resumen - 26° jornadas argentinas de ingeniería estructural
TRANSCRIPT

DISPOSICIÓN DE APOYOS EN PUENTES OBLÍCUOS
Tomás A. del Carril Ingeniero Civil
Olga Vernazza Ingeniera Civil
Andrés Stiles Ingeniero Civil
Buenos Aires, Argentina - del Carril – Fazio Ingenieros Civiles
RESUMEN Se presenta un estudio destinado a definir la correcta colocación de apoyos de neopreno en el caso de puentes oblicuos de diferentes tipos. Es frecuente observar en los proyectos y en las obras ejecutadas, que no existe un criterio uniforme sobre la orientación a dar a estos apoyos, aún en el caso de puentes de tipos similares. El origen de esta diversidad de criterios debe buscarse en el apego a la forma en que se colocaban los antiguos aparatos de apoyo de acero y en la consideración de supuestas similitudes de deformaciones bajo cargas, de diferentes tipos de puentes.
Se brindan recomendaciones a seguir en el proyecto de diferentes situaciones y combinaciones de oblicuidad y tipo de la superestructura, obtenidas de la resolución de múltiples superestructuras de puentes.

1 INTRODUCCION En el presente trabajo se establecen recomendaciones para la ubicación correcta de aparatos de apoyo de neopreno en puentes oblicuos de luces moderadas.
Se consideran los puentes de tramos isostáticos formados por vigas prefabricadas y hormigonadas in situ, pretensadas o no, con luces de hasta 50m.
Se analiza el comportamiento de los apoyos de neopreno, que son utilizados casi con exclusividad en el tipo de puentes descrito.
El tipo de puentes considerado, por tratarse de estructuras económicas y de fácil ejecución, abarca una amplia gama de puentes sobre ríos no navegables y en cruces a desnivel con carreteras o vías férreas, a lo largo y ancho del país.
2 OBJETIVOS La experiencia obtenida durante la inspección de innumerables estructuras, tanto en el país como en el extranjero, demuestra que históricamente los apoyos en puentes oblicuos, se han colocado con una orientación errónea en una gran mayoría de los casos. Incluso en el caso de puentes de hormigón armado y hasta en puentes tipo losa, apoyados sobre los dispositivos de acero o fundición que se utilizaban antes de la difusión del neopreno.
La revisión de proyectos previa a la construcción, muestra que, también actualmente, existe una tendencia entre los proyectistas, a disponer los apoyos en puentes oblicuos con orientación inadecuada y que frecuentemente los llevan a trabajar con márgenes de seguridad insuficiente.
El objetivo del presente trabajo es suministrar elementos para que, ante el caso de puentes oblicuos, se cuente con un criterio correcto respecto de su posición en cada estructura. Eventualmente, que el proyectista o constructor, conozca las solicitaciones a las que se verá sometido el apoyo en las diferentes etapas de la construcción y puesta en servicio de un puente y pueda dimensionar correctamente el dispositivo de apoyo.
3 PROPIEDADES DE LOS DISTINTOS TIPOS DE APOYOS Los dispositivos de apoyo en los puentes, se colocan con el objeto de:
1. Centrar o alinear las cargas o reacciones sobre la infraestructura
2. Permitir rotaciones en una o en todas las direcciones (articulación esférica)
3. Absorber esfuerzos horizontales transmitiéndolos a la infraestructura
4. Permitir desplazamientos en una, dos o en todas las direcciones
En el presente análisis, sólo se consideran los dispositivos de apoyo en tanto se espera de ellos que permitan la libre rotación de las estructuras que soportan.
Anteriormente a la aparición comercial de los apoyos de neopreno, la forma habitual de los apoyos que permitían rotaciones (articulación fija) o rotaciones y desplazamientos (articulación móvil) era algún dispositivo que utilizaba rodillos de acero o fundición de acero o hierro. Estos apoyos, constituían articulaciones unidireccionales ya que podían rotar alrededor de un eje exclusivamente. Cuando

