capÍtulo iv resultados de la investigaciÓn fase i...
TRANSCRIPT
53
CAPÍTULO IV
RESULTADOS DE LA INVESTIGACIÓN
Para dar cumplimiento con el capítulo IV, los resultados de la
investigación, se consideraron una serie de fases, que ayudaran a
describir el modelo matemático de un manipulador robótico de tres (3)
ejes y serán desarrollados a continuación:
Fase I: Recopilación de la Información
Para llevar a cabo esta fase se realizaron dos (2) actividades, que
engloba el primer objetivo específico, de este trabajo de investigación, se
desarrolla a continuación:
1- Estudio de l funcionamiento de los elementos de los manipuladores robóticos
En la actualidad los manipuladores robóticos, son considerados de
gran ayuda para la industria de la manufactura , porque permiten realizar
tareas que facilitan el mejoramiento de la vida del hombre como por
ejemplo , traslado de objetos de un lugar a otro, mecanizados de piezas,
entre otros. La orientación del eje o el número de ejes y grados del robot
depende de la actividad de operación o requerimiento que sea necesario.
Las características básicas de la estructura de los robots están
formadas por configuraciones clásicas de brazos de robots industriales y
los tipos de articulaciones. Los robots manipuladores son esencialmente,
54
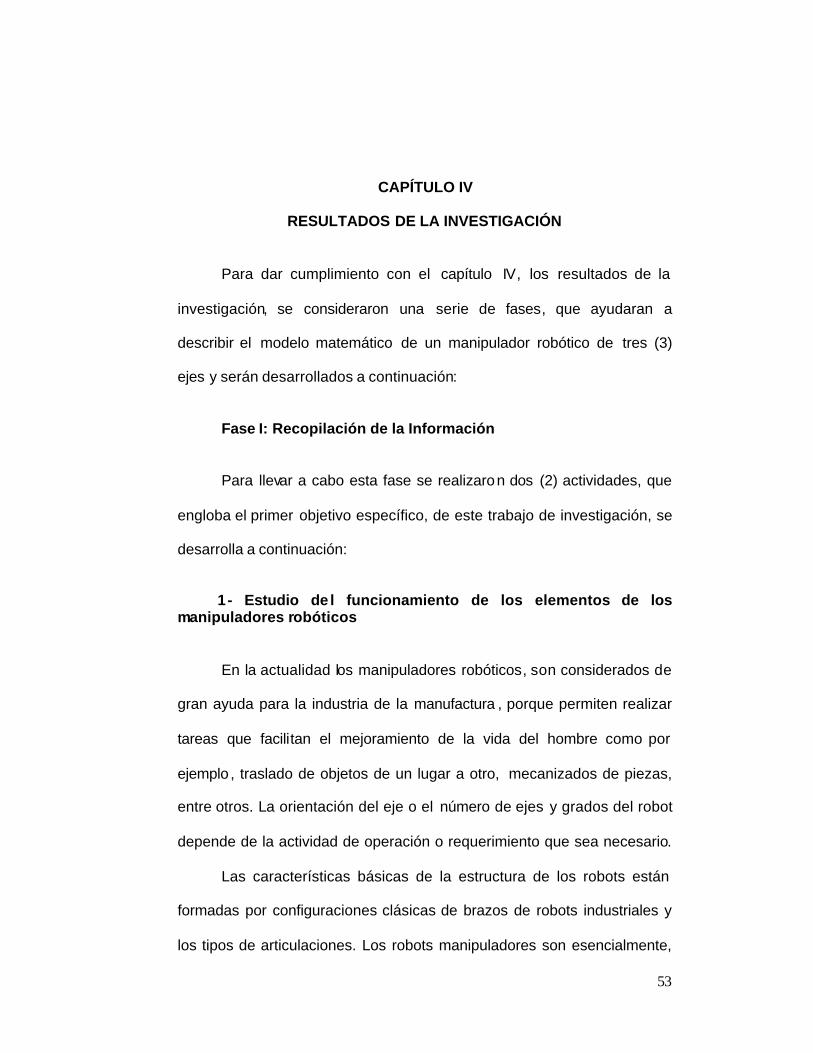
brazos articulados. En otras palabras, un manipulador industrial
convencional es una cadena cinemática abierta formada por un conjunto
de eslabones o elementos de la cadena interrelacionados mediante
articulaciones (las articulaciones permiten el movimiento relativo entre los
sucesivos eslabones) o pares cinemáticos, como se muestra en la figura
16.
Figura 16. Articulación y eslabones de los manipuladores Robóticos
Fuente: platea.pntic.mec.es(2012)
Existen diferentes tipos de articulaciones:
a. Articulación de rotación, es la que suministra un grado de
libertad consistente en una rotación alrededor del eje de la articulación.
b. Articulación prismática, el grado de libertad consiste en una
traslación a lo largo del eje de la articulación.
c. Articulación cilíndrica, existen dos grados de libertad: una
rotación y una traslación.
d. Articulación planar, está caracterizada por el movimiento de
desplazamiento en un plano, existiendo por lo tanto, dos grados de
libertad.
e. Articulación esférica, combina tres giros en tres direcciones

55
perpendiculares en el espacio.
En la figura 17 se muestran los diferentes tipos de articulación de
un robot:
Figura 17. Tipos de articulaciones de un Robot Fuente: platea.pntic.mec.es(2012)
Cuando se habla de articulación lineal se refiere a que es de tipo
deslizante, de traslación o prismática, es decir, el eslabón se desliza
sobre un eje solidario al eslabón anterior. Mientras que, una articulación
rotacional el eslabón gira en torno a un eje solidario al eslabón anterior.
En cuanto a los eslabones, este será el elemento para el enlace y la
sucesión de acciones, uno de los elementos básicos de una cadena
cinemática. Es un cuerpo rígido encargado de transmitir los distintos
movimientos.
Poseen puntos de unión llamados nodos. Por otro lado, el orden de
los eslabones viene dado por el número de nodos que contiene un
eslabón. Es decir, los eslabones pueden ser BINARIOS (de dos nodos),
TERNARIOS (de tres nodos), CUATERNARIOS (de cuatro nodos). En la
figura 18 se muestran los números de nodos que generalmente contienen
un eslabón.

56
Figura 18. Números de nodos que contiene un eslabón
Fuente: UTN-FRBB (2004)
Las juntas son un elemento importante a la hora de realizar la
conexión entre dos o más eslabones, efectuada por medio de sus nodos,
la cual permite algún movimiento entre los eslabones. Las juntas se
suelen llamar también como los pares cinemáticos. Existen diversos
tipos y se pueden clasificar el tipo de contacto entre los elementos de
línea, de punto (llamados también pares superiores) y de superficie
(llamados también pares inferiores). Por el número de grados de libertad
(GDL) permitidos en la junta; juntas completas (1 GDL) y semi-juntas (2 y
3 GDL). Por el tipo de cierre de la junta que pueden ser de fuerza o de
forma y por el número de eslabones conectados orden de la junta. En la
Figura 19 se muestran los tipos de juntos o pares cinemáticos.
Figura 19. Tipos de Juntas o pares cinemáticos
Fuente: UTN-FRBB (2004)

57
Los grados de libertad (GDL) son el número de parámetros
independientes que fijan la situación del órgano terminal. El número de
grados de libertad suele coincidir con el número de eslabones de la
cadena cinemática. A continuación en la figura 20 se muestra un robot
con seis (6) grados de libertad.
Figura 20. Grados de libertad de un manipulador robótico
Fuente: platea.pntic.mec.es(2012)
Los manipuladores robóticos pueden poseer desde uno (1) hasta n
grados de libertad. El grado de libertad del mecanismo entonces se refiere
al número de parámetros que es necesario conocer para determinar su
posición. Por otro lado, la configuración morfológica de los distintos
manipuladores viene dado según la geometría de la estructura mecánica.
El espacio de trabajo viene determinado tanto por la geometría del
manipulador (tipos de articulaciones, tamaño y forma de los elementos)
como por las restricciones que existan en las articulaciones (una
articulación de revolución en general tendrá una amplitud de giro de
menor de 360°). Se suele subdividir en dos partes, el espacio de trabajo
alcanzable que es el conjunto de puntos accesibles y el espacio de
trabajo hábil que es el conjunto de aquellos puntos que pueden ser

