informe final de pasantías -...
TRANSCRIPT
Nailit Méndez FACyT-UC
Estado del Arte de las Metodologías de Optimización de
Trayectorias en la Perforación de Pozos Petroleros: Análisis
y Recomendaciones.
Informe final de Pasantías
Presentado Ante el Departamento de Matemáticas de la
Facultad Experimental de Ciencias y Tecnología (FACYT)
de la Universidad de Carabobo
Mayo-2011
Nailit Méndez FACyT-UC
Universidad de Carabobo
Facultad Experimental de Ciencia y Tecnología
Departamento de Matemáticas
Estado del Arte de las Metodologías de Optimización de
Trayectorias en la Perforación de Pozos Petroleros: Análisis
y Recomendaciones.
Informe final de Pasantías
Alumno: Nailit Méndez
Tutor Académico: Prof. Víctor Griffin
Tutor Empresarial: Vicente Ciccola, Hosward Rodríguez
Licenciatura en Matemáticas

Resumen
La gerencia de PRCP de PDVSA, Intevep, está desarrollando un Proyecto que tiene como objetivo
minimizar los costos de perforación de pozos petroleros, en el cual intervienen diversos factores
como lo son las herramientas de perforación, tipo y profundidad del pozo, condiciones geológicas,
entre otros. Por tanto requieren minimizar la trayectoria del pozo por medio de métodos de
optimización heurísticas a partir de la elaboración de un estado del arte, en el cual se hace una
investigación documental con base en fuentes secundarias correspondiente a los métodos de
optimización aplicados para optimizar trayectorias de pozos, que delimita, describe, caracteriza e
interpreta.
La presente investigación tiene como objetivo principal la recopilación de información orientada
hacia el uso de métodos de optimización para minimizar la trayectoria de pozos petroleros. Se
estableció un intervalo de diez años aproximadamente, para la búsqueda de la información debido al
auge que ha tenido la tecnología en la actualidad.
Diversos estudios han demostrado que el uso de los algoritmos genéticos para optimizar
trayectorias de pozos ha proporcionado resultados significativos, tales como: minimizar la
profundidad total medida ( TMD ) y la severidad de cambio de ángulo (DLS ), permitiendo incluir
la mayor cantidad de variables asociadas al problema.
Por otra parte distintas investigaciones en el área de optimización de trayectoria que involucran
métodos como el gradiente descendiente, programación no lineal, programación difusa entre otros;
también han logrado ciertos beneficios en pozos sencillos, con la desventaja que la cantidad de
variables usadas en estos métodos es bastante reducido.
El desarrollo de estos métodos de optimización a nivel nacional para minimizar la trayectoria
direccional de pozos, se observa muy poco en la investigación, por lo cual no se encontraron
patentes nacionales en esta área. Sin embargo a nivel mundial, la implementación de estos métodos
se ha desarrollado un poco más.

Nailit Méndez FACyT-UC
Este trabajo servirá de apoyo conceptual y metodológico para el diseño y optimización de
trayectoria de pozos direccionales, basados en el uso de meta heurísticas tales como: búsqueda tabú,
recocido simulado, colonia de hormigas, algoritmo genético, etc.
Nailit Méndez FACyT-UC
TABLA DE CONTENIDO
Página
1. DESCRIPCIÓN DE LA EMPRESA 1
1.1 Nombre y Ubicación de la Empresa
1.2 Misión
1.3 Visión
1.4 Organigrama
2. DESCRIPCIÓN GENERAL DE LAS TAREAS REALIZADAS POR
EL ALUMNO
3. DESCRIPCIÓN TECNICA DE LAS TAREAS MÁS RELEVANTES
3.1 Tendencias Tecnológicas
3.2 Descripción de la perforación direccional
3.3 Descripción de algunos métodos de optimización heurística
3.4 Resultados publicados en optimización de trayectorias de pozos
3.5 Patentes en el área de optimización de trayectorias de pozos
4. CONCLUSIONES Y RECOMENDACIONES
4.1 Conclusiones
4.2 Recomendaciones
Nailit Méndez FACyT-UC
Capítulo 1
Descripción de la Empresa
En este capítulo se detallará el nombre, ubicación, misión, visión y organigrama de la empresa.
1.1 Nombre y Ubicación de la Empresa
Intevep, S.A. Centro de Investigación y apoyo Tecnológico. Filial de PDVSA. Urbanización Santa
Rosa. Sector El Tambor. Los Teques. Estado Miranda.
1.2 Misión
Intevep es una empresa cuya misión es apalancar a través de la tecnología las actividades y
proyectos requeridos por los negocios de PDVSA, promoviendo la soberanía tecnológica.
1.3 Visión
Ser el brazo tecnológico de todas las operaciones de la corporación, el cual asegure a futuro la
soberanía tecnológica del negocio de los hidrocarburos y del país.
Nailit Méndez FACyT-UC
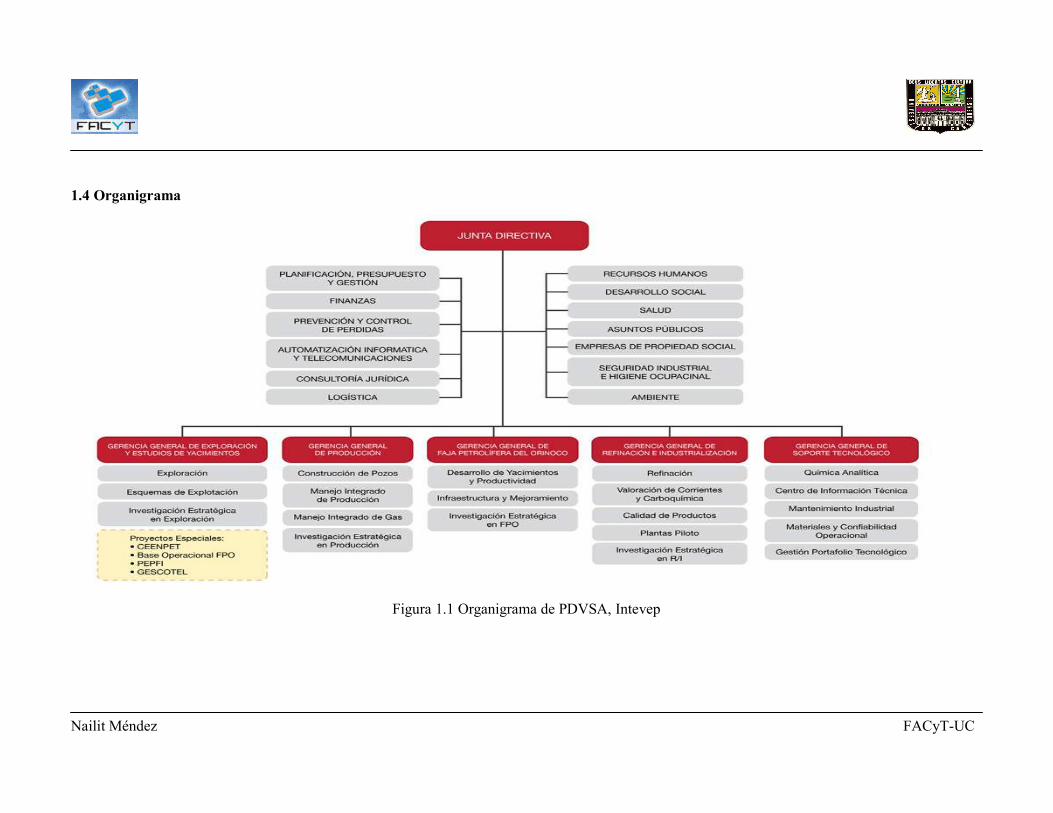
1.4 Organigrama
Figura 1.1 Organigrama de PDVSA, Intevep
Capítulo 2
Descripción general de las tareas realizadas por el
alumno
Durante las doce semanas de duración de las pasantías realicé una serie de tareas que a continuación
se enumeran:
� TAREA A: Las primeras dos semanas se hizo una investigación de los métodos de
optimización heurísticas más usadas, a fin de comprender su metodología para ser
aplicados en trayectorias de pozos petroleros.
