desarrollo de una hÉlice de alto
TRANSCRIPT

DESARROLLO DE UNA HÉLICE DE ALTORENDIMIENTO PARA BAJO NÚMERO DE
REYNOLDS
CAMILO ANDRÉS GONZÁLEZ ARTUNDUAGACÓD. 200315718
REPORTE PRESENTADO A LA UNIVERSIDAD DE LOS ANDES COMOREQUISITO PARCIAL DE GRADO EN LA MAESTRÍA EN INGENIERÍA
MECÁNICA
ASESOR:
Ing. ÁLVARO E. PINILLA S. Ph.D. M.Sc.
UNIVERSIDAD DE LOS ANDESFACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA MECÁNICABOGOTÁ. 2009

Dedicado a:
Mis Papas, por su interés y esfuerzo a lo largo de estos añosMis amigos, quienes me aconsejaron y acompañaron en todo el camino
Dios, quien con su infinita sabiduría lo hizo posible

Agradecimientos
Es mi deseo expresar mi más profundo y sincero sentido de gratitud a quién fue asesorde mi proyecto de pregrado y ahora asesor en este lindo y largo camino. Me refiero alIng. Álvaro Enrique Pinilla. Su invaluable ayuda, guía, consejo y persistencia en cada unade las etapas de este trabajo de investigación lo hicieron posible. Adicionalmente, porqueél depositó en mí la confianza necesaria para llevar a cabo este proyecto y simultáneamenteme encamino y permitió que empezara a apropiarme de esta linda rama de la ingeniería.De la misma manera, agradezco a los ingenieros Carlos Francisco Rodríguez y Luis ErnestoMuñoz quienes brindaron apoyo y consejo en la etapa experimental.
También deseo expresar mi sentido de gratitud a todo el personal del laboratorio deIngeniería Mecánica por su paciencia, ayuda, consejo y compañía; especialmente a OmarRodríguez, Ramiro Beltrán, Juan Carlos García, Jorge Reyes y Hugo Sierra quienes hicieronque este trabajo fuese posible.
De igual manera agradezco a mis padres y amigos por su apoyo, ayuda, esperanza y pacienciaen todas las etapas de mi vida.

Tabla de Contenido
1 Introducción 2
2 Comentarios Introductorios y Antecedentes 5
2.1 Introducción a las Hélices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Breve Historia del Desarrollo de Hélices . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Los Hermanos Wright . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.2 Pioneros del Siglo XX . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.3 Últimas Tendencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Aerodinámica de Hélices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Coeficientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.2 Pitch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.3 Vórtices y la Condición de Betz . . . . . . . . . . . . . . . . . . . . . . 17
2.3.4 Teoría del Elemento de Aspa . . . . . . . . . . . . . . . . . . . . . . . 18
3 Diseño de Hélices y Análisis Teórico 21
3.1 Métodos de Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Método de la Eficiencia . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.2 Método de la Velocidad de Impacto . . . . . . . . . . . . . . . . . . . . 22
3.1.3 Método Óptimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22

TABLA DE CONTENIDO ii
3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds . . . . . . . 23
3.2.1 Perfil Aerodinámico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2.2 Resultados Geométricos del Diseño . . . . . . . . . . . . . . . . . . . . 27
3.2.3 Análisis Teórico del Diseño . . . . . . . . . . . . . . . . . . . . . . . . 29
4 Desarrollo Computacional 35
4.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Perfiles Aerodinámico: S834 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Análisis CFX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5 Manufactura 41
5.1 Manufactura del Prototipo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Desarrollo del Banco de Pruebas . . . . . . . . . . . . . . . . . . . . . . . . . 45
6 Desarrollo Experimental 48
6.1 Protocolo Experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.2 Resultados Experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.2.1 Curvas de Rendimiento . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.2.2 Breve Análisis Acústico . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7 Conclusiones y Recomendaciones 60
7.1 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.2 Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.3 Trabajo Futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.4 Comentarios Finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
A Geometría detallada de la Hélice 65
A.1 Parámetros de Diseño y Valores Característicos . . . . . . . . . . . . . . . . . 65

TABLA DE CONTENIDO iii
A.2 Resultados Geométricos del Diseño . . . . . . . . . . . . . . . . . . . . . . . . 66
B Resultados Teóricos Curva de Rendimiento 67
B.1 Método de diseño óptimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
B.2 Simulación CFX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
C Extracto Resultados Experimentales 69
C.1 Hélice 9x6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
C.2 Hélice 10x6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
C.3 Hélice 11x7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
C.4 Hélice 13x6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
C.5 Hélice óptima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Bibliografía 72

Lista de Figuras
2.1 Hélice de dos palas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Helicóptero de Leonardo da Vinci . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Rendimiento de una réplica de la hélice de los hermanos Wright [3]. . . . . . . 10
2.4 Turbohélice y Propfan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Flujo a través del disco de acción de la Hélice . . . . . . . . . . . . . . . . . . 13
2.6 Diagrama de Pitch geométrico de una Hélice. . . . . . . . . . . . . . . . . . . 16
2.7 Vorticidad generada por la Hélice [6] . . . . . . . . . . . . . . . . . . . . . . . 17
2.8 Velocidades y Fuerzas sobre un elemento de Aspa . . . . . . . . . . . . . . . . 19
3.1 Diagrama de Cordier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Perfil Aerodinámico NREL S834 . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3 Coeficientes de Sustentación para el perfil NREL S834 . . . . . . . . . . . . . 26
3.4 Gráfica polar para el perfil NREL S834 . . . . . . . . . . . . . . . . . . . . . . 26
3.5 Modelo CAD de la hélice desarrollada . . . . . . . . . . . . . . . . . . . . . . 28
3.6 Hélice comercial en proceso de escaneo . . . . . . . . . . . . . . . . . . . . . . 29
3.7 Coomparación de la Cuerda de la Hélice . . . . . . . . . . . . . . . . . . . . . 30
3.8 Comparación del Ángulo de Calaje de la Hélice . . . . . . . . . . . . . . . . . 30
3.9 Empuje y Torque de la Hélice en el punto de diseño J=0.47 . . . . . . . . . . 31
3.10 Curva de la Hélice usando la teoría del elemento de aspa . . . . . . . . . . . . 32

LISTA DE FIGURAS v
3.11 Distribución local del coeficiente de sustentación en la pala . . . . . . . . . . . 34
3.12 Distribución local del coeficiente de arrastre en la pala . . . . . . . . . . . . . 34
4.1 Coeficiente de Sustentación simulado para el S834 . . . . . . . . . . . . . . . . 37
4.2 Curva Polar simulada para el S834 . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Simulación CFX de la Hélice . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4 Curvas de Corriente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.1 Geometría a mecanizar en el CNC . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Trayectorias para las estrategias de mecanizado . . . . . . . . . . . . . . . . . 43
5.3 Pala en proceso de mecanizado . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.4 Palas después del mecanizado . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.5 Palas finalizadas y Hélice Terminada . . . . . . . . . . . . . . . . . . . . . . . 44
5.6 Banco de pruebas para hélices y ventiladores no entubados de NASA [17]. . . 46
5.7 Esquema del banco de pruebas para hélices . . . . . . . . . . . . . . . . . . . 47
6.1 Lectura de la velocidad de giro . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.2 Coeficientes de Empuje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.3 Coeficientes de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.4 Eficiencia Aerodinámica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.5 Curva para la hélice McCauley 7557 [20]. . . . . . . . . . . . . . . . . . . . . . 55
6.6 Helice 5968-R6 de Pitch Variable [11] . . . . . . . . . . . . . . . . . . . . . . . 57
6.7 Nivel de Ruido de las Hélices a velocidad constante . . . . . . . . . . . . . . . 58
6.8 Nivel de Ruido de las Hélices a distancia constante . . . . . . . . . . . . . . . 59

Lista de Tablas
1 Nomenclatura Utilizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
3.1 Variables de entrada para la Hélice . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Parámetros finales de diseño de la Hélice . . . . . . . . . . . . . . . . . . . . . 32
4.1 Parámetros de Simulación para el perfil S834 . . . . . . . . . . . . . . . . . . 36
4.2 Parámetros de Simulación CFX de la hélice . . . . . . . . . . . . . . . . . . . 38
5.1 Estrategias de mecanizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Características del Cedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.1 Instrumentación utilizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
A.1 Parámetros de Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A.2 Valores Característicos del punto de diseño . . . . . . . . . . . . . . . . . . . . 65
A.3 Geometría detallada de la Hélice . . . . . . . . . . . . . . . . . . . . . . . . . 66
B.1 Análisis con algoritmo de diseño óptimo . . . . . . . . . . . . . . . . . . . . . 67
B.2 Rendimiento CFX 3500 RPM . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
B.3 Rendimiento CFX 7000 RPM . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
C.1 Rendimiento Experimental 9x6 . . . . . . . . . . . . . . . . . . . . . . . . . . 69
C.2 Rendimiento Experimental 10x6 . . . . . . . . . . . . . . . . . . . . . . . . . . 70

LISTA DE TABLAS vii
C.3 Rendimiento Experimental 11x7 . . . . . . . . . . . . . . . . . . . . . . . . . . 70
C.4 Rendimiento Experimental 13x6 . . . . . . . . . . . . . . . . . . . . . . . . . . 71
C.5 Rendimiento Experimental 13x8 . . . . . . . . . . . . . . . . . . . . . . . . . . 71

LISTA DE TABLAS 1
a Factor de Interferencia axiala’ Factor de Interferencia tangencialA Área del disco actuadorB Número de Palas o Aspasc Cuerda del elemento de aspacl Coeficiente de Sustentación localcd Coeficiente de Arrastre localCT Coeficiente de EmpujeCQ Coeficiente de TorqueCP Coeficiente de Potenciad DiámetroD ArrastreE EnergíaF Factor de Pérdidas de PrandtlJ Relación de AvanceL Sustentaciónm Flujo Másicon Velocidad de Operación en HzP PotenciaQ Torquer RadioR Radio Máximo (Radio en la punta de la hélice)T EmpujeV Velocidad del Flujo Agua ArribaVe Velocidad justo antes de la héliceVs Velocidad justo después de la héliceVss Velocidad mucho después de la hélice (Flujo desarrollado)W Velocidad relativa entre el elemento de aspa y el flujowa Velocidad inducida axialmentewt Velocidad inducida tangencialmente� Ángulo de Ataque� Ángulo de PitchΓ Circulación� Paso� Eficiencia� Viscosidad dinámica� Radio Adimensional r/R� Densidad del aire� Ángulo del flujo! Velocidad Angular en rad/seg
Tabla 1: Nomenclatura Utilizada

Capitulo 1
Introducción
Junto con los avances en la aviación civil y militar, se aprecia una fuerte tendencia queha evolucionado a una de las más exitosas líneas de investigación a nivel internacional.Ésta hace referencia a todo tipo de miniaturización y automatización de las tecnologíascomerciales en control, propulsión, estructuras e inclusive vehículos, abriendo un espectromuy amplio. Algunos ejemplos son: M.A.V. (Micro Aerial Vehicles), U.A.V. (UnmannedAerial Vehicles), P.A.V. (Personal Aerial Vehicles) y sus variantes. Este conjunto devehículos están diseñados para un gran número de aplicaciones en diferentes campos como elentretenimiento, la investigación, la evaluación de nuevas tecnologías, soporte a operacionesciviles y militares, entre muchas otras. Dichas actividades pueden ser tan simples comooperaciones de acompañamiento, hasta de alto nivel de complejidad como reconocimiento yapoyo en tiempo real en operaciones militares.
Hoy en día, la tecnología existente en el desarrollo de vehículos no tripulados está losuficientemente desarrollada para muchas aplicaciones. Prueba de ello es el amplio catálogode productos y de compañías encargadas en la manufactura de los U.A.V., sus partesy accesorios. De hecho, en los últimos 10 años han surgido más de 100 compañíasque han querido suministrar diferentes soluciones para fines civiles, militares, híbridos einvestigativos. Solo para el año 2008, la UVS-International (Unmanned Vehicle SystemsInternational) ha catalogado 974 sistemas aéreos no tripulados de 48 países mientras queen el año 2004 eran tan solo 477 sistemas [15]. Por otro lado, la demanda de vehículos notripulados se incrementará significativamente durante los próximos quince años, cuando lasprincipales aplicaciones militares lleguen a una plena satisfacción y las aplicaciones civilesse fortalezcan significativamente [26, 27, 28]. En estos años, las nuevas compañías jugaránun papel importante suministrando sus productos teniendo en mente que la calidad y elrendimiento final son factores decisivos en el éxito. Es justo en este punto donde empiezana manifestarse las debilidades cuando no se llevan a cabo planes sustanciosos en el área de

3
Investigación y Desarrollo (R & D).
En este tiempo, los equipos de ingeniería entienden lo suficiente de aerodinámica paradiseñar, construir y experimentar con la geometría; de integridad estructural paradimensionar y manufacturar con exactitud cada uno de los componentes físicos que hacenparte del vehículo; de control para diseñar sus pilotos automáticos dando vida y autonomía asus creaciones. Pero existe un área que está siendo subestimada: la Propulsión. Se pensaríade este conocimiento, aunque es más antiguo que la misma aviación [12], que debería estarlo suficientemente desarrollado para satisfacer cada una de las aplicaciones y necesidadesde la aeronáutica. A gran escala, esta primicia es cierta: se puede diseñar y calcular conexactitud los sistemas de propulsión para vehículos aéreos de la aviación general y militar.Pero no hay que olvidar que la aerodinámica es distinta cuando se consideran números deReynolds pequeños, justo al régimen de operación de pequeños vehículos aéreos cuandose desea optimizar la potencia del motor, minimizar el ruido (sumamente importante enaplicaciones de reconocimiento), reducir el consumo de combustible, la producción de gasesy así satisfacer las restricciones impuestas en el diseño.
Actualmente, la gran mayoría de vehículos utilizan un sistema de propulsión basado enhélices. En algunos casos se utilizan sistemas más sofisticados como sistemas Jet, turbinas oventiladores entubados generalmente en vehículos más grandes y por lo tanto costosos [15].Se podría decir, que la hélice se convierte en el sistema de propulsión más común, económicoy más utilizado en vehículos U.A.V.
En cuanto a las hélices para vehículos pequeños, el único referente existente son lashélices producidas para la industria del aeromodelismo. Muchos de los nuevos vehículosproducidos por pequeñas compañías o los vehículos en etapas de desarrollo, se basan enestos modelos para realizar los diseños de sus propias hélices. El problema radica en quelos aeromodelos han estado por mucho tiempo, ajenos a los desarrollos tecnológicos de laindustria aeroespacial, por lo que en general sus accesorios no corresponden a elementos deúltima generación y mucho menos corresponden al estado del arte.
En la mayoría de los casos, las hélices que se utilizan solo son un modelo a escala de unahélice usada en la aviación general o histórica, dejando de lado los principios aerodinámicosque la gobiernan. En otras ocasiones, las hélices son fuertemente alteradas con el fin defacilitar enormemente los procesos de manufactura. Aunque estos dispositivos funcionany producen empuje, no están optimizados y no aprovechan al máximo todos los recursosenergéticos disponibles. Las razones son simples: las hélices son fabricadas para un hobbyy no como ingeniería aplicada.
En todos los casos existe un fuerte desconocimiento en cuanto a la aerodinámica de hélices,en su funcionamiento, en su diseño y en su correcta selección. Prueba de este hecho es la falta

4
de información confiable relacionada con las curvas de rendimiento, los regímenes adecuadosde operación y la correcta selección del motor. De igual manera, no existe información sobreprocedimientos experimentales llevados a cabo con fines de caracterización. Otra evidenciaes la innumerable cantidad de formas y geometrías disponibles en el mercado con la mismadenominación.
Las hélices de aeromodelos generalmente tienen diámetros inferiores a dos pies y se operan amuy altas revoluciones; debido a las pequeñas longitudes de cuerda disponible, generan pocasustentación y dada su alta velocidad de giro incrementan sustancialmente el arrastre y lapotencia requerida. Por otro lado, la distribución de la cuerda y del ángulo de calaje no sonlos adecuados para el punto de operación que reportan; como consecuencia la distribuciónde carga aerodinámica a lo largo de cada una de las palas no está debidamente distribuida,y el ángulo de ataque local para cada elemento radial no es óptimo. Finalmente, si con elfin de fabricar con facilidad la hélice no se usa un perfil aerodinámico exacto, sino por elcontrario modificado, el rendimiento final se ve fuertemente afectado.
Por las razones mencionadas con anterioridad, esta investigación pretende romper algunosparadigmas en el desarrollo (diseño y construcción) de hélices para bajos Números deReynolds: bajas velocidades de operación, incremento en la longitud de la cuerda en cadaposición radial, cambio sustancial en la geometría de la hélice y la incorporación en elproceso de diseño de la condición de Betz. Todas estas modificaciones, son hechas conmiras a desarrollar una hélice mucho más apropiada para las condiciones de operación enpequeños vehículos aéreos incrementando la eficiencia, el rendimiento, y reduciendo los costosincurridos por un elevado gasto de combustible. El desarrollo de una hélice de bajo númerode Reynolds, como la que se desea implementar, corresponde en la correcta y adecuadaaplicación de la teoría de diseño usada en el desarrollo de hélices para la aviación comercial,teniendo en mente algunos aspectos que involucra la operación a bajo número de Reynoldsy las limitaciones del diseño tradicional. Si el lector está interesado en el diseño y análisis deventiladores entubados con propósitos de propulsión, se recomienda consultar la referenciaNo. [9]
Igualmente, esta investigación pretende motivar a todos los desarrolladores de pequeñosvehículos aéreos como U.A.V. y M.A.V. e inclusive a los aeromodelistas, a no tenermiedo a modificar los sistemas de propulsión de sus vehículos, con el fin de incrementarsu rendimiento y adecuarlo a las mejores condiciones de operación. De igual manera,unir esfuerzos en este fascinante tema de la propulsión aerodinámica, para que cada díase desarrollen mejores productos, más eficientes, más innovadores, más tecnificados, másmodernos y para que no sigamos cometiendo los errores ya vistos en el pasado.

