universidad autonoma metropolitana …148.206.53.84/tesiuami/uam5591.pdfel proceso del muestre0 y la...
TRANSCRIPT
UNIVERSIDAD AUTONOMA METROPOLITANA UNIDAD IZTAPALAPA
DIVISION: CIENCIAS BASICAS E INGENIERIA
LICENCIATURA: INGENIERIA ELECTRONICA
AREA DE CONCENTRACION: COMUNICACIONES
ALUMNO: AVILA GONZALEZ MAURlClO
MATRICULA: 89324298
REPORTE DE PROYECTO TERMINAL II "INTRODUCCION AL PROCESAMIENTO DE SEÑALES
UTILIZANDO FILTROS DIGITALES DE TIPO ADAPTIVO"
PROFESOR: Dr. HECTOR PEREZ MEANA
TRIMESTRE 94-0
UNIVERSIDAD Casa Abierta al Tiempo
AUTONOMA METROPOLITANA
Introducción al Filtrado Digital de Señales _-
I
CAPITULO 1 INTRODUCCION A LOS FILTROS DIGITALES
Los filtros digitales no son nada nuevo y mucho menos tan complicados como la mayoría de la gente cree, de hecho los filtros digitales existen desde que el hombre aprendió a contar y a sumar. Los filtros digitales basan su funcionamiento principalmente en las operaciones de suma y multiplicación, razón por la cual la mayoría de gente es capaz de entender que es un filtro digital. Recientemente, el gran avance en la tecnología ha convertido los filtros digitales en una aproximación viable en términos económicos con respecto a los métodos de filtraje analógico, el filtrado digital esta siendo utilizado cada vez más por los sistemas de medición y control entre muchos otros campos debido a que:
Se pueden implementar programas de filtrado en máquinas de propósito general, en lugar de máquinas especializadas, lo cual permite abaratar el costo de la implementación y prueba de los mismos.
Su operación está basada en operaciones básicas como la suma y la multiplicación, lo cual los provee de una estabilidad muy grande, la cual no se ve afectada con el tiempo.
Son más fáciles de modificar que los filtros analógicos, debido a que en estos Últimos se requiere normalmente un ajuste en los valores de los componentes del mismo, y esto provoca retrasos para conseguir elementos que no son de un standard comercial.
Son más fáciles de comprender.
Lo anterior no pretende dar la idea errónea que los filtros digitales sean la solución a todos los problemas de filtrado que se observan en el mundo real, por el contrario, el filtrado analógico tendrá una amplia aplicación en el futuro, pero, se espera que el filtrado digital se haga cargo de cada vez más aplicaciones que antiguamente eran exclusividad del filtrado analógico.
Introducción al Filtrado Digital de SeAales 2
DEFlNlClON DE UN FILTRO
Datos :-
de entrada:. -
En términos generales, un filtro es una caja negra con un conjunto de entradas y un conjunto de salidas, la caja contiene alguna clase de procesamiento de tal manera que las salidas son generadas a partir de las entradas, la figura 1 .I muestra el esquema general de un filtro:
I
: : Datos de ' salida F I L T R O
?
Figura 1 .I .- Esquema General de un Filtro
Para que se justifique el costo de un filtro, el conjunto de datos de salida deben de ser considerablemente más valiosos que los datos de entrada aplicados al filtro, básicamente existen dos propósitos para realizar el filtraje de señales, uno es el de mejorar la señal de entrada y la otra es la de extraer información a partir de los datos de entrada.
EJEMPLO DE UNA CAJA REGISTRADORA COMO FILTRO
Este es uno de los ejemplos más ilustrativos acerca del tema de los filtros y esto es debido a que de entrada, la caja registradora cumple con todas las características generales de un filtro que hasta el momento se ha mencionado es decir acepta entradas (el costo de los productos) y produce salidas (el total con el I .V.A. incluido).
Para ayudarnos a establecer una comprensión matemática del ejemplo se usará la siguiente notación: sea el número de artículo comprado un número que va desde 1 hasta NI de esta forma el primer artículo será el número 1 el segundo el numero 2 y así sucesivamente, hasta que el último artículo sea el número N. A continuación de denominará x(k) al valor del k-ésimo producto registrado en el filtro y finalmente llamaremos y(k) a la salida producida después de haber introducido el valor del k-ésimo artículo.
La forma básica en la que opera una caja registradora consiste en sumar los precios de todos los artículos y producir un total. De este modo, la salida de la caja registradora queda relacionada con sus entradas mediante la siguiente ecuación:
Introducción al Filtrado Digital de Señales 3
El gran total, la cantidad que habremos de pagar, será la salida de la caja registradora después que el Último artículo ha sido considerado. En nuestro ejemplo, se tienen N artículos, por lo que el gran total será y,.
La operación anterior la podemos expresar en una forma más compacta observando que Yk es un subtotal. De este modo, para obtener el siguiente subtotal, simplemente agregaremos el precio del nuevo artículo al subtotal anterior. En esta forma la caja registradora se podrá describir con la ecuación:
Yk = Yk-1 + Xk
Donde y, es el nuevo subtotal, yk-1 es el subtotal previo y xk es el precio del nuevo artículo.
Para estar seguros de que las dos representaciones anteriores son equivalentes, expresamos yk-1 en términos de los precios de los artículos, de modo que:
ecuación que al ser sustituida en la última relación da como resultado exactamente la primera ecuación:
Estas dos descripciones del filtro caja registradora son ejemplo de filtros digitales. La primera descripción es conocida como filtro digital no-recursivo y la segunda como filtro digital recursivo. Hasta aquí la descripción ha resultado demasiado simple en razón de que no se ha considerado el I.V.A. El impuesto al valor agregado es un cargo que se debe agregar al total de la compra. en nuestro caso esto es posible hacerlo escalando los precios de los artículos antes de obtener el total, Ó escalando solamente el total. Esto último lo podemos expresar como:
Introducción al Filtrado Digital de Señales 4
FILTROS ANALOGICOS CONTRA FILTROS DIGITALES
Los filtros analógicos difieren de los filtros digitales por la naturaleza de las señales de entrada y de salida. Un filtro analógico, por ejemplo, procesa entradas analógicas y genera salidas analógicas; en tanto que un filtro digital procesa y genera datos digitales. Estas diferencias en las señales de entrada y de salida determinan, también, diferentes técnicas de procesamiento. Por ejemplo, los filtros analógicos están basados en la relación de las operaciones matemáticas de diferenciación e integración; en tanto que los filtros digitales sólo requieren desarrollar operaciones de suma, multiplicación y retardo.
Probablemente nos sean curiosas las diferencias entre las señales analógicas y digitales; sin embargo, para propósitos de esta discusión, se reducirán esta diferencia únicamente en la representación de estas señales de acuerdo con el tipo de variable independiente.
La mayoría de las señales se representan por medio de dos variables, una dependiente, y otra independiente; la variable dependiente representará al dato, mientras que la variable independiente representa el orden del dato. Por ejemplo, si hiciéramos mediciones de la temperatura contra el tiempo, la variable dependiente sería la temperatura y la independiente el tiempo. Por otro lado, si los datos fueran la matrícula de los estudiantes contra su número e matrícula, la variable dependiente sería la altura y la independiente el número de matrícula.
La información analógica es caracterizada por una variable independiente continua que puede tomar cualquier valor, en tanto que la información digital se caracteriza por una variable independiente discreta que solo puede tomar ciertos valores. Algunas veces, las diferencias entre los datos analógicos y digitales pueden no ser muy claras, por ejemplo, en la medición de la temperatura contra el tiempo, se podría tomar la lectura de la temperatura en intervalos de una hora, al realizar esto, se obtendría una señal digital, debido que la variable independiente ahora es de tipo discreto.
Algo que se debe de tomar en cuenta es lo siguiente, que todos los datos analógicos son susceptibles de ser convertidos a datos digitales y que además estos datos digitales siempre se presentan en una forma ordenada y secuencial.
Introducción al Filtrado Digital de Señales 5
EL PROCESO DEL MUESTRE0 Y LA CONVERSION DE SEÑALES ANALOGICAS A DIGITALES
La mayoría de las señales que son procesadas con filtros digitales tienen su origen en señales analógicas, y en consecuencia, deben de ser convertidas a formato digital antes de ser procesadas por los filtros digitales. Este proceso de convertir una señal analógica otra digital constituye una parte fundamental en la mayoría de los sistemas de filtraje digital y debe ser comprendida cabalmente antes de iniciar una discusión sobre los procesos de filtraje digital.
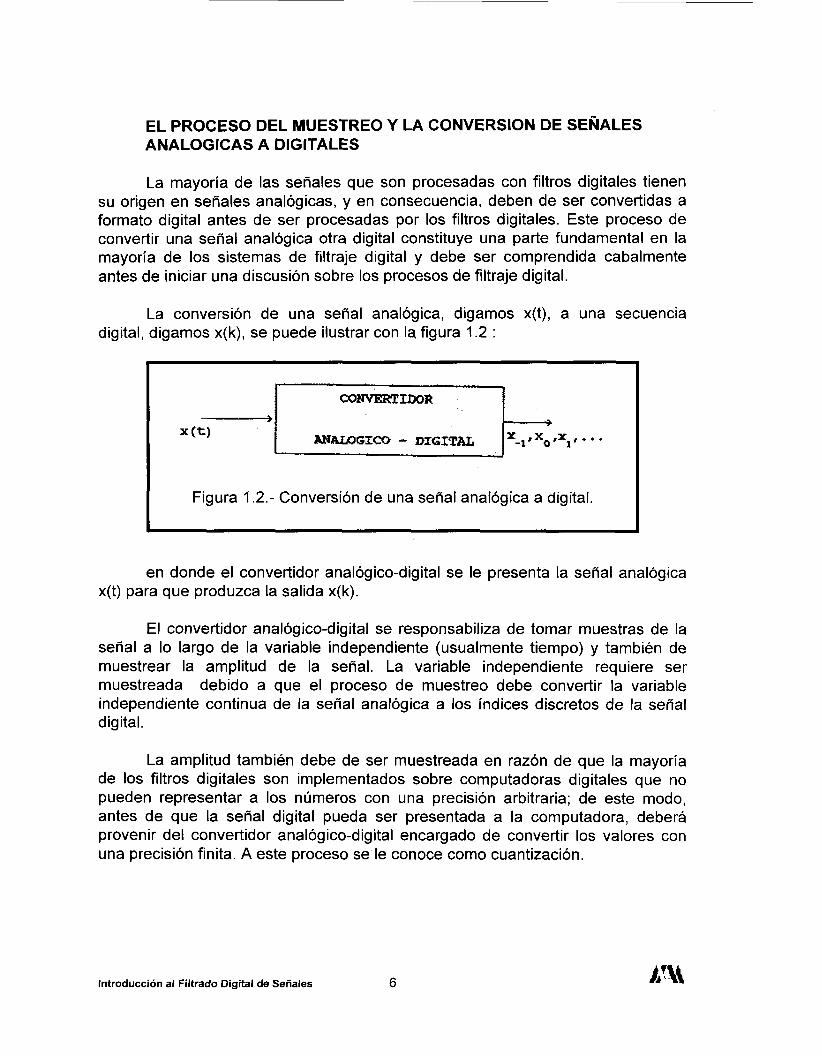
La conversión de una señal analógica, digamos x(t), a una secuencia digital, digamos x(k), se puede ilustrar con la figura 1.2 :
-i
Figura 1.2.- Conversión de una señal analógica a digital.
en donde el convertidor analógico-digital se le presenta la señal analógica x(t) para que produzca la salida x(k).
El convertidor analógico-digital se responsabiiiza de tomar muestras de la señal a lo largo de la variable independiente (usualmente tiempo) y también de muestrear la amplitud de la señal. La variable independiente requiere ser muestreada debido a que el proceso de muestre0 debe convertir la variable independiente continua de la señal analógica a los índices discretos de la señal digital.
La amplitud también debe de ser muestreada en razón de que la mayoría de los filtros digitales son implementados sobre computadoras digitales que no pueden representar a los números con una precisión arbitraria; de este modo, antes de que la señal digital pueda ser presentada a la computadora, deberá provenir del convertidor analógico-digital encargado de convertir los valores con una precisión finita. A este proceso se le conoce como cuantización.
Introducción al Filtrado Digital de Setiales 6
Debido a que, por efectos de la cuantización, es posible representar con toda precisión los valores de una señal analógica en la computadora, el convertidor analógico-digital usa un número que la computadora pueda representar y que esté lo más próximo al valor verdadero de la señal.
La diferencia entre los valores reales y los valores que son representados a la computadora se conoce como error de cuantización, el cual provoca un cierto grado de incertidumbre en la representación, que internamente genera la computadora, de los datos. En general, la precisión de la computadora y el convertidor analógico-digital son seleccionados de modo que el error de cuantización sea más pequeño que el asociado a una señal analógica, lo cual permite que el diseñador interprete el error de cuantización como ruido y pueda ignorar los efectos de cuantización.
