robótica de la construcción uc3m
TRANSCRIPT
INDOOR HEADING
NAVIGATION SYSTEM
Víctor González PachecoVíctor González PachecoRobótica en la ConstrucciónRobótica en la Construcción
MRyA – UC3MMRyA – UC3MFebrero 2009Febrero 2009

Índice
IntroducciónIntroducciónSistema iGPSSistema iGPS
FuncionamientoFuncionamientoVentajas e inconvenientesVentajas e inconvenientes
Experimentos iGPS para cálculo cabeceoExperimentos iGPS para cálculo cabeceoEscenarioEscenarioResultadosResultados
Fusión SensorialFusión SensorialConclusionesConclusionesComentariosComentarios
Introducción
Localización y orientación en interioresLocalización y orientación en interioresProblema sin solucionarProblema sin solucionar
Posible soluciónPosible solución iGPS (indoor GPS)iGPS (indoor GPS)
Medición de cabeceo de un vehículo Medición de cabeceo de un vehículo mediante tecnología iGPSmediante tecnología iGPS

Sistema iGPS
Sistema de posicionamiento 3D para interioresSistema de posicionamiento 3D para interiores
Transmisores Sonsor/es Hub Receptor (RH)
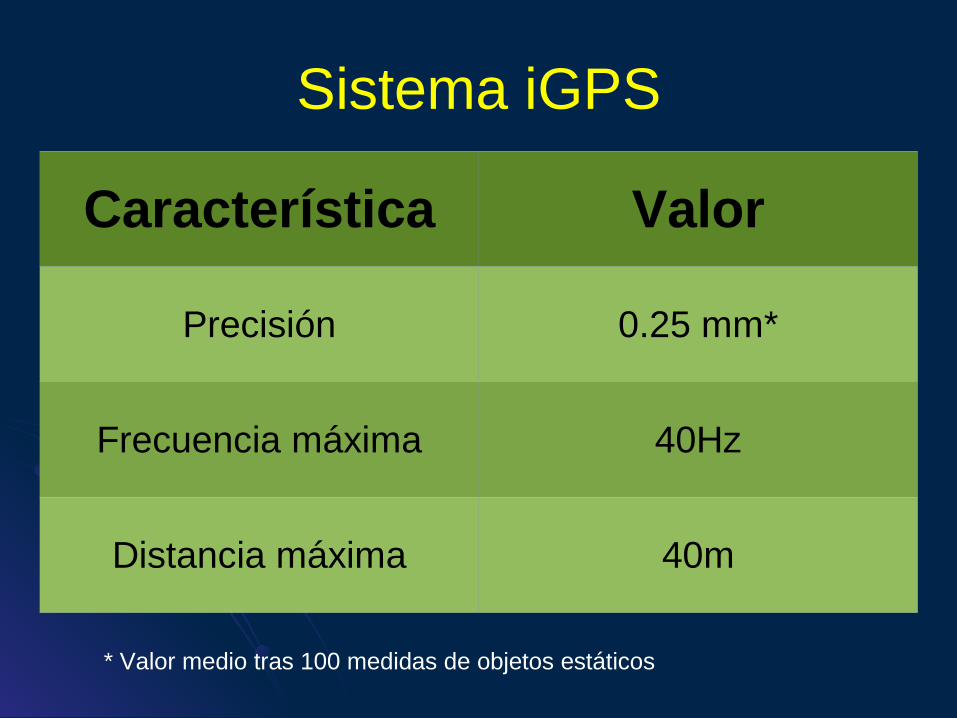
Sistema iGPS
Característica Valor
Precisión 0.25 mm*
Frecuencia máxima 40Hz
Distancia máxima 40m
* Valor medio tras 100 medidas de objetos estáticos
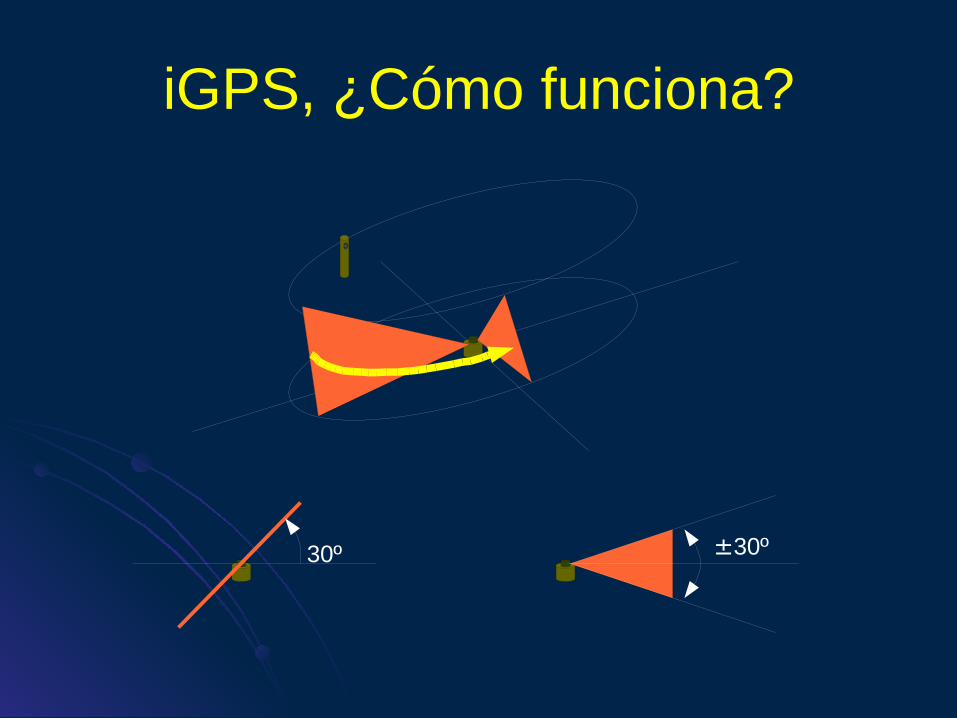
iGPS, ¿Cómo funciona?
±30º30º

iGPS, ¿Cómo Funciona?
AzEl
3ª Señal: Pulso 360º3ª Señal: Pulso 360ºEmitida cada cicloEmitida cada ciclo
Az = t(pulso) t(las1) El = t (las1) t(las2)
iGPS, ¿Como Funciona?
2 Rayos2 Rayos90º Separación90º SeparaciónGiran 360ºGiran 360ºDiferentes velocidadesDiferentes velocidadesDiferentes ángulosDiferentes ángulos
Alzado: +30ºAlzado: +30ºPerfil: ±30ºPerfil: ±30º
