algebra lin cap01 - profemunar.weebly.com · matriz posee orden 3x2 la segunda matriz posee orden...
TRANSCRIPT
Universidad de Ciencias de la Informática.Escuela de Ingeniería.Carrera de Ingeniería de Ejecución en Informática.
Algebra II
Miguel Angel Muñoz Jara.

Universidad de Ciencias de la Informática.Escuela de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. Curso: Algebra II.
Contenidos
1 Matrices.
1.1 Definiciones. 1
1.2 Matrices Especiales. 3
1.3 Operaciones entre Matrices. 4
1.4 Matrices Complejas. 9
1.5 Matrices Invertibles. 19
1.6 Sistemas de Ecuaciones. 25
2 Determinantes.
2.1 Definiciones. 39
2.2 Calculo de Inversas vía Determinantes. 42
3 Espacios Vectoriales.
3.1 Definiciones Básicas. 50
3.2 Independencia Lineal y Bases. 52
3.3 Matriz Cambio de Base. 59
3.4 Vectores en el Espacio. 62
4 Transformaciones Lineales.
4.1 Definiciones Básicas 73
4.2 Núcleo e Imagen de una Transformación Lineal. 76
4.3 Matriz Asociada a una Transformación Lineal. 78
Universidad de Ciencias de la Informática.Escuela de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. Curso: Algebra II.
5 Material de Apoyo.
5.1 Solemnes y Pautas Año 2001. 88
5.2 Solemnes Segundo Semestre Año 2000. 115

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 1 - Curso: Algebra II.
1. Matrices
1.1. Definiciones.
Definición 01: una matriz sobre el cuerpo de los números reales es unordenamiento rectangular de números denotado por:
=
amnaa
aa
aaa
A
mm
n
................
.
.
.
.
.
.
.
.
.................
................
21
2221
11211
donde njmiIRa ij ,....,2,1,...,2,1, ==∈ .
La i - esima fila de A es ( )inii aaa ............21 con mi ≤≤1 . Mientras que laj - esima columna de A es:
mj
j
j
a
a
a
.
.
.2
1
con nj ≤≤1 .
si una matriz A posee m filas y n columnas, diremos que A es una matriz deorden m por n )( nm × . Si nm = , se dice que la matriz A es una matriz cuadrada
de orden n y que los elementos nnaaa ,....., 2211 forman la diagonal principal de A .
Y nos referimos a los elementos ija como las entrada ),( ji de la matriz A con lo
cual podemos escribir:
A )( ijnm aA == × .
El conjunto )(KM nm× denota el conjunto de todas las matrices de orden nm × sobre
el cuerpo K( IR= o C) . si nm = )(KM n denota el conjunto de las matrices
cuadradas de orden n sobre el cuerpo K .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 2 - Curso: Algebra II.
Definición 02: dos matrices nmA × Y qpB × son iguales si y solamente si qnpm == ,
y njmiba ijij ,...,2,1;,...,2,1, =∀=∀= .
Ejemplo 01: observe que en cada caso los pares de matrices dados sondiferentes:
a)
−
≠
−
12
31
00
12
31
, ya que los ordenes son diferentes, mientras la primera
matriz posee orden 3x2 la segunda matriz posee orden 2x2.
b) BA =
−≠
−=
432
010
432
011, ya que los elementos 11a Y 11b son
diferentes.
Ejemplo 02: determine cba ,, y d si existen de manera que en cada caso las
igualdades sean validas.
a)
+
−−=
−+21
13
2
122
ab
aa, en )(2 IRM .
b)
=
+
+−16
23
12
12 c
dc
dcc, en )(2 IRM .
c)
+=
++
−++db
ca
cba
baa
2
21
2
12 22
, en )(2 IRM .
Solución:
a) ab
aa
ab
aa
ab
aa
+=−=+⇒
=+=−=−−=+
⇒
+
−−=
−+1)2(
32)1(
22
1
11
32
21
13
2
12 2
2
2
.
De la ecuación (1) vemos que una solución es 21 ia +−= , con lo cual ∈ba, Casí la igualdad no es posible en )(2 IRM .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 3 - Curso: Algebra II.
b) si
12)3(
2)2(
31)1(
16
23
12
12
2
=+==+−
⇒
=
+
+−
dc
cd
ccc
dc
dcc
de (2) y (3) obtenemos que 65=c , pero este valor no satisface la ecuación (1).
Con lo cual deducimos que no existen cba ,, y d números reales para que la
igualdad sea valida.
c)
( ) 221021
24
21)3(
)2(
12)1(
2
21
2
12
22
22
=
−==
=
⇒
==−=++
+=++
⇒
+=
++
−++
d
c
b
a
d
c
bcba
abaa
db
ca
cba
baa.
1.2. Matrices Especiales.
Definición 03: definimos la matriz nula o matriz cero por la matriz que posee todassus entradas cero, la cual denotamos por 00 =×nm .
Ejemplo 03:
a) 2000
00=
. B) 430
0000
0000
0000
×=
.
Definición 04:(Matriz Diagonal) sea )()( IRMaA nij ∈= diremos que A es una
matriz diagonal si y solo si 0=ija para ji ≠ .
Ejemplo 04:
a)
=
100
000
001
A b)
=
00
00B c)
=
4000
0300
0020
0001
C

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 4 - Curso: Algebra II.
Definición 05: llamamos matriz identidad o unitaria de orden n a la matrizdiagonal de orden n definida por
==
1......00.
.
.
.
.
.0......1
0......01
nII
Definición 06: (Matriz Triangular Superior e Inferior) Una matriz)()( IRMaA nij ∈= se denomina matriz Triangular Superior si jia ij >∀= ,0 ,
analogamente diremos que )()( IRMaA nij ∈= es una matriz Triangular Inferior si
jia ij <∀= ,0 .
Ejemplo 05:
a)
300
000
321
matriz triangular superior.
b)
0200
0000
0000
0001
matriz triangular inferior.
1.3. Operaciones entre Matrices.
Las operaciones entre matrices producen nuevas matrices a partir de las matricesdadas.
Definición 07:(Adición) sean )()(),( IRMbBaA mnijij ×∈== definimos la suma
entre A y B por:
( )ijijijijij bacbaBA +==+=+ )()()( .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 5 - Curso: Algebra II.
Observe que la suma de matrices solo esta definida entre matrices de mismoorden.
Ejemplo 06: sean
−−
−=
−
=412
3211,
210
321BA entonces
−−
=
−−
−+
−
=+622
0232
412
3211
210
321BA .
Teorema 01: ( )+× )(IRM mn es un grupo abeliano, es decir la suma es asociativa,
conmutativa, existe elemento neutro y existe elemento inverso.
Definicion 08: sean )()( IRMaA mnij ×∈= y IRk ∈ definimos el producto de un
escalar k por la matriz A por:
)()( ijij kaakkA == .
Ejemplo 07:
−−−−
=
−
−420
642
210
321)2( .
Definición 09:(Multiplicación de Matrices) sean ( ) ( )IRMaA nmij ×∈= y
( ) ( )IRMbB pnij ×∈= definimos el producto de A y B por:
( ) ( ) ( )pmijpnijnmij cbaAB
×××==
donde
∑=
=n
kkjikij bac
1
pjmi ,...,2,1.,...,2,1 == .
Ejemplo 08: sean
−
−=
−=
12
34
52
,413
121BA entonces
−=
−
−⋅
−=
166
24
12
34
52
413
121AB .
Observación: el producto de matrices no es conmutativo.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 6 - Curso: Algebra II.
Ejemplo 09: consideremos
=
=
000
001
000
,
000
001
001
BA entonces
=
=≠
=
=
000
001
000
000
001
001
000
001
000
000
000
000
000
001
000
000
001
001
BAAB .
Definición 10: si A es una matriz cuadrada de orden n y ∈k IN, definimos laspotencias de la matriz A por
1
0
−=
=
kk
n
AAA
IA
Ejemplo 10: sea
=
01
01A determine 3A
=
=
=
=
13
01
12
01
11
01
12
01
11
01
11
01
23
2
AAA
A
Definición 11: sea )()( IRMaA nij ∈= diremos que A es Idempotente si AA =2 .
Definición 12: sea )()( IRMaA nij ∈= diremos que A es Nilpotente si existe
∈k IN , tal que 0=kA .
Definición 13: sea )()( IRMaA nij ∈= diremos que A es Involutiva si nIA =2 .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 7 - Curso: Algebra II.
Ejemplo 11: sean
−=
−=
=
10
11,
010
000
010
,00
01CBA observe que:
a)
=
00
01A es Idempotente.
b)
−=
010
000
010
B es Nilpotente de orden dos ya que 02 =A .
c)
−=
10
11C es Involutiva.
Definición 14:(Matriz Traspuesta) Sea )()( IRMaA nij ∈= , definimos la traspuesta
de A por tA ( ) ( )IRMb mnij ×∈= donde
jiij ab = .
Es decir la traspuesta de una matriz A se obtiene a partir de A intercambiandolas filas por las columnas de A .
Ejemplo 12:
−−
−=⇒
−−−
=
−
−=⇒
−
−=
1075
1150
231
1012
7153
501
104
63
51
1065
431
t
t
AB
AA
Teorema 01: sean ( )IRMBA nm×∈, y IRk ∈ entonces
a) ( ) AAtt = .
b) ( ) tt kAkA = .
c) ( ) ttt BABA +=+
d) ( ) ttt ABAB =

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 8 - Curso: Algebra II.
Definición 15:(Traza ) sea )()( IRMaA nij ∈= definimos la traza de A por
∑=
=n
iiiaATr
1
)( .
Teorema 02: sean ( )IRMBA n∈, y IRk ∈ entonces
a) )()( AkTrkATr = .
b) )()()( BTrATrBATr +=+ .
c) )()( BATrABTr = .
Definición 16:(Matriz Simétrica ) sea ( )IRMA n∈ diremos que A es Simétrica sitAA = .
Definición 17:(Matriz Antisimétrica) sea ( )IRMA n∈ diremos que A es
Antisimétrica si AAt −= .
Proposición 01: dada ( )IRMA n∈ existe una descomposición única de A como
la suma de una matriz simétrica con una matriz antisimétrica, tal descomposiciónes:
876876 icaantisimetr
t
simetrica
t AAAAA
22−++=
.Ejemplo 13:
AAA t =
−=⇒
−=
3363
662
321
3363
662
321
, entonces A es simétrica.
AAA t −=
−−−
=⇒
−−−=
063
602
320
063
602
320
, entonces A es antisimétrica.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 9 - Curso: Algebra II.
Observación: note que si una matriz es antisimétrica los elementos de sudiagonal están obligados a ser ceros.
Definición 18: sea ( )IRMA n∈ diremos que A es ortogonal si IAAAA tt == .
Ejemplo 14: sea
−−
−
=
94
91
98
97
94
94
94
98
91
A es ortogonal.
Definición 19: sea ( )IRMA n∈ , diremos que A es Normal si AAAA tt = .
Observación: note que si ( )IRMA n∈ es simétrica, antisimétrica u ortogonal
entonces obviamente es normal. Sin embargo no todas las matrices normales sonde los tipos de matrices ya mencionados.
Ejemplo 20:
−=
63
36A es normal.
Teorema 03: sea ( )IRMA 2∈ una matriz normal entonces a es simétrica o bien lasuma de una matriz escalar y otra antisimétrica.
1.4. Matrices Complejas.
Denotaremos por (mnM × C ) al conjunto de matrices de orden mn × sobre el cuerpo
de los complejos.
Definición 20: sea ()( mnij MaA ×∈= C) definimos la conjugada de la matriz A por:
( )ijij aaA == )( .
Definición 21: sea ()( mnij MaA ×∈= C) definimos la traspuesta conjugada de A
por:
tij
H aA )(=

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 10 - Curso: Algebra II.
Ejemplo 21: sea
−++
=ii
iiA
16
132 entonces
+−
−−=
ii
iiAH
11
632.
Definición 22: diremos que una matriz (nMA∈ C) es:
a. Hermitica si y solo si AAH = .
b. Antihermitica si y solo si AAH −= .
Observe que si A es Hermitica entonces todos los elementos de su diagonaldeben ser reales. De forma similar si A es Antihermitica entonces los elementosde su diagonal deben ser complejos puros.
Proposición 02: dada (nMA∈ C ) existe una descomposición única de A como
la suma de una matriz Hermitica con una Antihermitica, tal descomposición es:
4847648476 icaantihermit
H
hermitica
H AAAAA
22−++=
Definición 23: diremos que una matriz (nMA∈ C) es Unitaria si IAAH = .
Ejemplo 22:determine en cada caso si la afirmacion dada es valida.
a)
+−+++−−
=011
11
11
21
ii
ii
ii
A es Unitaria .
b)
−−−++−
=2274
2421
74213
ii
iii
ii
B es Hermitica.
Solución: a) solo basta ver que IAAH = .
=
−−−−−−−
+−+++−−
=100
010
001
011
11
11
011
11
11
41
ii
ii
ii
ii
ii
ii
AAH
b) falso ya que el elemento IRb ∉22 , por lo cual B no puede ser hermitica.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 11 - Curso: Algebra II.
Ejercicios.
1. Dadas las siguientes matrices:
−
−=
=
−−−
=
−=
−
−=
415
653
122
43
12
312
765
422
18
23
10
403
212
ED
CBA
calcular si es posible:
( ) ( )tt ECAEACECAABDDADABBAABDCBCE ++++++ ,,,,,,,,, 2
2. Resolver la ecuación matricial para ( )IRMX 2∈ ; 22 BAAX t +=+ , donde:
=
=
21
13;
01
12BA .
3. Determine la forma general de las matrices cuadradas de orden 2, que
conmutan, respecto al producto, con la matriz A =−−
2 13 1
.
4. Si
=
012
220
112
A y B =−−−
1 1 1
2 2 0
1 0 1
, determine la matriz ( )IRMX 3∈ en la
siguiente ecuación matricial: [ ]AX B A Xt t t− = + .
5. Encuentre la matriz X, de orden 3, tal que ( )X A B− −+ =1 1 , si se sabe que
−−−
−−=
010
101
011
A y B =
1 1 1
1 1 0
1 0 0
.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 12 - Curso: Algebra II.
6. Si A =
1 1
1 2
1 1
, demuestre que tt AAAAI 13 )( −− es idempotente y encuentre su
rango.
7. Resuelva la siguiente ecuación matricial, de acuerdo a los diversos valores dela constante a:
Xa
a
a
a a⋅
=
1
1
1 (donde X es una matriz cuadrada de orden 2).
8. Se define la matriz A a M IRij= ∈( ) ( )4 , donde
≠=
=ji
ji
si
sia ij 1
0 . Sea
A bij2 = ( ) y c a bi ij
jij
j
= += =
∑ ∑1
4
1
4
. Calcule 3 42 3c c− .
9. Sea A aij= ×( )4 4 , tal que aij = 1, ∀i j, . Encuentre el único valor del número real
x, que cumple con la igualdad: ( )I A I xA41
4− = +− .
10. Suponga que A aij= ×( )3 3 , donde a
si i j
si i j
b si i jij
i j
=>=<
+ −
0
1
2
,
,
,
, y N A I= − 3 .
Demuestre que N 3 0= y que A I N N I⋅ − + =( )32
3 .
11. Si B bij= ×( )3 3 , donde bsi
si
i j
i jij =≠=
1
0
,
, . Determine todos los valores
reales de p y de q, sabiendo que A pI qB= +3 y A I23= .
12. Si A =
1 0 0
1 0 1
0 1 0
, demuestre que A nA n In2 231= − −( ) ; ∀ ∈n IN . Calcule A30 .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 13 - Curso: Algebra II.
13. Utilice el principio de inducción matemática para demostrar que:cos sen
sen cos
cos( ) sen( )
sen( ) cos( )
x x
x x
nx nx
nx nx
n
−
=−
; ∀ ∈n IN .
14. En cada caso, encuentre matrices particulares que cumplan la condición dada(justifique la no - existencia cuando corresponda):
a) A I22 0+ = b) AB BA I− = 2 c) A I2
3 0+ =
15. Demuestre que, en general, para dos matrices A, B cuadradas del mismoorden, se tiene que: ( )( )A B A B A B− + ≠ −2 2 .
16. Demuestre que ( )A B A B AB+ = + +4 14 , si A y B son matrices cuadradas deorden n, idempotentes y que conmutan.
17. Sean A y B dos matrices cuadradas de orden n, tales que A B In+ = y
AB O= . Demuestre que A y B son idempotentes.
18. Suponga que A y B son dos matrices cuadradas de orden n, invertibles y talesque A + B también es invertible. Resuelva el siguiente sistema de ecuacionesmatriciales, con X e Y son matrices cuadradas de orden n:
AX BX AYB A B I O
AX BX AYB I A B O
+ + − − − =
+ − − + + =
2 2
2 23 3 2 3 2 2
19. Si A, B y C son matrices tales que AC CA= y BC CB= , demuestre que( ) ( )AB BA C C AB BA± = ± .
20. Dada la matriz
=
111
111
111
A deduzca una formula para nA .
21. Si
−=
−=
−=
=
=
123
410
542
;52
23;
312
514
313
;
23
12
01
;412
321EDCBA
a. Calcular si es posible: C+E; AB; 2C-3E; CB+D; AB+DD.
b. Si es posible calcular: ABD; A(C+E); CB+D+E; 23A+2A.
c. Calcule : B t A t ; (C+E) t ; C t +E t .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 14 - Curso: Algebra II.
22. Si [ ]33×
= ijaA y [ ]33×
= ijbB tal que:
−−
−=
≥−
<+=
imparesjisii
paresjisib
jisiji
jisijia ijij
)(3
)(2
2
Determine: A-B; A+B; AB-2A.
23. Determinar IRwzyx ∈,,, tales que
+
++
−
=
3
4
21
63
wz
yx
w
x
wz
yx.
24. Demostrar que tAA y AAt están definidas para cualquier matriz A .
25. Demostrar las siguientes afirmaciones suponiendo que AB esta definida.
a. Si A posee una fila nula, entonces AB también.
b. Si B posee una columna nula, entonces AB también.
26. Sea
=
63
21A determinar una matriz B de orden 32× con entradas distintas
tales que 0=AB .
27. Sea
−
=34
21A determine )(Af donde 542)( 3 +−= xxxf .
28. Sea
−
=34
31A . Determinar una matriz de orden 12× no nula, B , tal que
BAB 3= .
29. Sea
−−−
=5125
152
321
A , determinar todas las matrices columnas u tales que
0=Au .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 15 - Curso: Algebra II.
30. Determinar todas las matrices de orden dos
=
tz
yxM que conmutan con
10
11.
31. Determine si existe una matriz triangular superior A de orden tres tal que
−−=
6202
332613
456333A .
32. ¿ Existen matrices que sean a la vez triangular superior y triangular inferior?
33. Determinar ℜ∈tsyx ,,, , si existen, de tal modo que
=
tss
y
x
A31
32
32
32
sea
ortogonal.
34. Demuestre que si
=
dc
baA es ortogonal entonces 122 =+ ba .
35. Demostrar por inducción que:
( )
−
=
= −
−−
n
nn
nnnn
n
p
npp
pnn
npp
p
p
p
A
00
02
1
00
10
011
21
.
36. Si INnna ∈= ,tgα , demuestre:
( ) ( )( ) ( )
−
=
+=
− αααα
nn
nn
na
na
na n
n
cossen
sencos1
1
1 22
.
37. Calcular:
−
=+++=11
01,....2 AAAAS n
n donde .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 16 - Curso: Algebra II.
38. Determinar todas las matrices de orden dos que conmuten con
−20
11.
39. Determine ( )IRMBA 2, ∈ distintas tales que 0=AB .
40. Considere BkIA n λ+= , donde ( )IRMB n∈ es tal que todos sus elementos son
1 salvo los elementos de su diagonal los cuales son nulos.
a. Determine λ,k de manera que nIA =2 .
b. Determine todas las matrices de orden tres que satisfacen a.
41. Resolver el sistema matricial para ( )IRMYX 2, ∈
( ) INnBYAX
BAYXAtntt
nt
∈=+
=− 24
donde
−
=
−−
=01
10,
23
23BA .
42. Sea ( )IRMA n∈ una matriz antisimétrica. Probar que si A es no singular,
entonces n debe ser par.
43. Sean A, B [ ]IRM n∈ y c IR∈ demuestre que:
a. Tr(cA)=cTr(A).
b. Tr(A+B)=Tr(A)+Tr(B).
c. Tr(AB)=Tr(BA).
44. Demuestre que no existen dos matrices de orden dos tales que AB – BA = I 2 .
45. Encuentre tres matrices de orden dos tales que AB = AC con B ≠ C y A ≠ 0.
46. Sea A una matriz de orden n x m y c IR∈ demuestre que si cA=0 entonces0 c = o A=0.
47. Sean A, B, C [ ]IRM n∈ demuestre que A (B + C) = AB+ BC .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 17 - Curso: Algebra II.
48. Sea A [ ]IRM n∈ . Diremos que A es Idempotente si y solo si A 2 = A. Diremos
que A es Nilpotente si y solo si existe Np ∈ tal que A p = 0. Muestre que:
a.
−−−
−−=
321
431
422
A es Idempotente.
b.
−−−=
312
625
311
B es Nilpotente.
49. Sea A [ ]IRM n∈ Nilpotente de orden 2 demuestre que para todo INp ∈ se tiene
que AAIA pn =± )( .
50. Sean A, B [ ]IRM n∈ demuestre que si AB=A y BA=B entonces las matrices A y B
son idempotentes.
51. Demuestre que si A, B [ ]IRM n∈ son triangulares superiores(inferiores)
entonces AB es triangular superior(inferior).
52. Deducir una formula para hallar el producto BA de una matriz B de orden mn ×por una matriz A de orden m diagonal.
53. Si A=
−
121
211
312
demuestre que 092 23 =−− AAA pero que 0923 ≠−− IAA .
54. Demuestre por inducción que para todo n natural se tiene que
=
−
n
nnn
x
nxxx
x
00
1 1
55. Demuestre que si A [ ]IRM n∈ es simétrica entonces: A t A; AA t y A 2 son
simétricas.
56. Demuestre que si AB = A y BA = B entonces se verifica que:
a. B t A t =A t y A t B t =B t .
b. A t y B t son idempotentes.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 18 - Curso: Algebra II.
57. Diremos que una matriz A de orden n es Involutiva si A 2 = I. Demuestre quesi A es Involutiva entonces las matrices ½ ( I + A ) y ½ ( I – A ) son idempotentesy que:
( I + A )( I – A )=0.
58. Sea ( )IRMA nm×∈ , demuestre que los elementos de la diagonal de AAt son
elementos positivos.
59. Pruebe que lo elementos de la diagonal de una matriz Hermitiana son reales,mientras que de una matriz Antihermitiana son imaginarios puros.
60. Pruebe que si A es simétrica, entonces APP t es simétrica para toda eleccióncompatible de P.
61. ¿Qué puede concluir si una matriz es triangular y simétrica?
62. Si ( )KMA n∈ es triangular estricta pruebe que es nilpotente, esto es que
INk ∈∃ tal que 0=kA
63. Pruebe que para cada ( )KMA n∈ se tiene que: mTDTA ++= 1 , en forma
única, donde 1T es triangular inferior estricta, D es diagonal, y mT es triangular
superior estricta.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 19 - Curso: Algebra II.
1.5. Matrices Invertibles.
Definición 24: sea ( )IRMA n∈ , diremos que A es invertible si B∃ ( )IRM n∈ tal
que nIBAAB == y diremos que B es la inversa de A y denotaremos 1−= AB .
Propiedades: sean ( )IRMBA n∈, matrices invertibles entonces:
a) ( ) AA =−− 11 .
b) ( ) 111 −−− = ABAB .
c) ( ) ( )tt AA 11 −− =
Observación: sea ( )IRMA 2∈ una matriz invertible, tal que
=
dc
baA entonces
es fácil comprobar que A es invertible si y solo si 0≠− bcad y su inversa es:
−
−−
=−
ac
bd
bcadA
11 .
Observación: si una matriz A es invertible, esta es llamada habitualmente matrizRegular o No Singular.
En lo que sigue de esta sección trataremos de proporcionar las herramientasnecesarias para poder determinar cuando una matriz es invertible y si lo es poderdeterminar su inversa, ya que para matrices de orden 2>n no es tan fácil deduciruna formula para la inversa.
Definición 25: sea ( )IRMA n∈ . Llamaremos operaciones elementales por filas
sobre A a cada una de las siguientes operaciones con filas de la matriz A .
a) Denotamos por ijF al intercambio de la fila i con la fila j.
b) Denotamos por )(rFi al reemplazo de la fila i por r veces la fila i, 0≠r .
c) Denotamos por )(rFij al reemplazo de la fila i por la suma de la fila i mas rveces la fila j, ji ≠ .
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 20 - Curso: Algebra II.
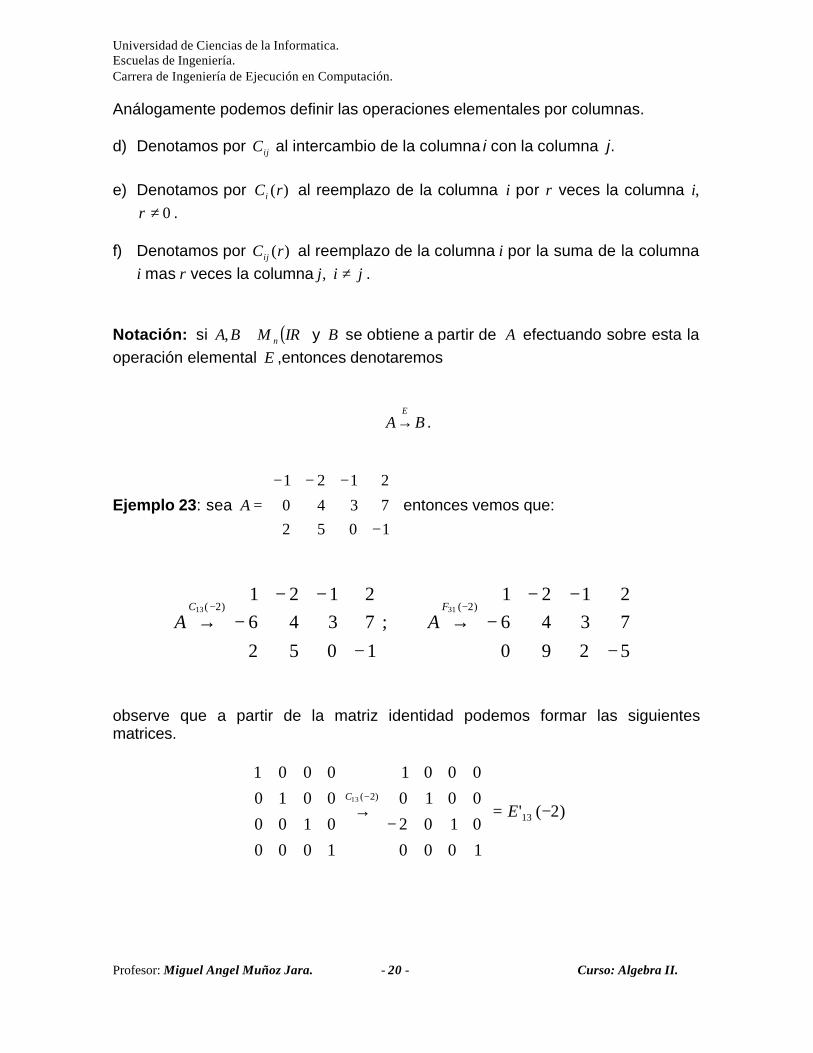
Análogamente podemos definir las operaciones elementales por columnas.
d) Denotamos por ijC al intercambio de la columna i con la columna j.
e) Denotamos por )(rCi al reemplazo de la columna i por r veces la columna i,0≠r .
f) Denotamos por )(rCij al reemplazo de la columna i por la suma de la columna
i mas r veces la columna j, ji ≠ .
Notación: si ( )IRMBA n∈, y B se obtiene a partir de A efectuando sobre esta la
operación elemental E ,entonces denotaremos
BAE
→ .
Ejemplo 23: sea
−
−−−=
1052
7340
2121
A entonces vemos que:
−−
−−→
−−
−−→
−−
5290
7346
2121
;
1052
7346
2121)2()2( 3113 FC
AA
observe que a partir de la matriz identidad podemos formar las siguientesmatrices.
)2('
1000
0102
0010
0001
1000
0100
0010
0001
13
)2(13
−=
−→
−
EC

