repaso.ppt
TRANSCRIPT

Repaso para ControlesINEL 4505
preparado por:
Guillermo Ramírez Rivera

Estas presentaciones contienen material relacionado con el curso INEL 4505de Control Básico.
Aquí encontrarán material de mis notas de la clase dada por el Dr. Raúl TorresMuñiz, el Dr. Gerson Beauchamp Báez e información que se encuentra en el libro titulado Control Systems Engineering de Norman S. Nise.
No me hago responsable de los errores que hayan en las transparencias. Esto es solo un repaso de la clase. Puede haber errores en las transparencias.
Espero que estas transparencias sean de provecho para todos los que lo vean.
atentamente,
Guillermo Ramírez Rivera
IMPORTANTECreditos e información sobre las transparencias.

Temas:
Resolver ecuaciones diferenciales
Utilizando condiciones iniciales = 0Saber utilizar Laplace para resolverEn el dominio de la frecuencia.
Saber utilizar Laplace inversa paraMover al dominio del tiempo.Domino de fracciones parciales.
Capítulo 1 y parte del capítulo 2
Modelos mecánicos, Modelos eléctricosModelos de amplificadores operacionales. Capítulo 2 y 3
Respuesta en el dominio del tiempoTiempo de establecimientoTiempo picoTiempo de subidaPor ciento de rebaseωn y ζTeorema del valor final Teorema del valor inicial
Capítulo 4

Diagrama de bloquesReducción de bloquesNo confundir un sistema Con una señal.
Capítulo 5
EstabilidadUsando método de RouthUsando método de Routh & Hurwitz
Capítulo 6
Root LocusError
Capítulo 7
Problemas asignados:
Cap1: 1, 2, 13, 15Cap2: 1, 2, 8, 16, 18, 21, 26, 42Cap4: 2, 4, 6, 8, 15, 16, 23, 24, 30Cap5: 1, 2, 4, 6, 20, 26, 27Cap6: 1, 2, 4, 8, 10, 12, 23, 25, 29Cap7: 1, 3, 9, 12, 14, 43, 44, 45

)94.15cos(6868.0)(
)cos(2)(07
5335
75335
wteetx
wteketxtt
att
Forma general en el dominio del tiempo
)7()2()2()7)(4(
5)(
4
5)7)((
2
5)(7)0()(*
3212
2
22
s
K
js
K
js
K
ss
ssX
s
sssX
s
ssXxsXS
Expansión en fracciones parciales
Problema de ecuaciones diferenciales
Para la siguiente ecuación diferencial
)2cos(57 txdt
dx
Buscar el valor de las Ks
53
35
)7)(4(
)7(5
848
80280
848
80280
)7)(2)(2(
)2(5
23
*12
1
ss
ssK
jKK
j
sjsjs
jssK )7)(2(
5
sjs
s
4
52 s
s
Evaluado en s = j2
Evaluado en s = -7

Objetivos de análisis y diseño• estabilidad• respuesta transitoria• error en estado estacionario igual a cero o bien pequeño
Un procedimiento de diseño:1. Transformar los requerimientos de desempeño a un sistema físico2. Dibujar diagrama de bloques funcional3. Dibujar un diagrama esquemático4. Desarrollar un modelo matemático5. Simular, analizar el sistema y simular su respuesta
1. Establecer los objetivos de control6. Diseñar el controlador que cumpla con los objetivos de control7. Simular el desempeño de sistema de control de lazo cerrado8. Evaluar desempeño, si es satisfactorio, implantar, si no lo es, volver a diseñar (paso 6)
Capítulo 2
Un conjunto de ecuaciones diferenciales que describe el sistema para todo tiempo no necesariamente tiene que ser lineal
Cuando aparece una ecuación no lineal, la linearizamos
Cuando las ecuaciones diferenciales son lineales e invariantes en el tiempo (estacionarias), entonces se puede usar la transformada de Laplace para transformar las ecuaciones diferenciales a funciones racionales y algebraicas.
y = mx +b

Ecuaciones diferenciales son el fundamento de los modelos matemáticos
Vamos a crear el modelo fundamental que describe el comportamiento dinámico del circuito.
Sistema lineal satisface el principio de superposición
Falta otra ecuación:
KCL1:
dt
tdvC
R
tvti
tititi
CcL
CRL
)()()(
)()()(
Para este modelo utilizamos una fuente AC senosoidal en estado estacionario. Ecuaciones diferenciales acopladas. Para ecuaciones que no posean transformada de Laplace seguimos usando la ecuación.
Para un circuito lineal:
+-
L
R CVi(t) Vc(t)
Tenemos dos variables desconocidas y una sola ecuación
1) Definir las variables que vamos a usar:
)()(
)( tvdt
tdiLtv C
Li
KVL1:
Ecuación diferencial lineal de primer orden con coeficientes constantes
Nombre y Apellido:
)(tiL
Ahora podemos expresar en términos de vc(t)

Ecuaciones diferenciales acopladas (continuación del circuito anterior)
Una parte de la ecuación resuelve parte de la otra ecuación y siguientemente otra parte de ese segundo resuelve una parte del primer circuito. Podemos escribir las ecuaciones que describen su comportamientodinámico utilizando las leyes de Kirchoff.
Vamos a buscar la función de transferenciadesde vi(t) hasta vo(t)
1) Aplicar transformada de Laplace
)0()()(
1)(
)()0()()(
CCCL
CLLi
vSSVCsVR
sI
sVIsSILsV
1’ 2’
Queremos resolver para: )(
)(
sV
sV
i
o
)()( tv
dt
diLtv ci LL
dt
tdvC
R
tvti Cc
L
)()()( LL
Las únicas condiciones que hacen faltapara que haya función de tranferenciason que sea lineal y estacionario. (sus parámetros no cambian función deltiempo)
Para un circuito con condiciones inicialesigual a cero
1
1
)(
)(2
sLCssV
sV
RL
i
o
+-
L
R CVi(t)Vo(t)
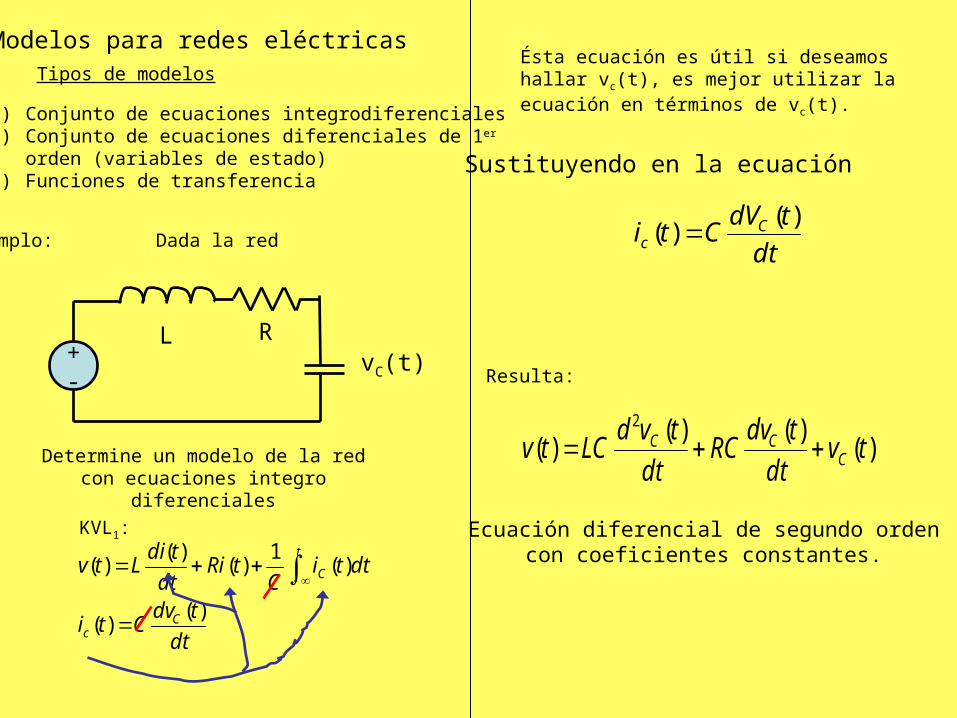
Modelos para redes eléctricasTipos de modelos
1) Conjunto de ecuaciones integrodiferenciales2) Conjunto de ecuaciones diferenciales de 1er
orden (variables de estado)3) Funciones de transferencia
KVL1:
dt
tdvCti
dttiC
tRidt
tdiLtv
Cc
t
C
)()(
)(1
)()(
)(
Ésta ecuación es útil si deseamos hallar vc(t), es mejor utilizar la ecuación en términos de vc(t).
Resulta:
)()()(
)(2
tvdt
tdvRC
dt
tvdLCtv C
CC
Ecuación diferencial de segundo ordencon coeficientes constantes.
Ejemplo: Dada la red
Determine un modelo de la red con ecuaciones integro diferenciales
+-
vC(t)RL
dt
tdVCti C
c
)()(
Sustituyendo en la ecuación

Función de transferencia
)()()(
)(2
tvdt
tdvRC
dt
tvdLCtv C
CC
Aplicando la Transformada de Laplacecon condiciones iniciales igual a cero
Los polos son:
LCL
R
L
RS
1
22
2
2,1
Podemos tener tres casos
LCL
R
LCL
R
LCL
R
1
2
1
2
1
2
2
2
2
Polos Complejos
Polos Reales
Polos Reales Repetidos
)()()()( 2 sVsVRCSsVLCSsV CCC
)(1)( 2 sVRCSLCSsV C
1
1
)(
)(2
RCSLCSsV
sVC
LCLR
LCC
SSsV
sV12
1
)(
)(
Sigue el análisis de la página anteriornegativopositivo
igual a cero

+-
RsC
1
sLvi(t)
Realizamos un divisor de voltaje en el inductor
sC
sRCLCssL
sCR
11 2 Buscamos impedancia total equivalente
)()(12
2
sVsVsRCLCs
LCsouti
1)(
)(2
2
sRCLCs
LCs
sV
sV
i
out
La función de transferencia que resulta es:
EjemploModelo de frecuencia

Modelo para capacitancias
sC1
)(tvc
)(tic
dt
tdvCtv C
C
)()(
+-
sC1
s
VC0
)0()()(
)0()()(
CVssCVsI
VssVCsI
CC
CC
Modelo para inductancias
sL
+–
IL(s)
s
siL )(+iL(s)–
sL+
VL(s)
– )0(
LLi
+vc(s)–
c*vc(0-)
+
vc(s)
–

Ejemplos de circuitos eléctricos
+-
vC(t)RL
KVL:
)()()( tvtvtv CL
)()(
)( tvdt
tdiLtv C
L
dt
tdvC
R
tvti
tititi
CCL
CRL
)()()(
)()()(
KCL:
)()0()()( SVIssILsV CL
)()()( sVsLsIsV CL
#1
#2 #1
)()(
)( sCSVR
sVsI C
CL
)()()(
)( sVsCSVR
sVLSsV CC
C
1)()( 2 S
R
LLCSsVsV C
1
1
)(
)(
2
SRL
SsV
sVC
Despreciando condiciones iniciales
Ecuaciones en el dominio del tiempo

Ejemplo de circuitos eléctricos
+-
RL1 L2
KVL1:
dt
titidLtvtv ci
)()()()( 21
1
KVL2:
dt
tdiLRti
dt
titidL
)()(
)()(0 2
2212
1
)()()()( 1 sIsIsLsVsV Cc
sLRsIsIssIL
ssILRsIsIsIsL
C
C
21
21
)()()(0
)()()()(0
)()( sCsVsI CC
Asi que
ssILsVCsLsVsV CC )()()()( 12
1
sLRsIsCsVsIsL
sLsICsLsVsV
C
C
21
12
1
)()()(0
)(1)()(
RsLsLsICsLsVC 121 )()(
Ecuaciones en el dominio del tiempo
i1(t) i2(t)

+-
R L
KVL1:
)()()()(1 titiRtvtv LCC
dt
tiLRtiti C
CL
)()()(0
KVL2:
KCL:
dt
tdvCti C
C
)()(
Ejemplo
C
Escribiendo las ecuaciones en el dominio del tiempo
RsIRCssVsV
RsIsIsVsV
LC
LCC
)()()(
)()()()(
RsIRCsCLsV
sRIRsLsI
sLsIsRIsRI
LC
LC
CCL
)()(0
)()(0
)()()(0
1
1

Usando modelo de frecuencia
+-
RsC
1sL
V1(s)
))((
1
1
112
1
1
sCRsL
RsLRCLs
sCRsL
sRL
Realizar divisor de voltaje:
))((
)(
1
112
11
1
sCRsLRsLRCLs
sVRsL
sRL
Vout
RsLRCLs
sRVCLsVout
11
211
2 )(
RsLRCLs
RCLs
sV
Vout
112
12
1 )(
Función de transrerencia resultante
Buscar impedancia total equivalente

KVL1 dt
titidLRtitv CR
R
)()()()( 111
KVL2
)()(
)()(0 1 tvRti
dt
titidL CC
RC
dt
tdvCti C
C
)()(
KCL
Escribiendo las ecuaciones en el dominio del tiempo
+-
RL C
R
1112
1112
11
)()()(
)()()(
)()()()(
RsLsIsVCLssV
RsLsIsCVLssV
sIsIsLRsIsV
RC
RC
CRR
sLsIsCRCsLsV
sVRsIsIsIsL
RC
CCRC
122
1
21
)(1)(0
)()()()(0
)()( sCsVsI CC

Lf
JB
+
Vf
–
Rf
+ –
RaLa
aI
Va(s)
Modelo de motor
Posibles entradas
va(t), vf(t), ia(t), if(t)
Posibles salidas
ө(t), ω(t), Te(t), Tm(t)
+
Va
–
fI

Efecto del valor de la resistencia de un potenciómetro
El valor de la resistencia de un potenciómetro se escoge para determinar la cantidad de corriente que se permitirá pasar al lado de menor tensión.
Vcc
Vout
1pt
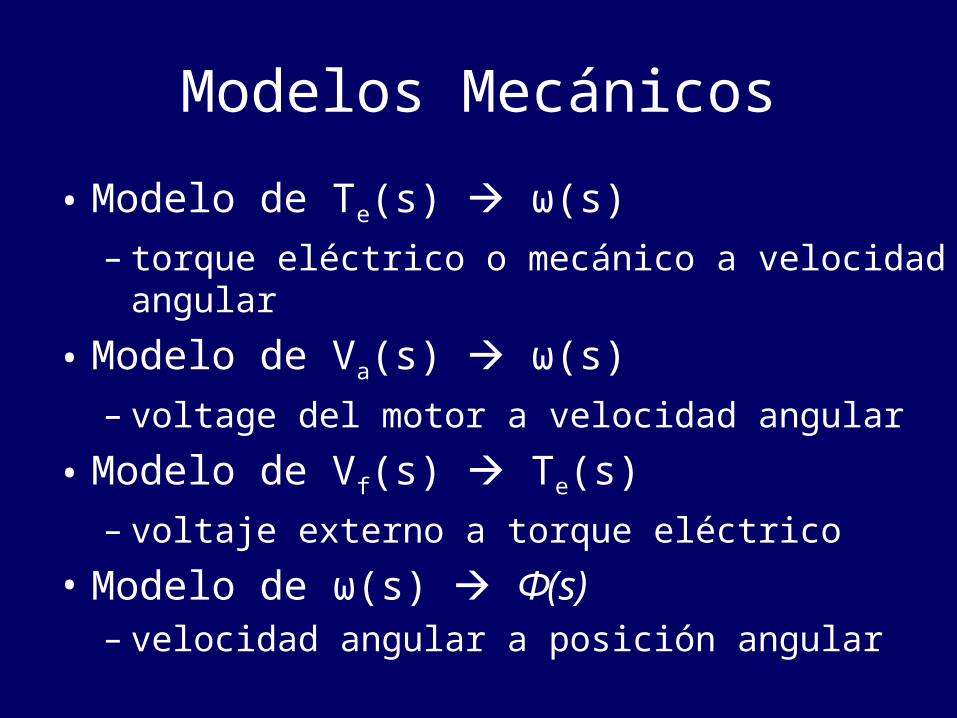
Modelos Mecánicos
• Modelo de Te(s) ω(s)
– torque eléctrico o mecánico a velocidad angular
• Modelo de Va(s) ω(s)
– voltage del motor a velocidad angular
• Modelo de Vf(s) Te(s)
– voltaje externo a torque eléctrico
• Modelo de ω(s) Ф(s)– velocidad angular a posición angular