Por otro lado, cuando esto no es posible, (debido a que implica una mayor precisión en los convertidores y en las computadoras) el error de cuantización puede llegar a constituir un serio problema y puede deformar en forma significativa el desempeño del filtro digital. Para efectos de esta explicación se presume que siempre se puede lograr la precisión deseada, y por lo tanto no se tomará en cuenta el ruido de cuantización.
CUANTIZACION
Supongamos que se cuenta con un convertidor analógico-digital con precisión de 1 parte de 256, es decir, que el convertidor es capaz de representar la amplitud de la entrada con 1 de 256 posibles valores. Supongamos también que el convertidor puede aceptar señales con amplitud entre -1 .O y 1 .O Volts.
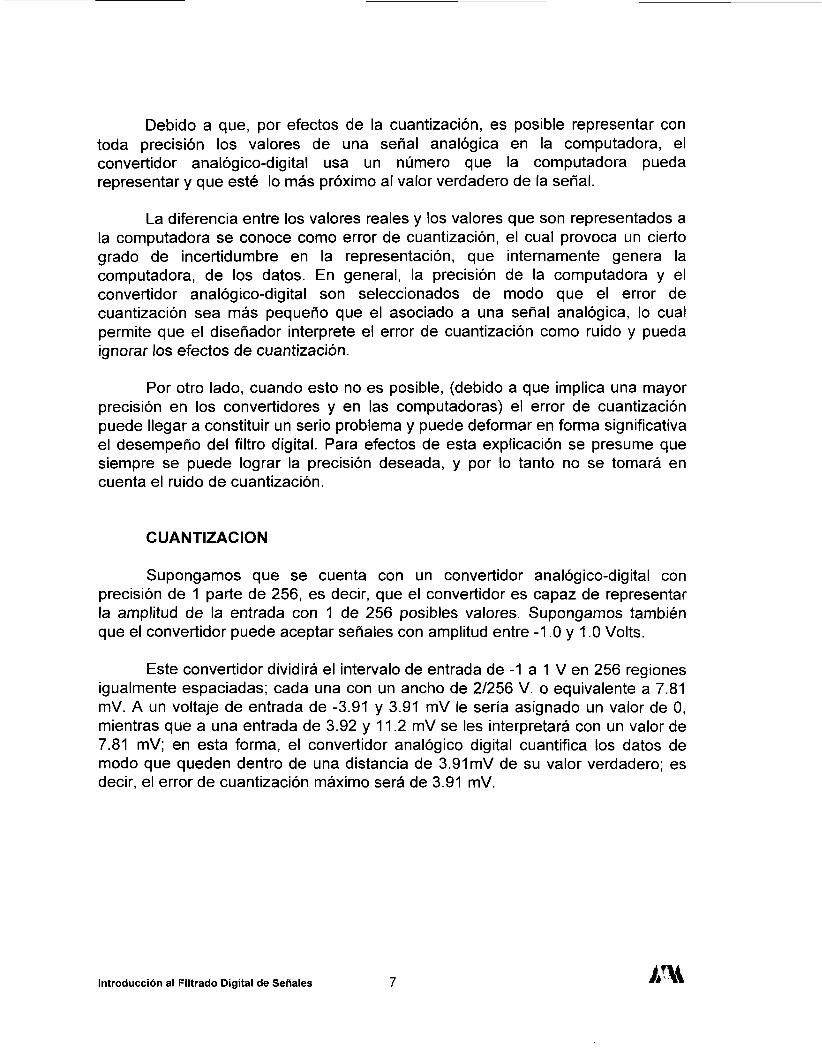
Este convertidor dividirá el intervalo de entrada de -1 a I V en 256 regiones igualmente espaciadas; cada una con un ancho de 2/256 V. o equivalente a 7.81 mV. A un voltaje de entrada de -3.91 y 3.91 mV le sería asignado un valor de O, mientras que a una entrada de 3.92 y 11.2 mV se les interpretará con un valor de 7.81 mV; en esta forma, el convertidor analógico digital cuantifica los datos de modo que queden dentro de una distancia de 3.91mV de su valor verdadero; es decir, el error de cuantización máximo será de 3.91 mV.
Introducción al Filtrado Digital de Señales 7
Este proceso de cuantización lo podemos representar gráficamente dibujando el valor de la salida del convertidor como una función de la amplitud a la entrada del convertidor analógico-digital, lo anterior se muestra en la figura 1.3:
Sal Ida c ~ n C l z s d o r
7 . 6 í 15.68 A a p l L t u d de antrnda
I Figura 1.3.- Representación gráfica de la Cuantización. Salida vs. Entrada.
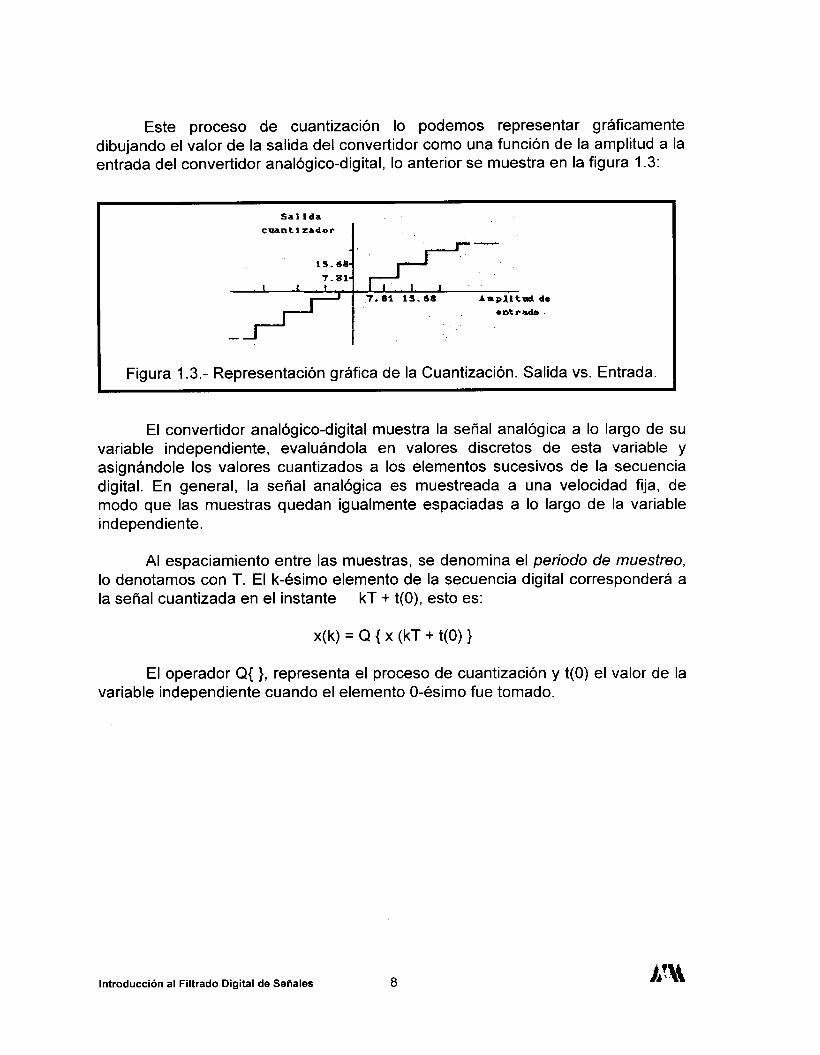
El convertidor analógico-digital muestra la señal analógica a lo largo de su variable independiente, evaluándola en valores discretos de esta variable y asignándole los valores cuantizados a los elementos sucesivos de la secuencia digital. En general, la señal analógica es muestreada a una velocidad fija, de modo que las muestras quedan igualmente espaciadas a lo largo de la variable independiente.
AI espaciamiento entre las muestras, se denomina el periodo de muestreo, lo denotamos con T. El k-ésimo elemento de la secuencia digital corresponderá a la señal cuantizada en el instante kT + t(O), esto es:
x(k) = Q { x (kT + t(0) }
El operador Q{ }, representa el proceso de cuantización y t(0) el valor de la variable independiente cuando el elemento O-ésimo fue tomado.
Introducción al Filtrado Digital de Señales 8
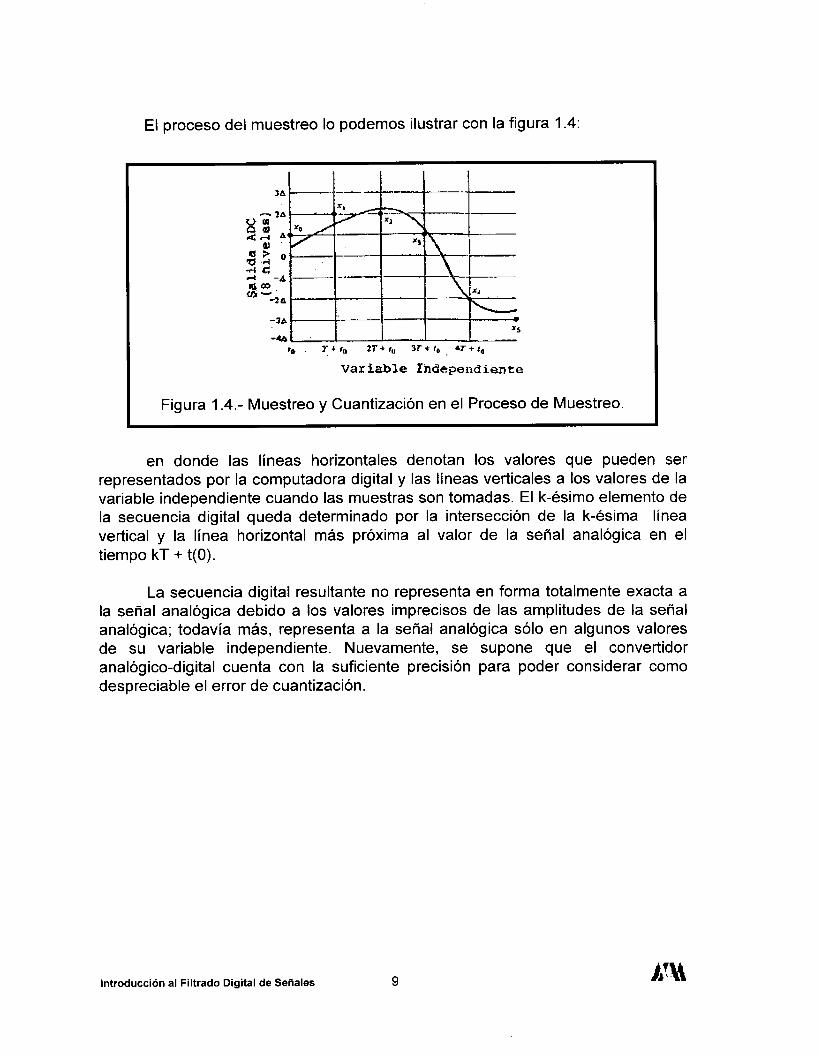
El proceso del muestre0 lo podemos ilustrar con la figura 1.4:
Figura 1.4.- Muestreo y Cuantización en el Proceso de Muestreo.
en donde las líneas horizontales denotan los valores que pueden ser representados por la computadora digital y las líneas verticales a los valores de la variable independiente cuando las muestras son tomadas. El k-ésimo elemento de la secuencia digital queda determinado por la intersección de la k-ésima línea vertical y la línea horizontal más próxima al valor de la señal analógica en el tiempo kT + t(0).
La secuencia digital resultante no representa en forma totalmente exacta a la señal analógica debido a los valores imprecisos de las amplitudes de la señal analógica; todavía más, representa a la señal analógica sólo en algunos valores de su variable independiente. Nuevamente, se supone que el convertidor analógico-digital cuenta con la suficiente precisión para poder considerar como despreciable el error de cuantización.
introducción al Filtrado Digital de Señales 9
VELOCIDAD DE MUESTRE0
AI trabajar una señal con un sistema de procesamiento digital una primera interrogante que hay que abordar es:
¿Cuál deberá ser el espaciamiento, periodo de muestreo TI entre muestras? o, equivalentemente, ¿cuál deberá ser la velocidad de muestreo, In, en el sistema digital responsable de procesar la señal analógica? La primera acción que se nos ocurre es la de muestrear la señal analógica tan rápido como sea posible, ya que entre más cercanas se encuentren las muestras se preservará de mejor manera la forma de la señal analógica
Sin embargo, esta solución resulta ser una solución muy costosa debido a que los convertidores N D con tiempos de conversión muy pequeños, y las computadoras para procesar las muestras resultantes, se vuelven muy costosas. Es posible determinar una señal de muestreo mínima para una señal dada si consideramos que tal velocidad quedará gobernada por la rapidez de las fluctuaciones que tenga la señal.
