capítulo 2 elementos de la dinamica de...
TRANSCRIPT

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Capítulo 2
ELEMENTOS DE LA DINAMICA DE SISTEMAS
1. Noción de sistema dinámico
Durante las úl t imas décadas , y con el f in de ayudar a la tomade decisiones, se ha desarrollado un interés creciente por estudios cuyacaracterística esencial es el estar basados en un procesamiento de informa-ción. En este área el interés principal se ha centrado en estudiar cómose genera la evolución de los datos observados a lo largo del tiempo.En este contexto se ha formalizado el concepto de sistema dinamico,que ha sido objeto de un estudio sistemático en una rama especializadade las matemáticas aplicadas a la que se ha denominado teoría matemáticade los sistemas dinámicos; al mismo tiempo se han desarrollado múltiplescampos de aplicación como, por ejemplo, la ingeniería de sistemasy la automática.
En el lenguaje ordinario se entiende por sistema un conjunto departes operativamente interrelacionadas, es decir, en el que unas partesactúan sobre las otras, y del que interesa considerar fundamentalmentesu comportamiento global. Así, por ejemplo, se habla del sistema nervio-so, del sistema bancario, de un sistema ecológico, del sistema planetario,e tc . S iempre que se habla de un s is tema se sobreent iende que , encierta forma, el conjunto tiene propiedades de interés que no puedenconsiderarse la simple suma de las de las partes. Son estas propiedades,precisamente, las que justifican la consideración del sistema como unidady no como simple suma de partes.
Un modelo es un sistema abstracto en el que los elementos que
39
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
40 Javier Aracil
interactúan son conceptos abstractos y las relaciones entre ellos estánformalizadas. Por ejemplo, se tiene un sistema matemático cuando sedefinen una serie de variables y se establecen unas relaciones formalizadasentre ellas, como en un sistema de ecuaciones.
La voz sistema se emplea tanto para referirse a cierto aspecto dela realidad como a un modelo formal del mismo, lo que puede produciruna cierta ambigüedad en la expresión. Sin. embargo no hay ningunaincorrección en este doble uso del término.
En el estudio de un sistema puede suceder que la característicafundamental que interese considerar sea su evolución en el t iempoy, en concreto, cómo las interacciones entre las partes determinan estaevolución . El modelo de l compor tamiento d inámico de un s i s temase denomina sistema dinámico. En este libro, los modelos que se consideranson modelos para simulación por cómputador de la evolución temporalde un sistema real y, por tanto, Ya expresión sistema dinámico se emplearápara referirse a esta clase de modelos.
De un determinado sistema real se puede obtener una colecciónde observaciones cuantitativas de atributos o propiedades del mismo.Si se considera el comportamiento dinámico, entonces estos datos seencuentran parametrizados con relación al tiempo. En el concepto desistema dinámico se formaliza esta colección de datos. Se puede decirque un sistema dinámico, en cuanto modelo de una c ier ta parcelade la realidad, constituye un resumen abstracto de los datos observadosen la misma.
Conviene insistir en que lo que interesa considerar es el comporta-miento dinámico de los sistemas. En el interior de un sistema, porla propia definición del mismo, se están produciendo unas determinadasinteracciones. El carácter dinámico del sistema se refiere a que es primor-dial la consideración de su evolución en el tiempo. En esta evoluciónlas variaciones que se producen en él son consecuencia, fundamentalmen-te, de las propias interacciones. Estas interacciones constituyen la estruc-tura del sistema. De ahí que se diga que bajo el punto de vista dela dinámica de sistemas, el comportamiento dinámico de un sistemaestá determinado por su estructura. Esta estructura tiene una importanciamayor en la evolución del mismo que la naturaleza de cada uno delos elementos Individuales que lo componen.
1.1. Limites del sistema
Al considerar un sistema dinámico como una unidad, tácitamentese asume que existen unos límites que separan esta unidad del medioen el que está inserta. En el interior de estos límites, se genera uncomportamiento que, en principio, puede no estar determinado única-menre por acciones aplicadas al sistema desde el medio. Un sistema

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 41
dinámico puede estudiarse como una entidad aislada del medio, quegenera su propio comportamiento dinámico. En la teoría de los sistemasdinámicos se dice, en ese caso, que se considera el comportamientoautónomo del mismo.
Los límites del sistema deben escogerse de manera que se incluyanen su interior aquellos componentes necesarios para generar los modosde comportamiento de interés. Si se trata de estudiar una cierta peculiari-dad (un problema) del sistema, los elementos descritos en el interior delos límites deben ser capaces de generar este problema. El conceptode límite pretende explicar que el comportamiento de interés del sistemase genera en el interior de los límites, y no viene determinado desdeel exterior. Lo cual no quiere decir que el comportamiento del sistemano vaya a estar afectado desde el exterior de los límites, sino quela acción del medio sobre el sistema puede ser considerada como unaperturbación que afecta al comportamiento autónomo del sistema; peroella misma no suministra al sistema sus características peculiares.
Al const ru i r un modelo de s imulación de un s is tema, se debe ,en primer lugar, estimar qué componentes interactúan para producirel comportamiento que se está investigando. La elección implica laselección de aquellos componentes situados en el interior de los límitesdel sistema que tengan interés para el estudio concreto que se estérealizando, y excluye todos aquellos componentes potenciales que sonirrelevantes al caso y que, por consiguiente, se sitúan fuera de loslímites considerados.
Los elementos que se encuentran fuera de los límites del sistemaestán relacionados con aquellos que se encuentran dentro de maneramuy diferente a cómo los elementos que se encuentran dentro estáninterrelacionados entre sí. Las relaciones de causa a efecto entre elmedio y el sistema son unidireccionales, mientras que los elementosen el interior del sistema están estructurados por medio de buclesde realimentación que determinan una fuerte interacción entre ellos.Es decir, el medio está constituido por el conjunto de todos los objetossituados en el exterior de los límites del sistema y tales que: 1) uncambio en ciertos de sus atributos afecta al sistema, y 2) otros atributos(distintos a los anteriores) son afectados por el comportamiento delsistema. Nótese que un mismo atributo no puede afectar y ser afectadopor el sistema; en tal caso estaría incluido en el propio sistema. Normal-mente, interesa considerar únicamente las acciones del medio sobreel sistema, y no las posibles acciones del sistema sobre el medio.
En la figura 2.1 se ilustran de forma gráfica las ideas anteriores.Se observa cómo el límite separa al sistema del medio. El sistemaestá formado por una serie de elementos, que se representan por puntosnegros, entre los que se producen fuertes interacciones. Por otra parte,en el medio se encuentran elementos que pueden actuar sobre determina-

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
42 Javier Aracil
dos elementos situados en el interior del sistema, pero esta acciónes simple, es decir no comporta cadenas cerradas de acciones. En elinterior del sistema se producen interacciones ta les que generan uncomportamiento autónomo aún prescindiendo de las acciones del medio.
FIGURA 2.1.-Representación de un sistema como interacción entre elementos en el interiorde unos límites que lo separan del medio en el que se encuentra inmerso.
Como ilustración de las ideas anteriores, considérese un medio urbanocomo un sistema cerrado. La mecanización de la agricultura en áreasrurales puede acelerar la emigración hacia las ciudades; ello puededeterminar la aparición en estas últimas de zonas suburbiales de bajonivel de vida. Por lo tanto cabe decir que la mecanización de la agricultu-ra, en ciertas zonas, determina la aparición de zonas suburbiales enciudades con atractivo para la emigración. Sin embargo, es evidenteque lo inverso no es cierto; es decir, la aparición de suburbios enlas ciudades, no determina la mecanización de la agricultura. Esta inexis-tencia de relación causal es la que permite establecer una frontera,a la hora de modelar la ciudad como sistema dinámico, entre la mismay el medio que la circunda. La aparición de chabolas en los suburbioses el resultado de factores internos a la propia ciudad, dentro de loslímites de la misma, que puede estar influenciada por un factor externocomo es la mecanización de la agricultura. Este tipo de razonamientoes el comúnmente empleado a la hora de establecer los límites deun sistema social bajo estudio.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 43
1.2. Elementos y relaciones en los modelos
Un modelo, en tanto que representación abstracta de un sistemareal, está compuesto por:
- un conjunto de definiciones que permiten identificar los elementosque constituyen el modelo;
- un conjunto de relaciones que especifican las interacciones entrelos elementos que aparecen en el modelo.
Un sistema está formado por un conjunto de elementos en interac-ción, lo cual se hace explícito en su modelo. De un mismo sistemareal se pueden establecer distintos modelos según los aspectos queinterese considerar de aquél. La elección de los elementos y de lasrelaciones de interés constituye una opción en la que se pone de manifies-to la capacidad del especialista que construye el modelo.
Los distintos elementos, o variables, que intervienen en el modelopueden clasificarse en exógenos y endógenos. Las variables exógenas sirvenpara describir aquellos efectos sobre el sistema que son susceptiblesde ser modificados desde el exterior del mismo. Representan, en ciertaforma, el medio en el que está inmerso el sistema. Las variables endóge-nas sirven para caracterizar aquellos elementos cuyo comportamientoestá completamente determinado por la estructura del sistema, sin posibi-lidad de modificación directa desde el exterior. Por ejemplo, en elestudio de una economía nacional, la fijación de la tasa de redescuentobancario es una variable exógena que puede ser fijada por el gobiernode un país, mientras que el nivel de precios es una variable endógenacuyo valor está determinado por la estructura del sistema.
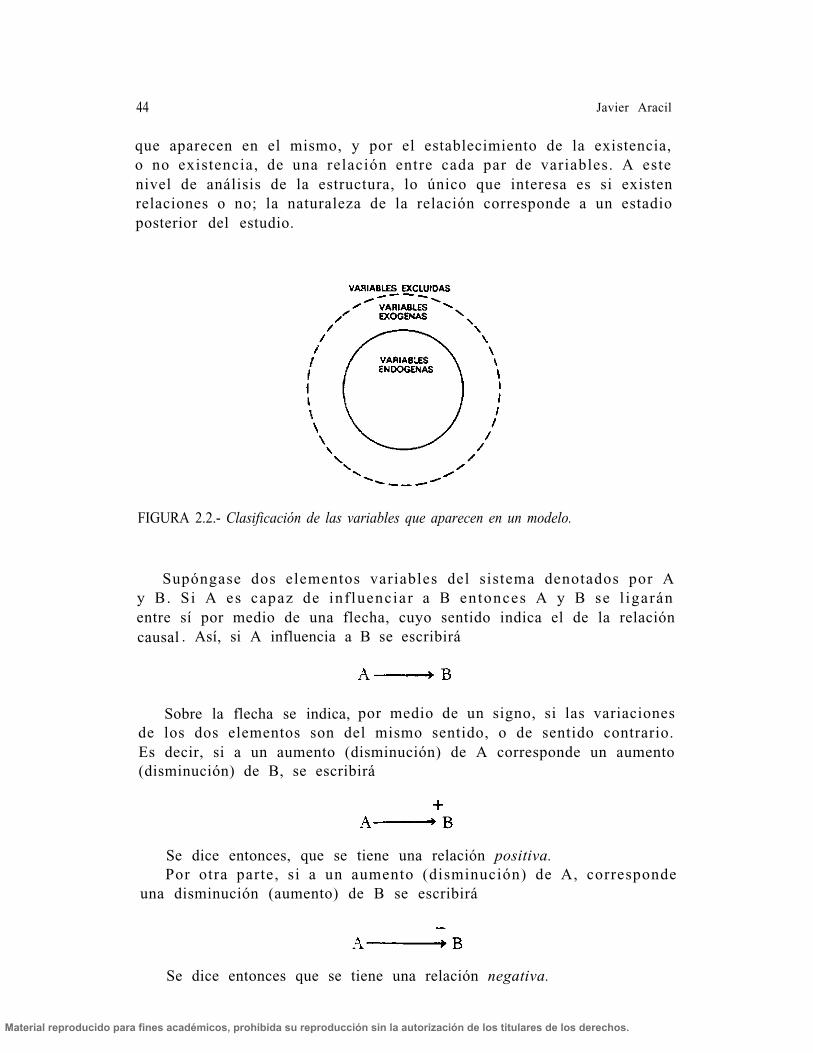
Al iniciar el proceso de modelado de un sistema social se debenelegir las distintas variables que intervendrán en el modelo. Estas varia-bles deben clasificarse, de acuerdo con lo anterior, en endógenas yexógenas. Normalmente, para ello se construye un gráfico como elde la figura 2.2 formado por dos círculos concéntricos en los quese disponen los distintos elementos que se considerarán en el modelo.
2. Diagramas causales
Entre los elementos que constituyen el sistema se establece un bos-quejo esquemático de aquellos que están relacionados entre sí, lo cualse hace por medio de un diagrama en e l cual los nombres de losdistintos elementos están unidos entre sí por flechas. El diagrama queasí se obtiene recibe las denominaciones de diagrama causal o de diagramade influencias. Aquí se empleará la primera de ellas.
El diagrama causal permite conocer la estructura de un sistemadinámico. Esta estructura viene dada por la especificación de las variables
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
44 Javier Aracil
que aparecen en el mismo, y por el establecimiento de la existencia,o no existencia, de una relación entre cada par de variables. A estenivel de análisis de la estructura, lo único que interesa es si existenrelaciones o no; la naturaleza de la relación corresponde a un estadioposterior del estudio.
FIGURA 2.2.- Clasificación de las variables que aparecen en un modelo.
Supóngase dos elementos variables del sistema denotados por Ay B. Si A es capaz de inf luenciar a B entonces A y B se l igaránentre sí por medio de una flecha, cuyo sentido indica el de la relacióncausal . Así, si A influencia a B se escribirá
Sobre la flecha se indica, por medio de un signo, si las variacionesde los dos elementos son del mismo sentido, o de sentido contrario.Es decir, si a un aumento (disminución) de A corresponde un aumento(disminución) de B, se escribirá
Se dice entonces, que se tiene una relación positiva.Por otra parte, si a un aumento (disminución) de A, corresponde
una disminución (aumento) de B se escribirá
Se dice entonces que se tiene una relación negativa.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 45
Al diagrama causal se llega por un proceso que implica una mezclade observaciones sobre el sistema, discusiones con especialistas en elsistema y análisis de datos acerca del mismo.
En los diagramas causales las relaciones que ligan a dos elementosentre sí, pueden ser de dos tipos:
- relación causal propiamente dicha, que es aquella en la que un elemen-to A determina a otro B, con una relación de causa a efecto.
- relación correlativa, que es aquella en virtud de la cual existe unacorrelación (por ejemplo estadística) entre dos elementos del sistema,sin existir entre ellos una relación de causa a efecto.
Al construir un modelo de un sistema social, en primer lugar seeligen qué elementos, o var iables , se van a emplear en e l modelo .Una vez realizada esta elección, se procede a construir un primer bosque-jo cualitativo de las relaciones que ligan a estos elementos por mediode un diagrama causal. En la figura 2.3 se tienen dos diagramas deesta naturaleza. El diagrama causal no contiene información cuantitativasobre la naturaleza de las relaciones que ligan a los distintos elementos,sino que sólo suministra un bosquejo esquemático de las relacionesde influencia causal.
a) b)
FIGURA 2.3.- Ejemplos de diagramas causales: a) estructura simple: b) estructura causalcompleja con cadenas cerradas de realimentación.
De acuerdo con el diagrama causal se puede establecer una primeraclasificación de la estructura de los sistemas. Existen dos tipos básicosde estructuras causales: la estructura causal simple y la estructura causalcompleja. En la figura 2.3a) se tiene un diagrama causal con estructurassimples; las var iables B y D actúan sobre las var iables A, C y E

