informe n°1 robotica
DESCRIPTION
informe de robótica industrialTRANSCRIPT

1
INGENIERIA ELECTROMECÁNICA
ROBÓTICA INDUSTRIAL
PRACTICA N° 1
CHACÓN QUISTAN BYRON EDUARDO
Fecha: 27/10/2015
Tema: Partes principales, características técnicas, accesorios y seguridades de los brazos
robóticos del laboratorio de robótica industrial de la ESPE Latacunga.
Objetivos Objetivo general
Identificar los aspectos generales de los robots industriales KUKA KR6.
Objetivos específicos
• Identificar las partes principales de un brazo robótico
• Comprobar las características técnicas de un brazo robótico
• Determinar los accesorios y deflectores de un brazo robótico
• Identificar los componentes de un brazo robótico
• Aplicar las seguridades empleadas para el manejo del brazo robótico KUKA
KR6
Materiales y Equipos • Manual del Robot KUKA ( KR6 - KR16)
• Brazo robótico KUKA KR6
• Accesorios y deflectores
2
Marco Teórico
PARTES PRINCIPALES DE UN ROBOT
Estructura Mecánica De Un Robot
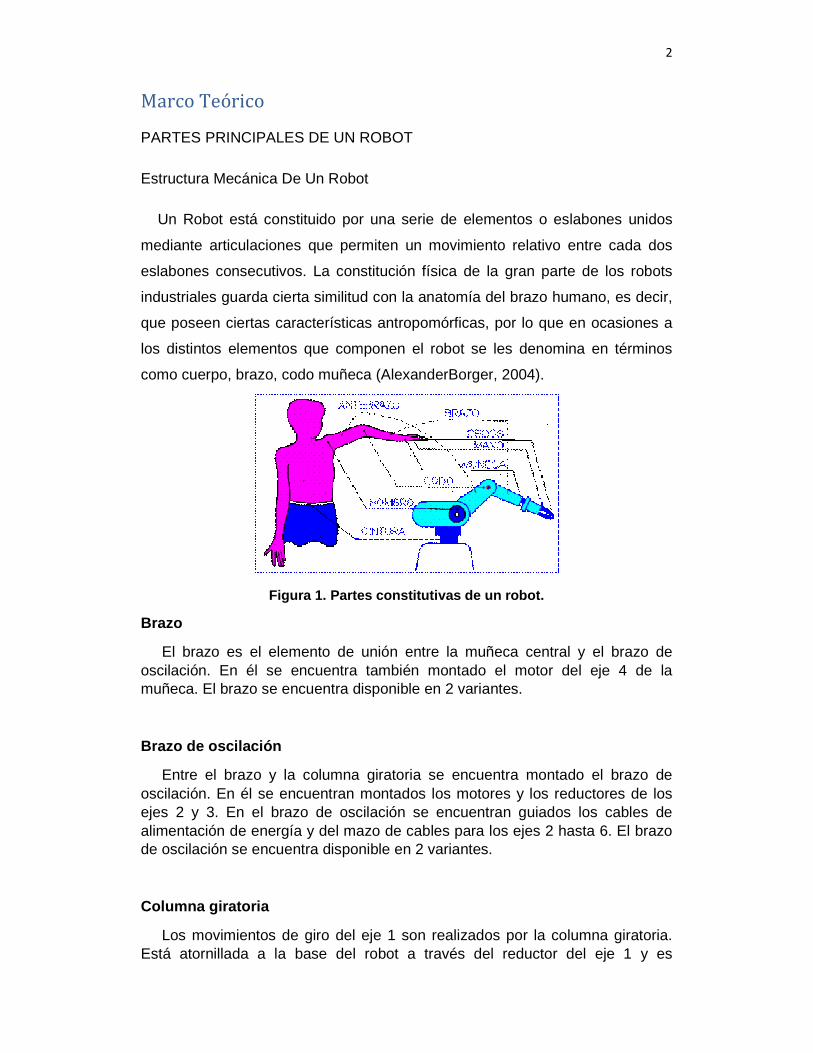
Un Robot está constituido por una serie de elementos o eslabones unidos
mediante articulaciones que permiten un movimiento relativo entre cada dos
eslabones consecutivos. La constitución física de la gran parte de los robots
industriales guarda cierta similitud con la anatomía del brazo humano, es decir,
que poseen ciertas características antropomórficas, por lo que en ocasiones a
los distintos elementos que componen el robot se les denomina en términos
como cuerpo, brazo, codo muñeca (AlexanderBorger, 2004).
Figura 1. Partes constitutivas de un robot.
Brazo
El brazo es el elemento de unión entre la muñeca central y el brazo de oscilación. En él se encuentra también montado el motor del eje 4 de la muñeca. El brazo se encuentra disponible en 2 variantes.
