enjambre colaborativo robÓtico heterogÉneo … · (dedicatoria o lema) a jesucristo mi rey,...
TRANSCRIPT
ENJAMBRE COLABORATIVO ROBÓTICO HETEROGÉNEO PARA
LA IDENTIFICACIÓN DE MATERIALES
Ing. Juan José González España
Universidad Nacional de Colombia
Facultad de Minas, Escuela de Sistemas
Medellín, Colombia
2012

ENJAMBRE COLABORATIVO ROBÓTICO HETEROGÉNEO PARA
LA IDENTIFICACIÓN DE MATERIALES
Ing. Juan José González España
Tesis presentada como requisito parcial para optar al título de:
Magíster en Ingeniería de Sistemas
Director:
Jovani Alberto Jiménez Builes, Ph. D.
Codirector (a): Freddy Bolaños Martínez, Ph. D.(c)
Línea de Investigación:
Robótica Distribuida y Colaborativa
Grupo de Investigación:
Inteligencia Artificial en Educación
Universidad Nacional de Colombia
Facultad de Minas, Escuela de Sistemas
Medellín, Colombia
2012


(Dedicatoria o lema)
A Jesucristo mi Rey, Señor y Salvador de mi
vida y de esta tesis, a Él sea la gloria y el
Reino por los siglos de los siglos. Amén
Y a Aquel que es poderoso para hacer todas las cosas mucho más abundantemente de lo que pedimos o entendemos, según el poder que actúa en nosotros, a él sea gloria en la iglesia en Cristo Jesús por todas las edades, por los siglos de los siglos. Amén.
Efesios 4; 20-21
No a nosotros, oh Jehová, no a nosotros, Sino a tu nombre da gloria, Por tu misericordia, por tu verdad.
Salmo 115; 1

Agradecimientos
A Cristo que me mantuvo firme en los momentos donde perdí la confianza, que me dio
perseverancia cuando desmayaba, que me hizo valiente cuando fui cobarde y que me
cubrió de amor en el frío intenso de la dificultad. Adicionalmente, porque Él me dio la
fuerza, inteligencia y conocimiento para obtener el éxito, por tanto SÓLO a Él es la gloria,
honra y alabanza.
A mi director de tesis de maestría, profesor Jovani Alberto Jiménez Builes, por haber
creído, apoyado y asesorado este proyecto y mi pasantía investigativa.
A mi codirector de tesis de maestría profesor John Fredy Bolaños por sus
recomendaciones para la elaboración de este documento final.
COLCIENCIAS por haber financiado esta tesis de maestría mediante el programa
Jóvenes Investigadores de COLCIENCIAS 2010.
Al profesor Gordon Hayward, Researcher Professor del Centre for Ultrasonic
Engineering, University of Strathclyde, Glasgow, Escocia, Reino Unido por permitirme
hacer una pasantía investigativa durante cuatro meses y medio en su laboratorio, la cual
fue fundamental para el desarrollo de este proyecto. De este centro, también agradezco a
Richard O’Leary, Gordon Dobie, Walter Galbraith por sus asesorías técnicas, y a Jurek
por su valiosa amistad.
A los profesores: Toshio Fukuda, Tetsuo Sawaragi, Kenzo Nonami, Takashi Matsuyama,
Edwardo Fukushima, Hiroshi G. Okuno, Masanori Okuyama por permitirme visitar el
Fukuda Laboratory, Sawaragi Laboratory, Nonami Laboratory, Matsuyama Laboratory,
Hirose & Fukushima Laboratory y el Okuno & Ogata Laboratory, respectivamente.
Al profesor Javier Herrera por facilitarme el osciloscopio que necesitaba para hacer mis
experimentos.
Al programa Enlaza Mundos de la Alcaldía de Medellín y a la oficina de Bienestar
Universitario de la Facultad de Minas por haber financiado parte de mi pasantía.
A Prodeminas por los créditos que me concedió para el pago de la mayoría de mis
matriculas de mis estudios de maestría.
VIII Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
A mi madre por sus valiosas enseñanzas, apoyo, oraciones, confianza y amor
A mi familia, y en especial a mi abuela Noemi, por todo lo que me aportaron en mi
formación y durante esta maestría.
A mi iglesia por su apoyo, amor, confianza, oraciones y consejos.
En definitiva a cada una de esas personas que como instrumentos de Dios me apoyaron,
creyeron o me animaron en este proceso. A los cuales les estoy profundamente
agradecido.
Resumen y Abstract IX
Resumen
En la presente tesis de maestría se aborda el desarrollo de un sensor ultrasónico para la
identificación de materiales con base en la impedancia acústica de la muestra
inspeccionada. El sensor debe ser adecuado en términos de costo computacional, para
su implementación en robots de pequeño tamaño. Esto se logra mediante el novedoso
método Peniel. El circuito electrónico y algoritmo asociados al método propuesto, tienen
como principales fortalezas su sencillez circuital y su bajo costo computacional,
respectivamente. Estas dos importantes características permitieron que se pudiera
implementar el sensor en dos robots del kit robótico de bajo costo TEAC2H-RI, el cual fue
construido como parte de esta tesis de maestría. El sistema desarrollado fue probado
con muestras de acrílico, aluminio y vidrio. En los experimentos llevados a cabo estos
materiales se identificaron con exactitud del 100% en un total de diez ensayos. Según la
literatura revisada, es la primera vez que en un sistema robótico se logra la
implementación de la identificación ultrasónica de materiales con base en la impedancia
acústica.
Palabras clave: Ultrasonido, Ensayos No Destructivos (NDT), Impedancia Acústica,
Sensores, Pequeños Robots, Identificación de Materiales.

X Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Abstract
The development of an ultrasonic sensor for materials identification, based on the
acoustic impedance of the inspected sample, was addressed on this work. This sensor
had to be appropriated, in terms of computational cost, in order to be implemented in
small robots. This was achieved by the novel method Peniel. The associated electronic
circuit and the algorithm of this method have as main strengths their circuital simplicity
and the low computational cost, respectively. These two characteristics let the sensor to
be implemented in two robots of the low cost robotic kit TEAC2H-RI, which was
constructed as part of this master thesis. The developed system was proved with acrylic,
aluminum and glass samples. In the performed experiments those materials were
identified with 100% accuracy in all of ten trials. According to the literature review, it is the
first time which is achieved the implementation in a robotic system of the ultrasonic
material identification based on the acoustic impedance.
Keywords: Ultrasound, Non Destructive Testing (NDT), Acoustic Impedance, Sensors,
Small Robots, Material Identification.
Contenido XI
Contenido
Pág.
Resumen ......................................................................................................................... IX
Lista de figuras ............................................................................................................. XIII
Lista de tablas ............................................................................................................. XVI
Lista de Símbolos y abreviaturas .............................................................................. XVII
Introducción .................................................................................................................... 1
1. NDT por medio de Ultrasonidos .............................................................................. 7 1.1 Planteamiento del Problema ............................................................................ 7 1.2 Justificación ..................................................................................................... 8 1.3 Objetivos.......................................................................................................... 9
1.3.1 Objetivo General ................................................................................... 9 1.3.2 Objetivos Específicos ............................................................................ 9
1.4 Marco Teórico: Ultrasonido. ............................................................................. 9 1.4.1 Características del Ultrasonido ............................................................ 10 1.4.2 Transductores ultrasónicos ................................................................. 14 1.4.3 Aplicaciones ........................................................................................ 17 1.4.4 Aplicaciones Identificación de materiales. ........................................... 19 1.4.5 Métodos para la medición de la impedancia acústica o sus efectos. ... 24 1.4.6 Sistemas Robóticos para NDT Ultrasónico. ......................................... 26
2. Método de la Pendiente ......................................................................................... 29 2.1 Pruebas en aire ............................................................................................. 29 2.2 Método de la Pendiente 1 .............................................................................. 32
2.2.1 Coeficiente de Decaimiento................................................................. 32 2.2.2 Pruebas y resultados........................................................................... 40
2.3 Método de la Pendiente 2 .............................................................................. 41
3. Método Peniel ......................................................................................................... 47 3.1 Modelo Matemático Asociado ........................................................................ 47 3.2 Circuito electrónico ........................................................................................ 53
3.2.1 Circuito electrónico de agrupamiento. ................................................. 53 3.2.2 Circuito electrónico de identificación de pico ....................................... 54 3.2.3 Circuito electrónico de identificación de cambios de duración ............. 55
3.3 Algoritmo ....................................................................................................... 57 3.4 Resultados ..................................................................................................... 59
XII Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
4. Enjambre Robótico y Sensor .................................................................................69 4.1 Implementación del Sensor en Dos Robots ....................................................70 4.2 Resultados .....................................................................................................73 4.3 Pantallas Gráficas ..........................................................................................75 4.4 Otros Patrones de Señal Ultrasónica para la Identificación de Materiales. .....76
5. Conclusiones y Trabajo Futuro .............................................................................79
Bibliografía .....................................................................................................................85
Contenido XIII
Lista de figuras
Pág.
Figura 1-1:Testeo Ultrasónico por eco-pulso. Tomado de [NASA, 2007] ....................... 15 Figura 1-2: Testeo Ultrasónico a través del Material. Tomado de [NASA, 2007] ............ 16 Figura 1-3: Testeo Ultrasónico con Ángulo de Inclinación. Tomado de [NASA, 2007] ... 16 Figura 1-4: Prototipo del Vehículo para NDE ultrasónica [Friedrich et al, 2006] ............. 27 Figura 2-1: Configuración para los experimentos en aire usando como objetivo una placa de aluminio de 100mm*150mm*15mm ........................................................................... 29 Figura 2-2: Reverberaciones que se producen entre un placa de aluminio de 150mm*100mm*15mm y un transductor ultrasónico de 50Khz. ...................................... 31 Figura 2-3: Reverberaciones que se producen dentro de una placa de cobre de 10mm de espesor y usando un transductor ultrasónico de 4.2MHz. El acople entre el transductor y la muestra inspeccionada es gel industrial. .................................................................... 33 Figura 2-4: Reverberaciones que se producen dentro de una placa. El acople entre el transductor y la muestra inspeccionada es un acople líquido. ........................................ 34 Figura 2-5: Usando un transductor ultrasónico de 4.2MHz y un gel industrial como acople líquido, se inspeccionan muestras de 15mm de espesor de a) Aluminio y de 10mm de espesor de b) Cobre c) Acero d) Latón ........................................................................... 35 Figura 2-6: Placas inspeccionadas, donde se tiene que a) acero de 10mm, b) acero de 6mm (de está no se presentan los resultados), c) cobre de 10mm, d) latón de 10mm y e) aluminio de 15mm .......................................................................................................... 36 Figura 2-7: Inspección ultrasónica, mediante un transductor ultrasónico de 10 MHz, de una pipeta transportadora de petróleo llena de aire en su interior. El material de la pipeta es acero. Se aplica la técnica de ajuste de una función exponencial a los picos de las reverberaciones. [Gunarathne, 1997] ............................................................................. 37 Figura 2-8: Circuito propuesto para la identificación de materiales con base en la impedancia acústica ....................................................................................................... 40 Figura 2-9: En azul curva que se ajuste a los datos de [Gunarathne, 1997], en rojo las rectas que unen los puntos donde aproximadamente se encuentran los picos máximos de las reverberaciones (en negro) ....................................................................................... 41 Figura 2-10: Usando dos transductores de 125KHz en la configuración a través del material (figura 1-2) se inspeccionó una muestra de a) aluminio de 16mm b) vidrio de 14mm. En c) se tienen a) y b) superpuestas, pero haciendo que la amplitud pico de aluminio sea igual a la que se produce en vidrio, esto con el propósito de hacer una correcta comparación ..................................................................................................... 43

XIV Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Figura 2-11: División del eco recibido en tres intervalos, para los cuales se hace cálculo de la energía contenida en ellos ..................................................................................... 44 Figura 3-1: Comportamiento de la duración del intervalo de tiempo en función de la ganancia. El intervalo de tiempo es el tiempo durante el cual una señal exponencial se encuentra por encima de w (0.5 en este caso). ............................................................... 49 Figura 3-2: Comportamiento del incremento de la duración del intervalo de tiempo (∆t) en función del coeficiente de decaimiento para valores de G1=10, 20, 30 y de G2= 20, 30, 40 ....................................................................................................................................... 52 Figura 3-3: Circuito electrónico para asegurar que sean similares los valores A de las señales que se comparan en términos de la duración del intervalo de tiempo. A este circuito se le llama circuito de agrupamiento. La abreviación Amp. se refiere a amplificador y la Comp. se refiere a comparador. ........................................................... 54 Figura 3-4: Circuito electrónico para estimar el valor A. Amp1, Amp2, Amp3 y Amp4 son los mismos que en la figura 19. Env. significa detector de envolvente. ........................... 55 Figura 3-5: Circuito electrónico para cálculo de las duraciones asociadas a diferentes valores de ganancias. ..................................................................................................... 56 Figura 3-6: Flujograma asociado al algoritmo del método Peniel ................................... 58 Figura 3-7: Diagrama de la configuración experimental usada en el procedimiento 1. El acoplante es aceite. Tx y Rx se refieren al transmisor y receptor, respectivamente. Se procura que Tx y Rx se encuentren en un mismo punto de coordenadas (x, z). Por otro lado, y representa la profundidad y por tanto siempre es diferente. ................................ 60 Figura 3-8: Incremento de la duración del Intervalo de Tiempo para los resultados obtenidos usando el procedimiento 1. Los materiales inspeccionados fueron a) Acrílico b) Vidrio y c) Aluminio ......................................................................................................... 62 Figura 3-9: Intervalos que se definieron para ∆t en el método Peniel para identificar el material de las muestras seleccionadas: Acrílico (Ac), Vidrio (Vi) y Aluminio (Al) ............ 63 Figura 3-10: Voltaje pico para los resultados obtenidos usando el procedimiento 1. Los materiales inspeccionados fueron a) Acrílico b) Vidrio y c) Aluminio ............................... 64 Figura 3-11: Incremento de las duraciones del intervalo de tiempo (∆t) para los resultados obtenidos mediante el uso del procedimiento 1. Los materiales inspeccionados fueron a) Acrílico b) Vidrio y c) Aluminio.......................................................................... 65 Figura 4-1: Robot madre e hijo en exploración del entorno [González et al, 2010b] ....... 69 Figura 4-2: Diagrama de la configuración experimental implementando el sensor ultrasónico en dos robots. En el lado izquierdo se encuentra el robot hijo (son-robot) con el transmisor ultrasónico y en el lado derecho el robot madre (Mom-Robot) con el receptor ultrasónico. ....................................................................................................... 71 Figura 4-3: Foto de la configuración experimental implementando el sensor ultrasónico en dos robots. En el lado izquierdo se encuentra el robot hijo (2) con el circuito electrónico de emisión (4), el transductor ultrasónico de transmisión (6) y la tarjeta principal (9) del robot hijo. En el lado derecho el robot madre (1) con el circuito electrónico de recepción (3), el transductor ultrasónico de recepción (5) y la tarjeta principal (10) del robot madre. Así mismo, se pueden ver en esta figura una muestra de vidrio (7) que está siendo inspeccionada por los dos robots y además el cable de conexión (8) entre el PC y el robot madre. ...................................................................... 72
Contenido XV
Figura 4-4: Sección del algoritmo Peniel usado para identificación de materiales por medio del robot madre del kit TEAC2H-RI. El software de programación es Winide. ...... 73 Figura 4-5: resultados que se obtienen en el PC cuando se inspecciona con el kit TEAC2H-RI y el sensor Peniel muestras de aluminio (“EL MATERIAL ES ALUMINIO”), acrílico (“EL MATERIAL ES ACRÍLICO”) y vidrio (“EL MATERIAL ES VIDRIO”). El cuadro rojo contiene el botón que se debe seleccionar para activar la captura de los datos enviados por el robot madre, mientras que el azul es para detener la captura. .............. 76
Contenido XVI
Lista de tablas Pág.
Tabla 1-1: Comparación de algunos de las propiedades acústica del aire, agua potable y aluminio (todos a condiciones normales al nivel del mar) Tomada de [Leighton, 2007] 17 Tabla 2-1: Características del transductor AT50 [Airmar Technology, 2011]. .............. 30 Tabla 2-2: Impedancia acústica, coeficiente de reflexión y transmisión cuando el primer medio es aire [Olympus, 2011], [Onda, 2011]. ............................................................... 32 Tabla 2-3: Características del transductor AT120 [Airmar Technology, 2011]. ............ 42 Tabla 3-1: Desempeño del sensor desarrollado para la identificación de materiales realizando el procesamiento con Matlab ......................................................................... 66 Tabla 4-1: Significado de algunas salidas del sistema robótico ...................................... 74 Tabla 4-2: Desempeño del sensor desarrollado para la identificación de materiales realizando el procesamiento sólo mediante microcontrolador ......................................... 75
Contenido XVII
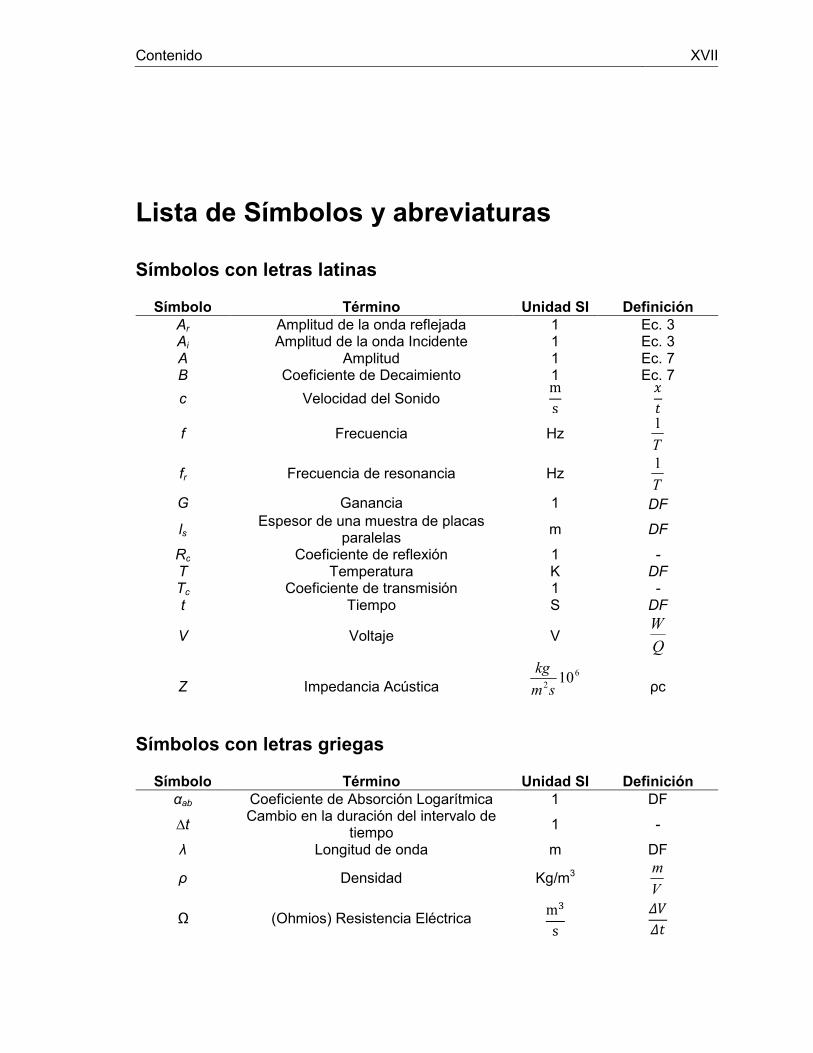
Lista de Símbolos y abreviaturas Símbolos con letras latinas
Símbolo Término Unidad SI Definición Ar Amplitud de la onda reflejada 1 Ec. 3 Ai Amplitud de la onda Incidente 1 Ec. 3 A Amplitud 1 Ec. 7 B Coeficiente de Decaimiento 1 Ec. 7
c Velocidad del Sonido m
s
f Frecuencia Hz T
1
fr Frecuencia de resonancia Hz T
1
G Ganancia 1 DF
ls Espesor de una muestra de placas
paralelas m DF
Rc Coeficiente de reflexión 1 - T Temperatura K DF Tc Coeficiente de transmisión 1 - t Tiempo S DF
V Voltaje V Q
W
Z Impedancia Acústica 6
210sm
kg
ρc
Símbolos con letras griegas
Símbolo Término Unidad SI Definición αab Coeficiente de Absorción Logarítmica 1 DF
∆t Cambio en la duración del intervalo de
tiempo 1 -
λ Longitud de onda m DF
ρ Densidad Kg/m3
V
m
Ω (Ohmios) Resistencia Eléctrica m
s

XVIII
Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales

Introducción
Los controles de calidad han tomado un rol fundamental para permitir el funcionamiento
de muchos de los campos industriales. En algunos casos la vida de muchas personas se
encuentra en riesgo si para un proceso industrial especifico una pieza fue sometida a un
control de calidad mediocre. Esto ha impulsado un creciente interés por la investigación
en estas temáticas y continuamente se hacen grandes inversiones económicas para
garantizar que los productos ofrecidos son de la mejor calidad y no ponen en riesgo la
vida de los que lo utilizan. Esto se logra mediante métodos de inspección que evalúan la
muestra.
Esta evaluación o ensayo de la muestra se puede clasificar como destructiva o no
destructiva. El procedimiento para el primer caso implica tomar aleatoriamente una
muestra de un lote de producción y a partir de esto desarrollar pruebas destructivas que
dejan la muestra inútil para ser utilizada. A partir del número de elementos de la muestra
que se encuentren defectuosos se estimará mediante métodos probabilísticos cuantos
del lote restante de producción se encuentran defectuosos. Si el número de elementos
defectuosos estimado está por encima de cierta tolerancia entonces todo el lote será
rechazado, de lo contrario se aprobará. Como se puede ver los métodos de esta
clasificación no inspeccionan directamente la muestra que va a ser implementada y esto
puede ser peligroso para algunas aplicaciones particulares.
Algunas aplicaciones donde se debe evitar al máximo el implementar los ensayos
destructivos son la industria aeronáutica, espacial o automotriz, entre otras. Debido a
esto los Ensayos No Destructivos (NDT) se han convertido en un atractivo campo
investigativo para dar respuesta a esta necesidad. Este campo se aborda desde
diferentes perspectivas buscando siempre proponer el mejor método en términos de
confiabilidad, costos, rapidez y sencillez de implementación. Algunos de los diferentes los
sistemas de NDT se basan en: Análisis de Vibraciones, Termografía Infrarroja, Análisis

2 Introducción
de Emisiones Acústicas, Ultrasonidos, Tomografía Computarizada de Rayos X, Ground
Penetrating Radar (GPR), Radiografía Digital, Métodos de Testeo Óptico,
Representación Óptica por Corrientes de Foucault, Testeo de Cables Magneto-
Inductivos, entre otros.
Muchos de estos métodos requieren de un operario experto en la interpretación de los
resultados o que se encargue de manipular el sistema de inspección. Esto puede reducir
la confiabilidad de las mediciones si se toma en cuenta que fatiga, estrés y desatención
entre otros estados del ser humano, puede llevar a que los experimentos no se
desarrollen de la manera correcta o que los resultados sean mal interpretados y por tanto
la evaluación del componente errónea.
La problemática asociada a factores humanos de error puede solucionarse mediante la
apropiada automatización del sistema y de esta manera se puede tener una mayor
confiabilidad y mayor rapidez para desarrollar los ensayos. Este es un estado deseable
para todos los campos de los NDT y muchos esfuerzos investigativos a nivel mundial lo
abordan desde diferentes perspectivas.
La robótica se ha presentado en los últimos años como una manera adecuada de brindar
autonomía a los NDT. No obstante, se presenta como principal limitante para alcanzar
esto que muchos de los métodos de NDT tienen altos requerimientos de cómputo lo que
a su vez implicaría que el sistema robótico debe tener un tamaño considerablemente
grande para portar el sistema de control y procesamiento o en su defecto tener una
excelente comunicación como un sistema remoto encargado de procesar los datos, lo
cual resta considerable autonomía al robot o grupos de robots. Adicionalmente, es
necesario considerar que robots de grande tamaño limitan considerablemente los lugares
a los que se puede acceder y en caso de falla o destrucción los costos asociados son
superiores a si se usa robots de pequeño tamaño.
Uno de los factores críticos para construir un sistema robótico de pequeño tamaño y bajo
costo es el desarrollo del método apropiado para de esta manera hacer un desarrollo
óptimo del software y hardware del sistema sensórico. Si el diseño se hace basándose
en un profundo análisis del contexto de la aplicación específica se puede generar una
considerable reducción en los requerimientos y complejidad del sistema como un todo.

Introducción 3
El obtener el método más pertinente según el contexto de la aplicación depende en gran
parte de la correcta selección o identificación del patrón de señal que se usará para
caracterizar la condición de la muestra inspeccionada. Para ondas ultrasónicas los
patrones se manifiestan en las variaciones de tres variables: amplitud, fase y frecuencia
de la onda. Estos se afectan dependiendo de las propiedades de la muestra
inspeccionada. Algunas de estas propiedades son atenuación, impedancia acústica,
velocidad del sonido, entre otras.
Cuando se identifica cambios en la atenuación, o desviaciones de los valores esperados
de la impedancia acústica o velocidad del sonido en el material, se puede deber a fisuras
internas, niveles inadecuados de rugosidad en la muestra, desgaste interno o externo, o
incluso indicar la probabilidad que en poco tiempo se presentará una falla en el elemento
evaluado.
Para el caso particular de la identificación de materiales ultrasónica basada en el cambio
de impedancia acústica del material, sus aplicaciones no solo se encuentran en el campo
de los NDT sino además en la seguridad, el bienestar humano, la salud, entre otras.
Algunos ejemplos son: identificar desgaste en el material inspeccionado, ausencia de
adherente en puntos particulares de dos placas que están adheridas, presencia de
contaminantes dentro de comida enlatada, minas anti-personales submarinas o
subterráneas, tumores en el cuerpo humano, el estado de pipetas transportadoras de
petróleo, entre otras aplicaciones.
En la presente tesis de maestría se aborda la automatización del proceso de
identificación de materiales mediante un robot y se presenta el desarrollo del método
Peniel usado para la identificación de materiales, a partir del cual se han diseñado y
construido un circuito electrónico y un algoritmo para la identificación de materiales. Las
características de bajo costo computacional del método han permitido que se haya
implementado en dos robots del kit robótico TEAC2H-RI: robot madre y robot hijo. Se
desarrollaron pruebas en acrílico, aluminio y vidrio con el sistema robótico, y para todas
ellas se identificó correctamente el material lo cual se traduce en que el sistema es 100%
efectivo en la identificación de materiales con base en la impedancia acústicas.
4 Introducción
El esquema de presentación de este trabajo es como se describe a continuación: en el
capítulo 1 se presenta el planteamiento del problema, la justificación, los objetivos,
definidos para el proyecto, el marco general de los ultrasonidos y el estado de arte de la
identificación de materiales con ultrasonidos. En el capítulo 2 se presentan los dos
primeros métodos que se obtuvieron dentro de esta tesis para la identificación de
materiales: el método de la pendiente 1 y el método de la pendiente 2. En el capítulo 3 se
presenta el desarrollo del método Peniel, su modelo matemático, su circuito electrónico,
su algoritmo y el sensor desarrollado a partir de estos insumos. Se presentan también los
resultados de la identificación de materiales. En el capítulo 4 se presenta la
implementación del sensor en dos robots del kit robótico TEAC2H-RI y los resultados de
la identificación de materiales. Finalmente, en el capítulo 5 se presentan las conclusiones
y el trabajo futuro de la presente tesis.