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
46 J a v i e r A r a c i l
sin que se produzca ningún tipo de interacción entre ellas. Mientrasque en la figura 2.3b) aparece una estructura causal compleja cuyacaracterística esencial es que se establecen cadenas cerradas de relacionescausales. En lo que sigue se considerarán exclusivamente sistemas con es-tructura compleja.
En un diagrama causal complejo se pueden distinguir bucles realimenta-dos. Un bucle realimentado es una cadena cerrada de relaciones causales.Por e jemplo, en la f igura 2 .3b se t iene un bucle cerrado formadopor A, B y C; en efecto, una variación de A determina una variación(aumento) de B, la que a su vez determina una disminución de C,que por ú l t imo determina una d isminución de A. Por lo tanto unavariación de A determina, por medio de un bucle cerrado de relacionescausales, una acción sobre sí misma. En la figura 2.3 se tienen otrosbucles de realimentación, como el formado por Ay C.
Existen dos clases de bucles realimentados:
1.° Bucles de realimentación positiva. Son aquellos en los que la varia-ción de un elemento se propaga a lo largo del bucle de manera que serefuerza la variación inicial. En la figura 2.4a) se tiene el diagrama causalde un bucle de esta naturaleza. En efecto, si se produce un aumento deuno cualquiera de los elementos, por ejemplo el A, éste determina un au-mento de B, que a su vez determina un aumento de C, lo que por últimodetermina un nuevo aumento de A, que reiniciará el proceso. Se tiene uncomportamiento explosivo caracterizado por un autorreforzamiento delas variaciones. Un bucle realimentado es positivo si contiene un númeropar de relaciones negativas.
a)
FIGURA 2.4.- Bucles realimentados: a) realimentación positiva y b) realimentación negati-va.
Un ejemplo elemental de bucle de realimentación positiva lo suminis-tra el crecimiento de una población de acuerdo con el diagrama causalde la figura 2.5.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 47
FIGURA 2.5.- Bucle de realimentación positiva de crecimiento de una población.
2.° Bucles de realimentación negativa. Son aquellos en los que una varia-ción en un elemento se transmite a lo largo del bucle de manera que deter-mine una variación que contrarreste la variación original. En la figura 2.4b)se tiene el diagrama causal de un bucle de esta naturaleza. En el mismo,un aumento de A determina un aumento de B, que a su vez determi-na un aumento de C, que por último determina una disminución de AEl comportamiento de estos bucles está, por tanto, caracterizado por unaacción autocorrectora. Cualquier variación que se produzca en uno de loselementos del bucle tiende a anularse. Un bucle de realimentacicín negati-va tiende a crear equilibrio. Un bucle realimentado es negativo si contieneun número impar de relaciones negativas.
Un ejemplo elemental de bucle de realimentación negativa lo suminis-tra el diagrama causal de la figura 2.6, que representa la limitaciónde una población, por efec to de la escasez de a l imentos . El buclecontrola la población por medio de la comida per cápita. El crecimientode la población se limita por la disminución de la tasa de nacimientoscuando disminuye la a l imentación per cápi ta . El bucle es negat ivopor ser negativa la relación que liga a la población a la comida percápita.
FIGURA 2.6.-Bucle de realimentación negativa de limitación del crecimiento de la poblaciónen función de las disponibilidades de alimentos.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
48 Javier Aracil
En todo diagrama causal coexisten normalmente bucles de realimen-tación positiva con bucles de realimentación negativa. Las interaccionesentre ambos tipos de bucles determinan el comportamiento global delsistema.
Por ejemplo, combinando los diagramas causales de las figuras 2.5y 2.6 se obtiene el diagrama de la figura 2.7, en el cual se representansimultáneamente los dos efectos antes discutidos. El comportamientodel conjunto dependerá de cuál de ambos bucles domine al otro encada momento. Normalmente sucederá que en los estadios inicialesdel desarrollo de una población el bucle que limita su crecimientopor agotamiento del territorio disponible, y por lo tanto por disminuciónde la comida per cápita, tendrá un efecto prácticamente nulo debidoa que no se ha llegado a niveles de saturación. En consecuencia, enesta primera etapa será el bucle de crecimiento de población el quedominará y se registrará un crecimiento de la misma tal como el indicadoen la figura 2.8. Sin embargo, según se vaya aumentando la poblaciónse producirán problemas de agotamiento de recursos, por lo que elbucle negativo de la figura 2.6 empezará a dominar sobre el buclepositivo, dando todo ello como resultado una tendencia al estancamientoen el crecimiento, tal como se indica en la figura 2.8. Se obtiene asíel llamado crecimiento en S, el cual será estudiado con detenimientoen el capítulo siguiente.
FIGURA 2.7 .-Diagrama causal complejo de evolución de la población con un bucle derealimentación positiva y uno de realimentación negativa.
Obsérvese que es la existencia de bucles de realimentación lo quedetermina un comportamiento peculiar para cada sistema dinámico.La simple existencia de relaciones de causa a efecto, sin bucles realimenta-dos , no da lugar a n inguna forma de comportamiento pecul iar porparte del sistema, el cual se limita a realizar una función según unarelación causal predeterminada. Es la existencia de bucles en el interiordel sistema lo que determina las formas propias de comportamientodel mismo, que pueden no guardar aparente relación con el comporta-

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 49
miento que cabría esperar del sistema si éstos bucles interiores noexistieran.
tiempo
FIGURA 2.8.- Evolución de la población en función del tiempo.
La construcción de un diagrama causal es, aparentemente, una laborsencilla. Sin embargo, debe procederse con gran cuidado a fin de evitarposibles errores. Para obtener diagramas causales satisfactorios debentenerse en cuenta las siguientes reglas:
1. Evitar bucles ficticios.2. Emplear elementos que sean fácilmente caracterizables por números.3 . No emplear dos veces la misma re lac ión en un mismo modelo
(fig. 2.9a). Sin embargo, con relaciones causales explícitas debenexplicitarse las mismas (fig. 2.9b).
4. Evitar bucles redundantes.5. No emplear el tiempo como un factor causal (fig. 2.10).
FIGURA 2.9.- Ejemplos de diagramas causales: a) incorrecto y b) correcto.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
50 Javier Aracil
FIGURA 2.10.- Ejemplos de diagramas causales: a) incorrecto y b) correcto.
3. Diagramas de Forresterl
Los distintos elementos que constituyen el diagrama causal se repre-sentan por medio de variables, las cuales se clasifican de acuerdo conlos tres grupos siguientes: variables de nivel, variables de flujo y variablesauxiliares. Se procede, a continuación, a estudiar cada una de estasclases de variables.
Para ayudar a comprender el significado de estas clases de variables,se puede concebir un símil hidrodinámico tal como el representadoen la figura 2.11. En esta figura se representan tres depósitos en losque se acumulan t res n iveles N1 N2 y N3 . Las var iaciones de losniveles vienen determinadas por las actuaciones sobre unas ciertas válvu-las que regulan los caudales que alimentan a cada uno de los depósitos.La decisión sobre la apertura de estas válvulas se toma teniendo comoúnica información los valores alcanzados por los niveles, en cada unode los depósitos, en el instante de tiempo considerado. En la figura 2.11esto se representa con ayuda de un observador que teniendo comoúnica información el conocimiento de los niveles en el resto de los
1 Se emplea en este libro la denominación de diagrama de Forrester para referirsea lo que se conoce también como diagrama Dynamo. Se considera más adecuada la denomina-ción adoptada aqui, ya que la segunda denominación hace referencia a un lenguaje concretode programación denominado DYNAMO, del que se hablará más adelante, restándolegeneralidad a estos diagramas, que como se pone de manifiesto en lo que sigue, danlugar a modelos susceptibles de ser programados en cualquier lenguaje de alto nivel.Por otra parte, está justificada la denominación aquí adoptada ya que en estos diagramasse encuentra la aportación más peculiar de Forrester al modelado de sistemas.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 51
depósitos determina la apertura de la válvula correspondiente. Aunqueen la figura sólo aparece el observador para una de las válvulas, debeconsiderarse que existiría uno por cada una de ellas.
FIGURA 2.11 .-Símil hidrodinámico de un sistema de ecuaciones diferenciales de primerorden.
Se observa cómo el valor tomado por la variable de flujo en cadainstante depende, exclusivamente, de los valores alcanzados por losniveles en dicho instante; de forma análoga, los valores alcanzadospor los niveles dependen de los valores tomados por las variablesde flujo que alimentan a dichos niveles.
Con el símil hidrodinámico se tiene una forma intuitiva, apropiadapara una mentalidad que busque imágenes físicas, de representar unsistema de ecuaciones diferenciales de primer orden. En efecto, es inme-

