apuntes de robotica unidad 1
DESCRIPTION
Primera unidad del temario de robotica de la DGESTTRANSCRIPT
2 | P a g e
Robótica
Contenido
1.- Morfología del robot..............................................................................................................................4
1.1.- Historia de los robots......................................................................................................................4
1.2.- Estructura mecánica de un robot....................................................................................................7
Configuraciones morfológicas.............................................................................................................9
1.3.- Transmisiones y reductores...........................................................................................................12
- Transmisiones..................................................................................................................................12
- Reductores......................................................................................................................................13
- Accionamiento directo....................................................................................................................14
1.4.- Comparación de los sistemas de acción........................................................................................15
- Actuadores neumáticos...................................................................................................................15
- Actuadores hidráulicos....................................................................................................................15
- Actuadores eléctricos......................................................................................................................16
1.5.- Sensores internos..........................................................................................................................17
- Sensores de posición.......................................................................................................................17
- Sensores de velocidad.....................................................................................................................20
- Sensores de presencia.....................................................................................................................20
1.6.- Elementos terminales....................................................................................................................21
1.7.- Tipos y características de robots...................................................................................................23
Bibliografía.........................................................................................................................................27
1.- Morfología del robot
1.1.- Historia de los robotsLa historia de la robótica se enlaza fuertemente con la idea de crear maquinas o mecanismos que ayudaran al ser humano con el trabajo. Es importante marcar la diferencia entre un robot y un mecanismo, un robot cuenta con sensores, mecanismos, y puede tener funciones que simulan inteligencia. El término ‘robot’ fue usado por primera vez por el escritor checo Karel Capek en su obra dramática Rossum’ Universal Robots, a partir de la palabra checa ‘robota’ que significa servidumbre o trabajo forzado. El término ‘robótica’ es adoptado por el escritor Isaac Asimov en su obra Runaround en 1942, y se refiere al estudio de los robots. Asimov también estableció las tres leyes de la robótica, las cuales se mencionan en muchos de sus relatos, y establecen lo siguiente:
1.- Un robot no hará daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
2.- Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la 1ª Ley.
3.- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la 1ª o la 2ª Ley.
El ser humano ha creado mecanismos desde hace siglos, diseñados para realizar sus tareas de manera más rápida y eficiente. Con el tiempo, estos mecanismos fueron volviéndose cada vez más complejos y especializados en las tareas para los que fueron creados.
Se considera que la robótica comenzó alrededor del inicio de la década de los 50’s, en la industria textil.
1801.- J. Jaquard invento su telar, que era una máquina programable para la urdimbre
1805.- H. Maillardet construyó una muñeca mecánica capaz de hacer dibujos.
1946.- El inventor americano G.C Devol desarrolló un dispositivo controlador que podía registrar señales eléctricas por medios magnéticos y reproducirlas para accionar un máquina mecánica. La patente estadounidense se emitió en 1952.
1951.- Trabajo de desarrollo con teleoperadores (manipuladores de control remoto) para manejar materiales radiactivos. Patente de Estados Unidos emitidas para Goertz (1954) y Bergsland (1958).
1952.- Una máquina prototipo de control numérico fue objetivo de demostración en el Instituto Tecnológico de Massachusetts después de varios años de desarrollo. Un lenguaje de programación de piezas denominado APT (Automatically Programmed Tooling) se desarrolló posteriormente y se publicó en 1961.
1954.- El inventor británico C. W. Kenward solicitó su patente para diseño de robot. Patente británica emitida en 1957.
1954.- G.C. Devol desarrolla diseños para Transferencia de artículos programada. Patente emitida en Estados Unidos para el diseño en 1961.
1959.- Se introdujo el primer robot comercial por Planet Corporation. Estaba controlado por interruptores de fin de carrera.
1960.- Se introdujo el primer robot ‘Unimate’’, basada en la transferencia de artic. Programada de Devol. Utilizan los principios de control numérico para el control de manipulador y era un robot de transmisión hidráulica.
1961.- Un robot Unimate se instaló en la Ford Motors Company para atender una máquina de fundición de troquel.
1966.- Trallfa, una firma noruega, construyó e instaló un robot de pintura por pulverización.
1968.- Un robot móvil llamado ‘Shakey’’ se desarrollo en SRI (Standford Research Institute), estaba provisto de una diversidad de sensores así como una cámara de visión y sensores táctiles y podía desplazarse por el suelo.
1971.- El ‘Standford Arm’’, un pequeño brazo de robot de accionamiento eléctrico, se desarrolló en la Standford University.
1973.- Se desarrolló en SRI el primer lenguaje de programación de robots del tipo de computadora para la investigación con la denominación WAVE. Fue seguido por el lenguaje AL en 1974. Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Víctor Scheinman y Bruce Simano.
1974.- ASEA introdujo el robot Irb6 de accionamiento completamente eléctrico.
1974.- Kawasaki, bajo licencia de Unimation, instaló un robot para soldadura por arco para estructuras de motocicletas.
1974.- Cincinnati Milacron introdujo el robot T3 con control por computadora.
1975.- El robot ‘Sigma’’ de Olivetti se utilizó en operaciones de montaje, una de las primitivas aplicaciones de la robótica al montaje.
1976.- Un dispositivo de Remopte Center Compliance (RCC) para la inserción de piezas en la línea de montaje se desarrolló en los laboratorios Charles Stark Draper Labs en estados Unidos.
1978.- El robot T3 de Cincinnati Milacron se adaptó y programó para realizar operaciones de taladro y circulación de materiales en componentes de aviones, bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing).
1978.- Se introdujo el robot PUMA (Programmable Universal Machine for Assambly) para tareas de montaje por Unimation, basándose en diseños obtenidos en un estudio de la General Motors.
1979.- Desarrollo del robot tipo SCARA (Selective Compliance Arm for Robotic Assambly) en la Universidad de Yamanashi en Japón para montaje. Varios robots SCARA comerciales se introdujeron hacia 1981.
1980.- Un sistema robótico de captación de recipientes fue objeto de demostración en la Universidad de Rhode Island. Con el empleo de visión de máquina el sistema era capaz de captar piezas en orientaciones aleatorias y posiciones fuera de un recipiente.
1981.- Se desarrolló en la Universidad de Carnegie- Mellon un robot de impulsión directa. Utilizaba motores eléctricos situados en las articulaciones del manipulador sin las transmisiones mecánicas habituales empleadas en la mayoría de los robots.
1982.- IBM introdujo el robot RS-1 para montaje, basado en varios años de desarrollo interno. Se trata de un robot de estructura de caja que utiliza un brazo constituido por tres dispositivos de deslizamiento ortogonales. El lenguaje del robot AML, desarrollado por IBM, se introdujo también para programar el robot SR-1.
1983.- Informe emitido por la investigación en Westinghouse Corp. bajo el patrocinio de National Science Foundation sobre un sistema de montaje programable adaptable (APAS), un proyecto piloto para una línea de montaje automatizada flexible con el empleo de robots.
1984.- Robots 8. La operación típica de estos sistemas permitía que se desarrollaran programas de robots utilizando gráficos interactivos en una computadora personal y luego se cargaban en el robot.

