prácticas de laboratorio de fundamentos matemáticos … · 2012-11-22 · prácticas de...
TRANSCRIPT

Prácticas de Laboratorio de Fundamentos Matemáticoscon DERIVE
José Mas, José Marín y Ma Consuelo Casabán


Dedicado a
Joan y Luisa
Asun
mi familia

Agradecimientos
Queremos agradecer a todas aquellas personas que de alguna forma han colaborado en laelaboración de este texto o en la puesta en marcha de las prácticas con ordenador en la docenciade las matemáticas en la ETSIA. Ello fue posible gracias al apoyo del Instituto de Ciencias dela Educación que, a través del Proyecto de Innovación Docente no 116, concedió apoyo humanoy material al equipo de profesores formado por Manuel López Pellicer, Rafael Bru García, AnaMaría Urbano Salvador, Alfredo Peris Manguillot y José Mas Marí, que con la inestimable ayudade los becarios Javier Llorens, Gonzalo Matamala y Sebastián Colomar, elaboraron y comenza-ron a impartir las primeras prácticas con DERIVE. De algunas de aquellas primeras versionesse podrían encontrar reminiscencias en el material que se presenta más adelante.
También debemos agradecer la colaboración de los alumnos de la asignatura «Laboratorio deFundamentos Matemáticos I», y de sus antecesoras «Laboratorio de Álgebra Lineal» y «Labora-torio de Cálculo», que al realizar las prácticas en cursos sucesivos nos han ayudado a depurarlas.
Por último agradecer a nuestra compañera de Departamento, Elena Alemany, su inestimableayuda durante el curso que compartió tareas docentes con nosotros. Su gran conocimiento delprograma DERIVE nos permitió mejorar muchas prácticas, además de que ella misma preparólas primeras versiones de algunas de ellas, concretamente las de cálculo integral. A Beatriz Olmo,estudiante de Ingeniería de Montes por proporcionarnos ejemplos de cómo la base matemáticade alguno de los temas incluidos en esta asignatura se aplican en otras asignaturas de su carrera.
V


Índice general
1. Introducción al uso de DERIVE 11.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. La ventana de Álgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1. La barra de la ventana . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.2. La barra de menús . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.3. La barra de herramientas . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.4. La barra de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.5. El área de trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3. Forma de trabajo con DERIVE . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4. Introducción y manejo de expresiones en DERIVE . . . . . . . . . . . . . . . . 4
1.4.1. Introducción de texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4.2. Introducción de expresiones matemáticas . . . . . . . . . . . . . . . . . 51.4.3. Sumas, restas, multiplicaciones y divisiones . . . . . . . . . . . . . . . . 61.4.4. Simplificación de expresiones . . . . . . . . . . . . . . . . . . . . . . . 61.4.5. Potencias y raíces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4.6. Paréntesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4.7. Funciones matemáticas predefinidas en DERIVE . . . . . . . . . . . . . 81.4.8. Edición en la ventana de autor . . . . . . . . . . . . . . . . . . . . . . . 91.4.9. Algunas constantes y símbolos especiales . . . . . . . . . . . . . . . . . 101.4.10. Grados y radianes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4.11. Vectores y matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.5. La opción de menú Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.6. Los modos de trabajo de DERIVE . . . . . . . . . . . . . . . . . . . . . . . . . 151.7. La opción de menú Simplify . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.8. La opción de menú Declare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.9. La opción de menú Solve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.9.1. Resolución de ecuaciones . . . . . . . . . . . . . . . . . . . . . . . . . 211.9.2. Resolución de desigualdades . . . . . . . . . . . . . . . . . . . . . . . . 251.9.3. Resolución de sistemas de ecuaciones lineales . . . . . . . . . . . . . . . 26
1.10. El menú Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.11. El resto de menús . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.11.1. El menú Edit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
VII

Índice general
1.11.2. Ayuda en DERIVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301.11.3. El menú File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2. Gráficos con DERIVE 372.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones) . . . . . . . . 37
2.2.1. Gráficas con DERIVE . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.2.2. El menú Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.2.3. El menú Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.2.4. El menú Edit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.3. Gráficos de dos variables (Dibujos en 3 dimensiones) . . . . . . . . . . . . . . . 512.3.1. La opción de menú Set . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.3.2. La opción de menú Options . . . . . . . . . . . . . . . . . . . . . . . . 54
2.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3. Cálculo diferencial de una variable con DERIVE 573.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.2. Derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.2.1. Álgebra de derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.2.2. Derivadas de funciones importantes . . . . . . . . . . . . . . . . . . . . 583.2.3. Derivación de funciones declaradas . . . . . . . . . . . . . . . . . . . . 603.2.4. Crecimiento y decrecimiento. Máximos y mínimos relativos . . . . . . . 603.2.5. Máximos y mínimos absolutos . . . . . . . . . . . . . . . . . . . . . . . 633.2.6. Concavidad y convexidad . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.3. Gráficas de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.3.1. Asíntotas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.4. Fórmula de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.5. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.5.1. Algunas definiciones sobre tasas de variación . . . . . . . . . . . . . . . 693.5.2. Función Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.5.3. Función exponencial natural . . . . . . . . . . . . . . . . . . . . . . . . 723.5.4. Función logística . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4. Curvas definidas paramétricamente 834.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.2. Ecuaciones paramétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.2.1. Recta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.2.2. Circunferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.2.3. Elipse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854.2.4. Hipérbola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854.2.5. Cicloide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3. Curvas definidas paramétricamente . . . . . . . . . . . . . . . . . . . . . . . . . 864.4. Rectas tangentes y derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
VIII

Índice general
4.5. Lanzamiento de un proyectil . . . . . . . . . . . . . . . . . . . . . . . . . . . . 904.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5. Coordenadas polares. Curvas en coordenadas polares 975.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.2. Coordenadas polares de un punto . . . . . . . . . . . . . . . . . . . . . . . . . . 975.3. Cambio de coordenadas cartesianas a polares . . . . . . . . . . . . . . . . . . . 995.4. Cambio de coordenadas polares a cartesianas . . . . . . . . . . . . . . . . . . . 1015.5. Curvas en polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.5.1. Coordenadas polares de las rectas . . . . . . . . . . . . . . . . . . . . . 1035.5.2. Las ecuaciones de las cónicas en coordenadas polares . . . . . . . . . . . 1035.5.3. Las ecuaciones paramétricas de las curvas de ecuación polar conocida . . 104
5.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
6. Aplicaciones de la Integral Definida I 1076.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1076.2. Cálculo de áreas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.2.1. Áreas en coordenadas polares . . . . . . . . . . . . . . . . . . . . . . . 1106.2.2. Áreas de curvas definidas paramétricamente . . . . . . . . . . . . . . . . 112
6.3. Cálculo de la longitud de arco de una curva . . . . . . . . . . . . . . . . . . . . 1126.3.1. Longitud de arco de curvas definidas paramétricamente . . . . . . . . . . 1136.3.2. Longitud de arco en polares . . . . . . . . . . . . . . . . . . . . . . . . 114
6.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
7. Aplicaciones de la Integral Definida II 1177.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1177.2. Elección de los extremos de integración . . . . . . . . . . . . . . . . . . . . . . 1177.3. Cálculo de volúmenes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
7.3.1. En función de las áreas de secciones paralelas . . . . . . . . . . . . . . . 1187.3.2. Volumen de cuerpos obtenidos por revolución alrededor del eje de abscisas1217.3.3. Volumen de cuerpos obtenidos por revolución alrededor del eje de orde-
nadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1237.3.4. Volumen de revolución en coordenadas polares . . . . . . . . . . . . . . 124
7.4. Superficies de revolución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1247.4.1. Áreas de cuerpos obtenidos por revolución alrededor del eje de abscisas . 1247.4.2. Áreas de cuerpos obtenidos por revolución alrededor del eje de ordenadas 1257.4.3. Área de una superficie de revolución en coordenadas polares . . . . . . . 126
7.5. Aplicaciones de los teoremas de Guldin . . . . . . . . . . . . . . . . . . . . . . 1277.6. Aplicación a la Inventariación Forestal: Cubicación de árboles apeados . . . . . . 129
7.6.1. Sólidos de revolución . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1297.6.2. Cálculo del volumen geométrico de los fustes . . . . . . . . . . . . . . . 130
7.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
IX

Índice general
8. Continuidad de funciones de varias variables 1358.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1358.2. Límites de funciones de dos variables . . . . . . . . . . . . . . . . . . . . . . . 135
8.2.1. Límites relativos por rectas . . . . . . . . . . . . . . . . . . . . . . . . . 1378.2.2. Límites relativos por curvas más generales . . . . . . . . . . . . . . . . 139
8.3. Límites iterados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1428.4. Cambio a coordenadas polares para demostrar la existencia del límite . . . . . . 1448.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
9. Cálculo diferencial de funciones de varias variables 1499.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1499.2. Derivadas direccionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
9.2.1. Un ejemplo de función con derivadas parciales pero sin ninguna otraderivada direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
9.2.2. Una función discontinua con todas las derivadas direccionales . . . . . . 1529.3. Matriz jacobiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
9.3.1. Cálculo del gradiente con DERIVE . . . . . . . . . . . . . . . . . . . . 1559.3.2. Cálculo de la matriz jacobiana con DERIVE . . . . . . . . . . . . . . . 157
9.4. Diferenciabilidad de funciones reales de dos variables . . . . . . . . . . . . . . . 1589.4.1. Cálculo de las derivadas direccionales de una función real diferenciable
de dos variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1619.5. Diferenciabilidad de funciones vectoriales de varias variables . . . . . . . . . . . 162
9.5.1. Cálculo de las derivadas direccionales de una función diferenciable . . . 1639.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
10. Cálculo diferencial de funciones de varias variables II 16710.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16710.2. Regla de la cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16710.3. Plano tangente y recta normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16910.4. Polinomio de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
10.4.1. Polinomio de Taylor desarrollado en un punto cualquiera . . . . . . . . . 17410.4.2. Polinomio de Taylor desarrollado en el origen . . . . . . . . . . . . . . . 17610.4.3. Polinomios de Taylor en un punto cualquiera. Cambio de variable . . . . 17710.4.4. Aproximaciones mediante polinomios de Taylor . . . . . . . . . . . . . 178
10.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
11. Máximos y mínimos de funciones de dos variables 18111.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18111.2. Definición de máximo y mínimo de una función real de varias variables . . . . . 18211.3. Puntos críticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18311.4. Clasificación de los puntos críticos mediante la matriz hessiana . . . . . . . . . . 185
11.4.1. Funciones de dos variables . . . . . . . . . . . . . . . . . . . . . . . . . 18711.5. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
X

Índice general
11.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
12. Extremos condicionados. Multiplicadores de Lagrange 19312.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19312.2. Extremos condicionados. Multiplicadores de Lagrange . . . . . . . . . . . . . . 19312.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
A. Funciones predefinidas en DERIVE 199A.1. Funciones potenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199A.2. Funciones exponenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
A.2.1. Simplificación de las funciones exponenciales . . . . . . . . . . . . . . . 200A.3. Funciones logarítmicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
A.3.1. Simplificación de la función logaritmo neperiano . . . . . . . . . . . . . 201A.4. Funciones trigonométricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201A.5. Inversas de las funciones trigonométricas . . . . . . . . . . . . . . . . . . . . . 202A.6. Funciones hiperbólicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202A.7. Inversas de las funciones hiperbólicas . . . . . . . . . . . . . . . . . . . . . . . 202A.8. Funciones definidas a trozos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
A.8.1. Valor absoluto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202A.8.2. La función signo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
A.9. Funciones de variable compleja . . . . . . . . . . . . . . . . . . . . . . . . . . . 205A.10.Funciones estadísticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205A.11.Funciones error y zeta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205A.12.Funciones financieras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205A.13.Funciones que descomponen expresiones . . . . . . . . . . . . . . . . . . . . . 205
B. La opción de menú Declare 207B.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207B.2. La opción Variable Value. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207B.3. La opción Algebra State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
B.3.1. El submenú Input. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208B.3.2. El submenú Output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.3.3. El submenú Reset All . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
Bibliografía 213
XI


Índice de figuras
1.1. Ventana de Álgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Menú Author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3. Ventana Author Expression. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4. Ventanas de diálogo que se abren con Author Vector. . . . . . . . . . . . . . . . 111.5. Ventanas de diálogo de Author Matrix. . . . . . . . . . . . . . . . . . . . . . . . 121.6. Menú Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.7. Cuatro primeras ventanas de diálogo correspondientes al menú Calculus . . . . 141.8. Últimas ventanas de diálogo correspondientes al menú Calculus . . . . . . . . . 141.9. Ventana de opciones de simplificación . . . . . . . . . . . . . . . . . . . . . . . 161.10. Menú Simplify . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.11. Ventana Simplify Expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.12. Ventana Expand Expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.13. Ventana Factor Expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.14. Ventana Approximate Expression . . . . . . . . . . . . . . . . . . . . . . . . . . 191.15. Ventana Approximate Expression . . . . . . . . . . . . . . . . . . . . . . . . . . 191.16. Menú Declare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.17. Menú Solve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.18. Ventana Solve Algebraically . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.19. Ventana Solve Numerically . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.20. Ventanas de diálogo del menú Solve System. . . . . . . . . . . . . . . . . . . . 261.21. Menú Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.22. Menú Edit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.23. Ventanas de diálogo correspondientes al menú Edit . . . . . . . . . . . . . . . . 301.24. Menú File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311.25. Ventanas de diálogo correspondientes al menú File . . . . . . . . . . . . . . . . 321.26. Ventana de álgebra con la demo trig cargada. . . . . . . . . . . . . . . . . . 331.27. Ventanas de diálogo correspondientes al menú File . . . . . . . . . . . . . . . . 34
2.1. Pantalla de gráficos en dos dimensiones. . . . . . . . . . . . . . . . . . . . . . . 382.2. Funciones trigonométricas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.3. Ventanas de diálogo del menú Set. . . . . . . . . . . . . . . . . . . . . . . . . . 412.4. Las ventanas de diálogo correspondientes al menú Options. . . . . . . . . . . . 432.5. Ventana Parametric Plot Parameters . . . . . . . . . . . . . . . . . . . . . . . . 44
XIII

Índice de figuras
2.6. Rosa de tres pétalos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.7. Rosa de 3 pétalos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.8. Dibujos de puntos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.9. Cambio de opciones en la gráfica. . . . . . . . . . . . . . . . . . . . . . . . . . 482.10. Ventanas de diálogo del menú Options. . . . . . . . . . . . . . . . . . . . . . . 492.11. Efecto de la opción autoescalado . . . . . . . . . . . . . . . . . . . . . . . . . . 502.12. Ventana Create Annotation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.13. Ventana de gráficos de tres dimensiones de DERIVE con la gráfica de la función
f(x, y) =1
9 + x2 + y2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.14. Ventanas de diálogo del menú Set . . . . . . . . . . . . . . . . . . . . . . . . . 532.15. Distintas formas de ver la gráfica de z = x2 − y2. . . . . . . . . . . . . . . . . . 552.16. Gráfica de x2 + y2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.1. Ventana Declare Function Definition. . . . . . . . . . . . . . . . . . . . . . . . 583.2. Ventana de diálogo Declare Variable Domain . . . . . . . . . . . . . . . . . . 593.3. Punto con derivada segunda no nula que no es punto de inflexión. . . . . . . . . . 643.4. Ventana Calculus Taylor series. . . . . . . . . . . . . . . . . . . . . . . . . . . 673.5. Pinus Pinaster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 743.6. Modelo del crecimiento de un cultivo de bacterias mediante la función logística.
Fases de crecimiento del cultivo. . . . . . . . . . . . . . . . . . . . . . . . . . . 753.7. Fagus Sylvatica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.1. Cicloide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 864.2. Lanzamiento de un proyectil. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.1. Coordenadas polares de un punto. . . . . . . . . . . . . . . . . . . . . . . . . . 985.2. Barra de estado en polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.3. Relación entre las coordenadas polares y las cartesianas de un punto. . . . . . . . 1005.4. Ángulo que forma el radio vector con la curva. . . . . . . . . . . . . . . . . . . 105
6.1. Área encerrada por la función f , las rectas x = a, x = b y el eje de abcisas. . . . 1086.2. Gráficas de cosx y de x4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1096.3. Gráficas de la circunferencia y la hipérbola equilátera xy = 1 . . . . . . . . . . . 1096.4. Área encerrada por la curva ρ = f(θ), y las rectas θ = α y θ = β. . . . . . . . . 1116.5. Gráficas de ρ = 1 + sen2 θ y ρ = 2 cos θ. . . . . . . . . . . . . . . . . . . . . . . 111
7.1. Volumen de un cuerpo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1187.2. Elipsoide y corte con plano de ecuación x = constante . . . . . . . . . . . . . . 1197.3. Corte transversal de una pirámide de base cuadrada. . . . . . . . . . . . . . . . . 1207.4. Corte transversal de la pirámide. . . . . . . . . . . . . . . . . . . . . . . . . . . 1207.5. Intersecciones de las curvas x2 con sen x, y de 1/x con 3− x. . . . . . . . . . . 1217.6. Gráficas de y2 = 4x y x = 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1237.7. Toro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
XIV

Índice de figuras
7.8. Centros de gravedad de la semicircunferencia y del semicírculo. . . . . . . . . . 1297.9. Sólidos de revolución. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1307.10. Sección perpendicular al eje axial del sólido. . . . . . . . . . . . . . . . . . . . . 131
8.1. Gráfica de f(x, y) =x sen y
x2 + 3y2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
8.2. Gráfica de f(x, y) =xy2
x2 + y4. . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
8.3. Gráfica de f(x, y) =xy2
x2 + y4cambiando el punto de vista. . . . . . . . . . . . . 141
9.1. Gráfica de f(x, y) = x2y. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1519.2. Gráfica de la función f(x, y) = − (| xy |)
12 . . . . . . . . . . . . . . . . . . . . 152
9.3. Gráfica de la función f(x, y) = xy2
x2+y4 . . . . . . . . . . . . . . . . . . . . . . . . 153
10.1. Aproximaciones a x ln y − y lnx por diferentes polinomios de Taylor. . . . . . . 175
11.1. Gráfica de f(x, y) = x2 − y2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
11.2. Gráfica de f(x, y) =1
9 + x2 + y2. . . . . . . . . . . . . . . . . . . . . . . . . 184
11.3. Gráfica de la función f(x, y) = xy2 + x2y − xy. . . . . . . . . . . . . . . . . . 189
12.1. Rectángulo inscrito en la elipse. Punto (x, y) en el primer cuadrante. . . . . . . . 195
A.1. Función valor absoluto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203A.2. Gráfica de la función de variable real signo. . . . . . . . . . . . . . . . . . . . . 204A.3. Representación geométrica del signo del número complejo 3 + 2i. . . . . . . . . 205
B.1. Opciones del menú Declare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207B.2. Ventana para asignar un valor fijo a una variable. . . . . . . . . . . . . . . . . . 208B.3. Ventana del submenú Input. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.4. Ventana con las opciones de salida. . . . . . . . . . . . . . . . . . . . . . . . . . 210B.5. Ventana para guardar los cambios en la configuración. . . . . . . . . . . . . . . . 211B.6. Ventana de configuración del acceso directo en Windows XP. . . . . . . . . . . . 212
XV

Introducción
Este texto incluye las prácticas de la asignatura «Laboratorio de Fundamentos MatemáticosI» del plan de estudios de 1996 de las carreras de Ingeniero Agrónomo e Ingeniero de Montesimpartidas en la Escuela Técnica Superior de Ingenieros Agrónomos de la Universidad Politéc-nica de Valencia. Dicha asignatura es optativa de primer ciclo y se imparte con durante el primercuatrimestre, paralelamente a los «Fundamentos Matemáticos I», asignatura de la que puedeconsiderarse complementaria.
Las prácticas corresponden a la parte de Cálculo Infinitesimal del temario de la asignaturatroncal antes mencionada. Se trata de resolver el mismo tipo de problemas, pero utilizando elprograma DERIVE.
El programa DERIVE
DERIVE es un programa comercial desarrollado por Soft Warehouse que se presenta a símismo como asistente matemático. Es un programa de cálculo simbólico, aunque también puedeutilizarse de forma numérica. Sencillo de manejar aunque difícil de programar. Su principal ven-taja consiste en que es muy fácil obtener los primeros resultados. Otros programas más potentesrequieren mucho tiempo antes de que el alumno pueda empezar a obtener resultados, lo quesiempre resulta desmotivador. Las primeras prácticas de este texto se dedican a la introducciónen el manejo del programa y sus aplicaciones gráficas.
Conviene aclarar aquí que se ha optado por la versión de DERIVE que trabaja en el entornoWindows, concretamente por la versión 4.03, aunque la mayoría de los ejemplos y ejerciciospueden resolverse sin cambio alguno en otras versiones.
¿Por qué usar programas de cálculo simbólico en las asignatu-ras de matemáticas?
La enseñanza de las matemáticas se encuentra en una crisis auspiciada por varios factores yen todos los niveles de la enseñanza. No queremos ahora discutir en profundidad este tema, porlo demás abierto. Lo que si nos parece claro es que la aparición en el mercado de programasde cálculo simbólico, como el propio DERIVE, y calculadoras programables con capacidadessimilares va a hacer (está haciendo ya en muchos lugares), que la enseñanza de las matemáticas
XVII
Introducción
se replantee. Este hecho no es nuevo, no hace demasiados años aún se enseñaba cómo manejartablas de logaritmos y de algunas otras funciones trascendentes. La popularización de las calcu-ladoras han hecho obsoletas estas técnicas, aunque ésto no merma la importancia que tienen enla ciencia y la tecnología. Los ordenadores son, y lo serán todavía más, mucho más potentes queaquellas calculadoras y pueden propiciar un cambio mucho mayor en la docencia, y más impor-tante todavía, en la comprensión de las matemáticas por parte del estudiante. El uso del ordenadorpuede liberarnos de complicados y tediosos cálculos1 y devolvernos tiempo para plantear pro-blemas e interpretar los resultados que obtengamos. En ese sentido se desarrollan las prácticasde este texto, los cálculos los realiza el programa DERIVE, al estudiante le queda la parte másdifícil ¿qué hay que calcular? ¿qué conclusiones se pueden extraer del resultado obtenido?
Algunas convenciones tipográficasA lo largo del texto se utilizan diferentes convenciones tipográficas para representar, de la
forma más clara posible, las diferentes acciones que se deben realizar o que realizará el propioprograma DERIVE.
El teclado del ordenador contiene teclas que realizan funciones especiales, estas teclas se hanrepresentado entre ángulos, <>. Son:
Teclas de función. Situadas en la parte superior del teclado y numeradas desde F1 a F12, DE-RIVE no las utiliza todas. En este texto se representan por ejemplo <F3> .
Tabulador. En este texto se ha representado por |�|, se utiliza para cambiar de forma secuencialentre distintos elementos de la ventana activa.
Escape. Situada en la parte superior izquierda del teclado se utiliza para anular la(s) última(s)acciones. Se ha representado por <Escape>.
Enter o intro. Según el teclado esta tecla puede recibir uno de los nombres indicados o estarrepresentada por una flecha que apunta hacia la izquierda y que en su parte derecha seprolonga ligeramente hacia arriba. Este símbolo indica una de sus funciones, empezarlínea nueva cuando se trabaja con un procesador de textos. En DERIVE se utiliza paraindicar al programa que debe realizar la acción correspondiente y es equivalente a pincharen el botón OK. Se ha representado en este texto por <ENTER> .
Flechas de dirección. Estas teclas, representadas por <↑>, <↓>, <←> y <→>, se utilizan paradesplazarse entre expresiones o texto.
Alternativa. Esta tecla, representada por <Alt> , se utiliza normalmente en combinación conotras, por ejemplo para acceder a los menús a través del teclado. La forma de hacerlo esmantener presionada la tecla <Alt> y, sin soltarla, presionar la otra tecla indicada. Si, porejemplo, la segunda tecla es la «f» se representa <Alt + F>.
1Lo que no significa que el estudiante no deba saber realizar estos cálculos.
XVIII
Introducción
Control. Se utiliza de forma similar a la anterior, ya que se combina con otras para acceder deforma rápida a algunos menús. Se ha representado por <Control + G>. En algunos casoshay que presionar también las mayúsculas, se ha representado por <Control + Shift + S>.
Suprimir o «Delete» Esta tecla sirve para borrar un caracter cuando se está introduciendo textoo para borrar alguna expresión de DERIVE. Se ha representado por <Del>. En algunosteclados aparece con la leyenda «Supr» y en otros con «Del».
Además de estas teclas todos los teclados tienen otras que realizan funciones específicas enel entorno Windows, pero no en el programa DERIVE, razón por la que no se describen aquí.
Como cualquier programa del entorno Windows DERIVE trabaja con menús. Para referirnosa un menú, por ejemplo el menú «file», utilizaremos la tipografía File. Normalmente los menúsabren ventanas de diálogo. Estas ventanas tienen un nombre. En este texto se representan con elnombre de la ventana sobre un fondo gris, como Author Expression . Estas ventanas de diálogosuelen tener una parte donde hay que introducir texto. Para indicar qué texto hay que introducirse utiliza un tipo de letra diferente. Por ejemplo, para indicar que hay que introducir «sin x» enuno de estos lugares, en el texto aparecerá sin x. Por último, en algunos casos se representanlas expresiones tal como las muestra el programa en pantalla.
Cambios en la segunda ediciónEn esta segunda edición se han corregido las erratas detectadas de la primera edición2. Se han
añadido nuevos ejercicios y ejemplos y se ha mejorado la redacción de algunos apartados parafacilitar su mejor comprensión.
Pero sin duda, la aportación más relevante de esta segunda edición es la inclusión de aplica-ciones relacionadas con las titulaciones de Ingeniería de Montes y Agronómica.
Finalmente se ha introducido un glosario para facilitar la búsqueda de palabras clave.
2Y se habrán introducido nuevas.
XIX


Práctica 1
Introducción al uso del programaDERIVE (versión Windows)
1.1. IntroducciónEl objetivo de esta primera práctica es describir los comandos más útiles y familiarizar al
lector con la forma de trabajo del programa DERIVE. En primer lugar se describirá la ventanade Álgebra, cómo introducir expresiones matemáticas y las distintas operaciones que se puedenrealizar. También se verá los distintos cálculos que DERIVE puede realizar: cálculo de deriva-das, integrales, series de Taylor ... Finalmente, se describirán otras opciones relacionadas con elmanejo de archivos tales como abrirlos, salvarlos en disco, imprimirlos, ...
1.2. La ventana de ÁlgebraAl ejecutar el programa DERIVE aparecerá en la pantalla la ventana que puede verse en la
figura 1.1. El aspecto es similar al de muchas aplicaciones diseñadas para la familia de sistemasoperativos Windows (95/98/2000/NT/Me/XP), aunque puede diferir ligeramente según la confi-guración del sistema operativo y del propio programa. A continuación describimos los elementosque la componen.
1.2.1. La barra de la ventanaLa parte superior de la ventana de Álgebra de DERIVE se denomina barra de la ventana,
y es un elemento común a todos los programas en el entorno Windows. A la izquierda del todoaparece el icono de DERIVE y después el texto «DERIVE for Windows-[Algebra ???.MTH]»,evidentemente «DERIVE for Windows» es el nombre del programa, «Algebra» indica que se estáen una ventana que DERIVE denomina de Algebra, es decir donde aparecerán sólo expresionesmatemáticas (además de este tipo de ventanas DERIVE utiliza también las de gráficas que sedescribirán en la práctica 2), los tres interrogantes ocupan el lugar del nombre del fichero en elque se guardaría el trabajo o del que se habría obtenido información. Como en este caso no se
1

Práctica 1. Introducción al uso de DERIVE
Figura 1.1: Ventana de Álgebra
ha abierto ningún fichero ni se ha salvado todavía ningún trabajo aparecen los tres interrogantesen su lugar. Por último las letras «MTH» corresponden a la extensión de los ficheros que utilizaDERIVE.
A la derecha aparecen tres cuadraditos . Si se pincha el primero por la izquierda con elratón1 el programa se minimiza, es decir desaparece de la pantalla quedando reducido a su iconoy una breve descripción en la barra de tareas (que normalmente está situada en la parte inferiorde la pantalla, pero que puede estar en cualquier otro lugar de la misma), bastará volver a pincharesta área para recuperar la ventana de DERIVE. El segundo botón, cuyo aspecto depende deltamaño que la ventana tenga ahora, sirve para maximizar a ventana completa (cuando el botóntiene el aspecto ) o restaurar a ventana normal ( cuando el botón es ). Trabajar con ventanacompleta, es decir ocupando toda el área de trabajo, es la situación más conveniente para lasprácticas que se van a realizar. Por último el tercer botón sirve para cerrar el programa.
1Esta expresión se usa habitualmente en el mundo de la informática como abreviación de la operación consistenteen desplazar el ratón hasta que la punta de la flecha del puntero quede sobre el área correspondiente (el cuadradito
en este caso) y entonces presionar una vez el botón izquierdo del ratón, también se le llama «hacer clic».
2
1.2. La ventana de Álgebra
1.2.2. La barra de menús
Inmediatamente debajo de la barra de la ventana se encuentra la barra de menús, donde estánla mayoría de las instrucciones que se pueden utilizar. Para acceder a uno de esos menús puedenseguirse dos caminos:
Ratón: Poniendo el ratón sobre el menú deseado y pinchando se ejecutará la acción correspon-diente o bien se abrirá mostrando una serie de submenús de entre los que se eligirá el quenos interese de la misma forma que se ha descrito anteriormente.
Teclado: También se accede a un menú presionando la tecla «Alt» y sin soltarla presionandola tecla correspondiente a la letra subrayada del menú. Por ejemplo, para acceder al menúSolve se debe presionar la combinación de teclas «Alt» y «l». A partir de ahora se utilizála notación <Alt + L> para referirse a que hay que apretar la tecla <Alt> y sin soltarlaapretar la tecla indicada después del signo +. Es indiferente que las letras sean minúsculaso mayúsculas, por claridad se usará en la descripción las mayúsculas, pero obviamentees más cómodo usar minúsculas en el teclado. Para acceder a los submenús basta conpresionar la tecla con la letra subrayada, sin usar la tecla <Alt> .
Las opciones de menú más interesantes se comentarán más adelante.
1.2.3. La barra de herramientas
Bajo la barra de menús se encuentra la barra de herramientas. Cada herramienta está repre-sentada por un icono alegórico a su función, son «atajos» para acceder a las operaciones másusuales que se realizan con DERIVE. A diferencia de otros programas del entorno Windows,esta barra no se puede personalizar por el usuario, es decir, no se pueden añadir ni quitar boto-nes. Se observa que algunos de estos iconos están ahora en un tono apagado lo que indica queno pueden actuar (debido a que no hay expresiones para ello). También es útil observar que si sedeja el puntero del ratón sobre uno de ellos aparecerá un recuadro con una descripción breve desu función que desaparecerá después de unos segundos.
1.2.4. La barra de estado
La parte inferior de la ventana es otra barra donde el programa informa sobre su estado ytambién sobre las expresiones. En principio puede estar en blanco, pero si, por ejemplo, se hapresionado la tecla de bloqueo de mayúsculas aparecerá la leyenda CAP, si se ha presionado lade bloquear el teclado numérico aparecerá NUM, etc.
Cuando se realiza alguna operación matemática (derivar, integrar, ...) aparece en la mismabarra un contador en forma de reloj , que indica el tiempo que ha tardado DERIVE enrealizar el cálculo.
3

Práctica 1. Introducción al uso de DERIVE
1.2.5. El área de trabajo
El resto de la ventana está dedicado a las expresiones que se introduzcan o que DERIVEcalcule. De momento debe estar en blanco.
Debe quedar pues claro que hay varias formas de acceder a las funciones de DERIVE, ya queademás de las ya descritas algunas de ellas son accesibles también mediante otras combinacionesde teclas. En esta práctica se estudiarán los comandos más usuales y cómo acceder a ellos.
1.3. Forma de trabajo con DERIVE
El programa DERIVE se utiliza manipulando expresiones introducidas por nosotros o pre-viamente obtenidas por el propio programa. Quizá lo que merezca más atención en esta primerapráctica es, precisamente, cómo introducir expresiones con DERIVE. La siguiente sección sededicará a mostrar cómo introducir y manejar expresiones.
1.4. Introducción y manejo de expresiones en DERIVE
La forma habitual de introducir una expresión en DERIVE es abriendo una ventana de diálo-go titulada «Author Expression», a partir de ahora referidas como ventana de autor. Esta ventanapuede abrirse de varias formas:
Menú El menú es Author, Expression. . . (ver figura 1.2).
Herramienta Pinchando el icono que contiene un lápiz .
Teclas rápidas Con la combinación <Control + A>.
Figura 1.2: Menú Author
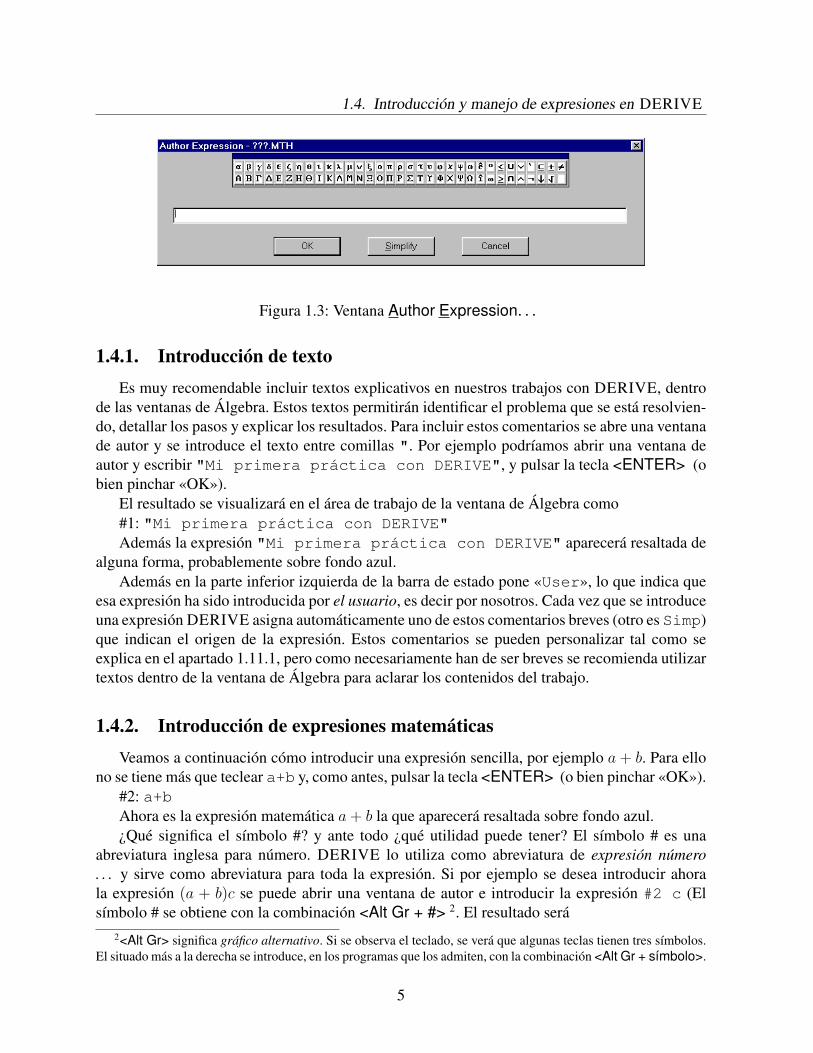
En cualquier caso se abrirá una ventana con el título «Author Expression- nombre del fiche-ro.MTH» tal como se muestra en la figura 1.3 en la página siguiente. Esta ventana de autor posee:una paleta para escribir letras griegas y símbolos matemáticos (en la primera fila están las letrasgriegas minúsculas y en la segunda las mayúsculas, así como algunos símbolos matemáticos);un recuadro donde se escribirá la expresión; y tres botones «OK», «Simplify» y «Cancel».
4
1.4. Introducción y manejo de expresiones en DERIVE
Figura 1.3: Ventana Author Expression. . .
1.4.1. Introducción de textoEs muy recomendable incluir textos explicativos en nuestros trabajos con DERIVE, dentro
de las ventanas de Álgebra. Estos textos permitirán identificar el problema que se está resolvien-do, detallar los pasos y explicar los resultados. Para incluir estos comentarios se abre una ventanade autor y se introduce el texto entre comillas ". Por ejemplo podríamos abrir una ventana deautor y escribir "Mi primera práctica con DERIVE", y pulsar la tecla <ENTER> (obien pinchar «OK»).
El resultado se visualizará en el área de trabajo de la ventana de Álgebra como#1: "Mi primera práctica con DERIVE"Además la expresión "Mi primera práctica con DERIVE" aparecerá resaltada de
alguna forma, probablemente sobre fondo azul.Además en la parte inferior izquierda de la barra de estado pone «User», lo que indica que
esa expresión ha sido introducida por el usuario, es decir por nosotros. Cada vez que se introduceuna expresión DERIVE asigna automáticamente uno de estos comentarios breves (otro es Simp)que indican el origen de la expresión. Estos comentarios se pueden personalizar tal como seexplica en el apartado 1.11.1, pero como necesariamente han de ser breves se recomienda utilizartextos dentro de la ventana de Álgebra para aclarar los contenidos del trabajo.
1.4.2. Introducción de expresiones matemáticasVeamos a continuación cómo introducir una expresión sencilla, por ejemplo a + b. Para ello
no se tiene más que teclear a+b y, como antes, pulsar la tecla <ENTER> (o bien pinchar «OK»).#2: a+bAhora es la expresión matemática a+ b la que aparecerá resaltada sobre fondo azul.¿Qué significa el símbolo #? y ante todo ¿qué utilidad puede tener? El símbolo # es una
abreviatura inglesa para número. DERIVE lo utiliza como abreviatura de expresión número. . . y sirve como abreviatura para toda la expresión. Si por ejemplo se desea introducir ahorala expresión (a + b)c se puede abrir una ventana de autor e introducir la expresión #2 c (Elsímbolo # se obtiene con la combinación <Alt Gr + #> 2. El resultado será
2<Alt Gr> significa gráfico alternativo. Si se observa el teclado, se verá que algunas teclas tienen tres símbolos.El situado más a la derecha se introduce, en los programas que los admiten, con la combinación <Alt Gr + símbolo>.
5

Práctica 1. Introducción al uso de DERIVE
#3: (a+b) · c
1.4.3. Sumas, restas, multiplicaciones y divisiones
Como ya se ha visto la suma se indica con el símbolo habitual, +, lo mismo puede decirsede la resta que se indica con el símbolo -, que también se puede usar para cambiar el signo deun número o expresión. Sin embargo para el producto se tienen dos opciones, usar el asterísco *(muchos programas utilizan este símbolo para el producto) o bien dejar un espacio en blanco. Encualquier caso DERIVE representará en la expresión correspondiente de la ventana de Álgebraun punto centrado, es decir que DERIVE representa de forma distinta (en general de forma máscomprensible) lo que escribe el usuario. También hay que considerar que DERIVE interpretarácomo producto una expresión del tipo 2x. Sólo en el caso de productos con números se debe sercuidadosos y escribir el asterisco o dejar el espacio en blanco.
El símbolo para la división es /, como es usual. DERIVE escribirá la fracción en la formahabitual.
1.4.4. Simplificación de expresiones
Aunque la simplificación merece un estudio más detallado, que se hará en el apartado 1.7,conviene saber ya cómo obtener algunos resultados para ilustrar mejor la forma de introducirexpresiones y su significado. DERIVE puede simplificar de varias formas, además cada unade ellas puede obtenerse de varias formas. Se verá ahora exclusivamente la forma «normal» desimplificación de DERIVE y las formas más sencillas de realizarla.
Una es seleccionar la opción Simplify en la ventana de autor en la que se está introduciendola expresión a simplificar. En este caso en la ventana de Álgebra sólo se mostrará el resultadosimplificado, el comentario que introduce DERIVE en la barra de estado es Simp(User). Elproblema de utilizar esta opción es que se pierde la expresión original, lo que puede dar lugar aque con el tiempo no se sepa qué o para qué se calculó esa expresión.
La otra forma de simplificar es seleccionar la expresión que se desee simplificar y pincharcon el ratón en el botón de la barra de herramientas. El comentario que introduce DERIVEes Simp(#n), donde n se sustituye por el número de la expresión simplificada.
Ejercicio 1.1 Introducir las siguientes expresiones y simplificarlas:
1. 3/15.
2. 3 + 1/3.
3. (3 + 1)/12.
4. 3 · 4/(7 · 3).
6

1.4. Introducción y manejo de expresiones en DERIVE
1.4.5. Potencias y raícesSe desea ahora introducir un polinomio como x3−3x2+5x−2. Para introducir este polinomio
se debe escribir en la ventana de autor xˆ3-3xˆ2+5x-2. Se observará que el acento circunflejo(^) no aparecerá escrito hasta que no se introduzca el siguiente número. Por tanto la forma deindicar la operación de potenciación es mediante el uso del acento circunflejo.
Para indicar raíces se debe utilizar esta forma. Así si se introduce la expresión 8ˆ(1/3)(nótese el uso del paréntesis) y se simplifica se obtendrá el resultado correcto 3
√8 = 2. Sólo
para las raíces cuadradas se puede utilizar el símbolo de raíz que aparece en la ventana de autor,también se puede obtener este resultado con la combinación <Control + Q>, o bien escribiendosqrt. En cualquier caso se considerará que la raíz sólo afecta al primer número o variable queaparezca tras ella, si se quiere la raíz cuadrada de una expresión más complicada se debe usarparéntesis.
Ejercicio 1.2 Introducir las siguientes expresiones y simplificarlas:
1. 4√
17.
2.√
25.
3.√
2.
4. 32.
5. 234.
1.4.6. ParéntesisComo es usual los paréntesis indican qué operaciones deben realizarse primero. Se tendrán
en cuenta tres cosas:
1. Sólo se puede utilizar paréntesis, nunca se debe utilizar corchetes o llaves.
2. Se deben utilizar más de lo que se hace habitualmente. Por ejemplo, para escribira
b+ cen
la ventana de autor se debe escribir a/(b+c)
3. Se deben cerrar todos los paréntesis que se abran. Si no es así se producirá un mensaje deerror («Syntax error»), tal como ocurre si se se introduce la expresión (a+b(c+d)
En resumen se puede decir que tratándose de paréntesis más vale que sobren que que falten.Si sobran DERIVE ya se encargará de quitarlos.
Para su correcto uso se ha de tener en cuenta que al operar, DERIVE usa el orden de pre-ferencia habitual en informática. En primer lugar se efectúan las potenciaciones (^), en segundolugar los productos y divisiones, que tienen igual orden de preferencia y por último las sumas yrestas, que también tienen igual orden de preferencia. Cuando hay varias operaciones de igualorden de preferencia se efectúan de izquierda a derecha, así el resultado de simplificar 1/2*3 es
7

Práctica 1. Introducción al uso de DERIVE
3/2 porque primero se divide 1 por 2 y el resultado se multiplica luego por 3. Para alterar estosórdenes deben usarse paréntesis. Una excepción a la regla de operar de izquierda a derecha esprecisamente el operador de potenciación (^) que opera de derecha a izquierda. Así 2ˆ3ˆ4 eslo mismo que 2ˆ(3ˆ4) =281 = 241785163922958349412352, y no (2ˆ3)ˆ4 = 84 = 4096.Como se ha dicho anteriormente en caso de duda lo mejor es poner paréntesis.
Ejercicio 1.3 Introducir las siguientes expresiones y simplificarlas:
1. 72 + 3 · 7
(3− 4 · 5)3.
2. 2(a+ b)2.
1.4.7. Funciones matemáticas predefinidas en DERIVEDERIVE puede trabajar con las funciones usuales de las matemáticas, cada una de ellas
tiene un nombre en DERIVE. Algunas de las funciones trascendentes más usuales y su nombreen DERIVE son:
SQRT(x) Raiz cuadrada de x. Que también puede escribirse como <Control + Q>, o con elsímbolo de raíz cuadrada incluido en la paleta de símbolos de la ventana de autor.
LN(x), LOG(x) Logaritmo neperiano de x, nótese que log significa logaritmo neperiano y nologaritmo en base 10, que se escribe como LOG(x,10).
SIN(x) Seno de x, nótese que se debe escribir sin y no sen.
COS(x) Coseno de x.
TAN(x) Tangente de x.
Además de muchas otras funciones, ver apéndice A donde se especifican todas, también estánpredefinidas el resto de funciones trigonométricas y las inversas de todas ellas, cuyo nombre esel mismo que el de la función con una «A » delante. Por ejemplo ASIN(x) es el arco seno de x.
Conviene observar que:
No importa (en principio) que se utilicen mayúsculas o minúsculas, DERIVE reconocelas funciones, por ejemplo sIn es el seno. Sí es importante observar que no pueden haberespacios en blanco en el nombre de las funciones, obsérvese qué pasa si se escribe SI N.
DERIVE escribe siempre el argumento entre paréntesis. Suele surgir una duda cuandose escriben cuadrados de ciertas funciones. Por ejemplo en matemáticas se suele escribirsen2 x, que significa lo mismo que (sen x)2 pero que es distinto de sen(x2) (que se sueleescribir abreviadamente como sen x2). Resumiendo:
SIN^2 x = (SIN x)^2 6= SIN (x^2)
8
1.4. Introducción y manejo de expresiones en DERIVE
Independientemente de cuál de las dos primeras formas escribamos el cuadrado del senode x, DERIVE mostrará SIN (x)^2 (obviamente también podemos usar esta forma enla ventana de autor).
Es importante recordar que DERIVE utiliza las letras mayúsculas para funciones y las mi-núsculas para variables y constantes. Si se ha intentado escribir una función y aparecen letrasminúsculas en el nombre es porque se ha cometido un error.
El apéndice contiene un listado completo de las funciones predefinidas en DERIVE.Además de las funciones predefinidas, el usuario puede definir sus propias funciones, tal
como se detalla en el apartado 3.2.1 de la práctica 3.
Ejercicio 1.4 Introducir las siguientes expresiones y simplificarlas:
1. log x− lnx.
2. sen2 x+ cos2 x.
3. sen(arc senx).
1.4.8. Edición en la ventana de autorSi se comete algún error al introducir una expresión en la ventana de autor se puede editar de
nuevo como es usual en Windows. Usando las teclas de dirección o el ratón se situará el cursoren el lugar de la expresión donde está el error y se rectificará. Se ha de tener en cuenta a la horade corregir que hay dos modos, el de inserción y el de sobreescritura. Se pasa de uno a otromediante la tecla <Insert>. En la parte derecha de la barra de estado aparecerán las letras OVRsi se está en modo de sobreescritura y nada si se está en modo de inserción.
Como es usual la tecla <Supr> borra el carácter sobre el que está situado el cursor en elmodo de sobreescritura y el carácter de la derecha del cursor en el modo de inserción. La tecla<Back> borra el carácter de la izquierda en ambos modos.
Es muy interesante tener en cuenta que si ya se ha escrito una expresión y se desea utilizarlase puede copiar de la siguiente forma. Se selecciona en la ventana de álgebra la expresión quese quiere copiar, y se abre una ventana de autor y se pulsa <F3> 3. Una alternativa interesantees <F4> que también copia la expresión seleccionada pero además la pone entre paréntesis. Lapotencia de estas teclas aumenta si se tiene en cuenta que es posible seleccionar no sólo unaexpresión entera sino también alguna parte de ella usando el ratón, clicando con él las veces quesean necesarias hasta quedarse con la subexpresión deseada4.
Cuando se han de introducir expresiones complicadas es recomendable hacerlo introduciendosubexpresiones y uniéndolas tal como se ha descrito. Por ejemplo, para introducir la expresión
sen(3x2 − 2y) + cos(2x− y)sen(2x− y) + cos(3x2 − 2y)
3<F3> copia en la ventana de autor la expresión que esté seleccionada4También se pueden seleccionar varias expresiones a la vez, clicando con el botón izquierdo del ratón mientras
se mantiene pulsada la tecla <Shift> pero sólo se copia una.
9

Práctica 1. Introducción al uso de DERIVE
se pueden introducir las expresiones#1: 3 · x2 − 2 · y#2: 2 · x− y
#3: sin#1 + cos#2
#4: sin#2 + cos#1
#5: #3 /#4
1.4.9. Algunas constantes y símbolos especialesDERIVE tiene definidas algunas constantes muy importantes en matemáticas. Por ejemplo
los números π y e. Ambos aparecen en la ventana de autor, después de las letras griegas. Tambiénpueden obtenerse con <Control + p> y <Control + e> respectivamente. Otra forma de introducirel número π es escribiendo simplemente pi pero este método aplicado al número e da lugar auno de los errores más frecuentes en DERIVE. Si se escribe simplemente e, DERIVE interpretaque se trata de una variable, no del número e. Lo que se debe escribir es ê, que es como el propioprograma escribe el número e.
Otro símbolo importante es ∞. También aparece en la ventana de autor y basta pincharlopara escribirlo. Otra posibilidad es escribir inf. DERIVE utiliza aquí la siguiente convención:∞ quiere decir en realidad +∞, ±∞ significa infinito sin signo determinado. Así los resultadosde simplificar las expresiones lımn→+∞ n, lımn→+∞(−1)n n y lımn→+∞−n, son∞,±∞ y−∞respectivamente.
Otra constante definida en DERIVE es la unidad imaginaria i, que se puede definir comoi =√−1, denotada en DERIVE, por î. DERIVE puede trabajar por tanto con números com-
plejos, aunque en estas prácticas trabajaremos con números y funciones reales, en algunas oca-siones DERIVE puede mostrar como resultado algún número complejo, por ejemplo al resolverecuaciones polinómicas.
Ejercicio 1.5 Comprobar la fórmula de Euler: eπi + 1 = 0, considerada por muchos la máselegante de las matemáticas por combinar los cinco números fundamentales.
1.4.10. Grados y radianesAl trabajar con funciones trigonométricas se puede trabajar con radianes o con grados. La
opción por defecto es trabajar con radianes. Si se desea indicar que una cantidad está en gradosse puede utilizar el símbolo (◦) de la paleta de la ventana de autor, o bien escribir deg. Si sesimplifica esta expresión se verá que el resultado es π/180. Es decir, DERIVE convierte siemprelos grados a radianes.
Ejercicio 1.6 Introducir y simplificar las siguientes expresiones
1. π
2. 45 deg
3. sin 45 deg
10
1.4. Introducción y manejo de expresiones en DERIVE
1.4.11. Vectores y matricesDERIVE permite trabajar con vectores y con matrices.Para introducir un vector se puede proceder de tres formas, se verán primero las dos más
sencillas:
Menú El menú es Author Vector. . . (ver figura 1.2 en la página 4).
Herramienta Pinchando el icono de la barra de herramientas.
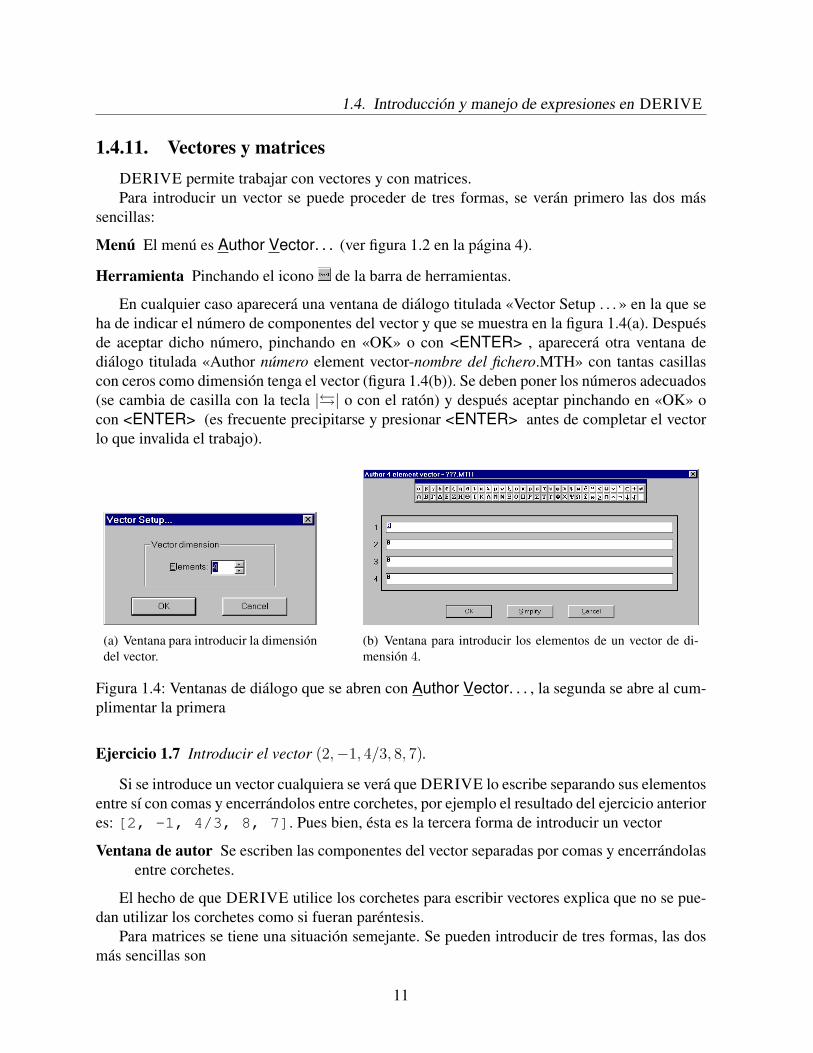
En cualquier caso aparecerá una ventana de diálogo titulada «Vector Setup . . . » en la que seha de indicar el número de componentes del vector y que se muestra en la figura 1.4(a). Despuésde aceptar dicho número, pinchando en «OK» o con <ENTER> , aparecerá otra ventana dediálogo titulada «Author número element vector-nombre del fichero.MTH» con tantas casillascon ceros como dimensión tenga el vector (figura 1.4(b)). Se deben poner los números adecuados(se cambia de casilla con la tecla |�| o con el ratón) y después aceptar pinchando en «OK» ocon <ENTER> (es frecuente precipitarse y presionar <ENTER> antes de completar el vectorlo que invalida el trabajo).
(a) Ventana para introducir la dimensióndel vector.
(b) Ventana para introducir los elementos de un vector de di-mensión 4.
Figura 1.4: Ventanas de diálogo que se abren con Author Vector. . . , la segunda se abre al cum-plimentar la primera
Ejercicio 1.7 Introducir el vector (2,−1, 4/3, 8, 7).
Si se introduce un vector cualquiera se verá que DERIVE lo escribe separando sus elementosentre sí con comas y encerrándolos entre corchetes, por ejemplo el resultado del ejercicio anteriores: [2, -1, 4/3, 8, 7]. Pues bien, ésta es la tercera forma de introducir un vector
Ventana de autor Se escriben las componentes del vector separadas por comas y encerrándolasentre corchetes.
El hecho de que DERIVE utilice los corchetes para escribir vectores explica que no se pue-dan utilizar los corchetes como si fueran paréntesis.
Para matrices se tiene una situación semejante. Se pueden introducir de tres formas, las dosmás sencillas son
11
Práctica 1. Introducción al uso de DERIVE
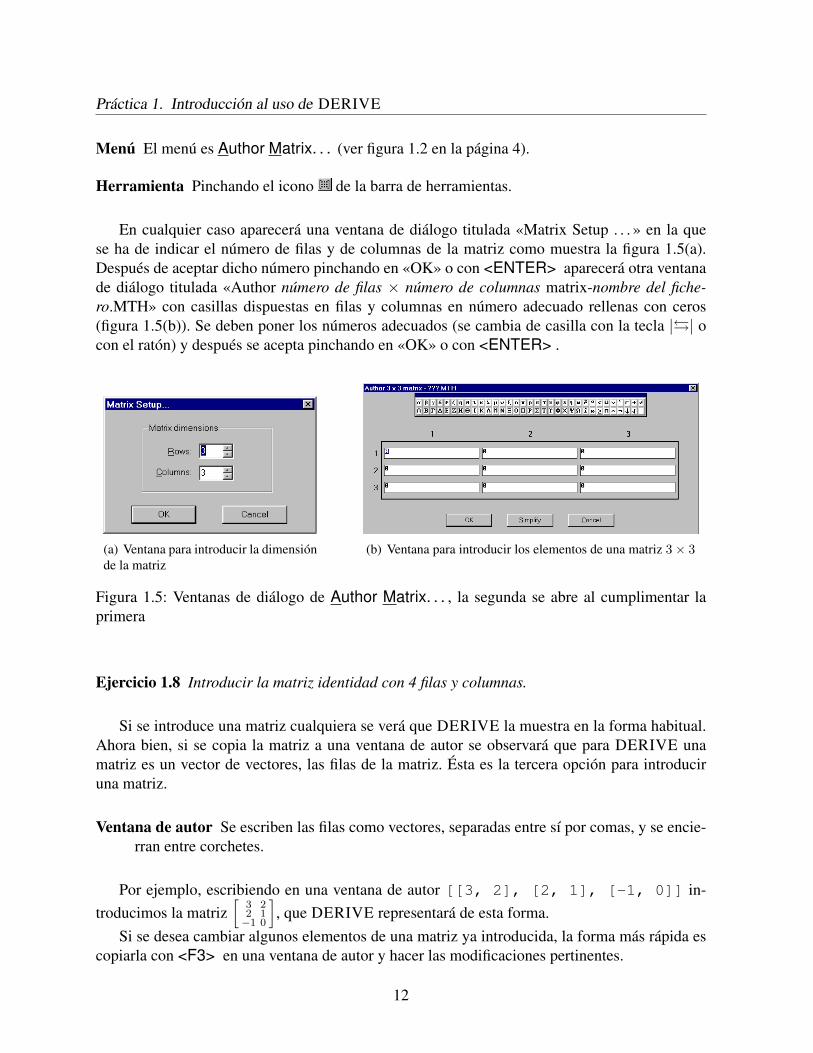
Menú El menú es Author Matrix. . . (ver figura 1.2 en la página 4).
Herramienta Pinchando el icono de la barra de herramientas.
En cualquier caso aparecerá una ventana de diálogo titulada «Matrix Setup . . . » en la quese ha de indicar el número de filas y de columnas de la matriz como muestra la figura 1.5(a).Después de aceptar dicho número pinchando en «OK» o con <ENTER> aparecerá otra ventanade diálogo titulada «Author número de filas × número de columnas matrix-nombre del fiche-ro.MTH» con casillas dispuestas en filas y columnas en número adecuado rellenas con ceros(figura 1.5(b)). Se deben poner los números adecuados (se cambia de casilla con la tecla |�| ocon el ratón) y después se acepta pinchando en «OK» o con <ENTER> .
(a) Ventana para introducir la dimensiónde la matriz
(b) Ventana para introducir los elementos de una matriz 3× 3
Figura 1.5: Ventanas de diálogo de Author Matrix. . . , la segunda se abre al cumplimentar laprimera
Ejercicio 1.8 Introducir la matriz identidad con 4 filas y columnas.
Si se introduce una matriz cualquiera se verá que DERIVE la muestra en la forma habitual.Ahora bien, si se copia la matriz a una ventana de autor se observará que para DERIVE unamatriz es un vector de vectores, las filas de la matriz. Ésta es la tercera opción para introduciruna matriz.
Ventana de autor Se escriben las filas como vectores, separadas entre sí por comas, y se encie-rran entre corchetes.
Por ejemplo, escribiendo en una ventana de autor [[3, 2], [2, 1], [-1, 0]] in-troducimos la matriz
[3 22 1−1 0
], que DERIVE representará de esta forma.
Si se desea cambiar algunos elementos de una matriz ya introducida, la forma más rápida escopiarla con <F3> en una ventana de autor y hacer las modificaciones pertinentes.
12
1.5. La opción de menú Calculus
1.5. La opción de menú CalculusHasta ahora se ha visto lo más importante relacionado con la opción de menú Author. Es
importante conocer bien este menú porque sin dominarlo no se podrán introducir expresiones.Sin embargo las capacidades más útiles de DERIVE están agrupadas en la opción de menúCalculus.
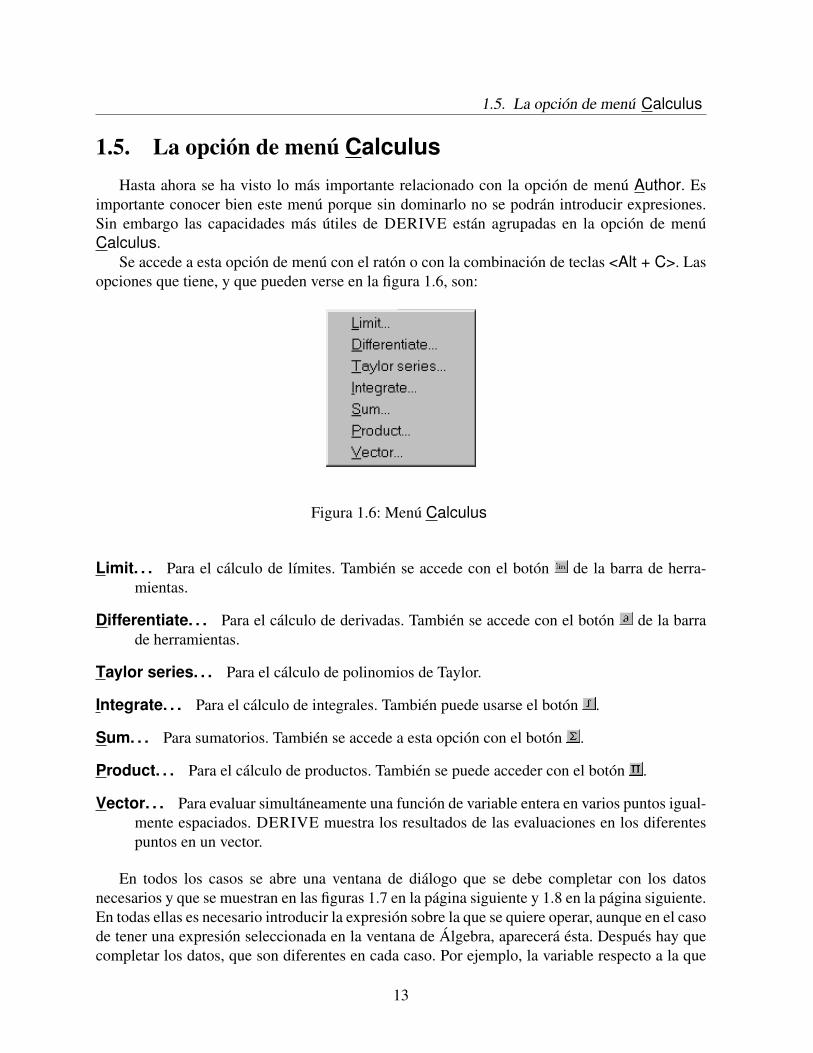
Se accede a esta opción de menú con el ratón o con la combinación de teclas <Alt + C>. Lasopciones que tiene, y que pueden verse en la figura 1.6, son:
Figura 1.6: Menú Calculus
Limit. . . Para el cálculo de límites. También se accede con el botón de la barra de herra-mientas.
Differentiate. . . Para el cálculo de derivadas. También se accede con el botón de la barrade herramientas.
Taylor series. . . Para el cálculo de polinomios de Taylor.
Integrate. . . Para el cálculo de integrales. También puede usarse el botón .
Sum. . . Para sumatorios. También se accede a esta opción con el botón .
Product. . . Para el cálculo de productos. También se puede acceder con el botón .
Vector. . . Para evaluar simultáneamente una función de variable entera en varios puntos igual-mente espaciados. DERIVE muestra los resultados de las evaluaciones en los diferentespuntos en un vector.
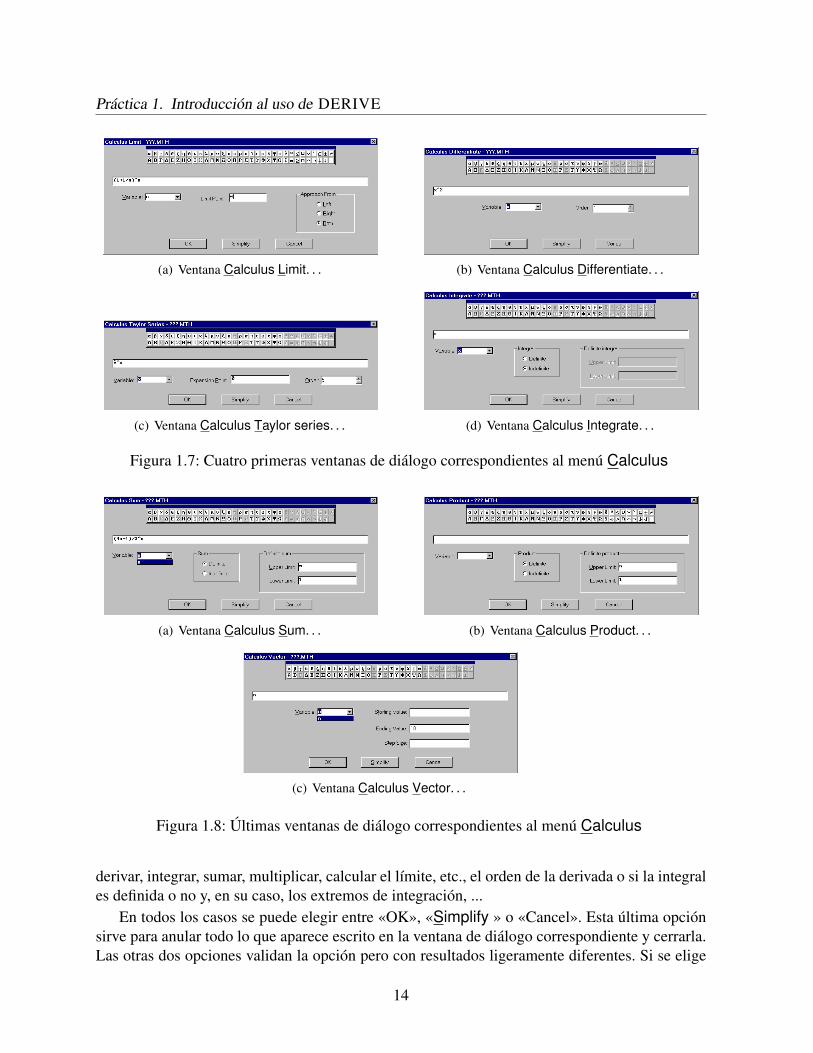
En todos los casos se abre una ventana de diálogo que se debe completar con los datosnecesarios y que se muestran en las figuras 1.7 en la página siguiente y 1.8 en la página siguiente.En todas ellas es necesario introducir la expresión sobre la que se quiere operar, aunque en el casode tener una expresión seleccionada en la ventana de Álgebra, aparecerá ésta. Después hay quecompletar los datos, que son diferentes en cada caso. Por ejemplo, la variable respecto a la que
13
Práctica 1. Introducción al uso de DERIVE
(a) Ventana Calculus Limit. . . (b) Ventana Calculus Differentiate. . .
(c) Ventana Calculus Taylor series. . . (d) Ventana Calculus Integrate. . .
Figura 1.7: Cuatro primeras ventanas de diálogo correspondientes al menú Calculus
(a) Ventana Calculus Sum. . . (b) Ventana Calculus Product. . .
(c) Ventana Calculus Vector. . .
Figura 1.8: Últimas ventanas de diálogo correspondientes al menú Calculus
derivar, integrar, sumar, multiplicar, calcular el límite, etc., el orden de la derivada o si la integrales definida o no y, en su caso, los extremos de integración, ...
En todos los casos se puede elegir entre «OK», «Simplify » o «Cancel». Esta última opciónsirve para anular todo lo que aparece escrito en la ventana de diálogo correspondiente y cerrarla.Las otras dos opciones validan la opción pero con resultados ligeramente diferentes. Si se elige
14

