diapositiva anexo2.1 respuesta transitoria,...
TRANSCRIPT

ELC-33103Teoría de Control
Anexo 2.1R t T it i d Respuesta Transitoria de
Sistemas Lineales e Invariantes en el Tiempo
Prof. Francisco M. [email protected]
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
http://www.giaelec.org/fglongatt/SP.htm

1. Ejemplo
• En el sistema de la siguiente Figura, x(t) es eldesplazamiento de entrada y θ(t) es el desplazamientodesplazamiento de entrada y θ(t) es el desplazamientoangular de salida.
txEntradab
L
k Salida
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Suponga que las masasinvolucradas son taninvolucradas son tanpequeñas que pueden noconsiderarse.
txb
L• Suponga que todos los
movimientos tienen la restricción de ser pequeños;por tanto, el sistema seconsidera lineal
k
considera lineal.
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Las condiciones inícialespara x y θ son cero, 00 txpara x y θ son cero,
x(0-)= 0θ(-) = 0
txb
Lθ( ) 0. L
k
00 t
k
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• La ecuación para el sistema es:
txb
L kMFresorte
k
LsenM
MxbFpiston
k senML Diagrama de Cuerpo Libre
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• De tal modo que la ecuación dinámica del sistemaresulta:resulta:
MxbkMFF psitonresorte
LxbkL
kMFresorte MxbkM
LxbkL
MxbFpiston xLkL MxbFpistonxL
bL
Diagrama de Cuerpo Libre
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
