automatización de operaciones mineras subterráneas …€¦ · block caving vs. sublevel stoping...
TRANSCRIPT

G R O U P
Automatización de Operaciones Mineras
Subterráneas de Mediana Mineria
Christian Riedel

Agenda
– Empresa
– Motivación
– Proyecto
– Avances
12.10.2017 2

Formación de la fundición de acero
„Gute Hoffnungshütte“ en 1782
Desde 1964 enfoque en diseño y fabricación de
equipos LHDs y Dump Trucks para la minería
subterránea y construcción de túneles
Fundación de GHH CHILE en 2012, desde entonces
se vendió 62 unidades en el mercado chileno
2015 / 2016 GHH invirtió USD 3,0 millones en sus
instalaciones en Chile (talleres, oficinas y bodegas)
2
Historia
GHH Fahrzeuge

3
Nuevas Instalaciones
GHH Fahrzeuge
En Febrero 2016, GHH CHILE se traslada a las nuevas
instalaciones
La Montaña 57
Parque Industrial Los Libertadores
Colina – Santiago

Nuestra Oferta por la Minería Chilena
Calidad Compromiso Flexibilidad Innovación

10
Propuesta de Post Venta
Taller de Componentes Taller de Máquinas
Servicio en Terreno Productos de Post Venta

7GHH Fahrzeuge
Avances y Desarrollos
Technology Investment Intentions for Vehicles
in LATAM
Nuestras soluciones para operación
Control
RemotoManual
Tele
Remoto
Semi -
AutónomoAutónomo
Sistemas de Asistencia
Análisis de
Rendimiento
Monitoreo de
Condición
Sistema
Anticolisiones
Fuente: Timetric, 2015

Motivación para la Automatización
Costo por toneladaSeguridad Ergonomia
Productividad Costo de operación

Evolución de Sistemas Autónomos
Manual
Remote Control
Tele-Operation
Semi-Automation
Automation
9
Fuente: Sandvik
Nivel de Seguridad
Fuente: Glencore
GHH Fahrzeuge

Automatización de LHD en el Mundo
GHH Fahrzeuge 10
La automatización casi nunca se implementa ya que los
sistemas son demasiado complejos y demasiado caros
Chile: El Teniente,
Codelco

Socios
12.10.2017 11GHH Fahrzeuge
Public Private Partnership (PPP)
Public Private

Objetivos
GHH Fahrzeuge 12
Automatización accesible para una minería
subterránea más eficiente y segura en Chile
Bajo Costo
Baja complejidad
Fácil de operar
Fácil mantenimiento y
servicio
Productividad similar a la
manual, superior a la RRC
Menos daño a la máquina
Seguridad y
ergonomía
para los
operadores
Adaptación a los requisitos locales con
Ingeniería local, avance local en
automatización
Formación y publicación locales
Mantenimiento / servicio / apoyo local