33erer rayo 360º cada ciclo rayo 360º cada cicloPosición = tiempo entre rayosPosición = tiempo entre rayos
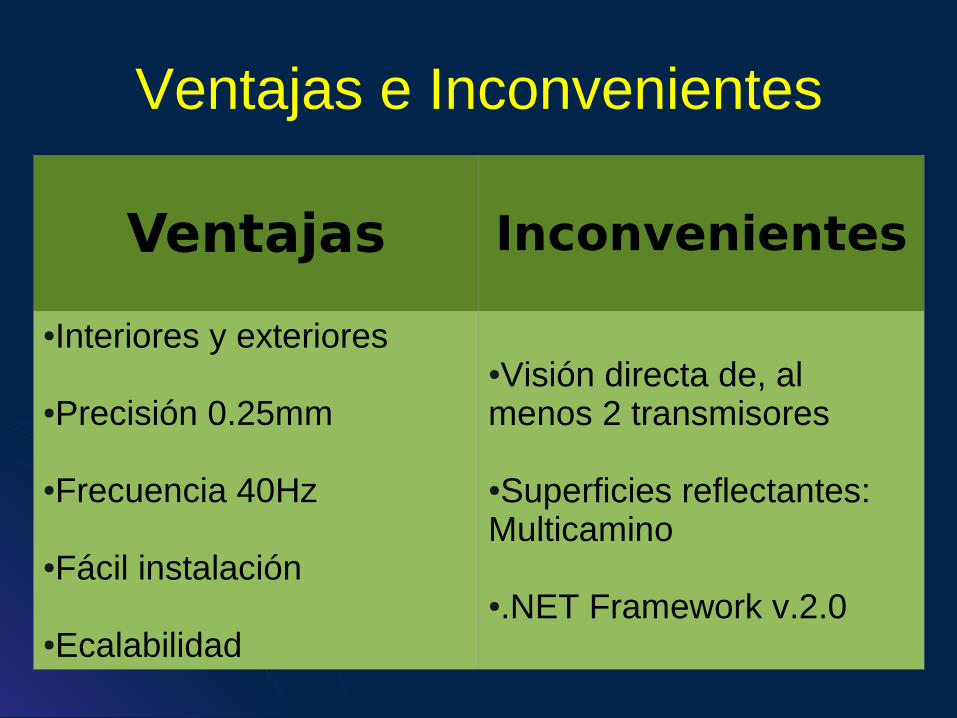
Ventajas e Inconvenientes
Ventajas Inconvenientes
●Interiores y exteriores
●Precisión 0.25mm
●Frecuencia 40Hz
●Fácil instalación
●Ecalabilidad
●Visión directa de, al menos 2 transmisores
●Superficies reflectantes: Multicamino
●.NET Framework v.2.0
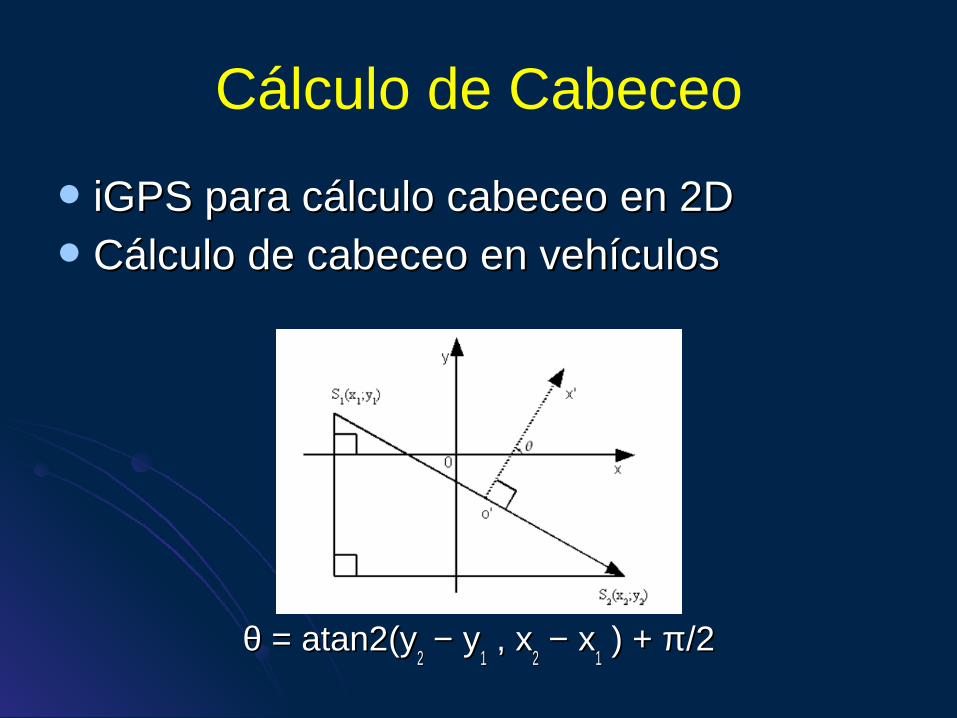
Cálculo de Cabeceo
iGPS para cálculo cabeceo en 2DiGPS para cálculo cabeceo en 2DCálculo de cabeceo en vehículosCálculo de cabeceo en vehículos
θ = atan2(yθ = atan2(y22 − y − y
11 , x , x
22 − x − x
11 ) + π/2 ) + π/2

Plataforma de Pruebas
iGPS Sensor
iGPS Sensor
iGPS RHPC
Embedded XP
RS232
2 Sensores iGPS2 Sensores iGPSSeparación: 41cmSeparación: 41cm
Área de pruebas: 5mx5mÁrea de pruebas: 5mx5m¿Cuántos Transmisores?¿Cuántos Transmisores?
