universidad autonoma metropolitana i148.206.53.84/tesiuami/uam6564.pdf · las terminales ( como...
TRANSCRIPT
U N I V E R S I D A D A U T O N O M A M E T R O P O L I T A N A
I ztapal apa
P r o y e c t o T e r m i n a l
/’ . R e d de C o n t r o l M o d u l a r
Asesores t
- M.C. Fausto Casco Sanchez - Ing. Joaquín PBrez Suarez
A l u m n o s :
- Jest5ts Francisco Sánchaz B l a n c o *
- Juan C a s t r e j d n Milián
- Javier Fernando Guillén siles
L Y
L L C . T Y B . ;E-L-T-hv\.Lr Lh-
.
I N D I C E
I . I n t r o d u c c i ó n
2 . D e s c r i p c i ó n
2 . 1 C e n t r a l d e Proceso
2 . 2 Unidad d e Modulac ión d i g i t a l
2 . 3 E t a p a d e T r a n s m i s i 6 n / R e c e p c i b n
2 . 4 Ter-.mit-tal d e C o n t r o l
2 . 5 Termina l b á s i c a d e eJecucic5n
146255
3 . F . S . K .
3 . 1 I n t r o d u c c i ó n a l a modulacifrn d i g i t a l
3.2 F . C . K . D e f i n i c i ó n
3 e 3 f . S. t i . Transm i sor 3 . 4 F . S . K . Anchct dé Banda
3 . 5 F. S. K. f?E.C@ptOt-.
3 . 6 Dise-ño
4 . Sistema Basado et? e l Mict -oprocesador 8088
4 . 1 D e s c r i p c i ó n Genera l
4 . 2 M ó d u l ~ 1 : Micrupt- .ocesadot~ y C o n t r o l a d o r d e R e l ~ j .
4 . 2 . 1 D e s c r i p c i á n d e 112s componentes
4.3 Mddulo 2 : D e c o d i f i c a c i 6 n d e Memorias
4 . 3 . 1 Descr ipc i6 t - i d e 113s Componentes
4 . 4 Módulo 3 : C o n t r o l a d o r de I n t e r r u p c i o n e s / P u e r t o P a r a l e l o
4 . 4 . 1 D e s c r i p c i ó n d e lrss componentes
4 . 5 Mddulcs 4 : C o n t r o l a d o r d e T e c l a d o e I n d i c a d o r e s
4 . 5 . 1 D e s c r i p c i ó n de 113s componentes
5 . Q p e r a c i d n
5 . 1 F u n c i o n a m i e n t o Genera l
5.2 F u n c i o n a m i e n t o T k c n i c o
5 . 3 Comandns
h . A p 1 i c ac i C I ~ I E ~ S
7 . B i b l i o g r a f í a
I
1. INTRoDuCCIoN
1. Introducci6n.
En la actualidad existe una cierta
conveniencia hacia tratar de llevar un control de todos los
procesos que se realizan en la rama de ingeniería, tanto en su
parte comercial como en la industrial.
La parte electrbnica cumple entonces una buena ayuda hacia
el control requerido para estos; por lo que es necesario
desarrollar una tecnologia que satisfaga y mejore l o s cada vez
más nuevos procesos de desarrollo.
Para hacerse participe de el problema, surge la idea de
poder llevar un control de distintas terminales operativas pclr
medio de una central; con lo que el proceso de revisar muchos
procesos, se reduce a una sola gente y aun sistema de respaldo
que sostiene todo el funcionamiento.
Para mejorar aún lo antes dicho, darenios alternativa a que
el control pueda realizarse en terminales que esten situadas
lejos de la central y tratar de que el costo de interconexi6n
sea el menor posible; para dar solucibri a lo planteado, tenemos
que el sistema de control se puede llevar por señales de
radiofrecuenciencia. Si la telefonía en nuestros dias inarca ya
una comunicación inalámbrica, por que nn poder hacer que los
nuevos controladores tambikn posean esta cualidad.
2. DESCRIPCION
2. Descripción.
La red de control modular es un sistema
interconectado de diversas terminales electrbnicas de control,
con una central cuya función principal de esta ultima es la de
ordenar e informar de los estados de las terminales, detectando
errores de ejecuci6n. La transmisión-recepci6n entre la central
y las terminales es por radiofrecuencia, lo q u e permite tener
un acceso rápido de las terminales, asi como un control a larga
distancia.
El sistema cuenta con un conjunto de unidades que realizan
funciones específicas así C ~ O con un protocolo de transmicibn
que permite tener comunicación con todas las terminales en
diferentes tiempos por una misma frecuencia, lo que permite
ocupar un solo canal de transmicibn en lugar de múltiples
interválos de frecuencia.
I
2.1 Central de Proceso ( Control central )
El control
central conforniado corno un subsistema de la red, tiene la gran
responsabilidad de relacionarse con todas la5 terminales, así
como la de inicializarlas. Su transmisión es de modo serial, 10
que permite que la información pueda ser modulada en un solo
canal. Por tener relación con todas las terminales la central
contiene todo el conjunto de funciones e instrucciones que
posteriormente serán ejecutadas por la terminal seleccionada.
Además de tener un enfoque de transmicihn de comandos, la
central es capaz de recibir información mandada por cada una de
las terminales ( como avisos de posibles errores, fallas de
ejecución, mensaje de buena recepción, y otros tipos comandos
de comunicación 1 , así la central se vuelve la herramienta
principal de el cisterna.
Para fines de este proyecto, la central se conforma de un
computador XT/AT con un puerto serie en su sistema, y un
programa que respalda todo el conjunto de instrucciones así
como una buena atencirjn a el puerto por donde los datos son
tanto enviados como accesados. El computador dentro de su parte
de programaci6n también contará con un conjunto de librerias,
donde serán colocadas cada una de las operaciones realizables
por cada una de las terminales, para así tener una conexiúri
rápida con las terminales.
Nota: El programa control será elebúrado en lenguaje "C".
__I---
2.2 Unidad de ndulac i6n d i g i t a l .
Esta unidad consiste en
un circuito FSK ( modo escogido para trabajar 1 , el cual dada
una entrada de bits en serie ( s o l o ceras y unos lógicos )
muestra a la salida, variaciones de frecuencia en una señal
dentro de un intervalo definido. Para la construcción de este
c.ircuito se utilizan los circuitos de serie EXAR, y l o s datos
de entrada le son provenientes de el puerto de la unidad
central. Como el sistema interconecta bidireccionalmente la
central y la terminal, exite una etapa contraria que toma los
datos de una manera de variac.iones de frecuencia y los
transforma en una señal puramente digital.
