sep dgeti seit centro nacional de actua~izaciÓn …20j.%20germ... · lÓs cuales entregan un...
TRANSCRIPT
SEP DGETI SEIT
CENTRO NACIONAL DE ACTUA~IZACIÓN DOCENTE EN MECATRÓNICA
TRABAJO RECEPCIONAL /I '1
u SEGUIDOR P A R A B ~ L I ~ O SOLAR" /I 11
Prototipo Mecatrónico '1 I
Que presentan: Para obtener el reconocimiento de especialista Ln Ingeniería Mecatrónica
I
SUBESPECIALIDAD MAQUINAS: SUBESPEC~AL~DAD / I CONTROL:
ing. J. Germán Gonzáiez González ing Rufino T. Jaimes Mateos
Ing. Roberto González Mares Ing. Joaquín Viilasís Simón
' '1 ASESORES: Máquinas: ing. Víctor M. R. Cach4 Barbosa Control. Pedagogía: Lic. Victoria Lima Deigabo Experto: ing. Nonmasa Matsushima
ing. J. Martín Albarrán\ biménez
DICIEMBRE DE 1999
SEP SEIT DGETI Centro Nacional de
Actualización Docente Mecatrónica Av. Estanislan Ramirez sln esq. Mar de las lluvias
.!I
CT 09FMP0001O ,! .I - coi. selene üelegación :TI&C Tel. Fax841 1431 841 1432 México, D.F.
2 de febrero del 2000
C.P. 12430
‘ 1
I. Asunto: Autorización de Impresión del Trabajo Recepcional
C.C Joaquín Villasis Simón Roberto González Mares José Germán G o d e z González Rufino Trinidad Jaimes Mateos Docentes en formación de la 6=. Generación P R E S E N T E S
Una vez que ha sido revisado el informe académico elahorado como trabajo recepcional del proyecto mecatrónico titulado “Seguidor parabólico solar”, por los asesores de las tres áreas y al no encontrar errores en los aspectos técnicos, en la estructura de contenidos y en la redacción de cada uno de los apartados que lo integran, se ha determinado que el informe cumple con los aspectos necesarios para que pueda imprimirse de forma definitiva.
‘ I
1 1
A T E N T A M E N T E r
ASESORES
Ing. Victor M. Rafael Cacho Barbosa Área de Máquinas
,I
Lic. Victoria Lim elgado Área de Pedagogía I
INDICE
! INTRODUCCION
CAPITULO 1 DISENO DE COMPONENTES MECANICOS .I ......................... 1
1 1.1 Cálculo de mecanismo de balancín ..................................................... 1 . 1 . 1 Análisis de movimiento .I.. 1 1 . 1 . 2 Cálculo de la inercia en el eje de la flecha 2 1 . 1 . 3 Selección y cálculo del mecanismo de reduccion ........................... 3
i !! 4 1 . 1 . 4 Selección del motor a pasos ..................................................... 1.1.5 Cálculo del torque aplicado a la flecha de lailparábola .................... 5 1 . 1 . 6 Cálculo de engranes del sistema de reduckion ............................. 8 1.1.7 Selección de rodamientos ............... ........: ................................ 11
1.2 Cálculo del mecanismo de elevación .................................................. 13 1.2.1 Análisis del movimiento .......................... ;. ................................ 13 1.2.2 Cálculo de la inercia en el eje de la flecha ..... 1.. .............................. 14 1.2.3 Selección y cálculo del mecanismo de reducción ........................... 16 1.2.4 Selección del motor a pasos .................... ' j ................................ 17 1.2.5 Cálculo del torque aplicado a la flecha de lalparábola .................... 18 1.2.6 Cálculo de engranes del sistema de reducch ............................. 22 1.2.7 Selección de los rodamientos .................. .¡ ................................. 25
1.3 Proceso de fabricación .................................................................... 27 1.3.1 Dibujos de los componentes ..................................................... 27
.............. 44 1.4 Ensamble ..................................................................................... 52
1.4.1 Secuencia de ensamble ........................................................... 52 1.4.2 Dibujos de ensamble ................................................................ 54 1.4.3 Ajustes .................................................................................. 73
.I
........................... ............................... .................................... I . '1 . I
. .
1.3.2 Descripción de los procesos de fabricación ;! ................
CAPITULO 2 DISENO DEL SISTEMA DE CONTROL .............................. 74
2.1 Descripción de etapas de control ....................................................... 74 ................................. 2.1 . 1 Diagrama a bloques del sistema de control 75
2.2 Elementos de entrada .................................... : ................................ 76 ...................................................... 76
..................... 76 77 .....................................
.................................................................. 80 2.2.3 Circuito convertidor
2.2.1 Sensores fotovoltaicos ..
2.2.2 Circuito de amplificación ....................
2.2.4 Interruptores de limite ............................................................... 83 2.2.4.1 Funcion .................................... _:_ ................................ 83 2.2.4.2 Circuitos de corriente antirrebotante " ................................. 83
.. 2.2.1 . 1 Funcion ...........................................
. . ..
, ,/ 2.2.5 Panel de control ... _. . .. . .. . . .. ._. . .. . . . . .. . .. . . . , . . .. . . . . . .. . . . . . . . :. . . . . . . . . . . . . . 85 2.2.5.1 Funciones de los elementos.. ... . .;. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
2.3 Elementos de salida ... ... ......... ......_........ .._. '..: ..... ......... ...... ... ... ... ....... 88 2.3.1 Motores a pasos .._._._.. ... ... ... .._... ... ..,. :i.. ... ... ... ... ... ... ._. .. . . .. ... .... 88
2.3.1.1 Función.. . .__ ... ... ... ... ... ... ... .,.. !.. ... . . . .. . .. . ._. . . . . .. ... . . . ... . .. . 88 2.3.1.2 Características técnicas. .. . . . . .,. : . . . . . . . . . . . . . . . . . . . . . :. . . . . . . . . . . . . 88 2.3.1.3 Circuito driver ........... 90
2.3.2 Indicadores.. . . . . . . . . . . ~. . . . . . . . . . . . . . . . . . . . . . . i:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93 2.4 Controlador ................................................ .................................... 96
2.4.1Sistema Mínimo ......__. ....................... .. ... ... ......... ... ... ... ... ... ..... 96 2.4.1.1 Funcion ...._ ~ : .................................... 96 2.4.1.2 Características.. . . . . . . . . . . . . . . . . . . . #:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 2.4.1.3 Tablas de U0 ........................ \ ................................... 97
2.4.2 Programa decontrol ......................... !.. .................................. 99 2.4.2.1 Diagrama de flujo ... . .. ... . .. .. . . .. .. . . . , .. . . .. .. . .. , ... .. . . . . . .. ... ... 100 2.4.2.2 Programa ............................ i: ................................... 114
,
i I¡
.,
.! 2.5 Operación y mantenimiento122 :
CONCLUSIONES Y RECOMUYDACIONES ............................................... 124
BlBLlOGRAFlA ................................................. ............................. .. .... 125
I ,
APENDICES ....................................................................................... 127
APENDICE A: CARTA SOLAR
APENDICE C: DIAGRAMAS DE PCBs
APENDICE E: MATERIALES
1
APENDICE B: PROGRAMAS DE CONTROL NUMERICO I1 / /
APENDICE D: DATOS TECNICOS DE DISPOSITMOS ELECTRONICOS /I

Seguidor Parabólico Solar CNAD
' I i
INTRODUCCION
Los energéticos proporcionan servicios indispensablds en la vida del hombre, mas sin embargo, aún en la actualidad la mayor partelhe los combustibles fósiles contaminan (como la gasolina, el petróleo, diesel,]\entre otros), por lo que la alternativa solar es una buena opción por sus cualidades, ya que es un sistema limpio y libre de contaminación. !
El objetivo de este trabajo es diseñar un equipo mecatrónico que siga la trayectoria del sol mediante el empleo de una pará6ola controlada con un sistema electrónico que le permita realizar movimientos, parail la concentración de energía solar en un punto focal.
Uno de los aspectos que se consideran importantes .$ara justificar el desarrollo de este prototipo es que se desea conocer más acerca del aprovechamiento de energías no renovables, que en este caso es la energía solar, y de esta forma poder emplear los rayos solares para producir calor que se pueda utilizar en diferentes aplicaciones, como calentador de agua, lparrilla solar, registros de temperaturas para investigaciones, conversión fot9voltaica (transformación a energía eléctrica) entre otras.
Nuestro interés es el aprovechamiento de nuevas formas de energía, que proporcionan servicios; en la actualidad se utilizan' :nuevas tecnologías para la obtención de energías, como la del sistema solar que es menos contaminante para el medio ambiente, que se aplica en las calculadoras, radios y relojes.
Lo novedoso del prototipo "seguidor parabólico solar" es la utilización de una parábola para la mayor Concentración de rayos sola& ya que al incidir de forma perpendicular a ésta, por su forma, los concentra en su punto focal.
Haciendo notar que un sistema similar, pero estático logra captar suficiente energía para ciertas aplicaciones con solo tener la inchación de la latitud del lugar (zona geográfica).
Mediante este sistema de seguimiento se podría tenler la ventaja de obtener un 35% más de eficiencia que un colector estático. Con! este incremento se podría compensar sobradamente la energía utilizada en el seguimiento. Como nuestro prototipo es un sistema de concenttación, necesitamos radiación directa, por lo que es necesario mantener nuestro didpositivo apuntando en todo momento en dirección al sol para que los rayos IlegUen de forma perpendicular a nuestra parábola, lo cual se lograría mediante el movimiento del sistema en dos ejes.
Se trata de cubrir la trayectoria del sol mediante dos"kovimientos, uno de norte a sur que su rango sea de O a 45 grados y otro de este a oeste con un rango de O a
,l. ;.
//. 1 1
? :I
'I
>I
J .
, . I
: ,! , ,.
I Equipo 1

CNAD Seguidor Parabólico Solar j
120 grados, se tornaron estos rangos de acuerdo a la posición en que se
El seguidor parabólico solar, se puede describir enI/ una forma general como un dispositivo mecatrónico que es capaz de seguir la: trayectoria del sol durante el día, cuenta con una parábola para la captación de;l.d energía en su punto focal.
Como ya se mencionó el seguidor parabólico solar ,requiere de dos movimientos los cuales se efectúan con motores a pasos de I ;@ grados por pulso y por una transmisión de caja reductora de engranes rectos, siendo controlados por el arreglo de cuatro sensores colectores fotovoltáicos! lÓs cuales entregan un voltaje máximo de 500 mV que determina la posición del sol durante el día ya que estos voltajes se introducen en una etapa de amplific$5ón y posteriormente a un convertidor analógico - digital y éste su vez entrega los datos necesarios a un sistema mínimo basado en un microprocesado$'Z-80, el cual interpretará los datos a través de un programa y una vez procesaba la información, mandará las señales necesarias a una etapa de drivers para el c4ntrol del motor o los motores correspondientes según sea el movimiento reque6d.o. Cuando nuestra parábola complete su ciclo durante el día, retorna a su p,osición inicial. Este programa también cuenta con subrutinas que contemplar$ problemas de solarimetría difusa (estudio de las sombras respecto al sol, en este caso serán las nubes, días
La parábola esta unida al eje mediante el contrdpeso que a la vez le sirve tambien de soporte.
Los baleros están colocados en cajas maquinadas enilos soportes de aluminio con la altura necesaria para que permitan ambos movimientos, .,... , I el de balancín con una amplitud de O a 120 grados y el de elevacioni,con , I una amplitud de O a 45 grados.
encuentra México, D. F. Respecto a su latitud. I
'I ll ! nublados y cualquier imprevisto de este tipo).
,!
Todo el material del proyecto es de aluminio para aligerar el peso, con excepción de la base metálica en acero para lograr estabilidad': 'I
La caja de control se diseño como modulo separado:,y en acrílico para facilitar su manejo, esta cuenta con entrepaños y dos puertas abatibles para el fácil de las tarjetas electrónicas, el acrílico es de color blanco para que no absorba los rayos solares y proteja los circuitos; la parte principal de :la caja de circuitos en donde se encuentran los display de temperatura, de amperaje, y los botones, esta protegida por acrílico transparente para poder ser observados. .b > (
El conjunto motor-reductor de ambos movimientos también cuenta con una cubierta de acrílico blanco con la misma finalidad quejla caja de control.
El proyecto cuenta con dos sistemas demando: Uno automático y otro manual. También tiene cuatro limit switch de seguridad que impedirán que el dispositivo se
," ,I
' I
,! .I
Equipo 1 ! ii

Seguidor Parabólico Solar CNAD
salga de 10s limites de carrera debido a una falla del sistema electrónico o
Como nuestro dispositivo necesita cierta orientación lleva montada una brújula, la Cual nos orientara para Colocar el plato de la parábola en dirección a la salida del sol. !
Entre los aspectos técnicos más relevantes con los 'que cuenta este prototipo es con un dispositivo de control basado en un sistema !,mínimo , el cual funciona con un microprocesador 280, así como la utilización d$ los sensores colectores de voltaje para determinar la posición del sol.
Además cuenta con una parábola de 43 cm de lado recto y su foco situado a 10.75 cm del vértice sobre el eje focal, en dicho foco se colbca un termopar para sensar la temperatura promedio de 85 OC.
En el capitulo uno, se presentan los análisis de losimovimientos de balancín y de elevación; los cálculos: del mecanismo de reducción,~Ilos torques aplicados en las flechas de la parábola, así como la inercia en el ejede la flecha, de los engranes del sistema de reducción y como consecuencia la selección del mecanismo de reducción y los rodamientos que estructuran el mecahismo. También se realiza la descripción de los procesos de fabricación de lodcomponentes y los dibujos elaborados con PROIENGINNER. Finalmente se! muestran las secuencias, dibujos de ensamble y los ajustes que fueron necesarios llevar a cabo.
El capítulo dos, incluye el diseño del sistema de coniroi del equipo, iniciando con una descripción general del funcionamiento de las etapas de control así como un diagrama a bloques para una mayor comprensión de'ku contenido.
Este capítulo es subdividido en tres partes principa#, que son los elementos de entrada, elementos de salida y la parte del controladx. Uno de los elementos de entrada son los sensores colectores fotovoltaicos, donde se explica su función, características técnicas, ubicación de montaje, así como se describe el diseño de la de mandar la señal amplificada al convertidor ND. De éste se describe su modo' de trabajo, así como la configuración de los canales requeridos.
Otros elementos de gran importancia son los interruptores de limite, donde se describen sus Características técnicas, utilización iiyi montaje en el equipo. Del panel de control se explica la utilización de cada 'elemento montado en él, así como su forma de operación y manejo.
De los elementos de salida se describe la utilizajjon de los motores a pasos, forma de conexión y polarización, así como sus características técnicas.
mecánico para evitar un daño físico al equipo. I
'' 1
!
II ,,
!I . .
~
~
etapa de amplificación encargada ,!
,i/
Equipo 1 .<. 111
i !
Seguidor Parabólico Solar CNAD
Y la tercera parte de este capítulo se aborda la aplicación del sistema del sistema mínimo, funcionando palabras de control para su i!Gonfiguración, así como sus
Los alcances de este prototipo son seguir la trayectoria del sol durante el dia, en un tiempo estimado de 10 horas (8:OO h. a 18:OO~I h.), así como registrar las temperaturas en el punto focal, estos alcances son válidos para la ciudad de
En cuanto a las limitaciones se puede decir que cuando hay días nublados y/o lluviosos el equipo permanece estado de reposo y como se mencionó antes este equipo sólo puede trabajar correctamente en la ciudad, de México.
datos técnicos y programa. ,'
México, debldo al diseño del prototipo. 'I .!
!
: i I Equipo 1 iv

Seguidor Parabóliw Solar CNAD
CAPíTULO 1 DISEÑO DEL SISTEMA MECANICO
Planteamiento
Para lograr el mejor aprovechamiento de los rayos solares la parábola necesita realizar los movimientos de balancín y de ,eievaciÓn. Los ejes de ambos movimientos descansan sobre rodamientos de bolas para evitar pérdidas por fricción.
En el movimiento de balancín se requiere equilibrar el peso de la parábola por Io cual se cuenta con un contrapeso; de igual !iforma en el movimiento de elevación se tiene que contrarrestar el peso del conjunto motor-reductor por lo que se coloca un contrapeso en el extremo opuestdd inferior; los mecanismos de ambos movimientos son manejados por motores a pasos acoplados a cajas reductoras, los coples utilizados son del tipo flexible dn el movimiento de balancín y del tipo rígido en el movimiento de elevación. Cuanido los movimientos llegan a su posición final activarán unos limit switch los que hacen ./ que éstos retornen a su posición inicial.
/I
1.1 Cálculos del mecanismo de balancín
1.1 .I Análisis de movimiento
Haciendo un análisis del movimiento para cudrir la trayectoria de rotación del Sol con ayuda de la carta de la trayectoria'kolar anual en la República Mexicana' se determinó una amplitud aprovechable de trayectoria del Sol de 120". Esta trayectoria la cubriremos con un rnovi6iento de balancín que se describe a continuación:
El movimiento de balancín debe tener una amplitud de cero a 120 grados y
1200 12" 12" -- - - = - = 0.2"/min 10h h 6Omin I: u
Este movimiento es proporcionado por un moior a pasos acoplado a una caja reductora de velocidades con una relación de!h:1530, el eje de salida de dicha caja se conecta por medio de un cople tipo fle4ible de 20 mm de longitud a Vroporcionada por el Centro de lnvestigacibn y de Estudios avanzados (INVESTAV) del Instituto Politécnico Nacional (I.P.N.)
!I utiliza diez horas para efectuado, por lo tanto:
II ., I ,
, I
I Equipo 1 1
CNAD Seguidor Parabólico Solar
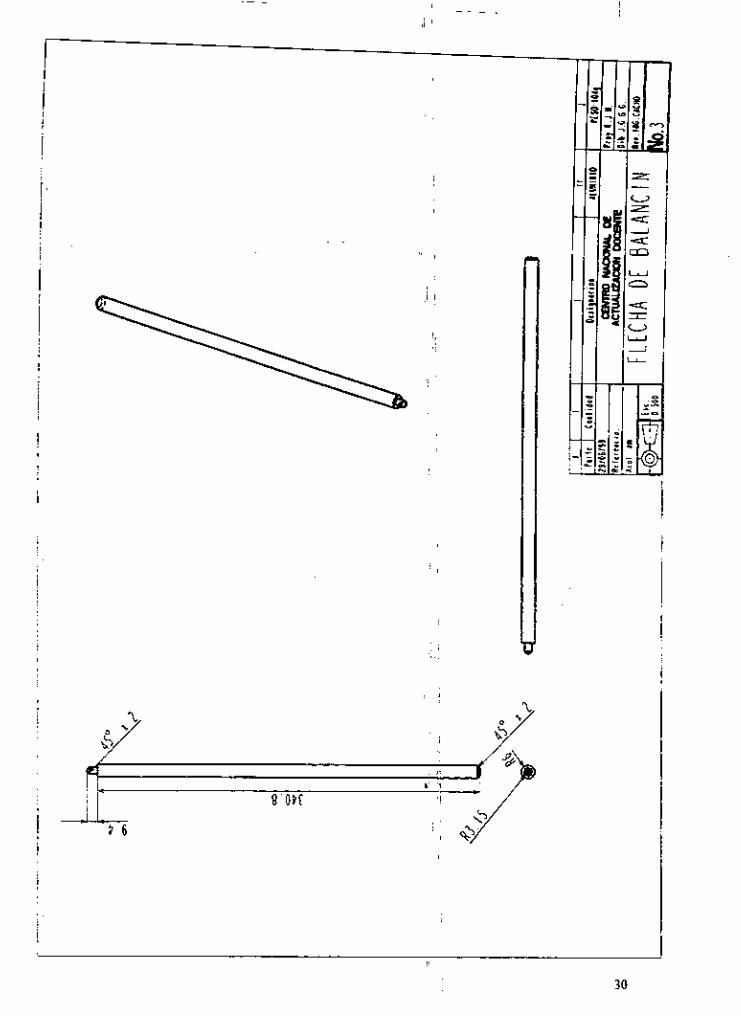
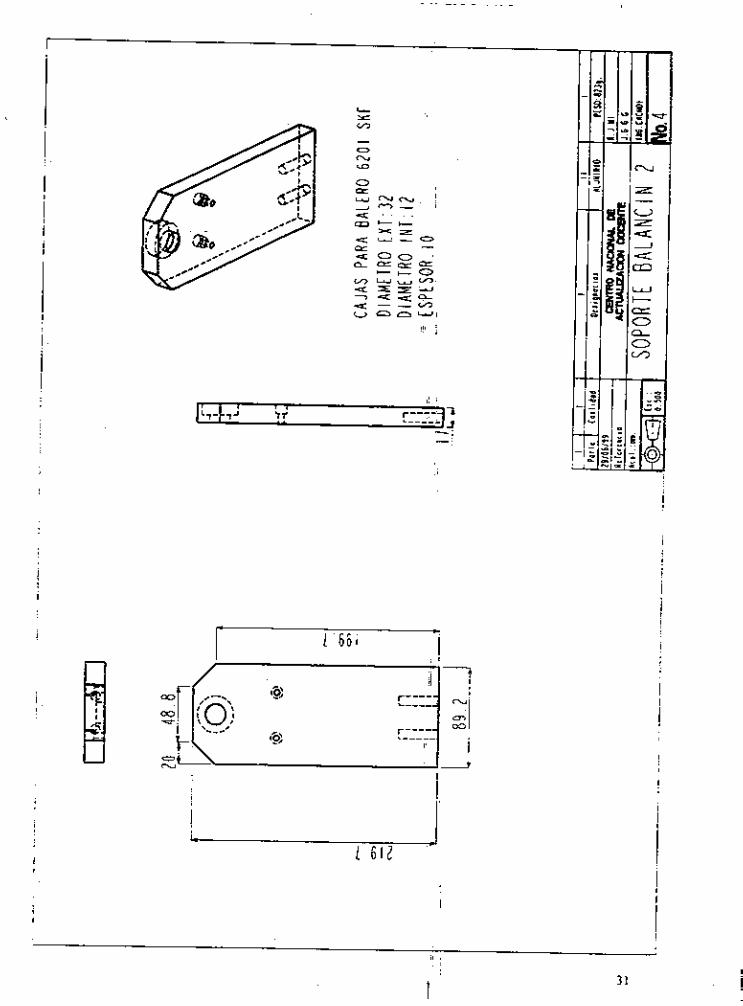
la flecha de balancín, montada sobre los baleros(6201 SKF cuyas cajas se encuentran en dos soportes de aluminio, atornillados en su parte inferior a un canal de aluminio que sirve de base para el movimiento de balancín a la parábola que está montada por su contrapeso a dicha flecha. 1
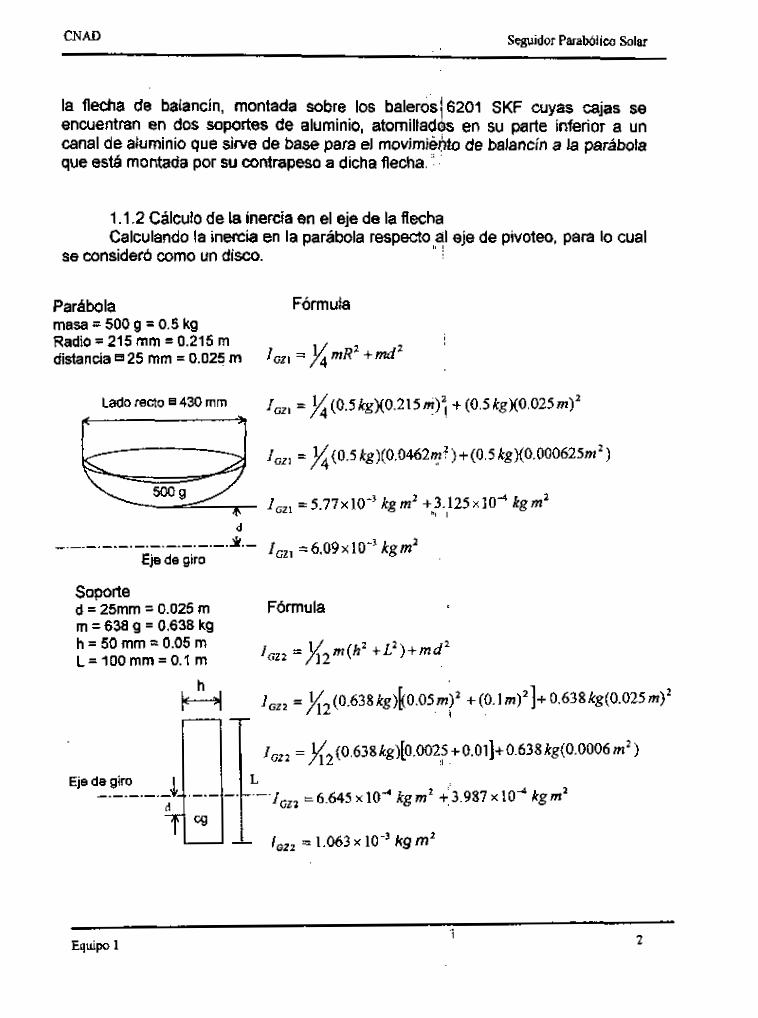
1.1.2 Calculo de la inercia en el eje de la flecha Calculando la inercia en la parábola respecto al eje de pivoteo, para lo cual
I’ I se consideró como un d i m .
Parábola Fórmula masa = 500 g = 0.5 kg Radio = 215 mm = 0.215 m distancia 25 mm = 0.025 m
! IGZ, = x m R ’ + m d 2
Lado recto 430 mm I,, = %(0.5kg)(0.215nz); + (0.5kg)(0.025m)2
I,, = % (0.5 kg)(O.M62?f)+(0.5 kg)(0.000625m2)
I,, = 5 . 7 7 ~ 1 0 - ~ kgm’ +3. l25xiO4 kgm’
I,, =6.09x10” kgm2
‘11 1
d
@ Eje de giro
Sopoite d = 25mm = 0.025 m m = 63% Q = 0.63% kg
Fórmula
I,, = / l 1 2 m ( h 2 + L Z ) + m d Z h = 50 mm = 0.05 m- L=100mm=0.1 m
I,, =)í,(0.638kg)[(0.05m)2 +(O.lm)’]+ 0.638kg(O.O25rn)’
I,, = x2 ( O 638kg)[0.0025 +0.01]+0.638kg(0.0006 m 2 )
I
I1
I,, = 6.645 x lo4 kg m2 +‘3.987 x I O 4 kg m2
I,, = 1.063 x kg m2
Eje de giro
2 I Equipo 1

Seguidor Parabólico Solar CNAD
Flecha Fórmula
!
I,, = ! I m R 3 /4 m = 104 g = 0.104 kg R = 6 mm = 0.006 m
I,, ;.=:~x(O. 104 kg)(0.006 m)* ' ,. .
I,, = ;)=(O. 104 kg)(0.000036 mZ) [I ,
I,, =1.872x1O4Rgm2 I
I G D l =I,, +I,, +I,, I,, = 6 . 0 9 ~ 1 0 ' ~ kgm2 + 1 . 0 6 3 ~ 1 0 - ~ kgm2 + 1.872~16" kgmZ= 0.0072kgm'
I! , j
1.1.3 Determinación de las condiciones de movimiento y de la relación de reducción
Para nuestro movimiento de balancín necesitdmos cubrir una amplitud de O" a 120" en el lapso de diez horas, considerando de'!las 8 h a las 18 h, por ser el período de mejor aprovechamiento de los rayos del sol. Para su movimiento se utilizó un motor a pasos para transmitir su potencial mecanismo de reducción.
Considerando que se emplea un motor cuyo driver lo hace girar a 40 rpm y tiene en su flecha acoplado un piñón de once dientes he paso diametral 48.
Para cumplir con esta amplitud de 120 grados en ese período de tiempo se necesita que la flecha de nuestro movimiento tenga' una velocidad angular con base en el siguiente cálculo:
/I, '!
!
'I
O rad l i rad 120" 120" 10hrs 600min mrn 57.3' m n
=0.2- -=3 .49~10-~ - -=
3 . 4 9 ~ 1 0 ' ~ --- rad I ra , -5,55x10T4-!? min 2xrad , min
Haciendo una comparación entre la ve1ocidad"que nos entrega el motor de pasos, con la tarjeta de control elaborada y la velocidad que requerimos .^ /)I 3 1
= 72072 40
5 . 5 5 ~ 1 0 - ~ Necesitaríamos un reductor de esa magnitud1 siempre y cuando nuestro
motor estuviera funcionando las diez horas. Como nuestro motor no va a estar en funcionamiento constante debido a que los desplazamientos angulares no son
" I
Equipo 1 3
CNAD Seguidor Parabdico Solar
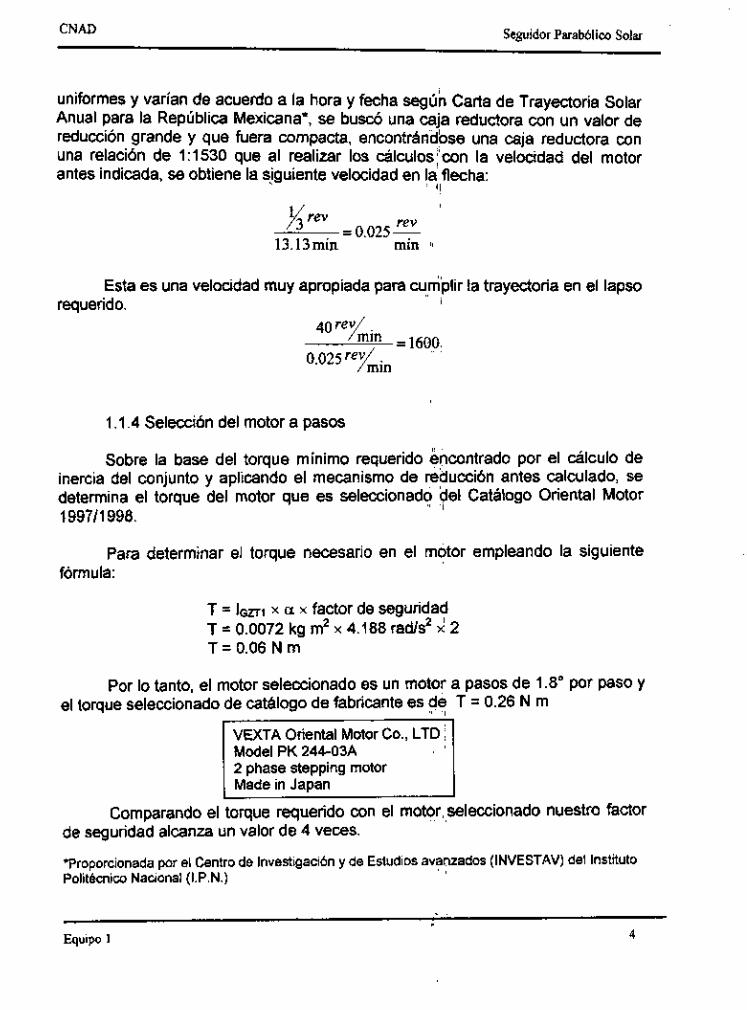
uniformes y varían de acuerdo a la hora y fecha según Carta de Trayectoria Solar Anual para la República Mexicana', se buscó una caja reductora con un valor de reducción grande y que fuera compacta, encontrándbse una caja reductora con una relación de 1:1530 que al realizar los cálculos;/con la velocidad del motor antes indicada, se obtiene la siguiente velocidad en la flecha:
(1
rev = 0.025 - 13.13min min 11
Esta es una velocidad muy apropiada para cu\mplir la trayectoria en el lapso requerido. I
1.1.4 Selección del motor a pasos
Sobre la base del torque mínimo requerido encontrado por el cálculo de inercia del conjunto y aplicando el mecanismo de reducción antes calculado, se determina el torque del motor que es seleccionado del Catálogo Oriental Motor 1997/1998.
Para determinar el torque necesario en el motor empleando la siguiente
I
fórmula:
T = 1 0 ~ ~ 1 x a x factor de seguridad T = 0.0072 kg m2 x 4.188 rads2 x' 2 T = 0.06 N m
Por lo tanto, el motor seleccionado es un motor a pasos de 1.8" por paso y el torque seleccionado de catálogo de fabricante es de T = 0.26 N m
VEXTA Oriental Motor Co., LTD , Model PK 244-03A 2 phase stepping motor Made in Japan
comparando el toque requerido con el rnotor!;seleccionado nuestro factor de seguridad alcanza un valor de 4 veces.
*Proporcionada por el Centro de Investigación y de Estudios avanzados (INVESTAV) del Instituto Politécnico Nacional (I.P.N.) I
. I
Equipo 1 4
Seguidor Parabólico Solar CNm
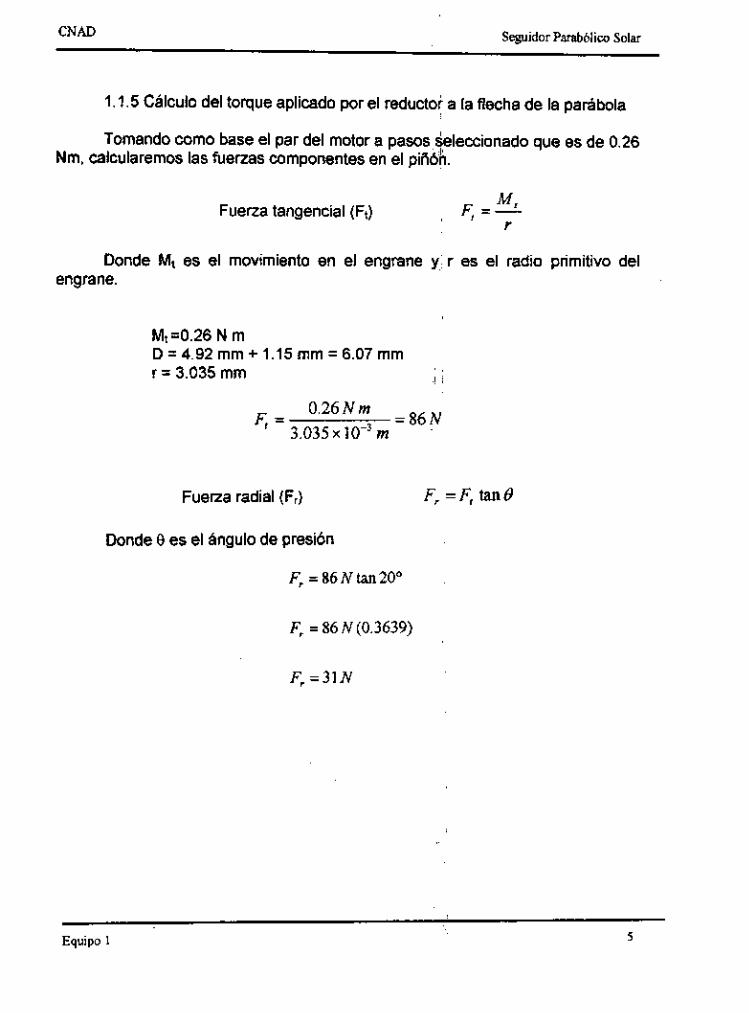
1.1.5 Calculo del torque aplicado por el reducto; a la flecha de la parábola
Tomando como base el par del motor a pasos seleccionado que es de 0.26 Nm, calcularemos las fuerzas componentes en el piñóh.
M , F, =- r
Fuerza tangencia1 (Ft)
Donde Mt es el movimiento en el engrane y r es el radio primitivo del engrane.
Mt=0.26 N m D = 4.92 mm + 1.15 mm = 6.07 mm r = 3.035 mm I /
= 86 N , 0.26 N m
3.035 x lo-’ m F , =
Fuerza radial (F,) F, =F, tan0
Donde 0 es el ángulo de presión
F, =86Ntan20°
F, = 86 N (0.3639)
F, = 3 1 N
Equipo 1 5
CNAD Seguidor Parabólico Solar
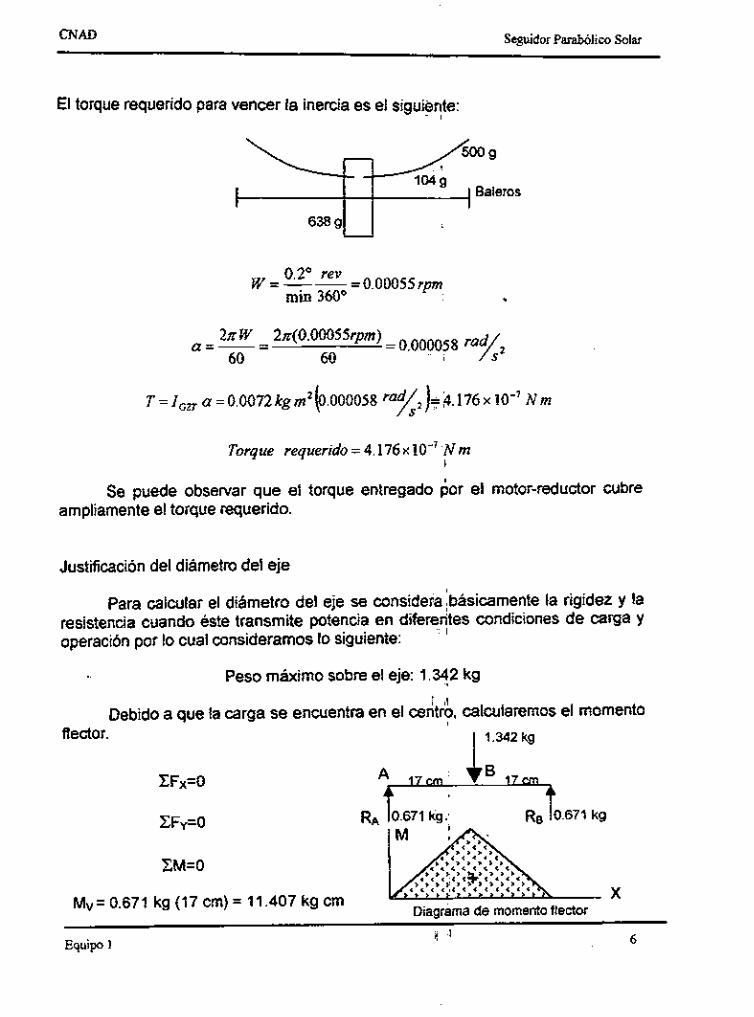
El torque requerido para vencer la inercia es el siguiente: ' 1
0.2' rev mm 360"
W = -- = 0.00055 rpm
= O.OOOÓ58 ruz2 2 ñ W 2ñ(O.O0055rpm) a=--- - 60 60
T = I , a=0.0072kgm2(0.000058 ru~2)=P.176x10-7 N m
Torque requerrdo= 4 .176~10-~ 'Nm I
Se puede observar que el torque entregado por el motor-reductor cubre ampliamente el torque requerido.
Justificación del diámetro del eje
Para calcular el diámetro del eje se considera \básicamente la rigidez y la resistencia cuando éste transmite potencia en diferentes 11 condiciones de carga y operación por lo cual consideramos lo siguiente:
Peso máximo sobre el eje: 1.342 kg
Debido a que la carga se encuentra en el cent& calcularemos el tnOment0
I 1.342kg
Rector.
Re 10.671 kg ZFy=O
< ' < < < < , , > , , > , < < ' e < < < < ,','.',,',~*','.'<
,'.','"<'<"'<~<~<'<.<
Diaarama de momento flector
ZM=O
X Mv= 0.671 kg (17 a) = 11.407 kg cm - Equipo 1 d l 6

