cap´ıtulo 1 relatividade restrita e espac¸o-tempo...
TRANSCRIPT

Capıtulo 1
RELATIVIDADE RESTRITA EESPACO-TEMPO PLANO
1.1 Coordenadas e Observadores Inerciais
O maior obstaculo a compreensao da Teoria da Relatividade (Restrita e Geral) e adificuldade de identificar de imediato os pressupostos subjacentes a natureza do espacoe do tempo na teoria newtoniana, antes mesmo de construir o continuum 4-dimensionalonde a teoria de Einstein e naturalmente descrita, como mostrou Herman Minkowskiem 1908:
“Daqui em diante o espaco so por si e o tempo so por si estao condenadosa tornarem-se meras sombras, e so uma uniao dos dois preservara umarealidade independente”.
Tanto na fısica newtoniana como na relatividade restrita, os observadores (ou refe-renciais) inerciais constituem uma classe privilegiada. Porem, enquanto na fısica deGalileu e Newton os referenciais inerciais sao considerados equivalentes para a descricaodas leis da Mecanica, na relatividade restrita (RR) estes referenciais sao equivalentespara descrever todas as leis fısicas. Para isso foi necessario generalizar a lei e esten-der o grupo de transformacoes entre as coordenadas de dois observadores inerciaisde modo a deixar as equacoes de Maxwell invariantes, e com isso a propria estruturado espaco e do tempo foi reformulada culminando na construcao de um continuum4-dimensional, o espaco-tempo, caracterizado por uma metrica pseudo-euclidiana, queautomaticamente traduz os dois postulados da RR de Einstein.
Embora, na fısica newtoniana, falemos habitualmente do espaco e do tempo separa-damente e, so na relatividade restrita, falamos de espaco-tempo, em ambas as teorias
1
podemos falar de um espaco-tempo contınuo, composto de acontecimentos (fısicos):sendo cada acontecimento definido por quatro coordenadas: (t, ~r) ≡ (t, x, y, z). Mas eclaro, aquilo que e natural na RR, e algo artificial na Mecanica Newtoniana.
Todos os acontecimentos, pelo menos numa vizinhanca de um dado acontecimento (ori-gem), podem ser unicamente caracterizados por 4 numeros reais (as suas coordenadas):dizemos que o espaco-tempo e uma variedade (diferenciavel) 4-D, M4.
O mundo fısico da nossa experiencia, e agora representado por um espaco a quatro di-mensoes, o espaco-tempo. Cada ponto do espaco-tempo e um acontecimento fısico,representado por quatro coordenadas (t, x, y, z): t representa o instante e (x, y, z) da-nos a localizacao do acontecimento. Diferentes observadores (inerciais) usam coorde-nadas diferentes para o mesmo acontecimento. O conjunto de todos os acontecimentosda vida de um observador (ou de uma partıcula) formam uma trajectoria do espaco-tempo a que se da o nome de linha do Universo. Para os observadores inerciaisas linhas do Universo sao geodesicas (neste caso, por se tratar de um espaco-tempoplano, linhas rectas) deste espaco-tempo. Se dois observadores se cruzam e tomamesse acontecimento como a origem das respectivas coordenadas de espaco e de tempo,a invariancia da velocidade da luz no vacuo exige que
x2 + y2 + z2 − c2t2 = x′2 + y′2 + z′2 − c2t′2
onde (t, x, y, z) e (t′, x′, y′, z′) sao as coordenadas dum mesmo acontecimento para cadaum dos observadores.
A semelhanca do que acontece com a geometria euclidiana, onde a generalizacao doteorema de Pitagoras nos diz que
∆r2 = ∆x2 + ∆y2 + ∆z2
e um comprimento invariante numa rotacao, tambem a geometria do espaco-tempo darelatividade restrita pode ser caracterizada pelo invariante fundamental,
∆s2 = −c2∆t2 + ∆x2 + ∆y2 + ∆z2, (1.1)
que traduz a invariancia da velocidade da luz no vacuo, e tambem e habitualmenteinterpretado como uma “distancia”entre dois pontos (acontecimentos) deste espaco-tempo a quatro dimensoes e, por isso, designado intervalo do Universo. Porem,devido a existencia de tres sinais positivos e um negativo (na linguagem matematicadiz-se que se trata de uma forma quadratica indefinida) esta “distancia”nem sempre epositiva como na geometria euclidiana.
Dados dois acontecimentos cuja separacao espacial e ∆r e cuja separacao temporal e∆t, tres situacoes diferentes podem ocorrer
a) ∆r2−c2∆t2 = 0, a distancia entre os dois acontecimentos e exactamente percorridapela luz no intervalo de tempo que os separa. Diz-se que os dois acontecimentosformam um par tipo-luz.
2
b) ∆r2 − c2∆t2 < 0, a distancia entre os dois acontecimentos e menor que o espacopercorrido pela luz no intervalo de tempo que os separa. Diz-se entao que os doisacontecimentos formam um par tipo-tempo.
c) ∆r2 − c2∆t2 > 0, no intervalo de tempo que separa os dois acontecimentos a luznao pode percorrer a distancia que os separa. Diz-se neste caso que os doisacontecimentos formam um par tipo-espaco.
Todos os pares de acontecimentos que estao numa relacao de causa-efeito pertencemas categorias a) ou b). Nenhuma informacao pode ser transmitida com velocidademaior do que a da luz. Logo, dois acontecimentos que pertencam a categoria c) naopodem estar causalmente relacionados. Como as partıculas materiais viajam com umavelocidade inferior a da luz em todos os referenciais inerciais, dois quaisquer aconteci-mentos da vida de uma partıcula material formam um par tipo-tempo para todos osobservadores inerciais, isto e, a sua separacao temporal e maior do que a sua separacaoespacial.
Como consequencia deste ultimo facto, vemos imediatamente que dados dois aconte-cimentos que formam um par do tipo tempo, eles pertencem necessariamente a vidade uma dada partıcula material, e ocorrem no mesmo ponto do espaco no referencialproprio dessa partıcula, isto e, no referencial onde a partıcula esta em repouso. Por-tanto, dados dois acontecimentos que formam um par de tipo tempo, existe sempre umreferencial onde eles ocorrem no mesmo ponto do espaco.
Por outro lado, dados dois acontecimentos que formam um par do tipo espaco, existesempre um referencial onde sao simultaneos, bastando para isso provar que eles selocalizam necessariamente sobre um eixo espacial de um dado referencial inercial.
Antes da teoria da RR, admitia-se que o espaco-tempo tinha a seguinte estruturaadicional: dado um acontecimento p do espaco-tempo, devia existir uma nocao natural,independente-do-observador, de “acontecimentos que ocorrem no mesmo instante quep”(nocao de simultaneidade com p). Mais precisamente, dados dois acontecimentosp e q, devia-se verificar uma das tres possibilidades mutuamente exclusivas:
[1] E possıvel, em princıpio, para um observador ou partıcula material, ir de umacontecimento q para outro acontecimento p: q 7→ p (diz-se, neste caso, que qpertence ao passado de p).
[2] E possıvel, em princıpio, para um observador ou partıcula material, ir de umacontecimento p para outro acontecimento q: p 7→ q (diz-se que q pertence aofuturo de p)
[3] E impossıvel, em princıpio, a um observador ou partıcula material, estar pre-sente em ambos os acontecimentos p e q (diz-se que p e q sao acontecimentossimultaneos).
3
Na fısica Newtoniana supoe-se que os acontecimentos que se encontram na terceiracategoria formam um so conjunto 3-D e definem a nocao de simultaneidade com p,enquanto que em RR existem infinitos conjuntos 3-D de acontecimentos simultaneos,nomeadamente quaisquer dois observadores inerciais distintos tem diferentes conjuntosde acontecimentos simultaneos com o acontecimento p. Em concreto, na teoria da RRtambem se verifica uma classificacao das relacoes causais entre os acontecimentos, mascom a seguinte modificacao: devemos substituir (3) por
[3’] Os acontecimentos simultaneos com p formam mais do que um conjunto 3-D.
Estes acontecimentos ainda se subdividem em:
[i] Acontecimentos que estao na fronteira do conjunto de pontos que formam o futurode p. Estes acontecimentos nao podem ser atingidos por uma partıcula materialque parta de p mas podem ser atingidos por sinais luminosos emitidos em p eformam o cone de luz do futuro de p (espaco 3-D).
[ii] Acontecimentos que formam o cone de luz do passado de p (espaco 3-D) definidode modo semelhante.
[iii] Acontecimentos que nao estao no futuro nem no passado de p e que se dizemespacialmente relacionados com p (os quais formam um conjunto 4-D).
O ponto essencial a destacar e o da ausencia de uma nocao de simultaneidade absolutaem RR; nao existem superfıcies 3-D espaciais absolutas no espaco-tempo, ao contrariodo que acontece na fısica pre-relativista, onde os acontecimentos simultaneos com umdado acontecimento p formam uma superfıcie 3-D (unica) no espaco-tempo. Aindae possıvel a um observador em RR definir acontecimentos simultaneos com um dadoacontecimento p–definindo assim uma superfıcie 3-D no espaco-tempo–mas essa nocaodepende do seu estado de movimento.
1.1.1 Postulados da Relatividade Restrita
Em 1905 A. Einstein constroi a teoria da RR partindo dos seguintes postulados:
Postulado 1 Os observadores inerciais sao equivalentes para a formulacao de todasas leis fısicas.
Postulado 2 A luz propaga-se no vacuo com uma velocidade finita c, a mesma paratodos os observadores inerciais, independentemente da velocidade relativa entre a fontee o observador. (Princıpio da Invariancia da velocidade da luz).
4
O primeiro postulado (P1), conhecido por Princıpio da Relatividade de Einstein,assume a equivalencia dos referenciais de inercia (RI). E o segundo postulado (P2),afirma a invariancia da velocidade da luz no vacuo.
Importa esclarecer alguns pontos. Um referencial inercial e um sistema de referenciaonde as partıculas livres se movem com velocidade uniforme segundo linhas rectas noespaco (e no espaco-tempo). Por observador inercial entendemos um observador emrepouso num referencial inercial, conhecido por referencial proprio, equipado comos respectivos instrumentos de medida (relogios e reguas).
Note que, de acordo com o Princıpio da Relatividade de Galileu, os observadores iner-ciais tambem sao equivalentes, mas so para as experiencias da mecanica de Galileu-Newton.
1.1.2 O efeito de Doppler e a dilatacao do tempo
Vamos comecar por examinar o efeito do movimento relativo sobre a taxa de progressaodo tempo medido por dois observadores inerciais distintos. Consideremos entao doisobservadores inerciais, sejam eles Duarte e Mariana, em movimento relativo com ve-locidade v. Vejamos como podem estes observadores medir a sua distancia relativanum dado instante do tempo proprio de um deles, isto e, o tempo medido no refe-rencial onde o observador esta parado. Comecemos por admitir que os observadoresse cruzaram num instante anterior e, nesse instante, acertaram os seus relogios. Paramedir distancias e comparar os tempos dos seus relogios, Duarte e Mariana podemtrocar sinais “luminosos”que, de acordo com o segundo postulado, se deslocam comvelocidade c em relacao a qualquer deles.
O Duarte podera medir a que distancia se encontra a Mariana, num dado instante doseu tempo proprio, se enviar um sinal luminoso no instante tA, que sera entretantoreflectido pela Mariana e chega de novo ao Duarte no instante posterior tB > tA. Diraentao que a Mariana estava a distancia d = (tB − tA)/2 segundos-luz (se assumirmosc = 1, e medirmos o espaco e o tempo em segundos-luz) no momento em que o sinalluminoso foi reflectido pela Mariana. O instante correspondente a esse acontecimento,tC , tambem facilmente se calcula, no referencial proprio do Duarte, em funcao de tA etB,
tC =1
2(tA + tB).
Mas e claro que a um intervalo de tempo T , no referencial do Duarte, corresponde umintervalo maior T ′ = KT, k > 1 no referencial da Mariana. Se nao vejamos isso como auxılio do seguinte exemplo (ver Fig(1.1)). Suponhamos que a Mariana se afasta doDuarte com uma velocidade v = 0.6(c = 1), e que o Duarte envia os seus sinais paraa Mariana a intervalos regulares de 6 meses do seu tempo proprio. Quando envia oprimeiro sinal, estando a Mariana ja a uma distancia de 0.5 anos-luz, entao o sinalleva 1.25 anos a atingi-la. Seis meses depois de enviar o primeiro sinal, Duarte envia o
5

T
T'=KT
DM
Figura 1.1: O Duarte envia dois sinais luminosos para a Mariana, separados de umintervalo T . A Mariana recebe esses sinais separados de um intervalo maior T ′ = KT ,onde K > 1 e funcao da velocidade relativa entre os 2 observadores inerciais.
segundo sinal luminoso. Durante esse tempo T = 12
ano-luz, a Mariana afastou-se mais0.3 anos-luz, de modo que o sinal luminoso vai ter de percorrer uma distancia maiorpara atingi-la. De modo que, pelo menos do ponto de vista do Duarte, e evidente quea um intervalo de 6 meses entre dois sinais emitidos corresponde um intervalo maiorentre os dois sinais recebidos pela Mariana; concretamente, Duarte mede um intervaloentre os dois sinais recebidos pela Mariana de 1.25 anos. Isto nao nos diz ainda qualo intervalo de tempo medido pela Mariana, mas e com certeza uma indicacao de queesse intervalo nao sera 6 meses, como para o Duarte. Um efeito semelhante ocorrera seos sinais fossem agora enviados da Mariana para o Duarte. E e de esperar, que sendoa velocidade relativa a mesma, que o factor K que relaciona os intervalos de temposeja o mesmo. Como veremos a partir das formulas deduzidas adiante, no nosso casoK = 2 e portanto ao intervalo de 6 meses do Duarte corresponde um intervalo de 1 anona recepcao desses mesmos sinais pela Mariana. E se os sinais recebidos pela Marianaforem (imediatamente) reflectidos de modo a regressarem ao Duarte, este recebe-los-aseparados de dois anos (ver Fig(1.2)).
Consideremos entao dois observadores inerciais em movimento relativo, que podemcontinuar a ser o Duarte e a Mariana. Duarte envia um sinal luminoso, espera umintervalo de tempo T do seu relogio (tempo proprio), e envia entao um segundo sinal.A Mariana mede um intervalo de tempo entre a recepcao desses dois sinais como sendo
T ′ = KT (1.2)
Se a Mariana estivesse em repouso em relacao ao Duarte, entao terıamos K = 1,isto e, os intervalos de tempo seriam os mesmos para os dois observadores. Nestecaso, as suas linhas do Universo seriam paralelas. Mas se os observadores se afastam
6

T
T'=KT
DM
T''=KT'
anos-luz
Figura 1.2: O Duarte envia dois sinais luminosos para a Mariana, separados de umintervalo T , e esta devolve-os assim que os recebe.
K > 1, e se os observadores se aproximam K < 1. Se soubermos a velocidade entreos 2 observadores facilmente poderemos determinar K. Na verdade, se os relogios daMariana e do Duarte foram previamente acertados, quando a Mariana se cruzou como Duarte, entao a partir das coordenadas do acontecimento C da Fig. (1.3) poderemosrelacionar K com a velocidade v,
tC = 12(tA + tB) = 1
2(K2T + T )
xC = 12(tB − tA) = 1
2(K2T − T )
(1.3)
Logo, vem
v =xC
tC=
K2 − 1
K2 + 1⇒ K =
√1 + v
1− v. (1.4)
Note-se que daqui tambem se pode obter a formula da dilatacao do tempo, com-parando o tempo entre 2 acontecimentos que ocorrem no mesmo ponto do espaco deum dado observador, e em pontos do espaco diferentes do outro observador. Assim,t′C = T ′ = KT com tC = (K2 + 1)T/2 vem
t′CtC
=2K
K2 + 1=√
1− v2,
e portanto,T ′ = t
√1− v2 (1.5)
Uma das formas mais praticas de medir a quantidade K e atraves da medicao docomprimento de onda (c.d.o.) da luz observada, ou de qualquer outra radiacao elec-tromagnetica, desde que se conheca o c.d.o. da radiacao emitida. Esta e a base das
7

KT=T '
T
KT '
A
B
C tC
Duarte
Mariana
Figura 1.3: No instante tA, Duarte envia um sinal luminoso para Mariana, que o devolveimediatamente no instante tC de Duarte. Este recebe-o de volta no seu instante tB.
medidas de deslocamento para o vermelho da radiacao emitida por um corpo que seafasta do observador.
Se um observador se afasta de nos, o Duarte por exemplo, e envia uma radiacao dec.d.o. λe, vamos recebe-la com c.d.o. dado por
λo = Kλe, (1.6)
pois o perıodo da radiacao emitida e dado λe = c∆τe, e a este perıodo corresponde∆τo = K∆τe, para o perıodo da radiacao observada, de acordo com a eq.(1.2).
Esta mudanca de c.d.o. e facil de medir directamente a partir do espectro da luzrecebida. Pode fazer-se esta medida atraves da identificacao no espectro observado deuma linha cujo c.d.o. e conhecido na fonte (como e o caso da ‘linha α’de c.d.o. 121.5 nmdo espectro do Hidrogenio), que depois e comparado com o c.d.o. recebido. Comfrequencia, o resultado da medida e expresso em termos do parametro do deslocamentopara o vermelho,z, definido por
1 + z =λo
λe
= K. (1.7)
Com este resultado ficamos a perceber que K, conhecido por factor de Bondi, estaassociado ao efeito de Doppler entre dois observadores inerciais em movimento relativo.
8

1.1.3 A adicao de velocidades
Consideremos agora tres observadores inerciais, cujas linhas do Universo sao dadas pelaFig.(1.3) Nesta figura o observador B tem velocidade v1 em relacao a A, e observador
T
T'
AB
T''
C
Figura 1.4: O observador B afasta-se do observador A com velocidade v1 e o observadorC afasta-se do observador B com velocidade v2
C tem uma velocidade v2 em relacao a B. Pretendemos saber qual e a velocidaderelativa, v12, de C em relacao a O. Atendendo a linearidade entre K e v, e de esperarque
T ′ = K1T, T ′′ = K12T.
Mas tambem podemos admitir que o observador B emite sinais para C separados deum intervalo T ′, pelo que
T ′′ = K2T′.
Combinando as relacoes anteriores concluımos que T ′′ = KBCKABT e portanto
KAC = KABKBC , (1.8)
Atendendo a relacao entre o factor de Bondi e a velocidade eqs.(1.4),
vAC =K2
AC − 1
K2AC + 1
=K2
ABK2BC − 1
K2ABK2
BC + 1ou
vAC =
1 + vAB
1− vAB
1 + vBC
1− vBC
− 1
1 + vAB
1− vAB
1 + vBC
1− vBC
+ 1=
vAB + vBC
1 + vABvBC
(1.9)
9
Com base nesta formula de composicao de velocidades, vemos que a velocidade da luznao pode ser ultrapassada: se uma destas velocidades vAB ou vBC e igual a c = 1, avelocidade resultante vem vAC = 1.
1.1.4 Deducao das transformacoes de Lorentz
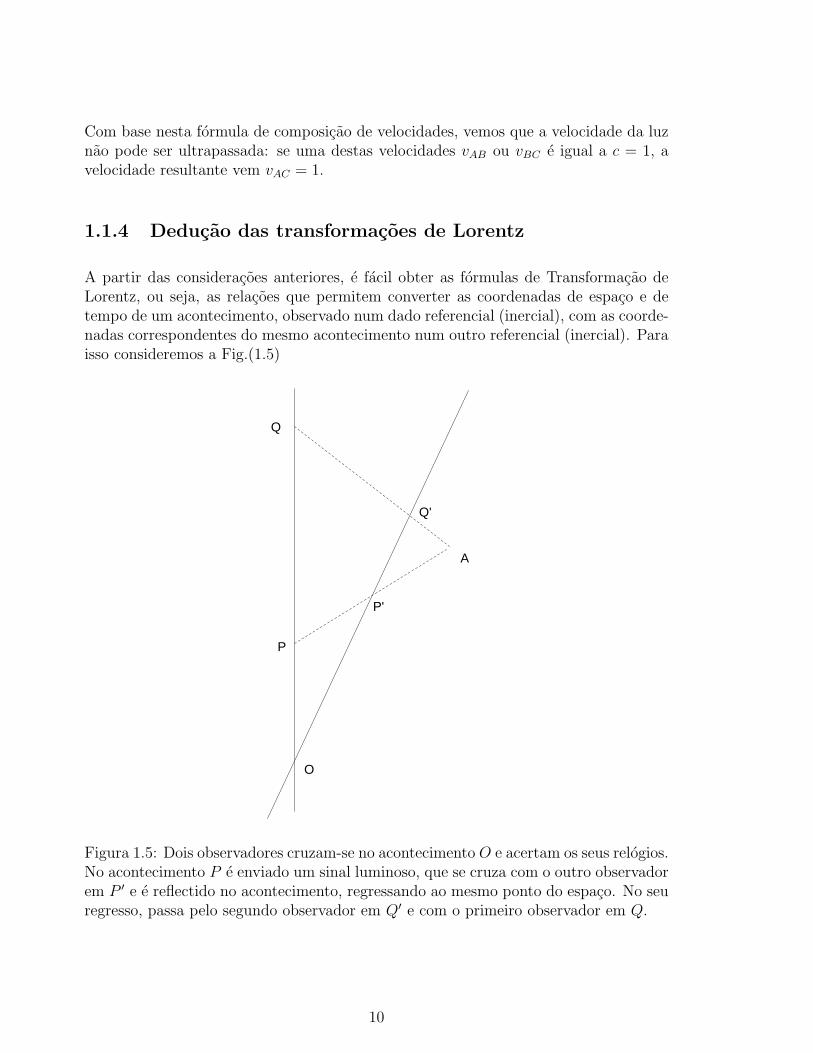
A partir das consideracoes anteriores, e facil obter as formulas de Transformacao deLorentz, ou seja, as relacoes que permitem converter as coordenadas de espaco e detempo de um acontecimento, observado num dado referencial (inercial), com as coorde-nadas correspondentes do mesmo acontecimento num outro referencial (inercial). Paraisso consideremos a Fig.(1.5)
O
A
P
P'
Q
Q'
Figura 1.5: Dois observadores cruzam-se no acontecimento O e acertam os seus relogios.No acontecimento P e enviado um sinal luminoso, que se cruza com o outro observadorem P ′ e e reflectido no acontecimento, regressando ao mesmo ponto do espaco. No seuregresso, passa pelo segundo observador em Q′ e com o primeiro observador em Q.
10

Chamando S e S ′ os dois referenciais, temos em S
tA = 12(tP + tQ)
xA = 12(tQ − tP )
(1.10)
e em S ′
t′A = 12(t′P ′ + t′Q′)
x′A = 12(t′Q′ − t′P ′)
(1.11)
Tendo em conta que t′P ′ = KtP e tQ = Kt′Q′ , vem para um acontecimento A arbitrario
t′ − x′ = K(t− x)
t + x = K(t′ + x′)
donde se deduz: −t′2 + x′2 = −t2 + x2, bem como
t′ = 12(K + K−1)t− 1
2(K −K−1)x = γ(x− vt)
x′ = 12(K + K−1)x− 1
2(K + K−1)t = γ(t− vx)
(1.12)
com
γ =1√
1− v2.
Assim, segundo Einstein, dados dois observadores inerciais arbitrarios, O e O′, ascoordenadas de um certo acontecimento P estao relacionadas entre si por uma trans-formacao de Lorentz, definida no caso particular em que v so tem componente segundox, e os dois referenciais estao igualmente orientados por
x ′ = γ(x− vt)y ′ = yz ′ = zt ′ = γ(t− vx/c2)
transformacao de Lorentz (1.13)
e onde
γ =1√
1− v2/c2.
Representando as coordenadas de O′ por uma barra em vez de uma plica, e multipli-cando a coordenada temporal pela velocidade da luz no vacuo, c, para que todas ascoordenadas fiquem com a mesma dimensao espacial, podemos escrever as coordenadasdo mesmo acontecimento fısico nos dois referenciais inerciais
xa = (ct, x, y, z) e xc = (t, x, y, z), com c = (0, 1, 2, 3). (1.14)
e podemos escrever a transformacao de Lorentz como uma relacao matricial X = L Xdada por
xc =3∑
a=0
Lca xa, (1.15)
11
onde Lca representa a matriz da transformacao de Lorentz. Note que os dois ındices
c e a dizem respeito a sistemas de coordenadas diferentes; por essa razao talvez fossepreferıvel representar a matriz da transformacao de Lorentz por Lc′
a e a transformacaodas coordenadas por
xc′ =3∑
a=0
Lc′a xa. (1.16)
1.2 Espaco-tempo de Minkowski
A invariancia da velocidade da luz no vacuo, c, implica a invariancia da forma qua-dratica
s2 = −c2t2 + x2 + y2 + z2 = −c2t2 + x2 + y2 + z2, (1.17)
conhecida por intervalo do Universo. Esta forma quadratica caracteriza um espaco 4-dimensional a que chamamos espaco-tempo de Minkowski, M4
0 , en honra de HermannMinkowski que o propos em Setembro de 1908 como o espaco adequado a descricao dateoria da RR de Einstein.
Recordemos que, devido a constancia da velocidade da luz e a isotropia da sua pro-pagacao no vacuo, uma vez emitido um sinal luminoso num dado ponto do espaco enum dado instante, que se tomam respectivamente como origens espacial e temporaldos referenciais S e S ′, este satisfaz simultaneamente as equacoes
x2 + y2 + z2 − c2t2 = x2 + y2 + z2 − c2t2 = 0,
ou seja, os pontos do espaco que num dado instante de cada referencial se encontramna mesma fase de vibracao formam uma onda esferica que esta centrada na origem doreferencial respectivo. Tendo em conta as transformacoes de Lorentz e a relatividadedo espaco e do tempo, escusado sera dizer que o conjunto dos pontos do espaco queestao na mesma fase de vibracao para os observadores de S e diferente dos pontos doespaco que estao na mesma fase de vibracao em S´. So assim se podera compreenderque em ambos os referenciais os respectivos observadores vejam uma onda luminosaesferica em torno de cada um deles.
1.2.1 Intervalo do Espaco-tempo e cone de luz
A equacao anterior permite definir a quantidade invariante dada por (1.1), isto e, umaquantidade que toma a mesma forma em todos os referenciais inerciais—relacionadosentre si por uma transformacao de Lorentz—indissoluvelmente ligada a invariancia davelocidade da luz, e que no caso de 2 acontecimentos cujas coordenadas tem valoresinfinitesimalmente proximos, se escreve
ds2 = dx2 + dy2 + dz2 − c2dt2 (1.18)
12