1.6. Los modos de trabajo de DERIVE
«OK» el resultado es una expresión que contiene lo que se quiere hacer, por ejemplo si se quierederivar el seno de x aparecerá la expresión correspondiente a la derivada de seno de x respectode x. Para obtener el resultado se tiene que simplificar esta expresión, obteniendo una nuevaexpresión cuyo contenido es cosx. En cambio, con «Simplify » se obtendrá directamente estaúltima. La ventaja de usar «OK» es que es más fácil ver de dónde proviene cada resultado. Laparte izquierda de la barra de estado proporciona información sobre la procedencia de la expre-sión seleccionada. Para el ejemplo de la derivación de la función seno, si se elige la secuencia« OK» y posteriormente se simplifica la expresión resultante obtendremos dos expresiones, labarra de estado mostrará para la primera la palabra User y para la segunda Simp(#numero),donde numero corresponde al número de la expresión que se ha simplificado, de esta formatoda la información sobre la procedencia de la expresión está disponible; en cambio, si se utilizala opción «Simplify » en la barra de estado se mostrará Simp(Dif(User,x)) que indica quees el resultado de derivar respecto de la variable x una función introducida por el usuario, perono se sabe cuál es ésta.
Ejercicio 1.9 Calcular:
1. lımn→∞
(1 + 1/n)n
2. lımn→∞
√n2 + n− n
3.∞∑
n=1
4n− 1
2n
4.∫ 1
0
x3 − xx4 + 2
dx
5.∂
∂x(x2 − y2)
6. Polinomio de Taylor de grado 5 de la función ex, alrededor del punto x = 1.
7.10∏i=1
i2
8. Obtener un vector con los cubos de los cinco primeros números impares.
1.6. Los modos de trabajo de DERIVEDERIVE puede trabajar en tres modos.
Exacto Este modo es el modo por defecto. Todas las operaciones se hacen de forma exacta. Sehacen todas las simplificaciones posibles, pero se mantienen los números irracionales ylas fracciones todo el tiempo. Es el modo más lento y que más fácilmente puede llenar lamemoria. Resumiendo,
√2 es siempre
√2 y 2/3 es siempre 2/3.
15

Práctica 1. Introducción al uso de DERIVE
Aproximado En este modo todos los números son aproximados. El funcionamiento sería equi-valente al de un ordenador en coma flotante aunque se puede modificar el número dedígitos con el que se trabaja. Es más rápido pero inexacto.
√2 es siempre 1,1421 y 2/3 es
siempre 0,66666.
Mixto En este modo los números irracionales se aproximan por los números racionales máspróximos, y éstos se mantienen como tales.
√2 es 1,41421 y 2/3 es siempre 2/3.
Según el modo en que se esté trabajando el resultado de Simplify será distinto. Por ejemplosi se introduce el número π y se simplifica se obtiene π (si se está en modo exacto). Si se cam-bia el modo utilizando el comando Declare y luego Algebra State y luego Simplification. . . ,se abrirá una ventana donde se pueden cambiar varias opciones y que se muestra en la figura1.9. El primer bloque de opciones de esta ventana, agrupado con el nombre TransformationDirection, afecta a las simplificaciones que hace el programa y se explica con detalle en losapartados A.2–A.4 del apéndice A. Interesa ahora la titulada Mode. En la ventana correspon-diente aparecerá ahora la palabra «Exact», indicando que se está trabajando en modo exacto. Sise pincha con el ratón en el triángulo que hay a la derecha de la misma se desplegará una ventanacon las tres opciones, si se selecciona (haciendo clic sobre ella) la opción «Approximate» y sevuelve a simplificar se obtiene 3,14159, pero se pueden obtener muchas más cifras si se modificatambién el número de dígitos, lo que puede hacerse repitiendo los pasos anteriores y cambiandoel número de dígitos en la opción Digits.
Figura 1.9: Ventana de diálogo donde se pueden cambiar, entre otras, las opciones de simplifica-ción
Ejercicio 1.10 Obtener 30 cifras del número e. Obtener 100 cifras decimales de π.
16
1.7. La opción de menú Simplify
Ejemplo 1.1 Si se introduce en una expresión, por ejemplo en la número 1, el número 10^(-1000)y luego se simplifica la expresión (1+#1)-1 y se simplifica en modo exacto, se obtendrá elresultado correcto, 10−1000 (DERIVE mostrará el resultado en forma de fracción, aunque utili-zará la notación exponencial si aproximamos el resultado). En cambio, si se cambia el modo detrabajo a aproximado y se simplifica la misma expresión se obtiene el resultado 0.
El modo de trabajo no sólo afecta al comando Simplify, también afecta al comando Solve. Enmodo exacto se busca la solución exacta por métodos algebraicos, en el modo aproximado se bus-ca una solución aproximada utilizando un método numérico, lo que permite obtener solucionesde ecuaciones cuando no se pueden obtener en modo exacto.
Ejercicio 1.11 Hallar las raíces de x3 + 3x− 1 y de x5 − 3x4 + 2x− 1.
No es necesario cambiar de modo para obtener el valor aproximado de una expresión. Paraello puede usarse el comando Approximate. . . o el botón de la barra de herramientas.
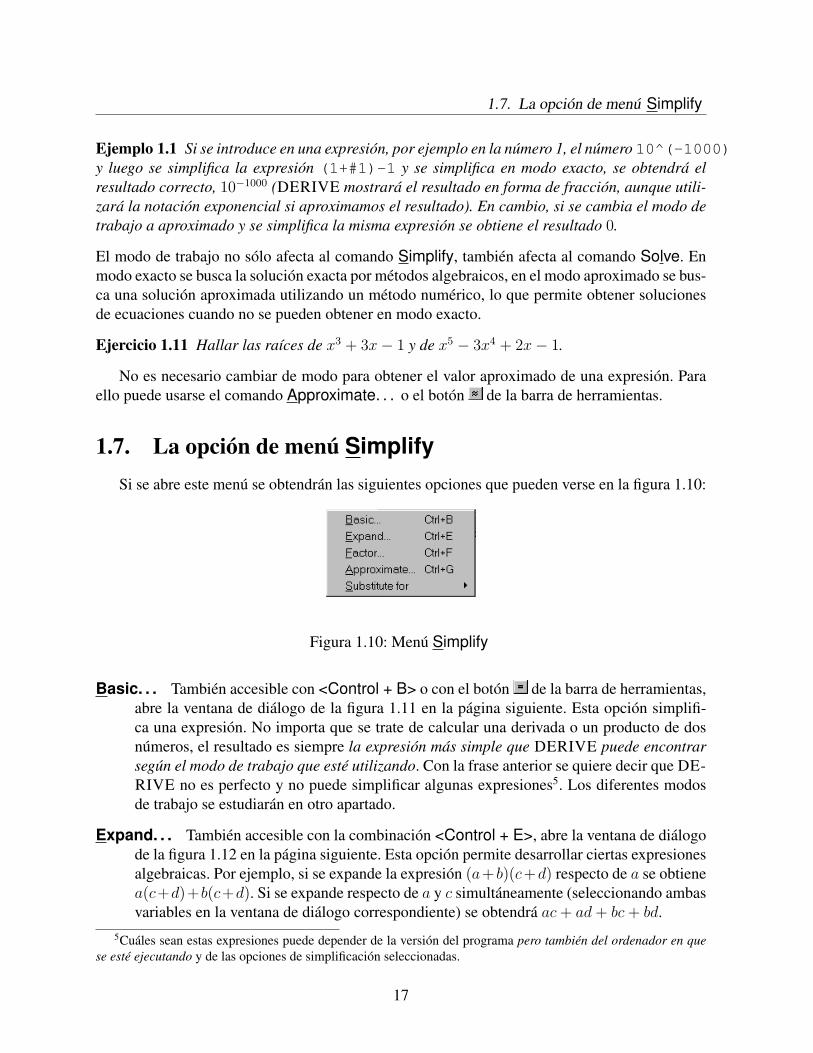
1.7. La opción de menú SimplifySi se abre este menú se obtendrán las siguientes opciones que pueden verse en la figura 1.10:
Figura 1.10: Menú Simplify
Basic. . . También accesible con <Control + B> o con el botón de la barra de herramientas,abre la ventana de diálogo de la figura 1.11 en la página siguiente. Esta opción simplifi-ca una expresión. No importa que se trate de calcular una derivada o un producto de dosnúmeros, el resultado es siempre la expresión más simple que DERIVE puede encontrarsegún el modo de trabajo que esté utilizando. Con la frase anterior se quiere decir que DE-RIVE no es perfecto y no puede simplificar algunas expresiones5. Los diferentes modosde trabajo se estudiarán en otro apartado.
Expand. . . También accesible con la combinación <Control + E>, abre la ventana de diálogode la figura 1.12 en la página siguiente. Esta opción permite desarrollar ciertas expresionesalgebraicas. Por ejemplo, si se expande la expresión (a+ b)(c+d) respecto de a se obtienea(c+d)+b(c+d). Si se expande respecto de a y c simultáneamente (seleccionando ambasvariables en la ventana de diálogo correspondiente) se obtendrá ac+ ad+ bc+ bd.
5Cuáles sean estas expresiones puede depender de la versión del programa pero también del ordenador en quese esté ejecutando y de las opciones de simplificación seleccionadas.
17

Práctica 1. Introducción al uso de DERIVE
Figura 1.11: Ventana Simplify Expression
Figura 1.12: Ventana Expand Expression
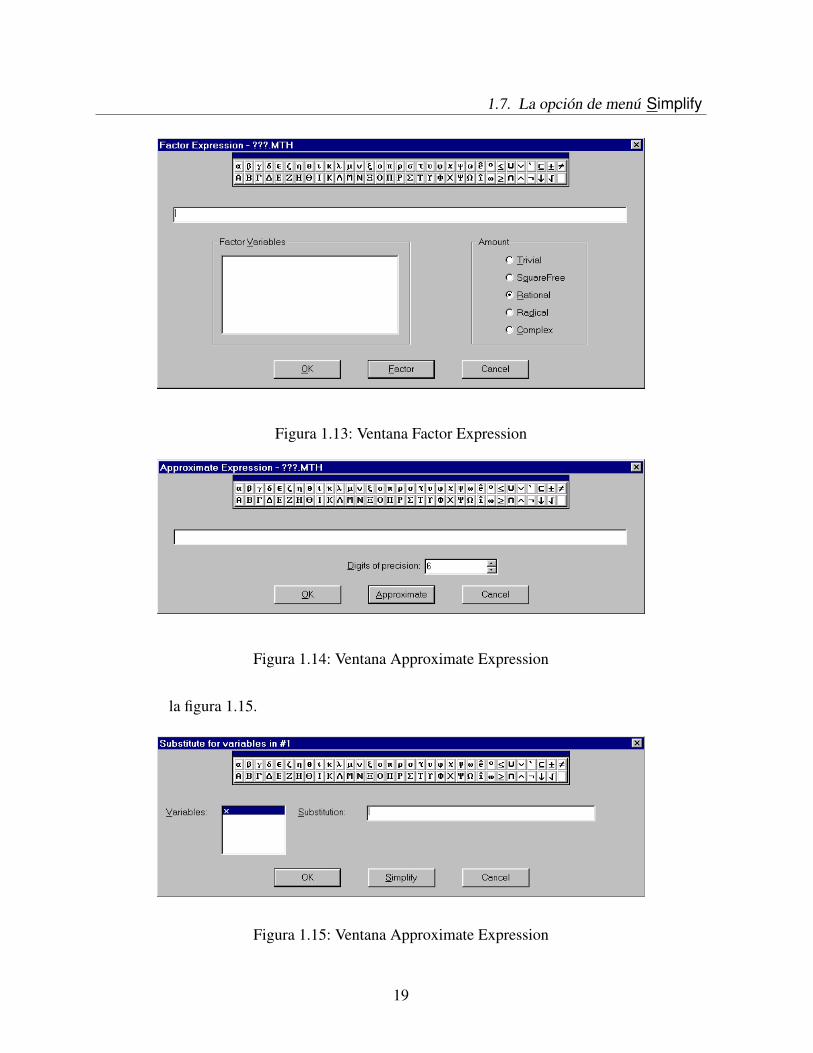
Factor. . . También accesible con la combinación <Control + F>, abre la ventana de diálogode la figura 1.13 en la página siguiente. Esta opción es, hasta cierto punto, la contraria ala anterior. Nótese que en ambos casos aparece a la derecha de la ventana de diálogo uncuadro de opciones mútuamente excluyentes sobre la forma en que se quiere el resultado.No es ahora el momento de analizarlas.
Approximate. . . También accesible con la combinación <Control + G> y con el botónde la barra de herramientas, abre la ventana de diálogo de la figura 1.14 en la páginasiguiente. Sirve para obtener resultados aproximados de las expresiones. Se puede porejemplo aproximar π y ver el resultado obtenido.
Substitute for De él dependen dos submenús:
Variables. . . También accesible con <Control + W> y con el botón de la barra deherramientas. Sirve para sustituir una o más variables de una expresión por otra ex-presión (un número, otra variable, una combinación de variables, ...) como muestra
18
1.7. La opción de menú Simplify
Figura 1.13: Ventana Factor Expression
Figura 1.14: Ventana Approximate Expression
la figura 1.15.
Figura 1.15: Ventana Approximate Expression
19

Práctica 1. Introducción al uso de DERIVE
Subexpression. . . También accesible con <Control + T>. Sirve para sustituir en unaexpresión una subexpresión. Si se selecciona una parte de una expresión y se accedea este comando se sustituirá la subexpresión seleccionada por lo que se escriba en laventana, siempre que esté seleccionada la opción «One». En cambio se sustituirá entoda la expresión si está seleccionada la opción «All».
1.8. La opción de menú DeclareEsta opción contiene varios submenús (ver la figura 1.16) que permiten asignar valores fijos o
variables o desasignarlos, ver el apéndice B; declarar el dominio de variables, ver la sección 3.2.2en la página 58; definir funciones, ver la sección 3.2.1 en la página 57; y cambiar el modo detrabajo de DERIVE, ver el apartado 1.6 y el apéndice B.
Figura 1.16: Menú Declare
1.9. La opción de menú SolveSe utiliza para resolver ecuaciones, desigualdades y sistemas de ecuaciones lineales. Re-
cordemos que una ecuación es una igualdad entre dos expresiones matemáticas, denominadasmiembros de la ecuación. Si en lugar de una igualdad se trata de una desigualdad entre dos ex-presiones se denomina inecuación. Cuando hay dos o más igualdades tenemos un sistema deecuaciones.
Las dos primeras opciones del menú Solve, ver la figura 1.17, sirven para resolver ecuacionese inecuaciones de una variable, de forma algebraica (exacta) o numérica (aproximada). La terceraopción sirve para resolver sistemas de ecuaciones lineales. Cada uno de estos submenús abre unaventana de diálogo.
Figura 1.17: Menú Solve
Para acceder directamente a estas ventanas se dispone del botón de la barra de herramientas. Si la expresión es una ecuación o una inecuación y se está trabajando en modo exacto se
20

1.9. La opción de menú Solve
abrirá la ventana Solve Algebraically , que puede verse en la figura 1.18. En cambio, si se está
trabajando en modo aproximado se abrirá la ventana Solve Numerically de la figura 1.19. Porúltimo, si la expresión seleccionada es un sistema de ecuaciones lineales se abrirá la ventana dediálogo Solve n equations .
1.9.1. Resolución de ecuacionesEn DERIVE disponemos de dos métodos para resolver ecuaciones. El algebraico o exacto al
que se accede desde el menú Solve, Algebraically. . . o con la combinación de teclas <Control +Shift+A>, y el numérico al que se accede desde el menú Solve, Numerically. . . o con la combi-nación de teclas <Control + Shift+N>, que abren las ventanas de diálogo Solve Algebraically ,
ver la figura 1.18, y Solve Numerically , ver la figura 1.19 respectivamente.
Figura 1.18: Ventana Solve Algebraically
Figura 1.19: Ventana Solve Numerically
En estas dos ventanas de las figuras 1.18 y 1.19, aparece un recuadro para introducir la ecua-ción, si en la ventana de Álgebra hay alguna expresión seleccionada aparecerá copiada en este
21
Práctica 1. Introducción al uso de DERIVE
recuadro. Aunque una ecuación tiene dos miembros, el comando Solve puede actuar sobre unaúnica expresión, entendiendo DERIVE que el segundo miembro de la ecuación es 0. Para facili-tar la introducción de la ecuación se puede utilizar la paleta de símbolos de la parte superior queaparece en dicha ventana. También hay que seleccionar la variable cuyo valor se quiere obtener,aunque cuando sólo hay una DERIVE la eligirá automáticamente. Si hay más aparecerá unalista desplegable, DERIVE selecciona preferentemente las variables x, y y z y luego por ordenalfabético, si se quiere elegir otro orden puede hacerse desde la ventana Output Options de lasucesión de menús Declare, Algebra State, Output. . . (ver el apartado B.3.2 del apéndice B enla página 209). Los botones OK, Simplify y Cancel funcionan igual que en el resto de ventanas.Además de estos elementos, en la ventana Solve Numerically aparece un apartado, denomina-do Bounds, donde debemos introducir los extremos del intervalo en el que queremos encontrarla solución, el extremo izquierdo corresponde a la casilla Lower y el derecho a la casilla Upper.
Para ilustrar la diferencia entre los dos modos de trabajo, algebraico y numérico, considere-mos el siguiente ejemplo.
Ejemplo 1.2 Resolver la ecuación sen x = 0, algebraica y numéricamente.
Solución: Como el segundo miembro de la ecuación es 0 podemos introducir la expresiónSIN(x).
Al resolver de forma algebraica se obtienen los resultados 0, π y −π. Hay que tener encuenta que cuando, como en este caso, hay infinitas soluciones, DERIVE sólo obtendrá algunas,en este ejemplo las soluciones son de la forma kπ, con k ∈ Z, como la solución proporcionadapor DERIVE parece sugerir.
Si se resuelve de forma aproximada, y no se cambian las opciones que propone DERIVE,el programa buscará una solución en el intervalo [−10, 10 ] (ésta es la opción que aparece laprimera vez que se abre esta ventana de diálogo, las siguientes veces se muestran los extremosdel último intervalo elegido). En este ejemplo DERIVE encontrará la solución 0 (pese a quetambién estén en dicho intervalo las soluciones −3π, −2π, . . . 3π). Si se quiere encontrar lasolución π hay que cambiar el intervalo de búsqueda y elegir uno que sólo contenga esta solución,por ejemplo [ 3, 4 ], entonces se obtendrá como solución 3,14160. �
Para resolver una ecuación se recomienda seguir los siguientes pasos:
1. Intentar resolver la ecuación algebraicamente. En el caso de que DERIVE devuelva lamisma ecuación, encerrada entre corchetes6, significa que no ha sido capaz de obtener lasolución exacta de la ecuación (probablemente porque es imposible expresarla utilizandofunciones elementales). En este caso hay que aplicar el punto siguiente.
2. Intentar resolver la ecuación numéricamente proporcionando un intervalo que contengauna de las soluciones que buscamos. Si no conocemos este intervalo es conveniente haceruna gráfica de la función (la diferencia entre los dos miembros de la ecuación, también
6En realidad DERIVE devuelve la ecuación cuyo miembro es la diferencia de los dos miembros de la ecuaciónoriginal y el segundo es 0.
22

1.9. La opción de menú Solve
se pueden dibujar ambos miembros y buscar el punto de corte). Hay que tener en cuentaque se deben proporcionar tantos intervalos como soluciones se quieran obtener y que esmuy recomendable que cada intervalo proporcionado contenga una única solución, porquesi contiene varias no se sabe cuál de todas ellas se encontrará, pudiendo no ser la quebuscamos.
Mientras las soluciones obtenidas numéricamente siempre tienen un pequeño error, las obte-nidas algebraicamente son exactas. Los métodos aplicados en ambos casos son diferentes: alge-braicamente se aplicará una fórmula (si existe) y se harán manipulaciones algebraicas (despejarla incógnita, completar cuadrados, ...); en cambio numéricamente se aplicará un método ite-rativo que proporciona aproximaciones de la solución cada vez mejores, pero siempre con uncierto error. Mientras el método algebraico puede fallar, el método numérico siempre encontrarála solución aproximada, suponiendo que la ecuación sea al menos continua en el intervalo debúsqueda.
Ejemplo 1.3 ¿En qué punto cosx = x?
Solución: Se introduce la ecuación que se quiere resolver en una ventana Author Expressionde DERIVE. Resolviendo algebráicamente el resultado obtenido es [COS(x) - x = 0], esdecir la ecuación que se obtiene igualando a 0 la diferencia de los dos miembros de la ecuaciónintroducida. Esto indica que DERIVE no la ha podidio resolver algebraicamente (de hecho lasolución de esta ecuación no se puede expresar en «forma cerrada»).
Para obtener la solución (aproximadamente) resolvemos de forma numérica. Seleccionamosla expresión con la ecuación y elegimos los menús Solve, Numerically. . . ; simplificamos laexpresión resultante y obtenemos el valor 0,739085. �
Ejemplo 1.4 Resolver la ecuación ex = x.
Solución: Si se intenta resolver algebráicamente se obtiene la expresión [ê^x - x = 0],indicando que no se puede obtener la solución exacta. Numéricamente, independientemente delintervalo que se elija, se obtiene la expresión [], lo que indica que tampoco se ha obtenidosolución de esta forma. Ello es debido a que la ecuación original no tiene solución, ya queex > x, como se puede comprobar haciendo la gráfica de ambas funciones. �
Raíces de polinomios Mención especial requiere el caso de las ecuaciones polinómicas, cuyassoluciones se llaman también raíces del polinomio. Uno de los resultados más importantes delas matemáticas, que enunciamos a continuación, establece su existencia.
Teorema 1.1 (Teorema fundamental del Álgebra) Todo polinomio con coeficientes complejostiene al menos una raíz.
23

Práctica 1. Introducción al uso de DERIVE
Como consecuencia todo polinomio de grado n con coeficientes complejos se puede escri-bir como producto de una constante y n polinomios de grado uno. Dicho de otra forma todopolinomio se descompone totalmente en C.
En el caso particular de que los coeficientes del polinomio sean números reales el resultado seaplica en el cuerpo de los números complejos. Es decir también se puede descomponer totalmenteen C, pero quizá no en R, como ocurre con x2 + 1 que no tiene ninguna raíz real pero tienedos complejas. De hecho si un polinomio con coeficientes reales tiene una raíz compleja (conparte imaginaria no nula), también tiene como raíz a la conjugada de ésta. Un polinomio concoeficientes reales se puede escribir como producto de una constante, polinomio reales de gradouno y polinomios reales de grado dos con raíces complejas conjugadas.
Ejemplo 1.5 Hallar las raíces del polinomio de tercer grado x3 − 8x2 + 25x− 26.
Solución: Se introduce en una expresión el polinomio de tercer grado abriendo una ventanaAuthor Expression y escribiendo x^3-8x^2+25x-26. Luego, con esta expresión seleccio-nada se pincha en el botón y se simplifica la expresión obtenida. DERIVE muestra la expre-sión [x = 2, x = 3 + 2 î, x = 3 - 2 î]. La descomposición (compleja) de estepolinomio es
x3 − 8x2 + 25x− 26 = (x− 2)(x− 3− 2i)(x− 3 + 2i)
y la realx3 − 8x2 + 25x− 26 = (x− 2)(x2 − 6x+ 13)
�
Nótese que DERIVE ha encontrado las raíces complejas y que las raíces se escriben comoun vector.
Ejercicio 1.12 Hallar las raíces del polinomio: x5 − 5x4 + 40x2 − x− 195.
Ejemplo 1.6 ¿Para qué x se cumple sen x = 1/3?
Solución: Si se resuelve de forma exacta, los resultados que proporciona DERIVE son arc sen 1/3,π − arc sen 1/3 y − arc sen 1/3− π.
Como el arco seno de un número y se define como el número x tal que sen x = y, es-ta solución puede interpretarse como «la solución del problema es la solución del problema»,afirmación que siendo cierta es absolutamente inútil. Para obtener más información podríamosresolver de forma numérica. Pero en este caso, ya que hay una función definida en DERIVEque proporciona la solución, es mejor que sea el propio programa quien aproxime el valor desea-do, por ejemplo utilizando el botón . Obtendremos entonces los valores 0,339836, 2,80175 y−3,48142. �
24

1.9. La opción de menú Solve
1.9.2. Resolución de desigualdades
DERIVE sólo resuelve desigualdades con una incógnita. El proceso de introducción de ladesigualdad es idéntico al de una ecuación, teniendo en cuenta que en lugar del signo de igualdad(=), habrá que introducir el signo de desigualdad que corresponda (<, ≤, >, ≥ y 6=), para intro-ducir alguno de ellos es necesario utilizar la paleta de símbolos. También hay que tener en cuentaque una desigualdad puede no tener solución, en cuyo caso DERIVE devuelve el símbolo [], opuede ser un intervalo, o incluso varios. Veamos algunos ejemplos.
Ejemplo 1.7
1. La desigualdad x2 + 2 < 0 no se cumple para ningún x, por tanto DERIVE devuelve [].
2. La desigualdad x2−3x+2 < 0 tiene como solución el intervalo ] 1, 2 [, DERIVE muestra[1<x<2].
3. La desigualdad contraria x2 − 3x+ 2 > 0 tiene como solución la unión de los intervalos]−∞, 1 [ ∪ ] 2, +∞ [, DERIVE devuelve [x<1, x>2].
4. Para la desigualdad x2 − 3x+ 2 ≥ 0 DERIVE devuelve [x ≤ 1, x ≥ 2].
5. La desigualdad x2 +2 > 0 se cumple para cualquier x, DERIVE devuelve [x=@no], in-dicando que x puede tomar cualquier valor, no es un número cuyo valor es 1 la primera vezque la solución de la desigualdad puede ser cualquier número y que se va incrementandocuando otra solución también es indeterminada.
Todas las desigualdades del ejemplo anterior se han resuelto utilizando el modo algebraicode Solve, no siendo recomendable utilizar el modo numérico.
También hay que tener en cuenta que algunas veces DERIVE devuelve la misma desigual-dad, o una equivalente aun siendo posible determinar la solución, tal como se ilustra en el si-guiente ejemplo.
Ejemplo 1.8 Es el caso de la desigualdad ex > x, que se cumple para cualquier número realx, como se puede comprobar fácilmente haciendo la gráfica de ambas ecuaciones. En vez dedevolver [x=@no], indicando que x puede ser cualquiera, DERIVE devuelve [êx-x>0].
DERIVE tampoco da la respuesta correcta a la desigualdad contraria ex < x, que no severifica para ningún número real x. En vez de devolver [], DERIVE devuelve [êx-x<0].
Una alternativa a la resolución de desigualdades, cuyos dos términos sean funciones conti-nuas, es resolver la ecuación correspondiente y tener en cuenta que la desigualdad se cumpliráo no entre dos soluciones consecutivas. Esto puede comprobarse dando un valor entre ambassoluciones de la ecuación.
25
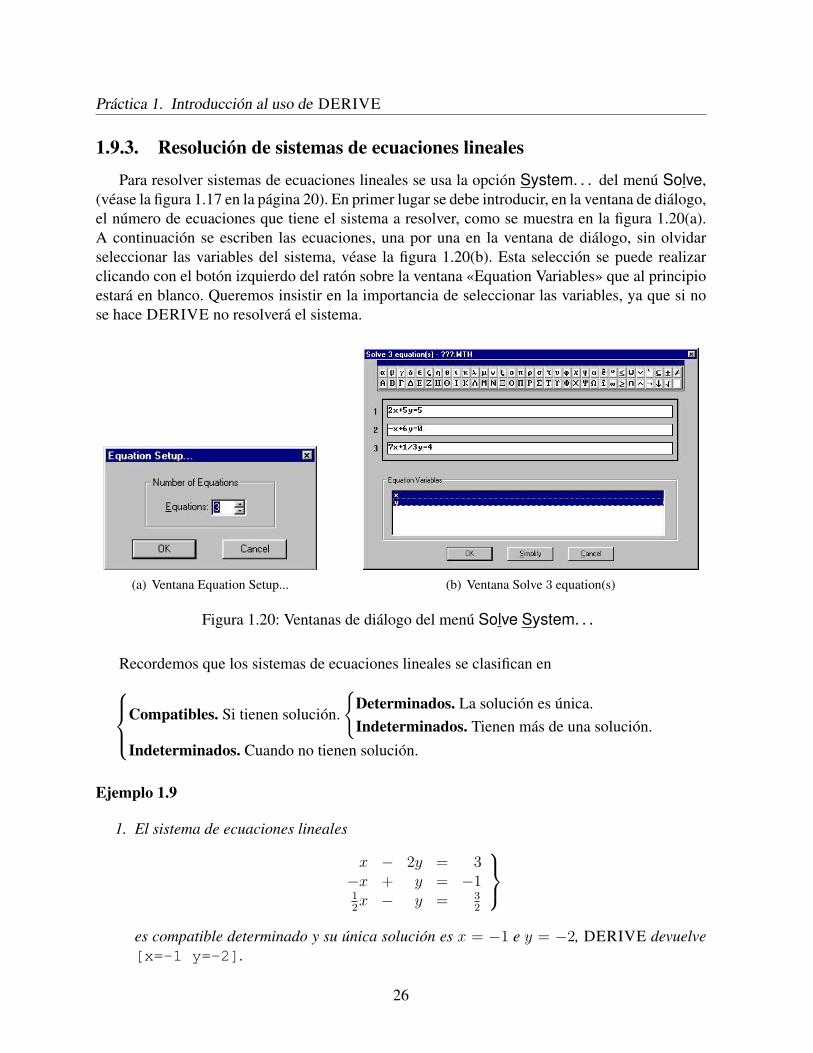
Práctica 1. Introducción al uso de DERIVE
1.9.3. Resolución de sistemas de ecuaciones lineales
Para resolver sistemas de ecuaciones lineales se usa la opción System. . . del menú Solve,(véase la figura 1.17 en la página 20). En primer lugar se debe introducir, en la ventana de diálogo,el número de ecuaciones que tiene el sistema a resolver, como se muestra en la figura 1.20(a).A continuación se escriben las ecuaciones, una por una en la ventana de diálogo, sin olvidarseleccionar las variables del sistema, véase la figura 1.20(b). Esta selección se puede realizarclicando con el botón izquierdo del ratón sobre la ventana «Equation Variables» que al principioestará en blanco. Queremos insistir en la importancia de seleccionar las variables, ya que si nose hace DERIVE no resolverá el sistema.
(a) Ventana Equation Setup... (b) Ventana Solve 3 equation(s)
Figura 1.20: Ventanas de diálogo del menú Solve System. . .
Recordemos que los sistemas de ecuaciones lineales se clasifican enCompatibles. Si tienen solución.
{Determinados. La solución es única.Indeterminados. Tienen más de una solución.
Indeterminados. Cuando no tienen solución.
Ejemplo 1.9
1. El sistema de ecuaciones lineales
x − 2y = 3−x + y = −112x − y = 3
2
es compatible determinado y su única solución es x = −1 e y = −2, DERIVE devuelve[x=-1 y=-2].
26

1.10. El menú Window
2. El sistema de ecuaciones lineales
x − 2y + 2z = 1−3x + 6y − 6z = −3−x + 2y + 2z = −1
es compatible indeterminado. El conjunto de soluciones es x = λ e y = λ−1
2, z = 0,
DERIVE devuelve [x=@no y=@no-1
2z=0].
3. El sistema de ecuaciones lineales
2x + 5y = 5−x + 6y = 07x + 1
3y = 4
de la figura 1.20(b) en la página anterior es incompatible, DERIVE devuelve [].
1.10. El menú Window
Este menú se utiliza para crear, cerrar o cambiar las distintas ventanas que maneja el progra-ma, y puede verse en la figura 1.21 en la página siguiente. DERIVE utiliza tres tipos distintos deventanas. Ventanas de álgebra, que contienen expresiones como se ha visto hasta ahora, y ven-tanas de gráficos, que pueden ser de dos o tres dimensiones y que se estudiarán en la práctica 2.Al abrir el menú se observará que sus submenús aparecen separados por unas líneas más claras.El primer grupo de submenús se utiliza para crear nuevas ventanas. New Algebra View permiteabrir una nueva ventana para ver otra parte de la ventana de álgebra actual, lo que es muy útilsi el documento es largo y se necesita visualizar simultáneamente expresiones anteriores y eltrabajo actual. Para abrir una nueva ventana de álgebra, con nuevos contenidos, debe usarse elmenú de ficheros File. Los otros dos generan nuevas ventanas de gráficas en dos dimensiones,New 2D-plot Window, o tres, New 3D-plot Window.
El siguiente grupo del menú permite controlar la forma de presentación de las ventanas,en forma de cascada (Cascade) o de mosaico horizontal (Tile Horizontally) o vertical (TileVertically)y para organizar los iconos correspondientes a ventanas minimizadas (Arrange Icons).
Los dos siguientes (ToolBar y Status Bar) sirven para mostrar u ocultar la barra de herra-mientas y la barra de estado respectivamente. Si aparecen con la marca de verificación significaque la barra correspondiente está activa.
El último grupo del menú contiene tantos submenús como ventanas se tengan abiertas. Ha-ciendo clic en uno de ellos se pasará a trabajar en la ventana correspondiente.
También se puede navegar por las distintas ventanas con las siguientes combinaciones
<Control + |�| > Va activando sucesivamente las distintas ventanas abiertas.
<Control + 1> Desde una ventana de gráficos nos llevará a la de álgebra correspondiente.
27

Práctica 1. Introducción al uso de DERIVE
Figura 1.21: Menú Window
<Control + 2> Nos llevará a una ventana de gráficos en dos dimensiones abierta, si no hayninguna la crea.
<Control + 3> Nos llevará a una ventana de gráficos en tres dimensiones abierta, si no hayninguna la crea.
Con <Control + > se pasa a la ventana correspondiente.
1.11. El resto de menúsA continuación se describen brevemente los contenidos del resto de menús. Se trata de menús
que tienen que ver con el propio programa más que con las matemáticas. En general funcionande forma estándar, es decir como otros menús similares de programas del entorno WINDOWS,sin duda el más específico es el menú Edit.
1.11.1. El menú Edit
Este menú es distinto en las ventanas de álgebra, de gráficos en dos dimensiones y de gráficosen tres dimensiones que se verán en la siguiente práctica. La figura 1.22 en la página siguientemuestra el menú Edit de la ventana de álgebra. Se observa que hay tres grupos de opciones, todasrelacionadas con las expresiones. El primer grupo tiene las opciones
Expression. . . Se utiliza para editar una expresión. Abre una ventana de autor con la expre-sión que el usuario tenga seleccionada en la ventana de álgebra para editarla.
Annotation . . . Abre una ventana (figura 1.23(a) en la página 30) que permite personalizarel comentario correspondiente a la expresión seleccionada y que aparece en la barra deestado y también al imprimir.
28
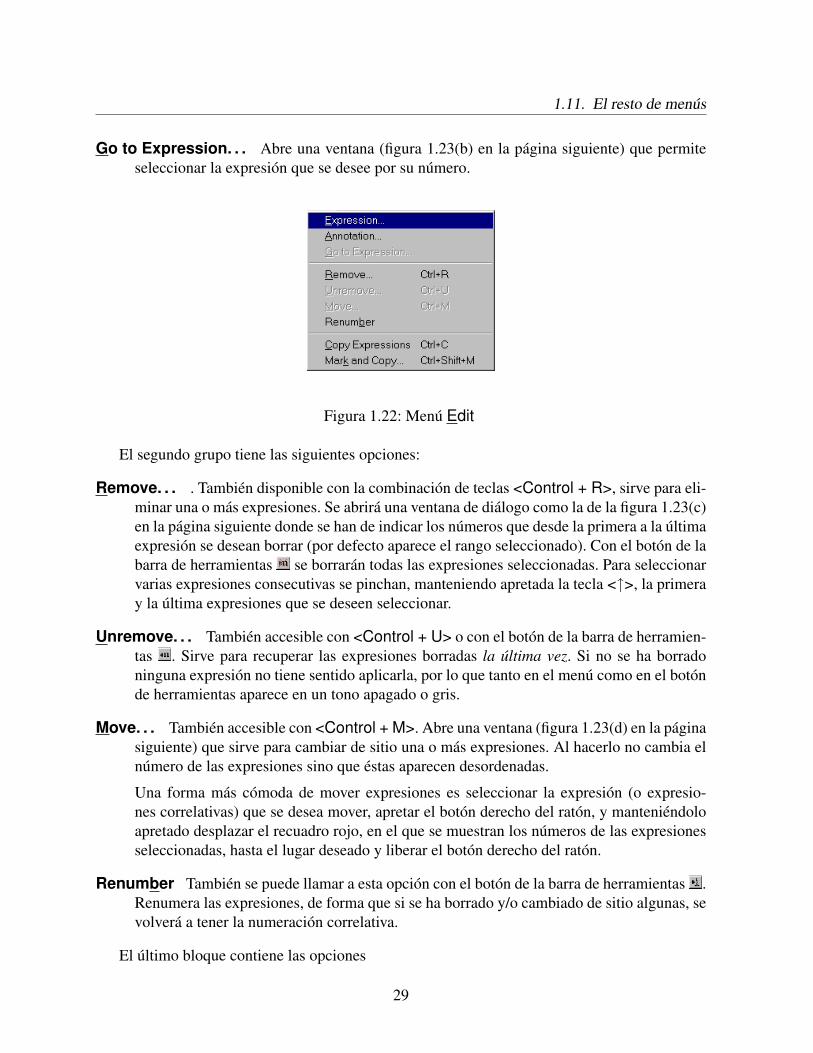
1.11. El resto de menús
Go to Expression. . . Abre una ventana (figura 1.23(b) en la página siguiente) que permiteseleccionar la expresión que se desee por su número.
Figura 1.22: Menú Edit
El segundo grupo tiene las siguientes opciones:
Remove. . . . También disponible con la combinación de teclas <Control + R>, sirve para eli-minar una o más expresiones. Se abrirá una ventana de diálogo como la de la figura 1.23(c)en la página siguiente donde se han de indicar los números que desde la primera a la últimaexpresión se desean borrar (por defecto aparece el rango seleccionado). Con el botón de labarra de herramientas se borrarán todas las expresiones seleccionadas. Para seleccionarvarias expresiones consecutivas se pinchan, manteniendo apretada la tecla <↑>, la primeray la última expresiones que se deseen seleccionar.
Unremove. . . También accesible con <Control + U> o con el botón de la barra de herramien-tas . Sirve para recuperar las expresiones borradas la última vez. Si no se ha borradoninguna expresión no tiene sentido aplicarla, por lo que tanto en el menú como en el botónde herramientas aparece en un tono apagado o gris.
Move. . . También accesible con <Control + M>. Abre una ventana (figura 1.23(d) en la páginasiguiente) que sirve para cambiar de sitio una o más expresiones. Al hacerlo no cambia elnúmero de las expresiones sino que éstas aparecen desordenadas.
Una forma más cómoda de mover expresiones es seleccionar la expresión (o expresio-nes correlativas) que se desea mover, apretar el botón derecho del ratón, y manteniéndoloapretado desplazar el recuadro rojo, en el que se muestran los números de las expresionesseleccionadas, hasta el lugar deseado y liberar el botón derecho del ratón.
Renumber También se puede llamar a esta opción con el botón de la barra de herramientas .Renumera las expresiones, de forma que si se ha borrado y/o cambiado de sitio algunas, sevolverá a tener la numeración correlativa.
El último bloque contiene las opciones
29

Práctica 1. Introducción al uso de DERIVE
Copy Expressions , también accesible con <Control + C>. Copia la expresión seleccionadapara pegarla con <Control + V> en donde sea posible, por ejemplo en una ventana de autoro en otra aplicación que permita el uso del portapapeles de Windows.
Mark and Copy . . . accesible también con las combinaciones de teclas <Control + Shift+M>,sirve para copiar una o varias expresiones al portapapeles de Windows para pegarlas comoimagen en otra aplicación.
(a) Ventana Edit Annotation . . . (b) Ventana Edit Go to Expression. . .
(c) Ventana Edit Remove. . . (d) Ventana Edit Move. . .
Figura 1.23: Ventanas de diálogo correspondientes al menú Edit
1.11.2. Ayuda en DERIVEDERIVE tiene una ayuda accesible desde el menú Help. Está organizada de forma similar
a todas las ayudas de programas del entorno Windows y es la mejor forma de resolver las dudasque puedan surgir mientras se está trabajando con el propio programa.
1.11.3. El menú FileDesde este menú se puede guardar nuestro trabajo, recuperarlo posteriormente e imprimirlo.
Las opciones están agrupadas por secciones como se observa en la figura 1.24 en la páginasiguiente. En la primera sección se tiene:
New También accesible con <Control + N> y con el botón de la barra de herramientas . Seutiliza para empezar una nueva sesión de trabajo en una ventana de álgebra nueva.
30
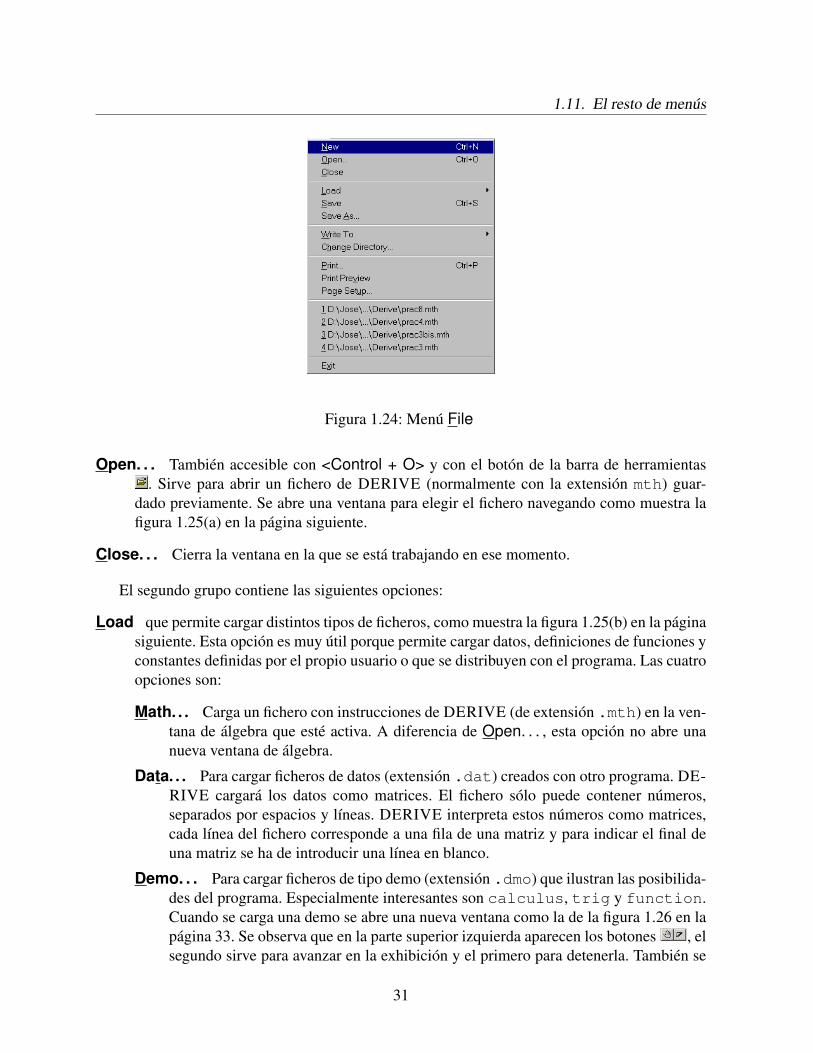
1.11. El resto de menús
Figura 1.24: Menú File
Open. . . También accesible con <Control + O> y con el botón de la barra de herramientas. Sirve para abrir un fichero de DERIVE (normalmente con la extensión mth) guar-
dado previamente. Se abre una ventana para elegir el fichero navegando como muestra lafigura 1.25(a) en la página siguiente.
Close. . . Cierra la ventana en la que se está trabajando en ese momento.
El segundo grupo contiene las siguientes opciones:
Load que permite cargar distintos tipos de ficheros, como muestra la figura 1.25(b) en la páginasiguiente. Esta opción es muy útil porque permite cargar datos, definiciones de funciones yconstantes definidas por el propio usuario o que se distribuyen con el programa. Las cuatroopciones son:
Math. . . Carga un fichero con instrucciones de DERIVE (de extensión .mth) en la ven-tana de álgebra que esté activa. A diferencia de Open. . . , esta opción no abre unanueva ventana de álgebra.
Data. . . Para cargar ficheros de datos (extensión .dat) creados con otro programa. DE-RIVE cargará los datos como matrices. El fichero sólo puede contener números,separados por espacios y líneas. DERIVE interpreta estos números como matrices,cada línea del fichero corresponde a una fila de una matriz y para indicar el final deuna matriz se ha de introducir una línea en blanco.
Demo. . . Para cargar ficheros de tipo demo (extensión .dmo) que ilustran las posibilida-des del programa. Especialmente interesantes son calculus, trig y function.Cuando se carga una demo se abre una nueva ventana como la de la figura 1.26 en lapágina 33. Se observa que en la parte superior izquierda aparecen los botones , elsegundo sirve para avanzar en la exhibición y el primero para detenerla. También se
31

Práctica 1. Introducción al uso de DERIVE
(a) Ventana File Open. . . (b) Menú File Load
(c) Ventana File Save As . . . (d) Ventana File Change Directory . . .
Figura 1.25: Ventanas de diálogo correspondientes al menú File
puede avanzar en la demo presionando cada vez <ENTER> , cuando se detiene unaexhibición las expresiones mostradas se copian en la ventana de álgebra, cerrándosela ventana de la demo. Hay que prestar a la barra de estado, donde se va mostrandola información de la demo.
Utility. . . Carga ficheros de extensión .mth, pero únicamente en memoria a diferenciade Open. . . y de Load Math. . . . Esta opción está pensada para cargar funciones yconstantes predefinidas, que pueden ser útiles en diferentes trabajos. Por ejemplo elfichero metric.mth contiene las definiciones de las diferentes unidades del sistemamétrico decimal en metros, segundos y gramos, sus conversiones, sus mútliplos (kilo,
32

1.11. El resto de menús
Figura 1.26: Ventana de álgebra con la demo trig cargada.
tera, ..., ), etc.
Ejemplo 1.10 Para saber cuántos metros cuadrados son 9,3 hectáreas, podemoscargar el fichero metric.mth, introducir la expresión 9.3 hectare y simplifi-carla, obtendremos 93000·meter2. Como se puede apreciar el fichero define hec-tárea como 10000m2. Para saber cuántas hectáreas son 12000 metros cuadrados seintroduce y se simplifica la expresión 12000 meter2/hectare.
Ejercicio 1.13 Cargar el fichero metric.mth utilizando Load Math. . . para poder versu contenido. Traducirlo a castellano y añadir las medidas locales arroba (12,5Kg. en laComunidad Valenciana), hanegada (la doceava parte de una hectárea en la ComunidadValenciana).
Save Sirve para guardar el trabajo en un fichero, también se puede utilizar <Control + S> o elbotón de la barra de herramientas . Si se trata de una sesión que no se ha guardado nunca(es decir, que en la barra de la ventana aparecen los interrogantes) se abre una ventana de
33
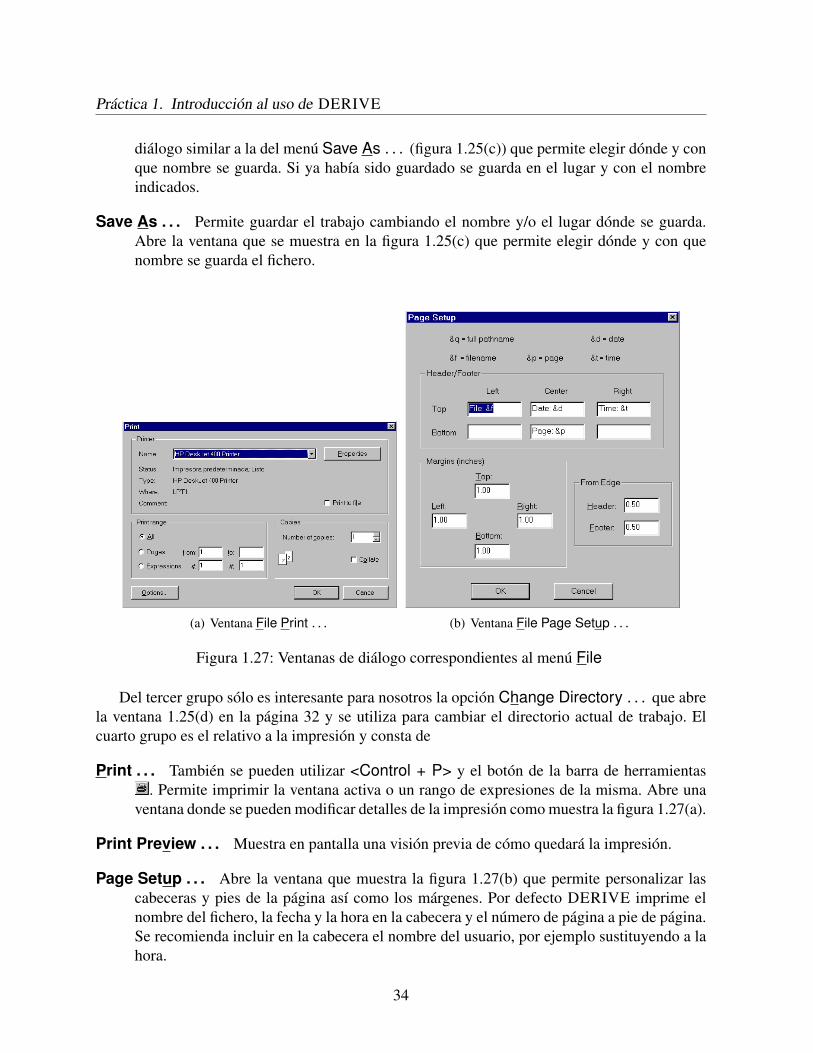
Práctica 1. Introducción al uso de DERIVE
diálogo similar a la del menú Save As . . . (figura 1.25(c)) que permite elegir dónde y conque nombre se guarda. Si ya había sido guardado se guarda en el lugar y con el nombreindicados.
Save As . . . Permite guardar el trabajo cambiando el nombre y/o el lugar dónde se guarda.Abre la ventana que se muestra en la figura 1.25(c) que permite elegir dónde y con quenombre se guarda el fichero.
(a) Ventana File Print . . . (b) Ventana File Page Setup . . .
Figura 1.27: Ventanas de diálogo correspondientes al menú File
Del tercer grupo sólo es interesante para nosotros la opción Change Directory . . . que abrela ventana 1.25(d) en la página 32 y se utiliza para cambiar el directorio actual de trabajo. Elcuarto grupo es el relativo a la impresión y consta de
Print . . . También se pueden utilizar <Control + P> y el botón de la barra de herramientas. Permite imprimir la ventana activa o un rango de expresiones de la misma. Abre una
ventana donde se pueden modificar detalles de la impresión como muestra la figura 1.27(a).
Print Preview . . . Muestra en pantalla una visión previa de cómo quedará la impresión.
Page Setup . . . Abre la ventana que muestra la figura 1.27(b) que permite personalizar lascabeceras y pies de la página así como los márgenes. Por defecto DERIVE imprime elnombre del fichero, la fecha y la hora en la cabecera y el número de página a pie de página.Se recomienda incluir en la cabecera el nombre del usuario, por ejemplo sustituyendo a lahora.
34

1.11. El resto de menús
En general la impresión que se obtiene del trabajo realizado con DERIVE es bastante pobre.No hay que olvidar que se trata de un «asistente matemático» y no de un programa de trata-miento de textos. Sin embargo el mayor problema no es la calidad o presentación, sino que elresultado final puede ser ininteligible por falta de detalles. Este aspecto es responsabilidad exclu-siva del usuario que puede hacer más inteligible su documento incluyendo anotaciones o brevescomentarios tal como se ha explicado en el apartado 1.4.1.
El siguiente grupo consiste en una lista que muestra los últimos ficheros abiertos (figura 1.24en la página 31). Permite abrirlos rápidamente con tan sólo hacer click con el ratón sobre elfichero deseado.
Por último Exit es para salir del programa, y es por tanto equivalente a pinchar sobre elbotón de la derecha de la barra de la ventana. Si no se ha salvado previamente el trabajorealizado DERIVE mostrará una ventana preguntando si se quieren guardar los cambios. Si seha cambiado alguna opción crítica también preguntará si se desea que la próxima vez que seinicie el programa se haga con estas nuevas opciones. En general es conveniente contestar queno a esta última pregunta.
35

Práctica 2
Gráficos con DERIVE
2.1. Introducción
Una de las mayores utilidades de DERIVE es su parte gráfica que permite representar fun-ciones de una o dos variables, modificar su presentación, etc.
DERIVE representa las gráficas de las funciones en una o más ventanas gráficas. Se verá enprimer lugar cómo trabajar con gráficos en dos dimensiones.
2.2. Gráficos de funciones de una variable (Dibujos en 2 di-mensiones)
Se puede acceder a una ventana de gráficos de dos dimensiones de dos formas. Bien creándolaen el menú Window, bien pinchando el botón de la barra de herramientas . Se ha de tener encuenta que la primera vez la ventana aparecerá simplemente con los ejes tal como puede verse enla figura 2.1 en la página siguiente. Para dibujar la función hay que volver a elegir el menú Plot!o bien pinchar en el icono de la barra de herramientas correspondiente. Se dibujará entoncesla expresión que esté elegida en la ventana de Álgebra. Se puede volver a la ventana de álgebrade varias formas: a través del menú Window; con el último botón de la barra de herramientas dela ventana de gráficos . o bien con la combinación de teclas <Control + 1>.
Antes que nada describiremos la ventana tal como aparece la primera vez que se accede aella. Se observa que los menús, la barra de herramientas y la barra de estado son distintas a las deuna ventana de Álgebra. Por su parte la barra de la ventana contiene ahora el texto «DERIVE forWindows-[2D-plot]». Los menús y los botones de la barra de herramientas se describirán másadelante.
El área de gráficas aparece con los ejes dibujados, con sus nombres, x e y y las marcas de lasunidades desde −4 hasta 4. También aparece una cruz en el punto (1, 1).
La línea de estado en este caso informa del tipo de coordenadas en que se trabaja en estemomento (este hecho se explicará más tarde en la página 42), de las coordenadas en las que estála cruz en ese momento, de las coordenadas del centro de la pantalla (la primera vez el centro
37

Práctica 2. Gráficos con DERIVE
Figura 2.1: Pantalla inicial de gráficos en dos dimensiones de DERIVE.
de la pantalla corresponde al origen) y de la escala (la distancia entre las marcas en los ejes deabcisas y de ordenadas, ambas igual a 1 al pasar a esta pantalla por primera vez. Notemos queestas marcas, aunque van de 1 en 1, no tienen la misma longitud en el eje de abcisas que en el deordenadas).
La cruz se puede cambiar de posición fácilmente haciendo clic con el ratón en el punto dondese quiera colocar, también puede desplazarse de forma continua con las teclas de dirección <↑>,<↓>, <←> y <→>. También usando la sucesión de menús Set, Cross. . . , tal como se describeen la página 39.
2.2.1. Gráficas con DERIVE
Como se ha comentado anteriormente, para obtener la gráfica de una función con DERIVEhay que escribir primero la función en la ventana de Álgebra. Con la expresión seleccionadairemos a la ventana de dibujos en dos dimensiones y allí utilizaremos el menú Plot! o bienpincharemos en el icono obteniéndose la gráfica de esta forma. Por ejemplo, para dibujar la
38