Brazo de oscilación
Entre el brazo y la columna giratoria se encuentra montado el brazo de oscilación. En él se encuentran montados los motores y los reductores de los ejes 2 y 3. En el brazo de oscilación se encuentran guiados los cables de alimentación de energía y del mazo de cables para los ejes 2 hasta 6. El brazo de oscilación se encuentra disponible en 2 variantes.
Columna giratoria
Los movimientos de giro del eje 1 son realizados por la columna giratoria. Está atornillada a la base del robot a través del reductor del eje 1 y es
3
accionado por un motor montado en la base del robot. En la columna giratoria se encuentran las baterías tampón para asegurar los datos de los ejes del sistema de medición de la Carrera.
Base del robot
La base del robot está formada por el bastidor. Forma la interfaz para los cables y tuberías de unión entre la mecánica del robot y la unidad de control y la alimentación de energía. Todos los cables y tuberías de unión se encuentran en la parte trasera de la base del robot.
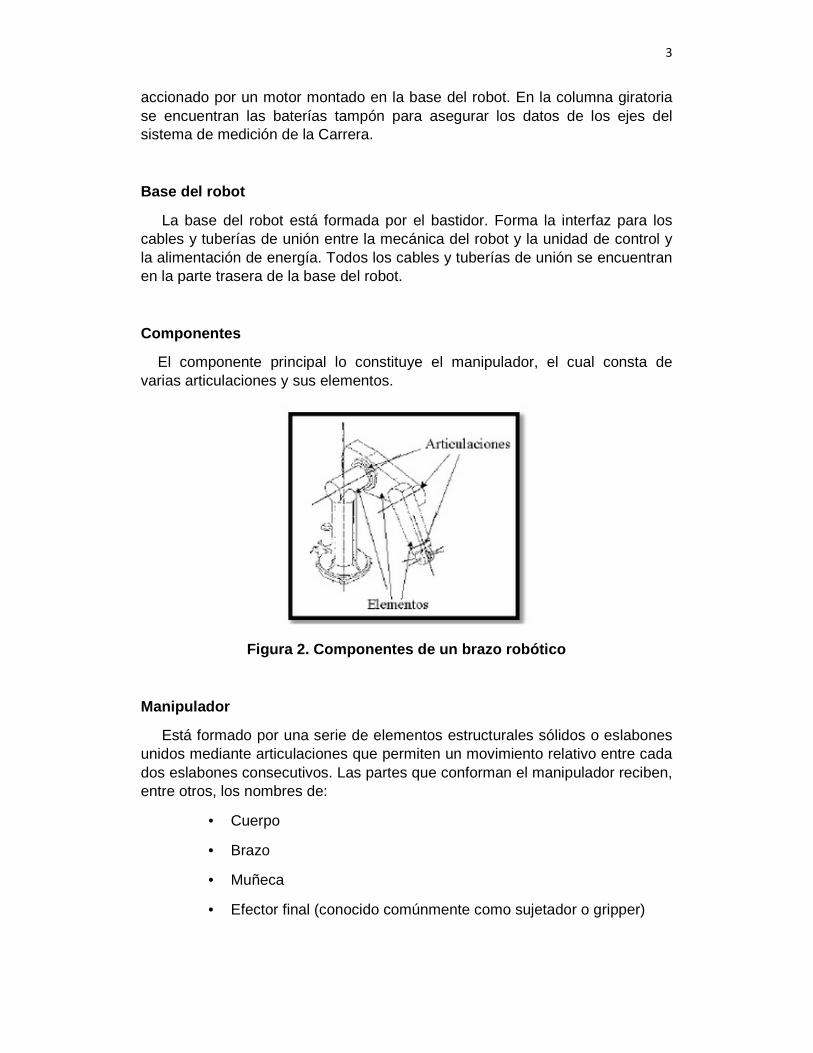
Componentes
El componente principal lo constituye el manipulador, el cual consta de varias articulaciones y sus elementos.
Figura 2. Componentes de un brazo robótico
Manipulador
Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Las partes que conforman el manipulador reciben, entre otros, los nombres de:
• Cuerpo
• Brazo
• Muñeca
• Efector final (conocido comúnmente como sujetador o gripper)

4
Controlador
Es el cerebro del robot industrial, éste puede ser desde un autómata programable (PLC) para los menos avanzados; hasta un mini ordenador numérico o microprocesador, para los más avanzados. Este componente regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información. El controlador recibe y envía señales a otras máquinas-herramientas y almacena programas. Existen varios grados de control que son función del tipo de parámetros que se regulan, lo que da lugar a los siguientes tipos de controladores: de posición, cinemático, dinámico y adaptivo.
El cerebro, es el que tiene el papel principal, contiene en sus memorias:
� Un modelo de robot físico: Las señales de excitación de los accionadores y los desplazamientos que son consecuencia de ellas.
