robotica 1
TRANSCRIPT
Historia de la robóticaWendy Dayana Vargas
Historia Historia de la RobóticaPor siglos, el ser humano ha construido máquinas que imitan partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses; los griegos construyeron estatuas que operaban con sistemas hidráulicos, los cuales eran utilizados para fascinar a los adoradores de los templos.
Que es un robotun robot
un robot es un manipulador mecánico usado para realizar diferentes actividades, controlado electrónicamente y con capacidad de programación por medio de software.
características
REPROGRAMABLE: Cambiar un proceso o funcionamiento de un robot no requere de reconstruir o reemplazar maquinaria. Simplemente se necesita reprogramar y tener una nueva secuencia de movimientos y se logra un nuevo proceso o nuevas operaciones del robot.
2.- MANIPULADOR: Poder tomar una parte, moverla a través del espacio y al mismo tiempo orientarla a la posición en que debe ser colocada y colocarla. Esta es la diferencia entre los robots y otras formas de automatización. La habilidad de manipular los objetos nos lleva inevitablemente a la comparación con los brazos y manos humanos.
3.- MULTIFUNCIONAL: Los robots desarrollan una gran variedad de tareas, lo que da una gran flexibilidad.
4.- RETEPIBILIDAD: Es la capacidad del robot de tomar y/o colocar un apieza en el mismo lugar una y otra vez.
5.- EXACTITUD: La capaciadad de moverse desde un punto a otro en el espacio de acuerdo a los comandos con que fue programado y repetirlo cada vez con la misma precisión.
:

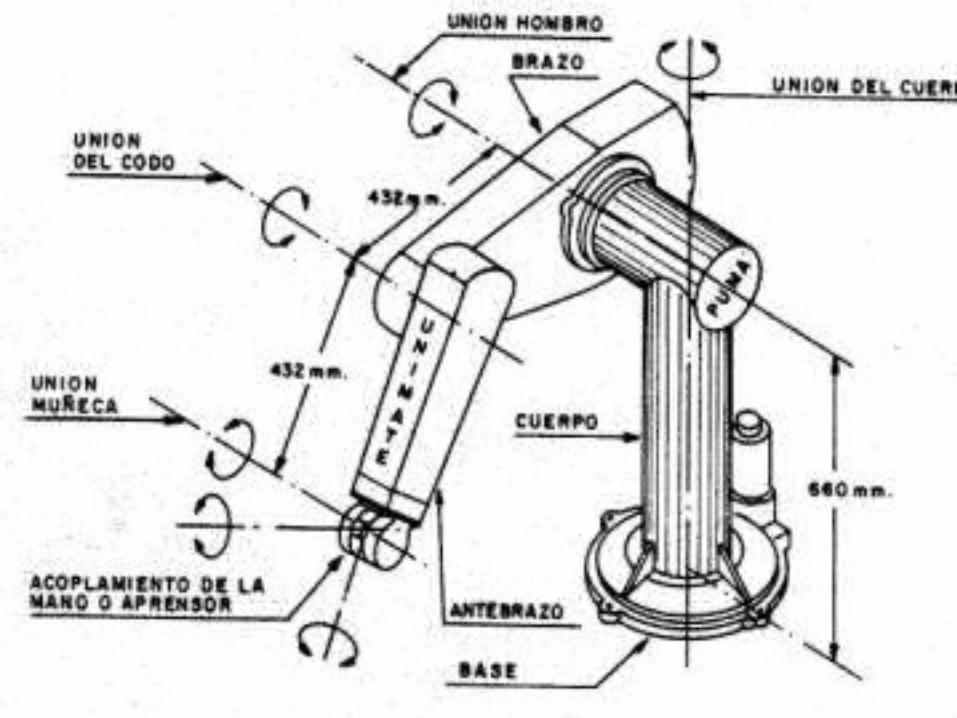
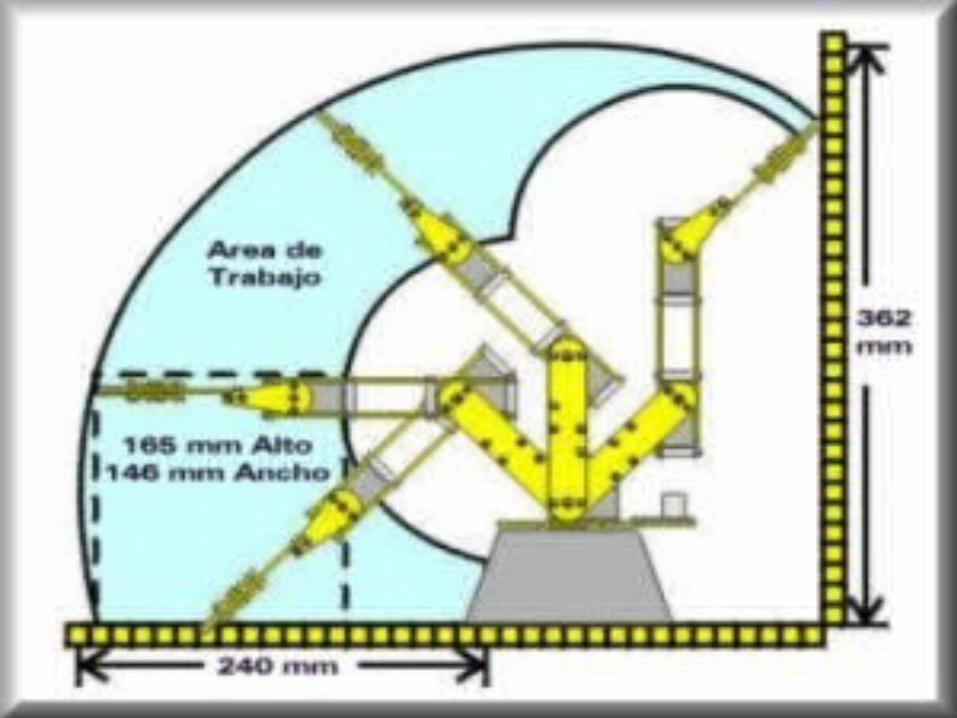
Partes principalesde un robot
El ManipuladorLa ComputadoraLa Fuente PoderEl Manipulador es la base mecánica del robot, la que ejecuta el
trabajo.
La Computadora es lo que da al robot la flexibilidad y lo hace ser tan versátil ; es la que controla los movimientos del Manipulador.
La Fuente Poderes la que provee de energía al Manipulador.