2.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones)
gráfica de la función seno en la ventana de Álgebra introduciremos la expresión SIN(x). Luegopodemos pinchar en el icono , entonces el programa mostrará la ventana de gráficos en dosdimensiones, pero vacía. Luego volvemos a pinchar en el icono y entonces DERIVE hará lagráfica de la función seno.
En una misma ventana de gráficos de dos dimensiones se pueden dibujar las gráficas devarias funciones simultáneamente. Basta repetir los pasos descritos anteriormente cambiando lafunción en la ventana de Álgebra, es decir que para cada nueva función hay que volver a laventana de Álgebra, seleccionar la función que se quiere dibujar (introduciendo previamente lacorrespondiente expresión si es necesario) y repetir el proceso. DERIVE dibuja las distintasgráficas en colores distintos.
Hay que tener en cuenta que si en la ventana de Álgebra se elige la opción de dibujo, enla barra de herramientas se volverá a la ventana de dibujos en dos dimensiones ya abierta. Sise desea se puede abrir una nueva ventana de dibujos en dos dimensiones a través del menúWindow. También conviene recordar que si en la ventana de gráficas se ordena dibujar se vuelvea hacer la gráfica de la expresión que esté seleccionada en la ventana de Álgebra y este proceso serepite tantas veces como se ordene dibujar. Si no tiene sentido realizar la gráfica de la expresiónseleccionada DERIVE mostrará un mensaje de error.
Ejercicio 2.1 Dibujar las gráficas de las funciones trigonométricas seno, coseno y tangente. (Sedebe obtener un resultado similar al de la figura 2.2 en la página siguiente)
Con los menús y la barra de herramientas se pueden realizar muchas operaciones, comocambiar los colores de los ejes u ocultarlos, hacer zooms, cambiar la región del dibujo que se veen pantalla, cambiar la posición de la cruz, etc. A continuación se verán las más interesantes.
2.2.2. El menú SetEste menú tiene las siguientes opciones, cada una de las cuales da lugar a una ventana de
diálogo.
Center. . . Accesible también mediante <Control + T>. Abre la ventana de la figura 2.3(a) enla página 41. Se puede elegir entre poner en el centro de la pantalla el origen, la cruz oun punto cualquiera, en este caso se introducirán directamente las coordenadas del puntoque será el que aparezca en el centro de la pantalla. Las dos primeras opciones se puedenrealizar con los botones de la barra de herramientas. y , respectivamente.
Cross. . . Sirve para cambiar la cruz de sitio. Abre una ventana de diálogo como la de la fi-gura 2.3(b) en la página 41. Se puede elegir de forma muy cómoda el actual centro de lapantalla, el origen o bien un punto cualquiera, para lo que se deben introducir directamen-te sus coordenadas. Como se ha dicho la cruz puede cambiarse también directamente conel ratón, pero sólo a un punto de la ventana, haciéndolo con el menú se puede elegir unpunto situado fuera de la ventana. También es posible desplazar la cruz usando las teclasde dirección <↑>, <↓>, <←> y <→> y con ellas también es posible desplazarla fuera de
39
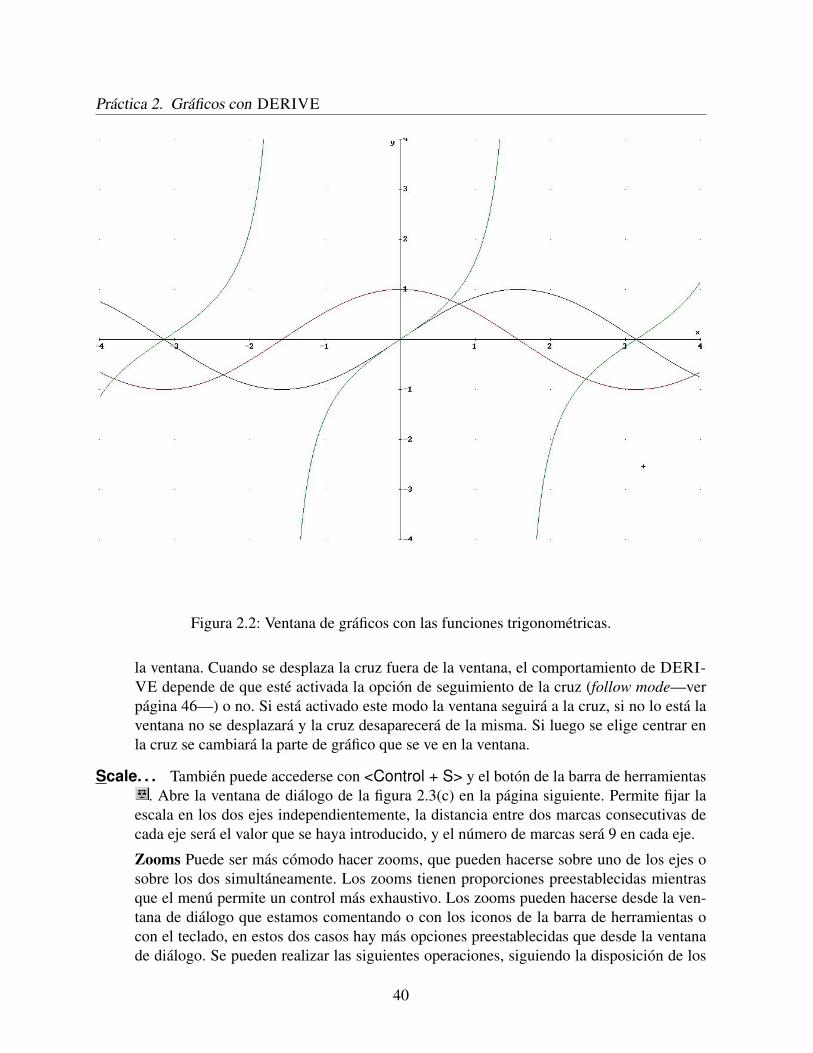
Práctica 2. Gráficos con DERIVE
Figura 2.2: Ventana de gráficos con las funciones trigonométricas.
la ventana. Cuando se desplaza la cruz fuera de la ventana, el comportamiento de DERI-VE depende de que esté activada la opción de seguimiento de la cruz (follow mode—verpágina 46—) o no. Si está activado este modo la ventana seguirá a la cruz, si no lo está laventana no se desplazará y la cruz desaparecerá de la misma. Si luego se elige centrar enla cruz se cambiará la parte de gráfico que se ve en la ventana.
Scale. . . También puede accederse con <Control + S> y el botón de la barra de herramientas. Abre la ventana de diálogo de la figura 2.3(c) en la página siguiente. Permite fijar la
escala en los dos ejes independientemente, la distancia entre dos marcas consecutivas decada eje será el valor que se haya introducido, y el número de marcas será 9 en cada eje.
Zooms Puede ser más cómodo hacer zooms, que pueden hacerse sobre uno de los ejes osobre los dos simultáneamente. Los zooms tienen proporciones preestablecidas mientrasque el menú permite un control más exhaustivo. Los zooms pueden hacerse desde la ven-tana de diálogo que estamos comentando o con los iconos de la barra de herramientas ocon el teclado, en estos dos casos hay más opciones preestablecidas que desde la ventanade diálogo. Se pueden realizar las siguientes operaciones, siguiendo la disposición de los
40
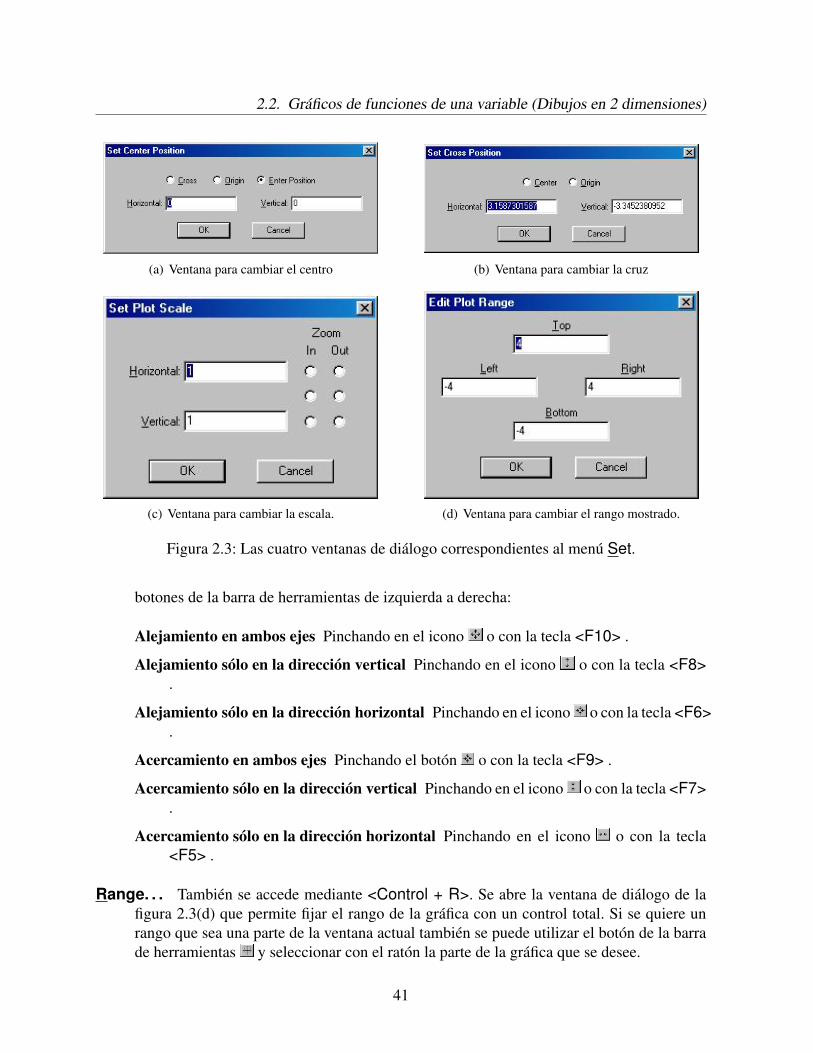
2.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones)
(a) Ventana para cambiar el centro (b) Ventana para cambiar la cruz
(c) Ventana para cambiar la escala. (d) Ventana para cambiar el rango mostrado.
Figura 2.3: Las cuatro ventanas de diálogo correspondientes al menú Set.
botones de la barra de herramientas de izquierda a derecha:
Alejamiento en ambos ejes Pinchando en el icono o con la tecla <F10> .
Alejamiento sólo en la dirección vertical Pinchando en el icono o con la tecla <F8>.
Alejamiento sólo en la dirección horizontal Pinchando en el icono o con la tecla <F6>.
Acercamiento en ambos ejes Pinchando el botón o con la tecla <F9> .
Acercamiento sólo en la dirección vertical Pinchando en el icono o con la tecla <F7>.
Acercamiento sólo en la dirección horizontal Pinchando en el icono o con la tecla<F5> .
Range. . . También se accede mediante <Control + R>. Se abre la ventana de diálogo de lafigura 2.3(d) que permite fijar el rango de la gráfica con un control total. Si se quiere unrango que sea una parte de la ventana actual también se puede utilizar el botón de la barrade herramientas y seleccionar con el ratón la parte de la gráfica que se desee.
41
Práctica 2. Gráficos con DERIVE
2.2.3. El menú Options
A través de está opción de menú se pueden cambiar muchas opciones de presentación de lasgráficas. Las más interesantes quizá sean las primeras. Pero debemos observar que se dividenen dos grupos. Las opciones del primer grupo abren una ventana de diálogo y se describen acontinuación.
Axes. . . Esta opción abre la ventana de diálogo de la figura 2.4(a) en la página siguiente. Comopuede verse se puede hacer que los ejes no se dibujen o se puede cambiar el color con elque se dibujan. También se pueden eliminar o cambiar de color las marcas de los ejes y losnúmeros que las acompañan (si se eliminan los ejes pero no se eliminan las marcas éstaspermanecen). Por último se puede cambiar el nombre de los ejes (o eliminarlos dejando laventana correspondiente en blanco) y también se puede elegir el color en el que se deseaque aparezca el nombre de los ejes. Todos los botones abren la ventana 2.10(a) enla página 49 donde se puede elegir el color.
Cross. . . Con esta opción se abre la ventana de diálogo de la figura 2.4(c) en la página si-guiente. Se puede hacer que desaparezca la cruz o cambiarla de color.
Grids. . . Con esta opción se controla el mallado, el mallado son unas marcas auxiliares quesirven para determinar mejor las coordenadas de los puntos. Puede presentarse en forma depuntos (que es la opción por defecto), en cuyo caso en los puntos con las dos coordenadasenteras, por ejemplo en (−2, 3), se dibuja un punto, que apenas es visible; otra alternativaes que se presente en forma de líneas. En este caso se dibujan líneas paralelas a los ejesde ecuaciones x = z, e y = z, donde z es un número entero; por último puede elegirseque no se dibujen ni puntos ni líneas. Si se ha optado por incluir algún tipo de malladopuede elegirse también el color en que se dibujarán puntos o líneas. Todas estas opcionesse eligen en la ventana de diálogo de la figura 2.4(f) en la página siguiente. Un ejemplodonde se ha utilizado esta opción y las dos anteriores puede verse en la figura 2.9 en lapágina 48.
Coordinate System. . . Esta opción determina si se está trabajando con coordenadas carte-sianas, también llamadas rectangulares, o con coordenadas polares. Las coordenadas pola-res se estudiarán con detalle en la práctica 5. Cuando se elige esta opción se abre la ventanade diálogo de la figura 2.4(d) en la página siguiente. Si se marca la opción Polar el aspectode la ventana cambia ligeramente, en la parte inferior izquierda de la ventana de gráficas endos dimensiones donde se informa del tipo de coordenadas que se están usando y de la po-sición de la cruz se observa que el icono sobre fondo azul muestra unas circunferencias enlugar de cuadrados, y las coordenadas de la cruz (aunque ésta no haya cambiado de sitio)son diferentes, debido a que ahora se expresan usando coordanadas polares. El aspecto, sila cruz está en el punto de coordenadas cartesianas (1, 1), es .
Pero ante todo cambia la forma en que se interpreta la función a dibujar. Aunque en la prác-tica 5 se estudiará con más detalle todo lo relativo a las coordenadas polares, se explicará acontinuación cómo dibujar una curva de la que se conoce su ecuación polar, en concreto la
42

2.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones)
(a) Opciones de los ejes (b) Opciones de los puntos.
(c) Opciones de la cruz. (d) Elección del tipo de coordenadas.
(e) Color del dibujo. (f) Opciones del mallado.
Figura 2.4: Las ventanas de diálogo correspondientes al menú Options.
43
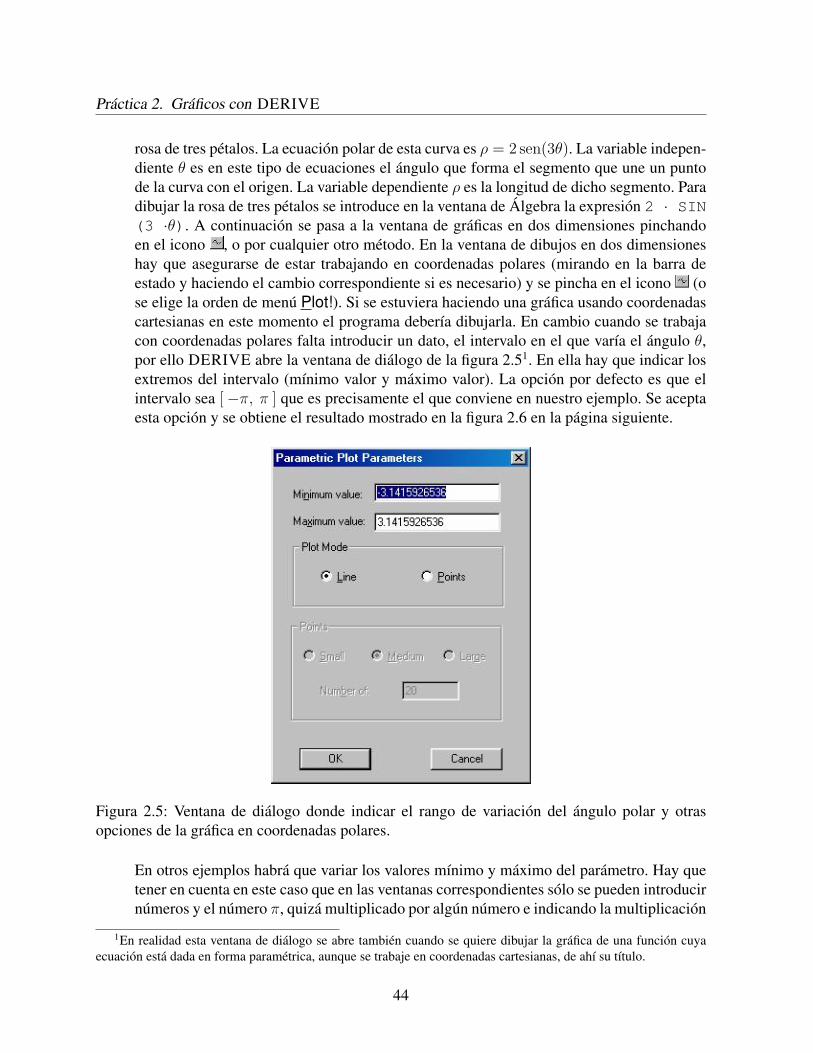
Práctica 2. Gráficos con DERIVE
rosa de tres pétalos. La ecuación polar de esta curva es ρ = 2 sen(3θ). La variable indepen-diente θ es en este tipo de ecuaciones el ángulo que forma el segmento que une un puntode la curva con el origen. La variable dependiente ρ es la longitud de dicho segmento. Paradibujar la rosa de tres pétalos se introduce en la ventana de Álgebra la expresión 2 · SIN(3 ·θ). A continuación se pasa a la ventana de gráficas en dos dimensiones pinchandoen el icono , o por cualquier otro método. En la ventana de dibujos en dos dimensioneshay que asegurarse de estar trabajando en coordenadas polares (mirando en la barra deestado y haciendo el cambio correspondiente si es necesario) y se pincha en el icono (ose elige la orden de menú Plot!). Si se estuviera haciendo una gráfica usando coordenadascartesianas en este momento el programa debería dibujarla. En cambio cuando se trabajacon coordenadas polares falta introducir un dato, el intervalo en el que varía el ángulo θ,por ello DERIVE abre la ventana de diálogo de la figura 2.51. En ella hay que indicar losextremos del intervalo (mínimo valor y máximo valor). La opción por defecto es que elintervalo sea [−π, π ] que es precisamente el que conviene en nuestro ejemplo. Se aceptaesta opción y se obtiene el resultado mostrado en la figura 2.6 en la página siguiente.
Figura 2.5: Ventana de diálogo donde indicar el rango de variación del ángulo polar y otrasopciones de la gráfica en coordenadas polares.
En otros ejemplos habrá que variar los valores mínimo y máximo del parámetro. Hay quetener en cuenta en este caso que en las ventanas correspondientes sólo se pueden introducirnúmeros y el número π, quizá multiplicado por algún número e indicando la multiplicación
1En realidad esta ventana de diálogo se abre también cuando se quiere dibujar la gráfica de una función cuyaecuación está dada en forma paramétrica, aunque se trabaje en coordenadas cartesianas, de ahí su título.
44

2.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones)
Figura 2.6: Ventana de DERIVE con la gráfica de la rosa de tres pétalos de ecuación ρ =2 sen(3θ).
con un espacio en blanco o juntado el número y la palabra pi, así para introducir π/2, sepuede escribir .5pi o .5 pi, pero no pi/2.
Se habrá observado que en la ventana de diálogo Parametric Plot Parameters de lafigura 2.5 en la página anterior, además de indicar el rango de variación del ángulo θ sepuede elegir la forma de hacer el dibujo, con líneas y con puntos. Si se elige la modalidadde puntos se puede determinar el número de los mismos y elegir entre tres tamaños. En lafigura 2.7 en la página siguiente se muestran algunos resultados posibles.
Points Esta opción no afecta a las gráficas de las funciones que se dibujan usualmente sinoa gráficas de puntos aislados. Al elegirla se abre la ventana de diálogo de la figura 2.4(b)en la página 43. Se puede elegir entre dibujar los puntos o conectarlos y también se puedeelegir entre tres tamaños. Puede verse un ejemplo en la figura 2.8 en la página 47.
Plot color. . . Esta opción abre la ventana de diálogo de la figura 2.4(e) en la página 43. La op-ción por defecto es que para cada nueva gráfica se cambie de color, pero esta opción puededesactivarse. También es posible elegir directamente el color de la gráfica que se dibujaráa continuación pinchando en el botón correspondiente, se abre entonces una ventana comola 2.10(a) en la página 49.
Background color. . . Esta opción permite cambiar el color del fondo de la gráfica. Abre laventana de diálogo de la figura 2.10(a) en la página 49, donde se puede elegir este color.
Printing. . . Permite cambiar algunas opciones de impresión, tal como puede verse en la figu-ra 2.10(b) en la página 49.
Las dos primeras opciones del segundo grupo del menú Options controlan algunos aspectosrelacionados con la cruz. La tercera opción afecta a la forma en que se presentará la gráfica.
45
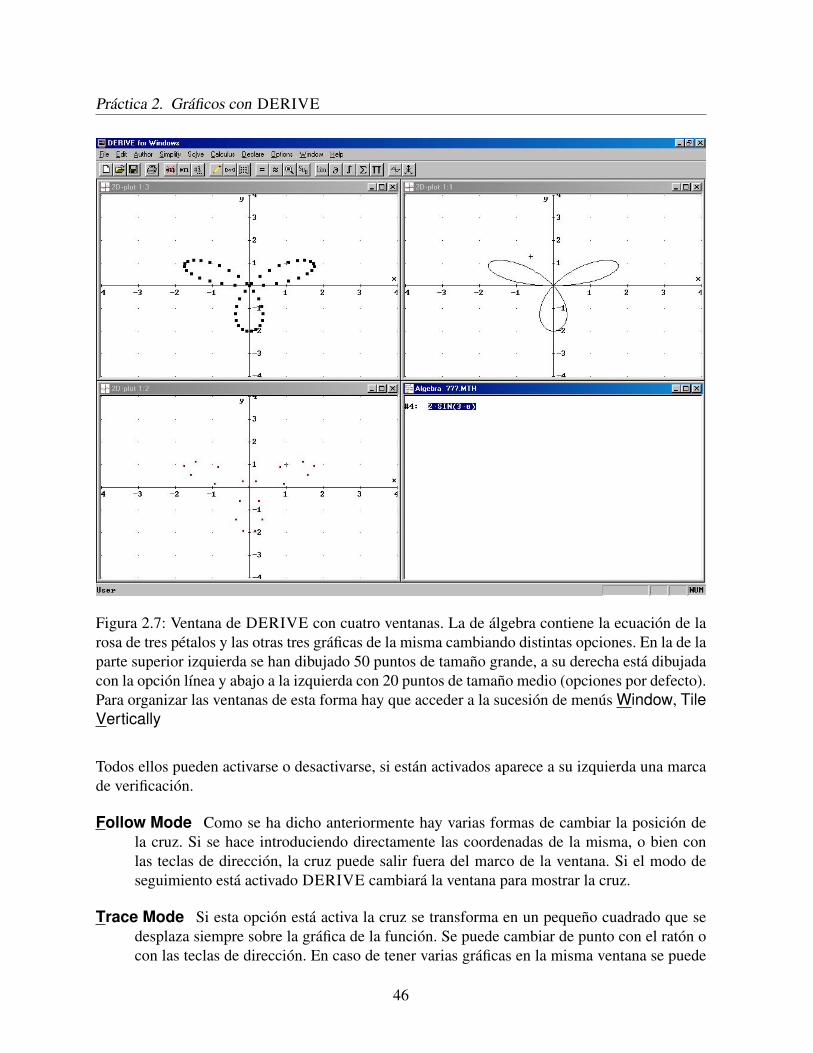
Práctica 2. Gráficos con DERIVE
Figura 2.7: Ventana de DERIVE con cuatro ventanas. La de álgebra contiene la ecuación de larosa de tres pétalos y las otras tres gráficas de la misma cambiando distintas opciones. En la de laparte superior izquierda se han dibujado 50 puntos de tamaño grande, a su derecha está dibujadacon la opción línea y abajo a la izquierda con 20 puntos de tamaño medio (opciones por defecto).Para organizar las ventanas de esta forma hay que acceder a la sucesión de menús Window, TileVertically
Todos ellos pueden activarse o desactivarse, si están activados aparece a su izquierda una marcade verificación.
Follow Mode Como se ha dicho anteriormente hay varias formas de cambiar la posición dela cruz. Si se hace introduciendo directamente las coordenadas de la misma, o bien conlas teclas de dirección, la cruz puede salir fuera del marco de la ventana. Si el modo deseguimiento está activado DERIVE cambiará la ventana para mostrar la cruz.
Trace Mode Si esta opción está activa la cruz se transforma en un pequeño cuadrado que sedesplaza siempre sobre la gráfica de la función. Se puede cambiar de punto con el ratón ocon las teclas de dirección. En caso de tener varias gráficas en la misma ventana se puede
46

2.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones)
Figura 2.8: Las ventanas de la parte de arriba muestran el dibujo de la matriz de la izquierda(expresión #1), nótese que cada fila de la matriz se interpreta como las coordenadas de un punto.La gráfica del centro está realizada con la opción de no unir los puntos y éstos son del mayortamaño posible. La de la derecha se ha realizado uniendo los puntos. Las ventanas de abajomuestran dos gráficas similares pero de la matriz de la izquierda (expresión #2), que difiere de lade arriba en el orden de dos filas. Aunque las gráficas sin unir los puntos son iguales, al unirlos elcambio de la ordenación de los puntos hace que los resultados sean diferentes. También convieneobservar que para cerrar la figura se ha repetido el primer punto como último.
pasar de una a otra con las teclas de dirección o con el botón derecho del ratón. Esta opciónpuede activarse y desactivarse también usando el teclado mediante <F3> .
Ejemplo 2.1 Hallar el mayor punto de intersección de las funciones sen x y ex.
Solución: Si se intenta resolver este problema de forma exacta se comprueba que no haysolución analítica. Sin embargo si se dibujan las gráficas de ambas funciones se observaque hay un punto de corte entre −4 y −3. Este es el mayor de todos los puntos de corte,
47
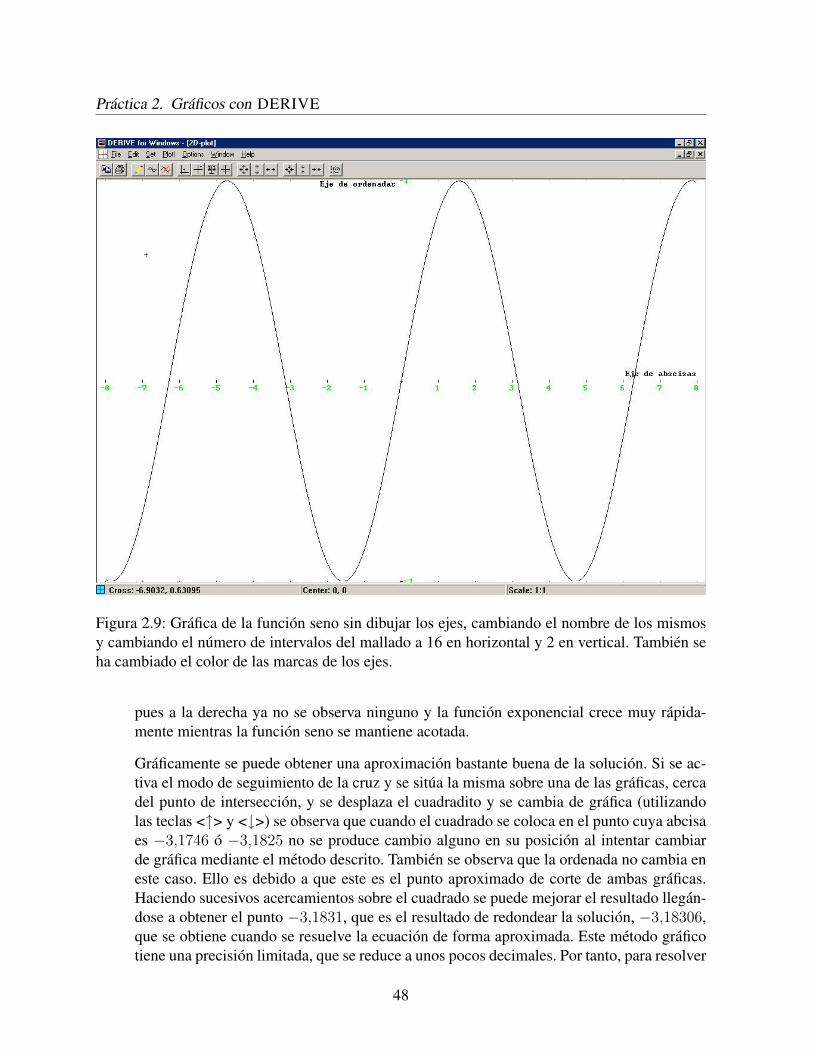
Práctica 2. Gráficos con DERIVE
Figura 2.9: Gráfica de la función seno sin dibujar los ejes, cambiando el nombre de los mismosy cambiando el número de intervalos del mallado a 16 en horizontal y 2 en vertical. También seha cambiado el color de las marcas de los ejes.
pues a la derecha ya no se observa ninguno y la función exponencial crece muy rápida-mente mientras la función seno se mantiene acotada.
Gráficamente se puede obtener una aproximación bastante buena de la solución. Si se ac-tiva el modo de seguimiento de la cruz y se sitúa la misma sobre una de las gráficas, cercadel punto de intersección, y se desplaza el cuadradito y se cambia de gráfica (utilizandolas teclas <↑> y <↓>) se observa que cuando el cuadrado se coloca en el punto cuya abcisaes −3,1746 ó −3,1825 no se produce cambio alguno en su posición al intentar cambiarde gráfica mediante el método descrito. También se observa que la ordenada no cambia eneste caso. Ello es debido a que este es el punto aproximado de corte de ambas gráficas.Haciendo sucesivos acercamientos sobre el cuadrado se puede mejorar el resultado llegán-dose a obtener el punto −3,1831, que es el resultado de redondear la solución, −3,18306,que se obtiene cuando se resuelve la ecuación de forma aproximada. Este método gráficotiene una precisión limitada, que se reduce a unos pocos decimales. Por tanto, para resolver
48
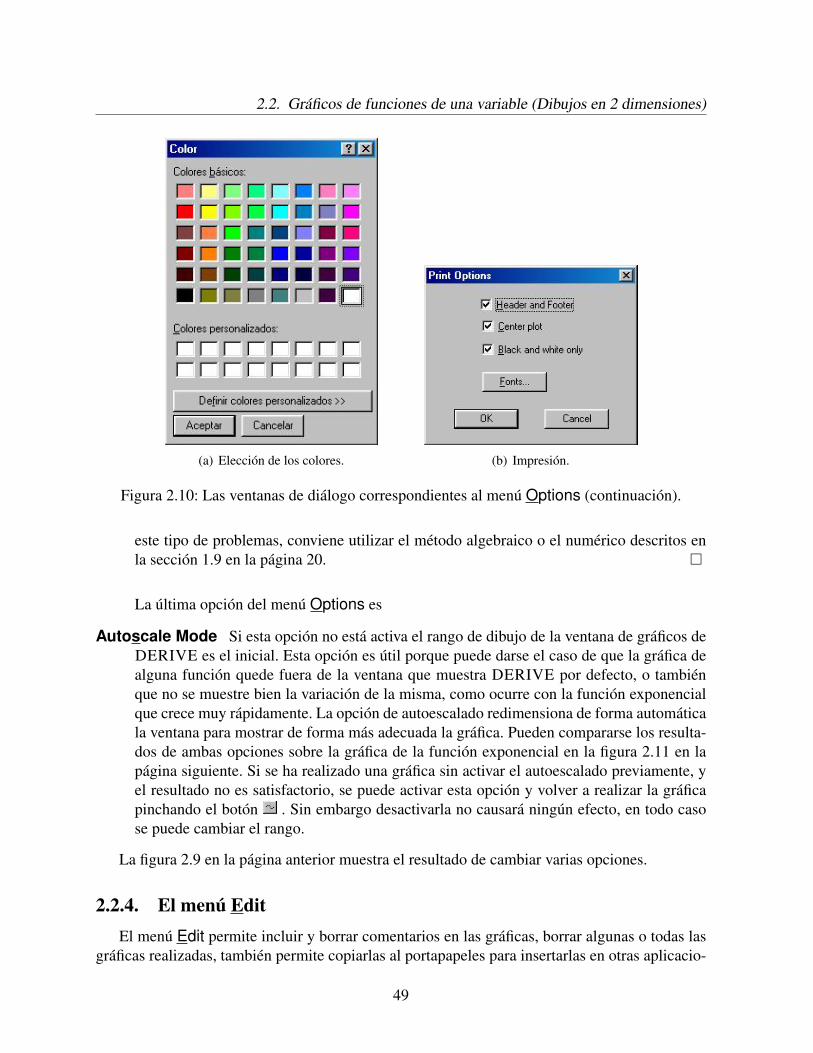
2.2. Gráficos de funciones de una variable (Dibujos en 2 dimensiones)
(a) Elección de los colores. (b) Impresión.
Figura 2.10: Las ventanas de diálogo correspondientes al menú Options (continuación).
este tipo de problemas, conviene utilizar el método algebraico o el numérico descritos enla sección 1.9 en la página 20. �
La última opción del menú Options es
Autoscale Mode Si esta opción no está activa el rango de dibujo de la ventana de gráficos deDERIVE es el inicial. Esta opción es útil porque puede darse el caso de que la gráfica dealguna función quede fuera de la ventana que muestra DERIVE por defecto, o tambiénque no se muestre bien la variación de la misma, como ocurre con la función exponencialque crece muy rápidamente. La opción de autoescalado redimensiona de forma automáticala ventana para mostrar de forma más adecuada la gráfica. Pueden compararse los resulta-dos de ambas opciones sobre la gráfica de la función exponencial en la figura 2.11 en lapágina siguiente. Si se ha realizado una gráfica sin activar el autoescalado previamente, yel resultado no es satisfactorio, se puede activar esta opción y volver a realizar la gráficapinchando el botón . Sin embargo desactivarla no causará ningún efecto, en todo casose puede cambiar el rango.
La figura 2.9 en la página anterior muestra el resultado de cambiar varias opciones.
2.2.4. El menú EditEl menú Edit permite incluir y borrar comentarios en las gráficas, borrar algunas o todas las
gráficas realizadas, también permite copiarlas al portapapeles para insertarlas en otras aplicacio-
49

Práctica 2. Gráficos con DERIVE
(a) No activada (b) Activada
Figura 2.11: Gráfica de la función exponencial tal como se obtiene con DERIVE según se activeo no la opción de autoescalado.
nes de Windows. Veamos las distintas opciones con un poco de detalle.
Create Annotation. . . Esta opción, que también se puede activar con la combinación de te-clas <Control + A> permite añadir comentarios a la gráfica. Abre la ventana de diálogo dela figura 2.12. La posición que aparece en principio es la de la cruz, pero puede cambiarse.Conviene tener en cuenta que el texto empezará en este punto centrado en altura. Puedecambiarse el color.
Figura 2.12: Ventana de diálogo que permite incluir comentarios
Delete Annotation. . . Esta opción permite eliminar un comentario. Si no se ha introducidoninguno no está disponible. Para borrar una anotación hay que situar la cruz sobre ella yluego activar la opción. Se abre una ventana de diálogo con el texto del comentario que seborraría.
50
2.3. Gráficos de dos variables (Dibujos en 3 dimensiones)
Delete Plot. . . Con esta opción se pueden eliminar gráficas. Cuando se tienen varias se puedeborrar la primera que se hizo con la opción First, o la última hecha con la opción Last,que también se puede realizar con el teclado usando la tecla <Del> o con el icono ,o todas excepto la última con la opción Butlast o todas con la opción All, o bien con lacombinación de teclas <Control + D>.
Un aspecto negativo de esta versión de DERIVE es la imposibilidad de guardar las gráficasrealizadas para usarlas con el mismo programa, lo único que se puede hacer con DERIVE esguardar las expresiones y volverlas a dibujar o imprimirlas. Una forma de guardarlas es utilizarlos dos submenús siguientes:
Copy Window Con esta opción, que también se puede ejecutar con la combinación de teclas<Control + C>, Windows copia el contenido de la ventana de gráficas a un programaespecial llamado portapapeles de Windows que permite el intercambio de informaciónentre diferentes programas de este entorno. Posteriormente se puede insertar el contenidodel portapapeles en otro documento de Windows, por ejemplo en Word habría que elegirla opción Pegar del menú Edición. Si se desea guardar la gráfica independientemente,se puede abrir el programa Paint, pegar la gráfica desde el portapapeles de Windows yguardarla en el formato y con el nombre deseados (las gráficas de este libro han sidoguardadas en el formato JPG).
Mark and Copy . . . Esta opción es similar a la anterior pero previamente hay que seleccionaruna parte (rectangular) de la ventana.
El resto de menús (File, Window y Help) son similares a los de la ventana de Álgebra(práctica 1, secciones 1.10 y 1.11).
2.3. Gráficos de dos variables (Dibujos en 3 dimensiones)En este caso los menús son diferentes y también cambia la información dada en la línea de
estado, que informa sobre las coordenadas del punto desde el que se está viendo la gráfica (Eye),del centro de la región dibujada (Center) y la longitud de cada uno de los ejes (Length).
Para dibujar una gráfica en tres dimensiones se debe introducir en la ventana de Álgebrauna función de dos variables, seleccionarla y entonces hacer clic en el botón de la barra deherramientas o bien seleccionar en el menú Window la opción de nueva ventana de dibujo entres dimensiones. Se abrirá entonces una ventana de gráficos en tres dimensiones. Para dibujarla gráfica se debe seleccionar la opción de menú Plot! o bien hacer clic sobre el correspondientebotón de la barra de herramientas. Un ejemplo de gráfica de una función de dos variables sepuede ver en la figura 2.13 en la página siguiente. Igual que muchos otros programas, DERIVEdibuja una función de dos variables (cuya gráfica es una superficie en el espacio) calculandoel valor de la función sobre un conjunto de rectas paralelas a los ejes X e Y, de forma que elresultado es similar a una malla formada por curvas contenidas en la superficie. Estas curvas sonplanas, ya que están contenidas en planos de ecuación x = constante o y = constante.
51
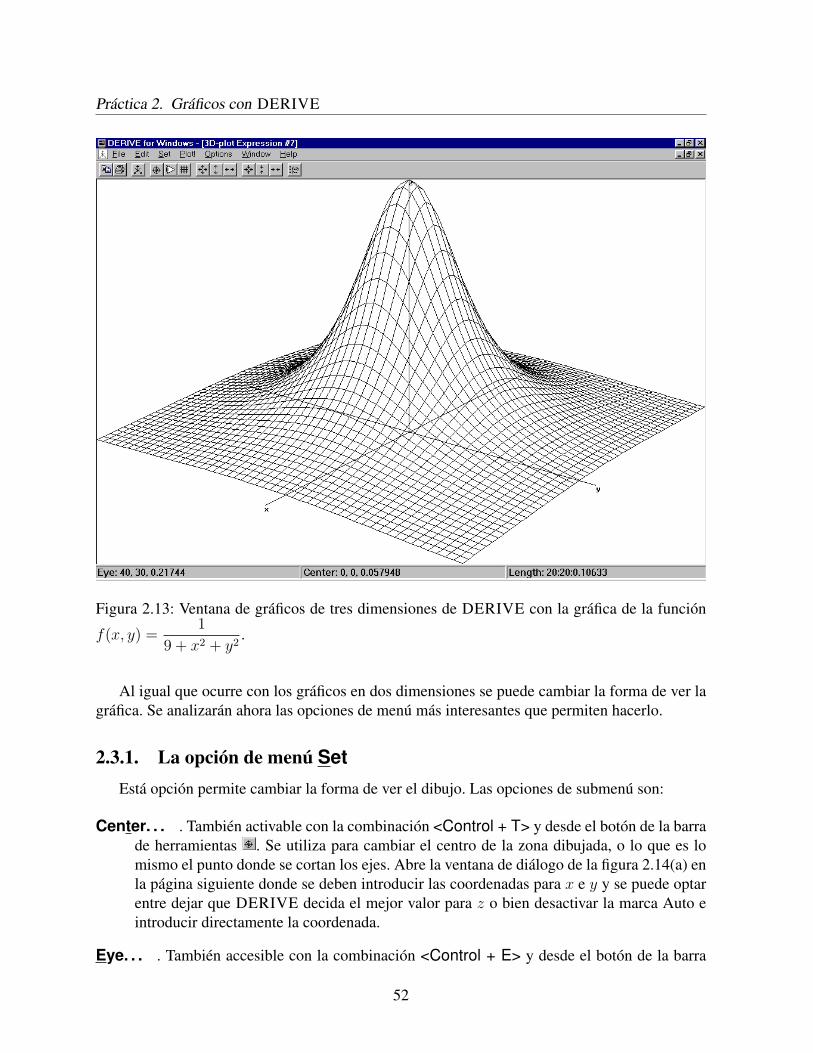
Práctica 2. Gráficos con DERIVE
Figura 2.13: Ventana de gráficos de tres dimensiones de DERIVE con la gráfica de la función
f(x, y) =1
9 + x2 + y2.
Al igual que ocurre con los gráficos en dos dimensiones se puede cambiar la forma de ver lagráfica. Se analizarán ahora las opciones de menú más interesantes que permiten hacerlo.
2.3.1. La opción de menú Set
Está opción permite cambiar la forma de ver el dibujo. Las opciones de submenú son:
Center. . . . También activable con la combinación <Control + T> y desde el botón de la barrade herramientas . Se utiliza para cambiar el centro de la zona dibujada, o lo que es lomismo el punto donde se cortan los ejes. Abre la ventana de diálogo de la figura 2.14(a) enla página siguiente donde se deben introducir las coordenadas para x e y y se puede optarentre dejar que DERIVE decida el mejor valor para z o bien desactivar la marca Auto eintroducir directamente la coordenada.
Eye. . . . También accesible con la combinación <Control + E> y desde el botón de la barra
52

2.3. Gráficos de dos variables (Dibujos en 3 dimensiones)
(a) Centro. (b) Punto de vista.
(c) Tamaño de la malla. (d) Región dibujada
Figura 2.14: Ventanas de diálogo para cambiar la forma de hacer la gráfica.
de herramientas . Se utiliza para cambiar el punto desde el que se mira la gráfica. Abrela ventana de diálogo de la figura 2.14(b) que es similar a la anterior aunque produceresultados distintos.
Grids. . . . También activable con la combinación <Control + G> y desde el botón de la barrade herramientas . Se utiliza para cambiar el número de curvas dibujadas por DERIVE,hay que tener en cuenta que un mayor número de curvas dará una idea mejor de la gráficapero hará que se dibuje más lentamente. Abre la ventana 2.14(c).
Length. . . . También activable con la combinación <Control + L>. Se utiliza para cambiarla región dibujada cambiando los datos de la ventana de diálogo 2.14(d). También puedecambiarse mediante el uso del zoom, que igual que en el caso de dos dimensiones tieneunas cantidades prefijadas. El zoom puede ser para alejarse o acercarse y en ambas o ensolamente una de las direcciones del plano XY. Puede activarse mediante los correspon-dientes botones de la barra de herramientas , y para acercarse en ambas direccioneso en una sola de ellas, , y para alejarse en ambas direcciones o en una sola de ellas.También se pueden usar las teclas <F10> (alejarse en ambas direcciones) <F8> (alejarseen la dirección vertical), <F6> (alejarse sólo en la dirección horizontal), <F9> (acer-carse en ambas direcciones), <F7> (acercarse sólo en la dirección horizontal) y <F5>
53

Práctica 2. Gráficos con DERIVE
(acercarse sólo en la dirección vertical).
En la figura 2.15 en la página siguiente se puede ver el efecto del cambio de algunas de estasopciones.
En todos los casos se abrirá una ventana de diálogo. Todas las opciones, excepto la deGrids. . . , permiten elegir la opción «Auto», que es la que aparece por defecto. También Grids. . .tiene un valor por defecto. La combinación de todas estas opciones por defecto suele dar buenosresultados.
2.3.2. La opción de menú Options
Permite controlar, entre otras, si se dibujan o no los ejes y los colores utilizados. Tambiénalgunas opciones de impresión. Todas las opciones son similares a las que ya se han analizadopara gráficas de dos dimensiones. Al elegir colores hay que tener en cuenta que la superficie2
tiene dos caras, la superior y la inferior, y que se pueden elegir colores distintos para ambas.La opción más importante es la que permite decidir si se dibujan o no las líneas ocultas
(Remove Hidden Lines), es decir aquellas que no se verían si la superficie fuese opaca. Puedeverse en la figura 2.16 en la página 56 la misma superficie cambiando sólo esta opción.
DERIVE sólo permite la gráfica de una función de dos variables en cada ventana. Si se deseadibujar la gráfica de más de una es necesario abrir nuevas ventanas.
2.4. EjerciciosEjercicio 2.2 Dibujar la circunferencia de centro en el origen y radio 2 de ecuación implícitax2 + y2 = 4. ¿Por qué el resultado no es el esperado?
Ejercicio 2.3 Dibujar en una misma gráfica las funciones ex y sus polinomios de Taylor degrados 1, 2, . . . , 6 en el punto x = 0. Repetir el ejercicio cambiando la opción de autoescalado.
Ejercicio 2.4 Estudiar la gráfica de la función sen (1/x) cerca del origen. Explicar qué ocurre.
Ejercicio 2.5 Dibujar las siguientes funciones definidas en DERIVE y deducir cuáles son:
1. SIGN(x)
2. ABS(x)
3. FLOOR(x)
4. STEP(x)
5. CHI(1.3, x, 2.4)
2Para ser estrictos habría que añadir «si es orientable», pero discutir este aspecto se aleja mucho de los objetivosde este texto en el que todas las superficies que aparezcan lo son.
54
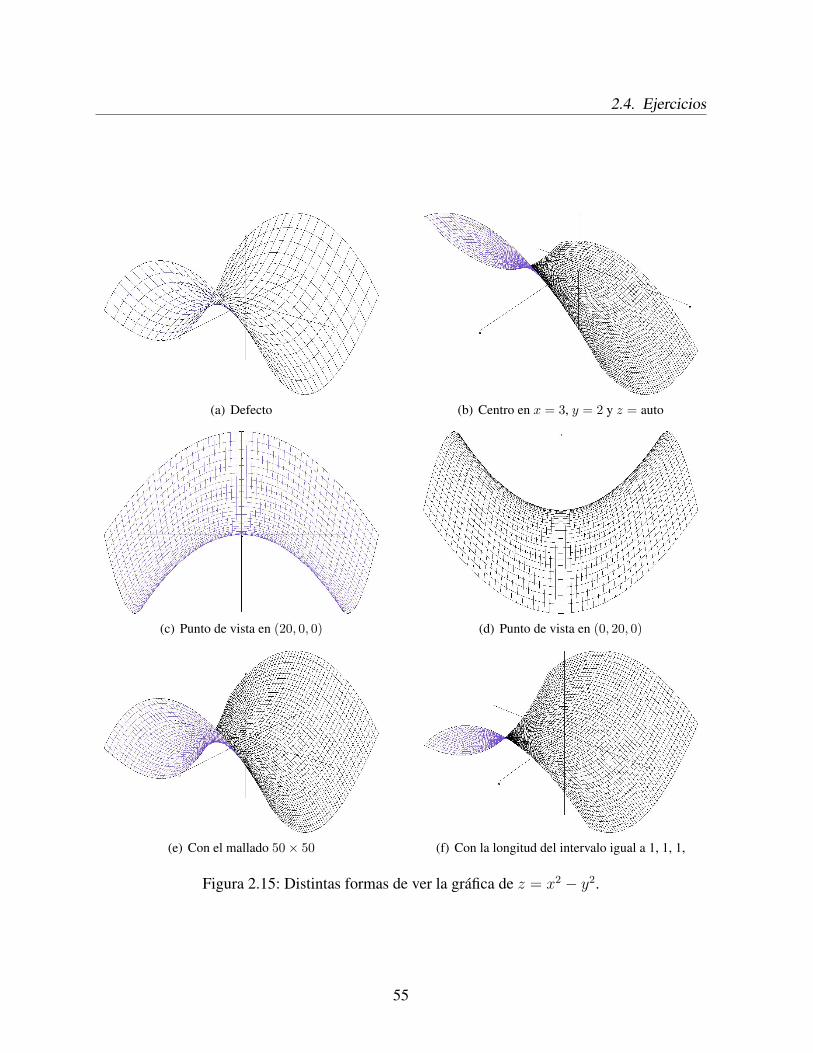
2.4. Ejercicios
(a) Defecto (b) Centro en x = 3, y = 2 y z = auto
(c) Punto de vista en (20, 0, 0) (d) Punto de vista en (0, 20, 0)
(e) Con el mallado 50× 50 (f) Con la longitud del intervalo igual a 1, 1, 1,
Figura 2.15: Distintas formas de ver la gráfica de z = x2 − y2.
55
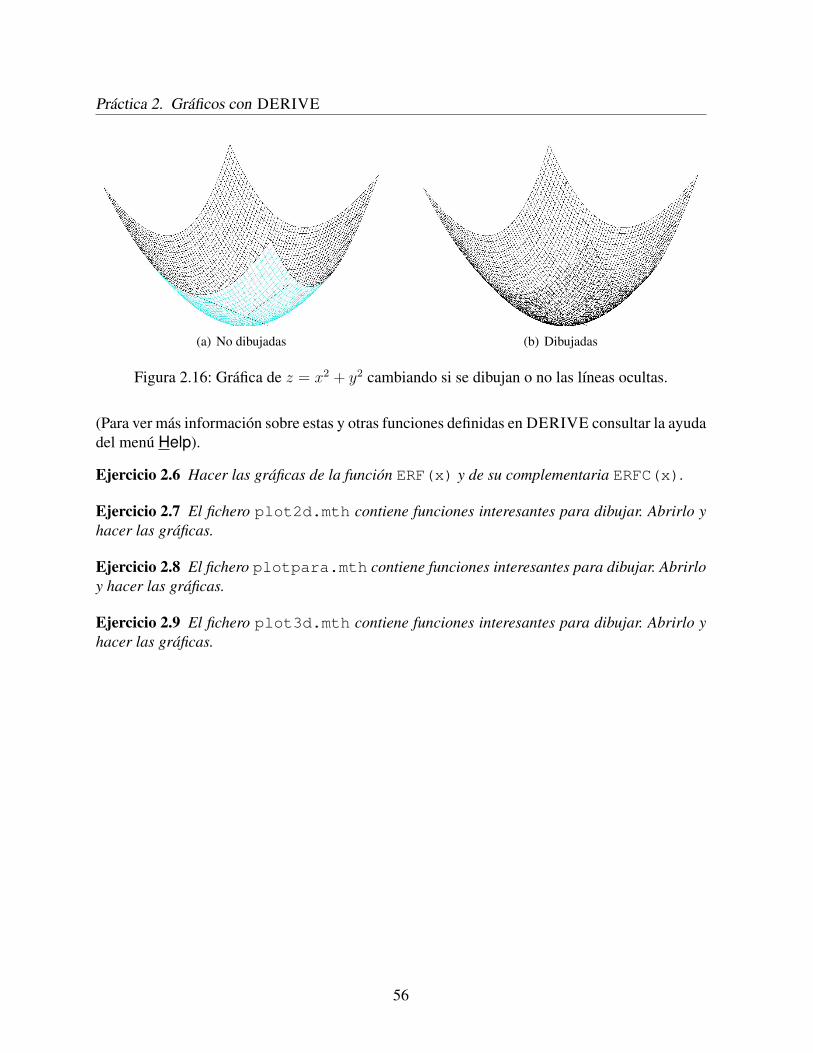
Práctica 2. Gráficos con DERIVE
(a) No dibujadas (b) Dibujadas
Figura 2.16: Gráfica de z = x2 + y2 cambiando si se dibujan o no las líneas ocultas.
(Para ver más información sobre estas y otras funciones definidas en DERIVE consultar la ayudadel menú Help).
Ejercicio 2.6 Hacer las gráficas de la función ERF(x) y de su complementaria ERFC(x).
Ejercicio 2.7 El fichero plot2d.mth contiene funciones interesantes para dibujar. Abrirlo yhacer las gráficas.
Ejercicio 2.8 El fichero plotpara.mth contiene funciones interesantes para dibujar. Abrirloy hacer las gráficas.
Ejercicio 2.9 El fichero plot3d.mth contiene funciones interesantes para dibujar. Abrirlo yhacer las gráficas.
56
Práctica 3
Cálculo diferencial de una variable conDERIVE
3.1. Introducción
El objetivo de esta práctica es familiarizarse con el cálculo de derivadas, resolución de ecua-ciones y representaciones gráficas de funciones reales de una variable utilizando el programaDERIVE. Se estudiarán sus aplicaciones al estudio de máximos y mínimos, intervalos de cre-cimiento, decrecimiento, concavidad, convexidad y asíntotas y se repasará la fórmula de Taylorcon la expresión del resto. Finalmente se aplicarán estas técnicas al estudio de funciones sencillasque aparecen en Biología y en las Ingenierías de Montes y de Agrónomos.
En esta práctica utilizaremos notaciones diferentes para la derivada de una función, todasellas habituales en los textos matemáticos y con las que conviene estar familiarizado. Así se
utilizará indistintamentedf(x)
dxo f ′(x) para denotar la primera derivada de la función f(x). Para
derivadas de orden superior se pueden utilizar indistintamente las notacionesdkf(x)
dxko f (k)(x),
aunque para k = 2 se suele utilizar f ′′(x), e incluso a veces si k = 3 se usa f ′′′(x), no siendoconveniente seguir usando esta notación por la posibilidad de error al contar las comillas. Por su
parte DERIVE escribe en el área de trabajo(
d
dx
)k
(f(x)).
3.2. Derivadas
3.2.1. Álgebra de derivadas
Se repasarán con DERIVE los resultados básicos del álgebra de derivadas. En primer lugarhay que declarar dos funciones f(x) y g(x) sin asignarles valor alguno. Para ello se abrirá la ven-tana de diálogo Declare Function Definition (figura 3.1 en la página siguiente) y se rellenarála opción Name and Arguments: con el nombre de la función y el argumento entre parénte-
57

Práctica 3. Cálculo diferencial de una variable con DERIVE
sis, por ejemplo f(x), dejando en blanco la opción Definition:. El mismo resultado se obtieneescribiendo f(x):= en una ventana Author Expression .
Figura 3.1: Ventana Declare Function Definition. . .
Ejercicio 3.1 Calcular
1.d
dx
(f(x) + g(x)
)2.
d
dx
(f(x)− g(x)
)3.
d
dx
(f(x) g(x)
)4.
d
dx
(f(x)/g(x)
)5.
d
dx
(f[g(x)
])3.2.2. Derivadas de funciones importantes
Vamos a utilizar el programa DERIVE para repasar las derivadas de algunas de las funcionesmás importantes.
Para realizar el apartado 17 del ejercicio siguiente, y algunos otros del libro, es convenien-te declarar qué tipo de valores puede tomar una variable. Para hacerlo hay que elegir la opciónVariable Domain del menú Declare que abre la ventana Declare Variable Domain (ver lafigura 3.2(a) en la página siguiente), donde se introduce el nombre de la variable cuyo dominiose quiere especificar y se elige el botón Declare, o se acepta presionando <ENTER>. Entoncesse abrirá otra ventana de diálogo con el mismo nombre, ver la figura 3.2(b) en la página siguien-te, donde se puede indicar que la variable es del tipo entero, real, complejo o no escalar (porejemplo si es un vector o matriz), en nuestro caso hay que elegir Real. Si la variable es entera oreal podremos especificar su dominio entre las múltiples opciones de la parte Interval de la
58
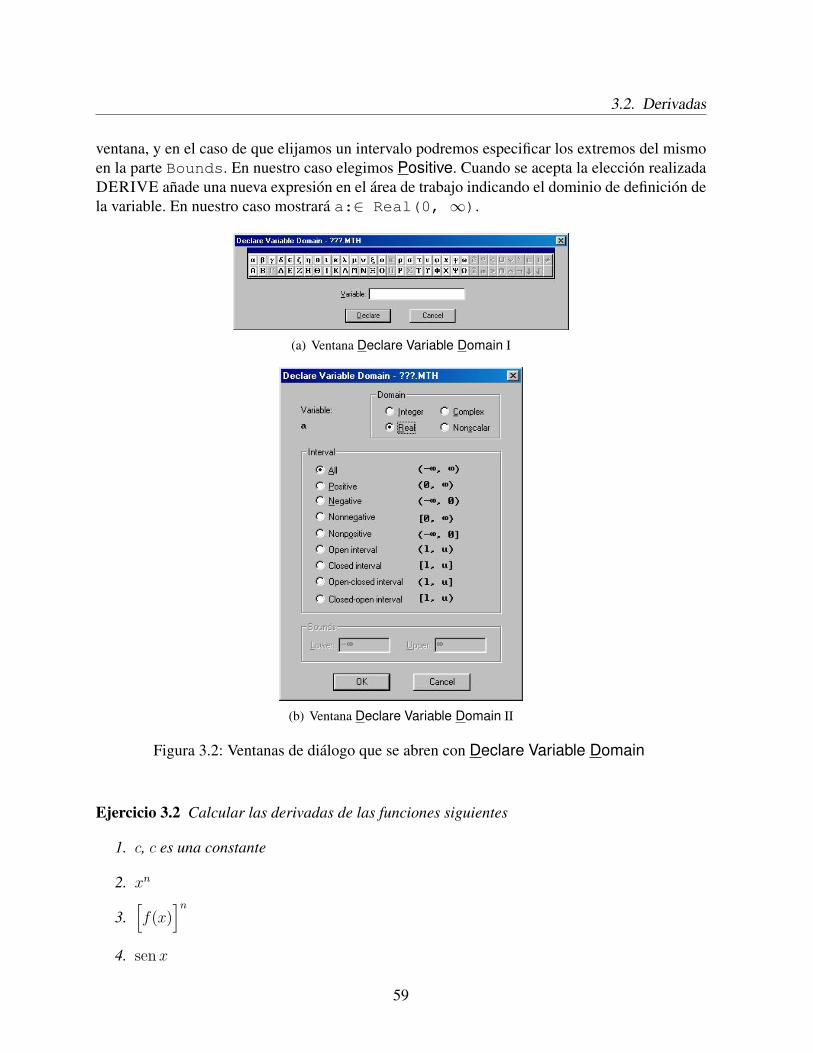
3.2. Derivadas
ventana, y en el caso de que elijamos un intervalo podremos especificar los extremos del mismoen la parte Bounds. En nuestro caso elegimos Positive. Cuando se acepta la elección realizadaDERIVE añade una nueva expresión en el área de trabajo indicando el dominio de definición dela variable. En nuestro caso mostrará a:∈ Real(0, ∞).
(a) Ventana Declare Variable Domain I
(b) Ventana Declare Variable Domain II
Figura 3.2: Ventanas de diálogo que se abren con Declare Variable Domain
Ejercicio 3.2 Calcular las derivadas de las funciones siguientes
1. c, c es una constante
2. xn
3.[f(x)
]n4. sen x
59
Práctica 3. Cálculo diferencial de una variable con DERIVE
5. cosx
6. tan x
7. cotx
8. sec x (nota: sec(x))
9. cosec x (nota: csc(x))
10. arc senx
11. arc cos x
12. arctanx
13. arc secx
14. arc cosecx
15. lnx
16. ex
17. ax, a > 0
18. loga x (nota: log(x,a))
3.2.3. Derivación de funciones declaradasCuando se declara una función mediante la ventana de diálogo Declare Function Definition ,
independientemente de que se deje en blanco el apartado Definition: o no, se pueden calcular susderivadas usando la comilla, ’, tantas veces como indique el orden de la derivada. Por ejemplo sideclaramos la función f(x):= sin(x2), su primera derivada se puede calcular con la ordenf’(x), su segunda derivada con f”(x) y así sucesivamente.
3.2.4. Crecimiento y decrecimiento. Máximos y mínimos relativos3.2.4.1. Crecimiento y decrecimiento
Es conocido que si f(x) es derivable en un punto x0 y f ′(x0) > 0 entonces f es crecienteen x0. Análogamente si f ′(x) > 0 para x en un intervalo I entonces f es creciente en todo elintervalo I . Por el contrario si f ′(x0) < 0 entonces f es decreciente en x0. Análogamente sif ′(x) < 0 para x en un intervalo I entonces f es decreciente en todo el intervalo I .
Ejercicio 3.3 Comprobar las afirmaciones anteriores gráficamente con f(x) = sen x dibujandola función y su derivada.
60

