teoria de variable compleja y...
TRANSCRIPT

Teoria de Variable Compleja y Transformaciones
Federico D Kovac
17 de agosto de 2008

2

Índice general
1. Funciones de variable compleja 91.1. Algebra de los números complejos . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2. Representación polar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3. Topología en C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4. Funciones de variable compleja . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5. Funciones analíticas, ecuaciones de Cauchy-Riemann . . . . . . . . . . . . . . . . 141.6. Ecuaciones de Cauchy-Riemann en coordenadas polares . . . . . . . . . . . . . . 201.7. La función exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.8. Función logaritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.9. Potencia general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.10. Funciones trigonometricas e hiperbólicas . . . . . . . . . . . . . . . . . . . . . . . 261.11. Comentario argumental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2. Mapeos en C 292.1. El plano complejo extendido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2. Representación geométrica de funciones complejas . . . . . . . . . . . . . . . . . 302.3. Mapeo conforme, curvas en C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4. Transformaciones biunívocas de C∞ . . . . . . . . . . . . . . . . . . . . . . . . . 412.5. Transformaciones fraccionarias lineales o de Möbius . . . . . . . . . . . . . . . . 432.6. Círculos generalizados en C∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.7. Puntos fijos de una transformación de Möbius . . . . . . . . . . . . . . . . . . . . 522.8. Orientación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.9. Distribución estacionaria de temperatura . . . . . . . . . . . . . . . . . . . . . . . 58
3. Integrales en C 633.1. Integrales en el campo complejo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.2. Teoremas de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.3. Primitivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.4. Fórmula integral de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 733.5. Módulo Máximo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4. Sucesiones y series en C 814.1. Sucesiones complejas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 814.2. Series complejas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.3. Criterios de convergencia para series de términos positivos . . . . . . . . . . . . . 874.4. Convergencia absoluta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3

4 ÍNDICE GENERAL
4.5. Criterios de convergencia para series . . . . . . . . . . . . . . . . . . . . . . . . . 904.6. Series de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 934.7. Convergencia uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 964.8. Consecuencias de la convergencia uniforme . . . . . . . . . . . . . . . . . . . . . . 994.9. Series de potencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5. Desarrollos en series, residuos 1095.1. Teorema de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.2. Series dobles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.3. Series de Laurent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.4. Singularidades aisladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1185.5. Residuos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1195.6. Ceros de una función analítica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1235.7. Indice de una curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.7.1. Raíces de polinomios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305.7.2. Ceros y polos de funciones racionales . . . . . . . . . . . . . . . . . . . . . 133
6. Series de Fourier 1356.1. Series de funciones reales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1356.2. Funciones periódicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1386.3. Aproximación por medio de polinomios trigonométricos . . . . . . . . . . . . . . 1396.4. Convergencia puntual de series de Fourier . . . . . . . . . . . . . . . . . . . . . . 1486.5. Orden de los coeficientes de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . 1526.6. Derivación e integración de series de Fourier . . . . . . . . . . . . . . . . . . . . . 1576.7. Expansiones de medio rango, efectos de la simetría . . . . . . . . . . . . . . . . . 1606.8. Series armónicas de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1646.9. Serie de Fourier compleja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1666.10. Separación de variables, ecuación del calor . . . . . . . . . . . . . . . . . . . . . . 1676.11. Ecuación de Ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
7. Integrales de Fourier 1757.1. Integrales impropias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1757.2. Funciones definidas con integrales impropias . . . . . . . . . . . . . . . . . . . . . 1797.3. Función Gama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1847.4. Integral de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1867.5. Integral de Fourier de seno y coseno . . . . . . . . . . . . . . . . . . . . . . . . . 1897.6. Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1907.7. Calculo de transformadas usando residuos . . . . . . . . . . . . . . . . . . . . . . 193
8. Transformada de Laplace 1998.1. Funciones de orden exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1998.2. Transformada de derivadas e integrales . . . . . . . . . . . . . . . . . . . . . . . . 2038.3. Función de Heaviside . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2068.4. Derivación e integración de transformadas . . . . . . . . . . . . . . . . . . . . . . 2098.5. Funciones periódicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2118.6. Valor inicial y final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2138.7. Convolución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214

ÍNDICE GENERAL 5
8.8. Transformada de Laplace Compleja . . . . . . . . . . . . . . . . . . . . . . . . . . 2178.9. Fórmula de inversión compleja . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2208.10. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227

6 ÍNDICE GENERAL

Prefacio
Este protolibro tiene sus origenes, como tantos, en las notas de clase de la asignatura Análi-sis Matemático III. Si bien no contiene absolutamente nada nuevo, tiene lo necesario para laasignatura en cuestión, de manera autocontenido, y sobre todo, con los temas tratados como ami me gusta, teniendo en cuenta las circunstancias y la audiencia. Como regla general, se haevitado llamar “demostración” a una cosa que no lo es, es decir, cuando un resultado no se puededemostrar rigurosamente, sencillamente se pone una idea que lo hace creible, o sencillamentese lo enuncia sin demostración. A diferencia de muchos libros de variable compleja, los temasfueron tratados haciendo uso de los resultados de calculo vectorial, lo que propende al uso deconocimientos previamente adquiridos.
7

8 ÍNDICE GENERAL
Capítulo 1
Funciones de variable compleja
Vamos a trabajar con los ya conocidos números complejos C. Mucho del material de estaprimera parte (secciones 1.1 a 1.4) se verá muy rápido y sin mucho cuidado, por ser solo unrepaso de conocimientos adquiridos en materias anteriores
1.1. Algebra de los números complejos
Como conjunto C = R2 = {(x, y) tq: x ∈ R, y ∈ R} , con las siguientes operaciones:
(a, b) + (c, d) = (a + c, b + d) = suma, y
(a, b) (c, d) = (ac− bd, ad + bc) = producto.
Lo nuevo acá con respecto a R2 es el producto, que transforma la modesta estructura de espaciovectorial de R2 en estructura de cuerpo, es decir:
La suma es asociativa
La suma es conmutativa.
(0, 0) el único número complejo tal que (a, b) + (0, 0) = (a, b) para todo número complejo(a, b) (neutro aditivo).
Para todo complejo (a, b) , (−a,−b) el único número complejo tal que (a, b) + (−a,−b) =(0, 0) (inverso aditivo).
El producto es asociativo.
El producto es conmutativo.
9

10 Funciones de variable compleja
(1, 0) el único número complejo tal que (a, b) (1, 0) = (a, b) para todo número complejo(a, b) (neutro multiplicativo).
Si (a, b) 6= (0, 0) , entonces (a, b)−1 =³
aa2+b2
, −ba2+b2
´es el único número complejo tal que
(a, b) .³
aa2+b2
, −ba2+b2
´= (1, 0) (inverso multiplicativo).
La multiplicación se distribuye con la suma.
Se denota (a, 0) = a; esta notación es buena porque respeta la suma y el producto: (a, 0) +(b, 0) = (a + b, 0) , y (a, 0) (b, 0) = (ab, 0) , es decir, cuando opero con pares que tienen cero enla 2da coordenada puedo hacer las operaciones como si fueran números reales (no es lo mismo siintercabiamos las coordenadas en el razonamiento anterior: (0, 1) (0, 1) = (−1, 0)). Esto permitever a los números reales “metidos” en los complejos, pensando cada a real como (a, 0) . Tambiénse denota i = (0, 1) , de modo que (a, b) = (a, 0) + (b, 0) (0, 1) = a + ib, y así no se usa más lanotación de par ordenado. Notar que ii = i2 = −1.
Nota importante 1 el cuerpo C no es ordenado, es decir, no se puede extender a C el orden≤ que uno conoce en R (ni definir en C ningún orden con las propiedades del orden de R), porlo tanto cada ves que se vea un signo ≤, en sus extremos deberán aparecer números reales.
Si z = a + ib, entonces:
Re (z) = a, Im (z) = b (parte real e imaginaria de z)
z = a− ib, el conjugado de z
|z| =√
a2 + b2, el módulo de z (el mismo módulo de Análisis II, o sea |(a, b)|, o sea es unnúmero real que mide distancias).
Notar que zz = |z|2 , en particular si z 6= 0 entonces z−1 = 1z = z
|z|2 .
Otras propiedades básicas son:
Re (z) = 12 (z + z) , Im (z) = 1
2i (z − z)
(z + w) = z + w, zw = z w
|zw| = |z| |w| , |z/w| = |z| / |w| , |z| = |z|
|z + w| ≤ |z|+ |w| (desigualdad triangular)
− |z| ≤ Re (z) ≤ |z| , − |z| ≤ Im (z) ≤ |z| .

Funciones de variable compleja 11
1.2. Representación polar
Esto es darle al plano complejo las coordenadas polares conocidas de Análisis II, es decir(x, y) = (r cos θ, r sin θ) = r (cos θ + i sin θ) , con la notación compleja. Claramente, |z| = r, y θse llama el argumento de z y se denota arg (z) . Si cambio θ por θ + 2kπ, con k un entero,me sigue dando el mismo número complejo, o sea el argumento de un número complejo no estaunivocamente determinado, lo que si es cierto es que para todo número complejo z 6= 0 hay unúnico θ con −π < θ ≤ π tal que z = r (cos θ + i sin θ) , y ese de llama el argumento principalde z.
Para escribir menos, se denota
cos θ + i sin θ = cis (θ) .
Si z1 = r1cis (θ1) y z2 = r2cis (θ2) , usando la regla de la suma del coseno y del seno se veque z1z2 = r1r2cis (θ1 + θ2) , es decir, arg (z1z2) = arg (z1) + arg (z2) (ejercicio: ¿que funciónreal f (x) tiene la propiedad de que f (xy) = f (x) f (y)?). Multiplicando muchos z0s, tenemosz1...zn = r1...rncis (θ1 + ... + θn) , en particular z...z|{z}
n
= zn = rncis (nθ) . Esto es muy útil
para encontrar raíces n-esimas: si n es un natural y a un complejo, una raíz n-esima de a es unnúmero complejo z tal que zn = a. Si z = rcis (θ) y a = |a| cis (α) , igualando las expresionesqueda
zn = rrcis (nθ) = |a| cis (α) , ⇒½
rn = |a|nθ = α + 2kπ, k ∈ Z , ⇒
½r = n
p|a|
θ = αn + 2k
n π, k ∈ Z ,
lo cual significa que tenemos n raíces complejas distintas:
z = np|a|cis
µα
n+
2k
nπ
¶, con k = 0, 1, ..., (n− 1)
(pues cuando k = n estoy de nuevo en la raíz de argumento α/n).
1.3. Topología en C
Esa palabra se refiere a la calificación de los subconjuntos del plano en abiertos, cerrados,conexos, etc, que son cosas estudiadas y usadas en Análisis II, lo único que cambia ligeramentees la notación, porque ahora en lugar de usar pares ordenados (a, b) , usamos a + ib. Para haceruna refrescada de memoria, vamos a hacer una lista de las mas importantes. Con z0 vamos adenotar un número complejo, y con S un subconjunto de C.
Un entorno de z0 es {z ∈ C tq: |z − z0| < ε} , donde ε es un número real positivo (estoes una bola de radio ε alrededor de z0)1
z0 se dice interior de S si hay algún entorno de z0 todo metido en S.
1En R2 en Análisis II poníamos (x, y) tq: (x− x0)2 + (y − y0)
2 < ε

12 Funciones de variable compleja
z0 se dice punto frontera de S si todo entorno de z0 contiene puntos de S y puntos queno están en S (notar que no importa si z0 está en S o no).
z0 es punto de acumulación de S si todo entorno de z0 contiene puntos de S distintosde z0.
La clausúra de S es el conjunto formado por S y todos los puntos frontera de S.
S se dice abierto si todos sus puntos son interiores, y cerrado si contiene todos suspuntos frontera.
S se dice conexo si todo par de puntos en S se pueden unir con una poligonal en S.
S se dice simplemente conexo si toda curva cerrada en S contiene en su interior sólopuntos de S (o si el complemento es conexo).
S se dice acotado si existe algún número M > 0 tal que S ⊆ {z ∈ C tq: |z| ≤M}.
S se dice compacto si es cerrado y acotado.
1.4. Funciones de variable compleja
Asi se llama a las funciones con dominio e imagen en C. De nuevo, como C = R2, tenemosde Análisis II muchas funciones f : D ⊆ R2 → R2, como por ejemplo
f (x, y) =¡x2 − y2, 2xy
¢,
nada mas que ahora vamos a usar la notación compleja. Así, si z = x + iy, la función de arribaqueda
f (z) = f (x, y) = x2 − y2 + i2xy = (x + iy)2 = z2.
Es decir, una función compleja es una regla que asigna a cada número complejo z de un conjuntoD, otro número complejo que se denota f (z) . Notar que dice regla y no fórmula: la
f (z) =
½z si |z| ≤ 1z2 si |z| > 1
es una función. Al conjunto D de arriba se lo llama el dominio de la función, y cuando nose especifica se toma como dominio al mayor conjunto donde la regla tiene sentido. Como todafunción compleja f tiene su imagen en R2, resulta que f tiene dos coordenadas; usualmente sedenota
f (z) = u (z) + iv (z) ,
donde u es la parte real de f y v es la parte imaginaria.

Funciones de variable compleja 13
Ejemplo 2 f (z) = zz+1 , es una función compleja cuyo dominio es C− {±1}. Para encontrar
la parte real e imaginaria de f la escribimos en coordenadas:
f (z) =z
z + 1=
z(z + 1)
(z + 1) (z + 1)=
(x + iy) (x− iy + 1)
(x + iy + 1) (x− iy + 1)=
=x (x + 1) + y2 + iy (x + 1)− xy
(x + 1)2 + y2=
x2 + x + y2 + iy
(x + 1)2 + y2,
o sea
f (x, y) =x2 + x + y2
(x + 1)2 + y2+ i
y
(x + 1)2 + y2.
Todas las nociones de continuidad, derivadas parciales, etc. de Análisis II se pueden aplicaracá, pues si tenemos una función de variable compleja f (z) , entonces tenemos una funciónf (x, y) = (u (x, y) , v (x, y)) , y tiene perfecto sentido hablar de ux, por ejemplo.
Veamos como quedan las nociones de límite y continuidad con esta nueva notación: si f (z)es una función compleja definida en un conjunto abierto D ⊆ C, z0 ∈ D, y w0 ∈ C, entoncesdiremos que
lımz→z0
f (z) = w0 si ∀ ε > 0 ∃ δ > 0 tal que |f (z)− w0| < ε si |z − z0| < δ.
Dicho en criollo, si para cada bolita (de radio ε) centrada en w0 que yo ponga, hay una bolita (deradio δ) centrada en z0 que f “lleva” adentro de la primer bolita. Dicho mas en criollo, cuandola variable z está cerca de z0, la imagen f (z) está cerca de w0. De nuevo, todas las nociones delímite de Análisis II se aplican.
Ejemplo 3 Sea f (x + iy) = x2 sin (y) + i¡x2 − y2
¢e−y, entonces lım
z→1+if (z) = sin (1) .
Definition 4 Si f es una función compleja, diremos que f es continua en z0 si esta definidaen un entorno de z0 y lım
z→z0f (z) = f (z0) . Si f es continua en todos los puntos de un conjunto
D, diremos que f es continua en D (notar que necesariamente D es abierto).
Teorema 5 Sean f, g funciones complejas continuas definidas en D, entonces:
1. f + g, fg, f − g, son continuas en D, y f/g es continua en todos los puntos de D dondeg no se anula.
2. Si h : R ⊆ C→ D es una función continua entonces f(h(z)) es continua en R.
3. Si f = u + iv, entonces f es continua si y solo si u, v : R2 → R son ambas continuas.
4. Si f (z0) 6= 0 para algún z0 ∈ D, entonces existe un entorno B de z0 en D tal que f (z) 6= 0para todo z ∈ B.
5. Si K ⊆ D es un conjunto compacto entonces existe m > 0 tal que |f (z)| ≤ m para todoz ∈ K, esto es, f es acotada en K.
Demostración. para 1 y 2 ver la carpeta de Análisis I, para los demás puntos la de AnálisisII.

14 Funciones de variable compleja
1.5. Funciones analíticas, ecuaciones de Cauchy-Riemann
La novedad en C (con respecto al R2 de Análisis II) es que acá podemos dividir. En Análi-sis II, si teníamos una f (x, y) entonces calculábamos sus derivadas parciales, derivadas direc-cionales, diferenciales, etc., pero nunca derivada porque la expresión
f ((x, y) + (∆x,∆y))− f (x, y)
(∆x,∆y)
no tenia sentido. Acá si:
Definición 6 Sea f (z) una función definida en un abierto D ⊆ C, y z0 ∈ D. La derivada def en z0 es
df
dz(z0) = f 0(z0) = lım
∆z→0
f (z0 +∆z)− f (z0)
∆z,
siempre que tal límite exista. En estas condiciones, diremos que f es derivable en z0. Si f esderivable en todos los puntos de D diremos que f es derivable en D; en tal caso, f 0 es una nuevafunción compleja definida en todo D.
Notar que el límite de la expresión de arriba es un límite del tipo de los de Análisis II, es decir∆z = (∆x,∆y) ∈ R2, y hacemos (∆x,∆y)→ (0, 0) ; lo que es nuevo es que estamos dividiendopor ∆z (y se pide D abierto para poder tomar dicho límite). Otra expresión para la derivada def en z0 es
lımz→z0
f (z)− f (z0)
z − z0,
que se obtiene de la anterior cambiando ∆z por z − z0.
Ejemplo 7 f (z) = z2,
f 0(z) = lım∆z→0
(z +∆z)2 − z2
∆z= lım
∆z→0
z2 + 2z∆z + (∆z)2 − z2
∆z= lım
∆z→0(2z +∆z) = 2z.
Teorema 8 Sean f.g funciones complejas derivables en z0, entonces:
1. f + g es derivable en z0 y (f + g)0 (z0) = f 0(z0) + g0(z0).
2. fg es derivable en z0 y (fg)0 (z0) = f 0(z0)g (z0) + f (z0) g0(z0).
3. Si g(z0) 6= 0 entonces f/g es derivable en z0 y (f/g)0 (z0) = f 0(z0)g(z0)−f(z0)g0(z0)g(z0)2
.
4. Si h es una función compleja derivable en f (z0) entonces (h ◦ f) es derivable en z0 y(h ◦ f)0 (z0) = h0(f (z0))f
0(z0).
5. La derivada de las funciones constantes es cero.
6. La derivada de zn es nzn−1, con n ∈N.

Funciones de variable compleja 15
Demostración. ejercicio, ver la carpeta de Análisis I y copiar, todas las demostraciones hechasahí deberían funcionar por tener C las mismas propiedades de cuerpo que R.
Teorema 9 Si f es derivable en z0 entonces es continua en z0.
Demostración. Que f sea continua es que lımz→z0
f (z) = f (z0) , que se lo mismo que
lımz→z0
(f (z)− f (z0)) = 0
Pero
lımz→z0
(f (z)− f (z0)) = lımz→z0
∙f (z)− f (z0)
z − z0(z − z0)
¸= f 0(z0)0 = 0, listo.
No todas las funciones continuas son derivables, por ejemplo la función f (z) = z es continuaen todo C y no es derivable en ningún punto.
Teorema 10 (Regla de L’Hospital) Si f, g son funciones derivables en z0, f (z0) = g (z0) =0, y g0 (z0) 6= 0, entonces
lımz→z0
f (z)
g (z)= lım
z→z0
f 0 (z)
g0 (z).
Demostración. mas adelante, cuando veamos series de Taylor.
El hecho de que una función compleja sea derivable es muy fuerte, es decir, le estamospidiendo a la función que cumpla algo medio dificil de cumplir porque el límite de la definiciónde derivada debe existir (como todo límite) haciendo ∆z → 0 por todos los caminos, vamos ausar esto para encontrar condiciones para que una función sea derivable.
Para esto, tomamos una función f = u + iv que sea derivable en z = x + iy, entonces
f 0(z) = lım∆z→0
f (z +∆z)− f (z)
∆z= lım
∆x→0∆y→0
f ((x, y) + (∆x,∆y))− f (x, y)
∆x + i∆y=
= lım∆x→0∆y→0
u (x +∆x, y +∆y)− u (x, y) + i [v (x +∆x, y +∆y)− v (x, y)]
∆x + i∆y.
Ahora, haciendo ∆z real, o sea haciendo ∆y = 0 (o sea haciendo que ∆z tienda a cero por eleje x del plano), queda
f 0(z) = lım∆x→0
u (x +∆x, y)− u (x, y) + i [v (x +∆x, y)− v (x, y)]
∆x=
= lım∆x→0
∙u (x +∆x, y)− u (x, y)
∆x+ i
v (x +∆x, y)− v (x, y)
∆x
¸=
= ux (x, y) + ivx (x, y) .

16 Funciones de variable compleja
Por otro lado, haciendo ∆z imaginario puro (o sea ∆x = 0) queda
f 0(z) = lım∆y→0
u (x, y +∆y)− u (x, y) + i [v (x, y +∆y)− v (x, y)]
i∆y=
= lım∆x→0
∙u (x, y +∆y)− u (x, y)
i∆x+ i
v (x, y +∆y)− v (x, y)
i∆y
¸=
=1
iuy (x, y) + vy (x, y) = vy (x, y)− iuy (x, y) .
Es decir, hemos obtenido dos expresiones para f 0(z), que obviamente deben ser iguales. estolleva a concluir que
ux (x, y) + ivx (x, y) = vy (x, y)− iuy (x, y)
o lo que es lo mismo,
ux = vy
uy = −vx
Estas son ecuaciones muy famosas e importantes, y se llamas las ecuaciones de Cauchy-Riemann (C-R para nosotros, de ahora en más). Con las cuentas de arriba hemos probado elsiguiente teorema:
Teorema 11 Si la función f = u+iv es derivable en z, entonces u y v cumplen las ecuacionesde C-R en z.
Haber obtenido semejante condición con solo usar dos caminos diferentes para hacer ∆z → 0hace pensar que usando mas caminos vamos a obtener condiciones adicionales que una funcióndebe cumplir si es derivable, pero no pasa eso, las ecuaciones de C-R son también condiciónsuficiente:
Teorema 12 Si u (x, y) , v (x, y) son funciones con derivadas parciales continuas que satis-facen las ecuaciones de C-R en un conjunto abierto D, entonces la función compleja f = u + ives derivable en D.
Demostración. Sea (x, y) un punto fijo en D y (∆x,∆y) chico pero no nulo de modo que(x +∆x, y +∆y) esté en D. Por el teorema del valor medio de Análisis II (o por el teorema deTaylor) sabemos que existen puntos P1, P2 en el segmento que va de (x, y) a (x +∆x, y +∆y)tal que
u (x +∆x, y +∆y)− u (x, y) = ∇u (P1) · (∆x,∆y) = ux (P1)∆x + uy (P1)∆y
v (x +∆x, y +∆y)− v (x, y) = ∇v (P2) · (∆x,∆y) = vx (P2)∆x + vy (P2)∆y
Poniendo ∆z = ∆x + i∆y, ∆f = f (z +∆z)− f (z), y usando las ecuaciones de arriba queda
∆f = ux (P1)∆x + uy (P1)∆y + i [vx (P2)∆x + vy (P2)∆y] .

Funciones de variable compleja 17
Usando C-R, podemos reemplazar uy por −vx y vy por ux, y queda
∆f = ux (P1)∆x− vx (P1)∆y + i [vx (P2)∆x + ux (P2)∆y] =
= ux (P1)∆x + iux (P2)∆y − vx (P1)∆y + ivx (P2)∆x =
= ux (P1)∆x + iux (P2)∆y + i [vx (P2)∆x + ivx (P1)∆y] .
Usando que ∆z = ∆x + i∆y, la expresión de arriba queda igual a
∆f = ux (P1)∆z + i∆y{ux (P2)− ux (P1)}+
+i [vx (P1)∆z +∆x {vx (P2)− vx (P1)}] ,
y dividiendo esto por ∆z queda
f (z +∆z)− f (z)
∆z= ux (P1) + i
∆y
∆z{ux (P2)− ux (P1)}+ i
∙vx (P1) +
∆x
∆z{vx (P2)− vx (P1)}
¸.
Ahora hacemos ∆z → 0, y usando la continuidad de las derivadas parciales, que¯i∆y∆z
¯≤ 1,¯
∆x∆z
¯≤ 1, y la definición de P1 y P2, se ve que el miembro de la derecha tiende a ux (x, y) +
ivx (x, y) , es decir, f es derivable en (x, y) y
f 0(x) = ux (x, y) + ivx (x, y) .
Ejemplo 13 1. f (z) = f (x + iy) = ex cos y + iex sin y = u (x, y) + iv (x, y) es una funcióncompleja definida en todo el plano complejo, las funciones coordenadas tienen derivadasparciales continuas en todo el plano, y
ux (x, y) = ex cos y, vy (x, y) = ex cos y,
uy (x, y) = −ex sin y, vx (x, y) = ex sin y,
es decir se cumplen las ecuaciones de C-R, o sea f es una función derivable en todo elplano.
2. f (z) = f (x + iy) = x + ia, con a un número real fijo, no es derivable en ningún punto,ejercicio.
Hemos llegado a un punto muy interesante de la materia, donde vamos a formular la definiciónmas importante y que nos va a acompañar por el resto del cuatrimestre:
Definición 14 Si f (z) es una función compleja derivable en un conjunto abierto D diremosque f es analítica en D (o sea las funciones son analíticas en conjuntos abiertos). La expresión“f es analítica en z0” significará que f está definida y es derivable en todo un entorno de z0.
En variable compleja no nos interesan las funciones que sean derivables en un punto, sino lasque son derivables en conjuntos abiertos. Un poco mas adelante veremos que si f es derivable enD entonces f 0 también es derivable en D, etc, es decir, una función compleja que tiene derivadatiene necesariamente derivadas de todos los ordenes, y entonces sus funciones coordenadas tienenderivadas parciales continuas. Esto nos permite unir los dos teoremas anteriores en el siguiente:

18 Funciones de variable compleja
Teorema 15 Si u (x, y), v (x, y) son funciones reales con primeras derivadas parciales con-tinuas en un abierto D, entonces las ecuaciones de Cauchy-Riemann
∂u
∂x=
∂v
∂yy
∂u
∂y= −∂v
∂x
son condición necesaria y suficiente para que la función compleja f = u+ iv sea analítica en D.Además bajo esas condiciones vale que
f 0 =∂u
∂x+ i
∂v
∂x=
∂v
∂y− i
∂u
∂y.
1. f (z) = z2 es analítica en todo C.
2. f (z) = ex (cos y + i sin y) es analítica en todo C.
3. f (z) = 1z es analítica en C− {0} .
4. f (z) = z no es analítica en ningún abierto de C.
Definición 16 una función ϕ : D ⊆ R2 → R definida y con derivadas parciales continuas enun abierto D se dice armónica si satisface la ecuación de Laplace
∂2ϕ
∂x2+
∂2ϕ
∂2y= 0.
Si f = u + iv es analítica en D, ya anticipamos arriba que f tiene derivadas de todos losordenes, entonces las funciones coordenadas tienen derivadas parciales continuas de todos losordenes. Con esto, podemos seguir derivando las ecuaciones de C-R para obtener:
Teorema 17 Las partes real e imaginaria de un función analítica son armónicas.
Demostración. Si f = u + iv es analítica, entonces
ux = vy
uy = −vx
Derivando la 1er ecuación respecto de x y la segunda respecto de y, obtenemos
uxx = vxy
uyy = −vyx
Pero como las derivadas parciales segundas son continuas, entonces vxy = vyx, y entonces uxx =−uyy. De manera análoga se ve que v es armónica.
Una pregunta que uno se hace inmediatamente es: si u y v son funciones armónicas, ¿esf = u+ iv analítica?. La respuesta de esta es bien fácil, y es no, por ejemplo tomar u (x, y) = x,

Funciones de variable compleja 19
v (x, y) = 3. La segunda pregunta es: si tengo una función u (x, y) armónica en un abierto D,¿existe alguna función armónica v en D tal que la función f = u + iv sea analítica en D?.En algunos casos no (por ejemplo u (x, y) = ln
³px2 + y2
´en C− {0} , como veremos mas
adelante), pero en otros casos si. Cuando tal v existe se llama una armónica conjugada deu. Notar que no hay una única armónica conjugada: si v es armónica conjugada de u entoncesv + c también lo es, donde c es un número complejo cualquiera. Para demostrar la existencia dearmónicas conjugadas en algunos casos, necesitamos la siguiente regla:
Teorema 18 (Regla de Leibnitz) si φ : [a, b]× [c, d]→ R2 es una función continua con φxcontinua, y
g (x) =
Z d
cφ (x, y) dy,
entonces g es derivable y
g0 (x) =
Z d
cφx (x, y) dy.
Idea de la Demostración.
g0(x) = lımh→0
g (x + h)− g (x)
h= lım
h→0
R dc φ (x + h, y) dy −
R dc φ (x, y) dy
h=
= lımh→0
R dc [φ (x + h, y)− φ (x, y)] dy
h= lım
h→0
Z d
c
[φ (x + h, y)− φ (x, y)]
hdy,
lo único que me hace falta saber es que puedo meter el lım dentro de la integral, y por eso estoes una “idea de la demo” en lugar de una demo. Pero se puede, y metiendo el límite dentro dela integral queda
g0(x) =
Z d
clımh→0
[φ (x + h, y)− φ (x, y)]
hdy =
Z d
cφx (x, y) dy, listo.
Con eso podemos demostrar el siguiente:
Teorema 19 Sea D = C ó D = bola centrada en (0, 0), y u una función armónica en D,entonces u tiene una armónica conjugada en D.
Demostración. Proponemos como v a la función
v (x, y) =
Z y
0ux (x, t) dt + ϕ (x) ,
donde ϕ es una función real de variable real desconocida, que vamos a elegir para que u y vcumplan las ecuaciones de C-R. Calculamos vx usando la regla de Leibnitz, y usamos que u esarmónica:
vx (x, y) =
Z y
0uxx (x, t) dt + ϕ0 (x) =
Z y
0−uyy (x, t) dt + ϕ0 (x) =
= −uy (x, t) |t=yt=0 + ϕ0 (x) = −uy (x, y) + uy (x, 0) + ϕ0 (x) ,

20 Funciones de variable compleja
como queremos vx = −uy, elegimos ϕ0 (x) = −uy (x, 0) , es decir,
ϕ (x) = −Z x
0uy (t, 0) dt,
y es fácil verificar que la función
v (x, y) =
Z y
0ux (x, t) dt−
Z x
0uy (t, 0) dt
satisface vy = ux, o sea listo.
1.6. Ecuaciones de Cauchy-Riemann en coordenadas polares
Muchas funciones complejas quedan mas lindas cuando se expresa la variable en coordenadaspolares. Por ejemplo, vimos que todo número complejo z = rcis (θ) tiene n raíces n-esimas. Sifijamos el argumento principal, entonces una de esas raíces es la función
f (z) = n√rcis
µθ
n
¶,
pero no sabemos si es analítica o no. Para contestar este tipo de preguntas vamos a ver comoquedan las ecuaciones de C-R expresadas en coordenadas polares. Si f (x + iy) = u (x, y) +iv (x, y) es analítica, x = r cos θ, y = r sin θ, entonces por la regla de la cadena de Análisis IItenemos
ur = uxxr + uyyr = ux cos θ + uy sin θ
uθ = uxxθ + uyyθ = −uxr sin θ + uyr cos θ.
Análogamente, y usando C-R obtenemos
vr = vx cos θ + vy sin θ = −uy cos θ + ux sin θ
vθ = −vxr sin θ + vyr cos θ = uyr sin θ + uxr cos θ.
Comparando estas ecuaciones con las de arriba obtenemos
ur =1
rvθ
1
ruθ = −vr
que son las ecuaciones de Cauchy-Riemann en coordenadas polares. ¿Donde valen lascuentas hechas? Necesitamos que la transformación de coordenadas T (r, θ) = (r cos θ, r sin θ) seacontinuamente diferenciable e invertible, lo cual se logra tomando 0 < r < ∞ y θ en cualquierintervalo abierto de amplitud menor o igual a 2π. En el fondo lo que estamos haciendo eslo siguiente: si fp es nuestra función en coordenadas polares, entonces fp (r, θ) = f (T (r, θ)) .Diferenciando y aplicando la regla de la cadena se obtiene
dfp (r, θ) = df (x, y) dT (r, θ) ,

Funciones de variable compleja 21
o sea µur uθvr vθ
¶=
µux uyvx vy
¶µcos θ −r sin θsin θ r cos θ
¶,
y lo que hicimos fue despejar ur, uθ, vr, vθ. Análogamente (invirtiendo la matriz de dT ) se veque si fp cumple las ecuaciones de C-R en coordenadas polares entonces ux, uy, vx, vy (existen,son continuas y ) cumplen las ecuaciones de C-R “usuales”. Todo lo hecho nos permite expresarcierto teorema anterior en coordenadas polares:
Teorema 20 Sean u (r, θ) , v (r, θ) son funciones reales con ur, uθ, vr, vθ definidas y continuasen un entorno de z0 = r0cis (θ0) , con r0 > 0. Entonces las ecuaciones de C-R en coordenadaspolares
ur =1
rvθ y
1
ruθ = −vr
(evaluadas en z0) son condición necesaria y suficiente para que la función compleja f (z) =f (rcis (θ)) = u (r, θ) + iv (r, θ) sea derivable en z0.
Nota importante 21 hay que tener mucho cuidado con el teorema anterior. Por ejemplo,si fijamos el argumento principal, y definimos f (rcis (θ)) = ln (r) + iθ = u (r, θ) + iv (r, θ) ,entonces la función v NO es continua en ningún punto de la forma rcis (π) (π es un argumentopermitido cuando trabajamos con el argumento principal), pues como v debe asignar el argumentoprincipal a cada número complejo, al movernos ligeramente hacia abajo desde un punto de laforma rcis (π), los valores de v “saltan” violentamente de π a −π. Si es cierto que la funciónde arriba satisface las hipótesis del teorema anterior en todo punto de C− {x ∈ R tq: x ≤ 0} (esdecir si 0 < r <∞, −π < θ < π), y entonces es analítica en dicho conjunto (ejercicio).
Ejemplo 22 consideremos la función f (z) = n√rcis¡θn
¢, de la cual estuvimos hablando al
comienzo de esta sección (estamos con el argumento principal). Expresada como suma de partereal e imaginaria queda
f (z) = n√r cos
µθ
n
¶+ i n√
r sin
µθ
n
¶= u (r, θ) + iv (r, θ) .
Las derivadas parciales son
ur =1
nr1n−1 cos
µθ
n
¶=
1
n
1
rr1n cos
µθ
n
¶uθ = −r
1n sin
µθ
n
¶1
n
vr =1
nr1n−1 sin
µθ
n
¶=
1
n
1
rr1n sin
µθ
n
¶vθ = r
1n cos
µθ
n
¶1
n
que claramente son continuas y satisfacen las ecuaciones de C-R en coordenadas polares enC− {x ∈ R tq: x ≤ 0} , es decir nuestra función es analítica en dicho conjunto (todavía no sabe-mos cual es su derivada).

22 Funciones de variable compleja
1.7. La función exponencial
Una de las virtudes de las pocas funciones analíticas que conocemos es que siguen teniendomuchas propiedades que tienen sus equivalentes reales. Por ejemplo, la función
f (z) = z2
extiende a la función real f (x) = x2 (extiende en el sentido de que si en la de arriba ponemosun complejo z con parte imaginaria nula nos da lo mismo que en la de abajo), es derivable, ysu derivada es la función f 0(z) = 2z (igual que su contraparte real). Queremos definir ahora lafunción exponenecial ez de la misma manera, o sea de modo que extienda la concida ex y tengasus propiedades. Especificamente, queremos que
(a) ez sea analítica y que su derivada sea ella misma, o sea dez
dz = ez.
(b) ez debe ser exactamente ex cuando Im (z) = 0.
Pongamos ez = u + iv, y tratemos de encontrar u y v. De cierto teorema anterior sabemosque
dez
dz= ux + ivx,
asi que para satisfacer (a) debemos tener ux + ivx = u + iv, o sea
ux = u, (1.1)
yvx = v (1.2)
La ecuación (1) implica que u (x, y) = φ (y) ex (resolviendo para cada y fijo), donde φ tienederivada de todos los ordenes (esto pues queremos ez analítica y ya hemos anticipado que lasfunciones analiticas tienen infinitas derivadas). Usando (2) y que u y v deben satisfacer C-R,concluimos que
uy (x, y) = −v (x, y) , (1.3)
y derivando respecto de y obtenemos
uyy (x, y) = −vy (x, y)
C-R↓= −ux (x, y)
por (1)↓= −u (x, y) = −φ (y) ex.
Pero por otro lado, uyy (x, y) = φ00 (y) ex, o sea
φ (y) ex + φ00 (y) ex = 0, ⇒ φ (y) + φ00 (y) = 0,
o sea (resolviendo la ecuación diferencial)
φ (y) = A cos y + B sin y,
y entonces usando (3) tenemos que
u (x, y) = ex (A cos y + B sin y) , v (x, y) = ex (A sin y −B cos y) ,

Funciones de variable compleja 23
o seaez = ex (A cos y + B sin y) + iex (A sin y −B cos y) .
Por último, haciendo y = 0, y usando la condición (b) llegamos a
ex = ex (A− iB) , ⇒ (A− iB) = 1, ⇒ A = 1, B = 0,
o sea,ez = ex (cos y + i sin y) = excis (y) (!!) .
Definición 23 para todo número complejo z = x + iy, se define la exponencial compleja como
ez = excis (y) = eRe(z)cis (Im (z)) .
Queda como ejercicio verificar que esta función, asi definida, cumple las condiciones (a) y (b)(Notar que no sabemos eso, que supusimos que cumpliar eso para ver como debia ser).
La función exponencial tiene las siguientes propiedades:
1. |ez| = |excis (y)| = ex = eRe(z); esto implica que ez 6= 0 para todo z ∈ C.
2. arg (ez) = arg (excis (y)) = y = Im(z) .
3. ez es periódica de período 2πi: ez+2πi = ex+iy+2πi = excis (y + 2π) = excis (y) = ez.
4. Como eiθ = cis (θ) , todo número complejo z = rcis (θ) es z = reiθ, y esa es la notaciónque vamos a usar de ahora en más.
5. ez+w = e(x+iy)+(a+ib) = e(x+a)+i(y+b) = e(x+a)ei(y+b) = exeaeiyeib = ezew.
1.8. Función logaritmo
Ahora que tenemos ez queremos una función que invierta su acción, o sea que si
z = ew, (1.4)
el logaritmo de z debería ser w (eso equivale a “despejar” la w de la ecuación (4)). Notar quenecesariamente z debe ser distinto de cero.
Pongamos w = x + iy y z = reiθ, y busquemos w: la ecuación (4) queda
reiθ = ex+iy = exeiy,
y este último es un número complejo expresado en coordenadas polares. Igualando el módulo yel argumento queda
r = ex y θ = y + 2kπ, con k ∈ Z,

24 Funciones de variable compleja
y entonces
x = ln (r) = ln |z| y y = θ + 2kπ = arg (z) , con k ∈ Z,
o seaw = ln |z|+ i arg (z)
(con arg (z) estamos denotando todos los argumentos de z). Es decir, hay infinitos w quecumplen la ecuación (4), o sea todo número complejo no nulo tiene infinitos logaritmos. Sifijamos un argumento, o sea si fijamos una banda de ancho 2π, todo complejo no nulo tieneun único logaritmo cuya parte imaginaria está en esa banda. Cuando el argumento fijado es elprincipal, la función que se obtiene se denota log (z) = ln |z|+iθ (z) y se llama la rama principaldel logaritmo (θ (z) acá esta denotando el argumento principal de z). Otra función logaritmoL (z) se obtiene fijando el argumento en el intervalo [0, 2π), y es una función definitivamentedistinta de log pues log (−2i) = ln (2) − i12π y L (−2i) = ln (2) + i32π, y ambas son funcioneslogaritmo en el sentido de que elog(−2i) = eL(−2i) = −2i.
Definición 24 Sea D ⊆ C un conjunto abierto y f : D → C una función continua tal queef(z) = z ∀ z ∈ D, entonces f se llama una rama del logaritmo en D (notar que necesaria-mente 0 /∈ D).
La rama principal del logaritmo es una rama del logaritmo en C− {x ∈ R tq: x ≤ 0}pues es continua en tal conjunto (ejercicio) y elog(z) = z para todo z en ese conjunto. Lo que nosabemos es si es analítica, eso lo contesta el siguiente teorema:
Teorema 25 las ramas del logaritmo son analíticas, mas aún, si f : D→ C es una rama dellogaritmo, entonces f 0(z) = 1
z para todo z en D.
Demostración. tomamos z0 fijo en D y ∆z 6= 0 chico de modo que z0 +∆z esté incluido en D(se puede porque D es abierto). Como
ef(z0+∆z) = z0 +∆z y ef(z0) = z0,
tenemos que f (z0 +∆z) 6= f (z0) (¿por que?), y entonces se puede dividir por f (z0 +∆z) −f (z0) . Entonces
1 =z0 +∆z − z0
∆z=
ef(z0+∆z) − ef(z0)
∆z=
ef(z0+∆z) − ef(z0)
f (z0 +∆z)− f (z0)
f (z0 +∆z)− f (z0)
∆z. (1.5)
Como f es continua,lım∆z→0
f (z0 +∆z) = f (z0) ,
y entonces
lım∆z→0
ef(z0+∆z) − ef(z0)
f (z0 +∆z)− f (z0)= lım
w→f(z0)
ew − ef(z0)
w − f (z0)=
dez
dz
¯f(z0)
= ef(z0) = z0.

Funciones de variable compleja 25
Como además lım∆z→0
1 = 1, tenemos que dos de los factores de (5) tiene límite y tal límite es no
nulo (recordar que dijimos que 0 /∈ D), por lo tanto tomando lım∆z→0 en (5) queda
1 = z0 lım∆z→0
f (z0 +∆z)− f (z0)
∆z= z0f
0(z0),
es decir f 0(z0) = 1/z0, listo.
Ejercicio 26 verificar que la rama principal del logaritmo es analítica en C− {x ∈ R tq: x ≤ 0}usando las ecuaciones de C-R en coordenadas polares.
1.9. Potencia general
Ahora que tenemos exponencial y ramas del logaritmo, podemos definir potencias complejasen general. Si z 6= 0 y c es un número complejo, definimos
zc = ecLn(z),
donde Ln es alguna rama del logaritmo en algún abierto D. O sea que en general parece que vaa haber muchas zc (como por ejemplo había muchas raíces n-esimas). Cuando tomamos la ramaprincipal del logaritmo, nos queda la función f (z) = ec log(z), que se llama la rama principalde zc.
Esta nueva definición nos trae algunos problemas, por ejemplo nosotros ya teníamos definidozn cuando n era un número natural, y había un solo zn, veamos que pasa con esta nuevadefinición: pongamos z = reiθ con θ el argumento principal, entonces
znnueva def
↓= enLn(z) = en(ln(r)+i arg(z)) = en(ln(r)+iθ+i2kπ) = en ln(r)einθ
1z }| {ei2nkπ = rneinθ
vieja def↓= zn,
es decir, por mas que usemos cualquier rama del logaritmo siempre nos da nuestro viejo zn (alo largo del razonamiento anterior y de los siguientes, k denotará un entero que depende de larama del logaritmo que tomemos).
Una situación análoga se da cuando c = −n con n ∈ N: la misma cuenta de arriba muestraque
z−n = r−ne−inθ
cualquiera sea la rama del logaritmo que usemos. Como zn = rneiθ se tiene que znz−n =rneiθr−ne−inθ = 1, es decir que z−n debe ser el único inverso multiplicativo de zn, es decirz−n = 1/zn (ojo, no teníamos definido de ninguna manera la cantidad z−n).
Por último, veamos que pasa cuando c = 1n con n ∈ N: nos gustaría que z1/n sea una raíz
n-esima de z, o sea en este caso la nueva definición debería darnos n valores distintos. La cuentade arriba con 1/n en lugar de n es
z1/nnueva def
↓= e
1nLn(z) = e
1n(ln(r)+i arg(z)) = e
1n(ln(r)+iθ+i2kπ) = eln(r)/nei(θ+2kπ)/n = n√rcis
µθ + 2kπ
n
¶,
es decir, nos da las n raíces n-esimas de z.

26 Funciones de variable compleja
Todavía no hemos dicho nada sobre la derivabilidad de las ramas de zc (en realidad yahabíamos visto que las funciones “raíces n-esimas” son analíticas con C-R en polares): sea Lnuna rama del logaritmo en D, entonces sabemos que dLn
dz (z) = 1z , así que usando la regla de la
cadena tenemos
d
dz
³ecLn(z)
´= ecLn(z)
c
z= ecLn(z)cz−1 = ecLn(z)ce−Ln(z) = ce(c−1)Ln(z)
pues vimos que para calcular z−1 se puede usar cualquier rama del logaritmo. Entonces quedoque si tenemos una rama de zc, su derivada es czc−1, donde la potencia zc−1 es la misma ramade la potencia de zc.
1.10. Funciones trigonometricas e hiperbólicas
Tomemos y un número real. A partir de las expreciones
eiy = cos (y) + i sin (y) ,
e−iy = cos (−y) + i sin (−y) = cos (y)− i sin (y) ,
se despeja
cos (y) =eiy + e−iy
2, y
sin (y) =eiy − e−iy
2i.
Teniendo en cuenta que las expresiones de la derecha tienen sentido si cambio y por un númerocomplejo z, y las ganas de extender funciones que tenemos, vamos a definir
cos (z) =eiz + e−iz
2, y sin (z) =
eiz − e−iz
2∀ z ∈ C.
La cuenta hecha arriba muestra que estas definiciones extienden nuestras viejas y conocidasfunciones trigonométricas reales. Tambien definimos
tan (z) =sin (z)
cos (z), sec (z) =
1
cos (z)
donde cos (z) no se anule, y
cosh (z) =ez + e−z
2, sinh (z) =
ez − e−z
s.
Todas estas funciones complejas extienden a sus contrapartes reales conocidas (extiene enel sentido de que si pongo un complejo z con parte imaginaria nula en las expreciones, el resul-tado es el mismo que se obtiene al usar las funciones de variable real). Tenemos las siguientespropiedades:

Funciones de variable compleja 27
1. Como ez es analítica en todo C, sin, cos, sinh, y cosh tambien lo son, y tan y sec sonanalíticas donde cos (z) 6= 0. Encontremos esos puntos: cos (z) = 0 ⇐⇒ eiz + e−iz =0⇐⇒ eiz = −e−iz, multiplicando ambos lados de esta última igualdad por eiz obtenemoscos (z) = 0⇐⇒ e2iz = −1. Si z = x + iy, esto es
−1 = e2i(x+iy) = e−2yei2x.
Como |−1| = 1 y arg (−1) = π + 2kπ, de la igualdad de arriba se deduce que
2y = 0 y 2x = π + 2kπ,
o sea
y = 0 y x =π
2+ kπ,
es decir que los ceros de cos son los puntos de la forma z = π2 + kπ + 0i, donde k es un
número entero, es decir que los ceros de la función compleja cos (z) son los mismos númerosreales que anulan la función real coseno.
2. cos0 (z) = − sin (z) y sin0(z) = cos (z) , estas dos fórmulas se obtienen sencillamentederivando la definición (ejercicio).
3. cos (z) es una función par (cos (z) = cos (−z) ∀ z) y sin (z) es impar, y ambas son periódicasde período 2π (ejercicio).
4. Valen las fórmulas de la suma para el seno y el coseno:
cos (z + w) = cos (z) cos (w)− sin (z) sin (w) ,
sin (z + w) = cos (z) sin (w) + cos (w) sin (z) ,
se ve facilmente usando la definición (ejercicio).
5. sin2 (z) + cos2 (z) = 1 ∀ z ∈ C, pero sin (z) y cos (z) NO son funciones acotadas en C, esdecir, no existe ningún número M tal que |cos (z)| ≤M : ∀ z ∈ C y lo mismo con sin (z),pues por ejemplo si y es un número real entonces
cos (iy) =eiiy + e−iiy
2=
e−y + ey
2= cosh (y) −→
y→∞∞.
1.11. Comentario argumental
A esta altura de la materia, todos han agarrado un libro de variable compleja y han vistola expresión “si z = x + iy entonces arg (z) = arctan (y/x) , pero nadie explica que es arctan,así que pongámonos de acuerdo: la tangente de un ángulo θ con -π/2 < θ < π/2 se definecomo tan (θ) = y
x (ver dibujo), resultando tan (θ) > 0 si (x, y) esta en el primer cuadrante, y

28 Funciones de variable compleja
tan (θ) < 0 si está en el cuarto cuadrante.
z
0
y
xθ
0 x
θ
zy π
12
π−12
Después se extiende a todo R por periodicidad, o sea como una función periódica de períodoπ. Por lo tanto, si (x, y) esta en el segundo cuadrante (o sea si x < 0, y > 0), o sea si π/2 < θ < π,tan (θ) = tan (θ − π) = y/x (!), y símil para el tercer cuadrante, resultando tan (θ) = y/x paratodo θ donde esta definida, o sea para todo x = 0 (todo esto se podría hacer con mas cuidadodiciendo que tan esta definida si x > 0, y luego hacer el cambio de cuadrante de forma de quex quede positivo, pero no es el punto).
x
y
−y
π−12
0 π12
π π32
2π π52
π−π−32−xθ−π
θ
Entonces, el problema no esta en el y/x que aparece en todas las explicaciones dibujadoinvariablemente en el primer cuadrante, sino en lo ambiguo de la expresión arctan (¿es unainversa de tan?, ¿es la inversa de la rama central de tan?), que cambia según donde este el punto(x, y) y según que argumento estemos usando. Por ejemplo, si (x, y) está en el segundo cuadrantey estamos usando el argumento principal entonces arctan será una inversa de tan en el intervalo(0, π) (y entonces nuestra calculadora no nos servirá para calcular el argumento de z = x + iy).
0
π

Capítulo 2
Mapeos en C
En este capítulo vamos a pensar a las funciones de variable compleja como transformacioneso mapeos de C en C, y vamos a estudiar sus propiedades de esta manera.
2.1. El plano complejo extendido
Cuando trabajamos con números reales, usamos el símbolo ∞ para indicar un objeto (noun número) que es mas grande que cualquier número real, y análogamente el símbolo −∞para indicar un objeto que es mas chico que cualquier número. Así, la expresión lımx→∞ f (x)significa (informalmente) ver como se comporta f cuando x se hace mas y mas grande, laexpresión lımx→a f (x) = −∞ significa que f (x) se hace mas chico que cualquier número realcuando x se acerca a a, etc, y uno podía imaginarse a ∞ al fondo a la derecha de la recta real,y −∞ al fondo a la izquierda. El problema en C es que tenemos muchas direcciones a partirdel origen (no dos como en R), por lo cual no tiene sentido hablar de ∞ o −∞, pero aún asínecesitamos algún objeto para estudiar “agrandamientos”. Por ejemplo, si z = reiθ entonces1/z = z−1 = 1
re−iθ, entonces uno ve que cuando z → 0 (esto es, cuando r → 0 variando θ de
cualquier manera) 1/z se aleja del origen (tiene módulo 1/r) pero en cualquier dirección. Lasolución de este problema es dictatorial, y consiste en poner un solo objeto que llamaremos ∞,y que servirá para medir alejamientos ilimitados desde el origen. Al agregarle al plano C estenuevo objeto obtenemos lo que se llama el plano complejo extendido que se denota a vecespor C∞. Valen, por definición, las siguientes reglas algebraicas: para todo z ∈ C,
z +∞ =∞+ z =∞.
z/∞ = 0 (notar que aquí z no es ∞ pues z ∈ C).
z ·∞ =∞ · z =∞, si z 6= 0.
29

30 Mapeos en C
z/0 =∞, si z 6= 0.
No tienen sentido expresiones del tipo ∞+∞ (mucho menos ∞−∞), ni ∞/∞.
La forma de visualizar a ∞ es con la famosa esfera de Riemann, con las proyeccionesestereográficas: pensemos a C ⊆ R3 como el plano (x, y) , y dibujemos la esfera de radio 1centrada en el origen. Si trazamos una recta entre el punto N = (1, 0, 0) (en R3) y un punto zdel plano, entonces esa recta corta la esfera en exactamente un punto. Asociando ese punto dela esfera a z, tenemos una correspondencia 1 a 1 entre cada punto del plano y cada punto de laesfera sin N. Notar que al círculo de radio 1 centrado en 0 en C le toca el ecuador de la esfera,a un círculo de radio grande centrado en 0 en C le toca un trópico del polo norte y a un círculode radio chico centrado en 0 en C le toca un trópico del polo sur.
0
N
z
Además (dibujarlo) a cualquier recta por el origen en C le toca un meridiano. Esta identi-ficación nos permite pensar que N = ∞, pues las cosas lejanas al origen en C están cerca deN en la esfera. Así, los entornos de ∞ serán “círculos” abiertos centrados en N en la esfera, esdecir conjuntos de la forma {z ∈ C : |z| > M} vistos en C, y con esto la expresión
lımz→∞
f (z) =
significará que∀ ε > 0 ∃M > 0 tal que |f (z)− | < ε si |z| > M,
y la expresiónlımz→z0
f (z) =∞
significará que∀M > 0 ∃ δ > 0 tal que |f (z)| > M si |z − z0| < δ
Ejercicio: comparar con las definiciones de límite anteriores y escribir en criollo que significacada una. 2- ver que lımz→z0 f (z) =∞ si y solo si lımz→z0 1/f (z) = 0.
2.2. Representación geométrica de funciones complejas
Puesto que las funciones complejas son f : R2 → R2, para poder hacer su gráfica necesi-taríamos 4 coordenadas y solamente tenemos 3 (pues vivimos en un mundo tridimensional).Por
Mapeos en C 31
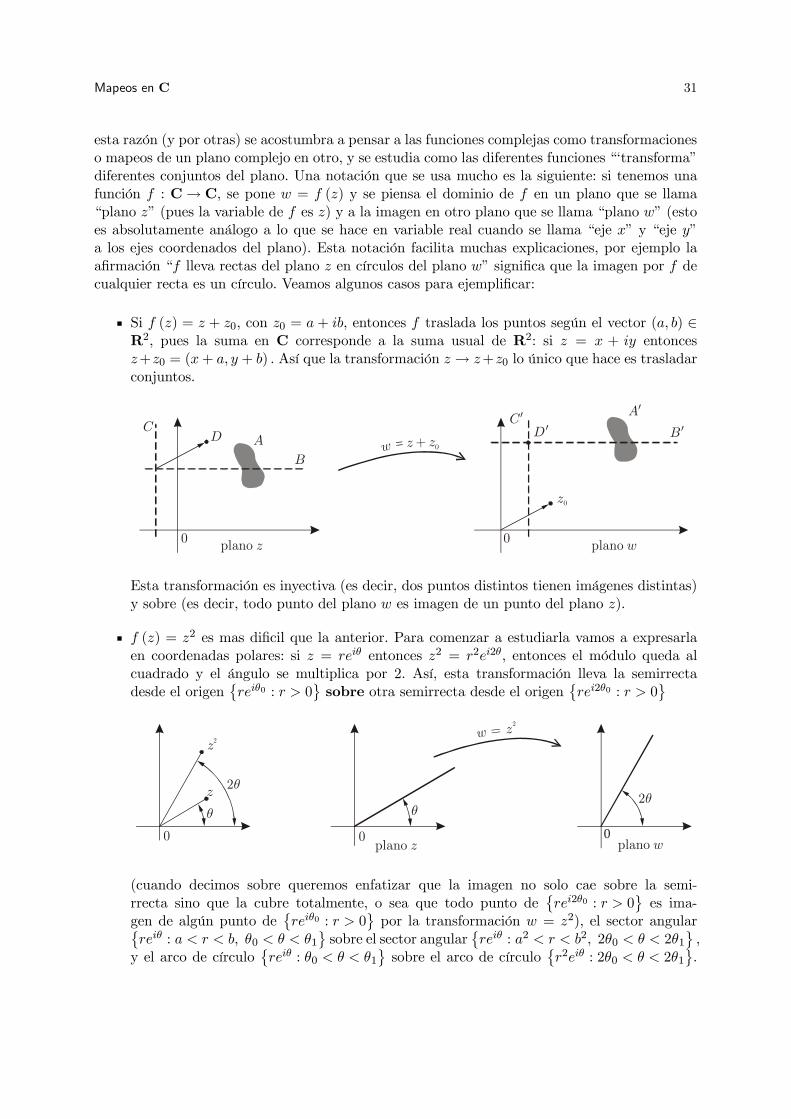
esta razón (y por otras) se acostumbra a pensar a las funciones complejas como transformacioneso mapeos de un plano complejo en otro, y se estudia como las diferentes funciones “‘transforma”diferentes conjuntos del plano. Una notación que se usa mucho es la siguiente: si tenemos unafunción f : C→ C, se pone w = f (z) y se piensa el dominio de f en un plano que se llama“plano z” (pues la variable de f es z) y a la imagen en otro plano que se llama “plano w” (estoes absolutamente análogo a lo que se hace en variable real cuando se llama “eje x” y “eje y”a los ejes coordenados del plano). Esta notación facilita muchas explicaciones, por ejemplo laafirmación “f lleva rectas del plano z en círculos del plano w” significa que la imagen por f decualquier recta es un círculo. Veamos algunos casos para ejemplificar:
Si f (z) = z + z0, con z0 = a + ib, entonces f traslada los puntos según el vector (a, b) ∈R2, pues la suma en C corresponde a la suma usual de R2: si z = x + iy entoncesz+z0 = (x + a, y + b) . Así que la transformación z → z+z0 lo único que hace es trasladarconjuntos.
A
B
C
0 0plano z plano w
w = z + z0D
z0
A0C 0
D 0 B 0
Esta transformación es inyectiva (es decir, dos puntos distintos tienen imágenes distintas)y sobre (es decir, todo punto del plano w es imagen de un punto del plano z).
f (z) = z2 es mas dificil que la anterior. Para comenzar a estudiarla vamos a expresarlaen coordenadas polares: si z = reiθ entonces z2 = r2ei2θ, entonces el módulo queda alcuadrado y el ángulo se multiplica por 2. Así, esta transformación lleva la semirrectadesde el origen
©reiθ0 : r > 0
ªsobre otra semirrecta desde el origen
©rei2θ0 : r > 0
ª
0 0 0plano w
z
θ
z2
2θ
θ2θ
plano z
w = z2
(cuando decimos sobre queremos enfatizar que la imagen no solo cae sobre la semi-rrecta sino que la cubre totalmente, o sea que todo punto de
©rei2θ0 : r > 0
ªes ima-
gen de algún punto de©reiθ0 : r > 0
ªpor la transformación w = z2), el sector angular©
reiθ : a < r < b, θ0 < θ < θ1ª
sobre el sector angular©reiθ : a2 < r < b2, 2θ0 < θ < 2θ1
ª,
y el arco de círculo©reiθ : θ0 < θ < θ1
ªsobre el arco de círculo
©r2eiθ : 2θ0 < θ < 2θ1
ª.