Modelos mecánicos
Motor DC
Te(s) ω(s)
)()(
)()( tBdt
tdJtTsT me
Torque eléctrico = Torque mecánico
Te(s) ω(s)
BJs 1
Modelo
Bloque de construcción
Te(s) ө(s)
BsJs 2
1
Bloque de construcción
Te(s) ө(s)
BJs 1
s
1
Modificación
BJssT
s
e
1
)(
)(
Usando Laplace
Este término proviene de la masa del eje
Este término proviene de la fricción viscosa
despreciando condiciones iniciales
)()()( sBsJssTe
BJsssTe )()( factorizando ω(s)
La función de transferencia resultante es:
Lf
J
B
+
Vf
–
Rf
RaLa
aI
Va(s)+
Va
–
fI
BJsssTe )()( )(skV bb
aaa
b
aa
a ksLR
V
sLR
VBJss
)(
aa
aa
aa
ba
sLR
kV
sLR
kkBJss
1
)()(
aa
aa
aa
abaa
sLR
kV
sLR
kksLRBJss
))(()(
aa
aa
aa
abaa
a
aa
sLR
kV
sLR
kksLRBJss
k
sLR ))(()(
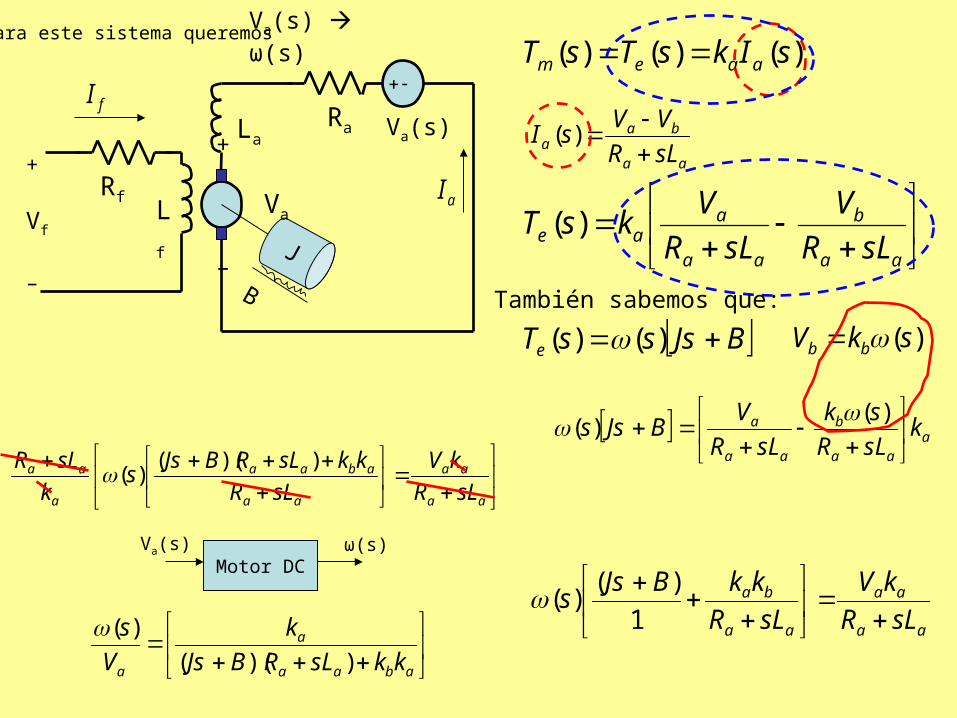
Va(s) ω(s)Para este sistema queremos
aaa
b
aa
a ksLR
sk
sLR
VBJss
)(
)(
abaa
a
a kksLRBJs
k
V
s
))((
)(
Motor DCVa(s) ω(s)
)()()( sIksTsT aaem
aa
baa sLR
VVsI
)(
aa
b
aa
aae sLR
V
sLR
VksT )(
También sabemos que:

abaa
a
a kksLRBJs
k
sV
s
))(()(
)(
abaa
a
kksLRBJs
k
))((
Va(s) ω(s)
Función de transferencia
abaa
a
kksLRBJs
k
))((
Va(s) ω(s)
s
1ө(s)
Lf
J
B
+
Vf
–
Rf
RaLa
aI
Va(s)+
Va
–
fI
Va(s) ω(s)Para este sistema queremos

Vf(s) ω(s)Te= kfIf(s)
ff
ff sLR
sVsI
)()(
ff
f
sLR
k
)(sTe)(sV f
Lf
J
B
+
Vf
–
Rf
RaLa
aI
Va(s)+
Va
–
fI
Para este sistema queremos
)(
)(
)(
)(
)(
)(
sV
s
sT
s
sV
sT
fef
e
ff
f
f
e
sLR
k
sV
sT
)(
)(ff
ffe sLR
sVksT
)()(
Te(s) ω(s)
BJs 1
ff
f
sLR
k
)(sV f
Nuevo bloque más complejo
))(( BJssLR
k
ff
f
)(sV f
ω(s)
Para obtener velocidad angular con voltaje Vf combinamos bloques
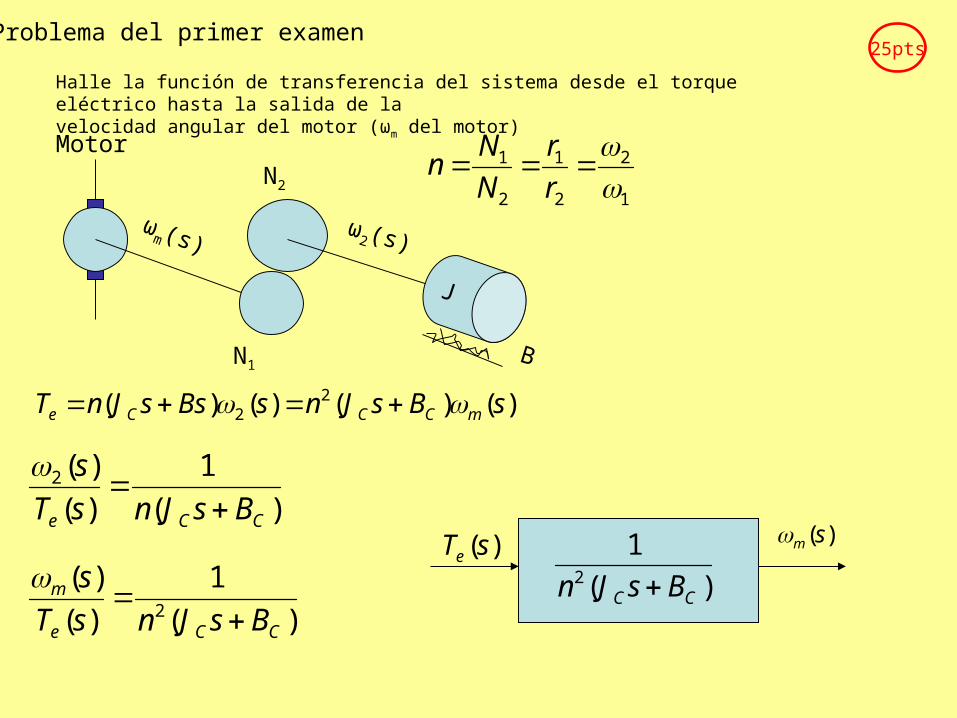
Problema del primer examen
Halle la función de transferencia del sistema desde el torque eléctrico hasta la salida de la velocidad angular del motor (ωm del motor)
J
ωm(s)
N2
N1B
ω2(s)
Motor
)()()()( 22 sBsJnsBssJnT mCCCe
)(
1
)(
)(2
CCe
m
BsJnsT
s
)(
1
)(
)(2
CCe BsJnsT
s
1
2
2
1
2
1
r
r
N
Nn
)(sm)(sTe
)(
12
CC BsJn
25pts

PolosLos polos de una función de transferencia son los valores de s que hacen que el denominador sea igual a cero
55
2)(
ss
ssG
CerosLos ceros de una función de transferencia son los valores de s que hacen que la función de transferencia sea igual a cero.
25
2)(
ss
ssG
Los polos se grafican con Xy los ceros se grafican con O
X O
Multiplicamos por el escalón: R(s) =1/s
5
2
s
sR(s) C(s)
tetc 553
52)(

1. El polo de la función de entrada R(s) genera la respuesta forzada del sistema
542)( 4321
s
K
s
K
s
K
s
KsC
Efectos de los polos y ceros
4. Los polos y ceros de una función generan las amplitudes de ambas respuestas (natural y forzada). K1; K2,K3 y K4.
3. Un polo en el eje real genera una respuesta de la forma e-αt donde –α es la posición del polo en el eje real. Adicionalmente, entre más lejos (hacia la izquierda) se encuentre el polo, la respuesta
transitoria exponencial caerá más rápidamente.
2. El polo de la función de transferencia genera la respuesta natural del sistema
ttt eKeKeKKtc 54
43
221)(
)5)(4)(2(
1)(
ssssG
ssR
1)(
Entrada

Buscando las K’s para distintos sistemas
)()()(
)146.1)(854.7(
9)(
99
9)(
146.13
854.721
2
tueKeKKtc
sssC
sssC
)())cos(()(
)()3)(3(
9)(
)(9
9)(
1
2
tutAKtc
sRjsjs
sC
sRs
sC
)())cos(()(
)()81)(81(
9)(
)(92
9)(
11
2
tutAeKtc
sRjsjs
sC
sRss
sC
)()()(
)()3(
9)(
)(96
9)(
32
321
2
tuteKeKKtc
sRs
sC
sRss
sC
tt
Casos:
1. Polos puramente reales
2. Polos puramente imaginarios
3. Polos complejos
4. Polos reales repetidos
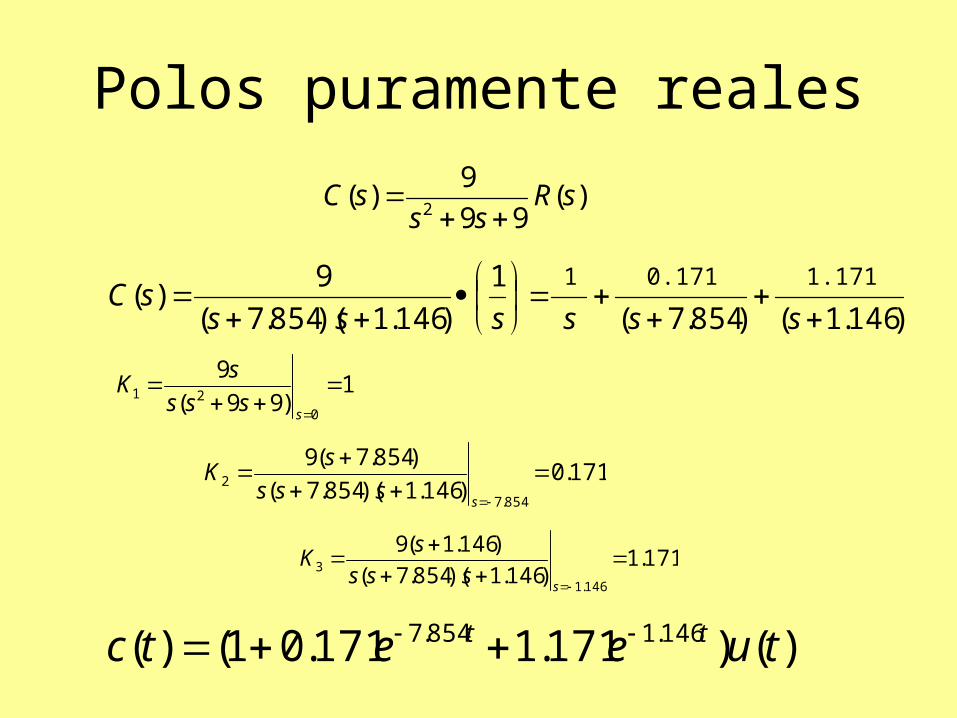
Polos puramente reales
)(99
9)(
2sR
sssC
)()171.1171.01()( 146.1854.7 tueetc tt
171.1)146.1)(854.7(
)146.1(9
146.1
3
ssss
sK
171.0)146.1)(854.7(
)854.7(9
854.7
2
ssss
sK
1)99(
9
021
ssss
sK
)146.1()854.7(
1
)146.1)(854.7(
9)( 321
s
K
s
K
s
K
ssssC
1 0.171 1.171

Polos puramente imaginarios)(
9
9)(
2sR
ssC
)()903cos(2
11)( tuttc
2
123 KK
2
1
)3)(3(
)3(9
3
2
jsjsjss
jsK
1)9(
9
021
s
ss
sK
)3()3(
1
)3)(3(
9)( 321
js
K
js
K
s
K
sjsjssC

Polos puramente complejos
23
81
2
021
321
2
)81)(81(
)81(9
192
9
\)81()81(
1
)81)(81(
9)(
)(92
9)(
KK
jsjss
jsK
sss
sK
js
K
js
K
s
K
sjsjssC
sRss
sC
js
s
)()cos()( 11 tutAeKtc
complejos

Polos reales repetidos
)(96
9)(
2sR
sssC
)(31)( 32
3 tuteKetc tt
223
2223
3
23
2
396
9123)96(9361896
96
)96(9
sss
ssssssss
sss
ss
ds
dK
s
3)3(
)3(9
3
2
2
2
s
ss
sK
1)3(
9
021
sss
sK
)3()3(
1
)3(
9)( 3
221
2
s
K
s
K
s
K
sssC

La frecuencia de oscilación de un sistema de segundo orden es la frecuencia de oscilación del sistema sin amortiguación. (rad/seg)
Frecuencia natural ωn
Factor de amortiguamiento ζ
Ejemplo: encuentre la frecuencia natural y el factor de amortiguamiento
362.4
362 ss
22 2 nns
K
36*2
2.4
36n