3.2. Derivadas
3.2.4.2. Máximos y mínimos relativos
Se dice que x0 es un máximo (mínimo) relativo o local de f si existe un δ > 0 tal que six ∈ ] x0 − δ, x0 + δ [, entonces f(x0) ≥ f(x), (f(x0) ≤ f(x)). Del apartado anterior se deduceque si x0 es un extremo relativo (es decir un máximo o mínimo local) y f es derivable en x0
entonces f ′(x0) = 0. Cuando f ′(x0) = 0 se dice que x0 es un punto crítico de f .
Ejercicio 3.4 Comprobar que x3 tiene un punto crítico en 0 que no es ni máximo ni mínimorelativo.
Para caracterizar los puntos críticos se sabe que si f (k)(x0) = 0, k = 1, 2, . . . , n − 1 yf (n)(x0) 6= 0. Entonces
Si n es par y f (n)(x0) > 0, x0 es un mínimo relativo. Si es f (n)(x0) < 0, x0 es un máximorelativo.
Si n es impar x0 no es ni máximo ni mínimo relativo (es un punto de inflexión que se define enel apartado 3.2.6).
La discusión anterior se resume en el cuadro 3.1.
x0 máximo/minimo =⇒:
f ′(x0) = 0
x0 máximo/minimo ⇐= f ′(x0) = 0 y la 1a derivada no nula en x0 es de orden par
Concretando:x0 máximo ⇐= f ′(x0) = 0 y la 1a derivada no nula es:f (par) < 0
x0 máximo ⇐= f ′(x0) = 0 y la 1a derivada no nula es:f (par) > 0
Cuadro 3.1: Clasificación de los puntos críticos de una función.
Ejemplo 3.1 Calcular los máximos y mínimos relativos de p(x) = x9 − 2x8 − x7 + 4x6 − x5 −2x4 + x3 + 3.
Solución: En DERIVE se introduce el polinomio (recordemos que en DERIVE sólo hay queintroducir la expresión x9 − 2x8 − x7 + 4x6 − x5 − 2x4 + x3 + 3, lo mismo hay que tener encuenta con las derivadas sucesivas) y se calcula su primera derivada que es
d p(x)
dx= p′(x) = 9x8 − 16x7 − 7x6 + 24x5 − 5x4 − 8x3 + 3x2 (3.1)
Para calcular los puntos críticos se obtienen los valores de x que anulan la derivada prime-ra (3.1). Para ello se utiliza el comando Solve de DERIVE (recordemos que al hacer Solvesobre una expresión DERIVE la iguala a cero automáticamente). Los puntos críticos son:
x = 0, x = 1, x = −1, x =2√
7− 1
9, x = −2
√7 + 1
9
A continuación procederemos a clasificarlos, para ello trabajaremos de uno en uno, estudian-do las derivadas de órdenes superiores que sean necesarias.
61
Práctica 3. Cálculo diferencial de una variable con DERIVE
Clasificación del punto 0. En primer lugar calculamos la derivada segunda con DERIVE,obteniéndose
p′′(x) = 72x7 − 112x6 − 42x5 + 120x4 − 20x3 − 24x2 + 6x (3.2)
Se sustituye x por 0 utilizando el comando Substitute for del menú Simplify (o el botón de labarra de herramientas ) y se simplifica, obteniéndose que la segunda derivada es nula en estepunto, por lo que no se puede clasificar todavía, siendo necesario calcular la derivada tercera quees
p(3)(x) = 504x6 − 672x5 − 210x4 + 480x3 − 60x2 − 48x+ 6 (3.3)
Nuevamente se sustituye x por 0 en (3.3), y en este caso se obtiene que p(3)(0) = 6 6= 0,lo que permite concluir que este punto no es ni máximo ni mínimo relativo, siendo un punto deinflexión como veremos luego.
Clasificación del punto 1. Sustituyendo nuevamente x por 1 en la expresión de la derivadasegunda (3.2), se obtiene que p′′(1) = 0, lo que no permite clasificar el punto, sustituyendo en laexpresión de la derivada tercera, (3.3), se obtiene p(3)(1) = 0, por lo que es necesario calcular laderivada cuarta de p(x) que es
p(4)(x) = 3024x5 − 3360x4 − 840x3 + 1440x2 − 120x− 48 (3.4)
Sustituyendo x por 1, se tiene p(4)(1) = 96 > 0, por tanto es un mínimo relativo.
Clasificación del punto −1. Sustituyendo x por −1 en la expresión de la derivada segun-da (3.2), se obtiene que p′′(−1) = −32 < 0, lo que permite afirmar que este punto correspondea un máximo relativo.
Clasificación del punto 2√
7−19
. Sustituyendo este punto en la expresión de la derivada segun-da (3.2), se obtiene que p′′(2
√7−19
) ≈ −0,50885 < 0, se tiene que este punto es un máximorelativo.
Clasificación del punto −2√
7+19
. Sustituyendo este punto en la expresión de la derivada se-gunda (3.2), se obtiene que p′′(−2
√7+19
) ≈ 7,6338 > 0, se tiene que este punto es un mínimorelativo. �
Ejercicio 3.5 Calcular los máximos y mínimos relativos del polinomio
x11
11+
3x10
10− 29x9
27+
73x8
216+
137x7
189− 7x6
54− 31x5
135− 5x4
108
62
3.2. Derivadas
Máximos y mínimos en puntos donde la función no es derivable. Puede suceder que unafunción tenga un máximo o un mínimo en un punto donde no sea derivable, es el caso porejemplo de la función |x| que tiene un mínimo en el punto 0. En estos casos hay que recurrira la definición, es decir estudiar si la función es menor o mayor en un entorno del punto (a laizquierda y a la derecha del punto).
También podría suceder que en un punto crítico la función no tuviera derivada segunda. Paraclasificarlo hay que recurrir a la definición de máximo/mínimo relativo y estudiar los valores dela función en un entorno del punto, o estudiar el signo de la primera derivada en un entorno delpunto.
3.2.5. Máximos y mínimos absolutosUna función puede tener varios máximos y mínimos relativos, como ocurre con la función
del ejemplo 3.1, y sin embargo ninguno de ellos es máximo ni mínimo absoluto ya que la funcióntiende a +∞ por la derecha y a −∞ por la izquierda. La función sen x tiene infinitos máximosabsolutos que son a la vez relativos, así como infinitos mínimos absolutos y relativos a la vez.
En muchos problemas interesa obtener los máximos o mínimos absolutos de una funcióndefinida en un intervalo acotado. El teorema de Bolzano-Weierstrass garantiza que toda funcióncontinua definida en un intervalo cerrado y acotado tiene un máximo y un mínimo absolutos.¿Cómo encontrarlos?
Es relativamente sencillo si la función además de ser continua en [ a, b ] es derivable en] a, b [. En este caso el máximo (mínimo) absoluto o bien es también relativo —y está dentro delintervalo— o bien está en a o en b, es decir en uno de los extremos del intervalo. El razonamientoes sencillo, si x ∈ ] a, b [ y f ′(x) > 0, entonces la función es creciente en este punto y a laderecha de x hay puntos donde la función toma valores más grandes, por lo que no puede sermáximo absoluto (ni relativo), a la izquierda toma valores más pequeños por lo que no puede sermínimo absoluto (ni relativo). Un razonamiento análogo demuestra que sucede lo mismo cuandof ′(x) < 0.
Ejemplo 3.2 La función
3.2.6. Concavidad y convexidadSe dice que si la gráfica de una función diferenciable f(x) está por debajo de las tangentes
a la misma en un intervalo es cóncava hacia arriba (o a veces que es convexa hacia abajo).Recíprocamente si la gráfica está por encima de las tangentes en un intervalo se dice que escóncava hacia abajo (o convexa hacia arriba). A menudo se llama cóncava a las cóncavas haciaarriba y convexas a las cóncavas hacia abajo. Si f tiene derivada segunda y es positiva en unintervalo la función es cóncava y si es negativa es convexa.
Los puntos donde la función pasa de cóncava a convexa, o viceversa, se llaman puntos deinflexión. En estos puntos la derivada segunda se anula, cambiando de signo en un entorno deeste punto, la derivada primera puede tomar cualquier valor. Los puntos críticos que no sonmáximos ni mínimos relativos son precisamente puntos de inflexión en los que además se anula
63

Práctica 3. Cálculo diferencial de una variable con DERIVE
la derivada primera. Como se ha visto en el ejercicio 3.4 la función x3 tiene un punto crítico en0 que no es ni máximo ni mínimo relativo. Es un punto de inflexión en el que la función pasa deser convexa a cóncava. Sin embargo la función tan x también tiene infinitos puntos de inflexión,kπ, k ∈ Z, donde no se anula la primera derivada. Para obtener los puntos de inflexión de unafunción hay que buscar los puntos donde se anula la segunda derivada, independientemente de loque le ocurra a la primera. Sin embargo esta condición tampoco es suficiente, se debe comprobarque la primera derivada que no se anula en ese punto es impar. Estos resultados se resumen en elcuadro PracDer.cuadro.inflexion.
x0 punto de inflexión =⇒:
f ′′(x0) = 0
x0 punto de inflexión ⇐= f ′′(x0) = 0 y la 1a derivada no nula en x0 es de orden impar
Cuadro 3.2: Clasificación de los puntos de inflexión de una función.
Ejemplo 3.3 El punto x = 0 es un candidato a punto de inflexión de la función f(x) = x4+x+1,porque f ′′(0) = 0. Sin embargo no lo es porque la función f es siempre mayor o igual que larecta tangente en 0, cuya ecuación es y(x) = 1 + x, por lo que la función es cóncava en estepunto, como puede verse en la gráfica 3.3
Figura 3.3: Gráfica de la función x4 + x+ 1 y de su recta tangente en el punto 0.
Ejercicio 3.6 Estudiar la concavidad y convexidad y hallar los puntos de inflexión de sen x.
64

3.3. Gráficas de funciones
3.3. Gráficas de funciones
El estudio de la gráfica de una función incluye determinar dónde está definida, determinarsu comportamiento en la frontera del campo de definición, estudiar su continuidad y derivabili-dad, calcular sus máximos y mínimos relativos, sus intervalos de crecimiento y decrecimiento,concavidad y convexidad así como los puntos de inflexión. Todos estos temas han sido tratadosanteriormente. Para completar el estudio es importante también hallar las asíntotas de la función,y, si tiene sentido, cuáles son sus límites cuando la variable tiende a +∞ y a −∞.
3.3.1. Asíntotas
Una asíntota de una función f(x) es una recta tal que la gráfica de f(x) y la de la recta tiendena juntarse. Hay asíntotas de tres tipos.
3.3.1.1. Asíntotas verticales
La recta x = x0 es una asíntota vertical de f(x) si se cumple lımx→x0+
|f(x)| = +∞, o si se
cumple lımx→x0−
|f(x)| = +∞, aunque frecuentemente se cumplen ambas condiciones simultánea-mente.
Ejercicio 3.7 Hallar las asíntotas verticales de tan x.
3.3.1.2. Asíntotas horizontales
La recta y = k es una asíntota horizontal de f(x) si lımx→+∞
f(x) = k, o si lımx→−∞
f(x) = k.
Ejercicio 3.8 Hallar las asíntotas de f(x) = 1/x.
3.3.1.3. Asíntotas oblicuas
La recta y = mx + n. m 6= 0 es una asíntota de f(x) si se cumplen las dos condicionessiguientes:
lımx→+∞
f ′(x) = m. Lo que significa que a medida que x crece, las pendientes de las tan-
gentes a la curva y = f(x) se van acercando a m, dicho de otra forma cuando x crece lastangentes se hacen cada vez más paralelas a y = mx.
lımx→+∞
(f(x) − mx) = n. Esta condición es equivalente a decir que cuando x crece, la
distancia entre las gráficas de la función y = f(x) y de la recta y = mx + n disminuyehaciéndose tan pequeña como se quiera.
65

Práctica 3. Cálculo diferencial de una variable con DERIVE
También lo es si lımx→−∞
f ′(x) = m y lımx→−∞
(f(x)−mx) = n.
Una función puede tener infinitas asíntotas verticales, como por ejemplo le ocurre a la fun-ción tan x, sin embargo el número total de asíntotas horizontales y oblicuas es 2, una cuando xtiende a −∞ y la otra cuando tiende a +∞. Obviamente hay funciones que no tienen asíntotasde ningún tipo, como por ejemplo sen x. En particular las funciones racionales cuyo numeradores de un grado mayor que el denominador tienen asíntotas oblícuas que se pueden obtener ha-ciendo la división polinómica. La división de dos polinomios no se puede hacer directamente enDERIVE, sin embargo el la parte no racional del resultado del comando expand es el cocientede la división.
Ejercicio 3.9 Calcular las asíntotas dex4
x3 + 1.
Ejercicio 3.10 Estudiar las gráficas de las funciones
1. sen x
2. cosx
3. tan x
4. lnx
5. ex
3.4. Fórmula de TaylorEs conocido que si f(x) es una función n + 1 veces derivable en un intervalo abierto que
contenga el punto a, entonces para cada punto x en dicho intervalo se tiene,
f(x) = Tn(x) +Rn(x)
donde
Tn(x) = f(a) +f ′(a)
1!(x− a) +
f ′′(a)
2!(x− a)2 +
f (3)(a)
3!(x− a)3 + · · ·+ f (n)(a)
n!(x− a)n
es el polinomio de Taylor de grado n de la función f(x) en el punto a, y el error cometido vienedado por,
Rn(x) =f (n+1)(ξ)
(n+ 1)!(x− a)(n+1) ξ ∈ ] a, x [ (ó ∈ ] x, a [, si x < a) (3.5)
Hay que hacer notar que la ecuación de la recta tangente a f(x) en un punto es el polinomiode Taylor de grado 1 en el mismo.
66
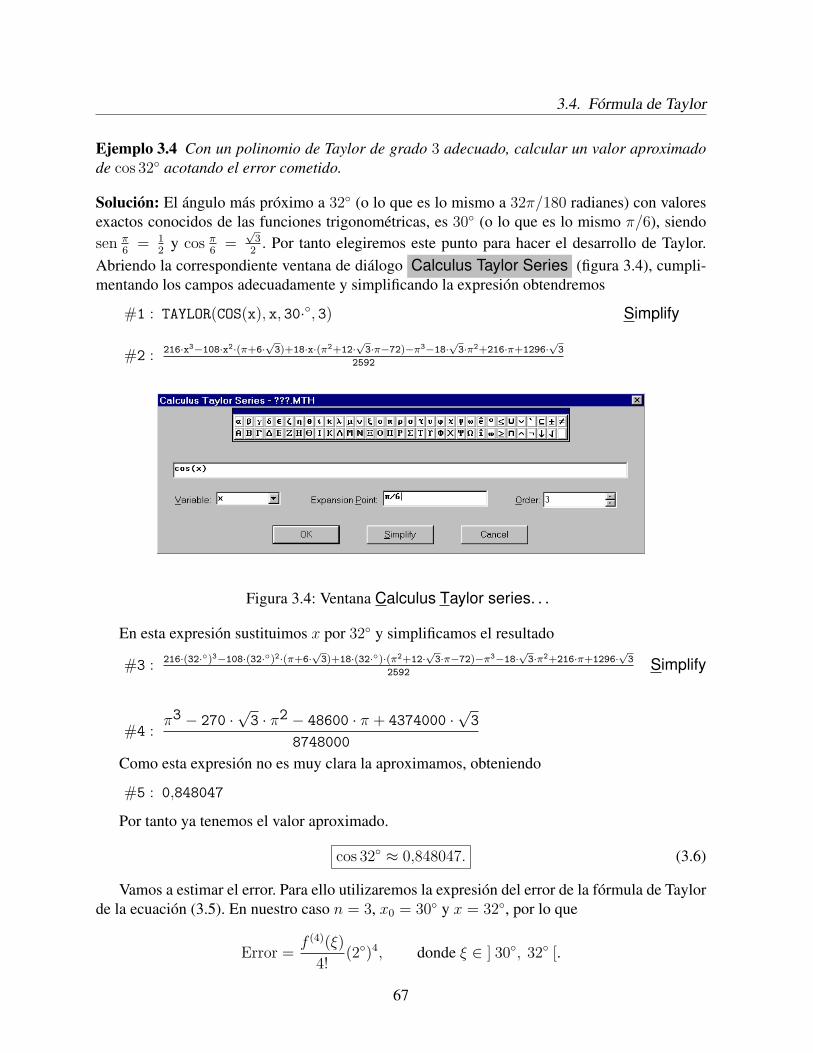
3.4. Fórmula de Taylor
Ejemplo 3.4 Con un polinomio de Taylor de grado 3 adecuado, calcular un valor aproximadode cos 32◦ acotando el error cometido.
Solución: El ángulo más próximo a 32◦ (o lo que es lo mismo a 32π/180 radianes) con valoresexactos conocidos de las funciones trigonométricas, es 30◦ (o lo que es lo mismo π/6), siendosen π
6= 1
2y cos π
6=
√3
2. Por tanto elegiremos este punto para hacer el desarrollo de Taylor.
Abriendo la correspondiente ventana de diálogo Calculus Taylor Series (figura 3.4), cumpli-mentando los campos adecuadamente y simplificando la expresión obtendremos
#1 : TAYLOR(COS(x), x, 30·◦, 3) Simplify
#2 : 216·x3−108·x2·(π+6·√3)+18·x·(π2+12·
√3·π−72)−π3−18·
√3·π2+216·π+1296·
√3
2592
Figura 3.4: Ventana Calculus Taylor series. . .
En esta expresión sustituimos x por 32◦ y simplificamos el resultado
#3 : 216·(32·◦)3−108·(32·◦)2·(π+6·√3)+18·(32·◦)·(π2+12·
√3·π−72)−π3−18·
√3·π2+216·π+1296·
√3
2592Simplify
#4 :π3 − 270 ·
√3 · π2 − 48600 · π + 4374000 ·
√3
8748000
Como esta expresión no es muy clara la aproximamos, obteniendo
#5 : 0,848047
Por tanto ya tenemos el valor aproximado.
cos 32◦ ≈ 0,848047. (3.6)
Vamos a estimar el error. Para ello utilizaremos la expresión del error de la fórmula de Taylorde la ecuación (3.5). En nuestro caso n = 3, x0 = 30◦ y x = 32◦, por lo que
Error =f (4)(ξ)
4!(2◦)4, donde ξ ∈ ] 30◦, 32◦ [.
67

Práctica 3. Cálculo diferencial de una variable con DERIVE
Como no podemos saber quién es exactamente ξ acotaremos el error tomando una cota de laderivada cuarta del coseno en el intervalo considerado. La derivada cuarta del coseno es el propiocoseno, como se comprueba fácilmente con DERIVE
#6 :
(d
dx
)4
COS(x) Simplify
#7 : COS(x)
y como la función coseno es decreciente entre 0◦ y 90◦ (aunque esta afirmación es vox populi sepuede comprobar fácilmente teniendo en cuenta que su derivada es − sen x que en el intervalomencionado es negativa) en el intervalo que nos interesa toma su máximo valor en 30◦. Por tantointroducimos la expresión correspondiente en DERIVE.
#8 :COS(30·◦) · (32 ·◦ −30·◦)4
4!Simplify
#9 :
√3 · π4
3149280000que nuevamente no es una cantidad muy clara. Si la aproximamos obte-
nemos
#10 : 5,35733 · 10−8
Por tanto
El valor aproximado de cos 32◦ utilizando el polinomio de Taylor de grado 3 en el punto 30◦
es 0,848047 con un error menor que 5,35733 · 10−8.
Nota: Hubiera sido mejor trabajar con radianes.Nota: Si calculamos con DERIVE el error cometido, es decir si dejamos a DERIVE calcular
cos 32◦, consideramos ese valor como exacto, y le restamos la expresión #4 que es el valorobtenido por la fórmula de Taylor obtenemos que el error es 5,33552× 10−8, que es muy similara la cota obtenida. Si calculamos más decimales el valor que proporciona DERIVE para cos 32◦
es 0,848048096156 y el de la fórmula de Taylor es 0,848048096156. �
Ejercicio 3.11 Declarar una función f(x) sin darle valor y obtener el polinomio de Taylor degrado 5 en un punto a.
Ejercicio 3.12 Calcular los polinomios de Taylor de grado 8 de las funciones siguientes desa-rrollando en el punto 0.
1. sen x
2. cosx
68
3.5. Aplicaciones
3. tan x
4. ln(x+ 1)
5. ex
Ejercicio 3.13 Dibujar con DERIVE la función ln(1 + x) así como los polinomios de Taylorde grados 1, 2, . . . , 5 y 20, desarrollando en el punto 0. Comparar visualmente las gráficas de lafunción y de los distintos polinomios.
Ejercicio 3.14 Con un polinomio de Taylor de grado 3 adecuado, calcular un valor aproximadode:
1. sen 58◦
2. sen 33◦
3.sen x
xpara x = 0,1◦
acotando el error cometido.
3.5. Aplicaciones: Estudio de algunas funciones que modelanprocesos en los ámbitos Agronómico y Forestal
En esta sección se aplican los conceptos y resultados introducidos previamente al estudio dealgunas de las funciones que modelan ciertos procesos relacionados con los ámbitos Agronómi-co y Forestal. Para cada uno de los procesos estudiados se define una función que se ajusta asu comportamiento, esta función es el modelo matemático del mismo y veremos cómo las ca-racterísticas del proceso se reflejan y se pueden estudiar en su modelo. Esta sección es tambiénuna introducción al estudio de modelos matemáticos. Las funciones que se utilizarán son lasexponenciales y la logística.
En muchos procesos es necesario medir la rapidez con que se produce el cambio del valor dela función, en estos casos el uso de la derivada proporciona la información necesaria, siendo laherramienta de cálculo fundamental, entre otros, en los estudios de Física, Química y Biología.
3.5.1. Algunas definiciones sobre tasas de variación
En ciertos procesos, sobre todo en el estudio del crecimiento de ciertas especies ya seananimales o plantas, es interesante analizar las distintas tasas de variación: media, absoluta yrelativa, a fin de analizar la rapidez con que se ha producido el proceso.
Si f(t) es la función que modela el proceso, tenemos las siguientes definiciones:
69

Práctica 3. Cálculo diferencial de una variable con DERIVE
Tasa de variación media:f(b)− f(a)
b− aEs la variación que experimenta la función f(t) respecto de la variable independiente t enun cierto intervalo [a, b], es decir, es la pendiente: tan(α), de la recta secante que pasa porlos puntos (a, f(a)) y (b, f(b)).
tan(α) =f(b)− f(a)
b− a
Esta tasa puede ser negativa, positiva o nula, y nos da una idea de la rapidez con que creceo decrece la función en un intervalo por unidad de incremento de la variable independiente.
Tasa de variación absoluta: f ′(t) = lımh→0
f(t+ h)− f(t)
h
A veces conocer la variación de una función en un intervalo grande no informa suficien-temente bien en el sentido de entender cómo se produce dicha variación. Se necesita estu-diar variaciones de la función en intervalos cada vez más pequeños para llegar a entenderel concepto de variación instantánea o referida a un punto, es decir el de derivada en unpunto.
Esta tasa representa la velocidad de variación instantánea de la función f(t) en un tiempoconcreto t. Por ejemplo, si t se mide en horas y f(t) es el número de bacterias en un ciertot, entonces
f ′(t1) = no de bacterias/h
es decir, la velocidad de crecimiento bacteriológico por hora en el instante t1.
Tasa de variación relativa:f ′(t)
f(t)
Esta tasa se utiliza para comparar la rapidez de la variación de f(t) respecto de la propiafunción f(t) en un instante t. Indica la velocidad de variación de la función por unidady se suele expresar en porcentajes. Por ejemplo si una población de 1000 individuos seincrementa en 50 individuos en un breve lapso de tiempo su tasa de variación relativa seráde 1/20, o del 5 %, en cambio si la población fuese de 10000 individuos y se incrementaraen 50 individuos la tasa de variación relativa sería 1/200, es decir sólo del 0,5 %.
3.5.2. Función ExponencialHay muchos procesos biológicos que evolucionan de modo que el aumento (o disminución)
del objeto de estudio en un pequeño intervalo de tiempo es proporcional a la cantidad del mismo
70
3.5. Aplicaciones
que había al comienzo. Esos procesos se describen mediante funciones exponenciales donde labase a representa el crecimiento peculiar de cada población y el exponente t el tiempo transcu-rrido.
La función exponencial de base a > 0, a 6= 1 es:
f(t) = at, t ∈ R
En el apartado A.2 en la página 200 del apéndice A se detalla el manejo de este tipo defunciones con DERIVE. Se ha excluido la función f(t) = 1t = 1 ya que al ser constante carecede interés para nuestro estudio.
Ejemplo 3.5 (Crecimiento de una población por bipartición) Un proceso típico que se ajustaa una función exponencial, concretamente a la función
f(t) = 2t
es el mecanismo de reproducción que siguen los organismos vivos más sencillos, los unicelulares(amebas, bacterias, algunas algas microscópicas, algunos hongos, etc...), y las células somáticasque forman los tejidos de los seres superiores. Estos organismos se reproducen partiéndose endos, fenómeno conocido como bipartición, originándose dos células hijas que contienen losmismos materiales genéticos que la célula de la que proceden. Cada una de estas dos célulashijas dará lugar a dos células más y así sucesivamente.
Ejercicio 3.15 Si inicialmente tenemos 20 amebas y la bipartición se produce cada hora, sepide:
(a) Calcular el número de amebas que hay al cabo de 1, 2, ..., 15 horas. Utilizar la funciónVECTOR de DERIVE.
(b) Estudiar la gráfica de la función que se ha utilizado para representar este modelo decrecimiento.
Ejercicio 3.16 Estudiar las gráficas de las funciones 3t y(
13
)t. Comprobar que son simétricasrespecto a la recta y = 1. ¿Por qué? Generalizar el resultado.
Ejercicio 3.17 (Desintegración radioactiva.) Las sustancias radioactivas como el uranio, sedesintegran transformándose en otras sustancias y lo hacen con mayor o menor rapidez segúnde la sustancia de que se trate.
Supongamos que tenemos un kilogramo de uranio que se desintegra reduciéndose a la mi-tad cada año. El resto de la sustancia no desaparece sino que se transforma en otra sustanciaquímica distinta. Se pide:
(a) Obtener la función que modela la desintegración anual del uranio.
(b) Calcular los kilogramos de uranio que van quedando a lo largo de 10 horas. Utilizar lafunción VECTOR de DERIVE.
(c) Estudiar la gráfica de la función que se ha utilizado para representar este proceso.
71

Práctica 3. Cálculo diferencial de una variable con DERIVE
3.5.3. Función exponencial naturalSi se toma como base de la función exponencial el número e = 2,718281828459045 . . ., se
tiene la llamada función exponencial natural:
f(t) = et, t ∈ R (3.7)
Cabe destacar lo siguiente:
Puesto que su recorrido es el conjunto de los números reales positivos, en los procesos quemodela nunca se obtendrá una cantidad negativa para ningún instante temporal t.
Ya que e > 1, la gráfica de la función exponencial natural tiene las mismas característicasque la de f(t) = at con a > 1.
Ejercicio 3.18 Estudiar la gráfica de la función f(x) = et.
Ejercicio 3.19 Estudiar la gráfica de la función f(x) = e−t.
Existen funciones que involucran potencias del número e y que describen tres tipos de com-portamiento: el crecimiento exponencial, el decaimiento exponencial y el crecimiento aco-tado. Algunos ejemplos de procesos reales que se pueden modelar por estas funciones son: elcrecimiento de bacterias; la evolución de numerosas poblaciones animales y vegetales; la distri-bución de los árboles en una masa forestal irregular; el enfriamiento de un cuerpo; la infusióncontinúa de un fármaco; la disolución de comprimidos, etc.
Crecimiento exponencial: Una función de la forma
f(t) = B ekt, t ≥ 0 (3.8)
donde k y B son constantes positivas, se dice que refleja crecimiento exponencial. A laconstante k se le llama constante de crecimiento.
Ejercicio 3.20 Sea f(t) la función que representa las bacterias presentes al cabo de tminutos
f(t) = B e0,4t (3.9)
donde B es una constante positiva a determinar. Se pide:
(a) Sabiendo que inicialmente hay presentes 1500 bacterias, calcular el valor de B quedetermina la función de crecimiento.
(b) ¿Cuántas bacterias habrán al cabo de 1 hora?
(c) Representar la función en el rango de valores adecuado para t y colocar etiquetasen los ejes coordenados. (Sugerencia: se puede utilizar la opción de autoescalado).
72

3.5. Aplicaciones
(d) Estudiar la gráfica de la función. ¿Cómo afecta al comportamiento de la función elque el valor de la constante de crecimiento k aumente o disminuya?, ¿y el valor deB?
Decaimiento exponencial: Una función de la forma
f(t) = Be−kt, t ≥ 0
donde k y B son constantes positivas, se dice que reflejan decaimiento exponencial. A laconstante k se la llama constante de decaimiento.
Ejercicio 3.21 Sea V (t), la función que representa el valor en euros de cierto equipo deordenadores, t años después de su compra inicial. Dicha función es
V (t) = B e−0,20t
donde B es una constante. Se pide:
(a) Si el equipo se compró por 2800 e, calcular el valor de B.
(b) ¿Cuál será su valor al cabo de 2 años?
(c) Representar la función en el rango de valores adecuado para t y colocar etiquetasen los ejes coordenados. (Sugerencia: se puede utilizar la opción de autoescalado).
(d) Estudiar la gráfica de la función. ¿Cómo afecta al comportamiento de la función elque el valor de la constante de decaimiento k aumente o disminuya?, ¿y el valor deB?
Crecimiento acotado: Función Monomolecular. Otro modelo que involucra potenciasdel número e viene dado por funciones de la forma
f(t) = A(1− e−kt
)f(t) = A−Be−kt
, t ≥ 0 (3.10)
donde A, B y k son constantes positivas. Este es el patrón de comportamiento que siguenlas especies de crecimiento rápido y acotado.
Ejercicio 3.22 Crecimiento del diámetro de un árbol: Pinus Pinaster
El pino marítimo o Pinus Pinaster, véase la figura 3.5 en la página siguiente, tiene impor-tancia económica por el aprovechamiento de su madera. Por eso, para los productores esinteresante conocer cuál es el crecimiento del diámetro del tronco a lo largo del tiempo.
73

Práctica 3. Cálculo diferencial de una variable con DERIVE
Estudios realizados han comprobado que la relación diámetro–edad del Pinus Pinaster, semodela por la función
f(t) = 50(1− e−0,03t), t ∈ [ 0, 200 ] (3.11)
donde el diámetro del árbol en el año t, f(t), se mide en centímetros.
Se pide:
(a) Representar la estimación del crecimiento del diámetro que se producirá a lo largode 200 años. Utilizar la opción de autoescalado.
(b) Estudiar la gráfica de la función.
(c) ¿Cuál es el máximo diámetro que podrá alcanzar? A partir del resultado obtenido yrealizando los cálculos necesarios, interpreta el sentido biológico de la constante Aque aparece en la primera expresión de (3.10).
(d) Calcula la tasa relativa de crecimiento, es decir el incremento anual del diámetro.Representarla en la misma ventana gráfica que f(t). ¿Qué se puede concluir sobreel incremento anual?
Figura 3.5: Pinus Pinaster
Ejercicio 3.23 Estudiar las funciones dadas en (3.10). ¿Qué similitudes y diferencias exis-ten?
3.5.4. Función logísticaLa función logística se utiliza para modelar el crecimiento de algunos organismos, sean ár-
boles o no (véase la figura 3.6 en la página siguiente), entre otros procesos. Las propiedades
74

3.5. Aplicaciones
cualitativas esenciales de la función logística son que para valores pequeños de la variable in-dependiente x, el crecimiento es aproximadamente exponencial, después éste se suaviza y porúltimo se estabiliza acercándose a un valor constante cuando x se hace muy grande. Estas carac-terísticas son comunes a varios fenómenos lo que explica la amplia aplicación de esta función.El crecimiento restringido queda reflejado en la asíntota horizontal que presenta. Mientras que elcambio de comportamiento se producirá en el punto de inflexión.
Figura 3.6: Modelo del crecimiento de un cultivo de bacterias mediante la función logística.Fases de crecimiento del cultivo.
El modelo general logístico se puede representar, entre otras, por la función:
f(x) =K
1 + b e−ax, x ∈ (−∞,+∞) (3.12)
donde K, a, b ∈ R+ son parámetros que dependen del problema, su valor tiene sentido biológicoy resultan interpretables como se verá en los ejercicios siguientes.
La función logística definida en (3.12) se puede reescribir utilizando otros parámetros, esdecir se puede reparametrizar. Las reparametrizaciones más conocidas y con las que se trabajaráen los ejercicios son las siguientes:
f(x) =K
1 + e−ax+c, donde c = ln b.
f(x) =1
A+ Ce−ax, donde A =
1
Ky C =
b
K.
Por tanto tenemos varias representaciones equivalentes de la función logística.
Ejemplo 3.6 (Crecimiento de un cultivo de bacterias) Un cultivo de bacterias crece de acuer-do con la función logística de crecimiento
f(t) =1,25
1 + 0,25 e−0,4t, t ≥ 0 (3.13)
donde f(t) es el peso del cultivo en gramos y t el tiempo en horas. Se pide:
75

Práctica 3. Cálculo diferencial de una variable con DERIVE
(a) Representar la gráfica de la función logística de crecimiento. Nombrar los ejes coordena-dos para indicar qué variables se están representando.
(b) Estudiar la gráfica de la función considerando primero que t ∈ (−∞,+∞): puntos críti-cos, intervalos de crecimiento y decrecimiento, concavidad y convexidad; y las asíntotas.
(c) En vista del rango de valores que toma la variable independiente t: t ≥ 0 (selecciona esterango en la ventana gráfica por ejemplo mediante el botón ), ¿esta función tiene puntode inflexión?, ¿cuántas asíntotas horizontales tiene?
(d) ¿Qué podemos decir sobre el crecimiento de este cultivo de bacterias en vista de la exis-tencia de una asíntota horizontal? Dibujar dicha asíntota en la misma ventana gráfica yanotar su valor.
(e) Calcular el peso del cultivo al cabo de 0 horas, 1 hora y 10 horas.
(f) Calcular la tasa media de crecimiento en los intervalos [0, 2], [2, 5], [5, 10] horas.
(g) Calcular la tasa de variación absoluta o velocidad de crecimiento en el peso de las bac-terias cuando t = 1, es decir, la variación instantánea cuando t = 1. Calcular la rectatangente en ese instante y dibujarla en la misma ventana gráfica.
(h) Calcular la tasa relativa de crecimiento que representa el incremento del peso de las bac-terias por hora respecto del peso del cultivo. Represéntala en la misma ventana gráficaque la función logística.
(i) A partir de la tasa relativa obtener qué porcentajes representan dicho incremento respectodel peso del cultivo en t = 5 y t = 10 segundos respectivamente.
Ejercicio 3.24 (Estudio de la función logística.)
(a) Demostrar que la función logística es siempre creciente utilizando su derivada y que comoconsecuencia no tiene ni máximos ni mínimos.
(b) Probar que tiene un punto de inflexión y que éste es:(
ln(b)
a,K
2
).
(c) Comprobar que si b < 1 entonces el punto de inflexión se localiza fuera del dominio[0,∞). ¿Qué ocurre si b > 1? ¿Cuánto vale la abscisa del punto de inflexión si b = 1?
(d) Para obtenerr los intervalos de concavidad y convexidad estudiar el signo de la segundaderivada de la función logística en un punto más a la izquierda del punto de inflexión, porejemplo en ln(b)
a− 1, y en un punto más a la derecha, por ejemplo en ln(b)
a+ 1.
(e) Calcular las asíntotas horizontales de la función logística.
Ejercicio 3.25 (Punto de máxima variación instantánea.)
76
3.5. Aplicaciones
(a) Calcular la tasa absoluta o instantánea de crecimiento de la función logística, definida en(3.12), para cualquier valor de x.
(b) Comprobar que la tasa instantánea tiene un máximo absoluto en x ∈ [0,+∞) y que éstecoincide con el punto de inflexión de la función logística.
(c) En vista del resultado obtenido en el apartado (b) anterior, ¿cuál es el punto donde seproduce la máxima variación instantánea en la función logística?
(d) Calcular la recta tangente a la función logística en el punto de máxima variación instan-tánea.
(e) Si se toman los siguientes valores para los parámetros que aparecen en la función logísticaK = 12, a = 0,75 y b = 24, deducir el punto de máxima variación instantánea y la rectatangente en ese punto. Representar en la misma ventana gráfica: la función logística parti-cular considerada, la función que representa la tasa absoluta o instantánea de crecimientoy la recta tangente obtenida. Colocar los nombres sobre cada elemento dibujado.
Ejercicio 3.26 (Interpretación del parámetro K.)A fin de ver qué papel juega el parámetro K en la curva logística se proponen los siguientesapartados:
(a) Probar que la constante K > 0 es la asíntota horizontal de la función logística definidaen (3.12) y también de su primera reparametrización. (Ayuda: definir el parámetro a en eldominio [0,+∞) ).
(b) Probar que la curva logística no tiene asíntota vertical y que la asíntota oblicua coincidecon la horizontal llamada asíntota de crecimiento.
(c) Representar en la misma ventana gráfica la función logística definida en (3.12) tomandoa = 0,75, b = 24 y variando el valor de K = 4, 6, 8, 10, 12.
Ejercicio 3.27 (Interpretación del parámetro a.)Vamos a estudiar ahora que la variación del parámetro a en la función logística influirá en elvalor de la abscisa del punto de inflexión. Posteriormente se interpretará su sentido biológico.
(a) Considerar la siguiente función logística:
f(x) =12
1 + 24 e−ax, t ≥ 0 (3.14)
Representar, en una misma ventana gráfica, las curvas logísticas que se obtienen al variarel parámetro a = 0,5, 1, 1,5 y a = 4. Dibujar cada curva con un color diferente y escribiruna pequeña leyenda sobre cada una de ellas indicando a qué valor del parámetro acorresponden.
77

Práctica 3. Cálculo diferencial de una variable con DERIVE
(b) ¿Qué le ocurre a la curva logística cuando aumenta el valor del parámetro a? Justificar-lo calculando los puntos de inflexión, las funciones que representan la tasa absoluta oinstantánea de crecimiento y las rectas tangentes en el punto de inflexión.
(c) Dibujar los puntos de inflexión y las rectas tangentes calculadas en el apartado (b) ante-rior, en la misma ventana gráfica que las curvas logísticas.
(d) Dibujar las funciones que representan las tasas absolutas o instantáneas de crecimientoen otra ventana gráfica.
(e) En un laboratorio se ha comprobado que la relación: peso (gramos)—tiempo (horas) quesiguen 2 cultivos distintos de bacterias: A y B, está representada por la función logística(3.14) donde a = 1 para el cultivo A y a = 4 para el cultivo B. En vista de los resultadosy de las gráficas obtenidas en los apartados anteriores analizar qué está ocurriendo en larelación peso–tiempo de ambos cultivos.
Ejercicio 3.28 (Interpretación del parámetro b.)En este ejercicio se estudiará que el parámetro b de la función logística está relacionado conel valor de la ordenada en el origen, es decir con f(0) = y0. Posteriormente se interpretará susentido biológico.
(a) Considerar la siguiente función logística:
f(x) =20
1 + b e−0,75 x, t ≥ 0 .
Representar, en una misma ventana gráfica, las curvas logísticas que se obtienen al variarel parámetro b = 1, 6, 12 y b = 24. Dibujar cada curva con un color diferente y escri-bir una pequeña leyenda sobre cada una de ellas indicando a qué valor del parámetrob corresponden. (Sugerencia: para dibujar las curvas utilizar la opción autoescalado yluego hacer un zoom de acercamiento en ambos ejes: .)
(b) ¿Qué le ocurre a la ordenada en el origen de la curva logística cuando aumenta el valordel parámetro b?
(c) Probar que el parámetro b se puede sustituir en la función logística general, dada en(3.12), por el siguiente cociente:
b =K − y0
y0
Ejercicio 3.29 En el carrascal de la Font Roja se detectó, hace un par de años, la defoliación(pérdida de hoja) que había sufrido como consecuencia del aumento de la población de lagartapeluda. Esta plaga afecta sobre todo a las especies del género Quercus. Como medida preventiva,se estudió la relación existente entre el número de montones con huevo de lagarta y el porcentajede defoliación. Dicha relación se modeliza por la función logística:
f(x) =300
3 + 17 e−0,0625 x, x > 0
78

3.5. Aplicaciones
donde x es el número de montones en miles y f(x) es el porcentaje de defoliación para un nú-mero de montones x.De esta manera se detectó rápidamente el riesgo de expansión de esta plaga tanto en este ca-rrascal como en los colindantes. Se pide:
(a) Escribir la función en la forma general de la función logística dada en (3.12).
(b) Representar la nueva función en un rango de valores adecuado y nombrar los ejes coor-denados para indicar las variables que intervienen.
(c) Calcular la asíntota horizontal de esta nueva función. ¿Qué representa en este caso?
(d) Estimar el porcentaje de defoliación si se cuentan 2000 montones de huevos de lagarta, esdecir para x = 2. ¿Cuál es el porcentaje de defoliación para el punto de inflexión?
(e) ¿A partir de qué cantidad de montones consideras que sería peligroso no actuar en elcarrascal? (Ayuda: calcular cuándo la velocidad de crecimiento es máxima)
(f) Estimar qué número de montones de huevos habrá sabiendo que se han defoliado las dosterceras partes del carrascal. (Ayuda: Transformar dicho porcentaje en tanto por cien yutilizar la orden SOLVE de DERIVE).
Ejercicio 3.30 Dada la sobrepesca de trucha común sufrida en los últimos años en algunostramos de nuestros ríos, un grupo de Ingenieros de Montes ha decidido que una solución acorto plazo es la repoblación con trucha. La suelta será de 500 peces en cada río estimandoun crecimiento de la población en pocos meses suficiente para recuperar el equilibrio. Estecrecimiento se aproxima según la curva logística:
p(t) =10000
1 + 19 e−t/5, t > 0
donde t se mide en meses. Se pide:
(a) Representar la función en un rango de valores adecuado y nombrar los ejes de acuerdocon las variables utilizadas.
(b) ¿Cuál es el tamaño límite de la población de truchas? Justificarlo.
(c) ¿A qué ritmo crece la población (variación instantánea) al final del primer mes?, ¿y alfinal del décimo?
(d) ¿Al final de qué mes crece más deprisa la población?
Ejercicio 3.31 (Especies arbóreas de distintas velocidades de crecimiento.)Se quiere comparar el crecimiento de dos especies arbóreas: Pinus Pinaster y Fagus Sylvatica(comúnmente llamada haya, véase la figura 3.7 en la página siguiente).
79

Práctica 3. Cálculo diferencial de una variable con DERIVE
Figura 3.7: Fagus Sylvatica
El Pinus Pinaster fue estudiado en el ejercicio 3.22 en la página 73, donde se vio que elcrecimiento de su diámetro a lo largo de los años se modelaba mediante la función monomole-cular (crecimiento exponencial acotado). El Fagus Sylvatica es un árbol de crecimiento lento yde bastante longevidad. Posee una madera dura, pesada, blanco-amarillenta, que pasa a rojiza.Se emplea en tornería, ebanistería y carpintería. También se ha utilizado en destilación. El cre-cimiento de su diámetro a lo largo del tiempo se modeliza por medio de una función logística.Supongamos que bajo ciertas condiciones climáticas y de suelo dicha función es:
D(t) =75
1 + 250 e−0,5 t+50, t ∈ [0, 200]
se pide:
(a) Representar ambas funciones en la misma ventana gráfica anotando el nombre de cadauna de ellas y poniendo en los ejes coordenados qué variables se han representado.
(b) Observar en las gráficas que efectivamente se tiene dos especies arbóreas con diferenteritmo de crecimiento. Evaluar las dos funciones en algunos instantes para comprobarlocuantitativamente.
(c) Calcular la asíntota de crecimiento. ¿Cuál es el máximo diámetro?
(d) Calcular el punto de inflexión en el crecimiento del diámetro.
(e) Calcular la tasa de variación relativa que representa el incremento anual del diámetroen mm. Dibujarla junto con la función logística. ¿Qué relación existe entre el incrementoanual producido y el tamaño del organismo?
80

3.5. Aplicaciones
(f) Anotar las similitudes y las diferencias encontradas al comparar ambas funciones: mono-molecular y logística.
81

Práctica 4
Curvas definidas paramétricamente
4.1. IntroducciónAlgunos fenómenos físicos se describen muy fácilmente de forma paramétrica. Por ejemplo,
si en cada instante de tiempo t conocemos la posición (x(t), y(t)) de un móvil su trayectoria sedefine de forma paramétrica, en este caso el parámetro es el tiempo t.
Por otra parte muchas curvas cerradas se describen usualmente de esta forma ya que ningunaecuación explícita (es decir de la forma y = f(x)) las representa.
El objetivo de esta práctica es aprender a trabajar con curvas definidas paramétricamente, enparticular a dibujarlas tanto a ellas como a sus tangentes.
4.2. Ecuaciones paramétricasSe considerará en primer lugar un ejemplo relativamente sencillo, el de una circunferencia
con centro en el origen y radio r > 0. Obviamente un punto (x, y) del plano está en la circunfe-rencia si, y sólo si, su distancia al centro de la misma (que por lo que se ha dicho es el origen) esr, es decir los puntos de la circunferencia son aquellos que cumplen
x2 + y2 = r2 (4.1)
Resulta imposible obtener y como una sóla función de x, ya que al despejar y de (4.1) se obtieney =
√r2 − x2 y si se elige el signo + en la raíz cuadrada se obtiene la parte superior de la
circunferencia, mientras que si se elige el signo − se obtiene la inferior.Sin embargo es posible describir la posición de un punto de la circunferencia de otra manera
muy natural. Dado un punto cualquiera sobre la circunferencia, se traza el segmento que lo uneal centro de la misma. Se tiene que este segmento forma con el eje de abcisas un ángulo que midet radianes y las coordenadas del punto son (r cos t, r sen t). Obviamente si se hace variar t en elintervalo [ 0, 2π [ se obtienen todos los puntos de la circunferencia. Las ecuaciones paramétricasde la circunferencia son, por tanto
x(t) = r cos t, y(t) = r sen t, t ∈ [ 0, 2π [ (4.2)
83

Práctica 4. Curvas definidas paramétricamente
Antes de dibujar la circunferencia usando las ecuaciones paramétricas se verá cómo se pue-de dibujar un punto con DERIVE. En la ventana de Álgebra se introducirán las coordenadasdel punto entre corchetes y después se dibujarán. Por ejemplo, para dibujar el punto (2, 3) seintroduce en DERIVE la expresión [2,3] (para ello se puede abrir una ventana de diálogoAuthor Expression o una Vector Setup . . . ) y luego se dibuja. DERIVE dibuja un punto enel lugar adecuado.
Pues bien, dibujar una función definida paramétricamente es como dibujar todo el conjuntode puntos de la gráfica. Así para dibujar la circunferencia de centro el origen y radio 1 se harálo siguiente, en la ventana de Álgebra se introduce la expresión [cos t, sin t] y luego sepasa a la ventana de gráficos.
Para dibujar la gráfica se elige el menú Plot!, o bien el botón de la barra de herramientas,llegados aquí DERIVE ha reconocido que se trata de un dibujo a realizar en coordenadas para-métricas y precisa saber el rango en el que varía el parámetro t. Como se observará la opción pordefecto es [−π, π ]. Si se acepta esta elección DERIVE dibuja la circunferencia empezando porel punto (−1, 0). Luego dibuja la parte de abajo de la circunferencia hasta llegar al punto (1, 0)y termina dibujando la parte de arriba de la circunferencia 1.
A continuación se verán las ecuaciones paramétricas de algunas curvas
4.2.1. RectaLa ecuación paramétrica de la recta que pasa por el punto (a, b) y tiene dirección v = v1e1 +
v2e2 es
x = a+ v1t, y = b+ v2t t ∈ R (4.3)
por tanto la ecuación de la recta que pasa por los puntos (a, b) y (c, d) es
x = a+ (c− a)t, y = b+ (d− b)t t ∈ R (4.4)
Ejercicio 4.1 Dibujar la recta que pasa por los puntos (3,−3) y (2,−1).
Evidentemente DERIVE no admite para hacer el dibujo los valores infinitos para que varíeel parámetro, comoquiera que tampoco es posible ver todo el plano se darán unos valores a t quehagan que en la ventana parezca que se ha dibujado la recta completa.
4.2.2. CircunferenciaLa ecuación paramétrica de la circunferencia con centro en el punto (a, b) y radio r se obtiene
desplazando la circunferencia con centro en el origen
x = a+ r cos t, y = b+ r sen t t ∈ [ 0, 2π [
1Si la circunferencia aparece achatada se debe al rango de dibujo elegido por DERIVE, puede verse mejorcambiando el rango del eje de ordenadas y poniendolo entre−2,5 y 2,5, para ello hay que usar la sucesión de menúsSet, Range. . . , o bien utilizar la combinación <Control + R> o el botón de la barra de herramientas ; en laventana de diálogo correspondiente se introducen los datos adecuados.
84

4.2. Ecuaciones paramétricas
Ejercicio 4.2 Dibujar la circunferencia de centro en el punto (2,−1) y radio 3.
4.2.3. ElipseLa ecuación paramétrica de una elipse de semiejes coincidiendo con los ejes y longitudes a,
b, con centro en el origen es
x = a cos t, y = b sen t t ∈ [ 0, 2π [
Ejercicio 4.3 Dibujar la elipse con centro en el punto (2,−1) y semiejes paralelos a los coor-denados de longitudes 2 y 4 respectivamente.
4.2.4. HipérbolaLas ecuaciones paramétricas de la hipérbola son
x = a cosh t, y = b senh t, t ∈ R
Ejercicio 4.4 Dibujar la parte de la rama derecha de la hipérbola de ecuaciones paramétricas
x = 3 cosh t, y = 1 senh t, t ∈ [−3, 3 ]
La rama entera se obtendría para t ∈ R. Las funciones cosh y senh son las funciones hiperbólicas,y en DERIVE corresponden a las funciones COSH(x) y SINH(x), respectivamente. Para sabercómo se definen simplificarlas con DERIVE.
4.2.5. CicloideSi una circunferencia de radio r gira sin deslizar sobre una recta, entonces uno cualquiera de
sus puntos recorre una curva llamada cicloide.Para hallar las ecuaciones paramétricas de la cicloide supóngase que la recta es el eje de
abcisas, que el punto de la circunferencia elegido es el que al iniciarse el movimiento se encuentrasobre la recta, y elíjase dicho punto como origen del sistema de coordenadas. Unos instantesdespués la circunferencia ha avanzado estando apoyada sobre el punto D de la recta (figura 4.1en la página siguiente). Si el punto que se considera se encuentra en A, la distancia recorrida porla circunferencia, que es el segmentoOD tiene la misma longitud que el arco de la circunferencia_
AD. La longitud de dicho arco se puede parametrizar fácilmente en función del ángulo t queforman el radio que une el centro de la circunferencia con el punto que describe la cicloidecon el radio que va a la recta. La longitud del arco es pues rt. Sea B el punto sobre el radioque une el centro de la circunferencia C con D que está a la misma altura que A. Entonces ladistancia de A a B es r sen t y la distancia de C a B es r cos t. La coordenada x del punto A esla longitud OD menos la longitud AB, ambas conocidas e iguales respectivamente a rt y r sen t.
85

Práctica 4. Curvas definidas paramétricamente
A
C
O D
B
t
?
��
Figura 4.1: Cicloide
La coordenada y es el radio de la circunferencia menos la distancia CB, también conocida enfunción del parámetro t. Por tanto las ecuaciones paramétricas son
x = r(t− sen t), y = r(1− cos t), t ∈ [ 0, 2kπ ]
donde k es el número de vueltas que da la circunferencia.
Ejercicio 4.5 Dibujar la cicloide de ecuaciones paramétricas
x = 4(t− sen t), y = 4(1− cos t), t ∈ [ 0, 2π ]
4.3. Curvas definidas paramétricamenteDesde el punto de vista formal las ecuaciones paramétricas de una curva corresponden a la
gráfica de una aplicaciónX : I −→ R2, donde I es el intervalo donde está definido el parámetro.Esta función tiene dos funciones reales de variable real como componentes, pudiéndose escribir
X(t) = [ϕ(t), ψ(t)], t ∈ I
Si ambas funciones componentes son continuas entonces se dice que X es continua.En algunas ocasiones será posible obtener a partir de las ecuaciones paramétricas de una
curva su ecuación explícita (es decir una ecuación de la forma y = f(x)). Para ello es preciso quela función x = ϕ(t) tenga inversa en I , en este caso se podrá obtener t = ϕ−1(x), y sustituyendoen y = ψ(t), se obtiene y(x) = ψ(ϕ−1(x)), de donde se deduce que f = ψ ◦ ϕ−1.
La obtención de la función inversa de x = ϕ(t), si existe, puede hacerse con DERIVEresolviendo la ecuación correspondiente, luego se puede sustituir en la expresión y = ψ(t).
86

4.3. Curvas definidas paramétricamente
Ejemplo 4.1 Considérese la función definida paramétricamente por
x = et y = sen t, t ∈ R
Obtener y como función de x.
Solución: Usando DERIVE se procederá como sigue:
Se abre una ventana de diálogo Author Expression en la que se introduce la expresiónx=ê^t
Se resuelve para t usando el menú Solve, Algebraically. . . , o la combinación <Control+ Shift+A>. Es muy importante elegir la variable t en el apartado Variable: de la ventanade diálogo Solve Algebraically .
Se simplifica para obtener el resultado t = ln x.
Se sustituye t por lnx en la expresión y = sen t, para ello se elige y se abre una venta-na de diálogo Substitute for Variables in #. . . (usando la sucesión de menús Simplify,Substitute for , Variables. . . , o bien la combinación <Control + W> o bien elegimos el
botón de la barra de herramientas . En la ventana se elige t en el apartado Variables. . .y en el apartado Substitution: se escribe LOG(x) (o se selecciona en la expresión anteriory se copia con <F3> ).
el resultado es la función buscada y = sen(log x). �
Ejercicio 4.6 Hallar la ecuación explícita correspondiente a las ecuaciones paramétricas de larecta (4.3). ¿Ha de cumplirse alguna condición? ¿Cuál? Demostrar que la pendiente de la rectacuyas ecuaciones paramétricas son (4.3) es v2/v1.
En el ejemplo 4.1 ha sido posible obtener y como función de x porque et es una funciónestrictamente monótona creciente y por tanto tiene inversa. En el ejercicio 4.6 es necesario quev1 6= 0 para que x sea una función estrictamente monótona (creciente si v2/v1 > 0, decrecientesi v2/v1 < 0) de t. Para que una función f tenga inversa es condición necesaria y suficiente quef(x) 6= f(y) siempre que x 6= y, entonces la inversa f−1 se define por f−1(y) = x, si f(x) = y.Esta condición necesaria y suficiente tiene una interpretación gráfica muy sencilla, cualquierrecta horizontal corta a la gráfica de la función en a lo sumo un punto. De hecho si la ecuaciónde la recta horizontal es y = y0 y corta a la gráfica de f en el punto (x0, y0 = f(x0)), entoncesf−1(y0) = x0. Obviamente las funciones estrictamente crecientes o estrictamente decrecientescumplen este criterio y por tanto tienen inversa. En nuestro caso siempre que x = ϕ(t) seaestrictamente creciente o estrictamente decreciente, a partir de las ecuaciones paramétricas es, almenos teóricamente, posible obtener una función explícita y = f(x), cuya gráfica representa lamisma curva que la dada inicialmente por las ecuaciones paramétricas.
87

Práctica 4. Curvas definidas paramétricamente
Ejercicio 4.7 Obtener la ecuación explícita de la recta que pasa por los puntos (a, b) y (c, d) apartir de la ecuación paramétrica de la misma (ecuación (4.4)).
En otras ocasiones no es posible proceder de esta forma porque la función ϕ no tiene inversa,aunque tomando subintervalos del parámetro se puede conseguir que en cada uno de ellos lafunción tenga inversa. Este es el caso de la circunferencia cuya ecuación paramétrica es (4.2).Puesto que la función coseno no tiene inversa en [ 0, 2π ], pero sí tiene inversa en [ 0, π ] y[ π, 2π ], se pueden usar estas inversas «parciales» para obtener las mitades superior e inferiorrespectivamente de la circunferencia, cuyas ecuaciones son y = +
√r2 − x2 e y = −
√r2 − x2.
Por último destacar que en algunas ocasiones, como es el caso de la cicloide, la función ϕtiene inversa pero ésta no se puede escribir a partir de las funciones elementales, siendo imposiblela obtención de una ecuación explícita aunque esta exista. En estos casos no hay otra opción quetrabajar con las ecuaciones paramétricas.
4.4. Rectas tangentes y derivadasEs muy fácil obtener las ecuaciones paramétricas de la recta tangente a una curva definida
paramétricamente. En efecto si
X(t) = [ϕ(t), ψ(t)], t ∈ I
es derivable en t0 ∈ I , es decir si existen las derivadas respecto a t de ϕ y ψ en t0, las ecuacionesparamétricas de la recta tangente a la gráfica de la curva X(t)) en t0 son
[ϕ(t0), ψ(t0)] + s[ϕ′(t0), ψ′(t0)], s ∈ R (4.5)
o bienx(s) = ϕ(t0) + s ϕ′(t0) y(s) = ψ(t0) + s ψ′(t0), s ∈ R (4.6)
Nótese que hemos utilizado otra letra, la s, como parámetro de la ecuación de la recta tan-gente.
Para demostrar que la ecuaciones paramétricas de la recta tangente son las dadas en (4.6)consideremos la ecuación de la recta que une los puntos de la curva (x0, y0) y (x, y), correspon-dientes a los valores t0 (fijo) y t (variable) del parámetro, esta ecuación es
x(s) = ϕ(t0) + sϕ(t)− ϕ(t0)
t− t0y(s) = ψ(t0) + s
ψ(t)− ψ(t0)
t− t0, s ∈ R (4.7)
(nótese que para s = t0 se obtiene el punto (x0 = ϕ(t0), y0 = ψ(t0)) y para s = t − t0 seobtiene el punto (x = ϕ(t), y = ψ(t))). Ahora juntemos los dos puntos anteriores de la curvahaciendo que t → t0 y calculemos el límite de las expresiones dadas en (4.7). Obviamenteobtendremos (4.6)
Ejercicio 4.8 Calcular las ecuaciones paramétricas de las rectas tangentes a la cicloide en lospuntos correspondientes a t = π
2, t = π y t = 3π
2. Comprobar gráficamente los resultados.
88

4.4. Rectas tangentes y derivadas
De la expresión (4.6) y del ejercicio 4.6 se deduce que si ϕ′(t0) 6= 0 la ecuación explícita dela recta tangente es
y =ψ′(t0)
ϕ′(t0)x+
ψ(t0)
ϕ(t0)(4.8)
4.4.0.1. Cálculo de la derivada primera
El cálculo de las derivadas de una función definida paramétricamente es muy sencillo apartir de la igualdad f = ψ ◦ ϕ−1, suponiendo que ϕ tenga inversa al menos en un intervaloque contenga el punto donde queremos calcular la derivada. En efecto, si ϕ(t0) = x0 entoncesf(x0) = (ψ◦ϕ−1)(x0) = ψ(ϕ−1(x0)), aplicando primero la regla de la cadena y después la expre-sión para la derivada de la función inversa2 obtenemos que f ′(x0) = ψ′(ϕ−1(x0))(ϕ
−1(x0))′ =
ψ′(t0)1
ϕ′(ϕ−1(x0)), es decir
f ′(x0) =ψ′(t0)
ϕ′(t0)
suponiendo, claro está que ϕ′(t0) 6= 0. La expresión anterior de la derivada coincide con lapendiente de la recta tangente de (4.8), como era lógico.
4.4.0.2. Rectas tangentes verticales
Hay que destacar que en algunos casos la ecuación paramétrica permite obtener más rectastangentes que la ecuación explícita cuando son verticales. Esto se debe a que estas tangentesverticales, son rectas que no tienen ecuación explícita, o dicho de forma menos rigurosa que supendiente es infinita.
Por ejemplo en el caso de la circunferencia es obvio que por cada punto se puede dibujar unarecta tangente. Sin embargo cuando se trabaja con las ecuaciones explícitas de la circunferencia,y = ±
√r2 − x2, al calcular la derivada y al sustituir x por los valores r y −r nos encontramos
con que el denominador de la derivada se anula, siendo imposible obtener la ecuación explícitade la recta tangente en los puntos (r, 0) y (−r, 0) de la circunferencia. Sin embargo trabajandocon las ecuaciones paramétricas obtenemos las ecuaciones correctas y = r e y = −r respec-tivamente. Obsérvese que son las tangentes correspondientes a los puntos donde la curva estádefinida por las dos ramas, superior e inferior, de las ecuaciones explícitas de la circunferencia.
Ejercicio 4.9 Calcular las derivadas de la función que define la cicloide en los puntos t = π2,
t = π y t = 3π2
, es decir en los mismos puntos del ejercicio 4.8.
Otra situación que puede darse es la que ocurre en el caso de la cicloide cuando t = 2kπ,cuando k ∈ Z, que corresponde a los instantes en que el punto de la circunferencia que estamosconsiderando, toca el suelo. Es ahí donde se enlazan dos cicloides consecutivas, la curva es
2La derivada de la inversa de una función f esddx
f−1(x) =1
f ′(f−1(x))
89

Práctica 4. Curvas definidas paramétricamente
continua pero no es derivable en ese punto ya que la gráfica presenta claramente un ángulo.En este caso al calcular las derivadas de ϕ(t) = r(t − sen t) y ψ(t) = r(1 − cos t) que sonϕ′(t) = r(1− cos t) y ψ′(t) = r sen t) respectivamente y al sustituir t por 2kπ, k ∈ Z, se obtieneque ϕ′(2kπ) = ψ′(2kπ) = 0. Entonces al sustituir en (4.6) no se obtiene una recta ya que laecuación se reduce a las coordenadas del punto (2kπ, 0), lo que indica que no hay recta tangenteen ese punto.
Análogamente se pueden calcular las derivadas de orden superior utilizando la regla de lacadena y la derivada de la función inversa.
4.5. Lanzamiento de un proyectilVamos a ver un ejemplo de uso de las ecuaciones paramétricas.
Ejemplo 4.2 Al lanzar un proyectil con velocidad inicial v0 y un ángulo α respecto a la tierra, sesabe que la distancia horizontal recorrida es directamente proporcional al tiempo transcurridoy a la componente horizontal de la velocidad inicial. La altura del proyectil es directamenteproporcional al tiempo transcurrido y a la componente vertical de la velocidad inicial menos elefecto de la gravedad que depende de la constante de gravitación g ≈ 9′80665m/seg2 y que esproporcional al cuadrado del tiempo transcurrido.
Se pide
1. Obtener las ecuaciones paramétricas de la trayectoria del proyectil.
2. Calcular la altura máxima que alcanzará.
3. Calcular cuánto tiempo tardará en caer a tierra.
4. Calcular cuánta distancia horizontal ha recorrido en ese tiempo.
5. Calcular la distancia total recorrida3.
6. Obtener la ecuación explícita de la trayectoria.
Todos los apartados deben resolverse utilizando las ecuaciones paramétricas.
Solución:1. Las ecuaciones paramétricas son
x(t) = v0(cosα)t, y(t) = v0(senα)t− 1
2gt2 (4.9)
Para poder trabajar con DERIVE se introducen las expresiones correspondientes
3Si f(x) es la ecuación explícita de la curva, x ∈ [ a, b ], la longitud de la curva es∫ b
a
√1 + f ′(x)2 dx (ver
práctica 6 en la página 107, sección 6.3).
90

4.5. Lanzamiento de un proyectil
#1 : X(t) := v COS(α) t
#2 : Y(t) := v SIN(α) t− g t2
2
donde para simplificar a v0 se ha llamado v. Teniendo en cuenta las características del problemaconviene declarar que v y g son variables positivas y que α varía en [ 0, π/2 ]. Esto hará queDERIVE simplifique de forma adecuada algunas expresiones que en otro caso quedarían máscomplicadas. Además aparecerán las expresiones
#3 : v :∈ Real(0,∞)
#4 : g :∈ Real(0,∞)
#5 : α :∈ Real[0, π/2]
2. Para calcular la altura máxima basta tener en cuenta que la expresión #2 proporciona laaltura correspondiente al instante t. Por tanto se deriva esta expresión respecto de t, se iguala laderivada a 0 obteniendose el punto que luego hay que comprobar que es máximo.
#6 :d
dt
[Y(t) := v SIN(α) t− g t2
2
]Simplify
#7 : v SIN(α)− g t Solve Variable: t
#8 : t =v SIN(α)
g
#9 :
[d
dt
]2 [Y(t) := v SIN(α) t− g t2
2
]Simplify
#10 : −g
que como es negativo corresponde a un máximo. Para calcular el valor del máximo se introduceen una ventana de diálogo Author Expression
#11 : Y
[v SIN(α)
g
]Simplify
#12 :v2 SIN(α)2
2g
Por tanto la altura máxima es
ymax =v2
0 sen2 α
2g
91