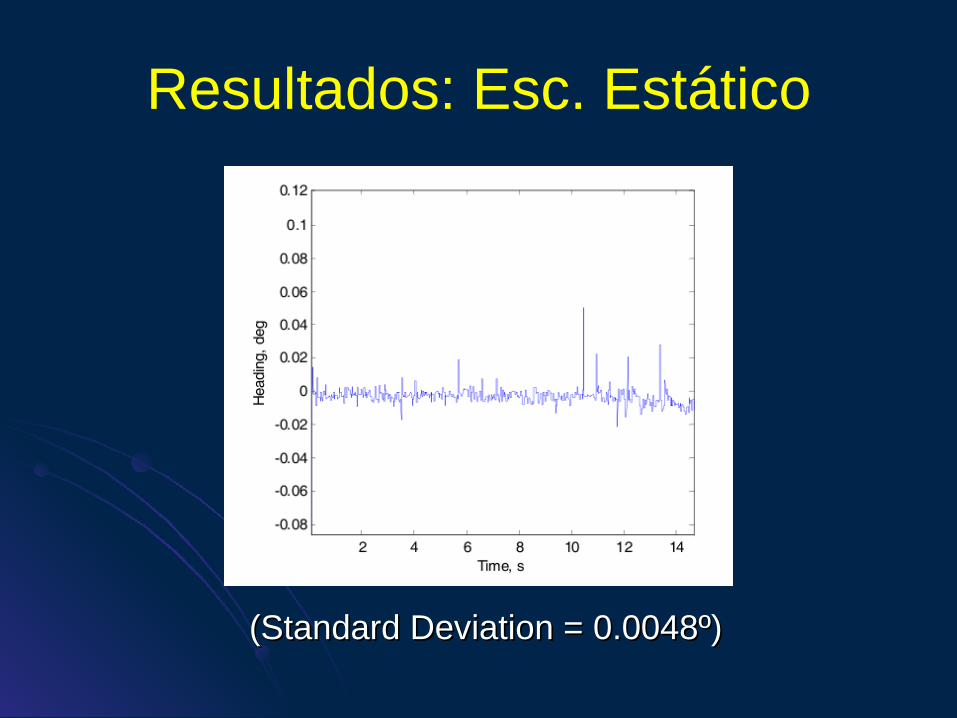
Resultados: Esc. Estático
(Standard Deviation = 0.0048º)(Standard Deviation = 0.0048º)
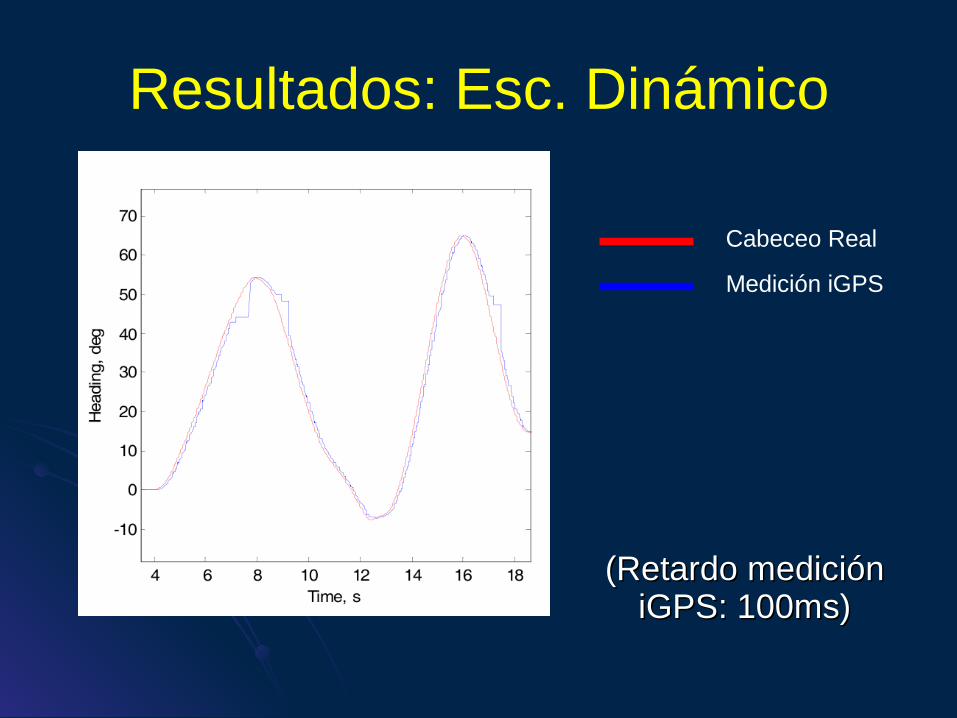
Resultados: Esc. Dinámico
(Retardo medición (Retardo medición iGPS: 100ms)iGPS: 100ms)
Cabeceo Real
Medición iGPS
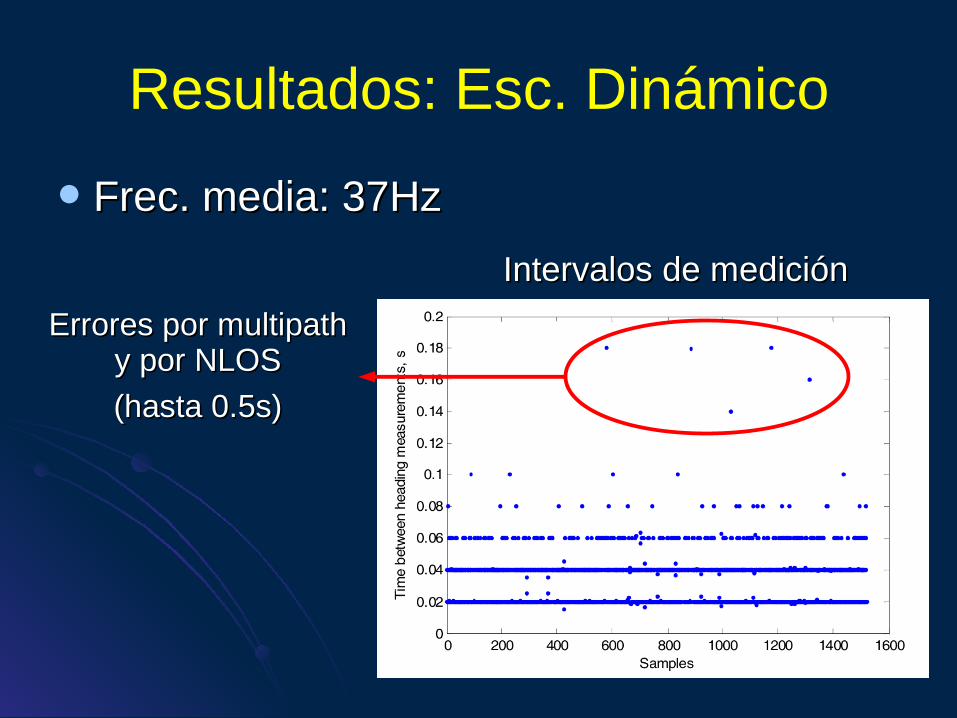
Resultados: Esc. Dinámico
Frec. media: 37HzFrec. media: 37Hz
Intervalos de mediciónIntervalos de medición
Errores por multipath Errores por multipath y por NLOSy por NLOS
