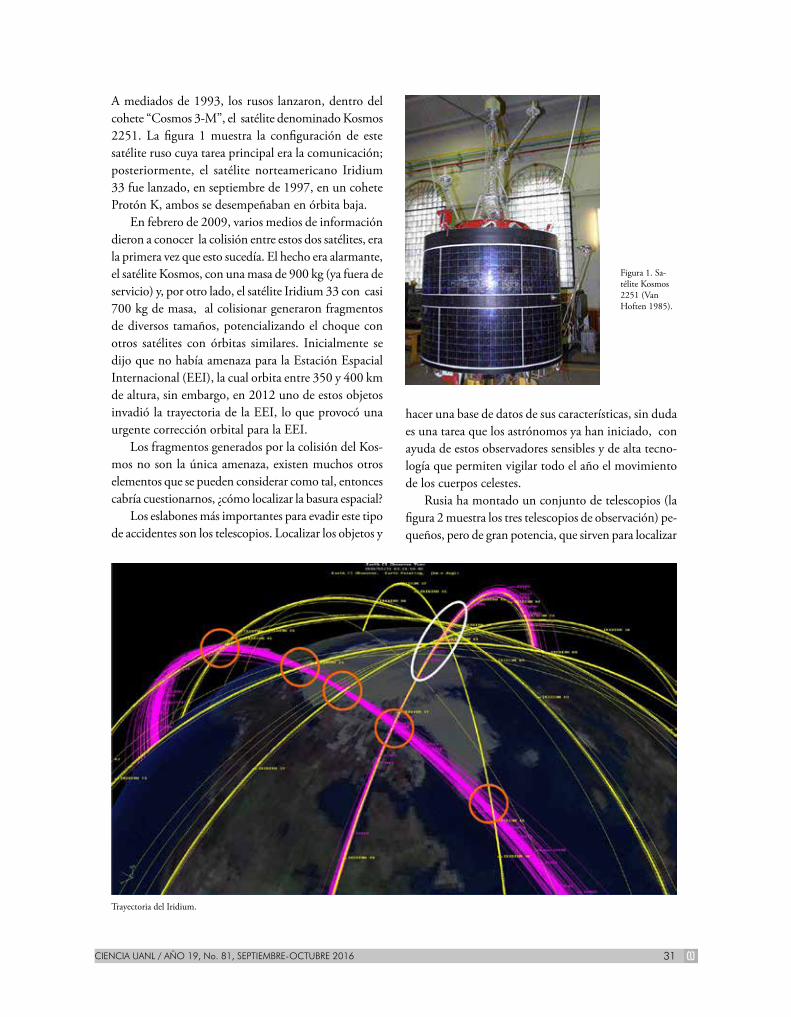
A mediados de 1993, los rusos lanzaron, dentro del cohete “Cosmos 3-M”, el satélite denominado Kosmos 2251. La figura 1 muestra la configuración de este satélite ruso cuya tarea principal era la comunicación; posteriormente, el satélite norteamericano Iridium 33 fue lanzado, en septiembre de 1997, en un cohete Protón K, ambos se desempeñaban en órbita baja.
En febrero de 2009, varios medios de información dieron a conocer la colisión entre estos dos satélites, era la primera vez que esto sucedía. El hecho era alarmante, el satélite Kosmos, con una masa de 900 kg (ya fuera de servicio) y, por otro lado, el satélite Iridium 33 con casi 700 kg de masa, al colisionar generaron fragmentos de diversos tamaños, potencializando el choque con otros satélites con órbitas similares. Inicialmente se dijo que no había amenaza para la Estación Espacial Internacional (EEI), la cual orbita entre 350 y 400 km de altura, sin embargo, en 2012 uno de estos objetos invadió la trayectoria de la EEI, lo que provocó una urgente corrección orbital para la EEI.
Los fragmentos generados por la colisión del Kos-mos no son la única amenaza, existen muchos otros elementos que se pueden considerar como tal, entonces cabría cuestionarnos, ¿cómo localizar la basura espacial?
Los eslabones más importantes para evadir este tipo de accidentes son los telescopios. Localizar los objetos y
Figura 1. Sa-télite Kosmos 2251 (Van Hoften 1985).
Trayectoria del Iridium.
hacer una base de datos de sus características, sin duda es una tarea que los astrónomos ya han iniciado, con ayuda de estos observadores sensibles y de alta tecno-logía que permiten vigilar todo el año el movimiento de los cuerpos celestes.
Rusia ha montado un conjunto de telescopios (la figura 2 muestra los tres telescopios de observación) pe-queños, pero de gran potencia, que sirven para localizar

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201632
Figura 2. Telescopio para detección de basura espacial (Yuraleva 2016).
estos elementos, uno de ellos alberga una lente de 40 cm de diámetro, la cual tiene la capacidad de observar objetos de hasta 60 cm a una distancia de 36,000 km. Esta distancia corresponde a la órbita geoestacionaria, en ésta los satélites parecen estáticos respecto de un punto fijo de la Tierra en rotación y éste, sin duda, es el mejor lugar para facilitar los servicios de comunica-ción: televisión, etcétera; es decir, aquellos servicios en los se requiere una cobertura territorial determinada. Los otros dos teles-copios tienen la tarea de captar los objetos más grandes y en espacios más amplios, mientras que el tercero tiene la tarea de vigilar objetos que están en órbitas más cercanas a la Tierra.
“Habitualmente los telescopios funcionan al mismo tiempo, vigilando algún objeto en particular; en parti-cular, los nuestros realizan una observación de varios objetos en los espacios más amplios y diferentes” (I. Molotov, entrevista personal, octubre 2012).
Una de las principales tareas de los astrónomos es recolectar datos celestes, a estos datos de los elementos observados y detectados como basura espacial se les conoce como catálogo, en este sentido la actualización y mejora de este catálogo necesita de mejores datos, es decir, más exactos.
La noche es el mejor momento para que el obser-vatorio empiece a ejercer funciones, no así el trabajo de los científicos, pues previamente es necesario dar a los telescopios la zona de observación, las partes que serán fotografiadas por los dispositivos ópticos durante toda la noche. La ubicación de estos objetos es posible mediante un tipo de coordenadas llamadas “celestes”, una vez localizado el objeto se toma una exposición y se pasa a la computadora, este proceso continua toda la noche y después es revisado.
La figura 3 muestra una exposición tomada por estos telescopios, se pueden observar puntos y muchos
Figura 3. Toma de fotografía estelar (Academia de Ciencias Rusa, 2015).
otros elementos parecidos a ciertas aberraciones de tipo astigmáticas, pero ¿qué significa esto?
Estas aparentes aberraciones corresponden a imágenes de estrellas; se ven así por la exposición de cuadro en diez segundos que el telescopio permanece inmóvil, mientras la Tierra gira, pero a los astrónomos les interesan los puntos que no son tan numerosos. Al referirse a los puntos:
Estos objetos se mueven junto con la Tierra, en-tonces significa que son o satélites o fragmentos de la basura espacial. Se toman muchas fotos, después se manda toda la información al centro de procesamiento, allá los datos son tratados y analizadas las coordenadas de esos llamados puntos en el momento dado, y comparados con la base de datos que se tiene en catálogos este-lares, catálogos satelitales (V. Linkov entrevista personal, octubre 2012).
Puede resultar que este punto sea una basura espa-cial o cualquier otro satélite desconocido, por lo tanto, es necesario identificarlo, catalogarlo, complementarlo con datos y actualizar el catálogo.
La identificación es la parte especial de este tra-bajo, todos los objetos notados durante la sesión de observación, con ayuda de las coordenadas espaciales, son comparados con los ya existentes; si los datos coinciden, el objeto es conocido y no hay motivos de preocupación, pero si no, se sacan y se incorporan a un grupo especial de acompañamiento. Por un año los astrónomos registran alrededor de 700 objetos de este tipo, la mitad de éstos es basura espacial. Son los restos de las etapas de los cohetes que giran cerca de la órbita de la Tierra, bloques propulsores que se desprenden del cohete cuando los objetos toman la órbita, aparatos
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 33
descompuestos que ya terminaron su servicio y que tuvieron que quedarse allí como basura.
Mikhail Lazareue es uno de los responsables por tratamiento de datos de los telescopios, según este autor, la amenaza de los objetos en el espacio es sólo una parte del problema, el otro es la posible caída de la basura a la Tierra, eso puede pasar con los dispositivos descompuestos ubicados en las órbitas bajas, Lazareue nos relata: “Tuvimos casos del abandono, no autorizado, de las órbitas y como hay aparatos del destino especial que no planeábamos bajar –todo eso en unos 40 o 50 años– empezarán a caer a la Tierra bastante rápido”(M. Lazareue, entrevista personal, octubre 2012 ).
En las oficinas de Moscú, concretamente en el Centro de Ciencias Astronómicas, es donde se piensa evadir los peores escenarios. Aquí llega la información de todos los objetos sospechosos o situaciones preocu-pantes sobre los acercamientos en el espacio. La infor-mación es recibida de observatorios de todo el mundo, incluyendo la aportación mexicana. Ahora son más de 30 observatorios, según los científicos, el flujo anual de medidas de volumen cubrió todo lo que fue recibido de los últimos 40 años. Todos juntos, incluyendo el centro de tratamiento de datos, forman un complejo que se dedica a la prevención de situaciones peligrosas en el espacio, una estructura única y original, la que nunca se ha hecho para el espacio civil.
Este complejo actualmente está en pruebas y se espera un pronto éxito; este sistema, por primera vez, será dedicado directamente al problema de la basura espacial. El principio del sistema es muy simple:
Según la figura 4, los datos de los telescopios, al principio, son tratados en el centro de análisis, es importante ir filtrando los datos o posibles objetos
sospechosos que se analizan para conocer en qué par-tes hay posibilidad de acercamiento, después pasan al centro de control de vuelo el cual inspecciona a los cosmonautas. Los especialistas revisan la información nuevamente y en caso de que se confirme, la pasan a los propietarios del satélite, a la agencia federal espacial, al ministerio de defensa o a las compañías privadas. Ellos decidirán qué hacer, si dejar el satélite esperando a que la amenaza desaparezca o llevarlo a algún lugar.
La pérdida del satélite representa mucho dinero, además de los gastos que se generarán para un lanza-miento nuevo o producción del satélite, su explotación, etcétera. El tiempo que requiere reponer esa merma implica la pérdida de un ingreso considerable, y si el satélite es comercial, se pierde también el beneficio. La corrección de órbita, hoy por hoy, es el método princi-pal para combatir la basura espacial; sin embargo, in-cluso este método tampoco garantiza el resultado. Para dejar de funcionar, un satélite sólo necesita chocar con un trozo de un centímetro, pero la basura tan pequeña no puede ser detectada por ningún sistema moderno, eso quiere decir que para solucionar el problema se necesita una limpieza global del espacio.
Ya se han propuesto varias soluciones de ingeniería: la captura de los objetos con ayuda de remolques, sis-temas de cables electromagnéticos, naves recolectoras, hasta se han propuesto mallas para basura más pequeña, pero por ahora todo se ha quedado en proyectos. ¿Qué tan pronto se realizarán?, depende de varios factores al mismo tiempo: el primero es el factor de ingeniería, porque la dificultad del sistema debe ser primero rea-lizada; el segundo factor es la seguridad, es necesario remolcar la basura sin dañar los satélites que funcionan; y el tercero, la cuestión jurídica, cada elemento de basura pertenece a algún país, entonces se necesitará un permiso para su eliminación. Todos estos temas son discutidos en los foros internacionales ¿se llegará a un acuerdo único para solucionar el problema?
Figura 4. Camino del análisis de los datos recabados.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201634
TENDENCIAS EDUCATIVAS
Construcción de un picosatélite cansat
Ángel colín*, bÁrbara bermúdeZ reyes*, gorki encarnación morrobel**, gerardo lira ibarra*, darío Zúñiga rosales*, luis Ávalos de la cruZ*, marcelo villarreal méndeZ*,
Jocelyn mendoZa martíneZ*** y brenda ÁlvareZ arce***
Los cansat son conocidos en casi todo el mundo. Su principal objetivo es transmitir a los estudiantes univer-sitarios los conceptos básicos de diseño y construcción de satélites artificiales. La mayoría de las universidades más importantes de diversos países que cuentan con una facultad de ingeniería y ciencias exactas han construido al menos uno de estos dispositivos como actividad extraescolar para sus alumnos, mediante cursos, talleres o a través de los programas de capaci-tación que las agencias espaciales ofrecen para captar las futuras generaciones de ingenieros y científicos en el área espacial (Walker et al., 2010).
La historia de diseño y construcción de cansat en México es muy reciente, comienza apenas en 2013, cuando la Red Universitaria del Espacio (RUE), de la Universidad Nacional Autónoma de México (UNAM), organizó su primer concurso interno (UNAM 2013). En 2014, la Agencia Espacial Mexicana (AEM) realizó un proyecto de capacitación en sistemas de ingeniería aplicados a una misión cansat (AEM, s.d.), en la que participaron más de 50 profesores de todo el país con la finalidad de que los profesores capacitados difundieran estos conocimientos a los estudiantes de sus universi-dades. La rápida y creciente aceptación por parte de la comunidad académica dio como resultado una serie de concursos regionales y nacionales como los organizados por el Centro Universitario de Ciencias Exactas e Inge-nierías (CUCEI) de la Universidad de Guadalajara en 2015; para 2016 se realizó un concurso por parte de la AEM y otro por la Escuela de Ciencias de la Ingeniería y Tecnología (ECITEC) de la Universidad Autónoma de Baja California (UABC) (Sánchez et al., 2016). Es
* Universidad Autónoma de Nuevo León.** Universidad APEC.*** Universidad Autónoma de Baja California. Contacto: [email protected]
un hecho que estos concursos irán tomando mayor im-portancia con el paso del tiempo. Para este año se espera tener mayor afluencia en cada uno de los eventos; hasta ahora, se tienen registrados únicamente dos concursos nacionales: el que organizó el CUCEI en junio y el que se llevará a cabo en octubre de 2016, organizado por la Universidad Autónoma de Nuevo León (UANL).
En la actualidad, la UANL forma parte de un comité de expertos certificados (2016) encargados de organizar y gestionar anualmente un concurso nacional de picosatélites, dicho concurso se realiza en una institución diferente cada año. Estos eventos nos conducirán paulatinamente a adquirir experiencia para participar en las competencias internacionales que se llevan a cabo en Europa, Estados Unidos, etcétera (ESA, 2016; ARLISS, 2016).
En este artículo se presenta la descripción física y la construcción de un picosatélite cansat, elaborado en junio de 2016, durante el segundo programa de entrenamiento teórico-práctico que la UANL ofreció a estudiantes universitarios.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DE UN PICOSATÉLITE CANSAT
Un cansat consiste en una plataforma que simula un sistema espacial; en este caso, es un picosatélite que cabe en una lata de refresco.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 35
Estos simuladores de satélite no son puestos en ór-bita, pero pueden lanzarse a diferentes alturas mediante un cohete, globo sonda, aeromodelo o multirrotor de control remoto. Durante su descenso, deben transmitir información por telemetría hacia una estación terrena conectada a una computadora portátil.
Los diseños y configuraciones de un cansat son muy variados, debido a que dependen del tipo de misión que se realizará. Una misión puede consistir únicamente en transmitir datos, efectuar retornos controlados o probar pequeños mecanismos de despliegue. En la figura 1 se muestran los componentes principales que constitu-yen los subsistemas de un cansat: de arriba abajo y de izquierda a derecha: a) subsistema de computadora, b) subsistema de comunicación, c) subsistema de la misión y d) subsistema de potencia con microcámara.
A continuación se describe cada uno de los sub-sistemas anteriores: a) Subsistema de la computadora, compuesto por microcontrolador Arduino Promini 328 y un chip Atmega328 a 8 MHz. b) Subsistema de comunicación, con antena XBee y protocolo de comu-nicaciones Zigbee (IEEE 802.15.4) y GPS (Global Po-sition System, por sus siglas en inglés) modelo GP635T. c) Subsistema de la misión, con sensor de temperatura y humedad DHT11, acelerómetro ADXL345, giros-copio L3G4200D, compás HMC5883L y barómetro BMP085. d) Subsistema de potencia, con batería de polímero de litio de 3.7 V a 1.2 mAh y microcámara 808 Car Key, para video-fotografía, con resolución de 720x480, y cuenta con su propia batería. Cada uno de
Figura 1. Configuración básica de los cuatro subsistemas de un cansat (ela-boración de los autores).
los subsistemas está conectado entre sí para formar el sistema completo (figura 2). En la figura 3 se observa el ensamble, listo para ser introducido en una lata de refresco. Por conveniencia el lenguaje de programación utilizado en la configuración de todo el sistema fue Arduino v1.6.6.
Es importante considerar que el mecanismo de descenso es un elemento adicional, externo al sistema
Figura 3. Ensamble completo de un cansat (elaboración de los autores).
Figura 2. Diagrama esquemático de conexiones para el sistema completo (cortesía del ECITEC-UABC).
integrado. El paracaídas de la figura 4 está sujeto en los orificios que se hicieron en la parte superior de la lata.
Con este modelo de paracaídas se realizó un análisis básico de su funcionamiento. Para ello se consideraron las condiciones ambientales en el interior del edificio de la Facultad de Ciencias Físico Matemáticas (FCFM). La densidad del aire, ρ = 1.1647, fue estimada tomando en cuenta una temperatura de 29°C, con una presión de 1019 hPa, humedad relativa 58% y un punto de rocío de 19.91°C. Al desplegarse el paracaídas, la masa total
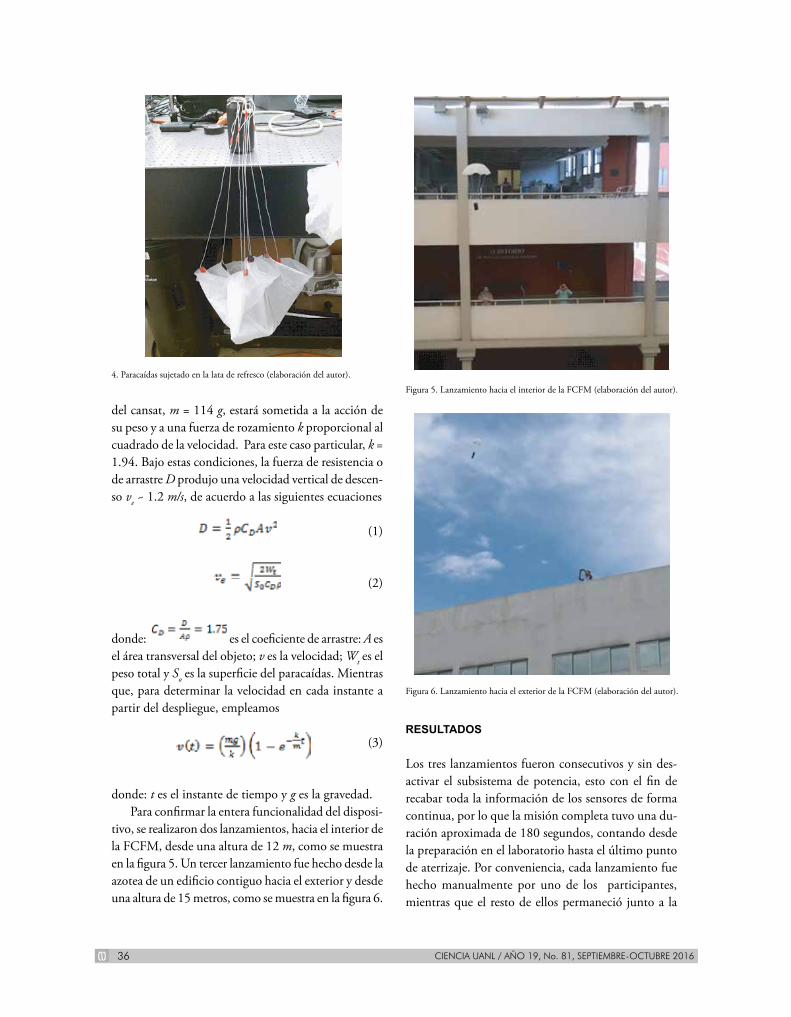
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201636
4. Paracaídas sujetado en la lata de refresco (elaboración del autor).
del cansat, m = 114 g, estará sometida a la acción de su peso y a una fuerza de rozamiento k proporcional al cuadrado de la velocidad. Para este caso particular, k = 1.94. Bajo estas condiciones, la fuerza de resistencia o de arrastre D produjo una velocidad vertical de descen-so ve ~ 1.2 m/s, de acuerdo a las siguientes ecuaciones
(1)
(2)
donde: es el coeficiente de arrastre: A es el área transversal del objeto; v es la velocidad; Wt es el peso total y So es la superficie del paracaídas. Mientras que, para determinar la velocidad en cada instante a partir del despliegue, empleamos
(3)
donde: t es el instante de tiempo y g es la gravedad.Para confirmar la entera funcionalidad del disposi-
tivo, se realizaron dos lanzamientos, hacia el interior de la FCFM, desde una altura de 12 m, como se muestra en la figura 5. Un tercer lanzamiento fue hecho desde la azotea de un edificio contiguo hacia el exterior y desde una altura de 15 metros, como se muestra en la figura 6.
RESULTADOS
Los tres lanzamientos fueron consecutivos y sin des-activar el subsistema de potencia, esto con el fin de recabar toda la información de los sensores de forma continua, por lo que la misión completa tuvo una du-ración aproximada de 180 segundos, contando desde la preparación en el laboratorio hasta el último punto de aterrizaje. Por conveniencia, cada lanzamiento fue hecho manualmente por uno de los participantes, mientras que el resto de ellos permaneció junto a la
Figura 5. Lanzamiento hacia el interior de la FCFM (elaboración del autor).
Figura 6. Lanzamiento hacia el exterior de la FCFM (elaboración del autor).
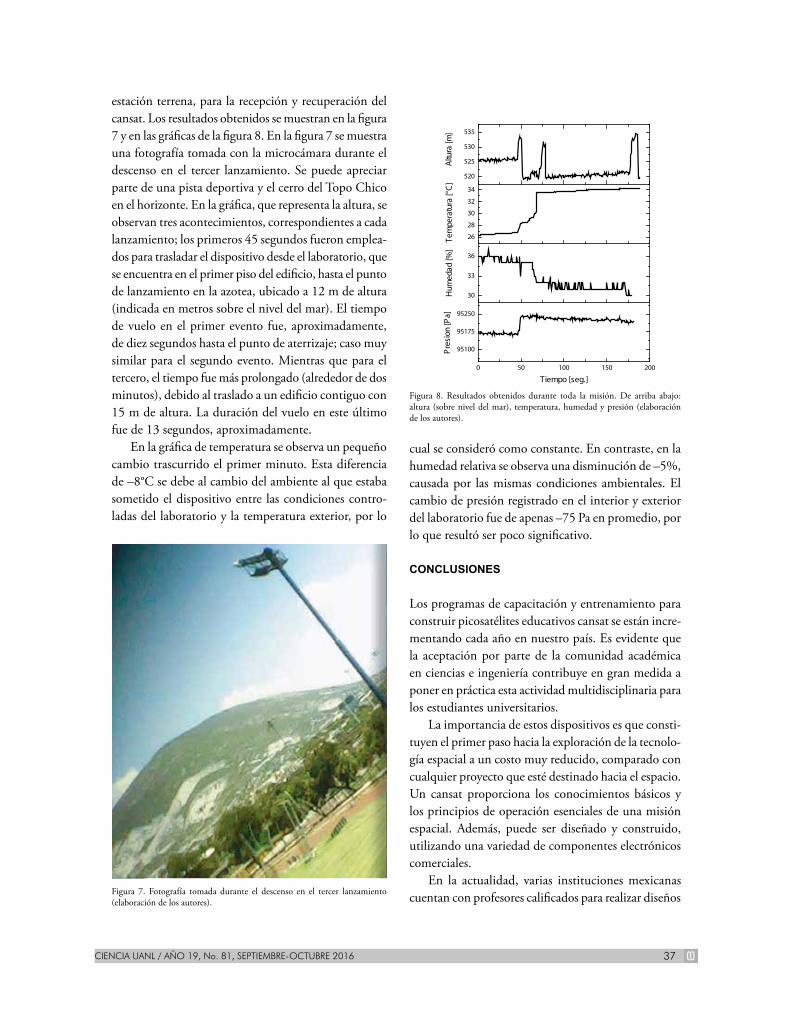
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 37
estación terrena, para la recepción y recuperación del cansat. Los resultados obtenidos se muestran en la figura 7 y en las gráficas de la figura 8. En la figura 7 se muestra una fotografía tomada con la microcámara durante el descenso en el tercer lanzamiento. Se puede apreciar parte de una pista deportiva y el cerro del Topo Chico en el horizonte. En la gráfica, que representa la altura, se observan tres acontecimientos, correspondientes a cada lanzamiento; los primeros 45 segundos fueron emplea-dos para trasladar el dispositivo desde el laboratorio, que se encuentra en el primer piso del edificio, hasta el punto de lanzamiento en la azotea, ubicado a 12 m de altura (indicada en metros sobre el nivel del mar). El tiempo de vuelo en el primer evento fue, aproximadamente, de diez segundos hasta el punto de aterrizaje; caso muy similar para el segundo evento. Mientras que para el tercero, el tiempo fue más prolongado (alrededor de dos minutos), debido al traslado a un edificio contiguo con 15 m de altura. La duración del vuelo en este último fue de 13 segundos, aproximadamente.
En la gráfica de temperatura se observa un pequeño cambio trascurrido el primer minuto. Esta diferencia de –8°C se debe al cambio del ambiente al que estaba sometido el dispositivo entre las condiciones contro-ladas del laboratorio y la temperatura exterior, por lo
Figura 7. Fotografía tomada durante el descenso en el tercer lanzamiento (elaboración de los autores).
0 50 100 150 200
95100
95175
95250
30
33
36
26
28
30
32
34
520
525
530
535
Pre
sion
[Pa]
Tiempo [seg.]
Hum
edad
[%]
Tem
pera
tura
[°C
]
Altu
ra [m
]
Figura 8. Resultados obtenidos durante toda la misión. De arriba abajo: altura (sobre nivel del mar), temperatura, humedad y presión (elaboración de los autores).
cual se consideró como constante. En contraste, en la humedad relativa se observa una disminución de –5%, causada por las mismas condiciones ambientales. El cambio de presión registrado en el interior y exterior del laboratorio fue de apenas –75 Pa en promedio, por lo que resultó ser poco significativo.
CONCLUSIONES
Los programas de capacitación y entrenamiento para construir picosatélites educativos cansat se están incre-mentando cada año en nuestro país. Es evidente que la aceptación por parte de la comunidad académica en ciencias e ingeniería contribuye en gran medida a poner en práctica esta actividad multidisciplinaria para los estudiantes universitarios.
La importancia de estos dispositivos es que consti-tuyen el primer paso hacia la exploración de la tecnolo-gía espacial a un costo muy reducido, comparado con cualquier proyecto que esté destinado hacia el espacio. Un cansat proporciona los conocimientos básicos y los principios de operación esenciales de una misión espacial. Además, puede ser diseñado y construido, utilizando una variedad de componentes electrónicos comerciales.
En la actualidad, varias instituciones mexicanas cuentan con profesores calificados para realizar diseños

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201638
y cursos de capacitación en este tema. Hay siete profe-sores que han obtenido una certificación internacional (CLTP7, 2015), reconocida por el Consorcio de Uni-versidades para la Ingeniería del Espacio (University Space Engineering Consortium) (UNISEC, 2015). Tres de estos profesores han formado el capítulo UNI-SEC-México (2016), el cual se ha establecido para crear una red nacional e internacional de colaboración entre estudiantes y profesores en actividades académicas y pro-yectos educativos que estén relacionados con el espacio.
AGRADECIMIENTOS
Este trabajo fue financiado, en parte, por Promep (pro-yecto: DSA/103.5/14/10812) y por la Agencia Espacial Mexicana (proyecto: Conacyt-AEM-2014-01-248438).
Los autores agradecen al M.C. Leopoldo Pineda, por facilitar el laboratorio de física moderna.
REFERENCIAS
AEM. (s.d.). Líderes cansat México. Consultado el 7 de julio de 2016. http://www.educacionespacial.aem.gob.mx/mapa_ Cansat.html
AEM. (2016). Consultado el 11 de julio de 2016. http://www.educacionespacial.aem.gob.mx/
ARLISS. (2016). Consultado el 7 de octubre de 2016 http://www.arliss.org/
CLTP7. (2015). The 7th CanSat Leader Training Program. Consultado el 13 de julio de 2016 http://cltp.info/
ESA. (2016). Cansat. Consultada el 7 de julio de 2016. http://www.esa.int/Education/CanSat
NASA. (2014). Small Spacecraft Technology State of the Art. National Aeronautics and Space Administration, California. Technical TP-2014-216648. Consultada el 7 de julio de 2016. http://www.nasa.gov/sites/default/files/atoms/files/small_spacecraft_technology_state_of_the_ art_2015_tagged.pdf
Sánchez C., Á.E. et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México, Celerinet, año 4, vol. VII, pp. 20-28.
Twiggs R. (1998). University Space System Symposium (USSS), Hawaii, USA.
UNAM. (2013). Misiones cansat 2013. Consultado el 7 de julio de 2016. http://rue.unam.mx/Eventos/Realizados/CANSAT/Misiones%20Cansat2013.pdf
UNISEC. (2015). The Fourth UNISEC-Global Meeting. Consultado el 13 de julio de 2016. http://www.unisec-global.org/
UNISEC-Mexico. (2016). Members UNISEC Mexico. Consultado el 7 de octubre de 2016 http://www.unisec.mx/#ourteam
Universidad de Guadalajara. (2015). Invitación a participar en el Concurso CanSat CUCEI. 2015 Consultado el 11 de julio de 2016 https://www.youtube.com/watch?v=G9BBp Ru1los
Walker, R. et al. (2010). ESA hands-on space education project activities for university students: Attracting and training the next generation of space engineers. IEEE EDUCON Conference, Madrid. Consultado el 19 de noviembre de 2015 http://ieeexplore.ieee.org/stamp/stamp.jsp?tp= &arnumber=5492406&isnum-ber=54923361
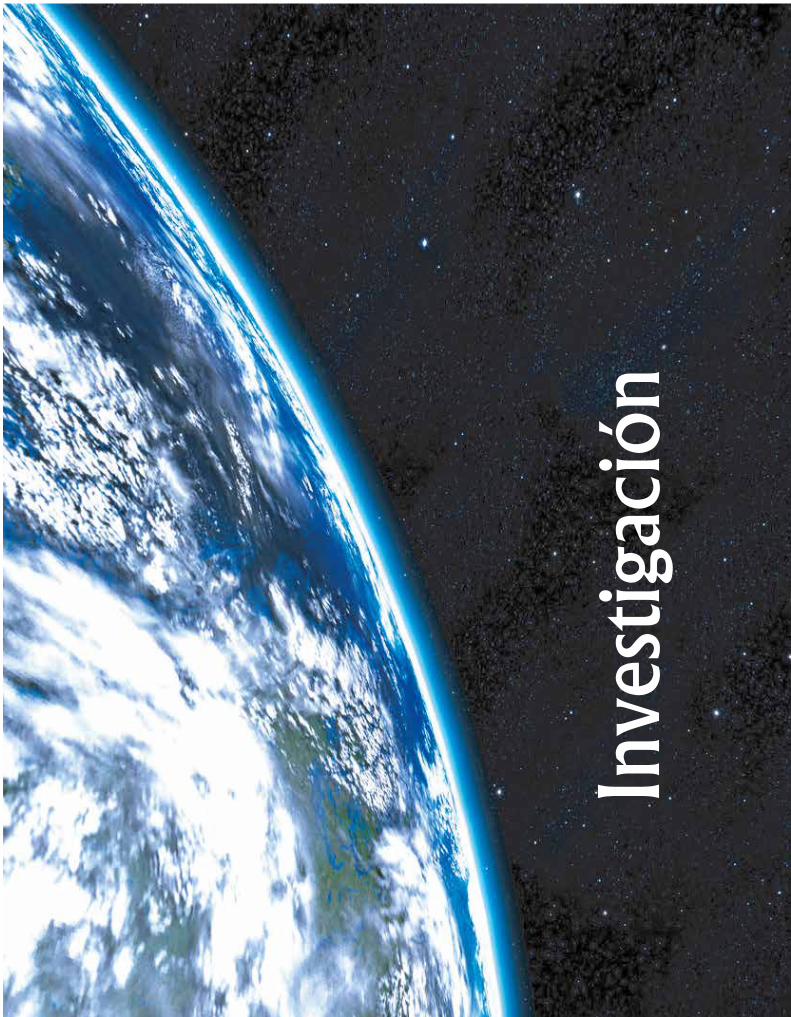
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 39
Inve
stig
ació
n