� Un modelo del entorno: Descripción de lo que se encuentra en el espacio que puede alcanzar.
� Programas: Permite comprender las tareas que se le pide que realice algoritmos de control
CARACTERISTICAS GENERALES DE LOS ROBOTS INDUSTRIALES
Grados De Libertad
Cada articulación provee al robot de al menos un ‘grado de libertad’, o bien, cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior, se denomina ‘grado de libertad’ (GDL) (AlexanderBorger, 2004).
TIPOS DE ARTICULACIONES
Son posibles seis tipos diferentes de articulaciones:
• Esférica o Rótula (3 GDL) • Planar (2 GDL) • Tornillo (1 GDL) • Prismática (1 GDL) • Rotación (1 GDL) • Cilíndrica (2 GDL)

5
Figura 3. Tipos de articulaciones.
Espacio o volumen de trabajo El volumen de trabajo de un robot se refiere únicamente al espacio dentro del cual puede desplazarse el extremo de su muñeca. Para determinar el volumen de trabajo no se toma en cuenta el actuador final.
Repetitividad. Grado de exactitud en la repetición de un movimiento. Se mide en el error máximo cometido en el posicionamiento de un robot en un mismo punto.
Precisión. Capacidad de un robot de situar el extremo de su muñeca en un punto determinado del espacio de trabajo. Se mide el error máximo cometido. Normalmente hay más precisión cerca de la base, tanto por razones geométricas como mecánicas. •La carga afecta a la precisión.
Capacidad de carga . El peso, en kilogramos, que puede transportar el manipulador. Es una de las características que más se tienen en cuenta en la selección de un robot, según la tarea a la que se destine.
Velocidad. Se suele dar en articulares y en cartesianas y es la rapidez a la que trabaja el robot con respecto al trabajo a realizar
Sensores:
Sensores Internos: Se utilizan para el control de posición y velocidad de las distintas articulaciones del robot
Sensores Externos: se usan para el control de la célula de trabajo Se utilizan para coordinar la operación de los trabajos. Se utilizan para coordinar la operación de los robots con otros elementos de la célula y/o reaccionar inteligentemente a los cambios del entorno como obstáculos, presencia de una pieza, etc. (Hernando)
6
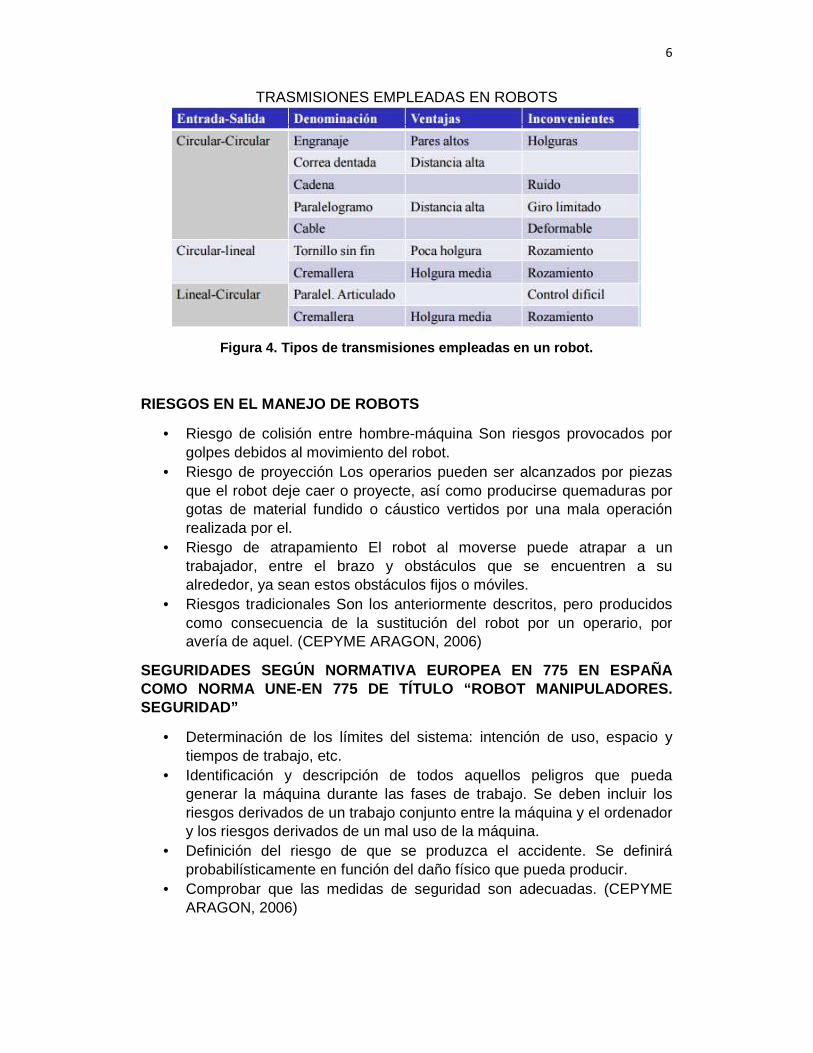
TRASMISIONES EMPLEADAS EN ROBOTS
Figura 4. Tipos de transmisiones empleadas en un ro bot.
