la mecatrónica en méxico - mecamex.net · casos típicos de diseño de molinos, es necesario que...
TRANSCRIPT


La Mecatrónica en México
Comité Editorial de la Revista
Diseño Gráfico Mónica Vázquez Guerrero
Kikey Stephanie Méndez Sánchez Alejandra Miguel Vargas Mandujano
Vinculación Luis Alberto Aguilar Bautista Luis Antonio Salazar Licea
Miguel Ángel Bacilio Rodríguez
Revisión de Formato Rodrigo Escobar Díaz-Guerrero
Conrado Vargas Cabrera Alejandro de León Cuevas Ángel Juárez Buenrostro
Soporte Técnico Gonzalo Elías Blanco Silva
Carlos Alberto Ramos Arreguín Juan Carlos Moya Morales
© DERECHOS DE AUTOR Y DERECHOS CONEXOS. La Mecatrónica en México, Año 7, No.2, Mayo - Agosto 2018, es una publicación cuatrimestral editada por la Asociación Mexicana de Mecatrónica A. C., Calle Fonología No. 116, Col. Tecnológico C.P. 76158, Querétaro Qro. Tel. (01- 442) 224 0257. www.mecamex.net/revistas/LMEM/ , Editores responsables: Juan Manuel Ramos Arreguín y José Emilio Vargas Soto. Reserva de Derechos al Uso Exclusivo en trámite, ISSN: 2448-7031. Responsables de la última actualización de este número: Juan Manuel Ramos Arreguín y José Emilio Vargas Soto. Este número se terminó de imprimir el 05 de julio del 2018. Las opiniones expresadas por los autores de los artículos no reflejan la postura de la Asociación Mexicana de Mecatrónica A.C. Esta revista es una publicación de acceso abierto, distribuido bajo los términos de la Asociación Mexicana de Mecatrónica A. C., la cual permite el uso, distribución y reproducción sin restricciones por cualquier medio, siempre y cuando los trabajos estén apropiadamente citados, respetando la autoría y el derecho de autor de las personas que realizaron los artículos.

PROLOGO Estimado lector,
El comité editorial se congratula en poner en sus manos éste nuevo número de la revista La Mecatrónica en México, en su segunda edición del 2018. En ésta ocasión se presentan tres interesantes artículos que espero sean de su interés. Reconozco y aprecio el importante trabajo de nuestro comité técnico de revisores, así como del comité editorial, gracias a ellos la revista se encuentra en constante mejora para aumentar su calidad en contenidos.
El primer artículo nos permite reconocer las competencias específicas que
adquieren estudiantes en la asignatura de “Diseño Mecánico” en carreras de Ingeniería Mecánica, pero extrapolable a otras carreras que donde se imparten asignaturas similares. El desarrollo de proyectos específicos sin duda nos permite reconocer la aportación significativa para diseñar y construir elementos de máquinas que resistan sus condiciones de trabajo. El segundo artículo nos presenta el diseño y construcción de un robot tipo SCARA, resaltando la forma en como el método del elemento finito es utilizado para valorar los esfuerzos en piezas relevantes del robot. Finalmente, el tercer artículo nos presenta una estrategia para procesar imágenes a través de una cámara digital a través de dispositivos lógicos programables.
Aprovecho la ocasión para invitarle a presentar trabajos con el propósito de
seguir promoviendo los avances y el conocimiento en la mecatrónica y áreas afines y así contribuir en mejorar las condiciones de productos, procesos o servicios, que faciliten y mejoren la vida de quienes nos rodean. Dr. José Emilio Vargas Soto Fundador Asociación Mexicana de Mecatrónica A.C.

ÍNDICE
Aplicación de las Competencias Específicas en la Asignatura del Diseño Mecánico en Carreras de Ingeniería Mecánica Rangel Aguilar Oscar, Flores Guerrero Mayra Deyanira, Ramírez Villarreal Daniel, Jesús Carlos Pedraza Ortega y Ángel Rolando Rivas Velázquez
59
Diseño y Análisis del Elemento Finito de Robot Tipo SCARA Estevez Carreón Jaime, Ríos Pérez Rafael, García Ramírez Rubén Senén, Pérez Pérez Jairo y Fuentes Goiz Sotero I.
71
Sistema Digital para Procesamiento Básico de Imágenes con Cámara OV7670 Gaspar Badillo José Eduardo, Ramos Arreguín Juan Manuel, Pedraza Ortega Jesús Carlos y Efrén Gorrostieta Hurtado.
79

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
59
Aplicación de las Competencias Específicas en la Asignatura del Diseño Mecánico en Carreras de
Ingeniería Mecánica
Rangel Aguilar Oscar*, Flores Guerrero Mayra Deyanira, Ramírez Villarreal Daniel, Jesús Carlos Pedraza Ortega y Ángel Rolando Rivas Velázquez
Universidad Autónoma de Nuevo León, Facultad de Ingeniería Mecánica y Eléctrica. *[email protected], [email protected]
Resumen Para la aplicación de las competencias específicas en la asignatura del diseño mecánico en carreras de Ingeniería Mecánica es importante que se planee didácticamente los proyectos integradores de las unidades temáticas de la asignatura, como en este proyecto que se desarrolló del diseño de un molino de bolas para que trabaje continuamente de manera satisfactoria. Se requiere que el estudiante tenga las competencias específicas de análisis de conceptos como deformación y esfuerzos y diseño de los elementos mecánicos, aplicando teoría de deformación y de esfuerzos y del diseño en cada uno de los componentes a analizar y diseñar, en este caso en componentes del molino de bolas, otra de las competencias a desarrollar es su capacidad de proponer materiales y geometrías de las diferentes componentes, desarrollando un programa de análisis de esfuerzo y deformación aplicando Excel. Este trabajo contribuye a una formación de los estudiantes en el desarrollo de sus habilidades del pensamiento crítico y los procesos cognoscitivos que le permitan el logro de sus competencias específicas a través de un proyecto integrador del curso y vinculado a la práctica profesional, que demanda una planeación didáctica del profesor de la asignatura y actividades competenciales que logren transitar al estudiante de su zona de desarrollo actual a su zona de desarrollo próximo y potencial. Palabras clave: competencias específicas, diseño, análisis, desarrollo, proponer, programar, planeación, didáctica, zona, próximo, potencial, actual, comportamiento, proyecto integrador.
Abstract For the application of the specific competences in the subject of mechanical design in Mechanical Engineering careers, it is important that the integrative projects of the thematic units of the subject are didactically planned, as in this project that was developed of the design of a ball mill for to work continuously in a satisfactory manner. It is required that the student has the specific skills of analysis of concepts such as deformation and efforts and design of mechanical elements, applying theory of deformation and effort and design in each of the components to be analyzed and designed, in this case in components of the ball mill, another of the skills to be developed is its ability to propose materials and geometries of the different components, developing a program of stress analysis and deformation using Excel. This work contributes to a formation of students in the development of their critical thinking skills and cognitive processes that allow them to achieve their specific competences through an integrative project of the course and linked to professional practice, which demands a planning didactic of the teacher of the subject and competency activities that manage to move the student from their current development zone to their zone of proximal and potential development.

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
60
Keywords: specific competences, design, analysis, development, propose, program, planning, didactic, zone, next, potential, current, behavior, integrating project.
1. Introducción
El modelo educativo por competencias profesionales integradas en el plano académico implica promover condiciones y situaciones de aprendizaje que permitan: Integrar el aprendizaje a las condiciones reales de trabajo, identificar o construir condiciones de aplicación más reales, ubicados en un contexto global (por ejemplo, diferentes ejercicios de simulación, trabajos de campo, ensayos, tesis, proyectos integradores, etcétera). Diseñar experiencias de aprendizaje que permitan arribar a diferentes soluciones o a varias vías de solución [1].
El análisis de deformación y esfuerzos para el diseño del molino juega un papel importante en el
diseño de los componentes de las máquinas, mecanismos y productos que estén expuestos a la acción de una o más fuerzas en su operación de trabajo. Por lo que, el estudiante debe mostrar un buen nivel de las competencias específicas previas a la asignatura de diseño mecánico, para que logre la comprensión de los nuevos conocimientos y habilidades de la misma.
En este trabajo presentado, como es el proyecto integrador que realizan los estudiantes, les
concede la capacidad de comprensión que; los componentes que propongan de la máquina del molino de bolas, sean significativos y tengan sentido, para su función y que el conocimiento previo de los materiales y su comportamiento elástico en las componentes mecánicas aseguren un trabajo satisfactorio de ellos. A continuación, presentamos el desarrollo del proyecto integrador como una técnica didáctica significativa en el aprendizaje del diseño mecánico en ingeniaría mecánica, en el que se puede demostrar las diferentes competencias específicas que logran los estudiantes.
En este proyecto se pretende realizar el análisis mecánico de deformación y esfuerzo en las
componentes de un molino de bolas de 25 hp para reducción de tamaño de 100 a 20 mm, aplicando las teorías la curva elástica, [2], y las teorías de fallas de la Energía de la Distorsión o Von Mises Hencky[3].
Los molinos de bolas se utilizan para moler minerales y materiales de construcción, así como
reducir el tamaño de materias primas en la industria química, de pinturas y cementera. En muchos casos típicos de diseño de molinos, es necesario que haya discontinuidades geométricas inherentes, para que cumplan con sus funciones asignadas. Como es el caso de tambor, engranes, catarinas o poleas para bandas, estos tienen varios diámetros, que originan una serie de hombros en el eje donde asientan los miembros trasmisores de potencia y los cojinetes de soporte. Estos cambios se consideran en el análisis de esfuerzos [4].
2. Desarrollo
A continuación, se describe a través del diagrama de bloques la metodología a seguir en el proyecto integrador del curso.
2.1 Metodología En la figura 1 se tiene los pasos metodológicos del desarrollo del estudio.