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201640
Jordan Sombrerero eSpinoza*, Telma Saraí encarnación corTéS*, JoSé raúl FloreS machorro*, mayra báez landa*, mariela Serrano cenTeno* y JoSué mancilla cerezo*
Sonda espacial
RESUMENEl objetivo del proyecto es simular una sonda espacial que mida las cantidades de CO2, oxígeno y nitrógeno, para saber si existen, en un lugar determinado, las condiciones para albergar vida terrestre. El cansat tomará las variables de temperatura, altitud, latitud, entre otras requeridas.
Palabras clave: sonda espacial, planeta, vida terrestre.
ABSTRACTSimulation of a space probe to measure the amounts of CO2, oxygen and nitrogen. To know if a planet has conditions to host terrestrial life, it will measure the variables of tempera-ture, altitude and latitude among the others required. This will lead to the possibility of finding a second alternative for an identical planet Earth that can be inhabitable. Similarly, the conditions of atmospheric gases will be calculated to determine their optimal levels since this involves either a good, bad or acceptable environment in order for terrestrial life to exist.
Keywords: space probe, planet, terrestrial life.
¿QUÉ ES UNA SONDA ESPACIAL?
Una sonda espacial es un instrumento artificial que se envía al espacio para estudiar los diferentes cuerpos del Sistema Solar. Los principales objetivos de las sondas espaciales son planetas, satélites, asteroides y cometas; no van tripuladas y recopilan in-formación que envían a los científicos en la Tierra. Las sondas espaciales también suelen denominarse satélites artificiales, pero se diferencian de estos últimos en que normalmente no orbitan alrededor de los objetos que estudian. La mayoría de las veces tienen trayectorias de acercamiento, aunque en ocasiones se sitúan en órbita de un determinado astro. Las sondas están equipadas con costosos sistemas fotográficos y de filmación, radares y sofisticados medios de comunicación en contacto con la Tierra (González, 2015).
* Instituto Tecnológico Superior de Tepeaca.Contacto: [email protected]
Misiones de sondas espaciales:
• Cassini. Su objetivo es el estudio de Saturno y de varios de sus satélites, entre ellos Titán.
• New horizons. Es una sonda espacial de la NASA destinada a volar sobre Plutón y su satélite Caronte, y luego continuar en el Cinturón de Kuiper. También estudiará Júpiter y sus lunas.
• Rosetta. Es una sonda espacial concebida por la Agen-cia Espacial Europea (ESA), cuyo objetivo principal es el estudio del cometa Churyumov-Gerasimenko.
• Marte Reconocimiento Orbiter (MRO). Esta sonda americana, lanzada el 12 de agosto de 2005 de Cabo Cañaveral, Florida, contribuye al enriquecimiento de los conocimientos sobre Marte, así como la historia del agua en su superficie, su clima y su sótano (González, 2015).
GASES REQUERIDOS PARA LA VIDA TERRESTRE
Los gases atmosféricos son los que encontramos en el aire que nos rodea: argón, dióxido de carbono, helio, nitrógeno y oxígeno.
De estos gases, el argón, el oxígeno y el nitrógeno se producen principalmente por la separación del aire en los componentes que los constituyen. Esto se logra al reducir la temperatura del aire hasta que cada componente se licua y se puede extraer.
De los dos gases restantes, el dióxido de carbono se pro-duce como subproducto de varios procesos químicos. El helio aparece de manera natural en la corteza terrestre, donde ha sido atrapado en cavidades de rocas no porosas, de manera similar a la que se encuentra el petróleo. Estos “pozos” de helio sólo se encuentran en ciertas áreas del mundo que poseen el tipo
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 41
JORDAN SOMBRERERO ESPINOZA ET. AL.
correcto de geología; esto hace del helio un gas raro y costoso (González, 2007).
MOTIVACIÓN DEL PROYECTO
La motivación del presente proyecto es adquirir conocimientos sobre misiones espaciales, tanto de comunicaciones como en satélites y sondas espaciales. Obtener experiencia práctica que nos sirva para ingresar en un futuro a la Agencia Espacial Mexicana (AEM) o, incluso, a la NASA. De igual manera ampliar el perfil de egreso con conocimientos multidiscipli-narios, mecánicos, electrónicos, físicos, entre otros. También, concursar en competencias nacionales e internacionales nos ayuda a obtener reconocimientos con valor curricular; además de adquirir el conocimiento para armar un satélite y saber cómo está compuesto hasta el mínimo detalle en la parte electrónica y mecánica.
OBJETIVO DE LA MISIÓN
Mostrar y guardar datos de la cantidad de gases atmosféricos –como CO2, oxígeno y nitrógeno y las variaciones de tempe-ratura (externa e interna), presión, humedad relativa, latitud, longitud, altitud, aceleración, vibración y nivel de batería–, al mismo tiempo que se graba un video en el momento del descenso del satélite por medio de la cámara incorporada.
• El éxito mínimo de la misión es que únicamente se midan y muestren los datos en intervalos de tiempo.
• El éxito medio es que se midan y muestren los datos constantemente y se grabe en video.
• El éxito máximo es que se cumpla todo lo especificado.
REQUERIMIENTOS DE LA MISIÓN
Tabla I. Requerimientos de los sistemas.
Requerimientos del sistema Subsistemas comprendidos
Metas
Volumen de una lata de refresco de 355 mL.
Eléctrico, computadora, misión y comunicación.
Diseñar una arquitectura compacta y fácil de manipular.
Masa máxima del cansat 355 g.
Eléctrico, computadora, misión y comunicación.
Diseñar sistemas esbeltos, seleccionar materiales y dispositivos de baja masa.
La alimentación suministrada por baterías o panel solar.
Eléctrico. Batería que sea capaz de suministrar la energía por lo menos 30 min.
La batería de fácil acceso. Eléctrico. Diseñarlo de forma que el cambio de batería no afecte los demás subsistemas.
Interruptor principal en un lugar accesible.
Comunicación. Botón de encendido y apagado en la parte superior para un mejor manejo.
Sistema de recuperación. De recuperación. Construir un paracaídas que asegure la recuperación óptima del cansat , de color llamativo para encontrarlo con facilidad.
Velocidad del descenso entre 5 y 12 m/s.
De recuperación. Diseñar el paracaídas para que caiga a 9 m/s y asegure la integridad del cansat.
Alcance del radio entre 400 a 500 m.
Comunicación. Seleccionar un dispositivo capaz de mantener comunicación mínima de 400 m.
Medición de datos atmosféricos.
Eléctrico, misión y computadora.
El subsistema eléctrico con el voltaje necesario para los sensores. El subsistema de misión diseñado para albergar los sensores. El subsistema de computadora debe contar con un dispositivo programable para hacer funcionar los sensores.
Medición de temperatura (externa e interna), presión, humedad relativa, latitud, longitud, altitud, aceleración, vibración, nivel de batería y video.
Misión, comunicación, computadora y eléctrico.
El subsistema eléctrico debe tener el voltaje para alimentar la cámara. El subsistema de misión debe albergar todos los sensores. El subsistema de comunicación debe albergar espacio para el GPS. El subsistema de computadora debe contar con un dispositivo programable para hacer funcionar todos los dispositivos.
El cansat debe ser elevado a una altura de 400 a 500 m.
Ascenso. Ensamblar un drone que permita elevar el cansat a más de 500 m.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201642
SONDA ESPACIAL
GESTIÓN DEL PROYECTO
Figura 1. Relación de actividades.
José Raúl Flores Machorro
Actividades. 1, 2, 3, 5, 6 , 7, 8, 9, 10, 11,12, 13, 15, 16, 17.
Mayra Báez Landa
Actividades. 1, 2, 3, 5, 6, 7, 8, 10, 11, 12, 13, 15, 16, 17.
Mariela Serrano Centeno
Actividades. 1, 2, 3, 5, 6, 7, 8, 9, 10, 11, 12, 13, 15, 16, 17.
Líder del proyecto
Jordan Sombrerero Espinoza
Actividades. 1, 2, 3, 4, 5, 6, 7, 8, 10, 11,12, 13, 14, 15, 16, 17.
Telma Saraí Encarnación Cortés
Actividades. 1, 2, 3, 4, 5, 6, 7, 8, 10, 11, 12, 13, 14, 15, 16, 17.
Actividades
1. Selección de misión.2. Requerimientos de la misión (búsqueda de materiales).3. Cotización y proveedores.4. Diseño del paracaídas.5. Armado del drone.6. Bosquejo de las etapas del cansat:
• Potencia: Jordan Sombrerero Espinoza, Telma Saraí Encarnación Cortés.
• Computadora: José Raúl Flores Machorro, Mayra Báez Landa, Mariela Serrano Centeno.
• Misión: Jordan Sombrerero Espinoza, Telma Saraí Encarnación Cortés.
• Comunicación: José Raúl Flores Machorro, Mayra Báez Landa, Mariela Serrano Centeno.
7. Pruebas de materiales requeridos.8. Diseño de las placas.9. Programación.10. Comprobación de las placas individuales:
• Potencia: Jordan Sombrerero Espinoza, Telma Saraí Encarnación Cortés.
• Computadora: José Raúl Flores Machorro, Mayra Báez Landa, Mariela Serrano Centeno.
• Misión: Jordan Sombrerero Espinoza, Telma Sarai Encarnación Cortés.
• Comunicación: José Raúl Flores Machorro, Mayra Báez Landa, Mariela Serrano Centeno.
11. Ensamble del cansat.12. Funcionamiento de placas ensambladas.13. Diseño de estación terrena.14. Diseño del programa de base de datos.15. Pruebas de ascenso y descenso.16. Envío de datos.17. Pruebas finales.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
Para la selección de misión se emplearon varios artículos de referencia de los cuales se destaca información relevante de la Agencia Espacial Mexicana (2015), así como artículos de electrónica y de proyectos cansat (Sanchez et al., 2016).
Una vez elegida la misión, se procedió a definir los requeri-mientos de la misma, es decir, los materiales, para esto se tomó en cuenta la dificultad para conseguir los sensores de oxígeno y de dióxido de carbono, puesto que no son muy comerciales.
Los costos de los componentes fueron los siguientes: comunicación, $2,350 pesos (2 xbee s2, un Gps, leds, sensor de temperatura y pines machos); la computadora, $150 pesos (un arduino pro mini y pines machos); cumplimiento de la misión, $5,180 pesos (sensores de oxígeno y de dióxido de carbono, nuevos en el mercado); potencia, $1,365 pesos entre todos sus componentes.
En el diseño del paracaídas, figuras 2 y 3 (todas las figu-ras y tablas que aparecen en este trabajo son elaboración de
Figura 2. Diseño del paracaídas de prueba.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 43
JORDAN SOMBRERERO ESPINOZA ET. AL.
los autores), se contempló la forma del mismo, de manera circular, se tuvo en cuenta el material para desarrollarlo así como la velocidad de descenso. Un factor importante para el tamaño del paracaídas fue el peso máximo permitido para el cansat (355 g).
Figura 3. Colocación de hilos al paracaídas de prueba.
Figura 4. Partes del drone.
Figura 5. Colocación de motores.
Figura 6. Colocación de parte electrónica.
Figura 7. Programación de la controladora de vuelo.
Figura 8. Primer vuelo del drone.
Figura 9. Etapas del cansat.
Figura 10. Interconexión.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201644
SONDA ESPACIAL
Figura 11. Resultados de las actividades realizadas.
En el armado del drone (figuras 4 a 8) se realizó desde cero, para ello se tomó un curso básico de electrónica.
Las etapas del cansat fueron desarrolladas de acuerdo a las necesidades de la misión. En las figuras 9 y 10 se muestra el bosquejo de fabricación.
Para las pruebas, los materiales adquiridos se inspeccio-naron de manera precisa para cerciorarse de su buen funcio-namiento, para lo cual se tuvo en cuenta el correcto voltaje, conectividad y resistencia de cada uno.
Para el diseño de las placas se empleó el software “Ares Proteus”, para un mejor diseño de las etapas de electrónica, así como para tener el correcto tamaño y diseño, según las necesidades del cansat.
Para la programación se utilizó el software arduino, puesto que es el indicado para la programación de los componentes.
Para la parte de la estación terrena se ocupó el software LabVIEW, para mostrar los datos enviados por el cansat y al mismo tiempo dichos datos serán almacenados en una base para tener concentradas fichas históricas de las mediciones.
RESULTADOS Y DISCUSIÓN
Se propuso la misión a partir de la revisión de trabajos rela-cionados con sondas espaciales. Fue posible observar, a través del análisis realizado, que no existen sensores en el mercado a precios accesibles para medir ciertos tipos de gases como helio y azufre.
Se diseñó y construyó un paracaídas a partir del modelo matemático en el que los parámetros considerados son velo-cidad, peso, turbulencias y densidad del aire.
Se ensambló un drone para elevar el cansat y realizar las pruebas de ascenso y descenso. Se plantea que con el paso del tiempo, el drone sea más rentable que algún otro dispositivo de ascenso.
CONCLUSIONES
Un proyecto cansat amplía los conocimientos de los estu-diantes de ingeniería y enriquece su perfil de egreso. Además,
los enfrenta a problemáticas reales en las que se comprueba que la teoría es necesaria para realizar cualquier proyecto; de lo anterior se desprende la práctica que consta no sólo de la construcción del proyecto, sino de la aplicación que se le da al mismo.
AGRADECIMIENTOS
El equipo Galactics les agradece a los directivos, docentes, jefe de carrera y personas administrativas del Instituto Tecnológico Superior de Tepeaca por el granito de arena que han puesto en la realización de este proyecto. También se le agradece a la empresa “DragonFly Mexico” por su apoyo.
REFERENCIAS
AEM. (2015). Estructura de un cansat. Consultado el 25 de agosto de 2016. http://www.educacionespacial.aem.gob.mx/cansat.html González V., M.A. (2015). La mecánica de las sondas espaciales. Consultado el 25 de Agosto de 2016. http://www.tayabeixo.org/encuentros/traba-jos_xxv_ena/06_Sondas.pdf
González, F.J. (2007). La tierra primitiva y su transformación en un planeta amigable: evidencias del registro geológico: rocas y minerales. Córdoba: Agencia Córdoba Ciencia.
Sánchez C., A.E., et al. (2016). Picosatélites Educativos Cansat: Primer Concurso Nacional en México, CELERINET, Año 4, Vol. VII, 20-28.
Recibido 8-8-16Aceptado 10-9-16
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 45
rodrigo SanTiago FloreS*, homero domínguez barranco*, diego mckinnon govela*, alFredo chimely caSTillo*, mario o. meraz eSpinoza* y óScar marTínez hernández*
CAPTEUR-SAT
RESUMENEl objetivo de este proyecto es diseñar y desarrollar un picosa-télite capaz de generar gráficos estadísticos que nos permitan determinar la condición ambiental del aire. Para ello, deberá medir, recolectar y transmitir ciertos compuestos químicos presentes, como el dióxido de carbono (C02) y dióxido de nitrógeno (NO2). Adicionalmente, se tomarán algunos datos de telemetría de interés –el posicionamiento global, temperatura interna y externa, altura, orientación, presión atmosférica, entre otros– durante su lanzamiento y descenso, con interva-los de lecturas de los datos de al menos 0.5 s y recuperación del cansat.
Palabras clave: picosatélite, telemetría, posicionamiento global.
ABSTRACTDesign and develop a picosatalite capable of measuring, gathering and transmiting certain chemical compounds in the air such as carbon dioxide (CO2) and nitrogen dioxide (NO2), with the objective of generating statistical graphics that would let us determine the environmental conditions of air. In addition, some interesting telemetry data is going to be taken for example: global positioning, internal and external temperature, height, orientation, atmospheric pressure, etc., during the launching and landing; with interval readings of data of at least 0.5 sec. to be able to obtain them.
Keywords: picosatellite, telemetry, global positioning.
Hoy en día, los sistemas satelitales cumplen una función importante en el ámbito científico y tecnológico. Dentro de sus aplicaciones, se encuentra la captura de datos para medir las variables presentes en un entorno y así poder analizar su interacción en un espacio bajo condiciones específicas.
El estado del aire y de la atmósfera son factores de vital importancia para el bienestar del ser humano. Desafortunada-mente, estos dos aspectos no son tomados en cuenta, a pesar de
que actualmente los niveles de contaminación son demasiado altos en algunas zonas, lo que puede perjudicar la salud de las personas que se encuentren en contacto directo. MOTIVACIÓN DEL PROYECTO
La realización del Capteur-sat surge de la necesidad de im-plementar una alternativa para medir las variables más sobre-salientes de la calidad del aire. De tal manera que al calcular estas características, se intentará determinar si el área de estudio representa un riesgo para la salud del ser humano; cabe men-cionar que en la zona sur de Tamaulipas existen indicadores de que el aire presenta índices elevados de factores contaminantes.
También se intenta, con este proyecto, fomentar en el esta-do el desarrollo de la tecnología aeroespacial con aplicaciones útiles en otros sectores de interés.
OBJETIVO DE LA MISIÓN
El objetivo es diseñar y desarrollar un cansat capaz de medir el nivel de ciertos compuestos químicos presentes en el aire, como el dióxido de carbono (C02), dióxido de nitrógeno (NO2) y humo, por mencionar algunos. Con el fin de construir gráficos estadísticos que permitan analizar los datos obtenidos de una manera sencilla.
Adicionalmente, se tomará telemetría del instrumento: datos de GPS, temperatura, altura, orientación y presión atmosférica.
Éxito mínimo: envío de datos de telemetría durante el ascenso y descenso entre el cansat y la estación terrena.
Éxito medio: envío de datos de telemetría y de C02, NO2 y humo; muestreo durante el lanzamiento y descenso cada ½ s.
Éxito máximo: lograr los dos objetivos de éxito anteriores; además, desplegar la información gráficamente en un orde-nador (estación terrena) y recuperar el cansat.
* Universidad Tecnológica de Altamira.Contacto: [email protected]
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201646
CAPTEUR-SAT
REQUERIMIENTOS DE LA MISIÓN
Tabla I. Requerimientos de la misión.
Requerimientos del sistema
Requerimientos del subsistema
Dimensión de una lata de 355 mL.
Temperatura interna y externa.
Antena con diámetro menor al de la lata.
Presión.
Peso máximo de 355 g. Humedad relativa. Alimentación por baterías.
Altitud.
Contar con interruptor principal.
Longitud.
Sistema de recuperación (paracaídas).
Nivel de batería.
Vibración. Aceleración. Fotografía/video.
GESTIÓN DEL PROYECTO
Descripción general del proyecto Capteur-sat
En la figura 1 se muestra el diagrama para la implementación y desarrollo de este proyecto (todas las figuras y tablas de este trabajo son obra de los autores).
La figura 2 muestra el organigrama de cada una de las actividades realizadas por cada integrante del equipo.
Figura 1. Diagrama de operación del proyecto Capteur-sat.
Figura 2. Organigrama de actividades realizadas por los integrantes del proyecto.
Figura 3. Arquitectura del sistema Capteur-sat.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
Arquitectura del sistema cansat
Distribución de masa
Masa total: 140 gramos.
Figura 4. Distribución de masa del Capteur-sat.
Tabla II. Distribución de consumo de energía.
Balance de consumo de energía estimado

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 47
RODRIGO SANTIAGO FLORES ET. AL.
La fuente de alimentación para los componentes del cansat será mediante una batería de litio de 5 V de 2000 mAh, la cual tiene una duración de 35 min de carga, el tiempo suficiente para poder realizar la misión.
La figura 5 muestra un diagrama del suministro de energía de las baterías para cada subsistema.
Figura 5. Diagrama del subsistema de energía.
Integración de subsistemas
Los subsistemas de Capteur-sat quedan distribuidas en tres etapas importantes: entradas, procesamiento de datos y salidas.
Figura 6. Integración de subsistemas del Capteur-sat.
Tabla III. Estimación de costos.
Estos componentes son lo que se tienen actualmente, se pre-tende poner en funcionamiento otros sensores.
RESULTADOS Y DISCUSIÓN
Antes de encapsular el cansat se realizó un diseño en 3D de la lata con el software Solid Work como se observa en la figura 7.
Figura 7. Diseño en Solid Work de la lata.
Con la ayuda de una impresora en 3D el diseño en Solid Work fue impreso con material TPA (figura 8).
Figura 8. Máquina impresora en 3D.
Una vez impresa nuestra lata, se procedió a implementar los circuitos en tablillas para la conexión y distribución de los dispositivos, para poder encapsularlos de la mejor manera. La figura 9 muestra la estructura final del cansat.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201648
Después de ordenar todo, se procedió a implementar la interfaz de visualización de datos en un panel de instrumentación vir-tual diseñado en el software de LabVIEW. Como se muestra en la figura 10.
Figura 9. Estructura final del Capteur-sat.
Figura 10. Panel de instrumentación virtual en LabVIEW.
Figura 11. Visualización de la variable temperatura del picosatélite Capteur-sat.
Figura 12. Visualización de los datos de vibración del picosatélite Capteur-sat.
De tal manera que los datos enviados del Capteur-sat a través del procesamiento de los mismos por nuestra computadora de vuelo son recibidos mediante comunicación inalámbrica con protocolo IEE 802.15.4 en los dispositivos Xbee Pro S3 al desplegar los datos que aparecen en la figura 11 (Naylamp Mechatronics, 2015a y 2015b).
CONCLUSIONES
Aunque los valores obtenidos hasta el momento con el cansat no arrojan datos claros para determinar en qué cantidad se encuentran los contaminantes en el ambiente, nos ayuda a entender que nuestros dispositivos funcionan y con la asesoría adecuada poder determinar la afectación de interés.
Por lo anterior, trabajaremos en el análisis de los datos, además de adherir o cambiar algunos componentes para cubrir la mayoría de las variables solicitadas en el concurso.
El desarrollo de este cansat permite a la zona sur de Tamaulipas una alternativa para evaluar las variables más importantes para la medición de la calidad del aire. Además, brinda la oportunidad a abrir nuevos tópicos de investigación en la zona donde el mayor peso académico está estrechamente relacionado al área petroquímica e industrial.
AGRADECIMIENTOS
Agradecemos al rector y al coordinador de ingeniería meca-trónica de la UT de Altamira por todo el apoyo y las facili-dades dadas en el desarrollo de este proyecto. Asimismo, al M.C.I.E Óscar Martínez por los consejos dados en cada etapa desarrollada.
REFERENCIAS
Agencia Espacial Mexicana. (2014). Material de enseñanza del Curso Nacional de Ingeniería en Sistemas Espaciales aplicado a una misión Cansat, del 8 al 12 de diciembre de 2014, Universidad Autónoma de Querétaro, Querétaro.
Agencia Espacial Mexicana. (2015). Estructura de un cansat. Consultado el 17 de noviembre de 2015. http://www.educacion espacial.aem.gob.mx/cansat.html
CAPTEUR-SAT