Esta unidad doblemente vista, también es doblemente
puesta, ya que la terminal de control contará con una etapa
identica a la aquí indicada.
e :tr
2.3 Etapa de transiisibn/recepcian.
En
ída de el FSK, se tiene ahora que mod
mitida v i a aire. La modulación se hace en
esta etapa la señal
ilar para ser trans--
FM por un circuito
oscilador, y la frecuencia a la que se piensa transmitir es de
27.9 MHz, frecuencia a la cual en distancias medias { a lac
cuales se realizarán las pruebas debidas 1 no existe una
pérdida de información. Como ya se explicd anteriormente, el
sistema es bidireccional con lo que la frecuencia arriba
mencionada es la de transmisidn desde la central; y para evitar
problemas de resonancia, tomamos la frecuencia de 29.7 MHz para
la transmisión desde la terminal.
Debido a que a las unidades involucradas pueden encon----
trarse a distancias largas, la señal a recibir será en una
frecuencia muy alta; por lo que es necesario demodular esta
señal, para así tomar la informaclbn contenida y luego procs---
sarla. Para ambas etapas demoduladoras ( terminal y central )
los demoduladores, se implementarán con circuitos ESAR, en
especial el XR 2212.
Nota: A el circuito de transmisi¿ln/recepcitn es posible
agregarsele circuitos amplificadores, ya sea para recuperar
señales dkbiles 6 para inyectar potencia a la señal a transmi--
tir, minimizando problemas de ruidcl y distorsión. Las salidas
y/o entradas al aire contarán con su respectivo circuito de
sintonía, contando estos con su respectiva antena.
2.4 Terminal de control.
Esta terminal tiene como funcidn
la dr ordenar l o s datos que ella recibe, a s i como la de hacer
ejecutar tales instrucciones. También en caso de un comando
requerido esta terminal dará inicio a una transmisibn hacia la
central, mandando l o s datos que la central le halla requerido.
Esta terminal además de interconectarse con las demás
unidades arriba mencionadas, tiene una comunicación con una
terminal electrdnica ( brazo mecánico, camaras de video,
unidades de control térmico, letreros, etc. 1 , a la cual
controlará de una manera directa; y las funciones que esta
pueda realizar serán almacenadas en una de las librerias de el
programa central.
Para la implantación de esta terminal utilizamos un
controlador basado en el procesadctr 8088 y periféricus comunes,
con 10 que este sistema contará con su propio sistema de
inicializacibn y su programa respectivo. En la seccidn 4 se
explica con más detalle su funcionamiento.
---- -I__.
2.5 Terminal básica de ejecuci6n.
Esta es la parte que
realizará todos los comandos que la central requiera d e acuerdo
a los trabajos que pueda ejecutar. Dicha terminal puede ser
desde el encendido d e foc.os, así conlo un sistema complicado de
sensores; pero eso sí con un definido número de operaciones
ejecutablec. Esta terminal se definirá posteriormente de
acuerdo a la aplicación que el sistema general requiera.
3. F.S.K.
3 FSX
3.1 INTRODUCCION A LA MOWLACION DIGITAL,
La propiedad que distingue un sistema digital de radio de un sistema de radio convencional AM,FM, rf PM es que en un sistema de
radio digital, l a s senales mduladas y deiroduiadas son pulsos; digitales 4 s que senales analógicas. Un sistema de radio digital ut i l iza l a portadora analdgica conm en los sistemas convencionales
se hace. EsencialRiente existen tres tipos de irodulacidn digital que son usados en sistemas digitales de radio, Frecuency Shift Ksying
CFSK3, Phase Shift KeyingCPsKr) y Quadrature Aiiplitude Modulation
CQAM).
3.2 FRECUENCY SHIFT KEYING
FSK es una envolvente constante de nrodulacibn angular similar a l a nmdulacibn en frecuencia convencional, excepto que l a sefáal a nmdular es un tren de pulsos binarios que varia entre dos niveles de voltaje discretos, d s que una onda cambiando continuammte.
En FSK binaria, el centro o frecuencia portadora es trasladada por l a entrada binaria de datos, Consec-nteniente l a saí ida del
nmdulador de FSJC es una funcidn en el dominio de la frecuencia, Conw, l a señal de entrada Cbinaria) cambia de un O l&gico a un 1 ldgico , y viceversa, l a salida FSK varia entre dos frecuencias: una marca o frecuencia lógica i y un espacio o frecuencia 1c3gica O.
En FSK hay M cainbio en l a frecuencia de salida cada vez qu,
hay un cainbio en l a secuencia de entrada. Por l o tanto el factor de cambio en l a entrada de el nmdulador es llamado relación de b i t y
tiene las unidades de b i t s por segundo.El factor de carRLo de l a
--
salida de el modulador es llamado relación de barn y es igual a l reciproco de el tierno de señalizacidn de l a salida.En FSC l a relación de cambio entre l a entrada y l a salida son iguales por lo tanto l a relacidn de baud y l a relación de b i t son iguales.
3.4 FSK ANCHO DE BANDA
A l igual que con todos los sistemas electrónicos de
comunicacidn, el ancho de banda 85: una de las principales consideraciones cuando se diseña un transmisor. Un roduiador FSK es de el t ipo de un transmisor de F.M. y es mqy a riendo un oscilador controlado por voltage.
La frecuencia fundaniental de una onda cuadrada binaria es igual a un -dio de l a razón de b i t , consecuentenrente si solarsnte l a frecuencia fundanental de l a entrada es considerada, l a frecuencia de IRodUlaci¿n mas a l t a para el d u l a d o r F S K es igual a un llsdio de la r a z h de b i t de entrada.
La frecuencia de reposo de el VCO se escoge de tal manera que se encuentre a l a mitad de l a s frecuencias marca y espacio. Un uno lbgico a l a entrada desplaza l a frecuencia de reposo a l a
frecuencia marca y un cero ldgico a l a entrada desplaza i a frecuencia de reposo a la frecuencia espacio.Con, FSK es una forma de modulacidn F.M., l a f¿rmula para el indice de rodulación usada en F.M. tambien es válida para F'SK.
Coino en FM el ancho de banda es directaawmte proporcional al indice de r#>dulaci&n.Consecuentemnte, en FSK el indice de
nwiulacidn es generainrente -nor que uno.&i corn en Fbí el minim a n c b de banda depende de el índice de amdulacidn,
3.51 FSK RECEPTOR
E l circuito mas conrunnrente usado para l a deriodulacidn de una sena1 FSK es el PLL Cphase locked loop>.Un P U ESK dedulador trabaja nwy similarnrente a un PLL FM .Como l a entrada al PLL varia
entre l a frecuencia marca y l a frecuencia espaclo,el voltaje de
error a l a salida del comparador de fase seguirá a las variaciones en l a frecuencia de entrada- Y a que solo hay 2 frecwncias de entrada, solo hay dos voltajes de error a l a salida. Por l o tanto l a salida es una representación en dos niveles de l a entrada FSK,
Generalniente la frecuencia natural de el PLL se hace igual a l a frecuencia central de el inodulador FSJG COY) resultado los cambios en el voltaje de error siguen a los cambios en l a frecwncia analdgica de entrada y son s i d t r i c o s a OV dc.
