fundamentos de robótica - eudim.uta.cl · introducción outline 1 introducción 2 números...
TRANSCRIPT

Fundamentos de RobóticaCuaterniones
http://3dgep.com/?p=1815
Ricardo-Franco [email protected]
Escuela Universitaria de Ingeniería MecánicaUniversidad de Tarapacá
Arica, Chile
June 9, 2014
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 1 / 25

Outline
Outline
1 Introducción
2 Números ComplejosDefiniciónOperacionesEl plano complejoRotores
3 Cuaterniones
4 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 2 / 25

Introducción
Outline
1 Introducción
2 Números ComplejosDefiniciónOperacionesEl plano complejoRotores
3 Cuaterniones
4 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 3 / 25

Introducción
IntroducciónLos cuaterniones permiten representar rotaciones con menosparámetros que las matrices de rotación. También permiten larepresentación de traslaciones.Debido a que su manejo computacional demanda menosmemoria que las matrices de transformación homogéneas, sonuna herramienta matemática común en la implementación dealgoritmos de control de robots.Aunque son más abstractos que las transformaciones, sonrelativamente fáciles de entender remarcando sus analogías connúmeros complejos.
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 4 / 25
Números Complejos
Outline
1 Introducción
2 Números ComplejosDefiniciónOperacionesEl plano complejoRotores
3 Cuaterniones
4 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 5 / 25

Números Complejos Definición
DefiniciónEl conjunto de números complejos, C, se define como: z = a + bi ;a, b ∈ <; i2 = −1
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 6 / 25

Números Complejos Operaciones
Suma(a1 + b1i) + (a2 + b2i)⇒ (a1 + a2) + (b1 + b2)i
Resta(a1 + b1i)− (a2 + b2i)⇒ (a1 − a2) + (b1 − b2)i
Multiplicación por un escalarλ(a + bi)⇒ λa + λbi
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 7 / 25

Números Complejos Operaciones
Multiplicación de números complejos
z1 = (a1 + b1i)z2 = (a2 + b2i)
z1z2 = (a1 + b1i)(a2 + b2i)= a1a2 + a1b2i + b1a2i + b1b2i2
= (a1a2 − b1b2) + (a1b2 + b1a2)i
Cuadrado de un número complejo
z = (a + bi)z2 = (a + bi)(a + bi)
= (a2 − b2) + 2abi
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 8 / 25
Números Complejos Operaciones
Conjugado de un número complejo (z∗)
z = (a + bi)z∗ = (a− bi)
La multiplicación de un complejo por su conjugado da un resultadoespecial:
Multiplicación de un complejo por su conjugado
z = (a + bi)z∗ = (a− bi)
zz∗ = (a + bi)(a− bi)= a2 − abi + abi + b2
= a2 + b2
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 9 / 25

Números Complejos Operaciones
Valor absoluto de un número complejo
z = (a + bi)|z| =
√zz∗
=√
(a + bi)(a− bi)=√
a2 + b2
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 10 / 25

Números Complejos Operaciones
Cociente de dos números complejos
z1 = (a1 + b1i)z2 = (a2 + b2i)
z1
z2=
a1 + b1ia2 + b2i
=(a1 + b1i)(a2 − b2i)(a2 + b2i)(a2 − b2i)
=a1a2 − a1b2i + b1a2i − b1b2i2
a22 + b2
2
=a1a2 + b1b2
a22 + b2
2+
b1a2 − a1b2
a22 + b2
2i
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 11 / 25

Números Complejos Operaciones
Potencias de “i”
i0 = 1i1 = ii2 = −1i3 = ii2 = −ii4 = i2i2 = 1i5 = ii4 = ii6 = ii5 = i2 = −1
Luego, se repite un patrón: (1, i ,−1,−i ,1, . . . )
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 12 / 25
Números Complejos Operaciones
. . . y un patrón similar se repite al incrementar potencias negativas:
Potencias de “i”
i0 = 1i−1 = −ii−2 = −1i−3 = ii−4 = 1i−5 = −ii−6 = −1
Luego, se repite un patrón: (1,−i ,−1, i ,1, . . . )
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 13 / 25

Números Complejos El plano complejo
El plano cartesiano
Se repite un patrón similar rotando en sentido anti-horario:(x , y ,−x ,−y , x , . . . )
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 14 / 25