Introducción 5

1. NDT por medio de Ultrasonidos
1.1 Planteamiento del Problema
La Evaluación no Destructiva (NDE) y el Ensayo no Destructivo (NDT) de Materiales ha
sido de las áreas de mayor investigación desde sus inicios en los años 20 cuando aún
era considerada una curiosidad propia de los laboratorios de investigación. Actualmente,
se encuentra presente en casi todo sector de la industria. Algunas de sus aplicaciones
son la detección de fisuras, huecos y fallas, internas o externas, en materiales
aeroespaciales, puentes o edificios. Esto es de vital importancia en industrias como la
aérea, donde no se podría garantizar los estándares de calidad y seguridad sino
existieran los NDT y NDE. Otros de sus usos son determinar las propiedades de las
muestras inspeccionadas, tales como impedancia acústica, tipo de material, espesor,
viscosidad, entre otros.
Las técnicas usadas para lograr esto se pueden basar en señales infrarrojas,
ultrasónicas, sónicas, ópticas, entre otras. Los NDT y NDE basados en ultrasonidos son
de los más usados, debido a su bajo costo y por sus ventajas técnicas sobre otros
métodos en ciertas aplicaciones. Unas de ellas es la identificación de materiales lo cual
es de gran relevancia en la exploración petrolífera, la industria cementera, la industria
alimenticia y la identificación de minas antipersonales tanto en el suelo como en el agua.
Empero, tanto estos sistemas como la mayoría de los NDT y NDE no han logrado
entregar todo su potencial porque en muchos casos se requiere de un operario altamente
calificado que se encargue de hacer las mediciones e interpretar los resultados
obtenidos. Esto limita grandemente la velocidad del proceso y además lo hace
dependiente del estado de ánimo o cansancio del operario, lo cual puede hacer que
ciertos factores importantes sean pasados por alto.
8 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Pregunta de Investigación
Tomando en cuenta las limitaciones anteriormente expuestas se podrían formular las
siguientes preguntas de investigación:
• ¿Cómo construir un sistema sensórico y autónomo para la identificación de
materiales de objetos con caras planas?
• ¿Qué caracteriza un módulo de percepción ultrasónica para la identificación de
materiales con base en la impedancia acústica?
• ¿Cuáles son las características de un enjambre colaborativo para la identificación
de materiales con base en la impedancia acústica?
• ¿Cuáles son los patrones en el eco de señal ultrasónica que permiten la
identificación de materiales con base en la impedancia acústica?
• ¿Cómo construir el módulo de percepción para la identificación de materiales?
• ¿Cómo construir un enjambre colaborativo con un módulo de percepción para la
identificación de materiales con base en la impedancia acústica?
• ¿Cómo desarrollar una interfaz gráfica de PC para visualizar los datos capturados
por el enjambre?
• ¿Es correcto el modelo construido?
Hipótesis
Un enjambre robótico heterogéneo con un sistema de percepción compuesto de diversos
sensores permite la automatización del proceso de identificación de materiales con base
en la impedancia acústica.
1.2 Justificación
La identificación de materiales por medio de ultrasonidos, tiene aplicaciones en la
exploración petrolífera, la búsqueda de minerales, la industria cementera, la producción
de alimentos y la identificación de minas antipersonales en el suelo y en el agua, entre
otras.
Actualmente hay sistemas que cumplen con este propósito pero tienen ciertas
limitaciones como ausencia de automatización, altos requerimientos computacionales,
grandes costos de implementación, entre otras.

NDT por medio de Ultrasonidos 9
Esta tesis no solo se enfoca en la creación de un sistema para la identificación de
materiales, sino también crear bases sólidas para nuevas investigaciones como
enjambres robóticos para la identificación y localización de minas antipersonales en un
área.
1.3 Objetivos
1.3.1 Objetivo General
Construir un enjambre Robótico para la Identificación del Material de Objetos con
Caras Planas
1.3.2 Objetivos Específicos
• Caracterizar el módulo de percepción ultrasónica para la identificación de
materiales
• Caracterizar el enjambre robótico para la identificación de materiales
• Determinar los patrones en el eco de señal ultrasónica que permiten la
identificación de materiales.
• Construir el módulo de percepción para la identificación de materiales.
• Construir el enjambre robótico integrando el módulo de percepción para la
identificación de materiales.
• Desarrollar la interfaz gráfica de PC para visualizar los datos capturados por el
enjambre
• Validar el modelo construido mediante pruebas de campo.
1.4 Marco Teórico: Ultrasonido.
La definición más ampliamente aceptada para los ultrasonidos es que son ondas que
transportan energía mecánica a través de vibración local de partículas, pero sin que
estas tengan un transporte neto. Su rango de frecuencia se encuentra por encima del
rango audible, es decir, 20KHz, y se extiende hasta muy por encima de los cientos de
Mega Hertz. Sin embargo, está definición es incompleta debido a que en algunos casos
si se presenta transporte neto de las partículas, aún más -no se puede asumir una sola

10 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
frecuencia para la onda, ya que en su interacción con el medio su contenido tonal puede
variar [Leighton, 2007]
Los errores previamente mencionados, junto con otros igualmente importantes, se deben
a que erróneamente se asume a la acústica como un campo concluido, lo cual hace que
también así se considere a la física ultrasónica. Es decir, como si las importantes
ecuaciones que la describen o los más importantes conceptos que tiene asociados, se
hubiesen escrito hace más de un siglo. Este hecho ha afectado gravemente la
investigación en ultrasonidos, dado que designa a los investigadores en esta temática la
sola tarea de trasladar esa teoría establecida en tecnologías prácticas. Esta simplista
concepción ha tenido la terrible consecuencia que se desestima su potencial de
aplicación y junto con esto que no se comprenda muchos de sus efectos en la materia,
siendo necesario por lo tanto un cambio de perspectiva en el que se asuma al ultrasonido
con el rigor y complejidad adecuados [Leighton, 2007].
A continuación, se presentan algunas características del ultrasonido, los dispositivos más
comunes para su generación, los modos de interacción y algunas de sus aplicaciones.
1.4.1 Características del Ultrasonido
Ciertas características de las ondas ultrasónicas se presentan en las siguientes líneas:
• Variables: siendo una onda puede ser definida mediante las variables de
amplitud, velocidad, frecuencia, longitud de onda y fase.
Algunos de los fenómenos físicos que afectan la onda ultrasónica son:
• Reflexión y Transmisión: la reflexión ultrasónica en el borde entre dos
materiales diferentes puede expresarse mediante: [Gunarathne, 1997], [Kessler,
2004].
2
21
12
+
−=
ZZ
ZZRc (1)
21
124
ZZ
ZZTc += (2)
21
12
ZZ
ZZ
A
A
i
r
+
−= (3)
Donde Ar y Ai son la amplitud de la onda incidente y la onda refleja,
respectivamente. Rc es el coeficiente de reflexión, Tc el coeficiente de transmisión,
NDT por medio de Ultrasonidos 11
y Z1 y Z2 son la impedancia acústica del primer y segundo medio,
respectivamente.
Empero, en la mayoría de las inspecciones por medio de ultrasonidos, el
transductor ultrasónico no tiene un perfecto contacto con el material
inspeccionado y para acoplarlo se usa un líquido acoplante. Como consecuencia
de esto la impedancia real, Zreal, es modificada de la siguiente manera:
+
+=
tZZ
tZZ
ZZ
realc
creal
capp
λπλπ
2tanh
2tanh
(4)
Donde Zapp es la impedancia aparente, λ es la longitud de onda acústica, Zc y t son
la impedancia acústica y espesor del acoplante, respectivamente.
Si se conoce la impedancia acústica (real o aparente, según sea el caso) de uno
de los medios, la amplitud de la onda incidente y la onda reflejada, se puede
encontrar a partir de (3) la impedancia acústica del otro medio (real o aparente,
según el caso), [Gunarathne, 1997], tal y como se muestra a continuación:
−
+
=
Ai
A
Ai
A
ZZr
r
1
1
12 (5)
La importancia de conocer estos conceptos sobre la impedancia acústica radica
en que es una propiedad de los materiales que puede usarse para identificar o
caracterizar el material. Esto también se puede comprender al analizar otra
expresión que permite calcular la impedancia acústica como el producto de la
densidad y la velocidad del sonido en el material, tal como se puede ver en (6):
cZ ρ= (6)
Donde Z es la impedancia acústica, ρ es la densidad, y c es la velocidad del
sonido en el medio [Ohtanil et al, 2006], [Chung et al, 2010], [González et al,
2010a]. Estas variables también son propiedades intrínsecas de cada material y
por tanto confirman la posibilidad de identificar el material mediante el
conocimiento de la impedancia acústica.
Algunos ejemplos del aprovechamiento de esta propiedad se encuentran en la
industria automotriz mediante la identificación de fisuras internas de partes, o la

12 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
identificación de la ausencia de adherente entre placas de aluminio o acero [Allin,
2002]. Así mismo en la industria petrolífera importantes aplicaciones como el
monitoreo del estado interno de las pipetas transportadoras pueden realizarse a
partir de estos principios. En el campo de la seguridad se presentan resultados
prometedores para mediante este principio detectar las minas antipersonales.
• Atenuación: el valor de la amplitud de la onda ultrasónica disminuye conforme se
aleja de su punto de origen. Uno de las variables que produce esto es la
atenuación, que cuantitativamente puede expresarse mediante el Coeficiente de
Absorción Logarítmica αab. Su valor depende del medio en que se propaga la
onda y puede variar de un punto a otro del mismo material cuando hay impurezas
presentes. Por ejemplo, mientras para una onda ultrasónica de 10KHz que se
propaga en el agua la distancia que puede alcanzar antes de decaer su amplitud
a 1−e de su valor inicial es de 250Km, para la misma onda en el agua de mar y en
el aire es de 10Km y 50m, respectivamente. Esta variable es una de las más
críticas ya que limita la profundidad a la que se pueden realizar las mediciones
ultrasónicas [Leighton, 2007], [Kessler, 2004].
• Dispersión: conforme la onda ultrasónica se aleja de su fuente de origen su haz
de radiación tiende a expandirse, por consiguiente su intensidad por unidad de
área disminuye, lo que a su vez implica que a grandes distancias sus valores de
potencia sean casi imperceptibles. Adicionalmente, como las superficies sobre las
que incide la onda tienen dimensiones finitas, la porción del eco que reflejen
dependerá de la relación longitud del frente de onda a las dimensiones del objeto,
en ese punto. Esta es una de las limitantes de los ultrasonidos para detectar
pequeños objetos a grandes distancias [Kessler, 2004].
• Variación en frecuencia: cuando el ultrasonido se propaga en ciertos medios
puede presentarse efectos no lineales que dan como resultado la aparición de
armónicos en la señal, es decir, la energía inicial de la señal que estaba
concentrada en un ancho de banda especifico ahora se encuentra dividida en un
mayor número de frecuencias, lo que implica que dentro del ancho de banda
inicial se tendrá una menor amplitud. No obstante, ante estos armónicos el mismo
medio de transmisión tiende a presentarse como un filtro pasa bajas y por tanto a
largas distancias tienden a desaparecer las componentes de alta frecuencia. Este
NDT por medio de Ultrasonidos 13
comportamiento es utilizado para caracterizar la respuesta en frecuencia de los
diferentes materiales [Leighton, 2007].
• Variación de velocidad: diferentes propiedades del medio de propagación del
ultrasonido o del objeto estudiado pueden generar variaciones de la velocidad,
algunos de ellos son la temperatura, la humedad, impurezas y en los líquidos,
también la presencia de burbujas.
La temperatura es una de las variables que tiene un mayor impacto en el cambio
de la velocidad de este tipo de onda. Esto se puede ilustrar mediante la siguiente
expresión:
2731
TVoVs += (7)
Donde V0 es la temperatura del sonido en el medio a 0ºC, y T es la temperatura
actual en ºC. En el aire a temperatura ambiente (20ºC), y con una velocidad inicial
V0 de 331m/s, Vs es de 343m/s [Mejía R., 2004], [Jiménez et al, 2008].
También la velocidad de la onda se halla dependiente del medio en el que se
propaga, por ejemplo, para temperatura ambiente en el aluminio es de 6400 m/s,
en el aire es de 343 m/s y en el agua es de 1500 m/s.
Adicional a las características anteriormente mencionadas, existen otras que igualmente
son importantes y que son aprovechadas en diversas aplicaciones. Estas son los modos
de propagación. Las ondas ultrasónicas tienen diversos modos de propagación, estos se
presentan a continuación:
• Onda acústica: Las ondas acústicas pueden propagarse en diferentes modos,
como son: Onda Plana Longitudinal (Compresión), Onda Plana Shear
(Desplazamiento Transversal) y Onda de Torsión. Otros tipos diferentes a los de
onda plana, son: Onda Rayleigh, Ondas Lamb, Ondas Love, Ondas Stoleney y
Ondas Faraday. La energía contenida en uno de estos tipos de propagación
puede transformar en otro en los límites entre dos medios [Leighton, 2007],
[Kessler, 2004].
La más común y familiar de estas formas de onda acústica es la Onda
Longitudinal de Compresión, en la cual las partículas se desplazan paralelamente
a la dirección de movimiento de la onda. Es de especial importancia saber que
para los casos anteriormente descritos, las partículas solo se desplazan
14 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
localmente u oscilan, y es la onda la que se desplaza desde la fuente hasta el
detector [Leighton, 2007], [Kessler, 2004].
1.4.2 Transductores ultrasónicos
En la naturaleza el ultrasonido es usado por seres vivos como los murciélagos, perros,
delfines, algunas clases de peces, ballenas y mariposas. Estos las usan para evitar a sus
depredadores, navegar entornos, buscar e identificar su presa, entre otros. El murciélago
es uno de los animales que ha generado mayor fascinación en los investigadores, pero
aún hay comportamientos que no se han logrado explicar en su totalidad, como lo es su
capacidad para detectar presas que son más pequeñas que la longitud de onda que
emite [Devaud et al, 2006]. Muchos de las investigaciones en ultrasonidos han estudiado
y tratado de comprender y emular artificialmente las características de estos seres vivos
[CUE, 2011].
Artificialmente las ondas ultrasónicas pueden ser generadas mediante transductores
piezoeléctricos, los cuales convierten señales eléctricas en ondas ultrasonoras, y
viceversa. Esto se logra mediante el principio de la piezoelectricidad (llamado con base
en la palabra griega pieze in, que significa apretar o presionar) descubierto por los
hermanos Curie, cuando demostraron que los cristales de turmalina, cuarzo, topacio,
caña de azúcar, y sal de Rochelle al ser sometidos a ciertos esfuerzos mecánicos
producían polarización eléctrica. La piezoelectricidad que se produce en una pieza de
cuarzo fue la base para el electrómetro de Curie [Mould, 2007].
La primera aplicación práctica de este descubrimiento (luego de la medición de la
radioactividad) fue en un sonar piezoeléctrico. Este detector de submarinos fue
desarrollado en 1917- durante la primera guerra mundial- por Paul Langevin quien fue
uno de los estudiantes de Pierre Curie [Mould, 2007]. Actualmente, se usan no solo
transductores ultrasónicos piezoeléctricos, sino también electroestáticos, capacitivos,
magnetostrictivos, [Khuri-Yakub Ultrasonics Group, 2009] que permiten diversos
alcances, y aplicaciones específicas.
En las técnicas de caracterización, diagnóstico y medición por medio de ultrasonidos el
método usado consiste en la emisión de una onda ultrasónica al medio u objeto
estudiado y mediante el procesamiento del eco recibido se puede extraer la información
NDT por medio de Ultrasonidos 15
buscada. Algunas de las configuraciones más usadas para esta tarea se ilustran a
continuación:
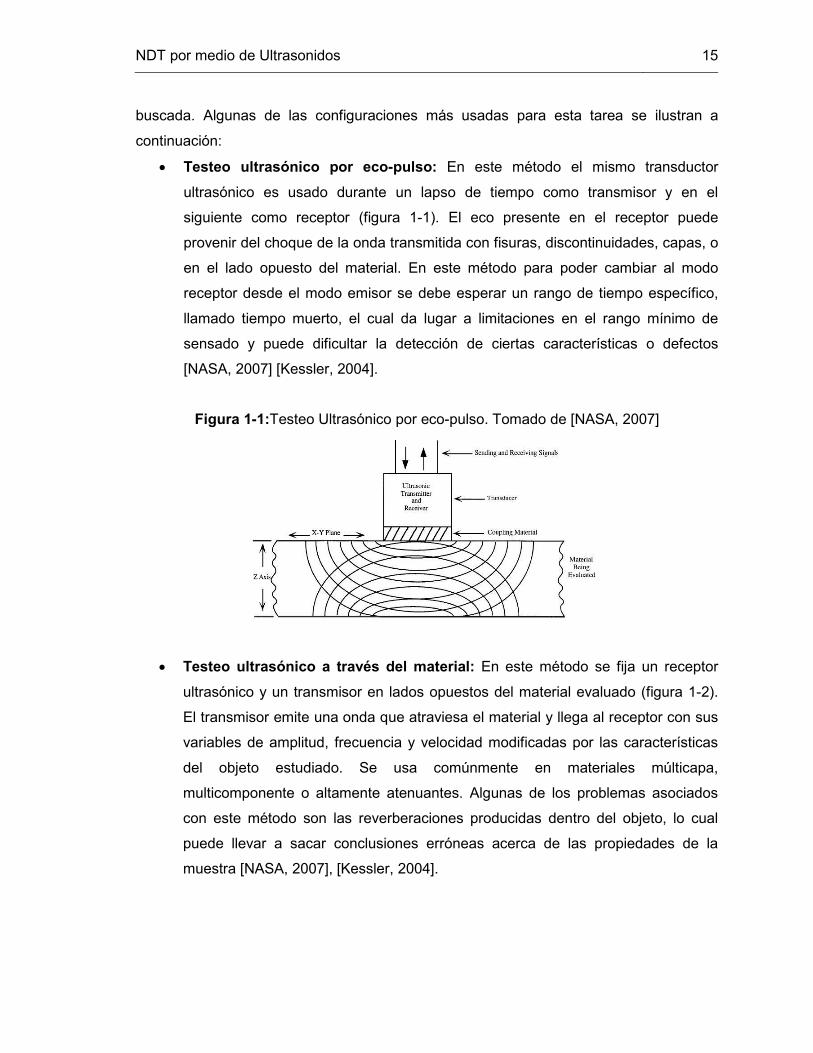
• Testeo ultrasónico por eco-pulso: En este método el mismo transductor
ultrasónico es usado durante un lapso de tiempo como transmisor y en el
siguiente como receptor (figura 1-1). El eco presente en el receptor puede
provenir del choque de la onda transmitida con fisuras, discontinuidades, capas, o
en el lado opuesto del material. En este método para poder cambiar al modo
receptor desde el modo emisor se debe esperar un rango de tiempo específico,
llamado tiempo muerto, el cual da lugar a limitaciones en el rango mínimo de
sensado y puede dificultar la detección de ciertas características o defectos
[NASA, 2007] [Kessler, 2004].
Figura 1-1:Testeo Ultrasónico por eco-pulso. Tomado de [NASA, 2007]
• Testeo ultrasónico a través del material: En este método se fija un receptor
ultrasónico y un transmisor en lados opuestos del material evaluado (figura 1-2).
El transmisor emite una onda que atraviesa el material y llega al receptor con sus
variables de amplitud, frecuencia y velocidad modificadas por las características
del objeto estudiado. Se usa comúnmente en materiales múlticapa,
multicomponente o altamente atenuantes. Algunas de los problemas asociados
con este método son las reverberaciones producidas dentro del objeto, lo cual
puede llevar a sacar conclusiones erróneas acerca de las propiedades de la
muestra [NASA, 2007], [Kessler, 2004].

16 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Figura 1-2: Testeo Ultrasónico a través del Material. Tomado de [NASA, 2007]
• Testeo Ultrasónico con Ángulo Inclinado: En este método se usan el
transmisor y receptor ultrasónicos en el mismo lado de la muestra (figura 1-3), sin
embargo en esta configuración los transductores hacen un ángulo θ con la
horizontal, que no necesariamente es cero. El transmisor emite una onda al
material evaluado, la cual se refleja en el lado opuesto con un determinado ángulo
y viaja como eco hacia el receptor. Esta configuración es usadas en diversas
aplicaciones como en la búsqueda de la posición exacta de fisuras en materiales.
[NASA, 2007], [Kessler, 2004].
Figura 1-3: Testeo Ultrasónico con Ángulo de Inclinación. Tomado de [NASA, 2007]
En la tabla 1-3 se puede ver el comportamiento del ultrasonido en tres medios: aire, agua
y aluminio. Se puede notar en esta tabla que los porcentajes de onda transmitida cuando
el aire es el acoplante y el material bajo inspección es agua y aluminio, son de 0.107% y
NDT por medio de Ultrasonidos 17
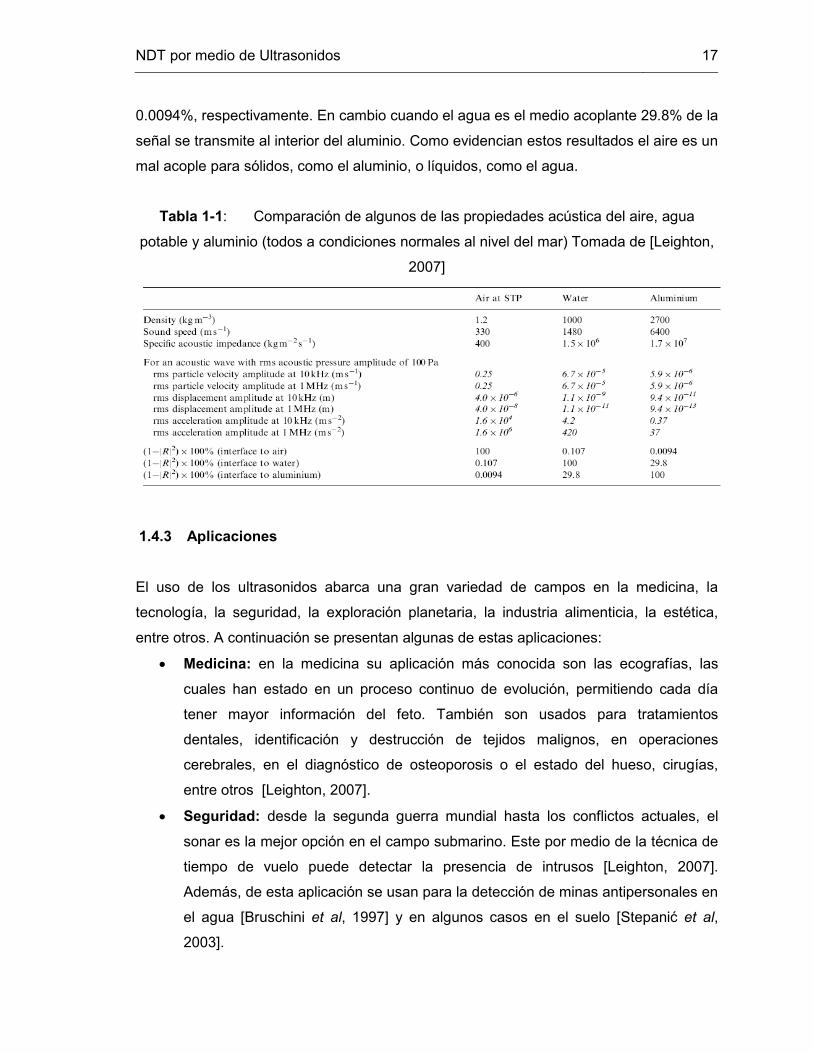
0.0094%, respectivamente. En cambio cuando el agua es el medio acoplante 29.8% de la
señal se transmite al interior del aluminio. Como evidencian estos resultados el aire es un
mal acople para sólidos, como el aluminio, o líquidos, como el agua.
Tabla 1-1: Comparación de algunos de las propiedades acústica del aire, agua
potable y aluminio (todos a condiciones normales al nivel del mar) Tomada de [Leighton,
2007]
1.4.3 Aplicaciones
El uso de los ultrasonidos abarca una gran variedad de campos en la medicina, la
tecnología, la seguridad, la exploración planetaria, la industria alimenticia, la estética,
entre otros. A continuación se presentan algunas de estas aplicaciones:
• Medicina: en la medicina su aplicación más conocida son las ecografías, las
cuales han estado en un proceso continuo de evolución, permitiendo cada día
tener mayor información del feto. También son usados para tratamientos
dentales, identificación y destrucción de tejidos malignos, en operaciones
cerebrales, en el diagnóstico de osteoporosis o el estado del hueso, cirugías,
entre otros [Leighton, 2007].
• Seguridad: desde la segunda guerra mundial hasta los conflictos actuales, el
sonar es la mejor opción en el campo submarino. Este por medio de la técnica de
tiempo de vuelo puede detectar la presencia de intrusos [Leighton, 2007].
Además, de esta aplicación se usan para la detección de minas antipersonales en
el agua [Bruschini et al, 1997] y en algunos casos en el suelo [Stepanić et al,
2003].
18 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
• Entretenimiento: algunas compañías aprovechando la variación de la
sensibilidad auditiva con la edad, envían mensajes en broadcasting de señales
ultrasónicas que en teoría solo podrían ser detectados por jóvenes, empero, sus
resultados no han sido lo suficientemente satisfactorios, ya que algunos adultos
mencionan haber escuchado los mensajes. Así mismo, en este campo se hace
muy prometedor la posibilidad que sean usados en la emisión de ondas sonoras
muy focalizadas para el envío de información personalizada, es decir, aunque dos
personas se encuentren cerca la una de la otra, se podría lograr mediante la
interacción de dos ondas ultrasónicas que la información solo llegue a la persona
deseada. [Leighton, 2007]
• Industria Alimenticia: en la industria alimenticia es usado para detectar la
presencia de cuerpos extraños en comida enlatada [Pallav et al, 2009], [Zhao et
al, 2003] o para dar ciertos niveles de cristalización en los alimentos. [Leighton,
2007]
• Robótica: de los sensores de rango usados para la evasión de obstáculos en
robótica los ultrasonidos son de los más usados. Adicionalmente, se usan
también para le generación de mapas de entornos [Mejía R., 2004], para
comunicación entre agentes robóticos, entre otros. [Siegwart et al, 2004],
[Jiménez et al, 2008]
• Ensayos No Destructivos (NDT): los dispositivos basados en ultrasonidos son
uno de los más usados en los NDT. Se usan, entre otras aplicaciones, para
detectar fisuras internas en objetos, identificar el material y la forma de los
mismos, medición de espesor, entre otros. [Leighton, 2007], [Kessler, 2004], [Allin,
2002].
• Industria Aeroespacial: son usados en los ensayos no destructivos para verificar
la presencia de fisuras internas en materiales aeroespaciales. Además, en los
últimos años se ha abordado su importancia en las exploraciones planetarias, ya
que su implementación permite conocer ciertas propiedades importantes de los
planetas [Leighton et al, 2008], [Leighton, 2009], [NASA, 2007], [Allin, 2002]
• Construcción: son adecuados para estudiar el comportamiento de mezclas
asfálticas y caracterizar la porosidad de estás, lo que permite conocer la velocidad
con los que los agentes químicos externos pueden penetrar el material y afectar
NDT por medio de Ultrasonidos 19
la durabilidad [Vidal 2006]. Adicionalmente, pueden ser usados para detectar
fisuras internas en estos materiales.
• Oceanografía Acústica: como sensores oceánicos, los sistemas acústicos
permiten detectar la presencia de reservas petrolíferas, sitios arqueológicos, y
monitorear una gran variedad de parámetros de importancia comercial y
ambiental, desde las poblaciones de peces hasta los efectos del calentamiento
global en el océano [Robb et al, 2009], [Leighton, 2007].
1.4.4 Aplicaciones Identificación de materiales.
La identificación de materiales mediante ultrasonido es muy importante para diversos
sectores de la industria, la investigación, la seguridad, la salud, entre otros. A diferencia
de otras técnicas para la identificación de materiales, los que se basan en ondas
ultrasónicas no solo son de inferior costo sino que además permiten en algunos casos
detectar objetos que se encuentren ocluidos por otros.
El procedimiento general para lograr esto se detalla a continuación:
1. Se utiliza una configuración específica como las mostradas de las figuras 1-1, 1-2,
1-3 o similares.
2. Se envía una onda ultrasónica al medio inspeccionado
3. Luego de la interacción de la onda con el objeto, una porción regresa en forma de
eco a su punto de origen y allí por medio de un receptor ultrasónico se captura.
4. Posteriormente se transmite a un sistema de acondicionamiento de señal, el cual
se compone de amplificadores, filtros, convertidores análogos a digital (CAD) etc.
5. Finalmente, se encuentra un sistema de procesamiento y control, el cual permite
llevar a cabo la etapa de mayor importancia en el proceso, es decir, el
procesamiento de señal. Para este caso se pueden usar microcontroladores,
microprocesadores, FPGA, ordenadores, entre otros dispositivos. En estos se
encuentra el algoritmo que identifica los patrones de señal respectivos e indica
que material está bajo inspección, así como también determina los pasos a seguir
ante un determinado estado. Con base en estos patrones es que el material
puede ser identificado.
20 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
A continuación se mencionan algunas de las aplicaciones que se basan en la medición o
monitoreo de la impedancia acústica de las muestras inspeccionadas y también como se
puede mediante señales ultrasónicas realizar esto.
• Medicina: en la medicina en [Carlson et al, 2003] se expone que conocer la
impedancia acústica junto con la velocidad del sonido es útil para determinar el
tiempo de solidificación del cemento óseo protésico, lo cual sería de gran
aplicabilidad en las cirugías de reconstrucción. En [Yoshizawa et al¸ 2004] se
menciona que un hueso humano con osteoporosis tiene una impedancia acústica
diferente a uno sano, de esta manera se presentan resultados prometedores para
la identificación de la osteoporosis mediante mediciones ultrasónicas. En
[Hughes et al, 2009] se ilustra que en los dientes la impedancia acústica de un
esmalte sano es diferente a la de un esmalte desmineralizado, de esta manera se
puede detectar de manera temprana el crecimiento de caries dentro del diente.
Estos resultados tendrían especial importancia al evitar la exposición al paciente a
los nocivos rayos X.
En el cuerpo no sólo las aplicaciones se encuentran en la evaluación de los
huesos sino que también se puede hacer esto en los tejidos humanos mediante
ecografía ultrasónica, la cual permite un monitoreo no invasivo y en tiempo real.
La impedancia acústica es una de las variables que se encuentra relacionada con
el estado de los tejidos. En [Shishitani et al, 2010] se presenta que mediante la
evaluación de la impedancia acústica de un músculo de pechuga de pollo se
puede reconocer zonas donde hay mayor coagulación que en otras, lo cual es de
especial importancia para la detección de tumores. Son muchas más las
aplicaciones que se encuentran en la medicina, pero para este caso sólo se
mencionan estas de manera ilustrativa.
• Industria Automotriz: en los últimos años en la industria automotriz con el fin de
reducir el peso de los automotores, y disminuir así el consumo de combustible, ha
estado tomando fuerza la unión de placas metálicas de poco espesor por medio
de adhesivos en vez de por soldadura. Además de los costos, los diseños
basados en esta filosofía ofrecen importantes ventajas sobre la unión por
soldadura tales como el no inducir calor en la zona de pegado y lograr que el
estrés entre las partes sea distribuido de manera más uniforme que en el caso de
la soldadura [Goglio et al, 1999], [Ganapathi, 2010], [Jian et al, 2002]. En [Goglio
NDT por medio de Ultrasonidos 21
et al, 1999], [Titov et al, 2008], [Chapman et al, 2006], [Hajian et al, 2011] se
utiliza mediciones que se basan en el coeficiente de reflexión para determinar el
estado de las placas metálicas adheridas con adhesivo tanto para muestras de
aluminio como de acero. En este caso la presencia de adhesivo entre dos placas
se verifica mediante el análisis de eco recibido. Cuando no hay una unión entre
alguna de las placas y el adhesivo entonces se encuentra aire. Dado que el aire
tiene una impedancia acústica muy inferior a la del adhesivo de la expresión (3)
se puede ver que la relación de reflexión para uno y otro caso es bastante
diferente. Esto se puede reconocer haciendo un análisis en el tiempo [Jian et al,
2002], [Titov et al, 2008], [Chapman et al, 2006], en la frecuencia [Allin et al,
2002b] o en la fase [Chapman et al, 2006]. Este es el principio básico para
detectar desuniones entre las junturas. Este es un área donde los ultrasonidos
tienen retos especiales como por ejemplo en la medición de las propiedades
adhesivas y cohesivas de los adhesivos de las junturas [Titov et al, 2008],
[Adams, 1997]. En [Jian et al, 2002] también se presenta el análisis ultrasónico de
junturas unidas con adhesivo. En este caso los especímenes a analizar son
motores de cohete de combustible sólido. Estos están formados por capas de
acero, goma y combustible sólido.
• Industria Energética: también, algunos métodos para la inspección ultrasónica
de oleoductos y gaseoductos se basan en la impedancia acústica [Rommetveit et
al, 2011], [Chnstidis et al, 1999], [Gunarathne et al, 2002]. En [Rommetveit et al,
2011] se menciona que se puede reconocer la presencia de depósitos de cera en
las tuberías basándose en el monitoreo de la impedancia acústica de la tubería.
En [Chnstidis et al, 1999] se propone una técnica similar para reconocer depósitos
de cal en las tuberías. En ambos casos cuando se presenta cal o cera en las
paredes de la tubería, los bajos valores de impedancia acústica de estos
materiales hacen que el eco ultrasónico recibido se encuentre considerablemente
afectado y con base en esto se detecta la presencia de estos problemas. Estos
depósitos es importante detectarlos cuando se producen porque causan pérdidas
en la producción debido a que restringen el flujo de fluido o gas y pueden producir
el taponamiento de las tuberías.
Otra aplicación importante dentro de la industria energética se presenta en los
recubrimientos epóxicos, los cuales son usados en los edificios de contención de

