la mecatrónica en méxico - mecamex.net · conocimiento como no habíamos tenido antes en la...
TRANSCRIPT

La Mecatrónica en México
Comité Editorial de la Revista
Diseño Gráfico Mónica Vázquez Guerrero
Kikey Stephanie Méndez Sánchez Alejandra Miguel Vargas Mandujano
Vinculación Luis Alberto Aguilar Bautista Luis Antonio Salazar Licea
Miguel Ángel Bacilio Rodríguez
Revisión de Formato Rodrigo Escobar Díaz-Guerrero
Conrado Vargas Cabrera Alejandro de León Cuevas Ángel Juárez Buenrostro
Soporte Técnico Carlos Alberto Ramos Arreguín
Juan Carlos Moya Morales Ma. Del Carmen García López
Ubaldo Geovanni Villaseñor Carrillo
LA MECATRÓNICA EN MÉXICO, Año 1, No. 1, Septiembre - Diciembre 2012, es una publicación cuatrimestral editada por la Asociación Mexicana de Mecatrónica A. C., Calle Fonología No. 116, Col. Tecnológico C.P. 76158, Querétaro Qro. Tel.(01- 442) 224 0257. www.mecamex.net/revistas/LMEM/ , Editores responsables: Juan Manuel Ramos Arreguín y José Emilio Vargas Soto. Reserva de Derechos al uso exclusivo No. 04-2012-092010534100-102 otorgado por el Instituto Nacional del Derecho de Autor. Responsable de la última actualización este número: Asociación Mexicana de Mecatrónica A.C., José Emilio Vargas Soto, Calle Fonología No. 116, Col. Tecnológico C.P. 76158, Querétaro Qro. Fecha de terminación de impresión: 05 de Agosto del 2012. Las opiniones expresadas por los autores de los artículos no reflejan la postura de la Asociación Mexicana de Mecatrónica A.C. Esta revista es una publicación de acceso abierto, distribuido bajo los términos de la Asociación Mexicana de Mecatrónica A. C., la cual permite el uso, distribución y reproducción sin restricciones por cualquier medio, siempre y cuando los trabajos estén apropiadamente citados, respetando la autoría de las personas que realizaron los artículos.
PROLOGO
Las actividades científicas y académicas en los últimos años han permitido una creciente evolución del
conocimiento como no habíamos tenido antes en la historia de la humanidad. Cada vez es más complejo
realizar una búsqueda de tópicos especializados, debido principalmente a la gran cantidad de información que
podemos encontrar y que no necesariamente nos será de utilidad.
Está claro que los avances en las tecnologías de la Información contribuyen a facilitar la tarea de
búsqueda de información específica, selección y almacenamiento. Sin embargo, al mismo tiempo se desborda
una gran cantidad de información, dificultando precisamente su clasificación y análisis.
Con el propósito de difundir y facilitar el intercambio de conocimientos vinculados con la
investigación y el desarrollo de las tecnologías afines a la Ingeniería Mecatrónica surge ésta revista. El ejemplar que tienes en tus manos es un esfuerzo que realiza la Asociación Mexicana de Mecatrónica A.C.
para dar a conocer a la sociedad los nuevos conocimientos y avances logrados en diversos tópicos de la
Ingeniería Mecatrónica. Espero que la revista contribuya en lograr la comprensión y aplicación de dichos
conocimientos con el propósito de mejorar la calidad de vida en la sociedad.
Confío firmemente en que los temas expuestos en esta edición sean elementos de inspiración para
innovar nuevos productos, procesos o servicios.
Disfrútalos.
Dr. José Emilio Vargas Soto
Fundador
Asociación Mexicana de Mecatrónica A.C.
ÍNDICE
Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR. 1 Reyes Ávila Luis, Jiménez López Eusebio, Olvera Aranzolo Ernesto, Vázquez Cuevas Ignacio, Chávez Mendiola Eduardo, Rivera Nieblas Jorge, López Figueroa Francisco, Delfín Vázquez Juan yUrbalejo Contreras Arturo. Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas. 12 Flores Nava Irma, Flores Salazar Fabiola yCarro Suárez Jorge. Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA. 20 Juárez Buenrostro Ángel, Vázquez Guerrero Mónica, Aceves Fernández Marco Antonio, Ramos Arreguín Carlos Alberto y Ramos Arreguín Juan Manuel. Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz. 33 Celia Martínez-Chiñas, S. Vergara, M. Vargas, F. Reyes, M. A. Vargas, A. Palomino y J.M. Rodriguez-Lelis.

La Mecatrónica en México, Vol. 1, No. 1, páginas 1 – 11, Septiembre 2012 Disponible en línea en www.mecamex.net/revistas/LMEM ISSN en trámite, © 2012, Asociación Mexicana de Mecatrónica A. C.
1
Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar
de 3GDL, tipo RRR
Reyes Ávila Luis1, Jiménez López Eusebio2, OlveraAranzoloErnesto3, Vázquez Cuevas Ignacio4, Chávez Mendiola Eduardo5, Rivera Nieblas Jorge6, López Figueroa
Francisco7, Delfín Vázquez Juan8 yUrbalejo Contreras Arturo9
1 Instituto Mexicano del Transporte-IIMM
2ULSA Noroeste - CINNTRA de la UTS –IIMM 3 Instituto Mexicano de Tecnología del Agua.
4Universidad Tecnológica de Nogales 5,6Universidad del Valle de México, campus Hermosillo
7,9CIAAM de la Universidad Tecnológica del Sur de Sonora (UTS) 8CETA del Instituto Tecnológico Superior de Cajeme
Recibido: 15 / Febrero / 2012. Aceptado: 11 / Abril / 2012. Publicado: 1 / Octubre / 2012. © 2012 Reyes Avila Luis, et. Al. Este es un artículo de acceso abierto, distribuido bajo los términos de la Asociación Mexicana de Mecatrónica A. C., el cual permite el uso, distribución y reproducción sin restricciones por cualquier medio, siempre que el trabajo original esté apropiadamente citado. La revista cuenta con el Certificado de Reserva de Derechos al Uso Exclusivo No. 04-2012-092010534100-102.
Resumen. Para la modelación cinemática y dinámica de multicuerpos rígidos se han aplicado diversas herramientas matemáticas. Las matrices homogéneas y los números complejos son algunas de las más utilizadas. Recientemente, las aplicaciones del álgebra hipercompleja se han generalizado en el estudio de los movimientos de robots y mecanismos, en especial el álgebra de Quaterniones. En este artículo se presenta una aplicación del álgebra hipercompleja en el modelado cinemático de posicionamiento de un robot paralelo planar, tipo RRR. Se utiliza una rotación variante descrita en el espacio vectorial de números complejos y una rotación usual definida en el espacio vectorial de Quaterniones. Se desarrollaron los modelos del robot y se formularon los problemas cinemáticos inversos. Dichos modelos generan un sistema de 12 ecuaciones no lineales con 12 incógnitas. Fue usada una biblioteca del softwareMathematica, que sistematiza elmétodo de Newton-Rapshon, para solucionar el problema inverso.Los resultados obtenidos muestran que los modelos logrados con la rotación variante del álgebra de los números complejos son equivalentes a los generados con la rotación usual de Quaterniones. El uso del software Mathematica facilita la solución de los sistemas de ecuaciones y permite visualizar los resultados. Los modelos obtenidos en este trabajo pueden ser utilizados para analizar y modelar los movimientos de sistemas mecatrónicos, como es el caso de los robots industriales. Palabras clave:Robot paralelo, Quaterniones, números complejos, cinemática

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
2
1. Introducción.
La Mecatrónica es una Ingeniería que integra tres campos principales del conocimiento: la Mecánica, la Computación y la Electrónica [1]. Para desarrollar los productos y los procesos, la Mecatrónica se auxilia de todas las tecnologías disponibles de sus tres campos primarios incorporando conocimientos de los campos secundarios, tales como las matemáticas, la manufactura, la inteligencia artificial, la robótica, entre otros. La Mecatrónica utiliza toda una metodología de diseño, en cuyos pasos resalta por su importancia, la simulación computacional. Para que un simulador sea representativo de la realidad, es necesario interrelacionar las Ciencias Físicas con las Matemáticas.
La Física proporciona las leyes y las teorías por medio de las cuales se interpreta un fenómeno y las Matemáticas permiten diseñar un modelo que representa parte del fenómeno. Posteriormente, una vez construido el modelo, se usa la computación para generar un simulador que permita, por un lado, probar la eficiencia del modelo y obtener datos ingenieriles y, por otro lado, probar diferentes casos o eventos del fenómeno en un ambiente computacional. Para el caso de la Mecatrónica, la simulación computacional puede usarse en cada subsistema que compone un producto. Por ejemplo, para imitar los movimientos de un robot, o bien para simular la funcionalidad de un subsistema electrónico [2].
Un producto mecatrónico clásico que se utiliza para diversas tareas industriales y didácticas es el robot. Para diseñar un robot es necesario modelar sus movimientos y posteriormente simular en un medio computacional dichos movimientos. Los modelos son generados usando herramientas matemáticas, como los números complejos o las matrices homogéneas, entre otras [3]. Otra herramienta que se ha estado utilizando en la modelación de robots es el álgebra hipercompleja parametrizada y sistematizada en el contexto del álgebra moderna, particularmente al álgebra de Quaterniones [4] y los números complejos [5] (de hecho los Quaterniones son una generalización formal de los números complejos).
Por otro lado, las herramientas matemáticas son aplicadas en la modelación de diferentes tipos de robots. Un caso especial es el robot tipo paralelo. Este robot a diferencia de losrobots antropomorfos tiene una alta rigidez y alta precisión [6]. Sin embargo, los robots paralelos tienen un área de trabajo muy delimitada y por su configuración paralela generalmente suelen tener complicaciones mecánicas. Otra diferencia importante en relación con los robots paralelos es el hecho de que la formulación y la solución del problema cinemático directo sonmássencillas en los robots antropomorfos, y se complica en los robots paralelos [7]. Formalmente, un robot paralelo se define de la manera siguiente [8]:
“Un robot paralelo es un mecanismo de cadena cerrada constituido por un órgano terminal de “n” grados de libertad y una base fija unidos entre sí por cadenas cinemáticas independientes. Cada cadena consta a lo mucho de dos segmentos articulados. La conexión entre los dos segmentos debe ser por una junta de un grado de libertad. El movimiento del mecanismo es efectuado por “n” actuadores simples, uno por cada cadena”.
Bajo este contexto, en este artículo se presenta la aplicacióndel álgebra hipercompleja al modelado de un robot paralelo plano de 3 GDL, tipo RRR. El robot es modelado con dos herramientas matemáticas, en primer lugar se usa el álgebra de Quaterniones y en segundo lugar se usará una rotación variante definida y sistematizada en el espacio vectorial de números complejos. El objetivo es dejar modelos cinemáticos de referencia para futuras aplicaciones de la mecatrónica en el campo de la robótica paralela. Fue utilizado el software Mathematica para programar y simular los movimientos del robot en estudio. El álgebra hipercompleja desarrollada en [4,5], ha sido utilizada para modelar el robot paralelo usando la rotación usual de números complejos [9] y en [10] se modelaron 2 robots y dos mecanismos utilizandoQuaterniones. En [11] se aplicó la rotación variante para modelar un robot delta de 5 barras y un robot de dos grados de libertad de cadena abierta.

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
3
2. Marco teórico. En esta sección se describen el álgebra de Quaterniones y la rotación variante definida en el espacio vectorial de números complejos.
2.1 Algunas consideraciones sobre el álgebra de Quaterniones.
De acuerdo con [4], sobre el conjunto en 4 se definen dos operaciones binarias ! : 4 x 4" 4 y # : 4 x 4" 4. Esto es,
1) (a,b,c,d) ! ($,%,&,') = (a+$, b+%, c+&, d+') ; ( (a,b,c,d), ($,%,&,') ) 4 2) (a,b,c,d) # ($,%,&,') = (a$-b%-c&-d', a%+b$+c'-d&, a&-b'+c$+d%, a'+b&-c%+d$), (
(a,b,c,d), ($,%,&,') ) 4 La operación ! : 4 x 4 " 4 es la suma usual en 4y es bien conocido que el conjunto ( 4, !) es un grupo aditivo conmutativo y que la terna ( 4, !,#) es un cuerpo no conmutativo. Por otro lado, la operación * : x 4" 4 definida por: $* (a,b,c,d) = (a$,b$,c$,d$), ((a,b,c,d) ) 4,$) es una multiplicación escalar en 4. Por lo tanto, la terna ( 4, !, *) es un espacio vectorial real. La
transformación +*,*,: 4 x 4 " , dada por:+p,q, = p qi
ii
-.
0
3
) , es un producto vectorial interno en 4
y la norma asociada es:
-p +p,q,1
2 = ( 23
22
21
20 pppp /// )
Por lo tanto, la estructura Q=( 4, !, #, *, * ) es un espacio vectorial normado el cual se llamará
Espacio Vectorial de Quaterniones y sus elementos Quaterniones [4]. Un Quaternion conjugado p) Q de p = (a,b,c,d) está definido por: p = (a,-b,-c,-d). Por otro lado, sea 0(p, *) : Q"Q, p)Q, entonces:
0(p, q) = p#q#p-1 =1
2
p* (p#q#1p), (p , q )Q (1)
Dicha transformación lineal es una rotación la cual preserva el producto interno, la norma y el ángulo. Finalmente, las relaciones geométricas entre los Quaterniones y los componentes de las rotaciones son las siguientes:
p0 = p Cos22
, pV= 3 p Sin 22
w (2)
Aquí, 2) es el ángulo de la rotación y w) 3 es el eje de la rotación.
2.2 Algunas consideraciones sobre la rotación variante del álgebra de números complejos.
Sobre el conjunto 2 se definen dos operaciones binarias! : 24 2" 2 y #: 24 2" 2mediante los cuales, las parejas ( 2, !) y ( 2,#) forman dos grupos, uno aditivo y otro conmutativo multiplicativo, respectivamente. Las operaciones ! : 24 2" 2 y # : 24 2" 2 se definen de la manera siguiente [5]:
i) (a, b) ! ($, %) = (a +$ , b +%) (3) ii) (a, b) #($, %) = (-a$ + b%, a% + b$), ( (a, b), ($,%) ) 2