Capitulo 2
Comentarios Introductorios yAntecedentes
Los vehículos aéreos requieren algún mecanismo por el cual adquiera movimiento a travésdel aire basándose en algún principio físico. Este mecanismo debe permitirle al vehículoacelerar y contrarrestar las fuerzas de fricción simultáneamente [25]. Este mecanismoconsiste básicamente en algún proceso mecánico que transforma energía química, potencialo cinética en trabajo útil. Idealmente, este mecanismo también debe reponer toda la energíaperdida en forma de calor debido a todo tipo de fricción.
El proceso de forzar al vehículo a moverse se denomina propulsión [16]. Los mecanismosde propulsión son muy variados: químicos como los propelentes sólidos y líquidos de loscohetes, nucleares, iónicos o electrostáticos, solares, netamente mecánicos (aerodinámicos)como hélices y ventiladores, y de tipo Jet como Turbojets, Turbofans, Ramjets y Scramjets[12, 16, 31].
Todo tipo de propulsión se basa en el principio de reacción del fluido de trabajo,generalmente aire, a través del mecanismo de propulsión [25]. Esto quiere decir que, paravuelos en la atmosfera terrestre, el momentum del aire es modificado (se acelera) y comoreacción a este cambio se genera propulsión; esencialmente la segunda y tercera ley deNewton [16].
Los sistemas de propulsión basados en aire requieren alguna fuente de poder para acelerarel flujo. Las principales fuentes son los combustibles fósiles, el hidrogeno, las baterías, lospaneles solares o la potencia humana [25].

2.1 Introducción a las Hélices 6
2.1 Introducción a las Hélices
La mayoría de vehículos de la aviación general y de la aviación privada están impulsados porhélices y por un motor de combustión interna que funciona similar al motor de un automóvilo de una motocicleta [25]. Esto no quiere decir que sean las únicas fuentes de poder, tambiénexiste la posibilidad de los motores eléctricos. De hecho, estos últimos son los preferidoscomo el intermediario para el suministro de potencia en pequeños vehículos aéreos como losM.A.V y aeromodelos.
Las hélices son la alternativa más común de propulsión aerodinámica para vehículos aéreospor varias razones. Inicialmente, fueron el primer mecanismo de propulsión aeronáutica queexistió. Además, la cada vez mejor relación potencia/peso, el bajo consumo de combustibley las mejoras en la confiabilidad que se registraron en el último siglo las hicieron ideales parala industria aeronáutica [31] sirviendo como base para su acelerado y fascinante crecimiento.
Por otro lado, el sistema hélice − motor es la solución más económica en adquisición deequipos y en gastos incurridos por operación a cualquier escala; además, no se debendimensionar gigantescos tanques de combustible, como ocurre en los sistemas Jet reduciendoconsiderablemente el peso y aumentando la distancia de vuelo antes de una recarga [12].Finalmente, las hélices son mucho más eficientes que otros sistemas cuando el régimen deoperación es totalmente subsónico. Sin embargo, tienen el problema de ser pesadas, ruidosasy ser fuente de vibraciones. Todas estas características hacen a la hélice la mejor opciónpara ser el sistema de propulsión a bajas velocidades y alturas de operación.
Físicamente, una hélice es un conjunto de palas o alabes que giran a una velocidad sobreun eje. La sección transversal en cualquier punto de la pala corresponde a un perfilaerodinámico, cuya geometría es decisiva en el empuje que es capaz de generar la hélice yen la potencia que se requiere para hacerla girar. Este perfil presenta una leve rotación conrespecto al movimiento rotacional. El ángulo que se forma es denominado ángulo geométricode Pitch y cambia a medida que se desplaza a lo largo del alabe. Cualquier punto sobrealguna de las palas describe una curva espiral sobre el eje de rotación a medida que la héliceavanza.[24].
La forma en que las hélices generan empuje, se basa en que cada una de los alabes o palasactúan como un ala rotativa, es decir, cada punto no se mueve en línea recta como lo hacenlas alas en los aviones, sino que giran alrededor de un punto, generando sustentación debidoa su movimiento a través del aire. La figura 2.1 muestra un esquema de configuración de unsistema de propulsión tipo hélice de dos palas.

2.2 Breve Historia del Desarrollo de Hélices 7
Fig. 2.1: Hélice de dos palas
2.2 Breve Historia del Desarrollo de Hélices
Las hélices han sido por largo tiempo reconocidas como mecanismos eficientes de propulsión,inclusive mucho antes que el primer vuelo de los hermanos Wright se llevara a cabo. Losprimeros modelos fueron usados como sistemas de propulsión para embarcaciones y lossistemas de palas en los molinos de viento [16]. Hoy en día, son sinónimos de alta sofisticaciónen aerodinámica y en diseño estructural.
Inicialmente, las hélices eran consideradas como tornillos (en alguna literatura se lesdenomina screws, airscrews, etc) debido a que su movimiento en el aire es muy similara como lo hace un tornillo sobre la madera. El concepto no es para nada nuevo. En elsiglo III A.C., el científico e ingeniero griego Arquímedes de Siracusa dio origen a lo que sepuede considerar como un plano inclinado alrededor de un cilindro que gira. Este invento esampliamente utilizado como un sistema de bombeo y su ingenioso modo de funcionamiento,dio origen a los precursores de las hélices tanto para la aviación como para la navegación.
Después de varios siglos sin nada novedosos, aparece Leonardo da Vinci con documentosprecisos, dibujos con alto grado de detalle, explicaciones y comentarios de lo que seconstituiría como los primeros esbozos de maquinas voladoras y de sus mecanismos [30].Dentro de todos los dibujos de Leonardo, se hace referencia al modelo de un helicópteroque levanta vuelo gracias a un mecanismo de tornillo helicoidal muy similar al tornillo deArquímedes y que data del año 14831. El mecanismo de sustentación consistía en un modelode plano inclinado alrededor de un eje de rotación, y cuyo ancho disminuye a medida que seacerca al tope superior del vástago. La figura 2.2 muestra un modelo de la idea de Leonardo.Posteriormente, en el año 1754, el ingeniero ruso Mikhail Lomonosov dibuja un pequeñohelicóptero de rotores con cuatro palas coaxiales, primera hélice con un número finito depalas destinada a la propulsión, y construye un modelo escala impulsado por un mecanismo
1http://www.helis.com/pioneers/. Última fecha de acceso: Febrero 10 de 2009

2.2 Breve Historia del Desarrollo de Hélices 8
Fig. 2.2: Helicóptero de Leonardo da Vinci
de resorte, que se puede considerar como uno de los primeros modelos voladores [18]. Otropionero, el padre de la aeronáutica, el inglés George Cayley en 1843 concibe un vehículoaéreo que dispone cuatro hélices sustentadoras agrupadas en dos pares y cuyos ejes estáninclinados tenuemente entre sí [30]. Las hélices servían como mecanismo de sustentación yde propulsión. Las hélices propuestas por Cayley consisten en nueve (9) palas, donde ya sedispone de un perfil aerodinámico en su sección transversal y están dispuestas de tal formaque presentan un ángulo de ataque.
De acuerdo a los resultados obtenidos por pioneros como Mikhail Lomonosov y Sir GeorgeCayley, las hélices poco a poco fueron adquiriendo cada vez más popularidad hastaconvertirse en el medio preferido de propulsión para los globos y los dirigibles. La carrera porla construcción de mejores dirigibles, cada vez más grandes y rápidos, permitió el desarrollode hélices cada vez más grandes, robustas, veloces, seguras y mejores acopladas a los motores.La competencia posicionó a la hélice como el sistema de propulsión más popular y tecnificadade la época; hasta el día de hoy donde es el sistema de propulsión más común y económicoen la aviación general.
Un invento interesante mostrado en la feria del Crystral Palace de Londres por Thomas Moyen 1875 fueron las dos hélices de seis pies de diámetro, impulsadas por un motor de vaporde tres caballos de fuerza. Aunque el objetivo del invento es mostrar un pequeño modelo devehículo aéreo, las hélices que tenía son las primeras en construirse que constan de un pitch

2.2 Breve Historia del Desarrollo de Hélices 9
ajustable para maximizar el empuje según las condiciones de vuelo2.
En cuanto al desarrollo matemático y técnico en la historia de las hélices, solo tres eventosson de suma importancia antes del siglo XX. El primero de ellos es el desarrollo de la Teoríadel Momentum o la Teoría del Disco Actuador. Ésta propone un modelo matemático parahélices o para rotores ideales en donde son considerados como discos infinitamente delgadosy que inducen una velocidad constante en el flujo que los traviesa. Posteriormente, WilliamFroude desarrolla las relaciones que gobiernan la propulsión de un dispositivo en un mediofluido. Finalmente, Stephan Drzewiecki presenta la famosa Teoría del Elemento de Aspa lacual permite el directo cálculo del rendimiento de una hélice y su geometría pero no tomaen cuenta el efecto que tiene cada elemento sobre la velocidad inducida por la hélice misma[36].
2.2.1 Los Hermanos Wright
Luego que los hermanos Wright mejoraron los sistemas de control de su modelo Flyer I,empezaron a trabajar en el sistema de propulsión adecuado. Ellos pensaron en comprar unpequeño motor y aplicar los principios de diseño de hélices para barcos para crear su propiahélice de avión [3].
Los hermanos empezaron a buscar un motor pero ninguno satisfacía las condiciones mínimasde peso y de potencia que necesitaban, así que decidieron construir su propio motor. Conla ayuda de Charlie Taylor, diseñaron y construyeron uno en menos de seis semanas.Simultáneamente, Wilbur Wright aprendió el proceso de diseño de hélices para barcos apartir de la literatura existente pero los hermanos se dieron cuenta que no iba a ser untrabajo fácil debido a las diferencias entre el agua y el aire.
El punto de partida fue la teoría del momentum de Rankine y el trabajo de Froude. Despuésde muchas horas de trabajo y de análisis, entendieron las hélices como un dispositivorotatorio que produce sustentación y que pueden ser tratadas como alas. De la mismamanera, entendieron que el rendimiento en vuelo es diferente de acuerdo a las condicionesde velocidad. Lo anterior no era evidente para muchos, pero hizo la diferencia a la hora dediseñar y construir su hélice [3].
Los hermanos nunca expusieron el método de selección del perfil aerodinámico queseleccionaron para su hélice, aunque sabían de antemano las ventajas en la selección deacuerdo a la relación de sustentación - arrastre del perfil para los diferentes ángulos deataque. Igualmente, no se sabe como seleccionaron la distribución de la cuerda comofunción del radio, ni como seleccionaron el centro de presión aproximadamente a 5/6 del
2http://www.ctie.monash.edu.au/hargrave/moy.html. Última fecha de acceso: Febrero 21 de 2009

2.2 Breve Historia del Desarrollo de Hélices 10
Fig. 2.3: Rendimiento de una réplica de la hélice de los hermanos Wright [3].
radio, procesos que nunca fueron reportados y que al día de hoy son un misterio. Luego quela hélice fue construida en un modelo a escala y probada, Wilbur estimó una eficiencia del66% para la versión a escala real.
El programa Wright Experience, una organización que pretende rescatar todo el legado delos hermanos Wright, ha construido una réplica de la hélice que los hermanos utilizaron,con una alta precisión geométrica. A partir de la réplica, se midió el empuje de cada unade las hélices dando como resultado 69 libras a una velocidad de 380rpm. Un hecho quees sorprendente es los altos rangos de eficiencia observados para diferentes relaciones deavance, figura 2.3, si se tiene en cuenta el proceso de manufactura y todo el conocimientoreferente a hélices que se disponía en la época. Simulaciones y pruebas experimentalescorroboran el extraordinario rendimiento de la hélice de los hermanos Wright. Es un hechoque los hermanos sabían con exactitud, que hélices largas con baja velocidad de rotación ybaja carga aerodinámica alcanzan los más altos niveles de eficiencia, además de la correctaselección del motor[3].
2.2.2 Pioneros del Siglo XX
Con el desarrollo de Ludwig Prandtl sobre la teoría de la línea de sustentación de alasen 1918 que introduce conceptos de vorticidad, se abre el camino a teorías más completasy coherentes en cuanto al funcionamiento de las hélices. Las teorías modernas de hélicesson análogas a la teoría de alas en donde cada pala es considerada como una superficiesustentadora [36] donde hay una circulación asociada. En el caso de un ala con mínimaperdida energética, los vórtices generados se distribuyen en una pequeña lámina uniforme ydescendiente (downwash).
Albert Betz, el mismo de la ley de Betz que establece los límites teóricos de las turbinas

2.2 Breve Historia del Desarrollo de Hélices 11
eólicas, en su investigación de doctorado culminada en 1919, establece que la distribuciónmás optima de vorticidad inducida para el caso de las hélices con baja carga aerodinámica, esdecir bajo empuje y potencia por unidad de área, corresponden a una distribución helicoidalque avanza a velocidad constante[2]. Prandtl, tiempo después, encontró una funciónaproximada al flujo helicoidal de los vórtices; la aproximación es buena para relaciones deavance bajas y para un alto número de palas, muy atractivo debido a su forma matemáticasimple y que continua siendo muy útil.
Sidney Goldstein resolvió el problema completo del campo potencial y de la distribuciónde circulación para los vórtices helicoidales para bajas relaciones de avance en el año 1929.La teoría, como él la presentó, estaba limitada a hélices con baja carga aerodinámica y convalores tabulados únicamente para hélices de dos o cuatro palas [36].
Aunque ya existía un entendimiento más profundo de la teoría de vórtices, la combinaciónde la teoría del momentum y del elemento de aspa continuó siendo refinado lo que permitióser empleada en cálculos prácticos. El refinamiento fue llevado a cabo por Hermann Glauerten 1936. En su trabajo, se corrigió las pérdidas de momento debido a los flujos radialespermitiendo buenos resultados aun cuando la contracción de la estela del fluido es ignorada.El refinamiento desarrollado aplica para discos con baja carga aerodinámica aunque trabajabien para cargas moderadas y altas [2].
Theodore Theodosen en 1944 mostró que la condición de Betz o el modelo de vorticidad nonecesariamente están limitados para aplicaciones con hélices de baja carga aerodinámica. Elanálisis se basa en estudiar el sistema de vórtices lejos de la hélice y no en sus inmediacionescomo los trabajos anteriores hacían. Theodorsen refinó y elaboró una teoría de hélices condistribución de vórtices ideal [36].
Para 1979 E. Eugene Larrabee rescató el procedimiento de diseño y lo presentó paradiseño óptimo. Sin embargo, su trabajo aún presentó algunas deficiencias, puesto queaproximaciones de pequeños ángulos fueron utilizadas y tomó como supuesto hélices debaja carga aerodinámica [2].
2.2.3 Últimas Tendencias
En los últimos años del siglo XX, el objetivo de los ingenieros en el diseño de hélices se enfocóen el desarrollo de nuevos productos que permitieran eliminar las limitantes de las hélicesconvencionales y otorgar nuevas características. Este proceso se llevó a cabo pensando enlos nuevos requerimientos de los clientes como más potencia, más empuje, más velocidad,menos ruido, menos vibraciones, menos costos de mantenimiento y de gasto de combustibley menor tamaño. Siguiendo esta sucesión de ideas, es posible rescatar algunos diseños.