22 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
las plantas nucleares y para los cuales es importante determinar su estado antes
que se presenten fallas. En [Kim et al, 2004] se propone detectar el desgaste de
recubrimientos epóxicos mediante el cambio de impedancia acústica. De esta
manera se podría conocer su vida útil restante y así repararlo antes que se
encuentre severamente degradado.
• Industria Alimenticia: en la industria alimenticia los ultrasonidos tienen en
general gran aplicabilidad, esto se debe a que son una técnica rápida, precisa,
no-destructiva, limpia y no invasiva que se puede aplicar a un líquido concentrado
u ópticamente opaco. Para el caso particular de la impedancia acústica con base
en el coeficiente de reflexión se podrían detectar cuerpos extraños en alimentos
como en el queso procesado, margarina y mermelada de cereza [Rastogi, 2011].
Esto se basa en que cuerpos extraños como metal, vidrio, madera, piedra y
plásticos, tienen una impedancia acústica diferente a la de los alimentos
específicos, por tanto a partir del procesamiento de las reflexiones se puede
identificar su presencia. En [Zhao et al, 2003], [Pallav et al, 2009] se utilizan estos
principios para detectar en comida enlatada cuerpos extraños. En [Wallhäußer et
al, 2011] se propone detectar la suciedad láctea en intercambiadores de calor a
partir del análisis de la impedancia acústica, del decaimiento logarítmico de la
señal y la energía de los dos primeros ecos. Estos dos últimas variables también
se encuentran relacionadas con la impedancia acústica. En [Gómez et al, 2008],
[Salazar et al, 2004] se presenta que conociendo la impedancia acústica de la
masa de torta se puede predecir la calidad de la torta resultante. De esta manera
se pueden reconocer masas defectuosas que deben rechazarse porque de lo
contrario resultarían en tortas con desplomes en el centro o con poco volumen.
En [Meng et al, 2012] con base en la impedancia acústica se propone monitorear
la fermentación del yogurt contenido dentro de un envase de acero inoxidable.
• Industria Cementera: para la industria cementera se presentan también
importantes aplicaciones. La evaluación correcta del cemento es de suma
importancia en aplicaciones submarinas costa afuera debido a los costos que
implica intervenir en estas terminaciones. Esto se puede realizar mediante la
evaluación de la impedancia acústica del mismo. En [Morris et al, 2003] se
presenta una aplicación para la evaluación de pozos petrolíferos submarinos
donde se puede conocer cuando el cemento se ha adherido a la carcasa del pozo
NDT por medio de Ultrasonidos 23
si se monitorea la evolución del valor de impedancia acústica en la interfaz
carcasa/cemento. En [Butsch et al, 2002] se presenta que conociendo el valor de
la impedancia acústica del cemento se puede conocer cuando éste se ha
solidificado.
• Industria Química: en [Schaefer et al, 2006], [Chung et al¸ 2010], [Montero de
Espinosa et al, 2001], [Bamberger et al, 2004], [Puettmer et al, 1998] se halla la
impedancia acústica y la velocidad del sonido para posteriormente hallar el valor
de la densidad en líquidos específicos (ver expresión (6)). La densidad se usa
para monitorear el estado y las concentraciones de procesos industriales en
líquidos, o para analizar el estado de suspensiones de desechos radioactivos, y
es de especial interés porque a diferencia de los métodos ópticos, los ultrasónicos
pueden monitorear el estado de procesos aun a través de envases opacos y en
líquidos opacos o muy concentrados. Por ejemplo en [Schaefer et al, 2005] se
halla la impedancia acústica, luego la velocidad del sonido, para mediante la
expresión (6) finalmente encontrar la densidad del líquido. Se presenta también
una expresión que relaciona la densidad con la concentración de glicerina disuelta
en agua. Se ilustra que esto se puede aplicar para otras substancias diferentes a
la glicerina, lo cual es de gran importancia en varios sectores industriales.
• Otras aplicaciones: en [Stepanić et al, 2003] se utiliza la identificación
ultrasónica de materiales para diferenciar entre objetos comunes enterrados en el
suelo y minas antipersonales. Para ello se implementa una sonda con un
transductor ultrasónico en su extremo, el cual a su vez se encuentra acoplado
acústicamente con el objeto bajo inspección. El procedimiento para operar el
sistema consiste en primeramente escoger una zona donde se sospecha la
presencia de una mina, y allí introducir la sonda en la tierra hasta hacer contacto
con el objeto. Una vez se logra el contacto se pueden hacer las mediciones
respectivas y con base en las diferencias de impedancia acústica identificar el
material para así detectar la presencia de minas.
En [Kazys et al, 1998] se propone detectar fallas en los cojinetes de deslizamiento
bimetálicos de turbinas mediante la medición del coeficiente de reflexión en la
interfaz entre la capa de metal antifricción y el núcleo metálico. Para este caso el
control de calidad consiste en determinar que efectivamente el metal antifricción
se encuentre adherido al núcleo metálico.

24 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
En [Xu et al, 2011] se propone que en la industria electrónica se podría conocer el
estado interno de embebidos electrónicos al analizar el comportamiento de la
impedancia acústica de punto a punto en la superficie del dispositivo. Al conocer
la impedancia acústica de cada punto del paquete electrónico se podría reconocer
desuniones u otros defectos específicos.
Otras aplicaciones del coeficiente de reflexión se encuentran en determinar las
propiedades viscoelásticas de películas de polímetro, la medición de la fuerza de
unión de difusión entre dos materiales idénticos y la detección de cambios en las
características de las burbujas en alimentos gaseosos [Capote et al, 2004].
Los fundamentos de las aplicaciones de los detectores de impedancia acústica se
encuentran en detectar el cambio de cualquier propiedad física o química de un
sistema. Se puede decir que en general estas técnicas son particularmente útiles
para el monitoreo de sistemas evolutivos, y específicamente para el monitoreo de
procesos industriales [Capote et al, 2004]. Por tanto, las posibles aplicaciones que
se pueden llevar a cabo con base en el monitoreo de la impedancia acústica, son
muchos más que las aquí mencionadas. A continuación se mencionan algunos
métodos usados para el monitoreo de la impedancia acústica o sus efectos.
1.4.5 Métodos para la medición de la impedancia acústica o sus efectos.
Para la medición de la impedancia acústica o una variable que se encuentre asociada
con esto se usan diferentes métodos que pueden requerir configuraciones mecánicas o
electrónicas especiales o complejos algoritmos para el procesamiento de la señal. A
continuación se presentan algunos de estos.
En [Titov et al, 2008], [Chapman et al, 2006] se usa una señal de referencia y mediante
comparaciones y substracciones se puede estimar el efecto de la impedancia acústica o
la impedancia acústica misma para por ejemplo detectar la presencia de adhesivo entre
dos placas. Estas señales de referencia se toman de placas metálicas que no tienen
adhesivo o que lo tienen pero el espesor es muy ancho. En [Goglio et al, 1999] se
inspeccionan junturas metálicas para evaluar la presencia del adhesivo entre las placas.
En esta oportunidad también se usan mediciones en muestras de referencia. El método
usado se basa en la medición de la rata de decaimiento de las reverberaciones en la
muestra inspeccionada y la comparación de ésta con el valor de la referencia. En
[Schaefer et al, 2006] mediante un análisis en frecuencia, un sistema basado en GVSD
NDT por medio de Ultrasonidos 25
(Generalized Singular Value Decomposition) y un modelo de impedancia eléctrica-
impedancia acústica del transductor, se logra encontrar el valor de la impedancia
acústica de ciertos líquidos seleccionados. En [Chnstidis et al, 1999] y en [Gunarathne et
al, 2002] se usa un ajuste de curva a los ecos recibidos (reverberaciones) para
determinar el coeficiente de decaimiento y con base en ello identificar el material. En este
caso con base en lógica difusa se da una probabilidad estadística y un valor de la
exactitud de la predicción. Adicionalmente, en [Chnstidis et al, 1999] se propone que para
otros casos usando el coeficiente de decaimiento junto con la velocidad del sonido y
alimentando una red neuronal se puede identificar el material de una manera más
precisa. Por otro lado, en [Gunarathne et al, 2002] se usa una base de datos que
contiene los valores típicos del coeficiente de decaimiento para materiales específicos.
Cabe aclarar que el coeficiente decaimiento es una variable que se encuentra
relacionada con el valor de la impedancia acústica del material.
En [Schaefer et al, 2005] se propone un método estadístico que basado en el Partial
Least Square Regression (PLSR) permita medir de forma indirecta la impedancia
acústica de un líquido mediante el análisis de la forma de los pulsos transmitidos. Para
este caso se necesitan mediciones de referencia, algunas de las cuales son usadas para
entrenar el modelo y otras para verificar su desempeño. En [Morris et al, 2003] se halla la
también la impedancia acústica del cemento por las reverberaciones que se producen
entre la parte interna y externa de la cubierta que se encuentra en contacto con este
material. En [Wallhäußer et al, 2011] la impedancia acústica se halla mediante el
procesamiento de las reverberaciones ultrasónicas y un algoritmo de regresión de
mínimos cuadrados. En [Meng et al, 2012] también se halla la impedancia acústica con
base en las reverberaciones. En [Yoshizawa et al¸ 2004] se identifica la impedancia
acústica mediante un método basado en la interferencia de ondas. En [Montero de
Espinosa et al, 2001] se halla la impedancia acústica mediante un sistema mecánico
especial y un método basado en la energía de la señal que es una modificación del
Método de Única Frecuencia (SFM) [Montero de Espinosa et al, 2001]. El Método de la
Energía presenta mejor desempeño ante el ruido. En [Bamberger et al, 2004] se halla la
impedancia acústica mediante el análisis de la amplitud espectral de cada una de las
reverberaciones, junto con un ajuste de mínimos cuadrados y tomando como referencia
las mediciones cuando el líquido es agua. En [Salazar et al, 2004] se halla la impedancia
acústica usando una medición de calibración, una señal de referencia, la amplitud del eco
recibido, para así encontrar la relación de reflexión y luego reemplazarlo en la expresión
26 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
(3) para hallar la impedancia acústica de la muestra inspeccionada. En este caso el
sensor tiene un diseño mecánico especial que le permite mejorar su desempeño en la
medición de la impedancia acústica.
En [Ohtanil et al, 2006], se utiliza un arreglo de sensores ultrasónicos y una red neuronal
MLP para la identificación de materiales. La distancia entre el objeto y el sistema puede
llegar hasta los 30cm. Este es de los pocos sistemas que permite la identificación del
material con base en la impedancia acústica teniendo aire como el medio acoplante. No
obstante, se considera que la identificación exitosa se debe más a la inclinación de las
muestras que a la impedancia acústica como tal, dado que el desacople acústico que
existe entre sólidos y el aire es demasiado grande como para que exista una diferencia
visible en los ecos recibidos de dos sólidos diferentes.
Como se puede ver existen varios métodos para la identificación ultrasónica de
materiales, pero ninguno de los anteriormente mencionados ha sido implementado en
robots de pequeño tamaño. A continuación se encuentran dos aportes que tienen
relación con la implementación en robots de los NDT.
1.4.6 Sistemas Robóticos para NDT Ultrasónico.
En [Thomas et al, 1991] se desarrolla un sistema de percepción ultrasónico para robots
para la identificación ultrasónica de materiales. Este sistema se basa en una red neuronal
Multi Layer Perceptron (MLP), la cual fue entrenada por medio de las características
espectrales de la energía y las características en el dominio del tiempo del eco
ultrasónico. Se puede resaltar de este sistema que no sólo se tomaron mediciones en un
solo eje coordenado, sino tanto en X como en Y, adicionalmente el transductor
ultrasónico no requería hacer contacto con el material inspeccionado. Sin embargo, los
resultados en la identificación del material fueron estocásticos y el sistema finalmente no
pudo ser implementado en un sistema móvil.
En [Friedrich et al, 2006], se implementa un sistema robótico móvil para la Evaluación No
Destructiva de Materiales (NDE) usando ultrasonidos, y aunque este sistema no identifica
el material de los objetos, su importancia radica en que es uno de los pocos sistemas
móviles que mediante enjambres robóticos realiza NDE. Cada robot tiene otros sensores,
además de los ultrasónicos, que les permiten evaluar fallas en los materiales
inspeccionados y obtener una información más robusta en sus mediciones. El enjambre
robótico se comunica con ordenador central que se encarga de recuperar la información

NDT por medio de Ultrasonidos 27
y entregársela de manera adecuada al usuario. Para la comunicación entre los agentes y
el control central se usa un radio enlace. Además de lo mencionado, es de resaltar el
tamaño de los robots (ver figura 1-4), la inspección distribuida del objeto y la autonomía
del sistema. Sin embargo, este último ítem se encuentra limitado porque debido a la
complejidad de los algoritmos asociados es necesaria una constante comunicación con
un PC remoto.
Figura 1-4: Prototipo del Vehículo para NDE ultrasónica [Friedrich et al, 2006]
Para encontrar la impedancia acústica o una métrica que refleje el comportamiento de la
misma, muchos de los métodos anteriormente expuestos requieren de dispositivos con
una capacidad de cómputo considerable debido a la complejidad de sus algoritmos
asociados. Esto en muchos casos los inhabilita para automatizar el proceso mediante
robots o sistemas de pequeño tamaño de bajas capacidades de cómputo, de hecho se
puede ver que dentro de la literatura revisada no se encuentran sistemas que
implementen en robots la medición de la impedancia acústica o una métrica asociada con
esta.
Esta problemática fue abordada en la presente tesis de maestría y a continuación se
presentan los resultados.

28 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
2. Método de la Pendiente
En el capitulo uno se ilustraron algunos métodos que podían ser usados para la
identificación de materiales mediante ultrasonidos basados en la impedancia acústica, no
obstante en el caso de muchos de ellos sus altos requerimientos de computo los
inhabilitaba para ser implementados en robots de pequeño tamaño. Detectada esta
necesidad fue necesario estudiar a profundidad la teoría y realizar múltiples experimentos
con diversas configuraciones de los transductores, para obtener mediante un análisis
detallado del eco ultrasónico, los patrones de señal que se encuentran asociados con las
propiedades del material inspeccionado, principalmente con la impedancia acústica, y de
esta manera desarrollar el método más apropiado para implementarse en la identificación
de materiales en pequeños robots.
2.1 Pruebas en aire
Para la identificación de materiales las primeras pruebas que se realizaron fueron en aire.
En la figura 2-1 se puede ver la configuración usada.
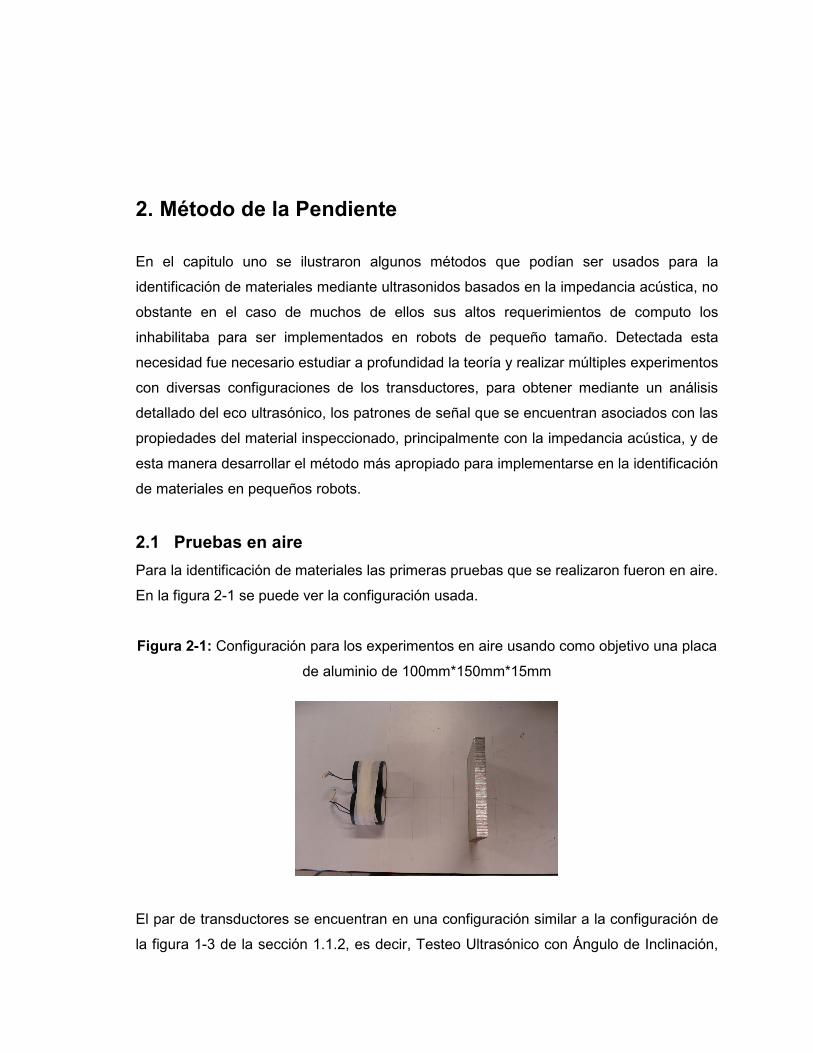
Figura 2-1: Configuración para los experimentos en aire usando como objetivo una placa
de aluminio de 100mm*150mm*15mm
El par de transductores se encuentran en una configuración similar a la configuración de
la figura 1-3 de la sección 1.1.2, es decir, Testeo Ultrasónico con Ángulo de Inclinación,

30 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
solo que para este caso se podría decir momentáneamente que “no existe” ángulo de
inclinación. Los transductores usados son desarrollados por la empresa Airmar
Technology [Airmar Technology, 2011] y sus características se describen en la tabla 2-1.
Las características de este transductor lo hacen ideal para aplicaciones como medición
de nivel, proximidad, evasión de obstáculos y robótica. Sin embargo, no es usado para
los NDT. Su costo es de $71.25US, lo cual es relativamente bajo con respecto a los
transductores usados para NDT (<400).
Tabla 2-1: Características del transductor AT50 [Airmar Technology, 2011].
Característica Valor Mejor Frecuencia de Operación 50kHz +/- 4%
Mínima sensibilidad de transmisión 106 dB re 1µPa/V a
1m Mínima sensibilidad de recepción -162 dB re 1V/1µPa Mínima Resistencia en paralelo 450Ω +/- 30%
Min/Max rango de sensado* 30cm – 15m Rango de sensado típico: 35cm – 10m
Ancho de Banda (3 dB ángulo completo)
12° +/- 2°
Máximo Voltaje de Entrada (2% ciclo de trabajo)
1500 Vpp
Temperatura de Operación -40°C to 90°C *Esto para el caso en que el transductor sea usado como transmisor y receptor al mismo
tiempo, es decir, en la configuración por eco pulso
La señal eléctrica de alimentación al transductor emisor consistía de veinte pulsos de
onda sinusoidal, con una frecuencia de aproximadamente 50KHz, y una amplitud pico a
pico de 18V. El circuito receptor era conformado por un amplificador operacional con la
ganancia adecuada para visualizarse el eco ultrasónico en un osciloscopio. De esta
manera el procedimiento que se siguió consiste básicamente en emitir una señal
ultrasónica hacia el objetivo, capturar el eco reflejado por el objeto y analizar sus
características o patrones específicos que dependen de las propiedades particulares de
los materiales. En la figura 2-2 se puede observar el eco obtenido cuando se inspecciona
una placa aluminio de 150mm*100mm*15mm.
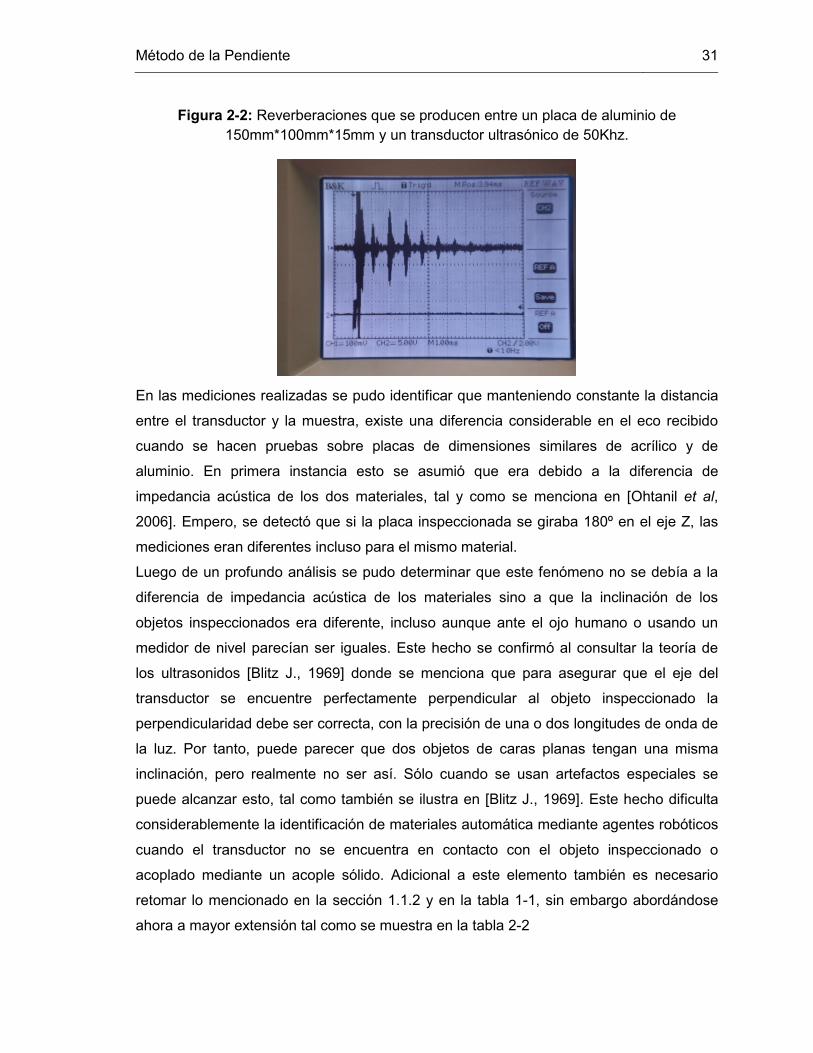
Método de la Pendiente 31
Figura 2-2: Reverberaciones que se producen entre un placa de aluminio de 150mm*100mm*15mm y un transductor ultrasónico de 50Khz.
En las mediciones realizadas se pudo identificar que manteniendo constante la distancia
entre el transductor y la muestra, existe una diferencia considerable en el eco recibido
cuando se hacen pruebas sobre placas de dimensiones similares de acrílico y de
aluminio. En primera instancia esto se asumió que era debido a la diferencia de
impedancia acústica de los dos materiales, tal y como se menciona en [Ohtanil et al,
2006]. Empero, se detectó que si la placa inspeccionada se giraba 180º en el eje Z, las
mediciones eran diferentes incluso para el mismo material.
Luego de un profundo análisis se pudo determinar que este fenómeno no se debía a la
diferencia de impedancia acústica de los materiales sino a que la inclinación de los
objetos inspeccionados era diferente, incluso aunque ante el ojo humano o usando un
medidor de nivel parecían ser iguales. Este hecho se confirmó al consultar la teoría de
los ultrasonidos [Blitz J., 1969] donde se menciona que para asegurar que el eje del
transductor se encuentre perfectamente perpendicular al objeto inspeccionado la
perpendicularidad debe ser correcta, con la precisión de una o dos longitudes de onda de
la luz. Por tanto, puede parecer que dos objetos de caras planas tengan una misma
inclinación, pero realmente no ser así. Sólo cuando se usan artefactos especiales se
puede alcanzar esto, tal como también se ilustra en [Blitz J., 1969]. Este hecho dificulta
considerablemente la identificación de materiales automática mediante agentes robóticos
cuando el transductor no se encuentra en contacto con el objeto inspeccionado o
acoplado mediante un acople sólido. Adicional a este elemento también es necesario
retomar lo mencionado en la sección 1.1.2 y en la tabla 1-1, sin embargo abordándose
ahora a mayor extensión tal como se muestra en la tabla 2-2
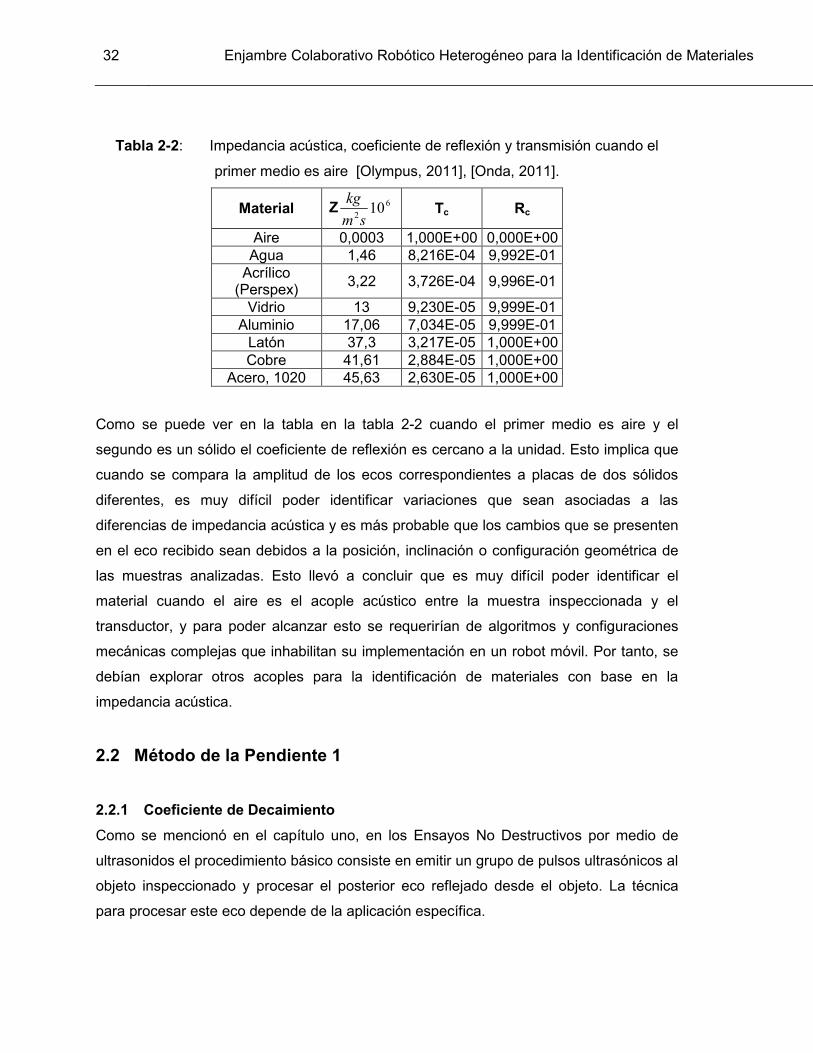
32 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Tabla 2-2: Impedancia acústica, coeficiente de reflexión y transmisión cuando el
primer medio es aire [Olympus, 2011], [Onda, 2011].
Material Z 6
210sm
kg Tc Rc
Aire 0,0003 1,000E+00 0,000E+00 Agua 1,46 8,216E-04 9,992E-01
Acrílico (Perspex)
3,22 3,726E-04 9,996E-01
Vidrio 13 9,230E-05 9,999E-01 Aluminio 17,06 7,034E-05 9,999E-01
Latón 37,3 3,217E-05 1,000E+00 Cobre 41,61 2,884E-05 1,000E+00
Acero, 1020 45,63 2,630E-05 1,000E+00
Como se puede ver en la tabla en la tabla 2-2 cuando el primer medio es aire y el
segundo es un sólido el coeficiente de reflexión es cercano a la unidad. Esto implica que
cuando se compara la amplitud de los ecos correspondientes a placas de dos sólidos
diferentes, es muy difícil poder identificar variaciones que sean asociadas a las
diferencias de impedancia acústica y es más probable que los cambios que se presenten
en el eco recibido sean debidos a la posición, inclinación o configuración geométrica de
las muestras analizadas. Esto llevó a concluir que es muy difícil poder identificar el
material cuando el aire es el acople acústico entre la muestra inspeccionada y el
transductor, y para poder alcanzar esto se requerirían de algoritmos y configuraciones
mecánicas complejas que inhabilitan su implementación en un robot móvil. Por tanto, se
debían explorar otros acoples para la identificación de materiales con base en la
impedancia acústica.
2.2 Método de la Pendiente 1
2.2.1 Coeficiente de Decaimiento
Como se mencionó en el capítulo uno, en los Ensayos No Destructivos por medio de
ultrasonidos el procedimiento básico consiste en emitir un grupo de pulsos ultrasónicos al
objeto inspeccionado y procesar el posterior eco reflejado desde el objeto. La técnica
para procesar este eco depende de la aplicación específica.
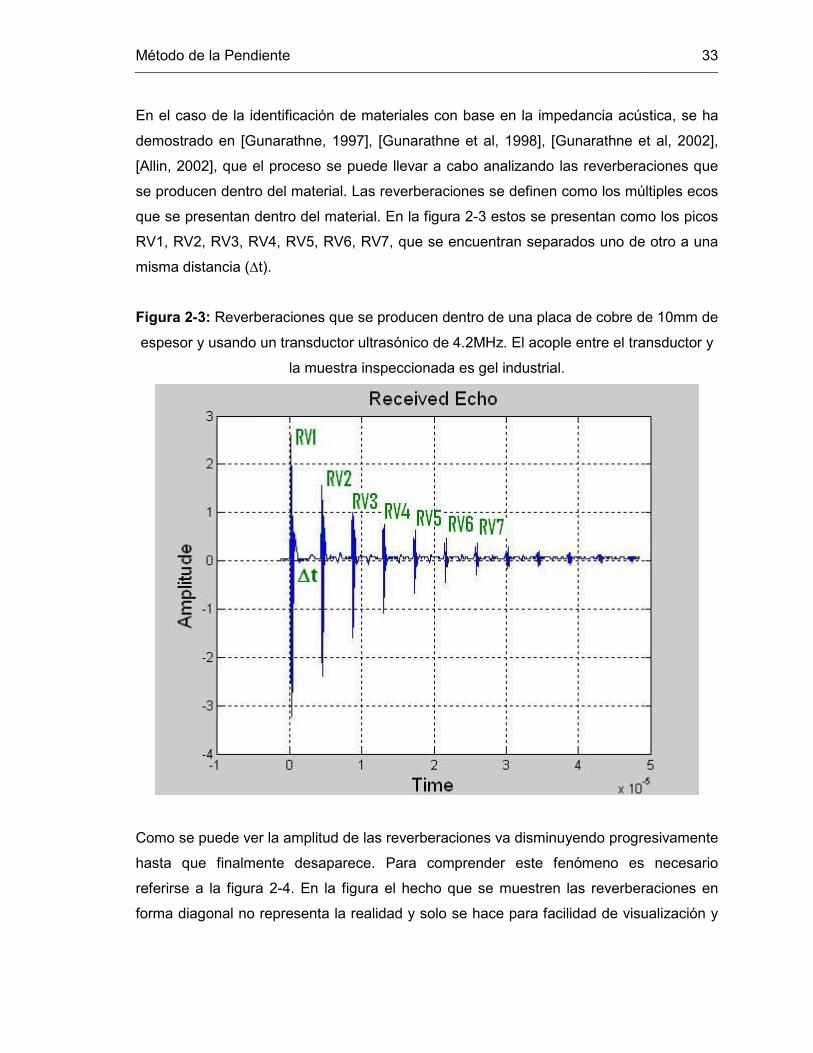
Método de la Pendiente 33
En el caso de la identificación de materiales con base en la impedancia acústica, se ha
demostrado en [Gunarathne, 1997], [Gunarathne et al, 1998], [Gunarathne et al, 2002],
[Allin, 2002], que el proceso se puede llevar a cabo analizando las reverberaciones que
se producen dentro del material. Las reverberaciones se definen como los múltiples ecos
que se presentan dentro del material. En la figura 2-3 estos se presentan como los picos
RV1, RV2, RV3, RV4, RV5, RV6, RV7, que se encuentran separados uno de otro a una
misma distancia (∆t).
Figura 2-3: Reverberaciones que se producen dentro de una placa de cobre de 10mm de
espesor y usando un transductor ultrasónico de 4.2MHz. El acople entre el transductor y
la muestra inspeccionada es gel industrial.
Como se puede ver la amplitud de las reverberaciones va disminuyendo progresivamente
hasta que finalmente desaparece. Para comprender este fenómeno es necesario
referirse a la figura 2-4. En la figura el hecho que se muestren las reverberaciones en
forma diagonal no representa la realidad y solo se hace para facilidad de visualización y

