tema 2_principio de los trabajos virtuales
DESCRIPTION
documento mecanicaTRANSCRIPT

1
Departamento de Ingeniería Mecánica y de Materiales
Área de Ingeniería Mecánica
http://www.upv.es/ingmec
Centro de Investigación de Tecnología de Vehículos
http://www.upv.es/citv
TEMA 2. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 2
Objetivos
Concepto de Desplazamiento Virtual
Concepto de Trabajo Virtual
Principio de los Trabajos Virtuales ESTÁTICA
Extensión del PTV a problemas dinámicos Principio de D’Alembert
Formalizar el Problema Dinámico Inverso
Comparar la resolución mediante Newton-Euler y el PTV
o Coordenadas independientes
o Coordenadas dependientes

2
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 3
Índice
1. INTRODUCCIÓN
2. DESPLAMIENTOS VIRTUALES
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
3.1 Trabajo Virtual
3.2 El Principio de los Trabajos Virtuales
3.3 El Trabajo Virtual de las Acciones Internas
3.4 El Principio de los Trabajos Virtuales mediante coordenadas generalizadas independientes
3.5 El Principio de los Trabajos Virtuales mediante coordenadas generalizadas dependientes
3.6 Fuerzas conservativas
4. EL PRINCIPIO DE D’ALEMBERT
5. EL PROBLEMA DINÁMICO INVERSO
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 4
1. Introducción
Diferencias entre las formulaciones de Newton-Euler y Trabajos Virtuales
Newton-Euler
Ecuaciones vectoriales
Aparecen acciones internas
Son ecuaciones del movimiento
2D 3 ec. por DSL
3D 6 ec. por DSL
Estática
Caso particular
Trabajos Virtuales
Ecuaciones escalares
Aparecen solo acciones externas
Caracterizan el problema Estático
2D/3D tantas ecuaciones como GDL
Dinámica
Principio de D’Alembert
1. INTRODUCCIÓN

3
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 5
Aquellos que relacionan fuerzas con
desplazamientos Muelles
Aquellos que relacionan fuerzas con
velocidades Amortiguadores viscosos
Aquellos que relacionan fuerzas con
aceleraciones Masas discretas
1. Introducción
Elementos constitutivos de un sistema mecánico:
12 xxkFe
1. INTRODUCCIÓN
xmFm
12 xxcFv
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 6
2. Desplazamientos Virtuales
Características de los desplazamientos virtuales
Es una magnitud infinitesimal, un diferencial
Los desplazamientos virtuales se suponen independientes del tiempo
Deben de ser consistentes con las restricciones geométricas que presente el
sistema mecánico considerado
2. DESPLAZAMIENTOS VIRTUALES
t,q,,q,qrrNOPOP
21
N
i
i
i
OP
OPq
q
rr
1
Variación de las coordenadas generalizadas

4
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 7
2. Desplazamientos Virtuales
Interpretación de los desplazamientos virtuales
El movimiento de un sólido no restringido dependen de las fuerzas actuantes
2. DESPLAZAMIENTOS VIRTUALES
dtt
rdq
q
rrd
dtt
rdq
q
rrd
OP
N
i
)(
i
i
OP)(
OP
OP
N
i
)(
i
i
OP)(
OP
1
22
1
11
N
i
)(
i
)(
i
i
OP)(
OP
)(
OPdqdq
q
rrdrd
1
1212
Dos trayectorias admisibles
N
i
i
i
OP)(
OP
)(
OPq
q
rrdrd
1
12
Aplicación de distintas fuerzas
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 8
2. Desplazamientos Virtuales
Obtención de los desplazamientos virtuales
2. DESPLAZAMIENTOS VIRTUALES
Dos procedimientos
Geométrico
Cinemático
N
i
i
i
OP
OPq
q
rr
1
Geométrico
jsenLicosLrOP
jcosLisenLjcosLisenL
d
jsenLicosLd
d
rdrr OPOP
OP

5
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 9
2. Desplazamientos Virtuales
Obtención de los desplazamientos virtuales
2. DESPLAZAMIENTOS VIRTUALES
Dos procedimientos
Geométrico
Cinemático
Cinemático
t
rq
q
r
dt
rdv OP
N
i
i
i
OPOP
P
1
dtt
rdq
q
r
t
rdt
dt
dq
q
rdt
t
rdtq
q
rdtvrd
OP
N
i
i
i
OP
OP
N
i
i
i
OPOP
N
i
i
i
OP
POP
1
11
N
i
i
i
OP
OPq
q
rr
1
Sistemas mecánicos
independientes del tiempo
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 10
2. Desplazamientos Virtuales
Carácter virtual de los desplazamientos virtuales
2. DESPLAZAMIENTOS VIRTUALES
Compatibles con las restricciones cinemáticas
No son necesariamente independientes
Esfera rodando y deslizando
sobre una superficie
Desplazamientos virtuales en mecanismos