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
52 Javier Aracil
diato ver que en la figura 2.11 no se hace sino representar, de formaanalógica, un sistema de ecuaciones diferenciales tal como
siendo
Estas funciones f1 pueden ser lineales o no lineales. La determinacióndel valor tomado por una variable de flujo, por ejemplo F1, a partirde los niveles N1, N2 y N3 puede que sea conveniente hacer la endistintas etapas, requiriéndose para ello el establecimiento de unas varia-bles auxiliares ; por ejemplo, la función f1 puede descomponerse entres etapas, empleando dos variables auxiliares VA, y VA,, teniéndose,
Obsérvese que
Es decir, las variables auxiliares representan etapas intermedias enla determinación de los flujos a partir de los niveles y, en últimoextremo, pueden ser eliminadas.
El símil hidrodinámico de la figura 2.11 se puede completar conla inclusión de variables exógenas. Éstas suministran información adicio-nal y exterior, que debe considerarse para decidir el valor que tomanlas variables de flujo F1. Es decir, llamando E a una variable exógena,las expresiones (2) se convertirían en
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 53
El interés del símil hidrodinámico reside en mostrar que constituyeuna analogía de un sistema de ecuaciones diferenciales de primer ordeny que, alternativamente, todo sistema de ecuaciones diferenciales deprimer orden puede representarse con ayuda de un símil de esta naturale-za. En el símil hidrodinámico aparece claramente que se pueden concebirdos tipos esenciales de variables, los niveles y los flujos, y una clasesecundaria, las variables auxiliares. Empleando esta analogía, en dinámicade sistemas, las variables que aparecen en un modelo se clasificanen variables de nivel, variables de flujo y variables auxiliares. De estamanera se consigue dar una forma intuitiva, y de una fecunda claridad,a l proceso de cons t ru i r un modelo , e l cual en ú l t imo ext remo nova a ser sino un sistema de ecuaciones diferenciales de primer orden.
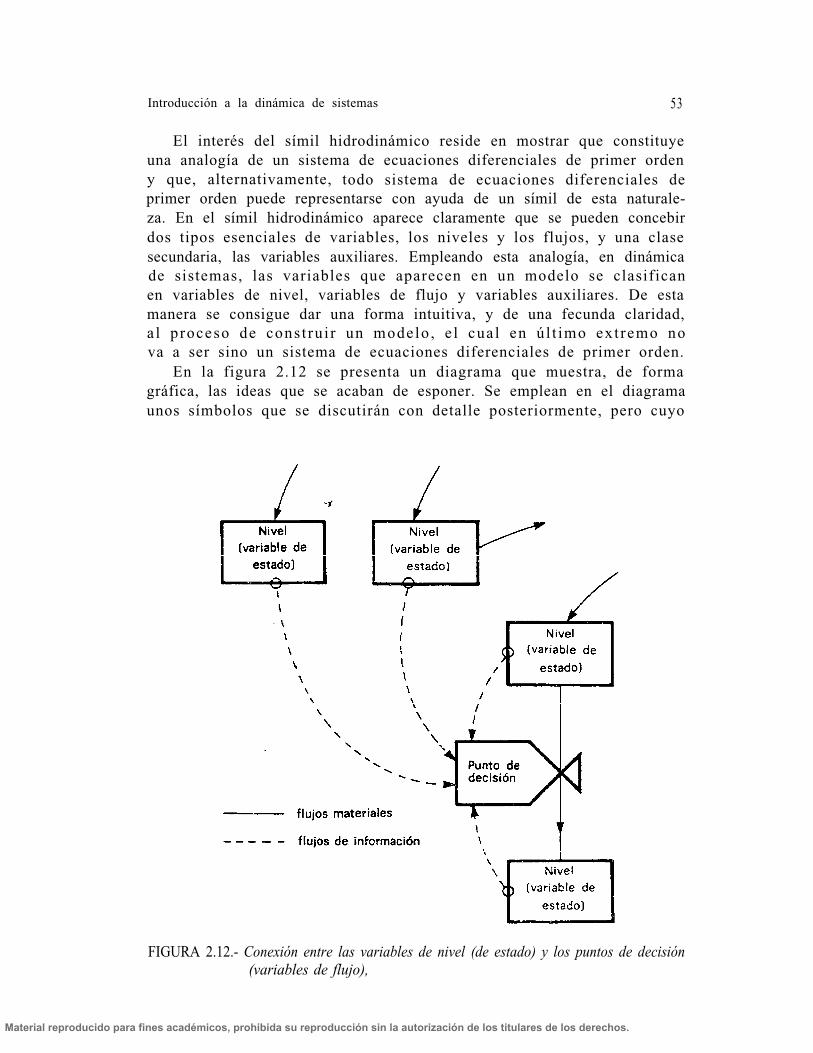
En la figura 2.12 se presenta un diagrama que muestra, de formagráfica, las ideas que se acaban de esponer. Se emplean en el diagramaunos símbolos que se discutirán con detalle posteriormente, pero cuyo
FIGURA 2.12.- Conexión entre las variables de nivel (de estado) y los puntos de decisión(variables de flujo),
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
54 Javier Aracil
significado es claro a primera vista. Se observa en el mismo cómo las va-riaciones de un nivel son el resultado de una decisión tomada a partir de información que proviene del resto de los niveles. En lo que sigue se estu-
. diará, de forma sistemática y detenida, este proceso. Para ello se discutenen primer lugar, con detalle, las variables de nivel, de flujo y auxiliares,así como las interconexiones que se establecen entre ellas.
3.1. Niveles
Las variables de nivel constituyen aquel conjunto de variables cuyaevolución es significativa para el estudio del sistema. Los niveles repre-sentan magnitudes que acumulan los resultados de acciones tomadasen el pasado. Esta función de acumulación puede asimilarse a la delnivel alcanzado por un líquido en un depósito; de ahí proviene ladenominación de nivel, siguiendo el símil hidrodinámico.
Las variables de nivel, o simplemente niveles, equivalen a las variablesde estado de la teoría de sistemas. Es decir, el estado de un sistemase representa por medio de las variables de nivel. Obsérvese cómode acuerdo con el símil hidrodinámico los niveles determinan la futuraevolución del sistema, a partir de un instante determinado, en la medidaen que determinan los valores tomados por los flujos, es decir, porlas variaciones de los propios niveles.
La elección de los elementos que se representan por niveles, enun modelo determinado, depende del problema específico que se estéconsiderando. En la elección de estas variables juega un papel primordialla experiencia del diseñador del modelo. Una característica común atodos los niveles es que cambian lentamente en respuesta a las variacionesde otras variables.
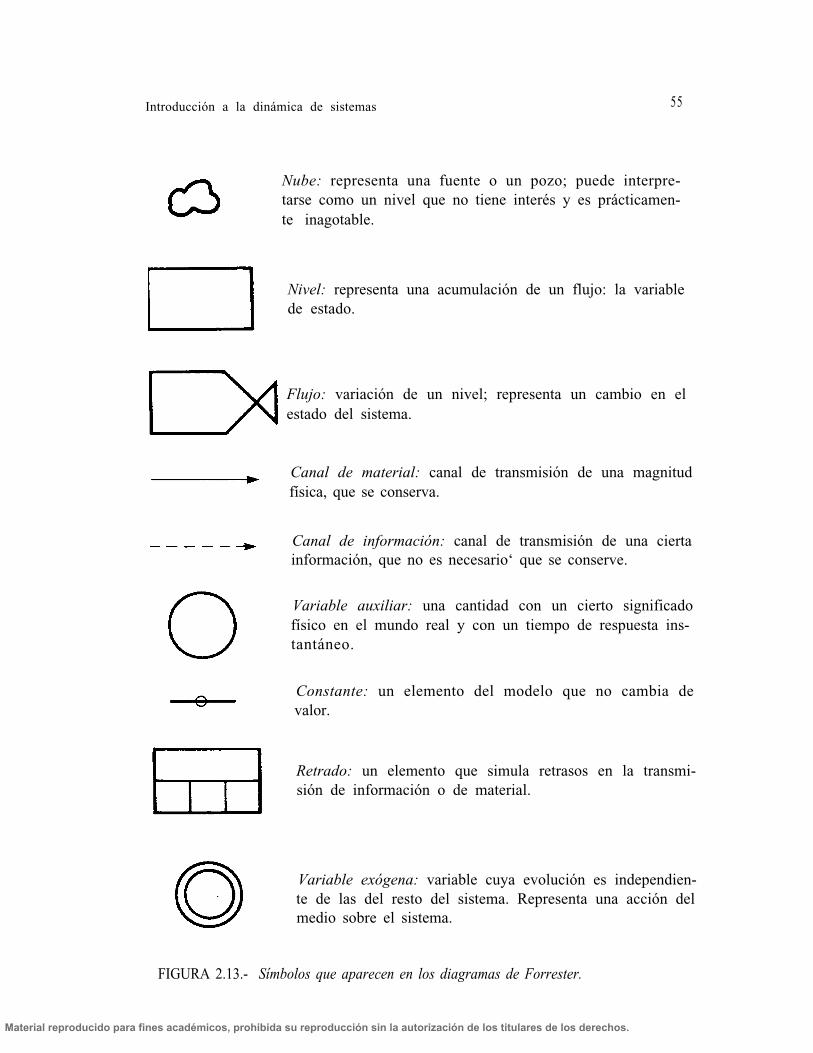
En los diagramas de Forrester los niveles se representan por mediode rectángulos (figura 2.13). La variación de un nivel tiene lugar pormedio de variables de flujo.
A cada nivel N se le puede asociar un f lu jo de entrada FE yun flujo de salida FS, de manera que la ecuación que representa laevolución del nivel es la siguiente,
o lo que es lo mismo,
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 55
Nube: representa una fuente o un pozo; puede interpre-tarse como un nivel que no tiene interés y es prácticamen-te inagotable.
Nivel: representa una acumulación de un flujo: la variablede estado.
Flujo: variación de un nivel; representa un cambio en elestado del sistema.
Canal de material: canal de transmisión de una magnitudfísica, que se conserva.
Canal de información: canal de transmisión de una ciertainformación, que no es necesario‘ que se conserve.
Variable auxiliar: una cantidad con un cierto significadofísico en el mundo real y con un tiempo de respuesta ins-tantáneo.
Constante: un elemento del modelo que no cambia devalor.
Retrado: un elemento que simula retrasos en la transmi-sión de información o de material.
Variable exógena: variable cuya evolución es independien-te de las del resto del sistema. Representa una acción delmedio sobre el sistema.
FIGURA 2.13.- Símbolos que aparecen en los diagramas de Forrester.
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
56 Javier Aracil
Esta ecuación se puede escribir, de forma aproximada, empleandoel método de Euler de integración numérica,
Esta última forma de escribir la ecuación de un nivel es la que seemplea comúnmente en dinámica de sistemas.
3.2. Variables de flujo
Las variables de flujo determinan las variaciones en los nivelesdel sistema. Las variables de flujo caracterizan las acciones que setoman en el sistema, las cuales quedan acumuladas en los correspondien-tes niveles. Las variables de flujo determinan cómo se convierte lainformación disponible en una acción o actuación.
Debido a su naturaleza se trata de variables que no son mediblesen sí, sino por los efectos que producen en los niveles con los queestán relacionadas. Se representan por medio de los símbolos que seindican en la figura 2.13. Estos símbolos están inspirados en el símilhidrodinámico, según el cual la-s variables de flujo se pueden asociara válvulas que regulen los caudales que alimentan determinados depósi-tos, cuyos niveles materializan el estado del sistema.
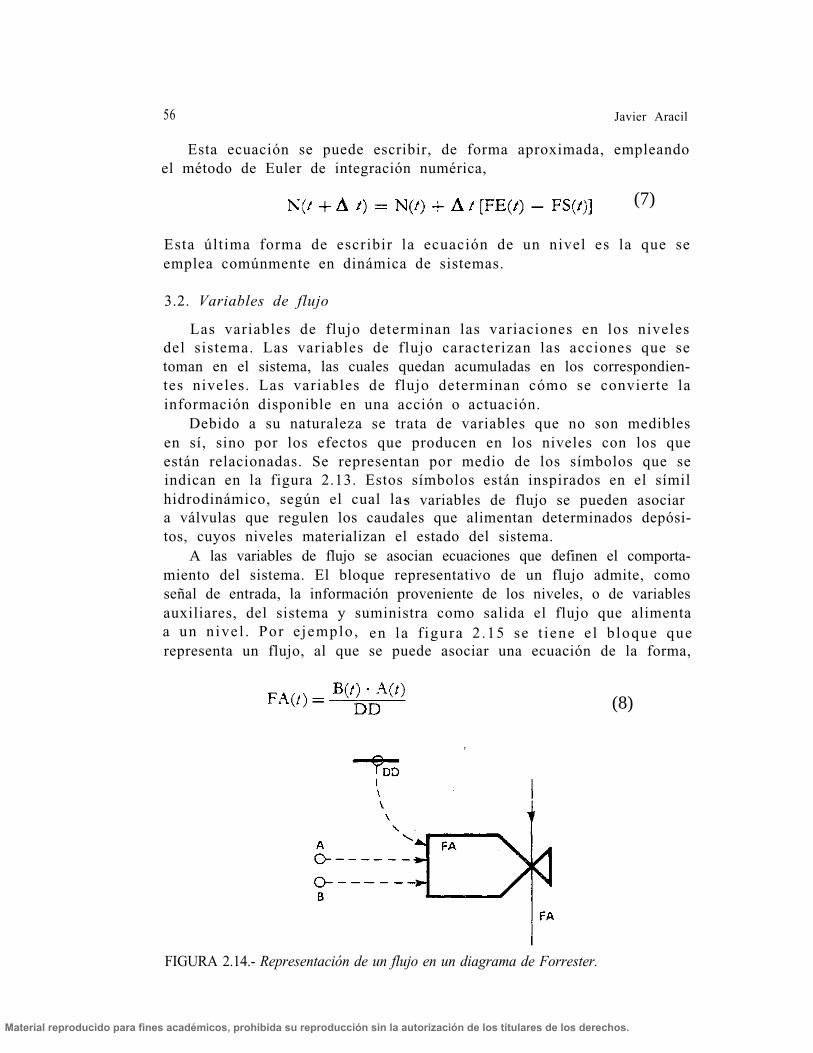
A las variables de flujo se asocian ecuaciones que definen el comporta-miento del sistema. El bloque representativo de un flujo admite, comoseñal de entrada, la información proveniente de los niveles, o de variablesauxiliares, del sistema y suministra como salida el flujo que alimentaa un n ivel . Por e jemplo , en la f igura 2 .15 se t iene e l b loque querepresenta un flujo, al que se puede asociar una ecuación de la forma,
FIGURA 2.14.- Representación de un flujo en un diagrama de Forrester.
(7)
(8)
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas
siendo A(t) y B(t) dos variablesasociadas a una variable de flujode flujo o funciones de decisión.
57
de nivel o auxiliares. Las ecuacionesreciben la denominación de ecuaciones
La ecuación de flujo representa la función desarrollada por el observa-dor del símil hidrodinámico de la figura 2.11. Es decir, con ayudade la ecuación de flujo el observador calcula en cada instante la aberturade la válvula, o sea el flujo; de ahí la denominación de función dedecisión.
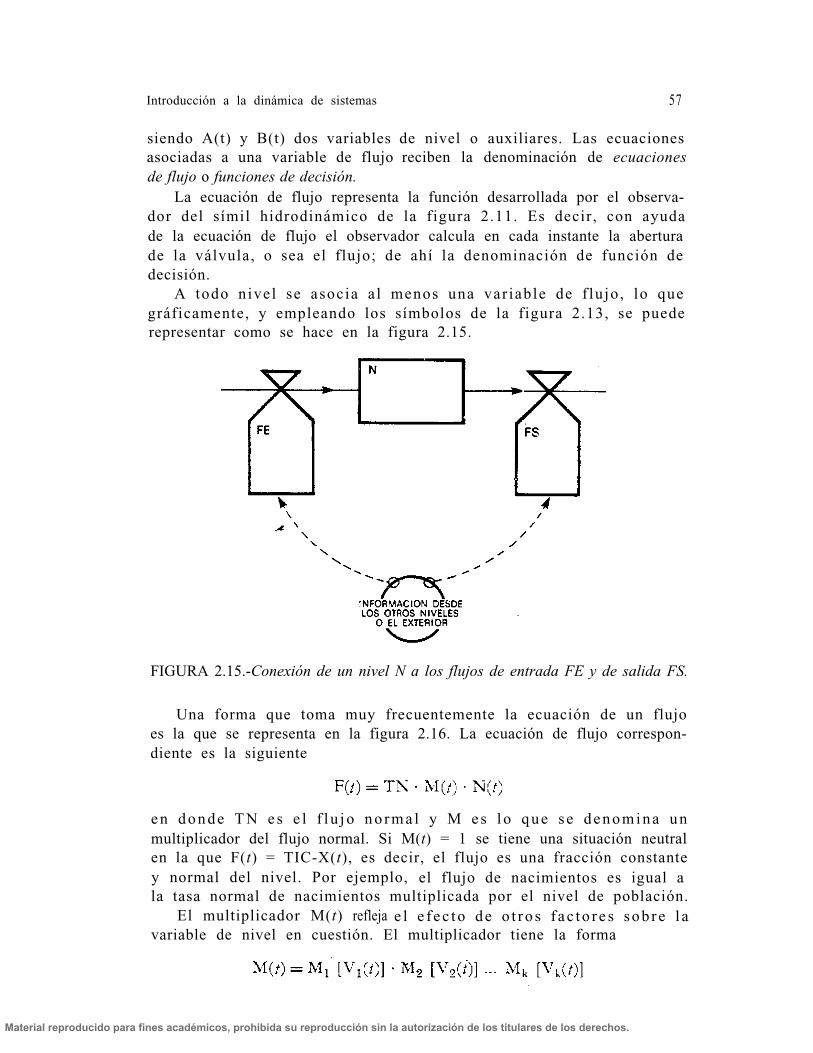
A todo nivel se asocia a l menos una var iable de f lu jo , lo quegráficamente, y empleando los símbolos de la figura 2.13, se puederepresentar como se hace en la figura 2.15.
FIGURA 2.15.-Conexión de un nivel N a los flujos de entrada FE y de salida FS.
Una forma que toma muy frecuentemente la ecuación de un flujoes la que se representa en la figura 2.16. La ecuación de flujo correspon-diente es la siguiente
e n d o n d e T N e s e l f l u j o n o r m a l y M e s l o q u e s e d e n o m i n a u nmultiplicador del flujo normal. Si M(t) = 1 se tiene una situación neutralen la que F(t) = TIC-X(t), es decir, el flujo es una fracción constantey normal del nivel. Por ejemplo, el flujo de nacimientos es igual ala tasa normal de nacimientos multiplicada por el nivel de población.
El multiplicador M(t) refleja e l e f ec to de o t ro s f ac to r e s sob re l avariable de nivel en cuestión. El multiplicador tiene la forma