58
alcanzados con cua lquier orientación del efector final. La capacidad del
robot para realizar trayectorias viene dada por diferentes variables.
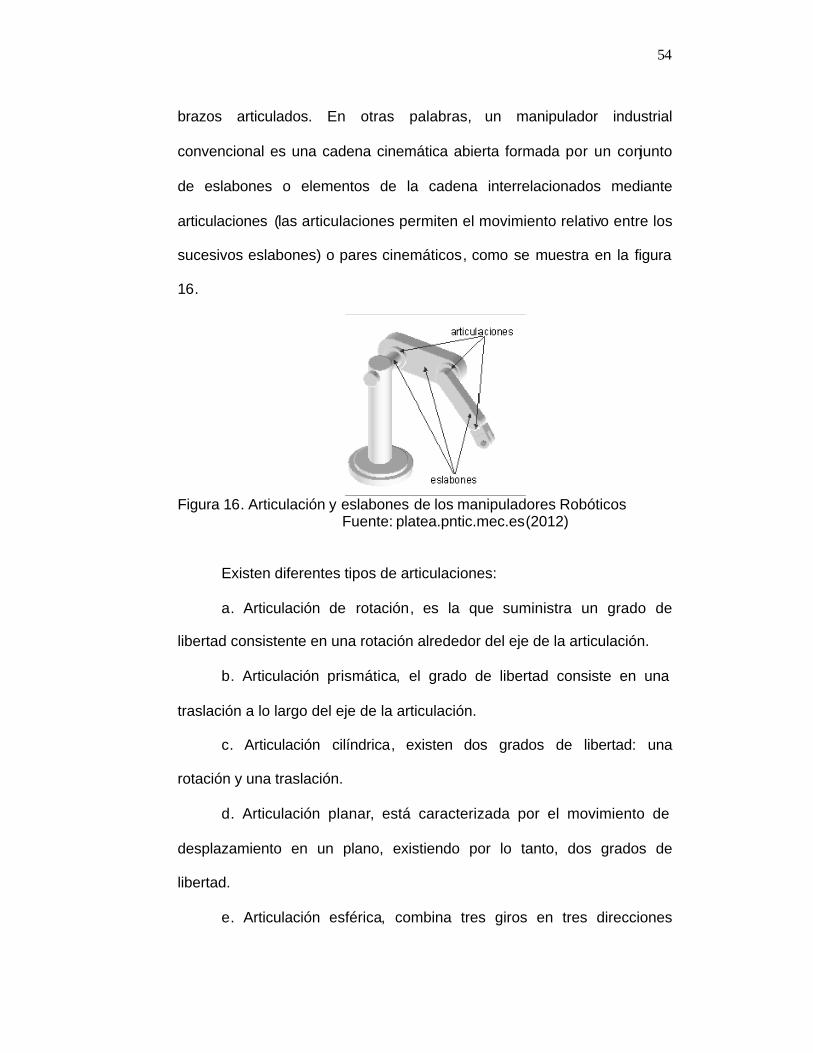
Los manipuladores se pueden clasificar siguiendo varios criterios,
tales como la geometría, estructura cinemática, la aplicación para la que
son diseñados, el tipo de control, entre otros. Estos están clasificados en
cartesiano, cilíndrico, polar, esférico, mixto, paralelo, considerando al
primero como el más simple y al último como el más complejo, se
muestran en la figura 22.
En principio tiene influencia la accesibilidad que tiene el elemento
terminal en el espacio, es decir, dentro del volumen de trabajo del robot
las restricciones de movimiento que pueden aparecer producto de la
configuración mecánica y de los rangos angulares de cada articulación.
En resumen, los manipuladores robóticos anatómicamente tienen un
parecido a la extremidad de brazo del cuerpo humano por lo que es
común que se utilicen los términos cintura, hombro, brazo, codo, muñeca,
y esto puede ser visualizado en la figura 21.
Figura 22. Característica Antropomórfica
Fuente: platea.pntic.mec.es(2012)
59
Configuración Geométrica Estructura cinemática
Figura 21. Configuración geométrica y estructura cinemática Fuente: platea.pntic.mec.es(2012)

60
2- Estudiar los diversos manipuladores e xistente s
Para llevar a cabo el estudio de los manipuladores robóticos, es
necesario desarrollar la clasificación de éstos, pero como la gama de
robots es muy amplia, en este caso solo se trataran los robots
manipuladores. Los robots manipuladores pueden ser de servicio o
industriales.
Según la Federación Internacional de la Robótica (IFR), los robots
de servicios son aquellos que operan con total o parcial autonomía para
desarrollar servicios útiles para personas o equipos, excluyendo aquellos
que realizan tareas de fabricación. Como ejemplo de los robots de
servicio se pueden citar los de laboratorio, los robots didácticos, los robots
de inspección (marina, de tuberías, entre otros.), robots domésticos, de
seguridad, medico quirúrgicos, entre otros.
Los robots industriales se clasifican según tres características:
número de ejes, tipo de control y estructura mecánica. Según el número
de ejes o grado de libertad, se clasifican en: robots de tres (3) ejes, robots
de cuatro (4) ejes y robots de cinco (5) o más ejes.
Según el tipo de control:
• Secuencia controlada que se genera cuando los movimientos del
robot se realizan en un orden determinado.
• Trayectoria continua se presenta cuando se realiza una
trayectoria específica con tres o más ejes en movimiento para alcanzar la
posición deseada.
• Adaptativo este tipo de robot tiene un control sensorial,
61
adaptativo o funciones para control mediante aprendizaje.
• Teleoperado es operado por una persona.
Según la conformación de la estructura mecánica:
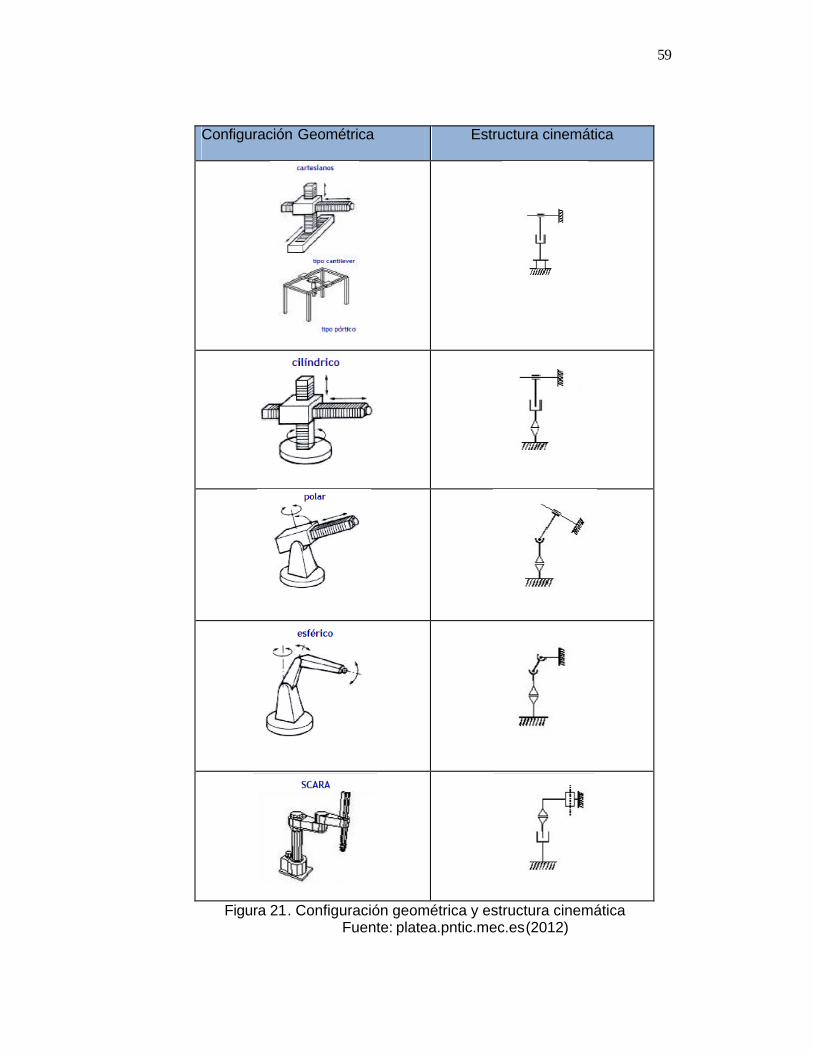
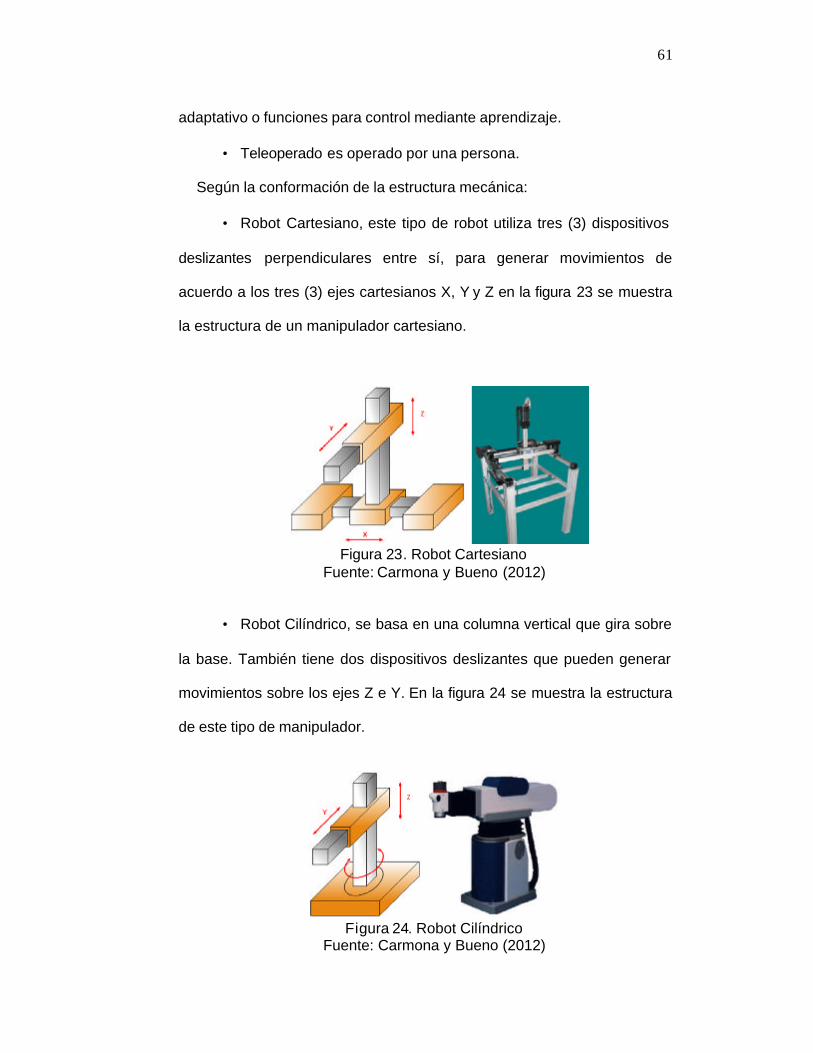
• Robot Cartesiano, este tipo de robot utiliza tres (3) dispositivos
deslizantes perpendiculares entre sí, para generar movimientos de
acuerdo a los tres (3) ejes cartesianos X, Y y Z en la figura 23 se muestra
la estructura de un manipulador cartesiano.
Figura 23. Robot Cartesiano
Fuente: Carmona y Bueno (2012)
• Robot Cilíndrico, se basa en una columna vertical que gira sobre
la base. También tiene dos dispositivos deslizantes que pueden generar
movimientos sobre los ejes Z e Y. En la figura 24 se muestra la estructura
de este tipo de manipulador.
Figura 24. Robot Cilíndrico
Fuente: Carmona y Bueno (2012)

