metodologia de la superficie de respuesta
DESCRIPTION
Explicación de como funciona la superficie de respuestaTRANSCRIPT
METODOLOGIA DE LA SUPERFICIE DE
RESPUESTAIng. Saúl Pérez P.
Ing. Mecatrónica
Universidad Autónoma del Caribe
SUPERFICIE DE RESPUESTA La metodología de la Superficie de Respuesta ha sido satisfactoriamente
utilizada para optimizar muy diferentes tipos de unidades, procesos y sistemas industriales. Este es un enfoque experimental que ha sido aplicado en laboratorios de investigación y desarrollo y, a veces en los propios equipos de fabricación. Sin embargo, en este último caso es con frecuencia más apropiada la Operación Evolutiva que es una forma modificada de aquella aplicable tanto para objetivos de cribado como de optimización.
Para implantar la metodología de la superficie de respuesta, se utilizan varios procedimientos estadísticos. El concepto de superficie de respuesta fue originalmente desarrollado y descrito por Box y Wilson (1951). Al principio, la metodología de la superficie de respuesta fue utilizada fundamentalmente como técnica de optimización experimental en la industria química. Pero, desde entonces, se le han hallado aplicaciones en muchos otros campos (ver Hill y Hunter1966).
2
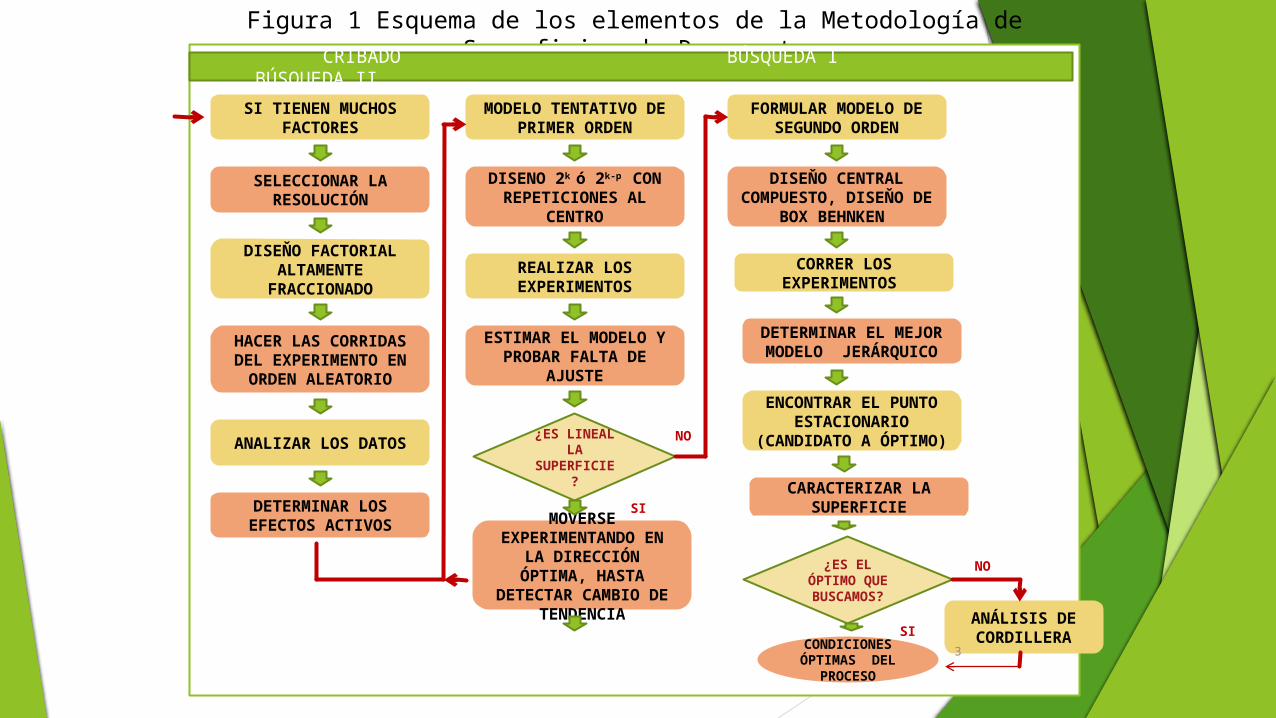
Figura 1 Esquema de los elementos de la Metodología de Superficies de Respuesta
CRIBADO BÚSQUEDA I BÚSQUEDA II
SI TIENEN MUCHOS FACTORES
DISENO 2k ó 2k-p CON REPETICIONES AL
CENTRO
REALIZAR LOS EXPERIMENTOS
MODELO TENTATIVO DE PRIMER ORDEN
DISEŇO FACTORIAL ALTAMENTE
FRACCIONADO
ANALIZAR LOS DATOS
FORMULAR MODELO DE SEGUNDO ORDEN
CORRER LOS EXPERIMENTOS
ENCONTRAR EL PUNTO
ESTACIONARIO (CANDIDATO A
ÓPTIMO)
ANÁLISIS DE CORDILLERA
MOVERSE EXPERIMENTANDO EN LA DIRECCIÓN ÓPTIMA, HASTA
DETECTAR CAMBIO DE TENDENCIA
CARACTERIZAR LA SUPERFICIE
DETERMINAR EL MEJOR MODELO
JERÁRQUICO
DISEŇO CENTRAL COMPUESTO, DISEŇO
DE BOX BEHNKEN
SELECCIONAR LA RESOLUCIÓN
HACER LAS CORRIDAS DEL
EXPERIMENTO EN ORDEN ALEATORIO
DETERMINAR LOS EFECTOS ACTIVOS
¿ES LINEAL LA SUPERFICI
E?
¿ES EL ÓPTIMO
QUE BUSCAMOS
?
ESTIMAR EL MODELO Y PROBAR FALTA DE
AJUSTE
CONDICIONES ÓPTIMAS DEL
PROCESO
NO
SI
SI
NO
3
UNA VARIABLE
Deficiencias del enfoque de «una variable a la vez». Un popular método de experimentación es el que aplica «una sola variable cada vez». Cada factor, es variado por turno, mientras los demás se mantienen a un determinado nivel constante. Un inconveniente de este enfoque es que se puede alcanzar un falso óptimo. Consideremos la siguiente hipotética situación.

