universidad de colima - promep.sep.gob.mx
TRANSCRIPT
UNIVERSIDAD DE COLIMA
FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SIRCOM 2013
INGENIERÍA, INNOVACIÓN Y TECNOLOGÍA PARA EL DESARROLLO SUSTENTABLE.
FECHAS: 4, 5 Y 6 DE SEPTIEMBRE DEL 2013.
1
Contenido I. CAPÍTULO I. CIUDADES INTELIGENTES SUSTENTABLES .............................................................................................. 6
Respuesta inelástica tanques de almacenamiento de GNL ante explosiones .................................................................................. 6 INTRODUCCIÓN....................................................................................................................................................................................... 7 REFERENCIAS ....................................................................................................................................................................................... 11
Arquitecturas para sistemas de ambientes inteligentes y técnicas de verificación y validación: una revisión del estado del arte. ............................................................................................................................................................................................................. 13
II. CAPÍTULO II. ENERGÍA Y MEDIO AMBIENTE .................................................................................................................... 18 Control Integral Relay para Motores Brushless DC ....................................................................................................................... 19
INTRODUCCIÓN .............................................................................................................................................................................. 19 MODELO MATEMÁTICO DEL MOTOR BLDC ................................................................................................................................... 20 CONTROL INTEGRAL RELAY............................................................................................................................................................... 22 RESULTADOS EXPERIMENTALES ........................................................................................................................................................ 23 CONCLUSIONES .................................................................................................................................................................................... 23 REFERENCIAS ....................................................................................................................................................................................... 24
Reachability analysis in fed-batch bioreactors ................................................................................................................................... 25 NONLINEAR STATE SPACE MODEL....................................................................................................................................................... 25 REACHABILITY ANALYSIS .................................................................................................................................................................... 25 REACHABILITY ANALYSIS FOR ? ? ................................................................................................................................................... 26 RESULT .................................................................................................................................................................................................. 27 DISCUSSION AND CONCLUSION.......................................................................................................................................................... 27 ACKNOWLEDGEMENTS ........................................................................................................................................................................ 27 BIOGRAPHY........................................................................................................................................................................................... 28
Detección, Conteo y Extracción de Características de Objetos Circulares Mediante la Transformada de Hough ................. 29 Luis E. Morán, Victor H. Castillo, Jorge M. Tadeo, Alejandro Martinez................................................................................. 29 Introducción ......................................................................................................................................................................................... 29 DESARROLLO ........................................................................................................................................................................................ 29 CONCLUSIONES .................................................................................................................................................................................... 31 REFERENCIAS ....................................................................................................................................................................................... 31
Evaluación Energética de Electrodomésticos ..................................................................................................................................... 33 LA ENERGÍA ELÉCTRICA EN MÉXICO .................................................................................................................................................. 33 III NORMAS DE EFICIENCIA ENERGÉTICA.......................................................................................................................... 34 IV DETERMINACIÓN DE CONSUMOS DE ENERGÍA ELÉCTRICA EN ELECTRODOMÉSTICOS ...................... 35 V. CONSUMOS DE ENERGÍA ELÉCTRICA ............................................................................................................................. 37 VI. CONCLUSIONES ....................................................................................................................................................................... 39 BIBLIOGRAFÍA ................................................................................................................................................................................. 39
Diseño e implementación del CPP EC-FIME..................................................................................................................................... 40 Introducción ......................................................................................................................................................................................... 40 PARTE TÉCNICA DEL ARTÍCULO ......................................................................................................................................................... 40 APÉNDICE A: IMÁGENES DE IMPLEMENTACION............................................................................................................................... 42 CONCLUSIONES ..................................................................................................................................................................................... 44 REFERENCIAS ....................................................................................................................................................................................... 44 BIOGRAFÍA ............................................................................................................................................................................................ 44
Sistema de Medición de Temperatura del CPP-ECFIME................................................................................................................. 45 Introducción ......................................................................................................................................................................................... 45

2
COMPORTAMIENTO DEL PANEL SOLAR FOTOVOLTAICO (PSF). ............................................................................. 45 TEMPERATURA AMBIENTE Y SUPERFICIAL ..................................................................................................................... 45 MEDICIÓN.......................................................................................................................................................................................... 46 EQUIPO DE MEDICIÓN ................................................................................................................................................................. 46 PRUEBAS REALIZADAS ............................................................................................................................................................... 46 Referencias .......................................................................................................................................................................................... 49 Biografía .............................................................................................................................................................................................. 49
III. CAPÍTULO III. INFRAESTRUCTURA ....................................................................................................................................... 50 Estudio Microestructural del Pelet de Lesa y su Efecto en la Calidad Física, Química y Metalúrgica ................................... 51
Introducción ......................................................................................................................................................................................... 51 PROCEDIMIENTO EXPERIMENTAL....................................................................................................................................................... 52 Conclusiones ....................................................................................................................................................................................... 55 APÉNDICE.............................................................................................................................................................................................. 55 AGRADECIMIENTOS ............................................................................................................................................................................. 55 REFERENCIAS ....................................................................................................................................................................................... 55
Análisis del Tráfico de Mercancías manipuladas 1992 al 2012 en el puerto de Manzanillo, Colima. Sus efectos en su cercano Desarrollo Portuario ............................................................................................................................................................. 57
Introducción ......................................................................................................................................................................................... 57 PARTE TÉCNICA. ................................................................................................................................................................................... 60 REFERENCIAS ....................................................................................................................................................................................... 63
IV. CAPÍTULO IV. INNOVACIÓN EN EL APROVECHAMIENTO DE LOS RECURSOS NATURALES ................ 64 Prototipo Agrícola para la Labranza de Conservación ...................................................................................................................... 65
INTRODUCCIÓN..................................................................................................................................................................................... 65 DESARROLLO................................................................................................................................................................................... 65 Resultados ............................................................................................................................................................................................ 66 CONCLUSIONES .............................................................................................................................................................................. 67 REFERENCIAS ....................................................................................................................................................................................... 67 BIOGRAFÍA ............................................................................................................................................................................................ 67
Determinación de las características dimensionales y distribución de los cafetos variedad Caturra Rojo en condiciones de ladera ............................................................................................................................................................................ 68
ABSTRACT........................................................................................................................................................................................ 68 I. INTRODUCCIÓN .......................................................................................................................................................................... 68 II. DESARROLLO ............................................................................................................................................................................. 68 B. Resultados y discusión .................................................................................................................................................................. 69 III. CONCLUSIONES ....................................................................................................................................................................... 72 IV. REFERENCIAS ........................................................................................................................................................................... 72 BIOGRAFÍA ........................................................................................................................................................................................ 72
Alternativas para la Preparación de Suelos en el Cultivo de Alimentos. El Caso del Arroz ...................................................... 73 Introducción ......................................................................................................................................................................................... 73 CONCLUSIONES .............................................................................................................................................................................. 75 Referencias ........................................................................................................................................................................................... 75 Biografía ............................................................................................................................................................................................... 75 Estimación de la variación espacial de características edafológicas mediante técnicas de interpolación en el estado de
Colima. México........................................................................................................................................................................................ 77 Introducción ......................................................................................................................................................................................... 77 Agradecimientos.................................................................................................................................................................................. 82
3
Referencias ........................................................................................................................................................................................... 82 Biografía ............................................................................................................................................................................................... 82
Caracterización por RAMAN de Endospermo Nixtamalizado ........................................................................................................ 84 Muestra ................................................................................................................................................................................................. 84 Preparación de las Unidades Experimentales................................................................................................................................. 84 Espectroscopia de Raman .................................................................................................................................................................. 84 Microscopia Electrónica de Barrido ................................................................................................................................................ 84 Referencias ........................................................................................................................................................................................... 86 Biografía ............................................................................................................................................................................................... 87
Diseño de un Sistema de Máquinas para el Revestimiento de Canales de Riego Agrícola ........................................................ 88 INTRODUCCION .............................................................................................................................................................................. 88 DESARROLLO................................................................................................................................................................................... 88 V. REFERENCIAS............................................................................................................................................................................. 91 VI. BIOGRAFÍA ................................................................................................................................................................................. 92
V. CAPÍTULO V. LA ENSEÑANZA PARA UN DESARROLLO SUSTENTABLE.............................................................. 93 Sistema de Tareas Docentes para Favorecer la Formación Ambiental desde la Asignatura Probabilidad y Estadística en la
Carrera de Ingeniería Industrial............................................................................................................................................................. 94 Introducción ......................................................................................................................................................................................... 94 DESARROLLO................................................................................................................................................................................... 95 conclusiones ......................................................................................................................................................................................... 98 Referencias ........................................................................................................................................................................................... 98 Biografía ............................................................................................................................................................................................... 98
Herramienta Multimedia para la Enseñanza del AutoCAD en la Carrera de Ingeniería Industrial del Instituto Tecnológico de Colima .................................................................................................................................................................................................. 99
DESARROLLO................................................................................................................................................................................. 100 Resultados. ......................................................................................................................................................................................... 100 CONCLUSIONES ............................................................................................................................................................................ 102 REFERENCIAS ..................................................................................................................................................................................... 102 BIOGRAFÍA .......................................................................................................................................................................................... 102
Evaluación de usabilidad a un juego serio para el aprendizaje de vocabulario en idioma inglés ............................................ 104 Introducción ....................................................................................................................................................................................... 104 Evaluación .......................................................................................................................................................................................... 104 Resultados .......................................................................................................................................................................................... 106 Profesores ........................................................................................................................................................................................... 106 Conclusiones ...................................................................................................................................................................................... 107 Referencias ......................................................................................................................................................................................... 107 Biografía ............................................................................................................................................................................................. 107
Scratch como apoyo al desarrollo de capacidades de abstracción en alumnos de nivel básico ............................................... 109 Introducción ....................................................................................................................................................................................... 109 Experimento ....................................................................................................................................................................................... 111 Plan de trabajo ................................................................................................................................................................................... 111 Interacción con el software .............................................................................................................................................................. 112 Evaluación .......................................................................................................................................................................................... 112 Resultados .......................................................................................................................................................................................... 112 Discusión ............................................................................................................................................................................................ 112 Referencias ......................................................................................................................................................................................... 113

4
Biografía ............................................................................................................................................................................................. 113 Un tutor virtual consciente de contexto en apoyo al proceso de tutorías universitarias ............................................................ 114
Introducción ....................................................................................................................................................................................... 114 Metodología ....................................................................................................................................................................................... 115 Referencias ......................................................................................................................................................................................... 119
Arquitectura basada en el patrón publish/subscribe para el desarrollo de aplicaciones en sistemas distribuidos de tiempo real ............................................................................................................................................................................................................ 120
Conclusiones ...................................................................................................................................................................................... 124 Referencias ......................................................................................................................................................................................... 124
Una Aproximación al Estudio y Desarrollo de Software de Calidad para Sistemas Cooperativos ......................................... 126 Introducción ....................................................................................................................................................................................... 126 FUNDAMENTOS ............................................................................................................................................................................ 126 TRABAJOS RELACIONADOS.................................................................................................................................................... 127 B.1. Seguridad ................................................................................................................................................................................... 129 B.2. Fiabilidad (Reliability)............................................................................................................................................................. 130 B.3.Mantenibilidad (Maintainability) ............................................................................................................................................ 130 B.4. Inocuidad (Safety) .................................................................................................................................................................... 130 Comunicación:................................................................................................................................................................................... 130 Coordinación:..................................................................................................................................................................................... 130 Colaboración:..................................................................................................................................................................................... 130 Casos de Estudio ............................................................................................................................................................................... 130 Google Docs....................................................................................................................................................................................... 131 Referencias ......................................................................................................................................................................................... 131
Plan Ambiental Institucional “Ola Verde” ........................................................................................................................................ 133 Introducción ....................................................................................................................................................................................... 133 Plan de Cultura Ambiental Institucional ................................................................................................................................. 134 Objetivo ............................................................................................................................................................................................. 134 Grupo Ambiental ............................................................................................................................................................................ 135 d. Resultados e impacto ambiental ............................................................................................................................................. 135 Conclusiones ..................................................................................................................................................................................... 136 Referencias ......................................................................................................................................................................................... 136 Biografía ............................................................................................................................................................................................. 136
5
I. CAPÍTULO I. CIUDADES INTELIGENTES SUSTENTABLES
6
Respuesta inelástica tanques de almacenamiento de GNL ante explosiones
José Manuel Negrete Ramírez y Guillermo M. Roeder Carbo
Resumen—En este artículo se presenta una metodología de análisis para obtener las presiones sobre estructuras cilíndricas que contienen gas natural licuado simulando con la dinámica de fluidos a alta velocidad el fenómeno de una explosión. Con estos resultados se hacen simulaciones numéricas en la estructura para observar su comportamiento no lineal y el daño por estas presiones. Los resultados que se obtiene son de dos estructuras. Una sin resortes en la base de la construcción y otra con resortes con la finalidad de validar el uso de la propuesta de análisis que se presenta en este artículo. Temas claves—Estructuras de almacenamiento, Elementos finitos, dinámicas de fluidos a alta velocidad, mecánica de sólidos no-lineal. INTRODUCCIÓN E n muchas construcciones de almacenamiento de ga natural licuado (GNL) se pueden producir daños por eventos extremos como son la ocurrencia de eventos sísmicos o explosiones generando altas temperaturas que influyen en las propiedades de los materiales, especialmente en el dominio inelástico. La complejidad del análisis introduciendo la no-linealidad de los materiales constituyentes se incrementa cuando se simulan las distribuciones de presiones de los fluidos compresibles y a altas temperaturas, en este caso aire, con una velocidad de llegada a la estructura mayor a la del sonido. Cabe señalar que, por la importancia de las estructuras involucradas en fenómenos de explosión, son pocos los estudios de explosiones y sus efectos en estructuras de almacenamiento por lo costoso que representan estás para ser sometidas este tipo de acciones, por este motivo, en este trabajo se expone un posible esquema de solución de este problema. La inquietud de entender las características típicas de un fenómeno de explosión y sus efectos sobre las construcciones viene desde fines de la segunda guerra mundial. Antes de esta época, Von Neumann y Ritchmeyer [1] estudiaron la dinámica de gases que está involucrada en las explosiones, que posteriormente Goldstine y Von Neumann [2] simularon numéricamente asumiendo una fuente puntual de la explosión y un comportamiento del gas como si éste fuese ideal. Posteriormente, Brode [3] consideró importante, no sólo el efecto inicial de la explosión, sino también los efectos post-explosión, observando el súbito decaimiento de la presión en el fenómeno. En años posteriores, diversos modelos numéricos se han propuesto; por ejemplo, el trabajo de Sod [4], Harten [5], Shu y Osher [6], Liu et al. [7], involucran el efectos antes y después de la explosión utilizando inclusive teorías probabilistas avanzadas aplicando métodos de diferencias finitas y elementos finitos para el modelado de las explosiones a altas
velocidades, modelando las ondas de choque como esféricas y cilíndricas. Algunos trabajos adicionales en aplicar los resultados de estas investigaciones y las aplican en la estimación del daño en estructuras de almacenamiento de GNL, como es el trabajo de Van Mier [8], mostrando cómo simular las características de los materiales como el concreto reforzado ante explosiones con presiones a altas temperaturas de gas. Para estudiar este fenómeno, en este artículo se propone una metodología de análisis para simular las presiones del fluido sobre el tanque de almacenamiento. También, utilizando los resultados del análisis anterior se realiza simulaciones numéricas del posible daño que se produce este tipo de construcciones con estas cargas. Para estudiar este fenómeno, se presentan tres tipos de modelos numéricos, uno para obtener las presiones aplicando la dinámica de fluidos de gases a altas velocidades y dos con modelos de sólidos con cimentación rígida y flexible, en esta última utilizando resortes en la base. SIMULACIÓN NUMÉRICA DEL PROBLEMA Dinámica de fluidos a alta velocidad Se obtienen las presiones que afectan al tanque de GNL. Una herramienta útil para este propósito, y que incluye la modelización de dispersión de vapor de GNL es la dinámica de fluidos computacional (CFD), para lo cual se emplea OpenFOAM (Open Field Operation and Manipulation) [9]. Un análisis con OpenFoam se realiza para ilustrar la configuración de las presiones que se obtienen luego de una simulación de flujo turbulento supersónico con un orden de Mach igual a 2. Además, se considera que el fenómeno que se simula se deriva de la explosión de un tanque o depósito de LNG adyacente que genera una onda de presión. OpenFOAM utiliza los valores numéricos de volúmenes finitos, método que recorre el sentido deductivo contrario obteniendo balances finitos a partir de los asociados a partículas infinitesimales. Para ello integra la ecuación diferencial original sobre un volumen finito [10]. La geometría apropiada se construye para representar las características del campo de flujo que afectan a las variables de interés que se simulan (Fig. 1). Al modelar la dispersión de la nube de vapor de GNL, los obstáculos (si los hay) y el terreno en dirección del viento debe construirse en el dominio para que se tomen en cuenta sus efectos sobre la nube de vapor, de lo contrario, el análisis CFD puede sobreestimar o subestimar la zona de peligro analizada [11].

7
Fig. 1. Geometría empleada para la simulación Un modelo se construyó para describir la velocidad y la distribución de la presión en un canal caliente a velocidades con un valor Mach = 2. La geometría consta de una entrada, una salida y un conjunto de paredes. La malla, construida con GMSH [12], tiene redes estructuradas en la mayor parte de dominio (principalmente en el tanque que se conforma de un cilindro y su tapa), que contiene elementos tetraédricos y prismáticos. El modelo empleado para el análisis consiste en un prisma cuadrangular, el cual en una de sus caras se combina con la mitad de un cilindro y su respectiva tapa, tal y como se aprecia en la Fig. 2.
Fig. 2. Mallado empleado para la simulación (caras del modelo) La malla empleada en este caso es relativamente simple, partiendo del modelo especificado en la Fig. 1. Las fronteras del elemento son las caras exteriores del mismo. El volumen ha sido subdividido en elementos prismáticos cuadrangulares y triangulares. Las propiedades de líquidos y los modelos físicos deben identificarse para poder efectuar el proceso físico de la dispersión de vapor de GNL en la definición del dominio. El GNL se compone principalmente de metano, pero también puede contener pequeñas cantidades de etano, propano e hidrocarburos más pesados [13]. El vapor será preferentemente rico en metano, mientras que los componentes más pesados se quedarán en el depósito de líquido [14]. Para predecir los efectos de la turbulencia en la atmósfera ambiental y el vapor de GNL, se debe identificar un modelo para la turbulencia. Los modelos de turbulencia de la denominada ?-teoría se han utilizado ampliamente en los modelos de Navier-Stokes para aplicaciones de dispersión de gas denso. Estos modelos de turbulencia asumen equilibrio local y emplean un coeficiente de difusión que depende de las
propiedades locales de la nube de gas denso y la atmósfera. Modelos de mayor orden de turbulencia, específicamente modelos k-epsilon, también se han utilizado [15]. Un estudio comparativo de los modelos de turbulencia en contra de los datos experimentales se informa en otras fuentes [16]. En el presente trabajo, se empleó el modelo ?-e estándar por su equilibrio entre el tiempo de cálculo y precisión. Este modelo ha sido utilizado para la simulación numérica de dispersión de vapor de GNL y otras dispersiones de gas denso, con resultados satisfactorios [17], [18], [19]. La nube de vapor de GNL se puede especificar como una frontera de entrada, desembocando en el dominio. La zona de la nube de vapor y forma, la tasa de evaporación, la temperatura del vapor, y la turbulencia en el término fuente son parámetros esenciales necesarios para describir la frontera de la nube de vapor de GNL. La liberación de gas natural licuado en un área abierta puede obtenerse a partir de una descarga instantánea o continua, en la cual los modelos de charco o piscina pueden emplearse para determinar la tasa de propagación y el área [20], [21], [22]. Para el presente caso, se considera que la nube de vapor se formó previamente e ingresa al canal modelado con anterioridad por la frontera conocida como left. El periodo de simulación fue 20 s, en el que no hubo variación en la velocidad y dirección del viento, con el objetivo de estudiar la presión que se produce sobre las paredes del tanque por la dispersión de vapor de GNL. Las condiciones iniciales, se agrupan en las tabla 1 [23]. Datos de la simulación fueron registrados cada 2.5 s, a alturas distintas, en las tabla 2 se muestran los valores para las presiones máximas durante la simulación. La manera en la cual aumenta el valor de la presión de manera gráfica alrededor de todo el tanque, se muestra en las Fig. 3 para las paredes del tanque; la Fig. 4 la sección a la mitad del tanque (sección transversal del plano de simetría). TABLA 1 SUMARIO DE CONDICIONES INICIALES PARA LA CONFIGURACIÓN DE LA SIMULACIÓN DE DISPERSIÓN DE VAPOR DE GNL Condiciones en la frontera inlet Nube de vapor U = Mach 2
p=1e5 Pa T=2.3e3 K
oulet cylinder
Salida symmetryPlane
ZeroGradient p=1e5 Pa T=2.3e3 K Simetría plana
up, down, arriba y abajo
symmetryPlane Simetría plana
TABLA 2 PRESIÓN MÁXIMA EN LAS PAREDES DEL CILINDRO Tiempo t h = 0 m h = 16 m h = 31.8 m 2.5 s 339.22 kPa 359.94 kPa 180.72 kPa 5 s 634.26 kPa 660.08 kPa 272.41 kPa 10 s 529.21 kPa 530.42 kPa 455.52 kPa 15 s 686.95 kPa 688.66 kPa 594.16 kPa 20 s 865.83 kPa 870.17 kPa 572.19 kPa
Mecánica no-lineal de sólidos

8
Se realiza un análisis, el cual presenta un tanque cilíndrico de concreto estructural con un plano circular en la base que protege al depósito interno que almacena gas natural licuado, como se observa en la Fig. 5. La pared del tanque se carga con una onda de presión p(t) la cual resulta de una explosión de una nube de gas a una cierta distancia de la pared. Para el propósito de este análisis, el modelo de la estructura real se ha modificado. En una estructura real, barras rígidas con forma de anillo pueden estar presentes en los bordes superior e inferior de la cubierta. Además, el espesor de la pared se puede escoger más grueso localmente si la cubierta se encuentra presforzada. Dichas partes más gruesas pueden ser para anclar los cables pretensados. Dichas complicaciones no son esenciales, pero pueden implicar un trabajo extra o confundir el análisis. Por lo tanto, se dejan fuera del presente ejemplo. Además, no se considera el preesfuerzo. La explosión de la nube de gas (deflagración) causa una onda de presión que se propaga con una velocidad v = 640 m/s, en un terreno con obstáculos. El tanque de concreto examinado en este documento [24] tiene altura libre h = 32.4 m, y se ilustra en la Fig. 5. Se emplean dos modelos, con los cuales se realiza el mismo análisis, el primero sin resortes en la base, y el otro con éstos en la misma zona; para conocer su respuesta El anillo de pilas se considera como un resorte alineando uniformemente distribuido. Se considera libre la rotación de la cubierta con respecto al borde inferior del tanque. La rigidez del resorte vertical por metro de la cubierta es k v = 2000 kN/m2. Horizontalmente la rigidez es k h = 50000 kN/m2. Ambas en las direcciones radial y tangencial. Para el concreto la relación de Poisson ? se considera igual a 0.2. La elasticidad del concreto, el módulo de Young Ec = 32.5x10^6. Para propiedades dinámicas, la masa específica o densidad ?c = 2.5 x 10^3 kg/m3 y el coeficiente de amortiguamiento ? = 0.05. El posible amortiguamiento adicional debido a la cimentación no se considera para este análisis.
Fig.3 . Presión (x 10^4 Pa) en las paredes del cilindro, h=31.8 m
Fig. 4. Presión (x 10^4 Pa) en la sección transversal del cilindro
Fig. 5. Representación del tanque con explosión El comportamiento no lineal en el concreto se asume que obedece las siguientes supuestos: criterio de fluencia de Mohr-Coulumb, no presenta endurecimiento, ablandamiento por tensión lineal y corte a la tensión (esfuerzo constante). La fuerza de compresión fcc = 29.75 N/mm2 para el concreto y el ángulo de fricción f se toma como 30?. La cohesión c = 8.59 N/mm2 [25]. Se define el comportamiento de agrietamiento del concreto. Un valor medio para la fuerza de tensión del concreto se toma del código alemán NEN 6720:1995 [26], ft = 2.8 N/mm2. La deformación última de la tensión eu = 0.714 x 10^-3, y para la cortante, se emplea un factor constante de retención de cortante ß = 0.2 [25]. El componente esencial en una representación de MEF para tanques cilíndricos circulares de pared delgada, es el desarrollo de un elemento de cáscara finita simple, pero robusta, que se pueda incorporar en un programa de computadora capaz de realizar un análisis no lineal transitorio [27]. La idelización del modelo en elementos finitos, comprenden los elementos del programa DIANA 9.4.3 [28], de cubierta Q20SH y CT30S para el tanque y de resorte de un nudo SP1TR, que son para las condiciones de frontera en el fondo del tanque. El modelo axisimétrico consiste en elementos rectangulares integrados isoparamétricos numéricamente de ocho nodos, empleando un sistema de integración gaussiana. Después de estudios de convergencia estándar, el tanque se modeló finalmente por 5440 elementos, en su mayoría cuadriláteros finitos de cubierta. Esta discretización particular requirió 5522 puntos nodales y la malla resultante, cuando se modela todo el tanque, se muestra en la Fig. 6.
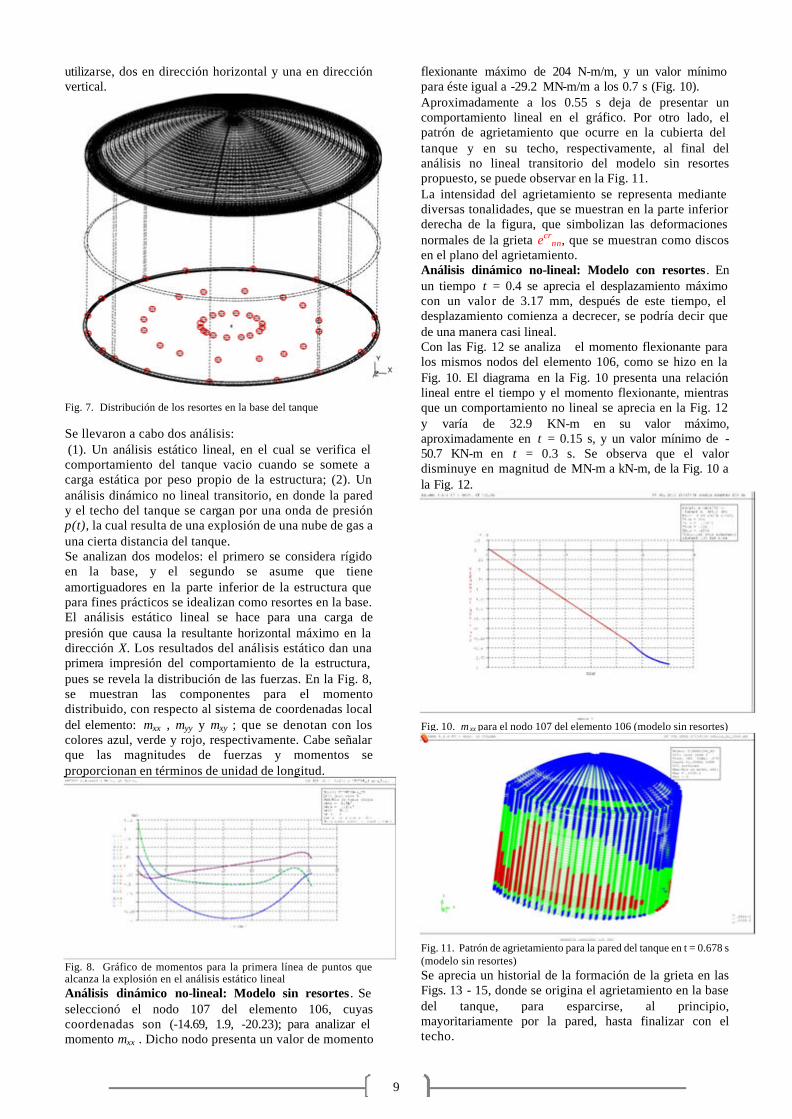
Fig. 6. Modelo de elementos finitos que se emplea para el análisis Los resortes elásticos se ubican en los nodos de la malla de la base (Fig. 7). En cada nodo tres resortes deben
9
utilizarse, dos en dirección horizontal y una en dirección vertical.
Fig. 7. Distribución de los resortes en la base del tanque Se llevaron a cabo dos análisis: (1). Un análisis estático lineal, en el cual se verifica el comportamiento del tanque vacio cuando se somete a carga estática por peso propio de la estructura; (2). Un análisis dinámico no lineal transitorio, en donde la pared y el techo del tanque se cargan por una onda de presión p(t), la cual resulta de una explosión de una nube de gas a una cierta distancia del tanque. Se analizan dos modelos: el primero se considera rígido en la base, y el segundo se asume que tiene amortiguadores en la parte inferior de la estructura que para fines prácticos se idealizan como resortes en la base. El análisis estático lineal se hace para una carga de presión que causa la resultante horizontal máximo en la dirección X. Los resultados del análisis estático dan una primera impresión del comportamiento de la estructura, pues se revela la distribución de las fuerzas. En la Fig. 8, se muestran las componentes para el momento distribuido, con respecto al sistema de coordenadas local del elemento: mxx , myy y mxy ; que se denotan con los colores azul, verde y rojo, respectivamente. Cabe señalar que las magnitudes de fuerzas y momentos se proporcionan en términos de unidad de longitud.
Fig. 8. Gráfico de momentos para la primera línea de puntos que alcanza la explosión en el análisis estático lineal Análisis dinámico no-lineal: Modelo sin resortes . Se seleccionó el nodo 107 del elemento 106, cuyas coordenadas son (-14.69, 1.9, -20.23); para analizar el momento mxx . Dicho nodo presenta un valor de momento
flexionante máximo de 204 N-m/m, y un valor mínimo para éste igual a -29.2 MN-m/m a los 0.7 s (Fig. 10). Aproximadamente a los 0.55 s deja de presentar un comportamiento lineal en el gráfico. Por otro lado, el patrón de agrietamiento que ocurre en la cubierta del tanque y en su techo, respectivamente, al final del análisis no lineal transitorio del modelo sin resortes propuesto, se puede observar en la Fig. 11. La intensidad del agrietamiento se representa mediante diversas tonalidades, que se muestran en la parte inferior derecha de la figura, que simbolizan las deformaciones normales de la grieta ecr
nn, que se muestran como discos en el plano del agrietamiento. Análisis dinámico no-lineal: Modelo con resortes. En un tiempo t = 0.4 se aprecia el desplazamiento máximo con un valor de 3.17 mm, después de este tiempo, el desplazamiento comienza a decrecer, se podría decir que de una manera casi lineal. Con las Fig. 12 se analiza el momento flexionante para los mismos nodos del elemento 106, como se hizo en la Fig. 10. El diagrama en la Fig. 10 presenta una relación lineal entre el tiempo y el momento flexionante, mientras que un comportamiento no lineal se aprecia en la Fig. 12 y varía de 32.9 KN-m en su valor máximo, aproximadamente en t = 0.15 s, y un valor mínimo de -50.7 KN-m en t = 0.3 s. Se observa que el valor disminuye en magnitud de MN-m a kN-m, de la Fig. 10 a la Fig. 12.
Fig. 10. m xx para el nodo 107 del elemento 106 (modelo sin resortes)
Fig. 11. Patrón de agrietamiento para la pared del tanque en t = 0.678 s (modelo sin resortes) Se aprecia un historial de la formación de la grieta en las Figs. 13 - 15, donde se origina el agrietamiento en la base del tanque, para esparcirse, al principio, mayoritariamente por la pared, hasta finalizar con el techo.

10
En t = 0.042 s (Fig. 13), se observa que la deformación por agrietamiento comienza a aparecer en la parte izquierda de dicha figura, al mismo tiempo que aumenta en la unión de la pared con el suelo. El techo empieza a presentar cambios, principalmente en el centro en t = 0.102 s (Fig. 14). La parte final del análisis se sumariza en la Fig. 15, donde es posible ver cómo la magnitud en la parte inferior del techo del tanque aumenta hasta t = 2 s; al punto de colorearse en verde en casi todo esta zona. Se selecciona el caso de carga 1001, que representa los resultados del incremento final del tiempo. Para poder observar el patrón de agrietamiento se escoge ecr
nn , que representa la deformación normal por agrietamiento en los puntos de integración de los elementos.
Fig. 12. m xx para el nodo 107 del elemento 106 (modelo con resortes)
Fig. 13. Patrón de agrietamiento para la pared del tanque en t = 0.042 s (modelo con resortes)
Fig. 14. Patrón de agrietamiento para la pared del tanque en t = 0.102 s (modelo con resortes) Conclusiones y recomendaciones El problema que se abordó en este artículo se genera de una situación de vulnerabilidad de un modelo de tanque de almacenamiento de gas natural licuado ante eventos
extremos de una explosión, que se genera de una fuente adyacente. Para la explicación de un análisis transitorio no lineal, que conlleva la aparición de grietas en la superficie del modelo que se analiza, se ha propuesto un punto de vista estructural que se basa en un modelo numérico, cuyos resultados se sustentan en esta tesis por simulaciones numéricas, empleando el método de los elementos finitos; debido a que un experimento físico, con las características que se describen, resultaría un riesgo a la sociedad, además de ser muy costoso.
Fig. 15. Patrón de agrietamiento para la pared del tanque en t = 2 s (modelo con resortes) El problema matemático del tanque de almacenamiento de gas natural licuado ante la explosión, en su parte estructural, se formula desde el punto de vista de la mecánica de medios continuos. Para resolver dicha cuestión, se ha seleccionado la aplicación del método de los elementos finitos (MEF), mediante la implementación del programa comercial DIANA 9.4.3 [28], ejecutando de análisis no lineal transitorio de manera satisfactoria. Luego de identificar los elementos de la cubierta que sufrieron un mayor impacto en el modelo de tanque que se propuso (primera línea vertical en la dirección y de la pared del tanque), se concluyó que las regiones más vulnerables son aquellas que reciben primero el impacto de la onda de presión, y la parte del tanque posterior a dicha zona. El modelo del tanque con resortes en la base fue el que resultó más apropiado, debido al amortiguamiento que dichos resortes propiciaron a la estructura. Las explicaciones y el modelo propuesto en esta tesis no se restringen al tanque en particular que aquí se estudia. Se pueden aplicar a cualquier otro tanque o cubiertas que se encuentren bajo cargas y condiciones de frontera similares. REFERENCIAS J. VonNeumann y R. D. Richtmyer, “A Method for the Numerical Calculation of Hydrodynamic Shocks”, J. Appl. Phys. , vol. 21, n.o 3, pp. 232-237, 1950. H. H. Goldstine y J. V. Neumann, “Blast wave calculation”, Commun. Pure Appl. Math., vol. 8, n.o 2, pp. 327–353, 1955. H. L. Brode, “Blast Wave from a Spherical Charge”, Phys. Fluids, vol. 2, n.o 2, pp. 217-229, mar. 1959. G. A. Sod, “Computer implementation of Glimm’s method”, Lawrence Livermore Laboratory, Report n.o UC10-7252, 1976. A. Harten, “High resolution schemes for hyperbolic conservation laws”, J. Comput. Phys. , vol. 49, n.o 3, pp. 357-393, mar. 1983.

11
C.-W. Shu y S. Osher, “Efficient implementation of essentially non-oscillatory shock-capturing schemes”, J. Comput. Phys. , vol. 77, n.o 2, pp. 439-471, ago. 1988. T. G. Liu, B. C. Khoo, y K. S. Yeo, “The numerical simulations of explosion and implosion in air: use of a modified Harten’s TVD scheme”, Int. J. Numer. Methods Fluids, vol. 31, n.o 4, pp. 661–680, 1999. J. G. M. Van Mier y TU Delft: Civil Engineering and Geosciences: Stevin Laboratory, “Examples of Non-Linear Analysis of Reinforced Concrete Structures with DIANA”. Delft University of Technology, 01-ene-1987. “The OpenFOAM® Foundation”. [Online]. Available: http://www.openfoam.org/. [Accessed: 25-nov-2011]. Ingeniería Mecánica Aplicada y Computacional (IMAC). (2006). Método de volúmenes finitos. Ecuación de difusión unidimensional. Navarra, España. [Online]. Available: http://www.imac.unavarra.es/Cursos/AyMFC/pascau/notesICSF1parte.pdf. R. Qi, D. Ng, B. R. Cormier, et M. S. Mannan, “Numerical simulations of LNG vapor dispersion in Brayton Fire Training Field tests with ANSYS CFX”, J. Hazard. Mater. , vol. 183, no 1-3, p. 51-61, nov. 2010. C. Geuzaine y J.-F. Remacle, “Gmsh: A 3-D finite element mesh generator with built -in pre- and post-processing facilities”, Int. J. Numer. Methods Eng., vol. 79, no 11, p. 1309–1331, 2009. M. M. Foss, “Introduction to LNG: An Overview on Liquefied Natural Gas (LNG)”. Energy Economics Research at the Bureau Economic Geology, jun. 2012. Disponible en: http://www.beg.utexas.edu/energyecon/INTRODUCTION%20T%20LNG%20Update%202012.pdf Institution of Chemical Engineers. “BP Process Safety Series-LNG Fire Protection Emergency Response” , IChemE, UK. 2007. R. P. Koopman y D. L. Ermak, “Lessons learned from LNG safety research”, J. Hazard. Mater. , vol. 140, no 3, p. 412-428, feb. 2007.
S. Sklavounos y F. Rigas, “Validation of turbulence models in heavy gas dispersion over obstacles”, J. Hazard. Mater., vol. 108, no 1-2, p. 9-20, abr. 2004. F. Gavelli, E. Bullister, y H. Kytomaa, “Application of CFD (Fluent) to LNG spills into geometrically complex environments”, J. Hazard. Mater. , vol. 159, no 1, p. 158-168, nov. 2008. G. A. Perdikaris y F. Mayinger, “Numerical simulation of heavy gas cloud dispersion within topographically complex terrain”, J. Loss Prev. Process Ind., vol. 7, no 5, p. 391-396, 1994. S. Sklavounos y F. Rigas, “Simulation of Coyote series trials—Part I:: CFD estimation of non-isothermal LNG releases and comparison with box-model predictions”, Chem. Eng. Sci., vol. 61, no 5, p. 1434-1443, marzo 2006. F. Briscoe y P. Shaw. (1980). “Spread and evaporation of liquid“. Prog. Energy Comb. Sci., vol. 6, p. 127-140. J. A. Fay, “Model of spills and fires from LNG and oil tankers”, J. Hazard. Mater., vol. 96, no 2-3, p. 171-188, janv. 2003. D. W. Hissong, “Keys to modeling LNG spills on water”, J. Hazard. Mater., vol. 140, no 3, p. 465-477, févr. 2007. J. M. Negrete Ramírez, "Análisis de presiones y daños en tanques de almacenamiento de gas licuado ante eventos extremos: explosiones," Master dissertation, FIC-FIME-FIE, Univ. Colima, dic-2012. T. K. Muller, “Concrete tanks, subjected to fire loads”, Graduate thesis, Part II, Delft University of Technology, Delft, Holanda, 1985 DIANA, TNO., “DIANA 9.3 User’s Manual”. TNO DIANA, Delft, 2008. “NEN 6720:1995, TGB 1990. Concrete Standards Structural requirements and calculation methods (VBC 1995), 2nd edition with revisions A2:2001 and A3:2004” (in Dutch).,NNI, Delft, Holanda, 1995. D. Talaslidis y G. A. Wempner, “The linear isoparametric triangular element: Theory and application”, Comput. Methods Appl. Mech. Eng., vol. 103, no 3, p. 375-397, marzo 1993. DIANA 2010, “DIANA 9.4.3”, TNO Building and Construction Research” Delft, Holanda, 2010.
12
Arquitecturas para sistemas de ambientes inteligentes y técnicas de verificación y validación: una revisión del estado del arte.
LUIS A. ANGUIANO, WALTER A. MATA, Y APOLINAR G. POTES
Facultad de Ingeniería Mecánica y Eléctrica
Maestría en Ingeniería Universidad de Colima
Colima, México Resumen—En el artículo se presenta un estudio del estado del arte acerca de los sistemas embebidos, ambientes inteligentes, principales características y técnicas que se utilizan para validarlos y verificarlos, estableciendo diferencias, ventajas y desventajas. También se realiza una revisión del estado del arte acerca de las principales arquitecturas utilizadas para el diseño de aplicaciones de sistemas embebidos distribuidos enfocados a los ambientes inteligentes, por último se concluye proponiendo un uso de las arquitecturas existentes con las técnicas de validaciones formales y sus beneficios. Palabras claves—Arquitecturas computacionales, sistemas embebidos, métodos formales, ambientes inteligentes, validación, verificación. Introducción
C ada vez que se observa alrededor es posible identificar dispositivos que contienen un microprocesador, el cual probablemente es un sistema embebido; su presencia cada vez mayor en productos y servicios en la actualidad proporciona una gran oportunidad de crecimiento en el futuro [1]. Los sistemas embebidos se encuentran alrededor de nuestras vidas, en forma de teléfonos móviles, equipos médicos, sistemas de navegación aérea, reproductores MP3, impresoras, automóviles, etc. [2]. El diseño de un sistema embebido distribuido es un trabajo de mucha dificultad. El hardware y el software se diseñan regularmente de forma secuencial, dando lugar a sistemas demasiado conservadores y caros. Los métodos existentes de diseño como los orientados a objetos, se centran en la reutilización y el mantenimiento de grandes sistemas. Estos métodos han mostrado que su diseño beneficia especialmente el desarrollo de software ___________________ Luis A. Anguiano estudiante de la Universidad de Colima, Facultad de Ingeniería Mecánica y Eléctrica - Km 9 carretera Colima - Coquimatlán, México. (e-mail: [email protected]).
Walter A. Mata Profesor Investigador de la Universidad de Colima, Facultad de Ingeniería Mecánica y Eléctrica - Km 9 carretera Colima - Coquimatlán, México. (e-mail: [email protected])
Apolinar G. Potes Profesor Investigador de la Universidad de Colima, Facultad de Ingeniería Mecánica y Eléctrica - Km 9 carretera Colima - Coquimatlán, México.. (e-mail: [email protected])
Víctor H. Topete Profesor Investigador de la Universidad de Colima, Facultad de Ingeniería Mecánica y Eléctrica - Km 9 carretera Colima - Coquimatlán, México. (e-mail: [email protected])
Tradicional, sin embargo no se consideran adecuados para el diseño de sistemas embebidos [3]. En el resto del artículo se describen las características principales de los sistemas embebidos distribuidos en la sección II, así como su relación con los ambientes inteligentes; en la sección III se describen técnicas de verificación utilizadas para ambientes inteligentes, también se citan algunos proyectos donde han sido utilizadas dichas técnicas; en la sección IV hablamos de las ventajas que nos dan la validación y verificación formal; en la sección V se describen arquitecturas según su topología de red que se utilizan en ambientes inteligentes. Sistemas embebidos y sistemas embebidos distribuidos Sistemas embebidos para ambientes inteligentes Existen diferentes definiciones acerca de los sistemas embebidos a continuación se mencionan algunas: Un sistema embebido es un sistema electrónico que contiene un microprocesador o microcontrolador[4]. Un sistema embebido es un sistema cuya función principal no es computacional, pero es controlado por una computadora integrada. Esta computadora puede ser un microcontrolador o un microprocesador. La palabra embebido implica que se encuentra dentro del sistema general, oculto a la vista, y forma parte de un todo de mayores dimensiones[5]. Un sistema embebido es un artefacto de ingeniería que implica cálculo que está sujeta a limitaciones físicas. Las limitaciones físicas surgen a través de dos tipos de interacciones de los procesos computacionales con el mundo físico: (1) la reacción a un entorno físico, y (2) la ejecución en una plataforma física [6]. Los avances en la tecnología de red y la miniaturización de los dispositivos y sensores han hecho posible la creación de ambientes inteligentes. Una típica casa hoy contiene un gran número de sistemas embebidos, cada uno con una función específica. Los sistemas embebidos se encuentran no sólo en equipos de alta tecnología, tales como tabletas electrónicas , iPods y teléfonos móviles, sino también en los electrodomésticos tradicionales como cocinas, lavadoras y refrigeradores [7]. No es necesario demostrar la utilidad de los electrodomésticos mencionados anteriormente, esta sería mayor si estuvieran conectados a través de una red para permitir la comunicación e interacción con ellos. Un

13
sistema en el que el refrigerador puede ordenar a la computadora principal el colocar un pedido en línea para la leche, ya que se está quedando sin ella es mucho más útil que si los aparatos estuvieran incomunicados entre sí. 1) Características de los sistemas embebidos Un sistema embebido se integra por tres componentes principales según [8]: Hardware. Software primario o aplicación principal; el cual lleva a cabo una tarea en particular o en algunas ocasiones una serie de tareas. Sistema operativo; el cual permite supervisar la(s) aplicación(es), además de proveer los mecanismos para la ejecución de procesos. En muchos sistemas embebidos es requerido que el sistema operativo posea características de tiempo real. Es importante mencionar que el software que se ejecuta en los sistemas embebidos se diseña bajo ciertas restricciones: utiliza pequeñas cantidades de memoria, entre otras. En la Fig. 1 se puede ver la arquitectura lógica de un sistema embebido, mientras que en la Fig. 2 se puede observar cómo luce realmente.
Fig. 1 Arquitectura de sistema embebido tradicional Sistemas embebidos Distribuidos Una definición muy precisa de los sistemas embebidos distribuidos la da Schroeder [9], donde dice que son varios equipos interconectados por una red que comparten estados y cooperan para alcanzar una meta común”. Por su parte Lamport [10] nos dice que un sistema es distribuido si el retardo de transmisión de mensaje no es despreciable en comparación con el tiempo entre los acontecimientos en un solo proceso. Muchos beneficios se pueden obtener gracias a la distribución de los sistemas embebidos, enseguida se muestran algunas de estas: Procesamiento más cercano a la fuente de datos: Inteligencia de sensores y actuadores. Confiabilidad: Independencia de los fallos de los nodos, error de contención dentro de los nodos. Composición: Es logrado mediante la integración de los subsistemas. Escalabilidad: Fácil adición de nuevos nodos con nueva o replicada funcionalidad.
Mantenimiento: Modularidad y fácil reemplazo de nodos, simplificación del cableado. Técnicas de vERIFICACIÓN Existen dos tipos de técnicas de verificación: formal e informal [11]. Las técnicas de verificación formal buscan exhaustivamente, pero de manera inteligente, el espacio de estados del sistema diseñado. Esto significa que todos los caminos posibles de cálculo se verificarán. La verificación formal se basa generalmente en matemáticas (lógica) modelos, métodos y teoremas. Existen varias técnicas, como la contención del lenguaje, la comprobación del modelo, verificación de equivalencia, la simulación simbólica y teoremas [12]. Las técnicas de verificación informal se basan, en principio, en la simulación. La principal diferencia con la verificación formal es que las técnicas informales sólo buscan en una parte limitada del espacio total del estado [12]. Por lo tanto no pueden garantizar la corrección del sistema, sólo falsificar. Por otra parte, tales técnicas no sufren de las desventajas principales de las técnicas formales, por ejemplo la explosión del espacio de estados. Las principales técnicas tanto formales como informales son simulación, estimación, prototipado rápido, emulación y sistemas de pruebas; las cuales a continuación se describen de manera general. Simulación. En la simulación, los modelos de diseño se ejecutan típicamente en equipos de propósito general. El modelo de diseño se abstrae del diseño real. Elegir la abstracción correcta es siempre un compromiso entre la velocidad de simulación y su precisión. Simulaciones más rápidas proporcionan una menor precisión. Durante la última década, una serie de simuladores con diferente nivel de abstracción se han desarrollado, los cuales se adaptan para el dominio de aplicación en uso; para redes de sensores inalámbricas se utiliza por su naturaleza libre el NS-2 [13], el Glomosim [14] y el TOSSIM [15]. La simulación es una técnica muy común para la validación de diseños y algoritmos, ya que la ejecución puede ser fácilmente controlada y observada por un desarrollador; además, es posible simular un gran número de nodos sin necesidad de disponer de hardware del nodo sensor. Estimación. La estimación es la aproximación calculada de un resultado que se puede utilizar incluso si los datos de entrada pueden estar incompletos, inciertos o ruidosos. Los modelos utilizados en la estimación son por lo general más sencillos que los utilizados en la simulación. El consumo de energía de un nodo sensor puede por ejemplo ser estimado considerando solamente el ciclo de trabajo de los nodos. El resultado de esta aproximación es, por supuesto, menos preciso que una simulación con un modelado de poder de grano fino tal como el Power TOSSIM [16]. Sin embargo, la ventaja de estimación es que el cálculo es mucho más rápido y no requiere datos detallados de entrada. Esto es importante para la

14
exploración en un espacio de diseño en una fase temprana, donde un número de alternativas de diseño tiene que ser rápidamente evaluados. Prototipado rápido y emulación. Emulación y simulación son similares en el sentido de que en el diseño no son evaluados en el hardware real. La diferencia es que los emuladores son más exactos porque se ejecuta el código de aplicación real en una plataforma que se comporta casi como el sistema final. La emulación se aplica a menudo en prototipos. Por ejemplo un prototipo para un Dispositivo de ASIC se pueden construir usando FPGAs. Estos prototipos deben esencialmente comportarse como los sistemas finales, pero pueden ser más grandes, consumir más poder, y tienen otras propiedades que son aceptables para su evaluación [18]. Los emuladores son más transparentes que el sistema final, ya que los desarrolladores pueden tener un mejor acceso a la información interna del Estado. En el caso de FPGA basados en emuladores, también son más flexibles en el sensado que el circuito reprogramable que permite al desarrollador evaluar rápidamente diferentes soluciones. Este tipo de emulación es llamado emulación de hardware. La definición de emulación de software no es tan clara como el de emulación de hardware. Existen un gran número de sistemas que se denominan emuladores tales como CPU, terminal, impresora, o emuladores de juegos de consola. Algo más que tienen en común es la capacidad de imitar otro programa (software) o dispositivo (hadware). Sin embargo no hay una distinción clara entre la simulación y la emulación. Los dos términos son intercambiables en su mayoría en muchos casos. La imitación de un procesador se conoce como la emulación de CPU o también como simulación de CPU. Existen una serie de emuladores de CPU para microcontroladores que normalmente se encuentran en los nodos sensores. Dicha emulación se han mejorado con la funcionalidad de emular simultaneidad de dispositivos de red múltiples. Ejemplos de ello son ATEMU [17] y Avrora [18]. Sistema de prueba Durante el diseño de sistemas embebidos, la prueba se realiza para cada capa de abstracción. Mediante la aplicación de los llamados patrones de prueba como entrada, podemos observar el comportamiento de los componentes individuales, o el sistema completo y se compara con la respuesta esperada. Las pruebas son esenciales para redes de sensores inalámbricos. Simulación y suave emulación de cerámica no son suficientes, ya que no puede capturar el complejo fenómenos físicos que aparecen en las implementaciones reales. La influencia de los efectos tales como la interferencia y al desvanecimiento multi-trayecto debe ser probado con una implementación en un entorno realista. El despliegue de una red de sensores puede ser un gran esfuerzo, sobre todo en el caso de una aplicación al aire libre que comprenda un gran número de nodos.
Por otra parte, la prueba se realiza no sólo una vez, sino varias veces y los nodos eventualmente deben ser actualizados con el nuevo software. Sin infraestructura especial, poniendo a prueba las redes de sensores en una implementación real se consume mucho tiempo. Por lo tanto, los investigadores han construido un banco dedicado de sensores de pruebas de red que consisten en un número fijo de nodos. Los nodos se colocan en lugares fijos en un laboratorio, típicamente dispuestas en una cuadrícula. Estos están también conectados a una computadora central con el fin de reprogramar los nodos y recoger los datos de salida de prueba. Ejemplos de tales bancos de pruebas son MoteLab [19] y el techo-Array de Emstar [20]. Estos bancos de pruebas a menudo también se denominan emulación-bancos de pruebas, cuando la aplicación se pone a prueba en una plataforma que se comporta similar al sistema real. verificación Y Validación por métodos formales La verificación formal se basa generalmente en modelos matemáticos (lógica), métodos y teoremas. Existen varias técnicas, como la contención del lenguaje, la comprobación del modelo, verificación de equivalencia, la simulación simbólica y teoremas [21]. La verificación formal permite describir propiedades del sistema de software (modelos, restricciones, diseños entre otros) siempre persiguiendo mejorar la calidad de los productos, como es la fiabilidad, seguridad y productividad, permitiendo su uso en distintos niveles de un sistema como en el análisis de requisitos, la arquitectura, el diseño , la verificación, la validación, etc. ; como se observa en la Fig. 3, es una vista general del proceso de la verificación formal donde se crea el modelado, para generar una especificación, aplicando análisis formal para verificar el producto final.
Fig. 3. Proceso de la verificación formal. La validación de métodos formales se encarga de demostrar formalmente que funcione correctamente un sistema usando el lenguaje de las matemáticas. Con el fin de hacer métodos formales aplicables, es necesario un modelo formal. En redes de sensores inalámbricas, no sólo modelos de computación (por ejemplo, redes de proceso, Redes de Petri, estado de grafos) son utilizados, sino también modelos de visibilidad (por ejemplo, unidad de disco gráfico), los modelos de despliegue (por ejemplo, uniforme o aleatorio), y modelos de movilidad (por ejemplo, el modelo random waypoint) [22].

15
Los modelos formales se aplican también en simulaciones. Sin embargo, la diferencia entre las simulaciones y la validación utilizando métodos formales es que los resultados obtenidos mediante simulación dependen de los patrones de entrada de una simulación de ejecución. Por otra parte, la simulación sólo puede probar la existencia de una cierta propiedad en carreras de simulación. Con los métodos formales, se intenta demostrar estas propiedades matemáticamente.
Arquitectura para ambientes inteligentes Los ambientes inteligentes tienen diferentes áreas que se pueden analizar y trabajar, algunas de estas áreas son la dómotica y la inmótica, así como la seguridad para estos. Los principales dispositivos y arquitecturas utilizadas para el desarrollo de sistemas domóticos se detallan a continuación. Dispositivos La amplitud de una solución de domótica puede variar desde un único dispositivo, que realiza una sola acción, hasta amplios sistemas que controlan prácticamente todas las instalaciones dentro de un edificio. Los distintos dispositivos de los sistemas de domótica se pueden clasificar en los siguientes grupos: Controlador: es el dispositivo que gestiona el sistema según la programación y la información que reciben. Puede existir un solo controlador o varios distribuidos por el sistema. Actuador: dispositivo capaz de ejecutar y/o recibir una orden del controlador y realizar una acción sobre un aparato o sistema (encendido/apagado, subida/bajada, apertura/cierre, etc.). Sensor: monitorea el entorno captando información que transmite al sistema (sensores de agua, gas, humo, temperatura, viento, humedad, lluvia, iluminación, etc.). Bus: es el medio de transmisión que transporta la información entre los distintos dispositivos por un cableado propio, por la redes de otros sistemas (red eléctrica, red telefónica, red de datos) o de forma inalámbrica. Interface: se refiere a los dispositivos (pantallas, móvil, Internet, conectores) y los formatos (binario, audio) en que se muestra la información del sistema para los usuarios u otros sistemas, donde los mismos pueden interactuar con el sistema.
Fig. 4. Ejemplos de Dispositivos de un Sistema Domótico.
En la Fig. 4 se muestran algunos ejemplos de los dispositivos mencionados anteriormente en el uso de sistemas domóticos. Arquitecturas La Arquitectura de los sistemas de domótica hace referencia básicamente a la estructura de su red. La clasificación de estas arquitecturas se realiza en base a donde reside la inteligencia del sistema domótico. Las principales arquitecturas descritas se mu estran a continuación: Arquitectura Centralizada: es aquella donde un controlador único, envía la información a los actuadores e interfaces según el programa, la configuración y la información que recibe de los sensores, sistemas interconectados y usuarios. Arquitectura Descentralizada: en esta arquitectura existen varios controladores, interconectados por un bus, que envía información entre ellos y a los actuadores e interfaces conectados a los controladores, según el programa, la configuración y la información que recibe de los sensores, sistemas interconectados y usuarios. Arquitectura Distribuida: cada sensor y actuador es también un controlador capaz de actuar y enviar información al sistema según el programa, la configuración, la información que capta por sí mismo y la que recibe de los otros dispositivos del sistema. Arquitectura Híbrida/Mixta: se combinan las arquitecturas de los sistemas centralizados, descentralizados y distribuidos. A la vez que puede disponer de un controlador central o varios controladores descentralizados, los dispositivos de interfaces, sensores y actuadores pueden también ser controladores (como en un sistema distribuido) y procesar la información según el programa, la configuración, la información que capta por sí mismo, y tanto actuar como enviarla a otros dispositivos de la red, sin que necesariamente pasa por otro controlador. Conclusiones En el presente artículo se presentaron las principales características de los sistemas embebidos distribuidos, así como las diferencias existentes con los sistemas embebidos centralizados y las ventajas que ofrecen para un mejor funcionamiento. Con los temas abordados podemos proponer el uso de la validación formal para los sistemas embebidos distribuidos, así como proponer modificaciones a las arquitecturas que se utilizan actualmente para los ambientes inteligentes, enfocándose más en el desarrollo de aplicaciones para sistemas domóticos. Referencias [1] E. Schoitsch, “ Embedded Systems - Introduction, European Research”. Consort ium for Informatics and Mathematics, nº 52, 2003.
[2] A. Burns y A. Wellings, Sistemas de Tiempo Real y Lenguajes de Programación, ADDISON-WESLEY, 2005.
[3] M.M.C.M. de Hoon, “Performance Analysis of Distributed Real-Time Embedded System,” Master thesis, Technische Universiteit Eindhoven, 2005.
[4] Wolf, W. “Computers as Components: Principles or Embedded Computing System Design”. Second Edition. Morgan Kaufmann. 2008.
[5] Morton, T. “Embedded Microcontrollers”. Prentice Hall. 2000.

16
[6] Mr Abdulla KP. “Low Power Design of Evolvable FuzzyInference System for Embedded” (2009).
[7] D. Monekosso, P. Remagnino, and Y. Kuno, "IntelligentEnvironments: Methods, Algorithms and Applications". Springer, 2008.
[8]David A. Pérez. “Sistemas Embebidos y Sistemas Operativos Embebidos,” 2009.
[9] S. Mullender, editor, Distributed Systems, 2nd ed., Addison-Wisley, ACM Press New York, New York, 1994, ISBN 0-201-62427-3
[10] Chandy, K. Mani, and Leslie Lamport. “Distributed Snapshots: Determining Global States of Distributed Systems.” ACM Trans. Comput. Syst. 3, no. 1 (February 1985): 63–75. doi:10.1145/214451.214456.
[11] M. Huth and M. Ryan, “Logic in Computer Science: Modeling and Reasoning about Systems”, Cambridge University Press 2004.
[12] Georgoulas, S.; Moessner, K.; Eracleous, D.; Nati, M., "Formal verification of the cooperative behaviour of network nodes for routing and context dissemination," Future Network & Mobile Summit (FutureNetw), 2012 , vol., no., pp.1,9, 4-6 July 2012
[13] The network simulator-ns-2. Available via ttp://www.isi.edu/nsnam/ns/ (accessed July 2006).
[14]X. Zeng, R. Bagrodia, and M. Gerla. Glomosim: a libraryfor parallel simulation of large-scale wireless networks. InProc. Twelfth Workshop on Parallel and Distributed Simulation(PADS), pages 154–61, 1998
[15] P. Levis, N. Lee, M. Welsh, and D. Culler. TOSSIM: Accurate and scalable simulation of entire TinyOS applications.In Proc. of the 1st int’l conference on Embedded networked sensor systems (SenSys), pages 126–137. ACM Press, New York,November 2003.
[16] V. Shnayder, M. Hempstead, B. Chen, G. W. Allen, and M. Welsh. Simulating the power consumption of large- scale sensor network applications. In SenSys ’04: Proceedings of the 2nd international conference on Embedded networked sensor systems, pages 188–200, New York, NY, USA, 2004.ACM Press.
[17] J. Polley, D. Blazakis, J. McGee, D. Rusk, and J.S. Baras. Atemu: a ?ne-grained sensor network simulator. In Sensor and Ad Hoc Communications and Networks, 2004. IEEE SECON 2004. 2004 First Annual IEEE Communications Society Conference on, pages 145–152, 2004.
[18] B.L. Titzer, D.K. Lee, and J. Palsberg. Avrora: scalable sensor network simulation with precise timing. In Information Processing in Sensor Networks, 2005. IPSN 2005. Fourth International Symposium on, pages 477–482, 2005.
[19] G. Werner-Allen, P. Swieskowski, and M. Welsh. Motelab:A wireless sensor network testbed. In Proceedings of theFourth International Conference on Information Processing inSensor Networks (IPSN’05), Special Track on Platform Toolsand Design Methods for Network Embedded Sensors (SPOTS).IEEE, Piscataway, NJ, apr 2005.
[20] J. Elson, L. Girod, and D. Estrin. Emstar: development with high system visibility. Wireless Communications, IEEE,11(6):70–77, 2004.
[21] Karlsson Daniel, “Verification of Component-based Embedded System Designs,” Linköping University, Dept. of Computer and Information Science, 2006.
[22] Dyer, Matthias. Distributed Embedded Systems - Validation Strategies. Aachen, Germany, Germany: Shaker Verlag GmbH, Germany, 2007.
17
II. CAPÍTULO II. ENERGÍA Y MEDIO AMBIENTE

18
Control Integral Relay para Motores Brushless DC
Eduardo Quintero-Manríquez, Ramón A. Félix y Alberto
Ochoa
Resumen—Este documento presenta una investigación acerca de la aplicación de un control integral relay a un sistema no lineal, donde el caso particular es el control de velocidad y corriente para un motor brushless DC. La técnica auxiliar de conducción del inversor trifásico que alimenta a los devanados de fase del motor es modulación por vector espacial. La técnica de modulación más el control integral relay es implementado a través de un Procesador Digital de Señales. El objetivo es controlar la velocidad angular del motor y demostrar que el sistema es estable dentro del ciclo limite en el cual se encuentra operando, donde el error de oscilación que se presenta es menor que la resolución que estima la instrumentación para la velocidad y por lo tanto se desprecia dicho error. Temas claves—Control integral relay, DSP, modulación por vector espacial y motor BLDC. INTRODUCCIÓN
L OS motores BLDC (del inglés: Brushless Direct Current) tienen un gran número de ventajas [1] [2] [3] en comparación con otros motores, principalmente en el control de velocidad, torque y posición. Los motores BLDC operan a grandes rangos de velocidad, presentan una inercia más baja lo que los hace responder más rápido ante cambios de torque, velocidad o de sentido de giro; disipan el calor de una manera óptima por tener los devanados en el estátor, son de estructura compacta ayudando a tener un peso y tamaño menor, producen eficiencias eléctricas superiores al 95 %, son menos ruidosos, brindan fiabilidad y requieren menos mantenimiento que los motores de Corriente Directa (CD) con escobillas y los de inducción. Los motores BLDC son ampliamente utilizados como actuadores para el control de movimiento y sus aplicaciones son en las áreas de robótica, aeroespacial, automoción, máquinas de control numérico, entre otras áreas. El motor BLDC es una máquina síncrona de imanes permanentes de Corriente Alterna (CA) [4], recibe el nombre de máquina síncrona ya que el campo magnético en el rotor (y el rotor mismo) se sincroniza con el campo magnético giratorio en el estátor [5], producido por un conjunto de voltajes trifásicos que se aplican al estátor de la máquina. A diferencia de un motor síncrono de CD convencional, el motor BLDC cuenta con imanes permanentes montados en el rotor. Mientras que a lo largo de su estátor se encuentra su bobinado distribuido en múltiples fases, normalmente en tres fases a, b y c, con una separación de 120° eléctricos entre ellas [6].
E. Quintero-Manríquez estudia la Maestría en Ingeniería en la FIE, Universidad de Colima, Carretera Manzanillo -Cihuatlán km 20, Colima, México. (e-mail: [email protected]) R. A. Félix y A. Ochoa laboran en la FIME, Universidad de Colima, Carretera Colima-Coquimatlán km 9, Colima, México. (e-mail: [email protected] y [email protected])
Debido a su construcción el motor BLDC no cuenta con escobillas y conmutador físico, su conmutación es electrónica y su modo de operación es más complejo. El principio de operación de un motor BLDC es aplicarle voltajes modulados a través de un dispositivo electrónico programable y un inversor trifásico a cada una de sus fases o bobinados del estátor, para crear un campo magnético giratorio. Entonces el campo magnético en el rotor tratará constantemente de alcanzar al campo magnético giratorio del estátor para producir el par mecánico y giro en el rotor. El subsistema encargado de realizar la conmutación electrónica programable es el modulador de pulsos. Este tiene como objetivo estimar la excitación óptima de cada una de las fases del motor. La modulación por vector espacial SVM (del inglés: Space Vector Modulation) es la técnica de modulación que se aplica a un dispositivo electrónico programable para activar los transistores de un circuito inversor trifásico y así modular los voltajes de fase que alimentan a los devanados de fase del estátor de un motor BLDC. El dispositivo electrónico programable es un DSP (del inglés: Digital Signal Processor), son dispositivos basados en un procesador o microprocesador que poseen un juego de instrucciones, un hardware y un software optimizados para aplicaciones que requieran operaciones numéricas a muy alta velocidad [7]; debido a que cuentan con un circuito MAC (del inglés: Multiplication-Accumulation) para ejecutar de manera óptima operaciones de multiplicar y acumular. Las técnicas de control comúnmente empleadas para motores BLDC son el control Proporcional Integral Derivativo (PID), lógica difusa y modos deslizantes. El control PID [7] [8] es una de las técnicas de control más empleadas debido a su simplicidad matemática por ser una función de transferencia lineal; lo que a su vez tiene como consecuencia que afecta a su desempeño para sistemas no lineales, debido a linealización del sistema en un punto de operación para el diseño del controlador. Lógica difusa es otra técnica alternativa para el control de motores [9], esta se encuentra relacionada y fundamentada en la teoría de conjuntos difusos. La lógica difusa puede corregir errores de manera óptima en comparación a otras técnicas cuando no existen modelos matemáticos precisos, para procesos altamente no lineales. Sin embargo no es buena idea emplearla cuando algún modelo matemático ya soluciona eficientemente el problema. Modos deslizantes es una técnica muy empleada para el control de sistemas no lineales. Está se compone de "Sistemas de Control de Estructura Variable"(SCEV), son una clase de sistemas a través de los cuales la ley de control cambia deliberadamente durante el proceso de control de acuerdo con alguna regla, la cual depende del estado del sistema. Al ser una técnica de control de estructura variable, presenta problemas de chattering, principalmente cuando la resolución de la instrumentación para las variables de estado es poca. El control integral relay es una técnica de control en la que su desempeño no disminuye para sistemas no lineales como es el caso del control PID, y su aplicación es más sencilla que un control de lógica difusa o modos deslizantes; por lo tanto es la técnica que se aplica para el control de velocidad y corriente de un motor BLDC.

19
MODELO MATEMÁTICO DEL MOTOR BLDC El modelado matemático se desarrolla bajo las siguientes suposiciones: Las bobinas del estátor tienen una distribución sinusoidal a lo largo del entrehierro. La histéresis magnética es despreciable. El efecto de saturación es despreciable. II-A. Ecuaciones del Modelo Eléctrico La dinámica eléctrica del motor BLDC se describe con la expresión:
(1)d
V RIdtΛ
= +
donde V=[va,vb,vc], I=[ia,ib,ic] y ? =[?a, ?b, ?c] son los vectores de voltajes de fase, corrientes y enlaces de flujo del motor respectivamente y R es una matriz diagonal de 3 x 3 con Re (resistencia eléctrica por devanado) en su diagonal. Cada componente del vector de enlaces de flujo del motor se puede expresar de la siguiente manera:
(2)a aa ab ac a am
b ba bb bc b bm
c ca cb cc c cm
L L L iL L L iL L L i
λ λλ λλ λ
= +
(3)mLIΛ = + Λ
?a, ?b, ?c son los enlaces de flujo dados por el material magnético del rotor, estos enlaces son funciones periódicas del ángulo eléctrico ?e; la magnitud de los enlaces está dada por ?m, determinada por el material del imán permanente. Por fase estos se pueden expresar como:
sin( )2
sin( )3
2sin( ) (4)
3
am m e
bm m e
cm m e
λ λ θπ
λ λ θ
πλ λ θ
=
= −
= +
Laa, Lbb, Lcc son las inductancias propias de cada fase, las demás son inductancias mutuas y se pueden generalizar como Lij donde se puede leer como la inductancia del devanado de la fase i, debida a la corriente del devanado de la fase j [10]. Las expresiones para las inductancias son:
cos(2 )
cos(2( 2 /3))
cos(2( 2 /3))
1 2 cos(2 / 3 )
1 2 cos(2 / 3 )
1 2 cos(2 ) (5)
aa ls m m p m
bb ls m m p m
cc ls m m p m
ab ba m m p m
ac ca m m p m
bc cb m m p m
L L L L n
L L L L n
L L L L n
L L L L n
L L L L n
L L L L n
θ
θ π
θ π
θ π
θ π
θ π
∆
∆
∆
∆
∆
∆
= + −
= + − −
= + − +
= = − − +
= = − − −
= = − − −
donde Lls, mL y L?m son, la inductancia debido al flujo
disperso que no cruza el entrehierro, el valor promedio de la inductancia de magnetización y la amplitud pico de la variación sinusoidal de la inductancia de magnetización, respectivamente. Las inductancias son dependientes a ?e, el
cual es igual a np?m con np como el número de polos pares magnéticos en el rotor y ?m el ángulo de giro del rotor. Desarrollando la derivada de los enlaces de flujo de la ecuación (3) para sustituir en la ecuación del modelado eléctrico (1), se tiene:
(6)mddI dLV RI L I
dt dt dtΛ
= + + +
La forma conveniente para representar el subsistema eléctrico en tres fases es despejando la derivada del vector de corriente con respecto al tiempo de la ecuación (6), obteniendo la siguiente expresión:
1 (7)mddI dLL V RI I
dt dt dt− Λ = − − −
II-B. Ecuaciones del Modelo Mecánico El subsistema mecánico del motor BLDC lo describe la segunda ley de Newton mediante la ecuación diferencial:
( )1 (8)m
em l f
ddt Jω
τ τ τ= − −
donde ? m es la velocidad angular del rotor, J es la inercia del rotor, tem es el par electromagnético generado por el motor, t l es el par de carga y t f es el torque de fricción, el cual es expresado como:
(9)f m mBτ ω=
con Bm como el coeficiente de fricción viscosa del motor. El par electromagnético t em puede ser expresado como [11]:
3 (10)2
T T mem
m m
LI I Iτθ θ
∂Λ∂= + ∂ ∂
II-C. Transformación dq A finales de 1920 H. Park introdujo una nueva aproximación de análisis para las maquinas eléctricas. Un cambio de variables que en efecto remplazaría a las variables (voltajes, corrientes y enlaces de flujo) asociadas con los devanados del estator de un maquina síncrona con variables asociadas a devanados rotatorios ficticios en el rotor [11]. En otras palabras la transformada de Park es la única propiedad que elimina las variaciones en el tiempo de las inductancias de las ecuaciones de voltaje de una maquina síncrona. Aunque esta transformación puede implementarse en un único paso, se compone de dos transformaciones [6], la transformada de Clarke y la transformada de Park. La transformada Clarke TC simplifica las ecuaciones transformando el espacio a, b y c de tres componentes en un espacio de dos componentes a y ß. La dependencia de la posición del ángulo ?m se elimina haciendo girar todo el sistema de referencia a y ß a través de la transformación de Park TP, obteniendo las nuevas componentes d y q, Figura 1.