62
• Robot esférico o polar, este manipulador utiliza un brazo
telescópico que puede bascular en torno a un eje horizontal. Este eje
telescópico está montado sobre una base giratoria. Las articulaciones
proporcionan al robot la capacidad de desplazar el brazo en una zona
esférica. A continuación se muestra en la figura 25.
Figura 25. Robot Esférico o Polar.
Fuente: Carmona y Bueno (2012)
• Robot de Brazo Articulado, está estructurado por una columna
que gira sobre la base. El brazo contiene una articulación, pero sólo
puede realizar movimientos en un plano. En el extremo del brazo contiene
un eje deslizante que se desplaza en el eje Z. El robot más común de este
tipo se conoce como robot SCARA. Ahora bien, en la figura 26 se muestra
su dinámica y un modelo de estos tipos de manipuladores.
Figura 26. Robot SCARA.
Fuente: Carmona y Bueno (2012)

63
• Robot Antropomórfico, este tipo de manipulador está constituido
por dos componentes rectos que simulan el brazo o antebrazo humano,
sobre una columna giratoria. Estos antebrazos están conectados
mediante articulaciones que se asemejan al hombro y al codo. En la
figura 27 a continuación se muestra este tipo de manipulador.
Figura 27. Robot Antropomórfico Fuente: Carmona y Bueno (2012)
Luego de desarrollar estos dos puntos , correspondientes a la
primera fase, se puede decir de esta manera, que queda cubierto el
primer objetivo de esta investigación relacionado con analizar el diseño
y funcionamiento de los manipuladores robóticos.
Fase II: Selección del Manipulador Apropiado Para llevar a cabo el desarrollo de esta fase, se llevara a cabo por
medio de dos (2) actividades la cual asocia a dos objetivos específicos, se
presentan a continuación:
1- Seleccionar el manipulador para realizar el modelado
matemático
Luego de haber hecho un estudio de las ventajas y funcionalidades
en la industria de los diferentes tipos de manipuladores de tres ejes

64
existentes en la actualidad, primeramente se considero realizar el análisis
del manipulador tipo Antropomórfico, pero éste ya posee un estudio muy
afondo tanto de sus características, utilidades y su modelado matemático,
por lo que se verifico nuevamente cual poseía mayores beneficios y que
por igual pueda servir de aporte para el entendimiento del modelo
matemático, tomando en cuenta que este manipulador efectuará sólo
funciones de posicionamiento..
Por lo anteriormente descrito, el modelo a estudiar será tipo
SCARA (Selective Compliant Assembly Robot Arm o Selective Compliant
Articulated Robot Arm), la razón por la cual se considera este manipulador
se debe a que es una combinación de dos brazos manipuladores: el brazo
articulado y el brazo cilíndrico, lo que lo hace un manipulador con muchas
ventajas.
En cuanto a funcionamiento en la industria, una de las principales
ventajas de este tipo de manipuladores, se muestran especialmente en
trabajos que se realizan en un plano, por otro lado dependiendo del
efector final podría ser utilizado para aplicaciones de soldadura, dispensar
o distribuir, guiado, coger y colocar (objetos o material), montaje de
componentes (por lo general electrónicos), entre otras. De igual forma,
son excelentes para gran capacidad de carga, área de trabajo extensa y
excelente repetitividad.
Este tipo de manipulador también es denominado como brazo
robótico de ensamblaje selectivo y compensado. Esto significa que el
movimiento del brazo robot se limita a dos dimensiones (eje X, Y);
mientras que es rígido para el eje Z, trabajando en coordenadas
65
cilíndricas donde el radio se trabaja con dos eslabones.
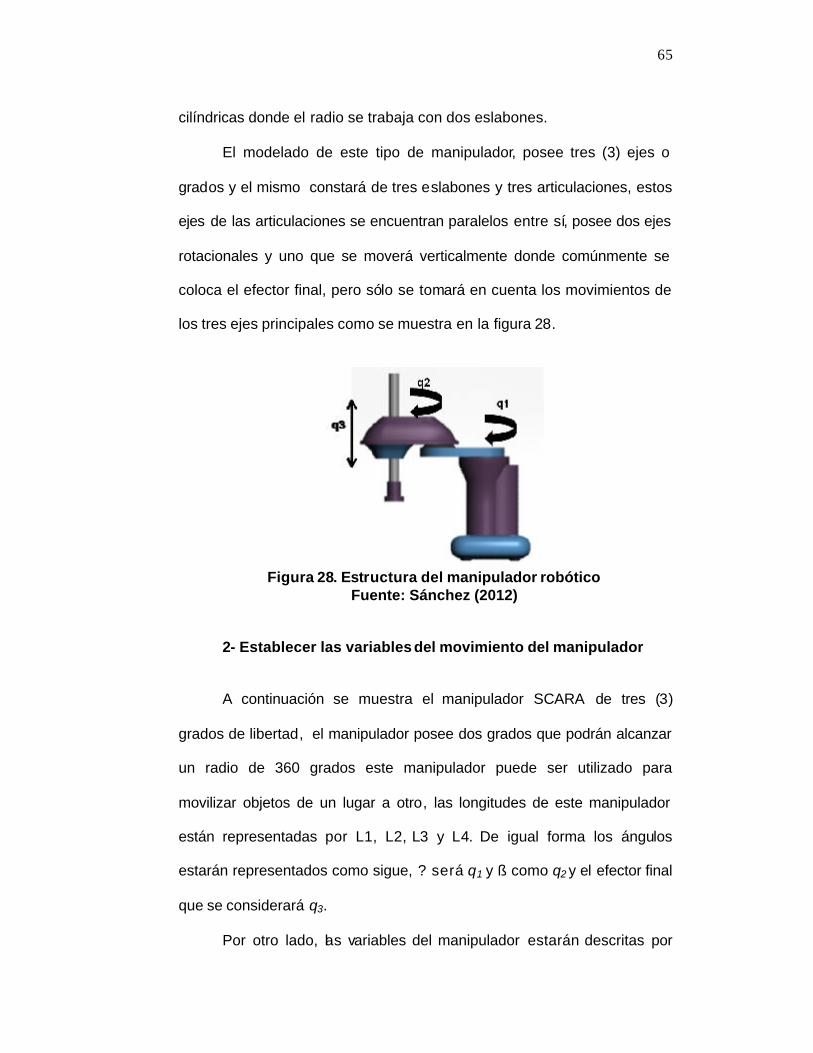
El modelado de este tipo de manipulador, posee tres (3) ejes o
grados y el mismo constará de tres eslabones y tres articulaciones, estos
ejes de las articulaciones se encuentran paralelos entre sí, posee dos ejes
rotacionales y uno que se moverá verticalmente donde comúnmente se
coloca el efector final, pero sólo se tomará en cuenta los movimientos de
los tres ejes principales como se muestra en la figura 28.
Figura 28. Estructura del manipulador robótico
Fuente: Sánchez (2012)
2- Establecer las variables del movimiento del manipulador
A continuación se muestra el manipulador SCARA de tres (3)
grados de libertad, el manipulador posee dos grados que podrán alcanzar
un radio de 360 grados este manipulador puede ser utilizado para
movilizar objetos de un lugar a otro, las longitudes de este manipulador
están representadas por L1, L2, L3 y L4. De igual forma los ángulos
estarán representados como sigue, ? será q1 y ß como q2 y el efector final
que se considerará q3.
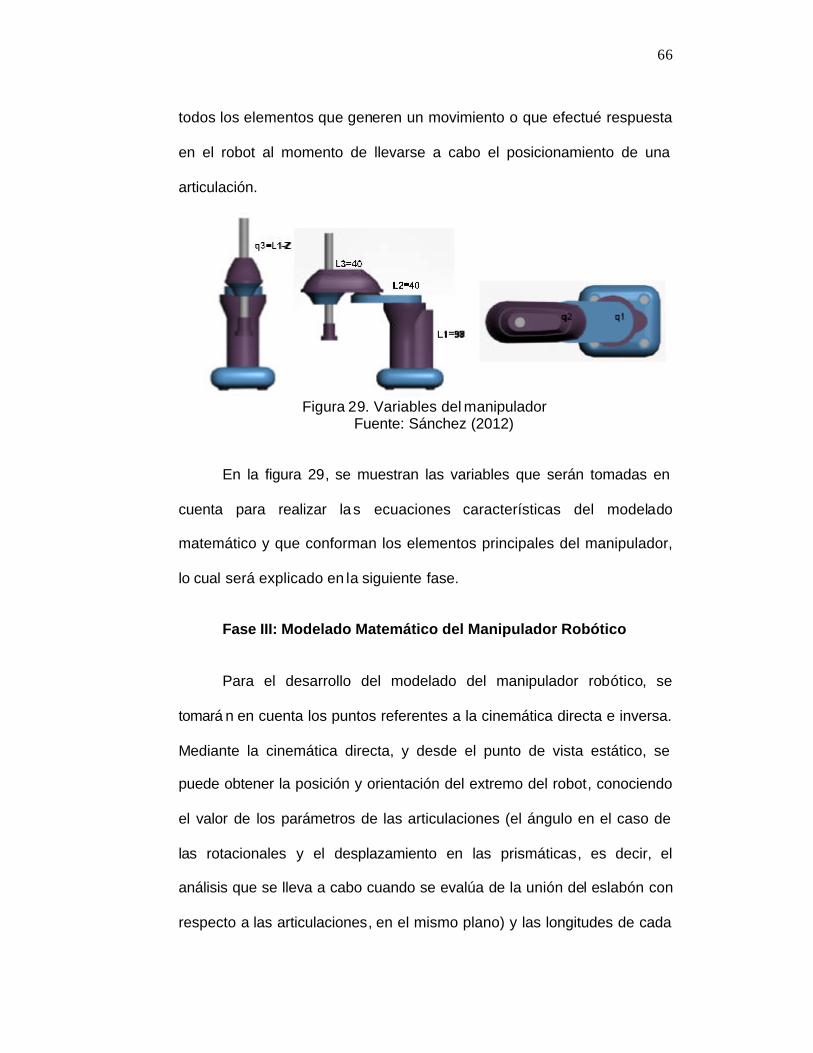
Por otro lado, las variables del manipulador estarán descritas por
66
todos los elementos que generen un movimiento o que efectué respuesta
en el robot al momento de llevarse a cabo el posicionamiento de una
articulación.
Figura 29. Variables del manipulador Fuente: Sánchez (2012)
En la figura 29, se muestran las variables que serán tomadas en
cuenta para realizar las ecuaciones características del modelado
matemático y que conforman los elementos principales del manipulador,
lo cual será explicado en la siguiente fase.
Fase III: Modelado Matemático del Manipulador Robótico
Para el desarrollo del modelado del manipulador robótico, se
tomará n en cuenta los puntos referentes a la cinemática directa e inversa.
Mediante la cinemática directa, y desde el punto de vista estático, se
puede obtener la posición y orientación del extremo del robot, conociendo
el valor de los parámetros de las articulaciones (el ángulo en el caso de
las rotacionales y el desplazamiento en las prismáticas, es decir, el
análisis que se lleva a cabo cuando se evalúa de la unión del eslabón con
respecto a las articulaciones, en el mismo plano) y las longitudes de cada