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
58 Javier Aracil
en donde cada factor Mi [Vi(t)] es una función no lineal de una variableVi, la cual puede ser un nivel o una variable auxiliar. Los multiplicadoresM i son ta les que para un valor considerado normal de la var iableVi toman el valor 1; en la figura 2.17 se tienen dos formas típicasque toman los multiplicadores Mi.
FIGURA 2.16.- Representación en el diagrama de Forrester de un flujo F cuyo valorviene dado por una tasa normal TN afectada por un multiplicadorM.
Las decisiones que aparecen en una ecuación de flujo pueden serabiertas, si implican la intervención de un agente externo al sistema,o implícitas, si están completamente determinadas por las variables inter-nas al sistema, es decir, por los niveles.
Las unidades en que se mide una variable de flujo deben ser consisten-tes con las de las variables que relaciona. En particular, una variablede flujo vendrá siempre medida por la unidad del nivel al que alimenta,partida por el tiempo.
Las variables de flujo tienen como entradas exclusivamente a nivelesy a variables auxiliares. Es decir, dos variables de flujo no puedenconectarse entre sí. Siguiendo el símil hidrodinámico es fácil concebircómo la decisión respecto a la abertura de la válvula, que alimentaa un cierto nivel, se toma exclusivamente en función de los valoresde los otros niveles; y como una variable de nivel no puede influirdirectamente a otra variable de nivel, sino a través del flujo que propor-cione la primera.
La evolución del sistema en el t iempo comporta variaciones enlos distintos niveles., Estas variaciones se deben no sólo a la acciónde factores externos (variables exógenas), sino, y sobre todo, a decisiones

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 59
en un sentido amplio, tomadas en el interior del sistema, que se interpre-tan con ayuda de las funciones de decisión asociadas a las variablesde flujo. En este sentido es como deben entenderse el que el sistemagenere su propio comportamiento y la existencia de unos límites parael mismo.
FIGURA 2.17.- Formas normales de los multiplicadores M1.
3.3. Variables auxiliares
,
Las variables auxiliares representan pasos o etapas en que se descom-pone el cálculo de una variable de flujo a partir de los valores tomadospor los niveles. Se representan por medio de círculos como los queaparecen en la figura 2.13. Por ejemplo, en la figura 2.18 se tienela representación, por medio de diagramas, del empleo de variablesauxiliares que se indicó en la expresión (3).
Las variables auxiliares unen los canales de información entre varia-bles de nivel y de flujo; en real idad son par te de las var iables deflujo. Sin embargo, se distinguen de ellas en la medida en que tengan