20
Figura 1. Representación de las componentes de transformación La transformación a coordenadas d, q se puede realizar desde el sistema en coordenadas a, b, c, es decir:
0 (11)dq abcf Tf=
con T siendo la matriz unitaria:
1 2 1 2 1 22
sin( ) sin( 2 3) sin( 2 3) 3
cos( ) cos( 2 3) cos( 2 3)
(12)p m p m p m
p m p m p m
P C
n n n
n n n
T T T
θ θ π θ π
θ θ π θ π
− +
− +
= =
El subsistema eléctrico que se muestra en la ecuación (7), se transforma a coordenadas d, q como:
10 1
0 0 0 (13)dqdq dq dq m
dI dT dTT LT V RI TL I
dt dt dt
−−= − − − Λ
El subsistema mecánico representado por la ecuación (8) se transforma a coordenadas rotacionales d; q; partiendo de la ecuación del par electromagnéticotem (10); está se reescribe como:
1
0 0
3 (14)
2T T
em dq dq mm m
T TI TL I Iτ
θ θ
− ∂ ∂= + Λ ∂ ∂
desarrollando matricialmente y simplificando ambos subsistemas se tiene que las ecuaciones que modelan al motor BLDC en componentes d, q son:
1
1
1 3( ) (15)
2
d d e d q p m q
d
q q e q d p m d m p m
q
m p m q d q d q l m m
i v R i L n iL
i v R i L n i nL
n i L L i i BJ
ω
ω λ ω
ω λ τ ω
= − +
= − − −
= + − − −
&
&
&
SVM La SVM es una técnica de modulación digital que estima los tiempos de activación de los transistores de un inversor trifásico para generar los voltajes sinusoidales que alimentan a los devanados de fase de un motor BLDC.
III-A. Subespacio Vectorial de Modulación Un inversor trifásico tiene como función cambiar un voltaje de entrada de CD, a tres señales de voltaje de CA, moduladas sinusoidalmente y desfasadas 120° entre sí, para obtener voltajes trifásicos balanceados los cuales se expresan como, Van, Vbn y Vcn. Para modular las tres señales separadas por PWM implicaría la aplicación de un control para cada una, complicando el modelado y análisis. Además solo sería válido para estado estable, lo que permitiría la entrada de transitorios de corriente y altos picos de voltaje. La SVM es una solución al problema de controlar tres diferentes fases, pues mediante transformaciones, el sistema trifásico balanceado de variación sinusoidal en el tiempo, queda representado por una expresión vectorial de dos coordenadas e invariante en el tiempo. El subespacio de modulación a y ß es donde se desarrolla la SVM, sin embargo el módulo de control estima los voltajes Vd y Vq, donde la resultante Vdq se desplaza a través de ?e en el subespacio de modulación como se muestra en la Figura 2; atravesando los sectores I, II, III, IV, V y VI delimitados por los vectores de modulación. Aplicando la transformación inversa de Park, el vector Vdq se transforma en el vector Vaß.
Figura 2. Subespacio vectorial de modulación en base 0aß El objetivo de la SVM es aproximar el vector de voltajes Vaß de manera instantánea a través de la combinación de los estados de activación de los transistores, correspondientes a los vectores de modulación [12]. Esto se logra definiendo un pequeño periodo de tiempo Tz en donde la salida de los voltajes de fase del inversor sea la misma que Vaß, como se muestra en la siguiente ecuación,
( )( 1)
1 2 60
1 1( ) (16)
z
z
n T
x xz znT
V t TV T VT Tαβ °
+
±= +∫
donde T1 y T2 son las duraciones respectivas para que los vectores de modulación que limitan a un sector, Vx y Vx±60° se apliquen y generen el vector de salida Vaß. Si suponemos que el cambio en la tensión de salida es pequeño dentro del tiempo Tz, entonces la ecuación se escribe como,
( )1 2 60
1( ) (17)z x xz
V nT TV T VTαβ °±
= +
donde T1 + T2 = Tz. Por lo tanto, es crítico que Tz sea pequeño con respecto a la velocidad de cambio de Vaß. Sí la suma de T1 y T2 es menor o igual a Tz, el inversor debe estar en el estado

21
V0 ó V7 durante el resto del periodo; por lo tanto T1+T2+T0 = Tz y la ecuación (17) se puede escribir como:
1 2 0 0,760 (18)z x x
T V TV T V T Vαβ °±= + +
y los tiempos T1 y T2 se estiman con la siguiente ecuación:
[ ]1
1 2 60 (19)
T
z x xT T T V V Vαβ°
−
± =
asumiendo que el ángulo ?e se encuentre en el sector limitado por los vectores de modulación Vx y Vx±60°. III-B. Identificación de Sector Es necesario conocer el sector en que se encuentra el vector de salida Vaß para determinar el tiempo de activación de los transistores en ese periodo de tiempo Tz y la secuencia. El siguiente algoritmo se emplea para identificar el sector en el que se encuentra el vector de salida. Primero se calcula Vref1, Vref2 y Vref3 con las siguientes ecuaciones:
1
2
3
sin(60 ) sin(30 )
sin(60 ) sin(30 ) (20)
ref
ref
ref
v v
v v v
v v v
β
α β
α β
° °
° °
=
= −
= − −
segundo calculamos,
1 2 3( ) 2 ( ) 4 ( ) (21)ref ref refN sign v sign v sign v= + +
tercero, de acuerdo a la Tabla I y el valor de N identificamos el sector en el que se encuentra el vector de salida Vaß. Tabla I DETERMINACIÓN DEL SECTOR PARA EL VECTOR Vaß EN BASE A N
N 1 2 3 4 5 6 Sector II VI I IV III V
III-C. Patrones de forma de onda En la Figura 3 se muestran las formas de onda que se aplican a los transistores S1, S3 y S5 mientras que a los transistores S2, S4 y S6 se les aplica la onda complementaria; tomando de ejemplo que el colector del transistor S1 se encuentra conectado al bus + y el emisor del transistor S2 al bus - y ambos en la misma línea para generar el voltaje de fase a.
Figura 3. Patrones de forma de onda para los transistores S1, S3 y S5
CONTROL INTEGRAL RELAY El sistema de control es el que se muestra en la figura 4. En el sistema se desea controlar la velocidad angular del rotor ? m y la corriente id, para lo cual se tienen dos controladores integral relay independientes para cada variable a controlar. El Controlador Integral Relay (CIR), está compuesto de una función signo, una ganancia K de diseño y un integrador, Figura 5. En resumen la ley de CIR implementada en el motor BLDC está dada por la expresión:
( ) (22)u Ksign e=&
Figura 5. Esquema del control integral relay La señal de control u que sale del controlador de velocidad es el voltaje vq y la del controlador de la corriente id es el voltaje vd. Ambas señales de control tienen una magnitud limite que previene una sobremodulación en la SVM; para prevenir la sobre modulación, al CIR se le agrega una función de saturación con anti-windup. El anti-windup evita que el integrador continué integrando cuando el sistema se encuentra saturado lo que permite al sistema responder de manera óptima a perturbaciones.

22
Figura 4. Esquema del sistema de control RESULTADOS EXPERIMENTALES El encoder empleado es incremental de 2500ppr de dos canales A y B y un indice, lo que significa contando los flancos de subida y bajada entre los canales, se tienen 9999 segmentos por revolución, para un periodo de muestreo de 0.1ms la resolución para la estimación de velocidad es aproximadamente de 2prad/rev . En cuanto a la corriente, los sensores tienen una salida de 185mV/A con una amplificación de cinco veces por la instrumentación, el ADC del DSP opera en un rango de 3V a 12 bits; por lo tanto se tiene una resolución de 0.678mA. El motor BLDC es de 0:19KW, se alimenta con un voltaje de bus de 70V, sus parámetros se muestran en la siguiente Tabla: TABLA II PARÁMETROS DEL MOTOR BLDC
Parámetro Magnitud
R 6.5 O Ld 9.3 mH Lq 7.5 mH ?m 0.1186 V*s/rad J 0.0677 kg*cm2
B 0.00001
En la Figura 6 se muestra la respuesta de la velocidad para una referencia de 100 rad/s y en la Figura 10 se muestra la señal de control que corresponde a vq; se puede apreciar que no existe una oscilación periódica, debido a la resolución del encoder y la frecuencia de muestreo, por lo tanto se puede decir que la ley de control tiende a estabilizar el sistema. Para el caso de la corriente, la respuesta se muestra en la Figura 7 y su señal de control vd, en la Figura 9. Esta si percibe una oscilación periódica en el transitorio de arranque, pero una vez que el sistema tiende a estado estable la oscilación periódica se estabiliza entre 0 A y 0.15 A.
Figura 6. Respuesta de la velocidad angular del rotor
Figura 7. Respuesta de la corriente id
CONCLUSIONES La ley de control implementada no pretendía estabilizar al sistema hacia un error nulo, sino que contenía una oscilación periódica alrededor del punto de equilibrio (e = 0), y de ser posible, que la oscilación periódica tuviera una amplitud menor que la resolución del encoder que estima la velocidad del rotor del motor como fue el caso, de esta manera se
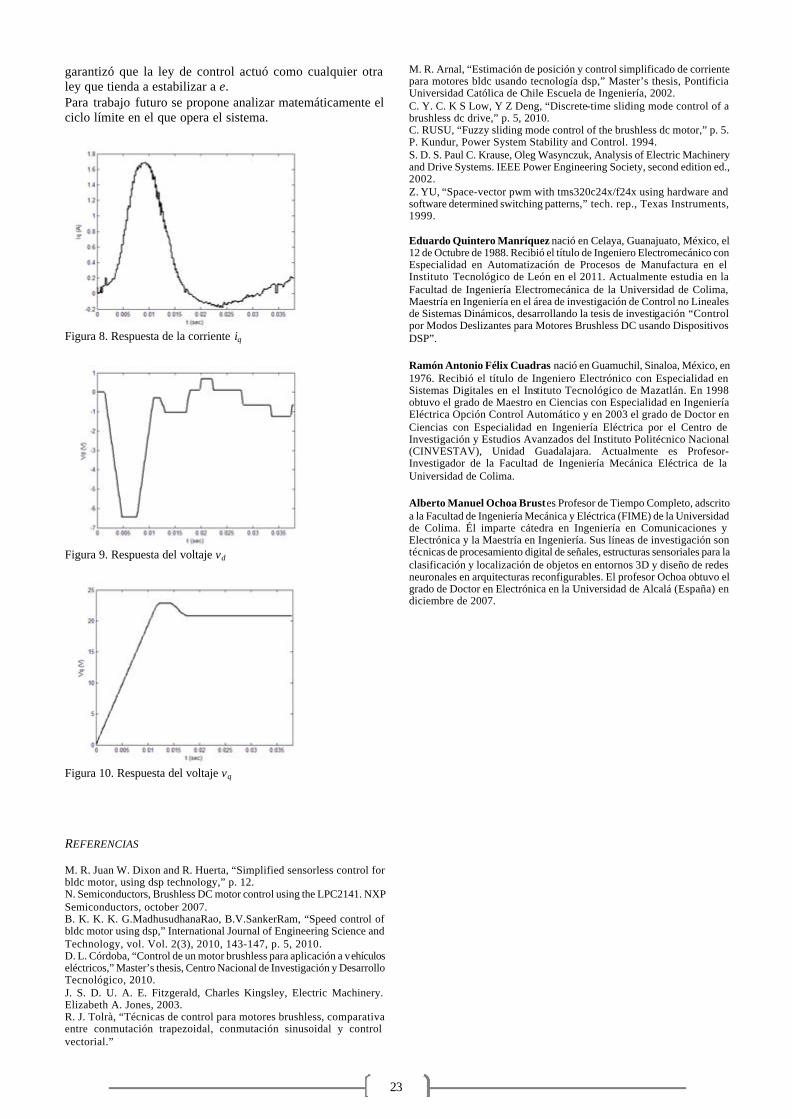
23
garantizó que la ley de control actuó como cualquier otra ley que tienda a estabilizar a e. Para trabajo futuro se propone analizar matemáticamente el ciclo límite en el que opera el sistema.
Figura 8. Respuesta de la corriente iq
Figura 9. Respuesta del voltaje vd
Figura 10. Respuesta del voltaje vq
REFERENCIAS M. R. Juan W. Dixon and R. Huerta, “Simplified sensorless control for bldc motor, using dsp technology,” p. 12. N. Semiconductors, Brushless DC motor control using the LPC2141. NXP Semiconductors, october 2007. B. K. K. K. G.MadhusudhanaRao, B.V.SankerRam, “Speed control of bldc motor using dsp,” International Journal of Engineering Science and Technology, vol. Vol. 2(3), 2010, 143-147, p. 5, 2010. D. L. Córdoba, “Control de un motor brushless para aplicación a vehículos eléctricos,” Master’s thesis, Centro Nacional de Investigación y Desarrollo Tecnológico, 2010. J. S. D. U. A. E. Fitzgerald, Charles Kingsley, Electric Machinery. Elizabeth A. Jones, 2003. R. J. Tolrà, “Técnicas de control para motores brushless, comparativa entre conmutación trapezoidal, conmutación sinusoidal y control vectorial.”
M. R. Arnal, “Estimación de posición y control simplificado de corriente para motores bldc usando tecnología dsp,” Master’s thesis, Pontificia Universidad Católica de Chile Escuela de Ingeniería, 2002. C. Y. C. K S Low, Y Z Deng, “Discrete-time sliding mode control of a brushless dc drive,” p. 5, 2010. C. RUSU, “Fuzzy sliding mode control of the brushless dc motor,” p. 5. P. Kundur, Power System Stability and Control. 1994. S. D. S. Paul C. Krause, Oleg Wasynczuk, Analysis of Electric Machinery and Drive Systems. IEEE Power Engineering Society, second edition ed., 2002. Z. YU, “Space-vector pwm with tms320c24x/f24x using hardware and software determined switching patterns,” tech. rep., Texas Instruments, 1999. Eduardo Quintero Manríquez nació en Celaya, Guanajuato, México, el 12 de Octubre de 1988. Recibió el título de Ingeniero Electromecánico con Especialidad en Automatización de Procesos de Manufactura en el Instituto Tecnológico de León en el 2011. Actualmente estudia en la Facultad de Ingeniería Electromecánica de la Universidad de Colima, Maestría en Ingeniería en el área de investigación de Control no Lineales de Sistemas Dinámicos, desarrollando la tesis de investigación “Control por Modos Deslizantes para Motores Brushless DC usando Dispositivos DSP”. Ramón Antonio Félix Cuadras nació en Guamuchil, Sinaloa, México, en 1976. Recibió el título de Ingeniero Electrónico con Especialidad en Sistemas Digitales en el Instituto Tecnológico de Mazatlán. En 1998 obtuvo el grado de Maestro en Ciencias con Especialidad en Ingeniería Eléctrica Opción Control Automático y en 2003 el grado de Doctor en Ciencias con Especialidad en Ingeniería Eléctrica por el Centro de Investigación y Estudios Avanzados del Instituto Politécnico Nacional (CINVESTAV), Unidad Guadalajara. Actualmente es Profesor-Investigador de la Facultad de Ingeniería Mecánica Eléctrica de la Universidad de Colima. Alberto Manuel Ochoa Brust es Profesor de Tiempo Completo, adscrito a la Facultad de Ingeniería Mecánica y Eléctrica (FIME) de la Universidad de Colima. Él imparte cátedra en Ingeniería en Comunicaciones y Electrónica y la Maestría en Ingeniería. Sus líneas de investigación son técnicas de procesamiento digital de señales, estructuras sensoriales para la clasificación y localización de objetos en entornos 3D y diseño de redes neuronales en arquitecturas reconfigurables. El profesor Ochoa obtuvo el grado de Doctor en Electrónica en la Universidad de Alcalá (España) en diciembre de 2007.

24
Reachability analysis in fed-batch bioreactors
E. Silva-Arellano, V. Ibarra-Junquera, G. Szederkényi,
P. Escalante-Minakata, J. Virgen-Ortiz, A. Osuna-Castro
Abstract-In the present paper deals with the analysis of accessibility in fed-batch bioreactors, the analysis was done in ? ? then becomes an extension of this analysis to ? ? . First using the Haldane kinetics later to make the analysis of the kinetics varying accessibility for the purpose of demonstrating the independence of the same in the fed-batch bioreactors. Shown that the known difficulties of controlling these processes are mainly caused by the fact that the distribution range of accessibility is always less than the number of state variables. Keywords-bioreactor, fed batch, kinetic models, accessibility. introduction
A bioreactor or fermenter is defined as the device providing a controlled environment that allows efficient growth of cells and the formation of a [1]. The proper environment that provides a bioreactor, must have optimal levels of temperature, pH, substrate, salts, and oxygen, thereby converting raw materials into specific products (metabolites) of interest [2]. The reachability of a simple nonlinear fed-batch fermentation process model is investigated in this paper. It is shown that the known difficulties of controlling such processes are primarily caused by the fact that the rank of the reachability distribution is always less than the number of state variables. What we intend to show in this work is that accessibility issues are independent of the kinetics, earlier this analysis was performed only with Haldane kinetics [3], but leaves uncertainty about what happens if we vary the kinetics, and we make a different to the Haldane. E. Silva-Arellano estudiante de maestría en ingeniería en la Universidad de Colima, Km. 9 carretera Colima -Coquimatlán, Coquimatlán, Col. 28400, México, ([email protected]). V. Ibarra-Junquera Facultad de Ciencias Químicas Universidad de Colima, Km. 9 carretera Colima-Coquimatlán, Coquimatlán, Col. 28400, México, ([email protected]). P. Escalante- Laboratorio de Bioingeniería Ambiental, Facultad de Ingeniería Civil de la Universidad de Colima, Coquimatlán, Col. 28400, México, J. Virgen-Ortiz Facultad de Ciencias Químicas Universidad de Colima, Km. 9 carretera Colima-Coquimatlán, Coquimatlán, Col. 28400, México, ([email protected]) A. Osuna-Castro Facultad de Ciencias Biológicas y Agropecuarias de la Universidad de Colima, Tecomán, Col. 28100, México. G. Szederkényi Research Fellow Process Control Research Group Computer and Automation Research Institute Hungarian Academy of Sciences H-1518 Budapest ([email protected]) NONLINEAR STATE SPACE MODEL The state equations are derived from dynamic conservation balances of the overall mass.
The simplest dynamic model of a fed-batch fermenter consists of three conservation balances for the mass of the cells (e.g. yeast to be produced), that of the substrate (e.g. sugar which is consumed by the cells) and for the overall mass. Here, we assume that the fermenter is operating under isotherm conditions that is no energy balance is needed. The cell growth rate is described by a nonlinear static function�? . The speciality of a fermentation model appears in the so-called source function which is highly nonlinear and non-monotonous in nature. Initially a solution containing both substrate and cells is present in the fermenter. During the operation we feed a solution of substrate with a given feed concentration ?? to the reactor. Under the above assumptions the nonlinear state space model of the fermentation process can be written in the following input-affine form [4]. ? ?? ? ?? ? ? ? ???? Where ? ? ?? ?? ?? ? ? ? ???? ? ?������������? ? ?
Also
? ?? ? ? ? ? ?? ? ?? ??? ? ?? ? ?? ?? ? ?���������? ??? ? ????? ? ? ?? ??? ? ? ?? ?? ???
??������ And ? ?? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? ? ??
REACHABILITY ANALYSIS First, we give the general form of the algorithm for constructing the reachability distribution as it is described in Lemmas1.8.1 and 1.8.2 in Reference [5]. Given a distribution ? and vector fields ?? ? ??? ?? ? ?g ?? ? ? construct the sequence: ? ? ? ? ? ? ? ? ? ? ? ? ? ?? ??? ? ? ? ??
?? ?
The sequence terminates at ? ? ? ? if ? ? ?? ? ? ? ? ? such that ? ?? ? ??? ?? ? ?? ? ?g ?? ? ?? ?. The above algorithm can be applied to the model of the fermenter in the following way: ? ? ? ???? ?? ? ? ? ? ? ? ? ?? ?? ? ? ? ???? ?? ??? ?? ?? ? ? ? ? ? ? ?? ?? ? ? ? ?? ?? ? ? ? ? ? ? ? ? ?? ??? ?? ???? ??? ?? ????? ??? ?? ??? The calculation of the Lie-products is as follows: ?? ?? ??? ? ? ? ?? ? ? ?? ? ? ? ?? ? ? ?? ?
Since

25
???? ? ??? ? ?????? ?? ? ? ? ?? ??? ? ?? ? ? ? ? ??? ??? ? ? ???
?? ? ?? ????? ?? ???? ? ?
? ????? ? ?? ? ?? ?? ?? ?? ? ? ?? ?? ?? ?? ???
??
And
? ?? ? ? ?? ? ? ????? ? ?? ? ? ? ? ?? ? ?? ? ? ?? ?? ? ?? ? ? ?? ? ? ?? ? ?? ? ? ?? ? ????
?? ?? ? ?? ?? ? ?? ?? ? ?? ? ? ?
? ?????? ? ?? ? ??? ?? ? ? ? ? ?? ? ?? ? ? ? ? ?? ??? ??? ? ??? ?? ? ? ? ? ?? ? ?? ? ? ? ? ?? ?? ? ?? ? ???
???
Where ? ? ?? ? ? ? The Lie-product ?? ?? ? has the form: ??? ?? ???? ?? ???? ?? ?? ? ? ??? ?? ?? ???? ?? ??? ?
Where �?? ?? ?? denotes the ??? �?? ? ???????? function of the vector field ?? ?? ?. It follows from Equations (10)-(13) that the distributions ????? ?? ?? and ?? ??? ?? ?? will also have the same form as (13), i.e.: ????? ?? ?? ? ???
? ?? ??? ?? ????? ?? ??? ?? ???? ????
And
?? ??? ?? ?? ? ???? ?? ????? ????? ?? ??? ?? ???? ???
?
On the basis of the above we can denote the co-ordinate functions of the vector fields spanning ? ? at a given point ? of the state space as follows: ? ? ?? ? ? ? ? ? ? ? ? ? ? ?? ? ?? ? ?? ? �? ? ? ?? ? ? ? ? ???? ? ? ?? ? ?? ? ?? ? ? ? ? ?? ? ? ? ? ?? ?? ? ? ?? ? ?? ? ?? ? ? ? ? ?? ? ? ? ? ?? ? ?
Where ? ?? ?? ? ? ? ?������������?? ? ?? ? ? ? ? ? ?? ? ? ? ? ? ??? ? ? ? ? ? ??? ? ? ?? ? ? ? ?? ? ? ? ? ??? ? ? ?? ? ? ? ?? ? ? ? ? ??? ? ? ?? ? ? ? ?? ?
i.e.
? ? ? ???? ? ?? ? ? ? ? ? ? ? ? ��������?? ?? ? ? ? ?? ?? ? ? ?? ? ? ? ? ?? ? ? ?? ? ? ����������? ??
Which means that we could not increase the dimension of the reachability distribution in the second step and the rank of ? ? is at most ? � in any point of the state space. Singular points: There are, however, points in the state space where the rank of the reachability distribution ? ? is less than 2. ? ? ? ? In this case ? ? is of dimension 1. This case means that there is no biomass in the system and since the inlet flow contains only substrate, the biomass concentration cannot be influenced by manipulating the input. [5]. So for the case of kinetic Haldane check that the system is not accessible since the distribution ? ? does not have a full rank. NONLINEAR ESTATE SPACE MODEL FOR ? ? The original model of fed-batch bioreactor, which is in ? ? can be carried ? ? adding an additional variable to the system, in this case the variable is the product generated by the reaction, now our model is defined as follows [5]: ? ? ?? ?? ?? ?? ? ? ? ????? ? ?���������������? ? ?
Where ? represents the product of the reaction. And our functions ? ?? ? and ? ?? ? are defined as follows:
? ?? ? ???????? ? ?? ? ?? ? ?? ? ??? ? ? ?? ? ?? ? ? ? ? ??? ? ? ?? ? ?? ? ? ? ? ?? ???
?????���������? ?? ? ?
???????? ? ? ?? ??? ? ? ?? ?? ? ? ? ?? ?? ???
?????
And where ? ?? ? ?? ? ? any substrate-product relation kinetic REACHABILITY ANALYSIS FOR ? ? To carry accessibility analysis ? ? performs the same process as in ? ? to determine degree of distribution corresponding ?, and identifies the Lie brackets and finally calculates the space generated. In the above four state variable case the final reachability distribution after four steps would be the following: ? ? ???? ?? ????????????????????????????????????????? ?????????????????????????????�???�???�???�? ???? If calculate the Lie brackets ?? ?? ?? ?? ??? ?? ?? and �?? ??? ?? ??� find that:
?? ?? ? ???????? ?? ?? ????? ?? ?? ????? ?? ?? ??? ???
????

26
?? ??? ?? ?? ???????? ?? ??? ?? ?????? ?? ??? ?? ?????? ?? ??? ?? ???? ???
????
Also:
?? ??? ?? ?? ???????? ?? ????? ?????? ?? ??? ?? ?????? ?? ??? ?? ???? ???
????
So doing the calculations to determine the distribution of ? accessibility. We get to rank this distribution is 2 for which the system is not accessible. RESULT The test was performed with Haldane kinetics, which is a kinetic involves only the substrate and observed that the rank ? accessibility matrix was equal to 2, for which reason it is not reachable, this test is performed with a series of kinetic than mentioned above. Regarding substrate kinetics Moser is located which is shown as follows: ? ?? ? ? ? ? ? ? ? ? ??? ? ? ? ??
Besides kinetics were used which involves both the substrate and the product produced, such as: ? ? ?? ? ? ? ? �??????? ?����� ? ?? ? ?? ? ? ? ? ? ? ? ? ??? ? ? ? ? ? ? ? ?? ? ? ??? ? ? ? ? ? ?? ? ? ? ? ??????????����� ? ?? ? ?? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ?? ? ? ?
? ? ?? ? ? ? ? �? ? ? ? ? ?����� ? ?? ? ?? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? ? ?? ? ?? ? ? ? ?? ? ? ? ? ? ? ? ? ? ? �??????? ?����� ? ?? ? ?? ? ? ? ? ? ? ? ? ??? ? ? ? ?? ? ? ?? ? ? ? ? ? ? ? ? ? ? ??????????����� ? ?? ? ?? ? ? ? ? ? ? ? ? ??? ? ? ? ?? ? ?? ? ? ??? ? ? ? ? ? ? ? ? �? ? ? ? ? ?����� ? ?? ? ?? ? ? ? ? ? ? ? ? ??? ? ? ? ?? ? ?? ? ? ? ??? ? ? ?
For each of the above kinetic analysis was done previously accessibility, finding both for ? ? and ? ? the rank of accessibility matrix (?) was 2 for each case, which tells us that no matter what studied the kinetics of the system will take inaccessible and also shows that the model is independent of the kinetics used.
DISCUSSION AND CONCLUSION It has been shown that no matter what type of kinetics we studied use when performing accessibility analysis type fed batch systems will be non-accessible. This allows us to handle different kinetics in different studies conducted in fed-batch bioreactors, knowing that this will not affect our results. One way in which the problem of accessibility may change, going from not-accessible is reachable through the number of control inputs are taken, put another way if increasing the control inputs, possibly in some cases adding more control input to our system, it may become reachable, otherwise you may need to add ? inputs control back to our reachable. Performing again our analysis but now with two control inputs as shown below [6]:
? ?? ? ? ? ??? ? ????? ? ?? ? ?? ?? ?
��? ? ?? ? ? ????? ? ? ?? ??? ? ? ?? ?? ???
??��
��? ? ?? ? ? ?????? ? ?? ?? ? ?? ?? ???
??����� If we make accessibility analysis of our system defined as shown above, solves the accessibility problem posed by Szederkényi et al. [5]. For ? ? two control inputs do not solve the problem of accessibility, since two control enter not complete the full rank of the ? distribution matrix for ? ? would have to have three control inputs, taking into account that added as an input to the product of the reaction. ACKNOWLEDGEMENTS Thank the Bioengineering Laboratory, for lending its facilities to perform this work, CONACYT, and Dr. Vrani Ibarra and Gabor Szederkényi. REFERENCES [1] Ward OP. Biotecnología de la Fermentación. Acriba. [España], 1991. [2] Schügerl K. Bioreaction Engineering. Vol. 2. John Wiley and Sons. [Great Britain], 1990. [3] Kuhlmann Ch, Bogle IDL, Chalabi ZS. Robust operation of fed batch fermenters. Bioprocess Engineering 1998; 19:53-59. [4] Isidori A. Nonlinear Control Systems. Springer: Berlin, 1995 [5] G. Szederkényi, M. Kovács, K.M. Hangos, Reachability of nonlinear fed-batch fermentation processes, International Journal of Robust and Nonlinear Control 12 (2002) 1109-1124. [6] V. Ibarra-Junqueraa, Jorgensen, J.J. Virgen-Ortíza,c, P. Escalante-Minakata, J.A. Osuna-Castrod, Following an optimal batch bioreactor operations model, Chemical Engineering and Processing 62 (2012) 114– 128

27
BIOGRAPHY
José Eduardo Silva Arellano was born in Colima, Mexico, on January 31, 1988. He graduated from the Faculty of Basic Sciences, University of Colima with a degree in Mathematics. Is currently studying the Master in Engineering at the same institution
Vrani Ibarra Junquera was born in México City, on March 12, 1976. Masters in Chemical Engineering UASLP. PhD in IPICYT, in San Luis Potosi in Applied Mathematics Division, specializing in Control and Dynamical Systems.
Gabor Szederkényi was born in Mór, Hungary, 21 April 1975, M.Sc . in Information Technology, University of Veszprém, Hungary, 1998. Ph.D. in Information Science, University of Veszprém, Hungary, 06 November 2002

28
Detección, Conteo y Extracción de Características de Objetos Circulares Mediante la Transformada de Hough
Luis E. Morán, Victor H. Castillo, Jorge M. Tadeo,
Alejandro Martinez
Resumen — Este articulo presenta un sistema para la detección y conteo de objetos circulares y semicirculares así como la extracción de características (área, radio, perímetro, etc.). El objetivo principal de este trabajo es el diseño e implementación de un sistema de inspección visual ap licado a la industria minera su uso en el control de calidad en la fabricación de pellets. Siendo una de las variables a controlar el tamaño del pellet. Para lo cual se ha empleado la transformada de Hough como principal herramienta en la detección de objetos circulares además de incorporar ciertas variaciones con el fin de incluir objetos semicirculares y sobre todo manejar el solapamiento de objetos. Temas claves—Detección de objetos, Conteo de Objetos, Solapamiento en Imágenes, Extracción de bibitem{libroLatex}características. Introducción L a detección de círculos y lineas son parte esencial del reconocimiento de formas en aplicaciones de visión artificial. En cuanto a la detección de círculos se refiere existen varios algoritmos dentro de la bibliografía de la visión artificial, tomando especial interés en la detección y reconocimiento de objetos con geometría circular ya que se tiene una gran aplicación a la inspección visual en la industria. Para la realización de este trabajo nos enfocaremos en el uso de la Transformada Circular de Hough (CHT) ya que es uno de los algoritmos mas conocidos y exactos que existen. Esta transformada trabaja estadísticamente y de tal manera que para cada punto que se evalúa para ver si es parte de una forma especifica, se aplica una operación dentro de cierto rango, con lo que se averiguan las posibles formas de las que puede ser parte el punto. Esto se realiza para todos los puntos en la imagen, al final por votación se determinan puntos de las formas en la imagen. Previo a la aplicación del TH, se aplica un operador para la detección de bordes como el Robert Cross, el filtro sobel o el filtro canny. Hough usa un array llamado acumulador para detectar la existencia de una forma especifica
Luis E. Morán labora en la Universidad de Colima, Av.
Universidad #333, (e-mail: [email protected]). Victor H. Castillo labora en la Universidad de Colima, Av.
Universidad #333 (e-mail: [email protected]). Jorge M. Tadeo, Alejandro Martinez estudian e en la Universidad
de Colima, Av. Universidad #333 (email: [email protected] y [email protected])
en la imagen. La dimensión del acumulador es igual al número de parámetros desconocidos del problema en la transformada de Hough. El resultado de la transformada de Hough se almacena en una matriz, en el caso de la transformada de Hough para círculos la matriz consta de 3 parámetros, dos de lo cuales representan el centro del circulo y un tercero para el radio del mismo. Como se puede ver la transformada transformada de Hough se desempeña en un espacio parametrico por lo que la ecuación que se utiliza para la votación, exclusivamente hablando del circulo es (x-a)2+(y-b)2=r2, , donde los parámetros a, b y r corresponden al centro del circulo y al radio del mismo. Objetivo del presente trabajo es implementar la Transformada de Hough para círculos, con el fin de localizar, contar y extraer características de objetos circulares y semicirculares en imágenes digitales, específicamente pellets de material ferroso, con el fin de automatizar este proceso en la industria minera. DESARROLLO A. Etapa de Adquisición y Preprocesa-miento Refiriéndonos a la cámara usada para este proyecto, se resolvió usar una cámara web convencional de 1.3 mega píxeles de la marca “Genius” con capacidad de capturar 30 fotogramas por segundo a una resolución de 640 x 480 píxeles, esto es suficiente para las capturas que se realizan, la resolución es suficiente como para identificar incluso objetos
solapados.
Fig 1. Cámara Web utilizada en el proyecto. Todo sistema de visión artificial, tiene una etapa de preprocesa-miento, en el cual se trata de eliminar el ruido contenido en las imagenes o de realzar características que nos permitan una mas eficiente segmentación en el caso de este proyecto, se tiene controlada la iluminación y el fondo ya que los pellets siempre tendrán como fondo la bandeja donde giran hasta formarse, aun si por la naturaleza del sensor de adquisición, se determino aplicar un filtraje gaussiano, con el fin de homogeneizar la imagen. G (x,y )=g (x,y)/min x,y (g (x,y )) ec. (2.1)

29
a)Imagen Original b)Imagen Filtrada Fig. 2.- Aplicación del filtro de Gauss con s =2. B. Transformada de Hough Su aplicación implica el uso de una formulación de parámetros específica al tipo de objeto que se desea detectar (rectas, círculos o elipses) en la imagen digital, en base a esto existe una transformada generalizada para objetos de forma arbitraria [3]. La TH consiste en el recorrido de todos los puntos fronteras del objeto a caracterizar y para cada uno de ellos esbozar los círculos que pasan por ese punto con los parámetros, radio y centros, acumulando un voto en el espacio de parámetros de tridimensional para los círculos que cumplan con la ecuación 2.2. En la Fig. 1a podemos observar algunos de los círculos de radio rn que pasan por un píxel perteneciente al conjunto de los puntos fronteras de la imagen, donde rn es menor que r. En la Figura 3, tenemos la matriz tridimensional de los parámetros del circulo. (x-a)2+(y-b)2=r2 ec. (2.2)
Fig. 3. Matriz tridimensional para la detección de círculos La dirección del gradiente ? G puede ser utilizada para reducir los cálculos en el espacio de parámetros de Hough [3] y de esta manera eficientar la detección, votando sólo para los valores de los parámetros que sean más consistentes con la orientación de los bordes de los círculos buscados en una imagen. Así, en lugar de seleccionar votos para todas las rectas que pasan por un punto determinado, se puede escoger votar solamente por aquella s cuya orientación f esté dentro de cierto rango
Ø - a =f = Ø +a, donde Ø es la dirección del gradiente, a dirección del gradiente siempre es perpendicular a la dirección tangente de una curva dada por f(x, y)=0.
Fig. 4.- Dirección del gradiente con respecto a la función. Por lo tanto el algoritmo queda planteado en base a las siguientes ecuaciones basadas en el gradiente.
1. Inicialización del arreglo de acumulación en el espacio de parámetros de Hough, La altura y el ancho del arreglo son los mismos que los de la imagen. 2. Para cualquier píxel que cumplan con las dos ecuaciones simultáneas, incrementar en uno todos los elementos del arreglo de acumulación. Para todo r tal que : 3. Cualquier elemento H ( x 0 , y 0 , r ) > Th representará un círculo de radio r y centro en (x0, y0) contenido en la imagen de bordes.
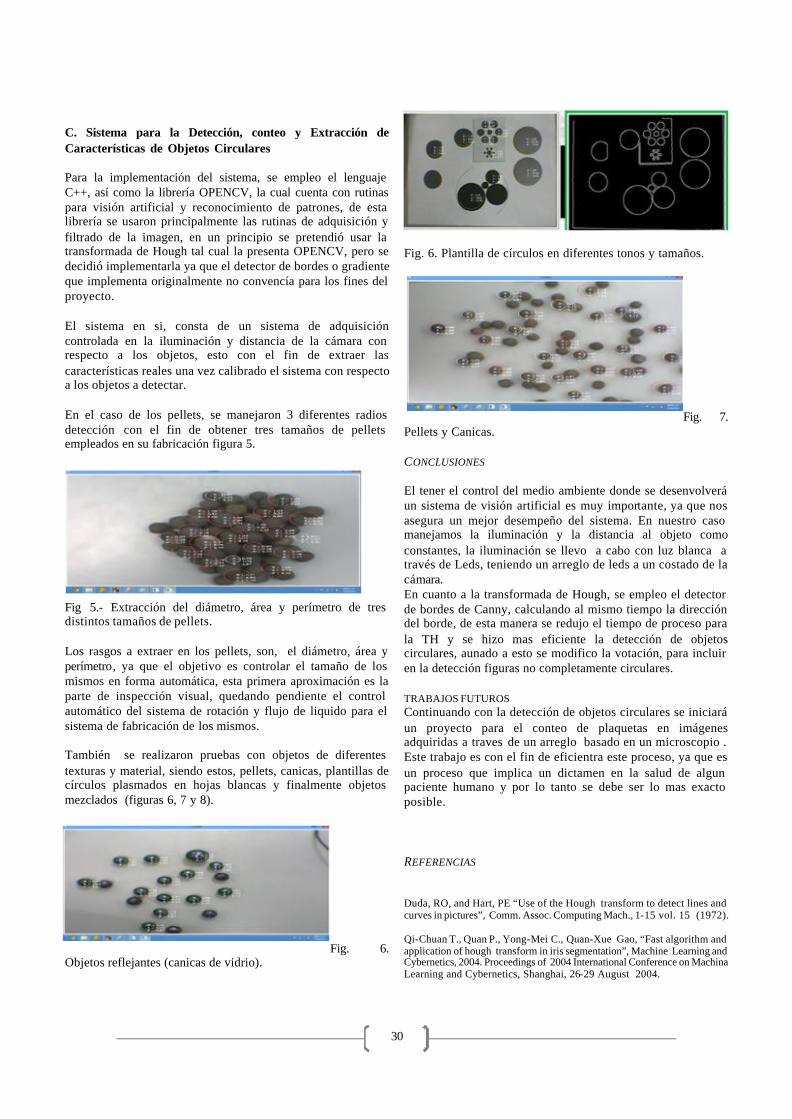
30
C. Sistema para la Detección, conteo y Extracción de Características de Objetos Circulares Para la implementación del sistema, se empleo el lenguaje C++, así como la librería OPENCV, la cual cuenta con rutinas para visión artificial y reconocimiento de patrones, de esta librería se usaron principalmente las rutinas de adquisición y filtrado de la imagen, en un principio se pretendió usar la transformada de Hough tal cual la presenta OPENCV, pero se decidió implementarla ya que el detector de bordes o gradiente que implementa originalmente no convencía para los fines del proyecto. El sistema en si, consta de un sistema de adquisición controlada en la iluminación y distancia de la cámara con respecto a los objetos, esto con el fin de extraer las características reales una vez calibrado el sistema con respecto a los objetos a detectar. En el caso de los pellets, se manejaron 3 diferentes radios detección con el fin de obtener tres tamaños de pellets empleados en su fabricación figura 5.
Fig 5.- Extracción del diámetro, área y perímetro de tres distintos tamaños de pellets. Los rasgos a extraer en los pellets, son, el diámetro, área y perímetro, ya que el objetivo es controlar el tamaño de los mismos en forma automática, esta primera aproximación es la parte de inspección visual, quedando pendiente el control automático del sistema de rotación y flujo de liquido para el sistema de fabricación de los mismos. También se realizaron pruebas con objetos de diferentes texturas y material, siendo estos, pellets, canicas, plantillas de círculos plasmados en hojas blancas y finalmente objetos mezclados (figuras 6, 7 y 8).
Fig. 6.
Objetos reflejantes (canicas de vidrio).
Fig. 6. Plantilla de círculos en diferentes tonos y tamaños.
Fig. 7.
Pellets y Canicas. CONCLUSIONES El tener el control del medio ambiente donde se desenvolverá un sistema de visión artificial es muy importante, ya que nos asegura un mejor desempeño del sistema. En nuestro caso manejamos la iluminación y la distancia al objeto como constantes, la iluminación se llevo a cabo con luz blanca a través de Leds, teniendo un arreglo de leds a un costado de la cámara. En cuanto a la transformada de Hough, se empleo el detector de bordes de Canny, calculando al mismo tiempo la dirección del borde, de esta manera se redujo el tiempo de proceso para la TH y se hizo mas eficiente la detección de objetos circulares, aunado a esto se modifico la votación, para incluir en la detección figuras no completamente circulares. TRABAJOS FUTUROS Continuando con la detección de objetos circulares se iniciará un proyecto para el conteo de plaquetas en imágenes adquiridas a traves de un arreglo basado en un microscopio . Este trabajo es con el fin de eficientra este proceso, ya que es un proceso que implica un dictamen en la salud de algun paciente humano y por lo tanto se debe ser lo mas exacto posible. REFERENCIAS Duda, RO, and Hart, PE “Use of the Hough transform to detect lines and curves in pictures”, Comm. Assoc. Computing Mach., 1-15 vol. 15 (1972). Qi-Chuan T., Quan P., Yong-Mei C., Quan-Xue Gao, “Fast algorithm and application of hough transform in iris segmentation”, Machine Learning and Cybernetics, 2004. Proceedings of 2004 International Conference on Machina Learning and Cybernetics, Shanghai, 26-29 August 2004.

31
D. H. Ballard, “Generalizing the Hough transform to detect arbitrary shapes”, Pattern Recognition, 111-122 vol 13(2) (1981). R.C. González y E.R. Woods, Tratamiento Digital de Imágenes, Segunda Edición, Prentice Hall, 2002. G. Pajares y J. M. de la Cruz, Visión por Computadora Imágenes Digitales y Aplicaciones , Editorial Alfa-Omega, 2002. Stockman, George; Shapiro, Linda G., Computer Vision, Prentice Hall Rizon M., Yaszid H. y otros (2005). Object de-tection using Circular Hough Transform. American journal of applied sciences. www.scipub.org/ fulltext/ajas/ajas2121606-1609.pdf [En línea].

32
Evaluación Energética de Electrodomésticos
Jorge Luis de Rueda1, Jaime Arroyo Ledesma2 y Tiberio
Venegas Trujillo2 Instituto Politécnico Nacional – Universidad de Colima
Resumen—En este artículo se presentan los principales resultados obtenidos al evaluar en laboratorio diversos electrodomésticos. Las mediciones fueron realizadas usando medidores de energía registradores en el tiempo, tarjeta de adquisición de datos LabVolt. Las tendencias de consumo en algunos electrodomésticos presentan un cambio característico al incluir sistemas de control de encendido y apagado, lo cual reduce significativamente el consumo de energía eléctrica. Los parámetros obtenidos son comparados con las Normas de Eficiencia Energética NOM -ENER. Temas claves—Eficiencia Energética, NOM-ENER, consumo de energía kWh, Electrodomésticos. Introducción En nuestra vida cotidiana utilizamos electrodomésticos los cuales nos ayudan a realizar las tareas del hogar de una manera rápida y eficiente. Todos los electrodomésticos tienen un consumo energético, el cual se ve reflejado en una cantidad monetaria en la facturación de servicio de energía eléctrica, además de tener cierto impacto en el ambiente. Cada electrodoméstico tiene un consumo energético, el cual puede aumentar o disminuir según los factores bajo los que se opere, en algunas ocasiones los electrodomésticos son utilizados de una manera inadecuada o en condiciones inadecuadas, lo que hace que aumente su consumo energético en algunos casos éstas situaciones se dan a falta de conocimiento del usuario hacia la operación del aparato ya sea por la falta de información proporcionada por el fabricante en el producto, o por la falta de difusión de consejos que permiten dar un mejor uso a los aparatos para obtener un menor consumo energético. Existen publicaciones que nos dan a conocer tips para mejorar el uso que damos a los electrodomésticos y de ésta manera aumentar la eficiencia de los aparatos tanto en sus funciones principales como energéticamente hablando, en su mayoría éstos textos se encuentran carentes de información, son erróneos o están muy generalizados, y no permiten al lector tener una visión particular acerca del comportamiento de cada uno de los aparatos electrodomésticos y como debe ser su uso. Mediante ésta evaluación energética a determinados electrodomésticos se pretende observar las características de uso de distintos aparatos y su comportamiento en diferentes formas de operación mediante pruebas determinadas, de ésta manera observar el comportamiento de su consumo energético en las distintas maneras que sea operado, y mediante los datos arrojados en las pruebas determinar formas de uso óptimas en cada aparato, buscando enriquecer con esto las publicaciones ya mencionadas.
LA ENERGÍA ELÉCTRICA EN MÉXICO En México la energía eléctrica principalmente es suministrada por la Compañía Federal de Electricidad (CFE), la cual se encarga de generar y transmitir la energía eléctrica a los diferentes sectores que la demandan, siendo el principal consumidor de la misma el sector industrial con un consumo de107,721 GWh. México se divide en 5 regiones basadas en la generación y suministro de energía eléctrica, las cuales son Noreste, Noroeste Centro Occidente, Centro y Sur sureste, en las cuales cada una engloba a varios estados de la república [1]. La Comisión Federal de Electricidad tiene diferentes taifas para el cobro de la energía eléctrica, las cuales son divididas por el sector que las utiliza, su consumo y la región en que se encuentre. Sector eléctrico El sector eléctrico en México es dirigido por la Comisión Federal de Electricidad, la que se encarga de generar la energía eléctrica en sus diversas plantas generadoras colocadas de manera estratégica en el país, para su posterior distribución hacia los sectores que la demandan industrial, residencial comercial, servicios y bombeo agrícola [2]. El mercado de energía eléctrica se divide principalmente en cinco regiones distribuido de la siguiente forma: Figura 1. Regiones del mercado de energía en México El sector eléctrico se basa en gran medida en las fuentes térmicas es decir termoeléctricas, seguido por las hidroeléctricas, además de contar con una nucleoeléctrica en Veracruz. En cada sector la comisión federal de electricidad tiene tarifas para el cobro de la energía eléctrica, que pueden ser domésticas, comerciales, para el servicio público, agrícolas, acuícolas o industriales, que tienen un costo definido en las tablas tarifarias de CFE las cuales en algunos casos se encuentran subsidiadas para disminuir el consumo del usuario. Tarifas eléctricas domésticas En México la compañía encargada de regular el suministro y cobro de la energía eléctrica es la comisión federal de electricidad, y ésta considera tarifa doméstica a la que se aplica en el consumo exclusivos con fines domésticos es decir en los hogares que tengan un fin de consumo de éste tipo, y ésta tarifa se clasifica con el número 1, y según la región de la república es dividida a su vez en las siguientes tarifas 1, 1A, 1B, 1C,1D,1F, las cuales cambian en el sentido de costo y el subsidio que se da a la misma, lo cual es determinado

33
principalmente por la temperatura de la zona, es decir a mayor temperatura menor costo y mayor subsidio y viceversa. La tarifas domésticas también puedan ser de alto consumo y son llamadas tarifas DAC (De alto consumo), y se aplican en cuestión de zonas de misma forma que las simplemente domésticas. Consumo de energía eléctrica en el país En México el suministro de energía eléctrica es entregado por dos componentes, uno son las ventas internas de energía eléctrica, en donde se incluye a la energía entregada a los usuarios a partir de los recursos de generación del servicio público, esto engloba la energía proporcionada por los productores de independientes energía, y el otro es el autoabastecimiento que abarca a los permisionarios de autoabastecimiento, cogeneración, pequeña producción e importación de electricidad. En 2009 se registró que en México se tiene un consumo de energía eléctrica de 206,263 GWh, que se desagrega principalmente en 5 sectores, industrial, residencial comercial, servicios y bombeo agrícola. En orden de magnitud en el consumo de energía eléctrica, el sector industrial es el primero, ya que debido a su gran cantidad de sistemas y procesos productivos que hacen uso de la energía eléctrica. En 2009 éste sector consumió un 53.6 % de las ventas internas con 107,721 GWh, por otra parte el sector residencial se concentra 27% de las ventas siendo el segundo consumidor de energía eléctrica, seguido por el sector comercial con el 7.4 % , posteriormente el de bombeo agrícola con 5.1 % y finalmente el sector de servicios con 4.3%.[3], lo anterior se observa en la figura 2. Figura 2. Ventas de energía por sector. El consumo de energía eléctrica según las regiones en las que se divide el país es observable en la figura 3:
Figura 3. Regiones energéticas en México.
III NORMAS DE EFICIENCIA ENERGÉTICA Existen normas encargadas de regular la eficiencia energética de diferentes maquinas aparatos eléctricos, las cuales cuentan con especificaciones acerca del consumo energético que éstos deben demandar, en México existen una serie de Normas Oficiales Mexicanas que cuentan con ésta especificaciones para diferentes máquinas y aparatos que en algunos casos son electrodomésticos, a continuación se encuentra un listado de Normas Oficiales Mexicanas vigentes encargadas de la eficiencia energética [4]: NOM-001-ENER-2000 Eficiencia energética de bombas verticales tipo turbina con motor externo eléctrico vertical. Límites y método de prueba. NOM-003-ENER-2011 Eficiencia térmica de calentadores de agua para uso doméstico y comercial. Límites, método de prueba y etiquetado. NOM-004-ENER-2008 Eficiencia energética de bombas y conjunto motor-bomba, para bombeo de agua limpia, en potencias de 0,187 kW a 0,746 kW. Límites, métodos de prueba y etiquetado. NOM-005-ENER-2010 Eficiencia energética de lavadoras de ropa electrodomésticas. Límites, método de prueba y etiquetado. NOM-006-ENER-1995 Eficiencia energética electromecánica en sistemas de bombeo para pozo profundo en operación.- Límites y método de prueba. NOM-007-ENER-2004 Eficiencia energética en sistemas de alumbrado en edificios no residenciales. NOM-008-ENER-2001 Eficiencia energética en edificaciones, envolvente de edificios no residenciales. NOM-009-ENER-1995 Eficiencia energética en aislamientos térmicos industriales. NOM-010-ENER-2004 Eficiencia energética del conjunto motor bomba sumergible tipo pozo profundo. Límites y método de prueba. NOM-011-ENER-2006 Eficiencia energética en acondicionadores de aire tipo central, paquete o dividido. Límites, métodos de prueba y etiquetado. NOM-013-ENER-2004 Eficiencia energética para sistemas de alumbrado en vialidades y áreas exteriores públicas. NOM-014-ENER-2004 Eficiencia energética de motores de corriente alterna, monofásicos, de inducción, tipo jaula de ardilla, enfriados con aire, en potencia nominal de 0,180 a 1,500 kW. Límites, método de prueba y marcado.

34
NOM-015-ENER-2002 Eficiencia energética de refrigeradores y congeladores electrodomésticos. Límites, métodos de prueba y etiquetado. NOM-016-ENER-2010 Eficiencia energética de motores de corriente alterna, trifásicos, de inducción, tipo jaula de ardilla, en potencia nominal de 0,746 a 373 kW. Límites, método de prueba y marcado. NOM-017-ENER/SCFI-2008 Eficiencia energética y requisitos de seguridad de lámparas fluorescentes compactas autobalastradas. Límites y métodos de prueba. NOM-018-ENER-1997 Aislantes térmicos para edificaciones. Características, límites y métodos de prueba. NOM-019-ENER-2009 Eficiencia térmica y eléctrica de máquinas tortilladoras mecanizadas. Límites, método de prueba y marcado. NOM-020-ENER-2011 Eficiencia energética en edificaciones, Envolvente de edificios para uso habitacional. NOM-021-ENER/SCFI-2008 Eficiencia energética, requisitos de seguridad al usuario en acondicionadores de aire tipo cuarto. Límites, métodos de prueba y etiquetado. NOM-022-ENER/SCFI-2008 Eficiencia energética y requisitos de seguridad al usuario para aparatos de refrigeración comercial autocontenidos. Límites, métodos de prueba y etiquetado. NOM-023-ENER-2010 Eficiencia energética en acondicionadores de aire tipo dividido, descarga libre y sin conductos de aire. Límites, método de prueba y etiquetado NOM-028-ENER-2010 Eficiencia energética de lámparas para uso general. Límites y métodos de prueba. Condiciones de operación de los electrodomésticos El diseño de cada uno de los electrodomésticos existentes permite operarlos bajo ciertas condiciones de uso para tener un resultado óptimo en diferentes parámetros, los cuales van desde las funciones principales para lo que fueron diseñados, la durabilidad y el consumo energético, entre otros. Ya que los electrodomésticos son aparatos de uso común, éstos se encuentran dentro de la gran mayoría de hogares ubicados en diferentes partes del mundo, y son operados por en cada caso por diferentes usuarios con diferentes hábitos, por estas razones cada uno de los aparatos electrodomésticos son sometidos a diversas condiciones de operación, y aunque éstas sean muy similares, su diferencia pueden hacer variar de manera significativa los resultados obtenidos de tales aparatos [5]. Algunas de estas condiciones son las siguientes: El voltaje de operación, el voltaje de operación se estandariza según el país o zona de éste en que nos encontremos, pero en algunas ocasiones existen caídas de tensión o variaciones de voltaje, que aunque en su mayoría son mínimas pueden
provocar ligeros cambios en el funcionamiento de los aparatos. Temperatura, la temperatura es un factor importante, ya que el cambio de la misma puede provocar que ciertos aparatos disminuyan o aumenten su potencia durante su operación, esto se refleja en su mayoría en electrodomésticos como refrigeradores o aires acondicionados. Hábitos de uso, los hábitos de uso son una de las condiciones más significativas dentro de los resultados de un electrodoméstico, principalmente en su durabilidad y su consumo energético. Electrodomésticos Existe una gran cantidad de electrodomésticos, en una casa habitación normal, los comunes son los siguientes: Cafetera Computadora de escritorio DVD Horno de microondas Lámparas incandescentes Lámparas fluorescentes Laptop Lavadora de ropa Licuadora Plancha Refrigerador Reloj Despertador Televisión Ventilador Efecto de la variación del voltaje El voltaje juega un papel muy importante dentro de algunos parámetros eléctricos como la corriente, la potencia, la demanda energética, el factor de potencia, entre otros, y sus variaciones alteran de manera directa a los parámetros mencionados. En el caso de los electrodomésticos el variar el voltaje para su operación puede provocar algunos cambios dentro de la misma, cambios que varían según el tipo de electrodoméstico, características y la marca del que éste sea [6]. Para observar éstos cambios se realizó una prueba la cual consistía en variar el voltaje de operación de un electrodoméstico desde el rango mayor de voltaje operado en una casa habitación en condiciones normales (120-127 V) hasta un rango mínimo de operación de los electrodomésticos tomado al azar (80V), y mediante éstos cambios se observó el cambio de ciertos parámetros eléctricos de potencia demandada(w), la energía demandada (kWh), el factor de potencia, la potencia reactiva, el desplazamiento entre corriente y voltaje, la impedancia, la distorsión de onda y la eficiencia de las funciones principales del aparato, entre otras. IV DETERMINACIÓN DE CONSUMOS DE ENERGÍA ELÉCTRICA EN ELECTRODOMÉSTICOS Todos los electrodomésticos tienen un consumo energético, que como ya se mencionó éste puede variar según las condiciones de operación a las que sea sometido, cada uno de los aparatos electrodomésticos por normatividad debe contener en sus datos de placa el consumo de energía que éste demanda, en algunas ocasiones como ya se vio anteriormente

35
los datos de placa proveen información errónea del producto. El consumo de energía eléctrica se determina sabiendo la potencia que demanda el electrodoméstico en un rango de tiempo, la medida normativa para la medición de consumo energético es el kilowatt-hora o kWh, y es medido por la compañía suministradora con un artefacto llamado watthorimetro, y en algunos otros casos existen otros aparatos que nos ayudan a medir éste parámetro. Durante el estudio de eficiencia energética en electrodomésticos se utilizaron principalmente los siguientes aparatos de medición: Analizador de calidad de energía marca Powerpad modelo 3945-B mostrado en la figura 4, durante el estudio nos permitió observar las tendencias en los parámetros de voltaje, corriente y potencia en ondas en tiempo real y a color, las cuales se acumulaban para proporcionarnos una gráfica al final de la prueba, a su vez nos permitía observar parámetros numéricos como voltaje, corriente, potencia real, frecuencia, potencia aparente y armónicos, cada uno de éstos parámetros podían ser guardados en una tabla en parámetros de tiempo determinados mínimos de un segundo, lo que nos fue muy útil para observar el comportamiento de los aparatos conectados en todo momento. Figura 4. Equipo de medición POWERPAD AEMC 3945B. Éste aparato nos permitió observar el consumo real de cada uno de los aparatos en un intervalo de tiempo determinado Voltímetro y Amperímetro conectados a una interfaz la cual estaba conectada a su vez hacia una PC manipulada por un software llamado Lab-Volt, que nos permitía tener mediciones en tiempo real de voltaje, corriente, potencia real, potencia aparente, frecuencia, impedancia, factor de potencia y armónicos, además de permitirnos observar la calidad de las ondas mediante un osciloscopio integrado en el software, además de ello daba la posibilidad de observar el comportamiento de los fasores de la carga colocada, por otra parte también nos era posible observar una gráfica del comportamiento de armónicos de la misma. Este software en ayuda de la interfaz y los aparatos de medición nos ayudó a observar el comportamiento de los diferentes parámetros eléctricos al ser sometidos a una disminución de voltaje gradual. Dicha tarjeta se muestra en la figura 5.
Figura 5. Tarjeta de Adquisición de datos LabVolt. Kill a watt, éste aparato nos permitió observar el consumo energético de determinados aparatos electrodomésticos en un rango de tiempo ya que media parámetros eléctricos como voltaje, corriente, potencia y consumo, además de calcular el costo del consumo al aplicarle una tarifa. Se muestra en la figura 6. Figura 6. Medidor de energía monofásico Kill a Watt Descripción de las pruebas En muchos de los casos los aparatos tienen variaciones en el consumo de energía por intervalos de tiempo como parte de su mecanismo de funcionamiento, y en éstos casos el consumo colocado en sus datos de placa solo llega a ser real en determinados momentos, para realizar un estimado de consumo real en algunos aparatos se realizaron algunas pruebas que nos ayuden determinar el consumo energético real de los electrodomésticos, éstas pruebas se realizaron con el analizador de calidad de energía, y éstas consistían en observar la tendencia de los aparatos en los parámetros de voltaje, corriente y potencia, en un tiempo determinado, los resultados obtenidos en tales parámetros se indican en la figura 7. En éstos resultados podemos observar el comportamiento de los aparatos sometidos a la prueba y mediante esto determinar su consumo energético, en el intervalo de tiempo mencionado.
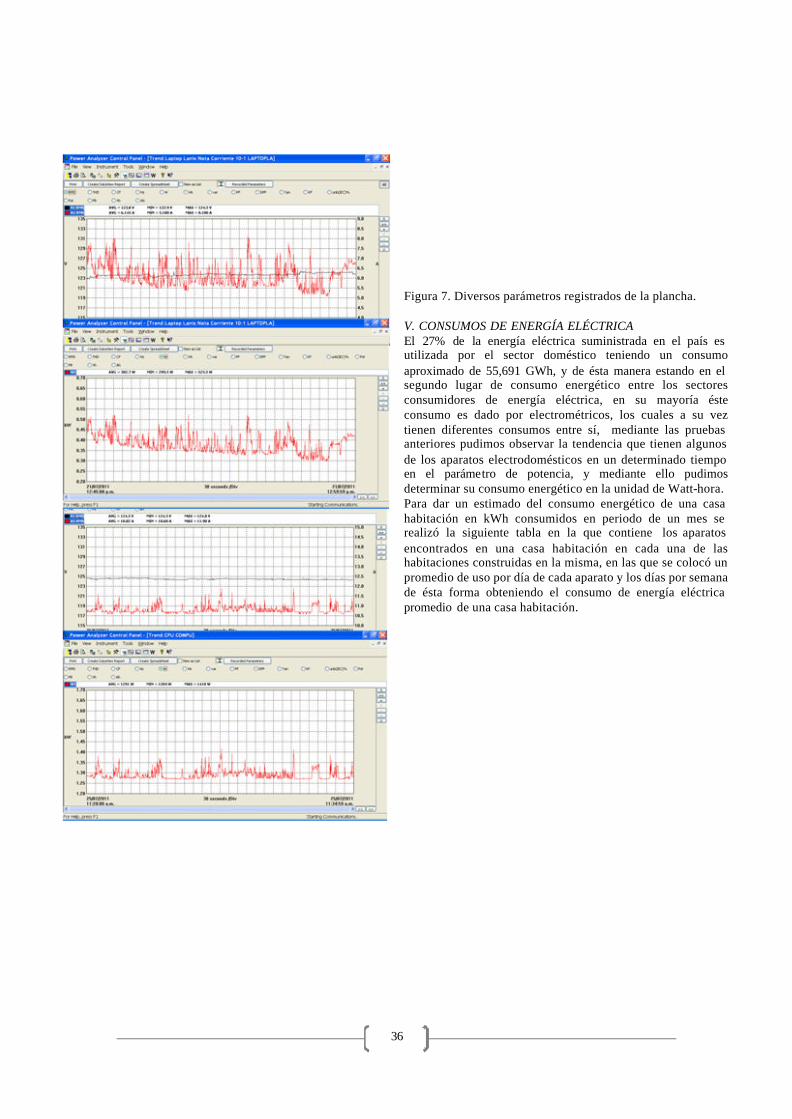
36
Figura 7. Diversos parámetros registrados de la plancha. V. CONSUMOS DE ENERGÍA ELÉCTRICA El 27% de la energía eléctrica suministrada en el país es utilizada por el sector doméstico teniendo un consumo aproximado de 55,691 GWh, y de ésta manera estando en el segundo lugar de consumo energético entre los sectores consumidores de energía eléctrica, en su mayoría éste consumo es dado por electrométricos, los cuales a su vez tienen diferentes consumos entre sí, mediante las pruebas anteriores pudimos observar la tendencia que tienen algunos de los aparatos electrodomésticos en un determinado tiempo en el parámetro de potencia, y mediante ello pudimos determinar su consumo energético en la unidad de Watt-hora. Para dar un estimado del consumo energético de una casa habitación en kWh consumidos en periodo de un mes se realizó la siguiente tabla en la que contiene los aparatos encontrados en una casa habitación en cada una de las habitaciones construidas en la misma, en las que se colocó un promedio de uso por día de cada aparato y los días por semana de ésta forma obteniendo el consumo de energía eléctrica promedio de una casa habitación.
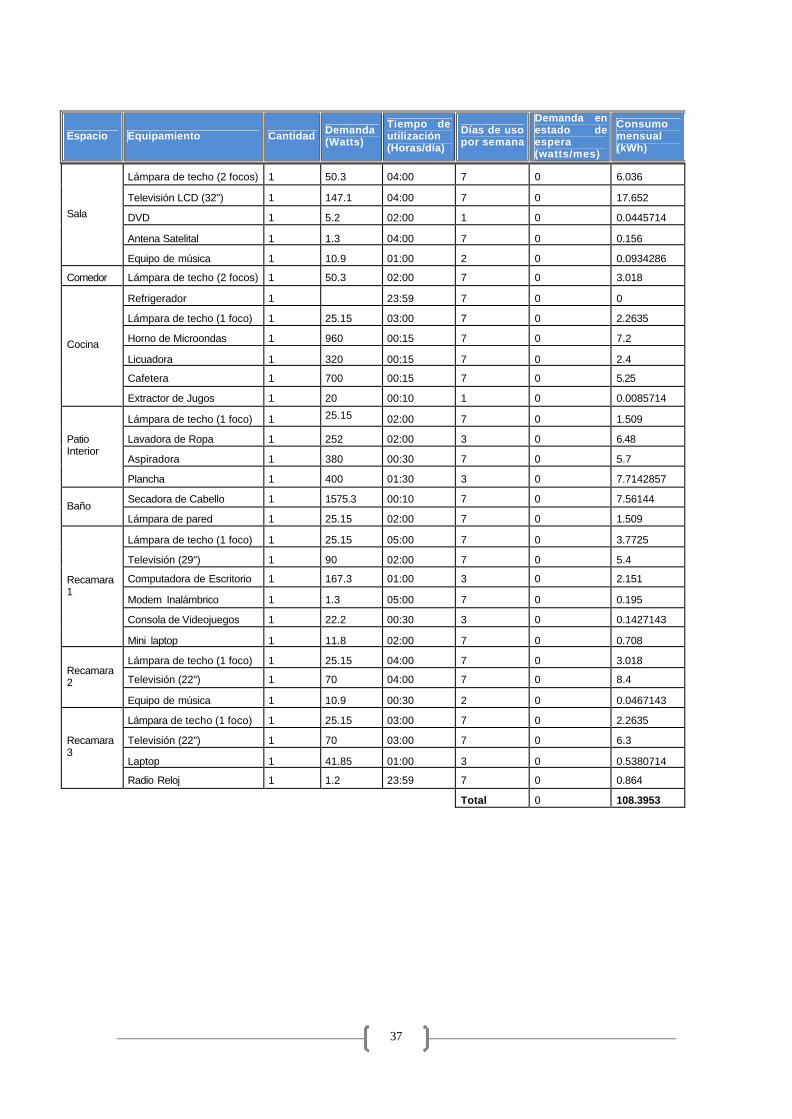
37
Espacio Equipamiento Cantidad Demanda (Watts)
Tiempo de utilización (Horas/día)
Días de uso por semana
Demanda en estado de espera (watts/mes)
Consumo mensual (kWh)
Sala
Lámpara de techo (2 focos) 1 50.3 04:00 7 0 6.036
Televisión LCD (32") 1 147.1 04:00 7 0 17.652
DVD 1 5.2 02:00 1 0 0.0445714
Antena Satelital 1 1.3 04:00 7 0 0.156
Equipo de música 1 10.9 01:00 2 0 0.0934286
Comedor Lámpara de techo (2 focos) 1 50.3 02:00 7 0 3.018
Cocina
Refrigerador 1 23:59 7 0 0
Lámpara de techo (1 foco) 1 25.15 03:00 7 0 2.2635
Horno de Microondas 1 960 00:15 7 0 7.2
Licuadora 1 320 00:15 7 0 2.4
Cafetera 1 700 00:15 7 0 5.25
Extractor de Jugos 1 20 00:10 1 0 0.0085714
Patio Interior
Lámpara de techo (1 foco) 1 25.15 02:00 7 0 1.509
Lavadora de Ropa 1 252 02:00 3 0 6.48
Aspiradora 1 380 00:30 7 0 5.7
Plancha 1 400 01:30 3 0 7.7142857
Baño Secadora de Cabello 1 1575.3 00:10 7 0 7.56144
Lámpara de pared 1 25.15 02:00 7 0 1.509
Recamara 1
Lámpara de techo (1 foco) 1 25.15 05:00 7 0 3.7725
Televisión (29") 1 90 02:00 7 0 5.4
Computadora de Escritorio 1 167.3 01:00 3 0 2.151
Modem Inalámbrico 1 1.3 05:00 7 0 0.195
Consola de Videojuegos 1 22.2 00:30 3 0 0.1427143
Mini laptop 1 11.8 02:00 7 0 0.708
Recamara 2
Lámpara de techo (1 foco) 1 25.15 04:00 7 0 3.018
Televisión (22") 1 70 04:00 7 0 8.4
Equipo de música 1 10.9 00:30 2 0 0.0467143
Recamara 3
Lámpara de techo (1 foco) 1 25.15 03:00 7 0 2.2635
Televisión (22") 1 70 03:00 7 0 6.3
Laptop 1 41.85 01:00 3 0 0.5380714
Radio Reloj 1 1.2 23:59 7 0 0.864
Total 0 108.3953

38
VI. CONCLUSIONES El consumo de energía eléctrica en el sector doméstico ha aumentado de manera sustancial en los últimos años, lo cual se ve reflejado de manera negativa tanto en los bolsillos de los consumidores como en el medio ambiente. En parte éste consumo ha aumentado en parte por el aume nto de habitantes que se tiene en nuestro país, pero por otra parte también se ha dado gracias al desperdicio de la energía eléctrica de aparatos electrodomésticos ineficientes ya sea por las condiciones en las que éste se encuentra operando o por los malos hábitos que tiene el usuario al utilizarlo. Existen muchos factores que pueden disminuir la eficiencia energética de un aparato electrodoméstico como la temperatura, las variaciones de voltaje, pero entre los más significativos se encuentra el propio ma nejo que da el usuario, ya que éste en algunas ocasiones da uso inadecuado al aparato en algunas ocasiones por sus malos hábitos y en otros por ignorancia hacia el manejo del aparato. En la mayoría de aparatos electrométricos los fabricantes proporcionan información escasa en su placa de datos acerca de las condiciones de operación en cuestión eléctrica del electrodoméstico, además se sus consumo en las condiciones en que se pueda encontrar, ésta falta de información no permite al usuario tener una visión clara acerca de las condiciones eléctricas en las que se pueda operar el electrodoméstico y acerca del consumo que éste conlleva. La caída de tensión en los aparatos puramente resistivos o inductivos disminuye su potencia, con esto disminuyendo la eficiencia dentro de su función principal, pero en los aparatos electrónicos aumenta la potencia demandada, lo que provoca un aumento de consumo energético, pero no disminuye de una manera muy notable la eficiencia en sus funciones principales. El aumento en la cantidad de devanados de un motor y disminuimos su voltaje nos dará cierta velocidad, misma velocidad que nos daría otro motor a un voltaje de operación normal pero con menos devanados, pero el primero tendrá un menor consumo energético que el segundo, es decir para aumentar la eficiencia energética de un motor se puede aumentar su cantidad de devanados a un voltaje reducido. Recomendaciones: Utiliza lámparas fluorescentes compactas en vez de lámparas incandescentes ya que éstas consumen 4 veces más energía eléctrica y desperdician el 80% de ésta en emisión de calor innecesario. Pinta el interior de tu casa de colores que reflejen la luz, de ésta manera no será necesario tener una gran fuente luminosa, lo que reduce tu consumo energético. Para el funcionamiento óptimo de un aparato electrodoméstico es necesario operarlo dentro del voltaje que el fabricante recomiende. Revisa tu instalación eléctrica intentando evitar las caídas de tensión, fugas de energía y los falsos contactos.
No mantengas las puertas o ventanas abiertas mientras uses el aire acondicionado ya que esto aumentara el consumo de energía y disminuirá la durabilidad de tu aparato. Busca que tu refrigerador se encuentre situado lejos del calor ya que el calor provocará que el refrigerador gaste mayor energía intentando enfriar. Coloca la perilla del termostato de tu refrigerador de acuerdo a la temperatura de la zona en que te encuentres. Plancha primero la ropa que requiera mayor temperatura y al final la que requiera una menor temperatura. Apaga los aparatos que no se encuentren en uso. Carga al máximo tu lavadora en ciclo de lavado, ya que el consumo energético será el mismo en cada ciclo. BIBLIOGRAFÍA [1] (2013) Ventas internas de energía eléctrica, disponible en http://www.sener.gob.mx/res/PE_y_DT/ee/Ventas_Internas_de_Energia_Electrica.pdf [2](2013) Conoce tu tarifa, disponible en http://www.cfe.gob.mx/casa/ConocerTarifa/Paginas/Conocetutarifa.aspx [3] (2012) Prospectiva del sector eléctrico en México, disponible en http://www.cfe.gob.mx/negocio/conocetarifa/Paginas/Tarifas.aspx [4](2013) Normas de Eficiencia Energética, disponible en http://www.sener.gob.mx/ [5](2012) revista del consumidor, disponible en http://www.profeco.gob.mx/revista/revista.asp [6] (2013) Find the most efficient products, disponible en http://www.energystar.gov/index.cfm?c=most_efficient.me_index

39
Diseño e implementación del CPP EC-FIME
L. A. Villaseñor, J. H. Adame, E. E. Vázquez, R. A.
Félix, J. M. Garibay, A. M. Ochoa
Resumen— En este trabajo se presenta el diseño e implementación de un Centro de Prueba de Prototipos (CPP), el cual es un espacio físico en el que se habilitará un Sistema Fotovoltaico Asilado e Interconectado a red (SFVA/I), el cual servirá para realizar el monitoreo y desempeño de los prototipos desarrollados de convertidores e inversores por los profesores participantes bajo condiciones de operación reales, lo anterior para dar validez a la etapa de simulación y pruebas bajo ambiente controlado en laboratorios. Se muestra el diseño y acciones realizadas para optimizar el funcionamiento del SFVA/I, por ultimo se muestran imágenes de los equipos instalados en el CPP. Temas claves— CPP, Sistemas Fotovoltaicos, Convertidor cd-cd, Inversores. Introducción En el transcurso de las últimas dos décadas la creciente contaminación producida por la quema de combustibles fósiles para la generación de energía eléctrica, entre otras, ha originado la búsqueda de alternativas para su sustitución, destacando las energías renovables como una posibilidad viable para generar energía eléctrica con impacto casi nulo al medioambiente enfocado tanto a zonas urbanas como a zonas rurales. En México se han implementado sistemas híbridos, fotovoltaicos y eólicos, de pequeña capacidad instalada cuyo propósito ha sido obtener la información necesaria para mostrar la viabilidad de estos sistemas en zonas aisladas de la red eléctrica. Los sistemas más representativos se han instalado en los estados de Hidalgo, Zacatecas y Quintana Roo, siendo los sistemas instalados en éste último estado los que más han sido estudiados y reportados en diversos foros. De las experiencias que han arrojado estos sistemas se pueden destacar tres áreas de oportunidad; la falta de personal capacitado en la operación y mantenimiento del sistema, la falta de un plan de crecimiento en las comunidades y los sistemas periféricos instalados, tales como convertidores e inversores. Este trabajo se enfoca en el desarrollo de dispositivos periféricos, desde el diseño pasando por pruebas hasta la construcción de un prototipo de convertidor CD/CD [1] e inversor [2], que contemplen las siguientes características: que sean de fácil operación, bajo consumo y costo reducido.
L. A. Villaseñor, J. H. Adame, son estudiantes de la FIME de la Universidad de Colima, ubicada en Coquimatlán, Colima (e-mail: [email protected], [email protected]).
E. E. Vázquez, R. A. Félix, J. M. Garibay, A. M. Ochoa, laboran en la FIME de la Universidad de Colima Campus Coquimatlán, Colima (email: [email protected], [email protected], [email protected], [email protected]).
Una vez probado el prototipo bajo condiciones controladas, y haber obtenido un desempeño óptimo del mismo, se esta en condiciones de probar el prototipo bajo condiciones de operación reales y críticas. Dichas condiciones las proporcionan los Centros de Pruebas de Prototipos (CPP) [3], los cuales son instalaciones tales como aulas o laboratorios dentro de las IES de adscripción de los investigadores participantes [4], cuya principal característica radica en el hecho de que se encuentran alimentadas por un SFVA y las cargas a alimentar, como las lámparas y equipo de cómputo, son de CD. Dentro de este punto se han desarrollado dos CPP, el primero en la FIME de la U. de Colima en el cual se probó la primera versión del prototipo del convertidor y del cual se obtuvieron las áreas de oportunidad que derivaron en la propuesta de diseño para la segunda versión del convertidor. A su vez se desarrolló el segundo CPP el cual fue implementado en el PGIIE del I. T. de Morelia, siendo los resultados obtenidos óptimos en cuanto al desempeño y funcionalidad del prototipo desarrollado. De esta forma se proporcionó certidumbre a la operación del sistema en su conjunto, para de esta manera caracterizarlo y estar en posibilidades de realizar la última etapa que consiste en desarrollar un sistema híbrido de generación de energía eléctrica, fotovoltaico y eólico. PARTE TÉCNICA DEL ARTÍCULO El espacio empleado para la implementación del tercer CPP fue el Edificio C de Aulas de la FIME, ubicado en el Campus Coquimatlán. A. Las características generales se enlistan a continuación: Es un edificio compuesto por 5 aulas de impartición de clases cuenta por aula con el siguiente equipamiento: Sistema de iluminación, que consta de 16 lámparas T8 de 32W. Sistema multimedia con cañón de video. Cuenta con 12 tomacorriente. Por último cuenta con 2 ventiladores industriales de techo. La carga instalada por aula es de 2.8kW, siendo un total de 14kW en el Edificio C. El consumo diario del Edificio C considerando 8 horas de uso es de 112kWh. Tomando como referencia la carga instalada en el edificio se decidió optimizar los sistemas instalados de manera tal que se redujera la carga y se ganara en la eficiencia de los sistemas. El primer sistema que se optimizo fue el de iluminación, realizándose un estudio de calidad de iluminación en las aulas. Dicho estudio arrojo los siguientes resultados: Los sistemas actuales no alcanzan a cubrir la norma en cuanto a la cantidad de lux necesarios para llevar las actividades de manera funcional dentro del aula al ser el promedio inferior a 300 lux. De igual manera la distribución actual de las luminarias no es la más adecuada teniendo zonas oscuras dentro del plano de trabajo. Las acciones realizadas para mejorar el sistema de iluminación se adoptaron después de simular el sistema de iluminación en

40
Dialux y obtener los perfiles que cumplieron tanto el requerimiento de iluminación como la distribución uniforme de la misma. Los resultados se enlistan a continuación: El sistema propuesto arrojo la utilización de 8 lámparas T5 de 50/28 W. Actualmente se ha instalado un sistema de lámparas T5 de 50W obteniéndose una calidad de iluminación por encima de lo requerido, faltando hacer la prueba con lámparas T5 de 28W para ver si es suficiente la iluminación que se obtenga. Se mejoró la distribución de iluminación dentro del área de trabajo, configurándose un plano de trabajo homogéneo en el aula. La capacidad instalada se redujo a 400 W. En cuanto al sistema multimedia y de ventilación no se pudo reducir significativamente la capacidad instalada, quedando 150W del cañón y 200W por ambos ventiladores. En cuanto a las tomas de corriente del aula, se dispuso que fueran retiradas del aula debido a que la Facultad cuenta con los Centros de Computo suficientes para la atención de los alumnos y por lo tanto no es indispensable que las computadoras portátiles permanezcan habilitadas en horario de clase. Únicamente se dejaran habilitados 2 tomacorriente para la computadora portátil de profesor y la del cañón multimedia. Con lo anterior solo quedan considerados 300W por este concepto. En la Tabla 1 se muestra un resumen de las cargas instaladas y la optimización que se realizó de las mismas. De la Tabla 1 se obtiene que la nueva capacidad instalada es de 1050W por aula y la capacidad instalada del Edificio C es de 5250W. El consumo del Edificio C por 8 horas de uso es de 42kWh. Restando todavía realizar la prueba con lámparas T5 de menor capacidad. TABLA 1. RESUMEN DE LAS CARGAS INSTALADAS EN UN AULA DEL EDIFICIO C.
Sistema Instalado
Cantidad Actual
Capacidad Instalada anterior
Capacidad Instalada optimizada
Sistema de iluminación
8 T5 50W + Balastro 560W 400W
Cañón Multimedia
1 150W 150W
Ventiladores 2 200W 200W Tomacorriente 2 1800W 300W
B. Sistema Fotovoltaico Aislado/Interconectado (SFVA/I) Para satisfacer las necesidades de energía del CPP EC-FIME se instaló un SFVA/I de 7.2 kW de capacidad y un banco de baterías con una capacidad de reserva de 5 días de autonomía. Dicho sistema se resume en la Tabla 2. TABLA 2.
SFVA/I IMPLEMENTADO EN EL CPP EC-FIME.
Descripción Cantidad Capacidad Instalada
PSF 235W @ 36V 32 7.2kW en 2 fases
B.C.P. 190Ah @ 12V
48 6840Ah en 2 bancos
Inversores y Controladores
2 Inversores 3.6kW 2 Controladores 80A
3.6kW por fase
El SFVA/I instalado en CPP EC-FIME fue diseñado para cumplir una serie de requerimientos que fueron detectados en la puesta y operación de los CPP anteriormente implementados. Las características de este CPP se enlistan a continuación: Los prototipos de segunda generación de convertidores e inversores fueron diseñados, construidos y probados con una potencia de 500W. El CPP EC-FIME tiene un SFVA/I de 7.2kW de capacidad instalada distribuida en dos fases, y está construido de forma tal que pueden probarse prototipos en diferentes potencias, desde 1.5kW hasta 7.2kW. El sistema instalado posee la característica de poder trabajar de manera aislada o interconectada a la red. Es por ello que se pueden probar los prototipos que se generen bajo ambos esquemas. Se está desarrollando una red de monitoreo de corriente, temperatura y en un futuro de caudal de viento, lo cual permitirá caracterizar el sistema de manera puntual para poder determinar su optimo desempeño y poder detectar las áreas de oportunidad que serán atendidas en su oportunidad. Se están llevando a cabo estudios de ahorro de energía, así como también estudios de sistemas de iluminación y automatización de aulas para la optimización de las aulas que componen el CPP EC-FIME. De igual manera se están implementando acciones para arraigar la cultura del ahorro de energía en la comunidad estudiantil, de forma tal que esta cultura permee en su ámbito de influencia social. Es importante mencionar que el CPP EC-FIME operara de manera aislada durante al menos 4 años, la razón de operar de esta manera es caracterizar su funcionamiento y obtener los registros que permitan certidumbre de estos sistemas para aplicaciones futuras en zonas aisladas de la red. Posteriormente se interconectara a la red y cumplirá con el propósito de apoyar el consumo de la FIME. C. Caracterización del sistema Desde su construcción y puesta en marcha el sistema se ha monitoreado mediante algunos sensores de corriente, en la entrada de generación y a la salida de los inversores, de esta forma se compara y mide la generación vs el consumo, todo esto utilizando LabView.