Este invariante pode ser entendido como uma generalizacao da definicao habitual dedistancia a um espaco a quatro dimensoes, o conhecido por espaco-tempo de Minkows-ki1, e e conhecido por intervalo do Universo entre o acontecimento origem (ct, x, y, z)e o acontecimento de coordenadas (c(t + dt), x + dx, y + dy, z + dz). Na verdade, talcomo a formula euclidiana ∆x2 + ∆y2 + ∆z2 = ∆r2 caracteriza o espaco ordinario 3-dimensional, e representa o quadrado da distancia entre dois pontos cujas coordenadasdiferem (∆x, ∆y, ∆z), tambem a formula ∆r2 − c2∆t2 pode servir para caracterizar oespaco-tempo de Minkowski e podera igualmente designar o quadrado da distanciaentre dois acontecimento cujas coordenadas diferem (∆r, c∆t), neste espaco-tempo 4-dimensional.
Exercıcio 1 Verifique que a as transformacoes de Lorentz (1.13)satisfazem a relacaode invariancia (1.1).
1.2.2 Pares de acontecimentos e estrutura causal
Consideremos dois acontecimentos infinitesimalmente proximos. Reduzindo o espaco-tempo a duas dimensoes, uma dimensao espacial e uma temporal, e fazendo coincidiressa direccao espacial com a direccao da velocidade relativa entre os dois referenciais,escrevemos o intervalo infinitesimal
ds2 = dx2 − c2dt2 = dx2 − c2dt2. (1.19)
Se os 2 acontecimentos ocorrem no mesmo ponto de S ′, dx = 0 ⇒ ds2 < 0, e podemosescrever (1.5) da seguinte forma
dx2 − c2dt2 = −c2dt2
e portanto
dt = dt
√1− v2
c2(1.20)
onde v = dx/dt e a velocidade de S ′ em S.
Concluımos que o intervalo de tempo e diferente em S e S ′ e que e mais curto no refe-rencial onde os acontecimentos ocorrem no mesmo ponto do espaco. Esse referencial,
1Hermann Minkowski foi o primeiro a mostrar em 1908 que: “daqui em diante o espaco so por si eo tempo so por si estao condenados a tornarem-se meras sombras, e so uma uniao dos dois preservarauma realidade independente”.
13
neste caso S ′, designa-se referencial proprio para esses acontecimentos. Assim, emqualquer referencial diferente do referencial proprio o tempo e dilatado. Note-se aindaque embora dx = 0, dx = vdt 6= 0 (use as transformacoes de Lorentz (1.13)), isto e, osdois acontecimentos ocorrem no mesmo ponto de S ′ mas ocorrem em pontos diferentesde S.
Consideremos agora dt = 0 (acontecimentos simultaneos em S ′). Vem ds2 > 0 e usandoas TL vemos que dt = vdx/c2, logo
ds2 = dx2 − c2dt2 = dx2 > 0 (par tipo-espaco).
Vemos que acontecimentos simultaneos em S ′, e que ocorrem em pontos diferentes doespaco de S ′, nao sao simultaneos em S : dt 6= 0.
1.2.3 Diagramas de espaco-tempo
Os diagramas de espaco-tempo, vulgarmente conhecidos por diagramas de Minkows-ki, tem um papel pedagogico relevante na assimilacao dos efeitos cinematicos da RR(dilatacao do tempo e contraccao do espaco) e na compreensao da estrutura causaldo espaco-tempo plano. Estes diagramas sao, alias, um bom ponto de partida paraintroduzir os conceitos fundamentais da RR. Mas aqui poderao ter uma funcao com-plementar da discussao algebrica anterior.
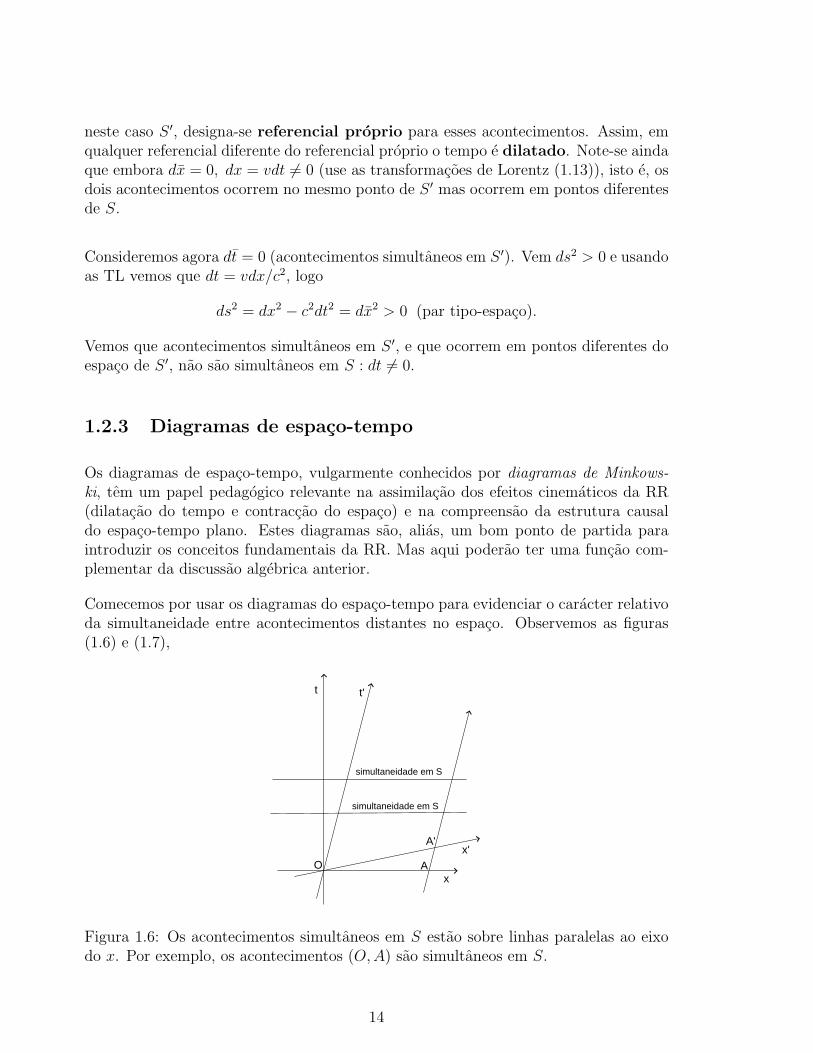
Comecemos por usar os diagramas do espaco-tempo para evidenciar o caracter relativoda simultaneidade entre acontecimentos distantes no espaco. Observemos as figuras(1.6) e (1.7),
Ox
x'
t t'
A
simultaneidade em S
simultaneidade em S
A'
Figura 1.6: Os acontecimentos simultaneos em S estao sobre linhas paralelas ao eixodo x. Por exemplo, os acontecimentos (O, A) sao simultaneos em S.
14

onde se observam os pares (O, A) e (O, A′). O primeiro par e constituıdo por acon-tecimentos simultaneos em S e o segundo por acontecimentos simultaneos em S ′. Aslinhas de simultaneidade em cada um dos referenciais, S e S ′, sao paralelas aos eixosx e x′ ≡ x, respectivamente.
Ox
x'
t t'
simultaneidade em S'
simultaneidade em S'
A'
A
Figura 1.7: Os acontecimentos simultaneos em S ′ estao sobre linhas paralelas ao eixox′. Por exemplo, os acontecimentos (O, A′) sao simultaneos em S ′ : tA′ = tO = 0. Masclaramente, tA′ > tO = 0. Note que a plica em t′A′ refere-se ao tempo t no referencialS ′.
Dilatacao do tempo
Vimos ja que dados dois acontecimentos que formam um par no tempo, ha um refe-rencial onde eles ocorrem no mesmo ponto do espaco, o chamado referencial proprio.Em qualquer outro referencial, o intervalo de tempo entre esses mesmos dois aconte-cimentos e maior do que o intervalo de tempo proprio. E por essa razao se fala emdilatacao do tempo. Este facto, ja conhecido e discutido previamente em termosalgebricos, torna-se muito evidente com o auxılio do diagrama de espaco-tempo que sesegue (1.8).
Tendo em conta a invariancia do intervalo do Universo, associada ao grupo de Lorentz,temos para o par temporal (O, C)
∆s2OC = −t2C + x2
C = −t′2C ⇒ t2C = x2C + t′2C (1.21)
concluımos que t′C < tC , e os acontecimentos O, C e B ocorrem todos na origem espacialde S.
Este diagrama representa a seguinte situacao fısica: um relogio de S ′ desloca-se emrelacao a S com velocidade v = xC/tC , e no seu percurso cruza-se com dois relogios(previamente sincronizados) e em repouso em S, colocados nos pontos de coordenadas
15

x=t
C
B
A
O
–1
0
1
2
3
4
t
–4 –3 –2 –1 1 2 3 4x
Figura 1.8: O ramo de hiperbole que passa pelos pontos A e B define o lugar geometricodos pontos do espaco-tempo (acontecimentos) que estao a mesma distancia da origemdo sistema de coordenadas. Logo, tA = t′B e como t′C < t′B e tA = tC vem t′C < tC .Tenha em atencao que estamos a admitir que o eixo do tempo do referencial S passapelos pontos O e A e que o eixo do referencial S ′ passa pelos pontos O,C e B.
espaciais x = 0 e x = xC . Atendendo a figura, vemos que o relogio de S ′ e acertadopelo relogio de S colocado na origem espacial, de modo que ambos comecam a marcart = 0 e t′ = 0 no mesmo acontecimento O. Quando o relogio de S ′ se cruza com ooutro relogio de S que esta a marcar tC , marca o tempo t′C < tC , e por isso se diz queo relogio de S ′ se atrasa em relacao aos dois relogios de S. O valor exacto do atraso efacil de determinar a partir da equacao (1.21),
t2C − x2C = t′2C ⇒ t′C = tC
√1− x2
C/t2C (1.22)
Fixemos assim esta ideia simples: na dilatacao do tempo compara-se o intervalo detempo entre dois acontecimentos, medido por um mesmo relogio (tempo proprio), como intervalo correspondente medido por dois outros relogios. Isto supoe que os doisacontecimentos ocorrem no mesmo ponto do espaco do primeiro relogio, e em pontos doespaco diferentes no referencial dos outros dois relogios, localizados onde esses mesmosdois acontecimentos ocorrem. Sendo o movimento um conceito relativo, nao podemospois afirmar simplesmente que os relogios em movimento se atrasam em relacao aosrelogios em repouso. Mas sim que havendo um movimento relativo entre um relogio deum referencial e dois relogios de outro, o relogio do primeiro referencial atrasa-se emrelacao aos dois relogios do outro, entendendo-se que os acontecimentos em causa, cujointervalo de tempo se esta a medir, ocorrem no mesmo ponto do espaco do primeiroreferencial, e em dois pontos distintos do espaco do segundo referencial, onde estaolocalizados os dois relogios (previamente sincronizados). A melhor forma de introduzirimplicitamente a nocao de movimento e sintetizar o resultado anterior e afirmar que otempo proprio entre dois acontecimentos e sempre mais curto que o tempocorrespondente medido noutro referencial qualquer, onde os acontecimentosocorrem em pontos do espaco diferentes.
16

Contraccao de Comprimentos
Pelo que vimos anteriormente, ha uma perfeita simetria entre os diferentes referenci-ais inerciais. A dilatacao do tempo ocorre porque se faz uma comparacao entre umrelogio de um referencial e dois relogios espacialmente separados de outro referenci-al. E embora possa sincronizar quantos relogios quiser de um mesmo referencial, naoposso sincronizar varios relogios de referenciais diferentes. Isto e uma consequencia docaracter relativo da simultaneidade entre acontecimentos espacialmente separados, quenaturalmente decorre da finitude da velocidade da luz (no vacuo). De igual modo, oscomprimentos na direccao do movimento serao sempre maiores no referencial proprioe serao observados contraıdos em todos os outros referencias em relacao aos quais osobjectos se movem.
Na realidade, a dilatacao do tempo e a contraccao dos comprimentos nao sao efeitosindependentes, na mesma medida em que o tempo e o espaco nao sao coordenadasindependentes. Recordemos a afirmacao de Minkowski a proposito da construcao doespaco-tempo. Para medir o comprimento de uma barra que se desloca longitudinal-mente, devo observar simultaneamente as suas extremidades e assim determinar assuas coordenadas.
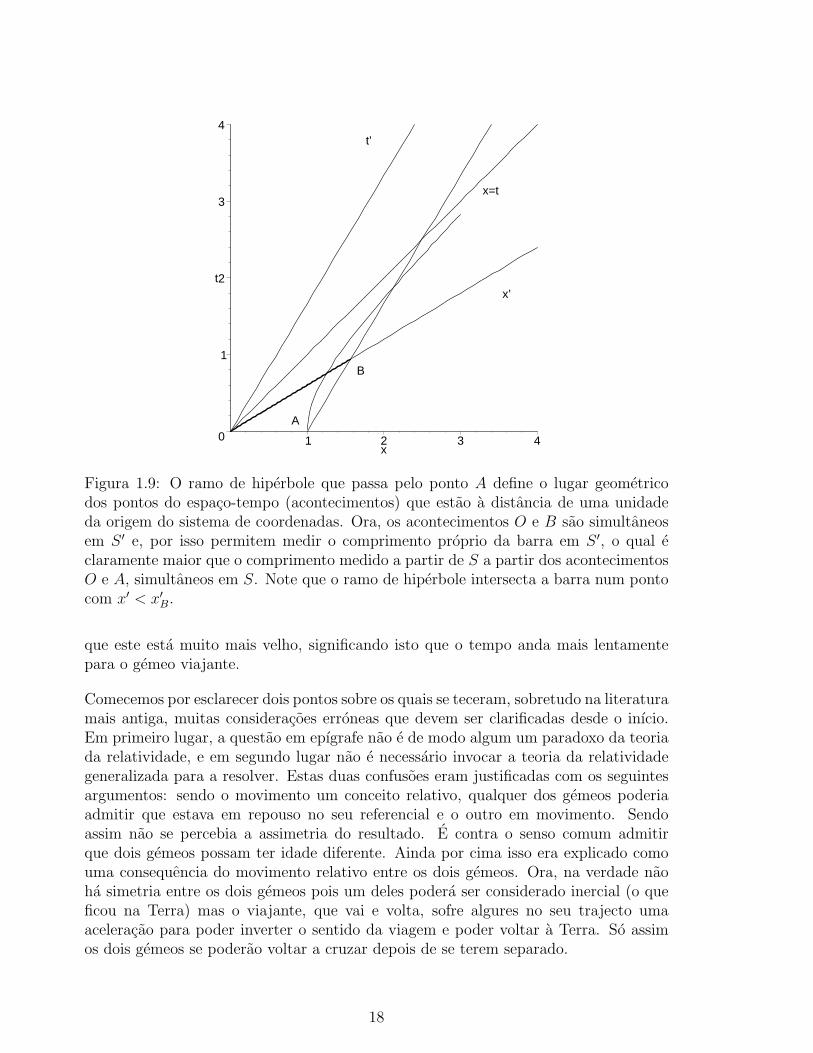
Na Fig. (1.9) vemos que as extremidades da barra, que esta em repouso em S ′, descre-vem duas linhas do Universo paralelas; a primeira passa pela origem O, e coincide como eixo t′, e a segunda passa pelos acontecimentos A e B. Claramente, o comprimentoda barra em S ′ e dado por x′B, visto que x′O = 0, e o comprimento em S e xA = 1unidade da escala, e sabemos pela observacao da hiperbole que xA < x′B. Note que severificam as seguintes relacoes:
x2A = x′2A − t′2A = x′2B
(1− v2
)(1.23)
xA = x′B√
1− v2 = 1 (1.24)
1.2.4 Resolucao do paradoxo dos gemeos
Nos ultimos anos tem surgido na literatura da especialidade muitos trabalhos sobreas “Maquinas do Tempo”, isto e, construcoes geometricas de espaco-tempo, solucoesdas equacoes de Einstein da Gravitacao, que admitem curvas temporais fechadas: qual-quer observador que seguisse ao longo dessas linhas do Universo poderia re-visitar o seupassado. Na sequencia dessa discussao voltaram a aparecer artigos sobre o chamadoparadoxo dos gemeos e sua resolucao no ambito da teoria da relatividade (restrita).O paradoxo dos gemeos (tambem conhecido por paradoxo de Langevin) e uma “expe-riencia de pensamento”, esquematizada na figura (1.10), onde dois gemeos se separamnum dado instante, iniciando um deles uma viagem numa nave que se desloca a umavelocidade proxima da velocidade da luz (v ≈ 1) ate uma estrela distante, e regressalogo em seguida a Terra. Ao encontrar-se com o seu gemeo que ficou na Terra verifica
17
A
B
x=t
x’
t’
0
1
2
3
4
t
1 2 3 4x
Figura 1.9: O ramo de hiperbole que passa pelo ponto A define o lugar geometricodos pontos do espaco-tempo (acontecimentos) que estao a distancia de uma unidadeda origem do sistema de coordenadas. Ora, os acontecimentos O e B sao simultaneosem S ′ e, por isso permitem medir o comprimento proprio da barra em S ′, o qual eclaramente maior que o comprimento medido a partir de S a partir dos acontecimentosO e A, simultaneos em S. Note que o ramo de hiperbole intersecta a barra num pontocom x′ < x′B.
que este esta muito mais velho, significando isto que o tempo anda mais lentamentepara o gemeo viajante.
Comecemos por esclarecer dois pontos sobre os quais se teceram, sobretudo na literaturamais antiga, muitas consideracoes erroneas que devem ser clarificadas desde o inıcio.Em primeiro lugar, a questao em epıgrafe nao e de modo algum um paradoxo da teoriada relatividade, e em segundo lugar nao e necessario invocar a teoria da relatividadegeneralizada para a resolver. Estas duas confusoes eram justificadas com os seguintesargumentos: sendo o movimento um conceito relativo, qualquer dos gemeos poderiaadmitir que estava em repouso no seu referencial e o outro em movimento. Sendoassim nao se percebia a assimetria do resultado. E contra o senso comum admitirque dois gemeos possam ter idade diferente. Ainda por cima isso era explicado comouma consequencia do movimento relativo entre os dois gemeos. Ora, na verdade naoha simetria entre os dois gemeos pois um deles podera ser considerado inercial (o queficou na Terra) mas o viajante, que vai e volta, sofre algures no seu trajecto umaaceleracao para poder inverter o sentido da viagem e poder voltar a Terra. So assimos dois gemeos se poderao voltar a cruzar depois de se terem separado.
18

t
O x
A
B10
3
3
Figura 1.10: Dois gemeos separam-se no instante O, em que acertam os seus relogiosum pelo outro, ficando um deles em repouso no referencial do laboratorio (Terra),com coordenadas (t, x) enquanto o outro viaja, com velocidade v = 0.8 (c = 1), ateuma estrela a 8 anos-luz da Terra, e no instante em que la chega (acontecimento B)regressa de imediato ao mesmo ponto do espaco onde tinha ficado o primeiro gemeo(acontecimento A).
Retomando o nosso exemplo dos gemeos, vamos entao concretiza-lo para o analisar empormenor (ver Fig.1.10). Sejam as nossas gemeas Patty e Selma Bouvier, as irmas maisvelhas de Marge Simpson. Admitamos que Patty fica ca na Terra enquanto Selma sedesloca numa nave espacial, ate um planeta distante (a procura do terceiro marido),com uma velocidade v = 0.8(c = 1), em relacao a Terra (e a Patty). Se Selma se afastada Terra durante 3 anos do seu tempo proprio, τ , entao do ponto de vista de Patty, aviagem de ida ocorre num tempo dilatado e demora
t =τ√
1− v2=
3√1− 0.82
= 5 anos.
Como tal, Selma afasta-se uma distancia de 4 anos-luz, de acordo com os observadoresdo referencial Terra. Com estes dados podemos escrever o intervalo do espaco-tempopara o par de acontecimentos (O,B),
τ 2 = t2 − x2 → 32 = 52 − 42,
que exprime a invariancia da velocidade da luz (no vacuo). Note-se igualmente que,para a gemea viajante, o espaco percorrido e uma contraccao do espaco medido porPatty, isto e,
x′ = x√
1− v2 = 4× 0.6 = 2.4 anos-luz.
O que esta em concordancia com o tempo medido pelo relogio de Selma, onde sotinha passado τ = x′/v = 2.4/0.8 = 3 anos. Admitindo que esta regressa de imediato a
19

Terra com a mesma velocidade v = 0.8, as duas gemeas voltam a encontrar-se passados10(=8/0.8) anos, no referencial de Patty, apos a partida de Selma, mas simplesmente 4.8anos no relogio de Selma. Em resumo as duas “gemeas”fazem agora uma diferenca de5.2 anos de idade, sendo Patty a mais velha. Este e sempre um resultado surpreendente,por muita familiaridade que tenhamos com a teoria da relatividade.
t
t'
T
O xBx
A
C
D
tB B x'
Figura 1.11: As duas gemeos separam-se no instante O, quando t = t′ = 0; no instantetA = 1 (ano) sai um sinal luminoso de Patty que chega a Selma no acontecimento B(t′B = 3 anos). Este mesmo acontecimento e visto por Patty no instante tC = 9 anos.
Continuando a nossa analise, vamos admitir que as duas gemeas estao munidas de po-tentes telescopios de modo a poderem observar os relogios de pulso uma da outra, paraprocurarem compreender em que medida o tempo e relativo. Assim, Selma vai obser-vando o relogio de Patty ao longo da viagem e regista o valor observado no momentoem que atinge o afastamento maximo da Terra e inicia o seu regresso (acontecimentoB, no diagrama da Fig.1.11). Selma ve o relogio de Patty marcar tA = 1 ano, quandoo seu relogio marca t′B = 3 anos, pois
t′ = Kt =
√1 + v
1− vt = 3× t,
atendendo ao efeito de Doppler. Por outro lado, Patty ve Selma atingir o acontecimentoB, e a iniciar o regresso, quando o seu relogio marca 9 anos, pois para Patty, a suagemea viajante leva 5 anos a atingir o planeta distante e a luz leva mais 4 anos aregressar a Terra, mostrando Selma a chegar ao planeta distante. Assim para Patty orelogio de Selma, que marca 3 anos, parece estar a trabalhar a um terco da velocidadedo seu relogio (3/9). Exactamente como acontece com Selma que ve o relogio de Pattytrabalhar a um terco da velocidade do seu (1/3).
Na viagem de regresso, Patty ve o relogio de Selma passar de 3 anos para 6 anos numso ano do seu relogio: intervalo de tempo tD − tC do relogio de Patty. Ou seja, Patty
20
ve agora o relogio de Selma avancar 3 anos num ano do seu tempo proprio, o quecorresponde a uma velocidade tres vezes maior. Por sua vez Selma ve, durante o seuregresso, o relogio de Patty avancar de 1 ano para 10 anos, enquanto o seu relogiomarca um tempo proprio de tres anos. Selma e tambem levada a concluir que ela ve orelogio de Patty a trabalhar a uma velocidade tres vezes maior do que o seu. E ambasconcordam que no fim da viagem, tem idades diferentes estando Patty 5.2 anos maisvelha que Selma, a gemea viajante, que nao teve tempo de encontrar o terceiro maridono planeta distante. A diferenca de idades deve ser entendida como uma consequenciada assimetria entre as duas gemeas: Patty ficou sempre no mesmo referencial (inercial)Terra, enquanto Selma teve que mudar de referencial e, por isso, o seu referencialproprio sofreu uma aceleracao, logo Selma nao e uma observadora inercial. Note-seainda que Patty e Selma concordam na leitura do relogio de Selma quando esta chegaao planeta distante, mas essas leituras correspondem a dois acontecimentos distintoscom tempos diferentes no relogio de Patty.
O xAx B
x
A
C
tA
tB= B
t
5
5
4
4
3
3
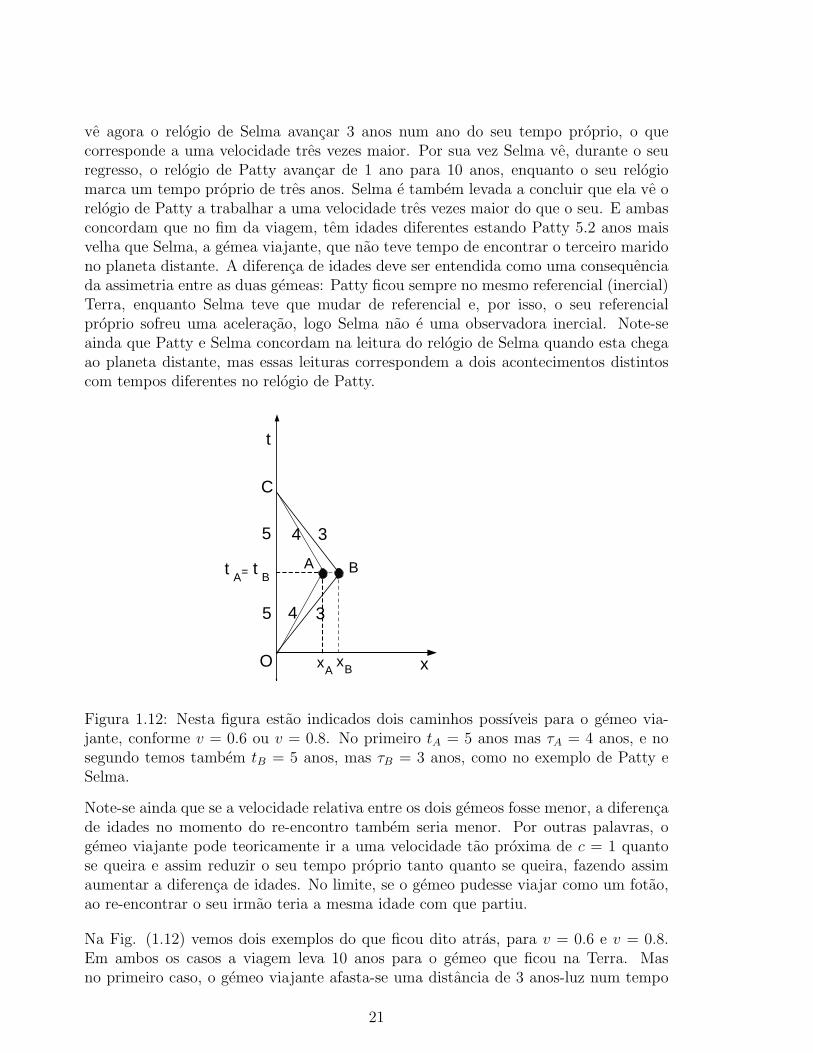
Figura 1.12: Nesta figura estao indicados dois caminhos possıveis para o gemeo via-jante, conforme v = 0.6 ou v = 0.8. No primeiro tA = 5 anos mas τA = 4 anos, e nosegundo temos tambem tB = 5 anos, mas τB = 3 anos, como no exemplo de Patty eSelma.
Note-se ainda que se a velocidade relativa entre os dois gemeos fosse menor, a diferencade idades no momento do re-encontro tambem seria menor. Por outras palavras, ogemeo viajante pode teoricamente ir a uma velocidade tao proxima de c = 1 quantose queira e assim reduzir o seu tempo proprio tanto quanto se queira, fazendo assimaumentar a diferenca de idades. No limite, se o gemeo pudesse viajar como um fotao,ao re-encontrar o seu irmao teria a mesma idade com que partiu.
Na Fig. (1.12) vemos dois exemplos do que ficou dito atras, para v = 0.6 e v = 0.8.Em ambos os casos a viagem leva 10 anos para o gemeo que ficou na Terra. Masno primeiro caso, o gemeo viajante afasta-se uma distancia de 3 anos-luz num tempo
21

proprio de 4 anos, e no segundo caso, o gemeo viajante afasta-se 4 anos-luz num tempoproprio de 3 anos.
Fica assim resolvido, no ambito da teoria da relatividade restrita, o chamado “pa-radoxo”dos gemeos. De caminho foi possıvel apreciar a interligacao entre dilatacaodo tempo e contraccao do espaco, e o efeito de Doppler entre dois observadores emmovimento relativo.
1.3 Simetrias do Espaco-tempo Plano
Um sistema de coordenadas em RR e, por definicao, uma correspondencia 1-1 entreos pontos de M4
0 e o conjunto R4 caracterizado por 4 numeros ordenados xc, comc = 0, 1, 2, 3 e x0 = ct, (x1 = x, x2 = y, x3 = z) = (xi) = ~x, isto e,
xa = (x0, xi) = (ct, ~r)
Com esta notacao compacta o intervalo do Universo pode escrever-se
s2 =3∑
a,b=0
ηabxaxb =
3∑
a,b=0
ηabxaxb
onde a matriz da forma quadratica, η, conhecida por metrica do espaco-tempo deMinkowski, tem os seguintes elementos diferentes de zero: η00 = −ηii = −1, comi = 1, 2, 3.
Dados dois referenciais inerciais e as coordenadas respectivas xa e xb′ de um mesmoacontecimento fısico p de M4
0 , admitimos que e sempre possıvel exprimir os xb′ comofuncoes dos xa e vice-versa:
xb′ =∑
c
Lb′cx
c
de modo a preservar o intervalo s2. Pelo teorema da funcao inversa, diremos quea transformacao de coordenadas e uma aplicacao 1-1 (i.e, tem inversa) num certodomınio U , se e so se a matriz Jacobiana ∂xb′/∂xa tiver um determinante nao nulonesse domınio. O conjunto L das matrizes L devem assim obedecer a seguinte relacao
3∑
a′,b′=0
ηa′b′xa′xb′ =
3∑
a′,b′=0
3∑
c,d=0
ηa′b′La′c L
b′dx
cxd =3∑
c,d=0
ηcdxcxd. (1.25)
Como esta relacao se deve verificar para qualquer xa, concluımos que
ηcd =3∑
a′,b′=0
ηa′b′La′cL
b′d (1.26)
22

Utilizando agora uma notacao matricial compacta, seja X a matriz-coluna cujo ele-mento generico e [xa], isto e
X =
x0
x1
x2
x3
.
Podemos agora escrever o intervalo do Universo s2 como um produto de matrizes
s2 = XT ηX (1.27)
bem como a transformacao de Lorentz
X = LX.
1.3.1 Grupos de Lorentz e Poincare
Definicao 1 O grupo de Lorentz, L, e o grupo das transformacoes lineares homogeneasdas coordenadas do espaco-tempo M4
0 que deixam invariante a forma quadratica:
XT ηX =(
x0 x1 x2 x3)
−1 0 0 00 1 0 00 0 1 00 0 0 1
x0
x1
x2
x3
= −(x0)2 + (x1)2 + (x2)2 + (x3)2 (1.28)
ou seja, e o conjunto das matrizes 4× 4, L, que satisfazem a condicao
LT ηL = η (1.29)
Nota: Se X = LX, entao a invariancia da forma quadratica (5) —ou seja, a invarianciada velocidade da luz para todos os observadores inerciais—implica XT ηX = XT ηX ⇒XT LT ηLX = XT ηX ⇔ LT ηL = η.
E facil mostrar que o conjunto de transformacoes L, com uma lei de composicao ade-quada, forma um grupo contınuo. Em primeiro lugar notemos que sendo
η =
−1 0 0 00 1 0 00 0 1 00 0 0 1
vem η2 = I. Efectivamente,(−1 01×3
03×1 I3×3
) (−1 01×3
03×1 I3×3
)= I4×4,
23

onde In×n e a matriz identidade num espaco de dimensao n.
Vamos agora mostrar que o conjunto das matrizes L que satisfazem a condicao (1.29),juntamente com a operacao de multiplicacao de matrizes, simbolicamente representadopor [L, ·], goza das quatro propriedades seguintes:
1. O produto de duas transformacoes de Lorentz (TL) L1 e L2 e uma TL L3. SejaL3 = L1 · L2, entao LT
3 ηL3 = LT2 LT
1 ηL1L2 = LT2 ηL2 = η, pois L1 e L2 obedecem
a Eq.(3) separadamente.
2. A multiplicacao de TL’s e associativa:
(L1 · L2) · L3 = L1 · (L2 · L3)
e uma propriedade geral do produto de matrizes!
3. A identidade e uma TL, i.e. IT ηI = η.
4. Qualquer TL, L, tem uma inversa, L−1, que e tambem uma TL; pois, sendoLT ηL = η vem ηLT ηL = η2 = I o que ⇒ L−1 = ηLT η. Por outro lado,(L−1)T ηL−1 = (ηLT η)T η(ηLT η) = ηLη2ηLT η = ηLηLT η = ηLL−1 = G, i.e.L−1 = ηLT η ∈ L.
Podıamos ter obtido este ultimo resultado recorrendo a uma variante da relacao (1.29).
Exercıcio 2 Mostre que se L ∈ L, entao LηLT = η, e L−1 tambem pertence a L.
Ja mostramos que:
• se L1, L2 ∈ L entao L1 · L2 ∈ L;
• se L ∈ L entao L−1 ∈ L• I ∈ L.
Juntando a estas propriedades a associatividade do produto de matrizes, podemosconcluir que o conjunto L de todas as TL constitui um grupo em relacao a operacaobinaria multiplicacao matricial.
24