este tipo de apoyos, era colocado, con su eje de giro orientado en diferente dirección que las rotaciones impuestas por la estructura, inevitablemente se bloqueaba y, si bien las rotaciones en la estructura se producían a pesar de ello, el impedimento de desplazamientos en la dirección correcta producía la rotura de los dados de apoyo o de pilares y estribos, como se ve en la figuras 1.
Figura 1 – Apoyo mal orientado en una losa oblicua
4 COMPORTAMIENTO DE LOS APOYOS DE NEOPRENO Este problema se ha eliminado, parcialmente, con la utilización de apoyos de neopreno. En efecto, estos dispositivos están constituidos por una almohadilla elástica de forma rectangular, cuadrada o circular, que permite desplazamientos y rotaciones en todas las direcciones, a menos que se impida alguno mediante un dispositivo especial. En los puentes de luces moderadas, tratados en este trabajo, es completamente usual disponer apoyos de neopreno multidireccionales.
Las almohadillas elásticas se deformarán y permitirán rotaciones en las direcciones impuestas por superestructura, sin importar la orientación con la cual se coloquen. Sin embargo, una correcta colocación con el eje de rotación en la dirección de la mayor dimensión del apoyo, hará que el apoyo se vea menos solicitado, mientras que si se lo obliga a rotar en otra dirección, habrá una esquina más solicitada que las otras y, si esto no se ha contemplado en el diseño del apoyo, puede producir la falla del dispositivo y el apoyo dejará de funcionar correctamente, debiendo reemplazarse.
Los apoyos generalmente utilizados, denominados también apoyos de neopreno armados, están formados por varias capas de policloropreno entre las cuales se intercalan chapas de acero, quedando finalmente una sucesión de capas de igual espesor y un recubrimiento externo para protección de las chapas de acero, que quedan firmemente adheridas al policloropreno durante el proceso de fabricación, una vulcanización a alta presión y temperatura (Fig 2).

Figura 2 – Corte de un apoyo de neopreno típico
El dispositivo debe mantener su gran capacidad de distorsionarse, manteniendo gran rigidez frente a cargas verticales, para que su altura no cambie apreciablemente por la acción de cargas axiales.
Cargas axiales o verticales
Esta gran rigidez frente a cargas axiales, se logra mediante la inclusión de las capas de acero que actúan como zunchos, impidiendo la expansión lateral del neopreno que trabaja casi completamente confinado. Entre las chapas de acero y el neopreno se producen grandes tensiones tangenciales en la superficie de contacto, crecientes hacia los extremos de las chapas.
Figura 3 – Confinamiento del neopreno mediante chapas de acero
Dado que el neopreno es un material prácticamente incompresible, pues tiene un coeficiente de Poisson de n=0.4992, con este confinamiento en capas de pequeño espesor, se obtiene un módulo de Elasticidad Longitudinal Efectivo del orden de doscientas veces superior al del material elastomérico sin confinar.
Figura 4 – Módulo Efectivo del Neopreno confinado
N
Dh
)1(2 ν+=E
Dh~0
)21()1(
)1(
ννν−+
−= EEeq
N
Dh
)1(2 ν+=E
Dh
)1(2 ν+=E
Dh~0
)21()1(
)1(
ννν−+
−= EEeq
Dh~0
)21()1(
)1(
ννν−+
−= EEeq