2.2 Breve Historia del Desarrollo de Hélices 12
Fig. 2.4: Turbohélice y Propfan
El primer modelo es la turbo hélice o turboprop usados en vehículos de velocidad subsónica yde tamaño moderado, la primera gran evolución de la hélice. La turbo hélice se caracterizapor ser una hélice convencional que adquiere potencia de una turbina jet y no de un motorde pistones. Este modelo se caracteriza por altas eficiencias pero en la mayoría de casosrequiere de una caja de cambios que permita reducir la velocidad de la hélice con respectoal eje de la turbina por razones de tipo estructural. El escape de gases de la turbina puedecontribuir con cerca del 20% del empuje total [31] pero con un flujo másico cerca de 25 a 50veces menor [12]. El sistema turbo hélice es más eficiente que una hélice convencional paravelocidades del vehículo mayores a Mach 0.5 pero está limitado a velocidades de punta de0.7 Mach.
Otro modelo reciente de hélice de vanguardia es el propfan o unducted fan. Este modeloalcanza eficiencias muy altas como 0.8 inclusive a Mach 0.9 y es bastante económico peroaun no es comercial debido a problemas de ruido. Son más pequeñas en diámetro que unsistema turbo hélice pero tienen muchas más palas, tienen longitud de cuerda mayor, son demenor grosor y con una geometría novedosa que permite regímenes transónicos sin perdereficiencia [31]. La figura 2.4 muestra una turbohélice3 y un propfan4.
La última tendencia a hacer referencia es el desarrollo de hélices de alto rendimiento abajo número de Reynolds, inclusive en regímenes completamente laminares. La finalidad essatisfacer las necesidades de los nuevos vehículos aéreos no tripulados cada vez más pequeñossin perder eficiencia. En esta área falta aun mucho por desarrollar.
3Imagen tomada de: http://www.mtu.de/en/products _ services/military _ business/programs/tp400_ d6/index.html. Última fecha de acceso: 22 de Febrero de 2009.
4Imagen tomada de: http://www.greencarcongress.com/2008/07/cfm-introduces.html. Última fecha deacceso: 22 de Febrero de 2009.

2.3 Aerodinámica de Hélices 13
Fig. 2.5: Flujo a través del disco de acción de la Hélice
2.3 Aerodinámica de Hélices
Los detalles de la aerodinámica de las hélices son complejos, muy exactos y en algunos casosconfusos. Algunos apartes de importancia existentes en la literatura son recopilados en estasección que pretende introducir los principios de la física y de la aerodinámica de las hélices.Además, son el punto de partida para el diseño y análisis de hélices.
El núcleo de la propulsión aerodinámica parte de dos principios básicos: la conservación delmomento y de la energía. El movimiento de la hélice hace trabajo en el fluido, causando unimportante cambio en su presión a través del área de acción de la hélice. Aerodinámicamente,el movimiento de la hélice genera baja presión delante de la hélice y alta por detrás conrespecto a la presión del flujo.
De acuerdo a la segunda ley de Newton y a la conservación del momento, la fuerza de empujeejercida por la hélice es proporcional al flujo de masa a través del área de acción y de surespectivo cambio de velocidad, figura 2.5. En otras palabras es la diferencia del momentodespués y antes de la hélice.
T = m(Vss − V ) (2.1)
Haciendo una leve manipulación algebraica es posible demostrar que
Ve =1
2(Vss + V ) (2.2)
por simplicidad se escribirá comoVe = V (1 + a) (2.3)
Vss = V (1 + 2a) (2.4)

2.3 Aerodinámica de Hélices 14
donde a es el factor de inducción o interferencia axial. Ahora, el cambio de energía cinéticaa través del disco actuador o la potencia suministrada al fluido por la hélice está dado por
dE
dt=
1
2�AVe(V
2ss − V 2) (2.5)
Si se imagina que la hélice se mueve a una velocidad V a través de un flujo estacionario, sepuede pensar en un trabajo TV y por lo tanto en una eficiencia propulsiva (de Froude)
� =TV
12�AVe(V
2ss − V 2)
(2.6)
Simplificando se usan las expresiones anteriores y se llega a
� =V
Ve=
1
1 + a(2.7)
La eficiencia de Froude es el límite superior a la eficiencia aerodinámica real que cualquierhélice puede llegar a alcanzar, puesto que no considera en ningún instante la naturalezaaerodinámica que genera la sustentación, ni mucho menos todas las perdidas en el proceso.Aunque esta eficiencia no es aquella usada en los cálculos de diseño, ni de rendimiento; solopermite identificar un punto de vital importancia [13]. Para una velocidad dada de vuelo V ,la eficiencia decrece con un aumento en la velocidad del flujo de salida Vss. Por ejemplo, unahélice de gran tamaño acelera gran cantidad de masa por lo que para un empuje requeridorequiere un factor de inducción axial muy pequeño (una velocidad Vss muy cercana a V )mientras que para el mismo empuje con una hélice más pequeña se requiere una mayoraceleración del flujo y como consecuencia baja eficiencia. La primera primicia de diseño esentonces maximizar el diámetro de la hélice y reducir al máximo la velocidad de operaciónde la misma.
La hélice real está sujeta a varios componentes de velocidad del fluido por el cual se mueve.Anteriormente solo se consideró el componente axial, pero aun faltan la velocidad rotacionalde cada elemento !r, las velocidades inducidas en el fluido y la interacción con el sistemade vortices. Se recomienda consultar [21, 13, 36] para mayor información al respecto.
2.3.1 Coeficientes
El rendimiento de las hélices es normalmente determinado por procedimientosexperimentales. Toda la información recopilada en pruebas que incluyen todas lascondiciones posibles de operación se expresan usando coeficientes adimensionales. Estosnúmeros son la mejor manera de presentar, planifica e interpretar toda la naturaleza delfenómeno [37].

2.3 Aerodinámica de Hélices 15
Las variables dinámicas que determinan los fenómenos aerodinámicos de la propulsión sonbásicamente el diámetro d, la velocidad de operación en revoluciones por segundo n, ladensidad del fluido �, la viscosidad cinemática �, el modulo de compresibilidad del fluido K,la velocidad de avance V, la velocidad del sonido a y la geometría de la superficie [13]. Laconjunción de todas estas variables permite concretamente obtener información del régimende flujo, los efectos paramétricos de la geometría y las características de una configuraciónparticular [5] que en el caso de las hélices permiten evaluar y predecir todo el espectro decondiciones de operación de un modelo específico. Se mostrará a continuación unas posiblescombinaciones de parámetros que son de utilidad en el diseño y análisis.
El Número de Reynolds se define como la relación entre las fuerzas inerciales y fuerzasviscosas de un fluido. Este parámetro determina globalmente la naturaleza del flujo.
Re =�V L
�(2.8)
El Número de Mach determina el nivel de compresibilidad del fluido. Es de importanciapara determinar los límites aerodinámicos en donde una teoría aplica.
Ma =V
a(2.9)
La Relación de Avance se define el cociente entre la velocidad del flujo aguas arriba y lavelocidad de la punta de la pala.
J =V
nd(2.10)
Los anteriores tres parámetros se consideran como las tres variables independientes(predomina la relación de avance) en el diseño y análisis de la hélice. Los demás parámetrosdependen intrínsecamente de la combinación de los anteriores [4].
El Coeficiente de Empuje
CT =T
�n2d4= f(J,Re,Ma) (2.11)
El coeficiente de Torque
CQ =Q
�n2d5= f(J,Re,Ma) (2.12)
Eficiencia Aerodinámica� = J
CT
CP=TV
Q!(2.13)
El Coeficiente de PotenciaCP =
P
�n3d5= f(J,Re,Ma) (2.14)

2.3 Aerodinámica de Hélices 16
Fig. 2.6: Diagrama de Pitch geométrico de una Hélice.
El Factor de Actividad mide la capacidad de absorción de energía por la hélice.
AF =105
d5
∫ R
0.15Rcr3dr (2.15)
El factor de actividad normalmente se encuentra entre 80 y 200, depende de lascaracterísticas geométricas de cada aspa [7]. Esta es una medida proporcional de la cargaaerodinámica de la hélice.
2.3.2 Pitch
El diagrama mostrado en la figura 2.6 ilustra un elemento de aspa a un radio r del eje derotación de la hélice, también muestra la línea que representa el ángulo de cero sustentacióndel perfil. El ángulo entre la línea de cero sustentación y el plano de rotación correspondeal ángulo geométrico de Pitch � [13]. Físicamente, este ángulo representa el alabeo de cadasección radial del aspa.
El ángulo tiene una relación directa al avance de la hélice, puesto que establece el paso dela misma; es decir la distancia que avanza axialmente por cada revolución completa que dael elemento. Matemáticamente
� = 2�r tan� (2.16)
Normalmente, el ángulo de Pitch varía en función del la distancia al eje de rotación de lahélice, pero el paso debe ser constante a lo largo de toda la pala. El paso es determinanteen la eficiencia de la hélice en función de la relación de avance. Por lo tanto, el pasotambién debe ser considerado en el diseño de hélices, por ejemplo un paso muy corto a altasvelocidades o un paso muy grande a bajas velocidades es fuente de baja eficiencia puesto

2.3 Aerodinámica de Hélices 17
Fig. 2.7: Vorticidad generada por la Hélice [6]
que puede llevar a los elementos de aspa a un estado de perdida [13].
2.3.3 Vórtices y la Condición de Betz
La razón por la cual entender los fenómenos existentes en la vecindad de cada pala de unahélice, es bastante compleja, no recae en la dificultad del fenómeno sino en limitaciones depresentación geométrica y en el tratamiento matemático[6].
De acuerdo a la forma en que la hélice genera empuje, se generan unos movimientos circularesen el flujo, llamados vórtices. La hélice está compuesta por perfiles aerodinámicos y debidoa las consecuencias de la teoría de la línea de sustentación, se genera un plano de vorticidada lo largo de todo el borde de fuga. A medida que la hélice gira alrededor de su eje, mientrasavanza, la vorticidad toma una forma de espiral. Este fenómeno ocurre en cada una de laspalas que conforman la hélice. De igual manera, se genera un vórtice en la punta de la pala,dada la interrupción de sustentación con sentido alta presión → baja presión, equivalente auna interrupción de la circulación. Por último se genera un vórtice en el eje de rotación dela hélice. Se recomienda consultar [5, 13, 24] para una explicación más profunda sobre elorigen de los vórtices. La figura 2.7 esquematiza la vorticidad generada por el movimientode una hélice de dos palas.
La generación de los vórtices es una de las razones de ineficiencias y de gasto elevadode energía de la hélice, puesto que aceleran el fluido axial y tangencialmente [8]. De talmodo, que la correcta distribución de vórtices generados por una hélice, es el aspecto másimportante en el proceso de diseño aerodinámico. De este hecho se desprende la condiciónde Betz que establece que el flujo detrás de una hélice con la mínima perdida de energíaes aquel que corresponde con superficies rígidas helicoidales desplegadas axialmente [6] yque se mueven a velocidad constante [8]. En otras palabras, como lo describe Wald en[36], la eficiencia es máxima sin restricciones de carga aerodinámica, cuando el paso de losvórtices generados por el borde de fuga es constante y cuando se mueven como una superficie

2.3 Aerodinámica de Hélices 18
helicoidal sin deformarse.
Matemáticamenter tan� = K = r
V + wa
!r − wt(2.17)
Donde wa y wt son las velocidades inducidas axial y tangecialmente por la hélice.
2.3.4 Teoría del Elemento de Aspa
La teoría del Elemento de Aspa propuesta por Drzewiecky permite el cálculo directo delrendimiento de una pala. El método utiliza directamente las fuerzas aerodinámicas existentesen el perfil, lo que hace a la teoría muy general y aplicable a muchas turbomaquinasexistentes, desde bombas y ventiladores hasta hélices y turbinas.
En esta teoría, cada pala es dividida en un número finito de elementos independientesa lo largo del radio en donde a cada uno se le hace un balance de fuerzas aerodinámicas(sustentación, arrastre) con el fin de determinar el empuje y el torque. El desarrollo completoy comentado puede ser encontrado en las referecias [13, 24].
El método en su forma tradicional, toma como suposición que en cada elemento radial, elperfil se comporta bidimensionalmente ignorando los efectos tridimensionales del flujo comola velocidad inducida debido al sistema vórtices entre otros efectos, dando como resultadouna sobreestimación del empuje y una subestimación del torque [35]. Este efecto es aunmás notable para ángulos de ataque pronunciados, fenómeno que se conoce como Post StallBehavior, haciendo particularmente difícil predecir el comportamiento de la hélice para bajasrelaciones de avance.
Análisis de Rendimiento
En resumen los principales resultados de la teoría el elemento de aspa, son tomados comobase posteriormente en el análisis de rendimiento de la hélice para bajo Número de Reynoldsa desarrollar. La figura 2.8 hace referencia a la nomenclatura usada.
Las fuerzas de empuje y torque sobre cada elemento del rotor son
dT =1
2Cl�BcW
2(cos�− D
Lsin�)dr (2.18)
dQ =1
2Cd�BcW
2(sin�+D
Lcos�)rdr (2.19)
Considerando ahora la teoría de la conservación del momentum, en términos del factor deinducción a. El empuje se define como, el flujo de masa por el cambio de velocidad a través

2.3 Aerodinámica de Hélices 19
Fig. 2.8: Velocidades y Fuerzas sobre un elemento de Aspa
del disco de acción de la hélice
dT = 4��V 2a(1 + a)rdr (2.20)
Por argumentos similares y usando el factor de inducción tangencial a′
dQ = 4��V !a′(1 + a)r3dr (2.21)
Ahora el problema se reduce a encontrar la solución para la velocidad efectiva del elementode aspa W y para los factores de interferencia a y a′ puesto que las demás variables sonconocidas. A partir del diagrama de velocidades y fuerzas de la figura 2.8 se obtiene unarelación geométrica para las variables desconocidas, simplificando el análisis a encontrar solouna de ellas por cada elemento de de aspa.
W =V (1 + a)
sin�=!r(1− a′)
cos�(2.22)
El método más sencillo (tradicional) sin necesidad de hacer ningún tipo de aproximaciónde pequeños ángulos, en el que se puede simplificar alguna de las expresiones, es haceruna iteración entre las ecuaciones de Empuje y de Torque proporcionadas por la teoría delelemento de aspa con las ecuaciones provenientes de la conservación del momentum.
La aproximación anteriormente planteada de la Teoría del Elemento de Aspa tiene algunasdeficiencias que deben ser corregidas o modificadas, para que el procedimiento sea cada vezmás preciso y exacto. Las modificaciones permiten que el método se constituya como unaherramienta de diseño y de análisis confiable, robusta, escalable y adecuada para todo tipode geometrías; con requerimientos más exigentes por ejemplo para aquellas que requieren

2.3 Aerodinámica de Hélices 20
una alta carga aerodinámica.
Como se mencionó anteriormente, se considera que cada perfil en el elemento deaspa se comporta de manera bidimensional ignorando todos los efectos tridimensionalesespecialmente los de inducción de velocidad radial. En cuanto al análisis de la conservacióndel momentum hay aun más problemas puesto que se toma como suposición que la hélicetiene muchas aspas, que la velocidad angular de la hélice no produce un efecto notable enlos cambios de presión del fluido y que todas las formulas son aplicables a hélices con unnumero finito y pequeño de aspas [24]. Finalmente, todo el análisis es independiente delNúmero de Mach.
Entre las modificaciones posibles se encuentran incluir el factor de Prandlt − Glauert queincluye los efectos de compresibilidad en la sustentación a números de mach subsónicos ytransónico [13, 24]. Dado que el objetivo es el desarrollo de una hélice para bajo Número deReynolds no se incluirá dentro del paquete de correcciones puesto que el número de Machno debería sobrepasar 0.4.
Otra modificación al procedimiento es incluir un factor que incluye los efectos del flujopotencial debido a la circulación presente en el sistema de vórtices generados por la héliceasí como su movimiento detrás de ella. La circulación debe desaparecer en la raíz y en lapunta de cada pala de la hélice por lo que en esos puntos no debe existir sustentación alguna[8]. Por otro lado, en el sistema de vórtices debe existir evidencia de un número finitoy pequeño de palas. Goldstein desarrolló una solución exacta al problema que se reduceal Factor Kappa de Goldstein � pero debido a la complejidad del problema no existe enuna forma matemática cerrada, fácil y rápida de calcular [21, 36]. Una aproximación es lacorrección de perdidas en la punta propuesta por Prandtl. La aproximación es muy cercanaa la solución de Goldstein para relaciones de avance bajas y un alto número de palas. Lacorrección se define como
F =2
�cos−1 exp−f (2.23)
f =B
2
1− �sin�T
(2.24)
Y la circulación sobre cada elemento de aspa debe ser corregida como
BΓ = 2�rFwt (2.25)
La última corrección a realizar es el método iterativo para la búsqueda de los factores deinterferencia axial a y tangencial a′. La corrección propuesta utiliza un método iterativo másrobusto sobre el ángulo de flujo y que incluye el uso del factor de pérdidas de momentum[36].