Estrutura do Grupo de Lorentz
O grupo de Lorentz pode ser representado como um certo subconjunto do espaco R16
visto que uma matriz de Lorentz L (4 × 4) tem a partida 16 elementos diferentes.Porem nem todos sao independentes, pois existem 10 condicoes dadas pelas equacoes
LT ηL = η.
Note que G e uma matriz simetrica, o mesmo acontecendo a LT ηL. Assim, qualquerL ∈ L tem so 6 parametros reais independentes, e L da origem a um sub-espaco a 6dimensoes de R16. Qualquer matriz L deve satisfazer a relacao
(detL)2 = 1 ⇒ detL = ±1
Como o determinante de uma matriz varia continuamente a medida a medida quevariam os elementos de matriz em funcao dos parametros, nao e possıvel deslocarmo-nos ao longo de uma curva contınua de L desde um valor de L com detL = +1 ate umvalor L′ com detL′ = −1. Ou seja, os conjuntos
L+ = L : detL = +1 e L− = L : detL = −1.
nao podem ser ligados por uma curva contınua em L; sao portanto desconexos. Enecessario saltar de L+ para L− ou vice-versa, de uma maneira descontınua.
E possıvel usar a condicao (1.29) de um modo mais eficiente, separando L em todas assuas partes desconexas. Para simplificar a escrita voltamos a representar a matriz deLorentz por La
c sem distinguir os dois tipos de ındices, e escrevemos (LT ηL)00 = η00 =−1, ou seja,
(LT ) 00 η00L
00 + (LT ) i
0ηijLj0 = −(L0
0)2 +
3∑
j=1
(Lj0)
2 = −1.
temos entao,
L00 = ±
√√√√1 +3∑
j=1
(Lj0)
2, |L00| ≥ 1. (1.30)
A condicao (1.30) divide L em duas regioes que, tal como acontecia antes, nao podemser ligadas por uma curva contınua; sao pois desconexas tambem. As duas regioes sao:
L↑ = [L : L00 ≥ +1], L↓ = [L : L0
0 ≤ −1].
As setas poem em evidencia o efeito de L sobre a componente temporal de 4-vector(tipo-tempo). Se L ∈ L↑ entao L0
.0U0 tem o mesmo sinal que U0, mas se L ∈ L↓, entao
L0. 0 U0 tem o sinal oposto a U0. Assim, L↑ e o conjunto das TL que preservam o sinal
25

do tempo, e por isso se chamam ortochronous (aportuguesando, diremos ortocronas),e L↓ e o conjunto das TL que invertem o sentido do tempo: transformam um vectortemporal, dirigido para o futuro (d.p.f.) num vector-temporal, dirigido para o passado(d.p.p) e vice-versa.
Podemos, portanto, dividir o espaco L em quatro regioes:
L↑+, L↑−, L↓+, L↓−,
cujo significado e evidente; estas quatro regioes sao desconexas, tal como se explicouatras. A TL I ∈ L↑+, a qual constitui um subgrupo do grupo de Lorentz, conhecidopor subgrupo proprio ortocrono ou componente conexa da identidade.
Esta particao de L em quatro sub-espacos distintos, permite-nos reconhecer duas trans-formacoes de Lorentz muito importantes: a paridade P = Ls e a inversao no tempoT = Lt. A TL P muda o sinal das coordenadas espaciais e preserva o do tempo,
P : (t, ~r) 7→ (t,−~r).
Evidentemente, detP = −1, P 0.0 ≥ 1, pelo que P ∈ L↑−. E interessante notar que se
L ∈ L↑+, entao P · L ∈ L↑−, visto que
det(P · L) = det(P ) · det(L) = −1,
(P · L)00 = P 0
0 · L00 = L0
0 ≥ +1.
Igualmente, se L ∈ L↑− entao P · L ∈ L↑+. Portanto, P permite definir uma corres-pondencia 1− 1 entre L↑+ e L↑−.
A TL inversao no tempo, T , muda somente o sinal do tempo,
T : (t, ~r) 7→ (−t, ~r),
logo, detT = −1, T 00 ≤ −1; a matriz T tem a forma
T ab =
−1 0 0 00 1 0 00 0 1 00 0 0 1
= diag(−1, 1, 1, 1) (1.31)
T estabelece, portanto uma correspondencia 1− 1 entre L↑+ e L↓−, como facilmente severifica. Finalmente, o operador (a matriz) PT = Ls ·Lt tem det(PT ) = +1, (PT )0
. 0 =−1; Logo, PT ∈ L↓+ e pode pois ser usado para estabelecer uma correspondencia 1− 1entre L↑+ e L↓−.
Concluımos que nao e necessario considerar todo o conjunto L = L↑+ ∪ L↓+ ∪ L↑− ∪ L↓−;basta-nos tomar o subgrupo L↑+ das TL proprias e ortocronas e juntar as transfor-macoes de Lorentz discretas P e T . Com estas transformacoes podemos obter todos
26

os elementos de L. A distincao entre transformacoes proprias e improprias, e entretransformacoes ortocronas e as outras, e importante. Todos os resultados experimen-tais sao invariantes em relacao as transformacoes (proprias) L+ = L↑+∪L↓+; mas, comoe sabido, em 1957 foi descoberta a violacao de paridade em decaimentos radioactivos,por sugestao de T.D. Lee e C.N. Yang. Assim, nao devemos exigir a invariancia dosresultados experimentais e, portanto, das teorias que os podem prever, em relacao atotalidade do grupo de Lorentz; e mais razoavel exigir essa invariancia so em relacaoao subgrupo L↑+.
Este grupo e gerado por dois conjuntos de matrizes que designaremos respectivamentepor LB (“boosts”) e LR (rotacoes). Um exemplo de “boost” (ou TL especial) e a matriz
LB(φ) =
cosh(φ) −senh(φ) 0 0−senh(φ) cosh(φ) 0 0
0 0 1 00 0 0 1
(1.32)
onde φ e um numero real. Esta matriz LB(φ) representa uma TL especial na direccaoOx, sem rotacao espacial e sem alterar o sentido do tempo. Por vezes, e designadapor “rotacao de Lorentz”, no plano (t, x), por analogia com as rotacoes espaciais. Apartir da Eq.(1.32) e facil construir “rotacoes de Lorentz” nos planos (t, y) ou (t, z).Finalmente, consideremos agora as matrizes 4× 4
LR =
(1 01×3
03×1 R
)(1.33)
onde R e uma matriz 3× 3 que e solucao de RT R = I, det(R) = 1.
Exercıcio 3 Verifique que LTRGLR = G se RT R = I.
A condicao RT R = I define o conjunto das matrizes ortogonais O(3) = [R : RT R = I].Como se sabe, estas matrizes sao caracterizadas por preservarem os comprimentoseuclidianos. Nao e difıcil mostrar que o conjunto O(3) e um grupo—o grupo ortogonaltri-dimensional (3-D) ou grupo das rotacoes no espaco ordinario.
O grupo O(3), tal como o grupo de Lorentz, tem duas partes nao conexas,
O+(3) = [R : RT R = I, det(R) = +1],
O−(3) = [R : RT R = I, det(R) = −1].
27

Estas duas partes estao relacionadas pelo operador paridade, P
P =
−1 0 00 −1 00 0 −1
visto que se R ∈ O+(3) := SO(3) entao P · R ∈ O−(3) e se R′ ∈ O−(3), entaoP ·R′ ∈ O+(3). Vamos, portanto, considerar unicamente SO(3), que e a parte de O(3)conexa com a unidade e, por isso, com estrutura de grupo.
Quando referidas a uma base nao ortonormada ou, em geral, quando se usam coorde-nadas curvilıneas, as matrizes ortogonais sao definidas pela condicao:
RT GR = G, (1.34)
onde a matriz G que figura na Eq. (1.34) e agora a matriz da forma quadratica positivaassociada a distancia Euclidiana em R3. Ha pois seis condicoes (1.34) entre os noveelementos que constituem cada matriz R, de modo que ficam so tres elementos de matrizindependentes: os tres parametros que caracterizam uma rotacao, tantos quantos osparametros do grupo SU(2). Podemos escolher, portanto, um angulo θ e uma direccao~n no espaco – a direccao do eixo de rotacao (note que podemos sempre escolher ~nunitario: ~n · ~n = 1). A matriz correspondente R representa uma rotacao de um anguloθ em torno de ~n. Esta parametrizacao de R torna claro o caracter rotacional de todasas matrizes ortogonais.
O espaco dos parametros (θ, ~n) pode ser representado por pontos numa bola densa de
raio π, onde cada ponto p tem coordenadas (θ, ~n), sendo θ = a distancia radial | ~Op| e
estando ~n apontando na direccao do raio vector ~Op. Como a rotacao de um angulo πem torno de ~n da o mesmo resultado que uma rotacao de −π em torno de ~n, e necessarioidentificar os pontos opostos sobre a superfıcie da esfera fronteira, i.e. os pontos que seencontram nas extremidades de um diametro, para estabelecer um isomorfismo entreo espaco dos parametros e o espaco gerado por todas as matrizes R: a variedade grupoSO(3). Este grupo e um grupo de Lie e, como veremos mais adiante, todo o grupo deLie e simultaneamente uma variedade diferenciavel cuja dimensao e igual a dimensaodo grupo.
Grupo de Poincare
Todos os pontos (acontecimentos) do espaco-tempo de Minkowski sao equivalentespara a descricao das leis fısicas. Do ponto de vista matematico, diremos que o espaco ehomogeneo. O grupo de simetria deste espaco e, portanto, mais vasto que o grupo deLorentz pois deve incluir as translacoes. No conjunto temos 10 simetrias: 4 translacoes,3 rotacoes e 3 transformacoes de Lorentz puras. Por isso dizemos que as coordenadasinerciais gozam da seguinte propriedade: dados dois sistemas de coordenadas inerciais,
28

existe sempre uma matriz 4 × 4 nao singular, L, e um vector-coluna constante A taisque para todo o ponto p de M
X = LX + A, (1.35)
e inversamenteX = L−1X − L−1A,
onde X e X sao as coordenadas de p em S e S.
Esta propriedade permite dar um conteudo matematico ao Princıpio da Relatividade,nomeadamente:
Definicao 2 As equacoes que representam uma dada lei fısica, expressa em funcaodas coordenadas, deverao ser invariantes em relacao as transformacoes (1.35).
Definicao 3 O grupo de Poincare, P, ou grupo de Lorentz nao homogeneo, comotambem e conhecido, e o conjunto de todas as transformacoes de coordenadas da forma(1.35), com
L ∈ L = [L : LT ηL = η] e A e um 4-vector constante.
Numa teoria fısica, expressa em termos de coordenadas, o objecto matematico maisimportante e o conjunto de todas as transformacoes de coordenadas que deixam asleis da teoria invariantes. Este conjunto de transformacoes formam um grupo: o grupode simetria da teoria. Efectivamente, dadas duas transformacoes entre coordenadasinerciais, as suas inversas sao igualmente transformacoes entre coordenadas inerciaise a composicao dessas transformacoes e tambem uma transformacao de coordenadasinerciais; por sua vez, a transformacao identidade esta incluıda no conjunto dessastransformacoes. Ou seja, dadas duas transformacoes de coordenadas que deixam asleis da teoria invariantes, entao quer as suas inversas quer o produto dessas duas trans-formacoes tambem deve deixar as leis da teoria invariantes. A unica dificuldade quepodera surgir na verificacao dos axiomas de grupo tem a ver com o facto das leis se-rem, em geral, expressas por equacoes diferenciais; assim, e necessario garantir queos objectos matematicos que representam as grandezas fısicas sejam suficientementediferenciaveis.
Partindo das equacoes que exprimem as leis, facilmente se encontra o grupo de simetriada teoria. Mas, inversamente, conhecendo o grupo de simetria tambem e possıvel retirarmuita informacao acerca da estrutura das proprias leis. Ao construir uma teoria, depoisde ter sido escolhido o grupo de simetria, so sao permitidas aquelas leis que sejaminvariantes em relacao as transformacoes do grupo.
Definicao 4 (Covariancia) Diz-se que uma equacao e covariante em relacao a umdado grupo de transformacoes de coordenadas se a forma dessa equacao e mantidainalterada por esse grupo de transformacoes.
29
E claro que se os dois membros de uma equacao forem tensores do mesmo tipo, aequacao e manifestamente covariante. Mas as equacoes de Maxwell, por exemplo, saocovariantes em relacao ao grupo de Lorentz mesmo quando nao estao escritas numaforma tensorial. A escrita tensorial torna, simplesmente, essa covariancia manifesta.
1.4 Objectos geometricos
Pretendemos definir os vectores como objectos geometricos que nao dependem de umsistema de coordenadas particular. Em geral, todas as grandezas fısicas deverao serformuladas em termos de objectos geometricos bem comportados (isto e, com propri-edades de diferenciabilidade conhecidas) de modo a assegurar que tais leis sao verda-deiras para todos os observadores e em todos os sistemas de coordenadas. Se entaoseleccionarmos um sistema de coordenadas, podemos expressar os vectores ou quais-quer outros objectos geometricos em termos das suas componentes nesse sistema decoordenadas. Mudando de sistemas de coordenadas, estas componentes mudarao deacordo com regras precisas, mas a natureza geometrica e independente do observadordos objectos geometricos utilizados assegurara que as leis fısicas no seu conjunto saoinvariantes relativamente a uma transformacao do grupo de transformacoes da teoria(grupo de simetria da variedade base). No ambito da RR o grupo de transformacoes eo grupo de Lorentz nao homogeneo ou grupo de Poincare.
No espaco Euclidiano 3-dimensional S ⊂ R3, qualquer par de pontos (a, b) define um
vector−→ab que os une. O vector
−→ab depende somente da diferenca das coordenadas dos
pontos a e b, e assim um dado vector pode ser representado de muitas formas: a podeser escolhido arbitrariamente e entao o vector
−→ab determina o outro ponto b = a +
−→ab.
Podemos transportar esta ideia para o espaco-tempo de Minkowski M40 . Associaremos
um vector a cada par de acontecimentos. E dois pares de acontecimentos (A,B) e(A′, B′) serao chamados equivalentes–(A,B) ∼ (A′, B′)–se as diferencas das suas coor-denadas sao iguais
Xa(B)−Xa(A) = Xa(B′)−Xa(A′),
para um dado sistema de coordenadas inerciais xa, e portanto para qualquer sistemainercial de coordenadas, atendendo a linearidade das transformacoes de Lorentz. Arelacao ∼ e uma relacao de equivalencia.
Definicao 5 Um vector do espaco-tempo de Minkowski e uma classe de equivalenciade pares de acontecimentos fısicos (A,B), · · · , (A′, B′) para a relacao de equivalenciadefinida por Xa(B)−Xa(A) = · · · = Xa(B′)−Xa(A′).
Por outras palavras, identificamos um dado vector X com a coleccao de todos os paresde pontos para os quais a diferenca das coordenadas seja igual as componentes do
30
vector. O vector da classe de equivalencia a que pertence o par de pontos (A,B)
representa-se por X ≡ −→AB. Ou seja, o vector que permite associar o ponto B ao ponto
A,B := A + X, tem componentes
Xc = Xc(B)−Xc(A)
Fazer uma transformacao de coordenadas corresponde a fazer uma transformacao deLorentz, pelo que as componentes de X no novo sistema de coordenadas sao dadas por
Xa =∑
c
LacX
c
onde L representa uma matriz de Lorentz. O conjunto das componentes de um vectornum dado sistema de coordenadas caracteriza completamente o vector.
Por razoes que se tornarao obvias mais adiante, quando tratarmos com espacos curvos,designaremos o conjunto de todos os vectores por TpM onde p e um ponto arbitrariodo espaco-tempo de Minkowski. Como TpM ≡ TqM , quaisquer que sejam os pontosp e q de M , escrevemos o espaco tangente num ponto do espaco-tempo de Minkowskisimplesmente como T.M . Trata-se de um espaco vectorial, uma vez definidas asoperacoes de adicao entre elementos de TpM e multiplicacao por um escalar.
Assim, se X e Y sao vectores de T.M , definimos o vector X + Y como aquele cujascomponentes sao Xa + Y a, e de modo semelhante para o produto aX com a ∈ R.Note-se que embora tenhamos recorrido a coordenadas para definir vectores e adicaode vectores, estas definicoes nao dependem de um sistema de coordenadas particular,e sao portanto independentes das coordenadas.
A definicao de vector—segmento orientado que une dois ‘pontos’ da variedade—so evalida num espaco-tempo plano. Num tal espaco ha outra maneira equivalente de defi-nir vector, mais adequada a indispensavel generalizacao deste conceito a uma variedadecurva. Consideremos o segmento de recta
Γ(λ) = A + λ(B − A), λ ∈ [0, 1] ,
com λ = 0 correspondendo a origem e λ = 1 a extremidade, isto e, Γ(0) = A eΓ(1) = B. Definimos o vector tangente no ponto A de M4
0 como sendo
XA =d
dλ[A + λ(B − A)] = B − A.
Esta definicao permite-nos substituir a ideia de um vector como um objecto dependendode dois pontos por um conceito local
XA =
(d
dλΓ(λ)
)
λ=0
, (1.36)
o vector tangente a curva Γ(λ) no ponto A = Γ(λ = 0) e a derivada ao longo da curvano ponto A.
31

Exemplo 1 Esta nova ideia de vector toma como ponto de partida o conceito de veloci-dade da Mecanica. Efectivamente, o vector velocidade e o vector tangente a trajectoriada partıcula. Transcrevendo esta ideia para o espaco-tempo, tomamos a linha do Uni-verso de uma partıcula, P(τ), aqui parametrizada pelo respectivo tempo proprio τ , edefinimos o 4-vector velocidade como o vector tangente a esta linha, e cujas compo-nentes sao
U0 =dt
dτ=
1√1− v2
, U i =dxi
dτ=
dxi
dt
dt
dτ=
vi
√1− v2
(1.37)
onde vk = dxk/dt sao as componentes da “velocidade ordinaria”, v2 = (v1)2 + (v2)2 +(v3)2.
Tenha-se em atencao que mais fundamental do que as componentes de um vector e oproprio vector. E um objecto geometrico com um significado independente de quaisquercoordenadas. Assim, podemos representar intrinsecamente o 4-vector velocidade deuma partıcula num dado ponto da sua linha do Universo P(τ) por
U =
(d
dτP(τ)
)
τ0
,
o qual existe independentemente do sistema de coordenadas.
1.4.1 Vector Tangente a uma Curva
Em relatividade geral, lidamos com espacos-tempo curvos onde e impossıvel definir umvector a custa de dois pontos. Portanto, temos de recorrer a uma nocao local de vector,que e a unica adequada a situacao: o vector tangente a uma curva que passa por umdado ponto da variedade. Assim, o vector tangente VP no ponto P do espaco-tempoM , por onde passa a curva C(λ), e o operador derivada ao longo daquela curva, nesseponto.
Quando nos referimos a uma curva, pensamos sempre numa curva diferenciavel quepassamos a definir.
Definicao 6 Uma curva diferenciavel C(λ) e uma aplicacao contınua do intervalo(a, b) da recta real no espaco-tempo M (de modo que a cada valor do parametroλ ∈ (a, b), C(λ) e um ponto de M) e que e tal que as funcoes x0 (C(λ))) , . . . , x3 (C(λ)),ou mais simplesmente xc(λ), sao funcoes diferenciaveis de λ para qualquer sistema decoordenadas,
C : (a, b) ⊂ R1 → U ⊂ Mλ0 7→ C(λ0) = P.
onde λ e o parametro a curva e xc(P ) = (x0, x1, x2, x3) sao as coordenadas do pontoP de M .
32

E claro que xc(λ) representa todos os pontos P pertencentes a curva C, dados pelassuas coordenadas, e por isso se designa representacao coordenada da curva.
Nesta definicao, a cada ponto imagem corresponde um unico valor do parametro λ.Assim, duas curvas sao diferentes, mesmo que tenham a mesma imagem em M , se saoparametrizadas por parametros diferentes, ou seja, se associamos um valor diferentedo parametro aos mesmos pontos imagem.
Definicao 7 O vector tangente a uma curva diferenciavel C no ponto C(λ0) da curvae dado por (
dCdλ
)
λ=λ0
= C(λ0) = limh→0
1
h[C(λ0 + h)− C(λ0)]
Em TpM este limite pode ser definido usando a topologia natural sobre um espacovectorial de dimensao igual a dimensao de M . Esta definicao so pode ser aplicada a umavariedade M arbitraria se M esta imersa num espaco plano de dimensao d = dim(M)+1, caso contrario nao sabemos o significam os “deslocamentos”C(λ0 + h)− C(λ0). Masse trabalharmos com as funcoes xc(C(λ)), temos na verdade uma aplicacao compostaxc C que e uma curva em R4, e podemos representar o vector
Vp =
(dCdλ
)
λ0
pelas suas componentes no sistema de coordenadas xc,
Vp = limh→0
1
h[x(C(λ0 + h))− x(C(λ0))] =
(d
dλx(C)
)
λ=λ0
ou seja, em componentes
V c =
(d
dλxc(C)
)
λ=λ0
.
Qualquer linha coordenada e um bom exemplo de curva diferenciavel, como e o casoda linha x0 (eixo temporal)
C(0)(t) : x0(C(t)) = t, x1(C(t)) = 0, x2(C(t)) = 0, x3(C(t)) = 0.
O vector tangente a esta linha coordenada e
e(0) =d
dtC(0)(t)
que e o mesmo em todos os pontos da linha coordenada, ou seja, para todos os valoresdo parametro t.
33

O vector e(0) ∈ TpM tem as seguintes componentes
e(0) :=d
dtx(C(0)(t)) =
1000
Do mesmo modo se definem os vectores tangentes as outras linhas coordenadas e(1), e(2),e(3), cujas componentes sao respectivamente,
e(1) =
0100
, e(2) =
0010
e(3) =
0001
e obtem-se de modo semelhante a e(0) por derivacao
e(1) :=d
dxx(C(1)(x)), e(2) :=
d
dyx(C(2)(y)), e(3) :=
d
dzx(C(3)(z)),
onde, por exemplo, x(C(1)(x)) e a aplicacao definida pela curva
C(1)(x) : x0(C(x)) = 0, x1(C(x)) = x, x2(C(x)) = 0, x3(C(x)) = 0.
Habitualmente representam-se os vectores base por ec em vez da notacao mais pesadae(c); mas o ındice c nao deve ser visto como indicando uma componente mas simcomo uma maneira de numerar os vectores tangentes as linhas coordenadas. Comoeste ındice toma os valores c = 0, 1, 2, 3, ha quatro vectores base no espaco-tempo.Qualquer vector Vp ∈ TpM pode ser representado como uma combinacao linear dosvectores base
Vp = V 0e0 + V 1e1 + V 2e2 + V 3e3. (1.38)
Na verdade, esta representacao e equivalente a representacao matricial
Vp =
V 0
V 1
V 2
V 3
= V 0
1000
+ V 1
0100
+ V 2
0010
+ V 3
0001
,
o que e inteiramente consistente com a Eq.(1.38). Veremos adiante que os vectores ec
constituem uma base ortonormada.
Como ao longo da linha do Universo de uma partıcula se podem definir diferentesvectores tangentes, um em cada ponto, deverıamos antes falar de um campo vectorialtangente. Em geral, um campo vectorial definido numa variedade M e uma regraque associa a cada ponto p de M um vector tangente nesse ponto.
34

1.4.2 Co-vectores ou vectores duais
Os vectores de TpM sao geralmente chamados vectores contra-variantes para os distin-guir dos seus duais que passamos a definir:
Definicao 8 Um vector covariante ou co-vector e uma aplicacao linear de TpM emR; o conjunto dos co-vectores forma um espaco vectorial dual de TpM que se escreveT ∗
p M e se designa espaco co-tangente. Por isso, os co-vectores tambem sao chamadosvectores duais.
Se αp ∈ T ∗p M , entao
αp : T ∗p M −→ R
Yp 7−→ αp(Yp) =< αp,Yp >, Yp ∈ TpM.
Isto e, se αp e um covector entao Yp(αp) =< αp,Yp >, e um numero real para todo oYp ∈ TpM e
αp (aXp + bYp) = a < αp,Xp > +b < αp,Yp >,
e tambem um numero real para todos os Xp,Yp ∈ TpM e a, b ∈ R.
O espaco dual T ∗p M , constituıdo por todos os co-vectores, e um espaco vectorial de
dimensao igual a dimensao de TpM . Assim,
dim(T ∗
p M)
= dim (TpM) = dim(M).
A partir de agora, e desde que nao haja ambiguidade, deixaremos cair o sub-ındice quecaracteriza o ponto p da variedade M onde estao definidos os espacos tangente ou co-tangente. Sendo T ∗
p M um espaco vectorial, estao aı definidas duas leis de composicao,a adicao entre co-vectores e a multiplicacao por um real
[i] < w1 + w2,X >≡< w1, X > + < w2, X >[ii] < aw,X >≡ a < w,X >
Isto pode ser posto em evidencia de uma maneira menos abstracta recorrendo a umsistema de coordenadas e a uma base coordenada ec. Atendendo a linearidade,
< α,X > = α(X) = X0α(e0) + X1α(e1) + X2α(e2) + X3α(e3)
= X0α0 + X1α1 + X2α2 + X3α3,
ou seja,
α(X) =3∑
c=0
Xcαc,
onde αc := α(ec) sao as componentes da 1-forma α, isto e, sao os numeros reaisresultantes da aplicacao linear a aos vectores base ec. Note que estas componentes
35

de α com respeito ao sistema de coordenadas escolhido caracterizam o covector aunicamente. Se fizermos uma mudanca de coordenadas, teremos X → X ′ com X ′ =LX e L matriz de Lorentz. Suponhamos que α muda para α′, temos entao
α(X) =3∑
c=0
αcXc =
3∑
c=0
α′cX′c
e, portanto,
αd =3∑
c=0
α′cLcd,
o que mostra que as componentes de um covector se transformam ao contrario dascomponentes dos vectores, isto e, por intermedio da matriz inversa.
1.4.3 A metrica
Na geometria dos espacos Euclidianos, como e o espaco R3, o produto escalar dedois vectores desempenha um papel primordial. O analogo do produto interno emrelatividade e desempenhado pela aplicacao bilinear η, ja anteriormente introduzidacomo a matriz da forma quadratica que caracteriza o intervalo do Universo, e querealmente associa a cada par de vectores tangentes, X e Y , o numero real
η(X,Y) := XT ηY = −X0Y 0 + X1Y 1 + X2Y 2 + X3Y 3 (1.39)
num sistema inercial de coordenadas. Efectuando uma mudanca de coordenadas (trans-formacao de Lorentz), encontramos
X ′T ηY ′ = XT LT ηLY = XT ηY, (1.40)
pois LT ηL = η, e portanto a definicao de η(X,Y) nao depende do sistema de coor-denadas (inerciais) usado. A aplicacao η e a metrica do espaco-tempo da relatividaderestrita.
Por vezes, e util considerar η como uma aplicacao linear de T.M em T ∗. M da seguinte
maneira: para cada X ∈ T.(M) definimos η(X) como aquele covector cujo valor paraum elemento arbitrario Y de T.(M) e
η(X)(Y) = η(X,Y), para todo Y ∈ T.(M).
A metrica e o objecto basico mais importante da teoria da relatividade. Seria por issomais apropriado comecar com a metrica e so depois definir o grupo de Lorentz como oconjunto de transformacoes das coordenadas que deixa a metrica invariante nos termosda Eq.(1.40).
Ja vimos que, no espaco-tempo de Minkowski, existe uma correspondencia (aplicacaolinear) 1-1 entre vectores e co-vectores que nos permite associar a cada vector X um
36
covector g(X), que por simplificacao de notacao vamos representar por X. O covectorX pode igualmente ser definido pela equacao
< X,Y >= η(X,Y) (1.41)
onde Y ∈ TpM e um vector arbitrario.
Aos co-vectores (vectores duais) tambem se da o nome de formas lineares ou 1-formas (leia-se “formas diferenciais de grau um”). Igualmente, a cada 1-forma Pcorresponde um unico vector: P = g−1(P ), definido pelas suas projeccoes em todosos outros vectores pela Eq. (1.41). Note que η−1 e a funcao inversa de η. Estacorrespondencia entre vectores e co-vectores, significa que uma determinada quantidadefısica pode ser igualmente descrita por um vector P ou pela sua 1-forma associada P .Por exemplo, afirmamos que o 4-momento era naturalmente descrito como um covector(ou 1-forma), mas podemos igualmente defini-lo como o vector correspondente. Acorrespondencia 1-1 entre vectores e co-vectores leva-nos muitas vezes a omitir o til da1-forma P e escrever o mesmo sımbolo P para ambos, vector e co-vector.
1.4.4 Vectores temporais, espaciais e nulos
A expressao que da o produto interno de um 4-vector por si proprio,
η(X,X) = X ·X = −(X0)2 + (X1)2 + (X2)2 + (X3)2, (1.42)
fornece o analogo do quadrado do comprimento do um vector de um espaco euclidiano3-dimensional. Mas ao contrario do que acontece em <3, η(X,X) pode ser positivo,negativo ou nulo, em particular η(X,X) = 0 nao implica que as componentes de X saonulas. A expressao (1.42) permite-nos classificar os vectores de T.(M) em tres tipos.
Fixamos o ponto O do espaco-tempo de Minkowski M40 como sendo a sua origem.
Entao a cada ponto P corresponde unicamente um vector U = P − O, e a classifi-cacao dos vectores de T.(M) fornece-nos uma classificacao dos acontecimentos de M4
0
relativamente a origem.
Sejam U = P − O e X = Q − O dois 4-vectores aplicados em O, sendo O a origemde um sistema de coordenadas inerciais. Se P se situa sobre o eixo do tempo (x0)desse sistema, entao o vector U = P −O tem componentes (U0, 0, 0, 0) e, por isso, daEq.(1.42) concluımos que η(U,U) < 0. Chamamos a todos os vectores para os quaisη(U,U) < 0, vectores temporais (ou tipo tempo).
Exercıcio 4 Dado um vector temporal mostre que e sempre possıvel encontrar umsistema de coordenadas inerciais no qual ele so tem componente temporal.
37
uk
XO
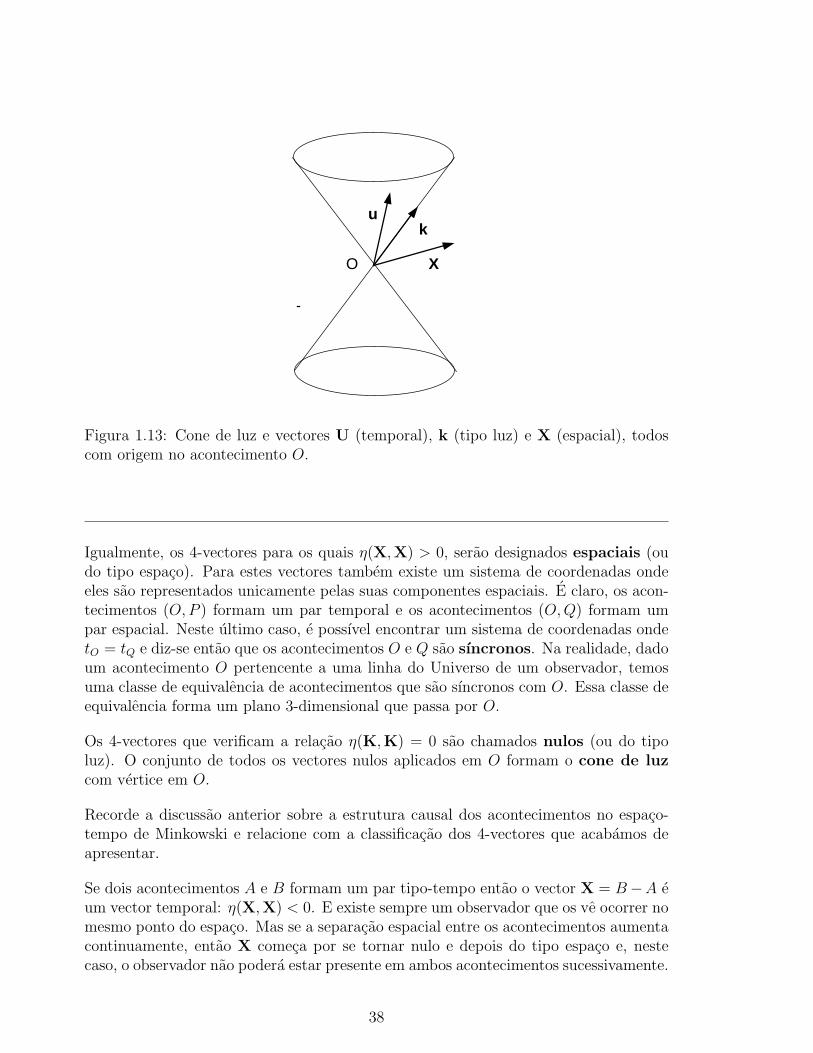
Figura 1.13: Cone de luz e vectores U (temporal), k (tipo luz) e X (espacial), todoscom origem no acontecimento O.
Igualmente, os 4-vectores para os quais η(X,X) > 0, serao designados espaciais (oudo tipo espaco). Para estes vectores tambem existe um sistema de coordenadas ondeeles sao representados unicamente pelas suas componentes espaciais. E claro, os acon-tecimentos (O, P ) formam um par temporal e os acontecimentos (O, Q) formam umpar espacial. Neste ultimo caso, e possıvel encontrar um sistema de coordenadas ondetO = tQ e diz-se entao que os acontecimentos O e Q sao sıncronos. Na realidade, dadoum acontecimento O pertencente a uma linha do Universo de um observador, temosuma classe de equivalencia de acontecimentos que sao sıncronos com O. Essa classe deequivalencia forma um plano 3-dimensional que passa por O.
Os 4-vectores que verificam a relacao η(K,K) = 0 sao chamados nulos (ou do tipoluz). O conjunto de todos os vectores nulos aplicados em O formam o cone de luzcom vertice em O.
Recorde a discussao anterior sobre a estrutura causal dos acontecimentos no espaco-tempo de Minkowski e relacione com a classificacao dos 4-vectores que acabamos deapresentar.
Se dois acontecimentos A e B formam um par tipo-tempo entao o vector X = B−A eum vector temporal: η(X,X) < 0. E existe sempre um observador que os ve ocorrer nomesmo ponto do espaco. Mas se a separacao espacial entre os acontecimentos aumentacontinuamente, entao X comeca por se tornar nulo e depois do tipo espaco e, nestecaso, o observador nao podera estar presente em ambos acontecimentos sucessivamente.
38

