transforma- ciones lineales...unidad nº 3: transformaciones lineales – prof. marÍ a eugenia...
TRANSCRIPT

UNIDAD N° 3
TRANSFORMA-CIONES
LINEALES

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 108
TRANSFORMACIONES LINEALES
DEFINICIÓN Nº 1:
1) Si V es cualquier espacio vectorial, la transformación identidad I, definida por
( )I α α= es una transformación lineal pues si c F∈ y α,β V∈ , entonces:
( ) � � ( ) ( )por definición por definición de I de I
I cα β cα β cI α I β+ = + = +
2) La transformación nula T, definida por ( )T α 0= α V∀ ∈ es una
transformación lineal pues si c F∈ y α,β V∈ , entonces:
( ) � � ( ) ( )por definición de T por definición y porque cα β V de T
T cα β 0 c 0 0 cT α T β
+ ∈
+ = = ⋅ + = +
Sean V y W espacios vectoriales sobre el cuerpo F.
Una TRANSFORMACIÓN LINEAL de V en W es una función T : V W→ tal
que ( ) ( ) ( )T cα β cT α T β+ = + α,β V∀ ∈ y c F∀ ∈ .
Veremos cómo se determina, a partir de la definición
precedente, si una función es o no transformación lineal.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 109
3) Si V es un espacio vectorial, entonces la transformación definida por
( )T α 2α= α V∀ ∈ es una transformación lineal pues si c F∈ y α,β V∈ , entonces:
( ) � ( ) ( ) � ( ) ( )por definición por definición de T de T
T cα β 2 cα β 2cα 2β c 2α 2β cT α T β+ = + = + = + = +
4) Determinaremos si ( ) ( )1 2 3 1 3 2 3T x ;x ;x x x ;x 2x= + − es una transformación
lineal de 3R en 2
R .
Para ello, debemos tener en claro qué ocurre cuando aplicamos T a un vector
de 3R .
En este caso, lo que sucede es que obtenemos un vector de 2R cuya primera
componente resulta de sumar la primera componente del vector original con la
tercera y cuya segunda componente resulta de restarle a la segunda componente
del vector original el duplo de la tercera.
Así, por ejemplo si aplicamos T al vector ( )3; 4;6− obtenemos lo siguiente:
( ) ( ) ( )T 3; 4;6 3 6; 4 2 6 9; 16− = + − − ⋅ = −
Hechas estas aclaraciones, veremos si T es una transformación lineal.
Sean c ∈R , ( ) 31 2 3α x ;x ;x= ∈R y ( ) 3
1 2 3β y ;y ;y= ∈R . Debemos demostrar que
( ) ( ) ( )T cα β cT α T β+ = + .
( ) ( ) ( )( )( ) ( )( )
( )
( )( )( )
+ = +
= +
= + + +
= + + + + − +
= + + + + − −
=
1 2 3 1 2 3
1 2 3 1 2 3
1 1 2 2 3 3
1 1 3 3 2 2 3 3
1 1 3 3 2 2 3 3
T cα β T c x ;x ;x y ;y ;y
T cx ;cx ;cx y ;y ;y
T cx y ;cx y ;cx y
cx y cx y ;cx y 2 cx y
cx y cx y ;cx y 2cx 2y
c ( ) ( )( )( ) ( )( ) ( )
+ + + − + −
= + − + + −
1 3 1 3 2 3 2 3
1 3 2 3 1 3 2 3
x x y y ;c x 2x y 2y
c x x ;c x 2x y y ;y 2y
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 110
( ) ( )( ) ( )
= + − + + −
= +1 3 2 3 1 3 2 3 c x x ;x 2x y y ;y 2y
cT α T β
Como ( ) ( ) ( )T cα β cT α T β+ = + 3 α,β∀ ∈R y c∀ ∈R , entonces T es una
transformación lineal.
PROPIEDADES DE LAS TRANSFORMACIONES LINEALES
Sea T : V W→ una transformación lineal.
1) ( ) =T 0 0
Demostración:
( ) ( ) � ( ) ( ) ( )por ser T transf.lineal
T 0 T 0 0 T 0 T 0 2T 0= + = + = ( ) ( ) ( ) 0 2T 0 T 0 T 0⇒ = − =
A partir de esta propiedad, queda claro que si T es una transformación lineal, al
valuarla en el vector 0 da por resultado 0.
Por lo tanto si se nos pide determinar si una función es o no transformación
lineal y observamos que al valuarla en 0 no da 0, entonces podemos afirmar que no
es transformación lineal.
Por ejemplo, al valuar en 0 la función n nT : →R R definida por
( ) ( )1 2 n 1 2 n 1 nT x ;x ; ;x x 1;x 2; ;x n 1;x n−= + + + − +… … , se obtiene ( ) ( )T 0;0; ;0 1;2; ;n 1;n 0= − ≠… …
lo cual nos permite afirmar que T no es una transformación lineal.
Pero, si al valuarla en cero da cero, no podemos afirmar nada, tenemos que
hacer la verificación, al igual que se hizo en los ejemplos anteriores porque podría
ser que T fuera una transformación lineal o no lo fuera.
Por ejemplo, al valuar en 0 la función 2 2T : →R R definida por
( ) ( )1
31 2 2T x ;x 2x ;x= , se obtiene ( ) ( )T 0;0 0;0= . Lo mismo ocurre al valuar en 0 la

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 111
función 2 2T : →R R , definida por ( ) ( )11 2 2 2T x ;x 3x x ;4x= − . Sin embargo, la primera
de estas funciones no es transformación lineal mientras que la segunda sí y a esto
último lo podemos afirmar luego de hacer la demostración correspondiente usando
la definición de transformación lineal.
2) ( ) ∑ ∑
n n
i i i ii=1 i=1
T cα = cT α
Esta propiedad será demostrada por inducción.
Si n 1==== , entonces ( ) ( )1 1 1 1T c α c T α= por ser T una transformación lineal.
Hipótesis inductiva: Supongamos que i i c F, α V∀ ∈ ∈ se cumple que
( )n 1 n 1
i i i ii 1 i 1
T c α c T α− −
= =
= ∑ ∑ .
Tesis inductiva: Demostraremos que i i c F, α V∀ ∈ ∈ se cumple que
( )n n
i i i ii 1 i 1
T c α c T α= =
= ∑ ∑ .
DEMOSTRACIÓN:
( )
( ) ( )
n n 1
i i i i n ni 1 i 1
n 1
i i n ni 1
n 1
i i n ni 1
T cα T cα c α
T c α T c α por ser T transformación lineal
c T α c T α por hipótesis inductiva y por ser T transformación li
−
= =
−
=
−
=
= +
= + →
= + →
∑ ∑
∑
∑
( )n
i ii 1
neal
c T α=
=∑
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 112
1) Determina cuáles de las siguientes funciones T son transformaciones
lineales. Justifica.
a) →2 2T :R R , ( ) ( )1 2 1 2T x ;x x 1;x= +
b) →2 2T :R R , ( ) ( )1 2 2 1T x ;x x ;x=
c) →2 2T :R R , ( ) ( )1
21 2 2T x ;x x ;x=
d) →2 2T :R R , ( ) ( )1 2 1 2T x ;x x x ;0= −
e) →2 2T :R R , ( ) ( )1 2 1 2 1 2T x ;x x 2x ;3x x= + −
f) 3 2T : →R R , ( ) ( )1 2 3 1 3 2 3T x ;x ;x x x ;x x 1= − − +
g) 3 2T : →R R , ( ) ( )1 2 3 1 3 2 3T x ;x ;x x x ;x x= − −
h) 3 3T : →R R , ( ) ( )1 2 3 2 1 3T x ;x ;x x ; x ;x= −
i) 2 2x2T : →R R , ( ) 1 21 2
1 2
x x 0T x ;x
0 x x
+ = +
j) 4 2T : →R R , ( ) ( )1 2 3 4 1 2 3 4T x ;x ;x ;x x x x x ;0= − − +
k) 2T : →R R , ( )1 2 1 2T x ;x x x= ⋅
l) 3 3T : →R R , ( ) ( )1 2 3 1 2T x ;x ;x x 1;x 2;0= + +
m) 2 3x3T : →R R , ( )1 1
1 2 1 1 2
2 1 2
x x 0
T x ;x x x x
0 x x x
= − −
RTA: No son transformaciones lineales las de los ítems a, c, f, k y l.
Teniendo en cuenta la definición de transformación
lineal y las propiedades vistas, resuelve los siguientes
ejercicios.
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 113
2) Determina qué condición deben cumplir las funciones lineales ( )f x ax b= +
de R en R para ser transformaciones lineales.
DEMOSTRACIÓN:
Como B es base de V, dado α V∈ , existen escalares únicos ia F∈ (con
i 1; ;n= … ) tal que 1 1 n nα a α a α= + +… .
Definimos T : V W→ de la siguiente manera:
( ) 1 1 n nT α a β a β= + +… (es decir, ( )j jT α β j 1; ;n= ∀ = … ).
De esta manera, T asocia a cada vector α V∈ un vector ( )T α W∈ pues es
combinación lineal de 1 nβ ; ; β… , vectores que pertenecen a W que es espacio
vectorial.
Hay que demostrar que T es una transformación lineal y que es única.
Sea c F∈ y β V∈ 1 1 n nβ b α b α⇒ = + +… (por ser B base ordenada de V).
Luego:
( ) ( )1 1 n n 1 1 n ncα β c a α a α b α b α+ = ⋅ + + + + +… …
TEOREMA Nº 9:
Sea V un espacio vectorial de dimensión finita sobre el cuerpo
F y sea { }1 nB α ; ; α= … una base ordenada de V.
Sea W un espacio vectorial sobre el mismo cuerpo F y 1 nβ ; ; β…
vectores cualesquiera de W.
Entonces existe una única transformación lineal T de V en W
tal que ( )j jT α β j 1; ;n= ∀ = …