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
60 Javier Aracil
un significado real por sí mismas, o sencillamente, porque hacen másfácil la comprensión de las ecuaciones de flujo.
FIGURA 2.18.- Variables VA2, y VA1 como pasos intermedios en la determinación
de F1 en función de N1, N2, y N3.
Las variables auxiliares se pueden emplear para representar las nolinealidades que aparecen en el sistema.
Si las variables A y B están ligadas por una expresión de la formaB = f(A), en donde f(A) es una función no lineal, entonces se empleaun símbolo como el empleado para las variables auxiliares, tal comose indica en la figura 2.19. Por ejemplo, los multiplicadores consideradosen 3.2 pueden considerarse variables auxiliares.
FIGURA 2.19.- Forma simbólica de representar que la variable B es una función nolineal o tabla de A.
3.4. Otros símbolos empleados en los diagramas
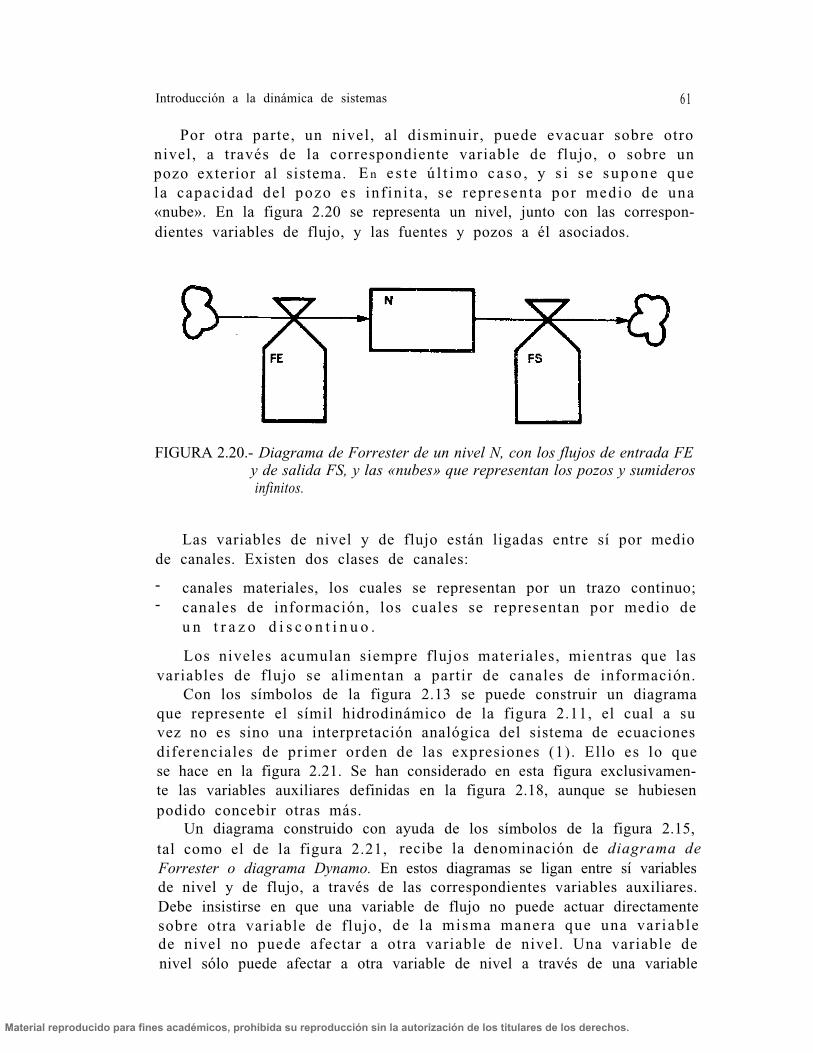
Un nivel se puede alimentar o bien desde otro nivel, a través dela correspondiente variable de flujo, o bien desde una fuente exterioral sistema. En este último caso si, además, la fuente puede considerarseinfinita, es decir, no agotable, se representa en los gráficos por mediode una «nube». En la figura 2.13 se tiene este símbolo.
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 61
Por otra parte, un nivel, al disminuir, puede evacuar sobre otronivel, a través de la correspondiente variable de flujo, o sobre unpozo exterior al sistema. E n e s t e ú l t i m o c a s o , y s i s e s u p o n e q u ela capacidad del pozo es inf in i ta , se representa por medio de una«nube». En la figura 2.20 se representa un nivel, junto con las correspon-dientes variables de flujo, y las fuentes y pozos a él asociados.
FIGURA 2.20.- Diagrama de Forrester de un nivel N, con los flujos de entrada FEy de salida FS, y las «nubes» que representan los pozos y sumiderosinfinitos.
Las variables de nivel y de flujo están ligadas entre sí por mediode canales. Existen dos clases de canales:
- canales materiales, los cuales se representan por un trazo continuo;- canales de información, los cuales se representan por medio de
u n t r a z o d i s c o n t i n u o .
Los niveles acumulan siempre flujos materiales, mientras que lasvariables de flujo se alimentan a partir de canales de información.
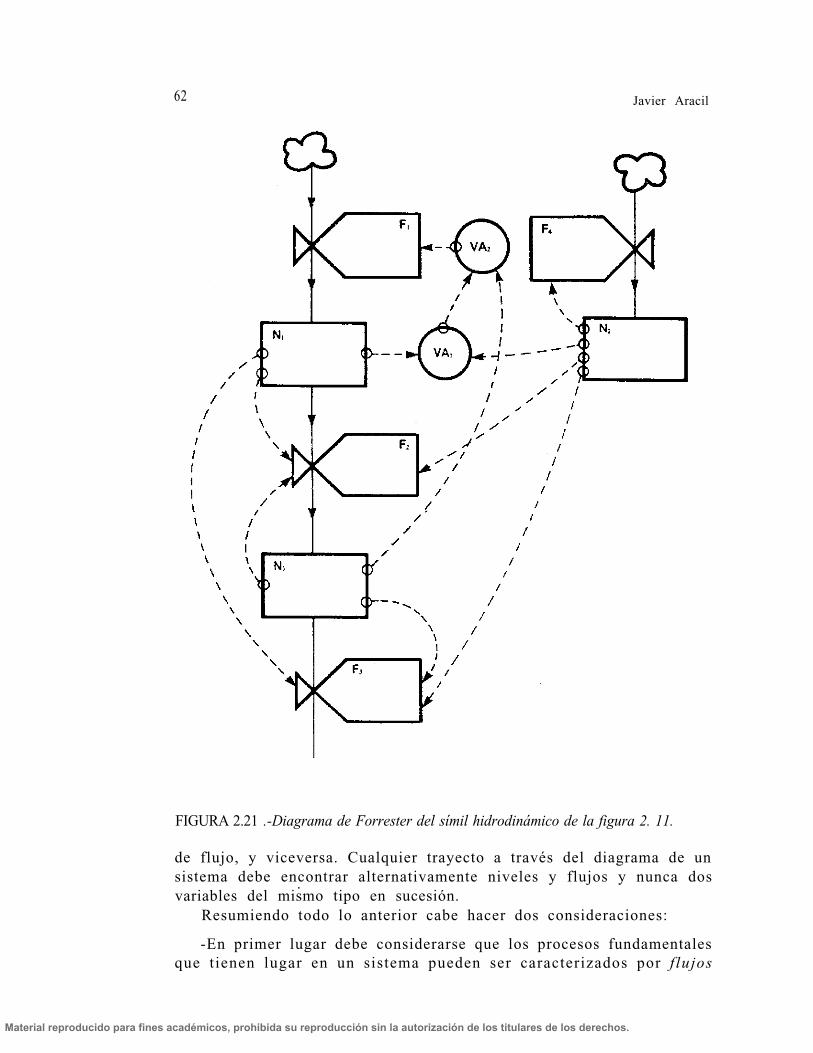
Con los símbolos de la figura 2.13 se puede construir un diagramaque represente el símil hidrodinámico de la figura 2.11, el cual a suvez no es sino una interpretación analógica del sistema de ecuacionesdiferenciales de primer orden de las expresiones (1). Ello es lo quese hace en la figura 2.21. Se han considerado en esta figura exclusivamen-te las variables auxiliares definidas en la figura 2.18, aunque se hubiesenpodido concebir otras más.
Un diagrama construido con ayuda de los símbolos de la figura 2.15,tal como el de la figura 2.21, recibe la denominación de diagrama deForrester o diagrama Dynamo. En estos diagramas se ligan entre sí variablesde nivel y de flujo, a través de las correspondientes variables auxiliares.Debe insistirse en que una variable de flujo no puede actuar directamentesobre otra variable de flujo, de la misma manera que una var iablede nivel no puede afectar a otra variable de nivel. Una variable denivel sólo puede afectar a otra variable de nivel a través de una variable
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
62 Javier Aracil
FIGURA 2.21 .-Diagrama de Forrester del símil hidrodinámico de la figura 2. 11.
de flujo, y viceversa. Cualquier trayecto a través del diagrama de unsistema debe encontrar alternativamente niveles y flujos y nunca dos.variables del mismo tipo en sucesión.
Resumiendo todo lo anterior cabe hacer dos consideraciones:
-En primer lugar debe considerarse que los procesos fundamentalesque tienen lugar en un sistema pueden ser caracterizados por f lujos

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 63
y por niveles (acumulaciones). Por ejemplo los flujos de nacimiento se acu-mulan en la población, los flujos de producción se acumulan en «stocks»,el personal contratado se acumula en la plantilla, etc. En este contexto esobvio que integración es sinónimo de acumulación.
-En segundo lugar se tiene que aunque el flujo y la integraciónson inherentes a los sistemas, solamente se puede observar la integración.Los flujos son instantáneos y sólo pueden ser medidos como promediossobre un determinado período. Por consiguiente las integraciones cobranun interés singular puesto que son las variables que pueden ser medidasy que suministran las bases prácticas para la actuación sobre el sistema.
3.5. Excepciones en los diagramas de Forrester
Se ha indicado anteriormente que un diagrama de Forrester estáconstituido por niveles y flujos unidos entre sí, de manera que una va-r iable de f lu jo afecte exclusivamente a var iables de nivel , y unavariable de nivel afecte exclusivamente a variables de flujo; estos efectosse pueden realizar a través de variables auxiliares. Esta regla general,cuya justificación es inmediata, admite, en la práctica, algunas excepcio-nes.
FIGURA 2.22.-Ejemplo de una excepción en el diagrama de Forrester.
En la f igura 2.22 se tiene un camino que va desde la variablede nivel NREF a la variable de flujo F. En este camino se intercalael nivel intermedio NI. El efecto de la introducción de este nivel inter-medio se refleja en la siguiente ecuación,
N I ( t + t ) = NI ( t ) + [NREF( t ) - NI ( t ) ] /TA
El parámetro TA representa el tiempo de ajuste.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
64 Javier Aracil
En este caso, se tiene un comportamiento caracterizado por la existen-cia de lo que puede llamarse un retraso de ajuste o de seguimiento. Esdecir, el nivel NREF suministra una referencia necesaria para calcularel flujo F. Sin embargo, el valor de este nivel no se transmite instantánea-mente sino que se produce un cierto retraso como consecuencia dela introducción de un nivel intermedio en el que se va produciendouna acumulación del valor de dicho nivel. En la figura 2.23 se representala evolución en el t iempo de la información que se transmite a lavariable de flujo suponiendo que el nivel NREF sufre una variaciónen escalón. Esta figura ilustra el efecto que se trata de obtener deun mecanismo como el que se acaba de describir. En el capitulo 3se estudiarán con mayor detenimiento las características de esta res-puesta temporal.
FIGURA 2.23.- Evolución en el tiempo del nivel NI.
4. Las ecuaciones del modelo y su programación
En la figura 2.24 se representa un diagrama causal que correspondeal diagrama de Forrester de la figura 2.21. De hecho, el proceso deconstrucción de un modeio de un determinado sistema se inicia conla construcción de un diagrama causal, tal como el de la figura 2.24,tras lo cual se establece el diagrama de Forrester correspondiente, comopuede ser el de la figura 2.21. Debe notarse que en el diagrama causalno está especificado el carácter de los distintos elementos que en élse relacionan, es decir, no se sabe si se trata de variables de nivel,de flujo o auxiliares. De hecho, la asignación de este carácter a cadauna de las variables puede constituir uno de los puntos más delicadosde la construcción de un modelo, y en el que se pone de manifiestola experiencia y habilidad del especialista que construye el mismo.
La distinción entre niveles y variables auxiliares, a partir del diagramacausal, no siempre está clara y a veces es difícil decidir si una variabledebe ser un nivel o una variable auxiliar. Ya se ha indicado que unnivel representa un punto de acumulación. Una regla aceptable para

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 65
decidir el carácter de una variable se basa en considerar la respuestaen el tiempo de la variable en discusión a un cambio en el sistema.Los niveles varían lentamente acumulando los flujos. Las variablesauxiliares varían instantáneamente en respuesta a los valores que tomanlos niveles a lo largo del sistema. Puede suceder que una variable,representada por una variable auxiliar cuando se emplea un horizontetemporal muy grande, deba ser representada como un nivel cuandoel horizonte temporal sea menor.
FIGURA 2.24.- Diagrama causal del simil hidrodinámico de la figura 2. 11.
Una vez identificadas las variables de nivel, las de flujo y las auxiliares,se procede a construir el diagrama de Forrester a partir del diagramacausal. De hecho, el diagrama de Forrester ya es en cierto sentidoun modelo matemático, puesto que cada uno de los bloques que intervie-nen en el mismo lleva asociada una ecuación matemática que caracterizala función realizada por dicho bloque.
El proceso de modelado del comportamiento dinámico de un sistemapuede resumirse diciendo que se procede de forma secuencial y progresivaal establecimiento de:
- los límites del sistema (variables endógenas y exógenas);- los bucles de realimentación como elementos básicos estructurales
dentro de los límites;

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
66 Javier Aracil
- las variables de nivel (estado) que representan las acumulacionesdentro de los bucles de realimentación;
- las var iables de f lu jo que representan la ac t iv idad dentro de losbucles de realimentación.
La c lase de modelos que se obt ienen con es ta metodología es ,esencialmente, la misma que es susceptible de ser programada sobreun calculador analógico. Está formada por integradores (niveles) queacumulan el resultado de las acciones en el tiempo, y por no linealidadessin memoria, convenientemente interconectados.
Del diagrama de Forrester se puede obtener el modelo matemáticodel sistema en forma analítica. Para ello lo único que se requiere estener las no linealidades que aparecen en el sistema en esta forma,es decir, en forma analítica. A partir del diagrama de Forrester sepuede escribir
en donde x es un vector que representa todos los niveles que aparecenen el diagrama, es decir, xT =[N1, N2,... NK], y u representa el conjuntode variables exógenas al sistema; recuérdense las expresiones (1). Lasvariables de flujo y las auxiliares se han eliminado, dejando únicamentelas variables de nivel y las variables exógenas. Si en lugar de escribirseel modelo en tiempo continuo, es decir, en forma de ecuaciones diferen-ciales, se prefiere la escritura en tiempo discreto, se tendrá
en donde el significado de x y u es el mismo que el indicado másarriba.
Normalmente, cuando se va a simular un modelo matemático notiene interés la forma analítica, puesto que lo que entonces interesaes la escritura del modelo en una forma fácilmente programable sobreun computador. Sin embargo, la forma analítica sí tiene gran interésen determinados problemas de optimización y de estimación de paráme-tros por ajuste de datos. En este sentido, se remite al lector al capítulo 5,en donde se hará ampl io uso de es ta forma de representación. Encualquier caso, la forma analítica tiene el interés de que permite aplicarla teoría moderna del control a los modelos matemáticos de los sistemasobtenidos con ayuda de la metodología de Forrester. Las expresiones(9) y (10) tienen la forma con que se representa un sistema dinámicoen aquella teoría.
A par t i r de las ecuaciones que r igen e l comportamiento de lasdistintas variables que intervienen en un modelo se obtiene la evolución

