imagen fundamentos i
TRANSCRIPT

Algunas consideraciones
en la selección de los
componentes de un
Sistema de Visión

Algunas aplicaciones de imagen
Farmacia: Definir rango de
difusión de spray nasal
Defectos piezas de madera
Ensamblaje
de hilo dental
Pulido fibra óptica Detectar bolas de estaño
Movilidad reducida
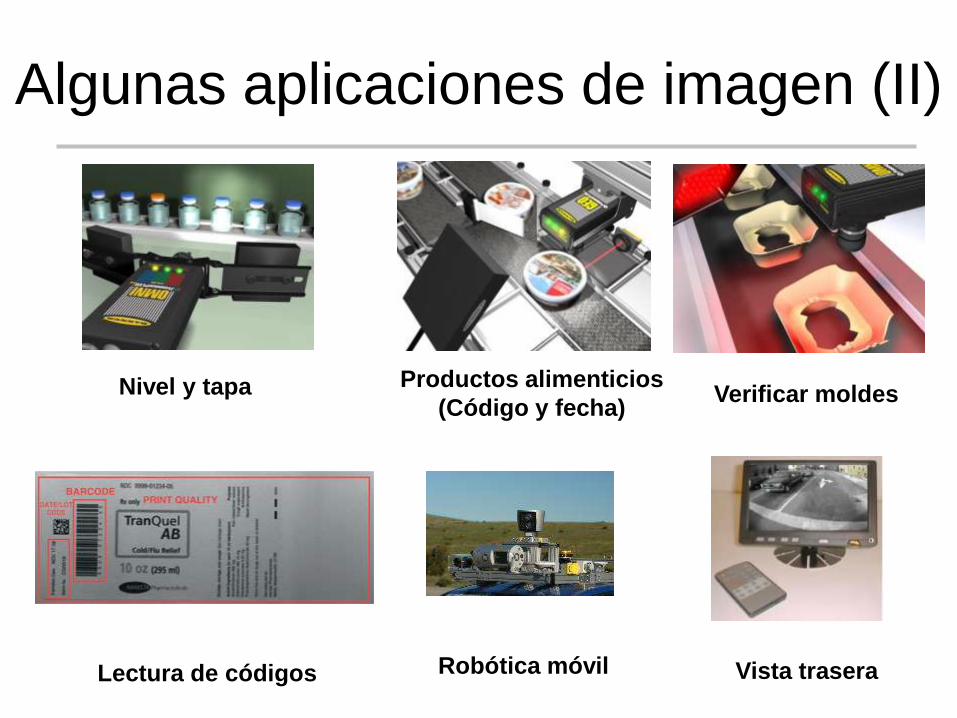
Algunas aplicaciones de imagen (II)
Verificar moldes
Lectura de códigos
Productos alimenticios
(Código y fecha)
Robótica móvil Vista trasera
Nivel y tapa

Algunas aplicaciones de imagen (III)
Calidad de paneles solaresReconocimiento e inspección
Inspección intestinal Llenado de materiales
peligrososQuemaduras

Algunas aplicaciones de imagen (IV)
Reconocimiento de escritura
Seguridad vial
Búsqueda de coincidencias (matching)

Componentes de un
sistema de visión
1.- Cámara y óptica
2.- Iluminación
3.- Sensor de posicionamiento
4.- Tarjeta capturadora de vídeo
5.- Ordenador
6.- Software de visión
7.- E/S y configuración de red

Adquisición de sistema de visión
Se debe considerar:
Accesorios de iluminación
Sistema integrado a la red (FTP, etc.)
Muestra inmediata del objeto de la visión
Herramientas de procesamiento de imagen
(software)
Selección de monitores compatibles con
sensores

Ejemplos de sistemas
MATROX-Genesis-Hitachi
Solución integrada (no PC) OMRON

Cámaras inteligentes
Sony: 3.800 Euros
Procesador integrado
Memoria
Sistema de operación
Algoritmos de imagen
Conectividad Ethernet
PPT: 6.187 Euros

Parámetros fundamentales de un
sistema de visión
• Campo de visión
• Resolución
• Distancia de trabajo
• Profundidad de campo
•Tamaño del sensor
1”(pulgada)=25,4mm
http://www.edmundoptics.com/

Parámetros fundamentales de un
sistema de visión (II)
Distancia de trabajo: Distancia medida
desde el lente de la cámara hasta el objeto
H
V
Campo de visión: Área del objeto
que se captará por el sensor