Capitulo 3
Diseño de Hélices y Análisis Teórico
Se aprecian tres diferentes métodos de diseño de hélices basados en la combinación de lateoría del elemento de aspa con la teoría del momentum con diferentes niveles de precisiónpara finalmente mostrar un ejemplo extensivo de diseño que funcione como una solución realpara una aplicación de bajo número de Reynolds. Adicionalmente, se incorporan algunascorrecciones consecuencia de los resultados de la teoría de vórtices, todas aquellas estánenfocadas al desarrollo de una hélice de alta eficiencia con la mínima cantidad de pérdidasde energía incluyendo la condición de Betz y los cálculos de las velocidades inducidas.
Las condiciones y requisitos de desarrollo para la hélice, aunque no serán detallados, seespecificarán a partir de una necesidad y una aplicación real para un vehículo aéreo notripulado de tamaño pequeño.
3.1 Métodos de Diseño
Se evalúan tres métodos distintos disponibles en la literatura para determinar cuál de elloses el más óptimo y cuál encaja con los requisitos y restricciones impuestas en el proceso dediseño. Como variable de entrada en los tres métodos se encuentra la relación de avancedeseada para el punto de mejor operación, alguna restricción geométrica y una condicióndinámica.
3.1.1 Método de la Eficiencia
La metodología corresponde al proceso de diseño de una hélice de máximo rendimientousando una combinación entre las teorías del momentum y la teoría del elemento de aspa a

3.1 Métodos de Diseño 22
través del método de la eficiencia [19, 32]. Esta metodología ya ha sido ampliamente usadaen varios trabajos de grado en el departamento de Ingeniería Mecánica de la Universidad deLos Andes. Se rescata el procedimiento de diseño del último trabajo hasta la fecha, tituladoDiseño y Evaluación de Hélices propulsoras para Aeromodelos para Flujos Laminares, trabajollevado a cabo en el segundo semestre del año 2007 por Santiago Losada. Adicionalmente,el trabajo de grado Diseño y Prueba de Hélices de Aeromodelos llevado a cabo por CarlosAlzate en el segundo semestre del 2005.
En el trabajo de Losada, se resume el procedimiento de diseño de hélices a partir de trabajosanteriores con cierto grado de similitud, pero incorpora en el análisis el factor de pérdidas dePrandtl F que involucra las pérdidas generadas en la punta debido a los vórtices generadosen esa zona de la Hélice. Adicionalmente, este trabajo expone las ecuaciones de análisisdinámico de las hélices con las cuales se pretende predecir el comportamiento del sistemapropulsivo para diferentes velocidades de operación.
Se ha denominado el método de la eficiencia, dado que como lo expresan Losada y Alzate ensus trabajos de grado, se parte de las restricciones geométricas impuestas por la aplicación:diámetro, velocidad de giro, número de aspas y un valor adicional que corresponde a laeficiencia aerodinámica de la hélice. Es decir, el procedimiento converge a una geometríacon la eficiencia escogida. Este procedimiento aunque es muy fácil de programar requiere laselección de la eficiencia, valor que es predecible de acuerdo a las condiciones y restriccionesde operación pero que su selección exacta no optimiza el procedimiento.
3.1.2 Método de la Velocidad de Impacto
El proceso de diseño de una nueva hélice a partir de la selección de la velocidad de impactoW0 está totalmente descrito y explicado en el capitulo 6 de la referencia [21]. La velocidadde impacto se define como la velocidad de desplazamiento axial del sistema de vórticeshelicoidal muy detrás de la hélice. La selección de este parámetro es totalmente arbitrario[21] y en su forma general es una función del radio adimensional �.
3.1.3 Método Óptimo
Este procedimiento es más sofisticado que los dos procesos de diseño mencionadosanteriormente debido a su naturaleza iterativa y a las restricciones o condiciones de entrada:geométricas (al igual que los procesos anteriores) y dinámicas. Para este método solo serequiere especificar el empuje deseado en el punto de diseño o su potencia y no se requiererealizar alguna especulación en cuanto a la eficiencia total de la hélice o a la distribución másoptima de la velocidad inducida a lo largo de la pala. Este último hecho es una considerable

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 23
Parámetro ValorDiámetro 33 cm (13")
Paso 21 cm (8.4")Velocidad 9 m/s
Velocidad Nominal de la hélice 3500 RPMVelocidad Máxima de la hélice 7000 RPM (Despegue - Intercepción)
Empuje Nominal 4 NEmpuje Máximo 16 N (Despegue - Intercepción)
Densidad del aire óptima 0.89 kg/m3
Tabla 3.1: Variables de entrada para la Hélice
ventaja puesto que permite el cálculo de una hélice exacta para las condiciones deseadas.
Este proceso está totalmente especificado en una ponencia del Congreso de CienciasAeroespaciales de 1983 en Reno, NV [1] y en el paper Design of Optimum Propellersde Adkins & Liebeck disponible en el Journal of Propulsion and Power [2]. En dichosdocumentos, se describe los orígenes del método y su carácter adimensional, lo que lo hacemuy útil para diferentes aplicaciones tanto en turbinas como hélices en diferentes tipos defluidos.
3.2 Desarrollo y Análisis de una hélice para bajo número deReynolds
Definidas las técnicas de diseño para hélices de alto rendimiento, se procede a generar unasolución de un sistema propulsivo para condiciones de vuelo muy específicas destinada a unvehículo aéreo no tripulado de tamaño pequeño, es decir no superior a una envergadura de1.5 m. Las variables de entrada para el diseño se describen en la tabla 3.1.
La hélice a desarrollar pretende remplazar una hélice de aeromodelo comercial de 11 ó 13pulgadas. El vehículo objetivo tiene un coeficiente de arrastre total aproximado de 0.35(alas, fuselaje, cola estabilizadora, tren de aterrizaje no retráctil y carga paga), su velocidadnominal es cercana a 30 km/h (etapa de loiter o reconocimiento) y hasta 100 km/h en unaetapa de intercepción.
No se desea aumentar el tamaño de la hélice, ya que se dispone para la fuente de poder unmotor Super Tigre 40 con una potencia máxima de 1.15 HP @ 15000 RPM al nivel del mar.Un diseño muy grande podría generar una carencia de potencia considerable.
Otro punto a tener en cuenta es que los datos estén cerca de la línea de diseño óptimo enel diagrama de Cordier. El diagrama de Cordier es una recopilación de los diámetros y

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 24
Fig. 3.1: Diagrama de Cordier
velocidades específicas para una innumerable cantidad de turbo máquinas. Éste representala mejor relación entre el diámetro específico y la velocidad específica de la turbo maquina.Aunque es un procedimiento muy común en el análisis de bombas, turbinas, soplantes yventiladores ha sido ajeno a las hélices aeronáuticas. Debido a que los fundamentos sonlos mismos, se presenta la ubicación de la hélice en su punto de diseño en le diagrama deCordier.
1. Velocidad Específica: 3.98
2. Diámetro Especifico: 1.49
Un diagrama de Cordier se muestra en la figura 3.1 1.
3.2.1 Perfil Aerodinámico
En la actualidad, existen una infinidad de perfiles cuyos autores aseguran un buen desempeñoa bajos números de Reynolds pero son muy pocos los perfiles a los cuales se les puede asegurar
1Diagrama de Cordier. Http://www.lstm.uni− erlangen.de/allgem/lehre/stroemungsmechanik_ cbi/folien/chapter10.pdf. Última fecha de acceso: Septiembre 5, 2007
3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 25
Fig. 3.2: Perfil Aerodinámico NREL S834
tal rendimiento a partir de pruebas experimentales. La Universidad de Illinois en UrbanaChampaign dispone de una enorme base de datos con perfiles y sus respectivas coordenadaspara su reproducción, y el laboratorio de Aerodinámica aplicada de la misma universidadposee una publicación donde se expone los resultados a mediciones en un túnel de viento aalgunos perfiles para bajo número de Reynolds2.
Por otro lado, el Laboratorio Nacional de Energías Renovables3 ha desarrollado una serie deperfiles aerodinámicos para bajo número de Reynolds. Los perfiles de NREL son interesantespara este tipo de aplicaciones (bajo número de Reynolds) facilitando la fabricación de laspalas debido a que poseen un grosor mayor a muchos de los perfiles publicados para el mismorégimen de Reynolds.
Después de varios intentos de diseño y de fabricación usando perfiles como Eppler E 387 oel Göttingen 417A, se seleccionó el perfil NREL S834. Un perfil desarrollado para turbinaseólicas de bajo número de Reynolds. Toda la información referente a este perfil comocoordenadas y gráficas polares puede encontrarse en las referencias [33, 34].
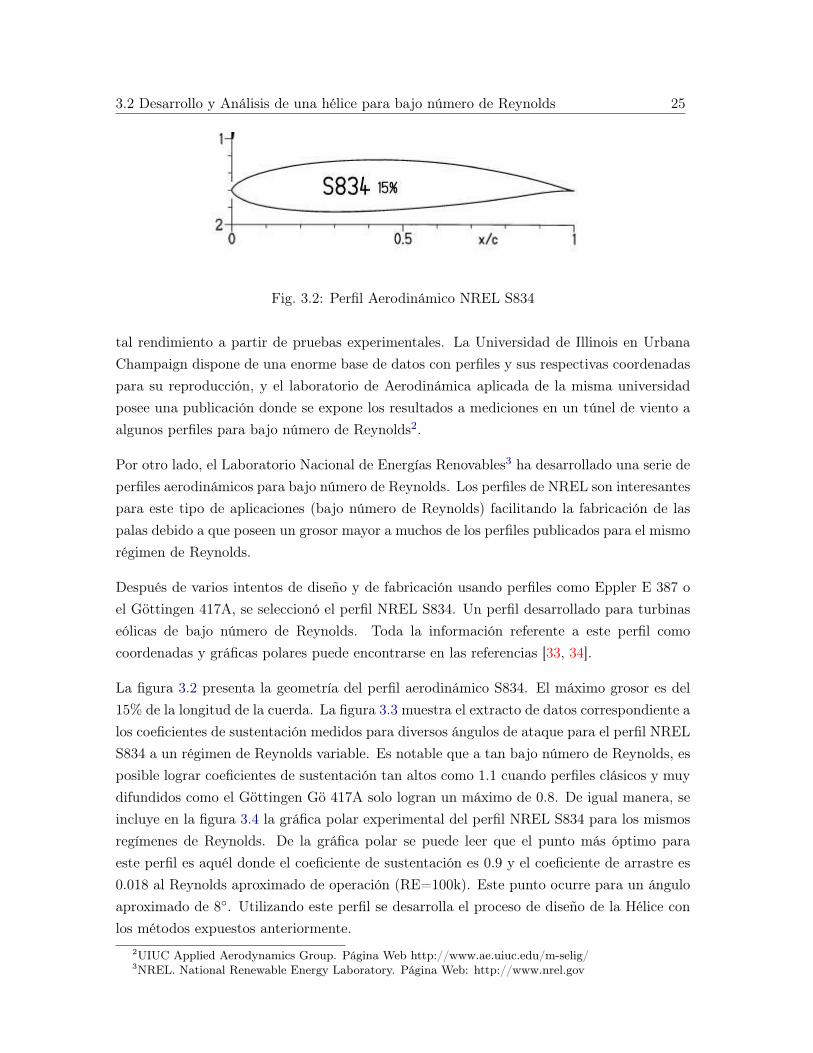
La figura 3.2 presenta la geometría del perfil aerodinámico S834. El máximo grosor es del15% de la longitud de la cuerda. La figura 3.3 muestra el extracto de datos correspondiente alos coeficientes de sustentación medidos para diversos ángulos de ataque para el perfil NRELS834 a un régimen de Reynolds variable. Es notable que a tan bajo número de Reynolds, esposible lograr coeficientes de sustentación tan altos como 1.1 cuando perfiles clásicos y muydifundidos como el Göttingen Gö 417A solo logran un máximo de 0.8. De igual manera, seincluye en la figura 3.4 la gráfica polar experimental del perfil NREL S834 para los mismosregímenes de Reynolds. De la gráfica polar se puede leer que el punto más óptimo paraeste perfil es aquél donde el coeficiente de sustentación es 0.9 y el coeficiente de arrastre es0.018 al Reynolds aproximado de operación (RE=100k). Este punto ocurre para un ánguloaproximado de 8∘. Utilizando este perfil se desarrolla el proceso de diseño de la Hélice conlos métodos expuestos anteriormente.
2UIUC Applied Aerodynamics Group. Página Web http://www.ae.uiuc.edu/m-selig/3NREL. National Renewable Energy Laboratory. Página Web: http://www.nrel.gov

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 26
Fig. 3.3: Coeficientes de Sustentación para el perfil NREL S834
Fig. 3.4: Gráfica polar para el perfil NREL S834
3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 27
3.2.2 Resultados Geométricos del Diseño
Inicialmente, dadas las condiciones y valores de entrada descritos en el principio de estasección, se desarrolló una hélice modelo usando la teoría descrita en los trabajos de gradode Alzate y de Losada. Es decir utilizando el método de la eficiencia. Se realizó el procesoy se obtuvo una geometría. Posteriormente se evaluaron algunos parámetros dinámicos dela Hélice.
Usando una eficiencia cercana al 60%, el algoritmo suministra una geometría que en elpunto de operación deseado produce cerca de 6.6 N de empuje con 0.29 Nm de torque,valores altos para las restricciones impuestas al inicio. Jugando con el algoritmo solo seconsigue los valores deseados para el diseño si se introduce una eficiencia cercana al 70%. Elproblema radica en la correcta selección de este parámetro. Hasta donde es viable aumentaro disminuir la eficiencia? Esa es la pregunta difícil de contestar si se usa este método.
Posteriormente se desarrolló una hélice con las mismas especificaciones usando las otras dosaproximaciones de diseño. Con el método de la velocidad de impacto, se seleccionó unadistribución constante a lo largo de la pala equivalente al 42% de la velocidad aguas arriba.Esta distribución hace posible conseguir las restricciones de empuje impuestas para la héliceseleccionando una distribución para la velocidad de impacto constante.
Por último, no hay que seleccionar ningún parámetro arbitrariamente en el métodoóptimo. El objetivo de este procedimiento es validar el estado y los resultados de las tresaproximaciones para unas condiciones (restricciones) muy exactas.
Los resultados son sorprendentes, puesto que las tres aproximaciones producen unageometría muy similar: leves diferencias en la distribución de la cuerda a lo largo de la palade la hélice (en función del radio adimensional) y en las eficiencias, y la misma distribucióndel ángulo de calaje. En el apéndice A se detalla más a fondo la geometría final de lahélice (método óptimo): La tabla A.1 muestra los parámetros iniciales de diseño, la tablaA.2 muestra algunos valores característicos del punto de diseño y la tabla A.3 muestra losresultados obtenidos en cada una de las estaciones radiales en cuanto a longitud de cuerda,ángulo de calaje, los aportes diferenciales de empuje y torque, el paso, el valor del Factor deperdidas de Prandtl y el número de Reynolds local para el punto de operación.
Obtenida la geometría del perfil, las distribuciónes de la cuerda y el ángulo de calaje alo largo de la pala, se procede a desarrollar un modelo CAD en tres dimensiones con laconfiguración de la hélice. Es importante aclarar que el proceso de diseño implementadodefine la geometría de la pala entre 0.15 y el 1.0 del radio adimensional � de tal manera queel restante pueda ser utilizado para el desarrollo del cubo y de la nariz de la hélice. Estevalor es perfectamente configurable para cada aplicación.

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 28
Fig. 3.5: Modelo CAD de la hélice desarrollada
A partir del modelo CAD de la hélice es posible iniciar el proceso de manufactura asistidapor computador y cada una de las simulaciones correspondientes. De acuerdo a los recursosdisponibles para el desarrollo de esta investigación, se utilizó el Software Siemens PLMSolid Edge en su versión 20. La figura 3.5 muestra el modelo geométrico final de la hélicedesarrollada.
Es importante resaltar las principales diferencias geométricas presentes con respecto a otrashélices de tipo comercial en especial aquellas destinadas para el aeromodelismo. En primerlugar, se observa un cambio radical en la distribución de la cuerda especialmente en laprimera mitad de cada pala. Las longitudes de cuerda son mucho mayores para la geometríaóptima. De igual manera, las diferencias en la distribución del ángulo de calaje son notables.En la primera mitad existen ángulos pronunciados que superan los presentes en los productoscomerciales.
Con fines de comparación, toda la información geométrica es confrontada con la equivalentede una hélice de tipo comercial de marca Top Flite con 13 pulgadas de diámetro y 6 pulgadasde paso construida en madera. La información de longitud de cuerda y ángulo de calajese obtuvo mediante un escáner 3D que permitió la construcción de un modelo CAD de lamisma. La figura 3.6 muestra la hélice comercial en el proceso de escaneo.
La figura 3.7 muestra el resultado de la distribución de la cuerda obtenida a través delmétodo óptimo y se contrasta con la distribución de la cuerda medida (aproximada) de la

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 29
Fig. 3.6: Hélice comercial en proceso de escaneo
hélice comercial. Es evidente que existe una fuerte diferencia en la distribución de la cuerdaradialmente acentuándose para bajos números del radio adimensional, es decir cerca delcubo de la hélice. Esta es la primera evidencia de un mal diseño, puesto que sugiere que lacarga aerodinámica se concentra mayormente en las puntas despreciando gran parte de lahélice. Igualmente, parece que el eje principal de la hélice no corresponde al eje de cuartacuerda o por lo menos la ubicación de la punta no es la correcta.
Similarmente, la figura 3.8 muestra la distribución más óptima del ángulo de calaje de lahélice según el método de diseño óptimo. Este valor depende básicamente de la relación deavance de la hélice (velocidad del viento incidente y de rotación) para la cual está diseñada.Con respecto al modelo comercial, el ángulo de calaje es muy bajo y es constante a tramos.Esta es otra prueba de un mal diseño, bajo ángulo de calaje implica directamente que lavelocidad de operación (velocidad del viento incidente) es baja con la respecto a la velocidadde rotación. Este hecho sugiere que gran parte de los elementos de aspa a lo largo del radiode la hélice no están en el ángulo óptimo produciendo fuerzas de arrastre y de sustentaciónfuera de los valores ideales.
3.2.3 Análisis Teórico del Diseño
La figura 3.9 muestra una estimación del empuje producido y del torque requerido parala geometría diseñada a diferentes velocidades de rotación en el punto ideal de operación