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
61
Figura 1. Metodología del desarrollo del estudio
2.2 Antecedentes. El molino de bolas a analizar es un molino tipo batch, de alimentación abierta, este tipo de
molinos son utilizados para obtener reducciones de tamaño del orden de 100 a 20 mm. Ver figura 1. Existen diversos parámetros para la selección de un molino de bolas, entre ellos, el más importante es el volumen de producción requerido y la capacidad en toneladas [5]. Basándonos en los modelos existentes en el mercado, se propone realizar el análisis mecánico de un molino de bolas con los siguientes parámetros propuestos: Capacidad molino: 4 toneladas. Diámetro del tambor= 0.9 m. Longitud tambor =1.8 m. Potencia motor=25hp (18.5KW)@1750 rpm. Velocidad tambor= 40 rpm. Velocidad de giro del eje.
Aquí los estudiantes logran las competencias de la indagación de antecedentes de los tipos de
molinos, la lectura y comprensión de conocimientos en particular de los molinos de bola, para luego realizar el ejercicio de análisis y discusión de las posibles propuestas para su diseño [6].
2.3 Función. La acción de moler se realiza mediante un cilindro horizontal rotatorio parcialmente lleno con
bolas. Las bolas, por lo general de piedra o metal, muelen el material por medio de fricción e impacto al caer. El material entra por un lado al cilindro, se muele, y posteriormente sale del otro lado [7]. En este punto los estudiantes logran la competencia de comprensión de la función y visualización de información específica del molino como de su acción [8]. Como se ve en la figura 2.
Figura 2. Molino de bolas.
Planteamiento del proyecto. La máquina será impulsada por un motor trifásico de c.a. con un par torsional normal, se considerará un tiempo de servicio del molino >12 hrs/día. Se utilizará primero un arreglo de banda en V, para transmitir la potencia del motor eléctrico; a la salida de la banda se
y analisis de resultados
Conclusiones
Antecedentes
Función
Análisis, diseño y resultado
Planteamiento del proyecto

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
62
acoplará un eje para conectar la banda con un reductor de engranes, que hará girar el tambor. Este estará apoyado por dos cojinetes con contacto de rodadura. El estudio se realiza aplicando las teorías de fallas de la energía de la distorsión, todos los cálculos del análisis y diseño de cada componente fueron programados y realizados en Excel para su iteración posterior.
Componentes propuestas a diseñar del molino de bolas (Ver figura 3): 1. Motor 2. Transmisión por Banda
a. Banda V b. Poleas
3. Eje principal. 4. Cojinetes (3). 5. Reductor Piñón-Engrane
a. Piñón tambor b. Engrane tambor
6. Cojinetes tambor (2) 7. Eje tambor (2) 8. Alimentador a Tambor 9. Contenedor/Tambor 10. Salida.
En este punto se puede mostrar como los estudiantes se colaboran para plantear el proyecto, establecer recursos técnicos y propuestas del molino a diseñar, es decir la comprensión del diseño conceptual de la máquina, así como proponer teorías del diseño, manejo de recursos de programación y aplicación de software como el Excel para la memoria de cálculo y diseño [9].
Figura 3. Propuesta del molino de bolas a diseñar.
3. Resultados 3.1 Análisis y diseño de las componentes de la máquina. Trasmision por banda en ‘v’ geometria propuesta y selección de la banda. En la figura 4 se
muestra la propuesta de la trasmsision por banda realizado con el programa Solidwork. En este punto los estudiantes logran las competencias de análisis y diseño de las componentes de la máquina y proponen las componentes mecanicos de esta parte del molino [9].