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 67
del sistema, lo que puede hacerse por cualquier procedimiento, incluidoel no recomendable, por lo tedioso, de realizar el cálculo directo amano. Habitualmente se emplea un computador numérico, aunque tam-bién puede utilizarse uno analógico.
En caso de emplear un calculador analógico, el establecimientodel programa para el mismo, a partir del diagrama de Forrester, esextraordinariamente simple. En efecto, se trata sencillamente de identifi-car los niveles con los integradores, tal como se hace en la figura 2.25y emplear los generadores de funciones no lineales del calculador analógi-co, para implementar las no linealidades del sistema. Este procedimientoes perfectamente válido, aunque, debido a la mayor difusión de los com-putadores numéricos, no es el más empleado en la práctica.
FIGURA 2.25.- Equivalencia entre la representación gráfica de una variable de nivelen un diagrama de Forrester y la representación de un integrador enun diagrama para un programa para un calculador analógico.
De hecho, el procedimiento de simulación más corriente está basadoen el empleo de computadores numéricos, en los cuales se realizanlos cálculos implícitos en las ecuaciones que definen la evolución delsistema. Las ecuaciones del modelo se escriben de acuerdo con unmétodo de integración numérica que, normalmente, es el método deEuler, tal como se aplicó en la expresión (7). La programación delas ecuaciones de un sistema dinámico puede hacerse en cualquier lengua-je de a l to n ivel como FORTRAN, BASIC, e tc . No obstante se hadesarrollado un lenguaje de programación específico con ayuda delcual se pretende que la escritura de las ecuaciones asociadas a undiagrama de Forrester sea lo más sencilla posible. Este lenguaje es elD Y N A M O [ 8 0 ] ; e n e l c u a d r o 2 . 1 s e m u e s t r a l a f o r m a q u e t o -man en DYNAMO las sentencias de los tipos de ecuaciones más usua-les en dinámica de sistemas.
En las ecuaciones escritas en DYNAMO se hace = DT, tal comose indica en la f igura 2 .26. Las le t ras J , K y L que s iguen a lossímbolos de las variables son los indicadores de tiempo. K indicael instante que se está considerando, J el precedente y L el siguiente.Para las ecuaciones de flujo, JK denota el flujo calculado en el intervaloprecedente, y KL, el flujo que se calcula para el intervalo siguiente.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
68 Javier Aracil
La figura 2.26, muestra esquemáticamente la secuencia de cálculo implí-cita en las ecuaciones. En la secuencia de cálculo se sobreentiendeque la evolución del sistema ha alcanzado el instante K, pero quelas ecuaciones aún no se han resuelto para los niveles en el instanteK ni para los flujos sobre el intervalo KL.
FIGURA 2.26.- Secuencia de cálculos del lenguaje DYNAMO en el instante K.
El cálculo de los niveles, en el instante K, está basado en el conoci-miento de los niveles en el instante anterior, J, y de los flujos (supuestosconstantes) en el intervalo JK. Una vez calculados los niveles en elinstante K, y después de haber calculado los flujos correspondientesal intervalo KL, los índices se adelantan un tiempo DT para iniciarel siguiente ciclo de cálculo. Los flujos calculados para el intervaloKL se convertirán en los flujos correspondientes al intervalo JK despuésdel cambio de índices; los índices K de los niveles se transformanen J; se inicia el siguiente ciclo de cálculo, y así sucesivamente.
Es muy importante observar que las ecuaciones auxiliares debencalcularse de una forma secuencial y no simultánea. Ello estaba implícitoen la discusión que se hizo al comentar las expresiones (3) y (4) cuando
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 69
se introdujeron estas variables. Se observa en estas expresiones cómoel conocimiento del valor que toman algunas de las variables auxiliareses necesario para el conocimiento que toman otras y, por lo tanto,debe procederse de una forma secuencial y ordenada a la determinaciónde los valores que toman estas variables.
En la resolución de las ecuaciones de un modelo debe procedersede forma sistemática. Es necesario construir una secuencia de cálculosque sirva de base para la elaboración del programa que permita obtenerla evolución en el tiempo del sistema que se modela.
Supóngase que en el instante t se dispone del valor de los nivelesN(t). La secuencia de cálculos es la siguiente:
1. A partir de N(t) se determinarán. en primer lugar. los valores tomadospor las variables auxiliares en el instante t; a continuación, con ayuda delas ecuaciones de flujo se determinan los valores de las variables de flujo
F(t).2. A partir de N(t) y de F(t) se determina N(t+ t), es decir, el
valor de los niveles en el instante t + t.3. Se hace t = t+ t y se vuelve a 1.
Debe notarse que la anterior secuencia de cálculo implica una ordena-ción de las ecuaciones. Dentro de las ecuaciones de flujo, o de lasde nivel, es indistinto el orden que se aplique al resolverlas, peroel conjunto de las ecuaciones de flujo debe resolverse completamenteantes de empezar a resolver las ecuaciones de nivel, y viceversa. Sise emplea el lenguaje DYNAMO, la ordenación de la secuencia decálculo se hace de una forma automática.
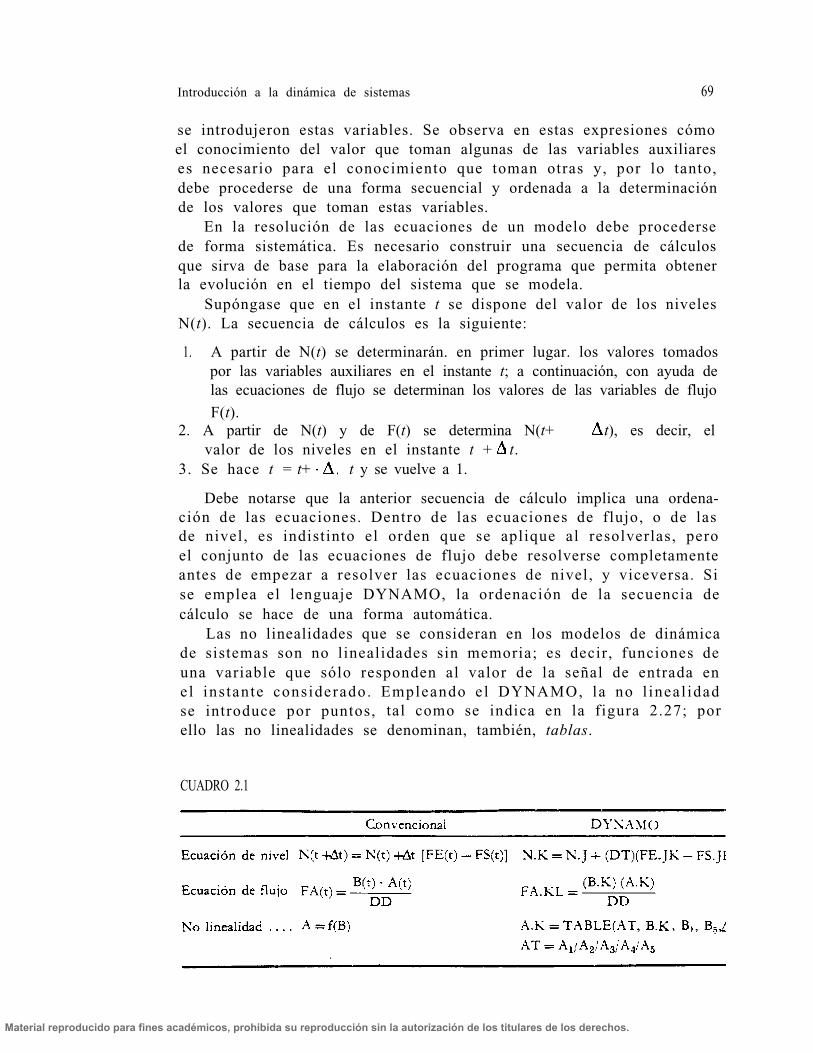
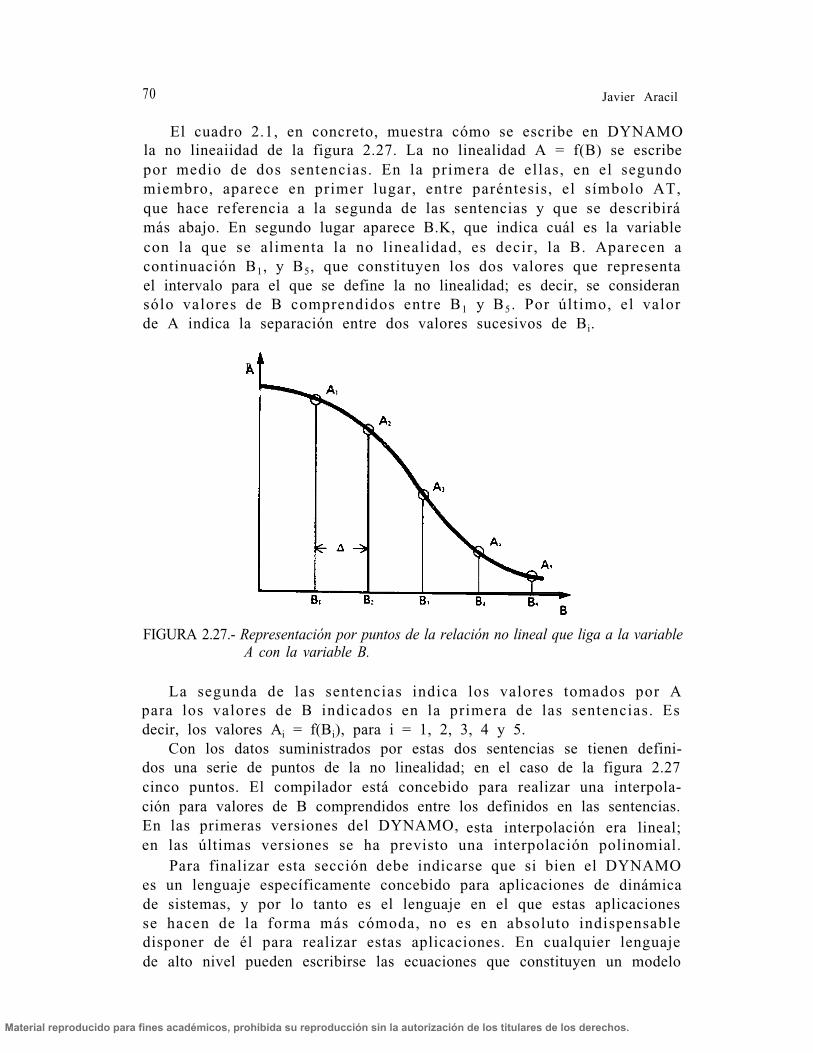
Las no linealidades que se consideran en los modelos de dinámicade sistemas son no linealidades sin memoria; es decir, funciones deuna variable que sólo responden al valor de la señal de entrada enel ins tante considerado. Empleando e l DYNAMO, la no l ineal idadse introduce por puntos, tal como se indica en la figura 2.27; porello las no linealidades se denominan, también, tablas.
CUADRO 2.1
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
70 Javier Aracil
El cuadro 2.1, en concreto, muestra cómo se escribe en DYNAMOla no lineaiidad de la figura 2.27. La no linealidad A = f(B) se escribepor medio de dos sentencias. En la primera de ellas, en el segundomiembro, aparece en primer lugar, entre paréntesis, el símbolo AT,que hace referencia a la segunda de las sentencias y que se describirámás abajo. En segundo lugar aparece B.K, que indica cuál es la variablecon la que se alimenta la no linealidad, es decir, la B. Aparecen acontinuación B1, y B5, que constituyen los dos valores que representael intervalo para el que se define la no linealidad; es decir, se consideransólo valores de B comprendidos entre B1 y B5. Por último, el valorde A indica la separación entre dos valores sucesivos de Bi.
P
FIGURA 2.27.- Representación por puntos de la relación no lineal que liga a la variableA con la variable B.
La segunda de las sentencias indica los valores tomados por Apara los valores de B indicados en la primera de las sentencias. Esdecir, los valores Ai = f(Bi), para i = 1, 2, 3, 4 y 5.
Con los datos suministrados por estas dos sentencias se tienen defini-dos una serie de puntos de la no linealidad; en el caso de la figura 2.27cinco puntos. El compilador está concebido para realizar una interpola-ción para valores de B comprendidos entre los definidos en las sentencias.En las primeras versiones del DYNAMO, esta interpolación era lineal;en las últimas versiones se ha previsto una interpolación polinomial.
Para finalizar esta sección debe indicarse que si bien el DYNAMOes un lenguaje específicamente concebido para aplicaciones de dinámicade sistemas, y por lo tanto es el lenguaje en el que estas aplicacionesse hacen de la forma más cómoda, no es en absoluto indispensabledisponer de él para realizar estas aplicaciones. En cualquier lenguajede alto nivel pueden escribirse las ecuaciones que constituyen un modelo