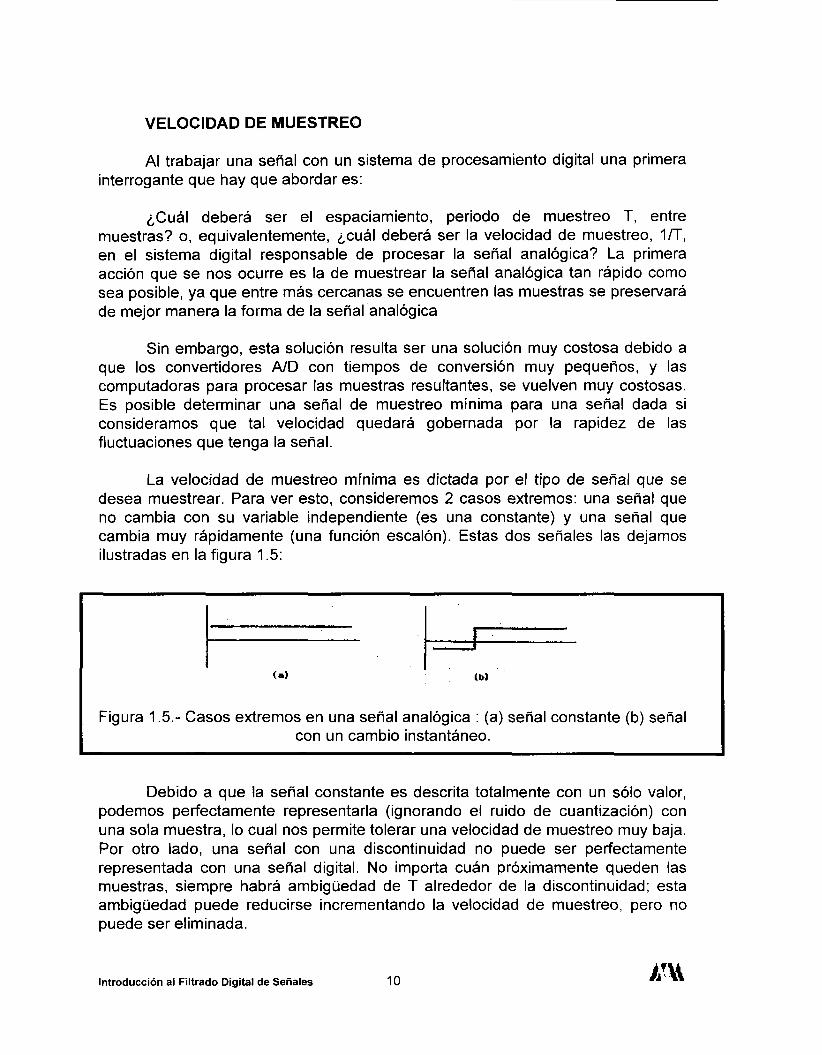
La velocidad de muestreo mínima es dictada por el tipo de señal que se desea muestrear. Para ver esto, consideremos 2 casos extremos: una señal que no cambia con su variable independiente (es una constante) y una señal que cambia muy rápidamente (una función escalón). Estas dos señales las dejamos ilustradas en la figura 1.5:
(a) lb)
Figura 1.5.- Casos extremos en una señal analógica : (a) señal constante (b) señal con un cambio instantáneo.
Debido a que la señal constante es descrita totalmente con un sólo valor, podemos perfectamente representarla (ignorando el ruido de cuantización) con una sola muestra, lo cual nos permite tolerar una velocidad de muestre0 muy baja. Por otro lado, una señal con una discontinuidad no puede ser perfectamente representada con una señal digital. No importa cuán próximamente queden las muestras, siempre habrá ambigüedad de T alrededor de la discontinuidad; esta ambigüedad puede reducirse incrementando la velocidad de muestreo, pero no puede ser eliminada.
Introducción al Filtrado Digital de Señales 10 i>N

Sobre la base de estos dos ejemplos, resulta claro que las señales analógicas que varían lentamente pueden ser representadas muy aproximadamente con señales digitales derivadas a partir de velocidades de muestreo bajas; en tanto que las señales que varían rápidamente requieren de velocidades superiores. Estas observaciones se pueden hacer extensivas a la noción de cosenos y senos con velocidades (frecuencias) altas y bajas.
Consideremos el muestreo de una señal coseno de frecuencia o
x(t) = cos o t
donde la variable o nos puede dar la idea de qué tan rápidamente varía la función coseno con su variable independiente. Cuando o = O se trata de una función constante; en tanto que un valor grande de o nos significa una función coseno rápidamente variante.
El muestreo de esta función coseno cada T unidades de tiempo nos proporciona la señal digital siguiente:
x, = cos kTo
en donde el producto de To determina que tan rápidamente varía esta señal digital con el índice k. To es llamada frecuencia normalizada, y es expresada en radianedmuestra. Aquí podríamos tener la tentación de aplicar los resultados del mundo analógico y decir que los valores grandes de To significarán que la señal digital varía rápidamente con k; pero este no es el caso.
Introducción al Filtrado Digital de Señales 11
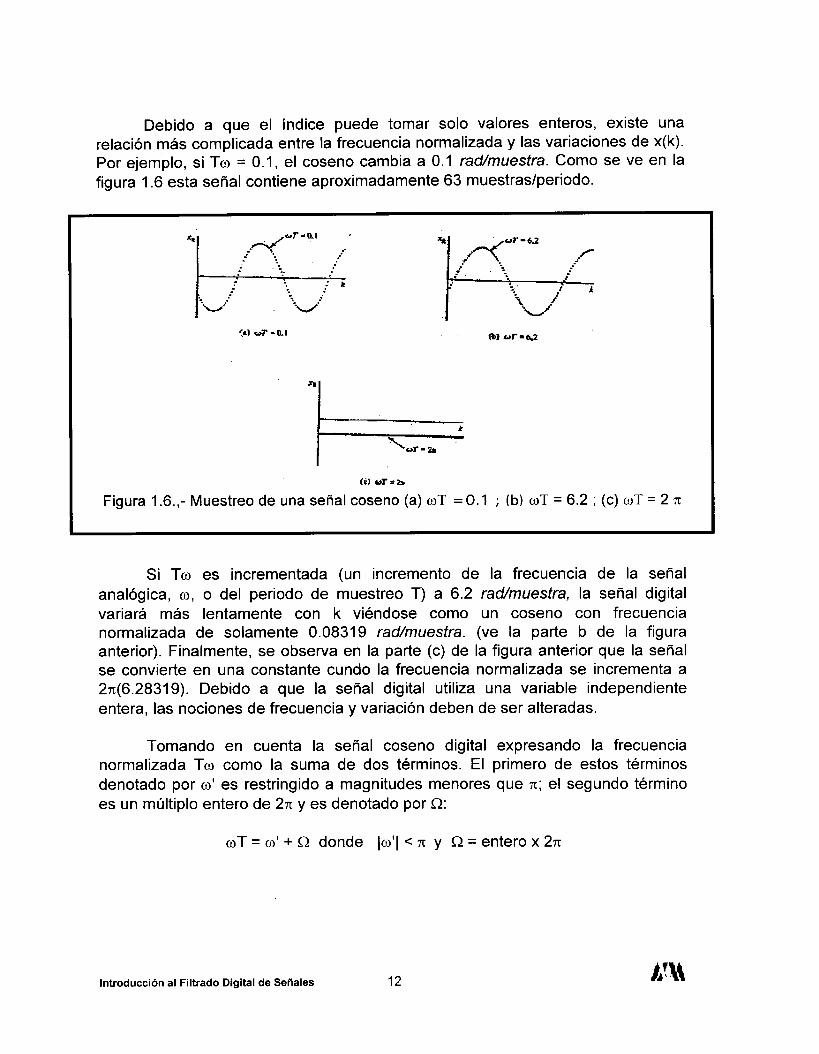
Debido a que el índice puede tomar solo valores enteros, existe una relación más complicada entre la frecuencia normalizada y las variaciones de x(k). Por ejemplo, si To = 0.1, el coseno cambia a 0.1 rad/muestra. Como se ve en la figura 1.6 esta señal contiene aproximadamente 63 muestras/periodo.
Figura 1.6.,- Muestre0 de una señal coseno (a) oT =O. 1 ; (b) oT = 6.2 ; (c) oT = 2 7c I Si To es incrementada (un incremento de la frecuencia de la señal
analógica, o, o del periodo de muestre0 T) a 6.2 rad/muestra, la señal digital variará más lentamente con k viéndose como un coseno con frecuencia normalizada de solamente 0.08319 rad/muesfra. (ve la parte b de la figura anterior). Finalmente, se observa en la parte (c) de la figura anterior que la señal se convierte en una constante cundo la frecuencia normalizada se incrementa a 246.2831 9). Debido a que la señal digital utiliza una variable independiente entera, las nociones de frecuencia y variación deben de ser alteradas.
Tomando en cuenta la señal coseno digital expresando la frecuencia normalizada To como la suma de dos términos. El primero de estos términos denotado por o' es restringido a magnitudes menores que X ; el segundo término es un múltiplo entero de 271. y es denotado por R:
COT = o' + R donde 1 0 ' 1 7~ y R = entero x 271.
Introducción ai Filtrado Digital de Señales 12
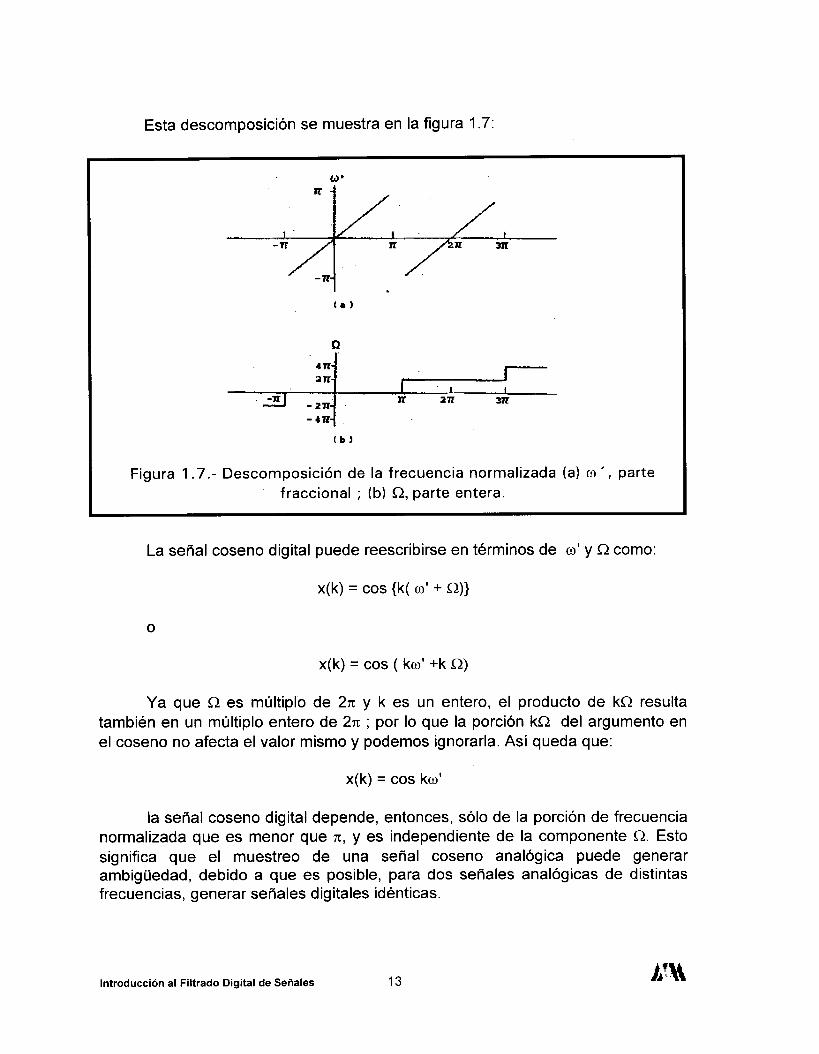
Esta descomposición se muestra en la figura 1.7:
I
t i 1
R
Figura 1.7.- Descomposición de la frecuencia normalizada (a) o ', parte fracciona1 ; (b) R, parte entera.
La señal coseno digital puede reescribirse en términos de o' y R como:
x(k) = COS {k( o' + 0))
O
x(k) = cos ( ko' +k R)
Ya que R es múltiplo de 2x y k es un entero, el producto de kR resulta también en un múltiplo entero de 2x ; por lo que la porción kR del argumento en el coseno no afecta el valor mismo y podemos ignorarla. Así queda que:
x(k) = cos ko'
la señal coseno digital depende, entonces, sólo de la porción de frecuencia normalizada que es menor que TC, y es independiente de la componente R. Esto significa que el muestre0 de una señal coseno analógica puede generar ambigüedad, debido a que es posible, para dos señales analógicas de distintas frecuencias, generar señales digitales idénticas.