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 21 - Curso: Algebra II.
)2(
102
010
001
100
010
001
31
)2(31
−=
−→
−
EF
Definición 26: Una matriz elemental de orden n es la matriz identidad de orden nluego de efectuarle una operación elemental y la denotaremos por:
)('),(','
)(),(,
)()(
)()(
rEIrEIEI
rEIrEIEI
i
rC
nij
rC
nij
C
n
i
rF
nij
rF
nij
F
n
iijij
iijij
→→→
→→→
.
Proposición 03: Sean ( )IRMBA nm×∈, tales que podemos obtener la matriz B vía
operaciones elementales sobre al matriz A , ya sean operaciones filas o columnas.Si enumeramos las operaciones por orden de ejecución y distinguimos lasoperaciones filas de las operaciones columnas, entonces existen matriceselementales filas tEEE ,......,, 21 de orden n y existen matrices elementales
columnas sEEE ',......,',' 21 de orden m tal que
BEEEEAEEEE sstt =⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅ −− 121121 ''
Proposición 04: toda matriz elemental es regular, es decir es invertible. Además:
a) ( ) ijij EE =−1 .
b) ( ) )()( 11 −− = rErE ii .
c) ( ) )()( 1 kEkE ijij −=− .
Definición 27: sean ( )IRMBA nm×∈, entonces:
a) Diremos que A es Equivalente por Filas a B si y solo si B se obtiene por unnumero finito de operaciones elementales filas sobre A . En tal caso
anotaremos BAF
→ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 22 - Curso: Algebra II.
b) Diremos que A es Equivalente por Columnas a B si y solo si B se obtienepor un numero finito de operaciones elementales columnas sobre A . En tal
caso anotaremos BAC
→ .
c) Diremos que A es Equivalente a B si y solo si B se obtiene por un número
finito de operaciones elementales sobre A . En tal caso anotaremos BA→ .
Observación: A es equivalente por filas a B implica que existe una matriz regularP tal que BPA = .
Análogamente A es equivalente por columnas a B implica que existe una matrizregular C tal que BAC = .
Por ultimo si A es equivalente a B implica que existen una matrices regulares P ,Q tal que BPAQ = .
Teorema 01: sea ( )IRMA n∈ entonces:
a) Si A es equivalente por filas a la matriz identidad, entonces A es producto dematrices elementales.
b) Si A es equivalente por columnas a la matriz identidad, entonces A esproducto de matrices elementales.
c) Si A es producto de matrices elementales entonces A es regular.
d) Si A es regular entonces A es producto de matrices elementales.
Proposición 05: sean ( )IRMBA n∈, entonces se tiene que:
a) Si A es singular y BAF
→ , entonces B es singular.
b) Si A es singular y BAC
→ , entonces B es singular.
c) Si A es singular y BA→ , entonces B es singular.
Proposición 06: si ( )IRMA n∈ posee una fila o columna nula entonces A es
singular.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 23 - Curso: Algebra II.
Ejemplo 24: las siguientes matrices son singulares.
a)
000
000
001
. b)
−
091
012
021
.
Ejemplo 25: usando operaciones elementales determine la inversa, si existe, de la
matriz
=
210
101
621
A .
Solución: consideremos la siguiente matriz
( )
=
100
010
001
210
101
621
| 3IA
y realicemos operaciones elementales tratando de obtener en el lado izquierdo lamatriz identidad vía operaciones elementales por filas.
( )
−−−−
→−−
−−→
−−
→
=
211
522
221
100
010
001
)1(
)2(
211
100
010
100
210
101
)2(
)1(
001
100
010
621
210
101
100
010
001
210
101
621
|
13
23
32
31
23
123
F
F
F
F
F
FIA
Así vemos que A es regular y que su inversa es
−−−−
=−
211
522221
1A .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 24 - Curso: Algebra II.
Definición 28: sea ( )IRME nm×∈ diremos que E es una matriz escalonada
reducida por filas si y solo si:
a) El primer elemento no nulo de cada fila no nula es igual a 1 y la columna enque aparece es columna de la matriz identidad mI (los demás elementos de la
columna son ceros..
b) Las filas nulas si las hay están bajo las filas no nulas.
c) Si los unos, con que comienza cada fila no nula están en las posiciones),(),.....,,2(),,1( 21 rcrcc entonces rccc <<< ......21
Ejemplo 26: las siguientes matrices son escalonadas por filas.
a)
=
000
100
021
A en este caso tenemos 31 21 =<= cc .
b)
=
0000
0100
0010
A es este caso tenemos 32 21 =<= cc .
c)
−=
1000
1100
0010
A es este caso A no es escalonada.
Teorema 02: si ( )IRMA nm×∈ entonces existe una única matriz escalonada
reducida por filas ( )IRME nm×∈ tal que EAF
→ . Denotaremos )(AEE = .
Definición 29: si ( )IRMA nm×∈ definimos el rango de A por el numero de filas nonulas de la matriz )(AE , que denotaremos por )(Aρ .
Teorema 03: sea ( )IRMA n∈ entonces A es regular si y solo si nA =)(ρ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 25 - Curso: Algebra II.
1.6. sistemas de ecuaciones.
En esta sección resolveremos sistemas de ecuaciones con las herramientasexpuestas en las secciones anteriores.
Consideremos el siguiente sistema:
mnmnmm
nn
nn
b
b
b
xaxaxa
xaxaxa
xaxaxa
=
==
+++
++++++
.
.
.
.
.........
.
.
.........
........
2
1
2211
2222121
1212111
(1)
observe que (1) es equivalente al sistema matricial
bAX = (2)
donde ( )IRMaA nmij ×∈= )( , ( )IRM
x
x
X n
n
1
1
.
.
.
×∈
= y ( )IRM
b
b
b m
m
1
1
.
.
.
×∈
= .
La matriz ( )IRMaA nmij ×∈= )( se denomina matriz asociada al sistema.
Definición 30: diremos que ( )IRM
t
t
X n
n
1
1
1 .
.
.
×∈
= es solución del sistema (2),
equivalentemente del sistema (1), si bAX =1
Es importante mencionar que los sistemas de ecuaciones se dividen en dos tipos,Sistemas Homogéneos y No Homogéneos.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 26 - Curso: Algebra II.
Definición 31:(Sistemas Homogéneos) El sistema de ecuaciones (1) se dice
Homogéneo si
=
0.
.
.0
b ( )IRM m 1×∈ , es decir el sistema (1) se transforma en:
0.
.
.
.0
0
.........
.
.
.........
........
2211
2222121
1212111
=
==
+++
++++++
nmnmm
nn
nn
xaxaxa
xaxaxa
xaxaxa
(3)
Observación: un sistema Homogéneo siempre posee solución, ya que siemprepodemos elegir la solución trivial 0......21 ==== nxxx .
De la observación anterior vemos que es importante determinar cuando unsistema Homogéneo posee una solución distinta a la trivial.
Proposición 07: si ( )IRMXX n 121 , ×∈ son soluciones del sistema homogéneo (3)
entonces pata todo IR∈βα, , ( )IRMXX n 121 ×∈+ βα es solución del sistema
Homogéneo (3).
Observación: por la Proposición 07 vemos que si un sistema de ecuacioneshomogéneo posee una solución distinta de la trivial entonces este posee infinitassoluciones.
Teorema 04: Dado el sistema homogéneo
0.
.
.
.0
0
.........
.
.
.........
........
2211
2222121
1212111
=
==
+++
++++++
nmnmm
nn
nn
xaxaxa
xaxaxa
xaxaxa
entonces:
a) El sistema posee solución única si y solo si nAE =))((ρ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 27 - Curso: Algebra II.
b) El sistema posee infinitas soluciones si y solo si nAE <))((ρ . En tal caso elgrado de libertad del sistema es ))(( AEnL ρ−= , es decir existen L variables
independientes.
Ejemplo 27: determine las soluciones del sistema
0262
033
032
=−++=−=+++
wzyx
wy
wzyx
Solución: consideremos el sistema matricial asociado.
=
−−
0
0
0
2162
3030
1132
w
z
y
x
(*)
Si realizamos operaciones elementales a la matriz asociada al sistemaobtenemos:
−
−−
−−−
−−=
0000
1010
1132
31
0000
3030
1132
)1(
3030
3030
1132
)1(
2162
3030
1132
23231 FFFA
vemos que 2)( =Aρ entonces 2)(4 =−= AL ρ , es decir el sistema posee grado
de libertad dos. Por lo cual posee infinitas soluciones.
Por otro lado vemos que el sistema (*) es equivalente al sistema.
wxz
wy
wy
wzyx
420
032
−−==
⇒=−=+++
Así podemos observar que el conjunto de soluciones esta dado por
( ){ }
( ){ }IRwxwwxwxS
wxzwywzyxS
∈−−=
−−=∧==
,/,42,,
42/,,,

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 28 - Curso: Algebra II.
Definición 32:(Sistemas No Homogéneos) El sistema de ecuaciones (1) se diceNo Homogéneo si este no es Homogéneo.
Definición 33: dado el sistema No Homogéneo
mnmnmm
nn
nn
b
b
b
xaxaxa
xaxaxa
xaxaxa
=
==
+++
++++++
.
.
.
.
.........
.
.
.........
........
2
1
2211
2222121
1212111
(*)
definimos la matriz ampliada asociada al sistema por la matriz [ ]bA donde
( )IRMaA nmij ×∈= )( ( )IRM
b
b
b m
m
1
1
.
.
×∈
= .
Teorema 05: Dado el sistema No Homogéneo
mnmnmm
nn
nn
b
b
b
xaxaxa
xaxaxa
xaxaxa
=
==
+++
++++++
.
.
.
.
.........
.
.
.........
........
2
1
2211
2222121
1212111
entonces:
a) El sistema posee solución única si y solo si [ ]( )( ) ( ) nAbAE == ρρ .
b) El sistema posee infinitas soluciones si y solo si [ ]( )( ) ( ) nAbAE <= ρρ . En tal
caso el grado de libertad del sistema es ))(( AEnL ρ−= , es decir existen Lvariables independientes.
c) El sistema no posee solución si [ ]( )( ) ( )AbAE ρρ ≠ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 29 - Curso: Algebra II.
Ejemplo 28: determine si el siguiente sistema posee solución
6262
333
132
=−++=−=+++
wzyx
wy
wzyx
determinemos el rango de la matriz ampliada
[ ]
−−
−−−
−−=
2
31
0000
30301132
)1(
5
31
3030
30301132
)1(
6
31
2162
30301132
3231 FFbA
con lo cual podemos deducir que el sistema no posee solución ya que[ ]( ) 32)( =≠= bAA ρρ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 30 - Curso: Algebra II.
Ejercicios.
1. Si A [ ]IRM n∈ es invertible, demuestre que (A t ) 1− = (A 1− ) t .
2. Si A, B [ ]IRM n∈ y A es invertible. Demuestre que
(A +B ) A 1− ( A - B ) =( A – B ) A 1− (A +B ).
3. Sea
−−
−=
0152
3210
4321
A . Encuentre las matrices que se obtienen aplicando a
la matriz A cada una de las siguientes operaciones elementales.
)1(..)2(.. 1323312 −−−−−− FdCcFbFa
4. Hallar A )(3 IRM∈ de modo que A= [ ][ ][ ])5()4( 32312 −− FFF .
5. Si A =
−
564
331
101
hallar una matriz B de modo que:
B= [ ][ ][ ] [ ])3()1()2( 2123112 −−− CAFFF
6. Obtener A 1− si A=
−
814
312
201
.
7. Dadas las matrices A y B con A regular determine condiciones para que lamatriz A t BA sea simétrica.
8. Encuentre las inversas de :
−=
−−−−
−
=
=
141454
32 52
2 5 63
2 3 42
4 1 32
11 2 1
32 3 1
2 11 2
,
541
431
331
CyBA
9. Demuestre que si A es cuadranda y B es ta lque AB = I, entonces 1−= AB .(Ayuda: Use traspuestas)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 31 - Curso: Algebra II.
10. Demuestre que si A es no-singular y simétrica, entonces 1−A también essimétrica.
11. Encuentre una matriz P no-singular tal que PA = B, donde:
−−
−=
=
1 12
2 1 1
12 1
421
134
432
ByA
12. Demuestre que la traspuesta de una matriz elemental es otra matriz elemental.
13. Encuentre la inversa de:
=
4121
0312
0021
0001
T
14. Demuestre que si T es triangular inferior y no-singular, entonces 1−T estambién triangular inferior.
15. Demuestre que si ( ) ( )CIF
BA || , entonces BAC 1−= . Esta es una forma muy
eficiente de calcular 1−A ; úsela para calcular:
−
−
−
−−
−
3100
0410
0031
0003
01128
01 44
0112
11 01
)
302
010
414
101
013
001
)23
5 2
43
21 )
11
1
cba
16. Si
−−=
0126 0
1210
14 2 1
62 1 4
A , encuentre P no singular tal que PA esté en la forma
escalonada ¿Es P única?
17. Exprese las matrices siguientes como productos de matrices elementales:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 32 - Curso: Algebra II.
−
=
=
=
4532
0314
0023
0001
,
001
013
101
,21
12CBA
18. Si A, B, C son matrices cuadradas tales que A, es no-singular y A = BC,demuestre que B y C también son no-singulares.
19. Para las matrices
−=
−=
01 2
211
11
02
21
ByA
Calcule ( ) ttttttt BBAABAABAB , , , ,
20. A y B son matrices no singulares tales que
( ) ( ) ( ) IABABBAtttt =+− −−−− 1111
Despeje A en términos de B.
21. Demuestre que: A y B conmuta tt ByAssi conmutan.
22. Si ( )KMBA n , ∈ ¿En que caso se cumple ( ) ( )? 22 BABABA −+=−
23. Para
−−−−
=111
2 2 1
6 5 3
A verifique que
−−=−
121
03 1
21 0 1A . Encuentre
( ) ( ) 11y
−−AAA tt
24. Determine el valor de verdad de las siguientes afirmaciones. Justifique surespuesta.
a. Si la matriz A es antisimétrica entonces A + A t =0.
b. Si A y B son invertibles entonces A + B es invertible.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 33 - Curso: Algebra II.
c. Si A nI≡ entonces existen P y Q matrices invertibles tal que A 1− = QP.
d. El producto de matrices triangulares es triangular.
e. Si A, B, C )(IRM n∈ , B regular y AB = C, entonces A = B 1− C.
f. Toda matriz diagonal es invertible.
25. Sea A )(IRM n∈ invertible y U )(IRM n∈ tal que U t AU = A.
a. Demuestre que U es invertible.
b. ¿Es U t invertible?
c. Si U t es invertible determine ( ) 1−tU .
26. Sean
=
−−
=
=
z
y
x
XBA ;
110
101
103
;
100
021
201
, resuelva la ecuación:
3AX-I 3 X=A t BX+
1
0
1
27. Sea A=
−
−
335
121
041
. Encuentre la inversa de A si existe y resuelva el siguiente
problema:
0335
02
04
=+−=++=−
wvu
wvu
vu
28. Sea A )(2 IRM∈ tal que 022 =−+ AIA , demuestre que A es invertible y calcule
su inversa.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 34 - Curso: Algebra II.
29. Sean A y B=
=−
−−
2 3 4
4 3 1
1 2 4
1 2 1
1 1 2
2 1 1
a. Encuentre una matriz P )(3 IRM∈ tal que PA = B.
b. ¿Son A y B regulares?
c. Determine la inversa de P.
30. Sea A =−
−−
1 1 1
2 1 1
1 1 2
, usando operaciones elementales,
a. Determinar A 1− .
b. Exprese A 1− como producto de matrices elementales.
31. Encuentre la matriz E A (matriz escalonada por filas) de la matriz
A=
1 2 0 0
1 1 1 1
2 1 2 1
−−
. Cual es el rango de la matriz A.
32. Sean
−
=
−−−−−−
−
=
1111
1423
2914
3465
2576
1531
1823
6512
CA y determine si son
equivalentes por filas.
33. De un ejemplo en cada caso si es posible de:
a. Un sistema de dos ecuaciones con dos incógnitas que no poseasolución.
b. Un sistema de dos ecuaciones que sea inconsistente.
c. un sistema de tres ecuaciones con dos incógnitas que posea soluciónúnica.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 35 - Curso: Algebra II.
34. Si A =
6 4 0
4 2 0
1 0 3
−−
−
determine todas las soluciones de los siguientes sistemas:
XAX 3= y XAX 2= .
35. Resolver los siguientes sistemas de ecuaciones.
a
x y z
x y z
y z
b
x y z
x y z w
y z w
x z w
c
x y z
x y z
x y z
x y z
d
x y z
x y z
x y z
e
y z w
x z w
x y w
x y z
f
x y z
. . .
. . .
− − =+ + =− + =
+ − =− − + = −
− + =+ − =
− + = −+ − =
− + + =− + =
− − =+ − =− + =
− + =− + = −+ − =+ − =
+ − =
1
2 3 2
5 1
2 5
2 2 3
3 2 5 1
2 0
3 2
2 3 0
3 3
2 1
2 1
3 4 2 11
3 2 4 11
3 3 5
2 3 4
3 2 5 12
4 3 5 5
−+ − =+ + =
+ − =
− − + =+ + =+ + = −
− − + =
+ + + =+ − = −
− + + − =+ − =
1
2 2 1
3
2 3 1
5
2 9
3 3 5
4 7
2
2 3 1
2 3
4
x y z
x y z
x y z
g
y z u
x y z
x z u
x y z u
h
x y z w
x z w
x y z w
x y z
. .
36. Analizar según los valores de a, b, c, d la existencia y los valores de lassoluciones de los siguientes sistemas lineales
a
ax y z
x ay z
x y az a
b
dx y z a
x y z b
x y z c
c
x y z
x y z
x y z a
x y z b
d
ax y z
x ay z
x y az
. .
.
+ + =+ + =+ + =
− + =+ − =− + =
− − =+ − =+ + =
+ − =
− + =− + =
− + =
0
0 2
2 3 3
3 5 0
4
3 13
3 3 4
3 2
9 7 8 0