(hasta 0.5s)(hasta 0.5s)

Fusión Sensorial
Fusión sensorial:Fusión sensorial:Reducir el intervalo entre medicionesReducir el intervalo entre medicionesReducir errores por multipath y NLOSReducir errores por multipath y NLOS
Se utiliza:Se utiliza:Filtro Kalman para el iGPSFiltro Kalman para el iGPSGiróscopoGiróscopo
100Hz100HzPero Bias acumulativoPero Bias acumulativo
Fusión entre datos Fusión entre datos
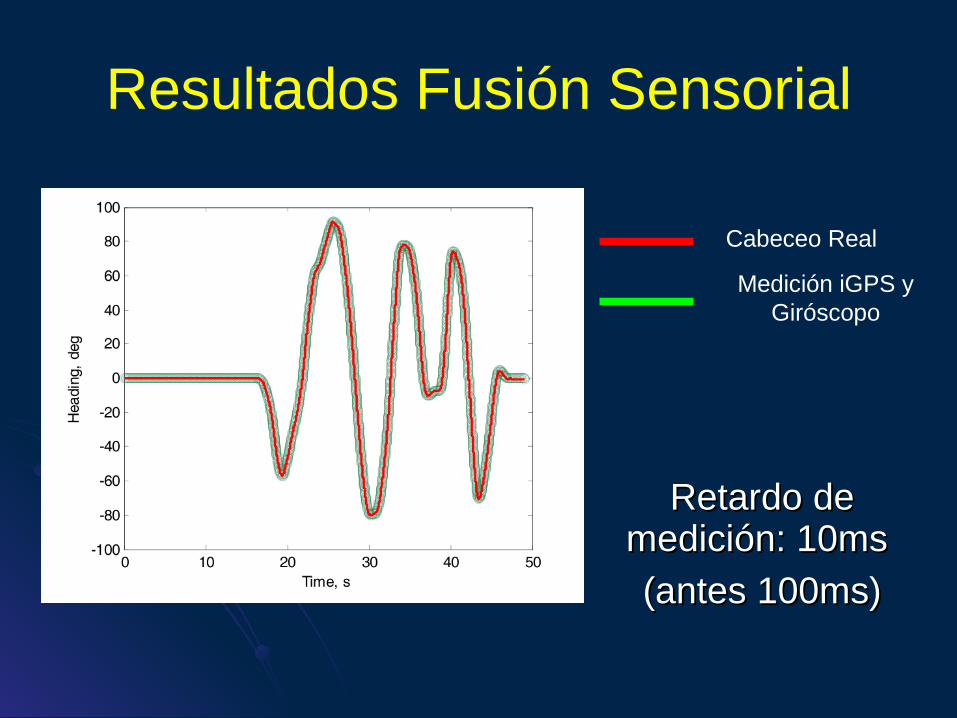
Resultados Fusión Sensorial