32 Mapeos en C
Notar que en este caso, la transformación no es inyectiva pero si sobre
plano wplano z
rr
2
00
w = z2
θ1
θ2
2θ2
2θ1
Veamos como se transforman rectas paralelas a los ejes coordenados: si z = x + iy en-tonces z2 = x2 − y2 + i2xy, y si c 6= 0 la recta {z = x + iy : x = c} se transforma en©w = u + iv : u = c2 − y2, v = 2cy
ª. Eliminando el parámetro y (que por cierto, toma
todos los valores reales) obtenemos u = c2 − v2
4c2, o sea que la imagen es una hipérbo-
la con las ramas hacia el eje u negativo y que corta el eje u en el punto c2 (la formade ver que la imagen es toda la hipérbola es mover el parámetro y en la imagen y asíver que v toma todos los valores reales). Análogamente, si k 6= 0, la imagen de la recta{z = x + iy : y = k} es
©w = u + iv : u = x2 − k2, v = 2xk
ª, y eliminando el parámetro x
queda u = v2
4k2 −k2, o sea una hipérbola con las ramas hacia el eje u positivo y que corta eleje u en −k2. Si tomamos dos rectas {z = x + iy : x = cj} , j = 1, 2, y dos rectas verticales{z = x + iy : y = kj} , j = 1, 2, se puede ver que el pequeño rectángulo que encierran semapea sobre la región que encierran las cuatro hipérbolas imagen, por ejemplo, viendo adonde se mapea cada pequeño segmento del cubo.
0
0
w = z2
plano z
plano wc2c1
k2
k1 c2c1k2 k12 2 22
f (z) = eiθ0z, con θ0 ∈ R. Esta transformación rota conjuntos en un ángulo θ0, pues siz = reiθ entonces f (z) = eiθ0reiθ = rei(θ+θ0), es decir no se altera el módulo y se suma un

Mapeos en C 33
ángulo fijo al argumento. Esta transformación es inyectiva y sobre.
0
A
B
C
0
lz
0
e z iθ0
plano wplano z
e z iθ0
θ
θ + θ0
A0C 0
B 0
l
w =
f (z) = r0z, con r0 > 0. Esta transformación “agranda” los conjuntos cuando r > 1 y los“encoge” cuando r < 1, pues si z = reiθ entonces f (z) = rore
iθ, es decir no se modifica elargumento y se multiplica el módulo. Es una transformación inyectiva y sobre.
0
z
caso < 1
0
z
r0 z
r0 caso 1 >r0
r0 z
f (z) = z0z, con z0 ∈ C. Esta transformación es una combinación de las dos anteriores yse estudia de esa manera, descomponiendo z0 = r0e
iθ0 , y entonces rota los conjuntos en unángulo θ0 y los agranda o enconge, dependiendo de como sea r0. Es una transformacióninyectiva y sobre
f (z) = 1/z. Escribiendo z = reiθ se tiene que 1z = 1
re−iθ, es decir, el módulo me queda 1
r yel argumento −θ. Asi, f lleva un círculo de radio R centrado en el origen en un circulo deradio 1/R centrado en el origen, los puntos del 1er cuadrante caen siempre en el 4to (simillos del 2do en el 3ro), los puntos de {z : |z| < 1} en {z : |z| > 1} , etc. Es una transformacióninyectiva pero no sobre, pues ningún número complejo satisface 1
z = 0.
θ
0
z
z
0
0
-
-
1/
1/
-1
1
1
11/z
1/
w = 1/z
plano z
plano w
θ1
θ2r2
r1
r2
r1
θ1
θ2z −θ
plano z

34 Mapeos en C
f (z) =√
z, donde√· denota la rama principal de la raiz cuadrada. Si z = reiθ entonces√
z =√
reiθ/2, es decir, se divide el argumento por 2 y se radica el módulo. El problemacon esta función es que hay que tener un ojo barbaro con el argumento: como tomamosel argumento principal (−π < θ ≤ π), una pequeña región angular que incluya puntosdel eje real negativo será transformada en dos pequeñas regiones, una en el 1er cuadrantee incluyendo un pequeño segmento del eje y, y otra en el 4to cuadrante, que no incluyeningún punto del eje y. Esta transformación no es sobre (trasnforma todo el plano en unsemiplano mas un semieje) y es inyectiva.
θ
θ/2
w =
0
0 0
z
z√
z√
plano z plano w
f (z) = ez. Si z = x+ iy entonces ez = exeiy, entonces ex es el módulo y y el argumento deez (es decir que nos conviene dibujar en coordenadas cartecianas el dominio y en polares laimagen). Asi, la recta {z : Re (z) = c} se transforma sobre
©z : z = eceiy, y ∈ R
ª, es decir,
un círculo de radio ec (pero notar que no es inyectiva, sino que la imagen de cualquiersegmento {z : Re (z) = c, a < Im (z) ≤ a + 2π} es todo el círculo). Análogamente, la recta{z : Im (z) = k} se transforma sobre
©z : z = exeik, x ∈ R
ª, es decir una semirecta desde
el origen con argumento constante k. Si tomamos dos rectas {z = x + iy : x = cj} , j =1, 2, y dos rectas verticales {z = x + iy : y = kj} , j = 1, 2, se puede ver que el pequeñorectángulo que encierran se mapea sobre el sector angular que queda entre los dos círculosy los dos radios. Por último, notar que la transformación se “repite”, es decir, si D ⊆ Cy D0 = {z + 2πi : z ∈ D} entonces ambos conjuntos son mapeados a la misma imagen, ycualquier banda {z : a < Im (z) ≤ a + 2π} es mapeada de manera inyectiva sobre C−{0} .
plano z
c2c1
k2
k1
w =
A0
B 0
k2
k1
c1e
ez
c2e
0
A
B0
plano w
f (z) = log (z) (la rama principal del logaritmo). En este caso es mas facil expresarel dominio en coordenadas polares y la imagen en coordenadas cartecianas, ya que siz = reiθ entonces log (z) = ln (r) + iθ. Asi, el círculo {z : |z| = R} se mapea sobre{z : z = ln (R) + iθ, −π < θ ≤ π} , es decir un segmento vertical de longitud 2π y parte realconstante igual a ln (R) , y la semirecta {z : arg (z) = θ0} sobre {z : z = ln (r) + iθ0, 0 < r} ,

Mapeos en C 35
o sea la recta {z : Im (z) = θ0} . Una propiedad muy util es que log mapea el semi-plano {z : Im (z) ≥ 0} en la franja {z : 0 ≤ Im (z) ≤ π} . Con esta transformación tam-bién tenemos que tener cuidado con los argumentos (como con
√·): log lleva el eje re-
al negativo en la recta {z : Im (z) = π} , y el semiplano {z : Re (z) < 0} en las franjas©z : π
2 ≤ Im (z) ≤ πª∪©z : −π ≤ Im (z) ≤ −π
2
ª
B
A
00 ln( )
log(z)
θ1
θ0
θ1
θ0
plano z plano w
r0
r1
r0 r1
A0
B 0
π−
π
2.3. Mapeo conforme, curvas en C
En los ejemplos anteriores no hemos usado ningún conocimiento sobre analiticidad paraestudiar las funciones analíticas como mapeos, solo usamos su definición y hicimos cuentas.Ahora bien, el estudio detallado de los ejemplos muestra lo siguiente: en algunos casos, lasfunciones llevan curvas que se cortan en cierto ángulo en curvas que se cortan en el mismoángulo (f (z) = z + b, f (z) = ez) y en otros casos no (f (z) = z2, tomando dos rectas por elorigen). Vamos a ver bajo que condiciones podemos asegurar que los ángulos se preservan, ypara eso hace falta otro repasín de Análisis II:
Definición 27 una función γ : [a, b] → R2(= C), γ (t) = (x (t) , y (t)) = x (t) + iy (t) es uncamino en C. La imagen C de γ se llama una curva en C, y decimos que γ parametriza la curvaC.
Valen todas las cosas de Análisis II, por ejemplo:
1. γ es continua sii sus funciones coordenadas Re (γ) = x (t) , Im (γ) = y (t) lo son.
2. γ es derivable sii sus funciones coordenadas lo son, y en tal caso γ0(t) = (x0(t), y0(t)) =x0(t) + iy0(t).
3. γ es continua por tramos sii existe una partición a = t0 < t1 < ... < tn = b tal que γ escontinua en cada intervalo [tj , tj+1] (límites laterales en los bordes).
4. γ es suave si γ0 es continua, y suave por tramos si γ0 es continua por tramos.

36 Mapeos en C
5. Si γ0(t) 6= 0 entonces es un vector tangente a C en γ (t) .
En condiciones generales, todas las cuentas que haremos con curvas no dependen de laparametrización, por lo cual muchas veces nos referiremos de manera indistinta a la curva o asu parametrización, por ejemplo hablaremos del tangente a γ (en lugar de el tangente a C).
Ejemplo 28
1. γ (t) = eit, t ∈ [0, 2π] en un camino que parametriza el círculo unitario centrado en elorigen.
2. γ (t) = e2πit, t ∈ [0, 1] es lo mismo que 1.
3. γ (t) = e2it, t ∈ [0, 2π] es lo mismo que 1, recorrido dos veces.
Lo que tenemos de nuevo acá es que podemos multiplicar y dividir curvas, y componer confunciones analíticas.
Lema 29 Si γ (t) y β (t) son caminos suaves a trozos definidos en [a, b] , y z0 ∈ C, entonces:
1. ddt (γ + β) = γ0 + β0.
2. ddt (γβ) = γ0β + γβ0.
3. ddt (γ/β) = γ0β−γβ0
β2, para todo t donde β (t) 6= 0.
4. Si f (z) es analítica en D y γ (t) ∈ D ∀ t, entonces η (t) = f (γ (t)) es un camino yη0(t) = f 0(γ (t))γ0(t).
5. Si ϕ (t) es una función derivable, ϕ : [c, d]→ [a, b] , entonces (γ ◦ ϕ) (t) es un camino conla misma imagen que γ, y (γ ◦ ϕ)0 (t) = γ0(ϕ (t))ϕ0(t) (lo interesante de esto es que ϕ (t)es un número real y ϕ0(t) es una derivada real).
Demostración.
1. Análisis II.
2. Descomponemos en parte real e imaginaria: si γ (t) = x (t) + iy (t) y β (t) = a (t) + ib (t)entonces γβ = xa− yb + i [xb + ya], y
(γβ)0 = x0a + xa0 −¡y0b + yb0
¢+ i£x0b + xb0 + y0a + ya0
¤= x0a− y0b + i
£x0b + y0a
¤+ xa0 − yb0 + i
£xb0 + ya0
¤=
¡x0 + iy0
¢(a + ib) + (x + iy)
¡a0 + ib0
¢= γ0β + γβ0
3. Como (2), ejercicio.

Mapeos en C 37
4. Si f (z) = u (x, y)+iv (x, y) y γ (t) = x (t)+iy (t) , entonces η (t) = f (γ (t)) = u (x (t) , y (t))+iv (x (t) , y (t)) . Para derivar, usamos la regla de la cadena de Análisis II (escribiendo comopar ordenado en lugar de notación compleja, de ser necesario para refrescar la memoria):
η0 = uxx0 + uyy
0 + i£vxx
0 + vyy0¤
= (ux + ivx)x0 + (uy + ivy)y0
= (ux + ivx)x0 + (−vx + iux)y0
= (ux + ivx)x0 + (ivx + ux)iy0
= (ux + ivx) (x0 + iy0) = f 0(γ)γ0,
donde hemos usado C-R en la tercer igualdad, sacado factor común i en la cuarta, yusado que f es analítica en la quinta (y por lo tanto su derivada se puede calcular comof 0 = ux + ivx).
5. Esta también es de Análisis II, lo que estamos haciendo es multiplicar el número real ϕ0
por el número complejo γ0 (en Análisis II era el producto de un escalar por un vector): siγ (t) = x (t) + iy (t) entonces γ (ϕ (t)) = x (ϕ (t)) + iy (ϕ (t)) , y
d
dtγ (ϕ (t)) = x0 (ϕ (t))ϕ0(t) + iy0(ϕ (t))ϕ0(t)
= γ0(t)ϕ0(t).
Ejemplo 30 Sea β (t) = ewt, con w un número complejo, entonces γ es la composición de lafunción f (z) = ez con el camino γ (t) = tw. Puesto que γ0(t) = w (derivando coordenada acoordenada), usando el lema anterior tenemos que β0(t) = wewt.
Supongamos que C es una curva parametrizada por un camino suave γ : [a, b] → C, conγ0(t0) 6= 0 para algún t0 ∈ (a, b) , entonces C tiene vector tangente γ0(t0) en z0 = γ (t0) ,y el ángulo que forma dicho vector con la horizontal es θ0 = arg (γ0(t0)) (con arg estamossuponiendo que hemos fijado algún intervalo de la forma (ω0, ω0+ 2π], por ejemplo puede ser larama principal). Supongamos que f (z) es una función analítica en C (o sea en un abierto quecontiene a C) y que f 0 (z0) 6= 0, entonces f transforma C en otra curva Γ parametrizada por elcamino suave β (t) = f (γ (t)) , y por el lema de recién tenemos que el vector tangente a β en t0es
β0(t0) = f 0 (z0) γ0(t0)
y entonces el ángulo que forma dicho vector con la horizontal es
φ0 = arg¡β0(t0)
¢= arg
¡f (z0) γ0(t0)
¢= arg
¡f 0 (z0)
¢+ arg
¡γ0(t0)
¢= arg
¡f 0 (z0)
¢+ θ0

38 Mapeos en C
es decir, el mismo ángulo que formaba el tangente a C mas ψ0 = arg (f 0 (z0)) .
w = f(z)
0
C
0plano z plano w
θ0
γ t ( )00
z0
z0
00
f( )
β t ( )00
Γφ0
Definición 31 si C1 y C2 son dos curvas que se cortan en z0, definimos el ángulo en que secortan las curvas como el ángulo que forman sus respectivos vectores tangentes en z0 (asumiendoque las curvas tengan vector tangente en z0). Notar que si γ1 y γ2 parametrizan a C1 y C2 yγ1 (t0) = γ2 (t0) = z0, entonces dicho ángulo es arg (γ2 (t0))− arg (γ1 (t0)) (hacer un dibujo!).
Tomemos ahora dos curvas C1 y C2 que se corten en z0, llamemos θ1 y θ2 el ángulo queforman los respectivos vectores tangentes en z0 con la horizontal, llamemos Γ1 y Γ2 las curvasimágenes de C1 y C2 por f, y φ1 y φ2 el ángulo que forman los respectivos vectores tangentesen f (z0) con la horizontal. Lo hecho recién dice que
φ1 = θ1 + ψ0 y φ2 = θ2 + ψ0
y entoncesφ2 − φ1 = θ2 − θ1
es decir, el ángulo que forman las curvas C1 y C2 en z0 es el mismo (en magnitud y sentido) queel ángulo en que se cortan Γ1 y Γ2 en f (z0)
0 0
C
plano z
z0 1
C2
θ1θ2−
z0f( )
plano w
Γ1
Γ2
−φ2 φ1
w = f(z)
A este tipo de suceso lo llamaremos conservar ángulos. Las funciones (o transformaciones)de R2 en R2 que conservan ángulos (en sentido y magnitud) se llaman funciones (o transforma-ciones) conformes; nosotros hemos probado el siguiente teorema:
Teorema 32 si f : D → C es analítica (D abierto en C), entonces f es conforme en todoslos puntos donde f 0(z) 6= 0.

Mapeos en C 39
Ejemplo 33 f (z) = ez es un mapeo conforme en todo C, ya que su derivada no se anula enningún punto.
0 10 e
π/2
w = ez
plano z
C1
C2π/4
π/2
π/4
Γ2Γ1
plano w
π/4
Tomemos una función analítica f en un abierto D, y z0 ∈ D. Vamos a ver el efecto de estafunción sobre un círculo chico centrado en z0 contenido en D: los ángulos entre líneas radialesse conservan, pero la longitud de las líneas no. Pero como¯
f 0 (z0)¯= lım
z→z0
|f (z)− f (z0)||z − z0|
entonces para z muy próximo a z0 (o sea si tomamos un circulito muy chiquito) tenemos que
|f (z)− f (z0)| '¯f 0 (z0)
¯|z − z0|
(el simbolito ' significa en este caso “muy parecido”), es decir, las líneas radiales (de ecuación|z − z0| = cte) están todas sujetas al mismo cambio de escala |f 0 (z0)| . Dicho de otra manera,círculos chicos alrededor de z0 se transforman sobre casi círculos alrededor de f (z0), con cambiode escala |f 0 (z0)|
z
f z( )
z0f( )
θθ
z0
Observación 34 Si f es analítica y f 0 (z0) 6= 0, entonces f es invertible en un entorno de z0pues si f = u+ iv, la miro como f : R2 → R2 con u y v con derivadas parciales continuas (puesf es analítica) y la matriz jacobiana de f es
Mf =
µux uyvx vy
¶C-R=
µux uy−uy ux
¶y el determinante jacobiano es, entonces, (ux)
2+(vx)2 . Como f 0 = ux + vx entonces |f 0(z0)|2 =
ux (z0)2 + vx (z0)
2 6= 0, entonces la matriz Mf (z0) es invertible, y entonces el teorema de lafunción inversa dice que f es invertible en un entorno de z0. Esta situación es local, considerarpor ejemplo f (z) = ez, que es conforme en todo C y no tiene una inversa global.

40 Mapeos en C
Dada la importancia que tiene determinar si f 0(z) = 0 o f 0(z) 6= 0, vale la pena el siguienteteorema (además es una belleza de teorema):
Teorema 35 Si f es analítica en un abierto conexo D, entonces cualquiera de las siguientesafirmaciones implica que f es constante en D:
1. f 0(z) = 0 ∀ z ∈ D.
2. Re (f (z)) es constante en D.
3. Im (f (z)) es constante en D.
4. |f (z)| es constante en D.
5. arg (f (z)) es constante en D.
Demostración. Pongamos f = u + iv.
1. Como f 0(z) = ux (z) + ivx (z) = 0 ∀ z ∈ D, tenemos que ux (z) = vx (z) = 0 ∀ z ∈ D.Analogamente, como f 0(z) = vy (z)− iuy (z) = 0 ∀ z ∈ D, tenemos que uy (z) = vy (z) =0 ∀ z ∈ D, es decir,
ux (z) = vx (z) = uy (z) = vy (z) = 0 ∀z ∈ D.
Tomo z0 fijo, voy a probar que f (z) = f (z0) para todo z en D. Tomo un z cualquiera enD, entonces hay una curva suave por trozos (mas aun, una poligonal) que une z con z0, esdecir, γ : [a, b] → D suave por tramos con γ (a) = z y γ (b) = z0. Vamos a suponer que γes suave. Llamo ϕ1 (t) = u (γ (t)) , ϕ2 (t) = v (γ (t)) , entonces si γ = x + iy, tenemos que
dϕ1dt
(t) = ux (γ (t))x0 (t) + uy (γ (t)) y0 (t) = 0 ∀ t, y
dϕ2dt
(t) = vx (γ (t))x0 (t) + vy (γ (t)) y0 (t) = 0 ∀ t
Es decir, ϕ1 y ϕ2 son funciones de una variable con derivada cero, y entonces son ambasconstantes, por lo tanto f (z) = f (γ (a)) = f (γ (b)) = f (z0) .
Finalmente, si γ no es suave, se parte [a, b] en intervalos donde γ es suave y se repite elrazonamiento, probando que γ es constante en cada intervalito. Se termina usando queγ es continua en [a, b] (ejercicio, escribir bien esto fijándose en la definición de suave portrozos).
2. Si u es constante entonces ux (z) = uy (z) = 0 ∀ z ∈ D, y por C-R tenemos que vx (z) =0 ∀ z ∈ D. Entonces f 0(z) = ux (z) + ivx (z) = 0 ∀ z ∈ D, y la parte (1) dice que f esconstante en D.
3. Símil que (2), ejercicio.

Mapeos en C 41
4. Si |f | es constante entonces |f |2 es constante, es decir u2+v2 es constante en D. Derivandoy usando C-R tenemos
2uux + 2vvx = 0
2uuy + 2vvy = −2uvx + 2vux = 0
es decir µu vv −u
¶µuxvx
¶=
µ00
¶Si u2+ v2 6= 0, este sistema tiene solución única ux = vx = 0, es decir f 0 = 0, y entonces fes constante en D por (1); si u2 + v2 = 0 quiere decir que |f | = 0, y entonces f = 0 en D.
5. Si arg (f (z)) = θ0 ∀ z ∈ D, entonces f (z) = |f (z)| eiθ0 ∀ z ∈ D (lo que estamos haciendoes poner f (z) en coordenadas polares). Llamemos g (z) = e−iθ0f (z) , entonces g es analíticaen D (es una constante por f), y Im (g (z)) = 0 ∀ z ∈ D (pues g = |f |), entonces g esconstante en D (por (3)), o sea f es constante en D.
2.4. Transformaciones biunívocas de C∞
Vamos a ver algunas propiedades geométricas de C∞ que son intuitivas pero difíciles deformalizar.
Definición 36 una curva C en C es cerrada simple si es cerrada y no se corta a si misma,esto es, si tiene una parametrización continua γ : [a, b]→ C tal que γ es inyectiva, excepto porser γ (a) = γ (b) .
Teorema 37 (de la curva de Jordan) toda curva cerrada simple divide el plano complejoextendido en dos regiones abiertas, una es acotada y simplemente conexa y la otra contiene a∞, siendo la curva la frontera de ambas regiones.
La región que contiene a ∞ se llama exterior de la curva, y la otra se llama interior. Otroteorema de similares característica es el siguiente:
Teorema 38 Si C es una curva cerrada simple en C, y β : [a, b]→ C es un camino continuocon β (a) en el interior de C y β (b) en el exterior de C, entonces β corta a C, es decir, existe

42 Mapeos en C
c ∈ [a, b] tal que β (c) ∈ C.
CInterior de C
Exterior de C
C
β a( )
β(b)
β c( )
Supongamos que T : C∞ → C∞ es una función (un mapeo) continuo, inyectivo y sobre, esdecir
T (z1) = T (z2)⇒ z1 = z2 y ∀ w ∈ C∞ ∃ z ∈ C∞ tal que T (z) = w
Dicho en criollo, T lleva puntos distintos en puntos distintos y T lleva todo C∞ sobre todo C∞.A este tipo de mapeo se lo llama transformaciones biunívocas de C∞.
Ejemplo 39 1. T (z) = ez no es biunívoca de C∞, pues no es inyectiva (e0 = e2πi) ni sobre(ez 6= 0 ∀ z).
2. T (z) = 1z es una trasnformación biunívoca de C∞, si definimos T (0) =∞ y T (∞) = 0.
Tomemos una transformación biunívoca T, y una curva cerrada simple en C en el plano z.T mapea C sobre una curva cerrada simple Γ en el plano w, pues si γ : [a, b]→ C parametrizaC entonces γ (a) = γ (b) , y esos son los dos únicos puntos donde la curva se corta, por lotanto T (γ (t)) parametriza en el plano w la imagen Γ de C por T, y es una curva cerradasimple pues T (γ (a)) = T (γ (b)) , y como T es inyectiva no hay mas puntos z1, z2 en C conT (γ (z1)) = T (γ (z2)).
CT(z)
Γ
Si T lleva un punto z0 del interior de C en un punto w0 = T (z0) del interior de Γ, entoncesT debe llevar todo el interior de C sobre todo el interior de Γ pues: si z1 esta en el interiorde C y w1 = T (z1) no esta en el interior de Γ, tomo una curva continua en el interior de C queuna z0 con z1 (Jordan dice que puedo pues el interior es conexo), entonces su imagen por T esuna curva continua en el plano w con un extremo en el interior de Γ y el otro en el exterior, yentonces debe cortar Γ, y esto es imposible pues los únicos puntos que lleva T sobre Γ son losde C. Todo eso dice que T lleva el interior de C en el interior de Γ, pero además debe cubrirlotodo pues todos los puntos del plano w son alcanzados, y por el mismo razonamiento de recién,ningún punto del exterior de C puede caer en el interior de Γ.

Mapeos en C 43
De manera absolutamente análoga, si Si T lleva un punto z0 del exterior de C en un puntow0 = T (z0) del interior de Γ, entonces T debe llevar todo el exterior de C sobre todo elinterior de Γ.
C
z0
z1
T(z)Γ
w0 T( ) z0=
w1 T( ) z1=
2.5. Transformaciones fraccionarias lineales o de Möbius
Así se llaman a las funciones del tipo
T (z) =az + b
cz + d,
donde a, b, c, d son números complejos con ad − bc 6= 0. T esta definida en C−©−d
c
ª, y es
analítica en dicho conjunto, con
T 0(z) =a (cz + d)− c (az + b)
(cz + d)2=
acz + ad− caz − cb
(cz + d)2=
ad− cb
(cz + d)2.
Como ad− cb 6= 0 tenemos que además T es conforme en C−©−d
c
ª, pues T 0(z) 6= 0 ∀ z (notar
que de no haber pedido ad− cb 6= 0 tendríamos T 0(z) = 0 ∀ z, y entonces T sería constante).Como
lımz→−d
c
T (z) =∞,
se define T¡−d
c
¢=∞, y como
lımz→∞
T (z) =a
c,
se define T (∞) = ac . Además T es invertible pues si
w =az + b
cz + d
entonces se puede despejar w:
w (cz + d) = az + b
wcz + wd = az + b
wcz − az = b− wd
(cw − a) z = b− wd
z =b− wd
cw − a

44 Mapeos en C
(o sea si w = T (z) , necesariamente z = b−wdcw−a). Teniendo en cuenta que
lımw→∞
b− wd
cw − a= −d
c, y lım
w→ac
b− wd
cw − a=∞
concluimos que T es inyectiva y sobre en C∞, es decir, es una transformación biunívoca de C∞.Notar que todo lo hecho vale para el caso particular c = 0, pues en tal caso a 6= 0 y d 6= 0(¿por que?), por lo cual queda (según nuestra convención) −dc = a
c =∞, y entonces T (∞) =∞.Hemos demostrado el siguiente teorema:
Teorema 40 las transformaciones de Möbius son biunívocas de C∞ sobre C∞, es decir, si
T (z) =az + b
cz + dcon ad− cb 6= 0,
entonces T : C∞ → C∞ es continua, inyectiva y sobre, y es analítica y conforme en C−©−d
c
ª.
La inversa de T es
T−1 (z) =−dz + b
cz − a,
Notar que la inversa de una transformación de Möbius también es una transformación deMöbius, y por lo tanto el teorema anterior también vale para ella.
Otra propiedad importante es que la composición de transformaciones de Möbius da comoresultado otra transformación de Möbius: si T (z) = az+b
cz+d con ad − bc 6= 0, y S (z) = αz+βγz+δ con
αδ − γβ 6= 0, entonces
T (S (z)) =aS (z) + b
cS (z) + d=
aαz+βγz+δ + b
cαz+βγz+δ + d=
a(αz+β)+b(γz+δ)γz+δ
c(αz+β)+d(γz+δ)γz+δ
=a (αz + β) + b (γz + δ)
c (αz + β) + d (γz + δ)=
(aα + bγ) z + (aβ + bδ)
(cα + dγ) z + (cβ + dδ),
con
(aα + bγ) (cβ + dδ)− (aβ + bδ) (cα + dγ) =
=z }| {aαcβ +aαdδ + bγcβ + bγdδ|{z}− z }| {aβcα−aβdγ − bδcα− bδdγ|{z}
= aαdδ + bγcβ − aβdγ − bδcα =
(ad− cb) (δα− γβ) 6= 0
pues ambos factores son distintos de cero.
Hay transformaciones de Möbius que son particularmente sencillas y tienen nombre:
Si T (z) = z + b, con b ∈ C, entones T se llama traslación.
si T (z) = bz, con b ∈ C, entonces T se llama dilatación.
si T (z) = 1/z, entonces T se llama inversión.

Mapeos en C 45
si T (z) = eiθz, con θ ∈ R, entonces T se llama rotación.
Notar que toda transformación de Möbius puede escribirse como composición de traslaciones,dilataciones e inversiones; para ver esto supongamos que T (z) = az+b
cz+d y dividamos en dos casos:Si c = 0 (entonces d 6= 0 y),
T (z) =a
dz +
b
d,
entonces T es la composición de la dilatación D (z) = adz y la traslación M (z) = z + b
d , o sea
T (z) = M (D (z)) .
Dicho de otra forma, si w = T (z) , entonces w es el resultado de la siguiente cadena de trans-formaciones: w1 = a
dz, w = w1 + bd .
Si c 6= 0, el cociente
az + b | cz + d
−az − adc
ac
b− adc
revela que
az + d =a
c(cz + d) +
µb− ad
c
¶,
es deciraz + d
cz + d=
a
c+
µbc− ad
c
¶1
(cz + d)
o sea que si
T1 (z) = cz = dilatación,
T2 (z) = z + d = traslación,
T3 (z) = 1/z = inversión,
T4 (z) =
µbc− ad
c
¶z = dilatación,
T5 (z) = z +a
c= translación,
entoncesT (z) = T1 (T2 (T3 (T4 (T5 (z)))))
Dicho de otra forma, si w = T (z) , entonces w es el resultado de la siguiente cadena de trans-formaciones: w1 = cz, w2 = w1+ d, w3 = 1/w2, w4 =
¡bc−ad
c
¢w3, w = w4+ a
c . Pongamostodo lo hecho en un teorema:
Teorema 41 la composición de dos transformaciones de Möbius da como resultado otrastransformación de Möbius, y toda transformación de Möbius puede escribirse como composi-ción de traslaciones, dilataciones e inversiones.

46 Mapeos en C
Ejemplo 42 si T (z) = z−1z+1 , entonces T (1) = 0, T (−1) = ∞, y T (∞) = 1 (ojo con estas dos
últimas, no poner ∞−1∞+1 , calcular lımz→∞z−1z+1 , pues la expresión
∞−1∞+1 no tiene ningún sentido).
La inversa de T se calcula así: si
w =z − 1
z + 1
entonces
w (z + 1) = z − 1,
wz + w = z − 1,
w + 1 = z − wzw + 1
1−w= z.
Notar que la elección w =∞ lleva a z = −1. Por último, descompongamos T como composiciónde transformaciones simples:
z − 1
z + 1=
z + 1− 2
z + 1= 1− 2
z + 1,
o sea T es el resultado de la cadena
w1 = z + 1
w2 = 1/w1
w3 = −2w2
w = w3 + 1.
Este tipo de descomposición suele ser útil para ver como transforma T algunos conjuntos delplano z, por ejemplo si C es el círculo de radio 1 centrado en −1, entonces aplicarle la transfor-mación T a C es lo mismo que aplicarle la transformación w1 a C, al resultado aplicarle w2, alresultado w3, y por último a ese resultado aplicarle w; en este caso queda así: w1 transforma Cen el círculo de radio 1 centrado en 0, w2 transforma dicho círculo en él mismo, w3 transformael resultado en el círculo de radio 2 centrado en 0, y w transforma ese resultado en el círculo deradio 2 centrado en 1. Puesto que T (−1) =∞, tenemos que T lleva todo el interior de C sobretodo el exterior de la curva T (C) , por ser T una transformación biunívoca de C∞.
1-1-2 2
-1-2 1 2
-1-2 1 20
0
-1-2 1 20
-1-2 1 20 3
w = z + 1
w =
1/w
w =
-2w
w = w +
1
0
1
1
2
2
3
3

Mapeos en C 47
2.6. Círculos generalizados en C∞
Ahora queremos estudiar como mapea una transformación de Möbius círculos y rectas, ypara eso nos hace falta encontrar una buena forma de expresar círculos y rectas en C:
La ecuación
a¡x2 + y2
¢+ bx + cy + d = 0, con (2.1)
a, b, c, d ∈ R, b2 + c2 > 4ad (2.2)
describe la totalidad de círculos y rectas de R2 (eso es, dado un círculo o una recta Γ enR2, existen constantes a, b, c, d en las condiciones de (7) tal que Γ tiene ecuación (6)) pues:
• Una recta en R2 es {(x, y) : xn + ym = k} con n,m, k números reales con (n,m) 6=(0, 0) (Análisis II), entonces tomar a = 0, b = n, c = m, y d = k.
• Un círculo en R2 esn(x, y) : (x− x0)
2 + (y − y0)2 = r2
ocon r > 0, y (x− x0)
2 +
(y − y0)2 = r2 es
x2 − 2xx0 + x20 + y2 − 2yy0 + y20 − r2 = 0
x2 + y2 + (−2x0)x + (−2y0) y + x20 + y20 − r2 = 0,
tomar a = 1, b = −2x0, c = −2y0, d = x20+y20− r2, y la condición (7) se cumple puesb2+c2
4a2− d
a = r2 > 0.
Recíprocamente, si a = 0 la ecuación (6) describe una recta en R2, y si a 6= 0 describe uncírculo pues
a¡x2 + y2
¢+ bx + cy + d = 0
x2 + y2 +b
ax +
c
ay +
d
a= 0µ
x +b
2a
¶2+³y +
c
2a
´2+
d
a− b2
4a2− c2
4a2= 0,
que es la ecuación de un círculo de centro¡b2a ,
c2a
¢y radio
qb2
4a2+ c2
4a2− d
a (que es mayorque cero por (7)). Notar que además vimos que una curva de ecuación (6) con condiciones(7) es un círculo sii a 6= 0, y pasa por (0, 0) sii d = 0.
La forma compleja de la ecuación (6) con condición (7) es
αzz + βz + βz + δ = 0, con α, δ ∈ R, β ∈ C, y |β|2 > αδ (2.3)
pues poniendo x = z+z2 , y = z−z
2i en (6) queda
a |z|2 + b
µz + z
2
¶+ c
µz − z
2i
¶+ d = 0
azz +b
2z +
b
2z − i
c
2z + i
c
2z + d = 0
azz +
µb
2+ i
c
2
¶z +
µb
2− i
c
2
¶z + d = 0,

48 Mapeos en C
tomar α = a, δ = d, y β =¡b2 + i c2
¢. Recíprocamente, toda ecuación de la forma (8) queda de
la forma (6) con condición (7) cuando se cambia z por x + iy (ejercicio), es decir que:
Lema 43 Γ es un círculo o una recta en C si y solo si existen α, δ ∈ R, β ∈ C con |β|2 > αδtal que Γ tiene ecuación
αzz + βz + βz + δ = 0,
resultando Γ una recta sii α = 0, y un círculo de radio³|β|2α2− δ
α
´sii α 6= 0. Además Γ pasa por
el origen sii δ = 0.
Nota 44 se suele pensar a las rectas en C como círculos de radio ∞, esto es coherente pues la
ecuación (8) es la de una recta si y solo si α = 0, y es la de un círculo de radio³|β|2α2 −
δα
´,
que tiende a ∞ cuando α tiende a cero. Además si uno sube a la esfera de Riemann, una rectaen C da un círculo que pasa por el polo norte, y por eso se dice que las rectas son los únicoscírculos que pasan por ∞. Es por todo esto que a los círculos y rectas en C se los llama círculosgeneralizados (cg) en C∞.
Teorema 45 la imagen de un círculo generalizado Γ de C∞ por una transformación deMöbius es otro círculo generalizado Γ1 de C∞.
Demostración. vamos a ver que el teorema es cierto para las transformaciones elementales; elcaso general se sigue inmediatamente del hecho de que toda transformación de Möbius se escribecomo composición de transformaciones elementales. Tomo Γ un cg; por el lemita anterior se queexisten α, δ ∈ R, β ∈ C con |β|2 > αδ tal que Γ tiene ecuación αzz + βz + βz + δ = 0
Caso T (z) = bz, con b ∈ C, b 6= 0 (T dilatación).
w = bz ⇐⇒ z =w
b,
entonces z satisface (9) sii
α³w
b
´³w
b
´+ β
³w
b
´+ β
³w
b
´+ δ = 0⇐⇒
α
b2|w|2 +
β
bw +
β
bw + δ = 0⇐⇒
α1ww + β1w + β1w + δ1 = 0, (2.4)
donde α1 = αb2 , β1 = β
b , y δ1 = δ, y
|β1|2 = |β|2b2
α1δ1 = αδb2
)⇒ |β1|2 > α1δ1
o sea que z cumple (9) si y solo si w = bz cumple (10), es decir que
z ∈ Γ⇐⇒ w ∈ Γ1,

Mapeos en C 49
donde Γ1 es el cg de ecuación (10). Con respecto al punto∞, solo está en Γ si es una recta,o sea si α = 0, y en tal caso está en Γ1 pues α1 = 0, y T (∞) =∞.Pero T : C∞ → C∞ es sobre, es decir debe alcanzar todos los puntos del plano (extendido)w, y como los únicos puntos del plano (extendido) z que pueden caer en Γ1 son los de Γ,entonces T debe llevar todo Γ en todo Γ1.
Caso T (z) = z + b (T traslación).Este es bastante intuitivo, se hace como el anterior si Γ es una recta (i.e si α = 0), peroen el caso de que Γ sea un círculo conviene usar la ecuación clásica |z − z0| = r; ejercicio.
Caso T (z) = 1/z (T inversión).
w =1
z⇐⇒ z =
1
w,
entonces un z 6= 0 satisface (9) (i.e está en Γ) sii
α
µ1
w
¶µ1
w
¶+ β
µ1
w
¶+ β
µ1
w
¶+ δ = 0⇐⇒
α
ww+
β
w+
β
w+ δ = 0⇐⇒
α + βw + βw + δww = 0⇐⇒δ1 + β1w + β1w + α1ww = 0, (2.5)
donde α1 = δ, β1 = β, y δ1 = α, y
|β1|2 = |β|2α1δ1 = αδ
¾⇒ |β1|2 > α1δ1
o sea que z cumple (9) si y solo si w = 1/z cumple (11), es decir que
si z 6= 0, z ∈ Γ⇐⇒ w ∈ Γ1, (2.6)
donde Γ1 es el cg de ecuación (11). Ahora T (0) =∞ y T (∞) = 0; entonces 0 ∈ Γ sii δ = 0sii α1 = 0 sii ∞ ∈ Γ1 (o sea sii Γ1 es recta), y ∞ ∈ Γ sii α = 0 sii δ1 = 0 sii 0 ∈ Γ1. Todoesto junto con (12) nos permite deducir que
∀ z, w ∈ C∞, z ∈ Γ⇐⇒ w ∈ Γ1.
Pero T : C∞ → C∞ es sobre, es decir debe alcanzar todos los puntos del plano (extendido)w, y como los únicos puntos del plano (extendido) z que pueden caer en Γ1 son los de Γ,entonces T debe llevar todo Γ en todo Γ1.
Notar que de la ecuación (11) que cumple w = 1z suponiendo que z cumpla (9), se deduce
que la inversión lleva:
Rectas que pasan por el origen sobre rectas que pasan por el origen.

50 Mapeos en C
Rectas que no pasan por el origen en círculos que pasan por el origen.
Círculos que pasan por el origen sobre rectas que no pasan por el origen.
Círculos que no pasan por el origen sobre círculos que no pasan por el origen.
Ejemplo 46 tomemos T (z) = 1/z, y C1 = {z : Im (z) = 0} . Como C1 es una recta que pasapor el origen, T la lleva a una recta que pasa por el origen, y como T (1) = 1, T (−1) = −1,debe llevarla en la misma recta pues C1 es la única recta que pasa por el origen y contiene lospuntos 1 y −1.
0 01 1
w = 1/z
plano z plano w
C1 T( ) C1
Si C2 = {z : |z − i| = 1} , como C2 es un círculo que pasa por el origen, entonces T lo lleva sobreuna recta que no pasa por el origen, y como
T (1 + i) =1
1 + i=
1− i
2=
1
2− i
1
2, y T (−1 + i) =
1
−1 + i=−1− i
2= −1
2− i
1
2,
concluimos que T (C2) =©w : Im (w) = −12
ª, pues esa es la única recta que contiene a
¡12 − i12
¢y¡12 − i12
¢.
0
0i
2i
- /2i
plano z plano w
w = 1/z
C1
C2T( ) C1
T( ) C2
Por último, si C3 = {z : Im (z) = 1} , como C3 es una recta que no pasa por el origen, T lo llevasobre un círculo que pasa por el origen, puesto que ya conocemos T (1 + i) y T (−1 + i) , resultaT (C3) =
©w :
¯w − i
2
¯= 1
2
ªpues este es el único círculo que contiene los puntos
¡12 − i12
¢, 0, y¡
12 − i12
¢(Notar los ángulos en que se cortan C2 y C3 y el ángulo en que se cortan sus respectivas
imágenes por T ). Además, puesto que T es una transformación biunívoca de C∞, podemos decir

Mapeos en C 51
que T lleva el disco {z : |z − i| ≤ 1} sobre el semiplano©w : Im (w) ≤ 1
2
ª.
0
0i
2i
- /2i
plano zplano w
w = 1/z
C1
C2
T( ) C1
T( ) C2
T( ) C3
-i
C3
Ejemplo 47 Queremos encontrar una transformación de Möbius T (z) = az+bcz+d que lleve el disco
{z : |z| ≤ 1} sobre el semiplano {w : Re (w) ≥ 0} .
0
-i
1-1
1 20plano z plano w
T(z)
Lo que vamos a hacer es tratar de llevar el círculo {z : |z| = 1} sobre la recta {w : Re (w) ≥ 0}(sabemos que siempre la imagen de un círculo será un cg, pero no sabemos si podemos elegira, b, c y d para que sea justo la recta que querremos). Como tres puntos determinan todo cg deC∞, elijo tres puntos del círculo y los mando sobre la recta: quiero
T (−1) = 0, T (−i) = 1, y T (1) = 2, (2.7)
o sea−a + b
−c + d= 0,
−ai + b
−ci + d= 1, y
a + b
c + d= 2,
que es lo mismo que
−a + b = 0, −ai + b = −ci + d, y a + b = 2c + 2d,
es decir que tengo 3 ecuaciones y 4 incógnitas, vamos a tratar de despejar en función de a: laprimera ecuación nos dice que
b = a,
y usando esto en la tercer ecuación concluimos que a = c + d. Haciendo lo mismo en la segundaqueda a− ia = d− ic, y restando estas dos últimas tenemos que ia = (1 + i) c, y entonces
c =(1 + i)
2a,

52 Mapeos en C
y entonces
d = a− c = a(1− (1 + i)
2) = a
(1− i)
2.
Puesto que ya tengo b, c y d en función de a, ponemos a = 1 y queda
T (z) =z + 1
(1+i)2 z + (1−i)
2
=2z + 2
(1 + i) z + (1− i).
Se puede verificar fácilmente que dicha T satisface (13), y por lo tanto debe llevar todo el círculo{z : |z| = 1} sobre toda la recta {w : Re (w) = 0} , pero además
T (0) =2
1− i= 1 + i,
que está en el semiplano {w : Re (w) ≥ 0} , y como T es una transformación biunívoca de C∞,debe llevar todo el disco {z : |z| ≤ 1} (que contiene a 0) sobre todo el semiplano {z : |z| ≤ 1}.
0
i
1-1
10plano z plano w
T(z)
i
2.7. Puntos fijos de una transformación de Möbius
El último ejemplo resulta inspirador, y nos preguntamos cuando podemos hacer esto, esdecir, elegir dos regiones del plano y encontrar una transformación de Möbius que lleve una enla otra.
Definición 48 z0 es punto fijo de una función f si f (z0) = z0.
Lema 49 Si T es una transformación de Möbius entonces T tiene a los mas dos puntos fijosen C, salvo que sea T (z) = z (en ese caso T se llama identidad). Dicho de otra forma, si unatransformación de Möbius tiene tres puntos fijos entonces debe ser la identidad.
Demostración. buscar los puntos fijos de T (z) = az+bcz+d es buscar los números complejos z que
satisfacen la ecuaciónaz + b
cz + d= z.

Mapeos en C 53
Puesto que z es un número complejo podemos asumir que cz + d 6= 0, y entonces la ecuación dearriba es equivalente a
az + b = z (cz + d) ,
o seacz2 + (d− a) z − b = 0.
Esta última ecuación tiene (a lo mas) dos soluciones si c 6= 0, una si c = 0 y (d− a) 6= 0, yninguna si c = 0, (d− a) = 0, y b 6= 0. Por último, todo z es solución de la ecuación si c = 0,(d− a) = 0, y b = 0, o sea si d = a y b = c = 0, o sea si T (z) = z.
Nota 50 en la demostración anterior en los casos con c = 0 encontramos a lo mas un puntofijo (salvo que T sea la identidad), pero también ∞ es punto fijo de T si c = 0, o sea que T tienea los mas dos puntos fijos en C∞. Puesto que si c 6= 0 entonces ∞ no es punto fijo de T, en ellema anterior se puede cambiar C por C∞.
Ahora veremos que dados z1, z2, z3 tres puntos distintos deC∞, y w1, w2, w3 otros tres puntosdistintos de C∞, existe una única transformación de Möbius M (z) tal que
M (z1) = w1, M (z2) = w2, y M (z3) = w3.
Pongamos
T (z) =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
z−z1z−z3
z2−z3z2−z1 si z1, z2, z3 ∈ C
z2−z3z−z3 si z1 =∞
z−z1z−z3 si z2 =∞
z−z1z2−z1 si z3 =∞
Así definida, T satisface
T (z1) = 0, T (z2) = 1, y T (z3) =∞.
Definamos de manera análoga S (w) cambiando las z’s por w’s en la definición anterior, de formatal que S satisfaga
S (w1) = 0, S (w2) = 1, y S (w3) =∞
(usamos la letra w porque queremos pensar T como una transformación del plano z en el plano wy S una transformación del plano w en el plano z). Pero S es de Möbius y entonces es invertible,es decir existe la transformación S−1, que es de Möbius, y S−1 (S (w)) = w ∀w ∈ C∞, enparticular
S−1 (0) = w1, S−1 (1) = w2, y S−1 (∞) = w3.
Pero entonces la composición S−1 (T (z)) es de Möbius y
S−1 (T (z1)) = w1, S−1 (T (z2)) = w2, y S−1 (T (z3)) = w3,

54 Mapeos en C
es decir que M = S−1 ◦ T es la transformación que buscamos.Veamos que M es única: si H (z) es otra transformación de Möbius con
H (z1) = w1, H (z2) = w2, y H (z3) = w3,
entonces la inversa de H, que es de Möbius, satisface
H−1 (w1) = z1, H−1 (w2) = z2, y H−1 (w3) = z3,
y entonces la transformación de Möbius H−1 (M (z)) satisface
H−1 (M (z1)) = z1, H−1 (M (z2)) = z2, y H−1 (M (z3)) = z3,
o sea que tiene tres puntos fijos, y entonces H−1 (M (z)) = z, o sea M (z) = H (z) ∀ z. Hemosprobado el siguiente:
Lema 51 dados z1, z2, z3 tres puntos distintos de C∞, y w1, w2, w3 otros tres puntos distintosde C∞, existe una única transformación de Möbius M (z) tal que
M (z1) = w1, M (z2) = w2, y M (z3) = w3.
Nota 52 Lo bueno es que en la demostración del lema tenemos un método para encontrar aw = M (z): hallar T (z) , luego S (w) y resulta w = S−1 (T (z)) ; tomando S en la igualdadanterior, resulta S (w) = T (z) , y entonces podemos encontrar w despejando de esa igualdad,por ejemplo si z1, z2, z3, w1, w2, w3 son todos puntos de C (o sea ninguno es∞) w sale de despejar
w −w1w −w3
w2 − w3w2 − w1
=z − z1z − z3
z2 − z3z2 − z1
Nota 53 untando todo lo que hemos hecho hasta ahora, podemos concluir que dado un cg C enel plano (extendido) z y otro Γ en el plano (extendido) w„ existe siempre una transformaciónde Möbius que lleva C sobre Γ.
Ejemplo 54 queremos encontrar la una transformación de Möbius que lleve el semiplano{z : Re (z) ≥ 0} sobre el disco {w : |w| ≤ 1} de forma tal que el eje {z : Re (z) = 0} llegue sobreel círculo {w : |w| = 1} .
Elejimos tres puntos del eje {z : Re (z) = 0}:
0,−i,∞,
elejimos tres puntos del círculo {w : |w| = 1}:
−1,−i, 1,
y ahora construimos T tal que
T (0) = −1, T (−i) = −i, y T (∞) = 1. (2.8)

Mapeos en C 55
Si T (z) = az+bcz+d , entonces
T (0) =b
d= −1⇒ b = −d,
T (∞) =a
c= 1⇒ a = c,
T (i) =ai + b
ci + d= i⇒ ai + b = −c + id.
Poniendo las dos primeras en la tercera concluimos que
ai− d = −a + id⇐⇒ a (1 + i) = d (1 + i)⇐⇒ a = d;
esto junto con la primera nos permite concluir que
b = −a, c = a, y d = a,
poniendo a = 1 tenemos que
T (z) =z − 1
z + 1.
Es inmediato que esta T satisface (14), entonces debe llevar la recta {z : Re (z) = 0} sobre elcírculo {w : |w| = 1} , y como además T (1) = 0, debe llevar todo {z : Re (z) ≥ 0} sobre todo eldisco {w : |w| ≤ 1} , o sea listo. Notar que nosotros no hicimos ningún esfuerzo en particularpara que T (1) = 0, y si T (1) hubiera caído fuera de {w : |w| ≤ 1} entonces T no nos hubieraservido. En este caso se hubiera podido arreglar fácil, tomado 1/T (z) (why??), pero tenemosque hacer algo para dejar de depender de nuestra suerte.
2.8. Orientación
En los últimos ejemplos hemos estado llevando “un lado” de una curva sobre otro de la curvaimagen, (los lados son el exterior y el interior si nuestras curvas son cg en C∞), basados en elhecho de que las transformaciones de Möbius son biunívocas de C∞. El método era llevar lacurva sobre la curva, y el resto venia solo, salvo que no podíamos asegurar de antemano quelado iba a caer sobre que lado. Vamos a ver (de manera un poco informal) como hacer paraasegurarnos antes de encontrar T, qué lado caerá sobre qué lado.
Supongamos que T : C → C es conforme y biunívoca, y tomemos una curva suave cerradasimple C. Parametricemos C por γ : [a, b] → C con γ0(t) 6= 0 ∀ t, de forma tal de recorrerla ensentido antihorario (esta expresión es fácil de entender siendo C una curva cerrada simple), así elinterior de C queda “a la izquierda” de C, y tomemos un punto z0 = γ (t0) en C. Llamemos Γ a laimagen de C por T, entonces Γ es una curva cerrada simple parametrizada por T (γ) . Si γ0(t0) =x0 + iy0 = (x0, y0) (vector tangente a C en z0), entonces el vector iγ0(t0) = ix0− y0 = (−y0, x0)es una rotación de π/2 en sentido antihorario del vector γ0(t0), y entonces es perpendicular a

56 Mapeos en C
γ0(t0) y apunta hacia el interior de C
π/2
C
T(z)Γ
z0γ t ( )00
00
Sea r (t) = (t− t0) (−y0 + ix0)+ z0 = recta perpendicular a γ0(t0), con r (t0) = z0 y r0(t0) =(−y0 + ix0) = (−y0, x0) ; r (t) corta C en un ángulo de π/2, entonces T (r (t)) parametriza unacurva que debe cortar Γ en un ángulo rotado en π/2 en sentido horario de el tangente a Γ enT (z0) (por ser T conforme en z0)
r t( )
π/2
T(z)
z0γ t ( )00
00
C
Γ
T( ) z0T( ) r t( )
Así, si T (γ (t)) recorre Γ en sentido antihorario luego T (r (t)) va del exterior al interior deΓ. Para valores de t próximos a t0 pero mayores que t0, r (t) está en el interior de C, y T (r (t))está en el interior de Γ, y entonces T debe llevar todo el interior de C sobre todo el interior deΓ (por ser T biunívoca)
π/2
r t( )
π/2
T(z)
z0γ t ( )00
00
C
Γ
T( ) z0T( ) r t( )
De manera absolutamente análoga se ve que si T (γ (t)) recorre Γ en sentido horario en-tonces T debe llevar todo el interior de C sobre todo el exterior de Γ (ejercicio). ¿Cómo seusa esto? supongamos que quiero encontrar una transformación de Möbius que lleve el discoD = {z : |z − a| ≤ r} sobre el disco ∆ = {w : |w − α| ≤ ρ} , entonces elijo z0, z1, y z2 en ∂D demodo que si camino de z0 a z2 pasando por z1 vaya en sentido antihorario, hago lo mismo con

Mapeos en C 57
w0, w1, y w2 en ∂∆,
aD
∂D0
0z1
z2 z3
w1
w2w3
T(z)
α
∂∆
∆
y construyo la transformación de Möbius T tal que
T (z0) = w0, T (z1) = w1, y T (z3) = w3,
entonces si γ (t) parametriza ∂D en sentido antihorario, necesariamente T (γ (t)) parametriza∂∆ en sentido antihorario (si γ (t0) = z0, γ (t1) = z1, γ (t2) = z2, con t0 < t1 < t2, entoncesT (γ (t0)) = w0, T (γ (t1)) = w1, T (γ (t2)) = w2, con t0 < t1 < t2), y entonces T debe llevar elinterior de ∂D sobre el interior de ∂∆.
Ejemplo 55 queremos encontrar una transformación de Möbius que lleve el disco{z : |z − (2 + i2)| ≤ 1} sobre el semiplano
©z : Im (z) ≤ −12 Re (z)− 1
ª. Vamos a construir T
de forma tal que lleve1 + i2 2 + i 3 + i2
T º ↓ ↓ ↓−i −2 ∞
Si T (z) = az+bcz+d , entonces
T (1 + i2) =a (1 + i2) + b
c (1 + i2) + d= −i⇒ a (1 + i2) + b = −ic (1 + i2)− id,
T (2 + i) =a (2 + i) + b
c (2 + i) + d= −2⇒ a (2 + i) + b = −2c (2 + i)− 2d,
T (3 + i2) =a (3 + 2i) + b
c (3 + 2i) + d=∞⇒ c (3 + 2i) + d = 0⇒ d = −c (3 + 2i)
Como d nos quedó en función de c, vamos a poner también a y b: reemplazando en las dosprimeras ecuaciones queda
a (1 + i2) + b = −ic (1 + i2) + ic (3 + 2i) = 2ic,
a (2 + i) + b = −2c (2 + i) + 2c (3 + 2i) = 2c + 2ic,
restando ambas obtenemos
a (−1 + i) = −2c⇒ a = c (1 + i) , y entonces
b = 2ic− a (1 + i2) = 2ic− c (1 + i) (1 + i2) = c (1− i) .
Tomando c = 1 queda
T (z) =(1 + i) z + (1− i)
z − (3 + 2i).