Ejemplo de prueba corta
366
362 ss
s
1Y(s)
Completando el cuadrado
932
6 22
0993662 ss
273273366
361)(
2 js
C
js
B
s
A
ssssY
1)366(
36
0
2
s
ssssA
2887.05.09722916
37.11221944
27654
27654
27654
36
276)27(2
36
)272(273
36
)273)(273(
)273(36
273
jj
B
j
j
jB
jjjB
jsjss
jsB
js
2887.05.0 jBC
Respuesta en tiempo
)(tan27cos(57735.02)( 1 ttc
3132732,1 jjs
273 2 s
273 2 s
27962 ss
Polos
4/6pts
verificar

Mostrar un ejemplo de:• Sistema de lazo abierto• Sistema de lazo cerrado
Sistema de lazo abierto
controlador planto o procesoRef.
entrada salida
Un lápiz mecánico puede ser considerado como un sistema de lazo abierto
Respuesta deseada: que la mina salga del lápiz mecánico; que el largo de la mina sea suficiente para que dure y a la misma vez lo suficientemente corta para que no se parta
Controlador: dedo pulgar
Planta o proceso: mecanismo “saca punta”
Salida: largo de punta en milímetros
1pt

Diagramas de Bloques
• Ocho Reglas– Retroalimentación– Bloques en serie– Bloques en paralelo– Adelantar un punto de bifurcación– Atrazar un punto de bifurcación– Adelantar un sumador– Atrazar un sumador– Propiedad asociativa de la suma

Retroalimentación
G(s)
H(s)
R(s) C(s)
)()(1)(
sHsGsG
R(s)
C(s)
Este bloque es el fundamentopara los sistemas de lazo cerrado.
Los sistemas de lazo cerrado son más estables porque miden su salida para manipular su entraday así lograr la respuesta deseada
)()()()(
)()()(
sCsHsRsE
sEsGsC
#2 #1
)()(1
)(
)(
)(
)()()()(1)(
)()()()()()(
)()()()()()(
)()()()()(
sHsG
sG
sR
sC
sRsGsHsGsC
sRsGsCsHsGsC
sCsHsGsRsGsC
sCsHsRsGsC
La retroalimentación típica es (-) degenerativaLa retroalimentación mala es (+) regenerativa

Bloques en serie
G1(s) G2(s)R(s) C(s)
G1(s) x G2(s)R(s) C(s)
Se multiplica lo que haya en los bloques
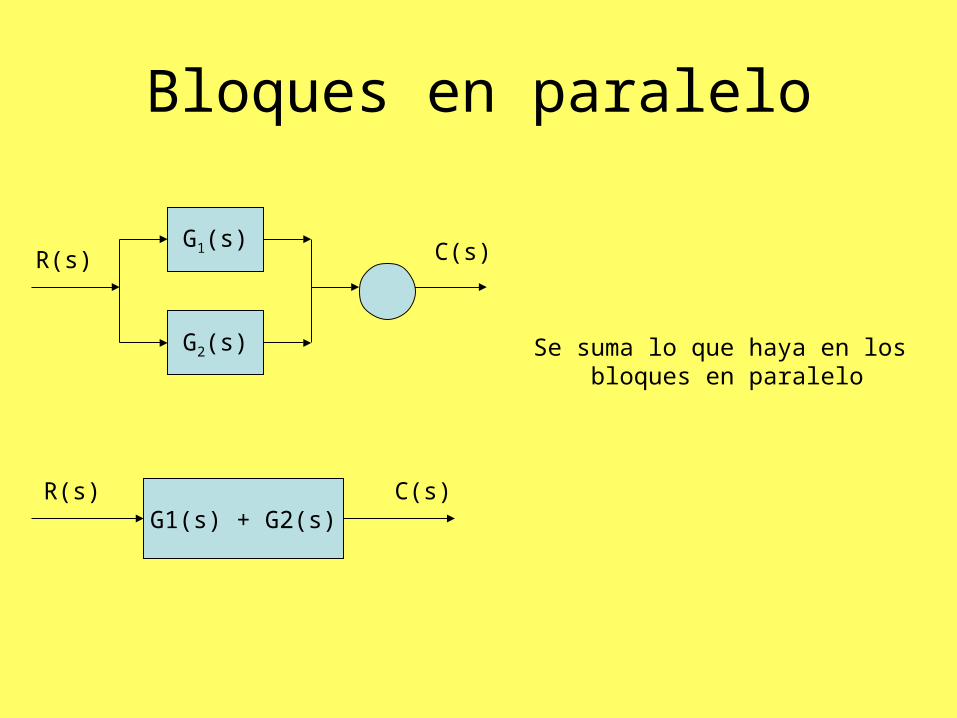
Bloques en paralelo
G1(s) + G2(s)R(s) C(s)
G1(s)
G2(s)
R(s) C(s)
Se suma lo que haya en los bloques en paralelo

Adelantar punto de bifurcación
G1(s)
G2(s)
X2(s)X1(s)
G1(s)X2(s)X1(s)
)(
)(
1
2
sG
sG

Atrazar un punto de bifurcación
G1(s)
G1(s)G2(s)
X2(s)X1(s)
G1(s)X2(s)X1(s)
)(2 sG
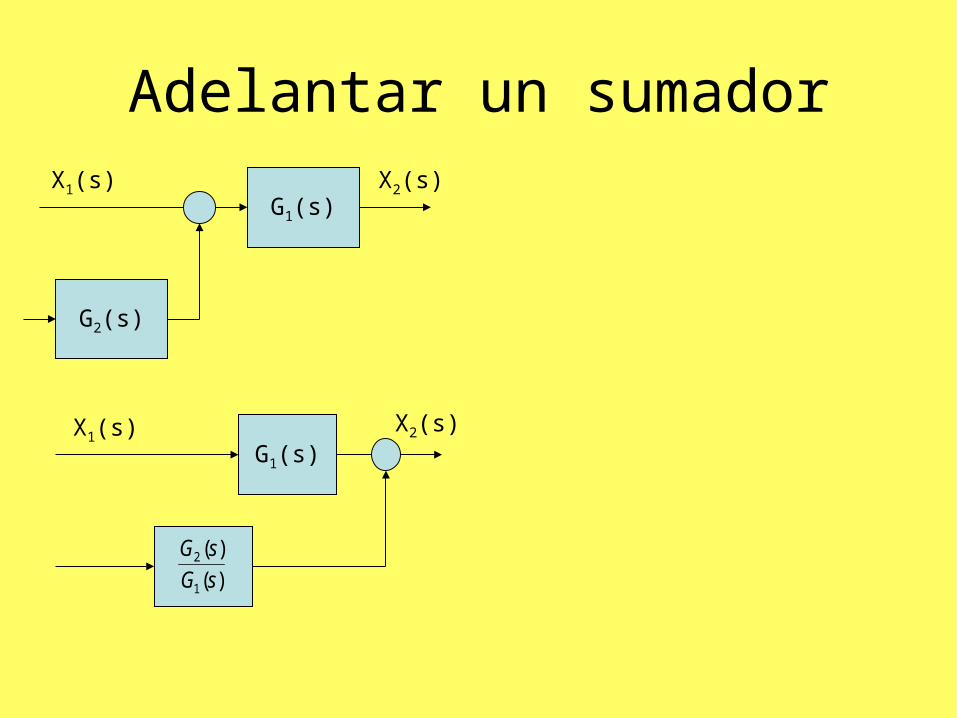
Adelantar un sumador
G1(s)
G2(s)
X2(s)X1(s)
G1(s)X2(s)X1(s)
)(
)(
1
2
sG
sG

Atrazar un sumador
G1(s)
G1(s)G2(s)
X2(s)X1(s)
G1(s)X2(s)X1(s)
)(2 sG

Propiedad asociativa de la suma
X4X1
X2 X3
X4X1
X2
X3
-
-
-

Ejemplos de diagramas de bloques dado en asignación
Procedimiento1. Adelantar el punto de bifurcación #12. Realizar retroalimentación unitaria3. Realizar suma4. Realizar bloques en serie
G(s)X XR(s) Y(s)
)(
1
sG
1)1)((1
)(
sG
sG
1 )(
1)(
sG
sG
1)(
1)(
sG
sG
Es importante saber que hay más de una forma de resolver este problema
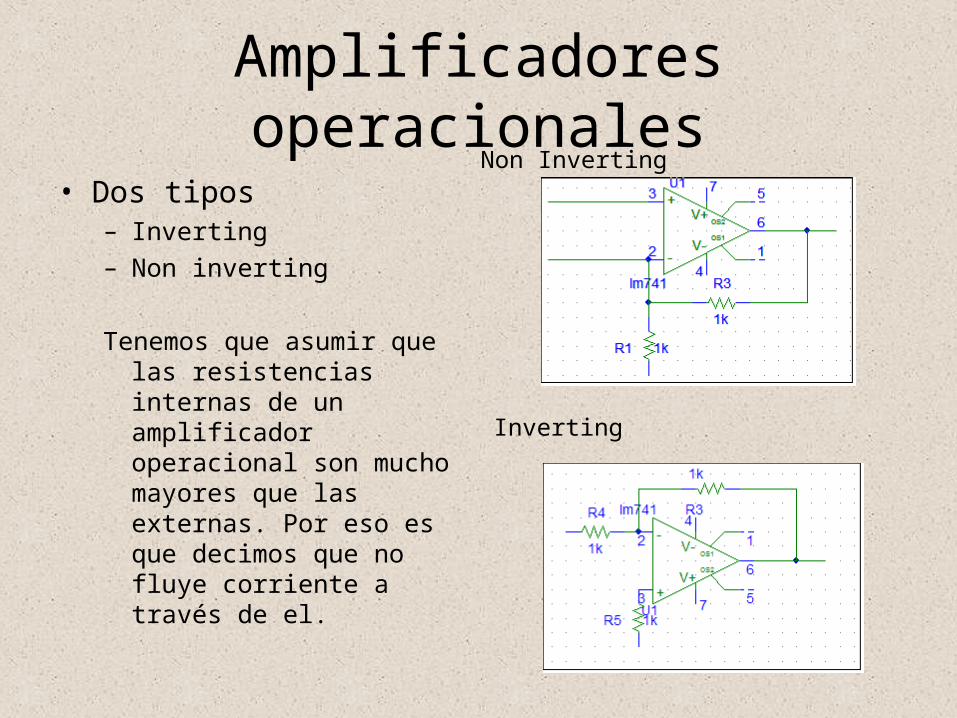
Amplificadores operacionales
• Dos tipos– Inverting– Non inverting
Tenemos que asumir que las resistencias internas de un amplificador operacional son mucho mayores que las externas. Por eso es que decimos que no fluye corriente a través de el.
Non Inverting
Inverting
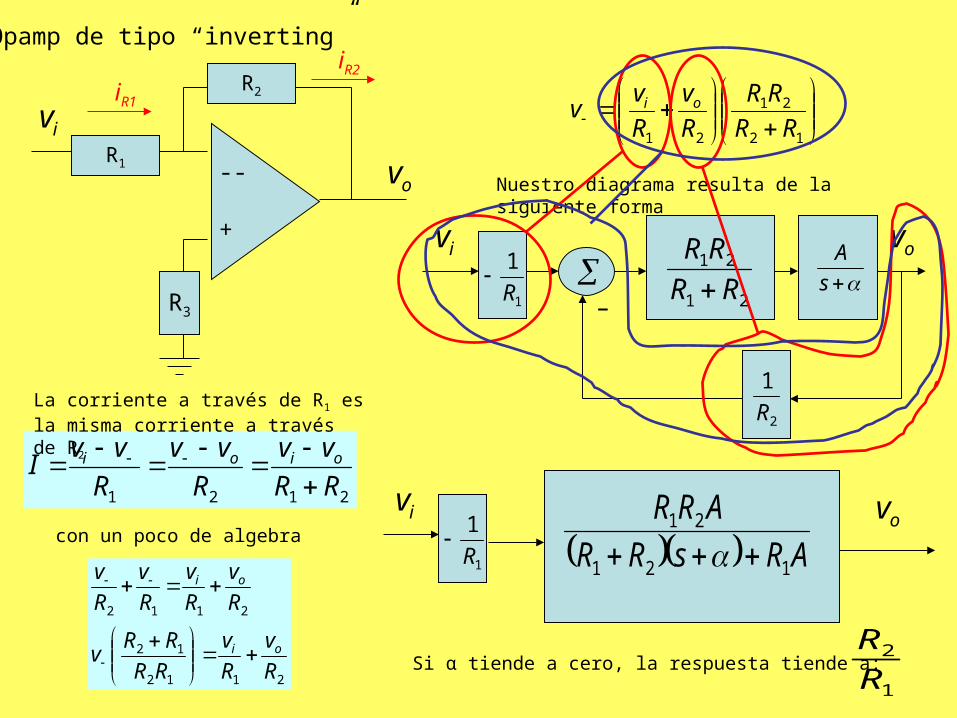
Opamp de tipo “inverting”
R2
R1 --
+
R3
ov
iv
2121 RR
vv
R
vv
R
vvI oioi
con un poco de algebra
2112
12
2112
R
v
R
v
RR
RRv
R
v
R
v
R
v
R
v
oi
oi
Nuestro diagrama resulta de la siguiente forma
ARsRR
ARR
121
21
1
1
R
ivov
Si α tiende a cero, la respuesta tiende a:
1
2
R
R
iR1
iR2
La corriente a través de R1 es la misma corriente a través de R2
12
21
21 RR
RR
R
v
R
vv oi
s
A
21
21
RR
RR
1
1
R
2
1
R
iv ov
–

R2
+
--
R1
ov
iv
Non Inveting
Las resistencias periferales al opamp son mucho más pequeñas que las resistencias internas al opamp.
La ganancia de este opamp es:
s
A
Como I = 0, V- es un divisor de voltaje de Vo entre R1 y R2.
Nuestro diagrama resulta de la siguiente forma
21
1
RR
Rvv o
s
A
21
1
RR
R
vov
v
21
1
RRARs
A