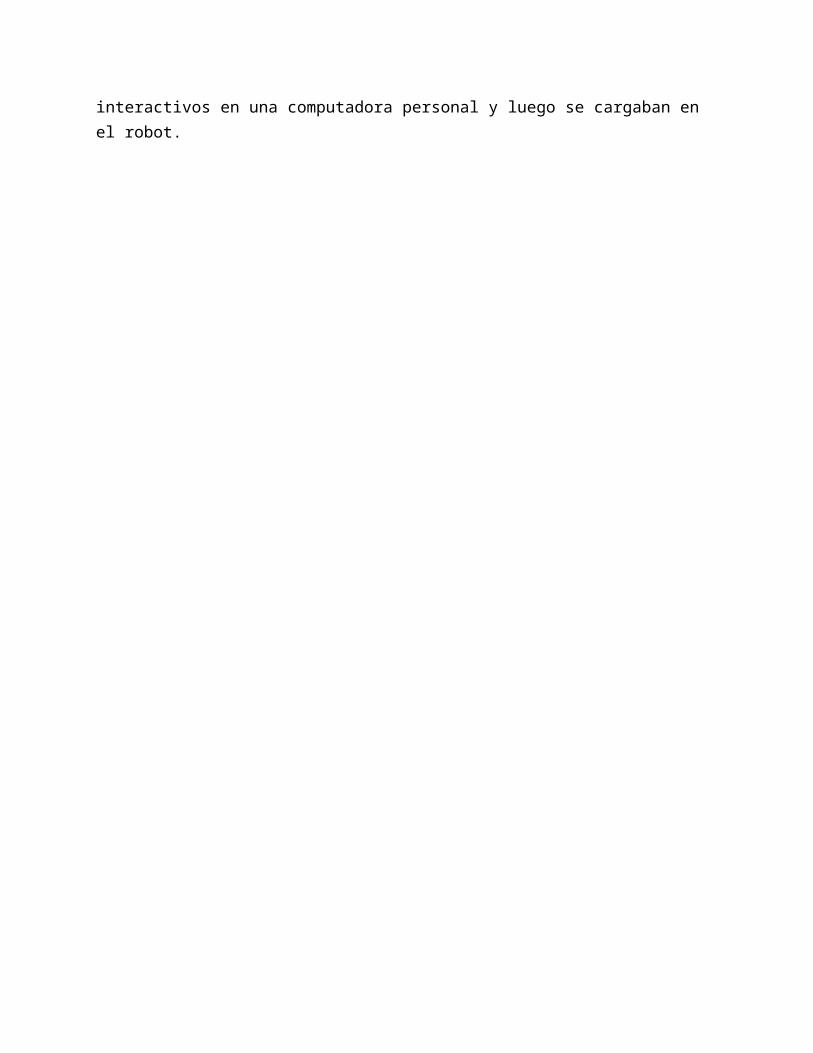
1.2.- Estructura mecánica de un robotLa estructura de un robot está formada por 7 elementos: La estructura mecánica, la transmisión, los sistemas de accionamiento, el sistema sensorial, los sistemas de control y los elementos terminales. Aunque algunos de estos elementos no sean exclusivos de los robots, las tareas para las que suelen ser utilizados han motivado que se utilicen estos elementos y algunos otros no enlistados, dependiendo su tarea específica. En cuanto a la estructura mecánica, un robot está formado por una serie de elementos o eslabones unidos mediante articulaciones que permiten un movimiento relativo en cada unión. La constitución física de la mayor parte de los robots industriales simula la anatomía de un brazo humano, y se suele hacer referencia a las partes del cuerpo para indicar las partes del robot.
Es importante reconocer cada una de las partes del robot y los tipos de articulaciones que manejan, debido a que al elegir un robot para una tarea específica se debe considerar la cantidad de movimientos que hará para finalizar su trabajo. La cantidad de movimientos que puede hacer un robot es determinada por sus grados de libertad (GDL). Los grados de libertad se definen como la cantidad de movimientos independientes que puede realizar cada articulación con respecto a la anterior. Un mayor número de grados de libertad conlleva un aumento de la flexibilidad en el posicionamiento del actuador final del robot. Usualmente en los robots industriales se requieren de 6 GDL, pero algunas tareas más complejas requieren un mayor número, como suele encontrarse en las tareas de montaje. Tareas sencillas, como las de pintura y paletizacion, suelen exigir 4 o 5 GDL. Cuando el número de grados de libertad del
robot es mayor que los necesarios para una determinada tarea se dice que el robot es redundante. Cada articulación provee de al menos un grado de libertad al robot.
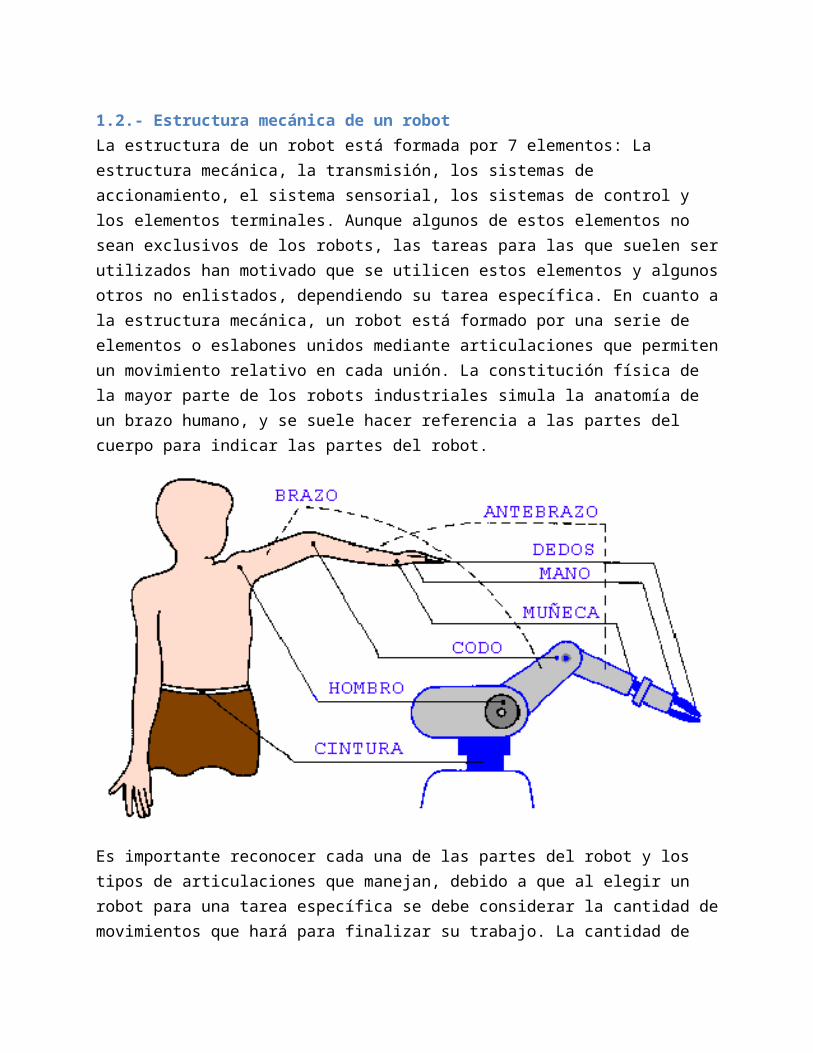
El movimiento de cada articulación puede ser de desplazamiento, de giro o una combinación de ambos. Existen 6 tipos diferentes de articulaciones: esférica o rotula, planar, de tornillo, prismática, de rotación y cilíndrica.
La combinación de las diferentes articulaciones en un robot crea diferentes configuraciones y características tanto en el diseño como en la construcción del robot. El número total de los grados de libertad se obtiene sumando los grados de libertad de las articulaciones que lo componen.