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 36 - Curso: Algebra II.
37. Determine los valores de a de modo que el siguiente sistema posea infinitassoluciones:
x y z
ax y zx y z
− + =+ − =
+ − = −
2 1
02 3 1
38. Determine el valor de m para que el sistema
mx y z
x my zy mz
+ − =+ + =
+ =
0
2 00
a. Sea inconsistente.
b. Tenga solución única, y determínela.
c. Tenga infinitas soluciones y determínelas.
39. Dado el sistema
x y a z b
y a z
x y a z
− + + =+ − =
− + − = −
( )
( )
( )
4 1
3 0
2 7 2
2
con IRba ∈, , determine condiciones
para a y b de manera que el sistema:
a. Tenga solución única.
b. No tenga solución.
c. Tenga infinitas soluciones. Determínelas todas en función de a y b.
40. Determine t de manera que A
t
=−
−
1 2 1
0 3 1
2 2
sea singular ¿Tiene solución el
sistema AX
t
t
=−
1
1
.
41. Determine el valor de verdad de las siguientes proposiciones:
a. El número de variables independientes de un sistema bAX = conA )(IRM mn×∈ es )(An ρ− .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 37 - Curso: Algebra II.
b. Si el sistema CAX = es consistente, A )(43 IRM x∈ , tsC ),2,1(= y2)( =Aρ entonces s=0.
c. Si el sistema CAX = es consistente, A )(43 IRM x∈ , C=(8, , )−7 s t y3)( =Aρ entonces s ≠ 0 .
d. Si A )(IRM nxm∈ y nA <)(ρ entonces el sistema 0=AX tiene solución
no trivial.
e. Si A )(3 IRM∈ entonces el sistema 0=AX tiene solución no trivial si Aes singular.
f. Si A )(3 IRM∈ y | A | = 0, el sistema BAX = con 0≠B no tiene solución.
42. Determine IRcba ∈,, tal que el sistema
ax by czx cy bz
x y cz
+ + =+ + =
+ + =
3 4 53 4 6
5 7
tenga como
solución a C= ( , , )12 3 t
43. Resuelva el sistema:
3
2
1
653
542
32
bzyx
bzyx
bzyx
=++=++=++
donde a) 1321 === bbb
b) 5 ,3 ,1 321 =−== bbb
c) 2 ,2 ,0 321 −=== bbb
44. Encuentre la matriz escalonada reducida por filas para:
−
−=
−−=
100031
01011 2
001213
121
03 1
21 0
ByA

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 38 - Curso: Algebra II.
45. Demuestre que si BAF
→ entonces AX =0 y BX = 0 son sistemas equivalentes,pero el recíproco no es cierto.
46. Resuelve los tres sistemas siguientes, simultáneamente, reduciendo por filas lamatriz ( ) :||| 321 BBBA
a)
==
1
1
1
1BAX b)
−==
2
3
1
2BAX c)
−==
2
2
1
3BAX
donde
=
653
542
321
A
47. Sea
=
341
431
331
A Resuelva simultáneamente los res sistemas:
=
=
=
1
0
0
,
0
1
0
,
0
0
,1
AZAYAX , usando la técnica sugerida
en el problema 46. Si [ ]ZYXB = calcule AB y BA

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 39 - Curso: Algebra II.
2. Determinantes
2.1. Definiciones.
La idea intuitiva de determinante de una matriz )(IRMA n∈ es la siguiente. El
determinante de A denotado por )det( A o por A , es un numero que pertenece al
cuerpo de los números reales.
Para matrices de orden dos y tres es fácil calcular su determinante ya que esteesta dado por:
a. Si bcadAAIRMdc
baA −==⇒∈
= )det()(2 .
b. Si )(2
333231
232221
131211
IRM
aaa
aaa
aaa
A ∈
= . Entonces
122133112332132231322113312312332211)det( aaaaaaaaaaaaaaaaaaAA −−−++== .
La expresión obtenida para calcular el determinante de una matriz de orden treses fácil recordarla por el siguiente algoritmo.
Ley de Sarrus
1. Se escriben las dos primeras columnas a continuación de la matriz.
2. Se desarrollan los productos triples según los signos de las flechas delsiguiente diagrama.
- - -
3231
2221
1211
333231
232221
131211
aa
aa
aa
aaa
aaa
aaa
+ + +

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 40 - Curso: Algebra II.
Para un desarrollo mas general, primero definamos para )(IRMA n∈ la submatriz
ijM , como la matriz de orden )1()1( −×− nn que se obtiene de la matriz A al
eliminar la fila i y la columna j.
Ejemplo 01: sea
−=
124
112
031
A entonces observamos que
=
−=
24
31;
12
112311 MM ; etc.
Observación: note que si )(IRMA n∈ entonces podemos formar 2n submatrices
de la forma ijM .
Estamos en condiciones de definir recursivamente el determinante de una matriz.
Definición 01: sea )()( IRMaA nij ∈= entonces
[ ]
>−
==
∑=
+ 1)det()1(
)det(
1
1111
nparaMa
aAsia
An
jijij
ji
Ejemplo 02: si
=
312
431
021
A entonces si escogemos 1=j obtenemos que:
151664943
022
31
02
31
43
)det()1()det(2313
221231
3332
131221
3332
232211
3
1
=+−−=+−=
+−=−= ∑=
+
aa
aaa
aa
aaa
aa
aaaMaA
jijij
ji

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 41 - Curso: Algebra II.
Proposición 01: sean )(, IRMBA n∈ y IRc ∈ entonces
a) )det()det( tAA = .
b) Si la matriz B se obtiene a partir de la matriz A por un intercambio de filas(ocolumnas) entonces
)det()det( AB −=
c) Si A tiene dos filas (columnas) iguales entonces 0)det( =A .
d) Si A tiene una fila(columna) nula entonces 0)det( =A .
e) Si B se obtiene a partir de la matriz A al multiplicar una fila(columna) por unescalar c entonces )det()det( AcB = .
f) Si B se obtiene a partir de la matriz A al intercambiar la fila(columna) i por lasuma de la fila(columna) i mas c veces la fila(columna) j )( ji ≠ entonces
)det()det( BA = .
g) Si A es triangular superior(inferior) entonces el determinante de A es elproducto de los elementos de s diagonal, es decir nnaaaA ⋅⋅⋅⋅= 2211)det( .
h) A es regular si y solo si 0)det( ≠A .
i) )det()det()det( BAAB = .
Ejemplo 03: sea
=
312
431
021
A si aplicamos la operación elemental 12F
obtenemos la matriz
=
312
021
431
B así 15)det()det( −=−= AB .
Proposición 02: si )(IRMA n∈ es no singular entonces )det(
1)det( 1
AA =− .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 42 - Curso: Algebra II.
2.2. Calculo de Inversas vía Determinantes.
Definición 02:(Cofactor) sea )()( IRMaA nij ∈= el cofactor ijA de ija se define
por:
ijji
ij MA +−= )1( , donde ijM es la submatriz ij de la matriz A .
Ejemplo 04: sea
−=
217
654
213
A entonces vemos que
1017
131)1(
.3427
641)1(
2332
23
12
2112
−=−
−=−=
=−=−=
+
+
MA
MA
.
Definición 03:(Adjunta) sea )()( IRMaA nij ∈= la matriz adjunta de A denotada
por )(AAdj esta definida por
=
nnnn
n
n
AAA
AAA
AAA
AAdj
21
22212
12111
)( .
Ejemplo 05: sea
−
−=
301
265
123
A entonces podemos calcular la matriz adjunta.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 43 - Curso: Algebra II.
2865
23)1(1
25
13)1(10
26
12)1(
201
23)1(10
31
13)1(6
30
12)1(
601
65)1(17
31
25)1(18
30
26)1(
633
532
431
523
422
321
413
312
211
=−
−=−=−=−=−
−=
−=−
−=−=−
−=−=−
−−=
−=−==−
−=−=−
−=
AAA
AAA
AAA
así la matriz adjunta es
−−−−
−−−=
2826
11017
10618
)(AAdj .
Teorema 01: si )()( IRMaA nij ∈= es una matriz regular entonces A
AAdjA
)(1 =− .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 44 - Curso: Algebra II.
Ejercicios
1. Calcular los siguientes determinantes:
a b c
dx x
x xe
x y x y
x y x yf
x
x x x
g
x y x y
x y x y
x y x y
h
a b c a a
b b c a b
c c c a b
i
. . .
.sen cos
cos sen. .
.
cos( ) sen( )
sen( ) cos( )
sen( ) cos( )
. .
1 2 1 4
2 4 3 5
1 2 6 7
5 2 6 7
1 2 1 2 1
0 0 1 1 1
1 1 0 0 0
0 0 1 1 2
1 2 2 1 1
3 4 0 0
4 2 0 0
0 0 1 0
0 0 0 1
1 1
1
1
1
1
2 2
2 2
2 2
1 1 1 1
1 2
3 2
−
− − −−
−+ −− +
−+ +
+ ++ +− +
− −− −
− −
3 4
1 3 1 0
1 0 3 0
2. Pruebe que A ( Adj(A)) = 0 cuando A es una matriz singular.
3. Para dos matrices cuadradas particulares A y B, compruebe la propiedad:adj AB adj B adj A( ) ( ) ( )= ⋅ . Demuestre que ésta propiedad es válida en general.
4. Si A y B son dos matrices cuadradas del mismo orden, tales que A es invertible,demuestre que ( ) ( ) ( ) ( )A B A A B A B A A B+ − = − +− −1 1 .
5. Sean A y B dos matrices de orden 2 1× . Demuestre que I ABt2 − es invertible y
que su inversa es IA B
ABtt
2
11
+−
; donde la matriz A Bt , de orden 1 1× , se
considera como un número real. Generalice el resultado para matrices deorden n × 1 .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 45 - Curso: Algebra II.
6. Determine los valores de la constante a, de modo que el determinante de la
matriz A
a a
a a
a
=−
− −− −
1 1
2 1
1 1 2 1
, sea cero.
7. Encuentre los valores de las constantes “a” y “b” , de modo que la siguiente
matriz sea invertible: A
a b a
a
b a b
=−
−
1 0 .
8. Si A =−
−
6 2 2
2 5 0
2 0 7
, resuelva la ecuación det( )A xI− =3 0 , donde x es una
variable real.
9. Sea A aij= ×( )3 3 , donde a cij = ; ∀i , ∀j . Demuestre que det( ) ( )A bI b b c+ = +32 3 .
10. Demuestre que
a b c a b
c b c a b
c a a c b
a b c
+ ++ +
+ += + +
2
2
2
2 3( ) .
11. Exprese el determinante de la matriz A
a a bcd
b b acd
c c abd
d d abc
=
2
2
2
2
1
1
1
1
, en forma
factorizada.
12. Demuestre que
a
a
a
a
a a
++
++
= +
2 3 4 5
2 3 4 5
2 3 4 5
2 3 4 5
143( ) .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 46 - Curso: Algebra II.
13. Sea A
a
a
a
a a b
=
−
1 1 1
1 1 1
1 1 1
0
, donde a y b son números reales. Exprese el
determinante de A en forma totalmente factorizada y a partir de esto calcule elrango de la matriz A, dependiendo de los valores de las constantes a y b.
14. Si A aij= ×( )4 4 , donde ab
si
si
i j
i jij =≠=
1 ; demuestre que
det( ) ( ) ( )A b b= − +1 33 , usando propiedades de determinantes. Encuentre elrango de la matriz, de acuerdo a los valores del parámetro b y determine lascondiciones bajo las cuales existe A−1 .
15. Si A es una matriz cuadrada de orden 4, cuyo determinante es igual a -3;encuentre el determinante de cada una de las siguientes matrices: 2A, At , A−1 ,A2 , P AP−1 .
16. Encuentre la forma general de las matrices cuadradas de orden 2, tales que
det( ) det( ) det( )A B A B+ = + , donde A =
2 1
1 1.
17. Demuestre que si x y z+ + =32π
(radianes), entonces
1
1
1
0
sen sen
sen sen
sen sen
x y
x z
y z
= .
18. Demuestre que
x y
x y
x y
1
1
1
01 1
2 2
= , representa la ecuación de la recta que pasa por
los puntos del plano cartesiano ( , )x y1 1 y ( , )x y2 2 .
19. Demuestre que el área del triángulo de vértices ( , )x y1 1 , ( , )x y2 2 y ( , )x y3 3 es el
valor absoluto de 12
1
1
1
1 1
2 2
3 3
x y
x y
x y
.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 47 - Curso: Algebra II.
20. Si A es una matriz cuadrada de orden n y simétrica, demuestre queA An= −( )1 . Deduzca que si n es impar, entonces A = 0 .
21. Si A es una matriz cuadrada de orden n, demuestre que adj A A n( ) = −1 .
22. Sea A =
−−
−− − −
1 1 1 1
1 1 1 1
1 1 1 1
1 1 1 1
. Demuestre que A A AA It t= = 4 4 y a partir de ésta
relación deduzca la inversa de la matriz A.
23. Sean A y B matrices cuadradas de orden n, tales que A, B y A + B soninvertibles. Demuestre que A B− −+1 1 también lo es y que( ) ( ) ( )A B A A B B B A B A− − − − −+ = + = +1 1 1 1 1 .
24. Calcule A A A A n− − − −+ + + ⋅ ⋅⋅ ⋅ +1 2 3 , en función del número natural n, si
A =−
1 0
1 1.
25. Suponga que A y B son matrices de orden n × 1 . Demuestre quedet( )I AB B An
t t+ = +1 .
26. Encuentre el rango de la matriz A
a ab
b a b
a b
=−− −
1 0
1 2
2 0 1
, de acuerdo a los
valores de las constantes reales a y b.
27. Determine el valor de verdad de cada una de las siguientes proposiciones:
a. El cofactor a 32 para la matriz A=
2 0 2 3
1 3 4 2
5 6 0 5
2 1 1 9
− −−
−
es 60 o 342.
b. Si )(IRMA n∈ entonces − = −A A .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 48 - Curso: Algebra II.
c. Si A A Itn= entonces A = ±1 , donde )(IRMA n∈ .
d. Si )(, IRMBA n∈ entonces AB A B= .
e. Si )(IRMA n∈ es regular, entonces |Adj(A)| = |A|n −1 .
28. Calcule los siguientes determinantes, usando propiedades
2100
1220
0121
0012
,
3520
2021
1432
0221
−−−
−−−
−−−−
29. Usando solo propiedades de determinantes demuestre que:
))()()()()((
1
1
1
1
zwywyzxwxzxy
www
zzz
yyy
xxx
−−−−−−=
30. Calcular el determinante de
=
0111
1011
1101
1110
4A . Determinar los determinantes
de las matrices 32 , AA , con ceros en la diagonal y unos en las demás
posiciones.¿ puede determinar el valor de nA ?
31. Demuestre que si )(, IRMBA n∈ y AB = I n entonces ambas matrices son
regulares.
32. Sean )(, IRMBA n∈ tales que | A | = 5 y | 4AB | = | B −1 | calcule | B |.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 49 - Curso: Algebra II.
33. Demuestre que
++++=
++
++
−
++=−−
−−−−
−
11111
1111
1111
1111
1111
.
)(
22
22
223
dcbaabcd
d
c
b
a
cba
cbacc
bcbab
aacba
b
a.
34. Dada la matriz
=
101
012
301
A determine los valores de k tal que 0=− kIA .
35. Determine sin son validas las siguientes igualdades
a) 0
111
111
111
=−−−
b) 0
010
321
301
=−−
c) 032
32
32
=zzz
yyyxxx
d)
1111
111
1111
11 2
xzxy
x
xzy
x
−=−
36. Resuelva las siguientes ecuaciones
a) 0
0
0
0
=xx
xx
xx
b) 0=bxb
mmm
xaa
c) 2123102
11 2
=−
−xx
37. Mediante un ejemplo demuestre que en general BABA +≠+ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 50 - Curso: Algebra Lineal.
3. Espacios Vectoriales.
3.1. Definiciones Básicas.
Definición 01: sea IK un cuerpo, V un conjunto no vacío y las operaciones ⊕ y∗ llamadas suma y producto por escalar respectivamente donde:
( ) vuvu
VVV
⊕→→×⊕
,
: ( ) ucuc
VVIK
∗→→∗∗
,
:
diremos que ( )∗⊕,,V es un espacio vectorial sobre el cuerpo IK si solo si se
satisfacen las siguientes propiedades:
Suma.
(S1) Vvu ∈⊕ para todo Vvu ∈, . Clausura.
(S 2) uvvu ⊕=⊕ para todo Vvu ∈, . Conmutatividad.
(S 3) ( ) ( ) wvuwvu ⊕⊕=⊕⊕ para todo Vwvu ∈,, . Asociatividad.
(S 4) existe un único elemento ∈0 V , llamado vector cero tal que para todo Vu ∈
uu =⊕ 0 .
(S 5) para todo Vu ∈ existe un único elemento Vu ∈− , llamado inverso aditivo tal que
0=−⊕ uu .
Multiplicación por escalar.
(M1) Vua ∈∗ para todo Vu ∈ y para todo IKa ∈ .
(M2) ( ) vauavua ∗⊕∗=⊕∗ para todo Vvu ∈, y para todo IKa ∈ .
(M3) ( ) uauauba ∗⊕∗=+ para todo Vu ∈ y para todo IKba ∈, .
(M4) ( ) ( ) uabuba ∗=∗∗ para todo Vu ∈ y para todo IKba ∈, .
(M5) uu =∗1 para todo Vu ∈ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 51 - Curso: Algebra Lineal.
Observación: Los elementos de un espacio vectorial se denominan vectores.Además es importante tener en cuenta que en la definición de despacio vectorialno se especifican ni los vectores ni las operaciones.
Ejemplo 01: ( ) ( ) ( )⋅+⋅+⋅+ ,,,,,,,, 32 IRIRIR son espacios vectoriales sobre el cuerpo de
los números reales con la suma y producto por escalar usual.
Ejemplo 02: ( )( )⋅+× ,,IRM nm es un espacio vectorial real con la suma y producto por
escalar usual.
Ejemplo 03: El conjunto de los polinomios de coeficientes reales con la suma yproducto por escalar usual, ( )( )⋅+,,IRP , es un espacio vectorial real.
Ejemplo 04: El conjunto de todas las funciones reales con dominio real con lasuma y producto por escalar usual, ( )( )⋅+,,IRF es un espacio vectorial real.
Ejemplo 05: ( )∗⊕,,IR donde vuvu 2−=⊕ y cuuc =∗ no es un espacio vectorialya que la propiedad (S2) no se satisface.
Definición 02: Sea VW ⊆ donde V es un espacio vectorial entonces diremosque W es un subespacio vectorial de V , lo cual denotaremos por VW ≤ , si y solosi W es un espacio vectorial con las operaciones suma y producto definidas en V .
Teorema 01: Si VW ⊆ entonces VW ≤ si y solo si
Wvbua ∈∗⊕∗ WuIKba ∈∀∈∀ ,, .
Corolario 01: Si VW ≤ entonces W∈0 .
Ejemplo 06: Observe que todo espacio vectorial V posee dos subespaciostriviales, los cuales son { }0 y V.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 52 - Curso: Algebra Lineal.
Ejemplo 07: Toda recta que pasa por el origen en 2IR es un subespacio de 2IR ,es decir si ( ){ }axyIRyxW =∈= /, 2 entonces 2IRW ≤ . En efecto sean
( ) ( ) Wdcyx ∈,,, y IRkt ∈, entonces es fácil comprobar que:
( ) ( ) Wdckyxt ∈+ ,,
Ejemplo 08: El conjunto de los polinomios de grado menor o igual a n , ( )IRPn , es
un subespacio vectorial de ( )( )⋅+,,IRP .
Ejemplo 09: Sea ( ),,*,+= QV es un Q espacio vectorial.
Observación: Algunas propiedades elementales en un espacio vectorial( )•+ , K, ,V son:
a. Vvv vk ∈∀=• ,00
b. Kvv ∈∀=• αα ,00
c. ( ) ( ) ( ) VvKvvv ∈∀∈∀−=−=•− ,, αααα
d. vKv vv 0 00 =∨===>=• αα
e. ( ) ( ) VvKvv ∈∀∈∀•=−•− , ααα
f. vuvu =⇒≠•=• 0y Kααα
3.2. Independencia Lineal y Bases.
Notación: veV . denotara la expresión: V espacio vectorial.
Definición 03: Sean { } vek Vvvvv .21 ,,.....,, ⊆ diremos que v es una combinación
lineal de { }kvvv ,.....,, 21 si existen IKaaa k ∈,.....,, 21 tales que:
kk vavavav ∗⊕⊕∗⊕∗= ..........2211 .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 53 - Curso: Algebra Lineal.
Ejemplo 10: Sean { } ( )IRPxrxxxqxxp 32323 1,,1 ∈+−=−−−=++= determine si
r es combinación lineal de p y q .
Solución: Para resolver el problema planteado solo basta ver si podemosencontrar escalares IRba ∈, tal que:
( ) ( )3232 11 xxxbxxaxr −−−+++=+−=
igualando los coeficientes de los polinomios vemos que solo basta ver si elsistema
1
0
1
0
−==−=−=−
a
ba
b
ba
posee solución. Por otro lado es fácil ver que la solución del sistema es ,1−=apor lo cual podemos afirmar que r es combinación lineal de p y q .
Definición 04: Sean { } vek Vvvv .21 ,.....,, ⊆ definimos el conjunto generador de
{ }kvvv ,.....,, 21 por el conjunto de todas las combinaciones lineales de { }kvvv ,.....,, 21 .
Denotaremos el generador de { }kvvv ,.....,, 21 por:
{ } { }kkk vaavvavVvvvv ∗⊕⊕∗⊕∗=∈= ...../,.....,, 221121 .
Ejemplo 11: Demuestre que ( )IRPxxx 332 ,,,1 = .
Solución: Sabemos que cualquier elemento de ( )IRPp 3∈ es de la forma:
32 dxcxbxap +++=
así claramente p es una combinación lineal de { }32 ,,,1 xxx .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 54 - Curso: Algebra Lineal.
Definición 05: Si { } vek VvvvS .21 ,.....,, ⊆= , diremos que S es un conjunto
Linealmente Dependiente si existen escalares IKaaa k ∈,.....,, 21 no todos nulos
tales que
0..........2211 =∗⊕⊕∗⊕∗ kk vavava .
En caso contrario diremos que el conjunto S es Linealmente Independiente.
Ejemplo 12: el conjunto }44,2,2{ 222 xxxxxx +−++− es Linealmente Dependiente
en ( )IRP3 , ya que:
( ) ( ) ( ) 0442222 222 =+−−+−+− xxxxxx .
Ejemplo 13: el conjunto
−
−
−22
10;
20
01;
02
11 es Linealmente Dependiente
en ( )IRM 2 , en efecto observe que:
=
−−
−
−
−00
00
22
10
20
01
02
11.
Ejemplo 14: el conjunto { }nxxx .....,,,,1 2 es un conjunto Linealmente Independiente
en ( )IRPn , en efecto:
0........2210 =++++ n
n xaxaxaa para todo IRx ∈
entonces 0....210 ===== naaaa .
Ejemplo 15: demuestre que el conjunto { }xxx +−+ 1,1,2 es un conjunto
Linealmente Independiente en ( )IRPn , en efecto:
Supongamos que ( ) ( ) 0112 =+−+++ xcxbax , entonces 0,0,0 =+=−= cbcba , dedonde podemos deducir que 0=== cba .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 55 - Curso: Algebra Lineal.
Observación: El ejemplo 15 puede ser resuelto de la siguiente manera; masadelante podremos mostrar que ( )IRPn puede ser identificado con nIR de una
manera muy natural. En efecto a todo polinomio nn xaxaxaa ++++ ....2
210 le
podemos asignar el vector ( )naaaa ,...,,, 210 , observe que la asignación es única.
Por lo tanto para mostrar que S ( )IRPn⊆ es linealmente independiente basta
mostrar que su conjunto asociado nIRS ⊆~
lo es.
El estudiante puede pensar que no hemos avanzado mucho pero ver que el
conjunto ~
S es linealmente independiente en 3IR es mucho mas manejablecomputacionalmente, en efecto:
Podemos mostrar que ~
S es linealmente independiente si y solo si ( )
=
~
# SAρ
donde A es la matriz cuyas filas son los vectores de ~
S .
Así Volviendo al Ejemplo 15, para mostrar que S { } ( )IRPxxx 32 1,1, ⊆+−+= es
linealmente independiente solo basta ver que ( ) ( ) ( ){ } 3~
0,1,1;0,1,1;1,0,0 IRS ⊆−= lo es.
En este caso vemos que la matriz asociada es:
−=
011
011
100
A y ( ) 3=Aρ .
Proposición 01: sea veVS .⊆ entonces:
a. Si S∈0 entonces S es linealmente dependiente.
b. Si WS ⊆ donde veVW .⊆ es linealmente independiente, entonces S es
linealmente independiente.
c. Si S posee dos o mas vectores iguales entonces S es linealmentedependiente.
Definición 06: diremos que veVB .⊆ es una base de V si y solo si:
a. B es un conjunto linealmente independiente.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 56 - Curso: Algebra Lineal.
b. B genera a V , es decir si Vv ∈ entonces existen escalares kaaa ,....,, 21
tales que kk vavavav +++= ......2211 donde { } Bvvv k ⊆,......,, 21 .
Definición 07: Diremos que V es un espacio de dimensión finita si y solo si Vposee una base finita. Denotaremos la dimensión de V por ( )Vdim .
Observación: Si V es un espacio de dimensión finita, la dimensión de V nodepende de la base.
Proposición 02: si veVW .≤ donde V es un espacio de dimensión finita entonces
( ) ( )VW dimdim ≤ .
Observación: si veV , es de dimensión finita n entonces toso subconjunto S con
cardinalidad mayor que n es un conjunto linealmente dependiente.
Definición 08: sea { } vek VvvvS .21 ,.....,, ⊆= definimos el conjunto generado por S
por:
{ }kvvvvVvS ,.....,,/ 21 de lineal ncombinació una es ∈=
claramente VS ≤ .
Ejemplo 16: Muestre que { }neeeB ,....,, 21= es una base de nIR . Donde B se
denomina la base canónica y ( )i
ieposición laen solo uno
0,....,0,1,0,....0,0,0= . Con lo cual podemos deducir
que la dimensión de nIR es n .
Ejemplo 17: ¿ Es el conjunto ( ) ( ){ }0,1,2;0,0,1=S una base de 3IR ?
Ejemplo 18: ¿ Es el conjunto ( ) ( )( ) ( ){ }5,1,1;1,0,10,1,2;0,0,1 −=S una base de 3IR ?
Proposición 03: sean veVWU ., ≤ entonces:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 57 - Curso: Algebra Lineal.
a. VWU ≤∩ .
b. { } VWwUuwuWU ≤∈∧∈+=+ / .
Definición 09: sean veVWU ., ≤ diremos que V es suma directa de U y W s i y
solo si:
a. { }0=∩WU .
b. VWU =+
lo cual denotamos por WUV ⊗= .
Ejemplo 18: determine una base y la dimensión del espacio generado por( ) ( ) ( ) ( ){ }1,1,1;6,3,0;2,0,1;0,1,1 −=S .
Solución: Claramente el conjunto S es linealmente dependiente, así paradeterminar una base de S basta determinar la matriz escalonada de la matriz A
asociada al conjunto S , cuyas filas son los vectores de S .
→
→
→
→
−
=
000
100
210
011
100
000
210
011
100
630
210
011
111
630
210
011
111
630
201
011
A
con lo cual podemos garantizar que una base para el espacio generado por S es:
( ) ( ) ( ){ }1,0,0;2,1,0;0,1,1=SB
en este caso vemos que ( ) 33dim IRSS =⇒= .
Ejemplo 19: Dados los subespacios:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 58 - Curso: Algebra Lineal.
( ){ }
( ) ( ){ }0,1,1;1,0,1
0/,, 3
−=
=+∈=
W
yxIRzyxU
a. Determine si U es subespacio vectorial de 3IR .
b. Determine una base y la dimensión de U y W .
c. Determine si WUIR ⊗=3 .
Solución:
a. observe que ( ) U∈0,0,0 .
Sean ( ) ( ) Uzyxcba ∈,,;,, y IR∈β verifiquemos si ( ) ( ) Uzyxcba ∈+ ,,,,β , enefecto sabemos que:
( )( ) 00
,,
,,=+∧=+⇒
∈∈
yxbaUzyx
Ucba
y que( ) ( ) ( )zcybxazyxcba +++=+ ββββ ,,,,,,
observe que: ( ) ( ) ( ) ( ) ⇒=+++=+++ 0yxbaybxa βββ ( ) ( ) Uzyxcba ∈+ ,,,,βpor lo tanto 3IRU ≤ .
b. Para determinar una base de U basta resolver el sistema:
0=+ yx . (*)
Observe que el sistema (*) posee infinitas soluciones por lo tanto podemosreescribir U de la siguiente manera:
( ){ }( ){ }( ){ }( ) ( ){ }( ) ( ){ }1,0,0;0,1,1
,/,0,00,,
,/,,
/,,
0/,,
3
3
3
3
−=ℜ∈ℜ∈+−=
ℜ∈ℜ∈−=
−=ℜ∈=
=+ℜ∈=
U
zyzyyU
zyzyyU
yxzyxU
yxzyxU
con este procedimiento podemos garantizar que una base de U es:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 59 - Curso: Algebra Lineal.
( ) ( ){ }1,0,0;0,1,1−=B
por lo tanto la dimensión de U es dos.
Observe que en el caso de W es mas fácil determinar una base ya que bastaescalonar la matriz asociada al conjunto generador, es decir escalonar lamatriz
−−
→
−
=110
101
011
101A
con lo cual podemos concluir que una base de W es ( ) ( ){ }4,1,0;1,0,11 −−=B ypor lo tanto la dimensión de W es dos.
c. Ejercicio.
d. Ejercicio.
3.3 Matriz Cambio de Base.
Sean { } { } ⊆== nn wwwBvvvB ,......,,,,.....,, 212211 veV . bases y V espacio vectorial de
dimensión finita. Es claro que todo vector de 2B puede ser expresado como una
combinación lineal, única, de los elementos de 1B es decir:
nnnnnn
nniiii
nn
nn
vavavaw
vavavaw
vavavaw
vavavaw
+++=
+++=
+++=+++=
.....
.....
.....
.....
2211
2211
22221122
12211111
donde unicosson Ka ij ∈
observe que podemos formar la matriz:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 60 - Curso: Algebra Lineal.
nnnn
n
n
aaa
aaa
aaa
21
22221
11211
la matriz que hemos formado se denomina matriz cambio de base y ladenotaremos por:
2
1
B
BI
.
Observaciones: Algunas propiedades importantes de la matriz cambio de baseson:
a.
2
1
B
BI
es invertible, y su inversa es
1
2
B
BI
.
b. Dado Vv ∈ se tiene que [ ] [ ] [ ]1
2
22 BBBB vIv = donde [ ]
iBv son las
coordenadas del vector v en la base iB .
Ejemplo 20: Consideremos { }211 ,eeB = la base canónica de 2IR y la base
( ) ( ){ }1,1,1,12 −=B . Determine la matriz cambio de base
2
1
B
BI
y compruebe las
afirmaciones anteriores.
Solución:
a. Para calcular la matriz cambio de base debemos resolver los siguientessistemas:
( ) ( ) ( )
( ) ( ) ( )1,11,11,0
1,11,10,1
−+=
−+=
dc
ba