Parámetros fundamentales de un
sistema de visión (III)
Profundidad de campo: Es el área al frente y detrás del objeto
bajo estudio que permanece enfocado por la lente. También
se le denomina tolerancia del enfoque
Profundidad de campo
Objeto bajo
estudio
Sensor CCD
Lente
Parámetros fundamentales de un
sistema de visión (IV)
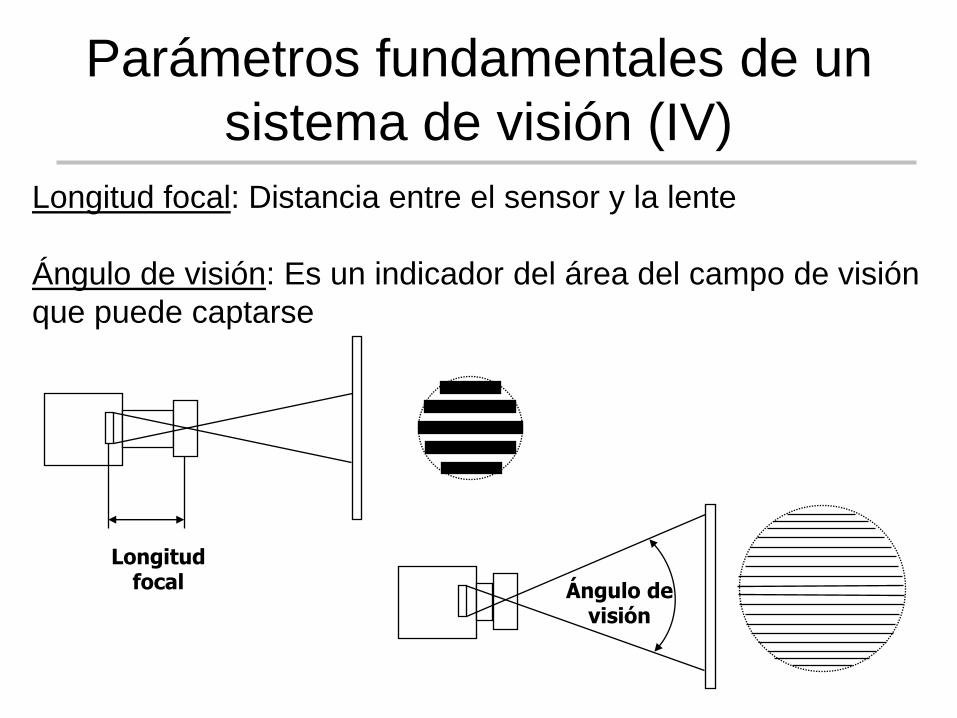
Longitud focal: Distancia entre el sensor y la lente
Ángulo de visión: Es un indicador del área del campo de visión
que puede captarse
Longitud focal Ángulo de
visión
Parámetros fundamentales de un
sistema de visión (V)
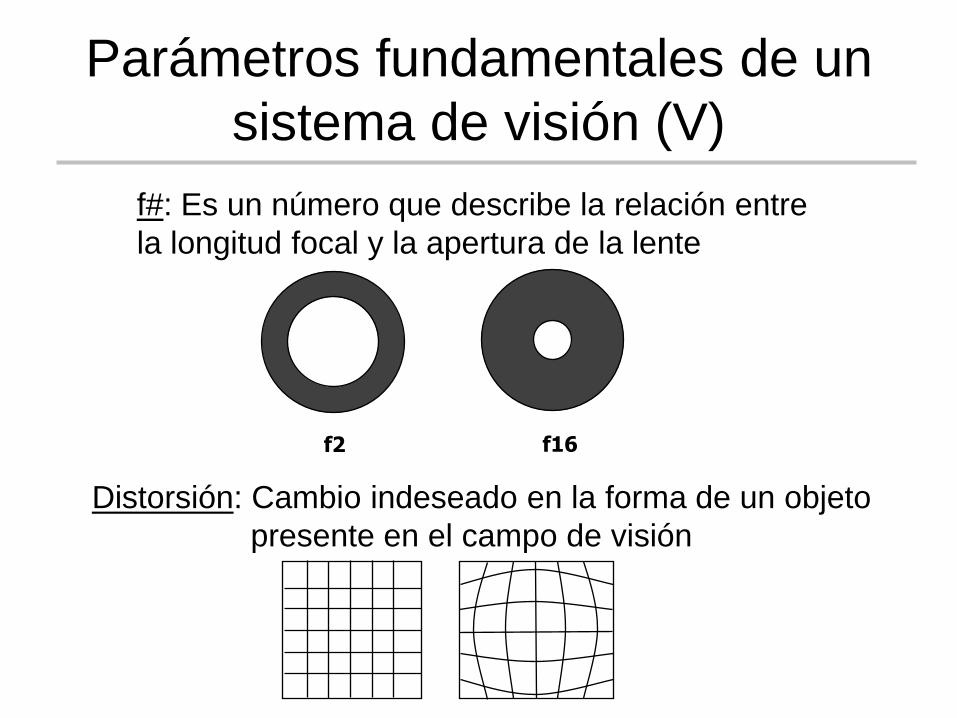
f#: Es un número que describe la relación entre
la longitud focal y la apertura de la lente
f2 f16
Distorsión: Cambio indeseado en la forma de un objeto
presente en el campo de visión
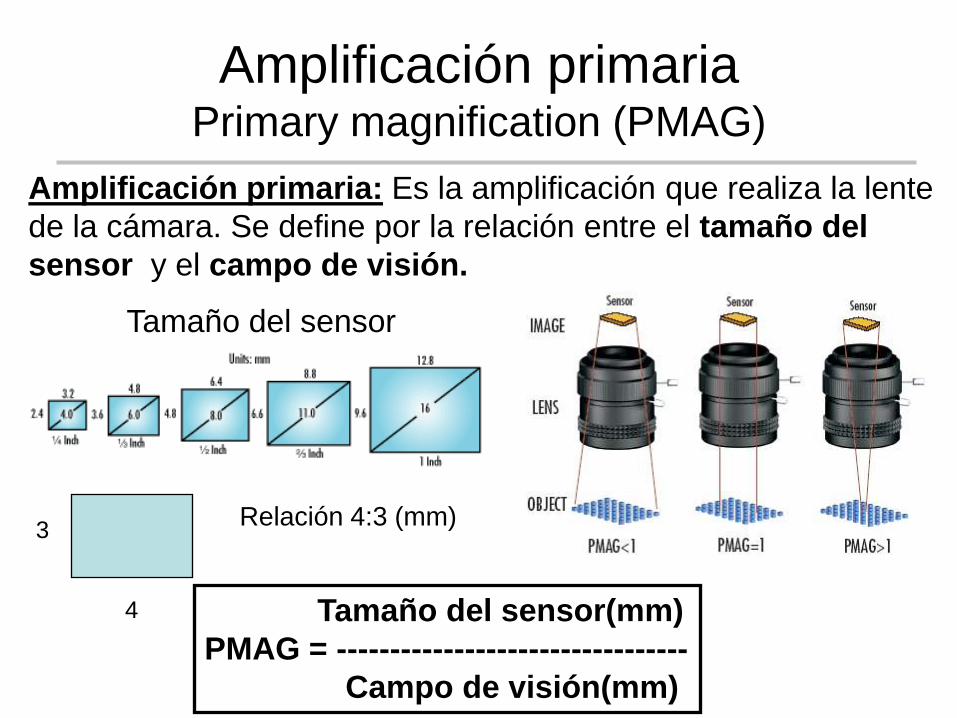
Amplificación primariaPrimary magnification (PMAG)
Amplificación primaria: Es la amplificación que realiza la lente
de la cámara. Se define por la relación entre el tamaño del
sensor y el campo de visión.
3
4
Tamaño del sensor
Relación 4:3 (mm)
Tamaño del sensor(mm)
PMAG = ---------------------------------
Campo de visión(mm)

Monitores de ordenador
Tamaño del
monitor
Tamaño de
imagen
Resolución
mínima
Resolución
máxima
14" 12.3"-13" 640x480 800x600
15" 13.5"-14" 640x480 1024x768
17" 15.5"-16" 800x600 1280x1024
19" 17.5"-18.1" 1024x768 1280x1024
20"/21" 19"-20" 1024x768 1600x1200
24" 21"-22" 1600x1000 1920x1200
Según la norma ISO 9241/3

Relación 4:3 en monitores(Aspect ratio)
Resoluciones para razón 4:3
800 x 600
1024 x 768
1152 x 864
1600 x 1200
Resoluciones para razón 5:41280 x 1024
1600 x 1280
Aspect ratio: Relación anchura/altura
Relación horizontal/vertical
: 4:3
La relación horizontal/vertical en monitores influye en la visión
de la imagen capturada por el sensor de imagen (4:3)

Amplificación secundaria(Secondary magnification)
Amplificación secundaria (SMAG): Es la amplificación
realizada entre el sensor de imagen y el monitor del sistema
de imagen.
Tamaño del monitor (mm)
SMAG = -------------------------------------
Tamaño del sensor (mm)