3.6 DISMJO
XR 2207 Conm transmisor de FSK de tres estados,
E l XR 2207 es un oscilador nmnolitlco controlado por voltajdVCO3 con excelente estabilidad con respecto a l a terperatura.Pwade producir alguna de las cuatro frecuencias preprogramadas por redio de señales ldgicas exteriores, estas frectmncias discretas pueden ser cuatro y son preprogramadas por Redio de l a s 4 resistencias ex t er 158s-
1 4 6 2 5 5
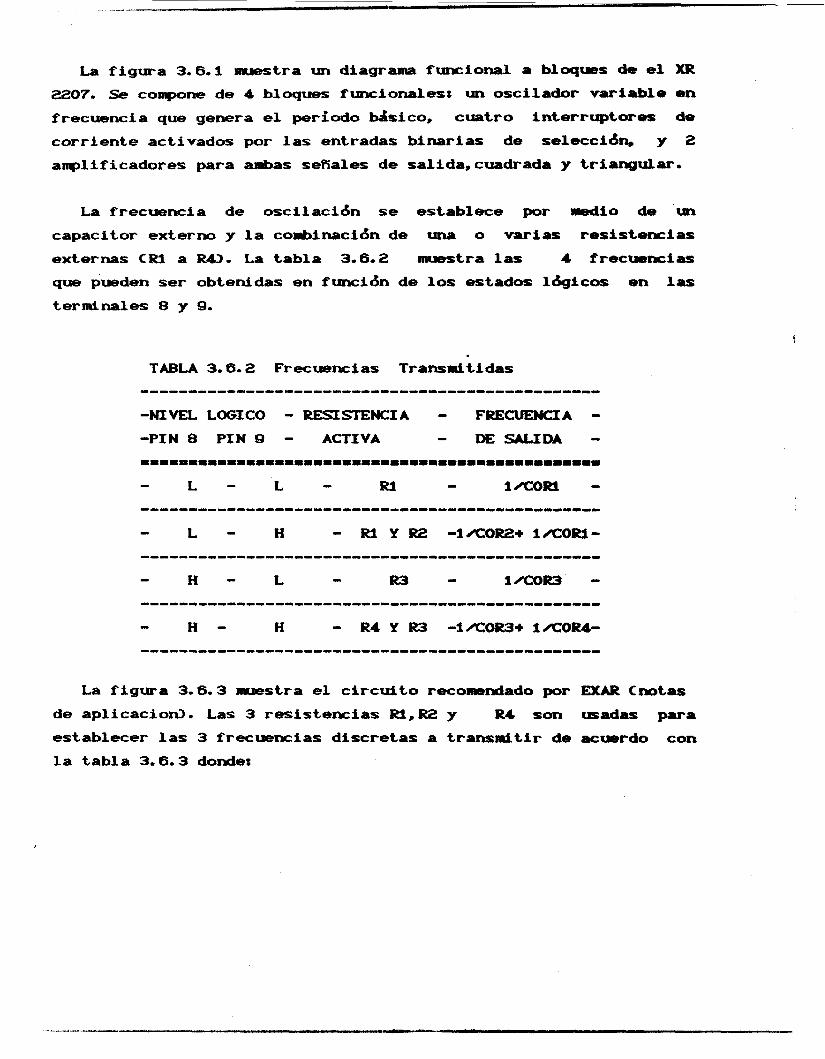
L a figura 3.6.1 nuiestra un diagram funcional a bloques da el XR
2207. Se compone de 4 bloques funcfonalesr M oscilador variable en frecuencia que genera el periodo bdsico, cuatro interruptores de
corriente activados por las entradas binarias de seleccidn, y 2
anplificadores para ambas señales de salida, cuadrada y triangular.
La frecuencia de oscilación se establece por d i o de un capacitor externo y l a combinacidn de una o varias resistencias externas CRl a W. La tabla 3.6.2 m i t r a las 4 frecuencias que pueden ser obtenidas en función de los estados l&gicos en las terminales 8 y 9.
'
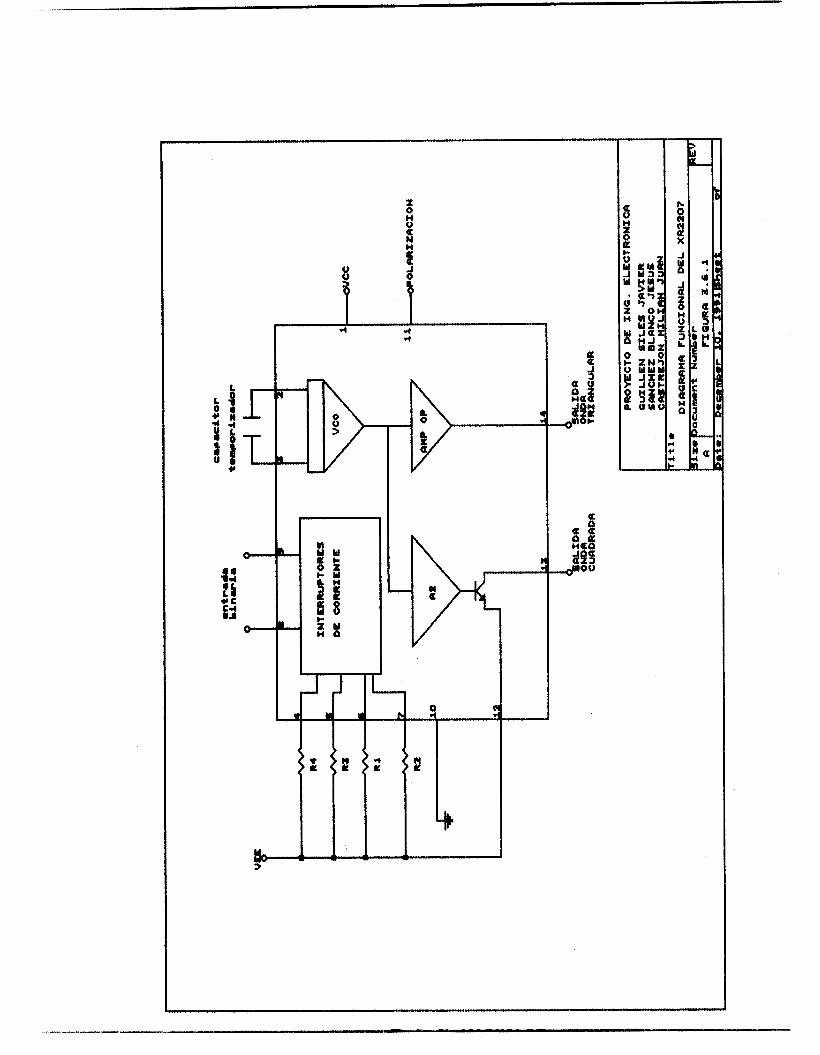
La figura 3.6.3 inuoeftra el circuito recoiaerxiado por MAR Cmtas
de aplicacion3. Las 3 resistencias Rl,Ré! y R4 son usadas para establecer l a s 3 frecuencias discretas a transmitir de acuerdo con l a tabla 3.6.3 donde:
o
F t l - l / C O R l Ft2- 1 4 O R l + l X O R 2 FtO- 14OR4 Nota l a terminal 5 de el 2207 fy) es conectada para permitir qu,
el circuito sea deshabilitado aplicando un estado l¿gico a l to en l a terminal 8 y un estado l¿gico bajo en l a terminal 8.