RIESGOS EN EL MANEJO DE ROBOTS
• Riesgo de colisión entre hombre-máquina Son riesgos provocados por golpes debidos al movimiento del robot.
• Riesgo de proyección Los operarios pueden ser alcanzados por piezas que el robot deje caer o proyecte, así como producirse quemaduras por gotas de material fundido o cáustico vertidos por una mala operación realizada por el.
• Riesgo de atrapamiento El robot al moverse puede atrapar a un trabajador, entre el brazo y obstáculos que se encuentren a su alrededor, ya sean estos obstáculos fijos o móviles.
• Riesgos tradicionales Son los anteriormente descritos, pero producidos como consecuencia de la sustitución del robot por un operario, por avería de aquel. (CEPYME ARAGON, 2006)
SEGURIDADES SEGÚN NORMATIVA EUROPEA EN 775 EN ESPAÑ A COMO NORMA UNE-EN 775 DE TÍTULO “ROBOT MANIPULADORE S. SEGURIDAD”
• Determinación de los límites del sistema: intención de uso, espacio y tiempos de trabajo, etc.
• Identificación y descripción de todos aquellos peligros que pueda generar la máquina durante las fases de trabajo. Se deben incluir los riesgos derivados de un trabajo conjunto entre la máquina y el ordenador y los riesgos derivados de un mal uso de la máquina.
• Definición del riesgo de que se produzca el accidente. Se definirá probabilísticamente en función del daño físico que pueda producir.
• Comprobar que las medidas de seguridad son adecuadas. (CEPYME ARAGON, 2006)
7
Otros Dispositivos
Dispositivos de entrada y salida de datos
Los más comunes son. Teclado (unidad de programación), monitor y caja de comandos (algunos robots únicamente poseen uno de estos componentes).
Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del controlador.
Dispositivos especiales
Entre éstos se encuentran:
� El sistema sensorial
� Sensores de visión, tacto, movimiento, etc.
� Sistemas mecánicos
Ejes que facilitan el movimiento transversal del manipulador.
Estaciones de ensamblaje, que son utilizadas para sujetar las distintas piezas de trabajo.
Cada articulación del manipulador provee al robot al menos un “grado de libertad”, en otras palabras, las articulaciones permiten al manipulador realizar:
� Movimientos Lineales, que pueden ser horizontales o verticales
� Movimientos angulares.
Especificaciones Especiales:
La selección del robot más idóneo debe hacerse valorando una gran variedad de características, siendo este un proceso de difícil sistematización. Sin embargo, en general puede ser suficiente con considerar un conjunto limitado.
8
Procedimiento
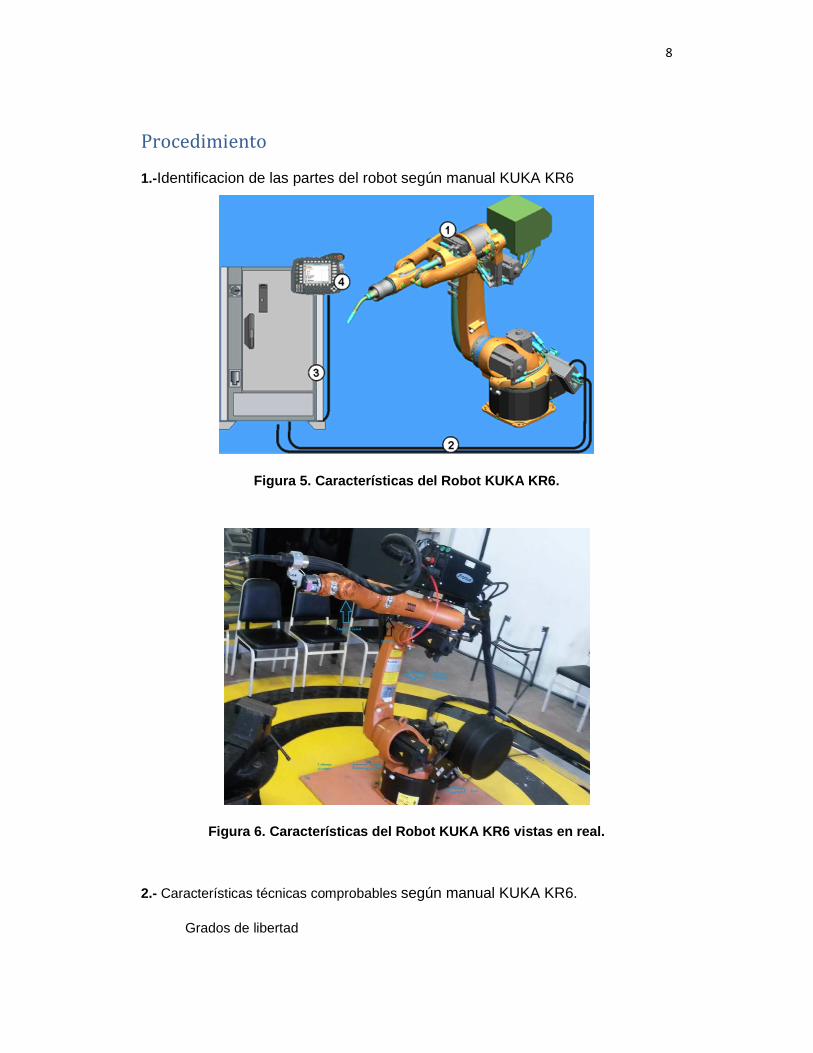
1.-Identificacion de las partes del robot según manual KUKA KR6
Figura 5. Características del Robot KUKA KR6.