Amplificación del sistema(System magnification)
Amplificación del sistema (SysMAG): Es la amplificación
total realizada entre el campo de visión y el monitor del
sistema de visión. Lo anterior incluye la amplificación
primaria y la amplificación secundaria
SysMAG = PMAG*SMAG
Lo que es equivalente a:
Tamaño del monitor (mm)
SysMAG = -------------------------------------
Campo de visión (mm)
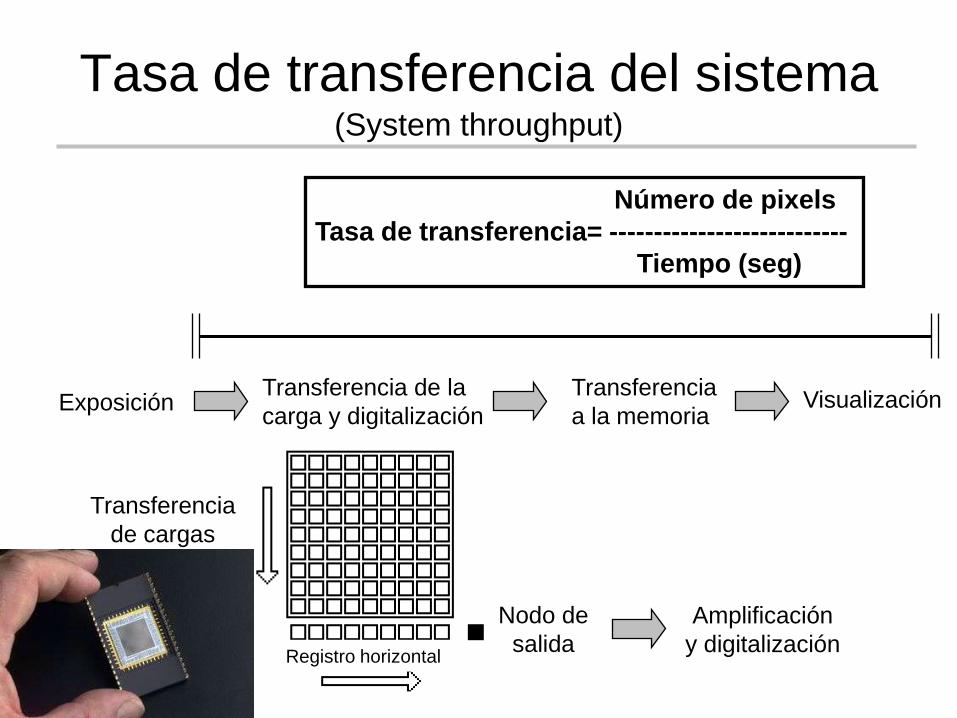
Tasa de transferencia del sistema(System throughput)
ExposiciónTransferencia de la
carga y digitalización
Transferencia
a la memoria Visualización
Número de pixels
Tasa de transferencia= ---------------------------
Tiempo (seg)
Transferencia
de cargas
Registro horizontal
Nodo de
salida
Amplificación
y digitalización
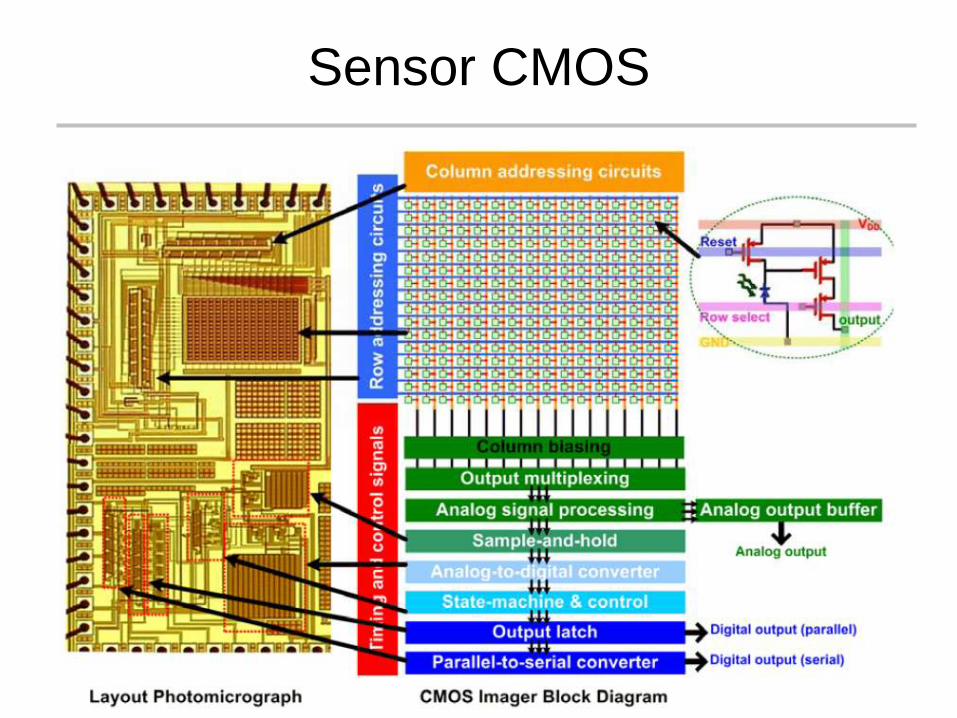
Sensor CMOS
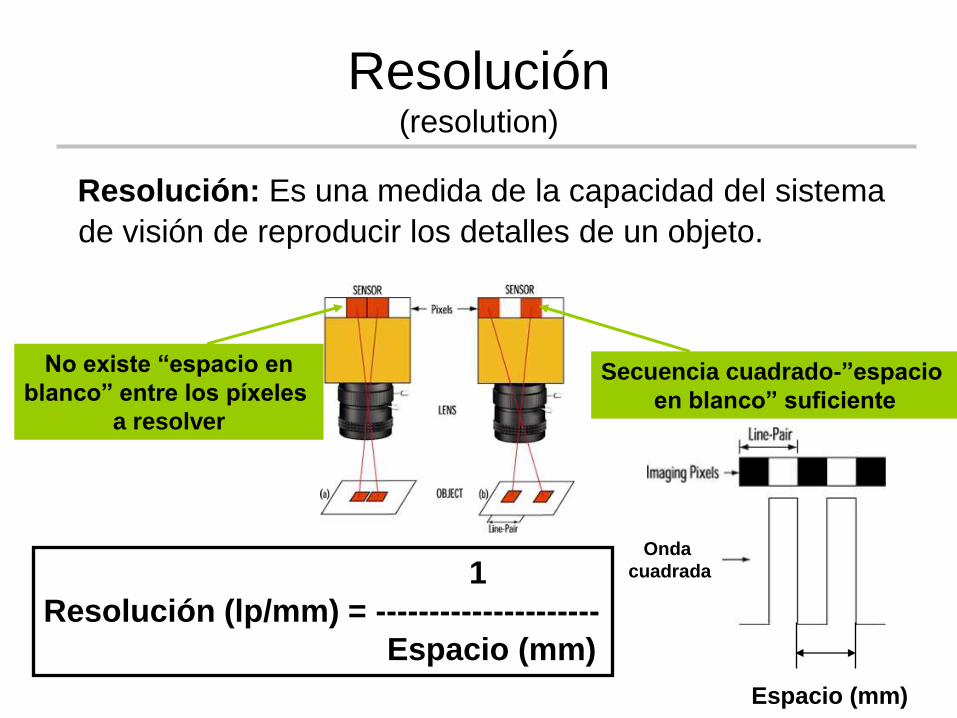
Resolución: Es una medida de la capacidad del sistema
de visión de reproducir los detalles de un objeto.
Resolución(resolution)
No existe “espacio en
blanco” entre los píxeles
a resolver
Secuencia cuadrado-”espacio
en blanco” suficiente
Onda
cuadrada
Espacio (mm)
1
Resolución (lp/mm) = ---------------------
Espacio (mm)