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
4
Cabe señalar que la operación#: 24 2" 2 es no asociativa. Por otro lado, en 2 se define una operación escalar * : 4 2" 2 , un producto interno, esto es:+*, *, : 24 2" y una norma 5*5 : 2" y, por tanto, la estructura ( 2, !, #, +*, *,, 5*5) es un espacio vectorial normado y con producto interno llamado el espacio vectorial de los números complejos. La transformación lineal R2 : 2" 2 definida por:
R2(p,q)= p
1* qp# ; q ) 2 fijo, (4)
es una rotación llamada variante ( qp# , es un complejo conjugado). Las relaciones entre los
componentes del complejos p 2 y los componentes de la rotación son las siguientes: p = {p0, p1} ;p0 = -Cos 21 ; p1 = -(3Sen21) (5)
3. Metodología. En esta sección se presenta la metodología por medio de la cual se modelará el robot paralelo motivo de estudio. Esto es:
1) Se describe la arquitectura del robot. 2) Se modelan las configuraciones de análisis. 3) Se construyen las ecuaciones de posición. 4) Se resuelven los modelos. 5) Se programan las ecuaciones. 6) Se visualizan los resultados.
4. Resultados.
En esta sección se presenta el modelo del robot motivo de estudio en este artículo. En primer lugar se describirá el modelo desarrollado con el álgebra de Quaterniones y, en segundo lugar, el modelo sistematizado con la rotación variante.
4.1 Modelación del robot usando Quaterniones.
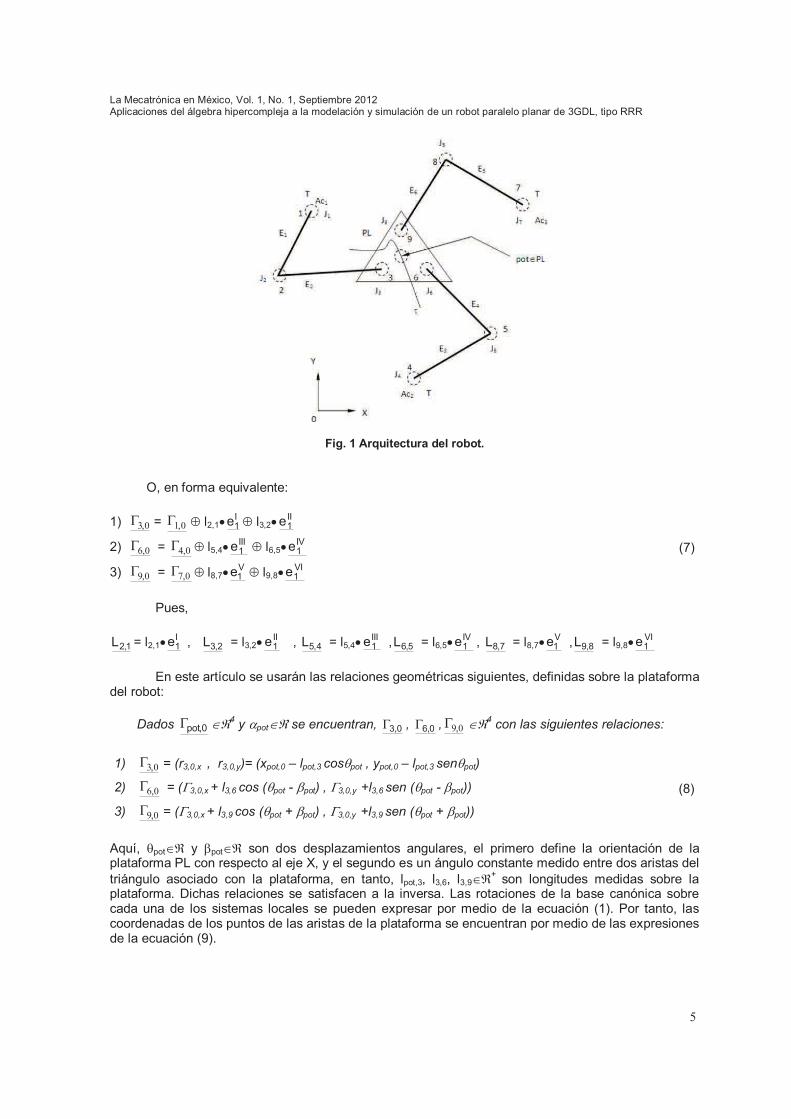
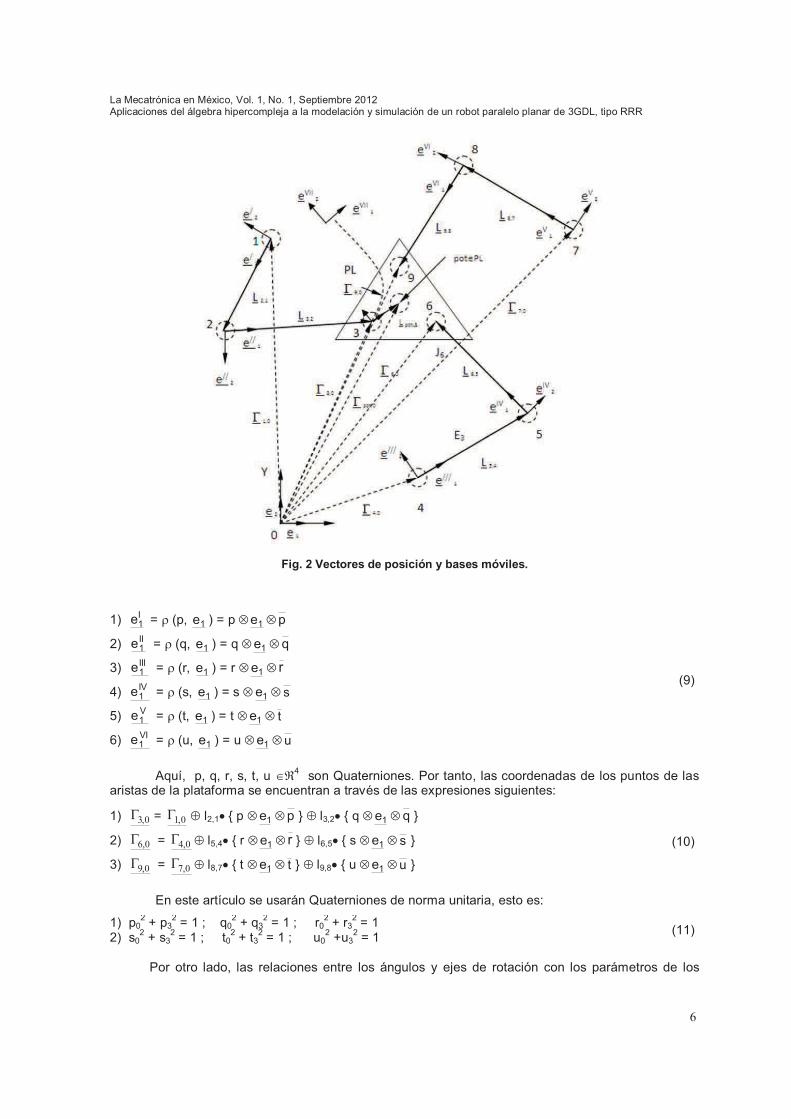
El robot motivo de estudio en este artículo, consta de 8 eslabones rígidos (incluyendo la tierra del sistema T) y tres cadenas cinemáticas cerradas independientes, como se muestra en la figura 1. Cada cadena tiene un actuador y los eslabones se conectan por juntas rotacionales. El robot es de 3GDL y sobre la plataforma PL mostrada en la figura 1, se localiza el punto pot llamado órgano terminal el cual describirá una trayectoria en el plano XY. Sobre las juntas del robot (posiciones 1,4 y 7) se localizan tres actuadores, uno por cada cadena, los cuales le darán movimiento al robot. Para poder modelar la posición del robot es necesario definir un sistema de ecuaciones de lazo cerrado sobre la estructura del multicuerpo. Para ello, sobre los eslabones del sistema articulado se definen vectores de posición y sistemas locales, como se muestra en la figura 2. Las ecuaciones de lazo son las siguientes: 1) 0,36 = 0,16 ! 1,2L ! 2,3L
2) 06,6 = 04,6 ! 45,L ! 56,L
3) 09,6 = 0,76 ! 78,L ! 89,L
(6)
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
5
Fig. 1 Arquitectura del robot. O, en forma equivalente:
1) 0,36 = 0,16 ! l2,1*I1e ! l3,2*
II1e
2) 0,66 = 0,46 ! l5,4*III1e ! l6,5*
IV1e
3) 0,96 = 0,76 ! l8,7*V1e ! l9,8*
VI1e
(7)
Pues,
1,2L = l2,1*I1e , 2,3L = l3,2*
II1e , 4,5L = l5,4*
III1e , 5,6L = l6,5*
IV1e , 7,8L = l8,7*
V1e , 8,9L = l9,8*
VI1e
En este artículo se usarán las relaciones geométricas siguientes, definidas sobre la plataforma
del robot:
Dados 0,pot6 ) 4 y $pot) se encuentran, 0,36 , 0,66 , 0,96 ) 4
con las siguientes relaciones:
1) 0,36 = (r3,0,x , r3,0,y)= (xpot,0 – lpot,3 cos2pot , ypot,0 – lpot,3 sen2pot)
2) 0,66 = (63,0,x + l3,6 cos (2pot - %pot) , 63,0,y +l3,6 sen (2pot - %pot))
3) 0,96 = (63,0,x + l3,9 cos (2pot + %pot) , 63,0,y +l3,9 sen (2pot + %pot))
(8)
Aquí, 2pot) y %pot) son dos desplazamientos angulares, el primero define la orientación de la plataforma PL con respecto al eje X, y el segundo es un ángulo constante medido entre dos aristas del triángulo asociado con la plataforma, en tanto, lpot,3, l3,6, l3,9)
+ son longitudes medidas sobre la plataforma. Dichas relaciones se satisfacen a la inversa. Las rotaciones de la base canónica sobre cada una de los sistemas locales se pueden expresar por medio de la ecuación (1). Por tanto, las coordenadas de los puntos de las aristas de la plataforma se encuentran por medio de las expresiones de la ecuación (9).
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
6
Fig. 2 Vectores de posición y bases móviles.
1) I1e = 0 (p, 1e ) = p # 1e #p
2) II1e = 0 (q, 1e ) = q # 1e # q
3) III1e = 0 (r, 1e ) = r # 1e # r
4) IV1e = 0 (s, 1e ) = s # 1e # s
5) V1e = 0 (t, 1e ) = t # 1e # t
6) VI1e = 0 (u, 1e ) = u # 1e #u
(9)
Aquí, p, q, r, s, t, u ) 4 son Quaterniones. Por tanto, las coordenadas de los puntos de las
aristas de la plataforma se encuentran a través de las expresiones siguientes:
1) 0,36 = 0,16 ! l2,1* { p # 1e #p } ! l3,2* { q # 1e # q }
2) 0,66 = 0,46 ! l5,4* { r # 1e # r } ! l6,5* { s # 1e # s }
3) 0,96 = 0,76 ! l8,7* { t # 1e # t } ! l9,8* { u # 1e #u }
(10)
En este artículo se usarán Quaterniones de norma unitaria, esto es:
1) p02 + p3
2 = 1 ; q02 + q3
2 = 1 ; r02 + r3
2 = 1 2) s0
2 + s32 = 1 ; t0
2 + t32 = 1 ; u0
2 +u32 = 1
(11)
Por otro lado, las relaciones entre los ángulos y ejes de rotación con los parámetros de los
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
7
Quaterniones se describen a continuación:
po= 3Cos212 , Vp = 3Sen
2
123e , qo= 3Cos
222 , Vq = 3Sen
2
223e
ro= 3 Cos 232 , Vr = 3Sen
2
323e , so= 3 Cos
2
42 , Vs = 3Sen2
423e
to= 3 Cos 2
52 , Vt = 3Sen2
523e , uo= 3 Cos
262 , Vu = 3Sen
2
623e
(12)
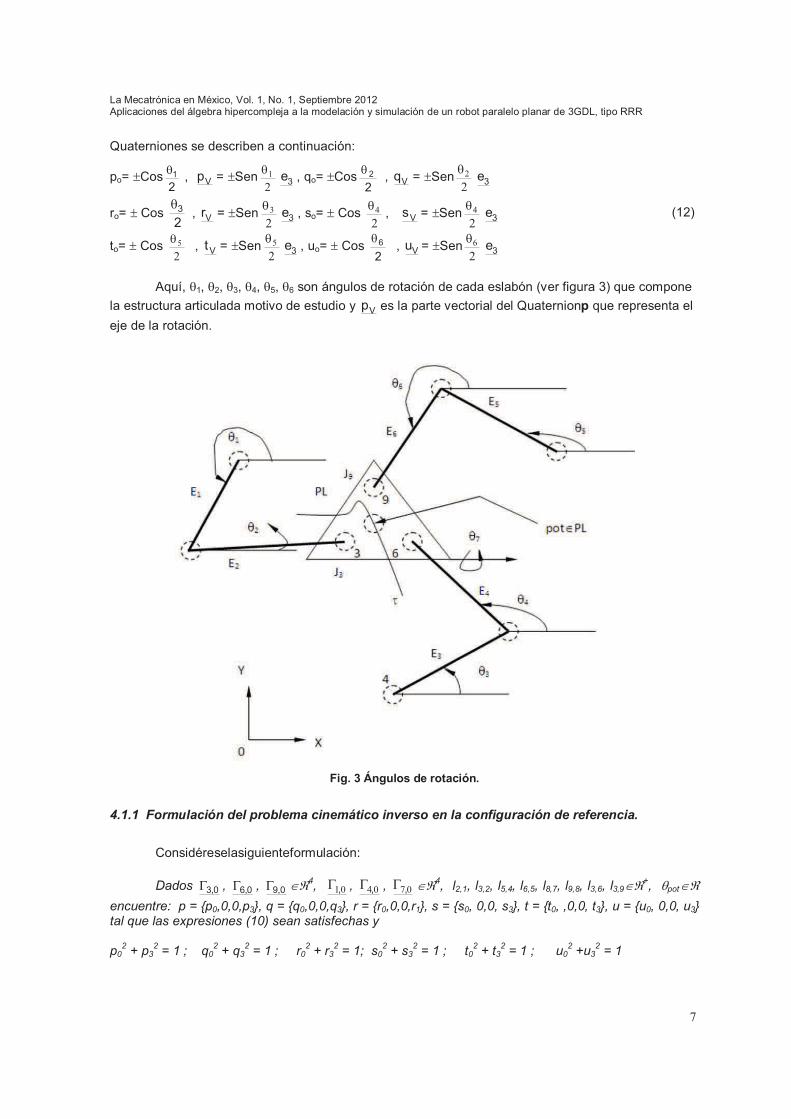
Aquí, 21, 22, 23, 24, 25, 26 son ángulos de rotación de cada eslabón (ver figura 3) que compone
la estructura articulada motivo de estudio y Vp es la parte vectorial del Quaternionp que representa el
eje de la rotación.
Fig. 3 Ángulos de rotación.
4.1.1 Formulación del problema cinemático inverso en la configuración de referencia.
Considéreselasiguienteformulación:
Dados 0,36 , 0,66 , 0,96 ) 4, 01,6 , 04,6 , 07,6 ) 4
, l2,1, l3,2, l5,4, l6,5, l8,7, l9,8, l3,6, l3,9) +, 2pot)
encuentre: p = {p0,0,0,p3}, q = {q0,0,0,q3}, r = {r0,0,0,r1}, s = {s0, 0,0, s3}, t = {t0, ,0,0, t3}, u = {u0, 0,0, u3}tal que las expresiones (10) sean satisfechas y
p02 + p3
2 = 1 ; q0
2 + q3
2 = 1 ; r0
2 + r3
2 = 1; s0
2 + s3
2 = 1 ; t0
2 + t3
2 = 1 ; u0
2 +u3
2 = 1

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
8
El problema cinemático inverso relacionado con el robot motivo de estudio, genera un sistema de 12 ecuaciones no lineales con 12 incógnitas.
4.2 Modelación del robot usando la rotación variante. Para modelar el robot paralelo motivo de estudio utilizando la rotación variante, se usarán las mismas ecuaciones de lazo integradas por los vectores y las bases móviles mostradas en la figura 2. Por lo tanto, las bases locales se pueden escribir en términos de la rotación variante (4) de la manera siguiente:
1) I1e = R2 (p, 1e ) = 1ep#
2) II1e = R2 (q, 1e ) = 1eq#
3) III1e = R2 (r, 1e ) = 1er #
4) IV1e = R2 (s, 1e ) = 1es#
5) V1e = R2 (t, 1e ) = 1et#
6) VI1e = R2 (u, 1e ) = 1eu#
(13)
Aquí, p, q, r, s, t, u ) 2 son números complejos.Las ecuaciones de lazo se pueden escribir en términos de la rotación variante. Esto es:
1) 0,36 = 0,16 + l2,1* { 1ep# } + l3,2* { 1eq# }
2) 0,66 = 0,46 + l5,4* { 1er# } + l6,5* { 1es# }
3) 0,96 = 0,76 + l8,7* { 1et# } + l9,8* { 1eu# }
(14)
En este trabajo se utilizarán complejos de norma unitaria. Por lo tanto, 1) p0
2 + p12 = 1 ; q0
2 + q12 = 1 ; r0
2 + r12 = 1
2) s02 + s1
2 = 1 ; t02 + t1
2 = 1 ; u02 +u1
2 = 1 (15)
Además, las relaciones geométricas entre las rotaciones y los parámetros son: 1) p = {p0, p1} ; p0 = – Cos 21 ; p1 = -(3Sen21) 2) q = {q0, q1} ; q0 = – Cos 22 ; q1 = -(3Sen22) 3) r = {r0, r1} ; r0 = – Cos 23 ; r1 = -(3Sen23) 4) s = {s0, s1} ; s0 = – Cos 24 ; s1 = -(3Sen24) 5) t = {t0, t1} ; t0 = – Cos 25 ; t1 = -(3 Sen 25) 6) u = {u0, u1} ; u0 = – Cos26 ; u1 = -(3Sen26)
(16)
4.2.1 Formulación del problema cinemático inverso. Considérese la formulación siguiente:
Dados 0,36 , 0,66 , 0,96 ) 2, 0,16 , 0,46 , 0,76 ) 2
,l2,1, l3,2, l5,4, l6,5, l8,7, l9,8, lpot,3, l3,6, l3,9) , encuentre:p
= {p0, p1}, q = {q0, q1}, r = {r0, r1}, s = {s0, s1}, t = {t0, t1}, u = {u0, u1}, tal que las expresiones (14) sean satisfechas y,