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 114
( ) ( )
( )
1 1 1 n n n
n
j j jj 1
ca b α ca b α
ca b α=
= + + + +
= +∑
…
Por definición de T:
( ) ( ) ( )n n
j j j j j jj 1 j 1
T cα β T ca b α ca b β= =
+ = + = +
∑ ∑
Por su parte:
( ) ( ) ( ) ( )
( )
= = = =
= =
= =
=
+ = + = +
= +
= +
= +
∑ ∑ ∑ ∑
∑ ∑
∑ ∑
∑
n n n n
j j j j j j j jj 1 j 1 j 1 j 1
n n
j j j jj 1 j 1
n n
j j j jj 1 j 1
n
j j jj 1
cT α T β cT a α T b α c a T α b T α
c a β b β
ca β b β
ca b β
Por lo tanto, ( ) ( ) ( )T cα β cT α T β+ = + α,β V∀ ∈ y c F∀ ∈ , es decir, T es
una transformación lineal.
Veamos que T es única.
Sea U : V W→ una transformación lineal tal que ( )j jU α β j 1; ;n= ∀ = … y sea
α V∈ .
( )
( )
( )
n
j jj 1
n
j jj 1
n
j jj 1
U α U a α
a U α por ser U transformación lineal
a β por definición de U
T α
=
=
=
=
= →
= →
=
∑
∑
∑

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 115
Como ( ) ( )U α T α= α V∀ ∈ , entonces U T= , es decir, T es única.
Queda entonces demostrado que existe una única transformación lineal T de V
en W tal que ( )j jT α β j 1; ;n= ∀ = … .
Como B es base, cualquier vector ( ) 2a;b ∈R puede expresarse como
combinación lineal de 1α y 2α , es decir, existen escalares R1 2x ,x /∈
( ) 1 1 2 2a;b x α x α= + .
Buscamos el valor de 1 2x y x en función de a y de b.
( )
( ) ( )
( )
1 1 2 2
1 2
1 2 1 2
a;b x α x α
x 1;2 x 3;4
x 3x ;2x 4x
= +
= +
= + +
Armamos la matriz y la reducimos:
1
2
33 x 2a b1 3 a 1 0 2a b 21 3 a 1 3 a 21
2 4 b 0 2 2a b 10 1 a b 10 1 a b2 x a b2 2
= − +− + → → → ⇒ − − + − − = −
Por lo tanto ( ) 1 2
3 1a;b 2a b α a b α
2 2 = − + + −
Sea { }α α=1 2
B ; una base ordenada de R2 en la que
( )α =1
1;2 y ( )α =2
3;4 .
Hallaremos la transformación T que verifica que
( ) ( )α =1
T 3;2;1 y ( ) ( )α =2
T 6;5;4 .

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 116
( ) ( ) ( )
( ) ( )
1 2
3 1T a;b 2a b T α a b T α
2 2
3 1 2a b 3;2;1 a b 6;5;4
2 2
9 3 5 6a b; 4a 3b; 2a b 6a 3b;5a b;4a 2b
2 2 2
⇒ = − + + −
= − + + −
= − + − + − + + − − −
3 1 1 b;a b;2a b
2 2 2 = + −
Así, por ejemplo, si quiero calcular ( )T 8; 6− tengo en cuenta que a 8= y b 6= −
y reemplazo:
( ) ( ) ( ) ( ) ( )3 1 1T 8; 6 6 ;8 6 ;2 8 6 9;5;19
2 2 2 − = ⋅ − + ⋅ − ⋅ − − = −
1) Sea { }1 2B α ;α= una base ordenada de 2R en la que ( )1α 1;1= y ( )2α 1;0= y
sea 2 2T : →R R el operador lineal tal que ( ) ( )1T α 1; 2= − y ( ) ( )2T α 4;1= − .
Encuentra una fórmula para ( )1 2T x ;x y halla, a partir de ella, ( )T 5; 3− .
RTA: ( ) ( )1 2 1 2 1 2T x ;x 4x 5x ;x 3x= − + − ( ) ( )T 5; 3 35;14− = −
2) Sea { }1 2B α ;α= una base ordenada de 2R en la que ( )1α 2;1= − y ( )2α 1;3=
y sea 2 3T : →R R la transformación lineal tal que ( ) ( )1T α 1; 2;0= − y
( ) ( )2T α 0; 3;5= − .
Encuentra una fórmula para ( )1 2T x ;x y halla, a partir de ella, ( )T 2; 3− .
RTA: ( )1 2 1 2 1 2 1 2
3 1 3 8 5 10T x ;x x x ; x x ; x x
7 7 7 7 7 7 = − + − +
( ) 9 30 20T 2; 3 ; ;
7 7 7 − = − −
En función de lo visto en el teorema anterior, resuelve los
siguientes ejercicios.
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 117
3) Sean 1 2α , α y 3α vectores de un espacio vectorial V y 3T : V → R una
transformación lineal para la que ( ) ( )1T α 1; 1;2= − , ( ) ( )2T α 0;3;2= y
( ) ( )3T α 3;1;2= − .
Halla ( )1 2 3T 2α 3α 4α− + .
RTA: ( ) ( )1 2 3T 2α 3α 4α 10; 7;6− + = − −
DEFINICIÓN Nº 2:
Sean V y W dos espacios vectoriales sobre el cuerpo F y T : V W→ una
transformación lineal.
Se llama NÚCLEO DE T o ESPACIO NULO DE T al conjunto
( ){ }TN α V / T α 0= ∈ = . A la dimensión del núcleo de T se la denomina NULIDAD
DE T.
Se llama IMAGEN DE T al conjunto ( ){ }TR T α /α V= ∈ . A la dimensión de
la imagen de T de la denomina RANGO DE T.
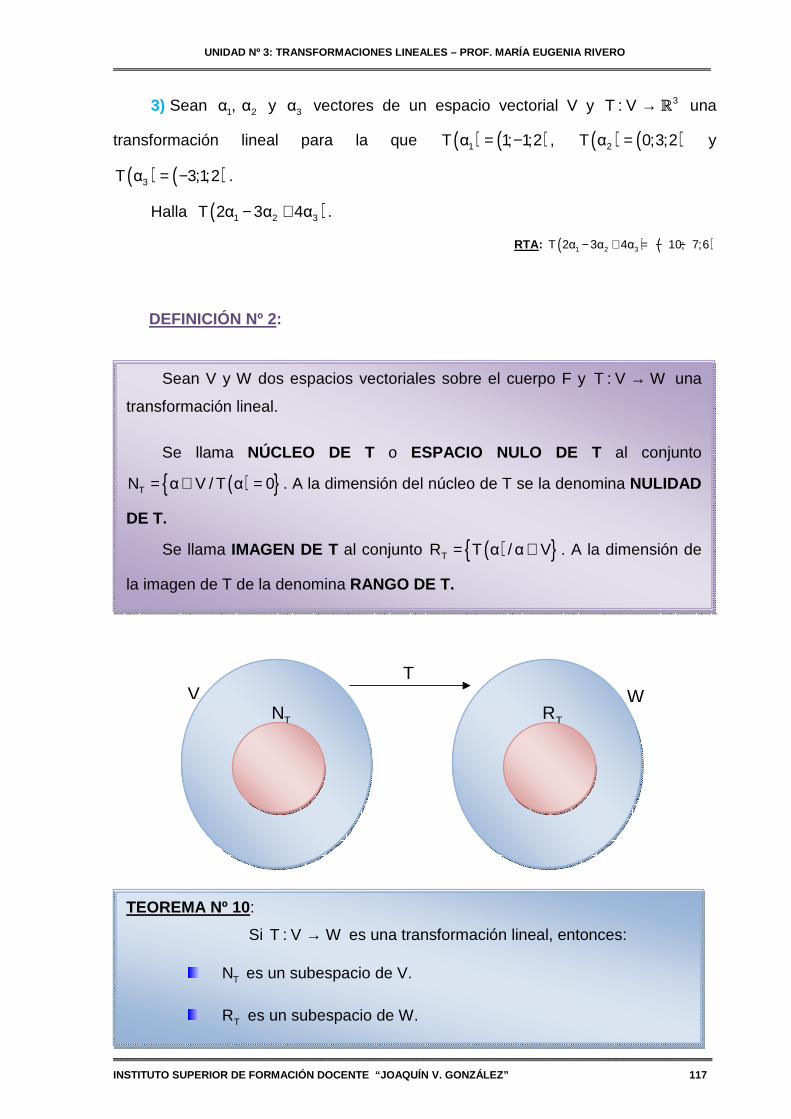
TEOREMA Nº 10:
Si T : V W→ es una transformación lineal, entonces:
TN es un subespacio de V.
TR es un subespacio de W.
VTN
WTR
T