Pontos cujo intervalo do Universo e do tipo tempo estao em comunicacao causal, poise sempre possıvel enviar um sinal de um para outro; porem o mesmo ja nao acontecepara um par de acontecimentos do tipo espaco.
De acordo com a teoria da relatividade se A e B constituem um par do tipo espaco,isto e, se η(X,X) > 0, entao nao ha nada que possa acontecer em A que tenha umainfluencia causal directa sobre o que acontece em B.
Um sub-espaco S de T.(M) diz-se:
• tipo-espaco se todos os seus vectores sao do tipo espaco;
• tipo-tempo se contem um vector do tipo tempo.
O sub-espaco S de T.(M) diz-se nulo se contem um vector tipo luz K tal que η(K,U) =0, para todo o U ∈ S. Os vectores U e K dizem-se ortogonais. Portanto um sub-espaco nulo nao pode ser do tipo espaco. Mostraremos, mais adiante, que um vectordo tipo tempo nao pode ser ortogonal a um vector do tipo luz, logo um sub-espaconulo tambem nao pode ser do tipo tempo. Assim todo o sub-espaco S de T.(M) sopode ser uma das tres coisas seguintes: tipo-espaco, nulo ou tipo-tempo.
Seja U um vector arbitrario tipo-tempo. Entao existe uma base ortonormada de T.(M)na qual Ua = 0 se a 6= 0. Sejam Ua = (U0, 0, 0, 0) e X um vector qualquer ortogonal aU : η(X,U) = 0. Entao se as componentes de X sao Xa = (X0, X1, X2, X3) temos
X ·U = −X0U0 = 0, logo X0 = 0,
pois U0 6= 0, e portanto
η(X,X) = (X1)2 + (X2)2 + (X3)2 > 0,
logo X e do tipo espaco. Confirma-se que um vector tipo-tempo nao pode ser ortogonala um vector tipo luz ou a um outro vector tipo-tempo.
Exercıcio 5 Mostre que estando qualquer 4-velocidade, Ua = dxa/dτ , normalizada deacordo com
ηabUaU b = UaUa = −1 (vector temporal)
verifica-se que o 4-vector ac = dU c/dτ , chamado 4-vector aceleracao, e ortogonal a Ua,de acordo com o metrica de Minkowski, ou seja,
U · a = U cac = 0
em todos os referenciais inerciais. Daqui se deduz que ac e um 4-vector espacial, comose mostrara mais adiante.
39

Exercıcio 6 Mostre que dois vectores nulos sao ortogonais se e so se sao proporcionais,isto e, se sao paralelos.
Seja I o conjunto dos vectores do tipo-tempo de T.(M). Vamos definir uma relacao deequivalencia ↑ sobre I escrevendo para X e Y ∈ I
X ≡ Y (mod ↑) significando η(X,Y) < 0
Formando o conjunto quociente I/ ↑ vemos que contem unicamente dois elementos.Seleccionemos um destes elementos e designemo-lo por sentido positivo do tempo.O espaco vectorial de Minkowski T.(M) fica assim orientado no tempo. Ao elementoseleccionado chamamos o futuro e ao outro o passado. Como ja vimos o conjuntode todos os vectores nulos forma o cone de luz ou cone nulo que e, portanto, umsub-espaco vectorial nulo de T.(M). Os vectores tipo-tempo dirigidos para o futuroencontram-se no interior de uma das folhas do cone, chamada a folha do futuro, e osvectores tipo-tempo orientados para o passado encontram-se no interior da outra folha,a folha do passado.
Convencao de soma
Para lidar com quantidades que dependem das coordenadas, e que sao mais complicadasque os vectores e matrizes que encontramos ate agora, e conveniente introduzir umanotacao mais compacta que passamos a explicar.
Quando escrevemos por extenso a expressao em componentes que representa o valorde um covector α sobre o vector X,
α(X) ≡< α,X >=3∑
a=0
αcXc, (1.43)
ou quando representamos o produto de uma matriz de Lorentz pelas componentes deum vector para obter as novas componentes desse vector,
Xa′ =3∑
b=0
La′b X
b, (a = 0, . . . , 3), (1.44)
existe sempre um ındice de soma que se repete, uma vez em baixo (ındice covariante)e outra vez em cima (ındice contravariante), e que se designa por ındice mudo. Na ex-pressao (1.44) a e um ındice livre que toma valores entre 0 e 3, mas b e um ındice mudo,e como tal, aparece repetido. Sempre que exista um ou mais ındices de soma omitimosos respectivos somatorios e escrevemos as expressoes anteriores respectivamente como
α(X) = αcXc, Xa′ = La′
b Xb.
40

Por outras palavras, quando um ındice aparece repetido num produto de factores, umavez covariante e outra contravariante, convenciona-se que e um ındice de soma, e naoha necessidade de incluir o somatorio para se entender que a soma deve ser efectuada.Esta regra e conhecida por convencao de soma de Einstein.
Ate agora foram ja utilizadas tres notacoes diferentes: uma notacao geometrica in-trınseca, baseada na definicao dos objectos geometricos envolvidos, uma notacao ma-tricial em termos das respectivas componentes, mas sem ındices, e uma notacao tenso-rial onde as componentes sao caracterizadas pelos seus ındices e se usa a convencao desoma. Comparemos as tres notacoes observando tres expressoes tıpicas: um covectoraplicado sobre um vector, a metrica aplicada a dois vectores, e uma funcao trilinear detres vectores e para a qual nao existe notacao matricial
Notacao
Geometrica Matricial Componentes
α(X) αX αcXc
g(X,Y ) XT GY ηabXaY b
Q(X, Y, Z) — QabcXaY bZc
Quando se pode utilizar, a notacao matricial e perfeitamente equivalente a notacaoem componentes e podemos passar de uma para outra sem dificuldade. A ordem dascomponentes e arbitraria, o mesmo nao sendo verdade no que se refere as matrizes.Observando quais sao os ındices mudos que figuravam na notacao em componentespodemos inferir a ordem das matrizes tendo em atencao as regras de multiplicacao dematrizes. Assim, nao tendo que nos preocupar com a ordem dos termos na notacao emcomponentes, os quais sao simplesmente numeros, as seguintes expressoes sao todasequivalentes
ηabXaY b = XaηabY
b = XaY bηab.
Consideremos agora a expressao que define a 1-forma associada ao vector X
Xb = Xaηab;
e indiferente escrever Xaηab ou Xcηcb, isto e, podemos substituir o ındice mudo porqualquer letra. Mas ja Xaηad representa uma outra componente que nao pode serigualada a Xa: os ındices livres em todos os termos de ambos os membros de umequacao tem de concordar. O nosso ponto de vista e que so devemos escrever expressoesem componentes que correspondam a alguma expressao geometrica. Por esta razao,uma expressao como αa = Xa, embora possa ser entendida sem ambiguidade (poissignifica que α0 = X0, α1 = X1, etc.) deve ser evitada pois seria associada a expressaosem significado geometrica α = X, que identifica dois objectos distintos: um covectora um vector. Portanto, os ındices livres devem concordar nas suas posicoes.
41

Finalmente, a convencao de soma tambem e usada em certos casos em que os termosnao sao so componentes como na escrita de um vector numa dada base ea
X = Xaea.
Vimos que em relatividade e tao habitual usar η para passar de um vector X ∈ T.(M)para um covector X = η(X) ∈ T ∗
. M , e a funcao inversa η−1 para voltar a X, que noshabituamos a considerar X e η(X) como duas representacoes do mesmo objecto. Eisso que transparece na escrita em componentes
η(X)a := ηabXb = Xa
onde se deixou cair o til que distinguia o covector do vector. A posicao do ındice evitaqualquer confusao com as componentes contra-variantes do vector X.
Inversamente, uma vez introduzido o covector a a expressao aa devera representar ascomponentes do vector contravariante correspondente η−1(a), isto e,
aa := (η−1)abab.
η−1 e η podem interpretar-se como operadores de subida e descida de ındices, respec-tivamente. Subir e descer ındices sao operacoes inversas: se subimos e descemos omesmo ındice, voltamos a situacao original. Podemos fazer subir ou descer ındices emqualquer objecto com ındices como, por exemplo,
Qabc = (η−1)adQdbc.
Quando discutimos a estrutura do grupo de Lorentz vimos que a matriz da metrica ηcoincide com a sua inversa, pois η2 = I. Assim as componentes do objecto geometricoη−1 sao tambem representadas pela matriz η. Contudo, η e η−1 sao geometricamentedistintos pois:
η : T.M → T ∗. M, η−1 : T ∗
. (M) → T.M
Por isso, quando representamos as componentes de η−1, escrevemos estas componentesna forma ηab, com os ındices em cima, enquanto que ηab indica que estamos a consideraras componentes de η. Isto tem a vantagem de estar de acordo com a nossa convencaopara subir e descer ındices, pois (η−1)de e simplesmente
ηde = (η−1)da(η−1)ebηab.
Efectivamente, como η e uma matriz simetrica, vem
ηab = ηba, ηab = ηba.
e, portanto,
ηab = (η−1)ad(η−1)beηde
= (η−1)adηde(η−1)eb
= (η−1)ab.
42

Note que nao usamos η2 = I, pelo que tambem em relatividade geral e valido escrever:gab = (g−1)ab.
E habitual representar as componentes da matriz identidade I pelo sımbolo δab, conhe-
cido por delta de Kronecker. Assim,
δab =
1 se a = b0 se a 6= b
Com esta representacao da matriz unidade I a equacao IX = X escreve-se em com-ponentes δa
bXb = Xa, mais geralmente temos
δabQacd = Qbcd.
Note ainda que δaa significa
∑a δa
a = 4, e o traco da matriz unidade.
Proposicao: Uma matriz que representa uma transformacao de Lorentz L satisfaz(L−1
)a
b= L a
b . (1.45)
I-Prova: Atendendo as convencoes de subida e descida de ındices
L ab = ηebη
daLed
= ηadLT ed ηeb
= (ηLT η)ab =
(L−1
)a
b.
II-Prova: Da equacao de definicao das matrizes de Lorentz, LT ηL = η, vem
LT ca ηcdL
db = ηab
Multiplicando a direita por ηbe e somando sobre b
LcaηcdL
dbη
be = ηabηbe = δ e
a
Multiplicando por (L−1)af e somando sobre a obtemos
(L−1)afL
ca(ηcdL
dbη
be) = (L−1)afδ
ea
δ fe L e
c = (L−1)ef
L ef = (L−1)e
f
Para terminar vamos aplicar este resultado a lei de transformacao dos covectores, α′ =αL−1, pondo em manifesto o facto ja discutido que as TL estabelecem uma relacaoentre sistemas de coordenadas diferentes, vem entao
αa′ = L ba′αb, (1.46)
43

enquanto que para vectores a lei de transformacao escreve-se, como ja vimos,
Xa′ = La′bX
b.
Com estes resultados fica estabelecida a consistencia das nossas convencoes.
Exercıcio 7 Sendo dados os vectores coluna
X =
1001
, Y =
0111
efectue os seguintes calculos:
i) XaXa; ii) YaY
a; iii) XaYa; iv) XaY b.
Exercıcio 8 Prove as seguintes relacoes:
i) Se XaYa = ZaYa para todo o Y ⇒ X = Z.
ii) Se T abX
b = 0 para todo o X, entao T ab = 0.
iii) Se T abX
b = Xa para todo o X, entao T ab − δa
b = 0.
Exercıcio 9 Uma matriz T = [T ab] e tal que para todo o X
T abZ
b = Xa, onde Za = TabXb.
Tendo em atencao as propriedades das matrizes de Lorentz, mostre que T e um membrodo grupo de Lorentz.
Exercıcio 10 i) Mostre que se TabXaY b = 0 para todos os X e Y , entao Tab = 0.
ii) Determine uma matriz T nao nula que satisfaca TabXaXb = 0, para todo o X.
iii) Mostre que se Sab = Sba e Aab = −Aba entao SabAab = 0.
44

1.5 Tensores
Ja vimos que os covectores se definem como aplicacoes lineares dos vectores sobre arecta real e a metrica g(X, Y ) como uma aplicacao bilinear (i.e., linear em X e Y )em <1. Podemos generalizar esta ideia a aplicacoes multilineares Q(X, Y, . . . , Z) =Qab...cX
aY b . . . Zc de n vectores em <1, linear em cada argumento. Podemos mesmo irmais longe e introduzir aplicacoes multilineares de s vectores e r covectores da forma
T (X,Y, . . . , Z, α, β, . . . , ω) = T de...fab...c XaY b . . . Zcαdβe . . . ωf
em <1. Esta aplicacao chama-se um tensor do tipo (ou valencia) (r, s) ou de ordemr + s. Note que r e o numero de ındices superiores e s o numero de ındices inferioresdas componentes do tensor T , as quais especificam o tensor completamente. Exemplosde tensores ja encontrados:
• Um vector e um tensor X de valencia (1, 0) e o seu valor sobre um covector α edefinido por < α, X >= Xcαc (= α(X));
• A matriz unidade δab e um tensor do tipo (1, 1), e o seu valor sobre um covector
α e um vector X e δbaαbX
a (= α(X));
• A metrica inversa g−1 e um tensor de valencia (2, 0)
g−1(α, β) = gabαaβb.
O conjunto de todos os tensores do tipo (r, s) escreve-se T (r,s)p M . Tal como a metrica,
que e um tensor do tipo (0, 2) pode ser considerada uma aplicacao linear de TpM →T ∗
p M , escrevendo g(X, Y ) como g(X)(Y ), tambem um tensor arbitrario pode ser con-siderado de muitas maneiras. Efectivamente, qualquer funcao multilinear
Q :(T ∗
p M)r × (TpM)s → T (r′,s′)
p M,
associando r covectores e s vectores a um tensor de valencia (r′, s′) pode ser vista comoum tensor de valencia (r + r′, s + s′).
1.5.1 Produto tensorial
Seja U um tensor do tipo (r, s) e V outro do tipo (p, q). Podemos entao combina-losde modo a formar o tensor do tipo (r + p, s + q) a que se chama produto tensorialde U e V : U ⊗ V .
Em termos de componentes, a definicao implica que multipliquemos as componentesde U pelas componentes de V ,
(U ⊗ V )c1···crd1···dp
a1···asb1···bq= U c1···cr
a1···asV
d1···dp
b1···bq
45

Por exemplo, o produto tensorial de dois vectores X e Y e um tensor X⊗Y de segundaordem do tipo (2, 0) com componentes XaY b.
1.5.2 Leis de transformacao
A lei de transformacao do tensor X ⊗ Y e uma consequencia imediata da lei de trans-formacao de um vector, Xa′ = La′
bXb, tem-se
(X ⊗ Y ) a′b′ = La′cL
b′d (X ⊗ Y )cd ,
e podemos deduzir uma lei semelhante a partir de αc′ = L bc′ αb para o produto tensorial
de dois covectores. Estes sao casos especiais da lei de transformacao geral
T c′···d′a′···b′ = L f
a′ · · ·L gb′ L
c′h · · ·Ld′
iTh···i
f ···g (1.47)
onde temos uma matriz de Lorentz L para cada ındice. A prova desta transformacaodecorre do calculo do escalar T (X, . . . , Z, α, . . . , β) em dois sistemas de coordenadas xe x′, tal como se deduziu a lei de transformacao para as componentes de um covector.
Contraccao
Um tensor do tipo (1, 1), com componentes T ba , da origem ao escalar Tr(T ) := T a
a ,chamado o traco de T , ao igualar um ındice contravariante com ındice covariante,transformando esses dois ındices livres num unico ındice de soma. Esta definicao eindependente do sistema de coordenadas, pois num sistema de coordenadas diferentetemos
T a′a′ = L b
a′La′cT
cb = δb
cTc
b = T cc
Em geral, dado um tensor, T , de valencia (r + 1, s + 1), por contraccao de dois dosseus ındices obtemos um tensor (r, s). Podemos pensar em T como uma aplicacao queassocia r co-vectores a(1), . . . , a(r) e s vectores X(1), . . . X(s) a um tensor do tipo (1, 1);se tomarmos o traco deste obtemos uma aplicacao de r co-vectores e s vectores numnumero real.
Em componentes,
T : (X, . . . , Z, a, . . . , ω) → T d...fja...hi Xa . . . Zhad . . . ωf
Tr(T ) : (X, . . . , Z, a, . . . , ω) → T d...fia...hi Xa . . . Zhad . . . ωf
A aplicacao Tr(T ) e multilinear e por isso define um tensor do tipo (r, s) chamadacontraccao de T (nos dois ındices i). E claro que podemos definir outras contraccoescomo, por exemplo,
T de...i...fab...i...h
46

A partir do tensor de componentes
T c...d...ea...b
podemos definir o tensorT c... ...e
a...b...d
tendo o cuidado de nao alterar a ordem dos ındices, e deixando vaga a posicao anteriordo ındice que foi descido. No caso mais simples de um tensor de segunda ordem,devemos distinguir as quatro formas seguintes
Tab, T ab, T ab, T b
a
ou seja, o primeiro e covariante, o segundo e contravariante, e os outros dois sao ambosmistos. Devemos ter em atencao que os dois ultimos tensores nao sao necessariamenteiguais. Podemos entender que o tensor
T ab = ηacTcb,
e um tensor misto que se obtem do tensor covariante por subida do primeiro ındiceou que
T ab = ηbcT
ac
e um tensor misto que se obtem do tensor contravariante T ab por descida do segundoındice. Igualmente, pode-se escrever as relacoes
T ba = ηbcTac, ou T b
a = ηacTcb,
que se interpretam de modo semelhante.
Propriedades de simetria
Definicao 9 Diz-se que um tensor T e simetrico em dois dos seus ındices se
T··· ab ··· = T··· ba ···,
como e o caso do tensor metrico.
Neste caso, isto e, se Tab e um tensor simetrico, entao T ab tambem e simetrico, e osdois tensores mistos sao identicos: T a
b ≡ T ba .
Vimos aqui como a metrica ηbc e a sua inversa ηbc se utilizam para descer e subir ındicesde um dado tensor, respectivamente.
Interessa tambem considerar o caso dos tensores anti-simetricos: Aab = −Aba. Noteque so se pode falar em simetria (ou anti-simetria) dos ındices da mesma especie, ambosco-variantes ou ambos contra-variantes.
47

Estas simetrias sao propriedades invariantes de um tensor (i.e., sao independentes dascoordenadas). Seja T um tensor do tipo (0, 2); entao e possıvel decompo-lo na suaparte simetrica, cujas componentes sao
T(ab) =1
2(Tab + Tba) (1.48)
e na sua parte anti-simetrica de componentes
T[ab] =1
2(Tab − Tba) . (1.49)
Segue-se imediatamente que para qualquer tensor de valencia (0, 2) podemos escrever
Tab = T(ab) + T[ab]. (1.50)
Se T(ab) = 0, o tensor Tab = T[ab] e anti-simetrico, e se T[ab] = 0, o tensor Tab = T(ab)
e simetrico. Num espaco a 4 dimensoes Tab tem 16 componentes das quais 10 saosimetricas e 6 sao anti-simetricas. No caso geral, um tensor de ordem p num espaco dedimensao n tem np componentes independentes. No caso de p = 2 as partes simetricae anti-simetrica terao respectivamente, n(n + 1)/2 e n(n− 1)/2 que perfazem
1
2(n + 1)n +
1
2(n− 1)n = n2
todas as componentes do tensor.
Dado um tensor com mais do que dois ındices, por exemplo Sabc, dizemos que e simetriconos seus dois primeiros ındices se
Sabc = Sbac. (1.51)
Mas se verificar as relacoes
Sabc = Sbac = Scab = Sacb = Sbca = Scba, (1.52)
dizemos que Sabc e simetrico em todos so seus ındices ou totalmente simetrico.
O tensor electromagnetico
Um exemplo de tensor anti-simetrico e o tensor electromagnetico, tambem conhecidopor tensor de Faraday, Fab = F[ab], o qual reune as componentes do campo electrico
E, e da inducao magnetica B. E sabido do estudo do electromagnetismo que o campoelectrico e representado, em cada ponto, por um vector polar de <3, e a inducaomagnetica por um vector axial (ou pseudo-vector) de <3,B. Estes objectos sao so“vectores”em relacao as rotacoes do espaco. Nao admira que as 6 componentes destes
48

dois campos vectoriais sejam descritas por um unico tensor anti-simetrico do tipo (0, 2),cujas componentes podem representar-se pela matriz
Fab =
0 −E1 −E2 −E3
E1 0 B3 −B2
E2 −B3 0 B1
E3 B2 −B1 0
(1.53)
Para saber como se transformam o campo electrico e a inducao magnetica numa mu-danca de referencial de inercia basta recorrer a lei de transformacao (1.47). De umaso vez, isto e de uma mesma expressao obtemos as leis de transformacao dos doiscampos vectoriais E e B. Mas este poder unificador do formalismo tensorial nao deveser visto como um mero expediente da matematica mas sobretudo como revelador docaracter unitario do campo electromagnetico. Em lugar de dois campos vectoriais Ee B, independentes, devemos de preferencia pensar num unico campo (tensorial) elec-tromagnetico: Fab. E claro que isto esta ja patente nas equacoes de Maxwell, na suaformulacao habitual, nao covariante. Voltaremos a este assunto mais adiante, depoisde tratar da diferenciacao de tensores.
O tensor de Levi-Civita
Um outro exemplo de um tensor (completamente) anti-simetrico, do tipo (0, 4), e oconhecido tensor de permutacao de Levi-Civita, cujas componentes num espaco-tempo de Minkowski sao definidas pelas relacoes seguintes:
εabcd =
+1 se abcd e uma permutacao par de 0123−1 se abcd e uma permutacao ımpar de 0123
0 se abcd tem ındices repetidos.(1.54)
Note-se que o tensor de Levi-Civita, tal como o tensor metrico, tem componentesque dependem de como os vectores base sao nao ortonormais. Na definicao dadaadmitimos que e0 aponta para o futuro e e1, e2, e3 formam um triedro directo. E sonestas condicoes temos
ε(e0, e1, e2, e3) = ε0123 = +1.
Uma “permutacao de 0123”e aqui entendida como uma ordenacao dos numeros 0, 1, 2, 3que pode ser obtida a partir de 0123 por troca de dois destes dıgitos; diz-se que apermutacao e par ou ımpar conforme e obtida por um numero par ou ımpar de trocas.Por exemplo, ε1023 = −1, mas ε1032 = 1.
Uma propriedade notavel do tensor de Levi-Civita, que so encontramos num numeroreduzido de tensores–a metrica, a metrica inversa e o tensor de Kronecker–e que apesarde obedecerem a lei de transformacao tensorial (1.47), as suas componentes permane-cem inalteradas em qualquer sistema Cartesiano de coordenadas num espaco-tempo
49

plano. E claro que nos espacos-tempo curvos da relatividade geral, ou mesmo no es-paco-tempo de Minkowski em coordenadas curvilıneas, ja estes tensores nao gozamdesta propriedade, com execpcao do tensor de Kronecker δa
b. Este ultimo tensor temexactamente as mesmas componentes em todos os sistemas de coordenadas e em todosos espacos-tempo. Isto faz sentido, pois o tensor de Kronecker a aplicacao (linear)identidade num espaco vectorial (TpM ou T ∗
p M) cujos elementos (vectores ou co-vectores) devem ter as mesmas componentes. Os outros tensores (a metrica, a suasinversa, e o tensor de Levi-Civita) caracterizam o espaco-tempo e todos dependem dametrica.
Definindo os sımbolos de permutacao, cujas propriedades de transformacao temainda que ser determinadas,
εabcd = εabcd =
+1 se abcd e uma permutacao par de 0123−1 se abcd e uma permutacao ımpar de 0123
0 se abcd tem ındices repetidos,(1.55)
podemos escrever as componentes do tensor de Levi-Civita num sistema de coordenadasarbitrario e mesmo para uma variedade espaco-tempo curvo, do seguinte modo
εabcd = (−g)1/2εabcd (1.56)
εabcd = −(−g)−1/2εabcd (1.57)
Daqui se deduz imediatamente que, num espaco-tempo de Minkowski, as componentescovariantes e contravariantes do tensor de Levi-Civita estao relacionadas pela equacao
εabcd = −εabcd.
Dado qualquer tensor, podemos simetrizar (anti-simetrizar) qualquer numero so seusındices superiores ou inferiores. Para simetrizar, tomamos a soma de todas as permu-tacoes dos ındices relevantes e dividimos pelo numero de termos:
T(a1...an)b =1
n!(Ta1...anb + soma das permutacoes dos ındices a1 . . . an) , (1.58)
por exemplo, para um tensor do tipo (0, 3) vem
T(abc) =1
3!(Tabc + Tcab + Tbca + Tbac + Tcba + Tacb) .
No caso da anti-simetrizacao definimos
T[a1...an]b =1
n!(Ta1...anb + soma alternada das permutacoes de a1 . . . an) , (1.59)
entendendo-se a soma alternada por
T[abc] =1
3!(Tabc − Tbac + Tcab − Tcba + Tbca − Tacb) ,
50

ou seja, as permutacoes ımpares (com um numero ımpar de trocas) sao precedidas dosinal menos. E habitual usar os parentesis curvos (rectos) para representar simetri-zacao (anti-simetrizacao). Por vezes poderemos quer simetrizar ındices que nao estaojuntos, e nesse caso colocamos umas barras verticais para isolar os ındices que nao saosimetrizados, como se faz a seguir
T(a|c|b) =1
2(Tacb + Tbca) , (1.60)
e de modo semelhante se procede no caso da anti-simetrizacao.
1.5.3 Vectores Polares e Pseudo Vectores
Para compreender a natureza do tensor electromagnetico e conveniente explicar aexistencia de dois tipos de vectores de <3. Aproveitamos para generalizar esta dis-tincao e para introduzir os conceitos muito uteis em fısica de densidades tensoriais epseudo tensores em geral.
Definicao 10 Diz-se que b e um vector (polar) de <3 se as suas componentes, bi, setransformam numa rotacao de acordo com
bi′ =3∑
`=1
Ri′` b`,
com RT R = I, matriz ortogonal de SO(3).
Se as transformacoes de coordenadas a considerar nao se limitarem a rotacao de siste-mas cartesianos directos, mas tambem forem tambem permitidas reflexoes nos planoscoordenados, o produto vectorial de dois vectores polares de <3, a e b, e um exemplode um vector axial ou pseudo-vector, sendo as componentes de
a ∧ b = c,
c`, dadas numericamente por
ci = ajbk − akbj, i, j, k permutacao circular de 1, 2, 3
ou, melhor ainda, pela expressao tensorial
ci =3∑
j,k=1
εijkajbk.
E claro, εijk e o tensor completamente anti-simetrico, de Levi-Civita, do espaco <3, queem qualquer sistema de coordenadas cartesianas e definido simplesmente pelas relacoes
εijk = ε[ijk] =
+1 se ijk e uma permutacao par de 123−1 se ijk e uma permutacao ımpar de 123
0 se ijk tem ındices repetidos,
51

a semelhanca da Eq.(1.54) de definicao para o espaco-tempo de Minkowski.
Numa inversao das coordenadas (reflexao espacial), as componentes de a e de b mudamde sinal, e portanto as componentes de c nao mudam. Pelo contrario, o vector c inverteo seu sentido, enquanto a e b ficam inalterados. Por isso dizemos que c e um vectoraxial, isto e, a sua orientacao depende da axialidade do espaco. A definicao intrınsecade produto vectorial de dois vectores pressupoe uma orientacao do espaco. Na verdade,diz-se que a ∧ b e um vector perpendicular ao plano dos dois vectores a e b e cujagrandeza e |a| · |b| sin(a, b). Como ha dois vectores com estas condicoes, e necessariofazer uma escolha acrescentando que a, b e c, por esta ordem, formam um triedro domesmo tipo dos eixos coordenados. Se estes formam um sistema “directo”e efectuamosuma reflexao espacial ou, de modo equivalente, se invertemos o sentido de um numeroımpar de eixos coordenadas, o sistema directo fica transformado num sistema inversoe o resultado do produto vectorial a ∧ b muda de sentido. Por isso se diz que ovector c = a∧b nao e um vector (polar) mas sim um pseudo-vector ou vector axial. Omomento angular L = r∧p e um exemplo deste tipo. Fazendo o produto interno de umvector com um pseudo-vector obtemos um pseudo-escalar (muda de sinal numa rotacaoimpropria, isto e, uma rotacao acompanhada de uma reflexao espacial, caracterizadapor uma matriz R cujo determinante e |R| = −1). Note que um verdadeiro escalardeve permanecer invariante numa qualquer transformacao ortogonal. Assim, o produtoescalar L · p nao e uma quantidade invariante a nao ser quando este produto se anula,como acontece quando c = p. As equacoes de transformacao das componentes de umpseudo-vector numa rotacao definida pela matriz ortogonal R sao
c′` = |R|3∑
k=1
R`kck.
Estas equacoes sao quase identicas as equacoes de transformacao das componentes deum vector; a unica diferenca reside no factor |R|. Note que no caso de uma transfor-macao propria (|R| = 1) os dois conjuntos de transformacoes coincidem. Notemos aindaque os pseudo-vectores de <3 podem ser representados por tensores anti-simetricos desegunda ordem. Efectivamente, as tres componentes do vector axial c, que sao dadaspor
c1 = a2b3 − a3b2
c2 = a3b1 − a1b3
c3 = a1b2 − a2b1
ou usando uma notacao tensorial com a convencao de soma de Einstein2,
ci = εijkajbk, (1.61)
que tambem pode representar-se pelas tres componentes do tensor anti-simetrico de 2a
ordemCij = aibj − biaj = 2a[ibj].
2Embora em coordenadas cartesianas nao haja distincao entre componentes covariantes e contra-variantes, fomos levados a usar estas ultimas para ficar evidente o uso da convencao de soma.
52