34 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
de esta manera comprender el concepto. Realmente lo que sucede es que la onda se
propaga perpendicularmente de la cara superior a la inferior.
En la figura 2-4 se puede ver que la onda que se emite desde el transductor ultrasónico
hacia el material inspeccionado, se refleja múltiples veces entre las caras de la muestra
inspeccionada. La explicación de este fenómeno es la siguiente: cuando la onda colisiona
con la interfaz generada por la cara superior de la muestra y la cara del transductor una
porción de la onda se transmite hacia el transductor y otra se refleja en dirección de la
cara inferior. En la cara inferior nuevamente una porción de la onda se refleja mientras
otra se transmite hacia fuera. Las amplitudes reflejadas y transmitidas para ambos casos
dependen del desacople acústico entre los materiales, por consiguiente cuando la onda
colisiona en el punto inferior para el caso de la figura 2-3 se puede decir que
aproximadamente la onda se refleja en su totalidad y no se transmite hacia fuera porque
para este experimento el material más allá de la cara inferior es aire. No obstante, esto
mismo no se puede decir para la colisión en la cara superior, porque la onda transmitida
del material hacia la cara del transductor no se puede despreciar. Por consiguiente, el
decrecimiento de la amplitud de las reverberaciones dependerá de cuanta porción de
onda se refleja en la cara superior de reverberación a reverberación, en otros términos
depende del desacople acústico. Por tanto, si la muestra inspeccionada tiene una
impedancia acústica cercana (lejana) a la de la cara del transductor el desacople será
bajo (alto) y entonces una menor (mayor) porción de onda se reflejará entre
reverberación y reverberación, como consecuencia la amplitud de las múltiples
reverberaciones caerá más rápidamente (lentamente).
Figura 2-4: Reverberaciones que se producen dentro de una placa. El acople entre el
transductor y la muestra inspeccionada es un acople líquido.
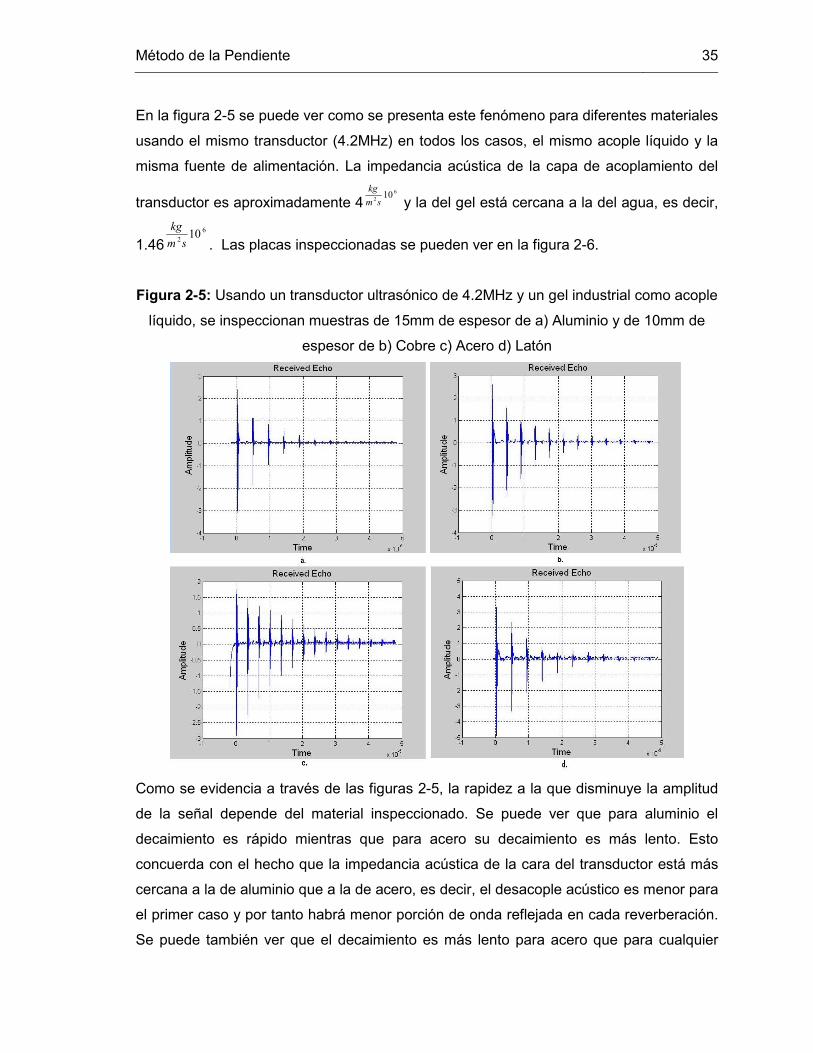
Método de la Pendiente 35
En la figura 2-5 se puede ver como se presenta este fenómeno para diferentes materiales
usando el mismo transductor (4.2MHz) en todos los casos, el mismo acople líquido y la
misma fuente de alimentación. La impedancia acústica de la capa de acoplamiento del
transductor es aproximadamente 46
210sm
kg
y la del gel está cercana a la del agua, es decir,
1.466
210sm
kg
. Las placas inspeccionadas se pueden ver en la figura 2-6.
Figura 2-5: Usando un transductor ultrasónico de 4.2MHz y un gel industrial como acople
líquido, se inspeccionan muestras de 15mm de espesor de a) Aluminio y de 10mm de
espesor de b) Cobre c) Acero d) Latón
Como se evidencia a través de las figuras 2-5, la rapidez a la que disminuye la amplitud
de la señal depende del material inspeccionado. Se puede ver que para aluminio el
decaimiento es rápido mientras que para acero su decaimiento es más lento. Esto
concuerda con el hecho que la impedancia acústica de la cara del transductor está más
cercana a la de aluminio que a la de acero, es decir, el desacople acústico es menor para
el primer caso y por tanto habrá menor porción de onda reflejada en cada reverberación.
Se puede también ver que el decaimiento es más lento para acero que para cualquier

36 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
otro material, lo cual es congruente con el hecho que es la mayor impedancia acústica,
es decir, tiene el desacople acústico más alto con el material de la cara del transductor.
En la literatura se ha encontrado que el decaimiento de la amplitud de los picos máximos
se puede aproximar mediante una función exponencial decreciente con los parámetros
adecuados. Esta expresión es:
DAey CxB += −− )( (8)
Donde y es la amplitud del eco, x el tiempo, A se relaciona con la amplitud del primer
eco, B con la rata de decaimiento de las reverberaciones, C con el tiempo en que
aparece el primer eco y D con la relación señal a ruido [Gunarathne, 1997], [Gunarathne
et al, 1998], [Gunarathne et al, 2002], [González et al, 2010a].
Figura 2-6: Placas inspeccionadas, donde se tiene que a) acero de 10mm, b) acero de
6mm (de está no se presentan los resultados), c) cobre de 10mm, d) latón de 10mm y e)
aluminio de 15mm
Por tanto, una de las formas de realizar el procesamiento de las reverberaciones consiste
en encontrar una función exponencial que se ajuste a los picos máximos de las
reverberaciones. Una vez se encuentra la función exponencial los parámetros A, B, C y D
se usan para estimar las propiedades del material y de esta manera identificarlo. En la
figura 2-7 se puede ver esta técnica implementada [Gunarathne, 1997] para el caso de
una inspección ultrasónica, mediante un transductor ultrasónico de 10 MHz, de una
pipeta transportadora de petróleo llena de aire en su interior. El material de la pipeta es
acero.

Método de la Pendiente 37
De estos cuatro parámetros uno de los que aporta mayor información para la
identificación del material es el coeficiente de decaimiento B, el cual depende del
desacople acústico entre los límites de las capas formadas por el transductor, el medio
acoplante y el material bajo inspección, además del material que se encuentra en
contacto con la cara opuesta a donde se tiene puesto el transductor.
Para encontrar el valor B a partir del eco ultrasónico, es necesario seguir el
procedimiento arriba mencionado (ajuste de función exponencial) o uno similar. Lo que
implica poseer en el sistema una capacidad computacional que convencionalmente no se
encuentra disponible en robots de pequeño tamaño.
Figura 2-7: Inspección ultrasónica, mediante un transductor ultrasónico de 10 MHz, de
una pipeta transportadora de petróleo llena de aire en su interior. El material de la pipeta
es acero. Se aplica la técnica de ajuste de una función exponencial a los picos de las
reverberaciones. [Gunarathne, 1997]
Con base en esta necesidad se desarrolló el método de la pendiente [González et al,
2010a]. El cual se detalla a continuación.
Al examinar nuevamente la expresión (8) y hallar su primera derivada se obtiene:
)(*' CxBBeAy −−−= (9)
Reemplazando (9) en (8) y reorganizando se obtiene:
/By'-Dy = (10)
Si se tienen dos valores (x1, y1) y (x2, y2) se tienen las siguientes ecuaciones:
ByDy /'11 −= (11)
ByDy /'22 −= (12)

38 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Restando (11) de (12), reorganizando y despejando B se obtiene:
y
yB
∆∆−
='
(13)
Remítase nuevamente a las figuras 2-3, 2-5 y 2-7, donde se puede ver que entre
reverberación y reverberación existe un retardo de valor ∆x el cual es aproximadamente
constante.
Los valores de x e y se pueden deducir directamente de los picos de las reverberaciones,
pero no se puede hacer lo mismo para y’. No obstante, se sabe qué y’ es la pendiente de
la recta tangente al punto en cuestión. Adicionalmente, si se toma la pendiente de la
recta que une dos picos máximos de las reverberaciones se puede demostrar que esta
se encuentra relacionada con la pendiente de la recta tangente a uno de esos puntos, de
la siguiente manera:
my kk *' λ= (14)
xBke
xB∆−−
∆=1
λ (15)
Donde y’k es la derivada en el punto k, λk es una variable que depende del punto k y de
B, m es la pendiente que hay entre el punto k y otro punto cualquiera de la curva, y ∆x es
la distancia en x entre estos dos puntos. Se puede demostrar que para distancias
infinitesimalmente pequeñas entre estos dos puntos λk→1, lo cual es congruente con la
definición de la pendiente de la recta tangente.
Si las reverberaciones ultrasónicas contiguas se encuentran a una distancia ∆x
constante, lo cual es de hecho cierto (ver figura 2-3, 2-5 y 2-7), se puede obtener
después de reemplazar (14) y (15) en (13) que:
y
m
e
xBB
xB ∆∆
−∆
−=∆−1 (16)
Simplificando y reorganizando (16) se obtiene:
x
y
mx
B∆
∆∆
∆+
−=
1ln
(17)
Como se puede ver todas estas variables con conocidas y por tanto el valor de B se
puede encontrar directamente a partir de esta expresión, lo cual reduce
considerablemente el costo computacional del proceso. En caso de ser necesario se
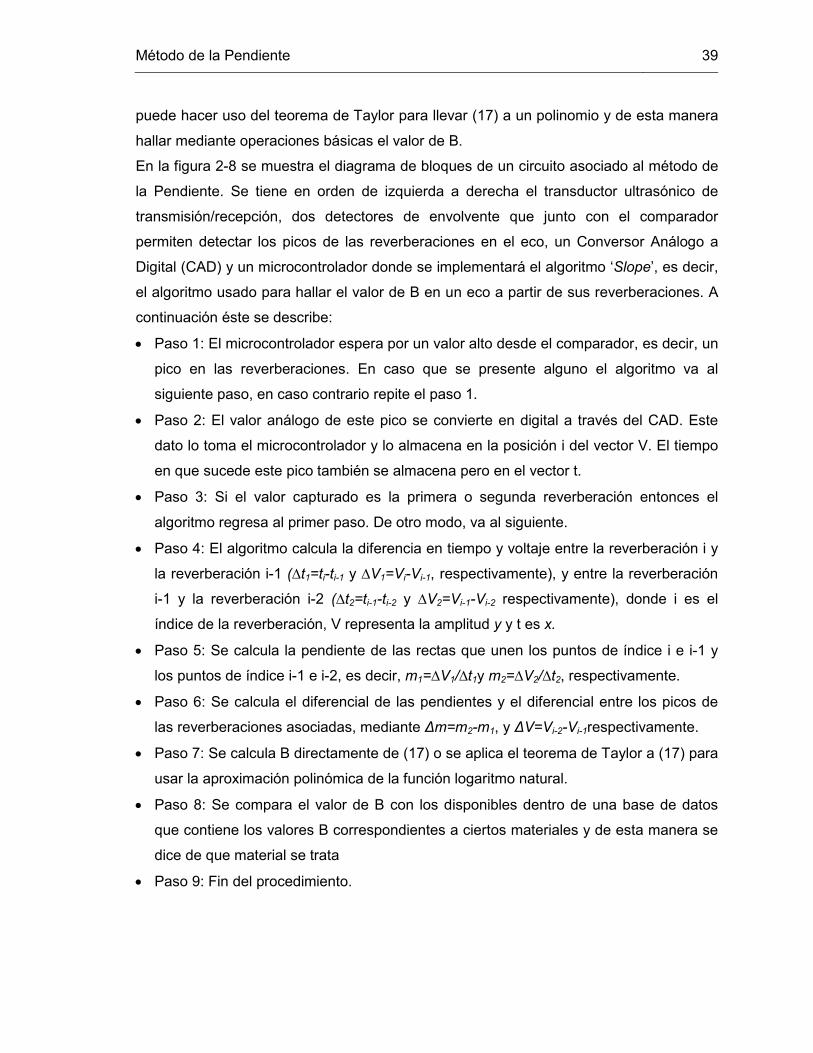
Método de la Pendiente 39
puede hacer uso del teorema de Taylor para llevar (17) a un polinomio y de esta manera
hallar mediante operaciones básicas el valor de B.
En la figura 2-8 se muestra el diagrama de bloques de un circuito asociado al método de
la Pendiente. Se tiene en orden de izquierda a derecha el transductor ultrasónico de
transmisión/recepción, dos detectores de envolvente que junto con el comparador
permiten detectar los picos de las reverberaciones en el eco, un Conversor Análogo a
Digital (CAD) y un microcontrolador donde se implementará el algoritmo ‘Slope’, es decir,
el algoritmo usado para hallar el valor de B en un eco a partir de sus reverberaciones. A
continuación éste se describe:
• Paso 1: El microcontrolador espera por un valor alto desde el comparador, es decir, un
pico en las reverberaciones. En caso que se presente alguno el algoritmo va al
siguiente paso, en caso contrario repite el paso 1.
• Paso 2: El valor análogo de este pico se convierte en digital a través del CAD. Este
dato lo toma el microcontrolador y lo almacena en la posición i del vector V. El tiempo
en que sucede este pico también se almacena pero en el vector t.
• Paso 3: Si el valor capturado es la primera o segunda reverberación entonces el
algoritmo regresa al primer paso. De otro modo, va al siguiente.
• Paso 4: El algoritmo calcula la diferencia en tiempo y voltaje entre la reverberación i y
la reverberación i-1 (∆t1=ti-ti-1 y ∆V1=Vi-Vi-1, respectivamente), y entre la reverberación
i-1 y la reverberación i-2 (∆t2=ti-1-ti-2 y ∆V2=Vi-1-Vi-2 respectivamente), donde i es el
índice de la reverberación, V representa la amplitud y y t es x.
• Paso 5: Se calcula la pendiente de las rectas que unen los puntos de índice i e i-1 y
los puntos de índice i-1 e i-2, es decir, m1=∆V1/∆t1y m2=∆V2/∆t2, respectivamente.
• Paso 6: Se calcula el diferencial de las pendientes y el diferencial entre los picos de
las reverberaciones asociadas, mediante ∆m=m2-m1, y ∆V=Vi-2-Vi-1respectivamente.
• Paso 7: Se calcula B directamente de (17) o se aplica el teorema de Taylor a (17) para
usar la aproximación polinómica de la función logaritmo natural.
• Paso 8: Se compara el valor de B con los disponibles dentro de una base de datos
que contiene los valores B correspondientes a ciertos materiales y de esta manera se
dice de que material se trata
• Paso 9: Fin del procedimiento.
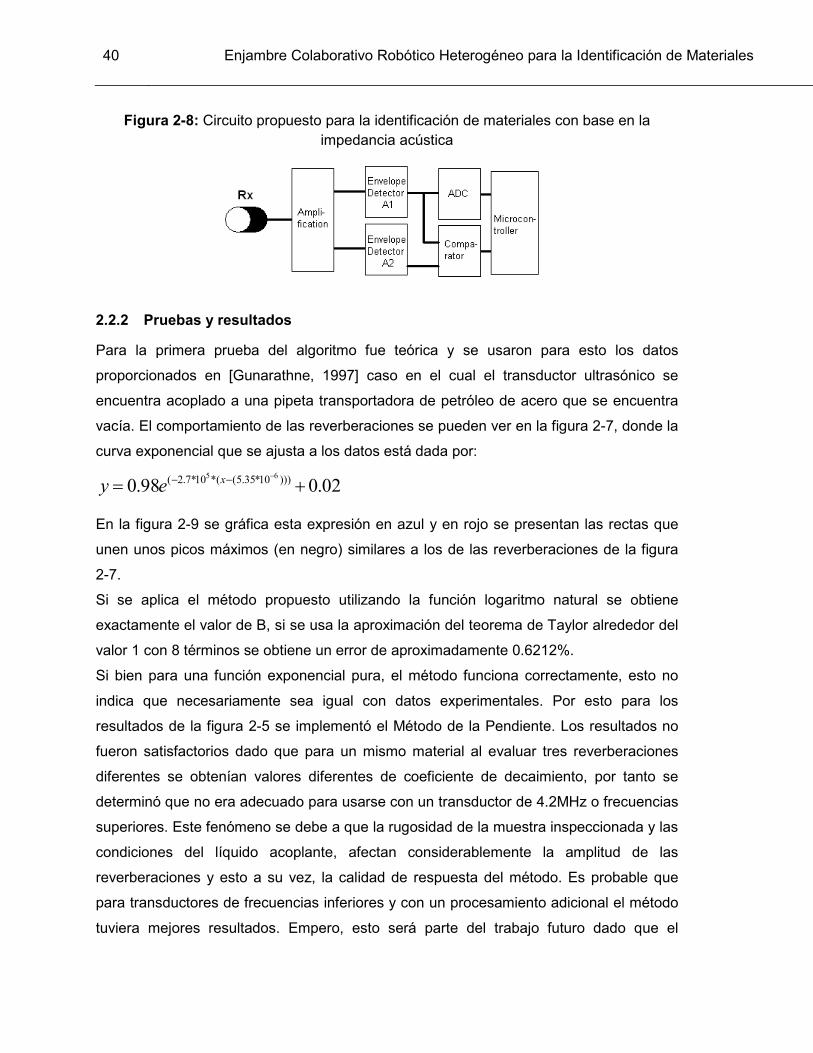
40 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Figura 2-8: Circuito propuesto para la identificación de materiales con base en la impedancia acústica
2.2.2 Pruebas y resultados
Para la primera prueba del algoritmo fue teórica y se usaron para esto los datos
proporcionados en [Gunarathne, 1997] caso en el cual el transductor ultrasónico se
encuentra acoplado a una pipeta transportadora de petróleo de acero que se encuentra
vacía. El comportamiento de las reverberaciones se pueden ver en la figura 2-7, donde la
curva exponencial que se ajusta a los datos está dada por:
02.098.0 )))10*35.5(*(10*7.2( 65
+=−−− xey
En la figura 2-9 se gráfica esta expresión en azul y en rojo se presentan las rectas que
unen unos picos máximos (en negro) similares a los de las reverberaciones de la figura
2-7.
Si se aplica el método propuesto utilizando la función logaritmo natural se obtiene
exactamente el valor de B, si se usa la aproximación del teorema de Taylor alrededor del
valor 1 con 8 términos se obtiene un error de aproximadamente 0.6212%.
Si bien para una función exponencial pura, el método funciona correctamente, esto no
indica que necesariamente sea igual con datos experimentales. Por esto para los
resultados de la figura 2-5 se implementó el Método de la Pendiente. Los resultados no
fueron satisfactorios dado que para un mismo material al evaluar tres reverberaciones
diferentes se obtenían valores diferentes de coeficiente de decaimiento, por tanto se
determinó que no era adecuado para usarse con un transductor de 4.2MHz o frecuencias
superiores. Este fenómeno se debe a que la rugosidad de la muestra inspeccionada y las
condiciones del líquido acoplante, afectan considerablemente la amplitud de las
reverberaciones y esto a su vez, la calidad de respuesta del método. Es probable que
para transductores de frecuencias inferiores y con un procesamiento adicional el método
tuviera mejores resultados. Empero, esto será parte del trabajo futuro dado que el

Método de la Pendiente 41
transductor de 4.2MHz no eran propios sino que fueron facilitados durante el tiempo de
una pasantía investigativa que se realizó dentro del marco de la presente tesis.
2.3 Método de la Pendiente 2
El método de la pendiente anteriormente mencionado fue diseñado con base en los
resultados de transductores de frecuencias del orden los mega Hertz, empero los
transductores de los que se disponían para este proyecto eran de máximo 300KHz lo que
hacía necesario que el método se adaptará a estas particularidades.
El transductor usado para las mediciones fue de 125KHz (AT120 Airmar Technology)
cuyas características se pueden ver en las tabla 2-3 y su circuito de alimentación fue el
T1 development board (Airmar Technology). La frecuencia de la señal eléctrica para
alimentar el transductor fue de 130KHz. Por tanto la onda ultrasónica emitida es cercana
a esta frecuencia.
Figura 2-9: En azul curva que se ajuste a los datos de [Gunarathne, 1997], en rojo las
rectas que unen los puntos donde aproximadamente se encuentran los picos máximos de
las reverberaciones (en negro)