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
63
Para ello aplicarán los conceptos de descomposición de la fuerza en una fuerza y un par [10], en las Fuerzas correspondientes F1 y F2 en la polea ‘V’ se resuelven al hacer el análisis de fuerzas, siendo el resultado el que se muestra en la tabla 1. También se calculó el factor de seguridad y la vida estimada de la banda ‘v’ los cuales se muestran en la tabla 2. En este punto muy significativo aplican sus conocimientos de teorías de la ciencia previas aplicados en este proyecto.
Figura 4. Trasmisión de potencia mecánica por medio de poleas – banda ‘v’.
Tabla 1. Resultados del análisis de la banda ‘V’
Longitud 36 in Centro 35.19 in Angulo de contacto 1 137.52º Angulo de contacto 2 222.48º Sección seleccionada 3VX Potencia de la banda 10.4 hp Numero de bandas 4
Tabla 2. Resultados del análisis de fuerzas en polea- banda ‘V’
Fuerzas Valor (Libras)
F1(tenso) 497 F2 (flojo) 170
3.2 Análisis de fuerzas y resultado en el eje del motor eléctrico. En la figura 5 se muestran en la polea-banda V las fuerzas ejercidas por la banda, y en la
tabla 2 los resultados que se obtuvieron del analisis de fuerzas en el lado tenso, fuerza F1 y en lado flojo, fuerza F2. El motor eléctrico se selecciona de acuerdo a los procedimientos que marca el manual de la ABB de referencia empleado [11].
Conclusión de los resultados del análisis de fuerzas, en la tabla se obtuvo un factor de
seguridad mayor a dos basado la resistencia a la cedencia del material, el recomendado para que el material trabaje elásticamente debe ser mayor de dos.
El análisis de esfuerzos en el punto crítico de la sección empotrada del eje de trasmisión, se realiza a través de la aplicación del método analítico realizados en el programa Excel obteniéndose los resultados que se muestran en la tabla 3, de los esfuerzos principales normales y cortantes y su dirección.
La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
64
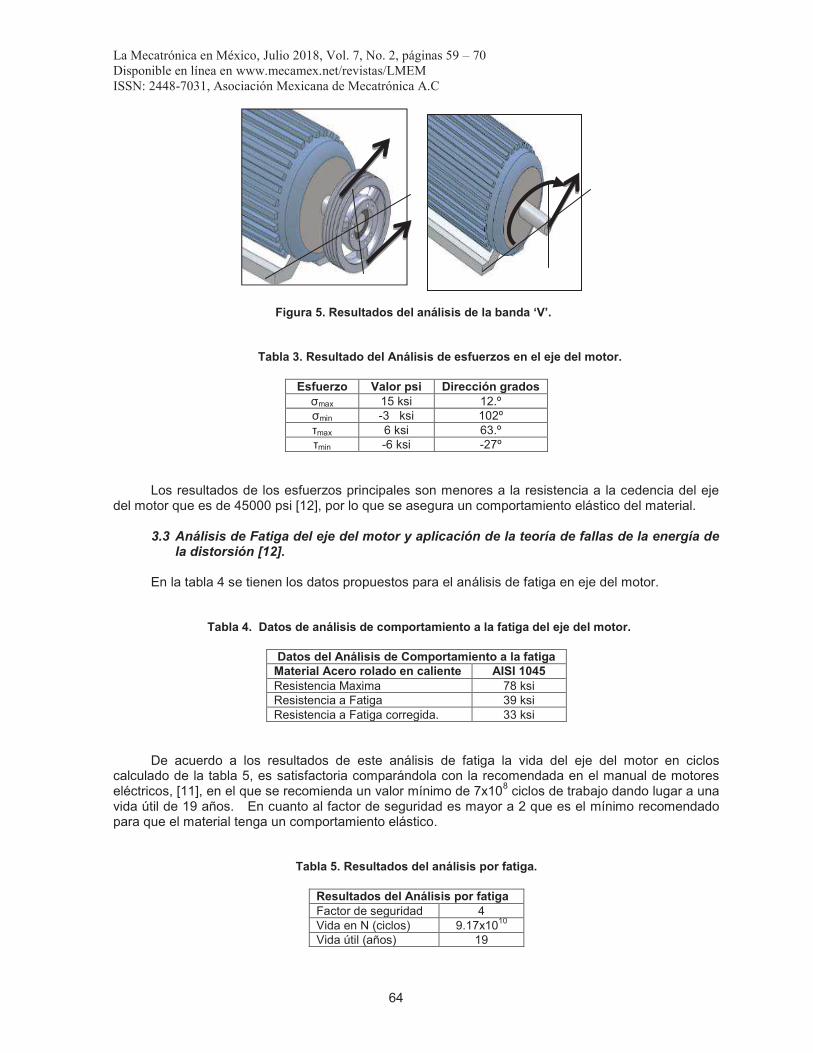
Figura 5. Resultados del análisis de la banda ‘V’.
Tabla 3. Resultado del Análisis de esfuerzos en el eje del motor.
Esfuerzo Valor psi Dirección grados
σmax 15 ksi 12.º σmin -3 ksi 102º τmax 6 ksi 63.º τmin -6 ksi -27º
Los resultados de los esfuerzos principales son menores a la resistencia a la cedencia del eje
del motor que es de 45000 psi [12], por lo que se asegura un comportamiento elástico del material. 3.3 Análisis de Fatiga del eje del motor y aplicación de la teoría de fallas de la energía de
la distorsión [12]. En la tabla 4 se tienen los datos propuestos para el análisis de fatiga en eje del motor.
Tabla 4. Datos de análisis de comportamiento a la fatiga del eje del motor.
Datos del Análisis de Comportamiento a la fatiga
Material Acero rolado en caliente AISI 1045
Resistencia Maxima 78 ksi Resistencia a Fatiga 39 ksi Resistencia a Fatiga corregida. 33 ksi
De acuerdo a los resultados de este análisis de fatiga la vida del eje del motor en ciclos
calculado de la tabla 5, es satisfactoria comparándola con la recomendada en el manual de motores eléctricos, [11], en el que se recomienda un valor mínimo de 7x108 ciclos de trabajo dando lugar a una vida útil de 19 años. En cuanto al factor de seguridad es mayor a 2 que es el mínimo recomendado para que el material tenga un comportamiento elástico.
Tabla 5. Resultados del análisis por fatiga.
Resultados del Análisis por fatiga Factor de seguridad 4 Vida en N (ciclos) 9.17x1010 Vida útil (años) 19
La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
65
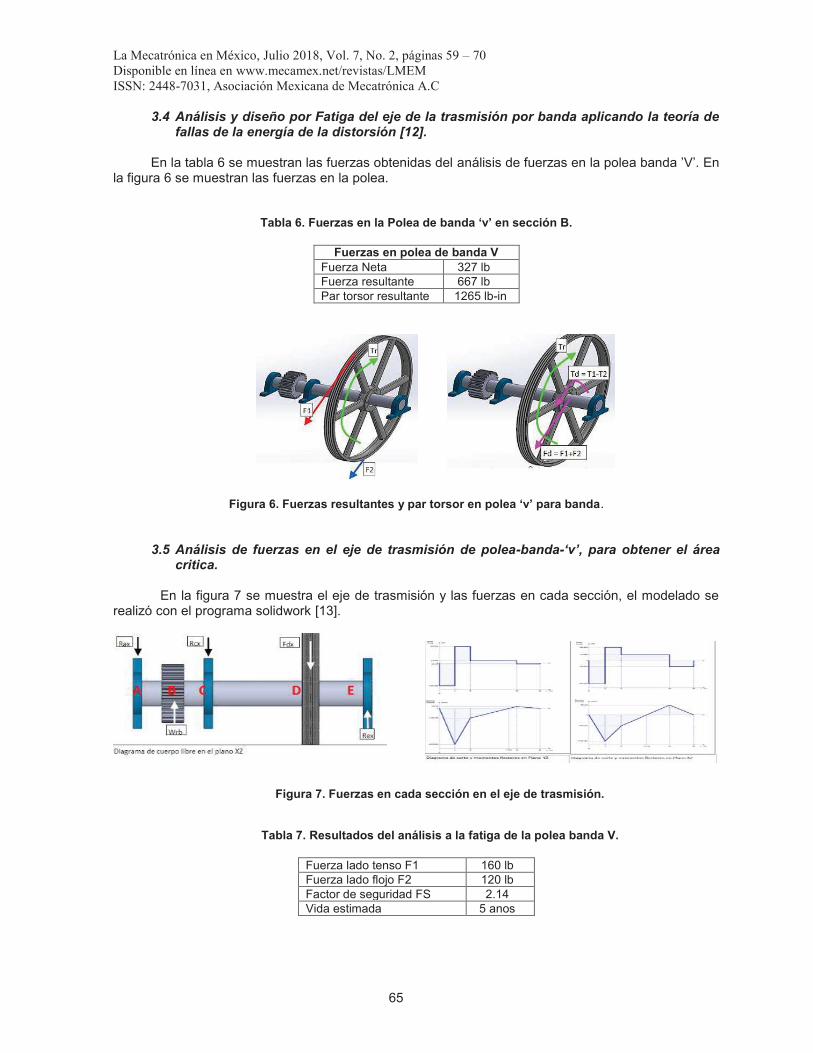
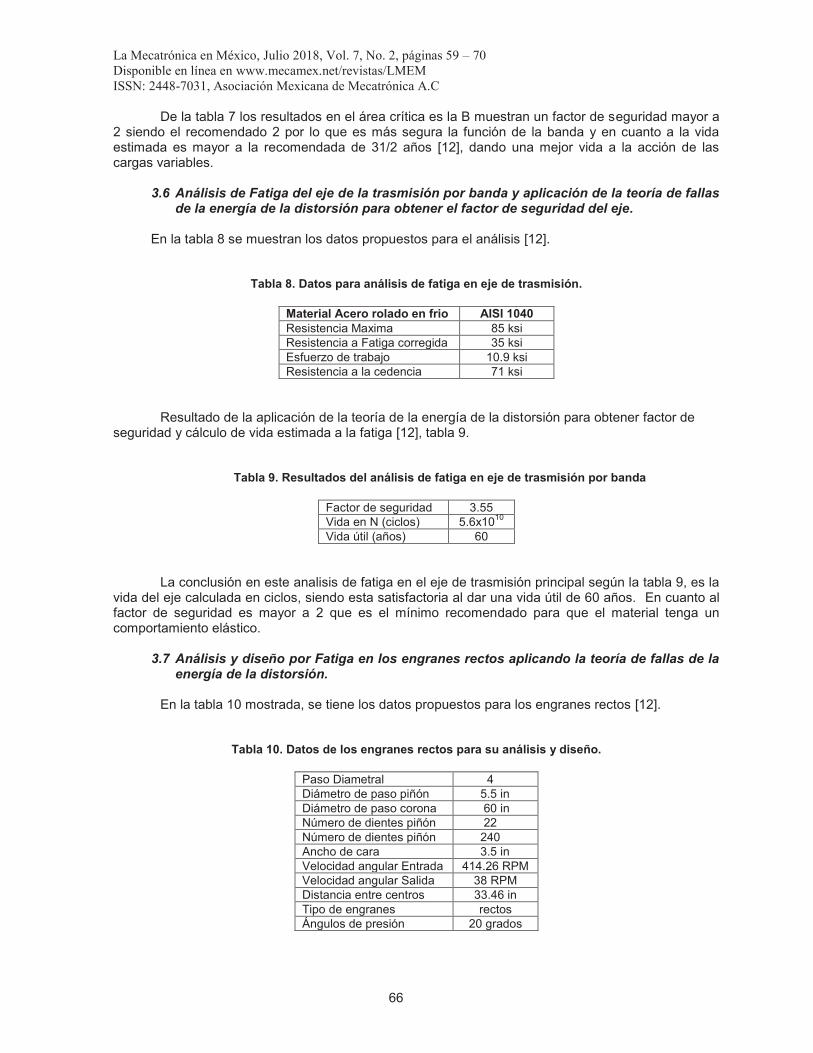
3.4 Análisis y diseño por Fatiga del eje de la trasmisión por banda aplicando la teoría de fallas de la energía de la distorsión [12].
En la tabla 6 se muestran las fuerzas obtenidas del análisis de fuerzas en la polea banda ’V’. En
la figura 6 se muestran las fuerzas en la polea.
Tabla 6. Fuerzas en la Polea de banda ‘v’ en sección B.
Fuerzas en polea de banda V
Fuerza Neta 327 lb Fuerza resultante 667 lb Par torsor resultante 1265 lb-in
Figura 6. Fuerzas resultantes y par torsor en polea ‘v’ para banda. 3.5 Análisis de fuerzas en el eje de trasmisión de polea-banda-‘v’, para obtener el área
critica. En la figura 7 se muestra el eje de trasmisión y las fuerzas en cada sección, el modelado se
realizó con el programa solidwork [13].
Figura 7. Fuerzas en cada sección en el eje de trasmisión.
Tabla 7. Resultados del análisis a la fatiga de la polea banda V.
Fuerza lado tenso F1 160 lb Fuerza lado flojo F2 120 lb Factor de seguridad FS 2.14 Vida estimada 5 anos
La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
66
De la tabla 7 los resultados en el área crítica es la B muestran un factor de seguridad mayor a 2 siendo el recomendado 2 por lo que es más segura la función de la banda y en cuanto a la vida estimada es mayor a la recomendada de 31/2 años [12], dando una mejor vida a la acción de las cargas variables.
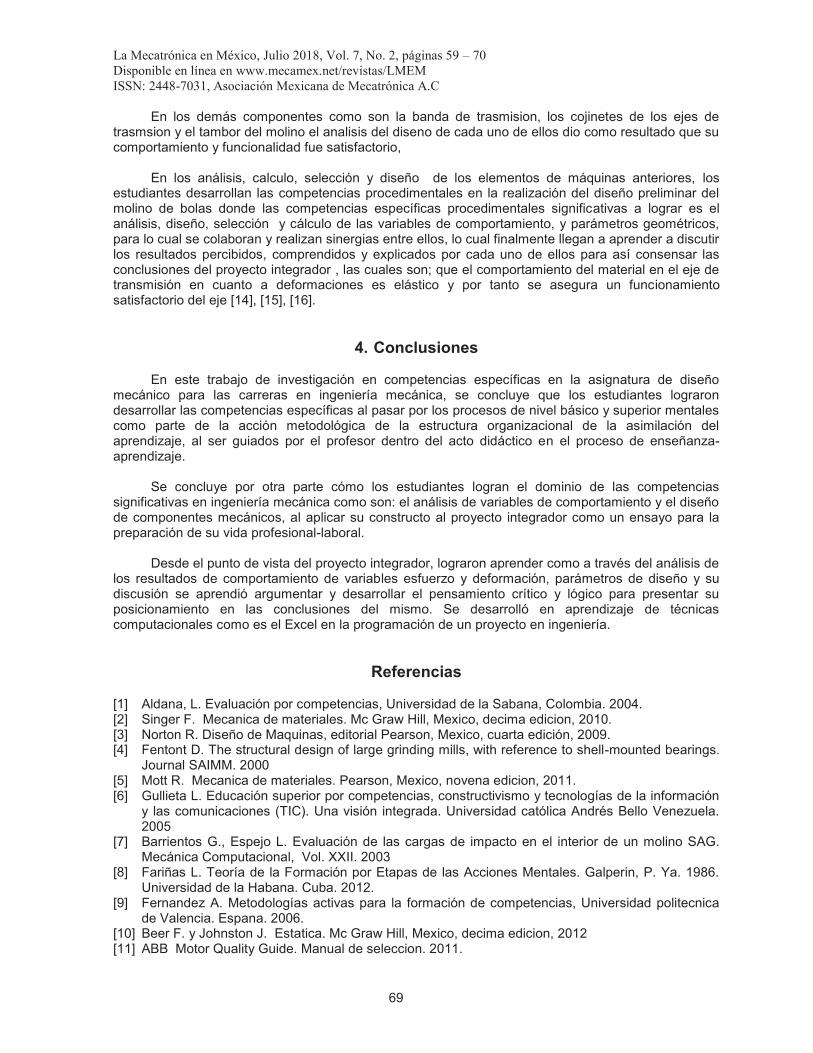
3.6 Análisis de Fatiga del eje de la trasmisión por banda y aplicación de la teoría de fallas
de la energía de la distorsión para obtener el factor de seguridad del eje.
En la tabla 8 se muestran los datos propuestos para el análisis [12].
Tabla 8. Datos para análisis de fatiga en eje de trasmisión.
Material Acero rolado en frio AISI 1040
Resistencia Maxima 85 ksi Resistencia a Fatiga corregida 35 ksi Esfuerzo de trabajo 10.9 ksi Resistencia a la cedencia 71 ksi
Resultado de la aplicación de la teoría de la energía de la distorsión para obtener factor de seguridad y cálculo de vida estimada a la fatiga [12], tabla 9.
Tabla 9. Resultados del análisis de fatiga en eje de trasmisión por banda
Factor de seguridad 3.55 Vida en N (ciclos) 5.6x1010 Vida útil (años) 60
La conclusión en este analisis de fatiga en el eje de trasmisión principal según la tabla 9, es la vida del eje calculada en ciclos, siendo esta satisfactoria al dar una vida útil de 60 años. En cuanto al factor de seguridad es mayor a 2 que es el mínimo recomendado para que el material tenga un comportamiento elástico.
3.7 Análisis y diseño por Fatiga en los engranes rectos aplicando la teoría de fallas de la
energía de la distorsión. En la tabla 10 mostrada, se tiene los datos propuestos para los engranes rectos [12].
Tabla 10. Datos de los engranes rectos para su análisis y diseño.
Paso Diametral 4 Diámetro de paso piñón 5.5 in Diámetro de paso corona 60 in Número de dientes piñón 22 Número de dientes piñón 240 Ancho de cara 3.5 in Velocidad angular Entrada 414.26 RPM Velocidad angular Salida 38 RPM Distancia entre centros 33.46 in Tipo de engranes rectos Ángulos de presión 20 grados