Introducción al Filtrado Digital de Seiiales 13
Por ejemplo, las señales analógicas de frecuencia O + 2n/ T proporcionarán la misma señal digital. A este proceso de le conoce como aliasing, ya que por el efecto del proceso de muestreo sobre señales coseno de diferentes frecuencias, se podría asumir la misma imagen digital, lo cual podría provocar que las asumiéramos como alias una de la otra.
Es imposible determinar con precisión la frecuencia efectiva y real de una señal coseno digital, debido a que el factor de R quedó oculto. Por tanto, estamos obligados a suponer un valor de SZ si queremos que tenga sentido en términos de la frecuencia normalizada. Para la mayoría de las aplicaciones es razonable suponer un valor de R = O; es decir, la frecuencia normalizada, oT, queda restringida al intervalo de -n a n.
Ciertamente, es posible muestrear una señal analógica de alta frecuencia (R) a una velocidad de muestreo baja (T grande) y por tanto producir una frecuencia normalizada mayor a n. En tales casos, el supuesto de R = O es erróneo, de modo que la señal digital será interpretada equivocadamente como el resultado del muestreo de una función coseno analógica de frecuencia inferior.
Así, el coseno de alta frecuencia es disfrazado (aliased) e interpretado como un coseno de frecuencia inferior por el proceso e muestreo. Para prevenir el efecto de aliasing el periodo de muestreo debe de ser suficientemente pequeño para acomodar las variaciones en la señal analógica; más precisamente, el periodo debe se lo suficiente mente pequeño para que R = O, es decir:
loTl n ó lo que es lo mismo:
En otras palabras, la onda coseno debe ser muestreada por lo menos dos veces en un periodo. Si esto no ocurre, la secuencia digital será interpretada como proveniente de una señal analógica de menor frecuencia.
Introducción al Filtrado Digital de Señales 14
SELECCION DEL PERIODO DE MUESTRE0
Consideremos el muestre0 de una señal senoidal con una frecuencia de repetición de 1000 rad/seg. ¿Cual será en este caso, la separación máxima necesaria entre muestras, de modo que la señal no se vea afectada por el alias?
Si se utiliza la desigualdad
se tiene que:
T < 7c I 1000
lo que equivale
T < 0.00314 seg.
es decir que se podrían tomar muestras con una separación de por lo menos 0.00314 seg. en otras palabras, requerirá de por lo menos 319 muesfras/seg. Usualmente, se acostumbra dejar un margen del 20% de más, por lo que se tendrían 400 muesfras/seg.
DETERMINACION DE LA FRECUENCIA MAS ALTA
Asumamos la presencia de un sistema que toma muestras cada décima de segundo. ¿Cuál será la función senoidal con frecuencia más alta que podría muestrearse sin que ocurriera el efecto de aliasing?
Esto se puede apreciar empleando otra vez la desigualdad del ejemplo anterior con T = 0.1 segundos, y evaluando el límite superior para o como:
ó equivalentemente
lo cual quiere decir que señales con frecuencia superiores a Ion: raú/seg. serán tratadas como alias por el sistema.
Introducción al Filtrado Digital de Señales 15
Hasta aquí hemos desarrollado nuestra explicación en función de las señales sinusoidales debido a que ellas resultan ser muy convenientes para la medición de qué tan rápido cambia una señal con respecto a su variable independiente. Sin embargo, los resultados se pueden aplicar a cualquier tipo de señales; y esto es posible porque todas las señales se pueden representar como una suma ponderada de cosenos y senos de diferentes frecuencias. Por supuesto, las componentes de frecuencias mayores que d T serán afectadas por el alias resultante del proceso de muestreo.
De este modo, una señal analógica que contenga componentes de alta frecuencia, podrá ser representada imprecisamente por una secuencia digital que hubiera sido generada con una velocidad de muestreo inferior a la requerida. La regla será entonces el muestrear las señales a una velocidad suficientemente grande para acomodar a la componente de frecuencia más alta de la señal.
El efecto del aliasing es el problema más estorboso para el diseñador. No importa cuánto cuidado se tenga, siempre habrá de soportarse algún grado de aliasing cuando las señales analógicas son convertidas a secuencias digitales. Esto se debe a que todas las señales analógicas poseen algunos componentes de frecuencias muy altas, de modo que no importa qué tan rápido sea muestreada la señal, algunas frecuencias tendrán que soportar el alias. En general, este efecto se puede atenuar introduciendo un filtro que atenúe las componentes de alta frecuencia antes de que la señal sea muestreada.
Introducción al Filtrado Digital de Señales 16
FILTROS DIGITALES
Todos los filtros digitales se pueden restringir a una de dos formas: filtros digitales no-recursivos y filtros digitales recursivos. Un filtro no-recursivo genera su salida ponderando las entradas con un conjunto de constantes y sumando estos resultados. Estas constantes son denominados los Coeficientes del filtro y, además son las que determinan la operación del filtro. en realidad el diseño de un filtro consiste en la elección de los valores de estos coeficientes. El filtro no- recursivo es definido por la siguiente relación:
m ...
Y k = x a i X k - i
este filtro computa la salida actual, y,, a partir de la entrada presente, x k , y las m entradas que le preceden, Xk.1, xk.*, ... , Xk-,, y las m entradas que le siguen, x ~ + ~ , x ~ + ~ , ... , xk+,. La salida es una suma ponderada de la entrada presente y de sus 2m vecinos.
Obsérvese que las entradas no contribuyen de igual modo a la salida; la contribución de cada elemento de la secuencia es gobernada por el coeficiente con que es multiplicado.
Si el coeficiente es grande, el elemento puede afectar dramáticamente la salida; si, por otro lado, el coeficiente es pequeño, el elemento tendrá un efecto proporcionalmente pequeño sobre la salida del filtro.
Introducción al Filtrado Digital de Seiiales 17
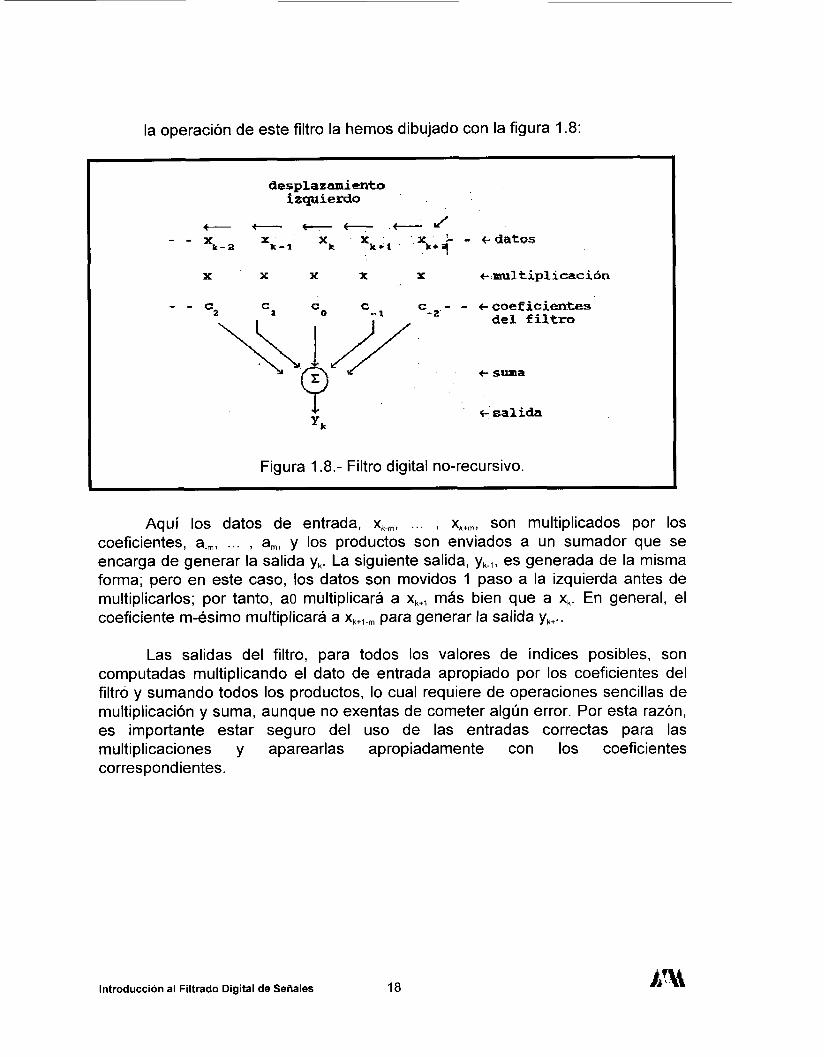
la operación de este filtro la hemos dibujado con la figura 1.8:
X X X X X cnnrlt ipl icación
- - cs C c-, - - +coeficientes del filtro
t suma
t- salida
I Figura 1.8.- Filtro digital no-recursivo.
Aquí los datos de entrada, Xk.,, ... , &+,, son multiplicados por los coeficientes, a-,, ... , a,, y los productos son enviados a un sumador que se encarga de generar la salida y,. La siguiente salida, y,,, es generada de la misma forma; pero en este caso, los datos son movidos 1 paso a la izquierda antes de multiplicarlos; por tanto, a0 multiplicará a &+I más bien que a x,. En general, el coeficiente m-ésimo multiplicará a Xk+l., para generar la salida y,+,.
Las salidas del filtro, para todos los valores de índices posibles, son computadas multiplicando el dato de entrada apropiado por los coeficientes del filtro y sumando todos los productos, lo cual requiere de operaciones sencillas de multiplicación y suma, aunque no exentas de cometer algún error. Por esta razón, es importante estar seguro del uso de las entradas correctas para las multiplicaciones y aparearlas apropiadamente con los coeficientes correspondientes.
Introducción al Filtrado Digital de Señales 18

OPERACION DE UN FILTRO DIGITAL NO-RECURSIVO
Consideremos el caso de un filtro digital con los siguientes 3 coeficientes:
a-. = -1 a ,=1 a 2 = 2
La relación de entrada-salida para este filtro particular se obtiene sustituyendo los valores de los coeficientes en la expresión general:
De este modo, dada una secuencia de entrada particular xk, es muy directo el cómputo de la salida de este filtro. Primero, se selecciona un valor de k para el que se requiere computar la salida, entonces se sustituyen los 3 valores de la entrada requeridos para ese valor de k. Por ejemplo, si fuera el caso de evaluar la salida en el tiempo O, podremos escribir
y, = -Ix, + I x -1 + ZX,
para la salida al tiempo 1 :
y, = -Ix2 + Ix, + 2x.,
y así sucesivamente. En esta forma se podrá, con un procedimiento muy laborioso, implementar la salida de este filtro digital para cualesquier secuencia de entrada dada. Estos filtros son, entonces, verdaderos clientes a ser implementados sobre computadoras.
FILTROS DIGITALES RECURSIVOS
Una segunda forma para realizar filtros digitales es la de tipo recursivo, en el que la salida no sólo queda en función de la entradas sino que depende también de las salidas pasadas. El filtro recursivo es definido por la relación:
rn M ...
i = - m j = i
en donde han aparecido los coeficientes b, que son utilizados para pesar las salidas pasadas yk.,.
Introducción al Filtrado Digital de Señales 19
Por supuesto, cuando todos estos coeficientes son O se tiene el caso particular de un filtro no-recursivo, es decir, el filtro no-recursivo puede interpretarse como un caso especial de los filtros recursivos.