Resolución (II)
Onda
cuadrada
lp= 2 pixels
Resolución del Objeto (RO)
PMAG
Resolución de la Cámara (RC)Relaciones entre resolución
cámara-objeto
RC (m) =2 x Tamaño del pixel (m)
RO (lp/mm) =PMAG x RC (lp/mm)
RC (m)
RO (m) =---------------------
PMAG
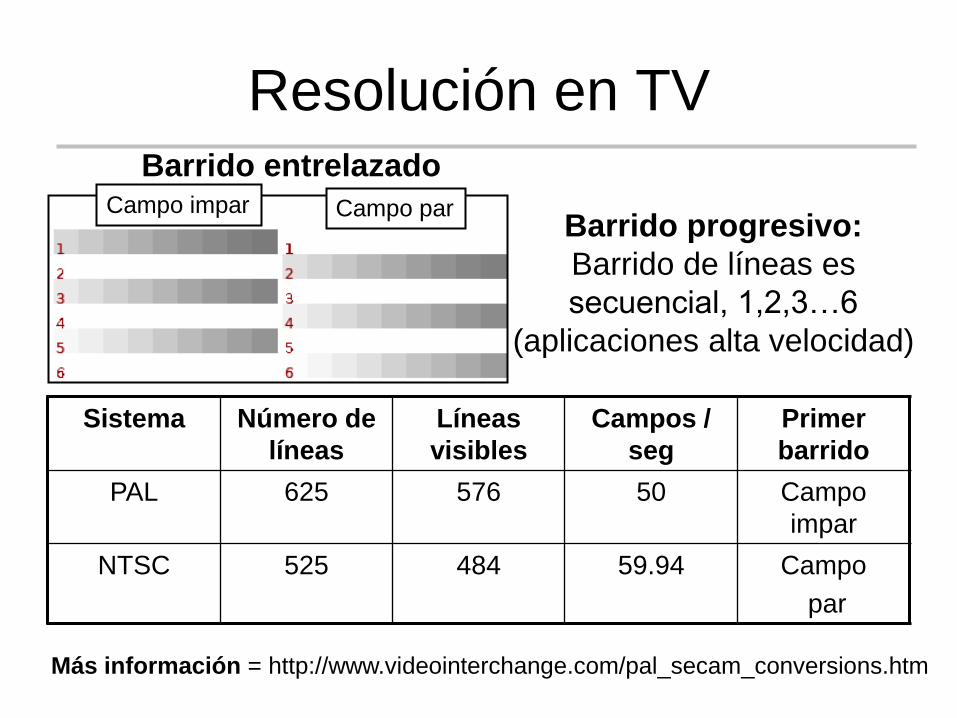
Resolución en TV
Campo impar Campo par
Sistema Número de
líneas
Líneas
visibles
Campos /
seg
Primer
barrido
PAL 625 576 50 Campo
impar
NTSC 525 484 59.94 Campo
par
Barrido entrelazado
Más información = http://www.videointerchange.com/pal_secam_conversions.htm
Barrido progresivo:
Barrido de líneas es
secuencial, 1,2,3…6
(aplicaciones alta velocidad)

Resolución basada en líneas de TV(TV line resolution)
Líneas de TV: Es una unidad de
medida estándar que se utiliza en la
industria para comparar cámaras
analógicas, se obtiene de aplicación
de patrón de pruebas
Ecuaciones para obtener la frecuencia (lp/mm)
Líneas de TV [V] x 1.333
Resolución horizontal (lp/mm)= ----------------------------------------------------------
2 x Longitud horizontal del sensor (mm)
Líneas de TV [V]
Resolución vertical (lp/mm)= ----------------------------------------------------------
2 x Longitud vertical del sensor (mm)

Contraste(contrast)
Contraste: Diferencia entre los tonos claros y oscuros
de un objeto
Blanco
Negro
Onda
cuadrada
Contraste
Imax - Imin
Contraste (%) = ------------------- x 100
Imax + Imin
Relación señal-ruído (SNR, signal-to-noise ratio): Parámetro dinámico de las cámaras
relacionados con el contraste
SNR = X bits = 6X db= 2x Escala de grises
1 bit es equivalente a 6db:
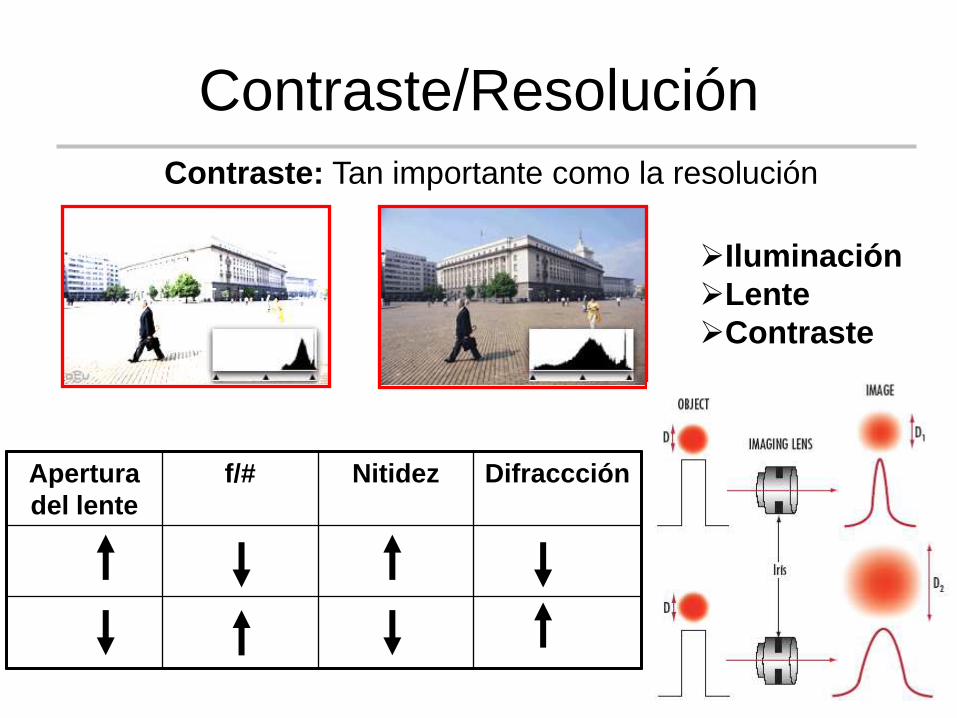
Contraste/Resolución
Iluminación
Lente
Contraste
Contraste: Tan importante como la resolución
Apertura
del lente
f/# Nitidez Difraccción

Contraste/Resolución
Resolución del sistema: Capacidad del
Sistema de Visión para discernir dos puntos
que forman parte del objeto
Resolución depende del contraste: Se analiza
el contraste para detectar el espacio que separa
los dos puntos
Elementos de los que depende la resolución de un sistema:
Límite de difracción y errores ópticos de la lente
Separación permisible a los puntos
Habilidad para detectar el contraste

Profundidad de campo
(Depth of Field)
Profundidad
de campo
Profundidad de campo:
Capacidad de
mantener nitidez de
imagen cuando el
objeto está fuera del
foco óptimo
Bajo f/# (Gran apertura)
Alto f/# (Poca apertura) Foco óptimo
f/# (11)
Calidad aceptable [1,2]m
35mm
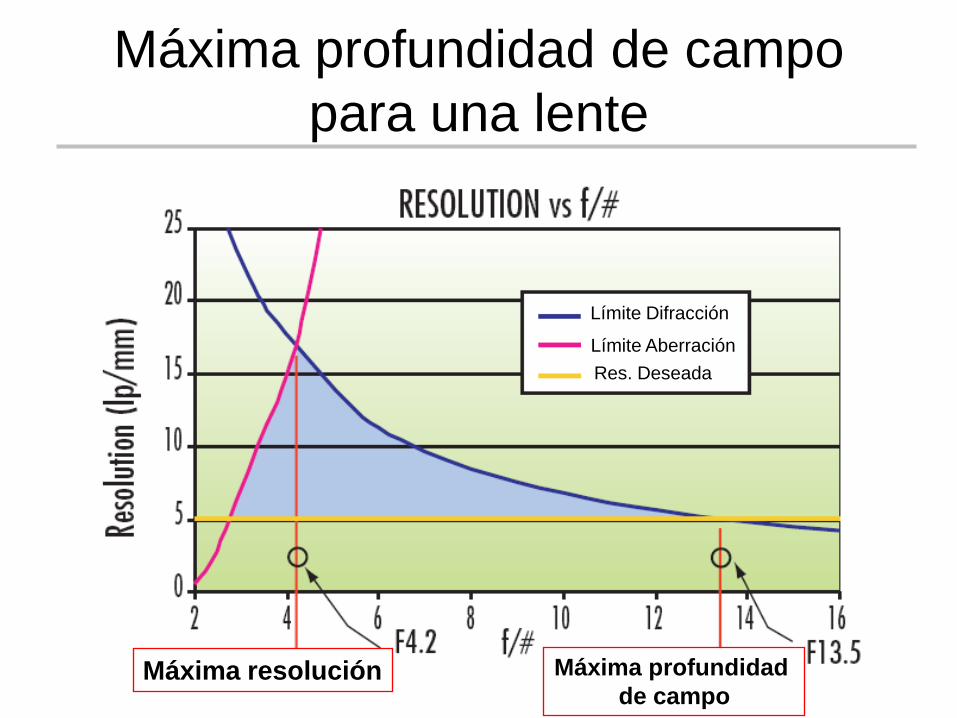
Máxima profundidad de campo
para una lente
Límite Difracción
Límite Aberración
Res. Deseada
Máxima resolución Máxima profundidad
de campo