41
Con estos datos se generaran curvas de funcionamiento del sistema en específico, en condiciones naturales, además de crear ambientes como días pocos soleados, paneles sucios y sin generación alguna. Como parte de lo antes mencionado se han realizado pruebas que consiste en desconectar los módulos de paneles en el sistema, dejándolo funcionando con solo las baterías esto para medir la autonomía, adema se observó que la recuperación del sistema es alrededor de. Además cada 15 días se realiza una revisión y ecualización de baterías, para tener una idea completa del estado actual del sistema en general. Al realizar estas actividades se han encontrado algunos problemas y fallas que se han corregido, actualmente el sistema se mantiene aislado como parte de la caracterización del sistema, aunque se han realizado pruebas de interconexión con la red de la escuela, esto para cerciorar el buen funcionamiento en caso de ser necesario interconectarlo. APÉNDICE A: IMÁGENES DE IMPLEMENTACION A continuación, en el Apéndice A, se muestra una serie de imágenes que ilustran la implementación del CPP EC-FIME. En dichas imágenes se ilustra desde la construcción del cuarto de baterías y control del sistema hasta las primeras pruebas de la puesta en operación del sistema.
A 1. Detalle de la construcción del cuarto de control y banco de baterías.
A 2. Campo solar instalado en el CPP EC-FIME.
A 3. Detalle de la instalación del Banco de Baterías.
A 4. Cableado de buses y protecciones del Campo Solar Fotovoltaico.
A 5. Armado de la red de tierra del SFVA/I.

42
A 6. Sistema de Inversión y Control del SFVA/I.
A 7. Detalle de la interconexión a la acometida de CFE.
A 8. Sensores de efecto Hall para la medición de corriente en cd y ac.
A 9. Habilitación de los sensores para medición de la corriente del Campo Solar.
A 10. Detalle de la tarjeta de adquisición de datos de NI y su módulo de alimentación.
A 11. Detalle de las lámparas T5 instaladas en el CPP EC-FIME.

43
A 12. Comparativa entre el Aula acondicionada y una actual. Se observa de las anteriores figuras que el CPP EC-FIME esta en fase de prueba y experimentación. Todo trabajo realizado en cuanto a diseños e implementaciones desarrollados para el CPP están siendo desarrollados por alumnos de octavo semestre de la carrera de Ingeniero Mecánico Electricista y queda constancia en las tesis que están llevando a cabo. CONCLUSIONES El CPP EC-FIME es un desarrollo tecnológico que permitirá la prueba de los prototipos de controladores e inversores, desarrollados por los investigadores asociados a este proyecto, bajo condiciones de operación reales y evaluar de la manera más óptima el desempeño como una unidad completa. De igual manera el dentro del diseño realizado destaca la flexibilidad del CPP para operar en las dos condiciones de trabajo de un sistema fotovoltaico: aislado e interconectado a la red. La información recaba del desempeño del sistema servirá para dar certidumbre de la operación de sistemas enfocados a zonas rurales en donde un mal diseño pone en riesgo la operatividad de la aplicación del mismo. Es por ello que se están diseñando e implementando sistemas de monitoreo de las principales variables que afectan el desempeño del sistema tales como, corriente y voltajes generados, temperatura y próximamente viento e irradiación solar. Por ultimo el CPP EC-FIME se encuentra en fase de prueba. TRABAJOS FUTUROS Dentro de los trabajos futuros destacan los siguientes: Implementar los sistemas de iluminación en el resto de las aulas que componen el CPP. Desarrollar un sistema de transmisión de datos vía RF para acondicionar el sistema de medición de temperatura. Desarrollar e implementar un esquema de medición diferencial para modelar el viento y poder calcular el factor de remoción de temperatura. Implementar el esquema de medición de irradiación solar. REFERENCIAS E. E. E. Vázquez-Fernández, L. E. Ugalde-Caballero, D. Torres-Lucio. “Diseño y Construcción del Prototipo de un Dispositivo Electrónico para Regular y Controlar un Sistema Híbrido de Generación de Energía Eléctrica”. Presentada en el 4to Congreso Internacional sobre Innovación y Desarrollo Tecnológico, Cuernavaca, Oct. de 2006. Juan G. Marroquín P., Ayac Ayala E., Erik E. Vázquez F., Domingo Torres L. “Diseño de un Inversor de Salida Sinusoidal de Bajo Contenido Armónico”. 6º. Congreso Internacional de Investigación en Ingeniería
Eléctrica y Electrónica 2008, VI CIIIEE 2008, 3-7 Noviembre de 2008, Aguascalientes, Aguascalientes, México. Vázquez F. E. E., Torres L. D., Félix C. R. A., Madrigal M. M., Ayala E. A., Marroquín P. J. G. “Proposal for a photovoltaic system for testing of protoype DC-DC converters and investors”. Electronics , Robotics and Automotive Mechanics Conference. CERMA 2009, 22-25 de septiembre de 2009, Cuernavaca, Morelos, México. Erik E. Vázquez Fernández, Domingo Torres Lucio, Ramón A. Félix Cuadras, Manuel Madrigal Martínez, Ayac Ayala Estrada, Juan G. Marroquín Pimentel, Bernabé López Araujo. “Fase 1 del Proyecto de Investigación y Desarrollo de un Sistema Híbrido de Generación de Energía Eléctrica”. XXXIII SEMANA NACIONAL DE ENERGÍA SOLAR ANES 2009, 28 septiembre-3 octubre de 2009, Guadalajara, Jalisco, México. BIOGRAFÍA L. A. Villaseñor, nació el 2 de enero de 1991 en Tecomán Colima. Curso el Bachillerato en la Universidad de Colima egresando como Técnico en Contaduría. Actualmente cursa sus estudios de licenciatura en la Facultad de Ingeniería Mecánica y Eléctrica en la carrera de Ingeniero Mecánico Electricista J. H. Adame, nació el 19 de junio de 1988 en Colima. Curso el Bachillerato en el CBTIS 19 egresando como Técnico Electricista, realizando sus prácticas en el Ingenio de Quesería. Actualmente cursa sus estudios de licenciatura en la Facultad de Ingeniería Mecánica y Eléctrica en la carrera de Ingeniero Mecánico Electricista
E. E. Vázquez, obtuvo el grado de Ingeniero Mecánico Electricista en la Universidad de Colima en el 2002. Obtuvo el grado de Maestría en Ciencias en Ingeniería Eléctrica en el Programa de Graduados e Investigación en Ingeniería Eléctrica del Instituto Tecnológico de Morelia en el 2005. Actualmente cursa estudios de doctorado en el PGIIE del ITM y es Profesor por Asignatura de la FIME en la
Universidad de Colima.
R. A. Félix, obtuvo el grado de Ingeniero en Electrónica por el Instituto Tecnológico del Mar en Mazatlán en 1998 y el grado de Maestría en Ciencias en Ingeniería Eléctrica y Doctorado en Ciencias por el Centro de Investigación y Estudios Avanzados del IPN (CINVESTAV) Unidad Guadalajara en 2001 y 2003 respectivamente.
J. M. Garibay, Ingeniero Mecánico egresado de la Universidad de Colima en 1986. Obtuvo el grado de Maestría en Ingeniería área diseño mecánico en 1994 en la Facultad de Ingeniería Mecánica Eléctrica y Electrónica de la Universidad de Guanajuato. Actualmente es Profesor de Tiempo Completo de la FIME en la Universidad de Colima.
A. M. Ochoa es Profesor de Tiempo Completo, adscrito a la Facultad de Ingeniería Mecánica y Eléctrica (FIME) de la Universidad de Colima. Él imparte cátedra en Ingeniería en Comunicaciones y Electrónica y la Maestría en Ingeniería. Sus líneas de investigación son técnicas de procesamiento digital de señales, estructuras sensoriales para la clasificación y localización de objetos en entornos 3D y diseño de redes neuronales en arquitecturas reconfigurables. El profesor Ochoa obtuvo el grado de Doctor en Electrónica en la Universidad de Alcalá (España) en diciembre de 2007. El cuenta con el reconocimiento del Sistema Nacional de Investigadores (SNI nivel Candidato) desde enero de 2009.
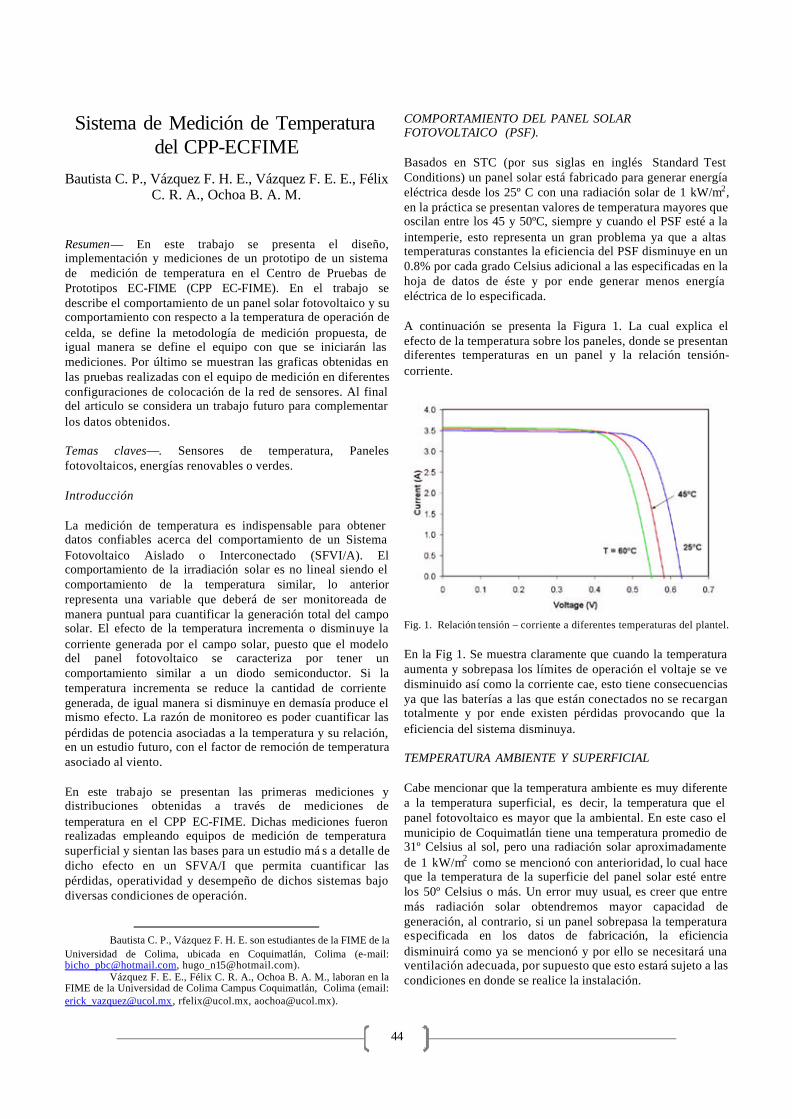
44
Sistema de Medición de Temperatura del CPP-ECFIME
Bautista C. P., Vázquez F. H. E., Vázquez F. E. E., Félix
C. R. A., Ochoa B. A. M.
Resumen— En este trabajo se presenta el diseño, implementación y mediciones de un prototipo de un sistema de medición de temperatura en el Centro de Pruebas de Prototipos EC-FIME (CPP EC-FIME). En el trabajo se describe el comportamiento de un panel solar fotovoltaico y su comportamiento con respecto a la temperatura de operación de celda, se define la metodología de medición propuesta, de igual manera se define el equipo con que se iniciarán las mediciones. Por último se muestran las graficas obtenidas en las pruebas realizadas con el equipo de medición en diferentes configuraciones de colocación de la red de sensores. Al final del articulo se considera un trabajo futuro para complementar los datos obtenidos. Temas claves—. Sensores de temperatura, Paneles fotovoltaicos, energías renovables o verdes. Introducción La medición de temperatura es indispensable para obtener datos confiables acerca del comportamiento de un Sistema Fotovoltaico Aislado o Interconectado (SFVI/A). El comportamiento de la irradiación solar es no lineal siendo el comportamiento de la temperatura similar, lo anterior representa una variable que deberá de ser monitoreada de manera puntual para cuantificar la generación total del campo solar. El efecto de la temperatura incrementa o disminuye la corriente generada por el campo solar, puesto que el modelo del panel fotovoltaico se caracteriza por tener un comportamiento similar a un diodo semiconductor. Si la temperatura incrementa se reduce la cantidad de corriente generada, de igual manera si disminuye en demasía produce el mismo efecto. La razón de monitoreo es poder cuantificar las pérdidas de potencia asociadas a la temperatura y su relación, en un estudio futuro, con el factor de remoción de temperatura asociado al viento. En este trabajo se presentan las primeras mediciones y distribuciones obtenidas a través de mediciones de temperatura en el CPP EC-FIME. Dichas mediciones fueron realizadas empleando equipos de medición de temperatura superficial y sientan las bases para un estudio má s a detalle de dicho efecto en un SFVA/I que permita cuantificar las pérdidas, operatividad y desempeño de dichos sistemas bajo diversas condiciones de operación.
Bautista C. P., Vázquez F. H. E. son estudiantes de la FIME de la Universidad de Colima, ubicada en Coquimatlán, Colima (e-mail: [email protected], [email protected]). Vázquez F. E. E., Félix C. R. A., Ochoa B. A. M., laboran en la FIME de la Universidad de Colima Campus Coquimatlán, Colima (email: [email protected], [email protected], [email protected]).
COMPORTAMIENTO DEL PANEL SOLAR FOTOVOLTAICO (PSF). Basados en STC (por sus siglas en inglés Standard Test Conditions) un panel solar está fabricado para generar energía eléctrica desde los 25º C con una radiación solar de 1 kW/m2, en la práctica se presentan valores de temperatura mayores que oscilan entre los 45 y 50ºC, siempre y cuando el PSF esté a la intemperie, esto representa un gran problema ya que a altas temperaturas constantes la eficiencia del PSF disminuye en un 0.8% por cada grado Celsius adicional a las especificadas en la hoja de datos de éste y por ende generar menos energía eléctrica de lo especificada. A continuación se presenta la Figura 1. La cual explica el efecto de la temperatura sobre los paneles, donde se presentan diferentes temperaturas en un panel y la relación tensión-corriente.
Fig. 1. Relación tensión – corriente a diferentes temperaturas del plantel. En la Fig 1. Se muestra claramente que cuando la temperatura aumenta y sobrepasa los límites de operación el voltaje se ve disminuido así como la corriente cae, esto tiene consecuencias ya que las baterías a las que están conectados no se recargan totalmente y por ende existen pérdidas provocando que la eficiencia del sistema disminuya. TEMPERATURA AMBIENTE Y SUPERFICIAL Cabe mencionar que la temperatura ambiente es muy diferente a la temperatura superficial, es decir, la temperatura que el panel fotovoltaico es mayor que la ambiental. En este caso el municipio de Coquimatlán tiene una temperatura promedio de 31º Celsius al sol, pero una radiación solar aproximadamente de 1 kW/m2 como se mencionó con anterioridad, lo cual hace que la temperatura de la superficie del panel solar esté entre los 50º Celsius o más. Un error muy usual, es creer que entre más radiación solar obtendremos mayor capacidad de generación, al contrario, si un panel sobrepasa la temperatura especificada en los datos de fabricación, la eficiencia disminuirá como ya se mencionó y por ello se necesitará una ventilación adecuada, por supuesto que esto estará sujeto a las condiciones en donde se realice la instalación.

45
MEDICIÓN El tipo de medición que se pretende realizar en los PSF va de acuerdo con el equipo de medición con el que se cuenta es decir XPLORER GLX PASCO [1], debido a las dimensiones del panel es necesario monitorear la temperatura tanto en la parte superior como en la inferior, con el fin de obtener la mayor cantidad de datos. El termopar cuenta con dos sensores de temperatura, con lo cual permite generar en una gráfica el comportamiento de la temperatura en la parte superior e inferior. Los sensores deben colocarse para una buena medición al centro de la celda, ya que existe una separación entre ellas de milímetros y se debe de tener cuidado de no sensar en dichas separaciones, para tener una monitoreo confiable. Con las especificaciones mencionadas en el párrafo anterior se pretende realizar 3 diferentes tipos de pruebas que se presentan a continuación: Muestreo en un panel de control Muestreo en una cama del campo solar Muestreo completo con 4 equipos de medición. En el muestreo en un panel de control se pretende monitorear el aumento y la disminución de la temperatura con el fin de comparar el efecto que tiene la temperatura en un solo panel y en un conjunto de ellos. Este panel se encuentra aislado de los demás, así como conectado independientemente al banco de baterías que permiten almacenar la energía generada. En el muestreo de una cama del campo se realizarán mediciones con un conjunto de paneles solares conectados entre sí, por cama se tienen 8 paneles, con lo cual nos permite observar las variaciones que se tiene a lo largo de ésta, ya que dependiendo de la ubicación del panel será el comportamiento de la temperatura porque influyen diversas variables como se mencionó previamente. En el muestreo completo se utilizarán 4 equipos de medición de temperatura, con el fin de analizar y concluir el comportamiento en general del campo solar fotovoltaico, ya que nos permitirá identificar fallas, bajas eficiencias y con esto poder dar una solución a problemas que se presenten en un futuro, así como también proveer un buen servicio de energía eléctrica al Edificio “C” de la Facultad de Ingeniería Mecánica y Eléctrica. EQUIPO DE MEDICIÓN XPLORER GLX PASCO Funciona como interfaz de escritorio de gran alcance para pasport y sensores de workshop el cual se conecta al puerto USB de la computadora y permite la transferencia de datos, esto es una herramienta verdaderamente útil, ya que se ahorra mucho trabajo y tiempo en la descarga de datos y la generación de gráficas manualmente. Una de las grandes ventajas es que cuenta con pantalla LCD que permite revisar fácilmente los datos y análisis de datos
básicos tales como estadísticas y curvas. La memoria interna del equipo permite almacenar una amplia cantidad de archivos ya que no requieren de gran espacio en la memoria, esto es bastante útil ya que en los tres tipos de mediciones ya mencionadas se requerirá un tiempo de captura de datos de alrededor de una hora. La batería es de alto rendimiento lo que nos permite mantener el equipo trabajando sin necesidad de tenerlo conectado a una fuente de alimentación. Otra característica importante del equipo es el rango de operación que tiene, ya que captura la temperatura cada 0.5 segundos, es to quiere decir que la calidad que presenta el muestreo es alta, lo que permite un buen trabajo. PRUEBAS REALIZADAS V.1. MUESTREO EN UNA CADENA DEL CAMPO SOLAR En la Figura 2 se muestra la variación de temperatura tomada con el aparato GLX en un día soleado, tomando diferentes paneles fotovoltaicos de la primer cadena. La finalidad de la prueba fue determinar la posición más representativa para efectuar la medición en una cadena del campo solar instalado.
Fig. 2. Gráfica de temperatura de la primera cadena. También se observa la diferencia de temperaturas entre la parte superior del panel solar fotovoltaico (PSF) medido y la inferior, siendo la medición superior la grafica color verde y la inferior la color roja. Las temperaturas registradas oscilan entre los 40° y 60° Celcius y en periodos punta de mayor insolación una diferencia entre las mediciones de 10°. Lo anterior debido a que el periodo punta se presenta a la 1 de la tarde y coincide con el inicio de las ráfagas de viento en la zona de Coquimatlán. Con lo cual el factor de remoción de temperatura superficial aumenta pero como se observa en la gráfica no es lineal. V.2. MUESTREO COMPLETO CON 4 EQUIPOS DE MEDICIÓN
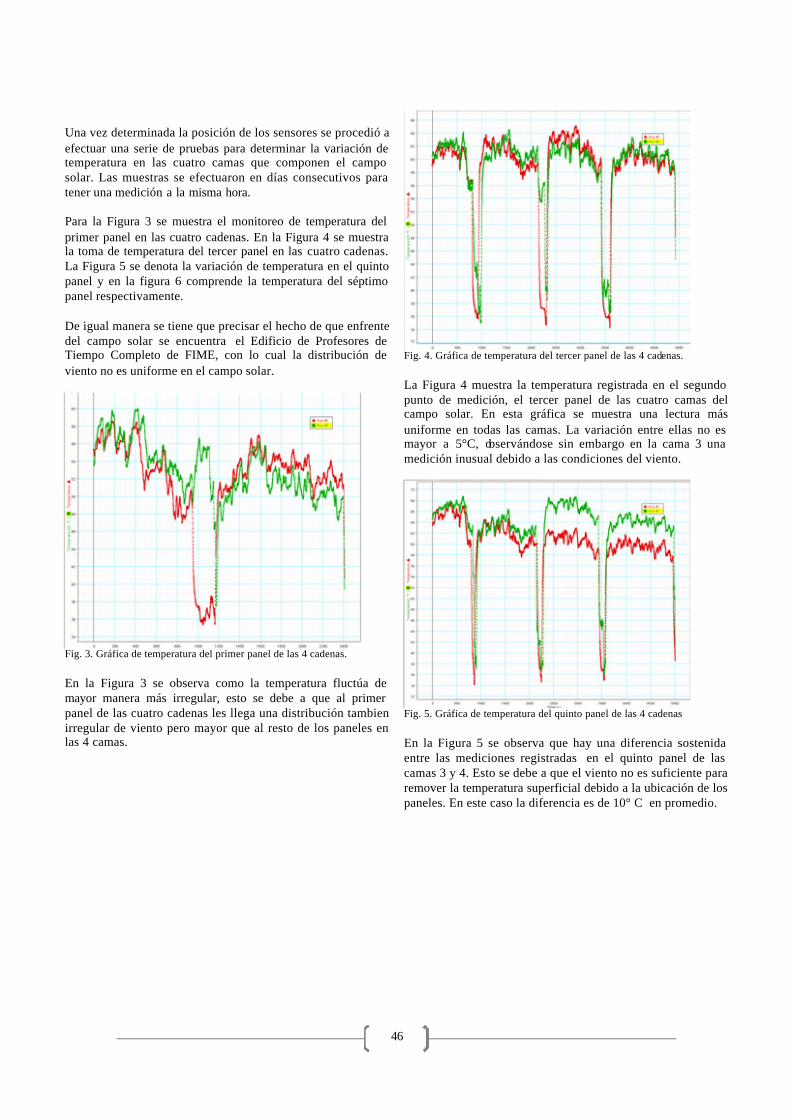
46
Una vez determinada la posición de los sensores se procedió a efectuar una serie de pruebas para determinar la variación de temperatura en las cuatro camas que componen el campo solar. Las muestras se efectuaron en días consecutivos para tener una medición a la misma hora. Para la Figura 3 se muestra el monitoreo de temperatura del primer panel en las cuatro cadenas. En la Figura 4 se muestra la toma de temperatura del tercer panel en las cuatro cadenas. La Figura 5 se denota la variación de temperatura en el quinto panel y en la figura 6 comprende la temperatura del séptimo panel respectivamente. De igual manera se tiene que precisar el hecho de que enfrente del campo solar se encuentra el Edificio de Profesores de Tiempo Completo de FIME, con lo cual la distribución de viento no es uniforme en el campo solar.
Fig. 3. Gráfica de temperatura del primer panel de las 4 cadenas. En la Figura 3 se observa como la temperatura fluctúa de mayor manera más irregular, esto se debe a que al primer panel de las cuatro cadenas les llega una distribución tambien irregular de viento pero mayor que al resto de los paneles en las 4 camas.
Fig. 4. Gráfica de temperatura del tercer panel de las 4 cadenas. La Figura 4 muestra la temperatura registrada en el segundo punto de medición, el tercer panel de las cuatro camas del campo solar. En esta gráfica se muestra una lectura más uniforme en todas las camas. La variación entre ellas no es mayor a 5°C, observándose sin embargo en la cama 3 una medición inusual debido a las condiciones del viento.
Fig. 5. Gráfica de temperatura del quinto panel de las 4 cadenas En la Figura 5 se observa que hay una diferencia sostenida entre las mediciones registradas en el quinto panel de las camas 3 y 4. Esto se debe a que el viento no es suficiente para remover la temperatura superficial debido a la ubicación de los paneles. En este caso la diferencia es de 10° C en promedio.

47
Fig. 6. Gráfica de temperatura del séptimo panel de las 4 cadenas En la Figura 6 se muestra la temperatura superficial medida en la parte final de las cuatro camas. Debido a que se encuentran en el extremo de las camas y los cubren lo edificios de profesores y el Laboratorio de Electromagnetismo el viento incidente no es tan pronunciado. Lo anterior se refleja en el hecho de que las mediciones registran una variación muy pequeña entre las temperaturas inferior y superior del PSF medido. En la Figura 7 se muestra el dispositivo de medición XPLORE GLX PASCO empleado para la obtención de las mediciones de temperatura superficial.
Fig. 7. XPLORER GLX PASCO efectuando una medición. En la Figura 8 y 9 se muestra un detalle de la implementación del equipo de medición de temperatura superficial.
Fig. 8. Detalle de la implementación del Sistema de medición de Temperatura Superficial.
Fig. 9. Detalle de la colocación de los equipos de medición. En la última figura se observa que las mediciones se realizan bajo diversas condiciones de operación, en este caso la cama 1 no se ha limpiado en una semana y el resto de las camas si han sido limpiadas. El objetivo es plantear diversas condiciones operativas y visualizar el efecto de la temperatura superficial en la generación del campo solar. Conclusiones La medición de la temperatura es indispensable para la obtención el factor de remoción causado por el viento cobre el campo solar. Lo anterior redunda en una mejor cuantificación de la energía generada por el Sistema Fotovoltaico implementado en el Edificio C de la FIME de la U. de Colima. Así mismo se cuenta con la distribución óptima de la ubicación de los sensores que compondrán la red de monitoreo de temperatura superficial. Los datos obtenidos, en un trabajo futuro, se compararan con los datos obtenidos del sistema de medición de corriente en cd del campo solar, con la finalidad de obtener un modelo capaz de efectuar las correcciones de generación en base a los parámetros de temperatura, viento e irradiación solar en un futuro. Actualmente se tiene diseñada una red de monitoreo con sensores superficiales, se han efectuado las pruebas para su implementación tanto en simulación como en prototipo. Como trabajo futuro se pretende implementarla en el campo solar y transmitir la información recabada a través de señales inalámbricas para de esta manera reducir la atenuación de la señal por la longitud de los cables de transmisión de datos.

48
Referencias XPLORER GLX, PASCO scientific, Manual PASCO Número 012-08950B. www.pasco.com Biografía Bautista C. P., nació el 1 de febrero de 1991 en Colima. Curso el Bachillerato en la Universidad de Colima egresando como Técnico en Dibujo. Actualmente cursa sus estudios de licenciatura en la Facultad de Ingeniería Mecánica y Eléctrica en la carrera de Ingeniero Mecánico Electricista en el 8vo Semestre. Vázquez F. H. E. , nació el 5 de agosto de 1989 en Colima. Curso el Bachillerato en el CBTIS 19 egresando como Técnico Electricista. Actualmente cursa sus estudios de licenciatura en la Facultad de Ingeniería Mecánica y Eléctrica en la carrera de Ingeniero Mecánico Electricista
Vázquez F. E. E., obtuvo el grado de Ingeniero Mecánico Electricista en la Universidad de Colima en el 2002. Obtuvo el grado de Maestría en Ciencias en Ingeniería Eléctrica en el Programa de Graduados e Investigación en Ingeniería Eléctrica del Instituto Tecnológico de Morelia en el 2005. Actualmente cursa estudios de doctorado en el PGIIE del ITM y es Profesor por Asignatura de la FIME en la
Universidad de Colima.
Félix C. R. A., obtuvo el grado de Ingeniero en Electrónica por el Instituto Tecnológico del Mar en Mazatlán en 1998 y el grado de Maestría en Ciencias en Ingeniería Eléctrica y Doctorado en Ciencias por el Centro de Investigación y Estudios Avanzados del IPN (CINVESTAV) Unidad Guadalajara en 2001 y 2003 respectivamente.
Ochoa B. A. M. es Profesor de Tiempo Completo, adscrito a la Facultad de Ingeniería Mecánica y Eléctrica (FIME) de la Universidad de Colima. Él imparte cátedra en Ingeniería en Comunicaciones y Electrónica y la Maestría en Ingeniería. Sus líneas de investigación son técnicas de procesamiento digital de señales, estructuras sensoriales para la clasificación y localización de objetos en entornos 3D y diseño de redes neuronales en arquitecturas reconfigurables. El profesor Ochoa obtuvo el grado de Doctor en Electrónica en la Universidad de Alcalá (España) en diciembre de 2007. El cuenta con el reconocimiento del Sistema Nacional de Investigadores (SNI nivel Candidato) desde enero de 2009.

49
III. CAPÍTULO III. INFRAESTRUCTURA
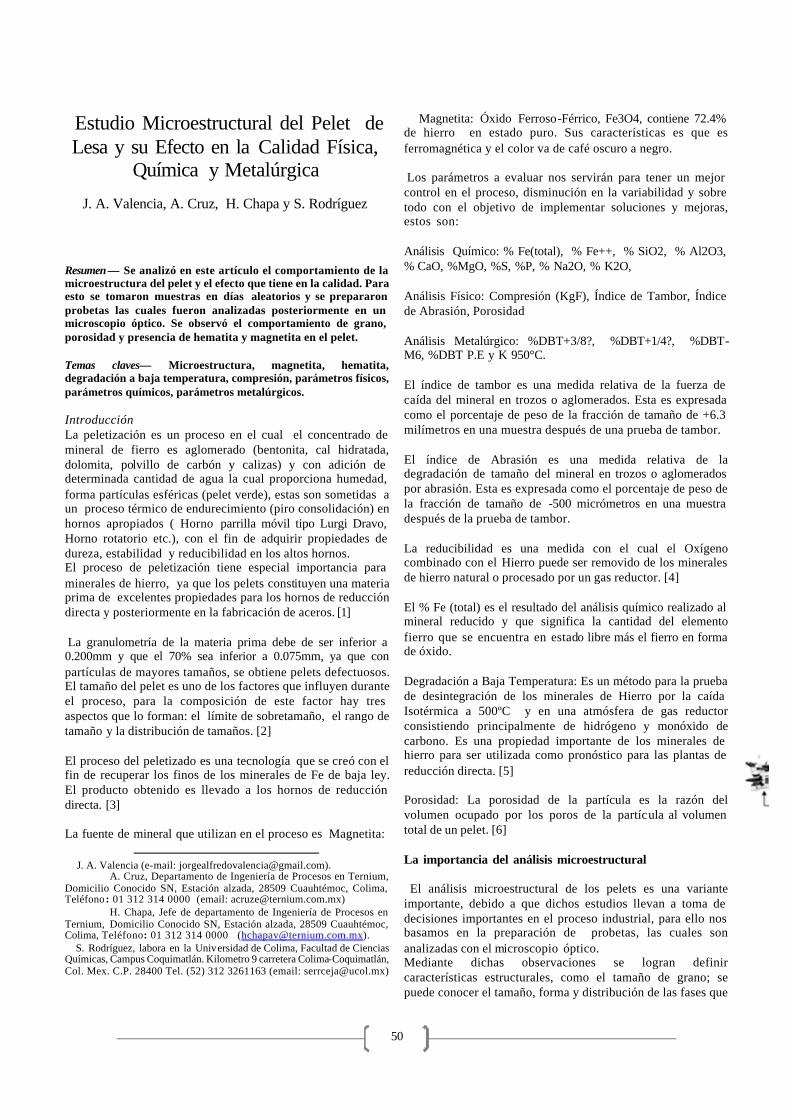
50
Estudio Microestructural del Pelet de Lesa y su Efecto en la Calidad Física,
Química y Metalúrgica
J. A. Valencia, A. Cruz, H. Chapa y S. Rodríguez
Resumen — Se analizó en este artículo el comportamiento de la microestructura del pelet y el efecto que tiene en la calidad. Para esto se tomaron muestras en días aleatorios y se prepararon probetas las cuales fueron analizadas posteriormente en un microscopio óptico. Se observó el comportamiento de grano, porosidad y presencia de hematita y magnetita en el pelet. Temas claves— Microestructura, magnetita, hematita, degradación a baja temperatura, compresión, parámetros físicos, parámetros químicos, parámetros metalúrgicos. Introducción La peletización es un proceso en el cual el concentrado de mineral de fierro es aglomerado (bentonita, cal hidratada, dolomita, polvillo de carbón y calizas) y con adición de determinada cantidad de agua la cual proporciona humedad, forma partículas esféricas (pelet verde), estas son sometidas a un proceso térmico de endurecimiento (piro consolidación) en hornos apropiados ( Horno parrilla móvil tipo Lurgi Dravo, Horno rotatorio etc.), con el fin de adquirir propiedades de dureza, estabilidad y reducibilidad en los altos hornos. El proceso de peletización tiene especial importancia para minerales de hierro, ya que los pelets constituyen una materia prima de excelentes propiedades para los hornos de reducción directa y posteriormente en la fabricación de aceros. [1] La granulometría de la materia prima debe de ser inferior a 0.200mm y que el 70% sea inferior a 0.075mm, ya que con partículas de mayores tamaños, se obtiene pelets defectuosos. El tamaño del pelet es uno de los factores que influyen durante el proceso, para la composición de este factor hay tres aspectos que lo forman: el límite de sobretamaño, el rango de tamaño y la distribución de tamaños. [2] El proceso del peletizado es una tecnología que se creó con el fin de recuperar los finos de los minerales de Fe de baja ley. El producto obtenido es llevado a los hornos de reducción directa. [3] La fuente de mineral que utilizan en el proceso es Magnetita:
J. A. Valencia (e-mail: [email protected]). A. Cruz, Departamento de Ingeniería de Procesos en Ternium, Domicilio Conocido SN, Estación alzada, 28509 Cuauhtémoc, Colima, Teléfono : 01 312 314 0000 (email: [email protected]) H. Chapa, Jefe de departamento de Ingeniería de Procesos en Ternium, Domicilio Conocido SN, Estación alzada, 28509 Cuauhtémoc, Colima, Teléfono: 01 312 314 0000 ([email protected]). S. Rodríguez, labora en la Universidad de Colima, Facultad de Ciencias Químicas, Campus Coquimatlán. Kilometro 9 carretera Colima-Coquimatlán, Col. Mex. C.P. 28400 Tel. (52) 312 3261163 (email: [email protected])
Magnetita: Óxido Ferroso-Férrico, Fe3O4, contiene 72.4% de hierro en estado puro. Sus características es que es ferromagnética y el color va de café oscuro a negro. Los parámetros a evaluar nos servirán para tener un mejor control en el proceso, disminución en la variabilidad y sobre todo con el objetivo de implementar soluciones y mejoras, estos son: Análisis Químico: % Fe(total), % Fe++, % SiO2, % Al2O3, % CaO, %MgO, %S, %P, % Na2O, % K2O, Análisis Físico: Compresión (KgF), Índice de Tambor, Índice de Abrasión, Porosidad Análisis Metalúrgico: %DBT+3/8?, %DBT+1/4?, %DBT-M6, %DBT P.E y K 950°C. El índice de tambor es una medida relativa de la fuerza de caída del mineral en trozos o aglomerados. Esta es expresada como el porcentaje de peso de la fracción de tamaño de +6.3 milímetros en una muestra después de una prueba de tambor. El índice de Abrasión es una medida relativa de la degradación de tamaño del mineral en trozos o aglomerados por abrasión. Esta es expresada como el porcentaje de peso de la fracción de tamaño de -500 micrómetros en una muestra después de la prueba de tambor. La reducibilidad es una medida con el cual el Oxígeno combinado con el Hierro puede ser removido de los minerales de hierro natural o procesado por un gas reductor. [4] El % Fe (total) es el resultado del análisis químico realizado al mineral reducido y que significa la cantidad del elemento fierro que se encuentra en estado libre más el fierro en forma de óxido. Degradación a Baja Temperatura: Es un método para la prueba de desintegración de los minerales de Hierro por la caída Isotérmica a 500ºC y en una atmósfera de gas reductor consistiendo principalmente de hidrógeno y monóxido de carbono. Es una propiedad importante de los minerales de hierro para ser utilizada como pronóstico para las plantas de reducción directa. [5] Porosidad: La porosidad de la partícula es la razón del volumen ocupado por los poros de la partícula al volumen total de un pelet. [6] La importancia del análisis microestructural El análisis microestructural de los pelets es una variante importante, debido a que dichos estudios llevan a toma de decisiones importantes en el proceso industrial, para ello nos basamos en la preparación de probetas, las cuales son analizadas con el microscopio óptico. Mediante dichas observaciones se logran definir características estructurales, como el tamaño de grano; se puede conocer el tamaño, forma y distribución de las fases que
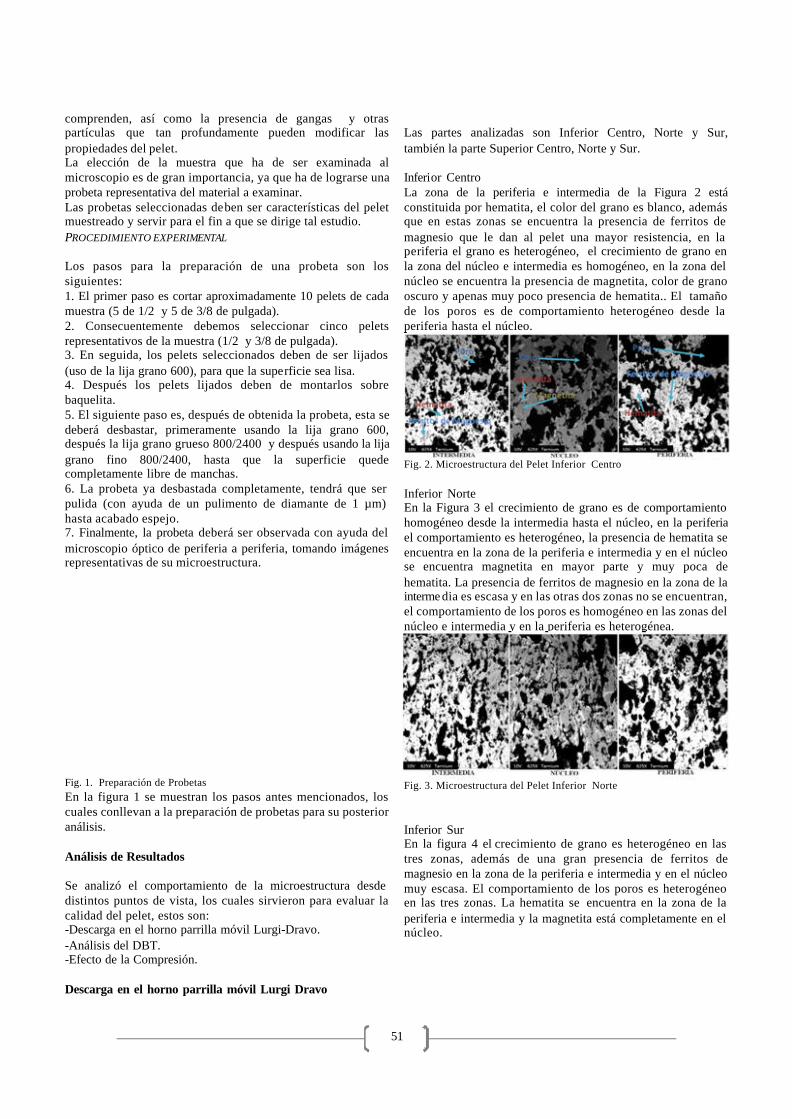
51
comprenden, así como la presencia de gangas y otras partículas que tan profundamente pueden modificar las propiedades del pelet. La elección de la muestra que ha de ser examinada al microscopio es de gran importancia, ya que ha de lograrse una probeta representativa del material a examinar. Las probetas seleccionadas deben ser características del pelet muestreado y servir para el fin a que se dirige tal estudio. PROCEDIMIENTO EXPERIMENTAL Los pasos para la preparación de una probeta son los siguientes: 1. El primer paso es cortar aproximadamente 10 pelets de cada muestra (5 de 1/2 y 5 de 3/8 de pulgada). 2. Consecuentemente debemos seleccionar cinco pelets representativos de la muestra (1/2 y 3/8 de pulgada). 3. En seguida, los pelets seleccionados deben de ser lijados (uso de la lija grano 600), para que la superficie sea lisa. 4. Después los pelets lijados deben de montarlos sobre baquelita. 5. El siguiente paso es, después de obtenida la probeta, esta se deberá desbastar, primeramente usando la lija grano 600, después la lija grano grueso 800/2400 y después usando la lija grano fino 800/2400, hasta que la superficie quede completamente libre de manchas. 6. La probeta ya desbastada completamente, tendrá que ser pulida (con ayuda de un pulimento de diamante de 1 µm) hasta acabado espejo. 7. Finalmente, la probeta deberá ser observada con ayuda del microscopio óptico de periferia a periferia, tomando imágenes representativas de su microestructura. Fig. 1. Preparación de Probetas En la figura 1 se muestran los pasos antes mencionados, los cuales conllevan a la preparación de probetas para su posterior análisis. Análisis de Resultados Se analizó el comportamiento de la microestructura desde distintos puntos de vista, los cuales sirvieron para evaluar la calidad del pelet, estos son: -Descarga en el horno parrilla móvil Lurgi-Dravo. -Análisis del DBT. -Efecto de la Compresión. Descarga en el horno parrilla móvil Lurgi Dravo
Las partes analizadas son Inferior Centro, Norte y Sur, también la parte Superior Centro, Norte y Sur. Inferior Centro La zona de la periferia e intermedia de la Figura 2 está constituida por hematita, el color del grano es blanco, además que en estas zonas se encuentra la presencia de ferritos de magnesio que le dan al pelet una mayor resistencia, en la periferia el grano es heterogéneo, el crecimiento de grano en la zona del núcleo e intermedia es homogéneo, en la zona del núcleo se encuentra la presencia de magnetita, color de grano oscuro y apenas muy poco presencia de hematita.. El tamaño de los poros es de comportamiento heterogéneo desde la periferia hasta el núcleo.
Fig. 2. Microestructura del Pelet Inferior Centro Inferior Norte En la Figura 3 el crecimiento de grano es de comportamiento homogéneo desde la intermedia hasta el núcleo, en la periferia el comportamiento es heterogéneo, la presencia de hematita se encuentra en la zona de la periferia e intermedia y en el núcleo se encuentra magnetita en mayor parte y muy poca de hematita. La presencia de ferritos de magnesio en la zona de la interme dia es escasa y en las otras dos zonas no se encuentran, el comportamiento de los poros es homogéneo en las zonas del núcleo e intermedia y en la periferia es heterogénea.
Fig. 3. Microestructura del Pelet Inferior Norte Inferior Sur En la figura 4 el crecimiento de grano es heterogéneo en las tres zonas, además de una gran presencia de ferritos de magnesio en la zona de la periferia e intermedia y en el núcleo muy escasa. El comportamiento de los poros es heterogéneo en las tres zonas. La hematita se encuentra en la zona de la periferia e intermedia y la magnetita está completamente en el núcleo.

52
Fig. 4. Microestructura del Pelet Inferior Sur Superior Centro En la figura 5 el crecimiento de grano es homogéneo desde la periferia hasta el núcleo, no existe presencia de ferritos de magnesio en ninguna zona, la presencia de hematita está en la periferia e intermedia, también se puede visualizar que existe poca presencia de magnetita en la periferia y en la zona del núcleo se encuentra magnetita en su mayor parte y muy poca presencia de hematita. El comportamiento de los poros es homogéneo en las tres zonas.
Fig. 5. Microestructura del Pelet Superior Centro Superior Norte En la figura 6 el crecimiento de grano y comportamiento de los poros es homogéneo en las tres zonas, la presencia de hematita se encuentra en la periferia e intermedia, además que en el núcleo se encuentra gran cantidad de magnetita y muy poca de hematita. Los ferritos de magnesio se encuentran en la zona de la periferia e intermedia.
Fig. 6. Microestructura del Pelet Superior Norte Superior Sur En la figura 7 el crecimiento de grano y comportamiento de los poros en las tres zonas es homogéneo, además los ferritos de magnesio se encuentran en la periferia e intermedia así como la presencia de hematita en estas zonas. En el núcleo se encuentra magnetita en casi su totalidad y muy poca hematita.
Fig. 7. Microestructura del Pelet Superior Sur
En la tabla I se muestra la calidad química que arrojaron las muestras al ser analizadas. Análisis del DBT DBT Alto En la figura 8 se puede observar como existe un crecimiento granular homogéneo y de la misma manera un comportamiento homogéneo en los poros dentro de las tres zonas, desde la periferia hasta el núcleo se logra la oxidación completa del pelet con lo cual existe presencia de hematita, además hay presencia de ferritos de magnesio en toda la microestructura logrando una buena resistencia entre los granos estructurales.
Fig. 8. Microestructura de un Buen DBT
En la tabla II se muestra la calidad obtenida para un DBT alto. DBT Bajo
Tabla I. Calidad Química de las partes del Horno
Tabla II. Análisis de Calidad para un DBT alto

53
En la figura 9 se puede observar como el crecimiento granular es mayor a otras figuras mostradas, son granos más grandes y por lo tanto el comportamiento de los poros es menor, lo cual provoca la presencia de magnetita completamente en el núcleo y presencia en las otras dos zonas, además como los granos se encuentras más unidos estos tenderán a romperse mucho más fácil.
Fig. 9. Microestructura de un Mal DBT
En la tabla III se muestra la calidad obtenida para un DBT bajo. Efecto de la Compresión Compresión Menor a 300 KgF: En la figura 10 se observa una microestructura con un crecimiento de granos homogéneo. El comportamiento de los poros es heterogéneo desde la periferia hasta el núcleo. Existe la presencia de hematita en la periferia e intermedia y magnetita en el núcleo.
Fig. 10. Microestructura Compresión menor a 300 KgF
En la tabla IV se muestra la calidad obtenida para una Compresión menor a 300 KgF. Compresión entre 301 hasta 320 KgF:
En la figura 11 se puede observar como el crecimiento de grano es menor en comparación a la otra compresión, existe entre grano y grano un comportamiento de poro homogéneo lo cual por consecuencia le permitió una oxidación total a la estructura del pelet, en otras palabras la presencia de hematita desde la periferia hasta el núcleo.
Fig. 11. Microestructura Compresión entre 301 hasta 320 KgF
En la tabla V se muestra la calidad obtenida para una Compresión que abarca desde 301 hasta 320 KgF. Compresión Mayor a 320 KgF: En la figura 12 el crecimiento de grano es heterogéneo, en la periferia y núcleo es más grande que en la intermedia, el comportamiento de los poros es homogéneo en la intermedia y periferia y en el núcleo heterogéneo, existe presencia de hematita en las tres zonas y la fase de magnetita muy poca en el núcleo.
Fig. 12. Microestructura Compresión mayor a 320 KgF En la tabla VI se muestra la calidad obtenida para una Compresión mayor a 320 KgF.
Tabla III. Análisis de Calidad para un DBT bajo
Tabla IV. Análisis de Calidad para una Compresión menor a 300 KgF
Tabla V. Análisis de Calidad para una Compresión entre 301 hasta 320 KgF
Tabla VI. Análisis de Calidad para una Compresión mayor a 320 KgF
54
Conclusiones La microestructura observada en las muestras de pelet Superior es mejor que la microestructura del pelet Inferior. En cuanto al análisis químico arrojado en la Tabla 1, el porciento en fósforo es muy bajo en las seis partes del horno y cumple con los requisitos que se especifican en la Tabla 8, también cumple con los requisitos de porciento en sílice, siendo la mejor zona la superior norte la cual presenta un porciento mucho menor que en las otras zonas. De acuerdo al porciento en Fierro total todas las zonas sobrepasan los requisitos que se especifican en la Tabla 8, la mejor zona es la inferior centro con el porciento en Fierro total más alto. En tanto al porciento Ferroso, 4 partes del horno sobrepasan el mínimo permisible a excepción de la inferior norte e inferior sur la cual cumple con los requisitos. La muestra con un alto DBT presenta una microestructura mejor que con un bajo DBT. En cuanto a la calidad se puede observar como el comportamiento de grano influye en las dos muestras, en un alto DBT, el porciento en Fósforo y porciento Ferroso cumple con los límites permisibles, mientras que el porciento en Fierro total es menor a la cantidad mínima que se maneja, al igual que el porciento en sílice es mayor al permitido, el sílice provoca fragilidad al pelet, pero en la microestructura observada se logra ver que no hay presencia de ganga y se deduce que esta se encuentra distribuida en forma homogénea beneficiándolo al pelet. Para un bajo DBT la calidad química y física cumple con los requisitos, pero el porciento en DBT es muy bajo, la microestructura revela como los granos se encuentran muy cercas unos de otros y por consecuencia la fragilidad aumenta para el pelet. La calidad de la compresión menor a 300KgF cumplió con los parámetros químicos y físicos, mas no con los metalúrgicos pues el DBT es muy bajo, aun así es mayor este porcentaje comparado con las otras compresiones. La calidad de la compresión entre 301-320KgF cumplió con los parámetros químicos y físicos, se logra observar que el comportamiento microestructural del pelet es de buena calidad, por lo que se pudo lograr una oxidación completa en toda la microestructura. La calidad de la compresión mayor a 320KgF cumplió con los parámetros químicos y físicos, mas no con los metalúrgicos pues el DBT es menor al permisible. En cuanto a la microestructura se observa un grano más grueso que a la anterior compresión, aun así el pelet se encuentra en su mayoría oxidado. La calidad del pelet de Lesa presentada cumplió con los requisitos para poder llevar el producto a procesos posteriores, y así fabricar aceros de gran calidad. APÉNDICE
En la
Tabla VII se
especifican los límites permisibles de cada especificación estándar a evaluar.
En la Tabla VIII se especifican los límites permisibles de cada parámetro químico a evaluar. Calidad Física Calidad Metalúrgica Fracción -1/2 + 1/4 ”, %
Índice de Tambor, %
DBT Pelet Entero, %
Mínimo Mínimo Mínimo 50 93.6 60.0 En la Tabla IX se especifican los límites permisibles de cada parámetro físico y metalúrgico a evaluar. AGRADECIMIENTOS Me siento agradecido con la empresa Ternium y la oportunidad que me brindó. Agradezco al Ing. Marco Ruíz por su apoyo incondicional, también al M. en C. Sergio Rodríguez Ceja. Doy gracias a mi asesor el Dr. Adrián Cruz Espinoza, por todos sus grandes consejos, el cual junto con el Dr. Mario siempre me estuvo inculcando el camino de la ciencia, también a mi asesor el Ing. Horacio Chapa el cual siempre me otorgó un gran apoyo en todos los momentos, es una persona muy positiva y siempre estuvo al pendiente de mí en todo momento. REFERENCIAS A. H. Forero y S. C. Díaz, "Beneficio de una Magnetita para producción de pelets utilizados en procesos de reducción directa," ISSN 0122-1701 Scientia et Technica Año XIII, No. 36, pp. 793-796, Sept. 2007. [2] R. Gutiérrez, "Influencia de la Basicidad en la Microestructura de los pellet y en su comportamiento metalúrgico en los procesos de reducción directa," Tesis de Maestría, Univ. De Colima, Facultad de Ciencias Químicas, 1998. [3] A. Forero y S. C. Díaz, "Beneficios de una Magnetita para producción de pelet utilizados en procesos de reducción directa," Scientia et Technica Año XIII, No. 36, pp. 793-796, Septiembre 2007. [4] R. Vibramontes y J. Aparicio, "Determinación de la Reducibilidad en minerales de Hierro," Hylsa, Monterrey, Nuevo León, Tech. Rep. IM-046-06, Abril. 1998.
Elemento de Control Especificación Índice de Tambor Mínimo 93.6% DBT Pelet Entero Mínimo 60.0% Ferroso Máximo 0.6%
Calidad Química Fe Total, % Si % P % Fe++ % Mínimo Máximo Máximo Máximo 66.2 2.79 0.03 0.6
Tabla VII. Especificación Estándar
Tabla VIII. Especificaciones de acuerdo a los parámetros Químicos.
Tabla IX. Especificaciones de acuerdo a las parámetros Físicos y Metalúrgicos.

55
[5] R. Vibramontes y J. Aparicio, "Pruebas para la desintegración a baja temperatura en minerales de Hierro," Hylsa, Monterrey, Nuevo León, Tech. Rep. IM-046-09, Abril. 1998. [6] R. Vibramontes y J. Aparicio, "Determinación HYL de la porosidad de la partícula, densidad sólida y densidad de la partícula en minerales de Hierro.," Hylsa, Monterrey, Nuevo León, Tech. Rep. IM-046-05, Abril. 1998. BIOGRAFÍA
Jorge Alfredo Valencia García (1990- ) Nació en Ciudad Guzmán Jalisco el 13 de Noviembre de 1990. Estudió en el Bachillerato Técnico No.4 de la Universidad de Colima y se graduó en la Facultad de Ciencias de la Universidad de Colima en la carrera de Ingeniería Química Metalúrgica en el 2012.Recibió la Beca de Excelencia en Sexto Semestre en el Bachillerato Técnico No. 4 y la Beca CAMIMEX obtenida en Sexto Semestre en la
carrera de Ingeniería Química Metalúrgica. Cuenta con el título de Analista Químico. En lo profesional realizó prácticas profesionales en Ternium Norte México. Adrián Cruz Espinoza (1981- ) Nació el 15 de Septiembre de 1981 en Colima. Estudió en la Facultad de Ciencias Químicas de la Universidad de Colima la carrera de Ingeniería Química Metalúrgica en el 2005 y obtuvo el grado de Doctor en Ciencias Químicas en el año 2011 en la Universidad de Colima. Cuenta con una publicación hecha en la revista Journal of Colloid and Interface Science el 8 de Febrero del 2012, el título del artículo es Synthesis of microporous eskolaite from Cr (VI) using activated carbon as a reductant and template. En experiencia laboral ha trabajado en el Ingenio de Quesería, S.A. de C.V. perteneciente al grupo BSM como Químico de Laboratorio en Control de Calidad desde el 5 de Noviembre del 2004 hasta el 13 de Marzo del 2005, también trabajó en la Facultad de Ciencias Químicas en la carrera de Ingeniería Química Metalúrgica e Ingeniería Química en Alimentos como maestro de la asignatura Balance de Materia y Energía desde Agosto del 2009 hasta Enero del 2010, trabajó en el Consorcio Minero Benito Juárez, Peña Colorada como Profesionista en Desarrollo del Laboratorio de Ingeniería de Procesos desde el 5 de Julio del 2011 hasta el 5 de Septiembre del 2011, y finalmente se encuentra laborando en el departamento de Ingeniería de Procesos en Ternium Norte. Ing. Horacio Chapa Villarreal es Ingeniero Químico Metalúrgico egresado de la Universidad Autónoma de Nuevo León. Actualmente es el Jefe del Departamento de Ingeniería de Procesos en Ternium Norte. Sergio Rodríguez Ceja (1962-)Nació en Pajacuarán Michoacán el 28 de Febrero de 1962. Estudió en la Universidad de Colima la carrera de Ingeniero Químico Metalúrgico, cuenta con la Maestría en Metalurgia la cual estudió en la Universidad de Colima en el año de 1992. Recibió el Premio Peña Colorada, obtenido en la Maestría de Metalurgia. Dentro de su experiencia profesional trabajó en la siderúrgica Lázaro Cárdenas las truchas 1985-1987. Profesor de tiempo completo en la Facultad de Ciencias Químicas en la Universidad de Colima desde 1987 hasta la fecha. Ha realizado diversos trabajos de investigación en Ternium México y Consorcio Minero Benito Juárez Peña Colorada.

56
Análisis del Tráfico de Mercancías manipuladas 1992 al 2012 en el
puerto de Manzanillo, Colima. Sus efectos en su cercano Desarrollo
Portuario
B. Lara, Juan P. Sierra, M. A. Galicia, Juan C. Chávez, Christian D. Ortega, Gloria A. Jiménez, Manuel Patiño,
Juan H. Gaviño, César Mosso y Eva Caderón.
Resumen—El presente trabajo tiene como objetivo analizar el tráfico de buques y de mercancías que arriban y que se mueven a través del puerto de Manzanillo, Colima, México, del período 2000-2012, de sus implicaciones para proyectar su futuro crecimiento. Con el fin de cumplir con los objetivos se efectúa el análisis y revisión estadística del tráfico marítimo registrado y
Basilio Lara Chávez, labora en el Centro Universitario de Investigaciones Oceanológicas de la Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo -Barra de Navidad, Manzanillo, Colima México. C. P. 28860. (email: [email protected]). Juan Pablo Sierra Pedrico labora en Departamento de Ingeniería Hidráulica Marítima y Ambiental de la Universidad Politécnica de Cataluña (UPC). Jordi Girona, 1-3, Edif. D1, Campus Nord. 08034. Barcelona, España. (email: [email protected]; [email protected]). Marco Antonio Galicia Pérez labora en el Centro Universitario de Investigaciones Oceanológicas de la Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo -Barra de Navidad, Manzanillo, Colima México. C. P. 28860. (email: [email protected]). Carlos Chávez Comparán labora en la Facultad de Ciencias Marinas, Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo-Barra de Navidad, Manzanillo, Colima México. C.P. 28860. (emails: [email protected] .). Christian Daniel Ortega Ortiz labora en la Facultad de Ciencias Marinas, Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo-Barra de Navidad, Manzanillo, Colima México. C.P. 28860. (emails: [email protected]).
Gloria A. Jiménez Ramón labora en el Centro Universitario de Investigaciones Oceanológicas de la Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo -Barra de Navidad, Manzanillo, Colima México. C. P. 28860. (email: [email protected]). Manuel Patiño Barragán labora en el Centro Universitario de Investigaciones Oceanológicas de la Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo -Barra de Navidad, Manzanillo, Colima México. C. P. 28860. (email: [email protected]). Juan H. Gaviño Rodríguez labora en el Centro Universitario de Investigaciones Oceanológicas de la Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo -Barra de Navidad, Manzanillo, Colima México. C. P. 28860. (email: [email protected]). César Mosso Aranda labora en Departamento de Ingeniería Hidráulica Marítima y Ambiental de la Universidad Politécnica de Cataluña (UPC). Jordi Girona, 1-3, Edif. D1, Campus Nord. 08034. Barcelona, España. (email: [email protected]; cesar,[email protected]).
Eva Caderón Parra estudiante de 9° semestre de Ingeniería Oceánica de la Facultad de Ciencias Marinas, Universidad de Colima, Campus Universitario el Naranjo. Km 20 Carretera Manzanillo-Barra de Navidad, Manzanillo, Colima México. C.P. 28860. (emails: [email protected]).
reportado por API-MAN, se realizó sistemáticamente identificando los tipos de tráficos que impactan el crecimiento portuario y así poder determinar el número y características de las terminales especializadas requeridas. Las principales mercancías que entran y salen del puerto, básicamente son cuatro: el primer lugar lo tiene el creciente movimiento de contenedores, en segundo el mineral de hierro, tercero graneles vegetales y en cuarto lugar carga general . Concluyendo, con la ampliación de la Zona Norte, el proyecto dará solución a las demandas del mercado logrará consolidar al puerto como uno de los más importantes del continente y que de acuerdo con las tendencias proyectadas del tráfico portuario, en un futuro próximo, será necesario la habilitación de nuevas instalaciones en el Vaso II en la Laguna de Cuyutlán. Temas claves—Diagnóstico del Movimiento de Mercancías en el puerto Interior de Manzanillo, Periodo 2000-2010. Análisis de Tráfico Marítimo y su Impacto en la Evolución de los Buques que llegan al puerto de Manzanillo. Propuesta para el Futuro Desarrollo Portuario de Manzanillo, Colima, México. Introducción El puerto de Manzanillo ubicado en el estado de Colima, se ha posicionado como la principal puerta para el manejo de las mercancías contenerizadas del comercio internacional en el Pacífico. Su zona de influencia abarca el Bajío en donde se localiza un importante número de las unidades de producción del país, que comprende los estados de Colima, Jalisco, Aguascalientes, San Luis Potosí, Nuevo León, Querétaro, Guanajuato, México y Distrito Federal, y varias entidades norteñas: Zacatecas, Nuevo León, Coahuila sus cargamentos llegan de Asia, Norteamérica y Sudamérica. Por lo tanto el puerto de Manzanillo se ha convertido en el puerto más dinámico del Pacífico Mexicano en la última década. Ya que por él circulan crecientes flujos de mercancías de diversas cadenas productivas globales. Al manejar el 68% de la carga que arriba por el Pacífico Mexicano, es el puerto en primer lugar el manejo de contenedores a nivel nacional lo que representa el 46% de TEU´S, de tal forma que su área de influencia incluye a los 17 estados que producen el 60% del PIB y donde radica el 42% de la población total. Su zona de influencia internacional se extiende a 74 destinos en el mundo, por su alto potencial de desarrollo pertenece a la principal cadena logística de la Cuenca del Pacífico, además de estar orientado hacia la Costa Oeste del Continente Americano [1]. Por ser un puerto multipropósito cuenta con terminales especializadas para contenedores, carga general, gráneles agrícolas y minerales, vehículos, perecederos y cruceros, donde actualmente escalan 32 líneas navieras [2]. En ellas se maniobra con las principales mercancías que pasan por el puerto interior de Manzanillo, y se clasifican en los siguientes tipos: Im. Carga general: Parafina, fertilizantes, triplay, productos de acero, rollos de papel, autopartes, refacciones, vehículos. IIm. Granel agrícola: canola, trigo, semilla de nabo, avena, sorgo, maíz, sorgo, soya, semilla de girasol, cebada, etc. IIIm. Granel mineral: cemento, zinc, pellet de hierro, yeso nitrato de potasio. IVm. Fluidos: aceite de palma, sebo, aceite de coco, aceite de pescado, aceite de canola, parafina liquida, sosa caustica. Vm.
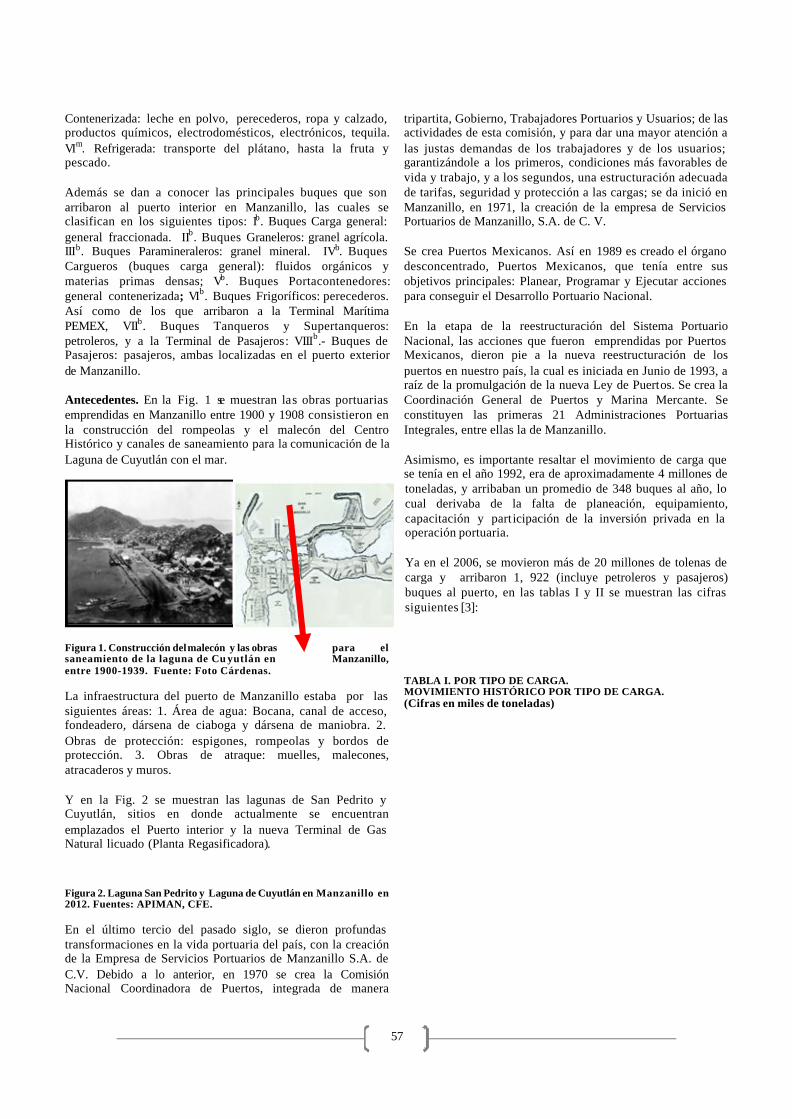
57
Contenerizada: leche en polvo, perecederos, ropa y calzado, productos químicos, electrodomésticos, electrónicos, tequila. VIm. Refrigerada: transporte del plátano, hasta la fruta y pescado. Además se dan a conocer las principales buques que son arribaron al puerto interior en Manzanillo, las cuales se clasifican en los siguientes tipos: Ib. Buques Carga general: general fraccionada. IIb. Buques Graneleros: granel agrícola. IIIb. Buques Paramineraleros: granel mineral. IVb. Buques Cargueros (buques carga general): fluidos orgánicos y materias primas densas; Vb. Buques Portacontenedores: general contenerizada; VIb. Buques Frigoríficos: perecederos. Así como de los que arribaron a la Terminal Marítima PEMEX, VIIb. Buques Tanqueros y Supertanqueros: petroleros, y a la Terminal de Pasajeros: VIIIb.- Buques de Pasajeros: pasajeros, ambas localizadas en el puerto exterior de Manzanillo. Antecedentes. En la Fig. 1 se muestran las obras portuarias emprendidas en Manzanillo entre 1900 y 1908 consistieron en la construcción del rompeolas y el malecón del Centro Histórico y canales de saneamiento para la comunicación de la Laguna de Cuyutlán con el mar.
Figura 1. Construcción del malecón y las obras para el saneamiento de la laguna de Cu yutlán en Manzanillo, entre 1900-1939. Fuente: Foto Cárdenas. La infraestructura del puerto de Manzanillo estaba por las siguientes áreas: 1. Área de agua: Bocana, canal de acceso, fondeadero, dársena de ciaboga y dársena de maniobra. 2. Obras de protección: espigones, rompeolas y bordos de protección. 3. Obras de atraque: muelles, malecones, atracaderos y muros. Y en la Fig. 2 se muestran las lagunas de San Pedrito y Cuyutlán, sitios en donde actualmente se encuentran emplazados el Puerto interior y la nueva Terminal de Gas Natural licuado (Planta Regasificadora). Figura 2. Laguna San Pedrito y Laguna de Cuyutlán en Manzanillo en 2012. Fuentes: APIMAN, CFE. En el último tercio del pasado siglo, se dieron profundas transformaciones en la vida portuaria del país, con la creación de la Empresa de Servicios Portuarios de Manzanillo S.A. de C.V. Debido a lo anterior, en 1970 se crea la Comisión Nacional Coordinadora de Puertos, integrada de manera
tripartita, Gobierno, Trabajadores Portuarios y Usuarios; de las actividades de esta comisión, y para dar una mayor atención a las justas demandas de los trabajadores y de los usuarios; garantizándole a los primeros, condiciones más favorables de vida y trabajo, y a los segundos, una estructuración adecuada de tarifas, seguridad y protección a las cargas; se da inició en Manzanillo, en 1971, la creación de la empresa de Servicios Portuarios de Manzanillo, S.A. de C. V. Se crea Puertos Mexicanos. Así en 1989 es creado el órgano desconcentrado, Puertos Mexicanos, que tenía entre sus objetivos principales: Planear, Programar y Ejecutar acciones para conseguir el Desarrollo Portuario Nacional. En la etapa de la reestructuración del Sistema Portuario Nacional, las acciones que fueron emprendidas por Puertos Mexicanos, dieron pie a la nueva reestructuración de los puertos en nuestro país, la cual es iniciada en Junio de 1993, a raíz de la promulgación de la nueva Ley de Puertos. Se crea la Coordinación General de Puertos y Marina Mercante. Se constituyen las primeras 21 Administraciones Portuarias Integrales, entre ellas la de Manzanillo. Asimismo, es importante resaltar el movimiento de carga que se tenía en el año 1992, era de aproximadamente 4 millones de toneladas, y arribaban un promedio de 348 buques al año, lo cual derivaba de la falta de planeación, equipamiento, capacitación y part icipación de la inversión privada en la operación portuaria. Ya en el 2006, se movieron más de 20 millones de tolenas de carga y arribaron 1, 922 (incluye petroleros y pasajeros) buques al puerto, en las tablas I y II se muestran las cifras siguientes [3]: TABLA I. POR TIPO DE CARGA. MOVIMIENTO HISTÓRICO POR TIPO DE CARGA. (Cifras en miles de toneladas)
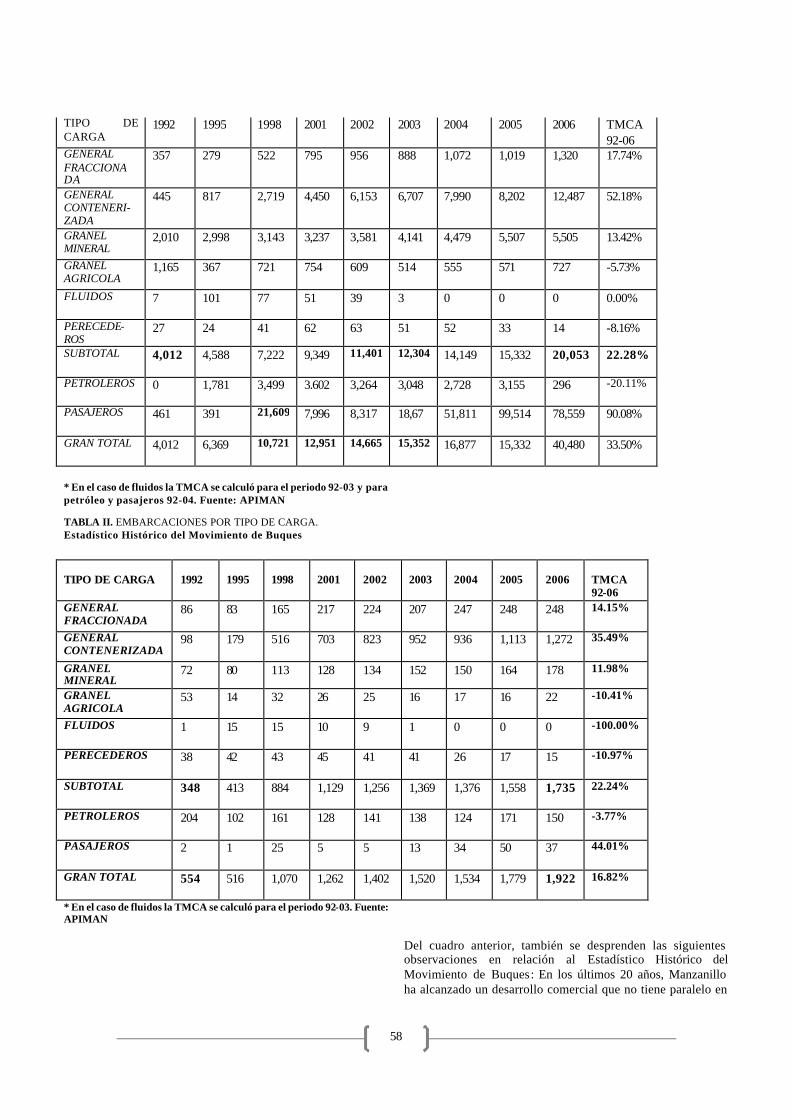
58
* En el caso de fluidos la TMCA se calculó para el periodo 92-03 y para petróleo y pasajeros 92-04. Fuente: APIMAN TABLA II. EMBARCACIONES POR TIPO DE CARGA. Estadístico Histórico del Movimiento de Buques
* En el caso de fluidos la TMCA se calculó para el periodo 92-03. Fuente: APIMAN
Del cuadro anterior, también se desprenden las siguientes observaciones en relación al Estadístico Histórico del Movimiento de Buques: En los últimos 20 años, Manzanillo ha alcanzado un desarrollo comercial que no tiene paralelo en
TIPO DE CARGA
1992
1995 1998 2001 2002 2003 2004 2005 2006 TMCA 92-06
GENERAL FRACCIONA DA
357 279 522 795
956 888 1,072 1,019 1,320 17.74%
GENERAL CONTENERI-ZADA
445 817 2,719 4,450 6,153 6,707 7,990 8,202 12,487 52.18%
GRANEL MINERAL
2,010 2,998 3,143 3,237 3,581 4,141 4,479 5,507 5,505 13.42%
GRANEL AGRICOLA
1,165
367 721 754 609 514 555 571 727 -5.73%
FLUIDOS 7 101
77 51 39 3 0 0 0 0.00%
PERECEDE- ROS
27 24 41 62 63 51 52 33 14 -8.16%
SUBTOTAL 4,012 4,588 7,222 9,349 11,401 12,304 14,149 15,332 20,053 22.28%
PETROLEROS 0 1,781 3,499 3.602 3,264 3,048 2,728 3,155 296 -20.11%
PASAJEROS 461 391 21,609 7,996 8,317 18,67 51,811 99,514 78,559 90.08%
GRAN TOTAL 4,012 6,369 10,721 12,951 14,665 15,352 16,877 15,332 40,480 33.50%
TIPO DE CARGA
1992
1995
1998
2001
2002
2003
2004
2005
2006
TMCA 92-06
GENERAL FRACCIONADA
86 83
165 217 224 207 247 248 248 14.15%
GENERAL CONTENERIZADA
98
179 516 703 823 952 936 1,113 1,272 35.49%
GRANEL MINERAL
72 80 113 128 134 152 150 164 178 11.98%
GRANEL AGRICOLA
53
14 32 26 25 16 17 16 22 -10.41%
FLUIDOS 1 15
15 10 9 1 0 0 0 -100.00%
PERECEDEROS 38 42 43 45
41 41 26 17 15 -10.97%
SUBTOTAL 348
413 884 1,129 1,256 1,369 1,376 1,558 1,735 22.24%
PETROLEROS 204 102 161 128
141 138 124 171 150 -3.77%
PASAJEROS 2 1
25 5 5 13 34 50 37 44.01%
GRAN TOTAL 554 516 1,070
1,262 1,402 1,520 1,534 1,779 1,922 16.82%