Block Caving vs. Sublevel Stoping
GHH Fahrzeuge 13
0,0 20,0 40,0 60,0 80,0 100,0 120,0 140,0 160,0 180,0
Manual / Control Remoto
Tele-operación
Semi-Autónomo
Sublevel Stoping
Traslado Cambio Carguio Cambio Traslado Descarga
0,0 5,0 10,0 15,0 20,0 25,0 30,0 35,0 40,0
Manual
Tele-operación
Semi-Autónomo
Block Caving
Traslado Cambio Carguio Cambio Traslado Descarga
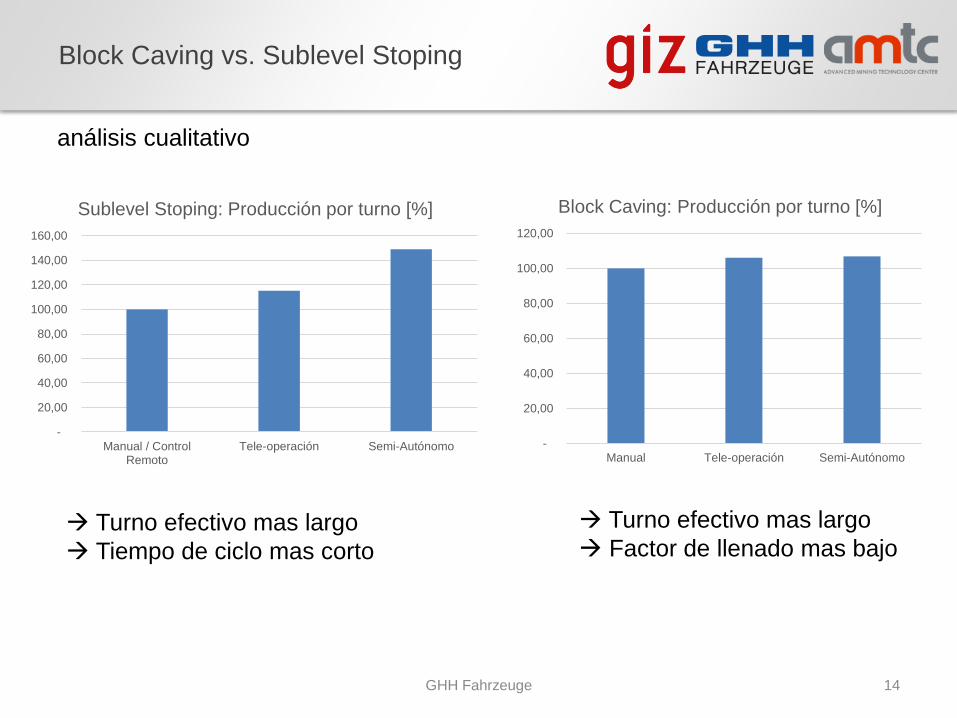
análisis cualitativo
Block Caving vs. Sublevel Stoping
GHH Fahrzeuge 14
análisis cualitativo
-
20,00
40,00
60,00
80,00
100,00
120,00
140,00
160,00
Manual / ControlRemoto
Tele-operación Semi-Autónomo
Sublevel Stoping: Producción por turno [%]
-
20,00
40,00
60,00
80,00
100,00
120,00
Manual Tele-operación Semi-Autónomo
Block Caving: Producción por turno [%]
Turno efectivo mas largo
Tiempo de ciclo mas corto
Turno efectivo mas largo
Factor de llenado mas bajo
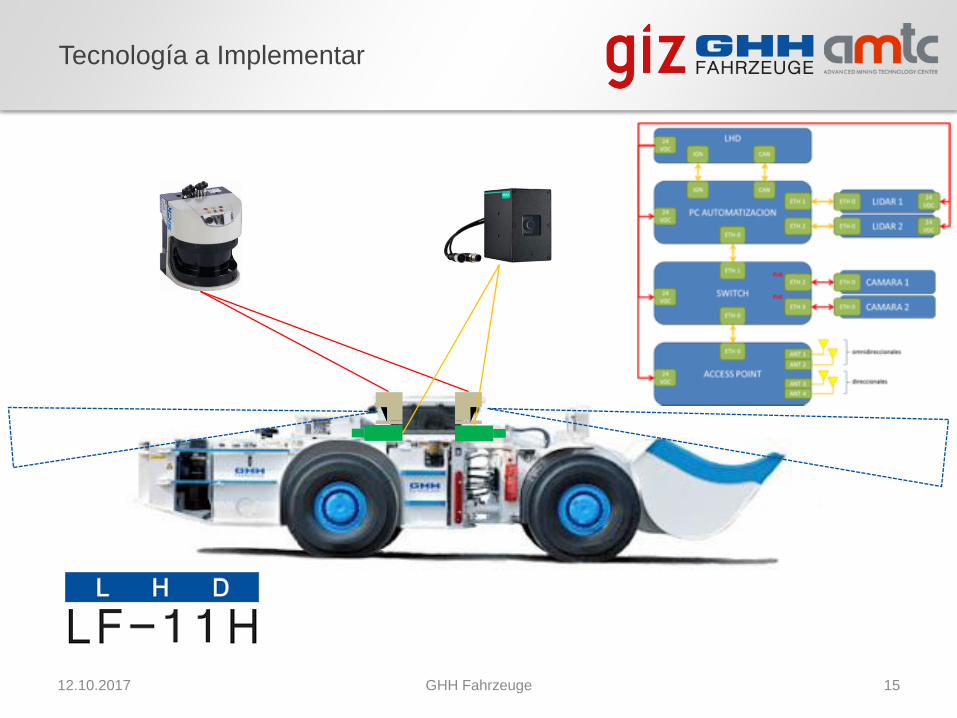
Tecnología a Implementar
12.10.2017 15GHH Fahrzeuge