67
elemento, con respecto a un sistema de referencia ubicado, por ejemplo,
desde la base del robot.
Mientras que, teniendo en cuenta el movimiento, se puede obtener
con cuál velocidad lineal y angular se mueve el extremo del robot, cuando
las articulaciones lo hacen a una cierta velocidad. La cinemática inversa,
se obtiene de los valores que deben tomar los parámetros de las
articulaciones, para que el extremo del robot se posicione y oriente , de
una forma determinada y con cuál velocidad deben moverse éstas para
que el extremo del robot lo haga con la velocidad que se requiera.
Es decir, en el primer caso, los datos de entrada a la función de
cálculo de la cinemática (en este caso directa) son los ángulos o
desplazamientos de cada articulación y, como salida de la función, se
obtienen las coordenadas XYZ y los ángulos de orientación del elemento
terminal. Mientras que en el segundo caso los datos son las coordenadas
XYZ y los ángulos de orientación, y la salida, son los parámetros
articulares (ángulos y/o desplazamientos) de cada articulación.
A continuación se desarrollan los métodos anteriormente
explicados.
1- Establecer la cinemática directa
Para el desarrollo de la cinemática directa , se utilizaron los
parámetros utilizados por Denavit-Hartenberg los cuales se enfocan en la
evaluación de las longitudes y desplazamiento de las articulaciones, en
donde se desconoce los puntos de coordenadas en tres dimensiones ?(X,
Y, Z), el análisis es desarrollado utilizando unas matrices, serán

68
explicadas paso a paso a continuación:
Es de gran importancia entender primeramente como Denavit-
Hartenberg enfoca la utilización de las matrices a ser utilizadas para
representar el movimiento de los manipuladores, pero para resolver el
problema hay que considerar una serie de reglas.
1. Evaluar desde la base, hasta la punta o muñeca.
2. Dejar un eje fijo.
3. Realizar la matriz de transformación correspondiente.
4. Repetir el proceso.
5. La matriz final será M= A*B*C*…X siendo
Por ejemplo, la siguiente matriz.
Donde,
El vector de perspectividad inicialmente será (0, 0, 0), si hay una
69
traslación (es decir, cuando no hay rotación o movimiento alguno en el
pivote y se evalúa el eslabón como tal) y la rotación será la matriz de
identidad.
Por otro lado, si se presenta una rotación de uno de los ejes se
tomara en cuenta como se desplaza el movimiento y en qué plano (X, Y,
Z) utilizando las ecuaciones trigonométricas en cuanto a los ángulos y la
regla de la mano derecha.
Ahora bien, ya definido como se realizarán las ecuaciones
correspondientes, a continuación se evaluará el robot tipo SCARA.
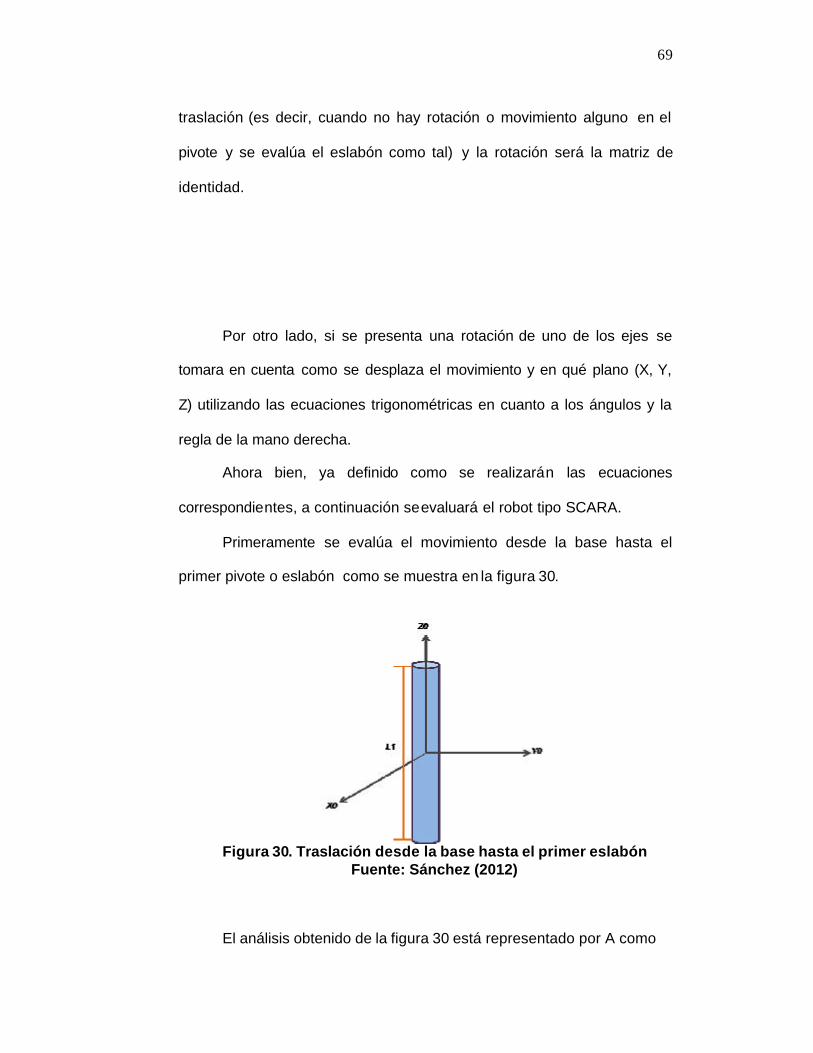
Primeramente se evalúa el movimiento desde la base hasta el
primer pivote o eslabón como se muestra en la figura 30.
Figura 30. Traslación desde la base hasta el primer eslabón
Fuente: Sánchez (2012)
El análisis obtenido de la figura 30 está representado por A como
70
sigue.
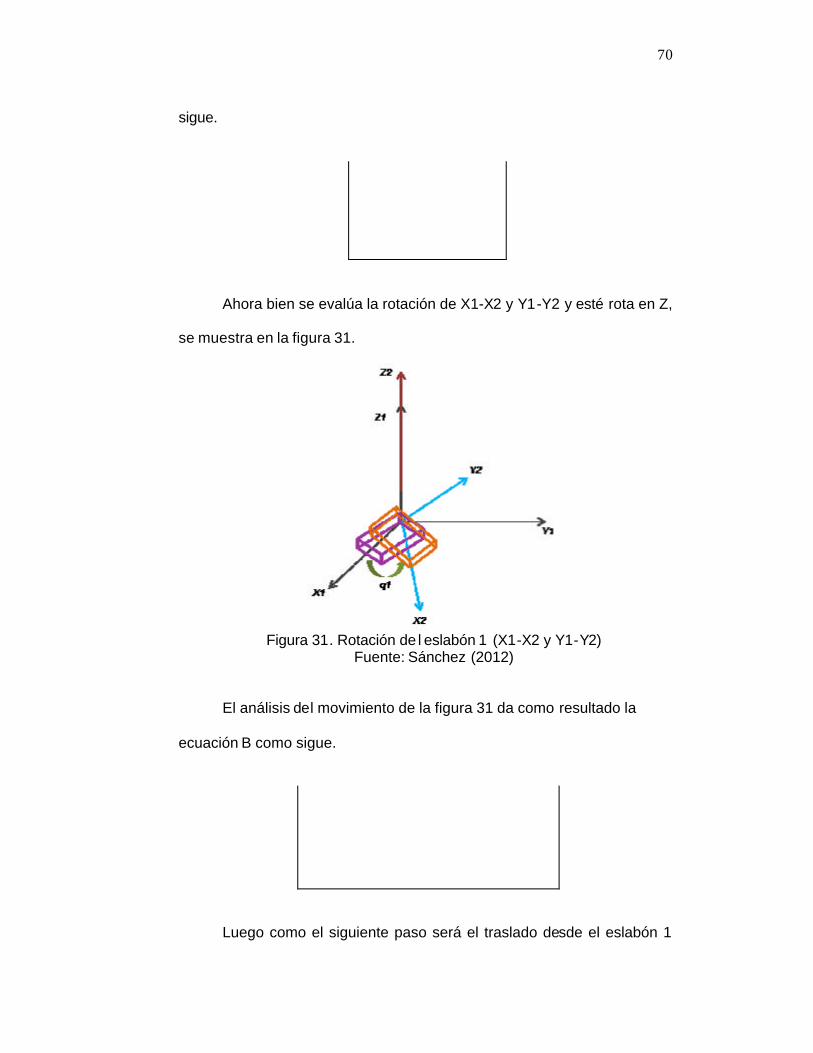
Ahora bien se evalúa la rotación de X1-X2 y Y1-Y2 y esté rota en Z,
se muestra en la figura 31.
Figura 31. Rotación de l eslabón 1 (X1-X2 y Y1-Y2)
Fuente: Sánchez (2012)
El análisis del movimiento de la figura 31 da como resultado la
ecuación B como sigue.
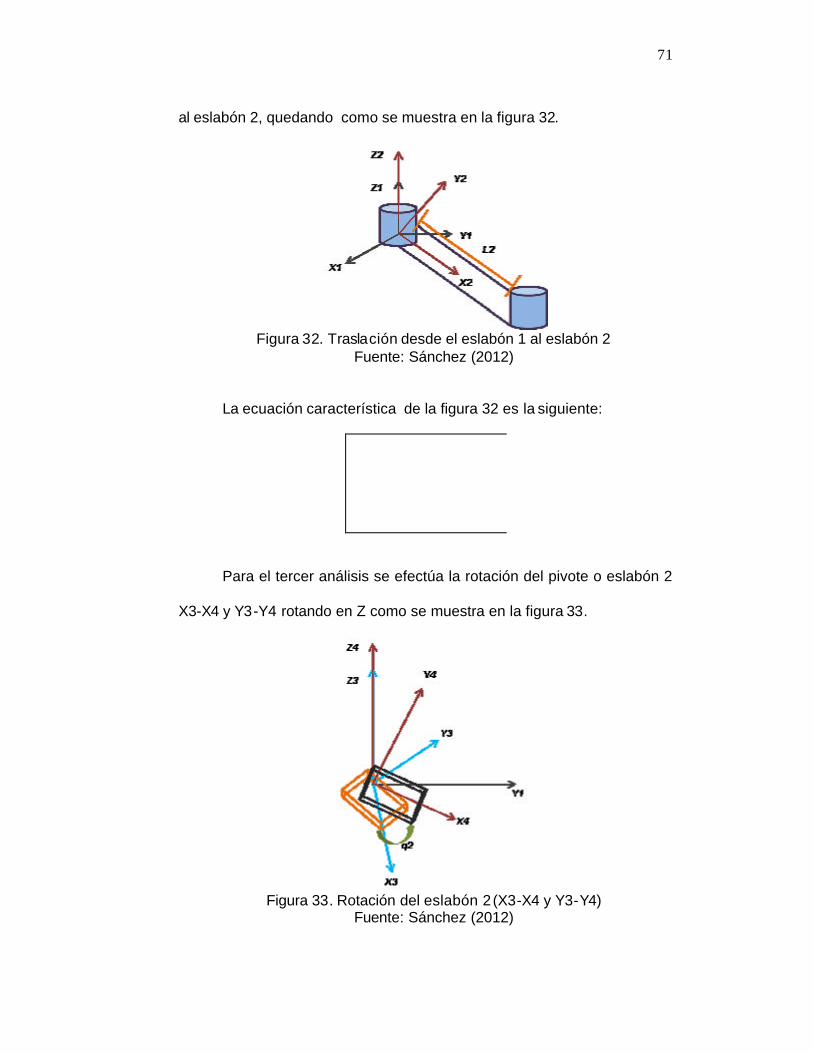
Luego como el siguiente paso será el traslado desde el eslabón 1
71
al eslabón 2, quedando como se muestra en la figura 32.
Figura 32. Traslación desde el eslabón 1 al eslabón 2
Fuente: Sánchez (2012)
La ecuación característica de la figura 32 es la siguiente:
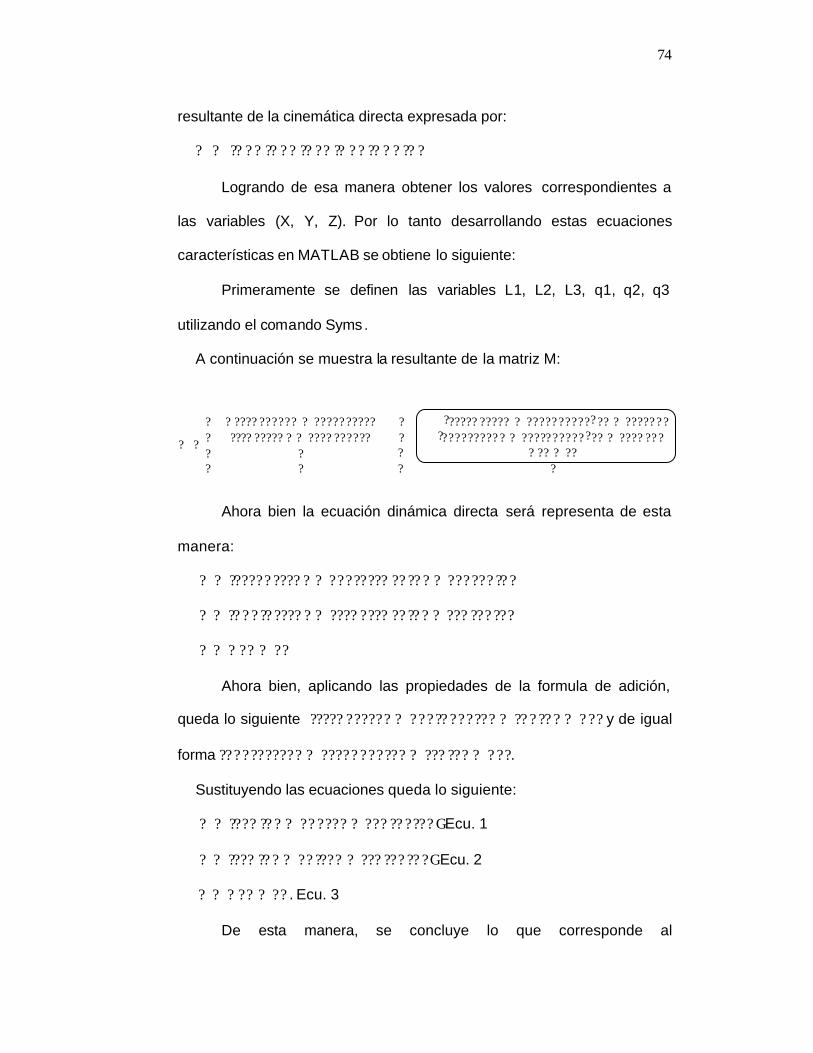
Para el tercer análisis se efectúa la rotación del pivote o eslabón 2
X3-X4 y Y3-Y4 rotando en Z como se muestra en la figura 33.
Figura 33. Rotación del eslabón 2 (X3-X4 y Y3-Y4)
Fuente: Sánchez (2012)