Pasos para la configuración de un
sistema de visión
• Definir parámetros del sistema: Campo de visión, distancia de trabajo, resolución, contraste….
• Estudiar la integración de componentes: Ver el sistema como un todo, no se deben unir elementos de alta con baja calidad (lente, cámara, tarjeta y monitor).
• Iluminación: Posible integración de filtros, polarizadores..
• Consideraciones futuras: Posibles variaciones futuras de estructuras modulares.

Ejemplo 1
Diámetro
nominal
Tolerancia
permitida
Imagen
ampliada
del orificio a
inspeccionar
Se desea medir el diámetro del círculo ( 3 mm)
con una precisión de 25m
Inspección de píldoras

1) Campo de visión (FOV): Se analiza sensor
CCD y monitor
Ejemplo 1(II)
Monitor CRT Monitor LCD

Se analizan las ecuaciones referidas a la amplificación total del sistema
Ejemplo 1(III)
Tamaño del sensor(mm) 4.8mm
PMAG = --------------------------------- = ------------ = 1.37X
Campo de visión(mm) 3.5mm
Tamaño del monitor (mm) 19”x25.4
SMAG = ------------------------------------- = -------------- = 60.325X
Tamaño del sensor (mm) 8mm
SysMAG = PMAG*SMAG = 1.37x 60.325 = 82,65X
Se supone que el sensor será de ½”

Anteriormente se ha definido:
2) Tamaño del sensor CCD: ½”
3) Amplificación primaria, secundaria y del sistema:
PMAG, SMAG y SysMAG
Ejemplo 1(IV)
3) Resolución:
3.1.- Resolución del objeto
3.5mm
3.5mm x 4/3=4.66mm
Campo de
visión
Onda
cuadrada
25m
Espacio (mm)=0.025mm
Tamaño pixel = 12.5 m
RO (m)= 2 x TP = 25m
RO (lp/mm)= 1/0.025mm
= 40 lp/mm

Ejemplo 1(V)
3.2.- Resolución de la cámara
Tamaño del píxel de cámara (TPC, m) = PMAG x Tamaño píxel objeto (m)
TPC = 1.37 x 12.5 m = 17.125 m
Resolución de cámara (m) = PMAG x RO (m)
RC (m) = 1.37 x 25 m = 34.25 m
RC (lp/mm) = RO (lp/mm) / PMAG = 40lp/mm / 1.37 = 29.2 lp/mm
Número de píxeles verticales
> 4.8mm / 0.017125 mm = 281 4.8mm
6.4mm
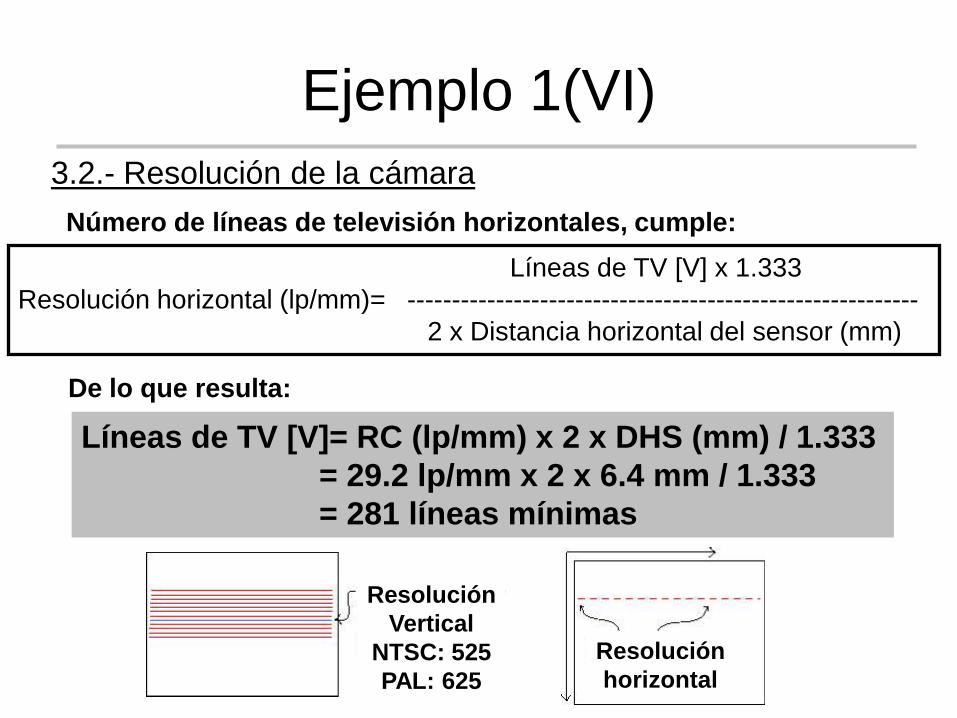
Ejemplo 1(VI)
3.2.- Resolución de la cámara
Número de líneas de televisión horizontales, cumple:
Líneas de TV [V] x 1.333
Resolución horizontal (lp/mm)= ----------------------------------------------------------
2 x Distancia horizontal del sensor (mm)
De lo que resulta:
Líneas de TV [V]= RC (lp/mm) x 2 x DHS (mm) / 1.333
= 29.2 lp/mm x 2 x 6.4 mm / 1.333
= 281 líneas mínimas
Resolución
horizontal
Resolución
Vertical
NTSC: 525
PAL: 625
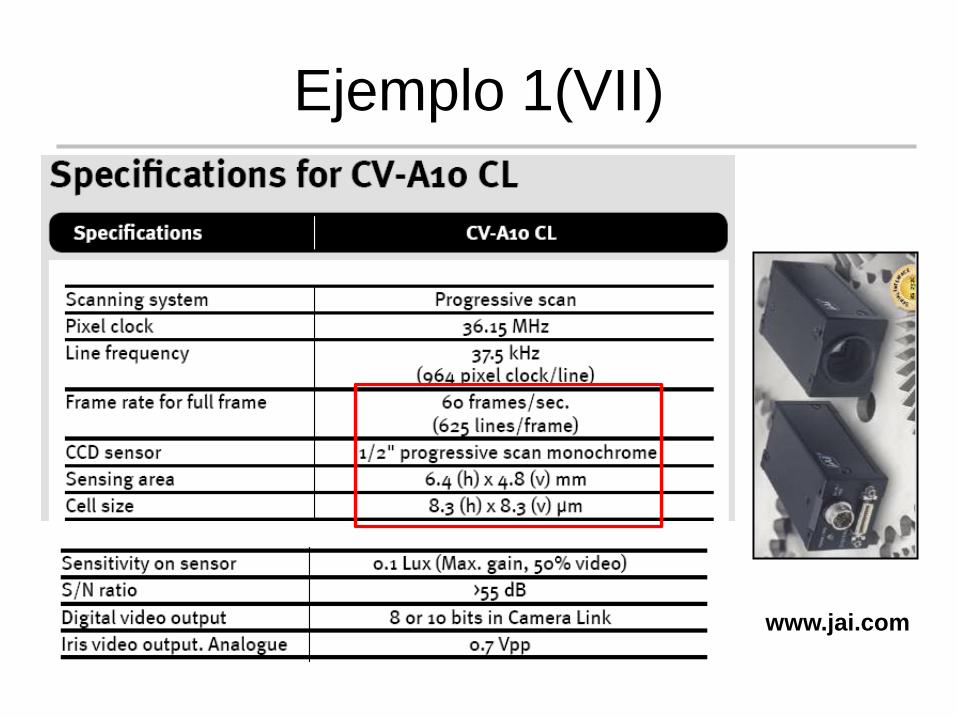
Ejemplo 1(VII)
www.jai.com