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
67
En seguida se muestra en la tabla 11 los resultados obtenidos de las fuerzas en los dientes en contacto de los engranes rectos.
Tabla 11. Fuerzas en los dientes en contacto de los engranes rectos
Velocidad Lineal 596 ft/min Fuerza Tangencial Wtb 1898 lb Fuerza radial Wrb 691 lb Fuerza resultante W 2019 lb
A continuación, se muestra en la tabla 12 los resultados del análisis de esfuerzos y cálculo de factor de seguridad por flexión y contacto en los dientes de los engranes rectos.
Tabla 12. Resultados de esfuerzos en dientes de engranes rectos.
Esfuerzos en el diente Piñón Corona
Esfuerzo de Flexión 16.3 ksi 12.8 ksi Esfuerzo de contacto 106 ksi 106 ksi
Estos resultados obtenidos por las teorias del diseno de engranes rectos se aplicaran para
resolver el facor de seguridad y vida util de los mismos, dando lugar a los resultados mostrados en la tabla 13.
Tabla 13. Resultados del análisis y diseño de engranes rectos.
Factor seguridad, FS 10.98 Ciclos de vida propuestos N en ciclos. 8.8x109 Vida util en años. 89
La conclusión en este análisis de fatiga en los dientes de los engranes rectos a diseñar resulta satisfactoria al dar una vida útil de 89 años. Ver tabla 13. En cuanto al factor de seguridad es mayor a 2 que es el mínimo recomendado para que el material tenga un comportamiento elástico.
3.8 Análisis, diseño y selección de rodamientos para los ejes de trasmisión diseñados de
la máquina. Datos considerados: Servicio Diario, 12 horas/día, tipo de Cojinete Seleccionado: Una hilera
de bolas con ranura profunda (Buena capacidad carga radial). Duración mínima deseada del diseño: 30,000 horas, Duración mínima deseada diseño: 745, 668,000 Revoluciones. Una vez realizado los calculos de la carga basica con ella se selecciono los tipos de rodamientos del eje de trasmision a traves de catalogos y manuales de selección. En la tabla 14 se muestra los resultados de la selección y diseno de los rodamientos en el eje.
La conclusión en este análisis, diseño y selección de los rodamientos de los resultados en
cuanto a la carga dinámica básica real calculada se concluye que es mayor que la dinámica básica del catálogo, para los rodamientos seleccionados asegurando un funcionamiento satisfactorio de los rodamientos A, C y E.

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
68
Tabla 14. Resultados de la análisis, diseño y selección de los rodamientos.
Rodamiento Carga Dinámica Básica catalogo
Tipo Rodamiento Carga Dinámica Básica real
Modelo Soporte
A 47890.25 N 6910 NSK 62 000 N SNV110 C 28421.50 N 6210 NSK 35 000 N SNV90 E 4722 N 6310 NSK 14 500 N SNV072
Analisis, diseno y selección de tambor de bolas. En la tabla 15 se muestran los resultados del
calculo de las fuerzas cortantes y momentos flectores en el tambor. Tabla 15. Resultados de fuerzas cortantes y momentos flectores en el tambor.
Fuerzas cortantes, V, (libras) Momentos flectores, M, (libras pulgadas)
V1=1305 M1=0 V2=214 M2=35108
V3=2637 M3=27089
V4=0 M4=0
3.9 Analisis de la deformación en el eje principal de trasmisión.
Aplicando la teoria de la curva elastica al a lo largo del eje de trasmision, como se muestra en la
tabla 16.
Tabla 16. Resultados de la deformacion resultante localizacion y direccion del eje principal el molino.
Sección Localización
in. Deformación
Resultante (in) Dirección (Grados)
A 36 0,000148143 4,57 B 24 2,30529E-12 1,42 H 22 1,26622E-05 0,40 G 18 3,44596E-05 0,27 C 14 3,77087E-05 0,36 D 4 2,13437E-05 2,69 E 0 0 0
La conclusión en este análisis de deformación resultante en el eje de trasmisión es la magnitud que se obtuvo en los cálculos para cada sección como se muestra en la tabla 15. Siendo los valores menores al recomendado de un valor de 0.01 in, lo que indica que el material del eje tiene un comportamiento elástico.
3.10 Analisis de resultados. A partir del analisis de comportamiento de la deformacion resultante contra variable de
localizacion y direccion en eje de trasmision principal del molino, presentado en la tabla 15. Se puede mostrar que las deformaciones son pequenas y que no son mayores a una decima de pulgada para lo cual el comportamiento del material se consdera elastico, siendo la sección más deformada la A.
En cuanto a el estado de esfuerzo se tiene que todos los puntos criticos de las areas criticas del
eje de trasmsion trabajan elasticamente debido a que los esfuerzos principales en ellos son menores a la resitencia a la cedencia.
La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
69
En los demás componentes como son la banda de trasmision, los cojinetes de los ejes de trasmsion y el tambor del molino el analisis del diseno de cada uno de ellos dio como resultado que su comportamiento y funcionalidad fue satisfactorio,
En los análisis, calculo, selección y diseño de los elementos de máquinas anteriores, los
estudiantes desarrollan las competencias procedimentales en la realización del diseño preliminar del molino de bolas donde las competencias específicas procedimentales significativas a lograr es el análisis, diseño, selección y cálculo de las variables de comportamiento, y parámetros geométricos, para lo cual se colaboran y realizan sinergias entre ellos, lo cual finalmente llegan a aprender a discutir los resultados percibidos, comprendidos y explicados por cada uno de ellos para así consensar las conclusiones del proyecto integrador , las cuales son; que el comportamiento del material en el eje de transmisión en cuanto a deformaciones es elástico y por tanto se asegura un funcionamiento satisfactorio del eje [14], [15], [16].
4. Conclusiones
En este trabajo de investigación en competencias específicas en la asignatura de diseño mecánico para las carreras en ingeniería mecánica, se concluye que los estudiantes lograron desarrollar las competencias específicas al pasar por los procesos de nivel básico y superior mentales como parte de la acción metodológica de la estructura organizacional de la asimilación del aprendizaje, al ser guiados por el profesor dentro del acto didáctico en el proceso de enseñanza-aprendizaje.
Se concluye por otra parte cómo los estudiantes logran el dominio de las competencias
significativas en ingeniería mecánica como son: el análisis de variables de comportamiento y el diseño de componentes mecánicos, al aplicar su constructo al proyecto integrador como un ensayo para la preparación de su vida profesional-laboral.
Desde el punto de vista del proyecto integrador, lograron aprender como a través del análisis de
los resultados de comportamiento de variables esfuerzo y deformación, parámetros de diseño y su discusión se aprendió argumentar y desarrollar el pensamiento crítico y lógico para presentar su posicionamiento en las conclusiones del mismo. Se desarrolló en aprendizaje de técnicas computacionales como es el Excel en la programación de un proyecto en ingeniería.
Referencias [1] Aldana, L. Evaluación por competencias, Universidad de la Sabana, Colombia. 2004. [2] Singer F. Mecanica de materiales. Mc Graw Hill, Mexico, decima edicion, 2010. [3] Norton R. Diseño de Maquinas, editorial Pearson, Mexico, cuarta edición, 2009. [4] Fentont D. The structural design of large grinding mills, with reference to shell-mounted bearings.
Journal SAIMM. 2000 [5] Mott R. Mecanica de materiales. Pearson, Mexico, novena edicion, 2011. [6] Gullieta L. Educación superior por competencias, constructivismo y tecnologías de la información
y las comunicaciones (TIC). Una visión integrada. Universidad católica Andrés Bello Venezuela. 2005
[7] Barrientos G., Espejo L. Evaluación de las cargas de impacto en el interior de un molino SAG. Mecánica Computacional, Vol. XXII. 2003
[8] Fariñas L. Teoría de la Formación por Etapas de las Acciones Mentales. Galperin, P. Ya. 1986. Universidad de la Habana. Cuba. 2012.
[9] Fernandez A. Metodologías activas para la formación de competencias, Universidad politecnica de Valencia. Espana. 2006.
[10] Beer F. y Johnston J. Estatica. Mc Graw Hill, Mexico, decima edicion, 2012 [11] ABB Motor Quality Guide. Manual de seleccion. 2011.

La Mecatrónica en México, Julio 2018, Vol. 7, No. 2, páginas 59 – 70
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
70
[12] Mott R. Diseño de elementos de maquinas. Pearson. Mexico cuarta edicion. 2010 [13] CARLISLE Service Manual for Industrial V-Belt Drives” USA. 2012 [14] Ávila J. y Tuirán R. La educación superior: escenarios y desafíos futuros. ANUIES. 2011. [15] García F. y Sabán V. Un nuevo modelo de formación para el Siglo XXI: la enseñanza basada en
competencias. Barcelona, colección Redes. 2008. [16] D.G.E.S.T. Modelo educativo para el Siglo XXI. Formación y desarrollo de competencias
profesionales. SEP. México. 2012.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
71
Diseño y Análisis del Elemento Finito de Robot Tipo SCARA
Estevez Carreón Jaime*, Ríos Pérez Rafael, García Ramírez Rubén Senén, Pérez Pérez Jairo y Fuentes Goiz Sotero I.
Tecnológico Nacional de México, Instituto Tecnológico de Puebla. *[email protected]
Resumen En este artículo se expone, el diseño y construcción de un robot tipo SCARA por medio del método de diseño descriptivo empleado en la ingeniería, utilizando un programa de CAD (Computer-Aided-Design) como herramienta de diseño, donde para el desarrollo de los eslabones del robot, se toma en cuenta la colocación de los actuadores, la ubicación de la transmisión y el extremo del mismo, en conjunto con las características del material, los elementos de sujeción, que lleva a definir la colocación final de los eslabones; con ayuda del análisis de elemento finito se realiza un análisis estructural y de movimiento al sistema robótico con el fin de conocer su comportamiento para el diseño final con la intención de identificar errores en el diseño y su corrección, la optimización de ensamble y movimientos de forma simulada, suscitando un ambiente de aprendizaje cercano a los del tipo industrial. El método de diseño descriptivo empleado en la ingeniería aplicado en el diseño de este tipo de sistema robótico representa una gran oportunidad en la adquisición de conocimientos, destrezas y habilidades profesionales para los estudiantes interesados en robótica, diseño mecánico, mecatrónica y manufactura, en relación con la modelación y análisis de sistemas por medio de un software de CAD. Palabras clave: Análisis del elemento finito, Diseño CAD, Robot tipo SCARA.
Abstract This article exposes the design and construction of a SCARA type robot by means of the descriptive design method used in engineering, using a CAD program (computer aided design) as a design tool, where for the development of the links of the robot, it is taken into account the placement of the actuators, the location of the transmission and the end thereof, together with the characteristics of the material, the fastening elements, which leads to the final placement of the links; with the help of finite element analysis, a structural and movement analysis is made to the robotic system in order to know its behavior for the final design with the intention of identifying errors in the design and its correction, the optimization of the set and the movements of the simulated form, provoking a learning environment next of the industrial type. The method of descriptive design used in the engineering applied in the design of this type robotic system, represents a great opportunity in the acquisition of knowledge, skills and professional abilities for students interested in robotics, mechanical design, mechatronics and manufacturing, in relation to the modeling and systems analysis through CAD software. Keywords: Finite element analysis, CAD design, SCARA type robot.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
72
1. Introducción
Día a día, la robótica se hace cada vez más imprescindible, aumentando la producción en menor tiempo y haciendo tareas repetitivas con mayor precisión, liberando a los trabajadores de situaciones peligrosas [1]. En la industria se pueden observar diferentes tipos de brazos robóticos, realizando diversas tareas de soldado, ensamble, transporte y manipulación de material, haciendo imprescindible contar con alta tecnología en las instituciones de educación superior [5] [7] [14], con la intención de que los estudiantes apliquen y refuercen sus conocimientos en problemas reales relacionados con la mecánica, control, instrumentación, programación, mantenimiento y reparación de robots, que los haga capaces de desenvolverse en ambientes cercanos a los industriales [8].
Para el diseño del sistema robótico se hace uso del método de diseño descriptivo empleado en
la ingeniería [15], (figura 1), como procedimiento de aprendizaje para los estudiantes involucrados en investigación, innovación o desarrollo de prácticas de laboratorio, al proporcionar cuatro pasos claros y sencillos en secuencia para el diseño de sistemas; donde el estudiante puede ubicarse claramente en la etapa que se encuentra, al final de cada uno de estos, se verifica y reflexiona los requisitos de la fase siguiente. El primer paso, el diseño conceptual en que se describe los objetivos, conceptos y tareas, en este punto se puede observar que en el robot tipo SCARA se conserva la complejidad matemática, por su morfología, es más apto para el traslado o manipulación de material [1] [11] [13], se propone un volumen de trabajo aproximado de 1 m3, al dotarlo de un entorno abierto [2] [3] [7] y con el debido sistema de seguridad lo convierte en un sistema robótico tipo industrial apto para desarrollar aprendizajes en un ambiente cercano al industrial; una vez definido los conceptos se continua los pasos dos y tres (partes centrales de este artículo) el diseño a detalle y el análisis, en el que el diseño mecánico para nuestro caso juega un papel preponderante en el modelado CAD, en la selección del tipo de material, actuadores el análisis de esfuerzos, de deformaciones y de movimiento proporcionando información esencial para el desarrollo del prototipo físico.
Figura 1. Método de diseño descriptivo empleado en la ingeniería.
2. Diseño a detalle y análisis por elemento finito.
2.1 Diseño Estructural.
Se procede a desarrollar el diseño estructural del robot tipo SCARA (modelado CAD), en esta etapa es importante que el estudiante verifique el correcto funcionamiento mecánico, relacionado con las propiedades del tipo de material, área de trabajo, ubicación de cargas, actuadores y posible tarea a realizar, es desarrollada por medio de las herramientas de diseño CAD, de análisis del elemento finito [2] [4] [6] [12] [15].