Ejemplo. Tenemos en estudio una reacción química en la que hay dos factores de interés: la concentración de uno de los reactivos y el tiempo de reacción. ¿Qué valores de los dos factores maximizarán el resultado?. Los que se consideraban mejores, al principio de la investigación eran una concentración del 25 por 100 y un tiempo de 1 hora.
Siguiendo el comentado enfoque, el ingeniero realizó una serie de experimentos, variando el tiempo, mientras mantenía la concentración en el 25 por 100. El resultado mostró que una producción máxima de alrededor del 65 por 100 se obtenía cuando el tiempo era de 1.9 horas. Manteniendo el tiempo fijo en este valor, se varió la concentración, y se obtuvo un máximo en el 25 por 100. con lo que el ingeniero llegó a la conclusión de que la mayor producción (el 65 por 100) se alcanzaba con una concentración del 25 por 100 y un tiempo de 1.9 horas. Esta conclusión, sin embargo, es incorrecta
Superficie de respuesta. La situación real, desconocida para el investigador, se puede ver en la Figura 2. Aquí, el resultado se muestra como una función de la concentración y el tiempo. Las curvas de trazo continuo son líneas de contorno de resultado constante. Por ejemplo, hay un conjunto de condiciones de concentración y tiempo que dan una producción del 80 por 100. El conjunto de los contornos puede verse como una montaña cuyo vértice es el punto P. Los contornos de 90.80 y demás, serían las altitudes. Esos números representan los porcentajes de producción.
6
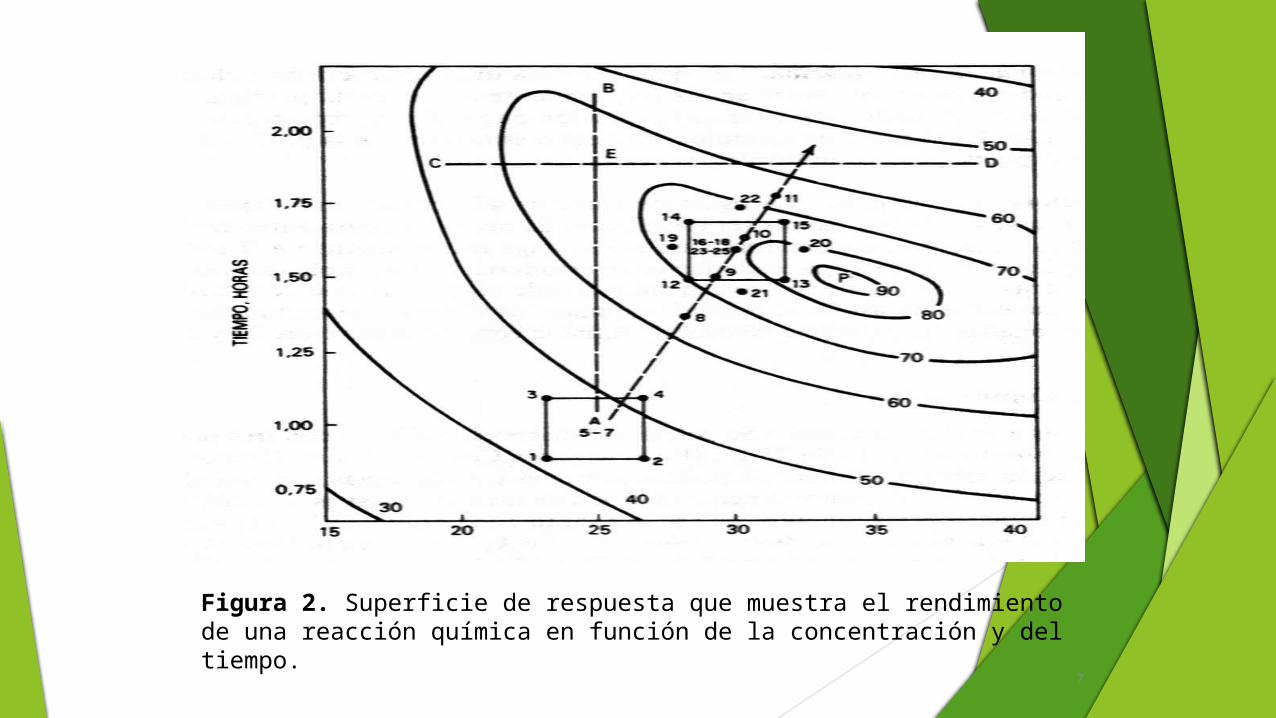
Figura 2. Superficie de respuesta que muestra el rendimiento de una reacción química en función de la concentración y del tiempo.
7
El objetivo del ingeniero era hallar aquellos valores de la concentración y del tiempo que daban la máxima producción. Visto geométricamente, lo que el ingeniero quería hacer era ascender al punto más alto de la montaña. El intento falló por una muy simple razón.
Hablando en forma figurada, al variar el tiempo, el ingeniero, primero, atravesó la montaña a lo largo del camino que va del punto A al punto B (ver la Figura 2). Entre A y E el camino sube. pero, a partir del punto E, empieza a bajar por el otro lado. Entre el punto E y el punto B. el ingeniero ha estado descendiendo por el otro lado de la montaña. Vemos también el camino (de C a E y a D) recorrido al variar las concentraciones.
8
El investigador ha alcanzado sólo una producción del 65 por 100 (en E), mientras que es posible (en P) llegar al 90 por 100. Esta mayor producción puede alcanzarse si. simultáneamente, se incrementa la concentración y se reduce el tiempo a partir de los valores «óptimos» de los que ha informado el ingeniero.
Si los contornos de la montaña hubieran sido circulares y no hubiera ningún valor experimental, el procedimiento de «uno a la vez» habría llevado al ingeniero al punto más alto de la montaña. En general, los contomos reales de las superficies de respuesta no son circulares o esféricos, y. por eso. es necesaria una estrategia experimental más sofisticada, tal como la metodología de la superficie de respuesta.
9
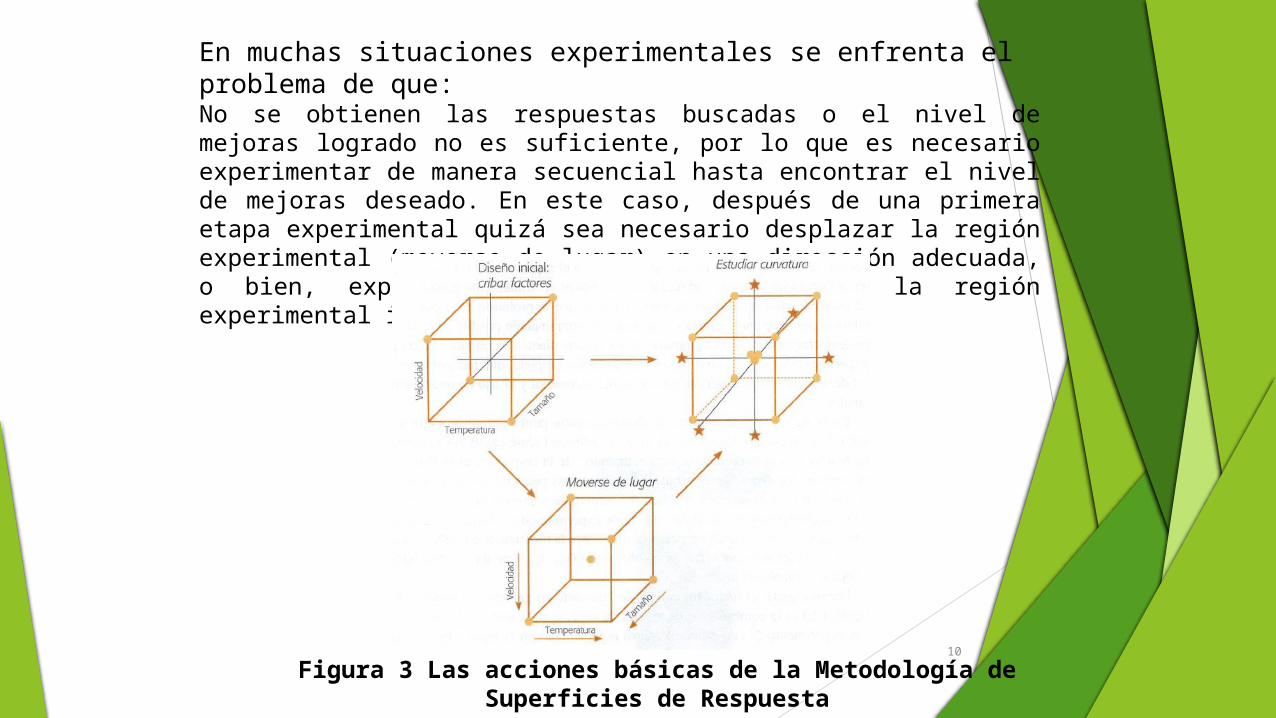
En muchas situaciones experimentales se enfrenta el problema de que:No se obtienen las respuestas buscadas o el nivel de mejoras logrado no es suficiente, por lo que es necesario experimentar de manera secuencial hasta encontrar el nivel de mejoras deseado. En este caso, después de una primera etapa experimental quizá sea necesario desplazar la región experimental (moverse de lugar) en una dirección adecuada, o bien, explorar en forma más detallada la región experimental inicial
Figura 3 Las acciones básicas de la Metodología de Superficies de Respuesta10
¿Cómo se construye un Modelo de Superficies de Respuesta apropiado para cada variable de respuesta del proceso?
11
La Metodología de Superficies de Respuesta (MSR) es la estrategia
experimental y de análisis que permite resolver el problema de encontrar las
condiciones de operación óptimas de un proceso, es decir, aquéllas que dan por
resultado “valores óptimos” de una o varias características de calidad del
producto.
La MSR implica tres aspectos: diseño, modelo y técnica de optimización.
El diseño y el modelo se piensan al mismo tiempo y dependen del tipo de
comportamiento que se espera en la respuesta.
El modelo puede ser de primero o segundo orden, por ello, el diseño y el método
de optimización se clasifican de igual manera.
12
El aspecto diseño implica que para optimizar un proceso se debe aplicar el diseño de experimentos, en particular aquellos que sirven para ajustar un modelo de regresión lineal múltiple.
El aspecto del modelo utiliza el análisis de regresión lineal múltiple, junto con sus elementos básicos que son: parámetros del modelo, modelo ajustado, significancia del modelo, prueba de falta de ajuste, residuos, predichos, intervalos de confianza para predichos y coeficiente de determinación.
Por último, el aspecto de optimización está formado por algunas técnicas matemáticas que sirven para que, dado un modelo ajustado, explorarlo a fin de obtener información sobre el punto óptimo. Conviene recordar técnicas como: derivadas de funciones, multiplicadores de Lagrange, operaciones con matrices, valores y vectores propios y sistemas de ecuaciones simultáneas. 13

14

Número de
factores
Número de parámetros
Factorialcompleto 3k
Central compuesto
Box-Behnken
Draper y Lin
2 6 9 13 -16 - -
3 10 27 17 - 23 15 12
4 15 81 27 - 36 27 18
5 21 243 29 - 36 46 24
6 28 729 47 - 59 54 30
Número de corridas
DISEÑOS EXPERIMENTALES PARA MODELOS DE SEGUNDO ORDEN
15
ALGUNOS CONCEPTOS BÁSICOS
REGIONES EXPERIMENTAL Y DE OPERABILIDAD
16
La región experimental es el espacio delimitado por los rangos de experimentación utilizados con cada factor. La región de operabilidad está delimitada por el conjunto de puntos o condiciones donde el equipo o proceso puede ser operado. Es difícil delimitar con certeza el tamaño de la región de operabilidad, ya que aun cuando se conozca (por especificaciones del equipo) el rango en que se puede colocar cada factor individual, es necesario determinar esos límites considerando varios factores de manera simultánea. Por ejemplo, es posible que la temperatura se pueda correr en su nivel más alto de operabilidad, siempre y cuando los factores velocidad y fuerza se mantengan bajos. La región de operabilidad considera todas las combinaciones posibles de los niveles de los factores donde el proceso puede operarse y ésta siempre es igual o más grande que la región experimental.

17
En la MSR es importante tener presente esta visión de las regiones de operabi-lidad y experimental, ya que en principio, el punto óptimo que interesa encontrar pudiera localizarse en cualquier lugar de la región de operabilidad. dentro o afuera de la región experimental inicial. En procesos ya establecidos y muy estudiados, es de esperarse que dicho punto óptimo se encuentre "no muy lejos" de las condiciones de operación usuales, posiblemente dentro de la región experimental inicial. En cambio, cuando el proceso es nuevo o cuando se está escalando o rediseñando, es más probable que el punto de interés se ubique fuera de la primera región experimental propuesta para el experimento inicial, y en ese caso primero será necesario acercarse a dicho punto para luego "atraparlo".
18
19