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 49
Carrasco D., R., y Vázquez H., S. (2014). Nanosatélite basado en microcon-troladores PIC: cansat, 3er. Congreso Virtual, microcontroladores y sus aplicaciones, Cuba.
Hangar. (2012). Arduino + Xbee; primeros pasos. Consultado el 10 de agos-to de 2016. https://hangar.org/webnou/wp-content/uploads/2012/01/arduino-xbee-primeros-pasos.pdf
Hetpro. (2015). GPS Ublox: NEO-6M módulo GPS con MATLAB por USB. Consultado el 20 de noviembre de 2015. https://hetpro-store.com/TUTORIALES/gps-ublox-neo-6m-modulo-con-matlab/
Naylamp Mechatronics. (2015a). Configuración del módulo bluetooth HC-06 usando comandos AT. Consultado el 20 de noviembre de 2015. http://www.naylampmechatronics.com/blog/15_Configuraci %C3%B3n—del-m%C3%B3dulo-bluetooth-HC-06-usa.html
Naylamp Mechatronics. (2015b). Tutorial sensor de temperatura y humedad DHT11 y DHT22. Consultado el 20 de noviembre de 2015. http://www.naylampmechatronics.com/blog/40_Tutorial-sensor-de-tem-peratura-y-humedad-DHT1.html
Naylamp Mechatronics. (2015c). Tutorial sensor de presión barométrica BMP180. Consultado el 20 de noviembre de 2015. http://www.naylampmechatronics.com/blog/43_Tutorial-sensor-de-presi%-C3%B3n-barom%C3%A9trica-BMP180.html
Nylund, A., y Antonsen, J. (2015). CanSat general introduction and educational advantages. Consultado el 20 de noviembre de 2015. https://www.narom.no/.
Ruiz G., J.M. (2015). Labview + arduino. Utilización LabVIEW para la visualización y control open hardware arduino. Consultado el 20 de noviembre de 2015. http://es.slideshare.net/AlbertoSanchez6/arduino-lab-view
Sanchez C., A.E., et al. (2016). Picosatélites Educativos Cansat: Primer Concurso Nacional en México, Celerinet, Año 4, Vol. VII, 20 -28.
Twiggs, R. (1998). University Space System Symposium (USSS), Hawaii, USA.
UNISEC-MÉXICO (2016). Focused on continuous improvement. Consul-tado el 20 de noviembre de 2015. http://www.unisec.mx
Walker, R., et al., (2010), ESA hands-on space education project activities for university students: Attracting and training the next generation of space engineers. IEEE EDUCON Conference, Madrid. Consultado el 19 de noviembre de 2015 http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber =5492406&isnumber=5492336
Recibido 8-8-16Aceptado 10-9-16
RODRIGO SANTIAGO FLORES ET. AL.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201650
Juan Julio céSar campaS buiTimea*, guSTavo adolFo caSTillón ramírez*, german garzón manJarrez*, erick alberTo méndez mendoza*, chriSTian arTuro Saavedra ceballoS* y Silvia karina reyeS lio*
IGNICIÓN 2.0
RESUMENSe diseñó un cansat que actuará como sonda y que, con ayuda de sensores y un arduino, recolectará diversos parámetros relativos a las condiciones para la vida en ambientes aún no habitados. Posterior a la recolección y el descenso se publicará una base de datos en una página web de acceso público para aquellos interesados en dicha información. El cansat debe ser capaz de soportar las condiciones del lugar de aterrizaje hasta el momento de recuperación, por lo que se apoyará de celdas solares para suministrar energía a la batería.
Palabras clave: cansat, base de datos, sensores.
ABSTRACTWe will send a CanSat that will act as a probe and, using sen-sors and a micro controller, we will collect various parameters relating to the conditions for life in uninhabited environments. After collecting information and the descent, database will be generated and posted on a publicly accessible webpage for those interested in this information. The CanSat must be able to withstand the conditions of its landing until its recovery, so it will build solar cells to supply power to the battery.
Keywords: CanSat, database, sensors.
Un cansat es un picosatélite del tamaño de una lata de 355 mL con capacidad de recopilar datos relativos a su ubicación, para posteriormente ser transmitidos a una estación terrestre donde serán monitoreados por medio de una interfaz gráfica. Las misiones tienen un propósito académico, son llamados “satélites” pero no se encuentran orbitando alrededor de la Tierra. Los cansat se elevan a una altura previamente estable-cida (por medio de un globo aerostático, un drone, etcétera) para posteriormente ser liberados; cuentan con un sistema de recuperación, un paracaídas, para reducir el impacto sobre
* Instituto Tecnológico de Nogales.Contacto: [email protected]
la superficie terrestre al momento del aterrizaje (Sánchez et al., 2016). Todos estos procedimientos tienen la intención de simular a un verdadero satélite.
Los satélites cansat se caracterizan por su volumen y zona de operación, mientras que se categorizan por el enfoque de su misión. El primer tipo de misión es de telemetría, y se en-carga específicamente de recolectar y transmitir información en tiempo real a una estación terrena para ser procesada y monitoreada según la misión específica del equipo (UANL et al., 2016). El segundo tipo de misión es el de comeback, cuyo objetivo es manufacturar un cansat de telemetría y, además, diseñar e implementar un vehículo tipo Rover, que permita regresar el cansat al punto de partida (UNAM, 2015). Gracias a la simplicidad y al bajo costo de realización, comparado con otro tipo de proyectos espaciales, el cansat es una excelente oportunidad para los estudiantes para iniciarse en el campo aeroespacial, en donde se ponen a prueba diferentes compe-tencias como el diseño y ensamblaje en placas con circuitos impresos (PCB), la programación en diferentes lenguajes, la estructuración e integración de sistemas, el manejo de distintos protocolos de comunicación, así como la implementación de bases de datos y, por supuesto, el trabajo en equipo.
MOTIVACIÓN DEL PROYECTO Tanto el conocimiento teórico como su aplicación, suelen ser vitales para el crecimiento académico y profesional. Como jóvenes estudiantes nos motiva la experiencia que ofrece participar en actividades que incluyen el desarrollo de trabajo individual al momento de la generación de subsistemas que, posteriormente, pasarán a formar un único sistema como
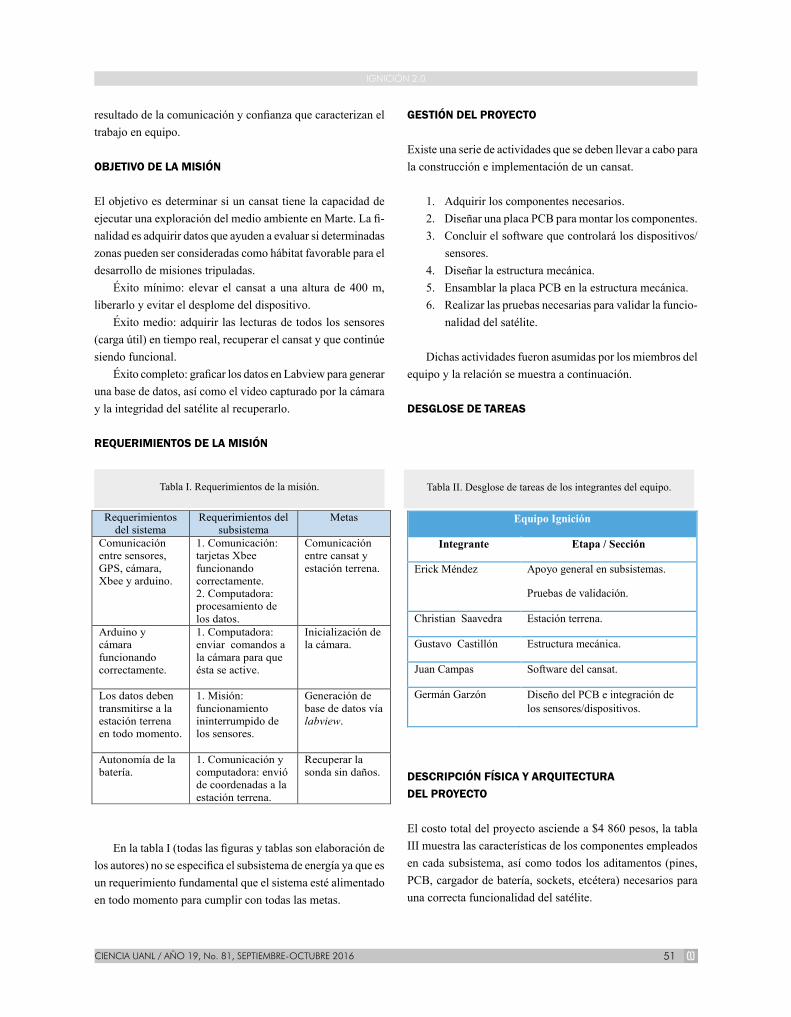
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 51
IGNICIÓN 2.0
resultado de la comunicación y confianza que caracterizan el trabajo en equipo.
OBJETIVO DE LA MISIÓN El objetivo es determinar si un cansat tiene la capacidad de ejecutar una exploración del medio ambiente en Marte. La fi-nalidad es adquirir datos que ayuden a evaluar si determinadas zonas pueden ser consideradas como hábitat favorable para el desarrollo de misiones tripuladas.
Éxito mínimo: elevar el cansat a una altura de 400 m, liberarlo y evitar el desplome del dispositivo.
Éxito medio: adquirir las lecturas de todos los sensores (carga útil) en tiempo real, recuperar el cansat y que continúe siendo funcional.
Éxito completo: graficar los datos en Labview para generar una base de datos, así como el video capturado por la cámara y la integridad del satélite al recuperarlo.
REQUERIMIENTOS DE LA MISIÓN
Tabla I. Requerimientos de la misión.
Requerimientos del sistema
Requerimientos del subsistema
Metas
Comunicación entre sensores, GPS, cámara, Xbee y arduino.
1. Comunicación: tarjetas Xbee funcionando correctamente. 2. Computadora: procesamiento de los datos.
Comunicación entre cansat y estación terrena.
Arduino y cámara funcionando correctamente.
1. Computadora: enviar comandos a la cámara para que ésta se active.
Inicialización de la cámara.
Los datos deben transmitirse a la estación terrena en todo momento.
1. Misión: funcionamiento ininterrumpido de los sensores.
Generación de base de datos vía labview.
Autonomía de la batería.
1. Comunicación y computadora: envió de coordenadas a la estación terrena.
Recuperar la sonda sin daños.
En la tabla I (todas las figuras y tablas son elaboración de los autores) no se especifica el subsistema de energía ya que es un requerimiento fundamental que el sistema esté alimentado en todo momento para cumplir con todas las metas.
Tabla II. Desglose de tareas de los integrantes del equipo.
Equipo Ignición
Integrante Etapa / Sección
Erick Méndez Apoyo general en subsistemas.
Pruebas de validación.
Christian Saavedra Estación terrena.
Gustavo Castillón Estructura mecánica.
Juan Campas Software del cansat.
Germán Garzón Diseño del PCB e integración de los sensores/dispositivos.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
El costo total del proyecto asciende a $4 860 pesos, la tabla III muestra las características de los componentes empleados en cada subsistema, así como todos los aditamentos (pines, PCB, cargador de batería, sockets, etcétera) necesarios para una correcta funcionalidad del satélite.
GESTIÓN DEL PROYECTO Existe una serie de actividades que se deben llevar a cabo para la construcción e implementación de un cansat.
1. Adquirir los componentes necesarios.2. Diseñar una placa PCB para montar los componentes.3. Concluir el software que controlará los dispositivos/
sensores.4. Diseñar la estructura mecánica.5. Ensamblar la placa PCB en la estructura mecánica. 6. Realizar las pruebas necesarias para validar la funcio-
nalidad del satélite.
Dichas actividades fueron asumidas por los miembros del equipo y la relación se muestra a continuación.
DESGLOSE DE TAREAS
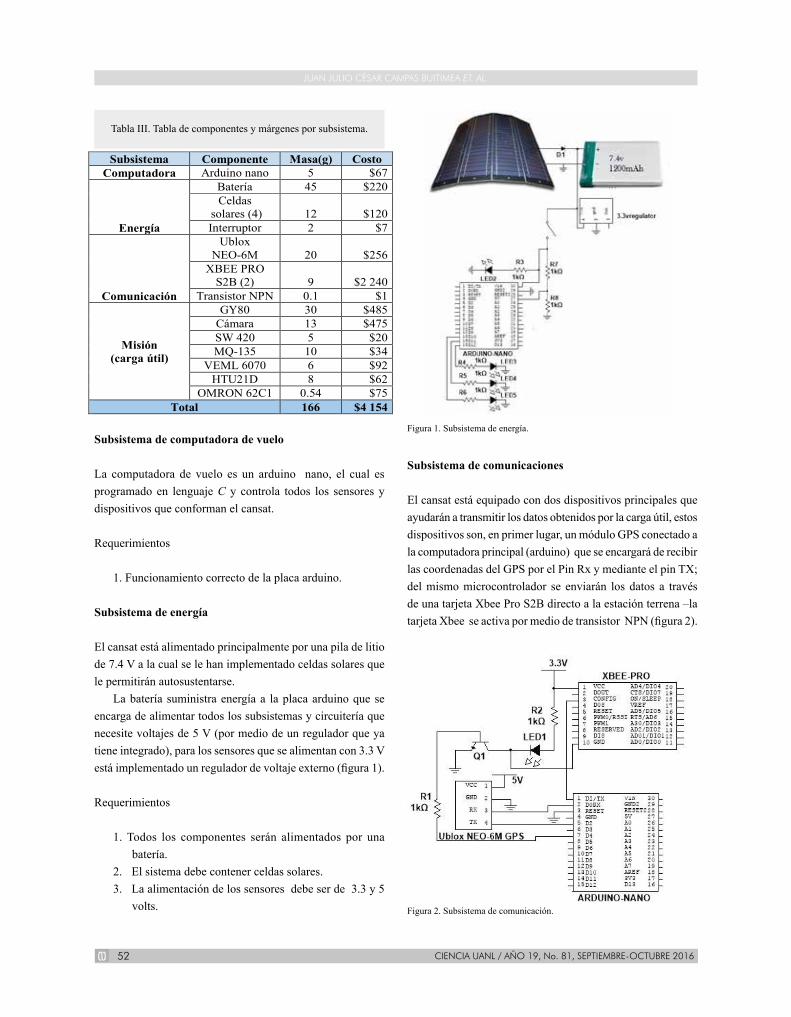
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201652
JUAN JULIO CÉSAR CAMPAS BUITIMEA ET. AL.
Tabla III. Tabla de componentes y márgenes por subsistema.
Subsistema Componente Masa(g) Costo Computadora Arduino nano 5 $67
Energía
Batería 45 $220 Celdas
solares (4) 12 $120 Interruptor 2 $7
Comunicación
Ublox NEO-6M 20 $256
XBEE PRO S2B (2) 9 $2 240
Transistor NPN 0.1 $1
Misión (carga útil)
GY80 30 $485 Cámara 13 $475 SW 420 5 $20 MQ-135 10 $34
VEML 6070 6 $92 HTU21D 8 $62
OMRON 62C1 0.54 $75 Total 166 $4 154
Subsistema de computadora de vuelo
La computadora de vuelo es un arduino nano, el cual es programado en lenguaje C y controla todos los sensores y dispositivos que conforman el cansat.
Requerimientos
1. Funcionamiento correcto de la placa arduino.
Subsistema de energía
El cansat está alimentado principalmente por una pila de litio de 7.4 V a la cual se le han implementado celdas solares que le permitirán autosustentarse.
La batería suministra energía a la placa arduino que se encarga de alimentar todos los subsistemas y circuitería que necesite voltajes de 5 V (por medio de un regulador que ya tiene integrado), para los sensores que se alimentan con 3.3 V está implementado un regulador de voltaje externo (figura 1).
Requerimientos
1. Todos los componentes serán alimentados por una batería.
2. El sistema debe contener celdas solares.3. La alimentación de los sensores debe ser de 3.3 y 5
volts.
Figura 1. Subsistema de energía.
Subsistema de comunicaciones
El cansat está equipado con dos dispositivos principales que ayudarán a transmitir los datos obtenidos por la carga útil, estos dispositivos son, en primer lugar, un módulo GPS conectado a la computadora principal (arduino) que se encargará de recibir las coordenadas del GPS por el Pin Rx y mediante el pin TX; del mismo microcontrolador se enviarán los datos a través de una tarjeta Xbee Pro S2B directo a la estación terrena –la tarjeta Xbee se activa por medio de transistor NPN (figura 2).
Figura 2. Subsistema de comunicación.
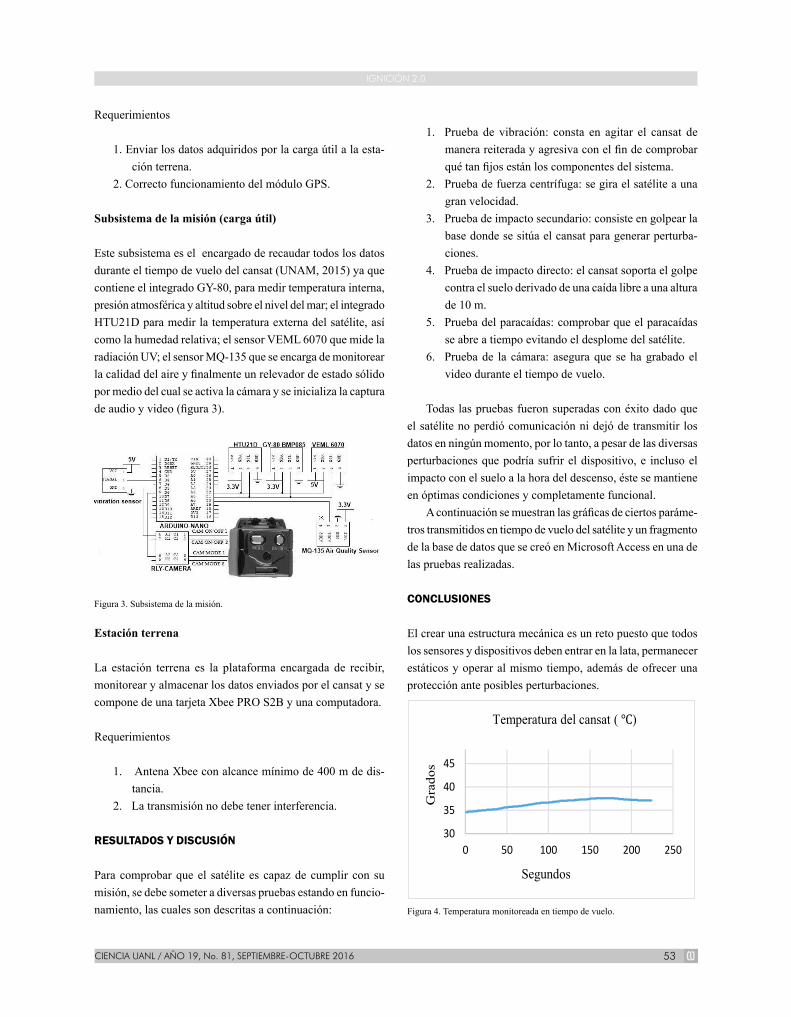
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 53
Requerimientos 1. Enviar los datos adquiridos por la carga útil a la esta-
ción terrena.2. Correcto funcionamiento del módulo GPS.
Subsistema de la misión (carga útil)
Este subsistema es el encargado de recaudar todos los datos durante el tiempo de vuelo del cansat (UNAM, 2015) ya que contiene el integrado GY-80, para medir temperatura interna, presión atmosférica y altitud sobre el nivel del mar; el integrado HTU21D para medir la temperatura externa del satélite, así como la humedad relativa; el sensor VEML 6070 que mide la radiación UV; el sensor MQ-135 que se encarga de monitorear la calidad del aire y finalmente un relevador de estado sólido por medio del cual se activa la cámara y se inicializa la captura de audio y video (figura 3).
Figura 3. Subsistema de la misión.
Estación terrena
La estación terrena es la plataforma encargada de recibir, monitorear y almacenar los datos enviados por el cansat y se compone de una tarjeta Xbee PRO S2B y una computadora.
Requerimientos
1. Antena Xbee con alcance mínimo de 400 m de dis-tancia.
2. La transmisión no debe tener interferencia.
RESULTADOS Y DISCUSIÓN
Para comprobar que el satélite es capaz de cumplir con su misión, se debe someter a diversas pruebas estando en funcio-namiento, las cuales son descritas a continuación:
1. Prueba de vibración: consta en agitar el cansat de manera reiterada y agresiva con el fin de comprobar qué tan fijos están los componentes del sistema.
2. Prueba de fuerza centrífuga: se gira el satélite a una gran velocidad.
3. Prueba de impacto secundario: consiste en golpear la base donde se sitúa el cansat para generar perturba-ciones.
4. Prueba de impacto directo: el cansat soporta el golpe contra el suelo derivado de una caída libre a una altura de 10 m.
5. Prueba del paracaídas: comprobar que el paracaídas se abre a tiempo evitando el desplome del satélite.
6. Prueba de la cámara: asegura que se ha grabado el video durante el tiempo de vuelo.
Todas las pruebas fueron superadas con éxito dado que el satélite no perdió comunicación ni dejó de transmitir los datos en ningún momento, por lo tanto, a pesar de las diversas perturbaciones que podría sufrir el dispositivo, e incluso el impacto con el suelo a la hora del descenso, éste se mantiene en óptimas condiciones y completamente funcional.
A continuación se muestran las gráficas de ciertos paráme-tros transmitidos en tiempo de vuelo del satélite y un fragmento de la base de datos que se creó en Microsoft Access en una de las pruebas realizadas.
CONCLUSIONES
El crear una estructura mecánica es un reto puesto que todos los sensores y dispositivos deben entrar en la lata, permanecer estáticos y operar al mismo tiempo, además de ofrecer una protección ante posibles perturbaciones.
Figura 4. Temperatura monitoreada en tiempo de vuelo.
30
35
40
45
0 50 100 150 200 250
Gra
dos
Segundos
Temperatura del cansat ( ℃)
IGNICIÓN 2.0
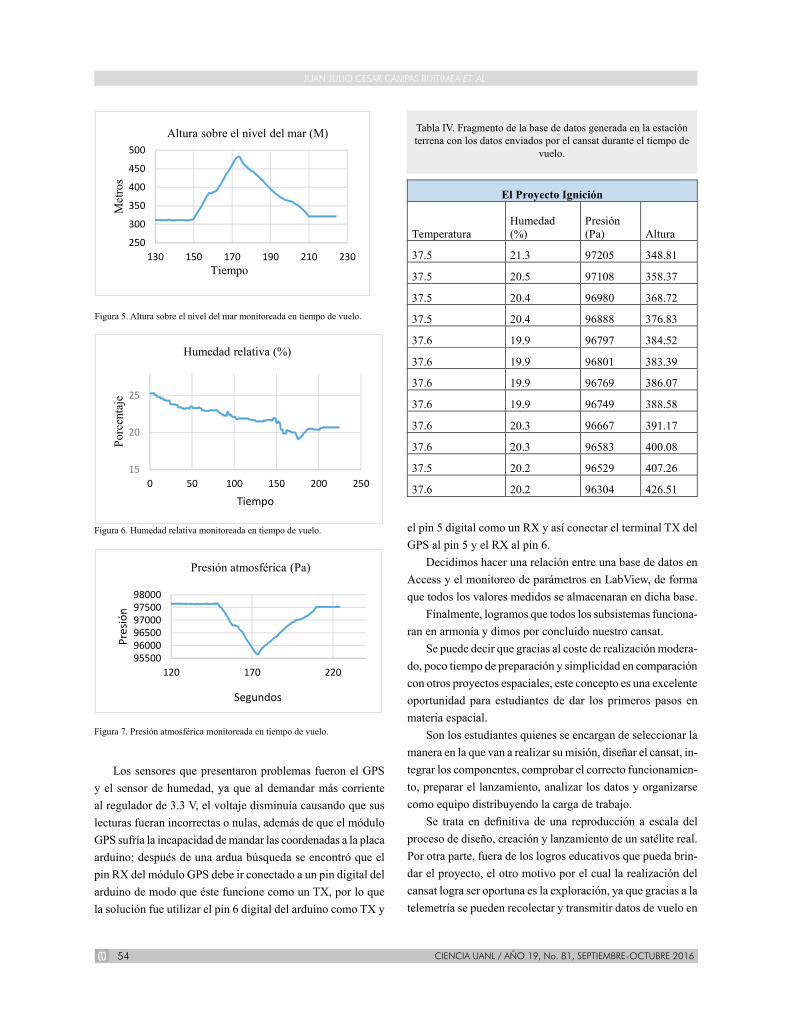
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201654
250
300
350
400
450
500
130 150 170 190 210 230
Met
ros
Tiempo
Altura sobre el nivel del mar (M)
15
20
25
0 50 100 150 200 250
Porc
enta
je
Tiempo
Humedad relativa (%)
955009600096500970009750098000
120 170 220
Pres
ión
Segundos
Presión atmosférica (Pa)
Figura 5. Altura sobre el nivel del mar monitoreada en tiempo de vuelo.
Figura 6. Humedad relativa monitoreada en tiempo de vuelo.
Figura 7. Presión atmosférica monitoreada en tiempo de vuelo.
Tabla IV. Fragmento de la base de datos generada en la estación terrena con los datos enviados por el cansat durante el tiempo de
vuelo.
Los sensores que presentaron problemas fueron el GPS y el sensor de humedad, ya que al demandar más corriente al regulador de 3.3 V, el voltaje disminuía causando que sus lecturas fueran incorrectas o nulas, además de que el módulo GPS sufría la incapacidad de mandar las coordenadas a la placa arduino; después de una ardua búsqueda se encontró que el pin RX del módulo GPS debe ir conectado a un pin digital del arduino de modo que éste funcione como un TX, por lo que la solución fue utilizar el pin 6 digital del arduino como TX y
El Proyecto Ignición
Temperatura Humedad (%)
Presión (Pa) Altura
37.5 21.3 97205 348.81
37.5 20.5 97108 358.37
37.5 20.4 96980 368.72
37.5 20.4 96888 376.83
37.6 19.9 96797 384.52
37.6 19.9 96801 383.39
37.6 19.9 96769 386.07
37.6 19.9 96749 388.58
37.6 20.3 96667 391.17
37.6 20.3 96583 400.08
37.5 20.2 96529 407.26
37.6 20.2 96304 426.51 el pin 5 digital como un RX y así conectar el terminal TX del GPS al pin 5 y el RX al pin 6.
Decidimos hacer una relación entre una base de datos en Access y el monitoreo de parámetros en LabView, de forma que todos los valores medidos se almacenaran en dicha base.
Finalmente, logramos que todos los subsistemas funciona-ran en armonía y dimos por concluido nuestro cansat.
Se puede decir que gracias al coste de realización modera-do, poco tiempo de preparación y simplicidad en comparación con otros proyectos espaciales, este concepto es una excelente oportunidad para estudiantes de dar los primeros pasos en materia espacial.
Son los estudiantes quienes se encargan de seleccionar la manera en la que van a realizar su misión, diseñar el cansat, in-tegrar los componentes, comprobar el correcto funcionamien-to, preparar el lanzamiento, analizar los datos y organizarse como equipo distribuyendo la carga de trabajo.
Se trata en definitiva de una reproducción a escala del proceso de diseño, creación y lanzamiento de un satélite real. Por otra parte, fuera de los logros educativos que pueda brin-dar el proyecto, el otro motivo por el cual la realización del cansat logra ser oportuna es la exploración, ya que gracias a la telemetría se pueden recolectar y transmitir datos de vuelo en
JUAN JULIO CÉSAR CAMPAS BUITIMEA ET. AL.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 55
tiempo real, lo cual lo hace un dispositivo idóneo para investi-gar otros planetas, desde la órbita hasta la superficie terrestre. Midiendo diferentes variables como la presión del aire y el porcentaje de oxígeno, es posible construir una imagen de la historia del terreno, además de que se puede ejecutar la misión en diferentes partes y abarcar un terreno más amplio en menos tiempo.
AGRADECIMIENTOSA UNISEC-México, así como a la UANL por realizar este tipo de concursos y no dejar que muera esa pasión por la tecnología y las misiones espaciales.
Al ITN por ser la institución que nos da las herramientas para competir.
REFERENCIAS
Sánchez C., Á.E., et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México. Celerinet, Año 4, Vol. VII. 20-28.
UANL, et al. (2016). 2° Concurso Nacional de Ppicosatélites Educativos Cansat. Consultado el 19 de agosto de 2016. http://concursoscansat.com/documentos/cansat2016/Convocatoria_2do_Concurso_Can-Sat%202016.pdf
UNAM. (2015). Manual cansat. Consultado el 19 agosto de 2016. http://rue.unam.mx/Eventos/Realizados/CANSAT_II/Manual_Can-sat_RUE_AEM.pdf
Recibido 8-8-16Aceptado 10-9-16
IGNICIÓN 2.0