58 Mapeos en C
2.9. Distribución estacionaria de temperatura
Consideremos el problema de determinar la temperatura de un cuerpo homogéneo plano(de grosor depreciable) en cada instante de tiempo. Llamemos T (x, y, t) a la función que da latemperatura de cada punto (x, y) en el instante t. Fourier probó,basado en ciertos principiosfísicos que no mencionaremos acá, que T debe satisfacer la ecuación
a2 (Txx + Tyy) = Tt,
donde a es una constante no nula que depende de la conductividad del material del cuerpo.Para determinar la temperatura necesitamos mas datos, como la temperatura inicial y/o latemperatura del borde del objeto en cuestión.
Cuando, por circunstancias físicas específicas, la temperatura no depende del tiempo (de ahíel nombre estacionaria), la ecuación queda
Txx + Tyy = 0,
o sea T debe cumplir la ecuación de Laplace (que es la que cumplen las funciones armónicas), yhabrá que poner condiciones iniciales o de borde.
Nos proponemos revolver, a modo de ejemplo, el siguiente problema de distribución esta-cionaria de temperatura: consideremos una placa semifinita, que para nosotros será el semiplano{z : Im (z) ≥ 0} , de la cual sabemos que tiene distribución estacionaria, y que la temperatu-ra en el borde entre −1 y 1 vale 10o, y la temperatura en el resto del borde vale 0o. Bus-camos una T (x, y) definida y continua en {z : Im (z) ≥ 0} , con derivadas segundas continuas en{z : Im (z) > 0} , (que tome valores reales, pues representa la temperatura), tal que
Txx (x, y) + Tyy (x, y) = 0 ∀ (x, y) con x ∈ R, y > 0T (x, 0) = 10 si − 1 < x < 1T (x, 0) = 0 si x < −1 ó x > 1T (x, y) debe ser acotada
1-1 0
Notar que necesariamente en los puntos (−1, 0) y (1, 0) nuestra función T no va a estardefinida; además la primer condición junto con la continuidad de las derivadas segundas pedidas,dice que T es armónica. Como no tenemos idea de como encontrar T, comenzamos con unproblema parecido: encontrar F (x, y) armónica en la franja {z : 0 ≤ Im (z) ≤ π} , acotada y talque
F (x, 0) = 0, F (x, π) = 1 ∀ x ∈ R,

Mapeos en C 59
que equivale a resolver el problema de distribución estacionaria de temperatura en la franja{z : 0 ≤ Im (z) ≤ π} con temperatura 0o en el borde inferior y 1o en el borde superior
0
π
Encontrar F es muy fácil, basta con tomar F (z) = 1π Im (z) (ejercicio: verificar que sirve). Ahora,
si M (z) es una función analítica en el semiplano{z : Im (z) > 0} y continua en {z : Im (z) ≥ 0} ,que lleva dicho semiplano en la franja {z : 0 ≤ Im (z) ≤ π} de forma tal que el segmento{z : −1 < Re (z) < 1, Im (z) = 0} caiga en la recta {z : Im (z) = π} y las dos semirectas{z : Re (z) < −1, Im (z) = 0}∪{z : Re (z) > 1, Im (z) = 0} caigan sobre la recta {z : Im (z) = 0} ,o sea, que
Im (M (x, 0)) =
½π si − 1 < x < 10 si x < −1 ó x > 1
.
0
π
1-1 0
A
BB
M(z)
A0
B 0
Entonces
T (z) =10
πIm (M (z))
es la función que buscamos, pues:
T es armónica en {z : Im (z) > 0} pues es la parte real de una función analítica (!).
T (x, 0) = 10π Im (M (x, 0)) =
½π si − 1 < x < 10 si x < −1 ó x > 1
T es acotada pues 0 ≤ T (x, y) ≤ 10.
Para encontrar M, usamos nuestros conocimientos sobre transformaciones de Möbius y laspropiedades de log (z) (la rama principal): esta última mapea el semiplano {z : Im (z) ≥ 0} enla franja {z : 0 ≤ Im (z) ≤ π} , llevando el semieje real positivo sobre el eje real, y el semieje realnegativo sobre el eje {z : Im (z) = π} . Por eso, compondremos primero con la transformaciónde Möbius que lleva {z : −1 < Re (z) < 1, Im (z) = 0} sobre el semieje real negativo (y entoncesnecesariamente lleva {z : Re (z) < −1, Im (z) = 0}∪{z : Re (z) > 1, Im (z) = 0} sobre el semieje

60 Mapeos en C
real positivo) dejando el semiplano superior en el semiplano superior, y listo!
1-1 0
0
log( )z
π
La fórmula específica para dicha transformación de Möbius es
z − 1
z + 1,
por lo tanto M (z) = log³z−1z+1
´, y la función que buscamos es
T (x, y) =10
πIm
µlog
µz − 1
z + 1
¶¶=
10
πarg
µz − 1
z + 1
¶, con z = x + iy.
Busquemos específicamente T, para estudiar algunas otras propiedades:
z − 1
z + 1=
(z − 1) (z + 1)
(z + 1) (z + 1)=
zz + (z − z)− 1
|z + 1|2=
x2 + y2 + i2y − 1
(x + 1)2 + y2=
x2 + y2 − 1
(x + 1)2 + y2+i
i2y
(x + 1)2 + y2,
y entonces
T (x, y) =10
πarctan
µ2y
x2 + y2 − 1
¶,
donde arctan (·) es la rama de la arcotangente que toma valores en [0, π] (ver sección 1.11).La función obtenida parece no definida en el arco de círculo
©x2 + y2 = 1, y > 0
ª, pero si
x2o + y2o = 1, con yo > 0, entonces
lım(x,y)→(xo,yo)
10
πarctan
µ2y
x2 + y2 − 1
¶= lım
t→±∞10
πarctan (t) =
10
π
π
2= 5
(esto por la rama de la tangente que estamos usando). Además, si −1 < xo < 1 y hacemos(x, y)→ (xo, 0
+) (o sea que (x, y) tienda a (xo, 0) desde el semiplano superior) tenemos que
2y
x2 + y2 − 1→ 0−
(es decir se acerca a 0 por valores negativos), pues cuando y esta suficientemente cerca de 0 y xde xo se tiene que x2 + y2 < 1 (y y > 0). Entonces,
lım(x,y)→(xo,0+)
T (x, y) = lımt→0−
10
πarctan (t) =
10
ππ = 10,

Mapeos en C 61
y de manera análoga se ve que si |xo| > 1 entonces
lım(x,y)→(xo,0+)
T (x, y) = lımt→0+
10
πarctan (t) = 0,
es decir que se cumplen las condiciones de borde.
0 1-1
( , )x y
x0
arctan( )t
t
π
π/2
Veamos como son las isotermas, o sea las líneas que tienen igual temperatura:
T (x, y) = c⇐⇒ 10
πarctan
µ2y
x2 + y2 − 1
¶= c⇐⇒ 2y
x2 + y2 − 1= tan
³πc
10
´⇐⇒ 2y = tan
³πc
10
´ ¡x2 + y2 − 1
¢⇐⇒ x2 + y2 − 1− 2y
tan (πc/10)= 0
⇐⇒ x2 +
µy − 1
tan (πc/10)
¶2− 1−
µ1
tan (πc/10)
¶2= 0,
es decir las isotermas son círculos de centro³0, 1tan(πc/10)
´y radio
r1 +
³1
tan(πc/10)
´2. Notar que
por la rama de la tangente que estamos usando, necesitamos 0 ≤ πc10 ≤ π, es decir que los únicos
valores que puede tomar c son 0 ≤ c ≤ 10. Además los círculos siempre pasan por (±1, 0) , y si
0 < c < 5 entonces el centro³0, 1tan(πc/10)
´está en el semiplano superior, y si no en el inferior.
210-1-2
1
c < 5
c = 5
c > 5

62 Mapeos en C
Capítulo 3
Integrales en C
En este capítulo estudiaremos la clase de integral compleja mas usual, que es la integralde línea. Mas que usarla directamente en aplicaciones, lo que nosotros vamos a hacer es usarlacomo herramienta teórica para demostrar importantes hechos sobre las funciones de variablecompleja.
3.1. Integrales en el campo complejo
Comenzaremos definiendo la integral de una función de variable real pero imagen complejade la manera obvia (que es, integrando su parte real e imaginaria) para luego definir las integralesde líneas. Teniendo en cuenta que este capítulo contiene muchos resultados teoricos que no sonsencillos para interpretar intuitivamente, trataremos de pasarlo de la forma mas clara y concisa,ejemplificando en cada casa para que se entienda que estamos haciendo.
Definición 56 si γ (t) = x (t) + iy (t) es un camino continuo a trozos definido en [a, b] , pon-dremos Z b
aγ (t) dt =
Z b
ax (t) dt + i
Z b
ay (t) dt,
es decir queR ba γ (t) dt es un número complejo con
Re
µZ b
aγ (t) dt
¶=
Z b
ax (t) dt y Im
µZ b
aγ (t) dt
¶=
Z b
ay (t) dt.
Proposición 57 Si γ (t) , β (t) son caminos continuos a trozos en [a, b] , z0 es un número com-plejo y c es tal que a < c < b, entonces
63

64 Integrales en C
1.R ba γ (t) dt =
R ca γ (t) dt +
R bc γ (t) dt.
2.R ba (z0γ (t) + β (t)) dt = z0
R ba γ (t) dt +
R ba β (t) dt.
3.R ba γ (t) dt = −
R ab γ (t) dt.
4. Si X 0 (t) = x (t) y Y 0(t) = y (t) en (c, d) ⊆ [a, b] , entoncesR dc γ (t) dt = X (d) − X (c) +
i [Y (d)− Y (c)] , es decir, si Γ0(t) = γ (t) ∀ t ∈ (c, d) (con (c, d) ⊆ [a, b]), entoncesR dc γ (t) dt = Γ (d)− Γ (c) .
Demostración. ejercicio, descomponer en parte real e imaginaria, como dice la definición.
Ejemplo 58 queremos calcularR π0 eitdt. Como sabemos que d
dt
³eit
i
´= eit, la cuarta propiedad
anterior nos dice que Z π
0eitdt =
µeiπ
i
¶−µ
ei0
i
¶=−2
i= 2i.
Proposición 59 si γ : [a, b]→ C es continua a trozos, entonces¯Z b
aγ (t) dt
¯≤Z b
a|γ (t)| dt.
Demostración. escribimos el número complejoR ba γ (t) dt en coordenadas polares:Z b
aγ (t) dt = r0e
iθ0 ,
donde r0 =¯R ba γ (t) dt
¯, así que tenemos que demostrar que r0 ≤
R ba |γ (t)| dt. Pero
r0 = e−iθ0Z b
aγ (t) dt =
Z b
ae−iθ0γ (t) dt;
tomando parte real y usando la definición queda
r0 = Re (r0) = Re
µZ b
ae−iθ0γ (t) dt
¶ def.↓=
Z b
aRe³e−iθ0γ (t)
´dt
Análsis I↓≤
Z b
a
¯e−iθ0γ (t)
¯dt =
=
Z b
a|γ (t)| dt,
listo.
Definition 60 Si γ : [a, b] → C ⊆ C es un camino suave a trozos, y f (z) es continua en C,(es decir que f (γ (t)) es continua a trozos), entonces se poneZ
γf (z) dz =
Z b
af (γ (t)) γ0(t)dt,
que es la integral de línea de f sobre γ (tiene muchos nombres: integral de camino de f sobre γ,integral de f a lo largo de C, integral de f sobre C, etc.).
Integrales en C 65
Ejemplo 61 : Si γ (t) = eit, t ∈ [0, 2π] , entonces C es el círculo unitario centrado en 0 recorridoen sentido antihorario y para calcular
Rγ1zdz hacemosZ
γ
1
zdz =
Z 2π
0
1
eitieitdt = 2πi.
Una notación que se usa mucho en matemática aplicada, y que es la que seguiremos nosotros,es la siguiente: si γ : [a, b] → C ⊆ C es un camino suave a trozos, y f (z) es continua en C, sepone Z
γf (z) dz =
ZC
f (z) dz,
es decir, se piensa la integral sobre la imagen y no sobre la curva. Esto trae el problema de quela misma curva C puede tener mas de una parametrización, y en tal caso la notaciónZ
Cf (z) dz
podría significar muchos valores distintos (de hecho, la dirección en que recorremos la curvaes fundamental). Como para nosotros una curva C es la imagen de un camino γ, cada ves quetrabajemos con una curva se entenderá que tenemos una parametrización dada (que nos indicará,por ejemplo, los puntos inicial y final de C, y el sentido en el que se recorre. Las integrales delínea son, en cierta medida, independientes de la parametrización que usemos: si γ : [a, b] → Ces un camino suave por tramos que parametriza C y τ : [c, d]→ [a, b] es biyección creciente conderivada continua, entonces la función β (t) = γ (τ (t)) parametriza C en [c, d], y se puede verfácilmente que Z
γf (z) dz =
Zβ
f (z) dz,
es decir, este tipo de cambio de parametrización no afecta el valor de la integral. Por lo expuestoal comienzo de este capítulo, no profundizaremos mas sobre esta cuestión.
Ejemplo 62 Si C es el segmento de recta que va desde z0 hasta z1 y queremos calcularRC dz,
entonces parametrizamos C por medio de γ (t) = z0 + t (z1 − z0) , t ∈ [0, 1] , yZC
dz =
Z 1
0(z1 − z0) dt = (z1 − z0) .
Proposición 63 Si f (z) , g (z) son funciones continuas y C, C1 y C2 son curvas suaves portramos, entonces
1.RC (z0f (z) + g (z)) dz = z0
RC f (z) dz +
RC g (z) dz.
2. Si −C es la curva C recorrida en sentido inverso, entoncesR−C f (z) dz = −
RC f (z) dz.
66 Integrales en C
3. Si C = C1⊕C2, es decir si la curva C consiste en recorrer primero la curva C1 y luego lacurva C2, entonces
RC f (z) dz =
RC1
f (z) dz +RC2
f (z) dz.
4. Si |f (z)| ≤M ∀ z ∈ C, entonces¯RC f (z) dz
¯≤M (C) , donde (C) = largo de la curva
C.(1)
Demostración. las tres primeras son inmediatas de las definiciones y propiedades anterioresy quedan como ejercicio. Para la cuarta, tomamos una parametrización γ : [a, b] → C de C,entonces ¯Z
Cf (z) dz
¯=
¯Z b
af (γ (t)) γ0(t)dt
¯,
teniendo en cuenta que esta es una integral del tipo de la proposición anterior, resulta¯ZC
f (z) dz
¯≤Z b
a
¯f (γ (t)) γ0(t)
¯dt ≤M
Z b
a
¯γ0(t)
¯dt = M (C) .
Definition 64 Si f es una función de variable compleja, entonces diremos que F (z) es unaprimitiva de f si ocurre que F es derivable y F 0(z) = f (z) .
Teorema 65 Si f (z) es una función continua en un abierto D y tiene una primitiva F (z)en D (o sea si F 0(z) = f (z) ∀ z ∈ D), entonces para todo camino suave γ : [a, b]→ D se tieneque Z
γf (z) dz = F (γ (b))− F (γ (a)) ,
es decir, la integral no depende del camino γ sino de los puntos inicial y final γ (a) y γ (b) . Enparticular si γ es cerrada se tiene que
Rγ f (z) dz = 0.
Demostración. hemos visto ya que
d
dt(F ◦ γ) (t) = F 0 (γ (t)) γ0(t) = f (γ (t)) γ0(t),
y entonces Zγf (z) dz =
Z b
af (γ (t)) γ0(t)dt = F (γ (b))− F (γ (a)) .
1Si C está parametrizada por el camino suave por trozos γ : [a, b]→ C, entonces (C) =b
a|γ0(t)| dt

Integrales en C 67
3.2. Teoremas de Cauchy
En esta sección veremos un montón de resultados, que en el fondo son todo equivalentes.Todas las curvas que aparecen se suponen suaves por trozos, salvo especificación contraria.
Teorema 66 (de Cauchy) Si D es un abierto simplemente conexo en C, f (z) es analíticaen D y C es una curva cerrada simple contenida en D, entoncesZ
Cf (z) dz = 0.
Demostración. supongamos, a los fines de allanar a demostración, que f 0 es continua (lademostración sin esta hipótesis adicional es muy complicada y no vale la pena meterse en eso).Entonces si f = u + iv, resulta que u y v tienen derivadas parciales continuas en D, por lo cualvamos a poder aplicarles el teorema de Green.(2) Tomemos γ : [a, b]→ D una parametrización deC, γ (t) = x (t)+iy (t) , y supongamos que γ recorre C en sentido antihorario (esto es para poderaplicar Green, y no afecta al resultado general pues es lo mismo probar que
R−C f (z) dz = 0).
Entonces
f (γ) γ0 = [u (γ) + iv (γ)]¡x0 + iy0
¢= u (γ)x0 − v (γ) y0 + i
£u (γ) y0 + v (γ)x0
¤,
y entoncesZC
f (z) dz =
Z b
af (γ (t)) γ0(t)dt =
Z b
a[u (γ (t)) + iv (γ (t))]
¡x0 (t) + iy0 (t)
¢dt
=
Z b
a
£u (x (t) , y (t))x0 (t)− v (x (t) , y (t)) y0 (t)
¤+
+i
Z b
a
£u (x (t) , y (t)) y0 (t) + v (x (t) , y (t))x0 (t)
¤dt
=
ZC
udx− vdy + i
ZC
udy + vdx,
donde la últma igualdad viene de la definición de Análisis II. Sea R la región interior a la curvaC, entonces usando Green y C-R tenemos queZ
Cudx− vdy =
ZC
udx + (−v) dy =
ZZR
(−vx − uy) dxdy = 0,
y ZC
udy + vdx =
ZC
vdx + udy =
ZZR
(ux − vy) dxdy = 0,
y entoncesRC f (z) dz = 0.
2Teorema de Green: si P (x, y) y Q (x, y) tienen derivadas parciales continuas en un abierto D, y R es unaregión simplemente conexa tal que R ∪ ∂R ⊆ D, entonces
∂RPdx + Qdy =
R(Qx − Py) dxdy, donde ∂R se
recorre en sentido antihorario.
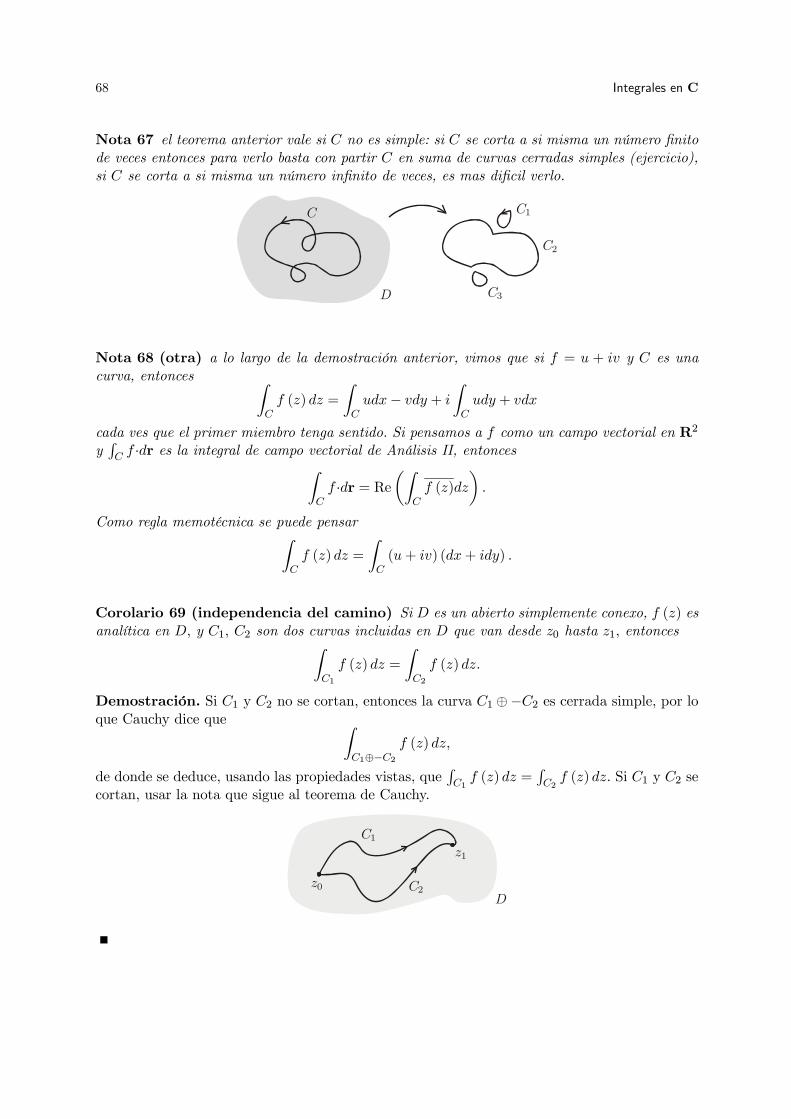
68 Integrales en C
Nota 67 el teorema anterior vale si C no es simple: si C se corta a si misma un número finitode veces entonces para verlo basta con partir C en suma de curvas cerradas simples (ejercicio),si C se corta a si misma un número infinito de veces, es mas dificil verlo.
C
D
C1
C2
C3
Nota 68 (otra) a lo largo de la demostración anterior, vimos que si f = u + iv y C es unacurva, entonces Z
Cf (z) dz =
ZC
udx− vdy + i
ZC
udy + vdx
cada ves que el primer miembro tenga sentido. Si pensamos a f como un campo vectorial en R2
yRC f ·dr es la integral de campo vectorial de Análisis II, entoncesZ
Cf ·dr = Re
µZC
f (z)dz
¶.
Como regla memotécnica se puede pensarZC
f (z) dz =
ZC
(u + iv) (dx + idy) .
Corolario 69 (independencia del camino) Si D es un abierto simplemente conexo, f (z) esanalítica en D, y C1, C2 son dos curvas incluidas en D que van desde z0 hasta z1, entoncesZ
C1
f (z) dz =
ZC2
f (z) dz.
Demostración. Si C1 y C2 no se cortan, entonces la curva C1 ⊕−C2 es cerrada simple, por loque Cauchy dice que Z
C1⊕−C2f (z) dz,
de donde se deduce, usando las propiedades vistas, queRC1
f (z) dz =RC2
f (z) dz. Si C1 y C2 secortan, usar la nota que sigue al teorema de Cauchy.
D
C1
C2z0
z1

Integrales en C 69
Nota(ción) 70 en las condiciones del corolario anterior, se suele denotarR z1z0
f (z) dz a laintegral de f sobre cualquier camino suave por trozos que va desde z0 hasta z1. Notar que fuerade este contexto específico, la expresión
R z1z0
f (z) dz no tiene ningún sentido en variable compleja.
Corolario 71 (otro) si R es una región cuya frontera ∂R consta de dos curvas cerradas simples(∂R)1 y (∂R)2, la segunda en el interior de la primera y recorridas en sentido inverso, y f (z)es una función analítica en un abierto D que contiene a R ∪ ∂R, entoncesZ
(∂R)1
f (z) dz = −Z(∂R)2
f (z) dz.
Como consecuencia, Z∂R
f (z) dz = 0.
Demostración. dividamos a R como sugiere el dibujo, y llamemos C1 y C2 a las fronteras decada pedazo de R:
R DT1
T2T3
T4
S1
S2
S3S4
de modo que C1 = T1 ⊕ T2 ⊕ T3 ⊕ T4 y C2 = S1 ⊕ S2 ⊕ S3 ⊕ S4 con las orientaciones dibujadas.Cauchy dice que Z
C1
f (z) dz =
ZC2
f (z) dz = 0,
y entonces
0 =
ZT1
f (z) dz +
ZT2
f (z) dz +
ZT3
f (z) dz +
ZT4
f (z) dz +
+
ZS1
f (z) dz +
ZS2
f (z) dz +
ZS3
f (z) dz +
ZS4
f (z) dz,
pero teniendo en cuenta queZT2
f (z) dz +
ZS4
f (z) dz =
ZT4
f (z) dz +
ZS2
f (z) dz = 0,
resulta que
0 =
ZT1
f (z) dz +
ZT3
f (z) dz +
ZS1
f (z) dz +
ZS3
f (z) dz,
o sea
0 =
Z∂R
f (z) dz.

70 Integrales en C
A la orientación que le hemos dado a ∂R se llama orientación positiva. Notar que en elcorolario anterior, D no necesita ser simplemente conexo, o sea que por ejemplo se aplica aD = C− {0} , R = {z : 1 < |z| < 2} , y f (z) = 1/z. Además el corolario anterior se puedegeneralizar para regiones “con muchos huecos”, o sea regiones cuya frontera es una curva cerradasimple C y curvas cerradas simples C1, ..., Cn en el interior de C y que no se cortan entre ellas.
CC1
C2
C3Cn
Corolario 72 (principio de deformación de la trayectoria) si C1 y C2 son dos curvascerradas simples recorridas en el mismo sentido, y f (z) es una función analítica en un abiertoD que contiene a C1, C2 y la región (Int (C1) ∪ Int (C2)) − (Int (C1) ∩ Int (C2)) (ver dibujo),entonces Z
C1
f (z) dz =
ZC2
f (z) dz.
Demostración.
C1
C2
C1
C2
C1
C2
para curvas que se cortan una cantidad finita de veces, la región en cuestión es la que determinanlas dos curvas, y es el caso interesante. Si las curvas no se cortan entonces este resultado es como“otro corolario” si una esta en el interior de la otra, o las integrales son cero si no se cortan, porel teorema de Cauchy. La demostración del caso interesante es igual que el corolario anterior,usando la nota siguiente al teorema de Cauchy.
Ejemplo 73 1. Si C es la frontera del anillo {z : 1 ≤ |z| ≤ 2} orientada positivamente, en-tonces
RC1zdz = 0 pues f (z) = 1/z es analítica en C− {0}.
2. Sea C es una curva cerrada simple recorrida en sentido antihorario y z0 es un punto enel interior de C, queremos calcular
RC (z − z0)
m dz, con m un entero. Llamemos γ (t) =

Integrales en C 71
eit+z0, con t ∈ [0, 2π] (o sea γ parametriza un círculo de radio 1 centrado en z0), entoncesusando el principio de deformación de la trayectoria, tenemos que
ZC
(z − z0)m dz =
Zγ(z − z0)
m dz
def.↓=
Z 2π
0
¡eit + z0 − z0
¢mieitdt =
Z 2π
0i¡eit¢m+1
dt =
=
Z 2π
0ieit(m+1)dt =
⎧⎨⎩ 2πi si m = −1
1m+1e
it(m+1)¯2π0
= 0 si m 6= −1.
z0
3.3. Primitivas
Ya definimos lo que es una primitiva de una función compleja, ahora veremos una forma deencontrar primitivas de funciones dadas.
Teorema 74 (de existencia de primitivas) Sea f (z) una función analítica en un abiertoD simplemente conexo y z0 un punto de D. Entonces la función
F (z) =
Z z
z0
f (w) dw
es analítica en D y satisface F 0(z) = f (z) ∀ z ∈ D.
Demostración. antes que todo, notar que F esta bien definida pues según uno de nuestroscorolarios, en estas condiciones la integral (que define F ) no depende del camino. Tomamos unz ∈ D fijo, quiero ver que F 0(z) = f(z), o sea que
lım∆z→0
F (z +∆z)− F (z)
∆z= f (z) ,
que es lo mismo que ver que
lım∆z→0
¯F (z +∆z)− F (z)
∆z− f (z)
¯= 0,
y para poder ver que este límite vale cero vamos a escribir F (z+∆z)−F (z)∆z y f (z) de otra manera.

72 Integrales en C
Tomo r > 0 tal que el disco {w : |w − z| < r} este incluido en D.
Dz z + ∆
z0
Entonces para todo ∆z con 0 < |∆z| < r es
F (z +∆z)− F (z)
∆z=
1
∆z
µZ z+∆z
z0
f (w) dw −Z z
z0
f (w) dw
¶=
1
∆z
µZ z
z0
f (w) dw +
Z z+∆z
zf (w) dw −
Z z
z0
f (w) dw
¶=
1
∆z
Z z+∆z
zf (w) dw.
Por otro lado, comoR z+∆zz dw = ∆z (lo vimos en un ejemplo, notar que puedo calcular dicha
integral por cualquier camino que va de z a z +∆z), entonces
f (z) = f (z)
µ1
∆z
Z z+∆z
zdw
¶=
1
∆z
Z z+∆z
zf (z) dw
(recordar que z está fijo). Entonces
F (z +∆z)− F (z)
∆z− f (z) =
1
∆z
Z z+∆z
zf (w) dw − 1
∆z
Z z+∆z
zf (z) dw
=1
∆z
Z z+∆z
z(f (w)− f (z)) dw,
y como el largo del segmento que va de z a z +∆z es |∆z| y la última integral la puedo hacersobre cualquier camino, resulta¯F (z +∆z)− F (z)
∆z− f (z)
¯=
¯1
∆z
Z z+∆z
z(f (w)− f (z)) dw
¯≤ 1
|∆z|M (∆z) |∆z| = M (∆z) ,
donde
M (∆z) = max {|f (z)− f (w)| con w en el segmento que va de z a z +∆z} .
Ahora, esta claro que M (∆z) −→∆z→0
0 pues f es continua (por ser analítica) (si ∆z → 0 y w está
en el segmento que va de z a z +∆z entonces necesariamente f (w)→ f (z)), es decir que
lım∆z→0
¯F (z +∆z)− F (z)
∆z− f (z)
¯= 0,
listo.
Como corolario de este teorema podemos mejorar la versión que tenemos del teorema paraencontrar armónicas conjugadas:

Integrales en C 73
Corolario 75 Si u (x, y) es una función armónica (real) definida en un abierto simplementeconexo D, y z0 ∈ D, entonces la integral de línea (de Análisis II)
v (z) =
Z z
z0
uxdy − uydx
es independiente del camino, y define una función armónica conjugada de u en D.
Demostración. llamemos g (z) = ux (z)− iuy (z) , entonces g está definida en D y es analíticaen D, pues si ponemos g = U + iV queda U = ux, V = −uy, y entonces U y V tienen derivadasparciales continuas (pues u es armónica) y
Ux = uxx, Vy = −uyy = uxx (pues u es armónica), y
Uy = uyx, Vx = −uxy = −uyx.
Podemos, entonces, encontrar una primitiva G de g integrando como en el teorema anterior. SiCz es cualquier camino que va desde z0 hasta z, y usando “otra nota” después del teorema deCauchy queda
G (z) =
ZCz
g (w) dw =
ZCz
Udx− V dy + i
ZCz
Udy + V dx =
=
ZCz
uxdx + uydy + i
ZCz
uxdy − uydx =
ZCz
∇u · dt + iv (z) =
u (z)− u (z0) + iv (z) .
Como G es una función analítica (es derivable y su derivada es g) entonces G (z) − u (z0) esanalítica en D, y su parte imaginaria es v (z).
3.4. Fórmula integral de Cauchy
En esta sección veremos otro importante resultado teórico y sus consecuencias.
Teorema 76 (fórmula integral de Cauchy) Si f (z) es analítica en un abierto simple-mente conexo D, C es una curva cerrada simple en D y z0 es un punto en el interior deC, entonces
1
2πi
ZC
f (z)
(z − z0)dz = f (z0) ,
donde C se recorre en sentido antihorario.
Demostración. como f (z) = f (z0) + f (z)− f (z0) , tenemos que
1
2πi
ZC
f (z)
(z − z0)dz =
1
2πi
ZC
f (z0)
(z − z0)dz +
1
2πi
ZC
f (z)− f (z0)
(z − z0)dz
=f (z0)
2πi
ZC
1
(z − z0)dz +
1
2πi
ZC
f (z)− f (z0)
(z − z0)dz,
figur

74 Integrales en C
y comoRC
1(z−z0)dz = 2πi (lo vimos en un ejemplo), el teorema quedará demostrado si probamos
que ZC
f (z)− f (z0)
(z − z0)dz = 0.
Tomemos r0 lo suficientemente pequeño como para que el entorno {z : |z − z0| < r0} este incluidoen el interior de C (existe pues Jordan dice que el interior de C es abierto), entonces si Cr es uncírculo de radio r centrado en z0 con r < r0, un corolario del teorema de Cauchy nos dice queZ
C
f (z)− f (z0)
(z − z0)dz =
ZCr
f (z)− f (z0)
(z − z0)dz, (3.1)
donde Cr se recorre en sentido antihorario (esto es porque f(z)−f(z0)(z−z0) es analítico en D − {z0} ,
que es un abierto que contiene la región cuya frontera es C ∪ Cr).
C
D
Cz0
r0
LlamemosM (r) = max
z∈Cr|f (z)− fz0 |
(o sea M (r) es el máximo valor que toma la función |f (z)− fz0 | cuando z se mueve por Cr),entonces ¯
f (z)− f (z0)
(z − z0)
¯≤ M (r)
r∀ z ∈ Cr.
Combinado esto con (15), y usando las propiedades de acotación y que (Cr) = 2πr, queda¯ZC
f (z)− f (z0)
(z − z0)dz
¯| {z }
número fijo
=
¯ZCr
f (z)− f (z0)
(z − z0)dz
¯≤ M (r)
r2πr = 2πM (r)| {z }
depende de r
,
es decir, el número que queremos probar es cero, es mas chico que M (r) cualquiera sea r < r0.Por último, notar que haciendo r → 0 puedo hacer M (r) tan próximo a 0 como quiera, pues fes analítica en (un entorno de) z0 y por lo tanto continua en z0.
Una de las consecuencias importante de la fórmula integral de Cauchy es el siguiente teorema:
Teorema 77 si f es analítica en un abierto simplemente conexo D entonces tiene derivadasde todos los ordenes en D, es decir, f (n) (z) existe y es analítica en D para todo n ∈ N. Además,
f (n) (z0) =n!
2πi
ZC
f (z)
(z − z0)n+1dz ∀ z0 ∈ D y ∀n ∈ N,
donde C es cualquier curva cerrada simple en D que contenga z0 en su interior.

Integrales en C 75
Este teorema es muy importante porque dice que si uno tiene una función f : D → Cderivable (con D abierto simplemente conexo), entonces la puedo derivar tantas veces comoquiera, lo cual es bastante distinto a lo que pasaba en R.
Idea de la demostración. nada nuevo, con la fórmula integral de Cauchy y un poco de álgebrase llega a
f (z0 +∆z)− f (z0)
∆z=
i
∆z
µ1
2πi
ZC
f (z)
(z − z0 −∆z)dz − 1
2πi
ZC
f (z)
(z − z0)dz
¶,
y luego con argumentos algebraicos y del tipo usados en la demostración de la fórmula integralde Cauchy, se ve que eso tiende a 1
2πi
RC
f(z)
(z−z0)2dz (lo cual da el caso n = 1); el caso general se
sigue por inducción en n.
Corolario 78 Si f (z) es analítica en un abierto D que incluye la bola {z : |z − z0| ≤ r} , y|f (z)| ≤M ∀ z ∈ {z : |z − z0| = r} , entonces¯
f (n) (z0)¯≤ n!M
rn.
Demostración. Si Cr = {z : |z − z0| = r} , usando el teorema anterior y acotación, y puestoque |z − z0| = r si z ∈ Cr, tenemos que¯
f (n) (z0)¯≤¯
n!
2πi
ZCr
f (z)
(z − z0)n+1dz
¯≤ n!
2π
M
rn+1(Cr) =
n!
2π
M
rn+12πr.
Corolario 79 (del corolario, teorema de Liuville) si f (z) es analítica en todo C, y aco-tada, entonces f es constante.
Demostración. sabemos que hay un número positivo M tal que |f (z)| ≤M ∀ z ∈ C. Tomemosz0 ∈ C, entonces como {z : |z − z0| ≤ r} ⊆ C ∀ r > 0, el corolario anterior dice que
¯f 0 (z0)
¯≤ M
r∀ r > 0,
y por lo tanto f 0 (z0) = 0, como esto vale ∀ z0 ∈ C, tenemos que f es constante.
Para terminar, comentamos que también es cierta la recíproca de Cauchy, mas explícita-mente:
Teorema 80 (de Morera) si f (z) es una función compleja continua en un abierto conexoD y Z
Tf (z) dz = 0
para todo camino triangular T incluido en D, entonces f es analítica en D.

76 Integrales en C
Idea de la demostración. bastante parecida a la del teorema de las primitivas. El lineamientoes el siguiente: usar la hipótesis
RT f (z) dz = 0 para construir una primitiva F de f, entonces
F es analítica, entonces existe F 00 (z) (pues según un teorema anterior existe F (n) (z) ∀n ∈ N),entonces existe f 0 (z) , o sea f es analítica.
Ejemplo 81 1. Queremos acotarRCsin(z)z dz, donde C es el círculo {z : |z| = 2} . Como la
cota depende del largo de C y no de la dirección en que C se recorre, no hace falta especificarla orientación de C. Ahora, sin (z) = 1
2i
¡eiz − e−iz
¢, entonces
|sin (z)| ≤ 1
2
¡¯eiz¯+¯e−iz
¯¢,
y si z = x + iy, queda¯eiz¯=¯eix−y
¯= e−y, y análogamente
¯e−iz
¯= ey, o sea
|sin (z)| ≤ 1
2
¡ey + e−y
¢= cosh (y) .
Si z ∈ C entonces y ∈ [−2, 2] , tenemos que
|sin (z)||z| ≤ cosh (2)
2∀ z ∈ C,
por lo tanto ¯ZC
sin (z)
zdz
¯≤ cosh (2)
22π2 = 2π cosh (2) .
2. Queremos calcularR iπ0 ezdz. Notar que esa expresión tiene sentido pues ez es analítica
en todo el plano complejo, y por lo tanto la integral no depende del camino sino de losextremos. Puesto que (ez)0 = ez, resultaZ iπ
0ezdz = eiπ − e0 = −2.
3. Para calcularRC
zz2+2dz, donde C es el círculo {z : |z| = 1} recorrido en sentido antiho-
rario, no hay que hacer ninguna cuenta: puesto que la función
f (z) =z
z2 + 2
es analítica en D = {z : |z| < 2} , que es un abierto simplemente conexo que contiene C,Cauchy dice que tal integral vale 0.
4. Para calcularRCcos(z)z dz, donde C es el círculo {z : |z| = 1} recorrido en sentido antiho-
rario, se puede usar la fórmula integral de Cauchy: tomando f (z) = cos (z) y revisando elteorema, concluimos que
cos (0) =1
2πi
ZC
cos (z)
zdz, o sea
ZC
cos (z)
zdz = 2πi.

Integrales en C 77
3.5. Módulo Máximo
Otra importante consecuencia de la fórmula integral de Cauchy es que nos permite ver queuna función analítica no puede tener máximo, en módulo, en ningún abierto. Para ver esto,comenzamos con un lema:
Lema 82 Si f (z) es una función analítica en el entorno B = {z : |z − z0| < ε} , y |f (z0)| ≥|f (z)| para todo z ∈ B, entonces f es constante en B.
Demostración. tomemos w ∈ B y llamemos ρ = |w − z0| y Cρ al círculo {z : |z − z0| = ρ}recorrido en sentido antihorario (notar que Cρ ⊆ B). Parametrizamos Cρ por medio de γ (t) =z0 + ρeit, con t ∈ [0, 2π] ,
B
w
ρ εz0
entonces usando la fórmula integral de Cauchy y la definición de integral, tenemos que
f (z0) =1
2πi
ZCρ
f (z)
z − z0dz =
1
2πi
Z 2π
0
f¡z0 + ρeit
¢z0 + ρeit − z0
iρeitdt =1
2π
Z 2π
0f¡z0 + ρeit
¢dt,
y entonces
|f (z0)| =¯
1
2π
Z 2π
0f¡z0 + ρeit
¢dt
¯≤ 1
2π
Z 2π
0
¯f¡z0 + ρeit
¢¯dt ≤ 1
2π
Z 2π
0|f (z0)| dt = |f (z0)| ,
donde hemos usado propiedades de las integrales de funciones complejas de variable real en laprimer desigualdad y que |f (z0)| ≥ |f (z)| para todo z ∈ Cρ en la segunda. Esta última cadenade desigualdades nos permite deducir que
1
2π
Z 2π
0
¯f¡z0 + ρeit
¢¯dt =
1
2π
Z 2π
0|f (z0)| dt,
y entonces1
2π
Z 2π
0
¡|f (z0)|−
¯f¡z0 + ρeit
¢¯¢dt = 0.
Pero el integrando de esa integral es una función continua (de t) y positiva, por lo tanto debeser
|f (z0)|−¯f¡z0 + ρeit
¢¯= 0 ∀ t ∈ [0, 2π] ,
en particular, |f (w)| = |f (z0)| . Como este razonamiento vale para cualquier w de B, concluimosque
|f (w)| = |f (z0)| ∀ w ∈ B,

78 Integrales en C
es decir que f tiene módulo constante en B, y por lo tanto debe ser constante en B según ciertoteorema que vimos.
Con este lema, podemos demostrar el teorema principal de esta sección:
Teorema 83 Si f (z) es una función analítica en un abierto conexo D, entonces |f (z)| nopuede alcanzar un valor máximo en D, salvo que f sea constante en D. Dicho de otra forma,si f no es constante en D entonces no existe en D ningún punto z0 que satisfaga |f (z)| ≤|f (z0)| ∀ z ∈ D.
Demostración. supongamos que existe z0 ∈ D tal que |f (z)| ≤ |f (z0)| ∀ z ∈ D. Voy amostrar que en tal caso f es constante en D. Tomo w ∈ D cualquiera, y como D es conexoexiste una poligonal C que une z0 con w. Llamemos d a la mínima distancia entre C y ∂D (otomamos d cualquier número positivo si D = C, d es siempre positivo pero no vamos a demostrareso acá, lo vamos a aceptar). Formemos ahora una sucesión finita de números z1, z2, ..., zn en C,de forma tal que zn = w y
|zj − zj−1| < d ∀ j = 1, 2, ..., n,
y construyamos entornos B0, ..., Bn, donde Bj = {z : |z − zj | < d} .
D
z2z3
zn
z4
z0z1
B1B2
B3Bn
Notar que de esta forma el centro de la bola Bj pertenece también a la bola Bj−1.La demostración termina aplicando el lema anterior a cada bola: como |f (z0)| ≥ |f (z)| ∀ z ∈
B0 el lema anterior nos dice que f es constante en dicha bola, en particular f (z1) = f (z0) . Peroentonces |f (z1)| ≥ |f (z)| ∀ z ∈ D, en particular |f (z1)| ≥ |f (z)| ∀ z ∈ B1, y de nuevo ellema anterior nos dice que f debe ser constante en B1, en particular f (z2) = f (z0) . Repitiendoeste razonamiento n-veces concluimos que f (zn) = f (z0) , o sea f (w) = f (z0) . Como esto valepara todo w de D, listo.
Si una función es analítica en el interior de un conjunto conexo, cerrado y acotado R, ycontinua en todo R, entonces la función real y continua |f (z)| debe alcanzar un máximo en R(Análisis II, función continua sobre compacto), es decir, debe existir z0 en R tal que
|f (z)| ≤ |f (z0)| ∀ z ∈ R.
Si f es constante, tendremos que |f (z)| = |f (z0)| ∀ z ∈ R, pero si f no es constante, el teoremaanterior nos dice que
|f (z)| < |f (z0)| ∀ z perteneciente al interior de R,
es decir que vale el siguiente:

Integrales en C 79
Corolario 84 Si f es una función continua en un conjunto conexo, cerrado y acotado R, yanalítica en el interior R, entonces el máximo de |f (z)| se alcanza siempre en un punto de lafrontera de R y nunca en un punto del interior.
Para terminar, un teorema muy útil que se llama principio del máximo para funcionesarmónicas, que es el que permite asegurar la unicidad de solución en los problemas de tipoDirichlet(3):
Teorema 85 Si u (x, y) es una función armónica en un abierto conexo D de C, entonces uno puede alcanzar un valor máximo en D, salvo que sea constante en D.
Demostración. Supongamos primero que D es simplemente conexo, entonces existe una ar-mónica conjugada de u, que llamamos v. Así, la función g (z) = u (x, y) + iv (x, y) en analíticaen D, y por lo tanto también lo es
f (z) = eg(z).
Pero |f (z)| = eu(z), por lo tanto si u (z0) es máximo en D tendremos que |f (z0)| es máximo enD, y por lo tanto f es constante en D, segun el teorema anterior. Entonces eu(z) es constanteen D, lo que nos dice que u (z) es constante en D.
Si D no es simplemente conexo, se sigue un razonamiento similar al utilizado para MóduloMáximo (ejercicio).
Junto con el teorema anterior, tenemos el respectivo corolario:
Corolario 86 Si u (x, y) es una función real continua en un conjunto conexo, cerrado y acotadoR, y armónica en el interior R, entonces el máximo de u (x, y) se alcanza siempre en un puntode la frontera de R y nunca en un punto del interior.
3Con problema tipo Dirichlet nos referimos al siguiente: dado un abierto D de C, y una función real f definidaen ∂D, hay que encontrar una función armónica T en D, continua en D ∪ ∂D y con T (z) = f (z) ∀ z ∈ D.

80 Integrales en C

Capítulo 4
Sucesiones y series en C
Todo el trabajo de este capítulo esta destinada a mostrar que tiene sentido sumar infinitasfunciones. Dichas sumas infinitas de funciones se llamas series de funciones, y son fundamentalestanto en la teoría de variable compleja como en la resolución de ecuaciones diferenciales, y paramuchas cosas mas.
4.1. Sucesiones complejas
Definición 87 Si a cada número natural n se le asigna un número complejo zn, decimos que es-tos números z1, z2, z3, ..., zn, ... forman una sucesión infinita que se denota {zn}∞n=1 ó {zn}n∈N ó{z1, z2, z3, ...} . A los números z1, z2, z3, ... se los llama términos de la sucesión.
Ejemplo 88 1 + i, 12 + i, 1
3 + i, 14 + i, ... es una sucesión. Otra forma de denotar la misma
sucesión es {zn}n∈N , con zn = 1n + i.
Diremos que la sucesión {zn}n∈N converge a un número c ∈ C si para todo ε > 0 existeN > 0 tal que |zn − c| < ε si n > N. Dicho enlenguaje llano, la sucesión converge a c si para todo entorno de c hay un N (que depende del
81

82 Sucesiones y series en C
entorno que elija) tal que todos los zn con subíndice mayor que N están el entorno.
B
cε
z2
z3
zn
z4
z1
Esta situación se denota por
lımn→∞
zn = c ó zn −→n→∞
c.
Notar que lımn→∞ zn = c si y solo si lımn→∞ |zn − c| = 0 (ejercicio), y por lo tanto para estu-diar sucesiones complejas basta estudiar las reales. Además notar que si una sucesión convergeentonces el límite es único, es decir, no pueden existir dos valores distintos c1 y c2 tales quezn −→
n→∞c1 y zn −→
n→∞c2 (ejercicio).
Proposición 89 Si {zn}n∈N y {wn}n∈N son sucesiones complejas tales que lımn→∞ zn = c ylımn→∞wn = d, entonces:
1. lımn→∞ (αzn + wn) = αc + d.
2. lımn→∞ (znwn) = cd
3. Si d 6= 0 entonces wn 6= 0 para n suficientemente grande, y lımn→∞znwn
= cd .
4. Si zn = xn + iyn y c = a + ib, entonces lımn→∞ zn = c si y solo si lımn→∞ xn = a ylımn→∞ yn = b.
5. lımn→∞ zn+1 = c, en general, para cualquier número natural k se tiene que lımn→∞ zn+k =c.
Demostración.
1. Doy ε > 0; notar que el único caso interesante es α 6= 0. Por definición de límite se que
∃ N1 tal que |zn − c| < ε
2αsi n > N1, y ∃ N2 tal que |wn − c| < ε
2si n > N2.
Tomemos N = max (N1, N2) , entonces si n > N valen las dos desigualdades de arriba, y|(αzn + wn)− (αc + d)| = |(αzn − αc) + (wn − d)| ≤ |(αzn − αc)|+|(wn − d)| < α ε
2α+ ε2 =
ε.
2. Exactamente como (1), usando los trucos algebraicos que se usan siempre para ver que ellímite del producto es el producto de los límites y lo mismo del cociente, ver la carpeta deAnálisis I, ejercicio.
3. Simil al anterior.

Sucesiones y series en C 83
4. Usando que
|xn − a| = |Re (zn − c)| ≤ |(zn − c)| , y |yn − b| = |Im (zn − c)| ≤ |(zn − c)| ,
concluimos inmediatamente que si lımn→∞ zn = c entonces lımn→∞ xn = a y lımn→∞ yn =b. Recíprocamente, notar que
|(zn − c)| = |xn + iyn − a− ib| ≤ |xn − a|+ |iyn − ib| = |xn − a|+ |yn − b| ,
y ahí se ve que si lımn→∞ xn = a y lımn→∞ yn = b, entonces lımn→∞ zn = c.
5. Ejercicio de notación.
Ejemplo 90 La sucesión©1 + i, 1 + i
2 , 1 + i3 , 1 + i
4 , 1 + i5 , ...
ª, o sea la sucesión {zn}n∈N con
zn = 1 + in , converge a 1 pues
|zn − 1| =¯1 +
i
n− 1
¯=
1
n−→n→∞
0.
Notar que Re (zn) = 1 y Im (zn) = 1n , por lo tanto
Re (zn) −→n→∞
1 y Im (zn) −→n→∞
0.
Nota 91 Comenzar desde n = 1 es por costumbre, se puede comenzar desde cualquier natural,o incluso desde un entero negativo. En muchos casos usaremos sucesiones así: {z0, z1, z2, ...} .
A continuación vamos a ver un teorema que marca la diferencia entre R y Q (el conjuntode los números racionales). Para hacernos una idea podemos pensar en el siguiente problema:considerar la sucesión de números racionales
1,4142, 1,41421, 1,414213, 1,4142135, 1,41421356, 1,414213562, 1,4142135623, 1,41421356237,
1,414213562373, 1,41421356237309, 1,414213562373095, 1,41421356237309504, .....
Esta es una sucesión creciente (es decir, todo término es mas grande que su antecesor) y acotada(es decir, todos los términos están en un intervalo, por ejemplo en el [1, 2]), pero la sucesión noconverge a ningún número racional (está claro que converge a
√2, y como el límite es único no
puede converger a un racional). Es decir, si no pensamos en los números reales tendríamos unasucesión acotada y creciente que no converge. En R no puede pasar eso, de hecho, esa es ladiferencia entre R y Q.
Teorema 92 (completitud de R) Si {xn}n∈N es una sucesión de números reales crecientey acotada, entonces es convergente.

84 Sucesiones y series en C
Idea gráfica que lo hace creíble. primero notar que el enunciado dice que hay un intervalocerrado I0 tal que {xn}n∈N ⊆ I0, y que xm ≤ xm+1 ∀ m ∈ N. Dividamos I0 en dos intervaloscerrados, entonces uno de estos dos intervalos debe contener infinitos términos de la sucesión,lo llamo I1. Ahora repito el razonamiento anterior: divido I1 en dos intervalos cerrados igualesy llamo I2 al que contenga infinitos términos de la sucesión. Repitiendo este razonamiento,construyo una cadena infinita de intervalos cerrados I0 ⊃ I1 ⊃ I2 ⊃ I3 ⊃ I4 ⊃ I5 ⊃ .....
I1
I2
I3
con la particularidad de la longitud de In es la mitad de la longitud de In−1, y cada In contieneinfinitos términos de la sucesión. Se ve que hay un número real c que debe estar en todos losintervalos (concretamente, se ve que la intersección infinita I0∩I1∩I2∩I3∩I4∩I5∩..... =
T∞n=0 In
es no vacía).Además todo entorno de c contiene infinitos términos de la serie, pues si doy {z : |z − c| < ε}
un entorno de c, tomo k lo suficientemente grande para que la longitud de Ik sea menor que ε,y entonces (como c ∈ Ik) se tiene Ik ⊆ {z : |z − a| < ε} , y entonces tengo infinitos términos dela sucesión en el entorno dado.
También notar que xn ≤ c ∀n (si algún xno > c entonces xn > c ∀n ≥ no y el entorno dec©z : |z − c| < 1
2 (xno − c)ª
no contendría infinitos términos de la sucesión). Afirmamos que
lımn→∞
xn = c,
pues dado ε > 0 existe xN tal que |xN − c| < ε (en realidad existen infinitos términos quecumplen eso, tomo uno), y si n ≥ N se tiene
|xn − c| = c− xn ≤ c− xN = |xN − c| < ε.
4.2. Series complejas
Si z1, z2, z3, ... es una sucesión compleja, podemos intentar calcular la suma z1 + z2 + z3 +....Para poder sumar infinitos términos, lo que vamos a hacer es primero sumar n (una cantidadfinita), llamar
sn = z1 + z2 + z3 + ... + zn,
y luego hacerlımn→∞
sn.
Notar que esto es razonable pues si existe algo que pueda llamarse “la suma infinita” z1 + z2 +z3+ ..., entonces los números sn deberían aproximarse, a medida que n crece, a dicha suma tantocomo queramos.

Sucesiones y series en C 85
Definición 93 una sucesión {zn}n∈N se dice sumable si la sucesión {sn}n∈N , (con sn = z1 +z2 + z3 + ... + zn), es convergente. En tal caso se denota
lımn→∞
sn =∞Xj=1
zj = lımn→∞
nXj=1
zj .
La definición anterior es para hechar un poco de luz a la terminología popular: una sumainfinita
P∞j=1 zj se llama en general serie infinita, destacando la conexión de la palabra serie con
la sucesión {zn}n∈N . La afirmación de que la sucesión {zn}n∈N es sumable (o no) se sustituyeusualmente por la afirmación de que la serie
P∞j=1 zj converge (o no). Esa terminología es
confusa, porque en el mejor de los casos,P∞
j=1 zj es un número complejo (y entonces nopuede “converger”), o es nada si la sucesión {zn}n∈N no es sumable. De todos modos, como esbuena costumbre hablar el mismo lenguaje que habla la gente del lugar donde uno vive, vamosa adoptar la terminología popular. Otro complemento de esta terminología es la divergencia:cuando una serie no converge se dice que diverge.
Otra cosa: la suma puede comenzar desde cualquier número, o sea tiene perfecto sentidoP∞j=8 zj y significa lımn→∞ sn donde sn = z8 + z9 + z10 + ... + zn (obviamente debemos tomar
n ≥ 8 en este caso). Usualmente comenzaremos nuestras sumas con 0 ó 1, pero no hay ningunarestricción al respecto.
Ejemplo 94 si tomamos wo un número complejo distinto de 1, llamo zn = wno para n =
0, 1, 2, 3, ... (o sea tengo la sucesión {zn}n∈N∪{0} con zn = wno ). Entonces
sn = 1 + wo + w2o + ... + wno , y entonces
wosn = wo + w2o + w3o + ... + wn+1o ,
restando esas dos igualdades y despejando sn, obtenemos que
sn =1− wn+1
o
1− wo
(esta operación es legitima pues pedimos wo 6= 1). Si |wo| < 1, entonces wno −→n→∞
0, por lo tanto
lımn→∞
sn =1
1−wo,
y si |wo| > 1 entonces la sucesión {sn}n∈N no converge, por lo tanto tenemos que la sucesión{zn}n∈N∪{0} es sumable si |wo| < 1 y no es sumable si . Dicho de otra forma, la serie
∞Xn=0
wno
converge a 11−wo si |wo| < 1 y no converge si |wo| > 1. Por ejemplo,
∞Xn=0
µ1
2
¶n
=1
1− 12
= 2,

86 Sucesiones y series en C
y∞Xn=0
(3i)n
no converge.
A esta serie se la llama serie geométrica de razón wo.
Proposición 95 tomemos {zn}n∈N y {wn}n∈N dos sucesiones, y c ∈ C, entonces:
1. si {zn}n∈N y {wn}n∈N son sumables entonces {czn + wn}n∈N es una sucesión sumable yP∞n=1 (czn + wn) = c
P∞n=1 zn +
P∞n=1wn.
2. si zn = xn + iyn, entonces {zn}n∈N es sumable si y solo si {xn}n∈N y {yn}n∈N sonsumables, y en tal caso
P∞n=1 zn =
P∞n=1 xn + i
P∞n=1 yn.
Demostración. ejercicio, aplicar las propiedades de sucesiones a las sumas parciales
sn = z1 + ... + zn y rn = w1 + ... + wn.
Nota(ción) 96 si sn = z1 + ... + zn y s ∈ C, llamemos rn = s− sn, entonces
sn −→n→∞
s⇐⇒ rn −→n→∞
0,
y en tal caso
rn =∞X
j=n+1
zj ,
pues
s− sn =
⎛⎝ lımN→∞
NXj=1
zj
⎞⎠− nXj=1
zj = lımN→∞
⎛⎝ NXj=1
zj −nX
j=1
zj
⎞⎠ = lımN→∞
⎛⎝ NXj=n+1
zj
⎞⎠ =∞X
j=n+1
zj ,
donde todas las operaciones hechas son lícitas pues sabemos que la serie converge. A rn se lollama el resto de la serie o la cola de la serie, y la afirmación anterior dice que si la serieconverge a s entonces el resto debe tender a cero.
El siguiente criterio elemental nos permite detectar algunas sucesiones no sumables:
Lema 97 Si una sucesión {zn}n∈N es sumable, entonces
lımn→∞
zn = 0,
es decir, para que la serieP∞
n=1 zn converja es indispensable que los términos tiendan a cero.
Sucesiones y series en C 87
Demostración. sisn = z1 + ... + zn
entonceslımn→∞
sn = c, y también lımn→∞
sn+1 = c,
de donde se concluye que
lımn→∞
(sn+1 − sn) = 0, o sea listo.
Ejemplo 98 el lema anterior nos permite terminar nuestros conocimientos sobre series ge-ométricas (no sabíamos que pasaba si |wo| = 1): la serie
∞Xn=0
wno
converge si y solo si |wo| < 1.
4.3. Criterios de convergencia para series de términos positivos
A continuación veremos un par de criterios para estudiar la sumabilidad de sucesiones detérminos positivos, que resultan de particular importancia, porque según veremos, los casos demayor importancia pueden reducirse a estos.
Teorema 99 Si {xn}n∈N es una sucesión de reales positivos y sn = x1 + ... + xn entonces
{sn}n∈N converge ó lımn→∞
sn =∞,
es decir, la sucesión es sumable o las sumas parciales se hacen arbitrariamente grandes.
Demostración. simplemente notar que {sn}n∈N es una sucesión de números reales positivos, ycreciente. Si existe M tal que {sn}n∈N ⊆ [0,M ] , entonces la sucesión converge por completitud.Si tal M no existe entonces las sumas parciales se hacen arbitrariamente grandes.
Corolario 100 (criterio de comparación) Si {an}n∈N y {bn}n∈N son sucesiones de númerosreales positivos tal que an ≤ bn ∀ n ∈N, entonces
1. Si la serieP∞
n=1 bn converge entonces la serieP∞
n=1 an converge.
2. Si la serieP∞
n=1 an diverge entonces la serieP∞
n=1 bn diverge.
Demostración.

88 Sucesiones y series en C
1. Si sn = a1+ ...+an y c =P∞
n=1 bn entonces {sn}n∈N es una sucesión creciente de númerosreales y {sn}n∈N ⊆ [0, c] , listo.
2. Si Sn = b1 + ... + bn entonces 0 ≤ sn ≤ Sn y lımn→∞ sn =∞, listo.
Existe otro criterio muy útil, que proviene de pensar a la suma de términos positivos comosumas de Riemann de una función positiva:
Proposición 101 (Criterio de la integral) Sea ϕ (x) una función real positiva definida paranúmeros reales x ≥ 0. Para n ∈ N pongamos
sn =nX
k=1
f (k) y tn =
Z n
1f (x) dx.
Entonces las sucesiones {sn}n∈N y {tn}n∈N son ambas convergentes o ambas divergentes.
Demostración. comparandoR n1 f (x) dx con las sumas de Riemann sugeridas en el dibujo,
obtenemos las desigualdades
nXk=2
f (k) ≤Z n
1f (x) dx ≤
n−1Xk=1
f (k) ,
es decir, sn − f (1) ≤ tn ≤ sn−1. Como las sucesiones {sn}n∈N y {tn}n∈N son ambas crecientes,esta desigualdad muestra que ambas son acotadas o ambas son no acotadas, o sea listo.
4.4. Convergencia absoluta
Definición 102 Una sucesión {zn}n∈N se llama absolutamente sumable si la sucesión {|zn|}n∈Nes sumable. Dicho de otra forma, la serie
P∞n=1 zn se llama absolutamente convergente si la serieP∞
n=1 |zn| es convergente (notar que nada se dice de la convergencia deP∞
n=1 zn propiamentedicha).
Ejemplo 103 según lo visto en Análisis I, la sucesiónn(−1)n+1
n
on∈N
es sumable pero no abso-
lutamente sumable, o sea la serie
1− 1
2+
1
3− 1
4+ ...
converge, pero la serie
1 +1
2+
1
3+
1
4+ ...
no converge.

Sucesiones y series en C 89
El ejemplo anterior es el de un caso muy indeseable, donde la primer serie converge por unacuestión de cancelación: notar que el hecho de que la segunda serie no converja significa quelas sumas parciales se hacen arbitrariamente grandes (pues estamos intentando sumar muchosnúmeros positivos), fenómeno que desaparece con los signos menos de la primer serie. Nosotrosvamos a trabajar con series absolutamente convergentes, cuyo comportamiento es mucho masbenigno, según el siguiente:
Teorema 104 si una serie es absolutamente convergente entonces es convergente (dicho deotra forma, si la sucesión {|zn|}n∈N es sumable entonces la sucesión {zn}n∈N es sumable).Además en tal caso se tiene que ¯
¯∞Xn=1
zn
¯¯ ≤
∞Xn=1
|zn|
Demostración. supongamos primero que zn ∈ R ∀n, y definamos bn = zn + |zn| , entonces
bn =
½0 si zn ≤ 0
2 |zn| si zn > 0, y entonces 0 ≤ bn ≤ 2 |zn| .
Puesto queP∞
n=1 |zn| es convergente, podemos concluir queP∞
n=1 bn es convergente, y aplicandolas propiedades concluimos que
∞Xn=1
zn =∞Xn=1
(bn − |zn|) =
à ∞Xn=1
bn
!−Ã ∞Xn=1
|zn|!
.
Supongamos ahora que los términos son complejos, y pongamos zn = xn+iyn. Como |xn| ≤ |zn| ,la convergencia de
P∞n=1 |zn| implica la convergencia de
P∞n=1 |xn| , y esta a su ves, por el caso
real ya visto, implica la convergencia deP∞
n=1 xn. De manera análoga se ve queP∞
n=1 yn converge,y finalmente tenemos que
∞Xn=1
zn =
à ∞Xn=1
xn
!+ i
à ∞Xn=1
|zn|!
.
Para la última afirmación del teorema, notar que¯¯NXn=1
zn
¯¯ ≤
NXn=1
|zn|
y hacer N →∞.
El teorema anterior es importantísimo. Para terminar, mencionamos el siguiente hecho quemarca la tremenda diferencia entre series absolutamente convergentes y no: si
P∞n=1 zn converge
absolutamente, y {wn}n∈N es una reordenación de {zn}n∈N (o sea los mismos números pero enotro orden), entonces la serie
P∞n=1wn converge y
∞Xn=1
zn =∞Xn=1
wn

90 Sucesiones y series en C
(es decir que en este caso la suma infinita es conmutativa). Por otro lado, siP∞
n=1 rn es unaserie de términos reales que converge pero no converge absolutamente, entonces para todo a realexiste una reordenación de {rn}n∈N cuya serie converge a a (hay extensiones parciales de estehecho a series complejas convergentes pero no absolutamente convegentes, pensar alguna).
4.5. Criterios de convergencia para series
Existen montones de criterios para decidir si una serie es convergente o no, nosotros nosvamos a concentrar en los mas usados, que son básicamente tres: comparación, cociente y raíz.
Proposición 105 (Criterio de comparación) Si {zn}n∈N es una sucesión compleja, y {bn}n∈Nes una sucesión de números reales positivos tal que:
La |zn| ≤ bn ∀ n ∈N, y
la serieP∞
n=1 bn converge.
Entonces la serieP∞
n=1 zn es absolutamente convergente.
Demostración. es una aplicación directa del criterio de comparación para series de términospositivos.
Proposición 106 (Criterio del cociente) Supongamos que {zn}n∈N es una sucesión con zn 6=0 ∀n ≥ N (donde N es algún natural). Si existe q < 1 tal que¯
zn+1zn
¯≤ q ∀ n ≥ N,
entonces la serieP∞
n=1 zn converge absolutamente. Si, en cambio,¯zn+1zn
¯≥ 1 ∀ n ≥ N,
entonces la serie no converge.
Demostración. Supongamos primero que¯zn+1zn
¯≤ q ∀ n ≥ N. Si ponemos n = N esto nos
dice que ¯zN+1zN
¯≤ q ⇒ |zN+1| ≤ q |zN | .
Eligiendo n = N + 1, y usando la desigualdad obtenida concluimos que¯zN+1zN+2
¯≤ q ⇒ |zN+2| ≤ q |zN+1| ≤ q2 |zN | .