Figura 6. Características del Robot KUKA KR6 vistas en real.
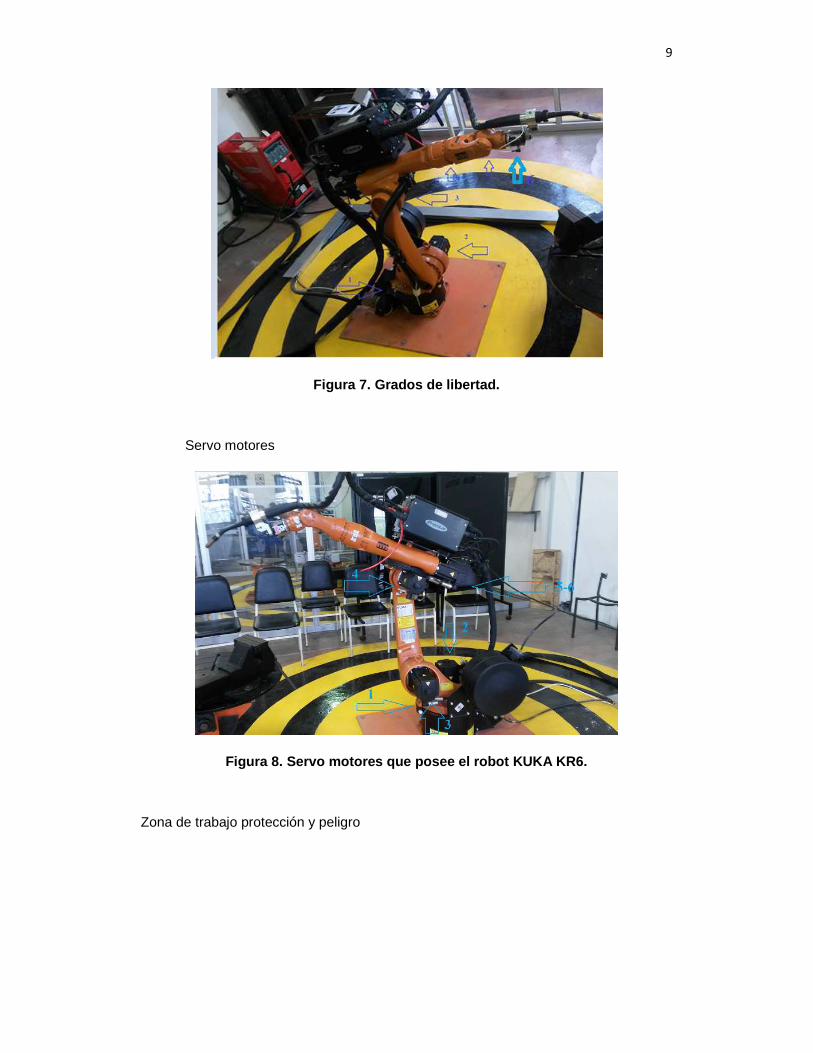
2.- Características técnicas comprobables según manual KUKA KR6.
Grados de libertad
9
Figura 7. Grados de libertad.
Servo motores
Figura 8. Servo motores que posee el robot KUKA KR6 .