Problema del primer examenDado el siguiente circuito:a) Haga el diagrama de bloques del sistemab) Determine la función de transferencia del sistema usando reducción de bloques
6/70pts
oi
oio
vvv
vvvv
132
31
1
131
11 )(
oo
ooo
vvv
vvvv
221
121
2
2121
22 )(
X31
vi
32v1o
v1–
X21
v1o
21v2o
v2–
+ |
R3
R2
R1
+ |
R5
R4
vi
v1o
v1–
v2–
v2o
v1+
Para el primer opampito (opamp chiquito)
Para el segundo opampa (opamp argentino)
sAv1+– v1– v1o
sAv1o– v2– v2o
Bloques de construcción
Bloques de construcción
v2o
sAv1+– v1– v1o
sAv1o– v2– v2oX
–
v1+ X
X21v1o
v2–
21
X31
vi
32
v1–
–
X31
vi
32v1o
v1–
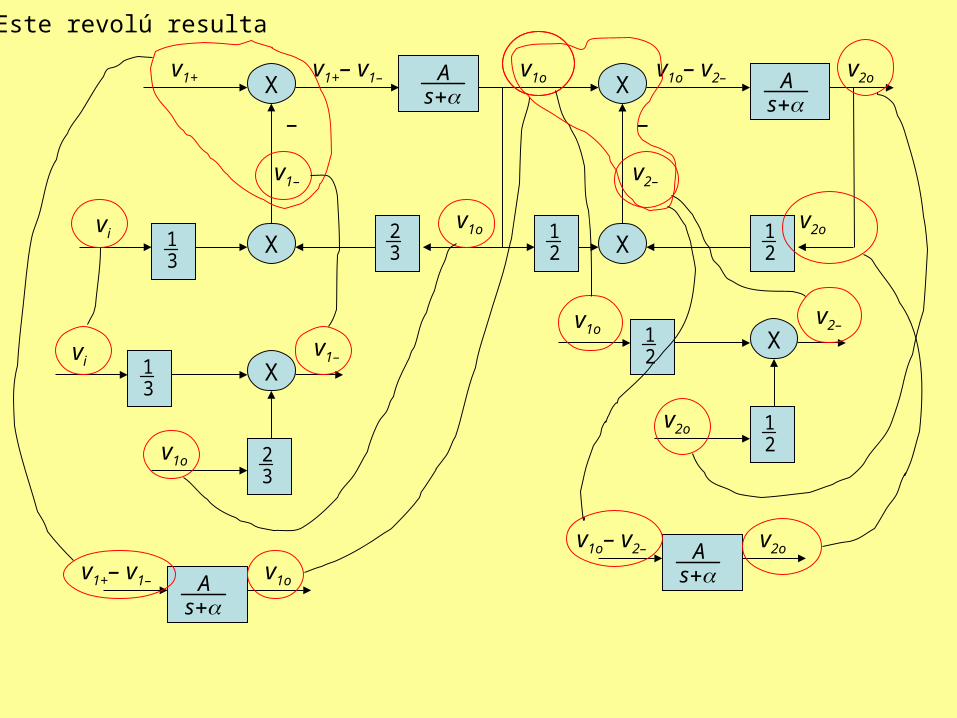
Este revolú resulta
sAv1+– v1– v1o
X21
v1o
21v2o
v2–
sAv1o– v2– v2o

Sistemas de primer orden
),()( sRas
asC
Un sistema de primer orden es aquel que posee un solo polo
ssR
1)(
sas
asC
1)(
atetc 1)(
Respuesta Forzada
Respuesta Natural
Cuando t = 1/a el exponencial llega al 37% de su valor
63.037.011)( atetc
La constante de tiempo tau es el valor para el cual e-αt llega al 37% o c(t) al 63%
La constante de tiempo es el recíproco del polo
Podemos calcular cuanto tiempo se demora la función en llegara a su valor final.
Laplace
apolo a
1

Tiempo de establecimientoTiempo de establecimiento (settling time) Ts: es el tiempo en el cual la respuesta alcanza un valor del 2% del valor final (necesita mejor explicación)
aT
at
e
etc
s
at
at
4
491.3
02.0
198.0)(
Podemos calcular cuanto tiempo se demora la función en llegara por primera vez a su valor final.
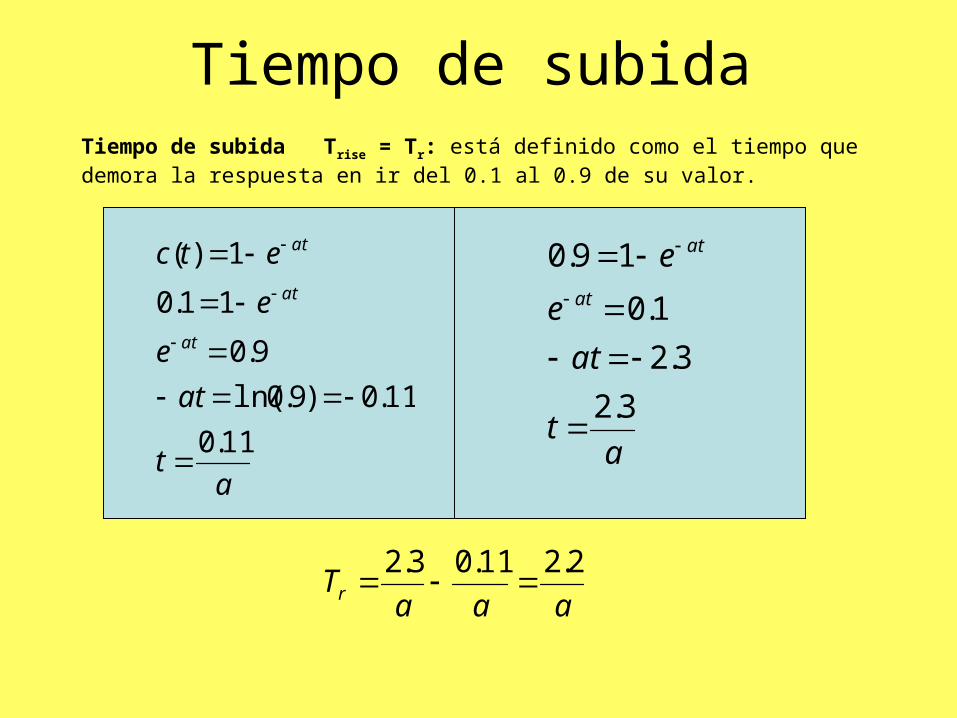
Tiempo de subidaTiempo de subida Trise = Tr: está definido como el tiempo que demora la respuesta en ir del 0.1 al 0.9 de su valor.
aaaTr
2.211.03.2
at
at
e
e
etc
at
at
at
11.0
11.0)9.0ln(
9.0
11.0
1)(
at
at
e
eat
at
3.2
3.2
1.0
19.0

Sistemas de Segundo Orden
• Hay cinco tipos de sistemas
– Estables• Críticamente amortiguado• Sub Amortiguado• Sobre Amortiguado• No Amortiguado (oscilatorio)
– InestablesDescontrolado

Sistema inestable
Usualmente se caracteriza por un sistema sin retroalimentación
La señal de salida del sistema crece sin cota.
Todos los sistemas están limitados en la cantidad de energía que pueden proveer.Los sistemas inestables llegan a un punto de saturación
G(s)X

Sistemas Estables
Para una ecuación de segundo orden:
22 2)(
nns
KsF
02 22 nns Ecuación característica
= Factor de Amortiguamiento
El factor de amortiguamiento va a determinar la naturaleza del sistema.
Tipo de Estabilidad
Críticamente
Amortiguado
Igual a 1
Sub Amortiguado Menor que
1 y mayor que 0
Sobre Amortiguado Mayor que
1
No Amortiguado Igual a 0

Tiemo de establecimiento: es el tiempo requerido para que las oscilaciones amortiguadas del Periodo oscilatorio alcancen 2% de su valor en estado estacionario
Porciento de rebase: Representa la diferencia porcentual entre el pico máximo y el valor final de la respuesta en estado estacionario.
Tiemo de subida: es el tiempo requerido para que la respuesta pase del 0.1 al 0.9 del valor final.Cuando la respuesta corta por primera vez el valor final.
Tiemo pico: es el tiempo requerido para que la respuesta alcance su primer pico o máximo pico
nsT
4
21
n
PT
Para sistemas de segundo orden
nrT
1039.146.076.1 23
100%21
eOS

Para mantener el Tp constante el producto tiene que permanecer constante, asi que decimos que la parte imaginaria debe de permanecer constante
21 n
Para mantener el %OS constante hay que mantener la razón de tiene que permanecer constante (factor de amortiguamiento constante).
1
Para mantener Ts constante hay que mantener la parte real de los polos constante
• Aumento en la frecuencia de la respuesta• Tiempo de crecimiento y tiempo de pico menores• Se manteiene la envoltura exponencial (generada por la parte real) • El tiempo de establecimiento se mantiene constante• Aumenta el %OS
• El %OS se mantiene constante • Tiempo de pico, de subida y de establecimiento varían.(menor tiempo a medida que los polos se alejan del origen)
• La frecuencia de la respuesta permanece igual• Tiempo de crecimiento y tiempo de pico se mantienen constantes• El tiempo de establecimiento aumenta• Varía el %OS, (aumenta)• A medida que los polos se alejan del eje imaginario, la respuesta se hace menos oscilatoria
σ
jwd
0 σ
jwd
σ
jwd

)()(
)146.1)(854.7(
9)(
99
9)(
146.13
854.721
2
tueKeKKtc
sssC
sssC
Respuesta Sobre Amortiguada
0 σ
jwd
)()cos()(
)()81)(81(
9)(
)(92
9)(
11
2
tutAeKtc
sRjsjs
sC
sRss
sC
Respuesta Sub Amortiguada
-40 σ
jwd
)()cos()(
)()3)(3(
9)(
)(9
9)(
1
2
tutAKtc
sRjsjs
sC
sRs
sC
Respuesta No Amortiguada
0 σ
jwd
Respuesta Críticamente Amortiguada
)()(
)()3(
9)(
)(96
9)(
32
321
2
tuteKeKKtc
sRs
sC
sRss
sC
tt
-3 0 σ
jwd
Sistemas de segundo orden
•Dos polos en el eje real negativo
•Respuesta Natural: dos exponenciales con constantes de tiempo iguales al recíproco de la ubicación de los polos
•Dos polos complejos
•Respuesta Natural: Una onda senosoidal envuelta en un exponencial cuya constante de tiempo corresponde al recíproco de la parte real de los polos
•Dos sobre el eje imaginario
•Respuesta Natural: Una onda senosoidal no amortiguada.
•La ausencia de parte real corresponde a una respuesta que no decrece
•Dos polos complejos
•Respuesta Natural: Un término exponencial y otro termino exponencial multiplicado por t.
Gráfica de polos Características

)6)(3(
5)(
sssT
)20)(10(
)7(10)(
ss
ssT
1446
20)(
2
sssT
9
2)(
2
s
ssT
2)10(
5)(
s
ssT
Naturaleza:Sobre amortiguadoPolos: S1,2= -3, -6Ceros: no tieneNaturaleza:Sobre amortiguadoPolos: s1,2= -10, -20Cero: s = -7
Naturaleza:NO AmortiguadoPolos: s1,2= j3, -j3Ceros: s = -2
NaturalezaSobre amortiguadoPolos: s1,2= -10, -10Ceros: s = -5
Problema 4.8ζ ζ ωn
-ζ ωn+(1- ζ2)1/2
4.5 S1,2= -3, -6
15 s1,2= -10, -20
3 s1,2=
0 0 s1,2= j3, -j3
.001 20 s1,2= -10, -10
1353 j
118
5.4
1200
15
112
3
Naturaleza:Sub amortiguadoPolos: s1,2= Ceros: no tiene
1353 j

Aproximación de sistemas a segundo orden
Los polos dominantes son los que se encuentran más cerca del origen. Si un sistemas tiene polos adicionales y estos se encuentran diez veces más lejos del origen que los polos dominantes, entonces se puede despreciar su efecto para así aproximar el sistema a uno de segundo orden.
X 820 1.2
veinte es más de diez veces mayor que 1.2

)()94.2)(20(
)4.2()(
)94.2)(20(
)4.2()(
2
2
sRsss
ssY
sss
ssG
20ptsProblema del segundo examen
Determine el por ciento de rebase para el siguiente sistema de lazo cerrado cuando se le alimenta un salto unitario a la entrada
1)( sR
Queremos ver si podemos eliminar este polo
Buscamos la ecuación característica para la aproximación
094.22 ss
de esta ecuación obtenemos que:
1210
2.12
4.2
n
n
El polo adicional está en s = -20 así que como es más de diez veces mayor,este sistema se puede aproximar a uno de segundo orden.
Las gráficas son más o menos así
n
a
percent overshoot 50%
2
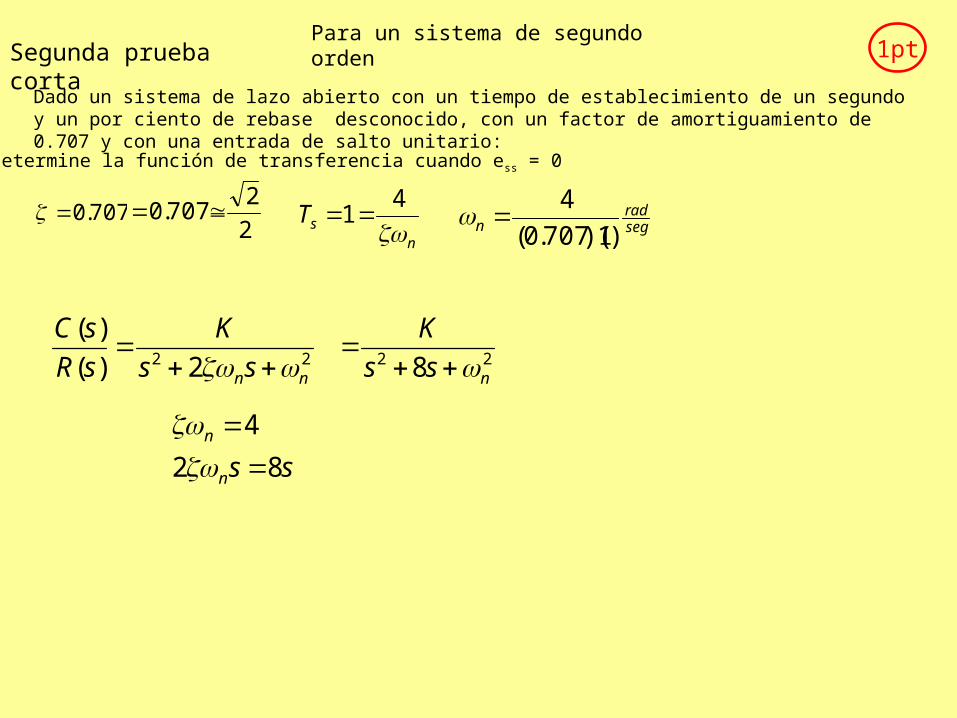
Segunda prueba corta
Dado un sistema de lazo abierto con un tiempo de establecimiento de un segundo y un por ciento de rebase desconocido, con un factor de amortiguamiento de 0.707 y con una entrada de salto unitario:
707.0
a) determine la función de transferencia cuando ess = 0
Para un sistema de segundo orden
nsT
4
1
1pt
22 2)(
)(
nnss
K
sR
sC
ssn
n
82
4
22 8 nss
K
2
2707.0
segrad
n )1)(707.0(
4

Problema 4.20Para cada uno de los sistemas de segundo orden encuentre el valor del factor de amortiguamiento, tiempo de subida, tiempo de establecimiento, tiempo pico y por ciento de rebase.
22
2
2 21212.13
121)(
nn
n
ssssT
%45.85100%
25.52.0
)05.0(039.1)05.0(47.0)05.0(76.1
73.15)05.0(12.01
40005.0)2.0(
4
05.0)2.0(2
02.0
2.004.0
204.002.0
04.0)(
2)05.0(1
)(05.0
23
22
22
2
2
eOS
T
T
T
ssssT
r
n
P
s
n
nn
n
%478.9100%2)6.0(1
)(6.0
eOS
11
)6.0(039.1)6.0(47.0)6.0(76.1 23 rT
22 )6.0(1111
n
PT
606.011)6.0(
44
nsT
11121 n 6.0)11(2
2.13
11
)(039.1)(47.0)(76.1 23 rT