� TAREA B: En la próxima semana se hizo un estudio sobre los conceptos básicos de la
perforación direccional de pozos, tales como: perforación, procedimiento, terminología,
entre otros.
� TAREA C: En las siguientes cuatro semanas se realizo un estudio bien detallado sobre
los trabajos previos en optimización de trayectorias de pozos, con la finalidad de
comprender y comparar los métodos de optimización usados en dichos trabajos, sus
características, resultados, ventajas y desventajas.
� TAREA D: Se realizó un estudio sobre las tendencias existentes en optimización de
trayectorias. Para esto se utilizaron dos semanas.
� TAREA E: Se generó el informe del estado del arte y una propuesta de desarrollo a
partir de todo el estudio realizado.
Nailit Méndez FACyT-UC
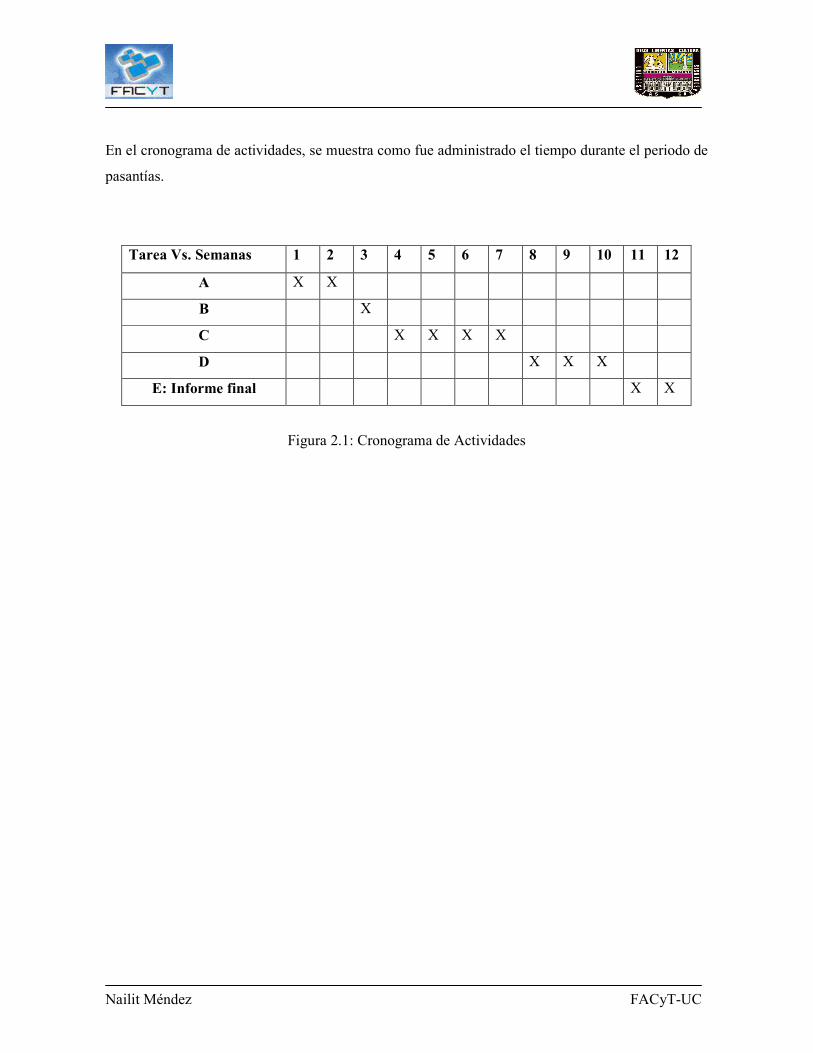
En el cronograma de actividades, se muestra como fue administrado el tiempo durante el periodo de
pasantías.
Tarea Vs. Semanas 1 2 3 4 5 6 7 8 9 10 11 12
A X X
B X
C X X X X
D X X X
E: Informe final X X
Figura 2.1: Cronograma de Actividades
Capítulo 3
Descripción técnica de la tarea más relevante
La tarea más relevante fue poner en práctica los conocimientos y destrezas adquiridas en la
Licenciatura en Matemáticas para comprender los métodos de optimización utilizados para
minimizar la trayectoria de pozos direccionales, además de diferentes herramientas matemáticas que
fueron empleados en los distintos trabajos.
El primer día de pasantía, la gerencia me informó sobre la necesidad de desarrollar un método de
optimización heurística para minimizar la trayectoria de pozos direccionales, a fin de optimizar los
costos de perforación, ya que PDVSA actualmente utiliza compañías de software que son
sumamente costosos en comparación con sus resultados, debido a que no toman en cuenta las
características especificas de los pozos venezolanos. Pero para proponer y desarrollar un método
de optimización se requería realizar un estado del arte de las metodologías de optimización de
trayectorias con la finalidad de comprender todo lo que se ha hecho hasta ahora para abordar este
tipo de problemas.
Se estudiaron algunas metas heurísticas como: Búsqueda Tabú, templado simulado, algoritmo
genético y colonias de hormigas. Los cuales son los más utilizadas en la actualidad para atacar
problemas de optimización combinatoria.
Durante las dos semanas que estuve estudiando todo lo referente a lo que es perforación direccional,
me reuní varias veces con mis tutores empresariales para aclarar conceptos que eren nuevos para
mí, así como los parámetros que se usan en la perforación. Todo esto debía tenerlo claro para
comprender los trabajos publicados y finalmente proponer una meta heurística para ser desarrollada
en el trabajo especial de grado.
Nailit Méndez FACyT-UC
Antes de presentar el análisis de los trabajos publicados, es necesario entender lo que es perforación
y su terminología para tener una idea de lo que quiere la gerencia.
3.1 Tendencias Tecnológicas
La búsqueda de información para la realización de este estudio se inició en la Red de Información
Petrolera y Petroquímica (RIPPET) de PDVSA, en la cual se seleccionaron las dos fuentes de
información internacionales más relevantes enfocadas hacia el área de las ciencias e ingenierías los
cuales son ONEPETRO (SPE) y Science Direct. Además, se utilizó el archivo técnico de PDVSA
Intevep para la búsqueda de información en el área, desarrollada en Venezuela. El intervalo de
tiempo tomado para la búsqueda fue 2000-2011, ya que se requiere hacer un estudio de las
publicaciones más recientes con respecto al tema.
3.2 Descripción de la perforación direccional
Es la perforación rotatoria que se realiza desviando su trayectoria del curso de una recta, con
diversos ángulos que permitan evadir obstáculos que pudieran aumentar la dificultad de la
perforación, como la presencia de fallas, además de alcanzar múltiples yacimientos desde un mismo
hoyo, con la desventaja de presentar alta probabilidad de ruptura y pérdidas de equipos en el pozo,
por las innumerables desviaciones que se pudiera lograr .