CNAD Seguidor Parabólico Solar
Tramo 2
Tramo 1 vx = o I x 1 17
Vx = RA = 0.671 kg Mx = RA (x)
Vx= 1 7 1 x 1 3 4 RA - 1.342= 0.671 kg
Mx= RA o()- 1.342 kg (X- 34)
b" - , X
,' 1
Vx
Diagrama de cortante
Calculando la deflexión máxima de la tiecha;/ de acuerdo a la siguiente ecuación: ' I
F I ) = -- 4 8 E I Y ,
D = 12.7 mm y R = 6.35 mrn = 6 . 3 5 ~ 1 0 - ~ m , I
donde
1.342 kg(0.34m)' 1 - _ Y , -
13.42 N(0.039 m') " =-
0.523m 4349.5452
- _ Y,, -
= -0.12 mm lOOOmm 1 mi
y , =-1 .202~10-~ m
Como se puede observar, utilizando el diámetro de 12.7 mm para la flecha, la deflexión máxima es aceptable.
-
Equipo 1 ; I
7

Seguidor Parabóliu, Solar CNAD
Calculando el esfuerzo de torsión (r), tenemos: 1
donde T es el par aplicado res el radio de la flecha J es el momento polar de inercia
Donde D es el diámetro de la flecha.
Sustituyendo la ecuación (2) en la ecuación (l).'tenemoc:
16T
z = 16x0 '26Nm =646967N/m2 ~ ( 0 . 0 1 2 7 m)3
kg N kg m2 m2 9 .8N lo6 mm2 mm2
= 0.066 - 646 967 - -
Como se observa el valor del esfuerzo de todion es aceptable. ' I
1 .I .6 Cálculo de engranes del sistema de reducción
Nuestra caja reductora fue adquirida, por lo tanto no realizamos un cálculo de los engranes del sistema de reducción, pero seiefectúa un análisis de los elementos que la componen.
A continuación se muestra el arreglo de los engranes en la transmisión selemonada, en donde los dígitos indican el número de dientes:
/I '
1 :

CNAD Seguidor Parabóliw Solar ./ ,,
La caja reductora es movida por un piAón/ide 7 mm de diámetro, once dientes y paso diametral de 48; consta de 11 engrahes nueve de éstos son de paco diametral 48 y dos de paso diametral 40, obteniéndose con base a lo siguiente: ' I
N p = - D
I'
donde P = paco diametral N = número de dientes D = diámetro primitivo
Engrane A piñón
- 4 S a 11 N = l l p=--
D=0.229" 0.229"
Debido a la regla de transmisión de engranes que establece que para que dos engranes se acoplen para transmitir potencia, 1 deben ser del mismo paso diametral y el mismo ángulo de presión y como los engranes A, 6, C, D, E, F, G, H, I y J se acoplan, tienen el mismo paso diametral y'ánguio de presión. Mientras que K y L que se acoplan entre sí tienen el siguiente,paso diametral.
Engrane K !!I '
- 40 11 N = l l p=--
D=0.275' 0.275
Encontrando la reducción de velocidad de &da engrane de acuerdo a la ecuación
n , = - n - - n 1; 2 1 - 1 2 21
donde n = número de vueltas o rpm N = número de dientes d = diámetro de paso
El engrane A le transmite a B nB = - n - -1 =0.261 1; A / - ! : ; I Como C está sobre B cuando el engrane A dé/una vuelta, tanto C como 6
darán 0.261 vueltas.
Equipo 1

Seguidor Parabólico Solar CNAD
El engrane C le transmite a D Nc 24 n, = - N - -0.261 = 0.49 I N , ci-142 I
Como E está sobre D cuando el engrane C dé0.261 vueltas tanto E como D darán 0.49 vueltas. !I 1
nF = 1% NEI = 1$0.491= 0.22 El engrane E le transmite a F
Como G está sobre F cuando el engrane E de 0.49 vueltas tanto G como F I darán 0.22 vueltas.
El engrane G le transmite a H n,, = X N G = -0.22 =0.073 1:" I 1: I Como I está sobre H cuando el engrane G dé 0.22 vueltas tanto H como I
/I darán 0.073 vueltas.
El engrane I le transmite a J I N I = -0.073 =0.011
nJ=l% 1 I;* I Como K está sobre J cuando el engrane I dér0.073 vueltas tanto K como J
/I ! darán 0.01 1 vueltas.
El engrane K le transmite a L nL = 1% NKl = ~ ~ 0 . 0 1 1 ~ = 2.050 x lo-' vueltas
De esta forma se va viendo la reducción que se tiene en cada paso pudiendo determinar el número de vueltas de cualquiera de los engranes que forma la caja reductora. I! h
Para encontrar la reducción se utiliza la siguiente ecuación: producto de los números de diente4 impulsores producto de los números de dientes! impulsados
e =
Sustituyendo en la ecuación anterior:
e = engranes impulsores engranes impulsados
A . C . E.G. I . K - 1 IX 24x19~ 1 4 x 9 ~ 11 - 1695217 = 6,52 10-4 e = - B . D . F . H. J . L 42 x 42x 42x 42x 58x 59 -8 lr064x 10"
I/
I, ~
Equipo 1 10

Seguidor Parsbólico Solar CNAD
Obteniendo el recíproco de 6 . 5 2 ~ 1 0 ~
= 1531.638 1 ! ,!
6.52 x 1
1 - 1530'; x - 40 ~
X = 0.026 rpm '. i
I rev lmin 2zrud rad min 60s lrev
0.026- - -- - 2.733~ - S , i ,I
2.737~10"(1373)=3.75 W e% 412 mm ' 'I 1.8 W en 4 6 mm
1 .1.7 Selección de los rodamientos
Se selecciono el tipo de rodamiento rígido de: bolas debido a su diseño sencillo, no desmontable y que requiere de poca atehción en servicio; aunado a estas características su precio es bajo.
El modelo de rodamiento elegido es el 620;lI/SKF, el cual es un rodillo rígido de una hilera de bolas con las siguientes caracteristicas:
'I 1,
I! .I Diámetro interior: 12 mm Diámetro exterior: 32 mm Ancho: 1 O mm Capacidad de carga dinámica: 6890 N , Capacidad de carga estática: 3100 N ' ' i Velocidad nominal con grasa: 22 O00 radjmin Velocidad nominal con aceite: 28 O00 &dmin Masa: 0.037 kg
'I
!
Este tipo de rodamiento tiene caminos de irodadura profundos y sin interrupciones haciendo posible que soporten caigas radiales considerables, siendo de este tipo la carga que tenemos en el mohmiento, la carga radial es mínima para nuestros movimientos.
Los cálculos de las cargas axiales y radialesisobre éstos rodamientos se dan a continuación:
Carga radial
de los siguientes componentes:
:I
,!! I/
La carga radial máxima sobre nuestros rodamientos está dada por el peso /I 'i
, #!
Equipo 1 11
Seguidor Parabólico Solar CNAD
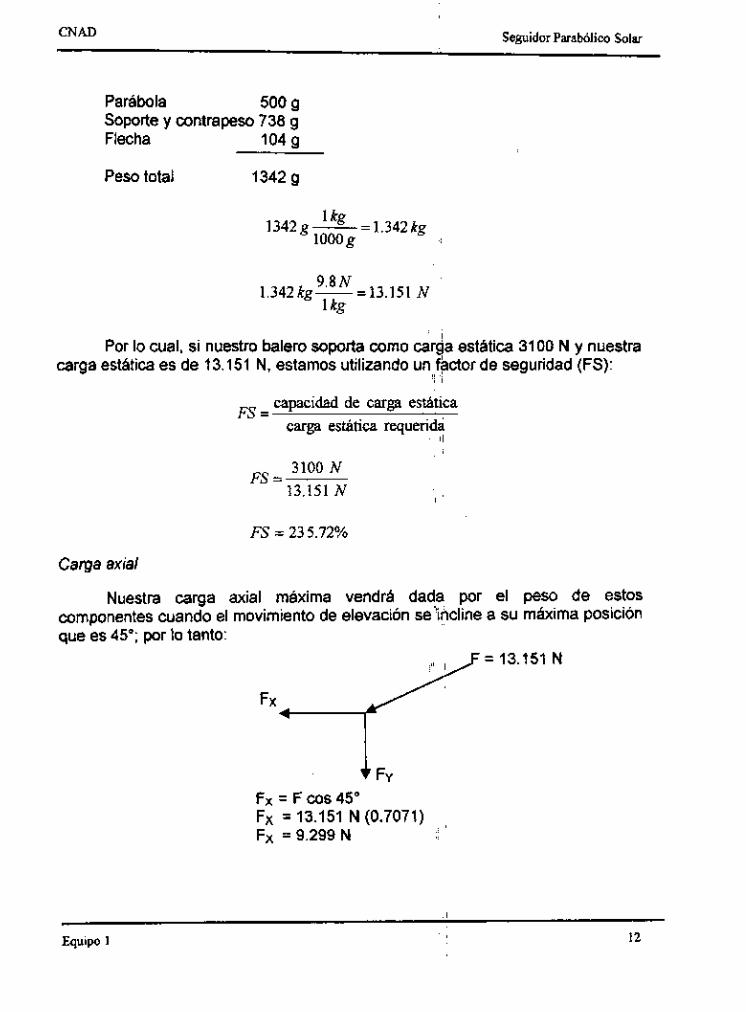
Parábola 500 g Soporte y contrapeso 738 g Flecha 104 g
Peso total 1342 g
1 kg lO0Og
1342 g - = 1.342 kg
9.8 N 1.342kg-=13.151 N
1 kg
Por lo cual, si nuestro balero soporta como carga estática 31 O0 N y nuestra carga estática es de 13.151 N, estamos utilizando un factor de seguridad (FS):
/I ~ , I
capacidad de carga estática carga estática requerida
FS = II
3100 N 13.151 N
FS =
FS = 23 5.72%
Carga axial
Nuestra carga axial máxima vendrá dada por el peso de estos componentes cuando el movimiento de elevación se 'incline a su máxima posición que es 45"; por lo tanto: I
Fx = F COS 45" Fx = 13.151 N (0.7071) Fx =9.299N
I
Equipo 1 12
CNAD Seguidor Parabólico Solar
Por lo cual, si nuestro balero soporta como j carga dinámica 6890 N y nuestra carga axial es de 9.299 N, estamos utilizandb un factor de seguridad (FS):
I
capacidad de carga dinámica carga axial requerida '
FS =
6890 N 9.299 N
FS =
FS = 74 093%
Considerando que la operación de nuestro prototipo es en el exterior de este tipo de baleros, estos vienen sellados y iubricadh de fábrica con una grasa que permite usarlos a temperaturas comprendidas de+30 a 110°C.
1. 2 Cálculo del mecanismo de elevación 81
1.2.1 Análisis de movimiento
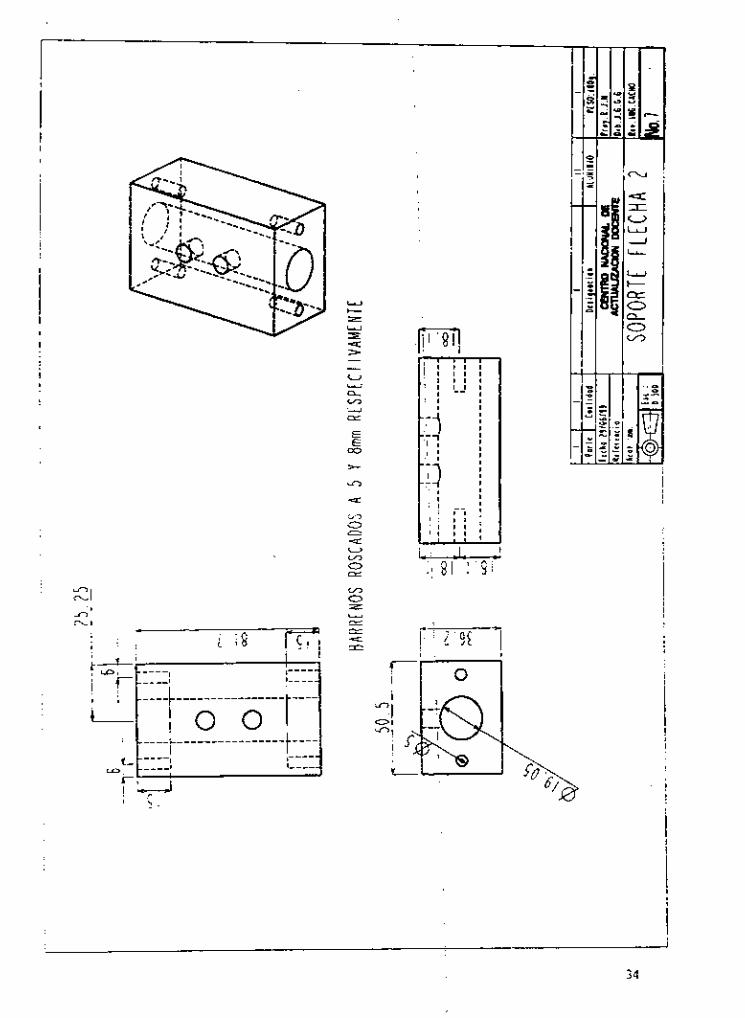
El movimiento de elevación debe tener una amplitud de O a 45 grados que es proporcionado por un motor a pasos acoplado! a una caja reductora de velocidades con relación de 1:1530, el eje de salida ib dicha caja se conecta por medio de un cople rígido a la flecha del movimiento"de elevación montada sobre dos baleros 1203 E SKF, cuyas cajas se encuentran en dos soportes de aluminio, atomillados en su parte inferior a una placa de agro que le sirve de base al conjunto del seguidor parabdico solar. Además de los dos baleros mencionados, la flecha del movimiento de elevación esta apoyada'en un soporte-flecha 2 sujeto en el canal-base que se utiliza en el movimiento de balancín.
13 ' i
Equipo 1

Seguidor Parabólico Solar CNAD
1.2.2 Calculo de la inercia en el eje de la flecha
Flecha rn = 150g = 0.150 kg D = 19 rnrn = 0.019 rn
Canal m = 787 g = 0.787 kg h = 38.1 rnrn = 0.0381 rn L = 152.2 mrn = 0.1522 m d = 21 rnrn = 0.021mrn
I,, = %(o. i50 kg)(0.0095 m)’ I: I(
I,, = x 2 m ( h 2 + L 2 ) + m d 2
I,, = ,?(2(0.787kg)[(0.0381m)2 + (0.1522r~)~]+ 0.787kg(0.021m)2
I,, =1.96x10” kgm’
38
152.2
Equipo 1 14
SeguidorParabólim Solar CNm , .
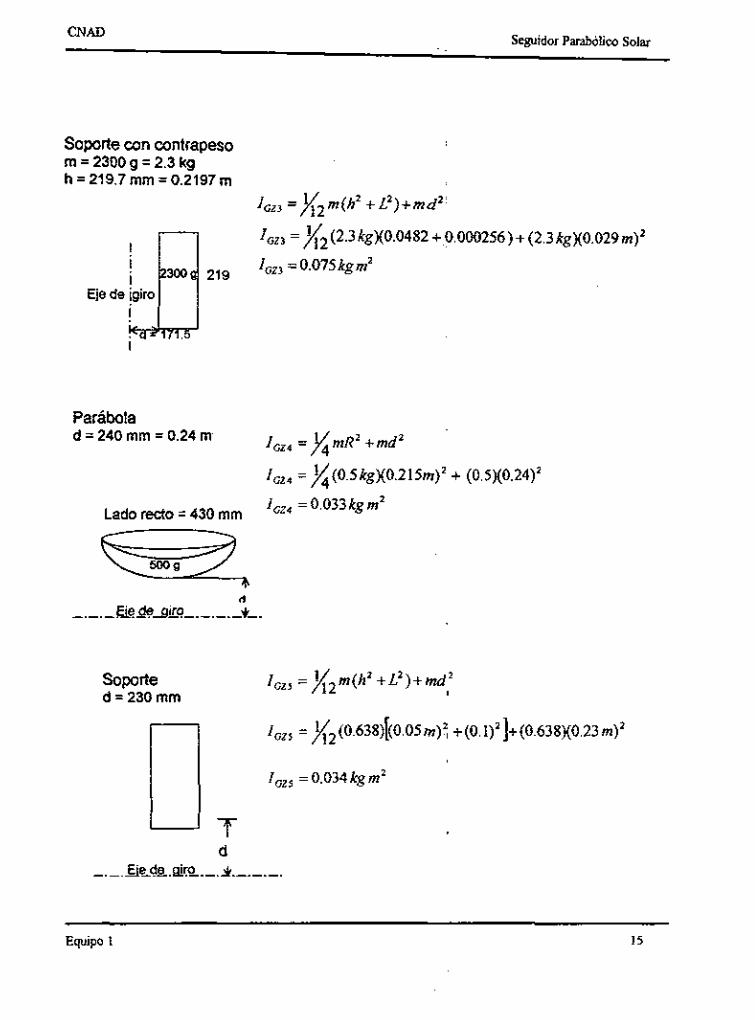
Soporte con contrapeso m = 2300 g = 2.3 kg h = 219.7 mm = 0.2197 m
I,,, = ) í 2 m ( h 2 + L 2 ) + m d 2
I,, = x2 (2.3 kgXO.0482 + 0.000256) + (2.3kg)(0.029m)Z
I,,, = 0.075 kgm’
Eje de ¡giro
I J 219
Parábola d = 240 mm = 0.24 m IGz4 =%mR’ +md’
I,, = ~(0.5kg)(O.215rn)’ + (0.5)(0.24)*
I,,, = 0.033 kg m’ Lado recto = 430 mm
Soporte d = 230 mm
IGZ5 = ) í 2 m ( h 2 + L z ) + m d 2 I
I,, = )&(0.638)[(0.05m)i +(0.1)2]+(0.638)(0.23m)2
I,, = 0.034 kg m2
d -. -.Eie_be.g!!rO_.-.A.-.
Equipo 1 15

Seguidor Parabólico Solar CNAD
Flecha d =220mm
I I G i 6 = %(O. i04kg)(P.O06m)* + ( O . 104 kg)(O.22)'
'GZT = IGZi + I G Z i + "GZ3 'IGZ4 +IC25 +'GZS
I,, = 6.77x104+i.96x10~3+2(0.075)+0.033+0.034+5~~035x = 0.224 kgmZ 1 1 1
1.2.3 Selección y cálculo del mecanismo de reducción
Para nuestro movimiento de balancín necesitamos cubrir una amplitud de cero a 120" en el lapso de diez horas, considerando'de las 8 h a las 18 h, por ser el período de mejor aprovechamiento de los rayos de¡Sol.
El mecanismo de nuestro movimiento está accionado por un motor a pasos que transmite su potencia al mecanismo de reducción.
Considerando que se emplea un motor cuyo ddver lo hace girar a 40 rpm y tiene en su flecha acoplado un piñón de once dientes'he paso diametral 48.
I
I
Para cumplir con esta amplitud de 120 grados en ese período de tiempo se necesita que la flecha de nuestro movimiento tengaltuna velocidad angular con base en el siguiente cálculo: ~
7
O rad rad 10hrs 600min mm 57.3O min -- 1200 - 1200 - -0.2--=3.49~10-'-
rad 1 rev ' rev min 2 z rad I min
3.49 10-3 -- - - 5.55 x 10:~ -
16 I Equipo 1
! Seguidor Parabóiico Solar CNAD
Haciendo una comparación entre la velocidad que nos entrega el motor y la velocidad que requerimos / I
40 =72072 5.55 x
Necesitaríamos un reductor de esa magnitud siempre y cuando nuestro motor estuviera funcionando las diez horas.
Como nuestro motor no va a estar en funcionbmiento constante debido a que los desplazamientos angulares no con uniform& y varían de acuerdo a la hora y fecha según Carta de Trayectoria Solar'I Anual para la República Mexicana', se buscó una caja reductora con un valoq de reducción grande y que fuera compacta, encontrándose una caja reductora'con una relación de 1:1530 que al realizar los cálculos con la velocidad del motor antes indicada, se obtiene la
'I
siguiente velocidad en la flecha: (I
rev 13.13 min min
= 0.025 - %rev
'1 , Esta es una velocidad muy apropiada para cumplir la trayectoria en el lapso
requerido.
1.2.4 Selección del motor a pasos
Sobre la base del torque mínimo requerido ,,encontrado por el cálculo de inercia del conjunto y aplicando el mecanismo de rebucción antes calculado, se determina el torque del motor que es seleccionado! : . del I Catálogo Oriental Motor
Para determinar el torque necesario en el motor empleando 7 , I , la siguiente fórmula:
,. , 1997/1998. , I
t !
T = 1 0 1 ~ 1 x a x factor de seguridad T = 0.0072 kg mz x 4.188 rad& x' 2
Por lo tanto, el motor seleccionado es un motor a pads de 1.8" por paso de acuerdo al catálogo del fabricante es de T = 0.26 N n"!.
T = 0.06 N m
'Proporcionada por el Centro de Investigación y de Estudios afanzados (INVESTAV) del instituto Politécnico Nacional (I.P.N.) I
Equipo 1 17 il 1 1
I
CNAü Seguidor Parabólico Solar
1.2.5 Cálculo del torque aplicado en la flecha'de la parábola
Ahora encontraremos las fuerzas componentes en el piñón: I
, I
Fuerza tangencia1 (FS t F , = - M' r
Donde Mt es el movimiento en el engrane y r es el radio primitivo del engrane. I
N=0.26 N m D = 4.92 mm + 1.15 mm = 6.07 mm r = 3.035 mm
= 86N 0.26 N m
3.035~ m F, =
Fuerza radial (F,) F,t=F, tans
Donde 0 es el ángulo de presión
F, =86Ntan20°
F, = 86 N (0.3639)
F, =31N
Dado que estas fuerzas están aplicadas all piñón acoplado a una caja
Calculando el torque aplicado a la flecha, tenemos lo siguiente:
reductora de I : 1530.
0.26 N m x 1530 = 398 N rn
Este es el torque que el motor-reductor nos está I/ entregando a la flecha.
Equipo 1 18

-
Seguidor Parabólico Solar CNAD
El torque requerido para vencer la inercia es e1:siguiente:
,: ~
... . ,
T
T = 1 . 3 ~ 1 0 - ~ N m '
Se puede observar que el torque estregado por el motor-reductor cubre ampliamente el toque requerido.
Justificación del diámetro del eje
Para calcular el diámetro del eje se consideraiibásicarnente la rigidez y la resistencia cuando éste transmite potencia en difefentes condiciones de carga y operación por lo cual consideramos lo siguiente:
Peso máximo sobre el eje: 6.'534 kg
I
Considerando que la carga se encuentra enl el centro, calcularemos el momento flector.
R A 13.267 kg Re 13.267 kg
Mv= 03.267 kg (16 cm) = 52.272 kg cm
19

Seguidor Parabólico Solar I‘ CNAD
!/. I V Tramo 1
V X = O < X < 16 Vx = RA = 3.267 kg
Mx = RA (x)
Tramo 2 V x = 1 6 < ~ < 3 2
Vx = RA - 6.534 = 3.267 kg Mx = RA (x) - 6.534 kg (X - 32)
b x + l! ,/
Diagrama de cortante !)I. :/
Calculando la deflexión máxima de la flecha! de acuerdo a la siguiente I ll ecuación:
F P 4 8 E I Y,, -
D = 19 mm y R = 9.5 mm = 9.5~10” m /I I
donde
6.534kg(0.32 m):, -- Y,, -
65.34 Ní0.032 -_ N 7~(8&10-~)
m
Y , - 3408xi09 ?( 4 , )m
2.09m 21413.145 Y , =-
lOOOmm l m
= -9 x lo-’ m Y,, =‘-0.09 mm
Equipo 1 20
CNAD Seguidor Parabólico Solar
Se puede observar que el toque estregado por el motor-reductor cubre
Como se puede observar, utilizando el diámetro de 19 mm para la flecha, la
Calculando el esfuerzo de torsión (T), tenemos: I
ampliamente el toque requerido.
deflexión máxima es aceptable. I
donde T es el par aplicado res el radio de la flecha J es el momento polar de inercia
z D4 J = -
32
Donde D es el diámetro de la flecha.
Sustituyendo la ecuación (2) en la ecuación (l),Itenemos: i
I ,I I
16T
n D 3 r=-
16 x 0.26 N m - - ,93 4 d 8 ~ y m 2 7 =
n(0.019m)' I1
I I kg
='0.019- N kg m2 mz 9 .8N 106mm2 ' 1 mmZ
190488- -
Como se observa el valor del esfuerzo de torsión es mínimo respecto al esfuerzo constante de cedencia del material que es de 84.38 kg/mm2 *.
Tomado de Tippens, Paul E., "Física: ConceDtos v AplicaUones" 5a Edición, Editorial Mc Graw Hill, México, 1998. / I / '
21 ! Equipo 1

- -~ - -.
CNAD Seguidor Parabóiiw Solar
1.2.6 Cálculo de engranes del sistema de redbcción
Nuestra caja reductora fue adquirida, por lo &ai no realizaremos un cálculo de los engranes del sistema de reducción, pero efedtuaremos un análisis de los
La caja reductora es movida por un piñón de 7 mm de diámetro, once dientes y paso diametral de 48; consta de 1 I engrages de los cuales nueve son de paso diametral 48 y dos de paso diametral 40, est6 se encontró con base en lo
I
elementos que la componen. I
siguiente: I 'I N p = - D
donde P es el paso diametral N es el número de dientes D es el diámetro primitivo
, , , - .I I
Engrane A piñón
- 48 11 N = l l p=--
D=0.229' 0.229"
Debido a la regla de transmisión de engranes que establece que para que dos engranes se acoplen para transmitir potencia! 'deben ser del mismo paso diametral y el mismo ángulo de presión y como los 'engranes A, 6, C, D, E, F, G, H, I y J se acoplan, tienen el mismo paso diametral y'kngulo de presión. Mientras que K y L que se acoplan entre sí tienen el siguiente paso diametral.
Engrane K !
N = l l D=0.275" -40 I p = - - 11
0.275
Encontrando la velocidad de cada engrane de acuerdo a la ecuación
I
I 22 Equipo 1 I

CNAD Seguidor Parabdico Solar
donde n = número de vueltas o rpm N = número de dientes d = diámetro de paso
El engrane A le transmite a B
Como C está sobre B cuando el engrane A dB' una vuelta, tanto C como B & I darán 0.261 vueltas.
El engrane C le transmite a D
Como E está sobre D cuando el engrane C de 0.261 vueltas tanto E como D darán 0.49 vueltas.
El engrane E le transmite a F
Como G está sobre F cuando el engrane E dé 0.49 vueltas tanto G wmo F 1) darán 0.22 vueltas.
El engrane G le transmite a H n, = - N - -0.22 = 0.073 1; GI-1: I I
Como I está sobre H cuando el engrane G dé 10 22 vueltas tanto H como I 'I ' darán 0.073 vueltas.
El engrane I le transmite a J
Como K está sobre J cuando el engrane I dé 01073 vueltas tanto K como J darán 0.01 1 vueltas.
De esta forma se va viendo la reducciónlique se tiene en cada paso pudiendo determinar el número de vueltas de cualquiera de los engranes que forma la caja reductora.
23 11, ,¡ Equipo I
I ~ -
Seguidor Parabólico Solar CNm I I1
Para encontrar la reducción se utiliza la siguiente ecuación:
producto de los números de dientes impuIsores e =
producto de los números de dientes impulsados
Sustituyendo en la ecuación anterior:
e = engranes impulsores
engranes impulsados
= 6 5 2 ~ 1 0 - ~ A . C. E G . I . K B . D . F . H. J . L
1 1 x 24 x 19 x 14 x 9 x 1 1 ,6952 17 - - e = - 4 2 ~ 42 x 42 x 4 2 ~ 58 x 59 - 1.064~ 10"
/I I
Obteniendo el recíproco de 6 . 5 2 ~ 1 0 ~
=1531.638 6 . 5 2 ~ 1 0 - ~ ' I
1
2 - 15301
x - 40
X = 0.026 tpm
rev lmin 2;rrrad rad 0.026- - -= 2 .737~10-~ -
min 60s lrev S
2.737x105(1373)=3.75 W en 412 mm II
1.8 W en 4 6 mm
Equipo 1 24
I , -. -..
mAD Seguidor Parabólico Solar
1.2.7 Selección de los rodamientos
Se seleccionó el tiPo de rodamiento de dos qileras de bolas con un camino de rodadura esférico común en el aro exterior,]Idebido a que ésta Última característica le permite la propiedad de sBr autdlineable, lo cual acepta cierto
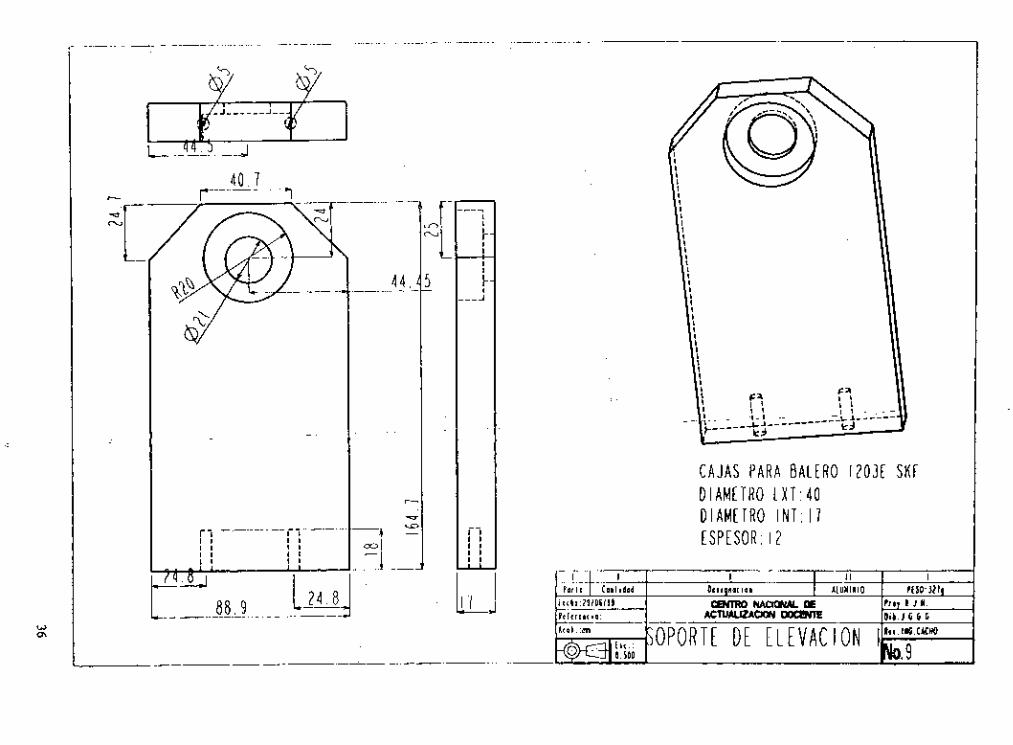
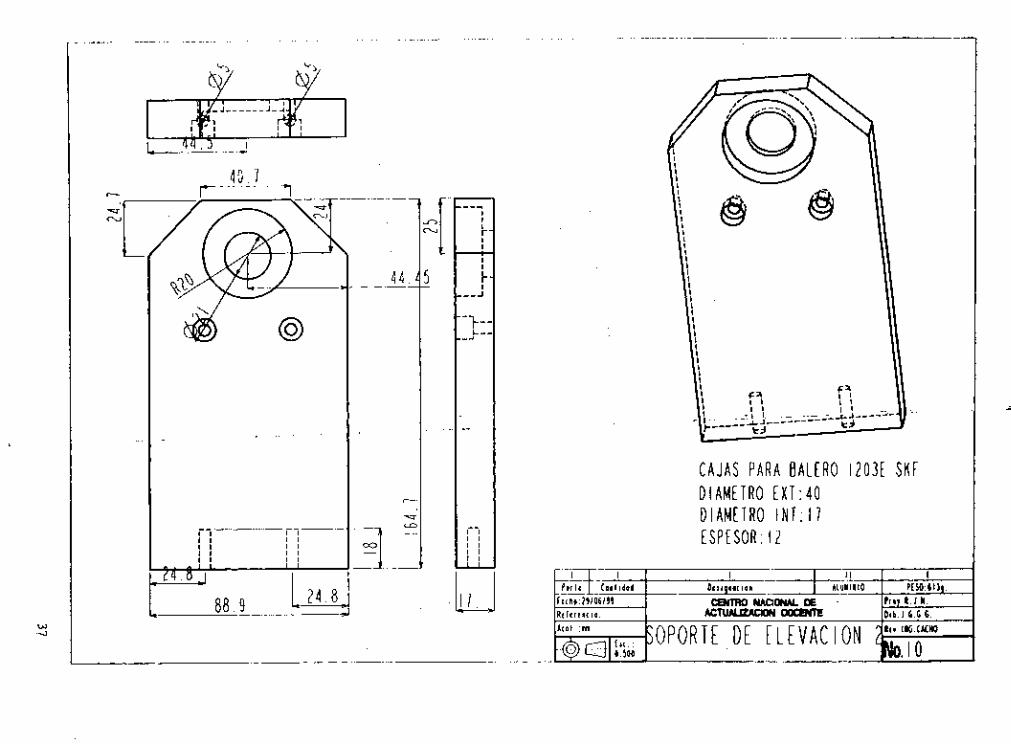
El modelo de rodamiento elegido es el 1203 E SKF con las siguientes
Diámetro interior: 17 mm Diámetro exterior: 40 mm Ancho: 12 mm
Capacidad de carga estática: 2200 N Velocidad nominal con grasa: 18 O00 radimin Velocidad nominal con aceite: 22 O00 radlrnin Masa: 0.073 kg
Este tipo de rodamiento de diseño E tiene una capacidad de carga mayor que otros en su mismo diámetro, nuestra carga considerada / t es únicamente del tipo radial, estimando mínima la carga axial.
Los cálculos de las cargas axiales y radiales sobre estos rodamientos se dan a continuación:
desalineamiento entre el eje de los soportes.
características: 1 ,
' !
I
'! Capacidad de carga dinámica: 8840 N '!I
$ 8
I
Carga radial I
'I I La carga radial máxima sobre nuestro rodamiento está dada por el peso de
los siguientes componentes:
Parábola Soporte Flecha Placas soporte Conjunto motor-reductor Base de balancín Contrapeso Flecha -
500 g 738 g 104 g
1655 g 1100 g 687 g
1600 g 150 g
I
6534 g 'I Peso total
I : I
25 , , Equipo 1
. .
Seguidor Parabólico Solar CNAD
6534 g kg =6.534kg 1000 g
9.8 N 6.534 kg- = 64.033 N
kg
Por lo cual si nuestro balero soporta una &rga estática de 2200 N y nuestra carga estática es de 64.033 N, estamos utilizhndo un factor de seguridad (FS): 'I
! I
capacidad de carga estátip carga estática requeriq
FS =
2200 N 64.033 N
FS =
/ I
FS = 34.35%
' I 1;
I
26 Equipo 1