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201656
gerardo anTonio lira ibarra*, luiS ángel ávaloS de la cruz*, JoSé guadalupe nava zavala*, darío manuel zúñiga roSaleS* y JoSé SanToS Tienda bazaldúa*
KANZAT
RESUMENCon la innovación en la tecnología enfocada en el estudio del espacio, surgieron los satélites artificiales clasificados en categorías. En una de ellas, en los llamados picosatélites, se encuentran unos dispositivos, de índole educativa, llamados cansat. Éstos buscan atraer a las personas con gusto por la ciencia y la tecnología, y darles una introducción de lo que implica una misión espacial en un satélite real. Integran di-ferentes elementos electrónicos, lenguajes de programación, sistemas de comunicaciones y estudios en la aerodinámica de los cuerpos que posibilitan su función educativa.
Palabras clave: satélites artificiales, picosatélites, cansat, misión espacial.
ABSTRACTWith innovation in technologies focused on the study of space, artificial satellites have come about that are classified into diffe-rent categories. One of them is the Picosatellite which includes devices that are educational in nature called CanSat, seeking to attract people with interest in science and technology. It gives them an introduction to what a space mission in a real satellite is like, integrating different electronics, programming languages, communication systems and studies in the aerody-namics of the bodies that help perform an educational satellite.
Keywords: artificial satellites, picosatellite, CanSat, space mission.
En la actualidad, cuando hablamos de sistemas aeroespaciales es muy común pasar por alto los satélites, los cuales tienen una gran participación en el desarrollo tecnológico de las agen-cias espaciales, en industrias enfocadas a temas del espacio e incluso en instituciones educativas; los satélites pueden ser usados para un amplio número de propósitos, como la comu-nicación, monitoreo del clima, observación e investigación (Walker et al., 2010). * Universidad Autónoma de Nuevo León.
Contacto: [email protected]
Los satélites cuentan con una clasificación, según su masa, la cual está relacionada directamente con los costos de lanzamiento y la órbita de operación. La categoría de menor masa es la de los picosatélites; es dentro de esta clasificación que fabricaremos un cansat.
¿QUÉ ES UN CANSAT?
El cansat es un dispositivo que consiste en simular el funcio-namiento de un satélite artificial (Sánchez et al., 2016), los también llamados picosat tienen un tiempo de elaboración menor y su costo de fabricación es relativamente económico, a diferencia de sus homólogos de mayor tamaño, que requieren, además, de un personal altamente calificado para construirlos. Los cansat pueden ser elaborados con componentes electró-nicos comerciales y necesitan una programación sencilla que puede realizarse desde una computadora personal (Carrasco y Vázquez, 2014). Éstos no son puestos en órbita, ya que pueden ser elevados y dejados caer desde diferentes alturas por diversos medios como cohetes, globos o multirrotores.
Igual que un satélite artificial, éstos cansats realizan una mi-sión, que deben cumplir con ciertos requisitos: ser autónomos y transmitir información por telemetría hacia una estación terrena durante el descenso –que puede ser por medio de paracaídas o desplegables– (Nylund y Antonsen, 2015). Los datos que toma del medio, mientras cae, son recolectados por sensores y procesados a través de una pequeña computadora. El programa encargado de interpretar dichos datos, los envía a través de una señal de radio, que será recibida y decodificada por un elemento receptor en tierra, para finalmente darles una utilidad y cumplir con lo encomendado. Todo lo anterior debe estar confinado en una lata de refresco que no supere los 500 mL.
En recientes años, se han comenzado a realizar compe-tencias en las que no sólo involucran lo antes ya mencionado,
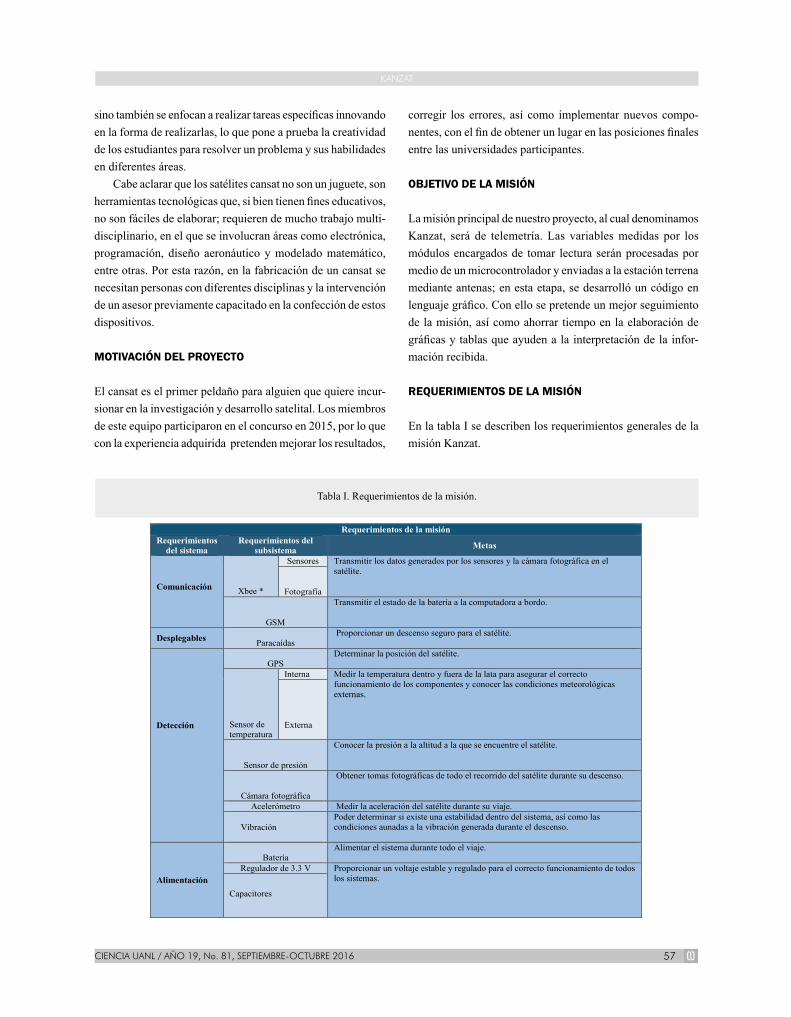
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 57
KANZAT
sino también se enfocan a realizar tareas específicas innovando en la forma de realizarlas, lo que pone a prueba la creatividad de los estudiantes para resolver un problema y sus habilidades en diferentes áreas.
Cabe aclarar que los satélites cansat no son un juguete, son herramientas tecnológicas que, si bien tienen fines educativos, no son fáciles de elaborar; requieren de mucho trabajo multi-disciplinario, en el que se involucran áreas como electrónica, programación, diseño aeronáutico y modelado matemático, entre otras. Por esta razón, en la fabricación de un cansat se necesitan personas con diferentes disciplinas y la intervención de un asesor previamente capacitado en la confección de estos dispositivos. MOTIVACIÓN DEL PROYECTO
El cansat es el primer peldaño para alguien que quiere incur-sionar en la investigación y desarrollo satelital. Los miembros de este equipo participaron en el concurso en 2015, por lo que con la experiencia adquirida pretenden mejorar los resultados,
Tabla I. Requerimientos de la misión.
Requerimientos de la misión Requerimientos
del sistema Requerimientos del
subsistema Metas
Comunicación
Xbee *
Sensores Transmitir los datos generados por los sensores y la cámara fotográfica en el satélite.
Fotografía
GSM
Transmitir el estado de la batería a la computadora a bordo.
Desplegables Paracaídas
Proporcionar un descenso seguro para el satélite.
Detección
GPS
Determinar la posición del satélite.
Sensor de temperatura
Interna Medir la temperatura dentro y fuera de la lata para asegurar el correcto funcionamiento de los componentes y conocer las condiciones meteorológicas externas.
Externa
Sensor de presión
Conocer la presión a la altitud a la que se encuentre el satélite.
Cámara fotográfica
Obtener tomas fotográficas de todo el recorrido del satélite durante su descenso.
Acelerómetro Medir la aceleración del satélite durante su viaje.
Vibración
Poder determinar si existe una estabilidad dentro del sistema, así como las condiciones aunadas a la vibración generada durante el descenso.
Alimentación
Batería
Alimentar el sistema durante todo el viaje.
Regulador de 3.3 V Proporcionar un voltaje estable y regulado para el correcto funcionamiento de todos los sistemas.
Capacitores
corregir los errores, así como implementar nuevos compo-nentes, con el fin de obtener un lugar en las posiciones finales entre las universidades participantes. OBJETIVO DE LA MISIÓN
La misión principal de nuestro proyecto, al cual denominamos Kanzat, será de telemetría. Las variables medidas por los módulos encargados de tomar lectura serán procesadas por medio de un microcontrolador y enviadas a la estación terrena mediante antenas; en esta etapa, se desarrolló un código en lenguaje gráfico. Con ello se pretende un mejor seguimiento de la misión, así como ahorrar tiempo en la elaboración de gráficas y tablas que ayuden a la interpretación de la infor-mación recibida.
REQUERIMIENTOS DE LA MISIÓN
En la tabla I se describen los requerimientos generales de la misión Kanzat.
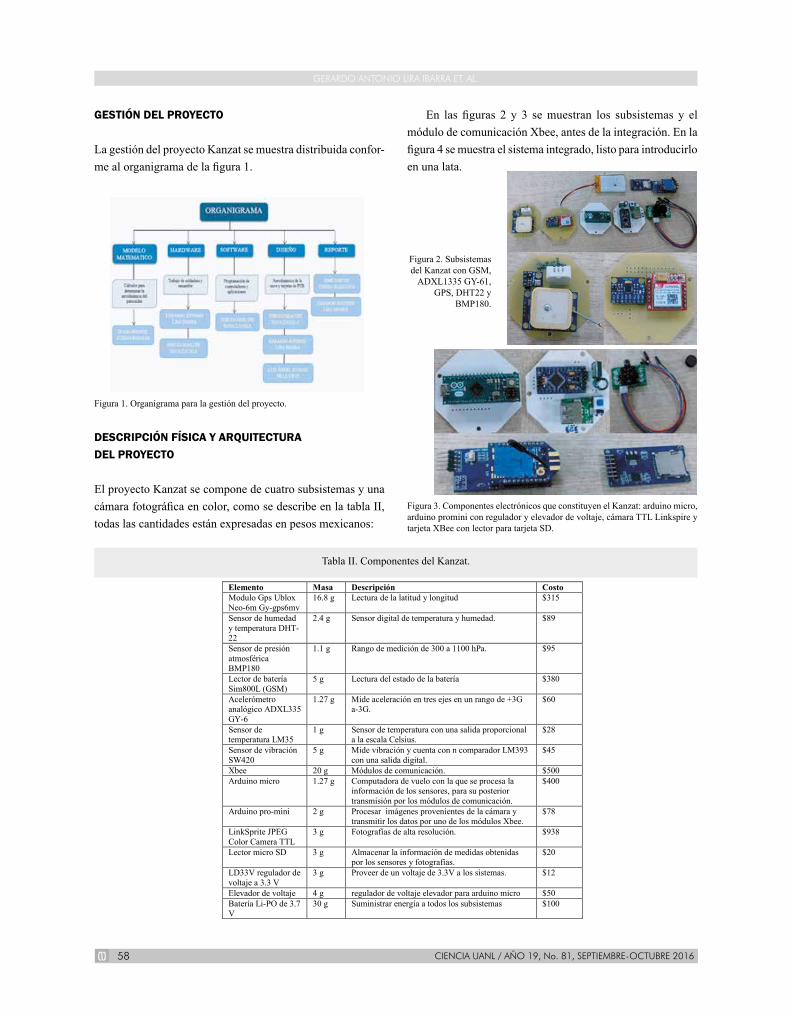
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201658
GERARDO ANTONIO LIRA IBARRA ET. AL.
GESTIÓN DEL PROYECTO La gestión del proyecto Kanzat se muestra distribuida confor-me al organigrama de la figura 1.
Figura 1. Organigrama para la gestión del proyecto.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
El proyecto Kanzat se compone de cuatro subsistemas y una cámara fotográfica en color, como se describe en la tabla II, todas las cantidades están expresadas en pesos mexicanos:
Tabla II. Componentes del Kanzat.
En las figuras 2 y 3 se muestran los subsistemas y el módulo de comunicación Xbee, antes de la integración. En la figura 4 se muestra el sistema integrado, listo para introducirlo en una lata.
Figura 2. Subsistemas del Kanzat con GSM,
ADXL1335 GY-61, GPS, DHT22 y
BMP180.
Figura 3. Componentes electrónicos que constituyen el Kanzat: arduino micro, arduino promini con regulador y elevador de voltaje, cámara TTL Linkspire y tarjeta XBee con lector para tarjeta SD.
Elemento Masa Descripción Costo Modulo Gps Ublox Neo-6m Gy-gps6mv
16.8 g Lectura de la latitud y longitud $315
Sensor de humedad y temperatura DHT-22
2.4 g Sensor digital de temperatura y humedad. $89
Sensor de presión atmosférica BMP180
1.1 g Rango de medición de 300 a 1100 hPa. $95
Lector de batería Sim800L (GSM)
5 g Lectura del estado de la batería $380
Acelerómetro analógico ADXL335 GY-6
1.27 g Mide aceleración en tres ejes en un rango de +3G a-3G.
$60
Sensor de temperatura LM35
1 g Sensor de temperatura con una salida proporcional a la escala Celsius.
$28
Sensor de vibración SW420
5 g Mide vibración y cuenta con n comparador LM393 con una salida digital.
$45
Xbee 20 g Módulos de comunicación. $500 Arduino micro 1.27 g Computadora de vuelo con la que se procesa la
información de los sensores, para su posterior transmisión por los módulos de comunicación.
$400
Arduino pro-mini 2 g Procesar imágenes provenientes de la cámara y transmitir los datos por uno de los módulos Xbee.
$78
LinkSprite JPEG Color Camera TTL
3 g Fotografías de alta resolución. $938
Lector micro SD 3 g Almacenar la información de medidas obtenidas por los sensores y fotografías.
$20
LD33V regulador de voltaje a 3.3 V
3 g Proveer de un voltaje de 3.3V a los sistemas. $12
Elevador de voltaje 4 g regulador de voltaje elevador para arduino micro $50 Batería Li-PO de 3.7 V
30 g Suministrar energía a todos los subsistemas $100

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 59
Figura 4. In-tegración del sistema Kan-zat.
RESULTADOS Y DISCUSIÓN
En etapa de pruebas se realizó una serie de cálculos que demuestran el funcionamiento del paracaídas, el cual fue lanzado desde una altura aproximada de 9 m en el interior de un edificio, como se muestra en la figura 5.
Figura 5. Prueba de despliegue del paracaídas.
La ecuación del movimiento en el instante en que se abre el paracaídas se puede expresar de la siguiente manera.
(1)
Donde k es la constante de proporcionalidad según la forma del paracaídas; g es la gravedad terrestre (9.81 m/s2); v es la velocidad de descenso y m la masa total del sistema.
Para resolver la ecuación 1 integramos para obtener la velocidad (v) en cualquier momento (t). Las condiciones iniciales son v0 la velocidad de la partícula en el instante t0 cuando se abre el paracaídas.
Para resolver la integral se hace cambio v = zv1. Ahora deshacemos el cambio y se despeja (v) en función del tiempo (t = t0) para obtener (2).
Podemos obtener la expresión de la posición de la partí-cula en función de la velocidad haciendo cambio de variable.
La ecuación del movimiento se transforma en:
(3)
que se puede integrar de forma inmediata.
La altitud a la cual se dejó caer en función de su velocidad de descenso v es:
(4)
Despejando v en la expresión anterior, obtenemos que la velocidad en la función de la posición x de la partícula sea:
(5)
Con la velocidad de la partícula se tiene un estimado del tiempo de vuelo, posible trayectoria a expensas de los cambios atmosféricos, así como de la fuerza con la que el cansat golpea contra el suelo.
Para nuestro Kanzat de masa 0.15 kg el paracaídas se abrió a los 0.55 segundos de dejarse caer, 3.3 segundos después tocó el suelo quedando en posición vertical desde una altura aproximada de 9 m. Hay que hacer la aclaración de que esta prueba se realizó en un cuarto cerrado, por lo que la velocidad de descenso cambió.
KANZAT
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201660
La prueba de integración de los sensores principales tuvi-mos que realizarla a nivel de suelo en un cuarto cerrado con calefacción, obteniendo con esto una serie de resultados muy satisfactorios, los cuales se muestran en la figura 6.
Figura 6. Resultados obtenidos de temperatura, humedad, presión y aceleración.
0 200 400 600 800 1000 1200 1400 1600956.0
956.5
957.0
957.560
63
66
6922
23
24
25
480
482
484
Pre
sion
[kP
a]
Tiempo [seg.]
Hum
edad
[%]
Tem
pera
tura
[°C
]
Altu
ra [m
snm
]
CONCLUSIONES
Hemos descrito la construcción y pruebas de funcionamiento de nuestro dispositivo Kanzat. En la realización de este pro-yecto nos encontramos con muchos problemas, los cuales, con
paciencia y perseverancia, conseguimos resolver; la realización de un trabajo como éste es muy satisfactoria cuando personas de diferentes disciplinas colaboran en equipo.
De igual manera aprendimos cómo implementar sistemas de ingeniería en la realización de una tarea aeroespacial.
AGRADECIMIENTOS
Gracias a la ayuda provista por nuestros asesores, Bárbara Bermúdez Reyes y Ángel Colín, que creyeron en nosotros para realizar semejante tarea.
Agradecimientos especiales a nuestros familiares y amigos que nos acompañaron en momentos de arduo trabajo y supieron apoyarnos cuando más lo ocupábamos.
REFERENCIAS
Carrasco D., R., y Vázquez H., S. (2014). Nanosatélite basado en micro-controladores pic: cansat, 3er. Congreso Virtual, Microcontoladores y sus Aplicaciones, Cuba.
Nylund, A., y Antonsen, J. (2015). CanSat general introduction and educational advantages. Consultado el 15 de Agosto de 2016 en: https://www.narom.no/
Sánchez C., E., et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México. Celerinet, Año 4, Vol. VII, 20-28.
Twiggs, R., (1998). University Space System Symposium (USSS), Hawaii, USA.
Walker, R., et al. (2010). ESA Hands-on Space Education Project Activities for University Students: Attracting and Training the Next Genera-tion of Space Engineers, IEEE EDUCON. Education Engineering. 1699-1708.
Recibido 8-8-16Aceptado 10-9-16
GERARDO ANTONIO LIRA IBARRA ET. AL.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 61
óScar marTínez hernández, noel del ángel polanco*, eril a. paulín rodríguez*, pablo nieTo marTínez*, eliu beníTez hernández* y ricardo caSTillo pérez*
ICARUS
RESUMENEl objetivo de este proyecto es diseñar y construir un picosaté-lite cansat que pueda ser capaz de recolectar y transmitir datos de telemetría y posicionamiento global a una estación terrena móvil dentro de un smartphone, combinando algunas de las tecnologías que son aplicadas en comunicación inalámbrica (Zigbee y wifi). Se pretende que los datos de interés (presión, temperatura, humedad, posicionamiento global, etcétera) sean desplegados gráficamente en la aplicación móvil durante el lanzamiento y descenso del cansat, con intervalos de lecturas de los datos de al menos 0.5 segundos. Otro objetivo del pro-yecto es la recuperación del cansat después del lanzamiento.
Palabras clave: picosatélite, cansat, smartphone, wifi.
ABSTRACTDesign and build a CanSat Picosatellite able to receive and broadcast Telemetry and Global positioning data to a mobile station inside a Smartphone, along with ZigBee and Wi-Fi which are applied technologies for wireless communication so the device will be able to display graphically in a mobile app important data (Pressure, Temperature, Humidity, Global Positioning, etc.) during the launch and landing of the Can Sat, with data reading lapses of at least 0.5 seconds, as well as the recovery of the device.
Keywords: Picosatellite, CanSat, Smartphone, wi-fi.
Este cansat trabaja con los requerimientos necesarios para el envío de datos de telemetría y posicionamiento global (GPS). El segmento de vuelo está constituido por una computadora de vuelo que utiliza un microcontrolador ESP8266 encapsulado en una tablilla compacta denominada ESP12-Q, a la cual se le incorpora un GPS, el sensor BMP180 y otros dispositivos para procesar los datos y obtener los valores de posicionamiento global, temperatura interna y externa, presión, latitud y altitud relativa –como lo haría un satélite convencional– (Walker et al., 2010). * Instituto de Estudios Superiores de Tamaulipas.
Contacto: [email protected]
La estación terrena ha sido diseñada y desarrollada a través de una aplicación móvil, la cual despliega, en tiempo real, los datos recopilados del cansat en un smartphone o PC, con esto se logra un despliegue de datos más amigable, ágil y versátil. La aplicación ha sido desarrollada con tecnología web; para poder hacerla llegar a su destino combina la transferencia de datos entre tres protocolos de comunicación inalámbrica: Zigbee (IEEE 802.15.4), transmisión de video de 5.8 GHz y wifi (Domoprac, 2016; Pluralsigth, 2016). MOTIVACIÓN DEL PROYECTO
El motivo para el desarrollo de este cansat, esencialmente, es que en la zona sur de Tamaulipas, compuesta por las ciudades de Tampico, Madero y Altamira, los temas relacionados con la tecnología espacial son escasos, y el peso académico de la mayoría de las líneas de investigación está estrechamente relacionado al área petroquímica e industrial.
Otras motivaciones son el reto para combinar varias tecno-logías típicas para la transmisión de datos de forma inalámbri-ca, con el uso de los protocolos Zigbee (IEEE 802.15.4) y wifi. Así como programar y diseñar nuestra propia estación terrena mediante el software Node.js e IONIC (Nómadas electrónicos, 2015), para crear una aplicación capaz de representar los datos de telemetría del cansat en cualquier dispositivo, en cualquier parte del mundo, por medio de internet, ya sea una PC o un smartphone, como lo hiciera cualquier estación terrena.
OBJETIVO DE LA MISIÓN
Desarrollar una aplicación móvil que cumpla las característi-cas de una estación terrena capaz de representar los datos de telemetría y posicionamiento global transmitidos de un cansat al combinar varias tecnologías de comunicación inalámbrica. Éxito mínimo: trasmisión de datos entre el cansat y la esta-
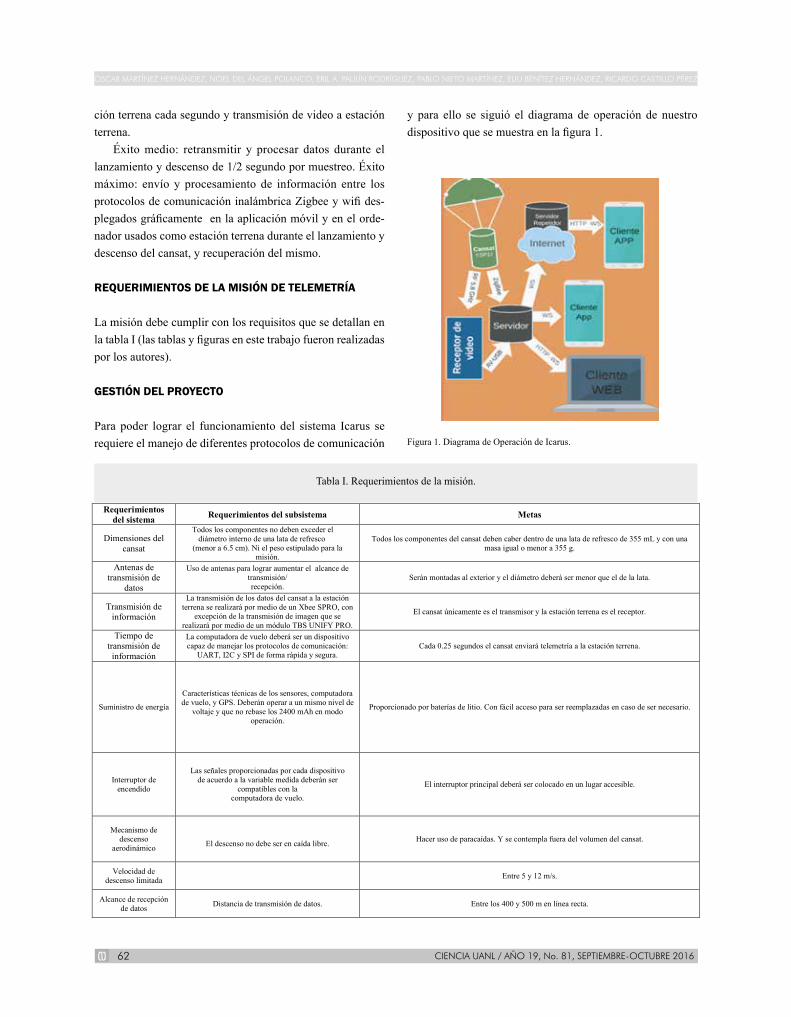
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201662
ÓSCAR MARTÍNEZ HERNÁNDEZ, NOEL DEL ÁNGEL POLANCO, ERIL A. PAULÍN RODRÍGUEZ, PABLO NIETO MARTÍNEZ, ELIU BENÍTEZ HERNÁNDEZ, RICARDO CASTILLO PÉREZ
ción terrena cada segundo y transmisión de video a estación terrena.
Éxito medio: retransmitir y procesar datos durante el lanzamiento y descenso de 1/2 segundo por muestreo. Éxito máximo: envío y procesamiento de información entre los protocolos de comunicación inalámbrica Zigbee y wifi des-plegados gráficamente en la aplicación móvil y en el orde-nador usados como estación terrena durante el lanzamiento y descenso del cansat, y recuperación del mismo.
REQUERIMIENTOS DE LA MISIÓN DE TELEMETRÍA
La misión debe cumplir con los requisitos que se detallan en la tabla I (las tablas y figuras en este trabajo fueron realizadas por los autores).
GESTIÓN DEL PROYECTO
Para poder lograr el funcionamiento del sistema Icarus se requiere el manejo de diferentes protocolos de comunicación
Tabla I. Requerimientos de la misión.
Requerimientos del sistema Requerimientos del subsistema Metas
Dimensiones del cansat
Todos los componentes no deben exceder el diámetro interno de una lata de refresco
(menor a 6.5 cm). Ni el peso estipulado para la misión.
Todos los componentes del cansat deben caber dentro de una lata de refresco de 355 mL y con una masa igual o menor a 355 g.
Antenas de transmisión de
datos
Uso de antenas para lograr aumentar el alcance de transmisión/ recepción.
Serán montadas al exterior y el diámetro deberá ser menor que el de la lata.
Transmisión de información
La transmisión de los datos del cansat a la estación terrena se realizará por medio de un Xbee SPRO, con
excepción de la transmisión de imagen que se realizará por medio de un módulo TBS UNIFY PRO.
El cansat únicamente es el transmisor y la estación terrena es el receptor.
Tiempo de transmisión de información
La computadora de vuelo deberá ser un dispositivo capaz de manejar los protocolos de comunicación:
UART, I2C y SPI de forma rápida y segura. Cada 0.25 segundos el cansat enviará telemetría a la estación terrena.
Suministro de energía
Características técnicas de los sensores, computadora de vuelo, y GPS. Deberán operar a un mismo nivel de
voltaje y que no rebase los 2400 mAh en modo operación.
Proporcionado por baterías de litio. Con fácil acceso para ser reemplazadas en caso de ser necesario.
Interruptor de encendido
Las señales proporcionadas por cada dispositivo de acuerdo a la variable medida deberán ser
compatibles con la computadora de vuelo.
El interruptor principal deberá ser colocado en un lugar accesible.
Mecanismo de descenso
aerodinámico
El descenso no debe ser en caída libre. Hacer uso de paracaídas. Y se contempla fuera del volumen del cansat.
Velocidad de descenso limitada Entre 5 y 12 m/s.
Alcance de recepción de datos Distancia de transmisión de datos. Entre los 400 y 500 m en línea recta.
y para ello se siguió el diagrama de operación de nuestro dispositivo que se muestra en la figura 1.
Figura 1. Diagrama de Operación de Icarus.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 63
ICARUS
DESGLOSE DE ACTIVIDADES DE LOS INTEGRANTES DEL EQUIPO
En la figura 2 se muestra el organigrama de cada una de las actividades necesarias para el desarrollo de este proyecto.
Figura 2. Organigrama del proyecto.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
Arquitectura del sistema cansat
Figura 3. Arquitectura del sistema cansat.
Lista de componentes en cada subsistema
El proyecto está dividido en varios subsistemas cada uno, con un determinado conjunto de componentes. En la tabla II se muestra una lista de componentes.
Tabla II. Lista de componentes y utilidad.
Componente Peso unitario
Dimensiones (mm)
Fenólicas 5 g 30 X 50
GPS ublox m6 18 g 35 x 25 x 10
ESP12 5 g 45 x 18
Bmp 180 1 g 21 x 18
Xbee pro S3B 15g 61 x 52
Lata 25 g 6.5 diámetro
Baterías 30 g 33 x 16
Video TX 5 g 17 x 24 x 4
Antenas 27 g 198 x 13
Dht22 2.5g 15 x 22 x 7.7
Cámara 33g 15*15*25
Estructura 155g -
Tabla III. Distribución de masa de cada componente.
Subsistema Componente Modelo Utilidad
Computadora de vuelo ESP8266 ESP12-Q Procesamiento de
datos
Energía Batería de li-ion Li-ion 14500 Proporcionar energía al cansat
Comunicación
Transmisor de datos / receptor
XBee PRO S3B
Transmisión y recepción de
datos Transmisor de
video TBS Unify
Pro Transmitir video en tiempo real
Antenas RPSMA Aumento de alcance
Receptor de video HC-06 Recepción de
datos
Misión (carga útil)
GPS Ublox 6
Adquisición de datos de altitud, longitud, latitud,
etcétera
Unidad de medición
barométrica BMP180
Adquisición de datos de
temperatura, presión y altura
Giroscopio / Acelerómetro MPU6050 Para la medición
de vibraciones
Camara CMOS FAT SHARK CMOS 700v2
Enviar imágenes de alta definición
en tiempo real
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201664
ÓSCAR MARTÍNEZ HERNÁNDEZ, NOEL DEL ÁNGEL POLANCO, ERIL A. PAULÍN RODRÍGUEZ, PABLO NIETO MARTÍNEZ, ELIU BENÍTEZ HERNÁNDEZ, RICARDO CASTILLO PÉREZ
Componente
Voltaje
de operación (VCD)
Potencia requerida
en reposo
Potencia
requerida
en uso
ESP12-Q
(ESP8266) 3.0-3.6v 25 mA
25 mA + 30 mA max / pin
activo
Unidad de medición
barométrica (bmp180)
3.3-5v -- 5uA
GPS Ublox 3.3 – 6.0 V
12mA
50mA
Xbee PRO S3B 3.3-5v 240 mA 295 mA
MPU6050 3.6 -4.1 V 30-40mA 40 mA
DH22 3.3-6 V 1.5mA
Cámara 3.5-5v 60mAh
Video TX 5v 250-600mAh
Tabla IV. Distribución de potencia de componentes.
Distribución de masa
Con base en los lineamientos del proyecto fue necesario reali-zar una tabla (véase tabla III) con los pesos de los componentes.
Costo de cada componente
Tabla V. Costos de cada componente.
Subsistema Componente Costo (MXN) Cantidad
Computadora de vuelo ESP12-Q $ 95 1
Energía Batería de litio $ 45 1
Comunicación
Transmisor / receptor Xbee PRO S3B $1600 2
Regulador para Xbees $190 1 Programador para Xbee $300 1
Antena XBEE $150 2
Transmisor de video $1000 1
Misión (carga útil)
GPS $239 1 Unidad de medición
barométrica $69 1
Giroscopio / acelerómetro $58 1 Cámara $800 1 DHT22 $90 1
Total $5898
Integración de los subsistemas
En la figura 4 se muestra un diagrama que detalla la interacción de los subsistemas que componen el proyecto.
Figura 4. Interacción de subsistemas.
A continuación se explica brevemente la secuencia a seguir de cada subsistema para lograr que la misión sea exitosa.
SUBSISTEMA CANSAT
Se realiza la medición de las diversas variables físicas me-diante el uso de sensores. Las lecturas serán colectadas por la computadora de vuelo basada en el MCU esp8266 (Nómadas electrónicos, 2015) y, posteriormente, enviadas mediante un módulo emisor Xbee (Hangar, 2012). La transmisión de video será encendida por la computadora de vuelo, pero será transmitida independientemente por una conexión directa entre la cámara y el módulo TBS Unify (Team Blacksheep, 2016).
´
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 65
Figura 5. Gráfica de aceleración ( ) contra el tiempo en ms.
SUBSISTEMA ESTACIÓN TERRENA
Se procede a la recepción de datos mediante un módulo receptor Xbee, posteriormente se realiza el tratamiento de datos –recepción, proceso, empaquetado– en un pequeño servidor portable. También recibe los datos de video mediante un receptor análogo con pantalla y los reenvía mediante un servicio de websockets (Phoboslab, 2013).
SUBSISTEMA CLIENTE PC O DISPOSITIVO MÓVIL
La aplicación Icarus realizará el desempaquetado y presen-tación de datos numérica y gráficamente. Y estará disponible para poder acceder a los datos y video en tiempo real desde la red local, y estamos trabajando en el acceso desde Internet.
RESULTADOS Y DISCUSIÓN
Se precisó enfocar la transferencia de información en un alto muestreo del sensor MPU6050 (acelerómetro y giroscopio) (Naylamp Mechatronics, 2016), se obtenían 46 muestras por segundo de los seis ejes, como se muestra en la figura 5.
En esta figura se presentan los datos de los tres ejes del acelerómetro. Son 70 muestras de cada eje a lo largo de 1520 milisegundos. Las vibraciones no parecen ser críticas, pero en algunos puntos llegan a tener altos cambios. No se aplicaron filtros.
El resto de las mediciones se recibieron cada segundo (figuras 6 y 7). Debido a que la prueba fue de baja altitud se obtuvieron resultados sin cambios significativos. La prueba se realizó a 12 metros y el tiempo de caída fue de poco más de dos segundos.
ms2
Figura 6. Gráfica de presión (hPa) contra tiempo (ms).
Debido al corto tiempo de caída sólo se tomaron tres muestras de presión (ver figura 6), que equivalen a altitudes desde 12.5 hasta un metro (si la presión a partir de la cual se mide es 1006.5hPa), como se muestra en la figura 7.
Figura 7. Gráfica de altitud (m) contra tiempo (s).
CONCLUSIONES
Los resultados obtenidos nos permiten darnos cuenta que el manejo de los diferentes sistemas de comunicación inalámbrica pueden ser aplicadas a una misión cansat; con ello logramos tener el conocimiento necesario para poder utilizarla en otros campos, como la medicina espacial y la comunicación satelital, entre otros.
Cabe mencionar que las conclusiones de este documento son preliminares, ya que se seguirá trabajando en el diseño de la aplicación, la distribución de componentes de cada subsistema y, por ende, en el diseño mecánico de nuestro cansat, además de adherir algunos filtros y procesamiento de datos necesarios para obtener información de mejor calidad para el análisis.
Finalmente, el desarrollo de los satélites educativos cansat permite a la zona sur del estado de Tamaulipas (Tampico, Madero, Altamira) acercarse a los temas relacionados a la tecnología espacial.
ICARUS