Retardo de Retardo de medición: 10ms medición: 10ms
(antes 100ms)(antes 100ms)
Cabeceo Real
Medición iGPS y Giróscopo
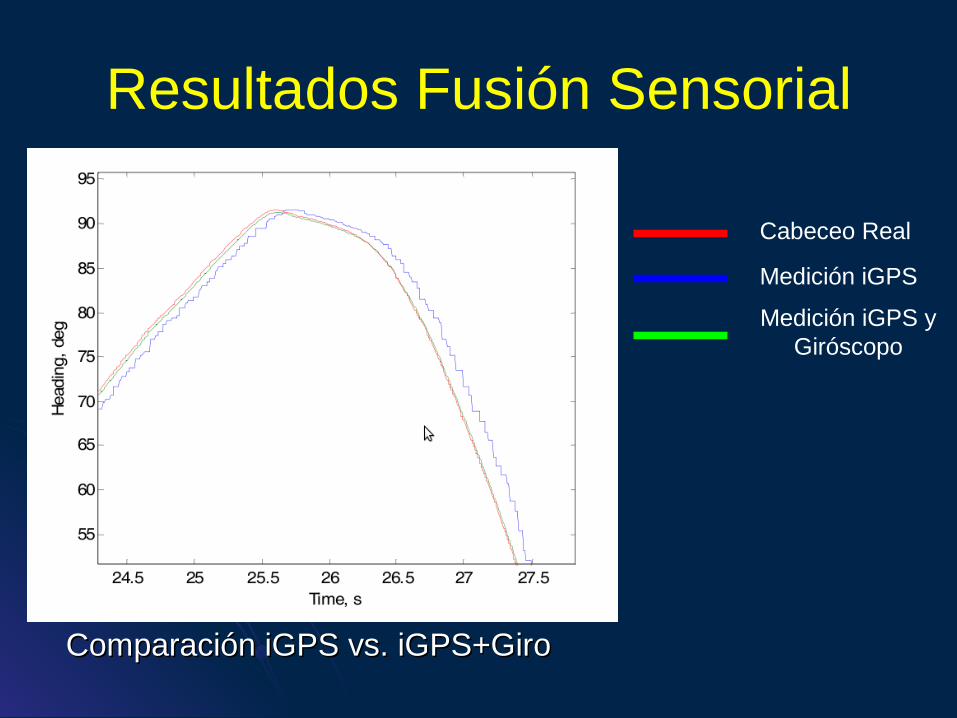
Resultados Fusión Sensorial
Comparación iGPS vs. iGPS+GiroComparación iGPS vs. iGPS+Giro
Cabeceo Real
Medición iGPS
Medición iGPS y Giróscopo
Resultados Fusión Sensorial
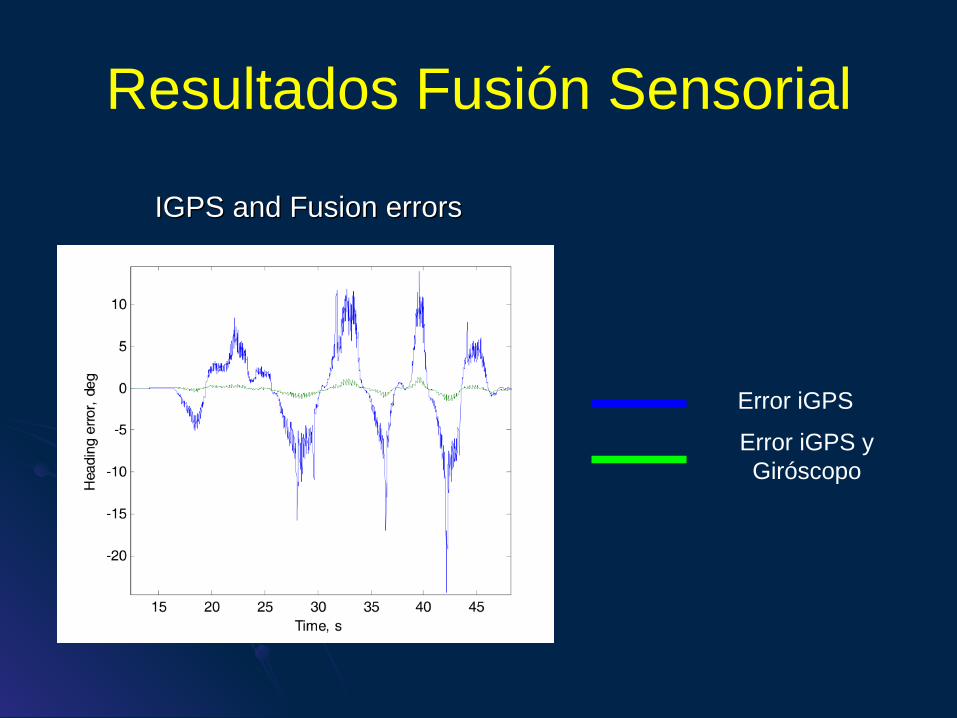
IGPS and Fusion errorsIGPS and Fusion errors
Error iGPS
Error iGPS y Giróscopo
Resultados Fusión Sensorial
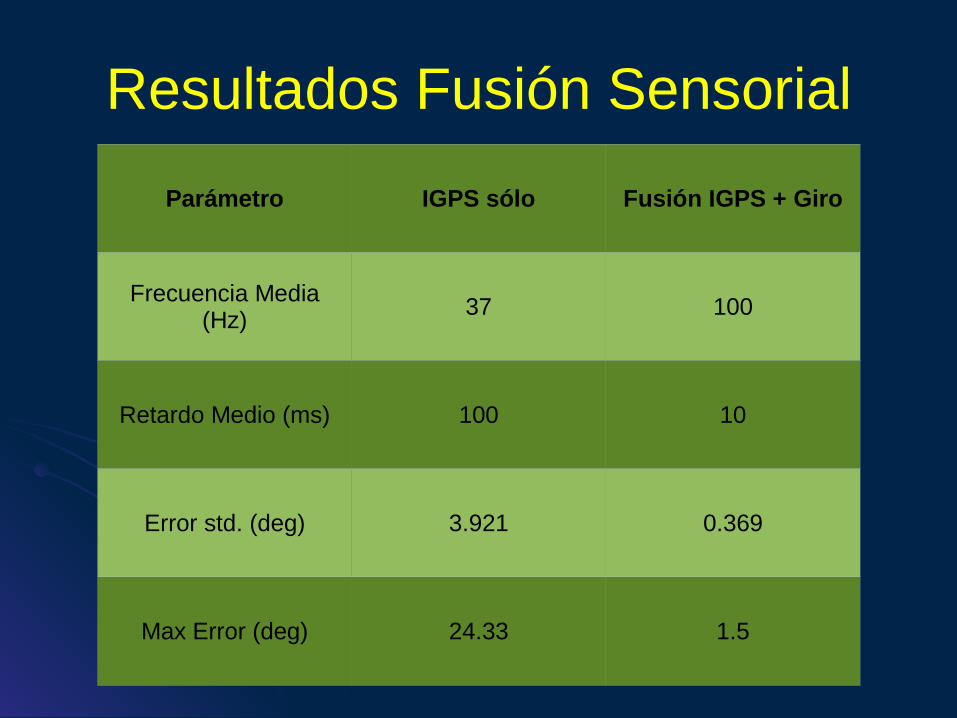
Parámetro IGPS sólo Fusión IGPS + Giro
Frecuencia Media (Hz)
37 100
Retardo Medio (ms) 100 10
Error std. (deg) 3.921 0.369
Max Error (deg) 24.33 1.5
Conclusiones
iGPS posible solución para interioresiGPS posible solución para interioresNecesita LOSNecesita LOSMultipathMultipath
Fusión SensorialFusión SensorialMejora iGPSMejora iGPSReducción retardo de mediciónReducción retardo de mediciónReducción de erroresReducción de errores
Comentarios
Explicación poco clara del porqué iGPSExplicación poco clara del porqué iGPS¿Otras alternativas?¿Otras alternativas?Falta de profundidad:Falta de profundidad:
Explicación del escenario de pruebas muy Explicación del escenario de pruebas muy pobrepobre
Replicación experimentosReplicación experimentos
Justifiación: ¿Robótica Construcción?Justifiación: ¿Robótica Construcción?Utilización iGPS + Giro parece buena Utilización iGPS + Giro parece buena
alternativaalternativa
Gracias por su atención
¿Preguntas?¿Preguntas?