I . ~ -.
Seguidor Parabólim Solar CNAü
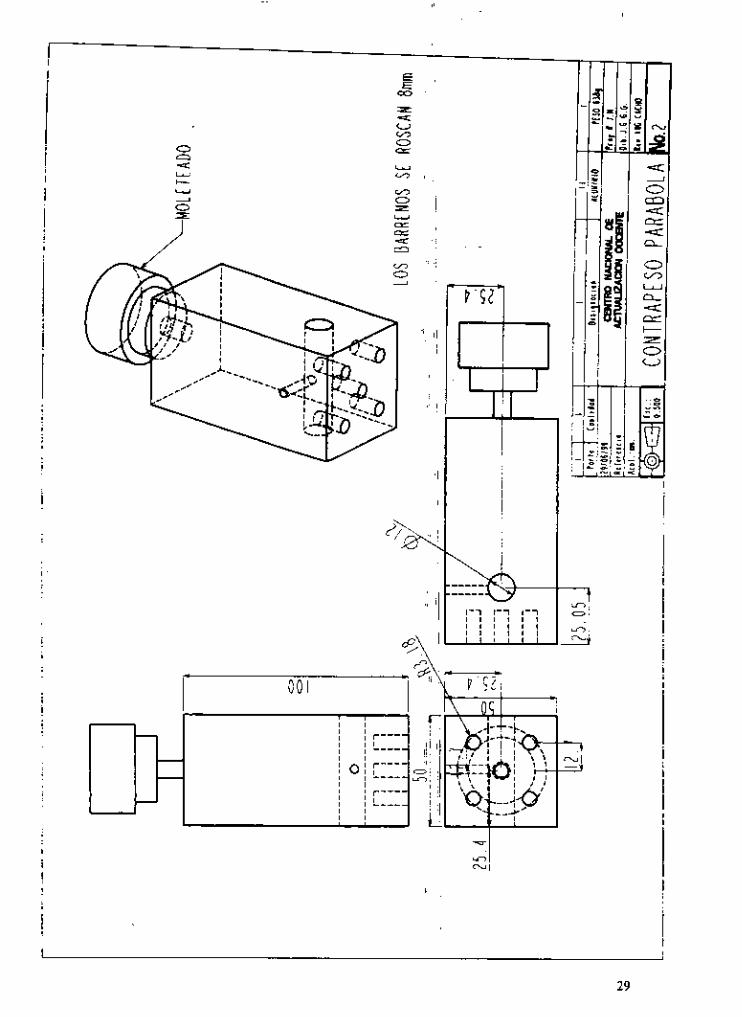
1.3 Procesos de fabrlcacidn Para la fabricación de este dispositivo meaitrónico se realizó el mayor
número de piezas en el taller mecánico del C.N.A.D:!l'I Debido a la precisión en ajuste que requerían! los ajustes de balero, éstos
se realizaron en el Centro de Maquinado de Contiol' Numérico obteniéndose así resultados Óptimos. Todas las demás piezas fue& realizadas en máquinas herramientas convencionales con excepción de la pabbola y las cajas reductoras de velocidad de los motores, que debido a su fdrma y a su dificultad para maquinarlas, fue necesario adquirir piezas de tipo c66ercial.
Se emplearon la mayor parte de las máquinas herramientas existentes en el taller, ya que hubo necesidad de rectificar, torndar, fresar, doblar y cizallar, aplicando los conocimientos adquiridos durante el &$o.
1.3.1. Dibujos de los componentes '4
Los dibujos de los componentes del sistema parabólico solar fueron realizados en la sala de cómputo de CAD/CAM $on la ayuda del software Pro/ENGINEER, con el que se facilitó la representación gráfica de los diseños así como su ensamble.
!I,
, 'I
27 Equipo1 .

!/
28
O
4 w c w iI
n
O
I
29
i
:. ,
'/
i
30
/I , . .

I
: : :
. : 6 '
1
w c
c
t
u7
U
34
w m
/ I
I
L
C A J A S P A R A B A L E R O 1203E SHf D I A M E T R O f X T : 4 0 D I A M E T R O I N T : 1 7 ESPESOR: I 2
OPORTE DE E L E V A C I O N I
W '4
. . . . . . . . . . . . . . . . . . . . . . .... ~- ..... - ............. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.... 10. I
4 4 .
I-
T u
.
. ...
'i c--
C A J A S P A R A B A L E R O 1203E S K F D I A M E T R O E X T : 4 0 DIAMETRO I N T : 1 7

!
, 6 9
38
u W
.~ ,.. . . . ~ ~ . -. . ..
-7
I
y-- _- r--
0-1 I 1 I , 1 1 I , $ 1 I 1 iLL
S E R E Q U I E R E N DOS P l f Z A S
10s B A R R E N O S S F L R O S C A N C O N -M4

I
40

v, U N
41 I
'--TE-
Z -=I Y c Y
43

CNAü : !
Seguidor Parabólico S o h I r
1.3.2 Descripción de los procesos de fabnwción I /
1, Seleccidn de materiales
Para llevar a cabo la selección de ma;eiiales, se tomó en cuenta, sus propiedades mecánicas, físicas, químicas y deidoto. En la selección se t i a de involucrar los aspectos de cargas, cargas extemas como las del medio ambiente, .L ::
todo esto expresado en función del diseño.
En nuestro proyecto para seleccionar 10s materiales nuestros criterios más importantes fueron:
Esfuerzos que soporta !!
Baja densidad :i *
Resistencia del material ,a la corrosión
4 I! '! 4 1 , '; /I
/I. '!
I' 'I ,f
Materiales para cada elemento / /
A continuación se describen los diferentes materiales que se usaron para la / / ! utilización de cada elemento:
Asignación de pieza
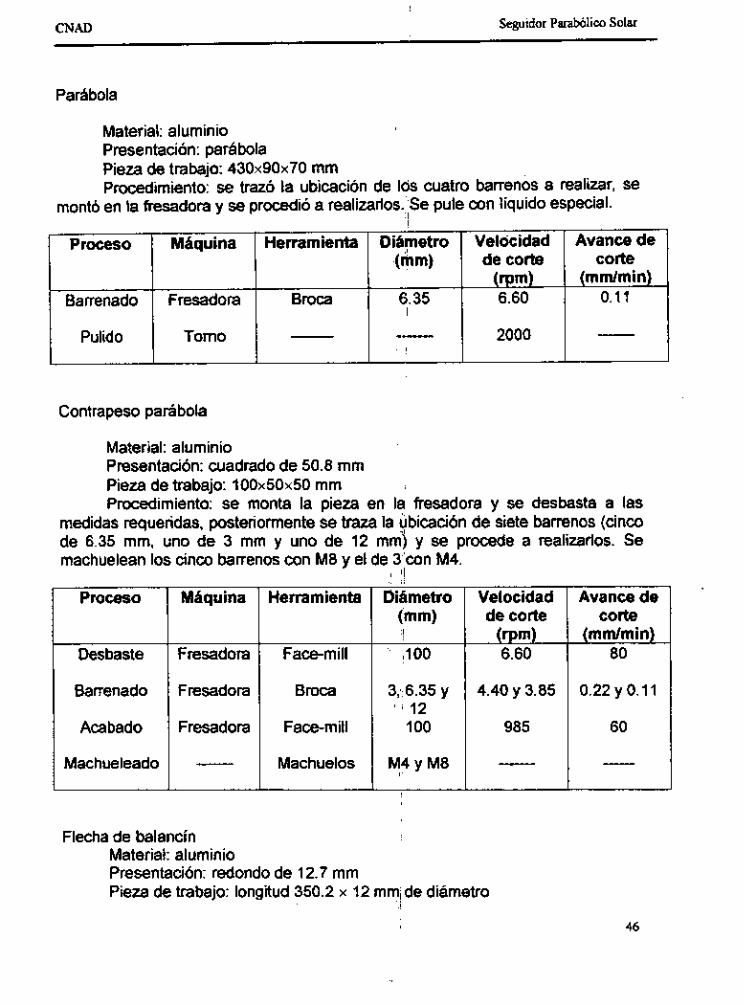
Parábola
Contrapeso parábola
Flecha balancín Soportes balancín
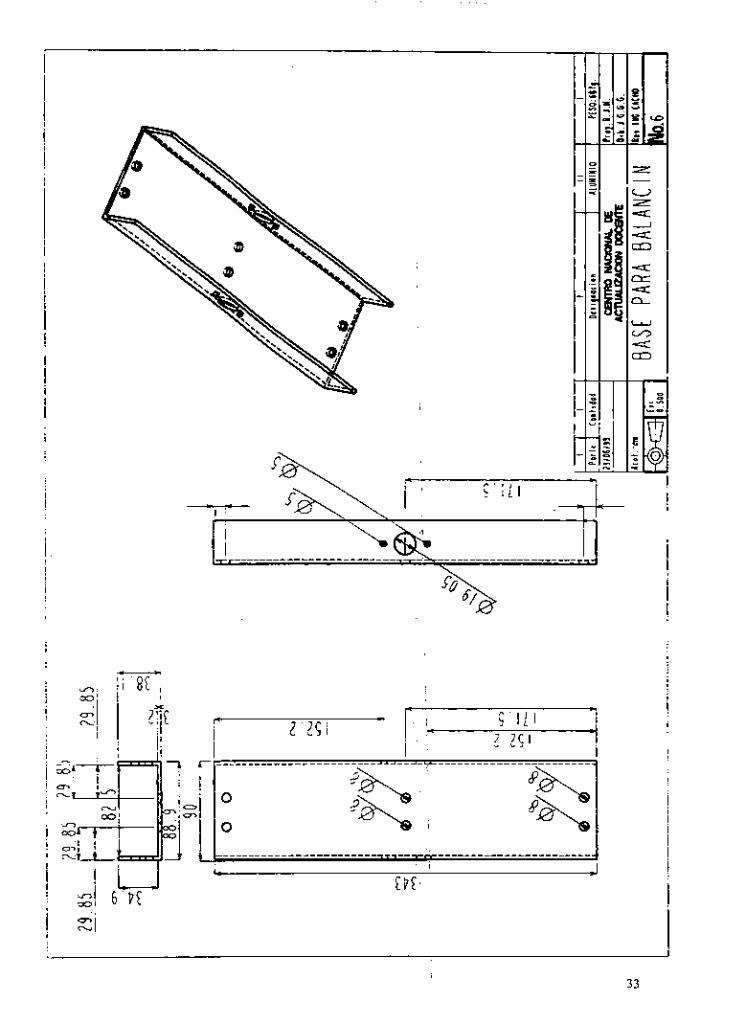
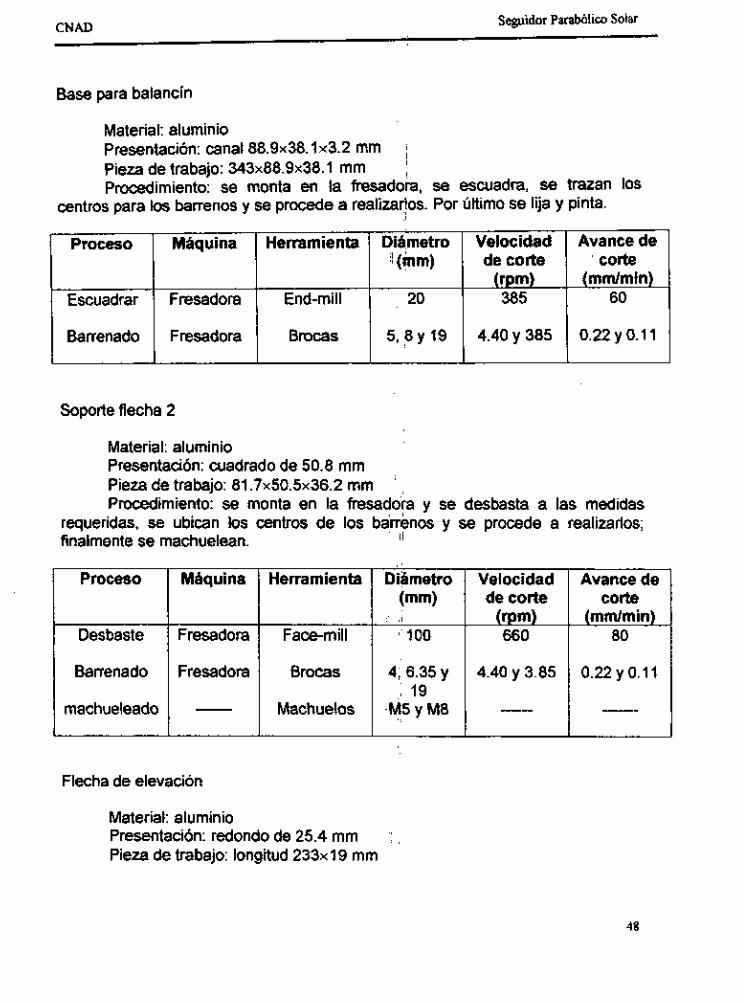
Base Pam balancín
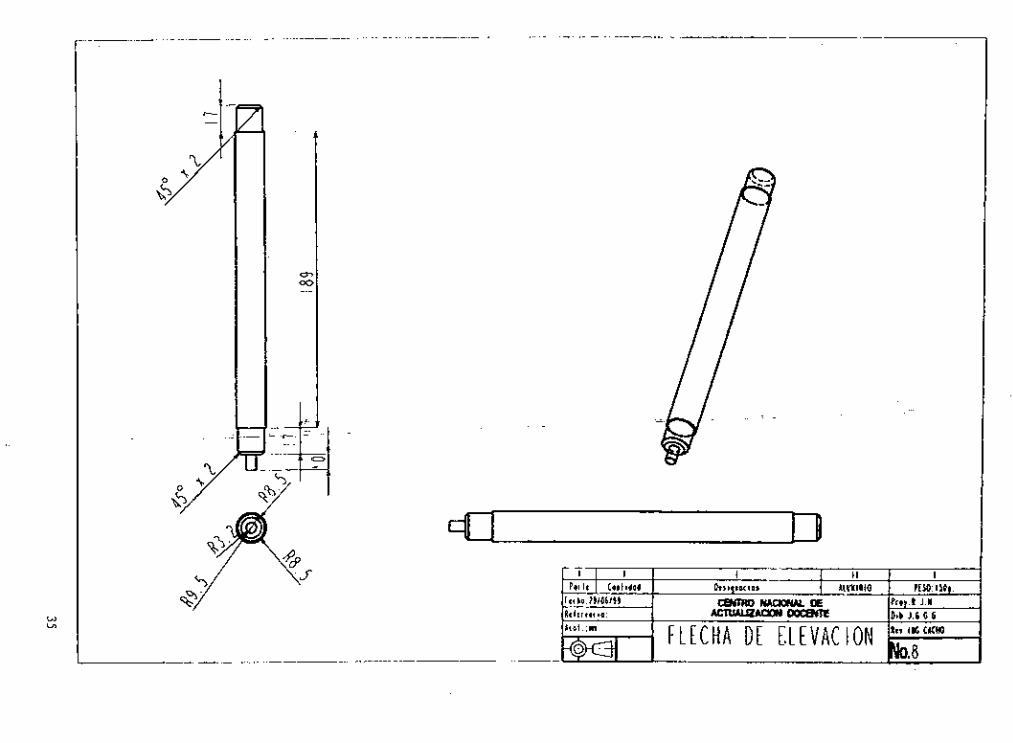
Soporte de flecha 2 Flecha de elevación Soportes de elevación
Material
Aluminio
Aluminio
Aluminio
Aluminio
Aluminio
Aluminio
Aluminio
Alumni0
Presentación
Parábola
Cuadrado de 50.8 mm
Redondo de 12.7 mm Perfil rectangular 95x254 mm de espesor Canal 88.9x38.1 x3.2 mm Cuadrado de 50.8 mm Redondo de 25.4 mm Perfil rectangular de 95x25.4mm
Resistencia última (Mpa) 24 1
24 1
24 1
241
24 1
241
24 1
24 1
Densidad I # (kgim3)
.! : 2770
! 2770
' . . 2770
. . 2770
2770
,. 2770
' 2770
' , 2770
I '
44

CNAD Seguidor Parabólim Solar
Asignaci6n de - pieza
Adaotadores de motores
Bases para motores
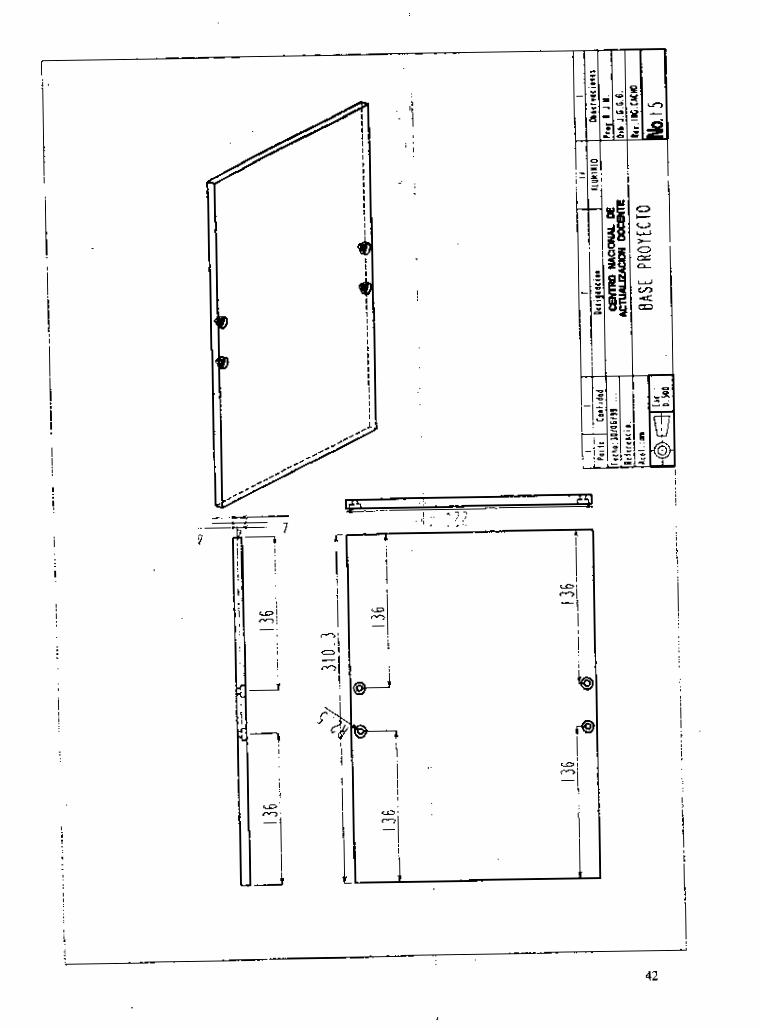
Base proyecto
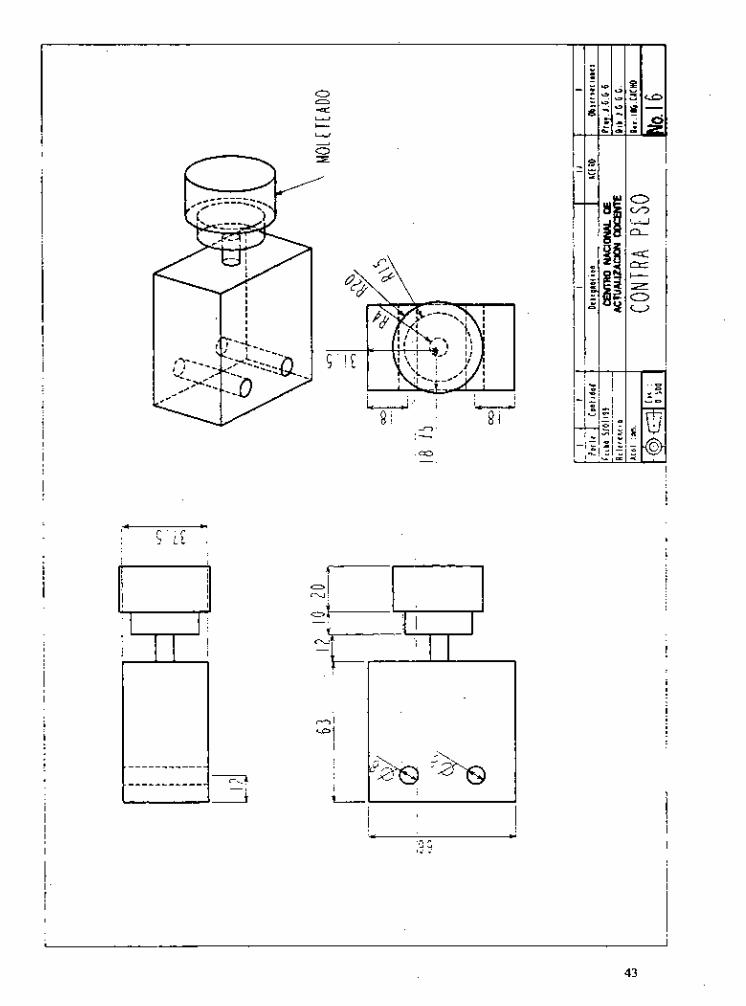
Contrapesos
Bases para contrapesos
Material
Aluminio
Aluminio
Acero
Acero
Acero
Presentación
Perfil rectangular de 95x25.4mm de espesor Perfil rectangular de 95x25.4mm de espesor Placa de 15 mm Redondo de 45 mm Perfil rectangular de 7Ox40mm
Módulo de Resistencia elasticidad 1 última
70 1 241
193 I 758
~ 193 1 758
758 ' . ' Ig3 I I
Densidad (kslm3)
2770
2770
8030
8030
8030
Manufactura de los componentes
A continuación se describe el proceso de maquinado de las piezas, mencionando máquina, herramientas, program+ de control numérico (anexados en apéndices) y algunos comentarios para facilitar su elaboración.
I
Las fórmulas para calcular revoluciones por mindto y avances son: 1000 vi!
RPM= r d j
donde RPM = revoluciones por minuto Vc = velocidad de corte en mmlmin d = diámetro de la pieza de trabajo en mm
1
Avance = f N n
donde f = arranque por filo N = número de filos de la herramienta n = número de revoluciones por minuto
Criterio para la selección de los avances i
Resistencia del material - ,+ Mayor avance Menor avance
45
Seguidor Parabólico Solar CNAD
Proceso Máquina Herramienta Diámetro Velocidad de corte
(rpm) Barrenado Fresadora Broca 6.35 6.60
Pulido Tomo - -- 2000
(mm)
I
I
Avance de corte
(mmlmin) 0.11
-
Contrapeso parábola
Broca
Face-mill
Machuelos
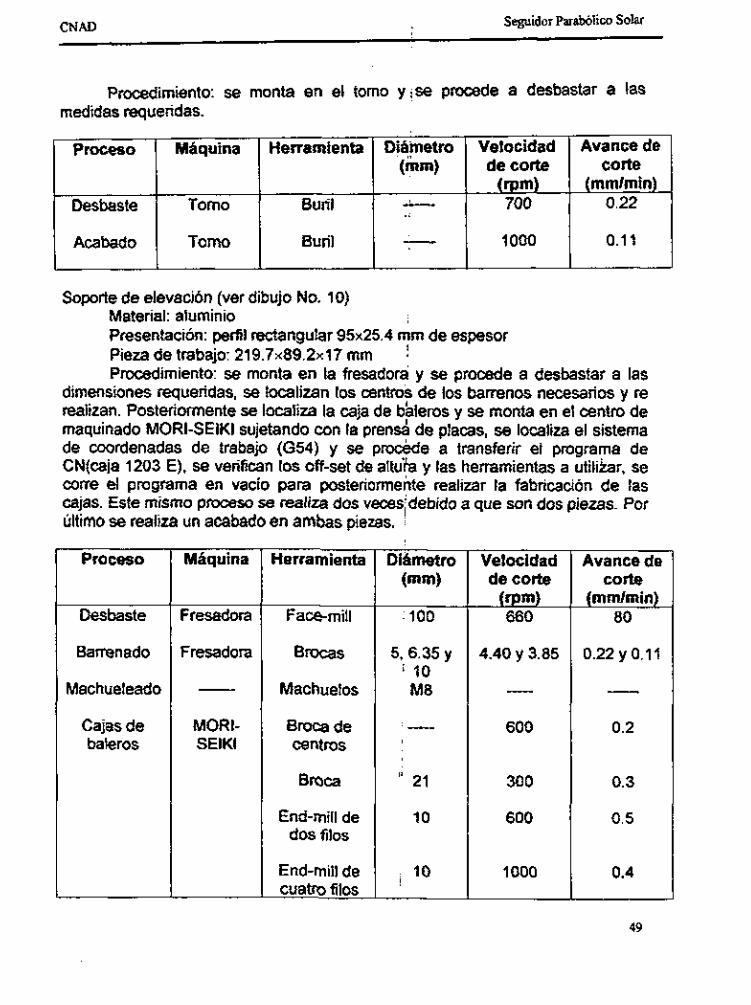
Material: aluminio Presentación: cuadrado de 50.8 mm Pieza de trabajo: 100x50~50 mm Procedimiento: se monta la pieza en la fresadora y se desbasta a las
medidas requeridas, posteriormente se traza la ubicación de siete barrenos (cinco de 6.35 mm, uno de 3 mm y uno de 12 mmj y se procede a realizarlos. Se machuelean los cinco barrenos con M8 y el de 3'con M4.
1 'I
3;t6.35 y * I 1 2
1 O0
M4 y M8 ' I
Machueleado
Velocidad de corte
(rpm) 6.60
4.40 y 3.85
985
Flecha de balancín Material: aluminio Presentación: redondo de 12.7 mm Pieza de trabajo: longitud 350.2 x 12 mm,de diámetro
I
Avance de corte
(mmlmin) 80
0.22 y o. I 1
60
46

mm Seguidor Parabdico S o h
Proceso Máquina Herramienta Diámetro Velocidad de corte (hm)
I (rpm) Desbaste Tomo Buril - 700 Acabado Tomo Buril - 1 O00
Avance de corte
(mmlmin) 0.22 0.11
ambas piezas.
Proceso
Desbaste
Barrenado
Machueleado
Cajas de baleros
Máquina
Fresadora
Fresadora
- MORI- SElKl
Herramienta
Face-mill
Brocas
Machuelos
Broca de centros
BraCa
End-mill de dos filos
End-mill de cuatro filos
l i .
Diámetro (mm)
1100
' 110 5,: 6.35 y
M8
18
10
10
Velocidad de corte
(rpm) -660
4.40 y 3.85
600
300
600
1 O00
Avance de corte
(m m/min) 80
0.22 y o. 11
- 0.2
0.3
0.5
0.4
47
Seguidor Parabiilico Solar CNAD
Proceso Máquina Herramienta Diámetro Velocidad Avance de '
I (rpm) (mnúmin) Escuadrar Fresadora End-mill 20 385 60
Barrenado Fresadora Brocas 5, 8 y 19 4.40 y 385 0.22 y 0.1 1
i (mm) de corte corte
Proceso
Desbaste
Máquina Herramienta Diámetro Velocidad Avance de
(rpm) (mnúmin) (mm) de corte corte
Fresadora Face-mill " 1 O0 660 80
I Barrenado I Fresadora 1 Brocas I 4, 6.35 y I 4.40 y 3.85 1 0.22 y 0.1 1 , 19
--I- I -- I Machuelos I lM5yM8 I machueleado I - I ' I
Flecha de elevacion
Material: aluminio Presentación: redondo de 25.4 mm Pieza de trabajo: longitud 233x19 mm
' ,
48
Seguidor Parab6liw Solar CNAD
Proceso Máquina Herramienta Diámetro Velocidad (mm) de corte
(rpm) Desbaste Tomo Buril I-- 700
Acabado Tomo Buril - 1 O00 , /
Avance de corte
(mmlmin) 0.22
0.1 1
Proceso Diámetro ímm)
Desbaste
Velocidad Avance de de corte corte
Barrenado
,100
Machueleado
Cajas de baleros
(rpm) (mmlmin) 660 80
Máquina
Fresadora
Fresadora
__
MORI- SElKl
--_
I’ 21
Herramienta
600 0.2
300 0.3
Face-mill
Brocas
Machuelos
Broca de centros
Broca
End-mill de dos filos
End-mill de cuatro filos
5, 6.35 y 1 4.40 y 3.85 I 0.22y0.11 i 10

Seguidor Parabóiiw Solar CNAD
' I
Adaptador motor-reductor (ver dibujo No. 11)
Material: aluminio Presentación: perfil rectangular 95x254 de espesor Pieza de trabajo: 83.7~80.3~20.5 mm Procedimiento: Se monta en la fresa dora]^ se procede a desbastar a las
dimensiones requeridas. se lomiizan los cent@ para barrenos y se procede a realizarlos, se machuelean. Finalmente se lijan y pintan.
,, I
I
Proceso
Desbaste
Careado
Barrenado
machueleado
Máquina
Fresadora
Fresadora
Fresadora
-
Herramienta
Face-mill
End-mill
Brocas
Machuelos
Diámetro I1 cmm,
b !
1 O0
20
3.4, 5 y 22
M5 ' I
Velocidad de corte
6.60
3.85
4.40 y 3.85
--f!Pt-
-
Avance de corte
(mmlmin) 80
60
0.22yo. 1
-
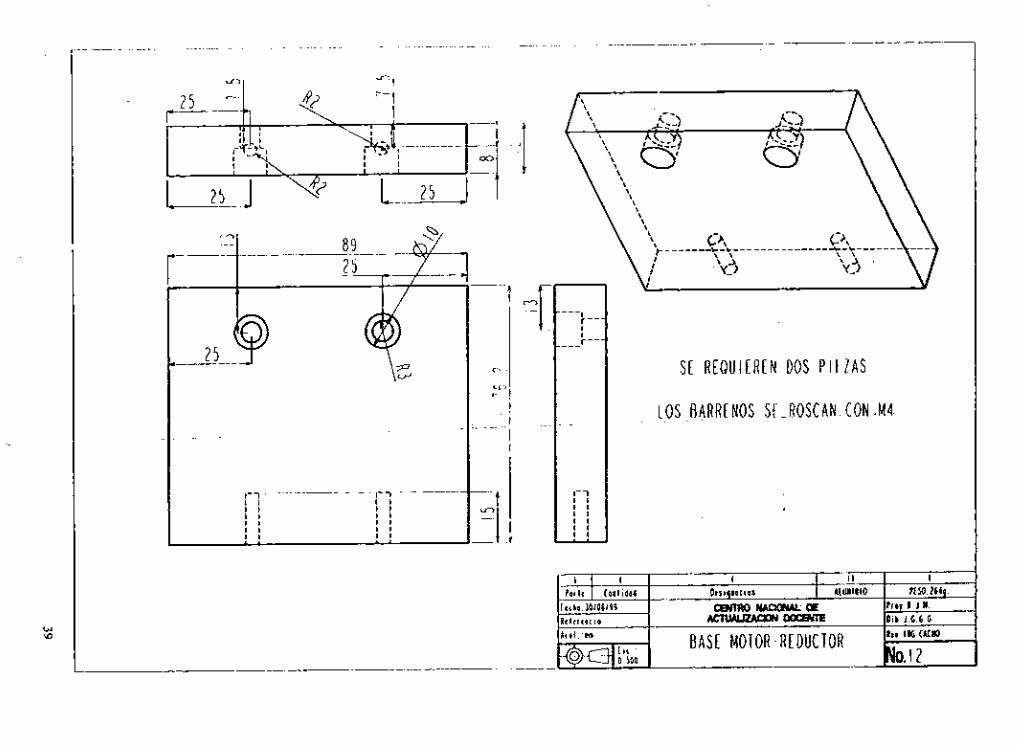
Base motor-reductor (ver dibujo No. 12)
Material: aluminio Presentación: pen31 rectangular 95x254 mm de espesor
Procedimiento: se monta en la fresadora y se procede a desbastar a las dimensiones requeridas, se localizan los centros para los barrenos y se realizan; se machuelea. Finalmente se lija y pinta.
Pieza de trabajo: 76.2~23 mm 'I
Máquina r Machueleado
Herramienta Díámetro
Face-mill i 100
3 1 5 ~ 1 0
Machuelos
I1
de corte
I - -
50