La mayor exigencia para el Neopreno ante esta acción es la distorsión en el extremo de las placas de acero y en los puntos de contacto con ellas, más que la tensión de compresión.
Cargas y desplazamientos impuestos horizontales
Por otra parte, este zunchado horizontal, no impide aprovechar la gran capacidad del neopreno de sufrir distorsiones de gran magnitud y permitir grandes desplazamientos horizontales. Su módulo de Elasticidad Transversal es del orden de G=0.7 a 0.8 N/mm² para cargas lentas y el doble para cargas rápidas (Fig. 5).
Figura 5 – Distorsión por desplazamiento
Estos desplazamientos también exigen al neopreno por imposición de una distorsión, ahora uniforme en todo el espesor.
Rotaciones
Finalmente, también la estructura impondrá rotaciones a los apoyos. En este caso, se producirá la compresión de un lado del apoyo y la extensión del otro lado. La capacidad de rotación de un apoyo está dada por la capacidad de rotación de cada una de las capas.
q
M
q
M
Figura 6 – Comportamiento frente a las rotaciones impuestas
La mayor exigencia para el Neopreno ante esta acción es, nuevamente, la distorsión en el extremo de las placas de acero y en los puntos de contacto con ellas, más que la tensión de compresión.
Esta distorsión, debida a la rotación, es importante y lógicamente debe tratar de minimizarse. Para ello, los apoyos adoptan formas rectangulares, con la menor
dimensión en dirección perpendicular al eje de la rotación. Con ello, se minimiza la distorsión en el extremo más comprimido.
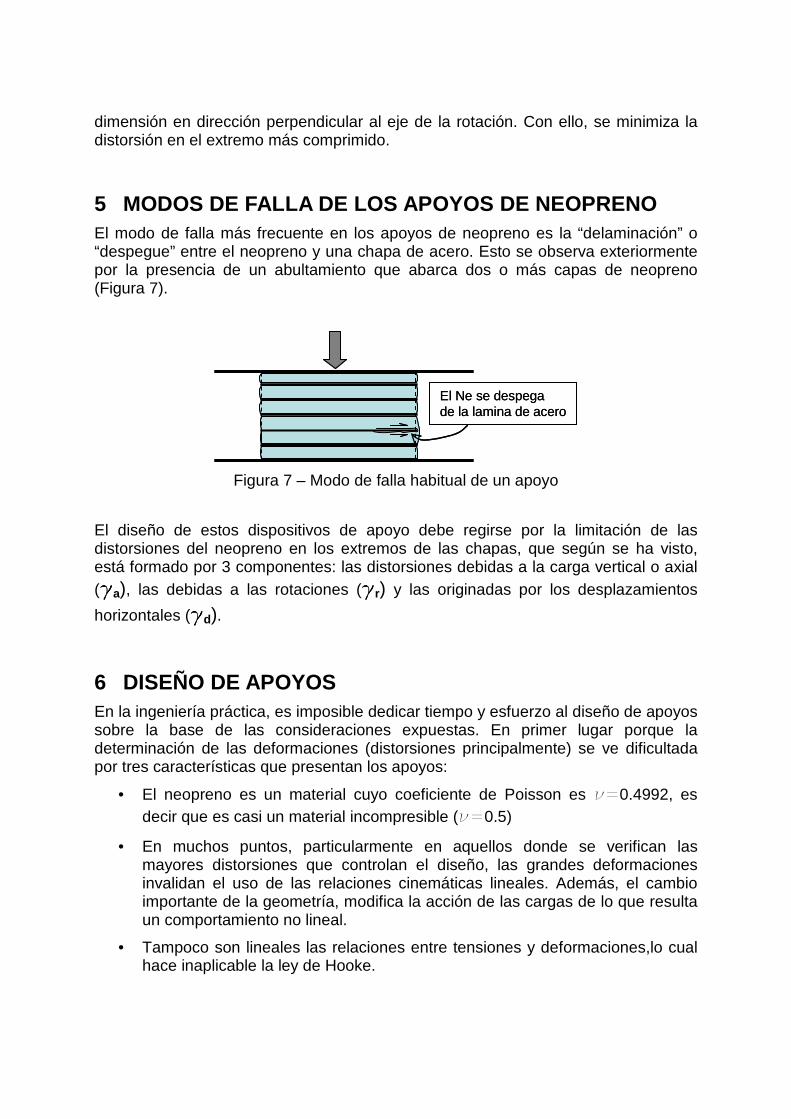
5 MODOS DE FALLA DE LOS APOYOS DE NEOPRENO El modo de falla más frecuente en los apoyos de neopreno es la “delaminación” o “despegue” entre el neopreno y una chapa de acero. Esto se observa exteriormente por la presencia de un abultamiento que abarca dos o más capas de neopreno (Figura 7).
El Ne se despegade la lamina de aceroEl Ne se despegade la lamina de acero
Figura 7 – Modo de falla habitual de un apoyo
El diseño de estos dispositivos de apoyo debe regirse por la limitación de las distorsiones del neopreno en los extremos de las chapas, que según se ha visto, está formado por 3 componentes: las distorsiones debidas a la carga vertical o axial (gggga), las debidas a las rotaciones (ggggr) y las originadas por los desplazamientos
horizontales (ggggd).
6 DISEÑO DE APOYOS En la ingeniería práctica, es imposible dedicar tiempo y esfuerzo al diseño de apoyos sobre la base de las consideraciones expuestas. En primer lugar porque la determinación de las deformaciones (distorsiones principalmente) se ve dificultada por tres características que presentan los apoyos:
• El neopreno es un material cuyo coeficiente de Poisson es n=0.4992, es decir que es casi un material incompresible (n=0.5)
• En muchos puntos, particularmente en aquellos donde se verifican las mayores distorsiones que controlan el diseño, las grandes deformaciones invalidan el uso de las relaciones cinemáticas lineales. Además, el cambio importante de la geometría, modifica la acción de las cargas de lo que resulta un comportamiento no lineal.
• Tampoco son lineales las relaciones entre tensiones y deformaciones,lo cual hace inaplicable la ley de Hooke.