� Procedimiento de la perforación
El pozo se construye perforando un agujero de 7 a 32 pulgadas de diámetro en el suelo mediante
una torre de perforación que hace girar una línea o sarta con una broca en su extremo. Luego de
completada la perforación, se introduce una cañería de diámetro levemente inferior al de la
perforación, lo que permite sellar con cemento el resto del pozo. Este caño camisa provee integridad
estructural a la obra, y al mismo tiempo permite aislarla en relación a zonas de alta presión que
pueden resultar potencialmente peligrosas. La perforación se realiza por etapas, de tal manera que el
tamaño del pozo en la parte superior es ancho y en las partes inferiores cada vez más angosto. Esto
le da consistencia y evita derrumbes, para lo cual se van utilizando brocas y tubería de menor
tamaño en cada sección.
Nailit Méndez FACyT-UC
Todo el proceso se basa en una torre de perforación que contiene todo el equipamiento necesario
para bombear el fluido de perforación, bajar y elevar la línea, controlar las presiones bajo tierra.
Extraer las rocas del fluido, y generar en situaciones la energía necesaria para la operación.
� Terminología usada en la perforación direccional
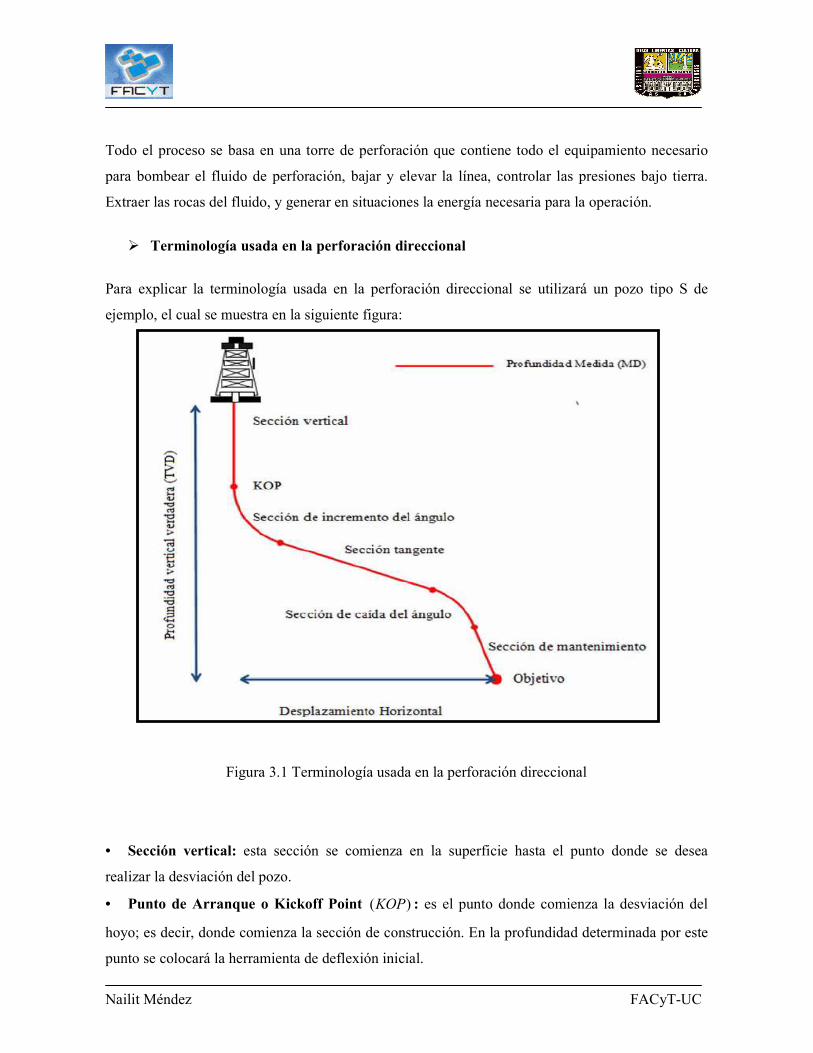
Para explicar la terminología usada en la perforación direccional se utilizará un pozo tipo S de
ejemplo, el cual se muestra en la siguiente figura:
Figura 3.1 Terminología usada en la perforación direccional
• Sección vertical: esta sección se comienza en la superficie hasta el punto donde se desea
realizar la desviación del pozo.
• Punto de Arranque o Kickoff Point )(KOP : es el punto donde comienza la desviación del
hoyo; es decir, donde comienza la sección de construcción. En la profundidad determinada por este
punto se colocará la herramienta de deflexión inicial.
Nailit Méndez FACyT-UC
• Sección de Construcción: mejor conocida como build section, es la parte del hoyo después del
arranque inicial, donde el ángulo de desviación aumenta hasta conseguir la localización final del
objetivo o ángulo final de la sección, previamente planificado. Normalmente se expresa en grados
por cada 100 pies (°/100 pies), esto permite medir los cambios de ángulo a lo largo de la
profundidad perforada mejor conocida como Measured Depth )(TMD . Específicamente el
)(TMD representa la longitud del hoyo a través de la sarta de perforación.
• Objetivo: es un punto fijo del subsuelo en la formación hasta donde se quiere perforar.
• Ángulo de inclinación: representa el ángulo de desviación del hoyo medido con respecto a la
vertical.
• Dirección o Azimuth: representa el ángulo de desviación con respecto a algún plano de
referencia, usualmente el norte verdadero.
• Profundidad Vertical Verdadera: mejor conocida como True Vertical Depth
)(TVD Representa la distancia vertical desde cualquier punto del hoyo al piso de la cabria o torre de
perforación.
• Desviación: mejor conocida como desplazamiento horizontal, es la distancia horizontal entre
cualquier punto del hoyo al eje vertical de referencia donde se encuentra el cabezal del pozo.
• Sección Tangente: se comienza después de la sección de construcción y su propósito es
mantener el ángulo y dirección del pozo hasta encontrar un punto de referencia indicado por el
usuario.
• Sección de descenso o drop section: Es el tramo del hoyo después de la sección tangencial
donde el ángulo de inclinación del calibre del pozo disminuye.
3.3 Descripción de algunos métodos de optimización heurística
� Búsqueda Tabú
La búsqueda tabú es un método de optimización matemática, perteneciente a la clase de técnicas de
búsqueda local. La búsqueda tabú aumenta el rendimiento del método de búsqueda local mediante
el uso de estructuras de memoria: una vez que una potencial solución es determinada, se la marca
Nailit Méndez FACyT-UC
como "tabú" de modo que el algoritmo no vuelva a visitar esa posible solución. La búsqueda tabú es
atribuida a Fred Glover.
La búsqueda tabú utiliza un procedimiento de búsqueda local o por vecindades para moverse
iterativamente desde una solución x hacia una solución x′ en la vecindad de x , hasta satisfacer
algún criterio de parada . Para poder explorar regiones del espacio de búsqueda que serían dejadas
de lado por el procedimiento de búsqueda local, la búsqueda tabú modifica la estructura de vecinos
para cada solución a medida que la búsqueda progresa. Las soluciones admitidas para )(* xN , el
nuevo vecindario, son determinadas mediante el uso de estructuras de memoria. La búsqueda
entonces progresa moviéndose iterativamente de una solución x hacia una solución )(* xNx ∈′ .