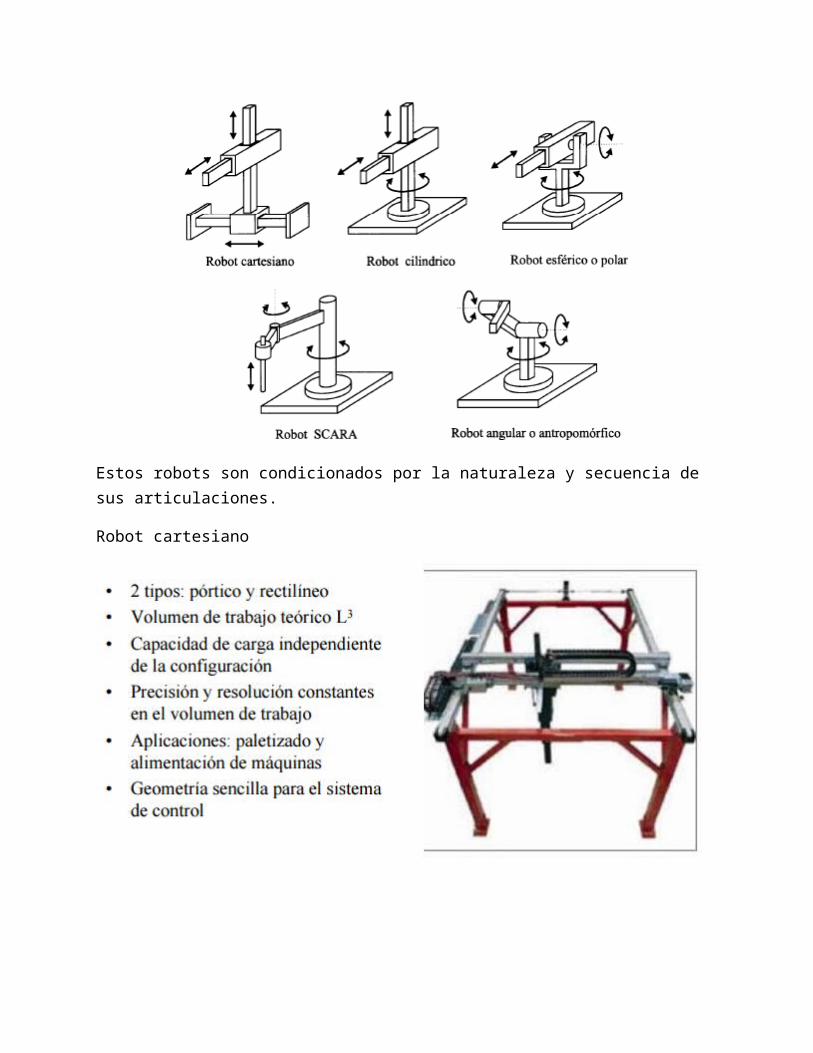
Configuraciones morfológicasLas diferentes combinaciones de articulaciones crean una clasificación más generalizada para las configuraciones.
Estos robots son condicionados por la naturaleza y secuencia de sus articulaciones.
Robot cartesiano

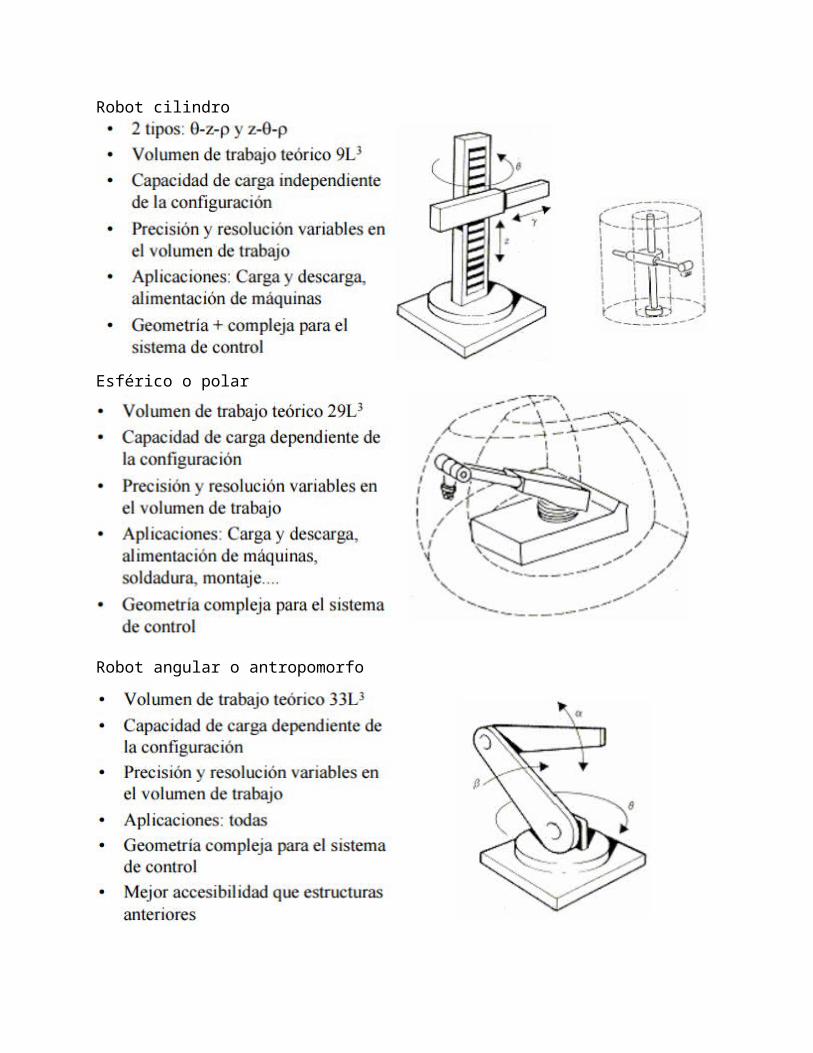
Robot cilindro
Esférico o polar
Robot angular o antropomorfo
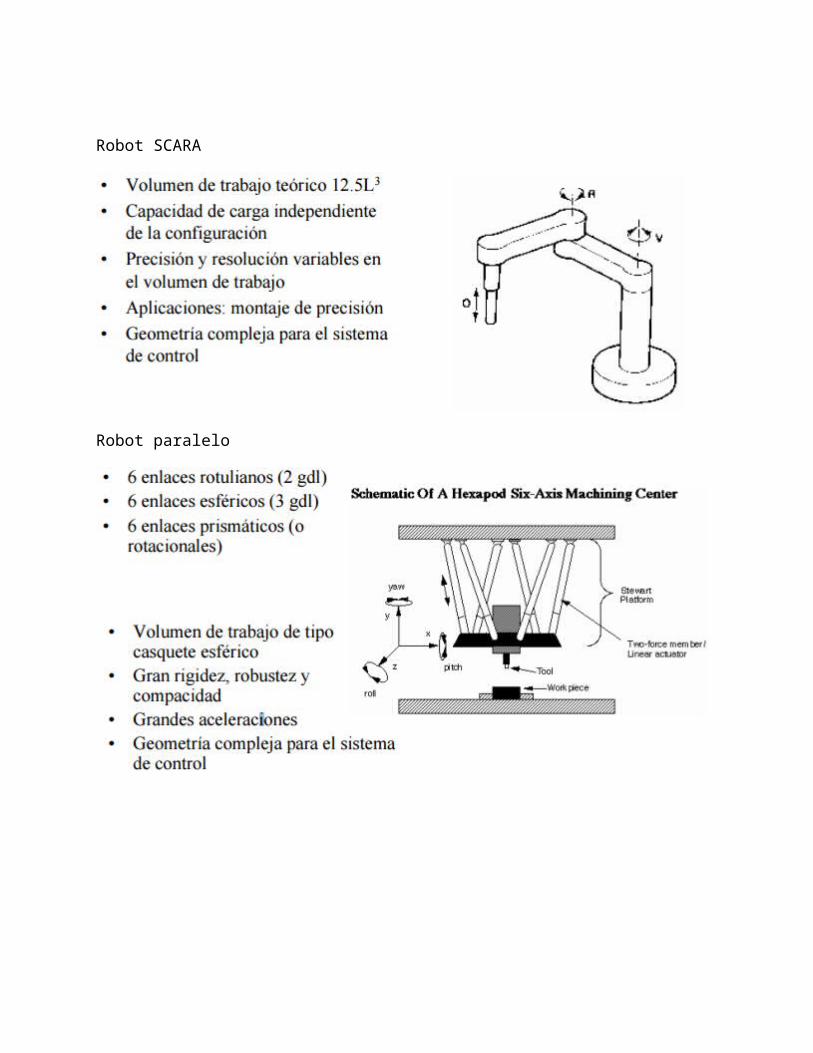
Robot SCARA
Robot paralelo
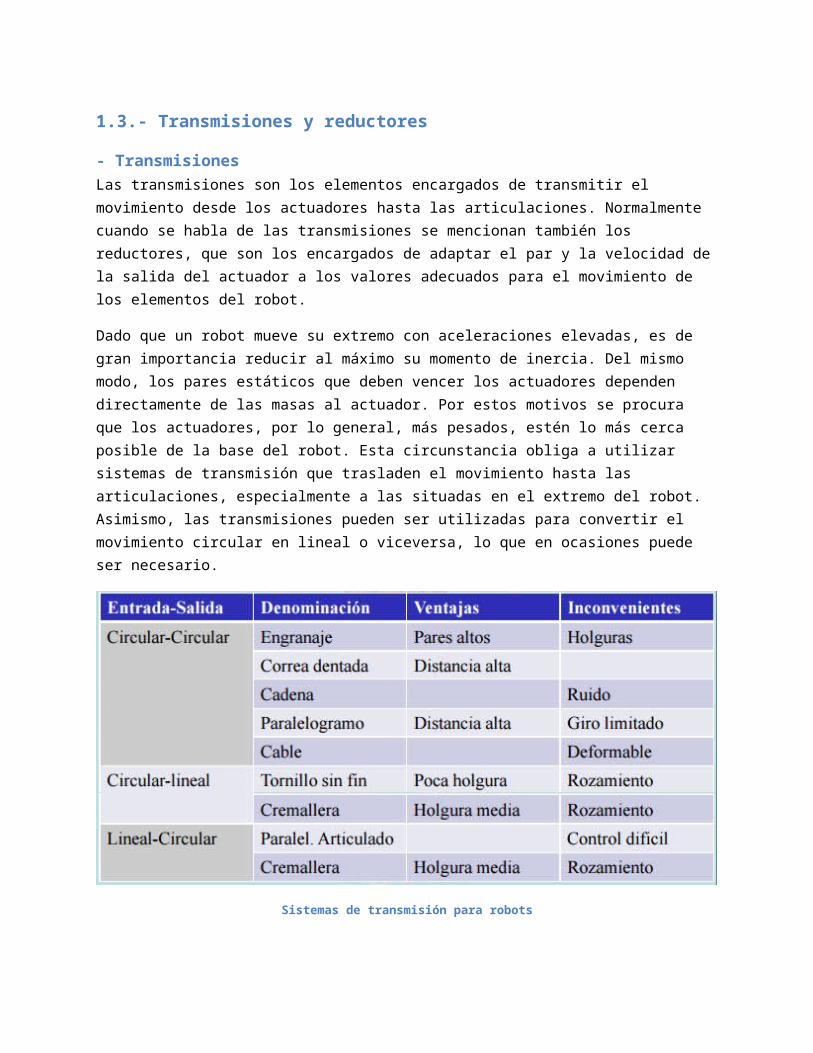
1.3.- Transmisiones y reductores
- TransmisionesLas transmisiones son los elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones. Normalmente cuando se habla de las transmisiones se mencionan también los reductores, que son los encargados de adaptar el par y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los elementos del robot.
Dado que un robot mueve su extremo con aceleraciones elevadas, es de gran importancia reducir al máximo su momento de inercia. Del mismo modo, los pares estáticos que deben vencer los actuadores dependen directamente de las masas al actuador. Por estos motivos se procura que los actuadores, por lo general, más pesados, estén lo más cerca posible de la base del robot. Esta circunstancia obliga a utilizar sistemas de transmisión que trasladen el movimiento hasta las articulaciones, especialmente a las situadas en el extremo del robot. Asimismo, las transmisiones pueden ser utilizadas para convertir el movimiento circular en lineal o viceversa, lo que en ocasiones puede ser necesario.
Sistemas de transmisión para robots
Es de esperar que un buen sistema de transmisión cumpla con una serie de características básicas:
- Debe tener un tamaño y peso reducido- Se ha de evitar que presente juegos u holguras considerables- Se deben buscar transmisiones con gran rendimiento
Las transmisiones más habituales son aquellas que cuentan con movimiento circular tanto a la entrada como a la salida. Incluidas en éstas se encuentran los engranajes, las correas dentadas y las cadenas.