g p

1. Ejemplo
xLbkL
• Tomando la transformada de Laplace en ambosmiembros de la ecuación anterior resulta:
b
miembros de la ecuación anterior resulta:
ssXsLkLs
ssXsL
bLs
ss
bkLs
ssXs
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
b

1. Ejemplo
• Se observa claramente que se trata de un sistema deprimer orden: ssprimer orden:
bkLs
ssXs
• Si la entrada es un escalón unitario se tiene:b
tx txb
L
k
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• La entrada de un escalón unitario resulta X(s) = 1/s
Xs sX
bkLs
ss
b
skLs
ss 1
bLs
1
bkLs
s
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
b
1. Ejemplo
ks 1
• Aplicando la transformada inversa de Laplace en
bkLs
• Aplicando la transformada inversa de Laplace enambos miembros ecuación resulta:
tk1 tbe
Lt
1
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
1. Ejemplo
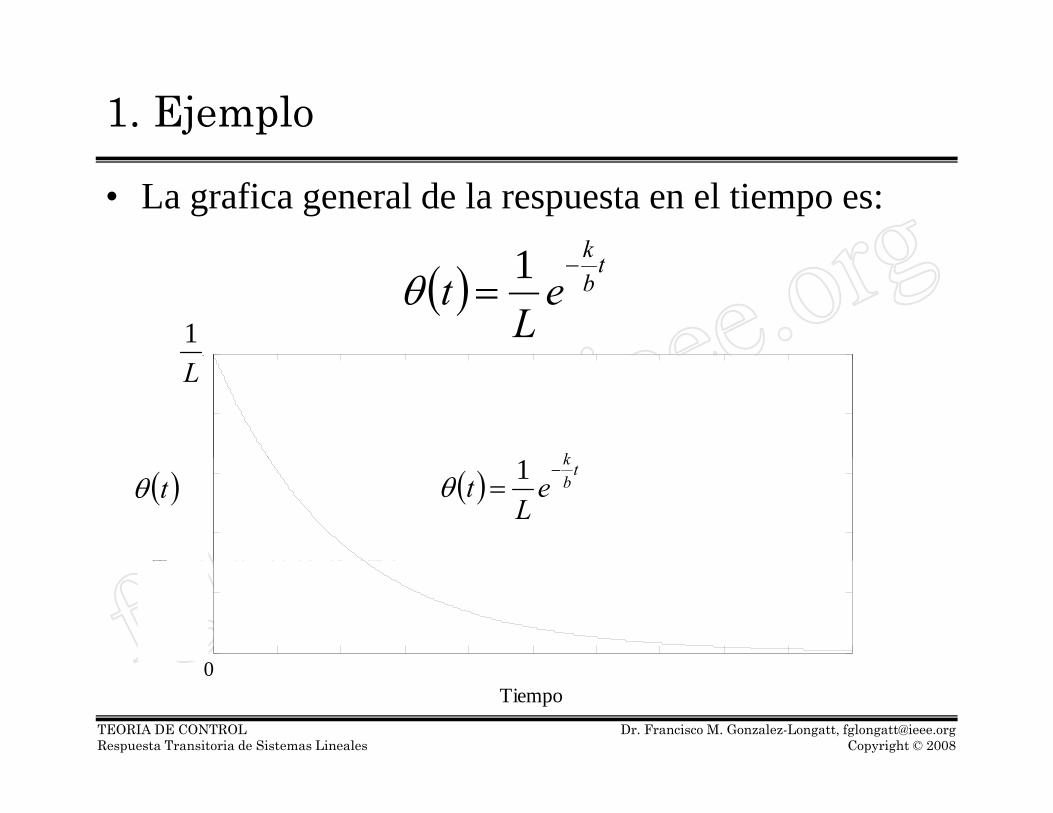
• La grafica general de la respuesta en el tiempo es:k1 tbk
eL
t
1
11
0.8
1
t)
L
k
0.4
0.6
Resp
uesta
c(t
tbk
eL
t
1 t
00
0.2
R
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
0 Tiempo

1. Ejemplo
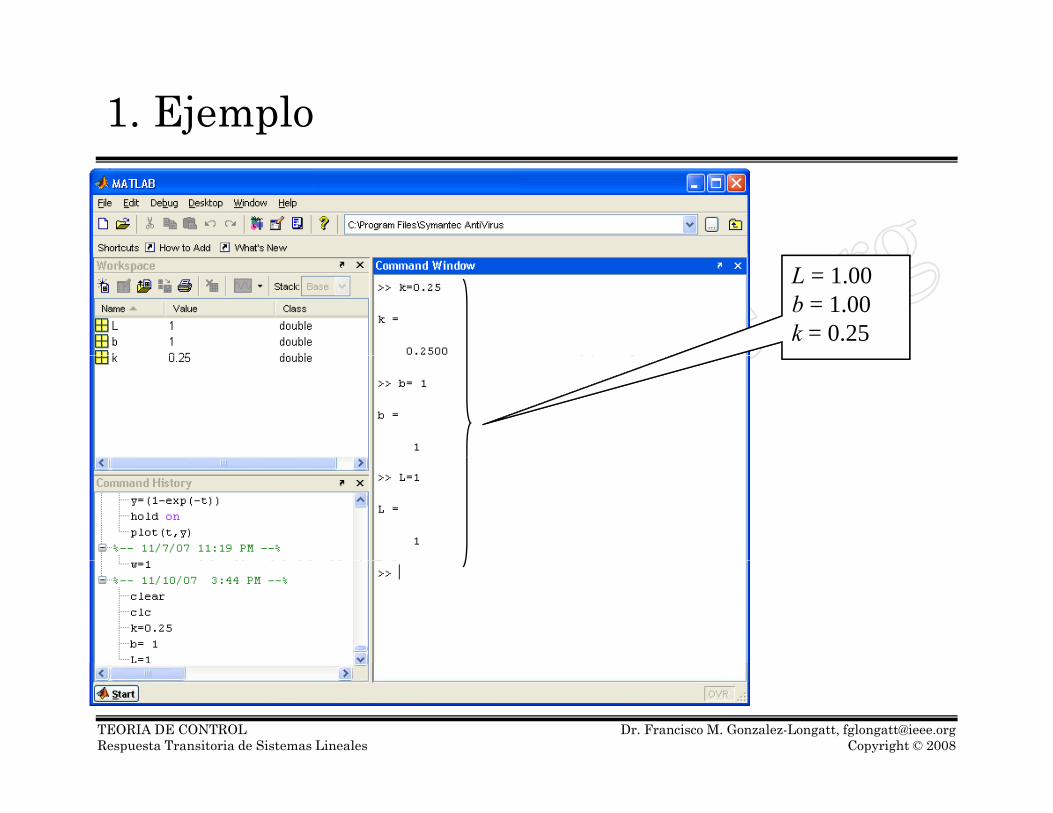
• Se procede a efectuar unasimulación de la respuestasimulación de la respuestatemporal del sistema de primerorden, empleando MathWork®
Matlab™.• Se introduce los valores de las
constantes de los dispositivos enel command line de Matlab™.