12.10.2017 16
TrasladoVaciado
Teleoperado
Carguío
GHH Fahrzeuge
Ciclo de Operación
Semi-AutónomoAutónomo
Concepto modular para todos los métodos de
extracción
Optimización automática de la ruta mediante un
"mapa predefinido
Movimiento completamente autónomo del vehículo
en la ruta (el vehículo busca automáticamente la
mejor manera)
Evitar las colisiones
Transferencia de imagen y datos vía WIFI
Concepto de seguridad integrado
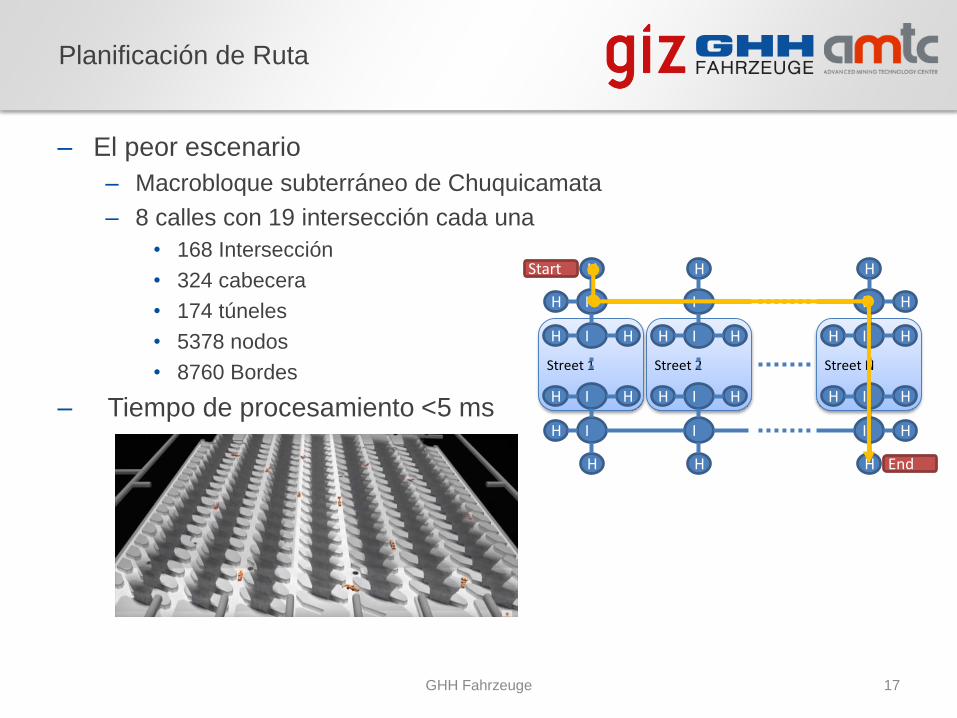
Planificación de Ruta
– El peor escenario
– Macrobloque subterráneo de Chuquicamata
– 8 calles con 19 intersección cada una
• 168 Intersección
• 324 cabecera
• 174 túneles
• 5378 nodos
• 8760 Bordes
– Tiempo de procesamiento <5 ms
GHH Fahrzeuge 17
Street NStreet 2Street 1
I
I
I
H
H
H
H
H
H
I
H
H
I
I
I
H
H
H
H
H
I
H
I
I
I
H
H
H
H
H
H
I
H
H
Start
End