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
9
p02 + p1
2 = 1 ; q0
2 + q1
2 = 1
r02 + r1
2 = 1 ; s0
2 + s1
2 = 1
t02 + t1
2 = 1 ; u0
2 + u1
2 = 1
El problema cinemático inverso relacionado con el robot motivo de estudio, genera un sistema
de 12 ecuaciones no lineales con 12 incógnitas.
4.3 Programación y simulación. La programación y la simulación de las ecuacionesse realizaron en la plataforma de cálculo formal Mathematica. A continuación se presenta una parte del código en Mathematicarelacionada con la operación de Quaterniones, el conjugado y la rotación, esto es: QMULT[P_,Q_]:={P[[1]] Q[[1]]-P[[2]] Q[[2]]-P[[3]] Q[[3]]- P[[4]] Q[[4]],P[[1]] Q[[2]]+P[[2]] Q[[1]]+ P[[3]] Q[[4]]-P[[4]] Q[[3]],P[[1]] Q[[3]]- P[[2]] Q[[4]]+P[[3]] Q[[1]]+P[[4]] Q[[2]], P[[1]] Q[[4]]+P[[2]] Q[[3]]-P[[3]] Q[[2]]+ P[[4]] Q[[1]]}
QCONJ[P_]:={P[[1]],-P[[2]],-P[[3]],-P[[4]]}
ROT[P_,Q_]:=QMULT[P,QMULT[Q,QCONJ[P]]]
Una parte de la programación correspondiente almétodo de Newton Raphson, cuya biblioteca se ejecuta con el comando FindRoot, es la siguiente: f0 = N[rp1[[2]]]; f1 = N[rp1[[3]]]; g0 = N[RR1[[2]]+rp2[[2]]]; g1 = N[RR1[[3]]+rp2[[3]]]; h0 = N[RR2[[2]]+rp3[[2]]]; h1 = N[RR2[[3]]+rp3[[3]]];
inc=5; inct=.125; For[Theta = 0;t=0,t<=1,Theta += inc;t+=inct, px=S0[[1]]+(S1[[1]]-S0[[1]])*t; py=S0[[2]]+(S1[[2]]-S0[[2]])*t; puntop[i]={px,py,Theta}; p1x = N[ px - L3*Cos[Theta Degree]]; p1y = N[ py - L3*Sin[Theta Degree]]; p2x = N[ p1x + L4*Cos[(Theta-30) Degree]]; p2y = N[ p1y + L4*Sin[(Theta-30) Degree]]; p3x = N[ p1x + L5*Cos[(Theta+30) Degree]]; p3y = N[ p1y + L5*Sin[(Theta+30) Degree]];
solucion1[i]=FindRoot[{f0 == p1x, f1 == p1y, p0^2 + p3^2==1,
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
10
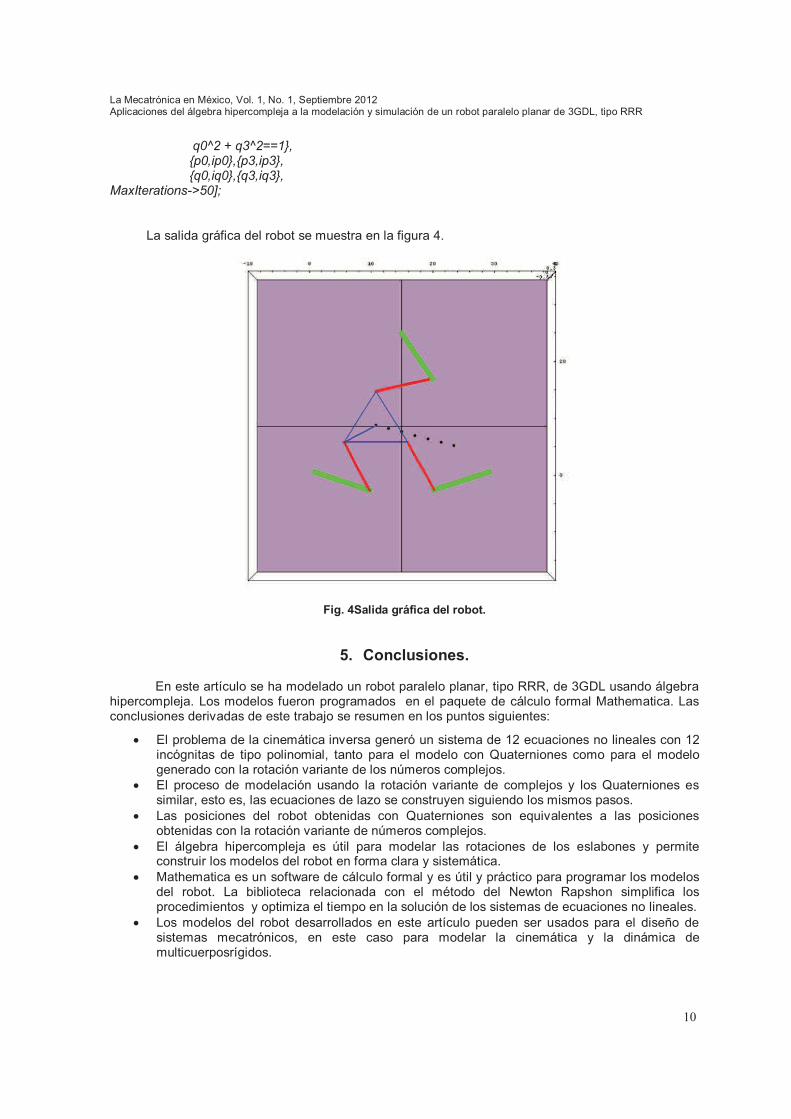
q0^2 + q3^2==1}, {p0,ip0},{p3,ip3}, {q0,iq0},{q3,iq3}, MaxIterations->50]; La salida gráfica del robot se muestra en la figura 4.
Fig. 4Salida gráfica del robot.
5. Conclusiones. En este artículo se ha modelado un robot paralelo planar, tipo RRR, de 3GDL usando álgebra hipercompleja. Los modelos fueron programados en el paquete de cálculo formal Mathematica. Las conclusiones derivadas de este trabajo se resumen en los puntos siguientes:
* El problema de la cinemática inversa generó un sistema de 12 ecuaciones no lineales con 12 incógnitas de tipo polinomial, tanto para el modelo con Quaterniones como para el modelo generado con la rotación variante de los números complejos.
* El proceso de modelación usando la rotación variante de complejos y los Quaterniones es similar, esto es, las ecuaciones de lazo se construyen siguiendo los mismos pasos.
* Las posiciones del robot obtenidas con Quaterniones son equivalentes a las posiciones obtenidas con la rotación variante de números complejos.
* El álgebra hipercompleja es útil para modelar las rotaciones de los eslabones y permite construir los modelos del robot en forma clara y sistemática.
* Mathematica es un software de cálculo formal y es útil y práctico para programar los modelos del robot. La biblioteca relacionada con el método del Newton Rapshon simplifica los procedimientos y optimiza el tiempo en la solución de los sistemas de ecuaciones no lineales.
* Los modelos del robot desarrollados en este artículo pueden ser usados para el diseño de sistemas mecatrónicos, en este caso para modelar la cinemática y la dinámica de multicuerposrígidos.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Aplicaciones del álgebra hipercompleja a la modelación y simulación de un robot paralelo planar de 3GDL, tipo RRR
11
Referencias [1] Bishop, R. The Mechatronic Handbook. Crc Press Washington D.C. 2002 [2] Jiménez E., Vázquez I., Reyes L., Mendiola E., Rivera J,. López F., Delfín V. Urbalejo A.
Modelación y simulación de un robot paralelo plano usando Quaterniones y Labview.10º Congreso Nacional de Mecatrónica. Noviembre 3 y 4. Puerto Vallarta, Jalisco.(2011).
[3] Jorge A. “Fundamentals of Robotic Mechanical System. Theory, Methods and Algorithms”. Springer- Verlag. New York (1997).
[4] Reyes L. Quaternions: Une Representation ParametriqueSystematique Des Rotations Finies. Partie 1: Le Cadre Theorique. (1990). Rapport de Recherche INRIA Rocquencourt. France.
[5] Reyes, L. “Sobre la parametrización de las Rotaciones y Reflexiones de Multicuerpos Rígidos en el plano”. Estudios Ocasionales. Universidad Anáhuac del Sur. ISBN 968-64-02-08-X (1998).
[6] Min Ki Lee, KunWoo Park. “Kinematic and Manipulator for Enlarging Workspace and Avoiding Singularities”. IEEE Transaction on Robotics and Automation Vol. 15, No. 6 (1999).
[7] Luc Baron, J. Angeles. “The Direct Kinematics of Parallel Manipulators Under Joint-Sensor Redundancy”. IEEE Transaction on Robotics and Automation Vol. 16, No. 1, (2000).
[8] Merlet Jean – Pierre. Les Robots Paralléles. Traité del Nouvelles Technologies – Serie Robotique. Hermés. Paris, 1990.
[9]Vázquez I., Jiménez E., Domínguez G., Reyes L., Delfín J., Lara S. Modelación y diseño de un simulador de un robot paralelo manejado por un controlador manual didáctico. 8º Congreso Nacional de Mecatrónica, Noviembre 26 y 27, 2009. Veracruz, Veracruz.
[10] Jiménez E. Simulación de un proceso de manufactura con obstáculo en la línea de producción. México. (1998). (Tesis de Maestría en Ingeniería Mecánica). UNAM, Facultad de Ingeniería, División de Estudios de Postgrado, Sección Mecánica.
[11] Islas M. Programación y simulación de multicuerpos rígidos planares usando álgebra hipercompleja y LABVIEW. Tesis de Maestría en Ciencias de la Ingeniería Mecatrónica. Instituto Tecnológico Superior de Cajeme. (2008).
La Mecatrónica en México, Vol. 1, No. 1, páginas 12 – 19, Septiembre 2012 Disponible en línea en www.mecamex.net/revistas/LMEM ISSN en trámite © 2012, Asociación Mexicana de Mecatrónica A. C.
12
Comparación de métodos de extracción de características para la clasificación de Señales
Mioeléctricas
Flores Nava Irma, Flores Salazar Fabiola y Carro Suárez Jorge. Ingeniería Mecatrónica.
Universidad Politécnica de Tlaxcala, Av. Universidad Politécnica No. 1, San Pedro Xalcaltzinco, Tepeyanco, Tlax. C.P 90199.
Recibido: 15 / Febrero / 2012. Aceptado: 11 / Abril /2012. Publicado: 1 / Octubre / 2012. © 2012 Flores Nava Irma, et. Al. Este es un artículo de acceso abierto, distribuido bajo los términos de la Asociación Mexicana de Mecatrónica A. C., el cual permite el uso, distribución y reproducción sin restricciones por cualquier medio, siempre que el trabajo original esté apropiadamente citado. La revista cuenta con el Certificado de Reserva de Derechos al Uso Exclusivo No. 04-2012-092010534100-102.
Resumen. El presente artículo muestra el análisis de las señales mioeléctricas (SME) para la extracción de características que tienen la finalidad de clasificar las SME de acuerdo a los tipos de movimientos realizados por la mano. Estos movimientos son: Esférico, Cilíndrico, precisión (pinch) y tipo llave (key). La obtención de señales se llevó a cabo mediante tres electrodos superficiales colocados en tres músculos del brazo, las muestras fueron tomadas de diferentes sujetos de entre 20 y 22 años, y clasificadas a su vez de acuerdo al movimiento realizado.
Los métodos empleados para este análisis son cuatro métodos estadísticos: desviación estándar, varianza, valor medio absoluto y Valor cuadrático medio (RMS). Además de la aplicación de un método de análisis no lineal como es el exponente de Hurst.
Como resultados de este análisis se encontró que los métodos estadísticos son eficaces para la clasificación de señales y son rápidos en la compilación, además con la aplicación de estos métodos en las SME’s se tienen ya definidos los rangos de valores de cada método en tres tipos de agarres (cilíndrico, esférico y de llave) y el exponente de Hurst da un comportamiento global de las señales pero no un rango de valores para cada movimiento.
Palabras clave:Desviación estándar, varianza, valor medio absoluto, RMS, exponente de Hurst. Señal mioeléctrica.
1. Introducción.
El objetivo del presente artículo es determinar características específicas de cada tipo de
movimiento seleccionado para la clasificación de las señales generadas por los músculos de la mano (SME). La señal mioeléctrica es la integración temporal y espacial de todos los potenciales de acción de la unidad motora detectados utilizando uno o dos electrodos a partir de un cierto volumen de tejido [5], los electrodos pueden ser de dos tipos, superficiales o profundos. La señal recibida provee

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
13
información concerniente a la actividad local asociada con la contracción del músculo conocida como el potencial de acción de la unidad motora [4].
La adquisición de SME por medio de electrodos superficiales es una forma práctica, segura y no
invasiva de obtenerla, sin embargo solo permite obtener señales limitadas del músculo. La amplitud de la señal está limitada de 0 a 10mV (pico-pico) o 0-1.5 mV (rms). La energía útil está limitada de 0 a 500 Hz en el rango de frecuencia, con una energía dominante de 50-150Hz [6].
Existen varios métodos para el análisis de las señales mioeléctricas, entre los que se
encuentran los que evalúan las señales en el dominio del tiempo y de la frecuencia. En la clasificación de los métodos en el dominio del tiempo se encuentran los métodos estadísticos y los geométricos, mientras que por parte del dominio de la frecuencia están los espectrales [7].Algunos métodos utilizados en el dominio del tiempo son: cruces por cero, el valor absoluto promedio, la varianza y la desviación estándar. Entre las técnicas de dinámica no-lineal están la dimensión de correlación, exponente de Hurst y máximo exponente de Lyapunov, los cuales estiman la dimensionalidad de un fenómeno, su persistencia y su sensibilidad a condiciones iniciales respectivamente [3].
Este trabajo muestra los resultados obtenidos del análisis de las señales mioeléctricas
obtenidas de cuatro movimientos de la mano, que son el agarre cilíndrico, esférico, llave (key) y precisión (pinch), obteniendo como resultado la comparación de cada método aplicado.
2. Metodología.
2.1 Movimientos.
La mano realiza múltiples funciones y agarres, existen muchos estudios sobre los movimientos básicos que puede realizar la mano, para el objetivo de este artículo se seleccionaron cuatro tipos de agarres (Fig. 1), los cuales se pueden diferenciar por el tipo de objeto que se sostiene (Fig. 2).
Fig. 1. Agarres básicos [2] Fig. 2. Objetos utilizados para los agarres.
2.2 Equipo de medición y Software.
La medición se llevó a cabo mediante electrodos superficiales de la marca 3M modelo No.
2239, y el amplificador de instrumentación AD620, con tres electrodos conectados, dos en
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
14
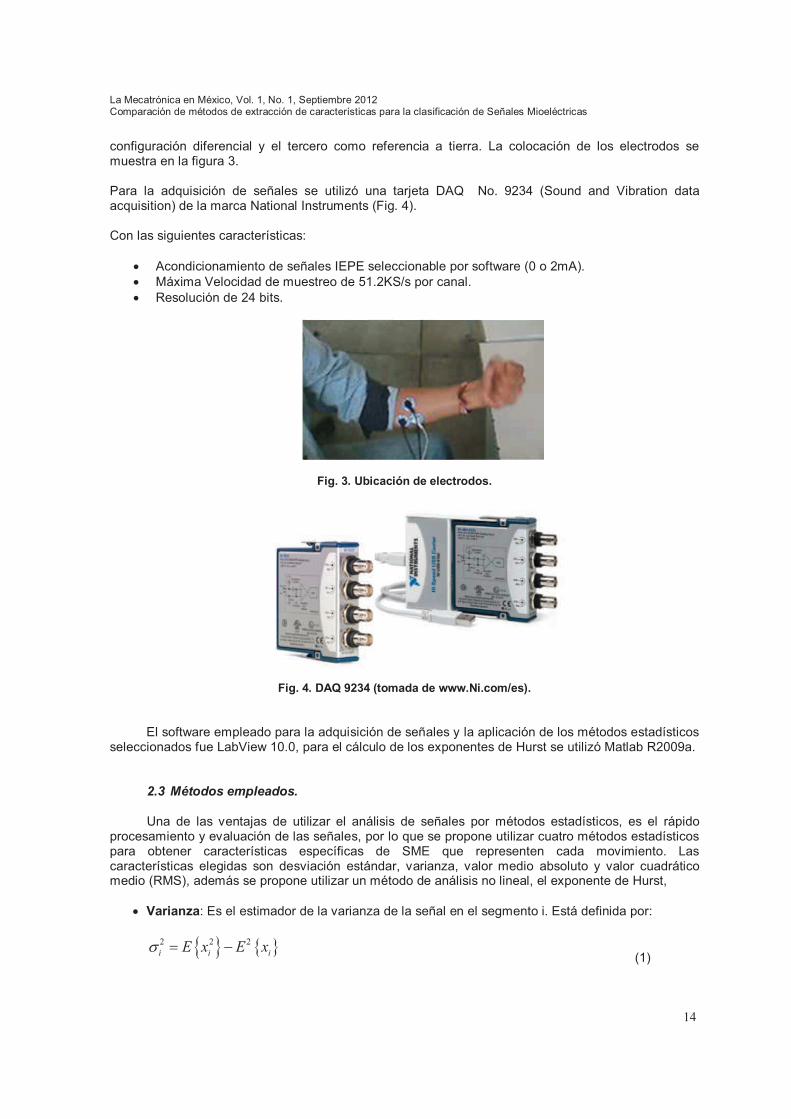
configuración diferencial y el tercero como referencia a tierra. La colocación de los electrodos se muestra en la figura 3.
Para la adquisición de señales se utilizó una tarjeta DAQ No. 9234 (Sound and Vibration data acquisition) de la marca National Instruments (Fig. 4). Con las siguientes características:
* Acondicionamiento de señales IEPE seleccionable por software (0 o 2mA). * Máxima Velocidad de muestreo de 51.2KS/s por canal. * Resolución de 24 bits.
Fig. 3. Ubicación de electrodos.
Fig. 4. DAQ 9234 (tomada de www.Ni.com/es).
El software empleado para la adquisición de señales y la aplicación de los métodos estadísticos seleccionados fue LabView 10.0, para el cálculo de los exponentes de Hurst se utilizó Matlab R2009a.
2.3 Métodos empleados.
Una de las ventajas de utilizar el análisis de señales por métodos estadísticos, es el rápido procesamiento y evaluación de las señales, por lo que se propone utilizar cuatro métodos estadísticos para obtener características específicas de SME que representen cada movimiento. Las características elegidas son desviación estándar, varianza, valor medio absoluto y valor cuadrático medio (RMS), además se propone utilizar un método de análisis no lineal, el exponente de Hurst,
* Varianza: Es el estimador de la varianza de la señal en el segmento i. Está definida por:
7 8 7 82 2 2
i i iE x E x9 - : (1)