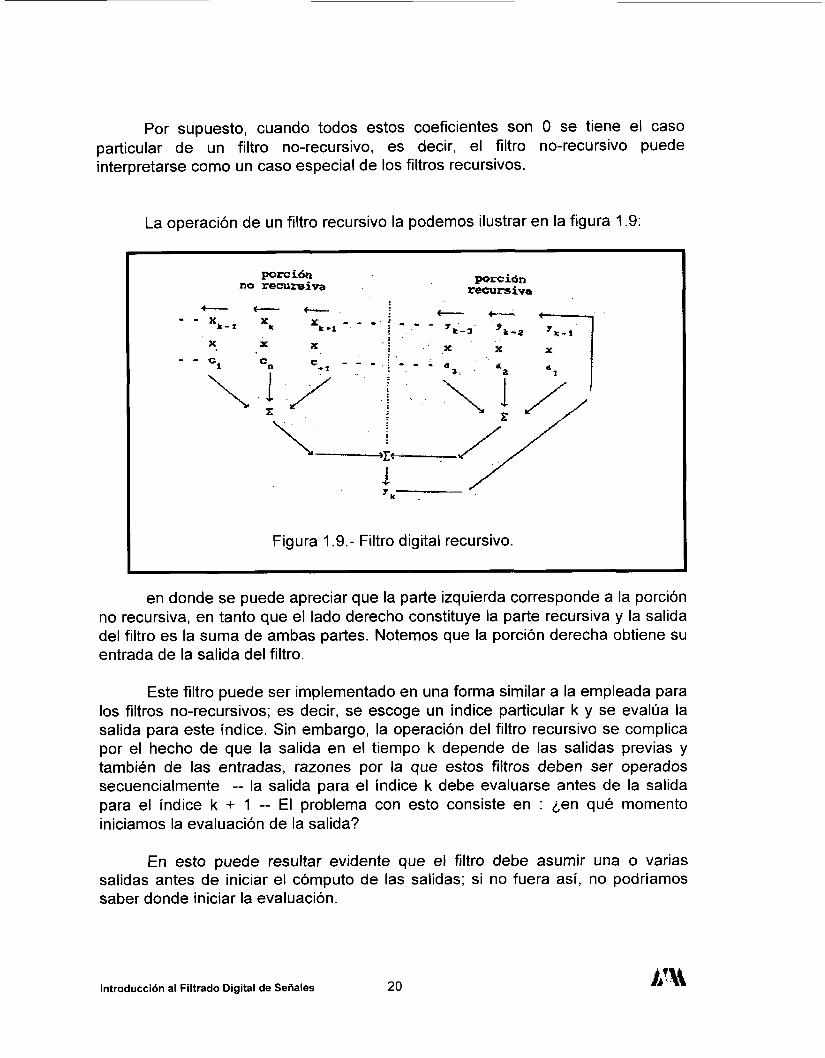
La operación de un filtro recursivo la podemos ilustrar en la figura 1.9:
I -
- -
\
Figura I .9.- Filtro digital recursivo. I en donde se puede apreciar que la parte izquierda corresponde a la porción
no recursiva, en tanto que el lado derecho constituye la parte recursiva y la salida del filtro es la suma de ambas partes. Notemos que la porción derecha obtiene su entrada de la salida del filtro.
Este filtro puede ser implementado en una forma similar a la empleada para los filtros no-recursivos; es decir, se escoge un índice particular k y se evalúa la salida para este índice. Sin embargo, la operación del filtro recursivo se complica por el hecho de que la salida en el tiempo k depende de las salidas previas y también de las entradas, razones por la que estos filtros deben ser operados secuencialmente -- la salida para el índice k debe evaluarse antes de la salida para el índice k + 1 -- El problema con esto consiste en : ¿en qué momento iniciamos la evaluación de la salida?
En esto puede resultar evidente que el filtro debe asumir una o varias salidas antes de iniciar el cómputo de las salidas; si no fuera así, no podríamos saber donde iniciar la evaluación.
Introducción al Filtrado Digital de Señales 20
Tales salidas iniciales son las denominadas condiciones iniciales, en general, el filtro tendrá condiciones iniciales O antes de que los datos de entrada afecten la salida, pudiendo empezar la evaluación de las salidas cuando la primera entrada diferente de O introduce la porción no-recursiva del filtro. Después de esto, las salidas se deberán computar secuencialmente, ya que serán utilizadas en las salidas del filtro.
OPERACION DE UN FILTRO RECURSIVO
Consideremos un filtro recursivo en donde los coeficientes son:
a2 = 0.14 b, = 1.77 b, = -1.19 b, = 0.28
Además se asumirá que el filtro está inicialmente relajado y que los datos O, y que se de entrada son O para índices negativos; es decir, x, = O para k
incrementan linealmente para índices positivos, esto es, x, = k + 1 para k 2 O.
Sabemos que la salida es O hasta que la primera entrada distinta de O afecta al filtro, de modo que el primer valor posible distinto de O será x,. ¿En qué momento el valor x, afecta al filtro?
No necesariamente en k = O, ya que esto está en función de los coeficientes de la porción no-recursiva del filtro.
En este caso, debido a que a2 es el primer coeficiente diferente de O, x, afectará la salida en el índice k = 2, dos pasos después de k = O. Por tanto, la primera salida de este filtro la dejamos ilustrada en la figura 1 . I O .
Introducción al Filtrado Digital de Señales 21
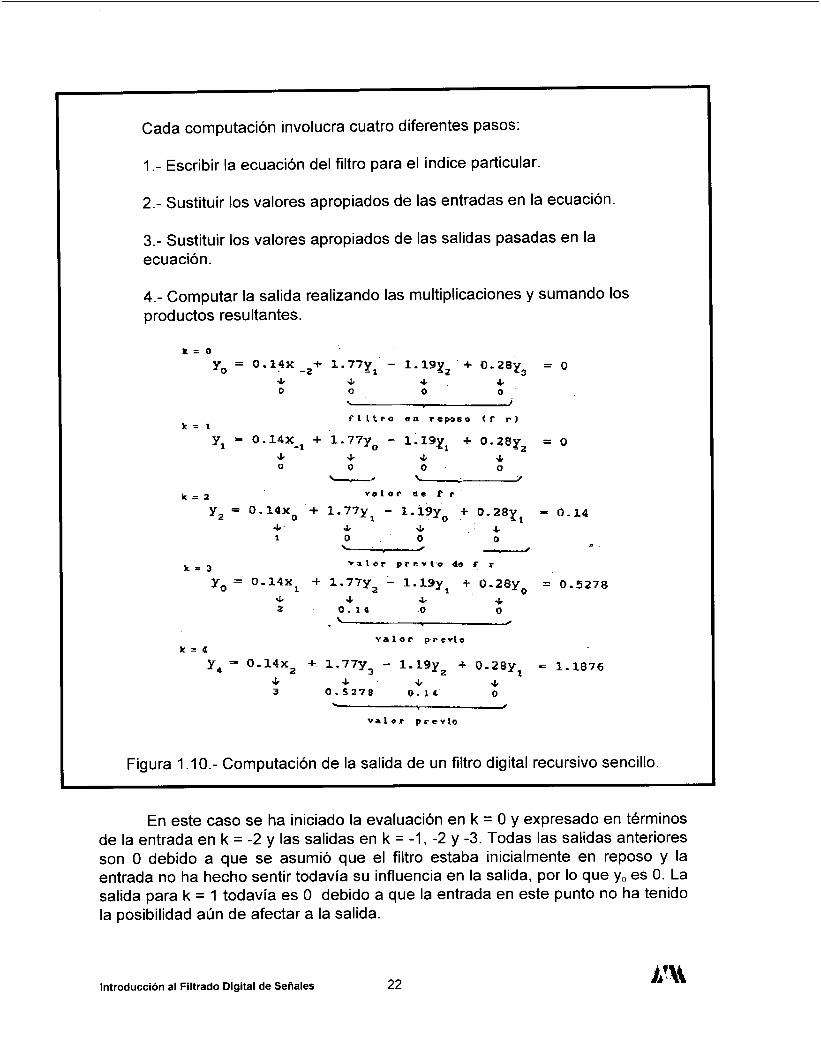
Cada computación involucra cuatro diferentes pasos:
I I Figura 1 . IO . - Computación de la salida de un filtro digital recursivo sencillo.
1 .- Escribir la ecuación del filtro para el índice particular.
2.- Sustituir los valores apropiados de las entradas en la ecuación.
3.- Sustituir los valores apropiados de las salidas pasadas en la ecuación.
4.- Computar la salida realizando las multiplicaciones y sumando los productos resu Mantes.
c J
v a l o r p r e v i o k = 4
. I
v a l o r p r e v i o
En este caso se ha iniciado la evaluación en k = O y expresado en términos de la entrada en k = -2 y las salidas en k = -1, -2 y -3. Todas las salidas anteriores son O debido a que se asumió que el filtro estaba inicialmente en reposo y la entrada no ha hecho sentir todavía su influencia en la salida, por lo que y,, es O. La salida para k = 1 todavía es O debido a que la entrada en este punto no ha tenido la posibilidad aún de afectar a la salida.
Introducción al Filtrado Digital de Señales 22
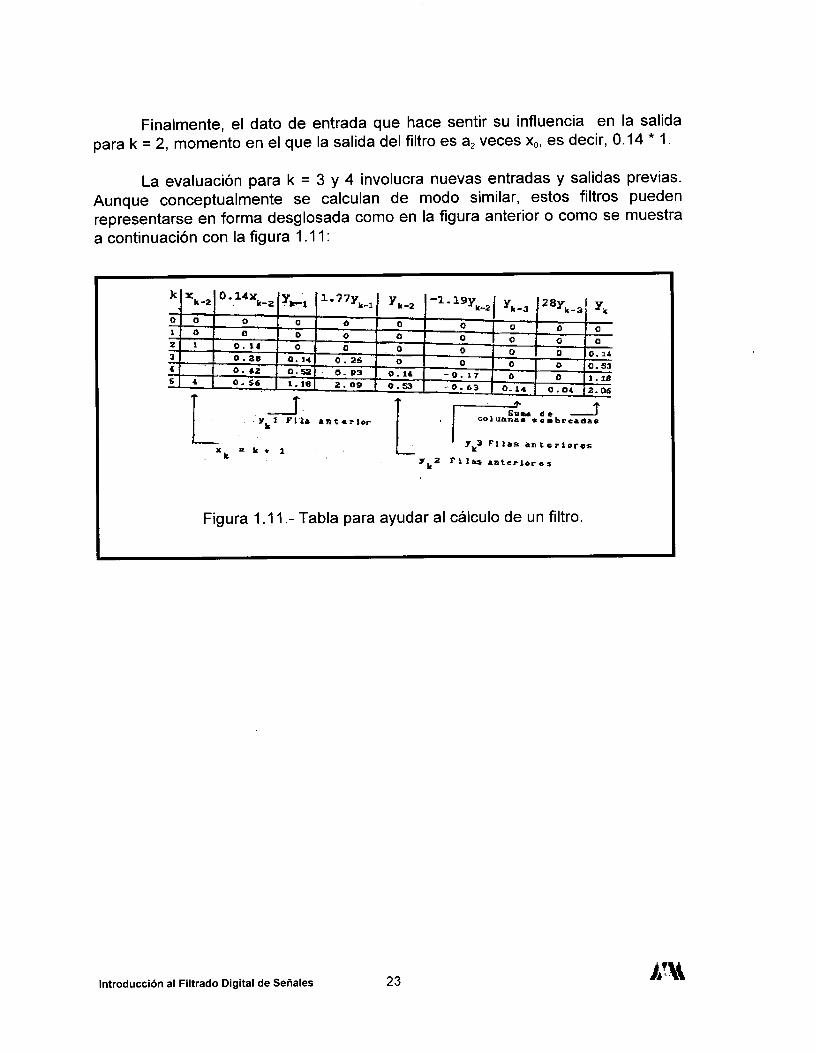
Finalmente, el dato de entrada que hace sentir su influencia en la salida para k = 2, momento en el que la salida del filtro es a2 veces x,, es decir, 0.14 * 1.
La evaluación para k = 3 y 4 involucra nuevas entradas y salidas previas. Aunque conceptualmente se calculan de modo similar, estos filtros pueden representarse en forma desglosada como en la figura anterior o como se muestra a continuación con la figura 1 .I 1 :
I
Figura 1 .I 1 .- Tabla para ayudar al cálculo de un filtro. I
Introducción al Filtrado Digital de Señales 23
CAPITULO 2 CAUSAS POR LAS QUE SE NECESITA FILTRADO ADAPTIVO
Un filtro adaptivo es definido generalmente como un filtro cuyas características pueden ser modificadas para alcanzar algún objetivo, y normalmente se asume que cumplirá con esta modificación (o "adaptación") automáticamente, sin necesidad de una intervención substancial del usuario.
Aunque no es un requisito indispensable, también se suele suponer que la escala de tiempo en la cual se lleva a cabo la modificación es muy lenta comparada con el ancho de banda de la señal a ser filtrada. Implícito en estas suposiciones se encuentra el hecho que el diseñador del sistema pudiera de hecho, usar un filtro no adaptivo e invariante en el tiempo si solo supiera lo suficiente de las señales de entrada para diseñar un filtro antes de que sea empleado. Esta falta de conocimiento puede saltar cuando no se tiene un pleno conocimiento acerca de las características de la señal cuando el filtro es encendido, o porque las características de la señal de entrada pueden cambiar muy lentamente durante la operación del filtro.
Faltando este conocimiento, el diseñador entonces cambia hacia un filtro "adaptivo" el cual pueda "aprender" las características de la señal cuando es encendido por primera vez y además pueda "rastrear" en el futuro los pequeños cambios que ocurren en las características de la señal.