6
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 11
3.1 El Trabajo Virtual
Trabajo Virtual
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Propiedades del Trabajo Virtual:
El trabajo virtual es un diferencial
Las fuerzas y pares serán constantes durante el desplazamiento
virtual
Se considerarán únicamente sistemas mecánicos en los que el
trabajo neto efectuado por las fuerzas de restricción será nulo
.Tr.FW
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 12
3.2 El Principio de los Trabajos Virtuales
Sistema compuesto por n partículas en equilibrio estático
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Si el conjunto está en equilibrio, cada una
de las partículas que lo forma también lo
estará
n,,,i,Ri
210
0iOPii
rRW 0
1
n
i
OPi irRW
Desplazamiento virtual
Presencia de restricciones mecánicas:
iiifFR
7
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 13
3.2 El Principio de los Trabajos Virtuales
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
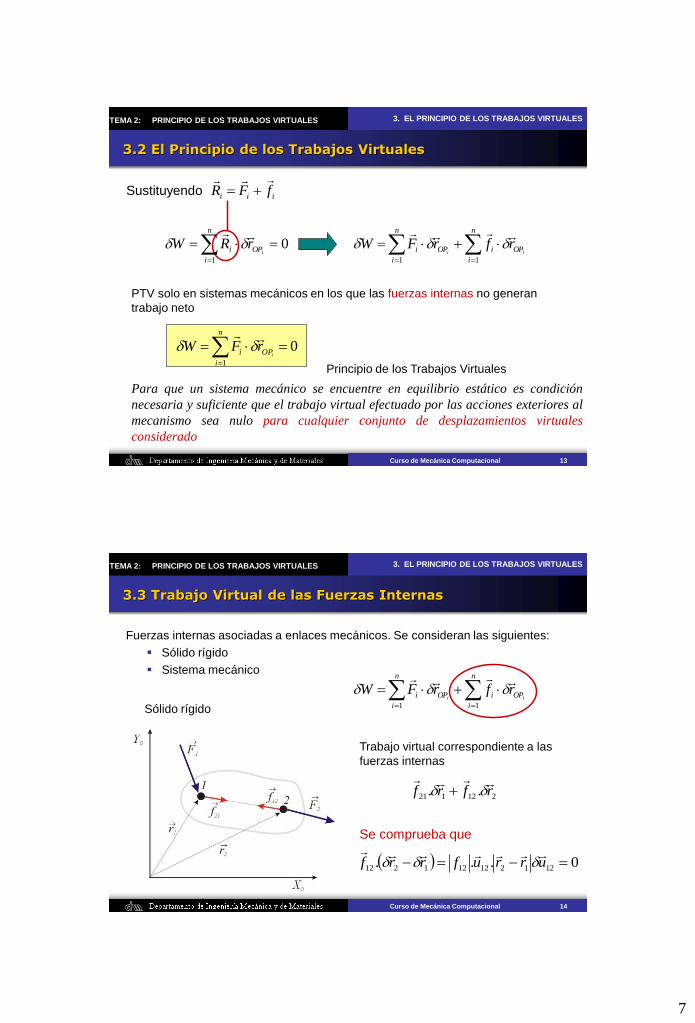
Sustituyendo
01
n
i
OPi irRW
PTV solo en sistemas mecánicos en los que las fuerzas internas no generan
trabajo neto
n
i
OPi
n
i
OPi iirfrFW
11
iiifFR
01
n
i
OPi irFW
Para que un sistema mecánico se encuentre en equilibrio estático es condición
necesaria y suficiente que el trabajo virtual efectuado por las acciones exteriores al
mecanismo sea nulo para cualquier conjunto de desplazamientos virtuales
considerado
Principio de los Trabajos Virtuales
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 14
3.3 Trabajo Virtual de las Fuerzas Internas
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Fuerzas internas asociadas a enlaces mecánicos. Se consideran las siguientes:
Sólido rígido
Sistema mecánico
Sólido rígido
212121r.fr.f
Trabajo virtual correspondiente a las
fuerzas internas
Se comprueba que
0121212121212 urr.u.frr.f
n
i
OPi
n
i
OPi iirfrFW
11