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
15
Donde 7 8iE x
es el valor esperado de la señal en el segmento i.
* Desviación estándar: Permite determinar el promedio aritmético de fluctuación de los datos respecto a su punto central o media. Se calcula por:
}{}{ 222
ii xExE :-- 99 (2)
Donde 2 representa la varianza.
* Valor RMS: Permite caracterizar la señal de acuerdo a la estimación del contenido de energía, relacionado con su amplitud, en un determinado intervalo de tiempo. Para una señal discreta, la cual consiste en N muestras igualmente espaciadas x(n), n=1 a N, la estimación está dada algebraicamente por medio de la siguiente ecuación:
NkkxN
RMSN
k
,...,2,1;)]([1
1
2 -- .-
(3)
Donde N, es el número total de muestras x(k) de la señal. * Valor Medio Absoluto: Es un estimador del valor medio absoluto de la señal, xi, en el segmento
i, el cual contiene N muestras de longitud. Está dado por:
.-
-N
k
ki XN
X1
1 (4)
Donde Xk es la muestra k-ésima en el segmento i.
* El exponente de Hurst: Mide la suavidad (homogeneidad) de las series de tiempo [3]. El
exponente de Hurst (H) se define como:
)log()/( TSRLogH - (5)
Donde T es la duración de las muestras de datos y, R/S la correspondiente relación entre el rango y la desviación típica de los valores de la serie, expresada como:
5.0/ TkSR 4- (6)
Donde k es la constante que depende de la serie de tiempo y H es el exponente de Hurst. Dónde:
o 5.0-H Corresponde a la ausencia de dependencia R/S. Es un proceso que cae dentro de esta clase de equivalencia, aleatorio y no correlacionado.
o 5.00 +;H Es llamado un proceso anti-persistente, en el que existe una tendencia de los valores que toma el proceso por compensarse uno al otro. (anti-correlaciones).
o 15.0 +;H Es conocido como un proceso persistente, en el que los valores que toma el proceso tienden a reforzar la tendencia actual (memoria o correlaciones de larga distancia).
o 5.0<H Cuando una serie de tiempo cae en este valor las observaciones no son independientes.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
16
3. Resultados.
3.1 Adquisición de señales.
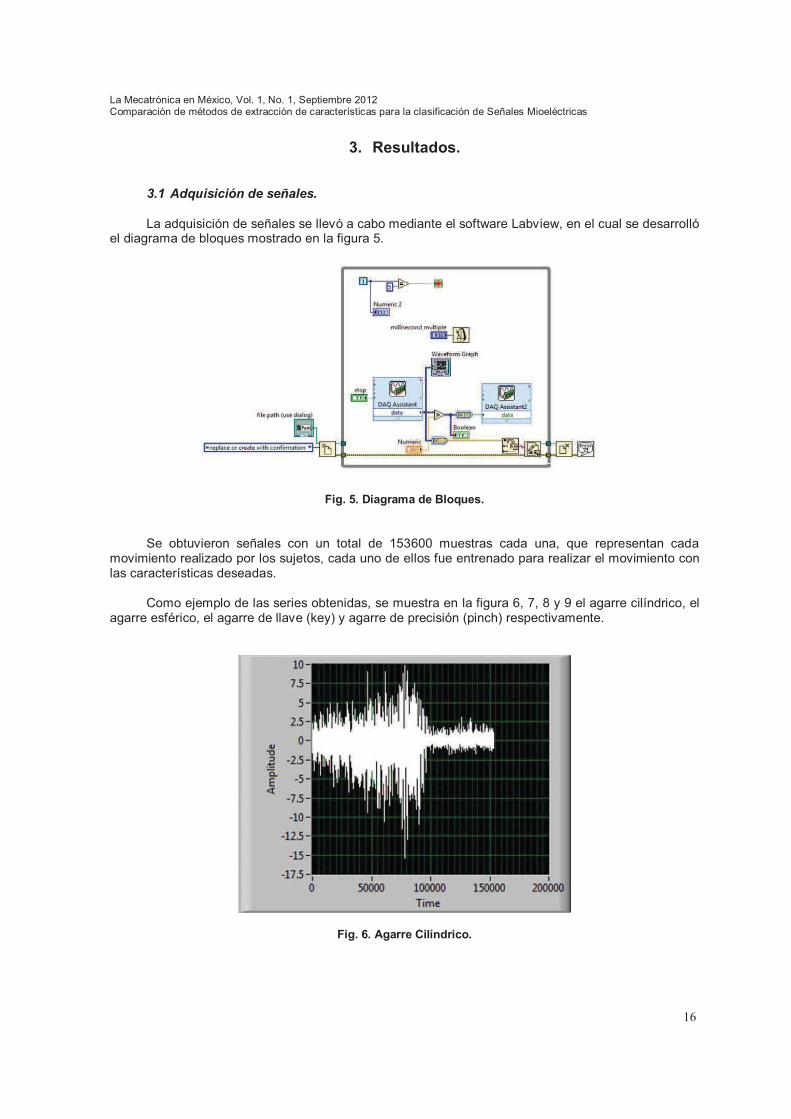
La adquisición de señales se llevó a cabo mediante el software Labview, en el cual se desarrolló el diagrama de bloques mostrado en la figura 5.
Fig. 5. Diagrama de Bloques.
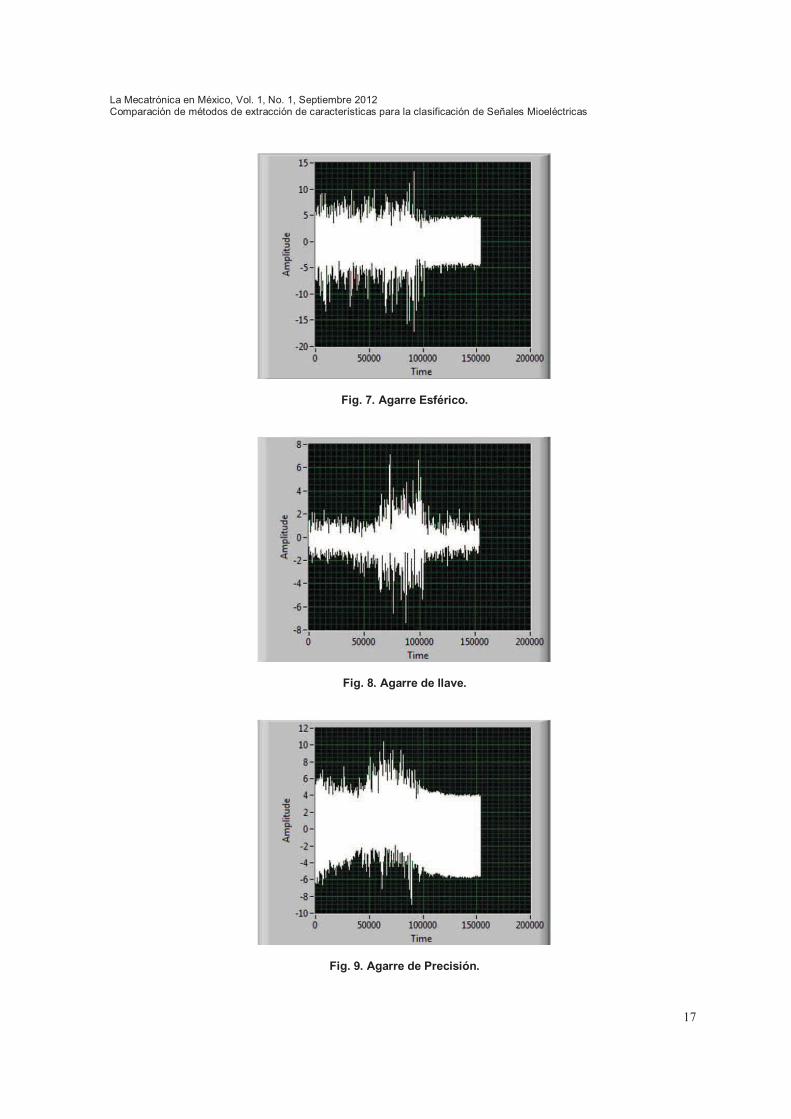
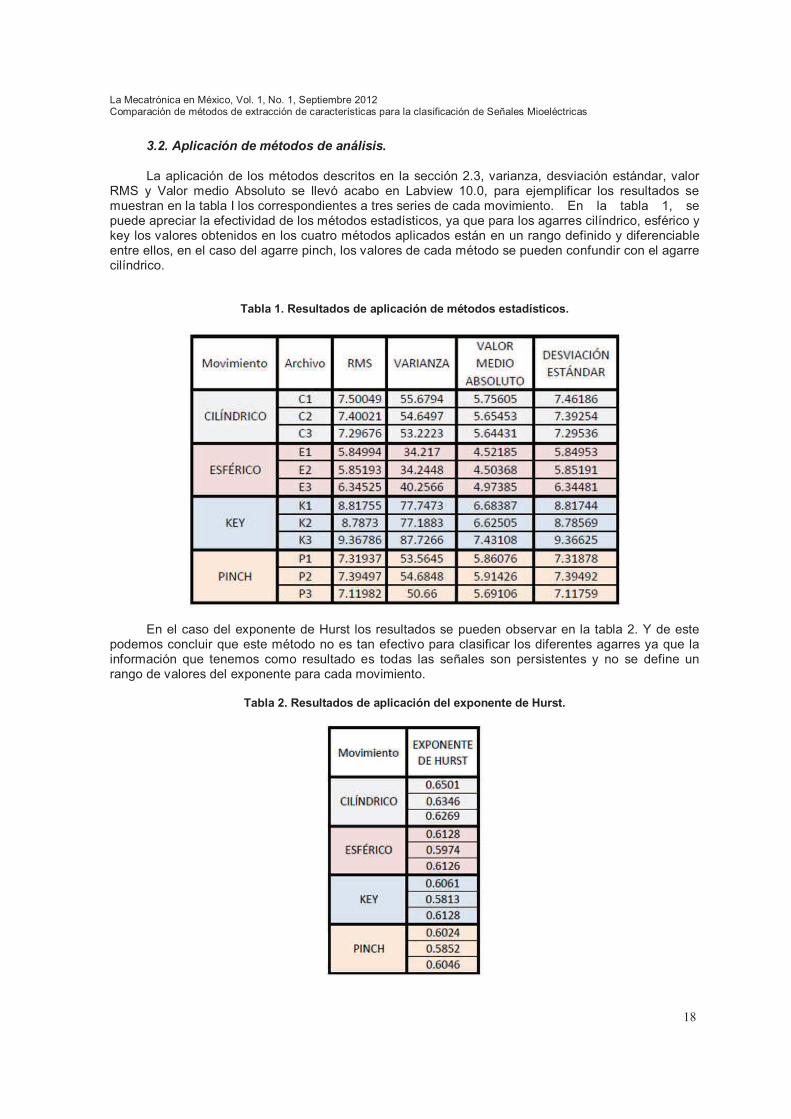
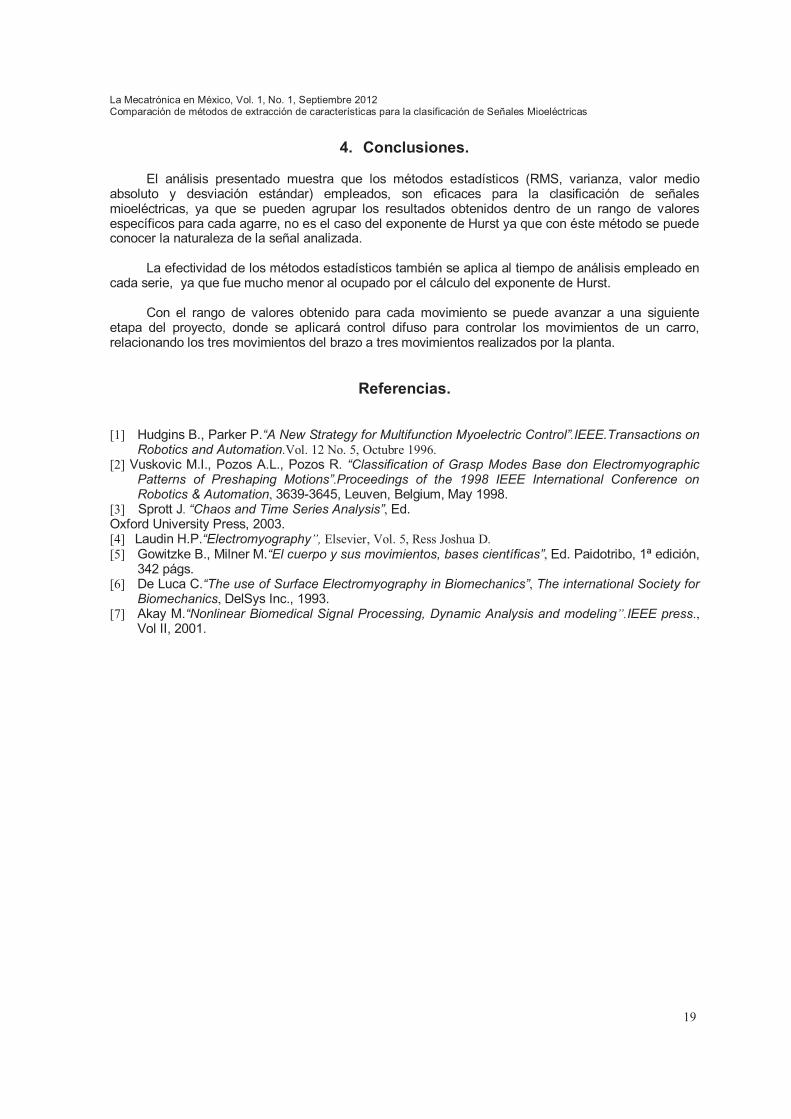
Se obtuvieron señales con un total de 153600 muestras cada una, que representan cada movimiento realizado por los sujetos, cada uno de ellos fue entrenado para realizar el movimiento con las características deseadas. Como ejemplo de las series obtenidas, se muestra en la figura 6, 7, 8 y 9 el agarre cilíndrico, el agarre esférico, el agarre de llave (key) y agarre de precisión (pinch) respectivamente.
Fig. 6. Agarre Cilíndrico.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
17
Fig. 7. Agarre Esférico.
Fig. 8. Agarre de llave.
Fig. 9. Agarre de Precisión.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
18
3.2. Aplicación de métodos de análisis. La aplicación de los métodos descritos en la sección 2.3, varianza, desviación estándar, valor RMS y Valor medio Absoluto se llevó acabo en Labview 10.0, para ejemplificar los resultados se muestran en la tabla I los correspondientes a tres series de cada movimiento. En la tabla 1, se puede apreciar la efectividad de los métodos estadísticos, ya que para los agarres cilíndrico, esférico y key los valores obtenidos en los cuatro métodos aplicados están en un rango definido y diferenciable entre ellos, en el caso del agarre pinch, los valores de cada método se pueden confundir con el agarre cilíndrico.
Tabla 1. Resultados de aplicación de métodos estadísticos.
En el caso del exponente de Hurst los resultados se pueden observar en la tabla 2. Y de este podemos concluir que este método no es tan efectivo para clasificar los diferentes agarres ya que la información que tenemos como resultado es todas las señales son persistentes y no se define un rango de valores del exponente para cada movimiento.
Tabla 2. Resultados de aplicación del exponente de Hurst.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Comparación de métodos de extracción de características para la clasificación de Señales Mioeléctricas
19
4. Conclusiones.
El análisis presentado muestra que los métodos estadísticos (RMS, varianza, valor medio absoluto y desviación estándar) empleados, son eficaces para la clasificación de señales mioeléctricas, ya que se pueden agrupar los resultados obtenidos dentro de un rango de valores específicos para cada agarre, no es el caso del exponente de Hurst ya que con éste método se puede conocer la naturaleza de la señal analizada. La efectividad de los métodos estadísticos también se aplica al tiempo de análisis empleado en cada serie, ya que fue mucho menor al ocupado por el cálculo del exponente de Hurst.
Con el rango de valores obtenido para cada movimiento se puede avanzar a una siguiente etapa del proyecto, donde se aplicará control difuso para controlar los movimientos de un carro, relacionando los tres movimientos del brazo a tres movimientos realizados por la planta.
Referencias. [1] Hudgins B., Parker P.“A New Strategy for Multifunction Myoelectric Control”.IEEE.Transactions on
Robotics and Automation.Vol. 12 No. 5, Octubre 1996.
[2] Vuskovic M.I., Pozos A.L., Pozos R. “Classification of Grasp Modes Base don Electromyographic Patterns of Preshaping Motions”.Proceedings of the 1998 IEEE International Conference on Robotics & Automation, 3639-3645, Leuven, Belgium, May 1998.
[3] Sprott J. “Chaos and Time Series Analysis”, Ed. Oxford University Press, 2003. [4] Laudin H.P.“Electromyography”, Elsevier, Vol. 5, Ress Joshua D.
[5] Gowitzke B., Milner M.“El cuerpo y sus movimientos, bases científicas”, Ed. Paidotribo, 1ª edición, 342 págs.
[6] De Luca C.“The use of Surface Electromyography in Biomechanics”, The international Society for Biomechanics, DelSys Inc., 1993.
[7] Akay M.“Nonlinear Biomedical Signal Processing, Dynamic Analysis and modeling”.IEEE press.,
Vol II, 2001.

La Mecatrónica en México, Vol. 1, No. 1, páginas 20 – 32, Septiembre 2012 Disponible en línea en www.mecamex.net/revistas/LMEM ISSN en trámite © 2012, Asociación Mexicana de Mecatrónica A. C.
20
Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
Juárez Buenrostro Ángel, Vázquez Guerrero Mónica, Aceves Fernández Marco Antonio, Ramos Arreguín Carlos Alberto y Ramos Arreguín Juan Manuel
Universidad Autónoma de Querétaro, Facultad de Informática
Recibido: 7 / Marzo / 2012. Aceptado: 15 / Mayo / 2012. Publicado: 1 / Octubre / 2012. © 2012 Juárez Buenrostro Ángel, et. Al. Este es un artículo de acceso abierto, distribuido bajo los de la Asociación Mexicana de Mecatrónica A. C., el cual permite el uso, distribución y reproducción sin restricciones por cualquier medio, siempre que el trabajo original esté apropiadamente citado. La revista cuenta con el Certificado de Reserva de Derechos al Uso Exclusivo No. 04-2012-092010534100-102.
Resumen.
Este trabajo presenta una propuesta de método para el desarrollo de interfaces para sistemas de desarrollo con FPGA’s. Se parte de las necesidades que se tienen al trabajar con los sistemas de desarrollo y sus limitaciones para interactuar con hardware externo. Se realiza un análisis de las características eléctricas de las tecnologías CMOS y TTL, para establecer valores de resistencias de protección y las suficientes para evitar daños al sistema de desarrollo. Finalmente, se presentan dos casos de desarrollo de hardware, mediante el cual se pudo comprobar el buen funcionamiento del hardware diseñado. Con este trabajo, un estudiante puede desarrollar el hardware que requiera, de una manera más sencilla y confiable, logrando obtener un mayor provecho a los sistemas de desarrollo con FPGA e incluso para desarrollar su propio sistema de desarrollo basado en FPGA. Palabras clave: FPGA, sistema de desarrollo, interfaz, sistema de desarrollo.
1. Introducción.
Los sistemas digitales tienen una gran importancia en el desarrollo tecnológico de hoy día, donde los dispositivos reprogramables han cobrado una importancia mayor, al permitir desarrollar e implementar sistemas digitales en un muy poco tiempo. Este tipo de sistemas digitales son, entre otros, microprocesadores, microcontroladores, DSP, sistemas embebidos, sistemas móviles, etc.
Una de las herramientas importantes en el desarrollo de sistemas digitales, son las tarjetas
(kits) de desarrollo. Sin embargo, generalmente estos dispositivos no cuentan con interfaces de potencia para el control de motores, y en ocasiones no tenemos la cantidad suficiente de interruptores o de leds, por lo que en ocasiones es necesario que el usuario diseñe interfaces para diseñar un sistema digital específico.
Cada una de las tarjetas de desarrollo con FPGA o CPLD, tienen características diferentes,
dependiendo del fabricante de cada tarjeta. Por lo anterior, podemos encontrar tarjetas que tienen interfaces de usuario como exhibidores de 7 segmentos (Displays), interruptores deslizables, botones de presión (push-boton), en algunos casos incluye el manejo de pantallas de cristal líquido (LCD). Algunas tarjetas manejan puertos con conectores no comunes, que difícilmente se consiguen en
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
21
México. Cuando la tarjeta de desarrollo que se está utilizando para un diseño digital, no cuenta con alguna interfaz de usuario, es necesario comprar una que tenga la interfaz requerida, o bien, diseñar la interfaz para utilizarla con la tarjeta de desarrollo. Se entiende por interfaz de propósito especial aquel circuito que realiza una tarea específica de acuerdo con un estándar o protocolo de comunicación previamente establecido [1].
Los dispositivos reprogramables son fabricados utilizando tecnología CMOS, por lo tanto, los
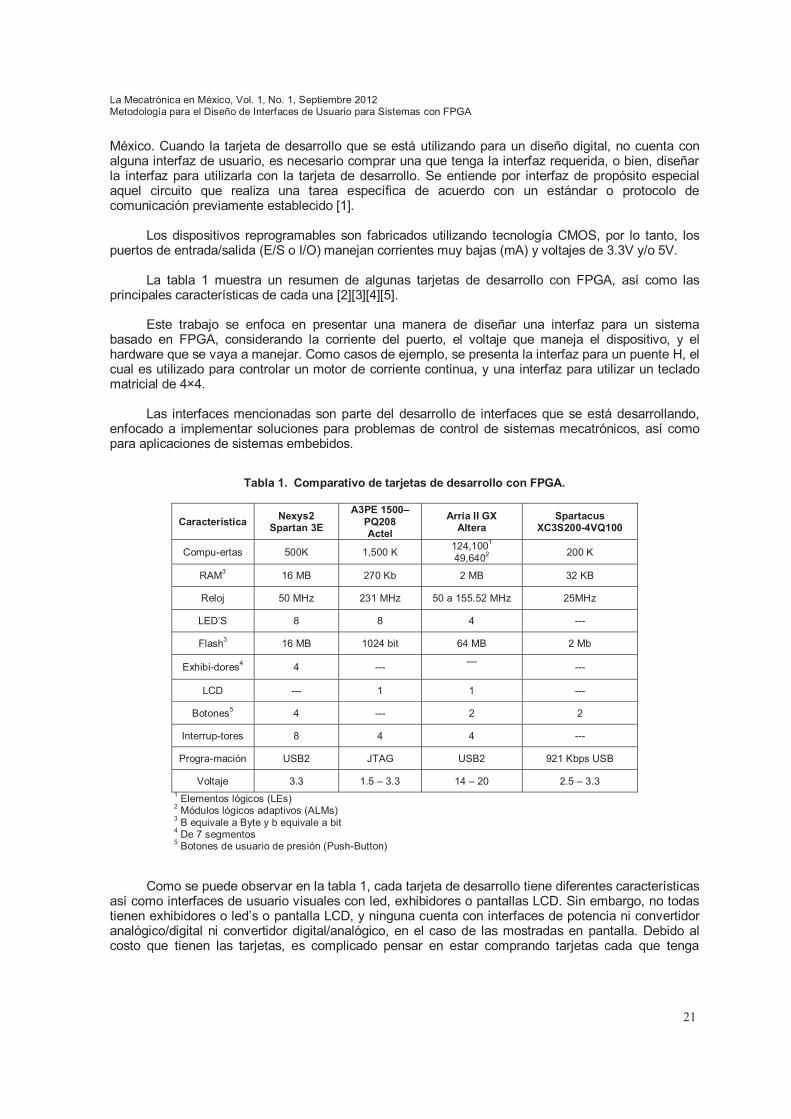
puertos de entrada/salida (E/S o I/O) manejan corrientes muy bajas (mA) y voltajes de 3.3V y/o 5V. La tabla 1 muestra un resumen de algunas tarjetas de desarrollo con FPGA, así como las
principales características de cada una [2][3][4][5]. Este trabajo se enfoca en presentar una manera de diseñar una interfaz para un sistema
basado en FPGA, considerando la corriente del puerto, el voltaje que maneja el dispositivo, y el hardware que se vaya a manejar. Como casos de ejemplo, se presenta la interfaz para un puente H, el cual es utilizado para controlar un motor de corriente continua, y una interfaz para utilizar un teclado matricial de 4×4.
Las interfaces mencionadas son parte del desarrollo de interfaces que se está desarrollando,
enfocado a implementar soluciones para problemas de control de sistemas mecatrónicos, así como para aplicaciones de sistemas embebidos.
Tabla 1. Comparativo de tarjetas de desarrollo con FPGA.
Característica Nexys2
Spartan 3E
A3PE 1500–PQ208 Actel
Arria II GX Altera
Spartacus XC3S200-4VQ100
Compu-ertas 500K 1,500 K 124,1001 49,6402
200 K
RAM3 16 MB 270 Kb 2 MB 32 KB
Reloj 50 MHz 231 MHz 50 a 155.52 MHz 25MHz
LED’S 8 8 4 ---
Flash3 16 MB 1024 bit 64 MB 2 Mb
Exhibi-dores4 4 --- ---
---
LCD --- 1 1 ---
Botones5 4 --- 2 2
Interrup-tores 8 4 4 ---
Progra-mación USB2 JTAG USB2 921 Kbps USB
Voltaje 3.3 1.5 – 3.3 14 – 20 2.5 – 3.3 1 Elementos lógicos (LEs) 2 Módulos lógicos adaptivos (ALMs) 3 B equivale a Byte y b equivale a bit 4 De 7 segmentos 5 Botones de usuario de presión (Push-Button)
Como se puede observar en la tabla 1, cada tarjeta de desarrollo tiene diferentes características
así como interfaces de usuario visuales con led, exhibidores o pantallas LCD. Sin embargo, no todas tienen exhibidores o led’s o pantalla LCD, y ninguna cuenta con interfaces de potencia ni convertidor analógico/digital ni convertidor digital/analógico, en el caso de las mostradas en pantalla. Debido al costo que tienen las tarjetas, es complicado pensar en estar comprando tarjetas cada que tenga