Los filtros adaptivos pueden ser implementados en una gran variedad de formas, permitiendo que una gran cantidad de problemas prácticos sean resueltos. Muchos de los aspectos del diseño de filtros adaptivos, y aún el desarrollo de algunos algoritmos adaptivos dependen de la naturaleza de la aplicación en sí.
Debido a esto, a continuación se muestran ejemplos de como los filtros adaptivos pueden ser empleados con dos de los mucho casos que se presentan en la práctica. En cada caso, no se examinarán los detalles acerca de los filtros adaptivos, en vez de esto se tomarán dos problemas prácticos de procesamiento de señales y se formulará una solución para cada uno de ellos empleando un filtro "inteligente".
Introducción al Filtrado Digital de Señales 24
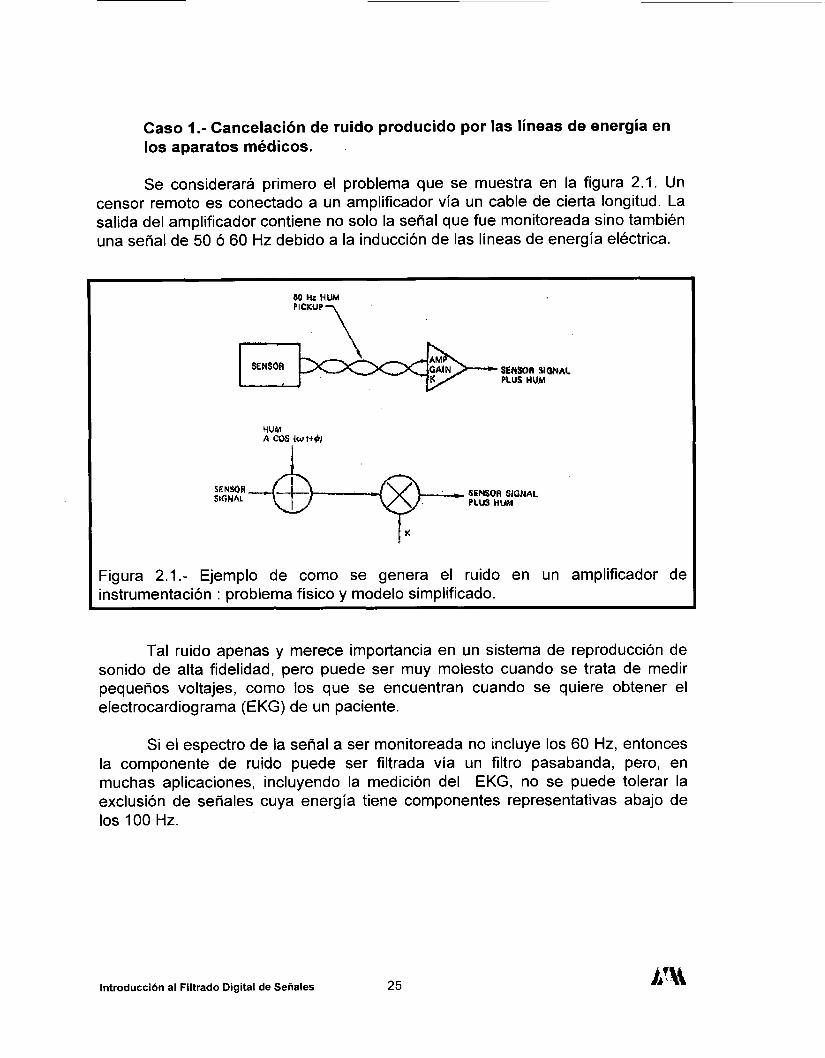
Caso 1.- Cancelación de ruido producido por las líneas de energía en los aparatos médicos.
GAIN SEH(SOR SIGNAL
Se considerará primero el problema que se muestra en la figura 2.1. Un censor remoto es conectado a un amplificador vía un cable de cierta longitud. La salida del amplificador contiene no solo la señal que fue monitoreada sino también una señal de 50 Ó 60 Hz debido a la inducción de las líneas de energía eléctrica.
Tal ruido apenas y merece importancia en un sistema de reproducción de sonido de alta fidelidad, pero puede ser muy molesto cuando se trata de medir pequeños voltajes, como los que se encuentran cuando se quiere obtener el electrocardiograma (EKG) de un paciente.
Si el espectro de la señal a ser monitoreada no incluye los 60 Hz, entonces la componente de ruido puede ser filtrada vía un filtro pasabanda, pero, en muchas aplicaciones, incluyendo la medición del EKG, no se puede tolerar la exclusión de señales cuya energía tiene componentes representativas abajo de los 100 Hz.
Introducción al Filtrado Digital de Señales 25
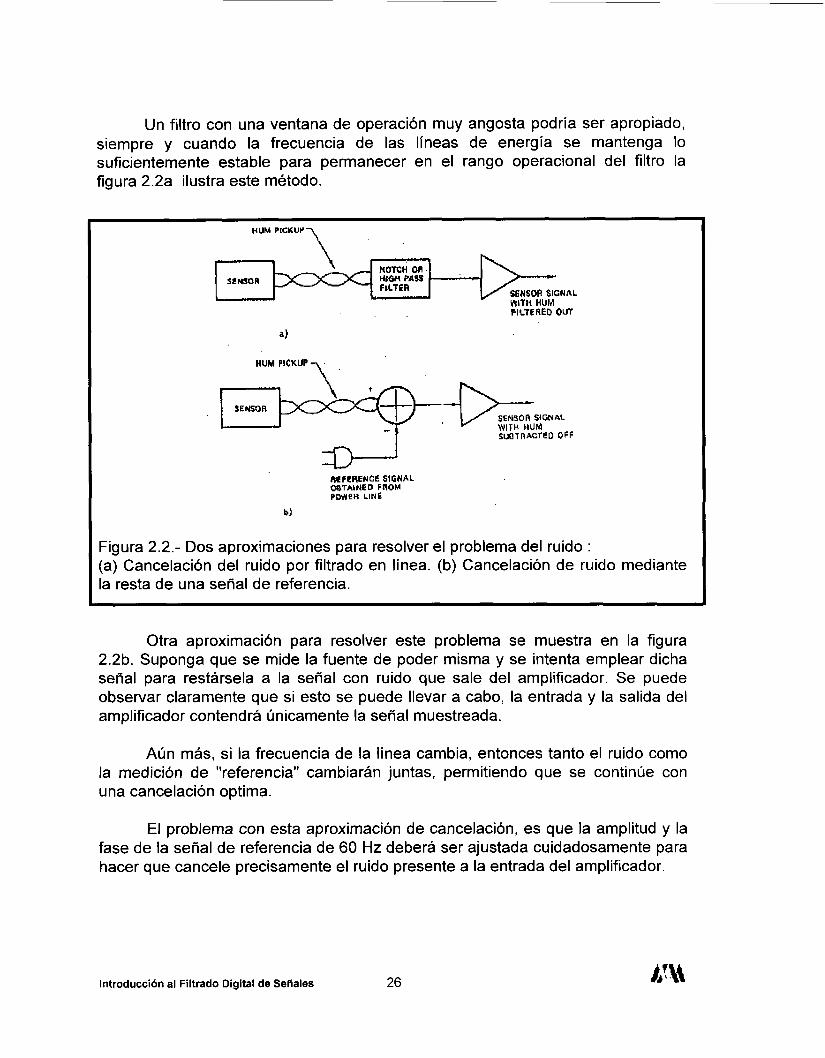
Un filtro con una ventana de operación muy angosta podría ser apropiado, siempre y cuando la frecuencia de las líneas de energía se mantenga lo suficientemente estable para permanecer en el rango operacional del filtro la figura 2.2a ilustra este método.
t ,. SENSOR
~
NOTCH on HIGH PASS
i - SENSOR SIGNAL
FICTBRED our
' FiCTPR
HUM CiCKUP
SlNSOA
ai
HUM PiCXUP
SENSOR SiGNRL
Figura 2.2.- Dos aproximaciones para resolver el problema del ruido : (a) Cancelación del ruido por filtrado en línea. (b) Cancelación de ruido mediante la resta de una señal de referencia.
Otra aproximación para resolver este problema se muestra en la figura 2.2b. Suponga que se mide la fuente de poder misma y se intenta emplear dicha señal para restársela a la señal con ruido que sale del amplificador. Se puede observar claramente que si esto se puede llevar a cabo, la entrada y la salida del amplificador contendrá Únicamente la señal muestreada.
Aún más, si la frecuencia de la línea cambia, entonces tanto el ruido como la medición de "referencia" cambiarán juntas, permitiendo que se continúe con una cancelación optima.
El problema con esta aproximación de cancelación, es que la amplitud y la fase de la señal de referencia de 60 Hz deberá ser ajustada cuidadosamente para hacer que cancele precisamente el ruido presente a la entrada del amplificador.
Introducción al Filtrado Digital de Señales 26
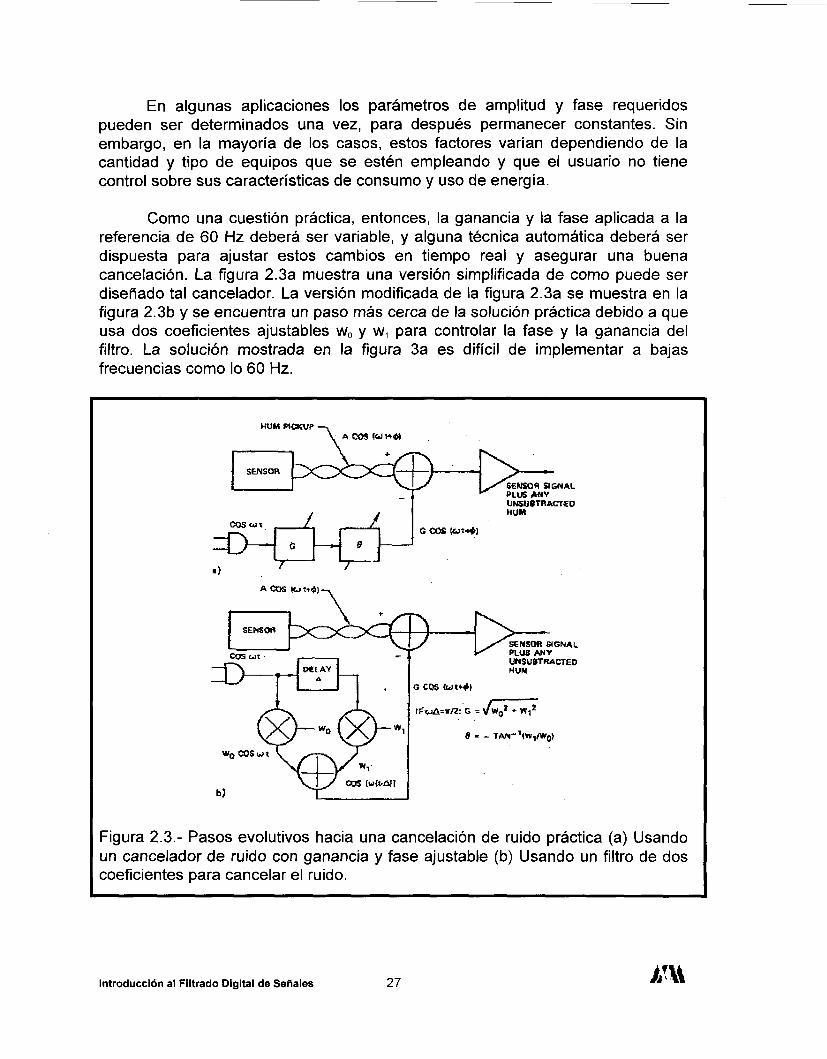
En algunas aplicaciones los parámetros de amplitud y fase requeridos pueden ser determinados una vez, para después permanecer constantes. Sin embargo, en la mayoría de los casos, estos factores varían dependiendo de la cantidad y tipo de equipos que se estén empleando y que el usuario no tiene control sobre sus características de consumo y uso de energía.
Como una cuestión práctica, entonces, la ganancia y la fase aplicada a la referencia de 60 Hz deberá ser variable, y alguna técnica automática deberá ser dispuesta para ajustar estos cambios en tiempo real y asegurar una buena cancelación. La figura 2.3a muestra una versión simplificada de como puede ser diseñado tal cancelador. La versión modificada de la figura 2.3a se muestra en la figura 2.3b y se encuentra un paso más cerca de la solución práctica debido a que usa dos coeficientes ajustables w, y w, para controlar la fase y la ganancia del filtro. La solución mostrada en la figura 3a es difícil de implementar a bajas frecuencias como lo 60 Hz.
O05 Wt - n
I F d = * I Z : G =
e -
Figura 2.3.- Pasos evolutivos hacia una cancelación de ruido práctica (a) Usando un cancelador de ruido con ganancia y fase ajustable (b) Usando un filtro de dos coeficientes para cancelar el ruido.