72
La ecuación D muestra el movimiento mostrado en la figura 33.
Ahora analizaremos el eslabón final este se encuentra ubicado en
el eje X y se mueve verticalmente pero antes que todo hay que realizar la
ecuación correspondiente a la traslación desde el 2 eslabón hasta donde
se encuentra el efector final. Como se muestran en la figura 34.
Figura 34. Traslación eslabón 2 hasta base vertical último eslabón
Fuente: Sánchez (2012)
Para el desarrollo de este análisis se considera como en los pasos
anteriores, la matriz será la identidad.
Por último, para el desplazamiento vertical se considera el último

73
eslabón y donde se considera que va el efector final, la figura 35 muestra
las dos (2) ecuaciones características.
Figura 35. Eslabón Vertical y efector final
Fuente: Sánchez (2012)
Las ecuaciones correspondientes se muestran a continuación:
Para el movimiento del efec tor se considera un q3 que será
considerada negativo porque el eslabón se desplaza en sentido contrario
a como se evalúa desde la base o origen del manipulador, donde será
igual a cero por no representar ningún movimiento en esa coordenada.
Quedando de esta manera la siguiente ecuación:
Ahora bien, luego de haber desarrollado los movimientos
característicos de los manipuladores tipo SCARA se procede a obtener la
74
resultante de la cinemática directa expresada por: ? ? �?? ? ? ?? ? ? ?? ? ? ?? ? ? ?? ? ? ?? ? Logrando de esa manera obtener los valores correspondientes a
las variables (X, Y, Z). Por lo tanto desarrollando estas ecuaciones
características en MATLAB se obtiene lo siguiente:
Primeramente se definen las variables L1, L2, L3, q1, q2, q3
utilizando el comando Syms.
A continuación se muestra la resultante de la matriz M:
? ? ? ? ???? ?? ? ? ? ? ? ????? ????? ���? �� �������?????? ????? ? ????? ? ? ? ? ?? ?? ? ????? ? ?? ???? ????? ? ? ???? ?? ? ? ?? �? �������?? ? ? ? ????? ? ? ????? ? ? ? ? ? ??? ? ???? ?? ??? ?? ? ����������������������������������������? ?? ? ?? �������������������������������? ������������������������������������������������? ���������������������������������������
Ahora bien la ecuación dinámica directa será representa de esta
manera:
? ? ????? ? ???? ? ? ? ? ? ?? ??? ?? ?? ? ? ???�?? ? ?? ?
? ? ?? ? ? ?? ???? ? ? ???? ? ??? ?? ?? ? ? ??? ?? ? ?? ?
? ? ? ? ? ? ? ?
Ahora bien, aplicando las propiedades de la formula de adición,
queda lo siguiente ????? ? ???? ? ? ? ? ? ?? ? ? ? ?? ? ? ?? ?�?? ? ? ? ? ? y de igual
forma ?? ? ? ?? ???? ? ? ???? ? ? ? ? ?? ? ? ??? ?? ? ? ? ? ?. Sustituyendo las ecuaciones queda lo siguiente:
? ? ????�?? ? ? ? ? ?�?? ? ? ???�?? ? ?? ? G Ecu. 1
? ? ???? ?? ? ? ? ? ??? ? ? ??? ?? ? ?? ? G Ecu. 2
? ? ? ? ? ? ? ? . Ecu. 3
De esta manera, se concluye lo que corresponde al