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 71
de dinámica de sistemas. Por último debe también indicarse que puestoque el CSMP (Continuous System Modelling Program) permite simularun computador analógico en uno numérico (digital), podrá, en conse-cuencia , emplearse para programar modelos como los que se es tánconsiderando.
5. Ejemplos elementales de aplicación
Se dedica la presente sección a desarrollar dos ejemplos elementalesde apl icación de la d inámica dc s is temas con c l f in de i lus t rar losconceptos vertidos en las secciones anteriores.
Vamos a presentar, en términos de dinámica de sistemas, dos modeloscuya concepción ha sido originalmente hecha de forma clásica. Conello se pretende facilitar al lector el acceso a las técnicas y notacionesespecíficas de la dinámica de sistemas. Más adelante, en los capítulosposteriores, se presentarán múltiples ejemplos de modelos típicos dela dinámica de sistemas.
5.1. Problemas de las ballenas
Se trata de estudiar la conservación de una determinada población,por ejemplo la de ballenas, somet ida a una ext inc ión impor tante poracción de la pesca o de la caza. La evolución de la poblac ión deballenas depende de los nacimientos, las muertes naturales y las muertespor pesca. Con estas relaciones iniciales se puede construir un diagramacausal como el que muestra la figura 2.28.
FIGURA 2.28.- Diagrama causal de la evolución de la población de ballenas, en funciónde los nacimientos muertes naturales y muertes por pesca.
La f igura 2 .29 muest ra la re lación no l ineal que exis te ent re lapoblación y los nacimientos o las muertes naturales. Si la poblaciónse encuentra por debajo de un valor P1 , se t iene una s i tuación de

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
72 Javier Aracil
«subpoblación» : laspor la baja densidad
tasas de nacimiento son muy bajas debido a que,de población, es difícil que se encuentren parejas,
por problemas de «soledad», falta de protección para las crías, etc.Si la población se encuentra por encima de P2 se tiene una «superpobla-ción» que determina problemas de densidad relativamente elevada, porlo que las tasas de nacimiento tienden a estabilizarse, mientras quelas tasas de mortalidad tienden a aumentar.
FIGURA 2.29.- Repesentación gráfica de la relación que liga a la población POB deballenas, con los nacimientos NAC y con las muertes naturales MNA.
Por otra parte, y simplificando mucho el modelo, se supone quela mortalidad debida a la pesca es proporcional a la población total,es decir,
Mp =K x P
en donde MP representa la mortalidad debida a la pesca, P es la poblaciónde ballenas y K es una constante de proporcionalidad.
Existe un límite superior para esta mortalidad fijado por la capacidadde procesamiento y almacenaje de los productos balleneros por partede la flota pesquera; por lo tanto se tiene que
Mp = min (K x P, BMAX)

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 73
que significa que la mortalidad anual de ballenas, por efecto de lapesca, será el mínimo de los valores tomados por K x P, fracción dela población que puede ser pescada, y BMAX, número máximo decetáceos que pueden ser procesados por la flota.
Las hipótesis realizadas son enormemente simplificadoras. Por ejem-plo, se ha supuesto que todas las ballenas son igualmente apreciadas.Sin embargo, en un primer ejemplo introductorio se consideran acepta-bles.
En la f igura 2 .30 se ha representado e l d iagrama de Forres tercorrespondiente al diagrama causal de la figura 2.28. Se observa cómopara la caracterización del sistema se requiere un solo nivel. Escritaen forma de ecuaciones diferenciales, la ecuación del modelo sería
FIGURA 2.30.- Diagrama de Forrester del modelo de evolución de la población de ballenas.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
74 Javier Aracil
en donde P es la población de ballenas, N el número de nacimientos,Mn el número de-muertes naturales y MP el número de muertes porpesca.
Las no linealidades de la figura 2.29 pueden representarse o bienanalíticamente o bien por puntos. En el primer caso, se tiene parala relación entre el número de nacimientos y la población la siguienteexpresión :
N = A1[exp (- a P ) ] + A 2 [ e x p ( - b P ] + C
siendo los valores de las constantes
Por lo que respecta a la re lación entre la tasa de morta l idad yla población se puede ajustar por medio de un polinomio de segundoorden tal como
M=A' x P + A ' x P 2
siendo los valores numéricos de las constantes
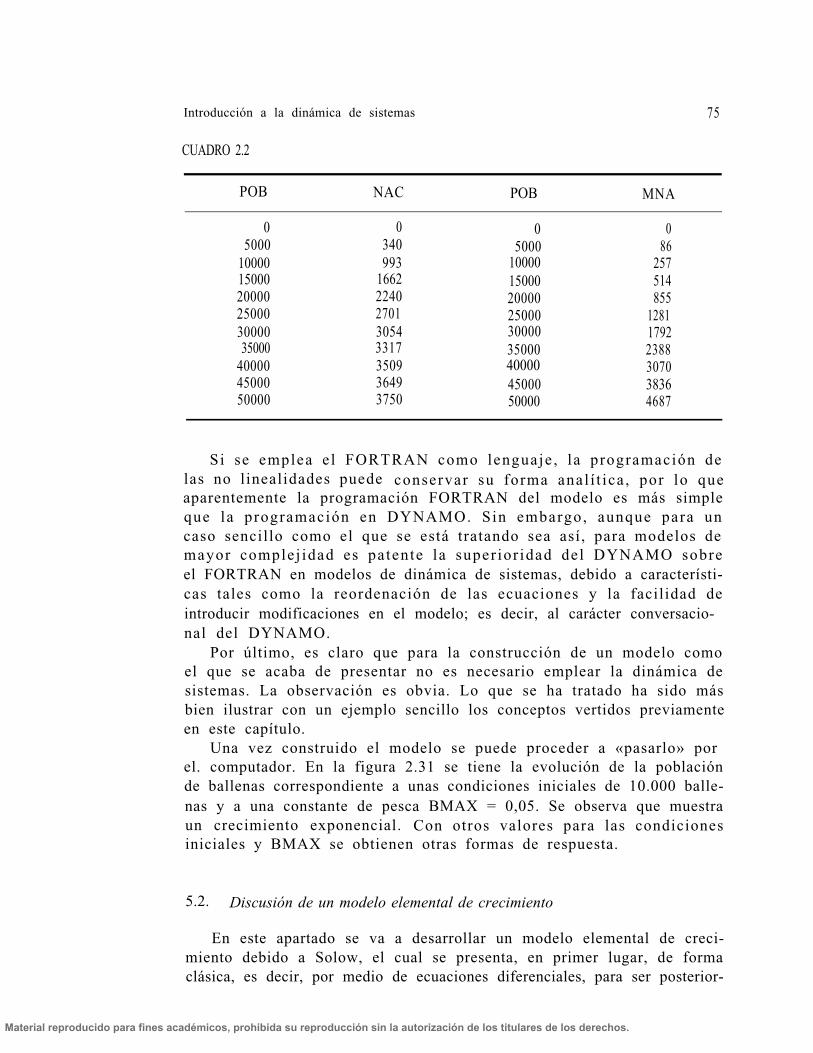
El modelo así obtenido puede ser simulado sobre un computadoranalógico o digital. En el segundo de los casos se requiere el empleode un lenguaje tal como el DYNAMO o el FORTRAN. Si se empleael DYNAMO las no linealidades deben tabularse; ello es lo que sehace en el cuadro 2.2. Teniendo en cuenta esta tabulación, el modelo,en DYNAMO, se escribe así:
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 75
CUADRO 2.2
POB NAC POB MNA
0 0 0 05000 340 5000 86
10000 993 10000 25715000 1662 15000 51420000 2240 20000 85525000 2701 25000 128130000 3054 30000 179235000 3317 35000 2388
40000 3509 40000 307045000 3649 45000 383650000 3750 50000 4687
Si se emplea e l FORTRAN como lenguaje , la programación delas no linealidades puede conservar su forma anal í t ica , por lo queaparentemente la programación FORTRAN del modelo es más simpleque la programación en DYNAMO. Sin embargo, aunque para uncaso sencillo como el que se está tratando sea así, para modelos demayor complej idad es patente la super ior idad del DYNAMO sobreel FORTRAN en modelos de dinámica de sistemas, debido a característi-cas tales como la reordenación de las ecuaciones y la facilidad deintroducir modificaciones en el modelo; es decir, al carácter conversacio-nal del DYNAMO.
Por último, es claro que para la construcción de un modelo comoel que se acaba de presentar no es necesario emplear la dinámica desistemas. La observación es obvia. Lo que se ha tratado ha sido másbien ilustrar con un ejemplo sencillo los conceptos vertidos previamenteen este capítulo.
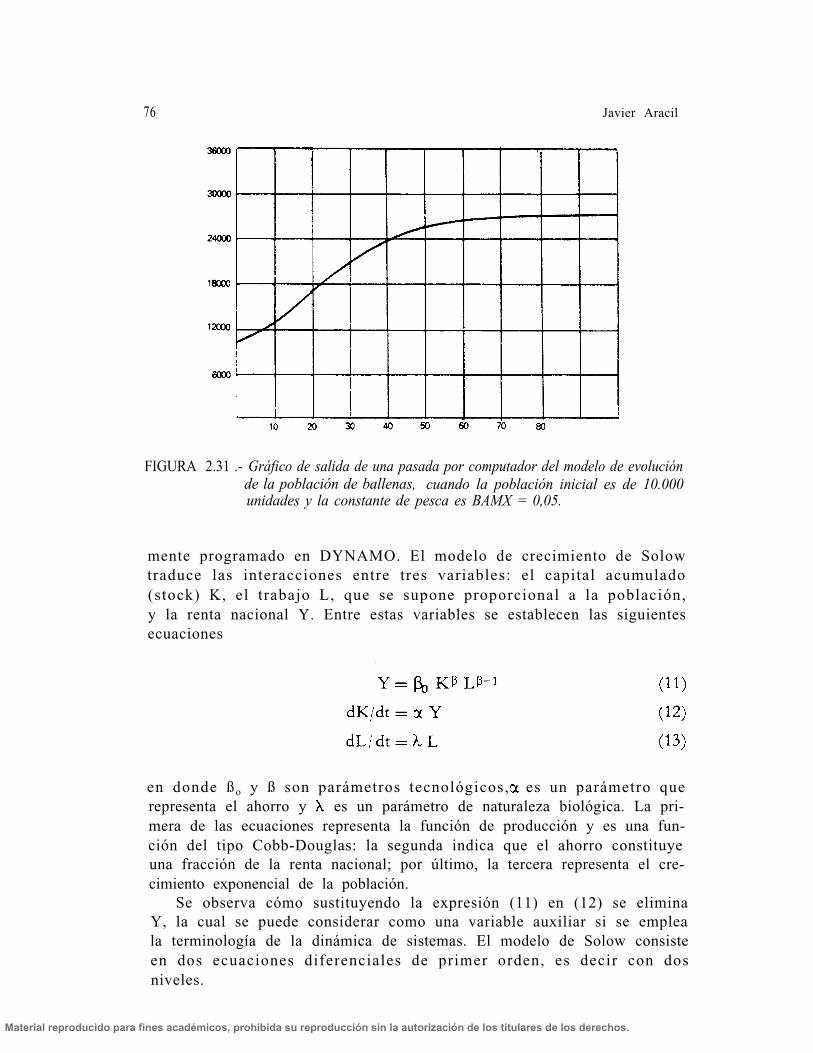
Una vez construido el modelo se puede proceder a «pasarlo» porel. computador. En la figura 2.31 se tiene la evolución de la poblaciónde ballenas correspondiente a unas condiciones iniciales de 10.000 balle-nas y a una constante de pesca BMAX = 0,05. Se observa que muestraun crecimiento exponencial. Con otros valores para las condicionesiniciales y BMAX se obtienen otras formas de respuesta.
5.2. Discusión de un modelo elemental de crecimiento
En este apartado se va a desarrollar un modelo elemental de creci-miento debido a Solow, el cual se presenta, en primer lugar, de formaclásica, es decir, por medio de ecuaciones diferenciales, para ser posterior-
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
76 Javier Aracil
FIGURA 2.31 .- Gráfico de salida de una pasada por computador del modelo de evoluciónde la población de ballenas, cuando la población inicial es de 10.000unidades y la constante de pesca es BAMX = 0,05.
mente programado en DYNAMO. El modelo de crecimiento de Solowtraduce las interacciones entre tres variables: el capital acumulado(stock) K, el trabajo L, que se supone proporcional a la población,y la renta nacional Y. Entre estas variables se establecen las siguientesecuaciones
en donde ßo y ß son parámetros tecnológicos, es un parámetro querepresenta el ahorro y es un parámetro de naturaleza biológica. La pri-mera de las ecuaciones representa la función de producción y es una fun-ción del tipo Cobb-Douglas: la segunda indica que el ahorro constituyeuna fracción de la renta nacional; por último, la tercera representa el cre-cimiento exponencial de la población.
Se observa cómo sustituyendo la expresión (11) en (12) se eliminaY, la cual se puede considerar como una variable auxiliar si se empleala terminología de la dinámica de sistemas. El modelo de Solow consisteen dos ecuaciones diferenciales de primer orden, es decir con dosniveles.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 77
Interesa introducir las variables auxiliares
La K en YK y la L en YL no son exponentes sino supraíndices.Con el concurso de estas variables auxiliares la ecuación (11) se
puede escribir
El conjunto de las ecuaciones (12)-(16) es equivalente al (1l)-(13).En el cuadro 2.3 se muestra la nomenclatura empleada para denominarlas distintas variables que aparecen en el modelo con el fin de escribirloen DYNAMO. En la f igura 2 .32 se t iene e l d iagrama de Forres tercorrespondiente al modelo de Solow.
En la práctica, el especialista en dinámica de sistemas construyeel diagrama de Forres ter a par t i r del diagrama causal y extrae lasecuaciones del modelo a partir de aquel diagrama. Aquí se ha procedidoal revés , ya que de lo que se t ra ta es de i lus t rar e l empieo de ladinámica de sistemas. Debe notarse cómo las convenciones de Forresterreproducen, minuciosamente, las correspondientes ecuaciones diferencia-les, distinguiéndose nítidamente las variables de nivel, flujo y auxiliares.
CUADRO 2.3
Nomenclatura de las variables que aparecen en el modelo de Solow
En el modelo aparecen dos no linealidades, las cuales correspondena las ecuaciones (14) y (15). Se trata de no linealidades sin memoria,