- ReductoresAl contrario de las transmisiones, existen determinados sistemas de reductores usados de manera preferente en los robots industriales. Esto se debe a que los reductores usados en robótica se les exige condiciones de funcionamiento muy restrictivas. La exigencia de estas características viene motivada por las altas prestaciones que se le piden al robot en cuanto a precisión y velocidad de posicionamiento. Las características que usualmente se exigen en una reducción son:
- Bajo peso, tamaño y rozamiento
- Capacidad de reducción elevada en un solo paso
- Mínimo momento de inercia
- Mínimo juego o backslash
- Alta rigidez torsional
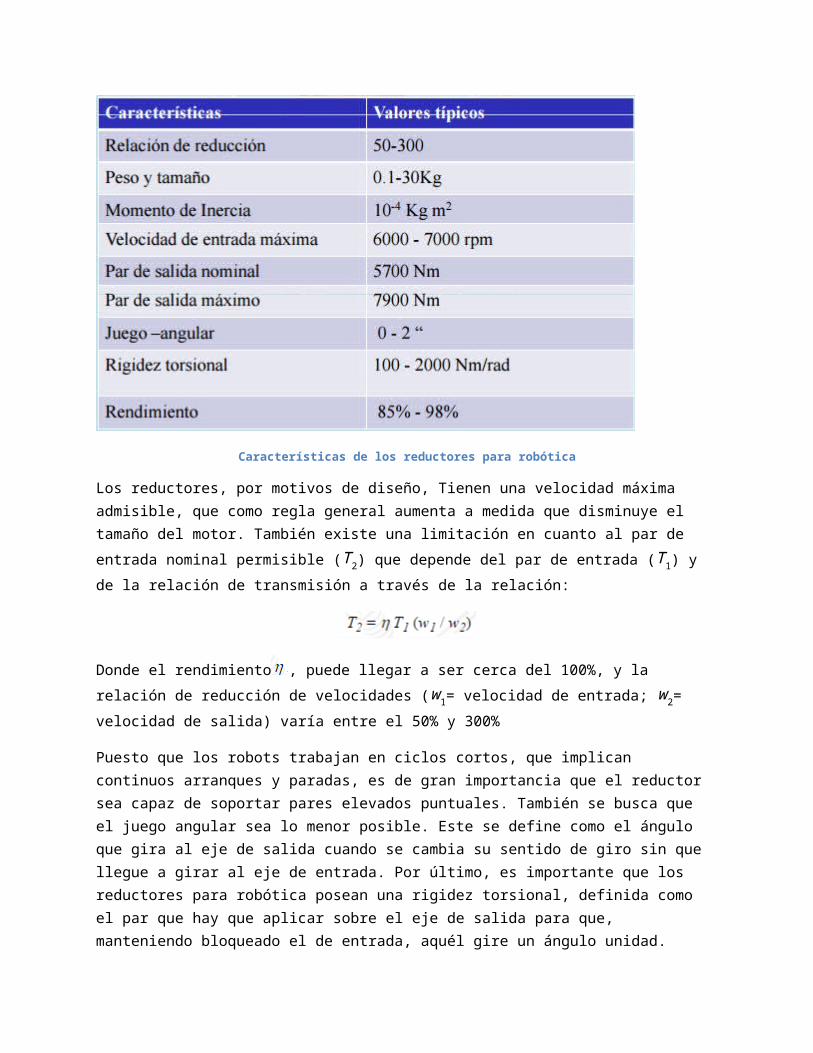
Características de los reductores para robótica
Los reductores, por motivos de diseño, Tienen una velocidad máxima admisible, que como regla general aumenta a medida que disminuye el tamaño del motor. También existe una limitación en cuanto al par de entrada nominal permisible (T 2) que depende del par de entrada (T 1) y de la relación de transmisión a través de la relación:
Donde el rendimiento , puede llegar a ser cerca del 100%, y la relación de reducción de velocidades (w1= velocidad de entrada; w2= velocidad de salida) varía entre el 50% y 300%
Puesto que los robots trabajan en ciclos cortos, que implican continuos arranques y paradas, es de gran importancia que el reductor sea capaz de soportar pares elevados puntuales. También se busca que el juego angular sea lo menor posible. Este se define como el ángulo que gira al eje de salida cuando se cambia su sentido de giro sin que llegue a girar al eje de entrada. Por último, es importante que los reductores para robótica posean una rigidez torsional, definida como el par que hay que aplicar sobre el eje de salida para que, manteniendo bloqueado el de entrada, aquél gire un ángulo unidad.