75
posicionamiento del extremo del robot del manipulador propuesto,
comúnmente considerado como la cinemática directa del manipulador tipo
SCARA.
2- Determinar la cinemática inversa
Ya determinada la cinemática directa, es necesario continuar con lo
que serian los valores que deben tomar las articulaciones para que de
esta manera se posicione y oriente en una determinada localización
espacial el robot. Este análisis depende en especial de la configuración
del robot. Primeramente se definen las matrices inversas de las
transformaciones homogéneas y utilizando el método geométrico, como
sigue:
Para q1,
Figura 36. Ángulo de alpha
Fuente: Sánchez (2012)
Despejando a obtenemos
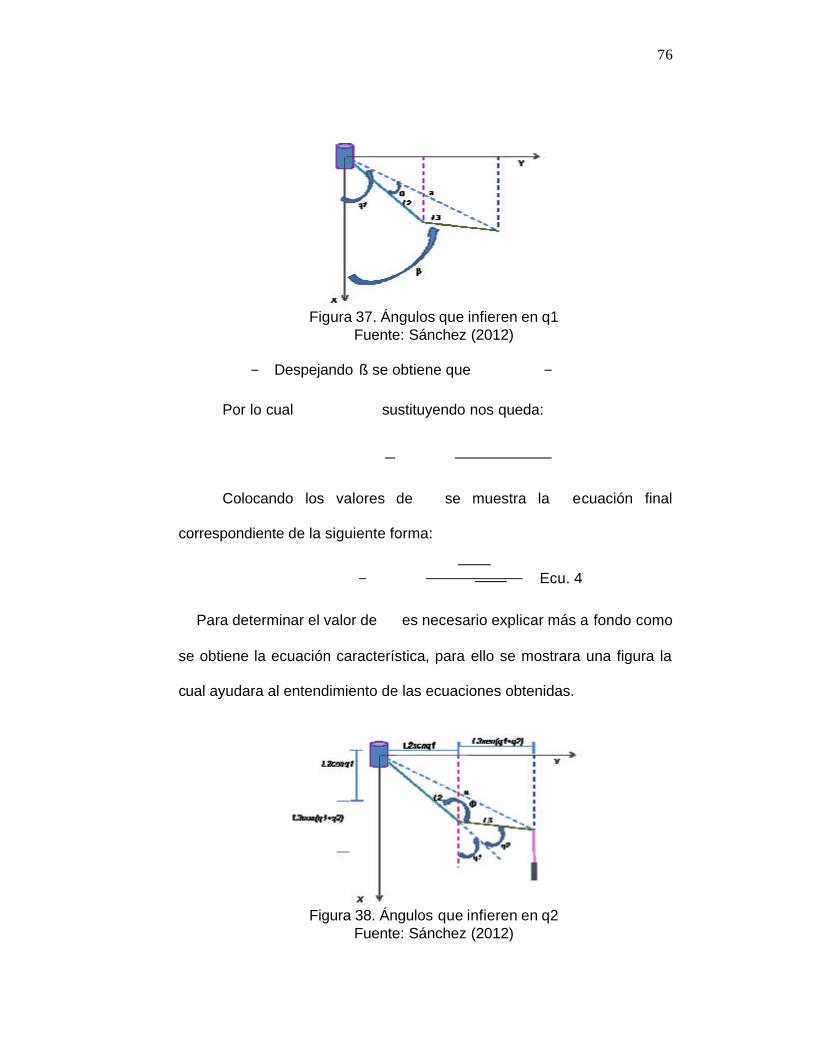
76
Figura 37. Ángulos que infieren en q1
Fuente: Sánchez (2012)
Despejando ß se obtiene que
Por lo cual sustituyendo nos queda:
Colocando los valores de se muestra la ecuación final
correspondiente de la siguiente forma:
Ecu. 4
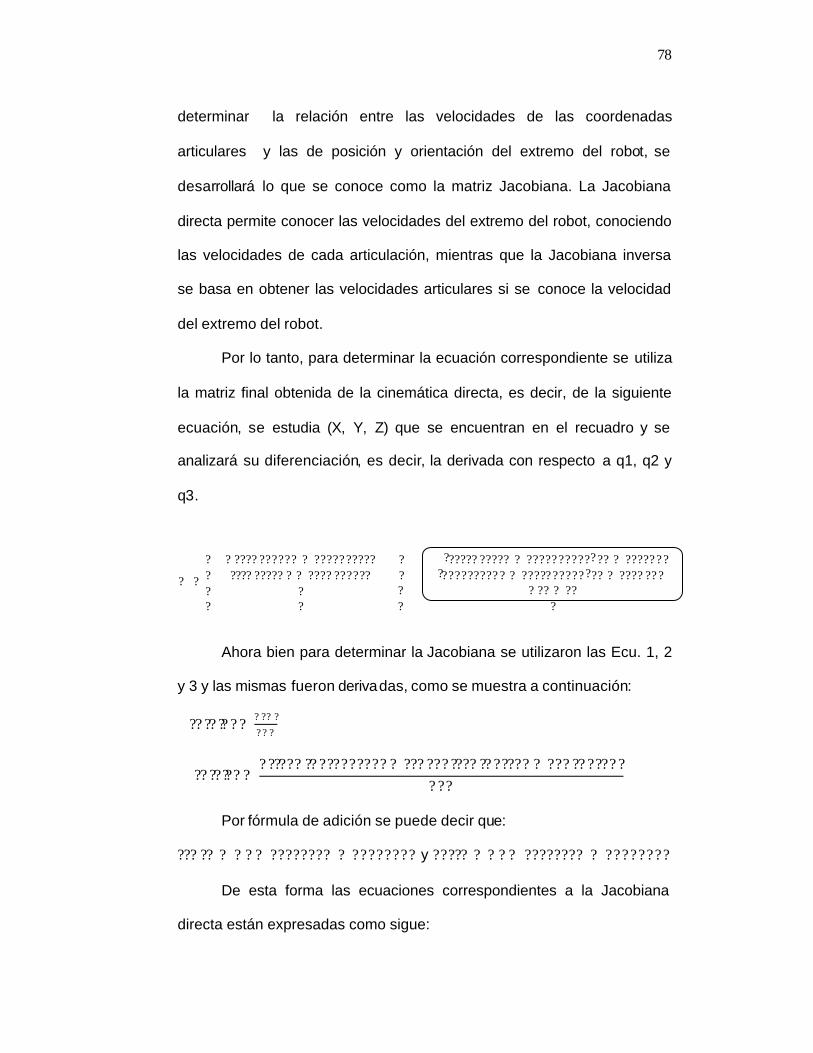
Para determinar el valor de es necesario explicar más a fondo como
se obtiene la ecuación característica, para ello se mostrara una figura la
cual ayudara al entendimiento de las ecuaciones obtenidas.
Figura 38. Ángulos que infieren en q2
Fuente: Sánchez (2012)

77
Despejando q2 obtenemos
Entonces despejamos
=
Quedando de esta manera que es igual a:
y esto a su vez es igual a
Ecu. 5
Por último para obtener el valor de q3 se dice que
Figura 39. Ángulos que infieren en q3
Fuente: Sánchez (2012)
. Ecu. 6
3- Determinar las ecuaciones correspondientes a las velocidades del manipulador utilizando el método Jacobiano
Luego de haber obtenido el modelo o las ecuaciones
correspondientes a la cinemática directa e inversa, pasaremos a
78
determinar la relación entre las velocidades de las coordenadas
articulares y las de posición y orientación del extremo del robot, se
desarrollará lo que se conoce como la matriz Jacobiana. La Jacobiana
directa permite conocer las velocidades del extremo del robot, conociendo
las velocidades de cada articulación, mientras que la Jacobiana inversa
se basa en obtener las velocidades articulares si se conoce la velocidad
del extremo del robot.
Por lo tanto, para determinar la ecuación correspondiente se utiliza
la matriz final obtenida de la cinemática directa, es decir, de la siguiente
ecuación, se estudia (X, Y, Z) que se encuentran en el recuadro y se
analizará su diferenciación, es decir, la derivada con respecto a q1, q2 y
q3.
? ? ? ? ???? ?? ? ? ? ? ? ????? ????? ���? �� �������?????? ????? ? ????? ? ? ? ? ?? ?? ? ????? ? ?? ???? ????? ? ? ???? ?? ? ? ?? �? �������?? ? ? ? ????? ? ? ????? ? ? ? ? ? ??? ? ???? ?? ??? ?? ? ����������������������������������������? ?? ? ?? �������������������������������? ������������������������������������������������? ���������������������������������������
Ahora bien para determinar la Jacobiana se utilizaron las Ecu. 1, 2
y 3 y las mismas fueron derivadas, como se muestra a continuación:
?? ?? ?? ? ? ? ?? ?? ? ?
�����?? ?? ?? ? ? ? ?????�?? ? ?? ? ?�?? ? ? ? ??? ?? ? ???? ?? ? ??? ? ? ???�?? ? ?? ? ?? ? ?
Por fórmula de adición se puede decir que: ??? ?? ? ? ? ? ???????? ? ? ? ? ? ? ? ? ? y ????? ? ? ? ? ???????? ? ? ? ? ? ? ? ? ? De esta forma las ecuaciones correspondientes a la Jacobiana
directa están expresadas como sigue:

79
�����?? ?? ?? ? ? ? ? ? ??? ? ? ? ? ?? ? ? ? ? ?�?? ? ?? ?? ? ?
Por propiedades de las derivadas:
• ??? ???? ? �? ? ? ? ? ? ?? ?
• ??? ? ? ? ? ? �???? ? ?? ?
?? ???? ? ? ? ? ? ??? ?? ? ? ? ? ? ? ? ? ??? ?? ? ? ?? ?? ?? ? ? ? ?? ?? ? ?
�?? ???? ? ? �? ?? ??? ?? ? ? ? ? ? ?? ?? ?? ? ? ? ?? ?? ? ?
?? ???? ? ? ?
?? ?? ?? ? ? ? ?? ?? ? ?
?? ???? ? ? ? ? ????? ? ? ? ? ? ? ? ? ????? ? ? ?? ?? ?? ? ? ? ?? ?? ? ?
�?? ???? ? ? ? ? ? ? ??? ? ? ? ? ? ?? ?? ?? ? ? ? ?? ?? ? ?
?? ???? ? ? ?
?? ?? ?? ? ? ? ???? ? ?

80
�?? ???? ? ? ?
?? ?? ?? ? ? ? ???? ? ?
?? ???? ? ? ?
?? ?? ?? ? ? ? ???? ? ?
�?? ???? ? ? ? ?
Por lo tanto se puede representar la matriz Jacobiana como sigue:
�����? ? ?? ?? ??? ?? ? ? ? ?? ? ?? ??? ?? ?? ? ?? ??? ?? ? ? ? ?? ��??? ????? ? ? ? ? ?? ?? ????? ? ? ������?? ????? ? ? ? ? ? ��?? ? ? ? ? Ecu. 7
Ahora, se hallará lo correspondiente a la matriz de la Jacobiana
Inversa. Para ello, se utilizará las ecuaciones obtenidas de la cinemática
inversa y se analizará su diferenciación:
De las ecuaciones q1, q2 y q3 obtenidas de la cinemática inversa,
se derivara en función de (X, Y, Z) para de esta manera obtener las
matrices correspondientes a las velocidades articulares.
Tal como se analizó la Jacobiana directa serán efectuadas estas
ecuaciones.
? ? ? ??•? ? ?? ? ???? ? ?? ? ? ? ? ? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? ? ? ? ? �����? ? ? ? ? ? ?? ? ? ? ?? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? �����? ? ? ? ? ? ?