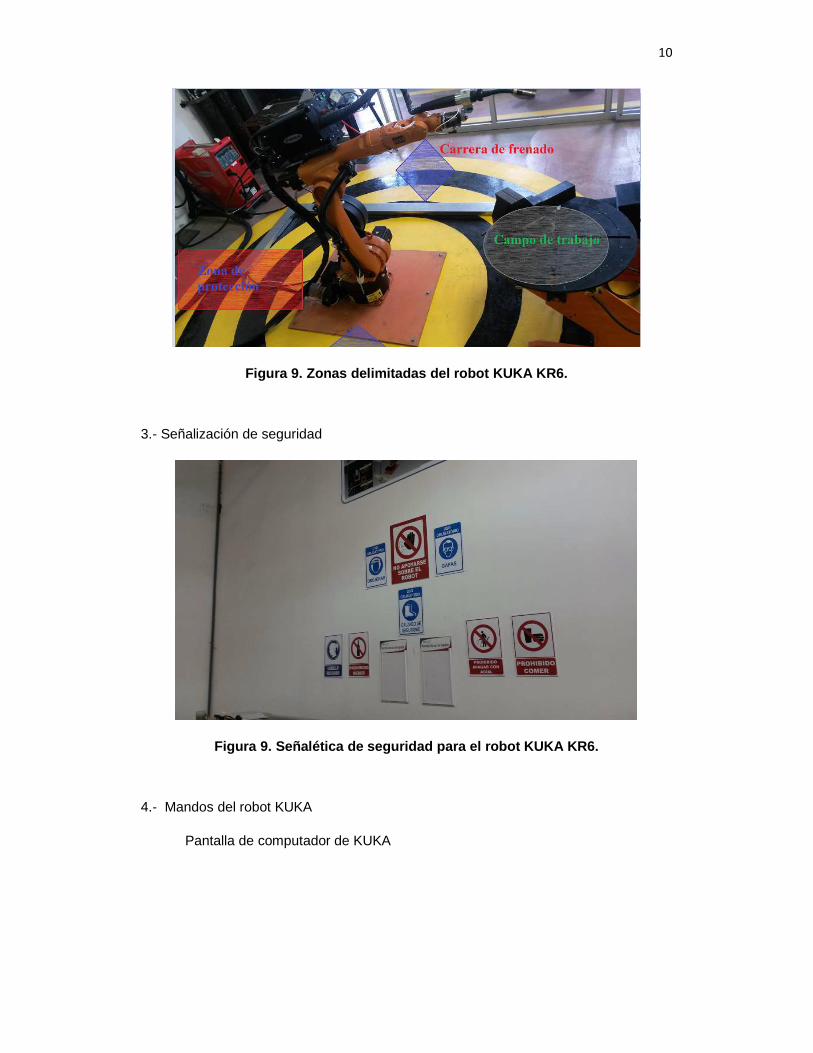
Zona de trabajo protección y peligro
10
Figura 9. Zonas delimitadas del robot KUKA KR6.
3.- Señalización de seguridad
Figura 9. Señalética de seguridad para el robot KUK A KR6.
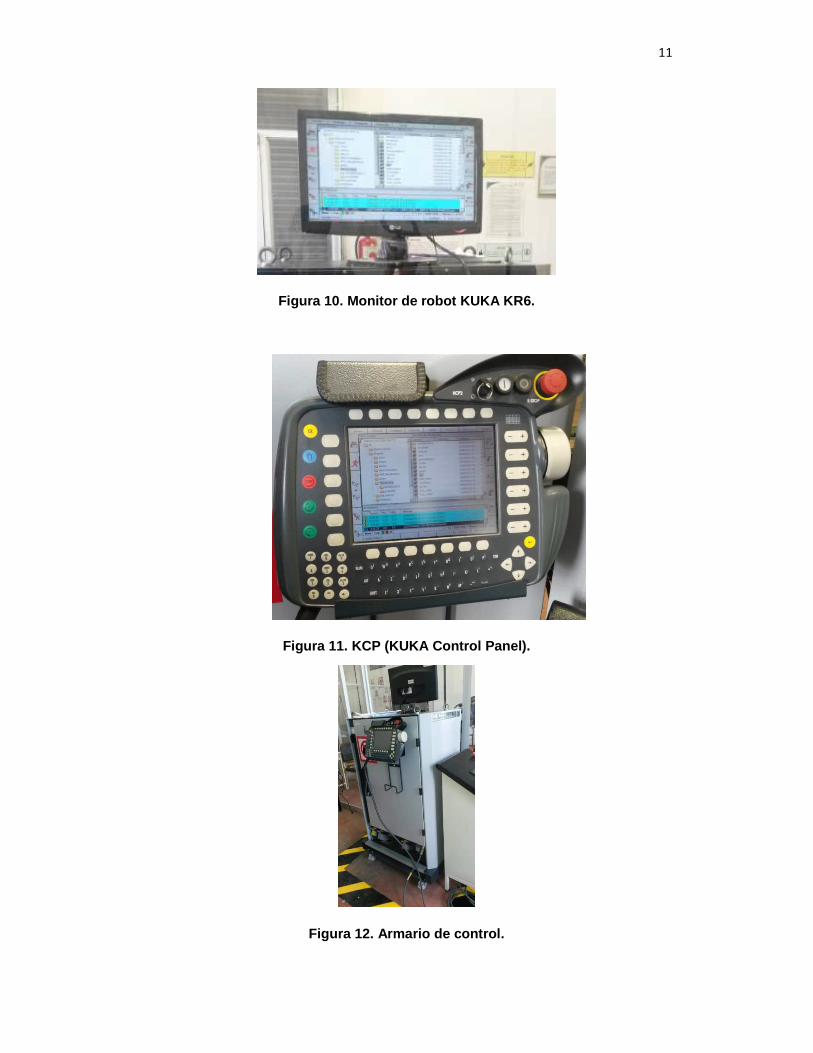
4.- Mandos del robot KUKA
Pantalla de computador de KUKA
11
Figura 10. Monitor de robot KUKA KR6.