Sucesiones y series en C 91
Siguiendo así (usando inducción, en realidad), vemos que
|zN+m| ≤ qm |zN | .
Pero la serie∞X
m=1
qm |zN |
converge (pues es una serie geométrica de razón q por una constante), y entonces comparaciónnos dice que la serie
∞Xm=1
|zN+m|
converge, y entoncesP∞
n=1 |zn| converge pues es sumarle N términos a la anterior.
Por otro lado, si¯zn+1zn
¯≥ 1 ∀ n ≥ N , entonces los términos individuales no tienden a cero
pues |zn+1| ≥ |zn| ∀ n ≥ N y |zN | 6= 0 (o sea la sucesión crece en lugar de tender a cero), ypor lo tanto la serie
P∞n=1 zn no puede converger.
Corolario 107 Supongamos que
lımn→∞
¯zn+1zn
¯=
(o sea suponemos que el límite existe y vale ). Entonces la serieP∞
n=1 zn converge absolutamentesi < 1 y no converge si > 1.
Demostración. Supongamos primero que < 1 y tomemos ε > 0 chico, de forma tal que+ ε < 1 (por ejemplo, ε = 1
2 ( − 1) sirve). Por definición de límite, existe N > 0 tal que¯¯zn+1zn
¯−¯< ε ∀ n ≥ N,
en particular, ¯zn+1zn
¯< ε + < 1 ∀ n ≥ N,
y entonces puedo aplicar el criterio del cociente. De manera análoga se razona para concluir quela serie es divergente cuando > 1, ejercicio.
Proposición 108 (Criterio de la Raíz) Tomemos {zn}n∈N una sucesión. Si existen N y q <1 tal que
np|zn| ≤ q ∀ n ≥ N,
entonces la serieP∞
n=1 zn converge absolutamente. Si, en cambio existe N tal que
np|zn| ≤ q ≥ 1 ∀ n ≥ N,
entonces la serie diverge.

92 Sucesiones y series en C
Demostración. ejercicio, ver la demo anterior y notar que np|zn| ≤ q ⇒ |zn| ≤ qn.
Corolario 109 Supongamos quelımn→∞
np|zn| =
(o sea suponemos que el límite existe y vale ). Entonces la serieP∞
n=1 zn converge absolutamentesi < 1 y no converge si > 1.
Demostración. ejercicio.
Ejemplo 110
1. La serie∞Xn=1
1
np
converge si y solo si p > 1, pues si tomamos ϕ (x) = x−p, entoncesZ n
1x−pdx =
(n1−p−11−p si p 6= 1
ln (n) si p = 1.
Cuando p > 1 el factor n1−p → 0 cuando n → ∞, y entonces la sucesiónnn1−p−11−p
on∈N
converge a −11−p , por lo que el criterio de la integral nos dice que la serie converge. Cuando
p < 1 un análisis similar nos dice que la serie diverge.
2. La serie∞Xn=1
n2n
n!
no converge pues el término general es zn = n2n/n!, y¯zn+1zn
¯=
¯¯(n + 1)2(n+1) n!
(n + 1)!n2n
¯¯ =
(n + 1)2n (n + 1)2
(n + 1)n2n=
µn + 1
n
¶2n(n + 1) ≥ 1 ∀n.
3. La serie∞Xn=1
n + i
2nn
converge pues
n
s¯n + i
2nn
¯=
1
2
ns¯
n + i
n
¯≤ 1
2
ns¯
n + in
n
¯=
n√
2
2≤√
2
2< 1,
donde el último ≤ vale para todo n ≥ 2.

Sucesiones y series en C 93
4. La serie∞Xn=1
µn− i
n + i
¶no converge pues ¯
n− i
n + i
¯=
¯n + i
n + i
¯= 1,
y entonces los términos no tienen a cero.
4.6. Series de funciones
De la misma forma que pensamos en sucesiones de números complejos {zn}n∈N , dondeteníamos un número complejo para cada natural n, podemos pensar en una sucesión de funciones{fn}n∈N, donde cada fn (z) es una función compleja definida en cierto dominio (o sea, tenemosuna función compleja para cada número natural n). Por ejemplo si llamamos
fn (z) = nz,
entonces {fn}n∈N es una sucesión de funciones complejas, cada una de las funciones de la sucesiónesta definida en todo C, y la n-ésima función de la sucesión es nz.
Supongamos que tenemos una sucesión de funciones {fn}n∈N , y tomemos un número zfijo que esté en el dominio de todas las funciones fn, entonces {fn (z)}n∈N es una sucesión denúmeros complejos, así que tiene sentido plantear la serie
f1 (z) + f2 (z) + f3 (z) + ... =∞Xn=1
fn (z) .
Para decidir si una serie de este tipo converge, se puede aplicar cualquiera de los criteriosvistos, pues se trata de una serie normal de números complejos. Pero estamos interesados enver el problema desde otro punto de vista: dada una sucesión de funciones {fn}n∈N , queremosencontrar los números complejos z para los cuales la serie numérica
P∞n=1 fn (z) es convergente
(si es que hay alguno). Suponiendo que la serieP∞
n=1 fn (z) converge para todo z de ciertoconjunto D, llamamos
S (z) = lımN→∞
NXn=1
fn (z) =∞Xn=1
fn (z) ,
y esto define una nueva función, S (z) , en D (la función que asigna a cada z de D el valor de laserie numérica
P∞n=1 fn (z)). Este hecho se suele denotar omitiendo la variable:
S = lımN→∞
NXn=1
fn =∞Xn=1
fn,
y se dice que la serie de funcionesP∞
n=1 fn converge a la función S. La definición de convergenciaqueda así: la serie de funciones
P∞n=1 fn converge a la función S en D si para todo z en D es

94 Sucesiones y series en C
cierto que,
dado ε > 0 existe N > 0 tal que
¯¯ nXj=1
fj (z)− S (z)
¯¯ < ε si n ≥ N
(por supuesto que en general, N dependerá no solo de ε sino también de z).
Ejemplo 111 tomar fn (z) = zn, con n ∈ N (es decir, f1 (z) = z, f2 (z) = z2, f3 (z) = z3,etc.), y queremos ver para que valores de z podemos calcular
f1 (z) + f2 (z) + f3 (z) + ...
(notar que cada función fn está definida en todo C). Llamando Sn (z) = f1 (z)+f2 (z)+f3 (z)+...fn (z) y haciendo la misma cuenta que para la serie geométrica, concluimos que para z 6= 1vale
Sn (z) =z − zn+1
1− z.
Entonces, para z con |z| < 1 tenemos que
∞Xn=1
fn (z) = lımn→∞
Sn (z) =z
1− z,
y para z con |z| ≥ 1 la serie no converge pues los términos no tienden a cero. Es decir, la serieP∞n=1 fn converge en la región D = {z : |z| < 1} .
Definición 112 dada una sucesión de funciones {fn}n∈N , definimos la región de convergenciade la serie
P∞n=1 fn como el conjunto(
z :∞Xn=1
fn (z) converge
),
y se dice queP∞
n=1 fn converge en un conjunto D siP∞
n=1 fn (z) converge para todo z ∈ D.Análogamente, diremos que la serie
P∞n=1 fn converge absolutamente en D si la serie
P∞n=1 |fn (z)|
converge para todo z ∈ D (o sea si la serieP∞
n=1 fn (z) converge absolutamente para todo z ∈ D).
Los criterios enunciados para series numéricas quedan ahora así:
SiP∞
n=1 fn yP∞
n=1 gn son series de funciones,P∞
n=1 fn converge a f en Df ⊆ C, yP∞n=1 gn converge a g en Dg ⊆ C, y α es un número complejo, entonces la serie de
funcionesP∞
n=1 (αfn + gn) converge a la función αf + g en Df ∩Dg.
Si fn = un + ivn y f = u + iv, entoncesP∞
n=1 fn converge a f en Df si y solo siP∞
n=1 unconverge a u en Df y
P∞n=1 vn converge a v en Df .

Sucesiones y series en C 95
Si Sn = f1 + ... + fn y S es una función compleja, llamemos Rn = S − Sn, entonces
Sn −→n→∞
S en D ⇐⇒ Rn −→n→∞
0 en D
y en tal caso
Rn =∞X
j=n+1
fj en D.
SiP∞
n=1 fn converge en D ⊆ C entonces
lımn→∞
fn (z) = 0 ∀ z ∈ D.
SiP∞
n=1 fn converge absolutamente en D ⊆ C entonces converge en D (es decir, siP∞n=1 |fn (z)| converge para todo z en D entonces
P∞n=1 fn (z) converge para todo z en
D).
Si |hn (z)| ≤ |fn (z)| ∀ z ∈ D yP∞
n=1 |fn| converge en D, entoncesP∞
n=1 |hn| converge enD (y entonces
P∞n=1 hn converge en D).
Si {fn}n∈N es una sucesión con fn (z) 6= 0 ∀ z ∈ D y ∀n ≥ N (donde N es algún natural)y para todo z ∈ D existe qz < 1 tal que¯
fn+1 (z)
fn (z)
¯≤ qz ∀n ≥ N,
entonces la serieP∞
n=1 fn converge absolutamente en D. Si, en cambio,¯fn+1 (z)
fn (z)
¯≥ 1 ∀ z ∈ D y ∀n ≥ N,
entonces la serie no converge.
Si {fn}n∈N es una sucesión y para todo z ∈ D existe qz < 1 tal que
np|fn (z)| ≤ qz ∀n ≥ N,
entonces la serieP∞
n=1 fn converge absolutamente en D. Si, en cambio,
np|fn (z)| ≥ 1 ∀ z ∈ D y ∀n ≥ N,
entonces la serie no converge.
Ejemplo 113 tomemos
fn (z) =
µz
z + 1
¶n
(o sea que cada fn está definida en C−{−1}), buscamos la región de convergencia deP∞
n=1 fn.Por el ejemplo anterior, sabemos que necesitamos¯µ
z
z + 1
¶¯< 1,

96 Sucesiones y series en C
y si ponemos z = x + iy, entonces¯µz
z + 1
¶¯< 1⇐⇒ |z| < |z + 1|⇐⇒ |z|2 < |z + 1|2 ⇐⇒
x2 + y2 < (x + 1)2 + y2 ⇐⇒ x2 < x2 + 2x + 1⇐⇒ −1
2< x,
es decir, la serie converge en el semiplano©z : Re (z) > −12
ª.
4.7. Convergencia uniforme
En esta sección introduciremos una definición bastante dificil de entender, y fundamentalpara poder realizar operaciones como derivar o integrar series de funciones.
Definición 114 Tomemos una sucesión de funciones {fn}n∈N definidas todas en un conjuntoD ⊂ C. Diremos que la serie
P∞n=1 fn converge uniformemente a la función S (z) en D si
dado ε > 0 existe N > 0 tal que
¯¯ nXj=1
fj (z)− S (z)
¯¯ < ε ∀ z ∈ D, si n ≥ N.
Es muy importante comprender la diferencia entre convergencia y convergencia uniforme.Que la serie
P∞n=1 fn converge a S en D significa esto: elija un z0 en D, y ahora, para cada ε > 0
hay una cantidad de término N mínima que se deben sumar para asegurar que, para ese z0¯¯ nXj=1
fj (z0)− S (z0)
¯¯ < ε si n ≥ N,
y esto puede hacerse para cada z0 de D.Por otro lado, que la serie
P∞n=1 fn converge a S uniformemente en D significa esto: para
cada ε > 0 hay una cantidad de términos N mínima que se deben sumar para asegurar que¯¯ nXj=1
fj (z)− S (z)
¯¯ < ε si n ≥ N, para todo z en D.
Es decir, en el primer caso la cantidad mínima de términos que necesitamos sumar para hacerel error mas chico que cierto valor ε dado depende de z, y en el segundo no. Saber que una serieconverge uniformemente en D es tener mas información que saber simplemente que converge enD.
En términos del resto (definido en la lista de propiedades de convergencia se series de fun-ciones), tenemos que la serie
P∞n=1 fn converge uniformemente en D si
dado ε > 0 existe N > 0 tal que |Rn (z)| < ε ∀ z ∈ D, si n ≥ N.

Sucesiones y series en C 97
Ejemplo 115 (ejemplificador) consideremos la siguiente sucesión de funciones:
f0 (z) = z, f1 (z) =1
z, f2 (z) =
µ1
2z− 1
z
¶, f3 (z) =
µ1
3z− 1
2z
¶, f4 (z) =
µ1
4z− 1
3z
¶,
en general
fn (z) =1
nz− 1
(n− 1) zsi n ≥ 2,
y definamos la función S (z) = z. Notar que el mayor conjunto donde están definidas todas lasfunciones fn es D = C− {0} . Queremos ver que la serie
P∞n=0 fn converge a la función S (z)
en D. Para esto, notar que la n-ésima suma parcial es
Sn (z) = f0 (z) + f1 (z) + f2 (z) + ... + fn (z)
= z +1
z+
µ1
2z− 1
z
¶+
µ1
3z− 1
2z
¶+ ... +
µ1
nz− 1
(n− 1) z
¶= z +
1
nz,
y entonces
|S (z)− Sn (z)| =¯z − z − 1
nz
¯=
1
n |z|por lo tanto, fijado z en D, si queremos hacer
|S (z)− Sn (z)| < ε
basta con hacer1
n |z| < ε,
o sea con tomar N > 1ε|z| nos aseguramos que si n ≥ N entonces |S (z)− Sn (z)| < ε.
Así, si tomamos ε = 0,02 y z0 = 10i, N = 6 sirve (es decir, |10i− Sn (10i)| < 0,02 para todon ≥ 6), pero si z1 = 2, entonces
|2− S3 (2)| =¯2− 2− 1
12
¯=
1
12,
que no es menor que 0,02 (o sea para z1, N = 6 no sirve). Para z1 necesitamos tomar N = 26.La siguiente pregunta es:¿converge la serie uniformemente a S en D? Y la respuesta es NO,
pues la misma desigualdad que nos permitió encontrar N (para un z fijo) nos esta mostrandoque la cantidad de términos que tengo que sumar para hacer el resto chico depende de z. Dadoun ε > 0 no existe un N > 0 tal que
|S (z)− Sn (z)| < ε si n ≥ N ∀ z ∈ D,
pues eso me diría que1
n |z| < ε si n ≥ N ∀ z ∈ D,
y entonces tendríamos que1
|z| < Nε ∀ z ∈ D,

98 Sucesiones y series en C
lo cual es obviamente falso.Ahora tomemos D1 = {z : 0,1 ≤ |z| ≤ 10}. Como D1 ⊆ D, sabemos que la serie
P∞n=0 fn
converge a la función S (z) en D1, queremos ver que converge uniformemente en D1. Paraeso, dado un ε > 0 deberíamos conseguir un N > 0 tal que
1
n |z| < ε si n ≥ N ∀ z ∈ D1, (4.1)
pero notar que si z ∈ D1, entonces
0,1 ≤ |z| , y entonces1
n |z| ≤10
n,
por lo tanto si tomamos N > 10ε tendremos (16).
El ejemplo anterior, además de clarificar algunas cuestiones sobre convergencia y conver-gencia uniforme, debe haber dejado en claro que necesitamos alguna herramienta sencilla peropoderosa que nos permita decidir cuando tenemos convergencia uniforme. Esa herramienta es elsiguiente teorema:
Teorema 116 (Test M de Weierstrass) Si {fn}n∈N es una sucesión de funciones definidasen un conjunto D, y {Mn}n∈N es una sucesión de números reales positivos tales que
1. Para cada n ∈ N, vale que |fn (z)| ≤Mn ∀ z ∈ D, y
2. la serieP∞
n=1Mn converge.
Entonces la serieP∞
n=1 fn converge absoluta y uniformemente en D.
Demostración. Para cada z ∈ D, la serieP∞
n=1 |fn (z)| converge por comparación, es decir,P∞n=1 fn converge absolutamente en D, y como convergencia absoluta implica convergencia,
tenemos que la serie converge en D. Pongamos
Rn (z) =∞X
j=n+1
fj (z) y rn =∞X
j=n+1
Mj .
Ambos restos existen pues ambas series convergen, (y la serie que define Rn converge absoluta-mente en D) Puesto que
|fn+1 (z) + fn+2 (z) + ... + fn+m (z)| ≤ |fn+1 (z)|+ |fn+2 (z)|+ ... + |fn+m (z)|≤ Mn+1 + Mn+2 + ... + Mn+m ≤ rn,
tomando lımm→∞ concluimos que
|Rn (z)| ≤ rn ∀ z ∈ D.
Por último, usar que rn −→n→∞
0 (y la versión de convergencia absoluta usando el resto, ejercicio).
A continuación un teorema, que nos dice como afecta cuando multiplicamos una serie defunciones por una función acotada:

Sucesiones y series en C 99
Teorema 117 Supongamos que la serie de funcionesP∞
n=1 fn converge uniformemente en D,y que g (z) es una función acotada en D. Entonces la serie
P∞n=1 gfn converge uniformemente
en D.
Demostración. que la serieP∞
n=1 gfn converge en D es inmediato pues para cada z en Dtenemos que
∞Xn=1
(gfn) (z) = g (z)∞Xn=1
fn (z) .
Llamemos Rn (z) =P∞
j=n+1 fj (z) , y tomemos ε > 0. Como g es acotada en D, se que existe Mtal que
|g (z)| ≤M ∀ z ∈ D,
y como la serie converge uniformemente en D se que existe N > 0 tal que
|Rn (z)| < ε
Msi n ≥ N, ∀ z ∈ D.
Entonces¯¯ ∞Xj=n+1
(gfj) (z)
¯¯| {z }
resto de la serie ∞n=1(gfn)
= |g (z)|
¯¯ ∞Xj=n+1
fj (z)
¯¯ = |g (z)| |Rn (z)| < M
ε
M= ε si n ≥ N, ∀ z ∈ D,
o sea listo.
4.8. Consecuencias de la convergencia uniforme
Hasta ahora hemos aprendido a definir funciones nuevas “sumando” una sucesión de fun-ciones complejas, pero no hemos estudiado en que condiciones las propiedades de las funcionesde la sucesión pasan a la serie. Es decir: si {fn}n∈N es una sucesión de funciones continuas enD y la serie
P∞n=1 fn converge en D, será cierto que la función
P∞n=1 fn (z) es continua en D?.
¿y si las fn son analíticas?. Ahora comenzamos a contestar esas preguntas con tres teoremas:
Teorema 118 Si {fn}n∈N es una sucesión de funciones continuas en un abierto D y la serieP∞n=1 fn converge uniformemente en D a S (z), entonces S es una función continua en D.
Demostración. doy un z0 fijo en D, quiero ver que puedo hacer |S (z)− S (z0)| chico tomandoz suficientemente próximo a z0, es decir, doy ε > 0 y quiero ver que hay un δ > 0 tal que
|S (z)− S (z0)| < ε si |z − z0| < δ.
Llamemos Sn (z) =Pn
j=1 fj (z) , entonces
|S (z)− S (z0)| = |S (z)− Sn (z) + Sn (z)− Sn (z0) + Sn (z0)− S (z0)| ≤≤ |S (z)− Sn (z)|+ |Sn (z)− Sn (z0)|+ |Sn (z0)− S (z0)| == |Rn (z)|+ |Sn (z)− Sn (z0)|+ |Rn (z0)| , (4.2)

100 Sucesiones y series en C
y esta desigualdad vale para cualquier n. Tomo n0 tal que
|Rn0 (z)| < ε
3∀ z ∈ D (4.3)
(que existe pues la serie converge uniformemente en D), en particular |Rn0 (z0)| < ε3 . Ahora
tomo δ tal que|Sn0 (z)− Sn0 (z0)| <
ε
3si |z − z0| < δ (4.4)
(que existe pues la función Sn0 (z) es continua en z0 pues es la suma de n0 funciones continuas).Combinando (18) y (19) con (17), terminamos la demostración.
Teorema 119 Si {fn}n∈N es una sucesión de funciones continuas en un abierto D y la serieP∞n=1 fn converge uniformemente en D a S (z) , y C es una curva suave en D, entoncesZ
CS (z) dz =
∞Xn=1
ZC
fn (z) dz.
Demostración. Antes de comenzar la demostración, notar que el enunciado dice queRC S (z) dz
existe (o sea es un número complejo), que la serie numérica
∞Xn=1
ZC
fn (z) dz
converge, y que converge aRC S (z) dz.
Primero notar que el teorema anterior dice que S (z) es continua en D, por lo cual no ten-emos problemas para calcular
RC S (z) dz. Por definición de convergencia de una serie numérica,
queremos ver que dado ε > 0 existe N > 0 tal que¯¯Z
CS (z) dz −
nXj=1
ZC
fj (z) dz
¯¯ < ε si n ≥ N.
Como la suma de las integrales es la integral de la suma, si ponemos Rn (z) =P∞
j=n+1 fj (z)queda ¯
¯ZC
S (z) dz −nX
j=1
ZC
fj (z) dz
¯¯ =
¯¯Z
CS (z) dz −
ZC
⎛⎝ nXj=1
fj (z)
⎞⎠ dz
¯¯ =
=
¯¯Z
C
⎛⎝S (z)−nX
j=1
fj (z)
⎞⎠ dz
¯¯ =
¯ZC
Rn (z) dz
¯. (4.5)
Llamemos a la longitud de C; como la serie converge uniformemente en D se que existe N > 0tal que
|Rn (z)| < εsi n ≥ N, ∀ z ∈ D,
en particular|Rn (z)| < ε
si n ≥ N, ∀ z ∈ C,

Sucesiones y series en C 101
y entonces, ¯ZC
Rn (z) dz
¯≤ ε
= ε.
Combinando esto con (20) concluimos que¯¯Z
CS (z) dz −
nXj=1
ZC
fj (z) dz
¯¯ < ε,
que es lo que queríamos.
Corolario 120 Si a las hipótesis del teorema anterior le agregamos que cada fn sea analíticaen D, entonces S (z) es analítica en D.
Demostración. para demostrar este coro vamos a usar Morera. Supongamos primero que D essimplemente conexo, entonces como cada fn es analítica en D, Cauchy dice queZ
Tfn (z) dz = 0 ∀ n ∈ N
para todo camino triangular T, y entonces el teorema 2 nos dice queZT
S (z) dz = 0,
para todo camino triangular T. y entonces Morera nos dice que S (z) es analítica. Si D no essimplemente conexo, dividirlo en regiones simplemente conexas (ejercicio).
Nota importante 121 Este corolario marca una diferencia importante entre la teoría de vari-able compleja y la teoría de variable real: si se observa con cuidado todo lo hecho con sucesiones yseries complejas hasta antes del corolario, se ve que todo lo hecho puede ser traducido a variablereal, cambiando los z’s por x’s, los conjuntos de C por conjuntos de R, las funciones complejaspor funciones reales,etc. Todo se traduce y se obtienen resultados equivalentes (por ejemplo, siuno tiene una sucesión de funciones reales continuas en un intervalo y su serie converge uni-formemente en dicho intervalo, la serie es entonces una función continua en el intervalo). Elcorolario anterior no tiene equivalente (es mas, no es cierto en variable real, salvo que uno tomecomo función analítica real a funciones con derivadas de todos los ordenes y no como funcionesderivables), y en el fondo de todo esto está el hecho de que pedirle a las funciones fn que seananalíticas es pedirles mucho: le estamos pidiendo que tengan derivadas de todos los ordenes. Hayfunciones de variable real que tiene derivada continua pero no tienen derivada segunda.
Teorema 122 Si {fn}n∈N es una sucesión de funciones analiticas en un abierto D y la serieP∞n=1 fn converge uniformemente en D a S (z) , entonces S (z) es analítica en D y
S0(z) =∞Xn=1
f 0n (z) ∀ z ∈ D.

102 Sucesiones y series en C
Demostración. tomo z0 en D, voy a calcular S0(z0), que se que existe por el coro anterior.Tomo r > 0 tal que el círculo Cr = {z : |z − z0| = r} este en D (que existe pues D es abierto),y tomo un número positivo ε < r, y llamo Dε = D − {z : |z − z0| ≤ ε} .
D
rε
Cr
z0
Definamosg (z) =
1
2πi (z − z0),
entonces g es analítica y acotada en Dε (ejercicio), y entonces la serie
∞Xn=1
(gfn) (z)
converge a g (z)S (z) uniformemente en Dε (que converge a eso es porque g no depende de n ysale de la serie, que converge uniformemente es por el último teorema de la sección anterior).Puesto que Cr ⊆ Dε, el teorema 2 me dice queZ
Cr
g (z)S (z) dz =∞Xn=1
ZCr
g (z) fn (z) dz,
(donde estamos pensando Cr recorrido en sentido antihorario) es decir
1
2πi
ZCr
S (z)
(z − z0)dz =
∞Xn=1
1
2πi
ZCr
fn (z)
(z − z0)dz,
pero S (z) y todas las fn (z) son analíticas en D, por lo tanto la fórmula integral de Cauchy sepuede aplicar, y la igualdad anterior queda
S0(z0) =∞Xn=1
f 0n (z0) ,
que es lo que queríamos probar.
4.9. Series de potencias
En esta sección vamos a estudiar un caso particular de series de funciones, que es cuandola sucesión de funciones a sumar es particularmente sencilla, mas concretamente, sumaremossucesiones {fn}n∈N∪{0} donde fn (z) = cn (z − a)n (un monomio de grado n, creo que le dicen).

Sucesiones y series en C 103
Definición 123 Una serie de la forma
c0 + c1 (z − a) + c2 (z − a)2 + c3 (z − a)3 + c4 (z − a)4 + ...
donde a y c0, c1, ... son números complejos, se llama una serie de potencias centrada en a (o unaserie de potencias “en a”). Es decir, una serie de potencias en a es una serie
P∞n=0 fn, donde
fn (z) = cn (z − a)n .
Ejemplo 124 la serie geométricaP∞
n=0 zn es una serie de potencias centrada en 0, donde todoslos coeficientes cn valen 1. Notar que vimos que le región de convergencia de dicha serie era eldisco {z : |z| < 1} .
La región de convergencia de una serie de funciones puede tener muchas formas, pero laregión de convergencia de una serie de potencias es siempre un disco, según puede deducirse delsiguiente teorema:
Teorema 125 Si la serie de potencias
∞Xn=0
cn (z − a)n
converge para z = z0 entonces converge para todo z con |z − a| < |z0 − a| . Mas aún, convergeabsoluta y uniformemente en cualquier disco de la forma {z : |z − a| ≤ r} con r < |z0 − a|.
Demostración. Como la serie (numérica)
∞Xn=0
cn (z0 − a)n
converge, sabemos que lımn→∞ cn (z0 − a)n = 0, y entonces existe M tal que
|cn (z0 − a)n| ≤M ∀n ∈N ∪ {0}
(o sea como la sucesión tiene a cero seguro que está metida en alguna bola centrada en 0). Tomor < |z0 − a| y llamo Dr = {z : |z − a| ≤ r} , entonces para todo z en Dr vale que
|cn (z − a)n| ≤¯cn (z − a)n
(z0 − a)n
(z0 − a)n
¯=
¯cn (z0 − a)n
(z − a)n
(z0 − a)n
¯= |cn (z0 − a)n|
¯(z − a)n
(z0 − a)n
¯≤M
rn
|(z0 − a)n| .
Puesto que la serie∞Xn=0
Mrn
|(z0 − a)n| = M∞Xn=0
µr
|(z0 − a)|
¶n

104 Sucesiones y series en C
converge (pues es geométrica de razón r|(z0−a)|), el test M de Weierstrass me dice que la serieP∞
n=0 cn (z − a)n converge absoluta y uniformemente en Dr, o sea listo.
El teorema anterior me dice que las series de potenciasP∞
n=0 cn (z − a)n convergen endiscos abiertos, pues cada ves que la serie converge en un punto z0, converge en el disco{z : |z − a| < |z0 − a|} . El mayor disco abierto donde una serie de potencias converge (cuyaexistencia aceptamos) se llama el disco de convergencia de la serie, y el radio de tal disco sellama el radio de convergencia de la serie. Entonces si R es el radio de convergencia de la serieP∞
n=0 cn (z − a)n tenemos que:
la serie converge absolutamente en {z : |z − a| < R} , y converge absoluta y uniformementeen cualquier disco de la forma {z : |z − a| ≤ r} con r < R
la serie diverge en cualquier z0 con |z0 − a| > R, pues de converger para un tal z0 entoncesconvergería en el disco {z : |z − a| < |z0 − a|}, y entonces el disco {z : |z − a| < R} no seríael mayor disco donde la serie converge.
Nota 126 El radio de convergencia puede ser infinito (cuando la serie converge en todo el planocomplejo), y puede ser cero (cuando la serie converge solo en un punto).
Veremos ahora un par de métodos para encontrar el radio de convergencia a partir de loscoeficientes cn de una serie de potencias
P∞n=0 cn (z − a)n .
Proposición 127 Considerar la serie de potenciasP∞
n=0 cn (z − a)n . Si el límite
lımn→∞
¯cn+1cn
¯existe y vale L, entonces el radio de convergencia de la serie es R = 1/L.
Demostración. tomemos z fijo y distinto de a, entonces con nuestras hipótesis tenemos que
lımn→∞
¯¯cn+1 (z − a)n+1
cn (z − a)n
¯¯ = lım
n→∞
¯cn+1cn
¯|(z − a)| = L |(z − a)| ,
por lo cual el corolario del criterio del cociente nos dice que la serie va a converger si L |(z − a)| <1, es decir si |(z − a)| < 1/L, y va a diverger si L |(z − a)| > 1, o sea si |(z − a)| > 1/L, es decirque el mayor disco abierto donde la serie converge es
{z : |z − a| < 1/L} ,
es decir el radio de convergencia es 1/L.

Sucesiones y series en C 105
Proposición 128 Considerar la serie de potenciasP∞
n=0 cn (z − a)n . Si el límite
lımn→∞
np|cn|
existe y vale L, entonces el radio de convergencia de la serie es R = 1/L.
Demostración. tomemos z fijo y distinto de a, entonces con nuestras hipótesis tenemos que
lımn→∞
nq|cn (z − a)n| = lım
n→∞|(z − a)| n
p|cn| = |(z − a)|L,
por lo cual el corolario del criterio de la raíz nos dice que la serie va a converger si L |(z − a)| < 1,es decir si |(z − a)| < 1/L, y va a diverger si L |(z − a)| > 1, o sea si |(z − a)| > 1/L, es decirque el mayor disco abierto donde la serie converge es
{z : |z − a| < 1/L} ,
es decir el radio de convergencia es 1/L.
Los resultados mas importantes tienen que ver con derivadas e integrales de series de poten-cias. Notar que si la serie
P∞n=0 cn (z − a)n tiene radio de convergencia R, entonces la función
compleja
S (z) =∞Xn=0
cn (z − a)n
está definida en el disco abierto D = {z : |z − a| < R} , y como la convergencia es uniforme encada disco {z : |z − a| < r} con r < R, el corolario al teorema 2 de la sección anterior nos diceque S (z) es analítica en D (pues cada fn (z) = cn (z − a)n es analítica en C). Además S0 (z)se obtiene derivando término a término, es decir
S0 (z) =∞Xn=1
ncn (z − a)n−1 ,
y puedo encontrar una primitiva de S (z) en D integrando (como en el teorema de las primitivas)término a término pues tenemos convergencia uniforme e independencia de camino, es decir, unaprimitiva de S (z) en D esZ z
aS (z) dz =
Z z
a
à ∞Xn=0
cn (w − a)n!
dw =∞Xn=0
µZ z
acn (w − a)n dw
¶=
∞Xn=0
cnn + 1
(z − a)n+1
(el último igual vale pues cnn+1 (z − a)n+1 es una primitiva de cn (z − a)n en D, recordar lo que
significa la notación de integral usada arriba).Ahora, el teorema que nos permite derivar término a término nos asegura que la serie que
define S0(z) converge (por lo menos) en la misma región donde converge la serie que define S (z) ,y por lo tanto el radio de convergencia de la serie
∞Xn=1
ncn (z − a)n−1 (4.6)

106 Sucesiones y series en C
debe ser por lo menos R, y exactamente lo mismo se aplica a la serie
∞Xn=0
cnn + 1
(z − a)n+1 . (4.7)
Esto implica que el radio de convergencia de la serie (21) debe ser exactamente R, pues sifuera mayor que R, integrando concluiríamos que la serie
∞Xn=0
cn (z − a)n
tiene radio de convergencia mayor que R. Un razonamiento análogo se aplica para concluir quela serie (22) debe tener radio de convergencia R, o sea tenemos el siguiente teorema:
Teorema 129 Si la serie de potenciasP∞
n=0 cn (z − a)n tiene radio de convergencia R, en-tonces la función
S (z) =∞Xn=0
cn (z − a)n
que define en el disco abierto D = {z : |z − a| < R} es analítica en D, y las derivadas (resp. inte-grales) de S se obtienen derivando (resp. integrando) término a término, y las series resultantestienen el mismo radio de convergencia R.
Para terminar, un teoremita que caracteriza a las series de potencias en términos de suscoeficientes: si tengo dos series de potencias
P∞n=0 cn (z − a)n y
P∞n=0 dn (z − a)n que convergen
ambas en cierto disco D = {z : |z − a| < r} (no estoy pidiendo que tengan el mismo radio deconvergencia), y se que cn = dn para todo n, entonces está claro que las dos series son iguales.La pregunta obvia es si la recíproca es cierta: supongamos que
∞Xn=0
cn (z − a)n =∞Xn=0
dn (z − a)n ∀ z ∈ D,
¿será cierto que cn = dn ∀n?, ¿o se podrán elegir los coeficientes cn y dn distintos pero de formatal que cuando uno hace la suma infinita de igual? La respuesta es:
Teorema 130 Si dos series de potenciasP∞
n=0 cn (z − a)n yP∞
n=0 dn (z − a)n convergen am-bas en D = {z : |z − a| < r} y
∞Xn=0
cn (z − a)n =∞Xn=0
dn (z − a)n ∀ z ∈ D,
entonces cn = dn ∀n.

Sucesiones y series en C 107
Demostración. Llamemos f (z) =P∞
n=0 cn (z − a)n y g (z) =P∞
n=0 dn (z − a)n , ambas fun-ciones analíticas en D. Puesto que f (a) = g (a) , tenemos que c0 = d0. Derivando tenemosque
f 0(z) =∞Xn=1
cn (z − a)n−1 y g0(z) =∞Xn=1
dn (z − a)n−1 ,
y además sabemos que f 0 = g0, en particular f 0(a) = g0(a), es decir c1 = d1. Siguiendo el mismoprocedimiento y usando inducción en n concluimos que cn = dn ∀n.

108 Sucesiones y series en C
Capítulo 5
Desarrollos en series, residuos
Existen dos tipos particularmente sencillos de funciones analíticas: los polinomios
p (z) = c0 + c1z + ... + cnzn,
y las funciones racionales
r (z) =p (z)
q (z),
donde p y q son polinomios sin raíces comunes. Los polinomios son analíticos en todo el planocomplejo, en particular en cualquier bola {z : |z − a| < R} , mientras que las funciones racionalesson analíticas en todo el plano complejo menos las raíces a1, ..., am del polinomio divisor, enparticular en cualquier anillo de la forma {z : r < |z − a| < R} que no contenga ninguna de lasraíces a1, ..., am. En esta sección veremos que en cierto sentido, estas son casi las únicas funcionesanalíticas.
5.1. Teorema de Taylor
Caracterizaremos con el siguiente teorema a las funciones analíticas en bolas:
Teorema 131 (Taylor) Si f (z) es una función analítica en un abierto D y la bola B ={z : |z − a| ≤ R} está contenida en D, entonces para todo z con |z − a| < R vale que
f (z) = f (a) + f 0(a) (z − a) +f 00(a)
2!(z − a)2 +
f 000(a)
3!(z − a)3 + ...
=∞Xn=0
f (n)(a)
n!(z − a)n ,
109

110 Desarrollos en series, residuos
y la serie converge absoluta y uniformemente a f en cualquier bola centrada en a de radioestrictamente menor que R.
Además el desarrollo es único en el siguiente sentido: si f (z) =P∞
n=0 cn (z − a)n para todoz en un entorno de a, entonces
cn =f (n)(a)
n!∀ n.
Demostración. Tomo z tal que |z − a| < R fijo, y llamo C = {w : |w − a| = R} ,
Cw
z
aR
D
Entonces para w ∈ C tenemos que
w − z = w − a + a− z = (w − a)
µ1− z − a
w − a
¶,
de donde1
w − z=
1
(w − a)
1³1− z−a
w−a
´ =1
(w − a)
∞Xn=0
µz − a
w − a
¶n
,
donde el último igual vale porque¯z−aw−a
¯< 1, usando la serie geométrica. Multiplicando por
f (w) /2πi quedaf (w)
2πi (w − z)=
∞Xn=0
f (w)
2πi (w − a)n+1(z − a)n . (5.1)
Puesto que f es analítica en D, es continua en D, y por lo tanto existe M tal que
|f (w)| ≤M ∀w ∈ C,
y entonces¯f (w)
2πi (w − a)n+1(z − a)n
¯≤ M
2π |(w − a)|
¯µz − a
w − a
¶n ¯≤ M
2πR
¯µz − a
R
¶n ¯∀w ∈ C,
y como la serie∞Xn=0
M
2πR
¯µz − a
R
¶n ¯converge, el test M de Weierstrass nos dice que la serie (23) converge uniformemente en C, y porlo tanto si integramos sobre C respecto de w, la integral se hace término a término, quedandoZC
f (w)
2πi (w − z)dw =
∞Xn=0
ZC
f (w)
2πi (w − a)n+1(z − a)n dw =
∞Xn=0
µ1
2πi
ZC
f (w)
(w − a)n+1dw
¶(z − a)n .

Desarrollos en series, residuos 111
Si pensamos C recorrida en sentido antihorario, la fórmula de Cauchy y su corolario paraderivadas, nos dice que la igualdad de arriba es
f (z) =∞Xn=0
f (n) (a)
n!(z − a)n ,
o sea listo. La convergencia uniforme y absoluta se sigue del teorema de convergencia de seriesde potencias, y la unicidad del teorema de unicidad de coeficientes de series de potencias.
Nota 132 el teorema anterior nos dice que toda función analítica en una bola de centro apuede expresarse como una serie de potencias centrada en a. Esta serie se llama el desarrollode Taylor de f en a, o desarrollo de f en serie de potencias centrada en a. Cuando a = 0 sesuele llamar desarrollo de McLaurin.
En la demostración anterior, se deduce que el radio de convergencia de la serie de Taylor def en a es la distancia desde a hasta el punto mas próximo del plano complejo donde f deja deser analítica, siendo ∞ si f es analítica en todo C.
Ejemplo 133
1. Tomemos f (z) = ez, como f es analítica en todo C, el teorema anterior nos dice que laserie de Taylor de f centrada en cualquier punto va a converger en todo C. Como
ez = f (z) = f 0 (z) = f 00 (z) = ... = f (n) (z) ∀ n,
tenemos quef (n) (0) = 1 ∀ n,
y entonces queda
ez =∞Xn=0
zn
n!∀ z ∈ C.
De manera análoga al punto anterior, se obtiene
sin (z) =∞Xn=0
(−1)nz2n+1
(2n + 1)!∀ z ∈ C,
y derivando,
cos (z) =∞Xn=0
(−1)nz2n
2n!∀ z ∈ C.
(ejercicio, dar los detalles).
2. Si f (z) = 11+z2
, y queremos encontrar la serie de f centrada en a = 0, primero notamosque f deja de ser analítica en ±i, por lo tanto dicha serie va a tener radio de convergencia1. Pero si |z| < 1, entonces usando la serie geométrica concluimos que
1
1 + z2=
1
1− (−z2)=
∞Xn=0
¡−z2
¢n=
∞Xn=0
(−1)n z2n

112 Desarrollos en series, residuos
(pues |z| < 1⇐⇒¯z2¯< 1), es decir que para todo z con |z| < 1 vale
f (z) =∞Xn=0
(−1)n z2n,
entonces por unicidad esa debe ser la serie de Taylor de f centrada en 0. Además como elcoeficiente de la potencia n-ésima de la serie de Taylor es
cn =f (n) (0)
n!,
el desarrollo anterior nos permite concluir que f (n) (0) = 0 para todo n impar (ejercicio).
Ahora que tenemos sabemos el teorema de Taylor, podemos demostrar la regla de L’Hospitalsin mucho esfuerzo:
Teorema 134 (Regla de L’Hopital) Si f, g son funciones analíticas en (un entorno de)z0, f (z0) = g (z0) = 0, y g0 (z0) 6= 0, entonces
lımz→z0
f (z)
g (z)= lım
z→z0
f 0 (z)
g0 (z).
Demostración. sea B = {z : |z − z0| < R} una bola incluida en el entorno de z0 donde f y gson analíticas, entonces Taylor nos dice que para todo z en B vale
f (z) =∞Xn=0
f (n) (z0)
n!(z − z0)
n y g (z) =∞Xn=0
g(n) (z0)
n!(z − z0)
n ,
pero como f (z0) = g (z0) = 0, queda
f (z) = (z − z0)∞Xn=1
f (n) (z0)
n!(z − z0)
n−1 y g (z) = (z − z0)∞Xn=1
g(n) (z0)
n!(z − z0)
n−1 ,
y entonces
f (z)
g (z)=
(z − z0)P∞
n=1f (n)(z0)
n! (z − z0)n−1
(z − z0)P∞
n=1g(n)(z0)
n! (z − z0)n−1
=
P∞n=1
f(n)(z0)n! (z − z0)
n−1P∞n=1
g(n)(z0)n! (z − z0)
n−1.
Por último, notar que las funcionesP∞
n=1f(n)(z0)
n! (z − z0)n−1 y
P∞n=1
g(n)(z0)n! (z − z0)
n−1 sonanalíticas en B (son funciones definidas como series de potencias que convergen en B), enparticular son continuas en z0, y en z0 valen f 0(z0) y g0(z0) respectivamente. Por último, usandoque g0(z0) 6= 0 y tomando límite, queda
lımz→z0
f (z)
g (z)= lım
z→z0
P∞n=1
f (n)(z0)n! (z − z0)
n−1P∞n=1
g(n)(z0)n! (z − z0)
n−1=
f 0 (z0)
g0 (z0)= lım
z→z0
f 0 (z)
g0 (z),
donde el último igual vale pues la función f 0 (z) /g0 (z) es continua en z0 (ejercicio).

Desarrollos en series, residuos 113
5.2. Series dobles
En muchas ocasiones ocurre que en lugar de tener una sucesión de funciones {fn}n∈N ,tenemos una sucesión de la forma {fn}n∈Z , es decir
..., f−3 (z) , f−2 (z) , f−1 (z) , f0 (z) , f1 (z) , f2 (z) , f3 (z) , ...
y queremos darle sentido a la expresiónP∞
n=−∞ fn(es decir, queremos “sumar” todas esas fun-ciones). Un solución seria plantear sumas parciales del tipo
TN (z) =NX
n=−Nfn (z)
y llamar∞X
n=−∞fn (z) = lım
N→∞TN (z) ,
pero esto tiene algunos inconvenientes: por comenzar, si
fn (z) =
½zn n ≥ 0−zn n < 0
entonces tendríamos que∞X
n=−∞fn (z) = 1 ∀ z,
a pesar de que los términos no convergen a cero. Además deberíamos hacer toda la teoría denuevo, y no queremos eso, así que vamos a hacer lo siguiente: transformar la sucesión {fn}n∈Zen dos sucesiones, {fn}n∈N∪{0} y
©f(−n)
ªn∈N , y sumar ambas.
Definición 135 diremos que la serie (doble)P∞
n=−∞ fn converge [absolutamente, uniformemente]en D si las series ∞X
n=1
f(−n) (z) y∞Xn=0
fn (z)
convergen ambas [absolutamente, uniformemente] en D.
El ejemplo típico de estas series dobles se da cuando fn (z) = an (z − a)n , y la región típicade convergencia de estas series es un anillo, según veremos en la siguiente sección.
5.3. Series de Laurent
Caracterizaremos con el siguiente teorema a las funciones analíticas en anillos:

114 Desarrollos en series, residuos
Teorema 136 (Laurent) Si f (z) es una función analítica en un abierto D que contiene elanillo A = {z : r ≤ |z − a| ≤ R}, entonces para todo z en con r < |z − a| < R vale que
f (z) =∞X
n=−∞an (z − a)n ,
donde
an =1
2πi
ZC
f (w)
(w − a)n+1dw
con C cualquier curva cerrada simple en A que encierre a a recorrida en sentido antihorario,y la serie converge absoluta y uniformemente a f en cualquier anillo centrado en a de radiointerior mayor que r y radio exterior menor que R.
Además el desarrollo es único en el siguiente sentido: si f (z) =P∞
n=−∞ cn (z − a)n paratodo z en un anillo que contiene A, entonces
cn =1
2πi
ZC
f (w)
(w − a)n+1dw ∀ n ∈ Z.
Demostración. tomemos z con r < |z − a| < R fijo, y llamemos Cr = {z : |z − a| = r} recorridoen sentido antihorario, y símil CR. Dividiendo A (con una recta que pase por a pero no por z)como muestra el dibujo, obtenemos dos curvas cerradas simples que llamamos T1⊕S1⊕T2⊕S2y T3 ⊕ S3 ⊕ T4 ⊕ S4.
D
a a
az
Cr
CR T1
T2
T3
T4S1S2
S3S4
Necesariamente una de estas dos curvas encierra z, supongamos que la primera, y en tal caso lafórmula integral de Cauchy nos dice que
f (z) =1
2πi
ZT1⊕S1⊕T2⊕S2
f (w)
(w − z)dw
(pues f (w) es analítica en una región simplemente conexa que contiene T1⊕S1⊕ T2⊕S2), y elteorema de Cauchy dice que
0 =1
2πi
ZT3⊕S3⊕T4⊕S4
f (w)
(w − z)dw
(pues la función g (w) = f(w)(w−z) es analítica en una región simplemente conexa que contiene
T3⊕S3⊕T4⊕S4). Sumando estas dos igualdades y teniendo en cuenta que S1 = −S3, S2 = −S4,CR = T1 ⊕ T3, y −Cr = T2 ⊕ T4, resulta
f (z) =1
2πi
ZCR
f (w)
(w − z)dw − 1
2πi
ZCr
f (w)
(w − z)dw. (5.2)

Desarrollos en series, residuos 115
Desde acá la demostración sigue como en el teorema de Taylor. La primera integral de (24) setrata exactamente igual: si w ∈ CR entonces |w − a| = R, y como |z − a| < R tenemos
1
w − z=
1
w − a
1³1− z−a
w−a
´ =1
w − a
∞Xn=0
µz − a
w − a
¶n
,
entoncesf (w)
2πi (w − z)=
∞Xn=0
1
2πi
f (w)
(w − a)n+1(z − a)n
e integrando queda
1
2πi
ZCR
f (w)
(w − z)dw =
ZCR
∞Xn=0
1
2πi
f (w)
(w − a)n+1(z − a)n dw =
=∞Xn=0
∙1
2πi
ZCR
f (w)
(w − a)n+1dw
¸(z − a)n ,
donde el último paso es lícito porque la serie converge uniformemente en CR, ya que si tomamosM tal que
|f (w)| ≤M ∀w ∈ CR
resulta ¯1
2πi
f (w)
(w − a)n+1(z − a)n
¯≤ M
2πR
µ|z − a|
R
¶n
.
Por último, si C es una curva como pide el enunciado, el principio de deformación de la trayectorianos dice que Z
CR
f (w)
(w − a)n+1dw =
ZC
f (w)
(w − a)n+1dw n = 0, 1, 2, ...,
por lo que finalmente queda
1
2πi
ZCR
f (w)
(w − z)dw =
∞Xn=0
∙1
2πi
ZC
f (w)
(w − a)n+1dw
¸(z − a)n (5.3)
Para la segunda integral de (24) hacemos así: si w ∈ Cr entonces |w − a| = r, y como |z − a| > rtenemos
−1
w − z=
−1
w − a + a− z=
1
z − a + a− w=
1
(z − a)³1− w−a
z−a
´ =1
(z − a)
∞Xn=0
µw − a
z − a
¶n
pues¯w−az−a
¯< 1. Multiplicando por f (w) /2πi queda
−f (w)
2πi (w − z)=
∞Xn=0
1
2πif (w) (w − a)n
1
(z − a)n+1,

116 Desarrollos en series, residuos
e integrando, usando exactamente los mismos argumentos concluimos que
1
2πi
ZCr
−f (w)
(w − z)dw =
ZCr
∞Xn=0
1
2πif (w) (w − a)n
1
(z − a)n+1dw
=∞Xn=0
∙1
2πi
ZCr
f (w) (w − a)n dw
¸1
(z − a)n+1
=∞Xn=1
∙1
2πi
ZCr
f (w) (w − a)n−1 dw
¸1
(z − a)n
=∞Xn=1
∙1
2πi
ZCr
f (w)
(w − a)−n+1dw
¸(z − a)−n
=−∞Xn=−1
∙1
2πi
ZCr
f (w)
(w − a)n+1dw
¸(z − a)n
Por último, si C es una curva como pide el enunciado, el principio de deformación de la trayectorianos dice que Z
Cr
f (w)
(w − a)n+1dw =
ZC
f (w)
(w − a)n+1dw n = −1,−2,−3, ...,
por lo que finalmente queda
1
2πi
ZCr
−f (w)
(w − z)dw =
−∞Xn=−1
∙1
2πi
ZC
f (w)
(w − a)n+1dw
¸(z − a)n (5.4)
Combinando (24) con (25) y (26) obtenemos
f (z) =∞Xn=0
∙1
2πi
ZC
f (w)
(w − a)n+1dw
¸(z − a)n +
−∞Xn=−1
∙1
2πi
ZC
f (w)
(w − a)n+1dw
¸(z − a)n
=∞X
n=−∞
∙1
2πi
ZC
f (w)
(w − a)n+1dw
¸(z − a)n ,
que es exactamente lo que queríamos. En cuanto a la convergencia uniforme, se deduce que dees cierta para las series de (25) y (26), y la unicidad del desarrollo se obtiene así: si
f (z) =∞X
n=−∞cn (z − a)n ,
con convergencia uniforme en (un anillo que contiene a) A, entonces tomamos una curva C comola del enunciado y un k ∈ Z fijo, entonces la serie converge uniformemente en C, y
1
2πi
ZC
f (w)
(w − a)k+1dw =
1
2πi
ZC
1
(w − a)k+1
" ∞Xn=−∞
cn (w − a)n#
dw
=1
2πi
ZC
∞Xn=−∞
cn (w − a)n (w − a)−k−1 dw
=∞X
n=−∞cn
1
2πi
ZC
(w − a)n−k−1 dw,

Desarrollos en series, residuos 117
pero según vimos en un ejemplo,
1
2πi
ZC
(w − a)n−k−1 dw =
½1 si n− k − 1 = −10 si n− k − 1 6= −1
es decir, la serie de arriba tiene un único término distinto de cero, y es cuando n = k, y queda
1
2πi
ZC
f (w)
(w − a)k+1dw = ck,
es decir, listo.
Nota 137 El teorema anterior nos dice que toda función analítica en un anillo
A = {z : r < |z − a| < R}
puede expresarse como una serie de potencias (negativas y positivas) de (z − a) . Esta serie sellama el desarrollo de Laurent de f en A. Revisando la demostración anterior, se deduceque la mayor región de convergencia del desarrollo de Laurent de f en A es el mayor anilloque contiene a A donde f es analítica. Además, esta mal reemplazar las integrales que dan loscoeficientes de la serie por f (n) (a) /n! pues esto no tiene sentido si n < 0, y puede no tenerloaunque n sea positivo, pues no sabemos que f sea derivable en a
Nota 138 (Otra) Los desarrollos de Laurent incluyen a los de Taylor, es decir, si f es analíticaen un abierto que contiene el disco {z : |z − a| ≤ R} entonces en particular f es analítica en unabierto que contiene al anillo {z : r < |z − a| < R} (para cualquier r < R), y el desarrollo deLaurent de f en dicho anillo, será necesariamente el desarrollo de Taylor de f en a. Esto sededuce por la unicidad del desarrollo de Laurent (pues todo desarrollo de Taylor es un desarrollode Laurent), pero además notar que en estas hipótesis (f analítica en un entorno de a) se tiene
1
2πi
ZC
f (w)
(w − a)n+1dw =
½0 si n < 0
f (n) (a) /n! si n ≥ 0
donde C es cualquier curva cerrada simple en {z : |z − a| < R} que encierre a recorrida ensentido antihorario.
Ejemplo 139 1. Si tomamos f (z) = 1z(z+2) y queremos hallar su desarrollo de Laurent en
el anillo A = {z : 2 < |z|} , hacemos lo siguiente: como 2/ |z| < 1, tenemos
f (z) =1
z (z + 2)=
1
z
1
z (1 + 2/z)=
1
z21
(1− (−2/z))=
1
z2
∞Xn=0
µ−2
z
¶n
=∞Xn=0
(−2)nµ
1
zn+2
¶,
y esta debe ser la serie de Laurent de f en A por unicidad.

118 Desarrollos en series, residuos
2. Tenemos
f (z) =ez
z (z + i) (z − 1)
y queremos saber cuantos desarrollos de Laurent centrados en 1 tiene f. Primero notarque f es analítica en todo el plano salvo en los puntos 0, 1, y −i, y si llamamos
A1 = {z : 0 < |z − 1| < 1} , A2 =nz : 1 < |z − 1| <
√2o
, A3 =n
z :√
2 < |z − 1|o
,
entonces cualquier anillo centrado en 1 donde f sea analítica estará contenido en algunode estos. Por lo tanto, f tiene tres desarrollos de Laurent distintos centrados en 1.
5.4. Singularidades aisladas
Si f (z) es una función compleja que no es derivable en a, pero es analítica en un entorno dea, entonces diremos que a es una singularidad aislada de f . En general, dada una función f sellama singularidad de f a todo punto donde f no es analítica. Por ejemplo la función f (z) = e1/z
tiene una singularidad aislada en 0, y todos los puntos de la semirecta {z : Re (z) ≤ 0, Im (z) = 0}son singularidades (no aisladas) de la función f (z) = log (z) .
Si a es una singularidad aislada de f, entonces f es analítica en un entorno de la forma{z : 0 < |z − a| < ε} para algún ε > 0, y entonces tiene un desarrollo de Laurent centrado en ay válido en dicho entorno. Si tal desarrollo tiene una cantidad infinita de potencias negativas de(z − a) diremos que a es una singularidad esencial, si no tiene potencias negativas diremos quea es una singularidad evitable, y si tiene finitas potencias negativas y −m es el menor exponentedel desarrollo, diremos que a es un polo de orden m. Para aclarar tenemos el siguiente cuadro:
polo de orden m serie I%
a singularidad → aislada → esencial serie II↓ &no
aisladaevitable serie III
Ia−m
(z − a)m+
a−m+1
(z − a)m−1+ ..... +
a−2
(z − a)2+
a−1(z − a)
+ a0 + a1 (z − a) + a2 (z − a)2 + .....
II .....a−n
(z − a)n+
a−n+1
(z − a)n−1+ .....+
a−2
(z − a)2+
a−1(z − a)
+ a0 + a1 (z − a) + a2 (z − a)2 + .....
III a0 + a1 (z − a) + a2 (z − a)2 + a3 (z − a)3 .....
Ejemplo 140 1. Puesto que para todo número complejo w vale que
ew = 1 + w +w2
2!+
w3
3!+
w4
4!+ .....,

Desarrollos en series, residuos 119
tenemos que para todo z 6= 0 vale que
e1/z = 1 + (1/z) +(1/z)2
2!+
(1/z)3
3!+
(1/z)4
4!+ ..... = 1 +
1
z+
1
2!
1
z2+
1
3!
1
z3+
1
4!
1
z4+ .....,
y entonces por unicidad ese debe ser el desarrollo de Laurent de f (z) = e1/z en {z : 0 < |z|} ,es decir que f tiene una singularidad esencial en 0, pues 0 es singularidad aislada de fy el desarrollo de Laurent válido en cualquier anillo de la forma {z : 0 < |z| < ε} tieneinfinitas potencias negativas de z.
2. Como para todo z 6= 0 vale que
sin (z)
z= 1− z2
3!+
z4
5!− z6
7!+ .....
(ejercicio), entonces la función f (z) = sin (z) /z tiene una singularidad evitable en 0, pues0 es singularidad aislada de f y el desarrollo de Laurent válido en cualquier anillo de laforma {z : 0 < |z| < ε} no tiene potencias negativas de z.
3. Como para todo z 6= 0 vale que
cos (z)
z=
1
z− z
2!+
z3
4!− z5
6!+ .....
(ejercicio), entonces la función f (z) = cos (z) /z tiene un polo de orden 1 en 0, pues 0 essingularidad aislada de f y el desarrollo de Laurent válido en cualquier anillo de la forma{z : 0 < |z| < ε} tiene una potencias negativas de z.
Nota 141 Si a es singularidad evitable de f , entonces f se puede extender analíticamente aa, es decir, esté definido f (a) o no, podemos cambiarlo de modo que la función resultante seaanalítica en todo un entorno de a. Esto es porque si
f (z) = a0 + a1 (z − a) + a2 (z − a)2 + a3 (z − a)3 .....,
desarrollo de Laurent de f válido para todo z con 0 < |z − a| < r, entonces el miembro de laderecha es una función analítica en toda la bola {z : |z − a| < r} (pues es una serie de potenciasque converge en dicha bola), y es igual a f en toda la bola menos (posiblemente) en a. Ahora,el miembro de la derecha vale a0 cuando z = a, así que si definimos f (a) = a0 nos queda que fes analítica en toda la bola. Esto se puede hacer en el ejemplo anterior, definiendo
f (z) =
½sin(z)z si z 6= 01 si z = 0
.
5.5. Residuos

120 Desarrollos en series, residuos
Definición 142 Si a es una singularidad aislada de f (z) yP∞
n=−∞ an (z − a)n es el desarrollode Laurent de f válido en {z : 0 < |z − a| < r} , entonces el número complejo a−1 se llama elresiduo de f en a y se denota Res (f, a) .
Según las series de Laurent calculadas en los ejemplos anteriores, tenemos que Res¡e1/z, 0
¢=
1, Res³sin(z)z , 0
´= 0, y Res
³cos(z)z , 0
´= 1.
Una de las cosas que decía el teorema de Laurent, es que si f es analítica en una región quecontiene el anillo A = {z : 0 < |z − a| ≤ r} , y C es una curva cerrada simple en A que encierraa recorrida en sentido antihorario, entonces para todo z con 0 < |z − a| < r vale que
f (z) =∞X
n=−∞an (z − a)n , con an =
1
2πi
ZC
f (w)
(w − a)n+1dw,
en particular,
a−1 =1
2πi
ZC
f (w) dw,
y por lo tanto puedo usar esto al revés: en lugar de usar la fórmula de los coeficientes paraencontrar la serie de Laurent de f (cosa que, de hecho, nunca se hace), voy a usar la serie deLaurent (particularmente el coeficiente a−1 para calcular integrales), pues tenemosZ
Cf (w) dw = 2πiRes (f, a) .
Este resultado sencillo (para curvas simples que encierran una singularidad de f), se extiendede la siguiente manera:
Teorema 143 (de los residuos) Si f (z) es una función analítica en un abierto D salvo ensingularidades aisladas z1, z2, ..., zp, y C es una curva cerrada simple en D que encierra a talessingularidades recorrida en sentido antihorario, entoncesZ
Cf (z) dz = 2πi [Res (f, z1) + ... + Res (f, zp)]
Demostración. Como tenemos finitas singularidades (p en total) podemos centrar en c/u deellas círculos C1, ..., Cp de diámetro lo suficientemente chico para que no se corten mutuamente,que Cj encierre solo a la singularidad zj , (j = 1, ..., p), y que la curva C1 ⊕ ... ⊕ Cp esté en elinterior de C (ver dibujo).
C
Dzp
z2z3
z1

Desarrollos en series, residuos 121
Si pensamos todos los círculos Cj (j = 1, ..., p) recorridos en sentido horario, el teorema deCauchy (generalizado para regiones no simplemente conexas) nos dice queZ
C⊕C1⊕...⊕Cpf (z) dz = 0
pues f es analítica en un abierto que contiene la región interior a C y exterior a todas las curvasC1, ..., Cp. Entonces
1
2πi
ZC
f (z) dz =1
2πi
Z−C1
f (z) dz + ... +1
2πi
Z−Cp
f (z) dz,
y según nuestro análisis previo al teorema,
1
2πi
Z−Cj
f (z) dz = Res (f, zj) ∀ j = 1, ..., p,
o sea listo.
Ejemplo 144 Tomemos f (z) = −3z+4z(z−1)(z−2) y C el círculo {z : |z| = 3/2} recorrido en sentido
antihorario. f tiene tres singularidades aisladas, 0, 1 y 2, pero solo 0 y 1 están en el interior deC. Escribiendo f como fracciones simples queda
f (z) =2
z− 1
z − 1− 1
z − 2,
y eso implica queRes (f, 0) = 2 y Res (f, 1) = −1,
pues por ejemplo,
f (z) =2
z+
µ−1
z − 1+−1
z − 2
¶=
2
z+ g (z) ,
con g (z) analítica en (el entorno de 0) {z : |z| < 1} . Por lo tanto, para todo z ∈ {z : |z| < 1}vale que
g (z) =∞Xn=0
anzn,
y entonces para todo z con 0 < |z| < 1 vale
f (z) =2
z+
∞Xn=0
anzn,
y ese debe ser entonces el desarrollo de Laurent de f en el anillo {z : 0 < |z| < 1} , de dondese ve claramente que Res (f, 0) = 2. De manera análoga se ve que Res (f, 1) = −1, ejercicio, yentonces el teorema de los residuos me dice queZ
Cf (z) dz = 2πi [2− 1] = 2πi.