� Recocido Simulado
El Recocido Simulado es una de las meta heurísticas más clásicas. Su simplicidad y buenos
resultados en numerosos problemas, la han convertido en una herramienta muy popular, con cientos
de aplicaciones en los más variados campos. Su fundamentación se basa en el trabajo de Metropolis
et al. (1953) en el campo de la termodinámica estadística. Básicamente, Metropolis modeló el
proceso de recocido simulando los cambios energéticos en un sistema de partículas conforme
decrece la temperatura, hasta que converge a un estado estable (congelado).
Por tanto, cualquier implementación de búsqueda local puede convertirse en una implementación
RS al elegir elementos del entorno de modo aleatorio, aceptar automáticamente todos los
movimientos hacia una mejor solución, y aceptar los movimientos a una solución peor de acuerdo
con una probabilidad dada por la constante de Boltzmann k que en general tiene significado en los
problemas de optimización.
Esta meta heurística se utiliza con amplitud ya que permite al proceso escapar de un óptimo local.
La idea principal de este método es concentrarse en la cuesta más alta, donde el pico más alto puede
estar en cualquier sitio dentro de la región factible. Es por eso que la mayoría de los pasos
aceptados son ascendentes, en forma gradual la búsqueda se enfocará hacia aquellas partes de la
región factible que contienen las cumbres más altas.
� Algoritmo Genético
Nailit Méndez FACyT-UC
El algoritmo genético es una técnica de búsqueda basada en la teoría de la evolución de Darwin ,
que ha cobrado gran popularidad en todo el mundo durante los últimos años. Esta técnica se basa en
los mecanismos de selección que utiliza la naturaleza, de acuerdo a los cuales los individuos más
aptos de una población son los que sobreviven, al adaptarse más fácilmente a los cambios que se
producen en su entorno. Hoy en día se sabe que estos cambios se efectúan en los genes de un
individuo (unidad básica de codificación de cada uno de los atributos de un ser vivo), y que sus
atributos más deseables (los que le permiten adaptarse mejor a su entorno) se transmiten a sus
descendientes cuando éste se reproduce sexualmente.
Los Algoritmos Genéticos usan una analogía directa con el comportamiento natural. Trabajan con
una población de individuos, cada uno de los cuales representa una solución factible a un problema
dado. A cada individuo se le asigna un valor ó puntuación, relacionado con la bondad de dicha
solución. En la naturaleza esto equivaldría al grado de efectividad de un organismo para competir
por unos determinados recursos. Cuanto mayor sea la adaptación de un individuo al problema,
mayor será la probabilidad de que el mismo sea seleccionado para reproducirse, cruzando su
material genético con otro individuo seleccionado de igual forma. Este cruce producirá nuevos
individuos descendientes de los anteriores, los cuales comparten algunas de las características de
sus padres. Cuanto menor sea la adaptación de un individuo, menor será la probabilidad de que
dicho individuo sea seleccionado para la reproducción, y por tanto de que su material genético se
propague en sucesivas generaciones.
De esta manera se produce una nueva población de posibles soluciones, la cual reemplaza a la
anterior y verifica la interesante propiedad de que contiene una mayor proporción de buenas
características en comparación con la población anterior. Así a lo largo de las generaciones las
buenas características se propagan a través de la población. Favoreciendo el cruce de los individuos
mejor adaptados y así van siendo exploradas las áreas más prometedoras del espacio de búsqueda.
Si el Algoritmo Genético ha sido bien diseñado, la, población convergerá hacia una solución óptima
del problema.
� Optimización por colonias de hormigas

Nailit Méndez FACyT-UC
Es un método basado en población para resolver problemas de optimización combinatoria, que tiene
su fuente de inspiración en el comportamiento de las hormigas reales, que minimizan el recorrido
entre su colonia y cualquier fuente de abastecimiento, basándose fundamentalmente en los rastros
de feromona que van dejando a su paso . Para la meta heurística ACO se han propuesto varios
algoritmos, que desde su surgimiento han probado su amplia aplicabilidad y eficiencia en la
solución de Problemas de Optimización Combinatoria.
Las hormigas son capaces de seguir la ruta más corta en su camino de ida y vuelta entre la colonia y
una fuente de abastecimiento. Al desplazarse cada una va dejando un rastro de una sustancia
química llamada feromona a lo largo del camino seguido, “transmitiéndose información'' entre ellas
de esta forma.
Las feromonas forman un sistema indirecto de comunicación química entre animales de una misma
especie, que transmiten información acerca del estado fisiológico, reproductivo y social, así como la
edad, el sexo y el parentesco del animal emisor, las cuales son recibidas en el sistema olfativo del
animal receptor, quien interpreta esas señales, jugando un papel importante en la organización y la
supervivencia de muchas especies. Al iniciar la búsqueda de alimento, una hormiga aislada se
mueve a ciegas, es decir, sin ninguna señal que pueda guiarla, pero las que le siguen deciden con
buena probabilidad seguir el camino con mayor cantidad de feromona.
Para implementar este método basado en colonias de hormigas se trabaja con hormigas artificial, las
cuales simulan el concepto de feromona modificando variables de feromona asociadas a estados del
problema que visitan al construir una solución al problema de optimización.
Los algoritmos de OCH son esencialmente algoritmos constructivos: en cada iteración del
algoritmo, cada hormiga construye una solución al problema recorriendo un grafo de construcción.
Cada arista del grafo, que representa los posibles pasos que la hormiga puede dar, tiene asociada
dos tipos de información que guían el movimiento de la hormiga:
- Información heurística, que mide la preferencia heurística de moverse desde el nodo r hasta el
nodo s , o sea, de recorrer la arista ars . Se nota por hrs. Las hormigas no modifican esta
información durante la ejecución del algoritmo [11].
Nailit Méndez FACyT-UC
- Información de los rastros de feromona artificiales, que mide la deseabilidad aprendida del
movimiento de r a s . Imita a la feromona real que depositan las hormigas naturales. Esta
información se modifica durante la ejecución del algoritmo dependiendo de las soluciones
encontradas por las hormigas [11].
La huella de feromona en ACO sirve como información numérica distribuida, que las hormigas
usan para la construcción probabilística de soluciones del problema a resolver y la adaptan durante
la ejecución del algoritmo para reflejar su experiencia de búsqueda.
3.4 Resultados publicados en optimización de trayectorias de pozos
En esta sección se presenta una breve descripción de los trabajos realizados hasta la actualidad, la
cual tiene como finalidad conocer, comparar, e interpretar las variables, restricciones, funciones
objetivos, resultados y sobre todo los métodos de optimización que fueron utilizados para abordar
este tipo de problemas (optimización de trayectorias de pozos direccionales).
En el año 1998 Helmy, Khalf y Darwish, diseñaron el primer modelo de un pozo usando un
modelo a computadora. Este programa permite reducir la profundidad de la perforación, inclinación
y la severidad de la pata de perro. Las variables consideradas para ser optimizada fueron:
profundidad del KOP ( KOPD ), tasa de aumento de ángulo ( brθ ), tasa de disminución de ángulo
(drθ ) y ángulos de construcción ( 1θ y 2θ ). Las restricciones fueron tanto operacionales como de no
negatividad. Entre las operaciones están ángulos de construcción, tasa de aumento y disminución de
ángulo, profundidad del KOP , profundidad vertical hasta la primera y segunda sección de
construcción y profundidades del revestidor. El programa que propuso consta de tres segmentos, los
cuales son: Optimización de parámetros, donde utiliza un algoritmo llamado SUMT el cual
devuelve el mínimo de un función no lineal de varias variables sujeto a restricciones con
desigualdad no lineal; cálculo de los surveys (profundidad medida, inclinación y azimut), en el cual
utiliza el método de mínima curvatura; y por ultimo una rutina de simulación para el recorrido de la
mecha, el cual puede estimar el cambio esperado del azimut. El modelo caracteriza a tres tipos de
pozos direccionales a través de la modificación de ciertos parámetros. El diseño optimizado se
comparo con un diseño convencional utilizando datos de un pozo actual del golfo de Suez, donde se
obtuvieron los siguientes resultados: TMD de 12,101 ft. INCL 19.5°/100ft para el diseño
convencional y un TMD de 11,955 ft. INCL 15,8°/100ft para el modelo propuesto. Estos
Nailit Méndez FACyT-UC
parámetros permiten reducir la severidad de la pata de perro para obtener así un menor torque y
arrastre de la herramienta .