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 118
DEMOSTRACIÓN:
1) Para demostrar la primera afirmación tomaremos 1 2 Tα ,α N∈ y c F∈ y
demostraremos que 1 2 Tcα α N+ ∈ . Esto nos permitirá concluir en que TN es un
subespacio de V
Sean entonces ( ) ( )1 2 T 1 2α ,α N T α 0 y T α 0∈ ⇒ = = (por definición de TN ).
Sea c F∈ .
Debemos demostrar que 1 2 Tcα α N+ ∈ , es decir, que ( )1 2T cα α 0+ = .
( ) ( ) ( )1 2 1 2
1 2 T
T cα α cT α T α por ser T una transformación lineal
c 0 0 pues α ,α N
0
+ = + →
= ⋅ + → ∈
=
Como ( )1 2T cα α 0+ = , entonces 1 2 Tcα α N+ ∈ . Por lo tanto, TN es subespacio
de V.
2) Para demostrar la segunda afirmación tomaremos 1 2 Tβ ,β R∈ y c F∈ y
demostraremos que 1 2 Tcβ β R+ ∈ . Esto nos permitirá concluir en que TR es un
subespacio de W.
Sean:
( )1 T 1 1 1β R α V / T α β∈ ⇒ ∃ ∈ =
( )2 T 2 2 2β R α V / T α β∈ ⇒ ∃ ∈ =
c F∈
Como c F∈ , 1 2α ,α V∈ y V es subespacio, entonces 1 2cα α V+ ∈ . Luego:
( ) ( ) ( )1 2 1 2
1 2
T cα α cT α T α por ser T una transformación lineal
cβ β
+ = + →
= +
Como ( )1 2 1 2 1 2 1 2 T cα α V / T cα α cβ β cβ β R∃ + ∈ + = + ⇒ + ∈ ⇒ TR es subespa-
cio de W.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 119
1) Hallaremos el núcleo y la imagen de la transformación lineal 3 2T : →R R
definida por ( ) ( )1 2 3 1 3 2 3T x ;x ;x x x ;x x= − −
Buscamos el núcleo de la transformación.
( ) ( ) ( ){ }( ) ( ) ( ){ }( ){ }( ){ }( ){ }
( ){ }( )
R
R
R
R
R
R
3T 1 2 3 1 2 3
31 2 3 1 3 2 3
31 2 3 1 3 2 3
31 2 3 1 3 2 3
3 3 3 3
3 3
N x ;x ;x / T x ;x ;x 0;0
x ;x ;x / x x ;x x 0;0
x ;x ;x / x x 0 x x 0
x ;x ;x / x x x x
x ;x ;x / x
x 1;1;1 / x
1;1;1
= ∈ =
= ∈ − − =
= ∈ − = ∧ − =
= ∈ = ∧ =
= ∈
= ∈
=< >
De esta manera, ( ){ }TNB 1;1;1= es base de TN pues lo genera y al tener un
único vector no nulo es linealmente independiente.
Por lo tanto, nulidad de T 1= .
Buscamos la imagen de la transformación.
( ) ( ) ( ) ( ){ }( ) ( ) ( ) ( ){ }
= ∈ ∃ ∈ =
= ∈ ∃ ∈ − − =
2 3T 1 2 3 1 2 3
2 31 2 3 1 3 2 3
R a;b / x ;x ;x con T x ;x ;x a;b
a;b / x ;x ;x con x x ;x x a;b
R R
R R
Ahora:
En los siguientes ejemplos trataremos de hallar el núcleo y
la imagen de algunas transformaciones lineales.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 120
− = ⇔ = +
− = ⇔ = +
1 3 1 3
2 3 2 3
x x a x a x
x x b x b x
Tomando 3x 0= , podemos concluir en que, dado ( ) ( )2 3a;b , a;b;0∈ ∃ ∈R R /
( ) ( )T a;b;0 a;b= .
2T R∴ = R
De esta manera, ( ) ( ){ }TRB 1;0 ; 0;1= es base de TR pues sabemos que ésta es
la base canónica de 2R , que es igual a TR .
Por lo tanto, rango de T 2= .
2) Hallaremos el núcleo y la imagen de la transformación lineal 2 2x2T : →R R
definida por ( ) 1 2 21 2
2 1 2
x x xT x ;x
x x x
− = −
.
Buscamos el núcleo de la transformación.
( ) ( )
( )
( ){ }
( ){ }
( ){ }
2T 1 2 1 2
1 2 221 2
2 1 2
21 2 1 2 2
21 2 1 2
0 0N x ;x / T x ;x
0 0
x x x 0 0 x ;x /
x x x 0 0
x ;x / x x 0 x 0
x ;x / x x 0
0;0
= ∈ =
− = ∈ = −
= ∈ − = ∧ =
= ∈ = =
=
R
R
R
R
( ){ }T N 0;0∴ = , con lo cual la nulidad de T es igual a 0.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 121
En este caso, el núcleo de la transformación está compuesto solamente por el
vector nulo y, por tanto, no puede hablarse de una base del núcleo.
Buscamos la imagen de la transformación.
( ) ( )
( )
( )
= ∈ ∃ ∈ =
− = ∈ ∃ ∈ = −
= ∈ ∃ ∈ − = = ∧ = =
2x2 2T 1 2 1 2
1 2 22x2 21 2
2 1 2
2x2 21 2 1 2 2
a b a bR / x ;x con T x ;x
c d c d
x x xa b a b / x ;x con
x x xc d c d
a b / x ;x con x x a d x b c
c d
R R
R R
R R
= ∈
= + ∈
= + ∈
=< >
a b / a,b
b a
a 0 0 b / a,b
0 a b 0
1 0 0 1 a b / a,b
0 1 1 0
1 0 0 1 ;
0 1 1 0
R
R
R
De esta manera, TR
1 0 0 1B ;
0 1 1 0
=
es base de TR pues genera TR y sus
elementos son linealmente independientes. Demostramos esto tomando 1 2c ,c ∈R /
1 2
1 0 0 1 0 0c c
0 1 1 0 0 0
+ =
.
Pero entonces, 1 2
2 1
c c 0 0
c c 0 0
=
, con lo cual 1 2c c 0= = .
Por lo tanto, rango de T 2= .

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 122
a) ( ) ( )1 2 2 1T x ;x x ;x=
b) ( ) ( )1 2 1 2T x ;x x x ;0= −
c) ( ) ( )1 2 1 2 1 2T x ;x x 2x ;3x x= + −
d) 3 2T : →R R , ( ) ( )1 2 3 1 3 2 3T x ;x ;x x x ;x x= − −
e) 3 3T : →R R , ( ) ( )1 2 3 2 1 3T x ;x ;x x ; x ;x= −
f) 2 2x2T : →R R , ( ) 1 21 2
1 2
x x 0T x ;x
0 x x
+ = +
g) 4 2T : →R R , ( ) ( )1 2 3 4 1 2 3 4T x ;x ;x ;x x x x x ;0= − − +
h) 2 3x3T : →R R , ( )1 1
1 2 1 1 2
2 1 2
x x 0
T x ;x x x x
0 x x x
= − −
RTA: a) ( ){ }T TN 0;0 dimN 0= ⇒ = 2T TR dimR 2= ⇒ =R
b) ( )T TN 1;1 dimN 1=< >⇒ = ( )T TR 1;0 dimR 1=< >⇒ =
c) ( ){ }T TN 0;0 dimN 0= ⇒ = 2T TR dimR 2= ⇒ =R
d) ( )T TN 1;1;1 dimN 1=< >⇒ = ( ) ( )T TR 1;0;0 ; 0;1;0 dimR 2=< >⇒ =
e) ( ){ }T TN 0;0;0 dimN 0= ⇒ = 3T TR dimR 3= ⇒ =R
f) ( )T TN 1; 1 dimN 1=< − >⇒ = T T
1 0R dimR 1
0 1
=< >⇒ =
g) ( ) ( ) ( )T TN 1;1;0;0 ; 1;0;1;0 ; 1;0;0;1 dimN 3=< − >⇒ = ( )T TR 1;0 dimR 1=< >⇒ =
h) ( ){ }T TN 0;0 dimN 0= ⇒ = T T
1 1 0 0 0 0
R 1 1 0 ; 0 0 1 dimR 2
0 0 1 0 1 1
=< − >⇒ = −
En los siguientes casos, para las transformaciones lineales T,
encuentra T TN , R , nulidad de T y rango de T.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 123
DEMOSTRACIÓN:
Sean:
n dim V=
{ }N 1 kB α , ,α= … base de TN ( )( )i T α 0 i 1; ;k∴ = ∀ = … .
Como TN es subespacio de V y NB es base de TN , entonces (teorema nº 6)
existen { }k 1 n 1 k k 1 nα ; ;α V /B α ; ;α ;α ; ;α+ +∈ =… … … es base de V.
Sea ( ) ( ){ }R k 1 nB T α ; ;T α+= … .
Demostraremos que RB es base de TR .
( )∗ Por ser B base de V, n
1 n i ii 1
α V, c , ,c F /α c α=
∀ ∈ ∃ ∈ =∑…
Luego:
( ){ }
( )
( )�
( )
( )
T
n
i i i ii 1
n
i i i ii 1
k n
i i i i i ii 1 i k 1
0
n
i i i ii k 1
R T α / α V
T c α / c F, α B
c T α / c F, α B por ser T transformación lineal
c T α c T α / c F, α B
c T α / c F, α B donde c
=
=
= = +=
= +
= ∈
= ∈ ∈
= ∈ ∈ →
= + ∈ ∈
= ∈ ∈ →
∑
∑
∑ ∑
∑ ( )n
i ii k 1
R
R
T α es combinación lineal de
elementos de B
B
= +
= ⟨ ⟩
∑
TEOREMA Nº 11:
Sean V y W F - espacios vectoriales y T : V W→ una
transformación lineal.
Si V es de dimensión finita, entonces T TdimV dimN dimR= + .