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201666
AGRADECIMIENTOS
Agradecemos al IEST por las facilidades dadas en el desarrollo de este proyecto. Al MCIE Óscar Martínez Hernández por las asesorías brindadas en cada etapa desarrollada.
REFERENCIAS
Domoprac. (2016). Protocolos de red: tipos y utilidades. Consultado el 4 de agosto de 2016. http://www.domoprac.com/protocolos-de-co-municacion-y-sistemas-domoticos/protocolos-de-red-tipos-y-uti-lidades.html
Hangar. (2012). Arduino + Xbee; primeros pasos. Consultado el 10 de agos-to de 2016. https://hangar.org/webnou/wp-content/uploads/2012/01/arduino-xbee-primeros-pasos.pdf
Naylamp Mechatronics. (2016). Tutorial MPU6050, acelerometro, y giroscopio. Consultado el 11 de agosto de 2016. http://www.naylampmechatronics.com/blog/45_Tutorial-MPU6050-Aceler%-C3%B3metro-y-Giroscopio.html
Nómadas electrónicos. (2015). ESP8266-Wifi para microcontroladores. Consultado el 4 de agosto de 2016. https://nomadaselectronicos. wordpress.com/2015/03/08/esp8266-wifi-para-microcontroladores/
Phoboslab. (2013). Html5 live video streaming via websockets. Con-sultado el 11 de agosto de 2016. http://phoboslab.org/log/2013/09/html5-live-video-streaming-via-websockets
Pluralsigth. (2016). How to get started with Ionic framework on Mac and Windows. Consultado el 4 de agosto de 2016. https://www.pluralsight.com/blog/softwaredevelopment/ionic-framework-on-mac-and-windows
Team Blacksheep. (2016). TBS Unify Pro 5G8 (HV) Video Tx. Consultado el 10 de agosto de 2016. http://www.team-blacksheep.com/tbs-unify-pro-5g8-manual.pdf
Walker, R., et al. (2010). ESA Hands-on Space Education Project Activities for University Students: Attracting and Training the Next Genera-tion of Space Engineers, IEEEEDUCON, Education Engineering, 1699-1708.
Recibido 8-8-16Aceptado 10-9-16
ÓSCAR MARTÍNEZ HERNÁNDEZ, NOEL DEL ÁNGEL POLANCO, ERIL A. PAULÍN RODRÍGUEZ, PABLO NIETO MARTÍNEZ, ELIU BENÍTEZ HERNÁNDEZ, RICARDO CASTILLO PÉREZ

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 67
gerardo carraSco lozada*, david emmanuel coca guevara*, raFael moraleS ramírez*, arTuro Sánchez mendoza*, gerardo vera caSTelán* y roSa maría marTínez galván*
OLIXTEL
RESUMENEl proyecto Olixtel está pensado para el monitoreo, envío, recibimiento e interpretación de datos relacionados con el clima, haciendo uso de herramientas como sensores de tem-peratura, presión, vibración, etcétera. Además, de un sistema de GPS, como primera etapa del proceso se obtendrán los datos provenientes de los sensores integrados en el cansat, los cuales se empaquetarán y serán enviados a una estación terrena a través de una red Zigbee punto a punto. Ya en tierra, los datos se interpretarán con el uso del programa Labview y se mostrarán de manera congruente y entendible para el usuario.
Palabras clave: Olixtel, clima, GPS, cansat, red Zigbee.
ABSTRACTThe Project Olixtel is made for monitoring, transmission, re-ception and interpretation of data related to environment and weather with the help of tools including: temperature, altitude, pressure, vibration and acceleration sensors, as well as a GPS. In the first stage of the process the data will be obtained from the sensors that the computer on board the CanSat will then package and send to the terrestrial station though a point to point zigbee network. Once the data is received, the Labview program will interpret the data and display it in a cohesive and friendly matter in a user interface.
Keywords: Olixtel, weather, GPS, CanSat, zigbee network.
Los satélites artificiales, hoy en día, son de gran importancia, fueron creados como respuesta a distintos problemas que afectan al ser humano, su concepción comenzó a desarrollarse a principios del siglo XX (García, 1989). Con el tiempo se profundizó el concepto hasta que, en la segunda mitad del siglo pasado, fue posible el lanzamiento de uno. Este tipo de elementos son utilizados para las más variadas funciones, se destaca, entre ellas, la relacionada con la comunicación y la observación de la tierra para la elaboración de mapas, geopo-sicionamiento, etcétera (Neri, 2003).
* Instituto Tecnológico de Puebla.Contacto: [email protected]
Las imágenes satelitales también posibilitan el estudio de distintos fenómenos meteorológicos. En efecto, gracias a imágenes es posible tener referencia del comportamiento de distintos frentes de aire, así como de la dirección que tienen grandes tormentas. Pensemos cuánto pueden significar estos elementos si predijeran el comportamiento de un huracán o un tornado (Antunes, 2012).
Un cansat, por su parte, es un pequeño dispositivo elec-trónico del tamaño de una lata de refresco, el cual es elevado a cierta altura –gracias a globos, drones, entre otros– con el propósito de monitorear diferentes estados a su alrededor. Su misión puede variar, ya que depende totalmente de los objetivos del creador.
Se espera que, dentro del proyecto de los alumnos del Instituto Tecnológico de Puebla, se cumpla con todos los requisitos como temperatura interna y externa del cansat, presión, humedad relativa, altitud, longitud, latitud, etcétera. Evitando de manera perfecta todo tipo de ruido, ya que es un factor muy importante dentro de la comunicación de nuestro cansat.
MOTIVACIÓN DEL PROYECTO
Desde el principio, la humanidad ha mirado hacia las estrellas, intentando entenderlas, buscando su lugar en el cosmos y a pesar de que hoy en día se sabe mucho más que hace miles de años, aún falta mucho por recorrer; esa necesidad de saber, esa curiosidad incesante que palpita a cada momento dentro del ser humano también está presente en nosotros.
Cada integrante de este equipo ha soñado con hacer algo más de su vida que sólo trabajar en una empresa, a su manera, todos queremos ayudar a mejorar el mundo, a mejorar México, para eso estamos aquí.
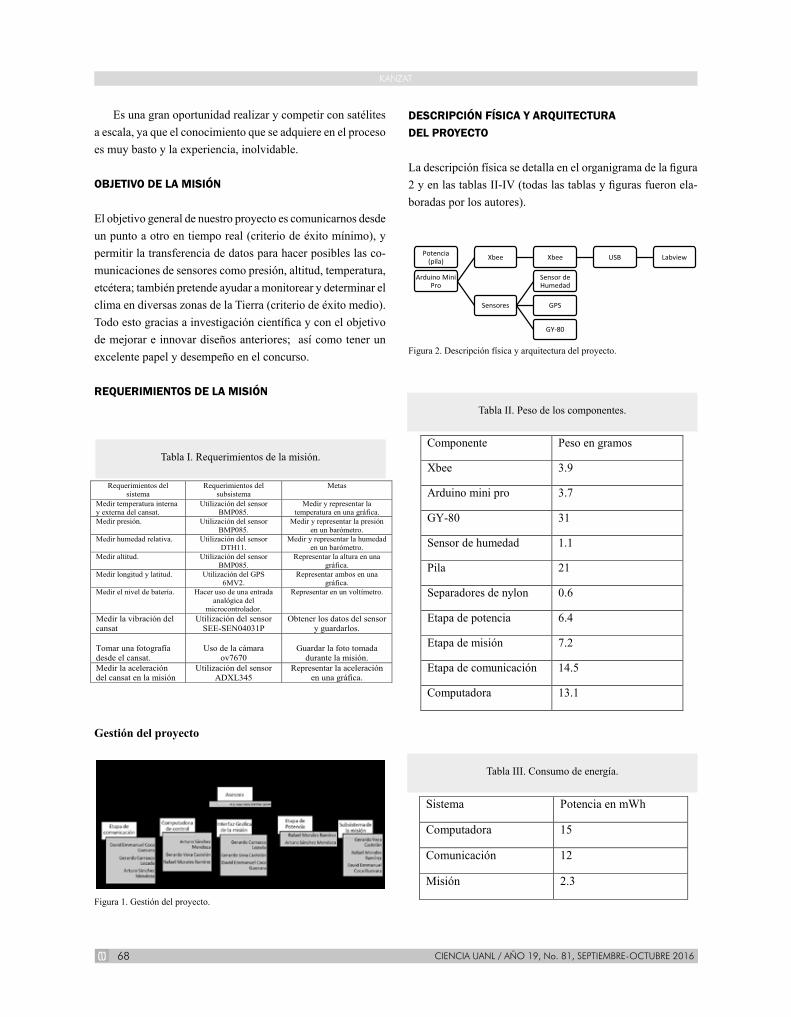
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201668
KANZAT
Es una gran oportunidad realizar y competir con satélites a escala, ya que el conocimiento que se adquiere en el proceso es muy basto y la experiencia, inolvidable.
OBJETIVO DE LA MISIÓN
El objetivo general de nuestro proyecto es comunicarnos desde un punto a otro en tiempo real (criterio de éxito mínimo), y permitir la transferencia de datos para hacer posibles las co-municaciones de sensores como presión, altitud, temperatura, etcétera; también pretende ayudar a monitorear y determinar el clima en diversas zonas de la Tierra (criterio de éxito medio). Todo esto gracias a investigación científica y con el objetivo de mejorar e innovar diseños anteriores; así como tener un excelente papel y desempeño en el concurso.
REQUERIMIENTOS DE LA MISIÓN
Tabla I. Requerimientos de la misión.
Requerimientos del sistema
Requerimientos del subsistema
Metas
Medir temperatura interna y externa del cansat.
Utilización del sensor BMP085.
Medir y representar la temperatura en una gráfica.
Medir presión. Utilización del sensor BMP085.
Medir y representar la presión en un barómetro.
Medir humedad relativa. Utilización del sensor DTH11.
Medir y representar la humedad en un barómetro.
Medir altitud. Utilización del sensor BMP085.
Representar la altura en una gráfica.
Medir longitud y latitud. Utilización del GPS 6MV2.
Representar ambos en una gráfica.
Medir el nivel de batería. Hacer uso de una entrada analógica del
microcontrolador.
Representar en un voltímetro.
Medir la vibración del cansat
Utilización del sensor SEE-SEN04031P
Obtener los datos del sensor y guardarlos.
Tomar una fotografía desde el cansat.
Uso de la cámara
ov7670
Guardar la foto tomada
durante la misión. Medir la aceleración del cansat en la misión
Utilización del sensor ADXL345
Representar la aceleración en una gráfica.
Gestión del proyecto
Figura 1. Gestión del proyecto.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
La descripción física se detalla en el organigrama de la figura 2 y en las tablas II-IV (todas las tablas y figuras fueron ela-boradas por los autores).
Figura 2. Descripción física y arquitectura del proyecto.
Potencia (pila)
Arduino Mini Pro
Xbee Xbee USB Labview
Sensores
Sensor de Humedad
GPS
GY-80
Tabla II. Peso de los componentes.
Componente Peso en gramos
Xbee 3.9
Arduino mini pro 3.7
GY-80 31
Sensor de humedad 1.1
Pila 21
Separadores de nylon 0.6
Etapa de potencia 6.4
Etapa de misión 7.2
Etapa de comunicación 14.5
Computadora 13.1
Tabla III. Consumo de energía.
Sistema Potencia en mWh
Computadora 15
Comunicación 12
Misión 2.3
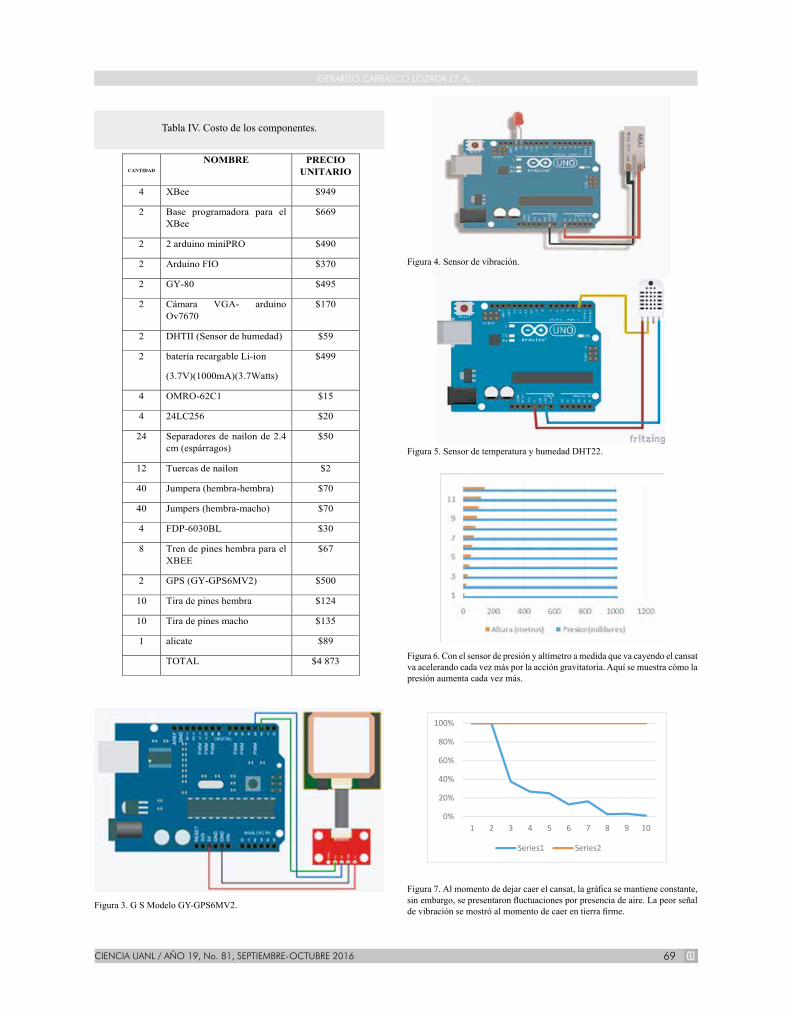
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 69
GERARDO CARRASCO LOZADA ET. AL.
Tabla IV. Costo de los componentes.
CANTIDAD NOMBRE PRECIO
UNITARIO
4 XBee $949
2 Base programadora para el XBee
$669
2 2 arduino miniPRO $490
2 Arduino FIO $370
2 GY-80 $495
2 Cámara VGA- arduino Ov7670
$170
2 DHTII (Sensor de humedad) $59
2 batería recargable Li-ion
(3.7V)(1000mA)(3.7Watts)
$499
4 OMRO-62C1 $15
4 24LC256 $20
24 Separadores de nailon de 2.4 cm (espárragos)
$50
12 Tuercas de nailon $2
40 Jumpera (hembra-hembra) $70
40 Jumpers (hembra-macho) $70
4 FDP-6030BL $30
8 Tren de pines hembra para el XBEE
$67
2 GPS (GY-GPS6MV2) $500
10 Tira de pines hembra $124
10 Tira de pines macho $135
1 alicate $89
TOTAL $4 873
Figura 3. GPS Modelo GY-GPS6MV2.
Figura 4. Sensor de vibración.
Figura 5. Sensor de temperatura y humedad DHT22.
0%
20%
40%
60%
80%
100%
1 2 3 4 5 6 7 8 9 10
Series1 Series2
Figura 6. Con el sensor de presión y altímetro a medida que va cayendo el cansat va acelerando cada vez más por la acción gravitatoria. Aquí se muestra cómo la presión aumenta cada vez más.
Figura 7. Al momento de dejar caer el cansat, la gráfica se mantiene constante, sin embargo, se presentaron fluctuaciones por presencia de aire. La peor señal de vibración se mostró al momento de caer en tierra firme.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201670
Figura 8. Gracias al sensor LIMU se pueden obtener este tipo de resultados con base en la temperatura y humedad. Los resultados variarían dependiente del lugar geométrico en el que nos encontremos.
RESULTADOS Y DISCUSIÓN
Para la recuperación de datos, utilizamos las configuraciones de las tarjetas arduino (Pérez, 2013; NI, 2013; Ruiz, 2012), como se muestra en las figuras 3-5 y los resultados se muestran en las figuras 6-9 (Art of Circuits, 2016; LabView, 2011).
CONCLUSIONES
Ha sido un proyecto complejo y lleno de retos hasta el momento, pero todo eso es proporcional a la satisfacción cuando cada componente por fin funciona como debe, aunque estamos conscientes de que los retos más difíciles están por
venir en la competencia, consideramos que estamos listos para afrontarlos.
Planeamos no abandonar el proyecto después de la compe-tencia, sino que en lugar de eso nos dedicaremos a mejorarlo basados en la experiencia que hemos tenido con él y buscar las aplicaciones más viables y realistas para nuestro estado (Puebla).
AGRADECIMIENTOS
Primeramente, nos honra contar con el apoyo de nuestra aseso-ra por fomentar estas actividades en el Instituto Tecnológico de Puebla, las cuales favorecen el aprendizaje y extiende nuestro conocimiento en el área de las telecomunicaciones. De la mis-ma manera, agradecemos a las instituciones organizadoras del concurso y participantes por la oportunidad de poner nuestro conocimiento en práctica.
REFERENCIAS
Antunes, S. (2012). DIY Satellite Platforms. EE.UU: O’ Reilly.Art of Circuits. (2016) 10DOF – GY-80 4-in-1 Multi-Sensor Module.
Consultado el 8 de septiembre de 2016. http://artofcircuits.com/product/10dof-gy-80-4-in-1-multi-sensor-module
García R. de A., J.J. (1989). Los satélites de comunicación. España: Marcombo.
Neri V., R. (2003). Comunicación por satélite. México: Thomson.
Recibido 8-8-16Aceptado 10-9-16
KANZAT
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 71
Cansat:lata-satélite
bÁrbara bermúdeZ reyes*
A partir de 1957 se han lanzado satélites para diversos propósitos –telecomunicación, observaciones, entre otros– (Janson, 2008). Desde entonces, cada vez eran más grandes, robustos y pesados, hasta que, en 1998, al Dr. Twiggs se le ocurrió para la tesis del doctorado de su estudiante, el Dr. Suari, hacer una constelación de satélites pequeños y una nave principal o nodriza para una misión en específico (NASA, 2013). Poste-riormente, en Hawai se oficializa, en 1999, el nombre cansat y se autoriza como picosatelite, a la par que se introducen los términos de:
• Minisatélite con masa total de 500-100 kg.• Microsatélite con masa total de 100- 10 kg.• Nanosatélite con masa total 1-10 kg.• Picosatélite con masa máxima total de 1 kg.
Cabe señalar que los términos nano y pico no son similares a las escalas de submicrométricas que se conocen convencionalmente, sino para enfocar peque-ños artefactos a misiones científicas y tecnológicas en
aplicaciones espaciales, así como en misiones espaciales, educativas y demostrativas (figura 1).
PICOSATÉLITE O CANSAT
El concepto de cansat se concibió cuando se tuvo la ne-cesidad de enseñar a los estudiantes cómo llevar a cabo una misión espacial de bajo costo sin salir al espacio, pero conservando todas las normas y exigencias de di-seño, manufactura, pruebas, integración y lanzamiento de una misión espacial. Por lo cual, el profesor Twiggs presentó el concepto de cansat que significa lata-satélite (figura 2), y desde 2002 se clasificó como picosatélite (CLTP4, 2013).
DISEÑO DE UN CANSAT
Un cansat debe ser diseñado de acuerdo a una misión en específico. Una misión es un objetivo que se desea alcan-zar, por ejemplo, mediciones de temperatura, presión, humedad, campo magnético, obtención de fotografías,
* Universidad Autónoma de Nuevo León.Contacto: [email protected]
CURIOSIDAD
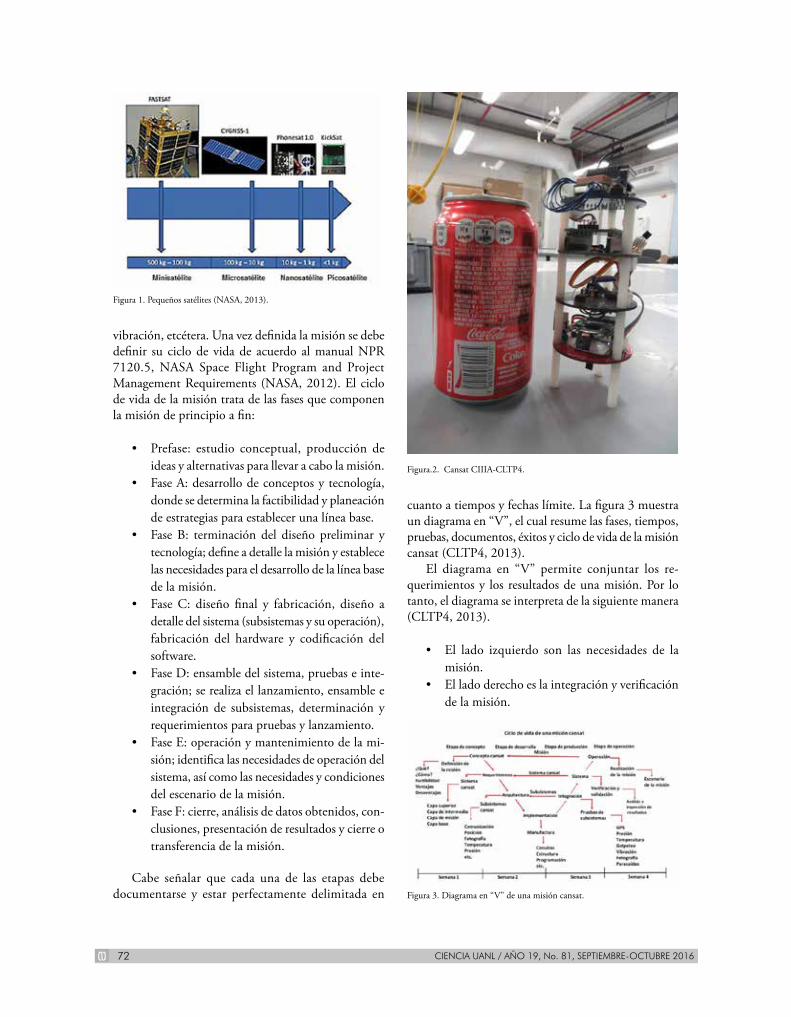
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201672
vibración, etcétera. Una vez definida la misión se debe definir su ciclo de vida de acuerdo al manual NPR 7120.5, NASA Space Flight Program and Project Management Requirements (NASA, 2012). El ciclo de vida de la misión trata de las fases que componen la misión de principio a fin:
• Prefase: estudio conceptual, producción de ideas y alternativas para llevar a cabo la misión.
• Fase A: desarrollo de conceptos y tecnología, donde se determina la factibilidad y planeación de estrategias para establecer una línea base.
• Fase B: terminación del diseño preliminar y tecnología; define a detalle la misión y establece las necesidades para el desarrollo de la línea base de la misión.
• Fase C: diseño final y fabricación, diseño a detalle del sistema (subsistemas y su operación), fabricación del hardware y codificación del software.
• Fase D: ensamble del sistema, pruebas e inte-gración; se realiza el lanzamiento, ensamble e integración de subsistemas, determinación y requerimientos para pruebas y lanzamiento.
• Fase E: operación y mantenimiento de la mi-sión; identifica las necesidades de operación del sistema, así como las necesidades y condiciones del escenario de la misión.
• Fase F: cierre, análisis de datos obtenidos, con-clusiones, presentación de resultados y cierre o transferencia de la misión.
Cabe señalar que cada una de las etapas debe documentarse y estar perfectamente delimitada en
Figura.2. Cansat CIIIA-CLTP4.
cuanto a tiempos y fechas límite. La figura 3 muestra un diagrama en “V”, el cual resume las fases, tiempos, pruebas, documentos, éxitos y ciclo de vida de la misión cansat (CLTP4, 2013).
El diagrama en “V” permite conjuntar los re-querimientos y los resultados de una misión. Por lo tanto, el diagrama se interpreta de la siguiente manera (CLTP4, 2013).
• El lado izquierdo son las necesidades de la misión.
• El lado derecho es la integración y verificación de la misión.
Figura 3. Diagrama en “V” de una misión cansat.
Figura 1. Pequeños satélites (NASA, 2013).
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 73
• La parte media es la manufactura de sistema y la correlación de los requerimientos con la integración.
Una ventaja de este diagrama es que permite op-timizar costos, tiempo, minimizar riesgos, garantizar calidad y buen funcionamiento. Indica el inicio y el final del ciclo de vida de la misión, y promueve la comunicación efectiva entre los integrantes del equipo o equipos para terminar una misión con éxito. Cabe señalar que también permite considerar el grado de éxito que se pretende obtener (Dori, 2002).
• Éxito máximo: consiste en lograr la misión completa y un objetivo extra.
• Éxito medio: consiste en lograr la misión completa.• Éxito mínimo: consiste en lograr al menos la
mitad de la misión.
Requerimientos
Los cansat, al igual que los grandes satélites, tienen los siguientes requerimientos (NAROM, 2012):
• Estructurales, dimensiones de la lata que va a lle-var el sistema. Tamaño para competencia, lata de 375 mL; dependiendo de la misión, la lata puede ser de aluminio (refresco) ABS o PET. En cuanto a la geometría, generalmente son cilíndricas, pero también las hay hexagonales o estriadas.
• Eléctricas, generalmente el subsistema eléctrico debe ser de 3 V, sin embargo, existen subsiste-mas de 5 y 6 V.
• Peso máximo, para un cansat es de 1 kg inclu-yendo sistemas desplegables.
• Desplegables, son estructuras externas como los paracaídas, ala y empenaje, vehículos rover o robóticos.
• Sistemas de lanzamiento, estos sistemas de-penden de la altura a la que se llevará a cabo la misión. Los sistemas de lanzamiento que se utilizan son: aeromodelos, multirrotor (drone), cohete, globo meteorológico.
• Sistemas de comunicación, actualmente para los sistemas cansat, la máxima altura a la que llegan es de 10 km. Esto significa que los transmisores y receptores (estación terrena y antenas) deben transmitir en tiempo real todas las mediciones desde la altura que se elija. Lo que implica que se pueden utilizar antenas sencillas como la XBee para alturas de hasta 1km o antenas tipo Jaggi para alturas mayores a 5 km.
• Computadora de a bordo, es el sistema de mando y manejo de datos de todo el cansat.
• Sensores, dispositivos electrónicos que miden magnitudes exteriores (temperatura, presión, vibración, campo magnético, gases, etcétera).
PRUEBAS DE INTEGRACIÓN
Las pruebas de integración se realizan con el cansat o cualquier otro satélite funcionando y la estación terrena recibiendo datos de los sensores; sin embargo, el cansat estará expuesto a ambientes mecánicos y térmicos. Por lo tanto las pruebas de integración tienen el objetivo de probar el sistema de comunicación bajo condiciones mecánicas y térmicas: vibración, golpeteo, aceleración, caída libre, enfriamiento, calentamiento. (Cho et al., 2014; Cho y Masui, 2014). Una vez realizadas estas pruebas con éxito, el cansat está calificado para lanzarse y llevar a cabo la misión.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201674
ACTIVIDADES CANSAT EN EL MUNDO
Actualmente la tecnología cansat es muy conocida y se ha adoptado como parte de los programas de ingeniería, investigaciones y competencias internacionales universi-tarias. Las competencias más importantes son: ARLISS (EUA), LEEM-UPM (España) y Unisec (Japón) (Sako et al., 2001; LEEM-UPM, 2015; NASA, 2012).
Estas competencias o concursos promueven el trabajo disciplinario e interdisciplinario, es decir, los equipos se conforman de estudiantes de diversas ingenierías –electrónica, aeronáutica, mecatrónica, instrumentación, aeroespacial, comunicaciones, físi-ca, etcétera– debido a que existen cuatro categorías (Walker et al., 2010).
1. Telemetría: sistemas de comunicación y recolec-ción de datos en tiempo real durante descenso con paracaídas.
2. Comeback: telemetría y retorno del cansat en un vehículo tipo rover al punto de partida.
3. Flyback: telemetría y retorno del cansat mediante el despliegue de ala y empenaje o parapente al punto de partida.
4. Openclass: telemetría, misión adicional. Llevada a cabo con un sistema robótico y regreso a un punto en específico.
Además, en 2003 se formó el University Space En-gineening Consortium (Unisec) en Japón, éste engloba a las universidades que realizan actividades aeroespaciales y espaciales del mundo. Lo que facilita la colaboración e intercambio entre las universidades a nivel mundial mediante cursos de entrenamiento cansat como el Cansat Leader Training Program (CLTP) y capítulos universitarios (Sahara y Ando, 2013). Cabe señalar que se cuenta con el capítulo Unisec-México desde 2014.
ACTIVIDADES CANSAT EN MÉXICO
Las actividades cansat en México comenzaron en 2008 en la Universidad Autónoma de México mediante la Red Universitaria del Espacio (RUE) (AEM, 2015). Posteriormente, al formarse la Agencia Espacial Mexi-cana, en 2013, facilitó trámites administrativos para que profesores mexicanos tomaran el Cansat Leader Training Program 4 (CLTP4). En el cual, una profesora de la FIME-UANL fue elegida de entre 28 profesores a nivel mundial. Cabe señalar que de 2013 a 2015, tres profesores de la UANL han asistido a este pro-grama de entrenamiento cansat (dos de FIME y uno
Figura 4. Integrantes del equipo del Mty-Sat.
de la FCFM). También se han llevado a cabo cursos de entrenamiento cansat para profesores y estudiantes en México: dos en la Universidad Autónoma de Baja California, uno en el Instituto Tecnológico de Nogales, uno en la Universidad Autónoma de Nuevo León, en-tre otros. En 2015 se llevó a cabo el Primer Concurso Nacional del Cansats (Sánchez et al. 2016), en Tijuana, B.C., el cual fue organizado por un comité de profeso-res de distintas universidades del país, siendo la sede en la Universidad Autónoma de Baja California. En este concurso, la UANL participó con el Mty-Sat (figura 4), construido por un equipo de cuatro estudiantes: Graciela Stephanie Espinosa Morales (ingeniería en aeronáutica), José Ángel Cardona Alanís (ingeniería en electrónica y comunicaciones), Gerardo Antonio Lira Ibarra (ingeniería mecatrónica), Antonio Emmanuel Rentería Rodríguez (ingeniería mecatrónica).
El 8 de octubre de 2016 se celebrará el Segundo Concurso Nacional de Cansats, en Nuevo León, orga-nizado por la FIME y la FCFM. En este 2° concurso se evaluarán las categorías de telemetría y comeback.
CONCLUSIONES
La miniaturización de dispositivos espaciales es una realidad que permite acceder a tecnología espacial. Esto implica enseñar y entrenar a los estudiantes y profesores mediante sistemas de bajo costo como los cansats. Estos picosatélites no son exclusivos para los estudiantes del área aeroespacial, sino que promueven las actividades en equipos disciplinarios y multidisciplinarios. Ade-más, son útiles en aplicaciones para resolver problemas específicos de electrónica y comunicaciones, inclusive en física, por ejemplo, en el cálculo de trayectorias, me-cánica orbital, etcétera o en temas de aeronáutica como el diseño y cálculo de paracaídas, diseño y construc-ción de cohetes, aeromodelos y drones. Asimismo, en aplicación de mecánica y procesamiento de materiales. Estos dispositivos permiten simular misiones espaciales e impulsan el trabajo colaborativo entre profesores y estudiantes de diversas instituciones.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 75
AGRADECIMIENTOS
Se agradece a la Red Temática Nacional de Ciencia y Tecnología del Espacio (Redcyte), por las facilidades para la realización de las actividades cansat en Nuevo León. Así como a Unisec Global por el apoyo para la formación y consolidación del Capítulo Unisec México.
REFERENCIAS
Agencia Espacial Mexicana. (2015). Kit cansat. México: Red Universitaria del Espacio. Universidad Nacional Autónoma de México.
Cho, M., Masui, H., y Hatamura. T.(2014). Satellite Testing Tutorial: Mechanical Test. Laboratory of Space environment Interaction Engineering. Japón: Kyushu Institute of Technology.
Cho, M. y Masui H. (2014). Satellite Testing Tutorial: Thermal Test. Laboratory of Space environment Interaction Engineering. Meisenkai: Kyushu Institute of Technology.
CLTP4. (2013). Cansat Leader Training Program 4. Kanagawa: Keio University and University Space Engineering Corsotium. Disponible en http://cltp.info/pdf/CLTP4%202nd%20ann_v0222.pdf
Dori, D. (2002). Object Process Methodology. A Holistic System Paradigm. Cambridge: Springer.
Janson, S.W. (2008). The History of Small Satellites, in Helvajian, H., y Janson, S.W. (eds.) Small Satellites: Past Present and Future. California: The Aerospace Press.
LEEM-UPM. (2015). International Cansat Competition. Disponible en http://upm.leem.es/proyectos/cansat/
NAROM. (2012). The Cansat Book. Noruega: Norwegian Centre for Space Related Education.
Sako, N., et al. (2001). Cansat suborbital Launch Experiment-University Educational Space using picosatellite. Acta Astronáutica, vol. 48, No. 15. 5-12 pp.767-776.
NASA. (2012). Space Flight Program and Project Management Requirements. National Aeronautics and Space Administration, California. Technical TP-2014-216648. NPR 7120.5. Disponible en http://nodis3. gsfc.nasa.gov/npg_img/N_PR_7120_005E_/N_PR _7120_005E_.pdf
NASA. (2013). University Student Launch Initiative. Student Launch Project National Aeronautics and Space Administration. Disponible en http://www.nasa.gov/audience/forstudents/studentlaunch/home/index.html
NASA. (2014). Small Spacecraft Technology State of the Art. National Aeronautics and Space Administration, California. Technical TP-2014-216648. Disponible en http://www.nasa.gov/sites/default/files/atoms/files/small_spacecraft_technology_state_of_the_art_2015_tagged.pdf
Sahara, H. y Ando E. (2013). CanSat Leader Training Program (CLTP). Disponible en http://cltp.info/pdf/121010-13Sahara_Ando_CLTP3 _Report_Full Paper.pdf
Sánchez, Á.E., et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México. Celerinet, año IV, vol. VII, enero-junio.
Walker, R., et al. (2010). ESA Hands-On Space Education Project Activities for University: Attracting and Training Next Generation of Space Engineers. Disponible en http://www.academia.edu/19276543/ESA_hands-on_space_education_project_activities_for_university_stude nts_Attracting_and_training_the_ next_generation_ of_space_engineers
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201676
CanSat Leader Training Program
-Past, Present and Future-
rei kawasHima*
EJES
It was the end of the 20th century when Prof Robert Twiggs proposed to make a tiny satellite called “CanSat.” He proposed the development of a new satellite that fits in a Soda-can. This soda-can sized satellite was the first small step to open a door to the new world where university students design, build, test, launch and operate satellites in the 21st century.
It should be noticed that CanSat itself has evolved, and that many types of CanSats such as rover type or parafoil type have been developed. In the beginning, a simple CanSat was a challenging project for graduate students in the aerospace engineering field, but now it became a popular tool of hands-on training to learn basic space technology as well, and high school students enjoy developing their CanSat. CanSat is continuously evolving through both ways; challenging more advanced mission and training beginners and new comers.
The motivation of this paper is to explore new possibilities and opportunities for CanSat Leader Training Program (CLTP). In order to explore it, I would like to reflect on the CanSat history.
In this paper, firstly the history of CanSat activities in Japan is introduced; secondly the motivation and achievement of CanSat Leader Training Program (CLTP) are described; thirdly new platforms and tools are introduced, followed by discussion on future possibilities of CLTP.
CANSAT HISTORY IN JAPAN
The first CanSats made by Japanese students were launched in the Black Rock desert in Nevada, USA in September 1999. Figure 1 shows one of the first CanSats built by students of the University of Tokyo.
It was the beginning of the project called “A Rocket Launch for International Student Satellites (ARLISS).” Since then, Japanese students visited the desert and participated in the ARLISS to make suborbital launch experiment every year. Rockets are provided
*University Space Engineering Consortium, UNISEC-Global.Contacto: [email protected]
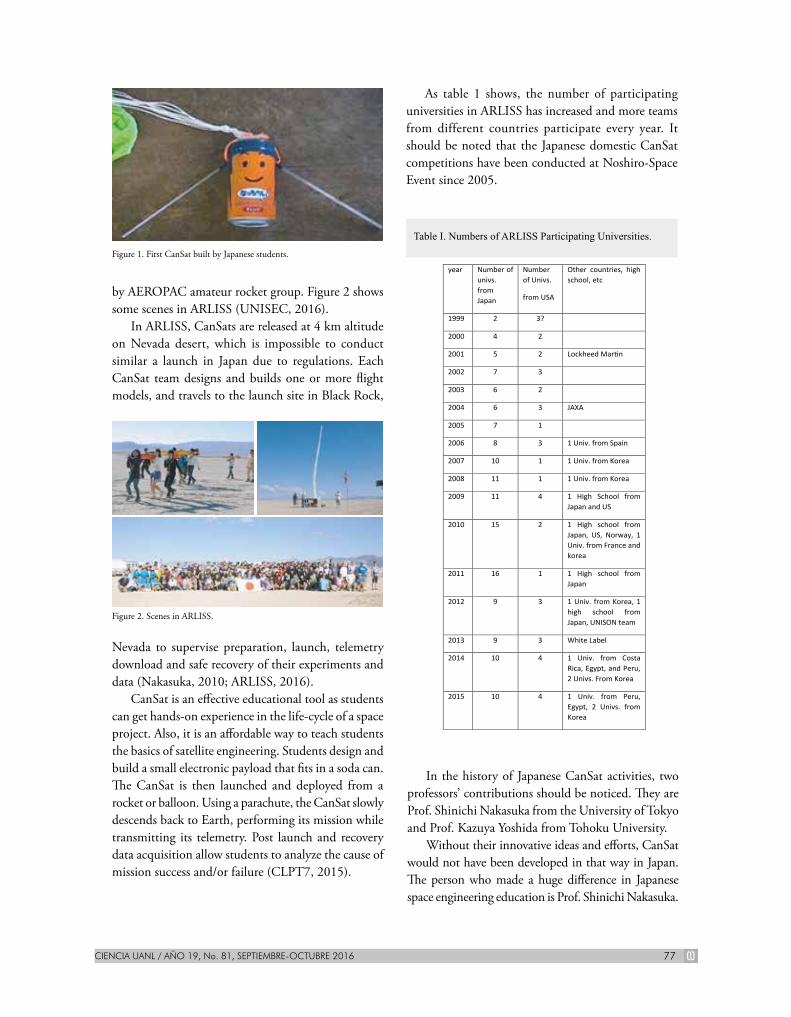
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 77
Figure 1. First CanSat built by Japanese students.
by AEROPAC amateur rocket group. Figure 2 shows some scenes in ARLISS (UNISEC, 2016).
In ARLISS, CanSats are released at 4 km altitude on Nevada desert, which is impossible to conduct similar a launch in Japan due to regulations. Each CanSat team designs and builds one or more flight models, and travels to the launch site in Black Rock,
Figure 2. Scenes in ARLISS.
Nevada to supervise preparation, launch, telemetry download and safe recovery of their experiments and data (Nakasuka, 2010; ARLISS, 2016).
CanSat is an effective educational tool as students can get hands-on experience in the life-cycle of a space project. Also, it is an affordable way to teach students the basics of satellite engineering. Students design and build a small electronic payload that fits in a soda can. The CanSat is then launched and deployed from a rocket or balloon. Using a parachute, the CanSat slowly descends back to Earth, performing its mission while transmitting its telemetry. Post launch and recovery data acquisition allow students to analyze the cause of mission success and/or failure (CLPT7, 2015).
As table 1 shows, the number of participating universities in ARLISS has increased and more teams from different countries participate every year. It should be noted that the Japanese domestic CanSat competitions have been conducted at Noshiro-Space Event since 2005.
Table I. Numbers of ARLISS Participating Universities.
year Number of univs. from Japan
Number of Univs.
from USA
Other countries, high school, etc
1999 2 3?
2000 4 2
2001 5 2 Lockheed Mar�n
2002 7 3
2003 6 2
2004 6 3 JAXA
2005 7 1
2006 8 3 1 Univ. from Spain
2007 10 1 1 Univ. from Korea
2008 11 1 1 Univ. from Korea
2009 11 4 1 High School from Japan and US
2010 15 2 1 High school from Japan, US, Norway, 1 Univ. from France and korea
2011 16 1 1 High school from Japan
2012 9 3 1 Univ. from Korea, 1 high school from Japan, UNISON team
2013 9 3 White Label
2014 10 4 1 Univ. from Costa Rica, Egypt, and Peru, 2 Univs. From Korea
2015 10 4 1 Univ. from Peru, Egypt, 2 Univs. from Korea
In the history of Japanese CanSat activities, two professors’ contributions should be noticed. They are Prof. Shinichi Nakasuka from the University of Tokyo and Prof. Kazuya Yoshida from Tohoku University.
Without their innovative ideas and efforts, CanSat would not have been developed in that way in Japan. The person who made a huge difference in Japanese space engineering education is Prof. Shinichi Nakasuka.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201678
His greatest contribution was to lead students to realize the first CanSat project. In 1998, he did research with Prof. Twiggs at Stanford University, and was fascinated by his idea and motivation that is to make aerospace engineering students experience the whole cycle of a real space project.
Another outstanding contribution made by Prof. Nakasuka was to organize “Comeback competition,” where a machine (a kind of satellite model) with a certain steering mechanism such as parafoil is to, after release in high altitude, come back to a target point autonomously without human interaction, and the one which comes nearest to the target point wins the competition (Kawashima et al., 2004). Through the competitions, CanSat has evolved in many ways; remote rovers, fliers and sophisticated communications both in flight and on the ground.
Prof. Kazuya Yoshida introduced rover to CanSat. He thought that the most effective way to come close to the target point could be rover, and gave students the opportunities to work on the project. The first three years, Tohoku University teams had difficulties, but eventually, they achieved “0 meter to target” with their advanced rover in 2008. Rover type CanSat is shown in Figure 3 (UNISEC, 2016).
ACHIEVEMENT OF CANSAT LEADER TRAINING PROGRAM (CLTP)
UNISEC had focused on domestic activities in the first 10 years since its establishment in 2001 including the preparation period. During these 10 years the experience gained from CanSat programs with Japanese students convinced us that CanSat are important for space engineering education. In 2011, UNISEC started spreading its activities to the rest of the world. A grant from “Funding Program for World-Leading Innovative R&D on Science and Technology” (FIRST Program) enabled UNISEC to spread its mission that is
Figure 3 Rover type CanSat (Left: The University of Electro-Communica-tions, Right: Tohoku University, 2011).
“support, promote and facilitate practical space projects at university level” to other countries.
We thought that the most effective way to spread the training program would be to «teach teachers how to teach.» Thus, we invited university professors to participate in CLTP. CanSat Leader Training Program (CLTP)
CLTP1 (Wakayama Univ. in Feb-March, 2011)Twelve participants from 10 countries
(Algeria, Australia, Egypt, Guatemala, Mexico, Nigeria, Peru started in this way. As table 2 shows, CLTPs was offered in six cycles in Japan (CLPT7, 2015).
Table II. CLTP offering cycles.
Sri Lanka, Turkey (3), Vietnam) CLTP2 (Nihon Univ. in Nov-Dec, 2011)
10 participants from 10 countries(Indonesia, Malaysia, Nigeria, Vietnam, Ghana, Peru, Singapore, Mongolia, Thailand, Turkey)
CLTP3 (Tokyo Metropolitan Univ. in July-Aug, 2012) 10 participants from 9 countriesEgypt (2), Nigeria, Namibia, Turkey, Lithuania, Mongolia, Israel, Philippines, Brazil
CLTP4 (Keio Univ. in July-August, 2013) 9 participants from 6 countriesMexico(4), Angola, Mongolia, Philippines, Bangladesh, Japan
CLTP5 (Hokkaido Univ. in Sept, 2014)7 participants from 5 countriesEgypt, Korea (2), Mexico (2), Mongolia, Peru
CLTP6 (Hokkaido Univ. in Aug-Sept, 2015)8 participants from 8 countriesAngola, Australia, Austria (United Nations), Bangladesh, Egypt, Mexico, Tunisia, Turkey
CLTP is a training course for researchers and instructors in one of the capacity-development programs in space technology. The CLTP encompasses the entire cycle of CanSat development, including design, fabrication, testing and launch. Participants are expected to learn space engineering education methods through hands-on training with CanSats and to teach CanSat training methods in their home countries. A CanSat launch experiment using a paper crafted rocket in the fifth and sixth cycles was conducted, as shown in Figure 4. Paper crafted rocket designed and provided