La funcion de las tres terminales de control p u d e ser descrita
conm sigue:
At Entrada de datos FSK, Los datos bimrios en for- serial son aplicados a esta terminal. Con el habilitador en estada a l to y el control en estado bajo, los datos binarios causan que el transmisor genere l a s frecuencias marca y espacio.
BtHabilitador. Cuando esta entrada está en estado l&gico bajo, el transmisor es deshabilitado.
C: Control. Cuando esta terminal est& en estado ldgico ai to el transmisor genera continuanmnte l a frecuencia Fto.
Con l a idgica externa nmstrada en l a figura 3.6.3 se puede
controlar el modo de operaci¿n de el transmisor.
La tabla 3.6.4nnrestra el tablero de verdad.
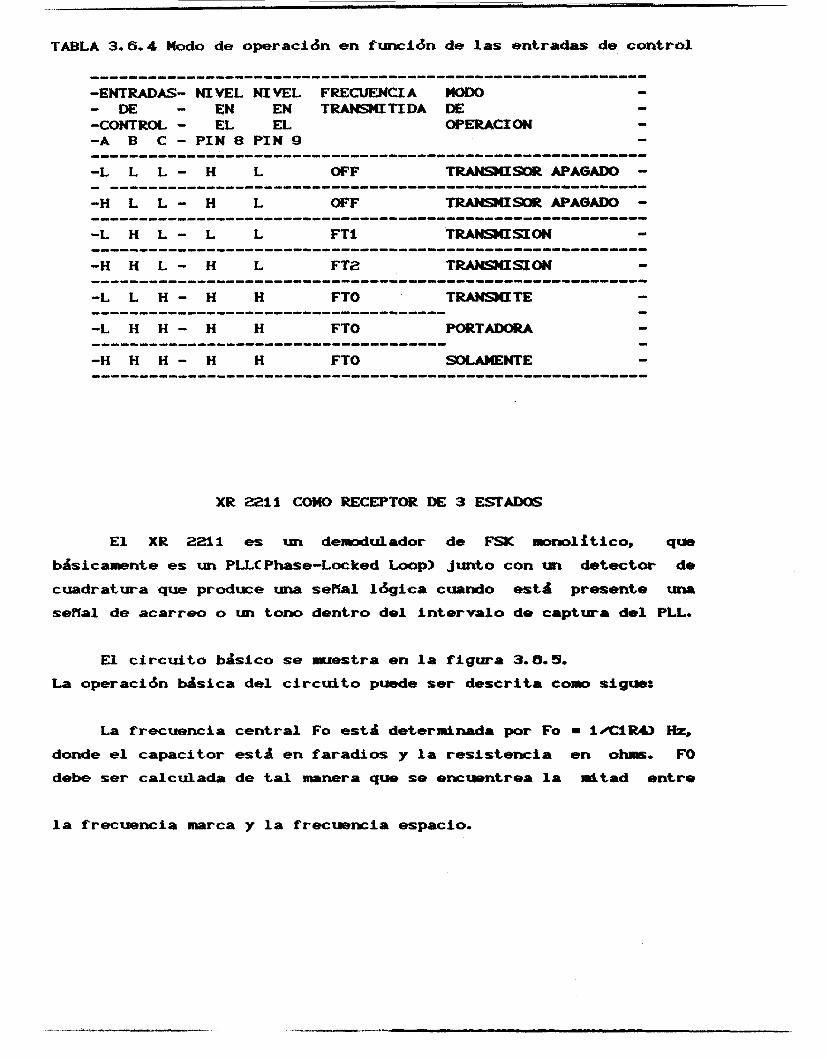
TABLA 3.6-4 Modo de operacidn en funcidn de las entradas de control
XR 2211 COMO RECEPTOR DE 3 ES"-
E l XR 2211 es un denrtiduiador de FSK Ronolítico, qu,
bdsicarnente es un PLLCPhase-Locked Loop3 junto con un detector de
cuadratura que produce una señal ldgica cuando esta presente una señal de acarreo o un tono dentro del intervalo de captura del PLL,
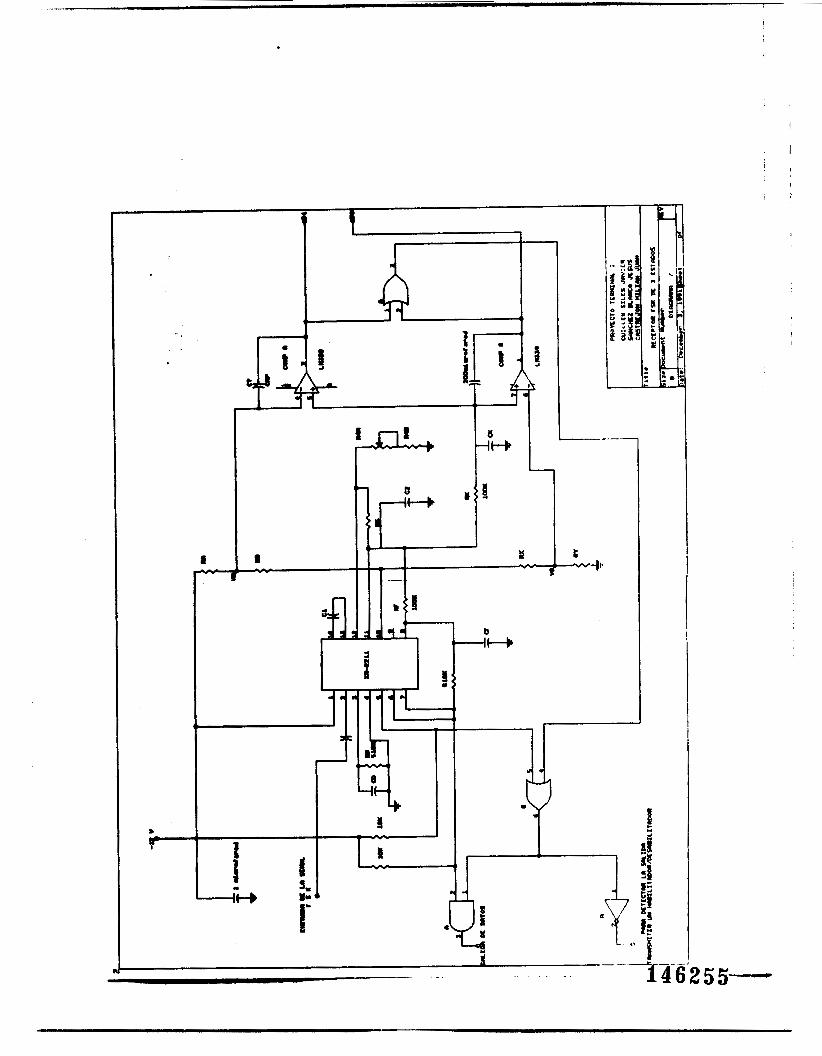
E l circuito bdsico se iaiuestra en la figura 3,6.5, La operación basica del circuito puede ser descrita CORO sigue:
La frecuencia central Fo estd determinada por Fo = l/ClRu Hz, donde el capacitor est4 en faradios y l a resistencia en o m , FO debe ser calculada de t a l manera que se encuentres la ndtad entre
l a frecuencia marca y l a frecuencia espacio.