81
?????? ? ? �? ? ??? =
? ??? ? ? ?? ? ???? ? ?? ? ? ? ? ? ? ? ? ? ? ? ?? ?? ? ?? ?? ? ? ? ? ? ?
??
Utilizando la ecuación correspondiente a la derivadas de la
funciones trigonométricas y de las trigonométricas inversas de Spiegel.
Se dice que la ?? ? ??? ? ? ? ? � ? ?? ? ? ? ? ? ?? ? ; ??? ??•? ? ? ? ?? ? ? ? ? ?? ?
???? ?? ? ? ??? ? ?? ? ??? ?? ??? ?? ??? ? ? ??
?
????? ?
? ? ? ??? ? ? ? ? ? ? ? ?? ?? ?? ? ? ? ? ? ? ? ? ???? ? ? ?? ?? ? ? ? ? ? ?
? ?? ? ? ? ? ? ? ? ?? ?? ? ? ? ?? ? ?
�???? ?? ? ? �?? ?? ? ? ?? ? ? ? ?? ?? ??? ? ? ?? ? ? ? ? ? ? ?? ? ? ? ? ?? ? ? ? ? ? ? ? ?? ??? ? ? ? ? ? ?? ??
? ? ?? ? ? ? ? ?? ? ?? ???? ? ?? ? ?
???? ?? ? ? ?
???? ?? ? ? ? ?? ? ? ? ? ? ? ? ?? ? ?? ? ? ? ? ? ???? ?? ? ??

82
???? ?? ? ? ?? ? ? ? ? ? ? ? ?? ? ?? ? ? ? ? ? ???? ? ? ??
???? ?? ? ? ? ???? ?? ? ? ? ???? ?? ? ? ? ???? ?? ? ? ? ?
Estas ecuaciones se muestran en una matriz 3x3 de la siguiente
manera.
??? ? ???? ??? ???? ?? ? ???? ?? ????? ?? ? ???? ?? ? ???? ?? ????? ?? ? ???? ?? ? ???? ?? ? Ecu. 8
Dicho de otro modo, para determinar la velocidad con un método
un poco más sencillo, es necesario llevar a cabo lo correspondiente a la
relación diferencial, esto no es más que la relación entre las velocidades
articulares y del extremo del robot, consiste en diferenciar las ecuaciones
correspondientes al modelo cinemático directo, es decir, se consideran las
ecuaciones 1, 2 y 3 correspondientes a ? , Y y Z respectivamente como
sigue,
? ? ????�?? ? ? ? ? ?�?? ? ? ???�?? ? ?? ? G ? ? ???? ?? ? ? ? ? ??? ? ? ? ? ???? ?? ? ???? ?? ? ??G
? ? ? ? ? ? ? ? .
Luego por medio de la ecuación (8) se expresara en forma matricial ? , Y y Z pero derivadas de la siguiente manera:

83
??????? ?? ?? ?? ?? ??????
??? ? ? ?????????????? ????
? Donde ? ? ???
??? ??? ? ???? ??? ? ?
g??gg??g
? ??? ? ???? ??? ? ? ????? Ecu. 8
De la ecuación de la cinemática directa se deriva ? , Y y Z
respectivamente, y quedaría expresado de la siguiente manera la
ecuación característica de la relación diferencial.
Ahora bien, para determinar el valor de la ecuación de la relación
diferencial primeramente se derivan las ecuaciones correspondientes a ? , Y y Z del modelo de la cinemática directa se obtiene:
? ?? ? ? ? ???? ?? ? ? ? ? ??? ?? ? ? ? ? ?? ? ? ? ? ? ???? ?? ? ??? ? ?? ? ??
? ?? ? ? ?? ? ?�?? ? ? ? ? ??? ?? ? ? ? ? ?? ??? ? ? ? ????�?? ? ??? ? ?? ??
? ?? ? ? ?? ?? ? ; Donde ? variara dependiendo del cuadrante de la matriz que
se este analizando se considerara como (? ? ?? ? �? �? ? )
De esta forma se obtiene la ecuación de diferencial que se
determina por medio de la siguiente ecuación:
???????? ? ??????? ?? ??? ?? ? ? ?? ? ?? ?????? ??? ?? ? ? ?? ??? ???? ?? ??? ??? ? ?? ? ?? ??? ????
??
????? ??? ? ?? ?? ????? ? ? ? ?? ? ?? ??? ?? ? ?? ? ?? ??? ?? ? ? ? ? ? ??? ??? ?? ? ? ? ?? ? ?? ???�?? ? ? ?? ???�?? ? ? ? ?? ?? ? ? ? ??? ??? ??? ??? Ecu. 9
84
Cabe considerar por otra parte , que el determinante de la matriz
Jacobiana está determinado como sigue:
??? ? ? ??? ? ???? ??•??? ? ?? ? ? ?? ??? ??? ?????????? ? ? ?? ?? ? ??? ?? ??? ??? ? ?? ? ???? ?????? ? ?? ? ??? ???? Agrupando y simplificando quedaría la ecuación como sigue:
??? ? ?? ? ? ? ??? ?? ? ? ????? ? ? ? ? ? ? ?? ? ? ? ??? ?? ? ? ? ? ? ????? ? ?? Por tanto , utilizando las propiedades de la formula de adición ??? ?? ? ? ? ? ??? ?? ?? ? ?�?? ? ? ????? ? ??? ?? ? la Jacobiana quedaría
entonces de la siguiente forma:
??? ? ? ? ? ? ???? ?? ? ? ? ? ? ? ? ?? Obteniendo de esta manera la
determinante final correspondiente a:
??? ? ? ? ? ? ? ??? ?? ? ? Ecu. 10; Donde las singularidades, es decir, su
determinante se anula cuando por ejemplo ??? ? ? , esto es ??? ?? ? ? ???? ?? ? ? ? , es decir, cuando ? ? ? ? ?? .
Por otra parte de la cinemática inversa de posición se tiene que:
? ? ? ???? ? ?? ? ? ? ? ? ??? ? ? ?? ?? ? ?? ? ??
Posición de codo abajo:
? ? ? ??•? ? ?? ? ???? ? ?? ? ? ?? ? ?? ?? ? ?? ? ?? ?? ? ? ?? ? ? ? ?
Posición de codo arriba:
? ? ? ??•? ? ?? ? ???? ? ?? ? ? ?? ? ?? ?? ? ?? ? ?? ?? ? ? ?? ? ? ? ?

85
? ? ? ? ? ? ?
Modelo cinemático inverso de la Velocidad ??? ?? ? ? ? Que se determina por la multiplicación de la determinante ?? ?? y la
inversa de la matriz de relación diferencial ??? ? ?. Donde la matriz inversa
puede ser determinada por el método de Gauss Jordán, es decir, el
cálculo se realiza mediante transformaciones elementales de filas
utilizando la Ecu. 9, a través de la adición en paralelo de una matriz
identidad y mediante operaciones elementales de filas se trata de
alcanzar que la matriz original de la Ecu. 9 pase a ser la matriz identidad y
donde la matriz identidad se transforme en la matriz inversa. Luego de
haber desarrollado este método se consigue la siguiente matriz resultante.
La cual se comprueba al multiplicar la matriz ? ? ? ? ? ? ?G De la ecuación de la Jacobiana directa o Ecu. 9, tenemos entonces:
????????? ? ? ??? ? ? ?????? ? ? ? ? ? ? ? ??? ?? ? ?? ? ? ? ??? ?? ? ? ? ? ? ??? ????? ? ? ?? ? ? ?? ???�?? ? ? ?? ???�?? ? ? ?? ? ?? ? ? ? ??? ? ?? ? ?? ? ? ??�?? ??? ?? ??? ?? ??? ?? ?? ?? ??
????????? ?? ?? ? ?? ? ?? ? ? ??? ?? ???�??? ? ?? ? ? ?? ?????? ? ??? ? ?? ???�??? ? ??? ??•??? ? ?? ? ????? ??? ? ?? ? ? ?? ??? ??? ? ?? ? ?? ?? ??? ???? ??? ??? ? ??? ? ?????? ? ?? ? ????????? ?? ??? ? ???? ??? ?? ?? ?? ?? ??
????????? ? ?�? ?? ? ? ?? ? ? ?? ? ? ?
86
?? ?? ??? �??? ? ?? ? ? ?? ?????? ? ??? ? ?????�??? ? ??? ??•??? ? ?? ? ?? ??? ??? ? ??? ? ?? ??? ??? ? ?? ? ?? ?? ??? ??? ? ?????? ? ?? ? ? ??? ??? ? ??? ??? ??? ???? ?? ?? ?? Ecu. 11
Luego de haber obtenido las ecuación características de la
cinemática directa e inversa y sus velocidades respectivas queda cubierta
la fase III correspondiente el objetivo cuatro (4) denominado desarrollar el
modelo matemático que represente el manipulador robótico. Pasando de
esta forma a la última fase de esta investigación evaluación del diseño
que será analizada a continuación.
Fase IV: Evaluación del Diseño
Para llevar a cabo el desarrollo de esta fase, en correspondencia al
quinto objetivo de esta investigación dirigido a validar por medio de
pruebas el funcionamiento del sistema, se realizaran una serie de pruebas
a las ecuaciones finales desarrolladas en el capitulo anterior, es decir, se
verificarán las ecuaciones del robot de la cinemática directa e inversa y la
Jacobiana; en tal sentido se tomara n puntos aleatorios de lo que se
espera que el manipulador ejecute, para que ejecute la posición deseada
y por último para demostrar la Jacobiana se tomara la ecuación de
relación diferencial con el fin de determinar la velocidad con la cual el
manipulador funcionara adecuadamente.
La validación es el proceso de llevar a un nivel aceptable la
confianza del usuario referente a que cualquier inferencia acerca de un
sistema que se derive de la simulación correcta. Para la validación de los
modelos cinemáticos directo e inverso, los datos resultantes de la