8
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 15
3.3 Trabajo Virtual de las Fuerzas Internas
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Par de Revolución
Sistema mecánico. Se considera el caso plano y los pares cinemáticos más
habituales
Par Prismático
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 16
3.3 Trabajo Virtual de las Fuerzas Internas
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Par de Rodadura sin deslizamiento
Sistema mecánico. Se considera el caso plano y los pares cinemáticos más
habituales
Posible extensión a 3D y todo tipo
de pares
Problemas con las fuerzas
disipativas (Rozamiento)

9
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 17
3.4 El PTV mediante coordenadas generalizadas independientes
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Empleo de coordenadas generalizadas
Coordenadas generalizadas independientes
Coordenadas generalizadas dependientes
Problemas a la hora de aplicar la expresión:
Puede ser complicada la obtención de los desplazamientos
virtuales
¿Cómo se implementa el … para todo desplazamiento virtual?
011
v
j
jj
u
i
OPiTrFW
i
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 18
3.4 El PTV mediante coordenadas generalizadas independientes
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Sustituyendo en la expresión del trabajo virtual
Sea un sistema mecánico modelizado mediante un conjunto
de coordenadas independientes
Nq,,q,q
21
N
j
j
j
OP
OPq
q
rr
1
Desplazamiento
virtual generalizado
j
N
j
jj
N
j
n
i j
OP
i
n
i
N
j
j
j
OP
i
n
i
OPiqQq
q
rFq
q
rFrFW ii
i
11 11 11
Fuerza generalizadaFormulación del PTV
001
jj
N
j
jqqQW N,,,j,Q
j210
10
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 19
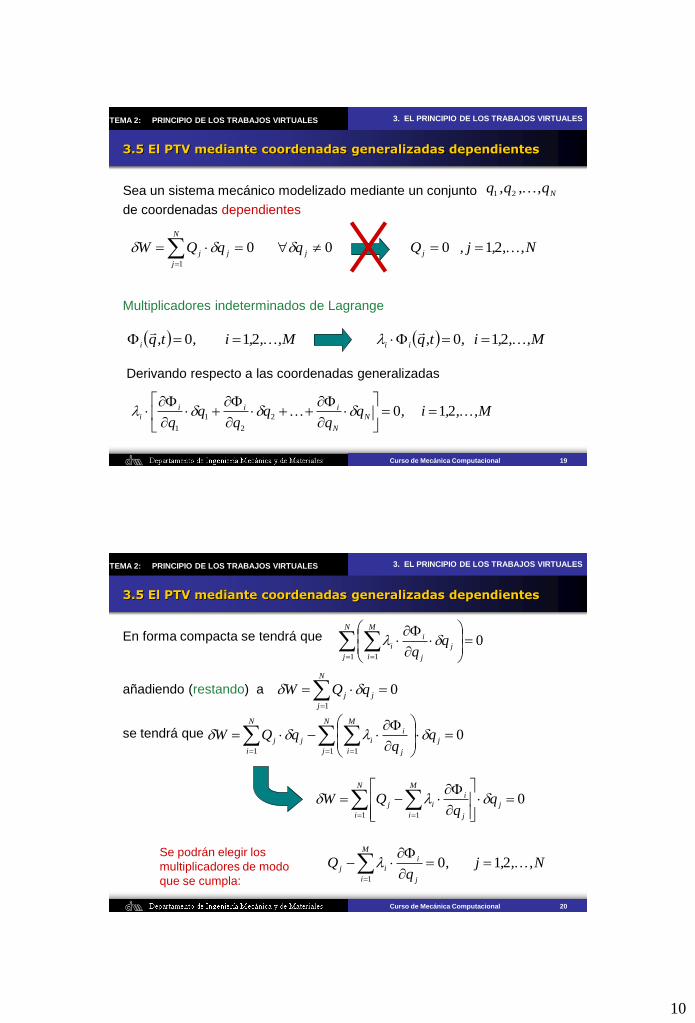
3.5 El PTV mediante coordenadas generalizadas dependientes
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Multiplicadores indeterminados de Lagrange
Sea un sistema mecánico modelizado mediante un conjunto
de coordenadas dependientes
Nq,,q,q
21
001
jj
N
j
jqqQW N,,,j,Q
j210
M,,,i,t,qi
210 M,,,i,t,qii
210
M,,,i,qq
N
N
iii
i 210
2
2
1
1
Derivando respecto a las coordenadas generalizadas
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 20
3.5 El PTV mediante coordenadas generalizadas dependientes
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
En forma compacta se tendrá que
añadiendo (restando) a
01 1
N
j
M
i
j
j
i
iq
q
01
j
N
j
jqQW
se tendrá que 01 11
j
N
j
M
i j
i
i
N
i
jjq
qqQW
01 1
N
i
j
M
i j
i
ijq
qQW
N,,,j,q
QM
i j
i
ij210
1
Se podrán elegir los
multiplicadores de modo
que se cumpla:

11
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 21
3.5 El PTV mediante coordenadas generalizadas dependientes
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
Aspectos destacados en la expresión
Interpretación del término
Jacobiano de las restricciones
Número de incógnitas
Ecuaciones adicionales (depende del problema)
N,,,j,q
QM
i j
i
ij210
1
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 22
Fuerza conservativa: El trabajo que hace sobre una partícula que se
mueve entre dos puntos es independiente de la trayectoria seguida
Se puede obtener a partir de una función potencial tal que
Cada fuerza conservativa tiene su propia función potencial
3.6 Fuerzas Conservativas
3. EL PRINCIPIO DE LOS TRABAJOS VIRTUALES
2121VVW
t,q,,q,qVVN
21
N
i
i
i
NNN
VV
t,qq,,qq,qqVt,q,,q,qVW
1
221121
i
con
iq
VQ

12
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 23
4. El Principio de D’Alembert
4. EL PRINCIPIO DE D’ALEMBERT
A partir de las ecuaciones de Newton se tendrá que:
GGG
G
IIM
amF
0
0
GGG
G
IIM
amF
Fuerzas y pares de inercia
Son ficticias
Sirven para imponer el equilibrio
dinámico
Útiles para Newton
Esenciales para el PTV
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 24
5. El PROBLEMA DINÁMICO INVERSO
5. EL PROBLEMA DINÁMICO INVERSO
Principales tipos de problemas dinámicos:
Problema Dinámico Inverso. Problema de Análisis de Fuerzas.
Problema Cinetoestático
Problema Dinámico Directo. Problema de Análisis del Movimiento
Problema Dinámico Inverso. Como abordarlo:
Formulación de Newton-Euler Fuerzas externas e internas
Principio de los Trabajos Virtuales Fuerzas externas
13
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 25