Ejemplo 1(VIII)
www.jai.com

Ejemplo 1(IX)
www.sony.com

Ejemplo 1(X)
C-lens
• 4:1 Zoom Ratio
• Parfocal Zoom: 0.75X - 3X
• 60mm Working Distance
• 2-8mm FOV on 1/2" CCD
• Rugged Mechanical Design
• Max. CCD Size: 2/3" Format
VZM™ 300 (EdmundOptics)
Par de líneas
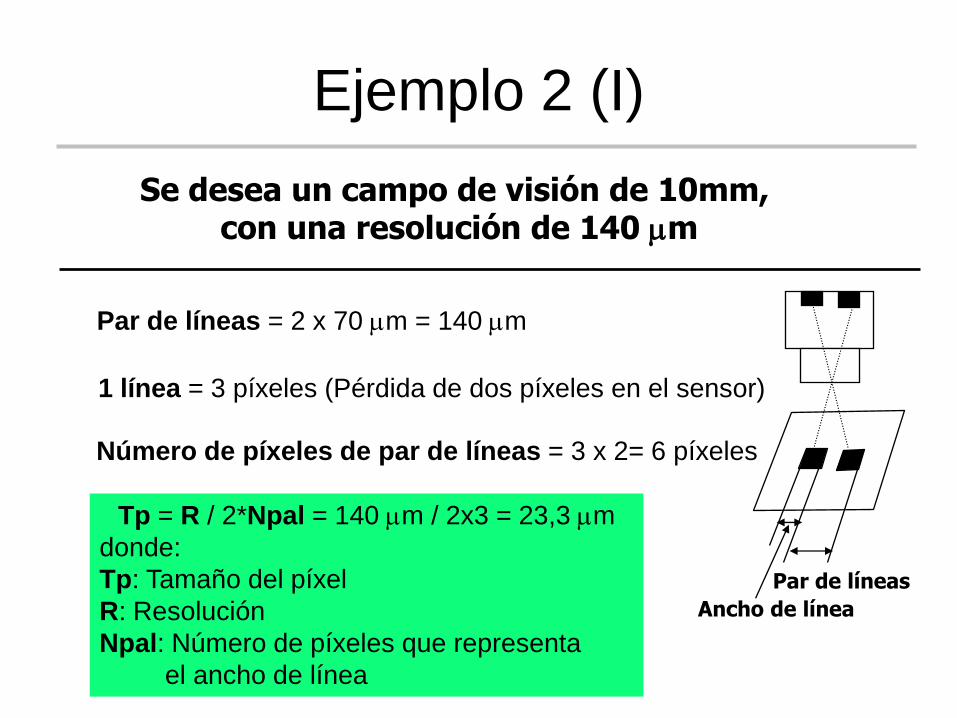
Ejemplo 2 (I)
Se desea un campo de visión de 10mm, con una resolución de 140 m
Par de líneas = 2 x 70 m = 140 m
1 línea = 3 píxeles (Pérdida de dos píxeles en el sensor)
Número de píxeles de par de líneas = 3 x 2= 6 píxeles
Tp = R / 2*Npal = 140 m / 2x3 = 23,3 m
donde:
Tp: Tamaño del píxel
R: Resolución
Npal: Número de píxeles que representa
el ancho de línea
Ancho de línea

Ejemplo 2 (II)
Primera aproximación del número de píxeles
Npvs = Cv / Tp = 10 mm / .0233 mm = 430 píxeles
donde:
Npvs: Número de píxeles de la vertical del sensor
Cv: Campo de visión
Tp: Tamaño del píxel
Consideración de la pantalla
Npvp = Npvs * Npal
= 430 x 3= 1290
donde:
Npvp: Número de píxeles de la vertical de la pantalla
Pantalla UXGA (ancho 1200)?
Sensor real > 430 píxeles en la vertical
Suposición de 2 píxeles perdidos en el sensor

Ejemplo 2 (III)
1 pulgada
16.09.6
12.8
AP = Ts / Cv = 9.6 mm/10 mm = 0.96X
Rc = V(mm) / Npvs = 9.6 mm/480 = 20 m
donde:
Rc: Resolución de la cámara
Npvs: Número de píxeles vertical sensor
Se supone que el sensor será de 1” (640x480)
Sensor real > 430 píxeles en la vertical
Tamaño del píxel < 23,3 m

Ejemplo 2 (IV)
Los parámetros del sistema en su conjunto serían (1 pulgada):
Amplificación primaria (AP) = 0.96X
La amplificación secundaria (AS), para un monitor de 19 pulgadas :
AS = 19x25.4 / 16 mm = 30,1625X
La amplificación total del sistema (ATS):
ATS = AP * AS = 0.96X * 30,1625X = 28.956X
Resolución del sistema (Rs):
Rs = Rc (m) / AP = 20 m / 0.96 = 20.83 m
Se selecciona un monitor de 19’ (1200 en vertical)

Función de transferencia modulada Modulation Transfer Function (MTF)
MTF: Capacidad del sistema de visión de transferir contraste,
a una determinada resolución (lp/mm), del objeto a la
imagen.
Incorpora contraste y resolución en una única especificación
Imagen original
Imagen original al pasar por una lente
Imagen original (lente+escáner)
2-200 lp/mm
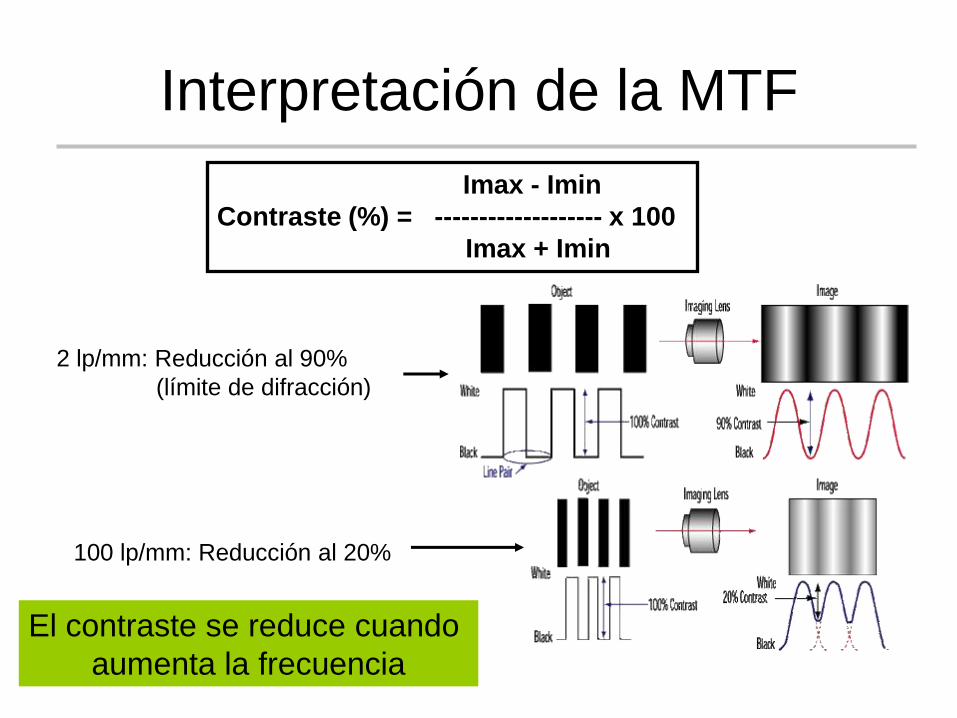
Imax - Imin
Contraste (%) = ------------------- x 100
Imax + Imin
2 lp/mm: Reducción al 90%
(límite de difracción)
100 lp/mm: Reducción al 20%
El contraste se reduce cuando
aumenta la frecuencia
Interpretación de la MTF