122 Desarrollos en series, residuos
Nos hace falta un buen método para calcular residuos, y eso vamos a buscar ahora. Notarque si f (z) tiene un polo de orden uno en a, entonces para todo z 6= a en un entorno de a valeque
f (z) =a−1
(z − a)+ a0 + a1 (z − a) + a2 (z − a)2 + a3 (z − a)3 + ...,
y entonces
(z − a) f (z) = a−1 + a0 (z − a) + a1 (z − a)2 + a2 (z − a)3 + a3 (z − a)4 + ..., (5.5)
de donde resultaRes (f, a) = lım
z→a(z − a) f (z)
(notar que eso es exactamente el miembro de la derecha de (27) valuado en z = a, pero nopodemos valuar el miembro de la izquierda en z = a pues no sabemos ni siquiera que f (z) estedefinida en z = a).
Si f (z) tiene un polo de orden dos en a, entonces para todo z 6= a en un entorno de a valeque
f (z) =a−2
(z − a)2+
a−1(z − a)
+ a0 + a1 (z − a) + a2 (z − a)2 + a3 (z − a)3 + ...,
entonces
(z − a)2 f (z) = a−2 + a−1 (z − a) + a0 (z − a)2 + a1 (z − a)3 + a2 (z − a)4 + a3 (z − a)5 + ...,
y entonces
d
dz
h(z − a)2 f (z)
i= a−1 + 2a0 (z − a) + 3a1 (z − a)2 + 4a2 (z − a)34 + 5a3 (z − a)4 + ...,
pues la convergencia uniforme de la serie permite derivar término a término. Tomado límitequeda
Res (f, a) = lımz→a
d
dz
h(z − a)2 f (z)
i.
Además, notar quelımz→a
(z − a) f (z) =∞.
Aplicando el mismo razonamiento al caso genérico de un polo de orden m, se obtiene el siguienteteorema:
Teorema 145 Si f (z) tiene un polo de orden m en a, entonces
Res (f, a) =1
(m− 1)!lımz→a
dm−1
dzm−1[(z − a)m f (z)] ,
y para todo n < m se tiene que
lımz→a
dn−1
dzn−1[(z − a)n f (z)] =∞.

Desarrollos en series, residuos 123
Ejemplo 146 Tomemos f (z) = 1+z1−cos(z) . Puesto que cos (0) = 1 y cos (z) 6= 1 para todo z 6= 0
en un entorno de 0, tenemos que f tiene una singularidad aislada en 0. Para tratar de encontrarque tipo de singularidad es, procedemos de la siguiente manera: como
cos (z) = 1− z2
2+
z4
24− z6
720+ ...,
entonces
1− cos (z) =z2
2− z4
24+
z6
720− ... = z2
∙1
2− z2
24+
z4
720− ...
¸| {z }
g(z)
= z2g (z) ,
donde g (z) es una función analítica en un entorno de 0 con g (0) = 1/2 (¿por que?). Entonces
f (z) =1
z21 + z
g (z)=
1
z2h (z) ,
con h (z) analítica en un entorno de 0 y h (0) 6= 0 (mas precisamente, h (0) = 2), de donde sededuce que f tiene un polo de orden 2 en 0. Para calcular Res (f, 0) , derivamos
d
dz
∙z2
1 + z
1− cos (z)
¸=
2z (1 + z) + z2
1− cos z− z2 (1 + z)
(1− cos z)2sin z =
2z + 3z2
1− cos z− z2 + z3
(1− cos z)2sin z
y ahora, usando L’Hospital calculamos el límite
Res (f, 0) = lımz→0
∙2z (1 + z) + z2
1− cos z− z2 (1 + z)
(1− cos z)2sin z
¸= 2,
listo.
5.6. Ceros de una función analítica
Definición 147 Si f (z) es una función analítica en un entorno de a, entonces diremos que ftiene un cero de multiplicidad m en a si su desarrollo de Taylor centrado en a es
∞Xn=m
an (z − a)n
con am 6= 0 (es decir, a0 = a1 = ... = am−1 = 0).
En principio, no esta claro que en cada punto donde una función analítica se anule tenemosun cero de cierta multiplicidad. Para comenzar a avanzar en esa dirección, tenemos el siguientelema.

124 Desarrollos en series, residuos
Lema 148 Si f es analítica en un entorno de a, entonces las siguientes afirmaciones son equiv-alentes:
1. f tiene un cero de orden m en a.
2. f (a) = f 0 (a) = f 00 (a) = · · · = f (m−1) (a) = 0, y f (m) (a) 6= 0.
3. Hay una función analítica g (z) definida en un entorno de a tal que g (a) 6= 0 y f (z) =(z − a)m g (z) para todo z en dicho entorno.
Demostración. recordar que el teorema de Taylor dice que
f (z) =∞Xn=0
f (n) (a)
n!(z − a)n
para todo z en un entorno de a. Así, que la primer afirmación implica la segunda es inmediato dela definición de cero de multiplicidad m. Para ver que la segunda afirmación implica la tercera,notar que en tal caso queda
f (z) =∞X
n=m
f (n) (a)
n!(z − a)n = (z − a)m
à ∞Xn=m
f (n) (a)
n!(z − a)n−m
!.
Definamos
g (z) =∞X
n=m
f (n) (a)
n!(z − a)n−m ,
entonces el radio de convergencia de la serie de potencias que define g es igual al de la serie de
f, por lo tanto g es analítica en un entorno de a, y g (a) = f(m)(a)m! 6= 0.
Por último, para ver que la tercer afirmación implica la primera, desarrollamos g con Tayloren un entorno de a:
g (z) =∞Xn=0
bn (z − a)n ,
con b0 = g (a) 6= 0. Entonces
f (z) = (z − a)m g (z) = (z − a)m∞Xn=0
bn (z − a)n =∞Xn=0
bn (z − a)n+m =∞X
n=m
bn−m (z − a)n ,
es decir, f tiene un cero de multiplicidad m en a.
Corolario 149 Si f tiene un cero de multiplicidad m en a, entonces existe r > 0 tal quef (z) 6= 0 para todo z con 0 < |z − a| < r.
Demostración. Según el lema anterior, f (z) = (z − a)m g (z) con g (a) 6= 0. Como g es analíticaen un entorno de a, entonces es continua en un entorno de a, y entonces es no nula en un entornode a. En dicho entorno, f es el producto de dos factores no nulos, y entonces es distinto de cero.

Desarrollos en series, residuos 125
El corolario anterior nos permite demostrar un resultado que también divide la teoría defunciones de variable real de la teoría de funciones de variable compleja: los puntos donde unafunción analítica se anula son aislados:
Proposición 150 Si f es analítica en B = {z : |z − a| < R} y f (a) = 0, entonces f (z) = 0∀ z ∈ B, o existe r > 0 tal que f (z) 6= 0 para todo z con 0 < |z − a| < r.
Demostración. Como f (a) = 0, Taylor me dice que
f (z) =∞Xn=1
an (z − a)n .
Si f (z) = 0 ∀ z ∈ B, no hay nada que probar. Si no, alguno de los coeficientes an debe serdistinto de cero. Si an0 es el primer coeficiente distinto de cero, entonces f tiene un cero deorden n0 en a, y entonces el corolario anterior nos dice que existe el r que busco.
Como postre, esta proposición nos permite demostrar un resultado que nos será muy útilpara estudiar transformada de Laplace compleja:
Corolario 151 Si f es una función analítica en un semiplano de la forma P = {z : Re (z) > α}y f (x) = 0 para todo x real mayor que α, entonces f (z) = 0 para todo z ∈ P .
Demostración. Tomo w ∈ P fijo, voy a probar que f (w) = 0. Para eso, tomo a ∈ R, a > α,tal que la bola B = {z : |z − a| < a− α} contenga a w (se puede, ejercicio). Como f (a) = 0, ycomo no existe ningún r > 0 tal que f (z) 6= 0 para todo z con 0 < |z − a| < r, la proposiciónanterior nos dice que f (z) = 0 para todo z ∈ B, en particular f (w) = 0.
w
aα 0
Corolario 152 (del corolario) Si f y g son funciones analíticas en P = {z : Re (z) > α} yf (x) = g (x) para todo x real mayor que α, entonces f (z) = g (z) para todo z ∈ P .
Demostración. aplicar el corolario anterior a f − g.
A continuación veremos como calculando ciertas integrales podemos contar los ceros y lospolos de una función analítica.

126 Desarrollos en series, residuos
Si f tiene un cero de multiplicidad m en a, entonces sabemos que hay una función analíticag (z) con g (a) 6= 0 tal que
f (z) = (z − a)m g (z) .
Derivando esa expresión obtenemos
f 0(z) = m (z − a)m−1 g (z) + (z − a)m g0 (z) ,
y entoncesf 0(z)
f (z)=
m (z − a)m−1 g (z) + (z − a)m g0 (z)
(z − a)m g (z)=
m
(z − a)+
g0 (z)
g (z).
Además, la función g0 (z) /g (z) es analítica en un entorno de a (why?), por lo que la igualdadde arriba nos dice que la función f 0(z)/f (z) tiene un polo simple en a, y que
Res¡f 0/f, a
¢= m.
Análogamente, si f tiene un polo de orden n en a, Laurent dice que para z 6= a en un entornode a,
f (z) =a−n
(z − a)n+
a−n+1
(z − a)n−1+ · · ·+ a−1
(z − a)+ a0 + a1 (z − a) + a2 (z − a)2 + · · · =
=
³a−n + a−n+1 (z − a) + · · ·+ a−1 (z − a)n−1 + a0 (z − a)n + a1 (z − a)n+1 + · · ·
´(z − a)n
=
=1
(z − a)nh (z) ,
con h (z) analítica en un entorno de a, y h (a) 6= 0. Derivando la última expresión obtenemos
f 0(z) =−n
(z − a)n+1h (z) +
1
(z − a)nh0 (z) ,
y entoncesf 0(z)
f (z)=−n
(z − a)+
h0(z)
h (z)
con h0(z)/h (z) analítica en un entorno de a. Entonces la función f 0(z)/f (z) tiene un polo simpleen a y
Res¡f 0/f, a
¢= −n.
Con estas cuentas hechas, tenemos casi probado el siguiente teorema:
Teorema 153 Si f es una función analítica en D salvo por polos p1, ..., pk de orden n1, ..., nkrespectivamente, todos los ceros de f en D son z1, ..., zj de multiplicidad m1, ...,mj respectiva-mente, y C es una curva cerrada simple en D que contiene en su interior a p1, ..., pk, z1, ..., zj ,entonces
1
2πi
ZC
f 0(z)
f (z)dz = (m1 + · ·+mj)−(n1 + · · ·+ nk) ,
donde C se recorre en sentido antihorario.

Desarrollos en series, residuos 127
Demostración. aplicar el teorema del residuo a la función f 0(z)/f (z).
C
D
p1
p2p3
pn
z2z3 zkz1
5.7. Indice de una curva
En esta sección veremos de manera algo informal e intuitiva, como ciertas integrales de línea“cuentan” las vueltas que dan alrededor de un punto.
Imaginemos que tenemos una curva C como muestra el siguiente dibujo, parametrizada porγ : [a, b]→ C:
γ ( )t1
γ ( )t2
γ ( )t3
γ ( )aγ b ( )
Pensemos γ (t) en coordenadas polares con el argumento variando continuamente (notar queγ (t) 6= 0 ∀ t), es decir,
γ (t) = ρ (t) eiφ(t)
con φ (t) continua en [a, b] (es decir, no fijamos una rama del argumento, lo dejamos crecer ydecrecer continuamente a medida que t se mueve). Puede verse que φ (b) − φ (a) nos dará lavariación total del argumento (seguir el dibujo!). En la curva graficada, φ (t1) = φ (a) + 2π, y elargumento sigue variando continuamente hasta φ (b) . Además φ (t2) + 2π = φ (t3) = φ (b) .

128 Desarrollos en series, residuos
Si suponemos además que ρ y φ son suaves por tramos, entonces
1
i
Zγ
dz
z=
1
i
Zγ
γ0(t)
γ (t)dt =
1
i
Z b
a
ρ0(t)eiφ(t) + iρ (t) eiφ(t)φ0(t)
ρ (t) eiφ(t)dt =
=1
i
Z b
a
ρ0(t)
ρ (t)dt +
Z b
aφ0(t)dt = −i ln
µρ (b)
ρ (a)
¶+ [φ (b)− φ (a)] .
De esta expresión pueden sacarse varias conclusiones:
i) La variación total del argumento es Re³1i
Rγdzz
´, teniendo en cuenta incluso el signo: si
el resultado es negativo es porque me estoy moviendo en sentido horario.
ii) Si |γ (a)| = |γ (b)| , entonces la variación total del argumento es 1i
Rγdzz , en particular
1
2πi
Zγ
dz
z
mide las (fracciones de) vueltas que γ da alrededor de cero,en donde el signo nos indicasi son vueltas en sentido horario (negativo) o antihorario (positivo). En particular, si γ escerrada, esta integral cuenta la cantidad de vueltas que da alrededor de 0.
Esto se puede usar para contar las vueltas que da cualquier curva cerrada alrededor decualquier punto z0 (no necesariamente cero). Si tengo una curva cualquiera C parametrizadapor γ (t) que no pase por z0 (para que tenga sentido contar vueltas alrededor de z0), basta conaplicar lo hecho a β (t) = γ (t) − z0 (hacer un dibujo, β parametriza la curva C − z0), y en talcaso el número de vueltas lo cuenta
1
2πi
Zβ
dz
z,
que es exactamente igual a1
2πi
ZC
dz
z − z0
(ejercicio).
Una aplicación particularmente impresionante de estos hechos, es cuando tenemos un caminoγ : [a, b]→ C y una función f analítica en la curva que parametriza γ, y tal que f (γ (t)) 6= 0 ∀t ∈ [a, b] . Si llamamos Γ (t) = f (γ (t)) , entonces Γ es un camino que no pasa por cero, y
Variación total delargumento de Γ
= Re
µ1
i
ZΓ
dz
z
¶= Re
µ1
i
Z b
a
f 0 (γ (t)) γ0(t)
f (γ (t))dt
¶= Re
µ1
i
Zγ
f 0 (z)
f (z)dz
¶.
Uniendo esto con el último teorema de la sección anterior, obtenemos el siguiente:
Teorema 154 Si f es una función analítica en D salvo por polos p1, ..., pk de orden n1, ..., nkrespectivamente, todos los ceros de f en D son z1, ..., zj de multiplicidad m1, ...,mj respectiva-mente, y C es una curva cerrada simple en D que contiene en su interior a p1, ..., pk, z1, ..., zj ,entonces el número de vueltas que da la curva f (C) alrededor de 0 es
(m1 + · ·+mj)− (n1 + · · ·+ nk) .

Desarrollos en series, residuos 129
El teorema anterior es particularmente útil cuando uno sabe que la función en cuestión notiene (por ejemplo) polos, pues nos da un procedimiento gráfico para encontrar los ceros de lafunción en cierta región cuyo borde es una curva C: basta con graficar f (C) y contar!. Esto seusa particularmente en un criterio conocido como “criterio de estabilidad de Nyquist”.
Ejemplo 155 Llamemos Cr al círculo centrado en 0 de radio r. La función f (z) = z3 lleva aCr sobre Cr3 recorrido tres veces en el mismo sentido que recorremos Cr. Eso es porque f tieneun cero de multiplicidad 3 en 0. Análogamente, g (z) = z−3 lleva Cr sobre Cr3 recorrido tresveces en el sentido opuesto al que recorremos Cr. Eso es porque g tiene un polo de orden 3 en 0.
Ejemplo 156 (otro) en la gráfica siguiente se muestran cuatro curvas rectangulares y sus re-spectivas imágenes por la función
f (z) = 1 +6
(z + 1) (z + 2),
incluyendo la orientación (la flecha que indica la orientación además indica la concordanciaentre segmento de dominio y de imagen). Las gráficas fueron generadas por computadora. Notarque f tiene dos polos simples en z = −1 y z = −2, y dos ceros de multiplicidad uno en −32±i
√232 .
Además f es conforme en C−©−1,−2,−32
ª, lo cual permite apreciar la imagen de los vértices
de los rectángulos.

130 Desarrollos en series, residuos
Hay muchas variantes y situaciones en las que se usa el teorema anterior. A continuaciónvamos a exponer dos, sin poner demasiado énfasis en los detalles formales, y teniendo bienpresente que se trata de un método gráfico.
5.7.1. Raíces de polinomiosSupongamos que
p (z) = a0 + a1z + · · ·+ anzn
con an 6= 0, y que queremos saber cuantas raíces con parte real positiva tiene p (z). Para R > 0,consideremos la curva cerrada simple ΓR que consiste en el segmento desde iR hasta−iR, seguidadel semicírculo de radio R y centro 0 en el semiplano derecho. Si tomamos R lo suficientementegrande, todas las raíces de p (z) con parte real positiva están en el interior de ΓR.
iR
−iR
0 R
ΓR
Para saber cuantas hay, tengo que graficar la curva p (ΓR) y contar cuantas vueltas da alrededordel origen. El trabajo se reduce considerablemente si pensamos en R → ∞ : la imagen de la

Desarrollos en series, residuos 131
parte circular de ΓR tiende a infinito, y su contribución en la variación total de argumentopuede calcularse así: sobre dicho semicírculo debemos graficar
p³Reiθ
´, con − π
2≤ θ ≤ π
2.
Pero
p³Reiθ
´= a0 + a1Reiθ + a2R
2ei2θ + · · ·+ anRneinθ
= Rn
Ãa0R
+a1e
iθ
R2+ · · ·+ an−1ei(n−1)θ
R+ ane
inθ
!,
y como multiplicar por Rn no cambia el argumento, basta con saber la variación total delargumento de
a0R
+a1e
iθ
R2+ · · ·+ an−1ei(n−1)θ
R+ ane
inθ
cuando θ se mueve de −π2 hasta π
2 . Al hacer R→∞, los términos
a0R
+a1e
iθ
R2+ · · ·+ an−1ei(n−1)θ
R
se hacen arbitrariamente chicos, por lo cual, en el límite, la variación total es igual a la de aneinθ,
que claramente es
nπ
2−³−n
π
2
´= nπ.
Consecuentemente, basta con graficar p (z) con z moviéndose hacia abajo por el eje imaginario(situación que llamaremos “desde i∞ hasta −i∞”), medir la variación total de argumento en laimagen, y a eso sumarle nπ. Dividiendo esto por 2π obtenemos el número de vueltas alrededordel origen.
El trabajo se simplifica mas aún cuando p (z) tiene coeficientes reales, pues en tal casop (z) = p (z), es decir, la gráfica es simétrica respecto el eje x.
El método explicado no funciona si p tiene ceros sobre el eje imaginario, situación que seevidencia cuando la gráfica de p (it) , t ∈ R, pasa por el origen.
Ejemplo 157 Si p (z) = z3+ z2+4z +1, entonces p (it) = −it3− t2+4it+1, es decir, la curvaque queremos graficar tiene las siguientes ecuaciones paramétricas
u = 1− t2, v = 4t− t3.
La inspección de la gráfica revela que el argumento varia de 3π2 en i∞ hasta −3π2 en −i∞ (el
argumento en ±i∞ puede calcularse haciendo v/u y luego t→ ±∞, para verificar que tenemosasíntotas verticales), es decir, una variación neta de
−3π
2− 3π
2= −3π.

132 Desarrollos en series, residuos
Cuando a esto le sumamos 3π (correspondiente a la sección circular, según lo recientementeexpuesto), nos da cero, es decir, la gráfica no da vueltas alrededor del origen, y entonces notenemos ceros con parte real positiva.
p( )− ∞i
p( 1)−
p(1)
p(0)
p( )i∞
Si p (z) = z3 + z2 + z + 4, entonces p (it) = −it3 − t2 + it + 4. En este caso (haciendo unanálisis como en el caso anterior), la inspección de la gráfica revela que el argumento varía de−π2 en i∞ hasta π
2 en −i∞, es decir, una variación neta total de π. A esto debemos sumarle3π, lo que indica que la gráfica da dos vueltas alrededor del origen, es decir, el polinomio tienedos raíces con parte real positiva.

Desarrollos en series, residuos 133
p( )i∞
p( )− ∞i
p( 2)−i
p( 2)i
p(0)
5.7.2. Ceros y polos de funciones racionalesSupongamos que
f (z) = 1 +p (z)
q (z),
con p y q polinomios, p de grado menor que q, y queremos estudiar los ceros y polos de f en elsemiplano derecho. Como hay una cantidad finita de ellos, podemos hacer lo mismo que hicimospara contar las raíces de polinomios, es decir, considerar la misma curva ΓR. Si tomamos Rsuficientemente grande y graficamos f (ΓR), entonces el número de vueltas que dé alrededor delorigen (teniendo en cuenta el signo) nos dará M − N, donde M es el número de ceros de f(contados con multiplicidad) y N es el número de polos de f (contados teniendo en cuenta suorden).
Puesto quelımz→∞
f (z) = 1,
la imagen de la sección semicircular de ΓR (para R suficientemente grande) es una curva muypróxima a 1, por lo tanto para saber cuantas vueltas al origen da f (ΓR) , basta con graficarf (z) con z variando de iR hasta −iR y contar. Lo que se hace en la práctica, para no tener quedecidir que valor de R es suficientemente grande, es graficar f (z) con z variando de i∞ hasta−i∞ y contar.
El método explicado no funciona si f tiene ceros y/o polos sobre el eje imaginario, situaciónque se evidencia cuando la gráfica de p (it) , t ∈ R, pasa por el origen o se hace infinita.

134 Desarrollos en series, residuos
Ejemplo 158 Tomemos f (z) = 1+ 6(z+1)(z+2) (esta función la usamos en un ejemplo anterior).
La gráfica de f (z) con z variando desde i∞ hasta −i∞ revela que f tiene la misma cantidadde ceros que de polos en el semiplano derecho. Como evidentemente f no tiene polos en dichosemiplano, tampoco puede tener ceros.
1
Si g (z) = 1 + 6(z−1)(z+2) , entonces la gráfica de g (z) con z variando de i∞ hasta −i∞ da una
vuelta alrededor de cero en sentido antihorario. Eso revela que g tiene en el semiplano derechoun polo mas que ceros. Como g tiene claramente un polo en dicho semiplano, se desprende queg no tiene ceros en el. Se puede calcular directamente y verificar que los ceros de g son estánen −12 ± i
√152 .
1

Capítulo 6
Series de Fourier
En esta sección vamos a trabajar con funciones de variable real, e imagen real o compleja,o sea f (t) , con f : R → R ó f : R → C (en realidad vamos a estar pensando todo el tiempoen funciones de imagen real, pero conviene tener bien claro que esta no es ninguna limitación)Si tenemos una función así, que sea lo suficientemente derivable, se sabe de Análisis I quepodemos aproximar f localmente usando polinomios de Taylor, pero dicha aproximación tienemuchas limitaciones: necesita que la función tenga derivadas (mientras mas derivadas tenga,mas posibilidad de que la aproximación sea buena), y da una aproximación local, o sea buenacerca de un punto prefijado. Vamos a ver acá otra forma de hacer esto.
6.1. Series de funciones reales
Vamos a escribir como quedan los teoremas de convergencia de series de funciones de variablecompleja, con funciones de variable real (e imagen real o compleja).
Si {fn}n∈N es una sucesión de funciones de variable real (e imagen compleja o real) definidastodas en el intervalo [a, b], diremos que la serie
P∞n=1 fn converge a la función f en [a, b] si
para todo x ∈ [a, b] y para todo ε > 0 existe N > 0 tal que |SN (x)− f (x)| < ε, donde
SN (x) = f1 (x) + ... + fn (x) ,
es decir, si la serie numéricaP∞
n=1 fn (x) converge al número f (x) para todo x de [a, b] (notar esuna serie de números reales o complejos, pero también notar que los números reales son númeroscomplejos). De manera análoga, diremos que la serie
P∞n=1 fn converge uniformemente f en
[a, b] si para todo ε > 0 existe N > 0 tal que |SN (x)− f (x)| < ε para todo x ∈ [a, b].Una aclaración para tratar de dejar bien claro que es nuevo y que no: si tenemos una sucesión
de funciones reales {fn}n∈N y planteamos la serieP∞
n=1 fn, entonces para cada número real x
135

136 Series de Fourier
donde las funciones estén definidas,P∞
n=1 fn (x) es una serie numérica y por lo tanto todos loscriterios, propiedades y definiciones vistas para series numéricas son aplicables (def. de conver-gencia y convergencia absoluta, que convergencia absoluta implica convergencia, que una serieconverge si y solo si es de Cauchy, etc), pues todas estas propiedades dependen del conjuntoal que pertenecen los valores {fn (x)}n∈N , que es C. Por otro lado, si queremos estudiar lafunción de variable real f =
P∞n=1 fn, la cosa cambia. Las propiedades vistas no son las mismas
pues no es lo mismo derivar una función de variable real que una de variable compleja, de lamisma forma que no es lo mismo pedirle a una función de variable real que sea derivable (que espedir poco) que pedirle a una función de variable compleja que sea derivable. Estas propiedadesdependen estrechamente del conjunto donde se elige la variable (C ó R), y por lo tanto debenser redefinidas y estudiadas
Para detectar convergencia uniforme tenemos el test M de Weierstrass para variable real:
Teorema 159 (test M de Weierstrass) Si {fn}n∈N es una sucesión de funciones definidasen un intervalo [a, b], y {Mn}n∈N es una sucesión de números reales positivos tales que
1. Para cada n ∈ N, vale que |fn (x)| ≤Mn ∀x ∈ [a, b] , y
2. la serieP∞
n=1Mn converge.
Entonces la serieP∞
n=1 fn converge absoluta y uniformemente en [a, b].
Demostración. exactamente igual que la versión de variable compleja, ejercicio.
En el siguiente teorema veremos lo que realmente nos importa, que es cuando la serie heredalas propiedades de sus términos, y como derivar e integrar series:
Teorema 160 Si {fn}n∈N es una sucesión de funciones definidas en un intervalo [a, b] , en-tonces:
1. Si cada función fn es continua en [a, b] y la serieP∞
n=1 fn converge uniformemente a fen [a, b] , entonces f es continua, yZ b
af (t) dt =
∞Xn=1
Z b
afn (t) dt.
2. Si cada función fn es continua en [a, b] y derivable en (a, b) y su derivada es continua en(a, b) , y la serie
P∞n=1 f 0n converge uniformemente en [a, b] y la serie
P∞n=1 fn converge a
f en [a, b]entonces f es derivable en (a, b) y
f 0 (t) =∞Xn=1
f 0n (t) ∀ t ∈ (a, b) .
Demostración.

Series de Fourier 137
1. Exactamente igual que en variable compleja, ejercicio.
2. Llamemos g (t) =P∞
n=1 f 0n (t) , quiero ver que f es derivable y que f 0 (t) = g (t) ∀ t ∈ (a, b) .Por el teorema fundamental del cálculo,
fn (t)− fn (a) =
Z t
af 0n (x) dx,
Aplicando eso, y que la serie que define a g converge en [a, b], nos queda queZ t
ag (x) dx =
∞Xn=1
∙Z t
af 0n (x) dx
¸=
∞Xn=1
[fn (t)− fn (a)] =∞Xn=1
fn (t)−∞Xn=1
fn (a) = f (t)−f (a) ,
Pero sabemos del punto anterior que g es continua, por lo que el teorema fundamental delcálculo nos dice que
d
dt
∙Z t
ag (x) dx
¸= g (t) ,
que comparando con la igualdad anterior nos permite deducir que f es derivable y f 0 (t) =g (t) , listo.
Necesitamos además una herramienta que nos permita derivar funciones definidas comointegrales de funciones de varias variables. Nosotros vamos a usar esta versión de la regla deLeibnitz:
Teorema 161 (Regla de Leibnitz, (2da versión)) si φ (x1, ..., xn, y) es una función de n+1 variables, φ : [a1, b1]× [a2, b2]× ...× [an, bn]× [c, d]→ R (ó C) es continua con ∂φ
∂xkcontinua,
y
g (x1, ..., xn) =
Z d
cφ (x1, ..., xn, y) dy,
entonces g tiene derivada parcial respecto de xk, y
∂g
∂xk(x1, ..., xn) =
Z d
c
∂φ
∂xk(x1, ..., xn, y) dy.
Idea de la demostración.
∂g
∂xk(x1, ..., xn) = lım
h→0
g (x1, ..., xk + h, ..., xn)− g (x1, ..., xn)
h=
= lımh→0
R dc φ (x1, ..., xk + h, ..., xn, y) dy −
R dc φ (x1, ..., xn, y) dy
h
= lımh→0
R dc [φ (x1, ..., xk + h, ..., xn, y)− φ (x1, ..., xn, y)] dy
h
= lımh→0
Z d
c
[φ (x1, ..., xk + h, ..., xn, y)− φ (x1, ..., xn, y)]
hdy,

138 Series de Fourier
lo único que me hace falta saber es que puedo meter el lım dentro de la integral, y por eso estoes una “idea de la demo” en lugar de una demo. Pero se puede, y metiendo el límite dentro dela integral queda
g0(x) =
Z d
clımh→0
[φ (x1, ..., xk + h, ..., xn, y)− φ (x1, ..., xn, y)]
hdy =
Z d
c
∂φ
∂xk(x1, ..., xn, y) dy,
listo.
6.2. Funciones periódicas
Si bien ya hemos usados funciones (de variable compleja) periódicas, haremos acá un recontode las propiedades que necesitamos de las funciones de variable real periódicas.
Definición 162 una función f : R → C se dice periódica de período T si f (t) = f (t + T )para todo t ∈ R. Cuando existe un menor T positivo con esta propiedad se lo llama períodofundamental de f.
Por ejemplo, la función cos (t) es periódica de período 2kπ, k ∈ N, y su período fundamentales 2π; por lo tanto si n ∈N y p > 0, la función
f (t) = cos
µnπt
p
¶es periódica de período 2pk
n , y su período fundamental es 2pn . En particular, cualquiera sea el
número n, f tiene período 2p. Las funciones constantes son periódicas con cualquier período, yno tienen período fundamental.
Si f tiene período T entonces f tiene período kT para cualquier k ∈ N (ejercicio), y lasfunciones periódicas de período T quedan absolutamente determinadas por su valor en cualquierintervalo de la forma [a, a+T ), pues si conozco a f en un intervalo así y quiero saber cuanto valef (t) para cierto t, basta con buscar k ∈ Z tal que t + kT ∈ [a, a + T ). De esta forma se puedeconstruir funciones periódicas a partir de funciones definidas en algún intervalo: si conozco fen [a, b) y digo que f tiene período T = b − a, entonces tengo definida en todo R una funciónperiódica de período T. En particular, se usa mucho tener una función definida en un intervalosimétrico [−p, p) y periódica de período 2p.
T
a b0a T−
T
a ba−a T−2

Series de Fourier 139
Si sumamos funciones de período T obtenemos una nueva función que también tiene períodoT (ojo, no estamos hablando del período fundamental, solo de algún período), y también sitenemos una sucesión de funciones {fn}n∈N todas de período T y la serie
P∞n=1 fn converge,
entonces converge a una función de período T. Así, la función
SN (t) =a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶
es periódica de período 2p pues es suma de funciones de período 2p (se puede verificarfácilmente, además, que SN (t) = SN (t + 2p)), y si la serie
a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶converge, entonces converge a una función de período 2p.
Si f es periódica de período T, entonces para todo a ∈ R se tiene queZ T
0f (t) dt =
Z a+T
af (t) dt,
es decir que cada vez que integro sobre un intervalo de longitud T obtengo el mismo resultado.Esto puede verse fácilmente de manera gráfica, “recortando” el área bajo f en [a, a + T ) yreacomodandola para que quede como el área bajo f en [0.T )
a a T+0 T
6.3. Aproximación por medio de polinomios trigonométricos
Sabemos que podemos aproximar ciertas funciones f (t) con polinomios p (t) usando Taylor(Análisis I). Lo que se le pide a la función es que tenga suficientes derivadas en un entorno de unpunto t0, y el criterio de aproximación que se toma es hacer la desviación máxima |f (t)− p (t)| lomas chica posible en cierto intervalo [a, b] que contiene t0 (es decir, p (t) aproxima “bien” a f (t)en [a, b] si la diferencia máxima entre sus gráficas es “pequeña”). Al usar Taylor, construimosun polinomio de grado n,
pn (t) =nX
j=0
f (j) (t0)
j!(t− t0)
j ,

140 Series de Fourier
y para mejorar la aproximación debíamos aumentar n, y para que la aproximación sea tan buenacomo queramos necesitamos que f tenga derivadas de todos los ordenes en t0 y además que elresto ⎡⎣f (t)−
nXj=0
f (j) (t0)
j!(t− t0)
j
⎤⎦tienda a cero cuando n tiende a infinito para todo t de [a, b] , lo cual no ocurre siempre.
t0
f( )t
p( )t
Ahora vamos a tratar de aproximar funciones f (t) usando polinomios trigonométricosde grado N , que son funciones de la forma
SN (t) =a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶,
donde p es un número real fijo y a0, a1, ..., aN , b1, ..., bN son números (reales o complejos, dependi-endo de que f ser real o compleja) que elegiremos para satisfacer cierto criterio de aproximación.Notar que cada término de SN (t) es una función periódica de periodo 2p, por lo tanto SN (t) esuna función periódica de periodo 2p. Entonces SN va a ser bueno para aproximar funciones deperiodo 2p, o lo que es lo mismo, funciones definidas en algún intervalo de longitud 2p (pues sitengo una función definida en un intervalo de longitud 2p puedo construir una función periódicade periodo 2p definiendo f (t) = f (t + 2p) para todo t real, y viceversa). De acá en adelanteasumimos eso: vamos a trabajar con funciones definidas en un intervalo de longitud 2p yextendidas periódicamente a todo R.
En cuanto al criterio para aproximar, vamos a usar el que se llama de la media cuadráticamínima, y para motivar este criterio vamos a suponer que f : R→ R. Si, con la notación quetraemos, llamamos δN (t) = f (t)− SN (t) , entonces el criterio usado con polinomios de Taylorera hacer chico |δN (t)| , y si miramos las gráficas abajo, con ese criterio, 1 es mejor aproximaciónde f que 2
1
p0 p0
2f( )t
f( )t
-p-p

Series de Fourier 141
Pero el área que queda entre f y 1 en el intervalo [−p, p] es mas grande que la que quedaentre 2 y f, y ese es otro criterio que podríamos usar para decir que una función aproxima a f.Como dicha área es Z p
−p|δN (t)| dt,
deberíamos elegir los coeficientes (reales, pues f lo es) a0, a1, ..., aN , b1, ..., bN de SN para hacerR p−p |δN (t)| dt lo mas chico posible. Pero esto presenta complicaciones teóricas y tiene algunos
resultados indeseables, así que vamos a tomar como criterio de elección de los coeficientes deSN , minimizar Z p
−p|δN (t)|2 dt
con la esperanza de que sea mas o menos lo mismo (notar que en este caso δN (t)2 = |δN (t)|2pues todas las cantidades involucradas son reales).
Definición 163 si f (x) , g1 (x) y g2 (x) son funciones (de imagen real o compleja) integrablesen [a, b] , diremos que g1 aproxima mejor a f que g2 en [a, b] en el sentido de la media cuadráticasi Z b
a|f (x)− g1 (x)|2 dx ≤
Z b
a|f (x)− g2 (x)|2 dx.
Seguimos ahora con el problema de encontrar los coeficientes a0, a1, ..., aN , b1, ..., bN de SN , ypara ver como encontrarlos, de nuevo vamos a suponer que f tiene imagen real, o sea, tomemosuna f : [−p, p]→ R y busquemos los números reales a0, a1, ..., aN , b1, ..., bN de SN de forma talque SN aproxime lo mejor posible a f en el sentido de la media cuadrática. Como todas lascantidades involucradas son reales, tenemos que elegir a0, a1, ..., aN , b1, ..., bN de modo que
IN =
Z p
−pδN (t)2 dt =
Z p
−p
Ãf (t)−
"a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#!2dt
sea lo mas chico posible, es decir, podemos pensar IN (a0, a1, ..., aN , b1, ..., bN ) como una funciónde 2N + 1 variables, y tenemos que minimizarla. Pero la 2da versión de Leibnitz nos dice que sik ≥ 1 entonces
∂IN∂a0
=
Z p
−p2
Ãf (t)−
"a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#!µ−1
2
¶dt,
∂IN∂ak
=
Z p
−p2
Ãf (t)−
"a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#!µ− cos
µkπt
p
¶¶dt (6.1)
∂IN∂bk
=
Z p
−p2
Ãf (t)−
"a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#!µ− sin
µkπt
p
¶¶dt,
y deberíamos igualar estas integrales a cero.

142 Series de Fourier
Pero además, Z p
−pcos
µnπt
p
¶cos
µkπt
p
¶dt =
½p si n = k0 si n 6= k
,Z p
−psin
µnπt
p
¶sin
µkπt
p
¶dt =
½p si n = k0 si n 6= k
, (6.2)Z p
−pcos
µnπt
p
¶sin
µkπt
p
¶dt = 0 ∀ k, n,
y Z p
−pcos
µnπt
p
¶dt =
Z p
−psin
µnπt
p
¶dt = 0, (6.3)
(ejercicio) así que al hacer las integrales en (28) queda
∂IN∂a0
= −Z p
−pf (t) dt + pa0
∂IN∂ak
= −2
Z p
−pf (t) cos
µkπt
p
¶dt + 2akp para k ≥ 1
∂IN∂bk
= −2
Z p
−pf (t) sin
µkπt
p
¶dt + 2bkp para k ≥ 1,
que al igualarlas a cero nos dice que deberíamos tomar
a0 =1
p
Z p
−pf (t) dt
ak =1
p
Z p
−pf (t) cos
µkπt
p
¶dt para k ≥ 1
bk =1
p
Z p
−pf (t) sin
µkπt
p
¶dt para k ≥ 1.
Pero derivando de nuevo en (28) obtenemos
∂2IN∂a20
= p,∂2IN∂a2k
=∂2IN∂b2k
= 2p para k ≥ 1,
y como todas las derivadas cruzadas dan cero, resulta que la matriz Hessiana de IN es la matrizdiagonal ⎛⎜⎜⎜⎜⎜⎜⎝
p 0 · · · · · · 00 2p 0 0...
. . ....
.... . .
...0 · · · · · · 0 2p
⎞⎟⎟⎟⎟⎟⎟⎠ ,
de donde concluimos que efectivamente obtenemos un mínimo eligiendo los coeficientes de esaforma.
El trabajo hecho hasta ahora nos permite decir como debemos elegir los coeficientes de SNpara obtener la mejor aproximación de f en el sentido de la media cuadrática., pero todavía no

Series de Fourier 143
sabemos como de buena es esa aproximación (aunque sea la mejor puede ser malísima), así quepor ahora no tenemos teoremas pero si una definición:
Definición 164 Si f es una función (con imagen real o compleja) periódica de período 2p eintegrable en el intervalo [−p, p] , definimos sus coeficientes de Fourier por
an =1
p
Z p
−pf (t) cos
µnπt
p
¶dt y bn =
1
p
Z p
−pf (t) sin
µnπt
p
¶dt,
y el polinomio trigonométrico
SN (t) =a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶formado usando los coeficientes de Fourier de f se llama la aproximación N-ésima de Fourierde f .
Seguimos la cuenta: una ves elegidos los coeficientes de SN (tomando los coeficientes deFourier de f), estudiamos la integral que define IN : por un ladoZ p
−p2f (t)
"a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#dt =
= a0
Z p
−pf (t) dt +
NXn=1
⎡⎢⎢⎢⎣2an
Z p
−pf (t) cos
µnπt
p
¶dt| {z }
pan
+ 2bn
Z p
−pf (t) sin
µnπt
p
¶dt| {z }
pbn
⎤⎥⎥⎥⎦= pa20 +
NXn=1
£2pa2n + 2pb2n
¤= pa20 + 2p
NXn=1
£a2n + b2n
¤, (6.4)
Además, por (30)
Z p
−p
Ãa02
+
"NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#!2dt =
=
Z p
−p
a204
dt + a0
⎡⎢⎢⎢⎣NXn=1
an
Z p
−pcos
µnπt
p
¶dt| {z }
0
+ bn
Z p
−psin
µnπt
p
¶dt| {z }
0
⎤⎥⎥⎥⎦+
+
Z p
−p
"NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#2dt
= pa202
+ pNXn=1
£a2n + b2n
¤, (6.5)

144 Series de Fourier
pues cuando hacemos "NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#2obtenemos todas las combinaciones de
ak cos
µnπt
p
¶am cos
µnπt
p
¶, ak cos
µnπt
p
¶bm sin
µnπt
p
¶, y bk sin
µnπt
p
¶bm sin
µnπt
p
¶,
así que cuando integramos (usando las relaciones (29)) son distinto de cero únicamente lostérminos con solo cosenos o solo senos y con m = k, y en tal caso la integral vale p.
En fin, combinando (31) y (32) concluimos que
IN =
Z p
−p
Ãf (t)−
"a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶#!2dt
=
Z p
−pf (t)2 dt− pa20 + 2p
NXn=1
£a2n + b2n
¤+ p
a202
+ pNXn=1
£a2n + b2n
¤=
Z p
−pf (t)2 dt− p
Ãa202
+NXn=1
£a2n + b2n
¤!,
de donde podemos sacar las siguientes conclusiones:
1. Puesto que³a202 +
PNn=1
£a2n + b2n
¤´crece cuando N crece (pues sumo mas términos posi-
tivos), la aproximación mejora cuando N crece, pues
0 ≤ IN =
Z p
−pf (t)2 dt− p
Ãa202
+NXn=1
£a2n + b2n
¤!.
2. La seriea202
+∞Xn=1
£a2n + b2n
¤converge pues es creciente (es decir, mientras mas grande N mas grande es la suma) ypara todo N vale que
a202
+NXn=1
£a2n + b2n
¤≤ 1
p
Z p
−pf (t)2 dt
es decir, es acotada. Esto dice que£a2n + b2n
¤−→n→∞
0, y entonces a2n −→n→∞0 y b2n −→n→∞
0,
y entonces an −→n→∞
0 y bn −→n→∞
0.
Todo lo hecho hasta acá cierra mas o menos el problema cuando tenemos f : [−p, p] → R.Cuando tenemos una función no necesariamente real, o sea si f : [−p, p]→ C, descomponemos

Series de Fourier 145
f en su parte real e imaginaria, f = f1+if2, con fj : [−p, p]→ R (j = 1, 2), y lo mismo hacemoscon SN = SN,1 + SN,2, entonces
IN =
Z p
−p|f (t)− SN (t)|2 dt =
Z p
−p
³[f1 (t)− SN,1 (t)]2 + [f2 (t)− SN,2 (t)]2
´dt
=
Z p
−p[f1 (t)− SN,1 (t)]2 dt +
Z p
−p[f2 (t)− SN,2 (t)]2 dt = IN,1 + IN,2
o sea que para minimizar IN debemos minimizar IN,1 y IN,2, y eso fue la cuenta que hicimosrecién pues todas las funciones involucradas son reales, así que debemos tomar como coeficientesde SN,j a
an,j =1
p
Z p
−pfj (t) cos
µnπt
p
¶dt, n = 0, 1, 2, 3, ...
bn,j =1
p
Z p
−pfj (t) sin
µnπt
p
¶dt, n = 1, 2, 3, ...
y
SN (t) = Sn,1 (t) + iSn,2 (t)
=a0,12
+NXn=1
an,1 cos
µnπt
p
¶+ bn,1 sin
µnπt
p
¶+
+i
"a0,22
+NXn=1
an,2 cos
µnπt
p
¶+ bn,2 sin
µnπt
p
¶#
=a0,1 + ia0,2
2+
NXn=1
∙[an,1 + ian,2] cos
µnπt
p
¶+ [bn,1 + ibn,2] sin
µnπt
p
¶¸
=a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶,
donde
an = an,1 + ian,2 =1
p
Z p
−pf1 (t) cos
µnπt
p
¶dt + i
1
p
Z p
−pf2 (t) cos
µnπt
p
¶dt
=1
p
Z p
−p[f1 (t) + if2 (t)] cos
µnπt
p
¶dt =
1
p
Z p
−pf (t) cos
µnπt
p
¶dt,
y análogamente
bn =1
p
Z p
−pf (t) sin
µnπt
p
¶dt.
Además, una ves elegidos los coeficientes como los coeficientes de Fourier de f, queda
IN,1 =
Z p
−pf1 (t)2 dt− p
Ãa20,12
+NXn=1
£a2n,1 + b2n,1
¤!,

146 Series de Fourier
y
IN,2 =
Z p
−pf2 (t)2 dt− p
Ãa20,22
+NXn=1
£a2n,2 + b2n,2
¤!,
así que sumando queda
IN = IN,1 + IN,2
=
Z p
−pf1 (t)2 dt− p
Ãa20,12
+NXn=1
£a2n,1 + b2n,1
¤!+
Z p
−pf2 (t)2 dt− p
Ãa20,22
+NXn=1
£a2n,2 + b2n,2
¤!
=
Z p
−pf1 (t)2 dt +
Z p
−pf2 (t)2 dt− p
Ãa20,12
+a20,22
+NXn=1
£a2n,1 + b2n,1 + a2n,2 + b2n,2
¤!
=
Z p
−p|f (t)|2 dt− p
Ã|a0|2
2+
NXn=1
h|an|2 + |bn|2
i!,
de donde se pueden sacar las mismas conclusiones que sacamos cuando f tenía imagen real.Después de todo este trabajo hemos demostrado el siguiente teorema:
Teorema 165 Sea f (t) una función (con imagen real o compleja) periódica de período 2p eintegrable en el intervalo [−p, p], y llamemos
SN (t) =a02
+NXn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶.
Entonces la mejor aproximación de f por SN en el sentido de la media cuadrática. se obtiene alelegir
an =1
p
Z p
−pf (t) cos
µnπt
p
¶dt, n ∈ N∪ {0} , y bn =
1
p
Z p
−pf (t) sin
µnπt
p
¶dt, n ∈ N
(es decir, los coeficientes de Fourier de f). Con esta elección, la aproximación mejora a medida
que N crece, y la serieP∞
n=1
h|an|2 + |bn|2
iconverge, resultando
≤ 1
p
Z p
−p|f (t)|2 dt.
Además,
lımn→∞
Z p
−pf (t) cos
µnπt
p
¶dt = lım
n→∞
Z p
−pf (t) sin
µnπt
p
¶dt = 0.
Se puede ver que mas que lo que dice el teorema es cierto: en 1896 el matemático Liapunoff
demostró que lımN→∞ IN = 0, de donde se deduce que vale la igualdad |a0|22 +
P∞n=1
h|an|2 + |bn|2
i=
1p
R p−p |f (t)|2 dt para cualquier función integrable (incluyendo el caso en que
R p−p |f (t)|2 dt =∞).
Esta igualdad se llama igualdad de Parceval y la desigualdad del teorema se llama desigualdadde Bessel.

Series de Fourier 147
Nota importante 166 Cuando uno examina con cuidado lo hecho, se da cuenta de que loscoeficientes de Fourier no dependen del grado de la aproximación N . Esto es muy importanteporque significa que si uno no está conforme con la aproximación lograda con cierta cantidad detérminos, entonces puedo agregar términos sin tener que recalcular los primeros coeficientes. Esdecir, si para cierto problema usamos la 3ra aporximación de Fourier y no estamos conformescon los resultados, para usar la 4ta sólo necesitamos calcular dos nuevos coeficientes: a4 y b4.
Ejemplo 167
1. Tomemos f (t) = |t| en el intervalo [−π, π] (es decir, estamos pensando en la funciónperiódica de período 2π que coincide con |t| en el intervalo [−π, π]). Los coeficientes deFourier son
an =1
π
Z π
−π|t| cos (nt) dt y bn =
1
π
Z π
−π|t| sin (nt) dt,
y como la función |t| sin (nt) es impar, resulta que todas las integrales que definen bn soncero, es decir, bn = 0 ∀n, y si n 6= 0 queda
an =1
π
Z π
−π|t| cos (nt) dt =
2
π
Z π
0t cos (nt) dt =
2
π
∙t sin (nt)
n
¸t=πt=0
− 2
π
Z π
0
sin (nt)
ndt =
= − 2
π
∙−cos (nt)
n2
¸t=πt=0
=2
πn2[cos (nπ)− 1] =
½0 si n es par−4πn2
si n es impar.
Por otro lado,
a0 =2
π
Z π
0tdt =
2
π
∙t2
2
¸t=πt=0
= π,
y entonces la aproximación N-ésima para N impar de f queda
SN (t) =π
2− 4
πcos (t)− 4
π9cos (3t)− ...− 4
πN2cos (Nt) ,
y si N es par queda SN (t) = SN−1 (t) . La energía total de esta función esR π−π |t| dt =
π2 = π³π2
2 +P∞
n=116
π2(2n−1)4´
, donde el último igual vale por Parseval.
1
2
3
1
2
3
1
2
3
S0
S1 S2
1 2 3-3 -2 -1 0 1 2 3-3 -2 -1 0 1 2 3-3 -2 -1 0
2. Tomemos la función de período 2 tal que
f (t) =
½0 si − 1 ≤ t < 0t2 si 0 ≤ t < 1
,

148 Series de Fourier
entonces los coeficientes de Fourier de f son: para n ≥ 1
an =
Z 1
−1f (t) cos (nπt) dt =
Z 0
−1f (t) cos (nπt) dt +
Z 1
0f (t) cos (nπt) dt
=
Z 1
0t2 cos (nπt) dt =
∙t2 sin (nπt)
nπ− 2 sin (nπt)
n3π3+
2t cos (nπt)
n2π2
¸t=1t=0
=2cos (nπ)
n2π2= (−1)n
2
n2π2,
y
a0 =
Z 1
−1f (t) dt =
Z 1
0t2dt =
1
3
y por último
bn =
Z 1
−1f (t) sin (nπt) dt =
Z 0
−1f (t) sin (nπt) dt +
Z 1
0f (t) sin (nπt) dt =
=
Z 1
0t2 sin (nπt) dt =
∙− t2 cos (nπt)
nπ+
2cos (nπt)
n3π3+
2t sin (nπt)
n2π2
¸t=1t=0
=
= −cos (nπ)
nπ+
2 cos (nπ)
n3π3− 2
n3π3=
(−1)n+1
nπ+
2 (−1)n
n3π3− 2
n3π3=
=
½ −1nπ si n es par
1nπ −
4n3π3
si n es impar.
Así la sexta aproximación de Fourier de f es
S6 (t) =1
6− 2
π2cos (πt) +
µ1
π− 4
π3
¶sin (πt) +
1
2π2cos (2πt)− 1
2πsin (2πt)−
− 2
9π2cos (3πt) +
µ1
3π− 4
27π3
¶sin (3πt) .
0.5 10
0.5
1
-1 -0.5 0.5 10
0.5
1
-1 -0.5 0.5 10
0.5
1
-1 -0.5
S1S2 S3
Puede verse claramente, además, que la función anterior era mas fácil de aproximar, ya quesumando menos términos conseguíamos algo mas parecido a f .
6.4. Convergencia puntual de series de Fourier
Hasta ahora no hemos dicho nada cuanto se parece puntualmente f a su N -ésima aproxi-mación de Fourier, es decir no sabemos que relación hay, para cada t, entre f (t) y SN (t) , y

Series de Fourier 149
tampoco sabemos que pasa con SN (t) cuando N tiende a infinito. Para estudiar eso, introduci-mos la siguiente definición:
Definición 168 Si f (t) es una función (con imagen real o compleja) periódica de período 2p eintegrable en el intervalo [−p, p], la serie de Fourier de f es
a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶donde los coeficientes {an}n∈N∪{0} y {bn}n∈N son los coeficientes de Fourier de f . A vecesdenotaremos
f ∼ a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶para indicar cual es la serie de Fourier de f . Notar que no sabemos si dicha serie converge paraalgún valor de t, pero si tenemos f en las condiciones de la definición podemos construirla.
Por supuesto que nos gustaría mucho que la serie de Fourier de f converga a f, lo cuallamentablemente no ocurre. Pero tenemos el siguiente teorema, que demostró Dirichlet en 1829(este es el primer resultado de convergencia puntual de series de Fourier).
Teorema 169 (Dirichlet) Si f (t) es una función real de período 2p (definida en todo R),acotada en [−p, p] , con un número finito de discontinuidades en [−p, p] y con un número finitode máximos y mínimos en [−p, p] , entonces la serie de Fourier de f converge para todo t alvalor 1
2 [f (t+) + f (t−)] , es decir,
a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶=
1
2
£f¡t+¢
+ f¡t−¢¤
.
Si f : R→ C es tal que su parte real e imaginaria cumplen las hipótesis anteriores, entonces seobtiene la misma conclusión.
Entendamos que pide el teorema y que da: las condiciones pedidas a f (además de serperiódica de período 2p) se llaman las condiciones de Dirichlet en [−p, p] . Nosotros vamosa hacer el análisis pensando en f de imagen real, pero esto no saca generalidad, todo se puedepensar para f con imagen compleja, como hicimos en el teorema anterior. Seguimos: que tengaun número finito de máximos y mínimos en [−p, p] nos asegura que f no oscila demasiado, porejemplos la función periódica de período 2 tal que
f (t) =
½t sin (1/t) si 0 < |t| < 1
0 si t = 0
no cumple con esa condición (graficar f y ver!). Que tenga un número finito de discontinuidadesen [−p, p] está claro que significa, y por ejemplo la función de período 2
f (t) =
½0 si t ∈ Q1 si t ∈ R−Q

150 Series de Fourier
no cumple con esa condición. Las tres condiciones juntas (que pide Dirichlet) dicen algo muyimportante: que el intervalo [−p, p] se puede dividir de forma tal que la gráfica de f en cadasubintervalo es la de una función creciente o decreciente, y además, por ser acotada, los límites
f¡t+o¢
= lımt→t+o
f (t) y f¡t−o¢
= lımt→t−o
f (t)
existen para todo to en [−p, p] . Para convercerse de eso, marcar en [−p, p] primero todos losmáximos y mínimos de f , deducir que f debe crecer o decrecer entre puntos, y ahora agregar lasdiscontinuidades (y a la hora de graficar recordar que f es acotada). Notar que si f es continuaen t entonces f (t) = f (t+) = f (t−) , y si f es discontinua en t entonces debe tener un salto en t(por las características de f, pues sabemos que existen límites laterales en las discontinuidades),y entonces 1
2 [f (t+) + f (t−)] es el promedio del valor de f en el salto; es decir
1
2
£f¡t+¢
+ f¡t−¢¤
=
½f (t) si f es continua en t
promedio del salto si f no es continua en t.
Notar, por ultimo, que en estas condiciones sabemos que f es integrable en [−p, p] .
En cuanto a lo que el teorema da, nos asegura que la serie de Fourier de f converge paratodo t, pero no necesariamente a f, pues tenemos que
a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶=
1
2
£f¡t+¢
+ f¡t−¢¤
,
es decir que la serie de Fourier de f converge a f (t) en los t’s donde f es continua, y al promediodel salto en los t’s donde f es discontinua. O sea, para insistir y que quede bien claro, la igualdad
f (t) =a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶vale solo para los valores de t donde f es continua. El hecho de que la serie de Fourier de f noconverge a f en las discontinuidades de f es absolutamente razonable: notar que si tomamosto ∈ [−p, p] y fabricamos una nueva función
g (t) =
½f (t) si t 6= t0
f (to)− 7 si t = to,
entonces f y g tienen la misma serie de Fourier (y dicha serie no puede converger en to a f (to)y a g (to)).
En cuanto a la demostración del teorema, la omitimos porque es bastante dificil y no muyconstructiva, en el sentido de que no se ve mucho por que la serie converge al valor dicho.
Ejemplo 170 si consideramos la función de período 2 tal que
f (t) =
½0 si − 1 ≤ t < 0t2 si 0 ≤ t < 1
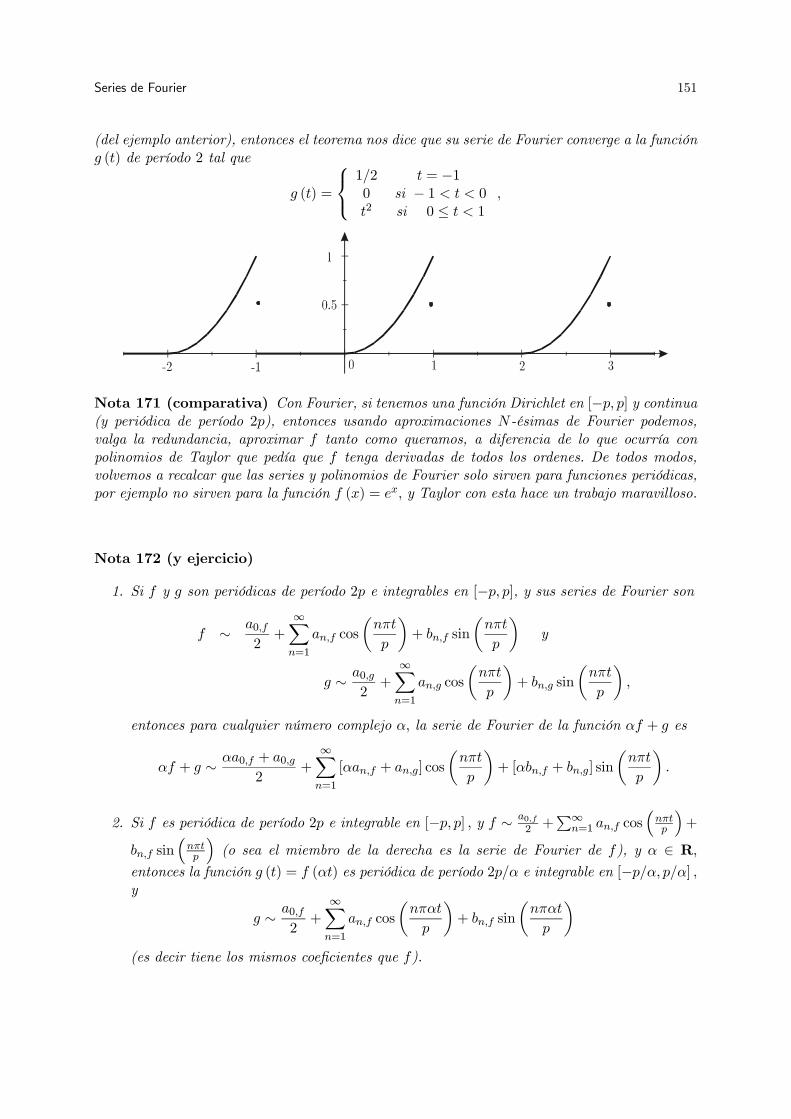
Series de Fourier 151
(del ejemplo anterior), entonces el teorema nos dice que su serie de Fourier converge a la funcióng (t) de período 2 tal que
g (t) =
⎧⎨⎩1/2 t = −10 si − 1 < t < 0t2 si 0 ≤ t < 1
,
Nota 171 (comparativa) Con Fourier, si tenemos una función Dirichlet en [−p, p] y continua(y periódica de período 2p), entonces usando aproximaciones N-ésimas de Fourier podemos,valga la redundancia, aproximar f tanto como queramos, a diferencia de lo que ocurría conpolinomios de Taylor que pedía que f tenga derivadas de todos los ordenes. De todos modos,volvemos a recalcar que las series y polinomios de Fourier solo sirven para funciones periódicas,por ejemplo no sirven para la función f (x) = ex, y Taylor con esta hace un trabajo maravilloso.
Nota 172 (y ejercicio)
1. Si f y g son periódicas de período 2p e integrables en [−p, p], y sus series de Fourier son
f ∼ a0,f2
+∞Xn=1
an,f cos
µnπt
p
¶+ bn,f sin
µnπt
p
¶y
g ∼ a0,g2
+∞Xn=1
an,g cos
µnπt
p
¶+ bn,g sin
µnπt
p
¶,
entonces para cualquier número complejo α, la serie de Fourier de la función αf + g es
αf + g ∼ αa0,f + a0,g2
+∞Xn=1
[αan,f + an,g] cos
µnπt
p
¶+ [αbn,f + bn,g] sin
µnπt
p
¶.
2. Si f es periódica de período 2p e integrable en [−p, p] , y f ∼ a0,f2 +
P∞n=1 an,f cos
³nπtp
´+
bn,f sin³nπtp
´(o sea el miembro de la derecha es la serie de Fourier de f), y α ∈ R,
entonces la función g (t) = f (αt) es periódica de período 2p/α e integrable en [−p/α, p/α] ,y
g ∼ a0,f2
+∞Xn=1
an,f cos
µnπαt
p
¶+ bn,f sin
µnπαt
p
¶(es decir tiene los mismos coeficientes que f).