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 79
by Uematsu Electric Co., Ltd. reduced a launch cost to less than 10% of that employed by used amateur rocket engines.
Figure 4. CanSat Launch Experiment with Paper Craft Rocket made by Each Participant.
NEW TOOLS AND PLATFORMS FOR CANSAT EDUCATION
Through CLTP activities, new tools and platforms have been developed to make the program more effective.
1) i-CanSatIn most university classes, a CanSat is normally developed from scratch. Students need to select components and order them within a given budget. In CLTP, the duration is short and the main goal is that participants learn CanSat development and teaching methods. To achieve this goal a training kit called i-CanSat was developed.
The first prototype of the iCanSat was developed by Prof. Hironori Sahara from Tokyo Metropolitan University, who was in charge of CLTP3. Prof. Shinichi Kimura from Tokyo Science University contributed in developing the Camera unit. It was used in the CLTP4-
6. With feedback from instructors, participants and teaching assistants, it has been revised. Figure 5 shows i-CanSat that has just been integrated during CLTP5.
2) CanSat TextbookProf. Yasuyuki Miyazaki from Nihon University authored a textbook about CanSat in Japanese. Figure 6 shows the cover page of the book. The book was co-authored with professors from other Japanese universities. The textbook was published in 2014 with funding from the Ministry of Education, Culture, Sports, Science and Technology in Japan. It was sold in a market and anybody could purchase it (UNISEC, 2014). This textbook has become vital to the CanSat trainings and activities in Japan. It will be translated into English to share with the Global CanSat Community where the main players are CLTP graduates.
3) CanSat Mapping Website CanSat Mapping was developed by Prof. Hidenori Watanabe and his students from the Tokyo Metropolitan University. It was designed to archive CanSats activities worldwide, using Google Earth. Anybody can upload his CanSat documentations with photos and/or movies to the website (UNISEC, 2015). Archiving the CanSat activities in each region would be helpful for the future generations. The lifecycle of students are quite short, and every year new students join. Technology succession is difficult especially hands-on training contains lots of implicit knowledge. With intentional and systematic archiving efforts, new students can learn from the past experiences. Figure 7 shows the CanSat Mapping website.
Figure 5. i-CanSat integrated in CLTP5 at Hokkaido University.
Figure 6. Cansat-Model nano-Satellite
Figure 7. CanSat Mapping website.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201680
FUTURE POSSIBILITIES OF CLTP
So far, we have presented the CanSat activities and CLTP. Before discussing future possibilities of CLTP, let’s consider why CanSat is important as basic space technology education. A comparison between CanSat and CubeSat would be helpful to understand it. As table 3 shows, CanSat and CubeSat have different characteristics and their learning outcomes are different. It is important to look at CanSat education as an introductory phase to a real space project such as CubeSat. Usually CanSat is considered as a very simple project by skilled satellite developers. Such criticism is vague because you can build complex CanSat that can perform complex mission such as the Comeback CanSat. The spectrum of CanSat is broad which makes it a really powerful customized tool that can satisfy different learning outcomes.
Table III. Comparison between CanSat and CubeSat.
CanSat CubeSat
Development time
1 week to 6 months
1 -2 years
Cost 200-3000 USD 20,000 USD or more
Launch cost should be added.
Launch Easy to find the launch means such as balloon, small rocket, multicopter, tall building, etc
Need to arrange Rocket to orbit is needed. Testing are necessary, and launch cost is expensive.
Communication Don’t need license from ITU
Need license from ITU
Consequences of failure
No critical damage.
Easy to investigate the reason as it returns to ground.
Debris problem.
Difficult to investigate the reason of failure
Operation Any portable PC can be used as ground station unit.
Dedicated ground station facility is required
Operational time
Few minutes 1 month – 5 years
Community Instructors and new students
Satellite Developer (new & experienced)
CubeSat is a real satellite which is launched into orbit. Even if it is small, it is a real satellite that can influence other satellites. The failure of satellite would contribute to increasing the number of debris. Satellite developers should consider the consequences of their satellite launch. Thus, it would be recommended to launch their satellite after getting enough skills and experiences. In this regards, CanSat education can provide the new satellite developers with the basic hands-on experience.
On the other hand, CanSat does not go to space and its cost is much less expensive. CubeSat requires all arrangements regarding frequency allocation and a launch slot as well as other legal procedures. CanSat allows students and instructors to focus on technical matters only, but CubeSat requires students and instructors not only to do technical matters but also to do a large amount of paperwork.
Now we understood the difference between CanSat and CubeSat, and let’s discuss future possibilities of CLTP from the view point of UNISEC-Global’s vision which state that “By the end of 2020, let’s create a world where university students can participate in practical space projects in more than 100 countries”(UNISEC, 2015; Kawashima, Cho and Ibrahim, 2014).
1) CLTP Localization
CLTP graduates are expected to teach CanSat to their students after going to their home country. So far, graduates are conducting CanSat training to their students and/or teachers in many countries such as Mexico, Egypt Turkey, Ghana, Nigeria, Peru, Mongolia, the Philippines, and Thailand.
They can teach as they like, but it would be better if there are some standards that they can follow. In that sense, CanSat textbook and i-CanSat kit would be one of good tools for localization. If CLTP graduates in each region could translate CanSat textbook into their native language, more people will benefit and enjoy CanSat training with sufficient knowledge. Especially, Spanish and Arabian languages are important because they are spoken in many countries. The i-CanSat kit may require customization to take into account with the availability of electronic components in local markets. So, the developed i-CanSat kit will serve as the baseline and based on it each local CLTP organizer can customize it to fit both the budget and