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 61 - Curso: Algebra Lineal.
podemos comprobar fácilmente que:
21
,21
,21
,21 ==−== dcba
por lo tanto la matriz cambio de base es:
−=
21
21
21
21
2
1
B
BI .
b. Análogamente observamos que
12
1
1
2 11
11 −
=
−=
B
B
B
BII
c. Dado el vector ( )2,4 −=v vemos que
[ ]
−
=2
41Bv de donde deducimos que [ ] [ ]
−
=
−
−=
3
1
2
4
21
21
21
21
12
1 BBB vI .
Por otro lado es fácil comprobar que [ ]
−
=2
42Bv . Por lo tanto
[ ] [ ] [ ]1
2
22 BBBB vIv = .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 62 - Curso: Algebra Lineal.
3.4 Vectores en el Espacio.
En esta sección consideraremos como espacio de trabajo ( )⋅+,,nIR , donde lasuma y el producto por escalar son los usuales. Trataremos de escribir elcomportamiento geométrico de los vectores, es decir al final de esta secciónpodremos calcular sumas, restas, longitudes vectores normales direcciones yángulos formados por vectores en ( )⋅+,,nIR .
Definición 10: sean ( ) ( ) nnn IRyyyvxxxu ∈== ,....,,,,....,, 2121 definimos el producto
punto o producto interior entre u y v por:
nn yxyxyxvuvu +++==• ......, 2211 .
Proposición 04: Sean IRcIRwvu n ∈∈ ,,, entonces son validas las siguientespropiedades:
a. uvvu ,, = simetría.
b. wuvuwvu ,,, +=+ Linealidad.
c. cvuvcuvuc ,,, == homogeneidad.
d. 0, ≥uu además 00, =⇔= uuu definición positiva.
Definición 11: dos vectores nIRvu ∈, se dicen ortogonales si y solo si 0, =vu .
Definición 12: definimos la norma, también se denomina longitud o magnitud, deun vector nIRu ∈ por:
uuu ,= .
Tomando en cuenta la definición de norma podemos definir la distancia euclidianaentre dos vectores nIRvu ∈, de la siguiente manera:
( ) vuvud −=, .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 63 - Curso: Algebra Lineal.
Definición 13: un vector nIRu ∈ se dice unitario si y solo si 1=u .
Ejemplo 21: dados los vectores ( ) ( )0,0,1,0,1,1 −=−= vu determinar: vu, , ( )vud , ,
vu , y si vu, son vectores unitarios.
Solución:
a. ( ) ( ) 10,0,1,0,1,1, −=−−=vu .
b. ( ) ( ) 50,1,2, =−=−= vuvud .
c. ( ) ( ) 10,0,1vy 20,1,1 =−==−=u .
d. Gracias a c. podemos deducir que u es un vector normal.
Definición 14: sea ( ) nn IRxxxu ∈= ,....,, 21 un vector distinto de cero, definimos el
vector unitario en la dirección u por
==
ux
ux
ux
uu
v n,...,, 21 .
Proposición 05: dados nIRvu ∈, se tiene que:
a. vuvu ⋅≤, , la igualdad solo se satisface si u y v son múltiplos escalares
entre si. Esta desigualdad se denomina desigualdad de Cauchy – Schwarz.
b. vuvu +≤+ . Esta desigualdad se denomina desigualdad triangular.
Observación: observe que gracias a la desigualdad de Cauchy – Schwarz setiene que para vectores no nulos:
1,
1 ≤⋅
≤−vu
vu.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 64 - Curso: Algebra Lineal.
Definición 15: definimos el ángulo formado por dos vectores nIRvu ∈, no nulos
por:
( )vu
vu
⋅=
,cos α .
Motivación: dados los vectores nIRvu ∈, no nulos deseamos determinar dos
vectores cpr uu , tales que:
cu
cpr uuu += pru v
donde pru es un múltiplo escalar de v y cu es ortogonal a pru . Como vemos en la
figura esta descomposición siempre es posible y además es única. El vector v sedenomina proyección ortogonal de u sobre v y el vector cu se denomina
componente vectorial de u ortogonal a v .
Observe que:
v
vu
vv
vucvcvvuvuvuuvu cprcpr
,
,
,0,,,,, ==⇒+=+=+= .
Por lo tanto:
2
,
v
vuu pr = y v
v
vuuuc 2
,−= .
Definición 16: sean ( ) ( ) 3,,,,, IRzyxvcbau ∈== . Definimos el producto cruz, vu ×como el vector de componentes:
( )bxxyazcxcybzvu −−−=× ,, .La relación anterior puede ser expresada en notación de determinantes:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 65 - Curso: Algebra Lineal.
−=+−==× k
yx
ba
zx
ca
zy
cbk
yx
baj
zx
cai
zy
cb
zyx
cba
kji
vu ,, .
Proposición 06: sean ( ) ( ) ( ) 3,,,,,,,, IRtsrwzyxvcbau ∈=== y IRc ∈ , entonces:
a. uvvu ×−=× .
b. ( ) ( ) ( )wuvuwvu ×+×=+× .
c. ( ) ( ) ( )uwuvuwv ×+×=×+ .
d. ( ) ( ) ( )cvuvcuvuc ×=×=× .
e. 00 =×u .
f. ( ) wvuvwuwvu ,, −=×× .
g.
tsr
zyx
cba
wvu =×, .
Teorema 01: las siguientes identidades son validas:
a. 2222
,vuvuvu −=× identidad de Lagrange.
b. θsenvuvu ⋅=× donde θ es el ángulo formado por los vectores u y v .
Proposición 07: dos vectores u , v 3IR∈ no nulos son paralelos si y solo si0=× vu .
Teorema 02: El volumen del paralelepipedo formado por los vectores u , wv, 3ℜ∈es:
wvuV ×= , .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 66 - Curso: Algebra Lineal.
Ejercicios
1. Mostrar que IR es un espacio vectorial real con la adición y multiplicaciónusuales y también que IR es un espacio vectorial sobre Q., pero Q no es unespacio vectorial sobre IR .
2. Determine en cada caso si ),,( ⊗⊕V es un IR - espacio vectorial:
a. ),(),(),(),(),(2 yxyxbaxbayxIRV ααα =⊗+=⊕=
b. ),,0(,,(),,(),,(),,(3 zyzyxzcybxacbazyxIRV ααα =⊗+++=⊕=
c.
=
⊗
++++
=
⊕
=
αα
0)(2
yx
wz
yx
xddc
ybxa
dc
ba
wz
yxIRMV
3. Probar que { }Qba, / 2 ∈+= baV es un espacio vectorial sobre Q.
4. Sean [ ]{ }función es fIRbafIR ba /,:],[ →= y [ ] [ ]{ }continua es fIRfbaT ba /, ,∈= .Determinar cuál de los siguientes conjuntos de funciones es un espaciovectorial real, con las operaciones de [ ]baIR , .
i) [ ] ( ) ( ){ }bfafbaCfV =∈= /, .
ii) [ ] ( ) ( ){ }xbfxafbaCfV −=+∈= /, .
iii) [ ] ( ) [ ]{ }ba, de losubintervaun en x cada pra ,0/, =∈= xfbaCfV .
iv) [ ] ( ) ( ){ }xfxfbaCfV −=∈= /, .
v) [ ] ( ) ( ){ }xfxfbaCfV −−=∈= /, .
5. Sea ( ){ }IRyxyxV ∈= ,/, . Se definen:
( ) ( ) ( )0,,, cadcba +=⊗( ) ( )baba ααα ,, =•
¿Es V un espacio vectorial real? ¿Por qué?.
6. Sea ( ){ }IRyxyxV ∈= ,/, . Si se consideran:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 67 - Curso: Algebra Lineal.
( ) ( ) ( )dbcadcba ++=⊗ ,,, y ( ) ( )baba ,, αα =•
¿Es ( )•⊗ ,,V un espacio vectorial?
7. En nIR se definen las leyes de composición:
( ) ( ) ( )( ) ( ) IRxxxxxx
yxyxyxyyyxxx
nn
nnnn
∈∀−−−=•−−−=⊗
ααααα ,,.....,,,......,,
,.....,,,....,,,......,,
2121
22112121
¿Qué axiomas de espacio vectorial se cumplen para ( )•⊗ ,,nIR ?
8. Sea 2IR con las leyes de composición definidas por:
( ) ( )
++=⊗
2,
2,,
dbcadcba
( ) ( ) IRbaba ∈∀=• αααα ,,,
9. Probar que en un espacio vectorial V(K) se tiene:
i) KVvovvv ∈∀∈∀==⇔⋅=⋅ βαβαβα ,,,0
ii) 00 =⇒=+∧−=⇒=+ vuvuuvvu
10. Determinar α sabiendo que 0≠v , en V(K), y que:
( ) ( ) ( ) KyKVvuvuvuu ∈∈∀−=−+− ααα ,,1
11. Sea ∞IR el conjunto que consiste de todas las sucesiones infinitas:
( ),......, 21 xxx =
de números reales, Si ( ),......, 21 yyy = es otra de tales sucesiones, se definen:
( );,......., 2211 yxyxyx ++=+ y ( ) IRxxx ∈∀=⋅ αααα ,......, 21
Demostrar que ∞IR es un espacio vectorial real.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 68 - Curso: Algebra Lineal.
12. Determine en cada caso si el conjunto dado es subespacio vectorial delespacio dado, demostrando o refutando según corresponda.
a. .}015/),,{( 33 IRVzyxIRzyxA ==+−−∈=
b. .}0303/),,,{( 44 IRVwyzwxIRwzyxB ==−+∧=−∈=
c. ).(032/)( 22 IRMVdcaIRMdc
baC =
=−+∈
=
d. ).()()/()( 322
3 IRMVbabaIRM
ihg
fedcba
D =
−≥+∈
=
e. ).,(}0)(/),({ IRIRFVxfIRIRFfE =≤∈=
13. ¿Cuál de los siguientes subconjuntos de )(2 IRM son subespacios? El conjuntode las matrices:
a. Simétricas.
b. Singulares.
c. Regulares.
d. Triangulares.
14. Demostrar que:
a. Una recta L que pasa por el origen del plano es un subespacio del plano.
b. Una recta L que pasa por un punto distinto del origen del plano no es unsubespacio del plano.
15. En cada caso determine el conjunto generador de:
a. }.038/),{( 2 =−∈= yxIRyxA
b. .0503/)(2
=+−∧=−∈
= dbcbaIRM
dc
baB