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
1. Ejemplo
1LL = 1.00b = 1.00k = 0.25
1L
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
1. Ejemplo
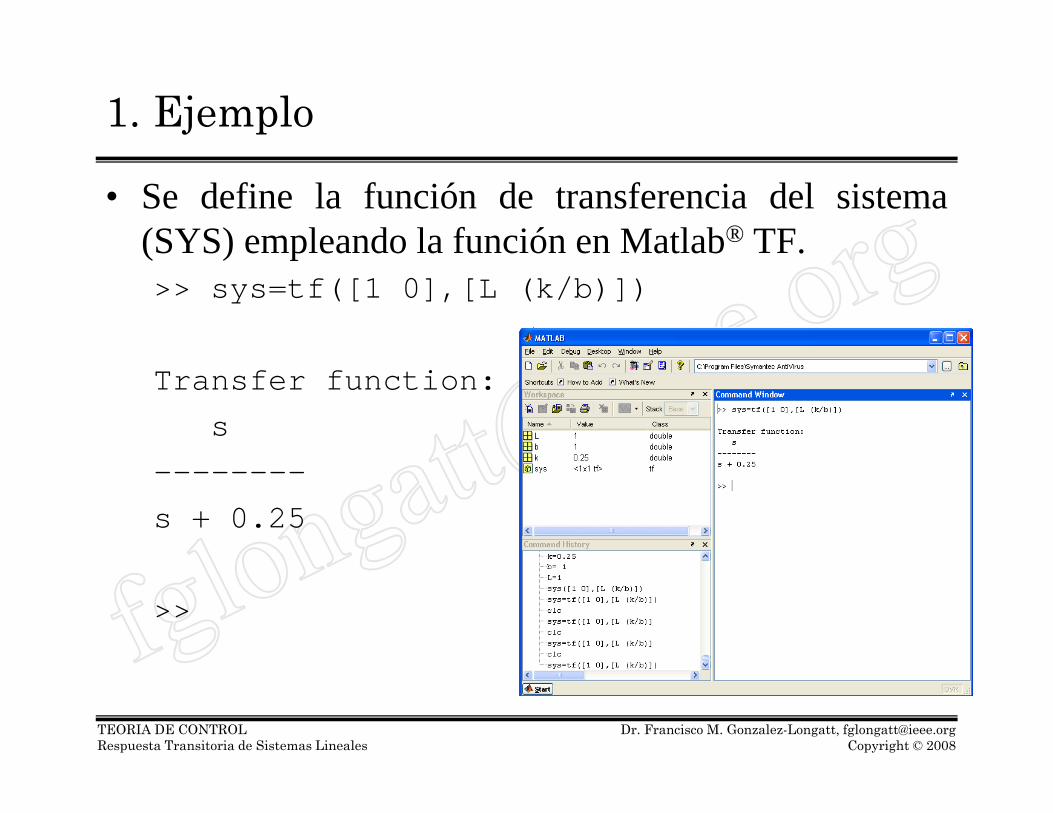
• Se define la función de transferencia del sistema(SYS) empleando la función en Matlab® TF.(SYS) empleando la función en Matlab TF.>> sys=tf([1 0],[L (k/b)])
Transfer function:s
--------s + 0.25
>>
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Se procede a determinar la respuesta del sistema anteuna entrada de escalón unitario.una entrada de escalón unitario.
• Para ello se emplea el comando STEP.>> step(sys)>> step(sys)
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
1. Ejemplo
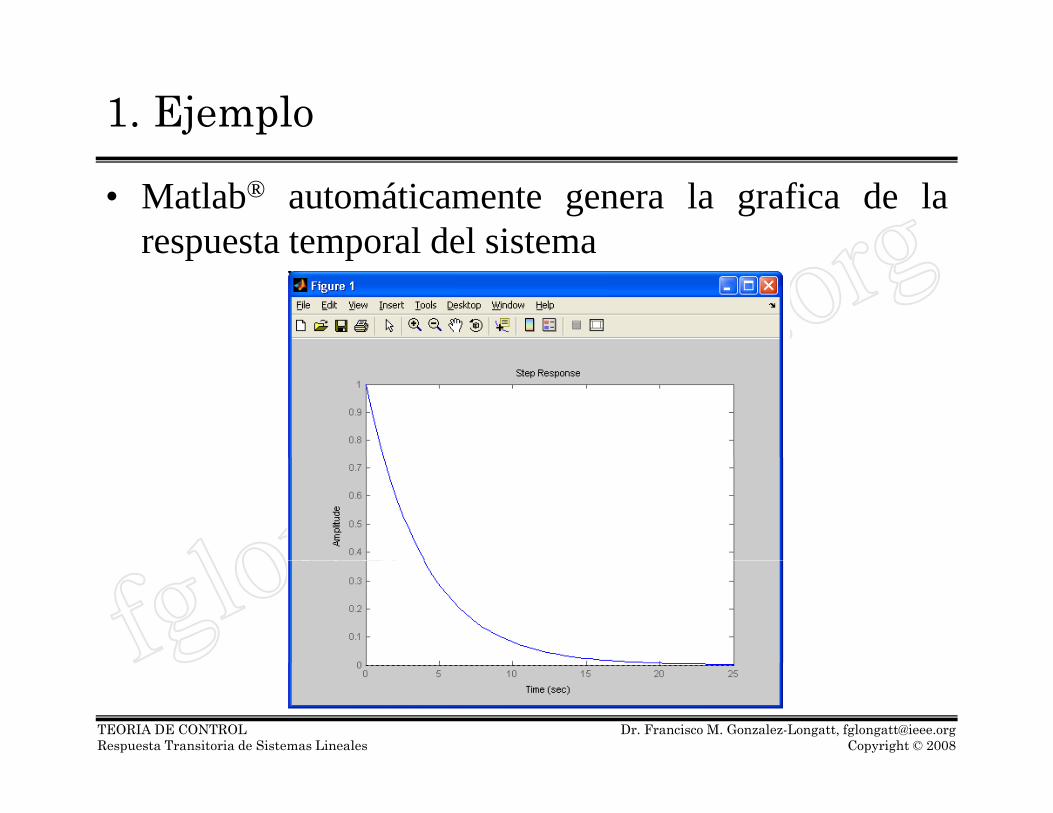
• Matlab® automáticamente genera la grafica de larespuesta temporal del sistemarespuesta temporal del sistema