Los robots pueden ser encontrados en cualquier centro de
manufactura como una mejora de producción, ahorro de gastos, reducción de riesgos, consistencia de calidad, alta productividad, eliminación de trabajos peligrosos, etc.
Los robots son la minifestación de la tecnología llamada AUTOMATIZACIÓN FLEXIBLE.
En la automatización flexible el control se realiza en el
software y no el hardware. Para realizar un cambio simplemente se requieren nuevas instrucciones o programas que se realizan en la computadora y no se requieren cambios en el herramental, soportes reconstruídos, reemplazo de máquinas o cualquier otro ajuste en el hardware.
En la automatización flexible el tiempo perdido por paro en el
cambio de modelo se minimiza y el trabajo es realizado con más precisión al no tener modificaciones en el hardware y no tener que realizar ajustes mecánicos.
Partes de un robotComo el robot ha evolucionado como una réplica de
sus creadores, salvando las distancias, tendremos los siguientes elementos:
· Como cerebro, el controlador que hoy día es un
chip que llamaremosmicrocontrolador.· Como extremidades manipuladoras, el
manipulador y la herramienta.· Como terminales nerviosos para recibir
información, los sensores. La microrrobótica una alternativa a los robots clásicos.
Los robots clásicos son complejos, mientras que los microrobots son simples y fáciles de construir y programar. Para realizar algunas actividades se puede optar por utilizar un único robot, caro y complejo, o muchos microrobots, baratos y simples. Este es el objetivo de la microrrobótica: utilizar muchos microrobots para realizar una tarea específica.
La microrrobótica alude implícitamente a un conjunto de
microrobots que cooperan y que interactúan los unos con los otros. La mejor manera de aprender es practicando; se celebran
concursos por todo el mundo. Todos los iniciados van profundizando en todos los aspectos del
robot: mecánica primero, electrónica segundo y programación lo último.