Desde el inicio de su utilización, los fabricantes han suministrado procedimientos simplificados para que los proyectistas elijan el apoyo adecuado a sus necesidades dentro de la gama de los productos que ofrecen.
Es así que, en un primer paso, se adopta una dimensión en planta del apoyo que mantenga las tensiones normales dentro de un límite recomendado, luego se adopta el número de capas adecuado para permitir el desplazamiento horizontal requerido y finalmente se verifica la capacidad de rotación del apoyo seleccionado en la dirección de su eje menor. Esto lleva a un procedimiento de aproximaciones sucesivas para cumplir dichos requisitos, con algunos otros adicionales como: una relación mínima a respetar entre ancho y altura (coeficiente de forma) y una tensión mínima de compresión para asegurar que no deslice ante acciones horizontales.
Sin embargo, con frecuencia se obvia la verificación de la capacidad de rotación en los diseños de puentes que se realizan en el país, pues se asume que las rotaciones son pequeñas y que con la altura que exigen los desplazamientos horizontales, queda cubierta la capacidad de rotación.
Esta suposición es muchas veces razonablemente cierta en puentes de hormigón armado o pretensado rectos y, aún cuando se supere la capacidad de rotación, será por un pequeño margen que queda cubierto por los coeficientes de seguridad implícitos en las recomendaciones del fabricante.
En puentes oblicuos, esta situación pasa a ser crítica, sobre todo cuando los dispositivos de apoyo se colocan con orientación inadecuada.
7 EL CASO DE LOS PUENTES OBLICUOS En puentes oblicuos, se presentan dos situaciones que inciden fuertemente en el diseño de apoyos: por un lado, los apoyos de las esquinas obtusas se ven sobrecargados con respecto a los de las esquinas agudas y por otra parte, la estructura impone rotaciones que se orientan en una dirección no coincidente con el eje del puente. Según la oblicuidad y el tipo de tablero, estos efectos son más o menos pronunciados y predecibles.
Tableros tipo “Losa”
En estos casos, los ejes de giro de la estructura, en todas las etapas de su construcción y utilización, tienen la dirección indicada en la Figura 8, a pesar de esta evidencia, en algunos puentes se encuentran apoyos dispuestos con el eje de giro en dirección perpendicular al tránsito, como se aprecia en la Figura 1, donde se ve que el mal funcionamiento del rodillo ha producido la rotura de la viga de apoyos del estribo.

Ejes de Giro en Losas y Emparrillados
Puente Losa
Ejes de Giro en Losas y EmparrilladosEjes de Giro en Losas y Emparrillados
Puente Losa
Ejes de Giro en Losas y EmparrilladosEjes de Giro en Losas y Emparrillados
Puente Losa
Ejes de Giro en Losas y EmparrilladosEjes de Giro en Losas y Emparrillados
Puente Losa
Figura 8 – Orientación de los ejes de giro de la superestructura
Tableros tipo “Vigas y Losa de Hormigón armado”
También en estos tableros, si el hormigonado de vigas y losas se realiza in situ y en una sola etapa, el eje de rotación es el indicado en la figura 9 en todas las etapas. A partir del retiro del apuntalamiento y del encofrado, actuarán las cargas del peso propio de la superestructura conforme al sistema estructural de losa nervurada y los giros se producirán alrededor de los ejes indicados, que unen los puntos de apoyo, siempre que existan vigas transversales extremas.
Puente de VigasPuente de VigasPuente de VigasPuente de VigasPuente de VigasPuente de Vigas
Figura 9 – Orientación de los ejes de giro en tableros de hormigón armado ejecutados in situ
Sin embargo, la extrapolación en el uso de planos típicos elaborados para puentes rectos y la costumbre de suponer, erróneamente, que las vigas giran en forma independiente al resto del tablero, ha llevado a la colocación errónea de apoyos, incluso de acero o fundición, como se ve en la figura 10.