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 30
Fig. 3.7: Coomparación de la Cuerda de la Hélice
Fig. 3.8: Comparación del Ángulo de Calaje de la Hélice

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 31
Fig. 3.9: Empuje y Torque de la Hélice en el punto de diseño J=0.47
(J=0.47).
Establecido el empuje y el torque (por ende la potencia) para el punto de diseño de la hélice,es necesario repetir un procedimiento de análisis para distintas condiciones de operación. Sehace un análisis de rendimiento para distintas condiciones de operación usando el método delelemento de aspa con las modificaciones comentadas con anterioridad. Este procedimientoes una modificación al proceso de diseño y está completamente descrito en las referencias[1, 2].
Los resultados del análisis teórico se muestran en la gráfica 3.10 para la hélice desarrollada.Esta curva supone dos consideraciones fuertes que no son totalmente ciertas. La primeraes que para cualquier relación de avance, todos y cada uno de los elementos de aspa tienenun Reynolds local de 100k. Y la segunda es que la información aerodinámica utilizada escertera y exacta; esta suposición se comenta a continuación.
El algoritmo empleado para estimar las curvas teóricas de las hélices en distintas condicionesde operación requiere la información aerodinámica de sustentación y arrastre de los perfilesaerodinámicos para un amplio rango de ángulos de ataque, incluso negativos. El problemaradica en que las pruebas experimentales solo proporcionan información para un rangoaproximado entre -15 y 15 grados. Con el fin de completar la información hasta ángulos muyelevados y garantizar la convergencia y exactitud del método, se simuló el comportamiento

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 32
Fig. 3.10: Curva de la Hélice usando la teoría del elemento de aspa
Característica ValorReynolds 75% 71kEmpuje (N) 4.00 NTorque (Nm) 0.1451
Potencia Efectiva (W) 53.2Eficiencia 68%
Coeficiente de Empuje 0.1114Coeficiente de Torque 0.0122Coeficiente de Potencia 0.0769Factor de Actividad 355
Tabla 3.2: Parámetros finales de diseño de la Hélice

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 33
del perfil aerodinámico mediante software especializado. Toda la información respectiva sepresenta en el capitulo No. 4.
La tabla 3.2 muestra los resultados finales del desarrollo geométrico de una hélice para bajonúmero de Reynolds. Solo con una comprobación experimental se corrobora que la geometríaes para alto rendimiento y que es superior a las hélices comerciales destinadas para el mismofin reduciendo el gasto de combustible, el ruido y la relación potencia − empuje.
Del algoritmo implementado para el análisis de rendimiento de la hélice también es posibleextraer información más allá de los coeficientes de rendimiento. Por ejemplo, es posibleanalizar los factores de interferencia axial y rotacional, las relaciones de desplazamiento, elángulo local de ataque, la relación local L/D y dos de importancia: El coeficiente local desustentación y el coeficiente local de arrastre.
La figura 3.11 muestra el coeficiente local de sustentación y la figura 3.12 el coeficiente localde arrastre para diferentes relaciones de avance. De estos dos diagramas es posible verificaralgunos puntos importantes que complementan la curva de rendimiento. El primero de elloses el nivel de perdida que cada pala tiene para relaciones de avances pequeñas y altas.
La perdida en relaciones de avance altas consiste en que el ángulo de ataque local es tanpequeño, incluso negativo, que el perfil ya no produce una sustentación sino por el contrarioentra en un estado de autorotación como se observa en la línea para J=0.9 (Coeficientes deSustentacion negativos). Este régimen es peligroso puesto que puede llevar a la perdida enel control del vehículo.
La otra perdida se encuentra para relaciones de avance menores a 0.3 donde el ángulo deataque local es tan alto que el perfil sufre separación del flujo aumentando rápidamenteel arrastre y perdiendo sustentación. Cuando la hélice se encuentra en este régimen deoperación exige mucha potencia puesto que es la zona más ineficiente. El gran problemaradica en que es la zona de operación en el despegue donde el vehículo aéreo exige la mayorcantidad de empuje.
La solución para los problemas de pérdida en las palas de la hélice consiste en el uso desistema que permita variar el ángulo de ataque local de cada pala con el fin de ajustarlas enla zona de mejor operación: hélices de pitch variable. Por otro lado las figuras establecen loslímites adecuados de operación óptima para la hélice. Para la hélice desarrollada el rangode operación adecuado se encuentra entre relaciones de avance de 0.35 y 0.8.

3.2 Desarrollo y Análisis de una hélice para bajo número de Reynolds 34
Fig. 3.11: Distribución local del coeficiente de sustentación en la pala
Fig. 3.12: Distribución local del coeficiente de arrastre en la pala

Capitulo 4
Desarrollo Computacional
4.1 Introducción
El desarrollo del proyecto se complementó con una fase computacional o de simulaciónusando software especializado para apoyar e integrar mayor confiabilidad al proceso dediseño y de manufactura de la hélice desarrollada. El uso de las herramientas disponibles enuna simulación computacional es acertado puesto que permite resolver la física completa delfenómeno en un medio controlado y evaluar prematuramente las características del diseño odel modelo antes del desarrollo de un experimento.
La etapa computacional se compone básicamente de dos grandes apartes. El primerocorrespondiente a la simulación del perfil aerodinámico utilizado en la hélice como unelemento aislado y el segundo corresponde a simulaciones de la geometría final con el fin deevaluar su comportamiento estructural, acústico y aerodinámico. El software utilizado enlas simulaciones es ANSYS CFX 11.
4.2 Perfiles Aerodinámico: S834
El análisis de la hélice para cualquier relación de avance bajo la teoría expuesta conanterioridad requiere el conocimiento previo de al menos los coeficientes de sustentacióny de arrastre para un amplio rango de ángulos de ataque.
Las pruebas experimentales previas hechas por NREL[33] para el perfil S834 solo cubrenun rango entre -10 y 15 grados lo que permitiría un análisis teórico alrededor de un rangocorto a la relación de avance de operación o de diseño. El algoritmo es utilizado para cubrirtodas las relaciones de avance en operación por lo que requiere información desde ángulos

4.3 Análisis CFX 36
Parámetro ValorFluido Aire
Temperatura 25 ∘CPresión 1 atm
Viscosidad 1.83× 10−5kg/ms
Densidad 1.185 kg/m3
Dimensiones VC (Largo-Ancho-Alto) 700× 300× 600 mmNodos Volumen de Control 150050Método de Turbulencia Shear Stress TransportPárametros Entrada Velocidad Normal 15.5 m/sParámetros Salida Presión Estática 0 Pa
Tabla 4.1: Parámetros de Simulación para el perfil S834
tan altos como el mayor de calaje geométrico (cercano a 70 grados) hasta ángulos negativos.Entonces, es necesario complementar la información aerodinámica del perfil desde los 15grados hasta 70 de tal manera que la información de entrada del algoritmo de análisis sealo más fiel a la realidad posible y poder aproximar la curva real de la hélice.
En la simulación del perfil aerodinámico utilizado en las palas de la hélice, el perfil NRELS834, se usó un modelo CAD reconstruido a partir de las coordenadas del perfil con unacuerda de 100 mm. La longitud total del perfil fue de 300 mm para un área de referencia de0.03 m2. Las condiciones implementadas en la simulación se detallan en la tabla 4.1.
Se hicieron varias simulaciones cambiando únicamente el ángulo de ataque del perfil. Secalcularon las fuerzas de sustentación y de arrastre del perfil para luego calcular loscoeficientes aerodinámicos respectivos. En las figuras 4.1 y 4.2 se muestran los resultadosde la simulación combinados con los resultados experimentales reportados por NREL. Laprimera gráfica relaciona el coeficiente de sustentación contra el ángulo de ataque y lasegunda el coeficiente de sustentación contra el coeficiente de arrastre.
4.3 Análisis CFX
Un modelo CFX es evaluado con dos velocidades distintas de giro y varias velocidades deincidencia. En el modelo solo incluye la presencia de la hélice e ignora la presencia del motor,del banco de pruebas y de la instrumentación utilizada en las inmediaciones. Se utilizó elmodelo CAD desarrollado con anterioridad resultado del algoritmo de diseño óptimo. Latabla 4.2 resume las condiciones de simulación.
La primera velocidad de giro corresponde a la velocidad nominal de giro de le hélice (3500RPM) y para esta velocidad se evaluaron 9 velocidades de incidencia entre 1 y 19 m/s en

4.3 Análisis CFX 37
Fig. 4.1: Coeficiente de Sustentación simulado para el S834
Fig. 4.2: Curva Polar simulada para el S834

4.3 Análisis CFX 38
Parámetro ValorFluido Aire
Temperatura 25 ∘CPresión 1 atm
Viscosidad 1.83× 10−5kg/ms
Densidad 1.185 kg/m3
Dimensiones VC (Díametro-Longitud) 660× 600 mmNodos Volumen de Control 91628Método de Turbulencia Shear Stress TransportPárametros Entrada Velocidad Normal 1-39 m/sParámetros Salida Presión Estática 0 Pa
Tabla 4.2: Parámetros de Simulación CFX de la hélice
intervalos de 2 m/s. La segunda velocidad de giro equivale a la máxima velocidad de rotaciónde 7000 RPM. Para esta última condición se evaluaron 13 velocidades incidentes entre 3 y39 m/s en intervalos de 3 m/s.
La simulación para las dos velocidades de giro es muy parecida presentando diferenciasmínimas debido al distinto comportamiento del perfil en dos regímenes de Reynoldsdiferentes. A 7000 RPM el Reynolds en el 75% de la pala es de 145k mientras que a 3500RPM es de 75k aproximadamente. En el Reynolds bajo, los coeficientes de sustentación sonmenores para ángulos de ataque pequeños lo que se evidencia en una leve disminución dela curva del coeficiente de empuje frente a la de mayor Reynolds y por consiguiente menoreficiencia aerodinámica. La segunda diferencia es un pico en la curva del coeficiente deempuje para un J cercano a 0.3. En este punto, el ángulo de ataque global de la pala es losuficientemente alto para alcanzar la zona de separación y empezar a perder sustentación,a un número más alto de Reynolds el pico de sustentación antes de separación es muchomayor.
Los resultados de la simulación muestran que la curva de rendimiento de la hélice eslevemente sensible a los cambios en el régimen de Reynolds por lo que la curva debeaproximarse bien en cualquier punto de operación. Con respecto a la curva analítica(algoritmo de diseño optimo), la simulación presenta fuertes diferencias para relaciones deavance menores a 0.3 lo que siguiere que la información aerodinámica del perfil usada nocoincide. De hecho en esta zona, pérdida y de separación del flujo, la predicción CFX no estan acertada debido a la complejidad de la física en la zona de transición y las deficienciasen los modelos computacionales que predicen la turbulencia.
En la figura 4.4 se aprecian algunas curvas de corriente para la condición de mejor operaciónde hélice. En dichas líneas de corriente se observa la condición de Betz. La estela deja lahélice a velocidad constante describiendo una forma helicoidal con paso de 17 cm. El paso

4.3 Análisis CFX 39
Fig. 4.3: Simulación CFX de la Hélice
Fig. 4.4: Curvas de Corriente

4.3 Análisis CFX 40
es levemente inferior al paso de la hélice (21 cm) debido a que presenta el fenómeno de lacontracción de la estela o wake contraction. Entonces, computacionalmente la geometría dela hélice corresponde a una hélice óptima.
De las simulaciones (y del algoritmo de análisis) se observa que la condición solo se cumpleen el punto de mejor operación. Para otras condiciones de operación el paso de la estela noes constante a lo largo de toda la pala presentando fuertes variaciones en bajas relacionesde avance y en un rango más reducido para las altas relaciones de avance.

Capitulo 5
Manufactura
5.1 Manufactura del Prototipo
Debido a la geometría compleja de cada una de las aspas y de la relación de aspecto presente,se decidió construir la hélice en dos piezas simétricas. Cada una corresponde a una de laspalas de la hélice y la mitad del cubo con sus respectivos dispositivos de sujeción.
Solo mediante un mecanizado de tipo CNC es posible garantizar la calidad del corte y sobretodo la geometría requerida para cada una de los elementos de aspa a lo largo de la hélice.Se utilizó el centro de mecanizado vertical MAG Fadal 2216 disponible en el laboratorio demanufactura de la Universidad de Los Andes. El software utilizado para generar la estrategiade mecanizado, verificar el proceso y generar los archivos con las trayectorias fue NX en sucuarta versión.
De la geometría de la pala se observa que existe una punta en el radio máximo que esnecesario reproducir (otra diferencia en comparación con los modelos comerciales) puestoque se desea la mínima cantidad de perdidas posible . En el proceso de manufactura esimposible reproducir esta característica directamente en el centro de mecanizado por loque se requiere modificar la geometría y posteriormente en otra etapa remover el materialsobrante para generar la punta. De la misma manera, el perfil aerodinámico posee un vérticeagudo en el borde de fuga que es imposible de reproducir, por lo que este borde se suavizógenerando un redondeo proporcional a la longitud de la cuerda local garantizando siempreel mismo perfil en cada estación radial. La figura 5.1 muestra la geometría final que sereproduce en el centro de mecanizado. Se observa en dicha figura la existencia de materialextra que permite sujetar la hélice al centro y al punto del centro de mecanizado.
Se intentaron varias estrategias de mecanizados tanto radiales como tangenciales.

5.1 Manufactura del Prototipo 42
Fig. 5.1: Geometría a mecanizar en el CNC
Herramienta Filos Función Calidad de AcabadoTorno Convencional 1 Cilindrar a 80 mm DesbasteFresa Plana 16 mm 4 Primer Contorneado DesbasteFresa Plana 1/2” 4 Segundo Contorneado SemiacabadoFresa Plana 1/4” 2 Tercer Contorneado Acabado
Broca 9/16” Agujero del Eje AcabadoBroca 3/32” Agujeros de sujeción Acabado
Tabla 5.1: Estrategias de mecanizado
Finalmente, se decidió por una estrategia tangencial puesto que la calidad superficial delcorte, el tiempo de mecanizado y la calidad geométrica fue superior. La figura 5.2 muestralas trayectorias seguidas con la herramienta de corte.
Con el fin de optimizar aun más el proceso de mecanizado, se desarrollaron cuatro rutinasde corte y dos de taladrado para un total de 4 horas de trabajo aproximadamente por pala.Cada etapa se ejecuta con una herramienta y con un acabado superficial distinto. La tabla5.1 resume la estrategia final de mecanizado.
Por otro lado, la correcta selección del material es importante. De acuerdo a los fines de estainvestigación, no se piensa en producción en serie, en modernas técnicas de manufactura oen materiales de última generación sino por el contrario en la construcción de un prototipoque permita la evaluación experimental de las propiedades aerodinámicas del diseño de lahélice. Entonces, se decidió por la construcción del prototipo en un material económico, conexcelente propiedades mecánicas, fácil de mecanizar y en lo posible liviano. La respuesta

5.1 Manufactura del Prototipo 43
Fig. 5.2: Trayectorias para las estrategias de mecanizado
Característica ValorNombre Científico Cedrela angustifolia
Color Rosado claro y castañoSecado Moderadamente fácil
Densidad 0.5 gr/cm3 seco al aireEsfuerzo límite proporcional 417.6 kg/cm2 seco al aire
Módulo de Ruptura 552.6 kg/cm2 seco al aireMódulo de Elasticidad 71000 kg/cm2 seco al aire
Tabla 5.2: Características del Cedro
que se encontró en el mercado nacional es una madera tipo Cedro. La tabla 5.2 resume suprincipales características y propiedades mecánicas1. El cedro es una madera muy resistentetanto mecánica como naturalmente. Es resistente al ataque de hongos, termites e insectos;es moderadamente fácil de trabajar por lo que no requiere herramientas duras y ofrece unexcelente acabado; y sus usos son básicamente construcciones medianas, carpintería general,utensilios, mangos, marcos, puertas y ventanas
Las figuras No. 5.3,5.4 y 5.5 muestran respectivamente el proceso de mecanizado utilizandotrayectorias tangenciales, las palas después de mecanizadas, las palas finalizadas y la héliceterminada.
1Universidad Nacional de Colombia, sede Medellín. Página Webhttp://www.unalmed.edu.co/ lpforest/PDF/Cedro.pdf última fecha de acceso: 11 de abril de 2009

5.1 Manufactura del Prototipo 44
Fig. 5.3: Pala en proceso de mecanizado
Fig. 5.4: Palas después del mecanizado
Fig. 5.5: Palas finalizadas y Hélice Terminada