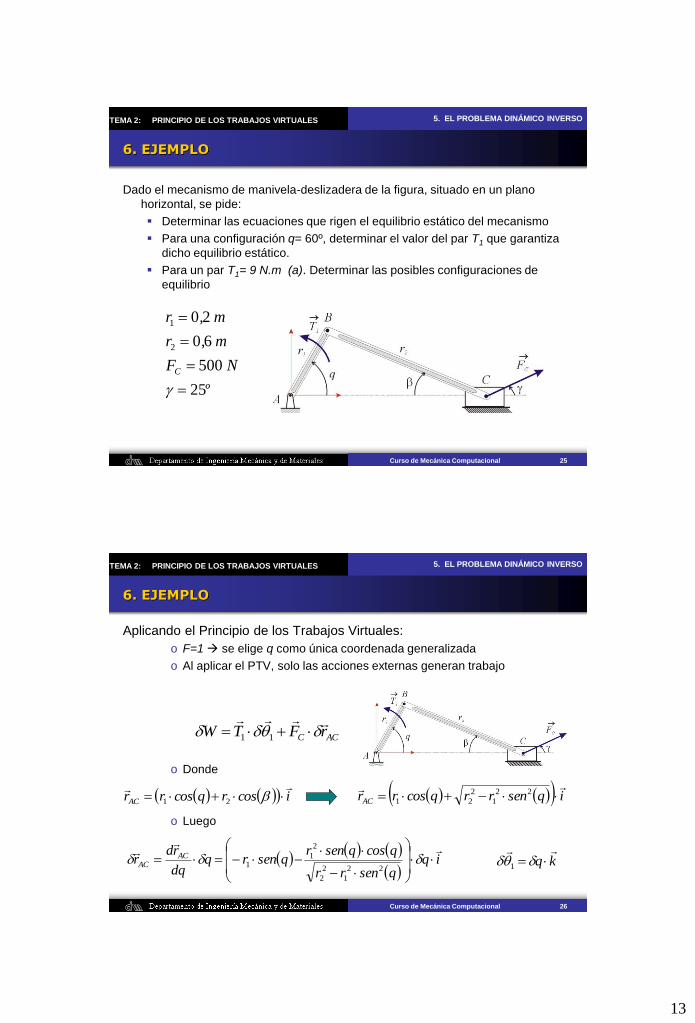
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
Dado el mecanismo de manivela-deslizadera de la figura, situado en un plano
horizontal, se pide:
Determinar las ecuaciones que rigen el equilibrio estático del mecanismo
Para una configuración q= 60º, determinar el valor del par T1 que garantiza
dicho equilibrio estático.
Para un par T1= 9 N.m (a). Determinar las posibles configuraciones de
equilibrio
º
NF
m,r
m,r
C
25
500
60
20
2
1
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 26
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
Aplicando el Principio de los Trabajos Virtuales:
o F=1 se elige q como única coordenada generalizada
o Al aplicar el PTV, solo las acciones externas generan trabajo
o Donde
o Luego
icosrqcosrrAC
21
ACC rFTW 11
iqsenrrqcosrrAC
22
1
2
21
iq
qsenrr
qcosqsenrqsenrq
dq
rdr AC
AC
22
1
2
2
2
11 kq
1
14
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 27
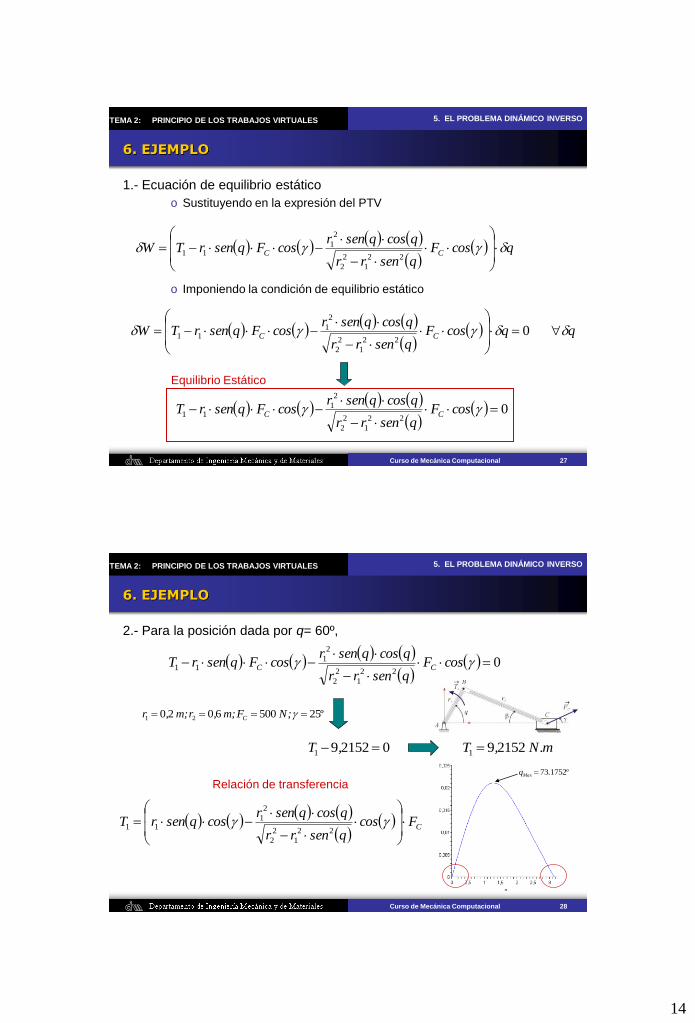
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
1.- Ecuación de equilibrio estático
o Sustituyendo en la expresión del PTV
o Imponiendo la condición de equilibrio estático
qcosF
qsenrr
qcosqsenrcosFqsenrTW CC
22
1
2
2
2
111
qqcosF
qsenrr
qcosqsenrcosFqsenrTW CC
0
22
1
2
2
2
111
0
22
1
2
2
2
111
cosF
qsenrr
qcosqsenrcosFqsenrT CC
Equilibrio Estático
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 28
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
2.- Para la posición dada por q= 60º,
0
22
1
2
2
2
111
cosF
qsenrr
qcosqsenrcosFqsenrT CC
0215291 ,T
º;NF;m,r;m,r C 255006020 21
m.N,T 215291
CFcos
qsenrr
qcosqsenrcosqsenrT
22
1
2
2
2
111
Relación de transferenciaº.qMax 175273