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
73
En nuestro caso, como paso dos, se elige el aluminio 6063T6 (tabla 1) como material para de diseño; por ser un robot tipo SCARA, con movimientos horizontales, se seleccionan los actuadores, un servomotor PM-DDB [9] para la primera articulación, dos servomotores Parker PM-FCL08AMK [10] para las articulaciones 2 y 3 (figuras 2 y 3).
Tabla 1. Propiedades mecánicas del aluminio 6061 T6
Propiedades Valor Unidades
Modulo elástico 6.9e+010 N/m2
Coeficiente de Poisson 0.33 N/D
Modulo cortante 2.58e+010 N/m2
Densidad de masa 2700 Kg/m3
Límite de Tracción 240000000 N/m2
Limite elástico 215000000 N/m2
Coeficiente de expansión térmica
2.34e-005 /K
Conductividad térmica 209 W/(m*K)
Calor especifico 900 J/(kg*K)
Figura 2. Motor PM-DDB Parker Hannifin Corporation©
Figura 3. Motor PM-FCL08AMK Parker Hannifin Corporation©
Para el diseño de los eslabones se toma en cuenta la ubicación de los motores, en particular el eslabón uno se diseña tomando en cuenta el equilibrio con respecto al centro de masa (figuras 4 y 5), teniendo una longitud de junta a junta de 350 mm y 250 mm para cada eslabón respectivamente.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
74
Figura 4. Eslabón 1 en software de CAD.
Figura 5. Eslabón 2 en software CAD.
Una vez diseñados los eslabones en CAD se genera un ensamble final que conforma al robot,
así como elementos de sujeción, base fija, cuerpo, la ubicación final de los motores y su sistema de transmisión de potencia para corroborar el diseño estructural en CAD con respecto al modelado analítico (modelo matemático), cabe mencionar que para la articulación tres se considera un esparrago tipo ACME de 12.7 mm de diámetro con paso de 2.44 mm (figura 6).
Figura 6. Ensamble final en software CAD.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
75
2.2 Análisis del Elemento Finito (paso tres). El análisis estructural, se realiza por separado para los eslabones 1 y 2 (figuras 4 y 5), donde se
considera las sujeciones y ubicación de cargas en puntos de interés (figuras 7 y 8) en mallado fino para mayor exactitud (figuras 9 y 10).
Figura 7. Análisis estructural del eslabón 1 Cargas de color morado, sujeciones de color verde.
Figura 8. Análisis estructural del Eslabón 2 Cargas de color morado, sujeciones de color verde.
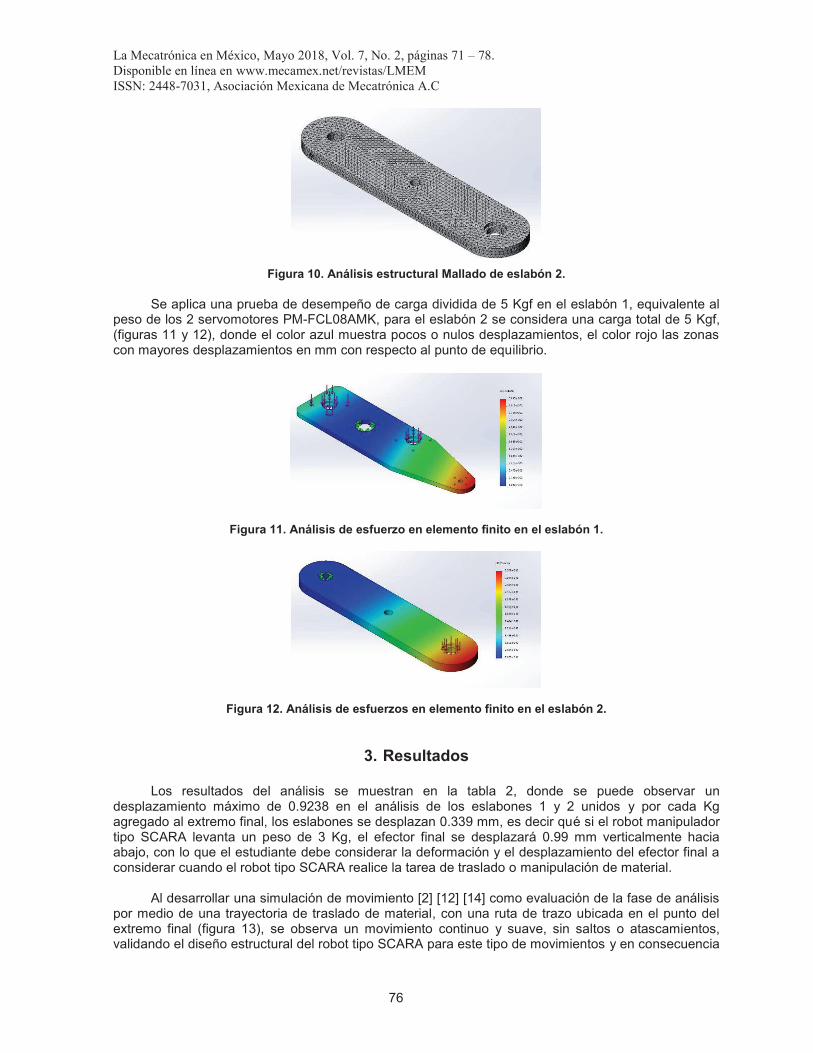
Figura 9. Análisis estructural Mallado de eslabón 1.
La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
76
Figura 10. Análisis estructural Mallado de eslabón 2.
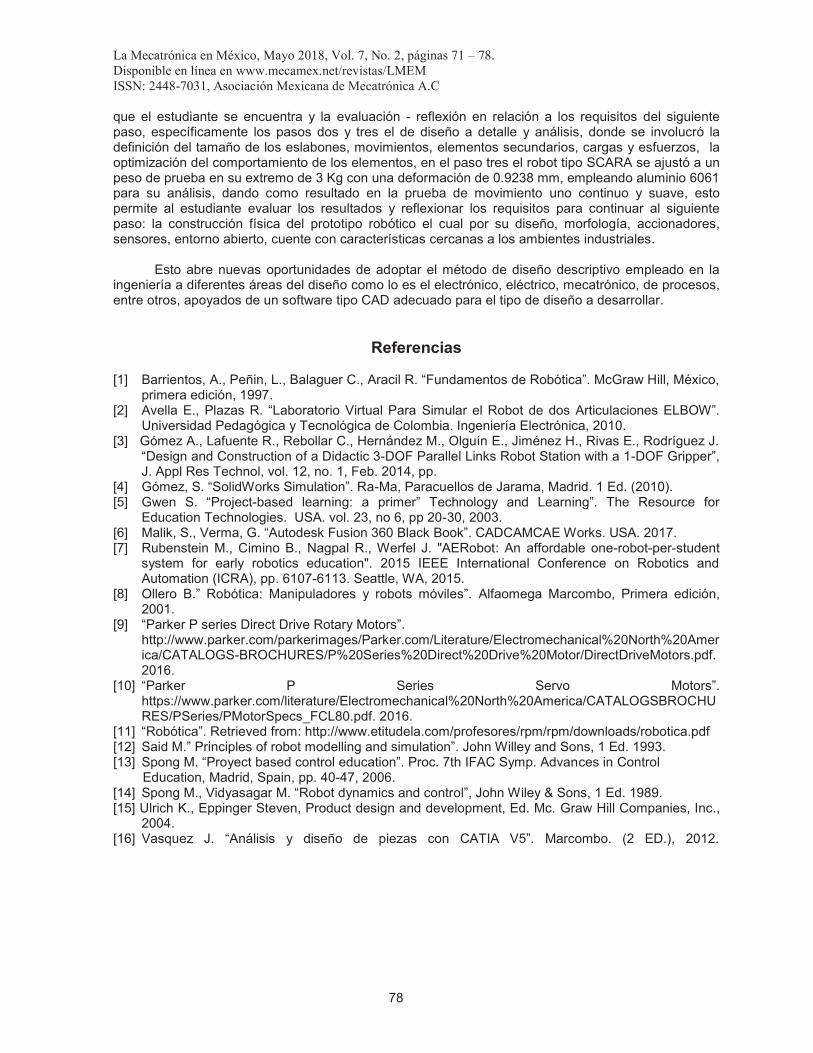
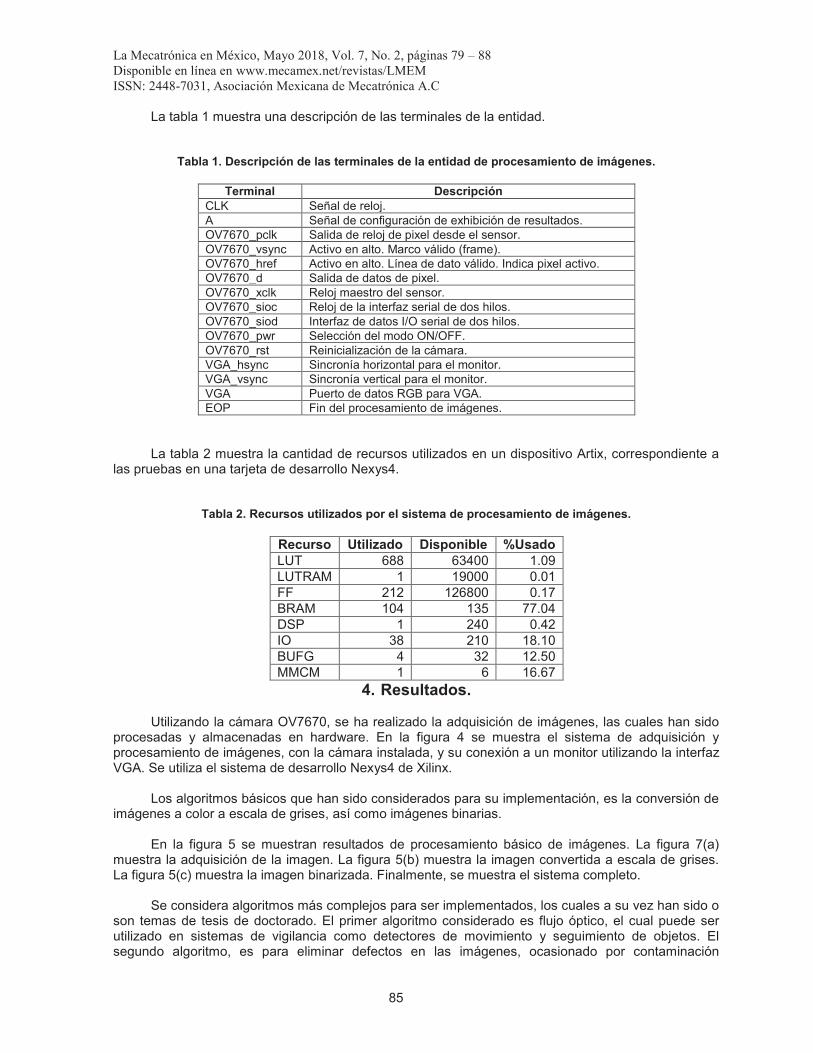
Se aplica una prueba de desempeño de carga dividida de 5 Kgf en el eslabón 1, equivalente al
peso de los 2 servomotores PM-FCL08AMK, para el eslabón 2 se considera una carga total de 5 Kgf, (figuras 11 y 12), donde el color azul muestra pocos o nulos desplazamientos, el color rojo las zonas con mayores desplazamientos en mm con respecto al punto de equilibrio.
Figura 11. Análisis de esfuerzo en elemento finito en el eslabón 1.
Figura 12. Análisis de esfuerzos en elemento finito en el eslabón 2.
3. Resultados
Los resultados del análisis se muestran en la tabla 2, donde se puede observar un
desplazamiento máximo de 0.9238 en el análisis de los eslabones 1 y 2 unidos y por cada Kg agregado al extremo final, los eslabones se desplazan 0.339 mm, es decir qué si el robot manipulador tipo SCARA levanta un peso de 3 Kg, el efector final se desplazará 0.99 mm verticalmente hacia abajo, con lo que el estudiante debe considerar la deformación y el desplazamiento del efector final a considerar cuando el robot tipo SCARA realice la tarea de traslado o manipulación de material.
Al desarrollar una simulación de movimiento [2] [12] [14] como evaluación de la fase de análisis por medio de una trayectoria de traslado de material, con una ruta de trazo ubicada en el punto del extremo final (figura 13), se observa un movimiento continuo y suave, sin saltos o atascamientos, validando el diseño estructural del robot tipo SCARA para este tipo de movimientos y en consecuencia