Derivaciones
Buscando ζ con %OS
21
eOS
Buscando ζ con Ts y Tp
21
4
Psn
TT
22
2
ln
ln
OS
OS 1ln
12
2
2
OS
2
2
2
2 1
ln
OS
222
1
ln
OS
21lnln
eOS
Sacamos el logaritmo de la ecuación
21
ln
OS
21
ln
OS
Cuadramos
22 )4()(
4
PS
P
TT
T
14
12
2
P
S
T
T
222
4
1
P
S
T
T

Problema 4.23
Para los siguientes sistemas de segundo orden encuentre la localización del par de polos
a) %OS = 12% y TS = 0.6 seg b) %OS = 17% y TP = 0.5 segc) TP = 7 seg y TS = 3 seg
22,1 1 nn js
Los polos están dados por
Para el a) buscamos ζ con la formula conocidadada por el %OS 22
2
ln
ln
OS
OS
buscamos ωn con la formula conocida dada por TS
nsT
4
Para el b) buscamos ζ con la formula conocidadada por el %OS 22
2
ln
ln
OS
OS
buscamos ωn con la formula conocida dada por TP 21
n
PT
22 )4()(
4
PS
P
TT
T
Para el c) buscamos ζ con la formula conocida
dada por TP y TS
buscamos ωn con la formula conocida dada por TP o por TS n
sT
4
21
n
PT

Teorema del Valor Final
Teorema: lim f(t) existe si y solo si todos los polos de F(s) tienen parte real negativa con la exepción de un polo simple en s = 0.
Es decir, todos los polos estan en el lado izquierdo del plano complejo con la Posible exepción de un polo simple en s = 0.
Ejemplo:
5
1)(
2
ssFSea
Note que:
05
)(lim20
s
sssF
s
Sin embargo,
tsentf 55
1)(
Esta es una función de Naturaleza oscilatoriaO sea NO CONVERGEA ningun valor.
Otro ejemplo
)1(
1)(
sssF
Determine f(t) y discuta si el Teorema del Valor final aplica o no.
)()1()( tuetf t
Si )(lim tft
existe
Entonces )(lim)(lim0
ssFtfst
Sea
)(lim tf
Sin embargo,
1)(lim0
ssFs
Otro ejemplo
)1(
1)(
sssFSea
1
11
)1(
1
ssss
11
1lim)(lim)(lim
00
sssFtf
sst
El teorema no se puede aplicar aquí

Teorema del Valor Inicial
Si f(t) no tiene descontinuidades infinitas en t=0Entonces, lim f(t) cuando t tiende a cero por la Derecha es igual al lim F(s) cuando s tiende a Infinito
La inversa de la transformada de Laplace medianteExpansión en fracciones parciales. El método deExpansión en fracciones parciales aplica únicamenteA funciones racionales en “s” que sean estricatamentePropias.
Si )(lim0
tft
existe
Entonces )(lim)(lim ssFtfst
Ej:
5
762)(
2
23
ss
ssssF
Es impropia dado que el grado del numerador es mayor que el del denominador.

Funciones estrictamente propias con polos reales y distintos
)3()2()3)(2(
6)(
s
C
s
B
s
A
ssssF
1)3)(2(
6
0
s
sss
sA
)3(
2
)2(
31
)3)(2(
6)(
ssssss
sF
3)3)(2(
)2(6
2
ssss
sB 2
)3)(2(
)3(6
0
ssss
sC
)()231()( 32 tueetf tt

F(s) tiene polos reales y algunos están repetidos
22 )2()2()1()2)(1(
2)(
s
C
s
B
s
A
sssF
2)2)(1(
)1(2
12
sss
sA
)()222()( 22 tuteetf tt
22)2)(1(
)2(2
sss
sB
2)2)(1(
)2(2
2
2
2
sss
sC
No se puede hacer esto
0)1(
)1()2()1)(2(2
)2)(1(
)2(22
2
2
2
2
2
2
sss
Bs
sAAss
ss
s
ds
dB
Método de los residuos de Heavyside
2)1(
2
2
2
s
sds
dB
0
2)2(
2
)2(
2
)1(
2)(
ssssF
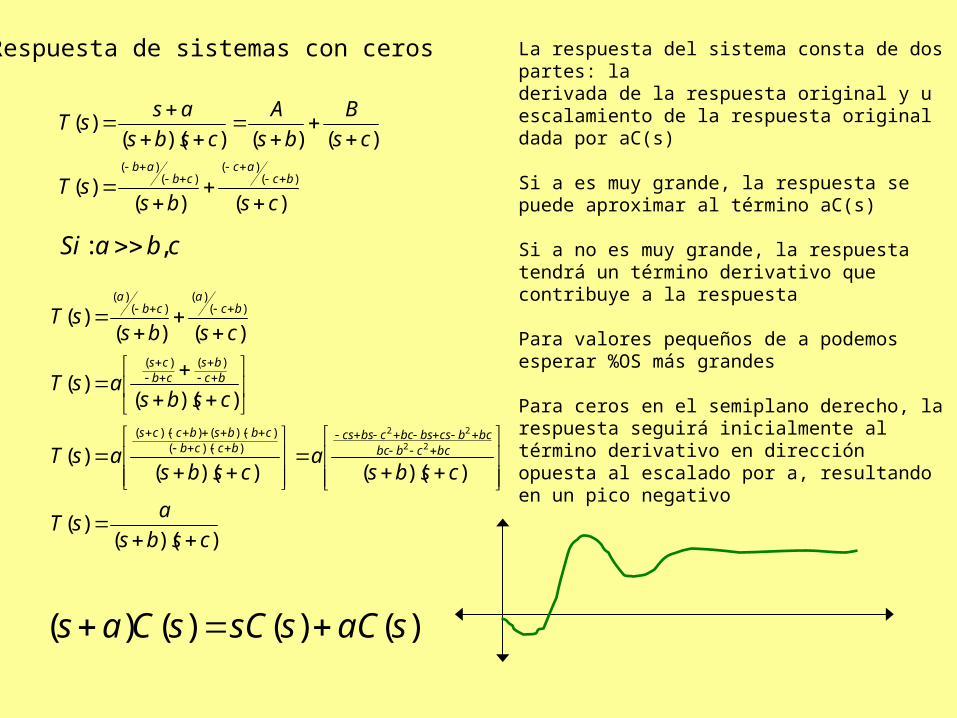
Respuesta de sistemas con ceros
)()()(
)()())(()(
)()(
)()(
csbssT
cs
B
bs
A
csbs
assT
bcac
cbab
cbaSi ,:
))(()(
))(())(()(
))(()(
)()()(
22
22
))(())(())((
)()(
)()(
)()(
csbs
asT
csbsa
csbsasT
csbsasT
csbssT
bccbbcbcbcsbsbccbscs
bccbcbbsbccs
bcbs
cbcs
bca
cba
)()()()( saCssCsCas
La respuesta del sistema consta de dos partes: la derivada de la respuesta original y u escalamiento de la respuesta original dada por aC(s)
Si a es muy grande, la respuesta se puede aproximar al término aC(s)
Si a no es muy grande, la respuesta tendrá un término derivativo que contribuye a la respuesta
Para valores pequeños de a podemos esperar %OS más grandes
Para ceros en el semiplano derecho, la respuesta seguirá inicialmente al término derivativo en dirección opuesta al escalado por a, resultando en un pico negativo

Dado por el cero en el semiplano positivoEste sistema se denomina “non minimum-phase system
))((
)()(
23 bassps
zsksT
Sistema superior con un cero
5.3
1
5
5.3
5
5.311
)6)(5)(5.3(
)4(25.26)(1
ssssssss
ssC
No es muy pequeño comparado con los otros residuos
Este término no se puede despreciar para aproximarlo a un sistema de segundo orden

En este caso si hacemos esto para tener un sistema de segundo orden
ssss
ssC
1
)6)(5)(01.4(
)4(25.26)(2
)01.4(
033.0
)6(
4.4
)5(
3.587.0)(2
ssss
sC
por lo cual podemos despreciar el término haciendo cancelación del cero en -4 y el polo en -4.01 para aproximar el sistema a un sistema de segundo orden
)(033.04.43.587.0)( 01.4652 tueeetc ttt

Estabilidad de sistemas lineales y estacionarios
Un sistema es estable del tipo BIBO (bounden input bounded output) (entrada acotada salida acotada) si y solo si toda entrada acotada produce una salida acotada
Si la salida es acotada solo para algunas entradas, entonces el sistema es marginalmente estable. Estos sistemas típicamente oscilan y su respuesta se sostiene a una amplitud constante sin decaer ni crecer.
Un sistema asintoticamente estable si todas sus respuestas debidas a condiciones iniciales decaen asintoticamente a cero.
Un sistema es inestable si alguna de sus respuestas crece sin cota

Prueba cortaHallar el rango de k que hace al sistema estable
X K )6(
1
ss–
12/12pt
)3(
1
ss
s
0)189(
0)1()3)(6(
0)3(
1
)6(1)()(1
22
2
KKssss
sKsss
ss
s
ss
KsHsKG
s4 1 18 K
s3 9 K
s2 α K
s1 β
s0 K
9
)18(9 K
)9()(9
KKK
0189)( 234 KKsssssD

Supuesto problema de examen de Raúl Torres
Dado que G(s) es un sistema de segundo orden sin ceros
R(s) ess Ts
1 0
1/s 0 2 seg
1/s2 0.1
Según estas características el sistema sabemos que el sistema es tipo 1
Determine G(s)
Identificar el sistema según la tabla que sabemos de memoria
R(s) 0 1 2
1 0 0 0
0 0
0
s1
21s
31s
pk11
vk1
ak1
Para un sistema de lazo cerrado esto es un sistema Tipo 1 de la forma:
)()(
1pss
KsG
Para retroalimentación unitaria
Kpss
KsGT
)(
)(1
G(s)R(s) C(s)

Nos dicen que TS = 2 segundos
24
n
ST así que si ζωn = 2, entonces
p1 = 4 = 2 ζωn
Para este sistema la tabla nos dice que
1.01
1)(
v
sRss k
es
Así que kv = 10
110
0
)(lim
)(lim
p
K
pss
sKk
ssGk
sv
sv
410
K
así que K = 40
Continuación de supuesto problema

Error en régimen permanenteLazo abierto
G(s)
Definimos: E(s) = R(s) – Y(s)
E(s) es la señal de error
Para un sistema estable tiene dos polos en el semiplano izquierdo
)()(lim)(lim00
sYsRsssEess
ss
)(lim)(lim00
sYssRss
1 para R(s)=1/s v.f.
Caso General
)(1)(lim
)()()(lim
0
0
sGssRe
sRsGsRse
sss
sss
Mediante el teorema del valor final si ambos límites existen, entonces
El límite de e(t) para t infinito existe si y solo si todos lospolos de E(s) están en el lado izquierdo del plano complejo con la posible excepción de un polo simple en cero.
Ilustración
sea
)()()(
)()()()(
)())((
)())(()(
21210
2
2
1
10
21
21
tueKeKeKKte
ps
K
ps
K
ps
K
s
KsE
pspspss
zszszsKsE
tpn
tptp
n
n
n
qe
n
0)(lim Ktet
solo si Re(-p1)<0
)()()(
lim)(lim2
2
1
10
0n
n
s ps
K
ps
K
ps
K
s
KsssE

Análisis en el dominio de la frecuencia
G(s)
H(s)
R(s) C(s)
E(s) = R(s) – C(s)
los polos del error son dados por la misma función característica que los polos del sistema
Pero sabemos:
)(1
)(
)(1
)(1)()(
)()(1
)()()(
)()(1
)()(
sG
sR
sG
sGsRsE
sRsG
sGsRsE
sRsG
sGsC
En general
)())((
)())(()(
21
21
n
q
pspspss
zszszsKsG
donde N = “tipo del sistema” = #polos de G(s) en s = 0
)(
)())((
)())((1
1)(
21
21
sR
pspspss
zszszsKsE
n
q
Error en respuesta a un escalón
ssR
1)(
ssGsE
1
)(1
1)(
)(lim1
1
)(lim1
1
)(1
1lim)(lim
0
000
sGe
sGsGsssEe
s
ss
sss
ss
Si N = 0 (sistema de tipo cero) (cero polos en s= 0)
Para N = 0 y r(t) = u(t) (escalón)
pss k
e
1
1constante
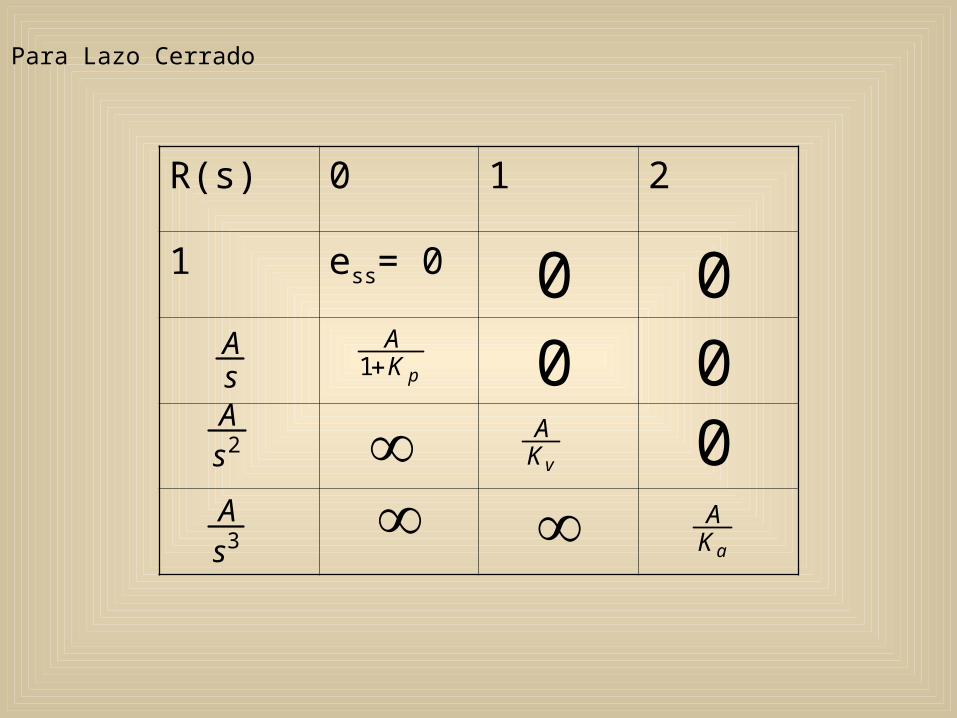
R(s) 0 1 2
1 ess= 0
sA
2sA
3sA
pKA
1
vKA
aKA
00
000
Para Lazo Cerrado

Disturbio y Sensibilidad
Sensibilidad – Caso se afecta al sistema a un cambio en parámetro
Sistema de lazo abierto
G(s)Y(s)R(s)
D(s)
R(s)G(s)
Y(s)
D(s)
Filtro
Sistema de lazo abierto
)()()()(
)()()(
sDsGsRsG
sDsRsG
Efecto del disturbio en la señal Y(s)
Para un disturbio en la entrada
Para un disturbio a la salida
G(s)
D(s)Y(s)
R(s)
No hay notas aqui