CNAD Seguidor Parabolico solar
Proceso Máquina Herramienta Diametro (mm)
I
Corte Fresadora End-mill 10
Limpieza Fresadora Face-mill ,100
Escuadrar Fresadora End-mill I 20
Rectificación Rectificadora Piedra 200 abrasiva
Barrenado Fresadora Brocas 5y10 I
Base proyecto (ver dibujo No. 15)
Material: acero Presentación: placa de 15 mm Pieza de trabajo: 220.4~310.3~13 mm , Procedimiento: se corta a dimensiones requeridas, posteriormente se
limpia en la fresadora una superficie superior y se escuadran todos los demás lados. Después se rectifica, se localizan los mntros de barrenos y se realizan.
4
Velocidad de corte
(rpm) 4.85
4.85
4.40
3600
4 4 0 ~ 3 . 8 5
! ' 100
Avance de corte
(mmlmin) 60
60
ao 0.35
0.22 y 0.11
(rpm) 660
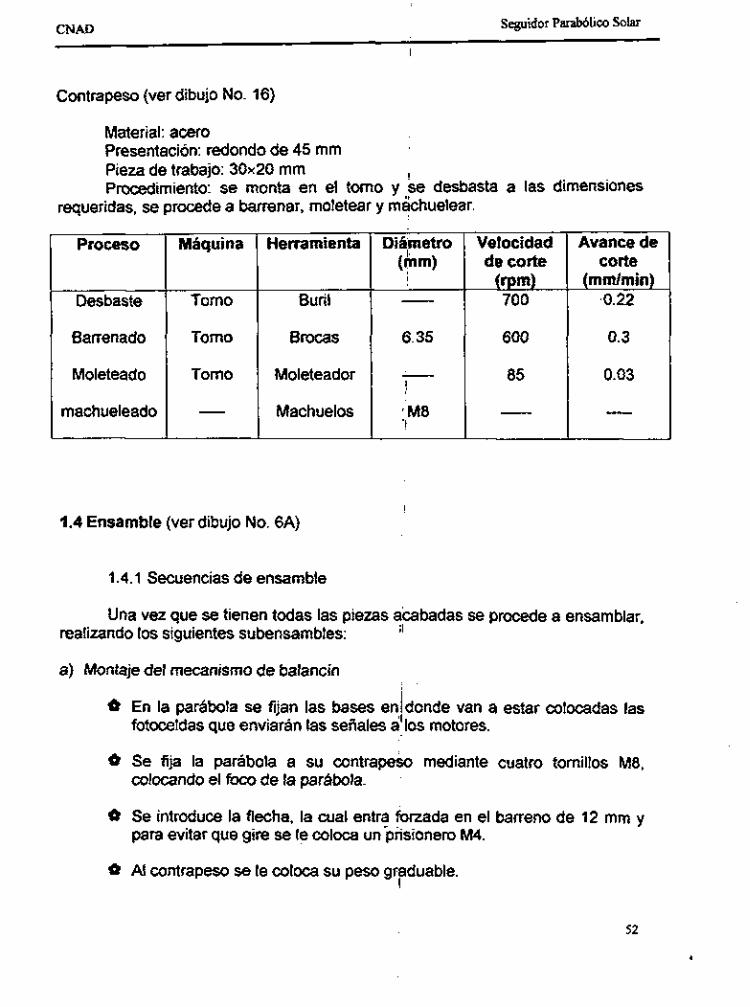
Base para contrapeso (ver dibujo No. 16)
Material: acero Presentación: perfil rectangular 70x40 mm Pieza de trabajo: 66~38x63 mm Procedimiento: se monta en la fresadora y se desbasta a dimensiones
requeridas, se localizan los centros para los bahnoc y se realizan. Se procede a
Fresadora
-
machuelear.
Barrenado
machueleado
Brocas
Machuelos
Máquina Herramienta I Fresadora Face-mill ----t-
Diámetro Velocidad -E--Ll=
I I
mmlmin Y o.22yo.11 I
51
Seguidor Parabólico Solar CNAD I
Proceso Máquina Herramienta Diálmetro Velocidad (mm) de corte
Desbaste Tomo Bun1 - 700
Barrenado Tomo Brocas 6.35 600
Moleteado Tomo Moleteador - 85
machueleado - Machuelos 'lM8 I)
(rpm) I
j
'I
Avance de corte
(mmlmin) 0.22
O. 3
0.03
-
1.4 Ensamble (ver dibujo No. 6A) !
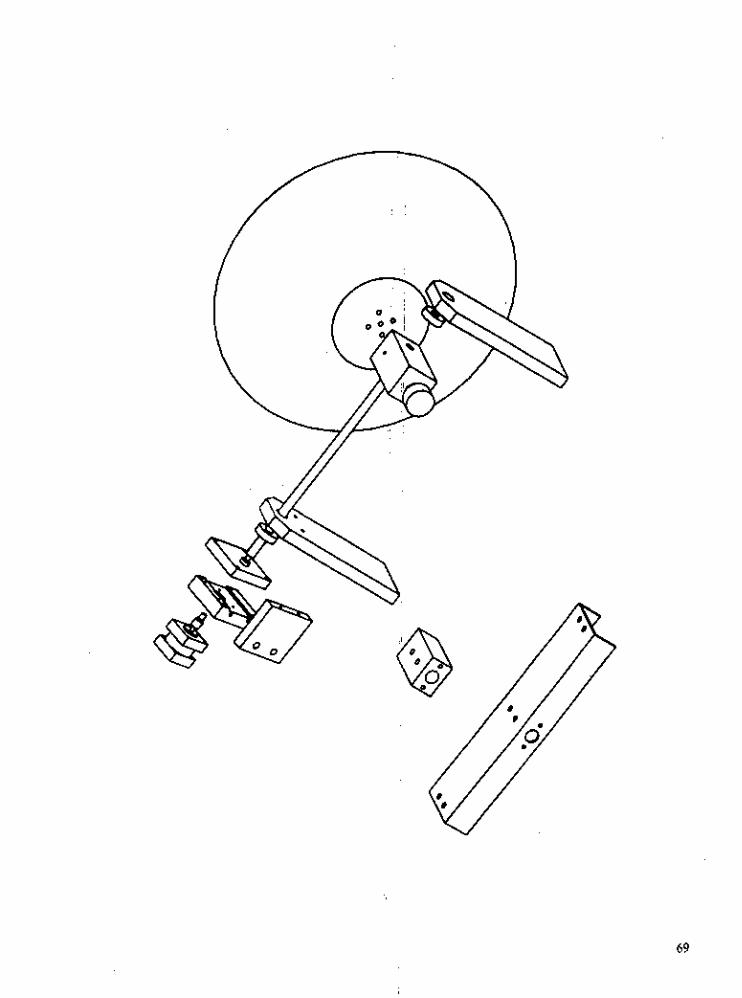
1.4.1 Secuencias de ensamble
Una vez que se tienen todas las piezas a'cabadas se procede a ensamblar, realizando los siguientes subensambles: il
a) Montaje del mecanismo de balancín
O En la parábola se fijan las bases en,donde i van a estar colocadas las
O Se fija la parábola a su contrapeso mediante cuatro tomillos M8,
O Se introduce la fiecha, la cual entra forrada en el barreno de 12 mrn y
fotoceldas que enviarán las señales ai los motores.
colocando el foco de la parábola.
para evitar que gire se le coloca un prisionero M4.
I
O Al contrapeso se le coloca su peso graduable. I
52

Seguidor Parabólico Solar CNAD
O En los soportes que contienen las cajas se montan los baleros 6201.
O Posteriormente la flecha se introduce en ambos balms.
O En la base para balancín se coloca el doporte para flecha 2 y se fijan los soportes para balancín, colocando el contrapeso que contrarresta el subensamble motor -reductor base.
7 1
I
I
O Se coloca en la flecha el cople tipo flexjble.
O Se realiza el subensamble que llevará el motor-adaptadoreja
O Se acopla en eje de la caja reductoy con la flecha de balancín y la
I
I reductora y base de éstos.
base de éste subensamble se fija al soporte.
b) Montaje del mecanismo de elevación
O Se introduce la flecha 2 en el soporte para ésta.
O En los soportes que contienen las cajas se montan los baleros 1203 E.
O Se introduce la flecha 2 en ambos baleros.
O Para evitar que la flecha gire sobre su soporte se le colocan dos prisioneros M8.
I
I
I
O Ambos soportes se fijan a la base proyecto.
O Se coloca en la flecha el cople tipo rígido.
O Se realiza el subensamble que lleva el motor-adaptador-caja reductora
O Se acopla el eje de la caja reductora con la flecha de elevación y la
O Por Último se fijan los limit-switch en las posiciones requeridas.
y base de éstos. I/
base de este subensamble se fija al soporte. I
I !I
53

Seguidor Parabolic0 Solar CNAD
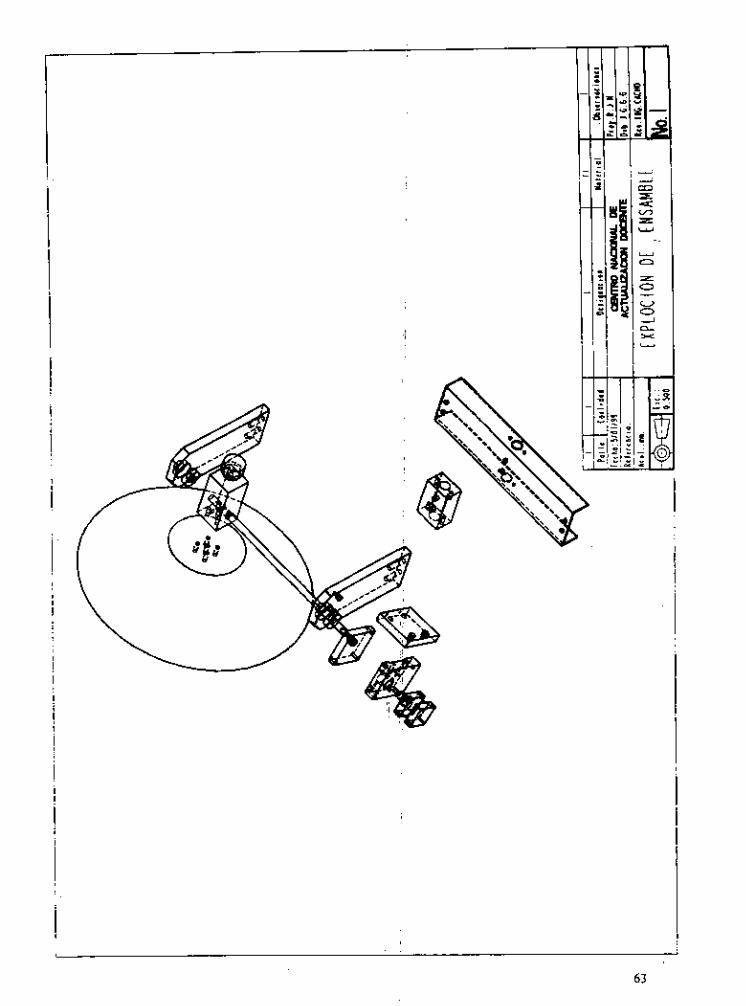
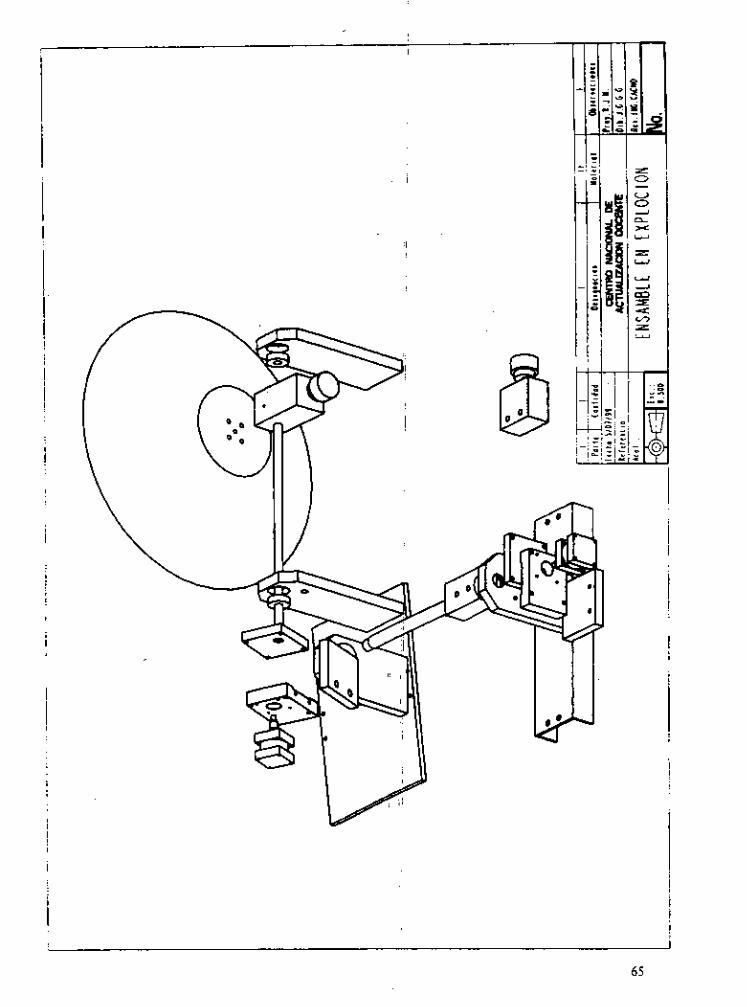
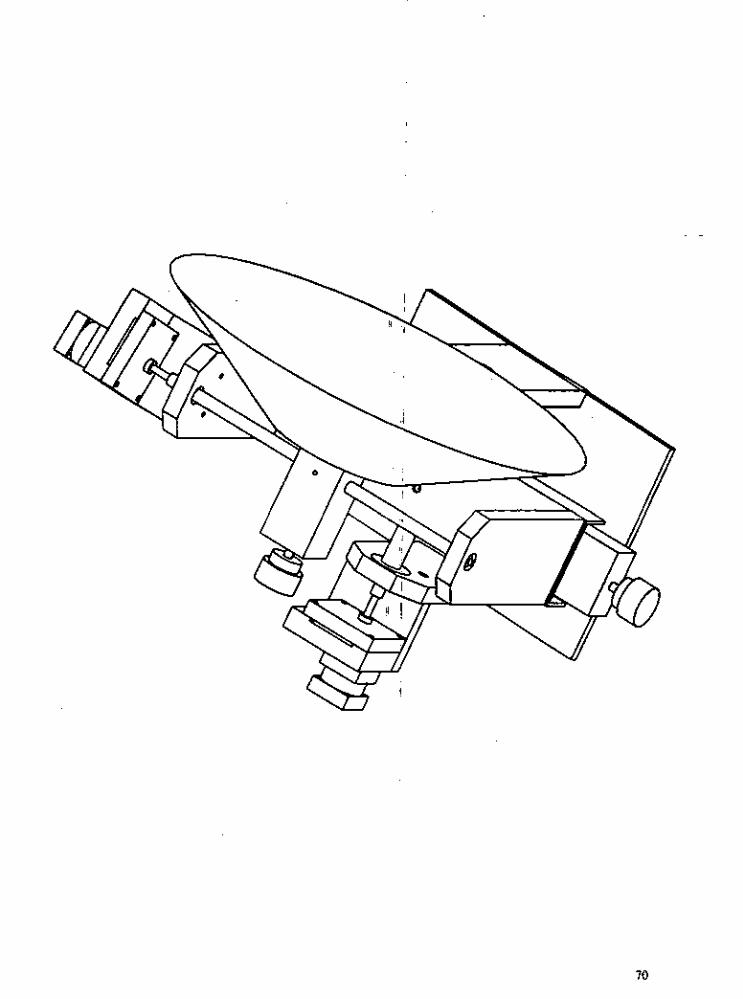
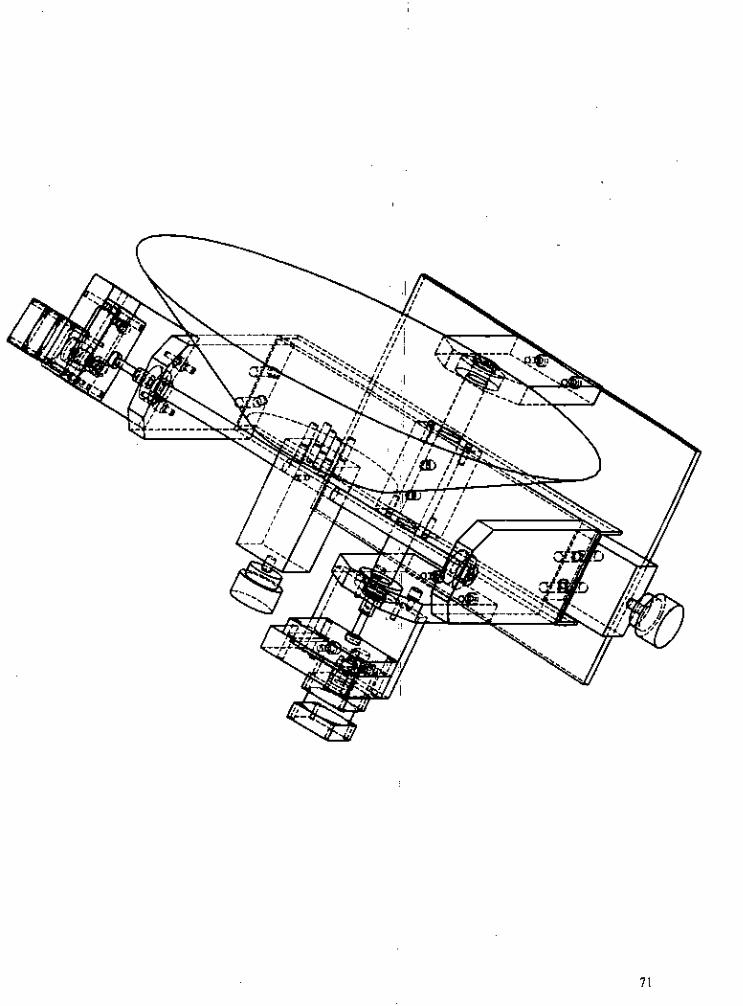
1.4.2 Dibujos de ensamble En esta sección se muestran los dibujos de ensamble de los elementos
que conforman el sistema parabólico solar, los dales fueron disenados mediante CAD/CAM del C.N.A.D. Para la realización de estos dibujos se empleo el sofhvare PrdENGINEER. I
54

!
j
1
55

56
I
57
I

------ ----_-___ - -
58
59
60

................. __ __ .......... . . . . . . . . . . . . . . . . . . . . . . ......
.... . . . . ....

62
63

. ... . , . ~~ . .. . ..... . . . . . .
i ~
1 I
I
!
I
I
!
~
! i I
!
i I
! i
I !
I
65

I
61

I
M O V I M I E N T O . D E B A L A N C I N
69
70
71

S E G U I D O R P A R A B O L I C O
s o i 4 R
I
Seguidor Parabóliw Solar CNAD I
11
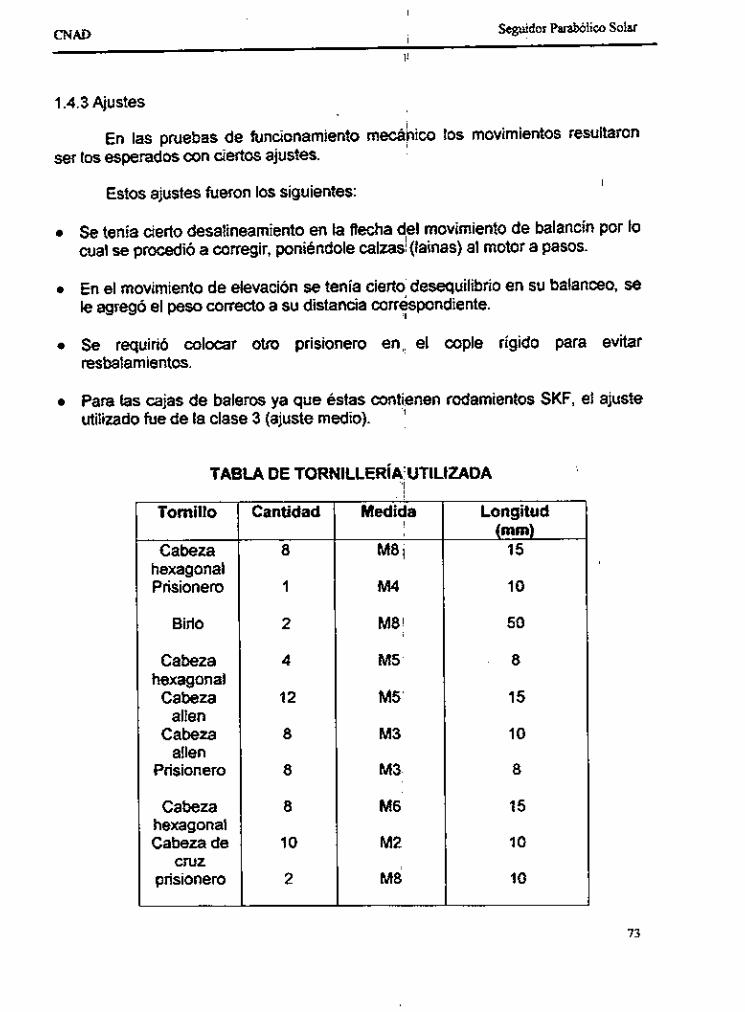
1.4.3 Ajustes
ser los esperados con ciertoc ajustes. En las pruebas de funcionamiento mecánico los movimientos resultaron
Estos ajustes fueron los siguientes: I
Se tenía cierto desalineamiento en la flecha del movimiento de balancín por lo cual se procedió a corregir, poniéndole calzas: (lainas) al motor a pasos.
En el movimiento de elevación se tenía cierto desequilibrio en su balanceo, se le agregó el peso correcto a su distancia corr+pondiente.
Se requirió colocar otro prisionero enii el cople rígido para evitar resbalamientos.
Para las cajas de baleros ya que éstas contienen rodamientos SKF, el ajuste utilizado fue de la clase 3 (ajuste medio). I
TABLA DE TORNILLERíA' UTILIZADA /I
Tomillo
Cabeza hexagonal Prisionero
Birlo
Cabeza hexagonal Cabeza
allen Cabeza
allen Prisionero
Cabeza hexagonal Cabeza de
prisionero cruz
Cantidad
a
1
2
4
12
a
a
a 10
2
I
Medida
Ma I
M4
Ma'
M5
M5
M3
M3
M6
M2
Ma
Longitud (mm)
15
10
50
a
15
10
a
15
10
10
73

CNm Seguidor Parabóiioo Solar
CAPITULO2 1 DISENO DEL SISTEMA DE CONTROL
1
2.1 Descripción de etapas de control
Este sistema de seguimiento solar, consiste en hacer incidir los rayos solares en cuatro pequeños sensores colectores fotovoltaicos, colocados en los lados de una cruz centrada en el foco de una parábola, los cuales trabajan en forma de pares fotosensibles(norte - sur, este - oeste); estos sensores nos emitirán unas pequeñas señales de voltaje que nos permitirá orientar el sistema con respecto al sol. Estas señales son introducidas a una etapa 3e amplificación constituida por amplificador operacional.
Una vez amplificadas las señales son introducidas a un convertidor analógico - digital y el dato digitalizado entregado por el ADC a su vez es leído por una microcomputadora 280 a través del puerto B del18PPI ( Programmable Peripheral Interface), donde estos datos son utilizados dentb de un programa desarrollado en lenguaje ensamblador, el cual compara los datos que registra cada sensor colector fotovoltáico y así poder determinar las señales de salida (a través del puerto A del PPI ), las cuales entran a uno de 18s dos drivers que activa los movimientos de los motores a pasos según los datos obtenidos del sistema mínimo en función del movimiento del sol.
/ / 1
'I
Este programa en lenguaje en ensamblador también contiene subrutinas que contemplan la solarimetria difusa (sombras ocasionadas por nubes) para evitar que el sistema se altere en sus movimientos en fdrma indeseada. El equipo también contempla un sensor c o l b d o en el punto focal de la parábola para medir la temperatura en el foco du6nte el transcurso del día, con lo que se podría llevar un registro de la información, para así poder emplear el sistema en aplicaciones o investigaciones posteriores. Dichas temperaturas son mostradas a esto a través de unos display montados en el panel frontal del equipo.
La alimentación del sistema es mediante de una 'batería recargable de 6 volts (a una corriente de 1.2 Ampers/ hora). En el sistema se localiza un panel frontal en donbe se ubican los elementos para operar (botones e interruptores) y para visualizar los estados del sistema se colocaron instrumentos de monitoreo. como lo son un volmetro, un amperímetro y un medidor de temperatura.
,El sistema se complementa con cuatro interdptores de limite rotatorios de carrera para protección del hardware del sistema! ubicados en los extremos de
I i
cada movimiento de la parábola. ';
I :I 74
Equipo 1

I :I II
Seguidor ParabóliG Solar / I :
!I :!
CNAD
2.2 Elementos de entrada : ,
Todo sistema de control cuenta con eie+mentos de entrada, como ¡/son: Interruptores de limite, botón de arranqudparo, lsensores de temperatura, de luz, nivel, presión entre otros, con los que obtienFflinformaciÓn de los estados del sistema que requiere para su operación. En iiel caso de nuestro sistema, los elementos de entrada están conformados por sensores fotovoltaicos, interruptores de limite, interruptores cola de rata y un botón pulsador, los cuales se desdben a continuación: ,I it
2.2.1 Sensores fotovoltáicos
En el sistema se localizan cuatro pequeños :[sensores de voltaje, que son dispositivos que a partir de recibir o sensar una señal solar nos entregan un determinado valor de voltaje en función de la untidad de energía solar incidida sobre su superficie. Con base a pruebas de camtoo que se hicieron con dositipos de sensores fotovoltaicos y debido a las dacterísticas técnicas propias de cada una, se opto por seleccionar sensor futovoltaico "silicon solar cell " debido a su eficiencia, tamaño, comercialización en Méxic6 y su versatilidad de cabieado en sene o sene paralelo para obtener el voltab'l y la comente necesaria según , .. sea requerida. :j !$
i! I 2.2.1.1 Función , .!
Estos sensores fotovoltaicos tienen la funcióq 'primordial de captar la energía emitida por el sol; que al censar ésta nos entreba un voltaje que va desde 0; volts hasta 550 milivolts, cuando no percibe señal soia; (noche) nos entrega O volts, y a plena luz del día nos entrega 550 milivolts. Estos'sensores están colocado$ de tal forma para captar la energía solar de este a 'Mste (en un plano), el cuali,es el movimiento del sol durante el día. Y la captacióntnorte - sur que es el movimiento de la tierra con respecto al sol en las cuatro estaiiones del año.
:! 11
I /
Esquema de colocación los sensores colectores fotovoltaicos /j I (
N' , . .I .
E E
Equipo 1 ' 76

Seguidor Parabólico Solar CNAD I
Estos sensores están montados junto con una, cubierta de acrílico negro con perforaciones que permiten la incidencia del sol para obtener una señal de voltaje de referencia confiable. Estas lecturas van a permitir realizar el movimiento de la parábola en forma adecuada de acuerdo a la medición entregada de cada sensor fotovoltaico. De lo contrario de no llevar esta dbierta las cuatro fotoceldas nos estregarían el mismo voltaje de referencia y eilprograma no podría interpretar estos datos para orientar el sistema parabóiico hacia el sol y el equipo permanecería estático.
Modelo 276-124 de RadioShack
Dimensiones 2 4 centímetros
I
lmax = 300 mA
Vmax = 550 mV
2
2.2.2 Circuito de amplificación
Como el voltaje entregado por sensores fotovoltkicos es pequeño (milivolts), y un tanto difícil de manejar estas variaciones de voltaje para el fin requerido. Se implemento una etapa de amplificacion de voltaje, la cual tiene como fin elevar las variaciones de voltaje de los cuatro sensores colectores en un rango de voltaje de O a 5 volts. Y así adecuar la información a manejar en el convertidor analógico digital. I
Equipo 1 71

CNAD Seguidor Parabólico Solar
De acuerdo a lo anterior se implemento una etapa amplificadora por medio de un (2.1 LM324 en configuración NO INVERSORA paka cada uno de los sensores de voltaje, tal como se muestra en el circuito siguiente.
Rl 1Ok
R F lOOk
I I
Sensor Fotovoltaico
I
- - En el circuito anterior se ilustra un amplificador ¡no inversor, esto es el voltaje de salida Vo tiene la misma polaridad que el voltaje de entrada E¡. ia resistencia de entrada del amplificador inversor es R1, pero la resistencia de entrada del amplificador no inversor es extremadamente g+nde en forma típica excede los 100 MR. Para fines prácticos se tiene un voltaje 0 entre las terminales (+) y (-) del amplificador operacional, entonces ambas están al mismo potencial E¡. Por tanto, Ei aparece a través de RI, lo cual causa que *la corriente fluya como muestra la ecuación:
I = Ei/Rl
La dirección de I depende de la polaridad de! E¡. La corriente de entrada a la terminal (-) del amplificador operacional es despreciable. Y la caída de voltaje de RF se representa por VRF y se expresa como:
VRF = (1 + RF/Rl) Ei
I
Para expresar la ganancia de voltaje del ampl/fi&ador no inversor se obtiene a partir de: It
ACL= Vo/Ei = (RF + R1)IRl
78 Equipo 1 I
SeguidorParabólico Solar CNAD
La ecuación anterior muestra que la ganancia de voltaje de un amplificador no inversor siempre es mayor a 1.
Del análisis anterior se determina que se necesita una ganancia de +10 y puesto que la ganancia es positiva se selecciono un ahplificador no inversor. Es decir, Ei a la entrada (+) del amplificador operacional.
Se escoge R1 = 10 KS2 (valor comercial).
Y de ACL= 1 + RFIRl
Tenemos 10 = 1 + RFI lOKS2
Donde RF = 9 (IO kn)
VRF= (RFI RI) E¡
VRF= (90 KS2I 10 kn) 550mV
VRF= 4.95V
Y Vo = ( 1 + RFIRI) Ei
VO = ( 1 + (90 Ki2 I 10 kn)) 550mV
v o = 5.5 v
Seguidor Parabblico Solar CNm
1
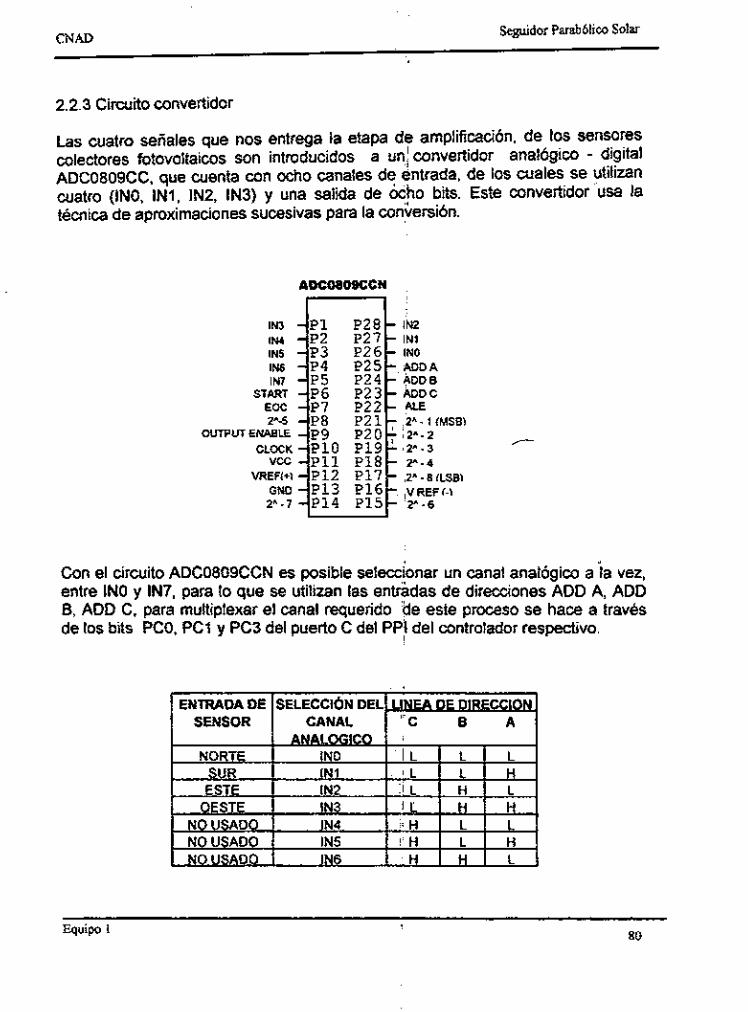
2.2.3 Circuito convertidor
Las cuatro señales que nos entrega la etapa de amplificación, de los sensores colectores fotovoltaicos son introducidos a un: convertidor analógico - digital ADCO809CC, que cuenta con ocho canales de entrada, de los cuales se utilizan cuatro (INO, INI, IN2, IN3) y una salida de ocho bits. Este convertidor 'usa la técnica de aproximaciones sucesivas para la conversión.
I1
IN4 IN5
IN7 START
EOC 2"-5
,--
Con el circuito ADC0809CCN es posible seleccionar un canal analógico a ¡a vez, entre IN0 y IN7, para lo que se utilizan las entradas de direcciones ADD A, ADD B, ADD C, para multiplexar el canal requerido be este proceso se hace a través de los bits PCO, PC1 y PC3 del puerto C del PPI del controlador respectivo.
I
ENTRADA DE SELECCIÓN DEL I SENSOR I CANAL
80 Equipo 1

CNAD Seguidor Psrabólico Solar
' 1
Una vez fijadas estas señales el programa de control manda por el bit PC3 del mismo puerto las señales de START y ALE. La señal de ALE (Address Latch Enable) habilita la lectura de las entradas analógicas, entonces al mismo tiempo llega la señal de START que da inicio a la
1
conversión analógica - digital. I
Después de activar el bit PC3 el programa espera la señal EOC (Enable Out Chip) de fin de conversión en el bit PC7. Cuando la señal se activa, el ADC indica que se ha digitalizado el voltaje del canal selecdonado, por lo tanto esta señal se retroalimenta a la habilitación de salida, así una /sola vez se le indica al programa que debe leer los datos del ADC y por tanto el ADC activa la salida de datos.
Los datos digitalizados del convertidor DO - D7 son introducidos a través del puerto B del PPI al sistema, que por medio del programa interpretará los datos y en base a estos se ejecutaran los movimientos de rotación yio translación según sea el caso.( Ver apéndice D). I
I
81 Equipo 1 ,I
m N
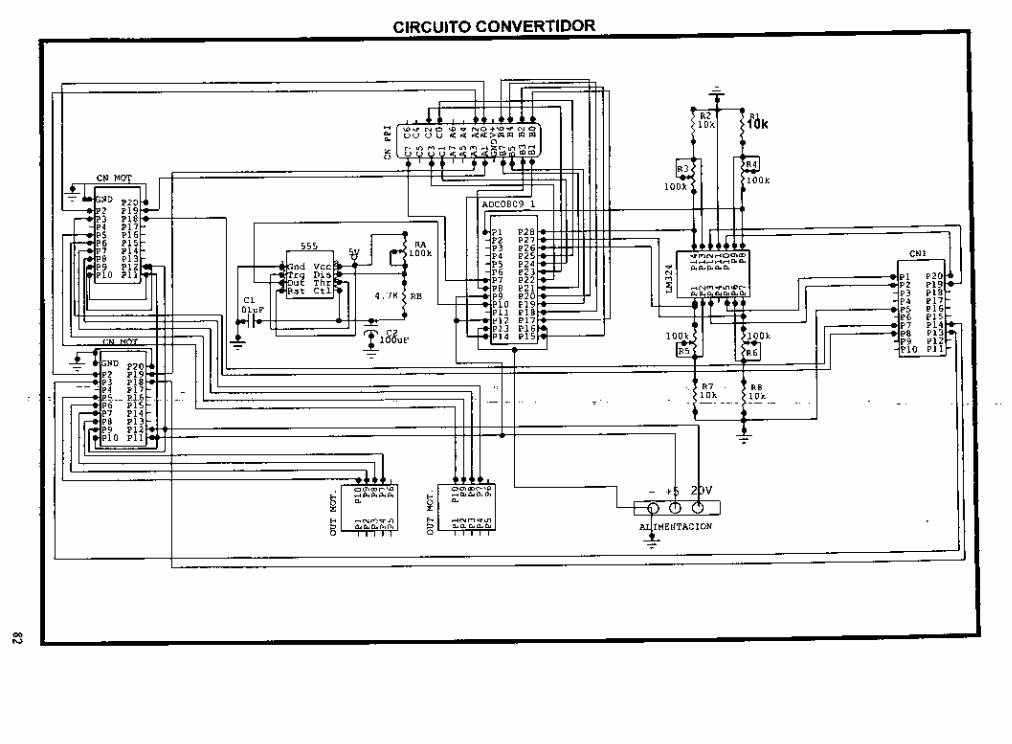
CIRCUITO CONVERTIDOR
t I -