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
22
necesidades diferentes. Ante esto, surge la necesidad de desarrollar las interfaces para la tarjeta específica que se está utilizando por el diseñador.
Además del FPGA existen otros dispositivos lógicos programables con los cuales podemos
trabajar este tipo de proyectos como son las GAL (GenericArrayLogic) que no es más que un PL en conjunto con una matriz AND reprogramable, una matriz OR fija y una lógica de salida programable mediante una macrocelda. Por medio de esta estructura es posible implementar cualquier función lógica. La tabla 2 muestra las especificaciones más importantes de algunos de estos dispositivos.
Tabla 2. Comparativo de dispositivos lógicos programables GAL.
Símbo-lo
Paráme-tro
GAL16LV8D GAL16V8 GAL16VP8 GAL18V10 GAL20LV8 GAL22V10 GAL6001
VIL Voltaje de entrada en
bajo
Min:Vss-0.3V Max:0.8
Min:Vss-0.5V Max:0.8
Min:Vss-0.5V Max:0.8
Min:Vss-0.5V Max:0.8
Min:Vss-0.3V Max:0.8
Min:Vss-0.5V Max:0.8
Min:Vss-0.5V Max:0.8
VIH Voltaje de entrada en
alto
Min:2.0V Max:5.25V
Min:2.0V Max:Vcc+1V
Min:2.0V Max:Vcc+1
Min:2.0V Max:Vcc+1V
Min:2.0V Max:5.25V
Min:2.0V Max:Vcc+1V
Min:2.0V Max:Vcc+1V
VOL Voltaje de salida en
bajo Max:0.4V Max:0.5V Max:0.5V Max:0.5V Max:0.4V Max:0.4V Max:0.5V
VOH Voltaje de salida en
alto Min:2.4V Min:2.4V Min:2.4V Min:2.4V Min:2.4V Min:2.4V Min:2.4V
IOL Corriente de salida en bajo
Max:8mA Max:16mA Max:64mA Max:16mA Max:8mA Max:16mA Max:16mA
IOH Corriente de salida en alto
Max:-8mA Max:-3.2mA Max:-32mA Max:-3.2mA Max:-8mA Max:-3.2mA Max:-3.2mA
IOS2
Corriente de salida en conrto circuito
Vcc=3.3V Vout=0.5V Min:-15mA Max:-80mA
Vcc=5V Vout=0.5V Min:-30mA Max:-150mA
Vcc=5V Vout=0.5V Min:-60mA Max:-400mA
Vcc=5V Vout=0.5V Min:-30mA Max:-130mA
Vcc=3.3V Vout=0.5V Min:-15mA Max:-80mA
Vcc=5V Vout=0.5V Min:-30mA Max:-130mA
Vcc=5V Vout=0.5V Min:-30mA Max:-130mA
A continuación, se muestran las características eléctricas que se deben tomar en cuenta para
diseñar las interfaces necesarias.
2. Consideraciones Técnicas
Las principales consideraciones a tener en cuenta son los intervalos de voltaje de salida y de entrada en cada terminal de los puertos de E/S, así como las corrientes máximas y mínimas permitidas para cada nivel lógico. En interfaces donde se utilicen frecuencias por encima de los 10 MHz, se tiene que diseñar la placa de circuito impreso tomando en cuenta diversas reglas de alta frecuencia para obtener los resultados deseados. Este trabajo se limita a interfaces de baja velocidad.
Para obtener la información necesaria de los puertos de E/S se requieren las hojas de datos de
los Dispositivos Lógicos. La tabla 2 muestra intervalos de voltaje y de corriente para algunas familias de dispositivos FPGA y CPLD, tomados de las hojas de datos de los fabricantes [2][6][7].
La mayoría de dispositivos trabajan con niveles de voltaje entre 5V y 3.3V; sin embargo, el
trabajo muestra ecuaciones para el diseño utilizando el voltaje de una manera general.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
23
Tabla 3. Características eléctricas importantes de los dispositivos reprogramables.
Familia
Características eléctricas de los puertos E/S Voltaje (V)
I(mA) Vcc
VOL
(máx) VOH
(min) VIL
(máx) VIH
(min)
ACT 1 5.0 3.3
0.5 0.4
3.84 2.40
0.8 0.8
5.3 3.6
10 6
SPARTAN 3E
3.3 0.4 2.40 0.8 2.0 16
ULTRA 37000
5.0 3.3
0.5 0.5
2.4 2.4
0.8 0.8
2.0 2.0
2 2
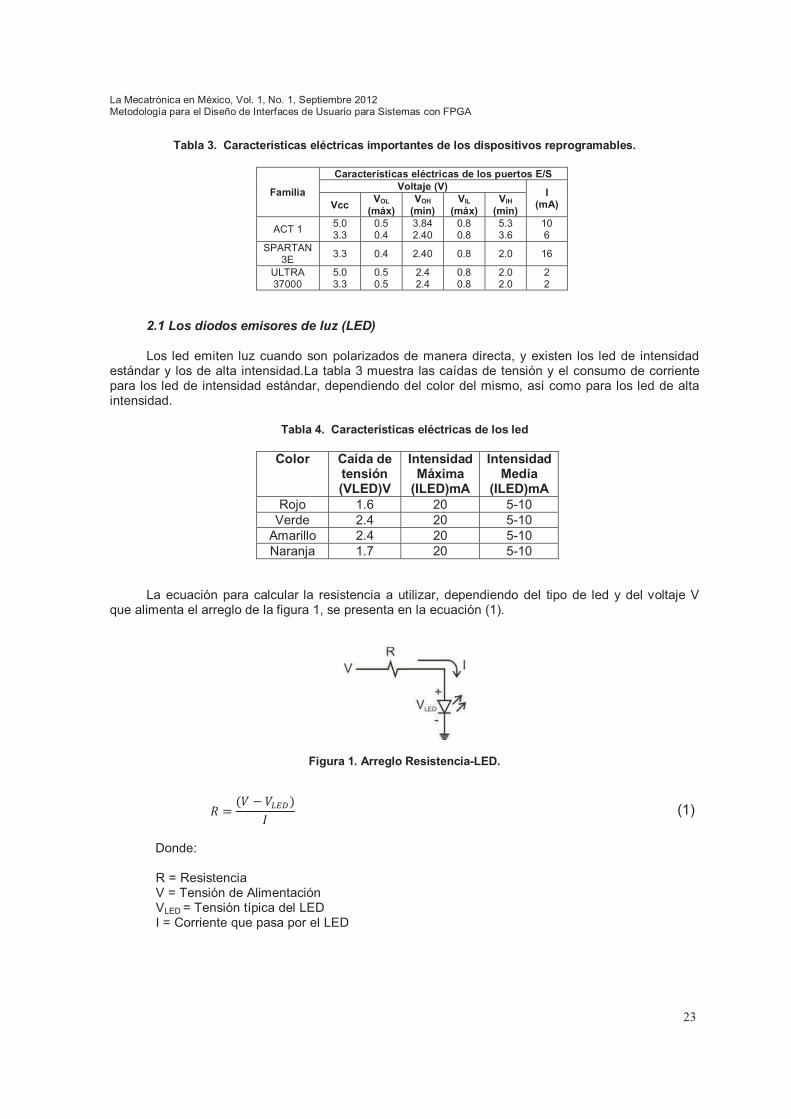
2.1 Los diodos emisores de luz (LED) Los led emiten luz cuando son polarizados de manera directa, y existen los led de intensidad
estándar y los de alta intensidad.La tabla 3 muestra las caídas de tensión y el consumo de corriente para los led de intensidad estándar, dependiendo del color del mismo, así como para los led de alta intensidad.
Tabla 4. Características eléctricas de los led
Color Caída de
tensión (VLED)V
Intensidad Máxima
(ILED)mA
Intensidad Media
(ILED)mA Rojo 1.6 20 5-10
Verde 2.4 20 5-10 Amarillo 2.4 20 5-10 Naranja 1.7 20 5-10
La ecuación para calcular la resistencia a utilizar, dependiendo del tipo de led y del voltaje V
que alimenta el arreglo de la figura 1, se presenta en la ecuación (1).
Figura 1. Arreglo Resistencia-LED.
!"# $ #%&'(
)(1)
Donde:
R = Resistencia V = Tensión de Alimentación VLED = Tensión típica del LED I = Corriente que pasa por el LED

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
24
Es importante no exceder la corriente especificada en la tabla 3, pues el tiempo de vida del diodo se ve reducida drásticamente, y se puede quemar en cualquier momento.
Dentro de los led se incluyen los exhibidores, especialmente los de 7 y 16 segmentos, los cuales son arreglos de led y tienen la función de mostrar una información determinada, y tienen una distribución física similar a la que se muestra en la figura 2. Sin embargo, también tenemos otros tipos de exhibidores, como los de plasma y de cristal líquido. En la tabla 5 se muestran las características eléctricas de los exhibidores y algunos led.
Tabla 5. Características de los displays
Caracterís-ticas LED Alvacío Plasma
Cristal líquido
Incandes-centes
Brillo Bueno a excelente
Bueno Bueno a excelente
No disponible Cualquiera
Colores Rojo, naranja, amarillo
Rojo, amarillo, verde y azul
naranja Iluminación externa
Cualquiera
Tipo de caracteres
7 – 16 seg. Matriz de puntos
7 – 16 seg. Matriz de puntos
7 – 16 seg. Matriz de puntos
7 – 16 seg. Matriz de puntos
7 – 16 seg.
Temperatura -40° a 85° 0° a 55° 0° a 55° -20° a 60° -40° a 85° Voltaje 1.6v a 5v 10 a 35 (Vcd) 125 a 180
(Vcd) 3 a 20 (Vcd) 3 a 5 (Vcd)
Potencia/dígito
10 a 250 mW 20 a 250 mW 175 a 750 mW
10 a 250 mW 100 a 700 mW
Tiempo de respuesta
50 a 500 nSeg.
1 a 10 Seg. 15 a 500 Seg.
50 a 200 mSeg.
10 mSeg.
Tiempo de vida
100 000 hr. 50 000 hr. 50 000 hr. 50 000 hr. 1000 a 20 000 h
Figura 2. Exhibidores de uso Frecuente.
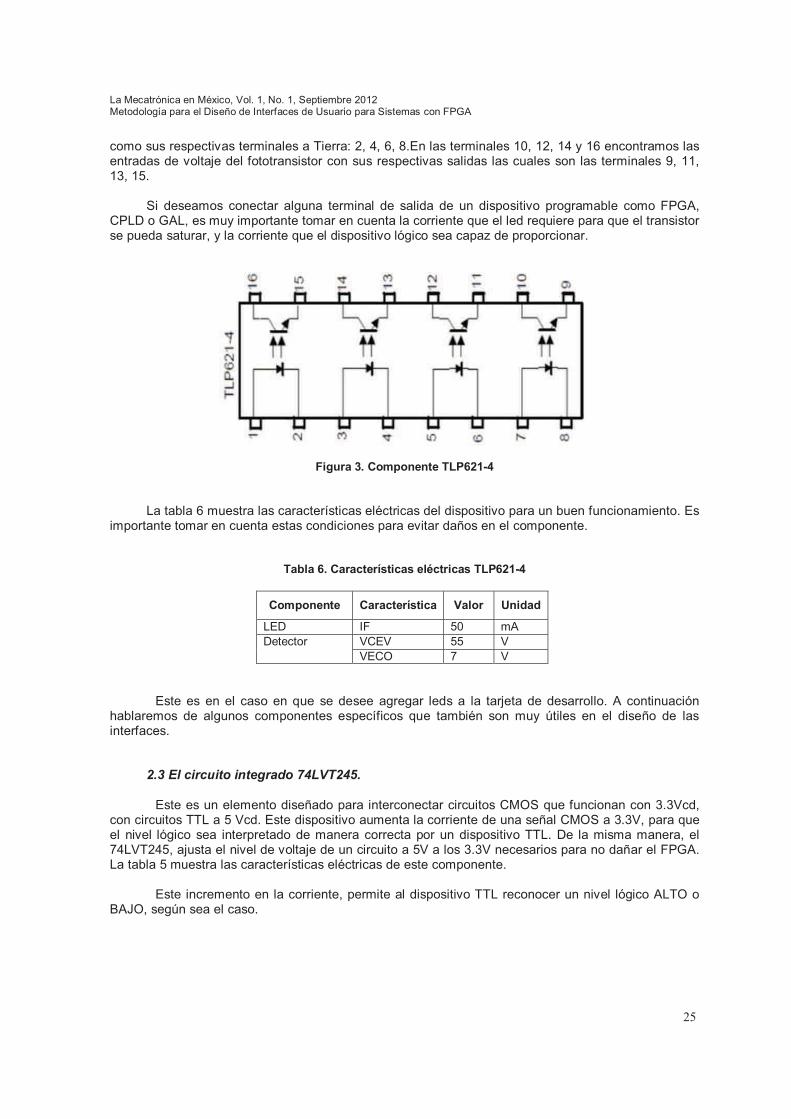
2.2 Optoacopladores. En este caso, se pone de ejemplo el componente TLP621-4, que contiene 4 pares de emisor
infrarrojo con su receptor, en el mismo encapsulado. La figura 3 muestra un esquema de este componente, el cual tiene como terminal de entrada de voltaje al led las terminales 1, 3, 5 y 7; así
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
25
como sus respectivas terminales a Tierra: 2, 4, 6, 8.En las terminales 10, 12, 14 y 16 encontramos las entradas de voltaje del fototransistor con sus respectivas salidas las cuales son las terminales 9, 11, 13, 15.
Si deseamos conectar alguna terminal de salida de un dispositivo programable como FPGA,
CPLD o GAL, es muy importante tomar en cuenta la corriente que el led requiere para que el transistor se pueda saturar, y la corriente que el dispositivo lógico sea capaz de proporcionar.
Figura 3. Componente TLP621-4 La tabla 6 muestra las características eléctricas del dispositivo para un buen funcionamiento. Es
importante tomar en cuenta estas condiciones para evitar daños en el componente.
Tabla 6. Características eléctricas TLP621-4
Componente Característica Valor Unidad
LED IF 50 mA Detector VCEV 55 V
VECO 7 V Este es en el caso en que se desee agregar leds a la tarjeta de desarrollo. A continuación hablaremos de algunos componentes específicos que también son muy útiles en el diseño de las interfaces.
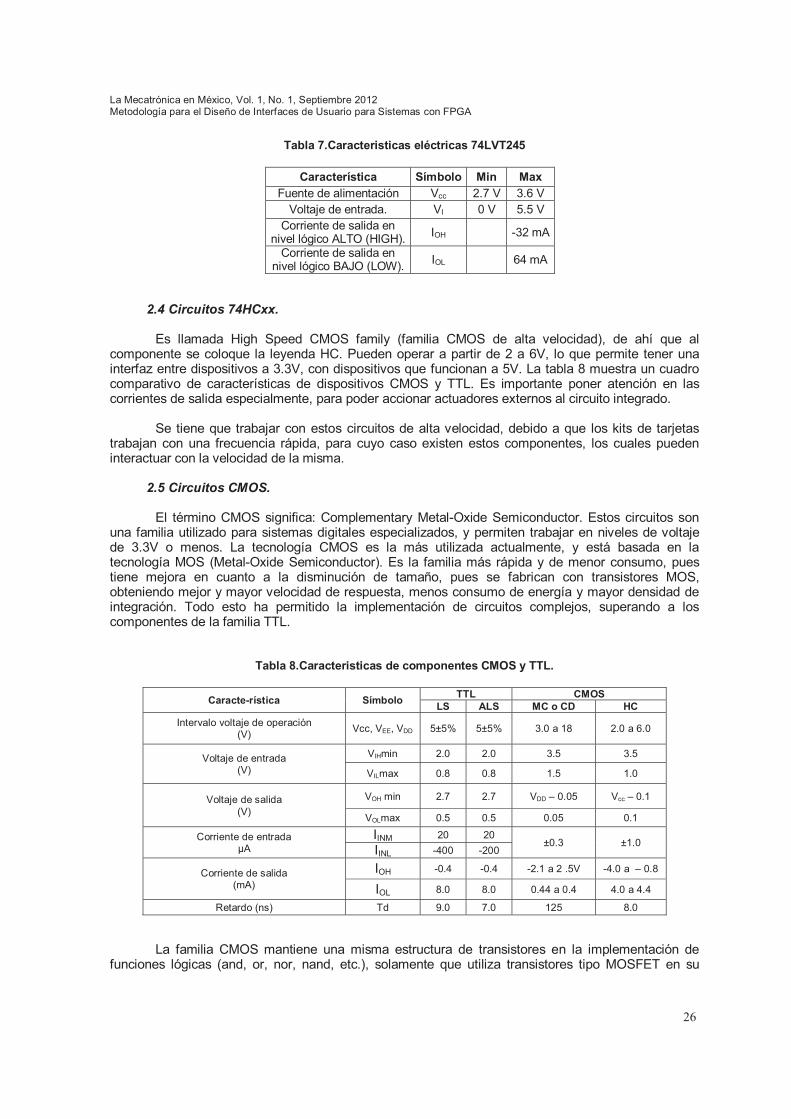
2.3 El circuito integrado 74LVT245.
Este es un elemento diseñado para interconectar circuitos CMOS que funcionan con 3.3Vcd, con circuitos TTL a 5 Vcd. Este dispositivo aumenta la corriente de una señal CMOS a 3.3V, para que el nivel lógico sea interpretado de manera correcta por un dispositivo TTL. De la misma manera, el 74LVT245, ajusta el nivel de voltaje de un circuito a 5V a los 3.3V necesarios para no dañar el FPGA. La tabla 5 muestra las características eléctricas de este componente. Este incremento en la corriente, permite al dispositivo TTL reconocer un nivel lógico ALTO o BAJO, según sea el caso.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
26
Tabla 7.Caracteristicas eléctricas 74LVT245
Característica Símbolo Min Max Fuente de alimentación Vcc 2.7 V 3.6 V
Voltaje de entrada. VI 0 V 5.5 V Corriente de salida en
nivel lógico ALTO (HIGH). IOH -32 mA
Corriente de salida en nivel lógico BAJO (LOW). IOL 64 mA
2.4 Circuitos 74HCxx.
Es llamada High Speed CMOS family (familia CMOS de alta velocidad), de ahí que al componente se coloque la leyenda HC. Pueden operar a partir de 2 a 6V, lo que permite tener una interfaz entre dispositivos a 3.3V, con dispositivos que funcionan a 5V. La tabla 8 muestra un cuadro comparativo de características de dispositivos CMOS y TTL. Es importante poner atención en las corrientes de salida especialmente, para poder accionar actuadores externos al circuito integrado. Se tiene que trabajar con estos circuitos de alta velocidad, debido a que los kits de tarjetas trabajan con una frecuencia rápida, para cuyo caso existen estos componentes, los cuales pueden interactuar con la velocidad de la misma.
2.5 Circuitos CMOS.
El término CMOS significa: Complementary Metal-Oxide Semiconductor. Estos circuitos son una familia utilizado para sistemas digitales especializados, y permiten trabajar en niveles de voltaje de 3.3V o menos. La tecnología CMOS es la más utilizada actualmente, y está basada en la tecnología MOS (Metal-Oxide Semiconductor). Es la familia más rápida y de menor consumo, pues tiene mejora en cuanto a la disminución de tamaño, pues se fabrican con transistores MOS, obteniendo mejor y mayor velocidad de respuesta, menos consumo de energía y mayor densidad de integración. Todo esto ha permitido la implementación de circuitos complejos, superando a los componentes de la familia TTL.
Tabla 8.Caracteristicas de componentes CMOS y TTL.
Caracte-rística Símbolo TTL CMOS
LS ALS MC o CD HC
Intervalo voltaje de operación (V)
Vcc, VEE, VDD 5±5% 5±5% 3.0 a 18 2.0 a 6.0
Voltaje de entrada (V)
VIHmin 2.0 2.0 3.5 3.5
VILmax 0.8 0.8 1.5 1.0
Voltaje de salida (V)
VOH min 2.7 2.7 VDD – 0.05 Vcc – 0.1
VOLmax 0.5 0.5 0.05 0.1
Corriente de entrada µA
IINM 20 20 ±0.3 ±1.0
IINL -400 -200
Corriente de salida (mA)
IOH -0.4 -0.4 -2.1 a 2 .5V -4.0 a – 0.8
IOL 8.0 8.0 0.44 a 0.4 4.0 a 4.4
Retardo (ns) Td 9.0 7.0 125 8.0
La familia CMOS mantiene una misma estructura de transistores en la implementación de funciones lógicas (and, or, nor, nand, etc.), solamente que utiliza transistores tipo MOSFET en su