Burak Yeton (2003) implemento un método sistemático para optimizar el tipo, ubicación y
trayectoria de un pozo. La función objetivo fue considerada como la producción de petróleo
acumulada. Se aplico algoritmo genético para optimizar los pozos no convencionales en conjunto
con otros tres algoritmos que permiten acelerar la convergencia del método. El primer algoritmo lo
usaron para representar el simulador de yacimiento, el segundo para mejorar la búsqueda inmediata
en la vecindad de la solución y el tercero para acelerar la ejecución con diferencia finita. Los
parámetros que definen la función objetivo son: cantidad de año, fase de producción durante al año
p, ganancia o perdida asociada con la producción de petróleo, gas y agua, tasa de interés anual y
costo de perforación. El vector producción se obtiene con el simulador de yacimiento y el costo de
perforación es calculado a partir de los resultados obtenidos con el algoritmo genético. Las
variables a optimizar con algoritmo genético son: el cabezal del pozo, el fondo, laterales (uniones
de puntos) y el fondo de cada lateral. Se crea una función de adaptación a partir de la función
objetivo que involucra el valor esperado de la soluciones de f , la probabilidad de riesgo y la
desviación estándar del vector soluciones de f . Para la aplicación del algoritmo genético utiliza
selección por ranking, una probabilidad de cruce entre 0.8 y 1 y una probabilidad de mutación igual
a Nind1 . Las restricciones tomadas en cuenta son las siguientes: el pozo que se obtiene debe estar
dentro de la red de yacimiento, el pozo no puede intersectar cualquier otro pozo de trayectoria
lateral, cualquier trayectoria propuesta debe respetar cualquier anisotropía definida y las direcciones
de los esfuerzos. Se aplico este método para tres tipos diferentes de yacimiento y en cada uno d
ellos se obtuvo un valor significativo de la función objetivo.
Shokir (2004), Utilizo algoritmo genético y desarrollo un modelo de optimización para el diseño de
pozos petroleros en 3D, es decir dada las coordenadas de la superficie, la ubicación del objetivo y
restricciones, diseñó y optimizó la trayectoria. Las variables que se consideran en el diseño del pozo
y que optimizó son las siguientes: ángulos de inclinación, ángulos azimut en cada sección,
severidades de la pata de perro (en cada sección), KOPDKOP, ,secciones verticales verdaderas hasta
Nailit Méndez FACyT-UC
primera y segunda sección y la longitud horizontal; y Las unidades de estas variables se reciben en
grados/100 pies pero al aplicar el sistema se transforman en grados/30.48m.
La función objetivo que se quiere optimizar es la profundidad verdadera medida y está dada por:
HDDDDDDDTMD KOP ++++++= 54321 , donde el KOPD es la profundidad vertical verdadera
del KOP , iD son las diferentes secciones del pozo (corresponden a cada sarta de perforación) y
HD es la longitud horizontal. Cada una de estas variables de la función objetivo se calculan a partir
de ciertas formulas matemáticas que se describen en varias referencias bibliograficas (Wilson 1968,
callas 1976, Taylor 1972, Mcmillan 1981) y con los datos que se mencionaron anteriormente.
Las restricciones tomadas en cuenta son las operacionales y de no negatividad. Las operaciones son
las que se imponen para bienestar del diseño debido a los diferentes tipos de formación a perforar
para envolver las profundidades de ajuste, y que son en relación a: ángulos de inclinación, ángulos
azimut, severidad de la pata de perro (solo menor o igual a cierto valor), KOPD ,secciones verticales
verdaderas hasta primer y segunda sección y las profundidades del revestidor; y las de no
negatividad son solamente en relación a 21 ,DD ; que indica que la primera y segunda sección deben
ser siempre positivos para garantizar que se tendrá una trayectoria de cualquier pozo.
Los elementos utilizados para implementar el algoritmo genético son: población inicial aleatoria de
tamaño 100=N , unidad de medida: metros, función de aptitud: TMDFit += 1000010000 (función
de la función objetivo), método de selección: rueda de la ruleta, cruce de 1 punto; Utilizando así una
codificación binaria.
Por otro lado señala que si una variable (gen) tiene valor que no esta en sus limites de restricción, el
valor de su función de aptitud se debe reducir en un cierto valor, llamado función de penalización.
Por lo tanto: )1()()( penviejoFitnuevoFit ii −×= donde pena es el valor de la función penal (no
describe como debe ser esta función penal).
La técnica de mutación que implementó funciona cambiando el valor de la variable (gen) añadiendo
un valor aleatorio a su valor anterior de la siguiente manera:
aleatvviejoVvalorN _)1(__ ×−+= λ con 10 ≤≤ λ
El criterio de parada es el siguiente: si en el mejor estado físico, la aptitud máxima en la población
es igual a la aptitud media de toda la población se detiene el software y el cromosoma que tenga la
mejor aptitud es la solución al problema. Utiliza el método de minima curvatura para diseñar la
trayectoria.

Nailit Méndez FACyT-UC
Weiyi Qian y Enmin Feng (2004) , desarrollaron dos modelos Mult. Objetivo difusos para diseñar
trayectorias en 3D para pozos horizontales y optimizándolos con algoritmo genético. Las funciones
objetivos que se consideran optimizar son longitud de la trayectoria y error de entrada al objetivo,
los cuales están relacionados con los siguientes parámetros: valor de la posición inicial, valor de la
posición final, el límite inferior y superior del radio de curvatura, ángulo de la cara del taladro y la
longitud de arco de cada sección de la curva; La inclinación esta restringida a un valor, mientras el
azimut no. Todos estos parámetros se consideran difusos dependiendo el modelo. Crean el modelo
conciso y luego plantean dos nuevos modelos difusos; uno donde las función objetivo es difuso y el
otro donde tanto la función objetivo como las condiciones iniciales son difusas. Luego utilizando
teoría de conjuntos difusos y programación no lineal difusa basado en Zimmermann y Lee and Li
para resolver estos modelos y posteriormente algoritmo genético, que fue propuesto por Mondal y
Maiti para su optimización. Presentaron un ejemplo de un pozo pequeño para comparar los dos
modelos difusos con diferentes valores de peso y se demostró la ventaja de utilizar modelos difusos.