Numa notacao matricial, podemos escrever
Cij =
0 c3 −c2
−c3 0 c1
c2 −c1 0
Trata-se de objectos pertencentes a espacos com a mesma dimensao, havendo entreCij e ci uma relacao simples, conhecida por operacao dualidade (de Hodge), quedefiniremos com generalidade mais adiante, e que se traduz pelas seguintes expressoes
Cij = εijkck, ci =
1
2εijkC
jk,
onde mais uma vez se usou a convencao de soma de Einstein.
Outro exemplo de pseudo-vector e o vector inducao magnetica, dado pelo rotacionaldo potencial vector: B = ∇∧A(x), e cujas componentes sao
B1 = ∂2A3 − ∂3A2
B2 = ∂3A1 − ∂1A3
B3 = ∂1A2 − ∂2A1
ou seja,Bi = εijk∂
jAk, (1.62)
onde ∂k = ∂/∂xk, ∂j = δjk∂k e k = 1, 2, 3.
Veremos ja a seguir que os vectores axiais e o tensor das permutacoes de Levi-Civitase incluem na categoria dos tensores relativos. Mas, pelo que vimos anteriormente,podemos evitar o conceito de “vector axial”substituindo o produto externo de doisvectores (polares) e o rotacional de um campo vectorial por tensores anti-simetricos de2a ordem,
Cij = aibj − ajbi = 2a[ibj], Bij = ∂iAj − ∂jAi = 2∂[iAj] (1.63)
e todas as equacoes onde aparecem vectores axiais podem assim ser escritas com aajuda destes tensores anti-simetricos de 2a ordem.
1.5.4 Tensores Relativos e Densidades Tensoriais
No caso geral, os tensores obedecem a leis de transformacao lineares e homogeneas dotipo seguinte
Ba′. b′c′ = |J |−w ∂xa′
∂xa
∂xb
∂xb′∂xc
∂xc′Ba. bc, (1.64)
onde J = [∂xa′/∂xa], e o determinante da matriz jacobiana da transformacao geralde coordenadas: xa → xa′ ; ou seja, devemos generalizar a definicao de tensor ao casoque as suas componentes sao determinadas a menos um factor escalar constante, τ ,
53

dependente de |J |, com τ = |J |−w. Quantidades ou tensores com uma lei de trans-formacao ponderada (i.e., w 6= 0) sao chamados densidades tensoriais de peso w, esao usualmente denotadas por letras Goticas ou sımbolos gregos. Brillouin cunhou osnomes “intensidades”e “capacidades”para as densidades de peso +1 e −1, que ocor-rem frequentemente em fısica. Na verdade, o nome ‘densidade’ deriva da densidade demassa ρ, definida de modo que ρdV e a massa contida num elemento de volume dV .Se transformamos as coordenadas espaciais, dV ′ = |J |dV , quando efectuamos umatransformacao de coordenadas cartesianas em coordenadas curvilıneas, por exemplo.Portanto a invariancia da massa ρ′dV ′ = ρdV exige ρ′ = |J |−1ρ. Logo ρ transforma-secomo uma densidade escalar, sendo uma ‘capacidade’ segundo Brillouin.
Definicao 11 Em geral, um conjunto de nr+s funcoes T a1...arb1...bs
(xc) constitui as compo-nentes de um campo tensorial relativo de tipo (r, s) e peso w sobre uma variedade Mn se,dada uma transformacao geral de coordenadas xa → xa′, estas funcoes transformam-sede acordo com a relacao
Ta′1...a′r
b′1...b′s(xc′) = J−w ∂a′1
∂a1
. . .∂a′r∂ar
∂b1
∂b′1. . .
∂bs
∂b′sT a1...ar
b1...bs(xc) (1.65)
Os tensores relativos ou pseudo tensores obedecem a leis de transformacao ho-mogeneas e lineares, tal como os tensores ordinarios. A diferenca reside no comporta-mento da factor de ponderacao em relacao as transformacoes de coordenadas improprias(J < 0). A factor de ponderacao do pseudo-tensor muda de sinal numa transformacaoimpropria. Os vectores axiais sao um exemplo deste ultimo caso. Um tensor ordinariopor seu lado ou nao tem factor de ponderacao (w = 0) ou transforma-se com o valorabsoluto do Jacobiano Eq. (1.64). Neste ultimo caso o tensor e chamado uma densida-de tensorial, como vimos. Note-se, porem, que existe alguma confusao na literatura nautilizacao destas denominacoes. Alguns autores restringem as transformacoes de coor-denadas a transformacoes proprias (J > 0) e por isso falam so em densidades tensoriaisde peso w. Outros autores preferem reservar o denominacao de densidades tensoriaispara os tensores relativos de peso w = ±1.
Consideremos agora o seguinte exemplo. Seja o determinante da matriz da metricadet(gab) = g. Numa transformacao geral de coordenadas ga′b′ transforma-se de acordocom
ga′b′ =∂xa
∂xa′∂xb
∂xb′ gab
de modo que g transforma-se do seguinte modo
g′ = det
(∂xa
∂xa′∂xb
∂xb′ gab
)
g′ = J−2g,
Vemos que g nao e um escalar para esta transformacao, pois: g′ 6= g, isto e, transforma-se como um escalar mas com um factor τ extra dependente de J . Neste caso τ = J−2,
54

e dizemos que g e uma densidade escalar de peso w = 2. Extraindo a raiz quadrada daexpressao anterior e escolhendo so o valor positivo, vem
√−g′ = |J−1|√−g, (1.66)
pelo que√−g e um densidade tensorial de peso w = 1. Por outro lado, sabemos que
o elemento de volume 4-dimensional,
d4x = dx0dx1dx2dx3
transforma-se de acordo comd4x′ = |J | d4x
Assim √−g′ d4x′ =
√−g d4x,
mostra que√−g d4x e um escalar para uma transformacao geral de coordenadas.
Os sımbolos de permutacao εabcd sao particularmente uteis quando queremos calculara forma multilinear de quatro vectores
εabcdAa(0)A
b(1)A
c(2)A
d(3) = det(Aa
(b)) = D. (1.67)
Atendendo a lei de transformacao das componentes dos vectores
Aa′(b) =
∂xa′
∂xaAa
(b)
e a regra de multiplicacao de determinantes, obtemos
D′ = JD
Se nos limitarmos a transformacoes proprias (J > 0), que preservam o caracter dosistema de referencia, dizemos que D−1 e uma densidade escalar e D
√−g e um escalarabsoluto.
Voltando a eq.(1.67) podemos escrever
εabcdAa(l)A
b(m)A
c(n)A
d(s) = Dεlmns.
ou de modo equivalente,
J−1εa′b′c′d′ =∂xa
∂xa′∂xb
∂xb′∂xc
∂xc′∂xd
∂xd′ εabcd, (1.68)
o que mostra que εabcd e uma densidade tensorial de peso w = −1. Sendo√−g uma
densidade escalar de peso w = 1, podemos construir uma densidade tensorial de pesow = 0, ou seja, um tensor absoluto, a custa de
εabcd =√−gεabcd. (1.69)
55

E facil verificar que se trata de um tensor covariante de 4a ordem, pois
∂xa
∂xa′∂xb
∂xb′∂xc
∂xc′∂xd
∂xd′ εabcd =√−gεa′b′c′d′J
−1
=√−g′εa′b′c′d′
= εa′b′c′d′
Sendo εabcd as componentes de um tensor, e natural que possa escreve-lo na formacontravariante, isto e, posso subir todos os seus ındices,
εabcd = gaegbfgcggdhεefgh
o que mostra queεabcd = gaegbfgcggdh√−gεefgh
e portanto podemos concluir que na forma contravariante este tensor toma a forma
εabcd = − εabcd
√−g. (1.70)
E como se tem ε0123 = ε0123 = +1, vem ε0123 = −(−g)−1/2.
Definimos o delta de Kronecker generalizado pelas relacoes
δabcd =
+1 para a 6= b, a = c, b = d−1 para a 6= b, a = d, b = c
0 nos outros casos,
e de modo semelhante para tensores de ordem superior. Trata-se de tensores constantesdo tipo indicado, e que podem sempre ser definidos em termos do delta de Kroneckerusual por intermedio de determinantes; por exemplo,
δabcd =
∣∣∣∣∣δac δb
c
δad δb
d
∣∣∣∣∣ e δabcdef =
∣∣∣∣∣∣∣
δad δb
d δcd
δae δb
e δce
δaf δb
f δcf
∣∣∣∣∣∣∣,
e assim por diante. E claro que num espaco com quatro dimensoes o delta de Kroneckergeneralizado com cinco ındices e identicamente nulo. Facilmente se verifica que
A[ab] =1
2δcdabAcd
A[abc] =1
3!δdefabc Adef
representam tensores totalmente anti-simetricos.
56

A quatro dimensoes podemos relacionar os delta de Kronecker generalizados com ossımbolos de permutacao do seguinte modo
εabcdεefgh = δabcdefgh
εabcdεefgd = δabcefg
εabcdεefcd = 2! δabef
εabcdεebcd = 3! δae
εabcdεabcd = 4! (1.71)
Exercıcio 11 Mostre que e igualmente possıvel escrever o delta de Kronecker genera-lizado δcd
ab em termos dos delta de Kronecker usuais do seguinte modo
δcdab = 2! δc
[aδdb]
Aproveite este resultado para mostrar que
δc1···cpa1···ap
= p! δc1[a1· · · δcp
ap]
Exercıcio 12 Mostre que se usar os tensores de Levi-Civita, em lugar dos sımbolos depermutacao vem, por exemplo
εabcdεefcd = −2! δabef , εabcdεabcd = −4! (1.72)
1.6 Dinamica Relativista
Uma das aplicacoes mais correntes da relatividade restrita e ao estudo dos feixes departıculas muito rapidas, produzidas por aceleradores. Quando estas partıculas inci-dem num alvo, que quase sempre esta em repouso em relacao ao laboratorio, variaspartıculas sao emitidas, tambem a altas velocidades; algumas destas partıculas saoinstaveis e por isso decaem ao fim de algum tempo (que se relaciona com a sua vidamedia) em duas ou mais partıculas. Para um estudo completo (dinamico) terıamosde recorrer a mecanica quantica, mas as ideias fundamentais (cinematicas) que mo-tivam a descricao quantica baseiam-se num modelo simples de partıculas pontuais,caracterıstico da fısica classica.
O 4-momento linear de uma partıcula pontual classica pode ser representado por um4-vector P a temporal (ou nulo, no caso de uma partıcula que se move a velocidade da
57

luz) e d.p.f. O quadrado da massa em repouso da partıcula e dado por (fazendo c = 1no que se segue)
m2 = −P aPa. (1.73)
Se o 4-vector unitario temporal, d.p.f, V a, representar a 4-velocidade de um observador,entao a energia da partıcula medida em relacao a esse observador, e
E = −PaVa. (1.74)
Por exemplo, no referencial onde a partıcula esta em repouso P a = (m, 0, 0, 0), e seo observador tem uma velocidade ~v em relacao a partıcula entao V a = γ(1, ~v) ondeγ = 1/
√1− v2 e o factor de Lorentz associado a velocidade ~v. Nestas condicoes,
obtemos para E o resultado conhecido
E =m√
1− v2. (1.75)
Embora esta expressao seja muito util em certas circunstancias, a formula invariante(1.74) e a que deve ser retida para aplicacoes futuras pois pode ser usada mesmo emrelatividade geral.
Em particular, se P a e um vector tipo luz ja a expressao (1.75) nao e aplicavel (v = 1e m = 0) pois da um valor indeterminado para E, mas a expressao (1.74) continuavalida.
Assim se P a representa o 4-momento de uma partıcula de massa em repouso nula, entaoE e a energia dessa partıcula tal como e medida por um observador com 4-velocidadeV a.
Portanto, se um fotao e emitido por um corpo com 4-velocidade Ua e recebida por umobservador com 4-velocidade V a, entao a energia emitida e Ee = −PaU
a (no referencialproprio do corpo), e a energia recebida pelo observador e Er = PaV
a. E o facto destasenergias serem diferentes (pois Ua 6= V a, por hipotese) que esta na base do efeito deDoppler relativıstico.
No referencial proprio do corpo emissor temos Ua = (1, 0, 0, 0), V a = γ(1, ~v), e P a =(E, ~p) com −E2 + p2 = 0. A energia emitida Ee e entao
Ee = −PaUa = E,
e a energia recebida Er e dada por
Er = −PaVa = γ(E − ~p · ~v).
A razao entre estas energias e Er/Ee = γ(1− v cos θ) onde θ e o angulo entre ~p e ~v.
Assim, se a velocidade do receptor tem a mesma direccao e sentido da do fotao, demodo que θ = 0, vem
Er
Ee
=
√1− v
1 + v,
58
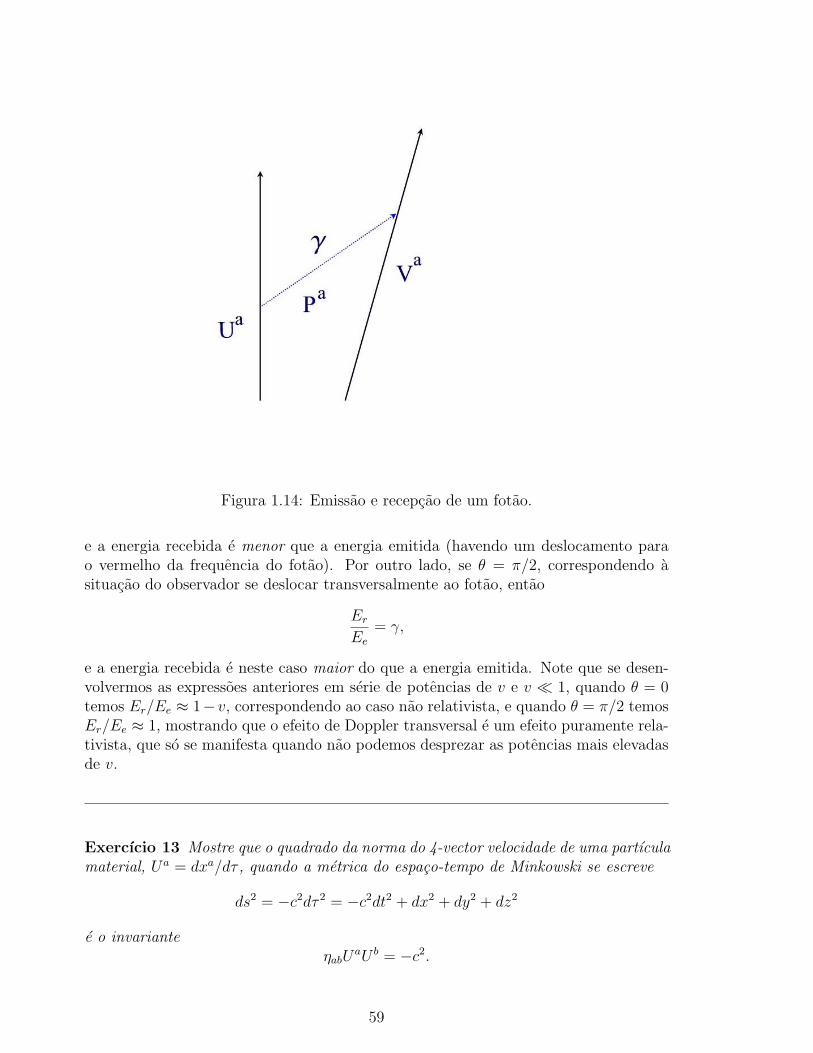
Figura 1.14: Emissao e recepcao de um fotao.
e a energia recebida e menor que a energia emitida (havendo um deslocamento parao vermelho da frequencia do fotao). Por outro lado, se θ = π/2, correspondendo asituacao do observador se deslocar transversalmente ao fotao, entao
Er
Ee
= γ,
e a energia recebida e neste caso maior do que a energia emitida. Note que se desen-volvermos as expressoes anteriores em serie de potencias de v e v ¿ 1, quando θ = 0temos Er/Ee ≈ 1− v, correspondendo ao caso nao relativista, e quando θ = π/2 temosEr/Ee ≈ 1, mostrando que o efeito de Doppler transversal e um efeito puramente rela-tivista, que so se manifesta quando nao podemos desprezar as potencias mais elevadasde v.
Exercıcio 13 Mostre que o quadrado da norma do 4-vector velocidade de uma partıculamaterial, Ua = dxa/dτ , quando a metrica do espaco-tempo de Minkowski se escreve
ds2 = −c2dτ 2 = −c2dt2 + dx2 + dy2 + dz2
e o invarianteηabU
aU b = −c2.
59

Exercıcio 14 Se energia e o momento linear de uma partıcula forem definidos paraum referencial arbitrario por
E = mdt
dτc2 = mγc2, ~p = m
d~r
dt
dt
dτ= mγ~v, (1.76)
imediatamente se verifica que (E/c, ~p) se transforma de modo semelhante ao 4-vectorposicao (ct, ~r). Verifique este resultado e mostre que ele permite definir um 4-vectormomento com estas componentes contravariantes: P a = (E/c, ~p), ou seja, P a = mUa.
Quando o sistema de partıculas esta isolado, embora as partıculas possam interactuar,o 4-momento total do sistema e conservado. Ja sabemos que a componente temporal do4-momento de uma partıcula, P a, e P 0 = E, onde E = mγ(v) e a energia da partıculamedida por um observador em relacao ao qual a partıcula tem velocidade ~v. Por suavez as componentes espaciais sao
~p = mγ(v)~v,
que sendo parte de P a tambem se conservam.
Se definirmos m∗ = mγ(v), entao ~p = m∗~v adquire a forma newtoniana do momentoe por isso se atribui a m∗ o significado de uma massa efectiva; porem, seguindo umatendencia moderna, vamos designa-la massa aparente e reservamos o termo massa paraa massa em repouso ou massa propria.
Expandindo P 0 em potencias de v (recorde que v < 1) vem
E = mγ(v) = m +1
2mv2 + O(v2), para pequenas v.
Podemos entao escrever
E ≈ massa + energia cinetica
Isto sugere que a massa e a energia devem ser da mesma natureza. Na realidadepodemos converter uma na outra, como se pode ver pelo exemplo seguinte.
Imaginemos duas massas inelasticas (de plasticina, por exemplo) com momentos
mγ(1,−~v) e mγ(1, ~v),
que se deslocam na mesma direccao mas em sentidos opostos e que em dado momentocolidem, formando uma unica massa de 4-momento M(1,~0). A conservacao do 4-momento aplicada a P 0 exige que
M = 2mγ ≈ 2(m +1
2mv2),
60

ou seja, as energias cineticas das duas massas foram incorporadas na massa unica Mque apresenta um excesso de massa mv2.
Assim, e razoavel considerar massa e energia cinetica como formas de energia e iden-tificar E = mγ como a energia total da partıcula.
1.6.1 Decaimento de Partıculas
Consideremos uma partıcula livre de massa M que decai em dois fragmentos. Epossıvel escolher um sistema de coordenadas f(referencial) tal que a linha do Universoda partıcula (trajectoria do espaco-tempo) e especificada por
x1 = x2 = x3 = 0,
ou seja, podemos escolher o referencial proprio da partıcula como referencial de inercia.
Apos o decaimento a partıcula divide-se em dois fragmentos com velocidades ~v1 e ~v2 emassas m1 e m2, respectivamente,
P a = P a(1) + P a
(2),
cujas componentes sao as seguintes
P a = M(1,~0), P a(1) = (E1, ~p1), P a
(2) = (E2, ~p2),
onde para cada um dos fragmentos temos
g(P(i), P(i)) = −E2(i) + p2
(i) = −m2(i), (i = 1, 2) (1.77)
e a lei de conservacao do 4-momento exige
M = E1 + E2
~0 = ~p1 + ~p2.
Esta ultima eq. da |~p1| = |~p2|. Conjugando este resultado com (1.77) vem
E21 −m2
1 = E22 −m2
2.
Recorrendo as equacoes de conservacao podemos eliminar E1 ou E2, obtendo-se
E1 =M2 −m2
2 + m21
2M(1.78)
E2 =M2 −m2
1 + m22
2M(1.79)
A velocidade de cada fragmento obtem-se a partir
Ei =mi√1− v2
i
, i = 1, 2
61

Esta discussao mostra que o processo so e possıvel se E1 ≥ m1, o que e equivalente aexigir M ≥ m1 + m2, ou seja, o conteudo em massa-energia dos fragmentos deve sermenor do que o da partıcula original, aparecendo a diferenca sob a forma de energiacinetica da dos fragmentos.
Exemplo 2 A partıcula Λ (M = 1116 MeV ) decai num protao (massa m1 = 938 MeV )e num mesao π− (massa m2 = 140 MeV ). O protao e portanto emitido com energiaE1 = 943 MeV , e o mesao π− com energia E2 = 173 MeV .
Uma partıcula de massa M e 4-momento P a decai em duas partıculas sem massa:P a = Qa
1 + Qa2. Podemos reescrever esta equacao e formar P a −Qa
1 = Qa2. Quadrando
os dois membros desta equacao, obtemos M2 − 2PaQa1 = 0. Como P a = MUa, e Ua
e um vector unitario temporal na direccao de P a segue-se que PaQa1 = ME1 onde E1
e a energia de Qa1 medida no referencial do progenitor. Logo E1 = M/2 e igualmente
E2 = M/2.
Exemplo 3 Se um mesao π neutro (M = 135 MeV ) decai em dois fotoes segue-seque no referencial proprio do mesao π cada fotao tem energia E = 67.5 MeV .
1.6.2 Colisoes de Partıculas
No estuda da cinematica das colisoes, a tecnica mais utilizada consiste em usar coor-denadas nas quais o momento total do sistema tenha componentes espaciais nulas. Oreferencial correspondente e chamado o Referencial do Momento Zero. Duas partıculasincidentes teriam, nestas coordenadas, momentos (E1, ~p) e (E1,−~p). Existe uma ener-gia total E1+E2 disponıvel para a producao de uma, duas ou mais partıculas resultantesda colisao. Uma vez especificadas as suas massas, a lei de conservacao do 4-momentoestabelece as restricoes nas suas velocidades e, portanto, nas suas energias.
Na pratica tambem estamos interessados nas coordenadas acessıveis ao observador nolaboratorio (correspondentes ao Referencial do Laboratorio), no qual o alvo (partıcula2) esta em repouso. E e interessante calcular o valor da energia, E ′
1, da partıculaincidente nestas coordenadas.
Supondo que as partıculas tem massa m igual, temos
E1 = E2 = mγ(v), ~p = mγ(v)~v.
Para passar ao referencial do laboratorio (RL) temos de efectuar uma transformacaode Lorentz especial L(−~v), com 3-velocidade −~v. Por outras palavras, temos de noscolocar no referencial onde o alvo (partıcula 2) esta em repouso.
62

Se alinharmos as nossas coordenadas de modo que ~v = (v, 0, 0), entao a partıcula 1tem 4-momento (E, ~p) = mγ(1, v, 0, 0) e a transformacao de Lorentz sera dada por
[E ′
1
p′
]=
[γ γvγv γ
] [E1
p
]
ou seja, as componentes do 4-momento no RL sao
E ′1 = γ2m(1 + v2)
p′ = 2mγ2v
e comoE1 = mγ ⇒ γ2 = E2
1/m21
p2 = E21 −m2 = m2γ2v2 ⇒ γ2v2 = E2
1/m2 − 1,
vem
E ′1 =
2E21
m−m.
Vemos que quando E1 e grande (E1 À m) a energia E ′1 que deve ser fornecida a
partıcula incidente, medida no referencial do laboratorio, cresce com o quadrado deE1, a energia medida no referencial onde o 3-momento total e nulo, e que e a energiadisponıvel para a producao de novas partıculas. Este efeito torna o processo de obtencaode altas energias progressivamente mais difıcil. Podemos ultrapassar esta dificuldadefazendo com que os feixes de partıculas incidam frontalmente (colisao frontal), de modoque toda a energia se torna disponıvel.
Afirmamos que E1 = mγ(v) pode ser bastante maior que m. Na realidade em ex-periencias de colisoes de partıculas elementares efectuadas no laboratorio atingem-sefactores γ da ordem de 104, e nos protoes dos raios cosmicos ja se tem observadofactores γ da ordem de 1011!
Nota sobre o Referencial do Momento Zero
Dissemos que no estudo cinematico das colisoes e habitual usar coordenadas nas quaiso 4-momento total do sistema tem componentes espaciais nulas. E ao referencial queutiliza estas coordenadas chamamos referencial do momento zero (RMZ), SZM . Poroutro lado, sabemos que para um vector do tipo tempo e sempre possıvel encontrar umreferencial onde so a componente temporal desse 4-vector e diferente de zero. Portantopara assegurar a existencia do RMZ bastara provar que o 4-vector P a =
∑ni P a
(i) etemporal qualquer que seja o numero n de partıculas que constituem o sistema emestudo.
Em primeiro lugar observemos que qualquer vector V a = (V 0, ~V ), temporal ((V 0)2 >~V 2), e d.p.f. (V 0 > 0), pode exprimir-se como um multiplo positivo de um 4-vector
63

velocidade,
V a =√−g(V, V )Ua,
onde UaUa = −1.
Observe que dadas duas curvas C(τ) e C(θ(τ)), representando o mesmo caminho doespaco-tempo: C(τ) = C(θ(τ)), os seus vectores tangentes estao relacionados por
˙C(τ0) = C(θ(τ0))
(dθ
dτ
)
τ0
ou seja,
U(τ0) = V (θ0)
(dθ
dτ
)
τ0
,
com U = ˙C(τ0) e V = C(θ0), e
g(U,U) =
(dθ
dτ
)2
g(V, V ) = −1 ⇒(
dθ
dτ
)=
1√−g(V, V )
.
So uma curva parametrizada pelo tempo proprio τ tem como vector tangente um 4-vector velocidade normalizado (UaUa = −1). O 4-momento P a = mUa e claramenteum 4-vector temporal dirigido para o futuro: g(P,P) = −m2 < 0. A questao que senos coloca agora e saber se a soma de um numero arbitrario de vectores tipo tempoe ainda um vector tipo tempo. Seja V a : g(V, V ) < 0 e seja S o referencial onde ascomponentes de V a se reduzem a V a = (V 0, 0, 0, 0). O sinal da componente temporal einvariante visto que V ou “aponta”para o futuro absoluto (V 0 > 0) ou para o passadoabsoluto (V 0 < 0). Se W a e um segundo vector temporal isocrono com V a, i. e.,V 0W 0 > 0, entao temos em S
g(V + W,V + W) = (−(W 0 + V 0)2 + ~W 2
= g(V,V) + g(W,W)− 2W 0V 0 < 0.
Portanto a soma de dois vectores isocronos temporais e ainda um vector temporal eclaramente isocrono com cada uma das parcelas da soma. Por iteracao vemos que omesmo e verdadeiro para qualquer numero de vectores temporais e isocronos.
Consideremos num dado referencial S um sistema finito de partıculas, nao sujeito aforcas, com excepcao das colisoes mutuas. Definimos a sua massa efectiva total m∗, o3-momento total p e o 4-momento total P como a soma das respectivas quantidadesdas partıculas individuais,
m∗ =∑
i
m∗i , ~p =
∑
i
~pi, , P a =∑
P ai = (m∗, ~p).
Atendendo as leis de conservacao, cada uma destas quantidades mantem-se constanteno tempo para todas as colisoes. A luz da discussao anterior podemos afirmar que P e
64

um 4-vector temporal, d.p.f. Podemos portanto encontrar um referencial SMZ que semove em relacao a S com a velocidade
~uMZ = ~p/m∗, (1.80)
no qual P nao tem componentes espaciais, i. e., ~pMZ = ~0. E claro que SMZ e o jadesignado referencial do centro do momento. E tambem um referencial onde ocentro de massa do sistema esta em repouso. Note porem, que se por massa enten-dermos a massa efectiva (relativista), m∗, o centro de massa de um sistema dependedo referencial. Mas como se mostra facilmente todos os centros de massa estao emrepouso em SMZ . Por isso e natural definir o centro de massa do sistema como o seucentro de massa em SMZ .
Seja UaMZ o 4-vector velocidade do SMZ , cujas componentes em S sao
UaMZ = γ(uMZ)(1, ~uMZ).
Entao, de acordo com (1.80), para o 4-momento vem
P a = (m∗, ~p) = m∗(1, ~uMZ)
= m∗γ−1(uMZ)UaMZ .
Este vector devera ter uma norma invariante e como UaMZ e um vector velocidade:
g(U,U) = −1, m∗γ−1 deve ser um invariante cuja valor e a massa total do sistema emSMZ ,
m∗γ−1 = mMZ ,
e assim,P a = mMZUa
MZ .
Esta equacao mostra que mMZ e UaMZ representam para o sistema o que m e Ua sao
para uma unica partıcula. Sao as quantidades que reconhecerıamos como a massa (emrepouso) e a 4-velocidade do sistema se nao tivessemos conhecimento da sua naturezacomposta. Como a energia cinetica em SMZ e dada por
TMZ = (mMZ − m),
onde m =∑
i mi e a massa (em repouso) do sistema, vemos que a massa efectiva dosistema excede a massa m que e a soma das massas dos componentes.
1.7 Forca e Aceleracao em RR
Vamos agora introduzir o 4-vector forca, f , que se define pela equacao
f =dP
dτ, (1.81)
65