Viga Transversal extrema
Vigas longitudinales
Viga Transversal extrema
Vigas longitudinales
Figura 10 – Apoyos mal orientados en tableros de hormigón armado
Tableros de vigas prefabricadas y losa in situ
En el caso, completamente usual en nuestro país en la actualidad, de tableros ejecutados con vigas prefabricadas de hormigón pretensado, las rotaciones debidas al peso propio de las vigas inmediatamente después del montaje y las originadas por el hormigonado de vigas transversales y losas (suponiendo que esto se hace simultáneamente), se verificarán alrededor del eje perpendicular al eje de cada viga (ver figuras, 11 y 12).
Linea de centros de los apoyos
Ejes de giro de las vigas
Linea de centros de los apoyos
Ejes de giro de las vigas
Figura 11 – Ejes de rotación de las vigas luego del montaje

Linea de centros de los apoyos
Ejes de giro de las vigas
Linea de centros de los apoyos
Ejes de giro de las vigas
Linea de centros de los apoyos
Ejes de giro de las vigas
Figura 12 – Ejes de rotación al hormigonar vigas transversales y losas
Una vez que el hormigón ha fraguado y adquirido resistencia, el sistema pasa a ser una losa nervurada y las rotaciones debidas a la deformación diferida producida por el peso del sistema y las terminaciones, y las producidas por las sobrecargas de uso, se producirán alrededor de un eje que sigue la línea de los apoyos (figura 13).
Linea de centros de los apoyos
Ejes de giro del tablero monolítico
Linea de centros de los apoyos
Ejes de giro del tablero monolítico
Figura 13 – Ejes de los giros en la superestructura completa
8 ORIENTACION DE LOS APOYOS En el momento de establecer la orientación con la cual se colocarán los dispositivos de apoyo, surge la necesidad de evaluar cuáles son las mayores rotaciones, puesto que el comportamiento frente a carga axial y desplazamientos será independiente de la orientación del apoyo.
En forma elemental y práctica, puede optarse por una de las dos formas indicadas en la figura 14.

vigaviga
a) b)
Figura 14 – Orientación de los apoyos
La decisión entre una y otra orientación dependerá de la magnitud relativa de las rotaciones que se producen según ambos ejes.
Lo ideal sería que, una vez evaluadas las diferentes rotaciones, se optara por una orientación según la cual el apoyo trabaje en forma óptima, es decir que en él se verifique la menor distorsión debida a las rotaciones impuestas.
9 ANÁLISIS DE CASOS A fin de establecer obtener una conclusión práctica, se calcularon las rotaciones en los puntos de apoyo, para diferentes etapas de la construcción y servicio, en tableros de puentes de una luz típica de 30m formado por vigas prefabricadas pretensadas y losa y vigas transversales hormigonadas in situ en una misma etapa, con oblicuidades variables entre 5 y 50 grados.
Figura 15 – Sección Transversal Típica de los tableros resueltos
Las figuras 15 y 16 muestran la sección transversal de estos tableros y la forma en que, manteniendo la luz de las vigas, se consideraron diferentes oblicuidades.

L=30m
wwww
Oblicuidad Variable entre 0°y 55°
xxxx
hhhh
r
s
L=30m
wwww
Oblicuidad Variable entre 0°y 55°
L=30m
wwww
Oblicuidad Variable entre 0°y 55°
xxxx
hhhh
r
s
Figura 16 – Planta típica de los tableros calculados
Estos análisis se realizaron suponiendo, bajo cada extremo de viga, un apoyo que sólo toma la reacción vertical y permite los giros en todas las direcciones.
De esta manera se obtuvieron las rotaciones debidas a:
• El montaje de la viga aislada, pretensada y prefabricada, (designando con qη rotaciones alrededor del eje η)
• El hormigonado de vigas transversales y losas in situ: se considera la carga del hormigón fresco aplicadas sobre las vigas aisladas
• La deformación diferida producidas por la carga del tablero, ahora actuando sobre el sistema estructural monolítico
• Las terminaciones: pavimentos, veredas y barandas
• Las sobrecargas de uso
Las rotaciones obtenidas se expresaron en dos sistemas de ejes:
1. En el sistema xxxx-ηηηη coincidente con los eje de las vigas
2. En el sistema r-s , con s coincidente con la pila o estribo del tramo
Para mayor generalidad, se conisderó un sistema de ejes x-y, para expresar estas rotaciones, formando un ángulo llll=0 en el caso 1 y llll=wwww en el caso 2.
Los gráficos de las figura 17 y 18, muestran las rotaciones obtenidas para los ejes x e y cuando coinciden con la terna 1 (llll=0), y cuando coincide con la terna 2 (llll=wwww) terna, en función de las oblicuidades wwww del tablero.