ETAPAS DE LA MSR
1. Cribado: La optimización de un proceso se inicia con esta etapa cuando se
tienen muchos factores (más de 6) que influyen en la variable de interés.
2. Búsqueda I o de primer orden: Se aplica cuando se tienen pocos factores
y se sabe que estos influyen en la variable de respuesta. Se corre un diseño
de primer orden (factorial o factorial fraccionario con repeticiones en el
centro) que permita caracterizar en forma preliminar el tipo de superficie de
respuesta y detectar la presencia de curvatura.
3. Búsqueda II o de segundo orden: Se desarrolla cuando se detecta
curvatura o la superficie es más compleja que un híper plano. Se corre o
completa un diseño de segundo orden para caracterizar la superficie y
modelar la curvatura. Con el modelo ajustado se determinan las condiciones
óptimas de operación del proceso.
20
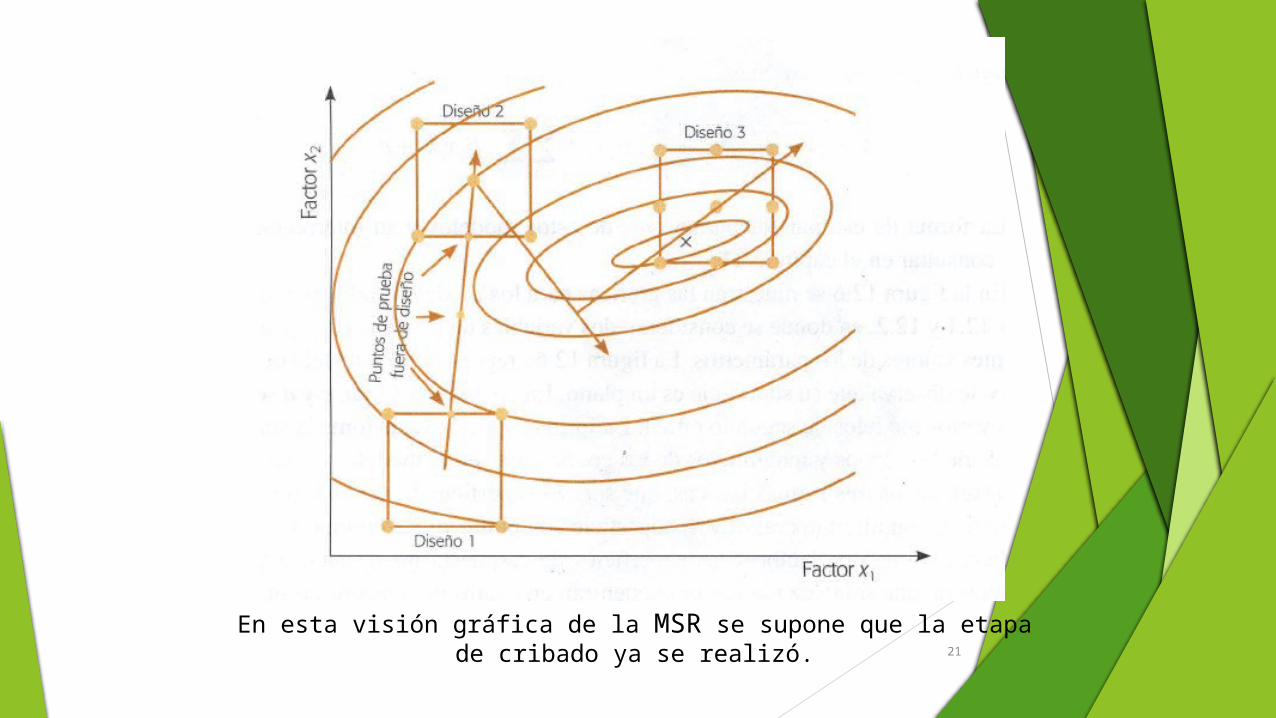
En esta visión gráfica de la MSR se supone que la etapa de cribado ya se realizó.21
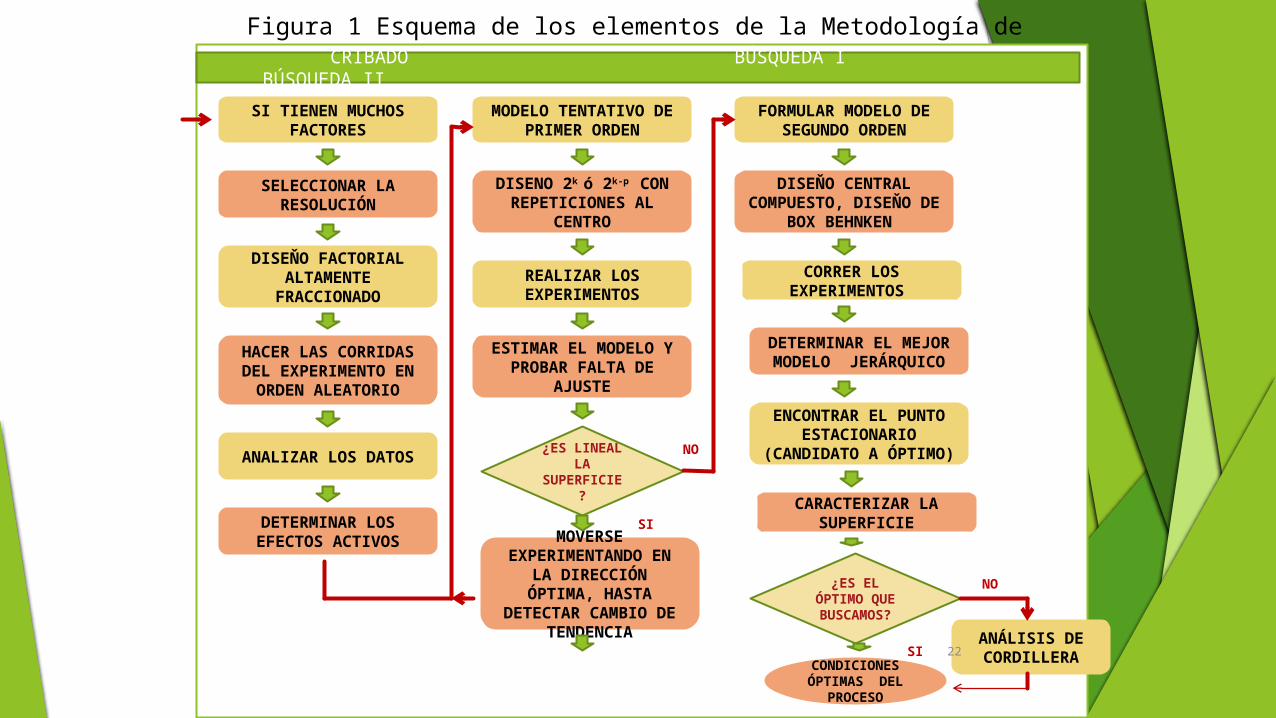
Figura 1 Esquema de los elementos de la Metodología de Superficies de Respuesta
CRIBADO BÚSQUEDA I BÚSQUEDA II
SI TIENEN MUCHOS FACTORES
DISENO 2k ó 2k-p CON REPETICIONES AL
CENTRO
REALIZAR LOS EXPERIMENTOS
MODELO TENTATIVO DE PRIMER ORDEN
DISEŇO FACTORIAL ALTAMENTE
FRACCIONADO
ANALIZAR LOS DATOS
FORMULAR MODELO DE SEGUNDO ORDEN
CORRER LOS EXPERIMENTOS
ENCONTRAR EL PUNTO
ESTACIONARIO (CANDIDATO A
ÓPTIMO)
ANÁLISIS DE CORDILLERA
MOVERSE EXPERIMENTANDO EN LA DIRECCIÓN ÓPTIMA, HASTA
DETECTAR CAMBIO DE TENDENCIA
CARACTERIZAR LA SUPERFICIE
DETERMINAR EL MEJOR MODELO
JERÁRQUICO
DISEŇO CENTRAL COMPUESTO,
DISEŇO DE BOX BEHNKEN
SELECCIONAR LA RESOLUCIÓN
HACER LAS CORRIDAS DEL
EXPERIMENTO EN ORDEN ALEATORIO
DETERMINAR LOS EFECTOS ACTIVOS
¿ES LINEAL LA SUPERFICI
E?
¿ES EL ÓPTIMO
QUE BUSCAMOS
?
ESTIMAR EL MODELO Y PROBAR FALTA DE
AJUSTE
CONDICIONES ÓPTIMAS DEL
PROCESO
NO
SI
SI
NO
22