Práctica 4. Curvas definidas paramétricamente
3. Nuevamente se utilizará la expresión de y(t) que da la altura en el instante t. Como sequiere saber cuándo esta es 0 se resuelve la expresión #2 respecto a la variable t medianteSolve. Y se obtiene
#13 : t = 0
#14 : t =2 v SIN(α)
g
La primera solución indica que en el momento inicial el proyectil está a la altura del suelo.La segunda solución es la interesante
t =2v0 sen(α)
g
Además esto determina el intervalo de variación del parámetro que hasta ahora no se conocía.4. La distancia horizontal recorrida en cada instante está dada por la expresión #1, ya que
x(t) da la posición horizontal del proyectil en cada instante. Por tanto se hace
#15 : X
[2 v SIN(α)
g
]Simplify
#16 :2 v2 SIN(α) COS(α)
g
La distancia horizontal recorrida es
2v20 sen(α) cos(α)
g
5. La fórmula para la longitud que nos han dado está referida a las ecuaciones explícitas dela trayectoria. Para adaptarla a las paramétricas se ha de hacer un cambio de variable determi-nado precisamente por la expresión #1, es decir se ha de hacer el cambio x por x(t), por tantof ′(x) deberá cambiarse por y′(t)/x′(t), los extremos de integración serán los determinados porel intervalo de variación del parámetro. Así si x′(t) no se anula en el intervalo de variación de tla fórmula es ∫ t1
t0
√(x′(t))2 + (y′(t))2 dt
Se realizarán pues los siguientes cálculos
#17 :d
dt(X(t) := v COS(α) t) Simplify
#18 : v COS(α)
#19 :d
dt
[Y(t) := v SIN(α) t− g t2
2
]Simplify
92

4.5. Lanzamiento de un proyectil
#20 : v SIN(α)− g t
Una vez calculados los elementos se introduce la expresión a integrar
#21 :√
((v COS(α))2) + (v SIN(α)− g t)2)
y ahora con Calculus Integrate. . . o el botón de la barra de herramientas se introduce
#22 :
∫ 2 v SIN(α)/g
0
√((v COS(α))2) + (v SIN(α)− g t)2)dt Simplify
#23 :v2 SIN(α)
g−
v2 COS(α)2LN
[1− SIN(α)
SIN(α) + 1
]2g
Por tanto
` =v2
0 senα
g−v2
0 cos2 α ln(
1−sen α1+sen α
)2g
6. Por último para obtener la ecuación explícita se introduce una expresión similar a la #1,pero sin declarar la función, además se debe sustituir la letra x por otra, por ejemplo z, y despejart
#24 : z = v COS(α) t Solve Variable: t
#25 : t =z
v COS(α)
y se sustituirá en la expresión #2, escribiendo
#26 : Y
[z
v COS(α)
]Simplify
#27 : x TAN(α)− g x2
2 v2 COS(α)2
Por tanto la ecuación explícita es
y = x tan(α)− gx2
2v20 cos2(α)
que corresponde a una parábola.Se pueden dibujar algunas trayectorias dando valores a v0, α y dando a g su valor. Si se quiere
hacer el dibujo con las ecuaciones paramétricas se debe dibujar la expresión [X(t), Y(t)] y
cuando DERIVE pida el intervalo este debería empezar en 0 y acabar en2v sen(α)
g. Si se dibuja
a partir de la ecuación explícita se verá que se dibuja la parábola entera y que coinciden en la
93

Práctica 4. Curvas definidas paramétricamente
0
100
200
300
400
500
600
700
0 200 400 600 800 1000
v = 100, α = π/3v = 200, α = π/4v = 100α = π/4v = 200α = π/3
Figura 4.2: Distintas trayectorias para distintos valores de los parámetros v0 y α.
parte que está por encima del eje de abcisas (ver figura 4.5). �
4.6. EjerciciosEjercicio 4.10 Calcular la derivada de
x = sen t, y = cos 2t
en el punto (1/2, 1/2).
Ejercicio 4.11 Comprobar que las tangentes a la cardioide
x = a(2 cos t− cos 2t)
y = a(2 sen t− sen 2t)
en los puntos t = π4
y t = π4
+ 2π3
son paralelas.
Ejercicio 4.12 Calcular la derivada de
x = 1− t2, y = t− t3
¿Qué se puede decir de la derivada en x = 0? ¿Y en x = 1? Obtener las ecuaciones de lasrectas tangentes en dichos puntos y dibujar conjuntamente la función y las rectas tangentes.
94

4.6. Ejercicios
Ejercicio 4.13 Calcular la derivada de
x = et sen t, y = et cos t
para t = 0.
Ejercicio 4.14 Calcular la ecuación de la recta tangente a la gráfica de
x = sen t, y = at
para t = 0.
Ejercicio 4.15 Dada la curva x = t2 − 1, y = t3 − t, se pide
1. Demostrar que la curva es simétrica respecto al eje de abcisas.
2. Hallar los puntos en los que la tangente es horizontal.
3. Hallar los puntos en los que la tangente es vertical.
4. Demostrar que en los puntos en que la curva se corta a sí misma las tangentes son per-pendiculares.
5. Encontrar la ecuación explícita de la curva, o al menos de una parte de la misma.
95


Práctica 5
Coordenadas polares. Curvas encoordenadas polares
5.1. IntroducciónEl objetivo de esta práctica es que el estudiante aprenda a trabajar con un sistema de coorde-
nadas distinto del cartesiano, el sistema de coordenadas polares mediante el programa DERIVE.Este sistema de representación de puntos facilita la obtención de ecuaciones sencillas de muchascurvas planas, en particular de muchas curvas cerradas, por lo que es muy utilizado en aplicacio-nes geométricas.
En particular se verá cómo obtener las coordenadas polares de un punto conociendo las car-tesianas, y recíprocamente cómo obtener las coordenadas cartesianas de un punto conociendo laspolares. También se estudiarán algunas curvas a partir de sus ecuaciones polares.
5.2. Coordenadas polares de un puntoEl proceso de determinar un punto del plano mediante sus coordenadas cartesianas se realiza
del siguiente modo: se eligen dos rectas perpendiculares1, una de ellas, que normalmente se dibu-ja horizontal, es el eje de abcisas, y la otra, que normalmente es vertical, es el eje de ordenadas.Si en DERIVE se abre una ventana de dibujo de dos dimensiones se verán dibujados estos ejescoordenados. El punto donde se cortan estas rectas se llama origen del sistema de coordenadas.Cualquier punto del plano está inequívocamente determinado por un par de números2, llamadossus coordenadas cartesianas. Se practicá un poco el dibujo de puntos en coordenadas cartesia-nas con DERIVE. En primer lugar es importante resaltar que si bien la notación usual para lascoordenadas de un punto es (a, b), DERIVE no acepta este tipo de notación (pruébese a introdu-cir, por ejemplo en una ventana Author Expression (2,1) y se obtendrá el mensaje de error
1En realidad para determinar la posición del punto basta con que las rectas se corten en un sólo punto.2En matemáticas cuando se habla de un par se está diciendo algo más que dos, se está haciendo una distinción
entre el orden en que se consideran dichos números. Dicho de otra forma el par (2, 1) es diferente del par (1, 2).
97

Práctica 5. Coordenadas polares. Curvas en coordenadas polares
Figura 5.1: Coordenadas polares de un punto.
de sintaxis3). Para representar un punto en DERIVE se deben introducir sus coordenadas entrecorchetes. Por ejemplo para dibujar el punto (2, 1) se hará lo siguiente:
Abrir una ventana de diálogo Author Expression
Introducir [2,1]
Dibujarlo en una ventana de dibujo de dos dimensiones.
Nota: Lo que se hace en realidad es escribir un vector de dos componentes. Por tanto unaalternativa es abrir una ventana Vector Setup . . . , elegir 2 en Elements y en la ventana de
diálogo Author 2 element Vector - ???-MTH introducir las coordenadas del punto.
Ejercicio 5.1 Dibujar el origen de coordenadas (0, 0) y los puntos (2, 0), (1, 1), (−1, 0), (0, 1,5),(0,−0,5), (−3, 1), (−2,−1), (0,−4).
Hay otra forma de determinar un punto del plano usando únicamente una semirecta llamadaeje polar (ver la figura 5.1). Un punto del plano puede describirse mediante dos números: ρ ladistancia del punto al extremo de la semirecta, llamado polo, y θ, el ángulo que forma el eje polarcon el segmento que une el punto con el polo, este ángulo debe medirse en sentido opuesto a lasagujas del reloj. A ρ se le llama radio vector o distancia radial y a θ ángulo polar o argumento.
Dado que se usan ángulos es evidente que un mismo punto puede tener distintas coordenadaspolares, eso sí todas ellas con el mismo radio vector y con argumentos que difieran en múltiplosenteros de 2π (dicho de otra forma: al calcular el argumento se pueden dar unas vueltecitas).Además para el polo, y sólo para él, se da la circunstancia de que no tiene sentido hablar deargumento, ya que en este caso el segmento que une el polo consigo mismo se reduce a un puntoy por tanto no hay ángulo con el eje polar, así se aceptan como coordenadas polares del polocualquier par (0, θ).
3Ello es debido a que la notación de paréntesis está reservada a los argumentos de las funciones y a establecerprioridades en las operaciones.
98
5.3. Cambio de coordenadas cartesianas a polares
Para dibujar en coordenadas polares usando DERIVE hay que cambiar el tipo de coorde-nadas que se usan, este proceso se explicó en el apartado 2.2.3 en la página 42 y se recuerdabrevemente a continuación. En la ventana de gráficos en dos dimensiones en que se quiera di-bujar en coordenadas polares, se abre una ventana de diálogo Options Coordinates mediantela sucesión de menús Options, Coordinate System. . . y en ella se elige la opción Polar. Alcambiar la opción del tipo de sistema de referencia utilizado a coordenadas polares esta opciónpermanece así hasta que vuelva a ser cambiada. El programa DERIVE informa sobre el tipode coordenadas en que se hará el dibujo en la parte izquierda de la barra de estado (que si estávisible aparece en la parte inferior de la pantalla), si aparece un cuadrado dibujado sobre un siste-ma de referencia se interpretarán las coordenadas como cartesianas, si aparecen circunferencias(imagen 5.2) se interpretarán como polares.
Figura 5.2: La barra de estado muestra el dibujo en polares
Ejercicio 5.2 Dibujar los puntos de coordenadas polares (0, π), (0, π/2), (3, 0), (1, π/2), (2, π),(3, 3π
2
), (4, 2π) y (3, π/2).
Se habrá dibujado dos veces el polo y luego puntos sobre los ejes coordenados desplazándose ensentido opuesto a las agujas del reloj.
De la definición de radio polar se deduce que no puede ser negativo (de hecho casi siempre espositivo, sólo al polo corresponde un radio polar nulo), ya que se ha definido como una distancia.Sin embargo, en algunas ocasiones se abusa del lenguaje y se aceptan radios polares negativosconsiderando que se deba añadir π al argumento. Dicho de otra forma, (−ρ, θ) se consideralo mismo que (ρ, θ + π). Desgraciadamente DERIVE acepta este abuso que puede dar lugar aerrores.
5.3. Cambio de coordenadas cartesianas a polaresEl paso de coordenadas cartesianas a polares es muy sencillo si se supone que el polo coincide
con el origen del sistema de coordenadas cartesianas y la recta polar coincide con la parte positivadel eje de abcisas (de hecho esta suposición es la que ha hecho DERIVE al dibujar anteriormentelos puntos). Esta suposición no supone ninguna restricción, ya que siempre se puede hacer uncambio previo en el sistema de coordenadas cartesianas para tener esta situación. Se ilustra lasituación descrita en la figura 5.3.
Tal como se ha definido previamente, el radio vector es la distancia entre el punto (x, y) yel polo, que es el punto (0, 0), de donde se deduce que ρ =
√x2 + y2 (también se llega a la
misma conclusión observando que el radio vector es la hipotenusa de un triángulo rectángulocuyos catetos miden x e y respectivamente). Respecto al argumento es obvio que la tangente del
99

Práctica 5. Coordenadas polares. Curvas en coordenadas polares
Figura 5.3: Relación entre las coordenadas polares y las cartesianas de un punto.
ángulo θ es y/x, por tanto θ = arctan y/x. Resumiendo
ρ =√x2 + y2 (5.1)
θ = arctany
x(5.2)
Se puede implementar una función DERIVE que automáticamente transforme las coorde-nadas cartesianas de un punto en las correspondientes polares, de forma que dadas las coorde-nadas cartesianas de un punto aplique las expresiones (5.1) y (5.2) automáticamente. Para defi-nirla, en la ventana de algebra, se abre una ventana de diálogo Declare Function Definition ,en la ventana Name and Arguments: se introduce el nombre que se quiera dar a la funcióny los argumentos que va a tener (x e y, las coordenadas cartesianas del punto), por ejemplocartesianas_polares(x,y) y en la ventana Definition: se escribirá [sqrt(x^2+y^2),atan(y,x)].Después se acepta con el botón «OK» o con <ENTER> 4.
La función ATAN(y,x) está definida en DERIVE y calcula el arco tangente del ángulo queforma el radio vector del punto (x, y) con el eje polar. Nótese que se ha de cambiar el orden delas coordenadas5.
Ejercicio 5.3 Calcular las coordenadas polares de los puntos del ejercicio 5.1 usando la funciónpreviamente definida.
Nótese la respuesta al origen. De los ejercicios anteriores se observará que el resultado es correc-to aunque la tangente del argumento no esté definida, como ocurre para los puntos sobre el eje deordenadas, (0, y). También se observará que el argumento se toma en el intervalo ]−π, π ]. Si seprefiere que se haga en el intervalo [ 0, 2π ] se puede definir una nueva función. Se abre una ven-tana de diálogo Declare Function Definition , en la ventana Name and Arguments: se intro-duce el nombre de la función y sus argumentos, por ejemplo cartesianas_polares2(x,y)
4Se podría haber definido la función directamente en una ventana de diálogo Author Expression introduciendocartesianas_polares(x,y) := [sqrt(x^2+y^2),atan(y,x)]
5También existe la función ATAN(z) que calcula el arco tangente del ángulo z —en radianes—, pero ATAN(y, x)no es equivalente a ATAN(y/x). ¿Por qué?
100
5.4. Cambio de coordenadas polares a cartesianas
y en la ventana Definition: se escribe [sqrt(x^2+y^2), IF(atan(y,x)>=0, atan(y,x),atan(y,x)+2 pi, atan(y,x))] 6.
Ejercicio 5.4 Repetir el ejercicio 5.3 usando la nueva función.
5.4. Cambio de coordenadas polares a cartesianasPara pasar de coordenadas polares a cartesianas, es obvio viendo el dibujo 5.3, que
x = ρ cos θ (5.3)y = ρ sen θ (5.4)
También se puede definir una función DERIVE que haga el cambio automáticamente sinmás que abrir una ventana de diálogo Declare Function Definition , en la ventana Nameand Arguments: se introduce el nombre que se quiera dar a la función y los argumentosque tendrá (que ahora son las coordenadas polares ρ y θ del punto), por ejemplo se escribi-ría polares_cartesianas(ρ, θ) y en la ventana Definition: se escribe [ρ cos θ, ρsin θ].
Ejercicio 5.5 Encontrar las coordenadas cartesianas de los puntos de coordenadas polares(0, π), (0, π/2), (2, π/2), (2, 5π/2).
5.5. Curvas en polaresAlgunas curvas son muy fáciles de describir usando las coordenadas polares. La mayoría
de ellas no tienen una expresión explícita como función de sus coordenadas cartesianas. Nor-malmente una curva en polares se describe dando su radio vector como función del argumento,es decir de la forma ρ = ρ(θ). El argumento θ suele variar entonces en el intervalo [ 0, +∞ [o bien en el intervalo [ 0, 2π ] o algún otro similar. Para empezar se trabajará con un ejemplosencillo. La ecuación de la circunferencia con centro en el origen de coordenadas y radio r esx2 + y2 = r2. Se introducirá esta ecuación y se pasará a polares.
Abrir una ventana Author Expression y escribir en ella x^2+y^2= r^2
Con la expresión anterior seleccionada abrir una ventana de diálogoSubstitute for Variables in #. . . y en ella sustituir la x por ρ cos θ y la y por ρ sin θ.
6La función IF(cond,acS,acN,acD) de DERIVE actua de la siguiente forma. En primer lugar se com-prueba si la condición cond es cierta o no —en nuestro ejemplo se comprueba si el arco tangente correspondienteal punto (x, y) es no negativo—. Si es cierta el resultado es acS — en nuestro caso el resultado sería el arco tan-gente correspondiente al punto (x, y), si no es cierta el resultado es acN, — en nuestro caso el resultado de sumar2π al arco tangente del punto (x, y) para que el resultado sea un número no negativo, y, por último, si el resultadoes dudoso el resultado es acD — en nuestro caso nuevamente el arco tangente correspondiente al punto (x, y)—.Aunque pueda parecer extraño puede que el resultado de una comparación sea dudoso, por ejemplo si en vez decalcular las coordenadas polares de un punto concreto se intenta calcular las de un punto genérico (a, b).
101

Práctica 5. Coordenadas polares. Curvas en coordenadas polares
Simplificar el resultado.
Se obtendrá ρ2 = r2, teniendo en cuenta que ρ no debe ser negativo y que r es positivo, resultaque la ecuación de la circunferencia es muy sencilla ρ = r. Por ejemplo, para dibujar la circun-ferencia de radio 2, hay que introducir la expresión ρ = 2 (o simplemente la expresión 2), abriruna ventana de dibujo en dos dimensiones, cambiar el sistema de coordenadas a polares en elmenú Options, y aceptar el rango propuesto por DERIVE, si este es [−π, π ], para el ángulopolar θ. El resultado es el mismo que se obtuvo al dibujar la circunferencia en el apartado 4.2 dela práctica 4 sobre curvas definidas paramétricamente. Para que el aspecto gráfico sea adecuadohay que seguir las indicaciones de la nota al pie de página de la página 84.
En el siguiente ejercicio se verán otras curvas dadas en polares.
Ejercicio 5.6 Dibujar las siguientes curvas en los intervalos indicados:
1. La elipse: ρ =2
1− 0,5 cos θ, θ ∈ [ 0, 2π ].
2. La hipérbola: ρ =2
1− 2 cos θ, θ ∈ [−π/3, π/3 ].
3. La parábola: ρ =2
1− cos θ, θ ∈ [ 0,2, 1,8π ].
4. La lemniscata de Bernouilli: ρ = 2√
cos 2θ, θ ∈ [ 0, 2π ].
5. La cardioide: ρ = 2(1 + cos θ), θ ∈ [ 0, 2π ].
6. La espiral de Arquímedes: ρ = 3θ, θ ∈ [ 0, 10π ] (hacer zoom con <F10> ).
7. La espiral hiperbólica: ρ = 2θ, θ ∈ [ π, 100π ] (hacer un zoom para alejarse — <F10> —
o para acercarse —<F9> —).
8. La espiral logarítmica: ρ = e0,5θ, θ ∈ [ 0, 10π ].
9. La rosa de tres pétalos: ρ = 2 sen 3θ, θ ∈ [ 0, 2π ].
10. La rosa de cuatro pétalos: ρ = 3 |sen 2θ|, θ ∈ [ 0, 2π ].
Como se habrá observado estas curvas suelen tener muchas simetrías. Así si ρ(−θ) = ρ(θ)se tendrá simetría respecto al eje de abcisas. Si ρ(π− θ) = ρ(θ) se tendrá simetría respecto al ejede ordenadas, y si ρ(θ) = ρ(π + θ) se tendrá simetría respecto al origen.
En general si se tiene ρ(θ) = ρ(α+ θ) se tendrá que si el punto (ρ, θ) es de la curva, tambiénlo son los puntos (ρ, θ + kα), k ∈ N. Esto permite dibujar la curva haciendo rotaciones y,sobre todo, permite simplificar cálculos en los que hay que usar integrales, como cálculos delongitudes, áreas, etc.
El siguiente ejemplo muestra cómo las simetrías y rotaciones pueden utilizarse para repre-sentar gráficamente una curva en polares. Hay que comprobar con DERIVE las afirmaciones
102

5.5. Curvas en polares
que se harán a continuación. Considérese la curva de ecuación polar ρ = cos(3θ). Para θ = 0 seobtiene el punto de coordenadas polares (1, 0), luego ρ va disminuyendo de valor hasta anularsepara θ = π/6. Entre este ángulo y θ = π/2 no hay gráfica de la función, pues corresponderíanvalores negativos del radio vector, luego volvería a hacerse positivo y se podría seguir dibujandola gráfica. Sin embargo es más fácil completar la figura una vez dibujado el primer arco si se tieneen cuenta que el coseno es una función par, es decir tal que cos(−x) = cosx, lo que implica quela gráfica es simétrica respecto al eje de abcisas (o semieje polar), esto permite «cerrar» el primerpétalo. Como la función coseno es periódica de periodo 2π se tendrá que cos(3θ) es periódica deperiodo 2π/3 (es decir 120 grados), con lo cual se obtendrá la gráfica completa girando el pétalo2π/3 y a su vez éste otra vez.
Si se pide ahora calcular la superficie encerrada por esta curva o la longitud de la mismabastaría con resolver el problema correspondiente a un (o a medio) pétalo y multiplicar por 3 (opor 6).
5.5.1. Coordenadas polares de las rectas
Si una recta pasa por el polo y el ángulo que forma con el eje polar es θ0 la ecuación de larecta es θ = θ0. Nótese que en la ecuación no aparece ρ y que si sólo se admiten valores nonegativos del radio vector entonces la ecuación debe ser doble θ = θ0 ó θ = θ0 + π.
Si la recta no pasa por el polo para determinar su ecuación hay que trazar la perpendicular ala misma desde el polo. Si esta perpendicular corta a la recta en el punto (p, ω) (nótese que p esla distancia del polo a la recta), entonces la ecuación de la recta es
ρ cos(θ − ω) = p.
Conociendo dos puntos (ρ1, θ1) y (ρ2, θ2) por los que pasa la recta se obtiene la ecuación
ρ (ρ1 sen(θ − θ1) + ρ2 sen(θ − θ2)) = ρ1ρ2 sen(θ2 − θ1)
5.5.2. Las ecuaciones de las cónicas en coordenadas polares
Como se habrá observado en el ejercicio 5.6 la ecuación polar de una cónica es de la forma
ρ =p
1− e cos θ(5.5)
donde e es la excentricidad de la cónica, si e < 1 se trata de una elipse, si e = 1 es una parábola ysi e > 1 una hipérbola. Además el polo es uno de los focos de la cónica descrita. Esta observaciónpermite interpretar el parámetro p como la abcisa correspondiente al polo, ya que para θ = π/2se tiene ρ = p y por tanto la cónica pasa por el punto de coordenadas polares (p, π/2). Seobserva también que la circunferencia es un caso particular de la elipse, concretamente cuandola excentricidad e es 0.
103

Práctica 5. Coordenadas polares. Curvas en coordenadas polares
5.5.3. Las ecuaciones paramétricas de las curvas de ecuación polar cono-cida
A partir de la ecuación polar ρ = ρ(θ), θ ∈ I , donde I es un intervalo (cerrado, abierto,semiabierto, acotado o no) es relativamente sencillo obtener una expresión cartesiana paramétricade la curva usando como parámetro el ángulo θ, sin más que tener en cuenta las ecuaciones (5.3)y (5.4) y sustituir. Se tiene así que una parametrización de la curva es
x(θ) = ρ(θ) cos θ, y(θ) = ρ(θ) sen θ, θ ∈ I
A partir de aquí puede obtenerse la expresión para la pendiente de la recta tangente a la curvaen un punto como se pide en el ejercicio 5.7 teniendo en cuenta la expresión para la derivada auna curva a partir de sus coordenadas paramétricas estudiada en la práctica anterior.
5.6. EjerciciosEjercicio 5.7 Comprobar que la pendiente de la recta tangente a la curva ρ = ρ(θ), dada encoordenadas polares es
(tan θ)dρ
dθ+ ρ
dρ
dθ− ρ tan θ
. (5.6)
Usar para el cálculo las ecuaciones paramétricas de la curva. Demostrar que también puedeescribirse en la forma
ρ cos θ + ρ′ sen θ
−ρ sen θ + ρ′ cos θ. (5.7)
Ejercicio 5.8 1. Comprobar que
tan(α− β) =tanα− tan β
1 + tanα tan β
(con DERIVE hay que comprobar que la diferencia entre ambas expresiones es 0).
2. Si ρ = f(θ) es la ecuación de una curva dada en polares y P es un punto de la misma decoordenadas polares (ρ, θ), de la figura 5.4 se deduce que el ángulo que forma el radiovector con la curva (que se define como el ángulo que forma con la recta tangente) estárelacionado con θ y con el ángulo que forma la tangente con el semieje polar. Deducir esarelación y, a partir de ella que
tanφ =ρ
ρ′
3. Demostrar que el ángulo que forma el radio vector de un punto cualquiera de la cardioideρ = a(1− cos θ) con la curva es la mitad del que forma el radio vector con el eje polar.
104

5.6. Ejercicios
Figura 5.4: Ángulo que forma el radio vector con la curva.
Ejercicio 5.9 Hallar los puntos de la curva ρ = b+ a cos θ, a < b donde la recta tangente tienependiente 1 ó −1. ¿Hay algún punto en que la curva no tenga recta tangente? Hallar los puntosde la curva más cercanos y lejanos del polo.
Ejercicio 5.10 Calcular la ecuación de la recta tangente a la cardioide
ρ = 3(1 + cos θ),
en el punto θ = π4.
Ejercicio 5.11 Calcular la ecuación de la recta tangente a la rosa de tres pétalos
ρ = 2 sen(3θ),
en el punto θ = π6.
Ejercicio 5.12 Utilizar la ecuación polar de la elipse (5.5), en la que el polo coincide con unode los focos y el eje mayor de la elipse está sobre el eje polar, para hallar los puntos de menor ymayor distancia al foco.
Ejercicio 5.13 La Tierra recorre una órbita elíptica en uno de cuyos focos está el Sol, con ejemayor 16,8× 107 Km. y excentricidad 0,017. Determinar las distancias del perihelio y el afelio(mínima y máxima distancias respectivamente). (Nota: Si la ecuación de la elipse está dada enpolares con uno de los focos en el polo y es una elipse horizontal de eje mayor la distancia entrelos puntos (ρ1, 0) y (ρ2, π).)
105
Práctica 5. Coordenadas polares. Curvas en coordenadas polares
Ejercicio 5.14 Tres estaciones LORAN están en los puntos (4, 0), (0, 0) y (4, π/4) de un sistemade coordenadas polares. Se envían señales de radio simultáneas desde las tres estaciones. Unavión que recibe las señales nota que las que provienen de las estaciones segunda y tercerallegan 2/c segundos más tarde que las que provienen de la primera, donde c es la velocidad dela señal. Determinar la situación del avión en coordenadas polares.
Ejercicio 5.15 Hallar los puntos en los que la tangente a la curva ρ = 1 + sen θ es horizontal overtical.
Ejercicio 5.16 Demostrar que si ρ = f(θ) pasa por el polo y θ0 cumple f(θ0) = 0, la ecuaciónde la recta tangente a la curva en el polo (0, θ0) es θ = θ0.
Ejercicio 5.17 Hallar las ecuaciones en coordenadas polares de la cisoide de Diocles cuyaecuación implícita es
y2 =x3
2a− x.
Usando estas ecuaciones demostrar que dadas dos cisoides (obtenidas para distintos valores dea), las rectas tangentes a ambas en puntos con el mismo ángulo polar son paralelas. (Dichode otra forma, demostrar que la pendiente de la recta tangente a la cisoide en un punto (ρ, θ)depende exclusivamente de θ y no de a)
106

Práctica 6
Aplicaciones de la Integral Definida I
6.1. IntroducciónEn esta práctica se trabajarán algunas aplicaciones de la integral definida utilizando el progra-
ma DERIVE. Concretamente se estudiará el cálculo de áreas de figuras planas y de longitudesde arco, incluyendo su cálculo en coordenadas polares y paramétricas.
Conviene recordar que para calcular una integral definida con DERIVE hay que utilizarla sucesión de menús Calculus, Integrate. . . o bien el botón de la barra de herramientasy elegir la opción Definite para poder introducir los extremos de integración en la ventana dediálogo Calculus Integrate .
6.2. Cálculo de áreasEl área limitada superiormente por la gráfica de la función no negativa f , a la izquierda por
la recta de ecuación x = a, a la derecha por la recta de ecuación x = b e inferiormente por el ejede abcisas como se muestra en la figura 6.1 es∫ b
a
f(x) dx (6.1)
Ejemplo 6.1 Calcular el área de la elipse
x2
a2+y2
b2= 1
Solución: Si se introduce la expresión de la elipse y se despeja la y abriendo una ventana de diá-logo Solve Algebraically (Solve Algebraically. . . o el botón ), se obtendrán las ecuacionesde la parte superior e inferior de la elipse
y =b√a2 − x2
ae y = −b
√a2 − x2
a
107

Práctica 6. Aplicaciones de la Integral Definida I
Figura 6.1: Área encerrada por la función f , las rectas x = a, x = b y el eje de abcisas.
obviamente la figura es simétrica respecto al eje de abcisas1 por lo que se calculará el área dela parte superior y se multiplicará por 2, por otra parte es obvio que la elipse está definida paravalores de x en [−a, a ]. Integrando con DERIVE (y teniendo en cuenta que se considera a > 0)se obtiene que el área de la elipse es πab. �
Cuando f(x) ≥ g(x) el área delimitada superiormente por la gráfica de f(x), inferiormentepor la de g(x) y por las rectas x = a y x = b es
∫ b
a
(f(x) − g(x)
)dx. Normalmente se pide
calcular el área delimitada por ambas funciones, entendiéndose que éstas se cortan en dos puntosque hay que calcular, tal como se hace en el siguiente ejemplo.
Ejemplo 6.2 Calcular el área delimitada por las curvas y = cos x e y = x4.
Solución: Se introducen ambas funciones y se dibujan superpuestas; se obtendrá una gráficasimilar a la figura 6.2. Se observa que las curvas se cortan en dos puntos. Para calcular los puntosde intersección se debe utilizar cálculo numérico ya que la solución no se puede obtener de formaexacta. Por tanto se abre una ventana de diálogo Solve Numerically (Solve Numerically. . . )donde se introduce la ecuación cosx = x4, al resolver numéricamente hay que proporcionar unintervalo que contenga la solución. Por la gráfica se sabe que la abcisa de la primera solución seencuentra en el intervalo [−1, 0 ]. Introduciendo estos datos DERIVE encontrará que la abcisaes x = −0′890552.
Se resuelve de nuevo la ecuación cosx = x4 de la misma forma que antes pero esta vez conx ∈ [ 0, 1 ], donde se encuentra el segundo punto de corte cuya abcisa es x = 0′890552 (enrealidad dada la simetría respecto al eje de ordenadas de ambas funciones este segundo cálculoes innecesario).
Se introduce la expresión cosx−x4 y se calcula su integral en el intervalo cerrado [−0′890552, 0′890552 ],obteniéndose que el área es 1’33078.
1También es simétrica respecto al eje de ordenadas por lo que podría obtenerse el área calculando4∫ a
0b√
a2−x2
a dx
108
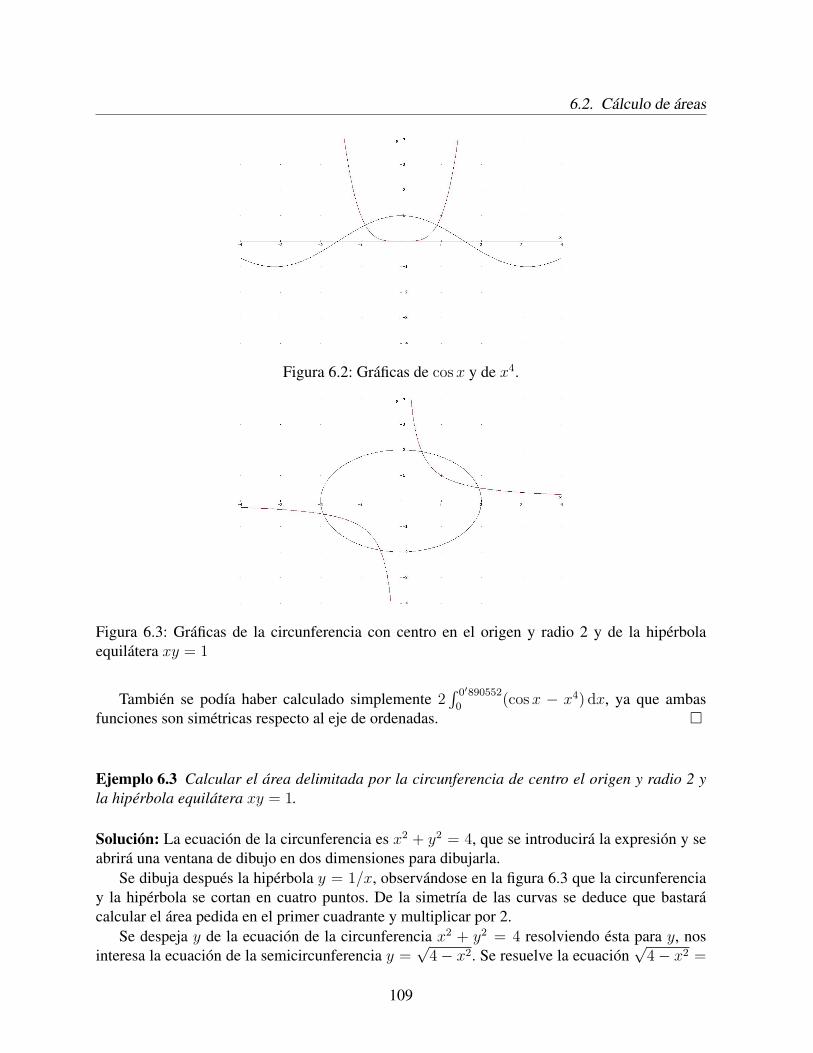
6.2. Cálculo de áreas
Figura 6.2: Gráficas de cosx y de x4.
Figura 6.3: Gráficas de la circunferencia con centro en el origen y radio 2 y de la hipérbolaequilátera xy = 1
También se podía haber calculado simplemente 2∫ 0′890552
0(cosx − x4) dx, ya que ambas
funciones son simétricas respecto al eje de ordenadas. �
Ejemplo 6.3 Calcular el área delimitada por la circunferencia de centro el origen y radio 2 yla hipérbola equilátera xy = 1.
Solución: La ecuación de la circunferencia es x2 + y2 = 4, que se introducirá la expresión y seabrirá una ventana de dibujo en dos dimensiones para dibujarla.
Se dibuja después la hipérbola y = 1/x, observándose en la figura 6.3 que la circunferenciay la hipérbola se cortan en cuatro puntos. De la simetría de las curvas se deduce que bastarácalcular el área pedida en el primer cuadrante y multiplicar por 2.
Se despeja y de la ecuación de la circunferencia x2 + y2 = 4 resolviendo ésta para y, nosinteresa la ecuación de la semicircunferencia y =
√4− x2. Se resuelve la ecuación
√4− x2 =
109

Práctica 6. Aplicaciones de la Integral Definida I
1/x elevándola al cuadrado y se obtiene que las abcisas de los puntos de corte son√
6−√
2
2≈
0′517638 y√
6 +√
2
2≈ 1′931858.
Se calcula la integral
∫ √6+
√2
2
√6−
√2
2
(√4− x2 − 1
x
)dx =
2π
3− ln(
√3 + 2) ≈ 0′777437,
por tanto el área pedida es4π
3− 2 ln(
√3 + 2) ≈ 1′55482.
�
También hay que tener en cuenta que si la función f cambia de signo un número finito deveces en el intervalo [ a, b ], las áreas correspondientes a los subintervalos en que f es negativason negativas.
Ejemplo 6.4 Calcular el área limitada por la sinusoide sen x y el eje de abcisas en un periodode la misma.
Solución: El periodo del seno es 2π y en π se produce un cambio de signo, si se calcula∫ 2π
0sen x dx se obtendrá el resultado 0, que obviamente no es el buscado. Hay que tener en
cuenta que sen x es no negativo en [ 0, π ] y no positivo en [ π, 2π ]. Por tanto se ha de calcular∫ 2π
0
|sen x| dx =
∫ π
0
sen x dx−∫ 2π
π
sen x dx = 4
�
6.2.1. Áreas en coordenadas polares
El área limitada por la curva de ecuaciones en coordenadas polares ρ = f(θ) y las rectas quepasan por el polo θ = α y θ = β que se muestra en la figura 6.4 es
1
2
∫ β
α
[f(θ)]2 dθ
Ejemplo 6.5 Calcular el área delimitada por la parte exterior de la curva ρ = 1 + sen2 θ y laparte interior de la curva ρ = 2 cos θ.
110

6.2. Cálculo de áreas
Figura 6.4: Área encerrada por la curva ρ = f(θ), y las rectas θ = α y θ = β.
Figura 6.5: Gráficas de ρ = 1 + sen2 θ y ρ = 2 cos θ.
Solución: Se introducen las expresiones 1 + sen2 θ y 2 cos θ y se dibujan. Para ello en la ven-tana de gráficos se selecciona Options, Coordinate System. . . y en la ventana de diálogoOptions Coordinates se elige Polar, para dibujar ambas gráficas utilizando coordenadas po-lares, se obtendrá una gráfica como la de la figura 6.5. Al pulsar Plot! o el botón para dibujar,DERIVE pide el rango de θ para representar la curva. Se aceptan los valores sugeridos porDERIVE (−π y π) para la representación de ambas gráficas.
Se observará que las curvas se cortan en puntos simétricos respecto al eje polar. Volviendo ala ventana de álgebra se hallan los puntos de corte resolviendo la ecuación 1+sen2 θ− 2 cos θ =0, en modo aproximado en el intervalo [ 0, π/2 ] y [−π/2, 0 ] (en realidad este último no esnecesario por la simetría). Se obtiene que las intersecciones corresponden a θ = 0′749468 yθ = −0′749468. Se calcula el área como la integral
1
2
∫ 0′749468
−0′749468
[(2 cos θ)2 − (1 + sen2 θ)2
]dθ ≈ 1′45995.
111

Práctica 6. Aplicaciones de la Integral Definida I
�
6.2.2. Áreas de curvas definidas paramétricamente
Si las ecuaciones paramétricas de una curva son
x = x(t), y = y(t), t ∈ [ t0, t1 ]
el área limitada por la curva se obtiene mediante el cambio de variables x = x(t) en la ecuación(6.1). Por tanto dx = x′(t) dt y el área es
∫ t1
t0
y(t)x′(t) dt
Ejemplo 6.6 Calcular el área encerrada por la cicloide.
Solución: La cicloide ya se estudió en la sección 4.2.5 del capítulo 4. La ecuación de esta curva,cuando se da una vuelta completa, es
x = r(t− sen t), y = r(1− cos t), t ∈ [ 0, 2π ] (6.2)
Derivando la variable x respecto del parámetro t se obtiene dx = x′(t) dt = r(1 − cos t) dt. Elárea se obtiene integrando entre 0 y 2π∫ 2π
0
r2(1− cos t)2 dt = 3πr2.
�
6.3. Cálculo de la longitud de arco de una curvaLa longitud del arco de la curva y = f(x), para x ∈ [ a, b ], donde se supone que f tiene
derivada continua en dicho intervalo es
` =
∫ b
a
√1 + (f ′(x))2 dx (6.3)
Ejemplo 6.7 Calcular la longitud de una circunferencia de centro en el origen de coordenadasy radio r.
112
6.3. Cálculo de la longitud de arco de una curva
Solución: La ecuación de esta circunferencia es x2 + y2 = r2. Para calcular la longitud conDERIVE se ha de tener en cuenta la simetría respecto al eje de abcisas de la circunferencia, porlo que se calculará sólo la longitud de la mitad superior2. La ecuación de la mitad superior esy =√r2 − x2. También hay que tener en cuenta que es conveniente declarar que r > 0, y que la
variable x toma valores de −r a r.Por tanto hay que calcular
2
∫ r
−r
√1 +
x2
r2 − x2dx = 2πr
�
6.3.1. Longitud de arco de curvas definidas paramétricamenteSi las ecuaciones paramétricas de un arco de una curva son
x = x(t), y = y(t), t ∈ [ t0, t1 ]
donde se supone que x(t) e y(t) son funciones con derivada continua respecto de t y que x′(t) 6= 0para todo t ∈ [ t0, t1 ], entonces la longitud de dicho arco puede calcularse como
` =
∫ t1
t0
√x′(t)2 + y′(t)2 dt (6.4)
que se obtiene haciendo el cambio de variables x = x(t) (dx = x′(t) dt), y = y(t) (y′(x) =y′(t)/x′(t)) en la ecuación (6.3).
Ejemplo 6.8 Calcular la longitud de una circunferencia de centro en el origen de coordenadasy radio r.
Solución: Esta longitud ya se ha obtenido en el ejemplo 6.7 trabajando con la ecuación de lacircunferencia en coordenadas cartesianas. Una ecuación paramétrica de la circunferencia es
x = r cos t, y = r sen t, t ∈ [ 0, 2π ]
Si se hacen los cálculos correspondientes con DERIVE y se sustituye en la fórmula (6.4) se tieneque calcular ∫ 2π
0
r dt = 2πr.
�
2También se puede calcular sólo la longitud de la parte de la circunferencia correspondiente al primer cuadrante,dada la simetría respecto al eje de ordenadas.
113

Práctica 6. Aplicaciones de la Integral Definida I
Ejemplo 6.9 Calcular la longitud de un arco de la cicloide.
Solución: El resultado es 8r. Para obtenerlo se puede introducir la función paramétrica (6.2)como un vector bidimensional [r(t - sin t), r(1-cos t)], derivar la expresión re-sultante y calcular la raíz cuadrada del producto escalar3 de la derivada por sí misma. El resultadose integra entre 0 y 2π. �
La longitud de una curva en el espacio tridimensional descrita por las ecuaciones paramétri-cas
x = x(t), y = y(t), z = z(t), t ∈ [ t0, t1 ]
es
` =
∫ t1
t0
√x′(t)2 + y′(t)2 + z′(t)2 dt
6.3.2. Longitud de arco en polaresLa longitud del arco de curva descrito en ecuaciones polares por
ρ = ρ(θ), θ ∈ [ θ0, θ1 ] (6.5)
es
` =
∫ θ1
θ0
√(ρ′(θ))2 + (ρ(θ))2 dθ (6.6)
Esto se deduce fácilmente de la ecuación (6.4) sin más que tener en cuenta que las ecuacionesparamétricas de la curva descrita por (6.5) son
x = ρ cos θ, y = ρ sin θ, θ ∈ [ θ0, θ1 ]
como se puede comprobar con DERIVE.
Ejemplo 6.10 Calcular la longitud de una circunferencia de centro el origen y radio r.
Solución: La ecuación en coordenadas polares de la circunferencia es ρ = r. Por lo que haciendolos cálculos necesarios y sustituyendo en (6.6) se tiene que hay que calcular∫ 2π
0
r dθ = 2πr.
�
En los ejemplos 6.7, 6.8 y 6.10 se ha calculado la longitud de la circunferencia de tres formasdistintas, según el tipo de ecuación de la misma que se ha utilizado. Este caso puede ilustrar la
3En DERIVE el producto escalar se representa por un punto. Habrá que introducir [r(1 - cos t), rsin t)].[r(1 - cos t), r sin t)]
114

6.4. Ejercicios
conveniencia de elegir adecuadamente la forma de representar una curva o superficie antes deiniciar los cálculos. Si se repasan los tres ejemplos mencionados se observará que el orden dedificultad es decreciente. Este hecho es más notable cuando los cálculos se hacen a mano quecuando se usa un programa de cálculo simbólico como DERIVE, pero aún así el trabajo usandocoordenadas cartesianas es mayor que en el resto de casos, y usando coordenadas polares puedehacerse mentalmente sin ningún esfuerzo.
6.4. EjerciciosEjercicio 6.1 Hallar el área limitada por la curva ρ = 2 + cos θ.
Ejercicio 6.2 Calcular el área de la figura comprendida entre las parábolas y = x2
3e y =
4− 23x2.
Ejercicio 6.3 Calcular el área limitada por el eje de abcisas y un arco de la cicloide.
Ejercicio 6.4 Calcular la longitud del arco de la parábola semicúbica y2 = x3 desde el origende coordenadas hasta el punto cuyas coordenadas son (4, 8).
Ejercicio 6.5 Calcular la longitud de la curva
x = a(2 cos t− cos 2t), y = a(2 sin t− sin 2t), t ∈ [0, 2π], a > 0
Ejercicio 6.6 Calcular la longitud de un arco de la hélice
x = a cos t, y = a sen t, z = amt, t ∈ [ 0, 2π ] , a > 0
Ejercicio 6.7 Calcular la longitud de la cardioide de ecuación ρ = a(1 + cos θ) con a > 0.
Ejercicio 6.8 Calcular la longitud de la primera espira de la espiral de Arquímedes de ecuaciónρ = kθ, donde k es una constante. (Dibujar más de una espira de la curva).
115


Práctica 7
Aplicaciones de la Integral Definida II
7.1. Introducción
En esta práctica se continúa el estudio de aplicaciones de la integral definida utilizando elprograma DERIVE. Concretamente se estudiará el cálculo de volúmenes y superficies, prestan-do especial atención a los volúmenes y superficies de cuerpos obtenidos por revolución. Tambiénse estudia la aplicación de los teoremas de Guldin al cálculo de centros de masas de curvas y su-perficies y a la obtención de superficies y volúmenes. Finalmente, el estudio teórico realizado seaplicará a la cubicación de árboles apeados, técnica utilizada en la Inventariación Forestal.
7.2. Elección de los extremos de integración en el cálculo devolúmenes y áreas de cuerpos de revolución
Hay que tener en cuenta que si la curva que genera el volumen o la superficie es simétricarespecto del eje de rotación, el cuerpo o superficie se genera girando sólo una de las dos partes.Por tanto hay que elegir los extremos de integración en las fórmulas que se darán en los aparta-dos siguientes teniendo en cuenta esta observación. Es decir, en estos casos hay que considerarsólo una de las mitades de la curva que generan el cuerpo completo. En particular, habrá queprestar atención especial cuando la curva que genera el cuerpo viene dada paramétricamente ocon ecuación polar. Ver el ejemplo 7.5.
Otra consideración importante es que muchas de las fórmulas que se presentan en esta prác-tica requieren que la función, o funciones, a integrar sean no negativas en el intervalo de inte-gración1. Cuando se producen cambios de signo de la función, conviene dividir el intervalo deintegración en subintervalos en los que la función mantenga el signo, calcular las integrales porseparado y sumar los resultados correspondientes (todas las integrales deben ser no negativas).Para no tener que subdividir el intervalo de integración, se podría tomar el valor absoluto de lafunción a integrar, pero hemos observado que la versión de DERIVE que estamos utilizando
1Si la función es siempre negativa en el intervalo basta cambiar su signo.
117

Práctica 7. Aplicaciones de la Integral Definida II
Figura 7.1: Integrando todas las áreas A(x) se obtiene el volumen del cuerpo.
calcula estas integrales, al menos en algunas ocasiones, de forma errónea2.
7.3. Cálculo de volúmenesEl cálculo de volúmenes en general se realiza mediante la integral triple, o doble, cuyo estudio
excede los objetivos de este texto. Sin embargo, el volumen de algunos cuerpos sencillos se puedeexpresar mediante una integral simple, este es el caso de los cuerpos obtenidos por revoluciónalrededor de uno de los ejes coordenados, pero también puede hacerse cuando se conoce el áreade secciones paralelas del cuerpo.
7.3.1. En función de las áreas de secciones paralelasSi se conocen las áreas planas, A(x), resultantes de cortar un cuerpo sólido por todos los
planos paralelos de ecuación x = cte., y si el cuerpo está contenido entre los planos x = a yx = b, entonces el volumen de dicho cuerpo es
V =
∫ b
a
A(x) dx (7.1)
Ejemplo 7.1 Calcular el volumen del elipsoide
x2
a2+y2
b2+z2
c2= 1 (7.2)
Solución: En primer lugar se observa que si a 6= b, a 6= c y b 6= c, este elipsoide no es derevolución por lo que no pueden utilizarse las fórmulas de los apartados siguientes.
2Por ejemplo, al calcular utilizando la fórmula (7.5), el volumen generado por la función y = sen x, entre 0 y 2πcuando gira alrededor del eje de ordenadas, aunque se tome el valor absoluto de la función, se obtiene el resultadoerróneo 4π2 en lugar de 8π2.
118

7.3. Cálculo de volúmenes
Figura 7.2: Elipsoide y corte con plano de ecuación x = constante
Como se conoce el área de una elipse en función de lo que miden sus semiejes (π por elproducto de la medida de los semiejes —ver ejemplo 6.1—) y teniendo en cuenta que la ecua-ción (7.2) se puede escribir como
y2
b2+z2
c2= 1− x2
a2,
dividiendo ambas partes de la igualdad por la segunda parte de la misma se obtiene la ecuación
y2(b√
1− x2
a2
)2 +z2(
c√
1− x2
a2
)2 = 1
que es la ecuación de una elipse escrita en la forma habitual. Por tanto se tiene que el área de laelipse resultante de cortar el elipsoide por el plano paralelo al plano coordenado OYZ que pasapor x, véase la figura 7.2 es
A(x) = πbc
(1− x2
a2
)por lo que integrando entre −a y a se obtiene que el volumen es
V =4
3πabc
�
Ejemplo 7.2 Calcular el volumen de una pirámide de base cuadrada con longitud del lado dela base ` y altura h.
Solución: Este volumen se puede obtener por integración. Tomemos como origen del sistemade referencia el vértice de la pirámide. Como eje OX la recta que une el vértice de la pirámidecon el centro de la base (es decir que la pirámide está «acostada»), y los ejes OY y OZ paralelosa los lados de la base. Al cortar la pirámide con un plano de ecuación x = k, 0 ≤ k ≤ h,se obtiene una sección cuadrada de área A(k), a determinar. Para calcular dicha área basta con
119
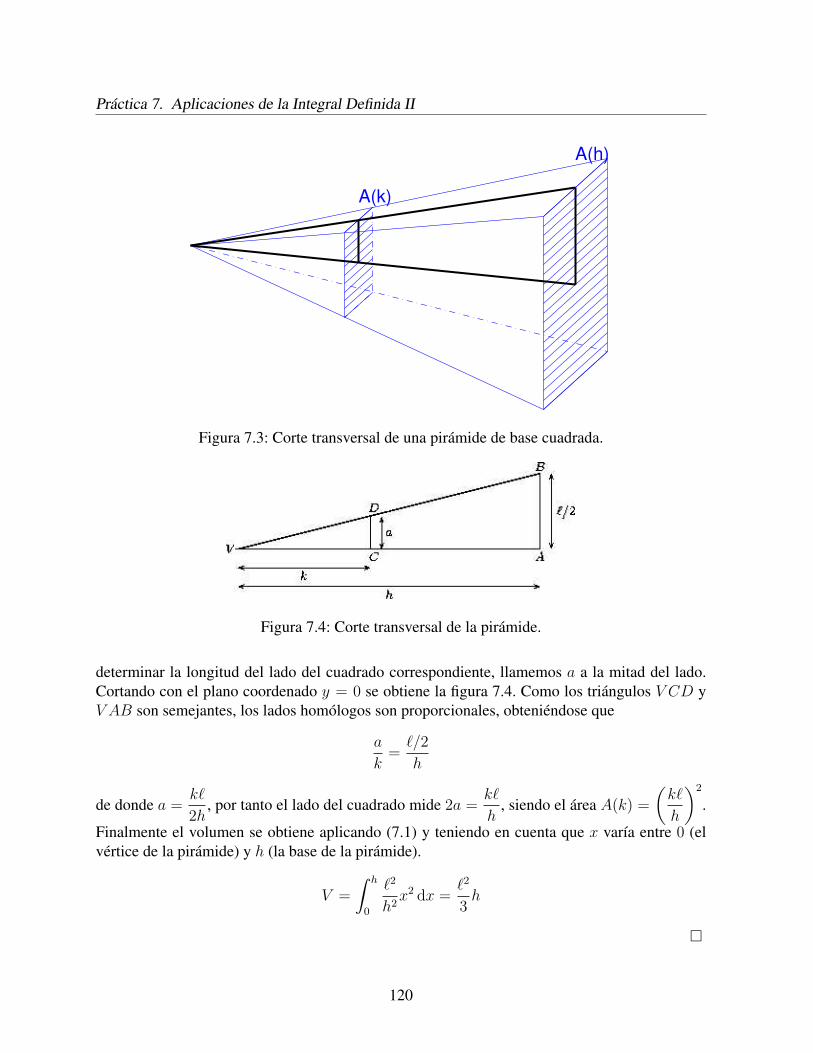
Práctica 7. Aplicaciones de la Integral Definida II
A(h)
A(k)
Figura 7.3: Corte transversal de una pirámide de base cuadrada.
Figura 7.4: Corte transversal de la pirámide.
determinar la longitud del lado del cuadrado correspondiente, llamemos a a la mitad del lado.Cortando con el plano coordenado y = 0 se obtiene la figura 7.4. Como los triángulos V CD yV AB son semejantes, los lados homólogos son proporcionales, obteniéndose que
a
k=`/2
h
de donde a =k`
2h, por tanto el lado del cuadrado mide 2a =
k`
h, siendo el área A(k) =
(k`
h
)2
.
Finalmente el volumen se obtiene aplicando (7.1) y teniendo en cuenta que x varía entre 0 (elvértice de la pirámide) y h (la base de la pirámide).
V =
∫ h
0
`2
h2x2 dx =
`2
3h
�
120

7.3. Cálculo de volúmenes
(a) Gráficas de y = x2 e y = sen x. (b) Gráficas de y = 1/x e y = 3− x.
Figura 7.5: Gráficas de las curvas que generan los sólidos de revolución del ejercicio 7.4.
Ejemplo 7.3 Calcular el volumen de un cono de radio de la base r y altura h.
Solución: Si se procede de forma análoga al ejercicio anterior se obtiene que el volumen esπr2h
3, que corresponde también a la fórmula «un tercio del área de la base por la altura». �
¿Por qué ambos volúmenes se calculan mediante la fórmula un tercio del área de la basepor la altura? Es fácil de deducir. La intersección con el plano y = 0 de una pirámide y uncono que tienen el semilado y el radio iguales `/2 = r es el mismo triángulo, por tanto lasintersecciones con planos x = k determinan cuadrados en un caso y circunferencias en el otrode lado y diámetro iguales. Las áreas correspondientes son por tanto proporcionales (el lado alcuadrado en un caso y π veces el cuadrado del radio en el otro). Esta proporción constante, π/4,«sale fuera de la integral».
7.3.2. Volumen de cuerpos obtenidos por revolución alrededor del eje deabscisas
Si la curva y = f(x), x ∈ [ a, b ] gira alrededor del eje de abscisas genera un cuerpo (derevolución) cuyo volumen es
VOX = π
∫ b
a
f 2(x) dx (7.3)
Ejemplo 7.4 Calcular el volumen del sólido que se obtiene al girar la región encerrada por lascurvas y = x2 e y = senx alrededor del eje OX. Lo mismo para las curvas 1/x y 3− x.
Solución: Se dibujan ambas curvas superpuestas para determinar los límites de integración, seobtendrá un resultado similar al de la figura 7.5(a). Las curvas se cortan en el origen y en unpunto de abscisa menor que 1. Se resuelve la ecuación sen x = x2 en modo aproximado en el
121

Práctica 7. Aplicaciones de la Integral Definida II
intervalo [ 0,1, 1 ]. Obtenemos que la abscisa del punto de corte es x = 0,876726. La gráficade sen x va, en el intervalo que nos interesa por arriba de la gráfica de x2, así que se busca elvolumen que genera la curva y = senx al girar menos el volumen que genera la curva y = x2 algirar. Por tanto el volumen se calcula por la integral∫ 0,876726
0
π(sen2 x− x4) dx ≈ 0,279363.
La segunda parte se resuelve de forma análoga. La figura 7.5(b) muestra las gráficas de lasdos curvas. En este caso los puntos de intersección pueden obtenerse de forma exacta, y son3 +√
5
2y
3−√
5
2. Sustituyendo se obtiene que el volumen es
5√
5π
3≈ 11,708 �
7.3.2.1. Paramétricas
Si la curva está dada paramétricamente
x = x(t), y = y(t), t ∈ [ t0, t1 ]
haciendo el cambio x = x(t) en la integral (7.3), y suponiendo que x(t0) = a y x(t1) = b, seobtiene la siguiente fórmula para el volumen
VOX = π
∫ t1
t0
y2(t)x′(t) dt (7.4)
Nótese que x′(t) puede ser negativa. En este caso se debe cambiar el signo del integrando.También hay que tener en cuenta que si esta derivada cambia de signo, se debe subdividir elintervalo de integración tal como se ha explicado previamente. En el siguiente ejemplo tenemosun caso en el que x′(t) < 0 en todo el intervalo de integración y se explica porqué ocurre ésto.
Ejemplo 7.5 Calcular el volumen que genera la astroide
x(t) = a cos3 t, y(t) = a sin3 t, t ∈ [ 0, 2π ]
al girar alrededor del eje de abscisas.
Solución: Si se dibuja la figura se observa que es simétrica respecto de ambos ejes. El cuerpocuyo volumen deseamos calcular se genera al girar la parte superior, por tanto basta integrar entre0 y π, o aprovechando la simetría entre 0 y π/2 y multiplicar por 2.
De cualquiera de las dos formas descritas, como x′(t) = −3a cos2 t sin t ≤ 0 en cualquierade los dos intervalos [ 0, π/2 ] y [ 0, π ], se aplica la fórmula (7.4) cambiando el signo de x′(t),
se obtiene el resultado32πa3
105.
¿Por qué x′(t) < 0? Lo que ocurre es que para el valor del parámetro t = 0 se obtiene elpunto de la curva (a, 0) (que es el que está más a la derecha), para t = π/2 se obtiene el punto
122
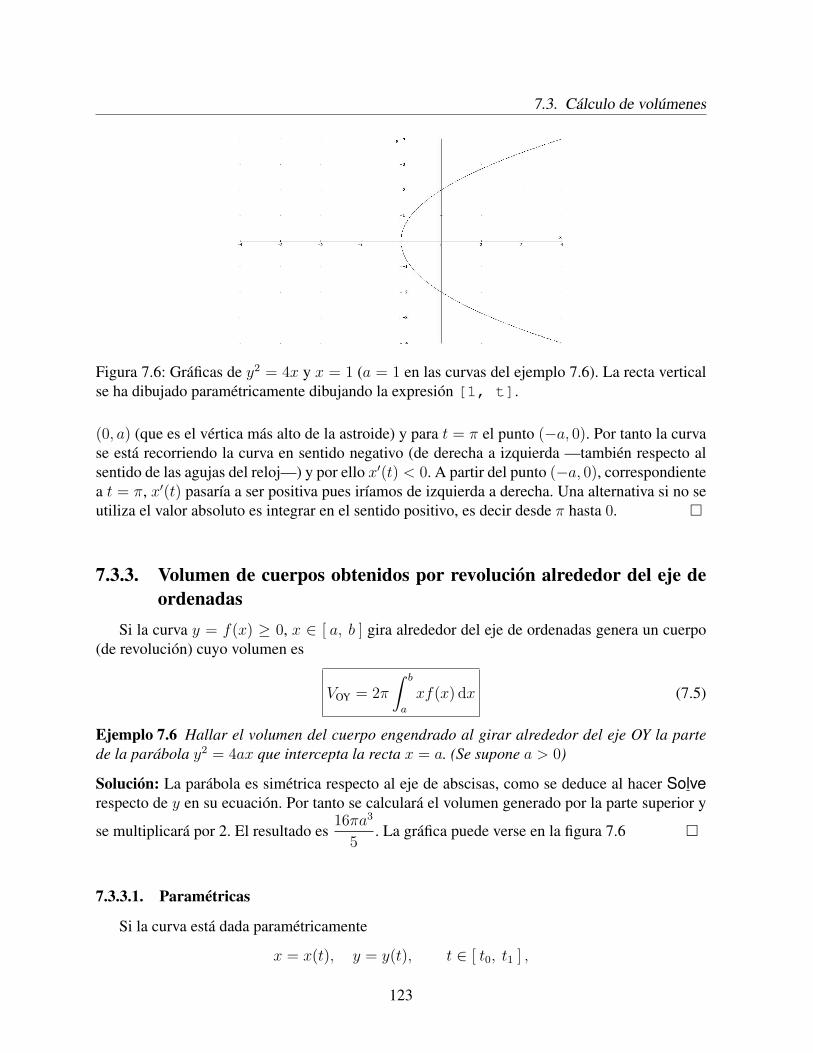
7.3. Cálculo de volúmenes
Figura 7.6: Gráficas de y2 = 4x y x = 1 (a = 1 en las curvas del ejemplo 7.6). La recta verticalse ha dibujado paramétricamente dibujando la expresión [1, t].
(0, a) (que es el vértica más alto de la astroide) y para t = π el punto (−a, 0). Por tanto la curvase está recorriendo la curva en sentido negativo (de derecha a izquierda —también respecto alsentido de las agujas del reloj—) y por ello x′(t) < 0. A partir del punto (−a, 0), correspondientea t = π, x′(t) pasaría a ser positiva pues iríamos de izquierda a derecha. Una alternativa si no seutiliza el valor absoluto es integrar en el sentido positivo, es decir desde π hasta 0. �
7.3.3. Volumen de cuerpos obtenidos por revolución alrededor del eje deordenadas
Si la curva y = f(x) ≥ 0, x ∈ [ a, b ] gira alrededor del eje de ordenadas genera un cuerpo(de revolución) cuyo volumen es
VOY = 2π
∫ b
a
xf(x) dx (7.5)
Ejemplo 7.6 Hallar el volumen del cuerpo engendrado al girar alrededor del eje OY la partede la parábola y2 = 4ax que intercepta la recta x = a. (Se supone a > 0)
Solución: La parábola es simétrica respecto al eje de abscisas, como se deduce al hacer Solverespecto de y en su ecuación. Por tanto se calculará el volumen generado por la parte superior y
se multiplicará por 2. El resultado es16πa3
5. La gráfica puede verse en la figura 7.6 �
7.3.3.1. Paramétricas
Si la curva está dada paramétricamente
x = x(t), y = y(t), t ∈ [ t0, t1 ] ,
123