Navegación
GHH Fahrzeuge 18
H1
T1
I1 T2 H2
T3
I4 T5 I2
H3
T7
T6
I3
T4
OP1
LP1 OP2

Simulación de Algorithmos
19

Tiempo de Traslado
Autónomo vs. Tele-Operado
GHH Fahrzeuge 20

Prueba con Tuneles Falsos
21

Prueba en Mina Subterranea
GHH Fahrzeuge 22
Método de explotación: Sublevel Stoping
Caserón
Punto de Descarga (Stockpile)
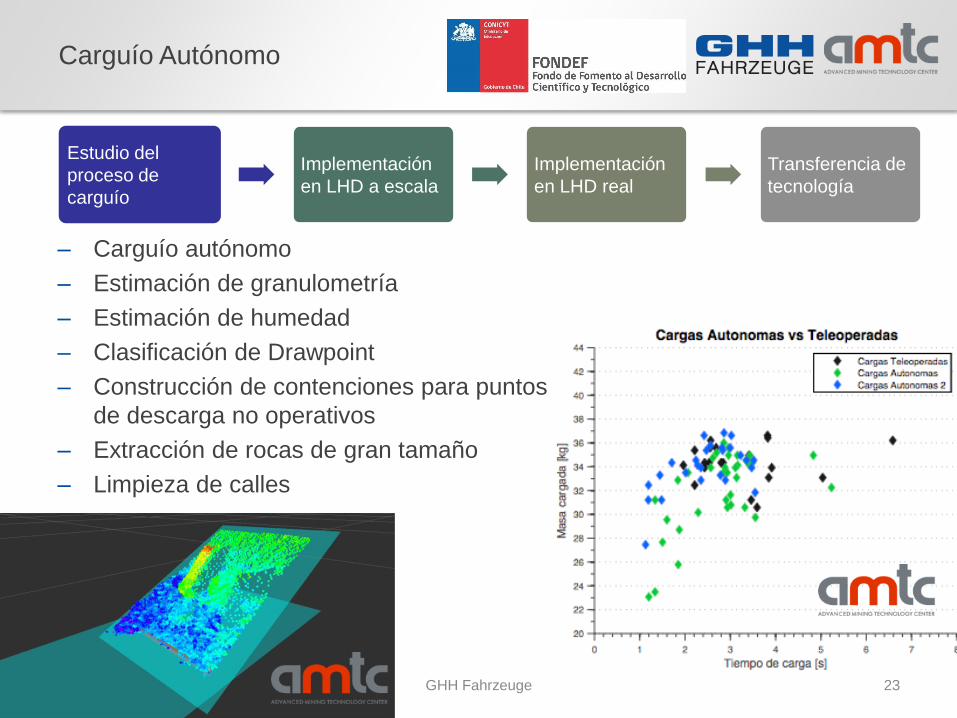
Carguío Autónomo
GHH Fahrzeuge 23
– Carguío autónomo
– Estimación de granulometría
– Estimación de humedad
– Clasificación de Drawpoint
– Construcción de contenciones para puntos
de descarga no operativos
– Extracción de rocas de gran tamaño
– Limpieza de calles
Estudio del
proceso de
carguío
Implementación
en LHD a escala
Implementación
en LHD real
Transferencia de
tecnología
Nuevos Escáneres de Radar para
Automatización
GHH Fahrzeuge 24

Sistema Anticolisión (Multimarca)
25

Sistema de Monitoreo de Condición
(Multimarca)
26

Resumen
– Los sistemas de automatización anteriores son demasiado
complejos y caros
– No son adecuados para minas pequeñas y medianas
– Una eficiente asociación público-privada (PPP) con el apoyo del giz
de Alemania en Chile
– Sistema simple de bajo costo
– Formación de operadores y servicios
– Prueba subterránea en mina San Gerónimo ha comenzado
– Desarrollo adicional con nueva tecnología de sensores y nuevas
funciones
GHH Fahrzeuge 27
Gracias por su apoyo!

G R O U P
Save the Date!
Workshop Automatización
23.11.2017
@GHH Chile, Colina