I
s
f
I L
a -- ---i4g 25-
E l intervalo de localización Af es t4 dado por A f i C W O / R f J ) H h i
Af debe ser nienor o igual a l a diferencia entre l a frecuemia marca
y l a frecroencia espacio- Para una optima estabilidad el intervalo de valores recomendables para R4 est8 en 10Kn y 100Kn.
E l intervalo de captura Afc es siempre iaenorqueel rango de
localización, el intervalo de captura está limitado por c2 que junto con RS forman l a constante de tiempo para el f i l t r o de lazo.
En la nmprfa de las aplicaciones Afc es el 80% (t5 el €WXde el intervalo de localización.
La constante de tiempo para el f i l t r o de salida FSK elimina vibraciones a l a salida FSK, su f o r d a es 7f= WCP, normlmbnte T f m O. 3&aZOn de baud .
El f i l t r o capacitor CD elimtna vibraciones en l a salida detectora de 1lave.El valor de CD puede ser determinado por rCD- 164ntervalo de captura.
E l receptor tiene 3 salidas npn de colector abierto, cada una es capaz de manejar hasta S a . La t e rana l 7 es l a salida de datos. La terminal 5 es l a salida =detectora de llave) que esti en baJo
cuando una señal de acarreo es detectada. La terminal 6 es la salida negada de l a terminal 5. Que pasa a a l to cuando l a llave es detectada.Ya que l a terminal 7 es conectada junto con l a salida detectora de tono y despriies pasadas a traves de una coipuerta junto conla salida detectora de acarreo, los datos s e r h habilitados
cuando las frecuencias marca y espacio esten presentes, pero rm cuando el ,acarreo este presente.
Los conparadores de voltaJe externos son usados para dlstinguír
__-
niveles de voltaje de salida del PLL correspondientes a varias frecuencias de entrada.Los niveles de voltaje y polaridades eon relativos al voltaje de referencia externo V i 0 en l a terdnal 10, L a s frecuencias marca y espacio F r l y Fr2 generan el maxim nine1 de dc desplazando V r l y Vr2, que son interpretados por el comparador interno, el cual está polarizado internammte por nediq de el voltaje d e referencia VlO.
Los conparadores A y B son controlados por los nive les de voltaJe Va y Vb que están aproximadaniente a la d t a d entre V r l y
Vr2 para cortar a frecuencias Fa y Fb que estan a l a mitad entre la frecuencia central y l a frecuencia marca y entre l a frecwncií central y l a frecuerrcia espacio- Este control es logrado por medio
de los divisores formados por Ra, Rb, Rx, y Ry que generan los voltajes de referencia Va y Vb con respecto a l a referencia interna en l a terminal 10. Los valores de Ra+Rb y Rx+Ry deben ser l o mas grande posibles, para eliminar disturbios en el nivel de voltaje de l a terminal 10.
La salida en l a terminal 11 es f i l t rada a tranBrs de Rx y &,y es usada para maneJar los conparadores de voltaje externos, l a salida de estos coaparadores es conectada a través de lbgica externa para
producir l a señal de acarreo d l a señal de ñabilitacion, La salida ldgica resultante será normalmnte bajo y cambiar8 a a l to cuando l a señal de acarreo, Fro este presente. Fsta señal es usada co-nte
corn control de habilitacion.
A continuación se Aliuestra una tabla de valores de corporwrntes para l a s bandas tipicas de FSK C n o t a s de aplicacion E M .
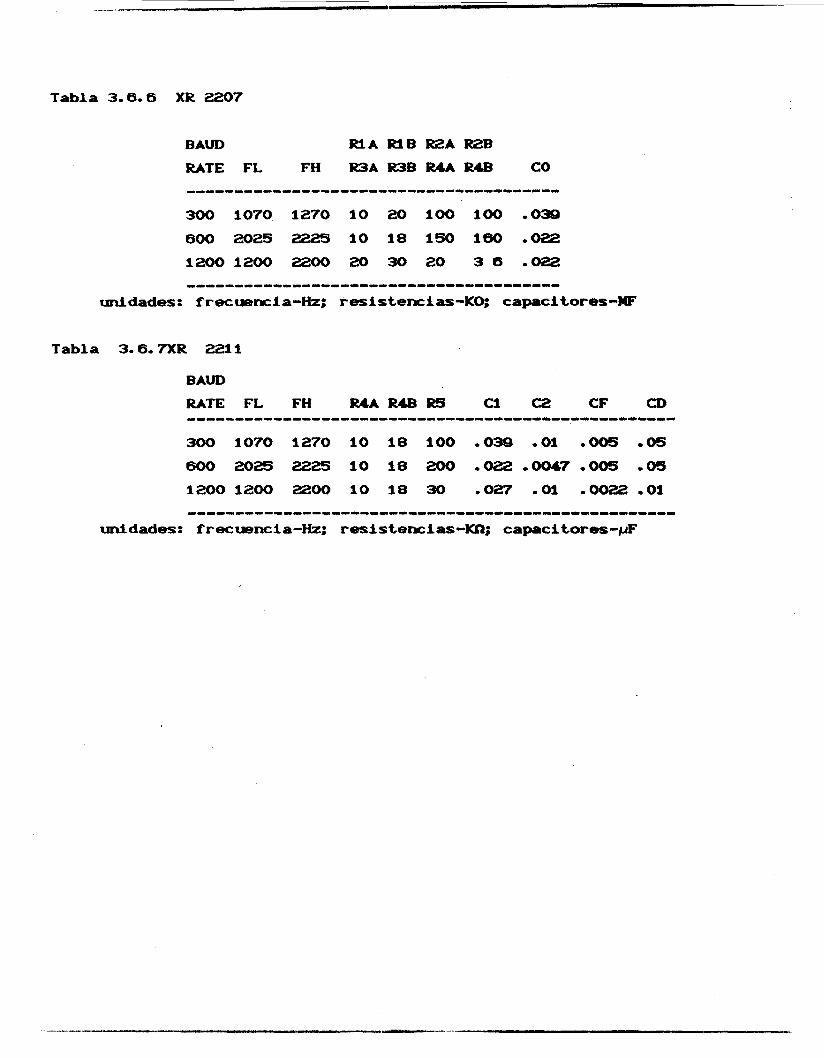
T a b l a 3.6.6 XR 2207
T a b l a 3.6.7XR 2211
BAUD
RATE FL FH R4A R4B RCJ c1 c2 CF CD
300 1070 1270 10 18 100 o 0 3 9 o 0 1 0005: -05
600 2025 2225 10 18 200 o O 2 2 - 0 0 4 7 o 0 0 5 0 0 5
1200 1200 2200 10 18 30 o 0 2 7 o O l 00022 -01
,
rp
4. SISTEMA BASADO EN EL MICROPROESADOR 8088
Sistema basado en el Microprocasador 8088
4.1 Descripcibn General
El sistema controlador q u e desarrollamosr se basa en el
microprocesadur de INTEL 8088 que tiene la característica de s e r
compatible t o t i cualquier micro-computador de la actualidad, por lo que p e r m i t e amplia flexibilidad en cuanto a la proyramacidn e intrrFacl- se refiere.