59
la historia de los puertos del país. Sólo por citar un ejemplo, mientras en 1992 Manzanillo arribaron 554 buques (incluye petroleros y pasajeros), ya para el año 2000 estaban llegando a más de 1,200 barcos, y al 2010 se alcanzó la cifra de 1,962. Si analizamos los números y en base a la Tabla II, en términos de incrementos porcentuales, la tasa media crecimiento anual calculada es 18.62 % en el período, notaremos que la zona portuaria aumentó drásticamente su tráfico marítimo, es decir, si redondeamos cifras, encontraremos que prácticamente se cuadruplicó el arribo de embarcaciones, justificándose la ampliación de la zona norte. En la fig. 3 se muestra el plano general de Uso del Suelo. PARTE TÉCNICA. Instalaciones Portuarias Actuales. La ciudad de Manzanillo cuenta con un recinto portuario, con extensión territorial de 437 hectáreas en total, dividido en dos polígonos; el polígono uno, ubicado en el Puerto Exterior con superficie de 30.99 hectáreas, ahí, se encuentra la terminal de Petróleos Mexicanos, tiene tres posiciones de atraque y se utilizan para la recepción de productos petroleros. En la Fig. 3, se muestra el polígono dos, se localiza en la zona de San Pedrito y se le conoce como el puerto interior de Manzanillo con superficie de 406.30 has , en el se ubica la principal actividad comercial del puerto, con terminales especializadas para el manejo de contenedores, productos a granel, carga general y refrigerada, así como la Zona Norte en desarrollo de 73.2 has, habilitadas para próxima recepción de contendores.
Fig. 3 Polígonos: 1. Puerto Exterior (en verde y amarillo); 2. Puerto Interior de Manzanillo (en colores), Zona Norte (naranja y banda roja), y Dársenas (azul). Fuente APIMAN. Infraestructura Portuaria. Los polígonos comprenden: zona de aguas abrigadas (dársenas), más de 5,000 metros lineales de muelles con 16 posiciones de atraque (14 comerciales y 2 para cruceros); la profundidad de la zona de agua es de -16 metros con un calado de hasta -14 metros, un canal de acceso al puerto interior de 600 metros de longitud y dos dársenas de ciaboga con diámetros de 460 metros y 526 metros. Análisis del Movimiento de Mercancía Contenerizada en el puerto Interior de Manzanillo, Periodo 2001-2012. Actualmente el puerto se ha posicionado como la principal entrada de contenedores en el país, el 60 % de los contenedores que se manejan en México entran por Manzanillo. En la Fig. 4, muestra que entre 2001 y 2010 el movimiento de contenedores ha aumentado notablemente. En
2009 disminuyó el tráfico de contenedores, se debió a los problemas económicos y financieros de nivel internacional, recuperándose al año siguiente. Es el segundo puerto más importante del Pacífico Mexicano en volumen de carga transportada, el primer lugar nacional en carga contenerizada, el año histórico fue 2006 quedó rebasada la cifra de un millón de contenedores al moverse 1, 249,630 cajas. Otro año histórico fue el 2010, porque quedó rebasada la cifra del millón y medio de contenedores al mover 1, 511,378 teus.
Fig. 4 Movimiento de contenedores, años 2001 al 2010 (Fuente: API de Manzanillo, S. A. de C.V.) En la Fig. 5 se muestran los años siguientes: 2011 el movimiento de contenedores se elevó a un millón 762 mil 508 TEUs, y en 2012, el Puerto movilizó un millón 942 mil 601 TEUs (contenedores de 20 pies), una cifra histórica que muestra la fortaleza en la operación diaria del Recinto. Con excepción del 2009 año de crisis económica mundial, en los últimos 20 años el movimiento de contenedores ha venido creciendo de manera ininterrumpida, manteniendo una tasa media de crecimiento anual del 20% [3]. Fig. 5 Movimiento de contenedores en los años 1992 a 2012 (Fuente: Administración Portuaria Integral de Manzanillo, S. A. de C.V.) Diagnóstico del Tráfico Portuario. Por el tipo de carga [4], el tráfico portuario que el puerto en
el año 2010, manejó: 23´579,359 toneladas de carga contenerizada, siendo el 40% del movimiento nacional ocupando el primer lugar. El 54´199,662 toneladas de granel mineral, siendo el 9% del movimiento nacional ocupando el cuarto lugar. 11´528, 814 toneladas de granel agrícola, siendo el 6% del movimiento nacional ocupando también el cuarto lugar. 15´550,011 toneladas de carga general, siendo el 6% del movimiento nacional ocupando el séptimo lugar.
Series1; 1; 458,472
Series1; 2; 638,507
Series1; 3; 708,417
Series1; 4; 829,603
Series1; 5; 872,386
Series1; 6; 1249,63
Series1; 7; 1409,614
Series1; 8; 1409,782Series1; 9;
1110,356
Series1; 10; 1511,378MOVIMIENTO DE TEU`S
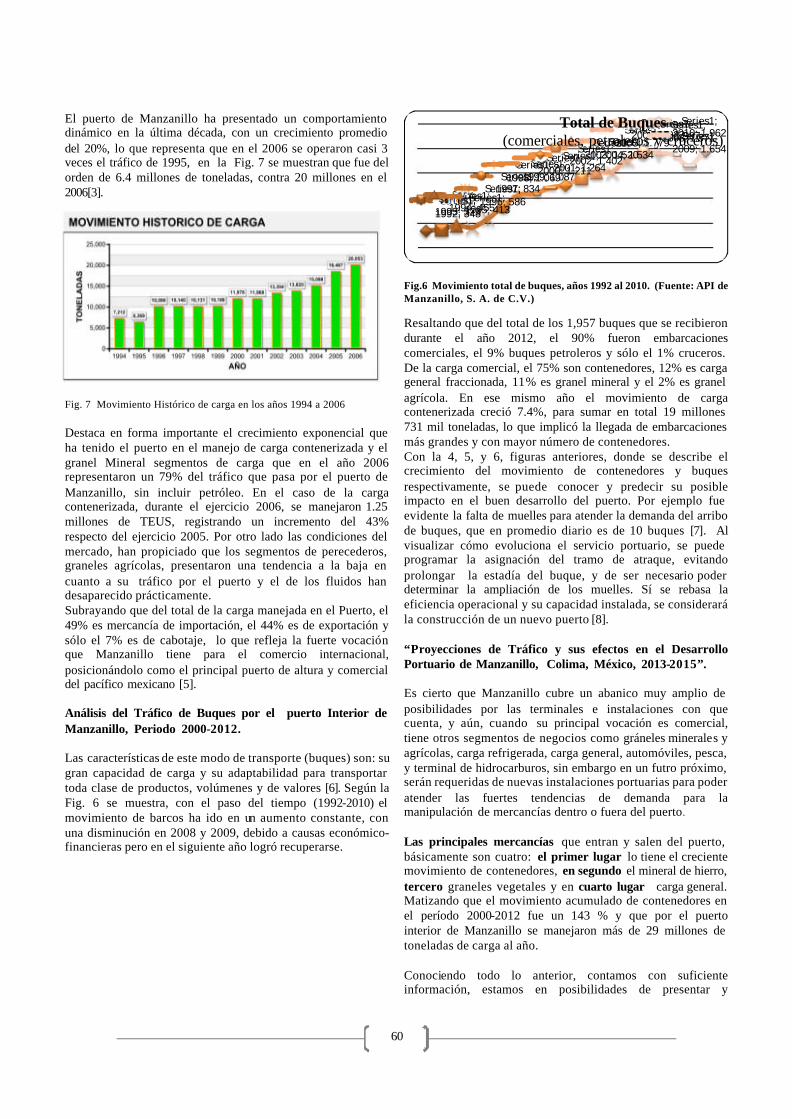
60
El puerto de Manzanillo ha presentado un comportamiento dinámico en la última década, con un crecimiento promedio del 20%, lo que representa que en el 2006 se operaron casi 3 veces el tráfico de 1995, en la Fig. 7 se muestran que fue del orden de 6.4 millones de toneladas, contra 20 millones en el 2006[3].
Fig. 7 Movimiento Histórico de carga en los años 1994 a 2006 Destaca en forma importante el crecimiento exponencial que ha tenido el puerto en el manejo de carga contenerizada y el granel Mineral segmentos de carga que en el año 2006 representaron un 79% del tráfico que pasa por el puerto de Manzanillo, sin incluir petróleo. En el caso de la carga contenerizada, durante el ejercicio 2006, se manejaron 1.25 millones de TEUS, registrando un incremento del 43% respecto del ejercicio 2005. Por otro lado las condiciones del mercado, han propiciado que los segmentos de perecederos, graneles agrícolas, presentaron una tendencia a la baja en cuanto a su tráfico por el puerto y el de los fluidos han desaparecido prácticamente. Subrayando que del total de la carga manejada en el Puerto, el 49% es mercancía de importación, el 44% es de exportación y sólo el 7% es de cabotaje, lo que refleja la fuerte vocación que Manzanillo tiene para el comercio internacional, posicionándolo como el principal puerto de altura y comercial del pacífico mexicano [5]. Análisis del Tráfico de Buques por el puerto Interior de Manzanillo, Periodo 2000-2012. Las características de este modo de transporte (buques) son: su gran capacidad de carga y su adaptabilidad para transportar toda clase de productos, volúmenes y de valores [6]. Según la Fig. 6 se muestra, con el paso del tiempo (1992-2010) el movimiento de barcos ha ido en un aumento constante, con una disminución en 2008 y 2009, debido a causas económico-financieras pero en el siguiente año logró recuperarse.
Fig.6 Movimiento total de buques, años 1992 al 2010. (Fuente: API de Manzanillo, S. A. de C.V.) Resaltando que del total de los 1,957 buques que se recibieron durante el año 2012, el 90% fueron embarcaciones comerciales, el 9% buques petroleros y sólo el 1% cruceros. De la carga comercial, el 75% son contenedores, 12% es carga general fraccionada, 11% es granel mineral y el 2% es granel agrícola. En ese mismo año el movimiento de carga contenerizada creció 7.4%, para sumar en total 19 millones 731 mil toneladas, lo que implicó la llegada de embarcaciones más grandes y con mayor número de contenedores. Con la 4, 5, y 6, figuras anteriores, donde se describe el crecimiento del movimiento de contenedores y buques respectivamente, se puede conocer y predecir su posible impacto en el buen desarrollo del puerto. Por ejemplo fue evidente la falta de muelles para atender la demanda del arribo de buques, que en promedio diario es de 10 buques [7]. Al visualizar cómo evoluciona el servicio portuario, se puede programar la asignación del tramo de atraque, evitando prolongar la estadía del buque, y de ser necesario poder determinar la ampliación de los muelles. Sí se rebasa la eficiencia operacional y su capacidad instalada, se considerará la construcción de un nuevo puerto [8]. “Proyecciones de Tráfico y sus efectos en el Desarrollo Portuario de Manzanillo, Colima, México, 2013-2015”. Es cierto que Manzanillo cubre un abanico muy amplio de posibilidades por las terminales e instalaciones con que cuenta, y aún, cuando su principal vocación es comercial, tiene otros segmentos de negocios como gráneles minerales y agrícolas, carga refrigerada, carga general, automóviles, pesca, y terminal de hidrocarburos, sin embargo en un futro próximo, serán requeridas de nuevas instalaciones portuarias para poder atender las fuertes tendencias de demanda para la manipulación de mercancías dentro o fuera del puerto. Las principales mercancías que entran y salen del puerto, básicamente son cuatro: el primer lugar lo tiene el creciente movimiento de contenedores, en segundo el mineral de hierro, tercero graneles vegetales y en cuarto lugar carga general. Matizando que el movimiento acumulado de contenedores en el período 2000-2012 fue un 143 % y que por el puerto interior de Manzanillo se manejaron más de 29 millones de toneladas de carga al año. Conociendo todo lo anterior, contamos con suficiente información, estamos en posibilidades de presentar y
Series1; 1992; 348
Series1; 1993; 373
Series1; 1994; 455
Series1; 1995; 413
Series1; 1996; 586
Series1; 1997; 834
Series1; 1998; 1.069
Series1; 1999; 1.087
Series1; 2000; 1.211
Series1; 2001; 1.264
Series1; 2002; 1.402
Series1; 2003; 1.520
Series1; 2004; 1.534
Series1; 2005; 1.779
Series1; 2006; 1.922
Series1; 2007; 1.907
Series1; 2008; 1.871Series1;
2009; 1.654
Series1; 2010; 1.962
Total de Buques(comerciales, petroleros y cruceros)

61
programar las proyecciones de tráfico al año 2015, en términos manipulación de la carga en toneladas, movimiento de contenedores y el tráfico de buques con la finalidad de identificar y verificar los tipos de terminales especializadas que serán necesarias emplazar en el “Megaproyecto del Nuevo Puerto de Manzanillo en la Laguna de Cuyutlán”. Movimiento Portuario Proyectado [9]. En las Figuras 8, 9 y 10 se muestran las cifras de los pronósticos de carga y de arribo de buques respectivamente y así mismo del movimiento de contenedores proyectados, resultado de trabajos de investigación asesorados, realizados por estudiantes de octavo de Ingeniería Oceánica. Para la Carga en Toneladas Movidas. La proyección de carga resultante, fue de 36 millones 179 mil toneladas al año 2015.
Fig. 8 Movimiento de carga entoneladas proyectado al 2013 al 2015. Para el Tráfico de Buques Operados. La proyección del arribo de buques, resultante, fue un crecimiento de 2, 245 barcos al año 2015.
Fig. 9 Movimiento de buques proyectado al 2013 hasta el 2015. Y para el Movimiento de Contenedores. La proyección del movimiento de contenedores, resultante, fue un crecimiento de 2, millones 407 mil TEUs al año 2015.
Fig. 10 Movimiento Proyectado de contenedores en los años 2000 a 2015 Mientras tanto API-MAN [3], presentó las siguientes proyecciones. La proyección de carga resultante, fue de 37 millones 760 mil toneladas al año 2015. Incluye solo petroleros. En la proyección del arribo de buques, resultante, fue un crecimiento de 2, 669 barcos al año 2015. Incluye cruceros (pasajeros) y petroleros y no así los gaseros y en la proyección del movimiento de contenedores, resultante, fue un crecimiento de 2 millones, 900 mil TEUs en el año 2015. Resultados no distantes de los logrados con los estudiantes avanzados, que por sí mismos, reflejaron la necesidad de ampliar la zona norte y justifican la construcción de nuevas instalaciones portuarias. Miramientos. Para el Puerto Interior. El Puerto de Manzanillo tiene 15 concesionarios, quienes operan 11 instalaciones y 4 terminales, manejadas todas por inversionistas privados, que hasta mediados del presente año 2013, han venido trabando. Resaltar que la ampliación de la Zona Norte, dará solución a las demandas actuales del mercado, y que de acuerdo con las tendencias proyectadas del tráfico portuario en un futuro próximo, será necesaria la habilitación de nuevas instalaciones en el Vaso II en la Laguna de Cuyutlán. También es importante hacer la consideración del tema Terminal Pesquera, es un reglón pendiente que será necesario analizar y remover. Para el Nuevo Puerto. Habilitar el vaso II de la Laguna de Cuyutlán como Recinto Portuario, que albergaría un potencial de crecimiento de más de 50 años. El Megaproyecto del Nuevo Desarrollo Portuario en la Laguna de Cuyutlán. Polígono del Vaso II de la Laguna de Cuyutlán cuenta con una extensión aproximada de 1,535 ha. para la ubicación de terminales de contenedores y terminales de carga de productos agrícolas, mineros y vehiculares, mediante la apertura de un canal hacia el Océano Pacífico y el dragado de la zona a fin de permitir la maniobra de barcos de carga. Se incluyen los proyectos de infraestructura regional del Gobierno del Estado de Colima, Secretaría de Fomento Económico [10]. En la Fig. 11 se muestra que se contemplan instalar cuatro (diversas) empresas: 1.-Terminal Regasificadora de Gas Natural Licuado (TRGNL); 2.-Terminal Para Almacenamiento De Gas Licuado Zeta Gas; 3.-Terminal de Biocombustibles y 4.-De minerales.
INDICADORES DE TONELADAS 2000-2015
Estimación a 3 años utilizando datos de 12 años
Estimación a 3 años utilizando datos de 5 años
INDICADORES DE BUQUES 2000 -2015
Estimación a 3 años utilizando datos de 12años
Estimación a 3 años utilizando datos de 5años
No. de teus Estimación a
3 años…
A

62
Estas instalaciones se unen con la actual Central Termoeléctrica Gral. Manuel Álvarez de CFE.
En la Fig. 11 Visión el Desarrollo Portuario en el II Vaso de la Laguna de Cuyutlán donde se instalarán cuatro empresas. Con los resultados logrados en las proyecciones anteriores, sí, los cruzamos con la información obtenida de los principales tráficos que actualmente (2012-2013) pasan por el puerto de Interior de Manzanillo, y que son 1° carga contenerizada, 2° carga de minerales, 3° graneles agrícolas y 4° carga general, nos invitan dar vocación al nuevo puerto en Cuyutlán y a visualizarlo como un “Mega-Puerto Multipropósitos” que deberá continuar y estar dotado de nuevas instalaciones para abrigar terminales especializadas para el manejo de contenedores (perecederos), carga general (vehículos), gráneles agrícolas y especialmente de minerales. Entonces, es importante diferenciar los proyectos generados por la
investigación, producto del análisis estadístico y de mercado, a los de envergadura política que atienden intereses de inversionistas, disminuyen la calidad de vida de la población y afectan directamente su entorno natural. En la Fig. 12 se muestra el proyecto infraestructural y portuario, resultado de investigación en la Universidad de Colima. Propuesta apuntalada en las proyecciones de carga y que hace necesario atender la demanda de los cuatro principales tráficos y la terminal pesquera en el nuevo puerto. En la Fig. 11 Puerto Cuyutlán: propuesta e studiantes FACIMAR APÉNDICE Tráfico Marítimo. Es el que se realiza por embarcaciones (buques) a través de los mares; este tipo de tráfico se divide en: Tráfico de altura.- Es la cantidad de carga que se mueve por los puertos nacionales con origen o destino en puertos del
extranjero. Tráfico de cabotaje.- También conocido como tráfico costero es el volumen de carga que se mueve entre los puertos nacionales. Tráfico portuario.- Es la cantidad de carga transportada por las embarcaciones y que se mueve a través de un puerto. REFERENCIAS R.C. Roel. Puerto de México. CHAMATOS S.V. México D.F pág. 410.2005. Secretaría de Comunicaciones y Transportes, Instituto Mexicano del Transporte. 2011. MANUAL ESTADÍSTICO DEL SECTOR TRANSPORTE 2011. Sanfandila, Qro, 2011. Administración Portuaria de Manzanillo. 2007. Programa Maestro de Desarrollo Portuario del Puerto de Manzanillo 2007 – 2012. Manzanillo, Colima, México. Yoana Argentina Álvarez Cerda.2013. Análisis del Tráfico de Mercancías en el Puerto de Manzanillo, Colima. Período 2000 al 2010. Trabajo de Seminario Investigación II. Licenciatura en Administración de Recursos Marinos, Facultad de Ciencias Marinas de la Universidad de Colima. 2012. Movimiento de TEUS en puerto de Manzanillo. Fecha de Última Actualización:15/01/2013(11:37Horas). http://manzanillo.mexicoxport.com/noticias/6269/crece-10-movimiento -teus-puerto-manzanillo L. F. Becerra Mejía. Análisis de l tráfico marítimo y su impacto en la evolución de los buques que arriban al puerto de Manzanillo, Colima. Trabajo de Seminario Investigación II. Licenciatura en Administración de Recursos Marinos. Facultad de Ciencias Marinas de la Universidad de Colima. 2012. Franchescoli Eduardo Guzmán Juárez; Pavel Escalante Zepeda, Análisis de las Problemáticas que afectan el desarrollo y la operatividad del puerto de Manzanillo, Colima. Tesis Profesional. Licenciado en Administración de Recursos Marinos.2011. Víctor Manuel Guillen Pérez y Francisco David Velázquez Domínguez, Análisis de Tiempos y Movimientos de la Carga y Descarga de Contenedores en la Fase de Manipulación a Bordo en el Puerto Interior de Manzanillo, Colima, Noviembre a Febrero 2008. Tesis Profesional. Licenciado en Administración de Recursos Marinos. Universidad de Colima. 2009. E. Calderón Parra, J. E. Ricón Deniz. Ejercicios y Trabajos de Investigación de la Asignatura de Dimensionamiento y Operación Portuaria. Carrera Ingeniería Oceánica, Facultad de Ciencias Marinas de la Universidad de Colima. 2013. Rafael Gutiérrez Villalobos. Proyectos de Infraestructura Regional. Colima Estado Competitivo. Gobierno del Estado de Colima. Secretaría de Fomento Económico. 2012.

63
IV. CAPÍTULO IV. INNOVACIÓN EN EL APROVECHAMIENTO DE LOS RECURSOS
NATURALES

64
Prototipo Agrícola para la Labranza de Conservación
J. Mejías, O. Lúa, R. Urzúa, A. Ordorica, J. Cárdenas, G. Ventura, C. Castrejón
Resumen— En años recientes se ha incrementado el interés por la sostenibilidad de la agricultura. Los sistemas sostenibles de producción de cultivos requieren que el suelo se mantenga en una buena condición física, biológica y química. Esta situación ha requerido del desarrollo e implementación de métodos de labranza que mejoren los ya existentes. Este trabajo consiste en el diseño de un implemento combinado para la preparación acelerada de suelos, capaz de realizar con un solo pase varias labores, además de contribuir a la descompactación, el subsolado y el control de malezas. Temas claves— laboreo mínimo, agricultura de conservación, implemento agrícola INTRODUCCIÓN
L a erosión del suelo es uno de los ejes más importantes de la problemática ambiental y constituye un fenómeno de especial gravedad por afectar a extensas áreas geográficas. La pérdida de suelo conlleva graves consecuencias económicas ya que se produce una disminución en su nivel de fertilidad además del arrastre de sedimentos, fertilizantes y fitosanitarios hacia masas de agua, [4]. En la agricultura, este problema está influido principalmente por el excesivo laboreo del suelo, que genera a su vez a un aumento de emisiones de CO2 a la atmósfera y a la pérdida de biodiversidad. El alcance de este objetivo en el sector agrario de se ve limitado por la intensa sequía de los últimos años, la incidencia de las manifestaciones de los procesos de degradación, tales como la erosión, salinización, J. Mejías labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). O. Lúa labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). A. O. Ordorica labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). G. Ventura labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). J. Cárdenas labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). Claudia Castrejón labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: clau_castrejó[email protected] ). escasez de agua potable para consumir y regar, utilización de tecnologías de manejo inadecuadas, sobre pastoreo y deforestación. Por otro lado, la agricultura está necesitada de una disminución de costes para resultar más competitiva, al mismo
tiempo que las administraciones comienzan a exigir medidas conservacionistas para la concesión de subvenciones. Las técnicas de Laboreo de Conservación, surgidas hace años, pueden dar solución a estas dos problemáticas, la ambiental y la económica, ya que disminuyen la erosión y la contaminación e incrementan la rentabilidad de las producciones, [4]. De esta forma el agricultor se convierte no sólo en protector del medio del que vive, sino en uno de los principales garantes de la conservación de un medio natural imprescindible para todos. Tradicionalmente, el laboreo se ha considerado imprescindible para la implantación y desarrollo de un cultivo. Sin embargo, desde el punto de vista ecológico, la práctica agrícola tradicional se opone a la sucesión natural de los suelos por producir una perturbación reiterada en la estructura del terreno. La agricultura tradicional incluye prácticas como la quema de rastrojos y el laboreo para controlar las malas hierbas. Estas técnicas incrementan considerablemente la erosión del suelo y la contaminación de los ríos con sedimentos, fertilizantes y pesticidas. Además, las prácticas de la agricultura convencional incrementan la emisión de CO2 a la atmósfera y reducen la materia orgánica y la fertilidad del suelo, entre otros efectos negativos para el medio ambiente. La naturaleza tarda de 1000 a 10000 años en recuperar o formar espesor de suelo ya que anualmente se forma de 0,1 a 1mm de suelo cultivable. De ahí la importancia de conservarlo; es virtualmente irremplazable y es nuestra obligación cuidarlos según, [1]. La Agricultura de Conservación es la combinación del uso de medidas agronómicas, biológicas y mecánicas que mejoran la calidad del suelo a través de tres principios técnicos cruciales: no alterar el suelo de forma mecánica (se planta o siembra directamente); cobertura permanente del suelo; especialmente con el uso de rastrojos y cultivos de cobertura; selección juiciosa para las rotaciones de los cultivos y cultivos múltiples, agroforestería e integración pecuaria. Estos sistemas muestran que cuando la calidad del suelo mejora, aumenta la producción agrícola y disminuye la erosión del suelo, [4]. Tradicionalmente en la preparación de suelos se emplean arados de discos, gradas de discos, subsoladores, escarificadores entre otros, estos equipos realizan su función cada uno por separado para lograr el objetivo final de la preparación de suelos que es dejar los mismos listos para recibir la simiente. Este trabajo consiste en el diseño de un implemento combinado para la preparación acelerada de suelos, capaz de realizar con un solo pase varias labores, además de contribuir a la descompactación, el subsolado y el control de malezas.. DESARROLLO Metodología Antes de comenzar con el proceso de diseño de estas máquinas se realizó una investigación sobre los diferentes equipos existentes en el mercado, con el propósito de
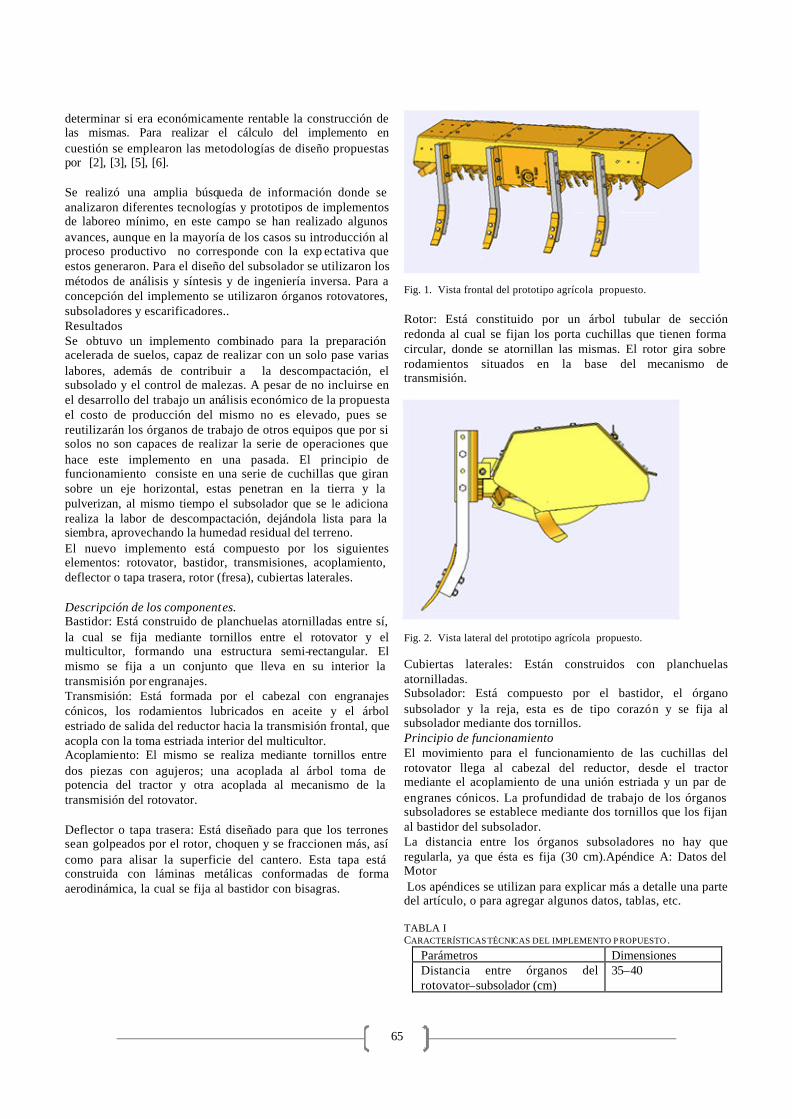
65
determinar si era económicamente rentable la construcción de las mismas. Para realizar el cálculo del implemento en cuestión se emplearon las metodologías de diseño propuestas por [2], [3], [5], [6]. Se realizó una amplia búsqueda de información donde se analizaron diferentes tecnologías y prototipos de implementos de laboreo mínimo, en este campo se han realizado algunos avances, aunque en la mayoría de los casos su introducción al proceso productivo no corresponde con la exp ectativa que estos generaron. Para el diseño del subsolador se utilizaron los métodos de análisis y síntesis y de ingeniería inversa. Para a concepción del implemento se utilizaron órganos rotovatores, subsoladores y escarificadores.. Resultados Se obtuvo un implemento combinado para la preparación acelerada de suelos, capaz de realizar con un solo pase varias labores, además de contribuir a la descompactación, el subsolado y el control de malezas. A pesar de no incluirse en el desarrollo del trabajo un análisis económico de la propuesta el costo de producción del mismo no es elevado, pues se reutilizarán los órganos de trabajo de otros equipos que por si solos no son capaces de realizar la serie de operaciones que hace este implemento en una pasada. El principio de funcionamiento consiste en una serie de cuchillas que giran sobre un eje horizontal, estas penetran en la tierra y la pulverizan, al mismo tiempo el subsolador que se le adiciona realiza la labor de descompactación, dejándola lista para la siembra, aprovechando la humedad residual del terreno. El nuevo implemento está compuesto por los siguientes elementos: rotovator, bastidor, transmisiones, acoplamiento, deflector o tapa trasera, rotor (fresa), cubiertas laterales. Descripción de los componentes. Bastidor: Está construido de planchuelas atornilladas entre sí, la cual se fija mediante tornillos entre el rotovator y el multicultor, formando una estructura semi-rectangular. El mismo se fija a un conjunto que lleva en su interior la transmisión por engranajes. Transmisión: Está formada por el cabezal con engranajes cónicos, los rodamientos lubricados en aceite y el árbol estriado de salida del reductor hacia la transmisión frontal, que acopla con la toma estriada interior del multicultor. Acoplamiento: El mismo se realiza mediante tornillos entre dos piezas con agujeros; una acoplada al árbol toma de potencia del tractor y otra acoplada al mecanismo de la transmisión del rotovator. Deflector o tapa trasera: Está diseñado para que los terrones sean golpeados por el rotor, choquen y se fraccionen más, así como para alisar la superficie del cantero. Esta tapa está construida con láminas metálicas conformadas de forma aerodinámica, la cual se fija al bastidor con bisagras.
Fig. 1. Vista frontal del prototipo agrícola propuesto. Rotor: Está constituido por un árbol tubular de sección redonda al cual se fijan los porta cuchillas que tienen forma circular, donde se atornillan las mismas. El rotor gira sobre rodamientos situados en la base del mecanismo de transmisión.
Fig. 2. Vista lateral del prototipo agrícola propuesto. Cubiertas laterales: Están construidos con planchuelas atornilladas. Subsolador: Está compuesto por el bastidor, el órgano subsolador y la reja, esta es de tipo corazón y se fija al subsolador mediante dos tornillos. Principio de funcionamiento El movimiento para el funcionamiento de las cuchillas del rotovator llega al cabezal del reductor, desde el tractor mediante el acoplamiento de una unión estriada y un par de engranes cónicos. La profundidad de trabajo de los órganos subsoladores se establece mediante dos tornillos que los fijan al bastidor del subsolador. La distancia entre los órganos subsoladores no hay que regularla, ya que ésta es fija (30 cm).Apéndice A: Datos del Motor Los apéndices se utilizan para explicar más a detalle una parte del artículo, o para agregar algunos datos, tablas, etc. TABLA I CARACTERÍSTICAS TÉCNICAS DEL IMPLEMENTO P ROPUESTO .
Parámetros Dimensiones Distancia entre órganos del rotovator–subsolador (cm)
35–40

66
Profundidad de trabajo (cm) 40–45 Cantidad de hileras de trabajo (u) 4
Las técnicas de agricultura de conservación comprenden diversas modalidades tales como la siembra directa (no laboreo), el laboreo de conservación (reducido, sin labores de volteo, donde se no incorporan o sólo en parte, los restos de la cosecha precedente), y el establecimiento de cubiertas vegetales localizadas entre hileras de árboles en plantaciones de cultivos leñosos. El uso de este implemento combinado que permite realizar varias operaciones con una sola pasada de trabajo permite laborar el suelo hasta una profundidad de 30 cm, roturando el mismo sin invertirlo, las aletas cortadoras trozan las raíces de las plantas presentes por lo que el control de malezas se puede efectuar de forma mecánica y sin utilizar herbicidas, como se hace en la labranza tradicional. Con este equipo el suelo se rotura de forma vertical y horizontal permitiendo de esta forma el incremento de la infiltración del agua después de preparado el suelo para el cultivo. Las bondades de este equipo para conformar agregados agrícolas favorecen su introducción en la agricultura de conservación. CONCLUSIONES El implemento diseñado cumple con las características fundamentales exigidas para realizar la labranza conservacionista. La reutilización de algunos componentes de otros implementos agrícolas contribuye a bajar los costos de producción del mismo. El implemento propuesto es fiable y de fácil montaje, ya que se acopla directamente entre la toma de fuerza del tractor y el conjunto de enganche. El equipo puede labrar 4 hileras dejando el terreno listo para la siembra en una sola pasada. REFERENCIAS A. Alvarez, " Siembra en contornos una forma eficaz de controlar el suelo," Revista Cañaveral, vol. 2, pp. 27-30, 1996. J. Álvarez, Elementos de máquinas. La Habana: Editorial de la ISJAE, 1985, pp. 128-203. A. 3. Androsov, " Diseño de Elementos de Máquinas. Rostov del Don : Editorial del ICMA, 1986, pp. 115-134. M. González, “Apuestas por una agricultura sostenible: Laboreo de Conservación” Valladolid: Editorial Excma, 2001, pp. 12-20. J.E. Shigley, y Mischke, C. R. “Diseño en Ingeniería”. México: Editorial McGraw Hill Interamericana, 2002. pp. 262-280. B. A. Stiopin. “Resistencia de materiales”. Moscú: Editorial Mir, 1985. pp. 162-168. BIOGRAFÍA Johann Mejías Brito nació en Holguín, Cuba, el 10 de diciembre de 1977. Se graduó de Ingeniero Mecanizador Agropecuario en la Universidad de Granma en 2001, de Ingeniero Mecánico en la Universidad de Holguín en 2004. Obtuvo el título de Maestro en Ciencias en 2007 y el DEA del Programa de Doctorado Curricular conjunto con la Universidad Politécnica de Madrid en septiembre de 2010. Su experiencia profesional se ha desarrollado casi en su totalidad en la Universidad de Holguín-Cuba desde septiembre de 2001 hasta enero de 2011, desempeñándose como profesor e investigador de Tiempo Completo en el Departamento de Ingeniería Mecánica de la Facultad de Ingeniería Ha trabajado en diferentes proyectos de investigación con empresas como KTP y CEDEMA. De 2012 hasta la fecha comienza a trabajar como profesor e investigador en el Departamento de Ingeniería Industrial y Mecatrónica del Instituto Tecnológico de Colima. Olimpo Lúa Madrigal. Graduado de Ingeniero Industrial, posee el grado de Maestro en Ciencias. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial del Instituto Tecnológico de Colima impartiendo diversas materias. Ha ocupado cargos de
directivos en la Institución y en la actualidad atiende el área de Innovación Tecnológica del Instituto. Ana Olga Ordorica Hoyos. Nació el 19 de Septiembre de 1969 en Colima, México. Graduada de Ingeniera en Sistemas Computacionales en 1992. Terminó la Maest ría en Ingeniería Industrial con la Especialidad en Calidad en el mismo Instituto en 2013, donde se desempeña desde ese mismo año como profesora e investigadora de tiempo completo en el Departamento de Ciencias Básicas, impartiendo numerosas asignaturas del área. Gerardo Ventura Rivera. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, donde se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial, impartiendo numerosas asignaturas del área. Ha ocupado cardos de dirección durante varios años en la Institución. José Cárdenas Zavala . Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, posee el grado de Maestro en Ciencias, donde se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial, impartiendo numerosas asignaturas del área. Claudia Lissete Castrejón Cerro. Nació en Colima, Colima, México el 16 de febrero de1981. Ingeniero Industrial 2003 por el Instituto Tecnológico de Colima, México y Maestro en Ciencias en Ingeniería Industrial 2005 por el Instituto Tecnológico de Colima, México. Imparte las asignaturas de Probabilidad, Estadística Inferencial, Estadística, Matemáticas Financieras, Matemáticas Administrativas, Matemáticas Aplicadas a la Arquitectura, Cálculo Diferencial, Cálculo Integral y Administración de la Producción.

67
Determinación de las características dimensionales y distribución de los cafetos variedad Caturra Rojo en
condiciones de ladera J. Torres, B. Gaskin, I. Macías, J. Mejías, A. de la Rosa,
R. Pacheco Resumen-En Cuba se trabaja desde la década de los 80 en el estudio de la cosecha selectiva de café mediante vibraciones, para la cual es necesario conocer las características dimensionales de las plantas de cafetos, por lo que el presente trabajo tiene como objetivo determinar las características dimensionales y su distribución en el área experimental de la variedad Caturra Rojo; para lo cual se determinaron las dimensiones principales que caracterizan dicho cultivo y se hicieron análisis estadísticos de correlación y regresión para conocer la relación entre las características dimensionales, dispersión y distribución espacial; los resultados obtenidos permitirán caracterizar desde el punto de vista dimensional esta variedad de cafeto en condiciones de ladera, aspecto novedoso para este tipo de estudio. Temas claves: cosecha, vibraciones, laderas ABSTRACT In Cuba one works from the decade of the 80 in the study of the selective crop of coffee by means of vibrations, for which is necessary to know the dimensional characteristics of the coffee plants, for what the present work has as objective to determine the dimensional characteristics and its distribution in the experimental area of the variety Red Caturra; for that which the main dimension1s were determined that characterize this cultivation and statistical analysis of correlation and regression was made to know the relation ship among the dimensional characteristics, dispersion and space distribution; the obtained results will allow to characterize from the dimensional point of view this coffee variety under hillside conditions, novel aspect for this study type. Key words: harvesting, vibration, slopes
J. M. Torres labora en el Instituto Tecnológico de Colima, Av.
Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]).
B. Gaskin labora en el Departamento de Ingeniería Agrícola, Facultad de Ciencias Técnicas, Universidad de Granma, (e-mail: [email protected])
J. Mejías labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]).
I. Macías labora en el Departamento de Ciencias Técnicas, Universidad de Granma. (e-mail: [email protected])
R. Pacheco profesor labora en el Departamento de Ciencias Técnicas, Universidad de Granma. (e-mail: (e-mail: [email protected])
A. de la Rosa labora en el Departamento de Ciencias Técnicas, Universidad de Granma. (e-mail: [email protected])
I. INTRODUCCIÓN En el Centro de Mecanización Agropecuaria (CEMA) se trabajó en la década de los 80 en el estudio de las características dimensionales de los cafetos con el objetivo de mecanizar la cosecha mediante vibraciones. Aspecto este que se vuelve a retomar en la actualidad por la importancia que representa el tema para Cuba La determinación de los parámetros de diseño y operación de los equipos para el desprendimiento de frutas a partir de la aplicación de vibraciones a los arbustos o sus ramas, es una tarea compleja que no es posible abordar únicamente sobre su base experimental. Investigaciones realizadas en el CEMA a lo largo de más de 20 años, relacionadas con la determinación de características dimensionales y las propiedades físico-mecánicas de los arbustos y sus frutos, en condiciones de las plantaciones de la provincia La Habana, permitieron constar con una base de datos primarios para posteriores estudios (Ciro et al., 2004) Los estudios realizados hasta el momento son representativos en condiciones de llano no así para las condiciones de la montaña, pues más del 70% del Café en Cuba se cultiva en lugares montañosos y a diferentes alturas sobre el nivel del mar lo que influye en la calidad del grano. (Ciro et al., 2004) Por lo que el objetivo del trabajo es determinar las características dimensionales y su distribución en el área experimental de la variedad Caturra Rojo en una localidad montañosa de la provincia Granma. II. DESARROLLO Materiales y métodos La investigación se realizó en la Cooperativa Cafetalera de San Isidro perteneciente al municipio montañoso de Guisa de la provincia Granma, ubicada a 300 msnm, la variedad objeto de estudio fue Caturra Roja, con un marco de siembra de 0.75 x 2.50 m y una edad de 4 años después de una poda total, bajo sombra (Algarroba, Varia y Cedro), en la cual se considera que el arbusto ha alcanzado su etapa adulta en producción y desarrollo morfológico. Los arbustos para el muestreo fueron seleccionados con un diseño de completamente aleatorizado, evitando además el efecto de borde, dejando 5 hileras de cafetos por cada lado del campo. Se realizó un pre experimento con 25 arbustos y las características dimensionales fueron:
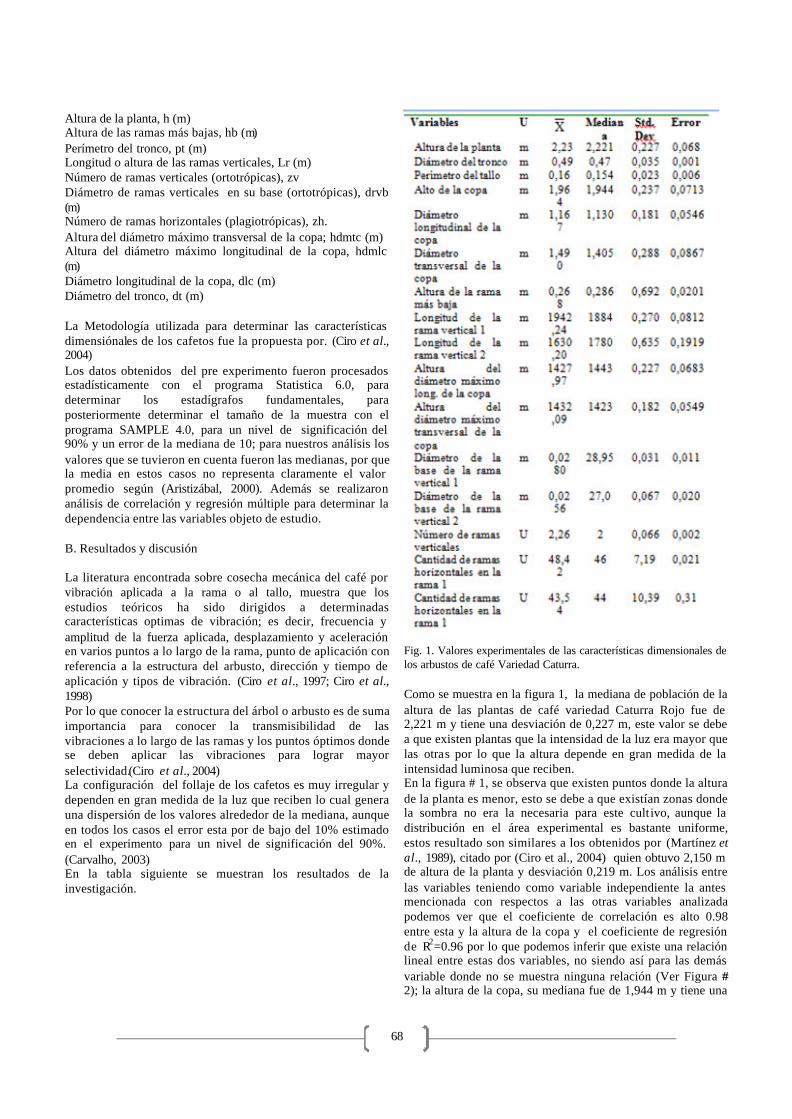
68
Altura de la planta, h (m) Altura de las ramas más bajas, hb (m) Perímetro del tronco, pt (m) Longitud o altura de las ramas verticales, Lr (m) Número de ramas verticales (ortotrópicas), zv Diámetro de ramas verticales en su base (ortotrópicas), drvb (m) Número de ramas horizontales (plagiotrópicas), zh. Altura del diámetro máximo transversal de la copa; hdmtc (m) Altura del diámetro máximo longitudinal de la copa, hdmlc (m) Diámetro longitudinal de la copa, dlc (m) Diámetro del tronco, dt (m) La Metodología utilizada para determinar las características dimensiónales de los cafetos fue la propuesta por. (Ciro et al., 2004) Los datos obtenidos del pre experimento fueron procesados estadísticamente con el programa Statistica 6.0, para determinar los estadígrafos fundamentales, para posteriormente determinar el tamaño de la muestra con el programa SAMPLE 4.0, para un nivel de significación del 90% y un error de la mediana de 10; para nuestros análisis los valores que se tuvieron en cuenta fueron las medianas, por que la media en estos casos no representa claramente el valor promedio según (Aristizábal, 2000). Además se realizaron análisis de correlación y regresión múltiple para determinar la dependencia entre las variables objeto de estudio. B. Resultados y discusión La literatura encontrada sobre cosecha mecánica del café por vibración aplicada a la rama o al tallo, muestra que los estudios teóricos ha sido dirigidos a determinadas características optimas de vibración; es decir, frecuencia y amplitud de la fuerza aplicada, desplazamiento y aceleración en varios puntos a lo largo de la rama, punto de aplicación con referencia a la estructura del arbusto, dirección y tiempo de aplicación y tipos de vibración. (Ciro et al., 1997; Ciro et al., 1998) Por lo que conocer la estructura del árbol o arbusto es de suma importancia para conocer la transmisibilidad de las vibraciones a lo largo de las ramas y los puntos óptimos donde se deben aplicar las vibraciones para lograr mayor selectividad.(Ciro et al., 2004) La configuración del follaje de los cafetos es muy irregular y dependen en gran medida de la luz que reciben lo cual genera una dispersión de los valores alrededor de la mediana, aunque en todos los casos el error esta por de bajo del 10% estimado en el experimento para un nivel de significación del 90%. (Carvalho, 2003) En la tabla siguiente se muestran los resultados de la investigación.
Fig. 1. Valores experimentales de las características dimensionales de los arbustos de café Variedad Caturra. Como se muestra en la figura 1, la mediana de población de la altura de las plantas de café variedad Caturra Rojo fue de 2,221 m y tiene una desviación de 0,227 m, este valor se debe a que existen plantas que la intensidad de la luz era mayor que las otras por lo que la altura depende en gran medida de la intensidad luminosa que reciben. En la figura # 1, se observa que existen puntos donde la altura de la planta es menor, esto se debe a que existían zonas donde la sombra no era la necesaria para este cult ivo, aunque la distribución en el área experimental es bastante uniforme, estos resultado son similares a los obtenidos por (Martínez et al., 1989), citado por (Ciro et al., 2004) quien obtuvo 2,150 m de altura de la planta y desviación 0,219 m. Los análisis entre las variables teniendo como variable independiente la antes mencionada con respectos a las otras variables analizada podemos ver que el coeficiente de correlación es alto 0.98 entre esta y la altura de la copa y el coeficiente de regresión de R2=0.96 por lo que podemos inferir que existe una relación lineal entre estas dos variables, no siendo así para las demás variable donde no se muestra ninguna relación (Ver Figura # 2); la altura de la copa, su mediana fue de 1,944 m y tiene una
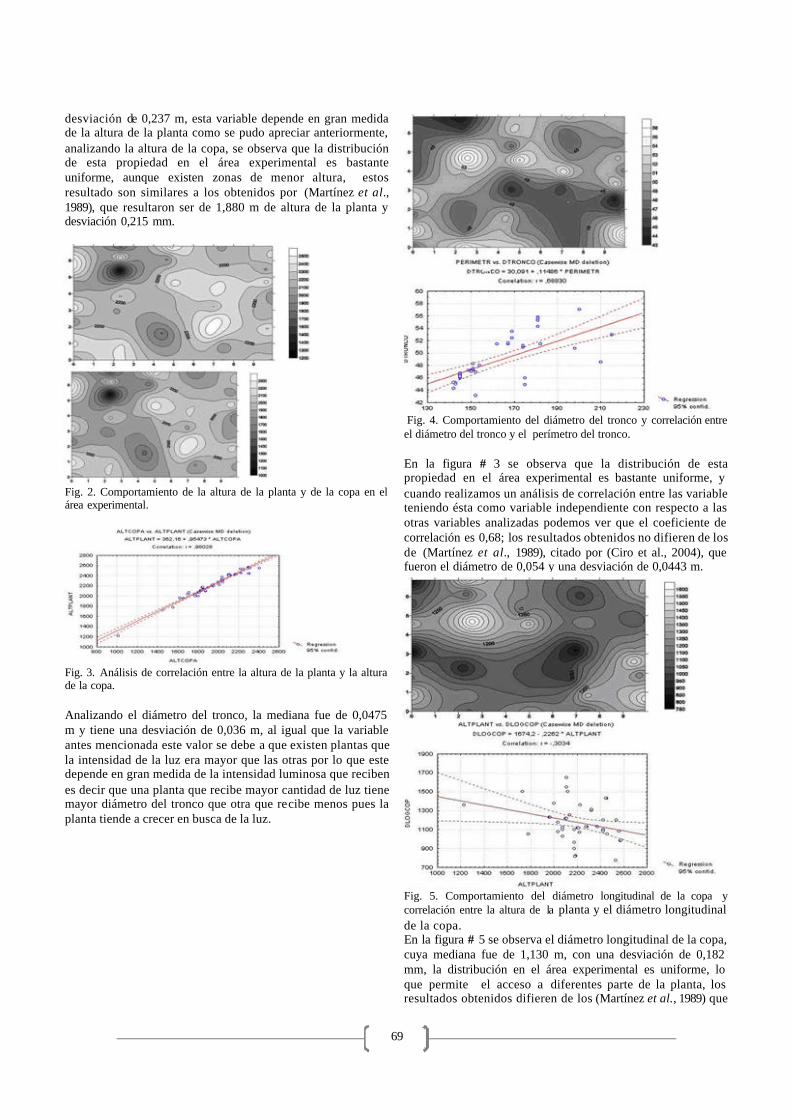
69
desviación de 0,237 m, esta variable depende en gran medida de la altura de la planta como se pudo apreciar anteriormente, analizando la altura de la copa, se observa que la distribución de esta propiedad en el área experimental es bastante uniforme, aunque existen zonas de menor altura, estos resultado son similares a los obtenidos por (Martínez et al., 1989), que resultaron ser de 1,880 m de altura de la planta y desviación 0,215 mm.
Fig. 2. Comportamiento de la altura de la planta y de la copa en el área experimental.
Fig. 3. Análisis de correlación entre la altura de la planta y la altura de la copa. Analizando el diámetro del tronco, la mediana fue de 0,0475 m y tiene una desviación de 0,036 m, al igual que la variable antes mencionada este valor se debe a que existen plantas que la intensidad de la luz era mayor que las otras por lo que este depende en gran medida de la intensidad luminosa que reciben es decir que una planta que recibe mayor cantidad de luz tiene mayor diámetro del tronco que otra que recibe menos pues la planta tiende a crecer en busca de la luz.
Fig. 4. Comportamiento del diámetro del tronco y correlación entre el diámetro del tronco y el perímetro del tronco. En la figura # 3 se observa que la distribución de esta propiedad en el área experimental es bastante uniforme, y cuando realizamos un análisis de correlación entre las variable teniendo ésta como variable independiente con respecto a las otras variables analizadas podemos ver que el coeficiente de correlación es 0,68; los resultados obtenidos no difieren de los de (Martínez et al., 1989), citado por (Ciro et al., 2004), que fueron el diámetro de 0,054 y una desviación de 0,0443 m.
Fig. 5. Comportamiento del diámetro longitudinal de la copa y correlación entre la altura de la planta y el diámetro longitudinal de la copa. En la figura # 5 se observa el diámetro longitudinal de la copa, cuya mediana fue de 1,130 m, con una desviación de 0,182 mm, la distribución en el área experimental es uniforme, lo que permite el acceso a diferentes parte de la planta, los resultados obtenidos difieren de los (Martínez et al., 1989) que
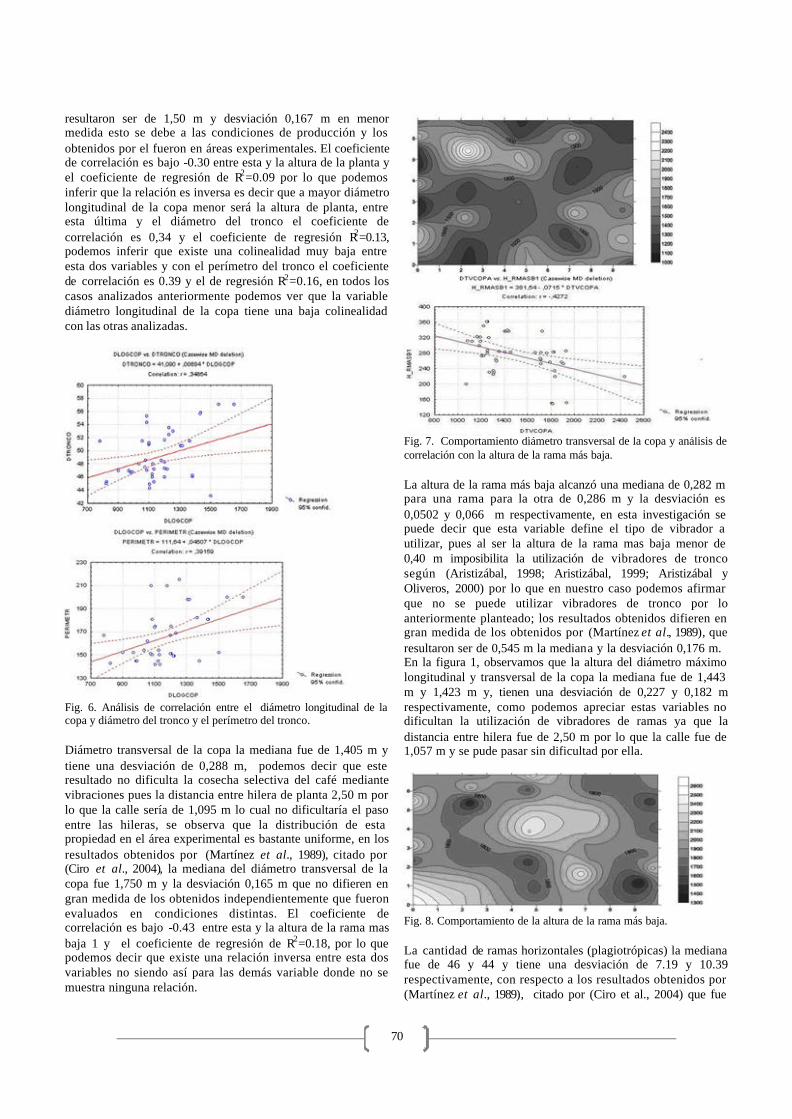
70
resultaron ser de 1,50 m y desviación 0,167 m en menor medida esto se debe a las condiciones de producción y los obtenidos por el fueron en áreas experimentales. El coeficiente de correlación es bajo -0.30 entre esta y la altura de la planta y el coeficiente de regresión de R2=0.09 por lo que podemos inferir que la relación es inversa es decir que a mayor diámetro longitudinal de la copa menor será la altura de planta, entre esta última y el diámetro del tronco el coeficiente de correlación es 0,34 y el coeficiente de regresión R2=0.13, podemos inferir que existe una colinealidad muy baja entre esta dos variables y con el perímetro del tronco el coeficiente de correlación es 0.39 y el de regresión R2=0.16, en todos los casos analizados anteriormente podemos ver que la variable diámetro longitudinal de la copa tiene una baja colinealidad con las otras analizadas.
Fig. 6. Análisis de correlación entre el diámetro longitudinal de la copa y diámetro del tronco y el perímetro del tronco. Diámetro transversal de la copa la mediana fue de 1,405 m y tiene una desviación de 0,288 m, podemos decir que este resultado no dificulta la cosecha selectiva del café mediante vibraciones pues la distancia entre hilera de planta 2,50 m por lo que la calle sería de 1,095 m lo cual no dificultaría el paso entre las hileras, se observa que la distribución de esta propiedad en el área experimental es bastante uniforme, en los resultados obtenidos por (Martínez et al., 1989), citado por (Ciro et al., 2004), la mediana del diámetro transversal de la copa fue 1,750 m y la desviación 0,165 m que no difieren en gran medida de los obtenidos independientemente que fueron evaluados en condiciones distintas. El coeficiente de correlación es bajo -0.43 entre esta y la altura de la rama mas baja 1 y el coeficiente de regresión de R2=0.18, por lo que podemos decir que existe una relación inversa entre esta dos variables no siendo así para las demás variable donde no se muestra ninguna relación.
Fig. 7. Comportamiento diámetro transversal de la copa y análisis de correlación con la altura de la rama más baja. La altura de la rama más baja alcanzó una mediana de 0,282 m para una rama para la otra de 0,286 m y la desviación es 0,0502 y 0,066 m respectivamente, en esta investigación se puede decir que esta variable define el tipo de vibrador a utilizar, pues al ser la altura de la rama mas baja menor de 0,40 m imposibilita la utilización de vibradores de tronco según (Aristizábal, 1998; Aristizábal, 1999; Aristizábal y Oliveros, 2000) por lo que en nuestro caso podemos afirmar que no se puede utilizar vibradores de tronco por lo anteriormente planteado; los resultados obtenidos difieren en gran medida de los obtenidos por (Martínez et al., 1989), que resultaron ser de 0,545 m la mediana y la desviación 0,176 m. En la figura 1, observamos que la altura del diámetro máximo longitudinal y transversal de la copa la mediana fue de 1,443 m y 1,423 m y, tienen una desviación de 0,227 y 0,182 m respectivamente, como podemos apreciar estas variables no dificultan la utilización de vibradores de ramas ya que la distancia entre hilera fue de 2,50 m por lo que la calle fue de 1,057 m y se pude pasar sin dificultad por ella.
Fig. 8. Comportamiento de la altura de la rama más baja. La cantidad de ramas horizontales (plagiotrópicas) la mediana fue de 46 y 44 y tiene una desviación de 7.19 y 10.39 respectivamente, con respecto a los resultados obtenidos por (Martínez et al., 1989), citado por (Ciro et al., 2004) que fue

71
de 44.37 y la desviación de 7.96, por lo que podemos decir que no existe diferencia con respecto a una rama y con la otra solo de 1.63 es decir que prácticamente no existe diferencia. El número de ramas verticales (ortotrópicas) la mediana resulto ser de 2 ramas por planta, y tiene una desviación de 0.66, con respecto a los resultados obtenidos por (Martínez et al., 1989), citado por (Ciro et al., 2004) que fue de 3 y la desviación de 0.867 por lo que podemos decir que la diferencia no es alta solo de una rama y en la desviación típica de 0.207. III. CONCLUSIONES Se determinaron las características dimensionales de las plantas, obteniéndose los datos necesarios para el diseño y dimensionamiento de los órganos de trabajo para la cosecha mecanizada del café por vibración. El valor medio obtenido para la altura de la planta fue de 2,221 m permite considerar la posibilidad de acceso de los cosechadores, utilizando dispositivos de cosecha portátiles, a las diferentes zonas de la planta. El ancho medio de la calle disponible no impide el paso de medios portátiles auxiliares a emplear por los cosechadores. El valor medio obtenido para la altura de las ramas más bajas es 0,282 m indica la factibilidad para la colocación de dispositivos para la captura de frutos durante la caída. IV. REFERENCIAS ARISTIZÁBAL, T.: "Estudio del efecto de la vibración del árbol de café en la selectividad de la cosecha.", Cenicafé, (Experimento ING - 0105, Informe anual): 1998. ARISTIZÁBAL, T.: "Cosecha mecánica del café mediante vibraciones multidireccionales", Cenicafé, 50(3): 173-182, 1999. ARISTIZÁBAL, T. y C. OLIVEROS: "Cosecha mecánica de café aplicando vibraciones circulares al tallo del cafeto", Cenicafé, 51(1), 51(1): 2000. CARVALHO, J., C.: "Influência de Sistemas de Colheita na Qualidade do Café Cereja/Verde, Bóia e Mistura", Anais do III Simpósio de Pesquisa dos cafés do Brasil, Embrapa Café Brasília(DF): 175, 2003. CIRO, H.; M. ALVAREZ y A. OLIVEROS: "Estudio dinámico de la rama del café para el desarrollo de la cosecha mecánica por vibración ", Universidad Nacional de Colombia. Facultad de Ciencias Agropecuarias, (98): 1997. CIRO, H.; M. ALVAREZ y A. OLIVEROS: "Respuesta dinámica de la rama del cafeto a la aplicación de vibraciones unidireccionales", Cenicafé, 49(2): 151-161, 1998. CIRO, H. J.; M. F. ALVAREZ y T. C. OLIVEROS: "Estudio experimental de la dinámica de las vibraciones longitudinales y transversales aplicadas a las ramas de café", Revista de la Facultad Nacional de Agronomía Medellín, 51(2): 63-90, 2004. BIOGRAFÍA Juan Manuel Torres Ochoa. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, posee el grado de Maestro en Ciencias por el Instituto Tecnológico de Querétaro. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial
del Instituto Tecnológico de Colima, impartiendo numerosas asignaturas del área. Benjamín Gaskin Espinoza. Ingeniero Mecanizador Agropecuario, por la Universidad Grararia de La Habana y Doctor en Ciencias Técnicas Agropecuarias en 2007. Director de la Facultad de Ciencias Técnicas en la Universidad de Granma, Cuba. Johann Mejías Brito nació en Holguín, Cuba, el 10 de diciembre de 1977. Se graduó de Ingeniero Mecanizador Agropecuario en la Universidad de Granma en 2001, de Ingeniero Mecánico en la Universidad de Holguín en 2004. Obtuvo el título de Maestro en Ciencias en 2007 y el DEA del Programa de Doctorado Curricular conjunto con la Universidad Politécnica de Madrid en septiembre de 2010. Su experiencia pro fesional se ha desarrollado casi en su totalidad en la Universidad de Holguín-Cuba desde septiembre de 2001 hasta enero de 2011, desempeñándose como profesor e investigador de Tiempo Completo en el Departamento de Ingeniería Mecánica de la Facultad de Ingeniería Ha trabajado en diferentes proyectos de investigación con empresas como KTP y CEDEMA. De 2012 hasta la fecha comienza a trabajar como profesor e investigador en el Departamento de Ingeniería Industrial y Mecatrónica del Instituto Tecnológico de Colima. Idalberto Macías Socarrás. Nació en Bayamo, Cuba el 22 de julio de 1975. Ingeniero Mecanizador Agropecuario, 2001 por la Universidad de Granma y Doctor en Ciencias Técnicas Agropecuarias en 2008 por La Universidad Politécnica de Madrid, España. Jefe de Departamento de Ingeniería Agrícola perteneciente a la Facultad de Ciencias Técnicas en la Universidad de Granma, Cuba. Imparte las asignaturas en pregrado de : Diseño de Elementos de Máquinas, Diseño Asistido por Computadoras (CAD), Mecanización Agropecuaria, Instalaciones Agropecuarias, Maquinaria Agrícola; en postgrado: Sistemas de Máquinas Transportadoras, Tecnología de los Cultivos y Administración de sistemas de Ingeniería. Raúl Pacheco Gamboa. ngeniero Metalúrgico, por la Universidad de Moa y Maestro en Ciencias en 2004. Vicerrector Económico de la Universidad de Granma, Cuba. Alain de la Rosa Andino. Ingeniero Mecanizador Agropecuario, 2001 por la Universidad de Granma. Profesor del Departamento de Ingeniería Agrícola perteneciente a la Facultad de Ciencias Técnicas en la Universidad de Granma, Cuba.