ou pelas suas componentes
fa =dP a
dτ= m
dUa
dτ,
se se consideram partıculas com massa (propria) m constante3. Neste caso, podemosescrever f c = mac, onde ac = dU c/dτ e o 4-vector aceleracao. Usando o facto deUaUa = −1, facilmente se verifica que ac e um 4-vector espacial, ortogonal a U c:
ηabUaab = 0, ηcba
cab > 0;
e, portanto, g(f, U) = 0.
O exemplo mais simples de uma forca na fısica newtoniana e a forca devida ao campogravıtico. Porem, em relatividade, a gravidade nao e descrita por uma forca, maspela curvatura do proprio espaco-tempo. E, por isso, preferıvel recorrer ao campoelectromagnetico. A forca de Lorentz 3-dimensional e dada por
~f = q(~E + ~v × ~B
),
onde q e a carga da partıcula. Com a introducao do campo electromagnetico deMaxwell-Faraday, descrito pelo tensor anti-simetrico Fab = ∂aAb − ∂bAa, onde Aa =(V, ~A) e um co-vector construıdo a partir do potencial escalar V (x, y, z, t) e do poten-
cial vector ~A(x, y, z, t), veremos mais adiante que e possıvel a generalizacao tensorialda forca de Lorentz, dando-lhe a forma seguinte
fa = qU bF ab . (1.82)
Num diagrama de Minkowski, o caminho duma partıcula acelerada e descrito por umacurva onde em cada ponto Ua e um vector tangente, dirigido segundo o eixo dos temposdo referencial proprio instantaneo da partıcula; o vector aceleracao ac e ortogonal aU c e esta assente no hiper-plano espacial de simultaneidade do observador inercialinstantaneamente em repouso em relacao a partıcula.
As componentes de f num referencial de Lorentz arbitrario podem exprimir-se emfuncao das componentes de P a = (E, ~p),
fa =dt
dτ
dP a
dt= γ(v)
d
dt(E, ~p) = γ(v)
(dE
dt, ~f
), (1.83)
onde a 3-forca relativista ~f e obtida do 3-momento ~p = mγ(v)~v como na segunda leide Newton
~f =d~p
dt=
d
dt
(m~v√1− v2
). (1.84)
Esta definicao nao tem, contudo, nenhum conteudo fısico enquanto nao forem especi-ficadas todas as propriedades da forca ~f . Entre as propriedades da forca, que figuram
3No caso de uma nave espacial, queimando uma parte do seu combustıvel para se deslocar, ja naoe possıvel fazer m = const.
66
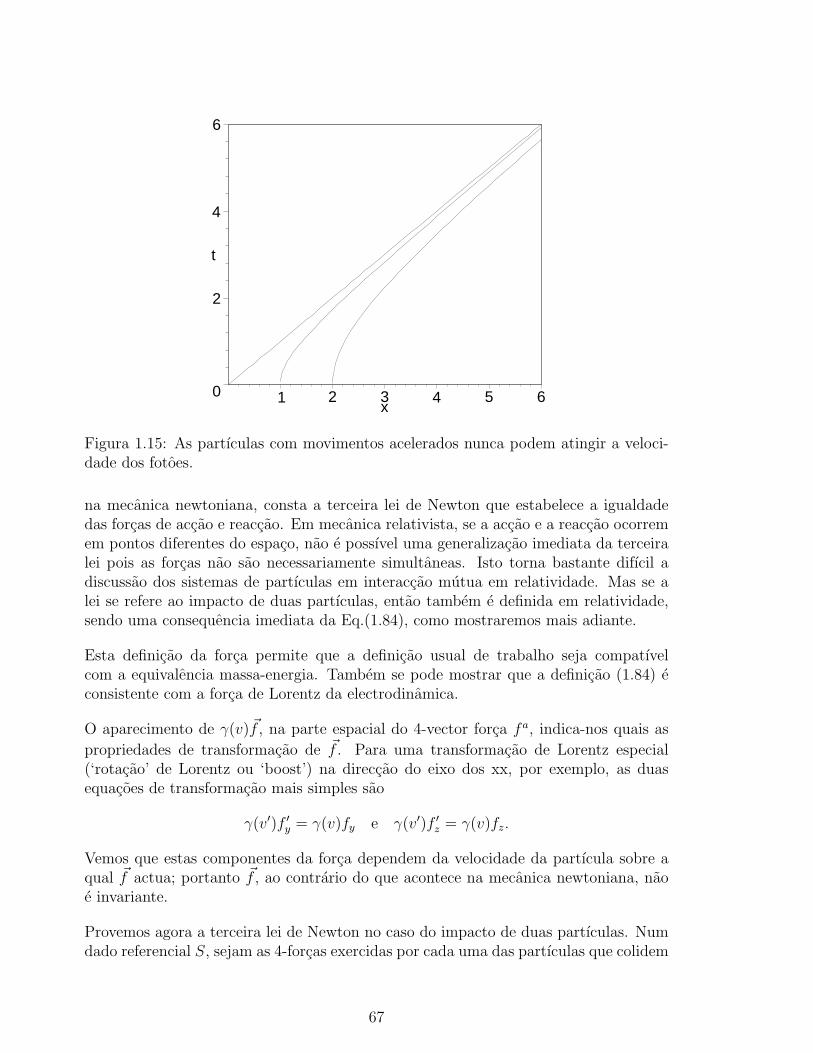
0
2
4
6
t
1 2 3 4 5 6x
Figura 1.15: As partıculas com movimentos acelerados nunca podem atingir a veloci-dade dos fotoes.
na mecanica newtoniana, consta a terceira lei de Newton que estabelece a igualdadedas forcas de accao e reaccao. Em mecanica relativista, se a accao e a reaccao ocorremem pontos diferentes do espaco, nao e possıvel uma generalizacao imediata da terceiralei pois as forcas nao sao necessariamente simultaneas. Isto torna bastante difıcil adiscussao dos sistemas de partıculas em interaccao mutua em relatividade. Mas se alei se refere ao impacto de duas partıculas, entao tambem e definida em relatividade,sendo uma consequencia imediata da Eq.(1.84), como mostraremos mais adiante.
Esta definicao da forca permite que a definicao usual de trabalho seja compatıvelcom a equivalencia massa-energia. Tambem se pode mostrar que a definicao (1.84) econsistente com a forca de Lorentz da electrodinamica.
O aparecimento de γ(v)~f , na parte espacial do 4-vector forca fa, indica-nos quais as
propriedades de transformacao de ~f . Para uma transformacao de Lorentz especial(‘rotacao’ de Lorentz ou ‘boost’) na direccao do eixo dos xx, por exemplo, as duasequacoes de transformacao mais simples sao
γ(v′)f ′y = γ(v)fy e γ(v′)f ′z = γ(v)fz.
Vemos que estas componentes da forca dependem da velocidade da partıcula sobre aqual ~f actua; portanto ~f , ao contrario do que acontece na mecanica newtoniana, naoe invariante.
Provemos agora a terceira lei de Newton no caso do impacto de duas partıculas. Numdado referencial S, sejam as 4-forcas exercidas por cada uma das partıculas que colidem
67

dadas por
fa(i) = γ(vi)
(dEi
dt, ~fi
), (i = 1, 2).
Quando as partıculas estao em contacto: v1 = v2 e, atendendo a conservacao de energia
d
dt(E1 + E2) = 0.
Portanto, a componente temporal de fa1 + fa
2 anula-se em S e, pelo mesmo argumento,em todos os referenciais inerciais, pois a conservacao da energia deve verificar-se emtodos os referenciais inerciais. Sendo assim, conclui-se que f1 + f2 = 0, porque um4-vector que tem uma componente nula em todos os referenciais, e identicamente nulo,i.e., tem todas as suas componentes nulas. Logo, ~f1 + ~f2 = ~0, o que prova a terceiralei de Newton nas condicoes referidas.
Observe que esta lei foi demonstrada a partir da conservacao da energia-momento,exactamente ao contrario do que se faz em mecanica newtoniana.
Se considerarmos unicamente partıculas com massa (propria) m constante no tempo,sabemos que g(f, U) = 0 e, portanto
f 0 = γ(v)~v · ~f,
ou seja, as componentes de fa podem escrever-se
fa = γ(v)(~v · ~f, ~f
), (1.85)
donde se conclui tambem quedE
dt= ~f · ~v. (1.86)
Podemos entao adoptar a definicao habitual de trabalho, e constatar que tambem emRR o trabalho elementar dW realizado por uma forca ~f ao deslocar o seu ponto deaplicacao segundo d~r e dado por
dW = ~f · d~r = ~f · ~vdt = dE.
Este resultado e outra manifestacao da equivalencia entre massa e energia, e da suaintegracao sai a energia cinetica:
T = E −m =m√
1− v2−m. (1.87)
Voltando a Eq.(1.84) vemos que ~f tem dois termos
~f = mγd~v
dt+
d
dt(mγ)~v = γ(v)m~a +
(~f · ~v
)~v. (1.88)
68

Assim, embora ~f , ~a e ~v sejam complanares, a aceleracao nao e em geral paralela a forcaque a produz. Ha, no entanto, duas situacoes em que o e, quando ~f e ortogonal ouparalela a ~v. Em particular, no referencial proprio da partıcula: ~f = m~a.
Se ~n e um 3-vector unitario perpendicular a ~v (dirigido para o centro de curvatura
da trajectoria espacial descrita pela partıcula), podemos escrever as componentes de ~fparalela, f‖, e normal, f⊥, a velocidade ~v de acordo com
f‖ = ~f · ~vv, f⊥ = ~f · ~n.
Podemos decompor a Eq.(1.88) em
f‖ = γ(v)ma‖ + f‖v2, f‖ = mγ3(v)a‖,
ef⊥ = mγ(v)a⊥,
onde a‖ e a⊥ sao, respectivamente, as componentes paralela e normal de ~a em relacaoa ~v.
Tudo se passa como se a partıcula em movimento oferecesse diferentes resistencias amesma forca, conforme esta actua longitudinal ou transversalmente a velocidade. Poresta razao era costume introduzir os conceitos de massa “longitudinal”: ml = γ3(v)me massa “transversal”: mt = γ(v)m, mas estas designacoes caıram em desuso e naoha razao para lhes atribuirmos qualquer significado fısico especial, tanto mais queo conceito de massa se identifica com o que vulgarmente se designa por “massa emrepouso”ou “massa propria”, m, o unico conceito de massa invariante e caracterısticode cada partıcula.
Para terminar, notemos ainda que multiplicando os dois membros de (1.88) por ~v,
obtemos ~f · ~v(1− v2) = mγ~a · ~v, o que nos permite re-escrever a Eq.(1.88) da seguinteforma
~f = mγ~a + mγ3 (~a · ~v)~v, (1.89)
que mostra que se ~v e constante em modulo, i.e., se ~v · ~a = o, entao ~f = mγ~a e,portanto, ~f · ~v = 0, tal como acontece na mecanica newtoniana.
Exercıcio 15 Tendo em atencao a definicao a = du/dτ , mostre que as componentesda aceleracao num referencial de Lorentz arbitrario sao da forma
ac = γ2(γ2~a · ~v,~a + γ2(~a · ~v)~v
),
em particular, no referencial proprio instantaneo da partıcula ac = (0,~a) e, portanto,acac = ~a · ~a = a2.
69

Exercıcio 16 Partindo das componentes do 4-vector forca
f c = γ(v)(~f · ~v, ~f
)
mostre que as componentes da 3-forca se transformam de acordo com as seguintesexpressoes
f ′x =fx − u(~v · ~f)
1− vxu
f ′y =fy
γ(u) (1− vxu)
f ′z =fz
γ(u) (1− vxu)
numa transformacao de Lorentz especial com velocidade u segundo o eixo dos xx.
Exercıcio 17 Por derivacao da lei de transformacao das componentes da 3-velocidade(vx, vy, vz), mostrar que as componentes da 3-aceleracao ~a se transformam de acordocom as expressoes
ax = K3a′x, K =
√1− u2
1 + uv′x
ay = K2
[a′y −
v′yu
1 + uv′xa′x
]
az = K2
[a′z −
v′zu1 + uv′x
a′x
](1.90)
numa transformacao de Lorentz especial segundo o eixo dos xx.
Note que ~a nao depende so de ~a ′ mas tambem de ~v ′, i.e., a um movimento unifor-memente acelerado em S ′ (~a ′ =
−−−→const., ~v ′ = ~a ′t′) nao corresponde a um movimento
uniformemente acelerado em S. Portanto, ao contrario da mecanica newtoniana, oconceito de movimento uniformemente acelerado depende do referencial.
1.7.1 Aceleracao Propria
Seja S o referencial do Laboratorio e consideremos um ponto P(t, ~r) da linha do Uni-verso duma partıcula material acelerada em relacao a S. Seja S0 o referencial inercialdum observador O, instantaneamente em repouso em relacao a partıcula no pontoP(t, ~r).
70

A velocidade de S0 em relacao a S e ~u = ~v(t), i.e., ~u =−−−→const. e igual a velocidade
da partıcula em relacao a S no instante t. Representemos por ~a0 a velocidade dapartıcula em S0. A mecanica relativista devera reduzir-se a mecanica newtonianaquando v ¿ 1. Assim, o observador O ligado ao referencial S0 podera aplicar as leisda mecanica newtoniana para determinar a aceleracao no ponto P(t, ~r) de S, i.e., naorigem do seu referencial, onde a lei fundamental da dinamica newtoniana permiteescrever: ~f0 = m~a0.
Conhecendo o valor da aceleracao no referencial comovel S0, ou seja, ~a0, podemosdeterminar ~a em S por intermedio das formulas (1.90), tendo em atencao que: S ′ ≡S0, ~v
′ = ~v0 = ~0 e ~v = ~u; neste caso K reduz-se a√
1− u2 = γ−1(u), e vem
ax = a0x(1− u2)3/2,
ay = a0y(1− u2),
az = a0z(1− u2). (1.91)
Estas formulas sao validas para um ponto P da linha do Universo da partıcula, e acada ponto P e preciso fazer corresponder um referencial S0 diferente, mas com oseixos semelhantemente orientados a S, e escolhidos de tal modo que a velocidade dapartıcula, ~v, esteja dirigida segundo o eixo dos xx.
Se nos restringirmos a um movimento unidireccional, por exemplo, ao longo do eixodos xx, podemos definir a aceleracao propria da partıcula, a = a0x, como sendo aaceleracao da partıcula em relacao ao seu referencial instantaneamente comovel,
a = (1− v2)−3/2dv
dt, (1.92)
sendo dv/dt a aceleracao da partıcula em relacao ao referencial do laboratorio. Dadosdois referenciais inerciais S e S ′, tais que a direccao do movimento relativo coincidacom a da partıcula, tem-se
(1− v2)−3/2dv
dt= (1− v′2)−3/2dv′
dt′.
Movimento Hiperbolico
Consideremos um nave espacial que parte da Terra numa direccao que tomamos comoo eixo dos xx do referencial ligado a Terra, com uma aceleracao propria constantea = α e mantendo uma trajectoria rectilınea. No instante inicial t = 0, medido em S(referencial inercial ligado a Terra), temos: x = 0, v = 0, e a = α. Ao fim de um certotempo t temos
a =dv
dt= α
(1− v2
)3/2
71

ou seja,dv
(1− v2)3/2= αdt, 0 ¿ v < 1,
onde v e a velocidade em S do referencial inercial instantaneamente comovel com apartıcula.
Fazendo a substituicao de variaveis: v = tanh φ, a Eq. anterior toma a forma
cosh φdφ = αdt,
cuja integracao dasinh φ = αt,
atendendo as condicoes iniciais.
Para encontrar as equacoes parametricas da curva descrita pela partıcula no espaco-tempo de Minkowski, devemos obter agora x em funcao do parametro φ. Como dx/dt =tanh φ, vem
dx = tanh φα−1 cosh φdφ,
o que da lugar acosh φ = αx + 1,
atendendo novamente as condicoes iniciais (x = 0, φ = 0).
As equacoes parametricas do movimento de uma partıcula acelerada, com aceleracaopropria constante α, sao
t = α−1 sinh φ,
x = α−1 (cosh φ− 1) . (1.93)
O sistema de Eqs.(1.93) representa uma hiperbole no espaco-tempo de Minkowski.Quando t → ∞ (φ → ∞, tanh φ → 1) : v → 1. Para velocidades v ¿ 1, i.e., φ ¿ 1temos
x ' φ2
2α, t ' φ
α,
logo
x ' 1
2αt2,
que e o movimento parabolico que se esperava.
Voltando ao sistema de Eqs. (1.93), e fazendo uma translacao da origem
x 7→ x = x +1
α
podemos escrever as equacoes parametricas na forma seguinte
t = α−1 sinh φ,
x = α−1 cosh φ. (1.94)
72

Nestas novas coordenadas inerciais, a equacao que descreve a curva do espaco-tempodo nave espacial com aceleracao propria α obtem-se por eliminacao do parametro φ
x2 − t2 =1
α2.
CBA
–8
–6
–4
–2
0
2
4
6
8
ct
–8 –6 –4 –2 2 4 6 8x
Figura 1.16: Movimentos Hiperbolicos para os valores de α = 1/2, 1/3, 1/6 ano−1,respectivamente para os ramos de hiperbole A,B, C.
Trata-se da equacao de uma hiperbole, como se ve na figura junta, com assımptotasx = ±t, correspondentes as linhas do Universo dos fotoes. Neste sentido, diz-se que aaceleracao propria dos fotoes e α = ∞.
Vejamos agora qual o significado do parametro φ. Mostremos que e proporcional aotempo proprio τ do nave espacial
dτ = dtγ−1(v) = dt√
1− v2,
se o relogio de bordo da nave espacial marca τ = 0 quando t = 0, vem
τ =∫ t
0dt√
1− v2 =∫ φ
0
1
αdφ = α−1φ.
73

Coordenadas de Rindler
As coordenadas (inerciais) dum observador sujeito a uma aceleracao propria constanteα na direccao do eixo dos xx do referencial de Lorentz S sao
t = α−1 sinh(ατ),
x = α−1 cosh(ατ).
Definindo X = α−1 e T = φ = ατ , podemos escrever
t + x = X exp(T )
t− x = −X exp(−T ),
e, portanto, t2 − x2 = −X2, como ja era conhecido. Diferenciando as expressoesanteriores facilmente se obtem
−dt2 + dx2 = −X2dT 2 + dX2, (1.95)
onde X =√
x2 − t2, 0 < X < ∞ e T = tanh−1(t/x), −∞ < T < ∞. (T,X) saoas coordenadas de um observador com aceleracao propria constante (algumas vezesdesignado observador ‘uniformemente‘ acelerado). Note que a coordenada T e do tipotempo, enquanto que X e do tipo espaco.
T = ατ = const. ⇒ t
x= const.
X = 0 (α = ∞) ⇒ x = ±t.
No diagrama de Minkowski da figura junta, os pontos A, B e C estao todos a mesmadistancia da origem (acontecimento O). A todos eles corresponde a mesma coordenadaX = constante. Sao pontos da linha do Universo de um observador com aceleracaopropria constante α = 1/X.
As coordenadas (T, X) chama-se, por vezes, coordenadas de Rindler. Vejamos queeste sistema de coordenadas curvilıneas nao cobre todo o espaco-tempo de Minkowski.Para isso consideremos dois observadores O1 e O2, sendo o primeiro um observadorinercial e o segundo um observador com aceleracao propria constante. As respectivaslinhas do Universo estao representadas na figura seguinte. De inıcio (t = 0) O1 naopode ver O2. So a partir do instante correspondente ao acontecimento B, O1 comecaa receber as primeiras informacoes sobre a “historia”de O2. Por sua vez O1 pode darsinal da sua presenca ao seu companheiro O2 se lhe enviar sinais luminosos antes doacontecimento A. Apos esse instante O1 torna-se invisıvel para O2. Entre A e B oobservador inercial O1 nao pode enviar nem receber qualquer sinal para ou de O2. Porseu lado, o observador acelerado O2 pode enviar sinais para o seu colega inercial O1
em qualquer instante, mas esta limitado a historia de O1 anterior a A, e os seus sinaisso chegam a O1 apos o acontecimento B, como ja se disse.
74

O conjunto de acontecimentos do espaco-tempo que definem uma fronteira a partir daqual uma determinada regiao do espaco-tempo deixa de ser acessıvel a um observadorou famılia de observadores chama-se um horizonte de acontecimentos. Geralmente,aparecem horizontes de acontecimentos se, ao longo do caminho de um certo observa-dor, os cones do luz do passado ou os cones de luz do futuro nao cobrem todas asregioes do espaco-tempo. No caso do espaco-tempo plano de Minkowski, os cones deluz associados com qualquer observador inercial cobrem de facto todo o Universo deMinkowski. Dado que os cones de luz do passado, associados a um observador inercial,tem esta propriedade de cobertura, um tal observador sera capaz de ver, mais cedoou mais tarde, todo e qualquer acontecimento onde quer que tenha lugar e indepen-dentemente de quando ocorreu. Igualmente, como os cones de luz do futuro de umobservador inercial cobrem todo o Universo, um tal observador pode ser visto a partirde qualquer posicao e em qualquer instante.
No caso do observador O2, os seus cones de luz do passado ou do futuro nao cobremtodo o espaco-tempo, como mostram as figuras juntas; portanto, o observador acelera-do nao pode ver tudo e, por sua vez, pode tornar-se invisıvel para outros observadoresacelerados. As linhas de luz x = ±t dividem o espaco-tempo de Minkowski em quatroquadrantes: I, II, III e IV. Para o observador acelerado com aceleracao propria cons-tante, a viajar no quadrante I, os acontecimentos do quadrante III sao completamenteinacessıveis: nao pode enviar sinais para la nem receber sinais de la. Pode, no entanto,receber sinais de IV e enviar sinais para II. Mas nao pode receber sinais de II nem en-viar sinais para IV. As duas regioes I e III definidas, respectivamente, pelos caminhosdas partıculas para as quais x > 0 e x < 0, sao completamente desconexas: nenhumobservador uniformemente acelerado, cujo caminho e uma das hiperboles da regiao I,recebe qualquer informacao sobre as partıculas da regiao III. Pois nao ha nenhum raioluminoso que possa interceptar simultaneamente um dos caminhos da regiao III e umoutro da regiao I.
Voltemos a metrica 2-D (1.95)
ds2 = −dt2 + dx2 = −X2dT 2 + dX2.
Escrita em coordenadas de Rindler a metrica de Minkowski deixa de ser constante,embora continue a representar um espaco-tempo plano, e seja estatica pois nao dependede T ,
ηab =
[−X2 0
0 1
],
desde que se continue a usar uma base coordenada. Mas estas coordenadas so saovalidas nos quadrantes I e III. Ainda assim, e possıvel recorrer a uma base o.n. decovectores e re-encontrar a forma de Minkowski
η = ηabdxa ⊗ dxb = ηabωa ⊗ ωb, (a, b = 1, 2),
com ω0 = XdT, ω1 = dX, mas pagando o preco inerente a utilizacao de 1-formasnao-exactas. A base dual de vectores e0, e1 obtem-se imediatamente a partir do
75

conhecimento dos covectores ωa e da relacao
< ωa, eb >= δab.
Ou ainda, como na base coordenada as componentes da metrica sao dadas por
η00 = g(
∂∂T
, ∂∂T
)= −X2
η01 = g(
∂∂T
, ∂∂X
)= 0
η11 = g(
∂∂X
, ∂∂X
)= 1.
Na base nao-coordenada temos
e0 =1
X
∂
∂T
e1 =∂
∂X. (1.96)
As linhas do Universo das partıculas uniformemente aceleradas verificam X = const.e T a variar continuamente. O tempo proprio de uma dessas partıculas e dado por
τ =∫ τ
0dτ = X
∫ T
0dT = XT,
pois X e constante ao longo desse caminho.
Referencial movel transportada por um observador uniforme-mente acelerado
A partir da questao anterior e facil construir um conjunto de vectores base que consti-tuem uma tetrada o.n., transportada por um observador com aceleracao propria cons-tante. Esta tetrada e uma versao infinitesimal de um sistema de coordenadas a quechamamos “referencial movel de Cartan”, ou conjunto de vectores base: e0, e1, e2, e3.Seja o eixo dos tempos deste sistema de coordenadas coincidente com o eixo dos tem-pos do referencial inercial onde a partıcula esta instantaneamente em repouso. Assim,e0 ≡ u, e u e o 4-vector velocidade do observador. Os eixos espaciais e2 e e3 nao saoafectados por uma transformacao de Lorentz na direccao de e1. Portanto, tomemos e2
e e3 os vectores base o.n. do referencial de Lorentz global, i.e., e2 = e2 e e3 = e3, emrelacao ao qual o movimento hiperbolico e descrito pelas equacoes
xa (Γ(τ)) ≡
t = g−1 sinh gτ, y = yx = g−1 cosh gτ, z = z.
(1.97)
O vector base e1, ortogonal aos outros tres, e paralelo ao 4-vector aceleracao: e1 = g−1a.
Note que no referencial de Lorentz global o 4-vector velocidade U e dado por
U = Uaea =dxa
dτea = cosh(gτ)e0 + sinh(gτ)e1, (1.98)
76

e o 4-vector aceleracao por
a =dUa
dτea = g sinh(gτ)e0 + g cosh(gτ)e1,
de modo que os 4 vectores base que constituem a tetrada tem as seguintes componentesna base ea
(e0)a = (cosh gτ, sinh gτ, 0, 0)
(e1)a = (sinh gτ, cosh gτ, 0, 0)
(e2)a = (0, 0, 1, 0)
(e3)a = (0, 0, 0, 1)
(1.99)
E interessante observar que os ea constituem uma base coordenada (global). Omesmo ja nao acontece com os vectores ea, que constituem uma base nao-coordenada,como se viu no paragrafo anterior. Efectivamente,
∂
∂T=
dt
dT
∂
∂t+
dx
dT
∂
∂x= X (cosh Te0 + sinh Te1) ,
ou seja,
e0 =1
X
∂
∂T= cosh Te0 + sinh Te1.
Em resumo, podemos caracterizar o referencial movel ea da seguinte maneira: o eixodos tempos e0 e o 4-vector velocidade do observador acelerado, e0 ≡ u, de modoa garantir que este permaneca em repouso, em cada instante, no seu referencial; osoutros tres vectores sao escolhidos de modo que a tetrada seja: i) ortonornada, e ii)nao-rotativa. A primeira condicao e entendida como significando
ea · ec = g (ea, ec) = ηac. (1.100)
Para satisfazer a segunda condicao procedemos do seguinte modo: parte-se do referen-cial de Lorentz global ea e aplicamos-lhe uma “rotacao”de Lorentz no plano (x0, x1),ou seja, uma transformacao de Lorentz, sem rotacao espacial, na direccao x1, de talmodo que e0 fica coincidente com o 4-velocidade do observador acelerado. Esta trans-formacao de Lorentz define simultaneamente e0 e e1; quanto aos restantes teremose2 = e2 e e3 = e3, o que e, alias, tambem uma consequencia da mesma transformacaode Lorentz.
Transporte de Fermi-Walker
Vamos agora considerar um observador, ou um objecto, cuja aceleracao, embora finita,varia arbitrariamente com o tempo. Tambem aqui vamos impor tres criterios na defi-nicao do referencial movel ou tetrada: i) os vectores base da tetrada devem permanecerortonormados, de acordo com a Eq. (1.100); ii) os vectores base devem ser tais que
77

formem um referencial proprio, onde o observador se encontra em repouso em cadainstante, i.e., e0 = u; iii) o referencial deve ser nao-rotativo.
Vamos discutir este ultimo criterio com um certo pormenor, aproveitando para escla-recer alguns aspectos da rotacao no espaco-tempo 4-D. Em primeiro lugar, os vectoresbase do referencial movel, num dado instante de tempo proprio τ , estao relacionadoscom os vectores base ea dum referencial inercial (global) por uma transformacao deLorentz: ea = L b
a eb. O que permite concluir que os vectores base em dois instantessucessivos devem estar relacionados tambem por uma transformacao de Lorentz. Comoe sabido, uma TL pode ser concebida como uma “rotacao”no espaco-tempo. Sendo oobservador acelerado, o seu 4-vector velocidade muda de direccao constantemente noespaco-tempo. As diferentes direccoes de u definem diferentes eixos temporais paraa tetrada; logo, esta “rotacao”do eixo dos tempos e uma consequencia inevitavel daaceleracao. O que significa afirmar que a tetrada deve ser nao-rotativa? Entende-secom isto que a unica rotacao permitida e aquela que exigida pela variacao de u = e0
com o tempo proprio.
A semelhanca do que se faz com o espaco ordinario 3-D, vamos definir uma rotacao deum vector arbitrario no espaco-tempo por intermedio de um tensor anti-simetrico Ω,atraves da seguinte relacao entre componentes
dXa
dτ= ΩabXb, Ωab = −Ωba. (1.101)
Esta rotacap generalizada deixa o comprimento do 4-vector Xa invariante
d
dτ(XaXa) = 2
dXa
dτXa = 2ΩabXbXa = 0.
Deve observar-se que o tensor anti-simetrico Ω representa uma TL infinitesimal, etem 4 × 3/2 = 6 componentes independentes. Este numero coincide com o numerode componentes de uma TL finita (tres parametros para rotacoes nos planos Xi, Xj)e tres “rotacoes”nos planos (X0, Xi). Mas aqui estamos interessados em que a TLinfinitesimal Ω seja capaz de originar uma TL adequada no plano temporal definidopela velocidade U c e pela a aceleracao ac, i.e., o plano (u, a), com exclusao de rotacoesem quaisquer outro plano, nomeadamente nos planos do tipo espaco. A resposta quesatisfaz esta exigencia e dada por
Ω = U ∧ a := (U ⊗ a− a⊗ U) , (1.102)
que e um tensor anti-simetrico de segunda ordem cujas componentes sao
Ωbc = U bac − abU c.
Aplicando esta rotacao a um vector ωa, ortogonal a U b e ac : g(ω, u) = g(ω, a) = 0,ve-se imediatamente que
Ωbcωc = 0,
o que mostra a ausencia de rotacao espacial no plano (x2, x3).
78