O.R. Ayodele (2004) En su trabajo presenta diferentes técnicas que se pueden utilizar para lograr
optimizar la ubicación del pozo y/ó su trayectoria, seleccionando y controlando además los
diferentes factores que afectan nuestro objetivo. Esos factores son los siguientes: tipo de BHA en
términos de tamaño y propiedades elásticas, forma y curvatura del pozo, tipo de mecha, resistencia
de la formación y anisotropía (propiedad general de la materia según determinadas propiedades
físicas tales como: temperatura, elasticidad, conductividad, etc. Que varían según la dirección en
que son examinadas) y las condiciones y parámetros de la perforación. Entre esas técnicas se
encuentra la de:
- Maldia et al. Desarrolló una técnica para diseñar pozos con 2 objetivos obteniendo un recorrido
significante de la mecha. Esta técnica es una generalización de un método de diseño de trayectoria
con 2 objetivos y con un enfoque informativo. Argun and Kuru, desarrolló una tecnica para
aproximar la trayectoria entre 2 survey consecutivos usando una curva definida en 3 dimensiones.
Esta técnica determina las coordenadas de cualquier punto a lo largo del pozo, que conduce a la
estimación de los survey y por tanto a optimizar la ubicación.
Nailit Méndez FACyT-UC
- McCann and Suryanarayana, presentan un procedimiento que usa teoría de optimización no lineal
para un diseño complejo de trayectorias tridimensional de pozos y correcciones mientras se perfora.
El procedimiento ayuda a colocar con precisión el pozo en la trayectoria correcta. Utilizan el
algoritmo de SGRA para la optimización del problema.
Además de eso presentan varios métodos de optimización de las perspectivas de desarrollo de
corrección de errores de las nuevas técnicas presentadas anteriormente. Williamson, Desarrollo un
método para predecir la incertidumbre de la posición del pozo, el método se basa en la corrección
de errores en las mediciones de herramientas MWD que contribuyen al problema de predecir o
conocer la trayectoria del pozo real.
- Chia et al. Desarrolló un método, llamado el MAP , técnica de la posición mas precisa, similar a la
de Williamson. Wilson y Brook mostró que la contaminación del fluido de perforación puede
causar error de la posición del pozo. Tales fluidos de perforación causan un error del azimut de
desplazamiento debido a la presencia de acero / partículas magnéticas en la tubería y el desgaste la
sarta de perforación. Por otra parte muestran una técnica de corregir la gravedad del azimut
propuesta por McElhinney et al[25].
Jorge H.B. Sampaio, Jr (2006), diseñó trayectorias en 3 dimensiones utilizando funciones cúbicas
y optimizándola con el método del gradiente descendiente e interpolación parabólica. Este trabajo
se caracteriza por utilizar funciones cúbicas para diseñar la trayectoria, lo cual hace que la curva sea
más suave y continua y así permitir un buen desempeño del taladro. Considera en la optimización
dos formas de llegar al objetivo: sin imponer condiciones con respecto al azimut y ángulo de
inclinación ó fijando condiciones de las mismas. Las funciones cúbicas son utilizadas para generar
las tres funciones coordenadas que describen la trayectoria (curva parametrizada).El objetivo de
este trabajo es obtener una curva suave, continua, con mejor torque y arrastre de manera que se
pueda adaptar a la herramienta principal (el taladro), y esto se logra optimizando la desviación
estándar de la curvatura a lo largo de la trayectoria.
Las expresiones derivadas por las funciones cúbicas se utilizan para obtener las funciones de
coordenadas paramétricas, además estas permiten imponer las condiciones finales del pozo. Para
cada una de las condiciones impuestas para llegar al objetivo, las condiciones iniciales como la
posición (Profundidad, norte y este geográfico) y los ángulos de inclinación y azimut del extremo
Nailit Méndez FACyT-UC
inicial de la trayectoria son conocidos así como también la posición del extremo final de la
trayectoria. En relación a las condiciones impuestas se consideran los siguientes casos:
Azimut e Inclinación fijados.
Azimut e Inclinación libres.
Azimut fijado e Inclinación libre.
Azimut libre e Inclinación fijada.
Y para cada uno de estos casos se le calcula en cada punto su posición geográfica (profundidad,
norte y este geográfico) y a partir de estas posiciones de la trayectoria utilizan las formulas dada
por la curva parametrizada para obtener la longitud de arco, longitud medida, inclinación y ángulo
azimut en cada punto de la trayectoria. Al parametrizar la trayectoria se obtuvieron parámetros
independientes, L0 y L1 que son principalmente los encargados de describir la trayectoria y por
tanto son los utilizados para optimizar la trayectoria. Las variables a optimizar son: posición
(Profundidad, norte y este geográfico), longitud de arco, profundidad medida, inclinación, azimut,
DLS , ángulo y dirección de la cara del taladro.
Para optimizar la trayectoria utiliza el esquema del gradiente descendiente si esta tiene dos o más
grados de libertar y para trayectorias con un sola grado de libertar utiliza el esquema de
interpolación parabólica. Se aplicó el método considerando los siguientes casos: donde el azimut y
la inclinación son fijados se optimizo la trayectoria con los mismos datos dados anteriormente y
considerando 241210 == LL es decir un solo grado de libertad, para lo cual se obtuvo un DLS
máximo de 4.37 grados/30m con una profundidad medida 2029 m; y para el mismo caso con la
trayectoria no optimizada se obtuvo con DLS de 5.01grados/30m y 2036 m.( tan solo 24 ft de
ahorro). Por otro lado si los parámetros se tratan independiente entonces se encuentra que
90.20450 =L y 68.28081 =L y con un DLS máximo de 3.98grado/30m y una profundidad medida
de 1968.
R. Hernández (2009), se basó en los estudios realizados por Sampaio (2006) para diseñar la
trayectoria y luego la optimizó con algoritmo genético. Los parámetros a optimizar que consideró
fueron: la posición de la trayectoria (profundidad, norte y este geográfico), la longitud total medida
(TMD ), los ángulos de inclinación y azimut, el dls, el ángulo y dirección de la cara del taladro. El
Nailit Méndez FACyT-UC
TMD se obtiene de la siguiente forma: uuU sTMDTMD += −1 _. Utilizo método del trapecio para
resolver la integral que involucra a la longitud de arco. Para cada uno de los 5 casos aplico
algoritmo genético para optimizar la trayectoria en donde la población inicial es de 1000 individuos
o cromosomas. La función de aptitud: 2)( TMDTRAISOFitness = , TRAISO es la longitud de la
trayectoria sin optimizar y el TMD es la longitud de la trayectoria que se busca, es decir, ya
optimizada. Sin embargo este Fitness es penalizado cada vez que en algún punto de la trayectoria el
DLS es mayor que cierto valor (para este trabajo se tomó 5 grados/30,00 metros) por lo que el
Fitness será: )1()()( penviejofitnessnuevoFitness −×= $ ; en donde pen es el valor de la
penalización (no describe la forma de la función pena).
Las variables 0L y 1L son las que determinan la forma final de la trayectoria, por lo que en este
trabajo se utilizan estos parámetros independientes como soluciones, son las variables que forman
los cromosomas para optimizar la trayectoria 3D. El cromosoma contará con 26 genes, 0L y 1L se
llevan a número binarios, es decir, 0L va a ocupar los 13 primeros genes y 1L ocupará los otros 13
genes. Para calcular elFitness se transforman los números binarios a números reales y se realizan
los cálculos. La probabilidad de selección de los cromosomas, para el cruzamiento, es igual a 1
(cruce de un punto). El método de selección de los cromosomas a cruzar es el del torneo. En el
proceso de cruzamiento se intercambian 0L y 1L para generar un hijo, este hijo se le aplica el
proceso de la mutación con una probabilidad de 0,05 para cada gen, si el gen seleccionado tiene el
valor de 1 se cambia a 0 y viceversa.