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
77
el espacio de trabajo que el sistema robótico alcanza para esta tarea que debe considerar el estudiante como área límite de seguridad en la periferia del robot tipo SCARA para evitar accidentes cuando se esté realizando los movimientos y para evitar obstáculos o choques al interior del volumen de trabajo.
Tabla 2. Resultados de simulaciones.
Pieza Máximo
desplazamiento (mm)
Eslabón 1 0.003285
Eslabón 2
0.3369
Eslabones 1 y 2 0.9238
Resultando exitosa la aplicación del método descriptivo empleado en la ingeniería, en los pasos dos y tres para los estudiantes el desarrollo de conocimientos, habilidades y destrezas profesionales en relación con la modelación por medio de un análisis estructural y de elemento finito, en relación a la definición del tamaño de los eslabones, actuadores, movimientos, elementos secundarios, cargas y esfuerzos, optimización del comportamiento de los elementos, en el análisis estructural y de movimiento del sistema robótico en ambientes cercanos a los industriales.
Figura 13. Resultados de ruta de trazo en robot manipulador tipo SCARA.
4. Conclusiones
En el presente artículo se desarrolló el diseño y análisis de elemento finito de un robot manipulador tipo SCARA, por medio del método de diseño descriptivo empleando en la ingeniería, como procedimiento para desarrollar conocimientos, habilidades y destrezas profesionales en relación a la modelación y análisis de sistemas por medio de un software de CAD, en ambientes cercanos a los industriales, cuyas aportaciones más destacadas del método son la fácil ubicación en el paso en el
La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 71 – 78.
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
78
que el estudiante se encuentra y la evaluación - reflexión en relación a los requisitos del siguiente paso, específicamente los pasos dos y tres el de diseño a detalle y análisis, donde se involucró la definición del tamaño de los eslabones, movimientos, elementos secundarios, cargas y esfuerzos, la optimización del comportamiento de los elementos, en el paso tres el robot tipo SCARA se ajustó a un peso de prueba en su extremo de 3 Kg con una deformación de 0.9238 mm, empleando aluminio 6061 para su análisis, dando como resultado en la prueba de movimiento uno continuo y suave, esto permite al estudiante evaluar los resultados y reflexionar los requisitos para continuar al siguiente paso: la construcción física del prototipo robótico el cual por su diseño, morfología, accionadores, sensores, entorno abierto, cuente con características cercanas a los ambientes industriales.
Esto abre nuevas oportunidades de adoptar el método de diseño descriptivo empleado en la
ingeniería a diferentes áreas del diseño como lo es el electrónico, eléctrico, mecatrónico, de procesos, entre otros, apoyados de un software tipo CAD adecuado para el tipo de diseño a desarrollar.
Referencias [1] Barrientos, A., Peñin, L., Balaguer C., Aracil R. “Fundamentos de Robótica”. McGraw Hill, México,
primera edición, 1997. [2] Avella E., Plazas R. “Laboratorio Virtual Para Simular el Robot de dos Articulaciones ELBOW”.
Universidad Pedagógica y Tecnológica de Colombia. Ingeniería Electrónica, 2010. [3] Gómez A., Lafuente R., Rebollar C., Hernández M., Olguín E., Jiménez H., Rivas E., Rodríguez J.
“Design and Construction of a Didactic 3-DOF Parallel Links Robot Station with a 1-DOF Gripper”, J. Appl Res Technol, vol. 12, no. 1, Feb. 2014, pp.
[4] Gómez, S. “SolidWorks Simulation”. Ra-Ma, Paracuellos de Jarama, Madrid. 1 Ed. (2010). [5] Gwen S. “Project-based learning: a primer” Technology and Learning”. The Resource for
Education Technologies. USA. vol. 23, no 6, pp 20-30, 2003. [6] Malik, S., Verma, G. “Autodesk Fusion 360 Black Book”. CADCAMCAE Works. USA. 2017. [7] Rubenstein M., Cimino B., Nagpal R., Werfel J. "AERobot: An affordable one-robot-per-student
system for early robotics education". 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 6107-6113. Seattle, WA, 2015.
[8] Ollero B.” Robótica: Manipuladores y robots móviles”. Alfaomega Marcombo, Primera edición, 2001.
[9] “Parker P series Direct Drive Rotary Motors”. http://www.parker.com/parkerimages/Parker.com/Literature/Electromechanical%20North%20America/CATALOGS-BROCHURES/P%20Series%20Direct%20Drive%20Motor/DirectDriveMotors.pdf. 2016.
[10] “Parker P Series Servo Motors”. https://www.parker.com/literature/Electromechanical%20North%20America/CATALOGSBROCHURES/PSeries/PMotorSpecs_FCL80.pdf. 2016.
[11] “Robótica”. Retrieved from: http://www.etitudela.com/profesores/rpm/rpm/downloads/robotica.pdf [12] Said M.” Principles of robot modelling and simulation”. John Willey and Sons, 1 Ed. 1993. [13] Spong M. “Proyect based control education”. Proc. 7th IFAC Symp. Advances in Control Education, Madrid, Spain, pp. 40-47, 2006. [14] Spong M., Vidyasagar M. “Robot dynamics and control”, John Wiley & Sons, 1 Ed. 1989. [15] Ulrich K., Eppinger Steven, Product design and development, Ed. Mc. Graw Hill Companies, Inc.,
2004. [16] Vasquez J. “Análisis y diseño de piezas con CATIA V5”. Marcombo. (2 ED.), 2012.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
79
Sistema Digital para Procesamiento Básico de Imágenes con Cámara OV7670
Gaspar Badillo José Eduardo, Ramos Arreguín Juan Manuel*, Pedraza Ortega Jesús Carlos y Efrén Gorrostieta Hurtado
Universidad Autónoma de Querétaro, Facultad de Ingeniería *[email protected]
Resumen Las aplicaciones de procesamiento digital de imágenes han crecido de manera importante, hasta ser parte importante de la vida diaria. En el campo de sistemas embebidos, el desarrollo de aplicaciones que requieren del uso de procesamiento digital de imágenes también ha crecido significativamente. Este crecimiento se ha dado especialmente en aplicaciones de tiempo real, con la limitante del tiempo de procesamiento que cada sistema digital requiere. Una importante alternativa es el uso de Dispositivos Lógicos Programables, los cuales se caracterizan por su paralelismo natural en la implementación de hardware. Esto permite implementar algoritmos de procesamiento de imágenes, cuyo tiempo de cómputo depende directamente del diseño de la arquitectura de hardware. Debido a que la implementación de este tipo de algoritmos no es algo trivial, es importante establecer bases que permitan a un diseñador sin mucha experiencia, poder realizar este tipo de implementaciones en hardware. Este trabajo se enfoca a establecer las bases para implementar algoritmos de procesamiento de imágenes, facilitando el crecimiento del desarrollo de arquitecturas en hardware para el procesamiento digital de imágenes. Palabras clave: Dispositivos Lógicos Programables, VHDL, Procesamiento digital de imágenes, binarización, escala de grises.
Abstract The applications of digital image processing have grown significantly and are an important part of our life. In the field of embedded systems, the development of applications that require the use of digital image processing has also grown significantly. This growth has occurred especially in applications of real time, with the limitation of the processing time that each digital system requires. An important alternative is the use of Programmable Logic Devices, which are characterized by their natural parallelism in hardware implementation. This allows the implementation of image processing algorithms, whose computation time depends directly on the design of the hardware architecture. Due that the implementation of this type of algorithm is not trivial, it is important to establish bases that allows a designer the hardware implementation algorithm, when the designer has not experience to be able to carry out this type of implementation. This work focuses on establishing the bases to implement image processing algorithms, facilitating the growth of the development of hardware architectures for the digital processing of images. Keywords: Programmable Logic Devices, VHDL, image digital processing, binarization, gray scale.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
80
1. Introducción
El desarrollo de descripciones de hardware enfocados a procesamiento digital de imágenes tiene reportes en los inicios de la década del 2000, cuando se aprovecha a nivel de datos el paralelismo del FPGA (Compuerta Reconfigurable en Campo) en la implementación de algoritmos para procesamiento de imágenes [1]. En el 2011, se reporta un nuevo lenguaje específico de dominio (SDL), llamado CAPH, el cual es utilizado para la implementación de aplicaciones de procesamiento de flujo en campo de arreglos de compuertas programables (FPGA), con un intérprete y un compilador que generan el código VHDL [2]. Se han reportado trabajos de interfaces humano-máquina, para el reconocimiento de gestos [3].
En los años recientes, el uso de dispositivos lógicos programables ha ido en aumento
especialmente para el desarrollo de sistemas de visión por computadora. Es por esto que Sérot reporta que las aplicaciones que requieren de un procesamiento de datos de manera continua, requieren un alto poder de cómputo, especialmente para el procesamiento de imágenes en tiempo real, por lo que son buenos candidatos para la aplicación de la lógica reconfigurable como matrices de puertas programables (FPGAs) [4]. En el siguiente año, se presenta las técnicas de diseño de sistemas embebidos utilizando arreglos de compuertas programables en campo (FPGA) para la aplicación de procesamiento de imágenes y vídeo [5]. En este mismo año, se propone un nuevo enfoque para la solución de problemas de automatización industrial de renombre tales como Control de Calidad y Paletización (QCP), y se usa un algoritmo de procesamiento de imágenes para modelar la inteligencia de un mecanismo de cuadrilátero singular [6]. Así mismo, se establece que un sistema de prevención de colisiones de alto rendimiento a bordo establece restricciones drásticas, que pueden cumplirse mediante el uso de arquitecturas computacionales de múltiples núcleos cuidadosamente optimizados [7]. También se han realizado descripciones de procesadores de imágenes, como el que reporta donde se presenta un procesador reconfigurable multi-propósito; sin embargo, requiere de imágenes ya binarizadas [8]. También se presenta un procesador de núcleo blando escalable orientado a aplicaciones de procesamiento de imágenes, basado en la arquitectura Xilinx DSP48E1 [9].