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 69 - Curso: Algebra Lineal.
c. }.23/)({ 22 caccbaIRPcbxaxC =+∧=−∈++=
16. Sean VCBA ⊆,, V un K - espacio vectorial. Demuestre que:
a. Si BA ⊆ entonces BA ⊆ .
b. AA = si y solo si .VA ≤
c. BABA ∩⊆∩ .
17. Determine si los siguientes conjuntos son Ld o Li:
a. )}.1,0,0(),0,1,0(),1,1,1{(=A
b. }.1,,1,1{ 2xxxB −+=
c. .11
84,
20
11,
11
00,
10
75
−−
−
−
−=C
d. }.52,7,12{ 223 −+++−= xxxxxD
e. )}.exp(),{exp( 2eeE =
f. .3
sen,sen,cos
+= π
xxxF
g. )}.3sen(),2sen(,{sen xxxG =
18. Determine en cada caso el valor de IR∈α , para que los siguientes conjuntossean Li.
a. A={(α ,3),(1, α)}.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 70 - Curso: Algebra Lineal.
b. B={(2α ,1,3),(1,2,- α),(1,0,1-α)}.
c. C={ 2),1(,)1( 2 −++ ααα xx }.
d. D= .1
01,
.3
11,
01
0
αα
α
19. ¿ Si vuwvu ,,, = , entonces { }wvu ,, es L.d ?
20. Determine [ ]Bu si:
a. ( ) 1,1,1=u y ( ) ( ) ( ){ }1,0,0,1,1,2,1,0,1=B .
b.
=
11
21u y
−
=
11
20,
00
40,
10
00,
00
01B .
c. 132 ++= xxu y ( )( ){ }3,1,12 −−−= xxxB .
21. Determine la matriz cambio de base [ ] 1BBI si:
a. ( ) ( ){ } ( ) ( ){ }1,0,1,15,2,6,1 1 == BB .
b.
=
=
21
03,
21
00,
00
03,
12
23
01
00,
22
00,
00
13,
00
101BB .
c. { } { }4,32,13,1,13 21
2 ++=−+= xxBxxB .
22. Sean veV . sobre un cuerpo K y { }321 ,, vvvB = una base, demuestre que
{ }2132131 5,,3 vvvvvvB −−−= es una base de veV . . Determine [ ] 1BBI .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 71 - Curso: Algebra Lineal.
23. Sean ( ) ( ) ( ){ } 31 1,0,0,1,1,1,1,0,2, IRBB ⊂= bases , tales que [ ] =1B
BI
−
102
111
011
determine B .
24. Sean { } [ ]IRPxxBB 22
1 9,32,8, ⊂−−= bases, tales que [ ] =1BBI
−
102
111
011
determine B .
25. Determine [ ]IRPu 2∈ si [ ] [ ] tBu 145= y [ ] =1B
BI
−
102
111
011
donde
{ } [ ]IRPxxxBB 22
1 89,23,28, ⊂+−−= son bases.
26. Determine la dirección y la magnitud de los siguientes vectores:
a. ( )4,4=→v .
b. ( )1,3 −=→v .
c. ( )8,5−=→v .
27. En cada uno de los siguientes casos determine
−+
→→→→→→→→badbababa ,;,;43;2
y →
→
a
a:
a. ( ) ( )4,5;3,2 −==→→ba .
b. ( ) ( )3,2,1;4,5,2 −−=−=→→ba .
c. kjbkjia −=++=→→
; .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 72 - Curso: Algebra Lineal.
28. Un vector →v posee dirección opuesta al vector
→u , si la dirección de
→v es la
dirección de →u mas π .
→u ,
→v en el plano.
Determine en cada caso un vector unitario →v que tenga la dirección opuesta a
la dirección del vector dado →u :
a. ( )1,1=→u .
b. ( )3,2 −=→u .
c. ( )4,3−=→u .
29. Determine el ángulo formado por los vectores:
a. ( ) ( )1,1;1,1 −==→→vu .
b. ( ) ( )1,1,0;1,1,1 −==→→vu .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 73 - Curso: Algebra II.
4. Transformaciones Lineales
En este capitulo estudiaremos funciones definidas entre espacios vectoriales dedimensión finita que satisfacen ciertas condiciones, las cuales se denominantransformaciones lineales.
4.1. Definiciones Básicas
Definición 01: sean V y W espacios vectoriales sobre un cuerpo IK yconsideremos WVT →: función. Diremos que T es una transformación lineal si ysolo si IKsVvu ∈∀∈∀ ,, se tiene que:
( ) ( ) ( )
( ) ( )usTsuT
vTuTvuT
=
+=+
)2(
)1(
Observación: las condiciones mencionadas en la definición pueden ser reducidassolo por:
( ) ( ) ( )vTusTvsuT +=+ (3)
es decir una función T es una transformación lineal si y solo si satisface (3).
Ejemplo 01: consideremos 33: IRIRT → tal que ( ) ( )xzyxxzyxT +−= ,2,,, ,
determinemos si T es una transformación lineal.
Solución: sean ( ) ( ) IRtIRcbazyx ∈∧∈,,,,, entonces
( ) ( )( ) ( ) ( ) ( )( )( ) ( )( ) ( )
( ) ( )cbaTzyxtT
acbaaxzyxxt
acbaatxtztytxtx
atxctzbtyatxatxctzbtyatxTcbazyxtT
,,,,
,2,,2,
,2,,2,
,2,,,,,,,
+=+−++−=
+−++−=++++−++=+++=+
por lo tanto T es una transformación lineal.
Ejemplo 02: sea IRIRT →3: tal que ( ) zyxzyxT +−= 32,, , entonces T es una
transformación lineal.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 74 - Curso: Algebra II.
Ejemplo 03: sea ( ) ( )IRIPIRMT 22: → definida por ( ) axcbaxdc
baT +−+=
2 ,
entonces T es una transformación lineal.
Ejemplo 04: consideremos ( ) ( )IRIPIRMT nn →: definida por ( ) AXXT = donde
( )IRMX n∈ es una matriz fija, entonces T es una transformación lineal.
Proposición 01: Sean V y W espacios vectoriales sobre un cuerpo IK yconsideremos WVT →: una transformación lineal entonces:
a. ( ) WVT 00 = .
b. ( ) ( ) VuuTuT ∈∀−=− .
Proposición 02: Sean V y W espacios vectoriales sobre un cuerpo IK ,WVT →: una transformación lineal y { }nvvvB ,....,, 21= una base deV entonces:
( ) ( ) ( ) ( ){ }nvTvTvTuTVu ,....,, 21∈∈∀ .
Ejemplo 05: sea 33: IRIRT → una transformación lineal que satisface( ) ( ) ( ) ( ) ( ) ( )1,22,0,5,0,01,1,1,2,11,0,2 ==−= TTT determine ( ) ( ) 3,,,,, IRzyxzyxT ∈∀ .
Solución: no es difícil mostrar que ( ) ( ) ( ){ }2,0,5,1,1,1,1,0,2=S es una base de 3IR porlo cual se tiene que:
( ) ( ) ( ) ( )2,0,51,1,11,0,2,,/,, ++=∈∃ bazyxIRcba
observe que para determinar cba ,, basta resolver un sistema el cual tiene
asociada la matriz ampliada:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 75 - Curso: Algebra II.
yzxc
yb
zyxa
zyx
y
yzx
yz
y
yzx
z
y
zx
z
y
x
+−==
+−−=⇒
+−−
+−
−
+−→
−−→
2
532
532001
010
2100
201
010
2100
211
010
2110
211
010
512
por lo tanto
( ) ( ) ( ) ( ) ( ) ( )( )( ) ( ) ( )( )( )zyxzyx
yzxyzyx
TyzxyTTzyxzyxT
853,954
1,220,02,1532
2,0,521,1,11,0,2532,,
+−−−+=+−++−+−−=
+−+++−−=
Ejemplo 06: sea 33: IRIRT → una transformación lineal que satisface( ) ( ) ( ) ( ) ( ) ( )2,12,1,3,0,21,1,1,2,11,0,2 ==−= TTT determine ( ) ( ) 3,,,,, IRzyxzyxT ∈∀ si es
posible.
Definición 02: sean V y W espacios vectoriales sobre un cuerpo IK yconsideremos T y H transformaciones lineales de WV → , entonces HT + es
una transformación lineal de WV → definida por ( )( ) ( ) ( )uHuTuHT +=+ .
Definición 03: el conjunto de todas las transformaciones lineales definidas deWV → , donde V y W son espacios vectoriales sobre un cuerpo IK , será
denotado por:
( )WVHom , .
Observación: ( )( )⋅+.,,WVHom es un grupo conmutativo sobre el cuerpo IK con lasuma y ponderación por escalar usual.
Ejemplo 07: dadas las transformaciones lineales 22: IRIRTi → definidas por:
( ) ( )( ) ( )( ) ( )xyxT
yxxyxT
yxyxyxT
−=+=
−+=
,0,
,,
,,
3
2
1

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 76 - Curso: Algebra II.
calcule: 3211321321 ,,, TTTTTTTTTT oooo++ .
4.2. Núcleo e Imagen de una Transformación Lineal.
Definición 04: sean V y W espacios vectoriales sobre un cuerpo IK y T unatransformación lineal, definimos el núcleo de T o Ker(T ) al conjunto:
( ) ( ){ }WuTVuTKer 0/ =∈= .
Observación: Es fácil mostrar que ( ) VTKer ≤ .
Ejemplo 08: sea 44: IRIRT → definida por
( ) ( )wyxzyxwzywyxwzyxT 42,23,2,2,,, ++−−++−−+=
determine base y dimensión de ( )TKer .
Solución:
( ) ( )
=++−=−+=+−=−+
=
042
023
02
02
,,,
wyx
zyx
wzy
wyx
wzyxTKer
si resolvemos el sistema:
( ) ( ) ( ) ( )8,1,6,20,,,,,,
8
6
20
1800
0000
0610
02001
1800
0000
1210
3401
3040
1210
1210
1021
4021
0231
1210
1021
−=⇔∈⇒=
−==
⇒
−
→
−
−−
→
−−
−
→
−−−
−
zwzyxTKerwzyx
zw
zy
zx
por lo tanto ( ) ( ){ }8,1,6,20 −=tKer .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 77 - Curso: Algebra II.
Observe que para determinar el núcleo de una transformación lineal basta resolverun sistema homogéneo.
Proposición 03: sean V y W espacios vectoriales sobre un cuerpo IK y T unatransformación lineal, entonces T es inyectiva si y solo si ( ) { }WTKer 0=
Definición 05: sean V y W espacios vectoriales sobre un cuerpo IK y T unatransformación lineal, definimos la imagen de T por el conjunto:
( ) ( ){ }wvTVvWwT =∈∃∈= :/Im .
Observación: Es fácil mostrar que ( ) WT ≤Im
Teorema 01: sea WVT →: una transformación lineal dada entonces:
( ) ( )( ) ( )( )TDimTKerDimVDim Im+= .
Proposición 04: sea WVT →: una transformación lineal entonces:
1. T es inyectiva si y solo si ( ) { }VTKer 0= .
2. T es epiyectiva si y solo si ( ) WT =Im .
Definición 06: sea WVT →: una transformación lineal entonces diremos que:
a. T es monomorfismo si y solo si T es inyectiva.
b. T es epimorfismo si y solo si T es epiyectiva.
c. T es isomorfismo si y solo si T es biyectiva.
Definición 07: sea WVT →: una transformación lineal entonces diremos queT es invertible o no singular si y solo si existe VWT →− :1 transformación lineal talque WV ITTITT == −− 11 oo y .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 78 - Curso: Algebra II.
Proposición 05: sea WVT →: una transformación lineal entonces:
a. T es invertiste si y solo si T es biyectiva.
b. 1−T es una transformación lineal única tal que ( ) TT =−− 11 .
Ejemplo 09: 33: IRIRT → tal que ( ) ( )zxyxzyxzyxT +−−−+= ,2,2,, es una
transformación invertible.
Observación: WVT →: es una transformación lineal inyectiva si y solo si laimagen de todo conjunto linealmente independiente es linealmente independiente.
4.3. Matriz Asociada a una Transformación.
Consideremos WVT →: una transformación lineal donde los espacios vectorialesson de dimensión finita n y m respectivamente.
Sean { } { }nn wwwSvvvS ,......,,,......,, 212211 == y bases de V yW
respectivamente. Así para todo vector V∈α existen IRaa n ∈,.....,1 tales que:
[ ]
=⇔++=
n
Snn
a
a
vava
1
11 1........ αα
análogamente se tiene que existen IRbb n ∈,.....,1 tales que:
( ) ( )[ ]
=⇔++=
n
Snn
b
b
TwbwbT
1
11 2........ αα
así obtenemos que:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 79 - Curso: Algebra II.
=
nmnmm
n
n a
a
aaa
aaa
b
b 1
21
112111
donde:
( )( )
( ) mmnnn
mm
mm
wawawavT
wawawavT
wawawavT
+++=
+++=+++=
.....
.....
.....
22111
22221122
12211111
la matriz:
=
mnmm
n
aaa
aaa
A
21
11211
se denomina la matriz de la transformación en las bases 1S y 2S la cual
denotaremos por:
[ ] 2
1
SST .
Observación: [ ] [ ] ( )[ ]21
2
1 SSSS uTuT =
Proposición 06: sea mn IRIRT →: una transformación lineal tal que( ) ( )IRMAAuuT nm×∈= , , entonces:
a. La imagen de T es el espacio columna de A .
b. T es inyectiva si y solo si las columnas de A son linealmente independientes.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 80 - Curso: Algebra II.
c. El sistema bAu = posee solución si y solo si b es combinación lineal de lascolumnas de A .
Proposición 07: Sea WVT →: una transformación lineal donde ( ) nV =dim y
( ) mW =dim , consideremos { }nuuuS ,....,, 211 = y { }naaaS ,....,, 212 = bases de V con
matriz cambio de base de 2S en 1S dada por [ ] 1
2
SSIP = ; sean
{ }nwwwS ,....,, 213 = y { }nbbbS ,....,, 214 = bases de W con matriz cambio de base de
4S en 3S dada por [ ] 3
4
SSIQ = entonces:
[ ] [ ] [ ] [ ] 1
2
3
1
4
3
4
2
1 SS
SS
SS
SS TTTPAQT == −
.
Ejemplo 10: Sea T : 23 IRIR → una transformación lineal tal que
[ ]
−=
310
121BAT , donde ( ) ( ) ( ){ }0,0,1;2,1,0;1,0,1 −=A y ( ) ( ){ }1,5;1,1 −−=B
a. Determine T(2,1,-3).
b. Determine la matriz de cambio de base, de la base canónica de 3IR a labase A.
Solución:
a.
( )[ ] ( )[ ]
( ) ( ) ( ) ( )2,341,581,163,1,2
8
6
3
1
5
310
1213,1,2
310
1213,1,2
=−−−−=−∴
−−
=
−
−=−
−=−
T
T BB
b.
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )
[ ]
−
−=⇒
++−−=−+−=++−=
121
010
120
0,0,12,1,01,0,11,0,0
0,0,122,1,001,0,120,1,0
0,0,12,1,001,0,100,0,1
3
A
CI

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 81 - Curso: Algebra II.
Ejemplo 11: Sea 33: IRIRT → transformación lineal tal que
[ ]
−−−
−=
133
445
4673
3
CCT donde 3C es la base canónica de 3IR . Resuelva los
siguientes problemas:
a. Determine ( )zyxT ,, .
b. Determine base y dimensión para ( )TKer .
c. Determine base y dimensión para ( )TIm .
d. Determine si T es un isomorfismo. Si su respuesta es afirmativa determine1−T .
e. Considere ( ) ( ) ( ){ }1,2,2,1,1,2,0,1,1 −−−−=β base de 3IR , determine [ ]ββT ,
utilizando [ ] 3
3
CCT .
Solución:a.
( )[ ]
( ) ( )zyxzyxzyxzyxT
zyx
zyx
zyx
z
y
x
zyxT C
+++−−−+=⇒
+++−−
−+=
−−−
−=
33,445,467,,
33
445
467
133
445
467
,,3
b.
( ) ( )
=++=+−−=−+
∈=033
0445
0467
/,, 3
zyx
zyx
zyx
IRzyxTKer
consideremos la matriz asociada al sistema
unica solución∃⇒
−−−−
→
−→
−→
−−
−
200
810
701
2230
1420
701
133
721
701
133
445
467

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 82 - Curso: Algebra II.
por lo tanto se tiene que ( ) ( ){ }0,0,0=TKer
c. Considerando el resultado anterior se tiene por el teorema de ladimensión que ( )( ) 3Imdim =T por lo tanto ( ) 3Im IRT = .
d. T es un isomorfismo ya que T es inyectiva, por la parte b, y esepiyectiva, por la parte c.Además
[ ] [ ]( )
( )
−++−−−+=
⇒
−
−−−
==
−
−−
2233
,2
857,434,,
123
23
425
27
434
1
11 3
3
3
3
zyxzyxzyxzyxT
TT CC
C
C
e. [ ] [ ] [ ] [ ]
−=
−−−
−
−−−
−
−
−=
=
100
020
001
110
211
221
133
445
467
111
011
201
33
33
CB
CC
BC
BB ITIT
ya que:
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 1,0,21,2,21,1,20,1,11,0,0
1,1,01,2,21,1,20,1,10,1,0
1,1,11,2,21,1,20,1,10,0,1
−==−=⇒−−−+−====⇒−−−+−====⇒−−−+−=
cbacba
cbacba
cbacba