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 124
Por lo tanto, RB genera TR .
( )∗∗ Sean ( )n
k 1 n i ii k 1
c , ,c F / 0 c T α+= +
∈ = ∑… .
Deberemos demostrar que ic 0 i k 1; ;n = ∀ = + … , con lo cual quedará probado
que RB es linealmente independiente.
( ) �
n n n
i i i i i i Ti k 1 i k 1 i k 1 por ser T
transf.lineal
0 c T α T c α c α N= + = + = +
= = ⇒ ∈
∑ ∑ ∑
Como NB es base de TN , existen 1 kb , ,b F∈… / n k
i i j ji k 1 j 1
c α b α= + =
=∑ ∑ .
Así:
( )k n
j j i ij 1 i k 1
0 b α c α= = +
= + −∑ ∑
Como B es base de V, es linealmente independiente, con lo cual,
jb 0 j 1; ;k = ∀ = … y ic 0 i k 1; ;n= ∀ = + … .
Por lo tanto, RB es linealmente independiente.
Por ( )∗ y ( )∗∗ , resulta que RB es base de TR .
T TdimN dimR k n k n dim V∴ + = + − = =
ÁLGEBRA DE LAS TRANSFORMACIONES LINEALES
A continuación veremos teoremas referidos a la suma de transformaciones
lineales, al producto entre un escalar y una transformación lineal y a la composición
entre transformaciones lineales.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 125
DEMOSTRACIÓN:
1) Se debe demostrar que la función T U+ es una transformación lineal.
Sean c F∈ , α,β V∈ .
( )( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )( ) ( ) ( )
T U cα β T cα β U cα β por definición de T U
cT α T β cU α U β por ser T y U transf.lineales
c T α U α T β U β
c T U α T U β por definició
+ + = + + + → +
= + + + →
= + + +
= + + + → n de T U+
Por lo tanto, T U+ es una transformación lineal.
2) Se debe demostrar que la función cT es una transformación lineal.
Sean a F∈ , α,β V∈ .
( )( ) ( )
( ) ( )
cT aα β c T aα β por definición de cT
c aT α T β por ser T transf.lineal
+ = + →
= + →
TEOREMA Nº 12:
Sean V y W F - espacios vectoriales.
Sean T : V W→ y U : V W→ transformaciones lineales.
Entonces:
1)La función T U : V W+ → definida por ( )( ) ( ) ( )T U α T α U α+ = +
es una transformación lineal.
2) Si c F∈ , la función cT : V W→ definida por ( )( ) ( )cT α cT α=
es una transformación lineal.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 126
( ) ( )
( ) ( ) ( )
( )( ) ( )( )
caT α cT β
a cT α cT β
a cT α cT β
= +
= +
= +
Por lo tanto, cT es una transformación lineal.
NOTACIÓN:
Sean V y W F – espacios vectoriales.
Se denota por L(V;W) al conjunto de todas las transformaciones lineales de V
en W, es decir, ( ) { }L V;W T : V W / T es una transformación lineal= → .
Sean c F∈ , ( )T, U L V,W∈ .
De acuerdo con el teorema nº 12, ítem 2, ( )cT L V,W∈ .
Como ( )cT L V,W∈ y ( )U L V,W∈ , entonces, también por el teorema nº 12,
ítem 1, L(V;W) es un subespacio del espacio de todas las funciones de V en W.
Sin demostración.
Observación.
TEOREMA Nº 13:
Sean V y W F - espacios vectoriales de dimensión n y m
respectivamente.
Entonces, ( )dimL V;W m n= ⋅