En el 2015, se presenta una descripción de hardware en FPGA para la aceleración del proceso
de recontrucción y segmentación simultánea de imágenes [10]. Posteriormente se propone una descripción de hardware donde la carga de procesamiento de imágenes se distribuye entre FPGAs y procesadores de señales digitales (DSP) para aprovechar los puntos fuertes de ambas tecnologías para su uso en inspección de superficies [11]. Se presenta un sistema para procesamiento de imágenes de alta resolución y alta fidelidad [12]. Mientras, se diseña un módulo para FPGA para el procesamiento de imágenes de resonancia magnética [13].
Las posibles aplicaciones de implementar procesamiento digital de imágenes tienen cada vez
mayor relevancia, como es el caso de reconstrucción 3D de objetos [14] [15], entre otros. En las líneas de trabajo actuales que se están llevando a cabo en la Facultad de Ingeniería, se
tienen diversos trabajos que se han encaminado a la implementación de arquitecturas de hardware para el procesamiento de imágenes, de las cuales han surgido temas de tesis de maestría y de doctorado. Para poder contar con sistemas económicos y novedosos, es necesario diseñar e implementar diversos algoritmos de procesamiento de imágenes en sistemas embebidos basados en FPGA. Por lo tanto, se requiere modificar los algoritmos para que puedan ser implementados en hardware, y en ocasiones, se requiere diseñar métodos numéricos alternativos que ayuden a simplificar la implementación. Una alternativa es la implementación de procesos paralelos que permitan una mayor velocidad en la obtención del resultado buscado. Algunas posibles aplicaciones son: Dehazing, detección de movimiento, flujo óptico, entre otros.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
81
2. Procesamiento básico.
Algunos de los tipos de procesamiento digital de imágenes más usados son los siguientes: · Imágenes RGB. · Escala de grises. · Imágenes binarias. Las imágenes RGB se caracterizan por tener 3 componentes de color: rojo (Red), verde (Green)
y azul (Blue). La mezcla de estos valores son lo que da a cada pixel de la imagen el color deseado. Cada componente tiene un valor cuantizado de 0 a 255. La combinación de valores RGB determina el color que se puede visualizar en un pixel específico, de modo que el color negro se representa por la combinación RGB de (0,0,0). Mientras que el color blanco está representado por la combinación (255,255,255). La figura 1(a) muestra una imagen en formato RGB.
Las imágenes en escala de grises se caracterizan en que el valor de cada componente RGB
tienen el mismo valor. Las imágenes en escala de grises pueden tener su origen en una imagen a color, o bien, desde su adquisición el sensor puede entregar el valor de la imagen en escala de grises. En el primer caso, donde la imagen puede tener su origen en una imagen de color, para obtener la escala de grises, se puede utilizar 3 métodos: promedio (average), ligero (lightness) y luminosidad (luminosity). El primer método, promedio, se obtiene sumando la intensidad de cada componente y dividiendo entre 3, como se ve en (1). El segundo método, ligero, es también un promedio, pero entre el valor más alto y el más bajo de las intensidades RGB, y dividiendo entre 2, lo que se aprecia en (2). Finalmente, el método de luminosidad se apoya en (3) para obtener el valor resultante de la escala de grises.
!"# = $ + + %3 (1)
!"# = &'()$, , %* + &"-)$, , %*2 (2)
!"# = ./$ + .0 + .1% (3) El valor obtenido en !"# representa la intensidad del pixel en cada uno de los componentes
RGB. En la ecuación 3, los valores .4 pueden tener valores entre 0 y 1, con la limitación de que se debe cumplir (4).
./ + .0 + .1 = 5 (4)
La figura 1 muestra la conversión a escala de grises de una imagen a color, utilizando los
métodos de conversión de (1), (2) y (3). Las imágenes binarias se caracterizan porque cada pixel maneja solamente dos valores de
intensidad, blanco y negro. Este tipo de imágenes tienen su origen en la escala de grises, donde se determina el valor de intensidad del pixel a partir de un valor de umbral, como se muestra en (5).
6)(, 7* = 8299 #": !"# ; <> #": !"# ? < = @%A'-BC #": !"# ; <
DEF!C #": !"# ? < (4)
Donde 6)(, 7* es la intensidad del pixel ubicado en la coordenada )(, 7* del monitor. La variable
< es el valor de umbral deseado. Este valor de umbral es definido por el usuario, pues depende de las características buscadas en la imagen.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
82
La figura 2 muestra un ejemplo de imágenes binarias con un umbral de 80, comparando con los diferentes métodos de escala de grises. La figura 3 muestra las imágenes binarias con un umbral de 100.
(a)
(b)
(c)
(d)
Figura 1. Ejemplo de imagen RGB. (a) Color. (b) Escala de grises método de promedio. (c) Escala de
grises método ligero. (d) Escala de grises método de luminosidad con K1=0.3, K2=0.6 y K3=0.1.
(a)
(b)
Figura 2. Imágenes binarias de acuerdo al método de escala de gris, con =80. (a) Original. (b) Método de promedio. (c) Método ligero. (d) Método de luminosidad con K1=0.3, K2=0.6 y K3=0.1.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
83
(c)
(d)
Figura 2 (continuación). Imágenes binarias de acuerdo al método de escala de gris, con =80. (a) Original. (b) Método de promedio. (c) Método ligero. (d) Método de luminosidad con K1=0.3, K2=0.6 y K3=0.1.
(a)
(b)
(c)
(d)
Figura 3. Imágenes binarias con =100. (a) Original. (b) Método de promedio. (c) Método ligero. (d) Método
de luminosidad con K1=0.3, K2=0.6 y K3=0.1.
3. Adquisición de la imagen. En este caso, se propone el uso de una cámara OV7670, la cual es una cámara que entrega
imágenes VGA, es decir, en formato RGB. La interfaz de comunicación es compatible con I2C, y su consumo de energía es relativamente bajo.
La figura 4, muestra la cámara a usar, así como una relación de las terminales que utiliza.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
84
Signal Usage
3V3 3.3V de alimentación Gnd Tierra de alimentación SIOC Reloj del bus Serial de comandos (hasta 400KHz) SIOD Bus de datos de comandos serial VSYNC Sincronía vertical HREF CE de salida para muestreo de pixeles PCLK Reloj de pixel XCLK Reloj de sistema (10-48MHz, 24MHz típico) D0-D7 Datos de pixel RESET Reinicio del dispositivo PWDN Apagado del sistema
Figura 4. Cámara OV7670 y su descripción de terminales.
La figura 5 muestra un bloque descriptivo de hardware (BDH) correspondiente a la entidad del
proyecto de procesamiento de imágenes en hardware.
Figura 5. Entidad del proyecto de Procesamiento de Imágenes en Hardware.
La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
85
La tabla 1 muestra una descripción de las terminales de la entidad.
Tabla 1. Descripción de las terminales de la entidad de procesamiento de imágenes.
Terminal Descripción
CLK Señal de reloj. A Señal de configuración de exhibición de resultados. OV7670_pclk Salida de reloj de pixel desde el sensor. OV7670_vsync Activo en alto. Marco válido (frame). OV7670_href Activo en alto. Línea de dato válido. Indica pixel activo. OV7670_d Salida de datos de pixel. OV7670_xclk Reloj maestro del sensor. OV7670_sioc Reloj de la interfaz serial de dos hilos. OV7670_siod Interfaz de datos I/O serial de dos hilos. OV7670_pwr Selección del modo ON/OFF. OV7670_rst Reinicialización de la cámara. VGA_hsync Sincronía horizontal para el monitor. VGA_vsync Sincronía vertical para el monitor. VGA Puerto de datos RGB para VGA. EOP Fin del procesamiento de imágenes.
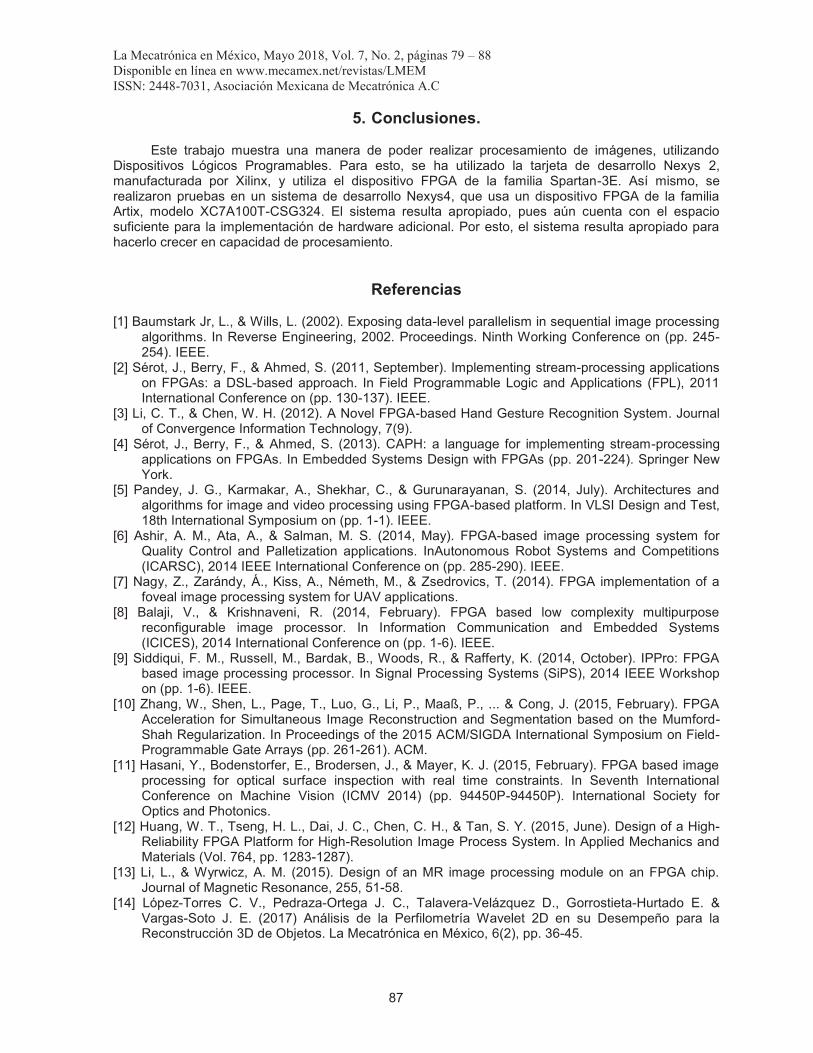
La tabla 2 muestra la cantidad de recursos utilizados en un dispositivo Artix, correspondiente a
las pruebas en una tarjeta de desarrollo Nexys4.
Tabla 2. Recursos utilizados por el sistema de procesamiento de imágenes.
Recurso Utilizado Disponible %Usado
LUT 688 63400 1.09 LUTRAM 1 19000 0.01 FF 212 126800 0.17 BRAM 104 135 77.04 DSP 1 240 0.42 IO 38 210 18.10 BUFG 4 32 12.50 MMCM 1 6 16.67
4. Resultados. Utilizando la cámara OV7670, se ha realizado la adquisición de imágenes, las cuales han sido
procesadas y almacenadas en hardware. En la figura 4 se muestra el sistema de adquisición y procesamiento de imágenes, con la cámara instalada, y su conexión a un monitor utilizando la interfaz VGA. Se utiliza el sistema de desarrollo Nexys4 de Xilinx.
Los algoritmos básicos que han sido considerados para su implementación, es la conversión de
imágenes a color a escala de grises, así como imágenes binarias. En la figura 5 se muestran resultados de procesamiento básico de imágenes. La figura 7(a)
muestra la adquisición de la imagen. La figura 5(b) muestra la imagen convertida a escala de grises. La figura 5(c) muestra la imagen binarizada. Finalmente, se muestra el sistema completo.
Se considera algoritmos más complejos para ser implementados, los cuales a su vez han sido o
son temas de tesis de doctorado. El primer algoritmo considerado es flujo óptico, el cual puede ser utilizado en sistemas de vigilancia como detectores de movimiento y seguimiento de objetos. El segundo algoritmo, es para eliminar defectos en las imágenes, ocasionado por contaminación