Práctica 7. Aplicaciones de la Integral Definida II
haciendo el cambio x = x(t) en la integral (7.5) se obtiene la fórmula
VOY = 2π
∫ t1
t0
x(t) y(t) x′(t) dt (7.6)
Ejemplo 7.7 Calcular el volumen generado al girar la astroide alrededor del eje de ordenadas.
Solución: Se introducen las ecuaciones de la astroide, se deriva x(t) respecto de t y se aplica lafórmula (7.6) con los límites de integración t = 0 y t = π/2 y se multiplica por 2, o bien desdet = −π/2 a t = π/2 (gira en este caso la parte derecha de la astroide). Debido a la simetría dela astroide el resultado coincide con el del ejemplo 7.5, pese a que los integrandos son diferentesen ambos casos. �
7.3.4. Volumen de revolución en coordenadas polaresSi la curva ρ = ρ(θ), θ ∈ [ θ0, θ1 ] gira alrededor del eje polar genera un volumen
V =2
3π
∫ θ1
θ0
ρ3(θ)sen θ dθ (7.7)
Ejemplo 7.8 Calcular el volumen de la esfera.
Solución: La esfera de radio r se obtiene girando la semicircunferencia de ecuación polar ρ = r,θ ∈ [ 0, π ], alrededor del eje polar. Aplicando la fórmula se obtiene que el volumen es 4πr3/3.
�
Ejemplo 7.9 Calcular el volumen generado al girar la cardioide ρ = a(1+cos θ) alrededor deleje polar.
Solución: Debido a la simetría respecto del eje polar sólo hay que aplicar la fórmula (7.7) te-
niendo en cuenta que el ángulo polar varía desde 0 hasta π radianes. El volumen pedido es8πa3
3.
�
7.4. Superficies de revolución
7.4.1. Áreas de cuerpos obtenidos por revolución alrededor del eje de abs-cisas
Si y = f(x) tiene derivada continua la superficie del cuerpo que se obtiene al girar alrededordel eje de abscisas (OX) es
SOX = 2π
∫ b
a
f(x)√
1 + f ′(x)2 dx (7.8)
124

7.4. Superficies de revolución
Si en lugar de hacer un giro completo (2π radianes) se gira únicamente α radianes el área dela superficie es la parte proporcional
α
∫ b
a
f(x)√
1 + f ′(x)2 dx
Ejemplo 7.10 Calcular el área de la esfera.
Solución: La esfera de radio r y centro el origen se obtiene al hacer girar la semicircunferenciade ecuación
√r2 − x2 respecto al eje OX. Aplicando la fórmula (7.8) a esta curva se obtiene el
área de una esfera cualquiera de radio r (ya que el área es invariante por traslación). Esta área es4πr2. �
7.4.1.1. Paramétricas
Si las ecuaciones paramétricas de un arco de la curva son
x = x(t), y = y(t), t ∈ [ t0, t1 ]
y ésta gira alrededor del eje de abscisas la superficie obtenida es
SOX = 2π
∫ t1
t0
y(t)√x′(t)2 + y′(t)2 dt (7.9)
Ejemplo 7.11 Hallar la superficie del cuerpo que se obtiene al hacer girar la astroide alrededordel eje de abscisas.
Solución: Tras hacer los cálculos necesarios se obtiene que el integrando que aparece en la fór-mula (7.9) es a2 |sen t cos t| sen3 t. Para eliminar el valor absoluto e integrar funciones positivas,como cos t cambia de signo en t = π/2, calculamos
2πa2
(∫ π/2
0
cos t sen4 t dt+
∫ π
π/2
cos t sen4 t dt
)=
12πa2
5
�
7.4.2. Áreas de cuerpos obtenidos por revolución alrededor del eje de or-denadas
Con la misma condición de continuidad de la derivada de y = f(x), si se hace girar la curvaalrededor del eje OY la superficie puede calcularse utilizando
SOY = 2π
∫ b
a
x√
1 + f ′(x)2 dx (7.10)
125

Práctica 7. Aplicaciones de la Integral Definida II
7.4.2.1. Paramétricas
Si la ecuación está dada paramétricamente la fórmula es similar a (7.9) con el lógico inter-cambio de papeles.
SOY = 2π
∫ t1
t0
x(t)√x′(t)2 + y′(t)2 dt (7.11)
Ejercicio 7.1 Hallar el área de la superficie del cuerpo que se obtiene al hacer girar la astroidealrededor del eje de ordenadas.
Solución: Debido a la simetría de la astroide el cuerpo obtenido es el mismo que el del ejem-
plo 7.11, por tanto el área es12πa2
5. Sin embargo, aunque los cálculos previos son casi idénticos
en este caso hay que calcular 2π∫ π/2
−π/23a2 sen t cos4 t dt. No sólo cambia el integrando, sino los
extremos de integración ya que en este caso hay que hacer girar la parte de la derecha de la as-troide. �
Ejemplo 7.12 Considérese el cuerpo obtenido al girar la circunferencia de centro (3, 0) y radio1 alrededor del eje OY. Calcular la superficie y el volumen del mismo.
Solución: El cuerpo obtenido puede verse en la figura 7.7 en la página siguiente, y se llama toro.Las coordenadas paramétricas de la circunferencia que lo genera son
x(t) = 3 + cos t, y(t) = sen t, t ∈ [ 0, 2π ] .
Aplicando la fórmula (7.9) se obtiene que la superficie es 12π2, de la fórmula (7.4) se obtieneque el volumen es 6π2 (probablemente se obtenga este resultado cambiado de signo si se recorrela circunferencia empezando por su punto de mayor abcisa). �
7.4.3. Área de una superficie de revolución en coordenadas polares
Si la curva ρ = ρ(θ), θ ∈ [ θ0, θ1 ] gira alrededor del eje polar genera un cuerpo cuyasuperficie es
S = 2π
∫ θ1
θ0
ρ(θ) |sen θ|√
(ρ′(θ))2 + (ρ(θ))2 dθ (7.12)
Ejemplo 7.13 Calcular el área de una esfera.
126
7.5. Aplicaciones de los teoremas de Guldin
Figura 7.7: Distintas vistas del toro.
Solución: La ecuación polar de la circunferencia es ρ = r, donde r es el radio. Aplicando (7.12)se obtiene
S = 2π
∫ π
0
r2 sen θ dθ = 4πr2
�
Ejemplo 7.14 Calcular el área obtenida al hacer girar la cardioide ρ = a(1+ρ cos θ) alrededordeleje polar.
Solución: Aplicando la fórmula (7.12) se obtiene32πa2
5. Nótese que sólo hay que girar la parte
superior de la cardioide, ya que si se hace girar entera se obtendría el doble de su volumen. �
7.5. Aplicaciones de los teoremas de GuldinLos dos teoremas de Guldin que se enuncian a continuación tienen un evidente paralelismo
entre sí, y pueden usarse tanto para calcular superficies y volúmenes conociendo las coordenadas
127

Práctica 7. Aplicaciones de la Integral Definida II
del centro de gravedad de la curva o superficie que gira, como para, recíprocamente, calcular lascoordenadas del centro de gravedad de una curva o superficie conociendo la superficie o volumenque generan. También permiten deducir algunas de las fórmulas que hemos visto anteriormente.
Teorema 7.1 (Guldin) El área de la superficie de revolución engendrada por una curva planaal girar alrededor de un eje de su plano que no la corta es igual al producto de la longitud dedicha curva por la longitud de la circunferencia descrita por su centro de gravedad.
Teorema 7.2 (Guldin) El volumen del cuerpo de revolución engendrado por un recinto planoal girar alrededor de un eje de su plano es igual al producto de la superficie de dicho recinto porla longitud de la circunferencia descrita por su centro de gravedad.
Ejemplo 7.15 Calcular, aplicando los teoremas de Guldin, el área y el volumen de un torogenerado por una circunferencia de radio r cuyo centro se encuentra a R unidades, R > r de larecta alrededor de la que gira para generar el toro.
Solución: El centro de gravedad de la circunferencia es su centro. En este caso las coordenadasson (R, 0). Si la circunferencia gira alrededor del eje OY su centro describe otra circunferenciade radio R y longitud 2πR.
Como la longitud de la circunferencia que genera el toro es 2πr, se tiene que la superficie deltoro es 4π2rR.
Como el área del círculo que genera el toro es πr2 el volumen del toro es 2π2r2R. �
Nótese que en el ejemplo 7.12 se resuelve el mismo problema calculando dos integrales.Usando los teoremas de Guldin no hace falta calcular ninguna integral.
Ejemplo 7.16 Calcular las coordenadas de los centros de gravedad de una semicircunferenciay de un semicírculo.
Solución: Si una semicircunferencia gira alrededor del diámetro que la cierra —suponemos quela semicircunferencia tiene centro en el origen y que es la mitad superior de la circunferencia—genera una esfera, cuya superficie es —ver ejemplo 7.10— 4πr2. Como la longitud de la semi-circunferencia es πr, aplicando el primer teorema de Guldin se obtiene que el centro de gravedad
de la semicircunferencia ha recorrido una circunferencia de longitud4πr2
πr= 4r, de donde se
deduce que la altura del centro de gravedad es 2r/π. Por simetría de la curva respecto al eje OYse deduce que el centro de gravedad está sobre este eje. Por tanto las coordenadas del centro degravedad son (0, 2r/π).
Por su parte, si hacemos girar un semicírculo (suponemos que con centro en el origen y quees la mitad superior del círculo), obtendremos una esfera cuyo volumen es —ver ejemplo 7.8—4πr3/3. Como el área del semicírculo es πr2/2, se tiene que el centro de gravedad ha recorrido
una circunferencia de longitud4πr3/3
πr2/2=
8r
3. Por tanto el radio de esta circunferencia es
4r
3π. La
otra coordenada del centro de gravedad se deduce por simetría igual que se ha hecho antes. Las
coordenadas del centro de gravedad son(
0,4r
3π
). �
128

7.6. Aplicación a la Inventariación Forestal: Cubicación de árboles apeados
Figura 7.8: El círculo marca el centro de gravedad de la semicircunferencia y el asterisco el delsemicírculo.
7.6. Aplicación del cálculo de volúmenes a la InventariaciónForestal: Cubicación de árboles apeados
La Dasometría, que es la ciencia que trata sobre la medición de árboles y masas forestalesasí como de la estimación de sus crecimientos y producciones, encuentra en la InventariaciónForestal una herramienta para cubicar árboles tanto apeados como en pie.
La cubicación de árboles apeados consiste en el cálculo del volumen geométrico de fustesde árboles cortados por el pie y derribados. Por fuste se entiende la parte aprovechable del árbol(sin la copa ni las ramas).
En la actualidad se utilizan varios métodos para la cubicación de fustes y trozas3 de árbolesapeados. La que estudiaremos en la asignatura se basa en la aproximación del volumen de árbolesapeados mediante sólidos de revolución, que son engendrados por la rotación de una línea planacaracterística (denominada perfil) alrededor de un eje de simetría que representará el eje axialdel fuste. El resto de los métodos se estudiarán en profundidad en la asignatura de InventariaciónForestal que se imparte en el tercer curso de la Ingeniería de Montes.
7.6.1. Sólidos de revolución
Los sólidos de revolución que más se aproximan a la forma de los fustes de árboles4 son losde tipo dendrométrico: cilindro, paraboloide, cono y neiloide (véase la figura 7.9 en la páginasiguiente).
Las curvas planas (líneas de perfil) que engendran estos sólidos tienen por ecuación general:
3Trozas: partes en que se divide un fuste.4Supondremos que los árboles se han desarrollado normalmente, es decir, sus ejes axiales son rectilíneos y que
se mantienen las secciones circulares.
129
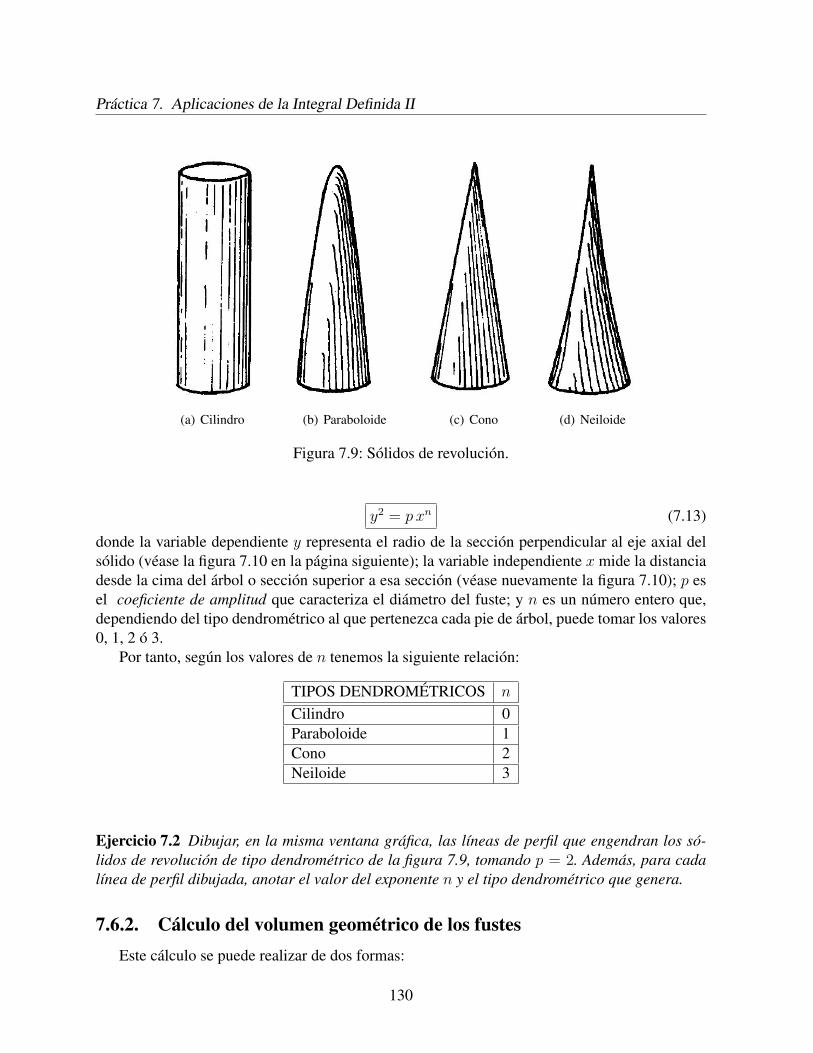
Práctica 7. Aplicaciones de la Integral Definida II
(a) Cilindro (b) Paraboloide (c) Cono (d) Neiloide
Figura 7.9: Sólidos de revolución.
y2 = p xn (7.13)
donde la variable dependiente y representa el radio de la sección perpendicular al eje axial delsólido (véase la figura 7.10 en la página siguiente); la variable independiente x mide la distanciadesde la cima del árbol o sección superior a esa sección (véase nuevamente la figura 7.10); p esel coeficiente de amplitud que caracteriza el diámetro del fuste; y n es un número entero que,dependiendo del tipo dendrométrico al que pertenezca cada pie de árbol, puede tomar los valores0, 1, 2 ó 3.
Por tanto, según los valores de n tenemos la siguiente relación:
TIPOS DENDROMÉTRICOS n
Cilindro 0Paraboloide 1Cono 2Neiloide 3
Ejercicio 7.2 Dibujar, en la misma ventana gráfica, las líneas de perfil que engendran los só-lidos de revolución de tipo dendrométrico de la figura 7.9, tomando p = 2. Además, para cadalínea de perfil dibujada, anotar el valor del exponente n y el tipo dendrométrico que genera.
7.6.2. Cálculo del volumen geométrico de los fustesEste cálculo se puede realizar de dos formas:
130

7.6. Aplicación a la Inventariación Forestal: Cubicación de árboles apeados
Figura 7.10: Sección perpendicular al eje axial del sólido.
Utilizando que las secciones resultantes de cortar los tipos dendrométricos por planos pa-ralelos de ecuación x = cte son siempre círculos (Apartado 7.3.1);
Aprovechando que se conoce la ecuación de las líneas de perfil, ecuación (7.13), que porrevolución alrededor del eje OX (eje axial del fuste) generan un cierto tipo dendrométrico(Apartado 7.3.2).
Con ambos métodos se llegará a la misma fórmula del volumen geométrico de los tipos den-drométricos. Para su cálculo supondremos que los fustes tienen altura h.
1a FORMA:
El área de una sección, en cualquier tipo dendrométrico, a una determinada distancia xdesde la cima del fuste sería:
Sx = área del círculo de radio y = π y2 , (7.14)
sustituyendo en (7.14) la expresión dada en (7.13) se obtiene:
Sx = π p xn . (7.15)
131

Práctica 7. Aplicaciones de la Integral Definida II
Integrando todas las áreas planas, Sx, se obtiene el volumen geométrico de los tipos den-drométricos de altura h:
Vg =
∫ x=h
x=0
π p xn dx = π p
[xn+1
n+ 1
]x=h
x=0
=π p hn+1
n+ 1=
= π p hn h
n+ 1= Sh
h
n+ 1(7.16)
donde Sh es el área de la sección de la base del árbol, que dista de la cima la distancia h(es decir, x = h en la ecuación (7.15)).
2a FORMA:
Ejercicio 7.3 Calcular la fórmula del volumen geométrico de los fustes para todos lostipos dendrométricos de altura h utilizando la fórmula (7.13).
En general hay que decir que en la realidad los árboles no se pueden definir exclusivamentesegún un tipo dendrométrico concreto, sino que a lo largo de su tronco se adapta a varios deellos, correspondiendo normalmente el neiloide a la base, por el ensanchamiento típico de lostocones5, a un cilindro o un paraboloide en el fuste y a un cono al final del árbol. Este estudio,que consigue cubicaciones tan próximas como se precise al volumen exacto del fuste, se estudiacon detalle en la asignatura de Inventariación Forestal.
7.7. EjerciciosEjercicio 7.4 Demostrar que el volumen de cualquier pirámide regular puede obtenerse apli-cando la fórmula «un tercio del área de la base por la altura» 6.
Ejercicio 7.5 Hallar el volumen del cuerpo engendrado al girar la curva
ρ = a cos2 θ
alrededor del eje polar.
Ejercicio 7.6 Hallar el volumen del cuerpo engendrado al girar la superficie limitada por laparábola semicúbica y2 = x3, el eje de abscisas y la recta x = 1 alrededor del eje OX.
5Tocón: parte del tronco de un árbol que queda unida a las raíces cuando lo cortan por el pie.6Se puede pensar en el cono como un caso límite de pirámide con base un polígono de n lados cuando n tiende
a∞.
132

7.7. Ejercicios
Ejercicio 7.7 Hallar el volumen del cuerpo engendrado al girar la superficie limitada por laparábola x2 = y3, el eje de abscisas y las rectas x = 0 y x = 2 alrededor del eje OX.
Ejercicio 7.8 Calcular el área del cuerpo obtenido al girar la parábola y2 = 2px en [ 0, b ]alrededor del eje de abscisas.
133


Práctica 8
Continuidad y cálculo de límites defunciones de varias variables.
8.1. IntroducciónEn esta práctica vamos a trabajar con funciones reales de dos variables. Los conceptos se pue-
den extender a funciones de más variables y con más valores, pero resulta más sencillo empezarcon funciones de sólo dos variables.
Los primeros ejercicios están relacionados con la continuidad de este tipo de funciones. Paraestudiar la continuidad es preciso trabajar con la noción de límite. Aunque el concepto de límitede una función de dos o más variables es similar al de límite de funciones reales de una variable,cuando se trabaja con dos o más variables se complica el cálculo de los mismos. Por ejemplo,se sabe que si f(x) es una función real de variable real el límite de f(x) cuando x tiende a aexiste si, y sólo si existen los límites laterales de f(x) cuando x tiende a a por la derecha y por laizquierda y ambos coinciden. Este resultado se debe a que en una recta sólo podemos acercarnosal punto a por la izquierda o por la derecha. En cambio en el plano podemos acercarnos a unpunto por infinitos caminos. Esto hace que un resultado análogo al anterior sólo sea útil parademostrar que un límite no existe.
8.2. Límites de funciones de dos variablesLa definición de límite de una función de dos variables es similar a la de límite de una función
de una variable.
Definición 8.1 Sea f una función definida en un subconjunto D de R2 en R. Sea (x0, y0) unpunto de acumulación1 de D. Se dice que ` es el límite de f cuando (x, y) tiende a (x0, y0) y seescribe
lım(x,y)→(x0,y0)
f(x, y) = `, (8.1)
1Es decir: tan cerca como se quiera del punto (x0, y0) hay puntos de D.
135
Práctica 8. Continuidad de funciones de varias variables
si para todo ε > 0 existe un δ > 0 tal que si ‖(x, y)− (x0, y0)‖ < δ, (x, y) ∈ D, entonces|f(x, y)− `| < ε.
Aunque la definición es similar a la de límite de una función real de una variable real es máscomplicada de utilizar porque aparecen dos variables.
De todas formas nos interesa sobre todo calcular límites con DERIVE. La primera dificultadque encontramos es que DERIVE no calcula límites de funciones de dos (o más) variablesdirectamente. Por ello vamos a introducir alguna de las técnicas que se utilizan normalmente.
En primer lugar es obvio que si f es continua en el punto (x0, y0) su límite se calculará sinmayor dificultad como f(x0, y0). Cuando esto no sea posible las técnicas que se utilizan parademostrar que el límite existe y para demostrar que el límite no exite son diferentes.
Empezaremos con técnicas para demostrar que el límite no existe. De alguna forma se va ageneralizar el concepto de límite lateral. Cuando se trabaja con funciones de dos o más variableses posible «ir» al punto de muchas formas distintas, pero si la función tiene límite en ese puntoel resultado es independiente del camino. Dicho en forma de teorema
Teorema 8.1 Sea f una función definida en un subconjuntoD de R2 en R. Sea (x0, y0) un puntode acumulación de D. Entonces
lım(x,y)→(x0,y0)
f(x, y) = `,
si, y sólo si para cualquier subconjunto S deD, tal que (x0, y0) es de acumulación de S, entonces
lım(x,y)→(x0,y0)
(x,y)∈S
f(x, y) = ` (8.2)
Los límites de la forma (8.2) se llaman límites relativos y son la generalización de los límiteslaterales. Para cada S ⊂ D que tenga a (x0, y0) como punto de acumulación puede calcularseuno o puede no existir.
Aunque este teorema establece una condición necesaria y suficiente para la existencia dellímite, dada la imposibilidad de calcular todos los límites relativos, el teorema sólo puede usarsepara demostrar que un límite no existe. En efecto, calculando dos límites relativos distintos,o bien encontrando un S tal que no exista el correspondiente límite relativo. Por tanto, si sesospecha que el límite no existe se elige una curva S1 que pase por (x0, y0) y se calcula elcorrespondiente límite relativo, y luego se elige otra S2 tal que el límite relativo sea distinto. Sino se sabe cuáles pueden ser esas curvas se eligen en primer lugar rectas (se suelen llamar alos correspondientes límites límites direccionales) y luego curvas más complicadas. La ventajade utilizar curvas es que el límite relativo sólo depende de una variable. Utilizaremos curvas deecuación y = h(x) tales que y0 = h(x0) y calcularemos el límite cuando x tiende a x0. Tambiénutilizaremos curvas de ecuación x = g(y), en este caso ha de ser x0 = g(y0) y calcularemosel límite cuando y tiende a y0. Incluso pueden utilizarse las ecuaciones paramétricas x = ϕ(t),y = ψ(t) de la curva, en este caso para un valor del parámetro t0 se debe cumplir que x0 = ϕ(t0),y0 = ψ(t0), y se calcula el límite cuando t tiende a t0.
136

8.2. Límites de funciones de dos variables
Por último cabe resaltar que haciendo el cambio de variables x = X + x0, y = Y + y0,se obtiene que en las nuevas variables X e Y las nuevas coordenadas de (x0, y0) son (0, 0). Portanto calcular el límite cuando (x, y) −→ (x0, y0) en las variables originales equivale a calcularel límite cuando (X, Y ) −→ (0, 0) en las nuevas variables, lo que simplifica los cálculos. Todoslos ejemplos se harán pues en el origen, sin que ello signifique ninguna pérdida de generalidad.Veamos algunos ejemplos.
8.2.1. Límites relativos por rectas
Los límites relativos por rectas son los más sencillos de calcular, S es en este caso una rectaque pasa por (0, 0) (asumimos que en caso de ser necesario ya se ha realizado el cambio devariables mencionado anteriormente). Las rectas que pasan por el origen tienen ecuación y = mxó x = 0.
El límite de una función de dos variables f en el origen según la dirección de la recta y = mxes
lımx→0
f(x,mx) (8.3)
si existe.En este caso estamos calculando, de forma simultánea el límite relativo por todas las rectas
que pasan por el origen excepto la recta de ecuación x = 0. m es la pendiente de la recta ysi para algún m el límite no existe, o para dos pendientes distintas los límites no coinciden, ellímite (8.1) no existe.
Además se ha de tener en cuenta la recta de ecuación x = 0, por lo que hemos de calculartambién, suponiendo que el resto de límites hayan salido independientes de m,
lımy→0
f(0, y) (8.4)
Ejemplo 8.1 Comprobar que no existe el límite:
lım(x,y)→(0,0)
x sen y
x2 + 3 y2(8.5)
Solución: La gráfica se puede ver en la figura 8.1 en la página siguiente, y en ella se aprecia elcomportamiento irregular de la función cerca del origen.
Se calculan en primer lugar los límites «por rectas». Llamando
f(x, y) =x sen y
x2 + 3 y2, (x, y) 6= (0, 0) (8.6)
se introduce la función anterior. Para ello se abre una ventana de diálogo de autor Author Expressiony escribimos
f(x, y):= x sin y/(x^2+3y^2)
137

Práctica 8. Continuidad de funciones de varias variables
Figura 8.1: Gráfica de la función f(x, y) =x sen y
x2 + 3y2.
es muy importante no olvidar poner los «: » (También se puede utilizar la secuencia de instruc-ciones Declare, Function Definition. . . e introduciendo en la ventana de diálogo correspon-diente los datos, en Name and Arguments: hay que escribir f(x, y) y en Definition: hay queponer x sin y/(x^2+3y^2)).
Para calcular el límite por la recta y = mx, sólo se consideran los puntos de la forma (x,mx).En una ventana de diálogo Author Expression se escribe f(x,mx) y simplificando la expre-sión resultante se obtiene que para los puntos de esta recta el valor de la función es
senmx
x (3m2 + 1)
Ahora hay que calcular el límite de esta expresión cuando x tiende a 0. Para ello se puede utilizarla sucesión de menús Calculus, Limit. . . , o bien el botón de la barra de herramientas . Enambos casos se abrirá una ventana de diálogo con la expresión cuyo límite se debe hallar, en lacasilla Variable: debe aparecer una x, y el punto debe ser 0, además, recordando que el límiteen un punto (para funciones reales definidas en un conjunto de números reales) sólo existe sicoinciden los límites «por la izquierda» y « por la derecha», siendo ambos reales, la opción quese debe utilizar es «BOTH». Se obtiene que el límite es
lımx→0
senmx
x(3m2 + 1)=
m
3m2 + 1(8.7)
138

8.2. Límites de funciones de dos variables
Como se observa, el valor del límite depende del valor de la pendiente de la recta (es decir dem), por tanto el límite varía según modifiquemos la dirección por la que nos acercamos al origen.Decimos entonces que el límite de f en el punto (0, 0) no existe, ya que una condición necesariapara que exista es que los límites direccionales existan y coincidan en todas las direcciones. �
Aunque ya no es necesario calcular el límite por la recta x = 0 es un buen ejercicio hacerlo.¿Cuál es su valor?
8.2.2. Límites relativos por curvas más generalesCuando todos los límites relativos por rectas coinciden pero se sospecha que el límite no
existe, se puede recurrir a límites por funciones más generales que las rectas. En el siguienteejercicio, la representación gráfica de una función de dos variables permite deducir que el límitede dicha función en el origen no existe.
Ejemplo 8.2 Demostrar que no existe el límite de la función
f(x, y) =x y2
x2 + y4, (x, y) 6= (0, 0)
en el origen.
Solución: Evidentemente la función no está definida en el origen, pero ello no es óbice paraque su límite en el origen pueda existir, de hecho como la función está definida en todos lospuntos menos en el origen tiene sentido calcular su límite en este punto. Igual que en el ejercicioanterior se declara la función, por ejemplo abriendo una ventana de diálogo Author Expressiony escribiendo:
f(x, y):=x y^2 / ( x^2 + y^4 )
Antes que nada conviene comprobar que todos los límites por rectas (incluyendo x = 0) soniguales a 0, comprobación que queda a cuenta del lector.
Para poder observar el comportamiento de la función en los alrededores del origen se pasa a laventana de gráficos tridimensionales teniendo seleccionada la expresión con la función, se eligenlas opciones de menú Window, New 3D-plot Window, o bien se pincha con el ratón sobre elbotón de la barra de herramientas que tiene una gráfica en tres dimensiones. DERIVE muestraentonces la ventana de gráficos en tres dimensiones.
Antes de realizar dibujo alguno conviene aumentar la precisión del dibujo incrementando elnúmero de curvas dibujadas, esto se hace eligiendo la sucesión de menús Set, Grids. . . , o bienmediante la combinación de teclas <Control + G>, o bien pinchando con el ratón en el botón dela barra de herramientas con una red dibujada.
Por cualquiera de los tres métodos se abrirá la ventana de diálogo Set Number of Grids yponiendo el número de líneas en x en 50 y también 50 en y.
139

Práctica 8. Continuidad de funciones de varias variables
Como interesa ver la función cerca del origen se restringe la zona del dibujo a |x| ≤ 1,|y| ≤ 1 y |z| ≤ 1. Para conseguirlo se elige la sucesión de menús Set, Length. . . , o la com-binación de teclas <Control + L>. En cualquier caso se abrirá una ventana de diálogo tituladaSet Interval Length . En ella se cambian los datos que aparecen en x e y, poniendo en amboscasos 1. No es necesario cambiar la opción z, ya que si se deja que se calcule automáticamenteobtenemos el valor requerido.
Por último se cambia el punto de vista, para ello mediante las opciones de menú Set, Eye. . . ,o con la combinación de teclas <Control + E> o haciendo clic en el botón de la barra de herra-mientas , abrimos una ventana de diálogo titulada Set Eye Position , donde se introduce−20en x, 5 en y, y 5 en z, antes de introducir este último dato se tiene que desactivar la opción Auto.
Una vez preparadas todas estas opciones se dibuja la gráfica con la opción de menú Plot! ohaciendo clic en el botón de la barra de herramientas con la gráfica tridimensional . Se obtieneentonces la gráfica de la figura 8.2.
Figura 8.2: Gráfica de la función f(x, y) =xy2
x2 + y4.
140
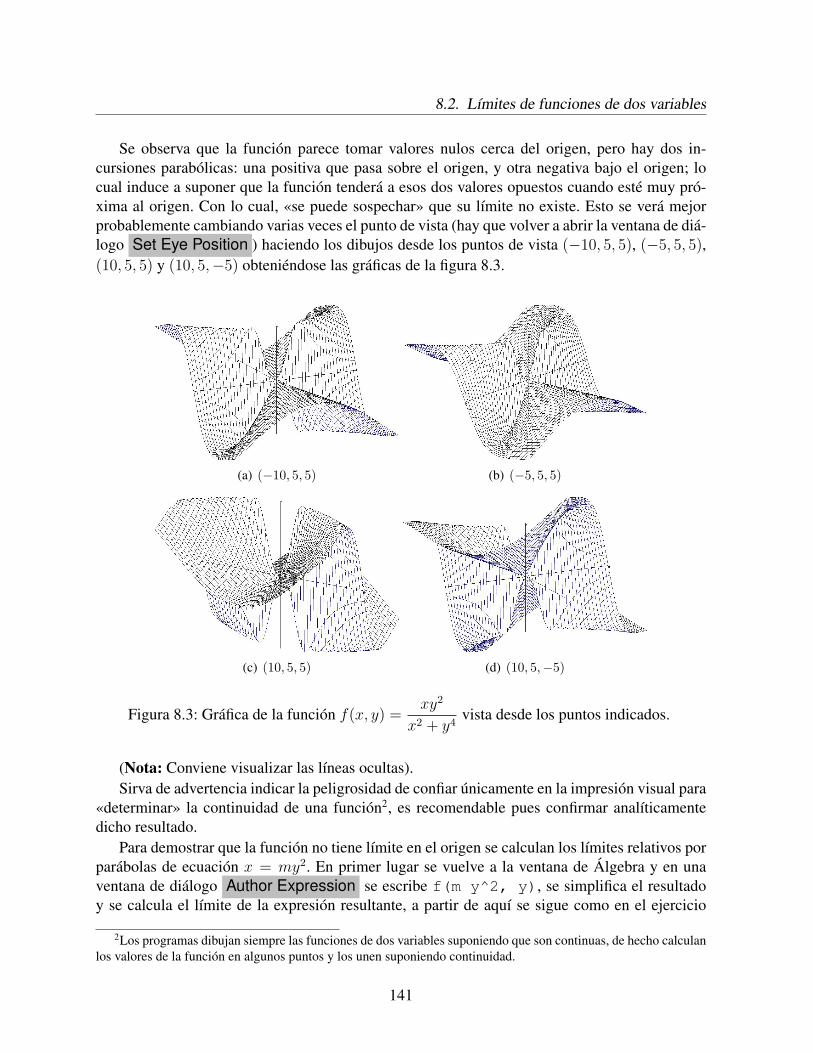
8.2. Límites de funciones de dos variables
Se observa que la función parece tomar valores nulos cerca del origen, pero hay dos in-cursiones parabólicas: una positiva que pasa sobre el origen, y otra negativa bajo el origen; locual induce a suponer que la función tenderá a esos dos valores opuestos cuando esté muy pró-xima al origen. Con lo cual, «se puede sospechar» que su límite no existe. Esto se verá mejorprobablemente cambiando varias veces el punto de vista (hay que volver a abrir la ventana de diá-logo Set Eye Position ) haciendo los dibujos desde los puntos de vista (−10, 5, 5), (−5, 5, 5),(10, 5, 5) y (10, 5,−5) obteniéndose las gráficas de la figura 8.3.
(a) (−10, 5, 5) (b) (−5, 5, 5)
(c) (10, 5, 5) (d) (10, 5,−5)
Figura 8.3: Gráfica de la función f(x, y) =xy2
x2 + y4vista desde los puntos indicados.
(Nota: Conviene visualizar las líneas ocultas).Sirva de advertencia indicar la peligrosidad de confiar únicamente en la impresión visual para
«determinar» la continuidad de una función2, es recomendable pues confirmar analíticamentedicho resultado.
Para demostrar que la función no tiene límite en el origen se calculan los límites relativos porparábolas de ecuación x = my2. En primer lugar se vuelve a la ventana de Álgebra y en unaventana de diálogo Author Expression se escribe f(m y^2, y), se simplifica el resultadoy se calcula el límite de la expresión resultante, a partir de aquí se sigue como en el ejercicio
2Los programas dibujan siempre las funciones de dos variables suponiendo que son continuas, de hecho calculanlos valores de la función en algunos puntos y los unen suponiendo continuidad.
141

Práctica 8. Continuidad de funciones de varias variables
anterior y se obtiene que el límite relativo por estas parábolas depende de m ya que esm
m2 + 1,
lo que indica que el límite global no existe. �
8.3. Límites iteradosEn esta sección se estudiará la existencia del límite de una función f(x, y) a partir de sus lími-
tes iterados. Los límites iterados igual que los límites relativos, pueden utilizarse para demostrarque una función no tiene límite en un punto. La técnica se basa en el siguiente teorema.
Teorema 8.2 Si en el punto (a, b) se tiene que lım(x,y)→(a,b)
f(x, y) = L, y si existen los dos límites
unidimensionaleslımx→a
f(x, y) y lımy→b
f(x, y) (8.8)
entonces,
lımx→a
[lımy→b
f(x, y)
]= lım
y→b
[lımx→a
f(x, y)]
= L (8.9)
Los dos límites de la igualdad (8.9) se llaman límites iterados, y por ser límites que dependende una sóla variable son más fáciles de calcular que el límite doble.
Es importante observar que el cumplimiento de la relación (8.9) no implica la existencia dellímite doble, como se demuestra en el ejercicio 8.1. Los límites iterados son útiles cuando nocoinciden, pues en ese caso no existe el límite doble, tal como se hace en el ejemplo 8.4. Por otraparte la inexistencia de algún límite iterado puede deberse a que falle alguna de las condicionesdel teorema, en ese caso el límite doble puede existir, como ocurre en el ejemplo 8.5, o no. Encualquier caso cuando coinciden los límites iterados sólo se puede decir que el valor L es el únicocandidato a límite posible, pero hay que demostrar que lo es o no utilizando otras técnicas.
Ejemplo 8.3 La función
f(x, y) =5x2y
x2 + y2, (x, y) 6= (0, 0),
tiene límite 0 en el punto (0, 0). Comprobar la existencia e igualdad de los límites iterados.
Solución: Para ello, en DERIVE se declara la función f . Para calcular el límite iterado
lımx→0
[lımy→0
f(x, y)
]se calcula en primer lugar el límite unidimensional
lımy→0
f(x, y)
142

8.3. Límites iterados
como se ha hecho en ejercicios anteriores. El resultado que se obtiene es 0.Obviamente, al calcular lım
x→00 se obtiene el valor 0. Procediendo de la misma forma pero
cambiando el orden en que se calculan los límites se obtiene el otro límite iterado que tambiénes 0. �
Ejercicio 8.1 Sea la función
f(x, y) =xy
x2 + y2(x, y) 6= (0, 0).
Demostrar quelımx→0
[lımy→0
f(x, y)]
= lımy→0
[lımx→0
f(x, y)]
= 0,
pero que f(x, y) no tiende a un límite cuando (x, y) → (0, 0). (Examinar el límite direccionalsobre la recta y = x).
Ejemplo 8.4 Considérese la función
f(x, y) =xy + y2
x2 + y2(x, y) 6= (0, 0).
Demostrar que los dos límites iterados en el punto (0, 0) son distintos, y por tanto, no existe ellímite doble de la función en el origen.
Solución: Se obtiene quelımx→0
[lımy→0
f(x, y)]
= lımx→0
0 = 0
ylımy→0
[lımx→0
f(x, y)]
= lımy→0
1 = 1.
�
Ejemplo 8.5 Sea
f(x, y) =
x sen
(1
y
), si y 6= 0
0, si y = 0
Comprobar que lım(x,y)→(0,0) f(x, y) = 0 , pero que
lımx→0
[lımy→0
f(x, y)
]6= lım
y→0
[lımx→0
f(x, y)].
Explicar por qué esto no contradice el teorema 8.2.
143

Práctica 8. Continuidad de funciones de varias variables
Solución: Para demostrar que el límite doble existe y vale cero se puede recurrir directamente ala definición 8.1. En este caso se tiene que
|f(x, y)− 0| ≤∣∣∣∣x sen
1
y
∣∣∣∣ ≤ |x| = √x2 ≤√x2 + y2 = ‖(x, y)‖
por lo que dado ε tomando δ = ε se tiene que si ‖(x, y)− (0, 0)‖ < δ, entonces
|f(x, y)− 0| ≤ ‖(x, y)‖ < δ = ε,
lo que prueba que el límite doble existe y vale cero.Por otra parte no existe lım
y→0x sen(1/y) y por tanto no puede existir el límite iterado lım
x→0
[lımy→0
x sen(1/y)].
En cambio sí que existe el otro límite iterado lımy→0
[lımx→0
x sen(1/y)]
= 0. Sin embargo no hay
contradicción con el teorema 8.2, ya que no se cumple una de las hipótesis (8.8).�
8.4. Cambio a coordenadas polares para demostrar la exis-tencia del límite
Para demostrar que el límite de una función de dos variables f(x, y) cuando (x, y) tiende a(x0, y0) es 0 puede hacerse un cambio a coordenadas polares. Sustituyendo x por ρ cos θ e y porρ sen θ se obtiene f(ρ cos θ, ρ sen θ), que es una función de las nuevas variables ρ y θ.
Teorema 8.3 Si al cambiar en f(x, y) a coordenadas polares se obtiene que la nueva fun-ción f(ρ cos θ, ρ sen θ) puede escribirse como producto de dos funciones f(ρ cos θ, ρ sen θ) =G(ρ)H(ρ, θ) tales que
lımρ→0
G(ρ) = 0,
y H(ρ, θ) está acotada en un entorno del origen. Entonces
lım(x,y)→(0,0)
f(x, y) = 0,
Si queremos aplicar este teorema para demostrar que
lım(x,y)→(x0,y0)
f(x, y) = `,
se han de seguir los siguientes pasos
1. Transformar el límite cuando (x, y) tiende a (x0, y0) en un límite cuando las nuevas va-riables (X, Y ) tienden a (0, 0). Para ello basta hacer el cambio de variables x = X + x0
e y = Y + y0. Obviamente (x, y) −→ (x0, y0) si, y sólo si (X, Y ) −→ (0, 0). Y sif(x, y) = g(X, Y ) se tiene
lım(X,Y )→(0,0)
g(X, Y ) = `,
144

8.4. Cambio a coordenadas polares para demostrar la existencia del límite
2. Hacer que el límite sea 0, demostrando que
lım(X,Y )→(0,0)
g(X, Y )− ` = 0,
Por tanto es la expresión g(X, Y )− ` la que hemos de intentar escribir como producto de unafunción de ρ ( y sólo de ρ) que tienda a cero multiplicada por otra función de ρ y de θ (a vecesno aparecerá alguna de ellas) acotada.
Ejemplo 8.6 Demostrar que:
lım(x,y)→(1,2)
xy2 − 5xy + x2 + 4x+ y − 1
x2 + y2 − 3y − xy + 3= 1. (8.10)
Solución: Primero se convierte el límite en un límite alrededor del punto (0, 0), teniendo encuenta que:
lım(x,y)→(1,2)
f(x, y) = lım(X,Y )→(0,0)
f(X + 1, Y + 2) (8.11)
Siendo en este caso:
f(x, y) =xy2 − 5xy + x2 + 4x+ y − 1
x2 + y2 − 3y − xy + 3(8.12)
Para realizar esta transformación con DERIVE se introduce la función original, ésta vez sinteclear f(x, y):=, usando una ventana de diálogo Author Expression y después se realiza lasubstitución de x por x+1 y la de y por y+2 seleccionando la expresión que se acaba de obtenery abriendo una ventana de diálogo Substitute for Variables in #. . . . Para abrir esta ventana sepueden elegir los menús Simplify, Substitute for , Variables. . . , o se puede usar la combinación<Control + W> o el botón de la barra de herramientas .
Se elige cada una de las variables y se introduce la correspondiente sustitución antes devalidar el trabajo. Finalmente se simplifica la expresión resultante.
Demostrar (8.10) es equivalente a demostrar que:
lım(x,y)→(0,0)
x2 + xy(y − 1) + y2
x2 − xy + y2= 1 (8.13)
o lo que es equivalente, que
lım(x,y)→(0,0)
x2 + xy(y − 1) + y2
x2 − xy + y2− 1 = 0
Para demostrar esta igualdad se utiliza el teorema de cambio a polares, es decir se prueba que
| g(ρ cos θ, ρ sen θ)− 1 |
está acotado superiormente por una función que depende únicamente del radio ρ y es tal que sulímite en el origen es nulo.
Se sustituyen las variables para obtener que:
145

Práctica 8. Continuidad de funciones de varias variables
| g(x, y)− 1 |=| g(ρ cos θ, ρ sen θ)− 1 |=∣∣∣∣ ρ sen2 θ cos θ
1− sen θ cos θ
∣∣∣∣ (8.14)
Teniendo en cuenta que sen 2θ = 2 sen θ cos θ, el resultado se puede escribir como (no sepuede obtener este resultado con DERIVE)
| g(x, y)− 1 |= ρ
∣∣∣∣∣∣∣sen θ
sen(2θ)
2
1− sen(2θ)
2
∣∣∣∣∣∣∣ (8.15)
Se trata ahora de estudiar el valor máximo que puede alcanzar esta expresión. Como el denomi-
nador∣∣∣∣1− sen(2θ)
2
∣∣∣∣ ≥ 1/2 y el numerador∣∣∣∣sen θ sen(2θ)
2
∣∣∣∣ ≤ 1/2, se tiene que
| g(x, y)− 1 |≤ ρ
y por tanto el límite de g(x, y)− 1 es cero cuando ρ tiende a cero.Por tanto se ha demostrado que:
lım(x,y)→(1,2)
f(x, y) = 1 (8.16)
�
8.5. EjerciciosEjercicio 8.2 Estudiar si las siguientes funciones tienen límite en el origen.
1. f(x, y) =
2x3
x2 + x3 − y2, si x2 + x3 − y2 6= 0
0, si x2 + x3 − y2 = 0
2. f(x, y) =
4x3
x2 + x3 − y, si x2 + x3 − y 6= 0
0, si x2 + x3 − y = 0
3. f(x, y) =
5x4
x2 + x4 − y2, si x2 + x4 − y2 6= 0
0, si x2 + x4 − y2 = 0
4. f(x, y) =
5x4
x2 + x4 + x3y2, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
146

8.5. Ejercicios
Ejercicio 8.3 Demostrar que no existe
lım(x,y)→(0,0)
x2y2
x2y2 + (x− y)(Aunque DERIVE da como iguales todos los límites por rectas y = mx, probar con y = x porseparado).
Ejercicio 8.4 Estudiar la continuidad en el punto (0, 0) de la función
f(x, y) =
x2y2
x2y2 + (x− y)2, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
Ejercicio 8.5 Estudiar la continuidad de la función en el origen
f(x, y) =
x2 + y2
x+ y2, si x 6= −y2
0, si x = −y2
Ejercicio 8.6 Demostrar que la función
f(x, y) =
x4y4
(x4 + y2)3, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
no es continua en el origen.
147

Práctica 9
Cálculo diferencial de funciones de variasvariables
9.1. IntroducciónEl concepto de derivada también debe generalizarse a funciones de varias variables. La ge-
neralización no es fácil, ya que se pretende que se cumplan propiedades similares a las de unavariable. Resulta fácil definir y calcular las derivadas parciales, pero se puede comprobar quesu existencia no garantiza buenas propiedades, como la continuidad. Un concepto un poco másgeneral es el de derivada direccional, aunque la existencia de todas las derivadas direccionalestampoco garantiza que la función tenga buenas propiedades, como se puede ver en los ejem-plos 9.4 y 9.5.
En esta práctica se definen y calculan las derivadas direccionales y se introduce el conceptode función diferenciable. También se introduce el cálculo de matrices jacobianas, gradientes yderivadas direccionales utilizando la matriz jacobiana.
Se trabajará casi exclusivamente con funciones reales, ya que la generalización a funcionesvectoriales es directa.
9.2. Derivadas direccionalesEl concepto de derivada de una función real de una variable real se puede generalizar de
varias formas para funciones reales de dos o más variables.Una generalización del concepto de derivada es la derivada direccional. Si f(x, y) es una
función de dos variables, (x0, y0) es un punto interior del dominio de f y se elige un vectorv = ue1 +we2 de R2 los puntos de R2 de coordenadas (x0 + tu, y0 + tw) forman una recta quepasa por el punto (x0, y0) (que corresponde al valor 0 de t) y tiene dirección v. Si consideramosel plano perpendicular al plano OXY que contiene esta recta cortará a la gráfica de f en unacurva plana1. Por tanto es posible calcular la derivada de esa curva plana de la misma forma que
1Una curva en el espacio es plana si está contenida en un plano.
149

Práctica 9. Cálculo diferencial de funciones de varias variables
se calcula la de una función de una variable.Para normalizar las derivadas direccionales se consideran sólo vectores unitarios o normales
(es decir ‖v‖ =√u2 + w2 = 1). Se define el límite direccional de f en el punto x = (x0, y0) en
la dirección v (unitario) como
f ′(x;v) = lımt→0
f(x + tv)− f(x)
t= lım
t→0
f(x0 + tu, y0 + tw)− f(x0, y0)
t(9.1)
si existe este límite.Cuando v es el vector i-ésimo de la base canónica la derivada direccional se llama derivada
parcial. En concreto si v = e1 se llama derivada parcial respecto de la variable x, ya que ellímite direccional (9.1) es en este caso
∂f(x0, y0)
∂x= lım
t→0
f(x0 + t, y0)− f(x0, y0)
t= lım
x→x0
f(x, y0)− f(x0, y0)
x− x0
, (9.2)
y cuando v = e2 se llama derivada parcial respecto de la variable y, que es
∂f(x0, y0)
∂y= lım
t→0
f(x0, y0 + t)− f(x0, y0)
t= lım
y→y0
f(x0, y)− f(x0, y0)
y − y0
, (9.3)
DERIVE puede calcular directamente las derivadas parciales (si la función permite aplicar lasreglas de derivación) pero no las direccionales en cualquier otra dirección.
Ejemplo 9.1 Calcular las derivadas parciales de f(x, y) = x2y.
Solución: Se abre una ventana Author Expression y escribimos x^2 y y a continuación sederiva la expresión obtenida respecto de x, obteniéndose 2xy que es la parcial de f respecto dex.
Luego se deriva la función respecto de y, obteniéndose x2, que es la parcial respecto de y. �
Ejemplo 9.2 Calcular las derivadas direccionales de la función f(x, y) = x2y del ejemploanterior en el origen.
Solución: La gráfica de la función cuando x ∈ [−1, 1 ] e y ∈ [−1, 1 ] puede verse en lafigura 9.1 en la página siguiente.
En el origen la función vale 0. En la expresión que contiene la función se sustituye x por tue y por tv. La expresión resultante se divide por t, se simplifica y se obtiene t2u2v y se calcula ellímite cuando t tiende a 0, que es cero. Es decir que todas las derivadas direccionales de f en elorigen son nulas. �
150

9.2. Derivadas direccionales
Figura 9.1: Gráfica de f(x, y) = x2y.
9.2.1. Un ejemplo de función con derivadas parciales pero sin ninguna otraderivada direccional
Tal como se ha dicho anteriormente las derivadas parciales se pueden considerar como casosparticulares de derivadas direccionales. De hecho son las derivadas direccionales en las direccio-nes de los ejes coordenados. Por tanto si para una función existen todas las derivadas direccio-nales existirán todas las derivadas parciales. El recíproco puede no ser cierto. En este apartadose muestra un ejemplo espectacular, ya que la función en cuestión tiene todas las parciales, peroninguna otra derivada direccional.
Ejemplo 9.3 Sea la función definida por:
f(x, y) = − (| xy |)12 (9.4)
Estudiar la existencia de sus derivadas direccionales en el origen y calcularlas cuando existan.
Solución: Para realizar este ejercicio con ayuda de DERIVE, primero se declara la función. Acontinuación se introduce el cociente incremental tal como aparece al final de la ecuación (9.1)(sin el límite). Se simplifica y se calcula el límite de la expresión resultante. Se observará que enel resultado aparecen los signos ± y el término SIGN(u·w), lo que es extraño, ya que el signopuede ser cualquiera, y por otra parte el resultado depende del signo de uw. Si se calculan loslímites laterales por la izquierda y por la derecha, se obtiene que tienen signos opuestos, por tantosólo coinciden cuando ambos valgan 0. Esto ocurre cuando u = 0 ó w = 0, es decir cuando ladirección es la del eje de abscisas o la del eje de ordenadas.
Para comprender el comportamiento de la función se realiza su gráfica que es la de la figu-ra 9.2 en la página siguiente. Se aprecia que en los ejes coordenados OX y OY la función esconstante y su valor es 0 en ambos. Al calcular la derivada parcial respecto de x en el origen,se fija y = 0 y se trabaja en realidad con la función de una variable g(x) = f(x, 0) = 0, cuyaderivada es 0. Lo mismo ocurre cuando se calcula la parcial respecto de y, se fija x = 0 y setrabaja con la función de una variable h(y) = f(0, y) = 0, cuya derivada es 0.
151
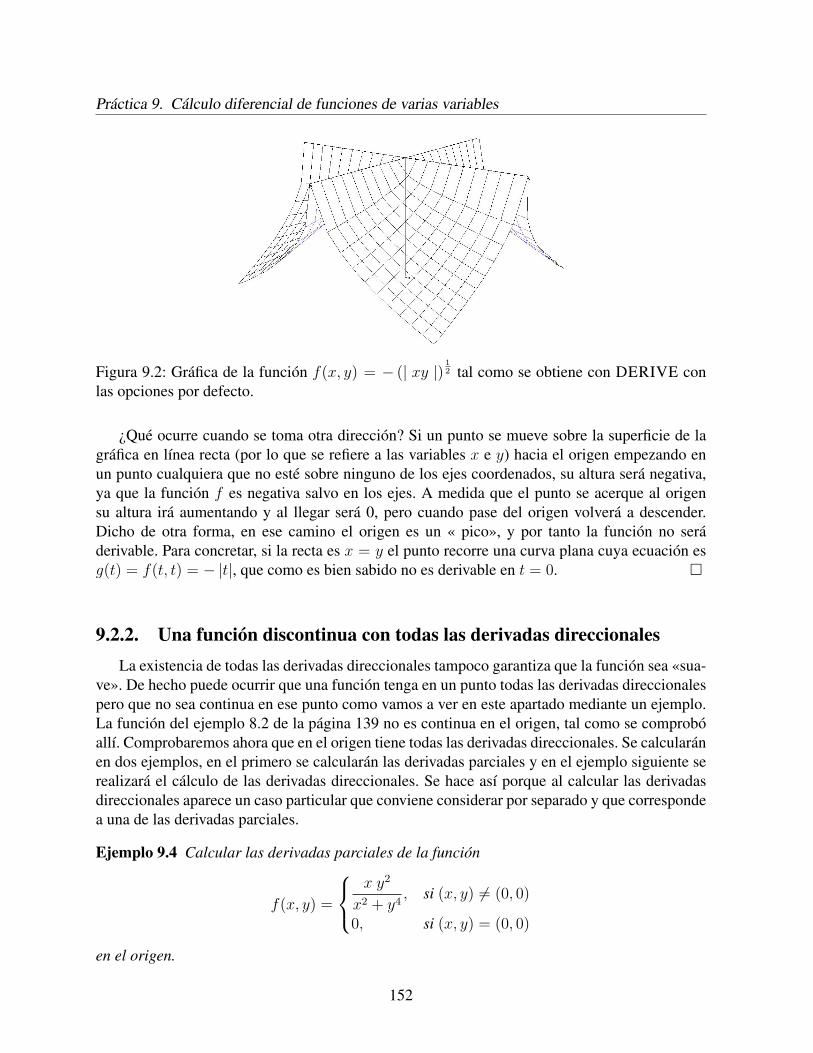
Práctica 9. Cálculo diferencial de funciones de varias variables
Figura 9.2: Gráfica de la función f(x, y) = − (| xy |)12 tal como se obtiene con DERIVE con
las opciones por defecto.
¿Qué ocurre cuando se toma otra dirección? Si un punto se mueve sobre la superficie de lagráfica en línea recta (por lo que se refiere a las variables x e y) hacia el origen empezando enun punto cualquiera que no esté sobre ninguno de los ejes coordenados, su altura será negativa,ya que la función f es negativa salvo en los ejes. A medida que el punto se acerque al origensu altura irá aumentando y al llegar será 0, pero cuando pase del origen volverá a descender.Dicho de otra forma, en ese camino el origen es un « pico», y por tanto la función no seráderivable. Para concretar, si la recta es x = y el punto recorre una curva plana cuya ecuación esg(t) = f(t, t) = − |t|, que como es bien sabido no es derivable en t = 0. �
9.2.2. Una función discontinua con todas las derivadas direccionalesLa existencia de todas las derivadas direccionales tampoco garantiza que la función sea «sua-
ve». De hecho puede ocurrir que una función tenga en un punto todas las derivadas direccionalespero que no sea continua en ese punto como vamos a ver en este apartado mediante un ejemplo.La función del ejemplo 8.2 de la página 139 no es continua en el origen, tal como se comprobóallí. Comprobaremos ahora que en el origen tiene todas las derivadas direccionales. Se calcularánen dos ejemplos, en el primero se calcularán las derivadas parciales y en el ejemplo siguiente serealizará el cálculo de las derivadas direccionales. Se hace así porque al calcular las derivadasdireccionales aparece un caso particular que conviene considerar por separado y que correspondea una de las derivadas parciales.
Ejemplo 9.4 Calcular las derivadas parciales de la función
f(x, y) =
x y2
x2 + y4, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
en el origen.
152

9.2. Derivadas direccionales
Solución: En este caso no puede utilizarse el comando de derivación de DERIVE porque la
Figura 9.3: Gráfica de la función del ejemplo 9.4 obtenida con DERIVE aumentando el númerode líneas dibujadas a 50 y haciendo que las variables x e y varíen en [−1, 1 ].
definición de la función en el origen no corresponde a la fórmula con la que se define en elresto de R2 ya que en dicho punto el denominador de la fórmula se anula. Hay que calcular lasderivadas parciales recurriendo a su definición como límite.
Declaración de la función. Se declara la función en una ventana Author Expression o Declare Function Definitionfunción mediante la fórmula del enunciado. Por ejemplo en Declare Function Definitionescribimos, en Name and Arguments: f(x,y) y en Definition: x y^2/(x^2 + y^4). Hay que tener en cuenta que esta definición no se aplica en el origen y que en esepunto la función vale 0.
Introducción del cociente incremental para calcular la primera parcial. El límite que hay quecalcular es
lımx→0
f(x, 0)− f(0, 0)
x,
como f(0, 0) = 0 en una ventana Author Expression se escribe f(x,0)/x.
Cálculo del límite cuando x tiende a 0. Simplemente se pincha en el botón de la barra de he-rramientas y se eligen las opciones adecuadas. Se simplifica la expresión resultante y seobtiene que la parcial de f respecto de x en el origen es 0.
Introducción del cociente incremental para calcular la segunda parcial. La parcial respectode y es
lımy→0
f(0, y)− f(0, 0)
y
siendo f(0, 0) = 0. En una ventana Author Expression se escribe f(0, y)/y.
153
Práctica 9. Cálculo diferencial de funciones de varias variables
Cálculo del límite cuando y tiende a 0. Igual que antes se pincha en el botón de la barra deherramientas y se eligen las opciones adecuadas. Se simplifica la expresión resultante yse obtiene la parcial de f respecto de y en el origen, que es 0.
�
Ejemplo 9.5 Demostrar que la función
f(x, y) =
x y2
x2 + y4, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
tiene todas las derivadas direccionales en el origen.
Solución: Se declara la función en una ventana Declare Function Definition . A continuaciónse escribe el cociente de la expresión (9.1), teniendo en cuenta que en el origen la función vale0, es decir que en una ventana Author Expression se escribe (f(tu,tv)-0)/t. Se simpli-
fica la expresión resultante que proporciona el resultadouv2
t2v4 + u2, se calcula el límite de esta
expresión cuando t tiende a 0 y se obtiene v2/u. Esta expresión carece de sentido si u = 0, peroeste caso corresponde a una derivada direccional que se ha calculado en el ejemplo anterior. Portanto se tiene que la derivada direccional de f en la dirección del vector unitario w = ue1 + ve2
(u2 + v2 = 1) es
f ′((0, 0);w) =
1− u2
u, si u 6= 0
0, si u = 0
�
9.3. Matriz jacobiana
Sea f una función vectorial definida de Rn en Rm, es decir una función de n variables con mcomponentes f1, f2, . . . , fm que son funciones reales de n variables.
f(x1, x2, . . . , xn) =(f1(x1, x2, . . . , xn), f2(x1, x2, . . . , xn), . . . , fm(x1, x2, . . . , xn)
).
Se llama matriz jacobiana de f en el punto (x(0)1 , x
(0)2 , . . . , x
(0)n ) a la matriz de tamaño
m× n
154
9.3. Matriz jacobiana
Jf(x(0)1 , x
(0)2 , . . . , x(0)
n ) =
∂f1(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x1
∂f1(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x2
· · · ∂f1(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂xn
∂f2(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x1
∂f2(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x2
· · · ∂f2(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂xn
...... . . . ...
∂fm(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x1
∂fm(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x2
· · · ∂fm(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂xn
(9.5)
Obsérvese que en la fila i están las parciales de fi y en la columna j las parciales respecto dexj . Si la función es « sencilla» se podrá calcular la matriz jacobiana en un punto cualquiera.
Cuando f es una función real de n variables la matriz jacobiana es una matriz de tamaño1 × n, es decir un vector fila. En este caso particular se le llama gradiente de la función en elpunto
∇f(x(0)1 , x
(0)2 , . . . , x(0)
n ) =[∂f(x
(0)1 , x
(0)2 , . . . , x
(0)n )
∂x1
∂f(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂x2
· · · ∂f(x(0)1 , x
(0)2 , . . . , x
(0)n )
∂xn
](9.6)
9.3.1. Cálculo del gradiente con DERIVEPara calcular el gradiente de una función real de varias variables con DERIVE basta aplicar
la función GRAD a la función cuyo gradiente se desea calcular. No se puede acceder a la funciónGRAD por menús ni por teclas rápidas, por lo que debe usarse una ventana Author Expression .
Ejemplo 9.6 Calcular el gradiente de f(x, y, z, t) = cos(x y z t).
Solución: Para calcular el gradiente de f se siguen los siguientes pasos
Introducción de la función. Se abre la ventana de diálogo Declare Function Definition y enName and Arguments: se escribe f(x,y,z,t) y en Definition: se escribe cos(xy z t). También se puede escribir f(x,y,z, t):=cos(x y z t) en una ventanaAuthor Expression .
Cálculo del gradiente Se abre una ventana Author Expression y se escribe grad(#n), don-de n es el número de la expresión que se acaba de introducir en el punto anterior y sesimplifica el resultado, obteniéndose el siguiente vector fila
155