El proceso de selección, cruzamiento y mutación se realiza 1000 veces. Con la aplicación del
método de los AGs se busca la mejor combinación de 0L y 1L que nos de la menor longitud posible
de la trayectoria, manteniendo la curvatura dentro de los límites establecidos. Este método fue
programado en jaba .
Las restricciones consideradas son en relación a la severidad de cambio de ángulo, este valor no
debe pasar los 5grados/100pies. Se implemento este algoritmo para cada unos de los cuatro casos
(condiciones de llegar al objetivo) utilizando los mismos datos. En ellos se observa que la diferencia
entre la profundidad medida no optimizada y optimizada varia de 100 a 200 pies. De igual forma se
hicieron pruebas de comparación con unos datos reales de un pozo de pdvsa cuya inclinación y
azimut tiene fijados. Con estos datos se diseño la trayectoria con funciones cúbicas y se observó una
Nailit Méndez FACyT-UC
reducción de 31.63 ft de profundidad y al optimizarla se logro una reducción de 167.56 ft
obteniendo además un DLS máximo de 4.88grados/100 ft.
Girling Marquez en el 2008, diseño una trayectoria de pozos direccionales utilizando algoritmo
genético y basándose en el modelo propuesto por Shokir. Utilizó las misma variables propuestas por
Shokir, en las restricciones operacionales considerada adecuado restringir superiormente e
inferiormente los valores correspondientes a la severidad de cambios de los ángulos, los cuales
permiten reducir el valor de la curvatura o rotación y rastra de la herramienta perforadora o mecha y
así tornar mas sencilla la operación de ingresar la tubería o revestimiento del yacimiento.
Utilizó una librería de algoritmo genético desarrollada en el centro de procesamiento de imágenes
de la universidad de Carabobo por el profesor Guillermo montilla, la cual cuenta con una clase
principal para la conformación de individuos binarios y una creación de individuos reales. Además
contiene los algoritmos de los distintos métodos de selección estocástica y determinística que son
los tomados en cuenta en este trabajo. Estos permiten trabajar los cromosomas (soluciones) de
acuerdo a las características de sus genes (unidades de las variables), es decir en el caso de cruce la
mezcla de información no alterará de forma inadecuada la estructura de los individuos.
La función de adaptación es la siguiente: penTMDAdapob 1.0)1000000010000000)(Pr ×+= .
Crea funciones que permiten seleccionar a los individuos menos aptos para garantizar la diversidad
de las generaciones y poder recorrer en un mayor numero de direcciones el espacio, y que también
evalúan las variables estadísticas (mediana, varianza y rango) de la población en términos de la
adaptación. Con respecto al operador cruce y mutación permite que el usuario pueda elegir entre los
más usados para así tener una variedad de resultados y quedarse con el más adecuado al problema.
El operador cruce se puede utilizar aleatoriamente.
El criterio de parada se estableció como el número máximo de iteraciones realizadas por el
algoritmo genético. Se comparó esta metodología con el de (Shokir), utilizando datos procedentes
de dos fuentes: datos de los pozos publicados por Shokir los cuales corresponden a una perforación
real realizada en el golfo de Suez, Egipto y otro de fundamento teórico. Las variables que en mayor
grado afectan la convergencia del AGs son: número de generaciones, número de individuos y la
mutación; se iniciaron pruebas con valores altos de mutación y valores altos de la población y de
igual forma con valores pequeños de mutación y valores pequeños y medianos de la población. Por
lo que se concluyó según las pruebas realizadas que con valores pequeños de mutación (0.1 0.2 0.3)
y generaciones e individuos entre 500 y 600 se garantiza en su totalidad que las soluciones

Nailit Méndez FACyT-UC
obtenidas cumplirán sin irregularidades las especificaciones del pozo, a la vez que se observa un
TMD menor que con poblaciones menores. El tiempo de cómputo fue de 10 minutos.
Los parámetros para el algoritmo genético fueron: Número de individuos: 1000, número de
generaciones: 1000, cruce simple: 100%, mutación 10 %, tipo de selección: estocástico con
reemplazo, método de interpolación: minima curvatura, número de trayectorias 5. Se obtuvo un
valor optimizado de 11583.7ft que con respecto al modelo comparado, representa un ahorro en
tubería de 1305.57ft para la construcción del pozo (esto con datos del pozo de formulación teórica)
y en los estudios presentados por Shokir representó un ahorro de tan solo 110ft
Y con los datos del pozo de Egipto se obtuvo un valor de 15098ft el cual con el modelo
comparado representa un ahorro de tubería de 398.3ft para la construcción del pozo. En los
estudios presentados por Shokir se obtuvo un ahorro en tubería de 68.3ft comparado con el método
convencional.
Adel M. Al-Ajmi, robert W.Zimerman (2009) Mostraron un nuevo modelo para optimizar pozos
mejorando la estabilidad mecánica del pozo. El objetivo principal es dar una idea de la influencia de
los sistemas in situ en la estabilidad mecánica del pozo y en particular desarrollar un modelo
analítico para la optimización de trayectoria de pozos. Describe los datos que se necesitan para
hacer un análisis de estabilidad de hoyo: orientación y magnitud de los esfuerzos, presión de poro y
criterio de fallas. Los criterios de fallas que se presentaron fueron dos: Mogi-Coulomb y Mohr-
Coulomb, para cada uno de estos se mostraron ejemplos en donde se determinó que la ruta optima
es casi la misma, es decir que le criterio de falla no influye significativamente en la trayectoria
optima. Al igual que con el criterio de Mohr-Coulomb los resultados mostrados son poco realista
para predecir la inestabilidad del pozo mientras el criterio de Mogi-Coulomb presenta resultados
más realistas. Con todo este estudio de estabilidad de hoyo, se determinó que la optimización de la
trayectoria esta principalmente controlado por los esfuerzos in situ. De igual forma se concluyó que
la perforación en pozos verticales reduce la inestabilidad del pozo solo cuando se los esfuerzos in
situ horizontales son isotropitos .
S. Vlemmix, Joosten, Brouwer and Jansen (2009) ; Desarrollaron una nueva técnica basada en el
gradiente para optimizar trayectorias de pozos, esta nueva técnica incluye un método adjunto que
involucra puntos tractores y pozos pesudo side track ficticios para optimizar la trayectoria. El
enfoque de este método es que cada punto de la trayectoria se mueva a través del yacimiento, esto

Nailit Méndez FACyT-UC
se hace creando pozos side track ficticios para cada punto de la trayectoria, luego se determina la
sensibilidad (incremento del valor del ciclo de vida del pozo) de cada side track con la formulación
basada en la adjunta similar a uno descrito por Zanvdliet, después de hacen una serie de llamadas de
los puntos tractores basados en la sensibilidad de los side track que rodean los puntos de la
trayectoria. Los puntos tractores son usados para mover la trayectoria a una dirección mejorada, una
dirección que mejora el NPV. Se basan en el trabajo de Zanvdliet (2008) quienes usaron con éxito
un enfoque similar para optimizar la localización del pozo, pero para pozos en 2 dimensiones
relativamente simple. El Objetivo es maximizar el NPV sobre un periodo de tiempo dado
cambiando la trayectoria del pozo. Utilizan el método de minima curvatura para calcular el radio Ri
entre dos puntos de la trayectoria y luego lo restringe a un valor máximo, esto para garantizar la
perforabilidad del pozo. También crean un algoritmo que suaviza la trayectoria en esos segmentos
de curvas donde los valores del radio de curvatura son excedidos , con el propósito de mantener de
manera eficaz la curvatura de la trayectoria optimizada bajo un limite predefinido. El método fue
aplicado a 2 casos sobre un modelo de yacimiento thin oil rim. En el primer caso solo la producción
de petróleo fue evaluado positivamente y se obtuvo un mejoramiento del 20. En el segundo caso se
le asignó tambien un valor positivo a la producción de gas y se obtuvo un incremento del 28n %. La
convergencia del método no es nada segura, y como todos los métodos basados en el gradiente
converge a óptimo local
R. Shulze-riegert. (2011) Aplicaron optimización multi objetivo para el diseño de trayectoria de
pozos bajo incertidumbre geológica. La idea de este trabajo fue incrementar la eficiencia de
modelos estocásticos para escenarios de aplicaciones complejas con múltiples objetivos. Este
trabajo se extendió a un flujo de trabajo (estudio de los aspectos operacionales de una actividad de
trabajo) con incertidumbre incluyendo múltiples modelos geológicos en el proceso de optimización.
