interpolaciÓn y aproximaciÓn polinomialpreliminares interpolación teorema teorema teorema: serie...
TRANSCRIPT

PreliminaresInterpolación
INTERPOLACIÓN Y APROXIMACIÓNPOLINOMIAL
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
PreliminaresInterpolación
Contenido
1 PreliminaresTeorema
2 InterpolaciónIntroducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Teorema
Contenido
1 PreliminaresTeorema
2 InterpolaciónIntroducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Teorema
Teorema
Teorema: Serie de TaylorSupongamos que f (x) admite derivadas continuas de todos losórdenes en un intervalo (a, b) en el que está el punto x0.Supongamos que la sucesión de polinomios de Taylorconverge a f (x), o sea,
f (x) = l«ımN→∞
PN(x) = l«ımN→∞
N∑k=0
f (k)(x0)
k !(x − x0)
k ,
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Teorema
Teorema
para todo x ∈ (a, b), entonces f es analítica y puededesarrollarse en serie de Taylor alrededor de x0
f (x) =∞∑
k=0
f (k)(x0)
k !(x − x0)
k .
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Contenido
1 PreliminaresTeorema
2 InterpolaciónIntroducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
La información necesaria para construir el polinomio deTaylor es el valor de f y los de sus derivadas en x0.Debemos conocer las derivadas de orden superior y, amenudo, suele ocurrir que o bien no están disponibles, obien son difíciles de calcular.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
Supongamos que conocemos N+1 puntos(x0, y0) , (x1, y1) , ..., (xN , yN) de la curva y = f (x), dondelas abcisas xk se distribuyen en un intervalo [a, b] demanera que
a ≤ x0 < x1 < ... < xN ≤ b
y yk = f (xk ). Construiremos un polinomio P(x) de grado Nque pase por estos N+1 puntos. Para construirlo,únicamente necesitaremos conocer los valores xk e yk , asíque las derivadas de orden superior no nos harán falta.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
El polinomio P(x) puede usarse luego como unaaproximación a f (x) en todo el intervalo [a, b].
Existen funciones especiales y = f (x), que aparecen enanálisis de tipo estadístico o científico, para las que sólodisponemos de una tabla de valores; es decir, sóloconocemos N+1 puntos (xk , yk ) y es necesario dar unmétodo para aproximar f (x) en abcisas que no estántabuladas.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
El polinomio P(x) puede usarse luego como unaaproximación a f (x) en todo el intervalo [a, b].
Existen funciones especiales y = f (x), que aparecen enanálisis de tipo estadístico o científico, para las que sólodisponemos de una tabla de valores; es decir, sóloconocemos N+1 puntos (xk , yk ) y es necesario dar unmétodo para aproximar f (x) en abcisas que no estántabuladas.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
1 Si el error de los valores tabulados es significativo,entonces es mejor usar los métodos de ajuste de curvas(próximo capítulo).
2 Si los puntos (xk , yk ) tienen un grado alto de precisión,entonces podemos considerar el polinomio y = P(x) quepasa por todos ellos.
3 Cuando x0 < x < xN , la aproximación P(x) se conocecomo valor interpolado.
4 Si se tiene x < x0 o bien xN < x , entonces P(x) se conocecomo valor extrapolado.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
1 Si el error de los valores tabulados es significativo,entonces es mejor usar los métodos de ajuste de curvas(próximo capítulo).
2 Si los puntos (xk , yk ) tienen un grado alto de precisión,entonces podemos considerar el polinomio y = P(x) quepasa por todos ellos.
3 Cuando x0 < x < xN , la aproximación P(x) se conocecomo valor interpolado.
4 Si se tiene x < x0 o bien xN < x , entonces P(x) se conocecomo valor extrapolado.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
1 Si el error de los valores tabulados es significativo,entonces es mejor usar los métodos de ajuste de curvas(próximo capítulo).
2 Si los puntos (xk , yk ) tienen un grado alto de precisión,entonces podemos considerar el polinomio y = P(x) quepasa por todos ellos.