23
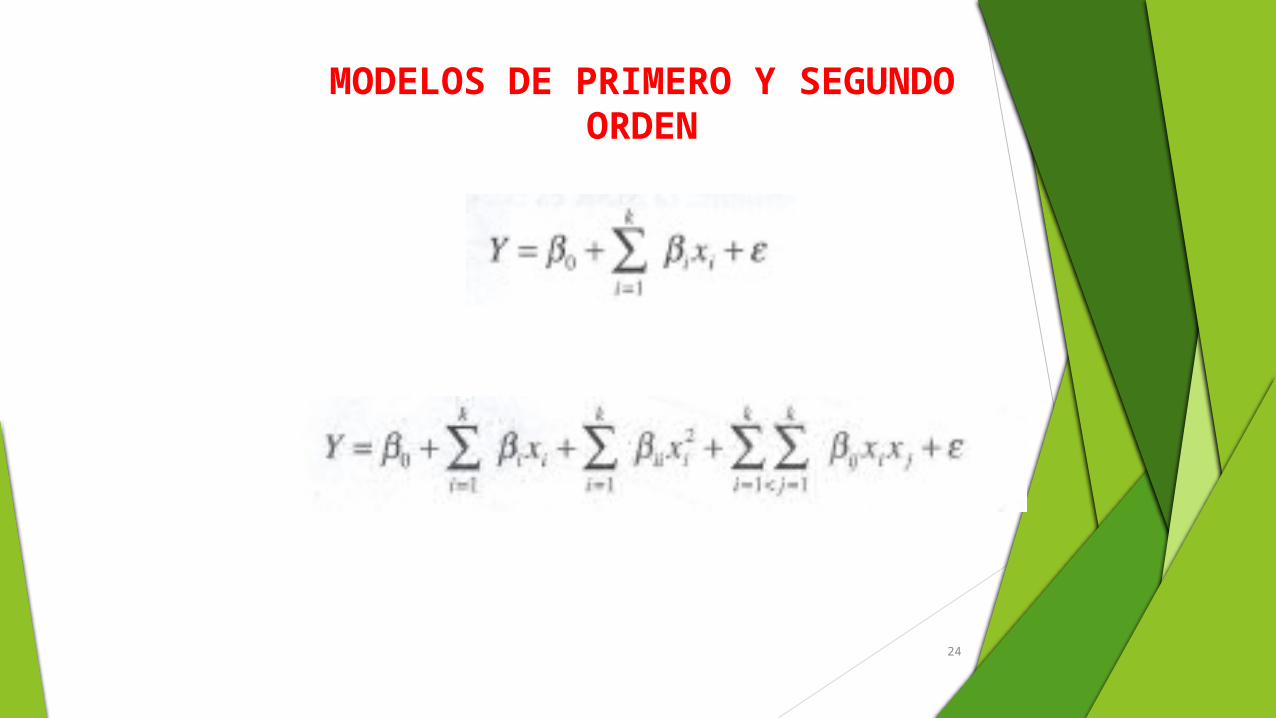
MODELOS DE PRIMERO Y SEGUNDO ORDEN
24
TÉCNICAS DE OPTIMIZACIÓN
Cuando se tiene el modelo debidamente ajustado y validado, se procede a
explorar la superficie descrita por el modelo para encontrar la combinación
de niveles de los factores que dan por resultado un valor óptimo de la
variable de respuesta (característica de calidad), o bien, para determinar la
dirección óptima de movimiento en la que se debe experimentar en el futuro.
Si el modelo no explica al menos el 70 % del comportamiento de la
respuesta (R aj2 ≥ 70 % ), no se recomienda emplearlo para fines de
optimización porque su calidad de predicción es mala.
25
TÉCNICAS DE OPTIMIZACIÓN
La técnica de optimización a utilizar depende del tipo de modelo ajustado y existen básicamente tres métodos, que son:
1. Escalamiento ascendente (o descendente)
2. Análisis canónico
3. Análisis de cordillera
El escalamiento ascendente es para el modelo de primer orden y las otras dos técnicas son para el modelo de segundo orden. A continuación se describen cada uno de estos métodos.
26
TÉCNICAS DE OPTIMIZACIÓN
1) Escalamiento ascendente ( o descendente)
Se aplica cuando se cree que se está lejos de la condición óptima, por
lo que será necesario explorar una región de experimentación inicial y a
partir de ésta determinar una dirección en la cual experimentar fuera
de la región inicial.
2) Análisis canónico
Se aplica un diseño de segundo orden cuando se quiere explorar con
más amplitud una región experimental y/o se espera que el punto
óptimo ya esté cerca (quizás en la región experimental).
3) Análisis de cordillera
Este análisis se realiza cuando el punto estacionario no es del tipo que
se requiere y entonces la opción es encontrar el “mejor punto
posible” dentro de la región experimental. 27
ESCALAMIENTO ASCENDENTE (DESCENDENTE)
28
Cuando la variable de respuesta de interés es del tipo: mientras más grande es mejor, se tiene un escalamiento ascendente; pero si lo que interesa es: mientras más pequeña mejor, se trata de escalamiento descendente.
De aquí en adelante, diremos simplemente escalamiento ascendente, en lugar de "escalamiento ascendente (descendente)", puesto que el escalamiento descendente se convierte en ascendente al cambiar los signos de los términos del modelo ajustado. Cuando la respuesta es del tipo: el valor nominal es lo mejor, el problema es localizar la curva de nivel específica que tenga la altura o valor requerido de la variable de respuesta. En este caso, cada punto sobre la curva de nivel es una solución, y de todos ellos se elige el de menor variabilidad y/o menor costo.
ESCALAMIENTO ASCENDENTE (DESCENDENTE)
29
ESCALAMIENTO ASCENDENTE (DESCENDENTE)
30
Se analizan con detalle los resultados y se ajusta un modelo de primer orden con niveles codificados. Si éste explica satisfactoriamente la variabilidad observada es necesario continuar como se indica más adelante, de lo contrario, investigar a qué se debe la falta de ajuste: ¿Mucha variabilidad? ¿Curvatura? ¿Región más complicada? y proceder en consecuencia.
31
Análisis canónico
Se aplica un diseño de segundo orden cuando se quiere explorar con más amplitud una región experimental y/o cuando se espera que el punto óptimo ya esté cerca (probablemente dentro de la región experimental). El análisis canónico es una de las técnicas para analizar el modelo de segundo orden y consiste en los siguientes pasos:
1. A partir del conocimiento que ya se tiene del problema, seleccionar los niveles de los factores para determinar la región de exploración.
2. Correr un diseño de segundo orden (un diseño de composición central, por ejemplo) para explorar la región experimental determinada antes.
3. Ajustar un modelo de segundo orden con niveles codificados. Si éste explica bien la variabilidad observada continuar al siguiente paso; de lo contrario, investigar por qué la falta de ajuste (¿mucha variabilidad?, ¿región más complicada?) y proceder en consecuencia.
32
4. Encontrar las coordenadas del punto estacionario.
5. Expresar el modelo ajustado en su forma canónica. El análisis canónico consiste en reescribir el modelo ajustado de segundo orden en su forma canónica, es decir, se expresa en términos de nuevas variables llamadas variables canónicas, las cuales son transformaciones de las variables codificadas. La ventaja es que la ecuación canónica proporciona información a simple vista sobre el tipo de superficie que se está observando y sobre su forma.
6. Evidenciar la relación entre las variables canónicas y las variables codificadas.
En la práctica, si se cuerna con un software adecuado no necesariamente se siguen los últimos tres pasos del análisis canónico. La mejor estrategia será encontrar, primero los coeficientes de la ecuación canónica que indican el tipo de superficie observada y sólo si ésta es del tipo que interesa (por ejemplo máximo), entonces se procede a localizar las coordenadas del punto estacionario. Si la superficie encontrada no es del tipo deseado se sigue el análisis de cordillera
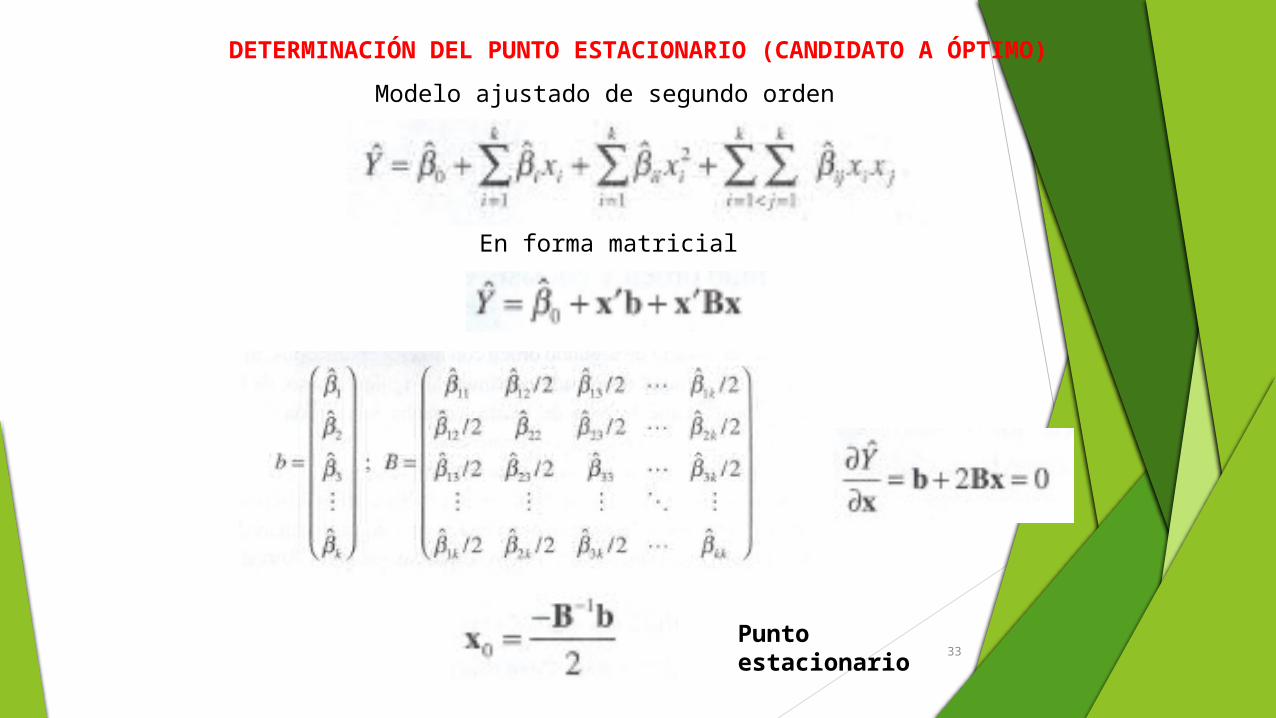
DETERMINACIÓN DEL PUNTO ESTACIONARIO (CANDIDATO A ÓPTIMO)
Modelo ajustado de segundo orden
En forma matricial
Punto estacionario33

TIPOS DE SUPERFICIE Y ECUACIÓN CANÓNICA
En algunos problemas de optimización, en especial cuando se analizan diversas variables, el tipo de superficie de respuesta no es tan evidente.Para resolver esta situación se utiliza la ecuación canónica del modelo de segundo orden, cuya expresión es la siguiente:
34
35
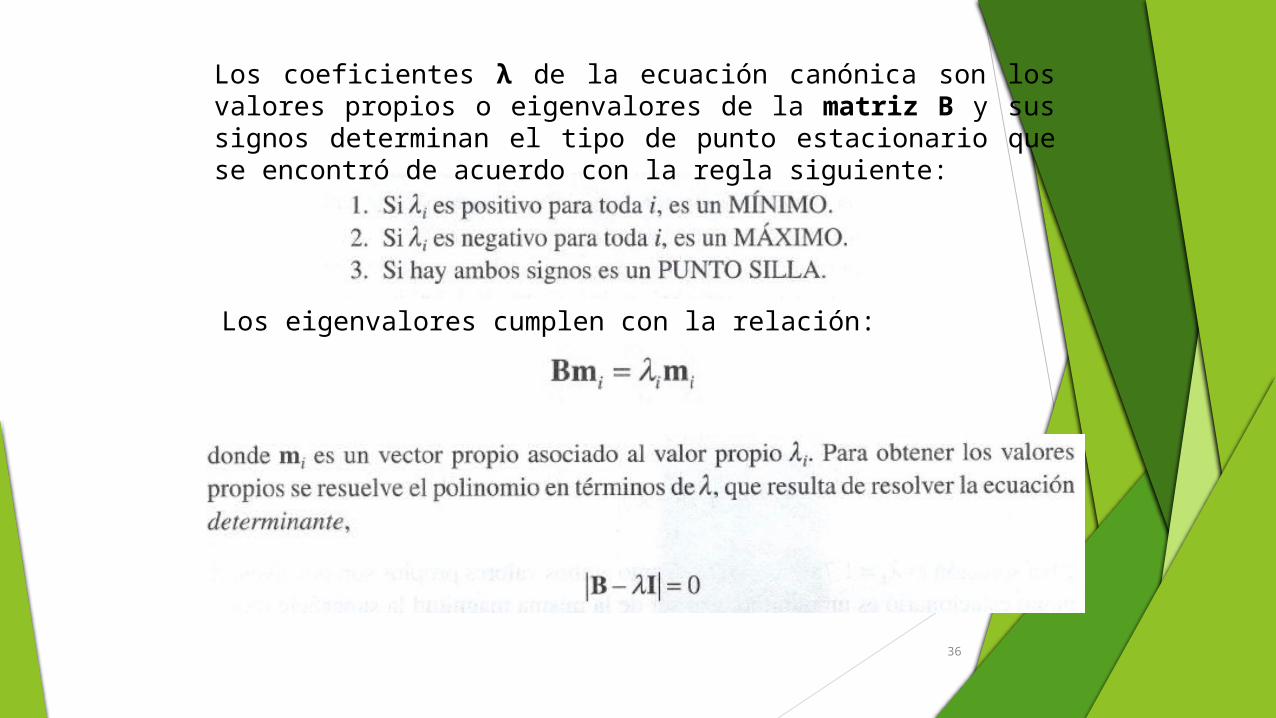
Los coeficientes λ de la ecuación canónica son los valores propios o eigenvalores de la matriz B y sus signos determinan el tipo de punto estacionario que se encontró de acuerdo con la regla siguiente:
Los eigenvalores cumplen con la relación:
36
ANÁLISIS DE CORDILLERA
Este análisis se realiza cuando el punto estacionario no es del tipo que se
requiere y entonces la opción es encontrar el “mejor punto posible”
dentro de la región experimental. Este punto se ubica sobre la cordillera
óptima del centro del diseño y es aquél que predice la mejor respuesta
sobre la región.
Consiste en calcular el máximo o el mínimo de la superficie de respuesta
sobre esferas concéntricas al centro del diseño, empezando por una
esfera de radio casi cero y se va aumentando el radio de la esfera hasta
llegar a una esfera que cubra los puntos experimentales. El punto óptimo
es aquél que predice el desempeño óptimo de la variable de respuesta.
37
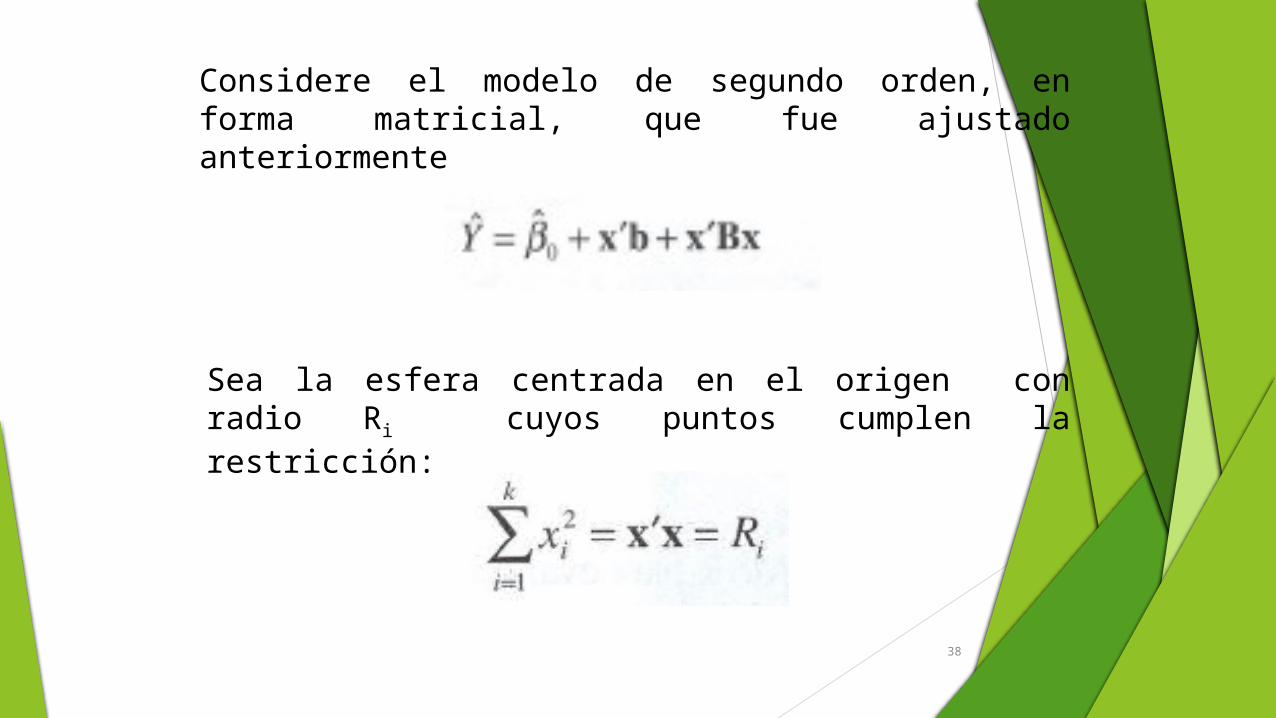
Considere el modelo de segundo orden, en forma matricial, que fue ajustado anteriormente
Sea la esfera centrada en el origen con radio Ri cuyos puntos cumplen la restricción:
38