Exercıcio 18 Mostre que ωc deve ser um vector do tipo espaco.
Se aplicarmos a transformacao infinitesimal de Lorentz Ωab ao 4-vector velocidade U c,obteremos
dUa
dτ= Ωabub = (Uaab − aaU b)ub = aa,
atendendo a que g(u, a) = 0 e g(u, u) = −1.
Quando um vector X e submetido a uma transformacao infinitesimal de Lorentz defi-nida por
dXa
dτ= ΩabXb = (Uaab − aaU b)Xb, (1.103)
diz-se que X sofreu um transporte de Fermi-Walker ao longo da linha do Universodo observador. Voltaremos a este conceito mais adiante para o generalizar a um espaco-tempo curvo.
Um referencial movel, associado a um observador acelerado, e constituıdo por 4 vectoresbase ea o.n. (i.e., g (ea, ec) = ηac), sendo cada um deles transportado a Fermi-Walkerao longo da linha do Universo do observador, ou seja
dea
dτ= (U ⊗ a− a⊗ U) · ea = U (a · ea)− a (U · ea) ,
sendo e0 ≡ U a 4-velocidade do observador.
No caso geral, uma transformacao de Lorentz infinitesimal inclui rotacoes espaciais,podendo ser representada por
Ω = U ⊗ a− a⊗ U + ω,
ou em componentes,Ωab = Ua ⊗ ab − aa ⊗ U b + ωab,
onde ωab = −ωba e ωabUb = 0. Com estas restricoes o tensor ωab tem so tres componen-tes independentes, tal como um tensor anti-simetrico de segunda ordem num espaco3-D; representa, portanto, uma rotacao espacial pura,
ωab = εabcdUcωd, ωa =1
2εabcdUbωcd.
Portanto, no caso geral, a transformacao de Lorentz infinitesimal depende de seisparametros: 3 rotacoes espaciais e 3 “boosts”.
79
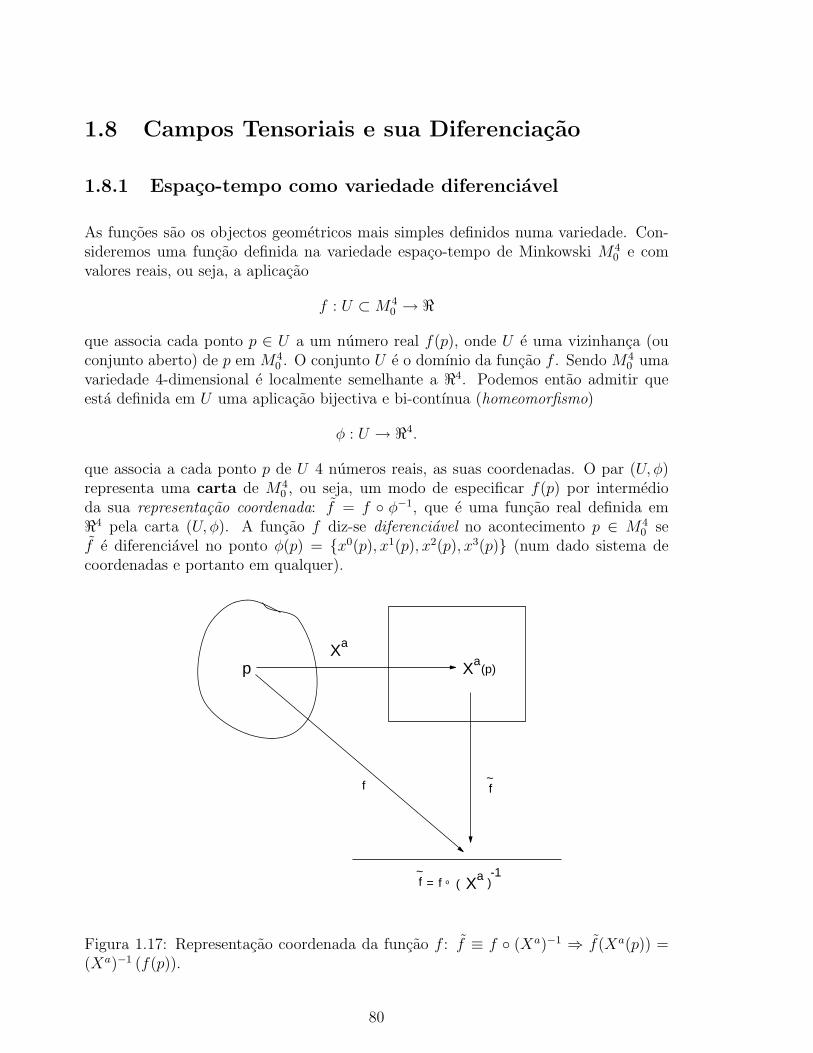
1.8 Campos Tensoriais e sua Diferenciacao
1.8.1 Espaco-tempo como variedade diferenciavel
As funcoes sao os objectos geometricos mais simples definidos numa variedade. Con-sideremos uma funcao definida na variedade espaco-tempo de Minkowski M4
0 e comvalores reais, ou seja, a aplicacao
f : U ⊂ M40 → <
que associa cada ponto p ∈ U a um numero real f(p), onde U e uma vizinhanca (ouconjunto aberto) de p em M4
0 . O conjunto U e o domınio da funcao f . Sendo M40 uma
variedade 4-dimensional e localmente semelhante a <4. Podemos entao admitir queesta definida em U uma aplicacao bijectiva e bi-contınua (homeomorfismo)
φ : U → <4.
que associa a cada ponto p de U 4 numeros reais, as suas coordenadas. O par (U, φ)representa uma carta de M4
0 , ou seja, um modo de especificar f(p) por intermedioda sua representacao coordenada: f = f φ−1, que e uma funcao real definida em<4 pela carta (U, φ). A funcao f diz-se diferenciavel no acontecimento p ∈ M4
0 sef e diferenciavel no ponto φ(p) = x0(p), x1(p), x2(p), x3(p) (num dado sistema decoordenadas e portanto em qualquer).
pX a
f
X a(p)
f o
f~
f~
= X a( )-1
Figura 1.17: Representacao coordenada da funcao f : f ≡ f (Xa)−1 ⇒ f(Xa(p)) =(Xa)−1 (f(p)).
80

1.8.2 Funcoes e gradientes de funcoes. Bases duais
O diferencial df (ou “gradiente”) de uma funcao diferenciavel e um caso especial decovector (ou 1-forma). Nos textos de analise elementar, o diferencial df e definido comorepresentando “uma variacao infinitesimal da funcao f(x)”associada a um deslocamentoinfinitesimal do ponto x; mas o deslocamento de x, embora infinitesimal e deixadoarbitrario. Assim, df representa uma variacao de f numa direccao nao especificada.E claro que se f e funcao de uma so variavel real, a direccao esta imediatamentedeterminada.
Ao identificarmos df com um covector estamos implicitamente a admitir a existenciade uma aplicacao linear,
df : TpM → <o que nos leva a seguinte
Definicao 12 O valor de df sobre Up ∈ TpM , isto e, a imagem do vector tangente Up
por intermedio da aplicacao linear df , e igual a derivada dirigida de f segundo Up
df(U)(p) =< df, U >p:= ∂Upf. (1.104)
Em componentes temos, se Up e um vector tangente no ponto p,
< df, Up >= ∂Uf = Uap
(∂f
∂xa
)
φ(p)
,
o que mostra que as componentes do covector df no ponto p ∈ M sao dadas por
dfa(p) =
(∂f
∂xa
)
φ(p)
.
Sendo Ua as componentes do vector tangente Up na base coordenada ∂a = ∂/∂xa, a =0, 1, 2, 3 entao
< df, U >p= df(U)(p) = Uadf(∂a) = Ua
(∂f
∂xa
)
φ(p)
isto e,∂f
∂xa=< df,
∂
∂xa> .
No que se segue nao faremos distincao entre f e f . Tal como dissemos que (1.104) daa derivada dirigida segundo U tambem podemos interpretar esta ultima equacao comoas derivadas dirigidas da funcao f segundo os vectores tangentes aos eixos coordenados∂/∂xa.
81

E necessario verificar se esta definicao da sempre o mesmo covector, independentementedo sistema de coordenadas. Num outro sistema x′ terıamos
∂f
∂xb=
∂xa′
∂xb
∂f
∂xa′ (1.105)
Mas no espaco-tempo de Minkowski a transformacao de coordenadas reduz-se a trans-formacao de Lorentz entre dois referenciais inerciais: xa′ = La′
bxb e, portanto
∂xa′
∂xb= La′
b,
ou seja, podemos escrever∂f
∂xb= La′
b
∂f
∂xa′ (1.106)
que e a lei de transformacao das componentes de um covector.
Podemos aplicar estas mesmas ideias as 4 funcoes coordenadas xa(p) e formar os co-vectores
dx0, dx1, dx2, dx3.
Tal como as componentes do covector df eram
(df)b =∂f
∂xb=< df, ∂b >,
tambem as componentes de dxa sao dadas por
(dxa)b =∂xa
∂xb=< dxa, ∂b >= δa
b. (1.107)
Podemos escrever as componentes dos covectores dxa sob a forma de matrizes-linha
dx0 =(
1 0 0 0)
dx1 =(
0 1 0 0)
dx2 =(
0 0 1 0)
dx3 =(
0 0 0 1)
A Eq. (1.107) mostra que os covectores dxa sao linearmente independentes e, por-tanto, formam uma base no espaco co-tangente T ∗
p M tal como os ∂/∂xa formam umabase (coordenada) em TpM . Se α ∈ T ∗
p M e uma 1-forma, entao podemos escreve-lacomo uma combinacao linear dos covectores dxa, isto e
α = αcdxc. (1.108)
Esta expressao e perfeitamente consistente com a Eq. (1.107), pois sendo α umaaplicacao linear vem
< α, ∂b >= αa < dxa, ∂b >= αb.
82

As duas bases dxa e ∂/∂xa, para as quais se verifica a relacao (1.107), dizem-seduais uma da outra. Sao ambas bases coordenadas de T ∗
p M e TpM , respectivamente.
Na base coordenada o covector escreve-se
df =
(∂f
∂xb
)dxb = f,adxa, (1.109)
o que esta de acordo com a ideia de gradiente de uma funcao (grad f) do calculoelementar, pois as componentes de df sao exactamente as componentes do gradiente.Igualmente, os covectores dxa, que formam a base coordenada no espaco cotangente,sao os gradientes das superfıcies coordenadas.
No espaco vectorial das formas diferenciais lineares, T ∗p M , qualquer conjunto de quatro
1-formas linearmente independentes constitui uma base. Contudo, uma vez escolhidauma base no espaco tangente TpM , ea, a = 0, 1, 2, 3 esta escolha induz uma basepreferencial em T ∗
p M , chamada a base dual, ωa, a = 0, 1, 2, 3, que a semelhanca doque acontece com as bases coordenadas, verifica a relacao
< ωa, eb >= δab
Se X e um vector arbitrario de TpM , entao as componentes (contravariantes) de X saoos numeros reais obtidos pela operacao
< ωa, X >= Xa,
sendo Xa as componentes de X na base ea. Da mesma maneira, as componentes deum tensor covariante de segunda ordem sao dadas por Tab = T (ea, eb) e as componentesde um tensor contravariante de segunda ordem por T ab = T (ωa, ωb). Mas e claro queestas nao sao as componentes nas bases coordenadas dxa e ∂/∂xa.
A vantagem das bases nao coordenadas esta no seguinte: como veremos mais adiante,a metrica de um espaco-tempo arbitrario pode sempre ser transformada localmentenuma metrica de Minkowski, pelo que e sempre possıvel encontrar um conjunto devectores base ea e seus duais ωa, em cada ponto, ortonormados. Isto significa quese g e a metrica de uma variedade espaco-tempo arbitraria entao: g(ea, eb) = ηab eg−1(ωa, ωb) = ηab, onde ηa,b e ηab sao as componentes da metrica e sua inversa de umespaco-tempo de Minkowski. Mas note que os ea nao sao necessariamente tangentesas linhas coordenadas nem os ωa sao gradientes das superfıcies coordenadas.
Em geral, para definir qualquer ωa e necessario conhecer todos os vectores ea. Umamudanca de um dos eb geralmente afecta todas as 1-formas base ωa. A correspondenciaque estabelecemos e entre uma base e a sua base dual, e nao entre 1 vector individuale a 1-forma associada.
Um campo de 1-formas numa variedade M , por analogia com os campos vectoriais, euma regra que associa uma 1-forma a cada ponto p de M . As propriedades mencionadas
83

na definicao dos covectores como aplicacoes lineares estendem-se aos campos de 1-formas, com uma pequena diferenca; na relacao
(aα) (U) = a < α, U >,
a pode ser funcao definida em M , e nao necessariamente uma constante.
A diferenciabilidade dos campos de 1-formas pode ser definida a custa da diferencia-bilidade dos campos vectoriais e das funcoes. Por exemplo, numa variedade C∞ ondeesta definido um campo vectorial X, um dado campo de 1-formas α define uma funcao
α(X) =< α,X > .
Se esta funcao α(X) e de classe C∞ para qualquer campo vectorial X de classe C∞,entao α e de classe C∞.
Entre os campos de 1-formas figura um, particularmente util, que e o gradiente de umafuncao f que passamos a escrever como df . Assim, pelo que foi dito atras, o gradientedf e definido por
df (d/dλ) =< df,d
dλ>=
df
dλ,
onde d/dλ e um campo vectorial tangente definido ao longo de uma curva parametri-zada pelo parametro λ. Por outras palavras, o gradiente de f num ponto p de M etodo o elemento de T ∗
p M cujo valor sobre um elemento X ∈ TpM e a derivada dirigidaao longo da curva integral de X (i.e., a curva de que X e vector tangente em p).
Podemos verificar que se trata de uma funcao linear sobre TpM ,
df
(a
d
dλ+ b
d
dµ
)= adf(d/dλ) + bdf(d/dµ)
= adf
dλ+ b
df
dµ
O gradiente permite-nos dar uma representacao pictorica duma 1-forma que podeconsiderar-se complementar da representacao de um vector como uma seta. Efecti-vamente, uma 1-forma a pode ser representada por uma serie de superfıcies e a suacontraccao com o vector X da o numero de superfıcies que X atravessa. Quantomais proximas sao as superfıcies, maior e a. Concretamente, as 1-formas tangentesα sao representadas por uma serie de superfıcies paralelas de dimensao d = n − 1 sedimM = n.
Campos Tensoriais e suas derivadas dirigidas
So e possıvel diferenciar tensores quando dispomos de funcoes com valores tensoriaissobre o espaco-tempo M , isto e, se a cada acontecimento p podemos associar um tensor
84

do tipo (r, s) : T (p) ∈ T(r,s)p M , onde
T(r,s)p M ∈ TpM
r︷ ︸︸ ︷⊗ · · ·⊗TpM ⊗ T ∗p M ⊗ · · ·⊗︸ ︷︷ ︸
s
T ∗p M. (1.110)
Uma tal funcao diz-se um campo tensorial. So consideraremos campos tensoriais emque o tensor e do mesmo tipo em toda a parte. O campo tensorial diz-se diferenciavelse as suas componentes
T ab...cd...f (φ(p)) = (T (p))ab...c
d...f
sao funcoes diferenciaveis das coordenadas.
Se T e um tensor do tipo (r, s), entao o seu diferencial e definido como o campo tensorialdo tipo (r, s + 1) cujas componentes num referencial de Lorentz sao
(∇T (p))a...bc...de =
∂
∂xeT a...b
c...d
= T a...bc...d, e (1.111)
Note que usamos o sımbolo de gradiente ∇ em vez do sımbolo d que esta reservadopara gradientes de campos escalares, para os quais temos: ∇f ≡ df . De facto, existemduas operacoes distintas, ∇ e d, que coincidem quando aplicadas a funcoes ordinarias.
E frequente querermos saber como varia uma funcao ou um campo tensorial ao longodo caminho de uma partıcula, isto e a derivada
f =d
dλf (C(λ)) .
Usando uma representacao coordenada para a funcao f = f x, temos
f =d
dλf [xa (C(λ))]
= < df, U >= ∇Uf
=dxa
dλ
∂f
∂xa,
onde U e o vector tangente a curva e cujas componentes sao Ua = dxa/dλ.
Observe que ha varias notacoes utilizadas e ha necessidade de adquirir familiaridadecom todas elas. Neste caso, em que a variedade base e o espaco-tempo de Minkowski,podemos escrever
f = ∇Uf = Uaf, a.
onde f, a = ∂af .
Sendo U = d/dλ o vector tangente a curva C(λ), ∇U e o operador que diferencia f aolongo da curva C(λ). Observe ainda que
∇Uf = Ua∂af = U(f),
85

i.e., a aplicacao de U a uma funcao f da origem a um numero real se U e simplesmenteum vector tangente no ponto p de M , ou uma funcao se U e um campo vectorial.
Podemos estender esta definicao a campos tensoriais pela relacao
(∇UT )a...bc...d = U eT a...b
c...d, e.
As componentes do tensor derivado obtem-se por derivacao parcial das componentesde T seguida de contraccao com as componentes de U . So num espaco plano, comoe o espaco-tempo de Minkowski, e que se pode obter assim as componentes do tensorderivado, pois neste caso admitimos que as componentes sao dadas numa base fixa.Num espaco-tempo curvo a base varia de ponto para ponto e ao derivar um campotensorial devemos derivar as suas componentes bem como os proprios vectores base.
Qualquer que seja a ordem do tensor T , podemos escrever de modo mais condensado
∇UT = Ua∂aT,
e vemos que o tensor derivado ∇UT tem exactamente a mesma ordem de T . Porem, seem lugar do vector tangente U escolhermos um vector base ∂a, tangente a uma linhacoordenada, entao
(∇eT )a...bc...d = T a...b
c...d, e.
representam as componentes do tensor ∇T (p), que como vimos acima e um tensor deordem (r, s+1). Mas note que este resultado so e valido quando a metrica toma a formade Minkowski. Mas e facilmente generalizavel a qualquer metrica da Relatividade Geralsubstituindo a derivacao parcial das componentes do tensor pela derivacao covariante,conceito que estudaremos adiante.
Temos agora conhecimentos suficientes para escrever as equacoes de Maxwell do elec-tromagnetismo numa forma manifestamente covariante em relacao ao grupo de Lorentz.Ainda que so facamos uma analise breve da electrodinamica classica, com o unico objec-tivo de apresentar a sua formulacao covariante, nao podemos rever a RR sem fazer estareferencia que ilustra como a RR e uma especie de cupula da teoria electromagnetica.
1.9 Equacoes de Maxwell e sua Formulacao Cova-
riante
No final do sec. XIX as equacoes de Maxwell escreviam-se na forma
∇∧B− ∂tE = J
∇ · E = ρ
∇∧ E + ∂tB = 0
∇ ·B = 0, (1.112)
86

na ausencia de meios materiais e estando as fontes representadas pelo 3-vector densi-dade de corrente J e pela densidade de carga electrica ρ.
Embora estas equacoes sejam formalmente invariantes em relacao a transformacaode Lorentz isso nao esta manifestamente expresso nesta formulacao. Para conseguireste ultimo objectivo e indispensavel escrever estas equacoes em termos de grandezastensoriais relativamente ao grupo de transformacoes de Lorentz. Vimos que o tensorde Faraday, F , era um tensor de segunda ordem anti-simetrico, cujas 6 componentescorrespondem exactamente aos graus de liberdade necessarios para descrever o campoelectrico E e a inducao magnetica B. Para compreendermos a decomposicao de F emE e B temos primeiro de estudar a decomposicao do espaco-tempo em tempo e espaco,a chamada decomposicao (1 + 3).
Como se sabe, uma matriz
LR =
(1 00 R
)
com R matriz ortogonal: RT R = I, e uma matriz de Lorentz pois satisfaz a condicao:LT
RηLR = η, onde η representa o tensor metrico do espaco-tempo de Minkowski. Porsua vez, R e uma matriz do grupo das rotacoes em <3, SO(3), que e por sua vez umsubgrupo de SO(1, 3) = L↑+, o subgrupo de Lorentz proprio, ortocrono. Este factosugere uma decomposicao dos 4-vectores do espaco-tempo de Minkowski numa partetemporal (que fica invariante numa transformacao LR) e uma parte espacial:
Aa = (A0, ~A), a = 0, 1, 2, 3. (1.113)
A componente temporal A0, comporta-se como um escalar em relacao a LR.
No caso de um tensor anti-simetrico de segunda ordem Fab = F[ab], as suas propriedadesde transformacao em relacao a LR levam a decomposicao seguinte
Fab =
(0 − ~E~E Fij
), i, j = 1, 2, 3 (1.114)
sendo ~E um vector polar de <3 e Fjk um tensor anti-simetrico de 2a ordem, do mesmoespaco. Note que se passarmos as componentes contravariantes
F ab = ηacηbdFcd
=
(−1 00 I
) (0 − ~E~E Fij
) (−1 00 I
)
=
(0 ~E
− ~E F ij
)
temos na mesma um vector polar ~E e um tensor anti-simetrico F ij definidos em <3;este ultimo pode ser associado a um vector axial pela relacao
Fi =1
2εijkF
jk,
87

onde εijk e o tensor de permutacao no espaco 3-D <3, isto e, F e um objecto que setransforma como um pseudo-vector em relacao as rotacoes improprias.
Podemos decompor o operador de derivacao ∂a = ∂/∂xa em
∂a = (∂t,∇),
como se representasse as componentes covariantes do 4-vector
∂a = ηab∂b = (∂t,−∇).
Ou seja, numa transformacao de Lorentz arbitraria, La′. c, terıamos ∂a′ = La′
c ∂c.
Compare com o que se disse antes: ∂a, para cada valor de a entre 0 e 3, e por si so umvector (tangente) e o conjunto dos vectores tangentes ∂ap forma uma base do espacovectorial TpM . Mas usando a interpretacao anterior, podemos olhar para a contraccao∂bF
ab como um 4-vector cujas componentes temporal e espacial sao
∂aFab = (−∇ · ~E, ~E −∇ ∧ F), (1.115)
onde ~E representa derivacao em ordem a x0 (tempo). Podemos igualmente verificarque
1
2εabcd∂bFcd = (−∇ · F ,∇∧ ~E + F). (1.116)
Tendo em conta estas ultimas duas equacoes, e comparando-as com as eqs.(1.112), con-cluımos que e possıvel escrever as equacoes de Maxwell de uma forma manifestamentecovariante, relativamente ao grupo de Lorentz, atraves das seguintes equacoes
∂aFab = −J b,
1
2εabcd∂bFcd = 0, (1.117)
onde o vector axial F ≡ ~B, e J b = (ρ, ~J) e o chamado 4-vector corrente. As quatroequacoes tradicionais de Maxwell sao assim substituıdas por duas equacoes tensoriais,o que tambem demonstra a economia da notacao tensorial. Mas o mais imprtante eo facto das equacoes serem manifestamente covariantes; isto significa que se elas saoverdadeiras num dado referencial de inercial, tambem o serao em qualquer outro queseja obtido do primeiro por uma transformacao de Lorentz. E e esta a razao essencialporque os tensores sao tao uteis em relatividade. Veremos que por vezes estamos inte-ressados em exprimir relacoes sem o recurso a qualquer sistema de referencia, e e entaonecessario que as quantidades que figuram em cada lado das equacoes se transformemda mesma maneira numa transformacao geral de coordenadas. As equacoes terao entaode ser escritas de uma forma covariante em relacao ao grupo de transformacoes geraisde coordenadas, como acontece na relatividade geral.
Introduzindo o 4-vector potencial Aa = (V, ~A), as componentes do tensor electro-magnetico Fab podem escrever-se
Fab = ∂aAb − ∂bAa. (1.118)
88

Sabemos que as componentes do 4-vector potencial sao solucoes do sistema das quatroequacoes diferenciais seguintes
∇2V − ∂2V
∂t2= −ρ
∇2 ~A− ∂2 ~A
∂t2= − ~J
⇔ 2Ab = −J b, (1.119)
onde 2 = ∂a∂a = −∂2/∂t2 + ∇2 e o conhecido operador (escalar) de d’Alembert,
caracterıstico das equacoes de ondas.
Ve-se agora imediatamente que
∂aFab = 2Ab = −J b, se ∂aA
a = 0 (condicao de Lorentz), (1.120)
o que confirma as eqs. (1.117).
Voltando ao 4-vector corrente J b, e assumindo que a densidade de corrente de conducaose pode escrever ~J = ρ~v, facilmente se constata que
JaJa = −ρ2/γ2 = −ρ20, γ =
1√1− v2
,
e um invariante associado a lei de transformacao da carga electrica: ρ = γρ0, ondeρ0 e a densidade de carga no referencial onde a carga esta em repouso. Ora, sabendoque a contraccao dos comprimentos de Lorentz implica que o elemento de volume3-dimensional, d3x = dV , se transforma segundo a relacao
dV0 = γdV,
entao a carga contida num dado volume permanece constante se
ρ0dV0 = ρdV. (1.121)
A conservacao da carga electrica assim resultante, justifica a posteriori que se tenhaassumido os J b como as componentes de um 4-vector. E esta conclusao vem aindareforcada quando constatamos que, como resultado da eq. (1.120) e, implicitamenteda condicao de Lorentz (∂aA
a = 0), somos conduzidos a equacao da continuidade
∂aJa =
∂ρ
∂t+∇ · ~J = 0. (1.122)
Para finalizar esta seccao, note-se que a conservacao da carga electrica implica tambema conservacao do sinal da carga, logo a forca electrica, bem como o campo electrico ~E,devem ser tomados como vectores polares.
89

1.9.1 Formas Diferenciais
Vamos agora introduzir uma classe especial de tensores, conhecidos por formas dife-renciais de grau-p (p-formas). Uma p-forma e um tensor de tipo (0, p) completamenteanti-simetrico. Assim, os campos escalares sao automaticamente 0-formas, e os vec-tores duais sao 1-forma. Dos exemplos dados temos ainda a 2-forma Fab e a 4-formaεabcd, tambem conhecida por forma volume.
O espaco de todas as p-formas e representado por Λp, e o espaco de todos os campos dep-formas sobre uma variedade M e denotado por Λp(M). Atendendo a associacao entrep-formas e tensores do tipo (0, p) anti-simetricos, imediatamente se conclui o espacoΛp(M) tem uma dimensao (numero de p-formas linearmente independentes) dada por
nCp =n!
p!(n− p)!=n Cn−p.
Assim, em cada ponto da variedade 4-dimensional espaco-tempo M ha uma 0-formalinearmente independente, quatro 1-formas, seis 2-formas, quatro 3-formas e uma 4-forma. Tal como nao podem existir tensores anti-simetricos de ordem superior a di-mensao da variedade base M , tambem nao e possıvel admitir p > n, sendo n a dimensaode M .
Exploremos agora as vantagens da introducao das formas diferenciais para lidar comtensores anti-simetricos, e vejamos a sua aplicacao ao electromagnetismo. A ideiaprincipal e a de que as formas diferenciais podem ser diferenciadas e integradas, sem aajuda de qualquer estrutura geometrica adicional, tanto na relatividade restrita comona relatividade geral.
Dada uma p-forma pα e uma q-forma qβ, podemos definir uma (p+q)-forma conhecidapor produto exterior α ∧ β tomando o produto tensorial anti-simetrizado
(α ∧ β)a1...ap+q=
(p + p)!
p!q!α[a1...apβap+1...ap+q ]. (1.123)
Notemos queα ∧ β = (−1)pqβ ∧ α, (1.124)
o que mostra que o produto exterior so e comutativo quando uma das formas e par, ee anti-comutativo se sao ambas ımpares.
Como exemplo, no caso de α e β serem 1-formas podemos escrever
(α ∧ β)ab = 2α[aβb] = αaβb − αbβa.
Sendo as 1-formas vectores duais, isto e, elementos do espaco co-tangente T ∗p M , cujas
bases (coordenadas) sao dadas pelos dxa, como vimos em (1.108), podemos escrever
α = αadxa, β = βbdxb ⇒ α ∧ β = α[aβb]dxa ∧ dxb (1.125)
90