Ejemplo de curva MTF
% C
on
tra
ste
Resolución de la imagen (lp/mm)

Comparación entre el lente
tradicional y el doble Gauss

Software para selección de óptica
Selector de óptica
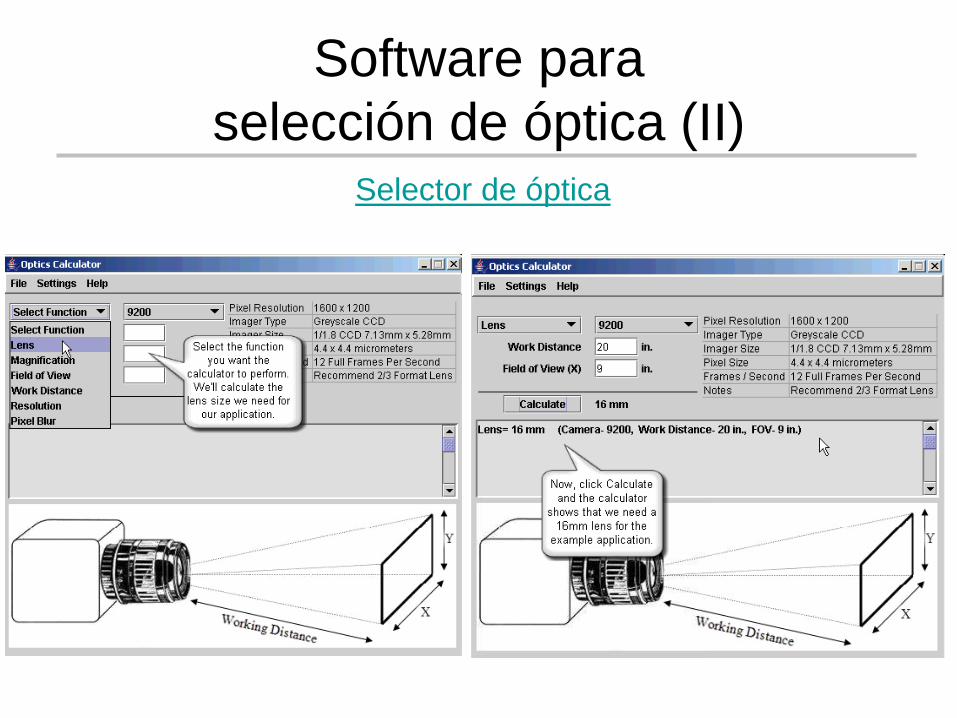
Software para
selección de óptica (II)Selector de óptica

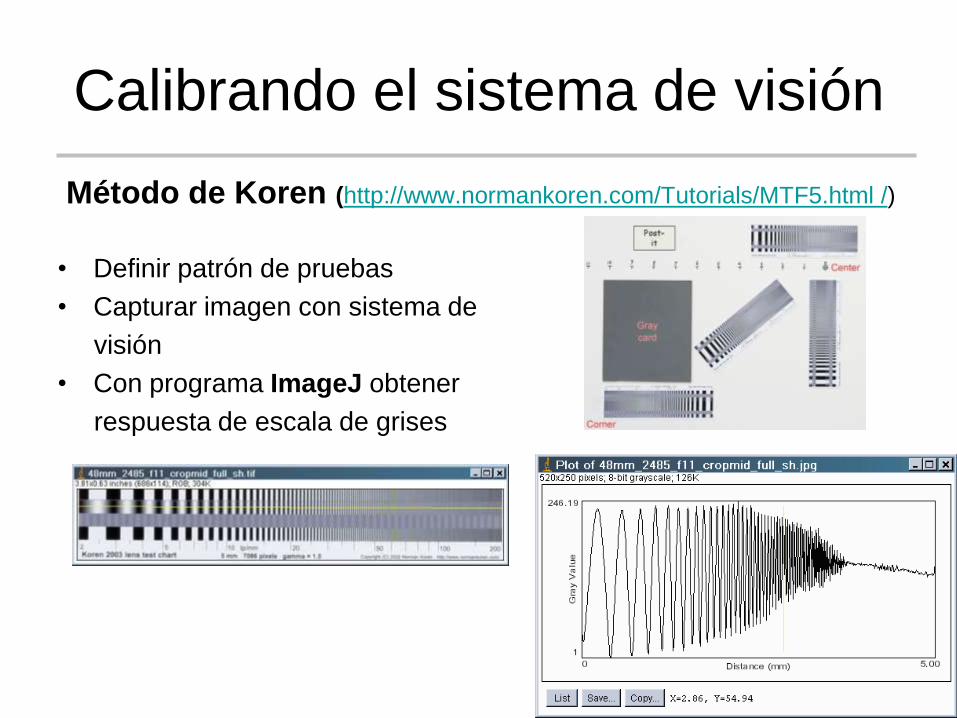
Método de Koren (http://www.normankoren.com/Tutorials/MTF5.html /)
• Definir patrón de pruebas
• Capturar imagen con sistema de
visión
• Con programa ImageJ obtener
respuesta de escala de grises
Calibrando el sistema de visión
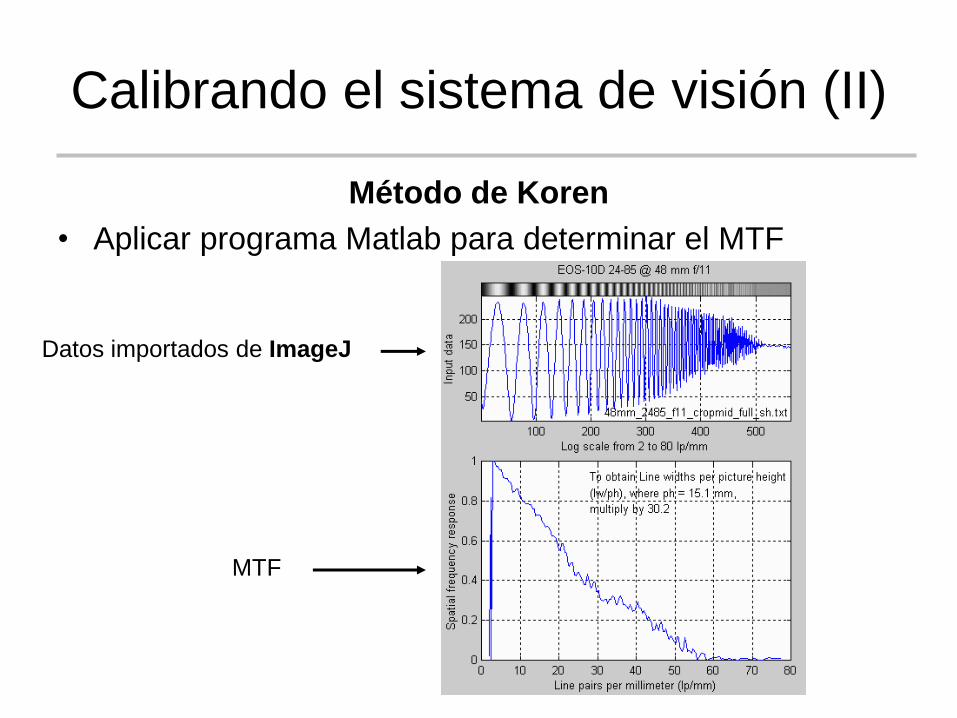
Método de Koren
• Aplicar programa Matlab para determinar el MTF
Calibrando el sistema de visión (II)
Datos importados de ImageJ
MTF
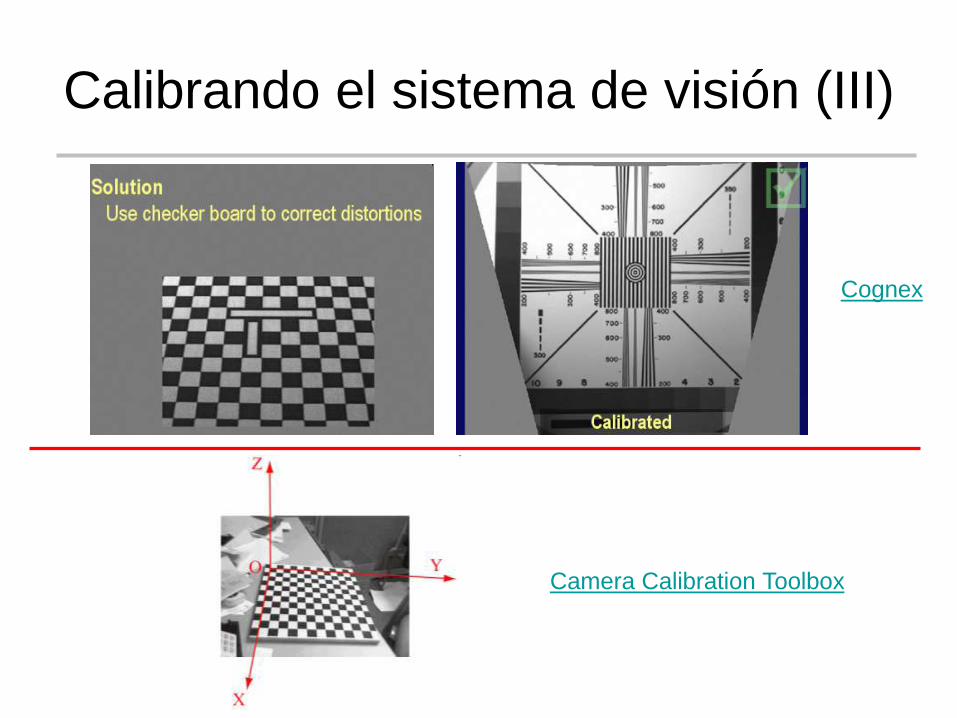
Calibrando el sistema de visión (III)
Cognex
Camera Calibration Toolbox