El punto óptimo sobre una esfera particular se determina al sustituir para un valor de λ que no sea un auto valor (eigenvalor) de la matriz B.
donde λ es un multiplicador de Lagrange
39
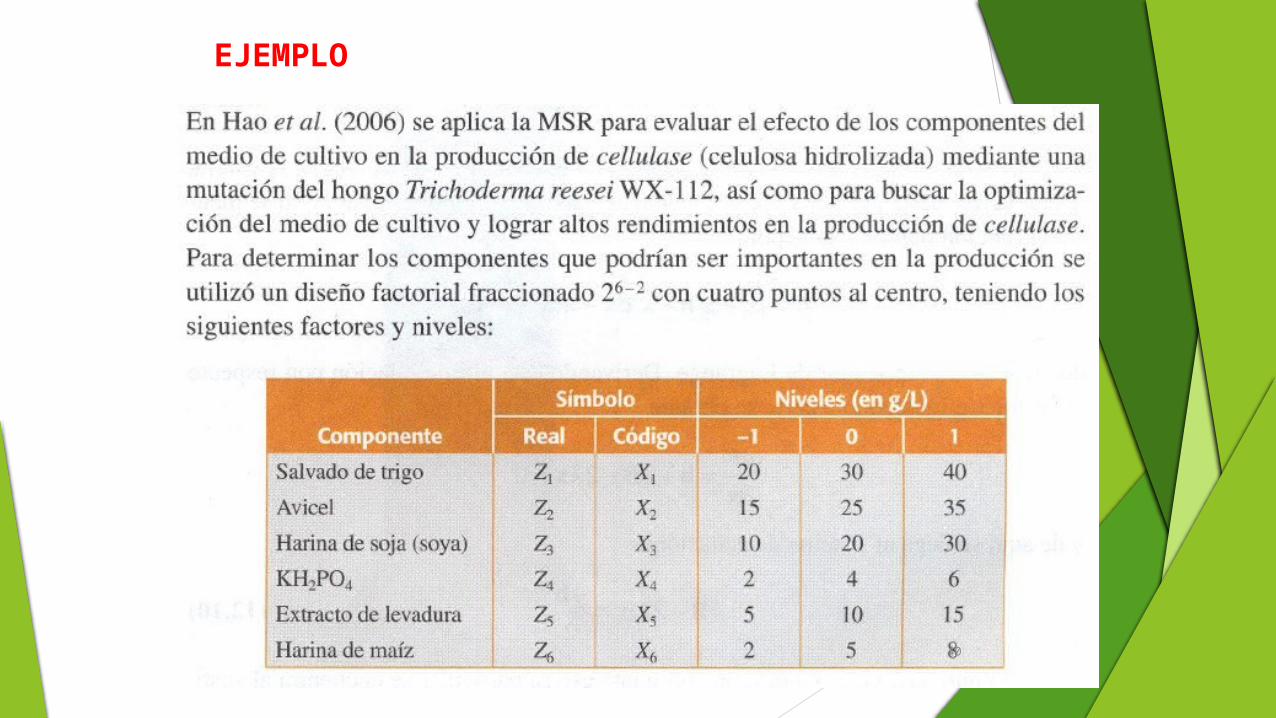
EJEMPLO
40
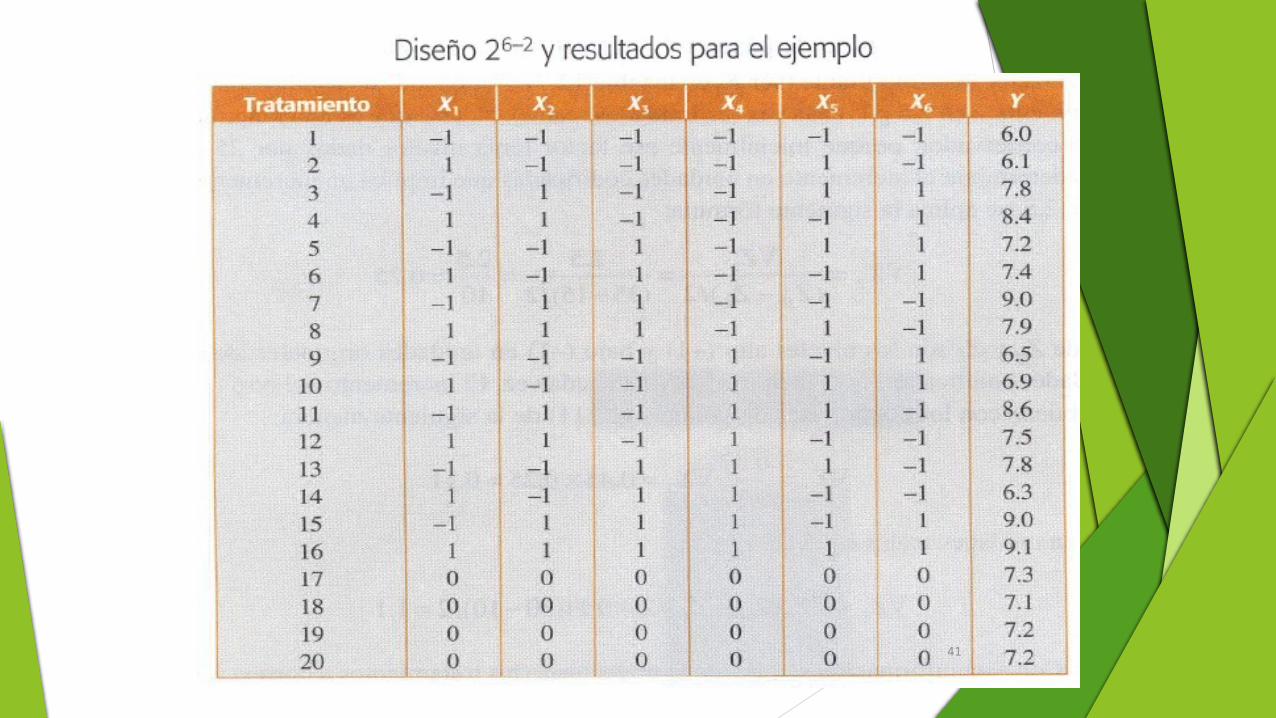
41
42
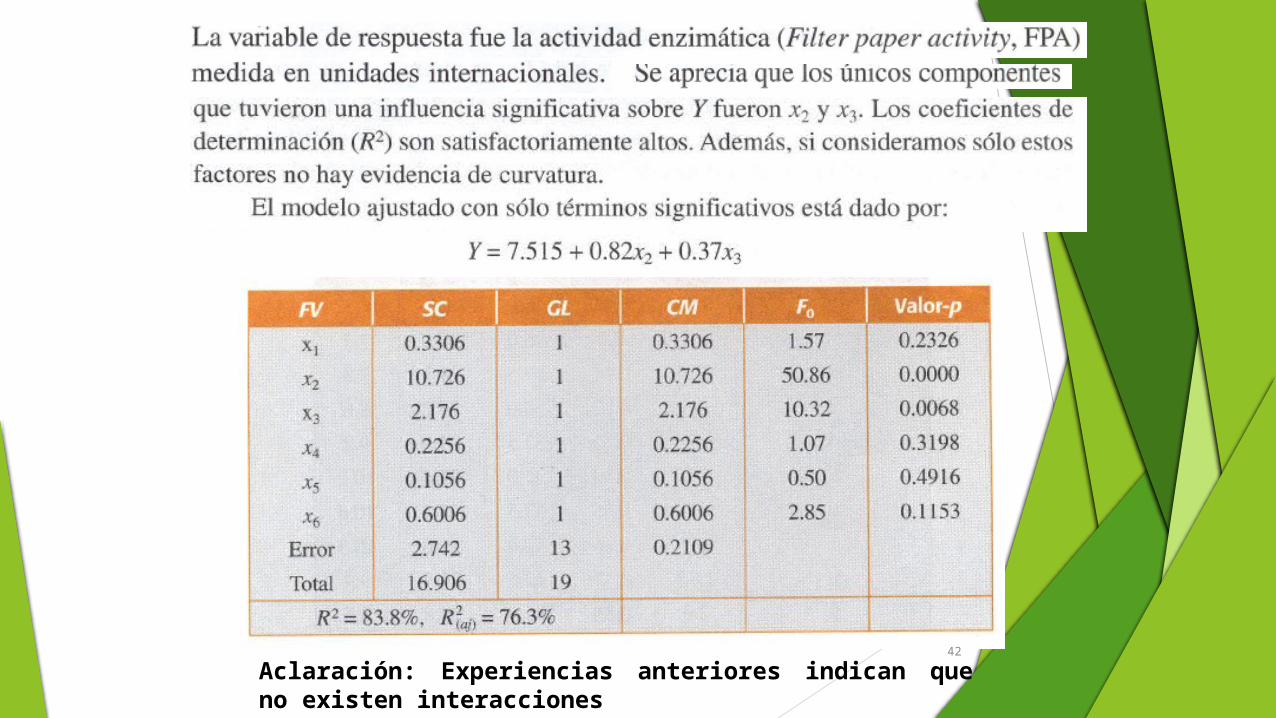
Aclaración: Experiencias anteriores indican que no existen interacciones
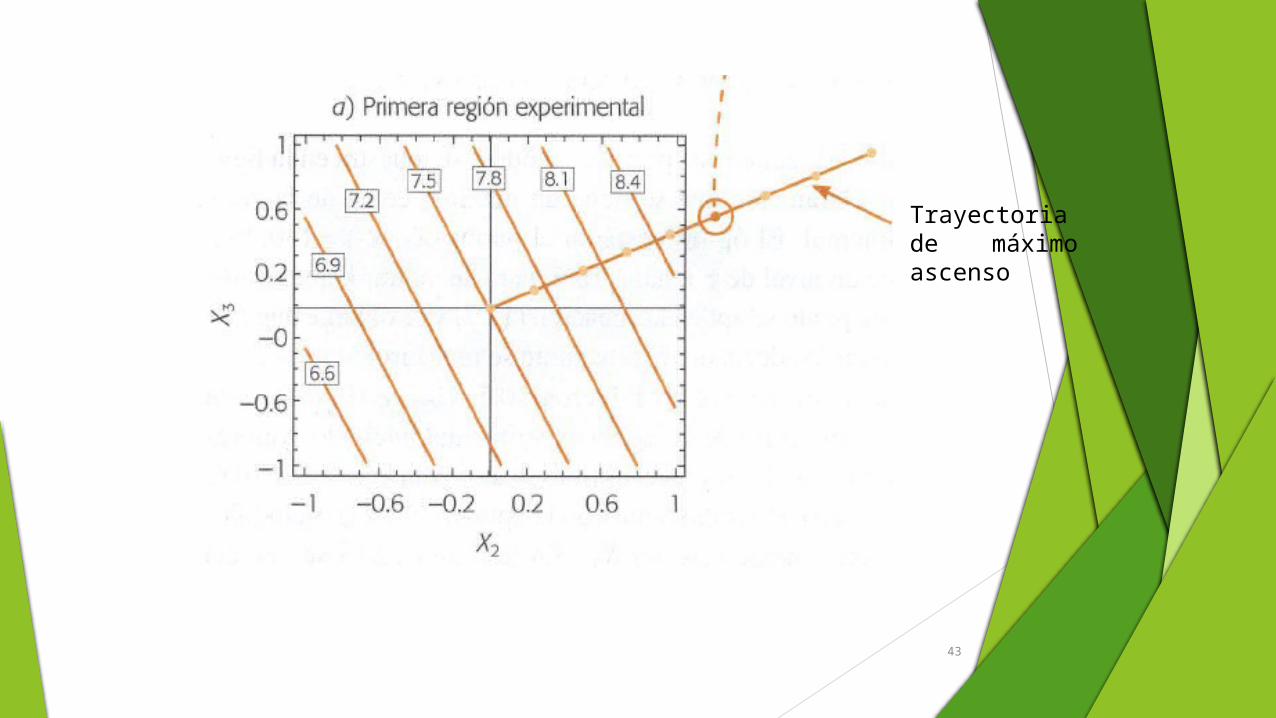
Trayectoria de máximo ascenso
43
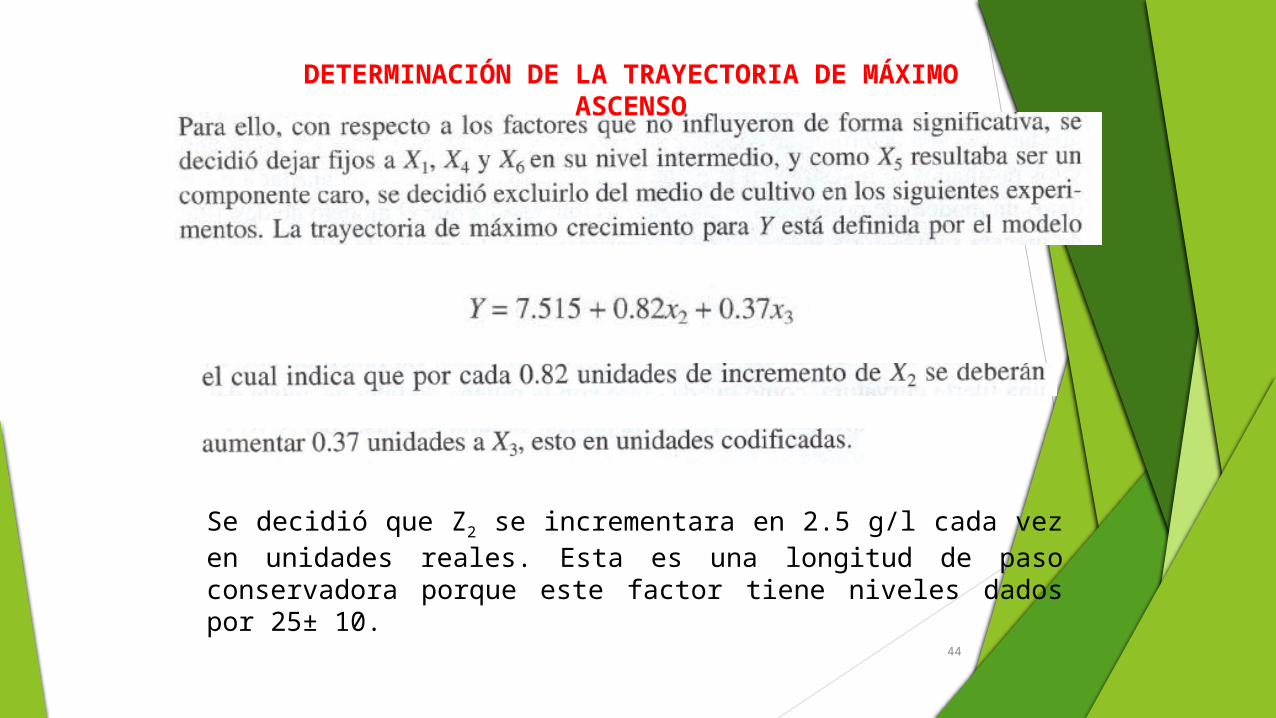
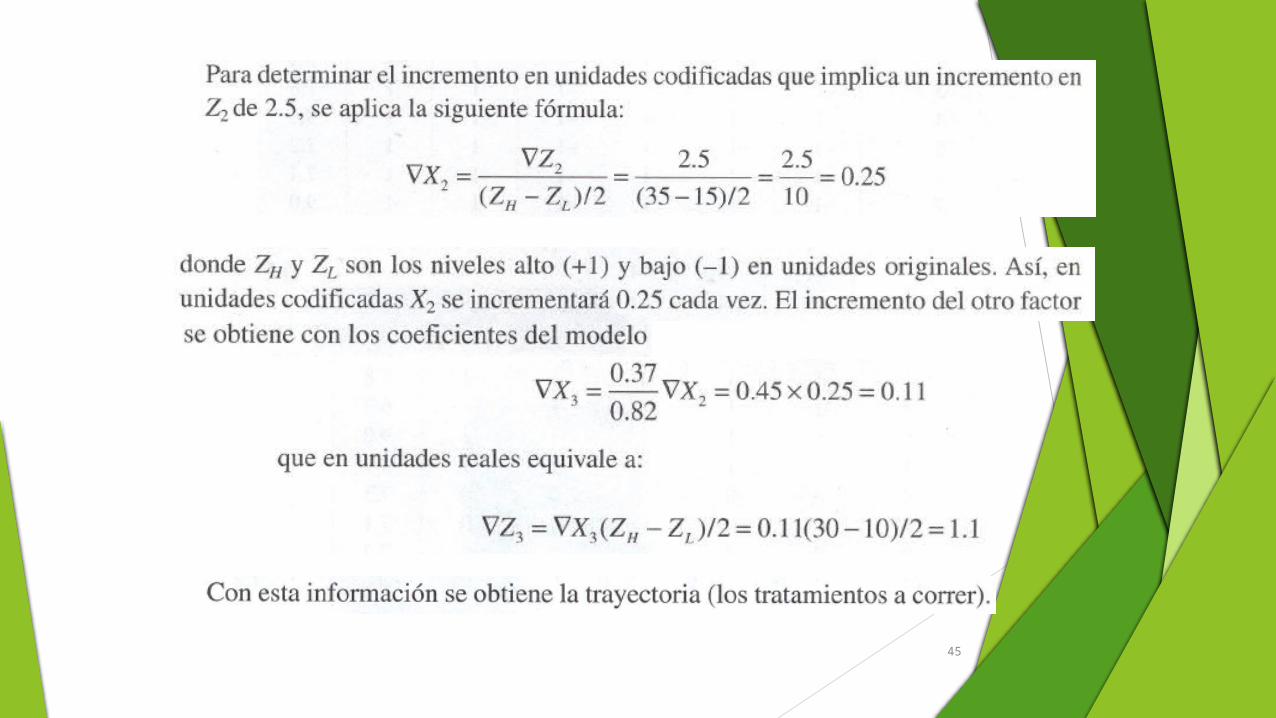
DETERMINACIÓN DE LA TRAYECTORIA DE MÁXIMO ASCENSO
Se decidió que Z2 se incrementara en 2.5 g/l cada vez en unidades reales. Esta es una longitud de paso conservadora porque este factor tiene niveles dados por 25± 10.
44
45