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Otra forma de evaluar la respuesta transitoria de unsistema, es el uso de Simulink, que es unasistema, es el uso de Simulink, que es unaherramienta con una interfaz de usuario sumamenteútil.
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Descargar y abrir en Matlab el modelo denominado:Ogata4 1.mdl, el cual es el modelo desarrollado porOgata4_1.mdl, el cual es el modelo desarrollado porel Prof. Francisco Gonzalez-Longatt, para mostrar larespuesta transitoria del sistema Brazo-fricción-resorte. tx
bLL
k
Enlace para descargar el archivo:
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
http://www.giaelec.org/fglongatt/TeoriaControlI.htmlp g

1. Ejemplo
• Una vez abierto el modelo:
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Se procede a ajustar los valores asociados a losparámetros del modelo:parámetros del modelo:
L = 1.00b = 1.00k = 0.25
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
1. Ejemplo
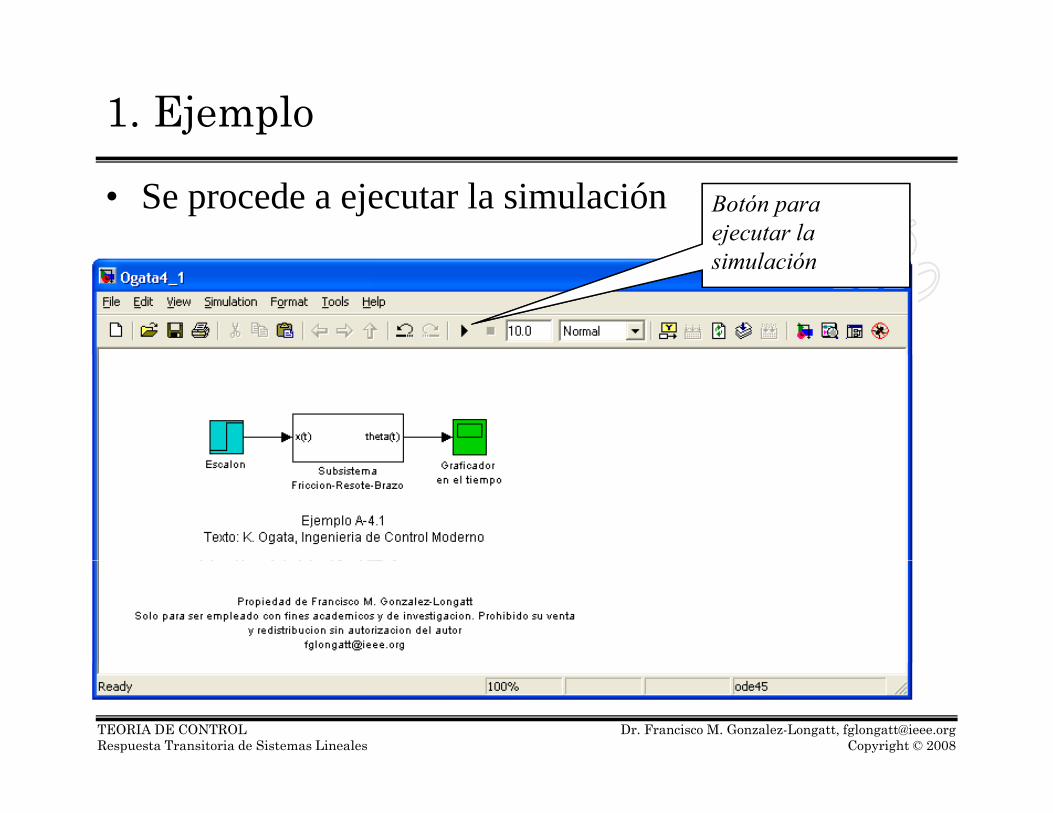
• Se procede a ejecutar la simulación Botón para ejecutar la