152 Series de Fourier
3. Si f es periódica de período 2p e integrable en [−p, p] , y f ∼ a0,f2 +
P∞n=1 an,f cos
³nπtp
´+
bn,f sin³nπtp
´, y α ∈ R, entonces la función g (t) = f (t− α) es periódica de período 2p e
integrable en [−p, p] , y sus coeficientes de Fourier son
an,g = an,f cos
µnπα
p
¶− bn,f sin
µnπα
p
¶, y
bn,g = an,f sin
µnπα
p
¶+ bn,f cos
µnπα
p
¶.
4. Si p (t) es un polinomio trigonométrico, entonces el es su serie de Fourier.
Unicidad y espectro: una pregunta un poco adelantada es: si f y g son periódicas deperíodo 2p y tienen los mismos coeficientes de Fourier, ?‘tiene que valer f (t) = g (t) ∀ t?Esta pregunta no es tan fácil de contestar, pero si es fácil cuando nos restringimos a funcionescomo las del teorema de Dirichlet: en ese caso, f y g deben ser iguales, salvo posiblemente enlas discontinuidades de ambas pues si {x1, ..., xn} son las discontinuidades de f en [−p, p] y{y1, ..., ym} son las de g, como f y g tienen la misma serie de Fourier y tal serie converge a f yg donde son continuas, tendremos que para todo t ∈ [−p, p]− {x1, ..., xn, y1, ..., ym} vale
f (t) =a02
+∞Xn=1
an cos
µnπt
p
¶+ bn
µnπt
p
¶| {z }
serie de Fourier de f y g
= g (t) .
Esto es muy importante porque nos dice que una función (periódica de período 2p y Dirichleten [−p, p]) está univocamente determinada por sus coeficientes de Fourier (salvo en las discon-tinuidades), es decir, si quiero transportar información puedo calcular los coeficientes de Fourierde f, tirar f y quedarme con los coeficientes, tranquilo de que f es la única función con dichoscoeficientes y de que puedo recuperarla cuando quiera (de nuevo, salvo por las discontinuidades).Por razones físicas al conjunto de todos los coeficientes de Fourier se llaman el espectro de f , y
a la cantidad p³|a0|22 +
P∞n=1
h|an|2 + |bn|2
i´(que es igual a
R p−p |f (t)|2 dt) la energía (espectral)
total.
6.5. Orden de los coeficientes de Fourier
Sabemos que los coeficientes de Fourier {an, bn} de una función (razonable) satisfacen an −→n→∞
0 y bn −→n→∞
0, pero no sabemos cuan rápido lo hacen. Para poder medir “velocidad” de conver-
gencia tenemos que fijar parámetros, y lo hacemos de la siguiente manera: vamos a usar paracomparar las sucesiones {1/n}n∈N ,
©1/n2
ªn∈N ,
©1/n3
ªn∈N , etc., teniendo en cuenta que, por
ejemplo, la segunda converge mas rápido a cero que la primera, en el sentido de que
1/n2
1/n−→n→∞
0.

Series de Fourier 153
En general, si tenemos {1/nm}n∈N y©1/nk
ªn∈N entonces la primera decrece mas rápido que la
segunda si m > k.
Nota(ción) 173 Si f (t) es periódica de período 2p y continua, puede pasar que f 0(t) exista entodo (−p, p) salvo en finitos puntos {t1, ..., tn}. En este caso, denotaremos por f 0 a tal función(periódica de período 2p), dejándola sin definir en los puntos que no exista (que serán infinitosen R). Esto no tendrá importancia pues estamos interesados en los coeficientes de Fourier def 0, y las integrales no se dan cuenta si f 0 no está definida en una cantidad finita de puntos.En algunos casos, cuando queramos remarcar esta situación, diremos que f 0 existe en casi todopunto. Así, por ejemplo, la función de período 2 tal que f (t) = |t| si t ∈ [−1, 1) tiene derivadaperiódica de período 2 y
f 0 (t) =
½−1 si − 1 < t < 01 si 0 < t < 1
,
y f 0 no está definida en los t ∈ Z.
1 2 3-3 -2 -1 0
1f t( ) f t
0( )
1 2 3-3 -2 -1 0
1
En las condiciones anteriores, o sea si f es continua 2p-periódica y f 0 existe en casi todopunto, si además f 0 es integrable en [−p, p] , vale queZ p
−pf 0(t)dt = f (p)− f (−p) .
Se suele poner f (p−)−f (−p+) en lugar de f (p)−f (−p) cuando no se sabe que f sea continuaen p y/o −p.
Vamos a ver un lema técnico para calcular integrales:
Lema 174 (teorema del valor medio para integrales) Si f es monótona en [a, b] (es de-cir, creciente o decreciente) y g es integrable en [a, b] , entonces existe ξ ∈ (a, b) tal queZ b
af (t) g (t) dt = f (a)
Z ξ
ag (t) dt + f (b)
Z b
ξg (t) dt.
Demostración. de Análisis I, típico ejercicio resultado del teorema de los valores intermedios,o algo así.
Tomemos ahora una función 2p-periódica y Dirichlet en [−p, p] . Como f tiene una cantidadfinita de máximos y mínimos en [−p, p] podemos dividir dicho intervalo en una cantidad finitade subintervalos de forma tal que f sea monótona en cada uno de ellos. Consecuentemente,
an =1
p
Z p
−pf (t) cos
µnπt
p
¶dt

154 Series de Fourier
puede expresarse como una suma finita de integrales del tipo
1
p
Z b
af (t) cos
µnπt
p
¶dt
con f monótona en (a, b) . Aplicándole el lema anterior a esta integral tenemos queZ b
af (t) cos
µnπt
p
¶dt = f (a)
Z ξ
acos
µnπt
p
¶dt + f (b)
Z b
ξcos
µnπt
p
¶dt =
=pf (a)
nπ
∙sin
µnπξ
p
¶− sin
µnπa
p
¶¸+
pf (b)
nπ
∙sin
µnπb
p
¶− sin
µnπξ
p
¶¸.
Ahora, como f es acotada existe M tal que |f (t)| ≤ M para todo t, y entonces acotando lasuma anterior queda ¯Z b
af (t) cos
µnπt
p
¶dt
¯≤ 4pM
nπ.
Por último, como el coeficiente era una suma finita de integrales de este tipo, concluimos queexiste una constante c (que no depende de n) tal que
|an| ≤c
n∀ n ∈ N.
Análogamente, se prueba que en estas condiciones existe una constante c tal que
|bn| ≤c
n∀ n ∈N.
Supongamos ahora que f es 2p-periódica, continua y Dirichlet en [−p, p] , y que existe f 0 encasi todo punto y es Dirichlet en [−p, p] , entonces calculamos los coeficientes de Fourier de fintegrando por partes:
an =1
p
Z p
−pf (t) cos
µnπt
p
¶dt =
∙p
nπf (t) sin
µnπt
p
¶¸p−p− p
nπp
Z p
−pf 0 (t) sin
µnπt
p
¶dt =
= 0−³ p
nπ
´ 1
p
Z p
−pf 0 (t) sin
µnπt
p
¶dt
pues sin (−nπ) = sin (nπ) = 0.Pero
1
p
Z p
−pf 0 (t) sin
µnπt
p
¶dt = b0n = coeficiente de f 0,
y como f 0 está dentro del razonamiento anterior, sabemos que existe c tal que¯a0n¯≤ c
ny
¯b0n¯≤ c
n∀ n ∈ N
(estamos denotando con 0 los coeficientes de f 0), así que tomando módulo arriba queda
|an| =¯³ p
nπb0n
´¯≤ pc
π
1
n2.

Series de Fourier 155
Análogamente, usando que f es continua y que f (p) = f (−p), se ve que existe una constante ctal que
|bn| ≤c
n2∀ n ∈N.
Motivados por todo este cuenterio, ponemos la siguiente definición:
Definición 175 Si {cn}n∈N es una sucesión que converge a cero, diremos que es de orden 1/nk
si existe una constante M tal que
|cn| ≤M1
nk
para todo n. Otra forma de decir esto es que {cn}n∈N decrece al menos como (la sucesión)©1/nk
ªn∈N .
Esta no es la definición de orden mas precisa ni la forma de determinar velocidad de conver-gencia mas ajustada (por ejemplo, ?‘por que quedarnos con k natural en lugar de usar cualquierotro exponenete?) pero alcanza para lo que nosotros queremos establecer.
Ejemplo 176 si
cn =
½4
πn2si n es par
0 si n es impar,
entonces {cn}n∈N es de orden 1/n2 pero no de orden 1/n3.
Para seguir con el razonamiento que traíamos, vamos a poner todo en un teorema:
Teorema 177 Sea f (t) una función de período 2p, entonces:
1. Si f es Dirichlet en [−p, p] , entonces sus coeficientes de Fourier son ambos de orden(al menos) 1/n (es decir, existe M tal que |an| ≤ M/n y |bn| ≤ M/n ∀n). Si f tienediscontinuidades no evitables (es decir, saltos por ser f Dirichlet), entonces sus coeficientesde Fourier no pueden decrecer ambos mas rápido que 1/n (decrecer mas rapido en el sentidode la demostración, ver).
2. Si f es Dirichlet en [−p, p] y continua, y existe f 0 en casi todo punto y es Dirichlet en[−p, p] , entonces los coeficientes de Fourier de f son ambos de orden (al menos) 1/n2 (esdecir, existe M tal que |an| ≤ M/n2 y |bn| ≤ M/n2 ∀n). Si f 0 tiene discontinuidades,entonces los coeficientes de Fourier de f no pueden decrecer ambos mas rápido que 1/n2.
3. En general, si f es Dirichlet en [−p, p] y continua, y f 0, f 00, ..., f (k) existen todas, sonDirichlet en [−p, p] y continuas, y f (k+1) existe en casi todo punto y es Dirichlet en [−p, p] ,entonces sus coeficientes de Fourier son ambos de orden (al menos) 1/nk+2 (es decir, existeM tal que |an| ≤M/nk+2 y |bn| ≤M/nk+2 ∀n). Si f (k+1) tiene discontinuidades, entonceslos coeficientes de Fourier de f no pueden decrecer ambos mas rápido que 1/nk+2.

156 Series de Fourier
Demostración.
1. Que los coeficientes de Fourier de f decrecen al menos como 1/n ya lo probamos, veamosque no pueden decrecer mas rápido ambos: para eso, supongamos que si, o sea que existeM y α > 0 tal que
|an| ≤M
n1+αy |bn| ≤
M
n1+α∀ n ∈ N.
Llamo
g (t) =a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶(el miembro de la derecha es la serie de Fourier de f, que converge para todo t pero nonecesariamente a f), entonces¯
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶¯≤ 2M
n1+α∀ t ∈ R,
y como la serie∞Xn=1
2M
n1+α= 2M
∞Xn=1
1
n1+α
converge (puesR∞1
¡1/t1+α
¢dt = 1/α, es decir, la integral converge), Weierstrass me dice
que la serie que define g converge uniformemente en R, y como es una serie de funcionescontinuas, resulta que g es continua en R. Pero f (t) = g (t) en todos los t0s donde f escontinua, y esto quiere decir que f es continua o tiene discontinuidades evitables (pensar),lo cual contradice nuestras hipótesis.
2. que los coeficientes de Fourier de f decrecen al menos como 1/n2 ya lo probamos, veamosque no pueden decrecer mas rápido ambos: para eso, supongamos que si, o sea que existeM y α > 0 tal que
|an| ≤M
n2+αy |bn| ≤
M
n2+α∀ n ∈ N.
Como f es continua, tenemos que
f (t) =a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶,
y si miro la serie derivada término a término, tenemos que
∞Xn=1
µan cos
µnπt
p
¶+ bn sin
µnπt
p
¶¶0=
∞Xn=1
−nπanp
sin
µnπt
p
¶+
nπanp
cos
µnπt
p
¶, (6.6)
y ¯−nπan
psin
µnπt
p
¶+
nπanp
cos
µnπt
p
¶¯≤ 2nπ
p
M
n2+α=
2πM
p
1
n1+α∀ t ∈ R,
y como la serie∞Xn=1
2πM
p
1
n1+α=
2πM
p
∞Xn=1
1
n1+α

Series de Fourier 157
converge, Weierstrass me dice que la serie (33) converge uniformemente en R, y entoncescierto teorema me dice que f es derivable y
f 0(t) =∞Xn=1
−nπanp
sin
µnπt
p
¶+
nπanp
cos
µnπt
p
¶.
Pero de nuevo, esta serie es de funciones continuas y converge uniformemente en R, dedonde tendríamos que f 0 es continua en R, lo cual contradice nuestras hipótesis.
3. Se prueba usando inducción en n y los dos puntos anteriores.
Nota 178 (sutil) fijarse que en el enunciado de (1) dice “Si f tiene discontinuidades no evita-bles”, en cambio en (2) dice “Si f 0 tiene discontinuidades”, esto es porque hay un teorema quedice que las funciones derivadas no pueden tener discontinuidades evitables, ver Spivak pag. 262.
Ejemplo 179
1. Si f (t) es la función de período 2π tal que f (t) = |t| si t ∈ [−π.π), ya calculamos suscoeficientes de Fourier y nos dio bn = 0 ∀n, a0 = π, y
an =
½ −4πn2
si n es impar0 si n es par
,
es decir que son de orden 1/n2 pero no mas, y eso es porque f es continua pero f 0 esdiscontinua.
2. Si f es tal que sus coeficientes de Fourier son
an =−7
πn3y bn =
n√n10 + 1
,
entonces |an| = 7πn3 , y
n2√n10≤ |bn| ≤ n√
n10, de donde se deduce que ambos son de orden
1/n3 y no mas, es decir que f tiene derivada continua y derivada segunda discontinua.
6.6. Derivación e integración de series de Fourier
Toda la sección anterior, además de ser útil para “saber” cuantos términos debemos usar paraobtener una “buena” aproximación, nos permite sospechar que va a pasar cuando integremos y/oderivemos una serie de Fourier. De Análisis I, uno sabe que en general al integrar una funciónobtenemos una función “mejor”, y que al derivarla obtenemos una función “peor” (por ejemplo,en cuanto a cuantas derivadas tiene). Esta situación también se observa en las series de Fourier:

158 Series de Fourier
supongamos que tenemos una función 2p-periódica y Dirichlet en [−p, p] , y construimos su seriede Fourier
f ∼ a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶.
Si derivamos término a término, obtenemos la serie trigonométrica
∞Xn=1
∙−nπan
p
¸sin
µnπt
p
¶+
∙nπan
p
¸cos
µnπt
p
¶,
cuyos coeficientes decrecen mas lentamente, y por lo tanto la serie converge “peor” (si es queconverge). Por otro lado, si integramos término a término obtenemosZ t
0
a02
dx +∞Xn=1
an
Z t
0cos
µnπx
p
¶dx + bn
Z t
0sin
µnπx
p
¶dx =
=a02
t +∞Xn=1
anp
nπsin
µnπt
p
¶− bnp
nπ
µcosnπ
t
p− 1
¶
=a02
t +p
π
∞Xn=1
bnn
+∞Xn=1
anp
nπsin
µnπt
p
¶− bnp
nπcos
µnπt
p
¶,
que es una serie (no trigonometrica, salvo que a0 = 0) que converge “mejor” (y efectivamente,converge). Mas aún, con f como tomamos, nosotros, se puede ver que esta serie converge uni-formemente en R, pues los coeficientes {an, bn}n∈N , son de orden 1/n. Todo esto hace creíbleel siguiente teorema:
Teorema 180 Sea f (t) una función periódica de período 2p, y {a0, an, bn}n∈N sus coeficientesde Fourier, entonces:
1. Si f es Dirichlet en [−p, p] , la integral de f se puede calcular integrando término a términosu serie de Fourier; mas precisamente,Z t
af (x) dx =
Z t
a
a02
dx +∞Xn=1
Z t
a
∙an cos
µnπx
p
¶+ bn sin
µnπx
p
¶¸dx.
2. Si f es continua y f 0 es Dirichlet en [−p, p] , la serie de Fourier de f 0 se puede encontrarderivando término a término la serie de Fourier de f ; mas precisamente,
f 0 ∼∞Xn=1
d
dt
∙an cos
µnπt
p
¶+ bn sin
µnπt
p
¶¸.
Demostración. dificil con estas hipótesis, pero queda como ejercicio demostrar que (1) es ciertosi f es además continua, y (2) es cierto si además f 0 es continua.

Series de Fourier 159
Ejemplo 181 tomemos la función de período 2π tal que f (t) = t si t ∈ [−π, π),
π 2π 3π-3π -2π -π 0
π
f t( )
-π
entonces los coeficientes de Fourier de f son
an =1
π
Z π
−πt cos (nt) dt = 0 ∀ n
pues es la integral de una función impar en el intervalo [−π, π] , y
bn =1
π
Z π
−πt sin (nt) dt = − 2
ncos (nπ) = (−1)n+1
2
n.
Los coeficientes son de orden 1/n por ser f discontinua, la serie de Fourier de f es
f ∼ 2∞Xn=1
(−1)n+11
nsin (nt) = 2
∙sin (t)− 1
2sin (2t) +
1
3sin (3t)− .....
¸,
y converge a la función
g (t) =
½f (t) si (2n− 1)π < t < (2n + 1)π para algún entero n
0 si t = (2n− 1)π para algún entero n.
La función
h (t) =
Z t
0f (x) dx
es periódica de período 2p, pues para cada t vale
h (t + 2p)− h (t) =
Z t+2p
0f (x) dx−
Z t
0f (x) dx =
Z t+2p
tf (x) dx =
Z 2p
0f (x) dx = 0,
y para t ∈ [−π, π] vale
h (t) =
Z t
0f (x) dx =
Z t
0xdx =
t2
2.

160 Series de Fourier
Además el teorema anterior nos dice que
h (t) = 2∞Xn=1
(−1)n+11
n
Z t
0sin (nx) dx = 2
∞Xn=1
(−1)n1
n2cos (nt) + 2
∞Xn=1
(−1)n+11
n2=
= 2∞Xn=1
(−1)n+11
n2+
∞Xn=1
(−1)n2
n2cos (nt) ,
de donde concluimos que esta última es la serie de Fourier de h, y por lo tanto
2∞Xn=1
(−1)n+1
n2=
1
2π
Z π
−πh (t) dt =
1
2π
Z π
−π
t2
2dt =
π2
6,
es decir, la serie de Fourier de h es
π2
6+
∞Xn=1
(−1)n2
n2cos (nt) ,
lo cual es coherente con nuestros conocimientos, pues esa es la serie de Fourier de una funciónpar, continua y con derivada discontinua.
Finalmente, si derivamos término a término la serie de f, obtenemos
2 [cos (t)− cos (2t) + cos (3t)− .....] ,
que diverge para todo t (notar, sin embargo, que f 0 es periódica (de período 2π, pues es ciertoque f 0(t) = f 0(t + 2π)), es decir este es un caso donde la serie de Fourier de la derivada nopuede calcularse derivando la serie de f, y esto no contradice el teorema, porque el problemaestá en que f no es continua.
6.7. Expansiones de medio rango, efectos de la simetría
Hemos visto en algunos ejemplos, que cuando una función es par su serie de Fourier no tienesenos, y cuando es impar no tiene cosenos; en está sección vamos a ver que efectos tienen algunassimetrías en los coeficientes de Fourier.
Lema 182 si f es una función integrable de período 2p entonces sus coeficientes de Fourierquedan determinados de la siguiente manera:
1. Si f es par, entonces para todo n vale
an =2
p
Z p
0f (t) cos
µnπt
p
¶dt y bn = 0.
2. Si f es impar, entonces para todo n vale
an = 0 y bn =2
p
Z p
0f (t) sin
µnπt
p
¶dt.

Series de Fourier 161
Demostración. ejercicio muy simple.
La principal utilidad del lema anterior no es solo ahorrarse calcular algunos coeficientes queobviamente eran cero (y cuyo calculo innecesario es una frecuente fuente de errores), sino quenos permite, en algunas circunstancias, encontrar desarrollos de Fourier que contengas solo senoso solo cosenos. El caso típico es el siguiente: supongamos que tenemos una función f definidasolo en el intervalo [0, p), y queremos lograr la igualdad
f (t) =∞Xn=1
bn sin
µnπt
p
¶para todo t ∈ [0, p), o para la mayor cantidad de t0s posibles (por ejemplo difícilmente logremosigualdad en los t0s donde f es discontinua). Entonces hacemos lo siguiente: definimos f (t) =−f (−t) para t ∈ (−p, 0) (recordar que comenzamos con f solamente definida en [0, p)), y asíextendida, f es impar en [−p, p), y ahora definimos f en todo R para que sea periódica deperíodo 2p, es decir ponemos f (t) = f (t + 2p) ∀ t ∈ R.
p0p0 2p−p−2p−3p 3p
Así, hemos construido una función periódica de período 2p e impar, que coincide con mi funciónoriginal en el intervalo [0, p), por lo tanto su serie de Fourier tendrá solo senos, y si por ejemplo,tenemos f continua en (0, p) , habremos conseguido
f (t) =∞Xn=1
bn sin
µnπt
p
¶∀ t ∈ (0, p) .
Además, notar que en realidad la extensión de f la hacemos virtualmente, es decir, no necesi-tamos calcular explícitamente cuanto vale f en todo t, porque para calcular los coeficientes bnnecesitamos conocer f solo en el intervalo (0, p) , según el lema anterior.
Ejemplo 183 queremos encontrar una serie de Fourier que converge a la función f (t) = t2
en el intervalo (0, 1) y que contenga solo senos, entonces el razonamiento anterior nos dice quedebemos tomar
bn = 2
Z 1
0t2 sin (nπt) dt = −2
(−1)n
nπ+ 4
(−1)n
n3π3− 4
n3π3,
y con eso nomás estamos seguros de que
t2 =∞Xn=1
∙−2
(−1)n
nπ+ 4
(−1)n
n3π3− 4
n3π3
¸sin (nπt) ∀ t ∈ (0, 1) .

162 Series de Fourier
-1 -0.5 0.5 1
-1
1
0.5 1
0.5
1
Lo que estamos haciendo, en el fondo, es calcular la serie de Fourier de la función de período2 tal que
f (t) =
½−t2 si − 1 ≤ t < 0t2 si 0 ≤ t < 1
.
Exactamente de la misma manera procedemos si tenemos una función solo definida en [0, p)y queremos encontrar una serie de Fourier que contenga solo cosenos y que converge a f (parala mayor cantidad posible de t0s): en este caso deberíamos definir f (t) = f (−t) para t ∈ [−p, 0)(de forma que quede par en el intervalo [−p, p] , y después extender f de período 2p a todo R.
p0 p0 2p−p−2p−3p 3p
De nuevo, esta función será periódica de período 2p y par, por lo que su serie de Fourier tendrásolo cosenos, en particular si f es continua en (0, p) entonces tendremos
f (t) =a02
+∞Xn=1
an cos
µnπt
p
¶∀ t ∈ (0, p)
con
an =2
p
Z p
0f (t) cos
µnπt
p
¶dt,
es decir que no necesitamos calcular explícitamente la extensión de f, pues para calcular loscoeficientes solo necesito saber como es f en el intervalo [0, p)
Ejemplo 184 si, como en el ejemplo anterior, queremos encontrar una serie de Fourier queconverge a f (t) = t2 para todo t ∈ (0, 1) pero que contenga solo cosenos, tenemos que tomar
an = 2
Z 1
0t2 cos (nπt) dt = 4
(−1)n
n2π2para n ≥ 1, y a0 = 2
Z 1
0t2dt =
2
3,

Series de Fourier 163
y con eso estamos seguros de que
t2 =1
3+
∞Xn=1
4(−1)n
n2π2cos (nπt) ∀ t ∈ (0, 1) .
-1 1
0.5
1
0.5 1
0.5
1
Notar, que a diferencia del ejemplo anterior, acá nos quedaron coeficientes de orden 1/n2, y estose debe a que la función extendida de forma par resulta continua con derivada discontinua enR.
Una simetría muy usada es la “impar de media onda” o simetría T, que se define así:
Definición 185 Si f es una función de período 2p, diremos que f tiene simetría impar de mediaonda (o simetría T) si
f (t) = −f (t + p) ∀ t ∈ R.
Una forma de ver que significa gráficamente esto es la siguiente: si en la definición no estuvierael signo −, estaríamos pidiendo que f tenga período p, por lo tanto una forma de detectar estetipo de simetría es graficar la función en el intervalo [−p, p), y luego reflejar con respecto al ejet en el intervalo (0, p) . Si el resultado obtenido es la misma gráfica que en el intervalo (−p, 0)tendremos simetría T
p
0 2p
−p
−2p−3p
3p
0−p
Lema 186 si f es una función de período 2p e integrable en [−p, p] y con simetría T, y{an}∞n=0 , {bn}∞n=1 son los coeficientes de Fourier de f, entonces a0 = a2n = b2n = 0 paratodo n ≥ 1 (es decir, los coeficientes con subíndice par son todos nulos).

164 Series de Fourier
Demostración. usando la simetría y haciendo el cambio de variables u = t + p tenemos que
a2n =1
p
Z p
−pf (t) cos(
2nπt
p)dt =
1
p
Z 0
−pf (t) cos(
2nπt
p)dt +
1
p
Z p
0f (t) cos(
2nπt
p)dt =
=1
p
Z 0
−p[−f (t + p)] cos(
2nπt
p)dt +
1
p
Z p
0f (t) cos(
2nπt
p)dt =
=−1
p
Z p
0f (u) cos(
2nπ (u− p)
p)du +
1
p
Z p
0f (t) cos(
2nπt
p)dt =
=−1
p
Z p
0f (u) cos(
2nπu
p)du +
1
p
Z p
0f (t) cos(
2nπt
p)dt = 0.
De manera análoga se ve que los otros coeficientes son cero.
Se puede ver que (en cierta medida) la recíproca del lema anterior es verdad: si los coeficientesde subíndice par son nulos, entonces f tiene simetría T pues (si por ejemplo, f es continua)
f (t + p) =∞Xn=1
a2n−1 cos
µ(2n− 1)π (t + p)
p
¶+ b2n−1 sin
µ(2n− 1)π (t + p)
p
¶=
=∞Xn=1
a2n−1 cos
µ(2n− 1)πt
p+ 2nπ − π
¶+ b2n−1 sin
µ(2n− 1)πt
p+ 2nπ − π
¶=
=∞Xn=1
a2n−1 (−1) cos
µ(2n− 1)πt
p
¶+ b2n−1 (−1) sin
µ(2n− 1)πt
p
¶= −f (t) .
Para convertir esto en una demostración rigurosa habría que ver si toleramos en la definición desimetría T que la igualdad valga en “casi todo punto” (expresión cuyo significado se explica en6,5).
Combinando esta simetría con paridad e imparidad, podemos en algunas ocasiones, ahor-rarnos el cálculo de muchos coeficientes de Fourier. Considerar por ejemplo la función de período2π tal que f (t) = |t|− π
2 en el intervalo [−π, π]: esta función es impar y tiene simetría T, por locual sabemos que sus coeficientes de Fourier serán
a2n = 0 ∀n ∈ N ∪ {0} , y bn = 0 ∀n.
Comparar este ejemplo con el primero visto en 6,3.
6.8. Series armónicas de Fourier
Cuando tenemos una función real f , se suele escribir su serie de Fourier de otra manera, queclarifica la forma en que se usan las funciones trigonométricas para reconstruir f a partir decoeficientes. Esto no es mas que aplicar un poco de álgebra: si f es periódica de período 2p yDirichlet en [−p, p] , construimos su serie de Fourier
f ∼ a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶.

Series de Fourier 165
Llamemos An =p
a2n + b2n, entonces como para cada n, An = 0 si y solo si an y bn son amboscero, podemos sacar de la serie los términos para los cuales An = 0, y queda
f ∼ a02
+∞X
n tq An 6=0an cos
µnπt
p
¶+ bn sin
µnπt
p
¶=
=a02
+∞X
n tq An 6=0An
∙anAn
cos
µnπt
p
¶+
bnAn
sin
µnπt
p
¶¸.
Puesto que el número complejo anAn
+ i bnAntiene módulo 1, existe un único θn ∈ [−π, π) tal que
anAn
+ ibnAn
= cos (θn) + i sin (θn)
(es, casualmente, el argumento principal del número), y entonces la serie de Fourier de f queda
f ∼ a02
+∞X
n tq An 6=0An
∙cos (θn) cos
µnπt
p
¶+ sin (θn) sin
µnπt
p
¶¸=
=a02
+∞X
n tq An 6=0An cos
µnπt
p− θn
¶
=a02
+∞Xn=1
An cos
µnπt
p− θn
¶,
este último igual vale pues si agregamos los términos donde An = 0 en realidad no agregamosnada (los ponemos para que la serie quede expresada mas linda). Esa última serie se llama la
serie armónica de cosenos de f, el n-ésimo armónico de f es cos³nπtp − θn
´, la amplitud
de tal armónico es An, y θn es el ángulo de fase.Esta forma de escribir la serie de Fourier de una función es muy usada porque permite “leer”
datos de la función directamente: nos dice que f “se puede expresar” superponiendo onditas:la de menor frecuencia se llama el armónico fundamental, y todas las siguientes tienen porfrecuencia un múltiplo entero de la frecuencia fundamental, An nos dice “cuanto” hay del n-ésimo armónico, y el ángulo θn nos indica cuando el n-ésimo armónico alcanza su máximo: si espositivo el armónico está en retraso, y si es negativo esta en adelanto.
Nota 187 por supuesto que la forma en que escribamos la serie de Fourier no va a cam-biar los hechos: los teoremas de convergencia siguen siendo los mismos (hay que leerlos concuidado), pero todo tiene traducción obvia. Además notar que la energía espectral pasa a ser
p³a202 +
P∞n=1A2n
´, y {An}n∈N es de orden 1/nk si y solo si ambos coeficientes {an}n∈N y
{bn}n∈N son de orden 1/nk. Por último, notar que si conocemos la serie armónica de cosenosde una función, entonces procediendo al revés de como hicimos recién podemos construir la seriede Fourier de f .
Nota 188 (otra) podemos usar senos en lugar de cosenos y construir la serie armónica desenos. Nosotros que ya tenemos construida la de cosenos seguimos desde esa: con la misma

166 Series de Fourier
notación, llamemos γn = π/2− θn, entonces
cos
µnπt
p− θn
¶= cos
µnπt
p+ γn − π/2
¶= cos
µnπt
p+ γn
¶cos (−π/2)− sin
µnπt
p+ γn
¶sin (−π/2)
= sin
µnπt
p+ γn
¶,
por lo que la serie de f queda
f ∼ a02
+∞Xn=1
An sin
µnπt
p+ γn
¶,
que es la serie armónica de senos de f .
6.9. Serie de Fourier compleja
Vamos a seguir haciendo cuentas para escribir la serie de Fourier que conocemos de otraforma: si f es periódica de período 2p y Dirichlet en [−p, p] , construimos su serie de Fourier
f ∼ a02
+∞Xn=1
an cos
µnπt
p
¶+ bn sin
µnπt
p
¶.
Comocos (y) =
1
2
¡eiy + e−iy
¢y sin (y) =
1
2i
¡eiy − e−iy
¢,
reemplazando queda
f ∼ a02
+∞Xn=1
an2
³ei
nπtp + e−i
nπtp
´+
bn2i
³ei
nπtp − e−i
nπtp
´=
=a02
+∞Xn=1
µan2
+bn2i
¶ei
nπtp +
µan2− bn
2i
¶e−i
nπtp =
=a02
+∞Xn=1
µan − ibn
2
¶ei
nπtp +
µan + ibn
2
¶e−i
nπtp .
Si llamamos
c0 =a02
cn =
µan − ibn
2
¶para n ≥ 1
c−n =
µan + ibn
2
¶para n ≥ 1,

Series de Fourier 167
es decir, creamos una sucesión doble {cn}n∈Z, entonces la serie de arriba queda
f ∼ c0 +∞Xn=1
cneinπtp +
∞Xn=1
c−ne−inπt
p = c0 +∞Xn=1
cneinπtp +
∞Xn=1
c−nei−nπt
p =∞X
n=−∞cne
inπtp ,
donde la serie doble converge pues ambas series convergen. Esta última serie se llama la seriecompleja de Fourier de f. Veamos como se calculan los coeficientes cn: para n ≥ 1 es
cn =
µan − ibn
2
¶=
1
2
∙1
p
Z p
−pf (t) cos
µnπt
p
¶dt− i
1
p
Z p
−pf (t) sin
µnπt
p
¶dt
¸=
=1
2p
Z p
−pf (t)
∙cos
µnπt
p
¶− i sin
µnπt
p
¶¸dt =
1
2p
Z p
−pf (t) e−i
nπtp dt,
y para n ≤ −1 queda
cn =
µa−n + ib−n
2
¶=
1
2
∙1
p
Z p
−pf (t) cos
µ−nπt
p
¶dt + i
1
p
Z p
−pf (t) sin
µ−nπt
p
¶dt
¸=
=1
2p
Z p
−pf (t)
∙cos
µnπt
p
¶− i sin
µnπt
p
¶¸dt =
1
2p
Z p
−pf (t) e−i
nπtp dt,
y para n = 0,
c0 =a02
=1
2p
Z p
−pf (t) dt,
es decir, vale que
cn =1
2p
Z p
−pf (t) e−i
nπtp dt ∀ n ∈ Z.
De nuevo, notar que la forma de escribir la serie no cambia sus propiedades: los coeficientes{cn}n∈Z son de orden 1/nk si y solo si ambos coeficientes {an}n∈N y {bn}n∈N son de orden 1/nk,
la amplitud del n-ésimo armónico es |cn|+ |c−n| , la energía (espectral) es 2pP∞
n=−∞ |cn|2, etc.
6.10. Separación de variables, ecuación del calor
Queremos resolver el siguiente problema de condiciones iniciales: dados a un número real yh (x) una función definida en el intervalo [0, p] con h (0) = h (p) = 0, queremos encontrar unafunción u (x, t) definida en [0, p]× [0,∞) tal que cumpla
i) a2∂2
∂x2u (x, t) =
∂
∂tu (x, t)
ii) u (0, t) = u (p, t) = 0 (6.7)
iii) u (x, 0) = h (x) ∀x ∈ [0, p]
La ecuación (34i) se llama ecuación del calor, y el sistema (34) es un modelo matemático de lasiguiente situación: imaginemos que tenemos un alambre delgado de longitud p con los extremosa cero grado, y además que el único traspaso de calor es a lo largo del alambre, de forma tal

168 Series de Fourier
que los extremos están siempre a cero grado. Podemos imaginar el alambre como el segmentode recta [0, p] . Supongamos además que la temperatura en el instante t = 0 en el punto x esh (x) , entonces la función u (x, t) que da la temperatura en cada punto x del alambre en cadainstante t ≥ 0 debe satisfacer (34), donde a2 es una constante que depende de la conductividaddel alambre.
El método estandar para resolver el sistema (34) es el de separación de variables: despuésde mucho buscar soluciones de la ecuación (34i) y de no encontrarlas (el lector desconfiadodebería tratar de encontrar una solución sin seguir leyendo), y ya sin nada que perder, se nosocurre buscar soluciones que sean de la forma
u (x, t) = H (x)G (t) ,
es decir, nos preguntamos como será una función que sea un producto como arriba y queademás cumpla (34i). Derivando obtenemos
∂
∂xu (x, t) =
∂
∂xH (x)G (t) = H 0 (x)G (t) ,
∂2
∂x2H (x)G (t) = H 00 (x)G (t) ,
y∂
∂tH (x)G (t) = H (x)G0 (t) ,
por lo que la ecuación (34i) queda
a2H 00 (x)G (t) = H (x)G0 (t) ,
o lo que es lo mismo,
a2H 00 (x)
H (x)=
G0 (t)
G (t)∀ (x, t) ∈ (0, p)× (0,∞) (6.8)
Como el miembro de la izquierda de (35) depende solo de x, y el de la derecha depende solode t, concluimos que deben ser constantes (si, por ejemplo, G0 (t0) /G (t0) 6= G0 (t1) /G (t1) parat0 6= t1, no podría valer (35) pues en la izquierda tengo un valor fijo, salvo que mueva x).Entonces, existe algún valor λ (del cual no conocemos nada) tal que
a2H 00 (x)
H (x)=
G0 (t)
G (t)= λ ∀ (x, t) ∈ (0, p)× (0,∞) ,
es decir,a2H 00 (x) = λH (x) ∀ x ∈ (0, p) , (6.9)
yG0 (t) = λG (t) ∀ t ∈ (0,∞) , (6.10)
que son ecuaciones que sabemos resolver. Las condiciones (34ii) y (34iii) se transforman en
i) H (0) = H (p) = 0, y (6.11)
ii) H (x)G (0) = h (x)

Series de Fourier 169
respectivamente. Comencemos con (36): puesto que el polinomio P (x) = x2 − λa2
tiene raíces±√
λ/a (pensamos a > 0, esto no saca generalidad pues hemos puesto a2 porque la constate deconductividad es positiva), (36) tiene solución
H (x) =
⎧⎨⎩ αex√λ/a + βe−x
√λ/a si λ > 0
α + xβ si λ = 0
α cos¡x√−λ/a
¢+ β sin
¡x√−λ/a
¢si λ < 0
donde α y β son constantes reales. Veamos si alguna de estas soluciones nos sirve, comenzandocon (38i): si λ > 0 entonces H (x) = αex
√λ/a + βe−x
√λ/a, y H (0) = α + β = 0 ⇐⇒ α = −β,
entonces H (x) = αex√λ/a − αe−x
√λ/a, y H (p) = αep
√λ/a − αe−p
√λ/a = 2α sinh
³p√
λ/a´
=
0⇐⇒ α = 0 (pues p√
λ > 0), con lo que nos quedaría H (x) = 0 ∀x, y por lo tanto esta soluciónno nos sirve (nos diría que u (x, t) = 0 ∀ (x, t) así que no podríamos lograr (34iii) para ningunatemperatura inicial distinta de cero).
De manera análoga se descarta la posibilidad λ = 0, porque si H (x) = α + xβ, la únicaforma de poder cumplir (38i) es con α = β = 0. Analicemos entonces λ < 0: en tal casosería H (x) = α cos
¡x√−λ/a
¢+ β sin
¡x√−λ/a
¢, y H (0) = α = 0 ⇐⇒ α = 0, entonces
H (x) = β sin¡x√−λ/a
¢, y H (p) = β sin
¡p√−λ/a
¢= 0⇐⇒ p
√−λ/a = nπ, con n ∈ N (pues
p√−λ/a > 0) con lo que nos quedaría
−λ =
µanπ
p
¶2(es decir, esos son los únicos valores de λ que pueden llegar a ser útiles), y
H (x) = β sin
µnπx
p
¶.
Recapitulemos lo hecho hasta ahora: proponemos un producto H (x)G (t) como solución de (34i)y vemos que entonces que se deben cumplir las ecuaciones (36) y (37), donde λ es un valor realdesconocido. Al resolver (36) y teniendo en cuenta que H debe cumplir (39i), concluimos que los
únicos valores que puede tomar λ son −λn =³anπp
´2, n ∈ N, y para cada uno de esos valores
tenemos una solución de (36), que es
Hn (x) = βn sin
µnπx
p
¶,
con βn una constante real.Seguimos: para cada uno de los λn aceptables, (37) tiene solución
Gn (t) = γneλnt = γne
− anπp
2t,
donde γn es una constante real, así que terminando, concluimos que si tenemos una solución de(34i) y (34ii) de la forma H (x)G (t) , entonces u (x, t) debe ser alguna de
un (x, t) = Hn (x)Gn (t) = βn sin
µnπx
p
¶γne
− anπp
2t= cn sin
µnπx
p
¶e− anπ
p
2t,

170 Series de Fourier
donde n ∈ N y cn es una constante real. Pero derivando y chequeando directamente se ve quecada un es efectivamente solución de (34i) y (34ii), con lo que tenemos el siguiente lemita:
Lemita: u (x, t) = H (x)G (t) es solución de (34i) y (34ii) si y solo si existe n ∈N y cn ∈ Rtales que u (x, t) es
cn sin
µnπx
p
¶e− anπ
p
2t.
Volvamos a (34): nos falta agregar la condición (34iii), y para eso vamos a notar lo siguiente:si fuera
h (x) = 34 sin
µ9πx
p
¶,
entonces la función
34 sin
µ9πx
p
¶e− a9π
p
2t
es solución de (34) (pues sabemos que es solución de (34i) y (34ii), y justo al poner t = 0 nosqueda h (x)). Pero además nos damos cuenta del siguiente hecho: si u (x, t) y v (x, t) son ambassoluciones de (34i) y (34ii) entonces
u (x, t) + v (x, t)
también es solución de (34i) y (34ii) (ejercicio, verificarlo, esto es gracias a que en (34ii) se pideque sea igual a cero y no otra constante), por lo tanto podemos construir soluciones de (34i) y(34ii) sumado las soluciones un que construimos hace un rato. Y así, si nos dan
h (x) = 34 sin
µ9πx
p
¶+ 9 sin
µ34πx
p
¶+ 349 sin
µ934πx
p
¶,
entonces la función
34 sin
µ9πx
p
¶e− a9π
p
2t+ 9 sin
µ34πx
p
¶e− a34π
p
2t+ 349 sin
µ934πx
p
¶e− a934π
p
2t
es solución de (34) (pues sabemos que es solución de (34i) y (34ii), y justo al poner t = 0 nosqueda h (x)). Pero entonces a esta altura nos damos cuenta de lo siguiente: si h (x) es de la forma
h (x) =NXn=1
cn sin
µnπx
p
¶, (6.12)
entonces la funciónNXn=1
cn sin
µnπx
p
¶e− anπ
p
2t
(6.13)
es solución de (34).Pero al ver esto nos damos cuenta del siguiente hecho: h (0) = h (p) = 0, así que si extiendo
h al intervalo [−p, p] de forma que sea impar y luego periódica de período 2p, entonces la seriede Fourier de h converge a h, es decir, podemos poner
h (x) =∞Xn=1
an sin
µnπx
p
¶∀ x ∈ [0, p]

Series de Fourier 171
si {an}n∈N son los coeficientes del desarrollo de senos de Fourier de h (comparar con (40)). Así,si en lugar de considerar una suma finita como en (41) consideramos la serie de las un y elegimoscn = an, entonces la función
∞Xn=1
an sin
µnπx
p
¶e− anπ
p
2t
satisface (34iii), y es obvio que satisface (34ii), pero el problema es que no sabemos que cumpla(34) porque no es una suma finita. Pero para terminar, si supiéramos que podemos derivar dentrode la serie (respecto de x dos veces y respecto de t una ves) listo, porque quedaría
a2∂2u
∂x2= a2
∞Xn=1
∂2un∂x2
=∞Xn=1
a2∂2un∂x2
c/un cumple (34)↓=
∞Xn=1
∂un∂t
=∂u
∂t.
Se ve en el práctico que si existe M tal que |an| ≤ M ∀n, entonces se puede, por lo tantohemos probado el siguiente teorema:
Teorema 189 Si h (x) es una función Dirichlet en [0, p] con h (0) = h (p) = 0 y {an}n∈N sonlos coeficientes de Fourier de la serie de senos de h (i.e. extender h impar al [−p, p]), entoncesla función
∞Xn=1
an sin
µnπx
p
¶e− anπ
p
2t
está definida en [0, p]× [0,∞) y es solución de (34).
Ejemplo 190 Queremos encontrar una función u (x, t) definida en [0, 2]× [0,∞) y que cumpla
i) 4∂2
∂x2u (x, t) =
∂
∂tu (x, t)
ii) u (0, t) = u (2, t) = 0
iii) u (x, 0) = h (x) ∀x ∈ [0, 2]
donde h (x) =
½x si 0 ≤ x < 1
2− x si 1 ≤ x ≤ 2. Para eso, lo primero que tenemos que hacer, según el
teorema anterior, es encontrar la serie de Fourier de senos de h. Tenemos
an =
Z 2
0h (x) sin
³nπx
2
´dx =
Z 1
0x sin
³nπx
2
´dx +
Z 2
1(2− x) sin
³nπx
2
´dx =
=−2
n2π2
h−2 sin
³nπ
2
´+ nπ cos
³nπ
2
´i+
2
n2π2
hnπ cos
³nπ
2
´+ 2 sin
³nπ
2
´i=
=8
n2π2sin³nπ
2
´.
Entonces, inmediatamente y sin mas trámites, el teorema anterior nos dice que
u (x, t) =∞Xn=1
8
n2π2sin³nπ
2
´sin³nπx
2
´e−(nπ)
2t
=8
π2
∞Xn=1
(−1)n+1
(2n− 1)2sin
µ(2n− 1)πx
2
¶e−(2n−1)
2π2t.

172 Series de Fourier
31
x
2
y
1
1
z
0.5
2
6.11. Ecuación de Ondas
Una ves entendido por completo el razonamiento hecho para resolver la ecuación del calor,nos metemos con la de ondas, pero mas rápido.
El problema es mas o menos así: si fijamos los extremos de una cuerda de longitud p, y ledamos posición inicial y velocidad inicial a cada punto de la cuerda, entonces la función y (x, t)que da la posición de cada punto x de la cuerda en el instante t > 0 debe cumplir la ecuación
a2∂2y
∂x2=
∂2y
∂t2,
donde estamos pensando a la cuerda como el segmento [0, p]. Entonces, el problema de condi-ciones iniciales queda así: encontrar una función y (x, t) que satisfaga
i) a2∂2
∂x2y (x, t) =
∂2
∂t2y (x, t) (6.14)
ii) y (0, t) = y (p, t) = 0 (cuerda fija en los extremos)
iii) y (x, 0) = f (x) ∀x ∈ [0, p] (posición inicial de cada punto)
iv)∂y
∂t(x, 0) = g (x) ∀x ∈ [0, p] (velocidad inicial de cada punto)
Proponemos y (x, t) = H (x)G (t) , y derivando comprobamos que (41i) se transforman en
H 00 (x)
H (x)=
G00 (t)
a2G (t)∀ (x, t) ∈ (0, p)× (0,∞)
Entonces, existe algún valor λ (del cual no conocemos nada) tal que
H 00 (x)
H (x)=
G00 (t)
a2G (t)= λ ∀ (x, t) ∈ (0, p)× (0,∞) ,
es decir,H 00 (x) = λH (x) ∀ x ∈ (0, p) , (6.15)

Series de Fourier 173
yG00(t) = a2λG (t) ∀ t ∈ (0,∞) , (6.16)
que son ecuaciones que sabemos resolver. Además la condicione (41ii) se transforma en
H (0) = H (p) = 0. (6.17)
La ecuación (42) tiene solución
H (x) =
⎧⎨⎩ αex√λ + βe−x
√λ si λ > 0
α + xβ si λ = 0
α cos¡x√−λ¢
+ β sin¡x√−λ¢
si λ < 0
donde α y β son constantes reales, y cuando le imponemos (44) resulta que debe ser
λ = −µ
nπ
p
¶2, n ∈ N,
(es decir, λ < 0) y α = 0, y entonces para cada natural n tengo una solución
Hn (x) = βn sin
µnπx
p
¶.
La correspondiente Gn (t) se obtiene resolviendo (43) para cada λn = −³nπp
´2, y queda
Gn (t) = cn cos
µanπt
p
¶+ dn sin
µanπt
p
¶,
y multiplicando y unificando las constantes nos queda, en fin, que para cada natural n tenemosuna solución de (41i y ii)
yn (x, t) = sin
µnπx
p
¶ ∙αn cos
µanπt
p
¶+ βn sin
µanπt
p
¶¸,
donde αn y βn son constantes reales.De nuevo, observamos que si u y v son solución de (41i y ii) entonces u + v también lo es, lo
cual nos lleva a suponer que, bajo condiciones adecuadas de convergencia, la función
y (x, t) =∞Xn=1
sin
µnπx
p
¶ ∙αn cos
µanπt
p
¶+ βn sin
µanπt
p
¶¸será solución de (41i y ii) ((41ii) es inmediato, y para (41i) lo que necesitamos es poder derivartérmino a término dos veces respecto de x y dos veces respecto de t).
La condición (41iii) en esta función queda
y (x, 0) =∞Xn=1
αn sin
µnπx
p
¶= f (x) ∀x ∈ [0, p] ,
y esta igualdad se consigue eligiendo
αn =2
p
Z p
0f (t) sin
µnπt
p
¶dt,

174 Series de Fourier
o sea escribiendo f como un desarrollo de senos (y suponiendo que la extensión impar de f seacontinua). Por último, (suponiendo que pueda derivar término a término)
∂y
∂ty (x, t) =
∂y
∂t
∞Xn=1
sin
µnπx
p
¶ ∙αn cos
µanπt
p
¶+ βn sin
µanπt
p
¶¸=
∞Xn=1
sin
µnπx
p
¶ ∙αn−anπ
psin
µanπt
p
¶+ βn
anπ
pcos
µanπt
p
¶¸,
por lo que la condición (41iv) queda
∞Xn=1
∙βn
anπ
p
¸sin
µnπx
p
¶= g (x) ∀x ∈ [0, p]
y esta igualdad se consigue eligiendo
βnanπ
p=
2
p
Z p
0g (t) sin
µnπt
p
¶dt,
o sea escribiendo g como un desarrollo de senos (y suponiendo que la extensión impar de f seacontinua), es decir, debemos poner
βn =2
anπ
Z p
0g (t) sin
µnπt
p
¶dt.
Completando los detalles técnicos (que está en el práctico), queda probado el siguiente:
Teorema 191 si f (x) y g (x) son dos funciones definidas en [0, p] tales que: f (0) = f (p) =g (0) = g (p) , la extención impar de f tiene derivada segunda continua, y la extención impar deg tiene derivada continua. Entonces definiendo
αn =2
p
Z p
0f (t) sin
µnπt
p
¶dt y βn =
2
anπ
Z p
0g (t) sin
µnπt
p
¶dt,
resulta que la función
y (x, t) =∞Xn=1
sin
µnπx
p
¶ ∙αn cos
µanπt
p
¶+ βn sin
µanπt
p
¶¸es solución del problema de condiciones iniciales (41).
Capítulo 7
Integrales de Fourier
7.1. Integrales impropias
Vamos a repasar las cosas aprendidas en Análisis I sobre integrales impropias. Por ahorapensaremos en una función de variable e imagen real, es decir, f : [a, b]→ R, y al final diremosque pasa con funciones de imagen compleja.
Cuando se define Z b
af (t) dt
se asume que f es acotada en el intervalo (a, b) y que tanto a como b son finitos. Si algunode estos requisitos (o ambos) fallan, tenemos que darle una nueva interpretación al símboloR ba f (t) dt, y en tal caso se lo llama integral impropia.
Veamos primero el caso en que uno de los límites es infinito: si b =∞, entonces se define
Z ∞
af (t) dt = lım
b→∞
Z b
af (t) dt
cuando tal límite existe. En este caso, se suele decir que la integral impropiaR∞a f (t) dt con-
verge, mientras que si el límite no existe se dice que la integral diverge. Acá se hace el mismoabuso del castellano que cuando hablamos de convergencia y divergencia de series, ya que en elmejor de los casos
R∞a f (t) dt es un número, y por lo tanto no puede “converger” o “diverger”.
Lo correcto sería decir “la función f en integrable en (a,∞)”, de la misma manera que decíamos“la sucesión {zn}∞n=1 es sumable”.
175

176 Integrales de Fourier
Ejemplo 192 1. La integral impropiaR∞1 t−pdt converge si p > 1 y diverge si p ≤ 1 puesZ b
1t−pdt =
½ 11−p
¡b1−p − 1
¢si p 6= 1
ln (b) si p = 1,
de donde concluimos que lımb→∞R b1 t−pdt =
½ −11−p si p > 1
no existe si p ≤ 1.
2. La integral impropiaR∞0 cos (t) dt diverge puesZ b
0cos (t) dt = sin (b) ,
y lımb→∞ sin (b) no existe.
De manera análoga se define integrales impropias de la formaR b−∞ f (t) dt, y si tenemos una
función definida en todo R y las integralesR∞c f (t) dt y
R c−∞ f (t) dt convergen ambas para algún
c, entonces se define Z ∞
−∞f (t) dt =
Z ∞
cf (t) dt +
Z c
−∞f (t) dt.
Ejemplo 193 la integralR∞−∞ e−a|t|dt converge solo si a > 0 pues en tal caso si b > 0 entoncesZ b
0e−a|t|dt =
Z b
0e−atdt =
−1
a
³e−ab − 1
´−→b→∞
1
a,
y si c < 0 entonces Z 0
ce−a|t|dt =
Z 0
ceatdt =
1
a(1− eac) −→
c→−∞1
a,
de donde concluimos que Z ∞
−∞e−a|t|dt =
2
a.
Además, claramente la integralR∞0 e−a|t|dt diverge si a ≤ 0. Notar además que la integralR∞
−∞ e−atdt diverge cualquiera sea el valor de a.
Al igual que para series, diremos que la integralR∞a f (t) dt converge absolutamente si la
integralR∞a |f (t)| dt converge (y la misma definición para
R∞−∞ f (t) dt). Tenemos las siguientes
propiedades:
1. Si c es un número y las integralesR∞a f (t) dt y
R∞a g (t) dt convergen ambas, entoncesR∞
a (cf (t) + g (t)) dt converge yZ ∞
acf (t) + g (t) dt = c
Z ∞
af (t) dt +
Z ∞
ag (t) dt.

Integrales de Fourier 177
2. Si f (t) ≥ 0 para todo t ≥ a, entonces la integralR∞a f (t) dt converge o el conjunto
{R ba f (t) dt : b > a} no es acotado, y en tal caso se pone
R∞a f (t) dt =∞.
3. Si 0 ≤ g (t) ≤ f (t) para todo t ≥ a, entonces si la integralR∞a f (t) dt converge podemos
decir que la integralR∞a g (t) dt converge, y si
R∞a g (t) dt diverge podemos decir
R∞a f (t) dt
diverge.
4. Si la integralR∞a f (t) dt converge absolutamente, entonces converge.
Estas propiedades se demuestran mas o menos así: la primera es porque el límite de la sumaes la suma de los límites y la propiedad vale si en lugar de∞ ponemos un número b. La segundaes un poco mas complicada pero en realidad debería ser intuitivamente comprensible: si unafunción (real) F (t) es creciente en (a,∞) entonces si es acotada el lımt→∞ F (t) existe, y si no esacotada lımt→∞ F (t) =∞. Aplicar eso a la función (real creciente) F (t) =
R ta f (x) dx. Para la
tercera, aplicar el mismo hecho a las funciones crecientes G (t) =R ta g (x) dx y F (t) =
R ta f (x) dx
y compararlas. Por último, (4) es una aplicación de (3) a las funciones g (t) = f (t) + |f (t)| y2 |f (t)| , y un poco de álgebra. Notar la absoluta analogía con las propiedades de series.
Veamos ahora un poco las integrales impropias con intervalo finito pero función no acotada:si f no es acotada en a, se defineZ b
af (t) dt = lım
ε→0+
Z b
a+εf (t) dt
cuando tal límite existe (notar que lo que hacemos es integrar f en intevalitos mas chicos que[a, b] , y por eso necesitamos que ε tienda a cero por valores positivos). En tal caso, diremosque la integral impropia converge, mientras que si el límite no existe diremos que la integralimpropia diverge.
Ejemplo 194 la integral impropiaR b0 t−pdt converge si p < 1 y diverge si p ≥ 1 puesZ b
εt−pdt =
½ 11−p
¡b1−p − ε1−p
¢si p 6= 1
ln (b)− ln (ε) si p = 1,
de donde concluimos que
lımε→0+
Z b
εt−pdt =
(b1−p
1−p si p < 1
no existe si p ≥ 1.
La definición en este tipo de integrales impropias se extiende a todo los casos de maneraobvia. Por ejemplo, si f no es acotada en b entoncesZ b
af (t) dt = lım
ε→0+
Z b−ε
af (t) dt
cuando tal límite existe; si f no es acotada en a y en b entoncesZ b
af (t) dt = lım
ε→0+
Z c
a+εf (t) dt + lım
ε→0+
Z b−ε
cf (t) dt
178 Integrales de Fourier
cuando ambos límites existen para algún c en el intervalo (a, b) (notar que son dos límites
separados, no dice lımε→0+³R c
a+ε f (t) dt +R b−εc f (t) dt
´), y si f no es acotada en algún punto
c de (a, b) entonces Z b
af (t) dt = lım
ε→0+
Z c−ε
af (t) dt + lım
ε→0+
Z b
c+εf (t) dt
cuando ambos límites existen. Tenemos propiedades análogas a las anteriores, las enunciamospara el caso en que f no es acotada en a:
1. Diremos que la integralR ba f (t) dt converge absolutamente si la integral
R ba |f (t)| dt con-
verge.
2. Si c es un número y las integralesR ba f (t) dt y
R ba g (t) dt convergen ambas, entoncesR b
a (cf (t) + g (t)) dt converge yZ b
acf (t) + g (t) dt = c
Z b
af (t) dt +
Z b
ag (t) dt.
3. Si 0 ≤ g (t) ≤ f (t) para todo t ≥ a, entonces si la integralR ba f (t) dt converge podemos
decir que la integralR ba g (t) dt converge, y si
R ba g (t) dt diverge podemos decir
R ba f (t) dt
diverge.
4. Si la integralR ba f (t) dt converge absolutamente, entonces converge.
Por último, nos quedan las integrales impropias donde tenemos ambos problemas juntos: nila función a integrar es acotada ni el intervalo es finito. Un ejemplo típico de esto es tomar unafunción que no es acotada en a y plantearZ ∞
af (t) dt.
Vamos a decir que esta integral impropia converge cuando para algún c > a las integralesZ c
af (t) dt y
Z ∞
cf (t) dt
convergen ambas, y en tal casoR∞a f (t) dt =
R ca f (t) dt+
R∞c f (t) dt (es decir, la dividimos en dos
integrales, y nos queda cada una con un problema). De nuevo, tenemos las mismas propiedadesque ya no vamos a enunciar.
Para terminar, un examen sobre las funciones f : [a, b]→ C (variable real e imagen compleja):en tal caso, descomponemos f = f1 + if2 en su parte real e imaginaria, y aplicamos todo loanterior a c/u de ellas (recordar que hace mucho definimos
R ba f (t) dt =
R ba f1 (t) dt+i
R ba f2 (t) dt),
y sigue valiendo todo lo mismo. Como ejercicio se podría escribir el caso complejo de integralcon b =∞.