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 83 - Curso: Algebra II.
Ejercicios.
1. Sea ( )IRMA mn×∈ demuestre que nm IRIRT →: definida por ( ) AuuT = es una
transformación lineal.
2. Sea 32: IRIRT → definida por ( ) ( )xyyxyxT ,,, += demuestre que es
3. Sea ( ) ( )IRMIRMT nn →: definida por ( ) MAAMVT += donde ( )IRMM n∈ es
fija. Demuestre que T es una transformación lineal.
4. Sean 222111 :,: WVTWVT →→ transformaciones lineales, demuestre que
2221: WWVVT ×→× definida por ( ) ( ) ( )( )vTuTvuT ,, = es una transformaciónlineal.
5. Determinar cuales de las siguientes funciones determinan una transformaciónlineal:
a. ( ) .2,;: 2 yxyxTIRIRT −=→
b. ( ) ( ).,,,,;: 22 ywzyxwzyxTIRIRT −−+=→
c. ( ) ( ).,,,;: 32 xyyxyxTIRIRT =→
6. Considere V el espacio de todas las funciones reales continuas sobre elintervalo [ ]1,0 y sea W el subespacio que consta de todas las funciones realescon primera derivada continua sobre [ ]1,0 , demuestre que VWT →: definida
por ( ) 'uuT = es una transformación lineal: determine si es posible definir T enV .
7. Sea WVT →: una transformación lineal y suponga que las imágenes de
kuuu ,....,, 21 , ( ) ( ) ( )kuTuTuT .....,,, 21 , son linealmente independientes. Demuestre
que kuuu ,....,, 21 forma un conjunto linealmente independiente.
8. Sean S y T transformaciones lineales definidas de 2IR en 2IR tales que( ) ( )xyxS ,0, = y ( ) ( )0,, xyxT = demostrar que TSST oo ≠ .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 84 - Curso: Algebra II.
9. Sea ( ) ( )IRIPIRIPGF nn →:, definidas por ( )( ) ( )xpxpF '= y ( )( ) ( )xxpxpG '= ,
demuestre que S y G son transformaciones lineales.
10. Sea WVT →: una transformación lineal. Si { }kvvv ,......,, 21 genera al espacio V
demuestre que la imagen de T esta generada por ( ) ( ) ( ){ }kT vTvTvT ,......,, 21 .
11. Sea ( )IRMA n∈ fija demuestre que nn MMT →: definida por ( ) XAAXXT −=es una transformación lineal.
12. Dada
−−
=22
13A determine el núcleo y la imagen de ( ) ( )IRMIRMT 22: →
donde ( ) XAAXXT −= .
13. Dada la transformación lineal 33: IRIRT → definida por
( ) ( )zxzyyxzyxT 2,,2,, +−+= determine una base para el núcleo y la imagende T .
14. Sea de ( ) ( )IRMIRMT 22: → definida por ( ) XAXT = donde
−
−=
22
11M ,
determine base y dimensión para los subespacios núcleo e imagen de T .
15. Sea 23: IRIRT → una transformación lineal definida por:
( ) ( )( ) ( )( ) ( )0,00,1,1
1,20,2,0
2,13,0,0
===
T
T
T
a. Determine explícitamente ( )zyxT ,, .
b. Determine base y dimensión del ( )TKer .
16. Dados los vectores ( ) ( )3,7,5,3,5,3,2,1 =−= vu determinar un sistema homogéneotal que el conjunto solución de dicho sistema este generado por vu y .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 85 - Curso: Algebra II.
17. Determine si 33: IRIRT → definida por ( ) ( )zzyzyxzyxT ,,,, +++= esinvertible, si su respuesta es afirmativa determine su inversa.
18. Determine si la transformación lineal 33: IRIRT → definida por
( ) ( )zyzyxzyxzyxT +−++++= 2,33,32,, es invertible.
19. Sea 33: IRIRT → una transformación lineal tal que ( ) ( )3,2,10,0,1 =T ,
( ) ( )0,1,20,1,0 −=T y ( ) ( )3,1,31.0.0 =T .
a. Determine ( )zyxT ,, .
b. Determine una base para el Núcleo de T .
c. Determine base y dimensión de la imagen de T .
20. Sean UWSWVT →→ :,: transformaciones lineales, demuestre que:
a. ( ) ( )STS ImIm ⊂o .b. ( ) ( )TSKerTKer o⊂ .
21. Sea ( ) ( )IRIPIRIPT 42: → definida por ( )( ) ( ) ( )tptttpT 12 ++= demuestre que Tes una transformación lineal y determine la imagen de T .
22. En cada caso determine una transformación lineal 33: IRIRT → que cumpla lapropiedad dada.
a. ( ) ( ){ }1,1,3,2,1,1 −− sea una base para ( )TIm .
b. ( ) ( ){ }2,0,1,1,1,1 − sea una base para ( )TKer .
23. Sea ( ) ( )IRIPIRIPT 32: → una transformación lineal tal que: ( ) 21 2 −= xT ,
( ) xxxT += 3 y ( ) 12 232 ++= xxxT , determine cual de los siguientes polinomiospertenecen a la imagen de T .
a. 32 +− xx .
b. 12 +− xx .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 86 - Curso: Algebra II.
c. 534 3 +− xx .
24. Sea 33: IRIRT → definida por ( ) vuuT ×= donde v es un vector fijo no nulo delespacio:
a. Determine si T es una transformación lineal.
b. Determine el núcleo de la transformación.
c. Determine la matriz asociada a la transformación en las bases canónicas.
25. Considere 24:, IRIRTS → transformaciones lineales definidas por:
( ) ( )
( ) ( )ywzxwzyxT
wzyxwzyxS
−−=
++=
,,,,
,,,,
a. determine la matriz asociada a TS + en las bases canónicas.
b. Determine una base para el núcleo de TS + .
26. Considere la transformación lineal 33: IRIRT → definida por:
( ) ( )yxzxzyzyxT +++= ,4,3,,
a. Determine la matriz asociada a la transformación en la base canónica de3IR .
b. Determinar [ ]WBT donde ( ) ( ) ( ){ } ( ) ( ) ( ){ }1,2,2,0,1,3,1,3,20,0,1,0,1,1,1,1,1 −−== WB y .
27. Sea 23: IRIRT → una transformación lineal tal que [ ]
−=
013
312WBT donde
( ) ( ) ( ){ } ( ) ( ){ }0,2,1,13,2,1,0,2,0,1,0,1 −=−= WB y son bases de 23 IRIR yrespectivamente.
a. Determine la matriz asociada en las bases canónicas.
b. Determine el núcleo y la imagen de la transformación y sus respectivasdimensiones.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 87 - Curso: Algebra II.
28. Sea V un espacio vectorial de dimensión dos sobre el cuerpo de los númerosreales considere VVT →: una transformación lineal tal que:
( ) ( ) 212211 2 uuuTuuuT +=+=
donde { }21 ,uu es una base de V .
a. En cada caso determinar la matriz asociada en la base indicada.
i. { }21 ,uu .
ii. { }2121 ,2 uuuu ++
b. Determinar la matriz que representa 1−T en la base { }21 ,uu .
c. Determinar ( )21 buauT + en términos de la base { }21 ,uu .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 88 - Curso: Algebra II.
5. Material de Apoyo.
Solemnes Segundo Semestre del 2001
Primera Solemne
Alumno : Nota
Asignatura : Sección:
Profesor : Rossy Rivero – Miguel Muñoz J.
Carrera : Ingeniería de Ejecución Jornada: Diurna
Tipo de Prueba : Teórico Teórico Practico Fecha 09/10/01
Duración : 80 minutos(una hora 20 minutos).
Indique el numero de pregunta que NO responderá: (la cual NO será corregida)
1. Sea
=
31
31
32
32
32
bc
b
a
A determine IRcba ∈,,, si se sabe que A es una matriz
Ortogonal.(15 puntos)
2. Dado el sistema:
2
1
aazyx
azayx
zyax
=++
=++=++
determine los valores de IRa ∈ , si existen, de tal modo que:
a. El sistema tenga infinitas soluciones. (5 puntos)
b. El sistema sea inconsistente. (5 puntos)
c. El sistema tenga solución única, y determine dicha solución. (5 puntos)
3. Determine usando operaciones elementales la inversa de:
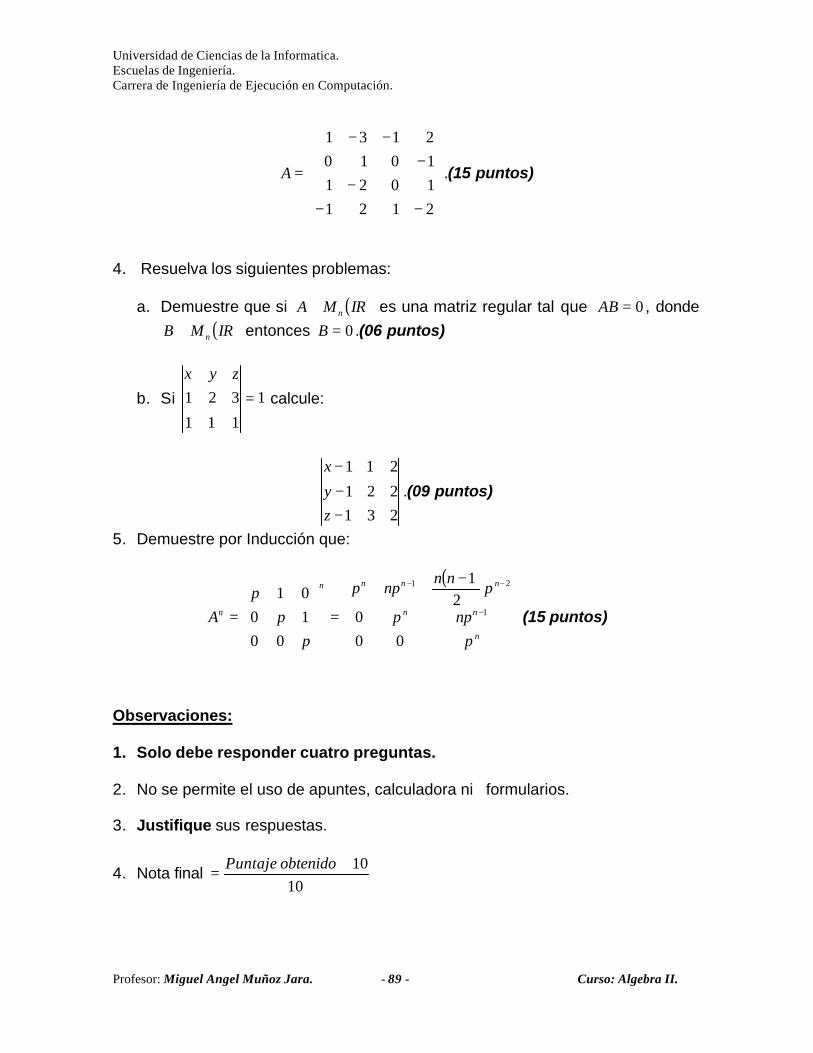
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 89 - Curso: Algebra II.
−−−
−−−
=
2121
1021
1010
2131
A .(15 puntos)
4. Resuelva los siguientes problemas:
a. Demuestre que si ( )IRMA n∈ es una matriz regular tal que 0=AB , donde
( )IRMB n∈ entonces 0=B .(06 puntos)
b. Si 1
111
321 =zyx
calcule:
231
221
211
−−−
z
y
x
.(09 puntos)
5. Demuestre por Inducción que:
( )
−
=
= −
−−
n
nn
nnnn
n
p
npp
pnn
npp
p
p
p
A
00
02
1
00
10
011
21
(15 puntos)
Observaciones:
1. Solo debe responder cuatro preguntas.
2. No se permite el uso de apuntes, calculadora ni formularios.
3. Justifique sus respuestas.
4. Nota final 10
10+= obtenidoPuntaje
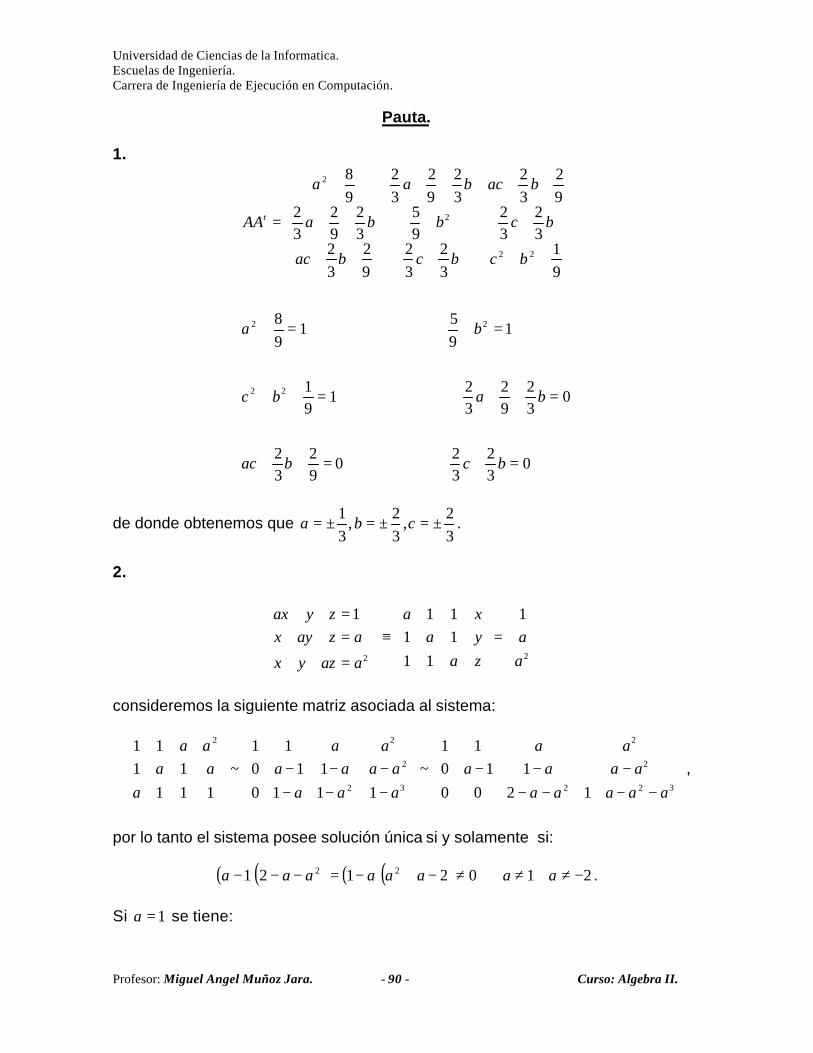
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 90 - Curso: Algebra II.
Pauta.
1.
032
32
092
32
032
92
32
191
195
198
91
32
32
92
32
32
32
95
32
92
32
92
32
32
92
32
98
22
22
22
2
2
=+=++
=++=++
=+=+
+++++
++++
+++++
=
bcbac
babc
ba
bcbcbac
bcbba
bacbaa
AAt
de donde obtenemos que 32
,32
,31 ±=±=±= cba .
2.
=
≡
=++
=++=++
22
1
11
11111
a
a
z
yx
a
aa
aazyx
azayxzyax
consideremos la siguiente matriz asociada al sistema:
−−+−−−−−
−−−−−−
322
2
2
32
2
22
1200
11011
~
1110
11011
~
111
1111
aaaaa
aaaaaa
aaa
aaaaaa
a
aaaa
,
por lo tanto el sistema posee solución única si y solamente si:
( )( ) ( )( ) 2102121 22 −≠∧≠⇔≠−+−=−−− aaaaaaaa .
Si 1=a se tiene:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 91 - Curso: Algebra II.
=
−−+−−−−−
0000
00001111
1200
11011
322
2
2
aaaaa
aaaaaa
.
Por lo tanto se tiene que el sistema posee infinitas soluciones.
Si 2−=a entonces:
−−
−=
−−+−−−−−
30006330
4211
1200110
11
322
2
2
aaaaaaaaa
aa.
Por lo tanto el sistema no posee solución.
3.
( )
−−−−−
−−−−
=⇒
−−−−−
−−−−
−−−−
−
−
−−−−
−
−−
−−−−
−
−−
−−−
−−−
−−
−−
−−
−−−
−−−
=
−
1011
0111
1001
1111
1011
0111
1001
1111
1000
0100
0010
0001
~
1011
0111
1001
2112
1000
0100
0010
0031
~
1011
0111
1001
2023
1000
0100
0010
0131
~
1011
0111
1001
0001
1000
0100
0010
2131
~
1011
0111
0010
0001
1000
0100
1010
2131
1001
0101
0010
0001
0010
1110
1010
2131
~
1000
0100
0010
0001
2121
1021
1010
2131
|
1A
IA
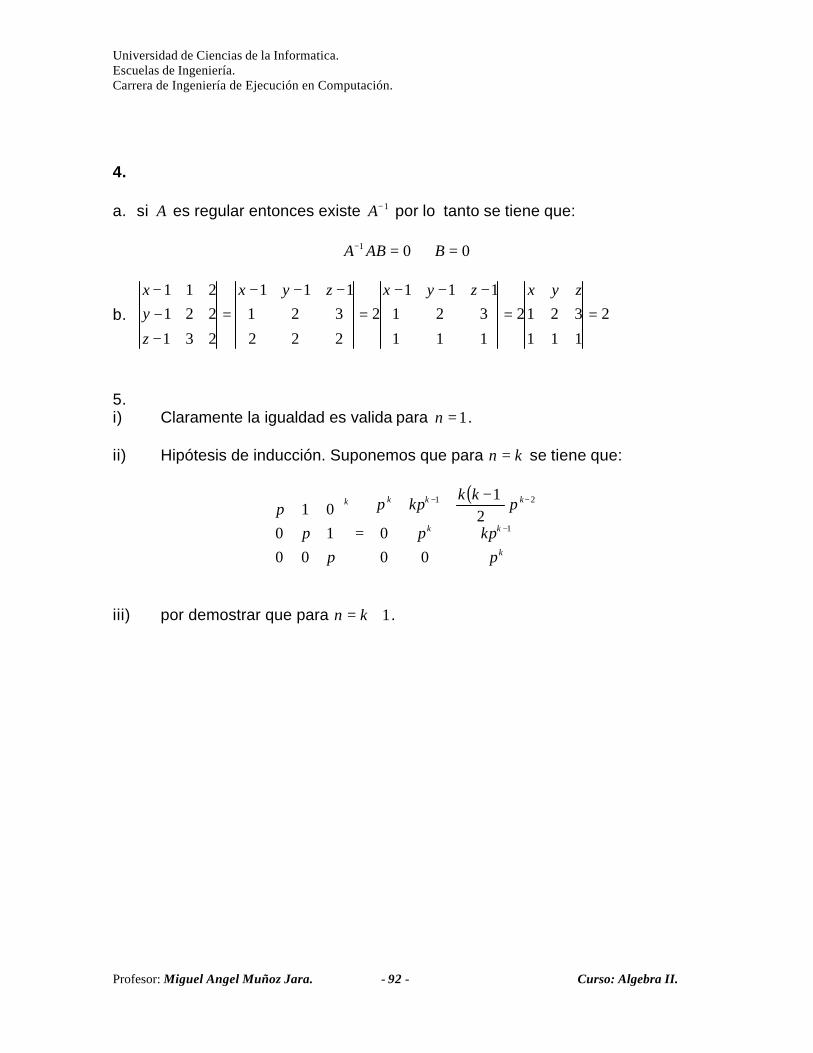
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 92 - Curso: Algebra II.
4.
a. si A es regular entonces existe 1−A por lo tanto se tiene que:
001 =⇒=− BABA
b. 2
111
3212
111
321
111
2
222
321
111
231
221
211
==−−−
=−−−
=−−− zyxzyxzyx
z
y
x
5.i) Claramente la igualdad es valida para 1=n .
ii) Hipótesis de inducción. Suponemos que para kn = se tiene que:
( )
−
=
−
−−
k
kk
kkkk
p
kpp
pkk
kpp
p
p
p
00
02
1
00
10
011
21
iii) por demostrar que para 1+= kn .

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 93 - Curso: Algebra II.
( )
( )
( ) ( )
( )
+
++
=
+
−++
=
−
=
+
+
−+
+
+
−−+
−
−−+
1
1
11
1
1
111
1
211
00
102
11
000
21
00
02
1
00
10
01
00
10
01
k
kk
kkk
k
kkk
kkkkk
k
kk
kkkk
p
pkp
pkk
pkp
pkppp
pkk
kpkppp
p
kpp
pkk
kpp
p
p
p
p
p
p

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 94 - Curso: Algebra II.
Segunda Solemne
Alumno : Nota
Asignatura : Sección:
Profesor : Rossy Rivero – Miguel Muñoz J.
Carrera : Ingeniería de Ejecución Jornada: Diurna
Tipo de Prueba : Teórico Teórico Practico Fecha 06/11/01
Duración : 80 minutos(una hora 20 minutos).
Indique el numero de pregunta que NO responderá(la cual NO será corregida):
Pregunta 3: Pregunta 5:
1. Considere el espacio de las matrices cuadradas de orden n , con lasoperaciones usuales, ( )( )*.,+IRM n . Determine si:
( ){ }TAATIRMAW n =∈= /
es un subespacio de ( )( )*.,+IRM n , donde ( )IRMT n∈ es fija.(12 Puntos)
2. Sea { } VwvuB ⊂= ,, una base del espacio vectorial real V . Determine si elconjunto { }vuuwwvS +−+= ,4,23 es una base de V .(12 Puntos)
3. Considere como espacio vectorial el conjunto de los polinomios de gradomenor o igual a tres, ( )IRIP3 , con las operaciones usuales. Dados
( ) ( ) ( ) ( ) ( ){ }{ }32232
3
232,2,1
0111/
xxxxxxxW
pppIRIPxpU
++−+−++−=
=∧−=∈=
a. Determine base y dimensión de WU ∩ .(4 Puntos)
b. Determine base y dimensión de WU + .(4 Puntos)
c. ¿Es ( )IRIP3 WU ⊕= ? Justifique su respuesta. (4 Puntos)
4. Determine si ( ) { }2222 1,73,523,142 xxxxxxxxxp −−−+−+∈−+= .
5. Considere los siguientes subespacios de 4IR :

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 95 - Curso: Algebra II.
( ) ( ) ( ){ }( ) ( ) ( ){ }3,4,3,1,3,2,3,2,2,2,2,1
1,3,3,2,0,3,2,1,1,0,1,1
−−−=
−−=
W
U
a. Determine WU ∩ .(4 Puntos)
b. Determine una base y la dimensión de WU + .(4 Puntos)
c. ¿Es WUIR ⊕=4 ?. Justifique. (4 Puntos)
6. Determine una base ortogonal del subespacio de 4IR generado por el conjuntode vectores ( ) ( ) ( ){ }7,4,2,1,4,2,1,1,1,1,1,,1 −− .(12 Puntos)
Pauta1.
a. ∅≠⇒∈ WW0 .
b. Sean IRWBA ∈∧∈ α, de donde se tiene que:
( )( ) ( ) WBABAT
WBABTATTBTATBA
∈+⇒+=∈+=+=+
ααααα , que ya
Por lo tanto de a y b se tiene que ( )IRMW n≤ .
2. consideremos la combinación lineal:
( ) ( ) ( ) ( ) ( ) ( )wbaubcvcavucuwbwva VV ++−++=⇒=++−++ 24300423
ya que { }wvu ,, es una base de V entonces se tiene que:
{ } I. L es tanto lo por wvucba
ba
bc
ca
,,,0
02
04
03
===⇒
=+=−=+

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 96 - Curso: Algebra II.
Por lo tanto, ya que { }vuuwwvS +−+= ,4,23 es un conjunto linealmente
independiente con cardinalidad tres, igual a la dimensión del espacio se tiene que{ }vuuwwvS +−+= ,4,23 es una base de V .
3.{ }{ }{ }1,1
,/
00/
32
32
32
−−=
∈++−−=
=+++∧=++++=
xx
IRdcdxcxxdc
dcbadbdxcxbxaU
Sea Wdxcxbxa ∈+++ 32 por lo tanto se tiene que:
( ) ( ) ( )3223232 23221 xxxrxqxxxpdxcxbxa ++−++−+++−=+++
de donde se deduce que:
{ }0230/
2
3
2
2
32 =++∧=++++=⇒
=+=++=−−=−
cbadbdxcxbxaW
d
c
b
a
rp
rqp
rp
qp
a. { }00230/32 =+++∧=++∧=++++=∩ dcbacbadbdxcxbxaWU así paradeterminar WU ∩ basta resolver el sistema
=+++=++=+
0
02
0
dcba
cba
db
así considerando la matriz asociada al sistema y realizando operacioneselementales obtenemos:
−→
−→
3100
1010
0101
1120
1010
1111
1010
0231
1111
de donde se puede deducir que:
{ } { }3232 33/33 xxxIRddxdxdxdWU ++−−=∈++−−=∩
por lo tanto una base de WU ∩ es { }3233 xxx ++−− y su dimensión es uno.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 97 - Curso: Algebra II.
b. { }3223232 232,2,1,1,1 xxxxxxxxxWU ++−+−++−−−=+
consideremos la siguiente identificación:
( )( )( )( )( )
−−−
−−
−
=
−→++−
−→+−
−→++−−→−
−→−
2320
0102
1111
1001
0101
2,3,2,0232
0,1,0,22
1,1,1,11
1,0,0,11
0,1,0,11
32
2
32
3
2
A
xxx
x
xxx
x
x
matriz la osconsideram si
si realizamos operaciones elementales a la matriz A obtenemos:
−
−−
→
−
−−
→
−−−
−−
→
−−
−−
−
→
0000
1000
0100
1210
0101
0100
1000
0100
1210
0101
2320
1100
0100
1210
0101
2320
0100
1210
1100
0101
A
de donde se deduce que:
{ }( )
{ }32322
32322
,,2,1
4
,,2,1
xxxxxxWU
WUDim
xxxxxxWU
++−−+
=+
++−−=+
es de base una
c. ( ) { }03 ≠∩⊕≠ WUWUIRIP que ya .
4. Para determinar si ( ) { }2222 1,73,523,142 xxxxxxxxxp −−−+−+∈−+=basta determinar si existen IRdcba ∈,,, tales que:
( ) ( ) ( ) ( )( ) ( ) ( )
−
−−−−⇒
=−+=++
−=+−−−
⇔−++++++−−−=−+
⇔−+−+−++−+=−+
11031
20321
41751
13
232
475
3327542
17352314222
2222
es sistema al asociada matriz la
dba
cba
dcba
dbaxcbaxdcbaxx
xdxcxxbxxaxx
si realizamos operaciones elementales se tiene que:

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 98 - Curso: Algebra II.
→
−−−−
−−−−→
−−−−−−−−−−
→
−
−−−−
30720
11310
41751
30720
21430
41751
11031
20321
41751
soluciones infinitas posee sistema el que ⇒
−−−−
−−−−
521300
11310
41751
por lo tanto ( ) { }2222 1,73,523,142 xxxxxxxxxp −−−+−+∈−+= .
5. ( ) ( ) ( ){ } ( ){ }02033/,,,1,3,3,2,0,3,2,1,1,0,1,1 =−+∧=−+=−= yxwyxzwzyxU por
otro lado se tiene que:
( ) ( ){ } ( ){ }0220/,,,1,2,1,0,0,2,0,1 =−+∧=+=−−= yxzywwzyxW
por lo tanto:
a. { } ( ){ }0,0,0,0022002033 ==−+∧=+∧=−+∧=−+=∩ yxzywyxwyxzWU
b. ( ) ( ) ( ) ( ){ } ( ) ( ) ( ){ }1,2,1,0,1,3,1,0,1,0,1,11.2.1.0,0,2,0,1,1,3,1,0,1,0,1,1 −−=−−=+WU
por lo tanto una base de WU + es ( ) ( ) ( ){ }1,2,1,0,1,3,1,0,1,0,1,1 −− , con lo cual ladimensión de WU + es 3
c. WUIR +≠4 ya que 4IRWU ≠+ .
6.
( )
( ) ( ) ( )( )
( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )( )
( )
−=
−−−−−
−−
−−−−−−−=
−−=−=
=
64
,2,67
,61
1,1,1,11,1,1,1
1,1,1,1,7,4,2,12,0,1,1
2,0,1,1
2,0,1,1,7,4,2,17,4,2,1
2,0,1,11,1,1,11,1,1,1
1,1,1,1,4,2,1,14,2,1,1
1,1,1,1
223
22
1
w
w
w