3 Cuando x0 < x < xN , la aproximación P(x) se conocecomo valor interpolado.
4 Si se tiene x < x0 o bien xN < x , entonces P(x) se conocecomo valor extrapolado.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Introducción a la Interpolación
1 Si el error de los valores tabulados es significativo,entonces es mejor usar los métodos de ajuste de curvas(próximo capítulo).
2 Si los puntos (xk , yk ) tienen un grado alto de precisión,entonces podemos considerar el polinomio y = P(x) quepasa por todos ellos.
3 Cuando x0 < x < xN , la aproximación P(x) se conocecomo valor interpolado.
4 Si se tiene x < x0 o bien xN < x , entonces P(x) se conocecomo valor extrapolado.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Contenido
1 PreliminaresTeorema
2 InterpolaciónIntroducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
Interpolar significa estimar el valor desconocido de unafunción en un punto, tomando una media ponderada desus valores conocidos en puntos cercanos al dado.
En la interpolación lineal se utiliza un segmento rectilíneo quepasa por dos puntos que se conocen. La pendiente de la rectaque pasa por dos puntos (x0, y0) y (x1, y1) es
m =y1 − y0
x1 − x0,
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
Interpolar significa estimar el valor desconocido de unafunción en un punto, tomando una media ponderada desus valores conocidos en puntos cercanos al dado.
En la interpolación lineal se utiliza un segmento rectilíneo quepasa por dos puntos que se conocen. La pendiente de la rectaque pasa por dos puntos (x0, y0) y (x1, y1) es
m =y1 − y0
x1 − x0,
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
así que en la ecuación de la recta y = m(x − x0) + y0 podemossustituir m y obtener
y = P(x) = y0 + (y1 − y0)x − x0
x1 − x0. (1)
(1) es un polinomio de grado ≤ 1 y la evaluación de P(x) en x0y x1 produce
P(x0) = y0 + (y1 − y0) (0) = y0, P(x1) = y0 + (y1 − y0) (1) = y1. (2)
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
J.L. Lagrange descubrió que se puede encontar este polinomiousando un método distinto: Si escribimos
y = P1(x) = y0x − x1
x0 − x1+ y1
x − x0
x1 − x0=
1∑k=0
ykL1,k (x), (3)
donde L1,0(x) = x−x1x0−x1
y L1,1(x) = x−x0x1−x0
son los polinomioscoeficientes de Lagrange para los nodos x0 y x1. Nótese quecada uno de los sumandos del miembro derecho de (3) es untérmino lineal, por lo tanto P1(x) es un polinomio de grado ≤ 1.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
Como
L1,0(x0) = 1, L1,1(x0) = 0, L1,0(x1) = 0, L1,1(x1) = 1,
entonces P1(x) definido en (3) también pasa por los dospuntos dados:
P1(x0) = y0 + y1(0) = y0, P1(x1) = y0(0) + y1 = y1.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
El polinomio interpolador de Lagrange cuadrático para lospuntos (x0, y0), (x1, y1) y (x2, y2) es
P2(x) = y0(x − x1) (x − x2)
(x0 − x1) (x0 − x2)+ y1
(x − x0) (x − x2)
(x1 − x0) (x1 − x2)+ y2
(x − x0) (x − x1)
(x2 − x0) (x2 − x1).
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
El polinomio interpolador de Lagrange de grado N=3 para lospuntos (x0, y0), (x1, y1), (x2, y2) y (x3, y3) es
P3(x) = y0(x − x1) (x − x2) (x − x3)
(x0 − x1) (x0 − x2) (x0 − x3)+ y1
(x − x0) (x − x2) (x − x3)
(x1 − x0) (x1 − x2) (x1 − x3)
+y2(x − x0) (x − x1) (x − x3)
(x2 − x0) (x2 − x1) (x2 − x3)+ y3
(x − x0) (x − x1) (x − x2)
(x3 − x0) (x3 − x1) (x3 − x2).