Figura 11. KCP (KUKA Control Panel).
Figura 12. Armario de control.
12
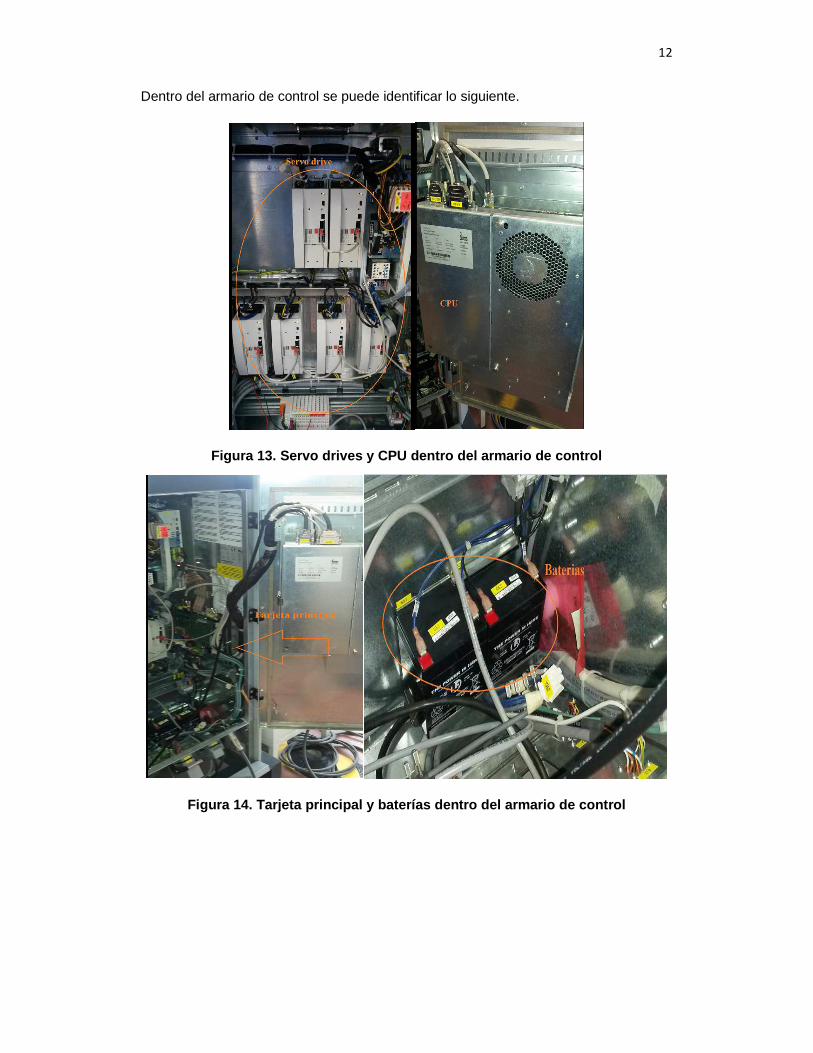
Dentro del armario de control se puede identificar lo siguiente.