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
27
construcción, lo cual provoca que estos componentes requieren menos corriente en su funcionamiento, en comparación de los circuitos TTL. Las características eléctricas se pueden apreciar en la tabla 8.
3. Desarrollo de las Interfaces.
En estasección se presenta algunos diseños como ejemplo de desarrollo con sus cálculos correspondientes. Las interfaces diseñadas se enfocan a la tarjeta Nexys 2, que se muestra en la figura 4. Las principales características de la tarjeta se mencionan en las tablas 1 y 2.
Además de las características mencionadas en la tabla 1 y 2, la tarjeta tiene las siguientes
características:
Una base para que el usuario conecte un oscilador a una frecuencia diferente de 50 MHz, que es la frecuencia base del funcionamiento del componente Spartan 3E.
Un puerto de salida de video VGA. Un puerto de comunicación serial RS232. 4 puertos de E/S digital de 12 bit con línea de 3.3V y tierra. Un puerto PS-2. Un puerto de expansión de 43 bit.
Figura 4. Tarjeta Nexys2. A continuación, se presenta el diseño de dos interfaces, que consisten en un teclado matricial y
un controlador de motores por medio de un puente H (L298n). Las interfaces permiten interactuar con la tarjeta NEXYS 2 de manera directa, con la debida protección para evitar dañar la tarjeta.
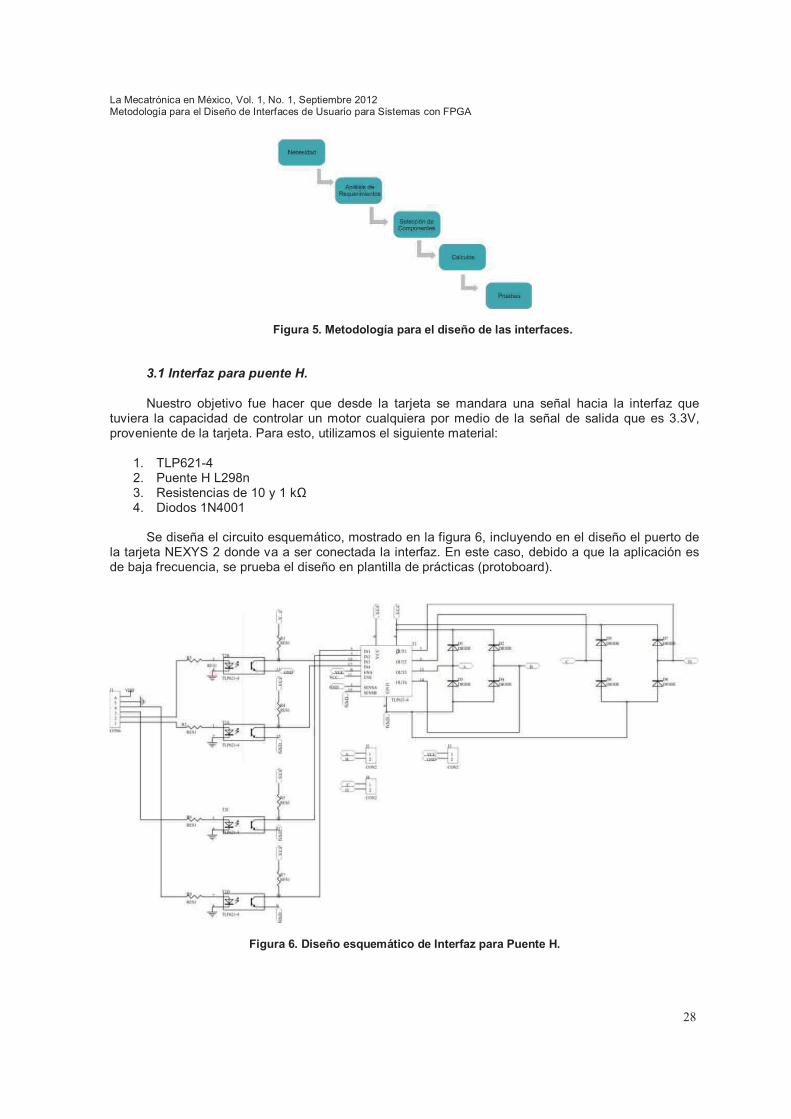
Las interfaces fueron diseñadas bajo la metodología mostrada en la figura 5. Esta metodología
es importante, pues permite diseñar el circuito de una manera más sencilla para resolver el problema lo más rápido posible y tener el mejor funcionamiento.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
28
Figura 5. Metodología para el diseño de las interfaces. 3.1 Interfaz para puente H. Nuestro objetivo fue hacer que desde la tarjeta se mandara una señal hacia la interfaz que
tuviera la capacidad de controlar un motor cualquiera por medio de la señal de salida que es 3.3V, proveniente de la tarjeta. Para esto, utilizamos el siguiente material:
1. TLP621-4 2. Puente H L298n 3. Resistencias de 10 y 1 k! 4. Diodos 1N4001
Se diseña el circuito esquemático, mostrado en la figura 6, incluyendo en el diseño el puerto de
la tarjeta NEXYS 2 donde va a ser conectada la interfaz. En este caso, debido a que la aplicación es de baja frecuencia, se prueba el diseño en plantilla de prácticas (protoboard).
Figura 6. Diseño esquemático de Interfaz para Puente H.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
29
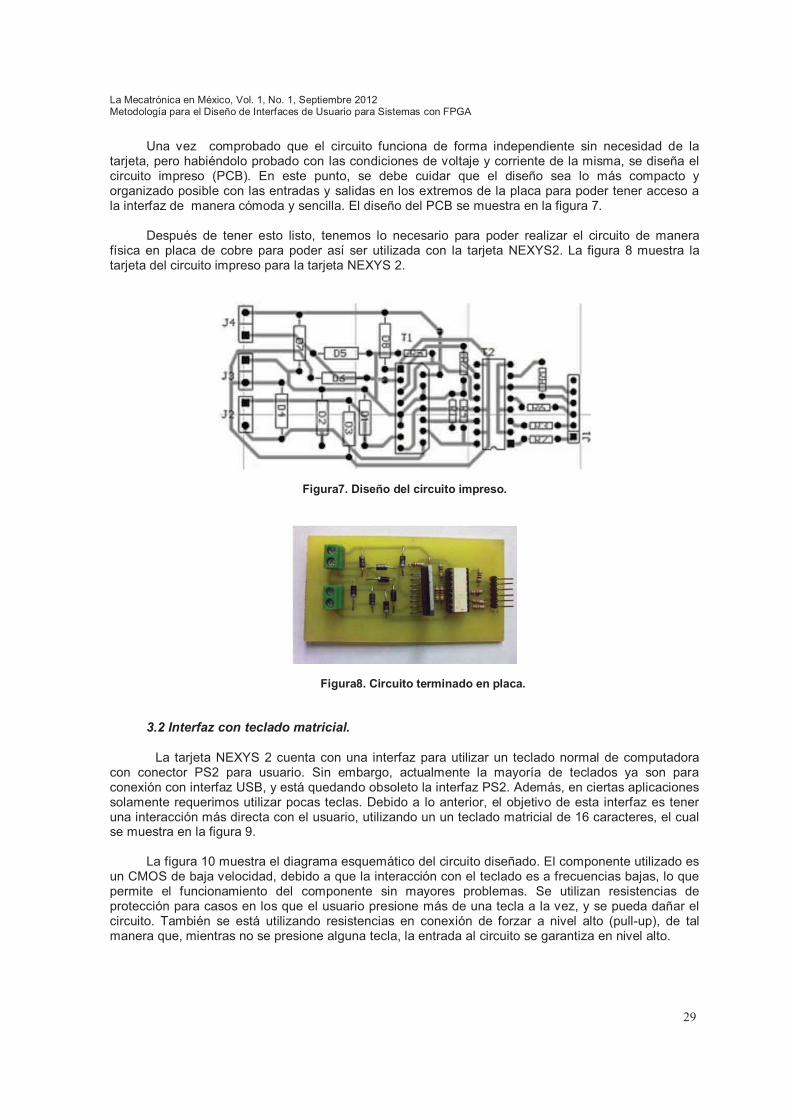
Una vez comprobado que el circuito funciona de forma independiente sin necesidad de la tarjeta, pero habiéndolo probado con las condiciones de voltaje y corriente de la misma, se diseña el circuito impreso (PCB). En este punto, se debe cuidar que el diseño sea lo más compacto y organizado posible con las entradas y salidas en los extremos de la placa para poder tener acceso a la interfaz de manera cómoda y sencilla. El diseño del PCB se muestra en la figura 7.
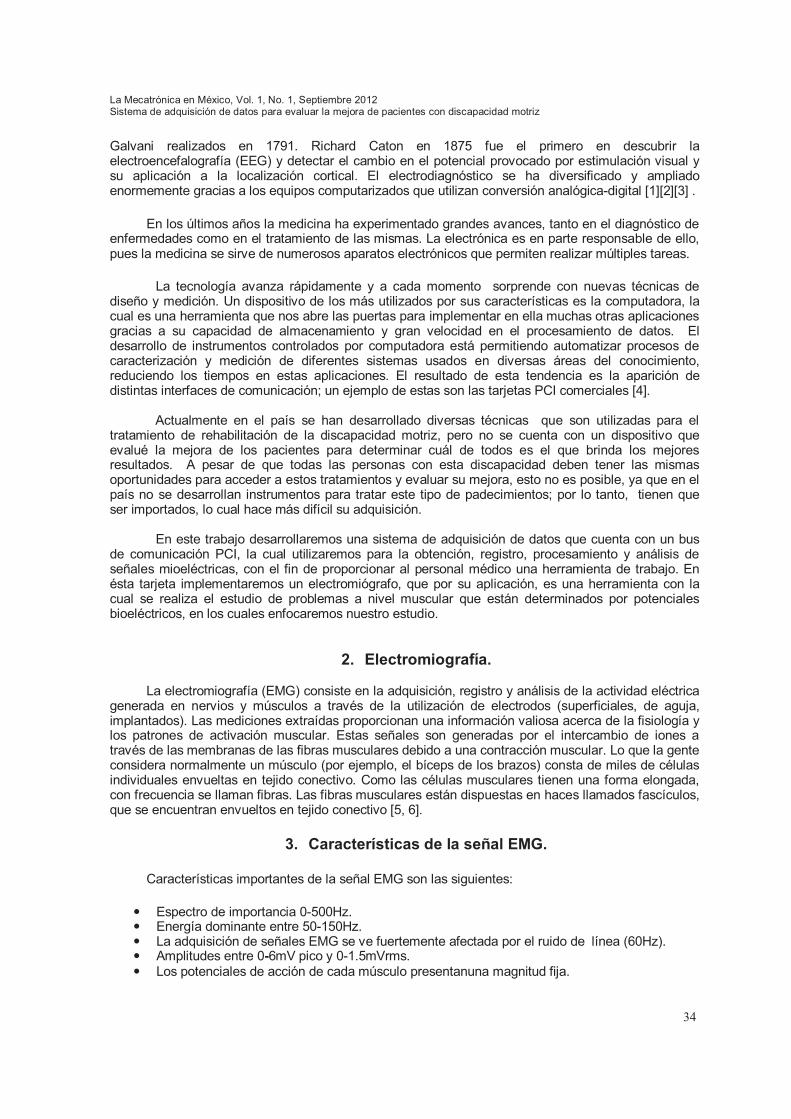
Después de tener esto listo, tenemos lo necesario para poder realizar el circuito de manera física en placa de cobre para poder así ser utilizada con la tarjeta NEXYS2. La figura 8 muestra la tarjeta del circuito impreso para la tarjeta NEXYS 2.
Figura7. Diseño del circuito impreso.
Figura8. Circuito terminado en placa. 3.2 Interfaz con teclado matricial.
La tarjeta NEXYS 2 cuenta con una interfaz para utilizar un teclado normal de computadora con conector PS2 para usuario. Sin embargo, actualmente la mayoría de teclados ya son para conexión con interfaz USB, y está quedando obsoleto la interfaz PS2. Además, en ciertas aplicaciones solamente requerimos utilizar pocas teclas. Debido a lo anterior, el objetivo de esta interfaz es tener una interacción más directa con el usuario, utilizando un un teclado matricial de 16 caracteres, el cual se muestra en la figura 9.
La figura 10 muestra el diagrama esquemático del circuito diseñado. El componente utilizado es
un CMOS de baja velocidad, debido a que la interacción con el teclado es a frecuencias bajas, lo que permite el funcionamiento del componente sin mayores problemas. Se utilizan resistencias de protección para casos en los que el usuario presione más de una tecla a la vez, y se pueda dañar el circuito. También se está utilizando resistencias en conexión de forzar a nivel alto (pull-up), de tal manera que, mientras no se presione alguna tecla, la entrada al circuito se garantiza en nivel alto.

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
30
Figura9. Teclado matricial hexadecimal.
Figura 10. Diagrama esquemático del teclado matricial hexadecimal.
La figura 11 muestra el diseño del circuito impreso. En este caso, se utilizan componentes comunes, pero tratando de obtener un circuito compacto. La figura 12 muestra el circuito terminado en placa el cual se va a utilizar con el teclado matricial, funcionando así como interfaz con la Tarjeta Nexys 2.
Una vez realizado el diseño en PCB fue posible la construcción de la placa, que como puede
observarse en la Figura 12, están los componentes debidamente colocados, teniendo especial cuidado en los componentes CMOS en que cada uno tuviera su base, para evitar que el calor a la hora de soldar pudiera afectarle. Una vez terminada fue posible utilizarla para conectarla a la tarjeta NEXYS2 como se muestra en la sección de resultados.

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
31
Figura 11. Circuito impreso del teclado matricial hexadecimal.
Figura 12. Circuito impreso de la interfaz del teclado.
4. Pruebas y Resultados.
Se probaron los sistemas, obteniendo como resultado el correcto funcionamiento de las
interfaces. La figura 12 muestra la tarjeta NEXYS 2 con la interfaz del puente H, mientras que la figura 13 muestra la tarjeta con la interfaz del teclado.
Los niveles de corriente fueron menores a los especificados en la tabla 6, de tal manera que el sistema pudo funcionar adecuadamente.
Figura 13. Interfaz del puente H y la Tarjeta Nexys2.