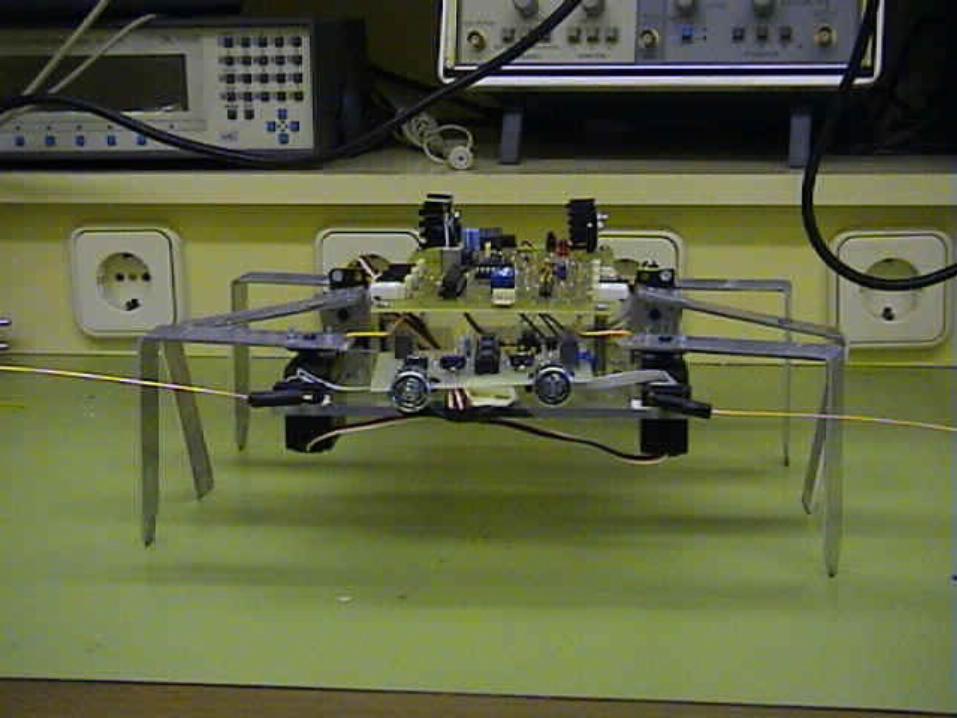
Micro organismo ¿ Por qué y para qué microrobots ?
En experimentos realizados se ha demostrado que si se ajustaba una tarea a un conjunto de microrobots, de forma que a cada uno se le asignaba una subtarea y, por ejemplo, se forzaba paulatinamente la inutilización de algunos, agotando los sistemas de energía poco a poco, era posible hacer que los microrobots restantes fueran cumpliendo sus propias subtareas y las de sus compañeros “ estáticos “. En el mejor de los casos el sistema “ cae “, cuando todas sus unidades lo hacen simultáneamente.

¿Qué aplicaciones tienen los microrobots? A pasos agigantados comienza a hacerse sitio en el mercado mundial un nuevo producto que va a revolucionar nuestras vidas dentro de pocos años. Con la llegada de microcontroladores más pequeños pero más potentes se desarrollarán estos pequeños móviles.
¿ Qué pueden hacer estos minirobots tan inteligentes ?De todo y como muestra voy a citar diez tareas que
ya están desarrolladas, generalmente, con éxito:1. Explorar volcanes.2. Recoger información y materiales en las
misiones espaciales extraterrestres.3. Simular la vida y el comportamiento de
insectos y animales.4. Transportar materiales y herramientas entre
puestos de fabricación.5. Realizar la limpieza de viviendas, oficinas y
locales industriales.
6. Llevar a cabo operaciones elementales en ambientes peligrosos ( radioactivos, submarinos, corrosivos, etc).
7. Vigilar y activar alarmas en zonas de seguridad.
8. Disputar partidos de fútbol, golf, etc, entre equipos de micro robots.
9. Competir en torneos de sumo.10. Supervisar todo tipo de parámetros en los
entornos bajo su control.