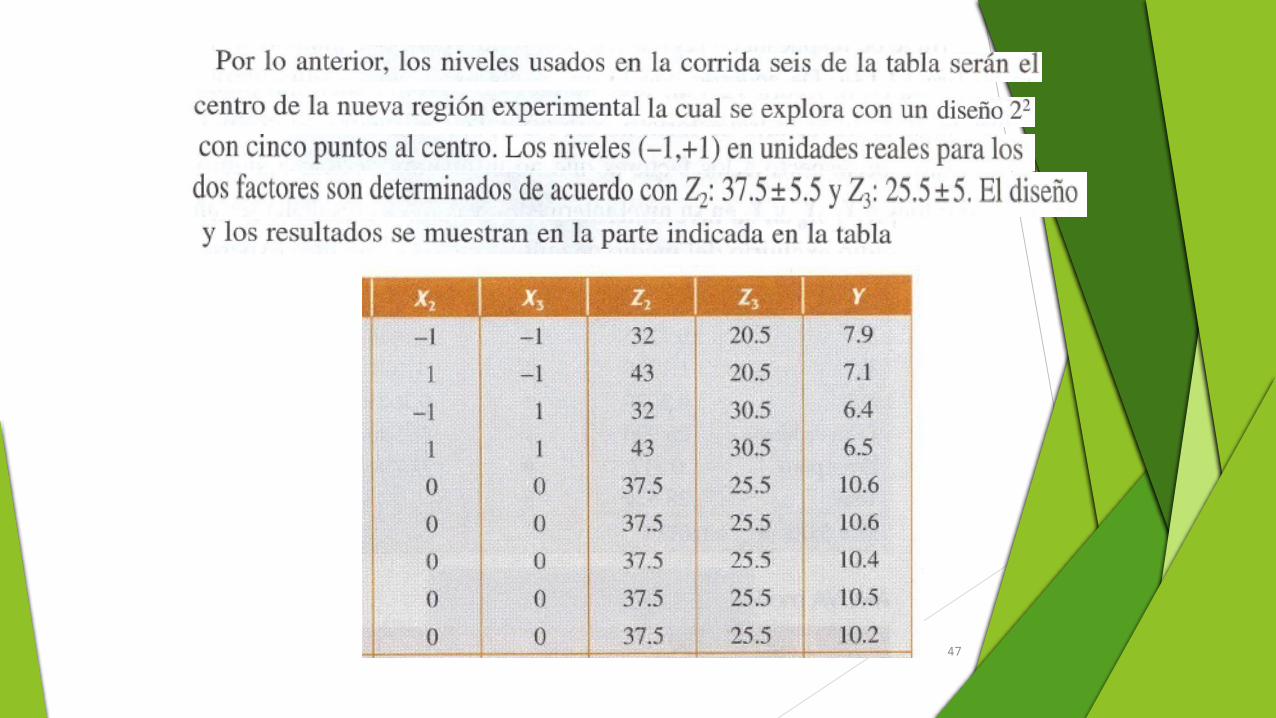
Trayectoria de máximo ascenso y resultados experimentales obtenidos
A partir de la corrida 6 los valores de la variable de respuesta comienzan a descender, por tanto éste debe ser el centro de una nueva región experimental.
46
47
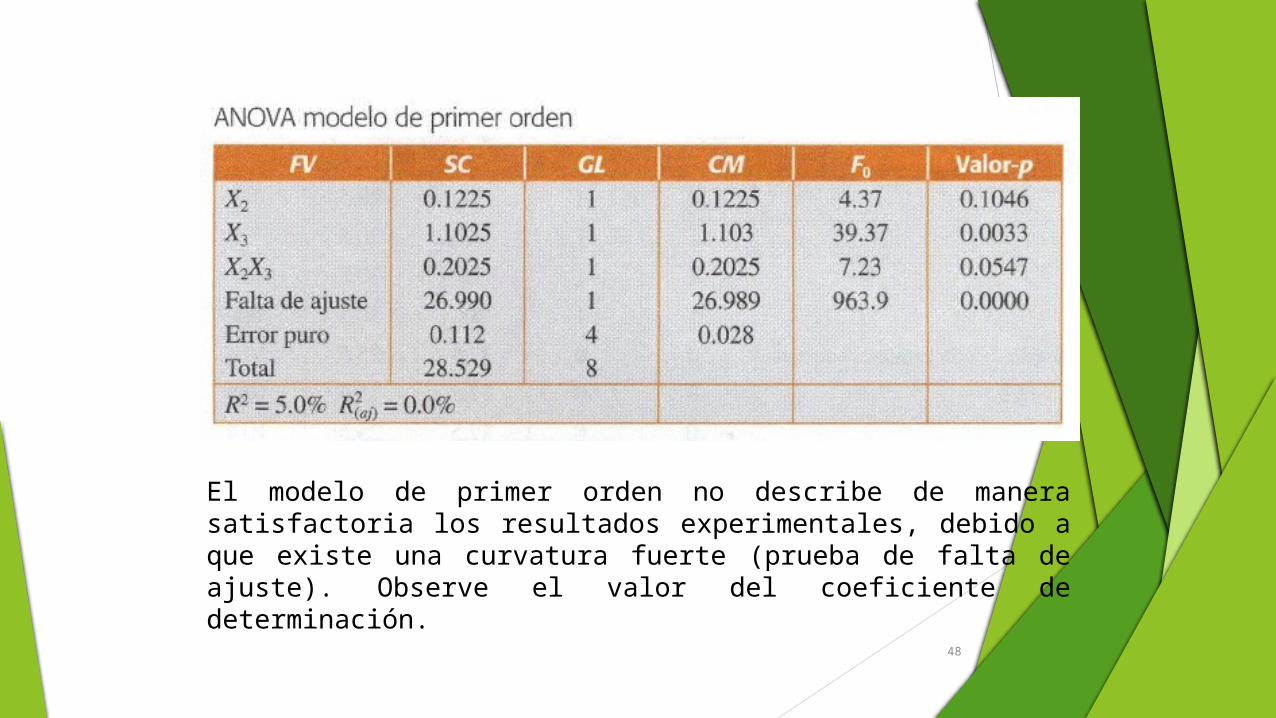
El modelo de primer orden no describe de manera satisfactoria los resultados experimentales, debido a que existe una curvatura fuerte (prueba de falta de ajuste). Observe el valor del coeficiente de determinación.
48
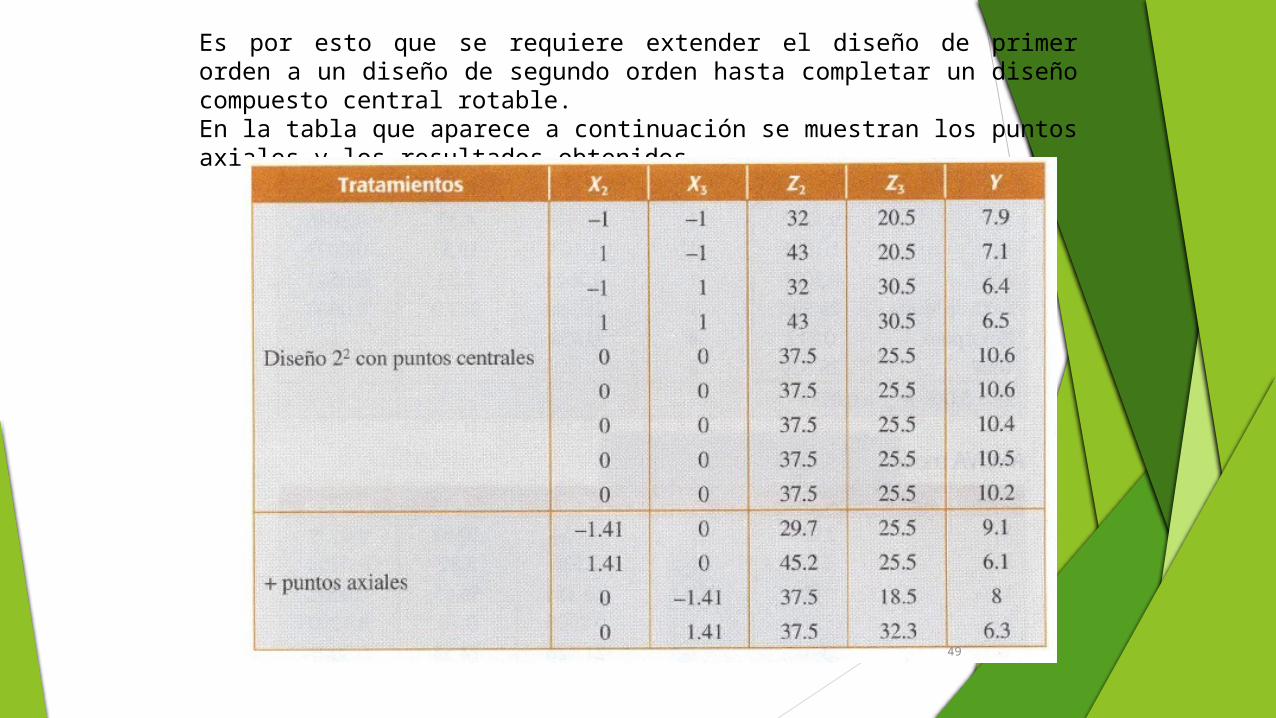
Es por esto que se requiere extender el diseño de primer orden a un diseño de segundo orden hasta completar un diseño compuesto central rotable. En la tabla que aparece a continuación se muestran los puntos axiales y los resultados obtenidos.
49
Para encontrar los niveles reales a los que corresponden los códigos + 1.41 y – 1.41 se utilizó la siguiente ecuación:
Al ajustar un modelo de segundo orden a todos los datos de la tabla se obtiene la tabla ANOVA que aparece a continuación, donde se aprecia que el modelo describe adecuadamente la superficie. Si se elimina el término X2 X3 que no es significativo, se obtiene el siguiente modelo ajustado:
50
Y = 10,66 - 0,61783*X 2 - 0,563021*X 3 - 1,63*X 2^2 - 1,855*X 3^2