42 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Tabla 2-3: Características del transductor AT120 [Airmar Technology, 2011].
Característica Valor Mejor Frecuencia de Operación 125kHz +/- 4%
Mínima sensibilidad de transmisión 107 dB re 1µPa/V a
1m Mínima sensibilidad de recepción 169 dB re 1V/1µPa Mínima Resistencia en paralelo 420Ω +/- 30%
Min/Max rango de sensado* 15cm – 7m Rango de sensado típico 20cm – 3m
Ancho de Banda (3 dB ángulo completo)
12° +/- 2°
Máximo Voltaje de Entrada (2% ciclo de trabajo)
800 Vpp
Temperatura de Operación -40°C to 90°C Para este caso la configuración con respecto a la muestra elegida fue la de la figura 1-2,
es decir, la de testeo ultrasónico a través del material. Se eligió esta porque la respuesta
del transductor elegido es lenta y por tanto antes que pudiera pasar al modo receptor, la
mayor parte del eco recibo se hubiera extinguido. El AT120 se usa tanto para el
transductor emisor como para el receptor. Ambas terminales de este último van
conectadas al amplificador instrumental INA129, y es la salida de este la que se analiza.
La señal recibida se captura mediante el Osciloscopio DPO2014 de Tektronix y se
procesa mediante Matlab. En la figura 2-10 se puede ver la señal que se produce dentro
de una placa de aluminio y una de vidrio, de 16mm y 14mm de espesor,
respectivamente.
Como se puede ver en la figura 2-10c la onda decae más rápidamente en vidrio que en
aluminio, esto no se debe a que la muestra de aluminio tenga un mayor espesor porque
cuando se realizaron posteriores experimentos con una muestra de aluminio de 8mm de
espesor, se evidenció que el decaimiento en vidrio sigue siendo más rápido. Este hecho
se debe específicamente a que la impedancia acústica del vidrio es más cercana a la de
la cara del transductor, es decir, el desacople acústico es menor y por tanto la
transmisión de energía del transductor a la muestra de vidrio y viceversa, es mayor que
para el caso de aluminio. Otros experimentos con acrílico confirmaron este hecho
también.
La principal diferencia que existe entre las formas de onda en la figura 2-10 con respecto
a las de la figura 2-5, es que en esta última las múltiples reverberaciones se encuentran
espaciadas, mientras que para la primera las reverberaciones hacen parecer que la señal
de decaimiento fuera continua. Esto es consecuencia de la mayor longitud de onda para
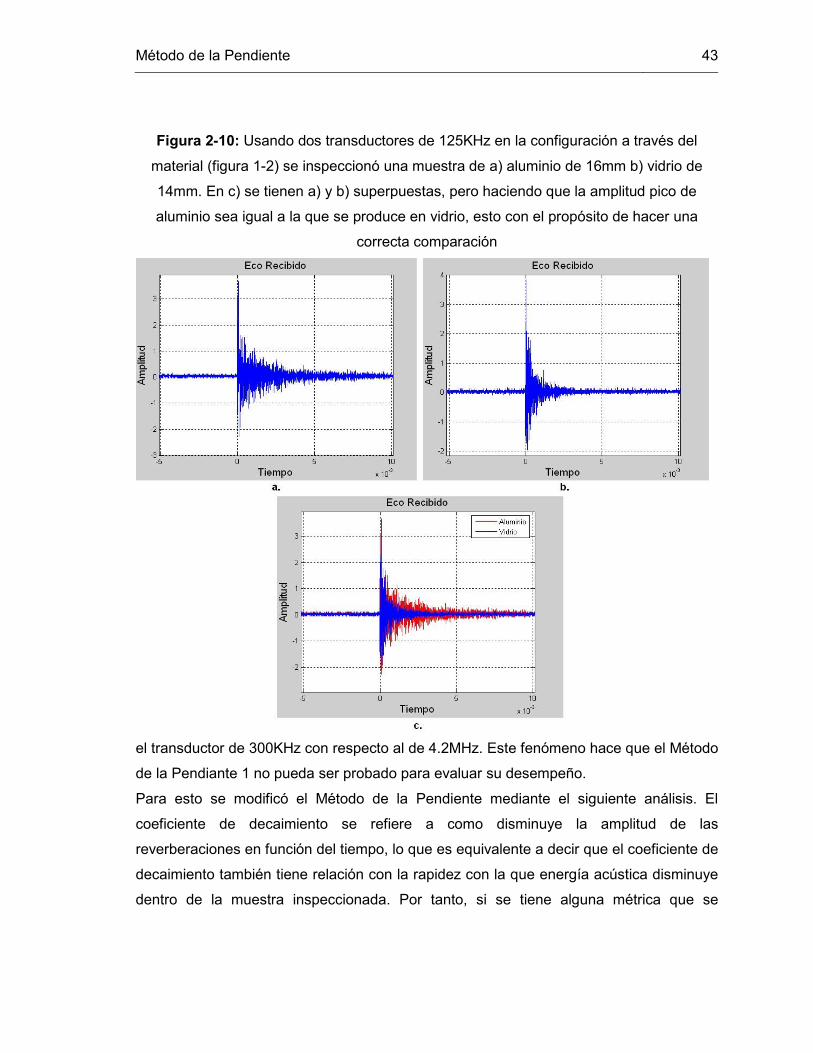
Método de la Pendiente 43
Figura 2-10: Usando dos transductores de 125KHz en la configuración a través del
material (figura 1-2) se inspeccionó una muestra de a) aluminio de 16mm b) vidrio de
14mm. En c) se tienen a) y b) superpuestas, pero haciendo que la amplitud pico de
aluminio sea igual a la que se produce en vidrio, esto con el propósito de hacer una
correcta comparación
el transductor de 300KHz con respecto al de 4.2MHz. Este fenómeno hace que el Método
de la Pendiante 1 no pueda ser probado para evaluar su desempeño.
Para esto se modificó el Método de la Pendiente mediante el siguiente análisis. El
coeficiente de decaimiento se refiere a como disminuye la amplitud de las
reverberaciones en función del tiempo, lo que es equivalente a decir que el coeficiente de
decaimiento también tiene relación con la rapidez con la que energía acústica disminuye
dentro de la muestra inspeccionada. Por tanto, si se tiene alguna métrica que se
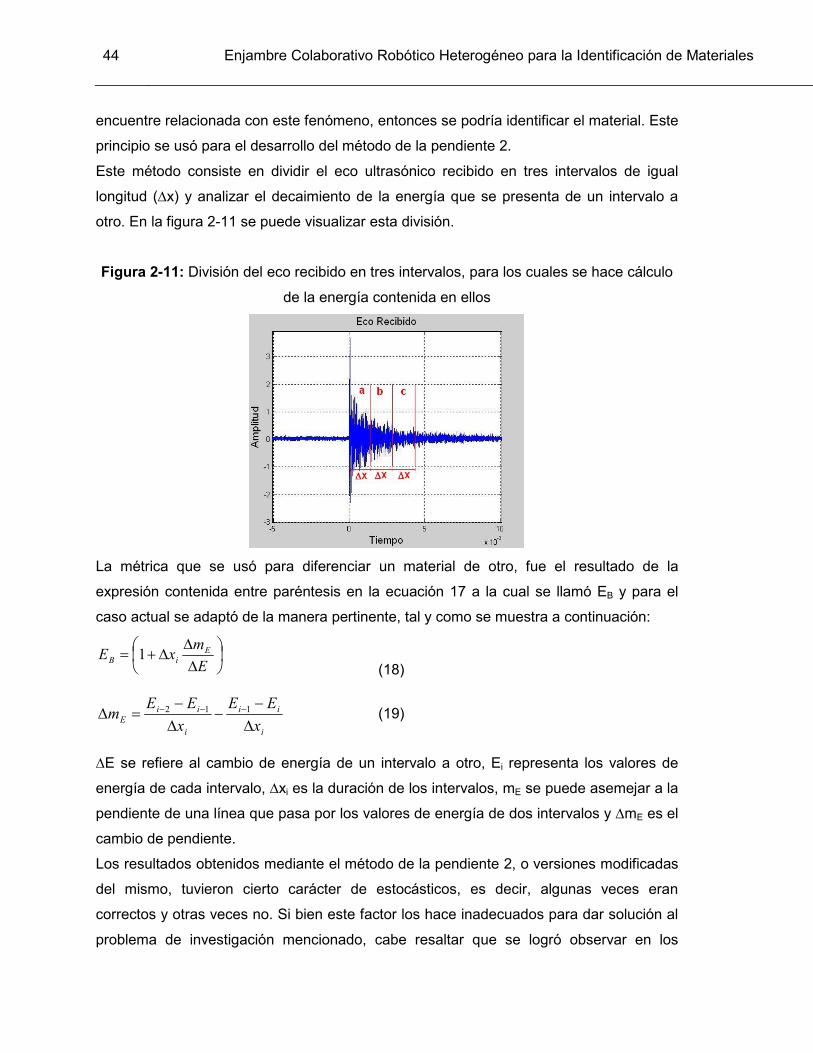
44 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
encuentre relacionada con este fenómeno, entonces se podría identificar el material. Este
principio se usó para el desarrollo del método de la pendiente 2.
Este método consiste en dividir el eco ultrasónico recibido en tres intervalos de igual
longitud (∆x) y analizar el decaimiento de la energía que se presenta de un intervalo a
otro. En la figura 2-11 se puede visualizar esta división.
Figura 2-11: División del eco recibido en tres intervalos, para los cuales se hace cálculo
de la energía contenida en ellos
La métrica que se usó para diferenciar un material de otro, fue el resultado de la
expresión contenida entre paréntesis en la ecuación 17 a la cual se llamó EB y para el
caso actual se adaptó de la manera pertinente, tal y como se muestra a continuación:
∆∆
∆+=E
mxE EiB 1
(18)
i
ii
i
iiE
x
EE
x
EEm
∆
−−
∆
−=∆ −−− 112 (19)
∆E se refiere al cambio de energía de un intervalo a otro, Ei representa los valores de
energía de cada intervalo, ∆xi es la duración de los intervalos, mE se puede asemejar a la
pendiente de una línea que pasa por los valores de energía de dos intervalos y ∆mE es el
cambio de pendiente.
Los resultados obtenidos mediante el método de la pendiente 2, o versiones modificadas
del mismo, tuvieron cierto carácter de estocásticos, es decir, algunas veces eran
correctos y otras veces no. Si bien este factor los hace inadecuados para dar solución al
problema de investigación mencionado, cabe resaltar que se logró observar en los

Método de la Pendiente 45
experimentos realizados ciertos patrones en el eco de señal recibida que fueron
importantes para el desarrollo del método Peniel, mencionado en el siguiente capítulo.

46 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
3. Método Peniel
En las siguientes líneas se presenta el método propuesto Peniel, el cual es relativamente
sencillo y que por tanto su algoritmo y circuito asociado pueden ser implementados en un
robot de tamaño pequeño. Es importante resaltar que para la implementación del método
sólo se usa un microcontrolador, el MC68HC908JK8 de la compañía Freescale. Esto se
presenta como un muy importante aporte al estado del arte del desarrollo de sensores,
porque dentro de la mayoría de la literatura revisada mencionada en la sección 1.4.4
[Gunarathne, 1997], [Gunarathne et al, 1998], [Gunarathne et al, 2002], [Allin, 2002],
[Zhao et al, 2003], [Pallav et al, 2009], [Stepanić et al, 2003], [Ohtanil et al, 2006],
[Thomas et al, 1991] se detectó que no se había logrado implementar la identificación de
materiales en un dispositivo de procesamiento de bajas capacidades de cómputo.
3.1 Modelo Matemático Asociado
En [Gunarathne et al, 2002] se menciona que conociendo el coeficiente de decaimiento B
en la expresión (8) se puede identificar el material. También, en 1.4.5 se menciona que
existen varios métodos que se basan en el coeficiente de decaimiento para detectar
algún comportamiento asociado con la impedancia acústica o para medir esta como tal.
La importancia de esta variable radica en que para un espesor constante, el coeficiente
de decaimiento solo depende de la impedancia acústica y de la atenuación. En la
mayoría de los sólidos para frecuencias cercanas a los 100 KHz esta última tiene un
valor lo suficientemente pequeño que hace que su efecto sea despreciable en
comparación con el de la impedancia acústica [Hauptmann et al, 2001] y por tanto al
estimar el valor de esta última se puede identificar el material. En las siguientes líneas se
presenta un novedoso método desarrollado para estimar indirectamente el coeficiente de
decaimiento B.
Se reescribe y ajusta la expresión (8) para mayor claridad del procedimiento que se sigue:

48 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
DAetA CtB += −− )()( (20)
Es importante resaltar que se cambió x por t (tiempo) e y por A (Amplitud), dado que
estos son las correspondientes variables que realmente participan en esta ecuación.
Sin pérdida de generalidad se supondrá que D es = 0 y que así mismo sucede con C. Si
se busca el intervalo de tiempo para el cual A(t) es mayor o igual que un valor w,
entonces la ecuación mediante la cual se puede encontrar esto, sería:
wtA ≥)( (21)
Reemplazando 20 en 21 y tomando en cuenta las consideraciones que se hicieron con C y D para los cálculos actuales se obtiene:
wAe tB ≥↔ ⋅− (22)
Luego de algunas operaciones algebraicas se obtiene:
B
w
A
t
≤↔ln
(23)
Esto quiere decir que en el rango de tiempo
B
w
Aln
,0 la función exponencial será
mayor o igual que w. La duración de este intervalo de tiempo se definirá como tdi, por lo cual se puede decir que para el caso anterior
B
w
A
tdi
=ln
(24)
Siendo el término del lado izquierdo de la expresión (22) una curva que describe el
comportamiento de una señal, entonces si está última es amplificada por un valor G lo
mismo sucederá con la función exponencial. De esta manera se obtiene de 22:
wAeG tB ≥⋅ ⋅− (25)
Lo que lleva a una expresión similar a la que se presenta en (23) y en (24):
B
w
AG
t
⋅
≤ln
(26)

Método Peniel 49
B
w
AG
tdi
⋅
=ln
(27)
Según esto, para dos señales con valores similares de A la duración tdi es inversamente
proporcional al coeficiente de decaimiento B. En la figura 3-1 se comprueba esto para
valores de A=1, w=0.5, y valores de B de 1000, 2000, 3000 y 4000. Adicionalmente, se
presenta el resultado de la diferencia entre tdi3 y tdi4. Esto permite inferir que tdi puede ser
usado para caracterizar un material si se conoce G, A y w.
Figura 3-1: Comportamiento de la duración del intervalo de tiempo en función de la
ganancia. El intervalo de tiempo es el tiempo durante el cual una señal exponencial se
encuentra por encima de w (0.5 en este caso).
Ahora bien, si se usan dos valores de ganancia (G1 y G2) para una misma señal, de la
ecuación (27) se obtiene:
B
w
AG
tdi
⋅
=
1
1
ln
(28)
50 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
B
w
AG
tdi
⋅
=
2
2
ln
(29)
Si se asume que G1<G2 y se resta (26) de (27), se obtiene:
B
w
AG
B
w
AG
tt didi
⋅
−
⋅
=−
12
12
lnln
(30)
B
w
AG
w
AG
tt didi
⋅−
⋅
=−
12
12
lnln
(31)
B
w
AGw
AG
tt didi
⋅
⋅
=−
1
2
12
ln
(32)
B
G
G
ttt didi
=∆=− 1
2
112
ln
(33)
( )B
Gt rln1 =∆ (34)
Donde 1
2
G
GGr =
Donde ∆t1 es la diferencia entre las dos duraciones (tdi1 y tdi2) correspondientes a amplificar
la misma señal con dos ganancias diferentes (G1 y G2). Como se puede ver (33) no depende de A y por tanto solo es necesario conocer G2 y G1
para encontrar B a partir de ∆t1. Además de esto, si se tienen dos señales pertenecientes
a diferentes materiales, incluso sin conocer G2 y G1, se podría identificar el material a
partir del diferente comportamiento de las correspondientes ∆t, siempre y cuando G2 y G1
se mantengan constantes. En la figura 3-2 se puede ver el comportamiento de ∆t en
función de B para diferentes valores de Gr.
Ahora bien, es ilustrativo verificar los siguientes casos que se presentan para diferentes
valores de Gr.
Método Peniel 51
Caso I (Gr=e)
Para el caso que Gr=e entonces se tiene de (34):
( )BB
et
1ln1 ==∆
Para finalmente obtener:
1
1
tB
∆=
De esta manera se halla el coeficiente de decaimiento.
Ahora bien, para el caso Gr≠e entonces se tiene:
( )B
K
B
at ==∆
ln1
Donde a>0 y a≠e y K ≠1.
Si deriva con respecto a B se tiene:
2
1
B
K
dB
td −=
∆
De esta manera se presentan dos casos dependiendo de los valores de Gr y por consiguiente de K.
Caso II
Cuando Gr<e entonces K<1 y se puede ver que la magnitud del valor de la derivada es
menor que para el caso con K=1, esto implica que se presenta una menor rata de cambio
para cada punto de la curva K/B, en otros términos esto quiere decir que se presenta un
menor cambio en ∆t1 cuando se evalúan dos valores diferentes de B.
Caso III
Cuando Gr>e entonces K>1 y se puede ver que la magnitud del valor de la derivada es
mayor que para el caso con K=1, esto implica que se presenta una mayor rata de cambio
para cada punto de la curva K/B, en otros términos esto quiere decir que se presenta un
mayor cambio en ∆t1 cuando se evalúan dos valores diferentes de B.
Lo anteriormente mencionado es de vital importancia. Primeramente, porque se puede
encontrar el valor de B directamente, sin necesidad de un post procesamiento y las
instrucciones requeridas para lograrlo son relativamente sencillas. En segunda instancia,
con base en el caso II y III y variando adecuadamente K (Gr) se puede realizar un zoom
acústico o modificar la sensibilidad del sensor. El caso II implica que variando

52 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
adecuadamente K (Gr) se puede llegar a ignorar pequeños cambios en B, y por tanto se
podría asignar el mismo ∆t1 a dos valores diferentes de impedancia acústica. Esto podría
ser de utilidad en aplicaciones donde se requieren grandes cambios de impedancia
acústica para tomar acciones correctivas o en casos donde grandes niveles de ruido
podría afectar un sensor muy sensible, de esta manera el sensor no se activa antes
pequeñas perturbaciones. Por otro lado el caso III, implica que variando K (Gr) se puede
llegar a amplificar pequeños cambios en B, y por tanto llegar a diferenciar materiales con
impedancia acústica similar. Esto podría ser de utilidad en aplicaciones críticas donde se
requiere identificar los más pequeños cambios en impedancia acústica para tomar
acciones correctivas.
Este zoom acústico es una de las fortalezas adicionales del método que no se encontró
dentro de la literatura revisada y podría tener un importante impacto en la industria. No
obstante esto es necesario comprobarlo experimentalmente y será parte de trabajo
futuro.
Figura 3-2: Comportamiento del incremento de la duración del intervalo de tiempo (∆t) en
función del coeficiente de decaimiento para valores de G1=10, 20, 30 y de G2= 20, 30, 40
Adicionalmente, con base en la figura 3-2 se puede ver que el incremento en la duración
del intervalo de tiempo (∆t) depende del valor B, para cuando Gr se mantiene constante.
También, se puede ver que si B se mantiene constante grandes valores de Gr resultan en
mayores incrementos en la duración del intervalo de tiempo (∆t). Adicional a esto, se
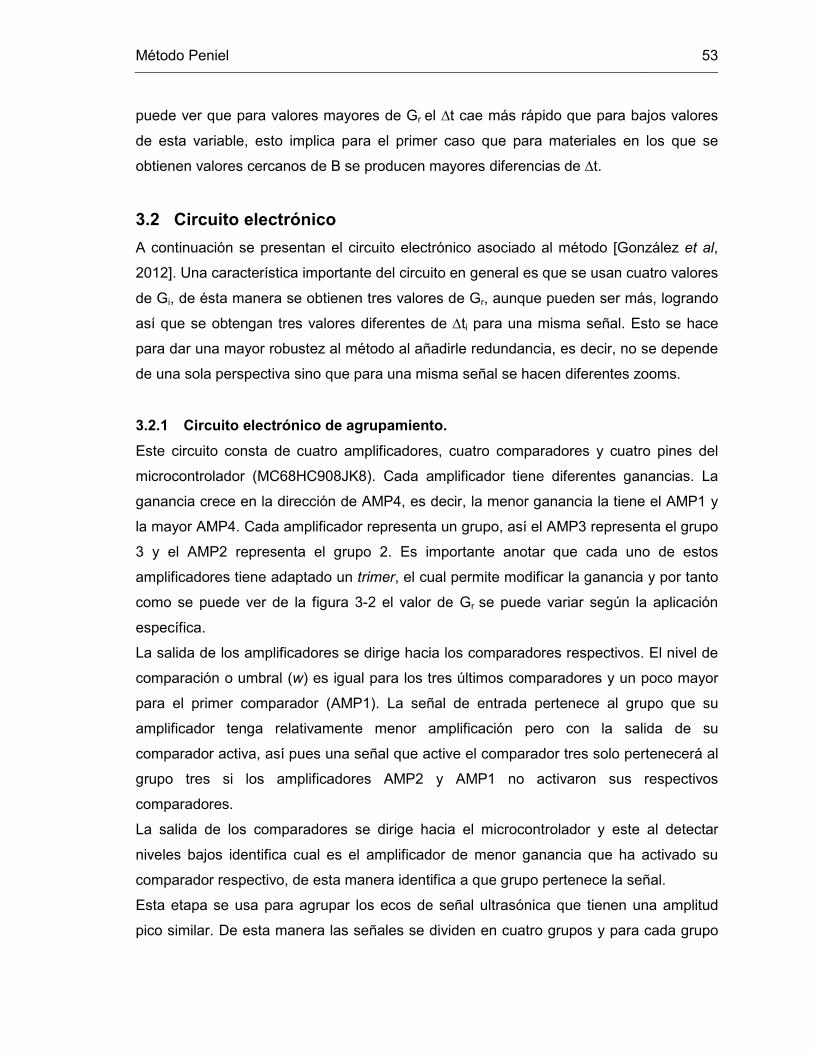
Método Peniel 53
puede ver que para valores mayores de Gr el ∆t cae más rápido que para bajos valores
de esta variable, esto implica para el primer caso que para materiales en los que se
obtienen valores cercanos de B se producen mayores diferencias de ∆t.
3.2 Circuito electrónico
A continuación se presentan el circuito electrónico asociado al método [González et al,
2012]. Una característica importante del circuito en general es que se usan cuatro valores
de Gi, de ésta manera se obtienen tres valores de Gr, aunque pueden ser más, logrando
así que se obtengan tres valores diferentes de ∆ti para una misma señal. Esto se hace
para dar una mayor robustez al método al añadirle redundancia, es decir, no se depende
de una sola perspectiva sino que para una misma señal se hacen diferentes zooms.
3.2.1 Circuito electrónico de agrupamiento.
Este circuito consta de cuatro amplificadores, cuatro comparadores y cuatro pines del
microcontrolador (MC68HC908JK8). Cada amplificador tiene diferentes ganancias. La
ganancia crece en la dirección de AMP4, es decir, la menor ganancia la tiene el AMP1 y
la mayor AMP4. Cada amplificador representa un grupo, así el AMP3 representa el grupo
3 y el AMP2 representa el grupo 2. Es importante anotar que cada uno de estos
amplificadores tiene adaptado un trimer, el cual permite modificar la ganancia y por tanto
como se puede ver de la figura 3-2 el valor de Gr se puede variar según la aplicación
específica.
La salida de los amplificadores se dirige hacia los comparadores respectivos. El nivel de
comparación o umbral (w) es igual para los tres últimos comparadores y un poco mayor
para el primer comparador (AMP1). La señal de entrada pertenece al grupo que su
amplificador tenga relativamente menor amplificación pero con la salida de su
comparador activa, así pues una señal que active el comparador tres solo pertenecerá al
grupo tres si los amplificadores AMP2 y AMP1 no activaron sus respectivos
comparadores.
La salida de los comparadores se dirige hacia el microcontrolador y este al detectar
niveles bajos identifica cual es el amplificador de menor ganancia que ha activado su
comparador respectivo, de esta manera identifica a que grupo pertenece la señal.
Esta etapa se usa para agrupar los ecos de señal ultrasónica que tienen una amplitud
pico similar. De esta manera las señales se dividen en cuatro grupos y para cada grupo
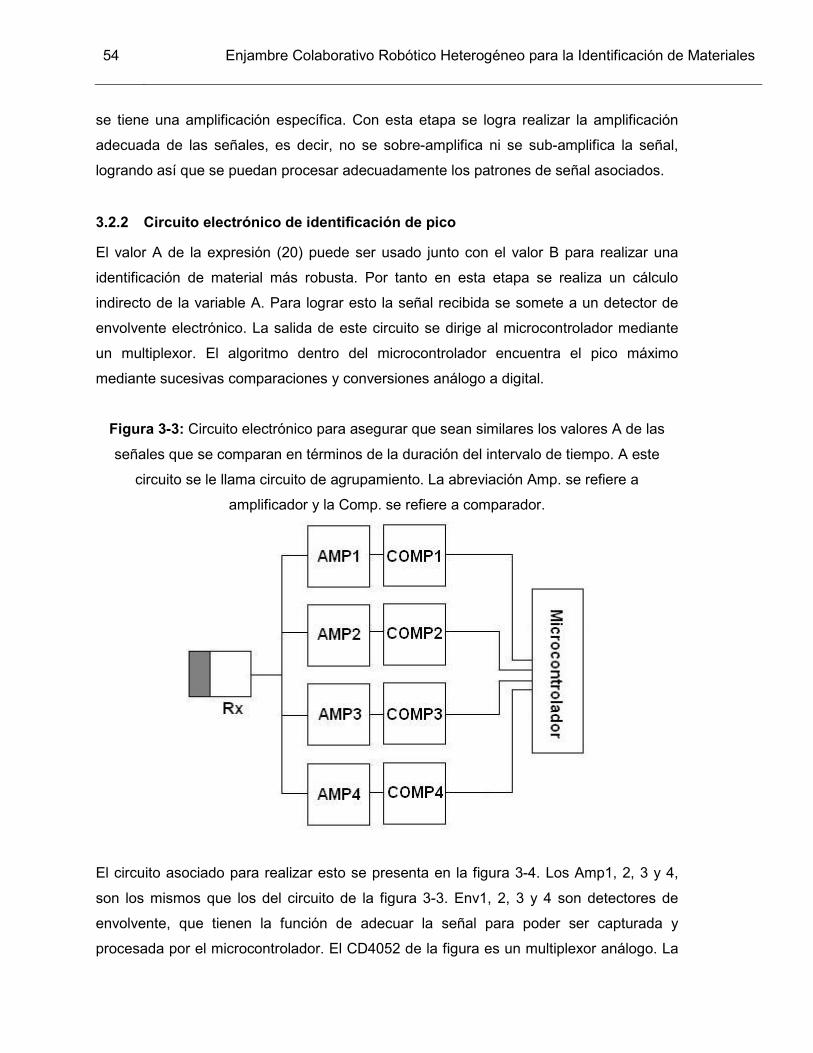
54 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
se tiene una amplificación específica. Con esta etapa se logra realizar la amplificación
adecuada de las señales, es decir, no se sobre-amplifica ni se sub-amplifica la señal,
logrando así que se puedan procesar adecuadamente los patrones de señal asociados.
3.2.2 Circuito electrónico de identificación de pico
El valor A de la expresión (20) puede ser usado junto con el valor B para realizar una
identificación de material más robusta. Por tanto en esta etapa se realiza un cálculo
indirecto de la variable A. Para lograr esto la señal recibida se somete a un detector de
envolvente electrónico. La salida de este circuito se dirige al microcontrolador mediante
un multiplexor. El algoritmo dentro del microcontrolador encuentra el pico máximo
mediante sucesivas comparaciones y conversiones análogo a digital.
Figura 3-3: Circuito electrónico para asegurar que sean similares los valores A de las
señales que se comparan en términos de la duración del intervalo de tiempo. A este
circuito se le llama circuito de agrupamiento. La abreviación Amp. se refiere a
amplificador y la Comp. se refiere a comparador.
El circuito asociado para realizar esto se presenta en la figura 3-4. Los Amp1, 2, 3 y 4,
son los mismos que los del circuito de la figura 3-3. Env1, 2, 3 y 4 son detectores de
envolvente, que tienen la función de adecuar la señal para poder ser capturada y
procesada por el microcontrolador. El CD4052 de la figura es un multiplexor análogo. La