- Accionamiento directoComo se ha indicado anteriormente, desde hace un tiempo que existen robots que poseen ‘accionamiento directo’ (Direct Drive DD), en que el eje del actuador se conecta directamente a la carga o articulación, sin la utilización de un reductor intermedio. Este término suele utilizarse exclusivamente para robots con accionamiento eléctrico. Este tipo de accionamiento aparece debido la necesidad de utilizar robots en aplicaciones que exigen combinar gran precisión con alta velocidad. Los reductores introducen una serie de efectos negativos, como son el juego angular, rozamiento o disminución de la rigidez del accionador, que pueden impedir alcanzar los valores de precisión y velocidad requeridos.
La utilización de accionamientos directos tiene muchas ventajas entre cuales se pueden destacar como las más importantes:
- Posicionamiento rápido y preciso, pues se evitan los rozamientos y juegos de las transmisiones y reductores
- Aumento de las posibilidades de control del sistema a costa de una mayor complejidad- Simplificación del sistema mecánico al eliminarse el reductor
Así como ventajas también tiene desventajas, como que en la aplicación práctica de un accionamiento directo el problema radica en el motor a emplear, estos deben tratarse de motores que proporcionen un par elevado (unas 50-100 veces mayor que un reductor) a bajas revoluciones (las de movimiento de la articulación) manteniendo la máxima rigidez posible.
1.4.- Comparación de los sistemas de acciónLos actuadores tienen como misión generar el movimiento de los elementos del robot según las órdenes dadas por la unidad de control. Se clasifican en tres grandes grupos, según la energía que utilizan:
- Actuadores neumáticosLos actuadores neumáticos consisten tanto en cilindros lineales como en actuadores rotatorios proveedores del movimiento. Los actuadores neumáticos son menos costosos y más seguros que otros sistemas, sin embargo, es difícil controlar la velocidad o la posición debido a la compresibilidad del aire que se utiliza.
En los actuadores neumáticos se comprime el aire abastecido por un compresor, el cual viaja a través de mangueras. Los robots pequeños están diseñados para funcionar por medio de actuadores neumáticos. Los robots que funcionan con actuadores neumáticos están limitados a operaciones como la de tomar y situar ciertos elementos. La exactitud se puede incrementar mediante paros mecánicos y los robots accionados en forma neumática son útiles para las aplicaciones ligeras que involucran las operaciones de recoger-colocar.
Entre los actuadores neumáticos se enlistan diversos dispositivos:
- Cilindros o pistones Neumáticos:- Cilindros de doble vástago- Cilindro Tándem- Cilindro multiposicional- Cilindro de Impacto- Cilindro de giro- Cilindros de simple efecto- Cilindro de doble efecto- Motores de Alertas Rotativas- Motores de pistones
- Actuadores hidráulicosEstos actuadores se basan, para su funcionamiento, en la presión ejercida por un líquido, generalmente un tipo de aceite. Las maquinas que normalmente se encuentran conformadas por actuadores hidráulicos tienen mayor velocidad y mayor resistencia mecánica y son de gran tamaño, por ello, son usados para aplicaciones donde requieran de una carga pesada. Cualquier tipo de sistema hidráulico se encuentra sellado herméticamente a modo que no permita, de ninguna manera, derramar el líquido que contiene, de lo contraria se corre un gran riesgo. Los actuadores hidráulicos requieren demasiado equipo para suministro de energía, así como de mantenimiento periódico.
Se clasifican en Actuadores Lineales, llamados Cilindros. Y actuadores rotativos en general denominados motores hidráulicos. Los actuadores son alimentados con fluido a presión y se obtiene un movimiento con una determinada velocidad, fuerza, o bien velocidad angular y momento a partir de la perdida de presión de un determinado caudal del fluido en cuestión.
Potencia de Entrada = Presión x Caudal
Potencia Entregada en el Actuador = Variación de Presión x Caudal.
Esta variación de presión deberá computarse entre la entrada y la salida del actuador. En estas expresiones no consideramos las pérdidas por rozamiento que existen y no se debe dejar de tenerlas en cuenta para las realizaciones prácticas. La potencia mecánica de salida estará dada en los actuadores lineales por:
Potencia de Salida = Fuerza x Velocidad
Y en los actuadores rotativos por:
Potencia de Salida = Momento Motor (Torque) x Velocidad Angular
Es evidente que las perdidas entre la potencia de entrada y salida serán las pérdidas por rozamiento.
De acuerdo con su función podemos clasificar a los cilindros hidráulicos en 2 tipos:
- De efecto simple: se utiliza fuerza hidráulica para empujar y una fuerza externa, diferente, para contraer.
-De acción doble: se emplea la fuerza hidráulica para efectuar ambas acciones.
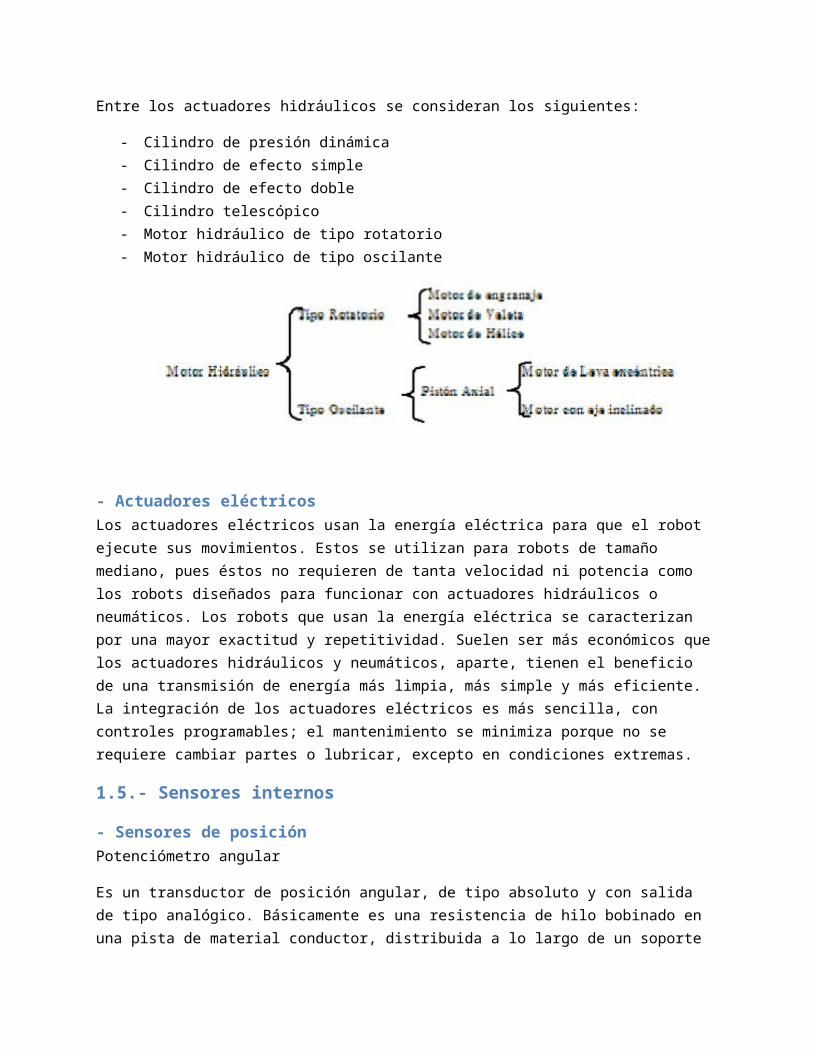
Entre los actuadores hidráulicos se consideran los siguientes:
- Cilindro de presión dinámica - Cilindro de efecto simple - Cilindro de efecto doble - Cilindro telescópico- Motor hidráulico de tipo rotatorio- Motor hidráulico de tipo oscilante
- Actuadores eléctricosLos actuadores eléctricos usan la energía eléctrica para que el robot ejecute sus movimientos. Estos se utilizan para robots de tamaño mediano, pues éstos no requieren de tanta velocidad ni potencia como
los robots diseñados para funcionar con actuadores hidráulicos o neumáticos. Los robots que usan la energía eléctrica se caracterizan por una mayor exactitud y repetitividad. Suelen ser más económicos que los actuadores hidráulicos y neumáticos, aparte, tienen el beneficio de una transmisión de energía más limpia, más simple y más eficiente. La integración de los actuadores eléctricos es más sencilla, con controles programables; el mantenimiento se minimiza porque no se requiere cambiar partes o lubricar, excepto en condiciones extremas.