θθθθx
0.0000 0.0002 0.0003 0.0005 0.0006 0.0007
0.0000
-0.0024
-0.0049
-0.0078
-0.0109
-0.0146
-0.0200
-0.0150
-0.0100
-0.0050
0.0000
0.0050
0.0100
0.0150
0.0200
0.0250
0° 10° 20° 30° 40° 50°
Oblicuidad del puente
Ro
taci
on
es
λ=0°
λ=ω
θθθθy
0.0147 0.0146 0.0147 0.0145 0.01440.0138
0.0147 0.01480.0155
0.0165
0.0183
0.0206
-0.0200
-0.0150
-0.0100
-0.0050
0.0000
0.0050
0.0100
0.0150
0.0200
0.0250
0° 10° 20° 30° 40° 50°
Oblicuidad del puenteR
ota
cio
ne
s
λ=0°
λ=ω
Figura 17 – Rotaciones según x e y para tableros sin vigas transversales
θθθθx
0.0000 0.0002 0.0003 0.0005 0.0006 0.0007
0.0000
-0.0025
-0.0052
-0.0081
-0.0117
-0.0158
-0.0200
-0.0150
-0.0100
-0.0050
0.0000
0.0050
0.0100
0.0150
0.0200
0.0250
0° 10° 20° 30° 40° 50°
Oblicuidad del puente
Ro
taci
on
es
λ=0°
λ=ω
θθθθy
0.0152 0.0152 0.0153 0.0153 0.01530.0147
0.0152 0.01540.0162
0.0174
0.0195
0.0220
-0.0020
0.0030
0.0080
0.0130
0.0180
0.0230
0° 10° 20° 30° 40° 50°
Oblicuidad del puente
Ro
taci
on
es
λ=0°
λ=ω
Figura 18 – Rotaciones según x e y para tableros con vigas transversales
De estos gráficos se extraen algunas conclusiones:
1. No hay diferencia apreciable entre un tablero sin viga transversal y uno con viga transversal en el centro del tramo, en cuanto a la rotación de los extremos
2. A medida que se incrementa la oblicuidad, las rotaciones mayores se producen para llll=wwww,
3. Las rotaciones alrededor del eje s, que coincide con y cuando llll=wwww