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 99 - Curso: Algebra II.
Tercera Solemne
Alumno : Nota
Asignatura : Algebra II Sección:
Profesores : Rossy Riveros. – Miguel Muñoz J.
Carrera : Ingeniería de Ejecución en Computación Jornada: Diurna
Tipo de Prueba : Teórico Teórico Practico X Fecha
Duración : 90 minutos(una hora treinta minutos ).
1. Sean 33:,, IRIRTHGF → transformaciones lineales definidas por:
( ) ( )( ) ( )( ) ( )yzzyxzyxzyxH
zxzxzyxzyxG
zyyxzyxzyxF
−+++−=−++−=
++−+=
3,,3,,
5,3,,,
,32,42,,
Determine:
a. HGF 53 −+ .(04 Puntos)b. FH o .(03 Puntos)c. 2F .(03 Puntos)
2. Determine 33: IRIRT → transformación lineal tal que ( ) ( )0,0,00,1,1 =−T y
( ) ( )TIm1,1,1 ∈− (10 Puntos)
3. Sea 33: IRIRT → transformación lineal tal que [ ]
−−−
−=
133
445
4673
3
CCT
donde 3C es la base canónica de 3IR . Resuelva los siguientes problemas:
a. Determine ( )zyxT ,, .(05 Puntos)
b. Determine base y dimensión para ( )TKer .(05 Puntos)
c. Determine base y dimensión para ( )TIm .(05 Puntos)
d. Determine si T es un isomorfismo. Si su respuesta es afirmativa determine1−T .(10 Puntos)
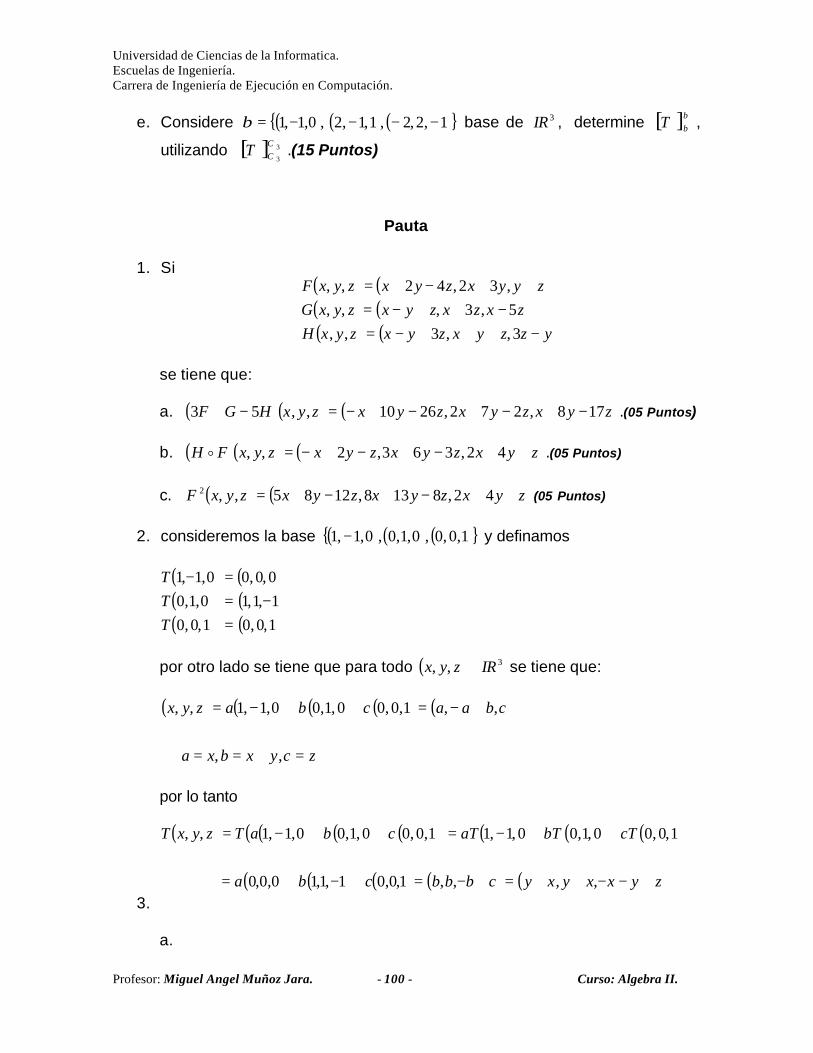
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 100 - Curso: Algebra II.
e. Considere ( ) ( ) ( ){ }1,2,2,1,1,2,0,1,1 −−−−=β base de 3IR , determine [ ]ββT ,
utilizando [ ] 3
3
CCT .(15 Puntos)
Pauta
1. Si( ) ( )( ) ( )( ) ( )yzzyxzyxzyxH
zxzxzyxzyxG
zyyxzyxzyxF
−+++−=−++−=
++−+=
3,,3,,
5,3,,,
,32,42,,
se tiene que:
a. ( )( ) ( )zyxzyxzyxzyxHGF 178,272,2610,,53 −+−+−+−=−+ .(05 Puntos)
b. ( )( ) ( )zyxzyxzyxzyxFH ++−+−+−= 42,363,2,,o .(05 Puntos)
c. ( ) ( )zyxzyxzyxzyxF ++−+−+= 42,8138,1285,,2 (05 Puntos)
2. consideremos la base ( ) ( ) ( ){ }1,0,0,0,1,0,0,1,1 − y definamos
( ) ( )( ) ( )( ) ( )1,0,01,0,0
1,1,10,1,0
0,0,00,1,1
=−=
=−
T
T
T
por otro lado se tiene que para todo ( ) 3,, IRzyx ∈ se tiene que:
( ) ( ) ( ) ( ) ( )
zcyxbxa
cbaacbazyx
=+==⇒
+−=++−=
,,
,,1,0,00,1,00,1,1,,
por lo tanto
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )zyxxyxycbbbcba
cTbTaTcbaTzyxT
+−−++=+−=+−+=
++−=++−=
,,,,1,0,01,1,10,0,0
1,0,00,1,00,1,11,0,00,1,00,1,1,,
3.
a.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 101 - Curso: Algebra II.
( )[ ]
( ) ( )zyxzyxzyxzyxT
zyx
zyx
zyx
z
y
x
zyxT C
+++−−−+=⇒
+++−−
−+=
−−−
−=
33,445,467,,
33
445
467
133
445
467
,,3
b.
( ) ( )
=++=+−−=−+
∈=033
0445
0467
/,, 3
zyx
zyx
zyx
IRzyxTKer
consideremos la matriz asociada al sistema
unica solución∃⇒
−−−−
→
−→
−→
−−
−
200
810
701
2230
1420
701
133
721
701
133
445
467
por lo tanto se tiene que ( ) ( ){ }0,0,0=TKer
c. Considerando el resultado anterior se tiene por el teorema de ladimensión que ( )( ) 3Imdim =T por lo tanto ( ) 3Im IRT = .
d. T es un isomorfismo ya que T es inyectiva, por la parte b, y esepiyectiva, por la parte c.Además
[ ] [ ]( )
( )
−++−−−+=
⇒
−
−−−
==
−
−−
2233
,2
857,434,,
123
23
425
27
434
1
11 3
3
3
3
zyxzyxzyxzyxT
TT CC
C
C
e.
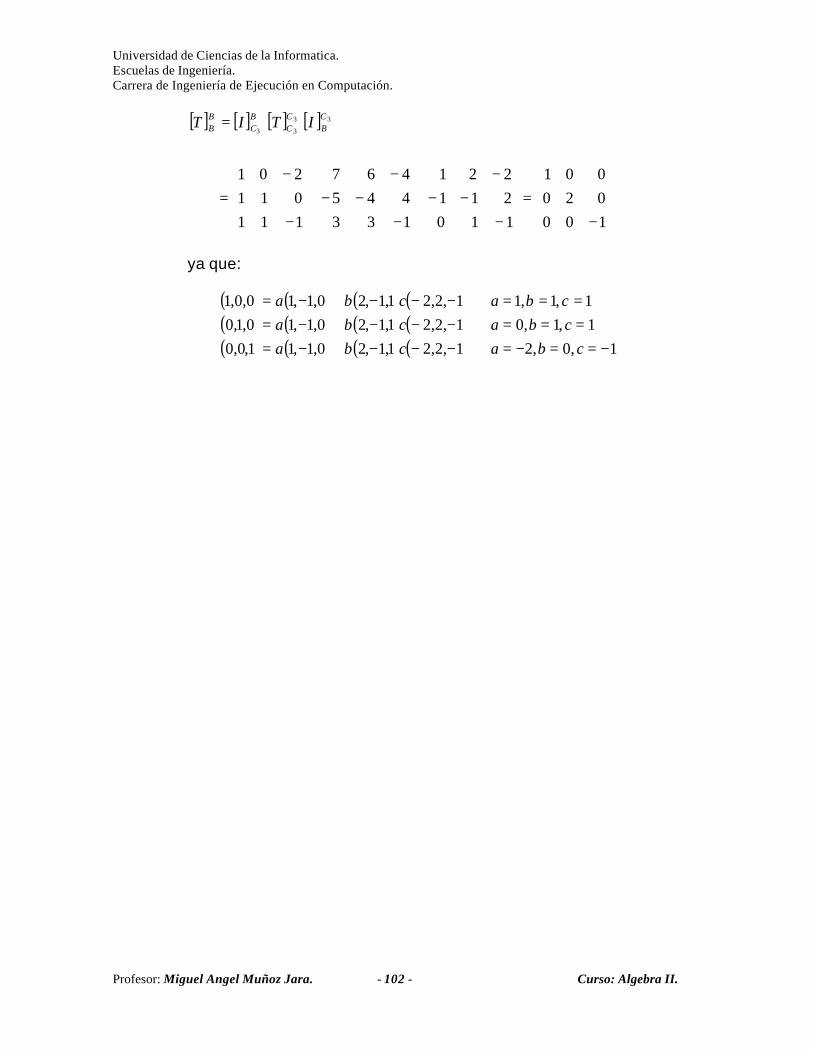
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 102 - Curso: Algebra II.
[ ] [ ] [ ] [ ]
−=
−−−
−
−−−
−
−
−=
=
100
020
001
110
211
221
133
445
467
111
011
201
33
33
CB
CC
BC
BB ITIT
ya que:
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 1,0,21,2,21,1,20,1,11,0,0
1,1,01,2,21,1,20,1,10,1,0
1,1,11,2,21,1,20,1,10,0,1
−==−=⇒−−−+−====⇒−−−+−====⇒−−−+−=
cbacba
cbacba
cbacba
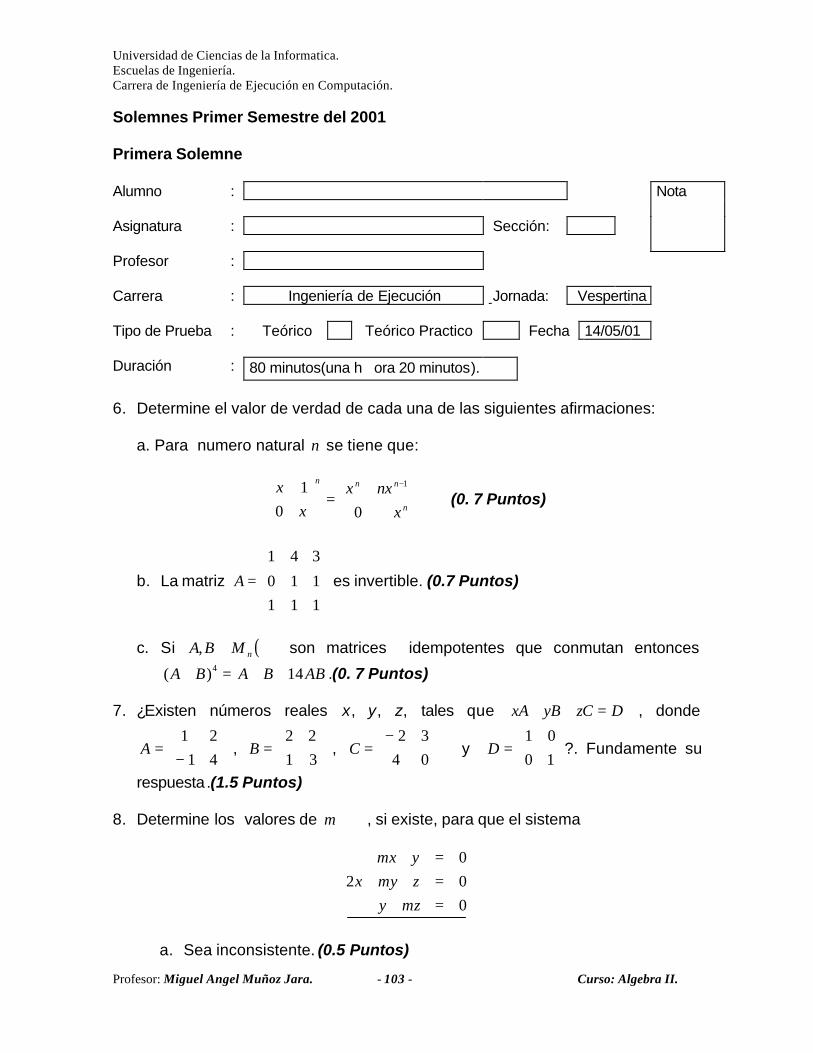
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 103 - Curso: Algebra II.
Solemnes Primer Semestre del 2001
Primera Solemne
Alumno : Nota
Asignatura : Sección:
Profesor :
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico Fecha 14/05/01
Duración : 80 minutos(una h ora 20 minutos).
6. Determine el valor de verdad de cada una de las siguientes afirmaciones:
a. Para numero natural n se tiene que:
=
−
n
nnn
x
nxxx
x
00
1 1
(0. 7 Puntos)
b. La matriz
=
111
110
341
A es invertible. (0.7 Puntos)
c. Si ( )ℜ∈ nMBA, son matrices idempotentes que conmutan entonces
( )A B A B AB+ = + +4 14 .(0. 7 Puntos)
7. ¿Existen números reales x, y, z, tales que xA yB zC D+ + = , donde
A =−
1 2
1 4 , B =
2 2
1 3 , C =
−
2 3
4 0 y D =
1 0
0 1?. Fundamente su
respuesta.(1.5 Puntos)
8. Determine los valores de ℜ∈m , si existe, para que el sistema
0
02
0
=+=++=+
mzy
zmyx
ymx
a. Sea inconsistente. (0.5 Puntos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 104 - Curso: Algebra II.
b. Tenga solución única, y determínela. (0.5 Puntos)
c. Tenga infinitas soluciones y determínelas. (0.5 Puntos)
9. Demuestre solo usando propiedades de determinantes, sin calcularlo, que:
( )3
22
22
22
zyx
yxzzz
yxzyy
xxzyx
++=−−
−−−−
(0.9 Puntos)
Pauta Primera solemne Algebra II
1. a. La afirmación es valida; en efecto lo demostraremos por inducción:
I. Claramente la igualdad se verifica para 1=n .
II. Supondremos valida la igualdad para kn = , es decir:
=
−
k
kkk
x
kxxx
x
00
1 1
III. mostraremos que si 1+= kn entonces es valida la igualdad es decir:
( )
+=
+
+
1
1
0
10
1k
kkk
x
xkxx
x
en efecto:
( )
+=
=
=
+
+−+
1
111
0
1
00
1
0
1
0
1
0
1k
kk
k
kkkk
x
xkx
x
kxxx
x
x
x
x
x
x
x
con lo cual demostramos nuestra afirmación:
b. La afirmación es verdadera, en efecto:
013223
11
230
110
341
111
110
341
≠=+−=−−
=−−
==A
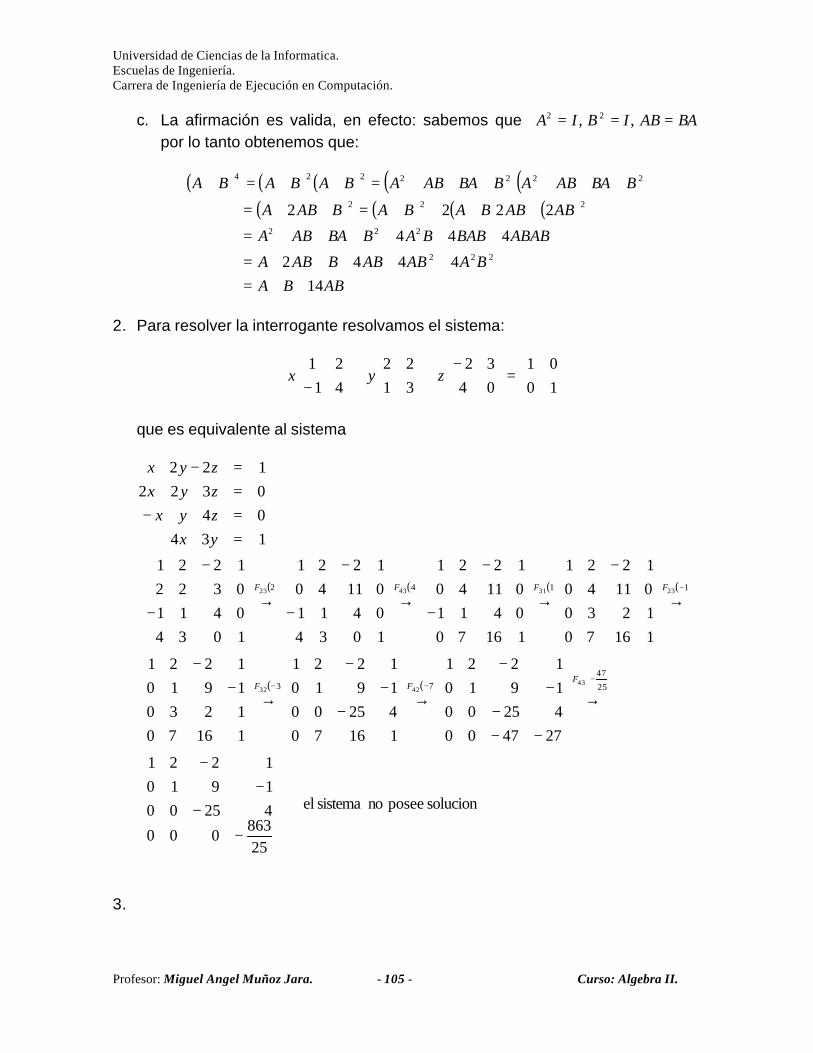
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 105 - Curso: Algebra II.
c. La afirmación es valida, en efecto: sabemos que BAABIBIA === ,, 22
por lo tanto obtenemos que:
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )
ABBA
BAABABBABA
ABABBABBABBAABA
ABABBABABABA
BBAABABBAABABABABA
14
4442
444
2222
222
222
222
2222224
++=+++++=
++++++=
++++=++=
++++++=++=+
2. Para resolver la interrogante resolvamos el sistema:
=
−+
+
− 10
01
04
32
31
22
41
21zyx
que es equivalente al sistema
( ) ( ) ( ) ( )
( ) ( )
solucion posee no sistema el
25863
000
42500
1910
1221
274700
42500
1910
1221
11670
42500
1910
1221
11670
1230
1910
1221
11670
1230
01140
1221
11670
0411
01140
1221
1034
0411
01140
1221
1034
0411
0322
1221
134
04
0322
122
25
47
73
1142
434232
23314323
⇒
−−
−−
→
−−−
−−
→
−−
−
→
−
−
→
−
→
−
−
→
−
−
→
−
−
⇒
=+=++−=++=−+
−
−−
−
FFF
FFFF
yx
zyx
zyx
zyx
3.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 106 - Curso: Algebra II.
a. El sistema nunca es inconsistente ya que es homogéneo por lo cualsiempre admite la solución trivial ( )0,0,0 .
b. Para que el sistema tenga solución única basta ver que la matriz asociadaal sistema sea invertible.
( )
( ) ( ) 33001202
si soloy sisolucion posee sistema el
200
10
12
20
10
12
022
10
12
01
10
12
10
12
01
22
22
−≠∧≠∧≠⇔≠−−⇔≠−+−
∴
−+−→
−−
→
→
→
mmmmmmmm
mmm
m
m
mm
m
m
m
m
m
m
m
m
m
m
m
por lo tanto si { }3,3,0 −−∈ IRm entonces el sistema posee solución única.Claramente dicha solución es la trivial.
c. Claramente el sistema posee soluciones infinitas si { }3,3,0 −∈m
4.
( ) ( )
( ) ( )3
00
00
111
22
22
111
22
22
111
22
22
22
22
22
zyx
yxz
xzyzyx
yxzzz
yxzyyzyx
yxzzz
yxzyyzyx
yxzzz
yxzyy
zyxzyxzyx
yxzzz
yxzyy
xxzyx
++=−−−
−−−++
=−−
−−++=−−
−−++
=−−
−−++++++
=−−
−−−−
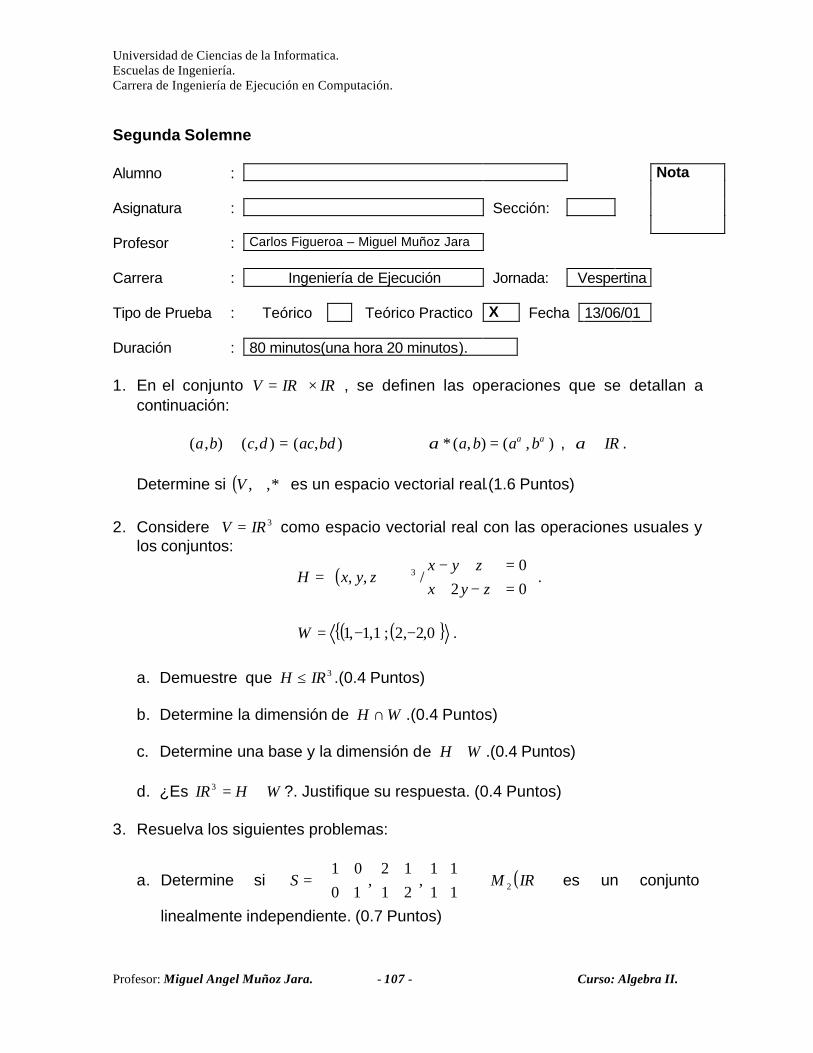
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 107 - Curso: Algebra II.
Segunda Solemne
Alumno : Nota
Asignatura : Sección:
Profesor : Carlos Figueroa – Miguel Muñoz Jara
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico X Fecha 13/06/01
Duración : 80 minutos(una hora 20 minutos).
1. En el conjunto V IR IR= ×+ + , se definen las operaciones que se detallan acontinuación:
( , ) ( , ) ( , )a b c d ac bd⊕ = ),(),( ααα baba =∗ , α ∈IR .
Determine si ( )∗⊕,,V es un espacio vectorial real.(1.6 Puntos)
2. Considere 3IRV = como espacio vectorial real con las operaciones usuales ylos conjuntos:
( )
=−+=+−
ℜ∈=02
0/,, 3
zyx
zyxzyxH .
( ) ( ){ }0,2,2;1,1,1 −−=W .
a. Demuestre que 3IRH ≤ .(0.4 Puntos)
b. Determine la dimensión de WH ∩ .(0.4 Puntos)
c. Determine una base y la dimensión de WH + .(0.4 Puntos)
d. ¿Es WHIR ⊕=3 ?. Justifique su respuesta. (0.4 Puntos)
3. Resuelva los siguientes problemas:
a. Determine si ( )IRMS 211
11,
21
12,
10
01⊆
= es un conjunto
linealmente independiente. (0.7 Puntos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 108 - Curso: Algebra II.
b. Sean ( )∗+,,V un espacio vectorial sobre un cuerpo K y { }321 ,, vvv una base
de V , determine si { }2131231 32,, vvvvvvvB −−−−= es una base de
( )∗+,,V .(0.7 Puntos)
4. Sean { }A = − −( , , ), ( , ,2 1 2 5 2 1 y { }B = − − − −( , , ),( , , ),( , , )4 7 8 15 7 11 1 subconjuntos de
IR3 . Demuestre que A B= .(1.4 Puntos)
Pauta Segunda Solemne Algebra II
1.
a. ( ) ( )[ ] ( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]fedcbabdfacefebdacfedcba ,,,,,,,,, ++==+=++ .
b. ( ) ( ) ( ) ( ) ( )badcbdacdcba ,,,,, +==+ .(0.2 Ptos)
c. ( ) ( ) ( )baba ,1,1, =+ .(0.2 Ptos)
d. ( ) ( ) ( )bababa
ba , de Inverso1
,1
1,11
,1
,
⇒=
+ .(0.2 Ptos)
e. ( )( ) ( ) ( ) ( ) ( ) ( ) ( )baqbapbababbaababaqp qqppqpqpqpqp ,,,,,,, +=+===+ ++ .
(0.2 Ptos)
f. ( ) ( )[ ] ( ) ( ) ( ) ( )dcpbapdbcabdacpdcbap pppp ,,,,,, +===+ .(0.2 Ptos)
g. ( )( ) ( ) ( )( )baqpbabapq pqpq ,,, == .(0.2 Ptos)
h. ( ) ( )baba ,,1 = .(0.2 Ptos)
2.
a. 3IRH ≤ (0.4 Ptos)
b. ( ){ }0/,, =+= yxzyxW por lo tanto
( ){ } ( ){ }0,0,00020/,, ==+∧=−+∧=−−=∩ yxzyxzyxzyxWH(0.4 Ptos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 109 - Curso: Algebra II.
c. ( ) ( ) ( ){ }0,2,2;1,1,1;3,2,1 −−−−=+WH para determinar una base de
escalonamos la matriz
−
−−→
−
−−→
−−−−
→
−−
−−=
1400
410
321
620
410
321
620
230
321
022
111
321
sA
claramente el rango de sA es tres así el conjunto ( ) ( ) ( ){ }0,2,2;1,1,1;3,2,1 −−−− es
linealmente independiente por lo cual es una base de 3IRWH =+ . (0.4 Ptos)d. por b. Y c. HWIR ⊕=3 .(0.4 Ptos).
3.
a.
cacbcb
cba
cba
cb
cb
cba
cba
=∧−=⇒
=+=++
⇒
=++=+=+=++
⇒
=
+
+
0
02
02
0
0
02
00
00
11
11
21
12
10
01
Por lo tanto el sistema posee infinitas soluciones, por lo cual el conjunto encuestión es Linealmente Dependiente. (0.7 Ptos)
b. consideremos la siguiente combinación lineal
( ) ( ) ( )
( ) ( ) ( )
0
02
3
032
032
321
3211231
===⇒
=−−==
⇒=−+−+−−
⇒=+−−+−+−
cba
cba
cb
ca
vacvcbvcba
vvvcvvbvva
v
v
por lo tanto ( ) ( ) ( ){ }3211231 32;; vvvvvvvS +−−−−= es un conjunto linealmente
independiente de dimensión tres en un espacio de dimensión tres por lo cual esbase. (0.7 Ptos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 110 - Curso: Algebra II.
4. a. ?=A sea ( ) ⇒∈ Azyx ,,
+−++
−→
+−−
−→
−
−→
−−
zy
zyx
y
zy
yx
y
z
x
y
z
y
x
230
3400
21
230
290
21
12
52
21
12
21
52
por lo tanto ( ){ }034/,, =++= zyxzyxA (0.7 Ptos)
b. ?=B
+−+−++
→
+−+−−−−
→
+−−
−→
−−−
−
yz
zy
zyx
yz
zy
zyx
yz
y
x
z
y
x
021
78190
34000
021
78190
44190
021
157
114
178
157
114
( ){ }034/,, =++= zyxzyxB (0.7 Ptos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 111 - Curso: Algebra II.
Tercera Solemne
Alumno : Nota
Asignatura : Sección:
Profesor :
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico Fecha
Duración : 80 minutos(una hora 20 minutos).
1. Sean ( )1,1,1=→a , ( )1,1,1 −=
→b y ( )1,0,1−=
→c vectores :
a. Determine →→→→→→→→
−−−− bacbcbba ,,, . (6 Ptos)
b. Determine un vector unitario ortogonal a los vectores →→
− ba y →→
− cb .Ptos)
2. Determine 44: ℜ→ℜT transformación lineal tal que ( ) ( )TTKer Im= .(9 Ptos)
3. Sea 33: ℜ→ℜT transformación lineal tal que
3
3111
101
111C
C
−
− donde 3C es la
base canónica, determine si T es un Isomorfismo, si lo es determine).,,(1 zyxT − (15 Ptos)
4. Sea ( ) ( )IRMIRMT 22: → tal que ( ) BAABAT −= , donde
−=
20
21B .
a. Demuestre que T es una transformación lineal. (4 Ptos)
b. Determine una base para el subespacio imagen de T .(4 Ptos)
c. ¿ Es T un isomorfismo? Justifique. (4 Ptos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 112 - Curso: Algebra II.
5. Sea T : 23 IRIR → una transformación lineal tal que [ ]
−=
310
121BAT , donde
( ) ( ) ( ){ }0,0,1;2,1,0;1,0,1 −=A y ( ) ( ){ }1,5;1,1 −−=B
a. Determine T(2,1,-3). (0.3 Ptos)
b. Determine la matriz de cambio de base, de la base canónica de 3IR a labase A. (0.5 Ptos)
c. ¿Cuál es la Nulidad de T? (0.4 Ptos)
Pauta Tercera Solemne Algebra II
1.
a.
( )
( )
3
2
2,1,2
2,0,0
=−
=−
−=−
=−
→→
→→
→→
→→
cb
ba
cb
ba
b. ( ) ( )( )
−=
−−
=⇒−=−
→
0,20
4,
20
20,4,20,4,2
osConsiderem0,4,2
212
200 w
kji
2. consideremos la base canónica de 4IR y una transformación lineal tal que:
( ) ( )( ) ( )( ) ( )( ) ( )
( ) ( )0,0,,,,,
0,0,1,01,0,0,0
0,0,0,10,1,0,0
0,0,0,00,0,1,0
0,0,0,00,0,0,1
wzwzyxT
T
T
T
T
=⇒
====
3. ( ) ( )zyxzxzyxzyxT ++−++−= ,,,,
a.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 113 - Curso: Algebra II.
( ) ( )
( ){ }0,0,0
0
0
0
/,, 3
=
=++−=+=+−
∈=zyx
zx
zyx
IRzyxTKer
por lo tanto T es inyectiva. Por el teorema de la dimensión tenemos que( )( ) 3=TIMDim , por lo cual ( ) 3IRTIM = .
Con lo cual podemos concluir que T es un Isomorfismo.
Para determinar la inversa de T basta determinar la inversa de la matriz3
3][ C
CT
−
−−
→
−→
−
−→
−
−
2/102/1100
011010
2/112/1001
2/102/1100
011010
010101
101200
011010
001111
100111
010101
001111
por lo tanto ( )
++−−+−=−
22,,
22,,1 zx
yxz
yx
zyxT .
4.
−
−+−=
−−
−
=
zz
wyxz
wz
yx
wz
yx
wz
yxT
23
2322
20
21
20
21
a.
+
=
+−−
−−+++−−=
++++
−−
−
++++
=
+
dc
barT
wz
yxT
rczrcz
rdwrbyraxrcz
rdwrczrbyrax
rdwrczrbyrax
dcba
rwzyx
T
2233
22332222
2021
2021
por lo tanto T es lineal.
b. ( )
−−
=23
02,
0
10TIM
c. T no es Isomorfismo ya que T no es sobreyectiva.
5.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 114 - Curso: Algebra II.
a. ( )[ ] ( )[ ]
( ) ( ) ( ) ( )2,341,581,163,1,2
8
6
3
1
5
310
1213,1,2
310
1213,1,2
=−−−−=−∴
−−
=
−
−=−
−=−
T
T BB
b.
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )
[ ]
−
−=⇒
++−−=−+−=++−=
121
010
120
0,0,12,1,01,0,11,0,0
0,0,122,1,001,0,120,1,0
0,0,12,1,001,0,100,0,1
3
A
CI