Introducción al Filtrado Digital de Señales 27

Lo que se ha hecho es desarrollar un filtro adaptivo para solucionar el problema del ruido. El filtro acepta una señal de referencia de 60 Hz (tomado de cualquier contacto) y cambia sus características (ganancia y fase) para producir una señal la cual cancelará el ruido en gran medida.
Caso 2.- Modulación diferencial adaptiva por pulsos codificados.
La transmisión digital de señales analógicas ha evolucionado rápidamente en los Últimos 40 años, principalmente a la inmunidad a los errores que la transmisión digital ofrece y al rápido abaratamiento del hardware de tipo digital comparado con el analógico. La técnica dominante para transformar una señal analógica en una señal propicia para la transmisión digital es la modulación por pulsos codificados (PCM por sus siglas en inglés).
.
La forma de onda analógica (por ejemplo: voz Ó televisión) es pasada por un filtro pasa-bajos y después digitalizada con un convertidor analógico digital (ADC) de B bits. Las muestras del ADC son mandadas vía el sistema de transmisión a la estación receptora. Esta transmisión es usualmente hecha en el formato de bits en serie ó transmisión serial, resultando en una tasa de bits requerida de Bfs bitskeg. para transmitir la señal analógica.
La frecuencia de muestre0 es determinada por el ancho de banda de la señal. Por ejemplo, las señales de voz son filtradas típicamente con un filtro pasa- bajas para limitar las componentes espectrales dentro de los 3300 Hz, y la salida del filtro es muestreada a 8KHz. El número de bits empleado para representar cada muestra, B, es seleccionado dependiendo del cumplimiento de varias condiciones:
a.- Un número B bajo, implica una tasa de bits baja en la transmisión de dicha señal, y por lo tanto bajarán los costos de transmisión.
b.- B deberá ser lo suficientemente grande para representar la señal analógica durante todo ó casi todo el rango de voltaje de esta; y
c.- B deberá ser lo suficientemente grande para reducir el "ruido de cuantización" a un nivel tolerable.
En la mayoría de los sistemas prácticos, las consideraciones b y c son usadas para determinar un mínimo valor tolerable de B. Por ejemplo, en telefonía digital, la combinación de los requerimientos de rango dinámico y los requerimientos de señal a ruido forzan a que B sea del orden de 12 Ó 13 si se realiza una conversión AiD lineal.
Introducción al Filtrado Digital de Señales 28
Dada un frecuencia de muestre0 de 8Khz. y una muestra digital de 12 bits, un enlace de 96 kbps deberá de ser empleado para que una sola señal de voz tenga "calidad aceptable". Por muchas razones, es deseable tener una tasa de transmisión baja, lo cual implica que los costos por los circuitos decrezcan también.
Como primer paso, virtualmente todos los sistemas comerciales de telefonía digital usan una compresión no-lineal de las muestras para reducir B de 12 a 8 bits. Esta compresión tiende a reducir la relación señal a ruido (SNR) de señales potentes, las cuales tienen más que la calidad requerida, mientras se preserva el SNR de las señales más débiles. Este compromiso alcanza una calidad aceptable por sobre un amplio rango de amplitudes de señal y, como resultado, 64 kbps es el estándar para la transmisión telefónica de voz.
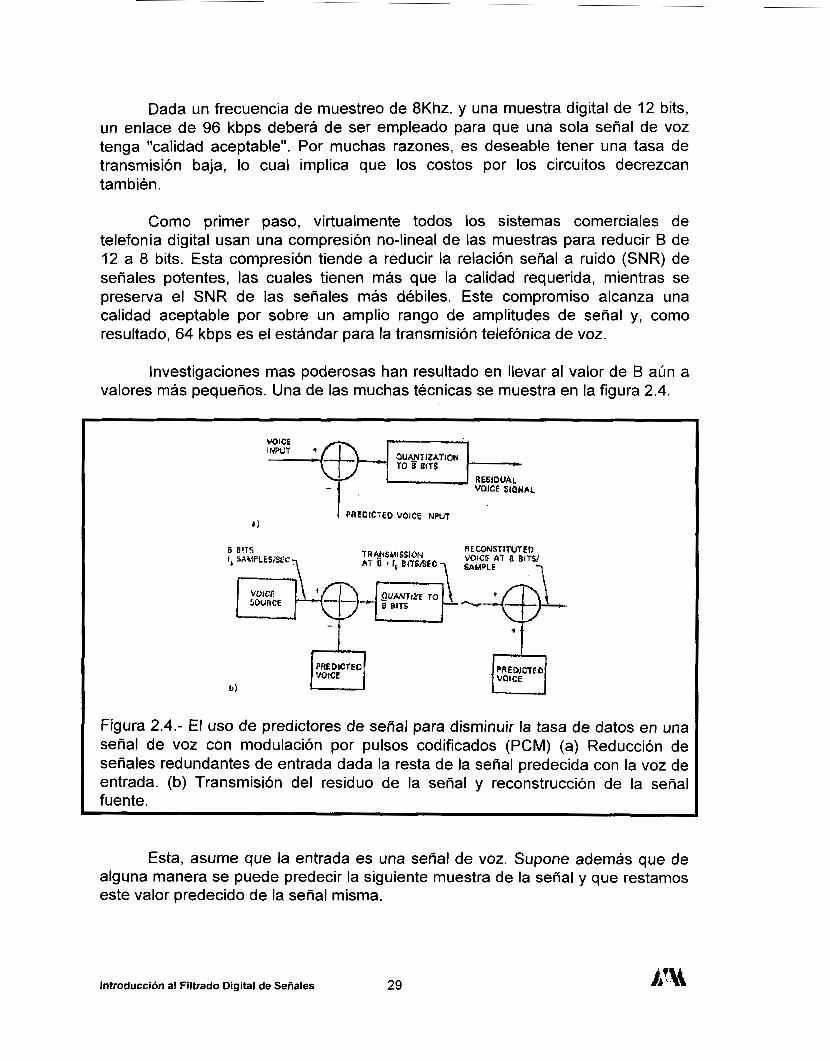
Investigaciones mas poderosas han resultado en llevar al valor de B aún a valores más pequeños. Una de las muchas técnicas se muestra en la figura 2.4.
VOICE
OUANTIZATiON
RESIDUAL VOICE S~PNAC
I PREDICTED VOICE lNPüT *)
VOICE
Figura 2.4.- El uso de predictores de señal para disminuir la tasa de datos en una señal de voz con modulación por pulsos codificados (PCM) (a) Reducción de señales redundantes de entrada dada la resta de la señal predecida con la voz de entrada. (b) Transmisión del residuo de la señal y reconstrucción de la señal fuente.
Esta, asume que la entrada es una señal de voz. Supone además que de alguna manera se puede predecir la siguiente muestra de la señal y que restamos este valor predecid0 de la señal misma.
Introducción al Filtrado Digital de Seiiales 29
Si la predicción es relativamente precisa, entonces la señal resultante de esta diferencia deberá ser substancialmente mas pequeña en magnitud que la señal misma.
Desde que la diferencia es más pequeña, menos bits, digamos 13, son necesarios para representarlos. Como la calidad de la predicción decrece el valor requerido de 13 aumenta.
En la figura 2.4b se muestra como un sistema de comunicación puede ser desarrollado basado en la idea de la predicción de las señales. La señal es predecida en el transmisor, el estimado es restado de la señal misma, la señal es cuantizada en 13 bits, y esos bits son transmitidos.
En el receptor la señal de entrada es de nuevo predecida, pero aquí es sumada a la señal recibida. La suma de las dos se identifica fácilmente como la señal de entrada original. Por lo tanto se concluye que una buena predicción en la señal de entrada podría teóricamente dar una reducción en la tasa de bits requerida para cuantizar y transmitir la "pequeña" señal producto de la resta en lugar de la señal original misma.
En general, las técnicas empleadas para predecir una señal dependen en gran forma de un conocimiento a priori acerca de como la señal fue generada. Se continuará usando el ejemplo de la transmisión de voz. Un trabajo considerable se ha desarrollado para caracterizar las señales de las frases, y muchos modelos de generación de frases han sido desarrollados.
Muchos usan el hecho que el tracto vocal humano puede ser modelado razonablemente como un filtro el cual tiene polos y ceros que cambian como la persona que habla mueve su mandíbula y lengua. Esto implica que una excitación semejante puede ser encontrada, y un filtro con sus polos y ceros debidamente ajustados pudiera ser usado para predecir las frases.
La figura 2.5 muestra una manera de como este esquema de filtro predictivo puede ser empleado. Este filtro predictivo emplea la señal de diferencia ya transmitida como su entrada. La señal de diferencia también es usada en el transmisor para censar que tan bien esta funcionando el modelo del tracto vocal que se esta utilizando. Si la señal de diferencia es pequeña en el promedio, entonces la predicción está funcionando bien, y diferencias muy grandes indican que se debe mejorar la etapa de predicción.
Introducción al Filtrado Digital de Señales 30
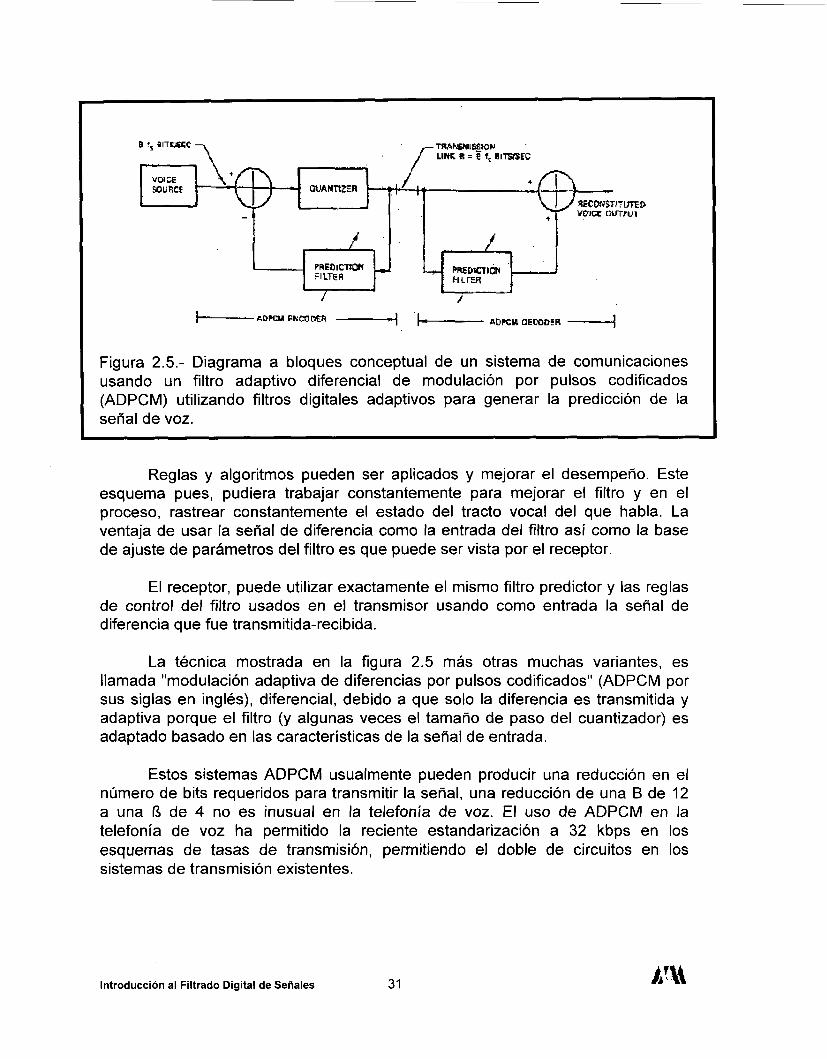
Figura 2.5.- Diagrama a bloques conceptual de un sistema de comunicaciones usando un filtro adaptivo diferencial de modulación por pulsos codificados (ADPCM) utilizando filtros digitales adaptivos para generar la predicción de la señal de voz.
Reglas y algoritmos pueden ser aplicados y mejorar el desempeño. Este esquema pues, pudiera trabajar constantemente para mejorar el filtro y en el proceso, rastrear constantemente el estado del tracto vocal del que habla. La ventaja de usar la señal de diferencia como la entrada del filtro así como la base de ajuste de parámetros del filtro es que puede ser vista por el receptor.
El receptor, puede utilizar exactamente el mismo filtro predictor y las reglas de control del filtro usados en el transmisor usando como entrada la señal de diferencia que fue transmitida-recibida.
La técnica mostrada en la figura 2.5 más otras muchas variantes, es llamada "modulación adaptiva de diferencias por pulsos codificados" (ADPCM por sus siglas en inglés), diferencial, debido a que solo la diferencia es transmitida y adaptiva porque el filtro (y algunas veces el tamaño de paso del cuantizador) es adaptado basado en las características de la señal de entrada.