Integrales de Fourier 179
7.2. Funciones definidas con integrales impropias
Cuando comenzamos con Fourier, vimos la idea de definir funciones usando integrales (fun-ciones de muchas variables, integrando respecto de algunas), y Leibnitz nos enseño a derivarlas.Ahora vamos a definir funciones usando integrales impropias: por ejemplo si g (x, t) es unafunción definida en [a, b]× [c,∞) tal que para cada x fijo la integral impropiaZ ∞
cg (x, t) dt
converge, entonces eso define en [a, b] una nueva función, que le asigna a cada x el valorR∞c g (x, t) dt.
Ejemplo 195 si g (x, t) = e−t cos (xt) , entonces la función
F (x) =
Z ∞
0e−t cos (xt) dt
esta definida en todo R, pues para todo x vale que¯e−t cos (xt)
¯≤ e−t, y la integral
R∞0 e−tdt
converge. En este caso se puede calcular F explícitamente:Z b
0e−t cos (xt) dt =
∙− 1
1 + x2e−t cosxt +
x
1 + x2e−t sinxt
¸t=bt=0
= − 1
1 + x2e−b cosxb +
x
1 + x2e−b sinxb +
1
1 + x2−→b→∞
1
1 + x2.
Además se puede calcular explícitamente F 0(x), y verificar que queda
F 0(x) =
Z ∞
0
∂
∂x
£e−t cos (xt)
¤dt =
Z ∞
0−te−t sin (xt) dt.
Las dificultades que se encuentran en este tipo de operaciones son similares a las encontradasen series (notar la similitud de todo lo hecho hasta ahora). De hecho, si la integral
R∞c g (x, t) dt
converge, entonces puede ser estudiada como una serie, de la siguiente manera: tomamos unasucesión de números reales {an}n∈N tales que c = a0 < a1 < a2 < ... y con lımn→∞ an = ∞, yentoncesZ ∞
cg (x, t) dt = lım
n→∞
Z an
cg (x, t) dt
= lımn→∞
"Z a1
cg (x, t) dt +
Z a2
a1
g (x, t) dt + ... +
Z an
an−1
g (x, t) dt
#
= lımn→∞
⎡⎣ nXj=1
Z aj
aj−1
g (x, t) dt
⎤⎦ =∞Xj=1
Z aj
aj−1
g (x, t) dt.
Si llamamos
un (x) =
Z an
an−1
g (x, t) dt,

180 Integrales de Fourier
queda Z ∞
cg (x, t) dt =
∞Xn=1
un (x) ,
es decir que transformo la integral impropia en una serie de funciones.Si g (x, t) y ∂
∂xg (x, t) son ambas continuas en [a, b] × [c,∞) entonces Leibnitz nos dice quecada un es derivable y u0n (x) =
R anan−1
∂∂xg (x, t) dt , y si la serie
∞Xn=1
u0n (x)
converge uniformemente en [a, b] entonces cierto teorema nos dice queP∞
n=1 un (x) es derivabley
d
dx
à ∞Xn=1
un (x)
!=
∞Xn=1
u0n (x) =∞Xn=1
ÃZ an
an−1
∂
∂xg (x, t) dt
!=
Z ∞
c
∂
∂xg (x, t) dt,
siempre que esta última integral sea convergente, es decir que en tal caso nos quedaría
d
dx
Z ∞
cg (x, t) dt =
Z ∞
c
∂
∂xg (x, t) dt.
Todo esto motiva la siguiente definición:
Definición 196 diremos que la integralR∞c g (x, t) dt converge uniformemente a F (x) en [a, b]
si
dado ε > 0 existe R > 0 tal que
¯F (x)−
Z r
cg (x, t) dt
¯< ε para todo x ∈ [a, b] , si r ≥ R.
Necesitamos un teorema que nos permita derivar e integrar funciones definidas como inte-grales impropias, y para ello nos hará falta una nueva versión de la regla de Leibnitz. Puestoque nuestro interés (como se verá mas adelante) está en estudiar
f (ω) =
Z ∞
−∞f (t) e−iωtdt y L (f) (s) =
Z ∞
0f (t) e−stdt
donde f será una función que no es necesariamente continua, nuestras versiones anteriores deLeibnitz, que caracterizan la suavidad de la función definida con una integral en términos de lasuavidad de la función integrada, no nos sirven (como función de t, f (t) e−iωt y f (t) e−st seráncasi siempre discontinuas. Por eso seguimos así:
Nota 197 una función f definida en un intervalo [a, b] se dice continua por tramos en [a, b]si puedo dividir [a, b] en subintervalos de forma tal que f sea continua en cada uno de ellos, ycon límites laterales en los extremos. Es decir, f es continua por tramos en [a, b] si tiene solodiscontinuidades que son saltos. Si I es un intervalo no acotado, diremos que f es continua portramos en I si lo es en todo intervalo [a, b] incluido en I.

Integrales de Fourier 181
Teorema 198 (Regla de Leibnitz, 3ra versión) si f (t) es una función continua por tramosen [c, d] y h (x, t) es una función definida e integrable en [a, b]× [c, d] , definimos
F (x) =
Z d
cf (t)h (x, t) dt.
Entonces
1. Si h (x, t) es continua en [a, b]× [c, d] , entonces F (x) es continua en [a, b] .
2. Si h (x, t) y ∂∂xh (x, t) son ambas continuas en [a, b]× [c, d] entonces F (x) es derivable en
[a, b] y
F 0 (x) =
Z d
cf (t)
∂h
∂xh (x, t) dt.
Ejercicio 199 Idea de la demostración. la misma idea que en las dos versiones anteriores.
Ahora vamos a seguir con el estudio de funciones definidas por integrales impropias, rescatan-do la idea de convertirlas en series, y utilizando como función a integrar un producto de funciones,como recién.
Teorema 200 Supongamos que f (t) es una función definida en [c,∞) y continua por tramosen [c,∞).
1. Si h (x, t) es una función continua en [a, b]× [c,∞) y la integralZ ∞
cf (t)h (x, t) dt
converge uniformemente en [a, b] , entonces la función
F (x) =
Z ∞
cf (t)h (x, t) dt
es continua en [a, b] , y si [α, β] ⊆ [a, b] , entoncesZ β
αF (x) dx =
Z ∞
cf (t)
∙Z β
αh (x, t) dx
¸dt
(o sea la integral de la derecha converge).
2. Si h (x, t) y ∂∂xh (x, t) son funciones continuas en [a, b]×[c,∞) y la integral
R∞c f (t)h (x, t) dt
converge para todo x de [a, b] , y la integralZ ∞
cf (t)
∂h
∂x(x, t) dt
182 Integrales de Fourier
converge uniformemente en [a, b] , entonces la función
F (x) =
Z ∞
cf (t)h (x, t) dt
es derivable en [a, b] , ydF
dx(x) =
Z ∞
cf (t)
∂h
∂x(x, t) dt.
Demostración. vamos a usar el razonamiento de hace un rato para probar las dos afirmaciones.Tomemos una sucesión de números reales {an}n∈N tales que c = a0 < a1 < a2 < ... y conlımn→∞ an =∞, y llamemos
un (x) =
Z an
an−1
f (t)h (x, t) dt,
entonces (como la integral converge) vimos que queda
F (x) =
Z ∞
cf (t)h (x, t) dt =
∞Xn=1
un (x) .
1. Se que la integralR∞c f (t)h (x, t) dt converge uniformemente a F (x) en [a, b], y eso impli-
ca que la serieP∞
n=1 un (x) converge uniformemente a F (x) en [a, b] (ejercicio), ademásLeibnitz nos dice que cada un (x) es continua en [a, b] , por lo que concluimos que F (x) escontinua en [a, b]. En cuanto a la integral, quiero ver que
lımr→∞
µZ β
αF (x) dx−
Z r
cf (t)
∙Z β
αh (x, t) dx
¸dt
¶= 0.
Para ε > 0 existe R tal que si r ≥ R entonces¯F (x)−
Z r
cf (t)h (x, t) dt
¯<
ε
b− a∀x ∈ [a, b] ,
entonces¯Z β
αF (x) dx−
Z r
cf (t)
∙Z β
αh (x, t) dx
¸dt
¯=
¯Z β
αF (x) dx−
Z r
c
Z β
αf (t)h (x, t) dxdt
¯=
¯Z β
αF (x) dx−
Z β
α
Z r
cf (t)h (x, t) dtdx
¯=
¯Z β
α
µF (x)−
Z r
cf (t)h (x, t) dt
¶dx
¯≤
Z β
α
¯µF (x)−
Z r
cf (t)h (x, t) dt
¶¯dx
<ε
(b− a)(β − α) < ε,
listo.

Integrales de Fourier 183
2. Si h (x, t) y ∂∂xh (x, t) son ambas continuas en [a, b]× [c,∞) entonces Leibnitz nos dice que
cada un es derivable y u0n (x) =R anan−1
f (t) ∂∂xh (x, t) dt , y como la integral
R∞c f (t) ∂h
∂x (x, t) dt
converge uniformemente en [a, b] resulta que la serie
∞Xn=1
u0n (x)
converge uniformemente en [a, b] (como el ejercicio del punto (1)). Entonces cierto teoremanos dice que
P∞n=1 un (x) es derivable y
d
dx
à ∞Xn=1
un (x)
!=
∞Xn=1
u0n (x) =∞Xn=1
ÃZ an
an−1
f (t)∂
∂xh (x, t) dt
!=
Z ∞
cf (t)
∂
∂xh (x, t) dt,
donde el último igual vale pues sabemos que la última integral converge.
Nota 201 en el teorema anterior lo que estamos haciendo es trabajar con un caso especialde función de dos variables: las funciones g (x, t) = f (t)h (x, t) , es decir, lo podríamos haberenunciado colocando una sola g (x, t) en lugar de f (t)h (x, t) , pero lo hicimos de esta manerapor dos razones: es mas sencillo especificar las hipótesis, y nos va a ser mas útiles cuandoestudiemos Fourier y Laplace.
Es interesante notar, a esta altura, la completa analogía que hay entre los resultados parafunciones definidas por series y funciones definidas por integrales. Y por supuesto que tenemostambién una herramienta para detectar convergencia uniforme de integrales:
Teorema 202 (Test M de Weierstrass para integrales) si g (x, t) es una función defini-da en [a, b]× [c,∞), y ϕ (t) es una función continua y positiva en [c,∞) tal que:
1. |g (x, t)| ≤ ϕ (t) ∀x ∈ [a, b] y ∀ t ∈ [c,∞), y
2.R∞c ϕ (t) dt converge.
Entonces la integral Z ∞
cg (x, t) dt
converge absoluta y uniformemente en [a, b].
Idea de la demostración. que la integralR∞c g (x, t) dt converge absolutamente para todo
x ∈ [a, b] sale de forma inmediata por (1). Para ver la convergencia uniforme, vamos a suponerprimero que g (x, t) es positiva (así, el número
R rc g (x, t) dt crecerá si r crece). Tomemos una
sucesión de números reales {an}n∈N tales que c = a0 < a1 < a2 < ... y con lımn→∞ an = ∞, yentonces Z ∞
cg (x, t) dt =
∞Xn=1
un (x) ,

184 Integrales de Fourier
con
un (x) =
Z an
an−1
g (x, t) dt.
Llamemos Mn =R anan−1
ϕ (t) dt, entonces (como la integralR∞c ϕ (t) dt converge) tenemos que la
serieP∞
n=1Mn converge, y además |un (x)| ≤ Mn ∀x ∈ [a, b] , por lo que Weierstrass me diceque la serie
P∞n=1 un (x) converge uniformemente a F (x) en [a, b] . Ahora, si r > aN entonces
¯F (x)−
Z r
cg (x, t) dt
¯ g≥0↓= F (x)−
Z r
cg (x, t) dt
g≥0↓≤ F (x)−
NXn=1
un (x)unif.−→N→∞
0.
Cuando g no es positiva, se aplica lo que ya sabemos a |g (x, t)| y se usa que¯F (x)−
Z r
cg (x, t) dt
¯=
¯Z ∞
cg (x, t) dt−
Z r
cg (x, t) dt
¯=
¯Z ∞
rg (x, t) dt
¯≤Z ∞
r|g (x, t)| dt
unif.−→r→∞
0.
Nota 203 todo el material visto para integrales impropias con un extremo infinito se adaptapara todos los otros tipos de integrales impropias, en caso de usar algo distinto lo aclararemos.
7.3. Función Gama
Una de las funciones mas célebres definidas usando integrales impropias es sin duda la funciónΓ. Para x > 0 se pone
Γ (x) =
Z ∞
0tx−1e−tdt.
Veamos primero que, efectivamente, esa integral impropia converge para todo x > 0: escribimos
Γ (x) =
Z ∞
0tx−1e−tdt =
Z 1
0tx−1e−tdt +
Z ∞
1tx−1e−tdt = I1 (x) + I2 (x) .
I1 (x) es integral impropia solo si 0 < x < 1, pero tomemos un x así fijo, entonces¯tx−1e−t
¯≤ tx−1 ∀ t > 0,
y como Z 1
0tx−1dt =
∙tx
x
¸t=1t=o
=1
x,
concluimos por comparación que I1 (x) converge. Veamos ahora I2 (x): como (para cada x > 0fijo)
lımt→∞
¯t2tx−1e−t
¯= lım
t→∞tx+1e−t = 0
(?‘por que?) tenemos que existe N > 0 tal que¯t2tx−1e−t
¯≤ 1 ∀ t ≥ N, y entonces¯
tx−1e−t¯≤ 1
t2∀ t ≥ N,

Integrales de Fourier 185
de donde se deduce que la integral Z ∞
Ntx−1e−tdt
converge (puesR∞N
¡1t
¢2dt converge), y entonces I2 (x) converge pues I2 (x) =
R N1 tx−1e−tdt +R∞
N tx−1e−tdt. Es decir, acabamos de probar que Γ (x) está definida para todo x > 0
Nota 204 Nota: si [a, b] ⊆ (0,∞) entonces la integral que define Γ converge uniformementeen [a, b]. Con esto se concluye que Γ es continua en [a, b] , y por lo tanto es continua en (0,∞)(ejercicio).
Nota 205 (otra mas) la integral que define Γ diverge para todo x ≤ 0, por lo tanto no se puedeusar para definir Γ en dichos valores.
Seguimos estudiando Γ: integrando por partes, vemos que
Γ (x + 1) =
Z ∞
0txe−tdt =
£−txe−t
¤t=∞t=0
+
Z ∞
0xtx−1e−tdt = 0 + xΓ (x) ,
es decirΓ (x + 1) = xΓ (x) ∀ x > 0.
Además Γ (1) =R∞0 e−tdt =
£−e−t
¤t=∞t=0
= 1, y entonces
Γ (1) = 1
Γ (2) = 1Γ (1) = 1
Γ (3) = 2Γ (2) = 2
Γ (4) = 3Γ (3) = 6, etc.
En general, quedaΓ (n + 1) = n! ∀ n ∈ N,
es decir, la función Γ es una función continua que interpola los valores de n! pues cada ves quex ∈N se tiene que Γ (x + 1) = x!.
Otra cosa interesante es la siguiente: la relación
Γ (x) =Γ (x + 1)
x
vale para todo x > 0, pero en el miembro de la derecha puedo poner x0s del intervalo (−1, 0) , asíque defino de esa forma Γ en tal intervalo. Y ahora sigo, y puedo definir Γ enR− {0,−1,−2,−3, ...} .
Por último, calculemos Γ (1/2): haciendo el cambio de variables
t = y1/x, dt =1
xy1x−1dy,

186 Integrales de Fourier
queda
Γ (x) =
Z ∞
0tx−1e−tdt =
Z ∞
0y(x−1)/xe−(y1/x) 1
xy1x−1dy =
1
x
Z ∞
0e−(y1/x)dy,
y por lo tanto
Γ
µ1
2
¶= 2
Z ∞
0e−y
2dy = 2
√π
2=√
π.
0 1 2 3 4 5-5 -4 -3 -2 -1
1
2
3
4
5
-1
-2
-3
-4
-5
Γ x( )
x
7.4. Integral de Fourier
Las series de Fourier resultan muy buenas cuando trabajamos con funciones periódicas, peroson absolutamente inútiles en otro caso. Como existen funciones no periódicas, vamos a tratarde acomodar lo que sabemos de series de Fourier para este caso.
Tomemos una función f : R→ R (la pensamos con imagen real para fijar ideas, en realidadtodo lo que vamos a hacer sirve para f : R→ C) tal que
1. f es Dirichlet en todo intervalo [a, b] ⊆ R, y
2. La integral impropiaR∞−∞ |f (t)| dt converge (i.e. la integral
R∞−∞ f (t) dt converge absolu-
tamente).
Con f, construimos la siguiente función fp de período 2p: fp (t) = f (t) si p ≤ t < p, yfp (t) = fp (t + 2p) ∀ t ∈ R (es decir, cortamos f en el intervalo [−p, p] y repetimos ese pedazo).Claramente, fp es periódica de período 2p, Dirichlet en [−p, p] , continua donde f es continua,salvo posiblemente en los valores de la forma t = (2n + 1) p, n ∈ N, y además
lımp→∞
fp (t) = f (t) ∀ t ∈ R.

Integrales de Fourier 187
Entonces fp tiene serie de Fourier compleja
fp ∼∞X
n=−∞cne
inπpt
con
cn =1
2p
Z p
−pfp (x) e−i
nπpxdx =
1
2p
Z p
−pf (x) e−i
nπpxdx =
µ1
2π
Z p
−pf (x) e−i
nπpxdx
¶π
p
(usamos la variable x pues en los siguientes pasos aparece t como variable independiente).Denotemos
wn =nπ
p= frecuencia del n-ésimo armónico,
entonces la diferencia de frecuencia entre dos armónicos consecutivos es
wn+1 − wn =(n + 1)π
p− nπ
p=
π
p= ∆w,
que no depende de n, y la serie de fp queda
fp (t) ∼∞X
n=−∞
µ1
2π
Z p
−pf (x) e−iwnxdx
¶eiwnt∆w.
Llamemos, para w real,
Cp (w) =1
2π
Z p
−pf (x) e−iwxdx y Fp (w) = Cp (w) eiwt,
y entonces la serie de Fourier de fp queda
fp ∼∞X
n=−∞Fp (wn)∆w,
donde wn es el extremo derecho del intervalo [wn−1, wn] . Notar que dichos intervalos cubrentodo R, y que ∆w → 0 cuando p→∞, y que la suma anterior es una suma de Riemman de laintegral de Fp en todo R.
Por otro lado, notar que¯f (t) e−iwt
¯= |f (t)| y por lo tanto la integral impropia
lımp→∞
1
2π
Z p
−pf (x) e−iwxdx =
1
2π
Z ∞
−∞f (x) e−iwxdx = C (w)
converge absolutamente, y entonces también existe
lımp→∞
Fp (w) = lımp→∞
Cp (w) eiwt = C (w) eiwt = F (w) .
Todo esto sugiere que
∞Xn=−∞
Fp (wn)∆w −→p→∞
Z ∞
−∞F (w) dw

188 Integrales de Fourier
(el problema que tenemos con la suma de Riemman es que la función sobre la cual calculo lasuma cambia cuando p→∞). Para finalizar, si tomamos un t donde f sea continua y luego unp > t, tenemos que
fp (t) =∞X
n=−∞Fp (wn)∆w
(pues fp es continua en t), así que haciendo p→∞ quedaría
f (t) =
Z ∞
−∞F (w) dw =
Z ∞
−∞C (w) eiwtdw =
Z ∞
−∞
∙1
2π
Z ∞
−∞f (x) e−iwxdx
¸eiwtdw.
Todo el razonamiento anterior hace creíble el siguiente teorema:
Teorema 206 Si f es una función real definida en R, Dirichlet en todo intervalo [a, b] y talque la integral
R∞−∞ |f (t)| dt converge, entonces la integralZ ∞
−∞
∙1
2π
Z ∞
−∞f (t) e−iwtdt
¸eiwtdw
vale exactamente f (t) en los t0s donde f es continua, y 12 [f (t+) + f (t−)] en los t0s donde f es
discontinua.
Si f es (de imagen) compleja y sus partes real e imaginaria cumplen ambas con las hipótesisanteriores, entonces se obtiene la misma conclusión sobre f . La integral anterior suele llamarsela integral compleja de Fourier de f .
Ejemplo 207 queremos encontrar la integral de Fourier de la función
f (t) =
½0 si t < 0
e−at si t ≥ 0,
donde a > 0. Entonces
C (w) =1
2π
Z ∞
−∞f (t) e−iwtdt =
1
2π
Z ∞
0e−ate−iwtdt =
1
2π
Z ∞
0e−(iw+a)tdt =
=1
2πlımr→∞
Z r
0e−(iw+a)tdt =
1
2πlımr→∞
"−e−(iw+a)t
(iw + a)
#t=rt=o
=1
2πlımr→∞
"−e−(iw+a)r
(iw + a)+
1
(iw + a)
#=
1
2π (iw + a)pues a > 0.
Entonces el teorema anterior dice que para todo t 6= 0 vale
f (t) =
Z ∞
−∞
1
2π (iw + a)eiwtdw.

Integrales de Fourier 189
7.5. Integral de Fourier de seno y coseno
De la misma forma que podemos expresar una serie de Fourier usando exponenciales com-plejas o senos y cosenos, podemos expresar la integral de Fourier. Nosotros comenzamos con laintegral de Fourier usando exponencial, ahora pasaremos esta a una forma con senos y cosenos.Para mayor claridad, vamos a suponer que f : R→ R, es decir que f es real (este es en realidadel único caso de interés, aunque en realidad yo no vi nunca usado esto para nada).
Entonces, cuando tomamos f en las hipótesis del teorema anterior, resulta que en todos lost0s donde f es continua
f (t) =
Z ∞
−∞
∙1
2π
Z ∞
−∞f (x) e−iwxdx
¸eiwtdw =
1
2π
Z ∞
−∞
Z ∞
−∞f (x) e−iwxeiwtdxdw
=1
2π
Z ∞
−∞
Z ∞
−∞f (x) eiw(t−x)dxdw
=1
2π
Z ∞
−∞
Z ∞
−∞f (x) [cos (w (t− x)) + i sin (w (t− x))] dxdw
=1
2π
Z ∞
−∞
Z ∞
−∞f (x) cos (w (t− x)) dxdw +
i
2π
Z ∞
−∞
Z ∞
−∞f (x) sin (w (t− x)) dxdw.
Puesto que f es real, concluimos que necesariamente
1
2π
Z ∞
−∞
Z ∞
−∞f (x) i sin (w (t− x)) dxdw = 0,
de donde queda
f (t) =1
2π
Z ∞
−∞
Z ∞
−∞f (x) cos (w (t− x)) dx| {z }
función par de w
dw =1
π
Z ∞
0
Z ∞
−∞f (x) cos (w (t− x)) dxdw =
=1
π
Z ∞
0
Z ∞
−∞f (x) [cos (wt) cos (−wx)− sin (wt) sin (−wx)] dxdw =
=1
π
Z ∞
0
Z ∞
−∞f (x) [cos (wt) cos (wx) + sin (wt) sin (wx)] dxdw =
=1
π
Z ∞
0
Z ∞
−∞f (x) cos (wt) cos (wx) dxdw +
1
π
Z ∞
0
Z ∞
−∞f (x) sin (wt) sin (wx) dxdw =
=1
π
Z ∞
0
∙Z ∞
−∞f (x) cos (wx) dx
¸cos (wt) dw +
1
π
Z ∞
0
∙Z ∞
−∞f (x) sin (wx) dx
¸sin (wt) dw.
Si llamamos
A (w) =
∙Z ∞
−∞f (x) cos (wx) dx
¸y B (w) =
∙Z ∞
−∞f (x) sin (wx) dx
¸queda
f (t) =1
π
Z ∞
0A (w) cos (wt) dw +
1
π
Z ∞
0B (w) sin (wt) dw,
que es la forma trigonométrica de la integral de Fourier. Notar las absolutas analogías con la seriede Fourier (como se transforma la integral doble en una integral con un solo extremo infinito,como se construyen A (w) y B (w) y como se reconstruye f a partir de ellos, etc.

190 Integrales de Fourier
7.6. Transformada de Fourier
Un análisis cuidadoso de lo hecho revela que tomamos una función f (t) , con ella construimosuna nueva función que llamamos C (w) , y con esta función podíamos recuperar f a travésde cierta integral. La constante 1/2π que aparecía en C (w) quedó ahí de manera natural,al introducir las integrales de Fourier a partir de las series de Fourier. De aquí en adelanteusaremos la siguiente notación: si f (t) es una función absolutamente integrable en R (es decir,R∞−∞ |f (t)| dt converge), la transformada de Fourier de f es
f (w) =
Z ∞
−∞f (t) e−iwtdt = F (f) (w)
Notar que f es una función de w, definida en R, y de imagen compleja. La importancia de estanotación radica en el hecho de pensar en F como un operador que “transforma” una función enotra, es decir, F es una función definida en un conjunto de funciones (que incluye las funcionesabsolutamente integrables en R), y cuya imagen es también un conjunto de funciones. Cuandohablamos de la transformada de Fourier, nos referimos al operador F , cuando hablamos de latransformada de Fourier de la función f, nos referimos a la función (de variable real) f (w). Elteorema anterior dice que bajo condiciones adecuadas,
f (t) =1
2π
Z ∞
−∞f (w) eiwtdw.
Esta operación, que lleva f de vuelta a f, se llama la transformada inversa de Fourier, y sueledenotarse por f = F−1
³f´
(o de forma mas general, si tengo g (w) y sé que F (f) = g, entonces
se pone f = F−1 (g).
Ejemplo 208
1. La transformada de Fourier de la función
f (t) =
½0 si t < 0
e−at si t ≥ 0, (a > 0)
es f (w) = 1a+iw .
2. Si
f (t) =
½1 si |t| ≤ a0 si |t| > a
, (a > 0)
entonces
f (w) =
Z ∞
−∞f (t) e−iwtdt =
Z a
−ae−iwtdt = −
∙e−iwt
iw
¸t=at=−a
= −eiwa − e−iwa
iw= 2
sin (wa)
w.

Integrales de Fourier 191
Nota importante 209 como es posible recuperar la función a partir de su transformada deFourier (al menos en cierta medida), entonces dos funciones con la misma transformada deFourier deben ser esencialmente iguales. En efecto, de manera análoga a lo que teníamos paraseries de Fourier, si f y g son funciones absolutamente integrables en R y Dirichlet en todointervalo de R, y f = g, entonces f (t) = g (t) en “casi todo punto” (concretamente, la igualdadpuede dejar de valer solo en las discontinuidades de ambas funciones). Para ver esto solo hayque notar que si f y g son continuas en cierto t, entonces
f (t) =1
2π
Z ∞
−∞f (w) eiwtdw =
1
2π
Z ∞
−∞g (w) eiwtdw = g (t) .
A continuación vamos a dar una lista con las propiedades mas usadas de la transformada deFourier. Para todas ellas asumimos que las funciones involucradas son absolutamente integralesen R y Dirichlet en todo intervalo de R.
1. F es un operador lineal, es decir, F (af + g) = aF (f) + F (g) para f, g funciones y a unnúmero real:
F (af + g) (w) =
Z ∞
−∞a (f + g) (t) e−iwtdt =
Z ∞
−∞(af (t) + g (t)) e−iwtdt =
= a
Z ∞
−∞f (t) e−iwtdt +
Z ∞
−∞g (t) e−iwtdt = aF (f) (w) +F (g) (w) .
La linealidad del operador F implica la linealidad del operador F−1, cuando se restringeel dominio de F de forma tal que sea invertible.
2. La función f es continua en R:
f (w) =
Z ∞
−∞f (t) e−iwtdt =
Z ∞
−∞f (t)h (w, t) dt,
con |f (t)h (w, t)| ≤ |f (t)| ∀ t ∈ R y ∀ w ∈ R, yR∞−∞ |f (t)| dt converge, por lo que
Weierstrass dice que la integral que define f converge uniformemente en R, y por lo tanto(por el teo sobre funciones definidas con integrales impropias) f es continua en R.
3. La transformada de Fourier es antisimétrica, es decir, F³f´
(t) = 2πf (−t) ∀ t donde f
es continua: para cada f, f es una nueva función definida en R, por lo cual tiene sentido(al menos, en principio) intentar calcular su transformada de Fourier. El teorema anteriordice que, para cada t ∈ R donde f es continua,
f (t) =1
2π
Z ∞
−∞f (w) eiwtdw =
1
2π
Z ∞
−∞f (w) e−iw(−t)dw =
1
2πF³f´
(−t) .
Notar que la cadena de igualdades implica que la segunda integral converge para todot ∈ R, y por lo tanto define bien a F
³f´
(−t).
4. Cambio de escala en f . Si a > 0 entonces F (f (at)) (w) = 1aF (f)
¡wa
¢: haciendo el cambio
de variables x = at resulta
F (f (at)) =
Z ∞
−∞f (at) e−iwtdt =
Z ∞
−∞f (x) e−
iwxa
dx
a=
1
aF (f)
³w
a
´.
(ejercicio: ?‘que pasa si no pedimos a > 0?)
192 Integrales de Fourier
5. Corrimiento en f. Si t0 ∈ R, entonces F (f (t− t0)) (w) = e−iwt0F (f) (w): haciendo elcambio de variables x = t− t0 resulta
F (f (t− t0)) (w) =
Z ∞
−∞f (t− t0) e−iwtdt =
Z ∞
−∞f (x) e−iw(x+t0)dx
= e−iwt0Z ∞
−∞f (x) e−iwxdx = e−iwt0F (f) (w) .
6. Corrimiento en frecuencia. Si w0 ∈ R entonces F¡eiw0tf (t)
¢(w) = F (f) (w − w0):
F¡eiw0tf (t)
¢(w) =
Z ∞
−∞eiw0tf (t) e−iwtdt =
Z ∞
−∞f (t) e−i(w−w0)tdt = F (f) (w − w0) .
7. Modulación. F (f (t) cos (w0t)) (w) = 12 [F (f) (w − w0) +F (f) (w + w0)]:
F (f (t) cos (w0t)) (w) =
Z ∞
−∞f (t) cos (w0t) e−iwtdt =
Z ∞
−∞f (t)
µeiw0t + e−iw0t
2
¶e−iwtdt
=1
2
Z ∞
−∞f (t) eiw0te−iwtdt +
1
2
Z ∞
−∞f (t) e−iw0te−iwtdt.
Las siguientes dos propiedades requieren hipótesis adicionales a las que hemos supuesto,de entrada, que teníamos:
8. Transformada de la derivada: Si f es continua en R, tiene derivada f 0 en “casi todo punto”(ver series de Fourier para ver que significa esto), y f 0 es absolutamente integrable en R yDirichlet en cada intervalo de R, y lımt→±∞ f (t) = 0, entonces F (f 0) (w) = iwF (f) (w).Para verlo aplicamos integración por partes:
F¡f 0¢(w) =
Z ∞
−∞f 0 (t) e−iwtdt = lım
N→∞
Z N
−Nf 0 (t) e−iwtdt
= lımN→∞
£f (t) e−iwt
¤t=Nt=−N − lım
N→∞
Z N
−Nf (t) (−iw) e−iwtdt
= 0 + iw
Z ∞
−∞f (t) e−iwtdt = iwF (f) (w) .
Esta propiedad, con las hipótesis adecuadas, se generaliza a
F³f (n)
´(w) = (iw)nF (f) (w) ∀ n ∈N.
9. Derivación de la transformada: si tf (t) es absolutamente integrable en R, entonces fes derivable y d
dw f (w) = F (−itf (t)) (w). Para verlo solo necesitamos verificar que secumplen las condiciones que nos permiten derivar una función definida por medio deintegrales impropias (análogo a lo hecho en la propiedad 2).
d
dwf (w) =
d
dw
µZ ∞
−∞f (t) e−iwtdt
¶=
d
dw
µZ ∞
−∞f (t)h (w, t) dt
¶

Integrales de Fourier 193
Como ∂∂w (f (t)h (w, t)) = −itf (t) e−iwt, entonces
¯∂∂wf (t)h (w, t)
¯≤ |tf (t)| ∀ t ∈ R y
∀ w ∈ R, yR∞−∞ |tf (t)| dt converge, por lo que Weierstrass dice que la integralZ ∞
−∞
∂
∂w(f (t)h (w, t)) dt
converge uniformemente en R, y por lo tanto (por el teo sobre funciones definidas conintegrales impropias) f es derivable en R y
d
dwf (w) =
Z ∞
−∞
∂
∂w(f (t)h (w, t)) dt =
Z ∞
−∞−itf (t) e−iwtdt = F (−itf (t)) (w) .
Esta propiedad, con las hipótesis adecuadas, se generaliza a
dn
dwnf (w) = (−i)nF (tnf (t)) (w)
7.7. Calculo de transformadas usando residuos
Los residuos son muy útiles para calcular cierto tipo de integrales impropias. Veamos elsiguiente ejemplo: supongamos que f (z) es analítica en el semiplano {z : Im (z) ≥ 0} salvopor singularidades aisladas z1, ..., zn en dicho semiplano, ninguna con parte imaginaria nula. SeaR tal que |zj | ≤ R ∀ j = 1, ..., n y consideremos la curva cerrada simple CR formada por elsegmento de recta real [−R,R] y la mitad superior ΓR del círculo |z| = R, recorrida en sentidoantihorario.
ΓR
R-R
z1z2
z3z4
zn
Según el teorema de residuos tenemos queZCR
f (z) dz = 2πinX
j=1
Res (f, zj) ,
es decir, Z[−R,R]
f (z) dz +
ZΓR
f (z) dz = 2πinX
j=1
Res (f, zj) ∀ R ≥ R0.
Parametrizando el segmento [−R,R] por medio de γ (t) = t, t ∈ [−R,R] , y despejando de laigualdad anterior, vemos queZ R
−Rf (t) dt = 2πi
nXj=1
Res (f, zj)−ZΓR
f (z) dz ∀ R ≥ R0.

194 Integrales de Fourier
Nosotros estamos interesados enZ ∞
−∞f (t) dt = lım
R→∞
Z R
−Rf (t) dt,
y la igualdad anterior nos sugiere que si pedimos condiciones sobre f como para que
lımR→∞
ZΓR
f (z) dz = 0,
podremos afirmar que Z ∞
−∞f (t) dt = 2πi
nXj=1
Res (f, zj)
ya que la suma de residuos no depende de R. Una forma de asegurar esto es la siguiente: siponemos
Mf (R) = max{|f (z)| : z ∈ ΓR},
entonces ¯ZΓR
f (z) dz.
¯≤ πRMf (R) ,
de donde se deduce inmediatamente el siguiente teorema:
Teorema 210 si f (z) es una función analítica en el semiplano {z : Im (z) ≥ 0} salvo porsingularidades aisladas z1, ..., zn (en dicho semiplano), ninguna con parte imaginaria nula, y talque lımR→∞RMf (R) = 0. EntoncesZ ∞
−∞f (t) dt = 2πi
nXj=1
Res (f, zj) .
Notar que la condición “lımR→∞RMf (R) = 0” nos dice, grosso modo, que f debe decreceren infinito mas rápido que la función 1/R.
Ejemplo 211 tomemos f (z) = 11+z2
, entonces f tiene polos simples en ±i, y como¯z2 + 1
¯≥¯
z2¯− 1 (al menos para z : |z| ≥ 2), entonces Mf (R) ≤ 1
R2−1 y
0 ≤ lımR→∞
RMf (R) ≤ lımR→∞
R
R2 − 1= 0.
AdemásRes (f, i) = lım
z→i(z − i)
1
1 + z2= lım
z→i
1
z + i=
1
2i,
y el teorema anterior dice que Z ∞
−∞
1
1 + t2dt = 2πi
1
2i= π.
Este ejemplo no es interesante por si, solo ilustra la forma en que se usa el teorema.

Integrales de Fourier 195
Si denotamos ΓR = {z : |z| = R, Im (z) ≤ 0} y Mf (R) = max{|f (z)| : z ∈ ΓR}, de maneraanáloga se prueba (ejercicio) el siguiente:
Teorema 212 si f (z) es una función analítica en el semiplano {z : Im (z) ≤ 0} salvo porsingularidades aisladas z1, ..., zm (en dicho semiplano), ninguna con parte imaginaria nula, y talque lımR→∞RMf (R) = 0. EntoncesZ ∞
−∞f (t) dt = −2πi
mXj=1
Res (f, zj) .
El signo menos que lo diferencia del teorema anterior viene de que, al considerar la curvaadecuada (el segmento [−R,R] seguida del semicírculo ΓR en sentido antihorario), la integralsobre el eje real queda con los extremos invertidos.
Nuestro interés esta en usar esta técnica para calcular transformadas de Fourier, es decir,aplicarla a las funciones del tipo f (z) e−iωz. Supongamos que quiero calcular f (ω) donde f (t)es una función que es la restricción a R de una función analítica en el semiplano {z : Im (z) ≥ 0}salvo por singularidades aisladas z1, ..., zn en dicho semiplano, ninguna con parte imaginarianula. Primero notar que las singularidades de la función f (z) e−iωz son exactamente las mismasque las de f . Tomemos ω ≤ 0 y z = x + iy con y ≥ 0, entonces¯
e−iωz¯=¯e−iω(x+iy)
¯= eωy ≤ 1,
y entonces0 ≤ max{
¯f (z) e−iωz
¯: z ∈ ΓR} ≤ max{|f (z)| : z ∈ ΓR}.
Entonces si f es tal que (con la notación de antes) lımR→∞RMf (R) = 0, resulta que
f (ω) =
Z ∞
−∞f (t) e−iωtdt = 2πi
nXj=1
Res¡f (z) e−iωz, zj
¢∀ ω ≤ 0.
De manera absolutamente análoga se ve que si f (t) es una función que es la restricción a R deuna función analítica en el semiplano {z : Im (z) ≤ 0} salvo por singularidades aisladas z1, ..., zmen dicho semiplano, ninguna con parte imaginaria nula, y lımR→∞RMf (R) = 0, entonces
f (ω) =
Z ∞
−∞f (t) e−iωtdt = 2πi
nXj=1
Res¡f (z) e−iωz, zj
¢∀ ω ≥ 0.
Ejemplo 213 Consideremos la función f (t) = 11+t2
, t ∈ R, que es la restricción a R de lafunción f (z) = 1
1+z2, z ∈ C − {±i}. Por las consideraciones hechas en el ejemplo anterior,
resulta
f (ω) = 2πiRes
µe−iωz
1 + z2, i
¶= 2πi
eω
2i∀ ω ≤ 0,
y
f (ω) = −2πiRes
µe−iωz
1 + z2,−i
¶= −2πi
e−ω
−2i∀ ω ≥ 0,
es decirf (ω) = πe−|ω| ∀ ω ∈ R.

196 Integrales de Fourier
Estos resultados se pueden mejorar, ya que las condiciones sobre decrecimiento de la funciónson innecesariamente restrictivas: notar que cuando pedimos ω ≤ 0 utilizamos que (en dichocaso, para y ≥ 0),
¯e−iωz
¯≤ 1. Esta cota no puede mejorarse, pero el procedimiento general si,
estudiando cuidadosamente la integral ZΓR
f (z) e−iωzdz.
Parametricemos ΓR por medio de γR (t) = Reit, t ∈ [0, π] , de forma tal que γ0 (t) = iReit, yZΓR
f (z) e−iωzdz =
Z π
0f¡Reit
¢e−iωRe
itiReitdt.
Como ¯e−iωRe
it¯=¯e−iωR(cos t+i sin t)
¯= eωR sin t
resulta ¯f¡Reit
¢e−iωRe
itiReit
¯≤ RMf (R) eωR sin t ∀ t ∈ [0, π]
(seguimos usando la misma notación para Mf (R)), y entonces¯ZΓR
f (z) e−iωzdz
¯≤Z π
0RMf (R) eωR sin tdt = RMf (R)
Z π
0eωR sin tdt.
Estudiemos esta última integral: usando que
sin (t)
t≥ 2
π∀ t ∈
h0,
π
2
i(ejercicio),
resulta que para ω < 0 (¡importante!)
ωR sin (t) ≤ 2ωRt
π∀ t ∈
h0,
π
2
i,
y entonces
0 ≤Z π
0eωR sin tdt = 2
Z π/2
0eωR sin tdt ≤ 2
Z π/2
0e2ωRtπ dt = 2
h π
2ωRe2ωRtπ
it=π/2t=0
=π
ωR
£eωR − 1
¤,
en donde en la primer igualdad hemos usado que la función eωR sin t es simétrica en [0, π] respectodel eje t = π/2 (por la simetría de la función sin t).
1
π
eωR sin( )t
Usando que ω < 0, queda
0 ≤Z π
0eωR sin tdt ≤ π
−ωR
£1− eωR
¤≤ π
|ω|R,

Integrales de Fourier 197
y entonces (juntando con lo hecho arriba)¯ZΓR
f (z) e−iωzdz
¯≤ RMf (R)
π
|ω|R =π
|ω|Mf (R) .
Esta desigualdad, aplicada a los métodos del comienzo de esta sección, implica de manerainmediata el siguiente teorema:
Teorema 214
1. Si f (t) , t ∈ R, es una función que es la restricción a R de una función f (z) , z ∈ C, quees analítica en el semiplano {z : Im (z) ≥ 0} salvo por singularidades aisladas z1, ..., zn endicho semiplano, ninguna con parte imaginaria nula, y lımR→∞Mf (R) = 0, entonces
f (ω) = 2πinX
j=1
Res¡f (z) e−iωz, zj
¢∀ ω < 0.
2. Si f (t) , t ∈ R, es una función que es la restricción a R de una función f (z) , z ∈ C, quees analítica en el semiplano {z : Im (z) ≤ 0} salvo por singularidades aisladas z1, ..., zm endicho semiplano, ninguna con parte imaginaria nula, y lımR→∞ Mf (R) = 0, entonces
f (ω) = −2πimXj=1
Res¡f (z) e−iωz, zj
¢∀ ω > 0.
Dos comentarios (relacionados): primero, notar que hemos perdido el caso ω = 0. Eso no seríauna limitación muy severa si pudiéramos asegurar que f es continua en ω = 0, lo cual ocurre sif es absolutamente integrable en R. Lo segundo, todas las integrales en el intervalo (−∞,∞) deesta sección se tomaron como límite de integrar en el intervalo (−R,R) , lo cual no coincide connuestra definición (que era integrar, de manera independiente, en los intervalos (−∞, 0) y (0,∞) ,y sumar), y no es lo mismo. A este tipo de integral se lo suele llamar el valor principal (o valorprincipal de Cauchy), y lo que si es cierto es que si f es absolutamente integrable en R, entoncesel valor principal da lo mismo que la integral. De cualquier manera, se usa el valor principal enlugar de integrar en cada intervalo y sumar cuando este último procedimiento no funciona. Enresumen, tenemos dos pequeños problemas que se solucionan si f es absolutamente integrableen R. Desafortunadamente, los casos mas interesantes de aplicación del teorema anterior vienede cuando f no es absolutamente integrable, pues en general si f es absolutamente integrableen R, decrece lo suficientemente rápido como para poder aplicar las fórmulas anteriores a esteteorema para calcular f .
Ejemplo 215 tomar f (t) = t1+t2 , que es la restricción a R de la función f (z) = z
1+z2 analíticaen C− {±i}. El teorema anterior dice que
f (ω) = 2πiRes
µze−iωz
1 + z2, i
¶= 2πi lım
z→i
µze−iωz
z + i
¶= 2πi
ieω
2i= iπeω ∀ ω < 0,

198 Integrales de Fourier
y
f (ω) = −2πiRes
µze−iωz
1 + z2,−i
¶= −2πi lım
z→−i
µze−iωz
z − i
¶= −2πi
−ie−ω
−2i= −iπe−ω ∀ ω > 0,
donde se ve claramente que f (ω) no es continua en 0. Notar que f no es integrable ni en (0,∞)ni en (−∞, 0) , pero Z R
−Rf (t) dt = 0 ∀ R > 0,
por lo que se define f (0) = 0.

Capítulo 8
Transformada de Laplace
8.1. Funciones de orden exponencial
Algunas funciones muy simples, como por ejemplo
u (t) =
½0 si t < 01 si t ≥ 0
,
no tienen transformada de Fourier, pues esta última requiere, en general, que la función seaabsolutamente integrable en R (lo cual implica, además, que la función esté definida en todo R).En muchas aplicaciones aparecen funciones definidas en [0,∞) (sobre todo cuando se piensa quela variable representa al “tiempo”) que no son integrables en [0,∞), y para las cuales se necesitauna herramienta análoga a la transformada de Fourier. Una solución posible es multiplicar a lafunción en cuestión por una función peso del tipo e−at a > 0, para obtener una integrable. Coneste espíritu se define:
Definición 216 para una función f : [0,∞) → R y para s ∈ R, se define la transformada deLaplace de f como
L (f) (s) =
Z ∞
0f (t) e−stdt
cada ves que la integral impropia converge.
La transformada L (f) de una función f es una nueva función (de s), cuyo dominio dependerá,en general, de f . De manera análoga a lo hecho con la transformada de Fourier, vamos a pensaren L como un operador que transforma una función f (t) en una nueva función L (f) (s). Si F (s)es una función tal que F (s) = L (f) (s) , entonces diremos que f es la transformada de Laplaceinversa de F, y denotaremos este hecho por f (t) = L−1 (F ) (t).
199

200 Transformada de Laplace
Ejemplo 217 Si f (t) = e−at, entonces para s > a tenemos
L (f) (s) =
Z ∞
0e−ate−stdt =
Z ∞
0e−(s+a)tdt = −
"e−(s+a)t
s + a
#t=∞t=0
=1
s + a.
Puesto que para s ≤ a la integral diverge, tenemos que el dominio de L (f) (s) es el intervalo(a,∞), y en tal intervalo vale L (f) (s) = 1
s+a (ojo, no confundir a L (f) (s) con 1s+a : el dominio
de la última función incluye estríctamente al de la primera). Con la notación de arriba, en estecaso tendríamos que
e−at = L−1µ
1
s + a
¶(t) .
e-at
-a
s a+1
Nota 218 puesto que para calcular la transformada de Laplace solo necesitamos una funcióndefinida en [0,∞), pero esto suele ser una limitación a la hora de realizar otros procedimientos,se suele pensar que las funciones involucradas valen 0 en (−∞, 0) . De aquí en mas tomaremosesa convención.
Lo siguiente que haremos es fijar condiciones para existencia de la transformada de Laplace.En eso, la siguiente definición es central
Definición 219 Si f : [0,∞) → R es una función y existen constantes reales α, M y T talesque |f (t)| ≤ Meαt ∀ t ≥ T, entonces f se dice de orden exponencial con exponente α. Paraescribir menos, denotaremos esto por OE (α).
Esta propiedad nos dice que f “no crece mas rápido que una exponencial”. Notar que enla definición no se hace hincapié en encontrar las constantes mas chicas con esa propiedad. Porejemplo, la función f (t) = t10 es de orden exponencial con exponente 1, pues como lımt→∞
t10
et =
0 se tiene que ∃ T ≥ 0 tal que¯t10
et
¯≤ 1 si t ≥ T, y entonces t10 ≤ et si t ≥ T (una mejora leve de
este razonamiento muestra que cualquier polinomio es de orden exponencial con exponente α,
cualquiera sea α > 0, ejercicio). Por otro lado la función f (t) = e(t2) no es de orden exponencial
( e(t2) ≤ Meαt es equivalente a t2 − αt ≤ ln (M) , la cual no es válida en ningún intervalo del
tipo [T,∞).Si tenemos |f (t)| ≤ Meαt ∀ t ≥ T y además sabemos que f es acotada en [0, T ] , entonces
se puede ver (ejercicio) que existe M tal que |f (t)| ≤ Meαt ∀ t ≥ 0. En particular esto es

Transformada de Laplace 201
cierto cuando f es continua por tramos en [0,∞). Puesto que nosotros vamos a trabajar entoda esta sección con funciones continuas por tramos en [0,∞), tomaremos esto como funciónde orden exponencial (de hecho, la razón por la cual no se define así directamente es para evitardisidencias con la mayoría de los textos que tratan el tema).
Ejemplo 220
1. Los polinomios p (t) =PN
n=0 antn son funciones de OE (α) para cualquier α > 0.
2. Las funciones acotadas son de OE (α) para cualquier α > 0, en particular las funcionesperiódicas lo son.
3. Si f (t) es de OE (α) y continua por tramos en [0,∞), y g (t) =R t0 f (x) dx, entonces g es
de OE (β) , con β = max (α, 0) (ejercicio).
4. Si f (t) es derivable y de OE (α) entonces f 0 (t) puede no serlo, por ejemplo considerar la
función f (t) = sin³et2´.
5. Si f (t) es derivable y f 0 (t) de OE (α) , entonces f es de OE (β) , con β = max (α, 0)(ejercicio). Ojo: esa fórmula no da el mínimo β, da uno con el cual funciona. La funcióne−3t es OE (−3) y su primitiva −1
3 e−3t también.
La definición de función de orden exponencial está hecha a medida de la transformada deLaplace, para asegurar la existencia de la misma y sus buenas propiedades, según el siguienteteorema fundamental:
Teorema 221 Si f es continua por tramos en [0,∞) y de orden exponencial, con |f (t)| ≤Meαt ∀ t ≥ 0, entonces la transformada de Laplace de f, L (f) (s) existe para todo s > α, esuna función continua en el intervalo (α,∞) , y
|L (f) (s)| ≤ M
s− α.
Demostración. puesto que |f (t)| ≤Meαt, entonces¯f (t) e−st
¯≤Meαte−st = Me−(s−α)t ∀ t ≥
0. Como la función Me−(s−α)t es integrable en (0,∞) si y solo si α > s, concluimos que, paratodo s > α, la función f (t) e−st es absolutamente integrable en (0,∞) , y
|L (f) (s)| =
¯Z ∞
0f (t) e−stdt
¯≤Z ∞
0
¯f (t) e−st
¯dt ≤
≤Z ∞
0Me−(s−α)tdt =
"−Me−(s−α)t
s− α
#t=∞t=0
=M
s− α.
Para ver que L (f) (s) es continua en (α,∞) vamos a ver que es continua en todo intervalo dela forma [α1,∞) con α1 > α (ejercicio, mostrar que con esto alcanza). Para ello, notar que,¯
f (t) e−st¯≤Me−(s−α)t ≤Me−(α1−α)t ∀ t > 0 y ∀ s ≥ α1,

202 Transformada de Laplace
comoR∞0 Me−(α1−α)tdt converge, el test M de Weierstrass (para integrales) nos dice que la
integral que define a L (f) (s) converge absolutamente, y uniformemente en [α1,∞), y entoncescierto teorema (de funciones definidas usando integrales impropias) nos dice que L (f) (s) escontinua en dicho intervalo.
Es importante destacar que las hipótesis que se piden en el teorema son suficientes perono necesarias, es decir, existen funciones que no cumplen tales hipótesis y sin embargo tienentransformada de Laplace. De cualquier manera, dentro de las hipótesis puestas entran la mayoríade los casos que se presentan en el uso de la transformada. Otra cosa: la desigualdad que incluyeel teorema dice que la transformada de Laplace decrece cuando s → ∞ “al menos tan rápido”como 1/s. Esta última afirmación debe tomarse en el mismo sentido que cuando hablamos de lavelocidad con la que decrecen los coeficientes de Fourier de una función.
Ejemplo 222
1. Si f (t) = 1 ∀ t ≥ 0, entonces para s > 0 se tiene que
L (f) (s) =
Z ∞
0f (t) e−stdt =
Z ∞
0e−stdt = −
∙e−st
s
¸t=∞t=0
=1
s,
y la integral diverge si s ≤ 0.
2. Si f (t) = ta ∀ t ≥ 0, donde a > −1, entonces haciendo el cambio de variables x = st, paras > 0, queda
L (f) (s) =
Z ∞
0tae−stdt =
Z ∞
0
³x
s
´ae−x
dx
s=
1
sa+1
Z ∞
0xae−xdx =
Γ (a + 1)
sa+1,
y la integral diverge si s ≤ 0. En particular, se tiene que ∀ n ∈ N,
L (tn) (s) =n!
sn+1∀ s > 0.
3. Si f (t) = sin (ωt) ∀ t ≥ 0, entonces para s > 0 queda
L (f) (s) =
Z ∞
0sin (ωt) e−stdt = −
∙e−st
(ω cosωt + s sinωt)
s2 + ω2
¸t=∞t=0
=ω
s2 + ω2
A continuación veremos las propiedades de la transformada de Laplace
Proposición 223 (linealidad) El operador L es lineal en el siguiente sentido: si f, g sonfunciones tales que L (f) (s) y L (g) (s) existen ambas para s ≥ s0, entonces para todo númeroreal a vale que L (af + g) (s) = aL (f) (s) + L (g) (s) ∀ s ≥ s0.

Transformada de Laplace 203
Demostración.
L (af + g) (s) =
Z ∞
0(af + g) (t) e−stdt = a
Z ∞
0f (t) e−stdt +
Z ∞
0g (t) e−stdt
= aL (f) (s) + L (g) (s) ,
donde el segundo igual vale pues ambas integrales convergen para s ≥ s0.
Ejemplo 224 combinando la propiedad anterior con uno de los ejemplos, concluimos que sep (t) =
PNn=0 ant
n (un polinomio de grado N), entonces
L (p) (s) = LÃ
NXn=0
antn
!(s) =
NXn=0
anL (tn) (s) =NXn=0
ann!
sn+1.
8.2. Transformada de derivadas e integrales
Proposición 225 (Transformada de la derivada) Si f es continua en [0,∞) y de OE (α) ,y existe f 0 en “casi todo punto” es continua por tramos en [0,∞) y de OE (α) , entonces
L¡f 0¢(s) = sL (f) (s)− f (0) ∀ s > α.
Demostración. Demo: en estas hipótesis podemos usar integración por partes; entonces paras > α se tiene que
L¡f 0¢(s) =
Z ∞
0f 0 (t) e−stdt =
£f (t) e−st
¤t=∞t=0−Z ∞
0f (t) (−s) e−stdt.
Por ser f continua en [0,∞) resulta£f (t) e−st
¤t=0
= f (0) , y por ser de OE (α) y s > α resulta£f (t) e−st
¤t=∞= 0, y entonces queda
L¡f 0¢(s) = −f (0) + sL (f) (s) .
Nota 226 Nota: es común encontrar en la propiedad anterior, f (0) reemplazado por f (0+) ,que es por definición lımt→0+ f (t) El significado es el mismo que le damos nosotros, ya que alpedir que f sea continua en [0,∞), nos estamos refiriendo de manera tácita a un límite lateralen 0. Utilizando tal notación , podemos pedir f continua en (0,∞) , y (conservando las otrashipótesis) tendríamos como conclusión que L (f 0) (s) = sL (f) (s)− f (0+).
Corolario 227 Si f, f 0, f 00, · · ·, f (n−1) son continuas en [0,∞) y de OE (α) , y existe f (n) en“casi todo punto” es continua por tramos en [0,∞) y de OE (α) , entonces
L³f (n)
´(s) = snL (f) (s)− sn−1f (0)− sn−2f 0 (0)− · · ·− sf (n−2) (0)− f (n−1) (0) ∀ s > α.

204 Transformada de Laplace
Demostración. veamos el caso n = 2
L¡f 00¢(s) = L
³¡f 0¢0´
(s) = sL¡f 0¢(s)− f 0 (0) = s (sL (f) (s)− f (0))− f 0 (0)
= s2L (f) (s)− sf (0)− f 0 (0) ;
el caso general se sigue por inducción en n.
Ejemplo 228 Si f (t) = sin (ωt) , entonces f 0 (t) = ω cos (ωt) , y f (0) = 0, y entonces
L (cos (ωt)) (s) =1
ωL¡f 0¢(s) =
1
ωs
ω
s2 + ω2=
s
s2 + ω2.
La propiedad anterior es una de las mas importantes para el uso que nosotros le vamos adar a la transformada de Laplace: la resolución y estudio de sistemas modelados con ecuacionesdiferenciales, fundamentalmente por ecuaciones lineales con coeficientes constantes. Veamos elsiguiente ejemplo: tenemos el problema de condiciones iniciales½
x00 + bx0 + cx = f (t)x (0) = x0, x0 (0) = y0
.
Asumiendo que se dan las condiciones necesarias, tomando transformada de Laplace queda
L¡x00 + bx0 + cx
¢= L (f) ,
y usando las propiedades 1 y 2 y las condiciones iniciales, resulta
s2L (x) (s)− sx0 − y0 + a (sL (x) (s)− x0) + bL (x) (s) = L (f) (s)
De esa ecuación puede despejarse L (x) (s) , y queda
L (x) (s) =L (f) (s) + sx0 + y0 + ax0
s2 + bs + c.
Lo notable de esto es que el miembro de la derecha es conocido, por lo cual sin resolver laecuación, sabemos exactamente cuanto vale la transformada de Laplace de la solución (la únicasolución que satisface las condiciones iniciales). De aquí siguen dos alternativas posibles: en-contrar x “invirtiendo” el operador L, o sin encontrar x, deducir sus propiedades a partir desu transformada de Laplace. Ambos caminos son muy usados, y ambos dependen de un hechofundamental: la transformada de Laplace de una función la determina por completo, según elsiguiente teorema:
Teorema 229 (Lerch) Si f y g son funciones continuas por tramos en [0,∞) y de OE (α) ,y L (f) (s) = L (g) (s) ∀ s ≥ s0, entonces f (t) = g (t) ∀ t > 0, salvo posiblemente en los puntosdonde f y/o g sean discontinuas.