Ajuste de parámetros
Condición Posibles causas Pruebas
Giro de la pieza Movimiento o
vibraciones, falta de
fijación
Girar cámara 0-3600
Variaciones de escala Variaciones distancia
cámara-objeto
Alejar y acercar la
cámara
Visión borrosa Óptica de la cámara
sin ajustar
Ajustar cámara para
que la pieza aparezca
enfocada
Poco contraste Bordes poco
definidos, pieza se
confunde con el fondo
Situar pieza sobre
fondo de alto
contrate
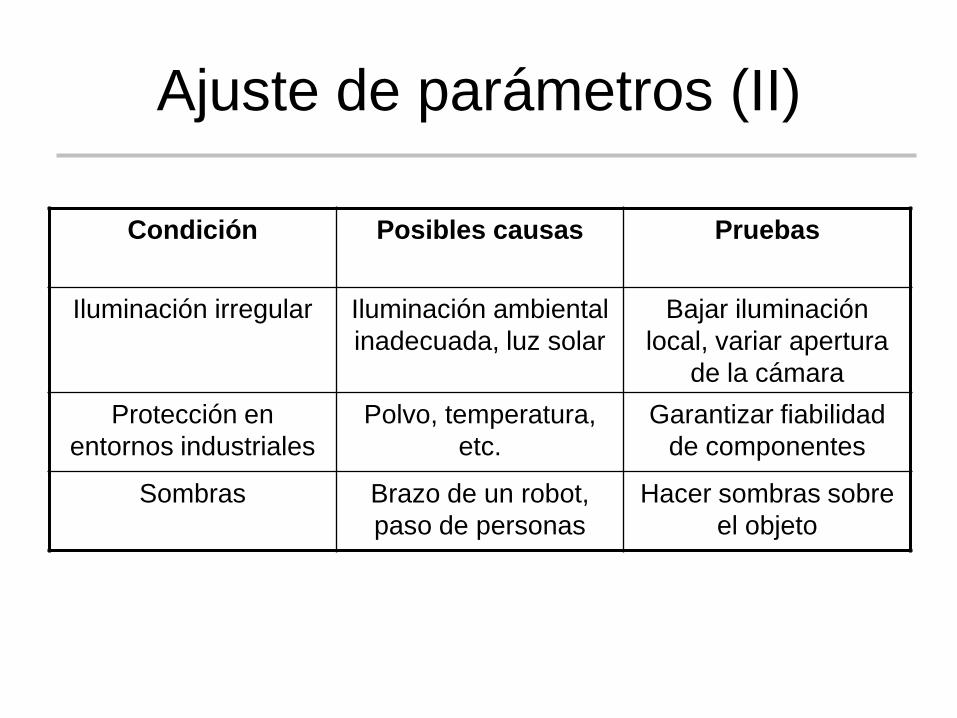
Ajuste de parámetros (II)
Condición Posibles causas Pruebas
Iluminación irregular Iluminación ambiental
inadecuada, luz solar
Bajar iluminación
local, variar apertura
de la cámara
Protección en
entornos industriales
Polvo, temperatura,
etc.
Garantizar fiabilidad
de componentes
Sombras Brazo de un robot,
paso de personas
Hacer sombras sobre
el objeto

Algunas empresas que producen hardware para imagen
• http://www.coreco.com/
• http://www.datatranslation.com/
• http://www.hamamatsu.com/
• http://www.matrox.com/
• http://www.qimaging.com/
• http://www.cognex.com/
• http://www.baneng.com/
• http://www.omron.com/
• http://www.pulnix.com/
• http://www.pptvision.com/
• http://www.toshiba-teli.co.jp/english/index.htm
• http://www.fairchildimaging.com/
• http://www.ptgrey.com/
• http://bssc.sel.sony.com/BroadcastandBusiness/markets/10005/market_10005.shtml
Buscador de otros fabricantes:
• http://www.controleng.com/buyersguide
• http://www.machinevisiononline.org/buyers_guide/
Palabras clave: Machine vision, vision system, image processing, image acquisition,
frame grabbers, image analysis, industrial imaging platform, vision
processor, c-lens
Empresas que venden hardware
para imagen