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
78 Javier Aracil
FIGURA 2.32.- Diagrama de Forrester del modelo elemental de crecimiento de Solow.
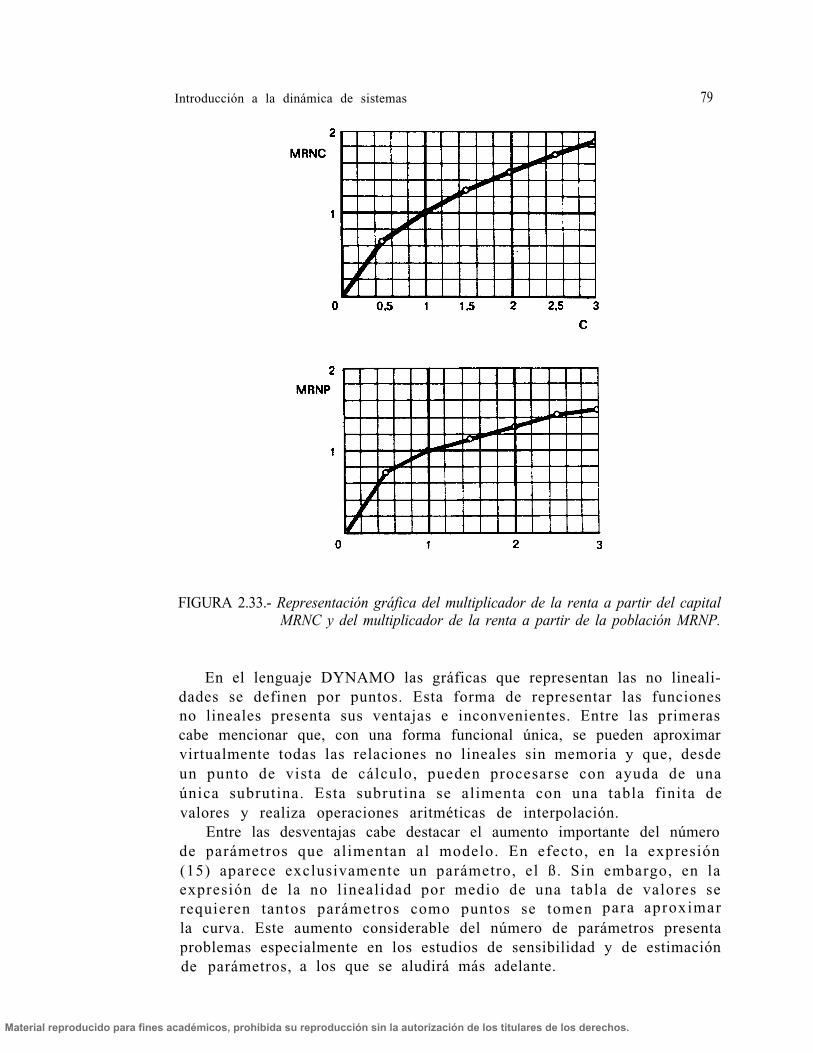
empleando la terminología habitual en teoría de sistemas. Este tipode no linealidades son las únicas que aparecen en los modelos construidoscon la ayuda de dinámica de sistemas y constituyen relaciones funcionalesno l ineales entre dos t ipos de variables en las que no aparece, enforma alguna, el factor tiempo; es decir, se trata de relaciones instantá-neas entre los valores tomados por dos variables. En la figura 2.33se representan las dos no linealidades.
�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 79
FIGURA 2.33.- Representación gráfica del multiplicador de la renta a partir del capitalMRNC y del multiplicador de la renta a partir de la población MRNP.
En el lenguaje DYNAMO las gráficas que representan las no lineali-dades se definen por puntos. Esta forma de representar las funcionesno lineales presenta sus ventajas e inconvenientes. Entre las primerascabe mencionar que, con una forma funcional única, se pueden aproximarvirtualmente todas las relaciones no lineales sin memoria y que, desdeun punto de vista de cálculo, pueden procesarse con ayuda de unaúnica subrutina. Esta subrutina se alimenta con una tabla finita devalores y realiza operaciones aritméticas de interpolación.
Entre las desventajas cabe destacar el aumento importante del númerode parámetros que alimentan al modelo. En efecto, en la expresión(15) aparece exclusivamente un parámetro, el ß. Sin embargo, en laexpresión de la no linealidad por medio de una tabla de valores serequieren tantos parámetros como puntos se tomen para aproximarla curva. Este aumento considerable del número de parámetros presentaproblemas especialmente en los estudios de sensibilidad y de estimaciónde parámetros, a los que se aludirá más adelante.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
80 Javier Aracil
Con ayuda del lenguaje DYNAMO la expresión (15) se escribe,
M R N P = TABLE(MRNPT, P, 0, 3, • 5)M R N P T =0.00/0.75/1.00/1.15/1.30/1.45/1.55
La primera de estas sentencias indica que existe una relación nolineal entre MRNP y la población P; de manera que para cada valorde la población P corresponde uno de MRNP. La sentencia indicaque para calcular cada valor de MRNP, a par t i r de P, se requiereuna tabla de valores correspondientes a las ordenadas, en la figura 2.33de los puntos de intersección de las rectas. Además se requiere conocerel intervalo total de variación de P, que resulta ser en este caso de 0a 3; el último de los valores que aparecen entre paréntesis representael intervalo de discretización de P, que en este caso resulta ser de0,5. La segunda de las sentencias indica los valores tomados por MRNPen los puntos de abcisas consideradas.
En el lenguaje DYNAMO las ecuaciones diferenciales se transfor-man en ecuaciones en diferencias finitas empleando la aproximación deEuler. Ello implica el transformar el sistema de ecuaciones diferencialesde las expresiones (11)-(13) en el sistema discreto
en donde h representa el intervalo elemental de tiempo en el modelo.Empleando esta discretización el conjunto de ecuaciones (12)-(16) sepuede escribir así:
En el sistema de ecuaciones anterior se han agrupado las ecuacionesde nivel, las de flujo y las auxiliares. Esta agrupación corresponde

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 81
al orden en que se deben realizar los cálculos. Empleando el lenguajeDYNAMO el anterior sistema de ecuaciones se escribe así:
De esta forma se tiene el modelo en una forma prácticamente listapara ser procesada por un computador. Sólo se necesita añadir lascondiciones iniciales, para lo cual se definen las variables
A través de este ejemplo se ha mostrado cómo los modelos quese obtiene con ayuda de la dinámica de sistemas corresponden a sistemasde ecuaciones diferenciales de primer orden, las cuales pueden progrä-marse de una forma cómoda empleando un lenguaje desarrollado alefecto que es el DYNAMO. El DYNAMO es un lenguaje de programa-ción desarrollado específicamente para el especialista en dinámica de sis-temas, con el que se facilita la programación de la aproximación de Eu-ler de un sistema de ecuaciones diferenciales de primer orden.
El DYNAMO incluye una función, denominada CLIP, mediantela cual se pueden conmutar valores de constantes o parámetros, de

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
82 Javier Aracil
un valor a otro, cuando cierta variable especificada excede de un ciertoumbral. Considérese, por ejemplo, que se quiere conmutar el valordel parámetro del modelo de Solow, es decir, MCRN, de un valorMCRNl a un valor MCRN2 en el año 1990. La sentencia correspondienteen DYNAMO ser ía
en donde T.K es el t iempo histórico que se calcula de acuerdo con
Existen otras funciones análogas a la CLIP que se acaba de describir.Por ejemplo, la función máximo, definida:
Análogamente, se define la función mínimo, de acuerdo con:
Otra función de interés, de características análogas a las anteriores,es la función SWITCH (conmutación) definida por
De forma análoga a las funciones que se acaban de describir sepueden concebir funciones de control más sofisticadas en el lenguajeDYNAMO, aunque las funciones de conmutación binaria que se acabande considerar son las más empleadas.
El empleo del lenguaje DYNAMO ofrece las siguientes ventajas:
1. Las sentencias de instrucciones son muy fáciles de entender.2 . Se pueden obtener los resul tados de la s imulación en forma de
gráf icas o l is tados.

�������������� �������������� ����� ������������������� ������������������ ������������������������������ ���
Introducción a la dinámica de sistemas 83
3. Las ecuaciones se ordenan de forma automática para la realizaciónde los cálculos.
4. Se realiza fácilmente la detección de errores en la preparación deprogramas.
5. Las operaciones de compilación y simulación se realizan rápidamente.6. Tiene un marcado carácter conversacional que permite, con toda
facilidad, efectuar cambios en el modelo.
No obstante estas ventajas, debe insistirse, una vez más, en queel empleo del DYNAMO no es indispensable para la programaciónde modelos construidos con ayuda de la dinámica de sistemas. Tantoel ejemplo considerado aquí, como el del apartado 5.1, pueden progra-mar se en FORTRAN aún cuando no s e d i sponga de l a exp re s iónanalítica de las no-linealidades. En este último caso deberá disponersede subrutinas para la interpolación. Sin embargo, lo que en cualquiercaso debe resal tarse es que empleando e l DYNAMO es como máscómodamente se construyen, modelos de dinámica de sistemas. Estacomodidad reside, sobre todo, en las facilidades conversacionales de queestá dotado este lenguaje.