Vamos estender a operacao derivada exterior “d”, ja introduzida em (1.104) paracampos de 0-formas (funcoes), agora para campos de formas de grau p. O resultadoda aplicacao deste operador dara lugar ao aparecimento de campos de (p + 1)-formas,cujas componentes sao dadas de acordo com a relacao
(dα)a1...ap+1 = (p + 1)∂[a1αa2...ap+1], (1.126)
ou de um modo mais geral podemos escrever
dα =1
p!dαa1...ap ∧ dxa1 ∧ . . . ∧ dxap
=1
p!∂cαa1...apdxc ∧ dxa1 ∧ . . . ∧ dxap (1.127)
= (p + 1)∂[cαa1...ap]dxc ⊗ dxa1 ⊗ . . .⊗ dxap
O exemplo mais simples e o gradiente, que e ja conhecido como a derivada exterior deuma 0-forma
(df)a = ∂af.
O interesse da derivada exterior reside no facto de dar origem a objectos tensoriais,mesmo na presenca de variedades base curvas, como acontece com o espaco-tempo darelatividade geral. Na verdade, embora nao possamos mostrar ja, as equacoes (1.128definem um tensor anti-simetrico do tipo (0, p + 1), qualquer que seja a metrica e ascoordenadas do espaco-tempo.
Um outro facto muito util e interessante e que, dada qualquer forma A, tem-se sempre
d (dA) = 0, (1.128)
o que numa notacao simbolica simplificada se escreve d2 ≡ 0. Esta identidade e umaconsequencia da definicao da derivada exterior e da relacao de comutatividadde daderivacao parcial, ∂a∂bf = ∂b∂af , para qualquer funcao contınua.
Define-se uma p-forma F como sendo fechada se dF = 0, e exacta se F = dApara alguma (p− 1)-forma A. E claro que todas as formas exactas sao fechadas, pelaidentidade d2 ≡ 0, mas o contrario nem sempre e verdadeiro, isto e, nem todas as formasfechadas sao exactas. Na sequencia disto vamos adiantar uma curiosidade matematica,embora nao possamos aqui mostrar a sua utilidade e muito menos prova-la. Numavariedade M , o conjunto das p-formas fechadas geram um espaco vectorial que sedenota Zp(M), e as p-formas exactas geram um espaco vectorial Bp(M). Define-se umnovo espaco vectorial das p-formas fechadas modulo as p-formas exactas como
Hp(M) =Zp(M)
Bp(M). (1.129)
Este espaco vectorial e conhecido como a cohomologia de Rham de ordem p, e dependesomente da topologia da variedade M . Sendo, por exemplo, o espaco-tempo de Min-kowski topologicamente equivalente a <4, todos os Hp(M) se anulam para p > 0; e
91
para p = 0 temos H0(M) = <. O que mostra que do ponto de vista topologico e umespaco trivial, onde todas as formas fechadas sao exactas, com excepcao das 0-formasque nao podem ser exactas, como e obvio. Mas e notavel que a informacao acerca datopologia possa ser extraıda deste modo, ou seja essencialmente atraves das solucoesde equacoes diferenciais. Por outro lado, a dimensao de Hp(M), bp, e conhecida pornumero de Betti de ordem p de M , e a soma alternada dessas dimensoes para os variosp,
χ(m) =n∑
p=0
(−1)pbp, (1.130)
e conhecida como a caracterıstica de Euler de M . A teoria da cohomologia esta nabase da moderna topologia diferencial.
1.9.2 Operacao dualidade de Hodge
A ultima operacao que vamos introduzir entre as formas diferenciais e a chamadadualidade de Hodge. Define-se o “operador estrela de Hodge”sobre uma variedaden-dimensional como uma aplicacao entre os espacos om a mesma dimensao pΛ(M) e(n−p)Λ(M) atraves da relacao
(∗α)a1...an−p =1
p!ε
a1...ap
b1...bn−pαa1...ap , (1.131)
entre uma p-forma pα e uma (n− p)-forma ∗α. Ao contrario das operacoes anterioresesta operacao depende da metrica, como se depreende pelo recurso ao tensor de Levi-Civita. A aplicacao sucessiva deste operador estrela de Hodge retribui a forma originalvezes um sinal menos ou mais consoante a assinatura da metrica,
∗∗α = (−1)s+p(n−p)α, (1.132)
onde s e o numero de sinais menos nos valores proprios da metrica.
Assim, sendo dados um 4-vector arbitrario J , um tensor anti-simetrico de 2a ordem Fe um tensor totalmente anti-simetrico de 3a ordem B, definimos novos tensores cujascomponentes sao dadas, respectivamente, por
∗Jabc = Jfεfabc
∗Fab =1
2F cdεcdab
∗Ba =1
3!Bbcdεbcda
a que chamamos os duais de J , de F , e de B, respectivamente. Numa variedadebase de dimensao 4, como e o espaco-tempo, podemos dizer que a operacao dualidadeestabelece uma correspondencia entre tensores anti-simetricos de ordem p e tensoresanti-simetricos de ordem 4 − p; e como se ve pelas definicoes, essa correspondencia e
92

obtida a custa da contraccao com o tensor alternante de Levi-Civita do espaco(-tempo)em causa.
Exercıcio 19 Com base nas relacoes obtidas em (1.71) e (1.72), ou usando (1.132)para as correspondentes p-formas associadas, mostre que
∗∗J = J, ∗∗F = −F, ∗∗B = B,
onde J, F e B sao os objectos definidos anteriormente.
Exercıcio 20 Um observador com 4-velocidade U interactuando com um campo elec-tromagnetico F mede um campo electrico EU e um campo magnetico BU no seu refe-rencial inercial local (isto e, numa base ortonormada com e0 = U). Estes campos sao4-vectores com componentes covariantes dadas pelas relacoes
Ea = FabUb, Ba = −∗FabU
b, com ∗Fab =1
2εabcdF
cd
1. Mostre que os campos Ea e Ba existem no plano ortogonal a linha do Universodo observador, e estao portanto assentes na hiper-superfıcie de simultaneidadedo observador.
2. Definindo Bab = 2U[aBb] e Eab = 2U[aEb], mostre que o tensor campo electro-magnetico pode ser reconstruıdo a partir da 4-velocidade do observador e dos cam-pos electrico e magnetico medidos no seu referencial do repouso por intermedioda equacao
Fab = Eab + ∗Bab, com ∗Bab = εabcdUcBd.
Exemplo 4 Vejamos como podemos obter as equacoes de Maxwell na sua versao 3-dimensional a partir das equacoes (1.117) formuladas covariantemente em relacao aogrupo de Lorentz. Vejamos como proceder no caso das equacoes nao homogeneas: ometodo mais directo passa por uma decomposicao (1 + 3), que corresponde a separar acomponente temporal das espaciais. Efectivamente,
∂aFab = −J b
(∂iF
i0, ∂0F0i + ∂jF
ji)
= −((ρ, ~J
)
(−∇ · ~E, ~E + εjik∂jBk
)= −
(ρ, ~J
)
ou seja,∇ · ~E = ρ, ∇∧ ~B − ∂t
~E = ~J
equacoes que correspondem a lei de Gauss e a lei de Ampere generalizada, respectiva-mente.
93

Exemplo 5 Recorrendo a definicao de tensor dual
∗F ab =1
2εabcdFcd
facilmente se obtem que as componentes de ∗F sao dadas pela seguinte matriz quadrada4× 4,
∗F ab =
0 −Bx −By −Bz
Bx 0 Ez −Ey
By −Ez 0 Ex
Bz Ey −Ex 0
(1.133)
portanto a transformacao F → ∗F corresponde a ~E → − ~B e ~B → ~E.
Atendendo a definicao de ∗F ab nao sera difıcil verificar que
∂∗b Fab =
1
2εabcd∂bFcd e ∂[bFcd] = 0 ⇒ ∂b
∗F ab = 0.
Exercıcio 21 Construa os escalares ψ = 12F abFab e φ = 1
2Fab
∗F ab, conhecidos comoos invariantes do campo electromagnetico.
Notemos dois factos acerca do dual de Hodge: Em primeiro lugar, a “dualidade”nosentido de Hodge e completamente diferente da dualidade entre vectores e co-vectores,embora ambas sejam aplicacoes entre espacos com a mesma dimensao. E com ambas asdualidades e possıvel definir aplicacoes do espaco original em <. Para o vector tangenteX e para 1-forma α num ponto de M temos α(X) ∈ <. Por outro lado, se pω e umap-forma e (n−p)β e uma (n− p)-forma num certo ponto do espaco-tempo, temos
∗((n−p)β ∧p ω) ∈ <.
O segundo facto diz respeito a formas diferenciais no espaco euclideano 3-dimensional<3. O dual do produto exterior de duas 1-formas e tambem uma 1-forma,
∗(a ∧ b)k = εijkaibj, (1.134)
o que e muito semelhante ao que ja vimos na equacao (1.61), ou mesmo identico seatendermos a que num espaco euclideano em coordenadas cartesianas nao distinguimosentre 1-formas e vectores. Neste caso, portanto o produto exterior nao se distingue doproduto vectorial. E isto explica porque e que so existe produto vectorial a num espacoa tres dimensoes: so a tres dimensoes temos uma aplicacao entre dois vectores duais eum terceiro vector dual. Tal como vimos, a proposito dos vectores axiais, a presenca
94

do tensor de Levi-Civita explica porque razao o produto externo de dois vectores mudade sinal na transformacao de um triedro directo em triedro inverso.
A Electrodinamica e um domınio onde as formas diferenciais se aplicam com bastantenaturalidade. Em rigor, a teoria das formas diferenciais e mesmo indispensavel paraclarificar a natureza matematica de todos os objectos que figuram nas equacoes deMaxwell, mas nao vamos discutir isso aqui com esse pormenor. Da definicao de derivadaexterior, vemos facilmente que a segunda das equacoes (1.117) pode escrever-se de modomais conciso como,
dF = 0, (1.135)
que traduz o facto da 2-forma Faraday F e fechada. Querera isto dizer que F etambem uma forma exacta? A resposta e afirmativa se considerarmos que a topologiado espaco-tempo de Minkowski e trivial: onde todas as formas fechadas sao exactas.Deve portanto existir uma 1-forma A tal que
F = dA. (1.136)
Esta 1-forma e o vector dual associado ao 4-vector potencial Aa = (V, ~A), que reune
o potencial escalar V e potencial-vector ~A. Se adoptarmos o ponto de vista que A eo campo fundamental do electromagnetismo, entao (1.135) segue-se como uma iden-tidade. Mas como sabemos A nao e unica, pois a invariancia de “gauge”exprime ofacto da teoria ser invariante na transformacao: A → A + dχ, para alguma funcaoescalar χ (0-forma), o que se conclui tambem da equacao (1.135). Quanto a primeiradas equacoes (1.117), que traduz a outra das equacoes de Maxwell, podemos escreve-lacomo uma relacao entre 3-formas,
d(∗F ) = ∗J, (1.137)
onde a 1-forma corrente J e o co-vector dual do 4-vector corrente Ja = (ρ, ~J).
Para finalizar vamos referir a um aspecto particularmente intrigante da fısica actual.As equacoes (1.135) e (1.137) sao bastante semelhantes. Em particular, se assumirmosJ = 0, as equacoes ficam invariantes nas “transformacoes dualidade”definidas por
F → ∗F∗F → −F. (1.138)
Dizemos que as equacoes de Maxwell de vacuo sao invariantes nas transformacoes dedualidade, mas que essa invariancia e quebrada na presenca de cargas electricas. Seimaginarmos que tambem existem monopolos magneticos na natureza, entao podere-mos adicionar uma corrente magnetica (∗JM) ao lado direito de (1.135), e as equacoesresultantes seriam invariantes para as transformacoes dualidade adicionadas da subs-tituicao J ↔ JM . Mas e claro que neste caso F 6= dA, e portanto esta hipotese so eaceitavel se A nao e um campo fundamental. Dirac considerou esta hipotese, ha bas-tante tempo, e mostrou que a condicao necessaria e suficiente para a existencia de um
95

monopolo magnetico era que a sua carga magnetica fosse inversamente proporcional acarga electrica fundamental.
Problemas
1.1 Considere um “cronometro de luz”constituıdo por dois espelhos plano-paralelosE1 e E2 nos quais se reflecte sucessivamente um raio luminoso. O cronometromove-se com velocidade constante v dirigida segundo a normal aos espelhos eparalela ao eixo dos xx no referencial do laboratorio.
Partindo do Princıpio da Relatividade e da invariancia da velocidade da luz novacuo deduza os coeficientes de contraccao do espaco e de dilatacao do tempo emostre como se podem obter as formulas de transformacao de Lorentz.
1.2 Se dois acontecimentos ocorrem no mesmo ponto (do espaco) de um dado re-ferencial inercial S, mostre que a sua sequencia temporal e a mesma em todosos referenciais inerciais. Discuta o problema com o auxılio de um diagrama deMinkowski. Em qual dos referenciais o intervalo de tempo e mınimo?
1.3 Determine a matriz da transformacao de Lorentz L resultante da composicao deduas transformacoes de Lorentz especiais (“boosts”): uma segundo o eixo dosXX, com parametro vx , seguida de outra transf. de Lorentz especial segundoo eixo dos Y Y , com parametro vy. Mostre que, em geral, o produto de duastransformacoes de Lorentz nao e comutativo:
L(vx) L(vy) 6= L(vy) L(vx).
1.4 Taquioes
Taquioes sao partıculas hipoteticas cuja velocidade e maior que a da luz (para to-dos os observadores inerciais!). Considere dois observadores inerciais O e O′, comuma velocidade relativa v segundo o eixo dos ZZ, equipados com transmissorestaquionicos para comunicarem entre si.
(a) Se o transmissor taquionico emite partıculas com velocidade u > 1(c = 1),no seu referencial proprio, mostre que a velocidade desses taquioes e u′ > 1em qualquer outro referencial S ′ animado com velocidade v em relacao a S.
(b) Suponha que um dos observadores se encontra a distancia L do referencialproprio do outro observador, S, no momento em que recebe a primeiramensagem e responde imediatamente com outra mensagem taquionica. Quale o intervalo de tempo entre a emissao e a recepcao das mensagens em S?
96

(c) Mostre que se
u >1
v[1 +
√1− v2],
a resposta pode ser recebida em S antes do sinal ter sido enviado!
(d) Discuta o problema com o auxılio de diagramas de Minkowski.
1.5 Movimento “Superluminal”
O quasar 3C 273 emite jactos relativısticos de plasma de uma regiao proximado seu centro onde se encontra um buraco negro de massa elevada. Os jactosviajam a uma velocidade v ao longo de uma direccao que faz um angulo θ coma direccao de observacao. Projectando no ceu, os jactos parecem deslocar-seperpendicularmente a direccao de observacao com uma velocidade angular vap/ronde r e a distancia ao quasar (tratando o espaco com euclideano) e vap e avelocidade aparente.
(a) Mostre que
vap =v sin θ
1− v cos θ.
(b) Para um dado valor de v, qual e o valor de θ que maximiza vap? Qual e ovalor correspondente de vap? Pode vap exceder c sem violar a relatividaderestrita?
(c) Para o 3C 273, vap ≈ 10c. Qual e o maior valor possıvel para θ?
1.6 Um carro de 5m de comprimento entra numa garagem de 4m a uma velocidadev = 3
5c. De acordo com um observador estacionario (fixo em relacao a garagem)
o comprimento do carro aparece contraıdo pelo factor de Lorentz e, por isso, cabeexactamente na garagem. Porem, para o condutor do carro a garagem tem so3, 2m, e o carro nao cabe na garagem. Como resolve este aparente paradoxo?Relacione a contraccao de comprimentos com a dilatacao do tempo e discuta oproblema do ponto de vista da relatividade da simultaneidade.
1.7 Considere uma nave espacial capaz de manter uma aceleracao constante de 1g(relativamente ao seu referencial proprio instantaneo). Se a nave parte da Terracom essa aceleracao,
(a) Qual e a distancia percorrida pela nave ao fim de 40 anos medidos na Terra?E qual a distancia percorrida ao fim de 40 anos medidos no referencialproprio da nave?
(b) Qual e o tempo (proprio) dispendido pelos tripulantes da nave ao fazeremuma viajem ate ao centro da galaxia (cerca de 30.000 anos luz). Suponha quea nave espacial mantem uma aceleracao de 1g durante metade do percurso euma desaceleracao de 1g durante a outra metade. (Faca uma representacaoesquematica com o auxılio de um diagrama de Minkowski).
97

1.8 Mostre que:
(a) Prove que para qualquer vector temporal U existe um referencial de Lorentzonde Ua tem componentes espaciais nulas.
(b) Se P a e um vector temporal e P aXa = 0 entao Xa e um vector espacial.
(c) Se P a e Qa sao vectores temporais e P aQa < 0 entao os dois vectores saoambos dirigidos para o futuro ou ambos dirigidos para o passado.
(d) Mostre que a soma de quaisquer dois vectores espaciais ortogonais e umvector espacial.
1.9 Diz-se que um vector Xa e transportado paralelamente ao longo de uma curvanuma variedade plana (M, g) se Ua∂aX
b = 0, e Ua e o campo vectorial tangentea curva. Se se verificar Ua∂aU
b = 0 a curva diz-se geodesica.
(a) Mostre que se Xa(x) e Y a(x) sao dois campos vectoriais transportados pa-ralelamente ao longo de uma curva temporal de um espaco-tempo de Min-kowski M4
0 , entao gabXaY b = XaYa e constante ao longo dessa curva.
(b) Partindo do resultado anterior conclua que se uma geodesica e do tipo espaco(do tipo tempo ou nula) num dado ponto, devera ser espacial (temporal ounula) por toda a parte onde esta definida.
1.10 Prove que a conservacao do 4-momento proıbe uma reaccao onde um electrao eum positrao se aniquilam e produzem um unico fotao γ. Prove que a producaode dois fotoes nao e proibida.
1.11 Considere uma partıcula cuja massa em repouso e m e cujo 4-momento e P a, eum observador O cuja 4-velocidade e Ua. Use c = 1 e mostre que:
(a) A energia da partıcula medida por O e E = −P aUa;
(b) O observador O atribui a partıcula uma massa em repouso m2 = −P aPa;
(c) O mede um 3-momento de grandeza ‖~p‖ =√
(P aUa)2 + P aPa;
(d) O mede uma 3-velocidade ~v cujo modulo e dado por
‖~v‖ =
√1 +
P aPa
(P aUa)2
1.12 Dispersao de Compton
(a) Um fotao de comprimento de onda (c.o.) λ colide com um electrao estaci-onario de massa m e emerge com um c.o. λ segundo um angulo θ. Mostreque
λ− λ =h
m(1− cos θ)
98

(b) Quando um fotao e disperso por uma partıcula carregada que se move comuma velocidade proxima da velocidade da luz diz-se que o fotao sofreu umadispersao de Compton inversa. Considere uma dispersao de Compton in-versa na qual uma partıcula carregada com massa em repouso m e energiatotal E À m, colide frontalmente com um fotao de frequencia ν(hν ¿ m).Qual e a maxima energia que a partıcula pode transferir para o fotao?
(c) Se o espaco esta preenchido por uma radiacao de corpo negro a temperaturade 3 K e contem protoes provenientes dos raios cosmicos com energias daordem dos 1020 eV , qual e a energia que um protao de energia 1020 eV podetransferir para um fotao de 3 K?
1.13 Determine a energia mınima necessaria para produzir antiprotoes a partir dareaccao
p + p → p + p + p + p .
1.14 Calcule o limiar de energia de um nucleao N para que sofra a reaccao
γ + N → N + π
onde γ representa um fotao a temperatura de 3 K. Suponha que a colisao efrontal; tome a energia do fotao como sendo ∼ KT ; mN = 940 MeV . (Note queEN À mN).
1.15 Considere a reaccaoπ+ + N → K+ + Λ0.
As massas proprias das partıculas sao mπ = 140 MeV, mN = 940 MeV ,mK = 494 MeV e mΛ = 1115 MeV . Qual o limiar de energia cinetica domesao π para criar um mesao K segundo um angulo de 90 no referencial dolaboratorio, onde N esta em repouso?
1.16 Considere uma variedade espaco-tempo (M, gab), cuja metrica e gab. Sejam dadosum 4-vector unitario temporal Ua e um tensor
hab := gab + UaUb .
(a) Mostre que hab e um operador de projeccao no espaco ortogonal a Ua. Ouseja, mostre que:
V a⊥ = ha
b V b = (δab + Ua Ub) V b
e ortogonal a Ua e nao e afectado por hab:
V a⊥ ⊥ = ha
bVb⊥
(b) Com base na alınea anterior mostre em que condicoes e que hi j (com i, j =1, 2, 3) sao as componentes do tensor metrico no sub-espaco dos vectoresortogonais a Ua.
99

1.17 Considere o 4-vector aceleracao ac = dU c/dτ .
1.18 Mostre que ac so tem 3 componentes independentes, e relacione-as com a acele-racao ordinaria (Newtoniana).
1.19 Uma partıcula move-se com 3-velocidade ~u e 3-aceleracao ~a em relacao a umobservador inercial O. E um outro observador inercial O′ tem velocidade ~v emrelacao a O. Mostre que as componentes paralela e perpendicular da aceleracaosao
~a′‖ = (1− v2)3/2(1− ~v · ~u)−3~a‖
~a′⊥ = (1− v2)(1− ~v · ~u)−3[~a⊥ − ~v × (~a× ~u)].
1.20 A linha do universo de uma partıcula material e dada pelas seguintes equacoesparametricas num dado referencial de Lorentz
t(λ) =1
asinh(λ), x(λ) =
1
acosh(λ)
sendo λ um parametro afim e a e uma constante.
1.21 Descreva o movimento e calcule as componentes do 4-vector velocidade e do 4-vector aceleracao da partıcula.
1.22 De o significado fısico dos parametros λ e a.
1.23 Considere o seguinte campo vectorial
V = a
(x
∂
∂t+ t
∂
∂x
)
definido nos pontos do espaco-tempo de Minkowski tais que |x| > |t|, sendoa uma constante positiva e ∂t, ∂x vectores base unitarios do espaco-tempo deMinkowski.
(a) Mostre que V e um 4-vector temporal, calcule aα = (−V µVµ)−1/2V β∂βV α
e de o significado da constante a. (Relacione com a discussao do problema11).
(b) Mostre que no sistema de coordenadas nulas u = t− x, v = t + x, vem
V = a
(v
∂
∂v− u
∂
∂u
).
1.24 (a) Mostre que as equacoes que caracterizam a linha do Universo do problema11 ?? definem uma transformacao de coordenadas do sistema (t, x) para osistema (λ, a) de coordenadas ortogonais. Desenhe as linhas coordenadasdesse sistema e mostre que elas so cobrem uma parte do espaco-tempo deMinkowski.
100

(b) Obtenha o tensor metrico neste sistema de coordenadas.
1.25 Seja ∂∂xc uma base coordenada do espaco de Minkowski e sejam ec um conjunto
de 4 vectores complexos nulos dados pelas relacoes:
e0 = mc ∂
∂xc, e1 = ma ∂
∂xa, e2 = la
∂
∂xa, e3 = ka ∂
∂xa
sendo kala = −1,mama = 1 e todos os restantes produtos escalares nulos.
(a) Mostre que os 4 vectores ea sao linearmente independentes e determine ascomponentes do tensor metrico gab = g(ea, eb) nesta base.
(b) Mostre que os unicos vectores nao-espaciais ortogonais a um dado vectortipo luz sao proporcionais a esse vector tipo luz.
Tensores Anti-simetricos: aplicacao ao Campo Electromagnetico
1.26 Sejam α = (1, 1, 0) e β = (1, 0, 1) as componentes de dois covectores.
(a) Prove, recorrendo a dois vectores arbitrarios X e Y , como argumentos, queα⊗ β 6= β ⊗ α e determine as componentes de α⊗ β.
(b) Obtenha as componentes das partes simetrica e anti-simetrica de α⊗ β.
(c) Representando por α∧β a parte anti-simetrica de α⊗β, mostre que se temα ∧ β(X,X) = 0, para qualquer vector X. (Definicao de produto exterior).
1.27 Sendo dado um tensor de 2a ordem pelas suas componentes T ab,
(a) Como poderemos testar se T ab e o produto directo de vectores A e B: T ab =AaBb?
(b) Prove que em geral um tensor de 2a ordem nao pode ser representado porum simples produto directo de 2 vectores, mas pode ser expresso como umasoma de muitos produtos desse tipo.
1.28 (a) Prove que num espaco-tempo 4-dimensional, a menos a multiplicacao poruma constante, existe um unico tensor εabcd que e totalmente anti-simetriconos seus 4 ındices. Em coordenadas Lorentzianas, escolhe-se habitualmenteε0123 = 1. Quais sao as componentes de ε num referencial coordenado geralcom metrica gab?
(b) Mostre que em geralεabcd = gεabcd
sendo g o determinante do tensor metrico: g ≡ det(gab).
101

(c) Mostre que o determinante do tensor metrico nao e um escalar.
1.29 Seja F um tensor anti-simetrico de segunda ordem cujas componentes sao Fab.A partir de F construa um outro tensor de segunda ordem, anti-simetrico, ?F ,chamado dual de F do seguinte modo
∗Fmn =1
2Fabε
abmn.
Mostre que ∗(∗F ) = −F .
1.30 Sejam α e β duas formas de grau p (p–formas) (α, β ∈ Λp), ou seja, dois tensoresanti-simetricos de grau p. Mostre que:
α ∧ ∗β = β ∧ ∗α = (α, β)ε
onde (α, β) = 1p!αi1···ipβ
i1···ip e o produto escalar induzido em Λ(R3) e ε e a forma
volume em R3.
1.31 Seja F o tensor anti-simetrico de segunda ordem campo electromagnetico, ou2-forma de Faraday, que descreve uma carga pontual e em repouso na origem deum referencial.
(a) Mostre que num espaco-tempo plano com coordenadas esfericas se podeescrever
F = − e
4πε0r2dt ∧ dr
(b) Obtenha a forma dual ∗F correspondente a alınea anterior e calcule a quan-tidade F ∧ ∗F .
(c) Obtenha as componentes de E e B para uma carga pontual em movimentouniforme, a partir das componentes de F (ou de ∗F ).
1.32 (a) Seja Fab um tensor antis-simetrico dado pelas suas componentes numa basecoordenada. Mostre que se Fab = ∂aAb − ∂aAb entao
∂[cFab] = 0.
(b) Mostre que as relacoes anteriores representam 4 equacoes escalares linear-mente independentes e obtenha essa equacoes para o caso em que o 4-vectorAa = (V, ~A) e o 4-vector potencial electromagnetico. Escreva as restantesequacoes que regem o campo electromagnetico.
1.33 Mostre que e possıvel escrever a 2-forma campo electromagnetico da seguintemaneira
F = E ∧ dt + B
onde E e B sao respectivamente as formas campo electrico e campo magneticodefinidas em R3. Escreva as equacoes de Maxwell em termos dessas formasdiferenciais definidas em R3.
102

1.34 Seja F a 2-forma que representa um campo electromagnetico arbitrario, numespaco-tempo de Minkowski. Determine as componentes de ∗F , obtenha as for-mas diferenciais F ∧ ∗F e F ∧ F e relacione-as com os “invariantes”do campoelectromagnetico.
1.35 Um observador com 4-velocidade U interactuando com um campo electromagneticoF mede um campo electrico EU e um campo magnetico BU no seu referencial iner-cial local (isto e, na base ortonormal com e0 = U). Estes campos sao 4-vectorescom as seguintes componentes
EaU ≡ F abUb, Ba
U ≡ −1
2εabcdUbFcd.
(a) Mostre que os campos EU e BU existem no plano ortogonal a linha doUniverso do observador, e estao portanto assentes na hipersuperfıcie de si-multaneidade do observador.
(b) Mostre que o tensor campo electromagnetico pode ser reconstruıdo a partirda 4-velocidade do observador e dos campos electrico e magnetico medidosno seu referencial do repouso por intermedio da equacao tensorial
F ab = UaEbU − Ea
UU b + εabcdU
cBdU . (1.1)
(c) Recorrendo ao conceito de formas duais, e escrevendo os 4-vectores anterio-res em termos dos seus co-vectores associados, mostre que e possıvel escrevera equacao (1) na forma
F = λ(U ∧ EU) + µ ∗ (U ∧ BU), (1.2)
e determine o valor das constantes λ e µ.
1.36 Em virtude da sua condutividade electrica, um plasma perfeitamente condutornao pode suportar um campo electrico no seu referencial proprio. (Mesmo umcampo electrico fraco produziria uma forte corrente electrica atraves do plasmaque rapidamente re-arranjava a distribuicao de carga electrica do plasma, demodo a eliminar o referido campo electrico.) Vamos representar por U a 4-velocidade do plasma, e por B o campo magnetico, dual de B em R3, no referencialproprio do plasma. Entao o tensor campo electromagnetico do plasma e dadopelas equacoes (1) ou (2) do problema anterior com EU = 0 e BU = B.
(a) Suponha agora um observador com 4-velocidade V . Escreva uma expressaogeometrica, independente do referencial (i.e. um tensor, tal como a eq. 1)para os campos eletrico e magnetico medidos por este observador, em termosde Ua, Va, e Ba.
(b) Introduza o referencial inercial local (instantaneo) do observador atraves dabase ea com e0 = V . Oriente a base de modo que o plasma seja visto pelo
103

observador a mover-se na direccao do eixo dos xx com velocidade v. Use osresultados da parte a) para derivar as componentes dos campos electrico e
magnetico, E i e B i, medidos no referencial do observador, em termos de v ede Bi (as componentes espaciais ortonormais de B no referencial proprio doplasma). (Sugestao: e necessario transformar as componentes do 4-vectorB do referencial do plasma para o referencial do observador.)
(c) Derive o resultado da parte b) usando a transformacao de Lorentz das com-ponentes ortonormais de F do referencial do plasma para o referencial doobservador.
1.37 Tensor Energia-Momento
O tensor energia-momento e definido de modo que, numa base ortonormada, T 00
e a densidade de energia, T 0i = T i0 e a componente i da densidade de momento(e a componente-i da densidade de fluxo de energia), e T ij = T ji sao as tensoesespaciais, ou melhor, e a componente-i do fluxo da componente-j da densidadede momento. Se n e um co-vector normal a uma superfıcie, T (n) = T abnaeb e adensidade de fluxo de energia-momento que atravessa a superfıcie.
(a) Para um fluido perfeito no seu referencial inercial local (ortonormado), T ab =diag(ρ, p, p, p), onde ρ e a densidade de energia e p e a pressao. Mostre que atransformacao destas componentes para um referencial onde a 4-velocidadedo fluido tem componentes Ua se pode escrever
T = ρU ⊗ U + ph, onde h = g−1 + U ⊗ U
e o tensor do tipo (2, 0) (de 2a ordem, contravariante) que projecta no es-paco de repouso do observador U (e e tambem a metrica da hipersuperfıcieespacial ortogonal a U).
(b) Considere um observador com 4-velocidade V , cujo referencial inercial local(instantaneo) e definido pela base (ortonormada) ea. Mostre que a 4-velocidade do fluido pode ser decomposta numa parte temporal e numa parteespacial no referencial do observador do seguinte modo: U 0 = −g(U, V ) =
−U ·V e U iei = U +g(U, V )V . O que sao U 0 e U i em termos da 3-velocidadedo fluido U i medida pelo observador?
(c) Usando os resultados da alınea b), calcule a densidade de energia, a densi-dade de momento, e as tensoes espaciais medidas pelo observador a partirdas componentes ortonormais T ac na base ea. Mostre que os seus resul-tados concordam com a transformacao de Lorentz das componentes dadasno referencial do fluido.
(d) Da lei de conservacao do tensor energia-momento ∇ · T = 0, deduza asequacoes relativistas do fluido,
∇Uρ + (ρ + p)∇ · U = 0, (ρ + p)∇UU = −h · ∇p.
104

Sera que um elemento de fluido segue uma geodesica? Justifique a suaresposta. Para um fluido nao relativista e para uma base ortonormal, mostreque estas equacoes se reduzem as equacoes da hidrodinamica de Newton.Quais sao os termos extra que aparecem se a conexao e nao nula?
(e) Deduza as componentes do tensor energia-momento electromagnetico T abEM
em termos do tensor Fab e da metrica, a partir da derivada funcional daaccao electromagnetica, isto e
T abEM = 2
δSEM
δgab
, SEM =∫
LEM
√−gd4x, LEM = −1
4FabF
ab.
onde L e a densidade Lagrangiana. Mostre que (∇aT )abEM = 0 para um
campo electromagnetico livre, mas a igualdade nao verifica quando existem(densidade de) correntes Ja. Compare o seu resultado com a forca de Lorentzsobre uma carga em movimento, e explique porque e que o tensor das tensoeselectromagnetico nao se conserva na presenca de fontes. O que e entaoconservado?
105