Seguidor Parabólico Solar CNAD
2.2.4 Interruptores de limite
El sistema cuenta con cuatro interruptores dellimite, de los cuales dos están colocados como limites de carrera para el movimiento de rotación y el otro par para el limite de carrera translación. 'I
2.2.4.1 Función
Su función principal es la de proteger el hardware, deshabilitando el circuito digital del de la etapa de potencia de los motores. Debido a una falla del controlador o falla mecánica. 11
El funcionamiento de estos es relativamente simple pero de gran importancia dado a que desactivan la señal de reloj del registro de corrimiento de la etapa de potencia y esta señal debe de estar presente,,para habilitar a los motores. De tal manera que cuando es presionado el limit switch de rodamiento a consecÜencia de una falla por control (programa), mecánica o'humana (accidental o de manera incidente) la señal de reloj es desactivada y por,,tanto el motor en funcionamiento es desactivado, evitando que los movimientos,,$ie la parábola se salgan de sus limites de trabajo, y así evitar un daño irreversible al equipo. ,
Es de tipo aciuador de rodamiento de ajuste corto Sensibilidad del switch = 2 - 15GW22 5 A a 125 VAC 3 A a 250 VAC
' *I
C. NO. NC.
2.2.4.2 Circuito de corrección antirrebote
Como el interruptor de rodamiento es un dispoktivo de entrada tipo mecánico, no efectúa un contacto firme en el momento 'de cierre. Las superficies de los contactos siempre "rebotan" una contra otra Varias veces antes de efectuar el
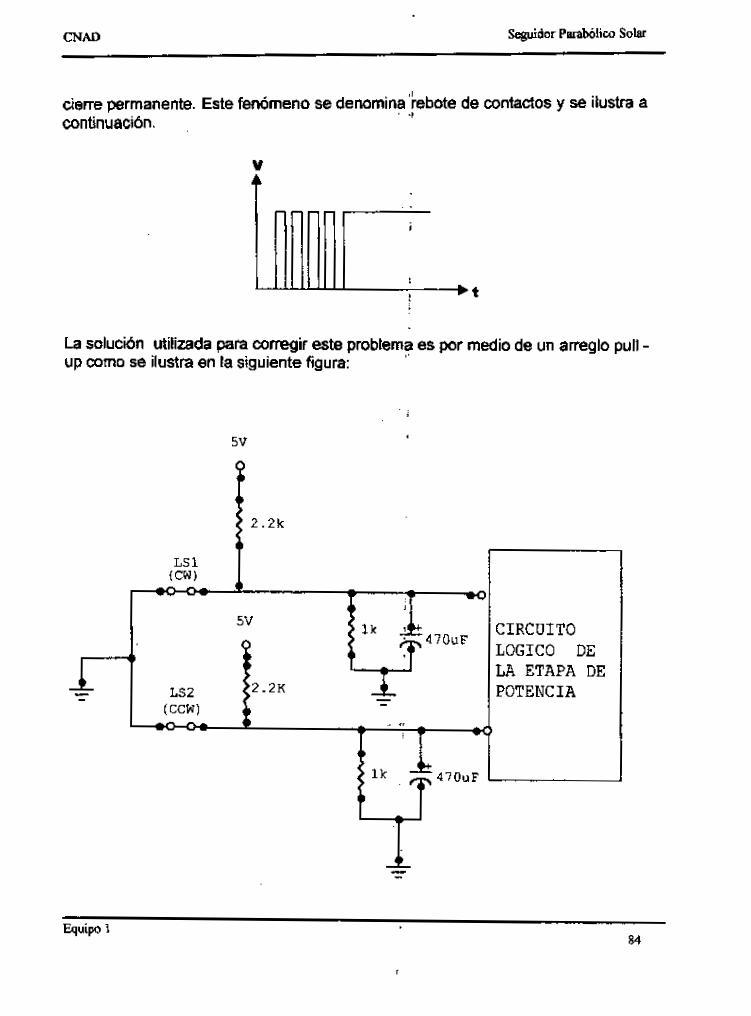
Seguidor Parabúlico Solar CNAD
cierre permanente. Este fenómeno se denomina ' 'kbote ,I de contactos y se ilustra a continuación.
La solución utilizada para corregir este problema es por medio de un arreglo pull - up como se ilustra en la siguiente figura:
5v
f
CIRCUITO LOGIC0 DE P L-*-l ILA ETAPA DE
Equipo 1 84
Seguidor Parab6lico Solar CNAD
I
2.2.5 Panel de control
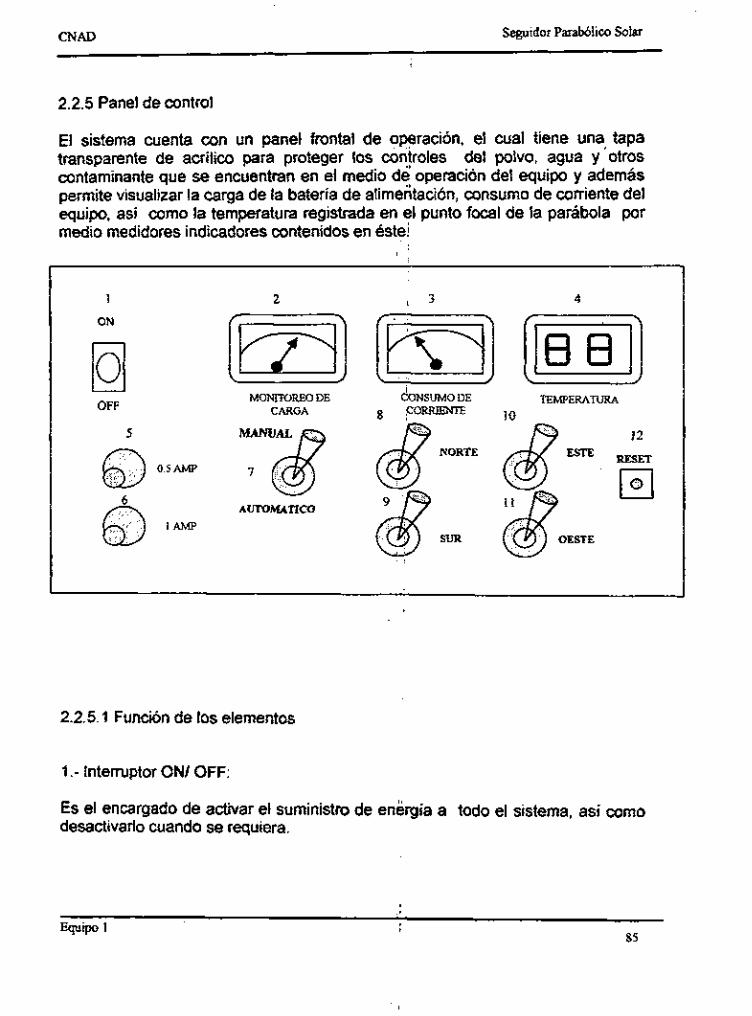
El sistema cuenta con un panel frontal de operación, el cual tiene una tapa transparente de acrílico para proteger los con;roles del polvo, agua y'otros contaminante que se encuentran en el medio de operación del equipo y además permite visualizar la carga de la batería de alimentación, consumo de corriente del equipo, así como la temperatura registrada en el punto focal de la parábola por medio medidores indicadores contenidos en éste!
1
ON
El OFF
2 I 3 4
[?E] [Fa] I [mi MONíTOFZO DE CONSUMO DE TEMPEFL4WW.
CARGA * CORRIENTE in
5 12
ESTE RESET NORTE
0.5 AMP
lAMP SUR OESTE
2.2.5.1 Función de los elementos
1 .- Intemptor ON/ OFF:
Es el encargado de adivar el suministro de energía a todo el sistema, así como desactivarlo cuando se requiera.
seguidor Parabólico Soh CNAD
2.- Monitoreo de carga:
Es un volmetro encargado de monitorear la carga almacenada en la batería que alimenta a los circuitos de control y etapa de potencia. !
,I t
3.- Consumo de comente:
I Amperímetro encargado de monitorear el consumo de comente en el sistema
I
4.- Termómetro:
Pantalla encargada de desplegar la temperaturajregistrada en el punto focal de la parábola. I
5.- Fusible a 1 A:
Dispositivo de seguridad para proteger la etapa de potencia, en caco de una sobrecarga en los motores. NI
6.- Fusible a 0.5 a:
Dispositivo de seguridad para proteger los circhitos de control en caco de una sobrecorriente. I
I /
7.- Interruptor Manual I Automatice:
Interruptor tipo SPST utilizado para seleccionariel modo de trabajo del equipo, ya sea en modo manual o automático. I
8.- Interruptor de movimiento hacia el NORTE: ! Interruptor tipo SPST encargado de dar movimiento a la parábola NORTE. I
hacia el

CNAD Seguidor PaFab6liw Solar
9.- Interruptor de movimiento hacia el SUR:
Intemptor tipo SPST encargado de dar movimiento a la parábola hacia el SUR
10.- Interruptor de movimiento hacia el ESTE:
intemptor tipo SPCT encargado de dar movimiei)to a la parábola hacia el ESTE.
11 .- Interruptor de movimiento hacia el OESTE:
Interruptor tipo SPST encargado de dar movimiento a la parábola hacia el OESTE. I
12.- Recet:
Botón pulsador utilizado para restablecer el sistema.
Seguidor Parabóliw Solar CNAD
2.3 Elementos de salida
Los elementos de salida reciben la información proveniente del controlador, etapas de drivers y ejecutan la orden recibida, es decir son los elementos actuadores. Este sistema cuenta con elementos' de salida como son motores a pasos. monitores de medición y lámparas indicadoras; todos ellos se describen a continuación. I1
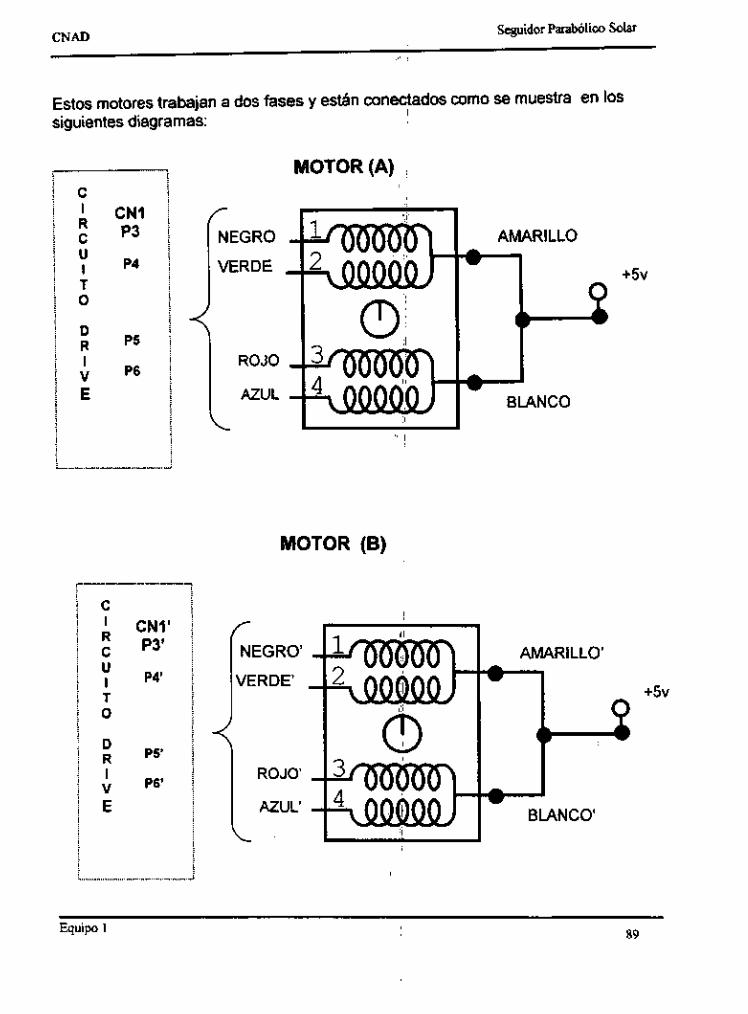
2.3.1 Motores a pasos
El sistema cuenta con dos motores a pasos, a dos fases, con un movimiento de 1.8" por pulso, al cual se le introduce un bit de;/commiento en cada una de sus bobinas en forma secuencial, dado por el registro de corrimiento MC74HC194. Este tipo de motor fue requerido debido a qud el control se tenia que realizar mediante pulsos y así controlar la posición en los movimientos de la parábola.
/ I
j 'I
2.3.1.1 Función
La función de un motor a pasos (A) es la de dar el movimiento a la parábola en dirección norte - sur, y el motor (6) es el encargado de hacer el movimiento oeste - este de la misma ya sea en sentido horario o antihorario según el posicionamiento del sol. Estos motores se moberán en cuando reciban los pulsos de la etapa de potencia. Ambos motores también pueden ser controlados en forma manual por medio de los interruptores dolocados en el panel frontal del sistema. I1
2.3.1.2 Características técnicas
Paso de 1 . 8 O
lmax = 0.4 A
Z = 3 0 R
V= 5 volts (Mot. A y Mot. 6)
Rango de temperatura ambiente de trabajo: -10°C s +50 "C
88 Epuipo 1
CNAD Seguidor Parabólico Solar
I .
Estos motores trabajan a dos fases y están conectados como se muestra en los siguientes diagramas: I
C I CNI
P3 C
y P4
T O
D R p5
4 P6
E
NEGRO
VERDE
ROJO
AZUL
C I CNI' C P3'
y P4'
T O
D
I v P6'
E
R PS'
NlOTOR(A) ,
AMARILLO
+5v
MOTOR (B)
I
NEGRO
VERDE
ROJO
AZUL'
+5v
89 Equipo 1 ~

Seguidor Parabóliw Solar CNAD
2.3.1.3 Circuito driver
El sistema es accionado por dos motores a pasos, uno que mueve la parábola de norte a sur y el otro motor mueve la parábola de este a oeste, con ambos motores se controlan los cuatro movimientos del seguidor parabólico solar.
A continuación se describe el drive utilizado para ambas actuadores. Los pulsos para accionar el motor a pasos son enviados a las bobinas del motor respectivo, desde un registro de corrimiento (74HC194), a través de sus bits de salida QO, Q1, Q2, Q3 estos bits son introducidos a cuatro transistores de potencia dadinton (TIP I=), esto son los encargados de dar la potencia necesaria para accionar los motores, (Ver fig. siguiente).
II
'I 5v I
Por LVK (Ley de Voltaje Kirchoff)
VCC - IBRB - VBE = O RB = (4.8 V - 0.7 V)I 40 mA RB = (4.1V) 140 mA (FAST and LS TTL Data) RB= 102.5R _= RB= 100R
Cada drive cuenta con una sección circuitos l&icos que nos permiten evitar que el motor se salga de sus limites de trabajo, esto es por medio de dos entradas de limit switch LS1 y LS2 para el motor (A), LS3'y LS4 para el motor (B). Estos le sirven al equipo para protección de hardware y que en combinación con las señales de dirección habilitan o desahabilitan la señal de reloj (clock) del registro de cornmiento y este a su vez deshabilita los transistores de potencia, evitando que el o los motores continúen moviéndose. Este mismo arreglo lógico nos permite girar el motor en sentido contrario11 una vez que toco un limit switch de limfie de trabajo.
90 Equipo 1

Seguidor Parabóliw Solar CNAD
' I
Este arreglo lógico fue obtenido en base a la siguiente tabla de verdad. I
I Las señales de sentido de giro de cada moior,l(CW y CCW) y la señal de reloj son enviadas por sistema mínimo (280).
La setial de clock es habilitada o deshabilitada en registro de corrimiento de acuerdo a la siguiente tabla de verdad I
Para activar inicialmente las entradas SO y S1 y la señal de reloj (CLK), requiere de un tiempo del orden del00 milisegundos ,I cual se consigue a través del arreglo RC (dado por R5 y Cl), Donde:
7 = R'C T = ( I O KR)(lOuF) T = 0.1 seg.
Una vez que SO y S1 son activados el registro de corrimiento (74HC194) esta listo para recibir la señal CLK .
I
'I
I
91 Eguipo 1 ,I

Seguidor Parabólico Solar CNAD
CIRCUITO DRNER $1
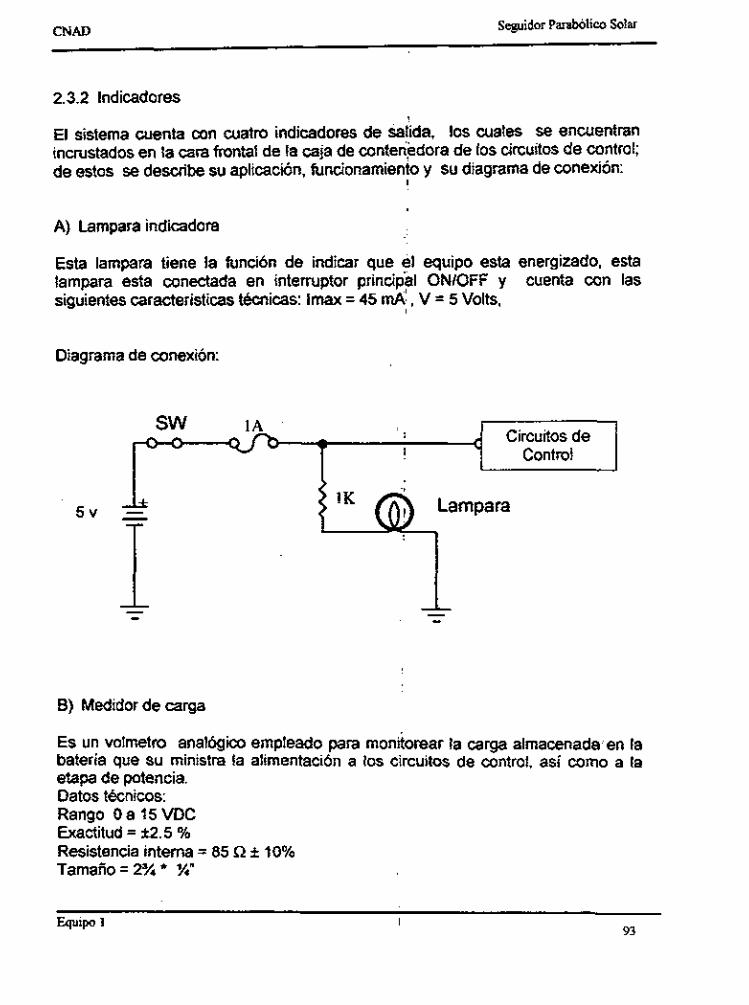
CNAD Seguidor Parabóiico Solar
- II -
2.3.2 Indicadores
El sistema cuenta con cuatro indicadores de salida, los cuales se encuentran incrustados en la cara frontal de la caja de contenidora de los circuitos de control; de estos se describe su aplicación, funcionamiento y su diagrama de conexión:
NI
Circuitos de Control
A) Lampara indicadora . i
Esta lampara tiene la función de indicar que el equipo esta energizado, esta lampara esta conectada en interruptor principal ONlOFF y cuenta con las siguientes características técnicas: lmax = 45 mA , V = 5 Volts,
I
Diagrama de conexión:
B) Medidor de carga
Es un volmetro analógico empleado para moniiorear la carga almacenada,en la batería que su ministra la alimentación a los circuitos de control, así como a la etapa de potencia. I Datos técnicos: Rango O a 15 VDC Exactitud = I2.5 % Resistencia interna = 85 $2 i 10% Tamaño=2%* %"
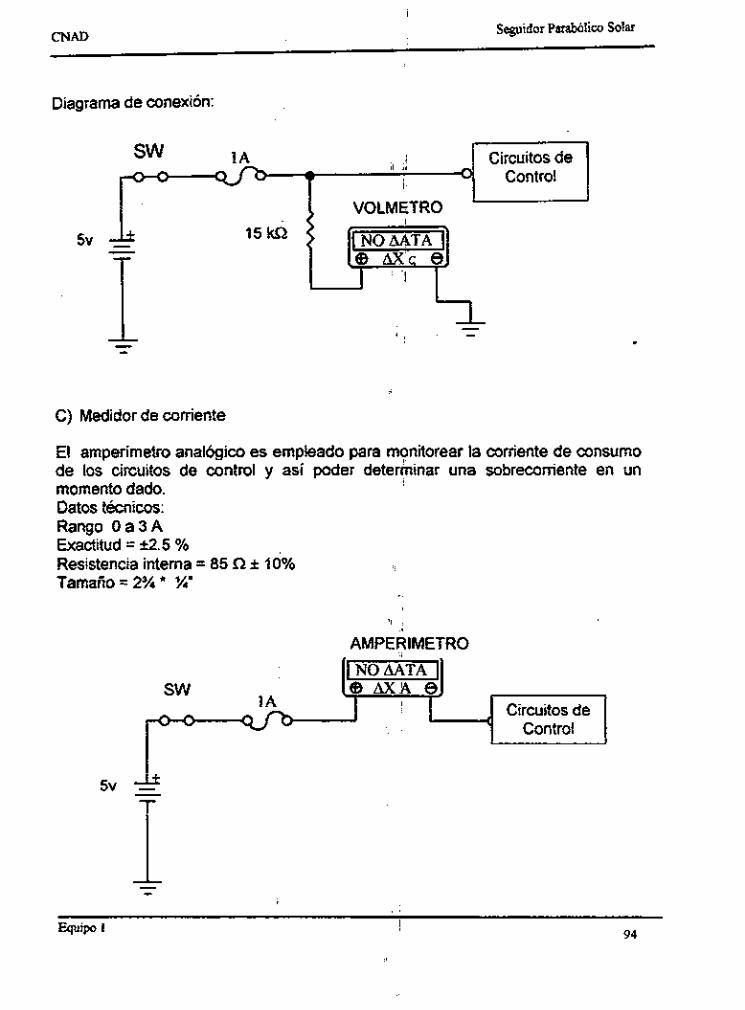
I
Seguidor Parabólim Solar CNAD
I 1A I
Diagrama de conexión:
- Circuitos de
Control
sw 1A Circuitos de Control
- - I - - 1 ,
C) Medidor de comente
.
El amperímetro analógico es empleado para monitorear la comente de consumo de los circuitos de control y así poder determinar una cobrecomente en un momento dado. Datos técnicos: Rango O a 3 A Exactitud = I2.5 % Resistencia interna = 85 R f 10% Tamaño = 2% %”
!
!+
94 Equipo 1 I
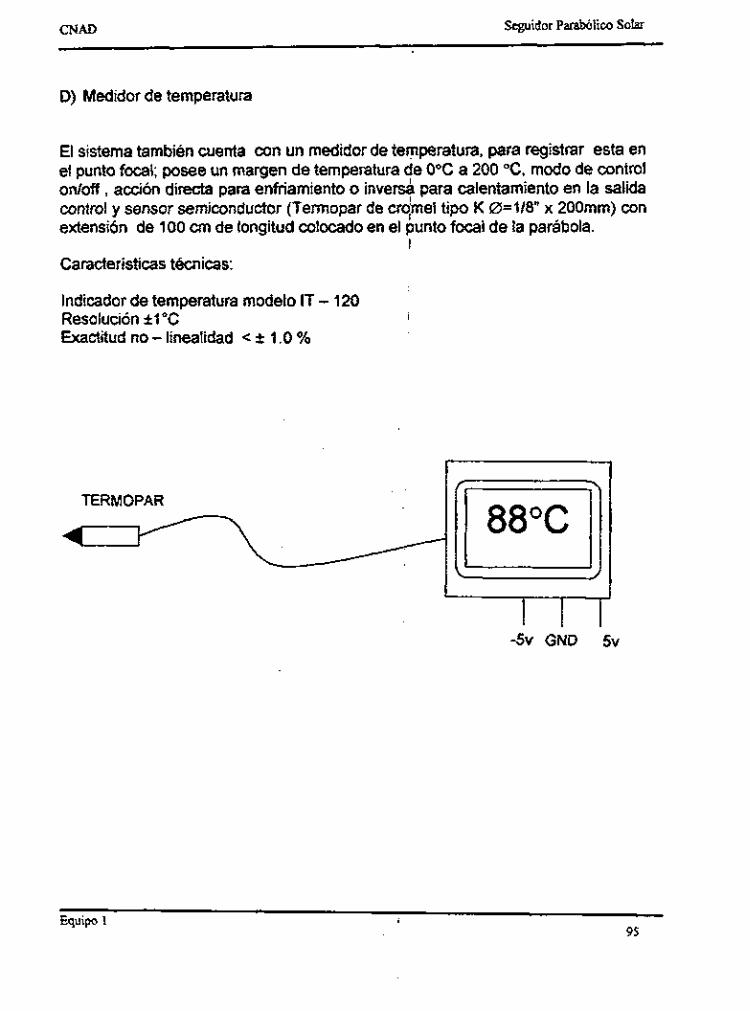
Seguidor Parabólico Solar CNAD
D) Medidor de temperatura
El sistema también cuenta con un medidor de temperatura, para registrar esta en el punto focal; posee un margen de temperatura de 0°C a 200 "C, modo de control onloff , acción directa para enfriamiento o i n v e d para calentamiento en la salida control y sensor semiconductor (Termopar de cr4mel tipo K 0=1/8" x 200mm) con extensión de 100 cm de longitud colocado en el punto focal de la parábola.
Características técnicas: I
Indicador de temperatura modelo IT - 120 Resolución f l "C I
Exactitud no - linealidad c f 1 .O %
m. I
TERMOPAR
-5V GND 5v
Seguidor Parabóliw Solar CNAD
2.4 Controlador
2.4.1 Sistema mínimo El controlador del sistema básicamente se/ puede describir como una microcomputadora que cuenta con una unidad central de procesamiento basada en un microprocesador 280, dos unidad de almacenamiento(mem0ria RAM y ROM), 280 PIO, PPI, y un chipset.
Este tipo de controlador se utiliza debido a que se tenían que manejar subrutinas para mover la parábola según el movimiento del,sol o poner el sistema en reposo según las condiciones del día, por ejemplo cuando es un día soleado, nublado o en su defecto cuando es de noche. Así comoiIlmanejar la posición del mismo. Además de que tenia que ser un equipo autónomo en sus funciones.
Dado a que la solución propuesta no se trata de una secuencia, se descartó la posibilidad de utilizar un PLC; y por que era necesario de que el equipo fuera transportable y además trabajara a la intemperie no se uso un control por PC.
I
I
11
2.4.1.1 Función:
La función del sistema mínimo es controlar lie1 funcionamiento de “Seguidor Parabólico Solar“, mediante un programa almacenado en su memoria, el cual contiene principalmente subrutinas de movidento para el día, subrutinas de reposo aplicadas durante la noche, subrutinds de decisión cuando hay días nu blados.
I
! 2.4.1.2 Características
Esta microcomputadora se caracteriza por manejar: 1. Un bus de datos de 8 bits I,
2. Un bus de direcciones de 16 bits 3. Una memoria RAM MS62256 de ( 8 Kb) 4. Una memoria ROM borrable con luz ultravioleta 27C256 ( 8 Kb) 5. Un PPI 8255 ( interfat% penfeflca programable). 280-PI0 puerto de entrada I
salida. I
96 Equipo 1 I
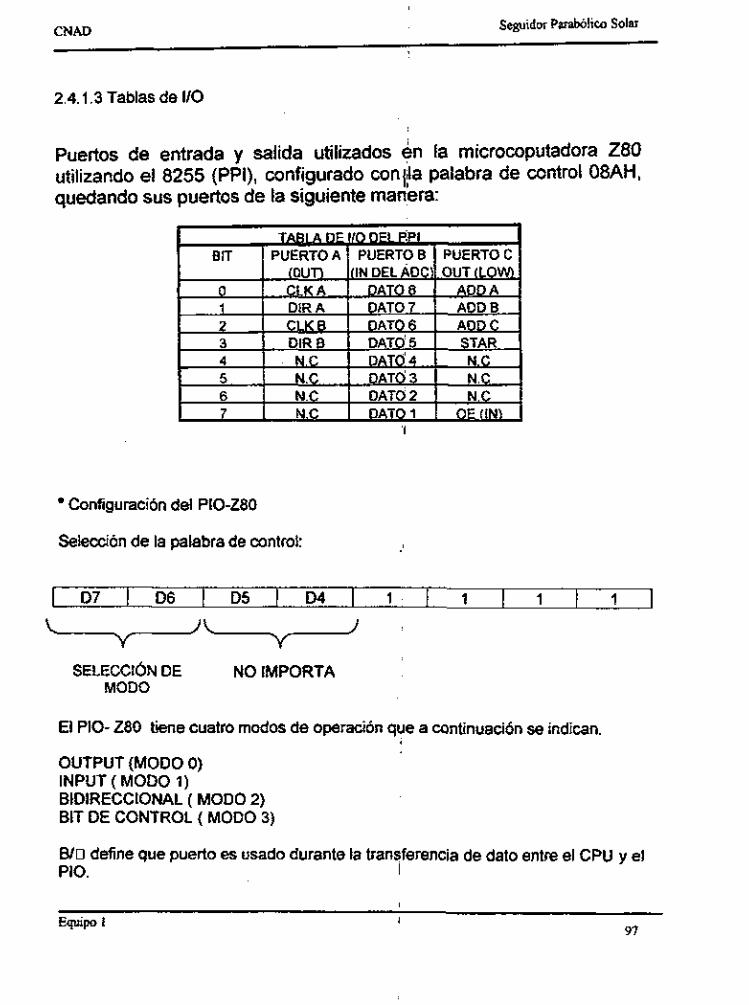
CNAD Seguidor Parabólico Solar
1 D7
2.4.1.3 Tablas de I/O
Puertos de entrada y salida utilizados en la microcoputadora 280 utilizando el 8255 (PPI), configurado conlila palabra de control 08AH, quedando sus puertos de la siguiente manera:
I
I
D6 D5 D4 1 1 1 1 1 1
Configuración del PIO-Z80
Selección de la palabra de control:
El PIO- 280 tiene cuatro modos de operación que a continuación se indican.
OUTPUT (MODO O) INPUT ( MODO 1) BlDlRECClONAL ( MODO 2) BIT DE CONTROL ( MODO 3)
,I
B/D define que puerto es usado durante la transferencia de dato entre el CPU y el PIO. I
I 97
Equipo 1
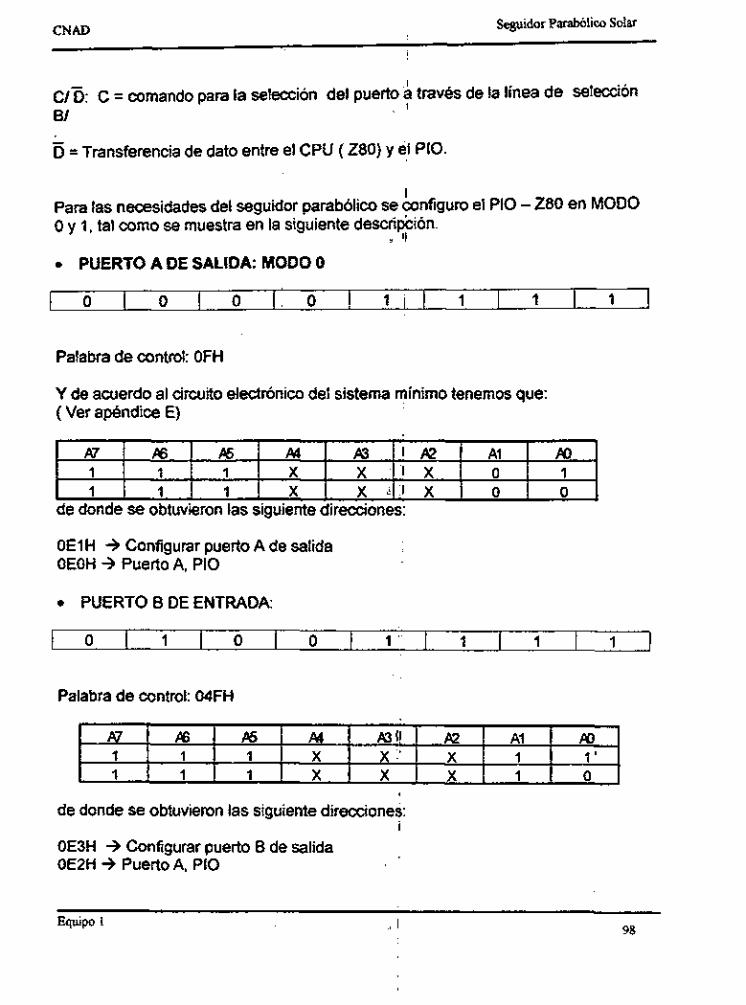
Seguidor ParabóliCO Solar CNAD !
O O O I / o 1 1 I 1
C/D: C = comando para la selección del puerto a través de la línea de selección BI
D = Transferencia de dato entre el CPU ( 280) y el PIO. -
1 1
* P? p6 p6 M A3 I N AI P o , I I 1 X x I X O 1 I 1 1 X x ' ; I x O O
O I 1 O O I I 1 1 1 1
de donde se obtuvieron las siguiente direcciones:
OE3H + Configurar puerto B de salida OE2H + Puerto A, Pi0
I
AJ 1 1
Equipo 1
p6 p6 M w 11 A2 AI Po 1 1 X x :I X I 1' 1 1 X X I X 1 O
,, 'I 98
Seguidor Parabólico Solar CNAD
2.4.2 Programa de control
El programa para controlar el sistema mínimo esta elaborado en lenguaje ensamblador. A través del programa se controla la operación tianual Automático del Sistema; al convertidor Analogico - Digital ADC 0809CCN y la etapa de drive de los motores a pacos. AI iniciar el programa se pregunta en que posición se encuentra el interruptor Manual - Automático; si esta en modo Manual dlta a una subrutina donde sensa los botones de movimiento en modo manual(NORTE, SUR, ESTE, OESTE), y dependiendo del que este activo, se energi4a el motor apropiado. si son oprimidos dos o más a la vez existe prioridad de los botones por lo cual se ejecuta
Si esta en modo automático, el programa se va a una subrutina para preguntar por los sensores colocados al NORTE y al SUR. '1 Por medio del programa se da el protocolo para controlar la operación del ADC O809CCN de la siguiente manera:
Primero se selecciona el canal analógico de una de las cuatro fotoceldas que funcionan como sensores; enseguida se manda/ un pulso de inicio de conversión (start), luego espera, el pulso de fin de conversión que manda el ADC; cuando esto ocurre, lee el puerto de datos digitales de¡jADC por medio del puerto B del PPI. Este dato digital que corresponde a la fotocelda NORTE es guardado en el registro L.
En seguida vuelve a seleccionar otro canal analógico el cual corresponde a la fotocelda opuesta a la primera (dirección SU@), y realiza otra vez el protocolo para la conversión del dato. Cuando ya tiene 'los dos primeros datos (NORTE- SUR), los compara, si son iguales activa a': un motor para que realice un movimiento de corrección. Cuando se realiza'lesto. se vuelve a regresar a la misma subrutina y vuelve a hacer todo el protocolo hasta que los dos datos digitales de las fotoceldas son iguales; efectüado lo anterior ya no se realiza ninguna corrección y se sigue a otra subrutina para volver a checar las fotoceldas colocadas al ESTE y el OESTE.
En esta subrutina se hace la misma corrección y se activa el motor B hasta que se hace la corrección de movimientos. Los datos jeídos en el convertidor analógico digital con comparados en una subrutina de nivel de voltaje, para saber si el valor de voltaje de las fotoceldas que actúan como sensores esta en los niveles de DIA, NUBLADO, NOCHE.
I
!I
un movimiento a la vez y no dos. !
:< j /
I! 1;
I1
' I
99 Equipo 1
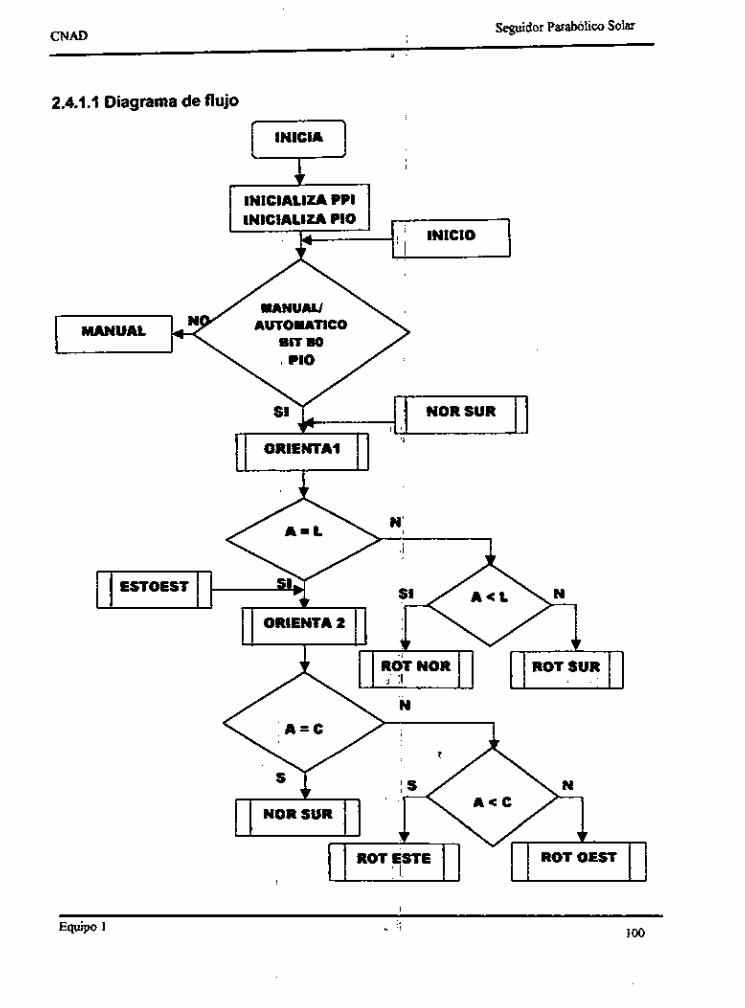
Seguidor Parabólim Solar CNAD I
.I ,
2.4.1.1 Diagrama de flujo
INICIA
I
INICIALIZA PPI INICIALIZA PI0
Ir I
AüTOMAllCO MANUAL
,Y-TIl NOR SUR