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 81
technical requirements. It is important to nurture good instructors whose motivation is high in learning more and sharing their experiences and knowledge for local CLTPs.
2) Expanding the CanSat community CLTP can be the first step to join the space engineering community. Without prior knowledge in space technology, participants can acquire the basic knowledge in space engineering from CanSat education. Instructors need to continue educating themselves. Once instructors stop improving and learning new things, they will lose the ability to inspire students. Instructors who teach CanSat would be better to have deeper knowledge about satellite because it is necessary to understand in order to explain the functions of each subsystem and component. Thus, affiliation to the CanSat community would force them to continue challenging new things. Localizing CLTP is expected to boost the spreading the CanSat education at higher rate. This in turn will build local CanSat communities. The CanSat communities will expand and interact. Such interaction will be very beneficial to students and the communities at large. Things such as teaching techniques, i-CanSat customization, innovative mission ideas for CanSat, open source firmware and much more can be evolutionized and shared.
CanSat community and CubeSat community would be different because CanSat community will be organized by initiatives of CLTP graduates who are highly motivated to teach others and interested in improving their teaching skills. Thus, the culture of CanSat community could be a little more altruistic. Eventually CanSat participants will join the CubeSat community.
3) Fund raising
Of course, financial resources are always necessary for practical space projects. Even small CanSat cannot be made without financial resources. As a community, fund raising should be discussed and necessary actions should be taken. Recent cloud funding system could be one way. As university does not have much funding, it should be considered how to raise funding from various resources.
CONCLUSION
As we have seen in the previous sections, CanSat activities are effective for education in aerospace engineering field. CanSat Leader Training Program (CLTP) has contributed to making seeds of capacity building worldwide through teaching CanSat training to instructors at university level.
In the future, CLTP will be localized in many regions, sharing the common values, knowledge and technology.
SUMMARY
CanSat activities started in the end of 20th century, and CanSat has continuously evolved because of students. Organizing the Comeback competition accelerated the evolution. After ten-year of CanSat experiences in Japan, CanSat Leader Training Program (CLTP) was launched to provide training opportunities for university instructors motivated in teaching satellite technology at university level. Through CLTPs, new tools and platforms were developed. The next step for CLTP would be localization so that more people will benefit from effective engineering education with hands-on training.
Acknowledgement
CanSat activity has been supported by many generous individuals and organizations. In terms of CLTP, it was supported by a grant from “Funding Program for World-Leading Innovative R&D on Science and Technology” (FIRST Program) where the principal investigator was Prof. Shinichi Nakasuka from the University of Tokyo in 2011-2014.
It is currently supported by the Coordination Funds for Promoting Aerospace Utilizarion, MEXT Japan, which is allocated to the UNISEC research team where the principal investigator is Prof. Yasuyuki Miyazaki from Nihon University.
CLTP 5-7 have been supported by Mr. Tetsuya Iwasaki of Sakura Rubber Co., Ltd.
With lots of generous supports and priceless contributions, CanSat activities have been sustainable.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201682
REFERENCES ARLISS. (2016). Consultado el 5 de agosto de 2016. http://www.arliss.org/CLTP7. (2015). The 7th Cansat Leader Training Program. Consultado el
7 de agosto de 2016. http://cltp.info/Kawashima, R., et al. (2004). Space Education in the 21st Century-»Real»
Education Pursued by UNISEC. ISTS 2004-u-04, 24th Interna-tional Symposium on Space Techonology and Science, Mizaki, Japan, June.
Kawashima, R.; Cho, M., and Ibrahim M. (2014). Challenges and Opor-tunities of UNISEC-Global. IAC-14-E1.5.10, Toronto, October.
Nakasuka, S. (2010). Evolution from education practical use in Uni-versity of Tokio’s nano-satellite activities. Acta Astranáutica. 66(7), pp 1099-1105, April.
UNISEC. (2014). Cansat-Model nano-satellite. Japón: Ohmsha.UNISEC. (2015). Cansat Mapping. Consultado el 8 de agosto de 2016.
http://unisec-global.org/UNISEC. (2016). Consultado el 4 de agosto de 2016. www.unisec.jpUNISEC. (2016). The Fourth UNISEC-Global Meeting. Consultado el
5 de agosto de 2016. http://www.unisec-global.org/
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 83
Monitoreo de la humedad de suelo superficial a partir de observaciones satelitales de Microondas
activas y pasivas
Juan carlos HernÁndeZ sÁncHeZ*, enrique ZemPoaltecatl ramíreZ*, José carlos JiméneZ escalona*, aleJandro monsivÁis Huertero* y antonio mosqueda sÁncHeZ*
* Instituto Politécnico Nacional.Contacto: [email protected]
TÓPICOS
Las estimaciones precisas de humedad de suelo superfi-cial son cruciales en hidrología, micrometeorología y en la agricultura para la interpretación de los ciclos del agua y el carbono. Las comunidades científicas relacionadas con estas temáticas han mostrado la necesidad de una mejor comprensión de las diferentes fuentes naturales de agua, ya que este recurso tiene un impacto social crítico en la producción alimenticia. Es por ello que los científicos buscan el monitoreo de la humedad de suelo y contenido de agua en la vegetación a gran escala espacial y temporal (Monsiváis, et al., 2008). Debido a la extensa área de monitoreo, los sensores a bordo de saté-lites representan una herramienta muy útil. Los estudios recientes han demostrado que es posible obtener estima-ciones de suelo, independientemente de las condiciones meteorológicas, mediante observaciones satelitales con sensores que operan en el rango de frecuencias de las mi-croondas (longitudes de onda mayores a 1 mm) (Kustas, Zhan y Schmugge, 1998). En los estudios también se ha encontrado que los sensores, que operan dentro de la banda L (1.2-1.4 GHz), son los más adaptados para monitorear la humedad de suelo superficial debido a su alta sensibilidad, profundidad de penetración y sus características de construcción (Dobson, et al., 1985). Dentro de las misiones satelitales dedicadas al monitoreo de la humedad de suelo, actualmente, se encuentran la Soil Moisture and Ocean Salinity (SMOS) de la Agencia Espacial Europea, lanzada en noviembre de 2009, y la Soil Moisture Active/Passive (SMAP) de la NASA (Na-
tional Aeronautics and Space Administration), lanzada en enero de 2015 (NASA, 2016).
La misión SMOS tiene a bordo un sensor pasivo de microondas (radiómetro) que captura imágenes con una resolución espacial de 35 km y un tiempo mínimo de revisita de tres días. Por otro lado, la misión SMAP tiene un tiempo mínimo de revisita de tres días y tiene un sensor pasivo de microondas (radiómetro) con una resolución espacial de 36 km y un sensor activo de mi-croondas (radar) con una resolución espacial de 3 km.
Este artículo presenta de forma breve las principales características de la misión SMAP, así como las activida-des que se han realizado para su validación y calibración.
IMPORTANCIA DEL MONITOREO DE LA HUMEDAD DE SUELO SUPERFICIAL A ESCALA GLOBAL
Las áreas de aplicación que requieren mediciones de humedad de suelo superficial a escala global pueden resumirse a continuación (Entekhabi et al., 2010).
• Pronóstico del clima y el tiempo: debido a que afecta la evolución del clima y el tiempo, tener información de este recurso natural hace posible mejorar los modelos y predicciones para el bene-ficio de la humanidad.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201684
• Sequías: este factor es esencial en el crecimiento de las plantas, especialmente en tiempos de sequías y de bajo riego. Gracias a las predicciones con los modelos que se basan en los datos espaciales, se puede mejorar la producción de cultivos.
• Inundaciones: la humedad de suelo está relacio-nada con los desastres naturales como las inunda-ciones o deslaves. Esto puede ser mitigado debido al modelado oportuno de filtrado y flujo del agua por debajo de la superficie.
• Productividad agrícola: las mediciones del terreno producidas por los satélites, como el SMAP, pro-veen información oportuna de la disponibilidad de agua y el comportamiento medioambiental en la producción de cultivos.
• Salud: al tener un control en la productividad agrí-cola e inundaciones, se puede atacar la hambruna que se tiene en diferentes zonas y crear programas oportunos de control de enfermedades.
• Seguridad nacional: la información de la humedad de suelo en la superficie es de gran importancia en el transporte debido a que se pueden conocer zonas con niebla y neblina.
PRINCIPIOS BÁSICOS PARA EL MONITOREO DE LA HUMEDAD DE SUELO MEDIANTE SENSORES SATELITALES
Es necesario monitorear la humedad de manera pe-riódica, por ello existen herramientas directas en las cuales encontramos las mediciones en campo (in situ) y las herramientas indirectas, entre éstas la percepción remota satelital.
Debido al amplio espectro electromagnético, los sensores ocupados en la percepción remota satelital pueden ser ópticos o de microondas, los primeros presentan una limitante al momento de monitorear zonas bajo climatología adversa, y no tienen una buena penetración hasta el nivel del suelo; no obstante, los sensores de microondas son capaces de penetrar hasta 5 cm por debajo del suelo y permiten un monitoreo continuo sin importar las condiciones climatológicas.
Otra clasificación dentro de la percepción remota satelital es la basada en la fuente de energía utilizada; los sistemas que emiten su propia energía se denominan activos y los que captan la energía proveniente de otra fuente como la solar o de emisión se llaman pasivos.
Las imágenes satelitales se forman a partir de las ondas electromagnéticas captadas y ordenadas en forma de matrices, luego se asocia un valor a cada pixel de la imagen correspondiente al área (resolución espacial) y al periodo de revisita (resolución temporal). Los productos generados por los sistemas de radar (senso-res activos) son imágenes que contienen la razón del campo eléctrico disperso por la escena en estudio y el campo eléctrico incidente, en cada pixel y por cada polarización de la onda. En aplicaciones de percepción remota satelital, el campo eléctrico está linealmente polarizado; es decir, polarización vertical o polarización horizontal. Es por ello que se pueden tener cuatro posi-bles combinaciones entre el campo eléctrico incidente y el disperso. Las combinaciones son campo incidente vertical–campo disperso vertical (VV); campo inciden-te vertical–campo disperso horizontal (VH); campo incidente horizontal–campo disperso vertical (HV); y campo incidente horizontal–campo disperso horizontal (HH). A la razón del campo eléctrico disperso por la escena en estudio y el campo eléctrico incidente se le
conoce como coeficiente de retrodispersión .Un radar mide los ecos de los pulsos de campo
eléctrico emitidos en el rango de las microondas que rebotan en la superficie terrestre. El campo eléctrico disperso (ecos) que regresa al radar cambia su amplitud y fase en función de la cantidad de humedad en el suelo; entre mayor sea el contenido de agua en el suelo, mayor será la amplitud del campo disperso. Particularmente, los sistemas de radar que operan en banda L no son afectados por las condiciones meteorológicas o por una cierta capa de vegetación en la superficie que cubre el suelo. Actualmente, los sistemas de radar usan una técnica conocida como apertura sintética (Maître, 2008) para medir el coeficiente de retrodispersión en áreas mucho más pequeñas que un radar convencional.
Por otro lado, los sistemas radiómetro (sensor pa-sivo) generan imágenes que contienen temperatura de brillo TBP. La TBP relaciona la emisividad del objetivo en estudio y su temperatura efectiva. En el monitoreo de ecosistemas terrestres, la TBP emitida desde la super-ficie terrestre, se recibe en dos polarizaciones (vertical u horizontal). Al ser un sensor pasivo, únicamente se recibe una sola polarización.
El radiómetro es un receptor muy sensible que mide de forma muy precisa la energía emitida por la superficie terrestre en el rango de las microondas. Este sensor opera
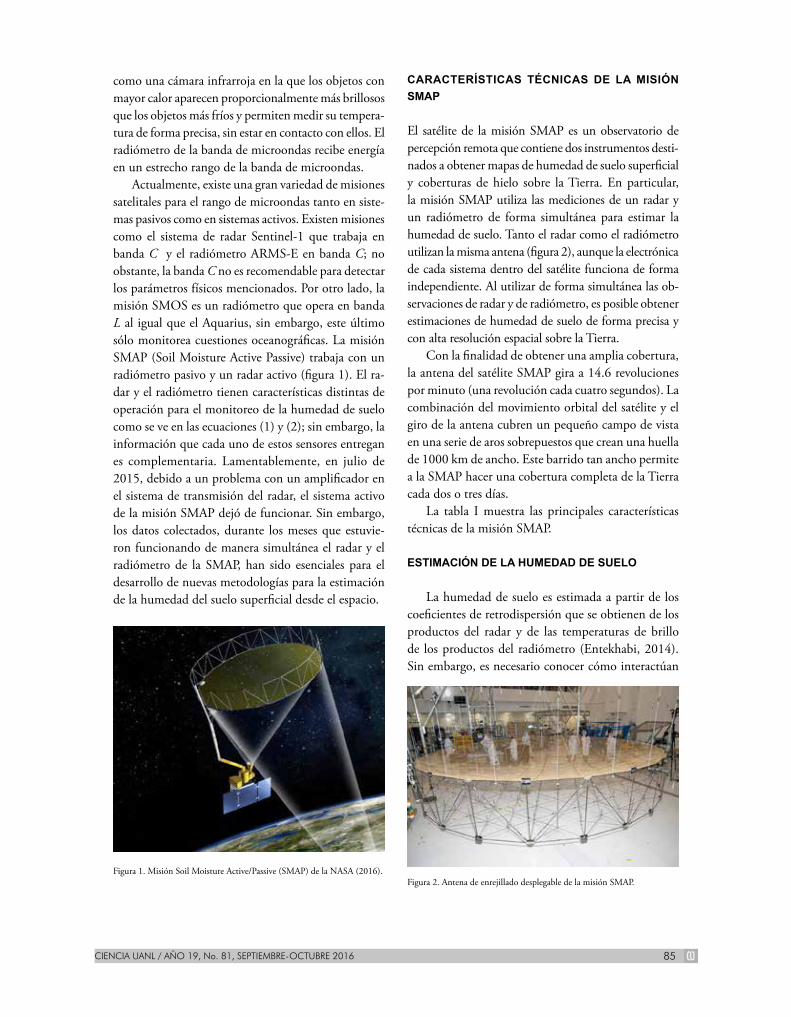
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 85
como una cámara infrarroja en la que los objetos con mayor calor aparecen proporcionalmente más brillosos que los objetos más fríos y permiten medir su tempera-tura de forma precisa, sin estar en contacto con ellos. El radiómetro de la banda de microondas recibe energía en un estrecho rango de la banda de microondas.
Actualmente, existe una gran variedad de misiones satelitales para el rango de microondas tanto en siste-mas pasivos como en sistemas activos. Existen misiones como el sistema de radar Sentinel-1 que trabaja en banda C y el radiómetro ARMS-E en banda C; no obstante, la banda C no es recomendable para detectar los parámetros físicos mencionados. Por otro lado, la misión SMOS es un radiómetro que opera en banda L al igual que el Aquarius, sin embargo, este último sólo monitorea cuestiones oceanográficas. La misión SMAP (Soil Moisture Active Passive) trabaja con un radiómetro pasivo y un radar activo (figura 1). El ra-dar y el radiómetro tienen características distintas de operación para el monitoreo de la humedad de suelo como se ve en las ecuaciones (1) y (2); sin embargo, la información que cada uno de estos sensores entregan es complementaria. Lamentablemente, en julio de 2015, debido a un problema con un amplificador en el sistema de transmisión del radar, el sistema activo de la misión SMAP dejó de funcionar. Sin embargo, los datos colectados, durante los meses que estuvie-ron funcionando de manera simultánea el radar y el radiómetro de la SMAP, han sido esenciales para el desarrollo de nuevas metodologías para la estimación de la humedad del suelo superficial desde el espacio.
Figura 1. Misión Soil Moisture Active/Passive (SMAP) de la NASA (2016).
CARACTERÍSTICAS TÉCNICAS DE LA MISIÓN SMAP
El satélite de la misión SMAP es un observatorio de percepción remota que contiene dos instrumentos desti-nados a obtener mapas de humedad de suelo superficial y coberturas de hielo sobre la Tierra. En particular, la misión SMAP utiliza las mediciones de un radar y un radiómetro de forma simultánea para estimar la humedad de suelo. Tanto el radar como el radiómetro utilizan la misma antena (figura 2), aunque la electrónica de cada sistema dentro del satélite funciona de forma independiente. Al utilizar de forma simultánea las ob-servaciones de radar y de radiómetro, es posible obtener estimaciones de humedad de suelo de forma precisa y con alta resolución espacial sobre la Tierra.
Con la finalidad de obtener una amplia cobertura, la antena del satélite SMAP gira a 14.6 revoluciones por minuto (una revolución cada cuatro segundos). La combinación del movimiento orbital del satélite y el giro de la antena cubren un pequeño campo de vista en una serie de aros sobrepuestos que crean una huella de 1000 km de ancho. Este barrido tan ancho permite a la SMAP hacer una cobertura completa de la Tierra cada dos o tres días.
La tabla I muestra las principales características técnicas de la misión SMAP.
ESTIMACIÓN DE LA HUMEDAD DE SUELO
La humedad de suelo es estimada a partir de los coeficientes de retrodispersión que se obtienen de los productos del radar y de las temperaturas de brillo de los productos del radiómetro (Entekhabi, 2014). Sin embargo, es necesario conocer cómo interactúan
Figura 2. Antena de enrejillado desplegable de la misión SMAP.
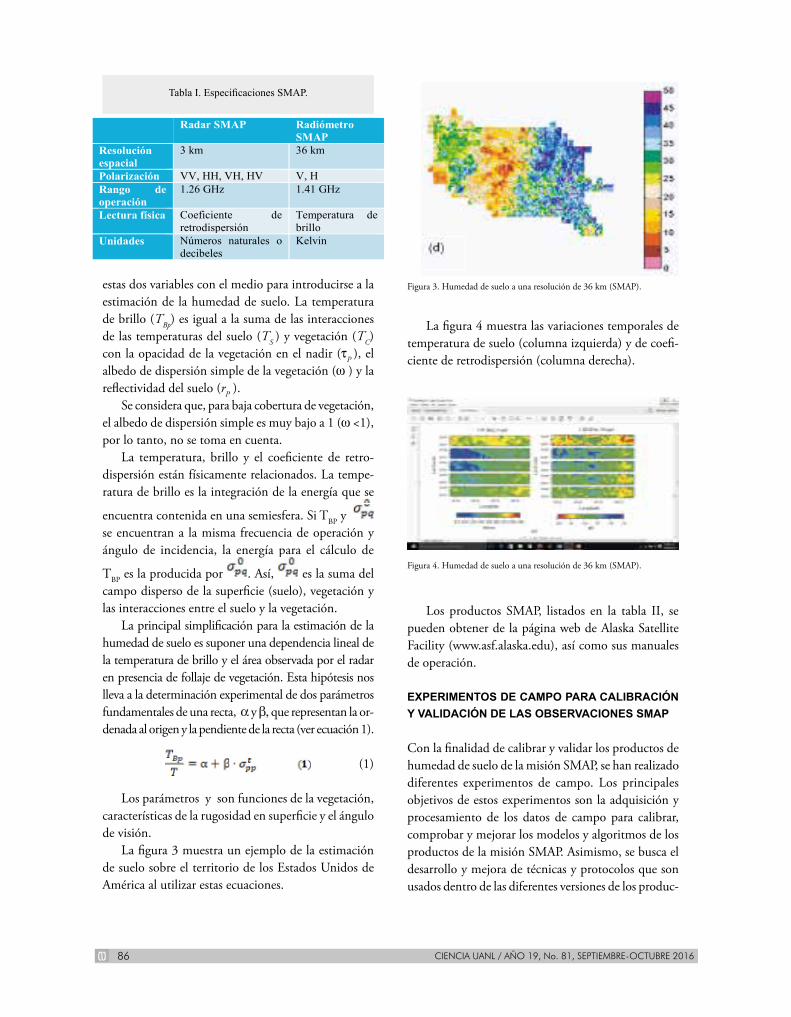
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201686
Tabla I. Especificaciones SMAP.
Radar SMAP Radiómetro SMAP
Resolución espacial
3 km 36 km
Polarización VV, HH, VH, HV V, H Rango de operación
1.26 GHz 1.41 GHz
Lectura física Coeficiente de retrodispersión
Temperatura de brillo
Unidades Números naturales o decibeles
Kelvin
estas dos variables con el medio para introducirse a la estimación de la humedad de suelo. La temperatura de brillo (TBp) es igual a la suma de las interacciones de las temperaturas del suelo (TS ) y vegetación (TC) con la opacidad de la vegetación en el nadir (τP ), el albedo de dispersión simple de la vegetación (ω ) y la reflectividad del suelo (rP ).
Se considera que, para baja cobertura de vegetación, el albedo de dispersión simple es muy bajo a 1 (ω <1), por lo tanto, no se toma en cuenta.
La temperatura, brillo y el coeficiente de retro-dispersión están físicamente relacionados. La tempe-ratura de brillo es la integración de la energía que se
encuentra contenida en una semiesfera. Si TBP y se encuentran a la misma frecuencia de operación y ángulo de incidencia, la energía para el cálculo de
TBP es la producida por . Así, es la suma del campo disperso de la superficie (suelo), vegetación y las interacciones entre el suelo y la vegetación.
La principal simplificación para la estimación de la humedad de suelo es suponer una dependencia lineal de la temperatura de brillo y el área observada por el radar en presencia de follaje de vegetación. Esta hipótesis nos lleva a la determinación experimental de dos parámetros fundamentales de una recta, α y β, que representan la or-denada al origen y la pendiente de la recta (ver ecuación 1).
(1)
Los parámetros y son funciones de la vegetación, características de la rugosidad en superficie y el ángulo de visión.
La figura 3 muestra un ejemplo de la estimación de suelo sobre el territorio de los Estados Unidos de América al utilizar estas ecuaciones.
Figura 3. Humedad de suelo a una resolución de 36 km (SMAP).
La figura 4 muestra las variaciones temporales de temperatura de suelo (columna izquierda) y de coefi-ciente de retrodispersión (columna derecha).
Figura 4. Humedad de suelo a una resolución de 36 km (SMAP).
Los productos SMAP, listados en la tabla II, se pueden obtener de la página web de Alaska Satellite Facility (www.asf.alaska.edu), así como sus manuales de operación.
EXPERIMENTOS DE CAMPO PARA CALIBRACIÓN Y VALIDACIÓN DE LAS OBSERVACIONES SMAP
Con la finalidad de calibrar y validar los productos de humedad de suelo de la misión SMAP, se han realizado diferentes experimentos de campo. Los principales objetivos de estos experimentos son la adquisición y procesamiento de los datos de campo para calibrar, comprobar y mejorar los modelos y algoritmos de los productos de la misión SMAP. Asimismo, se busca el desarrollo y mejora de técnicas y protocolos que son usados dentro de las diferentes versiones de los produc-
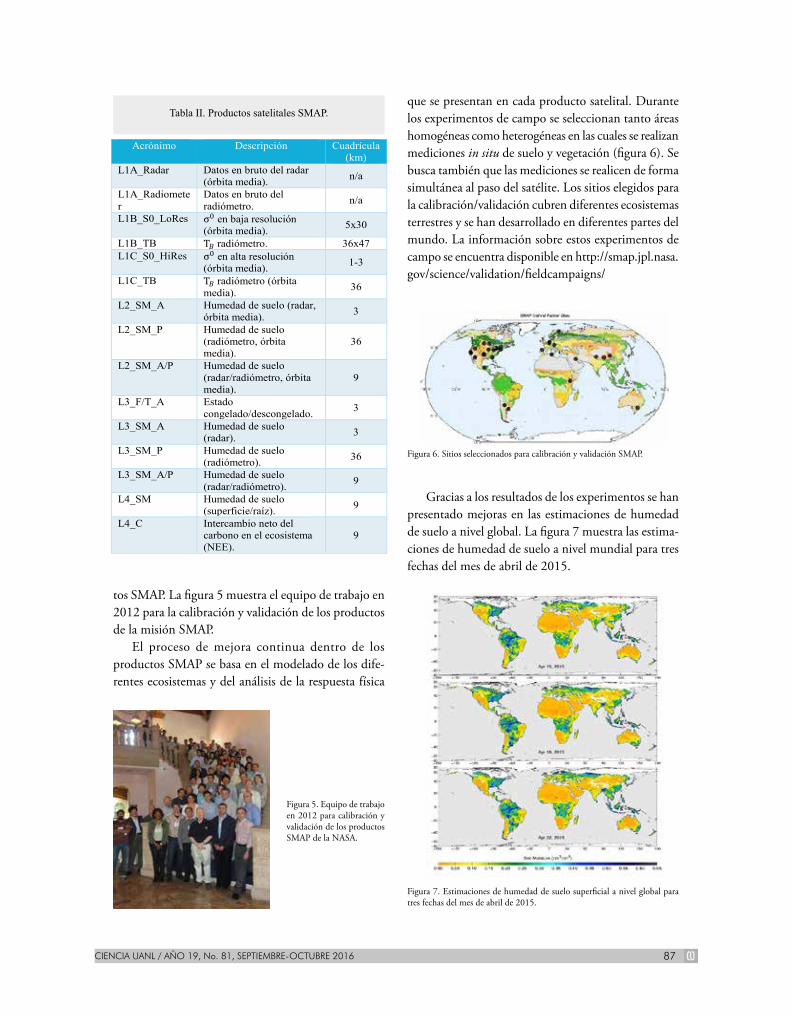
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 87
Tabla II. Productos satelitales SMAP.
Acrónimo Descripción Cuadrícula (km)
L1A_Radar Datos en bruto del radar (órbita media). n/a
L1A_Radiometer
Datos en bruto del radiómetro. n/a
L1B_S0_LoRes σ0 en baja resolución (órbita media). 5x30
L1B_TB T𝐵𝐵 radiómetro. 36x47 L1C_S0_HiRes σ0 en alta resolución
(órbita media). 1-3
L1C_TB T𝐵𝐵 radiómetro (órbita media). 36
L2_SM_A Humedad de suelo (radar, órbita media). 3
L2_SM_P Humedad de suelo (radiómetro, órbita media).
36
L2_SM_A/P Humedad de suelo (radar/radiómetro, órbita media).
9
L3_F/T_A Estado congelado/descongelado. 3
L3_SM_A Humedad de suelo (radar). 3
L3_SM_P Humedad de suelo (radiómetro). 36
L3_SM_A/P Humedad de suelo (radar/radiómetro). 9
L4_SM Humedad de suelo (superficie/raíz). 9
L4_C Intercambio neto del carbono en el ecosistema (NEE).
9
tos SMAP. La figura 5 muestra el equipo de trabajo en 2012 para la calibración y validación de los productos de la misión SMAP.
El proceso de mejora continua dentro de los productos SMAP se basa en el modelado de los dife-rentes ecosistemas y del análisis de la respuesta física
Figura 5. Equipo de trabajo en 2012 para calibración y validación de los productos SMAP de la NASA.
que se presentan en cada producto satelital. Durante los experimentos de campo se seleccionan tanto áreas homogéneas como heterogéneas en las cuales se realizan mediciones in situ de suelo y vegetación (figura 6). Se busca también que las mediciones se realicen de forma simultánea al paso del satélite. Los sitios elegidos para la calibración/validación cubren diferentes ecosistemas terrestres y se han desarrollado en diferentes partes del mundo. La información sobre estos experimentos de campo se encuentra disponible en http://smap.jpl.nasa.gov/science/validation/fieldcampaigns/
Figura 6. Sitios seleccionados para calibración y validación SMAP.
Gracias a los resultados de los experimentos se han presentado mejoras en las estimaciones de humedad de suelo a nivel global. La figura 7 muestra las estima-ciones de humedad de suelo a nivel mundial para tres fechas del mes de abril de 2015.
Figura 7. Estimaciones de humedad de suelo superficial a nivel global para tres fechas del mes de abril de 2015.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201688
La figura 8 muestra las estimaciones de humedad de suelo cuando se tienen observaciones de radióme-tro (TB) y de radar (s0) (Monsiváis et al., 2016). Este estudio concluyó que al combinar las observaciones de radar y de radiómetro dentro de dos algoritmos de asimilación de datos, uno basado en la estimación de los parámetros (SSP) y otro mediante la corrección de sesgo con retroalimentación (BCWF), los errores en la estimación de humedad de suelo se ubican por debajo de 5% cuando se tienen condiciones de suelo desnudo o una cobertura vegetal muy delgada.
Figura 8. Errores en las estimaciones de humedad de suelo superficial al utilizar observaciones de radiómetro y de radar.
Figura 9. Campaña de medición en Calakmul, Campeche, 2014.
En México se han realizado campañas en los estados de Sonora, Tabasco y Campeche para la explotación de datos de radar y de radiómetro. El Instituto Politécnico Nacional ha participado en la instrumentación de algunos de estos sitios (figura 9).
REFERENCIAS
Dobson, M.C., et al. (1985). Microwave dielectric behavior of wet soil, II, Dielectric mixing models. IEEE Trans. Geoscience and Remote Sensing, GE-23, 35-46.
Entekhabi, D., et al. (2010). The soil moisture active passive (SMAP) mision, Proceedings of the IEEE, vol. 98, no. 5. Entekhabi, D. (2014). Algorithm Theoretical Basis Document L2 & L3 Radar/Radiometer Soil Moisture (Active/Passive) Data Products, Jet Propulsion Laboratory, California Insti-tute of Technology, Revision A. Kustas, W.P., Zhan, X., y Schmugge T.J. (1998). Combining optical and microwave remote sensing for mapping energy fluxes in a semiarid watershed. Remote Sensing Environment, 64:116–31. Maître, H. (2008). Processing of synthetic apertura radar images. Great Britain: Wiley.Monsiváis H., A., et al. (2016). Impact of Bias Correction Methods on Estimation of Soil Moisture When Assimilating Active and Passive Microwave Observations. IEEE Trans. Geoscience and Remote Sensing, GE-23, Issue: 1, 262-278. Monsiváis H., et al. (2008). Parameter
Estimation from Backscattered Radar Response. IGARSS 2008-2008 IEEE International Geoscience and Remote Sensing Symposium, Vol. 3, 1119-1122.
NASA. (2016). Jet Propulsion Laboratory, California Institute of Technology, consultado el 29 de septiembre de 2016. http://www.jpl.nasa.gov/news

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 89
Marte a la vista “¡Marte!”, exclamó el navegante Lusting lue-go de que su nave, el cohete de “La tercera expedición”, surcara las oscuras soledades del espacio desde aquella tarde en que despegó del hermoso Ohio. La nada siguiendo a la nada, la oscuridad y el tiempo que parecía detenerse. “Era una nave nueva, con fuego en las entrañas y hom-bres en las celdas de metal, y se movía en un silencio limpio, vehemente y cálido” (Crónicas marcianas, de R. Bradbury).
El gran planeta rojo, “el viejo y simpático Marte”, que sigue maravillándonos y sirviendo de inspiración tanto para la especulación científica como para la imaginación literaria.
Aunque Bradbury narra en dos o tres frases cómo el cohete desacelera “con una eficiencia metálica en las atmósferas superiores de Marte” para después posarse en un prado verde, la realidad es que estos procesos encierran una gran complejidad, pues no es nada fácil hacer que un objeto descienda en aquel planeta.
Hasta ahora, más de 40 misiones se han enviado y son relativamente pocas las que han tenido éxito, por mínimo que éste sea. Apenas en 1976 se logró aterrizar en la superficie marciana; desde entonces, sólo otras cinco ocasiones se ha logrado con naves estadouniden-ses. Con el lanzamiento de ExoMars 2016, la Agencia Espacial Europea (ESA, pos sus siglas en inglés) ahora quiere sumarse a la NASA y convertirse la segunda potencia espacial en enviar un módulo de aterrizaje y completar con éxito una misión sobre la superficie del planeta rojo. El programa ExoMars consta de dos misiones y un total de cuatro aparatos. En la misión de este año, han viajado a Marte la sonda Schiaparelli, que aterrizará en la superficie, y el satélite TGO, que se situará en órbita alrededor del planeta para analizar
CiENCiA EN BREVE
el metano y otros gases minoritarios de su atmósfera. Para minimizar las probabilidades de fallo catastrófico, los ingenieros espaciales invierten mucho tiempo en garantizar que su vehículo de alta tecnología complete el proceso de entrada en la atmósfera y descenso de forma segura, culminando con el correcto aterrizaje.
Son muchos factores que se deben tomar en cuenta, entre otros se consideran cómo lograr una navegación precisa. Las ventanas de lanzamiento se producen cada 26 meses aproximadamente, cuando las órbitas de la Tierra y Marte se encuentran relativamente cerca. Una vez que la nave está en camino hacia Marte, el trayecto suele durar unos seis meses.
Asumiendo que su trayectoria se cruce con la órbita del planeta en el momento apropiado, la nave podrá iniciar la fase de entrada atmosférica y descenso, pero hablamos de una entrada balística a gran velocidad en la atmósfera. Aunado a esto, el ángulo de entrada es funda-mental: si es demasiado inclinado, la nave podría sobre-calentarse y desintegrarse; si su inclinación es insuficiente, podría rebotar en la atmósfera y perderse en el espacio.
La trayectoria de descenso, además, se ve modi-ficada por variaciones en la densidad atmosférica, turbulencias y por la velocidad del viento, así como por pequeñas incertidumbres en la trayectoria, por lo que la ubicación del punto de aterrizaje es bastante imprecisa y suele definirse mediante una elipse de tamaño considerable.
Otro factor es la energía, pues se debe decidir cómo alimentar las sondas o robots que son enviados, la mayoría ha sido con paneles solares, pero ahora las misiones de la ExoMars llevarán baterías no recargables, por lo que su actividad se verá limitada a unos pocos días marcianos.
En fin, son muchas las cuestiones que encierra un viaje y su respectivo aterrizaje en la superficie del gran coloso rojo, pero si quieres saber más, visita http://noticiasdelaciencia.com/not/21387/los-riesgos-de-aterrizar-en-marte/

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201690
Secuencian genoma del Zika a partir de semen humano Investigadores del Public Health England (PHE), dependiente del gobierno británico, han solicita-do diversas muestras de semen de pacientes infectados con el virus del Zika. La solicitud fue hecha a raíz de que científicos estadounidenses, en 2011, sugirieran que dicho virus se podía transmitir por vía sexual. Con las muestras de semen, el equipo de Barry Atkinson, del PHE, pretende obtener pruebas adicionales sobre esta posibilidad. No obstante que son muchos los estudios que hablan del riesgo de transmisión sexual, pocos laboratorios han tenido éxito al tratar de aislar el virus del Zika a partir de semen de hombres infectados.
El virus del Zika, transmitido por los mosquitos, por lo general provoca una enfermedad leve y transito-ria, pero puede ser particularmente dañino si se contrae durante el embarazo. Esto se debe a que la infección materna se ha vinculado con un defecto congénito grave llamado microcefalia, en que los bebés nacen con la cabeza y el cerebro demasiado pequeños.
Atkinson y sus colaboradores pudieron aislar y secuen-ciar de manera exitosa este virus a partir de una muestra de semen infectado de un residente convaleciente en el Reino Unido, quien acababa de regresar del archipiélago francés de Guadalupe, en el Caribe; esto representa el primer genoma del virus aislado a partir de semen.
Aunque éste es un logro importante, aún quedan muchas preguntas por responder, entre otras cómo el Zika es capaz de transmitirse sexualmente, mientras que virus similares no pueden. La respuesta a ésta y otras preguntas quizá resida en el genoma vírico, pero se necesitarán muchas más secuencias procedentes de semen para verificar si hay cambios que aporten pistas sólidas sobre este tema (fuente: Amazing/DYCIT).
Crean globo a escala manométrica
Se ha preguntado, ¿cómo sería utilizar máquinas de tamaño atómico para interactuar con algunos mecanismos de nuestro cuerpo? Se podrían resolver muchos problemas y enfermedades que hoy día presentan verdaderas complicaciones. En un
estudio llevado a cabo en las universidades de Berkeley, EUA, y de Umeå, en Suecia, un grupo de científicos ha demostrado cómo un nanoglobo (con una molécula de carbono, diez mil veces más delgado que el grosor de un cabello humano) puede ser controlado electros-táticamente para conmutar entre un estado inflado y otro desinflado.
Los dispositivos tipo globo inflable existen en la na-turaleza, como muestra tenemos a las arañas saltarinas, que crean microcojines llenos de fluido para impulsar sus patas en saltos “explosivos”; basados en estos me-canismos, se han creado aparatos con este principio a nivel macro, para levantar y proteger edificios, por ejemplo; incluso se han creado modelos atómicos para ser utilizados como microbombas.
Sin embargo, en la escala nanométrica, estos ac-tuadores, es decir, dispositivos mecánicos cuya función es proporcionar fuerza para mover o hacer “actuar” otro aparato, son prácticamente desconocidos. Hace varios años, investigadores de la Universidad Estatal de Pensilvania, idearon un actuador en forma de nano-globo, controlado por carga electroestática, basado en el inflado y el desinflado de un nanotubo de carbono.
Este diseño teórico ha sido llevado a la práctica en un trabajo de investigación y fabricación experimental realizado por Hamid Reza Barzegar, de la Universidad de Berkeley, y sus colegas. Este equipo ha demostrado cómo un nanotubo de carbono puede ser controlado para transformarse desde un estado colapsado o desinflado a otro inflado y viceversa, aplicando un pequeño voltaje. Este actuador sería capaz de funcionar sin desgaste ni fatiga estructural, con esto se lograría echar andar dis-positivos minúsculos en el tratamiento de diversas afec-ciones, como en el ensanchamiento de arterias o venas que se han estrechado u obstruido (Amazing/DYCIT).
Levaduras “come gasolina”, una alternativa para descontaminar ecosistemas
Sin duda alguna, todos hemos escuchado de barcos petroleros que por accidente derraman su contenido en las aguas del mar; o pipas de gasolina y diésel que vuelcan y contaminan ríos, arroyos o lagunas, pero poco hemos escuchado sobre la descontaminación de estos lu-gares. Al respecto, Nathalia Catalina Delgadillo, bióloga