Estos sistemas ADPCM usualmente pueden producir una reducción en el número de bits requeridos para transmitir la señal, una reducción de una B de 12 a una 13 de 4 no es inusual en la telefonía de voz. El uso de ADPCM en la telefonía de voz ha permitido la reciente estandarización a 32 kbps en los esquemas de tasas de transmisión, permitiendo el doble de circuitos en los sistemas de transmisión existentes.
Introducción al Filtrado Digital de Señales 31
CAPITULO 3. PRINCIPIOS BASICOS DE FILTRADO ADAPTIVO
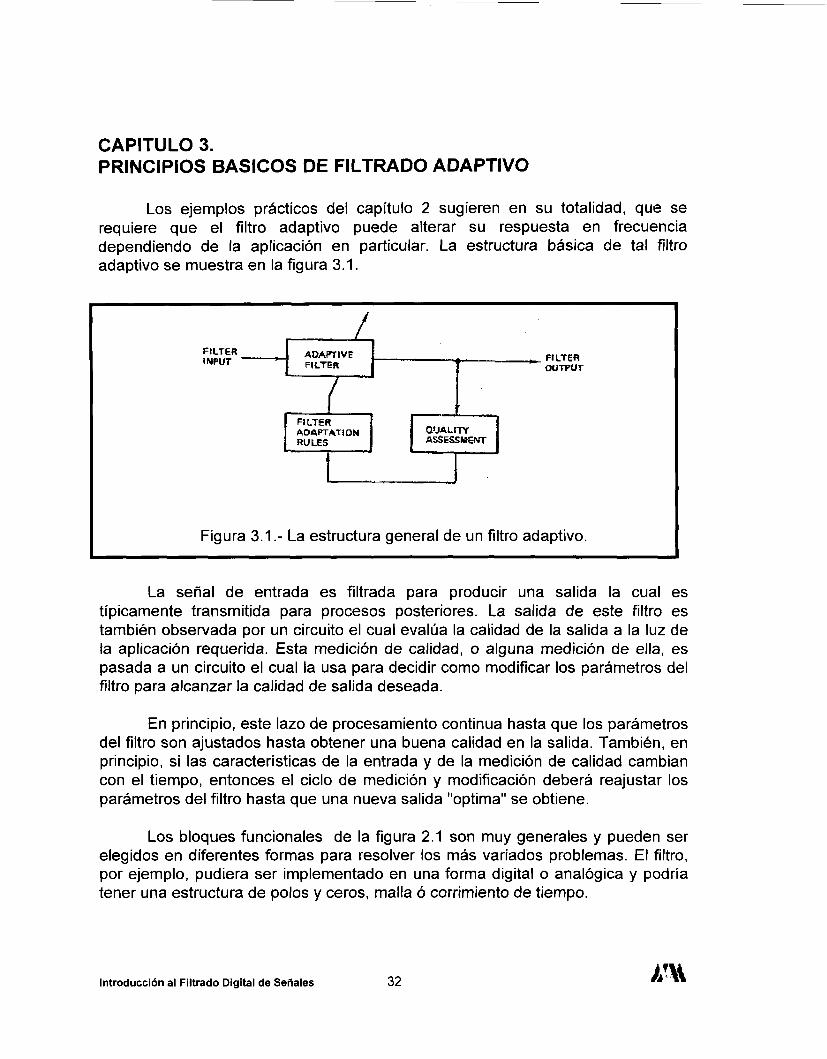
Los ejemplos prácticos del capítulo 2 sugieren en su totalidad, que se requiere que el filtro adaptivo puede alterar su respuesta en frecuencia dependiendo de la aplicación en particular. La estructura básica de tal filtro adaptivo se muestra en la figura 3.1.
ADAPTIVE F t L-rEf4 FILTER INPUT 7 WTPUT
FiLTEL
ASSESSMENT ADAPTATION
Figura 3.1 .- La estructura general de un filtro adaptivo.
La señal de entrada es filtrada para producir una salida la cual es típicamente transmitida para procesos posteriores. La salida de este filtro es también observada por un circuito el cual evalúa la calidad de la salida a la luz de la aplicación requerida. Esta medición de calidad, o alguna medición de ella, es pasada a un circuito el cual la usa para decidir como modificar los parámetros del filtro para alcanzar la calidad de salida deseada.
En principio, este lazo de procesamiento continua hasta que los parámetros del filtro son ajustados hasta obtener una buena calidad en la salida. También, en principio, si las características de la entrada y de la medición de calidad cambian con el tiempo, entonces el ciclo de medición y modificación deberá reajustar los parámetros del filtro hasta que una nueva salida "optima" se obtiene.
Los bloques funcionales de la figura 2.1 son muy generales y pueden ser elegidos en diferentes formas para resolver los más variados problemas. El filtro, por ejemplo, pudiera ser implementado en una forma digital o analógica y podría tener una estructura de polos y ceros, malla Ó corrimiento de tiempo.
Introducción al Filtrado Digital de Señales 32
Los parámetros disponibles para el ajuste pueden ser la secuencia de valores de respuesta al impulso o funciones más complicadas de la respuesta en frecuencia del filtro. Similarmente, el circuito que evalúa la calidad de la salida del filtro puede tomar muchas formas dependiendo de la aplicación del filtro adapativo.
La manera en la cual la evaluación de la calidad es convertida en parámetros de ajuste, los cuales determinaran el algoritmo adaptivo, pueden también variar. Variaciones en la estructura del filtro, los mecanismos de evaluación de calidad y las mejoras adaptivas son usadas comúnmente para catalogar las características principales, así como su factibilidad de uso de varios filtros adaptivos.
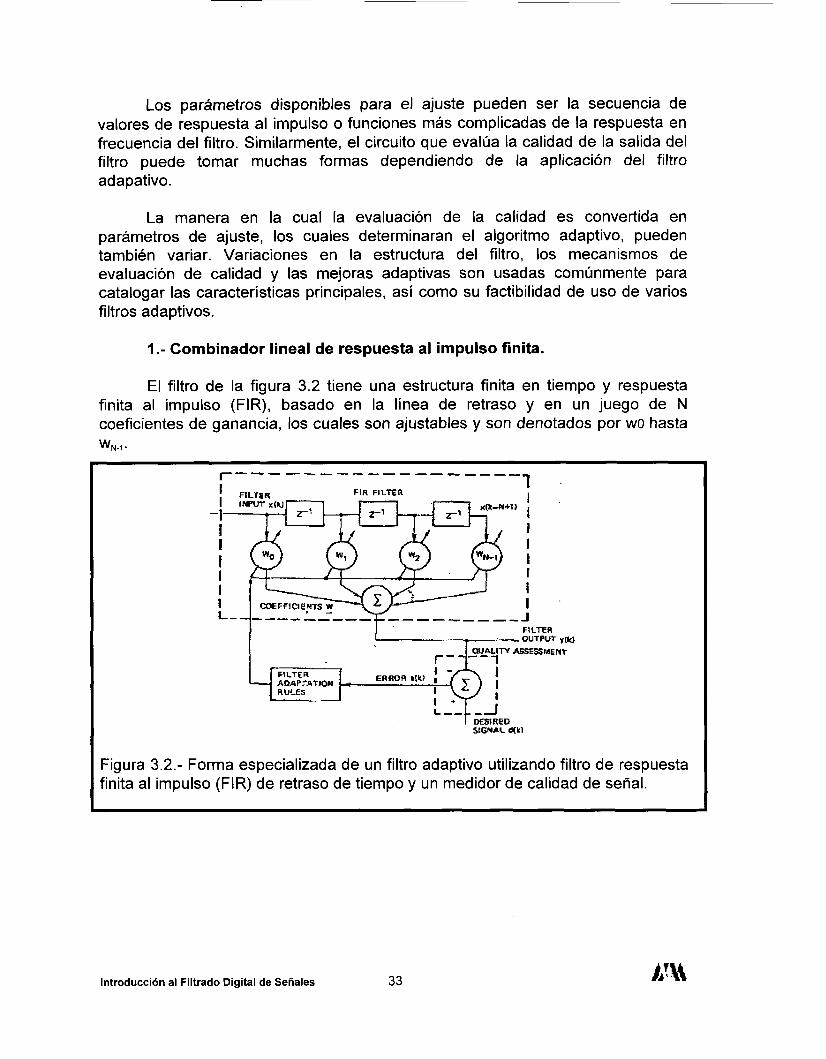
1 .- Combinador lineal de respuesta al impulso finita.
El filtro de la figura 3.2 tiene una estructura finita en tiempo y respuesta finita al impulso (FIR), basado en la línea de retraso y en un juego de N coeficientes de ganancia, los cuales son ajustables y son denotados por wo hasta WN-1.
Figura 3.2.- Forma especializada de un filtro adaptivo utilizando filtro de respuesta finita al impulso (FIR) de retraso de tiempo y un medidor de calidad de señal.
Introducción al Filtrado Digital de Señales 33
La salida del filtro y(k) es simplemente la suma de las entradas retrasadas y reescaladas, dadas por:
N - l
y ( k ) = w,x(k - i ) i = O
Por conveniencia, y(k) puede también ser descrita como el producto punto de dos vectores:
y(k) = Xt(k).W.
donde
w = [WO, W1, W2 ... WN-l]t
Y
X(k) = [X(k) x(k-I) ~(k-2) .... x(k - N + l)]t
La estructura de los filtros digitales es una de las más simples. Es estable (para cualquier W seleccionado) y la respuesta al impulso está dada directamente por los elementos del vector W.
El filtro adaptivo mostrado en la figura 3.2 también utiliza una manera muy simple de medición de calidad. La salida del filtro y(k) es comparada directamente con la forma de onda deseada d(k), y cualquier diferencia entre los dos constituye un error y por lo tanto una degradación en la calidad. La forma de onda d(k) es llamada algunas veces la señal deseada, señal de referencia ó señal de templado.
El objetivo en la selección de los coeficientes del filtro adaptivo radica en forzar que y(k) sea exactamente igual a d(k). Uno puede preguntarse porque d(k) no es simplemente pasada a la siguiente etapa de procesamiento, en lugar de y(k), tomando en cuenta que d(k) es la salida deseada del filtro. Por el momento, se mencionan dos circunstancias en las cuales la transmisión de d(k) en lugar de y(k) es inservible.
En ciertas aplicaciones d(k) esta disponible únicamente durante una fase de "entrenamiento" en conjunción con una secuencia x preseleccionada. En tales casos, la adaptación es interrumpida durante el procesamiento de la secuencia x actual, para la cual, d(k) no está disponible. En otras aplicaciones d(k) es "medible" solo después de haber calculado y(k).
Introducción al Filtrado Digital de Señales 34 hfN
Cualquier diferencia entre d(k) y y(k) resulta en una señal de error no-cero llamada e(k), la cual se intenta usar dentro de las reglas de adaptación de parámetros del filtro. Como se ha observado, el objetivo de estos ajustes es encontrar un conjunto de coeficientes, un vector WO, el cual reduce e(k), ó alguna función de e(k) al valor más pequeño posible. Cuando esta parametrización es alcanzada (y mantenida), se dice que el filtro a "convergido" al conjunto de coeficientes "óptimos" de operación, representados por el vector WO.
Hay que notar que si d(k) = Xt(k)Wo, entonces W = WO implica que e(k) = O para cualquier k, claramente, este es el valor más pequeño posible. Hasta el momento la reglas para ajustar los parámetros del filtro son llamadas adaptivas si, cumple que cuando la solución optima previa WO cambia a un nuevo valor, entonces W la sigue. tales algoritmos adaptivos, son necesariamente recursivos; así como nuevas entradas son procesadas y su calidad medida, el filtro es actualizado, si es necesario.
La mayor clave para el diseño de filtros adaptivos radica en el hecho de que para cada e(k), seamos capaces de encontrar un conjunto de coeficientes W que convergan al valor óptimo de operación.
Introducción al Filtrado Digital de Señales 35
BIBLIOGRAFIA
THEORY AND DESIGN OF ADAPTIVE FILTERS JOHN R. TREICHLER, C. RCHARD JOHNSON, JR. ; MICHAEL G. LARIMORE
JOHN WILEY & SONS COLECCIÓN TOPICS IN DIGITAL SIGNAL PROCESSING 1987
WILEY-INTERSCIENCE PUBLICATION
ADAPTIVE FILTER THEORY SIMON HAYKIN PRENTICE-HALL 1986
DIGITAL FILTERS: ANALYSIS AND DESIGN ANDREAS ANTONIOU MCGRAW-HILL BOOK COMPANY 1979
INTRODUCCION A LOS FILTROS DIGITALES JESUS BARRIOS ROMANO PUBLICACION DE LA UAM IZTAPALAPA 1992
Introducción al Filtrado Digital de Señales 36