Seguidor Parabólico Solar CNAD
ORiENTA 1 I 1
+ I
I TERMINA PULSO DE ARRANQÚE
LEER FIN DE CONVERSION
4 I /
LEER VALOR DIGITAL FOTO~ELDA SUR -0. B, PPI '1
I
LEER FIN DE CONVERSION 1, 4 /
LEER VALOR DIGITAL FOCELDA NORTE, PTO. B, PPI , '1
4 I
4
CARGAR EN L EL VALOR DE FOCELDA 1' II 'NORTE
SELECCIONAR CANAL 11; CONVERTIDOR AID 0809, FOTOCELDA
SUR, PTO. C BITS CoC5, IPPI I I
I .c ! 1 .
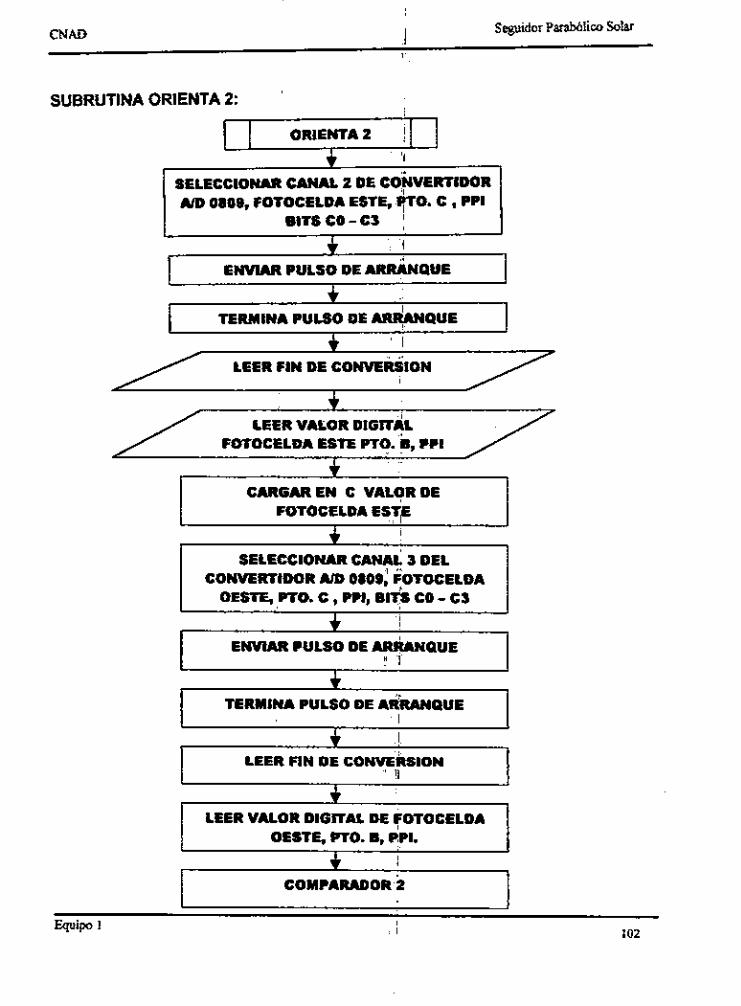
I Seguidor Parabólico Solar I CNAD
SUBRUTINA ORIENTA 2:
ORIENTA2 1 + 'I
I + I
SELECCIONAR CANAL 2 DE CO~ERTIDOR AID 0809, FOTOCELDA ESTE, &TO. C , PPI
BlTSCO-C3 ,
I ENWAR PULSO DE ARRhQUE
TERMINA PULSO DE +QUE + ' I LEER FIN DE CONVE~~ION
+ LEER VALOR DIGITAL
+
[I
FOTOCELDA ESTE PiO. 'B, PPI
CARGAREN C VALORDE FOTOCELDA ESTE
SELECCIONAR CANAI~ 3 DEL CONVERTIDOR AID 0809; OTOC CELDA
OESTEg PTO. C , PPI, BITS CO - C3 + II
I ENVIAR PULSO DE *QUE
I TERMINA PULSO DE ARRANQUE I
LEER FIN DE C0NV)ERSION 'I + I
LEER VALOR DIGITAL DE FOTOCELDA OESTE, PTO. B, dP1.
r + I COMPARADOR !2
!
i 1 o2 Equipo 1

CNm Seguidor Parabólico Solar
I b
SUBRUTINA ROT NOR
ROTNOR , 1
NOCHE
NUBLADO
B 010H I
GlRñ MOTOR A DlRECClON H O h O
I
INICIO!/ .,
' I 103
Equipo 1

Seguidor Parabóliw Solar CNAD
SUBRUTiNA ROT SUR:
ROT SUR ' I
!
. . /
I B C O l O H I I
GIRAR MOTOR A DlRECClON kCW 4 I ! I
I I I . .
DECREMENTA B 11
INICIO I

CNm Seguidor Parabólico S o h
SUBRUTINA ROT EST
ROT EST
NOCHE
NUBLADO
BCOlOH I + I
GIRA MOTOR B DlRECClON HORARIO
I + DECREMENTA B
! 1
NO
INICIO ¡

Seguidor Parabólico Solar CNAD
k
OIRAMOTORB I
I 1
DlRECClON CCW 1
1
106 Equipo 1 I
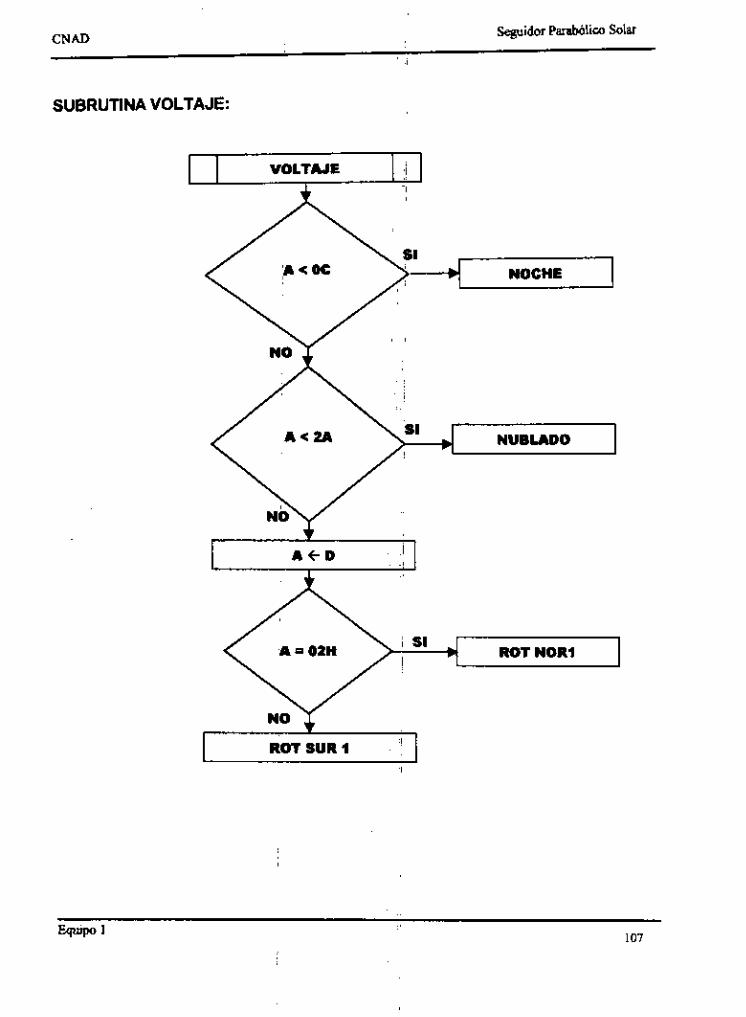
seguidor ParabólicO Solar I
CNAD I
SUBRUTINA VOLTAJE
VOLTAJE I
NOCHE
NUBLADO
Equipo' 107
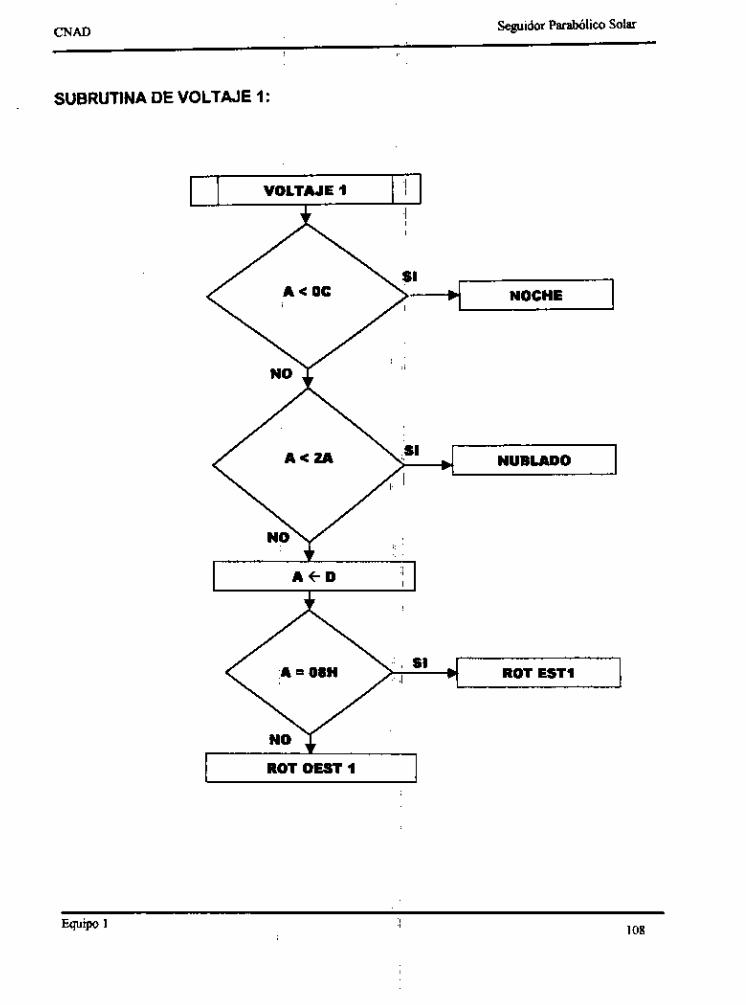
Seguidor Parabólico Solar CNAD
SUBRUTINA DE VOLTAJE 1:
VOLTAJE 1
NOCHE
NUBLADO
:; A t D I
ROT EST1
I ROT OEST 1 I
108 Equipo 1 I

I
Seguidor P d l i w Solar CNAD
SUBRUTINA NOCHE:
i NOCHE I '
LEER LIMIT SWITCH PTO. 6, PI0
6 i ENMASCARAR BIT 7 0% EAST I
, " " 1 , > , INICIO
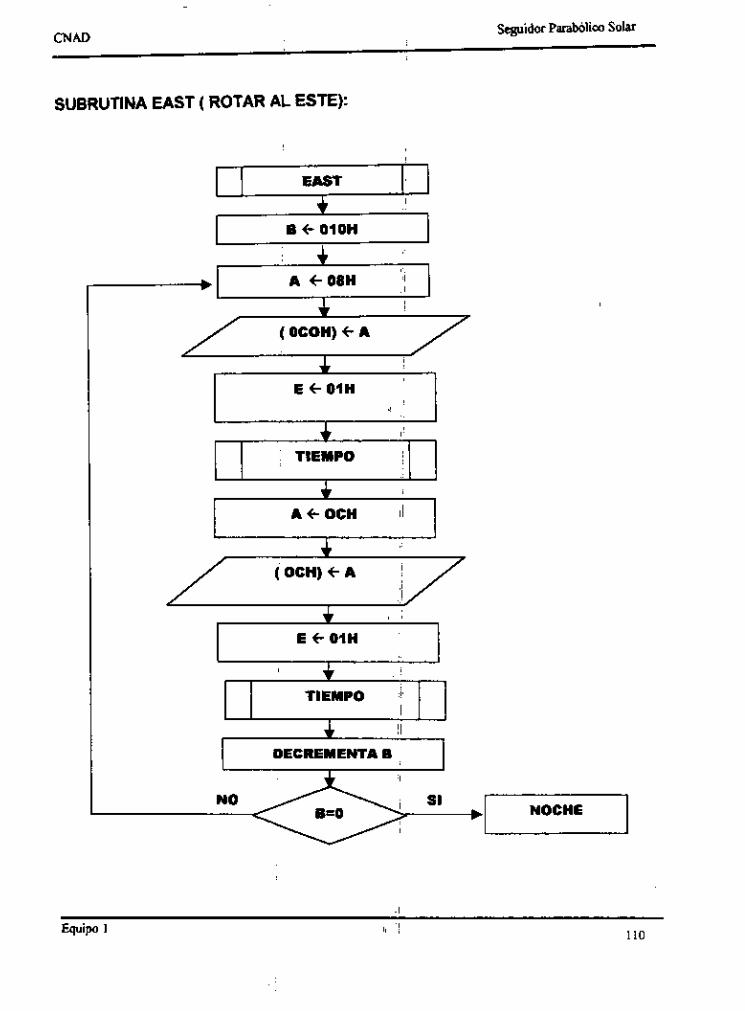
Seguidor Parabolic0 Solar CNAD
.c , ' E f O l H I I I
I 1 1
f
4 TIEMPO
!I DECREMENTAB ,
L NO
SUBRUTINA EAST ( ROTAR AL ESTE):
i"l B e O l O H
4 I ( OCH) t A I
i ,I
110 Equipo 1 /I !

! Seguidor Parabólico Solar
I
I
CNAD
SUBRUTINA MANUAL:
~ ) w I c I o . EWpo 1 111
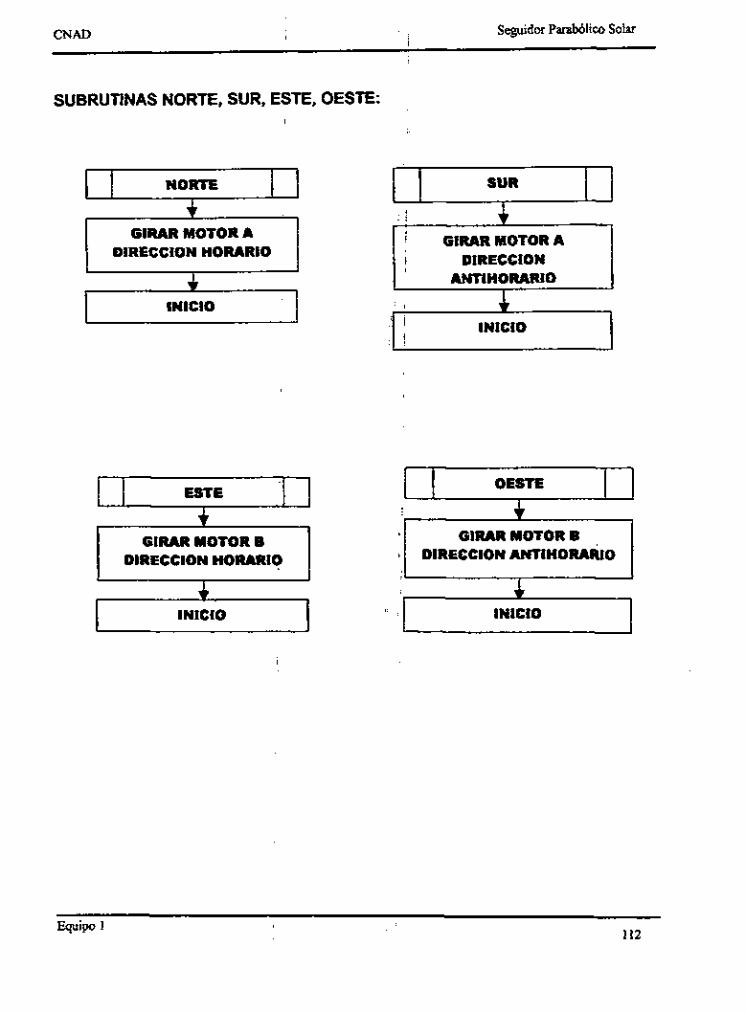
Seguidor Parabólico Solar i CNAD
I
SUBRUTINAS NORTE, SUR, ESTE, OESTE:
GIRAR MOTOR B DlRECClON ANTlHORARlO
GIRAR MOTOR A DlRECClON HORARIO
INICIO
ESTE 1 1 GIRAR MOTOR B
DlRECClON HORARIO
INICIO
I ' I SUR I I , I t
GIRAR MOTOR A DlRECClON
ANTIHORARIO I
INICIO
Equipo 1 112
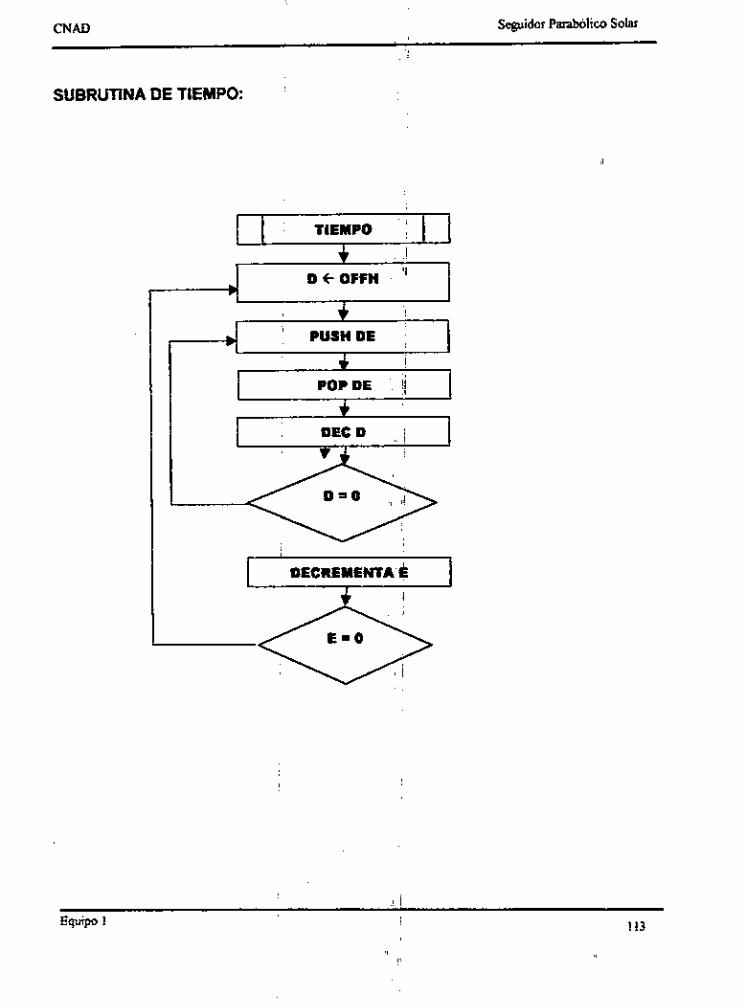
Seguidor ParabÓlico Solar CNAD
SUBRUTINA DE TIEMPO:
! . :
; TIEMPO ,:
. .. 'I
POPDE '! !I
DECD i j
+ 'i
I
I DECREMENTA E
' 11
113 Equipo 1
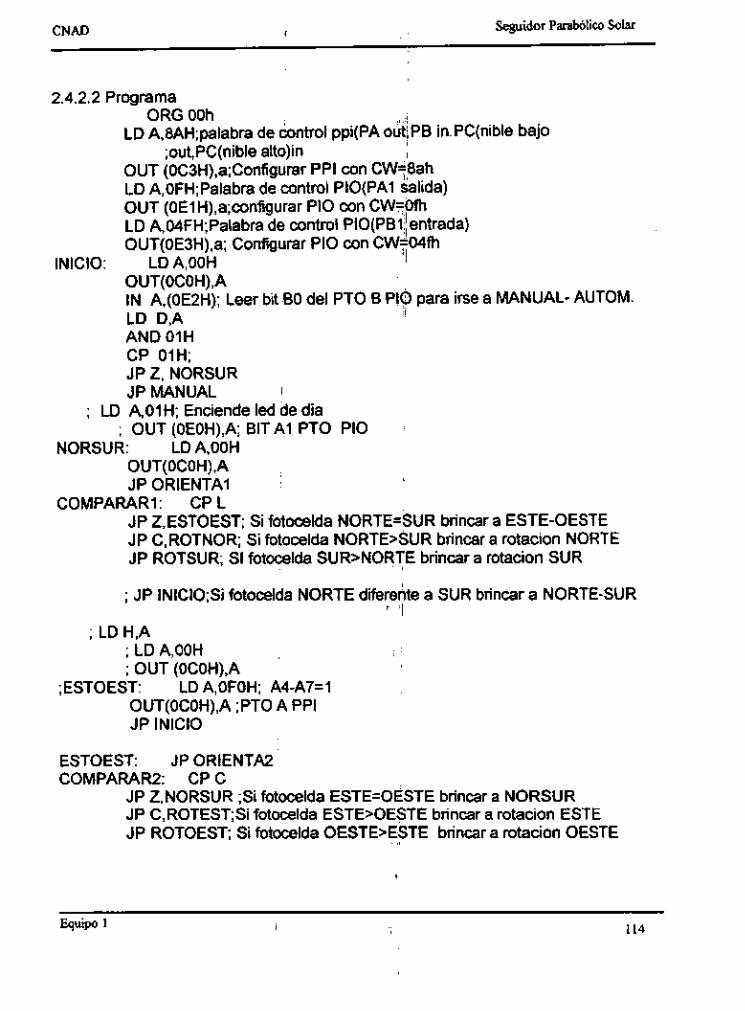
Seguidor Parabólico Solar CNAD I
2.4.2.2 Programa ORG OOh
LD A,8AH;palabra de kntrol ppi(PA outiPB in.PC(nible bajo
OUT (OC3H),a;Configurar PPI con CW28ah LD A,OFH;Palabra de control PIO(PA1 &da) OUT (OElH),a;configurar PI0 con CW=Ofh LD A,04FH;Palabra de control PiO(PB1'jentrada) OUT(OE3H).a; Configurar PI0 con CW=04fh
IN A,(OE2H); Leer bit BO del PTO B Pi0 para irse a MANUAL- AUTOM. LD D,A AND 01H CP OIH; JP 2, NORSUR JP MANUAL I
; LD AOIH; Enciende led de dia
;out,PC(nible alto)in
LD A,OOH .I INICIO: OUT(OCOH),A I
I
; OUT (OEOH),A; BITA1 PTO PI0 NORSUR: LD A.OOH
OUT(OCOH),A JP ORIENTA1
COMPARARI: CP L JP 2,ESTOEST; Si fotocelda NORTE=SUR bnncar a ESTE-OESTE JP C,ROTNOR; Si fotocelda NORTEsSUR brincar a rotacion NORTE JP ROTSUR; SI fotocelda CURsNORTE brincar a rotacion SUR
; JP INICI0;Si fotocelda NORTE diferente a SUR brincar a NORTE-SUR ' I
; LD H,A ; LD A,OOH . OUT (OCOH),A
OUT(OCOH),A ;PTO A PPI JP INICIO
ESTOEST: JP ORIENTA2 COMPARAR2: CP C
;ESTOEST: LD A,OFOH; A4-A7=1
JP 2,NORSUR ;Si fotocelda ESTE=OESTE brincar a NORSUR JP C,ROTEST;Si fotocelda ESTEsOESTE brincar a rotacion ESTE JP ROTOEST; Si fotocelda OESTEsESTE brincar a rotacion OESTE
Equipo 1 114
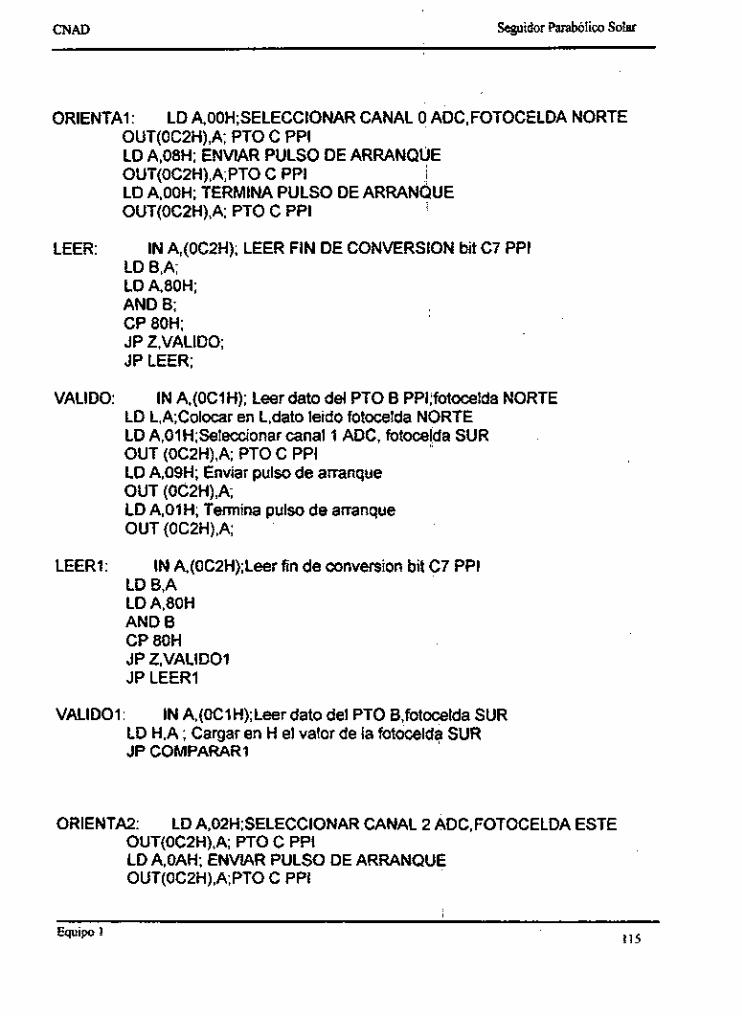
CNAD Seguidor Parabólico Solar
ORlENTAl: LD A,OOH;SELECCIONAR CANAL O ADC,FOTOCELDA NORTE OUT(OC2H),A; PTO C PPI LD A,08H; ENVIAR PULSO DE ARRANQUE
LD A,OOH; TERMINA PULSO DE ARRANQUE OUT(OC2H),A; PTO C PPI
LD B,A; LD A,80H; AND B; CP 80H; JP Z,VALIDO; JP LEER;
OUT(OC2H),A;PTO C PPI i
I
LEER: IN A,(OC2H); LEER FIN DE CONVERSION bit C7 PPI
VALIDO: IN A.(OClH); Leer dato del PTO B PP1;fotocelda NORTE LD L,A;Colomr en L,dato leido fotocelda NORTE LD A,OlH;Seleccionar canal 1 ADC, fotocelda SUR OUT (OC2H),A; PTO C PPI LD A,09H; Enviar pulso de arranque OUT (OC2H),A; LD A,01 H; Tennina pulso de arranque OUT (OC2H),A;
LEERl: IN A(OC2H);Leer fin de converSion bit C7 PPI LD B,A LD A,80H AND B CP 80H JP Z,VALIDOI JP LEERl
VALIDO1: IN A,(OC1 I);Leer dato del PTO B,fotocc.ja SUR LD H,A ; Cargar en H el valor de la fotocelda SUR JP COMPARAR1
ORIENTA2: LD A.02H;SELECCIONAR CANAL 2 ADC, FOTOCELDA ESTE OUT(OC2H),A; PTO C PPI LD A,OAH; ENVlAR PULSO DE ARRANQUE OUT(OC2H),A;PTO C PPI
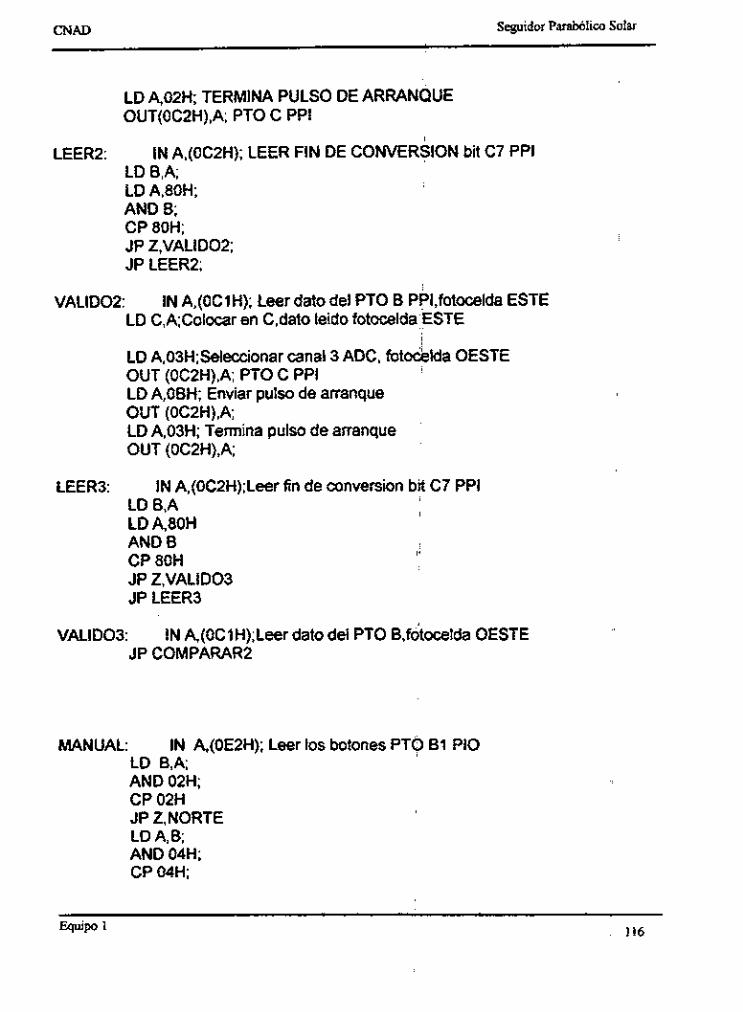
Seguidor Parabólico Solar CNAD
LD A,02H; TERMINA PULSO DE ARRANQUE OUT(OC2H),A; PTO C PPI
LD B,A; LD A,80H; AND B; CP 80H; JP Z,VALID02; JP LEER2;
LEER2: IN A,(OC2H); LEER FIN DE CONVERSION bit C7 PPI
VALID02: IN A,(OClH); Leer dato del PTO B PPl,fotocelda ESTE LD C,A;Colocar en C,dato leido fotocelda kSTE
LD A,O3H;Seleccionar canal 3 ADC, fotodelda OESTE OUT (OC2H),A; PTO C PPI LD A,OBH; Enviar pulso de arranque OUT (OC2H),A; LD A,03H; Termina pulso de arranque OUT (OC2H),A;
i
IN A,(OC2H);Leer fin de conversion bit C7 PPI I
LEER3: LD B,A LD A,80H AND B CP 80H JP Z,VALID03 JP LEER3
/ I
VALIDO3: IN AJOC1H);Leer dato del PTO B,fÓtocelda OESTE JP COMPARAR2
MANUAL: IN A,(OE2H); Leer los botones PTO B1 PI0 LD B,A; AND 02H; CP 02H JP Z,NORTE LD A,B; AND 04H; CP 04H:
mpo 1 116

CNAD Seguidor Parabóllico Solar
JP Z,SUR LD A,B; AND 1 OH ;BIT 84 PI0 CP 10H; JP Z,ESTE LD A,B AND 20H;BiT 85 PI0 CP 20H JP &OESTE JP INICIO
NORTE: LD A,OOH OUT(OCOH),A LD C,02H; AO=O CLK ;Al=l direccion CW LD A,C; OUT(OCOH),A ; PTO A PPI LD E,01 H CALL TIEMPO LD C,03H; AO=1 CLK , A l = l direccion CW LD A,C OUT (OCOH),A LD E,OIH CALL TIEMPO JP INICIO
SUR: LD A.OOH OUT(OCOH),A LD C,OOH; AO=O dk, A1=0 direccion CCW
LD A,C OUT (OCOH),A LD E, O1 H CALL TIEMPO LD C,O1 H; AO=1 CLK, A l =O direccion CCW LD A,C; OUT (OCOH),A LD E,01 CALL TIEMPO JP INICIO
ESTE: LD A,OOH OUT(OCOH),A
117
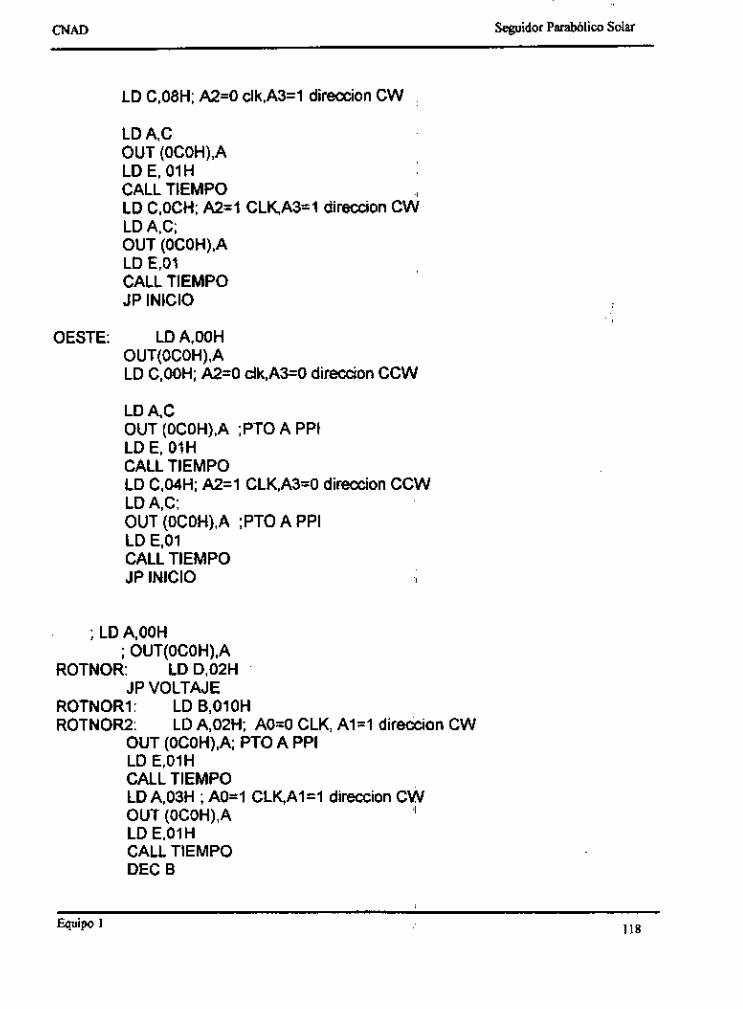
I Seguidor Parabólico Solar CNAü
LD C,08H; A2=0 clk,A3=l direccion CW 1
LD A,C OUT (OCOH),A LD E, OlH CALL TIEMPO LD C,OCH; A2=1 CLK,A3=1 direccion CW LD A,C; OUT (OCOH),A LD E,01 CALL TIEMPO JP INICIO
OESTE: LD A,OOH OUT(OCOH),A LD C,OOH; A2=0 dk,A3=O direccion CCW
LD A,C OUT (OCOH),A ;PTO A PPI LD E, 01H CALL TIEMPO LD C,04H; A2=1 CLK,A3=O direccion CCW LD A,C; OUT (OCOH),A ;PTO A PPI LD E,01 CALL TIEMPO JP INICIO
; LD A,OOH ; OUT(OCOH),A
JP VOLTAJE ROTNOR: LD D,02H
ROTNOR1: LD B,OIOH ROTNOR2: LD A,02H; AO=O CLK, A l= l direccion CW
OUT (OCOH),A; PTO A PPI LD E,OlH CALL TIEMPO LD A,03H ; AO=I CLK,A1=1 direccion CW OUT (OCOH),A LD E.01 H CALL TIEMPO DEC B
I
118 Equipo 1