87
simulación directa se introducen en la inversa y viceversa, obteniendo una
total congruencia de los resultados, por lo que se considera una
validación confiable, puesto que la solución de cada modelo fue realizado
por métodos independientes.
Para validar el modelo matemático se tomaran en cuenta las
características tanto de estructura física como área de trabajo de un
manipulador real. El cual se tomara en cuenta, para validar los modelos
matemáticos obtenidos de la cinemática directa e inversa. El modelo a
utilizar se muestra en los Anexos 1 y 2. Para llevar a cabo la validación
del modelo de la cinemática directa se consideraran las ecuaciones para
determinar X, Y y Z respectivamente.
�����? ? ?? ? ?�?? ? ? ? ? ?�?? ? ? ? ? ?�?? ? ?? ? G �����? ? ???? ?? ? ? ? ? ??? ? ? ??? ?? ? ???? ?? ? ?G ? ? ? ? ? ? ? ? .
Primeramente se validara las ecuaciones correspondientes a la
cinemática inversa, se colocaran valor a ? y ? respectivamente y se
sustituirán en las ecuaciones de la cinemática directa, es decir, ? ? �y ? ? se
sustituirán a la ecuaciones respectivas a la cinemática directa y los
valores obtenidos deben ser igual a los asignados primeramente en el
cálculo de los ángulos. De igual manera, para realizar estos análisis se
utilizo el programa MATLAB para realizar las ecuaciones respectivas y de
esta manera llevar a cabo de forma eficiente y precisa el cálculo de dichos
análisis. Ahora bien, para el análisis se consideraron las ecuaciones.
Para realizar la validación de las ecuaciones correspondientes a la

88
cinemática inversa con el fin de hallar q1 y q2 respectivamente se le
asigno valor a ? y Y , en tal sentido ? ? ? ? y ? ? ? ? ; luego q1 y q2 serán
sustituidas en las ecuaciones de la cinemática directa y si el resultado es
igual al valor asignado inicialmente se comprueban los modelos.
Del robot a analizar se consideran las siguientes especificaciones;
por otro lado, es importante recalcar que en este tipo de brazos , el
eje Z no interviene en la cinemática inversa porque es un resultado en sí
mismo. Desde el punto de vista del cálculo sólo tenemos en cuenta los
ejes ? e ? , y la longitud de las articulaciones.
? ? ? ? ?? y ? ? ? ? ?? base del manipulador robótico.
? ? ? �? ? ? ? ? ? ? ? ?? ?? �����? ? ? �? ? ? ? ? ? ? ? ?? �����? ? ? �? ? ? ? ? ? ? ? ??
El desarrollo del análisis realizado en el programa MATLAB dicha
programación encuentra en el anexo 3 a continuación se muestra los
resultados de este análisis:
Considerando primeramente valores arbitrarios para ? ?? se hayan
los valores correspondientes a ? ? ?? ? sustituyéndolas en las ecuaciones
características de la cinemática inversa
? ? ? ??•? ? ?? ? ???? ? ?? ? ? ? ? ? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? ? ? ? ? �����? ? ? ? ? ? ?? ? ? ? ?? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?? ? ? ? ? ? ? ? �����? ? ? ? ? ? ?
Solo se analizaran las variaciones correspondientes a ? ? ?? ? y ? ??
89
por ser rotacionales mientras que y es lineal.
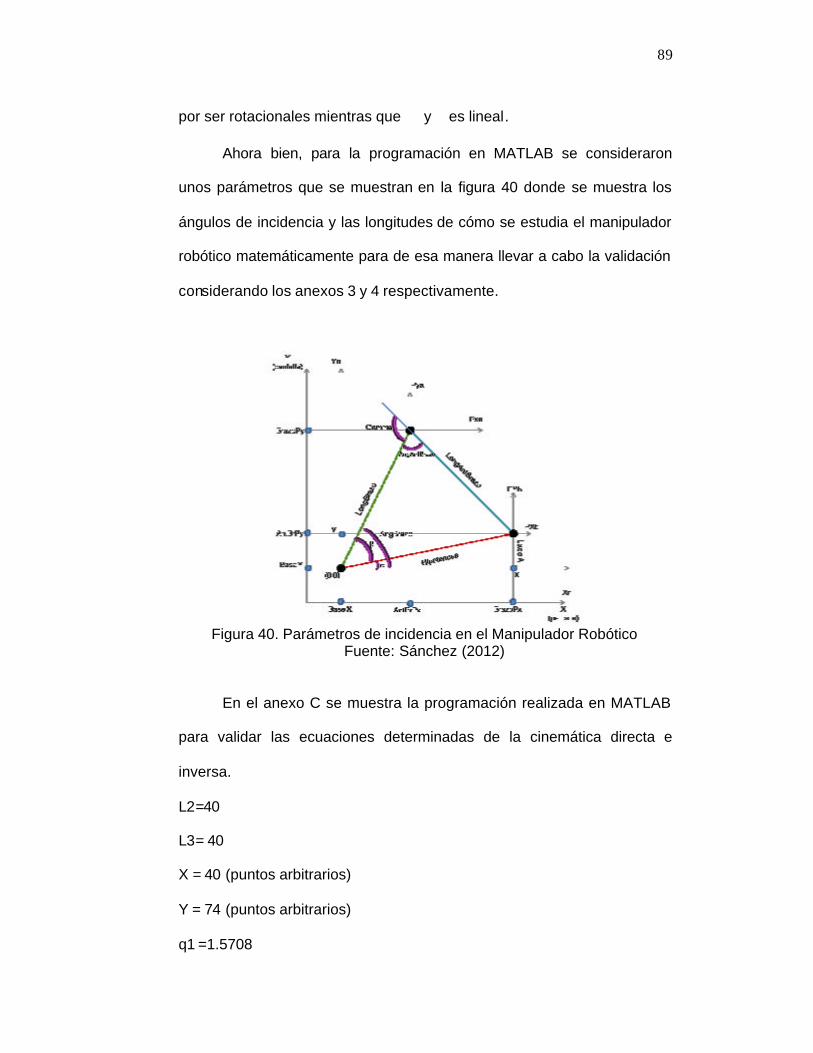
Ahora bien, para la programación en MATLAB se consideraron
unos parámetros que se muestran en la figura 40 donde se muestra los
ángulos de incidencia y las longitudes de cómo se estudia el manipulador
robótico matemáticamente para de esa manera llevar a cabo la validación
considerando los anexos 3 y 4 respectivamente.
Figura 40. Parámetros de incidencia en el Manipulador Robótico
Fuente: Sánchez (2012)
En el anexo C se muestra la programación realizada en MATLAB
para validar las ecuaciones determinadas de la cinemática directa e
inversa.
L2=40
L3= 40
X = 40 (puntos arbitrarios)
Y = 74 (puntos arbitrarios)
q1 =1.5708

90
q2 = -1.5708
X = 40
Y = 40.0000
Por lo que se comprueban las ecuaciones correspondientes a la
cinemática directa e inversa respectivamente.
Siguiendo con el mismo orden de ideas, para validar la velocidad
del manipulador se tomara en cuenta las ecuaciones descrita en el
método de la Jacobiana de la siguiente manera , y para realizar los
análisis se utilizo el programa MATLAB, para de esta manera para llevar
cálculos con exactitud.
???????? ? ?? ?? ?? ? ? ?? ? ? ? ? ? ?? ??? ?? ?? ? ?? ??? ?? ? ? ? ?? ??? ????? ? ? ? ? ?? ?? ???�?? ? ? ?? ???�?? ? ? ? ? ? ?? ? ? ? ??? ??? ??? ??? Se coloca primeramente valores arbitrarios a ????? ??? ???; ? ?? ? ? ?????? ?� ? ?? ? ? ?? ? ? ?? ? ? ?� ? ?? ? ? ? ?? ? ? ? ? ? ? �?? ? ? ? ? considerando que se encuentran
en un momento dado en la posición y que se mueve a una velocidad
constante ? ? y q2 su unidad es rad/seg se considera en esa unidad por
los movimientos que ejecutan por las articulaciones es de rotación
mientras que q3 es en m/seg ya que se encuentra desplazándose sobre
un eje perpendicular al plano, entonces dicho esto desarrollamos la
ecuación y se obtiene.
???????? ? ?? ? ? G? ? ? ?? ? ?G? ? ? ?? ? ? Siendo esta la velocidad del extremo del robot
conociendo la velocidad articular que se tomo como referencia.
Luego de conocer la velocidad del extremo del robot, se calcula la

91
ecuación correspondiente a la velocidad articular por medio de la
siguiente ecuación característica.
????????? ? ?�? ?? ? ? ?? ? ? ?? ? ? ??? ?? ??? �??? ? ?? ? ? ?? ?????? ? ??? ? ?????�??? ? ??? ??•??? ? ?? ? ?? ??? ??? ? ??? ? ?? ??? ??? ? ?? ? ?? ?? ??? ??? ? ?????? ? ?? ? ? ??? ??? ? ??? ??? ??? ???? ?? ?? ?? Donde entonces decimos que,
?? ??? ??? ? ? ? ? ? G? ? ? ?? ? G? ? ? ?? ?; Como estos valores están en rad y los valores
primeramente fueron tomados como angulares este resultado se
multiplica por ? ? ??? esto se hace con el fin de ver si la ecuación
característica posee relación una con la otra y de ser así pues entonces
se comprueba las ecuaciones de las velocidades. La programación de la
validación de la relación entre la velocidad angular y articular se muestra
en el anexo D.
Ahora bien ?? ??? ??? ?? ? ? ? G? ? ? ?? ? G? ? ? ?? ? ? ????? ? ? ? ?? ? ?? ? ? ? ? ??? ? ??? ? se comprueba de
esta manera las ecuaciones de velocidad.
Luego de haber validado las ecuaciones correspondientes a la
cinemática y velocidades correspondientes al manipulador SCARA, se
finaliza la fase denominada evaluación del diseño correspondiente al
último objetivo de la investigación validar por medio de pruebas el
funcionamiento del sistema, llegando de esta forma a la culminación de
este proyecto.