1.5.- Sensores internos
- Sensores de posiciónPotenciómetro angular
Es un transductor de posición angular, de tipo absoluto y con salida de tipo analógico. Básicamente es una resistencia de hilo bobinado en una pista de material conductor, distribuida a lo largo de un soporte en forma de arco y un cursor solidario a un eje de salida que pueda deslizar sobre dicho conductor. El movimiento del eje arrastra el cursor provocando cambios de resistencia entre éste y los extremos. De esta forma si se alimentan los extremos con una tensión constante Vo aparece en la toma de medida una tensión proporcional al ángulo girado a partir del origen. Interesa que esta variación sea lineal como se representa en la figura. En cuanto a la respuesta dinámica el potenciómetro es un elemento proporcional sin retardo, pero la frecuencia de funcionamiento suele quedar limitada a 5 Hz por motivos mecánicos.
Encoders
Los encoders son dispositivos formados por un rotor con uno o varios grupos de bandas opacas y translúcidas alternadas y un estator con una serie de captadores ópticos que detectan la presencia o no de banda opaca. Existen dos tipos de encoders, incrementales y absolutos. Los primeros dan un determinado número de impulsos por vuelta y requieren un contador para determinar la posición a partir de un origen de referencia, los absolutos disponen de varias bandas en el rotor ordenadas según un código binario, y los captadores detectan un código digital completo que es único para cada posición del rotor.
Los encoders incrementales suelen tener una sola banda de marcas repartidas en el disco del rotor y separadas por un paso p. En el estator disponen de dos pares de emisor-receptor ópticos, decalados un número entero de pasos más ¼ de paso. Al girar el rotor genera una señal cuadrada, el decalaje hace que las señales tengan un desfase de ¼ de periodo si el rotor gira en un sentido y de ¾ si gira en el sentido contrario, lo que se utiliza para discriminar el sentido de giro.
Un simple sistema lógico permite determinar desplazamientos a partir de un origen, a base de contar impulsos de un canal y determinar el sentido de giro a partir del desfase entre los dos canales. Algunos encoders pueden disponer de un canal adicional que genere un pulso por vuelta y la lógica puede dar número de vueltas más fracción de vuelta.
Encoder Incremental
La resolución del encoder depende del número N de divisiones del rotor, es decir del número de impulsos por revolución. No debe confundirse lo que es resolución angular del encoder con la posible resolución de un sistema de medida de coordenadas lineales que dependerá de la desmultiplicación mecánica.
Los encoders absolutos disponen de varias bandas dispuestas en forma de coronas circulares concéntricas, dispuestas de tal forma que en sentido radial el rotor queda dividido en sectores, con combinaciones de opacos y transparentes que siguen un código Gray o binario.
Encoder absoluto
El estator dispone de un conjunto emisor-receptor ópticos para cada corona del rotor. El conjunto de información binaria obtenida de los captadores es único para cada posición del rotor y representa su posición absoluta. Se utiliza el código Gray en lugar de un binario clásico porque en cada cambio de sector sólo cambia el estado de una de las bandas, evitando errores por falta de alineación de los captadores. Para un encoder con N bandas, el rotor permite 2N combinaciones, la resolución será 360° entre los 2N sectores, por ejemplo para encoders de 12 y 16 bits se obtiene una resolución angular de 0.0879° y 0.00054° respectivamente.
Sincros y Resolvers
Un sincro es un transductor de posición angular de tipo electromagnético. Su principio de funcionamiento puede resumirse diciendo que se trata de un transformador, en el que uno de los devanados es rotativo. La configuración más habitual es :
Primario en el rotor y monofásico
Secundario en el estator y trifásico
Cuando se aplica una tensión senoidal al devanado primario, se recogen en los devanados secundarios de cada una de las fases tres tensiones, cuya amplitud y fase con respecto a la tensión del primario dependen de la posición angular del rotor. En caso de existir una sola fase en el estator existiría una indeterminación en el signo del ángulo, que desaparece para un estator trifásico. Una configuración particular del Sincro es la del Resolver, cuyo principio de funcionamiento es análogo, con las siguientes particularidades constructivas:
Primario en el estator y bifásico
Secundario en el rotor, monofásico o bifásico.
Sensores Inductosyn
Es un transductor electromagnético utilizado para la medida de desplazamientos lineales, con precisión del orden de micras. Se emplea en máquinas medidoras de coordenada y máquinas herramientas de control numérico. El transductor consta de dos partes acopladas magnéticamente, una denominada escala fija y situada paralela al eje de desplazamiento y otra solapada a la anterior deslizante y solidaria a la parte móvil.
La parte fija lleva grabado un circuito impreso con pistas en forma de onda rectangular con un paso p. La parte móvil tiene dos más pequeños, encarados con los de la escala, y desfasados entre si un número entero de pasos más ¼ de paso (análogamente a lo visto para encoders incrementales). Si se excita la parte fija con una señal alterna en cada uno de los circuitos de la parte deslizante se recoge una tensión que es función del desplazamiento lineal y el paso de onda de la escala. La amplitud varía entre un máximo y un mínimo según las que los circuitos fijo y móvil estén enfrentados o decalados ½ de paso. La medida se realiza sumando el número de ciclos de señal de salida completos, más la variación dentro de un ciclo. La indeterminación del sentido se resuelve comparando la fase de los dos captadores.
Sensores LASER
Los sensores LASER pueden utilizarse como detectores de distancias por análisis de interferencias (interferometría LASER). El principio de funcionamiento se basa en la superposición de dos ondas de igual frecuencia, una directa y la otra reflejada. La onda resultante pasa por valores máximos y mínimos al variar la fase de la señal reflejada. Los sensores industriales generan un haz de luz que se divide en dos partes ortogonales mediante un separador. Un haz se aplica sobre un espejo plano fijo, mientras el otro refleja sobre el objeto cuya distancia se quiere determinar, los dos haces se superponen de nuevo en el separador, de forma que al separarse el objeto se generan máximos y mínimos a cada múltiplo de la longitud de onda del haz. La distancia se mide contando dichas oscilaciones o franjas, obteniéndose una salida digital de elevada precisión.
Sensores ultrasónicos
Los sensores ultrasónicos emiten una señal de presión hacia el objeto cuya distancia se pretende medir, y miden el tiempo que transcurre hasta la recepción del eco reflejado. El más conocido es el SONAR o en la actualidad los sistemas de ecografía, en el campo industrial se suelen emplear para controlar niveles de sólidos en depósitos, presencia de obstáculos en celdas robotizadas, detección de grietas en la inspección de materiales o soldaduras.
Sensores magnetoestrictivos
Están también basados en la detección de un impulso ultrasónico generado por la deformación elástica que se produce en algunos materiales bajo el efecto de un campo magnético. Básicamente se trata de una varilla de material magnético en la que se genera una perturbación ultrasónica mediante una bobina inductora, sobre la varilla se coloca un imán móvil que puede deslizarse. El imán provoca un
cambio de permeabilidad en el medio y esto provoca una reflexión de la onda ultrasónica, pudiéndose detectar la distancia al imán por el tiempo en recibir el eco.
- Sensores de velocidad Algunos sensores de velocidad están hechos con una bobina móvil fuera de un imán estacionario. El principio de operación es el mismo. Un otro tipo de transductor de velocidad consiste en un acelerómetro con un integrador electrónico incluido. Esta unidad se llama un velómetro y es en todos los aspectos superiores al sensor de velocidad sísmico clásico.