Método Peniel 55
salida de cada detector de envolvente se dirige a entradas específicas del multiplexor, y
el pin 3 de este último se conecta a un pin del puerto B del microcontrolador.
Como se mencionó anteriormente, el circuito de agrupamiento identifica a que grupo
pertenece la señal, este dato el microcontrolador lo toma para seleccionar cuál de los
cuatro detectores de envolvente será usado para encontrar el pico de amplitud. Esta
selección se hace mediante el CD4052. Una vez el microcontrolador ha escogido el
correcto detector de envolvente y capturado la señal correspondiente, en el algoritmo se
procede a buscar el pico máximo de señal mediante sucesivas conversiones análogo a
digital y comparaciones.
Figura 3-4: Circuito electrónico para estimar el valor A. Amp1, Amp2, Amp3 y Amp4 son
los mismos que en la figura 19. Env. significa detector de envolvente.
3.2.3 Circuito electrónico de identificación de cambios de duración
Como se mencionó en la sección 3.1 sí Gr es constante entonces a partir de ∆t el material
se puede identificar. Con el propósito de realizar esto se usó el circuito de la figura 3-5.
Para este caso Amp1-4 corresponde a los mismos amplificadores mencionados para la
figura 3-3. Amp1.1, Amp2.1, Amp3.1 y Amp4.1, son amplificadores adicionales que
tienen una misma ganancia. Comp5, Com6, Comp7 y Comp8 son comparadores que
ante una señal sinusoidal modulada en amplitud, como lo es el eco ultrasónico, se
mantienen activos siempre y cuando la envolvente de la señal sea superior al umbral de
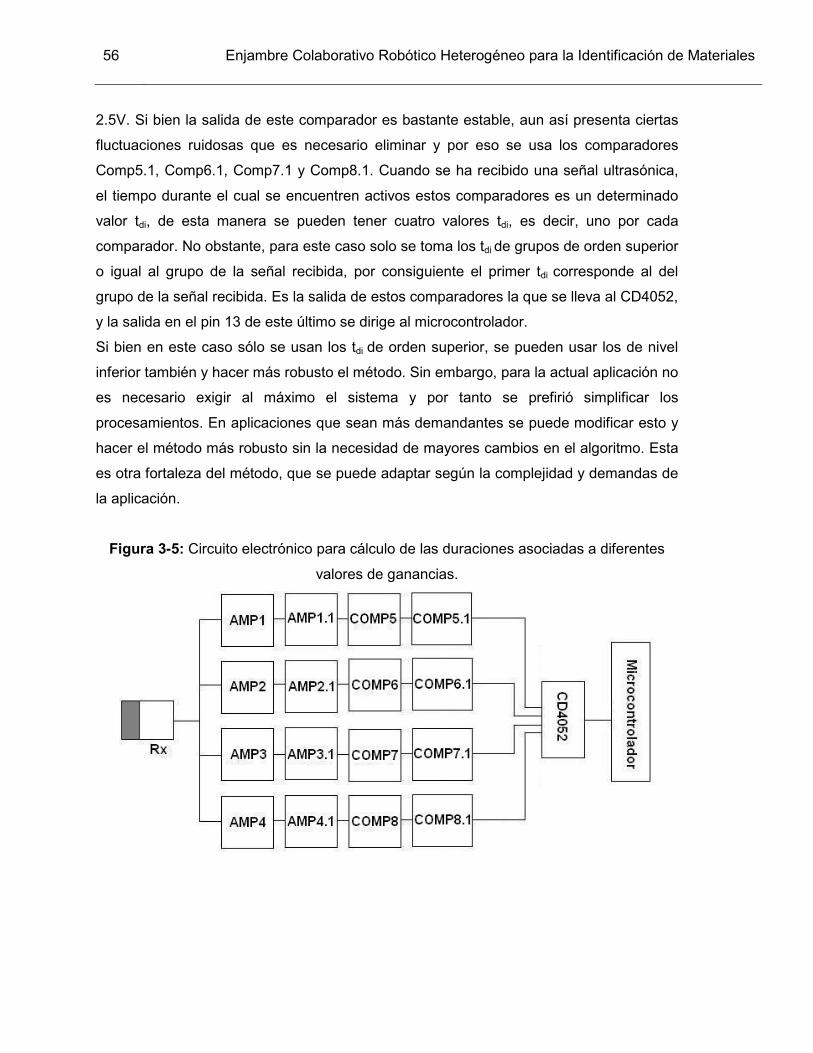
56 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
2.5V. Si bien la salida de este comparador es bastante estable, aun así presenta ciertas
fluctuaciones ruidosas que es necesario eliminar y por eso se usa los comparadores
Comp5.1, Comp6.1, Comp7.1 y Comp8.1. Cuando se ha recibido una señal ultrasónica,
el tiempo durante el cual se encuentren activos estos comparadores es un determinado
valor tdi, de esta manera se pueden tener cuatro valores tdi, es decir, uno por cada
comparador. No obstante, para este caso solo se toma los tdi de grupos de orden superior
o igual al grupo de la señal recibida, por consiguiente el primer tdi corresponde al del
grupo de la señal recibida. Es la salida de estos comparadores la que se lleva al CD4052,
y la salida en el pin 13 de este último se dirige al microcontrolador.
Si bien en este caso sólo se usan los tdi de orden superior, se pueden usar los de nivel
inferior también y hacer más robusto el método. Sin embargo, para la actual aplicación no
es necesario exigir al máximo el sistema y por tanto se prefirió simplificar los
procesamientos. En aplicaciones que sean más demandantes se puede modificar esto y
hacer el método más robusto sin la necesidad de mayores cambios en el algoritmo. Esta
es otra fortaleza del método, que se puede adaptar según la complejidad y demandas de
la aplicación.
Figura 3-5: Circuito electrónico para cálculo de las duraciones asociadas a diferentes
valores de ganancias.
Método Peniel 57
3.3 Algoritmo
En la figura 3-6 se presenta el diagrama de flujo resumido del algoritmo asociado a los
circuitos electrónicos anteriormente mencionados. En este flujograma se menciona de
manera general el proceso que se sigue para la identificación del material. Cuando allí se
menciona al Compj.k, es alguno de los de los comparadores de la figura 3-5 que se
encuentran más a la derecha, es decir, Comp5.1, Comp6.1, Comp7.1 ó Comp8.1.
El algoritmo que se ilustra por medio del flujograma comienza en el circuito 2-3 donde se
espera que alguno de los comparadores se active y de esta manera identificar a que
grupo pertenece la señal. Posterior a esto, con base en el grupo identificado se procede
a activar el CD4052 de la manera adecuada para monitorear las señales del grupo en
cuestión. Luego, durante 50ms el sistema no responde a ningún tipo de señal, esto con el
propósito de no procesar señales recibidas que correspondan a la anterior emisión. Esto
se hace para busca las señales producidas por una nueva emisión ultrasónica desde el
transmisor (Tx). Ahora se observa el estado del comparador Compj.k correspondiente al
grupo identificado y se espera a que este se active, lo que indica que se ha recibido un
nuevo eco de señal ultrasónica.
Una vez se ha detectado un nuevo eco ultrasónico, se inicia un TIMER del
microcontrolador para calcular el tiempo que se mantiene activo el comparador. Mientras
el TIMER está funcionando se determina cual es el voltaje pico de la señal recibida.
Posteriormente, se sigue a la espera que el Comj.k se desactive para de esta manera
detener el contador y calcular así la duración tdi. Una vez ha sucedido esto, se entra en
un ciclo iterativo para encontrar los valores tdi de los grupos de nivel superior al actual
(ver sección 3.2.3). Cuando se ha terminado con esto se detiene el TIMER.
Finalmente, con todos los tdi encontrados, se calculan los ∆t correspondientes y
dependiendo del rango al que pertenecen estos valores se identifica el material. Con esto
finaliza el algoritmo.

Figura 3-6: Flujograma asociado al algoritmo del método Peniel
3.4 Resultados
Con el propósito de determinar el desempeño el método Peniel, se desarrollaron algunos
experimentos. El detalle de estos se menciona a continuación.
El transductor que se usó para las mediciones fue el AT120 (125KHz) de Airmar
Technology, el cual es un transductor de bajo costo que se usa comúnmente para
evasión de obstáculos en robótica o medición de nivel pero no para Ensayos No
Destructivos (NDT), como se está haciendo en este caso (ver tabla 2-3). Este transductor
se usó tanto para la transmisión como para la recepción en la configuración de la figura
1-2, (Testeo Ultrasónico a través del Material) que se menciona en la sección 1.1.2. Esto
se hizo para la inspección de las muestras que se mencionan abajo.
El circuito transmisor seleccionado fue el T1 Development board de Airmar Technology
[Airmar Technology, 2011]. Con este transmisor se envió ráfagas de tonos con una
duración de 40µs y una rata de pulso de 10Hz entre ráfaga y ráfaga. La frecuencia
eléctrica de alimentación al emisor es de 130KHz.
Las muestras seleccionadas para ser inspeccionadas fueron acrílico (espesor de16mm),
aluminio (espesor de 16mm) y vidrio (espesor de 14mm). Se usó aceite como el
acoplante entre el transductor y la muestra inspeccionada. Es importante aclarar que
para este caso es necesario que las muestras tengan espesores similares para poderse
comparar sus coeficientes de decaimiento, de lo contrario los resultados se verían
afectados.
El circuito receptor desarrollado integra los tres circuitos mencionados en la sección 3.2.
El circuito se alimenta mediante cuatro baterías de 9voltios. Dos de estas son la fuente
positiva y las otras dos la negativa. Los datos fueron procesados mediante la mainboard
del robot madre del kit TEAC2H-RI [González et al, 2010b] el cual fue desarrollado en
parte por el autor de esta tesis. En la tarjeta principal (mainboard), el microcontrolador
MC68HC908JK8 es el dispositivo encargado de asignar tareas o procesar los datos de
los sensores. Las seis salidas del receptor (dos salidas CD4052 y cuatro salidas de
circuito figura 3-3) se dirigen a la tarjeta principal y dos salidas de esta última se conectan
al circuito receptor. Estas dos salidas controlan el CD4052.
Luego que el microcontrolador ha procesado el eco proveniente del receptor se envía la
duración de las señales y el pico de voltaje al PC mediante el módulo de comunicación
del robot madre del kit TEAC2H-RI. Posteriormente, los datos enviados al PC son
procesados mediante Matlab y se grafican los resultados.
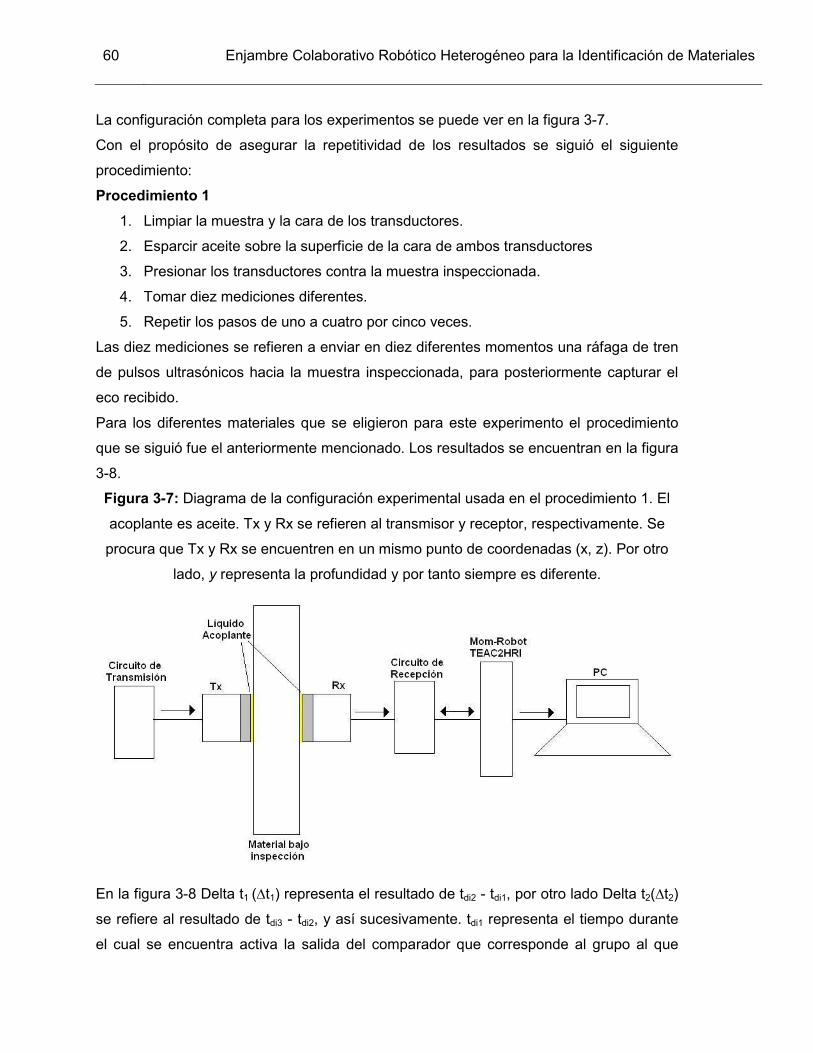
60 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
La configuración completa para los experimentos se puede ver en la figura 3-7.
Con el propósito de asegurar la repetitividad de los resultados se siguió el siguiente
procedimiento:
Procedimiento 1
1. Limpiar la muestra y la cara de los transductores.
2. Esparcir aceite sobre la superficie de la cara de ambos transductores
3. Presionar los transductores contra la muestra inspeccionada.
4. Tomar diez mediciones diferentes.
5. Repetir los pasos de uno a cuatro por cinco veces.
Las diez mediciones se refieren a enviar en diez diferentes momentos una ráfaga de tren
de pulsos ultrasónicos hacia la muestra inspeccionada, para posteriormente capturar el
eco recibido.
Para los diferentes materiales que se eligieron para este experimento el procedimiento
que se siguió fue el anteriormente mencionado. Los resultados se encuentran en la figura
3-8.
Figura 3-7: Diagrama de la configuración experimental usada en el procedimiento 1. El
acoplante es aceite. Tx y Rx se refieren al transmisor y receptor, respectivamente. Se
procura que Tx y Rx se encuentren en un mismo punto de coordenadas (x, z). Por otro
lado, y representa la profundidad y por tanto siempre es diferente.
En la figura 3-8 Delta t1 (∆t1) representa el resultado de tdi2 - tdi1, por otro lado Delta t2(∆t2)
se refiere al resultado de tdi3 - tdi2, y así sucesivamente. tdi1 representa el tiempo durante
el cual se encuentra activa la salida del comparador que corresponde al grupo al que
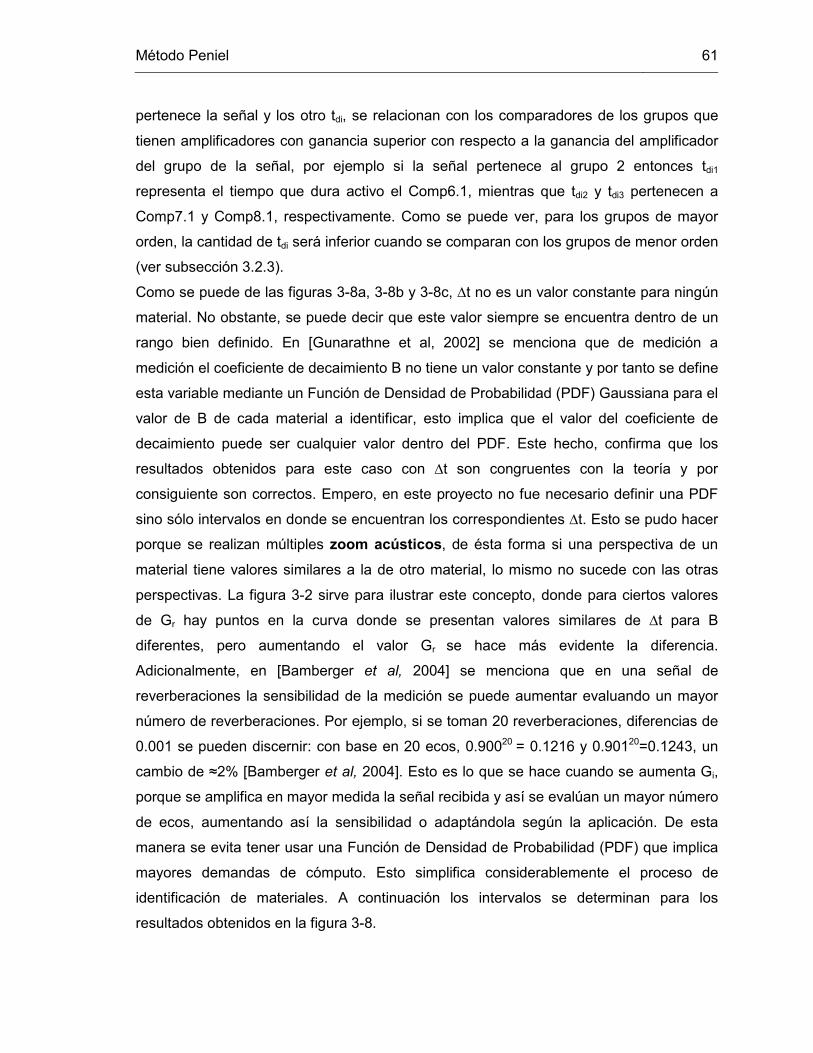
Método Peniel 61
pertenece la señal y los otro tdi, se relacionan con los comparadores de los grupos que
tienen amplificadores con ganancia superior con respecto a la ganancia del amplificador
del grupo de la señal, por ejemplo si la señal pertenece al grupo 2 entonces tdi1
representa el tiempo que dura activo el Comp6.1, mientras que tdi2 y tdi3 pertenecen a
Comp7.1 y Comp8.1, respectivamente. Como se puede ver, para los grupos de mayor
orden, la cantidad de tdi será inferior cuando se comparan con los grupos de menor orden
(ver subsección 3.2.3).
Como se puede de las figuras 3-8a, 3-8b y 3-8c, ∆t no es un valor constante para ningún
material. No obstante, se puede decir que este valor siempre se encuentra dentro de un
rango bien definido. En [Gunarathne et al, 2002] se menciona que de medición a
medición el coeficiente de decaimiento B no tiene un valor constante y por tanto se define
esta variable mediante un Función de Densidad de Probabilidad (PDF) Gaussiana para el
valor de B de cada material a identificar, esto implica que el valor del coeficiente de
decaimiento puede ser cualquier valor dentro del PDF. Este hecho, confirma que los
resultados obtenidos para este caso con ∆t son congruentes con la teoría y por
consiguiente son correctos. Empero, en este proyecto no fue necesario definir una PDF
sino sólo intervalos en donde se encuentran los correspondientes ∆t. Esto se pudo hacer
porque se realizan múltiples zoom acústicos, de ésta forma si una perspectiva de un
material tiene valores similares a la de otro material, lo mismo no sucede con las otras
perspectivas. La figura 3-2 sirve para ilustrar este concepto, donde para ciertos valores
de Gr hay puntos en la curva donde se presentan valores similares de ∆t para B
diferentes, pero aumentando el valor Gr se hace más evidente la diferencia.
Adicionalmente, en [Bamberger et al, 2004] se menciona que en una señal de
reverberaciones la sensibilidad de la medición se puede aumentar evaluando un mayor
número de reverberaciones. Por ejemplo, si se toman 20 reverberaciones, diferencias de
0.001 se pueden discernir: con base en 20 ecos, 0.90020 = 0.1216 y 0.90120=0.1243, un
cambio de ≈2% [Bamberger et al, 2004]. Esto es lo que se hace cuando se aumenta Gi,
porque se amplifica en mayor medida la señal recibida y así se evalúan un mayor número
de ecos, aumentando así la sensibilidad o adaptándola según la aplicación. De esta
manera se evita tener usar una Función de Densidad de Probabilidad (PDF) que implica
mayores demandas de cómputo. Esto simplifica considerablemente el proceso de
identificación de materiales. A continuación los intervalos se determinan para los
resultados obtenidos en la figura 3-8.
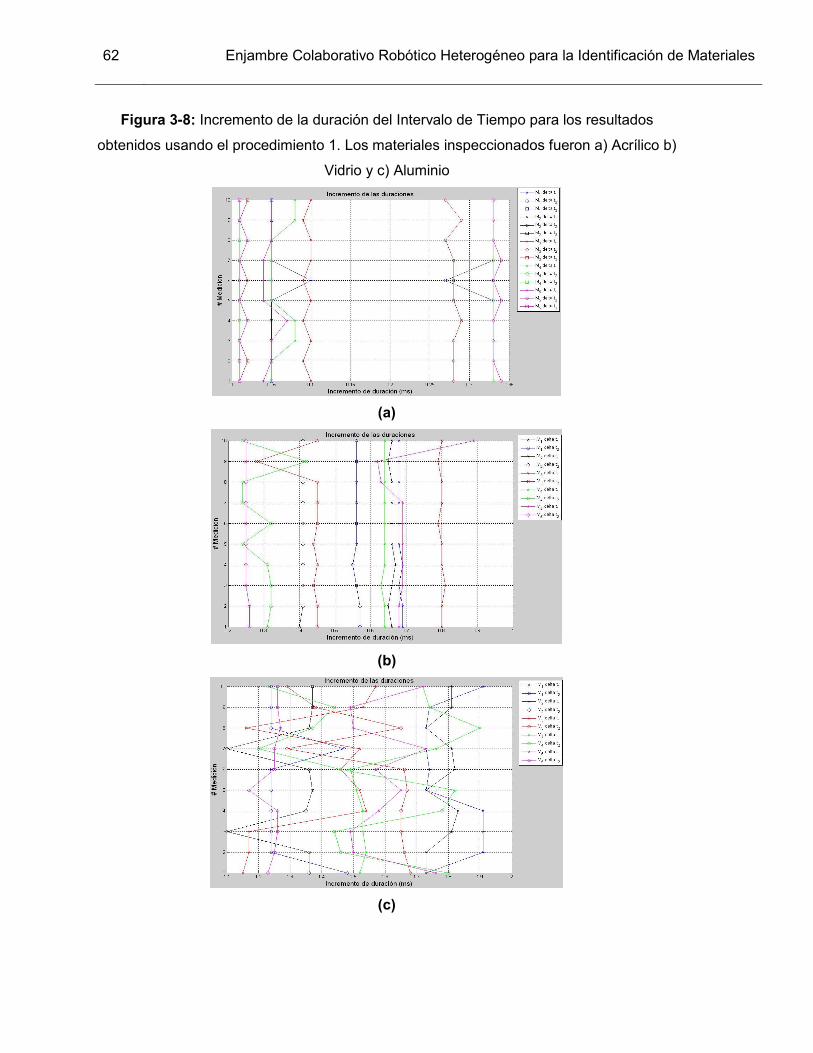
62 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Figura 3-8: Incremento de la duración del Intervalo de Tiempo para los resultados
obtenidos usando el procedimiento 1. Los materiales inspeccionados fueron a) Acrílico b)
Vidrio y c) Aluminio
(a)
(b)
(c)
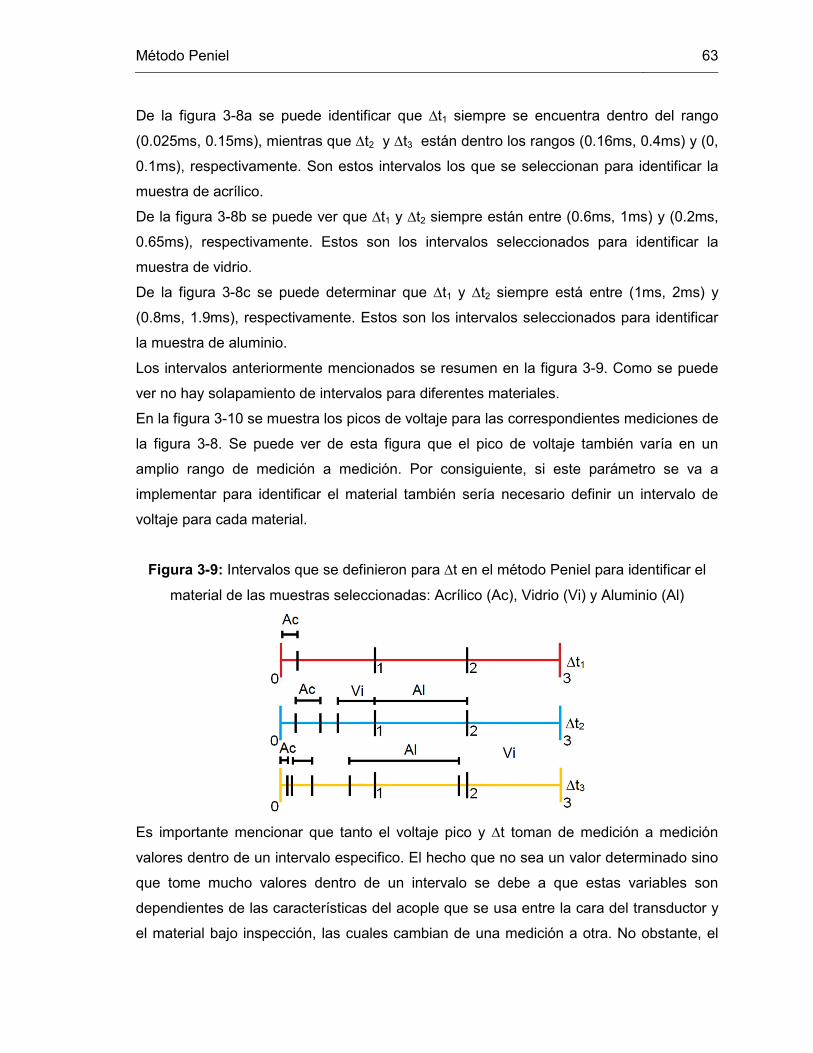
Método Peniel 63
De la figura 3-8a se puede identificar que ∆t1 siempre se encuentra dentro del rango
(0.025ms, 0.15ms), mientras que ∆t2 y ∆t3 están dentro los rangos (0.16ms, 0.4ms) y (0,
0.1ms), respectivamente. Son estos intervalos los que se seleccionan para identificar la
muestra de acrílico.
De la figura 3-8b se puede ver que ∆t1 y ∆t2 siempre están entre (0.6ms, 1ms) y (0.2ms,
0.65ms), respectivamente. Estos son los intervalos seleccionados para identificar la
muestra de vidrio.
De la figura 3-8c se puede determinar que ∆t1 y ∆t2 siempre está entre (1ms, 2ms) y
(0.8ms, 1.9ms), respectivamente. Estos son los intervalos seleccionados para identificar
la muestra de aluminio.
Los intervalos anteriormente mencionados se resumen en la figura 3-9. Como se puede
ver no hay solapamiento de intervalos para diferentes materiales.
En la figura 3-10 se muestra los picos de voltaje para las correspondientes mediciones de
la figura 3-8. Se puede ver de esta figura que el pico de voltaje también varía en un
amplio rango de medición a medición. Por consiguiente, si este parámetro se va a
implementar para identificar el material también sería necesario definir un intervalo de
voltaje para cada material.
Figura 3-9: Intervalos que se definieron para ∆t en el método Peniel para identificar el
material de las muestras seleccionadas: Acrílico (Ac), Vidrio (Vi) y Aluminio (Al)
Es importante mencionar que tanto el voltaje pico y ∆t toman de medición a medición
valores dentro de un intervalo especifico. El hecho que no sea un valor determinado sino
que tome mucho valores dentro de un intervalo se debe a que estas variables son
dependientes de las características del acople que se usa entre la cara del transductor y
el material bajo inspección, las cuales cambian de una medición a otra. No obstante, el
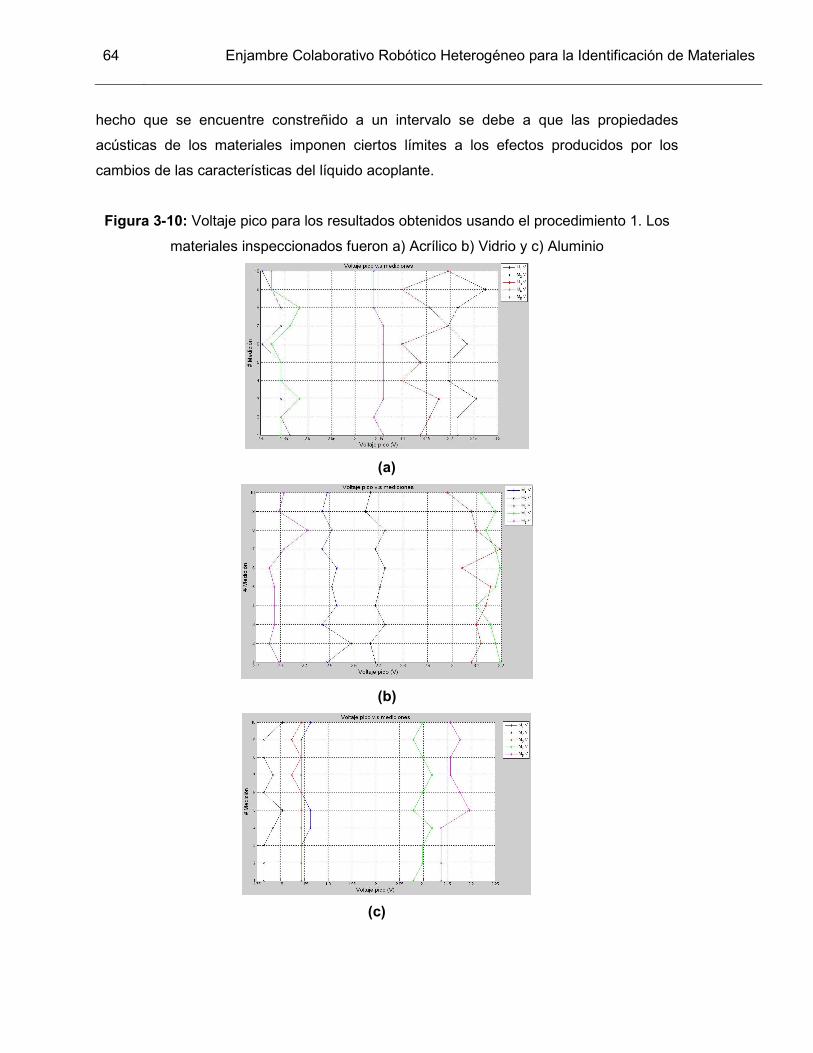
64 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
hecho que se encuentre constreñido a un intervalo se debe a que las propiedades
acústicas de los materiales imponen ciertos límites a los efectos producidos por los
cambios de las características del líquido acoplante.
Figura 3-10: Voltaje pico para los resultados obtenidos usando el procedimiento 1. Los
materiales inspeccionados fueron a) Acrílico b) Vidrio y c) Aluminio
(a)
(b)
(c)
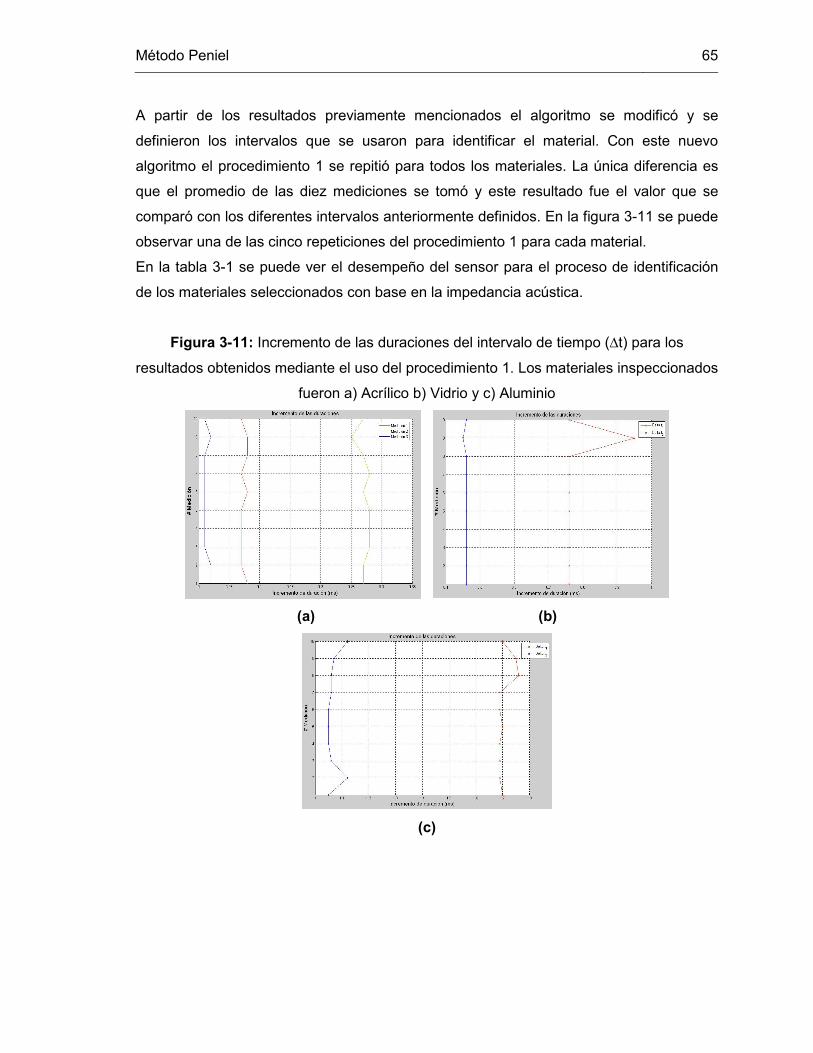
Método Peniel 65
A partir de los resultados previamente mencionados el algoritmo se modificó y se
definieron los intervalos que se usaron para identificar el material. Con este nuevo
algoritmo el procedimiento 1 se repitió para todos los materiales. La única diferencia es
que el promedio de las diez mediciones se tomó y este resultado fue el valor que se
comparó con los diferentes intervalos anteriormente definidos. En la figura 3-11 se puede
observar una de las cinco repeticiones del procedimiento 1 para cada material.
En la tabla 3-1 se puede ver el desempeño del sensor para el proceso de identificación
de los materiales seleccionados con base en la impedancia acústica.
Figura 3-11: Incremento de las duraciones del intervalo de tiempo (∆t) para los
resultados obtenidos mediante el uso del procedimiento 1. Los materiales inspeccionados
fueron a) Acrílico b) Vidrio y c) Aluminio
(a) (b)
(c)
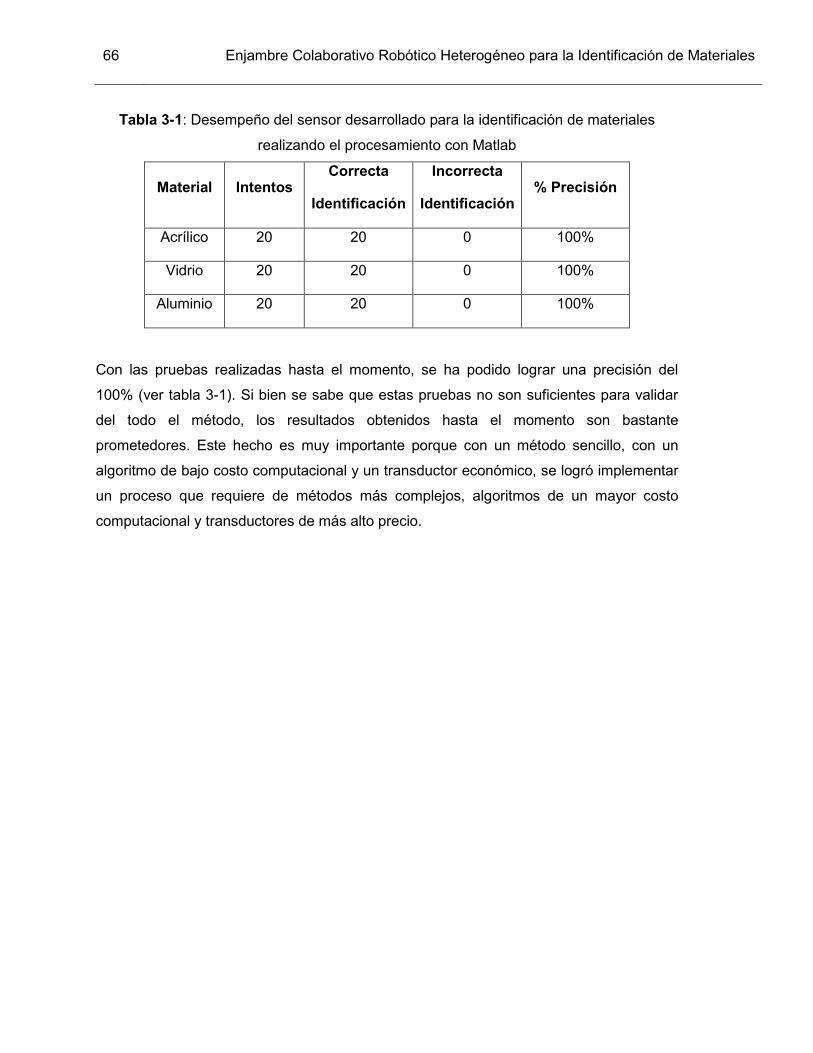
66 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Tabla 3-1: Desempeño del sensor desarrollado para la identificación de materiales
realizando el procesamiento con Matlab
Material Intentos Correcta
Identificación
Incorrecta
Identificación % Precisión
Acrílico 20 20 0 100%
Vidrio 20 20 0 100%
Aluminio 20 20 0 100%
Con las pruebas realizadas hasta el momento, se ha podido lograr una precisión del
100% (ver tabla 3-1). Si bien se sabe que estas pruebas no son suficientes para validar
del todo el método, los resultados obtenidos hasta el momento son bastante
prometedores. Este hecho es muy importante porque con un método sencillo, con un
algoritmo de bajo costo computacional y un transductor económico, se logró implementar
un proceso que requiere de métodos más complejos, algoritmos de un mayor costo
computacional y transductores de más alto precio.