Figura 13. Servo drives y CPU dentro del armario de control
Figura 14. Tarjeta principal y baterías dentro del armario de control
13
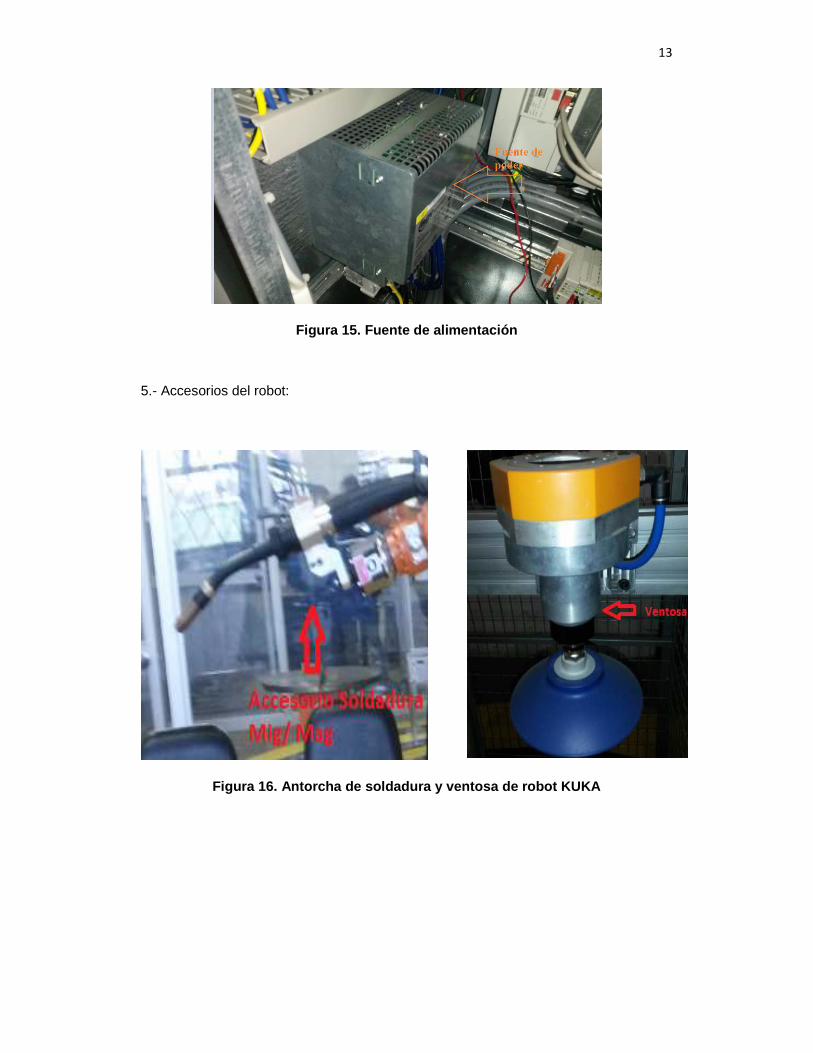
Figura 15. Fuente de alimentación
5.- Accesorios del robot:
Figura 16. Antorcha de soldadura y ventosa de robot KUKA

14
Figura 17. Fuente de alimentación
Análisis de resultados
Los robots KUKA poseen elementos móviles y fijos como toda máquina solo limitado
por sus características técnicas como por ejemplo los ángulos de operación del robot,
los grados de libertad la capacidad de carga y los accesorios.
Existen empresas que han innovado en sus procesos de producción implementando
procesos como impresión 3D, gonio fotómetros, moldeo de plástico por inyección, etc.
Las limitantes del robot KUKA es que a no podría ingresar a espacios pequeños
debido a sus medidas pero sin embargo es más versátil para trabajos precisos y
lugares confinados los cuales serían peligrosos para el acceso humano.
Los accesorios de los robots KUKA son implementos adicionales al robot que ayudan
en procesos de mecanizado, soldadura, fresado, pintura, succión, atornillado, etc.
Las normas de seguridad como respetar las zonas del robot deben ser respetadas al
igual que las recomendaciones de la señalética de seguridad instalada en el laoratorio.
Conclusiones
• Se identificó que el robot KUKA KR6/16 posee un brazo, muñeca
central, brazo de oscilación, columna giratoria, base, armario de control
y cables de unión.
• Se ha determinado los grados de libertad de nuestro KUKA.
15
• Se logró identificar algunas características generales del robot KUKA ya
que para la determinación de otras características como capacidad de
carga sería necesario implementos más adecuados.
• Se comprobó que existen muchos accesorios y cada uno realiza una función
dependiendo del área en que se emplee el robot.
• Ser cuidadoso con el robot y mantenerse en la zona de seguridad para
evitar accidentes.
Recomendaciones
• Se recomienda una mayor adquisición de accesorios para el
aprendizaje.
• Es recomendable maniobrar el KCP con cuidado ya que este puede
sufrir caídas si no se tiene el cuidado pertinente.
Bibliografía
AlexanderBorger. (2004). http://www.industriaynegocios.cl/. Obtenido de http://www.industriaynegocios.cl/Academicos/AlexanderBorger/Docts%20Docencia/Seminario%20de%20Aut/trabajos/2004/Rob%C3%B3tica/seminario%202004%20robotica/Seminario_Robotica/Documentos/MORFOLOG%C3%8DA%20DEL%20ROBOT.htm
CEPYME ARAGON. (2006). http://www.conectapyme.com/. Obtenido de http://www.conectapyme.com/documentacion/2006robotica.pdf
Hernando, M. (s.f.). Moodle Universidad Politecnica de Madrid. Obtenido de http://www.elai.upm.es/: http://www.elai.upm.es/moodle/mod/resource/view.php?id=905