51
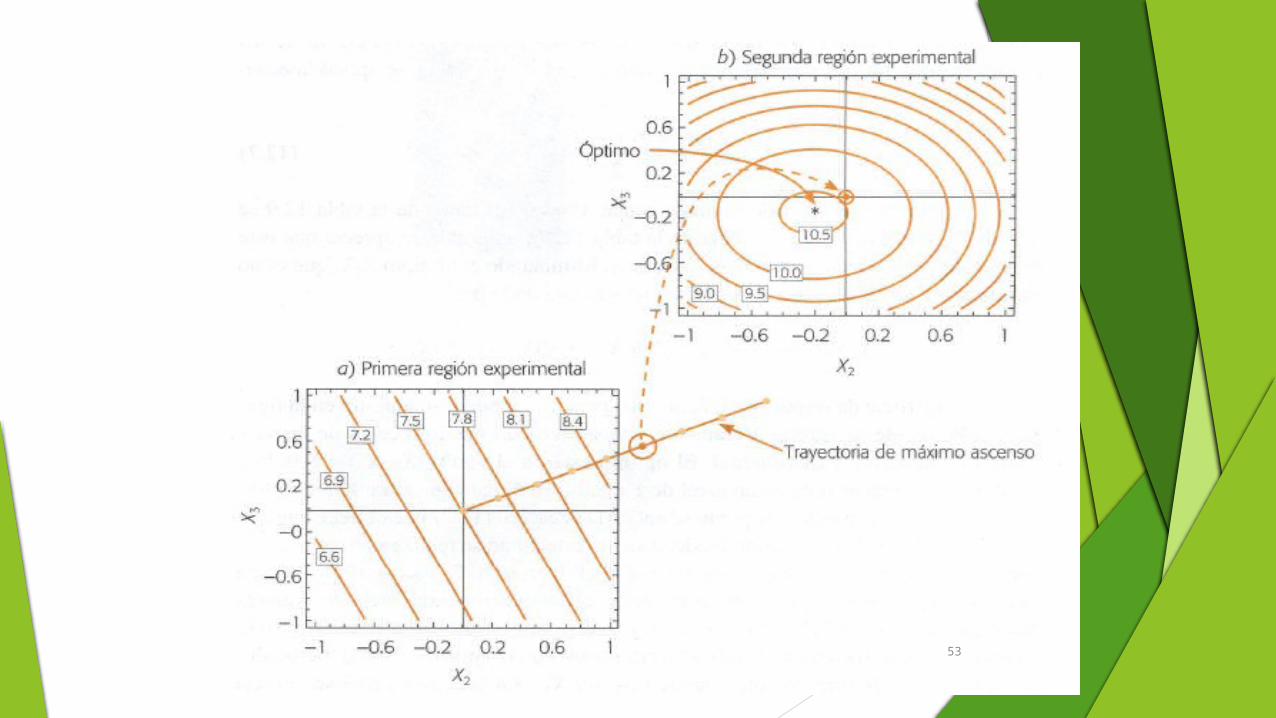
En la superficie de respuesta en contornos para este modelo se observa que se tiene claramente un máximo cerca de la zona central de la región experimental.
El óptimo está en el punto (X2 , X3 ) = (-0.189, -0.152) donde se predice un nivel de Y igual a 10.66. Para encontrar a qué condiciones reales corresponde este punto, se utiliza la expresión
Entonces se obtiene el valor (Z2 , Z3 ) = (36.5, 24.7). Para verificar este punto se hicieron tres corridas confirmatorias en este punto y se obtuvieron para Y los valores 10.5, 10.7 y 10.6.
Los valores obtenidos confirman un incremento real de 47% en el rendimiento con la aplicación de MSR, en comparación con el valor promedio obtenido en el centro de la región experimental inicial (7.2). Además, se eliminó un componente costoso (X5 ).
52
53