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 115 - Curso: Algebra II.
Solemnes Segundo semestre 2000
Segunda Solemne
Alumno : Nota
Asignatura : Sección:
Profesor : Miguel Angel Muñoz Jara
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico Fecha
Duración : 80 minutos(una hora 20 minutos).
1. Sea V= 3ℜ y sean los subconjuntos:
=−+=+−
ℜ∈=
=+ℜ∈=
02
0/),,(
}02/),,{(
32
31
zyx
zyxzyxH
yxzyxH
a. Demuestre que 2H es un subespacio de 3ℜ .
b. Encuentre una base para 21 HH ∩ y determine su dimensión.
c. Encuentre una base para 21 HH + y determine su dimensión.
d. ¿ Es 3ℜ = 21 HH ⊕ . Justifique?
2. Sea V={ }ℜ∈= xexfxf x ,)(/)( , se definen en V las siguientes operaciones:
ℜ∈==+ + αα αxyx exfeyfxf )()()(
Demuestre que V es un espacio vectorial sobre ℜ .
3. Dados u=(1,0,-1,2), v=(-1,2,3,-1) y w=(0,-1,1,-1), determine si (1,2,5,2) y(1,1,8,4) pueden ser escritos como combinación lineal de u,v y w.
4. Si { })1,0,0,1();1,0,1,0();0,1,0,1();1,1,1,1( −=W determine W por comprensión y su
dimensión.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 116 - Curso: Algebra II.
Tercera Solemne
Alumno : Nota
Asignatura : Sección:
Profesor : Miguel Angel Muñoz Jara
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico Fecha
Duración : 80 minutos(una hora 20 minutos).
1. Determine 34: ℜ→ℜT transformación lineal tal que 2)(( =TKerDim y
T(1,1,1,1) = (1,1,1) .
2. Sea 34: ℜ→ℜT lineal tal que T(x, y, z)=(x + y, w - y, y - x)
a. Determine una base y la dimensión para Ker(T).
b. Determine una base y la dimensión para Im(T).
3. Sea 33: ℜ→ℜT transformación lineal tal que
3
3111
111
111C
C
−
− donde 3C es la
base canónica, determine si T es un Isomorfismo, si lo es determine).,,(1 zyxT −
4. Demuestre que si WVT →: es un isomorfismo y },......,,{ 21 kvvvB = es
linealmente independiente entonces )}(),.....,(),({ 21 kvTvTvTW = es Linealmente
Independiente.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 117 - Curso: Algebra II.
Solemne Recuperativa
Alumno : Nota
Asignatura : Sección:
Profesor : Miguel Angel Muñoz Jara
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico Fecha
Duración : 80 minutos(una hora 20 minutos).
1. Si A, B [ ]ℜ∈ nM y A es invertible. Demuestre que
(A +B ) A 1− ( A - B ) =( A – B ) A 1− (A +B ).(5 Puntos)
2. Determine el valor de verdad de las siguientes afirmaciones. Justifique surespuesta.
a. Si A )(12 ℜ+kM es antisimétrica entonces |A t | =0.(5 Puntos)
b. Si A y B son invertibles entonces A + B es invertible. (5 Puntos)
c. Si A nI≡ por filas entonces existe P invertible tal que A 1− = PA. (5
Puntos)
d. Si A, B, C )(ℜ∈ nM , B regular y AB = C, entonces A = B 1− C. (5 Puntos)
e. Sea A )(ℜ∈ nM invertible y U )(ℜ∈ nM tal que U t AU = A, entonces que
U es invertible. (5 Puntos)
3. Sea V= 3ℜ y sean los subconjuntos:
{ }
=−+=+−
ℜ∈=
−−−=
02
0/),,(
)0,1,2();2,1,0();1,1,1(
32
1
zyx
zyxzyxH
H
a. Demuestre que 2H es un subespacio de 3ℜ .(5 Puntos)
b. Encuentre una base para 21 HH ∩ y determine su dimensión. (5 Puntos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 118 - Curso: Algebra II.
c. Encuentre una base para 21 HH + y determine su dimensión. (5 Puntos)
d. ¿ Es 3ℜ = 21 HH ⊕ . Justifique? (5 Puntos)
4. Sea 33: ℜ→ℜT transformación lineal tal que
β
β
−
−
111
111
111
donde
β={(1,1,1);(0,1,0);(0,0,-1)} es base 3ℜ , determine si T es un Isomorfismo, si lo
es determine ).,,(1 zyxT − (10 Puntos)

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 119 - Curso: Algebra II.
Examen Final
Alumno : Nota
Asignatura : Sección:
Profesor : Miguel Angel Muñoz Jara
Carrera : Ingeniería de Ejecución Jornada: Nocturna
Tipo de Prueba : Teórico Teórico Practico Fecha
Duración : 80 minutos(una hora 20 minutos).
1. Determine el valor de m para que el sistema
mx y zx my z
y mz
+ − =+ + =
+ =
02 0
0
a. Sea inconsistente.b. Tenga solución única, y determínela.c. Tenga infinitas soluciones y determínelas.
2. Determine si V= 3ℜ con las siguientes operaciones es un espacio vectorial:
ℜ∈=⊗+++=⊕ kcebeaecbakczbyaxcbazyx kkk ),,(),,(),,(),,(),,(
3. Sea V= 3ℜ y sean los subconjuntos:
{ }
=−+=+−
ℜ∈=
−−−=
02
0/),,(
)0,1,2();2,1,0();1,1,1(
32
1
zyx
zyxzyxH
H
a. Demuestre que 2H es un subespacio de 3ℜ .
b. Encuentre una base para 21 HH ∩ y determine su dimensión.
c. Encuentre una base para 21 HH + y determine su dimensión.
d. ¿ Es 3ℜ = 21 HH ⊕ . Justifique?
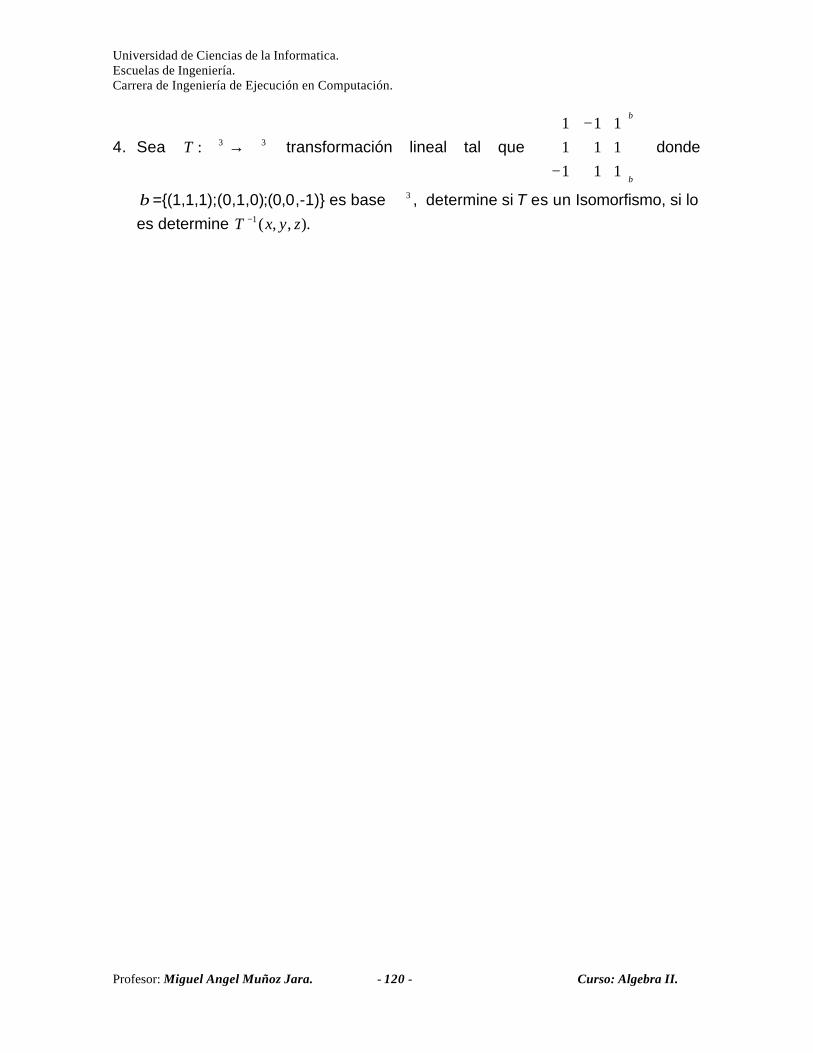
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 120 - Curso: Algebra II.
4. Sea 33: ℜ→ℜT transformación lineal tal que
β
β
−
−
111
111
111
donde
β={(1,1,1);(0,1,0);(0,0,-1)} es base 3ℜ , determine si T es un Isomorfismo, si lo
es determine ).,,(1 zyxT −

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 121 - Curso: Algebra II.
Examen Recuperativo
Alumno : Nota
Asignatura : Sección:
Profesor : Miguel Angel Muñoz Jara
Carrera : Ingeniería de Ejecución Jornada: Vespertina
Tipo de Prueba : Teórico Teórico Practico Fecha
Duración : 80 minutos(una hora 20 minutos).
1. Determine el valor de m para que el sistema
1
02
1
=+=++=−+
mzy
zmyx
zymx
a. Sea inconsistente.
b. Tenga solución única, y determínela.
c. Tenga infinitas soluciones y determínelas.
2. Determine 34: ℜ→ℜT transformación lineal tal que 1)(( =TKerDim y T(1,1,1,1)= (1,1,1), T(0,0,0,1)=(0,0,0,1).
3. Sea V= 3ℜ y sean los subconjuntos:
=−+=+−
ℜ∈=
=+ℜ∈=
02
02/),,(
}022/),,{(
32
31
zyx
zyxzyxH
yxzyxH
a. Demuestre que 2H es un subespacio de 3ℜ .
b. Encuentre una base para 21 HH ∩ y determine su dimensión.
c. Encuentre una base para 21 HH + y determine su dimensión.
d. ¿ Es 3ℜ = 21 HH ⊕ . Justifique?

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 122 - Curso: Algebra II.
4. Sea 33: ℜ→ℜT transformación lineal tal que
β
β
−
−
111
111
111
donde
β={(1,0,0);(0,1,0);(0,1,-1)} es base 3ℜ , determine si T es un Isomorfismo, si lo
es determine ).,,(1 zyxT −

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 123 - Curso: Algebra II.
NOMBRE ALUMNO :
ASIGNATURA : Algebra II SECCION 1 y 2 NOTA
PROFESOR : Daniel Munar, Miguel MuñozCARRERA : Ing. Ejecución en Informática JORNADA DTIPO DEPRUEBA:
TEORICO X TEORICO PRACTICO FECHA 08 11 00
TIPO DEEVALUACION:
SOLEMNE X EXAMEN ORD. EXAMEN REP.
NUMERO DE PREGUNTAS DE LAPRUEBA
4 TIEMPO MAX. PARA RESPONDER 80 Min.
Instrucciones
1. Conteste cada pregunta en una página, Hoja 1, pregunta 1 y 2, Hoja 2, pregunta 3 y4.
2. No Puede usar calculadora, apuntes ni libros.3. No se permiten consultas.4. Cada pregunta tiene puntuación de 1 punto.
Solemne 2
1. Determine si D pertenece al espacio generado por { A , B , C }
A =
−03
21 ; B =
−16
24 ; C=
−30
12 ; D =
−86
12
2. Determine si el conjunto A = { }4,923,73 234 ++++++ xxxxxx eslinealmente independiente.
3. En el conjunto IR2 se definen las siguientes operaciones
(a , b ) + ( c , d) = ( a + c , b + d )),( baα = ( )0,a⋅α
Determine si IR² con estas operaciones es un espacio vectorial sobre IR
4. Dados los siguientes subconjuntos de IR 3 :
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 124 - Curso: Algebra II.
H = { ( x , y , z ) }0/3 =−∈ zyR
W = { ( 2, -3,-3) ; ( 0 ,0 ,1) ; ( 2 , -3 , -2) }
Demuestre que H es un subespacio de 3IR , determine una base y sudimensión.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 125 - Curso: Algebra II.
NOMBRE ALUMNO :
ASIGNATURA : Algebra II SECCION 1 NOTA
PROFESOR : Miguel MuñozCARRERA : Ing. Ejecución en Informática JORNADA VTIPO DEPRUEBA:
TEORICO X TEORICO PRACTICO FECHA 13 11 00
TIPO DEEVALUACION:
SOLEMNE X EXAMEN ORD. EXAMEN REP.
NUMERO DE PREGUNTAS DE LAPRUEBA
4 TIEMPO MAX. PARA RESPONDER 80 Min.
Instrucciones
5. No Puede usar calculadora, apuntes ni libros.6. No se permiten consultas.7. Cada pregunta tiene puntuación de 1,5 punto.
Solemne 2
1. Sea 3IRV = y sean los subconjuntos:
( ){ }02/,, 31 =+∈= yxIRzyxH
( ){ }020/,, 32 =−+∧=+−∈= zyxzyxIRzyxH
a) Demuestre que 2H es un subespacio de 3IR .
b) Encuentre una base para 21 HH ∩ y determine su dimensión
c) Encuentre una base para 21 HH + y determine su dimensión.
d) ¿Es 213 HHIR ⊕= ?, justifique su respuesta.
2. Sea { }IRxexfxfV x ∈== ,)(/)( se definen en V las siguientes operaciones:
IRexfeyfxf xyx ∈=⋅∧=+ + αα α)()()(demuestre que V es un espacio vectorial sobre IR.

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 126 - Curso: Algebra II.
3. Dados ( ) ( ) ( )1,1,1,01,3,2,,1,2,1,0,1 −−=−−=−= wyvu determine si
( ) ( )4,8,1,12,5,2,1 y pueden ser escritos como combinación lineal de de u, vy w.
4. Si ( ) ( ) ( ) ( ){ }1,0,0,1;1,0,1,0;0,1,0,1;1,1,1,1 −=W determine W por comprensión,
una base y su dimensión.
Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 127 - Curso: Algebra II.
NOMBRE ALUMNO :
ASIGNATURA : Algebra II SECCION 1, 2 NOTA
PROFESOR : Daniel Munar, Miguel Muñoz
CARRERA : Ing. Ejecución en Informática JORNADA DTIPO DEPRUEBA:
TEORICO X TEORICO PRACTICO FECHA 29 11
00
TIPO DEEVALUACION:
SOLEMNE X EXAMEN ORD. EXAMEN REP.
NUMERO DE PREGUNTAS DE LAPRUEBA
4 TIEMPO MAX. 80 Min.
Instrucciones
5. No Puede usar calculadora, apuntes ni libros.6. No se permiten consultas.7. Cada pregunta tiene puntuación de 1,5 puntos.
Solemne 3
1. Sean:
{ }
{ })1,2,1(;)0,2,4(;)1,0,1(;)1,1,1(
020/),,( 3
−−=
=+∧=++∈=
W
zxzyxIRzyxH
a. Demuestre que 3RH < .
b. Determine una base y la dimensión de WH ∩ .
c. Determine una caracterización para el espacio W
2. Determine 33: IRIRT → tal que 1))(( =TKerDim , y
T(0,1,-1) = (1,1,1) y T(1,1,1) = (1,1,0)
3. Sea 34: IRIRT → lineal tal que T(x, y, z, w) = (x + 2y, w - y, y - 2x)
c. Determine una base y la dimensión para Ker(T).
d. Determine una base y la dimensión para Im(T).

Universidad de Ciencias de la Informatica.Escuelas de Ingeniería.Carrera de Ingeniería de Ejecución en Computación.
Profesor: Miguel Angel Muñoz Jara. - 128 - Curso: Algebra II.
4. Sea 33: IRIRT → tal que
3
3111
110
011C
C
−
−− donde 3C es la base canónica,
determine si T es un Isomorfismo.