Para Sistema de lazo cerradoCon Disturbios a la entrada
G(s)
H(s)
R(s) C(s)
D(s)
)()(1
)()(
)()(1
)()()(
sHsG
sDsG
sHsG
sRsGsC
La ventaja es que el sistema de lazo cerrado filtra los ruidos a la entrada
G(s)
H(s)
R(s) C(s)D(s)
)()(1
)(
)()(1
)()()(
sHsG
sD
sHsG
sRsGsC
)()(
)(
)(
)()(
sHsG
sD
sH
sRsC
Para |G(s)H(s)| >> 1
Para |G(s)H(s)| >> 1
)(
)()()(
sH
sDsRsC
Examen será el 10 de abril de 2003
Disturbios a la salida

Sensibilidad
yy
sY
y
yS
0
)( lim
Sensibilidad de la señal Y(s) a cambios en el parámetro α
y
yS sY
)(
Foto transistor
0.9
480nm λ
Que su control acepte cambios en la planta
1)(
)(
)(
)(
)(
)(
)(
)(
)(
)(
sR
sG
sG
sRS
sY
sG
sY
sGS
sY
sY
G(s)R(s) Y(s)=G(s)R(s)
G(s)+ΔG(s)R(s) Y(s)+ΔY
)()()(
)()()()()(
)()()()()()(
)()()()()(
sRsGsY
sRsGsYsYsY
sRsGsRsGsYsY
sRsGsGsYsY
1YGS
Implica que los cambios en el parámetrose reflejan directamente a la salida.
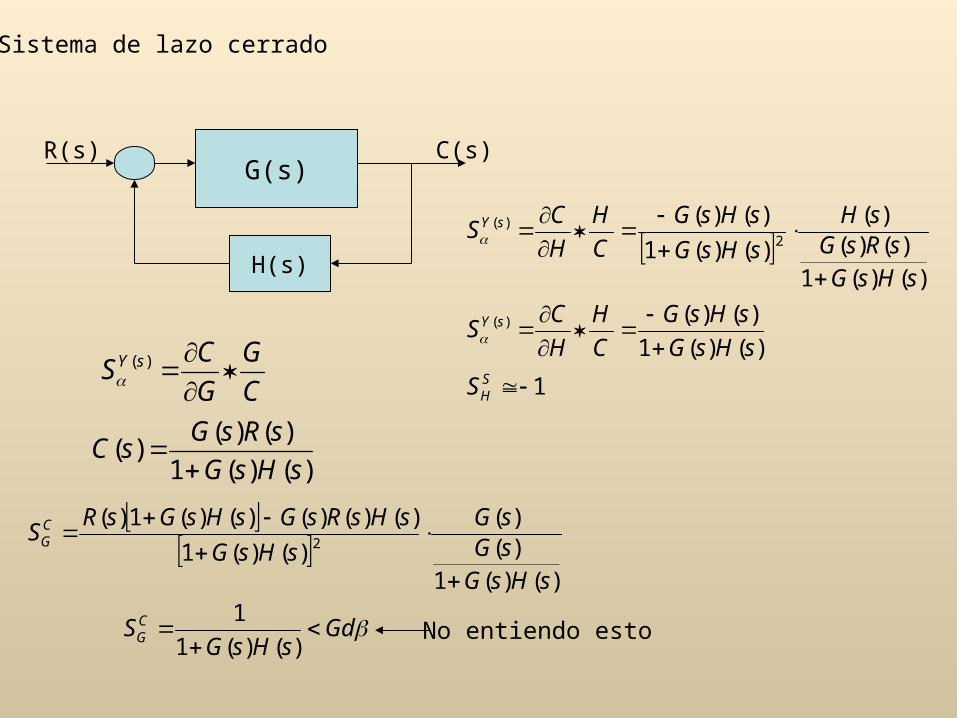
Sistema de lazo cerrado
G(s)
H(s)
R(s) C(s)
C
G
G
CS sY
)(
)()(1
)()()(
sHsG
sRsGsC
)()(1)()(
)()(1
)()()()()(1)(2
sHsGsGsG
sHsG
sHsRsGsHsGsRS C
G
GdsHsG
S CG
)()(1
1No entiendo esto
1
)()(1
)()(
)()(1)()(
)(
)()(1
)()(
)(
2)(
SH
sY
sY
S
sHsG
sHsG
C
H
H
CS
sHsGsRsG
sH
sHsG
sHsG
C
H
H
CS
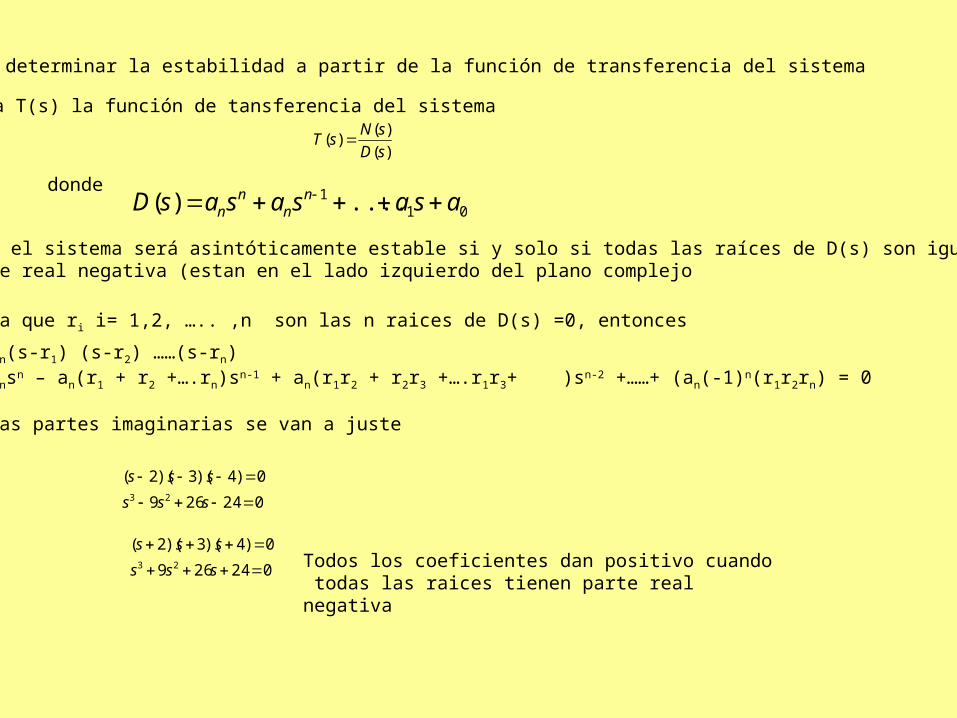
Deseamos determinar la estabilidad a partir de la función de transferencia del sistema
Sea T(s) la función de tansferencia del sistema
)(
)()(
sD
sNsT
donde01
1 ....)( asasasasD nn
nn
Sabemos que el sistema será asintóticamente estable si y solo si todas las raíces de D(s) son iguales a cerotienen parte real negativa (estan en el lado izquierdo del plano complejo
Suponga que ri i= 1,2, ….. ,n son las n raices de D(s) =0, entonces
D(s) = an(s-r1) (s-r2) ……(s-rn)D(s) = ansn – an(r1 + r2 +….rn)sn-1 + an(r1r2 + r2r3 +….r1r3+ )sn-2 +……+ (an(-1)n(r1r2rn) = 0
Las partes imaginarias se van a juste
024269
0)4)(3)(2(23
sss
sss
024269
0)4)(3)(2(23
sss
sssTodos los coeficientes dan positivo cuando todas las raices tienen parte real negativa

Dos condiciones necesarias para que todas las raices de D(s) tengan parte real negativa
1. que todos los coeficientes de D(s) teengan el mismo signo2. que nincun coeficiente sea cero3. estas condiciones no son suficientes para garantizar estabilidad sin embargo la podemos
usar como prueba preliminar ya que si alguna no se cumple inmediatamente podemos concluir que el sistema es inestable. pero si ambas se cumplen no podemos concluir nada con respecto a estabilidad
Contra ejemplo
82)( 23 ssssq
q(s) satisface la prueba preliminar sin embargo q(s) = (s+2)(s2 – s +4)donde los polos tienen parte real positiva
Los cambios de signo en la columna izquierda del arreglo R-H indican la cantidade raices con parte real positiva (en el lado derecho del plano complejo)

Criterio de Routh y HurwitzProvee una condición necesaria y suficiente para evaluar la estabilidad de sistemasLineales y estacionarios a partir de su polinomio característico. El método está basado en un arreglo de números formado a partir de los coeficientes del polinomio característico.
Tres posibilidades:•Caso1: No hay cambios de signo, No hay fila de ceros, El sistema es estable•Caso2: Hay ceros en la primera columna pero la fila no es totalmente de ceros. Se sustituye el cero por un epsilon y se asume positivo. Luego se busca el limite cuando epsilon tiende a cero por la derecha y se ve que signo tiene epsilon•Caso3: Fila de ceros. Se diferencia la ecuación auxiliar. La ecuación auxiliar es un factor de la ecuación característica

Dado el polinomio
31
2
11
1
nn
nn
nn aa
aa
ab
51
4
13
1
nn
nn
nn aa
aa
ab
31
31
11
1
nn
nn
nn bb
aa
bc
51
51
13
1
nn
nn
nn bb
aa
bc
012
21
1)( asasasasasq nn
nn
nn
Formamos el siguiente arreglo
0
3
2
1
s
s
s
s
s
n
n
n
n
na 2na
4na1na 3na
5na
1nb 3nb 5nb
1nc 3nc 5ncDonde:

R(s) C(s)K )2)(1(
1
sss
Ksss
K
Ksss
K
sR
sC
23)2)(1()(
)(23
Ksss 23 23
s3 1 2 0
s2 3 K
s1 0
s0 K3
6 K
K = 2, K = 6, K = 8
estable marginalmente estable
inestable
s3 1 2 0
s2 3 K
s1 4/3 0
s0 K
con K = 2
s3 1 2 0
s2 3 K
s1 -2/3 0
s0 K
con K = 8
s3 1 2 0
s2 3 K
s1 0 0
s0 K
con K = 6
fila de ceros
(caso especial)

01432 234 ssss
s4 1 3 1
s3 2 4 0
s2 1 1
s1 1 0
s0 1
01432 234 ssss
s4 1 3 5
s3 2 4 0
s2 1 5
s1 -6 0
s0 5
Dos cambios de signo en la primera columnaDos raices en la parte real positiva

01011422 2345 sssss
s5 1 2 11
s4 2 4 10
s3 0 6 0
s2 10
s1 d1
s0 10
124
124
722410 2
1
d
Un polinomio de orden impar, obligao,cruza en algun punto el eje

R(s) C(s)K )1)(1(
12 sss
01234 Ksssss
s4 1 1 K
s3 1 1
s2 έ K
s1
s0 K
K
si epsilon 0+ hay dos cambios de signosi epsilon 0- hay dos cambios de signo
Conclución: No es posible estabilizar este sistema

R(s) C(s)K )1)(1(
12 sss
0123 52 Kssss
s3 1 5
s2 2 K
s1 0
s0 K
210 K
Si K es igual a diez hay una fila de ceros en el arreglo R-H(caso 3)
Cuando esto ocurre, el polinomio correspondiente o la fila sobre la fila de ceros en este caso 2s2 + 10 se convierte en un factor del polinomio original
Las raíces del polinomio para K = 10 son s1 = -2 y s2,3 = raíz cuadrada de cinco
Para K = 10 el sistema queda uno marginalmente estable
)1)(102( 212 ss

Determine si el sistema se puede estabilizar para algún valor de K
R(s) C(s)
)2)(1(
)1( 2
ss
sK
Ecuación característica:
)2(3)1( 2 KssK
s2 (K+1) (2+K)
s1 3 0
s0 (2+K)
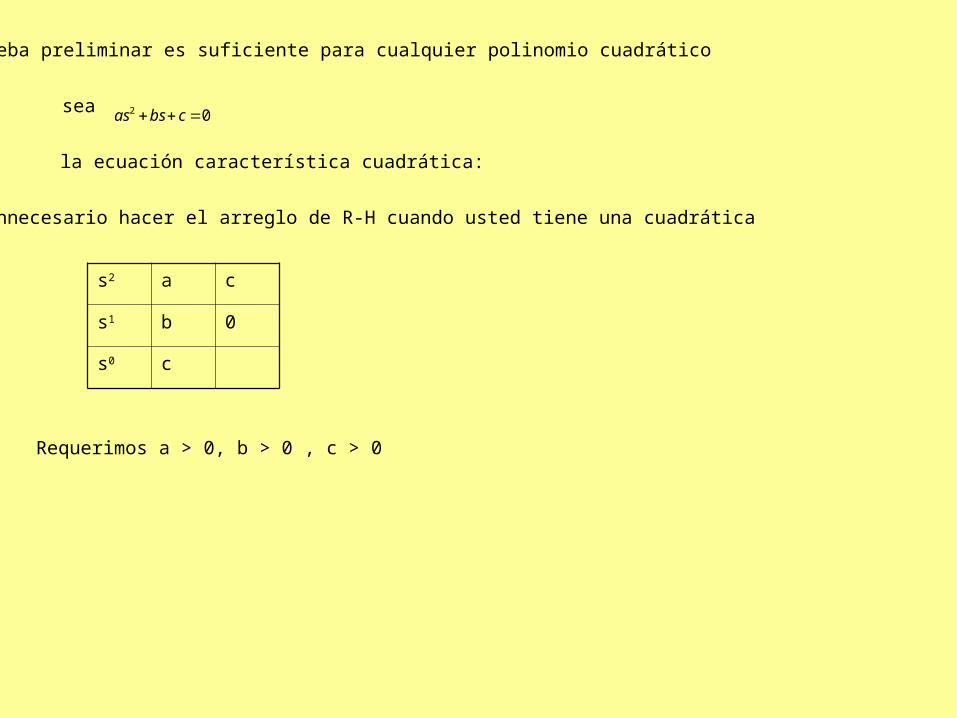
La prueba preliminar es suficiente para cualquier polinomio cuadrático
sea 02 cbsas
la ecuación característica cuadrática:
*Es innecesario hacer el arreglo de R-H cuando usted tiene una cuadrática
Requerimos a > 0, b > 0 , c > 0
s2 a c
s1 b 0
s0 c

R(s) C(s)
)3)(1(
)6(
sss
sK
Ecuación característica:
06)3(4 23 KsKss
Arreglo R-H
s3 1 (3+K)
s2 4 6K
s1
s0 6K4212 K