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 91
de la Universidad Nacional de Colombia (UN), constató la presencia de dos levaduras del género Rhodotorula (R. calyptogenae y R. dairenensis) en ambientes contamina-dos, particularmente en ductos y tanques de gasolina de automóviles. Este hallazgo es muy importante pues en la actualidad hay estudios sobre 150 géneros de bacterias que contienen especies capaces de crecer con hidrocarbu-ros como único proveedor de carbono, elemento funda-mental para la vida y energía, pero sólo unos pocos hon-gos (del género Penicilium) y levaduras (de los géneros Candida y Pichia) han sido estudiados en este sentido.
Para la obtención de la muestra, la bióloga frotó con copos de algodón estéril las paredes y los tubos del tanque de gasolina de tres automóviles. Una vez aislada en tubos de ensayo y conservada a 4°C, inició el proceso de comprobación, el cual constató que las levaduras encontradas, 17 en total, podían crecer en hidrocarburos aromáticos, reconocidos por sus olores intensos, normalmente agradables, y por su alta com-plejidad de degradación.
Los compuestos escogidos para probar estas levaduras fueron naftaleno, un sólido blanco producido natural-mente al quemar combustibles; fenantreno, presente en el humo del cigarrillo, y pireno, sustancia potencialmente carcinógena que contienen algunos alimentos.
Según la investigadora, aunque las levaduras no registraron un crecimiento similar a las utilizadas como controles, éste fue relevante, pues utilizan los hidro-carburos como nutrientes y fuentes de energía para su desarrollo, además generan enzimas útiles para que los hidrocarburos se fragmenten, es decir, transformen su estructura química, sean sustancias menos nocivas y permitan que otros microorganismos del medioam-biente puedan degradarlas con facilidad.
Estrategias como esa serán de gran ayuda para la sostenibilidad ambiental, pues a diario escuchamos noticias de grandes desastres que poco a poco acaban con nuestras reservas naturales (fuente: UN/DICYT).
“Anteojos” para tratar las cataratas Mi abuela y mi bisabuela sufrie-ron de cataratas. Como ellas, cientos de personas alrededor del mundo sufren esta terrible enfermedad que en su estado más avanzado ocasiona ceguera. Pero qué es lo que causa esta
condición, según Pablo Artal, catedrático de Óptica de la Universidad de Murcia, la pérdida de visión que producen las cataratas se origina porque los rayos de luz se dispersan al volverse lechoso el cristalino y la luz no llega correctamente a la retina.
Se sabe que esta enfermedad puede ser controlada con una operación, la cual, en muchos países puede ser muy costosa, por lo que el Laboratorio de Óptica de la Universidad de Murcia (LOUM), en España, ha logrado un avance tecnológico primordial para poder desarrollar unas lentes que permiten a las personas aquejadas de cataratas ver sin necesidad de someterse a una intervención quirúrgica, como si se tratara de unos anteojos para corregir la miopía o el astigmatismo.
El equipo del LOUM ha diseñado un oftalmos-copio capaz de obtener imágenes de la retina a través de la opacidad del cristalino del ojo humano, que es lo que origina esta patología causante de la mitad de los casos de ceguera que se diagnostican en el mundo.
La solución técnica que han ideado los investigado-res se fundamenta en el uso de una cámara de un único píxel. Benjamin Lochocki, el primer autor en el trabajo, publicado en la Revista Óptica, que edita la Sociedad Americana de Óptica (OSA), detalla que “las cámaras convencionales forman las imágenes del entorno sobre un sensor de dos dimensiones con millones de píxeles. En nuestro caso, hemos sustituido esto por un único píxel; y para obtener la información de la imagen recurrimos a un ‘truco’ que consiste en registrar muy rápidamente los valores de la intensidad de la luz que llega a este píxel cuando se proyectan sobre la imagen diferentes patrones que codifican la imagen” (Fuente: Universidad de Murcia).
El nacimiento de las estrellas
Cuando alzamos los ojos al cielo, en una noche estrellada, podemos contemplar el ejército celeste tintineando en el firmamento; llenando de pequeñas luces la gran bóveda oscura. Miles de pensamientos nos asaltan, pues el panorama es majestuoso, no en balde el género humano se ha preguntado su existencia, su futuro y muchas cosas más observando las estrellas. Éstas han sido guía en los largos caminos de los navegantes, o en las interminables jornadas de los viajeros nocturnos.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201692
Pero cómo es que se generan estos cuerpos. Sus lugares de nacimiento son enormes nubes frías formadas por gas y polvo, conocidas como ‘nebulosas’. Estas nubes comienzan a encogerse por obra de su propia gravedad.
A medida que una nube pierde tamaño, se fragmenta en grupos más pequeños. Cada fragmento puede final-mente volverse tan caliente y denso que se inicia una reacción nuclear. Cuando la temperatura alcanza los 10 millones de grados centígrados, el fragmento se convierte en una nueva estrella. Cabe resaltar que muy pocas veces se ha observado este fenómeno, debido a que sucede de forma relativamente rápida en términos astronómicos.
En este sentido, investigadores a bordo del Obser-vatorio Estratosférico para Astronomía Infrarroja –de la NASA y del Centro Aeroespacial Alemán– instalado en un avión Boeing 747SP, altamente modificado y que transporta como componente clave un telescopio con un diámetro efectivo de 2.54 m, observan y analizan el colapso de partes de seis nubes interestelares en su evolución hacia su transformación en nuevas estrellas que serán mucho más grandes que nuestro Sol.
El equipo de Friedrich Wyrowski, del Instituto Max Planck de Radioastronomía en Bonn, Alemania, rastreó esta etapa de desarrollo en nueve estrellas embrionarias (protoestrellas), mediante la medición de los movimien-tos del material dentro de ellas. El equipo encontró que seis de las nueve protoestrellas están activamente colap-sándose. La adición de estas seis protoestrellas en pleno colapso a la lista previa de menos de una docena en esta misma etapa de su desarrollo, constituye una importante ampliación del catálogo (fuente: Amazings/NCYT).
Matemáticas médicas
“¿Y yo para qué necesito saber matemáticas avanzadas, si voy a ser doctor?”. Aunque parece una pregunta de un estu-diante de secundaria al que no le gusta esa materia, en realidad es un cuestionamiento que se hace más de un estudiante de medicina. Lo cierto es que las matemáticas son parte fundamental del conocimiento humano, cualquiera que sea la rama que se estudie.
En el caso de la medicina, investigadores de la Univer-sidad Carlos III de Madrid (UC3M) han llevado a cabo un estudio que describe matemáticamente cómo crecen los tumores. El objetivo es conocer cómo se mueven los vasos
sanguíneos respecto al tumor, según los autores, se sabe que forman un solitón; es decir, una onda solitaria que se propaga sin deformarse en un medio no lineal, parecida a las ondas de un tsunami o como las que se forman en una acequia cuando se ha parado el agua con un ladrillo y éste se quita de repente. Al conocer este movimiento, se puede controlar la onda y de esta manera retardar su crecimiento, o bien hacer que los vasos sanguíneos no lleguen al tumor y no lo puedan alimentar.
En el estudio, publicado en la revista Scientific Reports, los científicos han realizado una descripción matemática mediante ecuaciones diferenciales de la densidad de vasos sanguíneos asociados al crecimiento de los tumores. Además, han confirmado este modelo mediante simulaciones numéricas.
Este modelo se ha aplicado en particular a la angio-génesis, es decir, el proceso de generación y crecimiento de los vasos sanguíneos, un mecanismo natural que se activa cuando a algunas células no les llega oxígeno y secretan factores de crecimiento. Estas sustancias alcanzan algún vaso sanguíneo y entonces sus paredes se abren y salen capilares que avanzan hacia la región que emite los factores de crecimiento, llevando allí oxígeno y nutrientes.
El entendimiento y control de esta enfermedad tiene una enorme importancia en la medicina actual y futura, dicen los autores, pues identificar el solitón como el mo-tor de la angiogénesis sugiere la posibilidad de controlar este proceso complejo a través del análisis de las coor-denadas colectivas del solitón, que son muchísimo más simples. Esto puede ser un primer paso importante para el entendimiento y control de la angiogénesis inducida por tumores a través de modelos teóricos.
Fuente: Bonilla, L.L., et al. (2016). Soliton driven angiogenesis. Scientific Reports. 6: 31296.
Octobot, el primer robot blando totalmente autónomo
¿A quién no le gustan las peleas de robots, en las que las piezas de estos mecanismos salen volando por todos lados?, ¿o quién no ha visto el baile de robot, o bien, ha imitado el movi-miento de éstos? Por lo general, al hablar de robots nos imaginamos máquinas rígidas, con movimientos muy mecanizados, pues presentan dificultad para doblar cada una de sus partes. La rigidez de estas máquinas se

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 93
debe primordialmente a sus componentes estructurales y de alimentación energética. Al respecto, un equipo de investigadores, liderado por la Universidad de Harvard (EUA), ha creado Octobot, un robot blando con forma de pulpo y totalmente autónomo. Ryan Truby, científico del Wyss Institute for Biologically Inspired Engineering de Harvard, explica que muchos grupos de investigación de todo el mundo están interesados en la creación de robots hechos de materiales blandos, pero estos sistemas requieren fuentes de energía y electrónica convencionales que dificultan su desarrollo y sus posibles aplicaciones.
El equipo de Truby resolvió el reto al combinar combustible peróxido de hidrógeno y un circuito lógico de microfluidos, con lo cual logró hacer un robot blando y autónomo sin necesidad de recurrir a las fuentes de energía ni a los sistemas electrónicos típi-cos. Así, para fabricar a Octobot utilizaron una mezcla de litografía blanda, piezas de fundición y una nueva técnica de impresión 3D embebida llamada EMB3D.
Aunque Octobot sólo tiene una autonomía de 10 minutos, se plantea que el diseño permitirá en el futuro, que estos robots funcionen con duraciones mucho más amplias. Respecto a las aplicaciones, Truby destaca que este tipo de robots blandos son más seguros y adecuados en aplicaciones que incluyan una interfaz entre máquinas y humanos. Podrán ser usados en bio-medicina y en tecnología wearable, es decir, aparatos y dispositivos electrónicos que se incorporan en alguna parte de nuestro cuerpo interactuando continuamente con el usuario y con otros dispositivos con la finalidad de realizar alguna función específica.
Fuente: Wehner, M., et al. (2016). An integrated design and fabrication strategy for entirely soft, auto-nomous robots. Nature, 24 agosto 2016.
Registran áreas desconocidas de la corteza cerebral
“Está vivo, vivo”, así traducen algunos países la frase que menciona el Dr. Frankenstein al dar vida a un hombre hecho a partir de diversas partes de otros cuerpos, entre éstas un cerebro. Al ver esta película o leer la novela de M. Shelley no podemos evitar preguntarnos ¿cómo es po-sible hacer esas conexiones?, es decir, ¿cómo conectar el cable rojo y el azul del cerebro con los correspondientes del cuerpo para que éste pueda funcionar?
Durante años se pretendió hacerlo mediante lobo-tomías o bien “robando” el cerebro de algunas personas fallecidas con el fin de diseccionarlos, estudiarlos y saber más acerca de este órgano indispensable para la vida humana. El desarrollo de un mapa preciso y de alta resolución de la arquitectura microestructural (o estructura local), la conectividad y la función del cerebro humano ha sido, durante mucho tiempo, un objetivo difícil de alcanzar de la neurociencia, debido a problemas técnicos. Aunque se pudo avanzar creando mapas de la corteza cerebral, muchas veces, hasta la fecha, eran incompletos e incompatibles.
Pero investigadores de la Universidad de Washin-gton (San Luis, EUA) y de otras instituciones inter-nacionales han realizado un mapa de 97 nuevas áreas de la corteza cerebral humana, además de confirmar otras 83 que ya se conocían previamente. Para ello, han desarrollado un software que detecta automáticamente la huella digital de cada una de estas áreas en los escá-neres cerebrales de un individuo.
Financiado por los Institutos Nacionales de Salud de EUA (NIH), a través de su Proyecto Human Con-nectome (HCP), este software ha mapeado las áreas mediante la incorporación de datos procedentes de múltiples medidas de imagen cerebral no invasiva que se corroboran entre sí. Los investigadores han creado este nuevo mapa perfeccionado del cerebro usando diversos tipos de imágenes por resonancia magnética para medir la arquitectura cortical, la actividad, la conectividad y la topografía del córtex de 210 adultos jóvenes sanos, participantes en el proyecto HCP.
Además de sus aplicaciones en neurocirugía, este mapa también podrá servir para indagar sobre la evo-lución cognitiva de los seres humanos en comparación con otros primates.
Fuente: Glasser, M.F., et al. (2016). A multi-mo-dal parcellation of human cerebral cortex. Nature. 20 julio 2016.
Sistema solar con dos estrellas y tres discos de forma-ción planetaria
En la escuela primaria, apren-dimos que nuestro planeta gira alrededor del Sol, y que, además de la Tierra, hay otros planetas que hacen lo mismo: es el sistema solar. Hay diversos

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201694
sistemas planetarios que siguen más o menos el mismo modelo: una estrella con un anillo de planetas orbitan-do a su alrededor.
Así lo sabíamos… hasta ahora, pero el equipo de Christian Brinch, del Instituto Niels Bohr, de la Universidad de Copenhague, en Dinamarca, ha des-cubierto un sistema solar que consiste en dos estrellas con tres discos de acreción (término que se utiliza para nombrar el crecimiento de un cuerpo por agregación de cuerpos menores) formadores de planetas, girando a su alrededor. Cada una de estas estrellas tiene su propio disco protoplanetario, pero, además, existe un tercer disco compartido. Los tres discos protoplanetarios están desalineados entre sí.
Cuando se crea una nueva estrella sigue girando –junto con el resto de gas y polvo de la nebulosa– hasta que forma un disco. Los materiales se acumulan
y forman grumos cada vez más grandes, los cuales, finalmente, se convierten en planetas, y… ¡zaz!, tene-mos entonces un sistema planetario o un sistema solar.
Muchas veces no es sólo una, sino dos estrellas las que se forman en el centro de la densa nube de gas y polvo. A estos sistemas se les llama estrella binaria, sus componentes se mantienen más o menos cerca por los efectos de la gravedad de ambas estrellas que orbitan una alrededor de la otra, con el centro desplazado hacia la de mayor masa, es decir, hacia la más grande.
Por todo lo anterior, lo descubierto por Brinch y su equipo es una rareza, pues se trata de una estrella binaria con no solo dos, sino con tres discos de gas giratorios. Estos cuerpos celestes se hallan a unos 400 años-luz de la Tierra, tienen entre 100 mil y 200 mil años y podría haber empezado ya la formación plane-taria en sus discos (fuente: Amazings/NCYT).
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 95
Alejandro Monsiváis HuerteroIngeniero en telecomunicaciones por la UNAM. Maestro en microondas y telecomunicaciones ópticas, y doctor en microondas, electromagnetismo y op-toelectrónica por la Universidad Paul Sabatier, Francia. Investigador del ESIME Ticomán, IPN.
Alfredo Chimely CastilloTécnico en electrónica por el CBTIS 103. Estudiante de Ingeniería Mecatrónica en la UTA.
Ángel Enrique Sánchez ColínLicenciado en física por la UABC. Maestro por la Universidad de Granada, España. Doctor por el Ins-tituto de Radio Astronomía Max Planck, Alemania. Profesor-investigador en la UANL. Miembro del SNI, nivel I.
Antonio Gómez RoaIngeniero electrónico y maestro en modelado de altas frecuencias para amplificadores PHEMT por la UABC. Tiene certificación en satélites por la UNISEC. Repre-sentante de la UNISEC México en Baja California y de la Red Temática Nacional Aeronáutica del Conacyt.
Antonio Mosqueda SánchezIngeniero metalúrgico, en el área de metalurgia física, con especialidad en materiales metálicos y materiales compuestos, y maestro en ciencias, con especialidad en ingeniería metalúrgica, por el IPN. Labora en la ESIME Ticomán, IPN.
Arturo Sánchez Mendoza Estudiante de la carrera de Ingeniería en Electrónica en el ITP.
Bárbara Bermúdez ReyesDoctora en metalurgia y ciencias de los materiales por la UMSNH. Profesora-investigadora del Centro de In-vestigación e Innovación en Ingeniería Aeronáutica de la UANL. Representante nacional de UNISEC México.
Pertenece a la Red de Ciencia Tecnología Espacial y a la AIAA. Certificada en satélites cansat por la Keio University-UNISEC y en pruebas térmicas, mecánicas y de vacío en satélites por el Instituto de Tecnología de Kyushu. Miembro del SNI, nivel I.
Carlos Romo FuentesIngeniero en telecomunicaciones por la UNAM. Maestro en sistemas de telemetría satelital y doctor en diseño de satélites bajo criterios de compatibilidad electromagnética, ambos por el Instituto de Aviación de Moscú. Profesor de tiempo completo en la UNAM. Responsable técnico del Laboratorio de Compatibili-dad Electromagnética de la UAT FI UNAM campus Juriquilla; de la Red Temática de Ciencia y Tecnolo-gía del Espacio del Conacyt, y del Proyecto Satelital Quetzal.
Christian Arturo Saavedra CeballosTécnico en comunicaciones y serie en físico matemático por el Colegio de Bachilleres del Estado de Sonora. Estudiante de Ingeniería Electrónica en el ITN.
Darío Manuel Zúñiga RosalesEstudiante de la Licenciatura en Física en la FC-FM-UANL.
David Emmanuel Coca GuevaraEstudiante de Electrónica en el ITP.
Diego Mckinnon GovelaEstudiante de Ingeniería Mecatrónica en la UTA.
Eliu Jair Benítez HernándezTécnico en electrónica por el CBTIS 103. Estudiante de Ingeniería Mecatrónica en el IEST.
Enrique Zempoaltecatl RamírezIngeniero electricista y maestro en ingeniería aeronáu-tica por el IPN. Profesor del posgrado de la ESIME Ticomán, IPN.
COLABORADORES
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201696
Erick Alberto Méndez MendozaTécnico en electrónica por el CETIS 128. Estudiante de Ingeniería Mecatrónica en el ITN.
Erik Alberto Paulín RodríguezTécnico en electrónica por el CETIS 109. Estudiante Ingeniería en Mecatrónica en el IEST.
Gerardo Antonio Lira Ibarra Técnico en mecatrónica industrial por la EIAO. Estu-diante de Ingeniería Mecatrónica en la FIME-UANL.
Gerardo Vera CastelánEstudiante de Ingeniería en Electrónica en el ITP.
German Garzón ManjarrezTécnico en electrónica por el CETIS 128. Estudiante de Ingeniería Mecatrónica en el ITN.
Gustavo Adolfo Castillón RamírezTécnico en electrónica por el CETIS 128. Estudiante de Ingeniería Mecatrónica en el ITN.
Hermes Moreno ÁlvarezProfesor-investigador de la UACH. Miembro activo de la UNISEC México.
Homero Domínguez BarrancoEgresado del Telebachillerato Peña de Afuera, Veracruz. Estudiante de Ingeniería Mecatrónica en la UTA.
Jaime Arturo Castillo ElizondoIngeniero administrador de sistemas por la UANL. Master en administración, con especialidad en recursos humanos y doctor en educación. Profesor titular de tiempo completo. Miembro del SNI, nivel I. Director de la FIME-UANL.
Jonathan Hernández MayaTécnico en electrónica por el CECATI 24. Estudiante de Ingeniería Mecatrónica en la UTA.
Jordán Sombrerero EspinozaEgresado del Colegio de Bachilleres del Estado de Puebla, plantel 10. Estudiante de Ingeniería en TICS en el ITST.
Jorge Alfredo Ferrer PérezDoctor en ingeniería aeroespacial y mecánica por la Universidad de Notre Dame. Profesor-investigador de la UNAM.
José Carlos Jiménez EscalonaIngeniero en aeronáutica; maestro y doctor en física de la atmósfera por la UNAM. Realizó una estancia postdoctoral en el Instituto de Geofísica de la UNAM. Profesor-investigador en el área de percepción remota satelital de la ESIME Ticomán del IPN.
José Guadalupe Nava ZavalaEgresado de la EIAO. Estudiante de Ingeniería Meca-trónica en la FIME-UANL.
José Noel del Ángel PolancoEstudiante de Ingeniería en Mecatrónica en el IEST.
José Raúl Flores MachorroEstudiante de Ingeniería en TICS en el ITST.
José Santos Tienda BazaldúaTécnico en mecatrónica industrial, en modalidad bilin-güe progresivo con acentuación en inglés, por la EIAO Unidad Linares. Estudiante de Ingeniería Mecatrónica en la FIME-UANL.
Josué Mancilla CerezoIngeniero electrónico por el ITP. Labora en el Departa-mento de Ingeniería en Tecnologías de la Información y Comunicaciones del ITST.
Juan Carlos Hernández SánchezIngeniero aeronáutico y maestro en ingeniería ae-ronáutica por el IPN. Estudiante de la Maestría en Ciencias en Ingeniería Aeronáutica y Espacial en el IPN. Realizó una estancia de investigación en el Centro de Aplicaciones e Investigación en Percepción Remota de la Universidad de Sherbooke.
Juan Julio César Campas BuitimeaTécnico en electrónica por el CETIS 128. Estudiante de Ingeniería Mecatrónica en el ITN.

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 97
Julio César Saucedo MoralesLicenciado en física por la Unison. Maestro en física por la Arizona State University, EUA. Doctor en astronomía por la University of Arizona, EUA. Profe-sor-investigador del Departamento de Investigación en Física de la Unison.
Lorenzo Olguín RuizLicenciado en física por la Unison. Maestro y doctor por la UNAM. Profesor de tiempo completo del De-partamento de Investigación en Física de la Unison.
Luis Ángel Avalos de la CruzEgresado del CBTIS 189 en Matamoros, Tamaulipas. Estudiante de Ingeniería Aeronáutica y Electricidad Industrial, ambas en la FIME-UANL.
Luis Enrique Gómez VanegasLicenciado en letras hispánicas por la FFyL-UANL. Autor del libro Soledades. Es corrector y revisor biblio-gráfico de la revista CienciaUANL y revisor de Entorno Universitario, de la Preparatoria 16-UANL.
Marcelo Núñez AguilarEstudiante de la Universidad Tecnológica de Altamira.
María Eugenia Contreras MartínezLicenciada en física y matemáticas por el IPN. Maestra y doctora por la UNAM. Investigadora posdoctoral en la Unison.
María PoliakovaAdscrita a la Escuela de Idiomas de la Universidad Autónoma de Chihuahua. Especialista en lingüística y traductora e intérprete de ruso-español-ruso, ru-so-inglés-ruso.
Mariela Serrano CentenoEstudiante de Ingeniería en TICS en el ITST.
Mayra Báez LandaEstudiante de Ingeniería en TICS en el ITST.
Miguel Ángel Mar HernándezEstudiante de Ingeniería Mecatrónica en la UTA.
Osborne Reinhardt MorenoTécnico en electrónica por el CETIS 78. Estudiante de Ingeniería Mecatrónica en la UTA.
Óscar Martínez HernándezIngeniero electrónico y maestro en ciencias de la inge-niería eléctrica por el ITCM. Profesor de asignaturas de la carrera de Ingeniería en Mecatrónica. Miembro activo y representante oficial del Estado de Tamaulipas en la UNISEC.
Pablo César Nieto MartínezEstudiante Ingeniería Mecatrónica en el IEST.
Patricia Zambrano RobledoIngeniera mecánica; maestra en ciencias de la ingeniería mecánica, con especialidad en materiales, y doctora en ingeniería de materiales por la UANL. Miembro de SNI, nivel I, y de la AMC. Directora de Investigación de la UANL.
Rafael Morales RamírezTécnico en informática. Estudiante de Ingeniería Electrónica en el ITP.
Rafael Vargas BernalIngeniero en comunicaciones y electrónica por la UG. Maestro y doctor en ciencias, con especialidad en electrónica, por el INAOE. Profesor-investigador en el ITESI. Miembro del SNI, nivel I; pertenece ala Red Nyn, la Redcyte y a la RTNA, todas del Conacyt.
Rei KawashimaM.A. Estudios de liderazgo por la Azusa Pacific University, EUA y M.S.S. por la International Space University, Francia. Cofundadora y colaboradora por la University Space Engineering Consortium (UNISEC).
Ricardo Castillo PérezEstudiante Ingeniería Mecatrónica en el IEST.
Rodrigo Flores SantiagoTécnico superior universitario en mecatrónica, con es-pecialidad en automatización, por la UTA. Estudiante de Ingeniería Mecatrónica en la UAA.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 201698
Rodrigo Nava AmezcuaLicenciado en administración militar. Piloto aviador militar del Estado Mayor Aéreo en la FAM y la Sedena. Especialista en geopolítica por el Centro de Estudios Superiores Navales. Actualmente ostenta el grado de mayor.
Rogelio Juvenal Sepúlveda GuerreroLicenciado en ciencias computacionales y maestro en teleinformática por la UANL. Profesor de tiempo completo y director de la FCFM-UANL.
Rosa María Martínez GalvánMaestra en optoelectrónica por la BUAP. Profesora del De-partamento de Ingeniería Eléctrica y Electrónica, del ITP.
Silvia Karina Reyes LioIngeniera electrónica por el ITN. Profesora en el Depar-tamento de Ciencias Básicas en el ITN.
Telma Saraí Encarnación CortesEgresada del CETIS 151. Estudiante de Ingeniería en TICS en el ITST. Residente profesional en el INAOE.
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 99
La revista CIENCiAUANL tiene como propósito di-fundir y divulgar la producción científica, tecnológica y de conocimiento en los ámbitos académico, científico, tecnológico, social y empresarial.
CiENCiAUANL está dirigida al público abierto, con y sin preparación universitaria, a científicos, aca-démicos, tecnólogos, investigadores y estudiantes de todas las áreas profesionales, así como a alumnos de bachillerato y secundaria interesados en aumentar sus conocimientos y fortalecer su perfil cultural.
En sus páginas se presentan avances de investigación científica, desarrollo tecnológico y artículos de divulga-ción en cualquiera de las siguientes áreas: ciencias exac-tas, ciencias de la salud, ciencias agropecuarias, ciencias naturales, humanidades, ciencias sociales, ingeniería y tecnología y ciencias de la tierra. Asimismo, se incluyen artículos de difusión sobre temas diversos que van de las ciencias naturales y exactas a las ciencias sociales y las humanidades (física, lógica, filosofía, historia, ecología, geología, antropología, matemáticas, biología, medicina, historia, astronomía, evolución, etcétera).
Se invita a todos los profesores, estudiantes e investigadores a enviar sus artículos tanto de difusión como de divulgación. Las colaboraciones deberán estar escritas en un lenguaje claro, didáctico y accesible co-rrespondiente al público objetivo, con un discurso que aproveche al máximo los recursos narrativos, literarios y gramaticales. Según sea el caso (divulgación o difusión), se deben seguir los siguientes criterios editoriales.
Criterios editoriales (difusión)
• No se aceptarán trabajos que no cumplan con los criterios y lineamientos indicados. Sólo se aceptan artículos originales, entendiendo por ello que el contenido sea producto del trabajo directo y que una versión similar no se ha publicado o enviado a otras revistas.
• Los autores deben demostrar haber trabajado y publicado en el tema del artículo.
• El artículo debe ofrecer una panorámica clara del campo temático.
• El artículo debe ser ordenado. Separar las dimen-siones del tema y evitar romper la línea de tiempo.
• Debe considerarse la experiencia nacional y local, si la hubiera.
• No se aceptan reportes de mediciones. Los artículos deben contener la presentación de resultados de me-dición y su comparación, también deben presentar un análisis detallado de los mismos, un desarrollo metodológico original, una manipulación nueva de la materia o ser de gran impacto y novedad social.
• Sólo se aceptan modelos matemáticos si son vali-dados experimentalmente por el autor.
• No se aceptarán trabajos basados en encuestas de opinión o entrevistas, a menos que aunadas a ellas se realicen mediciones y se efectúe un análisis de correlación para su validación.
• Para su consideración editorial, el autor deberá enviar el artículo vía electrónica en formato .doc de Word, así como el material gráfico (máximo cinco figuras, incluyendo tablas), fichas biográfi-cas de cada autor de máximo 100 palabras y carta firmada por todos los autores (formato en página web) que certifique la originalidad del artículo y cedan derechos de autor a favor de la UANL.
• Los originales deberán tener una extensión máxima de cinco páginas (incluyendo figuras y tablas) de acuerdo al formato que a continuación se especifica:- Formato. Tamaño carta; el margen superior
deberá ser de 2.5 cm. y el resto de 2 cm.- Título. Máximo dos renglones, tipografiado
en altas y bajas, tipo Times New Roman a 24 puntos, con interlínea normal, en negritas.
- Nombre del autor o autores. En mayúsculas con alineación al margen derecho, misma fuente
INFORMACIÓN PARA LOS AUTORES

CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016100
tipográfica en 12 puntos, asterisco sobrescrito al final.
- Adscripción. Colocarla en pie de página de la 2a. columna antecedida por un asterisco, en tipografía Times New Roman de 8 puntos.
- Cuerpo del texto. A dos columnas, con ti-pografía Times New Roman de 10 puntos, justificado.
- Resúmenes. No mayores de 100 palabras tanto en inglés como en español. Incluir a lo sumo cinco palabras clave tanto en inglés como en español para ser utilizadas en índices. Deben ubicarse al terminar el cuerpo y antes de las referencias. Misma tipografía que el cuerpo.
- Referencias. Deberán ser numeradas y aparece-rán en el orden que fueron citadas en el texto, utilizando la misma tipografía del cuerpo. Las fichas bibliográficas deberán contener los siguientes datos: autores o editores, título del artículo, nombre del libro o de la revista, lugar, empresa editorial, año de la publicación, volumen y número de páginas.
- Subtítulos. Tipografía Times New Roman, 10 puntos, en negritas.
- Notas al pie. Times New Roman, 8 puntos.- Material gráfico (incluye figuras, imágenes y
tablas). Mínimo dos, máximo cinco a una o dos columnas, máximo media página, todas las imágenes deberán ser de al menos 300 DPI.
- Pie de gráficos. Tipografía Times New Roman, itálica de 9 puntos.
- Deberán evitarse en lo posible las notas a pie de página.
Criterios editoriales (divulgación)
• Los contenidos científicos y técnicos tienen que ser conceptualmente correctos y presentados de una manera original y creativa.
• Todos los trabajos deberán ser de carácter acadé-mico. Se debe buscar que tengan un interés que rebase los límites de una institución o programa particular.
• Sólo se reciben para su publicación materiales ori-ginales e inéditos. Los autores, al enviar su trabajo, deberán manifestar que es original y que no ha sido postulado en otra publicación.
• Tendrán siempre preferencia los artículos que versen sobre temas relacionados con el objetivo, cobertura temática o lectores a los que se dirige la revista.
• Para su mejor manejo y lectura, cada artículo debe incluir una introducción al tema, posteriormente desarrollarlo y finalmente plantear conclusiones. Se recomienda sugerir bibliografía breve, para dar al lector posibilidad de profundizar en el tema. El formato no maneja notas a pie de página.
• Las referencias no deben extenderse innecesaria-mente, por lo que sólo se incluirán las referencias citadas en el texto y deberán numerarse en el orden de su aparición dentro del cuerpo y en el apartado de referencias. Nunca se sustituirá con raya el nombre de un autor cuando éste tenga más de una referencia. La exactitud de las referencias bibliográficas es responsabilidad del autor.
• Los artículos deberán tener una extensión máxima de cinco cuartillas y una mínima de tres, incluyen-do tablas, figuras y bibliografía. En casos excepcio-nales, se podrá concertar con el editor responsable de CiENCiAUANL una extensión superior, la cual será sometida a la aprobación del Consejo Editorial. Todas las siglas citadas deberán ser aclaradas en su significado y no se incluirán en el título del trabajo salvo que sean de conocimiento general.
• Si se desea incluir figuras, dibujos, fotografías o imágenes digitales, éstas deberán ser de al menos 300 DPI. CiENCiAUANL sólo utiliza figuras y tablas, en ellas se incluyen los cuadros, imágenes, fotos, gráficas, etcétera.
• Los documentos deberán enviarse en Microsoft Word (con extensión .doc). El artículo deberá con-tener claramente los siguientes datos en la primera cuartilla: título del trabajo (de preferencia breve, que refiera claramente el contenido), autor(es), institución y departamento de adscripción laboral (en el caso de estudiantes sin adscripción laboral, referir la institución donde realizan sus estudios), dirección de correo electrónico.
Nota importante
Todas las colaboraciones, sin excepción, serán eva-luadas; en el caso de los artículos de investigación (difusión) serán arbitrados por especialistas por área
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 101
científica. Los criterios aplicables a esta clase de artículos serán: el rigor científico, la calidad y precisión de la infor-mación, el interés general del tema expuesto y la claridad del lenguaje.
En el caso de los artículos de difusión, serán evaluados por especialistas en el tema, quienes valorarán la pertinen-cia, el lenguaje y la calidad del contenido.
Todos los textos son sometidos a revisión y los editores no se obligan a publicarlos sólo por recibirlos. Una vez aprobados, los autores aceptan la corrección de textos y la revisión de estilo para mantener criterios de uniformidad de la revista.
Todos los artículos deberán remitirse a la dirección de correo:
[email protected] bien al siguiente dirección:Revista CiENCiAUANL
Biblioteca Magna Universitaria “Raúl Rangel Frías”, 5o. Piso
Ave. Alfonso Reyes 4000 Nte., Col. Regina CP 64290 Monterrey, N.L., México
Para cualquier comentario o duda estamos a disposición de los interesados en:
Tel: (5281)8329-4236
http://www.cienciauanl.uanl.mx/
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016102
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016 103