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Metodología para el Diseño de Interfaces de Usuario para Sistemas con FPGA
32
Fig. 14. Interfaz del teclado Matricial y la Tarjeta Nexys2.
5. Conclusiones.
Esta metodología permite a un alumno implementar una interfaz para cualquier tarjeta con dispositivos reprogramables, de una manera segura, considerando todas las características eléctricas.
Con las consideraciones tomadas, se logró que el consumo de corriente fuera el adecuado, sin
exceder la corriente que puede proporcionar cada una de las terminales de salida.
También se pudo comprobar que es factible utilizar componentes opto-electrónicos para controlar el encendido y apagado de componentes de potencia, como motores.
Aún se va a trabajar en el desarrollo de más herramientas para las tarjetas, y se están desarrollando sistemas de alta frecuencia y baja frecuencia.
Referencias. [1] Romero R. “Electrónica Digital y lógica programable”, Universidad De Guanajuato, México,
primera edición año 2007. [2] XILINX, “SPARTAN-3E FPGA Family: Data Sheet”, DS312 (v3.8), 2009. [3] ACTEL, “ProASIC3E Flash Family FPGAs”, Actel Corporation, 2010. [4] ALTERA, “Arria II GX FPGA Development Board, Reference Manual”, Altera Corporation, 2011. [5] FPGA Circuit, “Spartacus Fpga Board, System Manual”, Second Edition, 2005, V1.2 [6] ACTEL, “ACT
TM 1 Series FPGA”, ACTEL Corporation, 1996.
[7] Cypress Perform, “Ultra 37000 CPLD Family (5V and 3.3V ISRTM
High Performance CPLDs)”, San Jose California, CA 95134-1709, 2010.

La Mecatrónica en México, Vol. 1, No. 1, páginas 33 – 43, Septiembre 2012 Disponible en línea en www.mecamex.net/revistas/LMEM ISSN en trámite © 2012, Asociación Mexicana de Mecatrónica A. C.
33
Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
Celia Martínez-Chiñas1, S. Vergara1, M. Vargas2, F. Reyes1, M. A. Vargas1, A.
Palomino1 y J.M. Rodriguez-Lelis3
1 Facultad de Ciencias de la Electrónica, Grupo de robótica, Maestría en Ciencias de la Electrónica opción Automatización, Benemérita Universidad Autónoma de Puebla, [email protected], Av. San
Claudio y 18 Sur S/N C.U., Edificio 109A, C.P. 72570, Puebla Pue., México. 2Escuela de Ciencias, Universidad Autónoma Benito Juárez de Oaxaca, Ciudad Universitaria, Avenida
Universidad s/n, Ex Hacienda “Cinco Señores”, Oaxaca de Juárez, Oaxaca, México. 3 Centro Nacional de Investigación y Desarrollo Tecnológico Departamento de Ingeniería Mecánica * Tribología Interior Internado Palmira s/n, Col. Palmira, Apartado Postal 5*164 Cuernavaca, Morelos,
México.
Recibido: 14 / Febrero / 2012. Aceptado: 12 / Abril / 2012. Publicado: 1 / Octubre / 2012. © 2012 Celia Martínez-Chiñas, et. Al. Este es un artículo de acceso abierto, distribuido bajo los términos de la Asociación Mexicana de Mecatrónica A. C., el cual permite el uso, distribución y reproducción sin restricciones por cualquier medio, siempre que el trabajo original esté apropiadamente citado. La revista cuenta con el Certificado de Reserva de Derechos al Uso Exclusivo No. 04-2012-092010534100-102.
Resumen. En la medicina existen diversos tipos de herramientas que son utilizadas como auxiliares en el tratamiento de ciertas patologías. En el presente trabajo se desarrolla una tarjeta PCI (Interconexión de componentes periféricos) que funcione como un sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz bajo tratamiento de rehabilitación, la cual será de gran ayuda para los médicos del área ya que se proporcionará una herramienta que permita evaluar las diferentes técnicas y equipo de rehabilitación, con el fin de que en el futuro se pueda establecer cuáles de éstas son las más adecuadas en función del problema a tratar. Con lo cual se espera indirectamente contribuir a la mejora de la calidad de vida de los pacientes. Palabras clave:Tarjeta de adquisición de datos, discapacidad motriz, señales bioeléctricas, señal mioeléctrica, electromiógrafo.
1. Introducción.
El rol de la electricidad con relación al sistema nervioso surgió de la observación de los efectos de la aplicación de la misma al organismo, y eventualmente, del descubrimiento que tanto músculos como nervios podían ser fuentes de esta energía. Éste descubrimiento fue la base del diagnóstico eléctrico o electrodiagnóstico.
El electrodiagnóstico incluye: Electroencefalografía, electromiografía, potenciales provocados por estimulación sensorial (espinal y cerebral), registro de potenciales de acción de un nervio-conducción nerviosa y electrorretinograma. Todos ellos tienen alguna relación con los escritos de
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
34
Galvani realizados en 1791. Richard Caton en 1875 fue el primero en descubrir la electroencefalografía (EEG) y detectar el cambio en el potencial provocado por estimulación visual y su aplicación a la localización cortical. El electrodiagnóstico se ha diversificado y ampliado enormemente gracias a los equipos computarizados que utilizan conversión analógica-digital [1][2][3] .
En los últimos años la medicina ha experimentado grandes avances, tanto en el diagnóstico de enfermedades como en el tratamiento de las mismas. La electrónica es en parte responsable de ello, pues la medicina se sirve de numerosos aparatos electrónicos que permiten realizar múltiples tareas.
La tecnología avanza rápidamente y a cada momento sorprende con nuevas técnicas de diseño y medición. Un dispositivo de los más utilizados por sus características es la computadora, la cual es una herramienta que nos abre las puertas para implementar en ella muchas otras aplicaciones gracias a su capacidad de almacenamiento y gran velocidad en el procesamiento de datos. El desarrollo de instrumentos controlados por computadora está permitiendo automatizar procesos de caracterización y medición de diferentes sistemas usados en diversas áreas del conocimiento, reduciendo los tiempos en estas aplicaciones. El resultado de esta tendencia es la aparición de distintas interfaces de comunicación; un ejemplo de estas son las tarjetas PCI comerciales [4].
Actualmente en el país se han desarrollado diversas técnicas que son utilizadas para el tratamiento de rehabilitación de la discapacidad motriz, pero no se cuenta con un dispositivo que evalué la mejora de los pacientes para determinar cuál de todos es el que brinda los mejores resultados. A pesar de que todas las personas con esta discapacidad deben tener las mismas oportunidades para acceder a estos tratamientos y evaluar su mejora, esto no es posible, ya que en el país no se desarrollan instrumentos para tratar este tipo de padecimientos; por lo tanto, tienen que ser importados, lo cual hace más difícil su adquisición.
En este trabajo desarrollaremos una sistema de adquisición de datos que cuenta con un bus
de comunicación PCI, la cual utilizaremos para la obtención, registro, procesamiento y análisis de señales mioeléctricas, con el fin de proporcionar al personal médico una herramienta de trabajo. En ésta tarjeta implementaremos un electromiógrafo, que por su aplicación, es una herramienta con la cual se realiza el estudio de problemas a nivel muscular que están determinados por potenciales bioeléctricos, en los cuales enfocaremos nuestro estudio.
2. Electromiografía.
La electromiografía (EMG) consiste en la adquisición, registro y análisis de la actividad eléctrica generada en nervios y músculos a través de la utilización de electrodos (superficiales, de aguja, implantados). Las mediciones extraídas proporcionan una información valiosa acerca de la fisiología y los patrones de activación muscular. Estas señales son generadas por el intercambio de iones a través de las membranas de las fibras musculares debido a una contracción muscular. Lo que la gente considera normalmente un músculo (por ejemplo, el bíceps de los brazos) consta de miles de células individuales envueltas en tejido conectivo. Como las células musculares tienen una forma elongada, con frecuencia se llaman fibras. Las fibras musculares están dispuestas en haces llamados fascículos, que se encuentran envueltos en tejido conectivo [5, 6].
3. Características de la señal EMG.
Características importantes de la señal EMG son las siguientes:
Espectro de importancia 0-500Hz. Energía dominante entre 50-150Hz. La adquisición de señales EMG se ve fuertemente afectada por el ruido de línea (60Hz). Amplitudes entre 0-6mV pico y 0-1.5mVrms. Los potenciales de acción de cada músculo presentanuna magnitud fija.

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
35
Dicha información refleja las fuerzas que son generadas por los músculos y la temporización de los comandos motores. Además, se usa en el diagnóstico de patologías que afectan al Sistema Nervioso Periférico, las alteraciones funcionales de las raíces nerviosas, de los plexos y los troncos nerviosos periféricos, así como de patologías del músculo y de la unión neuromuscular. La amplitud de las señales EMG varía desde los microvolts ( V) hasta un bajo rango de milivolts (mV) (menor de 10mV).
4. Modo de medición de la señal EMG. La contracción de fibras musculares genera actividad eléctrica que puede ser medida por
electrodos fijados a la superficie de la piel próxima al grupo muscular de interés. Para la adquisición de las señalesEMG se requiere de una correcta identificación de las regiones musculares comprometidas en la ejecución de los movimientos a clasificar. Debido a la elevada resistencia eléctrica natural de la piel, se recomienda la aplicación de un gel que mejore la conductividad además de lograrse una buena superficie de contacto y adherencia con los electrodos. A pesar de estas disposiciones, las señales recogidas serán demasiado débiles, por lo que es necesario un proceso previo de filtraje y amplificación antes de su análisis (figura 1).
Figura 1. Etapa de preamplificación y filtrado.
En el registro de las señales EMG de superficie existen inconvenientes tales como el ruido
ambiente, el ruido debido al movimiento de los electrodos y el crosstalk (definido como la interferencia producida por la actividad eléctrica de músculos próximos), entre otros [7, 8].
5. Diseño de un sistema de adquisición de datos basado en una tarjeta PCI.
El diagrama a bloques del sistema se muestra a continuación.
Figura 2. Diagrama a bloques general.