El sensor de velocidad fue uno de los primeros transductores de vibración, que fueron construidos. Consiste de una bobina de alambre y de un imán colocado de tal manera que si se mueve el cárter, el imán tiende a permanecer inmóvil debido a su inercia. El movimiento relativo entre el campo magnético y la bobina induce una corriente proporcional a la velocidad del movimiento. De esta manera, la unidad produce una señal directamente proporcional a la velocidad de la vibración. Es autogenerado y no necesita de aditamentos electrónicos acondicionadores para funcionar. Tiene una impedancia de salida eléctrica relativamente baja que lo hace relativamente insensible a la inducción del ruido.
Aun tomando en cuenta estas ventajas, el transductor de velocidad tiene muchas desventajas, que lo vuelven casi obsoleto para instalaciones nuevas, aunque hoy en día todavía se usan varios miles. Es relativamente pesado y complejo y por eso es caro, y su respuesta de frecuencia que va de 10 Hz a 1000 Hz es baja. El resorte y el imán forman un sistema resonante de baja frecuencia, con una frecuencia natural de 10 Hz. La resonancia tiene que ser altamente amortiguada, para evitar un pico importante en la respuesta a esta frecuencia. El problema es que la amortiguación en cualquier diseño práctico es sensible a la temperatura, y eso provoca que la respuesta de frecuencia y la respuesta de fase dependan de la temperatura.
- Sensores de presenciaUn sensor de presencia es un dispositivo electrónico equipado de sensores que responden a un movimiento físico. Se encuentran generalmente en sistemas de seguridad o en circuitos cerrados de televisión. El sistema puede estar compuesto, simplemente, por una cámara de vigilancia conectada a un ordenador que se encarga de generar una señal de alarma o poner el sistema en estado de alerta cuando algo se mueve delante de la cámara. Aunque, para mejorar el sistema se suele utilizar más de una cámara, multiplexores y grabadores digitales. Además, se maximiza el espacio de grabación, grabando solamente cuando se detecta movimiento.
Existen diferentes aplicaciones para un sensor de movimiento: seguridad, entretenimiento, iluminación, comodidad. Por ejemplo, en las tiendas se tienen sensores que detectan cuando una persona va a entrar y se abren las puertas automáticamente.
También hay varios tipos de sensores:
Sensores activos. Este tipo de sensores inyectan luz, microondas o sonido en el medio ambiente y detectan si existe algún cambio en él.
Sensores pasivos. Muchas alarmas y sensores utilizados usan la detección de ondas infrarrojas. Estos sensores son conocidos como PIR (pasivos infrarrojos). Para que uno de estos sensores detecte a los seres humanos se debe de ajustar la sensibilidad del sensor para que detecte la temperatura del cuerpo humano.
Sensores capacitivos. Se basan en la detección de un cambio en la capacidad del sensor provocado por una superficie próxima a éste. Constan de dos elementos; por un lado está el elemento cuya capacidad se altera (que suele ser un condensador formado por electrodos) y por otra parte el dispositivo que detecta el cambio de capacidad (un circuito electrónico conectado al condensador). La gran ventaja que detecta la proximidad de objetos de cualquier naturaleza.
Acelerómetro. El acelerómetro es uno de los transductores más versátiles, siendo el más común el piezoeléctrico por compresión. Este se basa en el principio de que cuando se comprime un retículo cristalino piezoeléctrico, se produce una carga eléctrica proporcional a la fuerza aplicada.
Giroscopio mecánico. Es un dispositivo para medir orientación o mantenerla. Consiste en un disco giratorio que puede tomar cualquier orientación, la cual cambia por las fuerzas externas causadas por el movimiento. El primero fue construido en el año 1810 en Alemania por Bohnenberg y en 1852 el físico francés Leon Foucault demostró que un giroscopio puede detectar la rotación de la tierra.
Los sensores inductivos. Se basan en el cambio de inductancia que provoca un objeto metálico en un campo magnético, constan básicamente de una bobina y de un imán, su funcionamiento es sencillo: si se detecta una corriente en la bobina, algún objeto ferromagnético a entrado en el campo del imán, tienen el inconveniente de que son limitados a objetos ferromagnéticos
1.6.- Elementos terminalesPara las aplicaciones industriales, las capacidades del robot básico deben aumentarse por medio de dispositivos adicionales. Podríamos denominar a estos dispositivos como los periféricos del robot. En robótica, el término de actuador final se utiliza para describir la mano o herramienta que está unida a la muñeca. El actuador final representa la herramienta especial que permite al robot de uso general realizar una aplicación particular, y debe diseñarse específicamente para dicha aplicación. Los actuadores finales pueden dividirse en dos categorías:
Pinzas (gripper)
Herramientas
Las pinzas se utilizan para tomar un objeto, normalmente la pieza de trabajo, y sujetarlo durante el ciclo de trabajo del robot. Hay una diversidad de métodos de sujeción que pueden utilizarse, además de los métodos mecánicos obvios de agarre de la pieza entre dos o más dedos. Estos métodos suplementarios incluyen el empleo de casquetes de sujeción, imanes, ganchos, y cucharas. Una herramienta se utiliza como actuador final en aplicaciones en donde se exija al robot realizar alguna operación sobre la pieza de trabajo. Estas aplicaciones incluyen la soldadura por puntos, la soldadura por arco, la pintura por
pulverización y las operaciones de taladro. En cada caso, la herramienta particular está unida a la muñeca del robot para realizar la operación.
PinzasLos elementos de sujeción se utilizan para agarrar y sostener los objetos, y se suelen denominar pinzas. Se distingue entre las que utilizan dispositivos de agarre mecánico y las que utilizan algún otro tipo de dispositivo (ventosas, pinzas magnéticas, adhesivas, ganchos, etc.). Se pueden clasificar según el sistema de sujeción empleado.
El accionamiento neumático es él más utilizado por ofrecer mayores ventajas en simplicidad, precio y fiabilidad, aunque presenta dificultades de control de posiciones intermedias. En ocasiones se utilizan accionamientos de tipo eléctrico. En la pinza se suelen situar sensores para detectar el estado de la misma (abierto o cerrado). Se pueden incorporar a la pinza otro tipo de sensores para controlar el estado de la pieza, sistemas de visión que incorporen datos geométricos de los objetos, detectores de proximidad, sensores fuerza par, etc.
Existen ciertos elementos comerciales que sirven de base para la pinza, siendo posible a partir de ellos diseñar actuadores válidos para cada aplicación concreta. Sin embargo, en otras ocasiones el actuador debe ser desarrollado íntegramente, constituyendo un porcentaje importante dentro del coste total de la aplicación. Los tipos de pinzas más comunes pertenecen al tipo llamado pivotante. Los dedos de la pinza giran en relación con los puntos fijos del pivote. De esta manera, la pinza se abre y se cierra. Otro tipo de pinzas se denominan de movimiento lineal. En este caso, los dedos se abren y se cierran ejecutando un movimiento paralelo entre sí.
HerramientasEn muchas ocasiones el robot ha de realizar operaciones que no consisten en manipular objetos, sino que implica el uso de una herramienta. Aparte de estos elementos de sujeción y herramientas más o menos convencionales, existen interesantes desarrollos e investigaciones, muchos de ellos orientados a la manipulación de objetos complicados y delicados.
1.7.- Tipos y características de robotsExisten 6 diferentes clasificaciones para los robots, dependiendo de su cronología, su arquitectura generacional, su estructura, su nivel de control, su programación, según su aplicación y según su inteligencia.
Según su cronología1. ª Generación.- Manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
2. ª Generación.- Robots de aprendizaje. Repiten una secuencia de movimientos que ha sido ejecutada previamente por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
3. ª Generación.- Robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
4. ª Generación.- Robots inteligentes. Son similares a los anteriores, pero además poseen sensores que envían información a la computadora de control sobre el estado del proceso. Esto permite una toma inteligente de decisiones y el control del proceso en tiempo real.
Según su arquitectura generacionalRobots Play-back, los cuales regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco. Estos robots comúnmente tienen un control de lazo abierto.