Ejemplos discutidos en clase
Dado D(s) decir si es estable, inestable o condicionalmente estable
013223 2345 sssss
0
1
2
3
4
5
s
s
s
s
s
s 1 2 3
3 2 1
34
38 0
-4
Despues que pasó todas las pruebas, el sistema es inestable. Este ejemplo se llama NO TE CONFIES.
1 243
•Todos los coeficientes son positivos•No faltan coeficientes
Prueba preliminar
Primer Ejemplo
•Todos los coeficientes son positivos•No faltan coeficientes
Prueba preliminar
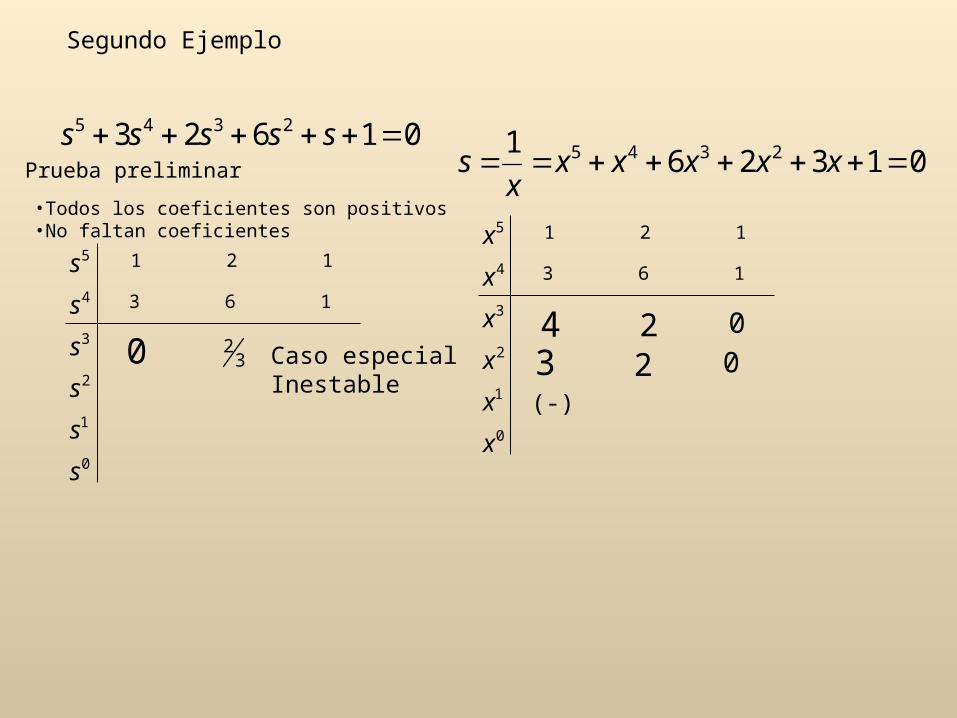
01623 2345 sssss
0
1
2
3
4
5
s
s
s
s
s
s 1 2 1
3 6 1
320 Caso especial
Inestable
0
1
2
3
4
5
x
x
x
x
x
x 1 2 1
3 6 1
24
013261 2345 xxxxxx
s
0
23 0(-)
Segundo Ejemplo

•Todos los coeficientes son positivos•No faltan coeficientes
Prueba preliminar
012233 2345678 ssssssss
0
1
2
3
4
5
6
7
8
s
s
s
s
s
s
s
s
s 1 3 1 2 1
1 3 2 1 0
10 Es inestable por el cero y no por el negativo uno
Tercer Ejemplo
0
1
2
3
4
5
6
7
8
x
x
x
x
x
x
x
x
x 1 2 1 3 1
1 2 3 1 0
20
m n
0lim)1(
lim00
m
Si α > 0 m > 0

•Todos los coeficientes son positivos•No faltan coeficientes
Prueba preliminar
0133 2345 sssss
0
1
2
3
4
5
s
s
s
s
s
s 1 3 1
1 3 1
00 0
013)( 24 sssA
Cuarto ejemplo
A(s) siempre es un factor de la Ecuación Característica
13 24 ss 133 2345 sssss
1s
2
53
2
531131)( 2224 sssssssD
Lo que hacemos es lo siguiente
0
1
2
3
4
5
s
s
s
s
s
s 1 3 1
1 3 1
00 0Fila anterior: ecuación auxiliar: A(s) 2
3 1
310
1
ssds
sdA64
)( 3
4 6
TODOS POSITIVOS

Problema 6.4
Cuántos polos se encuentran en el el lado izquierdo y cuantos se encuentran en el lado derecho Para el sistema de lazo abietro
152084
34)(
234
2
ssss
sssG
Ningun cambio de signo en la primera columna, por lo tanto ninguna raiz en el lado derecho del plano compejo por lo tanto el sistema es estable
S4 1 8 15
S3 4 20 0
S2 3 15 0
S1 0 0
s0 15
6

Problema 6.8
Determine si el sistema de retroalimentación unitaria es estable para:
4321
240)(
sssssG
G(s)
Hay dos cambios de signo en la primera columna del arreglo. Por lo tanto hay dos raíces en la parte real positiva (en el lado derecho del semiplano.EL SISTEMA ES INESTABLE
S4 1 29 264
S3 10 26 0
S2 264 2640
S1 -74
S0
264262910 234 ssss

Problema 7.3
Para el sistema mostrado ¿qué error podemos esperar para una entrada de 15u(t)
1/s 5/(s+1)
2
s+3

Problema 7.12Para el sistema encuentre Kp , Kv, y Ka
Encuentre el error en estado estacionario para entrada de 50u(t), 50tu(t), y 50t2u(t)
Diga de que tipo es el sistema
)2)(1(
5
sss
3s

Problema 7.14
)5(
)2(100
ss
s
s
1000
10
Diga que tipo de sistema es este

Problema 7.43Dado el sistema mostrado haga lo siguiente:a) Derive la expresión para el error, E(s) = R(s) – C(s), en términos de R(s) y D(s)b) Derive el error en estado estacionario e(inf), si R(s) y D(s) son funciones de salto unitarioc) Derermine los atributos de G1(s), G2(s) y H(s) necesarios para que el error en estado estacionario
llegue a cero
G1(s) G2(s)
H(s)

Problema 7.44
Dado el siguiente sistema encuentre la sensitividad de el error en estado estacionarioDebido al parametro a. Asuma que hay una entrada de salto unitario. Grafique la Sensitividad como función del parametro a.
(s+a)
)4)(1( sss
K

Problema 7.45
Para el sistema encuentre la sensitividad de el error en estado estacionario para cambiosEn K1, y en K2 , cuando K1=100 y K2=0.1. Asuma que las entradas de salto son en la entradaY en el distrurbio.
K1
22
s
K
s+1

Reglas para Root locus
Condición angular : hay root locus si los ángulos G(s)H(s) = 180 mas o menos n360Condición de magnitud: |KG(s)H(s)| = 1Note que 1 + KG(s)H(s) = 0 se puede escribir de la forma KG(s)H(s) = -1 + j0 = 1ángulo -180+-k360 para valores de k = 1,2,3…………
Root locus comienza en los polos y termina en los ceros X 0
Root locus existe a la izquierda de un numero impar de polos y ceros
Root locus es simétrico con respecto al eje real
Regla # 1
Regla # 2
Regla # 3
Regla # 4
Regla # 5
Las asíntotas señalan a los ceros en infinito
todas las asíntotas se intersecan en un punto ,σa y ese punto se encuentra e el eje real
aa n
cerospolos
na = número de polos – número de cerosna = numero de asíntotas o ceros en el infinito
an
n360180

Regla # 6Para hallar el intercepto con el eje imaginario usamos R-H y hacemos que el sistema sea oscilatorio creando una fila de ceros y buscando la frecuencia de oscilación
La frecuencia de oscilación es el intercepto con el eje imaginario.
0)9)(6)(3(
1
0)()(1)(
sss
K
sHskGsD
01629918
0)5415)(3(23
2
ksss
ksss
Regla # 7
Puntos de ruptura- Es donde el root locus abandona el eje realA) Pto Ruptura de salidaK es máximo con respecto a S
B) Pto. Ruptura de EntradaK es mínimo con respecto a S
C) Pto Ruptura de bifurcaciónK es un punto de inflexión
0)(
ds
sdK
0)(
ds
sdK
0)(
ds
sdK
Regla # 8Ángulo de salidad o ángulo de entrada. En el eje el ángulo de salida o entrada de los puntos de rupturava a ser igual a 1800 #de polos en el punto de ruptura.Fuera del eje se usa la condición angular.

Ejemplos de clase
Puntos de ruptura analíticamente:

Root locus es un procedimiento gráfico usado para determinar los polos de un sistema de lazo cerrado. Gráficamente, el locus es el conjunto de pasos en el plano trazado por los polos de lazo cerrado mientras se varía la ganancia (K) desde cero hasta infinito.
En términos matemáticos dada una función KG(s) donde K es la ganancia del root locus y la función de transferencia para lazo cerrado es:
El root locus esta dado por las raíces de 1 +KG(s) = 0 mientras K varía desde cera hasta el infinito. Mientras los valores de K cambian, las soluciones para la ecuación cambian
)()(1
)(
sHsKG
sKG
La ecuación característica de un sistema está basada en la función de transferencia que sirve de modelo para el sistema. Ella contiene la información necesaria para determinar la respuesta de un sistema dinámico. Solo hay una ecuación característica para un sistema dado
La ganancia del root locus, típicametne llamada K, es la ganancia del sistema de lazo cerrado. Mientras determinamos el root locus, variamosla ganancia desde cero hasta el infinito. Notamos que las variacionescorrespondientes en los polos de lazo cerrado determinan el root locus.Mientras la ganancia se mueve desde cero hasta el infinito, los polos se mueven desde los forward loop polos hasta los forward loop ceros o el infinito.

El criterio angular se usa para determinar los ángulos de salida para las partes del root locus que se encuantran cerca de los polos de lazo abierto y para saber los ángulos de llegada para las partesd de l root locus que se encuentran cerca de los ceros de lazo abierto. Cuando este criterio es utilizado juntamente con el criterio de magnitud, se puede determinar si un punto en el plano complejo es o no es parte del root locus
El criterio angular está definido como <KG(s) = -180
Note que se puede usar +180 en vez de -180. El uso de -180 es solo una convención. Como +180 y -180 son el mismo ángulo, cualquiera produce el mismo resultado. El criterio angular es el resultado directo de la definición de root locus; es otra forma para expresar los requisitos del locus. El root locus está definido como el conjunto de raíces que satisfacen la ecuación característica 1 + KG(s) = 0 o equivalentemente KG(s) = -1 Tomando la fase de cada lado de la ecuación resulta en criterio angular.
El criterio de magnitud se usa para determinar las localizaciones de un conjuntode raíces en el plano complejo para un valor de K dado. Matemáticamente, el criterio de magnitud es |KG(s)| = 1
El criterio de magnitud es un resultado directo de la definición de root locus;es otra forma para expresar los requisitos del locus. El root locus se define comoel conjunto de raíces que satisfacen la ecuación característica 1 + KG(s) = 0o equivalentemente, KG(s) = -1
Tomando la magnitud de cada lado de la ecuación obtenermos el criterio de magnitud

El ángulo de salida es el ángulo al cual en el cual el locus sale de un polo en el plano complejo. EL ángulo de llegada es el ángulo en el cual el locus llega a un cero en el plano complejo.
Por convención, ambos tipos de ángulos se miden relativamente a un rayo que comienzaen el origen y se extiende hacia la derecha a través del eje real del plano complejo.
Ambos, ángulo de salida y entrada se encuentran usando el criterio ángular
Los puntos de corte ocurren en el locus donde dos o más loci convergen o divergen.Los puntos de corte suelen ocurrir en el eje real pero pueden aparecer en cualquier sitio del plano complejo.
El loci que se acerca/diverge desde un punto de corte lo hace a ángulos que se encuentran colocados equitativamente con respecto al punto de corte.Los ángulos a los cuales ellos llegan/salen son una función del número de loci quese acerga/diverge del punto de corte.
El criterio de estabilidad de Routh-Hurwitz es un método para determinar si un sistema es on o es estable basado en los coeficientes de la ecuación característicadel sistema. El particularmente de ayda para los sistemas de un orden mayor (grande)porque no requiere que las expresiones del polinomio sean factorizadas.

La función de transferencia define las relaciones entre las entradas y salidas de un sistema. La función de transferencia es típicamente escrita en el dominio dela frecuencia, en vez del dominio del tiempo. La transformada de LaPlace se usapara representar el dominio del tiempo en el dominio de la frecuencia.
Si x(t) es la entrada a un sistema y y(t) es la salida del sistema, y la transformada LaPlace de la entrada es X(s) y la transformada de LaPlace de la salida es Y(s),entonces la función de transferencia entre la entrada y la salida es Y(s)/X(s)

Comenzamos con los polos y ceros del "forward loop". Como el locus representa elpaso de las raíces (específicamente de los polos de lazo cerrado) mientras la gananciase varía, comenzamos con la configuración en la cual la ganancia del sistema de lazocerrado es igual a cero. Cada locus comienza en el polo de lazo forward y terminaen forward loop cero. Si el sistema tiene más polos que ceros, entonces algunos de los loci terminan en ceros localizado infinitamente lejos de los polos.
Varias root loci tienen paso en el eje real. La parte del eje real que tiene la porción del locus es determiado utilizano la siguiente regla:
Si un número impar de polos y ceros existe en un punto que descansa a la derecha del punto en el cual se descansa en el eje real, entonces es punto corresponde al locus.
Las asíntotas indican a donde los polos van a ir mientras la ganancia se acerca ainfinito. Para sistemas con más polos que ceros, el número de asíntotas es igualal número de polos menos el número de ceros. En algunos sistemas no hay asíntotas;cuando el número de polos es igual al número de ceros en cada locus, se termina en un cero en vez de asintóticamente en el infinito.
Notar que es posible dibujar un root locus para sistemas con más ceros que polos, pero esos sistemas no representan sistemas físicos. En estos casos uno puede pensar que algunos de los polos estan colocados en el infinito.

Los puntos de corte existen donde dos o más loci se unen y luego divergen. A pesar de que los encontramos frecuentemente en el eje real, ellos pueden ocurrir en cualquierotro sitio del plano complejo.
Cada punto de corte es un punto donde una doble raíz existe para algún valor de K.Matemáticamente, dado la ecuación de root locus 1 + KG(s) = 0donde la función de transferencia G(s) consiste de un numerador, A(s), y un denominador
B(s), entonces los puntos de ruptura se pueden determinar de las raíces de:
Si K es real y positivo en un valor de s que satisface la ecuación, entonces el punto es uno de ruptura.
Siempre habrá un número par de loci alrededor de cualquier punto de ruptura;para cada locus que entra el locus, deberá haber uno que sale.
El criterio angular determina cuál es la dirección del movimiento de las raícesmientras se cambia la ganancia desde cero hasta el infinito

Los puntos donde el root locus interseca el eje imaginariose indican con los valores
de K en los cuales el sistema de lazo cerrado es marginalmente estable. El sistema de'lazo cerado será inestable para cualquier ganancia para la cual el locus se encuentreen la parte real positiva del plano complejo.
Si el root locus cruza el eje imaginario desde izquierda a derecha en un punto K=K0y se mantiene completamente en la parte derecha del plano complejo, entonces el sistemaes insetable para todos los valores de K>K0. Por lo tanto, sabiemos que el valor de K0es bien útil.
Algunos sistemas son particularmente nasty cuando su root locus entra y sale del eje imaginario. En estos sistemas, incrementar la ganancia de root locus causará que el sistema se vuelva inestable inicialmente y luego se vuelva estable de nuevo.