Transformada de Laplace 205
Demostración. Escapa al alcance de este curso,se puede ver una en Kreider, Koler, Ostberg,Perkins “Introducción al Análisis Lineal”. De cualquier manera, es importante notar que tantoel resultado como su demostración son similares a lo que teníamos para transformada de Fourier.
El teorema anterior nos permite hablar con mas autoridad del operador L−1 que men-cionamos mas arriba. Si φ (s) es una función definida en el intervalo (α,∞) y sabemos queφ (s) = L (f) (s) , entonces, salvo posiblemente por valores puntuales, f es la única función(continua por tramos en [0,∞) y de OE) con esa propiedad, y se pone f (t) = L−1 (φ) (t).La diferencia fundamental con la transformada de Fourier, es que para esta teníamos unafórmula para la transformada inversa, es decir, una fórmula para encontrar f a partir de f
(f (t) = 12πF
³f´
(−t)). El único camino que tenemos (por ahora) para invertir la transformadade Laplace es por verificación directa, tanto en transformada de funciones específicas como enlas propiedades del operador L. De aquí en adelante enunciaremos cada propiedad del operadorL con la correspondiente equivalente para L−1.
Ejemplo 230 1. La linealidad del operador L implica la linealidad del operador L−1, cuandose restringe el dominio de L de forma tal que sea invertible. Es decir, L−1 (aφ1 + φ2) =aL−1 (φ1) + L−1 (φ2).
2. L−1¡1s
¢= 1. En rigor, deberíamos poner “si φ es una función cuyo dominio es el intervalo
(0,∞) y en dicho dominio φ (s) = 1s , entonces L−1 (φ) (t) = 1 ∀ t > 0, pero semejantes
consideraciones no aportan demasiado y complican enormemente nuestra tarea.
3. L−1³PN
n=0ansn+1
´=PN
n=0ann!L−1
¡n!
sn+1
¢(t) =
PNn=0
ann! t
n.
4. L−1³
ωs2+ω2
´= sin (ωt).
5. Supongamos que f es continua en [0,∞), de OE (α) , f (0) = 0, y que f 0 existe en “casitodo punto”, es continua por tramos en [0,∞) y de OE (α) . Entonces si φ (s) = L (f) (s) ,luego
L−1 (sφ (s)) = f 0
Esto tiene poca utilidad práctica (para invertir sφ (s)) ya que las hipótesis en general sonimposibles de verificar. Lo que suele hacerse (si se tiene f = L−1 (φ)) y se quiere invertirsφ (s) es calcular f 0, y luego calcular L (f 0) (s) y ver si efectivamente da sφ (s). Debido aque en la mayoría de las aplicaciones la variable t representa al tiempo y la variable s ala frecuencia, este ejemplo suele leerse como “multiplicar en frecuencia por s es lo mismoque derivar en t”.
Proposition 231 (Transformada de la integral) Si f es continua por tramos en [0,∞) yde OE (α) , entonces
LµZ t
0f (r) dr
¶(s) =
1
sL (f) (s) ∀ s > max (α, 0) .
Esta propiedad suele leerse como “dividir en frecuencia es lo mismo que multiplicar en tiempo”

206 Transformada de Laplace
Demostración. primero, notar que la función g (t) =R t0 f (r) dr es continua y de OE (max (α, 0)) ,
por lo cual tiene sentido calcular su transformada de Laplace. Además g0 (t) = f (t) en casi todopunto, y g (0) = 0, por lo cual la propiedad 2 nos dice que
L¡g0¢(s) = sL (g) (s) ∀ s > max (α, 0) ,
de donde se sigue inmediatamente la propiedad.
Corolario 232 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) , entonces
L−1µ
1
sφ (s)
¶(t) =
Z t
0f (r) dr.
Demostración. Aplicar L−1 a la propiedad 3.
Ejemplo 233 puesto que L (sin (ωt)) (s) = ωs2+ω2
, entonces
L−1µ
1
s
ω
s2 + ω2
¶(t) =
Z t
0sin (ωr) dr =
1
ω(1− cos (ωt))
8.3. Función de Heaviside
Se llama así a la función escalón unitario
u (t) =
½0 si t < 01 si t ≥ 0
,
y se denota ua (t) = u (t− a). Si bien no es una limitación, en general se utiliza a > 0.
0 0 a
u t( ) u t( )a
Esta función es muy útil cuando se trabaja con trasformada de Laplace, pues nos da unanotación sencilla para “pensar” que las funciones con las que trabajamos están definidas comocero en el intervalo (−∞, 0): basta con tomar f (t)u (t) en lugar de f (t) (recordar el comentariohecho al calcular L−1
¡1s
¢, que según nuestra convención da u y no 1). Por ejemplo, cuando
calculamos L (tn), lo correcto hubiera sido poner L (u (t) tn) (s) = n!sn+1 ∀ s > 0. Pero mas allá
de las formalidades, tiene muchas otras virtudes porque puede usarse como un “interruptor” queenciende cierta señal en un instante a: puesto que
f (t)ua (t) =
½0 si t < a
f (t) si t ≥ a,

Transformada de Laplace 207
resulta que si quiero escribir que a una señal g (t) se le agrega otra señal f (t) en el instante a, laseñal resultante será g (t) + f (t)ua (t). Esto es particularmente útil en el modelado de sistemasdonde diferentes fuerzas actúan en diferentes instantes de tiempo.
Otro uso frecuente de la función ua es para desplazar funciones en su variable: la funciónf (t− a)ua (t) tiene la misma gráfica que f (t)u (t) pero con el cero en a
0 a0
f t( ) f t a( )-u t( )a
Ejemplo 234 Cuando uno quiere “filtrar” una señal f (t) y dejarla solo para cierto intervalode tiempo [a, b), como
ua (t)− ub (t) =
⎧⎨⎩0 si t < a1 si a ≤ t < b0 si t ≥ b
,
la señal filtrada queda f (t) [ua (t)− ub (t)].
0 a b
1
0 a b
1
u t( )a u t( )b− u t( )a u t( )b−
f t( )
f t( )( )
Proposición 235 (Corrimiento en frecuencia) Si f es continua por tramos en [0,∞) y deOE (α) , entonces
L¡eatf (t)
¢(s) = L (f) (s− a) ∀ s > α + a.
Demostración.
L¡eatf (t)
¢(s) =
Z ∞
0f (t) eate−stdt =
Z ∞
0f (t) e−(s−a)tdt = L (f) (s− a) .
Corolario 236 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) , entonces
L−1 (φ (s− a)) (t) = eatf (t) .

208 Transformada de Laplace
Ejemplo 237 1. Si φ (s) = 6(s+4)4
, entonces como L¡t3¢(s) = 6
s4, resulta φ (s) = L
¡t3¢(s + 4) ,
y entonces
L−1µ
6
(s + 4)4
¶= e−4tt3.
2. Puesto que L (cos (2t)) (s) = ss2+4
, se tiene que
L−1µ
s− 8
(s− 8)2 + 4
¶= e8t cos (2t) .
Proposition 238 (Cambio de escala) Si f es continua por tramos en [0,∞) y de OE (α) ,y c > 0, entonces
L (f (ct)) (s) =1
cL (f)
³s
c
´∀ s > cα.
Demostración. haciendo el cambio de variables x = ct queda
L (f (ct)) (s) =
Z ∞
0f (ct) e−stdt =
Z ∞
0f (x) e−sx/c
dx
c=
1
cL (f) (s/c) .
Corolario 239 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) , entonces
L−1 (φ (s/c)) (t) = cf (ct) .
Proposición 240 (Corrimiento en tiempo) Si f es continua por tramos en [0,∞) y deOE (α) , y a ≥ 0, entonces
L (f (t− a)ua (t)) (s) = e−asL (f) (s) ∀ s > α.
Demostración. haciendo el cambio de variables x = t− a queda
L (f (t− a)ua (t)) (s) =
Z ∞
0f (t− a)ua (t) e−stdt =
Z ∞
af (t− a) e−stdt
=
Z ∞
0f (x) e−s(x+a)dx = e−asL (f) (s) .
Nota importante 241 el resultado anterior no es válido si a < 0, probar por ejemplo conla función f (t) = t + 3 y a = −3. El problema en realidad viene de que cuando uno dice“f (t) = t + 3” tiende a olvidar que en realidad queremos decir f (t) = (t + 3)u (t). Otro temadelicado con la propiedad anterior, es que es muy común confundir f (t) con f (t− a) , y lapropiedad anterior no dice que L (f (t)ua (t)) (s) = e−asL (f) (s) , y en general esa igualdad no

Transformada de Laplace 209
es cierta. Si tenemos que calcular L (f (t) ua (t)) (s) para cierta función f, lo que se suele hacer esllamar g (t− a) = f (t) , es decir, construyo una nueva función que vale g (t) = f (t + a) ∀ t ≥ 0(¡y cero para t < 0!), y entonces
L (f (t)ua (t)) (s) = L (g (t− a)ua (t)) (s) = e−asL (g) (s)
(como calcular L (g) es otra cuestión, que se resuelve caso por caso).
Ejemplo 242 Para calcular L¡t2u3 (t)
¢(s) , hacemos g (t− 3) = t2, es decir, g (t) = (t + 3)2 ,
y entonces
L¡t2u3 (t)
¢(s) = e−3sL
³(t + 3)2
´(s) = e−3sL
¡¡t2 + 6t + 9
¢¢(s) =
= e−3s£L¡t2¢(s) + L (6t) (s) + L (9) (s)
¤= e−3s
∙2
s3+
6
s2+
9
s
¸.
Corolario 243 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) , entonces
L−1¡e−asφ (s)
¢(t) = f (t− a)ua (t) .
8.4. Derivación e integración de transformadas
Que carajo pongo, ah? Que ya tenemos experiencia derivando e integrando funciones definidaspor medio de integrales impropias, así que en esta sección tendremos resultados similares a losvistos en Fourier?
Proposición 244 (Derivación de la transformada) Si f es continua por tramos en [0,∞)y de OE (α) , entonces L (f) (s) es derivable en (α,∞) y
d
dsL (f) (s) = −L (tf (t)) (s) ∀ s > α.
Demostración. Para poder utilizar el teorema que nos permite derivar dentro de la integral,necesitaríamos que
R∞0 f (t) ∂
∂s
¡e−st
¢dt converja uniformemente en (α,∞) , lo cual en general no
es cierto. Por lo tanto apelaremos al mismo truco que usamos para ver que L (f) (s) es continuaen (α,∞): vamos a ver que L (f) (s) es derivable en todo intervalo de la forma (α1,∞) , conα1 > α, y con eso basta (ejercicio). Para ver esto, notar que si |f (t)| ≤Meαt, entonces¯
f (t)∂
∂s
¡e−st
¢¯=¯tf (t) e−st
¯≤ |t|Meαte−st ≤ |t|Meαte−α1t ∀ t > 0 y ∀ s ≥ α1,
comoR∞0 Mte−(α1−α)tdt converge, el test M de Weierstrass (para integrales) nos dice que la
integralR∞0 f (t) ∂
∂s
¡e−st
¢dt converge absolutamente, y uniformemente en (α1,∞), y entonces

210 Transformada de Laplace
(puesto que ∂∂s
¡e−st
¢es continua en todo su dominio) cierto teorema (de funciones definidas
usando integrales impropias) nos dice que L (f) (s) es derivable en dicho intervalo, y que
d
dsL (f) (s) =
Z ∞
0f (t)
∂
∂s
¡e−st
¢dt =
Z ∞
0(−t) f (t) e−stdt = −L (tf (t)) (s) .
Corolario 245 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) , entonces
L−1¡φ0 (s)
¢(t) = −tf (t) .
Corolario 246 (otro mas) Si f es continua por tramos en [0,∞) y de OE (α) , entoncesL (f) (s) tiene derivadas de todos los ordenes en (α,∞) y ∀ n ∈ N vale que
dn
dsnL (f) (s) = (−1)n L (tnf (t)) (s) ∀ s > α.
Demo: inducción en n usando la propiedad 7. Lo notable de esto es que vale bajo las mis-mas hipótesis para f, es decir, no importa si nuestra función es discontinua o si tiene infinitasderivadas, siempre su transformada de Laplace (tal como las funciones analíticas) tiene infinitasderivadas.
Corolario 247 (deo otro corolario) En las hipótesis de la propiedad anterior, si φ (s) =L (f) (s) , entonces
L−1³φ(n) (s)
´(t) = (−t)n f (t) .
Ejemplo 248 Supongamos que queremos encontrar f y sabemos que L (f) (s) = ln³s+1s−1
´. Co-
mod
dsln
µs + 1
s− 1
¶=
s− 1
s + 1
µ(s− 1)− (s + 1)
(s− 1)2
¶=
1
s + 1− 1
s− 1= L
¡e−t − et
¢(s) ,
y teniendo en cuenta que
L−1µ
d
dsln
µs + 1
s− 1
¶¶(t) = −tf (t) ,
resulta−tf (t) = e−t − et,
es decir, f (t) = 2t sinh (t).

Transformada de Laplace 211
Proposición 249 (Integración de la transformada) Si f es continua por tramos en [0,∞)
y de OE (α) , y lımt→0+f(t)t existe, entonces L (f) (s) es integrable en (α,∞) , yZ ∞
sL (f) (r) dr = L
µf (t)
t
¶∀ s > α.
Demostración. primero notar que el enunciado dice que la integral impropia converge. Ennuestras hipótesis, la función g (t) = f(t)
t es continua por tramos en [0,∞) y de OE (α) (ejercicio),y entonces la propiedad 7 nos dice que
L (f) (s) = L (tg (t)) = − d
dsL (g) (s) ∀ s > α.
Integrando, y teniendo en cuenta que L (g) (s) decrece como 1/s cuando s→∞, quedaZ ∞
sL (f) (r) dr = −
Z ∞
s
d
dsL (g) (r) dr = [L (g) (r)]r=∞r=s
= lımr→∞
L (g) (r)− L (g) (s) = −L (g) (s) = −Lµ
f (t)
t
¶(s) ,
o sea listo.
Corolario 250 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) , entonces
L−1µZ ∞
sφ (r) dr
¶(t) =
f (t)
t.
Ejemplo 251 Si f (t) = sin(ωt)t , entonces
L (f) (s) =
Z ∞
sL (sin (ωt)) (r) dr =
Z ∞
s
ω
r2 + ω2dr =
harctan
³ r
ω
´ir=∞r=s
=π
2− arctan
³ s
ω
´.
8.5. Funciones periódicas
En esta sección vamos a usar funciones periódicas (como cuando vimos series de Fourier),pero teniendo presente que pensamos a las funciones como cero en el intervalo (−∞, 0) . Con estaconvención, una función f (t) será periódica de período T si f (t + T ) = f (t) ∀ t ≥ 0, y nosreferiremos a este hecho como “f es periódica en [0,∞). En general resulta que f es periódicade período T en [0,∞) si y solo si f (t) = g (t)u (t) , con g periódica de período T. Notar que sif es periódica en [0,∞) de período T, y es continua por tramos en [0, T ], entonces f es continuapor tramos en [0,∞) y de OE (0) (ejercicio).

212 Transformada de Laplace
Proposición 252 (Transformada de funciones periódicas) Si f es periódica en [0,∞) deperíodo T, y es continua por tramos en [0, T ], entonces
L (f) (s) =1
1− e−sT
Z T
0f (t) e−stdt ∀ s > 0.
Demostración. Como f es continua por tramos en [0,∞) y de OE (0), sabemos que L (f) (s)está definida ∀ s > 0. Además, si N ∈ N, tenemos que
L (f) (s) =
Z ∞
0f (t) e−stdt = lım
N→∞
Z N
0f (t) e−stdt =
= lımN→∞
ÃZ T
0f (t) e−stdt +
Z 2T
Tf (t) e−stdt + · · ·+
Z NT
(N−1)Tf (t) e−stdt
!.
Haciendo el cambio de variables t = x + T en la segunda integral, t = x + 2T en la tercera, engeneral t = (k − 1)T en la k-ésima, y usando que f es periódica de período T, queda
L (f) (s) = lımN→∞
³R T0 f (t) e−stdt +
R T0 f (x + T ) e−s(x+T )dx + · · ·
· · ·+R T0 f (x + (N − 1)T ) e−s(x+(N−1)T )dt
´= lım
N→∞
µZ T
0f (t) e−stdt + e−sT
Z T
0f (x) e−sxdx + · · ·+ e−s(N−1)T
Z T
0f (x) e−sxdt
¶= lım
N→∞
µZ T
0f (t) e−stdt
¶³1 + e−sT + · · ·+ e−s(N−1)T
´Pero ahí aparece una suma parcial de una serie geométrica de razón e−sT (que es menor que 1pues s y T son positivos), de donde resulta que
L (f) (s) =
µZ T
0f (t) e−stdt
¶lım
N→∞
N−1Xn=0
¡e−sT
¢n=
µZ T
0f (t) e−stdt
¶ ∞Xn=0
¡e−sT
¢n=
µZ T
0f (t) e−stdt
¶1
1− e−sT.
Ejemplo 253 Para calcular la transformada de Laplace de la función de período 2 tal quef (t) = t2 en el intervalo [0, 2), hacemosZ 2
0t2e−stdt =
∙−s2t2e−st + 2ste−st + 2e−st
s3
¸t=2t=0
=2
s3− 2e−2s
2s2 + 2s + 1
s3,
de donde
L (f) (s) =1
1− e−2s
µ2
s3− 2e−2s
2s2 + 2s + 1
s3
¶.

Transformada de Laplace 213
Para utilizar la propiedad anterior se suele usar la función de Heaviside, de la siguiente forma:si tenemos f (t) definida en [0,∞) y queremos la transformada de Laplace de la función g (t)que es periódica de período T y coincide con f en el intervalo [0, T ), entoncesZ T
0g (t) e−stdt =
Z T
0f (t) e−stdt =
Z T
0[1− uT (t)] f (t) e−stdt
=
Z ∞
0[1− uT (t)] f (t) e−stdt = L (f) (s)− L (uT f) (s) ,
y queda
L (g) (s) =L (f) (s)− L (uT f) (s)
1− e−sT,
es decir, en lugar de calcular una integral necesitamos dos transformadas de Laplace.
Ejemplo 254 Para calcular la transformada de Laplace de la función de período 2 tal quef (t) = t2 en el intervalo [0, 2) con este método, primero notar que
L¡t2u2 (t)
¢(s) = L
³(t− 2 + 2)2 u2 (t)
´(s)
= L³(t− 2)2 u2 (t)
´(s) + L (4 (t− 2)u2 (t)) (s) + L (4u2 (t)) (s)
=2
s3e−2s +
4
s2e−2s +
4
se−2s,
y entonces
L (f) (s) =1
1− e−2s
∙2
s3−µ
2
s3e−2s +
4
s2e−2s +
4
se−2s
¶¸.
8.6. Valor inicial y final
Las siguientes dos propiedades nos permiten conocer, en determinadas circunstancias,el valor límite de f en 0 y en ∞, a partir de su transformada de Laplace. Es decir, podemosestudiar el comportamiento de f en los bordes del intervalo (0,∞) sin tener explícitamente a lafunción f . Ambas propiedades son consecuencias inmediatas de la propiedad 2.
Proposición 255 (Teorema del valor inicial) Si f es continua en [0,∞) y de OE (α) , yexiste f 0 en “casi todo punto” es continua por tramos en [0,∞) y de OE (α) , entonces
lıms→∞
sL (f) (s) = lımt→0+
f (t) .
Demostración. notar que la propiedad dice que, bajo las hipótesis pedidas, ambos límitesexisten y son iguales. Las hipótesis pedidas son exactamente las mismas que las de la propiedad2, y están puestas pues dicha propiedad es lo único que necesitamos: puesto que
L¡f 0¢(s) = sL (f) (s)− f
¡0+¢∀ s > α,

214 Transformada de Laplace
y teniendo en cuenta, que según el primer teorema,
lıms→∞
L¡f 0¢(s) = 0,
tomando límite queda demostrada la propiedad.
Ejemplo 256 Si
L (f) (s) =s + 3
2s2 + 2s + 1,
entoncesf¡0+¢
= lıms→∞
ss + 3
2s2 + 2s + 1=
1
2.
Nota 257 En general se aplica la propiedad 10 sin poder verificar las hipótesis, ya que no sedispone de la función y todavía no tenemos ningún resultado que nos de condiciones de suavidadpara f a partir de su transformada de Laplace, L (f). Sin embargo, utilizando el método defracciones parciales, se puede ver que si L (f) (s) = p(s)
q(s) , con p y q polinomios y el grado de p
menor o que el grado de q, entonces f está dentro de las hipótesis (ejercicio).
Proposición 258 (Teorema del valor final) Si f es continua en [0,∞) y de OE, y existef 0 en “casi todo punto” es continua por tramos en [0,∞) y de OE (α) con α < 0, entonces
lıms→0
sL (f) (s) = lımt→∞
f (t) .
Demostración. Notar que acá necesitamos que f 0 sea de OE con exponente negativo. En estascondiciones, el primer teorema nos asegura que L (f 0) (s) está bien definida y es continua en unentorno de s = 0, y entonces (usando la propiedad 2)
L¡f 0¢(0) = lım
s→0L¡f 0¢(s) = lım
s→0
£sL (f) (s)− f
¡0+¢¤
= lıms→0
sL (f) (s)− f¡0+¢.
Finalmente notar que también
L¡f 0¢(0) =
Z ∞
0f (t) dt = lım
t→∞f (t)− f
¡0+¢.
Igualando las expresiones obtenemos el resultado.
8.7. Convolución
En muchas aplicaciones de la transformada de Laplace aparece la necesidad de trabajar conproductos del tipo L (f) (s)L (g) (s) (por ejemplo cuando se busca la función de transferencia,ver mas abajo). Por lo tanto es natural preguntarse que ocurre cuando intentamos hacer la

Transformada de Laplace 215
transformada inversa del producto. Es fácil de verificar que, en general, no es cierto que lainversa del producto sea el producto de las inversas, por ejemplo
L¡t2¢(s) =
2
s3y L
¡t4¢(s) =
24
s5,
y entonces no se verifica que
L−1¡t2t2
¢= L−1
¡t2¢L−1
¡t2¢.
La respuesta está en la siguiente definición:
Definition 259 Definición 260 Para f, g funciones continuas por tramos en [0,∞) se pone
(f ∗ g) (t) =
Z t
0f (r) g (t− r) dr
la convolución de f con g.
La integral que define f ∗ g existe para todo t > 0 por ser la función h (r) = f (r) g (t− r)continua por tramos en [0, t] (ejercicio), por lo tanto f ∗ g es una nueva función definida en[0,∞). Esta nueva operación puede ser pensada como un “producto” definido en el conjunto delas funciones continuas por tramos en [0,∞), de la misma forma que tenemos el producto usualen R. En general, no es fácil ver “que pasa” cuando uno hace la convolución de dos funcionescualquiera, en el sentido de que es difícil predecir como será (que aspecto tendrá) la funciónf ∗ g a partir del aspecto de f y g. Uno de los casos mas entendibles es cuando uno piensa en gcomo una “campana” simétrica de área 1 (ver dibujo): en tal caso, fijado t, el valor de (f ∗ g) (t)será un promedio ponderado de los valores de f en un entorno de t. Es por eso que, en general,(f ∗ g) será una función mas suave que f , pero “parecida” a f (mientras mas concentrada seala campana de g, mas parecida será (f ∗ g) a f, hasta llegar al extremo cuando g es la funciónimpulso o δ de Dirac)
f g*
f
g
00
El producto de convolución tiene las siguientes propiedades: si f, g, h son funciones continuaspor tramos en [0,∞), y a un número real, entonces:
1. f ∗ g = g ∗ f (conmutatividad)
2. (f ∗ g) ∗ h = f ∗ (g ∗ h) (asociatividad)
3. f ∗ (g + h) = (f ∗ g) + (f ∗ h) (distribución respecto a la suma)
4. (af) ∗ g = a (f ∗ g) = f ∗ (ag) .

216 Transformada de Laplace
Estas propiedades se demuestran muy fácilmente, solo la segunda requiere un m. Por supuestoque lo que nos interesa a nosotros es la siguiente:
Proposición 261 (Convolución) Si f y g son continuas por tramos en [0,∞) y de OE (α) ,entonces (f ∗ g) es continua en [0,∞), de OE (α + ε) ∀ ε > 0, y
L (f ∗ g) (s) = L (f) (s)L (g) (s) ∀ s > α.
Demostración. Primero veamos que (f ∗ g) es de OE (α + ε) ∀ ε > 0: por hipótesis sabemosque existe M > 0 tal que |f (t)| ≤Meαt y |g (t)| ≤Meαt ∀ t ≥ 0, y entonces
|(f ∗ g) (t)| =¯Z t
0f (r) g (t− r) dr
¯≤Z t
0|f (r) g (t− r)| dr ≤
Z t
0MeαrMeα(t−r)dr = M2teαt.
puesto que para todo ε > 0 vale que t ≤ 1εe
εt ∀ t ≥ 0, se tiene que
|(f ∗ g) (t)| ≤M2e(α+ε)t.
Eso implica que tenemos definida L (f ∗ g) (s) ∀ s > α + ε cualquiera sea ε > 0, y por lo tanto∀ s > α.
En cuanto a la continuidad el tema es mas complicado, acá va una idea (que se puedeformalizar como ejercicio): tomo t0 ∈ [0,∞) y 0 < h < 1 (la razón de tan extraña elección severá abajo), entonces
(f ∗ g) (t0 + h)− (f ∗ g) (t0) =
Z t0+h
0f (r) g (t0 + h− r) dr −
Z t0
0f (r) g (t0 − r) dr
=
Z t0
0f (r) g (t0 + h− r) dr +
Z t0+h
t0
f (r) g (t0 + h− r) dr −Z t0
0f (r) g (t0 − r) dr
=
Z t0
0f (r) [g (t0 + h− r)− g (t0 − r)] dr +
Z t0+h
t0
f (r) g (t0 + h− r) dr
= I1 (h) + I2 (h) .
Como h < 1 y usando que f es acotada en [t0, t0 + h] y que g es acotada en [0, 1] , se ve fácilmenteque
lımh→0+
I2 (h) = 0.
Para I1 (h) , haciendo el cambio de variables x = t0 − r queda
I1 (h) =
Z t0
0f (r) [g (x + h)− g (x)] dr.
Acá el análisis se complica: para ver que eso tiende a cero necesitamos usar la noción de con-tinuidad absoluta (fuera del alcance de este curso) y que g tiene finitas discontinuidades en elintervalo [0, t0 + 1] , pero debería quedar claro que
lımh→0+
[g (x + h)− g (x)] = 0 ∀ x donde g es continua,

Transformada de Laplace 217
y eso hacer creíble quelımh→0+
I1 (h) = 0.
Argumentos similares muestran que
lımh→0−
I1 (h) = lımh→0−
I2 (h) = 0,
y por lo tanto (f ∗ g) es continua en t0.Por último,
L (f ∗ g) (s) =
Z ∞
0(f ∗ g) (t) e−stdt =
Z ∞
0
µZ t
0f (r) g (t− r) dr
¶e−stdt
=
Z ∞
0
Z t
0f (r) g (t− r) e−stdrdt,
invirtiendo el orden en las integrales (lo cual es lícito, por Fubini, en nuestras hipótesis) queda
L (f ∗ g) (s) =
Z ∞
0
Z ∞
rf (r) g (t− r) e−stdtdr =
Z ∞
0f (r)
Z ∞
rg (t− r) e−stdtdr.
Finalmente, haciendo el cambio de variables x = t− r en la integral de adentro queda
L (f ∗ g) (s) =
Z ∞
0f (r)
Z ∞
0g (x) e−s(x+r)dxdr =
Z ∞
0f (r) e−sr
µZ ∞
0g (x) e−sxdx
¶dr
=
Z ∞
0f (r) e−sr (L (g) (s)) dr = L (g) (s)
µZ ∞
0f (r) e−srdr
¶= L (g) (s)L (f) (s) .
Corolario 262 En las hipótesis de la propiedad anterior, si φ (s) = L (f) (s) y η (s) = L (g) (s) ,entonces
L−1 (φη) (t) = (f ∗ g) (t) .
8.8. Transformada de Laplace Compleja
Vamos a extender nuestra teoría de Transformada de Laplace al campo complejo, es decir,dejando que la variable s de L (f) (s) sea un número complejo, s = x + iy. La definición esexactamente la misma, teniendo en cuenta que (según se dijo al final de la sección 7,1) cuandointegramos una función de variable real e imagen imaginaria, se deben integrar ambas partespor separado. Es decir, si h (t) = h1 (t) + ih2 (t) con h1, h2 reales, entoncesZ ∞
0h (t) dt =
Z ∞
0h1 (t) dt + i
Z ∞
0h2 (t) dt,
cuando estas dos últimas integrales convergen. El resultado que mas vamos a usar al respectoes el siguiente: si h : [0,∞)→ C es tal que
R∞0 |h (t)| dt converge, entonces
R∞0 h (t) dt converge
(es decir, si h es absolutamente integrable, entonces es integrable), resultando¯R∞0 h (t) dt
¯≤R∞
0 |h (t)| dt.

218 Transformada de Laplace
Definición 263 para una función f : [0,∞) → R y para s ∈ C, se define la transformada deLaplace de f como
L (f) (s) =
Z ∞
0f (t) e−stdt
cada ves que la integral impropia converge.
Tenemos el siguiente resultado fundamental:
Teorema 264 Si f es continua por tramos en [0,∞) y de OE (α), con |f (t)| ≤Meαt ∀ t ≥ 0,entonces la transformada de Laplace de f, L (f) (s) , existe en todo el semiplano {s ∈ C : Re (s) >α}, es una función analítica y sus derivadas satisfacen
dnL (f) (s)
dsn= L ((−t)n f (t)) (s) .
Además
|L (f) (s)| ≤ M
Re (s)− α.
Demostración. si s = x + iy, entonces¯f (t) e−st
¯=¯f (t) e−(x+iy)t
¯=¯f (t) e−xte−iyt
¯=¯f (t) e−xt
¯≤¯Meαte−xt
¯∀ t ≥ 0.
Puesto que la integralR∞0 Meαte−xtdt converge ∀ x > α, tenemos que f (t) e−st es absolutamente
integrable en [0,∞) siempre que Re (s) > α, y por lo tanto tenemos definida L (f) (s) en dichosemiplano, y
|L (f) (s)| =
¯Z ∞
0f (t) e−stdt
¯≤Z ∞
0
¯f (t) e−st
¯dt
≤Z ∞
0Me−(x−α)tdt =
"−Me−(x−α)t
x− α
#t=∞t=0
=M
x− α=
M
Re (s)− α.
Veamos ahora que L (f) (s) es analítica, usando Cauchy Riemann:
L (f) (s) =
Z ∞
0f (t) e−stdt =
Z ∞
0f (t) e−xt [cos (yt)− i sin (yt)] dt
=
Z ∞
0f (t) e−xt cos (yt) dt + i
Z ∞
0−f (t) e−xt sin (yt) dt = u (x, y) + iv (x, y) .
Para poder calcular las derivada parciales de estas funciones vamos a usar el mismo truco queen la propiedad 7 (cuando calculamos la derivada como función de variable real): vamos a verque L (f) (s) es derivable en todo semiplano de la forma {s : Re (s) > α1}, con α1 > α, y coneso basta (ejercicio). Para ver esto, notar que para cada y ∈ R fijo tenemos¯
f (t)∂
∂x
¡e−xt cos (yt)
¢¯=
¯−tf (t) e−xt cos (yt)
¯≤ |t|Meαte−xt ≤
≤ |t|Meαte−α1t ∀ t > 0 y ∀ x ≥ α1,

Transformada de Laplace 219
comoR∞0 Mte−(α1−α)tdt converge, el test M de Weierstrass (para integrales) nos dice que la inte-
gralR∞0 f (t) ∂
∂x
¡e−xt cos (yt)
¢dt converge absolutamente, y uniformemente en (α1,∞) (recordar
que estamos pensando y fijo), y entonces (puesto que la función (x, t) → ∂∂x
¡e−xt cos (yt)
¢es
continua en todo su dominio) cierto teorema (de funciones definidas usando integrales impropias)nos dice que u (x, y) es derivable respecto de x en dicho intervalo, y que
∂u
∂x(x, y) =
Z ∞
0f (t)
∂
∂x
¡e−xt cos (yt)
¢dt =
Z ∞
0−tf (t) e−xt cos (yt) dt ∀ (x, y) : x > α1.
Análogamente, si fijamos x en (α,∞) tenemos que¯f (t)
∂u
∂y
¡e−xt cos (yt)
¢¯=¯−tf (t) e−xt sin (yt)
¯≤ |t|Meαte−xt ∀ t > 0 y ∀ y ∈ R,
comoR∞0 Mte−(x−α)tdt converge, el test M de Weierstrass (para integrales) nos dice que la inte-
gralR∞0 f (t) ∂
∂y
¡e−xt cos (yt)
¢dt converge absolutamente, y uniformemente en R (recordar que
estamos pensando x fijo en (α,∞)), y entonces (puesto que la función (y, t)→ ∂∂y
¡e−xt cos (yt)
¢es continua en todo su dominio) cierto teorema (de funciones definidas usando integrales im-propias) nos dice que u (x, y) es derivable respecto de y en R, y que
∂u
∂y(x, y) =
Z ∞
0f (t)
∂
∂y
¡e−xt cos (yt)
¢dt =
Z ∞
0−tf (t) e−xt sin (yt) dt ∀ (x, y) : x > α1.
De manera absolutamente análoga, se ve que
∂v
∂x(x, y) =
Z ∞
0−f (t)
∂
∂x
¡e−xt sin (yt)
¢dt =
Z ∞
0tf (t) e−xt sin (yt) dt ∀ (x, y) : x > α1,
y
∂v
∂y(x, y) =
Z ∞
0−f (t)
∂
∂y
¡e−xt sin (yt)
¢dt =
Z ∞
0−tf (t) e−xt cos (yt) dt ∀ (x, y) : x > α1,
de donde se deduce queux = vy y uy = −vx.
Utilizando las mismas técnicas se ve que, además, todas las derivadas parciales son continuas,por lo cual Cauchy-Riemann dice que L (f) (s) es analítica en el semiplano {s : Re (s) > α1} y
dL (f) (s)
ds= ux (s) + ivx (s) =
Z ∞
0−tf (t) e−xt cos (yt) dt + i
Z ∞
0tf (t) e−xt sin (yt) dt
=
Z ∞
0−tf (t) e−xt [cos (yt)− i sin (yt)] dt
=
Z ∞
0−tf (t) e−xte−iytdt =
Z ∞
0−tf (t) e−stdt = L (−tf (t)) (s) .
La fórmula de la derivada n-ésima se sigue por inducción.
La primer preocupación seria que aparece después de probar semejante teorema, es: ?‘quepasa con las propiedades que tengo probadas en el caso variable real? ?‘siguen valiendo? Y

220 Transformada de Laplace
en caso de que si, ?‘voy a tener que probar todas las propiedades de nuevo? ?‘Es cierto quepara s ∈ C vale que L (t) (s) = 1
s2? La respuesta a todas estas preguntas es bastante sencilla de
hacer, gracias a un corolario de cuando estudiamos ceros de funciones analíticas. Con el siguienteejemplo vamos a ver el procedimiento general a utilizar: sabemos que si f (t) = sin (ωt) ∀ t ≥ 0,entonces L (f) (s) es una función analítica en el semiplano P = {s : Re (s) > 0} (esto se vefácilmente utilizando el teorema anterior. Además la función φ (s) = ω
s2+ω2también es analítica
en dicho semiplano,
L (f) (s) =ω
s2 + ω2∀ s ∈ R, s > 0.
Es decir, L (f) (s) y φ (s) son dos funciones analíticas en P que son iguales en el semieje realpositivo, y entonces (por un corolario de la sección 5.6) deben ser iguales para todo s en P . Esdecir,
L (sin (ωt)) (s) =ω
s2 + ω2∀ s ∈ C, Re (s) > 0.
Podríamos haber calculado nuevamente la integral que define la transformada de sin (ωt) , pero laintención es no repetir ningún calculo ya hecho. De la misma forma, consideremos la propiedad2: Si f es continua en [0,∞) y de OE (α) , y existe f 0 en “casi todo punto” es continua portramos en [0,∞) y de OE (α) , entonces
L¡f 0¢(s) = sL (f) (s)− f (0) ∀ s > α.
Pero en estas hipótesis el teorema anterior dice que tanto L (f 0) (s) como L (f) (s) son analíticasen el semiplano {s : Re (s) > α}, y por lo tanto L (f 0) (s) y sL (f) (s)− f (0) son dos funcionesanalíticas en dicho semiplano, y que son iguales ∀ s ∈ R, s > α, y entonces el citado corolariodice que
L¡f 0¢(s) = sL (f) (s)− f (0) ∀ s ∈ C tal que Re (s) > α.
Con ese procedimiento podemos generalizar a variable complejas todas las propiedades vistas,salvo la propiedad 8, ya que no tenemos definido que significa el símbolo integral
R∞s cuando s
es complejo. La propiedad 10 requiere un cambio menor, y la conclusión resulta
lımRe(s)→∞
sL (f) (s) = f¡0+¢.
8.9. Fórmula de inversión compleja
La extensión de nuestra definición de transformada de Laplace al plano complejo nos permitellegar a una fórmula directa, del tipo de la que teníamos para la transformada de Fourier, parael operador L−1.
Definición 265 para f (z) analítica en un semiplano P = {z : Re (z) > α}, y para a > α, sepone Z a+id
a+icf (z) dz

Transformada de Laplace 221
para la integral de línea de f sobre el segmento {a + iy, y ∈ [c, d]}, yZ a+i∞
a−i∞f (z) dz = lım
c→∞
Z a+ic
a−icf (z) dz
cada vez que dicho límite existe.
Notar que la definición es la de una integral de línea, donde se da de manera específica lacurva sobre la cual se integra. Sin embargo, la notación es consistente con la utilizada cuandoestudiamos independencia del camino, ya que en nuestras hipótesis podríamos cambiar el seg-mento de recta por cualquier otra curva (con el mismo punto inicial y final), siempre que talcurva esté en el semiplano donde f es analítica.
El siguiente razonamiento heurístico nos llevará a la fórmula de inversión: tomemos f :[0,∞) → R Dirichlet en todo intervalo I ⊆ [0,∞) (ojo, no pedimos continua por tramos comosiempre) y de OE (α) , y definamos la siguiente función
g (t) =
½0 si t < 0
e−atf (t) si t ≥ 0,
donde a > α es un número fijo. Puesto que g es absolutamente integrable en R y Dirichlet entodo intervalo I ⊆ R, el teorema de Fourier nos dice que
g (t) =1
2π
Z ∞
−∞g (ω) eiωtdω
al menos ∀ t donde f es continua. Pero
g (ω) =
Z ∞
−∞g (t) e−iωtdt =
Z ∞
0e−atf (t) e−iωtdt =
Z ∞
0f (t) e−(a+iω)tdt = L (f) (a + iω) ,
de donde resulta
g (t) =1
2π
Z ∞
−∞L (f) (a + iω) eiωtdω.
Comparando con la definición de g vemos que
f (t) =eat
2π
Z ∞
−∞L (f) (a + iω) eiωtdω =
1
2π
Z ∞
−∞L (f) (a + iω) e(a+iω)tdω
=1
2πlımc→∞
Z c
−cL (f) (a + iω) e(a+iω)tdω.
Ahora, pensando en la función φ (z) = L (f) (z) ezt, que es analítica en el semiplano {z :Re (z) > α}, y en la curva γ (ω) = a + iω (ω ∈ R) , quedaZ a+ic
a−icφ (z) dz =
Zγφ (z) dz =
Z c
−cφ (γ (ω)) γ0 (ω) dω
=
Z c
−ciL (f) (a + iω) e(a+iω)tdω,

222 Transformada de Laplace
y entonces
f (t) =1
2πi
Z a+i∞
a−i∞L (f) (z) eztdz,
que es la que se llama la fórmula de inversión compleja de la transformada de Laplace. Hemosprobado el siguiente:
Teorema 266 Si f : [0,∞) → R es Dirichlet en todo intervalo I ⊆ [0,∞) y de OE (α) ,entonces para todo a > α vale
f (t) =1
2πi
Z a+i∞
a−i∞L (f) (z) eztdz ∀ t donde f es continua.
Nota 267 (sobre el teorema anterior)
1. Escribiendo el razonamiento hecho con cuidado se puede ver que la integral en cuestiónconverge a f (t) en los t0s donde f es continua, al promedio del salto donde f es discontinua,a 12f (0+) en t = 0, y a cero para todo t < 0.
2. Nuestro teorema tiene la falencia de que sólo nos permite hallar f a partir de su transfor-mada de Laplace, pero no nos permite encontrar una f (t) cuya transformada de Laplacesea una función φ (s) dada. Es decir, podemos aplicar la fórmula a φ (s) sólo si previa-mente sabemos que φ es una transformada de una función f que sea Dirichlet en todoI ⊆ [0,∞) y de orden exponencial. De cualquier manera, la metodología a aplicar, enprincipio, es usar la fórmula de inversión compleja para invertir cualquier función (quepueda ser una transformada), y si quedan dudas, calcular la transformada de Laplace dela función obtenida para verificar.
3. Se puede ver (por ejemplo en Churchill “Operational Mathematics”) que si φ (s) es unafunción analítica en un semiplano {z : Re (z) ≥ α} y existe k > 1 tal que |φ (s)| ≤ 1/
¯sk¯
para todo s en dicho semiplano, entonces existe una función f : [0,∞)→ R continua y deOE (α) tal que φ es su transformada de Laplace, y
f (t) =1
2πi
Z a+i∞
a−i∞φ (z) eztdz ∀ t ∈ [0,∞).
Es decir, en principio sólo bajo estas hipótesis podemos decir que dicha integral convergey define bien una función de t.
Una de las mejores cosas de la fórmula de inversión compleja es que la integral involucradatiene toda la pinta de integral que se puede calcular utilizando residuos, como hicimos paracalcular la trasformada de Fourier. Notar que en las condiciones del teorema anterior, la funciónL (f) (z) ezt tiene todas sus singularidades (aisladas o no) en el semiplano {z : Re (z) ≤ α}. Valeel siguiente:

Transformada de Laplace 223
Teorema 268 Si f : [0,∞) → R es Dirichlet en todo intervalo I ⊆ [0,∞) y de OE (α) , yφ (s) = L (f) (s) es una función analítica en C salvo por singularidades aisladas {z1, ..., zn},todas ellas con parte real menor que a ∈ R, y si existen constantes M y R0 tales que
|sφ (s)| ≤M ∀ s : |s| ≥ R0 y Re (s) ≤ a,
entonces
f (t) =nX
j=1
Res¡φ (z) ezt, zj
¢∀ t ∈ [0,∞).
Demostración. Consideremos la curva cerrada simple CR formada por el segmento de recta[a− iR, a + iR] seguida del semicírculo CR (a) = {z : |z − a| = R y Re (s) ≤ a}, recorrida ensentido antihorario.
C aR( )
a0z1
z2
z3
z4
zn
iR
−iR
Si tomamos R tal que |zj − a| < R ∀ j = 1, ..., n, el teorema de los residuos nos dice que
1
2πi
Z a+iR
a−iRφ (z) eztdz =
nXj=1
Res¡φ (z) ezt, zj
¢− 1
2πi
ZCR(a)
φ (z) eztdz.
Puesto que la fórmula de inversión compleja nos dice que
f (t) = lımR→∞
1
2πi
Z a+iR
a−iRφ (z) eztdz,
basta con ver que en nuestras hipótesis,
lımR→∞
1
2πi
ZCR(a)
φ (z) eztdz = 0.
Parametrizamos CR (a) por γ (θ) = a + Reiθ, θ ∈£π2 ,3π2
¤, entonces puesto que para R ≥ 2 |a|
se tiene que
2¯a + Reiθ
¯≥ 2
³¯Reiθ
¯− |a|
´≥ 2
R
2=¯Reiθ
¯,

224 Transformada de Laplace
entonces¯¯ZCR(a)
φ (z) eztdz
¯¯ =
¯¯Z 3π/2
π/2φ³a + Reiθ
´e(a+Re
iθ)tiReiθdθ
¯¯ ≤
≤Z 3π/2
π/2
¯φ³a + Reiθ
´¯ ¯Reiθ
¯eatetR cos θdz ≤
≤ eatZ 3π/2
π/2
¯φ³a + Reiθ
´¯2¯a + Reiθ
¯etR cos θdθ ≤ eat2M
Z 3π/2
π/2etR cos θdθ.
Para esta última integral, notar que si hacemos el cambio ω = θ + π2 y usando una cuenta ya
hecha (y que t > 0), queda
0 ≤Z 3π/2
π/2etR cos θdθ =
Z π
0etR cos(ω−
π2 )dω =
Z π
0e−tR sin(ω)dω = 2
Z π/2
0e−tR sin(ω)dω,
y como t > 0, entonces −tR sin (ω) ≤ −tR2ω/π ∀ ω ∈£0, π2
¤, y entonces
0 ≤Z 3π/2
π/2etR cos θdθ ≤ 2
Z π/2
0e−tR2ω/πdω = π
1− e−tR
tR≤ π
tR.
Finalmente, podemos decir que para R suficientemente grande, se tiene que¯¯ZCR(a)
φ (z) eztdz
¯¯ ≤ eat2M
π
tR,
lo cual termina la demostración.
Ejemplo 269 supongamos que queremos calcular
L−1µ
1
(s + a)2 + b2
¶.
Como la función φ (s) = 1(s+a)2+b2
tiene dos polos simples en −a± ib, calculamos
Res
µezt
(z + a)2 + b2,−a + ib
¶= lım
z→−a+ib
ezt
(z + a + ib)=
e(−a+ib)t
(−a + ib + a + ib)=
e−ateibt
2ib,
y
Res
µezt
(z + a)2 + b2,−a− ib
¶= lım
z→−a−ib
ezt
(z + a− ib)=
e(−aib)t
(−a− ib + a− ib)=
e−ate−ibt
−2ib,
y entonces
L−1µ
1
(s + a)2 + b2
¶=
e−ateibt
2ib+
e−ate−ibt
−2ib=
e−at¡eibt − e−ibt
¢2ib
=e−at sin (bt)
b.
Transformada de Laplace 225
Nota 270 Es muy importante notar que el teorema anterior no se puede usar para invertirtrastornadas de la forma φ (s) = e−bs P (s)Q(s) con b > 0 y P, Q polinomios, pues no hay forma delograr una cota del tipo
|sφ (s)| ≤M ∀ s : |s| ≥ R0 y Re (s) ≤ a.
De cualquier manera, esto no es una limitación pues se usa para invertir la función P (s) /Q (s) ,y el factor e−bs implica un corrimiento en la variable t.
Nota 271 (fuera de lugar) si f (z) es una función analítica en C salvo por singularidadesaisladas, y f tiene la propiedad de que f (z) = f (z) para todo z en su dominio, entonces ρ essingularidad de f si y solo si ρ lo es (pues f (z) = f (z), y recordar que, en general, si g esanalítica también lo es la función g (z) en el dominio adecuado), y
Res (f, ρ) = Res (f, ρ),
pues si Cw = w + εeit, t ∈ [0, 2π] , entonces para ε suficientemente chico se tiene que
Res (f, ρ) =1
2πi
ZCρ
f (z) dz =1
2πi
Z 2π
0f¡ρ + εeit
¢εieitdz =
=1
2πi
Z 2π
0f³ρ + εe−it
´εieitdt =
1
2πi
Z 2π
0f (ρ + εe−it)ε (−i) e−itdt =
=1
2πi
Z 2π
0f (ρ + εe−it) ε (−i) e−itdt =
−1
2πi
ZCρ
f (z) dz =
=1
2πi
ZCρ
f (z) dz = Res (f, ρ).
El teorema anterior es especialmente adecuado para caracterizar el comportamiento de lasfunciones cuya transformada de Laplace es de la forma φ (s) = P (s)
Q(s) , donde P, Q son polinomioscon coeficientes reales y el grado de Q es mayor que el grado de P y sin raíces comunes. Notarque en estas condiciones, φ está dentro de las hipótesis del teorema, y las singularidades deφ (z) ezt son exactamente las raíces de Q. Necesitamos calcular
Res¡φ (z) ezt, ρ
¢para toda raíz ρ de Q. Si ρ es una raíz de Q de multiplicidad N, entonces ρ es un polo de φ (z) ezt
de orden N. Entonces se puede poner Q (z) = Q (z) (z − ρ)N donde Q es un polinomio sin raícescomunes con P, y Q (ρ) 6= 0 (notar que no sabemos que Q (z) sea un polinomio con coeficientesreales, este será el caso únicamente si ρ es una raíz real).
Res¡φ (z) ezt, ρ
¢= lım
z→ρ
1
(N − 1)!
dN−1
dzN−1
∙(z − ρ)N
P (z)
Q (z)ezt¸
= lımz→ρ
1
(N − 1)!
dN−1
dzN−1
∙P (z)
Q (z)ezt¸
,

226 Transformada de Laplace
usando la regla de derivación de Leibnitz (o como se llame la generalización de la derivada delproducto) queda
dN−1
dzN−1
∙P (z)
Q (z)ezt¸
=N−1Xj=0
µN − 1
j
¶ ∙dN−1−j
dzN−1−jP (z)
Q (z)
¸ ∙dj
dzjezt¸
=N−1Xj=0
µN − 1
j
¶µP
Q
¶(N−1−j)(z) tjezt
y entonces
Res¡φ (z) ezt, ρ
¢=
1
(N − 1)!
dN−1
dzN−1
∙P (z)
Q (z)ezt¸z=ρ
=1
(N − 1)!
N−1Xj=0
µN − 1
j
¶µP
Q
¶(N−1−j)(ρ) tjeρt
=eρt
(N − 1)!
N−1Xj=0
µN − 1
j
¶µP
Q
¶(N−1−j)(ρ) tj ,
con³PQ
´(ρ) 6= 0 (es decir, aparece en la fórmula efectivamente un factor tN−1, cuando j = N−1
en la sumatoria). Es decir,Res
¡φ (z) ezt, ρ
¢= eρtp (t) ,
donde p (t) es un polinomio de grado N − 1 (y coeficientes no necesariamente reales). Y ahoradistinguimos dos casos:
Caso 1 Si ρ es real, entonces Q (z) es un polinomio con coeficientes reales, y por lo tanto P/Q(y la derivada de cualquier orden de ella) es una función racional con coeficientes reales.Consecuentemente p (t) es un polinomio con coeficientes reales, y
eρtp (t)
es una función de variable e imagen real.
Caso 2 Si ρ = a + ib con b 6= 0, como Q tiene coeficientes reales, resulta que ρ = a − ib tambiénes raíz de Q. Además, puesto que P también tiene coeficientes reales, se tiene que
φ (z) ezt =P (z)
Q (z)ezt =
P (z)
Q (z)ezt =
µP (z)
Q (z)ezt¶
,
con lo cual la nota anterior nos dice que
Res¡φ (z) ezt, ρ
¢= Res (φ (z) ezt, ρ),
y entonces,Res
¡φ (z) ezt, ρ
¢+ Res
¡φ (z) ezt, ρ
¢= 2Re
£eρtp (t)
¤.
Si ponemos p (t) = p1 (t) + ip2 (t) con p1 y p2 polinomios reales, al menos uno de ellos esde grado N − 1 y
Res¡φ (z) ezt, ρ
¢+ Res
¡φ (z) ezt, ρ
¢= 2Re
£eat (cos bt + i sin bt) (p1 (t) + ip2 (t))
¤= 2eat (p1 (t) cos bt− p2 (t) sin bt) .

Transformada de Laplace 227
En síntesis: si φ (s) = P (s)Q(s) , donde P, Q son polinomios con coeficientes reales y el grado de
Q es mayor que el grado de P y sin raíces comunes, entonces al usar la fórmula
L−1 (φ) (t) =X
ρ:Q(ρ)=0
Res
µP (z)
Q (z)ezt, ρ
¶
una raíz ρ = a + ib de Q de multiplicidad N aporta en la misma términos que son de la forma
eatN−1Xj=0
£cjt
j cos (bt) + djtj sin (bt)
¤, cj , dj ∈ R, cN−1 6= 0 y/o dN−1 6= 0,
de donde se puede concluir el siguiente:
Example 272 Teorema 273 si φ (s) = P (s)Q(s) , donde P, Q son polinomios con coeficientes
reales y el grado de Q es mayor que el grado de P y sin raíces comunes, entonces L−1 (φ) (t) esacotada si y solo si Q no tiene raíces con parte real positiva, y todas sus raíces con parte realnula son de multiplicidad uno. Además
lımt→∞
L−1 (φ) (t) = 0
si y solo si Q todas las raíces de Q tienen parte real negativa.
8.10. Estabilidad
Una de las aplicaciones mas importantes del teorema anterior el la que se da en Teoría deControl para determinar la estabilidad o no de un sistema físico. Un sistema físico en general secaracteriza por aceptar entradas (fuerza, voltaje, presión, corriente, etc) y producir una salidaen respuesta a esa entrada. En general caracterizamos las entradas y las salidas con funcionesreales f (t) , t ≥ 0 (pensando que la variable t representa al tiempo).
Definición 274 Un sistema es lineal si la respuesta se comporta de manera lineal con respectoa la entrada, es decir, si y1 es la respuesta a la entrada x1 y y2 a la entrada x2, entonces larespuesta a la entrada ax1 + bx2 será ay1 + by2. Un sistema es invariante en el tiempo si elefecto de correr en el tiempo la entrada produce el mismo corrimiento en la salida, es decir,si y1 (t) es la respuesta a la entrada x1 (t) entonces la respuesta a la entrada y1 (t− t0) seráx1 (t− t0). La función de transferencia G (s) de un sistema lineal e invariante en el tiempo sedefine como la relación entre las transformadas de Laplace de la salida y la entrada, suponiendoque las condiciones iniciales son todas cero. Es decir,
G (s) =L (xo) (s)
L (xi) (s).

228 Transformada de Laplace
Se puede ver que para tales sistemas (lineales invariantes en el tiempo) dicha definición esbuena, es decir, no depende de la entrada que elijamos para calcularla. La función de transferenciacaracteriza por completo al sistema físico. Para representar un sistema se utilizan bloques queidentifican la entrada y la salida, y la función de transferencia que lo caracteriza, como elsiguiente:
Gxi xo
Para fijar ideas veamos el siguiente ejemplo:
Ejemplo 275 si tenemos un sistema masa-resorte forzado y amortiguado como muestra el dibu-jo, entonces la ecuación que describe el sistema es
½mx00 + vx0 + kx = f (t)x (0) = x0, y (0) = y0
,
x
m
0
f t( )
v
k
donde m es la masa, v el coeficiente de rozamiento, k la constante elástica del resorte, f lafuerza aplicada al resorte (la entrada al sistema), y x la posición de la masa en cada instantede tiempo t ≥ 0 (la respuesta del sistema a la entrada, o sea la salida). Aquí x0 e y0 son lascondiciones iniciales (posición y velocidad respectivamente). Tomando transformada de Laplacequeda
ms2L (x) (s)− sx0 − y0 + vsL (x) (s)− x0 + kL (x) (s) = L (f) (s) .
Asumiendo que las condiciones iniciales son nulas (x0 = y0 = 0) y despejando obtenemos
L (x) (s)
L (f) (s)=
1
ms2 + vs + k,
es decir, la función
G (s) =1
ms2 + vs + k
es la función de transferencia de tal sistema. Notar que en la función aparecen todos los parámet-ros del sistema, y que no depende ni de la entrada ni de la salida.
Para el estudio de sistemas lineales invariantes en el tiempo se utiliza lo que se llama “álgebrade bloques”, que permite obtener la función de trasnferencia de un sistema que consiste devarios subsistemas interconectados de diferente manera, y de los cuales conocemos su funciónde transferencia. Veamos algunos ejemplos:
Ejemplos:

Transformada de Laplace 229
1. Si tenemos dos sistemas interconectados como sugiere el dibujo
G Hxi xoxp
(la entrada al segundo sistema es la salida del primero), con funciones de transferencia Hy G respectivamente, entonces
G (s) =L (xp) (s)
L (xi) (s)y H (s) =
L (xo) (s)
L (xp) (s),
de dondeL (xo) (s)
L (xi) (s)=L (xp) (s)
L (xi) (s)· L (xo) (s)
L (xp) (s)= G (s)H (s) ,
es decir, la función de transferencia es el producto de las funciones de transferencias dec/u de los sistemas.
2. Si tenemos dos sistemas interconectados como sugiere el dibujo
G
H
xi xo
xg
xh
(hay una entrada a dos subsistemas y la salida del sistema es la suma de ambas salidas),con funciones de transferencia H y G respectivamente, entonces
G (s) =L (xh) (s)
L (xi) (s)y H (s) =
L (xg) (s)
L (xi) (s),
puesto que xo = xh + xg, resulta L (xo) = L (xh) + L (xg) , y entonces
L (xo) (s)
L (xi) (s)=L (xh) (s) + L (xg) (s)
L (xi) (s)= G (s) + H (s) ,
es decir, la función de transferencia es la suma de las funciones de transferencias de c/ude los sistemas.
3. Si tenemos dos sistemas interconectados como sugiere el dibujo
G
H
xi xfxi xo
xoxf
(hay una entrada a un sistema, la salida del mismo entra a otro, que produce una salidaque realimenta al primero), entonces
G (s) =L (xo) (s)
L (xi) (s)− L (xf ) (s)y H (s) =
L (xf ) (s)
L (xo) (s),
230 Transformada de Laplace
entonces, despejando L (xf ) en ambas ecuaciones obtenemos
L (xi) (s)− 1
G (s)L (xo) (s) = L (xf ) (s) y H (s)L (xo) (s) = L (xf ) (s) ,
igualando y despejando llegamos a
L (xo) (s)
L (xi) (s)=
L (xo) (s)
H (s)L (xo) (s) + 1G(s)L (xo) (s)
=G (s)
G (s)H (s) + 1,
que es la función de transferencia de un sistema a lazo cerrado.
Definición: Un sistema se dice estable si la respuesta a toda entrada acotada es acotada, yasintoticamente estable si la respuesta a toda entrada acotada tiende a cero cuando el tiempotiene a infinito.
El siguiente es un razonamiento ampliamente aplicado y aceptado en Teoría de Control. Alfinal de la sección anterior vimos que la ubicación de los polos de la transformada de Laplace deuna función está relacionada con que la función sea acotada o no. Si un sistema tiene funciónde transferencia G (s) , entonces la relación entre la transformada de Laplace de la entrada y lasalida es
L (xo) (s) = L (xi) (s)G (s)
Si la función de entrada xi (t) es acotada, entonces su transformada de Laplace es una funciónanalítica en el semiplano {z : Re (z) > 0}, y por lo tanto no tiene polos con parte real positiva.Para que xo (t) sea acotada necesitamos que su transformada de Laplace tampoco tenga poloscon parte real positiva, y la ecuación anterior nos dice que los polos de L (xo) (s) son exactamentelos polos de L (xi) (s)G (s) , y por lo tanto los polos con parte real positiva de L (xo) (s) sonexactamente los polos con parte real positiva de G (s) . Los polos con parte real nula son unproblema ya que si G (s) y L (xi) (s) tienen ambas un polo de orden 1 en ib, entonces L (xo) (s)tiene un polo de orden 2 en ib, y por lo tanto xo no es acotada. Esto nos lleva al siguiente criteriogeneral:
Criterio: un sistema lineal invariante en el tiempo es estable si y solo si todos los polos desu función transferencia tienen parte real negativa.
El único problema del razonamiento anterior es que, debido a la naturaleza del último teoremade la sección anterior, se aplica solo a sistemas cuya función de transferencia sea una funciónracional, y para entradas cuya transformada de Laplace es una función racional. Si sabemosque la función de transferencia es una función racional, de todos modos no podemos asegurarque la respuesta a toda entrada acotada es acotada, pero si que la respuesta a toda entradaacotada cuya transformada de Laplace es racional es acotada. Esto no es una limitación , ya queel criterio se usa en control y ya, pero yo no encontré ningún libro que lo tenga y no me sale. ¿Ycomo determinamos si tengo polos con parte real positiva? Pues bien, los polos son los ceros deun polinomio, y ya vimos como encontrarlos cuando estudiamos ceros de funciones analíticas.