72
Alternativas para la Preparación de Suelos en el Cultivo de Alimentos. El
Caso del Arroz J. Mejías, I. Macías, O. Lúa, R. Urzúa, J.M. Torres, J.
Cárdenas
Resumen— El arroz (Oryza Sativa L.) constituye la mitad de la dieta alimentaria de unos 1 600 millones de seres humanos y supone para otros 400 millones. Este trabajo brinda una panorámica de la preparación de suelos tradicional en el cultivo del arroz y las tendencias actuales de este proceso para la producción de alimentos. Temas claves— preparación de suelo, cultivo de alimentos, arroz. Introducción
E L arroz (Oryza Sativa L.) constituye la mitad de la dieta alimentaria de unos 1 600 millones de seres humanos y supone para otros 400 millones, entre la cuarta y la mitad de su alimentación en la actualidad la producción mundial de cáscara es de aproximadamente 590 millones de toneladas, de los cuales América Latina produce el 3,58 %, cultivando el 4,46 % de la superficie total dedicada a este cereal, lo que equivale a 6,6 millones de hectáreas. Por otro lado, se indica que aunque la producción de alimentos en las últimas décadas ha crecido más rápido que la población y en la actualidad hay un 18 % más de alimentos per cápita que hace 30 años, la paradoja, es, sin embargo, que en el mundo de hoy, más de 800 millones de personas padecen de hambre. Según datos Cuba se encuentra entre los 5 países con más bajos rendimientos de América Latina, con 2,4 t/ha en el período 94/96 y una producción de 234 mil toneladas de arroz; sólo se encuentran por debajo Panamá con 2,2 t/ha, Bolivia con 2,0 t/ha y Haití con 1,6 t/ha. En Cuba es el cereal de mayor consumo con 52 kg per cápita anuales, sin embargo la producción nacional sólo cubre el
J. Mejías labora en el Instituto Tecnológico de Colima, Av.
Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]).
I. Macías labora en la Universidad de Granma. Carretera Bayamo-Manzanillo km 17½. Bayamo, Cuba. (e-mail: [email protected]). J. M. Torres labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). O. Lúa labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). J. Cárdenas labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]) R. Urzúa labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]).
60% de la demanda siendo el consumo per cápita uno de los más elevados de América Latina. La provincia Granma es la de mayor contribución a la producción arrocera, dado que representa cerca del 25 % de esta cifra a escala nacional y dispone de 3 800 ha, las cuales han sido afectadas progresivamente por la salinización y solidificación de los suelos en diferentes grados, lo cual ha ocasionado decrecimientos notables en los rendimientos agrícolas de este cereal y en particular en la zona norte de Vado del Yeso. La mecanización es un factor importante en la agricultura ya que por medio de ella se agiliza la producción nacional de alimentos logrando alcanzar mayores rendimientos, pero para lograr esto las actividades intermedias como preparación de suelo, siembra y atenciones culturales serán controladas atendiendo con igual rigor la cantidad y calidad de las labores, en igual sentido será necesario hacer evaluaciones cada vez más realistas y con la máxima tensión de balance entre los recursos y los objetiv os. La preparación del suelo en el arroz tiene una importancia enorme, pues en ella se concentran alrededor del 60 % de los costos totales de la producción arrocera, influyendo significativamente en esto el consumo de combustibles, lubricantes y piezas de repuesto para los equipos. No podemos olvidar que el porcentaje de roturas en los equipos de preparación de suelos del arroz con las tecnologías tradicionales es elevado, encareciendo mucho más todo el proceso. Este trabajo brinda una panorámica de la preparación de suelos tradicional en el cultivo del arroz y las tendencias actuales de este proceso para la producción de alimentos. Preparación de suelos Objetivos de la preparación de suelos El propósito de las labores mecanizadas en cualquier cultivo, incluido el arroz, es aumentar el rendimiento o evitar pérdidas económicas al reducir el costo de la producción. Es probable que el laboreo consiga evitar más las pérdidas que aumentar los rendimientos, a su vez el crecimiento de la planta depende en gran medida de factores como su nutrición, el suministro de agua, la calidad de preparación del suelo, la lucha contra las plagas y enfermedades, entre otros. Los principales objetivos de la preparación del suelo en el cultivo del arroz son los siguientes: 1. Lograr la nivelación óptima de la superficie de las terrazas. 2. Formar las propiedades físicas y regímenes nutritivos adecuados, de acuerdo con las exigencias de la planta. 3. Crear las condiciones necesarias en el suelo para la siembra, la germinación de las semillas y desarrollo de las plantas. Preparación del suelo para la siembra. La preparación del suelo se efectúa en seco fangueo en el período seco y fangueo directo en el período de lluvia. Seco fangueo: El proceso de seco fangueo se ejecuta de la siguiente forma: Preparación en seco: Se desarrolla combinando alrededor de tres pases de gradas medianas con la nivelación, la que podrá

73
ser nivelación tradicional con Land Plane en dos pases en sentido perpendicular, y la nivelación con láser. La nivelación con láser se está utilizando desde el comienzo de la década de los 90, con mayor auge y generalización en los últimos cinco años. Los primeros trabajos con nivelación con láser se desarrollaron con proyectos de terrazas planas, de aproximadamente 2,5 ha a 3 ha, pero esta nivelación plana ya no es utilizada debido a que provocó afectaciones en el suelo por zonas de corte indiscriminadas y lagunas por asentamiento por las zonas bajas. Ya es criterio generalizado en todo en nuestro país, para los productores que poseen el láser, romper los diques en el período seco, aplicar la nivelación en el proceso de preparación de tierra, posteriormente levantan el dique con una equidistancia entre 8 a 10 cm, siembran la campaña de seca, doblan con fangueo directo en la temporada de lluvia, utilizando solo el tablón alisador. En la próxima campaña repiten las mismas labores, incluyendo la nivelación con láser en la seca, lógicamente con mucho menos movimiento de tierra. Al concluir el proceso de preparación en seco, se procede a llenar los campos de agua y aplicar una revoltura con bajos niveles con Rodillo fangueador, acompañada de tablón alizador, este último tiene la desventaja de producir un lomillo entre pase y pase que resulta negativo para el riego. Cuando existe mucha mezcla lo mismo puede dejarse germinar antes del pase de fangueo o aplicar Glifosate y sembrar en agua. Fangueo directo: El fangueo directo o doblaje es la tecnología generalizada en la temporada de lluvias. En Cuba se alcanza la incorporación de los restos vegetales y el estado de lodo que exige la semilla para hacer correcta germinación, mediante los cortes que producen los angulares de nuestras fangueadoras, de 63,5 x 63,5 cm, dispuestos con una arista perpendicular al suelo, que lo va cortando con la rotación de la rueda. Como se puede observar, la fuerza que produce el corte e incorporación del suelo húmedo proviene directamente de la transmisión del tractor, lo que provoca innumerables roturas que acortan la vida útil y encarece los costos del proceso. La concepción comienza con el tipo de rueda fangueadora, la cual consta de cinco aros paralelos a los cuales van soldados los angulares de 40 x 40 cm y no como los nuestros, con la diferencia de que estos angulares están colocados con el ángulo hacia arriba y no sentados con una arista en posición de corte como en nuestro caso. Dado que no es la fangueadora quien posee la posibilidad de realizar el trabajo del batido del lodo, el mismo recae en: • Rodillos fangueadores. • Gradas hidráulicas para el fangueo. Rodillos fangueadores. Los rodillos fangueadores son los implementos que comienzan a utilizarse en nuestro país para el fangueo directo, suelen ser de varios tipos, de angulares rectos, de cuchillas, etc., pero el más utilizado, y según la mayoría de los productores, el más efectivo es el de ángulos inversos. Este rodillo va acoplado al sistema hidráulico del tractor mediante un bastidor simple y un eje con chumaceras. Posee
un diámetro de 60 cm y un ancho de trabajo de 4 m, subdividido en cuatro secciones de 1 m, con angulares 63.5 a 67 cm, en posición de corte y dispuestos entre sección y sección, formando ángulos obtusos. Del bastidor salen dos brazos de cuyos extremos penden sendas cadenas que arrastran un tubo o barra de acero que se encarga de la nivelación y sobre todo de emparejar el lodo. El rodillo rota con la tracción del tractor y a su paso corta el suelo y lo incorpora con sus angulares de forma muy eficiente. El diámetro del rodillo determina la velocidad de rotación, según la velocidad de rotación, según la velocidad de traslación del equipo utilizado. Para tener una idea, de estos rodillos generalmente dejan el terreno listo, incluyendo la nivelación en dos o en último caso tres pases, por los que sus índices de consumo y productividad por hora son los siguientes según nuestros estudios: TABLA I Tecnologías evaluadas Conceptos Fangueadora
tradicional Rodillo fangueador
No de pases 3 4 2 3 Productividad /hora
0.27 0.17 0.55 0.37
Consumo de combustible l/ha
66 81 25.5 37.8
Gradas hidráulicas para fangueo. En nuestro país se está introduciendo las mismas para así aumentar los rendimientos y la productividad de los equipos con menos consumo de combustible, en otros países se utilizan diferentes gradas para el fangueo. En estos momentos todavía no se le ha puesto el nombre a la grada pero sus características están dadas por tener cada tándem con nueve discos de 55 cm, con regulación en él ángulo de las secciones, para tractores de 20 kN, puede trabajarse con gomas. Es bueno decir que realmente las gradas hidráulicas para el fangueo requieren según nuestro modesto criterio de serios estudios de formación de agregado con tractores de la clase 20 kN, pues al observarlas trabajar se aprecia una elevada resistencia traccional; pero estos estudios serán motivo de otra publicación. Trazado de los diques. Todas Con el objetivo de resolver este importantísimo aspecto que estaba afectando nuestros rendimientos agrícolas, desde 1996 en Granma se comenzaron trabajos encaminados a la eliminación de divisores, calificación del personal para el correcto contorneo de los diques, utilización de sencillos equipos láser como antes habíamos mencionado para el trazado y el estudio de diferentes equidistancias verticales para el marcaje. También se han trabajado en la investigación de otras equidistancias verticales, tanto en diques con curvas en terreno natural, como en diques rectos con nivelación con doble pendiente. En la actualidad los productores utilizan el láser para la nivelación con doble pendiente, la que como es sabido disminuye considerablemente los costos de construcción, no

75
experiencia profesional se ha desarrollado casi en su totalidad en la Universidad de Holguín-Cuba desde septiembre de 2001 hasta enero de 2011, desempeñándose como profesor e investigador de Tiempo Completo en el Departamento de Ingeniería Mecánica de la Facultad de Ingeniería Ha trabajado en diferentes proyectos de investigación con empresas como KTP y CEDEMA. De 2012 hasta la fecha comienza a trabajar como profesor e investigador en el Departamento de Ingeniería Industrial y Mecatrónica del Instituto Tecnológico de Colima. Idalberto Macías Socarrás. Nació en Bayamo, Cuba el 22 de julio de 1975. Ingeniero Mecanizador Agropecuario, 2001 por la Universidad de Gr anma y Doctor en Ciencias Técnicas Agropecuarias en 2008 por La Universidad Politécnica de Madrid, España. Jefe de Departamento de Ingeniería Agrícola perteneciente a la Facultad de Ciencias Técnicas en la Universidad de Granma, Cuba. Imparte las asignaturas en pregrado de Diseño de Elementos de Máquinas, Diseño Asistido por Computadoras (CAD), Mecanización Agropecuaria, Instalaciones Agropecuarias, Maquinaria Agrícola; en postgrado: Sistemas de Máquinas Transportadoras, Tecnología de los Cultivos y Administración de sistemas de Ingeniería. Olimpo Lúa Madrigal. Graduado de Ingeniero Industrial, posee el grado de Maestro en Ciencias. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial del Instituto Tecnológico de Colima impartiendo diversas materias. Ha ocupado cargos de directivos en la Institución y en la actualidad atiende el área de Innovación Tecnológica del Instituto. Ramón Urzúa nació el 12 de Enero de 1956 en Colima, México. Graduado de Ingeniero Bioquímico en 1981 por el Instituto Tecnológico de Colima, donde se desempeña desde ese mismo año como profesor e investigador de tiempo completo en el Departamento de Ciencias Básicas, impartiendo numerosas asignaturas del área. Ha recibido premios y distinciones a lo largo de su dilatada carrera como docente. Juan Manuel Torres Ochoa. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, posee el grado de Maestro en Ciencias por el Instituto Tecnológico de Querétaro. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial del Instituto Tecnológico de Colima, impartiendo numerosas asignaturas del área. Gerardo Ventura Rivera. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, donde se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial, impartiendo numerosas asignaturas del área. Ha ocupado cargos de dirección durante varios años en la Institución. José Cárdenas Zavala. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, posee el grado de Maestro en Ciencias, donde se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial, impartiendo numerosas asignaturas del área.

76
Estimación de la variación espacial de características edafológicas mediante técnicas de interpolación en el estado
de Colima. México
T. E. Martínez, H. Flores y A. Chavez
Resumen— En el presente trabajo se obtienen características edafológicas en el estado de Colima a través de la interpolación de datos puntuales recabados en campo por el Instituto Nacional de Investigaciones Forestales, Agrícolas y Pecuarias (INIFAP). Para estimar la variación de características edafológicas se aplican técnicas de interpolación con la finalidad de identificar él o los métodos de interpolación más apropiados, es decir, con menos error a la distribución real de la información. Se hace uso de Sistemas de Información Geográfica utilizándose particularmente ArcGis para el proceso cartográfico y de análisis de información. Con dicho estudio se determina la variación espacial de características edafológicas. Con el resultado de la interpolación más próxima a la información real, se identifican puntualmente áreas que muestren mayor variabilidad, las cuales se correlacionan con la actividad agrícola para su verificación en campo. Temas claves—Edafología, Sistemas de Información Geográfica, Interpolación, Kriging, Validación. Introducción
E L estado de colima cuenta con el 0.26% del territorio nacional mexicano, sus dimensiones, genera 1.2% del valor de la producción agrícola nacional con cultivos en condiciones de riego y temporal, los rendimientos de muchos de ellos se encuentran por encima de la media nacional sin embargo, otros presentan deficiencias que son reflejadas en rendimientos muy por debajo del promedio general del país (SIAP-SAGARPA, 2010). De acuerdo con datos del Instituto Nacional de Estadística y Geografía (INEGI) en el año de 2010 la superficie sembrada ocupo un .70% de la superficie total sembrada en el país, sin embargo, la producción que se genera en cultivos como la caña, frijol, maíz y frutales como la papaya, limón, mango en los municipios de Armería y Manzanillo son significativos. (INEGI, 2013).
T. E. Martínez Profesora en la Universidad de Colima, Campus 4 Coquimatlán, Colima. (e-mail: [email protected]). H. E. Flores Investigador titular C del Instituto Nacional de Investigaciones Forestales Agrícolas y Pecuarias, (INIFAP), Tepatitlán, Jal. (email: [email protected]) A. Chavez Investigador Titular C del Instituto Nacional de Investigaciones Forestales Agrícolas y Pecuarias, (INIFAP), Tepatitlán, Jal. (e-mail: [email protected]).
Mantener la alta productividad en algunos cultivos y aumentarla en otros requiere de una gran cantidad de agroquímicos, particularmente fertilizantes y plaguicidas, que en Colima como en otros estados de México la falta de sustentos técnicos han provocado la contaminación del suelo y el agua, aumentado con ello el costo de producción. Es un reto en la agricultura del estado promover el desarrollo de sistemas de producción sustentables y con rentabilidad competitiva, pero que además promuevan el desarrollo de otros eslabones de las cadenas productivas. Los estudios de potencial productivo representan una opción viable para afrontar parte del reto del desarrollo agrícola del estado, los cuales permiten apoyar la planeación de los sistemas agrícolas con un enfoque de sostenibilidad e información a escala local, estatal o nacional. El análisis espacial de las características físicas como es el SUELO, primer factor que definen a los cultivos que potencialmente tendrán el mayor desempeño de manera natural, de modo que al conocer la distribución espacial de este recurso y cotejado con la distribución agrícola y el requerimiento ecológico de la planta, es posible delimitar las áreas potenciales para cultivos. Se presenta en primer lugar las generalidades de las características edafológicas que es el elemento principal de este estudio, los métodos de muestreo que existen para estimar la variabilidad edafológica. Se describen los materiales y métodos que se aplicaron en dicho estudio, como es el uso de Sistemas de Información Geográfica para el proceso cartográfico y recolección de información recabada en campo, así como los insumos utilizados. En la aplicación y desarrollo de la metodología, se presenta el modelado espacial de los resultados de la variabilidad edafológica en cada una de sus características que son pH, arena y arcilla. Para lo cual se usan métodos de interpolación, distancia inversa ponderada (IDW) y Kriging identificando la precisión de resultados mediante vecinos más cercanos. Una vez obtenidos los modelos correspondientes, y generado las superficies de distribución, se procedió a comparar los resultados entre los diferentes métodos y vecinos. Se presentan los resultados de la interpolación por diferentes métodos, como también se llega a definir el método y número de vecinos más confiable para estimar áreas que requieran de verificación en campo. Para esto se aplico la validación cruzada, con el cuadrado medio del error menor como criterio de selección. Los resultados sugieren que el método kriging considerando un total de 50 vecinos para la afinación de áreas fue lo más próximo a los datos reales, derivo en el menor margen de error, por lo que se seleccionó para la generación de información. No obstante dependiendo de la distribución de los datos también es considerable 6 vecinos. Finalmente, se hace un análisis del resultado de la interpolación con la distribución agrícola de zonas específicas, es decir, donde el método indica mayor error para definir toma de muestras y corroborar mediante análisis en laboratorio las características de pH, arena y arcilla. Se llevaron a cabo cuatro recolecciones de material edafológico para su análisis en los meses de enero y febrero del año 2013, con un total de 25 muestras de suelo.
77
Se pretende que los resultados de este estudio sirvan de base para mejorar la productividad en algunos cultivos y aumentarla en otros, es decir, promover el desarrollo de sistemas de producción sustentables y con rentabilidad competitiva, pero que además promuevan el desarrollo de otros eslabones de las cadenas productivas. Parte Técnica del Artículo La interpolación es un método o función matemática para estimar los valores de una variable en un espacio donde no se cuenta con valores disponibles. La interpolación puede ser tan simple como una línea recta entre dos puntos; sin embrago, la mayoría de las ciencias de la información geográfica involucran datos espaciales. La interpolación espacial asume que los atributos de los datos son continuos sobre el espacio, esto permite la estimación de los atributos en cualquier localización dentro de la región comprendida por los datos muestreados. Otra consideración es que los atributos son espacialmente dependientes, indicando que los valores más cercanos son más parecidos entre sí que con los valores que se encuentran más alejados.2 Gran cantidad de las variables que se pueden estudiar en un espacio determinado podría ser medida en un infinito número de lugares pero en la práctica solo se miden en unos pocos sitios de muestreo. Si se requiere conocer su valor en un sitio no muestreado es necesario estimarlo de los valores medidos. Existen métodos de estimación discretos o continuos con interpoladores determinísticos. La geoestadística considera el trabajo de la estimación de variables aleatorias usando el método de kriging.3 Métodos de Interpolación: Se dispone de un conjunto de valores de la variable aleatoria Z(xi) en N puntos xi dentro de un área R . Se desea calcular el valor estimado de la variable Z en un punto xo no muestreado. [1] Los métodos de interpolación lineal consideran estimadores de la forma: Z*(x0) = S wn Z(xn) (1) donde wn son los pesos correspondientes de cada valor muestreado. Difieren en la forma como determinan los pesos. 1. Métodos determinísticos: - El método IDW 2. Métodos geoestadísticos - Métodos de kriging En el presente estudio se realizó análisis de los datos con el método de interpolación IDW y el método kriging. Sus características principales son: IDW (Inverso de la Distancia Elevada a una potencia) es el método más simple de interpolación y es similar al promedio local excepto que las muestras más cercanas a los puntos no muestreados tienen más influencia o relación con los puntos
2 Bromhead (2001).Descripción de los datos y el procedimiento seguido en el análisis de estabilidad con el método del talud infinito en el deslizamiento Vallcebre.Barcelona.http://www.tdcat.cesca.es/TESIS_UPC/AVAILABLE/TDX-0713101-113341//19ANEJO4.pdf (Consulta realizada en enero 2008) 3 Echeverría J.C. Molinero H.B. Serra J.A. Peña Zubiate C. (1996). Evaluación de Recursos Naturales con Geoestadística y Kriging.
no muestreados que se localizan a más distancia. Esta función estima los valores de puntos desconocidos y se basa en el peso que tiene cada punto muestreado. Los valores de los datos son ponderados solamente por la distancia de la localización de la interpolación. El peso es el inverso de la distancia de los datos del punto muestreado elevado a una potencia determinada. Cuando se usa IDW se debe especificar una distancia en la cual el peso tienda a cero. Esto significa que solamente aquellos puntos más cercanos son usados para conocer el punto en la interpolación. Cuando tenemos distancias muy grandes el peso que tiene cada punto tiende a cero, ya que la distancia es inversamente proporcional al valor de cada punto muestreado.4 El método de interpolación por Krigeage o “kriging” es definido como un método de interpolación por medias ponderadas donde el conjunto de los pesos asignados a los puntos de muestreo minimiza la varianza de estimación, que es calculada en función de un modelo de variograma y de los emplazamientos relativos de los puntos, unos con respecto a otros, así como con relación al punto de estimación.5 Similar a IDW, Kriging utiliza una ponderación, la cual asigna más influencia para los datos de puntos más cercanos en la interpolación de valores desconocidos. Kriging es una técnica geoestadística de la interpolación que considera la distancia y el grado de variación entre los puntos de referencias sabidos cuando estima valores en áreas desconocidas. Una estimación con Kriging es una combinación linear cargada de los valores conocidos de la muestra alrededor del punto que se estimará. Kriging depende directamente de la relación espacial y estadística que hay entre puntos de muestreo para calcular una superficie de respuesta. Como se menciona en el trabajo “Análisis Comparativo de Técnicas de Interpolación Geoestadística con parámetros forestales”6 kriging al momento de interpolar datos lo hace de manera isotrópica, es decir, en todas direcciones sin tomar en cuenta la continuidad espacial, lo cual modelo la dirección en la que se pueden estimar los mejores valores posibles para los valores desconocidos. Kriging se hace presente en estudios referente a cuestiones forestales, edafológicas y redes hidrológicas. Para tal efecto se llevo a cabo análisis de los datos de las muestras edafológicas en pH con ambos métodos IDW y Kriging, como se observa en la Figura 1 el método de interpolación donde la media del error es más cercano a 0 es el Método de Interpolación Kriging. Para este caso, considerando la variable pH y de acuerdo a su distribución espacial el valor de error más cercano a cero fue considerando entre 6 y 2 vecinos con predicción como tipo de superficie.
4 Carroll, S. S. (1996). A Comparison of Geostatistical Techniques 5 Arce Mesén, Rafael. (Junio, 2001). Métodos de Interpolación Espacial. Escuela de Geografía Universidad de Costa Rica Junio. 6 Solis Villagrán, Zeferino (2003). Análisis Comparativo de Técnicas de Interpolación Geoestadística con parámetros forestales. Tesis de Maestría en Ciencias de la Tierra. Universidad de Colima.

78
Fig. 1. Análisis de interpolaciones. Media del error “pH” considerando superficie y vecinos. Como se observa en la Figura 2, el comportamiento de la variable “pH”, el cual muestra el método de interpolación más apegado a los resultados reales fue kriging prediction error, considerando 6 vecinos por cuadrante. Se detecta que las zonas donde se presenta mayor error es en la costa y zona noroeste del municipio de Manzanillo así como en la frontera con el estado de Michoacán. De acuerdo al resultado del análisis del método de interpolación el municipio de Minatitlán presenta error arriba de .13 comparada con la de menor error que es de .04 Colima, Cómala, Villa de Álvarez, es decir, el comportamiento de los datos al ser interpolados indican que la predicción que realiza kriging es la más semejante a los datos reales y que en las zonas de mayor diferencia es que existe mayor variabilidad de los datos calculados con los reales. Con relación a los resultados de la variable “arena” el análisis de interpolación kriging es el método en que sus predicciones son más cercanas al valor real. El comportamiento se presento de manera diferente con relación al pH, esto debido a que esta variable la contiene el 58.2% de total de los puntos muestreados en el estado de Colima y el 41.8% de los puntos muestreados carecía de dicha información.
Fig. 2. Método de Interpolación Kriging. Predicción de error. Variable “pH” Por lo anterior, el método de interpolación que muestra los datos predecidos más apegados a los datos reales, es decir, más cercano a 0, es Kriging ordinario considerando 50 vecinos por cuadrante. Ver Figura 3.
Fig. 3. Análisis de interpolaciones. Media del error “arena” considerando superficie y vecinos. Se detecta en la Figura 4, las zonas en las cuales la variable “arena” incrementa su diferencia entre el valor calculado por el método de interpolación y su valor real. Estas “islas de error” son evidentes en la zona noreste del municipio de Manzanillo, norte de Ixtlahuacán, centro y noroeste del municipio de Minatitlán. Dichas zonas fueron sometidas a revisión de características físicas, geológicas, edafológicas y uso del suelo apoyándose con material ortofogramétrico. En lo que respecta a la variable “arcilla” el método de interpolación donde la validación de los resultados presentó los datos calculados muy cercanos al valor real fue el método de interpolación kriging simple con 50 vecinos por cada cuadrante., como se observa en la Figura 5, donde la media del error es más cercano a cero. Como se aprecia en la Figura 6, la distribución de las zonas con mayor diferencia entre el valor calculado y el valor real, sobresale nuevamente el noroeste del municipio de Manzanillo, el norte de Minatitlán y la parte este de los municipios de Ixtlahuacán y Colima.
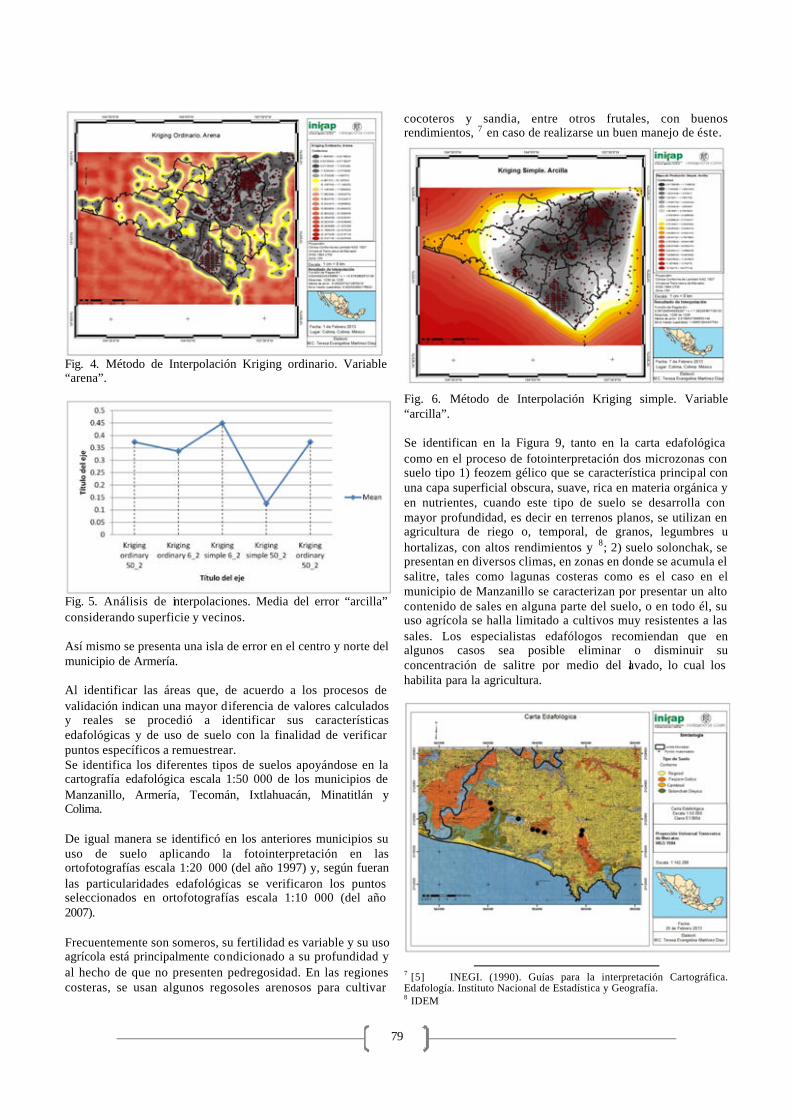
79
Fig. 4. Método de Interpolación Kriging ordinario. Variable “arena”.
Fig. 5. Análisis de interpolaciones. Media del error “arcilla” considerando superficie y vecinos. Así mismo se presenta una isla de error en el centro y norte del municipio de Armería. Al identificar las áreas que, de acuerdo a los procesos de validación indican una mayor diferencia de valores calculados y reales se procedió a identificar sus características edafológicas y de uso de suelo con la finalidad de verificar puntos específicos a remuestrear. Se identifica los diferentes tipos de suelos apoyándose en la cartografía edafológica escala 1:50 000 de los municipios de Manzanillo, Armería, Tecomán, Ixtlahuacán, Minatitlán y Colima. De igual manera se identificó en los anteriores municipios su uso de suelo aplicando la fotointerpretación en las ortofotografías escala 1:20 000 (del año 1997) y, según fueran las particularidades edafológicas se verificaron los puntos seleccionados en ortofotografías escala 1:10 000 (del año 2007). Frecuentemente son someros, su fertilidad es variable y su uso agrícola está principalmente condicionado a su profundidad y al hecho de que no presenten pedregosidad. En las regiones costeras, se usan algunos regosoles arenosos para cultivar
cocoteros y sandia, entre otros frutales, con buenos rendimientos, 7 en caso de realizarse un buen manejo de éste.
Fig. 6. Método de Interpolación Kriging simple. Variable “arcilla”. Se identifican en la Figura 9, tanto en la carta edafológica como en el proceso de fotointerpretación dos microzonas con suelo tipo 1) feozem gélico que se característica principal con una capa superficial obscura, suave, rica en materia orgánica y en nutrientes, cuando este tipo de suelo se desarrolla con mayor profundidad, es decir en terrenos planos, se utilizan en agricultura de riego o, temporal, de granos, legumbres u hortalizas, con altos rendimientos y 8; 2) suelo solonchak, se presentan en diversos climas, en zonas en donde se acumula el salitre, tales como lagunas costeras como es el caso en el municipio de Manzanillo se caracterizan por presentar un alto contenido de sales en alguna parte del suelo, o en todo él, su uso agrícola se halla limitado a cultivos muy resistentes a las sales. Los especialistas edafólogos recomiendan que en algunos casos sea posible eliminar o disminuir su concentración de salitre por medio del lavado, lo cual los habilita para la agricultura.
7 [5] INEGI. (1990). Guías para la interpretación Cartográfica. Edafología. Instituto Nacional de Estadística y Geografía. 8 IDEM
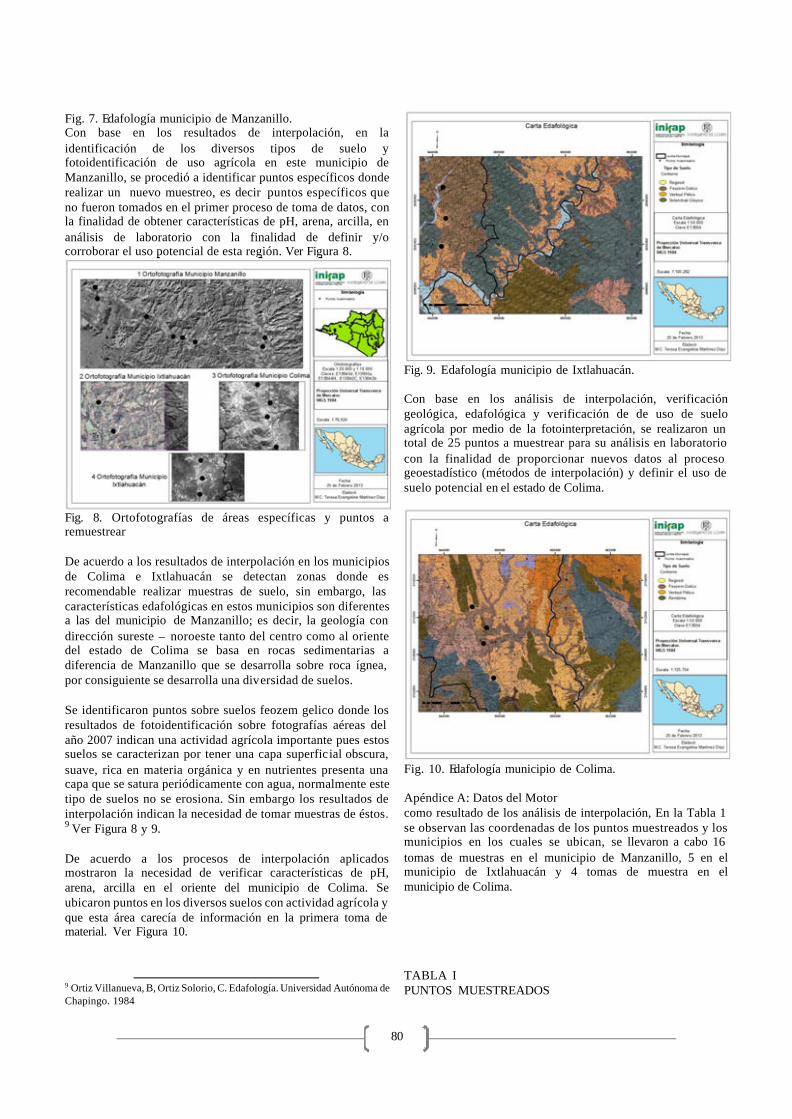
80
Fig. 7. Edafología municipio de Manzanillo. Con base en los resultados de interpolación, en la identificación de los diversos tipos de suelo y fotoidentificación de uso agrícola en este municipio de Manzanillo, se procedió a identificar puntos específicos donde realizar un nuevo muestreo, es decir puntos específicos que no fueron tomados en el primer proceso de toma de datos, con la finalidad de obtener características de pH, arena, arcilla, en análisis de laboratorio con la finalidad de definir y/o corroborar el uso potencial de esta región. Ver Figura 8.
Fig. 8. Ortofotografías de áreas específicas y puntos a remuestrear De acuerdo a los resultados de interpolación en los municipios de Colima e Ixtlahuacán se detectan zonas donde es recomendable realizar muestras de suelo, sin embargo, las características edafológicas en estos municipios son diferentes a las del municipio de Manzanillo; es decir, la geología con dirección sureste – noroeste tanto del centro como al oriente del estado de Colima se basa en rocas sedimentarias a diferencia de Manzanillo que se desarrolla sobre roca ígnea, por consiguiente se desarrolla una diversidad de suelos. Se identificaron puntos sobre suelos feozem gelico donde los resultados de fotoidentificación sobre fotografías aéreas del año 2007 indican una actividad agrícola importante pues estos suelos se caracterizan por tener una capa superficial obscura, suave, rica en materia orgánica y en nutrientes presenta una capa que se satura periódicamente con agua, normalmente este tipo de suelos no se erosiona. Sin embargo los resultados de interpolación indican la necesidad de tomar muestras de éstos. 9 Ver Figura 8 y 9. De acuerdo a los procesos de interpolación aplicados mostraron la necesidad de verificar características de pH, arena, arcilla en el oriente del municipio de Colima. Se ubicaron puntos en los diversos suelos con actividad agrícola y que esta área carecía de información en la primera toma de material. Ver Figura 10.
9 Ortiz Villanueva, B, Ortiz Solorio, C. Edafología. Universidad Autónoma de Chapingo. 1984
Fig. 9. Edafología municipio de Ixtlahuacán. Con base en los análisis de interpolación, verificación geológica, edafológica y verificación de de uso de suelo agrícola por medio de la fotointerpretación, se realizaron un total de 25 puntos a muestrear para su análisis en laboratorio con la finalidad de proporcionar nuevos datos al proceso geoestadístico (métodos de interpolación) y definir el uso de suelo potencial en el estado de Colima.
Fig. 10. Edafología municipio de Colima. Apéndice A: Datos del Motor como resultado de los análisis de interpolación, En la Tabla 1 se observan las coordenadas de los puntos muestreados y los municipios en los cuales se ubican, se llevaron a cabo 16 tomas de muestras en el municipio de Manzanillo, 5 en el municipio de Ixtlahuacán y 4 tomas de muestra en el municipio de Colima. TABLA I PUNTOS MUESTREADOS
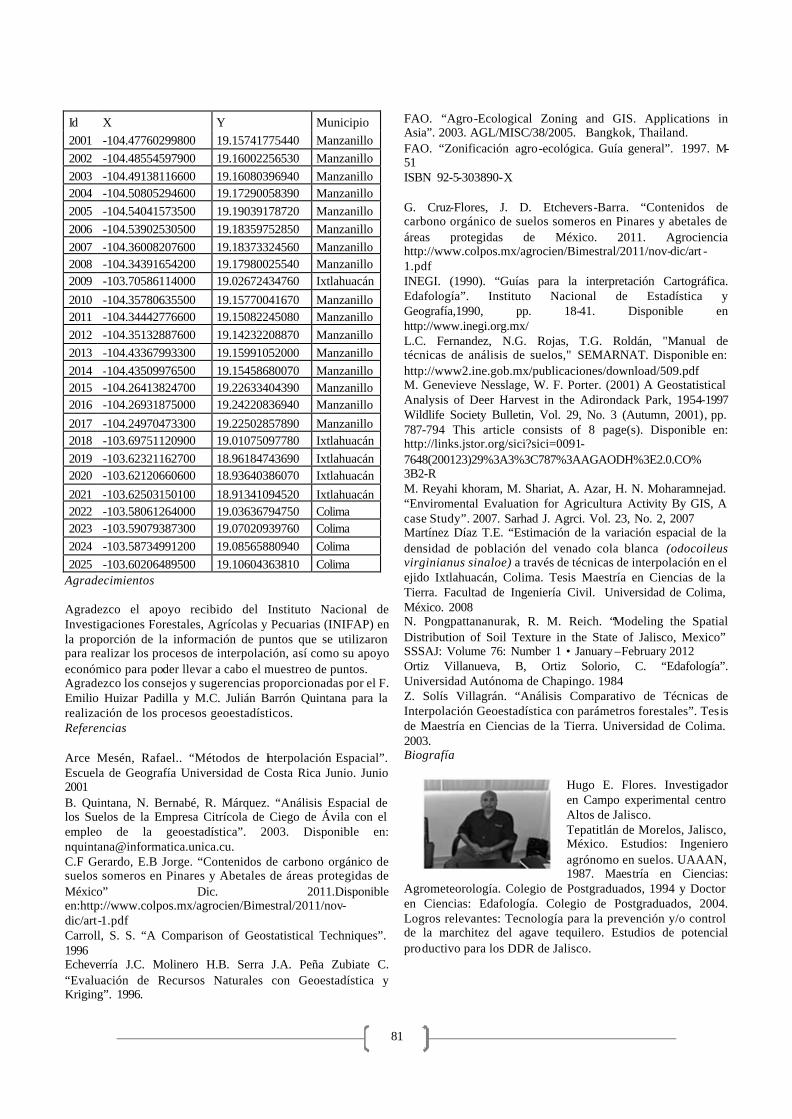
81
Id X Y Municipio 2001 -104.47760299800 19.15741775440 Manzanillo 2002 -104.48554597900 19.16002256530 Manzanillo 2003 -104.49138116600 19.16080396940 Manzanillo 2004 -104.50805294600 19.17290058390 Manzanillo 2005 -104.54041573500 19.19039178720 Manzanillo 2006 -104.53902530500 19.18359752850 Manzanillo 2007 -104.36008207600 19.18373324560 Manzanillo 2008 -104.34391654200 19.17980025540 Manzanillo 2009 -103.70586114000 19.02672434760 Ixtlahuacán 2010 -104.35780635500 19.15770041670 Manzanillo 2011 -104.34442776600 19.15082245080 Manzanillo 2012 -104.35132887600 19.14232208870 Manzanillo 2013 -104.43367993300 19.15991052000 Manzanillo 2014 -104.43509976500 19.15458680070 Manzanillo 2015 -104.26413824700 19.22633404390 Manzanillo 2016 -104.26931875000 19.24220836940 Manzanillo 2017 -104.24970473300 19.22502857890 Manzanillo 2018 -103.69751120900 19.01075097780 Ixtlahuacán 2019 -103.62321162700 18.96184743690 Ixtlahuacán 2020 -103.62120660600 18.93640386070 Ixtlahuacán 2021 -103.62503150100 18.91341094520 Ixtlahuacán 2022 -103.58061264000 19.03636794750 Colima 2023 -103.59079387300 19.07020939760 Colima 2024 -103.58734991200 19.08565880940 Colima 2025 -103.60206489500 19.10604363810 Colima
Agradecimientos
Agradezco el apoyo recibido del Instituto Nacional de Investigaciones Forestales, Agrícolas y Pecuarias (INIFAP) en la proporción de la información de puntos que se utilizaron para realizar los procesos de interpolación, así como su apoyo económico para poder llevar a cabo el muestreo de puntos. Agradezco los consejos y sugerencias proporcionadas por el F. Emilio Huizar Padilla y M.C. Julián Barrón Quintana para la realización de los procesos geoestadísticos. Referencias
Arce Mesén, Rafael.. “Métodos de Interpolación Espacial”. Escuela de Geografía Universidad de Costa Rica Junio. Junio 2001 B. Quintana, N. Bernabé, R. Márquez. “Análisis Espacial de los Suelos de la Empresa Citrícola de Ciego de Ávila con el empleo de la geoestadística”. 2003. Disponible en: [email protected]. C.F Gerardo, E.B Jorge. “Contenidos de carbono orgánico de suelos someros en Pinares y Abetales de áreas protegidas de México” Dic. 2011.Disponible en:http://www.colpos.mx/agrocien/Bimestral/2011/nov-dic/art-1.pdf Carroll, S. S. “A Comparison of Geostatistical Techniques”. 1996 Echeverría J.C. Molinero H.B. Serra J.A. Peña Zubiate C. “Evaluación de Recursos Naturales con Geoestadística y Kriging”. 1996.
FAO. “Agro-Ecological Zoning and GIS. Applications in Asia”. 2003. AGL/MISC/38/2005. Bangkok, Thailand. FAO. “Zonificación agro-ecológica. Guía general”. 1997. M-51 ISBN 92-5-303890-X G. Cruz-Flores, J. D. Etchevers-Barra. “Contenidos de carbono orgánico de suelos someros en Pinares y abetales de áreas protegidas de México. 2011. Agrociencia http://www.colpos.mx/agrocien/Bimestral/2011/nov-dic/art -1.pdf INEGI. (1990). “Guías para la interpretación Cartográfica. Edafología”. Instituto Nacional de Estadística y Geografía,1990, pp. 18-41. Disponible en http://www.inegi.org.mx/ L.C. Fernandez, N.G. Rojas, T.G. Roldán, "Manual de técnicas de análisis de suelos," SEMARNAT. Disponible en: http://www2.ine.gob.mx/publicaciones/download/509.pdf M. Genevieve Nesslage, W. F. Porter. (2001) A Geostatistical Analysis of Deer Harvest in the Adirondack Park, 1954-1997 Wildlife Society Bulletin, Vol. 29, No. 3 (Autumn, 2001), pp. 787-794 This article consists of 8 page(s). Disponible en: http://links.jstor.org/sici?sici=0091-7648(200123)29%3A3%3C787%3AAGAODH%3E2.0.CO%3B2-R M. Reyahi khoram, M. Shariat, A. Azar, H. N. Moharamnejad. “Enviromental Evaluation for Agricultura Activity By GIS, A case Study”. 2007. Sarhad J. Agrci. Vol. 23, No. 2, 2007 Martínez Díaz T.E. “Estimación de la variación espacial de la densidad de población del venado cola blanca (odocoileus virginianus sinaloe) a través de técnicas de interpolación en el ejido Ixtlahuacán, Colima. Tesis Maestría en Ciencias de la Tierra. Facultad de Ingeniería Civil. Universidad de Colima, México. 2008 N. Pongpattananurak, R. M. Reich. “Modeling the Spatial Distribution of Soil Texture in the State of Jalisco, Mexico” SSSAJ: Volume 76: Number 1 • January –February 2012 Ortiz Villanueva, B, Ortiz Solorio, C. “Edafología”. Universidad Autónoma de Chapingo. 1984 Z. Solís Villagrán. “Análisis Comparativo de Técnicas de Interpolación Geoestadística con parámetros forestales”. Tesis de Maestría en Ciencias de la Tierra. Universidad de Colima. 2003. Biografía
Hugo E. Flores. Investigador en Campo experimental centro Altos de Jalisco. Tepatitlán de Morelos, Jalisco, México. Estudios: Ingeniero agrónomo en suelos. UAAAN, 1987. Maestría en Ciencias:
Agrometeorología. Colegio de Postgraduados, 1994 y Doctor en Ciencias: Edafología. Colegio de Postgraduados, 2004. Logros relevantes: Tecnología para la prevención y/o control de la marchitez del agave tequilero. Estudios de potencial productivo para los DDR de Jalisco.

82
Teresa Evangelina Martínez Díaz. Profesora de tiempo complementario en la Facultad de Ingeniería Civil de la Universidad de Colima a partir de 2005. Estudios: Geógrafa de la UNAM 1989. Maestra en Ciencias de la Tierra con especialidad en Geomática 2008. Realizo estudios socioeconómicos de
la zona envolvente viñatera del Douro, Portugal en 2004. Ha realizado estudios de geoestadística - métodos de interpolación aplicados a la estimación del venado cola blanca en Ixtlahuacán, Colima.
Álvaro Agustín Chávez Duran. Investigador en Campo experimental centro Altos de Jalisco. Tepatitlán de Morelos, Jalisco, México. Ingeniero Topógrafo de la UdC 2002. Maestro en Ciencias de la Tierra con especialidad en Geomática 2006.
Logros relevantes: Desarrollo de tecnologías enfocadas a la prevención y combate de incendios forestales. Aplicación de Sistemas Automatizados para la clasificación de vocaciones de uso de suelo.

83
Caracterización por RAMAN de Endospermo Nixtamalizado
A. J. Palacios-Fonseca y G. Hernández-Padrón
Resumen— En este trabajo se estudió los cambios estructurales del endospermo de maíz obtenidos después del proceso térmico alcalino (nixtamalización). El análisis estructural del endospermo nixtamalizado se realizó mediante espectroscopia Raman con el fin de identificar diferencias micro-estructurales debido a la difusión de agua y calcio durante la nixtamalización, esta caracterización se complementó con microscopia electrónica de barrido (MEB). Se encontraron cambios en las bandas Raman características para los almidones en el mapeo del endospermo, así como en función del tiempo de reposo. Temas claves— Análisis químico instrumental; Seguridad alimentaria y nutricional. Introducción
E n México el maíz es consumido principalmente como tortilla y son la base de la dieta. Las tortillas son consideradas una buena fuente de calcio y fibra, así como una importante fuente de proteína and almidón [1-2]. Las tortillas son preparadas de masa o harina obtenida atreves del cocimiento y reposo del grano de maíz en solución saturada de hidróxido de calcio. Durante el tratamiento térmico alcalino ocurren una serie de cambios que promueve cambios reológicos o fisicoquímicos importantes en las estructuras anatómicas del grano que se refleja en las propiedades nutrimentales y sensoriales del producto final [3-5]. El endospermo representa entre el 80-90 % del grano de maíz, es su principal reserva energética y está constituido por gránulos de almidón dispersos en una matriz proteica. De acuerdo a [6] el endospermo es una estructura que está muy relacionada con la calidad de la tortilla. Sin embargo, la mayoría de los estudios sobre el proceso de nixtamalización han sido realizados en el grano entero [7-11]. La espectroscopia de Raman es una técnica que puede brindar información sobre el comportamiento de las moléculas con muy poca cantidad de muestra y no la destruye. Se ha usado para estudiar los cambios moleculares en alimentos que han sido sometidos a un proceso o para medir su calidad [12-14].
J. Palacios-Fonseca labora en la Universidad de Colima, Av.
Universidad 333, Colima, Colima, México, CP 28040. (e-mail: [email protected]). G. Hernández-Padrón labora en el departamento de Nanotecnología, en el Centro de Física Aplicada y Tecnología Avanzada, UNAM, Campus Juriquilla. Boulevard Juriquilla 3001, Querétaro, México CP 76230 (email: [email protected])
Varios investigadores han reportado estudios en cambios moleculares en almidón utilizando diferentes técnicas, como difracción de rayos X, calorimetría diferencial de barrido, espectroscopia de infrarrojo, Resonancia magnética nuclear, [6, 15]. Así mismo, un número de estudios de Raman han investigado la pérdida del orden molecular durante la gelatinización del almidón [16] y la ganancia del orden molecular durante la retrogradación [17-18]. Recientemente, [19] utilizó la técnica de Raman para determinar los cambios estructurales en el almidón asociados a la retrogradación en tortilla fresca y almacenada. Los resultados mostraron que la técnica de Raman puede ser una buena herramienta para mostrar los cambios es tructurales en el almidón. Sin embargo, actualmente no se ha realizado un estudio mediante Raman en el endospermo nixtamalizado. Así, el objetivo de este estudio fue investigar los cambios estructurales del endospermo de maíz obtenidos después del proces o térmico alcalino (nixtamalización). Materiales y Métodos Muestra En el 2011 se utilizó el híbrido de maíz 30G40 (Pioneer) obtenido de la compañía SACSA de Culiacan Sinaloa, México. El grano usado en este trabajo fue seleccionado libre de daño y tamaño homogéneo con la finalidad de reducir las variaciones y reproducir los resultados. Preparación de las Unidades Experimentales Los endospermos fueron obtenidos de granos de maíz procesados en un equipo prototipo de nixtamalización para garantizando su reproducibilidad [20], utilizando 2 litros de agua/1 Kg de maíz, añadiendo 10g de hidróxido de calcio, se inició a 25°C y alcanzó 92°C, ahí se coció 15 minutos y diferentes combinaciones de tiempos de reposo de los granos de 0, 3, 7 h. A cada muestra, se le sometió a un proceso de drenado del nejayote y posteriormente se lavó con agua corriente en 500 mililitros dos veces con ayuda de un colador. Finalmente, se extrajo 200 gramos de nixtamal durante el durante el cocimiento y los diferentes tiempos de reposo establecidos, se les retiro manualmente pericarpio y germen, dejando solo el endospermo. Finalmente, para el análisis se utilizó la parte interna del endospermo se cortan 10 en forma trasversal. Espectroscopia de Raman Espectro de raman fue obtenido usando un espectrómetro de Raman Dispersivo con microscopio marca Brukerl Modelo Sentrerra con un láser He-Ne (λ=785 nm). Los modos vibracionales para cada muestra de endospermo fueron determinados en una región de 80– 3200 cm-1. Los datos fueron recolectados con una resolución de 9-15 cm-1 con 6 barridos. Los experimentos fueron realizados por duplicado. Microscopia Electrónica de Barrido El estudio de la morfología del endospermo de maíz en función del tiempo de reposo fue evaluada utilizando micrografías obtenidas por un microscopio electrónico de barrido a bajo vacío modelo JEOL JSU-5600LV con una resolución de 5 nm, ajustado con un espectrómetro de rayos X
Inte
nsi
dad
0
9 0 0 0
Inte
nsi
dad

84
con energía de dispersión (Noran Instrument, Modelo 4.2.3 Voyager). Las condiciones del equipo fueron: voltaje de aceleración electrónica de 20 kV, con una presión en el rango de 237.72–396.20 kgf/m2 en la cámara de la muestra, las imágenes se obtuvieron en la superficie a partir de la señal electrónica de barrido. Resultados y Discusión Los espectros de Raman (Fig. 1) mostro bandas características a espectros de almidón [19, 21] en el endospermo nixtamalizado a diferentes horas de reposo, debido a que estas bandas (2900, 1340, 1122, 936, 856, 479 cm-1) se originan principalmente de los modos de vibración de amilosa y amilopectina. Las bandas por debajo de 800 cm-1, son atribuidas al esqueleto del anillo piranosa de la glucosa [22-23], entre las bandas se puede observar una banda más intensa a 479 cm-1 que representa el grado de polimerización [24], indicado como almidón en la Figura 1. En la Figura 2 se puede observar ligeros cambios en espectroscopia de Raman en el endospermo nativo de maíz en tres áreas diferentes, la banda a 2911 cm-1 muestra un incremento en la intensidad de la banda (C-4), aquí la intensidad del pico es atribuido a la cantidad de amilosa [25] demostrando la diferencia entre endospermo harinoso y corneo en el grano de maíz. Fig. 1. Espectro de Raman de endospermo nativo de maíz.
Fig. 2. Espectroscopia Raman de endospermo nativo de maíz: parte superior (C-2), parte media (C-3), parte baja (C-4). Los espectros de Raman contribuyen a un mayor entendimiento de los cambios moleculares en el almidón involucrados durante el proceso de nixtamalización [19]. En la Figura 3, se observan los principales cambios en función del tiempo de reposo durante la nixtamalización en la intensidad de las bandas 480 y 2911 cm-1. Por otro lado, mediante microscopia electrónica de barrido se observó los cambios estructurales en los gránulos de almidón que ocurren durante el proceso de nixtamalización. En la Figura 4, se observan ligeros cambios estructurales en la superficie de los gránulos de almidón en el endospermo harinoso (Figura 4), que corresponde a los espectros de espectroscopia de Raman (Figura 2 y 3). Sin embargo a 4 horas de reposo en solución alcalina hay modificación en la matriz proteica y la gelatinización de los gránulos de almidón. Esto explica los cambios de la intensidad del pico 2911 cm-1 atribuido a la variación en la relación amilosa/amilopectina.
4H
Nativo
Inte
nsi
dad
1H
0H
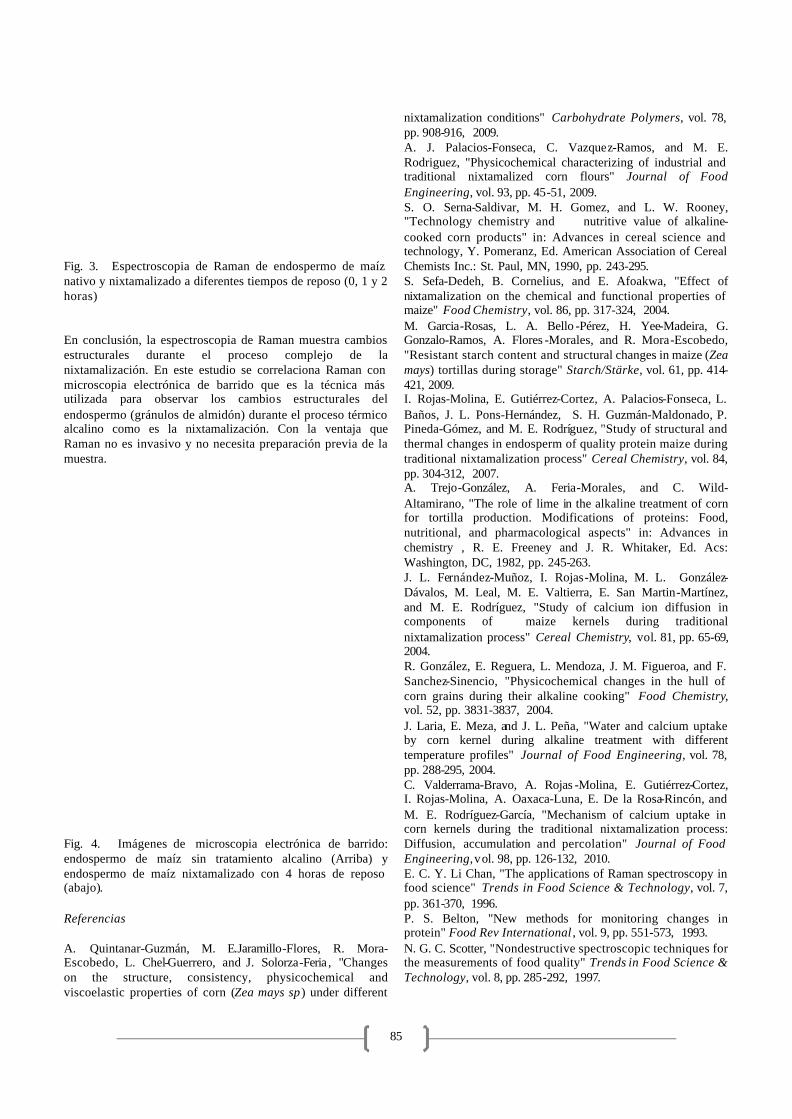
85
Fig. 3. Espectroscopia de Raman de endospermo de maíz nativo y nixtamalizado a diferentes tiempos de reposo (0, 1 y 2 horas) En conclusión, la espectroscopia de Raman muestra cambios estructurales durante el proceso complejo de la nixtamalización. En este estudio se correlaciona Raman con microscopia electrónica de barrido que es la técnica más utilizada para observar los cambios estructurales del endospermo (gránulos de almidón) durante el proceso térmico alcalino como es la nixtamalización. Con la ventaja que Raman no es invasivo y no necesita preparación previa de la muestra. Fig. 4. Imágenes de microscopia electrónica de barrido: endospermo de maíz sin tratamiento alcalino (Arriba) y endospermo de maíz nixtamalizado con 4 horas de reposo (abajo). Referencias A. Quintanar-Guzmán, M. E.Jaramillo-Flores, R. Mora-Escobedo, L. Chel-Guerrero, and J. Solorza-Feria , "Changes on the structure, consistency, physicochemical and viscoelastic properties of corn (Zea mays sp) under different
nixtamalization conditions" Carbohydrate Polymers, vol. 78, pp. 908-916, 2009. A. J. Palacios-Fonseca, C. Vazquez-Ramos, and M. E. Rodriguez, "Physicochemical characterizing of industrial and traditional nixtamalized corn flours" Journal of Food Engineering, vol. 93, pp. 45-51, 2009. S. O. Serna-Saldivar, M. H. Gomez, and L. W. Rooney, "Technology chemistry and nutritive value of alkaline-cooked corn products" in: Advances in cereal science and technology, Y. Pomeranz, Ed. American Association of Cereal Chemists Inc.: St. Paul, MN, 1990, pp. 243-295. S. Sefa-Dedeh, B. Cornelius, and E. Afoakwa, "Effect of nixtamalization on the chemical and functional properties of maize" Food Chemistry, vol. 86, pp. 317-324, 2004. M. Garcia-Rosas, L. A. Bello -Pérez, H. Yee-Madeira, G. Gonzalo-Ramos, A. Flores -Morales, and R. Mora-Escobedo, "Resistant starch content and structural changes in maize (Zea mays) tortillas during storage" Starch/Stärke, vol. 61, pp. 414-421, 2009. I. Rojas-Molina, E. Gutiérrez-Cortez, A. Palacios-Fonseca, L. Baños, J. L. Pons-Hernández, S. H. Guzmán-Maldonado, P. Pineda-Gómez, and M. E. Rodríguez, "Study of structural and thermal changes in endosperm of quality protein maize during traditional nixtamalization process" Cereal Chemistry, vol. 84, pp. 304-312, 2007. A. Trejo-González, A. Feria-Morales, and C. Wild-Altamirano, "The role of lime in the alkaline treatment of corn for tortilla production. Modifications of proteins: Food, nutritional, and pharmacological aspects" in: Advances in chemistry , R. E. Freeney and J. R. Whitaker, Ed. Acs: Washington, DC, 1982, pp. 245-263. J. L. Fernández-Muñoz, I. Rojas-Molina, M. L. González-Dávalos, M. Leal, M. E. Valtierra, E. San Martin-Martínez, and M. E. Rodríguez, "Study of calcium ion diffusion in components of maize kernels during traditional nixtamalization process" Cereal Chemistry, vol. 81, pp. 65-69, 2004. R. González, E. Reguera, L. Mendoza, J. M. Figueroa, and F. Sanchez-Sinencio, "Physicochemical changes in the hull of corn grains during their alkaline cooking" Food Chemistry, vol. 52, pp. 3831-3837, 2004. J. Laria, E. Meza, and J. L. Peña, "Water and calcium uptake by corn kernel during alkaline treatment with different temperature profiles" Journal of Food Engineering, vol. 78, pp. 288-295, 2004. C. Valderrama-Bravo, A. Rojas -Molina, E. Gutiérrez-Cortez, I. Rojas-Molina, A. Oaxaca-Luna, E. De la Rosa-Rincón, and M. E. Rodríguez-García, "Mechanism of calcium uptake in corn kernels during the traditional nixtamalization process: Diffusion, accumulation and percolation" Journal of Food Engineering, vol. 98, pp. 126-132, 2010. E. C. Y. Li Chan, "The applications of Raman spectroscopy in food science" Trends in Food Science & Technology, vol. 7, pp. 361-370, 1996. P. S. Belton, "New methods for monitoring changes in protein" Food Rev International , vol. 9, pp. 551-573, 1993. N. G. C. Scotter, "Nondestructive spectroscopic techniques for the measurements of food quality" Trends in Food Science & Technology, vol. 8, pp. 285-292, 1997.

86
M. E. Rodríguez, J. M. Yáñez-Limón, J. J. Alvarado, H. Vargas, F. Sánchez-Sinencio, F. Figueroa, B. F. Martínez, J. González-Hernández, M. D. Silva, and L. C. M. Miranda, "Influence of the structural changes during alkaline cooking on the thermal, rheological, and dielectric properties for maize tortillas" Cereal Chemistry, vol. 73, pp. 593-600, 1996. K. C. Schuster, H. Ehmoser, J. R. Gapes, and B. Lendl, "On-line FT-Raman spectroscopic monitoring of starch gelatinization and enzyme catalyzed starch hydrolysis ", Vibrational Spectroscopy , vol. 22, pp. 181-190, 2000. B. J. Bulkin, Y. Kwak, and C. M. Dea, "RAMAN spectroscopic study of starch retrogradation" in: Industrial polysaccharide, S. S. Stivala, V. Crescenzi, and C. M. Dea, Ed. N. Y.:Breach Science Publisher, 1986, pp. 267-281. P. M. Fechner, W. Siegfried, P. Kleinebudde, and N. H. Reinhard, "Studies of the retrogradation process for various starch gel using RAMAN spectroscopy" Carbohydrate Research, vol. 340, pp. 2563-2568, 2005. A. Flores-Morales, M. Jiménez-Estrada, and R. Mora-Escobedo, "Determination of the structural changes by FT-IR, Raman, and CP/MAS 13C NMR spectroscopy on retrograded starch of maize tortillas" Carbohydrate Research, vol. 87, pp. 61-68, 2012. E. Gutierrez, I. Rojas-Molina, J. L. Pons-Hernandez, H. Guzman, B. Aguas-Angel, J. Arenas, P. Fernandez, A. Palacios-Fonseca, G. Herrera, and M. E. Rodriguez, "Study of calcium ion diffusion in nixtamalized quality protein maize as a function of the cooking temperature" Cereal Chemistry, vol. 84, pp. 186-194, 2012. K. Ramazan, J. Irudayaraj, and K. Seetharaman, "Characterization of irradiated starches by using FT-Raman and FTIR spectroscopy" Journal of Agricultural Food Chemistry, vol. 50, pp. 3912-3918, 2002. A. T. Tu, J. Lee, and F. P. Milanovich, "Laser-Raman spectroscopic study of cyclohexaamylose and related compounds; spectral analysis and structural implications" Carbohydrates Research, vol. 76, pp. 239-244, 1979. M. Sekkal, V. Dincq, P. Legrand, J. P. Huvenne, "Investigation of the glycosidic linkages in several oligosaccharides using FTIR and FT-Raman spectroscopies" Journal of Molecular structure , vol. 349, pp. 349-352, 1995. B. J. Bulkin, Y. Kwak, C. M. Dea Iaian, "Retrogradation kinetics of waxy corn and potato starches; a rapid, Raman spectroscopic study" Carbohydrates Research, vol. 160, 95-112, 1987. K. C. Chan, J. Xing, D. L. Phillips, and H. Corke, "Development of NMR and RAMAN spectroscopic methods for the determination of the degree of substitution of maleate in modified starches" Journal of Agricultural Food Chemistry, vol. 49, 2702-2708, 2001. Biografía Alin Jael Palacios Fonseca nació en Celaya Guanajuato, el 9
de Diciembre de 1977. Estudio Nutrición y ejerció la profesión en Querétaro hasta el año 2007. Obtuvo el grado como Maestra en Ciencias Química en 2004 y en el 2010 termino los créditos de Doctorado en Ingeniería. Ejerció la
profesión de Docente del 2008-2010 en la FI-UAQ y de 2010-2012 en la DCSI-UG. Actualmente es Profesor de tiempo completo en la Facultad de Medicina en la U de C. Desempeña labores de investigación en Fisicoquímica de alimentos y Nutrición.

87
Diseño de un Sistema de Máquinas para el Revestimiento de Canales de Riego Agrícola
J. Mejías, R. Lugo, R. Urzúa, J. M. Torres, J. R. Sánchez, E. González, J. Martínez, C. Castrejón
Resumen— El trabajo consistió en la concepción, diseño, construcción y prueba de un sistema de máquinas para el revestimiento mecanizado de canales de riego agrícola. El método mecanizado de revestimiento incrementa el rendimiento respecto al tradicional, además contribuye al ahorro de materiales, mano de obra y uso de equipos, en particular de combustible. Para el logro de los objetivos propuestos se llevo a cabo una revisión del estado actual sobre los sistemas de máquinas revestidoras con hormigón, realizándose un análisis de variantes para la concepción de la máquina y cada conjunto, de esta forma se seleccionó los sistemas a diseñar. La utilización de métodos avanzados de cálculos y valoración permitió determinar las formas y dimensiones de las máquinas, conjuntos y piezas, obteniéndose un diseño ligero y una tecnología sencilla de fabricación.. Temas claves— Revestimiento, canales, diseño de máquinas. INTRODUCCION El desarrollo sostenible de la agricultura de riego se ve limitado por escasez de agua y de tierras regables, para lograr estos objetivos la construcción de canales magistrales es imprescindible en este proceso. Sin embargo, existe la posibilidad de incrementar en forma importante la producción agrícola si se utilizan el agua y la infraestructura disponibles, mediante un mejor manejo de los sistemas de conducción (incluyendo la operación), modernización de la infraestructura, un mejor mantenimiento y prácticas agrícolas más adecuadas. Actualmente el revestimiento de esos canales se efectúa con losas prefabricadas de 60 y 80 mm de espesor, unidas por juntas longitudinales y transversales de hormigón y montadas sobre un filtro. ________________ J. Mejías labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). R. Lugo labora en el Instituto Tecnológico de Colima. (e-mail: [email protected]). J. M. Torres labora en el Instituto Tecnológico de Colima. (e-mail: [email protected]). J. R. Sánchezc labora en la Universidad de Holguín, Cuba. (e-mail: [email protected]). J. Martínez labora en la Universidad de Holguín, Cuba. (e-mail: [email protected]). E. González labora en la Universidad de Holguín, Cuba. (e-mail: [email protected]). R. Urzúa labora en labora en el Instituto Tecnológico de Colima. (e-mail: [email protected] ). C. Castrejón labora en labora en el Instituto Tecnológico de Colima. (e-mail: [email protected] ). Las losas necesitan gran cantidad de acero, fundamentalmente debido a su izaje y transportación, no obstante la cantidad de losas con grietas es muy grande, como se pudo comprobar en el canal magistral “Bio – La Rioja” que, aproximadamente, es de 4,2 %. Todo esto trae consigo las pérdidas de agua, las cuales se producen, fundamentalmente, por fugas en las juntas, grietas y
debido a la impermeabilidad de las losas. Esta tecnología actualmente es poco usada en el mundo. En la actualidad el proceso tecnológico mecanizado de revestimiento de canales, utilizando diferentes sistemas de máquinas se ha desarrollado aceleradamente, debido fundamentalmente al incremento del rendimiento, disminución de los costos de construcción, las pérdidas en explotación y la humanización del trabajo. Existen dos sistemas de máquinas para el revestimiento mecanizado de canales: de revestimiento transversal y revestimiento longitudinal, los cuales pueden fundir tanto parte del perfil como el perfil completo, [Segura, 1993]. La compactación del hormigón se realiza o bien por cilindros vibratorios o por vibradores de superficies. El costo de estas máquinas o sistemas es alto y de tecnología muy avanzada, pueden desplazarse sobre rieles o por orugas automotrices guiadas en nivel y dirección mediante sensores electrónicos. El costo de un sistema oscila entre 800 mil y 1 millón y medio de dólares en función, fundamentalmente, del tipo de máquina y su forma de desplazamiento. En el mundo existen algunas firmas que construyen sistemas de máquinas para el revestimiento de canales con hormigón fundamentalmente Bélgica, Italia (MASSENZA), EE.UU (BID – WELL), Alemania, Rusia y otros. [Manz, 1990] La puesta en práctica en nuestro país de un sistema mecanizado para el revestimiento de canales magistrales aceleraría el desarrollo de la voluntad hidráulica, lo cual seria la base fundamental para la materialización del programa alimentario, de la industria azucarera y de otras tareas que se ven afectadas por las dificultades de los recursos hidráulicos disponibles. El objetivo fundamental del trabajo fue concebir, diseñar, fabricar, probar y poner en explotación un sistema de máquinas para el revestimiento mecanizado de canales magistrales. DESARROLLO Materiales y métodos Antes de comenzar con el proceso de diseño de estas máquinas se realizó una investigación sobre los diferentes equipos existentes en el mercado, con el propósito de determinar si era económicamente rentable la construcción de las mismas, así como de los principales sistemas de revestimiento de canales empleados en al actualidad. Para realizar el cálculo de las máquinas en cuestión se emplearon las metodologías de diseño propuestas por [Androsov, 1986; Álvarez Sánchez, 1985; Stiopin, 1985; Shigley y Mischke, 1990] El costo de fabricación del sistema de máquinas fue determinado a partir de los costos de las piezas fabricadas por distintas entidades, los costos de los componentes tantos de producción nacional como importación y los demás gastos directos e indirectos. Para la realización del

88
análisis técnico - económico de la introducción del sistema de máquinas en un proceso tecnológico mecanizado de construcción de canales se tomó como base la ejecución presupuestada de un kilómetro de canal por el método tradicional de losas prefabricadas, determinándose los gastos reales a partir de los indicadores obtenidos por la brigada que construye el canal Bio -La Rioja y diferenciándolo con los gastos del método mecanizado se obtuvo la economía que aporta. En el caso del método mecanizado, los gastos se determinan para tres variantes de revestimiento: Sin acero. Utilizando mallas de acero de 30 X 30 centímetros, o sea, un 53 % respecto a las losas. Con acero sólo en el hombro, siendo un 12,4 % de éste respecto al método tradicional. En estas variantes se mantuvo la misma resistencia del hormigón a razón de 175 kg/cm2. Para cada variante los gastos reales de materiales, mano de obra y uso de equipos, es decir los costos directos y las restantes partidas de los gastos indirectos, cuyos resultados se muestran en la tabla 2 conjuntamente con el costo presupuestado. Para los costos reales del método tradicional por losas no se tomó en cuenta las losas del fondo de 2 X 2 metros, la última losa del talud ni el material para las juntas del fondo. Todo ello influye en las partidas del costo y provoca diferencias entre los gastos presupuestados y reales del método tradicional fundamentalmente en materiales. En el caso de mano de obra, la diferencia se fundamenta en que el presupuesto no se contempla el alargamiento del plazo de ejecución por incumplimiento de la programación. Una vez realizado estos cálculos se procedió a determinar las economías de un kilómetro de taludes de canal de cada variante del método mecanizado respecto al método tradicional. Descripción del sistema de máquinas. Máquina distribuidora de hormigón. La máquina distribuidora de hormigón es la encargada de distribuir el hormigón de manera uniforme en el talud delante de la máquina revestidora, lo cual es importante para que se realice una correcta nivelación, compactación y acabado. Esta máquina está compuesta por las unidades ensambladas siguientes (Figuras 1 y 2): MDH-l.01.000: Esta unidad ensamblada se denomina "Carrito Distribuidor", el cual se encarga de realizar la descarga del hormigón hacia el suelo. Se mueve a lo largo de la máquina, utilizando cuatro ruedas sobre angulares guías de la estructura. El accionamiento se logra por dos cadenas de 38,1 mm de paso. El carrito se mueve a una velocidad de 0… 1 m/s. MDH-l.02.000: Esta unidad se denomina "Accionamiento Motriz del “Carro Inferior", lo integra un reductor mecánico montado en un árbol por uno de sus extremos y dos estrellas que mu even las dos cadenas de 38,1 mm de paso, cuyos extremo, se fijan a ambos lados del carrito distribuidor para moverlo. En el reductor mecánico se encuentra un hidromotor MGP-125 que le da movimiento a la unidad completa, impulsado por una Bomba VPA.
Fig. 1. Unidades ensambladas de la máquina distribuidora. MDH-l.03.000: Esta unidad se denomina "Accionamiento de la Máquina" y está formada por una base de angulares, vigas canales y planchas sobre la cual se monta el motor de combustión interna 4VD 8/8-2SV con potencia de 22 KW y consumo especifico de combustible de 292 g/KWh a 3000 r.p.m. y una caja de bomba que es movida por el motor a través de una transmisión por correa. En la caja de bomba están dos bombas una VPA-40 y la otra NCH-10. Además, sobre la base se encuentra un tanque con aceite hidráulico con capacidad de 70 litros para las bombas VPA-40 y otro con capacidad de 21 litros para la bomba NCH-10. MDH-l.04.000: Esta unidad se denomina "Sistema de Rodaje Motriz" y es la encargada de desplazar la máquina a lo largo del canal, con sus ruedas montadas sobre rieles a una velocidad de 0…0,5 m/s . Tiene la máquina una unidad con dos ruedas en el hombro del canal y otro par en el fondo. Cada par de ruedas es movida por cadenas de 19,05 mm de paso que son accionadas por hidromotores MIP-125 impulsados por la otra bomba VPA-40. MDH-l.05.000: Esta unidad se denomina "Sistema de Gavetas y Gatos Mecánicos" y está destinada a regular la altura y posición de la máquina en la parte superior de la misma. Está integrada por dos juegos de gavetas fabricadas en forma de viga canal y dos juegos de gatos mecánicos.
Fig. 2. Unidades ensambladas de la máquina distribuidora. MDH-1.06.000: Esta unidad es la "Estructura la Máquina" construida de angulares de aceros soldados y en módulos desde 1…3 metros de longitud. Los módulos se pueden unir por tornillos entre si y se centran con pines guías para su rápido montaje. En la parte superior se atornillan angulares sobre los cuales rueda el carrito distribuidor. La longitud total varía desde 4…12,5 metros, aunque longitudes mayores pueden ser añadidas. Sobre la estructura en la parte inferior están montadas la base del accionamiento de la máquina y el árbol para el

89
accionamiento motriz del carrito inferior y en su parte superior las estrellas movidas. MDH-l.09.000: Esta unidad se denomina "Sistema de Rodaje Movido" y está formado por una estructura con dos ruedas, estando un par en la parte superior y otro en la parte inferior. MDH-l.10.000: Esta unidad se denomina "Accionamiento Motriz del Transportador" y está integrada por un tambor con un árbol central en uno de cuyos extremos se une, por medio de un acoplamiento por cadenas, a un reductor mecánico el cual lo mueve un hidromotor MGP-125, impulsado por una bomba NCH-10. Esta unidad se encuentra en la parte inferior de la estructura y se encarga de dar la movimiento a la banda (12) a una velocidad de 1,5 m/s para el transporte del hormigón, el cual es depositado en la cinta transportadora a través de una tolva de carga que se encuentra en la parte superior de la estructura donde también esta el tambor movido (MDH-l.11.000) y que a su vez se montan sobre chumaceras en el sistema de tensado. Además de las unidades ensambladas descritas anteriormente, en la estructura se encuentran situados los rodillos superiores paira el soporte de la carga y los rodillos inferiores para el exceso de flecha en la banda en la rama de vacío. Máquina revestidora de hormigón. La máquina revestidora de canales con hormigón, marca MRCH-l utiliza como órgano de trabajo fundamental un cilindro compactador auxiliado en su función por un tornillo sinfín, lográndose una alta precisión en la compactación del hormigón y en el acabado de la superficie fundida. Tanto el tornillo sinfín como el cilindro compactador, así como su accionamiento conforman el conjunto 01 denominado "Carro Inferior", el cual se desplaza sobre unos angulares guías que se encuentran en la parte inferior de la estructura y a todo lo largo de ésta, obteniéndose de esta forma el ancho a revestir deseable. El conjunto 01 se representa en la figura 3 y en el plano constructivo general de la máquina MRCH-l.00.000 con el número 2. La función del tornillo sinfín es dosificar uniformente el hormigón distribuido hasta el nivel deseado permitiendo que el cilindro compacte el material hasta el espesor deseado con el acabado superficial requerido. El movimiento de traslación del carro inferior sobre los angulares guías es garantizado por el conjunto 02, compuesto por un motor hidráulico impulsado desde la caja de bombas por una VPA-40, un reductor mecánico KTP-l con una relación de transmisión de 4, un árbol con dos estrellas dentadas de paso 38,1 mm y el sistema de freno de emergencia. El conjunto 02 se representa en la figura 4 y en el plano constructivo general de la máquina MRCH-1.00.000 con el número 2. La base o soporte del motor de combustión interna, radiador y tanque de aceite, asiento, pizarra y el subconjunto de la caja de bomba conforman el conjunto 03, denominado "Sistema de Accionamiento". El conjunto 03 se representa en la figura 4 y en el plano constructivo general de la máquina MRCH-l.00.000 con el número 3. La traslación de la máquina sobre los rieles es garantizada por un sistema de accionamiento hidro-mecánico compuesto por un motor hidráulico, un reductor mecánico con relación de transmisión de 45 y ruedas de 180 mm de diámetros movidas por cadenas de paso 19,05 mm.
Estos elementos conforman el conjunto 04 denominado "Sistema de Ruedas Matrices". El sistema de ruedas movidas conforma el conjunto 09, el cual también garantiza el movimiento de traslación de la máquina. Los conjuntos están representados en la figura 4 y en el plano constructivo general de la máquina con el número 4 y 9.
Fig. 3. Conjunto 01, “Carro Inferior” de la máquina distribuidora. La unión de la estructura general de la máquina y los sistemas de ruedas motrices y movidas se realiza a través del sistema de gatos y soportes, denominado conjunto 05. El subconjunto de los gatos mecánicos garantiza la nivelación de la máquina en un rango determinado y el espesor de la capa del hormigón fundido. El subconjunto de los soportes o gavetas nos garantiza el funcionamiento de la máquina tanto en la posición horizontal como en el plano inclinado desde 0O hasta 38O, o sea, o sea, para taludes de 1:2; 1:1,75 y 1:1,25. El conjunto 05 se representa en la figura 4 y en el plano constructivo general de la máquina con el número 5. La estructura general de la máquina está formada por módulos de diferentes longitudes, construidos de angulares de acero conjunto 09, el cual también garantiza el movimiento de traslación de la máquina. Los conjuntos 04 y 09 están soldados y atornillados. El arme y desarme de los módulos es sencillo y rápido. En la actualidad, con la estructura que posee la máquina es posible fundir taludes de longitud menores a 8,75 m. La estructura de la máquina se denominó conjunto 06 y está representado en la figura 4 y en el plano constructivo general de la máquina MRCH-1.00.OOO con el número 6. La unión de los diferentes elementos hidráulicos se realiza a través de mangueras de alta presión y sistemas de tuberías modulares en la estructura general. La presión máxima es garantizada por válvulas de seguridad del tipo MKP-20. El radiador de aceite es componente del tractor YUMZ y el tanque de aceite con filtros y vacuómetro con componentes de KTP. El sistema hidráulico fue denominado conjunto 07 y está representado en la figura 4. El ancho de terminación de la capa de hormigón revestida es ajustado por el uso de limitadores eléctricos de hacen automático el control de cambio de sentido del movimiento del carro inferior. Los componentes utilizados y la forma de unión de los mismos conforman el conjunto 08, denominado "Sistema de Mando y Regulación". Este sistema utiliza cuatro limitadores, dos en un circuito de trabajo y dos en un circuito de seguridad para mayor protección del órgano de trabajo fundamental. El limitador envía la señal a un solenoide de doble acción,
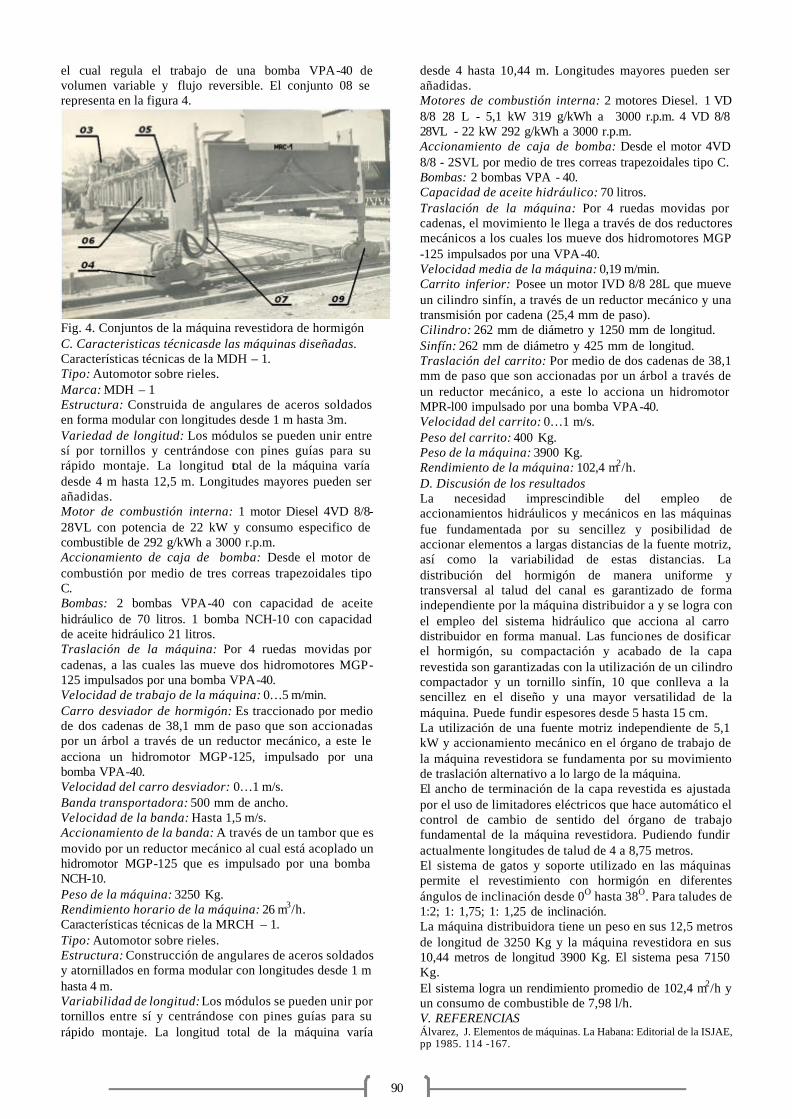
90
el cual regula el trabajo de una bomba VPA-40 de volumen variable y flujo reversible. El conjunto 08 se representa en la figura 4.
Fig. 4. Conjuntos de la máquina revestidora de hormigón C. Caracteristicas técnicasde las máquinas diseñadas. Características técnicas de la MDH – 1. Tipo: Automotor sobre rieles. Marca: MDH – 1 Estructura: Construida de angulares de aceros soldados en forma modular con longitudes desde 1 m hasta 3m. Variedad de longitud: Los módulos se pueden unir entre sí por tornillos y centrándose con pines guías para su rápido montaje. La longitud total de la máquina varía desde 4 m hasta 12,5 m. Longitudes mayores pueden ser añadidas. Motor de combustión interna: 1 motor Diesel 4VD 8/8-28VL con potencia de 22 kW y consumo especifico de combustible de 292 g/kWh a 3000 r.p.m. Accionamiento de caja de bomba: Desde el motor de combustión por medio de tres correas trapezoidales tipo C. Bombas: 2 bombas VPA-40 con capacidad de aceite hidráulico de 70 litros. 1 bomba NCH-10 con capacidad de aceite hidráulico 21 litros. Traslación de la máquina: Por 4 ruedas movidas por cadenas, a las cuales las mueve dos hidromotores MGP-125 impulsados por una bomba VPA-40. Velocidad de trabajo de la máquina: 0…5 m/min. Carro desviador de hormigón: Es traccionado por medio de dos cadenas de 38,1 mm de paso que son accionadas por un árbol a través de un reductor mecánico, a este le acciona un hidromotor MGP-125, impulsado por una bomba VPA-40. Velocidad del carro desviador: 0…1 m/s. Banda transportadora: 500 mm de ancho. Velocidad de la banda: Hasta 1,5 m/s. Accionamiento de la banda: A través de un tambor que es movido por un reductor mecánico al cual está acoplado un hidromotor MGP-125 que es impulsado por una bomba NCH-10. Peso de la máquina: 3250 Kg. Rendimiento horario de la máquina: 26 m3/h. Características técnicas de la MRCH – 1. Tipo: Automotor sobre rieles. Estructura: Construcción de angulares de aceros soldados y atornillados en forma modular con longitudes desde 1 m hasta 4 m. Variabilidad de longitud: Los módulos se pueden unir por tornillos entre sí y centrándose con pines guías para su rápido montaje. La longitud total de la máquina varía
desde 4 hasta 10,44 m. Longitudes mayores pueden ser añadidas. Motores de combustión interna: 2 motores Diesel. 1 VD 8/8 28 L - 5,1 kW 319 g/kWh a 3000 r.p.m. 4 VD 8/8 28VL - 22 kW 292 g/kWh a 3000 r.p.m. Accionamiento de caja de bomba: Desde el motor 4VD 8/8 - 2SVL por medio de tres correas trapezoidales tipo C. Bombas: 2 bombas VPA - 40. Capacidad de aceite hidráulico: 70 litros. Traslación de la máquina: Por 4 ruedas movidas por cadenas, el movimiento le llega a través de dos reductores mecánicos a los cuales los mueve dos hidromotores MGP -125 impulsados por una VPA-40. Velocidad media de la máquina: 0,19 m/min. Carrito inferior: Posee un motor IVD 8/8 28L que mueve un cilindro sinfín, a través de un reductor mecánico y una transmisión por cadena (25,4 mm de paso). Cilindro: 262 mm de diámetro y 1250 mm de longitud. Sinfín: 262 mm de diámetro y 425 mm de longitud. Traslación del carrito: Por medio de dos cadenas de 38,1 mm de paso que son accionadas por un árbol a través de un reductor mecánico, a este lo acciona un hidromotor MPR-l00 impulsado por una bomba VPA-40. Velocidad del carrito: 0…1 m/s. Peso del carrito: 400 Kg. Peso de la máquina: 3900 Kg. Rendimiento de la máquina: 102,4 m2/h. D. Discusión de los resultados La necesidad imprescindible del empleo de accionamientos hidráulicos y mecánicos en las máquinas fue fundamentada por su sencillez y posibilidad de accionar elementos a largas distancias de la fuente motriz, así como la variabilidad de estas distancias. La distribución del hormigón de manera uniforme y transversal al talud del canal es garantizado de forma independiente por la máquina distribuidor a y se logra con el empleo del sistema hidráulico que acciona al carro distribuidor en forma manual. Las funciones de dosificar el hormigón, su compactación y acabado de la capa revestida son garantizadas con la utilización de un cilindro compactador y un tornillo sinfín, 10 que conlleva a la sencillez en el diseño y una mayor versatilidad de la máquina. Puede fundir espesores desde 5 hasta 15 cm. La utilización de una fuente motriz independiente de 5,1 kW y accionamiento mecánico en el órgano de trabajo de la máquina revestidora se fundamenta por su movimiento de traslación alternativo a lo largo de la máquina. El ancho de terminación de la capa revestida es ajustada por el uso de limitadores eléctricos que hace automático el control de cambio de sentido del órgano de trabajo fundamental de la máquina revestidora. Pudiendo fundir actualmente longitudes de talud de 4 a 8,75 metros. El sistema de gatos y soporte utilizado en las máquinas permite el revestimiento con hormigón en diferentes ángulos de inclinación desde 0O hasta 38O. Para taludes de 1:2; 1: 1,75; 1: 1,25 de inclinación. La máquina distribuidora tiene un peso en sus 12,5 metros de longitud de 3250 Kg y la máquina revestidora en sus 10,44 metros de longitud 3900 Kg. El sistema pesa 7150 Kg. El sistema logra un rendimiento promedio de 102,4 m2/h y un consumo de combustible de 7,98 l/h. V. REFERENCIAS Álvarez, J. Elementos de máquinas. La Habana: Editorial de la ISJAE, pp 1985. 114 -167.