El sistema contrcilador l a dividimos en c u a t r o
apl.icaciunea específicasr l o s cuales son:
- M i c r o p r ~ c s s a d o r y c o n t r o l a d o r de Re113ja
- Decodificacibn de Mrsmurias. - C o n t r o l adúr de Interrupciones r Puerto
E n t r a d a C a l ida,
- Control ador de Tescl ado e Indicadores.
m6dulús de
Paralelo de
4.2 Mddulo 1 : Microprocesador y Controlador de Re1o.j
De e5ke módulci f s t - m a n p a r t e el M i c r u p r u c e s a d o r INTEL 8088
c o n f i g u r a d o e n el modo mínimo y el G e n e r a d o r d e Reloj 8284.
La f a m i l i a de m i c r o p r o c e s a d o r e s d e INTEL t i e n e n l a c a r a c t e r l s t i c a
de m u l t i p l e x a r i a l í n e a s de d a t o s y d i r e c c i o n e s ? por t a l m o t i v o se
t - e q u i r e n r e g i s t r o s t e m p o r a l e s e x t e r n o s p a r a d e c o d i f i c a r l a s señales. E 5 t a f u n c i ó n l a r e a l i z a n l o s < C.1.s. 74LS373 p a r a las
l í n e a s d e d i r e c c i o n r s s y el C.I. 74L5245 p a r a l a s l l n e a s de d a t o s .
En l a g e n e r a c i 6 n d e l r e l o j de s i n c r ~ r n l a del s i s tema? se u t i l i z a e l
(2.1. 8284t que además d e d a r una f r e c u e n c i a d e reloj e s t a b l e , se e n c a r g a de s i n c r u n i z a r el RESET del s i s t e m a l e i n t e r f a s a r
p e r i f&t- i c o s 1 e n t o s .
4.2.1 Descripcidn de los componentes,
L o s cc~mpunentes de e s t e módulo e s t a n r e f e r i d o s a l d i a g r a m a de l a
f i g u r a 4 . 2 . .
c. I. - SO88 ( W i c r u p r o c e s a d ü r )
- 8284 (Gen. d e Relojf
- 74LS373 - 74LC245
U n i d a d
u1
u1.5
u7 ? u9 ? U10
U 8
1 4 6 2 5 5
_ - I--
I
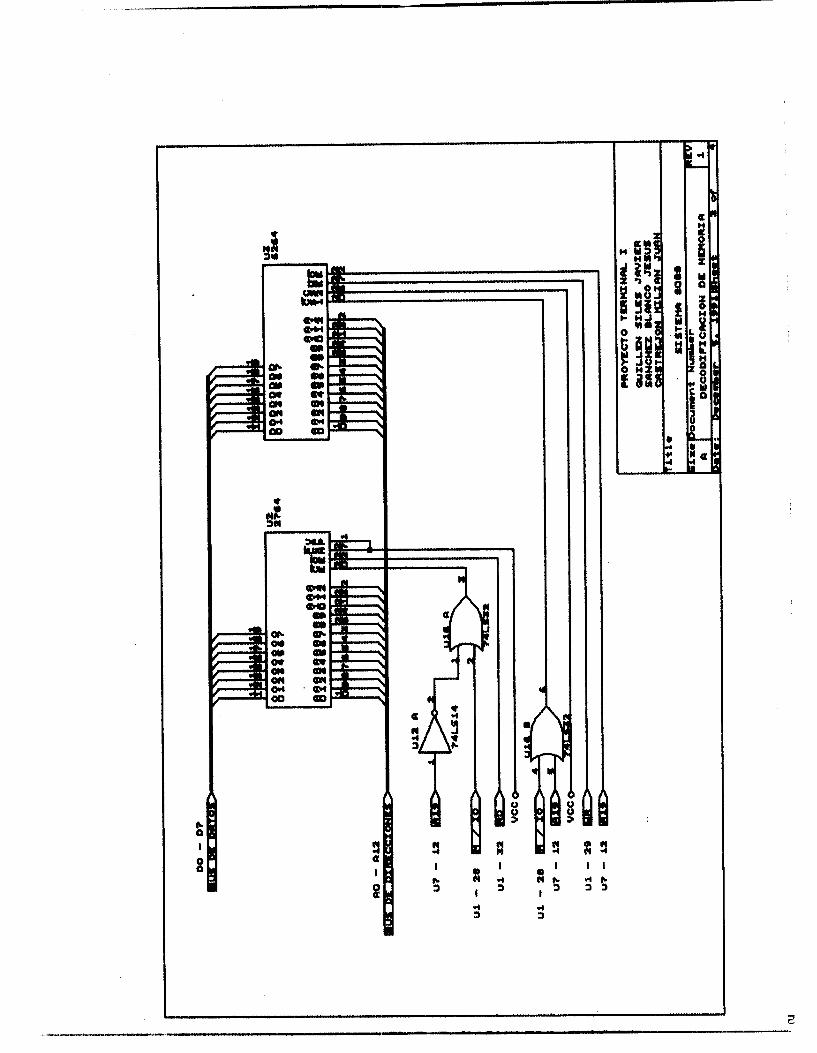
4.3 Mddulo 2 : Decodificación de Meinoria
Las a p l i c a c i o n e s e s p e c í f i c a s q u e se l e p u e d e d a r a un sis tema se deben g u a r d a r - e n memoria l e i S i s t e m a Básico d e E n t r a d a S a l i d a l
P r o g r a m a s r stc i e s t e módulo l ü c ü n f o r m a n l a s memorias RAN (6264)
y l a EPROM (2764).
En l a EPROM SE. e n c u e n t r a g r a b a d o un p r ü g r a m a m o n i t o r que f a c i l i t a
los r e c u ~ s o s del s i s t e m a a los u s u a r i o s y además es el e n c a r g a d o d e
c o m u n i c a ~ s e c o n o t r o s s i s t e m a s s i m i l a r e s ( u n a PC p o r e j e m p l o ) .