18
162)18(9918
162)18(99
k
k
Hacemos alpha igual a cero y eso implica que k= 90(18)
no es casualidad. siempre se va a poder cancelar ese término
La frecuencia de oscilación es el intercepto de root locus en el eje imaginario
jw=j3 por raiz de once

Root Locus:
Es un método para determinar el lugar de los polos según varía un parámetroDe cero a infinito.
Aplica para sistemas de lazo cerrado
K)4(
1ss
R(s) Y(s)
La razón por la cual no se usa Root Locus en el sistema de lazo abierto es queEl la ecuación característica del sistema de lazo cerrado el valor de la K no cambiaPorque simple y sencillamente no se encuentra en la ecuación característica.
Esto significa que no hay movimiento de los polos. Los polos se encuentran en elMismo lugar siempre.
-4 0
D(s) = s(s + 4) = 0

Las asintotas forman ángulos simétricos Фn
Ejemplo clásico
an
n360180
-9 -6 -3σ
jω
603
)0()963(
a
Siempre que usted tenga tres asíntotas los ángulos van a ser:180 y mas y menos 60
180,60
120603
360180
oon
“Este ejemplo es fenomenal por que se usan siete reglas de las ocho” Raul Torres Muñiz 22 de abril de 2003
<<<<<<<<X X X
Regla # 3
Regla # 6 na= 3 – 0 = 3
Regla # 5
punto en el eje donde intersecan todas las asíntotas
Regla # ba
ángulo que van a hacer las asíntotas
Root locus se encuentra a la izquierdade un numero impar de polos y ceros¡¡Esta regla es para el eje real!!
número de asíntotas
Regla # Hacer Routh y Hurwitz para saber intercepto en el eje imaginario.
01629918
0)5415)(3(23
2
ksss
ksss
0)9)(6)(3(
1
0)()(1)(
sss
K
sHsKGsD
s3 1 99
s2 18 162+K
s1 α
s0 162+K 18
162018
162)18(99
K
K
α tiene que ser iguala a cero para sistema oscilatorio. K = 90(18)
A(s)= 18s2 +90(18)+ 18(9)= 0
60o
- 60o
180o
0)27.4)(73.7(
993631629918)(
)9)(6)(3()(
223
ss
sssssds
d
ds
sdK
sssds
d
ds
sdK
Intercepto en el eje real

Hacer el Root locus de los siguientes sistemas de retroalimentación unitaria dadoel modelo de la planta en lazo abierto:
KssssD
sss
sssG
)2)(7321.2()(
)2)(7321.2(
12)(
2
(aproxime el punto de ruptura, no lo determine analíticamente)
Condición de magnitud: buscar el valor de la K|KG(s)H(s)| = 1
)2)(7321.2(
)1(
)2)(7321.2(
12)(
22
sss
s
sss
sssG
X X>>>0<<<X0<<<<Doble cero
7321.21
)11()7321.220(
a
aa n
cerospolos
na = número de polos – número de cerosna = numero de asíntotas o ceros en el infinito
1801
360180
n 0n
Como el root locus es simétrico, ya sabemosque hay dos polos que se van a ir hacia los ceros y nos queda un polo solitario que iráen búsqueda de su cero en el infinito.
ya esto no es un genuino disparate

Hacer el Root locus de los siguientes sistemas de retroalimentación unitaria dadoel modelo de la planta en lazo abierto:
KssssD
sss
sssG
)2)(7321.2()(
)2)(7321.2(
22)(
2
(aproxime el punto de ruptura, no lo determine analíticamente)
Condición de magnitud: buscar el valor de la K|KG(s)H(s)| = 1
)2)(7321.2(
)11)(11(
)2)(7321.2(
22)(
2
sss
jsjs
sss
sssG
X X >> << Xo
Doble cero
7321.21
)1111()7321.220(
jj
n
cerospolos
a
aa
na = número de polos – número de cerosna = 1
1801
360180
n 0n
Como el root locus es simétrico, ya sabemosque hay dos polos que se van a ir hacia los ceros y nos queda un polo solitario que iráen búsqueda de su cero en el infinito.
o
0)27.4)(73.7(
993631629918)(
)9)(2()(
223
ss
sssssds
d
ds
sdK
sssds
d
ds
sdK

)2)(7321.2(
222
sss
ssKX
Condición de magnitud: |KG(s)H(s)| = 1
Asi que K:
)()(
1
sHsGK
22
)2)(7321.2(2
ss
sssK
KssssD )2)(7321.2()(

Hacer el Root locus de los siguientes sistemas de retroalimentación unitaria dadoel modelo de la planta en lazo abierto:
)6)(3(
1)(
ssssG
X X X-6 -3 0
<<<<<<<<<<<<
KssssD )6)(3()(
33
)0()630(
a
aa n
cerospolos
3
360180 n 2,1,0n
180,60
na = número de polos – número de cerosna = numero de asíntotas o ceros en el infinitona = 3 – 0 = 3
s3 1 18
s2 9 K
s1 α 0
s0 K
Ksss
Ksss
189
)6)(3(23
9
)18(9 K
Para α igual a cero hay una fila de cerosÉsto hace al sistema marginalmente estableK debe ser igual a 9(18) = 162
Ecuación auxiliar
24.49
162
1629
2
2
s
s
s
)73.4)(27.1(
0)33)(33(
066
18183189)(
)6)(3()(
2
223
ss
ss
ss
sssssds
d
ds
sdK
sssds
d
ds
sdK

Dado el siguiente root locus:1. determine cuales serán las raíces del sistema de lazo cerrado cuando K = 02. Halle los puntos de ruptura3. Halle las asíntotas4. determine el rango de estabilidad del sistema de lazo cerrado5. Halle el punto donde el locus interseca el eje imaginario
-3 -1

Hacer el root locus de los siguientes sistemas de retroalimentación unitaria, dado el modelo de la planta en lazo abierto:
4
1)(
ssG
4
1
sKX
0
0
01
4
4
4
Ks
K
Ks
s
K<<<<<<<<<<<< X )5)(4(
1)(
ssssG
KX )5)(4(
1
sss
0209
0)5)(4(
0)5)(4(
)5)(4(
01)5)(4(
23
sss
Ksss
sss
Ksss
sss
K
<<<<<<X X<<< X
na = 3
3
3
054
a 60,180
3
360180
n
kG(s) + 1 = 0
))(()(
620183)(
209)5)(4()(
)(
1
32022
23
asbsds
sdK
ssssds
sdKds
sssd
ds
sssd
ds
sdK
sGK
s3 1 20
s2 9 K
s1 α 0
s0 K
9
)20(9 K
Para K = 180ecuación auxiliar =A(s) = 9s2 + 180 = 0intercepto en jraiz de 180/9

KX )22(
12 sss
11
1)1(
112
2,1
2
2
js
s
ss
KjsjsssGT
)11)(11(
1)(
kG(s) + 1 = 0
)(
1
sGK
0)11)(11( Kjsjss
)11)(11()( jsjsssK
X
X
X
3
2
3
)0()11()11(
jj
n
cerospolos
a
aa
3
360180 n 2,1,0n
180,60
na = 3 – 0 = 3
-132
<<<<<<<<<<<<
32
3422
2323
243)(
20922)(
ssssds
sdKds
sssd
ds
sssd
ds
sdK
s3 1 2
s2 2 K
s1 α 0
s0 K
2
4 K

-6 -4
-1.5
1.5
0
Hallar las raíces del sistema cuando K = 0, K = infinito y K = 1

Fulanito de tal trajo un sistema de retroalimentación negativa unitaria con entrada R(s)y salida C(s). Al alimentarle una entrada de salto unitario se encontró que el error en régimen permanente resultóse 0.5. Determine el tipo de sistema. ¿Cuál es el valorfinal de la planta cuando se le alimenta un salto de magnitud 10? B) Sultanito quiso copiarse de Fulanito, y trajo otro artefacto. Esta ve el error al alimentarle un salto unitario es de 1/3, e infinito para una entrada de rampa. ¿Cuál esel tipo de sistema de Pablo? ¿Cuál era el valor final de la planta cuando se le alimentó el salto unitario?

Estime el valor de la constante de amortiguamiento dado la respuesta del sistema a un salto unitario
Determine K1 y K2 para que el siguiente sistema rechace al menos el 80% de los disturbios.
K1 XX2
)(
K
sG
D(s)
El error en régimen permanente de un sistema de retroalimentación unitaria con entrada de salto unitario es de 0.7. ¿Cuál sería el error de la planta en lazo abierto para el mismo salto unitario de entrada?
Determine la región en el plano de s donde debe estar los polos de un sistema de segundo orden para que la respuesta a un salto unitario tenga un por ciento de rebase de 16.3 aproximadamente, y un tiempo de establecimiento igual a 2 segundos. Calcule el tiempo pico de estar los polos en el sitio que usted indica.
Dado un sistema con función de transferencia igual a Determine el desvío máximo que tiene el sistema al tratar de seguir una entradadde una onda cuadrada con amplitud unitraria y periodo de 20 segundos . Justifique su respuesta

ControladoresControladores
GC(s) GP(s)X
H(s)TS = ?
P.O. = ?
ess= ?

Controlador Proporcional (P.)Controlador Proporcional (P.)GC(s) = kp
Fácil de usar
No necesariamente se puede mejorar TS y P.O.
Error ess puede disminuir
Es barato
PropiedadesPropiedades
Se usa junto con el root locus
1
2
R
R
v
v
i
o
-+

Controlador Proporcional Diferencial (P.D.)Controlador Proporcional Diferencial (P.D.)GC(s) = kp + kos
Fácil de usar
TS disminuye y P.O. suele aumentar
Error ess puede disminuir
Es barato
PropiedadesPropiedades
Se usa junto con el root locus
111
1
1
1
21
2
CsRsC
Rv
v RR
sCR
R
i
o
1
)1( 12
R
CsRR
v
v
i
o
)(1
2
1 RR
i
o CsRv
v
-+

Controlador Proporcional Integral (P.I.)Controlador Proporcional Integral (P.I.)
Fácil de usar
P.O. puede disminuir
Error ess disminuye
Es barato
PropiedadesPropiedades
Se usa junto con el root locus
)()(
11
2 1
1
12
sCRRRsC
i
o
R
R
v
v
1
)1( 12
R
CsRR
v
v
i
o
)(1
2
1 RR
i
o CsRv
v
-+
s
s IPIP
kk
s
k kG(s)

Controlador Controlador PProporcional roporcional IIntegro ntegro DDiferencial iferencial (P.I.D.)(P.I.D.)
El más usado
Dismunuye ess, Ts, y %OS
Error ess disminuye
Es BARATO porque se usa mucho
PropiedadesPropiedades
Fácil de conseguir
1
1
||
)(
1
1
2
2
11
12
sCRRR
sCR
R
R
v
v
sC
sC
i
o
1
1
2
2 11
R
sCR
R
sCR
v
v
i
o
-+
s
sss IP
2D
DI
P
kkkk
s
k kG(s)
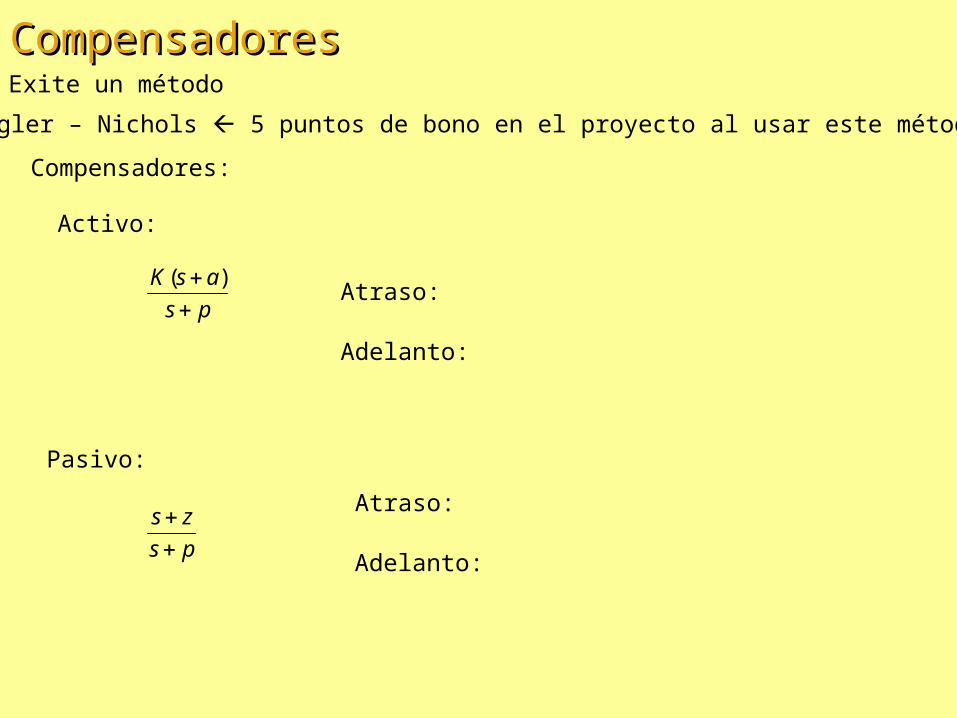
Exite un método
Ziegler – Nichols 5 puntos de bono en el proyecto al usar este método
Compensadores:
Activo:
Pasivo:
Atraso:
Adelanto:
Atraso:
Adelanto:
ps
asK
)(
ps
zs
CompensadoresCompensadores

Compensador de Adelanto Compensador de Adelanto
-c -p 0 Fácil de usar
Error ess disminuyes sin afectar %OS ni TS
Es barato
PropiedadesPropiedades
Se usa junto con el root locus
P.O. puede disminuir
zp
Estoy adelantando la fase
Se comporta parecido a un P.D.pero el %OS no aumenta tanto.En efecto, disminuye el TS

Compensador de Atraso Compensador de Atraso
-c -p 0
Fácil de usar
Error ess disminuyes sin afectar %OS ni TS
Es barato
PropiedadesPropiedades
Se usa junto con el root locus
P.O. puede disminuir
zp

GC(s)X
TS = 1.4seg
)4)(2(
1
ss
P.O. < 16.4% ζ =0.5 Ф = 600
ess< 0.25
Siempre vamos a empezar con el controlador proporcional P
GC(s) = kp
E.C. = s2 + 6s + 8 +kP
Este controlador no me cumple para un ess menor de 0.25
4
1
21
8
)(1
1
)(lim1
1
813
)4)(2(13
0
ssss
ss se
Necesito un controlador que me disminuya el error. Alternativas son P.I.D y P. I.
Luego ajusto la k usandola condición de magnitud
131)32( 22 k

Compensador de atraso P.I. Compensador de atraso
-4 -2 0 -4 -2 0
Al hacer esto TS aumenta y ea un polo por aumentar la ….. en el origen. Las probabilidades de que TS seadañada son bien altas.
-4 -2 0
P.I.D.

kX)5)(4(
1
sss
Primer Problema del Tercer Primer Problema del Tercer
ExamenExamen A. Haga el root locus del sistemasB. Halle el rango de K tal que el sistema sea estable y se pueda aproximar a un sistema
sub-amortiguado de segundo orden. (Hint: Utilice la condición de magnitud del root locus

KX)5)(1(
1
ss
Segundo Problema del Tercer Segundo Problema del Tercer
ExamenExamen A. Haga el root locus del sistemasB. Halle el rango de K tal que el tiempo de establecimiento sea igual a 1.6 segundos, y la constante de
amortiguamiento sea igual a 0.7071

Determine el root locus de los siguientes sistemas
)12)(7)(5)(3(
)4)(8()()(
ssss
ssssHsG
6)2(
1)()(
ssHsG