La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
36
La primera parte del diagrama a bloques es la señal analógica de entrada, la cual se pre-amplifica y filtra debido a que la señal proveniente de los electrodos es muy débil. Para digitalizar la señal de entrada utilizamos un Convertidor Analógico Digital (ADC) con una resolución de 10 bits. El sistema consta de cuatro canales; si se utilizan los cuatro canales analógicos la señal es muestreada a 10 KHz , en caso de que se utilicen dos esta puede ser muestreada a 20 KHz, con esto, nuestra señal puede ser interpretada por el FPGA (del inglés Field ProgrammableGateArray), el cual es un dispositivo semiconductor que contiene bloques de lógica cuya interconexión y funcionalidad se puede programar, este dispositivo es de la familia Cyclone, su matrícula es EP2C8Q208C7, en el que se puede implementar hasta dos DSP, cuenta con 208 terminales, el modo de programar dichos dispositivos es por medio del software de diseño creado por ALTERA Quartus II versión 5.0. En este se concentra el control del electromiógrafo. Esta etapa consta de varios módulos, en primer lugar tenemos la comunicación entre el PIC y el FPGA seguido del control de flujo de datos, la memoria FIFO, en donde se guardan todos los datos que en un futuro reproducen la señal, y por último tenemos el protocolo, encargado de comunicar a la computadora con la tarjeta electrónica que opera como electromiógrafo.
6. Diseño de las etapas de preamplificación y filtrado.
El punto importante del diseño de filtros es conseguir un sistema con muy poco ruido para la adquisición de la señal mioeléctrica. La interferencia en la señal se origina principalmente por la línea de corrientealterna, por electrodosindebidamente fijados y otros factores, siendo la interferencia de la línea de corriente alterna la que destaca entre ellas, y por consecuencia, la eliminación de sus efectos es de suma importancia [9].
La siguiente imagen muestra el diagrama a bloques de la etapa de amplificación y filtrado
(figura 3).
Fig.3. Diagrama a bloques de la etapa de preamplificación y filtrado.
6.1 Etapa de preamplificación.
Para la etapa de preamplificación se utiliza el amplificador de instrumentación AD8221 con una ganancia de 500. El propósito de este es amplificar las débiles señales biológicas hasta obtener un nivel apropiado para que puedan ser registradas, debe admitir altas tensiones de DC de modo diferencial a su entrada e importantes desbalances en las impedancias del generador de señal. Todo esto manteniendo buenas características; entre ellas, un alto rechazo de modo común (CMRR) y un bajo nivel de ruido [10].
La configuración que se utilizó la podemos observar en la siguiente figura:
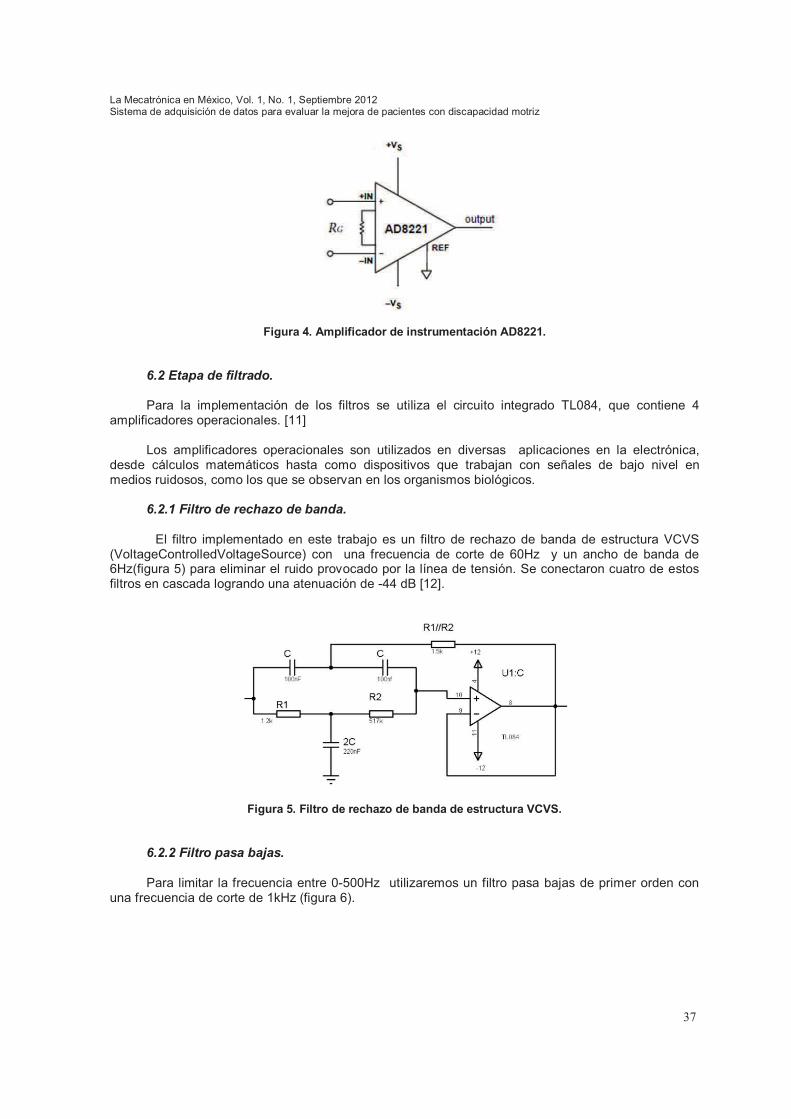
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
37
Figura 4. Amplificador de instrumentación AD8221.
6.2 Etapa de filtrado.
Para la implementación de los filtros se utiliza el circuito integrado TL084, que contiene 4 amplificadores operacionales. [11]
Los amplificadores operacionales son utilizados en diversas aplicaciones en la electrónica,
desde cálculos matemáticos hasta como dispositivos que trabajan con señales de bajo nivel en medios ruidosos, como los que se observan en los organismos biológicos.
6.2.1 Filtro de rechazo de banda.
El filtro implementado en este trabajo es un filtro de rechazo de banda de estructura VCVS (VoltageControlledVoltageSource) con una frecuencia de corte de 60Hz y un ancho de banda de 6Hz(figura 5) para eliminar el ruido provocado por la línea de tensión. Se conectaron cuatro de estos filtros en cascada logrando una atenuación de -44 dB [12].
Figura 5. Filtro de rechazo de banda de estructura VCVS.
6.2.2 Filtro pasa bajas.
Para limitar la frecuencia entre 0-500Hz utilizaremos un filtro pasa bajas de primer orden con una frecuencia de corte de 1kHz (figura 6).
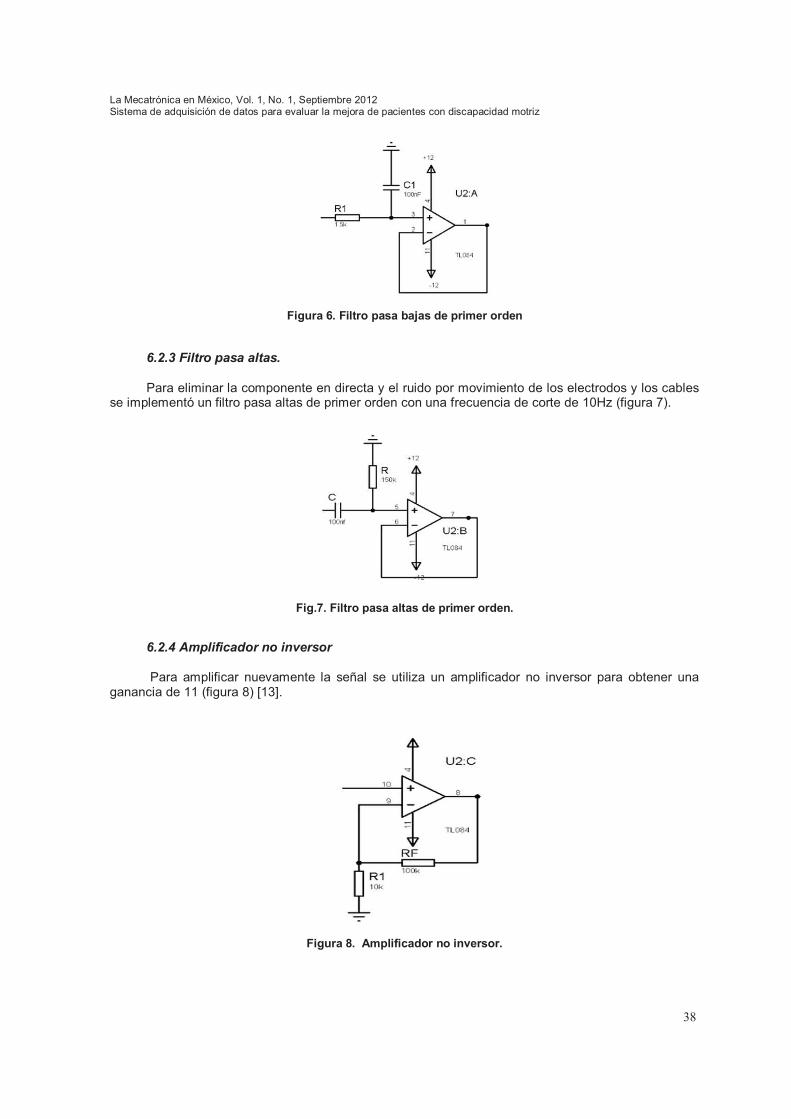
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
38
Figura 6. Filtro pasa bajas de primer orden
6.2.3 Filtro pasa altas.
Para eliminar la componente en directa y el ruido por movimiento de los electrodos y los cables se implementó un filtro pasa altas de primer orden con una frecuencia de corte de 10Hz (figura 7).
Fig.7. Filtro pasa altas de primer orden.
6.2.4 Amplificador no inversor
Para amplificar nuevamente la señal se utiliza un amplificador no inversor para obtener una ganancia de 11 (figura 8) [13].
Figura 8. Amplificador no inversor.
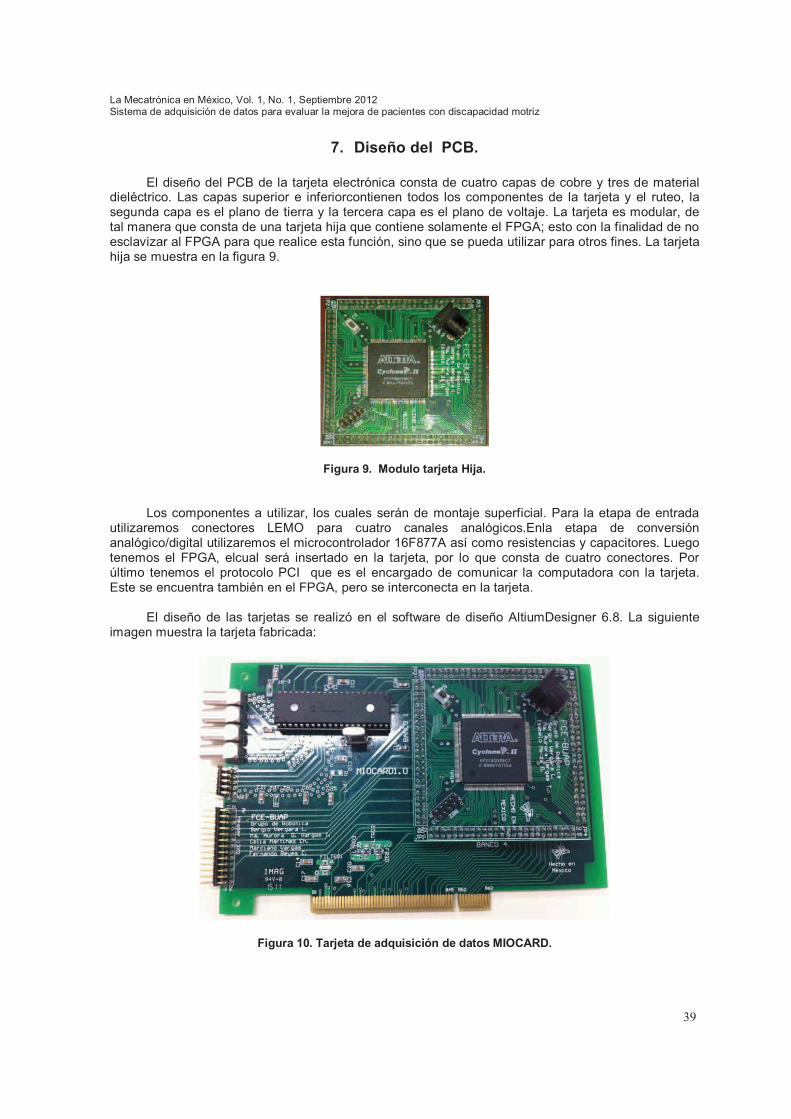
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
39
7. Diseño del PCB.
El diseño del PCB de la tarjeta electrónica consta de cuatro capas de cobre y tres de material dieléctrico. Las capas superior e inferiorcontienen todos los componentes de la tarjeta y el ruteo, la segunda capa es el plano de tierra y la tercera capa es el plano de voltaje. La tarjeta es modular, de tal manera que consta de una tarjeta hija que contiene solamente el FPGA; esto con la finalidad de no esclavizar al FPGA para que realice esta función, sino que se pueda utilizar para otros fines. La tarjeta hija se muestra en la figura 9.
Figura 9. Modulo tarjeta Hija.
Los componentes a utilizar, los cuales serán de montaje superficial. Para la etapa de entrada utilizaremos conectores LEMO para cuatro canales analógicos.Enla etapa de conversión analógico/digital utilizaremos el microcontrolador 16F877A así como resistencias y capacitores. Luego tenemos el FPGA, elcual será insertado en la tarjeta, por lo que consta de cuatro conectores. Por último tenemos el protocolo PCI que es el encargado de comunicar la computadora con la tarjeta. Este se encuentra también en el FPGA, pero se interconecta en la tarjeta.
El diseño de las tarjetas se realizó en el software de diseño AltiumDesigner 6.8. La siguiente
imagen muestra la tarjeta fabricada:
Figura 10. Tarjeta de adquisición de datos MIOCARD.
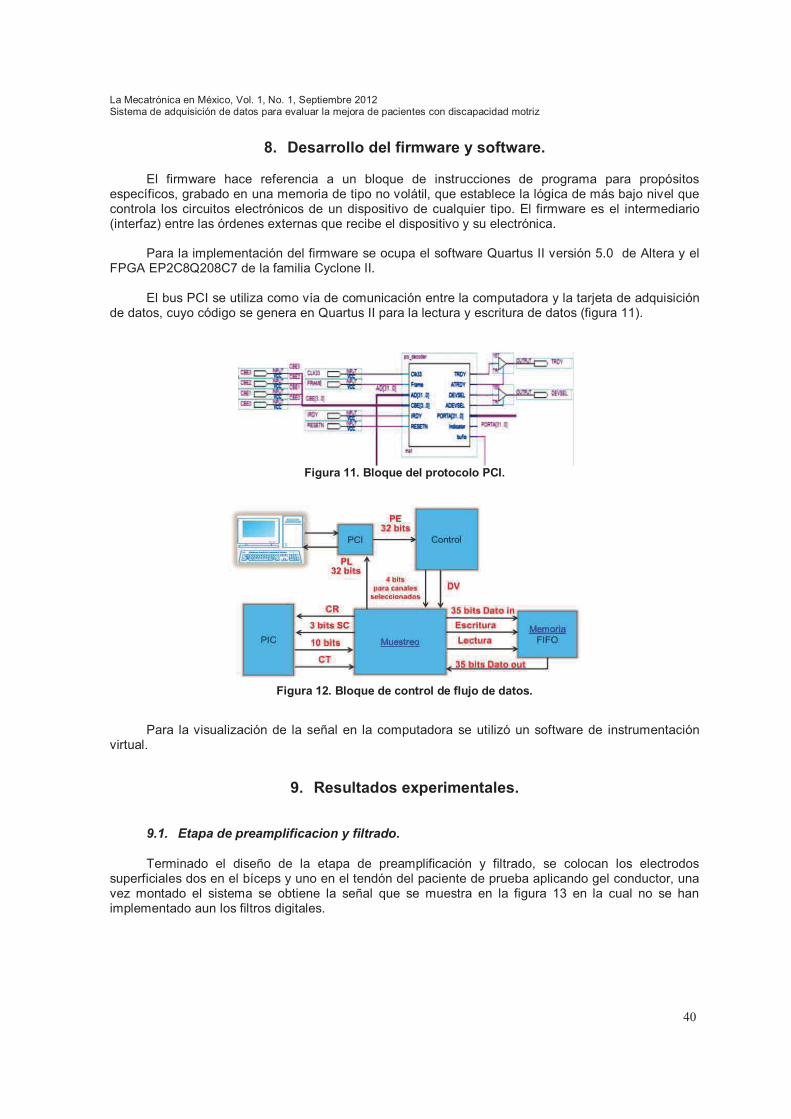
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
40
8. Desarrollo del firmware y software.
El firmware hace referencia a un bloque de instrucciones de programa para propósitos específicos, grabado en una memoria de tipo no volátil, que establece la lógica de más bajo nivel que controla los circuitos electrónicos de un dispositivo de cualquier tipo. El firmware es el intermediario (interfaz) entre las órdenes externas que recibe el dispositivo y su electrónica.
Para la implementación del firmware se ocupa el software Quartus II versión 5.0 de Altera y el
FPGA EP2C8Q208C7 de la familia Cyclone II. El bus PCI se utiliza como vía de comunicación entre la computadora y la tarjeta de adquisición
de datos, cuyo código se genera en Quartus II para la lectura y escritura de datos (figura 11).
Figura 11. Bloque del protocolo PCI.
Figura 12. Bloque de control de flujo de datos.
Para la visualización de la señal en la computadora se utilizó un software de instrumentación virtual.
9. Resultados experimentales.
9.1. Etapa de preamplificacion y filtrado.
Terminado el diseño de la etapa de preamplificación y filtrado, se colocan los electrodos superficiales dos en el bíceps y uno en el tendón del paciente de prueba aplicando gel conductor, una vez montado el sistema se obtiene la señal que se muestra en la figura 13 en la cual no se han implementado aun los filtros digitales.
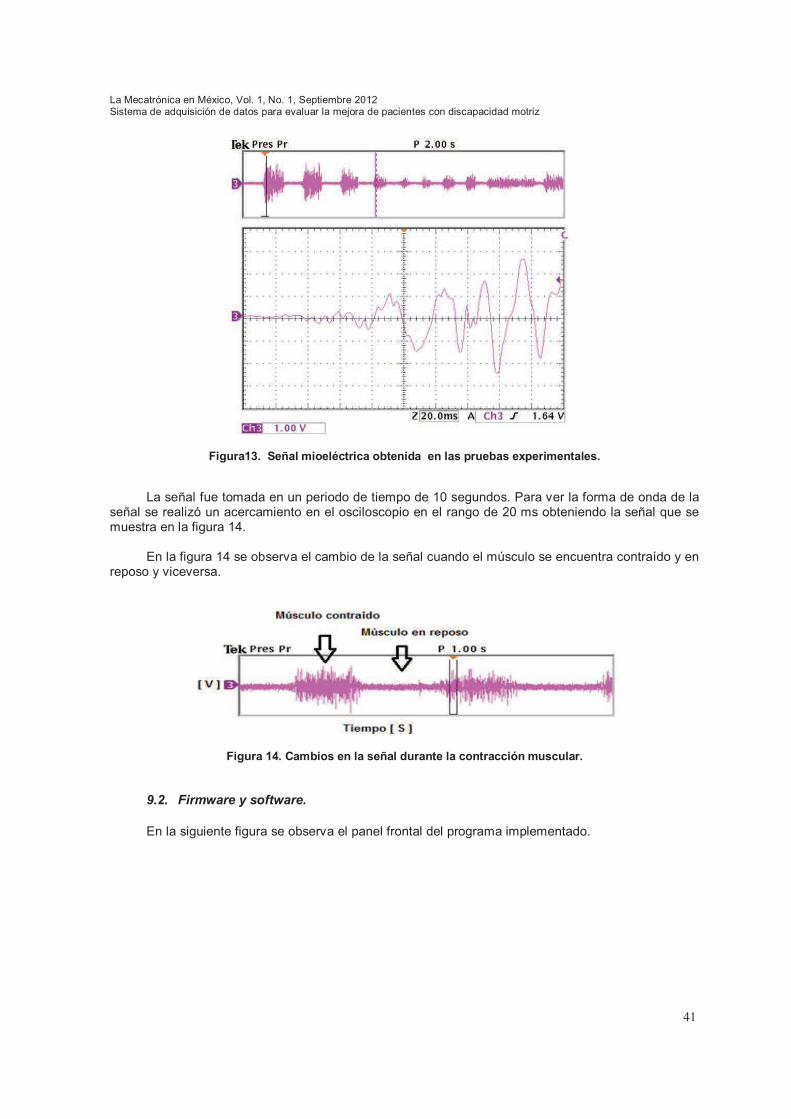
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
41
Figura13. Señal mioeléctrica obtenida en las pruebas experimentales.
La señal fue tomada en un periodo de tiempo de 10 segundos. Para ver la forma de onda de la señal se realizó un acercamiento en el osciloscopio en el rango de 20 ms obteniendo la señal que se muestra en la figura 14.
En la figura 14 se observa el cambio de la señal cuando el músculo se encuentra contraído y en reposo y viceversa.
Figura 14. Cambios en la señal durante la contracción muscular.
9.2. Firmware y software.
En la siguiente figura se observa el panel frontal del programa implementado.
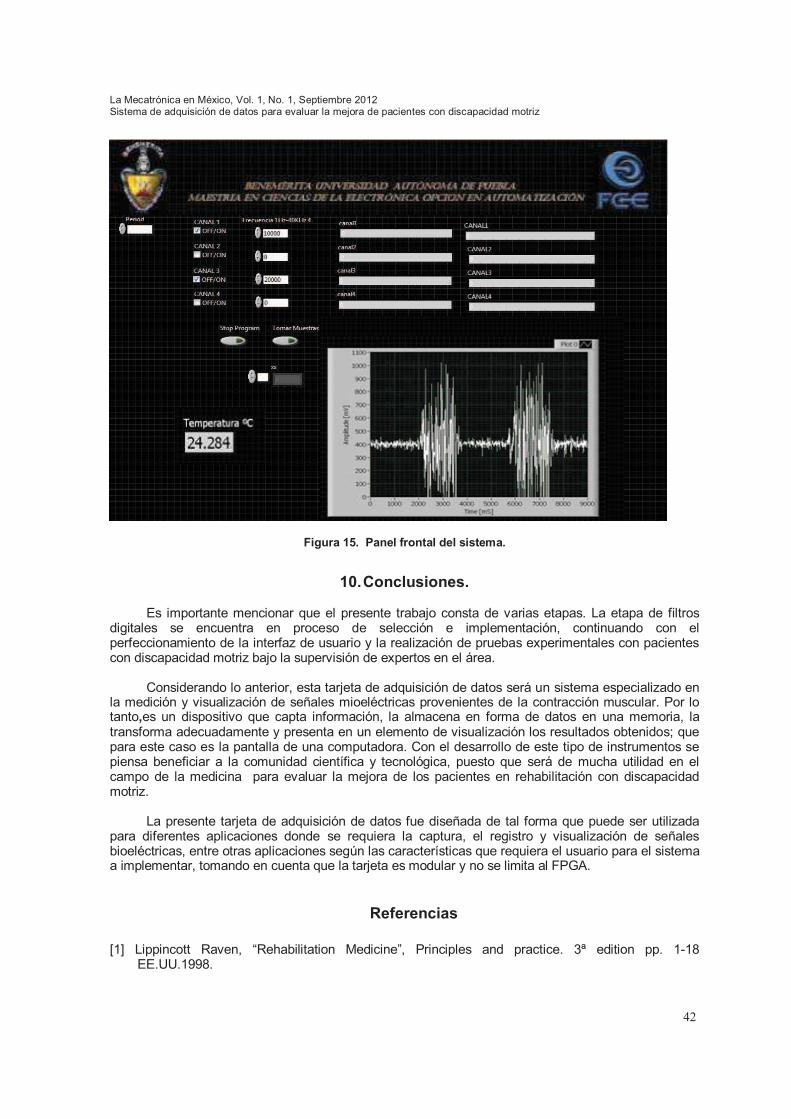
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
42
Figura 15. Panel frontal del sistema.
10. Conclusiones.
Es importante mencionar que el presente trabajo consta de varias etapas. La etapa de filtros digitales se encuentra en proceso de selección e implementación, continuando con el perfeccionamiento de la interfaz de usuario y la realización de pruebas experimentales con pacientes con discapacidad motriz bajo la supervisión de expertos en el área.
Considerando lo anterior, esta tarjeta de adquisición de datos será un sistema especializado en
la medición y visualización de señales mioeléctricas provenientes de la contracción muscular. Por lo tanto,es un dispositivo que capta información, la almacena en forma de datos en una memoria, la transforma adecuadamente y presenta en un elemento de visualización los resultados obtenidos; que para este caso es la pantalla de una computadora. Con el desarrollo de este tipo de instrumentos se piensa beneficiar a la comunidad científica y tecnológica, puesto que será de mucha utilidad en el campo de la medicina para evaluar la mejora de los pacientes en rehabilitación con discapacidad motriz.
La presente tarjeta de adquisición de datos fue diseñada de tal forma que puede ser utilizada para diferentes aplicaciones donde se requiera la captura, el registro y visualización de señales bioeléctricas, entre otras aplicaciones según las características que requiera el usuario para el sistema a implementar, tomando en cuenta que la tarjeta es modular y no se limita al FPGA.
Referencias
[1] Lippincott Raven, “Rehabilitation Medicine”, Principles and practice. 3ª edition pp. 1-18 EE.UU.1998.
La Mecatrónica en México, Vol. 1, No. 1, Septiembre 2012 Sistema de adquisición de datos para evaluar la mejora de pacientes con discapacidad motriz
43
[2] Brazier MA. “The Historical development of neurophysiology”. In: Field, J (Ed.) Handbook of Physiology. Washington: American Physiological Society pp. 1-29. 1959.
[3] Aminoff M. “Electrodiagnosis in Clinical Medicine”. New York: Churchill Livingston, 1997. [4] R. J. Tocci “Sistemas Digitales” 6ª ed. Pearson Educación, 1996. Pp690-691. [5] E. Mandado. “Instrumentación Electrónica”. Alfaomegamarcombo, 1995. Pp. 41-96. [6] STUAR IRA FOX, Fisiología humana, Mc Graw-Hill interamericana, séptima edición 2003. Pp.150-
370 [7] Andrés Felipe Ruiz Olaya, “Sistema Robótico Multimodal para Análisis y Estudios en Biomecánica,
Movimiento Humano y Control Neuromotor “, Tesis doctoral, Leganés, Madrid, España, Octubre de 2008.
[8] Angélica Ramírez, Diego Alexander Garzón, “Análisis de sensibilidad por la colocación de los electrodos en la electromiografía de superficie”, Antioquia no.46 Medellín Oct./Dec. 2008.
[9] Brown WF. “The physiological and technical basis of electromyography”.Bston: Butterworth-Heinemann, American Association of Electrodiagnostic Medicine, 1984.
[10] AnalogDevices , AD8221 ;EE.UU.2010 [Consulta 10 de Enero del 2011], Disponible: http://www.datasheetcatalog.net/es/datasheets_pdf/A/D/8/2/AD8221.shtml
[11] STmicroelectronics ,TL084;1999 [Consulta 10 de Enero del 2011], Disponible: http://www.datasheetcatalog.net/es/datasheets_pdf/T/L/0/8/TL084.shtml
[12] RolfSchauman, Mac E. Van Valkenburg, “Desing of analog filters”, Oxford university Press, 3ra. Edición, New York 2001
[13] Leydy Laura Alvarez, Ricardo Henao, Edison Duque. “Análisis de esquemas de filtrado análogo para señales ECG”. Scientia et Technica Año XIII, No 37, Diciembre de 2007.