5.2 Desarrollo del Banco de Pruebas 45
5.2 Desarrollo del Banco de Pruebas
Se hace necesario el desarrollo de algún dispositivo que facilite la lectura de variables talescomo empuje, momento par, velocidad de rotación y velocidad del flujo del aire aguas arribaque permita la caracterización experimental de la hélice y todos los respectivos coeficientesadimensionales relacionados.
Simultáneamente, el banco de pruebas debe tener dos características extras de sumaimportancia: adaptabilidad en el proceso de medición, y seguridad para los usuarios ycomponentes que hacen parte del banco garantizando un ambiente libre de agentes externos.La propiedad de adaptabilidad se refiere a la capacidad que tiene el banco para ser dispuestoen diferentes lugares y ambientes de medición, por ejemplo distintos túneles de viento,diferentes dispositivos rotodinámicos para medir (hélices o turbinas de diferentes formasy tamaños), diferentes condiciones de operación (velocidad de giro) , etc. La segundapropiedad se refiere explícitamente a la protección de todos los componentes internos quehacen parte del banco de pruebas contra el ambiente y sustancias dañinas como combustibles,aceites, gases, etc. imágen tomada de la referencia [17] Una búsqueda bibliográfica permitela recolección de valiosas ideas para el desarrollo del banco, especialmente si son hechos porindustrias o centros de alta tecnología dedicados al aérea aeroespacial tales como Honeywell,Pratt & Whitney, Boeing o NASA. Principalmente se tomaron como puntos de partida lainformación contenida en las referencias [14, 17, 22] para el desarrollo del banco de pruebaspara la hélice. La figura No. 5.6 es un ejemplo a gran escala del diseño del banco de pruebaspara configuraciones tipo hélice.
Tomando como base la información de las referencias consultadas, se construyó un banco depruebas muy sencillo y simple de operar lejos de sistemas electrónicos complejos, sensibles ymuy delicados. El banco consta de una celda de carga unidireccional de tensión-compresiónconstruida en aluminio con el cual se adquieren los datos de torque y una galga dedeformación con el cual se mide indirectamente el empuje de la hélice.
Cuando la hélice gira, por acción y reacción, se produce un momento par en sentido contrarioal movimiento de giro de las hélices e igual en magnitud al torque que debe hacer el motorpara vencer las fuerzas de arrastre de las palas. Si se hace girar libremente todo el sistemamotor-hélice a través de un eje colineal con el eje de giro de las hélices, el torque medible encualquier parte del eje es equivalente al torque ejercido por el motor. Usando este principio,se colocó en el otro extremo del eje un brazo de 57 mm que conecta con la celda de cargaunidireccional.
Por otro lado, el sistema motor-hélice está colocado en la parte superior de una barra deacero macizo de una pulgada de diámetro y de una longitud de 135 cm. Cuando la hélicegenera un empuje, y de acuerdo a la mecánica de materiales, esta fuerza genera un momento

5.2 Desarrollo del Banco de Pruebas 46
Fig. 5.6: Banco de pruebas para hélices y ventiladores no entubados de NASA [17].
flexor a través de toda la barra y es máximo en la parte inferior. En ese lugar, una galgade deformación mide las microdeformaciones existentes en el material debido al momentoproducido por el empuje. Con el fin de aumentar el rango de mediciones que otorga la galga,la parte inferior de la barra fue mecanizada a una sección rectangular de 7 mm de ancho y19 mm de largo.
Adicionalmente, se encuentra un servomecanismo controlado por computador lo quepermite controlar el nivel de apertura del carburador; en otras, palabras permite controlardigitalmente la cantidad de mezcla combustible-aire que entra al motor. También, seencuentra un tanque de combustible con una capacidad de 8 onzas. Por último, comomedida de seguridad para los usuarios y las personas presentes en el área de pruebas, seconstruyó una caperuza con tubos de PVC eléctrico y se encerró en una malla de acero conel fin de ofrecer una barrera primaria de protección en caso que algún componente del motoro fragmento de la hélice se desprenda en operación y se convierta en un riesgo.
La figura No. 5.7 esquematiza el funcionamiento del banco de pruebas y muestra el bancode pruebas construido.

5.2 Desarrollo del Banco de Pruebas 47
Fig. 5.7: Esquema del banco de pruebas para hélices

Capitulo 6
Desarrollo Experimental
6.1 Protocolo Experimental
El experimento desarrollado para caracterizar la hélice consiste en hacerla funcionar a unavelocidad relativamente constante de giro y hacerle incidir una corriente de viento a diferentesvelocidades utilizando para ello el túnel de viento [4]. En otras palabras es barrer la relaciónde avance de la hélice modificando únicamente la velocidad del viento incidente. Se diceque la velocidad de giro de la hélice es relativamente constante debido a que es altamenteimprobable que el motor de combustión usado gire exactamente a la misma velocidad durantetoda la prueba pero es posible hacer que gire dentro de un pequeño rango.
Para cada velocidad de viento incidente, se registran distintos valores de cada uno de lassiguientes variables: temperatura del flujo por medio de un termopar, presión atmosféricainstantánea con un barómetro digital, velocidad de giro de la hélice mediante un tacómetroóptico, torque ejercido por el motor con la celda de carga unidireccional y el empuje ejercidopor la hélice a través de la lectura de microdeformaciones de una galga. Es importanteaclarar que se requiere saber de antemano la velocidad de la corriente de viento incidentemediante una rápida calibración del túnel de viento que debe hacerse anterior al desarrollodel experimento. Del mismo modo, se requiere saber el arrastre producido por el bancode pruebas para distintas velocidades de viento incidente para luego hacer las correccionesrespectivas a los datos de la hélice.
Utilizando el anterior conjunto de datos para un instante particular del experimento, esposible reconstruir los cinco coeficientes adimensionales que caracterizan la hélice: relaciónde avance, coeficiente de empuje, coeficiente de torque, coeficiente de potencia y eficienciaaerodinámica.

6.1 Protocolo Experimental 49
Variable Instrumento Modelo IncertidumbreTemperatura del Flujo Termopar Omega 871A 0.05 ∘CPresión atmosférica Barometro digital Phywe 07136 0.5 hPaVelocidad de giro Tacómetro óptico Ametek 1726 2 RPM
Torque Celda de Carga Omegadyne LC105-25 0.35 N (0.01 Nm)Empuje Galga Vishay SR-4 1.5 ��
Nivel de Ruido Sonómetro Brüel Kjær 2231 0.05 dB
Tabla 6.1: Instrumentación utilizada
La tabla 6.1 sintetiza la instrumentación utilizada y la incertidumbre sistemática delexperimento.
Como complemento al banco de pruebas desarrollado, se utilizó un sistema de adquisiciónde datos para la lectura directa de los voltajes proporcionados por la celda de carga utilizadacomo sensor de torque y por la galga de deformación. El sistema de adquisición de datosconsiste en una plataforma National Instruments NI cDAQ 9172 que funciona como interfaceentre el computador y los sensores, un modulo de entradas analógicas NI9205 para la lecturade voltajes y un modulo NI9237 para la lectura de las microdeformaciones.
La información proveniente de la interfaz de adquisición de datos se cargó directamenteen Labview para su post-procesamiento. Los datos inmediatamente leídos fueron pasados através de un filtro pasa bajas con el fin de remover las altas frecuencias, ruidos y la frecuencianatural de la estructura. Finalmente los datos fueron analizados para el cálculo del torquey del empuje ejercido por la hélice.
Cada uno de los experimentos llevados a cabo para la caracterización de una hélice seejecutó de la misma manera. Inicialmente se prendió el motor de combustión con la hélicea aproximadamente el 50% de la máxima aceleración con el fin de obtener una velocidadaproximadamente uniforme, no hacer esforzar demasiado el motor, disminuir el ruido ylas vibraciones, mantener un gasto moderado de combustible y mantener un régimen deReynolds bajo. Cuando la velocidad del motor estuvo estable, se manipuló la velocidad delventilador del túnel de viento y luego que éste lograse un equilibrio se inició la toma dedatos.
El proceso de toma de datos consistió en la lectura de 12 registros de velocidad, 12 registrosde temperatura del flujo y 12 registros de presión atmosférica mientras que el módulo deadquisición de datos registró el voltaje de la celda de carga y las microdeformaciones de lagalga de deformación en cuatro sesiones consecutivas. El proceso se ejecutó para velocidadesdel ventilador del túnel entre 0 y 750 revoluciones por minuto en pasos de 75 revolucionesque en otras palabras significa velocidades entre 0 y 19.4 m/s en pasos de 1.9 m/s. Elproceso toma cerca de una hora y media por cada curva. La figura 6.1 muestra la lectura

6.1 Protocolo Experimental 50
Fig. 6.1: Lectura de la velocidad de giro
de la velocidad de giro de la hélice usando el tacómetro.
No se requieren mayores velocidades en el túnel de viento debido que en conjunción con lavelocidad de operación de la hélice se logra barrer una relación de avance J entre 0 y 0.8suficiente para abarcar la mayor parte de la curva, en especial los puntos de operación.
El túnel de viento se utilizó con una configuración abierta, en la sección de pruebas, puestoque la naturaleza de operación para una hélice es en flujo libre. También es posible lacaracterización de una hélice con la sección de pruebas cerrada pero requiere una seriede correcciones de continuidad descritos por Glauert [4]. De hecho, Glauert examinócuidadosamente el problema de la experimentación de hélices en los túneles de viento ysugirió que el diámetro de la hélice debe permanecer pequeño relativo al diámetro del flujo,además de un túnel con sección abierta [4]. La relación diámetro de la hélice a diámetro delflujo para la hélice más grande a caracterizar es de tan solo 0.33.

6.2 Resultados Experimentales 51
Fig. 6.2: Coeficientes de Empuje
6.2 Resultados Experimentales
6.2.1 Curvas de Rendimiento
Se muestra a continuación los resultados experimentales obtenidos en la caracterización delas hélices comerciales para aeromodelo tipo 9x6, 10x6, 11x7 y 13x6; adicionalmente lahélice desarrollada, equivalente a una hélice 13x8 de acuerdo a la denominación usada en elmercado.
La figura 6.2 muestra los coeficientes de empuje para el conjunto de hélices caracterizadas.La figura 6.3 muestra los coeficientes de potencia y la figura 6.4 muestra las eficienciasaerodinámicas respectivas. En las gráficas se ha superpuesto la información proveniente dela simulación en CFX y del algoritmo de diseño presentados anteriormente en las figuras3.10 y 4.3 con fines de comparación.
En el apéndice C se resume toda la información experimental con sus respectivasincertidumbres que informan sobre la calidad y precisión de cada uno de los conjuntosde datos medidos. La información se presenta por cada una de las hélices probadas.

6.2 Resultados Experimentales 52
En la figura 6.2 donde se muestran los coeficientes de empuje para las cinco hélicescaracterizadas, se observa una fuerte diferencia en sustentación para las geometrías. Lascuatro hélices comerciales siguen una tendencia muy similar siendo la hélice 10x6 la mejoren términos de sustentación y la hélice de 13x6 la de peor calidad. La diferencia existenteentre la curva de la hélice optima (13x8) y las otras hélices de tipo comercial se explica enlas diferencias en la distribución de la cuerda en cada una de las palas; es necesario recordarque la velocidad de giro para el modelo óptimo puede llegar a ser la mitad, o incluso menor,con respecto a la velocidad de giro convencional para las hélices de tipo comercial.
Adicionalmente, la diferencia también se fundamenta en la distribución del ángulo de calajeque para las hélices comerciales parece ser menor. Por lo tanto, para la misma relaciónde avance el ángulo de ataque efectivo es más pequeño respecto al diseño optimo; dehecho, posterior a un J de 0.8 tienden a ser negativos lo que implica que la hélice yano hace un trabajo en el flujo sino por el contrario el flujo imprime potencia en la hélice oautorotación. Este último régimen es conocido como "Windmilling Propeller" [36] y puedellegar a convertirse en una pesadilla para un piloto.
Una mayor distribución en el coeficiente de empuje en un rango más amplio de relaciones deavance implica directamente que el diseño óptimo es más flexible para distintas condicionesde operación. Es decir, permite operar a más bajas velocidades de giro, ser usada en vehículoscon mayor arrastre y permitir un mayor rango de velocidad al vehículo.
Respecto a la información preveniente de la simulación y del algoritmo, el coeficiente deempuje experimental es bastante inferior para relaciones de avance menores de 0.6 lo que llevaa pensar dos aspectos. Las simulaciones en CFX sobreestimaron la información aerodinámicadel perfil S384 lo que explica un alto valor para los coeficiente de empuje, en especial parabajas relaciones de avance, Post Stall Behavior del perfil [35]. Igualmente, las condicionesexperimentales en el cual se desarrollaron las mediciones no fueron óptimas en términos delnúmero de Reynolds obteniendo coeficientes de sustentación más bajos que los reportados.
Con el valor del coeficiente de empuje experimental, en la condición de diseño no se logróel objetivo de empuje (4N) sino de 3.42N. Entonces, se requiere acelerar la hélice hastauna velocidad de giro de 3800 RPM para cumplir con el requisito de empuje; el cambio develocidad mueve la relación de avance desde 0.47 a 0.43 y por consiguiente reduce levementela eficiencia aerodinámica del punto de operación experimental.
En la figura 6.3 donde se muestran los coeficientes de potencia para las hélices se observaque el modelo óptimo exige una mayor potencia por parte del motor para un mismo J.Esto es consecuencia de una distribución de cuerda mayor para cada una de las estacionesradiales, así como un mayor ángulo de calaje (mayor arrastre). La diferencia se hace aunmás evidente cuando la relación de avance es superior a 0.5 aproximadamente. La ventaja

6.2 Resultados Experimentales 53
Fig. 6.3: Coeficientes de Potencia
es nuevamente que la velocidad de operación para el modelo óptimo es menor que para losmodelos comerciales. Por ejemplo, para una relación de avance de 0.5 a la altura de Bogotáse requiere la misma potencia para mover a 3500 RPM la hélice óptima que a 7500 la de9x6, 5700 la de 10x6, 5500 la de 11x7 ó 4000 la 13x6. La curva medida se parece bastantea la predicción del algoritmo para relaciones de avance entre 0.3 y 0.8. La curva de CFXpredice unas potencias mayores dentro de este rango.
La figura 6.4 representa la eficiencia aerodinámica de la geometría de cada una de las hélicesprobadas. Este parámetro es el más importante puesto que mide cuanta de la potenciarequerida del motor se convierte efectivamente en empuje y en la selección de una hélice sedebe optimizar. En la figura es notable que la hélice óptima es más eficiente para relacionesde avance mayores a 0.3. La hélice comercial 9x6 le sigue muy de cerca para J menores a 0.7,las hélices 10x6 y 11x7 son muy similares siendo superior la hélice de 11 pulgadas. La hélicede 13 pulgadas no sobresalió. La eficiencia máxima conseguida por la hélice óptima es del74% y en el punto de diseño es del 59% (89% del valor estimado en el algoritmo de diseño).Igualmente, sigue bastante cerca la predicción de CFX y es superada por la prediccióndel algoritmo de análisis probablemente por las diferencias existentes en los coeficientes deempuje en gran parte la curva.