I Seguidor Parabólico Solar
I CNAD
JP NZ.ROTNOR2 JP INICIO
ROTSUR: LD D,OOH
ROTSURI: LD B,OIOH ROTSUR2: LD A,OOH ; AO=O CLK, A1=0 direccion I CCW
JP VOLTAJE
OUT (OCOH),A ;PTO A PPI LD E,OlH CALL TIEMPO LD A,01 H; AO=1 CLK. A1=0 direccion CCW OUT (OCOH),A LD E,OIH CALL TIEMPO ,I
DEC B JP NZ.ROTSUR2 JP INICIO
I
ROTEST: LD D.08H
ROTESTI : LD B,OIOH ROTEST2:
'I JP VOLTAJE1
LD A,08H ; A2=0 CLK, A3=1 direccion CW OUT (OCOH),A ;PTO A PPI LD E,OIH CALL TIEMPO LD A,OCH; A2=1 CLK, A3=1 direccion CW OUT (OCOH),A LD E.O1 H CALL TIEMPO DEC B JP NZ,ROTEST2 JP INICIO
i
ROTOEST: LD D,OOH
ROTOESTI: LD B,OIOH ROTOEST2:
JP VOLTAJE1
LD A,OOH ; A2=0 CLK, A3=0 direkion CCW I OUT (OCOH),A ;PTO A PPI
LD E,OIH CALL TIEMPO LD A,04H; A2=1 CLK, A3=0 direccion CCW OUT (OCOH),A LD E,OIH
.! .
I! il
!! 11
Equipo 1 ' + 1 'j 119
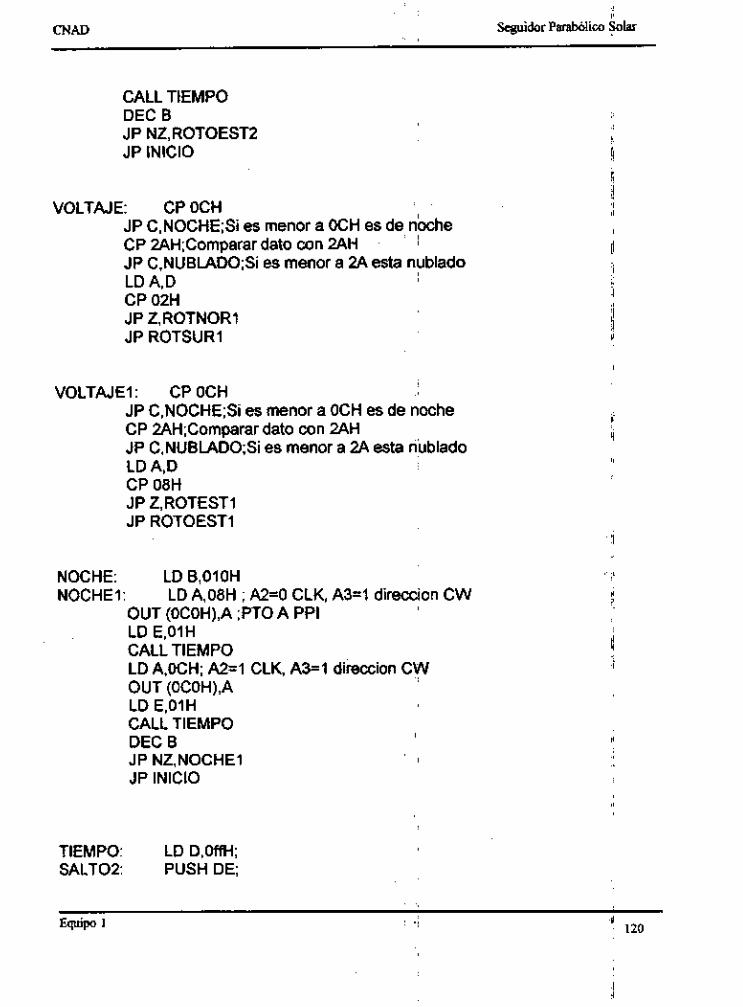
,I
CNAD Seguidor Parabóliu, Solar
CALL TIEMPO DEC B JP NZ,ROTOEST2 JP INICIO
VOLTAJE: CP OCH JP C,NOCHE;Si es menor a OCH es de doche CP 2AH;Comparar dato con 2AH JP C.NUBLADO;Si es menor a 2A esta nublado
CP 02H JP Z,ROTNORl JP ROTSURl
!
LD A,D I
I
VOLTAJE1: CP OCH JP C,NOCHE;Si es menor a OCH es de noche CP 2AH;Cornparar dato con 2AH JP C,NUBiADO;Si es menor a 2A esta nÚblado LD A,D CP 08H JP 2,ROTESTl JP ROTOESTl
NOCHE: LD B,OlOH NOCHE1: LD A,08H ; A2=0 CLK, A3=1 direccion CW
OUT (OCOH),A ;PTO A PPI LD E,OlH CALL TIEMPO LD A,OCH; A2=1 CLK. A3=1 direccion CW OUT (OCOH),A LD E,01 H CALL TIEMPO DEC 6 JP NZ,NOCHEl JP INICIO
I
TIEMPO: LD D,OfíH; SALT02: PUSH DE;
!! 8
I
'I
,: :/
i /;
/I 120
, .. Equipo 1
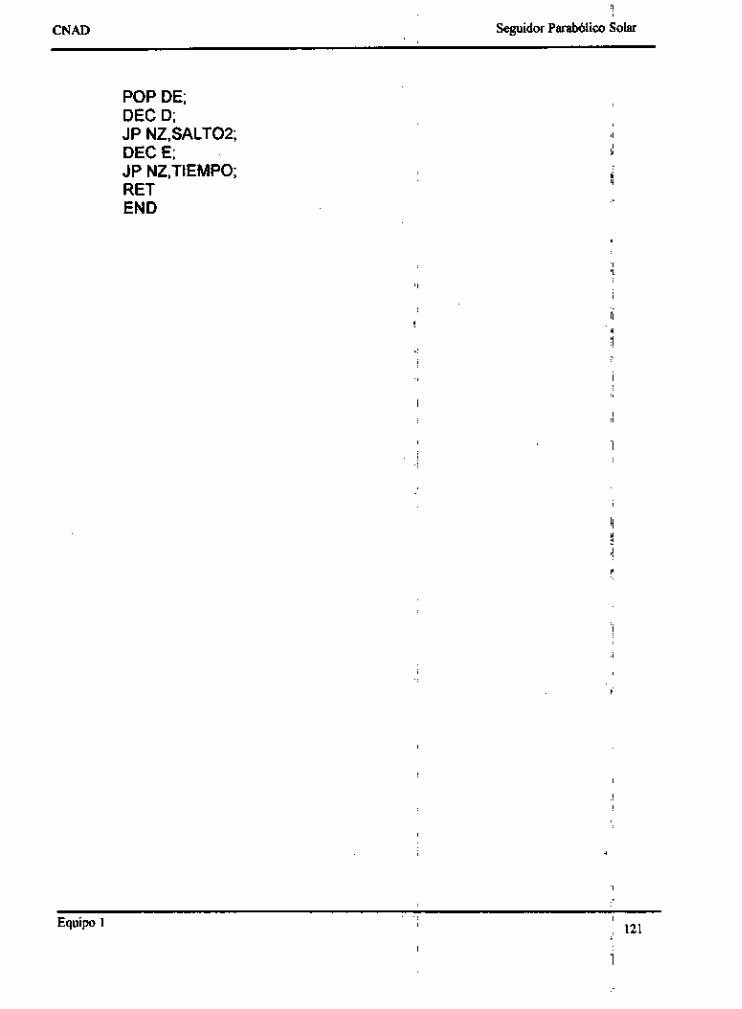
'! CNAD Seguidor Parabólico Solar
POP DE; DEC D; JP NZ.SALTO2; DEC E; JP NZTIEMPO; RET END
I
< . j
I/ 'I
i ii I!
i
!I
'I
,
' h , Equipo 1 ; 121
9 !
I
CNAD Seguidor Parabólico ,Solar
2.5 Operación y mantenimiento
A) Operación 'i
I
Mueva el interruptor general a la posición ON, para energizar el equipo, verifique el nivel de carga de la batería de alimentación a través del volmetro. I¡
L
)
=-Modo Manual:
¡I 1 .- Coloque el interruptor Manual - Automático, en posición Manual 2.- Mueva la palanca de los interruptores hacia arrila, NORTE, SUR, ESTE, 11 OESTE, dependiendo de la dirección hacia donde deseó mover la parábola. ..
3.-'Para desactivar el movimiento seleccionado en el punto 2, baje el interrupt&
Notas: si son activados dos interruptores a la vez, por ejemplo, NORTE y SUR la parábola se moverá en la dirección del intemdtor que halla sido accionado primero. ?!
Cuando la parábola esta en posición manual mohiendoce por ejemplo hacia el ESTE y es accionado el interruptor MANUAL - AbTOMATICO hacia la pos/&ón AUTOMATICPO, el control se toma en forma'! Automática y por tantol/ilos
.I Ij , I
'I , '
~ I)
9 !I interruptores NORTE, SUR, ESTE, OESTE quedan, inhabilitados. I/
=-Modo Automático: 'I i)
1.- Coloque el interruptor Manual - Automático, en,iposición Automático
Nota: En modo automático el movimiento de la parabola depende de los sensores fotovoltaicos colocados sobre la parábola. Si por alguna causa anormal,\ es accionado un limit switch de protección de hardwat'e, el equipo se detiene. Y para
/I
!. if
!i
sacar a la parábola de ese estado se debe actuar d:e la siguiente manera. fli
a) Coloque el interruptor Manual -Automático, en posición Manual b) Gire la parábola en sentido contrario,
'1
1:
Epuipo 1 122
I/ I I Seguidor Parabólico Solar
'1 CNAü
B) Mantenimiento:
Elédrico y Electrónico: Para tener acceso a las partes eléctricas y electrónicas quite la tapa posterior,!del
Las tarjetas electrónicas y el acumulador están montadas en charolas deslizables
Las fotoceldas están montadas sobre la superficie de la parábola.
Limpie las terminales del acumulador. Revise la condición de carga de la batería, si es!, baja sustituyalos por ot/o y
Lirnpie el bulbo del sensor de temperatura colocado en el foco de la parábola. :I
MECANICO: Cada 3 meses revise los baleros y engráselos con grasa grafitada p/rodamiento
Revise los coplees flexibles. Desamble los reductores de velocidad, límpielos internamente con p e t d o y
mi gabinete de acrílico. 1 It
de fácil acceso. 1 'I il Cada 15 días limpie la superficie de las fotoceldas con un trapo limpio.
recargue el gastado. !I
Limpie los limit switch y cheque continuidad. I/
'I 11
I
I 1
I de bolas. I
engráselos. I
I ' .!
I! ! !
/I
!I ! ! :¡ 123 Equipo 1
2 '!
CNAD Seguidor Parabóliw Solar
CONCLUSIONES Y RECOMENDACIONES
Durante la construcción del prototipo hubo la necesidad de aplicar los conocimientos adquiridos por cada participante en sus respectivas áreas.
En la parte mecánica se logró acoplar los elementos de control como con sensores fotoeléctricos, para seguir la trayectoria 1,del Sol, los limit switch para protección del hardware del sistema.
Algunos cálculos fueron complicados pero se realibaron de la forma más sim;bie sin afectar los resultados.
Por la parte electrónica, la base fundamental del dntrol del sistema, se realiz6 a través de una micmmputadora basada en un microprocesador 280 y un
Para operar el prototipo requiere de una orientación, para lo cual la brújula montada en éste, debe estar siempre apuntando al..Norte.
Debida la complejidad del movimiento del Sol, .I& sencorec fotoeléctricos son susceptibles de recalibrarse para un mejor seguimiento.
El equipo está diseñado para operar en la Cuidad.de México dado que su rango de operación Este-Oeste es de O a 120" y de NortdSur es de O a 45".
'I
I¡
programa en lenguaje ensamblador. I
!!
124 Equipo 1

CNAD Seguidor Parabólico Solar
BlBLlOGRAFlA
I. D I M J. - ZAPATA S. Resistencia de Materiales , Editorial LIMUSA, México 1994 579p.
2. SHIGLEY JOSEPH EDWARD - MISCHKE CHARLES R. Diseño en Inaeniería Mecánica Editorial Mc. Graw Hill, México 1996 883p.
3. RILEY WlLLiAM F.. STURGES LEROY D. lnaenieria Mecánica Dinámica Editorial Reverté, S.A., España 1996, 583p.
4. RILEY WILLIAM F., STURGES LEROY D. Inaekiería Mecánica Estática Editorial Reverté, S.A., España 1996, 583p. '
5. MANUAL TECNICO DE PRODUCTOS ACEROS FORTUNA México 1997 460p.
6. CATALOGO GENERAL SKF Italia 1997 974p
7. ORIENTAL MOTOR GENERAL CATALOG 1997/1998 Vexta O h fan , Tokyo, Japón
Equipo 1 125

Seguidor Parabólico Solar CNAD
8. JOSEPH C. NICHOLS, ELIZABETH A. NICHOLS MicroDrocesador 2-80: Proaramación e Interfaces Editorial Marcombo
I 9. PETER R. RONY, JOSEPH C. NICHOLS Proaramacion del MicroDrocesador
Editorial IlT
ODeracionales Y Circuitos lntearados Editorial Prentice Hall
I - Z-80
I O . ROBERT F. COUNGHLIN, FREDERICK F. DRISCOLL AmDlificadores
11. FAST AND LS l T L DATA Motorola
12. ROBERT L. BOYLESTAD, LOUIS NASHELSKY Teoría De Circuitos Editorial Prentice Hall
Equipo 1 1 126

'!
APENDICFS
127

APENDICE “A”
CARTA SOLAR ,I
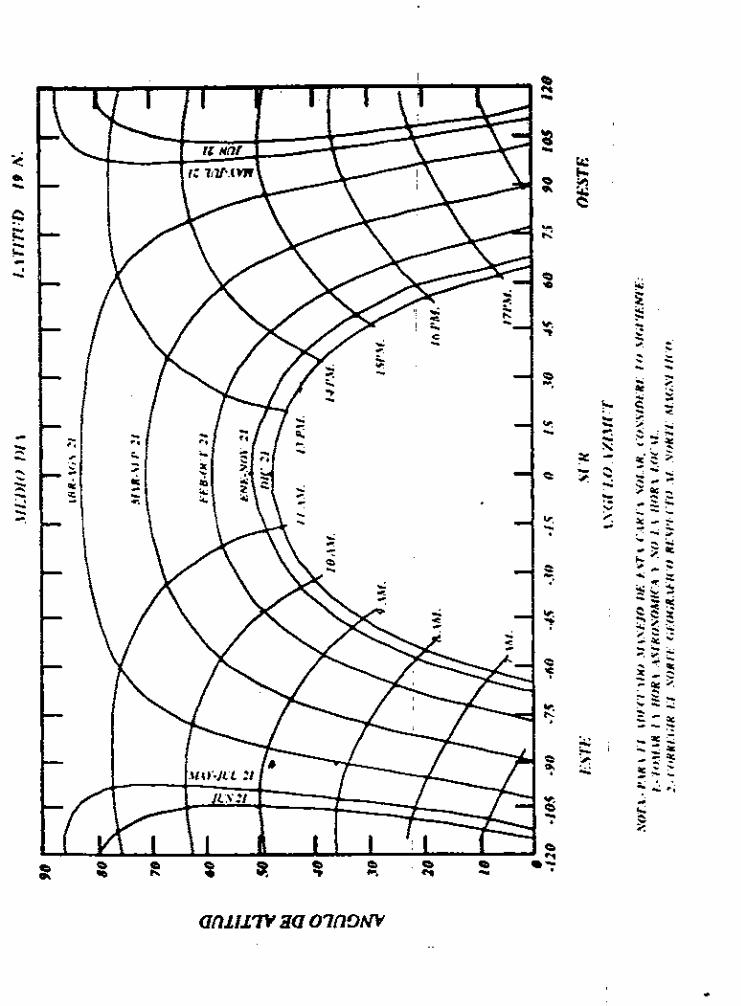
.

APENDICE “B”
PROGRAMAS DE CONTROL NUMERIC0
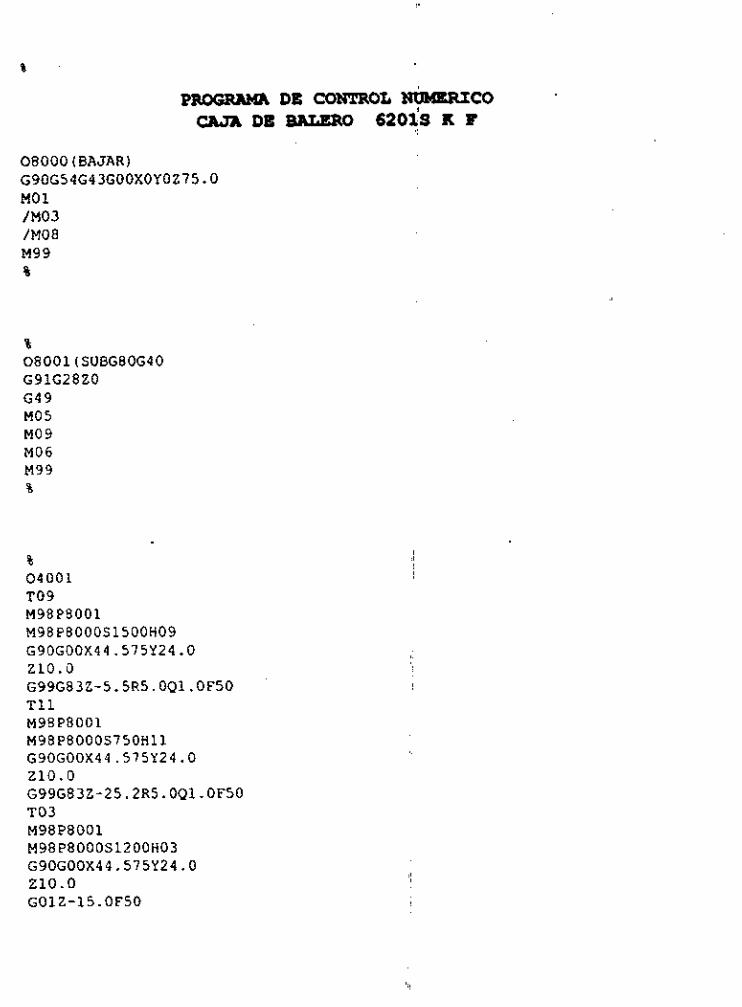
%
PROGRAMA DE CONTROL N k R I C O CAÍA DE 6201s K F
'I
O8000 (BAJAR) G90G54G43GOOXOYOZ75.O M01 /M03 /M08 M99 %
% O8001 (SUBG80G40 G9 1G2 8 20 G4 9 MO 5 M09 M06 M99 %
% 04001 TO9 M98P8001 M98P8000S1500H09 G90GOOX44.575Y24.0 210.0 G99G832-5.5RS.OQl.OF50 T11 M98P8001 M98P8000C750Hll G90GOOX44.575Y24.0 210. o G99G832-25.2RS.OQl.OF50 TO3 M98 P8 O0 1 M98P8000C1200H03 G90GOOX44.575Y24 .O 210.0 G012-15.0F50
'.

G91G41D03G01X-8.OY-2.OFlSO G03X8.OY-E.OR8.0 510. O G03XE.OYE.OR8.0 G40G01X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 511. O G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 512. O G03XE.OYE.OR8.0 G01G40X-8. G41X-8.OY-1.0 G03X8.OY-8.0R8.0 513.0 G03X8.OYE.ORE.O G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 514. O G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03XE.OY-8.0R8.0 515. O G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 516.0 G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 517. O XE.OY8.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-E.OR8.0 518. O XE.OY8.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0
i
z10.0 2200. o M30
!:
I
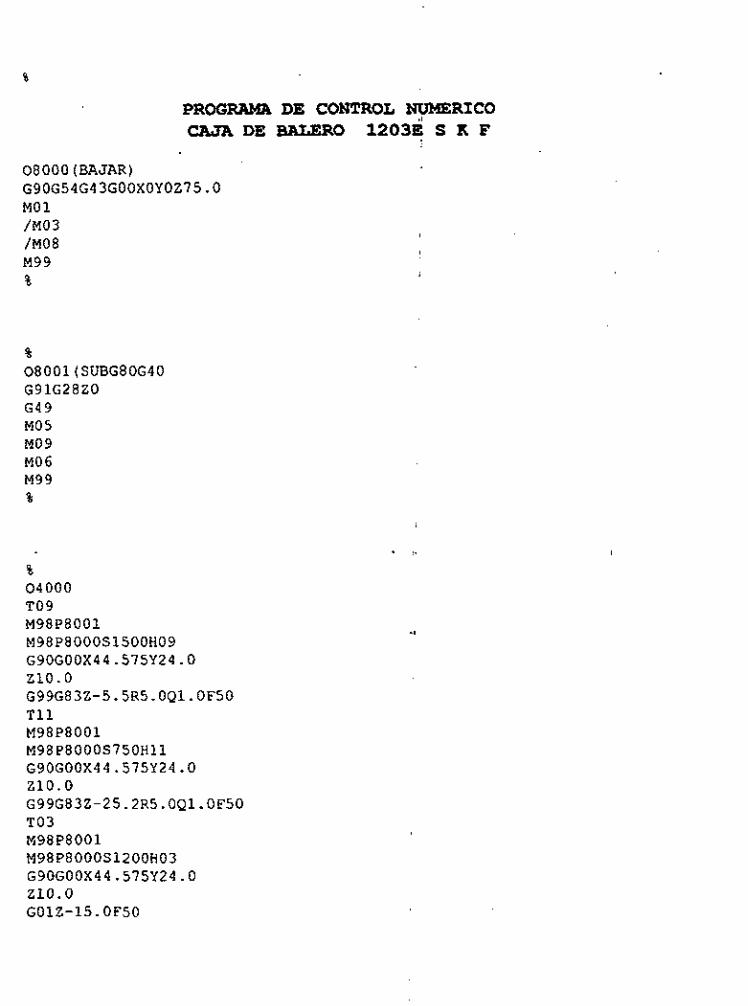
%
PROGRAMA DE CONTROL NUMERIC0 CAJA DE BALERO 1203E S K F
O8000 (BAJAR) G90G54G43GOOXOYOZ75.0 MO 1 /M03 /M08 M99 %
% O 8 0 0 1 (SUBG80G40 G91G28ZO G4 9 M05 M09 M06 M99 %
% 04000 TO9 M98P8001 M98P8000S15OOH09 G90GOOX44.575Y24.0 z10. o G99G83Z-5.5R5.OQl.OFSO T11 M98P8001 M98P8000S750Hll G90GOOX44.575Y24.0 z10.0 G99G83Z-25.2R5.0Ql.OF50 TO3 M98P8001 M98P8000S1200H03 G90GOOX44.575Y24.0 z10.0 GOlZ-15.OF50

G 9 1 G 4 1 D 0 3 G 0 1 X - E . O Y - 2 . O F 1 5 0 G03X8.OY-E.OR8.0 J10. O G03XE.OYE.OR8.0 G40G01X-8.0 G41X-8.OY-1.0 G03XE.OY-8.0R8.0 J11.0 G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03XE.OY-E.OR8.0 512.0 G03XE.OYE.OR8.0 G01G40X-8. G41X-8.OY-1.0 G03XE.OY-E.OR8.0 513.0 G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 ,G03X8.OY-E.OR8.0 514.0 G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03XE.OY-8.0R8.0 515. O G03XE.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03XE.OY-E.OR8.0 516. O G03X8.OYE.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03XE.OY-E.OR8.0 517. O XE.OY8.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 J18.0 XE.OY8.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03XE.OY-E.OR8.0

J19.0 XE.OY8.OR8.0 G01G40X-8.0 G41X-8.OY-1.0 G03X8.OY-8.0R8.0 520.0 XE.OYE.OR8.0 G40G01X-8.0Y8.0 G90GOOZ10.0 2200. o M30
APENDlgE “D”
DA TOS TECNICOS DE ~iDISPOSITIVOS €LEC TRONIlCOS /I

- logs i
N a t i o n a l S e m i c o n d u c t o r
ADC0808lADC0809 8-Bit pP Compatible AID Converters with 8-Channel Multiplexer ,l

Block Diagram

Absolute Maximum Ratings (Notes 1. 2)
owbutas 101 avi i iab i i~ and apesinsatlons
Voltage al Any Pin
Voltage ai Conbol Input6
siwaga Temperatura Range padrage Llisripaüon al T,=25'C Lead Temp. (Soldenng. IO sgxinai)
H MIIIteylAsmSPaCO SpaSMSd dsvkm W U i d , confact the Naüoml Ssmlwndustoi Cales o<lkd
6 . N S W Voltage Ww) (Note 3) 4.3v 10 W,+O.W
-0.3v 10 + 1 N
bs'c 10 t l W C 875 mw
Ex@ Control Inpifs
(START, OE. CLOCK. ALE. ADD A. ADD B. ADD C)
Dual-ln.Une Package (piast* 260C
Electrical Characteristics
O f f Channel Leakage Current Vo=N. V,.=N. TA=25'C TU~N 10 T w . 1.0
TA=25'C -2-30 -10 TMNN 10 T., -1.0
, 10 2w IOFFI.,
IOFFI-, OFF Channel Leakage Cumnil V,=N. V,.=O.
CONTROL INPUTS I VW,*, Logical -1. Input vollage v,-1.5
Logisal o' Input voltage 1 1.5 %"IO,
IiNl.1 L a r a l '1' Input Current v,,=isv 1.0
IiUO Logra1 'o hpvt current v,.=a -1.0 F e cailml Inpun)
(The caibo( In+) supphi cuneni lcu<=MO kHz 0.3 3.0 1,
nA ii*
nA ii*
V V iiA
ii*
mA
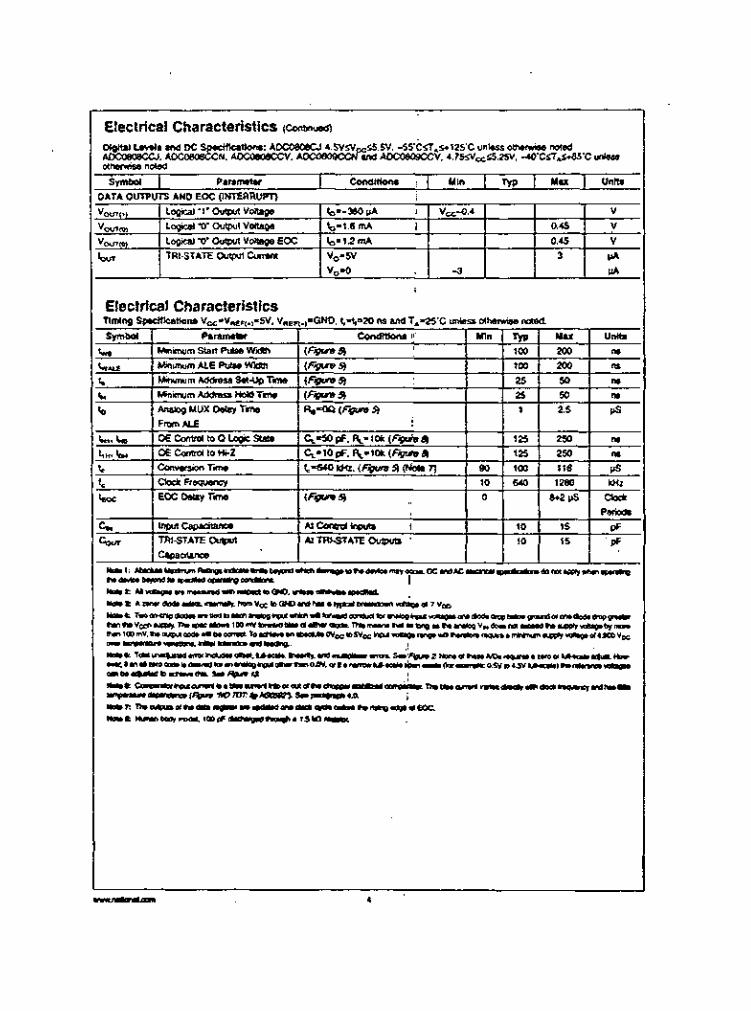

CHANNEL
H w IN5 H H
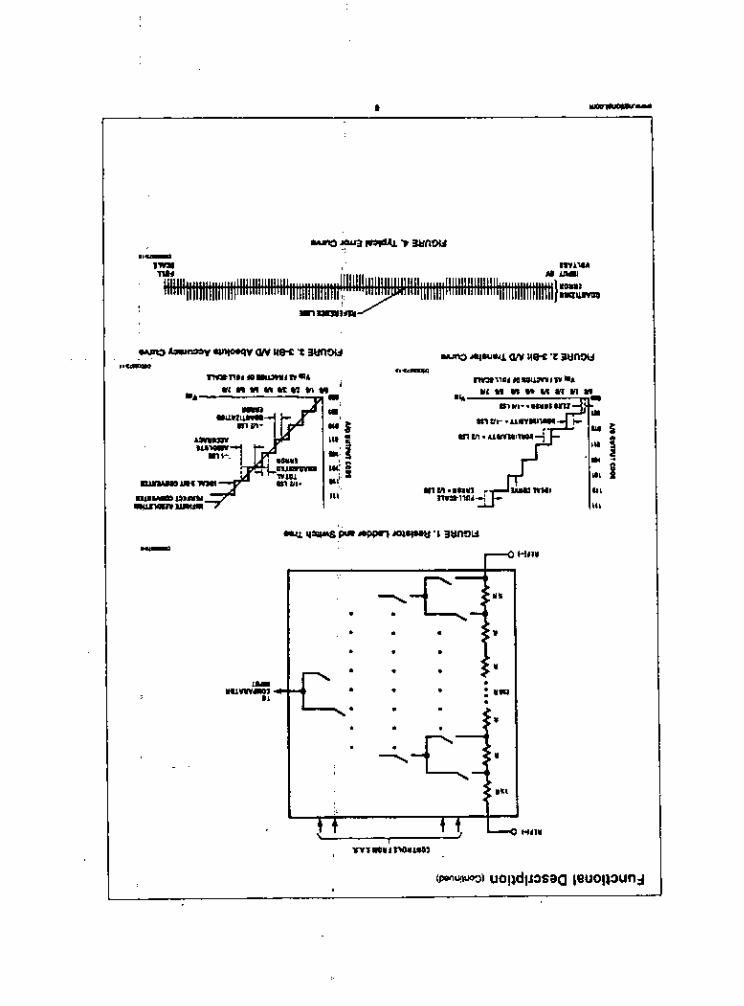
. .