Su principal objetivo fue optimizar la trayectoria de pozos a fin de maximizar la producción
acumulada esperada, sobre un determinado periodo. El flujo de trabajo que se presentó consta de lo
siguiente: se formula el objetivo(NPV) y se define el riesgo y la incertidumbre, luego se definen los
parámetros para el diseño(optimizadotes, geomodelos, factor de peso) , se optimiza luego la
trayectoria (en el yacimiento) eligiendo una predicción de periodo corto con alta contribución del
objetivo, rápidamente se integra así la incertidumbre con múltiple realizaciones geológicas y se
escogen los mejores escenarios con el máximo valor del objetivo, se comprueba así la robustez del
diseño para todos los escenarios. Esta técnica fue aplicada a un yacimiento con 2 formaciones
Nailit Méndez FACyT-UC
principales, donde el objetivo especifico fue encontrar la trayectoria de 2 pozos horizontales para
maximizar la producción de gas, la definición de riesgo fue incluido en la función objetivo, es decir
la producción esperada de gas al final del ciclo de producción fue simulada para cada escenario
(diferentes puntos de ubicación del pozo). Para comprobar la eficiente de este método los resultados
de este ejemplo son comparados con diseño de trayectoria de pozos optimizados con modelos de
simulación individuales.
3.5 Patentes en el área de optimización de trayectorias de pozos
� Patentes internacionales
Fuera de nuestro país se han desarrollado diversas técnicas que permiten optimizar la trayectoria de
pozos de diferentes maneras; entre las cuales se pueden mencionar.
Prange , et al. (Agosto 2008), desarrollaron un sistema y método para controlar la perforación
direccional. El mismo permite controlar la trayectoria de un pozo que comprende un conjunto de
perforaciones por una herramienta rotativa (mecha) en el extremo del pozo por un motor de
perforación. Este sistema utiliza 2 estabilizadores que poseen un conjunto de piezas o soporte que
tienen forma de costilla; un primer estabilizador se ajusta al pozo y el otro controla la trayectoria.
Es decir estos estabilizadores ayudan a posicionar y guiar la mecha en el pozo, esto para permitir la
perforación direccional. Fue uno de los primeros sistemas de auto-control o perforación. Permite
una mayor rapidez y una respuesta más adaptada a la desviación potencial de perforación
direccional, lo que reduce la severidad de la pata de perro.
Thore; Pierre (Pau, FR) (febrero 2000), desarrolló un método para determinar una trayectoria
óptima para alcanzar un objetivo situado en un medio, por ejemplo, el subsuelo, que comprende un
centro y borde periférico. Dicho objetivo forma un volumen centrado, la posición de cada uno de
estos puntos es conocida con incertidumbre geométrica. Se caracteriza por que consiste en : definir
para el volumen centrado una ganancia que tiene un valor por primera vez en el centro del volumen
y un segundo valor más bajo que el anterior en cada uno de los puntos de la frontera periférica, asi
mismo definir valores intermedios en cada uno de los puntos del volumen, valores fuera del
volumen, definir un volumen de interés, definir las trayectorias curvilíneas que pasan por el

Nailit Méndez FACyT-UC
volumen de interés, la integración de la ganancia total a lo largo de cada una de las trayectorias de
tal manera que se obtenga un beneficio asociado a cada trayectoria. Es decir que finalmente se
calcula el costo de cada una de estas trayectorias y la que tenga el menor costo será la óptima.
Prange , et al. (marzo 2010) construyeron técnicas para la optimización geométrica de
multiples trayectorias de pozos y para obtener la ubicación más beneficiosa de las plataformas y
orientar los pozos para llegar a un conjunto seleccionado de objetivos. El método incluye la
especificación de un gran número de localizaciones de objetivos de pozos. La ubicación de los
objetivos puede ser determinada en vista de la formación geológica o de la información de los
registros de pozos. Otras fuentes, tales como datos del subsuelo, restricción de la producción y los
datos de riesgo geológico se pueden evaluar en un valor de producción con una localización del
objetivo. Una variedad de factores definidos por el usuario pueden adicionarse con lo anterior.
Teniendo en cuenta el valor de producción del pozo, se generan una o varias trayectorias donde
estas trayectorias son optimizadas para la perforación del subsuelo. En una realización el plan de
desarrollo del pozo es optimizado para producir trayectorias de pozos que maximicen el valor del
proyecto. Valor de proyecto= suma de los valores de producción menos la suma de los diferentes
gastos de perforación, ubicación de la plataforma y construcción.
Capítulo 4
Conclusiones y Recomendaciones
4.1 Conclusiones
Se pudo realizar con satisfacción el estado del arte solicitado por la gerencia con la finalidad de
obtener una propuesta de desarrollo (ver recomendaciones). Para este estudio se seleccionó un
intervalo de tiempo de diez para recopilar únicamente la información más actual e innovadora sobre
la aplicación de estos métodos.
La mayor cantidad de artículos técnicos evaluados fueron publicados por la SPE.
A través de la búsqueda de información se observó que el idioma predominante en la mayoría de los
trabajos publicados es el inglés.
El algoritmo genético como meta heurística, es el que más ha predominado en los trabajos
publicados para minimizar la trayectoria de pozos petroleros, debido a que son intrínsicamente
paralelos y tienen una gran habilidad para manipular varios parámetros simultáneamente.
Sin embargo, existen muchas otras meta heurísticas que podrían tal vez derivar resultados muy
significativos para este tipo de problemas, como lo es por ejemplo el método de colonias de
hormigas, ya que este se caracterizan por minimizar trayectorias. Además durante los trabajos
investigados no se encontraron publicaciones donde hayan usado esta meta heurística.
El software utilizado actualmente por PDVSA para la perforación de pozos se basa en métodos
genéricos, debido a que no toman en cuenta las características específicas de los pozos
Venezolanos. Por tanto no son precisos y generan un costo alto en comparación con sus resultados.
A partir de esta problemática surge el incentivo de implementar los conocimientos adquiridos como
futuro profesional de la Licenciatura en Matemática, para utilizarlos como herramienta en la
Nailit Méndez FACyT-UC
implementación de un nuevo método de optimización que satisfaga las restricciones propias de
estos tipos de pozos, a fin de minimizar su trayectoria y con intención de reducir costos.
4.2 Recomendaciones
� Desarrollar otras meta heurísticas diferentes a las que se han implementado, como por
ejemplo el método por colonias de hormigas, para obtener una diversidad de resultados.
� Considerar las características propias de los pozos venezolanos para implementar esta meta
heurística.
� Usar un programa adecuado para implementar este método.