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 127
DEMOSTRACIÓN:
Sean c F∈ , α,β V∈ .
Se debe demostrar que ( ) ( ) ( ) ( ) ( )( )S T cα β c S T α S T β+ = +� � � .
( ) ( ) ( )( )( ) ( )( )( )( ) ( )( )
( )( ) ( )( )
S T cα β S T cα β
S cT α T β por ser T transf.lineal
cS T α S T β por ser S transf.lineal
c S T α S T β
+ = +
= + →
= + →
= +
�
� �
Por lo tanto, ( )S T L V;Z∈� , es decir, es una transformación lineal de V en Z.
Sean 3 3T : →R R y 3 3U : →R R definidas de la siguiente forma:
( ) ( )
( ) ( )
1 2 3 1 3 2 3 1 2 3
1 2 3 2 3 1 2
T x ;x ;x x 2x ;3x x ;4x x x
U x ;x ;x 0;x 2x ;x 3x
= − + + −
= − +
Entonces:
En el siguiente ejemplo veremos cómo sumar y componer
dos transformaciones lineales.
TEOREMA Nº 14:
Sean V, W y Z F - espacios vectoriales, ( )T L V;W∈ y
( )S L W;Z∈ ( )T SV W Z→ → , entonces ( )S T L V;Z∈�
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 128
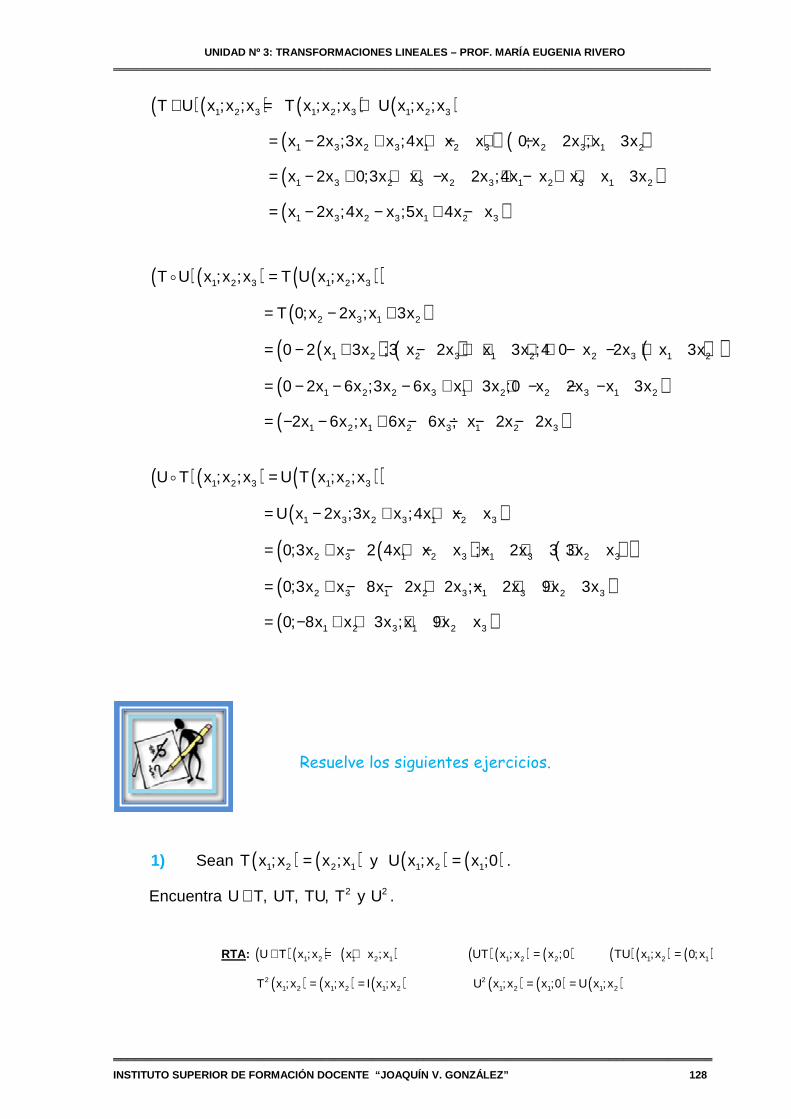
( )( ) ( ) ( )
( ) ( )
( )
1 2 3 1 2 3 1 2 3
1 3 2 3 1 2 3 2 3 1 2
1 3 2 3 2 3 1 2 3 1 2
1 3 2 3
T U x ;x ;x T x ;x ;x U x ;x ;x
x 2x ;3x x ;4x x x 0;x 2x ;x 3x
x 2x 0;3x x x 2x ;4x x x x 3x
x 2x ;4x x
+ = +
= − + + − + − +
= − + + + − + − + +
= − −( )1 2 3;5x 4x x+ −
( )( ) ( )( )( )
( ) ( ) ( )( )( )
1 2 3 1 2 3
2 3 1 2
1 2 2 3 1 2 2 3 1 2
1 2 2 3 1 2 2 3 1 2
T U x ;x ;x T U x ;x ;x
T 0;x 2x ;x 3x
0 2 x 3x ;3 x 2x x 3x ;4 0 x 2x x 3x
0 2x 6x ;3x 6x x 3x ;0 x 2x x 3x
=
= − +
= − + − + + ⋅ + − − +
= − − − + + + − − −
�
( )1 2 1 2 3 1 2 3 2x 6x ;x 6x 6x ; x 2x 2x= − − + − − − −
( )( ) ( )( )( )
( ) ( )( )( )
1 2 3 1 2 3
1 3 2 3 1 2 3
2 3 1 2 3 1 3 2 3
2 3 1 2 3 1 3 2 3
U T x ;x ;x U T x ;x ;x
U x 2x ;3x x ;4x x x
0;3x x 2 4x x x ;x 2x 3 3x x
0;3x x 8x 2x 2x ;x 2x 9x 3x
=
= − + + −
= + − + − − + +
= + − − + − + +
�
( )1 2 3 1 2 3 0; 8x x 3x ;x 9x x= − + + + +
1) Sean ( ) ( )1 2 2 1T x ;x x ;x= y ( ) ( )1 2 1U x ;x x ;0= .
Encuentra 2 2U T, UT, TU, T y U+ .
RTA: ( ) ( ) ( )1 2 1 2 1U T x ;x x x ;x+ = + ( ) ( ) ( )1 2 2UT x ;x x ;0= ( ) ( ) ( )1 2 1TU x ;x 0;x=
( ) ( ) ( )21 2 1 2 1 2T x ;x x ;x I x ;x= = ( ) ( ) ( )2
1 2 1 1 2U x ;x x ;0 U x ;x= =
Resuelve los siguientes ejercicios.
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 129
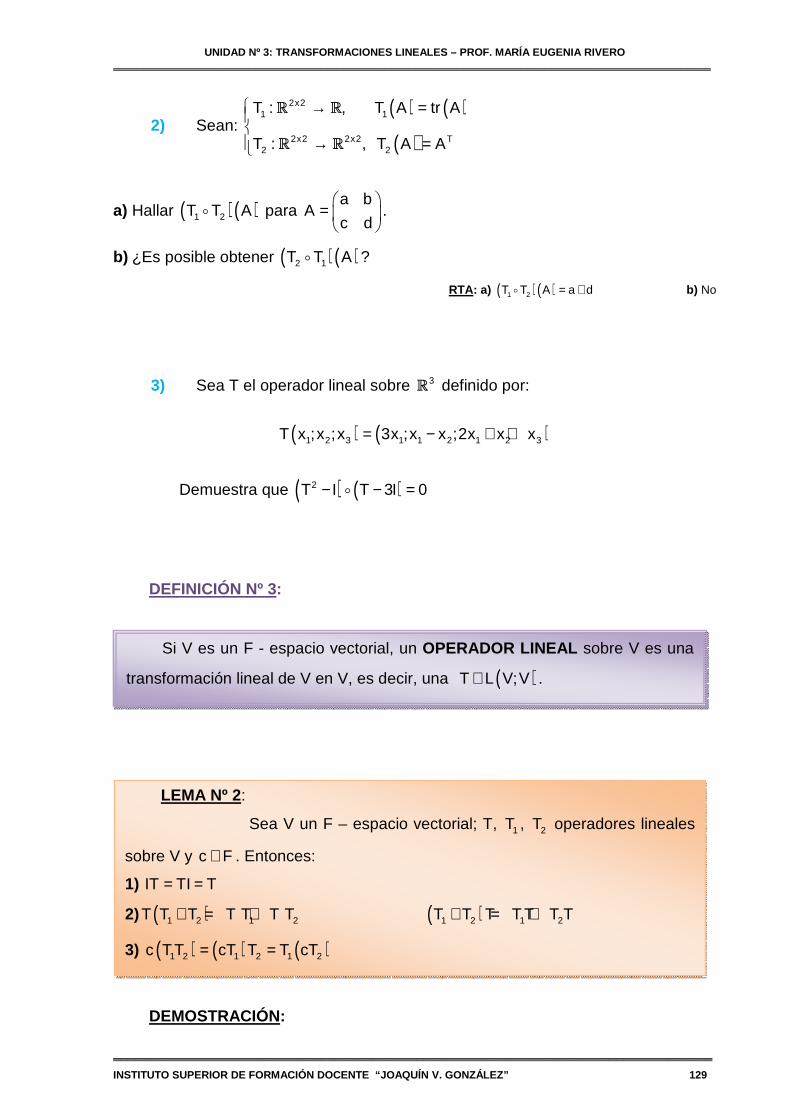
2) Sean: ( ) ( )
( )
2x21 1
2x2 2x2 T2 2
T : , T A tr A
T : , T A A
→ = → =
R R
R R
a) Hallar ( )( )1 2T T A� para a b
Ac d
=
.
b) ¿Es posible obtener ( )( )2 1T T A� ?
RTA: a) ( ) ( )1 2T T A a d= +� b) No
3) Sea T el operador lineal sobre 3R definido por:
( ) ( )1 2 3 1 1 2 1 2 3T x ;x ;x 3x ;x x ;2x x x= − + +
Demuestra que ( ) ( )2T I T 3I 0− − =�
DEFINICIÓN Nº 3:
DEMOSTRACIÓN:
Si V es un F - espacio vectorial, un OPERADOR LINEAL sobre V es una
transformación lineal de V en V, es decir, una ( )T L V;V∈ .
LEMA Nº 2 :
Sea V un F – espacio vectorial; T, 1T , 2T operadores lineales
sobre V y c F∈ . Entonces:
1) IT TI T= =
2) ( )1 2 1 2T T T T T T T+ = + ( )1 2 1 2T T T T T T T+ = +
3) ( ) ( ) ( )1 2 1 2 1 2c T T cT T T cT= =

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 130
Sea α V∈ .
1) ( )( )�
( ) ( )( )� ( ) ( ) ( )
( )�
( )IT α I T α T α T I α TI α∗∗∗ ∗∗∗
= = = =
Por ( )∗ , ( )∗∗ y ( )∗∗∗ , se tiene que IT TI T= =
2) ( ) ( ) ( )( )1 2 1 2T T T α T T T α + = +
( ) ( )
( ) ( )
( )( ) ( )( )
( )( )
1 2
1 2
1 2
1 2
T T α T α por teorema nº 12, ítem 1)
T T α T T α por ser T transf.lineal
T T α T T α
T T T T α po
= + →
= + →
= +
= + → ( )r teorema nº 12, ítem 1) ∗
( ) ( ) ( ) ( )
( ) ( )
( )( ) ( ) ( )
( )( ) ( )
1 2 1 2
1 2
1 2
1 2
T T T α T T T α
T T α T T α por teorema nº 12, ítem 1)
T T α T T α
T T T T α por teorema nº 12, ítem 1)
+ = +
= + →
= +
= + → ∗∗
Por ( )∗ y ( )∗∗ se tiene que ( )1 2 1 2T T T T T T T+ = + y que
( )1 2 1 2T T T T T T T+ = + .
3) ( ) ( ) ( ) ( )1 2 1 2c T T α c T T α por teorema nº 12, ítem 2 = →
( )( )( )
( )( )
( ) ( )
1 2
1 2 1
1 2
1 2
c T T α
T cT α por ser T lineal
T cT α por teorema nº 12, ítem 2)
T cT α
=
= →
= →
=