Robots controlados por sensores, estos tienen un control en lazo cerrado de movimientos manipulados, y hacen decisiones basados en datos obtenidos por sensores.
Robots controlados por visión, donde los robots pueden manipular un objeto al utilizar información desde un sistema de visión.
Robots controlados adaptablemente, donde los robots pueden automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.
Robots con Inteligencia Artificial, donde las robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas.
Robots médicos, fundamentalmente, prótesis para disminuir daos físicos que se adaptan al cuerpo y están dotados de potentes sistemas de mando. Con ellos se logra igualar al cuerpo con precisión los movimientos y funciones de los órganos o extremidades que suplen.
Androides, robots que se parecen y actúan como seres humanos. Los robots de hoy en día vienen en todas las formas y tamaños, pero a excepción de los que aparecen en las ferias y espectáculos, no se parecen a las personas y por tanto no son androides. Actualmente, los androides reales sólo existen en la imaginación y en las películas de ficción.
Robots móviles, provistos de patas, ruedas u orugas que los capacitan para desplazarse de acuerdo su programación. Elaboran la información que reciben a través de sus propios sistemas de sensores y se emplean en determinado tipo de instalaciones industriales, sobre todo para el transporte de mercancías en cadenas de producción y almacenes. También se utilizan robots de este tipo para la investigación en lugares de difícil acceso o muy distantes, como es el caso de la exploración espacial y las investigaciones o rescates submarinos.
Según su estructuraLa estructura, es definida por el tipo de configuración general del Robot, puede ser metamórfica. El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un Robot a través del cambio de su configuración por el propio Robot. El metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus elementos o subsistemas estructurales. Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del Robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los Robots, con base en su arquitectura, se hace en los siguientes grupos: poliarticulados, móviles, androides, zoomórficos e híbridos.
1.- Poliarticulados: En este grupo se encuentran los Robots de muy diversa forma y configuración, cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas, y con un número limitado de grados de libertad. En este grupo, se encuentran los manipuladores, los Robots industriales, los Robots cartesianos y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el espacio ocupado en el suelo.
2.- Móviles: Son Robots con gran capacidad de desplazamiento, basada en carros o plataformas y dotada de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores. Estos Robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
3.- Androides: Son Robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente, los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación. Uno de los aspectos más complejos de estos Robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del Robot.
4. Zoomórficos: Los Robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los Robots zoomórficos no caminadores está muy poco evolucionado. Los experimentos efectuados en Japón basados en segmentos cilíndricos biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. Los Robots zoomórficos caminadores multípedos son muy numerosos y están siendo objeto de experimentos en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, pilotados o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos Robots serán interesantes en el campo de la exploración espacial y en el estudio de los volcanes.
5. Híbridos: Corresponden a aquellos de difícil clasificación, cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismo tiempo, uno de los atributos de los Robots móviles y de los Robots zoomórficos.
Según su nivel de inteligenciaEn Japón, los japoneses (JIRA) clasifican a los robots dentro de seis escalas, basados en la inteligencia del mismo:
1.- Dispositivos de manejo manual, controlados por una persona.
2.- Robots de secuencia arreglada.
3.- Robots de secuencia variable, donde un operador puede modificar la secuencia fácilmente.
4.- Robots regeneradores, donde el operador humano conduce el robot a través de la tarea.
5.- Robots de control numérico, donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea.
6.- Robots inteligentes, los cuales pueden entender e interactuar con cambios en el medio ambiente.
Según el nivel de controlLos programas en el controlador del robot pueden ser agrupados de acuerdo al nivel de control que realizan o su predictibilidad en las formas para realizar su función.
Nivel de Inteligencia Artificial, donde el programa aceptará un comando como "levantar el producto" y descomponerlo dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas.
Nivel de modo de control, donde los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados.
Niveles de servosistemas, donde los actuadores controlan los parámetros de los mecanismos con el uso de una retroalimentación interna de los datos obtenidos por los sensores, y la ruta es modificada sobre la base de los datos que se obtienen de sensores externos. Todas las detecciones de fallas y mecanismos de corrección son implementados en este nivel.
Según el nivel de su lenguaje de programación1) Sistemas guiados, en el cual el usuario conduce el robot a través de los movimientos a ser realizados.
2) Sistemas de programación de nivel-robot, en los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado.
3) Sistemas de programación de nivel-tarea, en el cual el usuario especifica la operación por sus acciones sobre los objetos que el robot manipula.
Según su aplicación1) Robots Médicos, fundamentalmente, prótesis para disminuir daños físicos que se adaptan al cuerpo y están dotados de potentes sistemas de mando. Con ellos se logra igualar al cuerpo con precisión los movimientos y funciones de los órganos o extremidades que suplen.
2) Exoesqueletos Robóticos
3) Robots Industriales
Bibliografía
- http://www.monografias.com/trabajos6/larobo/larobo.shtml- https://es.wikipedia.org/wiki/Rob%C3%B3tica- http://www.profesormolina.com.ar/tecnologia/robotica/historia.htm- https://roboticstoday.wikispaces.com/Historia+de+la+Rob%C3%B3tica+2- http://robotiica.blogspot.com/2007/10/historia-de-la-robtica.html- https://es.wikipedia.org/wiki/Rob%C3%B3tica- http://robotec11.tripod.com/id4.html- http://roboticapuno.blogspot.com/2013/01/clasificacion-de-los-robots.html- https://roboticstoday.wikispaces.com/Clasificaci%C3%B3n+de+los+Robots+2- http://www.industriaynegocios.cl/Academicos/AlexanderBorger/Docts%20Docencia/
Seminario%20de%20Aut/trabajos/2004/Rob%C3%B3tica/seminario%202004%20robotica/Seminario_Robotica/Documentos/MORFOLOG%C3%8DA%20DEL%20ROBOT.htm
- http://automata.cps.unizar.es/robotica/Morfologia.pdf- http://proton.ucting.udg.mx/materias/robotica/r166/r66/r66.htm- http://informecatronica-robotica.blogspot.com/p/estructura-de-un-robot-
industrial.html- http://www.infoab.uclm.es/labelec/Solar/electronica/morfologia/
estructura_mecanica.htm- http://html.rincondelvago.com/robotica_1.html- https://oberobot.wordpress.com/2012/04/22/estructura-mecanica-de-un-robot/- http://www.udb.edu.sv/udb/archivo/guia/electronica-ingenieria/fundamentos-de-
robotica/2013/ii/guia-3.pdf- http://www.elai.upm.es/moodle/pluginfile.php/1468/mod_resource/content/0/
Tema2_MorfologiaDelRobot.pdf- http://platea.pntic.mec.es/vgonzale/cyr_0204/ctrl_rob/robotica/sistema/
transmisiones.htm- http://www.info-ab.uclm.es/labelec/Solar/electronica/elementos/Neumaticos.htm- http://cursos.aiu.edu/Sistemas%20Hidraulicas%20y%20Neumaticos/PDF/Tema
%204.pdf- http://www.uhu.es/rafael.sanchez/ingenieriamaquinas/carpetaapuntes.htm/Trabajos
%20IM%202009-10/Antonio%20Delgado%20Diez-Actuadores%20hidraulicos_2.pdf- http://laboratorios.fi.uba.ar/lscm/hidraulica3.pdf
- http://www.thomsonlinear.com/website/esm/esm/products/actuators/electric-linear-actuators.php
- http://www.info-ab.uclm.es/labelec/Solar/electronica/elementos/Electricos.htm- http://www.info-ab.uclm.es/labelec/solar/Componentes/SPOSICION.htm- http://azimadli.com/vibman-spanish/elsensordevelocidad.htm- https://es.overblog.com/
Como_funciona_un_sensor_de_velocidad_definicion_por_el_experto-1228321783-art334193.html
- http://ingeniatic.euitt.upm.es/index.php/tecnologias/item/587-sensor-de-presencia- https://es.wikipedia.org/wiki/Detector_de_movimiento- http://platea.pntic.mec.es/vgonzale/cyr_0204/ctrl_rob/robotica/sistema/terminal.htm- http://roboticapuj.es.tl/Elementos-Terminales.htm-