Práctica 9. Cálculo diferencial de funciones de varias variables
∇f(x, y, z, t) =[−tyz sen(txyz) −txz sen(txyz) −txy sen(txyz) −xyz sen(txyz)
]�
Nótese que a la orden GRAD hay que proporcionarle en primer lugar la función cuyo gradientese desea calcular, y, separada por una coma y entre corchetes, una lista con las variables de lasque depende la función, separadas entre sí por comas. Aunque en el ejemplo 9.6 se ha declaradola función antes de calcular su gradiente, se puede definir la función directamente en la ordenGRAD, tal como se hace en el ejemplo siguiente.
Ejemplo 9.7 Calcular el gradiente de g(x, y) = exy cos(2x− 3y)
Solución: Escribimos en una ventana Author Expression
grad(ê^(xy) cos(2x-3y) , [x, y])
simplificamos el resultado y obtenemos
∇g(x, y) =[yexy cos(2x− 3y)− 2exy sen(2x− 3y) xexy cos(2x− 3y) + 3exy sen(2x− 3y)
]�
En el caso de que la función sea de tres variables, no será necesario explicitar las variables, yaque la función GRAD de DERIVE considera por defecto funciones de tres variables. Este hechose ilustra en el siguiente ejemplo.
Ejemplo 9.8 Calcular el gradiente de h(x, y, z) = x2 y+x y z− 3 y z3 en un punto cualquiera(x, y, z).
Solución: Para calcular el vector gradiente de h, se declara la función Se abre una ventanaAuthor Expression y se escribe
grad(#n)
y simplificamos. El resultado es el vector fila (2 x y + y z, x2 + x z − 3 z3, x y − 9 y z2).�
Para calcular el gradiente en un punto específico, se puede calcular el gradiente en un puntocualquiera, y luego sustituir las variables por sus valores, o bien declarar la función gradiente yutilizarla para calcular su valor en el punto concreto. Si se trata de calcular el valor en muchospuntos es preferible la segunda opción.
Ejemplo 9.9 Calcular el gradiente de la función g del ejemplo 9.8 en los puntos (0, 0, 0) y(1,−2, 1).
156
9.3. Matriz jacobiana
Solución: Como la función es la misma del ejemplo 9.8 se supone que ya se ha calculado elvector gradiente.
Primer método: En la expresión que contiene el gradiente se sustituyen las variables x, y y zpor 0 y se simplifica. Se obtiene el resultado (0, 0, 0). Para el siguiente punto se vuelve a sustituiren la expresión del gradiente x por 1, y por −2 y z por 1, obteniéndose (−6,−1, 16).
Segundo método: Se supone que ya se ha calculado el gradiente. Se declara la funcióngradiente.
Declaración de la función gradiente. En una ventana Author Expression o en una ventana
Declare Function Definition se declara la función gradiente, a la que se puede llamarpor ejemplo grad g, las variables son las mismas que las de g y el valor es el gradiente. Sise ha optado por abrir una ventana Declare Function Definition en la parte Name andArguments: escribimos grad_g (x,y,z) y en Definition: escribimos #3.
Utilización de la función anterior para calcular los valores. Se abre una ventana de Author Expressionescribimos grad_g (0,0,0) y se simplifica la expresión resultante, se obtiene el resul-tado deseado (0, 0, 0). Para el siguiente punto se abre una ventana Author Expressiony se escribe grad_g (1,-2,1), se simplifica la expresión resultante y se obtiene elresultado (−6,−1, 16).
�
9.3.2. Cálculo de la matriz jacobiana con DERIVEDERIVE no calcula directamente la matriz jacobiana de una función vectorial de varias
variables, pero sí puede calcular como ya hemos visto, el gradiente de una función real de variasvariables. Quizá la forma más cómoda de calcular la matriz jacobiana de una función de variasvariables sea calcular los vectores gradientes de sus componentes y luego « juntar» los resultadosde forma adecuada.
Ejemplo 9.10 Calcular la matriz jacobiana de f(x, y, z) = (xy+ yz, x2 + y2 + z2) en un puntocualquiera.
Solución: En este caso f está definida en R3 y toma valores en R2. Tiene por tanto dos funcionescomponentes (son funciones reales de tres variables), son
f1(x, y, z) = x y + y z
f2(x, y, z) = x2 + y2 + z2
Se puede proceder de la siguiente forma
Introducción de las funciones componentes. Se declaran las funciones componentes que po-demos llamar f1 y f2, escribiendo en sendas ventanas Author Expression
157

Práctica 9. Cálculo diferencial de funciones de varias variables
f1(x,y,z):= x y + y zf2(x,y,z):=x^2+y^2+z^2
Cálculo de los gradientes de las funciones componentes. Para ello en una ventana Author Expressionse escribe grad(#1), se simplifica la expresión obtenida, se abre otra y se escribe grad(#2)y nuevamente se simplifica la expresión obtenida. Se obtienen dos expresiones con los gra-dientes de f1 y f2, que suponemos que son las expresiones #4 y #6 respectivamente.
Formar la matriz jacobiana. Para formar la matriz jacobiana hay que formar una matriz cuyasfilas son los gradientes de las funciones componentes en el orden adecuado. Se abre unaventana Author Expression y se escribe [#4, #6] y ya se tiene la matriz jacobiana.
Si se quiere se puede declarar luego la función jacobiana. En este ejemplo es
Jf(x, y, z) =
[y x+ z y
2 x 2 y 2 z
]�
Hay otras posibilidades para formar la matriz jacobiana, pero creemos que la expuesta es lamás sencilla. Hay que calcular los gradientes de las funciones componentes y a partir de ellos for-mar la matriz jacobiana. Este último paso es muy sencillo, sólo hay que escribir [#e1, #e2,, #em] donde la expresión #e1 contiene el gradiente de la primera componente, la expresión#e2 contiene el gradiente de la segunda componente y así sucesivamente. Es importante separarcon comas las distintas expresiones.
9.4. Diferenciabilidad de funciones reales de dos variables
Ya se han visto funciones de dos variables, como la del ejemplo 9.4, que no son continuas enun punto pero que tienen todas las derivadas direccionales en dicho punto. Cuando una funciónno es continua en un punto no tiene sentido decir que es diferenciable en dicho punto. De hechola diferenciabilidad está relacionada con la posibilidad de aproximar la función por otra mássencilla, que en el caso de una función real de dos variables es un plano. En el caso en que lafunción sea diferenciable este plano es el plano tangente que se estudiará en la práctica 10.
Definición 9.1 Una función real f(x, y) de dos variables es diferenciable en el punto (x0, y0) siexiste el gradiente,∇f(x0, y0) y se cumple
lım(x,y)→(x0,y0)
f(x, y)− f(x0, y0)−∇f(x0, y0)
[x− x0
y − y0
]‖(x, y)− (x0, y0)‖
= 0 (9.7)
158

9.4. Diferenciabilidad de funciones reales de dos variables
La condición (9.7) es la que garantiza que f(x, y) puede aproximarse cerca de (x0, y0) por elplano de ecuación
z = f(x0, y0) +∇f(x0, y0)
[x− x0
y − y0
](9.8)
Para comprobar que se verifica la condición (9.7) es necesario calcular la norma de un vectorv = (x, y). En lugar de calcularla directamente mediante la expresión
√x2 + y2, DERIVE
proporciona la orden abs(v). Por ejemplo para calcular ‖(3, 2)‖ deberíamos escribir abs([3,2]).
Veamos un ejemplo de función que no es diferenciable en un punto.
Ejemplo 9.11 Comprobar que la función
f(x, y) =
x y2
x2 + y4si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
del ejemplo 9.4 no es diferenciable en el origen.
Solución: Como ya se ha dicho esta función no es continua en el origen, por tanto no puede serdiferenciable en dicho punto. Como ya sabemos por el ejemplo 9.4 que tiene vector gradiente eneste punto (el gradiente es el vector nulo) debe fallar la segunda condición de diferenciabilidad.
Para comprobarlo vamos a continuar trabajando a partir del ejemplo 9.4. Suponemos pues queya hemos declarado la función y calculado el vector gradiente en el origen que ha resultado ser elvector nulo. Vamos a introducir ahora la expresión que aparece en el límite de la ecuación (9.11).En nuestro caso como f(0, 0) = 0, el gradiente es el vector nulo y el punto es el (0, 0), sólo hemosde escribir f(x,y)/abs([x, y]) en una ventana Author Expression . Si simplificamosla expresión resultante obtenemos
x y2√x2 + y2 (x2 + y4)
. (9.9)
Ahora hay que comprobar que el límite de esta expresión cuando (x, y) → (0, 0) no escero. Como se trata del límite de una función de dos variables hemos de utilizar las técnicas delcapítulo 8. Podemos declarar una función g(x, y) cuyo valor sea la expresión (9.9) y calcular ellímite relativo por rectas de ecuación y = mx. Se comprueba que estos límites no existen ya queno coinciden los límites cuando x tiende a cero por la izquierda y cuando tiende a cero por laderecha. Incluso los relativos dependen de m.
Como el límite de la función (9.9) no es cero, el plano de la ecuación 9.8 no es una buenaaproximación a la función, de hecho en el ejemplo (8.2) se vio que cerca del origen hay puntosen los que la función vale 1/2, por ejemplo los puntos (y2, y). �
Veamos ahora un caso en que sí es diferenciable la función.
Ejemplo 9.12 Comprobar que la función real f(x, y) = x2 y3 es diferenciable en (1, 2).
159

Práctica 9. Cálculo diferencial de funciones de varias variables
Solución:Como se trata de una función real calcularemos el gradiente en lugar de la matriz jacobiana.
Después de introducir la función calcularemos el gradiente, como sólo tenemos dos variables es-cribiremos grad(#1, [x,y]), suponiendo que en la expresión uno es donde hemos definidola función. El resultado es la expresión #3: [2 x y^3, 3 x^2 y^2]
Ahora hemos de introducir la expresión cuyo límite hemos de calcular, Aquí deberíamos
escribir el producto del gradiente, que es un vector fila, por el vector columna[x− 1y − 2
]. Si
lo hacemos así con DERIVE obtenemos como resultado una matriz de tamaño 1 × 1 que nopodremos restar al resto del numerador. Como en este caso el resultado ha de ser un escalarpodemos hacer el producto escalar de ambos vectores. Por eso escribimos este último vectorcomo vector fila (además esto es más cómodo). Hay que recordar que el producto escalar de dosvectores se representa en DERIVE por un punto. Resumiendo tenemos que escribir la expresión
(#1 - #3.[x-1, y-2])/abs([x-1, y-2])
Simplificamos la expresión y obtenemos
x2 y3 − 16 x− 4 (3 y − 8)√x2 − 2 x+ y2 − 4 y + 5
.
Hemos de probar que
lım(x,y)→(1,2)
x2 y3 − 16 x− 4 (3 y − 8)√x2 − 2 x+ y2 − 4 y + 5
= 0.
Al sustituir x por 1 e y por 2 en el denominador éste se anula, por tanto hemos de demostrar queel límite es cero utilizando las técnicas del capítulo 8. Primero sustituimos x por x + 1 e y pory + 2 y simplificamos la expresión resultante. En esta hacemos el cambio a coordenadas polaresx = r cos t, y = r sen t y simplificamos la expresión resultante.
El resultado es una expresión de la forma |r|h(r, t). Con h(r, t) ≤ 72 si suponemos 0 ≤ r ≤1, es decir acotada en un entorno del polo. Además |r| tiende a cero cuando r tiende a cero. Estoconcluye el ejercicio.
Para comprobar que el plano tangente es una buena aproximación de la función cerca de(x, y) podemos calcular su ecuación sustituyendo en (9.8), obtenemos que es z = 8 + 16(x −1) + 12(y − 2), restamos a la función la segunda parte de la ecuación del plano tangente y enla expresión resultante podemos sustituir diferentes valores de x próximos a 1 y de y próximosa 2 y comprobar que la diferencia es pequeña, de hecho es más pequeña cuanto más próximos aestos valores nos encontremos. Un ejemplo de estos valores puede verse en el cuadro 9.1. �
Afortunadamente en la mayoría de los casos no es necesario hacer esta comprobación ya quese tiene el siguiente resultado.
Teorema 9.1 (Condición suficiente de diferenciabilidad) Sea f una función real de dos varia-bles. Si existen las dos derivadas parciales en un entorno del punto (x0, y0) y al menos una deellas es continua en (x0, y0) entonces la función f(x, y) es diferenciable en (x0, y0).
160
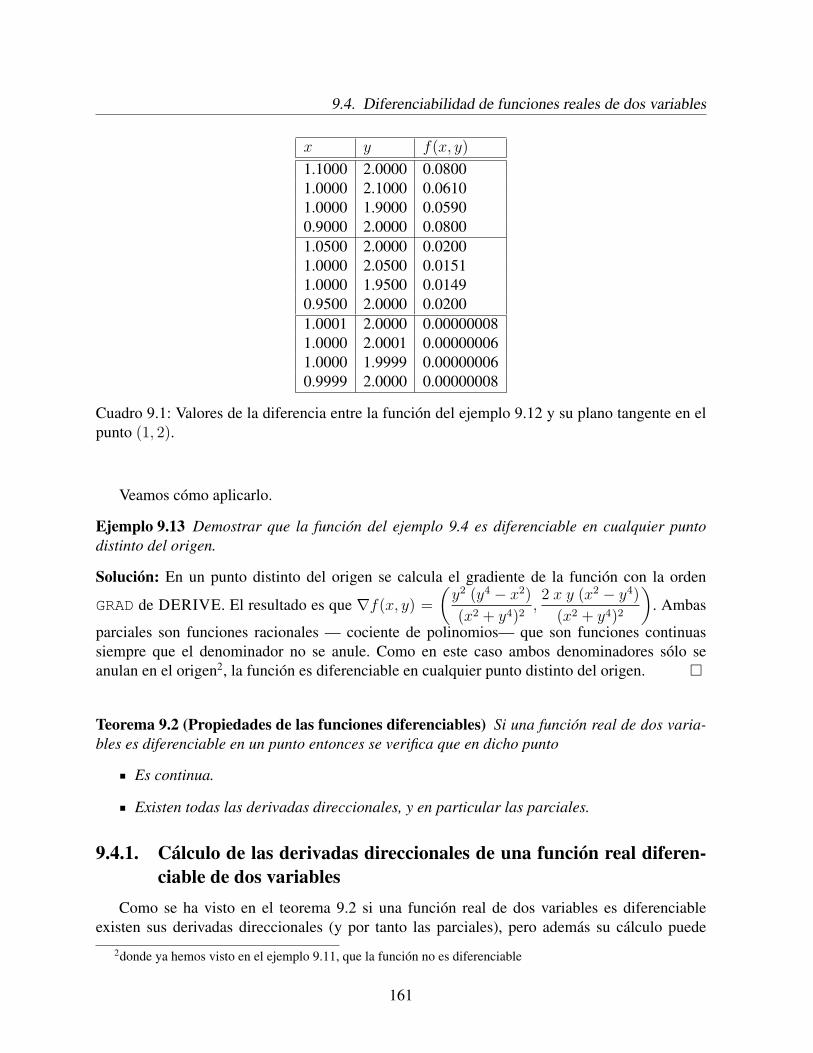
9.4. Diferenciabilidad de funciones reales de dos variables
x y f(x, y)
1.1000 2.0000 0.08001.0000 2.1000 0.06101.0000 1.9000 0.05900.9000 2.0000 0.08001.0500 2.0000 0.02001.0000 2.0500 0.01511.0000 1.9500 0.01490.9500 2.0000 0.02001.0001 2.0000 0.000000081.0000 2.0001 0.000000061.0000 1.9999 0.000000060.9999 2.0000 0.00000008
Cuadro 9.1: Valores de la diferencia entre la función del ejemplo 9.12 y su plano tangente en elpunto (1, 2).
Veamos cómo aplicarlo.
Ejemplo 9.13 Demostrar que la función del ejemplo 9.4 es diferenciable en cualquier puntodistinto del origen.
Solución: En un punto distinto del origen se calcula el gradiente de la función con la orden
GRAD de DERIVE. El resultado es que ∇f(x, y) =
(y2 (y4 − x2)
(x2 + y4)2,2 x y (x2 − y4)
(x2 + y4)2
). Ambas
parciales son funciones racionales — cociente de polinomios— que son funciones continuassiempre que el denominador no se anule. Como en este caso ambos denominadores sólo seanulan en el origen2, la función es diferenciable en cualquier punto distinto del origen. �
Teorema 9.2 (Propiedades de las funciones diferenciables) Si una función real de dos varia-bles es diferenciable en un punto entonces se verifica que en dicho punto
Es continua.
Existen todas las derivadas direccionales, y en particular las parciales.
9.4.1. Cálculo de las derivadas direccionales de una función real diferen-ciable de dos variables
Como se ha visto en el teorema 9.2 si una función real de dos variables es diferenciableexisten sus derivadas direccionales (y por tanto las parciales), pero además su cálculo puede
2donde ya hemos visto en el ejemplo 9.11, que la función no es diferenciable
161

Práctica 9. Cálculo diferencial de funciones de varias variables
hacerse a partir de las derivadas parciales (es decir del gradiente), tal como se muestra en elsiguiente resultado
Teorema 9.3 Si la función real de dos variables f(x, y) es diferenciable en (x0, y0) y v =
[v1
v2
]es un vector unitario entonces
f ′((x0, y0);v) = ∇f(x0, y0)
[v1
v2
]= v1
∂f
∂x(x0, y0) + v2
∂f
∂y(x0, y0) (9.10)
Ejemplo 9.14 Consideremos la función f(x, y) = x2y del ejemplo 9.1. Demostrar que es dife-renciable en cualquier punto y calcular las derivadas direccionales en la dirección del vector
unitario v =
[uw
]en un punto arbitrario (x, y).
Solución: Puesto que las parciales son∂f
∂x= 2xy y
∂f
∂y= x2, que obviamente son continuas en
cualquier punto, se tiene por el teorema 9.1, que la función es diferenciable en todos los puntos.Aplicando la ecuación (9.10) se tiene que
f ′((x, y);v) = 2xy u+ x2 w
Nótese que cuando (x, y) = (0, 0) la derivada direccional vale 0, tal como se vio en elejemplo 9.1. �
9.5. Diferenciabilidad de funciones vectoriales de varias va-riables
En esta sección se generaliza el concepto de diferenciabilidad a funciones vectoriales devarias variables. El concepto es equivalente, reemplazando el gradiente por la matriz jacobiana.
Definición 9.2 La función f es diferenciable en (x(0)1 , x
(0)2 , . . . , x
(0)n ) si se verifican las dos con-
diciones siguientes
Debe existir la matriz jacobiana de f en (x(0)1 , x
(0)2 , . . . , x
(0)n ).
Debe cumplirse que
lımx→x(0)
f(x)− f(x(0))− Jf(x(0))(x− x(0))
‖x− x(0)‖= 0 (9.11)
donde x = (x1, x2, . . . , xn) y x(0) = (x(0)1 , x
(0)2 , . . . , x
(0)n ).
162

9.5. Diferenciabilidad de funciones vectoriales de varias variables
Si f es una función real la matriz jacobiana es en realidad el vector gradiente. La primeracondición sólo exige la existencia de todas las parciales, la segunda es una condición de apro-ximación. Esta segunda condición puede sustituirse por otras equivalentes, por ejemplo puedentomarse normas también en el numerador.
Teorema 9.4 (Condición suficiente de diferenciabilidad, [8]) Si existen las derivadas parcia-les de f en un entorno de (x
(0)1 , x
(0)2 , . . . , x
(0)n ) y todas, excepto quizá una de ellas, son continuas
en dicho punto, entonces f es diferenciable en (x(0)1 , x
(0)2 , . . . , x
(0)n ).
Teorema 9.5 (Propiedades de las funciones diferenciables) Si una función es diferenciable enun punto entonces se verifica que en dicho punto
Es continua.
Existen todas las derivadas direccionales, y en particular las parciales.
9.5.1. Cálculo de las derivadas direccionales de una función diferenciable
Si sabemos que una función es diferenciable el cálculo de las derivadas direccionales se sim-plifica considerablemente, ya que basta multiplicar la matriz jacobiana de la función en el puntode interés por el vector unitario en cuya dirección queremos obtener la derivada direccional, talcomo se refleja en el siguiente teorema.
Teorema 9.6 Si la función f es diferenciable en un punto (x(0)1 , x
(0)2 , . . . , x
(0)n ) y v es un vector
unitario, entonces
f ′((x(0)1 ,x
(0)2 , . . . ,x(0)
n );v) = Jf((x(0)1 ,x
(0)2 , . . . ,x(0)
n )) v (9.12)
Ejemplo 9.15 Sea f(x, y, z, t) = (x y2 − z t, x + y − 2 z + t, 2 x y z t). Calcular la derivadadireccional en el punto (1, 2,−1, 3) en la dirección del vector unitario con la misma direcciónque
v = 2e1 − e2 + 3e3 − e4 =
2−1
3−1
Solución: En primer lugar declaramos las funciones componentes
f1(x, y, z, t) = x y2 − z tf2(x, y, z, t) = x+ y − 2 z + t
f3(x, y, z, t) = 2 x y z t
163

Práctica 9. Cálculo diferencial de funciones de varias variables
A continuación calculamos los gradientes de las componentes utilizando la orden GRAD de DE-RIVE. Se obtiene
∇f1(x, y, z, t) = (y2, 2 x y, −t, −z)∇f2(x, y, z, t) = (1, 1, −2, 1)
∇f3(x, y, z, t) = (2 t y z, 2 t x z, 2 t x y, 2 x y z)
Declaramos y formamos la matriz jacobiana que es
Jf(x, y, z, t) =
y2 2 x y −t −z1 1 −2 1
2 t y z 2 t x z 2 t x y 2 x y z
Calculamos la matriz jacobiana en el punto (1, 2,−1, 3)
Jf(1, 2,−1, 3) =
4 4 −3 11 1 −2 1
−12 −6 12 −4
Por último se introduce el vector en cuya dirección queremos calcular la derivada direccional.
Lo hacemos abriendo la ventana de diálogo Matrix Setup . . . del menú Author Matrix, indi-
cando 4 filas y una columna. Si el vector se introduce usando la ventana de diálogo Vector Setup . . .se obtendrá un vector fila y no se podrá multiplicar por la matriz jacobiana (también se podía ha-ber traspuesto posteriormente), por ello se introduce como matriz con una sola columna. Comoel vector no es unitario hacemos el producto
1
‖v‖Jf(1, 2,−1, 3) · v
y simplificamos la expresión resultante.El resultado es
f ′((1, 2,−1, 3);v
)=
−2√
15
5
−2√
15
522√
15
15
�
9.6. EjerciciosEjercicio 9.1 Demostrar que la función
f(x, y) =
2xy
x2 + y2, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
164

9.6. Ejercicios
tiene derivadas parciales en el origen pero no es continua en dicho punto.
Ejercicio 9.2 Demostrar que no existe
lım(x,y)→(0,0)
x2y2
x2y2 + (x− y)
(Aunque DERIVE da como iguales todos los límites por rectas y = mx, probar con y = xpor separado). Estudiar si la función del ejercicio anterior tiene derivadas direccionales en elorigen.
Ejercicio 9.3 Estudiar la continuidad y existencia de derivadas direccionales de la función
f(x, y) =
3x2y2 − xy3 + 2x3y
x4 + 2x2y2 + y4, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
Ejercicio 9.4 Calcular las derivadas parciales y la derivada en la dirección del vector w =ue1 + ve2 de la función f(x, y) en el origen.
f(x, y) =
x3 − y3
x2 + y2, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
Ejercicio 9.5 Calcular las derivadas parciales y la derivada en la dirección del vector w =ue1 + ve2 de la función f(x, y) en el origen.
f(x, y) =
x2(x+ y)− y2
x2 + y, si y 6= −x2
0, si y = −x2
Ejercicio 9.6 Estudiar la continuidad, la diferenciabilidad y calcular las derivadas parciales enel punto (0, 0) de las siguientes funciones:
a) f(x, y) =
3x2 + y2
x2 + 2y2 + x− y, si x2 + 2y2 + x− y 6= 0
0, si x2 + 2y2 + x− y = 0
b) g(x, y) =
x3 − y3
x2 + y2, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
Ejercicio 9.7 Dada la función h(x, y) =x3 − y3
x2 + y2 + 1, se pide
1. Comprobar que la función es continua y diferenciable en cualquier punto.
165

Práctica 9. Cálculo diferencial de funciones de varias variables
2. Calcular su gradiente en el origen.
3. Calcular las derivadas direccionales en la dirección del vector v = ue1 + we2 utilizandola ecuación (9.10).
4. Comprueba que aplicando la definición de derivada direccional dada en la ecuación (9.1)se obtiene el mismo resultado que en el apartado anterior.
Ejercicio 9.8 Demostrar que la función f(x, y, z) = (x2 y z, x y2 z, x y z2) es diferenciable enel punto (1, 1, 1). Calcular la matriz jacobiana en un punto cualquiera y la derivada direccionalen el punto anterior en una dirección cualquiera.
Ejercicio 9.9 Calcular la matriz jacobiana de f(x, y) = (x+ y, xy, sen xy).
166

Práctica 10
Cálculo diferencial de funciones de variasvariables II
10.1. IntroducciónEn esta práctica se cubren tres aspectos del cálculo diferencial de varias variables: La regla
de la cadena, que permite calcular de forma sencilla la matriz jacobiana de la composición de dosaplicaciones, la ecuación del plano tangente y de la recta normal a una superficie y la fórmula deTaylor.
10.2. Regla de la cadenaPara ilustrar el uso de la regla de la cadena vamos a considerar el siguiente ejemplo:
Ejemplo 10.1 Sean las funciones f y g definidas por:
f(x, y, z) = (ln(x2 + y2 + 1), cos(xz)) (10.1)
y porg(u, v) = (uv, u+ 3v) . (10.2)
Como se observaf : R3 −→ R2 y g : R2 −→ R2 , (10.3)
y por tanto es posible realizar la composición
g ◦ f : R3 −→ R2 .
Se plantea el problema de calcular la jacobiana, J(g ◦ f)(x, y, z), en un punto cualquiera.
El problema se puede resolver de dos formas distintas:
Directa Consiste en calcular la expresión de la composición g ◦ f .
167

Práctica 10. Cálculo diferencial de funciones de varias variables II
Utilizando la regla de la cadena que establece que
J(g ◦ f)(a) = Jg(f(a))Jf(a) (10.4)
Veamos primero cómo se calcularía la matriz jacobiana de forma directa.Solución: Para resolver el ejercicio usando la forma directa en primer lugar se ha de calcular laexpresión de la función compuesta h = g ◦ f
h(x, y, z) = (g ◦ f)(x, y, z) = g [f(x, y, z)]
= g(ln(x2 + y2 + 1)), cos(xz))
= (cos(xz) ln(x2 + y2 + 1), ln(x2 + y2 + 1) + 3 cos(xz))
(10.5)
y después, siguiendo los pasos ya vistos en la sección 9.3, se obtiene que
J(g ◦ f)(x, y, z) =2x cos(xz)
x2 + y2 + 1− z sin(xz) ln(x2 + y2 + 1)
2y cos(xz)
x2 + y2 + 1−x sin(xz) ln(x2 + y2 + 1)
2x
x2 + y2 + 1− 3z sin(xz)
2y
x2 + y2 + 1−3x sin(xz)
�
Solución: Para resolver el ejercicio usando la regla de la cadena hemos de calcular primerolas matrices jacobianas de las funciones f y g, que siguiendo los pasos de 9.3 son:
Jf(x, y, z) =
2x
x2 + y2 + 1
2y
x2 + y2 + 10
−z sin(xz) 0 −x sin(xz)
(10.6)
y
Jg(u, v) =
[v u1 3
](10.7)
sin embargo no es ésta la matriz que necesitamos para poder aplicar la regla de la cadena (10.4),sino Jg[f(x, y, z)] que se obtiene fácilmente de la anterior realizando las sustituciones indicadaspor (u, v) = f(x, y, z) = (ln(x2 + y2 + 1), cos(xz)), es decir
u = ln(x2 + y2 + 1), v = cos(xz) (10.8)
Obteniéndose:
J(g)[f(x, y, z)] =
[cos(xz) ln(x2 + y2 + 1)
1 3
](10.9)
168

10.3. Plano tangente y recta normal
Y ahora, siguiendo la Regla de la Cadena se realiza el producto1:
J(g ◦ f)(x, y, z) =[cos(xz) ln(x2 + y2 + 1)
1 3
] 2x
x2 + y2 + 1
2y
x2 + y2 + 10
−z sin(xz) 0 −x sin(xz)
=
2x cos(xz)
x2 + y2 + 1− z sin(xz) ln(x2 + y2 + 1)
2y cos(xz)
x2 + y2 + 1−x sin(xz) ln(x2 + y2 + 1)
2x
x2 + y2 + 1− 3z sin(xz)
2y
x2 + y2 + 1−3x sin(xz)
�
Ambos resultados son obviamente idénticos. Cabe preguntarse qué método es recomendable.Desde luego usando DERIVE ninguno de los dos entraña ninguna dificultad, el método directoes más natural y no requiere más esfuerzo que usando la regla de la cadena. Sin embargo cuandose han de realizar los cálculos «a mano» es recomendable usar la regla de la cadena.
Cuando se realizan los cálculos «a mano» es necesario calcular las parciales de las funcionescomponentes de h dadas en la expresión (10.5). En general esas expresiones son más complejasque las que hay que derivar para calcular las matrices jacobianas de f y g. Además, en muchoscasos si utilizamos el método directo nos veremos obligados a aplicar varias veces la regla de lacadena para derivar funciones de una variable, tal como pasa en el ejercicio siguiente.
Ejercicio 10.1 Calcular la matriz jacobiana de g ◦ f , siendo
f(x, y) = (ex, log y), g(u, v) = (sinu, cos v)
10.3. Plano tangente y recta normalSi f es una función real de dos variables x e y se puede representar gráficamente por la
superficie S cuyos puntos tiene coordenadas (x, y, f(x, y)). Mientras las dos primeras coorde-nadas representan las variables independientes la altura representa el valor de la función. Si lafunción es diferenciable en un punto (x0, y0) se puede obtener un plano que pasando por el punto(x0, y0, f(x0, y0)) sea una buena aproximación local a la función, de manera análoga a la formaen que la recta tangente es una buena aproximación local a la gráfica de una función de unavariable.
De hecho el plano tangente es el plano formado por todas las rectas tangentes a la gráfica dela superficie en (x0, y0, f(x0, y0)). En efecto, si consideramos un vector u = u1e1+u2e2 unitariode R2 y consideramos el plano Π perpendicular al plano coordenado OXY que pasa por (x0, y0)y tiene la dirección de u, cuyas ecuaciones paramétricas son
x = x0 + tu1, y = y0 + tu2, z = s, t, s ∈ R,1 En DERIVE el producto de matrices se realiza indicando el símbolo «.» (punto corriente).
169

Práctica 10. Cálculo diferencial de funciones de varias variables II
se tiene que la intersección de este plano con la superficie S es una curva plana (por estar con-tenida en Π) a la que se puede trazar la recta tangente en el punto (x0, y0, f(x0, y0)). Las ecua-ciones paramétricas de esta recta se obtienen fácilmente si se tiene en cuenta que ha de pasarpor (x0, y0, f(x0, y0)), y que su pendiente es la derivada direccional en este punto en la direcciónmarcada por u. Es decir, teniendo en cuenta que estamos restringiendo las variables x e y a larecta que pasa por (x0, y0) y tiene como vector director u x
yz
=
x0
y0
f(x0, y0)
+ λ
u1
u2
f ′((x0, y0);u)
y teniendo en cuenta
=
x0
y0
f(x0, y0)
+ λ
u1
10
∂f∂x
(x0, y0)
+ u2
01
∂f∂y
(x0, y0)
=
x0 + λu1
y0 + λu2
f(x0, y0) + λu1∂f∂x
(x0, y0) + λu2∂f∂y
(x0, y0)
Esta es la ecuación de una recta tangente a S. Haciendo variar el vector unitario u obten-
dremos todas las rectas tangentes posibles, en ese caso se pueden considerar λu1 y λu2 comoparámetros y la ecuación anterior es la ecuación paramétrica del lugar geométrico formado portodas las rectas tangentes a S en (x0, y0, f(x0, y0)). Se trata claramente de un plano, además sepuede despejar z fácilmente para obtener la siguiente ecuación del plano tangente
z = f(x0, y0) +∇f(x0, y0)
[x− x0
y − y0
](10.10)
Por su parte la recta normal a la superficie S en (x0, y0) es la recta que pasa por este punto yes perpendicular al plano tangente. Si escribimos la ecuación (10.10) en la forma
[x− x0 y − y0 z − f(x0, y0)
] −∂f∂x
(x0, y0)
−∂f∂y
(x0, y0)
1
= 0
observamos que si (x, y, z) es un punto cualquiera del plano tangente, el primer vector que apa-rece en la expresión es un vector con sus extremos en este plano, y el segundo vector es unvector perpendicular a todos los vectores con origen en (x0, y0, f(x0, y0)) y extremo en el planotangente, por tanto es el vector director de la recta normal, cuya ecuación paramétrica es: x
yz
=
x0
y0
f(x0, y0)
+ λ
−∂f∂x
(x0, y0)
−∂f∂y
(x0, y0)
1
170

10.3. Plano tangente y recta normal
Ejemplo 10.2 Obtener las ecuaciones del plano tangente y de la recta normal a la gráfica de lafunción real de dos variables, f(x, y) = arctan( y
x) en el punto (1, 1, π
4) (donde π
4= arctan 1).
En este caso (x0, y0) = (1, 1) y f(1, 1) = π4.
En primer lugar se calcula el vector gradiente de f . Para ello se puede declarar la funciónf y en una ventana Author Expression introducir la expresión grad(f(x,y),[x,y]) ysimplificar la expresión obtenida, que es
∇f(x, y) =
(− y
x2 + y2
x
x2 + y2
)luego se sustituyen, abriendo una ventana de diálogo Substitute for Variables in #. . . , las va-riables por su valor y se simplifica. El resultado será
∇f(1, 1) =
(−1
2
1
2
)Para calcular el segundo término de la ecuación (10.10) se hace el producto escalar2 de estaexpresión y el vector fila
[x− 1 y − 1
]y sumar f(1, 1)
z =π
4+
(−1
2
1
2
)· (x− 1, y − 1)
y simplificar. Se obtiene así la ecuación del plano tangente:
z = −2x− 2y − π4
Que también se puede escribir como
x− y + 2z =π
2
De esta ecuación se deduce que un vector normal al plano tangente, y por tanto a la superficieestudiada es:
v = (1,−1, 2)
Por tanto la ecuación paramétrica de la recta normal será, teniendo en cuenta que debe pasarpor el punto (1, 1, π
4) y que el vector director es v x
yz
=
11π4
+ λ
1−1
2
2En DERIVE el producto escalar se representa por un punto.
171

Práctica 10. Cálculo diferencial de funciones de varias variables II
La ecuación continua de la recta normal, que se obtiene despejando λ, es
x− 1
1=y − 1
−1=z − π
4
2
También se puede obtener una ecuación implícita a partir de la ecuación paramétrica, despe-jando el parámetro λ en una de las ecuaciones y sustituyendo en las otras dos, o también a partirde las igualdades anteriores. (Dependiendo de la elección realizada pueden obtenerse ecuacionesimplícitas diferentes de la indicada pero que corresponden a la misma recta).
8x− 4z = 8− π8y + 4z = 8 + π
}Es decir que la recta normal es la intersección de los dos planos dados por las ecuaciones
anteriores.
10.4. Polinomio de Taylor
Asumiremos en esta sección que las funciones son «suficientemente regulares» como paraque las derivadas mixtas que aparecen no dependan del orden de derivación.
El polinomio de Taylor de primer grado de una función de dos variables, f(x, y), desarrolladoen el punto (x0, y0) es
P1(x, y) = f(x0, y0) +∂f(x0, y0)
∂x(x− x0) +
∂f(x0, y0)
∂y(y − y0) (10.11)
que no es más que otra forma de escribir la ecuación (10.10) del plano tangente. El polinomio deTaylor de segundo grado desarrollando en el mismo punto es
P2(x, y) =f(x0, y0) +∂f(x0, y0)
∂x(x− x0) +
∂f(x0, y0)
∂y(y − y0)
+1
2!
(∂2f(x0, y0)
∂x2(x− x0)
2 +∂2f(x0, y0)
∂y2(y − y0)
2
+ 2∂2f(x0, y0)
∂x∂y(x− x0)(y − y0)
) (10.12)
que se obtiene añadiendo al polinomio de primer grado los términos correspondientes a las de-rivadas de segundo orden, incluyendo las cruzadas, como se puede derivar primero respecto dela variable x y luego respecto de la variable y, o hacerlo al revés, es decir primero respecto dey y luego respecto de x, y estamos suponiendo que ambas derivadas cruzadas coinciden, hemos
172

10.4. Polinomio de Taylor
incluido en la fórmula sólo una de ellas multiplicada por 2. El polinomio de tercer grado es
P3(x, y) =f(x0, y0) +∂f(x0, y0)
∂x(x− x0) +
∂f(x0, y0)
∂y(y − y0)
+1
2!
(∂2f(x0, y0)
∂x2(x− x0)
2 +∂2f(x0, y0)
∂y2(y − y0)
2
+ 2∂2f(x0, y0)
∂x∂y(x− x0)(y − y0)
)
+1
3!
(∂3f(x0, y0)
∂x3(x− x0)
3 + 3∂3f(x0, y0)
∂x2∂y(x− x0)
2(y − y0)
+ 3∂3f(x0, y0)
∂x∂y2(x− x0)(y − y0)
2 +∂3f(x0, y0)
∂y3(y − y0)
2
)(10.13)
donde los factores 3 por los que se multiplican las parciales cruzadas corresponden a que haytres formas posibles de derivar dos veces respecto de una variable y una vez respecto de la otra.
De esta forma se puede proceder hasta el grado que sea necesario. Por último incluimos elpolinomio de cuarto grado
P4(x, y) =f(x0, y0) +∂f(x0, y0)
∂x(x− x0) +
∂f(x0, y0)
∂y(y − y0)
+1
2!
(∂2f(x0, y0)
∂x2(x− x0)
2 +∂2f(x0, y0)
∂y2(y − y0)
2
+ 2∂2f(x0, y0)
∂x∂y(x− x0)(y − y0)
)
+1
3!
(∂3f(x0, y0)
∂x3(x− x0)
3 + 3∂3f(x0, y0)
∂x2∂y(x− x0)
2(y − y0)
+ 3∂3f(x0, y0)
∂x∂y2(x− x0)(y − y0)
2 +∂3f(x0, y0)
∂y3(y − y0)
2
)
+1
4!
(∂4f(x0, y0)
∂x4(x− x0)
4 + 4∂4f(x0, y0)
∂x3∂y(x− x0)
3(y − y0)
+ 6∂4f(x0, y0)
∂x2∂y2(x− x0)
2(y − y0)2
+ 4∂4f(x0, y0)
∂x∂y3(x− x0)(y − y0)
3 +∂4f(x0, y0)
∂y4(y − y0)
4
)conviene observar que los factores (x−x0) e (y− y0) están elevados precisamente al número deveces que se ha derivado respecto de dicha variable
173

Práctica 10. Cálculo diferencial de funciones de varias variables II
Para funciones de más variables los polinomios de Taylor son similares incluyendo las par-ciales respecto de todas las variables. Por ejemplo el polinomio de segundo grado de una funciónde tres variables es
P2(x, y, z) =f(x0, y0, z0)
+∂f(x0, y0, z0)
∂x(x− x0) +
∂f(x0, y0, z0)
∂y(y − y0) +
∂f(x0, y0, z0)
∂z(z − z0)
+1
2!
(∂2f(x0, y0, z0)
∂x2(x− x0)
2 +∂2f(x0, y0, z0)
∂y2(y − y0)
2
+∂2f(x0, y0, z0)
∂z2(z − z0)
2
+ 2∂2f(x0, y0, z0)
∂x∂y(x− x0)(y − y0) + 2
∂2f(x0, y0, z0)
∂x∂z(x− x0)(z − z0)
+ 2∂2f(x0, y0, z0)
∂y∂z(y − y0)(z − z0)
)
La versión de DERIVE que estamos utilizando no calcula polinomios de Taylor de funciones demás de una variable. Al menos no directamente. Vamos a describir cómo calcularlo distinguiendoque el punto de desarrollo sea o no el origen.
10.4.1. Polinomio de Taylor desarrollado en un punto cualquieraPara calcular el polinomio de Taylor de una función de dos o más variables dearrollando en
un punto cualquiera es necesario calcular las derivadas parciales que se precisen y organizar loscálculos correspondientes. Vamos a hacerlo con cierto detalle en el siguiente ejemplo.
Ejemplo 10.3 Calcular los polinomios de Taylor de primer, segundo y tercer grado de la funciónx log y − y log x, desarrollando en el punto (1, 1).
Solución: En primer lugar introducimos la función como primera expresión, es mejor en estecaso no declarar la función, obtenemos x LN(y) - y LN(x), a continuación realizamos loscálculos de las diferentes partes de la ecuación (10.11). En primer lugar calculamos el valor dela función en el punto de desarrollo. Para ello en la expresión de la función sustituimos x por 1 ey por 1. Simplificamos la expresión resultante y obtenemos (tercera expresión de DERIVE) queel valor de la función en el punto (1, 1) es 0.
A continuación calculamos la parcial de la función respecto de x, simplificamos obteniendoln y − y/x, sustituimos x por 1 e y por 1 y calculamos el valor de la parcial en ese punto queresulta ser −1, y que debe ser la expresión #7. Repetimos los pasos para calcular la parcialrespecto de y, que es x/y− lnx, y cuyo valor en (1, 1) es 1, que debe estar en la expresión #11.
Ya tenemos calculados todos los elementos necesarios para construir el polinomio de primergrado según la fórmula (10.11). En una ventana Author Expression introducimos la expresión
174
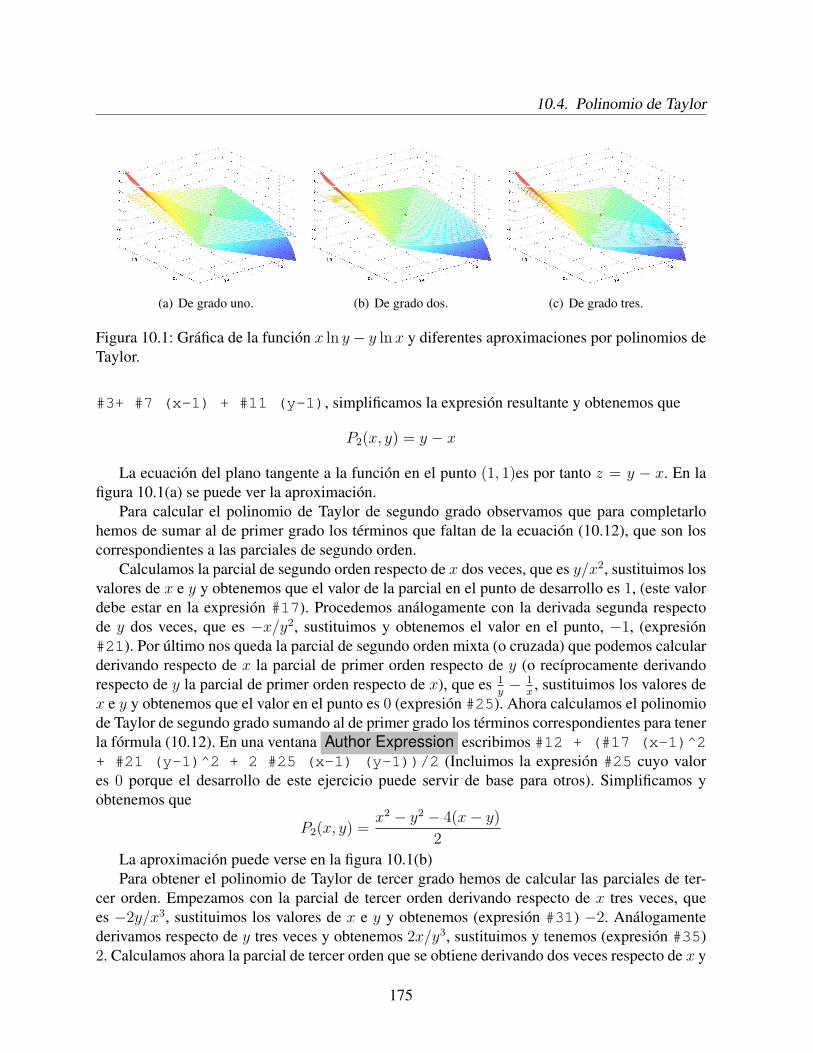
10.4. Polinomio de Taylor
(a) De grado uno. (b) De grado dos. (c) De grado tres.
Figura 10.1: Gráfica de la función x ln y − y lnx y diferentes aproximaciones por polinomios deTaylor.
#3+ #7 (x-1) + #11 (y-1), simplificamos la expresión resultante y obtenemos que
P2(x, y) = y − x
La ecuación del plano tangente a la función en el punto (1, 1)es por tanto z = y − x. En lafigura 10.1(a) se puede ver la aproximación.
Para calcular el polinomio de Taylor de segundo grado observamos que para completarlohemos de sumar al de primer grado los términos que faltan de la ecuación (10.12), que son loscorrespondientes a las parciales de segundo orden.
Calculamos la parcial de segundo orden respecto de x dos veces, que es y/x2, sustituimos losvalores de x e y y obtenemos que el valor de la parcial en el punto de desarrollo es 1, (este valordebe estar en la expresión #17). Procedemos análogamente con la derivada segunda respectode y dos veces, que es −x/y2, sustituimos y obtenemos el valor en el punto, −1, (expresión#21). Por último nos queda la parcial de segundo orden mixta (o cruzada) que podemos calcularderivando respecto de x la parcial de primer orden respecto de y (o recíprocamente derivandorespecto de y la parcial de primer orden respecto de x), que es 1
y− 1
x, sustituimos los valores de
x e y y obtenemos que el valor en el punto es 0 (expresión #25). Ahora calculamos el polinomiode Taylor de segundo grado sumando al de primer grado los términos correspondientes para tenerla fórmula (10.12). En una ventana Author Expression escribimos #12 + (#17 (x-1)^2+ #21 (y-1)^2 + 2 #25 (x-1) (y-1))/2 (Incluimos la expresión #25 cuyo valores 0 porque el desarrollo de este ejercicio puede servir de base para otros). Simplificamos yobtenemos que
P2(x, y) =x2 − y2 − 4(x− y)
2
La aproximación puede verse en la figura 10.1(b)Para obtener el polinomio de Taylor de tercer grado hemos de calcular las parciales de ter-
cer orden. Empezamos con la parcial de tercer orden derivando respecto de x tres veces, quees −2y/x3, sustituimos los valores de x e y y obtenemos (expresión #31) −2. Análogamentederivamos respecto de y tres veces y obtenemos 2x/y3, sustituimos y tenemos (expresión #35)2. Calculamos ahora la parcial de tercer orden que se obtiene derivando dos veces respecto de x y
175

Práctica 10. Cálculo diferencial de funciones de varias variables II
una respecto de y, para ello podemos derivar respecto de y la parcial de segundo orden respecto dex dos veces (expresión #14), obtenemos 1/x2, sustituimos el valor de x y obtenemos (expresión#39), 1. Análogamente, derivando la parcial de segundo orden respecto de y dos veces (expresión#18) respecto de x, se obtiene −1/y2, sustituyendo el valor de y obtenemos (expresión #43),−1. Por último en una ventana Author Expression escribimos #27 +(#31 (x-1)^3 +#35 (y-1)^3 + 3 #39 (x-1)^2 (y-1) + #43 (x-1) (y-1)^2)/6. Donde la ex-presión #27 corresponde al polinomio de Taylor de segundo grado. Después de simplificar yexpandir el resultado simplificado se obtiene
−x3
3+y3
3+ x2 − y2 +
x2y
2− xy2
2− 5x
2+
5y
2
Nota: Hemos reordenado algunos términos para poner de manifiesto la antisimetría de las varia-bles x e y.
En la figura 10.1(c) se observa la aproximación que proporciona este polinomio de tercergrado. �
Ejercicio 10.2 Comprobar que los polinomios de Taylor de primer, segundo y tercer grado dela función x3 sen y − y2 cosx, desarrollando en el punto (π/2, π) son
1. P1(x, y) = π2(x− π/2)− π3
8(y − π)
2. P2(x, y) =π3
2− π4
4− π2(x+ y) +
π3
4(3x+ y) + (2π − 3π2
4)xy y
3. P3(x, y) = −π4(3π2 − 16
128+π3(π2 − 48)
64x+
π3(π2 − 2)
16y−π
2(48− π2)
32x2−π(π3 + 8)
16y2+
3π2
4xy +
π3
48x3 − 3π
2x2y + xy2 +
π3
48y3
respectivamente
10.4.2. Polinomio de Taylor desarrollado en el origenEn este caso se puede calcular el polinomio de una función de dos o más variables con DE-
RIVE utilizando una pequeña estratagema consistente en hallar el polinomio de Taylor respectode una de las variables y luego el polinomio de Taylor respecto de otra variable del polinomiode Taylor anterior y así hasta agotar las variables. El resultado obtenido será un polinomio queno es el polinomio que buscamos, ya que contiene sumandos de sobra que hay que eliminar.Veámoslo en un ejemplo.
Ejemplo 10.4 Hallar el polinomio de Taylor de tercer grado de la función
f(x, y) = x2 sen(x+ y)
en el punto (0, 0).
176
10.4. Polinomio de Taylor
Solución: Para calcular el polinomio se siguen los siguientes pasos:
1. Se calcula el polinomio de Taylor de tercer grado de la función f respecto a la variable x(suponiendo y constante) en torno al punto x = 0. Para ello se deben utilizar los menúsCalculus Taylor series. . . , lo que abrirá una ventana de diálogo Calculus Taylor Series ,en la que se especifica la variable (x), el grado (3) del polinomio y el punto (0). Se obtiene:
x3 cos y + x2 sen y (10.14)
como se observa no es un polinomio en las variables x e y, ya que aparecen las funcionesseno y coseno, pero afectando sólamente a y.
2. Se calcula el polinomio de Taylor de tercer grado de la expresión que acabamos de obtener,es decir de (10.14), pero esta vez respecto a la variable y (suponiendo la x constante) y entorno al punto y = 0.
El resultado será ahora el polinomio:
− x3(y2 − 2)
2− x2y(y2 − 6)
6(10.15)
que es un polinomio de quinto grado, y por tanto NO es el polinomio de Taylor que bus-camos que es de grado 3. Sin embargo lo contiene.
3. Para obtener el polinomio buscado primero efectuamos las operaciones que aparecen en (10.15)abriendo una ventana de diálogo Expand Expression (lo que se puede hacer mediante lasucesión de menús Simplify Expand. . . o bien con la combinación de teclas <Control +E>) y después seleccionaremos todas las variables que aparecen en la ventana ExpansionVariables. . . , obteniendo:
−x3y2
2+ x3 − x2y3
6+ x2y
y de todos estos sumandos nos quedamos con aquellos que tengan grado (suma de losexponentes de las variables) menor o igual a 3. Por tanto el polinomio de Taylor es:
x3 + x2y
�
10.4.3. Polinomios de Taylor en un punto cualquiera. Cambio de variableEs posible utilizar la estratagema descrita en la sección anterior aunque el punto de desarrollo
no sea el origen. Lo único que hay que hacer es un cambio de variables que transforme el puntode desarrollo en el origen. Es decir basta hacer el cambio
X = x− x0
Y = y − y0
177

Práctica 10. Cálculo diferencial de funciones de varias variables II
De esta forma las coordenadas del punto (x0, y0)en el nuevo sistema son (0, 0). Se puedenrealizar los cálculos y luego deshacer el cambio de variables
x = X + x0
y = Y + y0
Ejemplo 10.5 Vamos a calcular el polinomio de Taylor de tercer grado de la función x3 sen y−y2 cosx, que ya se pidió en el ejercicio 10.2.
Solución: Se introduce la función y se sustituyen x por x − π/2 e y por y − π. Se aplica latécnica del apartado anterior calculando primero el polinomio de Taylor de tercer grado respectode x en el punto x/2 y luego el polinomio de Taylor de tercer grado de la expresión resultanterespecto de y en el punto π. De la expresión resultante se anulan los sumandos de grado superiora 3 (sumandos con x3y3, x2y3, ...). En la expresión resultante se sustituyen x por x+ π/2 e y pory + π. �
10.4.4. Aproximaciones mediante polinomios de TaylorLa expresión del error al tomar como aproximación del valor de la función en un punto (x, y)
el valor del polinomio de Taylor de grado n desarrollado en (x0, y0)puede consultarse en textoscomo [8, pág. 112]. A efectos prácticos diremos que el error está determinado por las parcialesde orden n+ 1 multiplicadas por expresiones de la forma (x− x0)
k(y − y0)n+1−k, lo que quiere
decir que si |x− x0| < ε y |y − y0| < ε, y suponiendo que las parciales no son «demasiadograndes» el error es del orden de εn+1.
Ejercicio 10.3 Utilizar los polinomios de Taylor calculados en el ejercicio 10.2 para calcularaproximaciones de (1,57)3 sen 3,14−(3,14)2 cos 1,57 y de (1,5708)3 sen 3,1416−(3,1416)2 cos 1,5708(obtenidas redondeando π a 2 y 4 cifras decimales). Comparar los resultados con el valor exacto.
Sin embargo, cuando se trata de calcular aproximaciones no siempre es buena idea calcularel polinomio de Taylor de dos o más variables. Una alternativa que se puede utilizar a menudo,por ejemplo en el ejercicio anterior, es calcular los polinomios de Taylor de una variable, en elejercicio anterior de sen x y cos y en los puntos π/2 y π respectivamente. Esta aproximaciónrequiere menos esfuerzo (en DERIVE el cálculo del polinomio de Taylor de una variable esautomático y el de dos o más requiere más trabajo, pero también haciendo los cálculos con lápizy papel hay que trabajar menos) y además suele dar resultados más precisos, puesto que al nodesarrollar ciertas partes de la función, x3 e y2 en el ejercicio, no se comete ningún error deaproximación en estas partes de la función.
10.5. EjerciciosEjercicio 10.4 Sean f(x, y, z) = (xyz, log(xyz)) y g(u, v) = (u2 + v2, uv, u − v2). CalcularJ(f ◦ g)(2, 1) y J(g ◦ f)(1, 1, 1).
178

10.5. Ejercicios
Ejercicio 10.5 Demostrar que los planos tangentes a la superficie xyz = m3 forman con losplanos coordenados tetraedros de volumen constante.
Ejercicio 10.6 Calcular el polinomio de Taylor de grado 3 de la función ex+y en el punto (0, 0).Comparar el resultado con el que se obtiene calculando el polinomio de Taylor de grado 3 de lafunción de una variable et y sustituyendo luego t por x+ y.
Ejercicio 10.7 Sea f : R2 → R3 la función f(x, y) = (ex+y, x − y, x2) y sea g : R3 → R2 lafunción g(u, v, w) = (uw, sen(v + w)). Calcular la matriz jacobiana de la función g ◦ f en elpunto (0, 0) utilizando la regla de la cadena.
Ejercicio 10.8 Calcular la ecuación del plano tangente a la gráfica de la función f(x, y) =ex(sen y+1) en el punto (0, π
2, 2). Calcular también el desarrollo de Taylor de grado 3, alrededor
del punto (0, 0) de la misma función.
Ejercicio 10.9 Calcular la ecuación del plano tangente a la gráfica de la función f(x, y) =ln√x2 + y2 en el punto (3, 4, ln 5). Calcular también el desarrollo de Taylor de grado 5, alre-
dedor del punto (0, 0) de la función f(x, y) = cos(x+ y).
Ejercicio 10.10 Calcular la ecuación del plano tangente a la gráfica de la función f(x, y) =cos y arctanx en el punto (1, 0, π
4). Calcular también el desarrollo de Taylor de grado 5, de la
misma función en el origen.
Ejercicio 10.11 Calcular J(g ◦ f)(e, 1, 0) mediante la regla de la cadena, donde:
f : R3 → R3; f(x, y, z) = (x2 + 2yz, y2 + 2zx, x4),
g : R3 → R2; g(u, v, w) = (u+ v, w2 − u)
Ejercicio 10.12 Calcular J(g ◦ f)(0, 0, 0) mediante la regla de la cadena, donde:
f : R3 → R2; f(x, y, z) = (ex + y2, aez + y), a ∈ Rg : R+ × R→ R; g(u, v) = lnu+ v2
Ejercicio 10.13 Calcular el polinomio de Taylor de grado 3 en el origen de f(x, y) = cos(2x+y)ex+y.
179


Práctica 11
Máximos y mínimos de funciones de dosvariables
11.1. IntroducciónEn esta práctica se introduce el análisis de los extremos relativos de las funciones de varias
variables, mediante el empleo de DERIVE y fundamentalmente en el dominio de R2, puestoque suponemos que las posibilidades gráficas en dos y tres dimensiones del programa así comosu utilización para el cálculo pueden ser muy útiles en el estudio de este tema.
El paralelismo entre el estudio de extremos (máximos o mínimos) relativos de funcionesreales de una o varias variables es prácticamente total. Recordemos que si f(x) es una funciónreal de una variable real, x, suficientemente derivable, sus extremos relativos pueden obtenersecalculando en primer lugar los puntos donde la derivada f ′(x) se anula. Si x0 es uno de esospuntos se calcula f ′′(x0) y si es positiva tenemos un mínimo relativo, si es negativa un máximorelativo y si es f ′′(x0) = 0, hay que calcular la derivada tercera, que si es no nula indica queestamos ante un punto de inflexión. Caso de ser nula se puede proceder a calcular f (4)(x0) y,para concretar, se tiene que si
f (1)(x0) = f (2)(x0) = · · · = f (n−1)(x0) = 0 6= f (n)(x0), (n ≥ 2)
entonces, si n es impar x0 es un punto de inflexión. Si n es par entonces
f (n)(x0)
{> 0, x0 es un mínimo relativo< 0, x0 es un máximo relativo
por supuesto pueden darse casos en que todas las derivadas en un punto sean nulas, o que lafunción no sea derivable en el punto en cuestión el número suficiente de veces como para poderaplicar este resultado.
Cuando f es una función real de varias variables el método de trabajo es similar, aunquealgunos pasos son más complicados. En primer lugar para obtener los puntos que son posiblesmáximos o mínimos relativos hay que calcular todas las derivadas parciales, igualarlas a 0 y re-solver el sistema correspondiente. Calcular n derivadas parciales cuesta más tiempo que calcular
181

Práctica 11. Máximos y mínimos de funciones de dos variables
una, pero no tiene más complicaciones que calcular una. Sin embargo resolver un sistema, que engeneral no será lineal, de n ecuaciones con n incógnitas es mucho más complicado que resolveruna sóla ecuación (no lineal) con una única incógnita. Además no existen métodos que se puedanaplicar en general.
Una vez obtenidos los puntos críticos se clasifican utilizando las parciales segundas. Comohabrá n2 hay que recurrir a otro criterio, aunque es muy similar al comentado para funciones deuna variable, en este caso se disponen las parciales segundas de forma adecuada en una matrizy se estudia si es definida positiva, definida negativa o indefinida, propiedades que pueden con-siderarse las análogas al signo. Si este criterio no determina cómo es el punto ya no se recurre aderivadas de mayor orden sino directamente a la definición.
11.2. Definición de máximo y mínimo de una función real devarias variables
Un máximo (mínimo) relativo de una función real es un punto en el que la función tieneun valor mayor (menor) que los puntos situados a su alrededor, o en su entorno utilizando lanomenclatura matemática al uso. No importa el tamaño de ese entorno sino su existencia, de ahíque en la definición se utilize un ε, que puede ser en algunos casos muy pequeño y que en otrosserá muy grande.
Definición 11.1 Una función real f de n variables tiene un máximo relativo en el punto (x(0)1 , x
(0)2 , . . . , x
(0)n )
si existe un ε > 0 tal que
f(x(0)1 , x
(0)2 , . . . , x(0)
n ) ≥ f(x1, x2, . . . , xn),
si∥∥∥(x1, x2, . . . , xn)− (x
(0)1 , x
(0)2 , . . . , x(0)
n )∥∥∥ < ε
(11.1)
La definición de mínimo relativo es análoga sustituyendo la condición (11.1) por
f(x(0)1 , x
(0)2 , . . . , x(0)
n ) ≤ f(x1, x2, . . . , xn),
si∥∥∥(x1, x2, . . . , xn)− (x
(0)1 , x
(0)2 , . . . , x(0)
n )∥∥∥ < ε
(11.2)
Un ejemplo sencillo de mínimo relativo es el origen para la función f(x, y) = x2 + y2, eneste caso f(0, 0) = 0 y si (x, y) 6= (0, 0) f(x, y) > 0, por lo que es un mínimo relativo (queademás es absoluto). En este caso en (11.2) puede ponerse cualquier ε > 0. La función f puedeconsiderarse como la función que a cada punto del plano hace corresponder su radio vector encoordenadas polares ρ = x2+y2. Si consideramos ahora f(x, y) = x2+y2−(x2+y2)2 = ρ−ρ2,tenemos que f(0, 0) = 0 y que si 0 < ρ = x2 + y2 < 1, entonces f(x, y) > 0, por lo que elorigen es también un mínimo relativo de esta función, pero en este caso no es absoluto porquecuando ρ = x2 + y2 > 1, se tiene que f(x, y) < 0. En este caso el ε más grande que se puedetomar en (11.2) es 1, es decir que el entorno más grande en el que el mínimo relativo es máspequeño que sus «vecinos» es el círculo de radio 1.
182