91
Androsov, A. A. Diseño de elementos de máquinas. Moscú: Editorial ICMA, 1986, pp. 132 – 189. Manz, D. H. “Systems analysis of irrigation conveyance systems”. In Proceedings of 1990 International Symposium on Water Resources Systems, Dept. of Civil Engineering, University of Manitoba, Winnipeg, Canada, pp. 388-400. Segura, J. Trazo y revestimiento de canales. Lima: Tecnología Intermedia ITDG, 1993, p. 36. Shigley, J.E y C. R. Mischke. Diseño en Ingeniería Mecánica. México: Editorial McGraw Hill Interamericana, 2002, pp. 341 - 386. Stiopin, B. A. Resistencia de materiales. Moscú: Editorial MIR, 1985, pp. 181 - 219. VI. BIOGRAFÍA
Johann Mejías Brito nació en Holguín, Cuba, el 10 de diciembre de 1977. Se graduó de Ingeniero Mecanizador Agropecuario en la Universidad de Granma en 2001, de Ingeniero Mecánico en la Universidad de Holguín en 2004. Obtuvo el título de Maestro en Ciencias en 2007 y el DEA del Programa de Doctorado Curricular conjunto con la Universidad Politécnica de Madrid en septiembre de 2010. Su experiencia profesional se ha desarrollado casi en su totalidad en la Universidad de Holguín-Cuba desde septiembre de 2001 hasta enero de 2011, desempeñándose como profesor e investigador de Tiempo Completo en el Departamento de Ingeniería Mecánica de la Facultad de Ingeniería Ha trabajado en diferentes proyectos de investigación con empresas como KTP y CEDEMA. De 2012 hasta la fecha comienza a trabajar como profesor e investigador en el Departamento de Ingeniería Industrial y Mecatrónica del Instituto Tecnológico de Colima. Rosario Lugo Báez. Graduado de la Escuela de Ingeniería de la Universidad Autónoma de Guadalajara como Ingeniero Mecánico Electricista en 1992 y en la Maestría en Educación en 2007. Desde el año 1986 labora como docente en la Universidad Autónoma de Guadalajara hasta el año 2002 y en el Instituto Tecnológico de Colima del 2002 a la fecha. Ha participado en proyectos de investigación educativa, como sinodal de titulación de alumnos de Licenciatura en Informática y de Administración. Participa en el Foro Colima del Plan Nacional de Desarrollo 2013-2018 en el área Educativa. Es Representante Institucional ante la Red Nacional de Innovación en Educación Superior de la ANUIES. Ha impartido cátedra en el área de matemáticas, estadística y física para ingenieros. Ha fungido como tutor y asesor de alumnos de Ingeniería del Instituto Tecnológico de Colima con el propósito de abatir la reprobación y deserción. Juan Manuel Torres Ochoa. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, posee el grado de Maestro en Ciencias por el Instituto Tecnológico de Querétaro. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial del Instituto Tecnológico de Colima, impartiendo numerosas asignaturas del área. Reemberto Sánchez Alonso: Nació el 7 de enero de 1954 en Villa Clara, Cuba. Graduado de: Ingeniero Mecánico en Construcción de Automóviles y Tractores en 1977 en el Instituto de Construcción de Maquinaria, Minsk, Bielorrusia y de Master en Ciencias en Ingeniería en 1979 en el mismo instituto, Doctor en Ciencias Técnicas en 1986 por el ICM de Rostov del Don, Rusia. Trabaja en la universidad de Holguín desde 1988 desempeñándose como profesor e investigador en el Dpto. de Mecánica Aplicada. Realizó sus estudios superiores en la Universidad de Holguín desde 1988 hasta 1993, donde obtuvo el título de Ingeniero Mecánico en la especialidad de Mecánica Industrial. Graduado en la
Maestría en Ingeniería de Máquinas Agrícolas en la Universidad de Holguín en 2002. Eusebio González Utria: Nació el 15 de diciembre de 1949. Graduado de Ingeniería Mecánica en julio de 1976, en la Escuela de Ingeniería Mecánica de la Universidad de Oriente, Santiago de Cuba, especializado en Transporte y Maquinaria Agrícola. Máster en Ciencias Técnicas (Maquinaria Agrícola), desde julio de 1997. Comienza su actividad laboral como profesor del antiguo Centro Universitario de Holguín (CUH), en septiembre de 1976, desarrollando su trabajo en la facultad de ingeniería. Durante estos 32 años de trabajo ha desarrollado la docencia, las investigaciones y las actividades administrativas, entre las que se destacan: Jefe de los Departamentos docentes de Ciencias Técnicas Básicas y Mecánica Industrial, asesor de investigaciones en la facultad, Vicedecano de Investigaciones de la facultad, jefe de la carrera de ingeniería mecánica, secretario del Comité Académico de la Maestría en Maquinaria agrícola. José A. Martínez grave de Peralta : Realizó sus estudios superiores en la Universidad de Holguín desde 1988 hasta 1993, donde obtuvo el título de Ingeniero Mecánico en la especialidad de Mecánica Industrial. De igual forma realizó los estudios correspondientes a la Maestría en Ingeniería de Máquinas Agrícolas en la Universidad de Holguín de 1994 a 1997. Trabaja en la Universidad de Holguín desde 1993. Pertenece al Departamento de Gráfica de la Facultad de Ingeniería, donde se desempeña como Jefe de Departamento, profesor e investigador. Imparte las asignaturas Resistencia de Materiales I y II, Diseño de Elementos de Máquinas I y II, Tecnología Mecánica, Explotación de Máquinas Agrícolas, Computación Básica, AutoCAD, Modelación de sólidos (Incluye paquetes profesionales como AutoCAD, Solid Works, AutoDesk Inventor), Proyectos de Ingeniería Mecánica I y III, Modelador de sólidos y Programación en Visual Basic. Ramón Urzúa nació el 12 de Enero de 1956 en Colima, México. Graduado de Ingeniero Bioquímico en 1981 por el Instituto Tecnológico de Colima, donde se desempeña desde ese mismo año como profesor e investigador de tiempo completo en el Departamento de Ciencias Básicas, impartiendo numerosas asignaturas del área. Ha recibido premios y distinciones a lo largo de su dilatada carrera como docente. Claudia Lissete Castrejón Cerro. Nació en Colima, Colima, México el 16 de febrero de1981. Ingeniero Industrial 2003 por el Instituto Tecnológico de Colima, México y Maestro en Ciencias en Ingeniería Industrial 2005 por el Instituto Tecnológico de Colima, México. Imparte las asignaturas de Probabilidad, Estadística Inferencial, Estadística, Matemáticas Financieras, Matemáticas Administrativas, Matemáticas Aplicadas a la Arquitectura, Cálculo Diferencial, Cálculo Integral y Administración de la Producción.
92
V. CAPÍTULO V. LA ENSEÑANZA PARA UN DESARROLLO SUSTENTABLE

93
Sistema de Tareas Docentes para Favorecer la Formación Ambiental desde la Asignatura Probabilidad y Estadística en la Carrera de Ingeniería
Industrial
A. Velueta, R. Lugo, R. Urzúa, J. Mejías, J. Aréchiga, A.M. Pérez, C. Castrejón Resumen—En este trabajo se propone un sistema de tares docentes que integren y vinculen los contenidos de la asignatura Probabilidad y Estadística de la carrera de Ingeniería Industrial del Instituto Tecnológico de Colima, con algunos de los principales problemas ambientales existentes en la actualidad como vía de concretar la formación integral de los futuros ingenieros industriales. Temas claves— medio ambiente, probabilidad y estadística, formación ambiental. Introducción
L A utilización irracional de los recursos naturales por parte del hombre ha desequilibrado la capacidad de la Tierra para regenerar los mismos a una velocidad similar a la que se consumen, haciendo crecer de manera desmedida la huella ecológica y acelerando el deterioro ambiental. Según los estudios realizados se ha superado la capacidad de generación de recursos del planeta desde la década de los 80. Esta destrucción del medio ambiente se manifiesta de forma creciente agudizándose en los últimos años, adquiriendo un carácter global, debido en gran medida a la intensificación de la actuación humana que no hace un uso adecuado de la ciencia y la tecnología, así como de los recursos naturales y que no ha logrado una verdadera integración económica social y ambiental, por la cual clama el desarrollo sostenible. Por ello que resulta evidente la amenaza de la supervivencia de la humanidad, de ahí la importancia de A. Velueta labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). R. Lugo labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). R. Urzúa labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). J. Mejías labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). J. Aréchiga labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). A. M. Pérez labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected] ). C. Castrejón labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected] ). hacer un esfuerzo por crear un nuevo paradigma de comunicación con la naturaleza, razón por cual se origina
la necesidad de la Educación Ambiental. Se comienza a hablar de este término hacia finales de la década de los sesenta, quedando definida en 1987 en el Congreso de Moscú como: “Un proceso permanente en que los individuos y la colectividad cobran conciencia de su medio, adquiere los conocimientos, los valores, las competencias, la experiencia y la voluntad capaces de hacerlos actuar individual y colectivamente para resolver los problemas actuales y futuros del medio ambiente”. El planeta tiene una amplia gama de recursos de gran importancia para la vida de los seres humanos. Algunos de ellos son renovables, otros se pueden renovar a altos costos y otros no son renovables. La Tierra contiene, además, una gran variedad de minerales, su abundancia puede ser rara o ilimitada, pero la dificultad de extraerlos del ambiente es un aspecto tan importante como su abundancia. Todas estas realidades evidencian la necesidad de una Educación Ambiental cada vez más creciente y consciente, lo que implica por lo tanto, la sensibilización por los problemas que afectan el medio ambiente, el desarrollo de hábitos, habilidades, capacidades, actitudes, la clarificación de valores y las aptitudes para resolver estos problemas. Constituye un proceso continuo y permanente que alcanza todos los ámbitos educativos, formales, no formales e informales y se desarrollan a partir de los problemas más inmediatos hasta los de ámbito regional, nacional e internacional. Educar de forma consciente es indispensable para modificar actitudes, adquirir nuevos hábitos y conocimientos, además de contribuir a la protección del medio ambiente y desempeñar una función muy importante en el logro del desarrollo sostenible. Esta problemática no está ajena a las instituciones educativas, quienes en gran medida, son las encargadas de la educación de la personalidad de los estudiantes y tienen la alta misión del desarrollo de la Educación Ambiental formal desde el preescolar hasta la universidad. Para hacer frente a este importante desafío. En el Congreso de Moscú de 1987, diseñó una estrategia para la introducción de la educación y formación ambiental en la década de los años 90, la cual establece la inclusión de la Educación Ambiental en los planes de estudio de todos los niveles de enseñanza, concebida no como una materia más a añadir sino, por el contrario como una dimensión, es decir, integrando al proceso pedagógico los elementos necesarios, reajustando los programas de estudio de las diferentes materias, actividades extra docente y extraescolares. La educación tiene una función, y es formar a las generaciones, por lo que educar para respetar el medio ambiente es una necesidad urgente. En este sentido la Enseñanza Superior juega un papel muy importante en esta compleja tarea, como institución productora de conocimientos y generadora de cambios. Las instituciones educativas juegan un papel fundamental en la educación integral de los futuros egresados y por
94
tanto deben garantizar una formación que permita desarrollar la Educación Ambiental dirigida a la transformación de los paradigmas tradicionales del conocimiento y al desarrollo de una conducta ambiental responsable en los estudiantes. En correspondencia con lo anterior resulta evidente la necesidad de la introducción de la dimensión ambiental en el currículo de la formación inicial de los futuros profesionales. Esto presupone una concepción integral en todo el proceso de enseñanza - aprendizaje lo que implica la introducción de la problemática ambiental de forma coherente. De acuerdo con el estudio del Programa para la Evaluación Internacional de Estudiantes (PISA) de la Organización para la Cooperación y el Desarrollo Económico (OCDE) en el 2006, el 64.8% de los estudiantes mexicanos reciben información sobre educación ambiental en el salón de clases, siendo este el principal medio, de ahí la importancia de incluir estos aspectos en las actividades docentes. Por otra parte, un 39.86% de dicha información proviene de los medios de comunicación tales como (televisión, radio, periódicos o revistas). Cabe mencionar que muchos estudiantes mexicanos utilizan en menor medida otras fuentes informativas como los libros y el Internet. Dentro de los problemas ambientales que se toman sobresalen: la escasez de agua, energía, desechos naturales, deforestación, extinción de la flora y fauna y contaminación ambiental (aire). Desarrollar la conciencia ambiental en los estudiantes es objetivo esencial en su formación, de manera que desarrolle estos valores, de conjunto con la apropiación de habilidades para el reconocimiento y solución de los problemas ambientales presentes, no solo en la escuela sino también en el resto de los factores comunitarios e incluso en el propio hogar, y propicie la prevención de otros. Es incuestionable que para lograr este empeño se requiere de la actuación del profesor como guía, orientador y vínculo entre los diversos sectores de la comunidad y la escuela; que sea capaz de cumplir con su labor de educador, incidiendo activamente en el proceso de formación de sus alumnos y en la selección de alternativas de solución de los problemas que se presentan en la escuela, el hogar y la comunidad. En esa función integradora del profesor, es donde que la dimensión ambiental desempeña un rol esencial, por su carácter interdisciplinar y unificador de acciones. Para solucionar o disminuir esta problemática se debe establecer una estrategia que integre metodológicamente la formación ambiental de los estudiantes, puesto que en la actualidad no se cuenta con literatura que trate, de manera concreta, los aspectos metodológicos y didácticos que posibiliten a los futuros egresados asimilar productivamente el contenido medio ambiental y lo apliquen consecuentemente en su vida cotidiana. Este trabajo propone un sistema de tares docentes que integren y vinculen los contenidos de la asignatura Probabilidad y Estadística de la carrera de Ingeniería Industrial del Instituto Tecnológico de Colima, con algunos de los principales problemas ambientales existentes en la actualidad como vía de concretar la formación integral de los futuros ingenieros industriales. DESARROLLO Metodología La Para la realización de la investigación se emplearon varios métodos tanto generales como particulares. Se tuvo
en cuenta el método de la observación participante el cual permite de manera natural que el investigador se integre a la vida social comunitaria, por lo que ha de diseñar y emplear instrumentos que contribuyan a la información visual y a la participación en el grupo, lo que favorece la obtención de una información amplia y precisa. Se empleó la técnica de análisis y síntesis, su utilización permitió el desglose e integración de la investigación a partir de la información obtenida, lo que posibilitó descomponer cada uno de los criterios dados por los autores consultados, así como abordar sus concepciones de lo complejo a lo simple, de lo casual a lo necesario, de la multiplicidad a la identidad. A través de este método se analizaron aspectos concernientes a la información sobre las de los problemas ambientales. El método histórico lógico facilitó el análisis del desarrollo y evolución de la cultura ambiental en el tiempo para poder proyectar la investigación. En el caso de esta investigación se hace necesaria la utilización del método inducción deducción, pues hay que abordar categorías del medio ambiente para posterior tratar el tratamiento que ha alcanzado el mismo en el contexto comunitario. Para la concepción de las diferentes tareas docentes se realizó una exhaustiva revisión bibliográfica para identificar los principales problemas ambientales que afectan al país y en la región donde está enclavado el estado de Colima, estas pueden incluirse en el programa la asignatura Probabilidades y Estadísticas en el momento y la forma que el profesor considere más oportuna. Se debe tener en cuenta también las diferencias individuales de cada estudiante y trabajar para lograr la motivación e implicación de todos en la realización de las mismas. Se empleó además la entrevista en profundidad, con la finalidad de recoger información directa de los especialistas que poseen un conocimiento compendioso sobre elementos relacionados con el tratamiento de la estadística aplicada al medio ambiente. Resultados Como resultado de este trabajo se elaboró una sistema de tareas docentes para su aplicación en la materia de Probabilidad y Estadística la cual está encaminada a garantizar que los estudiantes alcancen un nivel de conocimientos, habilidades y valores inherentes a esta rama del saber, donde los conceptos matemáticos y de la Educación Ambiental pueden vincularse a través de problemáticas actuales como son: deforestación, agotamiento de la capa de ozono, degradación de los suelos, contaminación de la atmósfera, sequía, agotamiento del agua disponible para uso humano, lluvias ácidas entre otras. Estas tareas están concebidas teniendo en cuenta las diferencias individuales y características de de cada estudiante y s e presupone que el docente tiene que trabajar para lograr la motivación e implicación de todos en la realización de las mismas. Para favorecer la integración de la materia Probabilidad y Estadística con otras materias del Plan de Estudios de Ingeniería Industrial y de estas con los problemas ambientales, con el fin de acercar a los estudiantes a los problemas que les afectan directamente o en los que está implicada la comunidad educativa, de forma que se pueda analizar el impacto que sobre el medio ambiente tienen los hechos, procesos y fenómenos objeto de estudio. Sistema de Tareas Docentes

95
La materia de Probabilidad y Estadística se plantea como una asignatura básica de la Carrera de Ingeniería Industrial, enlaza y fundamenta a la mayor parte de las Ingenierías, proporciona los elementos básicos para hacer una descripción de un fenómeno de interés por medio de la estimación de los parámetros poblacionales necesarios para su análisis a partir de una muestra de estudio seleccionada, provee además los elementos para entender los principios probabilísticos aleatorios que rigen las relaciones tanto a priori como a posteriori del fenómeno bajo estudio. Permite conocer el comportamiento que asumen los fenómenos más comunes que pueden ser estudiados desde la probabilidad y estadística y analiza información cuantitativa y cualitativa del campo de la logística y la Industria. En la concepción de las tareas se tuvieron en cuenta los elementos mencionados anteriormente, así como los objetivos del modelo del profesional del siglo XXI, los del Sistema de Gestión Ambiental del Instituto Tecnológico de Colima en concordancia con la Norma ISO 14001:2004 y los objetivos de la asignatura Probabilidades y Estadísticas para la carrera de Ingeniería Industrial, establecidos en el programa con clave AEC-1053 del Plan 2010, orientado por la Dirección General de Estudios Tecnológicos (DEGEST), las relaciones interdisciplinarias, las necesidades de los futuros profesionales, entre otros aspectos, presentes al resolver problemas donde se involucren eventos con incertidumbre, aplicando los modelos analíticos apropiados. Estas actividades se pueden orientar y controlar de acuerdo con las características de los estudiantes y del modo que el profesor considere más viable, organizados por equipos o por de forma individual, de manera que se pueda analizar el impacto ambiental que tienen los hechos, procesos y fenómenos históricos que estudia. Tarea No. 1 Problema de Prueba de Hipótesis El fideicomiso de ahorro de energía eléctrica Región Centro Occidente, implementó a partir del año 2010 su programa de luz sustentable para el cual se tenían que considerar casas domesticas, residencias y en todas las empresas del estado de Colima y para ello se involucraron a las principales tiendas comerciales para la atención de toda la población con el fin de hacer intercambios de sus lámparas incandescentes por las lámparas que el gobierno federal provee y en este caso por las de luz fluorescente. La razón principal de este programa es prácticamente el reflejo económico para todos los que participarían. Para 2010 y 2011 se tomaron datos de ahorro en Kilo-Watts-hora para tener los datos de diferencia en los dos periodos. a) Comisión Federal de Electricidad desea probar si existe diferencia significativamente en el ahorro de energía de más de 800 KWH y por ende en lo económico (utilizar un nivel de significancia del 5%) b) ¿Cuál sería el cambio medio del rendimiento en pérdida de KWH para el programa de luz sustentable? TABLA I fideicomiso de ahorro de energía eléctrica Región Centro Occidente (KW/H)
Años Antes Después
2010 y 2011 Enero 1375.5 550.2 Febrero 1386.4 554.5 Marzo 1370.7 548.28 Abril 1395.2 558.08 Mayo 1401.3 560.52 Junio 1398.8 559.52 Julio 1402.4 560.96 Agosto 1380.6 542.24 Septiembre 1388.9 555.56 Octubre 1400.6 560.24 Noviembre 1393.4 557.12 Diciembre 1405 557
Tarea No. 2 Problema de Prueba de Hipótesis La planta termoeléctrica de Manzanillo en Campos impulsada por carbón está considerando dos sistemas diferentes para reducir la emisión de contaminantes. El primer sistema reduce la emisión a niveles aceptables 68% del tiempo, según 200 muestras de aire en el área del poblado de Campos. El segundo sistema, más costoso, reduce a niveles aceptables 76% del tiempo, de acuerdo con 250 muestras en la misma área. Si el sistema costoso es significativamente más efectivo que el otro al reducir la emisión de contaminantes a niveles aceptables, entonces la administración de la planta instalará el sistema costos. a) ¿Qué sistema se debe instalar si la administración usa un nivel de significancia de 0.02 al tomar su decisión? b) Con esta información la Secretaria de Educación y las autoridades de la DGETI, optarán por no cambiar su plantel al el municipio de Santiago. Tarea No. 3 Problema de Análisis de Varianza Los investigadores del sector agrícola en México, están preocupados por la cantidad de hectáreas afectadas por la erosión hídrica y eólica en el territorio nacional. Para realizar su análisis se ha recopilado la siguiente información: a) Calcule la variabilidad para el caso de la erosión eólica y para el caso de la erosión hídrica. b) Establezca las hipótesis nula y alternativa explícitas, y pruebe al nivel de significancia de 0.02. TABLA II cantidad de hectáreas afectadas por la erosión hídrica y eólica en el territorio mexicano
Erosión Eólica Moderada (ha)
Erosión Hídrica Moderada (ha)
Estado
55923 62325 Ags 17792 4343 BC 71768 1635 BCS 0 0 Cam 0 139160 Chis 0 4464 Col 91560 2766367 Chih 694369 136175 Coah 5041 336732 Jal 1716600 1383444 Dgo

96
Tarea No. 4 Problema de Regresión simple El editor en jefe del periódico Diario de Colima ha intentado convencer al dueño para que mejore las condiciones de trabajo en la imprenta. Está convencido de que, cuando trabajan las prensas, el grado de ruido crea niveles no saludables de tensión y ansiedad. Recientemente hizo que un sicólogo realizara una prueba durante la cual situaron a los prensistas en cuartos con niveles variables de ruido y luego les hicieron otra prueba para medir niveles de humor y ansiedad. La siguiente tabla muestra el índice de su grado de ansiedad o nerviosismo y el nivel de ruido al que se vieron expuestos (1.0 es bajo y 10.0 es alto). a) Grafique los datos. b) Desarrolle una ecuación de estimación que describa los datos. c) Pronostique el grado de ansiedad que podríamos esperar cuando el nivel de ruido es 5. TABLA III ÍNDICE DE SU GRADO DE ANSIEDAD O NERVIOSISMO Y EL NIVEL DE RUIDO
Nivel de ruido 4 3 1 2 6 7 2 3
Grado de ansiedad 39 38 16 18 41 45 25 38 Tarea No. 5 Distribución Normal El aumento de la temperatura producida por el calentamiento global parece ser la causa dominante aunque no única, del retroceso de los Glaciares en México. No hay duda de que estos continuaran contrayéndose en un escenario de calentamiento global, aun cuando la precipitación también aumentase localmente en algunos glaciares. Pruebe la hipótesis de que el promedio en la temperatura es de 5 grados, si las temperaturas de muestra aleatoria de 5 grados. Con la siguiente información 0, 1.5, 3.3, 4.4, 5.6, y 6.2, y un nivel de significancia de 0.05 y suponga que la distribución de los contenidos es aproximadamente normal. Tarea No. 6 Asignación de Probabilidad Los datos a continuación representan el número de accidentes ambientales que ocurren por día en México. Número de accidentes ambientales durante los últimos 7 años
0 1 2 3 4 5 6 o más
Total
Frecuencia 62 48 32 25 17 10 6 200 Usando los valores anteriores estime la probabilidad de que en un día determinado ocurran: Exactamente 3 accidentes, b) a lo más 3 accidentes, c) 4 o más accidentes, d) al menos 3 accidentes. Tarea No. 7 Problemas de Intervalos de Confianza Los incendios son una de las principales causas de la mortalidad de los árboles, convirtiéndose a la vez en factor de la degradación y deforestación. Más del 90% de los incendios son ocasionados por actividades humanas, mientras que el otro 10% se debe a causas naturales, principalmente en épocas de sequía cuando se acumula la materia orgánica seca en bosques y selvas. Los datos a continuación representan a las entidades federativas mexicanas con mayor superficie afectada por incendios forestales en el año 2012. Desde el punto de vista estadístico con esta información se saben las medidas de tendencias central, también se puede generar utilizar las distribuciones T. a) Encuentre la media para los datos del porcentaje total. b) Encuentre la desviación estándar muestral. c) Encuentre el intervalo de confianza con nivel de confianza de 95% y 99%. TABLA IV ENTIDADES FEDERATIVA S MEXICANAS CON MAYOR SUPERFICIE AFECTADA POR INCENDIOS FORESTALES EN EL AÑO 2012.
Entidad federativa
Número de incendios
Superficie afectada Hectáreas
Índice de superficie afectada Hectáreas
Durango 166 40 341.5 243.0 Coahuila 55 29 610.0 538.4 Jalisco 443 18 633.5 42.1 Oaxaca 186 14 835.9 79.8 Guerrero 150 14 696.1 98.0 Sonora 32 13 300.0 415.6 Chihuahua 927 13 147.1 14.2 Michoacán 741 10 822.6 14.6 Chiapas 227 8 343.5 36.8 Zacatecas 69 4 521.9 65.5 Resto del país 2 166 22 247.7 10.3
Tarea No. 8 Problemas de Intervalos de Confianza Los inventarios nacionales de emisiones de gases de efecto invernadero en México son interesantes y preocupantes de acuerdo a la siguiente información.
TABLA IV ORDENAMIENTO JERÁRQUICO DE LAS EMISIONES DE CO2 EQUIVALENTES POR SECTOR
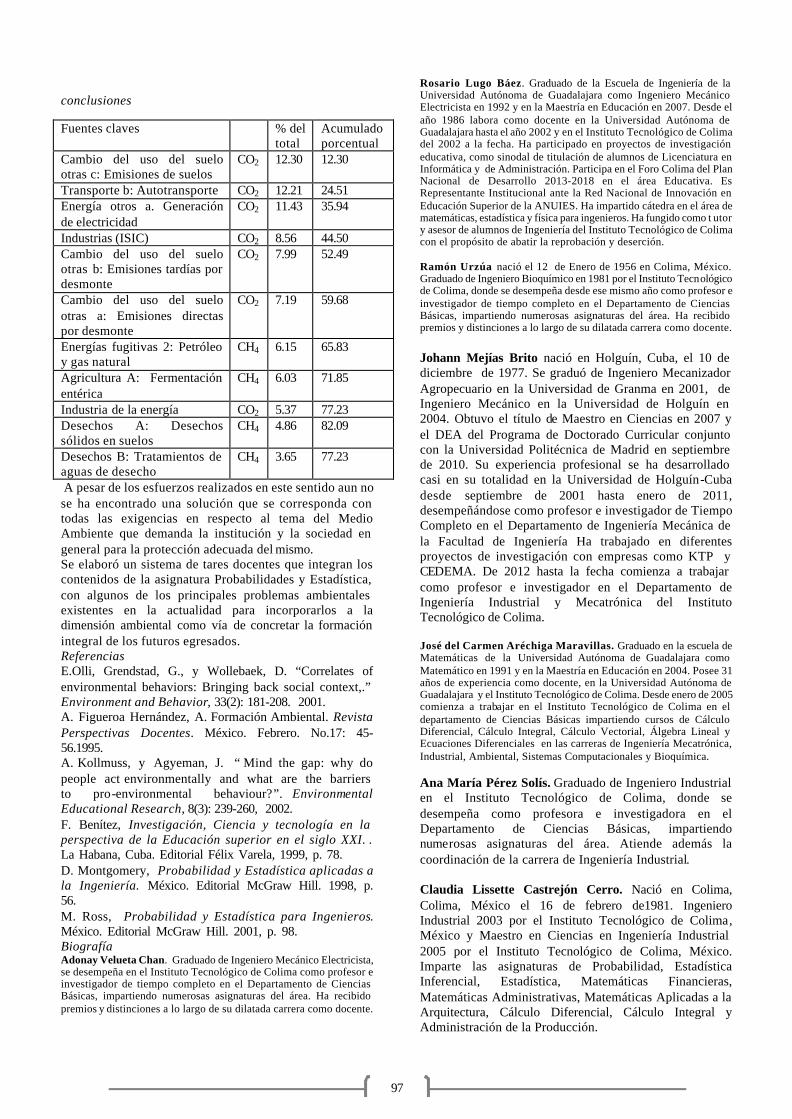
97
conclusiones
A pesar de los esfuerzos realizados en este sentido aun no se ha encontrado una solución que se corresponda con todas las exigencias en respecto al tema del Medio Ambiente que demanda la institución y la sociedad en general para la protección adecuada del mismo. Se elaboró un sistema de tares docentes que integran los contenidos de la asignatura Probabilidades y Estadística, con algunos de los principales problemas ambientales existentes en la actualidad para incorporarlos a la dimensión ambiental como vía de concretar la formación integral de los futuros egresados. Referencias E.Olli, Grendstad, G., y Wollebaek, D. “Correlates of environmental behaviors: Bringing back social context,.” Environment and Behavior, 33(2): 181-208. 2001. A. Figueroa Hernández, A. Formación Ambiental. Revista Perspectivas Docentes. México. Febrero. No.17: 45-56.1995. A. Kollmuss, y Agyeman, J. “ Mind the gap: why do people act environmentally and what are the barriers to pro-environmental behaviour?”. Environmental Educational Research, 8(3): 239-260, 2002. F. Benítez, Investigación, Ciencia y tecnología en la perspectiva de la Educación superior en el siglo XXI. . La Habana, Cuba. Editorial Félix Varela, 1999, p. 78. D. Montgomery, Probabilidad y Estadística aplicadas a la Ingeniería. México. Editorial McGraw Hill. 1998, p. 56. M. Ross, Probabilidad y Estadística para Ingenieros. México. Editorial McGraw Hill. 2001, p. 98. Biografía Adonay Velueta Chan. Graduado de Ingeniero Mecánico Electricista, se desempeña en el Instituto Tecnológico de Colima como profesor e investigador de tiempo completo en el Departamento de Ciencias Básicas, impartiendo numerosas asignaturas del área. Ha recibido premios y distinciones a lo largo de su dilatada carrera como docente.
Rosario Lugo Báez. Graduado de la Escuela de Ingeniería de la Universidad Autónoma de Guadalajara como Ingeniero Mecánico Electricista en 1992 y en la Maestría en Educación en 2007. Desde el año 1986 labora como docente en la Universidad Autónoma de Guadalajara hasta el año 2002 y en el Instituto Tecnológico de Colima del 2002 a la fecha. Ha participado en proyectos de investigación educativa, como sinodal de titulación de alumnos de Licenciatura en Informática y de Administración. Participa en el Foro Colima del Plan Nacional de Desarrollo 2013-2018 en el área Educativa. Es Representante Institucional ante la Red Nacional de Innovación en Educación Superior de la ANUIES. Ha impartido cátedra en el área de matemáticas, estadística y física para ingenieros. Ha fungido como t utor y asesor de alumnos de Ingeniería del Instituto Tecnológico de Colima con el propósito de abatir la reprobación y deserción. Ramón Urzúa nació el 12 de Enero de 1956 en Colima, México. Graduado de Ingeniero Bioquímico en 1981 por el Instituto Tecnológico de Colima, donde se desempeña desde ese mismo año como profesor e investigador de tiempo completo en el Departamento de Ciencias Básicas, impartiendo numerosas asignaturas del área. Ha recibido premios y distinciones a lo largo de su dilatada carrera como docente. Johann Mejías Brito nació en Holguín, Cuba, el 10 de diciembre de 1977. Se graduó de Ingeniero Mecanizador Agropecuario en la Universidad de Granma en 2001, de Ingeniero Mecánico en la Universidad de Holguín en 2004. Obtuvo el título de Maestro en Ciencias en 2007 y el DEA del Programa de Doctorado Curricular conjunto con la Universidad Politécnica de Madrid en septiembre de 2010. Su experiencia profesional se ha desarrollado casi en su totalidad en la Universidad de Holguín-Cuba desde septiembre de 2001 hasta enero de 2011, desempeñándose como profesor e investigador de Tiempo Completo en el Departamento de Ingeniería Mecánica de la Facultad de Ingeniería Ha trabajado en diferentes proyectos de investigación con empresas como KTP y CEDEMA. De 2012 hasta la fecha comienza a trabajar como profesor e investigador en el Departamento de Ingeniería Industrial y Mecatrónica del Instituto Tecnológico de Colima. José del Carmen Aréchiga Maravillas. Graduado en la escuela de Matemáticas de la Universidad Autónoma de Guadalajara como Matemático en 1991 y en la Maestría en Educación en 2004. Posee 31 años de experiencia como docente, en la Universidad Autónoma de Guadalajara y el Instituto Tecnológico de Colima. Desde enero de 2005 comienza a trabajar en el Instituto Tecnológico de Colima en el departamento de Ciencias Básicas impartiendo cursos de Cálculo Diferencial, Cálculo Integral, Cálculo Vectorial, Álgebra Lineal y Ecuaciones Diferenciales en las carreras de Ingeniería Mecatrónica, Industrial, Ambiental, Sistemas Computacionales y Bioquímica. Ana María Pérez Solís. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, donde se desempeña como profesora e investigadora en el Departamento de Ciencias Básicas, impartiendo numerosas asignaturas del área. Atiende además la coordinación de la carrera de Ingeniería Industrial. Claudia Lissette Castrejón Cerro. Nació en Colima, Colima, México el 16 de febrero de1981. Ingeniero Industrial 2003 por el Instituto Tecnológico de Colima, México y Maestro en Ciencias en Ingeniería Industrial 2005 por el Instituto Tecnológico de Colima, México. Imparte las asignaturas de Probabilidad, Estadística Inferencial, Estadística, Matemáticas Financieras, Matemáticas Administrativas, Matemáticas Aplicadas a la Arquitectura, Cálculo Diferencial, Cálculo Integral y Administración de la Producción.
Fuentes claves % del total
Acumulado porcentual
Cambio del uso del suelo otras c: Emisiones de suelos
CO2 12.30 12.30
Transporte b: Autotransporte CO2 12.21 24.51 Energía otros a. Generación de electricidad
CO2 11.43 35.94
Industrias (ISIC) CO2 8.56 44.50 Cambio del uso del suelo otras b: Emisiones tardías por desmonte
CO2 7.99 52.49
Cambio del uso del suelo otras a: Emisiones directas por desmonte
CO2 7.19 59.68
Energías fugitivas 2: Petróleo y gas natural
CH4 6.15 65.83
Agricultura A: Fermentación entérica
CH4 6.03 71.85
Industria de la energía CO2 5.37 77.23 Desechos A: Desechos sólidos en suelos
CH4 4.86 82.09
Desechos B: Tratamientos de aguas de desecho
CH4 3.65 77.23

98
Herramienta Multimedia para la Enseñanza del AutoCAD en la
Carrera de Ingeniería Industrial del Instituto Tecnológico de Colima
J. Mejías, R. Lugo, J. M. Torres, J. Aréchiga, O. Lúa,
R. Rodríguez
Resumen— El presente trabajo consiste en la elaboración de una herramienta multimedia para el desarrollo del proceso de enseñanza y aprendizaje de la asignatura Dibujo Asistido por Computadora de la carrera de Ingeniería Industrial. Para el diseño de la aplicación informática se utilizó el software Macromedia Flash, obteniendo como resultado una herramienta de fácil manejo encaminada a favorecer la enseñanza del AutoCAD. En esta multimedia se recogen una serie de conceptos, materiales, comandos y lecciones que permitirán contar con un respaldo bibliográfico adecuado tanto a profesores como estudiantes de pre y posgrado, así como a cualquier persona interesada en aprender el uso de este programa. Temas claves— Herramienta multimedia, enseñanza - aprendizaje, Ingeniería Industrial, AutoCAD Introducción
L A educación actual transita por un período pleno de desarrollo científico técnico que se evidencia a través del perfeccionamiento del proceso pedagógico de la enseñanza por competencias, lo que hace indispensable crear condiciones para la consolidación del sistema educativo del nivel superior, para dar respuesta a los retos y necesidades derivados de los procesos de modernización y a la vinculación intensa y creciente entre la investigación científica y tecnológica y la producción de bienes materiales y servicios.
J. Mejías labora en el Instituto Tecnológico de Colima, Av.
Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). R. Lugo labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]).
J. M. Torres labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]).
J. Aréchiga labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). O. Lúa labora en el Instituto Tecnológico de Colima, Av. Tecnológico, No. 1, Villa de Álvarez, Colima. (e-mail: [email protected]). R. Rodríguez labora en la Universidad Multitécnica Profesional, Río Marabasco 449, Colima, México. Colima (e-mail: [email protected]).
Conforme a lo que plantean Plattner y Herron (1962) citados por (Carnoy, 2004:2), durante más de cuarenta años, los educadores más innovadores se han mostrado optimistas con respecto al uso del ordenador en las escuelas. La formación de profesionales con las competencias pertinentes, con la capacidad de enfrentar con independencia y creatividad los retos que impone el desarrollo científico técnico de los tiempos actuales, constituye la tarea de máxima prioridad que enfrentan las instituciones de educación superior en México y el extranjero. En correspondencia con la tendencia mundial de utilización de las nuevas tecnologías de la computación, la información y las comunicaciones en el proceso de enseñanza -aprendizaje, en el Instituto Tecnológico de Colima se desarrollan investigaciones dirigidas a la utilización eficiente de estas tecnologías. En México la enseñanza en los Institutos Tecnológicos se organiza en planes de estudios centralizados y aprobados por la Dirección General de Estudios Tecnológicos (DGEST) los que se adecuan a las condiciones socio-económicas concretas de la región donde se encuentran las instituciones y donde básicamente se desempeñarán sus egresados. La actividad ingenieril ha sufrido cambios relevantes a partir del uso extensivo de la computadora como herramienta de trabajo. Se ha pasado del cumplimiento manual de largos y complejos procedimientos de cálculo al uso de programas que entregan soluciones optimizadas en muy breve tiempo, del dibujo manual a la entrega de diseños automatizados ajustados a las normas estatales y empresariales; de la concepción y desarrollo de una única variante del producto con altos costos de los procesos de testing y de evaluaciones experimentales de los prototipos, al análisis de variantes basadas en técnicas de realidad virtual utilizando los métodos modernos de simulación de sistemas Mecánicos en las condiciones reales de explotación del producto y de técnicas de prototipado rápido, que reducen sensiblemente los costos de evaluación del producto. De esta forma, se puede exponer gran cantidad de ejemplos que argumenten estos cambios, lo que justifica la creación de un programa de formación de habilidades computacionales en los estudiantes de Ingeniería Mecatrónica que los prepare para enfrentar este reto. Para las industrias manufactureras y de otros rubros, los productos deben estar diseñados para cumplir la función de tratamiento de la información y la comunicación, incluidas la transmisión y la presentación, y deben utilizar el procesamiento electrónico para detectar, medir y/o registrar fenómenos o para controlar un proceso físico, ello presupone que los recursos humanos deben prepararse adecuadamente para poder asimilarlas. Las instituciones universitarias tienen la responsabilidad de formar a sus estudiantes y recalificar a los profesionales que laboran en esas industrias para que puedan hacer un eso eficiente de las Tecnologías de la Información y las Comunicaciones (TIC). Con la gradual incorporación de las herramientas multimedia en los procesos de enseñanza y aprendizaje, las instituciones educativas tienden a desarrollarse como un sistema abierto y permanente que exige la innovación de enfoques pedagógicos modernos para favorecer el estudio autónomo e independiente, la autogestión formativa, el trabajo en equipo, el desarrollo de procesos interactivos de comunicación y construcción del

99
conocimiento, mediados por la acción interactiva entre profesores y estudiantes, así como por el uso de las TIC. En el trabajo se efectúa una revisión bibliográfica de la temática del Dibujo Industrial, específicamente del software AutoCAD y basados en los resultados de las investigaciones, encuestas y entrevistas realizadas a profesores y estudiantes de la carrera de Ingeniería Mecatrónica, se pudo afirmar que la bibliografía existente, así como el acceso a ella no satisface plenamente las necesidades de los usuarios por lo que se ve afectado el proceso de enseñanza-aprendizaje. Teniendo en cuenta lo anterior se trazó el objetivo de elaborar un material que contribuya a la erradicación de esta situación. De ahí que se lograra confeccionar, utilizando las Tecnologías de la Información y las Comunicaciones, específicamente el Macromedia Flash, una alternativa que va encaminada a favorecer la enseñanza del AutoCAD. En esta aplicación se recogen una serie de conceptos, materiales, comandos y lecciones que permitirán contar con un respaldo bibliográfico adecuado tanto a profesores como estudiantes de pre y posgrado. DESARROLLO Materiales y Métodos. El programa de estudios de la carrera de Ingeniería Mecatrónica de los Tecnológicos se organiza en planes de estudios centralizados y aprobados por la Dirección General de Estudios Tecnológicos (DGEST). El Plan de Estudios del 2010 de esta especialidad tiene como objetivo formar profesionistas en la Ingeniería Industrial con capacidad analítica, crítica y creativa que le permita diseñar, proyectar, construir, innovar y administrar equipos y sistemas mecatrónicos en el sector social y productivo; así como integrar, operar y mantenerlos, con un compromiso ético y de calidad en un marco de desarrollo sustentable, matizada por la necesaria e ineludible inserción dentro de los escenarios laborales de la rama para la materialización de su encargo social. La asignatura Dibujo Industrial aporta al perfil del Ingeniero Industrial, los conocimientos necesarios de dibujo en el diseño de prototipos, equipo y maquinaria. Así como las bases necesarias para elaborar y comprender diagramas, esquemas y planos, además de tener el conocimiento e interpretación de las normas aplicables para la elaboración de los mismos. Para el desarrollo de la investigación se emplearon diferentes métodos teóricos, ellos son: • El histórico – lógico, el cual se aplicó en el estudio de la evolución del proceso de enseñanza-aprendizaje del AutoCAD, así como el desarrollo de la computadora como medio de enseñanza. • El de análisis-síntesis, se puso de manifiesto fundamentalmente en la elaboración de la alternativa didáctica propuesta, una vez que se tuvo que estudiar y analizar cómo se ha aplicado el AutoCAD en la formación del ingeniero industrial. • El de inducción – deducción, se aplicó en la elaboración de la herramienta multimedia propuesta. Se utilizaron además métodos empíricos como: • La observación que estuvo presente durante la investigación pues se observaron acciones que desarrollaron los estudiantes en la resolución de los ejercicios y problemas a resolver.
• La entrevista que se aplicó a profesores que permitió determinar las deficiencias del problema de enseñanza y aprendizaje, sirviendo además para detectar y comprobar las posibilidades para el desarrollo del sistema. Como herramienta de programación se utilizó el software Macromedia Flash Player, debido a que proporciona medios de contenido elaborado y alto rendimiento, como vídeo; compatibilidad con estándares del sector, como servicios Web/SOAP, XML y el modelo de programación compatible con estándares ECMA; así como mejoras en la facilidad de uso y en el flujo de trabajo. Resultados. El primer paso orientado al desarrollo de la Herramienta Multimedia fue la definición de los requerimientos funcionales necesarios para el proceso de implantación (Tabla 1). TABLA I REQUERIMIENTOS FUNCIONALES DE LA HERRAMIE NTA MULTIMEDIA
R1: Visualizar presentación de la aplicación.
R6: Visualizar información complementaria sobre los elementos del Menú principal.
R2: Mostrar imagen de AutoCAD como pantalla principal.
R7: Ejecutar pistas de audio.
R3: Seleccionar Menús R8: Navegar por los hipertextos.
R4: Visualizar opciones generales y de navegabilidad.
R9: Mostrar menús interactivos.
R5: Visualizar la información seleccionada.
Los requisitos no funcionales del sistema son los que proporcionan las propiedades y cualidades que ha de tener la aplicación en cuestión. A continuación se expone una lista de requerimientos, agrupados en diferentes categorías dependiendo de su funcionalidad, que fueron recogidos durante las numerosas entrevistas realizadas (Figura 1).
Fig. 1. Requisitos funcionales. El sistema cuenta solo con un actor, que es el propio usuario final de la aplicación y el único que interactúa con la misma en todas sus pantallas. Los paquetes que conforman la

100
aplicación tienen como objetivo principal recoger de manera sintética y agrupada todas las partes que integran el sistema. El Paquete Principal controla el inicio de la aplicación, presentándola y ofreciendo el menú general que sirve de punto de partida para comenzar el recorrido por el sistema, además de contener las opciones generales, como la ayuda y la salida de la aplicación. El menú principal que aparece en la Pantalla inicial recoge el comportamiento relacionado con la información contenida en la aplicación, ya sean textos o imágenes que soportan los temas relativos los contenidos de la materia Dibujo Asistido por Computadora que el estudiante necesita conocer.
Fig. 2. Pantalla Inicial. El curso multimedia de AutoCAD es un programa interactivo para el estudio y aprendizaje del software para los estudiantes de Ingeniería Mecatrónica. Como herramienta de programación se utilizó el software Macromedia Flash Player. Este material está destinado a utilizarse con fines docentes, además de que puede extenderse su uso a la industria y también a todas aquellas personas que deseen aprender AutoCAD. Este material brinda un compendio de información donde pueden encontrarse entre otros aspectos una breve reseña de la historia y surgimiento del AutoCAD, orientaciones para los principiantes, así como una serie de lecciones que facilitan el aprendizaje de este software. Los requisitos mínimos para la instalación son: • Ordenador • 64 MB memoria RAM 120 MHz. • 10 MB espacio libre en disco. • Adaptador de video VGA o superior. El contenido de la multimedia puede ser copiado en la máquina y luego realizar la ejecución del mismo. Para ello se ejecutará el archivo AutoCAD.exe y se seguirán las instrucciones brindadas a continuación. ¿Cómo trabajar con el curso multimedia de AutoCAD? Para ejecutar el programa, se hará un clic sobre el icono de la multimedia, este icono estará acompañado de dos ficheros que almacenan los datos (La multimedia cargara estos datos de formas dinámica). Se muestra entonces la pantalla inicial del programa (Figura 3). Una vez ejecutado el archivo AutoCAD.exe, la multimedia comenzará el despliegue del menú principal y no se podrá acceder a ella hasta tanto no termine de desplegar el mismo. En esta ventana existe una barra de menús con varios botones de acceso directo o botones calientes. Se podrá acceder a cualquier menú, o sea el que más interés despierte al usuario.
Fig. 3. Mapa de navegación del Curso Multimedia AutoCAD.. De forma general, cuando un usuario accede al sistema, éste funciona de la siguiente forma siguiendo lo expresado en la Figura 3: • Aparece la presentación representativa de la aplicación. • Se muestra la imagen de la cual parten los menús contextuales. • El usuario selecciona una opción de uno de ellos. • Aparece la pantalla correspondiente a la opción solicitada. • El usuario interactúa con la aplicación y esta le responde según la solicitud recibida. • Si el usuario desea continuar interactuando con el sistema, vuelve al menú principal y selecciona otra opción que lo conducirá hacia nuevas pantallas pudiendo repetir el proceso de selección de las mismas de forma indefinida, hasta que se desea abandonar el sistema. • Cuando estime salir de la aplicación lo podrá hacer desde cualquier lugar en que se encuentre, y así concluye su navegación por la aplicación. Una vez dentro de la aplicación, el usuario tiene gran acceso y control sobre toda la información y recursos media que aparecen en cada pantalla. La interacción se produce mediante el seguimiento de los vínculos, la ejecución de los videos, la ampliación de las imágenes, la construcción interactiva de fórmulas y esquemas, la impresión de estos, o la simple navegación por las diferentes pantallas del sistema. La integración de todos estos elementos en función de mostrar el contenido de la asignatura acompañada de información novedosa sobre el tema, contribuye a una mayor atención y una mejor disponibilidad de los estudiantes a aprender y comprender lo que se les está mostrando. El primer menú que aparece es Introducción. Al hacer un clic sobre el mismo se accede de manera inmediata a los contenidos referidos a este tópico. En la parte derecha de la pantalla informativa de la multimedia aparecerá una línea que sobre ella corre un círculo pequeño, y en las esquinas dos puntas de flecha, esta opción se utilizará para mover el texto arriba o abajo según se quiera (existe en los demás menús). El menú Historia muestra una reseña histórica sobre el desarrollo del software AutoCAD, y la evolución y novedades

101
de las diferentes versiones del mismo hasta la actualidad. El menú Primeros pasos nos muestra la apariencia de la ventana principal del AutoCAD, donde aparecen las Barras de Herramientas, etc. Esta ventana tiene en su parte inferior un botón de acción de desplazamiento que me permite visualizar todos los contenidos de esta sección. El siguiente menú, Comandos permite acceder a los comandos utilizados en el trabajo con el software. Cuando se seleccione la opción de comandos 2D se desplegará un grupo de categorías de comandos 2D que podrán ser vistas al ejecutar cada una de ellas. La mima operación debe ser ejecutada para la acción de comandos 3D. El contenido de los comandos para 2D y 3D es necesario hacer clic sobre el menú que da nombre a los mismos e inmediatamente se muestran las categorías de los mismos. Para conocer los comandos de cada categoría se realiza la misma operación, en este caso haciendo clic en la categoría deseada. Dentro del menú Creación de Capas, se hará clic en los botones que se encuentran en la parte inferior de esta para avanzar o retroceder según se desee. Podrá observar de forma sencilla y muy entendible cada uno de los aspectos que debe de conocer a la hora de crear las capas para un dibujo. Debajo del texto mostrado y las imágenes existen dos botones propios del diseño de la multimedia que permiten seguir adelante y retroceder, cuando se avance hasta el límite el botón correspondiente desaparecerá indicando que no hay nada más adelante y solo aparecerá el botón de retroceder. La opción del menú principal Tipos de coordenadas está referido a las coordenadas utilizadas en AutoCAD, y como se explicó anteriormente, la forma de acceder a ella, es similar a las demás. El menú Sombreado es el siguiente en el orden presentado en la multimedia, el mismo me brinda una detallada información acerca de cómo realizar esta operación. El menú Dimensionamiento se ejecuta haciendo clic sobre el, y muestra una amplia información sobre este tema, permitiendo a los usuarios una rápida comprensión del mismo. El menú Bloques es el siguiente en el menú principal, y se accede haciendo clic encima del mismo. Lo referido a las tres dimensiones en AutoCAD esta también expuesto en la multimedia y se accede llevando el mouse a dicha opción el menú principal. Las Lecciones ocupan el último lugar en el menú principal, es una opción que consta dentro de ella de 12 lecciones explicadas detalladamente. A continuación se muestra una imagen que está referida a la lección número 1 entre la lista de 12, el modo de acceder es el mismo que en los demás menús antes mencionados. Experiencias de la introducción de la herramienta en la docencia. Se La herramienta Curso Multimedia AutoCAD fue objeto de aplicación inmediata en los alumnos de la Carrera de Ingeniería Industrial en la asignatura Dibujo Industrial. Entre los beneficios intangibles que reportó la presente multimedia educativa se tienen los siguientes: • Aumento de la calidad del proceso de enseñanza – aprendizaje al contar con un nuevo y novedoso medio de enseñanza. • Mayor atención e interés de los estudiantes hacia la asignatura Máquinas Herramienta.
• Mayor cantidad de información, además de su actualidad y variedad, sobre temas que despiertan el interés de los estudiantes en la asignatura. • Mayor interacción de los estudiantes con los términos y comandos del Dibujo Asistido por Computadoras. • Aumento del trabajo independiente, adaptándose cada estudiante a su habitual ritmo de trabajo y aprendizaje. • Mejor calidad en la información que se presenta, lo que equivale a una mejor comprensión por parte de los estudiantes de los contenidos que necesita aprender. CONCLUSIONES Se obtuvo un software multimedia educativo que sirve de apoyo al proceso de enseñanza –aprendizaje de la asignatura Dibujo Industrial, la cual es de importancia para la formación futura de los egresados de la carrera de Ingeniería Industrial. Se elaboraron y organizaron las lecciones básicas que permitirán un mejor desarrollo del proceso de enseñanza – aprendizaje de la asignatura Dibujo Industrial. La herramienta multimedia integra los contenidos de la materia Dibujo Industrial y los presenta de una forma amena valiéndose de diversos recursos multimedia, lo que favorece a los estudiantes la aprensión de los conocimientos transmitidos. La aplicación permitió la mejora en la calidad de los contenidos impartidos, el aumento de la velocidad de acceso a la información del tema, así como la autogestión del aprendizaje al ritmo propio de cada estudiante. REFERENCIAS L. Borrero, Tecnologías de la Información En Internet. Bogotá, Colombia: Editorial Norma. Colombia, 2003. M. Carnoy, “Las TIC en la enseñanza: posibilidades y retos”. En: Lección inaugural del curso académico 2004-2005 de la UOC (2004: Barcelona) C. Cebolla, AutoCAD 2000 Manual Práctico. México: Editorial Alfa-Omega, 2000. C. Jensen, y Hesel, J. Dibujo y diseño de Ingeniería. México: Editorial McGraw Hill, 2006. D. Laurillard, “Multimedia and the learner's experience of narrative”. Computers & Education. Vol. 31, 1998. J. López Fernández, y Tajadura, J.A. AutoCAD 2007 Avanzado. Editorial McGraw Hill, 2007. W. J. Luzadder y Duff J. M, Fundamentos de dibujo de ingeniería. México: Editorial Pearson, 2008. R. Pressman, Ingeniería del Software – Un enfoque práctico. Madrid, España: Editorial McGraw Hill, 2002. BIOGRAFÍA Johann Mejías Brito nació en Holguín, Cuba, el 10 de diciembre de 1977. Se graduó de Ingeniero Mecanizador Agropecuario en la Universidad de Granma en 2001, de Ingeniero Mecánico en la Universidad de Holguín en 2004. Obtuvo el título de Maestro en Ciencias en 2007 y el DEA del Programa de Doctorado Curricular conjunto con la Universidad Politécnica de Madrid en septiembre de 2010. Su experiencia profesional se ha desarrollado casi en su totalidad en la Universidad de Holguín-Cuba desde septiembre de 2001 hasta enero de 2011, desempeñándose como profesor e investigador de Tiempo Completo en el Departamento de Ingeniería Mecánica de la Facultad de Ingeniería Ha trabajado en diferentes proyectos de investigación con empresas como KTP y CEDEMA. De 2012 hasta la fecha comienza a trabajar como profesor e investigador en el Departamento de Ingeniería Industrial y Mecatrónica del Instituto Tecnológico de Colima. Rosario Lugo Báez. Graduado de la Escuela de Ingeniería de la Universidad Autónoma de Guadalajara como Ingeniero Mecánico Electricista en 1992 y en la Maestría en Educación en 2007. Desde el año 1986 labora como docente en la Universidad Autónoma de Guadalajara hasta el año 2002 y en el Instituto Tecnológico de Colima del 2002 a la fecha. Ha participado en proyectos de investigación educativa, como sinodal de titulación de alumnos de Licenciatura en Informática y de Administración. Participa en el Foro Colima del Plan Nacional de Desarrollo 2013-2018 en el área Educativa. Es

102
Representante Institucional ante la Red Nacional de Innovación en Educación Superior de la ANUIES. Ha impartido cátedra en el área de matemáticas, estadística y física para ingenieros. Ha fungido como tutor y asesor de alumnos de Ingeniería del Instituto Tecnológico de Colima con el propósito de abatir la reprobación y deserción. Juan Manuel Torres Ochoa. Graduado de Ingeniero Industrial en el Instituto Tecnológico de Colima, posee el grado de Maestro en Ciencias por el Instituto Tecnológico de Querétaro. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial del Instituto Tecnológico de Colima, impartiendo numerosas asignaturas del área. Olimpo Lúa Madrigal. Graduado de Ingeniero Industrial, posee el grado de Maestro en Ciencias. Se desempeña como profesor e investigador de tiempo completo en el Departamento de Ingeniería Industrial del Instituto Tecnológico de Colima impartiendo diversas materias. Ha ocupado cargos de directivos en la Institución y en la actualidad atiende el área de Innovación Tecnológica del Instituto. José del Carmen Aréchiga Maravillas. Graduado en la escuela de Matemáticas de la Universidad Autónoma de Guadalajara como Matemático en 1991 y en la Maestría en Educación en 2004. Posee 31 años de experiencia como docente, en la Universidad Autónoma de Guadalajara y el Instituto Tecnológico de Colima. Desde enero de 2005 comienza a trabajar en el Instituto Tecnológico de Colima en el depar tamento de Ciencias Básicas impartiendo cursos de Cálculo Diferencial, Cálculo Integral, Cálculo Vectorial, Álgebra Lineal y Ecuaciones Diferenciales en las carreras de Ingeniería Mecatrónica, Industrial, Ambiental, Sistemas Computacionales y Bioquímica. Rolando Rodríguez Henríquez. Graduado de Ingeniería en Equipos y Componentes Electrónicos. Universidad de Pinar del Río. Cuba. 1987 – 1992. Obtuvo el título de Maestro en Ciencias en 2007. Profesor del Departamento de Telecomunicaciones y Electrónica. Facultad de Informática y Telecomunicaciones. Universidad de Pinar del Río "Hnos. Saíz Montes de Oca", Cuba desde 1996 hasta la 2012. En 2013 comienza a trabajar como coordinador académico en la Universidad Multitécnica Profesional, Colima, México.
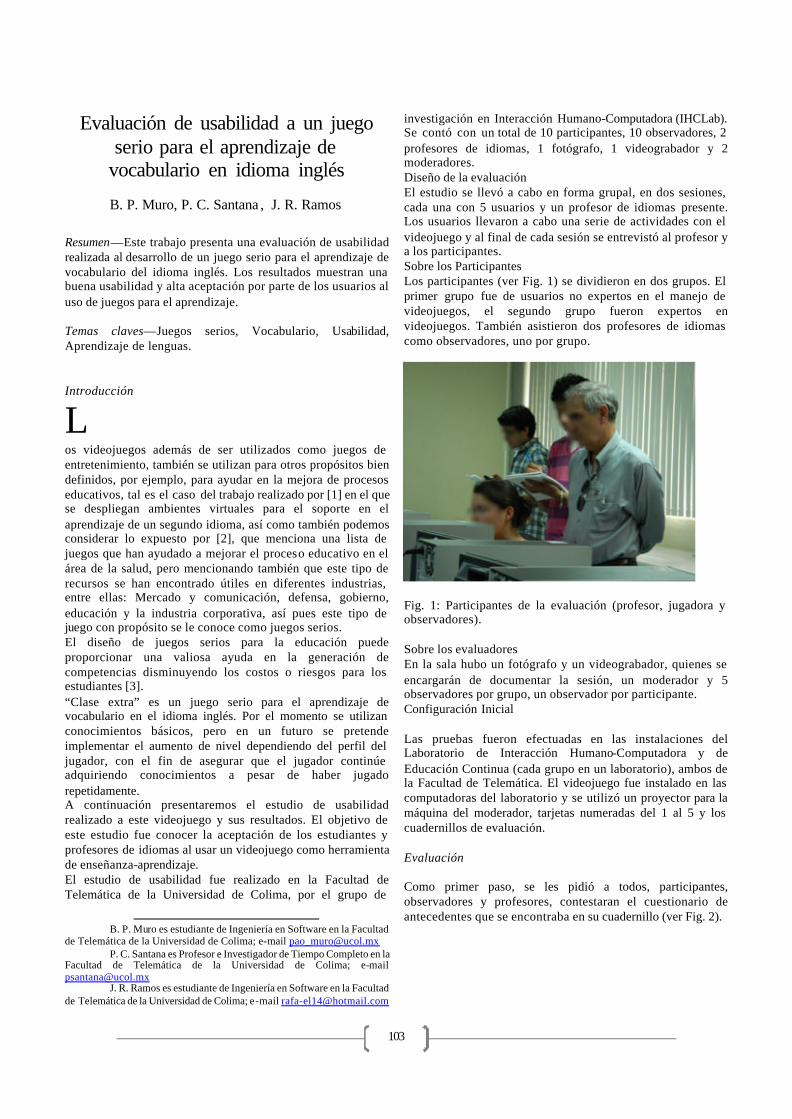
103
Evaluación de usabilidad a un juego serio para el aprendizaje de
vocabulario en idioma inglés
B. P. Muro, P. C. Santana , J. R. Ramos
Resumen—Este trabajo presenta una evaluación de usabilidad realizada al desarrollo de un juego serio para el aprendizaje de vocabulario del idioma inglés. Los resultados muestran una buena usabilidad y alta aceptación por parte de los usuarios al uso de juegos para el aprendizaje. Temas claves—Juegos serios, Vocabulario, Usabilidad, Aprendizaje de lenguas. Introducción
L os videojuegos además de ser utilizados como juegos de entretenimiento, también se utilizan para otros propósitos bien definidos, por ejemplo, para ayudar en la mejora de procesos educativos, tal es el caso del trabajo realizado por [1] en el que se despliegan ambientes virtuales para el soporte en el aprendizaje de un segundo idioma, así como también podemos considerar lo expuesto por [2], que menciona una lista de juegos que han ayudado a mejorar el proceso educativo en el área de la salud, pero mencionando también que este tipo de recursos se han encontrado útiles en diferentes industrias, entre ellas: Mercado y comunicación, defensa, gobierno, educación y la industria corporativa, así pues este tipo de juego con propósito se le conoce como juegos serios. El diseño de juegos serios para la educación puede proporcionar una valiosa ayuda en la generación de competencias disminuyendo los costos o riesgos para los estudiantes [3]. “Clase extra” es un juego serio para el aprendizaje de vocabulario en el idioma inglés. Por el momento se utilizan conocimientos básicos, pero en un futuro se pretende implementar el aumento de nivel dependiendo del perfil del jugador, con el fin de asegurar que el jugador continúe adquiriendo conocimientos a pesar de haber jugado repetidamente. A continuación presentaremos el estudio de usabilidad realizado a este videojuego y sus resultados. El objetivo de este estudio fue conocer la aceptación de los estudiantes y profesores de idiomas al usar un videojuego como herramienta de enseñanza-aprendizaje. El estudio de usabilidad fue realizado en la Facultad de Telemática de la Universidad de Colima, por el grupo de
B. P. Muro es estudiante de Ingeniería en Software en la Facultad
de Telemática de la Universidad de Colima; e-mail [email protected] P. C. Santana es Profesor e Investigador de Tiempo Completo en la
Facultad de Telemática de la Universidad de Colima; e-mail [email protected]
J. R. Ramos es estudiante de Ingeniería en Software en la Facultad de Telemática de la Universidad de Colima; e-mail [email protected]
investigación en Interacción Humano-Computadora (IHCLab). Se contó con un total de 10 participantes, 10 observadores, 2 profesores de idiomas, 1 fotógrafo, 1 videograbador y 2 moderadores. Diseño de la evaluación El estudio se llevó a cabo en forma grupal, en dos sesiones, cada una con 5 usuarios y un profesor de idiomas presente. Los usuarios llevaron a cabo una serie de actividades con el videojuego y al final de cada sesión se entrevistó al profesor y a los participantes. Sobre los Participantes Los participantes (ver Fig. 1) se dividieron en dos grupos. El primer grupo fue de usuarios no expertos en el manejo de videojuegos, el segundo grupo fueron expertos en videojuegos. También asistieron dos profesores de idiomas como observadores, uno por grupo.
Fig. 1: Participantes de la evaluación (profesor, jugadora y observadores). Sobre los evaluadores En la sala hubo un fotógrafo y un videograbador, quienes se encargarán de documentar la sesión, un moderador y 5 observadores por grupo, un observador por participante. Configuración Inicial Las pruebas fueron efectuadas en las instalaciones del Laboratorio de Interacción Humano-Computadora y de Educación Continua (cada grupo en un laboratorio), ambos de la Facultad de Telemática. El videojuego fue instalado en las computadoras del laboratorio y se utilizó un proyector para la máquina del moderador, tarjetas numeradas del 1 al 5 y los cuadernillos de evaluación. Evaluación Como primer paso, se les pidió a todos, participantes, observadores y profesores, contestaran el cuestionario de antecedentes que se encontraba en su cuadernillo (ver Fig. 2).

104
Fig. 2: Llenado del cuestionario de antecedentes. Posteriormente se les presentaron unas instrucciones para el juego (ver Fig. 3), como el uso de los controles y que para obtener poderes deben de responder las preguntas que les aparecerán en la parte superior izquierda de la pantalla.
Fig. 3: Presentación de instrucciones. A continuación, se creó la primera partida. Se le pidió a la persona que tuviera la tarjeta con el número 3 crear una nueva partida seleccionando el idioma español – inglés (ver Fig. 4), a tener 3 vidas y establecerla a 10 minutos. Una vez creada la partida, se les pidió a los demás participantes integrarse a ella y se les dejó jugar hasta quedar un ganador.
Fig. 4: Configuración del juego. Por último, se deseó probar ciertas funcionalidades del videojuego (ver Fig. 5), para esto se le pidió a la persona con la tarjeta con el número 1 crear una nueva partida seleccionando el idioma inglés, a 3 vidas y establecerla a 5 minutos. Una vez creada, se integraron los demás usuarios a la partida y una vez corridos 2 minutos del inicio de la partida, se le pidió al usuario con el número 4 se saliera de la partida. Después a los 3 minutos de la partida, se le pidió al creador de la misma (tarjeta número 1) que la cerrara.
Fig. 5: Configuración del juego. Final de la evaluación Terminado el ejercicio anterior se concluyó con la evaluación. Se les agradeció a los participantes por su ayuda y se les pidió llenar los cuestionarios al final de sus cuadernillos (ver Fig. 6). También a los observadores y al profesor.