Método Peniel 67
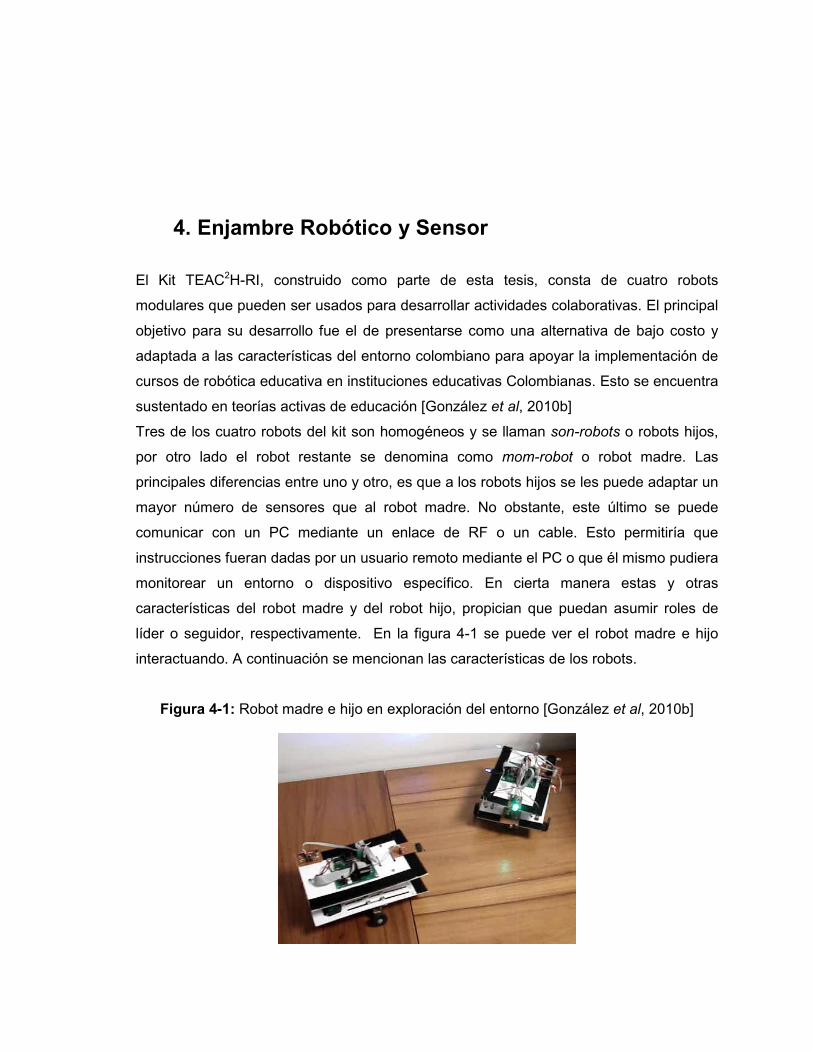
4. Enjambre Robótico y Sensor
El Kit TEAC2H-RI, construido como parte de esta tesis, consta de cuatro robots
modulares que pueden ser usados para desarrollar actividades colaborativas. El principal
objetivo para su desarrollo fue el de presentarse como una alternativa de bajo costo y
adaptada a las características del entorno colombiano para apoyar la implementación de
cursos de robótica educativa en instituciones educativas Colombianas. Esto se encuentra
sustentado en teorías activas de educación [González et al, 2010b]
Tres de los cuatro robots del kit son homogéneos y se llaman son-robots o robots hijos,
por otro lado el robot restante se denomina como mom-robot o robot madre. Las
principales diferencias entre uno y otro, es que a los robots hijos se les puede adaptar un
mayor número de sensores que al robot madre. No obstante, este último se puede
comunicar con un PC mediante un enlace de RF o un cable. Esto permitiría que
instrucciones fueran dadas por un usuario remoto mediante el PC o que él mismo pudiera
monitorear un entorno o dispositivo específico. En cierta manera estas y otras
características del robot madre y del robot hijo, propician que puedan asumir roles de
líder o seguidor, respectivamente. En la figura 4-1 se puede ver el robot madre e hijo
interactuando. A continuación se mencionan las características de los robots.
Figura 4-1: Robot madre e hijo en exploración del entorno [González et al, 2010b]
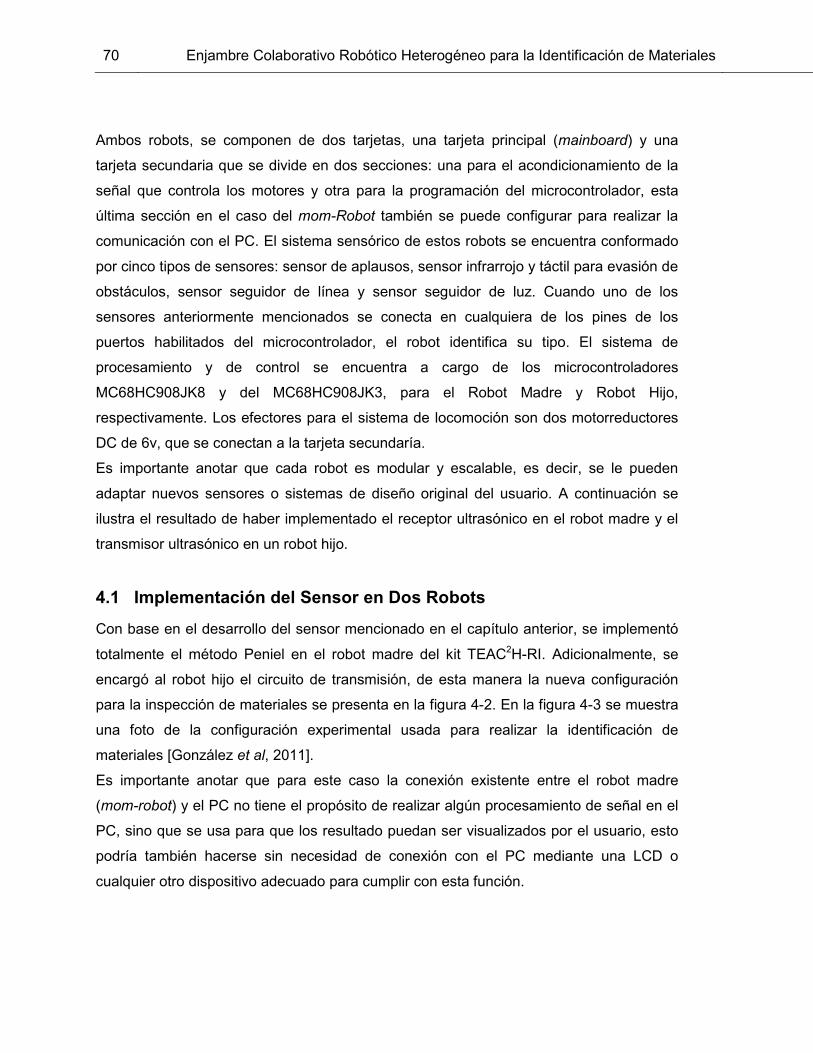
70 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Ambos robots, se componen de dos tarjetas, una tarjeta principal (mainboard) y una
tarjeta secundaria que se divide en dos secciones: una para el acondicionamiento de la
señal que controla los motores y otra para la programación del microcontrolador, esta
última sección en el caso del mom-Robot también se puede configurar para realizar la
comunicación con el PC. El sistema sensórico de estos robots se encuentra conformado
por cinco tipos de sensores: sensor de aplausos, sensor infrarrojo y táctil para evasión de
obstáculos, sensor seguidor de línea y sensor seguidor de luz. Cuando uno de los
sensores anteriormente mencionados se conecta en cualquiera de los pines de los
puertos habilitados del microcontrolador, el robot identifica su tipo. El sistema de
procesamiento y de control se encuentra a cargo de los microcontroladores
MC68HC908JK8 y del MC68HC908JK3, para el Robot Madre y Robot Hijo,
respectivamente. Los efectores para el sistema de locomoción son dos motorreductores
DC de 6v, que se conectan a la tarjeta secundaría.
Es importante anotar que cada robot es modular y escalable, es decir, se le pueden
adaptar nuevos sensores o sistemas de diseño original del usuario. A continuación se
ilustra el resultado de haber implementado el receptor ultrasónico en el robot madre y el
transmisor ultrasónico en un robot hijo.
4.1 Implementación del Sensor en Dos Robots
Con base en el desarrollo del sensor mencionado en el capítulo anterior, se implementó
totalmente el método Peniel en el robot madre del kit TEAC2H-RI. Adicionalmente, se
encargó al robot hijo el circuito de transmisión, de esta manera la nueva configuración
para la inspección de materiales se presenta en la figura 4-2. En la figura 4-3 se muestra
una foto de la configuración experimental usada para realizar la identificación de
materiales [González et al, 2011].
Es importante anotar que para este caso la conexión existente entre el robot madre
(mom-robot) y el PC no tiene el propósito de realizar algún procesamiento de señal en el
PC, sino que se usa para que los resultado puedan ser visualizados por el usuario, esto
podría también hacerse sin necesidad de conexión con el PC mediante una LCD o
cualquier otro dispositivo adecuado para cumplir con esta función.
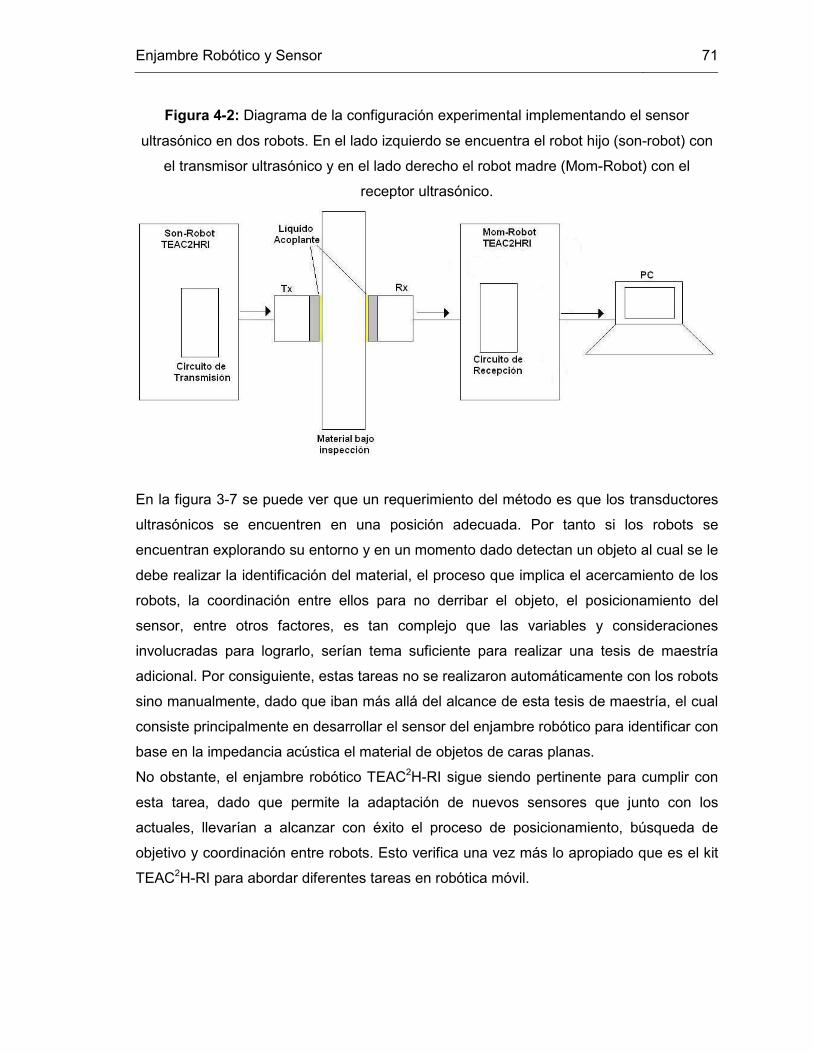
Enjambre Robótico y Sensor 71
Figura 4-2: Diagrama de la configuración experimental implementando el sensor
ultrasónico en dos robots. En el lado izquierdo se encuentra el robot hijo (son-robot) con
el transmisor ultrasónico y en el lado derecho el robot madre (Mom-Robot) con el
receptor ultrasónico.
En la figura 3-7 se puede ver que un requerimiento del método es que los transductores
ultrasónicos se encuentren en una posición adecuada. Por tanto si los robots se
encuentran explorando su entorno y en un momento dado detectan un objeto al cual se le
debe realizar la identificación del material, el proceso que implica el acercamiento de los
robots, la coordinación entre ellos para no derribar el objeto, el posicionamiento del
sensor, entre otros factores, es tan complejo que las variables y consideraciones
involucradas para lograrlo, serían tema suficiente para realizar una tesis de maestría
adicional. Por consiguiente, estas tareas no se realizaron automáticamente con los robots
sino manualmente, dado que iban más allá del alcance de esta tesis de maestría, el cual
consiste principalmente en desarrollar el sensor del enjambre robótico para identificar con
base en la impedancia acústica el material de objetos de caras planas.
No obstante, el enjambre robótico TEAC2H-RI sigue siendo pertinente para cumplir con
esta tarea, dado que permite la adaptación de nuevos sensores que junto con los
actuales, llevarían a alcanzar con éxito el proceso de posicionamiento, búsqueda de
objetivo y coordinación entre robots. Esto verifica una vez más lo apropiado que es el kit
TEAC2H-RI para abordar diferentes tareas en robótica móvil.
72 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
Figura 4-3: Foto de la configuración experimental implementando el sensor ultrasónico
en dos robots. En el lado izquierdo se encuentra el robot hijo (2) con el circuito
electrónico de emisión (4), el transductor ultrasónico de transmisión (6) y la tarjeta
principal (9) del robot hijo. En el lado derecho el robot madre (1) con el circuito
electrónico de recepción (3), el transductor ultrasónico de recepción (5) y la tarjeta
principal (10) del robot madre. Así mismo, se pueden ver en esta figura una muestra de
vidrio (7) que está siendo inspeccionada por los dos robots y además el cable de
conexión (8) entre el PC y el robot madre.
El software que se usó para el desarrollo del algoritmo del robot madre se llama Winide,
el cual es un lenguaje de bajo nivel de uso específico de los microcontroladores
Freescale de la familia HC08JLZ. En la figura 4-4 se presenta una sección del algoritmo
mencionado.
Enjambre Robótico y Sensor 73
Figura 4-4: Sección del algoritmo Peniel usado para identificación de materiales por
medio del robot madre del kit TEAC2H-RI. El software de programación es Winide.
El diagrama de flujo general es muy similar al presentado en la sección 3.3 del capítulo 3
y por tanto no se repite aquí.
A continuación se presentan los resultados de implementar completamente el proceso de
identificación de materiales en el robot madre y el robot hijo, con el algoritmo previamente
mencionado.
4.2 Resultados
Como se pudo ver en el capítulo 3, actualmente se dispone solo de tres materiales para
realizar el proceso de identificación de materiales: acrílico, aluminio y vidrio. También, se
dispone de acero, pero en los experimentos realizados se pudo percibir que dado que la
impedancia acústica de este material es tan alta (45MRayls, ver tabla 2-2) en
comparación con los otros tres y con la de la capa de acople del transductor ultrasónico,
el eco de señal ultrasónica recibido no se comportaba adecuadamente debido a su bajo
nivel y por tanto los resultados obtenidos de esta manera no eran confiables. Es
importante mencionar que los transductores utilizados son convencionalmente usados
para operar en aire, por tanto la empresa fabricante los construyo para que tuvieran un
buen acople acustico con aire lo que a su vez implica que el transductor tendría un

74 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
“pobre acople” con materiales sólidos de altos valores de impedancia acústica, tales
como el acero. Empero, se pudo ver en el capítulo 3 que los resultados obtenidos para
aluminio, acrílico y vidrio fueron muy satisfactorios. En caso que se requiriera que con el
actual transductor se pudiera inspeccionar materiales con mayor impedancia acústica
sería necesario usar un acople sólido intermedio con mayor impedancia acústica [Salazar
et al, 2004], el cual debe ubicarse entre la cara del transductor y la muestra
inspeccionada, esto se podría realizar mediante una static probe [Allin, 2002] o una línea
de retardo [Olympus, 2011] adecuada. Sin embargo, esto se encuentra fuera del alcance
de esta tesis y podría ser parte de trabajo futuro.
Para el actual caso acrílico, aluminio y vidrio serán usados para verificar el desempeño
del método Peniel cuando es implementado totalmente en una plataforma robótica de
baja capacidad de cómputo. Estos tres materiales son la base de datos para el proceso
de identificación de materiales actual.
El procedimiento 1 del capítulo 3 nuevamente se siguió para realizar los experimentos y
la configuración de los mismos fue la de la figura 4-2. Las posibles respuestas que envía
el robot al PC se ilustran en la tabla 4-1, las cuales para cada caso se encuentran
precedidas por un texto que dice “EL MATERIAL ES”. De la tabla 4-1 el ítem MNB se
obtiene como salida cuando se inspecciona un material diferente a los tres que
actualmente están en la base de datos.
Tabla 4-1: Significado de algunas salidas del sistema robótico
Salida Significado
MNB Material No disponible en la
Base de datos
ACRILÍCO Acrílico
ALUMINIO Aluminio
VIDRIO Vidrio
Los resultados de las mediciones se pueden ver en la tabla 4-2.Nuevamente se verifica el
hecho que el método es muy efectivo para la identificación de materiales. No obstante, el
hecho a resaltar en este caso es que se implementó exitosamente el proceso de
identificación de materiales en dos robots heterogéneos de pequeño tamaño. De esta
manera se confirma la pertinencia del método Peniel para la automatización en robots del
Enjambre Robótico y Sensor 75
proceso de identificación de materiales, lo cual es un muy importante aporte dentro de la
literatura revisada.
Tabla 4-2: Desempeño del sensor desarrollado para la identificación de materiales
realizando el procesamiento sólo mediante microcontrolador
Material Intentos Correcta
Identificación
Incorrecta
Identificación % Precisión
Acrilico 5 5 0 100%
Vidrio 5 5 0 100%
Aluminio 5 5 0 100%
4.3 Pantallas Gráficas
Uno de los objetivos trazados del presente proyecto era el desarrollo de la interfaz de
usuario, (GUI) no obstante dado que el sistema no tiene una considerable movilidad,
entonces el usuario no puede tomar muchas decisiones importantes con respecto al
comportamiento o estado de los robots. Por tanto, para este caso el rol del usuario será
pasivo, donde solo recibirá la información correspondiente al material identificado por los
robots.
Algunas actividades relacionadas con este objetivo fueron
• Desarrollo del módulo de comunicación entre el enjambre robótico y un PC
remoto.
• Selección del software para la visualización de los datos del enjambre.
De estas, las dos primeras se realizaron. La primera se trata del módulo de comunicación
del robot madre del kit TEAC2H-RI, que se basa en el estándar RS-232 y para la segunda
actividad se usó el HyperTerminal para visualizar los datos que se envían serialmente
desde el robot. En la figura 4-5 se puede visualizar la clase de resultados que se espera
obtener con la interfaz de HyperTerminal cuando se inspeccionan los tres diferentes
materiales. También se puede ver en esta figura que durante tres veces se presenta la
frase “EL MATERIAL ES MNB”, es decir, que el material no se encuentra en la base de
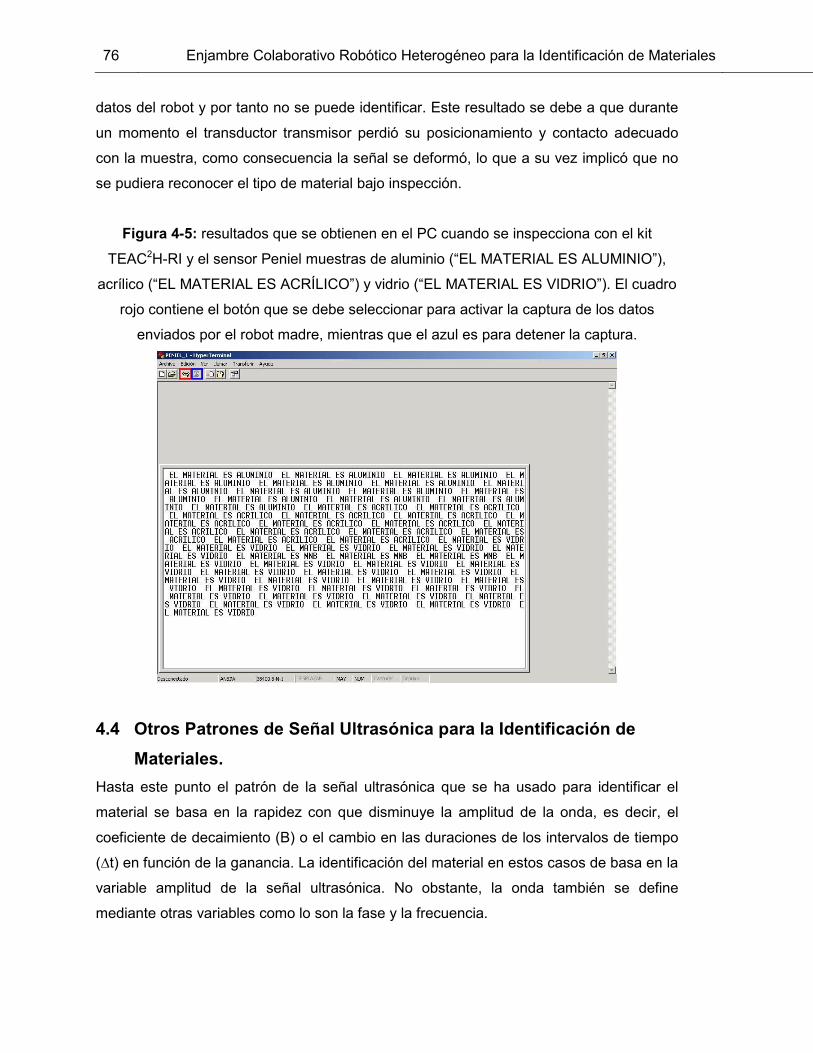
76 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
datos del robot y por tanto no se puede identificar. Este resultado se debe a que durante
un momento el transductor transmisor perdió su posicionamiento y contacto adecuado
con la muestra, como consecuencia la señal se deformó, lo que a su vez implicó que no
se pudiera reconocer el tipo de material bajo inspección.
Figura 4-5: resultados que se obtienen en el PC cuando se inspecciona con el kit
TEAC2H-RI y el sensor Peniel muestras de aluminio (“EL MATERIAL ES ALUMINIO”),
acrílico (“EL MATERIAL ES ACRÍLICO”) y vidrio (“EL MATERIAL ES VIDRIO”). El cuadro
rojo contiene el botón que se debe seleccionar para activar la captura de los datos
enviados por el robot madre, mientras que el azul es para detener la captura.
4.4 Otros Patrones de Señal Ultrasónica para la Identificación de
Materiales.
Hasta este punto el patrón de la señal ultrasónica que se ha usado para identificar el
material se basa en la rapidez con que disminuye la amplitud de la onda, es decir, el
coeficiente de decaimiento (B) o el cambio en las duraciones de los intervalos de tiempo
(∆t) en función de la ganancia. La identificación del material en estos casos de basa en la
variable amplitud de la señal ultrasónica. No obstante, la onda también se define
mediante otras variables como lo son la fase y la frecuencia.