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 131
( ) ( )1 2 1 2 c T T T cT∴ = ( )∗
Por otra parte:
( ) ( ) ( ) ( )( )( )
( )
1 2 1 2
1 2 1
1 2 2
cT T α cT T α
T cT α por ser T lineal
T T cα por ser T lineal
=
= →
= →
( )( )
( )( )1 2
1 2 1 2
T T cα
c T T α por ser T T lineal (teorema nº 14)
=
= →
( ) ( )1 2 1 2 cT T c T T∴ = ( )∗∗
Por lo probado en ( )∗ y ( )∗∗ , se tiene que ( ) ( ) ( )1 2 1 2 1 2c T T cT T T cT= = .
DEFINICIÓN Nº 4:
El siguiente teorema nos indica que la función inversa de una transformación
lineal es también una transformación líneal.
Una FUNCIÓN T : V W→ se dice INVERSIBLE si existe una función
S : W V→ tal que S T : V V→� es la identidad y T S : W W→� es la
identidad.
Si T es inversible, su inversa S es única y se denota por 1T− .
Más aún, decimos que T es inversible si y sólo si es inyectiva y
sobreyectiva a la vez.
T es INYECTIVA ⇔ ( ) ( )T α T β α β α,β V= ⇒ = ∀ ∈ .
T es SOBREYECTIVA ⇔ ( )Im T W= ⇔ ( ) w W v V / T v w∀ ∈ ∃ ∈ = .
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 132
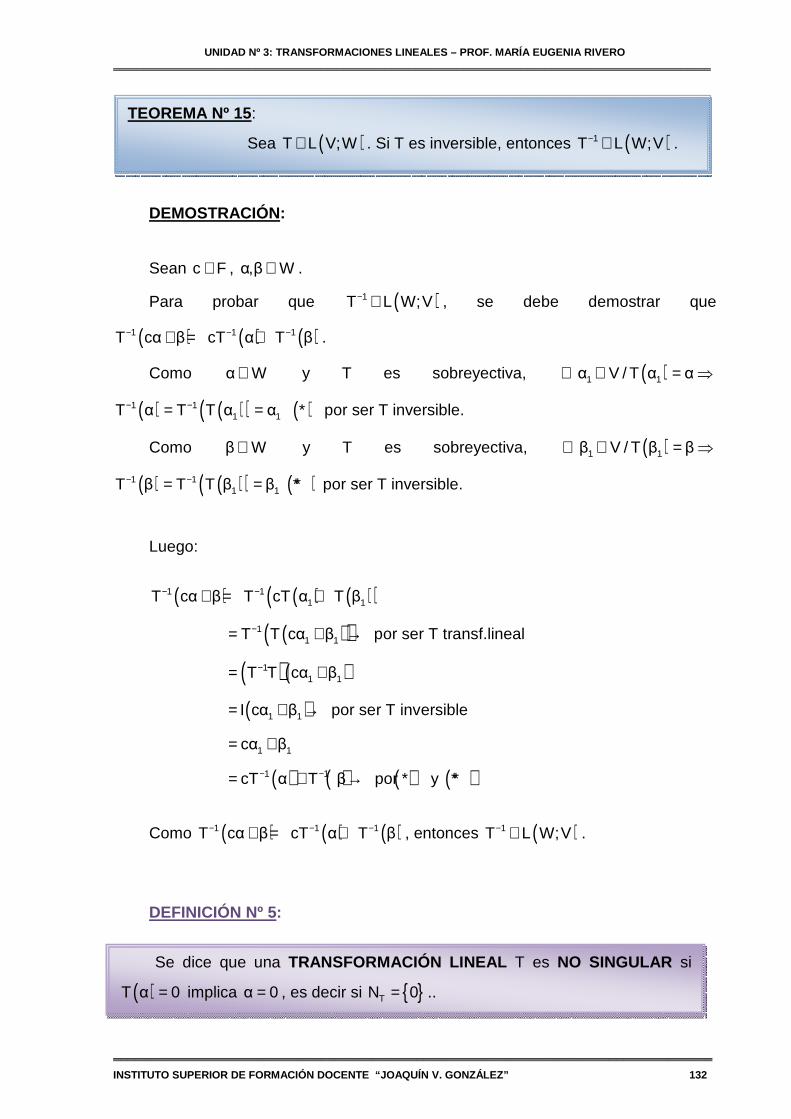
DEMOSTRACIÓN:
Sean c F∈ , α,β W∈ .
Para probar que ( )1T L W;V− ∈ , se debe demostrar que
( ) ( ) ( )1 1 1T cα β cT α T β− − −+ = + .
Como α W∈ y T es sobreyectiva, ( )1 1 α V / T α α∃ ∈ = ⇒
( ) ( )( ) ( )1 11 1T α T T α α − −= = ∗ por ser T inversible.
Como β W∈ y T es sobreyectiva, ( )1 1 β V / T β β∃ ∈ = ⇒
( ) ( )( )1 11 1T β T T β β− −= = ( )∗∗ por ser T inversible.
Luego:
( ) ( ) ( )( )( )( )
( )( )
( )
( ) ( ) ( )
1 11 1
11 1
11 1
1 1
1 1
1 1
T cα β T cT α T β
T T cα β por ser T transf.lineal
T T cα β
I cα β por ser T inversible
cα β
cT α T β por y
− −
−
−
− −
+ = +
= + →
= +
= + →
= +
= + → ∗ ( ) ∗∗
Como ( ) ( ) ( )1 1 1T cα β cT α T β− − −+ = + , entonces ( )1T L W;V− ∈ .
DEFINICIÓN Nº 5:
TEOREMA Nº 15:
Sea ( )T L V;W∈ . Si T es inversible, entonces ( )1T L W;V− ∈ .
Se dice que una TRANSFORMACIÓN LINEAL T es NO SINGULAR si
( )T α 0= implica α 0= , es decir si { }TN 0= ..

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 133
DEMOSTRACIÓN:
Sea T inyectiva.
Sea ( )α V / T α 0∈ = .
Por la propiedad 1 sabemos que ( )T 0 0= , entonces, por ser T inyectiva, α 0= .
Por lo tanto, T es no singular.
Supongamos que T es no singular.
Sean α,β V∈ / ( ) ( )T α T β= .
Luego:
( ) ( ) � ( ) �T lineal T no singular
T α T β 0 T α β 0 α β 0 α β− = ⇒ − = ⇒ − = ⇒ =
Como ( ) ( )T α T β α β α,β V= ⇒ = ∀ ∈ , T es inyectiva.
Dada T:
calculamos T
N .
Si ≠T
N 0 , entonces T no es no singular y por tanto, no
es inyectiva, con lo cual NO ES INVERSIBLE.
TEOREMA Nº 16:
Sea ( )T L V;W∈ .
T es inyectiva si y sólo si T es no singular (es decir
( )T α 0 implica α 0 α V= = ∀ ∈ ).
⇒
⇐
Luego de demostrar el teorema precedente, podemos
establecer algunas conclusiones que nos permitirán analizar
si una transformación lineal →T : V W es o no inversible.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 134
Si =T
N 0 , entonces T es no singular y por tanto, es
inyectiva.
calculamos T
R .
Si =T
R W , entonces T es sobreyectiva.
Si ≠T
R W , entonces T no es sobreyectiva y por tanto,
NO ES INVERSIBLE.
Si T es inyectiva y sobreyectiva simultáneamente, entonces es inversible.
Podemos resumir lo anterior en el siguiente cuadro, siempre considerando
que ( )∈T L V;W .
T
T
0 T NO ES INVERSIBLE N
0 T es inyectivaT
W T es sobreyectiva R
W T NO ES INVERSIBLE
≠ →≠ →≠ →≠ → = →= →= →= → = →= →= →= → ≠ →≠ →≠ →≠ →
DEMOSTRACIÓN:
Sea T no singular y sea { }1 kL α ; ;α= … un subconjunto LI de V.
TEOREMA Nº 17:
Sean V y W espacios vectoriales y ( )T L V;W∈ .
Entonces, T es no singular si y sólo si T aplica cada
subconjunto linealmente independiente de V en un subconjunto linealmente
independiente de W .
⇒
T ES INVERSIBLE

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 135
Debemos demostrar que ( ) ( ){ }1 kT α ; ;T α… es un subconjunto LI de W. De esta
manera quedará probado que siendo T no singular, aplica cada subconjunto LI de V
en otro LI de W.
Sean 1 kc , ,c F∈… y sea ( ) �
k k
i i i ii 1 i 1propiedad
2
0 c T α T c α= =
= =
∑ ∑ .
Como T es no singular y k k
i i i i ii 1 i 1
T c α 0 c α 0 c 0 i 1; ;k = =
= ⇒ = ⇒ = ∀ = ∑ ∑ … por
ser L LI.
Como ( )k
i ii 1
0 c T α=
=∑ y ( ) ( ){ }i 1 kc 0 i 1; ;k T α ; ;T α= ∀ = ⇒… … es LI.
Supongamos que T aplica un subconjunto LI de V en un subconjunto LI de
W.( )∗
Sea { }1 nB α ; ;α= … una base de V.
Sea α V∈ / ( )T α 0= (para ver que T es no singular deberemos demostrar que
α 0= ).
Como α V∈ y B es base, entonces existen 1 nc , ,c F∈… / n
i ii 1
α c α=
=∑ .
Luego:
( ) � ( )n n
i i i ii 1 i 1propiedad
2
0 T α T c α c T α= =
= = = ∑ ∑
Como B es base, es LI, entonces, por ( )∗ , ( ) ( ){ }1 nT α ; ;T α… es LI.
Ahora:
( )n
i ii 1
0 c T α=
=∑ con ( )iT α 0 i 1; ;n≠ ∀ = … (pues si ( )iT α fuese 0 para algún i,
( ) ( ){ }1 nT α ; ;T α… no sería LI, sería LD), entonces ic 0 i 1; ;n= ∀ = ⇒…
n n
i i ii 1 i 1
α c α 0 α 0= =
= = ⋅ =∑ ∑
⇐