105
Fig. 6: Llenado de cuestionarios finales. Resultados Como se comentó anteriormente, se utilizaron diferentes cuestionarios durante la evaluación, dependiendo del participante. Para todos los participantes, se aplicó el cuestionario de antecedentes, el cual nos da información básica sobre la persona su interacción con los videojuegos. Para los participantes expertos en videojuegos se aplicó una evaluación heurística y un cuestionario post-interacción. Los participantes no expertos en videojuegos contestaron un cuestionario de experiencia del juego (GEQ por sus siglas en inglés Game Experience Questionnaire) [4] y el cuestionario post-interacción. Los observadores, aparte de apuntar sus observaciones a lo largo de la sesión, también contestaron el cuestionario post-interacción desde el punto de vista de la interacción que presenciaron entre su participante y el videojuego. Por último, el profesor respondió un cuestionario con preguntas abiertas acerca de sus observaciones en la sesión. Profesores De los dos profesores, uno había tenido poca interacción con los videojuegos y el otro, nula. Ambos observaron buenas reacciones, como alegría y atención, en los participantes. También notaron mucho interés en el videojuego, que fue creciendo conforme le entendían a la dinámica. Ambos comentaron que aceptarían la idea de usar el videojuego como material de apoyo a la enseñanza y ven potencial a la idea. Jugadores expertos En el primer grupo hubo cinco jugadores expertos, los cuales se clasificaron de esta manera por tener interacción constante con los videojuegos y un promedio de 4 horas de juego diarias. De los 5 participantes, el 60% juegan cotidianamente con consola, y el 100% ha jugado a en PC y a través de internet. El 60% ha usado videojuegos para aprender. De las evaluaciones heurísticas, se concluye que el videojuego: Mostró una reacción coherente dependiendo de la acción que realizó el usuario, que el usuario pudo personalizar su perfil, ajustar el audio y video, así como la dificultad y velocidad del juego, y pudo encontrar una conducta predecible y razonable de los controles. El videojuego proporcionó vistas sin obstáculos acerca de las posibles acciones a realizar y provee información sobre el estado del usuario en el juego, todas estos puntos con cuatro de cinco calificaciones positivas.
El videojuego provee controles que son fáciles de manejar y que, de acuerdo al nivel, se basa la sensibilidad y capacidad de respuesta; e información visual que fue fácil de interpretar, teniendo 3 calificaciones positivas en estos aspectos. Todos los usuarios indicaron que pudieron evitar contenido no jugable (videos, imágenes) para volver al juego e información visual que fue fácil de interpretar. Por el contrario, los participantes indicaron que el videojuego no provee un uso de los controles de manera intuitiva y personalizable, ni proporciona instrucciones, ayuda y entrenamiento. Estos aspectos presentaron 3 y 4 calificaciones negativas respectivamente. En el cuestionario post-interacción, estos participantes indicaron que las opciones que les parecieron más complicadas fueron entrar a un cuarto, el menú y la dinámica del juego, con un voto cada uno. El tiempo que les tomó aprender la mecánica del juego fue inmediata para un participante, para tres participantes tomó alrededor de 1 min y uno no entendió en toda la sesión. A tres de los participantes les pareció fácil el uso de los controles, a uno muy fácil y a otro complicado. Cuatro de los participantes proponen integrar pocos tutoriales para el uso del videojuego. Los cinco usuarios sienten que sería mejor combinar el uso del videojuego con clases tradicionales para un mejor aprendizaje, puesto que usando el juego por sí mismo, cuatro opinaron que aprendería un poco y uno que no aprendería. Dos de los usuarios dijeron perder el interés en algún momento del juego, puesto que este “no es adictivo” o es “predecible, sencillo y simple”. Observadores de jugadores expertos Los observadores de los jugadores expertos fueron 5, uno por participante. De ellos, 3 son video jugadores asiduos con promedio de 4 horas de juego diarias, de los cuales 2 ya han utilizado algún videojuego para aprender. Sus observaciones fueron: Participante 1 : No entendió el juego. Participante 2: Mostró interés, expresiones de alegría, impaciencia, sorpresa. Tuvo dificultad inicial para entender el juego y acoplarse a los controles, después al entenderle tomó energía en el juego. Participante 3: Le entiende al juego pero se pierde con los controles, pierde sus vidas rápidamente. Participante 4: Le entiende perfectamente al juego, muestra expresiones faciales de que le ha gustado el juego. Participante 5: Problemas al principio del juego y no entiende la dinámica puesto que no toma en cuenta las preguntas. En el cuestionario post-interacción, los observadores indicaron que las complicaciones que pudieron identificar en sus participantes fueron la dinámica del juego, el menú para dos de ellos y entrar a los cuartos. El tiempo que les toma aprender la mecánica del juego es de 2 minutos para dos de ellos, 1 minuto para uno y más de 3 minutos para otro, diferente a la percepción de los usuarios. Tres de ellos opinaron que sus participantes se adaptaron al uso de los controles fácilmente y para uno fue complicado. También tres mencionaron la necesidad de incluir tutoriales al juego. Al igual que los usuarios, todos los observadores opinan que sería mejor usar el juego en conjunto con clases de manera tradicional. Sobre la forma en la que el juego presenta las preguntas de aprendizaje,
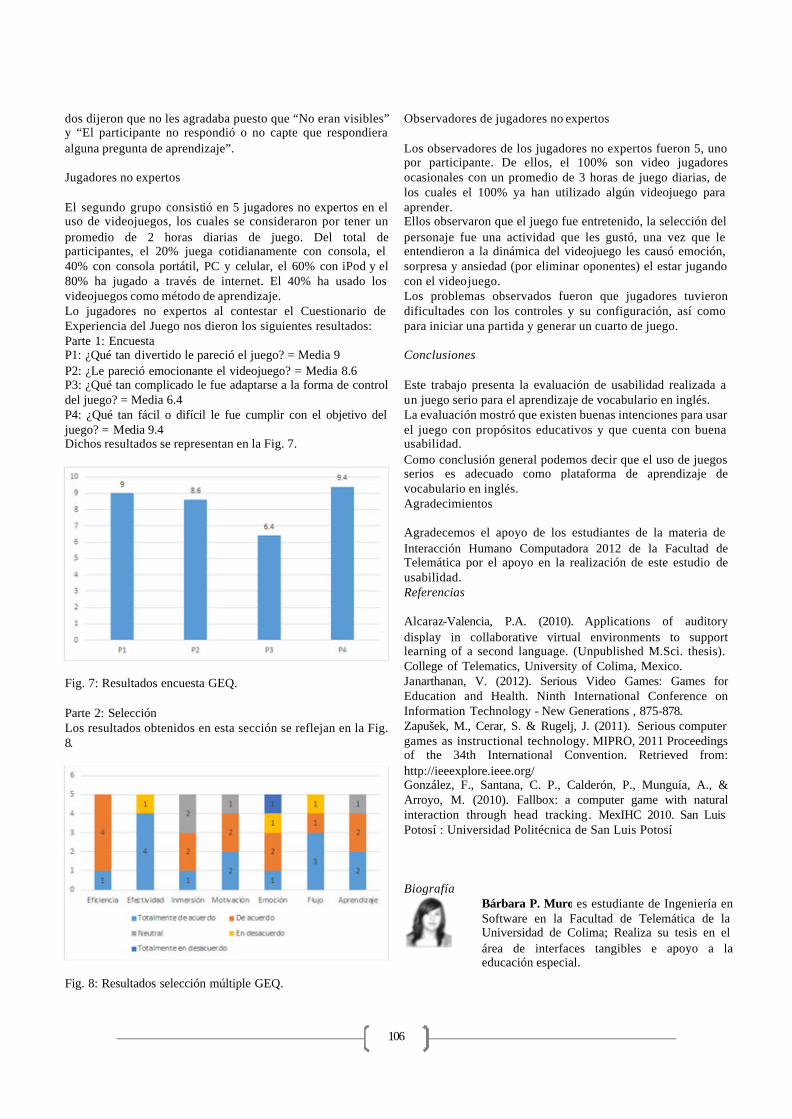
106
dos dijeron que no les agradaba puesto que “No eran visibles” y “El participante no respondió o no capte que respondiera alguna pregunta de aprendizaje”. Jugadores no expertos El segundo grupo consistió en 5 jugadores no expertos en el uso de videojuegos, los cuales se consideraron por tener un promedio de 2 horas diarias de juego. Del total de participantes, el 20% juega cotidianamente con consola, el 40% con consola portátil, PC y celular, el 60% con iPod y el 80% ha jugado a través de internet. El 40% ha usado los videojuegos como método de aprendizaje. Lo jugadores no expertos al contestar el Cuestionario de Experiencia del Juego nos dieron los siguientes resultados: Parte 1: Encuesta P1: ¿Qué tan divertido le pareció el juego? = Media 9 P2: ¿Le pareció emocionante el videojuego? = Media 8.6 P3: ¿Qué tan complicado le fue adaptarse a la forma de control del juego? = Media 6.4 P4: ¿Qué tan fácil o difícil le fue cumplir con el objetivo del juego? = Media 9.4 Dichos resultados se representan en la Fig. 7.
Fig. 7: Resultados encuesta GEQ. Parte 2: Selección Los resultados obtenidos en esta sección se reflejan en la Fig. 8.
Fig. 8: Resultados selección múltiple GEQ.
Observadores de jugadores no expertos Los observadores de los jugadores no expertos fueron 5, uno por participante. De ellos, el 100% son video jugadores ocasionales con un promedio de 3 horas de juego diarias, de los cuales el 100% ya han utilizado algún videojuego para aprender. Ellos observaron que el juego fue entretenido, la selección del personaje fue una actividad que les gustó, una vez que le entendieron a la dinámica del videojuego les causó emoción, sorpresa y ansiedad (por eliminar oponentes) el estar jugando con el videojuego. Los problemas observados fueron que jugadores tuvieron dificultades con los controles y su configuración, así como para iniciar una partida y generar un cuarto de juego. Conclusiones Este trabajo presenta la evaluación de usabilidad realizada a un juego serio para el aprendizaje de vocabulario en inglés. La evaluación mostró que existen buenas intenciones para usar el juego con propósitos educativos y que cuenta con buena usabilidad. Como conclusión general podemos decir que el uso de juegos serios es adecuado como plataforma de aprendizaje de vocabulario en inglés. Agradecimientos Agradecemos el apoyo de los estudiantes de la materia de Interacción Humano Computadora 2012 de la Facultad de Telemática por el apoyo en la realización de este estudio de usabilidad. Referencias Alcaraz-Valencia, P.A. (2010). Applications of auditory display in collaborative virtual environments to support learning of a second language. (Unpublished M.Sci. thesis). College of Telematics, University of Colima, Mexico. Janarthanan, V. (2012). Serious Video Games: Games for Education and Health. Ninth International Conference on Information Technology - New Generations , 875-878. Zapušek, M., Cerar, S. & Rugelj, J. (2011). Serious computer games as instructional technology. MIPRO, 2011 Proceedings of the 34th International Convention. Retrieved from: http://ieeexplore.ieee.org/ González, F., Santana, C. P., Calderón, P., Munguía, A., & Arroyo, M. (2010). Fallbox: a computer game with natural interaction through head tracking. MexIHC 2010. San Luis Potosí : Universidad Politécnica de San Luis Potosí Biografía
Bárbara P. Muro es estudiante de Ingeniería en Software en la Facultad de Telemática de la Universidad de Colima; Realiza su tesis en el área de interfaces tangibles e apoyo a la educación especial.

107
Pedro C. Santana es Profesor e Investigador de Tiempo Completo en la Facultad de Telemática de la Universidad de Colima; Sus áreas de interés son la Interacción Humano Computadora, Ingeniería de Software y la Tecnología en la Educación.
J. Rafael Ramos es estudiante de Ingeniería en Software en la Facultad de Telemática de la Universidad de Colima; Realiza su tesis en el desarrollo de juegos serios para el aprendizaje de vocabulario en inglés.

108
Scratch como apoyo al desarrollo de capacidades de abstracción en alumnos
de nivel básico
S.P. Jiménez, Universidad de Colima, V. H. Castillo, Universidad de Colima , J. Aguilar, Universidad de
Colima, L. Soriano-Equigua, Universidad de Colima y J.L. Álvarez, Universidad de Colima
Resumen—El razonamiento abstracto en la educación básica es importante para el desarrollo del estudiante. En México los problemas de aprovechamiento han prevalecido por mucho tiempo y siguen siendo una problemática importante que merece consideración, esto justifica la necesidad de basar la educación en nuevos métodos de aprendizaje. Scratch ha demostrado ser útil aplicado como método de aprendizaje. Este artículo tiene como objetivo desarrollar las capacidades de abstracción en alumnos de nivel básico. La metodología llevada a cabo se clasifica en tres etapas, primero la etapa del diseño del plan de trabajo, después la interacción con el software, para finalizar con la evaluación aplicada a dos grupos el de prueba y de control. Los resultados obtenidos por el instrumento de evaluación cumplieron con lo esperado. Sin embargo, como resultado de las limitantes en los parámetros, la diferencia entre ambos grupos fue mínima, tomando en cuenta lo anterior, se discute la posibilidad de mejorar los resultados aumentando los parámetros iniciales. Temas claves— Capacidades de abstracción, Scratch, TIC. Introducción
L A educación básica es importante en el desarrollo del estudiante, debido a que le proporciona las bases de conocimiento y tiene influencia en las actitudes y hábitos de estudio que pueden prevalecer a lo largo de su vida académica. Particularmente, esta investigación se enfoca en las capacidades de abstracción en los niños de nivel básico. El razonamiento abstracto es, la capacidad de resolver problemas lógicos expresados en términos de información abstracta o abstraída e implica las dos funciones del razonamiento: la inductiva y la deductiva, esta es la definición que presenta [1]. De acuerdo a la definición anterior, las capacidades de abstracción pueden enfocarse a distintas áreas, sin embargo, con la finalidad de limitar los alcances de este trabajo sólo se analiza el área de matemáticas en este artículo.
Samantha Paulina Jiménez. Estudiante de la Universidad de Colima (e-mail: [email protected]). Víctor .H. Castillo. Profesor-investigador de la Universidad de Colima (e-mail: [email protected]) Jairo Aguilar. Estudiante de la Universidad de Colima (e-mail: [email protected]) Leonel Soriano-Equigua. Profesor-investigador de la Universidad de Colima (e-mail: [email protected]). J.L. Álvarez. Profesor-investigador de la Universidad de Colima (e-mail: [email protected]).
La Tabla I muestra algunos datos obtenidos en la prueba Evaluación Nacional del Logro Académico en Centros Escolares (ENLACE) del ciclo escolar 2009-2010 en 5º de primaria. De un total de 8, 323, 728 alumnos que presentaron la prueba, el 19.7 % tuvo un nivel de "insuficiencia elemental", mientras que la mayoría presentó un nivel "elemental" con un 46.4 %, en cuanto al nivel "bueno" el 25.8 % de alumnos se ubican en él y solamente el 8.1 % presentó un nivel "excelente" de suficiencia en el área de Matemáticas [2]. TABLA I RESULTADOS DE LA PRUEBA ENLACE EN MÉXICO EN EL CICLO ESCOLAR 2009-2010 EN 5º DE PRIMARIA.
Nivel Porcentaje No. de alumnos Insuficiente 19.7 1,639,774.416 Elemental 46.4 760,855.329 Bueno 25.8 196300.6749 Excelente 8.1 15900.35467
Para ser más específicos, en Manzanillo, Colima, en el mismo periodo escolar (2009-2010) y mismo grado de primaria (5º), los resultados de la misma prueba y del área de matemáticas se muestran en la Tabla II. El 20 % de los alumnos presentó un nivel insuficiente, mientras que el nivel elemental mantiene la mayoría con el 47 %, por otra parte el nivel bueno lo desempeñan el 25 % de los alumnos de Colima y finalmente el 8 % muestra un nivel excelente. TABLA II RESULTADOS DE LA PRUEBA ENLACE EN EL ESTADO DE COLIMA EN EL CICLO ESCOLAR 2009-2010 EN 5º DE PRIMARIA.
Nivel Porcentaje No. de alumnos Insuficiente 25.2 2265.003275 Elemental 49.1 1112.721364 Bueno 21.0 234.0809679 Excelente 4.6 10.8590161
Lo mencionado anteriormente, además de considerar que el estudio de las matemáticas requiere de abstracción, justifica la necesidad de basar la educación en nuevos métodos para desarrollar las capacidades de abstracción en los alumnos de nivel básico. En [3] establecen que el aprendizaje de la educación preescolar se basa en el ciclo llamado espiral piensa creativo, ver Fig. 1. El ciclo consiste en cinco etapas. La primera es imagina qué hacer, para después crear un proyecto basado en las ideas imaginadas de la etapa previa, la siguiente etapa es jugar con las creaciones, posteriormente comparte tus experiencias con los demás y finalmente reflexionar de las mismas. En ese mismo documento señalan que algunos inventores y artistas del siglo XX dan crédito de su éxito a las experiencias que desarrollaron en preescolar.
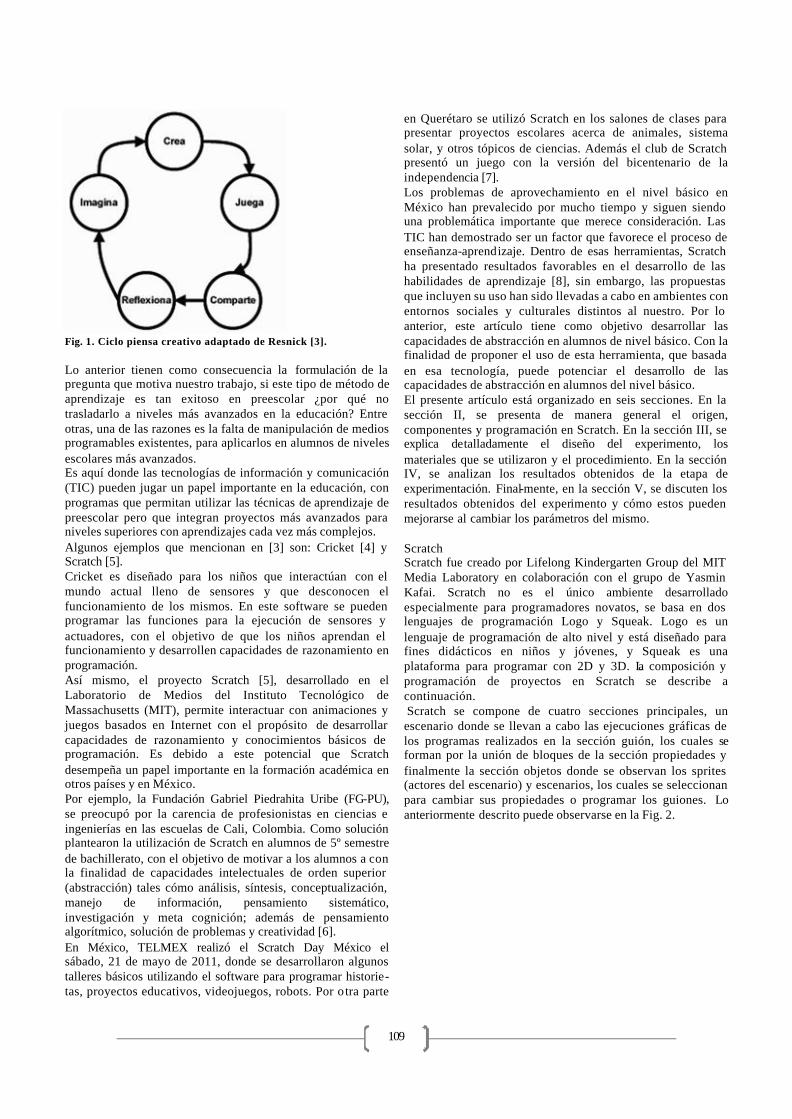
109
Fig. 1. Ciclo piensa creativo adaptado de Resnick [3]. Lo anterior tienen como consecuencia la formulación de la pregunta que motiva nuestro trabajo, si este tipo de método de aprendizaje es tan exitoso en preescolar ¿por qué no trasladarlo a niveles más avanzados en la educación? Entre otras, una de las razones es la falta de manipulación de medios programables existentes, para aplicarlos en alumnos de niveles escolares más avanzados. Es aquí donde las tecnologías de información y comunicación (TIC) pueden jugar un papel importante en la educación, con programas que permitan utilizar las técnicas de aprendizaje de preescolar pero que integran proyectos más avanzados para niveles superiores con aprendizajes cada vez más complejos. Algunos ejemplos que mencionan en [3] son: Cricket [4] y Scratch [5]. Cricket es diseñado para los niños que interactúan con el mundo actual lleno de sensores y que desconocen el funcionamiento de los mismos. En este software se pueden programar las funciones para la ejecución de sensores y actuadores, con el objetivo de que los niños aprendan el funcionamiento y desarrollen capacidades de razonamiento en programación. Así mismo, el proyecto Scratch [5], desarrollado en el Laboratorio de Medios del Instituto Tecnológico de Massachusetts (MIT), permite interactuar con animaciones y juegos basados en Internet con el propósito de desarrollar capacidades de razonamiento y conocimientos básicos de programación. Es debido a este potencial que Scratch desempeña un papel importante en la formación académica en otros países y en México. Por ejemplo, la Fundación Gabriel Piedrahita Uribe (FG-PU), se preocupó por la carencia de profesionistas en ciencias e ingenierías en las escuelas de Cali, Colombia. Como solución plantearon la utilización de Scratch en alumnos de 5º semestre de bachillerato, con el objetivo de motivar a los alumnos a con la finalidad de capacidades intelectuales de orden superior (abstracción) tales cómo análisis, síntesis, conceptualización, manejo de información, pensamiento sistemático, investigación y meta cognición; además de pensamiento algorítmico, solución de problemas y creatividad [6]. En México, TELMEX realizó el Scratch Day México el sábado, 21 de mayo de 2011, donde se desarrollaron algunos talleres básicos utilizando el software para programar historie-tas, proyectos educativos, videojuegos, robots. Por otra parte
en Querétaro se utilizó Scratch en los salones de clases para presentar proyectos escolares acerca de animales, sistema solar, y otros tópicos de ciencias. Además el club de Scratch presentó un juego con la versión del bicentenario de la independencia [7]. Los problemas de aprovechamiento en el nivel básico en México han prevalecido por mucho tiempo y siguen siendo una problemática importante que merece consideración. Las TIC han demostrado ser un factor que favorece el proceso de enseñanza-aprendizaje. Dentro de esas herramientas, Scratch ha presentado resultados favorables en el desarrollo de las habilidades de aprendizaje [8], sin embargo, las propuestas que incluyen su uso han sido llevadas a cabo en ambientes con entornos sociales y culturales distintos al nuestro. Por lo anterior, este artículo tiene como objetivo desarrollar las capacidades de abstracción en alumnos de nivel básico. Con la finalidad de proponer el uso de esta herramienta, que basada en esa tecnología, puede potenciar el desarrollo de las capacidades de abstracción en alumnos del nivel básico. El presente artículo está organizado en seis secciones. En la sección II, se presenta de manera general el origen, componentes y programación en Scratch. En la sección III, se explica detalladamente el diseño del experimento, los materiales que se utilizaron y el procedimiento. En la sección IV, se analizan los resultados obtenidos de la etapa de experimentación. Final-mente, en la sección V, se discuten los resultados obtenidos del experimento y cómo estos pueden mejorarse al cambiar los parámetros del mismo. Scratch Scratch fue creado por Lifelong Kindergarten Group del MIT Media Laboratory en colaboración con el grupo de Yasmin Kafai. Scratch no es el único ambiente desarrollado especialmente para programadores novatos, se basa en dos lenguajes de programación Logo y Squeak. Logo es un lenguaje de programación de alto nivel y está diseñado para fines didácticos en niños y jóvenes, y Squeak es una plataforma para programar con 2D y 3D. La composición y programación de proyectos en Scratch se describe a continuación. Scratch se compone de cuatro secciones principales, un escenario donde se llevan a cabo las ejecuciones gráficas de los programas realizados en la sección guión, los cuales se forman por la unión de bloques de la sección propiedades y finalmente la sección objetos donde se observan los sprites (actores del escenario) y escenarios, los cuales se seleccionan para cambiar sus propiedades o programar los guiones. Lo anteriormente descrito puede observarse en la Fig. 2.
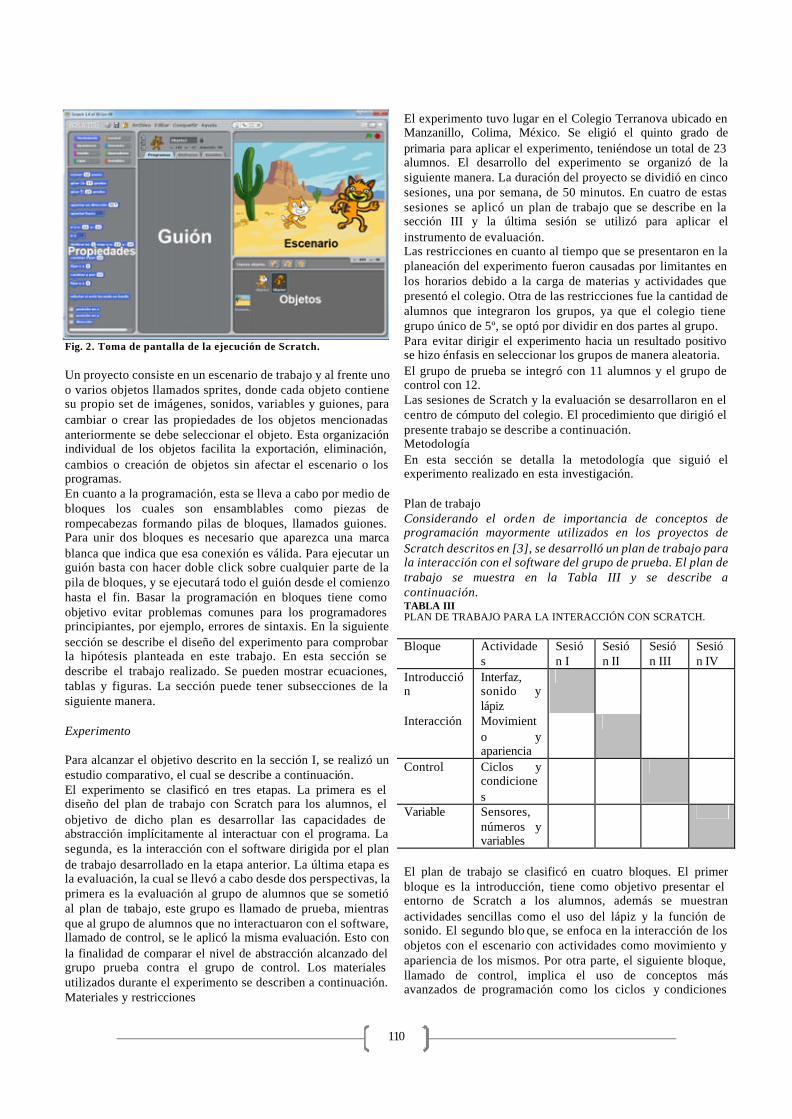
110
Fig. 2. Toma de pantalla de la ejecución de Scratch. Un proyecto consiste en un escenario de trabajo y al frente uno o varios objetos llamados sprites, donde cada objeto contiene su propio set de imágenes, sonidos, variables y guiones, para cambiar o crear las propiedades de los objetos mencionadas anteriormente se debe seleccionar el objeto. Esta organización individual de los objetos facilita la exportación, eliminación, cambios o creación de objetos sin afectar el escenario o los programas. En cuanto a la programación, esta se lleva a cabo por medio de bloques los cuales son ensamblables como piezas de rompecabezas formando pilas de bloques, llamados guiones. Para unir dos bloques es necesario que aparezca una marca blanca que indica que esa conexión es válida. Para ejecutar un guión basta con hacer doble click sobre cualquier parte de la pila de bloques, y se ejecutará todo el guión desde el comienzo hasta el fin. Basar la programación en bloques tiene como objetivo evitar problemas comunes para los programadores principiantes, por ejemplo, errores de sintaxis. En la siguiente sección se describe el diseño del experimento para comprobar la hipótesis planteada en este trabajo. En esta sección se describe el trabajo realizado. Se pueden mostrar ecuaciones, tablas y figuras. La sección puede tener subsecciones de la siguiente manera. Experimento
Para alcanzar el objetivo descrito en la sección I, se realizó un estudio comparativo, el cual se describe a continuación. El experimento se clasificó en tres etapas. La primera es el diseño del plan de trabajo con Scratch para los alumnos, el objetivo de dicho plan es desarrollar las capacidades de abstracción implícitamente al interactuar con el programa. La segunda, es la interacción con el software dirigida por el plan de trabajo desarrollado en la etapa anterior. La última etapa es la evaluación, la cual se llevó a cabo desde dos perspectivas, la primera es la evaluación al grupo de alumnos que se sometió al plan de trabajo, este grupo es llamado de prueba, mientras que al grupo de alumnos que no interactuaron con el software, llamado de control, se le aplicó la misma evaluación. Esto con la finalidad de comparar el nivel de abstracción alcanzado del grupo prueba contra el grupo de control. Los materiales utilizados durante el experimento se describen a continuación. Materiales y restricciones
El experimento tuvo lugar en el Colegio Terranova ubicado en Manzanillo, Colima, México. Se eligió el quinto grado de primaria para aplicar el experimento, teniéndose un total de 23 alumnos. El desarrollo del experimento se organizó de la siguiente manera. La duración del proyecto se dividió en cinco sesiones, una por semana, de 50 minutos. En cuatro de estas sesiones se aplicó un plan de trabajo que se describe en la sección III y la última sesión se utilizó para aplicar el instrumento de evaluación. Las restricciones en cuanto al tiempo que se presentaron en la planeación del experimento fueron causadas por limitantes en los horarios debido a la carga de materias y actividades que presentó el colegio. Otra de las restricciones fue la cantidad de alumnos que integraron los grupos, ya que el colegio tiene grupo único de 5º, se optó por dividir en dos partes al grupo. Para evitar dirigir el experimento hacia un resultado positivo se hizo énfasis en seleccionar los grupos de manera aleatoria. El grupo de prueba se integró con 11 alumnos y el grupo de control con 12. Las sesiones de Scratch y la evaluación se desarrollaron en el centro de cómputo del colegio. El procedimiento que dirigió el presente trabajo se describe a continuación. Metodología En esta sección se detalla la metodología que siguió el experimento realizado en esta investigación. Plan de trabajo Considerando el orden de importancia de conceptos de programación mayormente utilizados en los proyectos de Scratch descritos en [3], se desarrolló un plan de trabajo para la interacción con el software del grupo de prueba. El plan de trabajo se muestra en la Tabla III y se describe a continuación. TABLA III PLAN DE TRABAJO PARA LA INTERACCIÓN CON SCRATCH. Bloque Actividade
s Sesión I
Sesión II
Sesión III
Sesión IV
Introducción
Interfaz, sonido y lápiz
Interacción Movimiento y apariencia
Control Ciclos y condiciones
Variable Sensores, números y variables
El plan de trabajo se clasificó en cuatro bloques. El primer bloque es la introducción, tiene como objetivo presentar el entorno de Scratch a los alumnos, además se muestran actividades sencillas como el uso del lápiz y la función de sonido. El segundo blo que, se enfoca en la interacción de los objetos con el escenario con actividades como movimiento y apariencia de los mismos. Por otra parte, el siguiente bloque, llamado de control, implica el uso de conceptos más avanzados de programación como los ciclos y condiciones

111
para formar guiones más avanzados. Finalmente, el bloque variable, el cual maneja sensores, números y variables, conceptos más complejos y menos utilizados. En la siguiente sección se explican las actividades que se llevaron a cabo en la aplicación del plan detallado anteriormente. Interacción con el software Todas las sesiones se realizaron en tres etapas, en la primera se realizó un ejercicio dirigido, esto con la finalidad de familiarizar a los alumnos con el software. En la segunda etapa los alumnos desarrolla-ron actividades por su cuenta, estimulando el razonamiento. Finalmente, en la tercera etapa los alumnos interactuaron con el software libremente, incitando la creatividad. Evaluación Al término del periodo de interacción con el programa se aplicó la evaluación, la cual se clasificó en cuatro etapas que están consideradas entre las capacidades intelectuales de orden superior: lógica, razonamiento, análisis de textos y razonamiento de procedimientos. La estructura de la evaluación se realizó tomando en cuenta los objetivos iniciales, comparar si las TIC en este trabajo particularmente Scratch, puede incrementar las capacidades de abstracción en 4 alumnos de nivel básico. Cabe señalar que la misma evaluación se aplicó a ambos grupos, el de prueba y el de control. El instrumento de evaluación utilizado fue una evaluación escrita, la cual se integró de la siguiente manera: cinco reactivos implicaron completar secuencias lógicas, tres más estimularon el razonamiento en los alumnos al contestar acertijos, un reactivo se utilizó para valorar la capacidad de síntesis y análisis de un texto mediante la lectura de un texto para después resaltar las ideas principales de éste, por último, se evaluó la capacidad de razonar procesos mediante la realización de un algoritmo. Los resultados obtenidos en esta etapa se muestran en la siguiente sección. Resultados En esta sección se analizan los resultados obtenidos por el instrumento de evaluación. La Fig. 3 muestra los resultados de ambos grupos, de prueba y de control, clasificados por reactivo y tomando en cuenta sólo a los alumnos que contestaron correctamente el reactivo. Como se mencionó en la sección III los primeros cinco reactivos fueron secuencias lógicas en los cuales podemos establecer que solamente un alumno es la diferencia que favorece al grupo de prueba contra el de control. Por el contrario, en la siguiente sección integrada por tres problemas de razonamiento, el grupo de control superó al de prueba por dos alumnos. En la sección de síntesis y análisis de textos, una vez más el grupo de prueba superó al de control con una diferencia de tres alumnos. Asimismo, en la sección asignada a desarrollar un algoritmo, los resultados favorecieron al grupo de prueba.
Fig. 3. Gráfica de reactivos contestados correctamente por grupo. Aunque los resultados mostrados anteriormente no presentan una diferencia amplia, el grupo prueba superó al grupo de control. Que los resultados no presenten una diferencia amplia puede estar limitado por las restricciones mencionadas en la sección III, por ejemplo, población pequeña y tiempo de trabajo limitado. No obstante, cabe señalar que el grupo de control supera el número de integrantes por un alumno al grupo de prueba, de lo cual se puede concluir que el grupo de control presentó más errores que el grupo prueba. Otro análisis que presenta este trabajo es el promedio de ambos grupos, el cual se ilustra en la Fig. 4. En esa figura se puede observar el resultado del promedio por grupo, el grupo de control presentó un promedio de reactivos correctos respondidos del 4.29, y 4.45 es el promedio del grupo de prueba. Con una diferencia de 0.16 el grupo de prueba superó al grupo de control en el promedio.
Fig. 4. Gráfica del promedio de los grupos de control y prueba. La discusión y trabajo futuro se muestran en la siguiente sección. Discusión El estudio comparativo presentado en este trabajo nos permitió establecer la factibilidad de utilizar Scratch como una herramienta que mejora las capacidades de abstracción en alumnos de nivel básico. Cabe señalar que los resultados obtenidos por el estudio a pesar de ser satisfactorios, presentan una diferencia mínima al comparar ambos grupos. Las limitantes importantes de esta investigación fueron dos: 1) la duración del periodo de interacción con el software y 2) la cantidad de alumnos por grupo. Debido a que ambas, eran cantidades pequeñas la diferencia entre los grupos no es tan amplia. Sin embargo, lo anterior nos lleva a suponer que ampliando la cantidad de los parámetros limitados, podemos mejorar los resultados para establecer formalizar nuestra investigación. El presente trabajo es la base de desarrollos futuros. Contemplamos la implementación del mismo experimento ampliando los parámetros para formalizar la investigación.

112
Asimismo, es pertinente replicar el presente experimento en un ámbito estatal. Referencias T. N. D. Mendoza and S. G. Calderón, “Estrategias para el desarrollo de las capacidades de abstracción y razonamiento abstracto en estudiantes del primer semestre de esime zacatenco,” tech. rep., Instituto Politécnico Nacional, 2007. S. de Educación Pública, “Evaluación nacional del logro académico en centros escolares.” Web Pages, Septiembre 2010. http://enlace.sep.gob.mx/ba/. M. Resnick, “All i really need to know (about creative thinking) i learned (by studying how children learn) in kindergarten,” in Proceedings of the 6th ACM SIGCHI conference on Creativity & cognition, 2007. T. P. invention company, “Cricket.” Web Page, 2008. http://www.picocricket.com/. MIT, “Scratch.” Web Page. http://scratch.mit.edu/. B. S. Molano, “Eduteka.” Web Page, 2011. http://www.eduteka.org/modulos.php?catx=9&idSubX=278. I. Faculty, “Scratched.” Web Page, Febrero 2011. http://scratched.media.mit.edu/stories/scratch-day-2010-thomas-jefferson-institute-queretaro-mexico. [8] C. Abbott, ICT changing education. Routledge-Falmer, 2001. Biografía
Samantha Jiménez Calleros. Graduada de Ingeniera en Sistemas Computacionales en 2011 por la Universidad de Colima. Actualmente cursa sus estudios de maestría en la Facultad de Ingeniería Mecánica y Eléctrica de la Universidad de Colima.
Víctor H. Castillo. Es Doctor en Ciencias de la Computación por el CICESE, México. Tiene experiencia en modelado formal y desarrollo de software. Actualmente labora como profesor de tiempo completo para la Facultad de Ingeniería Mecánica y Eléctrica de la Universidad de Colima. Sus intereses de investigación se relacionan con los sistemas basados en conocimiento aplicados a la administración de cambio.
Leonel Soriano Equigua. Recibió el grado de Ingeniero en Comunicaciones y Electrónica en 1997 por la Universidad de Colima y los grados de Maestría y doctorado en Ciencias con especialidad de Telecomunicaciones por el Centro de Investigación Científica y de Educación Superior de Ensenada (CICESE) en los años 2000 y 2011, respectivamente. Desde el año 2000, se ha desempeñado como Profesor e Investigador de tiempo completo en la Facultad de Ingeniería Mecánica y Eléctrica de la Universidad de Colima.
José Luis Álvarez Flores. Graduado de la Ingeniería en comunicaciones y electrónica (1993), de la especialidad en telefonía (2003) y de la maestría en computación (2005) en la Universidad de Colima. Actualmente se desempeña como profesor y Director de la Facultad de Ingeniería Mecánica y Eléctrica.
113
Un tutor virtual consciente de contexto en apoyo al proceso de tutorías
universitarias
David A. Mejía, Víctor H. Castillo, María Berenice Fong Mata, Roberto Guerrero, Luis Siero
Resumen— El proceso de tutorías en la universidad se entiende como el proceso de acompañamiento permanente de los tutores a los estudiantes durante el paso de éstos por la universidad. Actualmente, este proceso no puede ser llevado a cabo en su totalidad de acuerdo a como está conceptualizado, debido al alto costo en términos de tiempo y esfuerzo que implica tener conocimiento al día de la situación académica y personal de los estudiantes. En este trabajo se presenta un concepto de diseño para el desarrollo de Tecnologías de la Información y la Comunicación que implementen un tutor virtual consciente de contexto que ayude a los tutores a realizar su tarea acorde a lo especificado en el concepto original de las tutorías. Temas claves— Tutorías universitarias, tutor virtual, concepto de diseño. Introducción
E N años recientes, el proceso de tutorías, entendido como “un proceso de acompañamiento durante la formación de los estudiantes, que se concreta mediante la atención personalizada a un alumno o a un grupo reducido de alumnos, por parte de académicos competentes y formados para esta función, apoyándose conceptualmente en las teorías del aprendizaje más que en las de la enseñanza” [1] está cobrando auge en las instituciones de educación superior en México. Esto ocurre debido principalmente a dos razones: la primera está relacionada con el impacto que la globalización ha tenido en la educación, propiciando reformas que faciliten la homologación de estudios entre instituciones educativas sin importar el país donde éstas se encuentren [2,7]. Estas reformas han llevado hacia un paradigma donde la educación debe de estar centrada en el alumno y no en la cátedra que brinda el profesor. La segunda razón tiene que ver con el hecho de que las instituciones de educación superior están adoptando el proceso de tutorías como un medio de acompañamiento al alumno para ayudar a reducir la deserción, el bajo rendimiento escolar, y
David A. Mejia. Centro de Ingeniería y Tecnología, Universidad
Autónoma de Baja California ([email protected]). Víctor H. Castillo. Facultad de Ingeniería Mecánica y Eléctrica,
Universidad de Colima ([email protected]). María Berenice Fong Mata. Centro de Ingeniería y Tecnología,
Universidad Autónoma de Baja California ([email protected]). Roberto Guerrero. Centro de Ingeniería y Tecnología, Universidad
Autónoma de Baja California ([email protected]). David A. Mejia. Centro de Ingeniería y Tecnología, Universidad
Autónoma de Baja California ([email protected]).
por ende, mejorar la eficiencia terminal [1]. La tutoría propicia entonces una relación pedagógica diferente a la que establece la docencia ante grupos numerosos. En este caso, el profesor asume el papel de un consejero o un “compañero” mayor; el ejercicio de su autoridad se suaviza hasta casi desaparecer; el ambiente es mucho más relajado y amigable [16]. El desarrollo de sistemas de información en apoyo al proceso de tutorías universitarias no es algo nuevo. De hecho, actualmente un gran número de universidades públicas en México cuentan con un sistema de información que sirva de apoyo a los tutores [19]. A grandes rasgos, estos sistemas cuentan con expediente del alumno (personal, académico, médico, psicológico, etc), sistema de registro de sesiones de tutorías, información sobre índices y probabilidades de reprobación y, en algunos casos, apoyo a la toma de decisiones de los tutores en la reinscripción y en la canalización de los alumnos. Ejemplos de estos sistemas pueden verse en [10-15]. El problema principal que surge con estos sistemas, es que en su d iseño sólo toman en cuenta como actores del proceso de tutorías al alumno y al tutor, dejando de lado la información diaria que producen los profesores sobre el desempeño de los alumnos. De esta forma, se tiene evidencia de situaciones en las que el alumno interactúa con el tutor durante el desarrollo del semestre y no le comenta que está teniendo problemas de determinada índole, los cuales están afectando su rendimiento; esto conlleva que el tutor no esté en condiciones de ayudarlo y/o canalizarlo al departamento correspondiente, por lo que convierte a los tutores en personajes con la responsabilidad de corregir situaciones en vez de prevenirlas, en la mayoría de los casos. Por esta razón, en este trabajo se presenta un concepto de diseño que fue desarrollado con la intención de servir de base para realizar sistemas de información que brinden apoyo a los tutores de manera permanente. Estos sistemas tendrán la capacidad de aprovechar la información sobre los alumnos que generan día a día los profesores, detectar cuando algún tutorado está cerca de tener problemas de aprovechamiento con algún profesor y notificar de manera automática al tutor, así como brindar ayuda sobre las actividades a realizar en caso de detectar a algún alumno con problemas. El resto del artículo está organizado de la siguiente manera: la sección 2 presenta antecedentes sobre la tutoría universitaria. En la sección 3 se explica la metodología de investigación utilizada en el desarrollo de este trabajo. En la sección 4 se presentan los inconvenientes encontrados durante el proceso de tutorías. En la sección 5 se presentan los requerimientos de diseño identificados en el estudio. Posteriormente, en la sección 6 se presenta el concepto de diseño del Tutor Virtual, y finalmente la sección 7 concluye el artículo. La Tutoría Universitaria El origen de la tutoría es algo ambiguo, ya que no queda claro aún el momento exacto en que surgió como concepto y como proceso; lo que se ha hecho entonces es un seguimiento sobre aquellos documentos o eventos donde se hace mención a conceptos que puedan hacer referencia a las tutorías. Uno de estos documentos es la “Declaración Mundial de Educación Superior en el Siglo XXI de la UNESCO” [20], el cual fue aprobado y publicado en la Conferencia Mundial sobre la Educación Superior en 1998, donde en el artículo 9 se

114
hace referencia a que “se percibe la necesidad de una nueva visión y un nuevo modelo de enseñanza superior, que debería estar centrado en el estudiante” [20]. Otro de los orígenes del concepto de tutorías se puede encontrar en la llamada “Declaración de Bologna”, el cual es un plan de convergencia firmado en 1999 por las universidades de la Unión Europea, cuyos objetivos principales son facilitar el intercambio de estudiantes y titulados en los países de la Unión, así como también adaptar el contenido de los estudios a las demandas sociales. La referencia a la tutoría se hace, de manera indirecta, a través de la concepción del crédito europeo, el cual incluye tiempo de trabajo autónomo debidamente tutelado. Además, mencionan que los ciudadanos europeos deben de ser capaces de dirigir adecuadamente su propio aprendizaje, ya que éste es un proceso que continúa a lo largo de toda la vida (Life Long Learning). En lo que respecta a la implementación de las tutorías en las universidades internacionales, la ANUIES en su libro “Programas Institucionales de Tutoría. Una propuesta de la ANUIES para su organización y funcionamiento en las instituciones de educación superior” [1] presenta una serie de investigaciones donde menciona la presencia e importancia que se da al proceso de tutorías en universidades de España, Estados Unidos, Australia y Reino Unido, entre otras. Con diversas definiciones entre ellas, en todas se considera a la tutoría como “la atención especializada a ciertas necesidades personales y sociales, así como con necesidades académicas especiales que desbordan la preparación, el tiempo y las finalidades de la atención formativa propias de la docencia universitaria” [1], así como también consideran a la tutoría como un derecho del estudiante y una obligación de los profesores. Metodología Al hablar de sistemas de cómputo, normalmente se piensa en los beneficios y las funciones que estos ofrecen a los usuarios. Esto debido a que el propósito principal del desarrollo de software debe ser el satisfacer las necesidades de los usuarios [8]. Aunado a esto, los sistemas de software deben apoyar estas necesidades en un contexto dado [21]. Sin embargo, los sistemas computacionales van más allá, generando nuevas posibilidades y dificultades al reestructurar las actividades humanas, [6]. Para lograr el objetivo de este proyecto, se tomó como base la metodología de diseño participativo, más específicamente, la metodología de diseño basado en escenarios propuesta por John Carroll [3,4], quien enuncia que “la propiedad que define a un escenario es la que proyecta una descripción concreta de las actividades en las que el usuario se encuentra involucrado cuando desarrolla una tarea en específico; esta descripción debe de ser lo suficientemente detallada de forma que las implicaciones de diseño puedan ser inferidas y razonadas a partir de dicho escenario” [5]. Adicionalmente, también se tomó en cuenta que muchos de los problemas que ocurren durante el proceso de evaluación de herramientas de groupware pueden ser eliminados de forma temprana si se mejoran las técnicas de evaluación actualmente usadas, de forma que la evaluación progrese al mismo tiempo que el desarrollo y la implementación de la herramienta en la organización del trabajo [17]. Esto se debe principalmente a
que el desarrollo y evaluación de herramientas computacionales que brindan soporte al trabajo en grupo (groupware), entre el cual podemos catalogar a las actividades realizadas por los profesores, tutores y alumnos durante el proceso de tutorías, es una actividad compleja, principalmente debido al impacto que este tipo de herramientas puede tener en las prácticas de trabajo de los usuarios potenciales, así como las múltiples variables que influyen en el uso y evaluación de las mismas. En otras palabras, las aplicaciones de groupware son tradicionalmente consideradas difíciles de desarrollar y evaluar adecuadamente debido a los efectos que pueden tener en múltiples personas y en el contexto social y organizacional [17]. Así pues, la evaluación permite validar si realmente las aplicaciones de software cumplen con el objetivo para el que fueron diseñadas. Por esta razón, se recomienda seleccionar un tipo de evaluación acorde al problema actual o a la pregunta de investigación que guíe el trabajo [9], además de tomar en cuenta el contexto y las características de aquellas organizaciones en las cuales estas herramientas podrían ser implementadas. Con base en lo anterior, para este trabajo de investigación se sigue una metodología definida con tres etapas progresivas: i) análisis del proceso de tutorías, ii) diseño de la solución, y iii) verificación del impacto de la solución. Es importante mencionar que en cada una de estas etapas se hizo una evaluación del resultado del proyecto, y sólo se comenzó la siguiente etapa hasta que el objetivo de la etapa actual fue alcanzado con éxito, así como también es importante señalar que este trabajo sólo reporta resultados de las dos primeras etapas, ya que la tercera etapa requiere de una implementación in situ que está en proceso de llevarse a cabo. La primera etapa consistió en hacer un análisis, tanto bibliográfico como de campo, para contrastar el concepto del proceso de tutorías con respecto a la forma en que los profesores, alumnos y tutores llevan a cabo ese proceso. Posteriormente, con la información obtenida durante esta etapa se hizo un diagnóstico sobre los inconvenientes que presenta el proceso, las necesidades que tienen los usuarios y participantes en este proceso. Así, el propósito principal de esta actividad fue precisamente conocer el contexto que envuelve al proceso de tutorías, de forma que el diseño de la solución emerja directamente de situaciones que acontecen (o no) durante este proceso. Para lograr el objetivo de esta etapa, se hicieron entrevistas a profesores y tutores de dos universidades públicas nacionales situadas en dos estados diferentes, con el fin de tener conocimiento sobre la manera en que realmente se lleva a cabo el proceso. Posteriormente, se hizo un análisis de las entrevistas utilizando técnicas de diseño basado en escenarios propuesto por Carroll [3,4], y finalmente se obtuvieron los inconvenientes que presenta el proceso de tutorías universitarias. Esta información fue corroborada con usuarios potenciales de las universidades en donde se llevó a cabo el estudio, partiendo de la hipótesis de que si se logra una empatía con los usuarios potenciales sobre los problemas o inconvenientes que ellos enfrentan, tendrán mayor disposición de colaborar en el resto del proceso de desarrollo. La segunda etapa consistió básicamente en proponer el concepto de diseño, tomando como base las necesidades e
115
inconvenientes que se identificaron en la etapa anterior. Así, en la propuesta se identifican y especifican los requerimientos de diseño, y se presenta una arquitectura de diseño que sirva de base para el desarrollo de tecnología de cómputo que de soporte al proceso de tutorías universitarias. Esta etapa concluyó con una sesión de grupo focal en donde los usuarios potenciales confirmaron que la solución presentada es adecuada y de utilidad en el proceso de tutorías. En la siguiente sección se presentan los resultados de los inconvenientes encontrados durante el proceso de tutorías. Inconvenientes del Proceso de Tutorías Universitarias En esta sección se presentan un par de escenarios que pueden ser utilidad para ilustrar los inconvenientes que se presentan durante el proceso de tutorías, los cuales surgieron de los comentarios hechos por los profesores durante las entrevistas. Escenario 1. Mario es un alumno de quinto semestre, quien lleva un promedio de 92. Durante el semestre, su papá se queda sin empleo y él se ve en la necesidad de comenzar a trabajar, por lo que sus notas comienzan a bajar. Un día, el Dr. Hernández, quien es tutor de Mario, lo encuentra en el pasillo y al verlo le pregunta sobre cómo va en el semestre. Mario, por pena, le dice que todo está bien como siempre. El tiempo transcurre, y al final del semestre, cuando se cargan finalmente las calificaciones, el Dr. Hernández se da cuenta que el alumno no solamente tuvo un promedio de calificaciones muy inferior a lo que normalmente hacía el alumno, sino que además reprobó dos materias. Al preguntar el tutor a Mario sobre las causas del bajo rendimiento académico, éste le explicó que al tener que trabajar se le dificultó asistir a algunas clases, además de que le faltó tiempo para cumplir con sus tareas. El Dr. Hernández le dice que por eso es importante que hable con el tutor, ya que de haberse enterado a tiempo, se hubiera podido tramitar una beca económica por su buen desempeño académico; sin embargo, debido a que había una baja de calificaciones, ya no era posible hacerlo. El escenario anterior permite identificar algunos inconvenientes en el proceso de tutorías: i) la información de los alumnos no está disponible en todos los lugares en que la requiere el tutor, ii) la información sobre los tutorados puede ser no confiable por estar desactualizada, y iii) que no siempre se tiene conocimiento de la situación actual del tutorado. Escenario 2. El Mtro. Díaz tiene como política revis ar las calificaciones de sus tutorados a medio semestre, para hacerles un reconocimiento o una recomendación según sea el caso. Para esto, el Mtro. Díaz pide a todos los profesores de todos sus alumnos las calificaciones hasta el momento, obtiene el promedio de las calificaciones y con base a eso, decide enviar un correo de felicitación a los alumnos que tienen un promedio igual o mejor a 80, así como un correo de recomendación de mejora a alumnos con promedio menor a 80. Entre los tutorados del Mtro. Díaz se encuentra Paúl, un alumno que normalmente tiene promedio de 96, pero que este semestre comenzó a andar de novio y su promedio está bajando a 82, así como Carolina, quien es una alumna con promedio de 62, pero que se ha esforzado por avanzar y hasta el momento lleva un promedio de 79. Al recibir el correo y verse felicitado, Paúl no siente que la baja en sus promedio tenga una consecuencia, ya que aún sigue siendo felicitado. Por otra parte, Carolina se siente un poco desmotivada de que
a pesar de su esfuerzo y del incremento en su promedio, aún no recibe un mensaje de reconocimiento. Al conocer la situación de Paúl, quien recibe reconocimiento a pesar de una baja de calificaciones, Carolina se siente más desmotivada y deja de preocuparse por tener mejores calificaciones, y solamente hace lo necesario por pasar el curso. Al final del semestre, el Mtro. Díaz se da cuenta de que a pesar de sus mensajes, ambos alumnos tuvieron un bajo rendimiento. Este segundo escenario también permite identificar el inconveniente de que la calificación numérica del estudiante en un momento dado no refleja su situación actual. Algunos otros requerimientos de diseño que se presentan en el proceso de tutorías son los siguientes: no siempre hay comunicación con los tutorados, la información sobre la situación académica del estudiante no está actualizada, la calificación numérica del estudiante en un momento dado no refleja su situación actual, es difícil para los tutores saber cuándo un alumno está teniendo problemas con su desempeño académico, además de que hay mucha información que los tutores deben de conocer sobre el devenir universitario. En la siguiente sección se presentan los requerimientos de diseño que se deben toma en cuenta en el desarrollo de tecnología de soporte a la tutoría universitaria. Requerimientos de Diseño Con base a los resultados obtenidos en el estudio, se obtuvieron los siguientes requerimientos de diseño: Proporcionar comunicación con los estudiantes. La comunicación es uno de los elementos indispensables para que la tutoría se pueda llevar a cabo de manera adecuada. Por tal razón, se requiere que la tecnología de apoyo a las tutorías universitarias establezca mecanismos que permitan la comunicación, tanto síncrona como asíncrona, entre tutor y tutorados, en cualquier momento o lugar que lo requieran. Evaluar permanente el desempeño académico de los estudiantes. Uno de los aspectos sobre el que más expresaron preocupación los tutores fue el hecho de que era difícil estar al tanto de la situación académica de los alumnos durante el desarrollo del semestre. Por esta razón, se requiere que la tecnología de apoyo a las tutorías universitarias implemente mecanismos que se encarguen de evaluar permanentemente el desempeño académico de los tutorados. Presentar la situación actual de un tutorado con base en su entorno e historial. La calificación numérica de un alumno en una etapa de la cohorte generacional no expresa su trayectoria escolar; para ello, es necesario conocer su historial y a su vez, conocer su entorno académico y personal para tener una mejor evaluación de la situación del tutorado. Por esta razón, se requiere que la tecnología de apoyo a las tutorías universitarias implemente mecanismos que se encarguen de presentar la situación actual de un tutorado, contextualizada con base en su historial académico y personal. Acceso a información desde diferentes dispos itivos. Idealmente, la tutoría se debería de llevar a cabo en una oficina, donde los tutores tengan a su alcance la información necesaria para guiar adecuadamente al tutorado. Sin embargo, no es raro que la tutoría ocurra de manera espontánea en pasillo de la universidad; esto conlleva que los tutores no cuentan con la información para llevar a cabo dicha tutoría. El uso de dispositivos móviles puede ser de apoyo para esta situación. Por esta razón, se requiere que la tecnología de
116
apoyo a las tutorías universitarias implemente mecanismos que permitan el acceso a la información relevante para la tutoría desde diferentes dispositivos de cómputo. Evaluar situaciones de riesgo. Uno de los aspectos más importantes de la tutoría no es solamente conocer la información de los tutorados, sino determinar si es necesario que los tutores los guíen o les proporcionen algún tipo de apoyo. Por esta razón, se requiere que la tecnología de apoyo a las tutorías universitarias implemente mecanismos que evalúen y etiqueten la s ituación actual de un alumno. Presentar información de apoyo a la toma de decisiones. Como parte del proceso de tutorías, los tutores deben de ser capaces de poder guiar a sus tutorados en las distintas situaciones académicas o personales que se les presenten. El inconveniente de esto es que difícilmente todos los tutores tienen conocimiento y dominio de todas las situaciones que se les presentan a los tutorados. Por esta razón, se requiere que la tecnología de apoyo a las tutorías universitarias implemente mecanismos que proporcionen información a los tutores sobre las acciones a realizar de acuerdo con la situación actual de su o sus tutorados. Dar apoyo al proceso de canalización de tutorados. Debido a la gran cantidad de situaciones que pueden presentarse durante el transitar universitario de los tutorados, hay ocasiones en las que el tutor canaliza a algunos de sus tutorados con alguien más. Sin embargo, los tutores expresan que no siempre tiene conocimiento sobre qué pasa con el alumno después de ser canalizado. Por esta razón, se requiere que la tecnología de apoyo a las tutorías universitarias implemente mecanismos que ayuden a los tutores a estar enterados sobre lo que pasa con sus tutorados cuando son atendidos por la persona a la que fueron canalizados. Adicionalmente a estos requerimientos de diseño surgidos directamente de la forma en que las tutorías son llevadas a cabo en la universidad, surgieron los siguientes requerimientos al momento de mostrar a los tutores la propuesta del tutor virtual que se presenta en este trabajo: Notificar acciones tomadas por el tutor virtual. Dado que el tutor virtual se encargará de tomar acciones e interactuar de manera preventiva con los alumnos, los tutores expresaron que sería recomendable que la tecnología de apoyo a las tutorías universitarias implemente mecanismos de notificación sobre las acciones llevadas a cabo por el tutor virtual. Integrar información de tutorías dentro de un núcleo académico virtual. Dentro de las universidades, los profesores tutores normalmente tienen que cumplir con diferentes actividades. Por ello, expresaron que sería recomendable que la tecnología de apoyo a las tutorías universitarias esté integrada con otros sistemas que requieren para cumplir con sus actividades académicas. Facilitar la captura de información académica de los tutorados. Para que la tecnología de apoyo a las tutorías universitarias funcione de acuerdo a lo que se propone en este trabajo, se requiere que haya una captura inmediata de la información sobre los alumnos que se genera durante el devenir académico. Esta actividad puede ser muy costosa en términos de tiempo y esfuerzo, por lo que sería recomendable que la tecnología de apoyo a las tutorías universitarias implemente mecanismos para facilitar la captura de información académica de los tutorados.
De los requerimientos de diseño presentados en esta sección, los dos últimos no fueron tomados en cuenta en el diseño de la propuesta de un tutor virtual, ya que están pensados en dar soporte a procesos de apoyo al desarrollo de la tutoría y no precisamente a la tutoría en sí. Módulo Inteligente de Tutorías Arquitectura Con base en las ideas de diseño obtenidas, se diseñó la arquitectura mostrada en la Figura 1, la cual servirá de base para el desarrollo de aplicaciones de cómputo que brinden apoyo a las tutorías universitarias. La arquitectura está en el esquema cliente-servidor; sus componentes se describen a continuación. Módulo Servidor. En esta sección se presenta la descripción de los componentes del modulo servidor. Base de datos. Este componente se encarga de almacenar físicamente toda la información que se requiere para que se lleve a cabo el proceso de tutorías, tal como la información sobre y para los tutores en la universidad, historial de los alumnos, relación tutor-tutorado, apoyos académicos, entre otros. Organizador de tutorías. Componente que se encarga de administrar toda la información referente a la estructura organizacional de las tutorías. Administrador de contexto de tutorados. Este componente se encarga de contextualizar la situación actual de los tutorados, con base en su historial y en el entorno personal y académico que lo rodea. Soporte a toma de decisiones. Este componente tiene como fin apoyar la toma de decisiones, tanto del profesor tutor como del tutor virtual, ya que una vez identificada la situación del alumno, presenta las opciones pertinentes para cada caso y sugiere la acción que evalúe más pertinente. Tutor virtual permanente. Componente diseñado con la finalidad de llevar a cabo, tomando como base las sugerencias del componente de soporte a la toma de decisiones, acciones encaminadas a prevenir, corregir o alentar alguna situación relevante para el tutorado. Administrador de sincronización. Este componente tiene como fin principal dar soporte al uso transparente de distintos tipos de dispositivos, al enviar la información en el formato adecuado para cada tipo de dispositivo de captura o visualización de la información que se es té utilizando, así como de asegurar la consistencia de la información independientemente del dispositivo que se utilice. Administrador de la comunicación. Componente diseñado para establecer y mantener la comunicación entre los diferentes dispositivos de cómputo que así lo requieran.

117
Fig. 1. Arquitectura de la propuesta de Tutor Virtual Módulo Cliente. En esta sección se presenta la descripción de los componentes del módulo cliente: Administrador de la información. Se encarga de presentar la información al tutor, tanto acorde a la situación específica de navegación como a la del dispositivo de cómputo que se esté utilizando. Configuración. Este componente está diseñado para facilitar la configuración de las acciones que tomará el componente Tutor Virtual Permanente. Tutoría. Este componente se encarga de controlar todas las actividades de tutorías, tanto las que el tutor lleva a cabo de forma manual como las realizadas por el tutor virtual. Administrador de sincronización. Tiene como fin notificar al servidor los cambios realizados a la información, tanto en la configuración como en el contenido de la misma. Administrador de la comunicación. Al igual que el servidor, este componente está diseñado para establecer y mantener la comunicación entre los diferentes dispositivos de cómputo que así lo requieran. Ejemplificando el Uso del Módulo Inteligente de Tutorías Escenario 2: El Mtro. Díaz tiene como política revisar las calificaciones de sus tutorados a medio semestre, para hacerles un reconocimiento o una recomendación según sea el caso. Para esto, el Mtro. Díaz programa en el cliente del Módulo Inteligente de Tutorías (MITu tor) , usando el componente de configuración , que a medio semestre (indica la fecha exacta) mande una serie de correos ya predefinidos, los cuales cataloga como bien antes-bien ahora, bien antes-mal ahora, mal antes-bien ahora, mal antes-mal ahora. Esta información es enviada al componente Tutor virtual permanente del servidor del MITutor, a través del componente Administrador de la Comunicación (ver Fig. 2).
Fig. 2. Diagrama de secuencia de primera parte del escenario El día señalado, el componente Tutor Virtual Permanente obtiene, con ayuda del componente Administrador del contexto de tutorados la situación actual de sus tutorados, y con base a los resultados decide cuál correo debe enviar a cada alumno. Así, el componente Tutor Virtual Permanente envía un correo de reconocimiento a Carolina, quien a pesar de su bajo promedio (79) está avanzando en su aprovechamiento, mientras que a Paúl le envía un correo de recomendación a que mejore sus calificaciones, ya que a pesar de tener un promedio no tan bajo, no es lo que normalmente acostumbra tener. Al final del semestre, tanto Paúl como Carolina tienen buenas calificaciones gracias a los mensajes de alerta y/o motivación de su tutor (ver Fig. 3). .
Fig. 3. Diagrama de secuencia de segunda parte del escenario Conclusiones La implementación de procesos de tutorías en las universidades públicas mexica nas es ya una realidad. La gran mayoría de éstas cuentan con un plan institucional de tutorías, en el cual detallan la forma en que éstas se deben de llevar a cabo, y hasta cuentan con sistemas de información que brindan apoyo a este proceso que tiene co-mo fin guiar a los alumnos, a través de un monitoreo permanente, durante el transcu-rrir de su vida universitaria. Sin embargo, a pesar de los grandes esfuerzos que se han realizado, los tutores no tienen al alcance herramientas tecnológicas que les permitan detectar situaciones de riesgo para sus tutorados, por lo que hacer un monitoreo constante de la situación de cada estudiante es muy costoso en términos de tiempo y esfuerzo, o en el peor de los casos, una tarea prácticamente imposible. Esto conlleva que al final de semestre, los tutores deben guiar a sus estudiantes en la realización de acciones que corrijan situa ciones que, de haber sido del conocimiento del tutor, podrían haberse prevenido, o al menos, reducir su impacto negativo.
118
En este trabajo se presentó el Módulo Inteligente de Tutorías, un concepto de dise ño que surge de un estudio donde se analizó el proceso de tutorías universitarias para, a t ravés de la metodología de diseño basado en escenarios, identificar los inconve nientes que este presenta. Para ello, se establecieron requerimientos de diseño que fueron incluidos y conceptualizados en el Módulo Inteligente de Tutorías. La idea básica de este concepto es que sea la tecnología quien se encargue de estar monitore-ando la información que los profesores generan día a día sobre los alumnos, y que mediante técnicas de consciencia de contexto e inteligencia computacional, hacer un diagnóstico para determinar si los alumnos están en una situación que ponga en riesgo su trayectoria académica; en caso de que así sea, la tecnología deberá de realizar acciones que alerten y apoyen tanto a los tutores como a los alumnos para prevenir o solucionar esta situación. Así, la contribución principal de este trabajo puede verse en la comprensión de los inconvenientes que tiene el proceso de tutorías aún con el uso de los sistemas de información con los que actualmente cuentan las universidades, así como en la propuesta de un concepto de diseño que mapea los inconvenientes que presenta el proceso de tutorías y los requerimientos de diseño propuestos en una arquitectura que servirá de base para desarrollar tecnología inteligente. Con el uso de la tecnología desarrollada, se espera que los tutores puedan conocer la situación de los alumnos, tomando en cuenta el historial y el contexto personal de estos, de manera que las acciones que tomen los tutores sean de carácter preventivo y no correctivo, reduciendo así el im-pacto negativo que una situación adversa puede tener en la trayectoria universitaria de un alumno, y cumpliendo así con el verdadero propósito de las tutorías: lograr que el alumno pueda aprovechar al máximo todos los recursos que ofrece la universidad para asegurar una educación de calidad. Referencias J ANUIES (2001). Programas institucionales de tutoría. Una propuesta de la ANUIES para su organización y funcionamiento en las instituciones de educación superior. México: ANUIES. Beck, U. “¿Qué es la globalización?” Edit. Paidós. España. 1998. Carroll, J. M. 1995. The Scenario Perspective on System Development: Scenario-Based Design: Envisioning Work and Technology in System Development. John Wiley and Sons. New York. 408 pp. Carroll, J. M.1997. Scenario-Based Design. En: M. Helander and T.K. Landauer, (eds.). Second edition. North Holland. Amsterdam. 383–406 p. Carroll, J.M., Rosson, M.B., Chin, G. and Koenemann, J. 1998. Requirements Development in scenario-based design. IEEE Transactions on Software Engineering, 24(12), 1156-1170. Carroll, J.M. 1999. Five Reasons for Scenario-Based Design. In: Proceedings of the 32nd Hawaii International Conference on System Sciences. Dieterich Heinz, S. "Globalización y educación", en Memoria del simposio internacional: formación docente, modernización educative y globalización. SEP-UPN. México. 1995. Franco, J., Friedman, D. P. 1989. Creating efficient programs by exchanging data for procedures. Computer Languages. 14(1). 11—23 p. Greenberg, S. and Buxton, B. (2008) Usability Evaluation Considered Harmful (Some of the Time). In Proceedings of
the ACM Conference on Human Factors in Computing Systems - ACM CHI'08. (Florence, Italy), ACM Press, pages 111-120, April 5-10. Universidad Veracruzana (2013). Tutorías. Consultado en línea el 10 junio de 2013 desde http://www.uv.mx/dgda/tutorias/, Universidad Autónoma de Baja California (2013). Sistema Institucional de Tutoría. Consultado en línea el 10 junio de 2013 desde http://148.231.9.12/wd120awp.exe/connect/tutorias Universidad Autónoma del Estado de Hidalgo (2013). Sistema de información de tutorías y asesorías académicas. Consultado en línea el 10 junio de 2013 desde http://sistemas.uaeh.edu.mx/digse/tutoriasyasesorias/index.php Universidad Autónoma de Nayarit (2013). Programa Institucional de Tutoría. Consultado en línea el 10 junio de 2013 desde http://tutoria.uan.edu.mx/pit.html Universidad de Colima (2010). Programa Institucional de Tutoría. Consultado en línea el 10 junio de 2013 desde http://saestuc.ucol.mx/Default.aspx http://www.daa.ugto.mx/tutorias/ Latapí, S.P. La enseñanza tutorial: elementos para una propuesta orientada a elevar la calidad. en: Revista de Educación superior, Num. 68, octubre – diciembre, ANUIES, 1998. pp. 5-19, México. Pinelle, D., Gutwin, C. 2000. A Review of Groupware Evaluations. In Proceedings of Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises (WETICE 2000). Gaithersburg, MD. 86-91 p. Roa Rivera, R. I. y Zamarripa Topete, J. de J. El sistema de información integral del estudiante para fortalecer la tutoría académica. Memorias del 2º Congreso Internacional de Innovación Educativa. México, DF. 2007. Romo, A. La incorporación de los programas de tutoría en las Instituciones de Educación Superior; ANUIES. México, D.F. 2005. UNESCO, 1998. Declaración Mundial de Educación Superior en el Siglo XXI. aprobados por la CONFERENCIA MUNDIAL SOBRE LA EDUCACION SUPERIOR, La educación superior en el siglo XXI: Visión y acción. 9 de octubre de 1998. Winograd, Terry, with John Bennett, Laura De Young, and Bradley Hartfield (eds.), Bringing Design to Software, Reading, MA: Addison Wesley, 1996.

119
Arquitectura basada en el patrón publish/subscribe para el desarrollo de aplicaciones en sistemas distribuidos
de tiempo real
Iván Mercado Rodríguez, Walter A. Mata López, Apolinar González Potes
Resumen — Un sistema distribuido de tiempo real necesita un modo de comunicación para que sus nodos puedan interactuar y funcionar de manera exitosa. Normalmente para comunicar nodos se necesita conocer muchos aspectos acerca del sistema y el tipo de aplicación, por ejemplo, sistema operativo, tipo red, protocolos de comunicación, lenguaje de programación, tipo de datos, etc., por lo que los desarrolladores de aplicaciones para sistemas distribuidos de tiempo real se centran más en conocer las características del sistema que en la lógica de la aplicación obteniendo como resultado que el tiempo y la dificultad de desarrollo se incrementen considerablemente. El presente trabajo trata sobre el desarrollo de un middleware estandarizado basado en el patrón publish/subscribe para facilitar el desarrollo de aplicaciones en sistemas distribuidos de tiempo real en los que sus nodos se comuniquen de forma inalámbrica mediante el intercambio de mensajes. Palabras clave: middleware, publish/subscribe, sistemas distribuidos, sistemas de tiempo real. Introducción
Muchas de las aplicaciones que se utilizan hoy en día son
sistemas distribuidos en tiempo real por lo que el manejo de la información dentro de estos sistemas es de suma importancia. Un sistema de comunicación en tiempo real (RTCS, por sus siglas en inglés) constituye el esqueleto para aplicaciones de control distribuidas. El RTCS difiere en muchos aspectos de un sistema de comunicación de propósito general. Mientras que los objetivos de un sistema de comunicación de propósito general se centran en el rendimiento, los RTCS se enfocan en la predecibilidad de la comunicación [1]. En este tipo de sistemas el factor más importante es el tiempo de entrega de la información, esta tarea no es fácil de lograr ya que los procesos que se ejecutan dentro del sistema deben cumplir con los tiempos especificados y lo deben hacer sin importar las restricciones que el medio de comunicación pueda provocar en el momento de la transferencia.
Iván Mercado Rodríguez Estudiante de maestría de la Universidad
de Colima, Facultad de Ingeniería Mecánica y Eléctrica – Km 9 carretera Colima – Coquimatlán, México. (e-mail: [email protected])
Walter A. Mata Profesor Investigador de la Universidad de Colima, Facultad de Ingeniería Mecánica y Eléctrica - Km 9 carretera Colima - Coquimatlán, México. (e-mail: [email protected])
Apolinar G. Potes Profesor Investigador de la Universidad de Colima, Facultad de Ingeniería Mecánica y Eléctrica - Km 9 carretera Colima - Coquimatlán, México. (e-mail: [email protected])
Un middleware facilita la comunicación entre los componentes de una aplicación. EL middleware suministra mecanismos y servicios para que un sistema distribuido se pueda poner en funcionamiento de una manera eficiente y flexible [2]. El middleware se coloca entre la capa del sistema operativo y la capa de aplicación proporcionando una abstracción de programación para aplicaciones de un sistema distribuido [3]. El servicio de distribución de datos (DDS, por sus siglas en inglés) es una especificación de un middleware basada en el esquema de comunicación publish/subscribe hecho para sistemas distribuidos de tiempo real. El modelo se define básicamente mediante tres participantes dentro un sistema o aplicación, publicadores (publishers), suscriptores (subscribers) y tópicos (topics). Los publishers generan datos en un tópico, sin necesidad de conocer hacia quien va dirigida. Los subscribers se inscriben en los tópicos de su interés para obtener datos y no es necesario conocer quien la ha generado. Middleware Es una capa de software que se coloca entre la aplicación y el sistema operativo (ver figura 1), facilita el desarrollo de aplicaciones en sistemas distribuidos. Las aplicaciones que emplean un middleware tienen muchos beneficios ya que la comunicación de datos en sistemas distribuidos es compleja por lo que el middleware ahorra tiempo a los desarrolladores y los deja centrarse en la lógica de la aplicación [4]. El middlewre esconde la heterogeneidad que existe en un sistema distribuido. Esta heterogeneidad se encuentra de diferentes formas [5]: Lenguaje de programación: diferentes objetos pueden ser desarrollados en diferentes lenguajes de programación. Sistema operativo: tiene diferentes caracterís ticas y capacidades. Arquitectura de computadora: las computadoras difieren en sus detalles técnicos. Redes: diferentes computadoras están unidas mediante diferentes tecnologías de red.
Figura 1. Ubicación de un middleware. Publish/Subscribe El uso del esquema publish/subscribe se ha incrementado debido a que proveen una infraestructura débilmente acoplada.