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
Generalizando, para construir un polinomio PN(x) de grado≤ N y que pase por N+1 puntos (x0, y0) , (x1, y1) , ..., (xN , yN) lafórmula es
PN(x) =N∑
k=0
ykLN,k (x), (4)
donde LN,k es el polinomio coeficiente de Lagrange para losnodos x0, x1, ..., xN definido por
LN,k (x) =(x − x0) ... (x − xk−1) (x − xk+1) ... (x − xN)
(xk − x0) ... (xk − xk−1) (xk − xk+1) ... (xk − xN)=
QNj=0,j 6=k (x − xj)QNj=0,j 6=k (xk − xj)
.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
Para cada k fijo, el polinomio coeficiente de Lagrange LN,k (x)tiene la siguiente propiedad:
LN,k (xj) =
{1, j = k0, j 6= k
. (5)
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
La sustitución de (5) en (4) prueba que la curva polinomialy = PN(x) pasa por los puntos
(xj , yj
):
PN(xj) = y0LN,0(xj) + ... + yjLN,j(xj) + ... + yNLN,N(xj)
= y0(0) + ... + yj(1) + ... + yN(0) = yj .
Aplicando el Teorema Fundamental del Álgebra se puedeprobar que PN(x) es único.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
Teorema: Polinomio Interpolador de Lagrange
Supongamos que f ∈ CN+1 [a, b] y que x0, x1, ..., xN ∈ [a, b] sonN+1 nodos de interpolación. Si x ∈ [a, b], entonces
f (x) = PN(x) + EN(x),
donde PN(x) es un polinomio que podemos usar paraaproximar f (x):
f (x) ≈ PN(x) =N∑
k=0
f (xk ) LN,k (x),
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Interpolación de Lagrange
llamado polinomio interpolador de Lagrange de f para losnodos dados, y el término del error EN(x) se puede escribircomo
EN(x) =(x − x0) (x − x1) ... (x − xN) f N+1(c)
(N + 1)!,
para algún valor c = c(x) del intervalo [a, b].
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Contenido
1 PreliminaresTeorema
2 InterpolaciónIntroducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
En ocasiones es útil considerar varios polinomiosaproximantes P1(x), P2(x), ..., PN(x) y, después, elegir elmás adecuado a las necesidades.
Uno de los inconvenientes de los polinomiosinterpoladores de Lagrange es que no hay relación entre laconstrucción de PN−1(x) y la de PN(x); cada polinomiodebe construirse individualmente y se requieren muchasoperaciones para calcular polinomios de grado elevado.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
En ocasiones es útil considerar varios polinomiosaproximantes P1(x), P2(x), ..., PN(x) y, después, elegir elmás adecuado a las necesidades.
Uno de los inconvenientes de los polinomiosinterpoladores de Lagrange es que no hay relación entre laconstrucción de PN−1(x) y la de PN(x); cada polinomiodebe construirse individualmente y se requieren muchasoperaciones para calcular polinomios de grado elevado.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
Los polinomios interpoladores de Newton se calculan medianteun esquema recursivo
P1(x) = a0 + a1 (x − x0) , (6)
P2(x) = a0 + a1 (x − x0) + a2 (x − x0) (x − x1) ,
P3(x) = a0 + a1 (x − x0) + a2 (x − x0) (x − x1) + a3 (x − x0) (x − x1) (x − x2) ,
... ... ...
PN(x) = a0 + a1 (x − x0) + a2 (x − x0) (x − x1) + a3 (x − x0) (x − x1) (x − x2)
+a4 (x − x0) (x − x1) (x − x2) (x − x3) + ...
+aN (x − x0) (x − x1) (x − x2) ... (x − xN−1) .
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
PN(x) se obtiene a partir de PN−1(x) usando la recurrencia
PN(x) = PN−1(x) + aN (x − x0) (x − x1) (x − x2) ... (x − xN−1) .
Se dice que PN(x) es un polinomio de Newton con N centrosx0, x1, ..., xN−1.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
Como PN(x) involucra sumas de productos de factoreslineales, siendo
aN (x − x0) (x − x1) (x − x2) ... (x − xN−1)
el de mayor grado, entonces PN(x) es de grado ≤ N.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
Diferencias Divididas: Queremos encontrar los coeficientesak de todos los polinomios P1(x), P2(x), ..., PN(x) que sirvenpara aproximar una función dada f (x).