Connection Diagrams
iirning Diagram
c u i
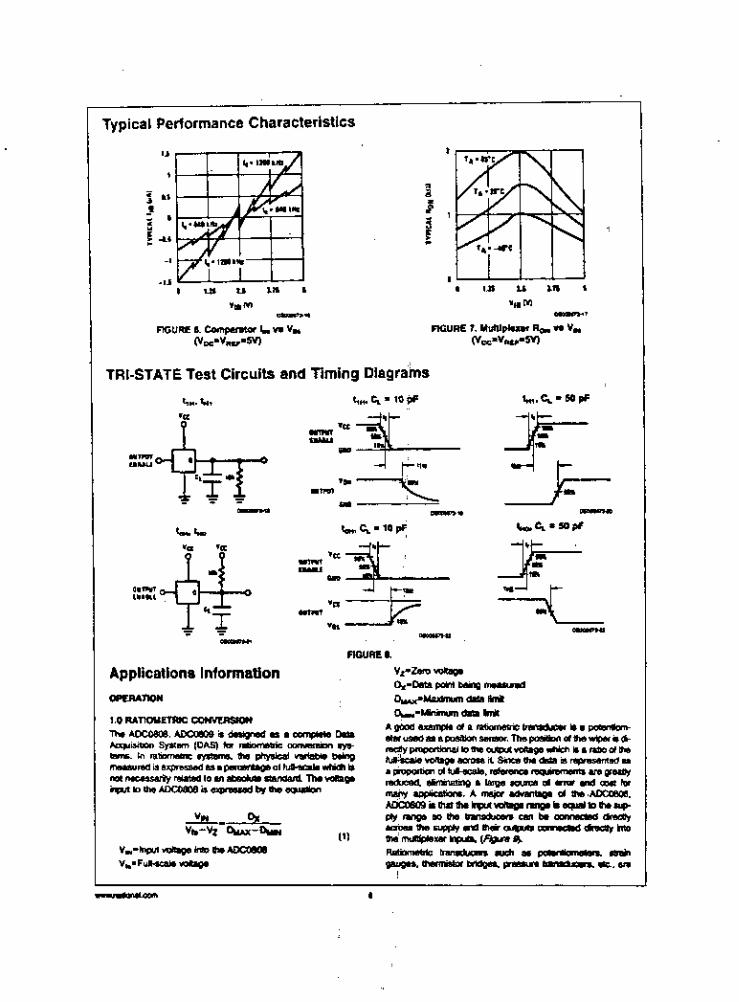
Typical Performance Characteristics
TRI-STATE lest Circuits and Timing Diagrams
bnb
__I
Applications Information
WER4llON
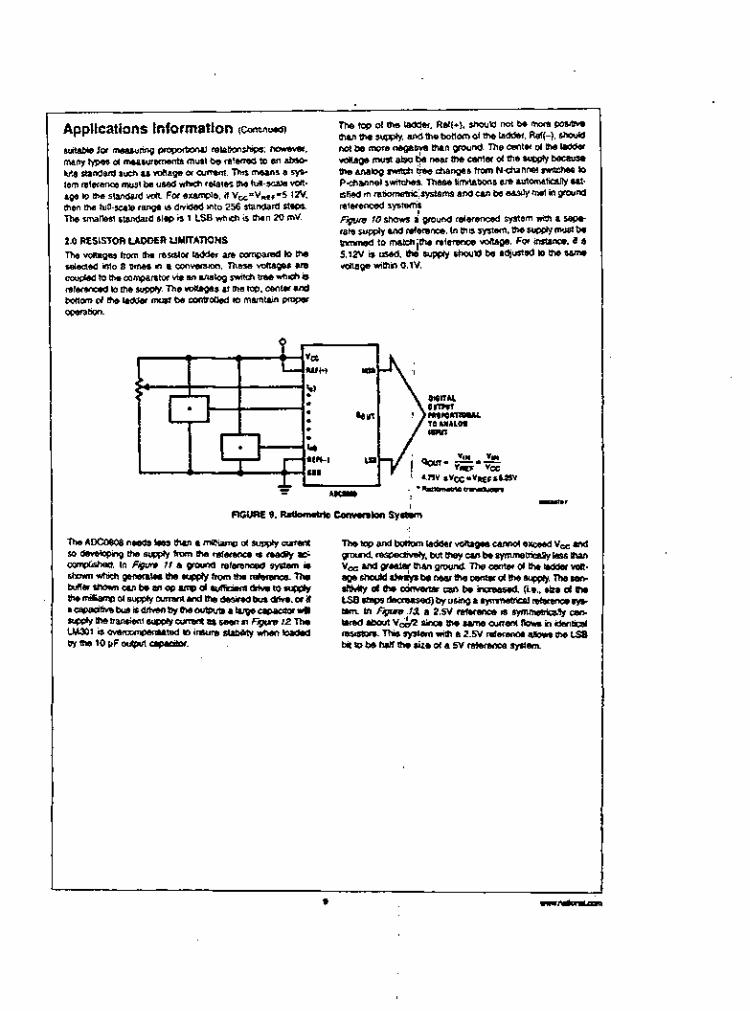
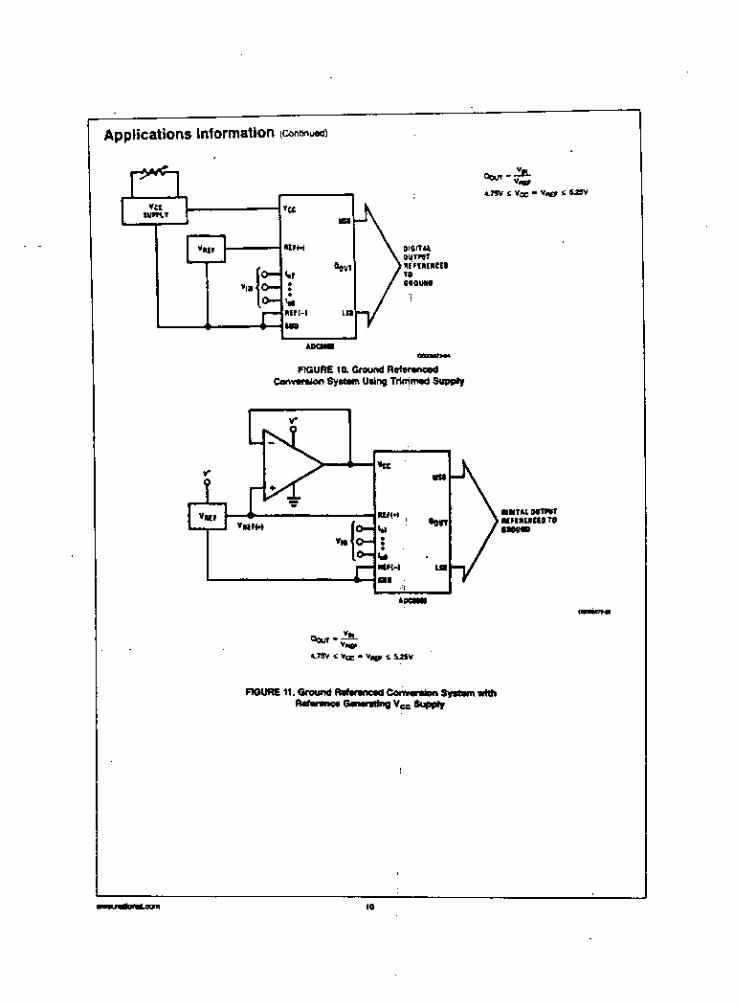
ipplications Information icon~wd)
I 1 A D C I

Information Conbnuedi
i & i l V %
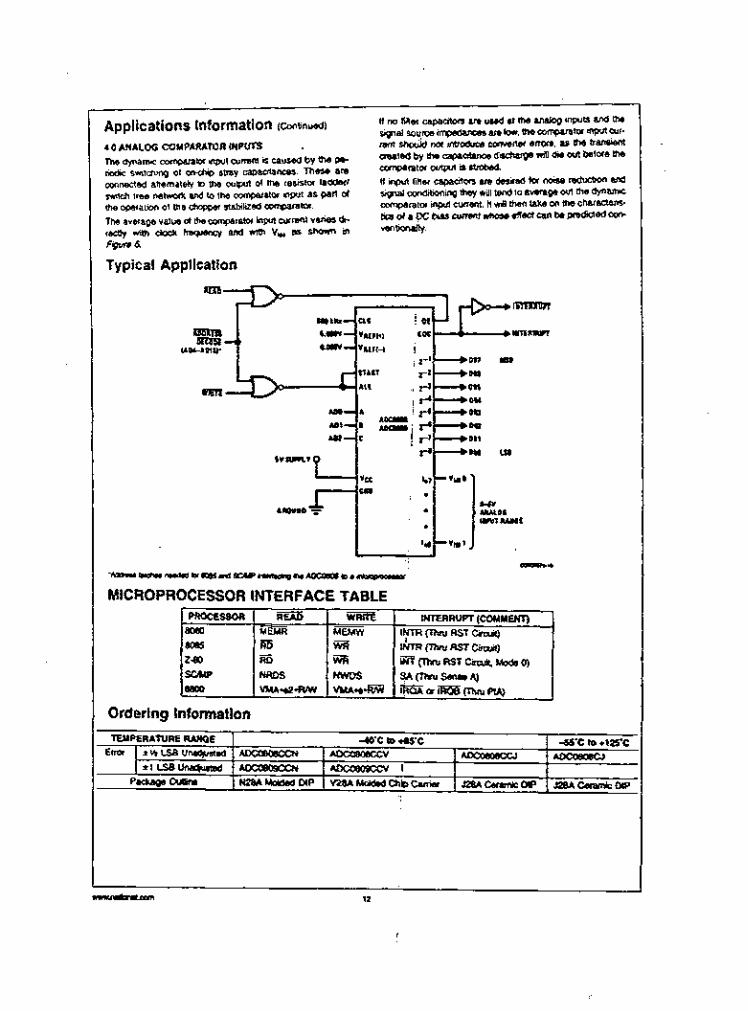
Typical Application
MICROPROCESSOR INTERFACE TABLE
z a SGW NRDC NWDS BBm VWAU.Rm w,m
Ordering information
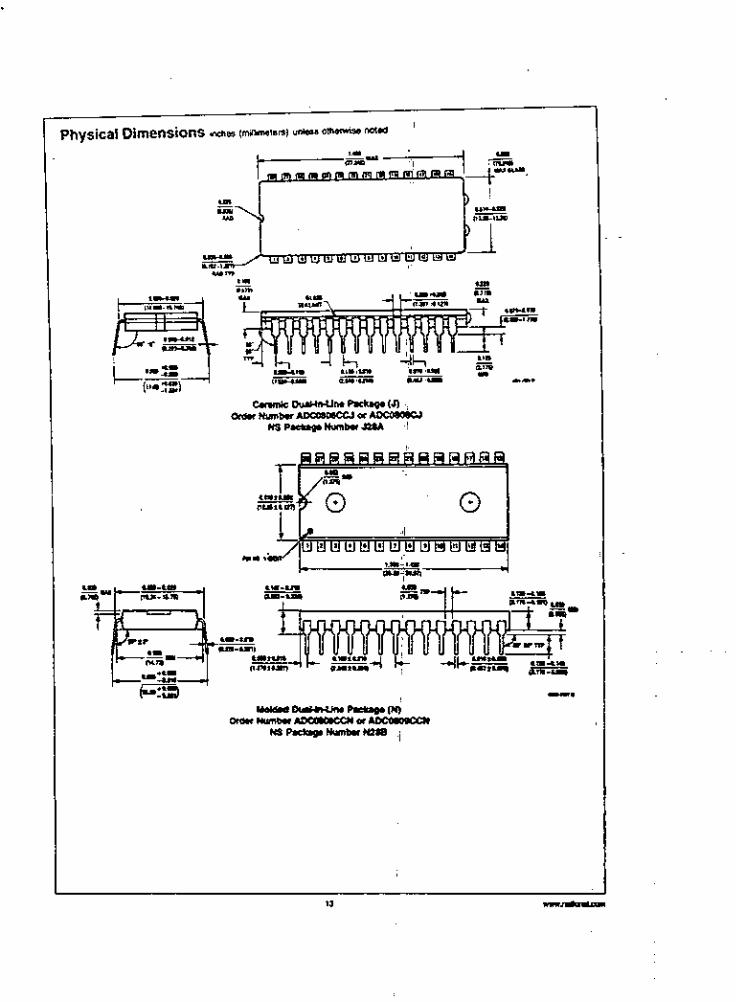
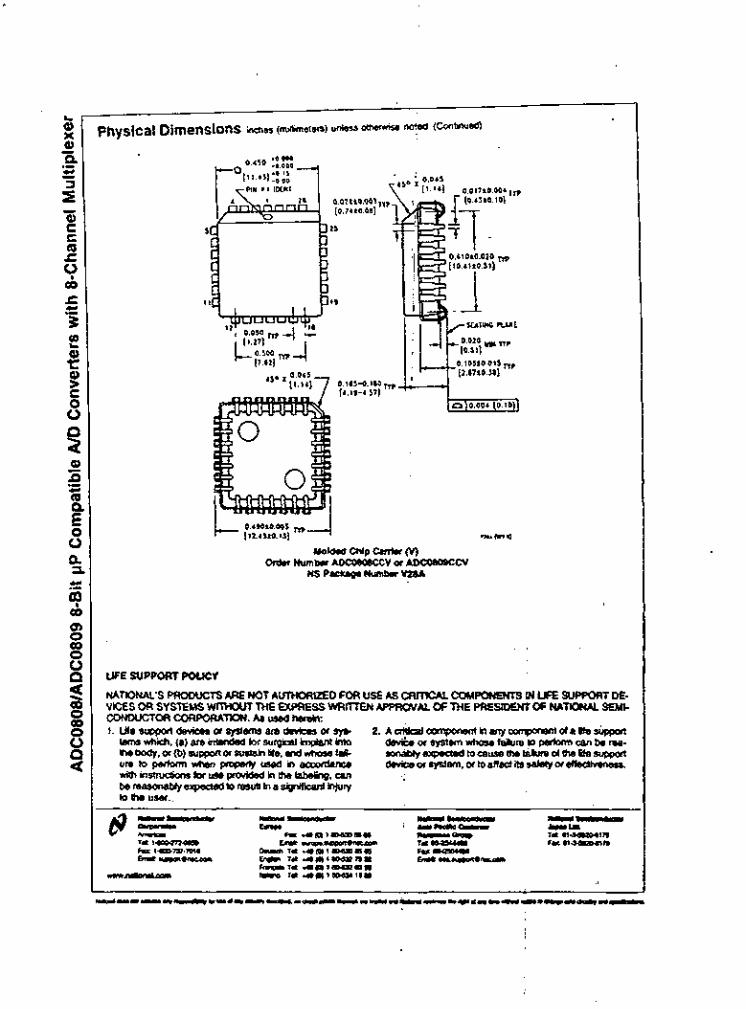
- al C C Q c o ai> 5 .- E E # ? e O o
s al - n m E
n a
CI
P
o 5
E
4 0
(0 UI O aD
n s O m O o d n
,
APENDICE “C”
D1AGRAMAS DE I/ PCBs
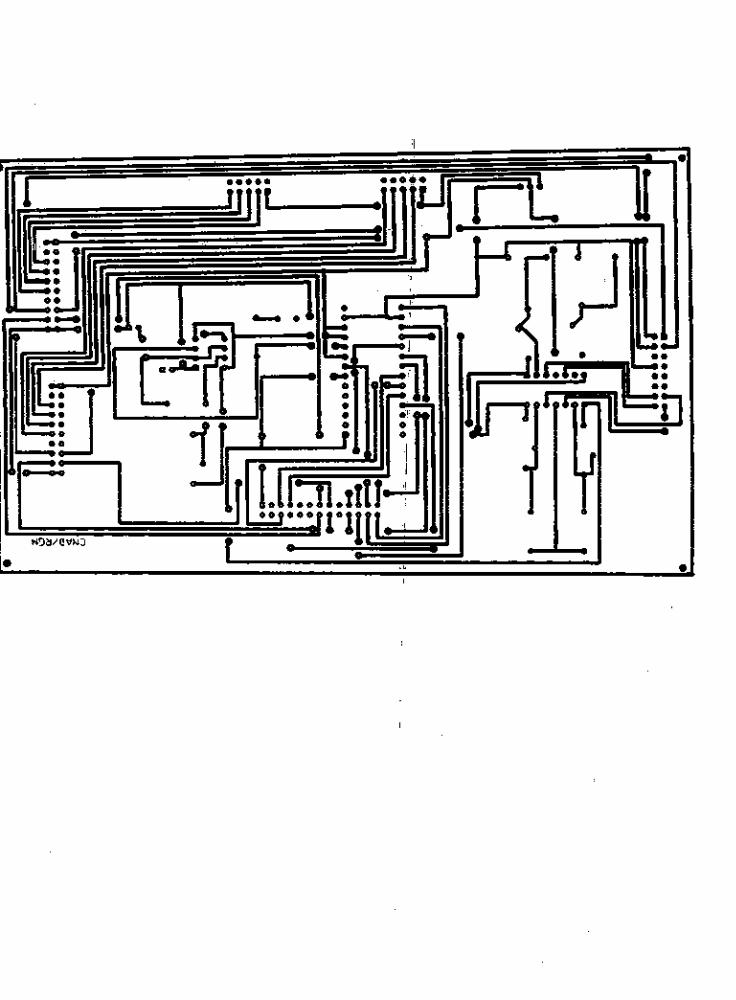

APENDICE I/
“D”
DATOS TECNICOS DE~DISPOSITIVOS ELECTRONICOS I
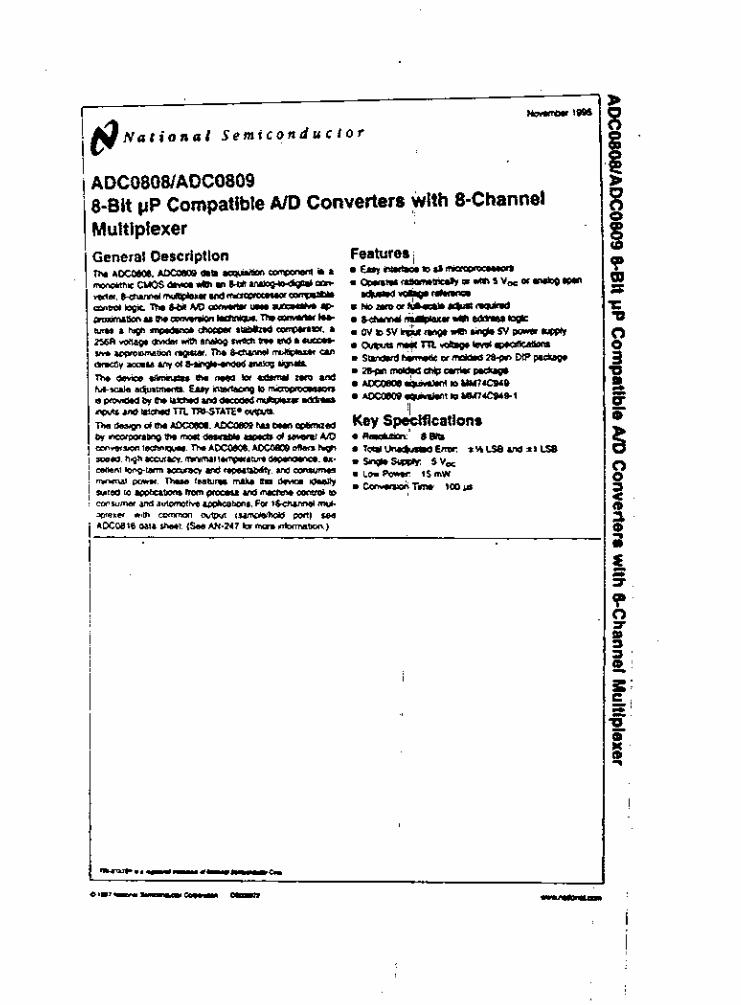
Nmmmm 1m5 @ Na t i o n a i S e m i c o n d u c l o r
ADC0808/ADC0809 8-Bit pP Compatible AID Converters wlth 8-Channel Multiplexer
I
3
3 z !i


I 6 5V -O 3V IO (v,+O 3v) Operating Conditions (MIS 1.8
s u m voltape (va) (Nom 3)
I I I t 1 l m
3

PWIl* condn!nns ~ Mln Typ Hai
Minimum Start pulse Wdü! W Q U ~ 3 I! I W 2W
Minimum ALE Pulsa width (FQm 3 100 2W
Minlmum Address Set-Up Time (Figum 5 ) 'I 25 M
Minimum Address Hold Time (FQu~ 5 ) 25 50 Anam MUX Delay Tim R,=Mi (Fwm 3 1 2.5
Symbol
NS
x u
Unib
ns
ns
ns
ns
VS
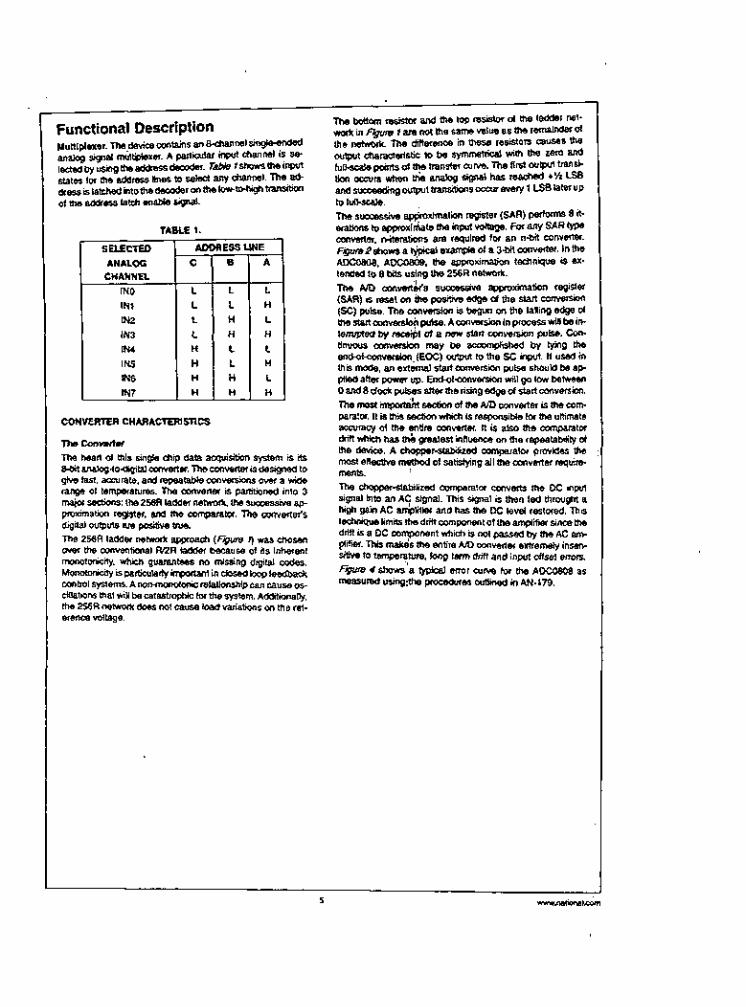
T I
ANALOG CHANNEL
IN6
E 1. - Al -
C
L
L L
L H H H
H
-
-
IESS UNE
L H H L i H H

I Functional Description (anfinued)
C O N I R O U F R W U I L '
IXR
L
R
myI : :-J .
i F i - i d FIGURE 1. Resistor Laddef and Saitsh iiw
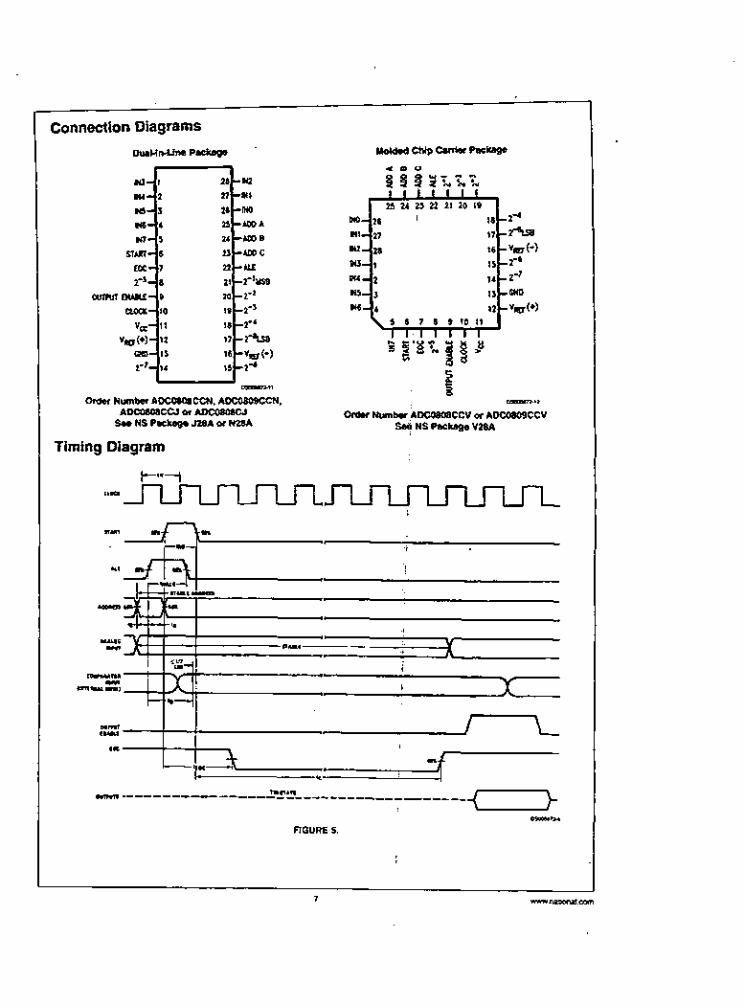
Connection Diagrams
DuiHn-Une Package .
e a -7,
-32 0-r Number ADCOSWCCN. ADCOBOBCCN,
See NC Pac*sga JZüA or NZüA ADCmüüCU Older Number Ar>cooBsCCV ff ADWüWCCV
Cee NS Package V2ñA
Timing Diagram
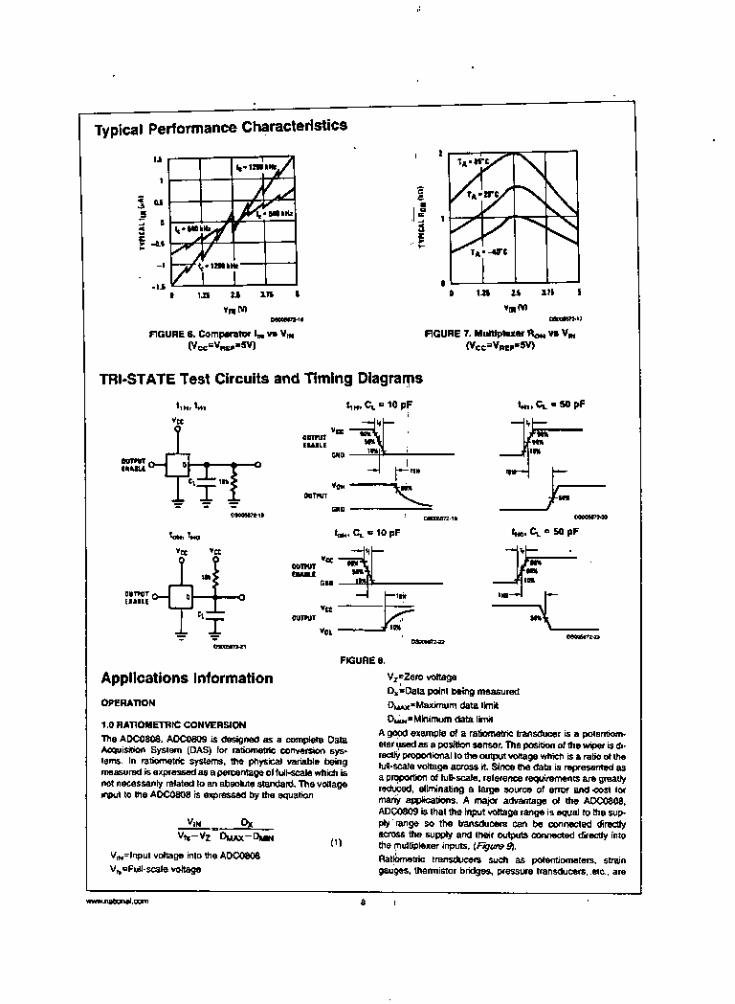
Typical Performance Characteristics
TRI-STATE Test Circuits and Timing Diagrams
I
I
I n I= u in 5
f". b.
T & A & _ - -
-6% D U l M t..llt
['T
Applications Information
OPERATION
1.0 RATIOMRñIC CONVERSION
"= I f - -- O U l N l
in V.,
' m e a l z a
FIGURE 8.
V,fiem vanage &=Data pant being measured D&=Maximum data limit DdiN=Minimum data limit

Applications information (Canondi
swtable JM measuring pmporOonal relationships; howBvBr. many types of msuremenls musi be retened io an abs- MB w a r d swh as vow M wnem. This means a sys- tem re1-n.x musi be usea w h d relates me hill-scale vdl- age lo me standard vok FM example, if Vcc=Vas~=5.12V. men me hilllcab range is dMded inm 256 siandaid st-. me sma11est standard step is I LSB which is men 20 my.
20 RESlSiüR LADDER LIMRATIONS me v ~ a g e s imm me resiJtn ladder am compared 10 the sekled imo 8 times b a conve-. mese voüages am mupled to me wmparamr via an analog switch tree hid is referenced to me supply. The vollages at me top, center and M o r n of me ladder misi be wntrmied 10 maintain pmpr OperaM.
me top of me ladder, mi(+). shnild not be mwe wsitivs man the supply. and me bottom of me ladder. Ref(-). sho& not be OR) mg.ah4 man pround. Ria canter of me ladder
mvst aka bi/near me canter oi me s W because me anabg mitd tree changes fmm Nchannei m i t d B S b paannd swme?. ,pese l imtwns am automaocaily Mt- ~ f i e d in raocmebic system and can be easily met in grwnd refemncul systems.: F W ~ to shows a Qmund r e t e r e d @em MJI a =a- rate supply and retepnce. In h i s system. me supply m- be bimmed 10 matdi de refwenat voüage. For imblnC3. I a 5 . 1 2 ~ is ussd. me Supply ohwm be adjusted to the same voltage wlmm 0.1V.'
The ADCOBOB needs lers man a millimp of supply c u m M dev-ing the supply hom me retereme is readiiy ac: wmpliied. In F/gurn 11 a gmund refemwed system is stam whd generates me supply hom me refe-. me buner shown can be an op amp of wfficient drive lo supply me rnilliamp of supply cymt and the desired bus drive. or I acap~busisdrivenbymeo~utsalargecapaatorwill ~ ~ ~ W m e a a n s i e n t ~ w m n t a s s e e n i n f ~ ~ m tzme Lhi301 is oveicompensaled 10 insure stability h e n loaded by me 10 PF ovtpul capamor.
The ts> and MWn ladder voltages cennoteroBBd V, and gmund. respeuiyely, but mey can be symmewily less man V, and grester man ground. The m t e r of the ladder mn. age shoum aiwayS be near me center of me s m y . i h e sen. sitivily of me mhener can be increased. (¡.e.. size of me LCB aeps demessed) by using a symmetric4 referenie sys. tern. In Fwm f3. a 2.5V reference is symme&ly cen. tered about v a si- me same WRWI flows in identical resistom. This sMem Wih a 2.5V reference auow me LSB bit to be half me size of a 5V refereme system.
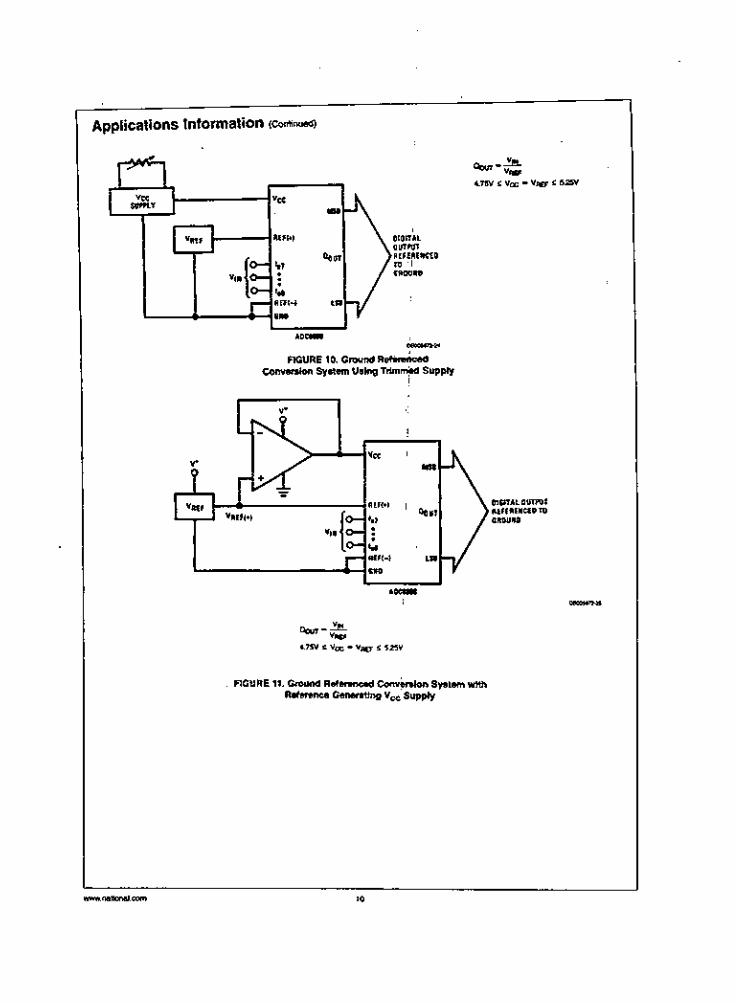
Applications Information (Continued)
flGURE 11. Gmund Reloren& Conwenim System wnh Reference Generating V& Supply

Applications Information (conan~ad)
I b t S V D C I O
. . The wipui code N for an artiimy input are lhe integers rrimin the range:
11 *ril*.Mtk,?aI.C

Applications Information (Contin&)
40 ANALOG COMPARATOR INPLm The dynamic comparator input cunsnt f caused by the pe riomc switching of on- siray sapaatarres . Thsse am mnnmed aüemaieiv io the ouiput o1 the msislor laddsr/ witch bes nemh and lo the mmpratu i n p t as part of me operation o1 me chopper aabilized comparatu. me avarage value of the mmparafor inpn current mies di- reay Wm, - hequency and wim V, as shown in F&m h
Typical Application
TENPERATURE RANGE
Enor t 'k LSB Unadpsted ri ffie ungustad
Package Outlme
Ordering Information
-40% to 45% ds'c to .1sc
I ADCOBOBCW ADC0808W
I ADCOBOllCCN I ADCüüüñCCV
N2üA Mlded DIP I V2üA Mdded Chip Came< A D C ~ ~ ~ ~ C C N I ADCOWKZV
I J28A Ceramic DIP n8A Ceramic DIP
WMb<nd.mm 12
I


i Physical Dimensions inmes (miiümeiers) unless nhemise n? (Continu@
LIFE SUPPORT POUCY
NATIONALS PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DE. VICES OR SYSTEMS WlTHOUT THE EXPRESS WRITEN APPROVAL OF THE PRESIDENT OF NATIONAL SEMI- CONDUCTOR CORPORATION. As usad nerein: I
1 , Lile support devices or systems are devices or sys- fems which. (a) am intended lor surgical implanl inlo h e body. or (b) suppon or sustain 118. and whose fall- ure lo perion when pmpfly usad in accordance wih insmcfions for use prwided in Ihe labeling. can be reasaiabtyexpected lo mull in a signifkanl injur/ Lo h e user.
2. A c& mmpcnenl in any mmpcnenl of a lile nipport device or system whose failure lo perform can be rea- windty expected 10 cause lhe failure of h e life support device or system. or lo aflecl its safety or e l l d n e s s .
!I

APENDICE
MA TERIA LES
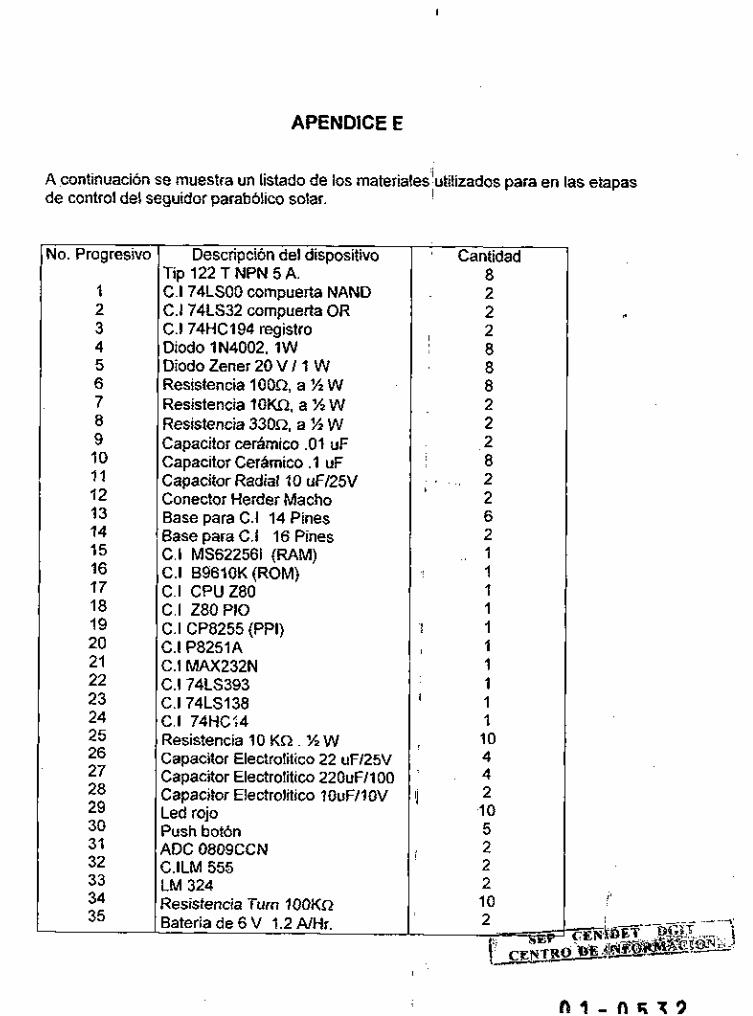
APENDICE E
A continuación se muestra un listado de los materiales’utilizados para en las etapas de control del seguidor parabólico solar. I
No. Progresivo
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Descripción del dispositivo Tip 122 T NPN 5 A. C.1 74LS00 compuerta NAND C.I74LS32 compuerta OR C.1 74HC194 registro Diodo 1N4002,lW Diodo Zener 20 V I 1 W Resistencia 1000, a % W Resistencia 1OKQ a % W Resistencia 3300, a % W Capacitor cerárnico .O1 UF Capacitor Cerámico .I UF Capacitor Radial 10 uF/25V Conector Herder Macho Base para C.1 14 Pines Base para C.1 16 Pines C.1 MS622561 (RAM) C.1 B9610K (ROM) C.1 CPUZ80 C.1 Z80PIO C.1 CP8255 (PPI) C.1 P8251A C.1 MAX232N C.174LS393 C.174LS138 C.1 74HC54 Resistencia 1 O KR . % W Capacitor Electrolitico 22 uF/25V Capacitor Electrolitico 22OuFll O0 Capacitor Electrolitico IOuF/IOV Led rojo Push botón 4DC 0809CCN C.ILM 555 LM 324 Resistencia Turn 100Kn Batería de 6 V 1.2 NHr.
‘I
I
li
I
8 2 2 2 8 8 8 2 2 2 8 2 2 6 2 1 1 1 1 1 1 1 1 1 1 10 4 4 2 10 5 2 2 2 10 2
’ Cantidad
ce”
1,