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 136
Como ( )T α 0= implica α 0= , entonces T es no singular.
1) Sea 2 2T : →R R definida por ( ) ( )1 2 1 2 1T x ;x x x ;x= + .
Para determinar si T es inversible deberemos establecer si es inyectiva (o no
singular) y sobreyectiva.
Sea ( ) ( ) 1 221 2
1
x x 0α x ;x / T α 0
x 0
+ == ∈ = ⇒ =
R
Luego, 1 2x x 0= = .
Por lo tanto, ( )T α 0= implica α 0= , entonces T es no singular (o sea,
inyectiva).
Esto nos permite determinar que el único vector que integra el núcleo de T es el
( )0;0 .
Sea ( ) 21 2β y ;y= ∈R .
Para demostrar que T es sobreyectiva deberemos encontrar un
( ) 21 2α x ;x /= ∈R ( ) T α β= (las coordenadas de α estarán en función de las de β
que es el vector conocido).
( )
( ) ( )
( ) ( )
1 2 1 2
1 2 1
1 2 1 1 2
1 2
T α β
T x ;x y ;y
x x yx x ;x y ;y
x y
=
=
+ =+ = ⇒ =
En los siguientes ejemplos analizaremos si algunas
transformaciones lineales son o no inversibles.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 137
Luego: sabemos que 1 2x y= , entonces reemplazando a 1x en la primera
ecuación del sistema tenemos que 2 2 1y x y+ = , con lo cual 2 1 2x y y= − .
Por lo tanto, dado ( ) 21 2β y ;y= ∈R , ( ) ( )2
2 1 2 α y ;y y / T α β∃ = − ∈ =R , entonces
T es sobreyectiva.
Esto nos permite concluir en que la imagen de T es 2R .
Como T es inyectiva y sobreyectiva, entonces T es inversible y
( ) ( )11 2 2 1 2T y ;y y ;y y− = − .
2) En este caso, analizaremos los dos ejemplos vistos anteriormente para
determinar si las transformaciones son o no inversibles.
Ejemplo 1) 3 2T : →R R definida por ( ) ( )1 2 3 1 3 2 3T x ;x ;x x x ;x x= − − .
En este caso, habíamos determinado que ( )1 2 3 1 2 3T x ;x ;x 0 x x x= ⇔ = = , con lo
cual podemos concluir en que T no es no singular.
Esto nos dice que T no es inyectiva y, por lo tanto, no es inversible.
Ejemplo 2) 2 2x2T : →R R definida por ( ) 1 2 21 2
2 1 2
x x xT x ;x
x x x
− = −
.
En este caso, ( )1 2 1 2T x ;x 0 x x 0= ⇔ = = , es decir, T es no singular y, por tanto,
T es inyectiva (teorema nº 16).
Pero, al buscar la imagen de la transformación, vimos que esta imagen no era
2x2R sino sólo una parte de 2x2
R : T
a bR / a,b
b a
= ∈
R .
Por lo tanto, la transformación no es sobreyectiva, con lo cual no es inversible.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 138
DEMOSTRACIÓN:
T es inversible, entonces es inyectiva, lo cual implica que es no singular
(teorema nº 16).
En este caso consideraremos que T es no singular.
Sea { }1 nB α ; ;α= … una base de V y, por tanto, un conjunto LI de V.
Entonces, de acuerdo con el teorema nº 17, ( ) ( ){ }1 nT α ; ;T α… es un conjunto LI
de W.
Como dim V dim W n= = y ( ) ( ){ }1 nT α ; ;T α… es LI, entonces ( ) ( ){ }1 nT α ; ;T α…
es base de W (pues es un conjunto LI de W que tiene tantos elementos como la
dimensión de W).
Por lo tanto, dado β W∈ , existen 1 nc , ,c F∈… / ( )n
i ii 1
β c T α=
=∑ .
TEOREMA Nº 18:
Sean V y W F - espacios vectoriales tal que dimV dimW= y
sea ( )T L V;W∈ . Entonces son equivalentes:
1) T es inversible.
2) T es no singular.
3) T es sobreyectiva.
4) T manda una base de V en una de W.
5) Existe una base de V tal que T de esta base es base de W.
El siguiente teorema establece equivalencias sólo
aplicables a transformaciones lineales definidas de un
espacio vectorial en otro (no necesariamente iguales),
ambos con la misma dimensión
1 2⇒
2 3⇒

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 139
Luego, por la propiedad nº 2 se tiene que ( )n
i ii 1
β T c α T α=
= = ∑ con α V∈ .
Por lo tanto, dado β W∈ , ∃ α V∈ / ( )T α β= , entonces T es sobreyectiva.
Sea T sobreyectiva.
Sea { }1 nB α ; ;α= … base de V.
Se debe demostrar que, siendo T sobreyectiva, ( ) ( ){ }1 nT α ; ;T α… es base de
W. Para ello probaremos que ( ) ( ){ }1 nT α ; ;T α… genera W (es decir, que todo vector
de W puede escribirse como combinación lineal de los elementos de
( ) ( ){ }1 nT α ; ;T α… ).
Sea β W∈ .
Como T es sobreyectiva, ∃ α V∈ / ( )T α β= .
Como B es base de V y α V∈ , existen 1 nc , ,c F∈… / n
i ii 1
α c α=
=∑ .
Así, ( ) � ( )n n
i i i ii 1 i 1propiedad
2
β T α T c α c T α= =
= = = ∑ ∑ , con lo cual, β es combinación lineal
de ( ) ( )1 nT α ; ;T α… . Entonces ( ) ( ){ }1 nT α ; ;T α… genera W, es decir, tengo n dimW=
elementos que generan W.
Por lo tanto ( ) ( ){ }1 nT α ; ;T α… es base de W.
Queda entonces demostrado que T manda una base de V en una de W.
Trivial.
Sea { }1 nB α ; ;α= … base de V tal que ( ) ( ){ }1 nT α ; ;T α… es base de W.
Debemos demostrar que T es inversible, es decir, no singular y sobreyectiva.
Sea ( )α V / T α 0∈ = (queremos probar que α 0= ).
3 4⇒
4 5⇒
5 1⇒

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 140
Como α V∈ y B es base de V, existen 1 nc , ,c F∈… / n
i ii 1
α c α=
=∑ .
( ) � ( )n n
i i i i ii 1 i 1propiedad
2
0 T α T c α c T α c 0 i 1; ;n= =
= = = ⇒ = ∀ = ∑ ∑ … pues
( ) ( ){ }1 nT α ; ;T α… es LI n
i ii 1
α c α 0=
⇒ = =∑ .
Como ( )T α 0= implica α 0= , entonces T es no singular.
Sea β W∈ .
Como ( ) ( ){ }1 nT α ; ;T α… es base de W, existen 1 na , ,a F∈… / ( )n
i ii 1
β a T α=
=∑
� ( )n
i ii 1propiedad
2
β T aα T α=
⇒ = =
∑ con α V∈ ,
n
i ii 1
α aα=
=∑ .
Por lo tanto, dado β W∈ , ∃ α V∈ / ( )T α β= , entonces T es sobreyectiva.
Como T es no singular y sobreyectiva, T es biyectiva.
1) Sea 3 3T : →R R , ( ) ( )1 2 3 3 2 1T x ;x ;x x ;x ;x=
Como 3V W dim V dim W 3= = ⇒ = =R . Por lo tanto podemos aplicar el
teorema anterior. Bastará entonces con verificar si T es no singular. Si así fuera,
quedará demostrado que es inversible.
( ) ( ) ( ) ( ) ( )1 2 3 3 2 1 3 2 1 1 2 3T x ;x ;x x ;x ;x 0;0;0 x x x 0 x ;x ;x 0;0;0= = ⇔ = = = ⇔ =
Por lo tanto, T es no singular, y entonces, T es inversible.
En los siguientes ejemplos determinaremos si los
operadores lineales son o no inversibles.

UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 141
¿Cómo hacemos para calcular, entonces, la inversa de T?
Sea ( ) ( ) ( ) ( ) ( )31 2 3 3 2 1 3 2a;b;c / T x ;x ;x a;b;c x ;x ;x a;b;c x a; x b;∈ = ⇒ = ⇒ = =R
1 x c= .
De esta manera:
( ) ( ) ( )( ) ( ) ( ) ( )1 1 1T c;b;a a;b;c T T c;b;a T a;b;c c;b;a T a;b;c− − −= ⇒ = ⇒ =
Así, ( ) ( )1T a;b;c c;b;a− = , con lo cual 1T− resulta ser igual a T (pues tanto T
como su inversa, aplicadas a un vector cualesquiera, intercambian las coordenadas
del mismo).
2) Sea 2x2 2x2T : →R R , a b a 0
Tc d 0 d
=
Nuevamente, 2x2V W dimV dim W 4= = ⇒ = =R . Por lo tanto podemos aplicar
el teorema anterior. Bastará entonces con verificar si T es no singular. Si así fuera,
quedará demostrado que es inversible.
a b a 0 0 0T a d 0
c d 0 d 0 0
= = ⇔ = =
a b 0 0 T
c d 0 0
∴ =
no implica a b 0 0
c d 0 0
=
.
Como T es singular, entonces T no es inversible.
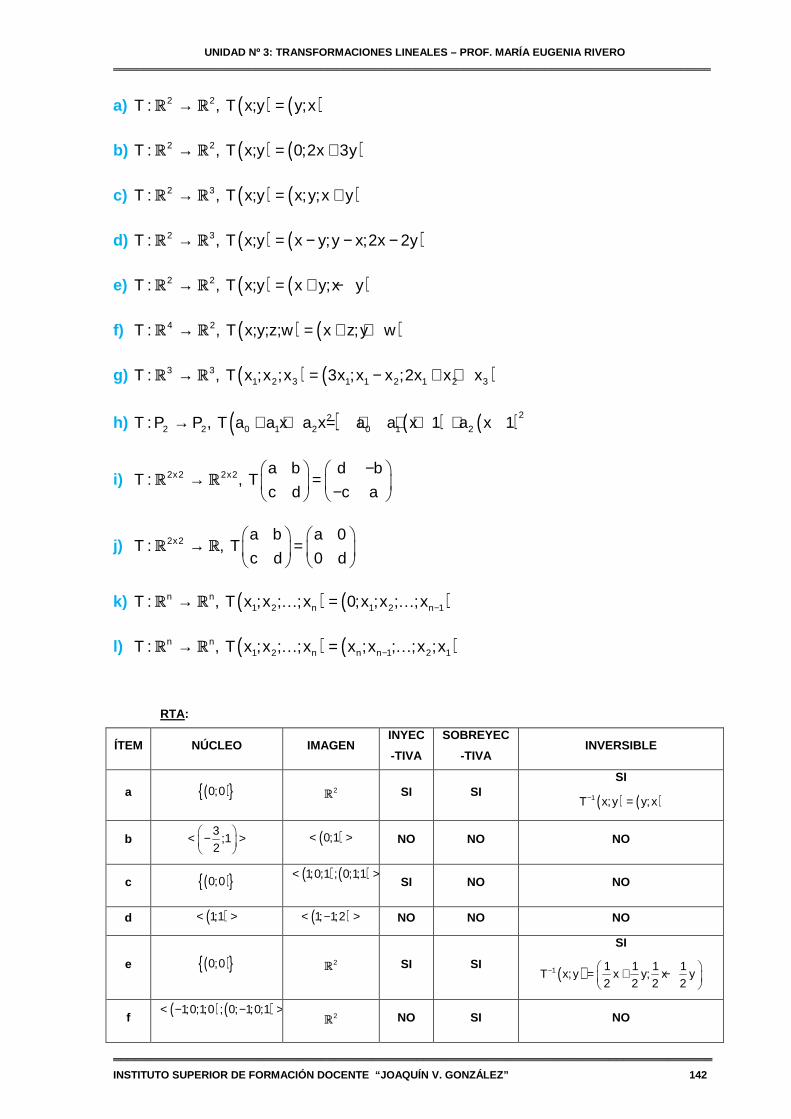
Haremos los siguientes ejercicios a modo de repaso
final. Para cada una de las transformaciones lineales,
determina núcleo, imagen y una base de cada uno de ellos.
Indica si son inyectivas, sobreyectivas e inversibles.
En caso de serlo, mostrar su inversa.
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 142
a) ( ) ( )2 2T : , T x;y y;x→ =R R
b) ( ) ( )2 2T : , T x;y 0;2x 3y→ = +R R
c) ( ) ( )2 3T : , T x;y x;y;x y→ = +R R
d) ( ) ( )2 3T : , T x;y x y;y x;2x 2y→ = − − −R R
e) ( ) ( )2 2T : , T x;y x y;x y→ = + −R R
f) ( ) ( )4 2T : , T x;y;z;w x z;y w→ = + +R R
g) ( ) ( )3 31 2 3 1 1 2 1 2 3T : , T x ;x ;x 3x ;x x ;2x x x→ = − + +R R
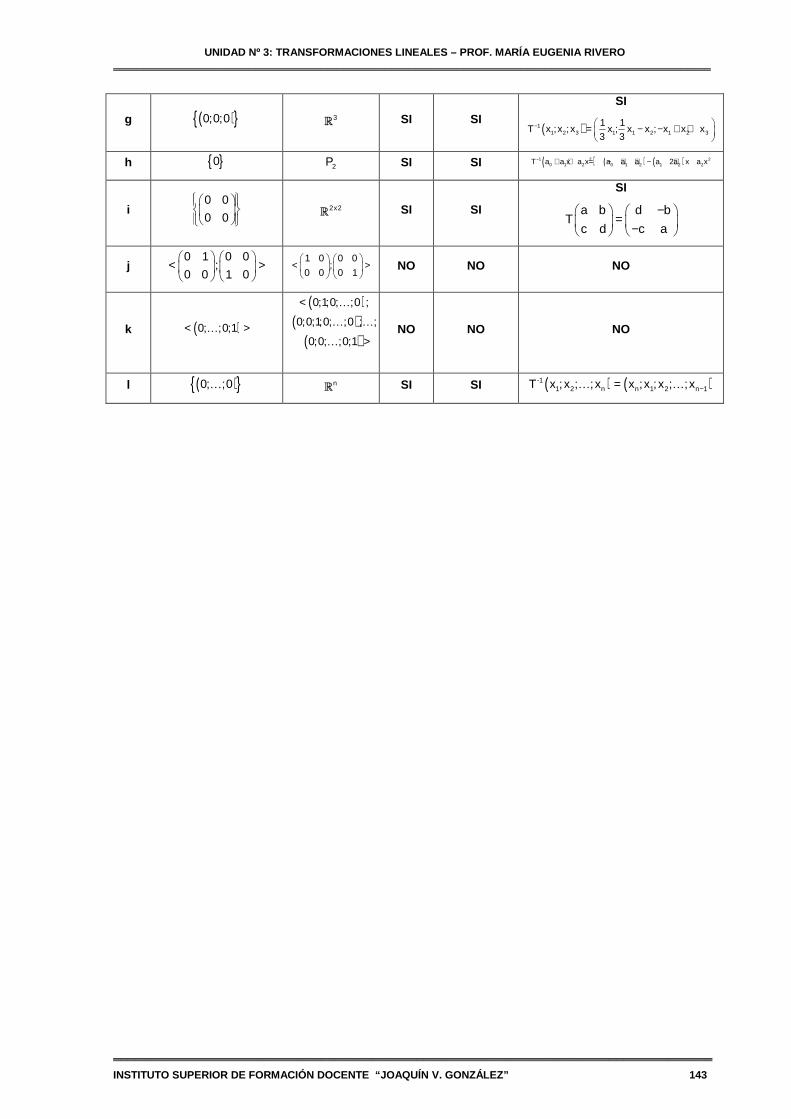
h) ( ) ( ) ( )222 2 0 1 2 0 1 2T : P P , T a a x a x a a x 1 a x 1→ + + = + + + +
i) 2x2 2x2 a b d bT : , T
c d c a
− → = −
R R
j) 2x2 a b a 0T : , T
c d 0 d
→ =
R R
k) ( ) ( )n n1 2 n 1 2 n 1T : , T x ;x ; ;x 0;x ;x ; ;x −→ =… …R R
l) ( ) ( )n n1 2 n n n 1 2 1T : , T x ;x ; ;x x ;x ; ;x ;x−→ =… …R R
RTA:
ÍTEM NÚCLEO IMAGEN INYEC
-TIVA
SOBREYEC
-TIVA INVERSIBLE
a ( ){ }0;0 2R SI SI
SI
( ) ( )1T x;y y;x− =
b 3
;12
< − >
( )0;1< > NO NO NO
c ( ){ }0;0 ( ) ( )1;0;1 ; 0;1;1< >
SI NO NO
d ( )1;1< > ( )1; 1;2< − > NO NO NO
e ( ){ }0;0 2R SI SI
SI
( )1 1 1 1 1T x;y x y; x y
2 2 2 2− = + −
f ( ) ( )1;0;1;0 ; 0; 1;0;1< − − >
2R NO SI NO
UNIDAD Nº 3: TRANSFORMACIONES LINEALES – PROF. MARÍ A EUGENIA RIVERO _____________________________________________________________________________________________________
_________________________________________________________________________________
INSTITUTO SUPERIOR DE FORMACIÓN DOCENTE “JOAQUÍN V . GONZÁLEZ” 143
g ( ){ }0;0;0 3R SI SI
SI
( )11 2 3 1 1 2 1 2 3
1 1T x ;x ;x x ; x x ; x x x
3 3− = − − + +
h { }0 2P SI SI ( ) ( ) ( )1 2 20 1 2 0 1 2 1 2 2T a a x a x a a a a 2a x a x− + + = − + + − +
i 0 0
0 0
2x2R SI SI
SI
a b d bT
c d c a
− = −
j 0 1 0 0
;0 0 1 0
< >
1 0 0 0
;0 0 0 1
< >
NO NO NO
k ( )0; ;0;1< >…
( )( )
( )
0;1;0; ;0 ;
0;0;1;0; ;0 ; ;
0;0; ;0;1
<
>
…
… …
…
NO NO NO
l ( ){ }0; ;0… nR SI SI ( ) ( )-1
1 2 n n 1 2 n 1T x ;x ; ;x x ;x ;x ; ;x −=… …