Números Complejos El plano complejo
El plano complejo
Se repiten las potencias de “i" girando en sentido anti-horario:(1, i ,−1,−i ,1, . . . )
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 15 / 25

Números Complejos El plano complejo
Ejemplo de rotación: p = 2 + iq = p × i resulta en:p = 2 + iq = pi
= (2 + i)i= 2i + i2
= −1 + 2i
r = q × i resulta en:q = −1 + 2ir = qi
= (−1 + 2i)i= −i + 2i2
= −2− is = r × i resulta en:r = −2− is = ri
= (−2− i)i= −2i − i2
= 1− 2i
t = s × i resulta en:s = 1− 2it = si
= (1− 2i)i= i − 2i2
= 2 + i
. . . luego se repite la secuencia.
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 16 / 25

Números Complejos El plano complejo
El plano complejo
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 17 / 25
Números Complejos Rotores
RotoresSe pueden hacer rotaciones arbitrarias, θ, mediante la multiplicaciónpor un número complejo: q = cos θ + i sin θ
. . .
p = a + biq = cos θ + i sin θ
pq = (a + bi)(cos θ + i sin θ)a′ + b′i = a cos θ − b sin θ + (a sin θ + b cos θ)i
O mediante representación matricial. . .
. . .[a′ −b′
b′ a′
]=
[cos θ − sin θsin θ cos θ
] [a −bb a
]
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 18 / 25

Cuaterniones
Outline
1 Introducción
2 Números ComplejosDefiniciónOperacionesEl plano complejoRotores
3 Cuaterniones
4 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 19 / 25
Cuaterniones
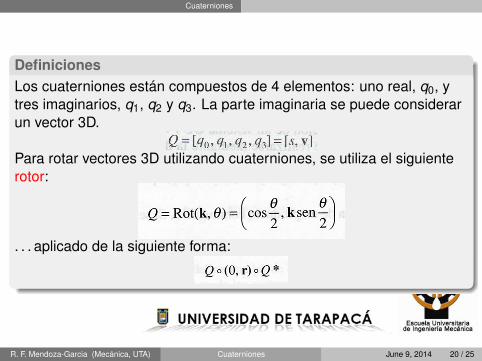
DefinicionesLos cuaterniones están compuestos de 4 elementos: uno real, q0, ytres imaginarios, q1, q2 y q3. La parte imaginaria se puede considerarun vector 3D.
Para rotar vectores 3D utilizando cuaterniones, se utiliza el siguienterotor:
. . . aplicado de la siguiente forma:
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 20 / 25

Cuaterniones
DefinicionesUna rotación Q1 seguida de una rotación Q2 se compone simplementecomo:
,. . . en ese orden. La multiplicación de cuaterniones no es conmutativa.
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 21 / 25
Cuaterniones
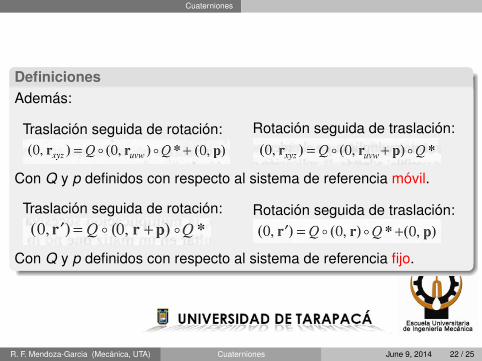
DefinicionesAdemás:
Traslación seguida de rotación: Rotación seguida de traslación:
Con Q y p definidos con respecto al sistema de referencia móvil.
Traslación seguida de rotación: Rotación seguida de traslación:
Con Q y p definidos con respecto al sistema de referencia fijo.
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 22 / 25

Cuaterniones
Ejemplo
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 23 / 25

Referencias
Outline
1 Introducción
2 Números ComplejosDefiniciónOperacionesEl plano complejoRotores
3 Cuaterniones
4 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 24 / 25

Referencias
BibliografíaBarrientos, A., Peñín, L.F., Balaguer, C., y Aracil, R., 2007,Fundamentos de Robótica, 2nd edition, McGraw-Hill.
R. F. Mendoza-Garcia (Mecánica, UTA) Cuaterniones June 9, 2014 25 / 25