La memoria R A M 5e u t i l i z a p a r a g u a r d a r p r o g r a m a s de a p i i c a c i b n
e s p s c í f i c a l i n t r o d u c i d a s p o r t e c l a d ü o a t r a v é s d e un p u e r t o s e r i e que c o m u n i q u e e l s i s t e m a con u n a PC ( t r a n s r n i s i 6 n de p r o g r a m a s de i d
cornputadcat-a a l c ú n t r ü l a d o r p o r ejemplo) .
4.3.1 Descripci6n de los corporrentes
L o s c o m p o n e n t e s de e s t e módulü e s t a n referidos a l d i a g r a m a de l a
f i g u r a 4.3..
c. I, - 2764 ( R O W )
- 6264 ( R A M )
- 74iS32 - 74L504
U n i d a d
u2
u3
U l b A ~ U l b B
Ul2A
.
?4 I 4 3
I a " S I
4 3
4.4 Módulo 3 : Controlador de Interrupciones / P u e r t o Paralelo
Todos 112s sistemas dedicados al cot-ttrol y automatizacibn requieren
transmitir y recibir datos a través de algCin puertop para el
sistema desarruitado se u s a uti puerto programable paralelo de entrada / s a l i d a ( P P I ) , 8 2 5 5 , el cual proporciona una interface de hasta 24 I f t i eas de controlr las c u a l e s permiten flexibilidad y rapidez en cualquier.. aplicación.
El contralador de interrupciones permite al sistema atender un
máximo de 8 dispositivos externos.
Los dispositivos que requieren atsticibn por medio de r
I n t e r r u p c lunes son:
El puet-to S e r i e que permite la comunicación e n t r e una unidad de control y el sistema de ejecución.
El teclado que permite a l o s usuarios disponer de l o s recursos del s ?sterna.
4.4.1 Descripción de los compormntes
L o s componentes de este módulo e s t a n
f iyut-a 4.4.. refevidos al diagrama de l a
c. I. - 8255 (PPI) - 8259 (Contt'uladot' de I N T )
- 74LS138
Unidad
u5 u4
U 1 4

J
I C
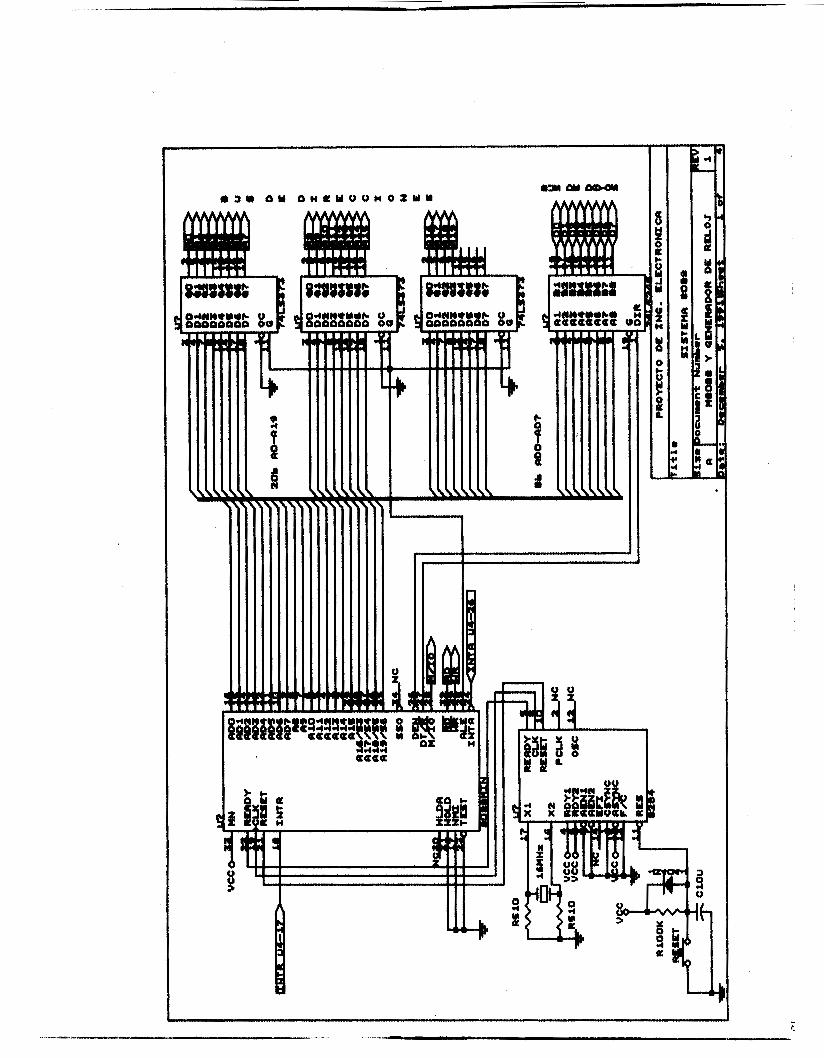
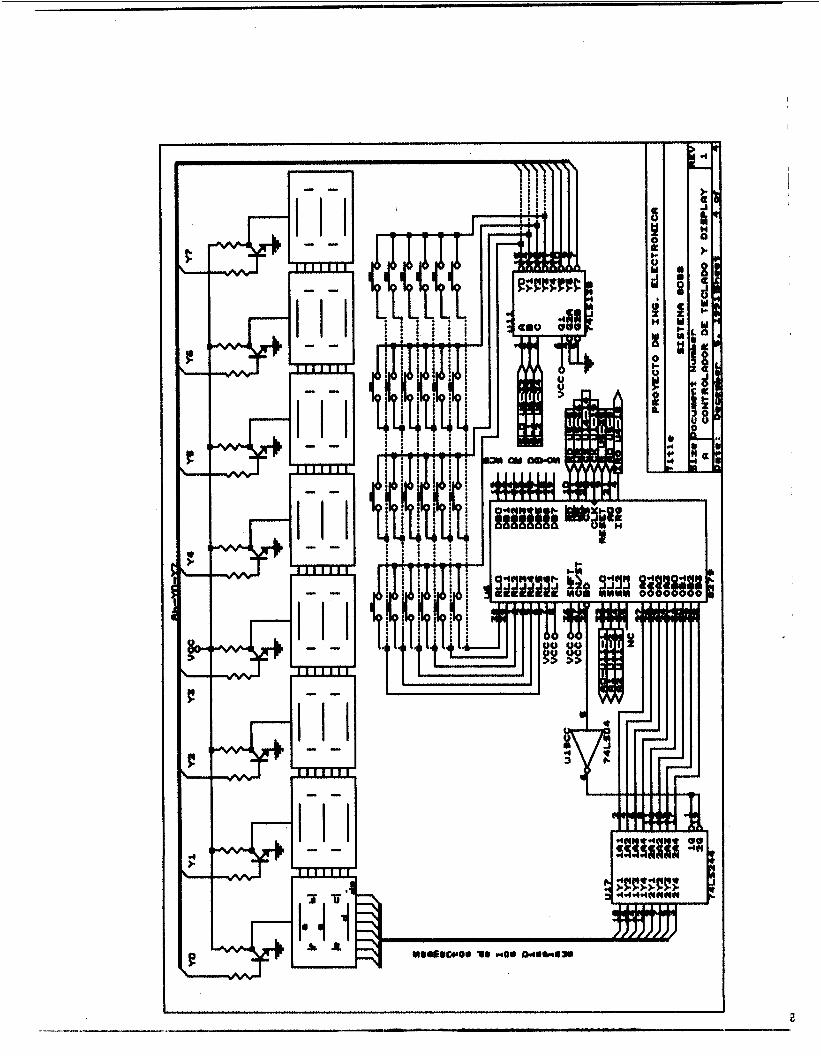
4.8 Móduio 4 t Controlador de teclado e Indicadores
E l c o t i t r o l de t e c l a d o I? I n d i c a d o t - e s se 1ogra graczas al C.I. 8279
que es t á conectad^ d i r e c t a m e n t e a l CPU p o r med io d e las l í n e a s de
datosr e s t e c i r c u i t ú es programable y puede manejar h a s t a 64 t e c l a s
d i s t i n t a s c a d a u n a d e ellas c o n t r e s f u n c i o n e s diferentesl además
p e r m i t e d e s p l e g a r met-tsaJes p u r med io de un p u e r t o paralelo d e 8 B i t s que v a cunec tado directamente a indicadores por medio de un
BufFrsr..