r
s
x
y
1 (A/2,-B/2)
2 (A/2,B/2)
3
(-A/2,B/2)
4
(-A/2,-B/2)
A
B xxxx
hhhh
wwwwllll
bbbb
Orientación más general
x, y : ejes principales del aparato de apoyox, h: ejes principales de la vigar, s : ejes principales del estribo o pila del puentew : oblicuidad del puente (=0, en puente recto)l : ángulo apoyo-viga
l=0° según eje de rotación de la viga l=w según eje de rotación del tablero
REFERENCIAS:
r
s
r
s
x
y
1 (A/2,-B/2)
2 (A/2,B/2)
3
(-A/2,B/2)
4
(-A/2,-B/2)
A
B
x
y
1 (A/2,-B/2)
2 (A/2,B/2)
3
(-A/2,B/2)
4
(-A/2,-B/2)
A
B xxxx
hhhh
xxxx
hhhh
wwwwllll
bbbb
Orientación más general
x, y : ejes principales del aparato de apoyox, h: ejes principales de la vigar, s : ejes principales del estribo o pila del puentew : oblicuidad del puente (=0, en puente recto)l : ángulo apoyo-viga
l=0° según eje de rotación de la viga l=w según eje de rotación del tablero
REFERENCIAS:
Figura 19 – Nomenclatura adoptada
Se ve, entonces, que orientarse los apoyos de manera que sean más eficientes para tomar estas rotaciones, o sea con su dimensión mayor coincidente con la dirección s (Figura 19).
Suele asumirse que, por tratarse de un elemento adaptable a la deformación que se le imponga, resulta indiferente orientarlo de una manera y otra, y de allí la frecuencia con que se los encuentra orientados con su mayor dimensión en el sentido perpendicular a la viga.
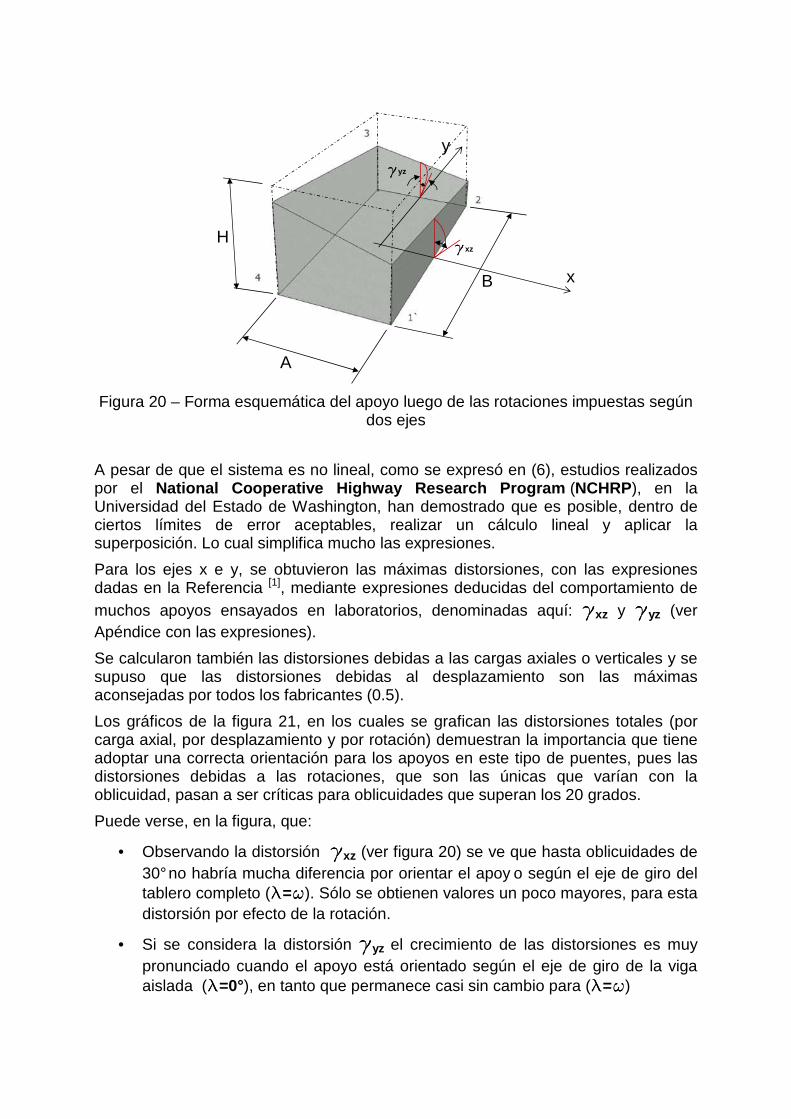
Sin embargo, dadas las formas de falla que presentan los apoyos, conviene analizar la magnitud de las distorsiones que se producen en las dos direcciones cuando el apoyo es sometido a rotaciones en los dos sentidos. Se ha representado en forma esquemática, en la figura 20, la forma que adopta un apoyo luego de ser sometido a rotaciones combinadas según sus dos ejes principales y las dos distorsiones que se evaluaron como se explica a continuación.
A
B x
y
H
ggggyz
ggggxz
Figura 20 – Forma esquemática del apoyo luego de las rotaciones impuestas según dos ejes
A pesar de que el sistema es no lineal, como se expresó en (6), estudios realizados por el National Cooperative Highway Research Program (NCHRP), en la Universidad del Estado de Washington, han demostrado que es posible, dentro de ciertos límites de error aceptables, realizar un cálculo lineal y aplicar la superposición. Lo cual simplifica mucho las expresiones.
Para los ejes x e y, se obtuvieron las máximas distorsiones, con las expresiones dadas en la Referencia [1], mediante expresiones deducidas del comportamiento de muchos apoyos ensayados en laboratorios, denominadas aquí: ggggxz y ggggyz (ver Apéndice con las expresiones).
Se calcularon también las distorsiones debidas a las cargas axiales o verticales y se supuso que las distorsiones debidas al desplazamiento son las máximas aconsejadas por todos los fabricantes (0.5).
Los gráficos de la figura 21, en los cuales se grafican las distorsiones totales (por carga axial, por desplazamiento y por rotación) demuestran la importancia que tiene adoptar una correcta orientación para los apoyos en este tipo de puentes, pues las distorsiones debidas a las rotaciones, que son las únicas que varían con la oblicuidad, pasan a ser críticas para oblicuidades que superan los 20 grados.
Puede verse, en la figura, que:
• Observando la distorsión ggggxz (ver figura 20) se ve que hasta oblicuidades de 30° no habría mucha diferencia por orientar el apoy o según el eje de giro del tablero completo (llll=wwww). Sólo se obtienen valores un poco mayores, para esta distorsión por efecto de la rotación.
• Si se considera la distorsión ggggyz el crecimiento de las distorsiones es muy pronunciado cuando el apoyo está orientado según el eje de giro de la viga aislada (llll=0°), en tanto que permanece casi sin cambio para (llll=wwww)