ESTRATEGIAS DE SEGUNDO ORDEN
¿Qué diseños se deben emplear?
54
55

56

57
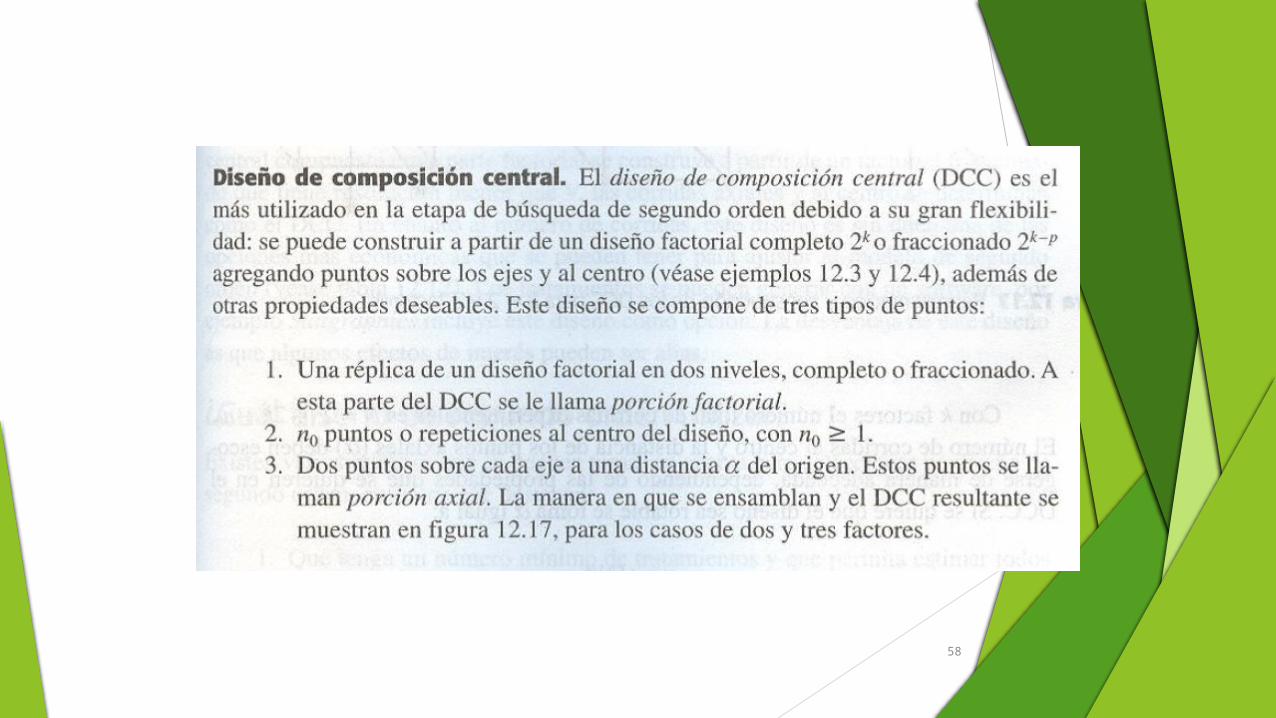
58
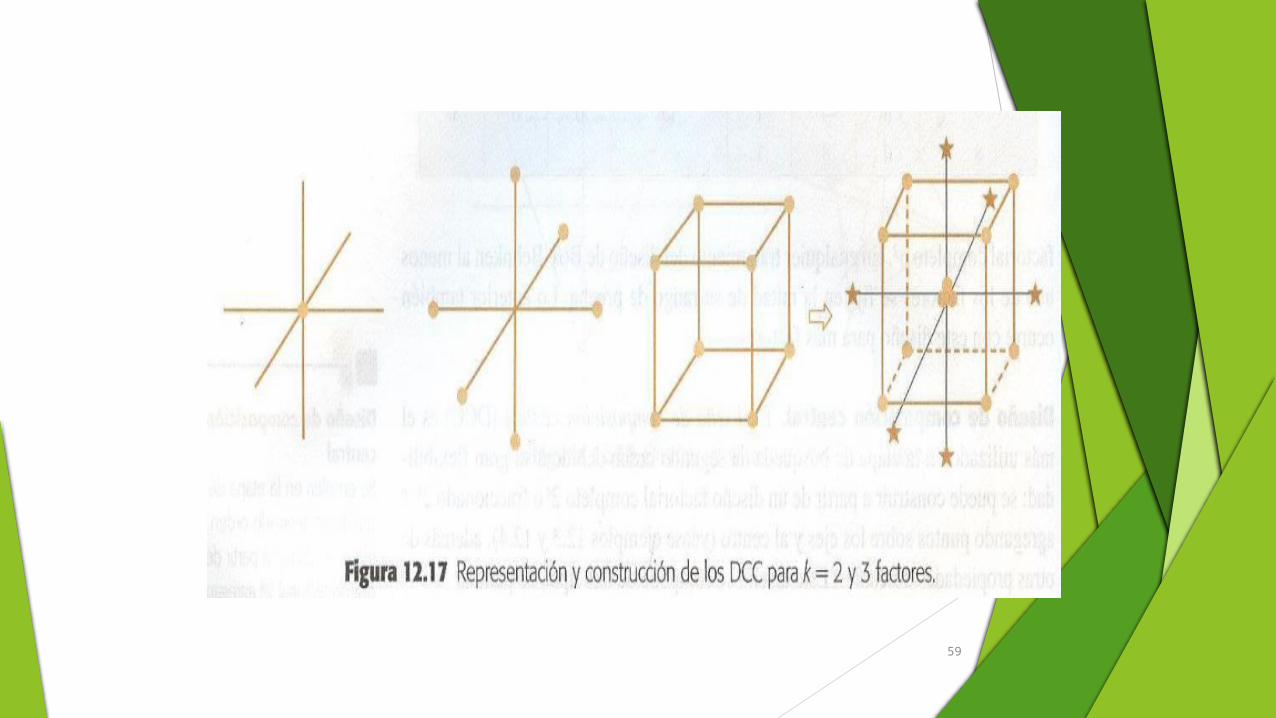
59
60

61
62
63

64
En Stargraphics* una vez seleccionado un modelo de regresión de segundo orden que describe adecuadamente el comportamiento de la respuesta (Y), la optimización de ésta se lleva a cabo en la opción tabular de Optimization. Una vez ahí. con las opciones de panel (botón derecho del ratón) se elige el tipo de optimización deseada: máximo, mínimo o un valor objetivo. Si se quiere un valor objetivo se declara su valor en el campo correspondiente. Se indica el rango de búsqueda para cada factor, típicamente el rango utilizado en la región experimental. Entonces, se corre el procedimiento y éste reporta las coordenadas del punto óptimo.
BIBLIOGRAFIA1. Análisis y diseño de experimentos, Humberto Pulido – Román De La
Vara, Segunda Edición, McGraw Hill, Méjico, 2008
2. Diseño y análisis de experimentos, Douglas Montgomery, Segunda Edición, Limusa Wiley, Mejico, 2004