6.2 Resultados Experimentales 54
Fig. 6.4: Eficiencia Aerodinámica
Un punto a comentar es el porqué la máxima eficiencia aerodinámica de la hélice no ocurreen el punto de diseño donde la relacion L/D de toda la pala es la más alta (criterio dediseño) sino por el contrario en una relación de avance mayor. La explicación radica en quea mayor J, menor el ángulo de ataque efectivo, menor coeficiente de sustentación local yuna transferencia de potencia más rápida. Es decir, la velocidad de incidencia del flujo crecemucho más rápidamente que lo que decrece la relación Empuje/Torque. Ahora, aunqueexiste una alta eficiencia aerodinámica, el problema radica en que el valor absoluto de loscoeficientes de empuje y de torque pueden ser muy pequeños en comparación a los valoresrequeridos para la aplicación y pequeñas perturbaciones en J pueden ocasionar una fuertepérdida de eficiencia.
En las pruebas realizadas solo se caracterizó el comportamiento aerodinámico de cuatro(4) modelos comerciales y el modelo óptimo. Por otro lado, en la literatura se hanreportado previamente algunas curvas de rendimiento para hélices comerciales con distintasconfiguraciones y geometrías. No se pueden incluir dichos resultados para ejecutar unacomparación directa del modelo óptimo desarrollado con los resultados de otras fuentes. Peroen las referencias [22, 23, 29, 35] se encuentran una gran cantidad de curvas experimentalespara otras hélices y en muchos de los casos el rendimiento obtenido es muy superior alrendimiento reportado en dichas fuentes. Se recomienda al lector consultar estas referencias

6.2 Resultados Experimentales 55
Fig. 6.5: Curva para la hélice McCauley 7557 [20].
para verificar el alto rendimiento del modelo desarrollado.
Contrastados brevemente los resultados experimentales obtenidos para las hélicescomerciales con la hélice desarrollada, de importancia es ahora mostrar las diferenciasexistentes con una hélice de la aviación comercial de tamaño real.
La primera hélice para comparar es la McCauley 7557 usada en la serie Cessna 172 y deperfil aerodinámico RAF6. El diámetro es de 75 pulgadas y un paso de 57 pulgadas en el75% de la pala. Haciendo una sustitución, el ángulo de calaje en el 75% es de 17.88 grados.En la figura 6.5 se ilustra la curva de esta hélice [20]. Se aprecia que la eficiencia máximaes de 83% para un J de 0.66. Los valores para el coeficiente de empuje son similares pararelaciones de avance pequeñas con la predicción de CFX y del algoritmo de análisis; pero elcoeficiente de potencia es menor que los presentados en la hélice desarrollada: la principalcausa es un régimen de Reynolds diferente. El modelo desarrollado presenta un rendimientolevemente inferior.
La segunda hélice para comparar es la 5868-R6 con ángulo de pitch variable [11]. Se comparacon la curva de rendimiento cuando el 75% se encuentra a 20 grados (3 grados inferior alángulo presente en la hélice desarrollada), figura 6.6. El coeficiente de empuje de estahélice es levemente superior para relaciones de avance menores a 0.6 para luego presentarun rendimiento muy similar. En cuanto al coeficiente de potencia, la hélice desarrolladapresenta un coeficiente superior, más bien parecido en magnitud al rendimiento de la curvade 25 grados y con la topología de la curva de 30 grados. La explicación es la curva polarpara cada uno de los perfiles en sus diferentes regímenes de Reynolds. El perfil RAF6 es

6.2 Resultados Experimentales 56
levemente más delgado que el S834, además que el Reynolds de operación difiere en un ordende magnitud.
6.2.2 Breve Análisis Acústico
Los niveles de ruido no son un criterio de diseño para la hélice desarrollada debido a que esuna hélice para bajo número de Reynolds, por lo tanto el diámetro es bajo y no se esperanefectos de compresibilidad en la punta como alta generación de ruido. La velocidad de lapunta a la velocidad nominal de operación es de 60.47 m/s (M 0.17) y a máxima velocidadde diseño es de 121 m/s (M 0.35). Solo con fines de caracterización se estudia brevemente elruido de campo lejano ocasionado por el movimiento rotacional de las palas (generación deun campo de presión oscilatorio) asociado con las características aerodinámicas del perfil.
En el momento de la medición, se utilizó un motor eléctrico que permite reducirconsiderablemente los niveles de ruido con miras a calificar el rendimiento sonoro de lasgeometrías. Se hicieron pruebas a distintas distancias comprendidas entre 25 y 150 cm ycon velocidades de rotación entre 2100 y 3600 RPM en intervalos de 300 RPM.
En las mediciones obtenidas el nivel de ruido mayor lo obtuvo la hélice óptima seguida porla hélice 13x6 y 11x7. El orden lo determina la física del fenómeno, entre mayor área decontacto mayor es el sonido producido.
Las primeras dos gráficas, figura 6.7, muestran el nivel de disipación de ruido a una velocidadconstante a medida que se aumenta la distancia entre el observador y el sistema hélice-motor.Esta gráfica permite determinar directamente cual es el nivel de ruido esperado para elfuncionamiento de la hélice óptima puesto que el experimento se realizó con la velocidadnominal de funcionamiento. A medida que se dobla la distancia se espera una reducciónde 6 dB. Se puede esperar niveles de ruido de 67 dB a 2 metros y de 55 dB a 32 metrosequivalente al nivel del medio ambiente.
Las últimas dos graficas, figura 6.8, son de mayor interés porque permiten estimar el nivelde ruido de las hélices comerciales en sus velocidades de operación cercanas a las 7000 RPMaproximadamente. De acuerdo a la tendencia presente en la gráfica, se presume que losniveles de ruido hélice motor son de 101 dB para 13x6 y 99 dB para la 11x7, valores muysuperiores a los presentados por la hélice óptima. Con estos niveles de ruido se requieren máso menos 130 metros para que el nivel de ruido sea equivalente al ruido del medio ambiente.
Las diferencias sonoras hacen a la hélice óptima más interesante en aplicaciones no tripuladascomparada con el uso de una hélice comercial para aeromodelo.

6.2 Resultados Experimentales 57
Fig. 6.6: Helice 5968-R6 de Pitch Variable [11]

6.2 Resultados Experimentales 58
Fig. 6.7: Nivel de Ruido de las Hélices a velocidad constante

6.2 Resultados Experimentales 59
Fig. 6.8: Nivel de Ruido de las Hélices a distancia constante

Capitulo 7
Conclusiones y Recomendaciones
7.1 Conclusiones
Se utilizó el método de diseño óptimo para hélices, implementado por Douglas AircraftCompany para el desarrollo de una hélice de alto rendimiento, en un régimen de operacióncon bajo número de Reynolds. La aplicación del algoritmo de diseño y de análisis conllevóa un modelo geométrico óptimo, y por ende más eficiente que los modelos comerciales conlas mismas características probadas.
La hélice óptima para bajo número de Reynolds, se diferencia de los modelos comercialesbásicamente en los siguientes aspectos: una reducción considerable en la velocidad deoperación, que trae ventajas adicionales como un menor gasto de combustible y un menorimpacto acústico, la optimización de las restricciones geométricas y dinámicas, un rango deoperación más flexible lo que permite ser empleada en condiciones más adversas (velocidadde incidencia y arrastre), mejor distribución de la carga aerodinámica, mediante la adecuadadistribución del ángulo geométrico de pitch y de la longitud de cuerda a lo largo de la pala;la incorporación de la condición de Betz para el punto de diseño y un rendimiento generalal nivel de una hélice comercial a tamaño real de la aviación general.
El algoritmo de diseño y de análisis iterativo, basado en la combinación de la teoríadel elemento de aspa y la teoría del momento, con algunas mejoras adicionales como laeliminación de las aproximaciones de ángulo pequeño, la eliminación en las restricciones decarga aerodinámica, un cálculo más preciso del sistema de vórtices y una optimización enel cálculo de las pérdidas de momento, constituyen un método más preciso en el estudiode hélices y turbinas eólicas que se ajustan más a la física real del problema que la teoríaclásica de diseño. La correcta aplicación del algoritmo optimiza el rendimiento de rotores encondiciones más exigentes, como un bajo número de Reynolds, alta carga aerodinámica, alta

7.1 Conclusiones 61
solidez y eficiencia esperada en comparación al método tradicional clásico; adicionalmenteestablece el rango más apropiado de operación. La desventaja presente en el método, esla necesidad de conocer con exactitud el comportamiento aerodinámico del perfil, utilizadopara un amplio rango de valores comprendidos entre ángulos negativos y el máximo ángulogeométrico de calaje. Dicha información requiere ser paramétrica en términos del ángulo deataque y del régimen de Reynolds. Falencias en dicha información son la principal causa enlas discrepancias existentes entre las curvas analíticas y las experimentales.
Las simulaciones basadas en CFX, constituyen una segunda herramienta de validación deldiseño antes de la experimentación. Las simulaciones muestran que la curva de rendimientode la hélice es levemente sensible a las diferencias en el régimen de Reynolds, cuando seopera a velocidad nominal de giro (3500 RPM y 4 N) y a la velocidad máxima de diseño(7000 RPM y 16 N) en el régimen apropiado de operación (J entre 0.3 y 0.8). Las diferenciasson levemente observables cuando el ángulo de ataque local es predominantemente bajo oen la zona donde se empieza a separar el flujo. Por otro lado, los resultados obtenidos enCFX, hay que manejarlos con prudencia debido a que las características aerodinámicas delas geometrías son estimadas y los modelos de turbulencia no son exactos. Generalmente,las simulaciones en CFX subestiman la potencia requerida y sobrestiman el empuje ejercido.
La manufactura CNC, facilita y asegura en cierto nivel la exactitud geométrica del modeloCAD de cada una de las palas, por lo que se convierte en el método apropiado de manufacturade geometrías muy complejas imposibles de fabricar mediante técnicas convencionales. Lamanufactura de la hélice debe ser optimizada y mejorada, si se piensa en la producción de unlote de hélices para posteriores pruebas. Ahora, para la caracterización y prueba de un únicomodelo como fue el fin de este trabajo, el método de manufactura empleado es acertado.En cuanto al material utilizado, se hace necesaria una nueva búsqueda para posterioresdesarrollos, intentando optimizar las propiedades mecánicas y físicas del material.
El banco de pruebas construido, simple pero funcional y el procedimiento experimentalllevado a cabo se logró medir el empuje, el momento par, la velocidad del flujo incidente, lavelocidad de rotación de la hélice y la temperatura del fluido, que permiten caracterizarel comportamiento dinámico y rendimiento de las hélices. Se presentaron algunosinconvenientes en la medición del momento par debido al método empleado. El análisisde error así lo demuestra, el nivel de incertidumbre en el coeficiente de potencia es muchomayor que en el coeficiente de empuje. Aunque las mediciones son coherentes, deben sermejoradas.

7.2 Recomendaciones 62
7.2 Recomendaciones
Se espera que en las experiencias desarrolladas en el presente trabajo, sean tenidas en cuentaen el desarrollo de próximas investigaciones, de tal manera que se eviten algunas falenciasevidenciadas a lo largo del diseño, simulación y experimentación de una hélice óptima.
La correcta selección del perfil aerodinámico es muy importante. El perfil debe estaroptimizado o presentar excelentes características en el régimen de operación nominal dela hélice. El perfil utilizado, aunque es un perfil diseñado para bajo número de Reynoldsque facilita la manufactura, parece no ser la mejor opción para el régimen de operación(75K). Se recomienda el uso de un perfil cuya relación sustentación-arrastre, para el ánguloóptimo sea mayor a cincuenta (50) en regímenes de Reynolds tan bajos como 50k, y asímismo que sean gruesos los que faciliten su manufactura y no comprometa estructuralmentelos alabes. Una segunda alternativa es reformular las restricciones geométricas de entrada,asegurando un incremento sustancial en el número de Reynolds para los alabes, teniendo enmente las condiciones de diseño óptimo.
La exposición confiable sobre la información aerodinámica experimental de perfilesaerodinámicos, es difícil de encontrar. Hay muy pocos sitios confiables donde se puedeencontrar información, tanto del procedimiento experimental como de los resultadosobtenidos, y normalmente esta información es incompleta. Se recomienda iniciar unprocedimiento experimental, para evaluar las características aerodinámicas del perfil dentrodel rango de ángulos de ataque y regímenes de Reynolds existentes en la aplicación.Una validación en CFX, es valiosa pero no representa información certera, puesto quetiende a sobreestimar los coeficientes aerodinámicos debido a las razones comentadas conanterioridad.
En el proceso de manufactura de geometrías complejas, se recomienda explorar nuevasalternativas de fabricación como inyección, moldeo o una optimización de las trayectoriasy de las herramientas de corte si se implementa mecanizado vertical. De igual manera, serecomienda explorar nuevas alternativas de materiales como plásticos o compuestos, queoptimicen las propiedades mecánicas deseadas como densidad, dureza, porosidad, facilidadde mecanizado entre otras.
En cuanto al procedimiento experimental, se aconseja una medición directa del torquemediante el uso de sensores de momento par. El método indirecto empleado presenta algunasdeficiencias, que no garantizan una alta precisión en el conjunto de datos tomado, como ruidoque requiere un procedimiento previo de caracterización para ser removido. Igualmente serecomienda el uso de sensores estroboscópicos o ópticos, para reducir el tiempo en la mediciónde la velocidad de giro del rotor, aumentando su confiabilidad y facilitando la adquisiciónde datos en tiempo real.

7.3 Trabajo Futuro 63
La selección de un motor eléctrico como remplazo a un motor de combustión, debeser fuertemente considerada con el fin de mejorar el medio experimental y facilitar lascondiciones de seguridad del operario. El uso de un motor eléctrico reduce los niveles deruido acústico y de vibración, no liberan gases tóxicos; facilita el control de la velocidadde giro, la medición de potencias, el encendido, entre otros; circunstancias que mejorandefinitivamente la calidad de las mediciones.
En un posterior trabajo de diseño y análisis de hélices o rotores eólicos, se recomiendamejorar el algoritmo incluyendo información paramétrica de los coeficientes aerodinámicosdel perfil, en función del ángulo de ataque, del número de Reynolds y del número de Mach.
7.3 Trabajo Futuro
El trabajo desarrollado en las etapas que componen el desarrollo de una hélice de altorendimiento para bajo número de Reynolds, corresponde solo a una breve introducción altema, aun queda mucha investigación por adelantar y muchos aspectos a mejorar.
Inicialmente, debe darse continuidad a este trabajo mediante una segunda iteración enel proceso de desarrollo (diseño, análisis, simulación y experimentación) ajustada a algúnvehículo físico disponible. El procedimiento experimental no debería limitarse solo a pruebascontroladas en el túnel de viento, sino complementarse con pruebas en campo abierto conel vehículo aéreo. De igual manera, se debería recopilar mayor información experimental dehélices comerciales.
Como una mejora al diseño, se debería suprimir la perdida y separación del flujo presenteen algunas relaciones de avance, mediante la inclusión del un ángulo de pitch variable. Asímismo, se debería realizar una optimización multidisciplinaria del modelo que involucrecomo mínimo la aerodinámica, el análisis estructural, la acústica y el sistema propulsivo[10].
Por el lado teórico, se recomienda adelantar un análisis más exhaustivo del sistema devórtices y de las interferencias ocasionadas por la presencia de la nariz de un motor y de unfuselaje, que modifican las líneas de corriente del flujo. Además, se recomienda un estudiosobre la configuración de la hélice (tractor o pusher).
Finalmente, se debe estudiar la viabilidad de nuevos métodos alternativos e innovadores enel área de la propulsión aerodinámica, como un sistema de hélices de rotación dual o contrarotantes, ventiladores entubados, los novedosos prop-fans; o la implantación de algunasnovedades aerodinámicas como perfiles recortados, el uso de ángulos de flecha variable osuperficies de punta (equivalente a los winglets en un ala).

7.4 Comentarios Finales 64
7.4 Comentarios Finales
El trabajo desarrollado en diseño, análisis y evaluación de hélices de alto rendimiento parabajo número de Reynolds, debe considerarse como un fuerte progreso en el conocimientoen el área de la propulsión aerodinámica, por parte de los entes involucrados en sudesarrollo. Igualmente, este trabajo debe ser punto de partida para el desarrollo de nuevasinvestigaciones en el área, y su posible transferencia tecnológica a la industria nacional.
Por último, se pretende motivar a las nuevas generaciones en el fabuloso mundo de laaerodinámica, para que con su trabajo y fascinación contribuyan en la curva de aprendizajey posteriormente en el progreso del país.

Apéndice A
Geometría detallada de la Hélice
A.1 Parámetros de Diseño y Valores Característicos
Parámetro ValorVelocidad de Giro 3500 RPM
Diámetro 0.33 mVelocidad Incidente 9 m/sNúmero de Palas 2Densidad del Aire 0.89 kg/m3
Número de Elementos 20Perfil Aerodinámico NREL S834Empuje Deseado 4 N
Tabla A.1: Parámetros de Diseño
Característica Valor! 366 rad/seg� 0.1488
Grosor Elemento 0.0083 mCl/Cd perfil 51.6Ma Máximo 0.18
J 0.4676Empuje Especifico 1.2975
Tabla A.2: Valores Característicos del punto de diseño

A.2 Resultados Geométricos del Diseño 66
A.2 Resultados Geométricos del Diseño
r/R c [mm] �(∘) dT [N/m] dQ [Nm/m] � [mm] F RE0,050 0,000 0,000 0,000 0,000 0,000 0,000 0,0000,100 0,000 0,000 0,000 0,000 0,000 0,000 0,0000,150 43,191 62,111 3,2426 0,115 213,338 0,991 322310,200 51,118 54,016 6,3626 0,225 213,338 0,988 450020,250 53,490 47,659 10,116 0,357 213,338 0,985 550370,300 52,683 42,648 14.189 0,502 213,338 0,980 625080,350 50,315 38,653 18,371 0,652 213,338 0,975 679190,400 47,289 35,424 22,5275 0,802 213,338 0,968 717410,450 44,061 32,774 26,5719 0,949 213,338 0,958 743270,500 40,842 30,570 30,4321 1,091 213,338 0,947 759110,550 37,715 28,713 34,0366 1,224 213,338 0,932 766290,600 34,695 27,130 37,3001 1,347 213,338 0,912 765370,650 31,761 25,767 40,1112 1,454 213,338 0,887 756220,700 28,867 24,582 42,3176 1,540 213,338 0,855 748010,750 25,949 23,543 43,7042 1,597 213,338 0,813 709130,800 22,922 22,625 43,9557 1,613 213,338 0,758 666860,850 19,656 21,809 42,5786 1,569 213,338 0,685 606600,900 15,927 21,079 38,1016 1,432 213,338 0,583 519740,950 11,197 20,422 30,3316 1,127 213,338 0,430 385261,000 0,000 19,828 0,000 0,000 213,338 0,000 0,000
Tabla A.3: Geometría detallada de la Hélice

Apéndice B
Resultados Teóricos Curva deRendimiento
B.1 Método de diseño óptimo
J CT CP �
0.0000 0.0846 0.0552 0.00000.0779 0.0959 0.0594 0.12590.1558 0.1061 0.0642 0.25770.2338 0.1139 0.0685 0.38860.3117 0.1184 0.0729 0.50630.3896 0.1172 0.0761 0.60040.4675 0.1114 0.0771 0.67590.5455 0.1041 0.0778 0.73010.6234 0.0935 0.0760 0.76690.7013 0.0786 0.0699 0.78780.7792 0.0570 0.0566 0.78500.8571 0.0314 0.0370 0.72770.9351 0.0078 0.0164 0.44510.9610 0.0009 0.0099 0.0865
Tabla B.1: Análisis con algoritmo de diseño óptimo