120
Los subscribers tienen la posibilidad de inscribirse a uno o más tópicos y posteriormente serán avisados cuando se genere un evento, dichos eventos son publicados por los publishers. Un evento se propaga mediante multicast y lo hace de manera asíncrona. La fuerza del modelo publish/subscribe radica en que es completamente desacoplado con respecto al tiempo, espacio y la sincronización entre los subscribers y los publishers [6] (ver figura 2).
Figura 2. Patrón publish/subscribe. Las principales entidades en un sistema publish/subscribe son los publicadores y suscriptores de contenido. Un publicador detecta un evento y luego publica el evento en forma de una notificación. Una notificación encapsula la información relativa al evento observado. La notificación también puede ser llamada como mensaje de eventos [7]. Existen muchos términos para las entidades en sistemas de eventos o pub/sub; por ejemplo, los términos suscriptor, consumidor y receptor de eventos son sinónimos. De forma similar, publicador, productor, proveedor y fuente de eventos son sinónimos. Una notificación o mensaje de eventos denota que ha sido observado o a ocurrido un evento [7]. Servicio de Distribución de Datos (DDS: Data Distribution Service) Es la especificación para el middleware basado en el patrón publish/subscribe para sistemas distribuidos de tiempo real. Esta especificación fue realizada por la OMG (Object Management Group), es la misma organización que rige las especificaciones para CORBA, UML y muchos otros estándares. El DDS provee comunicación abstracta entre los transmisores y receptores de los datos. Los publicadores de datos no necesitan saber acerca de los receptores, sólo necesitan saber específicamente el tipo de datos que están siendo comunicados. El mismo concepto se aplica para los suscriptores, estos no necesitan conocer de dónde vienen los datos publicados, sino solamente el tipo de datos que desean recibir [8]. La especificación para DDS está divida en dos secciones distintas (ver figura 3). La primera sección se refiere al Data-Centric Publish-Subscribe (DCPS) y la segunda al Data Local Reconstruction Layer (DLRL). El DCPS es una API de bajo nivel que proporciona la funcionalidad necesaria para que una aplicación publique y suscriba los valores de los objetos de datos. El DLRL es una API opcional que permite una integración simple del servicio en la capa de aplicación [9].
Figura 3. Capas estándar DDS. DDS provee un conjunto de perfiles que se dirigen a la disponibilidad de información en tiempo real, que van desde los pequeños sistemas de control embebidos hasta los sistemas de administración de información de grandes empresas. En el DDS la API y la calidad de servicio (QoS) se eligen para equilibrar un comportamiento predecible y una implementación eficiencia/rendimiento [1]. Uno de los aspectos importantes a considerar en el DDS es la calidad de servicio (QoS), que es un concepto que se utiliza para especificar ciertos parámetros relacionados con la forma en que un sistema funciona. Los QoS proporcionan la capacidad de controlar y limitar el uso de recursos como el ancho de banda de red, memoria, fiabilidad, puntualidad, y la persistencia de datos, entre otros. DDS proporciona comúnmente interfaces a nivel de aplicación, las cuales permiten a los procesos intercambiar información en forma de tópicos. Los tópicos son flujos de datos que tienen un identificador y un tipo de datos. Las aplicaciones que quieren escribir datos declaran su intención para convertirse en publishers de un tópico. De forma similar, las aplicaciones que desean leer información de un tópico declaran su intención de convertirse en subscribers [10]. Implementaciones DDS RTI DDS es un middleware de comunicaciones para aplicaciones distribuidas de tiempo real, desarrollado por la empresa americana Real-Time Innovations, se utiliza en diferentes campos donde las aplicaciones y los datos son de tiempo crítico tales como: Ferrocarriles. Control de tráfico aéreo. Monitorización del tráfico. Sistemas de combate de misión crítica. Procesamiento de transacciones financieras. Automatización industrial. RTI DDS es independiente de plataforma y lenguaje de programación, permitiendo que sistemas heterogéneos puedan comunicarse fácilmente unos con otros. Muchas políticas de calidad de servicio de la especificación DDS están disponibles y al utilizarlas, los desarrolladores pueden ajustar el

121
comportamiento de sus aplicaciones a la mejor combinación de rendimiento y uso de recursos [11]. El paquete de instalación se encuentra en la página oficial [13], es una versión de prueba, soporta los lenguajes de programación ANSI C, ISO C, ANSI C++ y Java. Las plataformas para las que se encuentra disponible son las siguientes: Linux Windows Integrity LynxOS VxWorks Otra implementación de la especificación es OpenSplice DDS, es desarrollada por la empresa PrismTech y su propósito es proporcionar una infraestructura y un middleware para sistemas distribuidos de tiempo real. OpenSplice DDS es de código abierto implementa estrictamente el estándar abierto DDS de la OMG, garantizando portabilidad e interoperabilidad entre otras implementaciones DDS. Se utiliza en algunos sistemas muy complejos en los que grandes cantidades de datos tienen que ser distribuidos en tiempo real a decenas de miles de dispositivos. El principal objetivo de esta plataforma es facilitar la construcción, la prueba y el desarrollo de sistemas distribuidos tolerantes a fallos, escalables y de alto rendimiento [12]. Algunas características clave de esta plataforma son: Soporta todos los perfiles de la capa DCPS. Se utiliza en sistemas embebidos de tiempo real y en sistemas tolerantes a fallos de gran escala. Disponible para lenguaje C, C ++ y Java. Soporta varias plataformas, Linux, Windows y VxWorks. En la página oficial [14], se puede descargar el paquete de instalación, está disponible para plataformas Linux y Windows en 32 y 64 bits en ambos casos. µDDS (microDDS) es el nombre de la implementación que presentamos en este artículo y es una plataforma que cuenta con un subconjunto de las características de la especificación DDS, permite desarrollar aplicaciones con un footprint pequeño y la manera en que se comunican tales aplicaciones es un medio de comunicación inalámbrico. Es importante mencionar que la plataforma no cuenta con todas las caractarísticas incluídas en la especificación, sólo incluye las principales entidades de la capa DCPS, que son el DomainParticipant, Publisher, Subscriber, Topic, DataWriter y DataReader con la finalidad de reducir el tamaño de la API. Es desarrollada en el lenguaje de programación C. Obtener un núcleo pequeño programado en lenguaje C permite utilizarlo en arquitecturas hardware con pocos recursos, como los son los sistemas embebidos. Pruebas y resultados
Se han realizado pruebas comparativas de µDDS con otras dos, RTI DDS y OpenSplice DDS, es importante mencionar que sólo se han comparado ciertos aspectos de las implementaciones, ya que RTI DDS y OpenSplice DDS cuentan con la mayoría de las características del estándar. Las pruebas fueron realizadas con el siguiente hardware y software: Software Sistema operativo Ubuntu 10.04 LTS 32-bits (Núcleo Linux 2.6.32-47-generic). Software X-CTU 5.2.7.5 RTI Data Distribution Service 4.2e OpenSplice DDS v6 µDDS Hardware Computadora personal HP Compaq 8100 Elite Convertible Minitower (procesador intel core i7, 8 GB de memoria RAM y disco duro de 1 TB). Las primeras pruebas se realizaron evaluando el tiempo que dura el sistema al crear entidades DDS. Para tomar el tiempo se utilizó la función clock_gettime de la librería time.h. Los tiempos se obtuvieron en nanosegundos, pero para lograr una mejor visualización en las gráficas se representó en milisegundos. En cada una de las pruebas que se describen más adelante se realizaron 1000 mediciones, cabe mencionar que el comportamiento de los grá ficas con las 1000 muestras es constante y por apreciación de los resultados en las gráficas sólo se graficaron las primeras 100 muestras. Con respecto a los promedios que se encuentran en las tablas I, II, III, IV, V se calcularon con las 1000 mediciones. En la figura 4 se muestran los resultados obtenidos al medir el tiempo en que se creó el publicador. Con cada middleware se ejecutó un programa publicador con un sólo proceso de creación de publicador, después se tomaron 100 muestras y se graficaron con su respectivo tiempo de ejecución. Se puede observar que RTI DDS y µDDS tienen tiempos semejantes, pero RTI DDS tiene algunos picos que aumentan su promedio. Las muestras de OpenSplice obtuvieron tiempos más altos que los otros dos.
Figura 4. Tiempos de creación de publicador. Se realizó el mismo proceso para el suscriptor, en la figura 5 podemos observar que los tres middlewares obtuvieron un comportamiento similar al de la figura 4, sólo que con diferentes tiempos. RTI DDS nuevamente presentó una serie
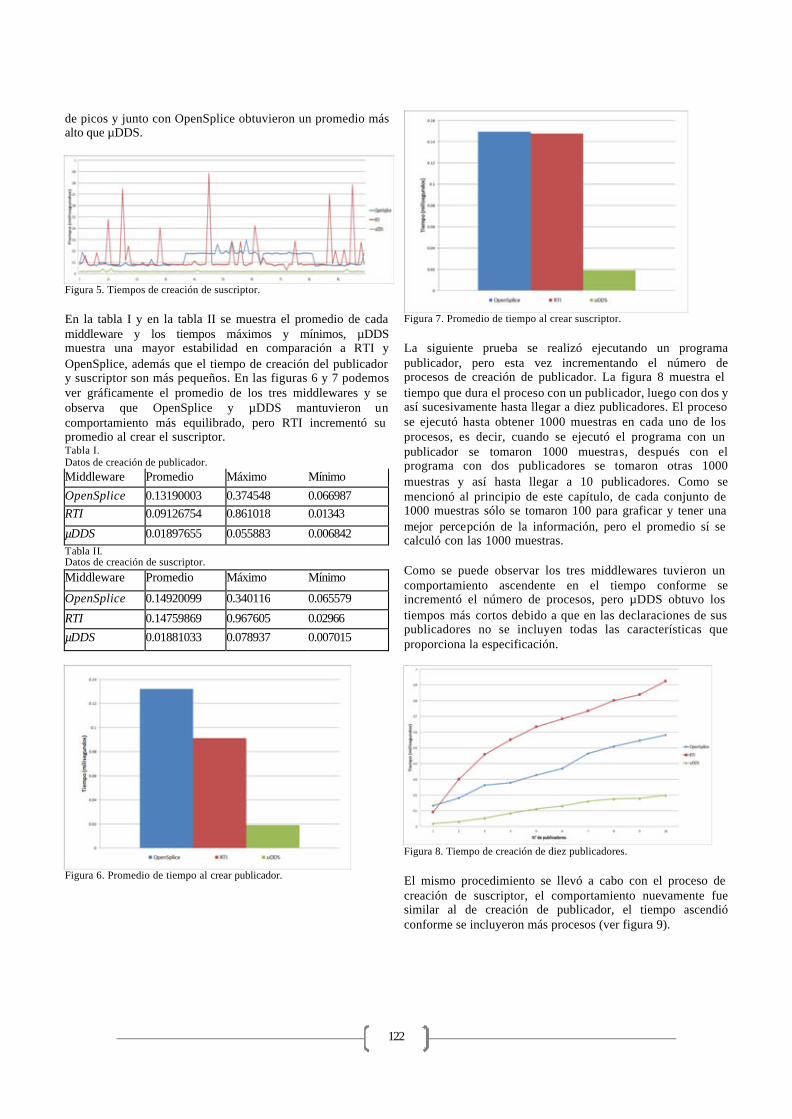
122
de picos y junto con OpenSplice obtuvieron un promedio más alto que µDDS.
Figura 5. Tiempos de creación de suscriptor. En la tabla I y en la tabla II se muestra el promedio de cada middleware y los tiempos máximos y mínimos, µDDS muestra una mayor estabilidad en comparación a RTI y OpenSplice, además que el tiempo de creación del publicador y suscriptor son más pequeños. En las figuras 6 y 7 podemos ver gráficamente el promedio de los tres middlewares y se observa que OpenSplice y µDDS mantuvieron un comportamiento más equilibrado, pero RTI incrementó su promedio al crear el suscriptor. Tabla I. Datos de creación de publicador. Middleware Promedio Máximo Mínimo OpenSplice 0.13190003 0.374548 0.066987 RTI 0.09126754 0.861018 0.01343
µDDS 0.01897655 0.055883 0.006842 Tabla II. Datos de creación de suscriptor. Middleware Promedio Máximo Mínimo
OpenSplice 0.14920099 0.340116 0.065579
RTI 0.14759869 0.967605 0.02966 µDDS 0.01881033 0.078937 0.007015
Figura 6. Promedio de tiempo al crear publicador.
Figura 7. Promedio de tiempo al crear suscriptor. La siguiente prueba se realizó ejecutando un programa publicador, pero esta vez incrementando el número de procesos de creación de publicador. La figura 8 muestra el tiempo que dura el proceso con un publicador, luego con dos y así sucesivamente hasta llegar a diez publicadores. El proceso se ejecutó hasta obtener 1000 muestras en cada uno de los procesos, es decir, cuando se ejecutó el programa con un publicador se tomaron 1000 muestras, después con el programa con dos publicadores se tomaron otras 1000 muestras y así hasta llegar a 10 publicadores. Como se mencionó al principio de este capítulo, de cada conjunto de 1000 muestras sólo se tomaron 100 para graficar y tener una mejor percepción de la información, pero el promedio sí se calculó con las 1000 muestras. Como se puede observar los tres middlewares tuvieron un comportamiento ascendente en el tiempo conforme se incrementó el número de procesos, pero µDDS obtuvo los tiempos más cortos debido a que en las declaraciones de sus publicadores no se incluyen todas las características que proporciona la especificación.
Figura 8. Tiempo de creación de diez publicadores. El mismo procedimiento se llevó a cabo con el proceso de creación de suscriptor, el comportamiento nuevamente fue similar al de creación de publicador, el tiempo ascendió conforme se incluyeron más procesos (ver figura 9).

123
Figura 9. Tiempo de creación de diez suscriptores. En la tabla III y en la tabla IV se encuentran los promedios de cada middleware con el número de publicadores por proceso. En estas tablas se encuentran los datos que se graficaron en la figura 8 y en la figura 9. Tabla III. Datos de creación de diez publicadores. # Publicadores OpenSplice RTI µDDS 1 0.13190003 0.09126754 0.01897655 2 0.18155042 0.29902875 0.03174519 3 0.26204602 0.4567992 0.05382483 4 0.27759995 0.55082485 0.08525846 5 0.32682297 0.63314307 0.11191535 6 0.36844531 0.68303045 0.13014807 7 0.46451556 0.7331354 0.15990725 8 0.50984183 0.80025 0.17585841 9 0.54557314 0.83788251 0.17893633 10 0.58172168 0.92401164 0.19868802 Tabla IV. Datos de creación de diez suscriptores. # Suscriptores OpenSplice RTI µDDS 1 0.14920099 0.14759869 0.01881033 2 0.17703448 0.41025572 0.03699105 3 0.23404919 0.53515272 0.06373189 4 0.31450044 0.67812687 0.10614398 5 0.33406973 0.87919591 0.12910746 6 0.40200259 0.917287 0.1772801 7 0.42328932 0.94531306 0.24394207 8 0.5268235 1.02408035 0.32576559 9 0.56737168 1.10685753 0.54136297 10 0.5964419 1.27099359 0.64151931 La siguiente prueba sólo se aplicó en el publicador, se calculó el tiempo en que el publicador escribe el tópico, en este caso la estructura Topic sólo contiene un miembro de tipo char * con un mensaje de “Hola mundo”. Cabe mencionar que esta medición es a nivel aplicación, es decir, la información sólo se genera dentro del programa en ejecución y no se ha establecido una conexión con el medio de comunicación, ya que esa es la función del DataWriter. Para esta prueba se tomaron 100 muestras de cada implementación del middleware. En la figura 10 se muestran los resultados, se puede observar que los tiempos en los tres
middlewares no se desvían significativamente entre cada muestra, pero µDDS presentó el mejor promedio de los tres.
Figura 10. Tiempo de escritura en el tópico. La tabla V contiene el promedio, los tiempos máximos y mínimos de cada middleware y en la figura 11 se muestran gráficamente los promedios.
Figura 11. Promedio del tiempo al escribir en el tópico. Tabla V. Datos de escritura en el tópico. Middleware Promedio Máximo Mínimo OpenSplice 0.01559824 0.111598 0.011395 RTI 0.01419831 0.079858 0.006492 µDDS 0.00713502 0.093752 0.003014 Conclusiones Como se ha mencionado la programación de aplicaciones para sistemas distribuidos es complicada y la utilización de un middleware permite abstraer la complejidad y facilita el desarrollo de este tipo de aplicaciones. La especificación del DDS proporciona la interoperabilidad entre las diferentes implementaciones del estándar, por lo que asegura escalabilidad a las aplicaciones desarrolladas sobre la plataforma middleware. Existen actualmente implementaciones del estándar las cuales se pueden utilizar para el desarrollo de aplicaciones para sistemas distribuidos, entre ellas se tienen las de la compañía RTI y OpenSplice. Se presentó una implementación con un subconjunto de dicha implementación para su uso en sistemas embebidos distribuidos llamada µDDS, presentando además los primeros resultados de rendimiento comparándolos con las otras dos implementaciones del estándar. Referencias
124
T. Guesmi, R. Rekik, S. Hasnaoui, and H. Rezig, “Design and performance of dds-based middleware for real-time control systems,” IJCSNS International Journal of Computer Science and Network Security, vol. VOL.7 No.12, December 2007 M. Y. C. Rodríguez, Middleware Basado en el Modelo Publicación/Suscripción para Aplicación en Sistemas Embebidos Distribuidos. PhD thesis, Universidad de Colima, 2010. K. A. Press, “Encyclopedia of distributed computing,” 2003. CoreDX DDS, Communications Middleware and DDS, TWINOAKS Computing Inc., December 2011. A. Puder, K. Römer, and F. Pilhofer, Distributed systems architecture a middleware approach. Amsterdam; Boston: Elsevier : Morgan Kaufmann, 2006 P. T. Eugster, P. A. Felber, R. Guerraoui, and A.-M. Kermarrec, “The many faces of publish/subscribe,” ACM Comput. Surv., vol. 35, pp. 114–131, June 2003. S. Tarkoma, Publish/Subscribe Systems - Design and Principles. Wiley series in communications networking and distributed systems, 2012. G. Pardo-Castellote, B. Farabaugh, and R. Warren., “An introduction to dds and data-centric communications.,” 12 agosto 2005. A. González, W. Mata, L. Villaseñor, R. Aquino, M. Chávez, A. Crespo. µDDS: A Middleware for Real-Time Wireless Embedded Systems. Journal of Intelligent and Robotic Systems, Ed. Springer. Vol.61, pp. 489-503, 2011. ISSN 0921-0296. M. Ryll and S. Ratchev, “Towards a publish/subscribe control architecture for precision assembly with the data distribution service.” RTI Data Distribution Service, User’s Manual, version 4.2, 2004-2007 Real-Time Innovations Inc. OpenSplice DDS, Getting Started Guide, version 4.x, PrismTech, October 2009. http://www.rti.com/downloads/connext.html http://www.prismtech.com/opensplice
125
Una Aproximación al Estudio y Desarrollo de Software de Calidad
para Sistemas Cooperativos
M. Cobián, J. L. Garrido, M. A. Rodríguez, W. A. Mata y S. Sandoval
Resumen—El software para sistemas cooperativos permite la combinación de tecnología, personas y organizaciones para
facilitar la comunicación, coordinación y colaboración; conocidas comúnmente como las 3 C’s. En el artículo se
presentan los fundamentos sobre los cuales está basado el presente proyecto, además de un resumen de los métodos
utilizados en el análisis y diseño de sistemas software cooperativos, así como la descripción de las relaciones
existentes entre algunos requisitos no funcionales y las 3C’s como estudio preliminar que debe guiar el diseño de los
sistemas cooperativos. Se presentan dos casos de estudio que permiten mostrar el planteamiento de la propuesta de forma
más detallada. Temas claves— Atributos de Calidad, Sistemas Cooperativos, Groupware, CSCW, Software de Calidad. Introducción
U NO de los factores fundamentales dentro de una organización es el trabajo en grupo, el cual si no se lleva a cabo de una forma satisfactoria se corre el riesgo de que la organización fracase. El uso de la tecnología dentro de este ámbito ha llegado a revolucionar la forma tradicional de llevar a cabo las actividades inherentes al trabajo en grupo y con el paso de los años se han desarrollado herramientas que facilitan dichas actividades. Estas herramientas son conocidas como groupware, término que se puede definir como cualquier tecnología, hardware o software, que apoye a las actividades propias del trabajo en grupo: tareas u objetivos comunes, ambientes compartidos, entre otros [1].
M. Cobián es profesora por horas en la Facultad de Telemática de
la Universidad de Colima, Av. Universidad #333, Colima, Colima, México. (e-mail: [email protected])
J. L. Garrido es profesor de la E.T.S de Ingeniería Informática del Departamento Lenguajes y Sistemas Informáticos de la Universidad de Granada, C/ Pdta. Saucedo Aranda s/n, Granada, España. (e-mail: [email protected])
M. A. Rodríguez es profesora de la E.T.S de Ingeniería Informática del Departamento Lenguajes y Sistemas Informáticos de la Universidad de Granada, C/ Pdta. Saucedo Aranda s/n, Granada, España. (e-mail: [email protected]@ugr.es)
W. A. Mata es Profesor Investigador de la Facultad de Ingeniería Mecánica y Eléctrica de la Universidad de Colima, Km 9 carretera Colima - Coquimatlán, México. (e-mail: [email protected])
S. Sandoval es Profesora Investigadora de la Facultad de Telemática de la Universidad de Colima, Av. Universidad #333, Colima, Colima, México. (e-mail: [email protected])
Aunado a esto, han surgido sistemas software cooperativos, los cuales permiten la combinación de tecnología, personas y organizaciones para facilitar la comunicación, coordinación y colaboración. Las características más destacables de un sistema cooperativo son la comunicación, coordinación y colaboración, las cuales son conocidas comúnmente como las 3 C’s [2]. La disciplina que estudia la actividad coordinada y asis tida por computadora que se lleva a cabo por grupo de personas que colaboran, se conoce como CSCW (del inglés Computer Supported Cooperative Work) [1]. Por lo tanto, el diseño de estas herramientas es determinante para que un grupo lleve a cabo su trabajo de forma eficaz y consecuentemente puedan alcanzar un objetivo compartido y lograr beneficios para todos los miembros del grupo. Al igual que otro tipo de sistemas software, los enfocados a la cooperación también necesitan cubrir ciertos requisitos o atributos de calidad. En este trabajo se centra la atención en los requerimientos no funcionales para establecer los atributos que un sistema cooperativo debe tomar en cuenta para que éste sea considerado de calidad. Se propone como inicio, la identificación de las principales relaciones existentes entre requisitos funcionales y no-funcionales, las cuales determinan en gran medida el diseño para que estos sistemas satisfagan importantes propiedades para su exitosa adopción y uso. Es decir, la primera fase de diseño arquitectónico que todo desarrollo debe de abordar. En la sección II se presentan los fundamentos sobre los cuales está basado este proyecto. En la sección III Y IV, se presenta un resumen de los métodos utilizados en el análisis y diseño de sis temas software. En la sección V y VI se describen las relaciones entre algunos requisitos no funcionales y las 3C’s como estudio preliminar que debe guiar el diseño de estos sistemas. Se presentan brevemente en la sección VII varios casos de estudio que ayudan a mostrar el planteamiento de la propuesta de forma más detallada. Finalmente, en la sección VII se condensan las conclusiones. FUNDAMENTOS Para que un sistema sea de calidad, su desarrollo debe iniciar dando especial cuidado a la selección de la arquitectura de software (AS) que se pretende utilizar. La AS es el factor principal para garantizar la calidad del software y por consecuencia, la del sistema en general [3]. Garlan [4] considera que la arquitectura de software establece un puente entre los requerimientos del sistema y el código. Tomando en cuenta esta afirmación, los requerimientos del sistema son los que dan la pauta para establecer la AS que se utilizará. Los requerimientos del sistema software pueden ser de dos tipos: requerimientos funcionales y no funcionales. Mediante los requerimientos se lleva a cabo la descripción del sistema, es decir, describen las actividades del sistema [5]. A continuación se da una descripción de cada uno de estos tipos de requerimientos: Requerimientos funcionales: este tipo de requerimientos se centra en especificar los servicios que el sistema debe proporcionar [6]. Permiten describir la interacción del sistema

126
con su ambiente, por ejemplo, considerando un sistema bancario ¿cuándo se permite eliminar a un cliente?, ¿qué cantidad de dinero es posible prestar a un tipo de cliente?, etc. Requerimientos no funcionales: De acuerdo con [5], son aquellos que describen una restricción al sistema, que en la mayoría de los casos se encuentra relacionada entre otros aspectos tales como desempeño, confiabilidad, disponibilidad, predictibilidad, etc. Por ejemplo en [6] los describe también como atributos de calidad. Para expresar lo anterior de una manera más clara, la Fig. 1 muestra la relación que existe entre los requerimientos del sistema a desarrollar y la arquitectura de software que se va a utilizar. La elección de la arquitectura de software adecuada ayudará en gran medida a alcanzar cada uno de los atributos de calidad establecidos [3]. Sin embargo, no es el único factor que se encuentra involucrado. Otros factores que se pueden considerar son la plataforma de desarrollo, RAD’s (por sus siglas en inglés Rapid Application Development), el lenguaje de programación, entre los más importantes.
Fig. 1. Relación entre requerimientos del sistema y la arquitectura de software TRABAJOS RELACIONADOS Desde el surgimiento de la arquitectura de software, a partir de la década de los 80’s poco a poco se ha ido fortaleciendo, tanto que ahora es una de las áreas fundamentales en el campo de la ingeniería de software [7]. De acuerdo con [8], la arquitectura de software es el estudio de la estructura completa de un sistema software haciendo énfasis en las relaciones entre los subsistemas y sus componentes; con lo cual se permite detectar errores en una temprana etapa. Dada la importancia de la AS, se han desarrollado diversos métodos de análisis y diseño centrados en la arquitectura, algunos de los cuales se han basado en SAAM (Software Architecture Analysis Method). Posteriormente se presenta una breve descripción de los métodos más representativos, es importante mencionar antes, que la característica fundamental que comparten estos (a excepción del último) y que confirman la importancia de la arquitectura de software es que consideran dentro de su desarrollo y evaluación los diferentes atributos de calidad que son requeridos dependiendo de las características propias del software a desarrollar [9], motivo por el cual la AS es relevante para el desarrollo del trabajo en cuestión.
MÉTODOS DE ANÁLISIS Y DISEÑO CENTRADOS EN LA ARQUITECTURA Estos métodos permiten hacer predicciones de calidad antes de que se lleve a cabo el desarrollo e implantación del software. De una forma más general, otras ventajas que proporciona la AS son: Visualizar claramente las interacciones entre los elementos del sistema, así como las consecuencias de realizar modificaciones en tales elementos. Permite realizar un prototipo evolutivo. El modelo utilizado para un sistema software puede ser transferible y reusable en algunos otros con características similares. Ayuda a estimar con mayor precisión coste y tiempo. SAAM (Software Architecture Analysis Method) [10] Objetivos: Evaluar la capacidad de modificación de un sistema. Tomando como base tres arquitecturas se evalúa en cuál de ellas es más fácil realizar modificaciones. Fuerte enlace entre atributos de calidad y las particiones canónicas (representación gráfica de las arquitecturas). Característica general: Evalúa la capacidad de soporte a un conjunto de tareas seleccionadas en base a un grupo de atributos de calidad previamente establecidos. Actividades: Caracterizar una partición canónica. Mapear la partición dentro de la descomposición de la estructura arquitectónica. Seleccionar un conjunto de atributos de calidad para alcanzar la arquitectura. Seleccionar un conjunto de tareas concretas para evaluar los atributos de calidad. Evaluar el grado en el cual las tareas dan soporte. ATAM (Architecture Tradeoff Analysis Method)[11] Objetivos: Comprender y evaluar las consecuencias de las decisiones de diseño arquitectónico, respecto a los requerimientos de atributos de calidad del sistema. Característica general: Permite analizar una arquitectura con respecto a sus atributos de calidad y está basado en la caracterización de atributos de calidad. Actividades: Elaboración de árboles de utilidad de atributos de calidad, análisis de posibles arquitecturas, lluvia de ideas y priorizar escenarios, presentación de resultados, entre otras. QAW (Quality Attribute Workshop) [12] Objetivos: Identificar atributos de calidad importantes y ver claramente requerimientos del sistema antes de elaborar una AS. Característica general: Creado para complementar ATAM. Es un método centrado en el sistema y en el cual la participación de los diversos usuarios (stakeholders) es muy importante. Permite descubrir, documentar y priorizar atributos de calidad del sistema en una etapa temprana del ciclo de vida. Actividades: Listado de arquitecturas que cubran las restricciones, requerimientos y atributos de calidad necesarios, lluvia de ideas para la creación de escenarios por parte de los

127
stakeholders, consolidación de escenarios similares, priorizar escenarios, detallar/refinar los escenarios seleccionados. ADD (Attribute-Driven Design)[13] Objetivos: Definir una AS en la cual el proceso de diseño está basado en los requerimientos de atributos de calidad. Característica general: Sigue un proceso recursivo (Planear-Hacer-Verificar) que descompone un sistema o elementos de un sistema aplicando tácticas y patrones de arquitectura que satisfacen el manejo de los requerimientos de atributos de calidad. Las entradas que se utilizan en este método son requerimientos funcionales, restricciones de diseño y requerimientos de atributos de calidad. La salida que se obtiene está basada en roles, responsabilidades, propiedades y relaciones entre elementos de software. Actividades: Reunir requerimientos, descomponer un elemento del sistema para identificar arquitecturas candidatas, seleccionar un diseño conceptual que satisfaga la arquitectura, definir interfaces, verificar y refinar requerimientos, entre otras. Es conveniente recordar que este proceso es cíclico y se detiene una vez que se obtiene el diseño de la arquitectura de software que satisfaga todos los requerimientos. NFR Framework (Non-Functional Requirements Framework)[14] Este framework se ha incluido porque ofrece un gran potencial para la representación y análisis de requerimientos no funcionales y se encuentra en una etapa inicial en el uso de la arquitectura de software. Objetivos: Permitir dar un seguimiento a los requerimientos no funcionales durante el desarrollo del proyecto para lograr alcanzarlos. Tratar a los NFR (Requerimientos No Funcionales) como softgoals (objetivos de software) para facilitar el seguimiento mencionado. Característica general: Los NFR’s son tratados como sub-objetivos para los cuales se diseñan alternativas de solución y posteriormente se toman las decisiones de diseño más convenientes. Utiliza gráficas de interdependencia de softgoals. Actividades: Identificar el dominio del sistema, los requerimientos funcionales y no funcionales; descomponer los NFR’s; identificar alternativas de solución para lograr los NFR’s. Posteriormente operacionalizar, es decir, desarrollar técnicas para los softgoals de los requerimientos no funcionales. Evaluar el impacto de las alternativas de decisión. Propuesta para evaluar la calidad en sistemas cooperativos De acuerdo con la definición dada anteriormente de sis temas cooperativos, este tipo de sistemas software involucra tres participantes indispensables: Recurso humano.- personas involucradas con las actividades propias de la organización. Organización.- quien marca las actividades y lineamientos bajo los cuales se van a regir las personas.
Tecnología.- las personas involucradas se apoyan tanto en hardware como software para realizar sus actividades dentro de la organización. Para que los seres humanos, normalmente involucrados en una misma organización o diferentes, puedan cooperar en la consecución de un objetivo común, se ha de prestar especial atención a las implicaciones de las 3 C’s mencionadas anteriormente y las cuales se describen a continuación: Comunicación: a través de la cual el intercambio de información se puede llevar a cabo entre los diferentes agentes remotos que se encuentran involucrados. Dicho intercambio de información puede ser mediante texto, voz, gráficas, etc. Colaboración: dado que dentro de la organización están involucradas varias personas, se necesita de la interacción entre ellas para que puedan lograr un objetivo común compartiendo la información necesaria, por lo tanto la colaboración entre los diferentes participantes es un factor primordial. Coordinación: para que la comunicación y la colaboración sean de forma eficiente es necesario que existan protocolos para evitar conflictos entre los participantes. Al hablar de calidad de un sistema software se deben considerar diferentes aspectos. De acuerdo con el estándar ISO 8402, la calidad va más allá de un software libre de errores ya que la define como un conjunto de características de un producto o servicio que tiene la capacidad de satisfacer necesidades establecidas tanto explícita como implícitamente. Las características de calidad que señala el ISO 9126 para cualquier software se pueden evaluar de 3 formas: 1) mediante el uso del software, 2) métricas externas y 3) métricas internas; permitiendo establecer el grado o nivel de calidad que un sistema software posee. La calidad de un sistema software es gradual, es decir, se debe de cuidar a lo largo de todo el proceso de desarrollo abarcando desde la determinación de requerimientos hasta la puesta en marcha del sistema. Dada la importancia de estos factores, la calidad de un sistema cooperativo debe centrarse en ellos. Es importante mencionar que por el momento la presente investigación se centra únicamente en la relación existente entre requerimientos no funcionales y la comunicación, coordinación y colaboración, dejando para trabajos futuros la integración con la arquitectura de software. Para iniciar el estudio de la relación entre los NFR’s y las 3C’s se ha seleccionado un conjunto pequeño de atributos y posteriormente se analizarán algunos otros. El criterio de selección de los NFR’s que aparecen en este trabajo es el efecto crucial más frecuente [10][11][13] y se presentan a continuación: I. Desempeño (performance) a. Latencia b. Rendimiento de procesamiento (throughput) c. Capacidad d. Modo II. Confiabilidad
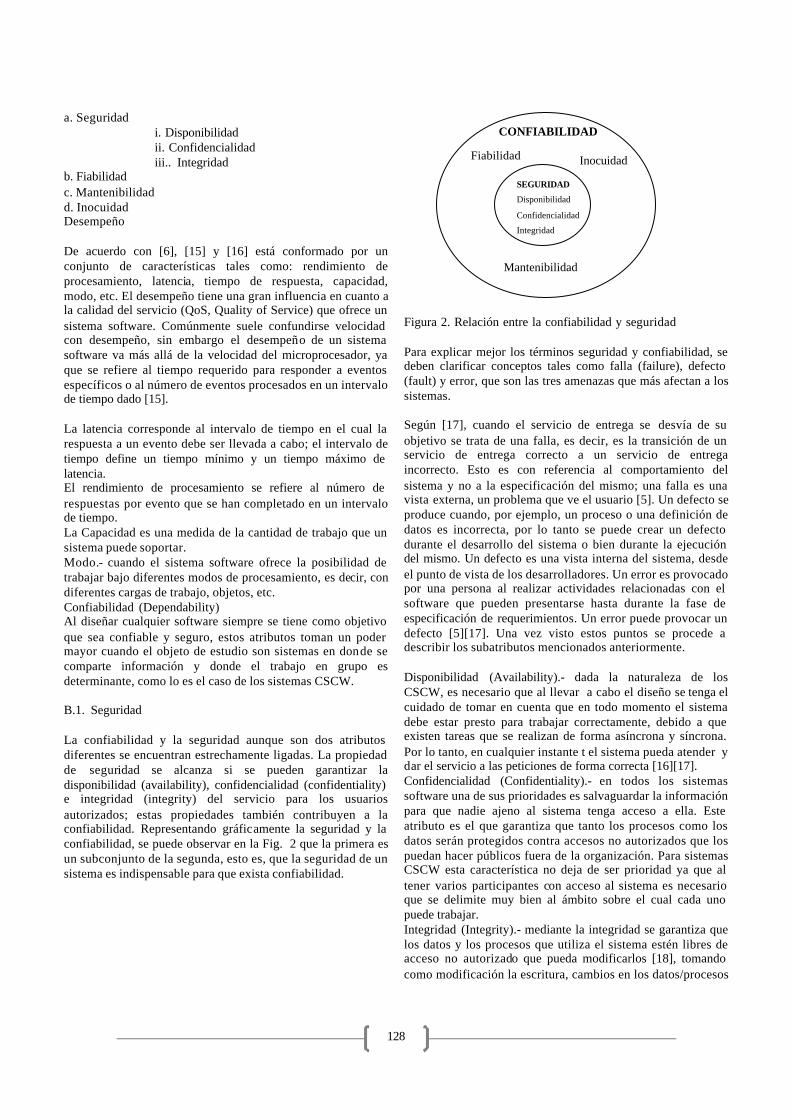
128
a. Seguridad i. Disponibilidad ii. Confidencialidad iii.. Integridad b. Fiabilidad c. Mantenibilidad d. Inocuidad Desempeño De acuerdo con [6], [15] y [16] está conformado por un conjunto de características tales como: rendimiento de procesamiento, latencia, tiempo de respuesta, capacidad, modo, etc. El desempeño tiene una gran influencia en cuanto a la calidad del servicio (QoS, Quality of Service) que ofrece un sistema software. Comúnmente suele confundirse velocidad con desempeño, sin embargo el desempeño de un sistema software va más allá de la velocidad del microprocesador, ya que se refiere al tiempo requerido para responder a eventos específicos o al número de eventos procesados en un intervalo de tiempo dado [15]. La latencia corresponde al intervalo de tiempo en el cual la respuesta a un evento debe ser llevada a cabo; el intervalo de tiempo define un tiempo mínimo y un tiempo máximo de latencia. El rendimiento de procesamiento se refiere al número de respuestas por evento que se han completado en un intervalo de tiempo. La Capacidad es una medida de la cantidad de trabajo que un sistema puede soportar. Modo.- cuando el sistema software ofrece la posibilidad de trabajar bajo diferentes modos de procesamiento, es decir, con diferentes cargas de trabajo, objetos, etc. Confiabilidad (Dependability) Al diseñar cualquier software siempre se tiene como objetivo que sea confiable y seguro, estos atributos toman un poder mayor cuando el objeto de estudio son sistemas en donde se comparte información y donde el trabajo en grupo es determinante, como lo es el caso de los sistemas CSCW. B.1. Seguridad La confiabilidad y la seguridad aunque son dos atributos diferentes se encuentran estrechamente ligadas. La propiedad de seguridad se alcanza si se pueden garantizar la disponibilidad (availability), confidencialidad (confidentiality) e integridad (integrity) del servicio para los usuarios autorizados; estas propiedades también contribuyen a la confiabilidad. Representando gráficamente la seguridad y la confiabilidad, se puede observar en la Fig. 2 que la primera es un subconjunto de la segunda, esto es, que la seguridad de un sistema es indispensable para que exista confiabilidad.
Figura 2. Relación entre la confiabilidad y seguridad Para explicar mejor los términos seguridad y confiabilidad, se deben clarificar conceptos tales como falla (failure), defecto (fault) y error, que son las tres amenazas que más afectan a los sistemas. Según [17], cuando el servicio de entrega se desvía de su objetivo se trata de una falla, es decir, es la transición de un servicio de entrega correcto a un servicio de entrega incorrecto. Esto es con referencia al comportamiento del sistema y no a la especificación del mismo; una falla es una vista externa, un problema que ve el usuario [5]. Un defecto se produce cuando, por ejemplo, un proceso o una definición de datos es incorrecta, por lo tanto se puede crear un defecto durante el desarrollo del sistema o bien durante la ejecución del mismo. Un defecto es una vista interna del sistema, desde el punto de vista de los desarrolladores. Un error es provocado por una persona al realizar actividades relacionadas con el software que pueden presentarse hasta durante la fase de especificación de requerimientos. Un error puede provocar un defecto [5][17]. Una vez visto estos puntos se procede a describir los subatributos mencionados anteriormente. Disponibilidad (Availability).- dada la naturaleza de los CSCW, es necesario que al llevar a cabo el diseño se tenga el cuidado de tomar en cuenta que en todo momento el sistema debe estar presto para trabajar correctamente, debido a que existen tareas que se realizan de forma asíncrona y síncrona. Por lo tanto, en cualquier instante t el sistema pueda atender y dar el servicio a las peticiones de forma correcta [16][17]. Confidencialidad (Confidentiality).- en todos los sistemas software una de sus prioridades es salvaguardar la información para que nadie ajeno al sistema tenga acceso a ella. Este atributo es el que garantiza que tanto los procesos como los datos serán protegidos contra accesos no autorizados que los puedan hacer públicos fuera de la organización. Para sistemas CSCW esta característica no deja de ser prioridad ya que al tener varios participantes con acceso al sistema es necesario que se delimite muy bien al ámbito sobre el cual cada uno puede trabajar. Integridad (Integrity).- mediante la integridad se garantiza que los datos y los procesos que utiliza el sistema estén libres de acceso no autorizado que pueda modificarlos [18], tomando como modificación la escritura, cambios en los datos/procesos
SEGURIDAD
Disponibilidad
Confidencialidad
Integridad
CONFIABILIDAD
Fiabilidad
Inocuidad
Mantenibilidad

129
o incluso creación de nuevos datos/procesos, lo cual impacta fuertemente en sistemas de naturaleza CSCW. En resumen, para que exista seguridad en un sistema software se deben incluir los tres atributos mencionados anteriormente durante la fase de diseño, de esta forma se puede garantizar un sistema software seguro. B.2. Fiabilidad (Reliability) Este atributo está relacionado con el comportamiento dinámico del sistema, si se tiene la certeza de que el sistema software estará funcionando siempre de forma correcta, entonces se puede asegurar el cumplimiento de la fiabilidad. Tener la confianza de que el sistema siempre tendrá un nivel específico de rendimiento, es decir, el rendimiento ha de ser un parámetro preciso y constante del sistema de acuerdo a las especificaciones establecidas [16]. B.3.Mantenibilidad (Maintainability) Ofrecer la posibilidad que en un futuro el sistema pueda crecer para dar respuesta a nuevos requerimientos hace que la mantenibilidad o capacidad de mantenimiento sea un atributo necesario para garantizar la calidad en un sistema. Permitir la evolución y fácil modificación desde el punto de vista estructural, alarga la vida útil de cualquier sistema software debido a que da la posibilidad de adaptarse a nuevo hardware o nuevas necesidades. B.4. Inocuidad (Safety) Básicamente representa la ausencia de consecuencias catastróficas en el entorno. Algunas definiciones que se dan en [18] establecen que es la situación en que se está libre de fallas y pérdidas tanto en el ámbito de los usuarios como del ambiente del producto software [19]. Es conveniente hacer énfasis en que la confiabilidad de un producto software va más allá de estar libre de fallas, debido a que la calidad del servicio no debe exceder un límite establecido, esto es, que el sistema continúe funcionando aun cuando se tenga la presencia de fallas. Como estudio previo a la evaluación de la calidad de sistemas software colaborativos, se propone la Tabla 1 en donde se han seleccionado algunos de los atributos y subatributos de calidad mencionados anteriormente y en donde se puede establecer su relación con las 3C’s, cabe hacer la aclaración que tales atributos que se proponen no son los únicos debido a que se sigue trabajando en el presente proyecto.
Tabla 1. Tabla de atributos de calidad En la tabla 1, se propone de forma general, para que de acuerdo a la herramienta que se vaya a analizar, se seleccione dentro de los casilleros aquellas características que impactan a las 3 C’s. propiedades específicas de las 3 C’s A continuación se detallan algunas de las propiedades específicas de las 3 C’s, las cuales se describen en [20]. Comunicación: Asíncrona.- cuando se lleva a cabo en diferente momento, por lo que no es necesario obtener respuestas dentro de un plazo de tiempo. Síncrona.- requiere respuestas explícitas dentro de intervalos de tiempo. Explícita.- las interacciones entre los participantes están basadas en intercambio de mensajes. Implícita.- los participantes interactúan teniendo acceso a datos locales o remotos. Coordinación: Centralizada.- se realiza en una instancia central. Distribuida.- descentralizada en varias instancias de control. Guiada.- sugiere de forma adelantada específicas alternativas para llevar a cabo tareas. Controlada.- el control de la ejecución de tareas se lleva a cabo posteriormente para conocer si se adecua a la planeación deseada. Baja.- solo da soporte a la coordinación interactiva humana. Media.- soporte explícito para patrones específicos y predefinidos de ejecución/interacción. Alta.- control total del sistema de ejecución de tareas. Colaboración: Largo.- la duración de estas actividades puede llevar días o semanas. Medio.- actividades con duración en escala de horas. Corto.- intervalos de tiempo menores a una hora. Casos de Estudio Dentro de la variedad de herramientas colaborativas que existen se han seleccionado dos de las más utilizadas actualmente para llevar a cabo una comparación entre ellas considerando como base la tabla de atributos mostrada anteriormente; tales herramientas son la videoconferencia a través de Microsoft NetMeetingMR y Google Docs MR.
Asín Sínc Imp Exp Cent Distr Guiada Ctrl Baja Media Alta Largo Medio Corto
Desempeñ
o
Atributo SubatributoComunicación Coordinación Colaboración
Throughput
T. respuesta
Latencia
Capacidad
Modo
Desempeñ
o
Segurid
adDisponibilidad
Confidencialidad
IntegridadSegurid
ad
Confia
bilidad
Fiabilidad
Mantenibilidad
InocuidadConfia
bilidad
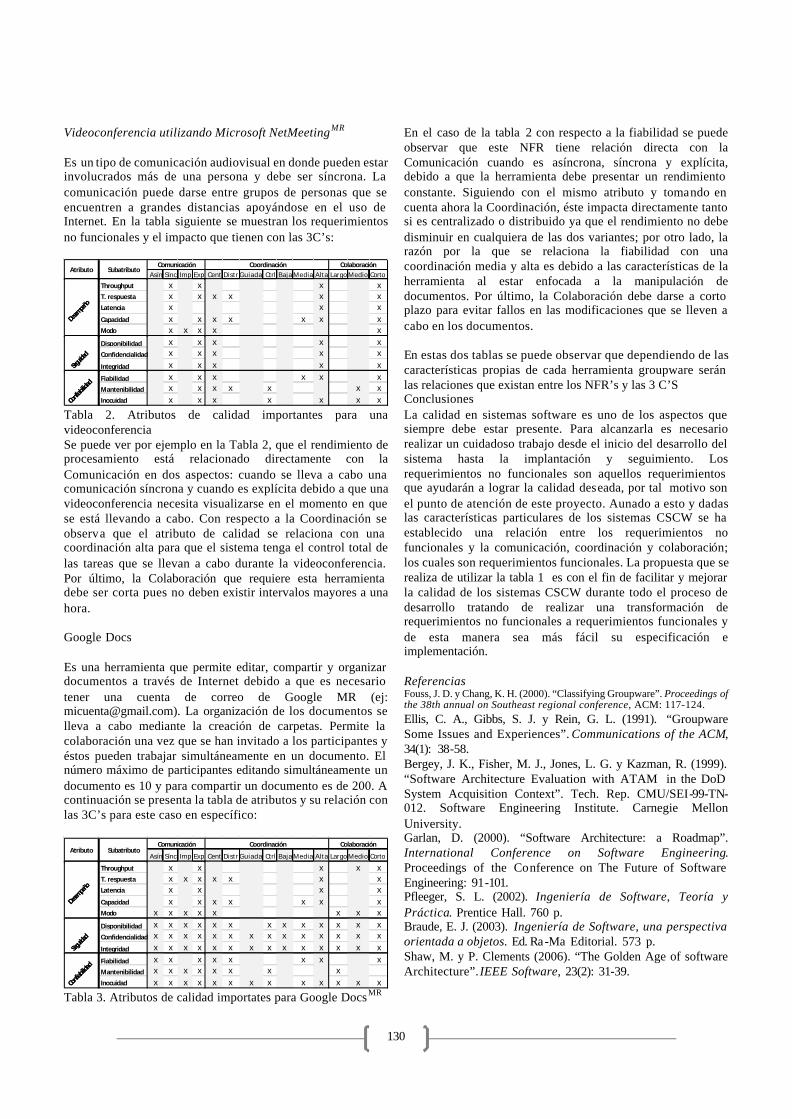
130
Videoconferencia utilizando Microsoft NetMeetingMR Es un tipo de comunicación audiovisual en donde pueden estar involucrados más de una persona y debe ser síncrona. La comunicación puede darse entre grupos de personas que se encuentren a grandes distancias apoyándose en el uso de Internet. En la tabla siguiente se muestran los requerimientos no funcionales y el impacto que tienen con las 3C’s:
Tabla 2. Atributos de calidad importantes para una videoconferencia Se puede ver por ejemplo en la Tabla 2, que el rendimiento de procesamiento está relacionado directamente con la Comunicación en dos aspectos: cuando se lleva a cabo una comunicación síncrona y cuando es explícita debido a que una videoconferencia necesita visualizarse en el momento en que se está llevando a cabo. Con respecto a la Coordinación se observa que el atributo de calidad se relaciona con una coordinación alta para que el sistema tenga el control total de las tareas que se llevan a cabo durante la videoconferencia. Por último, la Colaboración que requiere esta herramienta debe ser corta pues no deben existir intervalos mayores a una hora. Google Docs Es una herramienta que permite editar, compartir y organizar documentos a través de Internet debido a que es necesario tener una cuenta de correo de Google MR (ej: [email protected]). La organización de los documentos se lleva a cabo mediante la creación de carpetas. Permite la colaboración una vez que se han invitado a los participantes y éstos pueden trabajar simultáneamente en un documento. El número máximo de participantes editando simultáneamente un documento es 10 y para compartir un documento es de 200. A continuación se presenta la tabla de atributos y su relación con las 3C’s para este caso en específico:
Tabla 3. Atributos de calidad importates para Google DocsMR
En el caso de la tabla 2 con respecto a la fiabilidad se puede observar que este NFR tiene relación directa con la Comunicación cuando es asíncrona, síncrona y explícita, debido a que la herramienta debe presentar un rendimiento constante. Siguiendo con el mismo atributo y tomando en cuenta ahora la Coordinación, éste impacta directamente tanto si es centralizado o distribuido ya que el rendimiento no debe disminuir en cualquiera de las dos variantes; por otro lado, la razón por la que se relaciona la fiabilidad con una coordinación media y alta es debido a las características de la herramienta al estar enfocada a la manipulación de documentos. Por último, la Colaboración debe darse a corto plazo para evitar fallos en las modificaciones que se lleven a cabo en los documentos. En estas dos tablas se puede observar que dependiendo de las características propias de cada herramienta groupware serán las relaciones que existan entre los NFR’s y las 3 C’S Conclusiones La calidad en sistemas software es uno de los aspectos que siempre debe estar presente. Para alcanzarla es necesario realizar un cuidadoso trabajo desde el inicio del desarrollo del sistema hasta la implantación y seguimiento. Los requerimientos no funcionales son aquellos requerimientos que ayudarán a lograr la calidad deseada, por tal motivo son el punto de atención de este proyecto. Aunado a esto y dadas las características particulares de los sistemas CSCW se ha establecido una relación entre los requerimientos no funcionales y la comunicación, coordinación y colaboración; los cuales son requerimientos funcionales. La propuesta que se realiza de utilizar la tabla 1 es con el fin de facilitar y mejorar la calidad de los sistemas CSCW durante todo el proceso de desarrollo tratando de realizar una transformación de requerimientos no funcionales a requerimientos funcionales y de esta manera sea más fácil su especificación e implementación. Referencias Fouss, J. D. y Chang, K. H. (2000). “Classifying Groupware”. Proceedings of the 38th annual on Southeast regional conference, ACM: 117-124. Ellis, C. A., Gibbs, S. J. y Rein, G. L. (1991). “Groupware Some Issues and Experiences”. Communications of the ACM, 34(1): 38-58. Bergey, J. K., Fisher, M. J., Jones, L. G. y Kazman, R. (1999). “Software Architecture Evaluation with ATAM in the DoD System Acquisition Context”. Tech. Rep. CMU/SEI-99-TN-012. Software Engineering Institute. Carnegie Mellon University. Garlan, D. (2000). “Software Architecture: a Roadmap”. International Conference on Software Engineering. Proceedings of the Conference on The Future of Software Engineering: 91-101. Pfleeger, S. L. (2002). Ingeniería de Software, Teoría y Práctica. Prentice Hall. 760 p. Braude, E. J. (2003). Ingeniería de Software, una perspectiva orientada a objetos. Ed. Ra-Ma Editorial. 573 p. Shaw, M. y P. Clements (2006). “The Golden Age of software Architecture”. IEEE Software, 23(2): 31-39.
Asín Sínc Imp Exp Cent Distr Guiada Ctrl Baja Media Alta Largo Medio CortoComunicación Coordinación Colaboración
Atributo Subatributo
Desempeñ
o
Throughput x x x xT. respuesta x x x x x xLatencia x x xCapacidad x x x x x x xModo x x x x x
Segurid
ad
Desempeñ
o
Disponibilidad x x x x xConfidencialidad x x x x xIntegridad x x x x xSeg
uridad
Confia
bilidad
Fiabilidad x x x x x xMantenibilidad x x x x x x xInocuidad x x x x x x xCo
nfiabili
dad
Asín Sínc Imp Exp Cent Distr Guiada Ctrl Baja Media Alta Largo Medio Corto
Colaboración
Desempeñ
o
Atributo SubatributoComunicación Coordinación
Throughput x x x x xT. respuesta x x x x x x xLatencia x x x xCapacidad x x x x x x xModo x x x x x x x x
Desempeñ
o
Segurid
adDisponibilidad x x x x x x x x x x x x xConfidencialidad x x x x x x x x x x x x x xIntegridad x x x x x x x x x x x x x xSeg
uridad
Confia
bilidad
Fiabilidad x x x x x x x xMantenibilidad x x x x x x x xInocuidad x x x x x x x x x x x x xCo
nfiabili
dad
131
Shaw, M. (2001). “The Coming-of-Age of Software Architecture Research”. 23rd International Conference on Software Engineering (ICSE'01) : 656-664. Kazman, R., Nord, R. L. y Klein, M. (2003). Rethinking the Software Life Cycle. Software Engineering Institute. Carnegie Mellon University. Kazman, R., Bass, L., Abowd, G. y Webb, M. (1994). “SAAM: A Method for Analyzing the Properties of Software Architectures”. Proceedings of the 16th International Conference on Software Engineering: 81-90. Kazman, R., Klein, M. y Clements, P. (2000). “ATAM: Method for Architecture Evaluation”. Tech. Rep. CMU/SEI-2000-TR-004. Software Engineering Institute. Carnegie Mellon University. Barbacci, M. R., Ellison, R., Lattanze, A. J., Stafford, J. A., Weinstock, C. B. y Wood, W. G. (2003). Quality Attribute Workshops (QAWs) , Third Edition. Tech. Rep. CMU/SEI-2003-TR-016. Software Engineering Institute. Carnegie Mellon University. Wojcik, R., Bachmann, R., Bass, L., Clements, P., Merson, P., Nord, R. y Wood, B. (2006). “Attribute-Driven Design (ADD), Version 2.0”. Tech. Rep. CMU/SEI-2006-TR-023. Pittsburgh, PA: Software Engineering Institute, Carnegie Mellon University. Chung, L., Nixo n, B. A., Yu, E. y Mylopoulos, J. (1999). Non-Functional Requirements In Software Engineering. Kluwer Academic Publishers. 439 p. Stankovic, J. A. (1988). “Misconceptions About Real-Time Computing, A Serious Problem for Next -Generation Systems”. IEEE Computer, 21(10): 10-19. Barbacci, M., Klein, M. H., Longstaff, T. A. y Weinstock, C. B. (1995). “Quality Attributes”. Tech. Rep. CMU/SEI-95-TR-021. Software Engineering Institute. Carnegie Mellon University Avizienis, A., Laprie, J., Randell, B. y Landwehr, C. (2004). “Basic Concepts and taxonomy of Dependable and Secure Computing”. IEEE Transactions on Dependable and Secure computing, 1(1) pp. 11-33. Becker, S., Boskovic, M., Dhama, A., Giesecke, S. y Happe, J. (2006). Trustworthy Software Systems: A Discussion of Basic Concepts and Terminology. ACM SIGSOFT Software Engineering Notes, 31(6). pp. 1 - 18. Leveson, N. G. (1986). Safety Software: Why, What and How. ACM Computing Surveys (CSUR), 18(2): 125-163. Garrido, J. L. (2003). “AMENITIES: Una metodología para el desarrollo de sistemas cooperativos basada en modelos de comportamiento y tareas”. Tesis de Doctorado, Departamento de Lenguajes y Sistemas Informáticos. Universidad de Granada.

132
Plan Ambiental Institucional “Ola Verde”
C. Rodríguez, J.L. Rocha, M.P. López
Resumen—Las instituciones educativas de los niveles medio superior y superior tienen el compromiso de ofrecer educación de calidad, que prepare ciudadanos competitivos y productivos, pero a la vez comprometidos con el medio ambiente, generando en los jóvenes estudiantes la conciencia del cuidado y la preservación del entorno promoviendo de esta manera la importancia de canalizar la enseñanza para un desarrollo sustentable, que derive en organización comunitaria, participación ciudadana y conciencia ambiental colectiva; es por ello que en las aulas de las instituciones educativas de estos niveles, se debe forjar ciudadanía ambiental crítica, participativa y corresponsable que aporte soluciones a las problemáticas medioambientales de nuestros tiempos, una estrategia necesaria para difundir e implementar la cultura ambiental al interior de una Institución educativa, es que se diseñen Planes ambientales y que éstos sean diseñados, coordinados y difundidos por un Grupo Ambiental conformado por estudiantes interdisciplinarios, logrando con ello la formación y profesionalización de educadores ambientales, promoviendo la utilización del las TIC´s como un medio de difusión masivo que promueva la participación ciudadana ambiental. Temas claves—Plan de Cultura Ambiental, Desarrollo Sustentable, Grupo Ambiental , TIC´s. Introducción
E L Plan de Cultura Ambiental en una Institución educativa es aquel que promueve la conciencia ecológica mediante la ejecución de una serie de actividades a favor del medio ambiente y despierta el interés por comprender los alcances que el cuidado del medio ambiente tiene para beneficio de todos. En este sentido, las instituciones de educación en los niveles medio superior y superior tienen el enorme compromiso de ofrecer una educación de calidad, capaz de preparar ciudadanos competitivos y productivos, pero a la vez comprometidos con el medio ambiente y el desarrollo sustentable, genera ndo con ello ciudadanía ambiental participativa y corresponsable en la solución a las problemáticas medioambientales de nuestros tiempos. Lo anterior queda de manifiesto en el objetivo no. 2 de la Estrategia de Educación Ambiental para la Sustentabilidad en México [1] la cual establece: Conformar una amplia oferta de formación ambiental que permita al país y a sus distintas regiones contar con docentes, educadores y promotores ambientales, y recursos humanos estratégicos y operativos, profesionalizados, capaces de responder a las demandas que en materia de EAS (Educación
Ambiental para la Sustentabilidad) plantee la construcción de la sustentabilidad y de una ciudadanía crítica, propositiva y activa. … En este sentido, el grupo ambiental estudiantil “Ola Verde” del Instituto Tecnológico de Colima, se constituyó en el junio del 2010, con el objetivo de impulsar la cultura de la responsabilidad ambiental entre la comunidad tecnológica con la implementación de una serie de actividades académicas, ambientales y de vinculación, las cuales se fueron formalizando y aplicando periódicamente, convirtiéndose a la fecha en programas ambientales que derivaron en un Plan de Cultura Ambiental. Este Plan de Cultura Ambiental ha sido el antecedente o el pilar para formalizar la gestión ambiental institucional a través de implementación del Sistema de Gestión Ambiental bajo la norma ISO 14001:2004. Esta propuesta de Plan de Cultura Ambiental mediante la coordinación de un Grupo ambiental estudiantil, tiene amplias posibilidades de ser aplicable y reproducible en Instituciones educativas de los niveles Medio Superior y Superior, debido a su estructura flexible, a la facilidad, aplicabilidad y a lo altamente incluyentes de las actividades ambientales que propone, aunado a que aplica las TIC´s para lograr una comunicación ambiental más eficaz entre la comunidad tecnológica. Parte Técnica del Artículo Un plan de cultura ambiental es el antecedente o el pilar para formalizar la gestión ambiental a través de la implementación de Agendas Ambientales o Sistemas de Gestión Ambiental en una institución educativa para posteriormente si se desea, buscar la Certificación ambiental. Ver Figura 1. Proceso ambiental institucional. Figura 1. Proceso ambiental institucional En el Plan Estatal de Desarrollo como en el Programa de Educación Ambiental del Gobierno de Colima, se ha manifestado como prioridad asegurar que la dimensión ambiental quede comprendida en todos los niveles educativos del Estado, Por lo anterior, es importante promover la creación de agendas ambientales en las instituciones educativas de la entidad, que promuevan la cultura ambiental en los jóvenes estudiantes que serán los adultos y ciudadanos en el corto plazo y a quienes les tocará en un futuro próximo ser tomadores de decisiones, promoviendo con ello la construcción de una ciudadanía que participe en la solución de los problemas ambientales y que promueva el aprovechamiento sustentable de los recursos naturales de la entidad. Para sustentar lo anterior, el Gobierno Federal impulsa la Estrategia Nacional de Participación Ciudadana cuyo objetivo mandata en el Plan Nacional de Desarrollo [2] “En un marco de respeto a los derechos humanos, establecer una participación incluyente, equitativa, diferenciada,
Plan de Cultura Ambiental
Sistema de Gestión
Ambiental
Certificación Ambiental

133
corresponsable y efectiva de todos los sectores de la sociedad, y en todos los órdenes de gobierno, en la formulación de políticas la adopción de compromisos conjuntos que contribuyan al desarrollo sustentable de nuestro país”. Ante esta situación, en el Instituto Tecnológico de Colima, se han venido realizando una serie de acciones formalizadas en un Plan de Cultura Ambiental que busca promover la cultura ambiental a través de la conformación de un grupo ambiental institucional denominado “Ola Verde”. Aplicación de las TIC´s
Figura 2. Interfaz principal del portal mundoolaverd.org Con la intención de difundir las actividades, propuestas y acciones que proponen a favor del medio ambiente, este Grupo Ambiental ha diseñado e implementado un portal en internet denominado mundoolaverde.org, tal como se muestra en la Figura 2. Interfaz principal de mundoolaverde.org, además de promover y utilizar las redes sociales a través de un perfil en facebook : Grupo ambiental Ola Verde, poniendo de manifiesto con ello la importancia de la aplicación de las TIC´s para promover cultura ambiental . Esta plataforma web ha sido un soporte fundamental para promover la participación de la comunidad tecnológica en el Plan Ambiental y servir de punto de partida en la intención de generar un movimiento de ciudadanía ambiental. La manera de asegurar la difusión y comunicación ambiental de forma casi inmediata de esta propuesta ambiental es a través de los nuevos medios de comunicación de nuestros tiempos tal como se cita en [3]. “Vivimos tiempos dominados por los medios con una nueva atmósfera cultural colectiva de naturaleza virtual, donde se funciona a distancias gracias a canales masivos o redes de información. Donde los lenguajes son más de imagen, donde la interactividad es crucial. Quienes no hablen ese lenguaje prácticamente no existen, ya que no aparecer en los medios imposibilita el posicionamiento en la conciencia colectiva” . Plan de Cultura Ambiental Institucional
Considerando que algunas de las líneas de acción del Programa de educación ambiental, comunicación educativa y capacitación para promover la sustentabilidad en condiciones de cambio climático que establece el Gobierno del Estado, en el que se indica: a) el impulso a la organización y establecimiento de una agenda ambiental juvenil, escolar, b) fortalecimiento de Planes Ambientales en Instituciones de Educación Superior, c) fortalecimiento de las capacidades de los educadores ambientales y de los centros de educación y cultura ambiental, d) acciones de comunicación educativa ambiental y e) realización de estudios y proyectos en materia de educación ambiental para la sustentabilidad en condiciones de cambio climático, de lo anterior queda de manifiesto que es importante crear una estrategia institucional para cubrir algunas de las líneas de acción mencionadas anteriormente mediante la creación de un Plan de Cultura Ambiental, la conformación de un grupo ambiental que las coordine y las implemente, con el apoyo y aplicación de las TIC´s para eficientar la comunicación ambiental y posteriormente formalizar un Sistema de Gestión Ambiental. Objetivo El objetivo del Plan de Cultura Ambiental es el de promover la cultura de la responsabilidad ambiental entre la comunidad tecnológica. El Plan de Cultura Ambiental Institucional contempla los siguientes aspectos ambientales: consumo y ahorro de energía eléctrica, manejo de residuos sólidos urbanos, consumo y ahorro de agua, preservación de las áreas verdes y cultura ambiental. Para sensibilizar a la comunidad tecnológica sobre estos aspectos ambientales se han diseñado una serie de campañas tanto físicas como virtuales que son planeadas, diseñadas, coordinadas y difundidas por el Grupo Ambiental “Ola Verde”, las cuales se indican en la Tabla1. Campañas ambientales. Los aspectos ambientales que se indican en la referida tabla, son algunos de los aspectos que posteriormente han quedado formalizados en el Sistema de Gestión Ambiental bajo la norma ISO 14001:2004 que ha implementado la Institución, posterior a la puesta en marcha del Plan Ambiental “Ola Verde”. T ABLA 1. CAMPAÑAS AMBIENTALES Campañas Aspecto
Ambiental Descripción
Azul Agua Conjunto de actividades de sensibilización del cuidado del agua
Amarilla Energía eléctrica
Actividades de sensibilización del cuidado y ahorro de la energía eléctrica
Verde Cuidado y reforestación de áreas verdes
Diagnóstico e inventario de los recursos de flora, actividades de reforestación de áreas en el TEC y composteo
Gris Manejo y Actividades de
134
disposición de residuos sólidos urbanos (RSU)
sensibilización sobre el acopio, disposición y tratamiento de los Residuos Sólidos Urbanos
Cultura Ambiental
Todos los aspectos
Cápsulas ambientales y difusión de actividades ambienatales
En apoyo a la operación y difusión de las campañas anteriores, se diseñaron una serie de mecanismos y estrategias innovadoras que han cristalizado en programas ambientales que permiten fortalecer la cultura ambiental al interior y exterior de la Institución; algunos de estos programas se indican en la Tabla 2. Grupo Ambiental El Grupo Ambiental “Ola Verde”, es un grupo interdisciplinario con liderazgo académico y ambiental que coordina la operación del Plan de Cultura Ambiental mediante la puesta en marcha de algunos programas ambientales indicados anteriormente.
Figura 2. Logo del Grupo Ambiental “Ola Verde” Ola Verde es un grupo que promueve actividades, proyectos y alternativas a favor del medio ambiente. El Grupo representa a la comunidad tecnológica (alumnos, docentes, directivos, personal administrativo y de apoyo) y su ícono se representa en la Figura 2. Logo del Grupo Ambiental “Ola Verde” La importancia de este grupo de alumnos radica en que son los impulsores de iniciativas y estrategias ambientales, que buscan llegar a la comunidad tecnológica diseñando y utilizando diversos medios y mecanismos de comunicación incluyendo como una herramienta primordial la aplicación de las TIC´s. TABLA 2. PROGRAMAS AMBIENTALES Programa Aspecto que
aborda Descripción
Unas horas por mi TEC
Campaña verde Brigadas ambientales al interior del TEC
RecopilaTEC Campaña gris Acopio y disposición final de diferentes tipos de pilas
“El acopio del Cultura ambiental Acopio y
saber, reutiliza un libro”
(Promover la práctica de las 3 R´s)
donación de libros con contenido académicos vigentes entre la comunidad tecnológica
Concurso de responsabilidad ambiental
Todos los aspectos ambientales
Concurso entre las diferentes áreas de la Institución para promover la cultura de la responsabilidad ambiental
Campañas ambientales (elaboración de material)
Todos los aspectos Difusión del SGA
Brigadas ambientales
Residuos sólidos urbanos
Habilitar y mantener en orden los tres puntos verdes de la Institución
Elaboración de composta
Residuos orgánicos
Tratamiento de los residuos orgánicos que se generan en la cafetería y el estanquillo
“Apaga la luz, ilumina el futuro”
Campaña amarilla Pegado de calcas y ahorro de energía
Figura 3. Grupo Ambiental “Ola Verde” d. Resultados e impacto ambiental A partir de la formalización del Grupo Ambiental Institucional, se han realizado una serie de acciones a favor del medio ambiente que han permitido permear y difundir la importancia de la corresponsabilidad institucional en el cuidado del medio ambiente.
135
Este grupo ambiental ha sistematizado estas actividades y ha formalizado un Plan de Cultura ambiental de participación semestral, además de coordinar las intervenciones ambientales que se realizan al exterior mediante la vinculación con instituciones ambientales como la Dirección de Ecología del Gobierno del Estado(recientemente nombrada IMADES), la CONAFOR, la CONAGUA y con otras dependencias de Gobiernos como la Secretaría de Seguridad a través de la Dirección General de Prevención del Delito y Participación Ciudadana (DGPDyPC), entre otras. El plan de cultura ambiental ha permeado de la Comunidad tecnológica hacia la Unidad Directiva motivando a la formalización de un Sistema de Gestión Ambiental, que se ha implementado y en el presente semestre ha obtenido la Certificación ambiental bajo la Norma ISO 14001:2004. Adicionalmente, para formalizar las participaciones del grupo ambiental al exterior, este grupo ambiental ha impulsado la firma de dos convenios con instituciones del Gobierno del Estado y con instituciones particulares. . Esta propuesta de Plan de Cultura Ambiental mediante la coordinación de un Grupo ambiental estudiantil, tiene amplias posibilidades de ser aplicable y reproducible en Instituciones educativas de los niveles Medio Superior y Superior, debido a su estructura flexible y a lo sencillo de las actividades ambientales que comprende. Ola Verde es un grupo ambiental representativo de la comunidad tecnológica (alumnos, maestros, directivos, personal administrativo y de apoyo) que además de preocuparse, también se ocupa del medio ambiente. Este grupo ambiental se ha estado dando a conocer por las actividades de vinculación que realiza con diferentes sectores de la sociedad, en apoyo a programas ambientales y que inciden a la mejora de la calidad de vida de las comunidades urbanas. En el Grupo Ambiental, se consolida la red social y se conforma la red de educación ambiental. Díaz [4] las define como un modelo de cooperación entre individuos, grupos y organizaciones que comparten un interés común. De esta manera en este Grupo Ambiental, se comparten las decisiones y se construyen sobre la base del trabajo con individuos y para los individuos. Ver Figura 3. Grupo Ambiental “Ola Verde”. Conclusiones Sin duda alguna, la creación, difusión y operación del Plan de Cultura Ambiental, así como la implementación de la plataforma Web mundoolaverde.org y las redes sociales por iniciativa y conducto del Grupo Ambiental Ola Verde, han permitido la sensibilización y promovido la actuación de la comunidad tecnológica en el cuidado del medio ambiente. La difusión y socialización de las problemáticas ambientales, las propuestas de participación, la generación de cambios de actitud a favor del medio ambiente por parte de la comunidad tecnológica ha permitido que el Instituto Tecnológico de Colima formalizara en los últimos años el Sistema de Gestión Ambiental bajo la norma ISO 14001:2004 y recientemente lograra la certificación ambiental bajo esta norma, habiéndose
indicado como una fortaleza por parte del organismo acreditador la participación del Grupo Ambiental y la aplicación de las TIC´s en el proceso de la implementación del SGA, particularmente en el aspecto de la comunicación y difusión ambiental. En lo que respecta a las actividades ambientales para promover cultura ambiental realizadas al exterior, se ha apoyado de manera muy activa a diversas instituciones en la organización y colaboración de eventos ambientales, particularmente a la DGPDyPC en la intervención ambiental a comunidades urbanas vulnerables para tratar de prevenir los delitos mediante la implementación de programas de mejoramiento de las condiciones medio ambientales de dichas colonias, siendo ésta una gran área de oportunidad para implementar un programa de intervención ambiental comunitaria y promover con ello la generación de una red de colonias pro-ecológicas que implique educación ambiental, organización comunitaria y participación ciudadana . Pero sin lugar a dudas lo más importante es que a través de las intervenciones ambientales que realiza la comunidad tecnológica tanto al interior y exterior de la institución, se ha logrado iniciar un movimiento ambiental denominado “Ola Verde” y así como las olas generan movimiento, se espera que este se convierta en un movimiento a favor del cuidado y la preservación del medio ambiente y se logre extender en nuestra entidad, en nuestro País y hacia el mundo entero, aprovechando la cobertura mundial que hoy en día nos proporcionan las TIC´s. Si esto llegara a ser posible, se estaría en posibilidades de transitar hacia el estadio ideal del Desarrollo Sustentable como se establece en [5] y que indica que el Desarrollo Sustentable “Es aquel que puede lograr satisfacer las necesidades y aspiraciones del presente, sin comprometer la capacidad de las generaciones futuras de satisfacer sus propias necesidades y aspiraciones” Referencias SEMARNAT (2006). Estrategia de Educación Ambiental para la Sustentabilidad en México. Versión ejecutiva. Estrategia Nacional 2006-2014. p. 13-14 PND (2007) Plan Nacional de Desarrollo 2007-2012. Objetivo sectorial 9 del Programa Sectorial de Medio Ambiente y Recursos Naturales, 2007-2012 (PSMARN). Cambio climático, manual para comunicadores, Semarnat sep. 2008 Díaz C.R., (2011) Desarrollo Sustentable, una oportunidad para la vida. Mc.Graw Hill, p. 125-129. C. Rodríguez, Guía para orientar una comunidad urbana hacia la sustentabilidad, Semarnat 2012, p. 13 -16
Biografía . Rodríguez Catalina, Licenciada en Informática, egresada del instituto Tecnológico de Colima en 1987. Ha obtenido diferentes distinciones en el área ambiental en el Estado de Colima. Rocha José Luis, Ing. Electricista en Control. Egresado del Instituto Tecnológico de Cd. Madero Tamaulipas, en 1982. Obtuvo el grado de Maestría en Ingeniería especialidad Ingeniería de Control en el ITESM, Campus Monterrey en 1985. López Mayra Paola , Estudiante de 7º. Semestre de Ingeniería Ambiental en el Instituto Tecnológico de Colima .