γγγγxz
4.11 4.10 4.11 4.114.19
4.30
4.11 4.134.22
4.36
4.69
5.17
0.00
1.00
2.00
3.00
4.00
5.00
6.00
0° 10° 20° 30° 40° 50°Oblicuidad del puente
Dis
tors
ión
an
gu
lar
λ=0°
λ=ω
Dist.
γγγγyz
2.03
2.62
3.24
3.94
4.85
5.99
2.03 2.06 2.10 2.122.23
2.39
0.00
1.00
2.00
3.00
4.00
5.00
6.00
0° 10° 20° 30° 40° 50°Oblicuidad del puente
Dis
tors
ión
an
gu
lar
λ=0°
λ=ω
Dist.
Adm.
Figura 21 – Distorsiones según la dirección perpendicular y paralela al eje de giro
para tramos que tienen viga transversal solamente en los extremos
• Se puede observar que en ambos gráficos, las curvas parten, para oblicuidad 0°, de los valores de las distorsiones correspondie ntes a carga axial y desplazamiento (aproximadamente 2.00 en el ejemplo de análisis) y para la distorsión ggggxz se debe sumar la disorsión por rotación del tablero recto en torno al eje longitudinal del apoyo (y), que es del orden de 4.2 en el ejemplo
10 CONCLUSIONES Se concluye, entonces, que tiene gran importancia la orientación correcta de los apoyos de neopreno, en puentes oblicuos de vigas, según la línea que une los apoyos de las diferentes vigas y que es el verdadero eje de rotación de la superestructura bajo la acción de las sobrecargas. Debe considerarse que, para oblicuidades moderadas, los apoyos pueden llegar a exceder sus límites de falla cuando no están orientados con su eje mayor coincidente con el eje de las rotaciones que van a sufrir en las condiciones de servicio por acción de las sobrecargas.
Las distorsiones que aquí se han evaluado, permiten obtener conclusiones válidas, pero no son necesariamente las máximas que se producirán en los apoyos cuando estos sufren rotaciones según sus dos ejes, pues ellas se verificarán en el vértice más comprimido del apoyo. En dicho vértice, habrá que determinar cuál es la orientación en la cual se produce la máxima distorsión y dicho valor será el determinante del diseño. El hecho de que el problema sea no lineal en todos sus aspectos y que el diseño de apoyos de puentes de luz moderada no justifica el uso

de expresiones sofisticadas, avala las conclusiones obtenidas para ser usadas en un diseño de ingeniería.
11 REFERENCIAS [1] Rotation Limits for Elastomeric Bearings – Report 596 – Transportation Research Board of the National Academies – Stanton, Roeder, Mackenzie-Helnwein, White, Kuester and Craig – Washington D.C. – 2008 – www.TRB.org

APÉNDICE
En el presente trabajo, las distorsiones se han evaluado con las expresiones que siguen, que son el resultado de una simplificación del riguroso análisis no lineal que corresponde al problema y cuyo justificativo se puede ver en la Referencia 1.
La expresión de diseño, propuesta para ser adoptada por la AASHTO, es:
0.5)(2)( ≤+++++ dvrvavdra γγγγγγ
donde los subíndices indican:
a: producidas por cargas axiales o verticales
r: producidas por rotaciones
d: producidas por desplazamientos horizontales
v: producidos por cargas variables (sobrecargas)
Simbología
G: modulo de elasticidad transversal del elastómero
K: modulo de volumen (bula module) del elastómero confinado
A: menor dimensión del apoyo
B: mayor dimensión del apoyo
tc: espesor de una capa de neorpeno
n.c: número de capas del apoyo
S: coeficiente de forma
λ: Indice de Compresibilidad
( )
K
GS
BAt
BAS
c
3
2
=
+=
λ
Dr: Coeficiente adimensional para las distorsiones por rotación
Dr y min1.552 0.627λc⋅−( )
2.233 0.156λc⋅+A
B+
0.5,
:=
Dr x min1.552 0.627λc⋅−( )
2.233 0.156λc⋅+B
A+
0.5,
:=
c
y
c
ryzr
c
x
c
rxzrnt
AD
nt
BD
θγθγ
2
,
2
,
=
=

y la distorsión producida por cargas axiales o verticales se obtiene con:
2
3
2
2
2
1
321321
047.0195.0315.0
406.0071.0506.1
413.0210.0060.1
:
,max,max
λλλλλλ
−+−=
+−=
++=
+=
+=
a
a
a
aaaayaaaax
D
D
D
con
A
BDDDD
B
ADDDD