B.2 Simulación CFX 68
B.2 Simulación CFX
J CT CP �
0.0519 0.1239 0.0957 0.06720.1558 0.1268 0.0974 0.20280.2597 0.1240 0.0953 0.33800.3636 0.1189 0.0934 0.46290.4675 0.1108 0.0909 0.56980.5714 0.0985 0.0862 0.65320.6753 0.0816 0.0776 0.70940.8831 0.0387 0.0480 0.71150.9870 0.0148 0.0269 0.5445
Tabla B.2: Rendimiento CFX 3500 RPM
J CT CP �
0.0779 0.1265 0.0971 0.10150.1558 0.1275 0.0973 0.20410.2338 0.1256 0.0957 0.30660.3117 0.1277 0.0942 0.42230.3896 0.1180 0.0928 0.49510.4675 0.1116 0.0909 0.57430.5455 0.1028 0.0876 0.64010.6234 0.0915 0.0824 0.69240.7013 0.0780 0.0749 0.73060.8571 0.0457 0.0524 0.74790.9870 0.0154 0.0265 0.5750
Tabla B.3: Rendimiento CFX 7000 RPM
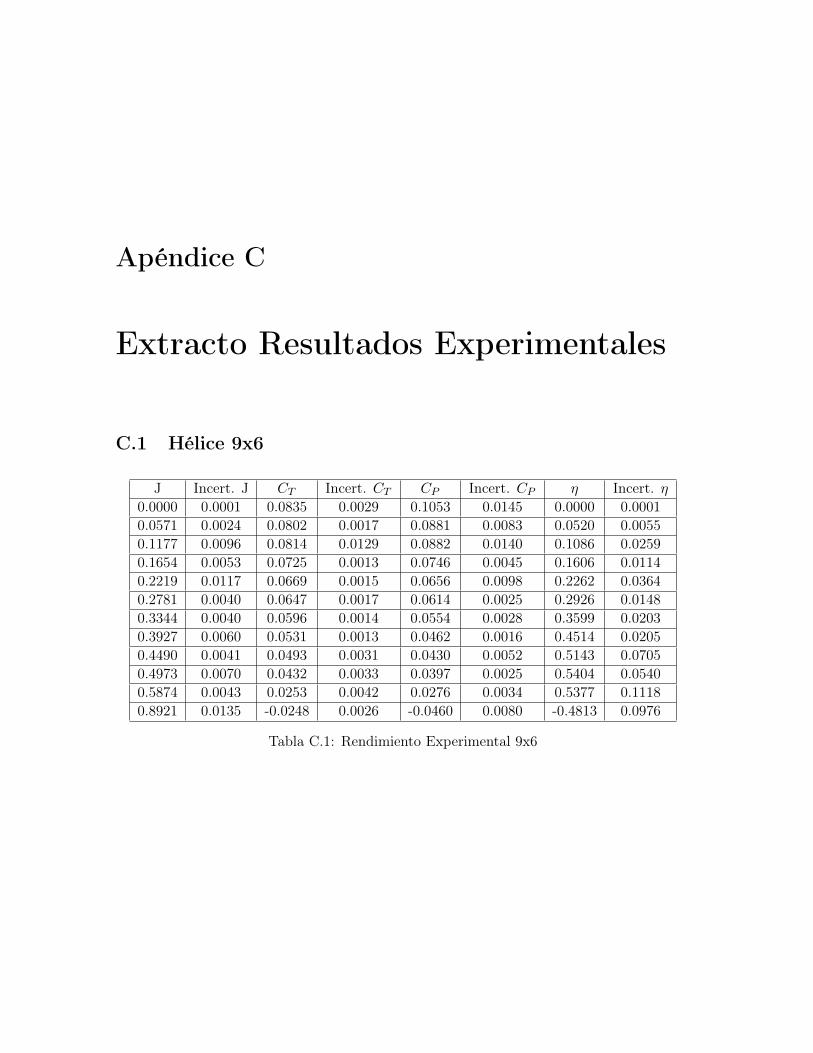
Apéndice C
Extracto Resultados Experimentales
C.1 Hélice 9x6
J Incert. J CT Incert. CT CP Incert. CP � Incert. �0.0000 0.0001 0.0835 0.0029 0.1053 0.0145 0.0000 0.00010.0571 0.0024 0.0802 0.0017 0.0881 0.0083 0.0520 0.00550.1177 0.0096 0.0814 0.0129 0.0882 0.0140 0.1086 0.02590.1654 0.0053 0.0725 0.0013 0.0746 0.0045 0.1606 0.01140.2219 0.0117 0.0669 0.0015 0.0656 0.0098 0.2262 0.03640.2781 0.0040 0.0647 0.0017 0.0614 0.0025 0.2926 0.01480.3344 0.0040 0.0596 0.0014 0.0554 0.0028 0.3599 0.02030.3927 0.0060 0.0531 0.0013 0.0462 0.0016 0.4514 0.02050.4490 0.0041 0.0493 0.0031 0.0430 0.0052 0.5143 0.07050.4973 0.0070 0.0432 0.0033 0.0397 0.0025 0.5404 0.05400.5874 0.0043 0.0253 0.0042 0.0276 0.0034 0.5377 0.11180.8921 0.0135 -0.0248 0.0026 -0.0460 0.0080 -0.4813 0.0976
Tabla C.1: Rendimiento Experimental 9x6

C.2 Hélice 10x6 70
C.2 Hélice 10x6
J Incert. J CT Incert. CT CP Incert. CP � Incert. �0.0000 0.0001 0.0948 0.0024 0.0549 0.0091 0.0000 0.00020.0570 0.0007 0.0916 0.0022 0.0578 0.0142 0.0904 0.02240.1135 0.0007 0.0877 0.0028 0.0575 0.0152 0.1730 0.04600.1700 0.0010 0.0813 0.0014 0.0624 0.0021 0.2216 0.00830.2245 0.0019 0.0758 0.0059 0.0706 0.0211 0.2412 0.07450.2803 0.0027 0.0708 0.0014 0.0748 0.0029 0.2652 0.01190.3353 0.0013 0.0651 0.0010 0.0680 0.0029 0.3208 0.01460.3893 0.0054 0.0586 0.0022 0.0642 0.0036 0.3552 0.02470.4445 0.0043 0.0515 0.0036 0.0610 0.0111 0.3752 0.07300.5017 0.0062 0.0431 0.0055 0.0561 0.0087 0.3855 0.07770.5390 0.0174 0.0373 0.0021 0.0499 0.0056 0.4028 0.05240.7785 0.0424 -0.0087 0.0022 -0.0157 0.0062 -0.4315 0.2042
Tabla C.2: Rendimiento Experimental 10x6
C.3 Hélice 11x7
J Incert. J CT Incert. CT CP Incert. CP � Incert. �0.0000 0.0001 0.0824 0.0070 0.0571 0.0098 0.0000 0.00020.0549 0.0020 0.0841 0.0031 0.0427 0.0073 0.1080 0.01920.1094 0.0046 0.0828 0.0073 0.0408 0.0042 0.2220 0.03170.1627 0.0010 0.0741 0.0009 0.0450 0.0065 0.2678 0.03910.2153 0.0005 0.0696 0.0010 0.0504 0.0023 0.2974 0.01440.2706 0.0007 0.0652 0.0012 0.0549 0.0026 0.3214 0.01630.3245 0.0030 0.0585 0.0013 0.0560 0.0012 0.3391 0.01050.3765 0.0034 0.0520 0.0007 0.0494 0.0026 0.3962 0.02150.4271 0.0059 0.0457 0.0011 0.0473 0.0019 0.4122 0.01980.4754 0.0038 0.0401 0.0013 0.0424 0.0027 0.4500 0.03260.5245 0.0050 0.0352 0.0007 0.0412 0.0088 0.4489 0.09620.7712 0.0494 0.0050 0.0030 0.0145 0.0058 0.2666 0.1910
Tabla C.3: Rendimiento Experimental 11x7

C.4 Hélice 13x6 71
C.4 Hélice 13x6
J Incert. J CT Incert. CT CP Incert. CP � Incert. �0.0000 0.0001 0.0631 0.0005 0.0616 0.0059 0.0000 0.00010.0631 0.0003 0.0594 0.0004 0.0680 0.0012 0.0551 0.00110.1263 0.0041 0.0568 0.0033 0.0635 0.0025 0.1130 0.00870.1796 0.0053 0.0515 0.0011 0.0598 0.0023 0.1546 0.00820.2370 0.0039 0.0489 0.0007 0.0598 0.0026 0.1935 0.00950.2912 0.0021 0.0466 0.0006 0.0577 0.0010 0.2349 0.00540.3398 0.0024 0.0426 0.0009 0.0554 0.0009 0.2610 0.00680.3936 0.0064 0.0381 0.0014 0.0543 0.0031 0.2761 0.01940.4690 0.0062 0.0305 0.0010 0.0494 0.0026 0.2900 0.01810.5168 0.0247 0.0272 0.0046 0.0488 0.0033 0.2880 0.05400.5444 0.0208 0.0246 0.0029 0.0481 0.0043 0.2782 0.04220.6326 0.0259 0.0091 0.0049 0.0374 0.0043 0.1539 0.0848
Tabla C.4: Rendimiento Experimental 13x6
C.5 Hélice óptima
J Incert. J CT Incert. CT CP Incert. CP � Incert. �0.0000 0.0002 0.1057 0.0018 0.0878 0.0025 0.0000 0.00020.0986 0.0042 0.1030 0.0031 0.0963 0.0064 0.1054 0.00890.1922 0.0065 0.0994 0.0006 0.0904 0.0042 0.2111 0.01210.2613 0.0019 0.1011 0.0007 0.0755 0.0005 0.3501 0.00410.3398 0.0009 0.0992 0.0013 0.0720 0.0008 0.4684 0.00830.4228 0.0038 0.0972 0.0023 0.0721 0.0008 0.5699 0.01560.5290 0.0101 0.0934 0.0032 0.0768 0.0029 0.6432 0.03510.6175 0.0096 0.0850 0.0038 0.0773 0.0024 0.6787 0.03860.6741 0.0060 0.0738 0.0039 0.0706 0.0016 0.7043 0.04120.7141 0.0040 0.0622 0.0048 0.0617 0.0020 0.7201 0.06030.7554 0.0026 0.0548 0.0036 0.0568 0.0015 0.7287 0.05220.7833 0.0179 0.0514 0.0045 0.0541 0.0025 0.7435 0.07570.8740 0.0563 0.0294 0.0026 0.0429 0.0054 0.5986 0.1003
Tabla C.5: Rendimiento Experimental 13x8

Bibliografía
[1] Charles Adkins. Design of optimum propellers. In AIAA, editor, AIAA 21st AerospaceSciences Meeting, number AIAA-83-0190, January 1983.
[2] Charles Adkins. Design of optimum propellers. Journal of Propulsion and Power,10(5):676–682, 1994.
[3] Robert Ash, Colin Britcher, and Kenneth Hyde. Prop-wrights. ME Magazine, (12),2003.
[4] Jewel Barlow, William Rae, and Alan Pope. Low-speed Wind Tunnel Testing.Wiley-Interscience, New York, USA, third edition, 1999.
[5] John Bertin. Aerodynamics for Engineers. Prentice Hall, New Jersey, USA, fourthedition, 2002.
[6] Albert betz. Naca technical note no. 83: The theory of the screw propeller. TechnicalReport TR No. 83, NASA, 1922. Reimpresión de Die Naturwissenschaften No. 18,Goettingen, 1921.
[7] Thomas C. Corke. Design of Aircraft. Prentice Hall, New Jersey, USA, first edition,2003.
[8] Sidney Goldstein. On the vortex theory of screw propellers. Proceedings of the RoyalSociety of London, 123:440–465, 1929.
[9] Camilo González. Diseño y Construcción del Sistema Propulsivo para un Micro VehículoAéreo. Universidad de Los Andes, Bogotá, Colombia, 2008. Tesis de pregrado enIngeniería Mecánica.
[10] Ohan Gur and Aviv Rosen. Optimization of propeller based propulsion systems.49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and MaterialConference, 2008.
[11] Edwin Hartman. The aerodynamic characteristics of full-scale propellers having 2,3and 4 blades of clark y and raf6 airfoil sections. Technical report, NACA, 1938.

BIBLIOGRAFÍA 73
[12] Philip Hill and Carl Peterson. Mechanics and Thermodynamics of Propulsion. Addison- Wesley, Massachusetts, USA, second edition, 1992.
[13] E. L. Houghton. Aerodynamics for Engineering Students. Butterworth - Heinemann,Massachusetts, USA, fiftt edition, 2003.
[14] Christopher E. Hughes. Summary of low-speed wind tunnel results of several high-speedcounterrotation propeller configurations. Technical Report NASA-TM-100945, NASA,Boston, MA, USA, July 1988. Disponible en linea.
[15] UVS International. UAS: The Global Perspective yearbook 2008/2009. Blyenburgh andCo, Paris, France, sixth edition, 2008. Disponible en Linea con suscripcion.
[16] Tracy Irons-Georges. Encyclopedia of Flight. Salem Press Inc, California, USA, firstedition, 2002.
[17] Bo He Little Jr., K. H. Tomlin, A. S. Aljabri, and C. A. Mason. Propfan test assessmenttestbed aircraft stability and contro/performance 1/9-scale wind tunnel tests. TechnicalReport NASA-CR-12121, NASA, Marietta, GA, USA, May 1988. Disponible en linea.
[18] Gordon Leishman. Principles of Helicopter Aerodynamics. Cambridge University Press,Cambridge, UK, first edition, 2002.
[19] Santiago Losada. Diseño y Evaluación de hélices para aeromodelos para flujos laminares.Universidad de Los Andes, 2007.
[20] Jhon Lowry. Performance of Light Aricraft. American Institute of Aeronautics andAstronautics, first edition, 1999.
[21] Barnes McCormick. Aerodynamics, Aeronautics, and Flight Mechanics. Wiley, NewJersey, USA, second edition, 1994.
[22] Monal Merchant. Propeller Performance Measurement for low Reynolds numberunmanned aerial vehicle applications. Wichita State University, KS, USA, 2005. Tesisde Maestría en Ingeniería Aeroespacial.
[23] Monal Merchant and Scott Miller. Propeller performance measurement for low reynoldsnumber uav applications. 44th AIAA Aerospace Science Meeting and Exhibit, 2006.
[24] L. M. Milne. Theoretical Aerodynamics. Dover Publications Inc, New York, USA, fourthedition, 1966.
[25] Dava Newman. Interactive Aerospace Engineering and Design. McGraw Hill Company,New York, USA, primera edition, 2002.

BIBLIOGRAFÍA 74
[26] Department of Defense. Unmanned Aerial Vehicles: Background and Issues forCongress. Department of Defense, Washington D.C., USA, first edition, 2003.Disponible en Linea en http://www.fas.org/irp/crs/RL31872.pdf.
[27] Department of Defense. Unmanned Aerial Vehicles and Uninhabited Combat AerialVehicles. Department of Defense, Washington D.C., USA, first edition, 2004. Disponibleen Linea en http://www.acq.osd.mil/dsb/reports/uav.pdf.
[28] Department of Defense. Unmanned Systems Roadmap 2007-2030. Departmentof Defense, Washington D.C., USA, first edition, 2007. Disponible en Linea enhttp://www.fas.org/irp/program/collect/usroadmap2007.pdf.
[29] Michael Ol and Cale Zeune. Analytical - experimental comparasion for small electicunmanned air vehicle propellers. 26th AIAA Applied Aerodynamics Conference, 2008.
[30] Edmond Petit. Histoire Mondiale de l’ Aviation. Libraire Hachette, Paris, France, firstedition, 1967.
[31] Daniel P. Raymer. Aircraft Design: A Conceptual Approach. American Institute ofAeronautics and Astronautics, Virginia, USA, fourth edition, 2006.
[32] Jam Roskam. Airplane Aerodynamics and Performance. DARCorporation, Kansas,USA, first edition, 1997.
[33] Michael Selig. Wind tunnel aerodynamic test of six airfoils for use in small windturbines. Technical Report NREL/SR-500-34515, NREL, 1617 Cole Boulevard, Golden,Colorado 80401-3393, Octuber 2004. Disponible en linea.
[34] Dan M. Somers. The s833, s834, and s835 airfoils. Technical ReportNREL/SR-500-36340, NREL, 1617 Cole Boulevard, Golden, Colorado 80401-3393,August 2005. Disponible en linea.
[35] Daniel Uhlig and Michael Selig. Post stall propeller behavior at low reynolds numbers.48th Aerospace Science Meeting and Exhibit, 2008.
[36] Quentin Wald. The aerodynamics of propellers. Progress in Aerospace Sciences,42(12):85–128, 2006.
[37] Frank M. White. Mecánica de Fluidos. McGraw Hill Company, Madrid, España, quintaedition, 2004.