15
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 29
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
Determinación de desplazamientos virtuales a partir de relaciones
cinemáticas
o Suponiendo
o Se tendrá que
o Siendo
o Operando
kq
1
BCABC rrv
21
jsenicosrr
jqseniqcosrr
BC
AB
2
1
qcos
senqcosrqsenrv;q
cosr
qcosrC
1
1
2
12
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 30
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
o No hace falta la relación explícita entre y q
o Luego
o Por lo tanto
o Sustituyendo y operando en la expresión del PTV se llega al mismo
valor del par a aplicar para mantener el Equilibrio Estático
q,vC 02030
senrqsenr 21º,778716
dt
dq,
dt
dxC 02030 q,xC 02030
iq,rAC
02030

16
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 31
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
3.- Posición/es de equilibrio para T1= 9 N.m
o La ecuación de equilibrio quedará como sigue
o Las soluciones reales son
0
9
03639063199
2
qsen
qcosqsen,qsen,
º,rad,
º,rad,q
098491601
42515698480
Para estas configuraciones se alcanza el Equilibrio Estático, cuando
el mecanismo está sometido a la fuerza y par indicados
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 32
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
4.- Resolución mediante ecuaciones de Newton
o Diagramas de Sólido Libre
o De la barra 3
0
0
23
03
cosFf
t
C
x cosFf C
x 23 cosFff C
xx 2332
17
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 33
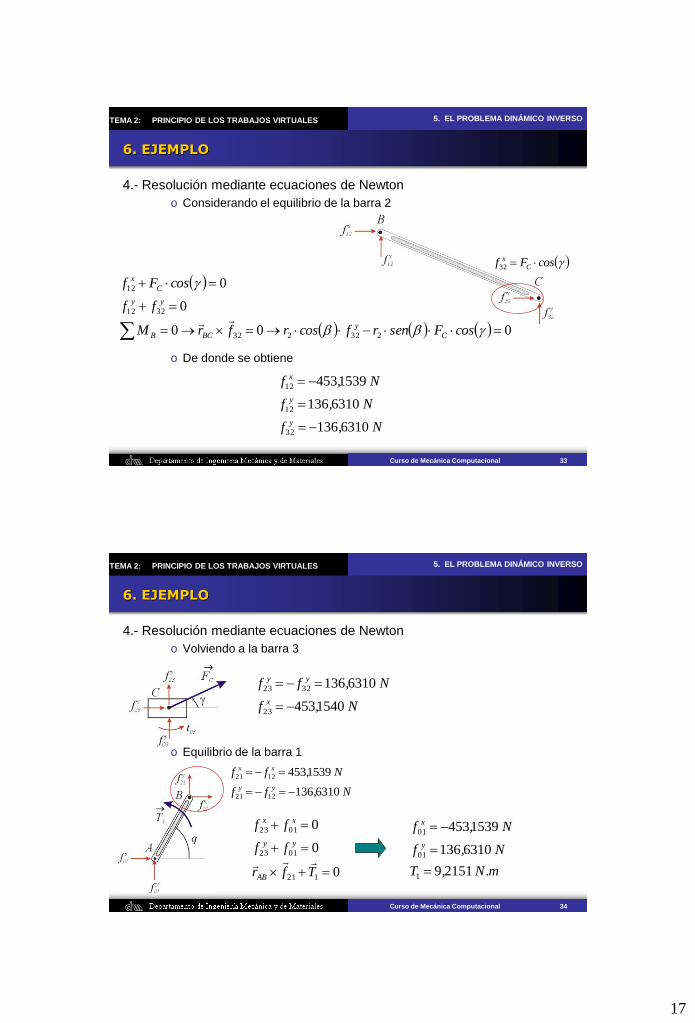
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
4.- Resolución mediante ecuaciones de Newton
o Considerando el equilibrio de la barra 2
o De donde se obtiene
000
0
0
232232
3212
12
cosFsenrfcosrfrM
ff
cosFf
C
y
BCB
yy
C
x
cosFf C
x 32
N,f
N,f
N,f
y
y
x
6310136
6310136
1539453
32
12
12
TEMA 2: PRINCIPIO DE LOS TRABAJOS VIRTUALES
Curso de Mecánica Computacional 34
6. EJEMPLO
5. EL PROBLEMA DINÁMICO INVERSO
4.- Resolución mediante ecuaciones de Newton
o Volviendo a la barra 3
o Equilibrio de la barra 1
N,f
N,ff
x
yy
1540453
6310136
23
3223
N,ff
N,ff
yy
xx
6310136
1539453
1221
1221
0
0
0
121
0123
0123
Tfr
ff
ff
AB
yy
xx
m.N,T
N,f
N,f
y
x
21519
6310136
1539453
1
01
01