Enjambre Robótico y Sensor 77
El cambio de fase [Allin, 2002] se puede usar con la configuración de la figura 1-1 para
identificar si el material más allá de la muestra inspeccionada tiene una impedancia
acústica superior o inferior a la del material bajo inspección. Esto se puede usar para
estimar de qué material se trata en situaciones donde sólo dos son los posibles
materiales a encontrar más allá de la muestra. Esto se usa en algunas ocasiones para la
detección de fallas [Allin, 2002]. Experimentos realizados dentro de esta tesis de
maestría permitieron observar este fenómeno pero dado que a partir de esto no se puede
identificar exactamente el material inspeccionado entonces no se consideró apropiado
para implementarlo en el robot.
El análisis en frecuencia de las ondas ultrasónicas se llama espectrometría ultrasónica y
también se usa para desarrollar algunos Ensayos No Destructivos (NDT). Dentro de esta
tesis de maestría se realizó el análisis del espectro de frecuencia mediante algunos
experimentos usando transductores ultrasónicos de valores 50KHz (AT50), 125KHz
(AT120), 200KHz (AT200) y 300KHz (AT300), todos desarrollados por la compañía
Airmar Technology [Airmar Technology, 2011]. El circuito de transmisión fue el
mencionado en secciones anteriores T1 Development board y la configuración de
inspección fue la de la figura 1-2. Los experimentos permitieron concluir que se
presentan cambios en el espectro de frecuencia dependiendo de las características de la
muestra evaluada y que estos cambios se encuentran relacionados con la frecuencia de
resonancia del material bajo inspección, su impedancia acústica y en mucho menor
medida su atenuación. La expresión que rige la frecuencia de resonancia acústica para
placas de caras planas es:
s
rl
cf
2= (35)
Donde fr es la frecuencia de resonancia, c es la velocidad del sonido en el material y ls es
el espesor de la muestra bajo inspección.
Si se considera que la velocidad del sonido, la impedancia acústica y la atenuación son
propiedades particulares de cada material, se puede concluir que el análisis en
frecuencia también permitiría identificar el material si se hacen los procesamientos
adecuados. No obstante, no se logró desarrollar un método lo suficientemente sencillo y
adecuado que facilitará su implementación en un robot de bajas capacidades de cómputo
y por esto se ha descartado momentáneamente esta opción.

5. Conclusiones y Trabajo Futuro
Los experimentos en aire confirmaron que es difícil en este medio realizar la
identificación de materiales con base en la impedancia acústica por medio de sensores
ultrasónicos dado el grande desacople acústico que existe entre los sólidos y el aire. Sin
embargo, estos experimentos, y la posterior validación teórica, evidenciaron un hecho
importante: si un objeto se posiciona en dos inclinaciones diferentes con respecto al eje
del transductor, muy cercanas una de la otra y ambas muy cercanas a la posición en la
que la superficie del objeto se encuentra perpendicular con respecto al eje del
transductor, entonces los ecos de onda recibidos son muy diferentes el uno del otro para
las dos inclinaciones. Esto se debe a que para que realmente el eje del transductor se
encuentre perpendicular a la superficie del objeto la perpendicularidad debe ser correcta,
con la precisión de una o dos longitudes de onda de la luz. Por tanto si se pone el
transductor en aire a una distancia d de un objeto o estructura, se podría identificar cual
es el ángulo de inclinación del objeto o estructura mediante por ejemplo una red neuronal
adecuadamente entrenada. Esto podría ser de especial interés para el sector de la
construcción.
Como se mencionó en el capítulo 2, el método de la pendiente 1 y 2 no dieron los
resultados esperados, no obstante aún no se pueden descartar totalmente y sería
necesario realizar nuevos experimentos que permitan determinar definitivamente si son o
no apropiados para la identificación de materiales en robots de pequeño tamaño. Podría
ser que con ciertas mejoras su funcionamiento fuera optimo, pero aun y con todo esto, no
se considera que pudieran superar el desempeño del método Peniel.
El término “enjambre robótico heterogéneo” se eligió para esta tesis porque en un
principio la primera hipótesis que se concibió contemplaba que era necesario más de un
robot y múltiples sensores para lograr implementar el procedimiento de identificación de
materiales en robots, no obstante, debido a la efectividad y robustez del método Peniel
no se requirió de más de dos robots heterogéneos. Esto fue un ahorro en términos de
complejidad y costos, y por tanto se puede decir que se obtuvo más de lo que al principio

80 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
se esperaba. Adicionalmente, si se consigue un transductor ultrasónico de mejor
desempeño y con las características adecuadas, se podría usar para el sensor
ultrasónico la configuración eco-pulso de la figura 1-1, mejorar el circuito electrónico junto
con el algoritmo y de esta manera sólo sería necesario un robot. De ésta manera sería
más fácil lograr que el robot explore su entorno, encuentre un objeto y se acerque para
determinar el tipo de material. Esto es parte de trabajo futuro. Por otro lado el término
heterogéneo se refiere a que los robots son diferentes, lo cual es cierto dado que, como
se mencionó en secciones anteriores, el robot madre es diferente al robot hijo y además
porque el robot madre tiene el circuito y el transductor receptor, mientras que el robot hijo
tiene el circuito y transductor transmisor.
Es también importante resaltar, que la arquitectura abierta del kit TEAC2H-RI acepta que
en futuros proyectos le sean implementados nuevos dispositivos que aumenten la
funcionalidad del sistema, obteniéndose así mejores resultados y ampliando el campo de
aplicación del desarrollo.
El principal aporte al estado del arte que se obtuvo con el desarrollo de esta tesis de
maestría, fue lograr la implementación de la identificación de materiales ultrasónica, con
base en la impedancia acústica, en dos robots de pequeño tamaño. Esto se alcanzó
debido a la sencillez del método Peniel y del circuito asociado, y al bajo costo
computacional que demanda el algoritmo. Aún más, se pudo evidenciar que siguiendo la
metodología apropiada se puede desarrollar un sensor de alto desempeño a un bajo
costo computacional y adaptado a las necesidades específicas de la aplicación. Para
este caso la metodología que se siguió para el desarrollo del sensor fue: 1) estudiar a
profundidad los modelos físico-matemáticos propuestos en la literatura 2) realizar
experimentos para confirmar lo aprendido e identificar nuevos patrones de señal
asociados que permitieran el desarrollo de nuevos modelos 3) redefinir o crear un nuevo
modelo físico-matemático que sea más sencillo y se ajuste a las características de la
aplicación específica, en este caso un pequeño robot para la identificación de materiales
4) Este nuevo modelo es la base del nuevo método, pero en éste último es necesario
considerar las características de la aplicación específica y las limitaciones que se tienen,
para en este cuarto paso a partir del nuevo método diseñar el circuito electrónico y el
algoritmo apropiado, 5) Construir el sensor con los dispositivos adecuados en términos
de costos, tamaño y funcionalidad 6) Diseñar pruebas adecuadas para la verificación del
método 7) Validar el desempeño del sensor mediante las pruebas propuestas y depurar
tanto el algoritmo como el circuito para obtener un desempeño optimo.
Conclusiones y Trabajo Futuro 81
El sensor construido no fue calibrado a su máximo nivel de operación, de hecho se
podría decir que está en un nivel medio. Esto se debe a que la implementación actual no
lo requirió, sin embargo, para aplicaciones más demandantes se podría ajustar el valor
de los trimer, modificar el valor de ciertas resistencias, tomar en cuenta un mayor numero
de Gr e identificar los rangos de voltaje pico que se obtienen de la inspección de los
materiales (ver figura 3-10), para así tomar en cuenta un mayor número de variables en
la identificación del material. Esto será parte del trabajo futuro.
En la sección 3.1, figura 3-2 se pudo ver que para valores altos de Gr el ∆t cae más
rápido que para bajos valores de esta variable. Esto implica que en algunos casos para
valores altos de Gr los materiales con impedancias acústicas cercanas (B cercanos)
pueden ser más fácilmente diferenciados, es decir, en cierta manera modificando Gr se
hace un “zoom acústico”, lo cual se presenta como una muy importante fortaleza
adicional del método con respecto a otros, donde materiales con impedancias acústicas
muy cercanas no se pueden distinguir. De hecho el enjambre robótico podría consistir de
robots que tuvieran diferentes niveles de “zoom acústico” y de esta manera poder
identificar un amplio rango de materiales. No obstante esto está por comprobar, es
necesario hacer ajustes adicionales para obtener éxito en la implementación y es parte
del trabajo futuro.
Por otro lado, el método propuesto favoreció considerablemente la reducción de costos
en términos de hardware. Los transductores usados para desarrollar el sensor son
transductores diseñados para aplicaciones específicas en aire, tales como evasión de
obstáculos, medición de nivel, medición de rango, entre otras, pero no para desarrollar
Ensayos No Destructivos (NDT), tal y como se hizo en este caso. Estos transductores
tienen un costo unitario de tan solo $35US, lo cual comparativamente es mucho más
económico que los transductores comerciales usados para NDT (>$400US). De esta
manera, mediante el desarrollo del método adecuado se lograron considerables ahorros.
Aún más, los robots que se usaron para implementar el sensor también fueron diseñados
buscando proveer una plataforma adecuada para la experimentación robótica y la
educación pero al menor costo posible, con esto en mente se lograron desarrollar robots
de un valor unitario cercano a $65US, lo cual está también relativamente muy por debajo
del costo de las plataformas disponibles en el mercado. Por consiguiente, el sistema
robótico construido para la identificación de materiales tiene un excelente desempeño a
un muy bajo costo, cumpliéndose así dos de los objetivos de la investigación en NDT:
automatización del proceso y reducción de costos. En este orden de ideas, es factible
82 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
aumentar el número de robots que se utilizan para desarrollar la tarea de identificación de
materiales y aun así mantener bajos costos.
Se realizaron pruebas en acero, pero debido al alto desacople acústico que éste tiene
con el material de la cara del transductor, los resultados fueron muy pobres. Esto se debe
por un lado a que el transductor es diseñado para trabajar en aire y por otro a que la
respuesta del transductor no es la adecuada para señales de tan bajo nivel como las que
se obtienen para este caso. Trabajo futuro se enfocará en desarrollar acoples sólidos,
como sondas en forma de rueda, que permitan ampliar el rango de operación de
materiales para el sensor. También con este propósito se realizarán nuevas pruebas
sobre un mayor número de materiales, de tal manera que el sensor contenga una base
de datos más amplia.
También, es importante anotar que pueden presentarse muestras con valores de
impedancia acústica muy similares, para los cuales el método podría fallar. Para estos
casos sería necesario basar la decisión no sólo en el efecto de la impedancia acústica (el
coeficiente B o ∆t) sino también en la velocidad del sonido y la atenuación. Conocer estas
variables podría eliminar la restricción que tiene el actual método en que se debe tener
control sobre el espesor de las placas inspeccionadas, lo cual también ocurre en varios
casos de la literatura revisada. Esto hace parte del trabajo futuro para hacer más robusto
el método. Con respecto a esto, además cabe remarcar que en este método se identifica
el valor B o ∆t y no la impedancia acústica como tal, trabajo futuro consistirá en encontrar
este valor que es de gran importancia para muchas aplicaciones industriales.
Los resultados mencionados en la sección 4.4 mencionan que es posible también
identificar el material mediante el análisis en frecuencia del comportamiento de las
reverberaciones. Este hecho permitiría no solo identificar el material sino además
desarrollar nuevos métodos para la caracterización de materiales, detección de fallas,
evaluación del estado de muestras, entre otras actividades relacionadas con los NDT.

Conclusiones y Trabajo Futuro 83

Bibliografía [Leighton, 2007] Leighton T., “What is ultrasound?” Progress in Biophysics and Molecular
Biology, 93, (1-3), 3-83. 2007. (doi:10.1016/j.pbiomolbio.2006.07.026)
[Gunarathne, 1997] G. P. P. Gunarathne, Measurement and monitoring techniques for
scale deposits in petroleum pipelines. En: Proc. IEEE Instrum. Meas. Technol. Conf.,
Ottawa, ON, Canada, May 19–21, 1997, pp. 841–847. DOI: 10.1109/IMTC.1997.610200
[Kessler, 2004] Kessler M., “Advanced Topics in Characterization of Composites”,
Trafford, 2004
[Ohtanil et al, 2006] Ohtanil K., Baba M. “An Identification Approach for Object Shapes
and Materials Using an Ultrasonic Sensor Array”. Proceedings of the SICE-ICASE
International Joint Conference, pp. 1676-1681. 2006
[Chung et al, 2010] Chung C., Popovics J., Struble L. “Using ultrasonic wave reflection to
measure solution properties”. Ultrasonics Sonochemistry 17 (2010) 266–272
[González et al, 2010a] González J., Jiménez J. Algoritmo para la Identificación de
Materiales en Agentes Robóticos (Español). Quinto Congreso Colombiano de
Computación (5CCC) Cartagena- Colombia (2010)
[Allin, 2002] Allin M. J., Disbond Detection in Adhesive Joints Using Low Frequency
Ultrasound. PhD Thesis. Imperial College of Science Technology and Medicine.
University of London. 2002
86 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
[Mejía R., 2004] Mejía R., Ríos L. H., Holguín G. A. Sensor ultrasónico rotativo para el
levantamiento de entornos Utilizando la técnica de tiempo de vuelo (t of f) Scientia et
Technica Año X, No 25, Agosto 2004. UTP. ISSN 0122-1701
[Jiménez et al, 2008] Jovani Alberto Jiménez Builes, Juan José González España,
“Sistema Doble Umbral para el Incremento de la Directividad en un Sensor Ultrasónico”.
En: Colombia Avances En Sistemas E Informática ISSN: 1657-7663 Ed: Universidad
Nacional De Colombia Sede Medellín v.5 p.179 - 183 ,2008
[Devaud et al¸ 2006] Devaud F.H., Hayward, G. and Soraghan, J.J., “Evaluation of a Bio-
Inspired Range finding Algorithm (BIRA)”, IEEE Ultrasonics Symposium 2006, pp. 1381 –
1384
[CUE, 2011] Centre for Ultrasonic Engineering http://www.strath.ac.uk/eee/research/cue/
Accesado en Agosto de 2011
[Mould, 2007] Mould RF. Pierre Curie, 1859–1906. Current Oncology—Volume 14,
Number 2: 74–82.
[Khuri-Yakub Ultrasonics Group, 2009] http://www-
kyg.stanford.edu/khuriyakub/opencms/en/research/cmuts/History/index.html Accesado en
11 de Septiembre de 2009
[NASA, 2007] NASA. “Ultrasonic Testing of Aerospace Materials”. 2007 URL:
klabs.org/DEI/References/design_guidelines/test_series/1422msfc.pdf Fecha de acceso:
Septiembre de 2009.
[Bruschini et al, 1997] Bruschini C., Gros B., “A Survey of Current Sensor Technology
Research for the Detection of Landmines”. Proceedings of the International Workshop on
Sustainable Humanitarian Demining (SusDem'97), 1997, Zagreb, Croatia, pp. 6.18/6.27
Bibliografía 87
[Stepanić et al, 2003] Stepanić, H. Wüstenberg, V. Krstelj, H. Mrasek “Contribution to
classification of buried objects based on acoustic impedance matching”, Ultrasonics,
41(2), pp. 115-123, 2003.
[Pallav et al, 2009] Pallav P., Hutchins D., Gan T. “Air-coupled ultrasonic evaluation of
food materials”. Ultrasonics 49 (2009) 244-253
[Zhao et al, 2003] B. Zhao, O.A. Bashir, G.S. Mittal, “Detection of metal, glass, plastic
pieces in bottled beverages using ultrasound”, Food Research International 36 (2003)
513–521.
[Siegwart R. et al, 2004] Siegwart R., Nourbakhsh I. Introduction to Autonomous Mobile
Robots. The MIT Press. Cambridge, Massachusetts, London, England. 2004
[Leighton et al, 2008] Leighton T., Andi Petculescu, “Sounds in Space: The Potential Uses
for Acoustics in the Exploration of Other Worlds”. Hydroacoustics, Vol. 11, 225-238. 2008
[Leighton, 2009] Leighton T., “Fluid loading effects for acoustical sensors in the
atmospheres of Mars, Venus, Titan, and Jupiter”. The Journal of the Acoustical Society of
America, vol. 125, issue 5, p. EL214-EL219, 2009
[Vidal 2006] Vidal, J. “Comportamiento Dinámico de Mezclas Asfálticas”. Revista
Universidad EAFIT. Vol. 42. No. 143 Pags. 72-88. 2006
[Robb et al, 2009] Robb G., Robinson S., Theobald P., Hayman G., Humphrey V.,
Leighton T., Wang L., Dix J. Best A. “Absolute calibration of hydrophones immersed in
sandy sediment”. The Journal of the Acoustical Society of America, vol. 125, issue 5, p.
2918-2927, 2009
[Carlson et al, 2003] Carlson J., Nilsson M., Fernandez E., Planell J.A. An ultrasonic
pulse-echo technique for monitoring the setting of CaSO4-based bone cement.
Biomaterials 24 (2003) 71–77.
88 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
[Yoshizawa et al¸ 2004] Yoshizawa M., Ushioda H., Moriya T., Development of a Bone-
Mimicking Phantom and Measurement of its Acoustic Impedance by the Interference
Method. 2004 IEEE International Ultrasonics, Ferroelectrics, and Frequency Control Joint
50th Anniversary Conference
[Hughes et al, 2009] Hughes D.A, Girkin J.M., Poland S., Longbottom C., Cochran S.
Focused Ultrasound for Early Detection of Tooth Decay. 2009 IEEE International
Ultrasonics Symposium (IUS).
[Shishitani et al, 2010] Shishitani T., Yoshizawa S., Umemura S. Change in Acoustic
Impedance and Sound Speed of HIFU-Exposed Chicken Breast Muscle. 2010 IEEE
International Ultrasonics Symposium Proceedings.
[Goglio et al, 1999] Goglio L., Rossetto M. Ultrasonic testing of adhesive bonds of thin
metal sheets. NDT&E International 32 (1999) 323–331
[Ganapathi, 2010] Ganapathi A. Pulse Echo Ultrasonic Testing of Adhesive Bonded Joints
for Automotive Applications. Clemson University. MSc Thesis, 2010
[Jian et al, 2002] Jian X. M., Guo N., Li M.X., Zhang H. L. Characterization of Bonding
Quality in a Multilayer Structure Using Segment Adaptive Filtering. Journal of
Nondestructive Evaluation, Vol. 21, No. 2, June 2002
[Titov et al, 2008] Titov S. A., Maev R. Gr., Bogachenkov A. N. Pulse-echo NDT of
adhesively bonded joints in automotive assemblies. Ultrasonics 48 (2008) 537–546.
[Chapman et al, 2006] Chapman G.B., Sadler J., Maev R.G., Titov S., Maeva E.Y.,
Severina I., Severin F. Ultrasonic Pulse-Echo NDE of Adhesive Bonds in Sheet-Metal
Assemblies. 2006 IEEE Ultrasonics Symposium
[Hajian et al, 2011] Hajian M., Honarvar F. Reflectivity estimation using an expectation
maximization algorithm for ultrasonic testing of adhesive bonds. Materials Evaluation.
Volume 69, Issue 2, February 2011, Pages 208-219
Bibliografía 89
[Allin et al, 2002b] Allin J. M., Cawley P., Lowe M. J. S. A Robust Technique for Disbond
Detection in the Automotive Industry. CP615, Review of Quantitative Nondestructive
Evaluation Vol 21, ed. by D. O. Thompson and D. E. Chimenti. 2002
[Adams, 1997] Adams R. D. and Drinkwater B. W. Nondestructive testing of adhesively-
bonded joints. NDT&E International, Vol. 30, No. 2, pp. 93~98, 1997.
[Rommetveit et al, 2011] Rommetveit T., Johansen T., Johnsen R. Using a multi-layered
transducer model to estimate the properties of paraffin wax deposited on steel.
Ultrasonics 51 (2011) 85–93
[Chnstidis et al, 1999] Chnstidis K., Gunarathne G.P.P. Novel Techniques for Down-Hole
Material Characterisation. IEE Seminar on on-line Monitoring Techniques for the Off-
Shore Industry, 1999.
[Gunarathne et al, 2002] G. Gunarathne, Christidis K., Material Characterization in situ
Using ultrasound measurements. En: Proceedings of the IEEE Transactions on
Instrumentation and Measurement. Vol. 51, pp. 368-373. 2002 DOI: 10.1109/19.997839
[Kim et al, 2004] Kim N., Nah H.S. Ultrasonic Characterization of Degradation of Aging
Epoxy Coating. Materials Science Forum, Vols. 449-452 (2004), pp. 1209-1212
[Rastogi, 2011] Rastogi N. K. Opportunities and Challenges in Application of Ultrasound
in Food Processing. Critical Reviews in Food Science and Nutrition, 51:8, 705-722. 2011
[Wallhäußer et al, 2011] Wallhäußer E., Hussein W. B., Hussein M.A., Hinrichs J., Becker
T.M. On the usage of acoustic properties combined with an artificial neural network – A
new approach of determining presence of dairy fouling. Journal of Food Engineering 103
(2011) 449–456

90 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
[Gómez et al, 2008] Gómez M., Oliete B., García J., Ronda F., Salazar J.
Characterization of cake batters by ultrasound measurements. Journal of Food
Engineering 89 (2008) 408–413
[Salazar et al, 2004] Salazar J., Turó A., Chávez J.A., García M.J. Ultrasonic inspection of
batters for on-line process monitoring. Ultrasonics 42 (2004) 155–159
[Meng et al, 2012] Meng R., Zhou J., Ye X., Liu D. On-Line Monitoring of Yogurt
Fermentation Using Acoustic Impedance Method. Applied Mechanics and Materials, Vols.
101-102 (2012), pp. 737-742
[Morris et al, 2003] Morris C., Garcia C., Wydrinski R., Tinker S.J., Mullen M., Collins A.
Cement Evaluation Under Extreme Conditions. SPE Western Regional/AAPG Pacific
Section Joint Meeting held in Long Beach, California, U.S.A., 19–24 May 2003.
[Butsch et al, 2002] Butsch R.J., Morris C.W., Wydrinski R., Kasecky M.J. The Evaluation
of Specialized Cements. SPE Western Regional/AAPG Pacific Section Joint Meeting, 20-
22 May 2002, Anchorage, Alaska
[Schaefer et al, 2006] Schaefer R. and Hauptmann P. Ultrasonic Density Measurement of
Liquids – A Novel Method using a Generalized Singular Value Decomposition based
System Identification. 2006 IEEE Ultrasonics Symposium
[Chung et al¸ 2010] Chung C.W., Popovics J.S., Struble L.J. Using ultrasonic wave
reflection to measure solution properties. Ultrasonics Sonochemistry 17 (2010) 266–272
[Montero de Espinosa et al, 2001] Higuti R.T., Montero de Espinosa F. R., Adamowski
J.C. Energy Method to Calculate the Density of Liquids Using Ultrasonic Reflection
Techniques. 2001 IEEE International Ultrasonics Symposium (IUS).
[Bamberger et al, 2004] Bamberger J.A., Greenwood M.S. Measuring fluid and slurry
density and solids concentration non-invasively. Ultrasonics 42 (2004) 563–567
Bibliografía 91
[Puettmer et al, 1998] Puettmer A., Hauptmann P. Ultrasonic Density Sensor for Liquids.
1998 IEEE Ultrasonics Symposium
[Schaefer et al, 2005] Schaefer R., Hauptmann P. Acoustic Impedance Measurement
using PLSR based Analysis of Ultrasonic Signals. 2005 IEEE Ultrasonics Symposium
[Kazys et al, 1998] Kazys R., Mazeika L., Voleisis A., Sliteris R., Kundrotas K., Augutis V.
Ultrasonic non-destructive testing system of journal bearings. NDTnet 1998 May, Vol.3
No.5
[Xu et al, 2011] Xu C., Liu Z., Hao J., Zhao X. An ultrasonic model for revealing electronic
package's inner structure using acoustic impedance. Review of Progress in Quantitative
Nondestructive Evaluation, Volume 30. AIP Conf. Proc. 1335, 91-94 (2011)
[Capote et al, 2004] Capote F.P., Luque de Castro M.D.. Analytical uses of ultrasound II.
Detectors and detection techniques. Trends in Analytical Chemistry, Vol. 23, No. 10–11,
2004
[Thomas et al, 1991] Thomas, S.M, Bull D.R, (1991) Neural Processing of Airborne Sonar
for Mobile Robot Applications. Proceedings of the Second International Conference on
Artificial Neural Networks. pp. 267-270. 1991.
[Friedrich et al, 2006] Friedrich M., Galbraith W., Hayward G., “Autonomous Mobile
Robots for Ultrasonic NDE”. Proceedings of the IEEE Ultrasonics Symposium, pp. 902-
905. 2006.
[AirmarTechnology, 2011]. http://www.airmartechnology.com/ Accesado en Agosto de
2011
[Blitz J., 1969] Blitz J., Fundamentos de los Ultrasonidos. Editorial Alhambra, S.A,,
Madrid, 1969

92 Enjambre Colaborativo Robótico Heterogéneo para la Identificación de Materiales
[Olympus, 2011] Ultrasonic transducers, Olympus. Accesado en enero 2011
http://www.olympus-ims.com/data/File/panametrics/panametrics-UT.en.pdf
[Onda, 2011] http://www.ondacorp.com/index.html Accesado en Agosto de 2011
[Gunarathne et al, 1998] G.P.P Gunarathne, Q. Zhou, K. Christidis. Ultrasonic feature
extraction techniques for characterization and quantification of scales in petroleum
pipelines. En: Proceedings IEEE Ultrasonic Symposium, vol. 1; 1998, p. 859–64 DOI:
10.1109/ULTSYM.1998.762279
[Hauptmann et al, 2001] Hauptmann P., Hoppe N., Puettmer A. Ultrasonic Sensors for
Process Industry. En: Proceedings 2001 IEEE Ultrasonic Symposium.
[González et al, 2010b] González J.J.; Jiménez J.A.; Ovalle D.A. (2010) TEAC2H-RI:
Educational Robotic Platform for Improving Teaching-Learning Processes of Technology
in Developing Countries. Technological Developments in Networking, Education and
Automation 2010, pp 71-76
[González et al, 2012] González J.J.; Jiménez J.A.; Guzmán J.A. (2012). Design and
Construction of an Ultrasonic Sensor for the Material Identification in Robotic Agents,
Robotic Systems - Applications, Control and Programming, Ashish Dutta (Ed.), ISBN:
978-953-307-941-7, InTech.
[González et al, 2011] González J.J.; Jiménez J.A.; Guzmán J.A. (2011). Peniel Method
for the Ultrasonic Material Identification in Robots. En: Proceedings 2011 IEEE
International Symposium on Signal Processing and Information Technology (ISSPIT).