4-5.1 Descripcidn de los conigonentes
Los c a m p a n e n t c s de e 5 t e m6dulcs e s t a n r e fe r idos a l d i a g r a m a de l a f i g u v a 4.5..
c. I, - 8279 ( C u n t r o I ador- de Tec Z ado
- 74LS138
- 74LS244
- 74LC04
Unidad U6
u11
U 1 7
U19C
2
5. OPERACION
f
5 . Operaci6n.
5.1 Funcionamiento general.
La siguiente descripción por
etapas define de una manera breve la manera en la cual e1
sistema toma y realiza cada una de las etapas para controlar un
proceso.
1) El computador central carga el programa y da
inicialización a todos sus puertos e implementa las librerias.
2 ) Las terminales son encendidas e inicializadas acorde a
su sistema de inicialización, que revisa que el sistema sf:
encuentra bien. La terminal de ejecucitin no realiza ninguna
operación y el sisteina queda abierto a recibir una instrucción.
3) La central manda primero un codigo de revisión para
confirmar que a la terminal a la que se va a transmitir se
encuentra en estado aceptable, de no ser así la anula de la red
e informa al ususrio de tal situación.
4 ) Via computador el usuario selecciona la terminal que se
quiere manejar- 6 programar mandando un ccmjuntíj de datos hacia
esta. El sistema de acceso a cada una de las terminales, se
realiza por ctrdigo, lo que da uso a manejar una s o l a frecuencia
de transmisión.
5) Una vez ya recibido el mensaje por la terminal, esta
procede a ejecutar ordenes, no sin antes confirmar a la central
que lo recibido se encuentra ya { c.onfirmación de cbdigo 1 .
6 ) La terminal ejecutará lo ordenado hasta que este se de
por terminado 6 en un caso de que la central desee interruripir
el proceso; con lo cual hablamos de que se puede para el
proceso que se estaba realizando, 6 se puede implementar uno
nuevo -
7) En caso de alguna falla en la ejecución de las
instrucciones mandadas I detectadas inteligentemente por la
terminal ) , esta dará aviso a la central, y esta a su vez a el
usuario, el cual tendrá acceso a una posible modificación a las
operaciones realizadas, 6 en un caso muy extremo a matar el
sistema.
8 ) Una vez ya programadas las terminales, el usuario tiene
las ventajas de poder realizar otra actividad y dejar que el
proceso de cada terminal continue, indicandole la central
cuando exista un error.
9) En caso de modificacibn a algún proceso el usuario
seleccionara este desde el menu, inicializando asl Gtro r,ic.lo
de programación.
Nota: Las funciones no serán especific.adas, ya que la
terminal a trabajar aun no se conoce; con 10 que las diferentes
directivas serán tacticamente definidas en un corto futura
u n a n u e v a d i r e c t i v a para empezar una i n s t r u c c i ó n . Debido a l
diserio de e l cicteim, l a central p u e d e i n t e r r u m p i r un proceso,
c a m b i a r l o , m e j o r a r l o , e x p a n d i r l o 6 a n u l a r l o .
I
5.3 Comandos.
D e un modo g e n e r a l podemos c l a s i f i c , a r a l a s i n s t r u e c i o n e s
coII10 :
D i r e c t i v a s : R e a l i z a n l a f u n c i ó n de r e c o n o c i m i e n t o , a s í
ccmo p o s i b l e s e x p a n s i o n e s 6 tiempos d e e s p e r a .
De t a n s m i s i d n : Son a q u e l l a s q u e l l e v a n tcido e1
o r d e n a m i e n t o de una buena t r a n s m i s i ó n ( c l a v e s de l lamada y d e
r e c . e p c i ó n ) .
E j e c u t i v a s : L a s q u e s e ñ a l a n l a c f u n c i o n e s q u e va a
r e a l i z a r cada t e r m i n a l . E s t a s van d e a c u e r d o a l a f u n c i ó n dada
por c a d a t e r m i n a l d e e j e c u c i ó n .
Datos: Números t r a n s m i t i d o s e n caso d e q u e a s í l o r equ ie ra
una i n s t r u c . c i t n e j e c u t i v a .
O t r a s : En caso d e q u e se requiera de un c ó d i g o d e
r e v i s i ó n , se c o n s i d e r a r á n l a i n c o r p o r a c i d n d e o t r o t i p o de
i n s t r u c c i o n e s .
6. APLICACIONES
6 . 0 Aplicaciones.
Debido a la multiplicidad de aplicaciones
de los sitemas electrónicos, este tipo de sistenias p u d e ser
aplicado a cualquier tipo de proceso ( siempre que este
requiera de terminales electrónicas ) . El realizar el control
par vía larga distancia, nos hace pensar eii ahora llegar a
procesos donde la presencia huitiana puede ser nula d e p v s i t o s
radioactivos, lugares de alta presión, e t c . 1 . El tener un
coritrol vía radiofrecuencia evita coltiplicaciones en u n a sola
línea de transmisión y expande el control a diversas zonas y a
distintos p u n t o s . El contener s o l o una central, es posible ciar
a una persona un control rápido y preciso de diversas
terminales dejando en cierto tiempo la supervisión a ui-i
computador que cumplirá con lo que en el se haya programado.
I
Universidad Autónoma Metropolitana, en busca de el proceso
humano.. .
7. BIBLIOGRAFIA
7 . Bibliografía.
- Manual Intel microprocesadores. Intel co. 1989
- Manual Intel periféricos Intel C o . 1989
- Micruprocesadorec e interfaces. Douglas V. Hall. Me. Graw Hill 1986.
- Manual EXAK EXAR Co.