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
86
atmosférica, o bien, el efecto de neblina. Los algoritmos de dehazing pueden ser aprovechados en sistemas de vigilancia, robótica móvil, entre otros.
Figura 6. Sistema de adquisición y procesamiento de imágenes basado en Nexys4.
Los resultados obtenidos son satisfactorios, y pueden ser escalados. La tarjeta Nexys2 maneja
una interfaz VGA de 10 bit, lo que limita la calidad de la imagen al momento de la exhibición. En comparación, la tarjeta Nexys4 maneja 12 bits en la interfaz VGA. Sin embargo, el procesamiento de los valores de cada pixel es realizado en todos los casos en 24 bits para las imágenes a color, y de 8 bits para imágenes en escala de grises y binaria. Por esto, el procesamiento es estándar y solamente se adapta la interfaz de salida a VGA de acuerdo a la interfaz de salida disponible.
|
(a) (b)
(c) (d)
Figura 7. Resultados del procesamiento de imágenes en hardware. (a) Imagen a color. (b) Escala de
grises. (c) Imagen binaria. (d) Vista completa del sistema.
La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
87
5. Conclusiones.
Este trabajo muestra una manera de poder realizar procesamiento de imágenes, utilizando Dispositivos Lógicos Programables. Para esto, se ha utilizado la tarjeta de desarrollo Nexys 2, manufacturada por Xilinx, y utiliza el dispositivo FPGA de la familia Spartan-3E. Así mismo, se realizaron pruebas en un sistema de desarrollo Nexys4, que usa un dispositivo FPGA de la familia Artix, modelo XC7A100T-CSG324. El sistema resulta apropiado, pues aún cuenta con el espacio suficiente para la implementación de hardware adicional. Por esto, el sistema resulta apropiado para hacerlo crecer en capacidad de procesamiento.
Referencias [1] Baumstark Jr, L., & Wills, L. (2002). Exposing data-level parallelism in sequential image processing
algorithms. In Reverse Engineering, 2002. Proceedings. Ninth Working Conference on (pp. 245-254). IEEE.
[2] Sérot, J., Berry, F., & Ahmed, S. (2011, September). Implementing stream-processing applications on FPGAs: a DSL-based approach. In Field Programmable Logic and Applications (FPL), 2011 International Conference on (pp. 130-137). IEEE.
[3] Li, C. T., & Chen, W. H. (2012). A Novel FPGA-based Hand Gesture Recognition System. Journal of Convergence Information Technology, 7(9).
[4] Sérot, J., Berry, F., & Ahmed, S. (2013). CAPH: a language for implementing stream-processing applications on FPGAs. In Embedded Systems Design with FPGAs (pp. 201-224). Springer New York.
[5] Pandey, J. G., Karmakar, A., Shekhar, C., & Gurunarayanan, S. (2014, July). Architectures and algorithms for image and video processing using FPGA-based platform. In VLSI Design and Test, 18th International Symposium on (pp. 1-1). IEEE.
[6] Ashir, A. M., Ata, A., & Salman, M. S. (2014, May). FPGA-based image processing system for Quality Control and Palletization applications. InAutonomous Robot Systems and Competitions (ICARSC), 2014 IEEE International Conference on (pp. 285-290). IEEE.
[7] Nagy, Z., Zarándy, Á., Kiss, A., Németh, M., & Zsedrovics, T. (2014). FPGA implementation of a foveal image processing system for UAV applications.
[8] Balaji, V., & Krishnaveni, R. (2014, February). FPGA based low complexity multipurpose reconfigurable image processor. In Information Communication and Embedded Systems (ICICES), 2014 International Conference on (pp. 1-6). IEEE.
[9] Siddiqui, F. M., Russell, M., Bardak, B., Woods, R., & Rafferty, K. (2014, October). IPPro: FPGA based image processing processor. In Signal Processing Systems (SiPS), 2014 IEEE Workshop on (pp. 1-6). IEEE.
[10] Zhang, W., Shen, L., Page, T., Luo, G., Li, P., Maaß, P., ... & Cong, J. (2015, February). FPGA Acceleration for Simultaneous Image Reconstruction and Segmentation based on the Mumford-Shah Regularization. In Proceedings of the 2015 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays (pp. 261-261). ACM.
[11] Hasani, Y., Bodenstorfer, E., Brodersen, J., & Mayer, K. J. (2015, February). FPGA based image processing for optical surface inspection with real time constraints. In Seventh International Conference on Machine Vision (ICMV 2014) (pp. 94450P-94450P). International Society for Optics and Photonics.
[12] Huang, W. T., Tseng, H. L., Dai, J. C., Chen, C. H., & Tan, S. Y. (2015, June). Design of a High-Reliability FPGA Platform for High-Resolution Image Process System. In Applied Mechanics and Materials (Vol. 764, pp. 1283-1287).
[13] Li, L., & Wyrwicz, A. M. (2015). Design of an MR image processing module on an FPGA chip. Journal of Magnetic Resonance, 255, 51-58.
[14] López-Torres C. V., Pedraza-Ortega J. C., Talavera-Velázquez D., Gorrostieta-Hurtado E. & Vargas-Soto J. E. (2017) Análisis de la Perfilometría Wavelet 2D en su Desempeño para la Reconstrucción 3D de Objetos. La Mecatrónica en México, 6(2), pp. 36-45.

La Mecatrónica en México, Mayo 2018, Vol. 7, No. 2, páginas 79 – 88
Disponible en línea en www.mecamex.net/revistas/LMEM
ISSN: 2448-7031, Asociación Mexicana de Mecatrónica A.C
88
[15] Moya-Morales J. C., Pedraza-Ortega J. C., Rodríguez-Reséndiz J. & Ramos-Arreguín J. M. (2017). Propuesta para la detección y corrección de discontinuidades generadas en la digitalización 3D. La Mecatrónica en México, 6(1), pp. 9-20.