l ósimulación
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
1. Ejemplo
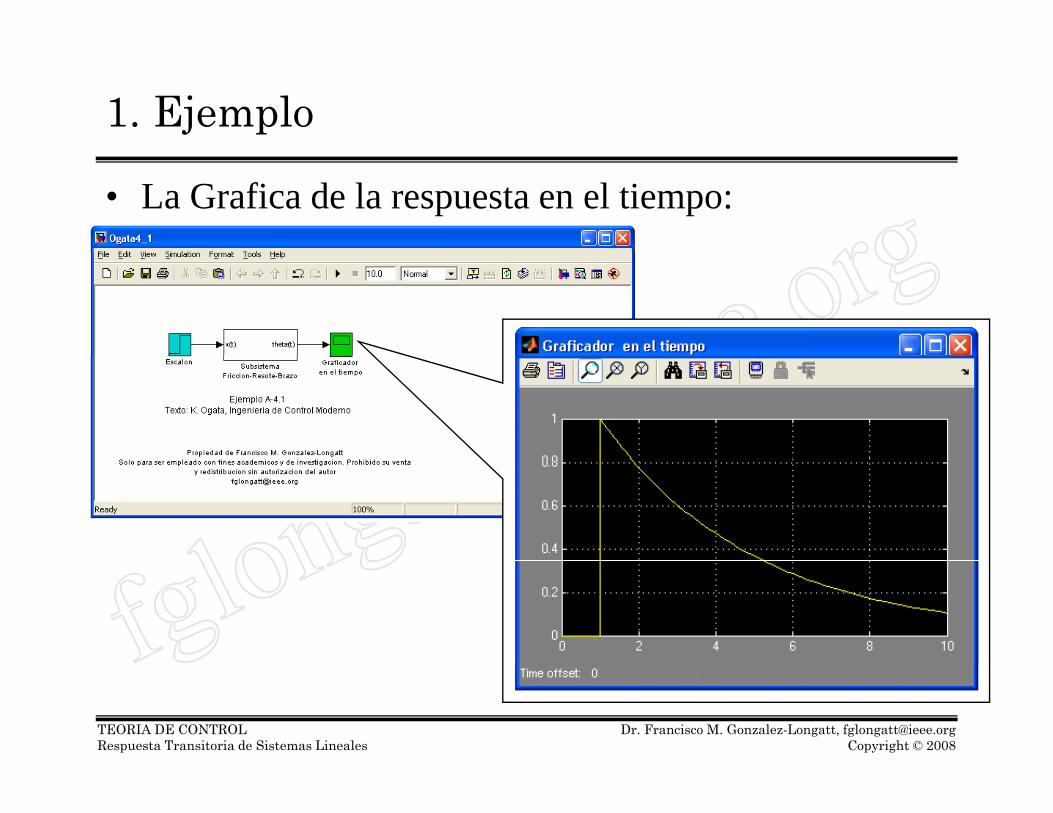
• La Grafica de la respuesta en el tiempo:
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Nótese en este caso, que larespuesta comienza en t =respuesta comienza en t1 segundo, debido a que elbloque de escalón estaconfigurado para que elcambio se produzca en esei t t d tiinstante de tiempo.
• Ver el cuadro de dialogoasociadoasociado..
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales

1. Ejemplo
• Resulta fácilmente evidente que si la relación k/b, esgrande, la respuesta θ(t), se aproxima a una senal degrande, la respuesta θ(t), se aproxima a una senal depulso.
tk10.9
1
0100b tbe
Lt
10.6
0.7
0.8
010b
0.100b
0.3
0.4
0.50.10b
0.1b
0
0.1
0.2
0.3
Dr. Francisco M. Gonzalez-Longatt, [email protected] © 2008
TEORIA DE CONTROLRespuesta Transitoria de Sistemas Lineales
0 1 2 3 4 5 6 7 8 9 100