De (6a):
f (x0) = P1 (x0) = a0 + a1 (x0 − x0) = a0 ⇒ a0 = f (x0) . (7)
De (6a) y (7):
f (x1) = P1 (x1) = a0+a1 (x1 − x0) = f (x0)+a1 (x1 − x0) ⇒ a1 =f (x1)− f (x0)
x1 − x0.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
Diferencias Divididas: Queremos encontrar los coeficientesak de todos los polinomios P1(x), P2(x), ..., PN(x) que sirvenpara aproximar una función dada f (x).
De (6a):
f (x0) = P1 (x0) = a0 + a1 (x0 − x0) = a0 ⇒ a0 = f (x0) . (7)
De (6a) y (7):
f (x1) = P1 (x1) = a0+a1 (x1 − x0) = f (x0)+a1 (x1 − x0) ⇒ a1 =f (x1)− f (x0)
x1 − x0.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
De (6b):
f (x2) = P2 (x2) = a0 + a1 (x2 − x0) + a2 (x2 − x0) (x2 − x1)
⇒ a2 =f (x2)− a0 − a1 (x2 − x0)
(x2 − x0) (x2 − x1)=
f (x2)−f (x1)x2−x1
− f (x1)−f (x0)x1−x0
x2 − x0.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
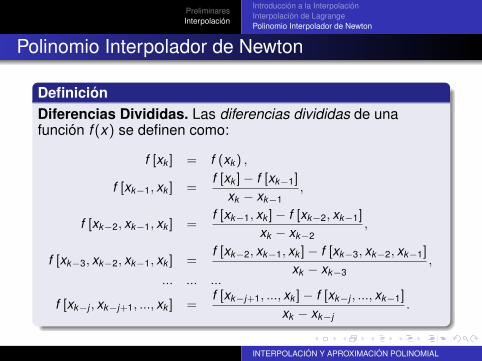
DefiniciónDiferencias Divididas. Las diferencias divididas de unafunción f (x) se definen como:
f [xk ] = f (xk ) ,
f [xk−1, xk ] =f [xk ]− f [xk−1]
xk − xk−1,
f [xk−2, xk−1, xk ] =f [xk−1, xk ]− f [xk−2, xk−1]
xk − xk−2,
f [xk−3, xk−2, xk−1, xk ] =f [xk−2, xk−1, xk ]− f [xk−3, xk−2, xk−1]
xk − xk−3,
... ... ...
f [xk−j , xk−j+1, ..., xk ] =f [xk−j+1, ..., xk ]− f [xk−j , ..., xk−1]
xk − xk−j.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
Tabla de diferencias divididas para y = f (x)
xk f [xk ] f [ , ] f [ , , ] f [ , , , ] f [ , , , , ]
x0 f [x0]
x1 f [x1] f [x0, x1]
x2 f [x2] f [x1, x2] f [x0, x1, x2]
x3 f [x3] f [x2, x3] f [x1, x2, x3] f [x0, x1, x2, x3]
x4 f [x4] f [x3, x4] f [x2, x3, x4] f [x1, x2, x3, x4] f [x0, x1, x2, x3, x4]
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL

PreliminaresInterpolación
Introducción a la InterpolaciónInterpolación de LagrangePolinomio Interpolador de Newton
Polinomio Interpolador de Newton
Teorema: Polinomio Interpolador de NewtonSupongamos que x0, x1, ..., xN son N+1 números distintos en[a, b]. Entonces existe un único polinomio PN(x) de grado ≤ Ntal que
f(xj
)= PN
(xj
); j = 0, 1, ..., N.
La forma de Newton de este polinomio interpolador es
PN(x) = a0+a1 (x − x0)+...+aN (x − x0) (x − x1) ... (x − xN−1) ,
siendo ak = f [x0, x1, ..., xk ] ; k = 0, 1, ..., N.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL
Apéndice
Bibliografía
MATHEWS, John; KURTIS, Fink.Métodos Numéricos con MATLAB.Prentice Hall, 2000.
INTERPOLACIÓN Y APROXIMACIÓN POLINOMIAL