11.3. Puntos críticos
11.3. Puntos críticosEl primer problema que hay que resolver es encontrar un criterio sencillo que permita discri-
minar si un determinado punto puede ser o no máximo o mínimo relativo. En ese sentido puedeser de gran ayuda el siguiente resultado.
Teorema 11.1 Si f es una función real diferenciable en (x(0)1 , x
(0)2 , . . . , x
(0)n ) que tiene un extre-
mo relativo en este punto, entonces sus derivadas parciales en (x(0)1 , x
(0)2 , . . . , x
(0)n ) valen 0. Es
decirDxi
f(x(0)1 , x
(0)2 , . . . , x(0)
n ) = 0, i = 1, 2, . . . , n
Es fácil entender por qué debe ser así. Si (x(0)1 , x
(0)2 , . . . , x
(0)n ) es, por ejemplo, un máximo
relativo, y si restringimos las variables a moverse por una recta que pase por él, también debeser máximo relativo sobre esa recta, por lo que la derivada direccional correspondiente debeanularse. Por otra parte el teorema tiene una restricción que puede ser importante: sólo puedeaplicarse cuando la función es diferenciable, lo que excluye funciones como f(x) = ‖x‖ quetiene un mínimo relativo en el origen, pero que no es diferenciable precisamente en este punto.Otro inconveniente es que en un punto pueden anularse todas las parciales y no ser ni máximo nimínimo como se comprueba en el ejemplo típico:
Ejemplo 11.1 Comprobar que la función f(x, y) = x2 − y2 tiene derivadas parciales nulas enel origen pero que en dicho punto no hay ni máximo ni mínimo relativo.
Solución: Es muy fácil comprobar (con DERIVE o sin él) que las parciales en el origen sonnulas. Para comprobar que en el origen no hay ni máximo ni mínimo basta comprobar quef(0, 0) = 0 y que si ε > 0 entonces
f(ε, 0) < 0 = f(0, 0) < f(0, ε)
este hecho también se aprecia en la figura 11.1 �
Como no todos los puntos en los que las parciales se anulan son máximos o mínimos relativosse utiliza la siguiente nomenclatura.
Definición 11.2 Si todas las derivadas parciales de la función f se anulan en el punto (x(0)1 , x
(0)2 , . . . , x
(0)n )
se dice que (x(0)1 , x
(0)2 , . . . , x
(0)n ) es un punto crítico o punto estacionario de la función f .
Un punto crítico que no es ni máximo ni mínimo relativo se llama punto de silla.
El nombre de estos últimos se debe a la similitud de la gráfica de la función f(x, y) = x2−y2
con la de una silla de montar.Veamos ahora otro ejemplo:
Ejemplo 11.2 Encontrar los máximos y mínimos relativos de la función:
f(x, y) =1
9 + x2 + y2(11.3)
183
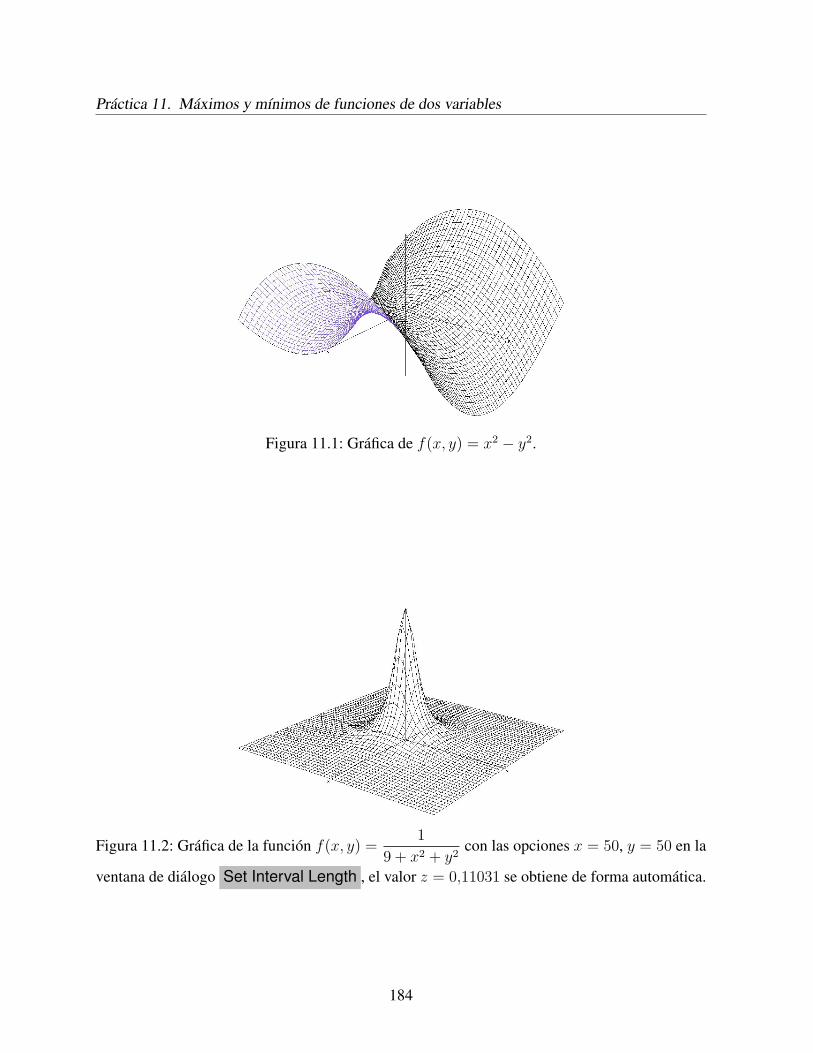
Práctica 11. Máximos y mínimos de funciones de dos variables
Figura 11.1: Gráfica de f(x, y) = x2 − y2.
Figura 11.2: Gráfica de la función f(x, y) =1
9 + x2 + y2con las opciones x = 50, y = 50 en la
ventana de diálogo Set Interval Length , el valor z = 0,11031 se obtiene de forma automática.
184

11.4. Clasificación de los puntos críticos mediante la matriz hessiana
Solución:Como se observa en la representación gráfica de la función en la figura 11.2 tiene un sólo
«pico» que, como se va a comprobar, es un máximo relativo.
Cálculo de las derivadas parciales de la función. Derivando la función dos veces, la primerarespecto de x y la segunda respecto de y (también se puede calcular el gradiente). Lasderivadas parciales son:
∂f
∂x=
2x
(x2 + y2 + 9)2(11.4)
∂f
∂y=
2y
(x2 + y2 + 9)2(11.5)
Obtención de los puntos críticos. Si se igualan a cero (no hace falta hacerlo con DERIVEpues cuando hagamos Solve se entiende ya que están igualadas a 0) ambas parciales seobtiene un sistema de dos ecuaciones cuyas soluciones corresponden a los puntos críticoso puntos estacionarios de la función. El problema es que ambas ecuaciones son no linealesy no hay una técnica de resolución que se pueda aplicar a todos estos sistemas.
En este caso conviene resolver mediante Solve, Algebraically. . . la primera parcial res-pecto a la variable x. El resultado es x = 0, los otros dos resultados proporcionados porDERIVE (x = ∞ y x = −∞) indican que el límite cuando x tiende a esos valores es 0.Esta información, aunque correcta, no es interesante para nuestro problema. Lo importantees tener en cuenta que la primera parcial se anula para x = 0 cualquiera que sea y.
Por su parte la solución de la ecuación correspondiente a la parcial respecto de y produceun resultado análogo. Se anula para y = 0 cualquiera que sea x.
Las soluciones del sistema se obtienen combinando las soluciones de ambas ecuaciones,por tanto el único punto crítico es (0, 0).
Estudio de los valores de la función en un entorno del punto crítico. Una técnica para com-probar que el punto crítico es un máximo es comprobar que en puntos cercanos, pero dis-tintos del punto crítico la función toma valores menores. Fácilmente se ve que f(0, 0) = 1
9,
y además que si (x, y) 6= (0, 0) entonces f(x, y) < f(0, 0), puesto que el denominador au-menta en valor absoluto y el cociente disminuye; es por eso que el punto (0, 0) correspondea un máximo absoluto. (O también es obvio que 9 < 9 + x2 + y2).
�
11.4. Clasificación de los puntos críticos mediante la matrizhessiana
Para clasificar los puntos estacionarios de las funciones de dos o más variables se puederecurrir a las parciales de segundo orden. Como el número de estas es n2 para una función de nvariables hay que considerarlas globalmente en una matriz.
185

Práctica 11. Máximos y mínimos de funciones de dos variables
Definición 11.3 Si f es una función real de n variables (x1, x2, . . . , xn), que admite derivadasparciales de segundo orden en (x
(0)1 , x
(0)2 , . . . , x
(0)n ) se llama matriz hessiana de f en (x
(0)1 , x
(0)2 , . . . , x
(0)n )
a la matriz Hf((x(0)1 , x
(0)2 , . . . , x
(0)n )) = [Di,j((x
(0)1 , x
(0)2 , . . . , x
(0)n ))].
Por tanto si f tiene n variables se trata de una matriz n×n que en la clasificación de los puntosestacionarios desempeña un papel similar al de la derivada segunda en el caso de funciones deuna sóla variable. El siguiente teorema establece cómo clasificar el punto crítico
Teorema 11.2 Sea f una función real que tiene derivadas parciales de segundo orden continuasen un entorno del punto estacionario (x
(0)1 , x
(0)2 , . . . , x
(0)n ), entonces
1. Si Hf(x(0)1 , x
(0)2 , . . . , x
(0)n ) es definida positiva, entonces (x
(0)1 , x
(0)2 , . . . , x
(0)n ) es un mínimo
relativo de f .
2. Si Hf(x(0)1 , x
(0)2 , . . . , x
(0)n ) es definida negativa, entonces (x
(0)1 , x
(0)2 , . . . , x
(0)n ) es un máximo
relativo de f .
3. Si Hf(x(0)1 , x
(0)2 , . . . , x
(0)n ) es indefinida, entonces (x
(0)1 , x
(0)2 , . . . , x
(0)n ) es un punto de silla
de f .
De las condiciones del teorema se deduce que Hf(x(0)1 , x
(0)2 , . . . , x
(0)n ) es simétrica y por tanto,
diagonalizable1.Hemos de ver ahora qué quiere decir que una matriz simétrica sea definida positiva, negativa,
. . . . El lugar más adecuado para ello es un texto de Álgebra Lineal, aquí resumiremos algunasde las condiciones que pueden utilizarse, para ello hace falta introducir el concepto de submatrizprincipal, que es aquella que se obtiene conservando de la matriz original sólo las i primeras filasy las i primeras columnas, hay por tanto n que son.
[a11
],
[a11 a12
a21 a22
],
a11 a12 a13
a21 a22 a23
a31 a32 a33
, . . . , ATeorema 11.3 Una matriz simétrica es definida positiva si cumple alguna de las condicionessiguientes:
1. Si todos los determinantes de sus submatrices principales son positivos.
2. Si todos sus valores propios son positivos.
Teorema 11.4 Una matriz simétrica es definida negativa si cumple alguna de las condicionessiguientes:
1Una matriz A es diagonalizable si existe una matriz invertible V tal que D = V −1AV es una matriz diagonal,es decir con todos los elementos que no están en la diagonal principal nulos. Los elementos de la diagonal principalde D se llaman valores propios de A.
186

11.4. Clasificación de los puntos críticos mediante la matriz hessiana
1. Si los determinantes de sus submatrices principales de orden impar son negativos y los deorden par positivos.
2. Si todos sus valores propios son negativos.
Teorema 11.5 Una matriz simétrica es indefinida si cumple alguna de las condiciones siguien-tes:
1. Si un determinante de orden impar es positivo o uno de orden par negativo.
2. Si tiene al menos un valor propio positivo y al menos uno negativo.
Desafortunadamente no son estas las únicas posibilidades que pueden darse ya que una matrizpuede tener como valor propio al número 0 y tener los demás positivos (o negativos), entonces noserá ni definida positiva (negativa) —no todos los valores propios son positivos (negativos)— niindefinida —no tiene valor propio negativo (positivo)—. En este caso la matriz se llama semide-finida positiva (negativa) y cuando la matriz hessiana de una función es semidefinida, positivao negativa, no sirve para decidir cómo es el punto estacionario.
11.4.1. Funciones de dos variables
Cuando f tiene dos variables, su matriz hessiana es 2 × 2 y sólo tiene dos valores propios(o uno repetido), por lo que no puede tener el valor propio 0, uno positivo y otro negativo, quecorrespondería a una matriz indefinida. En el caso 2 × 2 si el cero es valor propio la matriz essemidefinida (positiva o negativa), por tanto si el cero es valor propio la matriz hessiana no sirvepara clasificar el punto estacionario. Un conocido resultado de Álgebra Lineal establece que unamatriz tiene 0 como valor propio si, y sólo si no es invertible y por tanto, si y sólo si su determi-nante es nulo. Podemos utilizar por tanto los determinantes de la siguiente forma. Supongamosque H es la matriz hessiana de una función f de dos variables en un punto estacionario (x0, y0).Entonces si
detH
> 0
{h11 > 0 (x0, y0) es un mínimo relativoh11 < 0 (x0, y0) es un máximo relativo
< 0 (x0, y0) es un punto de silla
= 0 no se puede determinar mediante este criterio
Ejemplo 11.3 Obtener los máximos y mínimos relativos de la función:
f(x, y) = − y
9 + x2 + y2(11.6)
Solución:
187
Práctica 11. Máximos y mínimos de funciones de dos variables
Obtención de las parciales . Como hay que resolver el sistema posteriormente quizá conven-ga calcular las derivadas parciales por separado en lugar de utilizar la orden GRAD. Lasparciales son:
∂f
∂x=
2xy
(x2 + y2 + 9)2
∂f
∂y= − x2 − y2 + 9
(x2 + y2 + 9)2
Obtención de los puntos estacionarios Hay que resolver el sistema obtenido igualando las par-ciales a cero, es decir
2xy
(x2 + y2 + 9)2= 0 (11.7)
− x2 − y2 + 9
(x2 + y2 + 9)2= 0 (11.8)
La derivada respecto de x se anula cuando x = 0 y también cuando y = 0 tal como seobtiene resolviendo la (11.7) respecto de x y respecto de y con DERIVE.
Sustituyendo x = 0 en la expresión correspondiente a la derivada respecto de y y simpli-
ficando se obtiene9− y2
(y2 + 9)2, y resolviendo esta expresión se obtiene y = ±3. En cambio
cuando se sustituye y por 0 en (11.8) se obtiene1
x2 + 9que no se anula nunca como se
comprueba fácilmente resolviendo con DERIVE.
Se obtienen por tanto dos puntos críticos que son:
P1 = (0, 3) y P2 = (0,−3) (11.9)
Obtención de la matriz hessiana. La matriz hessiana puede obtenerse en DERIVE calculandolas parciales de segundo orden y poniéndolas en el lugar adecuado. Pero lo más sencilloes utilizar la orden GRAD dos veces, ya que el gradiente del gradiente proporcionará lamatriz hessiana. Suponiendo que la función está introducida en la expresión #1 escribi-ríamos grad(grad(#1,[x,y]),[x,y]), o bien calculamos en dos pasos, primeroel gradiente de la función y luego el gradiente de la expresión obtenida. Recordemos queDERIVE, salvo que se indique lo contrario como se ha hecho aquí, considera que lasvariables para calcular el gradiente son x, y y z. Se obtiene que
Hf(x, y) =
−2y(3x2 − y2 − 9)
(x2 + y2 + 9)3
2x(x2 − 3(y2 − 3))
(x2 + y2 + 9)3
2x(x2 − 3(y2 − 3))
(x2 + y2 + 9)3
2y(3x2 − y2 + 27)
(9 + x2 + y2)3
(11.10)
Cuando se tienen varios puntos estacionarios es más cómodo declarar una función de lasvariables x e y cuyo valor sea la matriz hessiana que sustituir cada vez.
188

11.4. Clasificación de los puntos críticos mediante la matriz hessiana
Figura 11.3: Gráfica de la función f(x, y) = xy2 + x2y − xy.
Clasificación del punto estacionario P1 = (0, 3). La matriz hessiana en este punto es
Hf(0, 3) =
− 1
540
0 − 1
54
que es una matriz diagonal, siendo por tanto sus valores propios los elementos de la dia-gonal principal, ambos negativos. Esto indica que (0, 3) es un máximo relativo.
Clasificación del punto estacionario P2 = (0,−3). La matriz hessiana en este punto es
Hf(0,−3) =
1
540
01
54
que también es una matriz diagonal, pero en este caso sus valores propios que son loselementos de la diagonal principal, son ambos positivos. Esto indica que (0,−3) es unmínimo relativo.
�
Ejemplo 11.4 Obtener y clasificar los puntos estacionarios de:
f(x, y) = xy2 + x2y − xy (11.11)
Solución: Como se observa en la gráfica 11.3 existen diversos puntos donde la función podríatener máximos y mínimos relativos, y puntos de silla.
189

Práctica 11. Máximos y mínimos de funciones de dos variables
Cálculo del gradiente de la función. Las parciales son:
∂f
∂x= 2xy + y2 − y (11.12)
∂f
∂y= x2 + x(2y − 1) (11.13)
Determinación de los puntos críticos. Esta vez para resolver el sistema de ecuaciones convie-ne resolver la ecuación deducida de la parcial respecto de x respecto de la variable y yaque es la más sencilla.
Al resolver la primera ecuación respecto de y se obtiene que esta parcial se anula cuandoy = 0 y cuando y = 1− 2x.
Se sustituye y por 0 en la segunda parcial y se obtiene x2− x, se resuelve y se tiene que seanula cuando x = 0 y cuando x = 1. Se tienen por tanto dos puntos estacionarios (0, 0) y(1, 0).
A continuación se sustituye y por 1 − 2x en la parcial respecto de y y se obtiene despuésde simplificar, x(1 − 3x), se resuelve y se obtiene x = 0 y x = 1/3. Ahora se sustituyenestos valores de x en y = 1 − 2x y se obtienen dos nuevos puntos estacionarios (0, 1) y(1/3, 1/3).
Los puntos críticos son: (0, 0), (1, 0), (0, 1) y (1/3, 1/3)
Cálculo de la matriz hessiana. Escribiendo grad(grad(f(x,y),[x,y]),[x,y]) obte-nemos la matriz hessiana
Hf(x, y) =
[2y 2x+ 2y − 1
2x+ 2y − 1 2x
]
Clasificación del punto crítico (0, 0). La matriz hessiana en este punto es( −1 0
0 −1
), para clasi-
ficar el punto podemos calcular su determinante con la orden det cuyo valor es −1 y portanto se trata de un punto de silla. Alternativamente pueden calcularse los valores propiosde la matriz utilizando la orden eigenvalues que proporciona los valores 1 y −1, quetienen signos distintos, indicando que se trata de un punto de silla.
Clasificación del punto crítico (1, 0). La matriz hessiana en este punto es(
0 11 2
), su determi-
nante es −1 y por tanto se trata de un punto de silla. Alternativamente los valores propiosson√
2 + 1 y 1 −√
2, que tienen signos distintos, indicando también que se trata de unpunto de silla.
Clasificación del punto crítico (0, 1). La matriz hessiana en este punto es(
2 11 0
), su determi-
nante es −1 y por tanto se trata de un punto de silla. Alternativamente los valores propiosson√
2 + 1 y 1 −√
2, que tienen signos distintos, indicando también que se trata de unpunto de silla.
190

11.4. Clasificación de los puntos críticos mediante la matriz hessiana
Clasificación del punto crítico (1/3, 1/3). La matriz hessiana en este punto es(
23
13
13
23
), su de-
terminante es 1/3 y como el elemento h11 es positivo se trata de un mínimo relativo. Al-ternativamente los valores propios son 1 y 1/3, ambos positivos, indicando también que setrata de un mínimo relativo.
�
Ejemplo 11.5 Estudiar los puntos estacionarios de
f(x, y) = 7x2 − y3 (11.14)
Solución:
Cálculo de las parciales∂f
∂x= 14x,
∂f
∂y= −3y2 (11.15)
Obtención de los puntos críticos El único punto crítico es, obviamente el (0, 0).
Cálculo de la matriz hessiana Como:
∂2f
∂x∂y=∂2f
∂y2(0, 0) = 0 , (11.16)
se tiene que el determinante hessiano es nulo, y el criterio usual no puede emplearse. Habráque hacer pues un estudio analítico de la función en los alrededores del punto crítico.
Puesto que f(0, 0) = 0, si y < 0 entonces:
f(x, y) = 7x2 − y3 = 7x2 + |y3| > 0 = f(0, 0) (11.17)
Sin embargo si tomamos x = 0 e y > 0, entonces sucede lo contrario:
f(x, y) = 7x2 − y3 = −y3 = −|y3| < 0 = f(0, 0) (11.18)
Con lo cual el punto estacionario no es máximo ni es mínimo, es un punto de silla.
�
191

Práctica 11. Máximos y mínimos de funciones de dos variables
11.5. ResumenHemos visto en esta práctica el estudio de los puntos críticos de funciones reales de dos
variables, pero el procedimiento para funciones reales de cualquier número de variables es elmismo y se resume en dos pasos
1. Obtención de los puntos estacionarios. Para obtenerlos hay que calcular todas las parcia-les de primer orden y calcular los puntos donde se anulan todas ellas.
2. Clasificación de los puntos estacionarios. Hay que formar la matriz hessiana de cadauno de los puntos estacionarios y ver si es definida positiva, negativa o indefinida. Si nopuede aplicarse este criterio hay que estudiar la función y ver que valores toma en lasproximidades del punto estacionario.
Ejemplo 11.6 Obtener y clasificar los puntos estacionarios de la función f(x, y, z) = xy+xz+yz.
Solución: Se tiene que
∂f
∂x= y + z,
∂f
∂y= x+ z
∂f
∂z= y + z.
Como el sistema es lineal se puede resolver utilizando la sucesión de órdenes Solve System. . . .Se obtiene que el único punto crítico es el origen, es decir (0, 0, 0). Se obtiene la matriz hessianaque es 0 1 1
1 0 11 1 0
y se calculan sus valores propios que resultan ser −1 y 2, por tanto la matriz es indefinida y elpunto estacionario es un punto de silla. �
11.6. EjerciciosEjercicio 11.1 Clasificar los puntos críticos de f(x, y) = y3 − 2x2 + xy.
Ejercicio 11.2 Clasificar los puntos críticos de f(x, y) = 2x2 + 2xy + y3.
Ejercicio 11.3 Clasificar los puntos críticos de f(x, y) = y3 + x2 − 4xy2.
Ejercicio 11.4 Clasificar los puntos críticos de f(x, y) = −x3 + 4xy − 2y2 + 1.
Ejercicio 11.5 Clasificar los puntos críticos de f(x, y) = y3 − x3 − 3x2y + x2.
Ejercicio 11.6 Clasificar los puntos críticos de f(x, y) = y3 − 3yx2 − 3y2 − 3x2 + 1.
Ejercicio 11.7 Calcular y clasificar los puntos críticos de f(x, y) = x3 + 3xy2 − 15x− 12y.
192
Práctica 12
Extremos condicionados. Multiplicadoresde Lagrange
12.1. Introducción
En esta práctica se estudia el problema encontrar el maximo o mínimo de una función de va-rias variables sujeta a ciertas restricciones o condiciones mediante el método de multiplicadoresde Lagrange. Las restricciones han de expresarse en forma de igualdades.
12.2. Extremos condicionados. Multiplicadores de Lagrange
Sea f : D −→ R donde D es un subconjunto de Rn una función real de n variables.Supongamos que se desea hallar los extremos relativos de f en un subconjunto de D que puededescribirse mediante las m ecuaciones (m < n)
g1(x1, x2, . . . , xn) = 0
g2(x1, x2, . . . , xn) = 0
...gm(x1, x2, . . . , xn) = 0
Lagrange demostró que si f , g1, g2, . . . , gm tienen derivadas parciales continuas respecto atodas las variables los extremos buscados son también extremos de la función de m+n variables
W (x1, x2, . . . , xn, λ1, . . . , λm) = f(x1, x2, . . . , xn) +m∑
i=1
λigi(x1, x2, . . . , xn).
Las variables auxiliares λ1, λ2, . . . , λm se llaman multiplicadores de Lagrange. Para encontrarlos extremos relativos se procede de la siguiente forma:
193

Práctica 12. Extremos condicionados. Multiplicadores de Lagrange
1. se forma la función
W (x1, x2, . . . , xn, λ1, . . . , λm) = f(x1, x2, . . . , xn) +m∑
i=1
λigi(x1, x2, . . . , xn).
2. se calculan las primeras derivadas de W (x1, x2, . . . , xn, λ1, . . . , λm) respecto de las varia-bles x1, x2, . . . xn, λ1, . . . , λm , es decir,
∂W
∂x1
(x1, x2, . . . , xn, λ1, . . . , λm) =∂f
∂x1
(x1, x2, . . . , xn) +m∑
i=1
λi∂gi
∂x1
(x1, x2, . . . , xn)
...
∂W
∂xn
(x1, x2, . . . , xn, λ1, . . . , λm) =∂f
∂xn
(x1, x2, . . . , xn) +m∑
i=1
λi∂gi
∂xn
(x1, x2, . . . , xn)
∂W
∂λ1
(x1, x2, . . . , xn, λ1, . . . , λm) = g1(x1, x2, . . . , xn)
...∂W
∂λm
(x1, x2, . . . , xn, λ1, . . . , λm) = gm(x1, x2, . . . , xn)
3. se igualan a 0 las derivadas parciales y se obtienen los puntos críticos solución del siguientesistema de ecuaciones:
∂f
∂x1
(x1, x2, . . . , xn) +m∑
i=1
λi∂gi
∂x1
(x1, x2, . . . , xn) = 0
...
∂f
∂xn
(x1, x2, . . . , xn) +m∑
i=1
λi∂gi
∂xn
(x1, x2, . . . , xn) = 0
g1(x1, x2, . . . , xn) = 0
...gm(x1, x2, . . . , xn) = 0
El sistema de ecuaciones que aparece en el método de multiplicadores de Lagrange no es,en general, un sistema lineal, y por tanto su resolución exige cierta imaginación.
4. se evalúa la función f en cada punto crítico encontrado en el punto 3. El mayor de elloscorresponde al máximo y el menor al mínimo.
194

12.2. Extremos condicionados. Multiplicadores de Lagrange
Ejemplo 12.1 Calcula el rectángulo de area máxima inscrito en la elipse de ecuación
x2
32+y2
42= 1 .
(x,y)
�
�
Figura 12.1: Rectángulo inscrito en la elipse. Punto (x, y) en el primer cuadrante.
Solución: Sea (x, y) el vértice del rectángulo sobre la elipse situado en el primer cuadran-te (ver figura 12.1). Este vértice determina un rectángulo de dimensiones 2x por 2y. El areadel rectángulo es por tanto 4xy. El problema consiste en determinar el máximo de la funciónf(x, y) = 4xy con x > 0, y > 0, bajo la condición
g(x, y) =x2
32+y2
42− 1 = 0 .
Se introduce la función auxiliar,
#1 : W(x, y, λ) := 4xy + λ
(x2
9+
y2
16− 1
)Hay que tener en cuenta que x e y son variables positivas. Para ello se abre una ventana de diá-
logo Declare Variable Domain , usando la sucesión de comandos Declare Variable Domain,y se introduce la variable en cuestión, eligiendo el botón Declare (o se acepta con <ENTER> ).Se abrirá otra ventana de diálogo con el mismo nombre donde se elige Real y Positive. Apare-cerán las expresiones
#2 : x :∈ Real(0,∞)
#3 : y :∈ Real(0,∞)
195

Práctica 12. Extremos condicionados. Multiplicadores de Lagrange
Se calculan las derivadas parciales respecto de las variables x, y y λ.
#4 :d
dx
[W(x, y, λ) := 4xy + λ
(x2
9+
y2
16− 1
)]Simplify
#5 :2(λx + 18y)
9
#6 :d
dy
[W(x, y, λ) := 4xy + λ
(x2
9+
y2
16− 1
)]Simplify
#7 :32x + λy
8
#8 :d
dλ
[W(x, y, λ) := 4xy + λ
(x2
9+
y2
16− 1
)]Simplify
#9 :x2
9+
y2
16− 1
Igualando la derivada respecto de la variable x a 0 y resolviendo respecto de λ se obtiene
#10 : λ = −18yx
Sustituyendo λ en la derivada respecto de y, ecuación #7, y resolviendo respecto de x ytomando la solución positiva se obtiene
#11 :
32x +
(−18y
x
)y
8Simplify
#12 :16x2 − 9y2
4xSolve Variable: x
#13 : x =3y
4
Ahora se sustituye x =3y
4en la ecuación de la restricción, expresión #9, y se resuelve para
la variable y, tomando la solución positiva.
#14 :
(3y
4
)2
9+
y2
16− 1 Simplify
#15 :y2
8− 1 Solve Variable: y
196

12.2. Extremos condicionados. Multiplicadores de Lagrange
#16 : y = 2√2
El valor de x se obtiene sustituyendo el valor de y en la expresión #13.
#17 : x =3(2√2)
4Simplify
#18 : x =3√2
Para los valores de x e y hallados, el area del rectángulo inscrito es
#19 : 43√22√2 Simplify
#20 : 24 �
Ejemplo 12.2 La longitud L de una varilla viene dada por L = l + x+ y + 2z, donde l es unaconstante, x la presión, y la humedad y z la temperatura. Las condiciones de trabajo hacen quelas variables están sujetas a las restricciones 3x2 + y2 = 12 y x + y + z = 2. Determinar losextremos relativos de la longitud L.
Solución: Procediendo de la misma forma que en el ejemplo anterior, se introduce la funciónauxiliar
W (x, y, z, λ, µ) = l + x+ y + 2z + λ(3x2 + y2 − 12) + µ(x+ y + z − 2),
cuyas derivadas parciales son
∂W
∂x= 1 + 6λx+ µ
∂W
∂y= 1 + 2λy + µ
∂W
∂z= 2 + µ
∂W
∂λ= 3x2 + y2 − 12
∂W
∂µ= x+ y + z − 2
Hay que resolver el sistema
1 + 6λx+ µ = 0
1 + 2λy + µ = 0
2 + µ = 0
3x2 + y2 − 12 = 0
x+ y + z − 2 = 0
197
Práctica 12. Extremos condicionados. Multiplicadores de Lagrange
De la tercera ecuación se obtiene µ = −2. Sustituyendo en las dos primeras se deduce que λ 6= 0,y por tanto 3x = y. Sustituyendo este resultado en las dos últimas ecuaciones se obtienen lospuntos críticos (1, 3,−2) y (−1,−3, 6), a los que corresponden los valores de la función L = ly L = l + 8 respectivamente, que son por tanto mínimo y máximo. �
12.3. EjerciciosEjercicio 12.1 Dividir el número 15 en tres sumandos cuyo producto sea máximo.
Ejercicio 12.2 Entre todos los paralelepípedos de volumen dado V existe uno de superficie totalmenor. Determinar sus dimensiones.
Ejercicio 12.3 Determinar los puntos de la elipse x2/a2 + y2/b2 = 1 cuya distancia al punto(0, 0) es mínima o máxima, siendo a > b > 0.
Ejercicio 12.4 Hallar el plano que pasa por el punto (1, 2, 3) y determina junto con los planoscoordenados un tetraedro de volumen mínimo.
Ejercicio 12.5 Entre todos los triángulos de perímetro 90 u.m. hallar el de área máxima. (Suge-rencia: utilizar la fórmula de Herón que relaciona el área de un triángulo con su semiperímetro.
Si los lados del triángulo miden x, y, z u.m, el semiperímetro del triángulo es p =x+ y + z
2.
Entonces el área viene dada por√p(p− x)(p− y)(p− z)).
198

Apéndice A
Funciones predefinidas en DERIVE
A.1. Funciones potencialesLas funciones potenciales son aquellas en las que la variable independiente se eleva a un
número real (o complejo) cualquiera, es decir son las funciones
xα, α ∈ R(C)
Recordemos que la definición de estas funciones se hace en función del subconjunto numé-rico al que pertenece el exponente α:
Si α ∈ N se define como xn =
(n)︷ ︸︸ ︷xx · · ·x
Si α = p/q ∈ Q+ se define xp/q como un número y tal que yq = xp (también se puedeescribir q
√xp).
Si α ∈ R+ ∼ Q, se define mediante un paso al límite. Se toma cualquier sucesión denúmeros racionales {qn} que converja a α, y se calculan las potencias correspondientes yel límite de los resultados, es decir
xα = lımn→∞
xqn , ∀ {qn}∞n=1 ⊂ Q, lımn→∞
qn = α (A.1)
Si α < 0 se define xα = 1/x−α
Si α ∈ C ???
Como ya se ha visto en DERIVE se escriben introduciendo x^α, a excepción de la raízcuadrada que también se puede escribir como SQRT(x) o con el símbolo de la raíz cuadrada dela paleta de símbolos de la ventana de autor,
√x . Estas funciones comparten las propiedades de
simplificación con las exponenciales, véase la subsección A.2.1.
199

Apéndice A. Funciones predefinidas en DERIVE
A.2. Funciones exponenciales
La función exponencial de base a > 0, a 6= 1 es:
f(x) = ax, x ∈ R
Estas funciones se escriben en DERIVE a^x. Ahora bien, si a = e se puede utilizar EXP(x)que se simplifica a e^x.
A.2.1. Simplificación de las funciones exponenciales
Las funciones exponenciales tienen las propiedades
a(x+y) = axay (A.2)
yatx = (ax)t (A.3)
que pueden utilizarse a conveniencia en cualquiera de las dos direcciones. Para un ser humanopuede ser más o menos fácil decidir cuál de las dos es la más conveniente, pero a DERIVE hayque indicarle en qué dirección queremos que se apliquen las igualdades cuando se simplifica unaexpresión.
La dirección en que se aplican estas igualdades está determinada por la opción elegida enel apartado Exponential de la ventana de diálogo Simplification Options de la secuenciade menús Declare, Algebra State, Simplification. . . (ver 1.9 en la página 16). El cuadro A.1indica como se realizan las simplificaciones
a(x+y) = axay atx = (ax)t
Auto a(x+y) ← axay atx → (ax)t
Collect a(x+y) ← axay atx ← (ax)t
Expand a(x+y) → axay atx → (ax)t
Cuadro A.1: Funcionamiento de las opciones de simplificación de las funciones exponenciales.
A.3. Funciones logarítmicas
DERIVE tiene definidas dos funciones logarítmicas: LN y LOG, o ln y log respectivamenteen la notación matemática habitual. La primera es el logaritmo natural o neperiano, de base e, lasegunda permite elegir la base.
Así LN es la función inversa de la exponencial natural de base e, es decir eln x = x y ln ex = x.Esta función sólo toma un argumento.
200

A.4. Funciones trigonométricas
Por su parte LOG puede tomar dos argumentos, el primero es el valor del que se quierecalcular el logaritmo y el segundo es la base del logaritmo. Si a es un nmero el logaritmo en basea es la función inversa de la exponencial de base a, ax, dicho de otra forma
loga x = y ⇐⇒ ay = x
El cálculo del logaritmo en base a del número x se indica a DERIVE como LOG(x,a). Lasdiferentes funciones logarítmicas están relacionadas por la ecuación
loga x =lnx
ln a
Si simplificamos la expresión LOG(x, a) obtenemos precisamente LN(x)LN(a) .
Ejercicio A.1 Si a > 0 y b > 0 están fijos, calcular y tal que loga x = logb y para un x > 0cualquiera.
Si se omite el segundo argumento de la función LOG se considera que este es e. Dicho de otraforma LOG(x) se simplifica en DERIVE a LN(x).
La función logarítmica más importante es el logaritmo natural o neperiano, de base e, tambiénse utilizan la de base 10, llamada decimal o común, y en informática es frecuente el uso de la debase 2.
DERIVE utiliza números complejos para trabajar con estas funciones.
A.3.1. Simplificación de la función logaritmo neperiano
Las igualdadeslnx+ ln z = ln(xz), z ∈ C, x > 0 (A.4)
yk ln z = ln zk, z ∈ C, k > 0 (o k ∈ ]−1, 1 ]) (A.5)
A.4. Funciones trigonométricasLas seis funciones trigonométricas1 son el seno, sen, el coseno, cos, la tangente tan, la secante
sec, la cosecante, csc y la cotangente cot. En DERIVE se representan por SIN, COS, TAN, SEC,CSC y COT respectivamente. Una vez definida la función seno el resto se pueden definir a partirde ella. Por ejemplo
cosx = − sen(x− π
2
)(A.6)
1Otras funciones trigonométricas como versen y exsec han caído en desuso.
201

Apéndice A. Funciones predefinidas en DERIVE
Ejercicio A.2 Comprobar la igualdad de la ecuación (A.6) simplificando en DERIVE la ex-presión de la derecha de la misma, haciendo las gráficas de ambas funciones y resolviendo laigualdad (A.6).
El resto se definen
tan x =sen x
cosx(A.7)
sec x =1
cosx(A.8)
csc x =1
sen x(A.9)
cotx =cosx
sen x=
1
tan x(A.10)
La definición de la función seno puede hacerse de varias formas. Una de las más usualespara calcular sen x consiste en considerar la circunferencia con centro en el origen de radio 1,construir el arco de la misma que empieza en el punto (1, 0) y tiene longitud x, la abcisa del otroextremo del arco es precisamente sen x, además su ordenada es cosx.
Con la opción Auto DERIVE simplificará la secante y cosecante y mantendrá el resto defunciones trigonométricas. Con la opción Expand. . . simplificará todas ellas de forma que en elresultado sólo aparezcan senos y cosenos.
A.5. Inversas de las funciones trigonométricas
A.6. Funciones hiperbólicas
A.7. Inversas de las funciones hiperbólicas
A.8. Funciones definidas a trozos
A.8.1. Valor absoluto
Esta función se representa en DERIVE como |z| aunque en la ventana de autor se puedeintroducir de esta forma o como ABS(z).
A.8.1.1. De un número real
El valor absoluto o módulo de un número real x, se representa por |x| y se define como sudistancia al origen (o número 0). Es decir
|x| =√x2
202

A.8. Funciones definidas a trozos
La función valor absoluto de variable real también se puede definir de la siguiente forma:
|x| =
{x si x ≥ 0
−x si x < 0, x ∈ R (A.11)
que es una función continua en todos los puntos de la recta real y que es derivable en la mismaexcepto en el origen.
La figura A.1 muestra la gráfica de la función valor absoluto.
Figura A.1: Función valor absoluto.
A.8.1.2. De un nmero complejo
El valor absoluto del número complejo z = x+ iy, es:
|z| =√x2 + y2
que también es la distancia del número al origen.
A.8.2. La función signoEsta función se representa en DERIVE por SIGN(x) y se introduce de la misma forma.
203
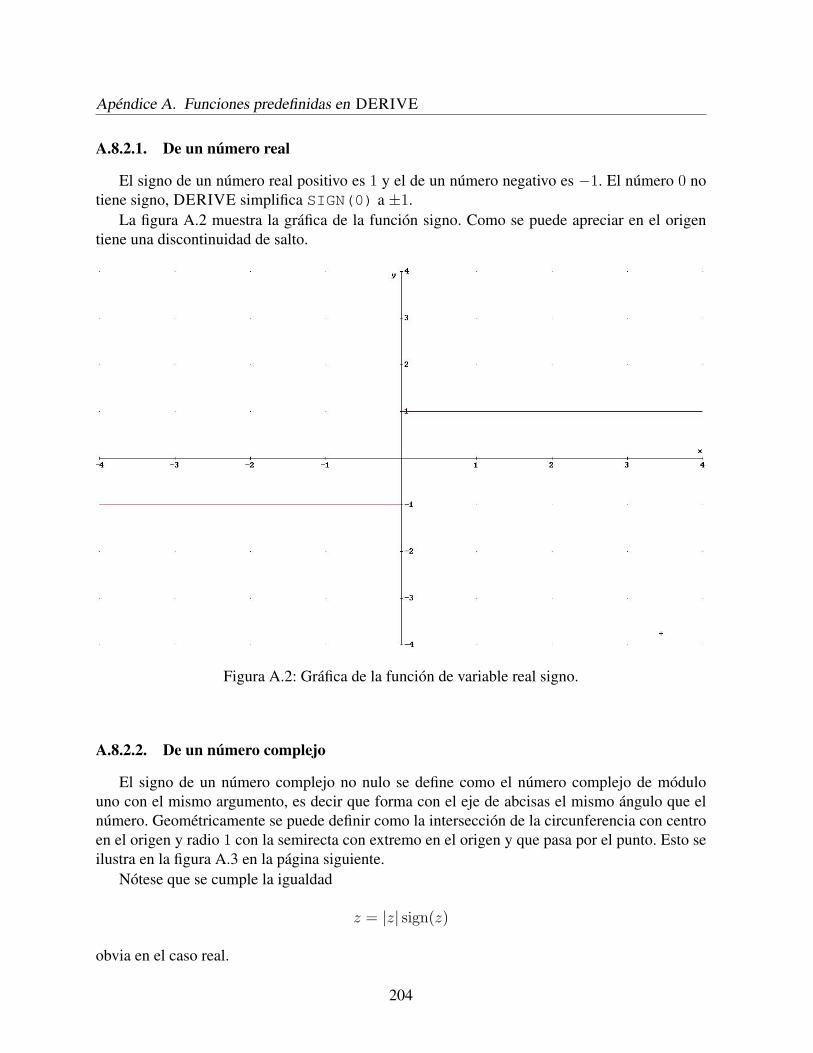
Apéndice A. Funciones predefinidas en DERIVE
A.8.2.1. De un número real
El signo de un número real positivo es 1 y el de un número negativo es −1. El número 0 notiene signo, DERIVE simplifica SIGN(0) a ±1.
La figura A.2 muestra la gráfica de la función signo. Como se puede apreciar en el origentiene una discontinuidad de salto.
Figura A.2: Gráfica de la función de variable real signo.
A.8.2.2. De un número complejo
El signo de un número complejo no nulo se define como el número complejo de módulouno con el mismo argumento, es decir que forma con el eje de abcisas el mismo ángulo que elnúmero. Geométricamente se puede definir como la intersección de la circunferencia con centroen el origen y radio 1 con la semirecta con extremo en el origen y que pasa por el punto. Esto seilustra en la figura A.3 en la página siguiente.
Nótese que se cumple la igualdad
z = |z| sign(z)
obvia en el caso real.
204
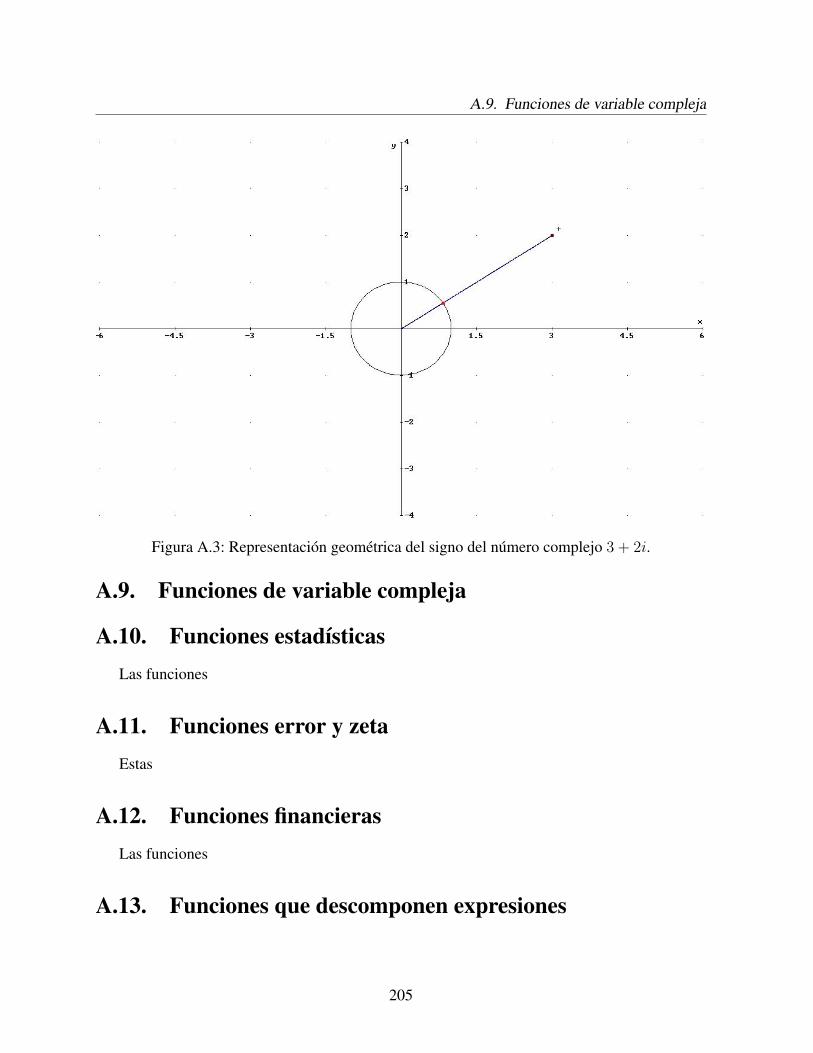
A.9. Funciones de variable compleja
Figura A.3: Representación geométrica del signo del número complejo 3 + 2i.
A.9. Funciones de variable compleja
A.10. Funciones estadísticasLas funciones
A.11. Funciones error y zetaEstas
A.12. Funciones financierasLas funciones
A.13. Funciones que descomponen expresiones
205

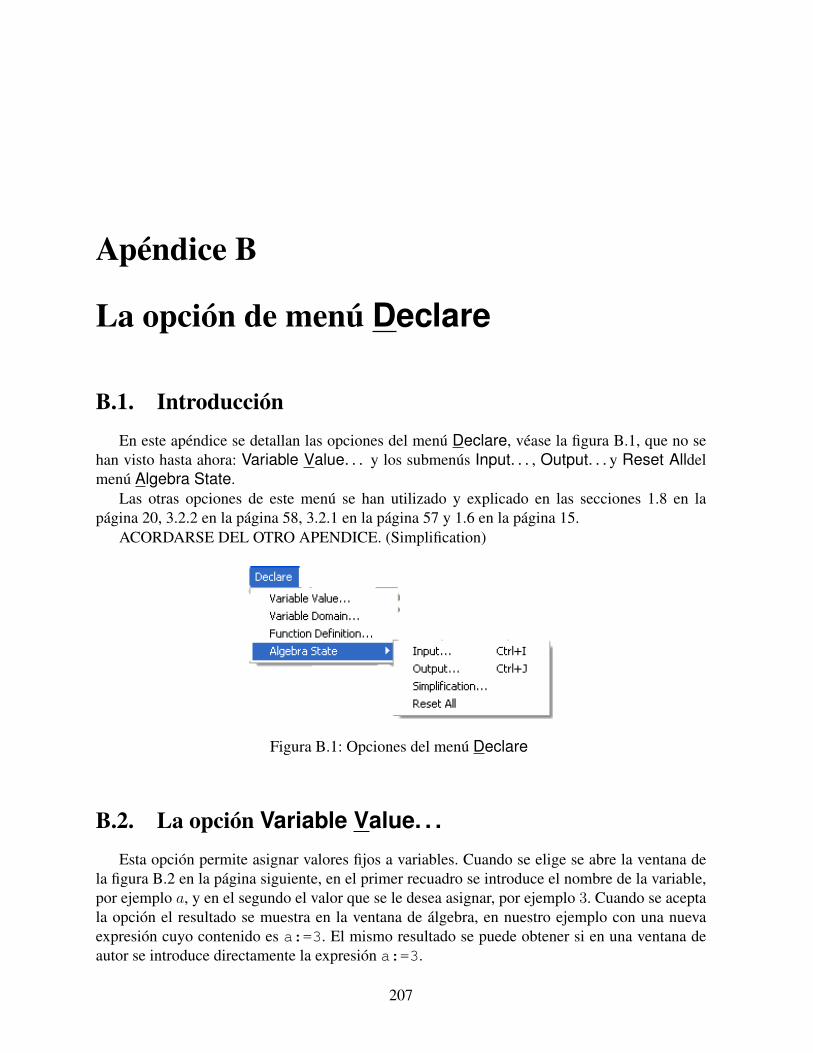
Apéndice B
La opción de menú Declare
B.1. IntroducciónEn este apéndice se detallan las opciones del menú Declare, véase la figura B.1, que no se
han visto hasta ahora: Variable Value. . . y los submenús Input. . . , Output. . . y Reset Alldelmenú Algebra State.
Las otras opciones de este menú se han utilizado y explicado en las secciones 1.8 en lapágina 20, 3.2.2 en la página 58, 3.2.1 en la página 57 y 1.6 en la página 15.
ACORDARSE DEL OTRO APENDICE. (Simplification)
Figura B.1: Opciones del menú Declare
B.2. La opción Variable Value. . .
Esta opción permite asignar valores fijos a variables. Cuando se elige se abre la ventana dela figura B.2 en la página siguiente, en el primer recuadro se introduce el nombre de la variable,por ejemplo a, y en el segundo el valor que se le desea asignar, por ejemplo 3. Cuando se aceptala opción el resultado se muestra en la ventana de álgebra, en nuestro ejemplo con una nuevaexpresión cuyo contenido es a:=3. El mismo resultado se puede obtener si en una ventana deautor se introduce directamente la expresión a:=3.
207
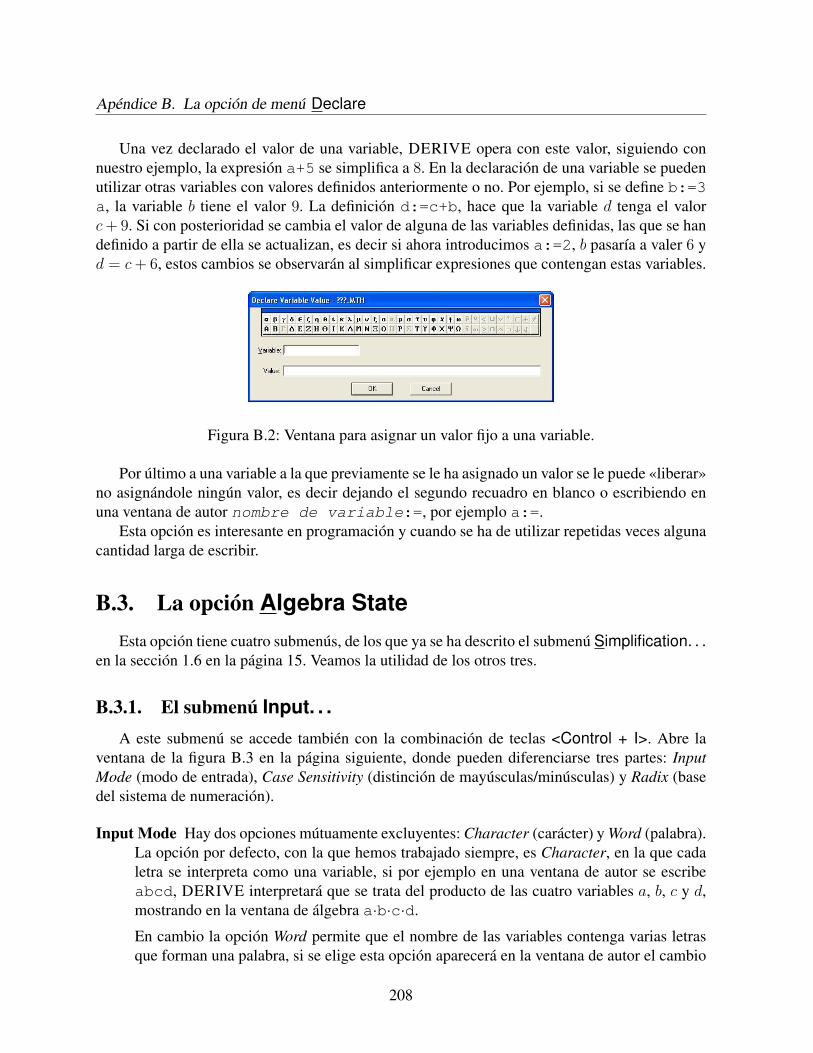
Apéndice B. La opción de menú Declare
Una vez declarado el valor de una variable, DERIVE opera con este valor, siguiendo connuestro ejemplo, la expresión a+5 se simplifica a 8. En la declaración de una variable se puedenutilizar otras variables con valores definidos anteriormente o no. Por ejemplo, si se define b:=3a, la variable b tiene el valor 9. La definición d:=c+b, hace que la variable d tenga el valorc+ 9. Si con posterioridad se cambia el valor de alguna de las variables definidas, las que se handefinido a partir de ella se actualizan, es decir si ahora introducimos a:=2, b pasaría a valer 6 yd = c+ 6, estos cambios se observarán al simplificar expresiones que contengan estas variables.
Figura B.2: Ventana para asignar un valor fijo a una variable.
Por último a una variable a la que previamente se le ha asignado un valor se le puede «liberar»no asignándole ningún valor, es decir dejando el segundo recuadro en blanco o escribiendo enuna ventana de autor nombre de variable:=, por ejemplo a:=.
Esta opción es interesante en programación y cuando se ha de utilizar repetidas veces algunacantidad larga de escribir.
B.3. La opción Algebra StateEsta opción tiene cuatro submenús, de los que ya se ha descrito el submenú Simplification. . .
en la sección 1.6 en la página 15. Veamos la utilidad de los otros tres.
B.3.1. El submenú Input. . .
A este submenú se accede también con la combinación de teclas <Control + I>. Abre laventana de la figura B.3 en la página siguiente, donde pueden diferenciarse tres partes: InputMode (modo de entrada), Case Sensitivity (distinción de mayúsculas/minúsculas) y Radix (basedel sistema de numeración).
Input Mode Hay dos opciones mútuamente excluyentes: Character (carácter) y Word (palabra).La opción por defecto, con la que hemos trabajado siempre, es Character, en la que cadaletra se interpreta como una variable, si por ejemplo en una ventana de autor se escribeabcd, DERIVE interpretará que se trata del producto de las cuatro variables a, b, c y d,mostrando en la ventana de álgebra a·b·c·d.
En cambio la opción Word permite que el nombre de las variables contenga varias letrasque forman una palabra, si se elige esta opción aparecerá en la ventana de autor el cambio
208
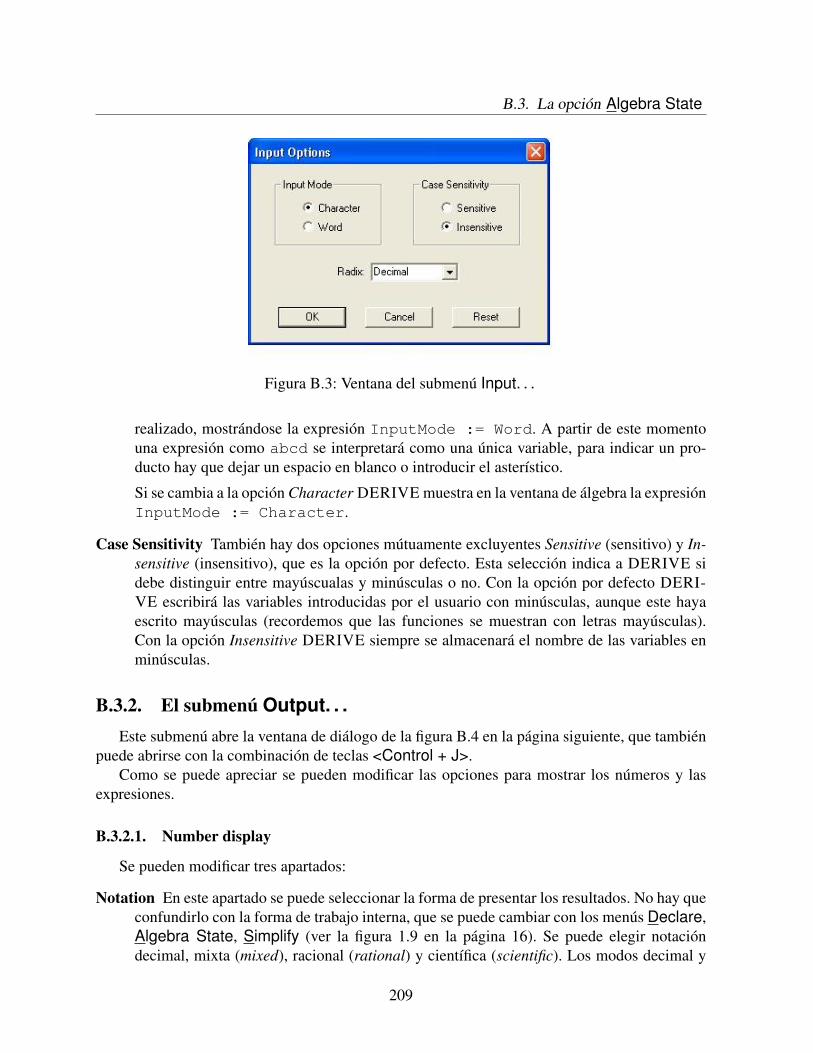
B.3. La opción Algebra State
Figura B.3: Ventana del submenú Input. . .
realizado, mostrándose la expresión InputMode := Word. A partir de este momentouna expresión como abcd se interpretará como una única variable, para indicar un pro-ducto hay que dejar un espacio en blanco o introducir el asterístico.
Si se cambia a la opción Character DERIVE muestra en la ventana de álgebra la expresiónInputMode := Character.
Case Sensitivity También hay dos opciones mútuamente excluyentes Sensitive (sensitivo) y In-sensitive (insensitivo), que es la opción por defecto. Esta selección indica a DERIVE sidebe distinguir entre mayúscualas y minúsculas o no. Con la opción por defecto DERI-VE escribirá las variables introducidas por el usuario con minúsculas, aunque este hayaescrito mayúsculas (recordemos que las funciones se muestran con letras mayúsculas).Con la opción Insensitive DERIVE siempre se almacenará el nombre de las variables enminúsculas.
B.3.2. El submenú Output. . .Este submenú abre la ventana de diálogo de la figura B.4 en la página siguiente, que también
puede abrirse con la combinación de teclas <Control + J>.Como se puede apreciar se pueden modificar las opciones para mostrar los números y las
expresiones.
B.3.2.1. Number display
Se pueden modificar tres apartados:
Notation En este apartado se puede seleccionar la forma de presentar los resultados. No hay queconfundirlo con la forma de trabajo interna, que se puede cambiar con los menús Declare,Algebra State, Simplify (ver la figura 1.9 en la página 16). Se puede elegir notacióndecimal, mixta (mixed), racional (rational) y científica (scientific). Los modos decimal y
209

Apéndice B. La opción de menú Declare
Figura B.4: Ventana con las opciones de salida.
racional fuerzan a que los resultados que se muestran en pantalla adopten estos formatos,en cambio el modo mixto optará entre uno u otro dependiendo de la complejidad de lafracción racional resultante. La notación científica utiliza el formato exponencial cuandoel número es muy grande o muy pequeño en valor absoluto.
Digits Controla el número de dígitos en la salida en formato decimal. Si se introduce un númeroen formato decimal con más dígitos de los indicados en esta opción, los últimos seránignorados.
Radix Permite elegir entre los sistemas de numeración: binario (binary), octal (octal), decimal(decimal) y hexadecimal (hexadecimal), de bases 2, 8, 10 y 16 respectivamente.
Aunque está fuera de los objetivos de este texto explicar los diferentes sistemas de nume-ración, sí que podemos comentar cómo usar DERIVE para representar un número dadoen uno de los cuatro sistemas de numeración que el programa maneja a otro de los mis-mos. Lo único que debe hacerse es elegir el sistema de numeración original en la ventanaInput Options y el sistema de numeración de salida en esta ventana, introducir el númeroy al presionar en el botón «OK» se obtendrá directamente en el sistema de numeración desalida. Si por ejemplo se selecciona el sistema binario1 para la entrada y el sistema he-xadecimal2 para la salida y se introduce el número 1000111111 se obtendrá 23F. En basedecimal éste número se representa por 575.
1El sistema binario sólo utiliza los símbolos 0 y 1 para representar cualquier número.2El sistema hexadecimal utiliza los símbolos: 0, 1, ... 9, A, B, C, D, E y F.
210
B.3. La opción Algebra State
B.3.2.2. Expression display
En este apartado cabe mencionar que se puede modificar el orden en que DERIVE elige lasvariables (variable order) y la forma de representar el operador multiplicación. Las diferentesformas son: por un asterísco (asterisk), por un punto (dot) que es la opción por defecto o dejandoun espacio en blanco (implicit).
El botón «Reset» de la ventana Output Options de la figura B.4 en la página anterior,restablece las opciones iniciales.
B.3.3. El submenú Reset AllCon esta opción se restablecen todas las opciones que se hayan cambiado con el menú
Declare a los valores que tenían al iniciar la sesión.Si al cerrar la ventana de álgebra activa DERIVE detecta que alguna de las opciones se han
modificado, se muestra la ventana de la figura B.5. Se puede elegir entre guardar la nueva confi-guración para futuras sesiones o no. Cuando se abre DERIVE el programa lee la configuracióninicial desde el fichero DFW.INI, y en este fichero es donde se guardan los cambios de confi-guración sucesivos. Si el usuario no tiene permiso de escritura en la carpeta donde se encuentraeste fichero, no podrá guardar sus cambios en la configuración para futuras sesiones.
Figura B.5: Ventana para guardar los cambios en la configuración.
Una forma de evitar este problema es crear un acceso directo al programa y cambiar la opción«Iniciar en» a la carpeta donde hayamos creado el acceso directo. El aspecto de las propiedadesdel acceso directo en Windows XP, debe ser como el de la figura B.6 en la página siguiente,donde usuario corresponde a nuestro nombre de usuario y carpeta a la carpeta que queramosutilizar.
211
Apéndice B. La opción de menú Declare
Figura B.6: Ventana de configuración del acceso directo en Windows XP.
212
Bibliografía
[1] Fórmulas y tablas de matemática aplicada. Mc Graw Hill, 2000.
[2] Tom M. Apostol. Calculus, tomo 1 y 2. Editorial Reverté, S.A, Barcelona, segunda edición,1998.
[3] David C. Arney. The student edition of Derive. Addison-Wesley, Benjamin/Cummings,1992.
[4] J. S. Berry. Learning mathematics through Derive. Ellis Horwood series in mathematicsand its applications. Ellis Horwood, 1993.
[5] Rafael Bru, Joan Josep Climent, Josep Mas y Ana M. Urbano. Álgebra Lineal. UniversidadPolitécnica de Valencia. Servicio de publicaciones, 1998.
[6] Rosa M. Calvo Haro, J. L. González AndÃojar y Susana Pérez Boada. Manual de modelosno lineales en los ámbitos Agronómico, Ganadero y Forestal. 1995.
[7] Juan de Burgos. Cálculo infinitesimal de una variable. McGraw-Hill, Madrid, 1994.
[8] Juan de Burgos. Cálculo infinitesimal de varias variables. McGraw-Hill, Madrid, 1995.
[9] Brian Denton. Learning linear algebra through Derive. Prentice-Hall, 1995.
[10] Bernhard Kutzler. Introduction to Derive for Windows. segunda edición, 1997.
[11] Ron Larson, Robert P. Hostetler y Bruce H. Edwards. Cálculo I, tomo 1. 7a edición, 2002.
[12] Jean Pardé y Jean Bouchon. Dasometría. 1994.
[13] Bruce H. Edwards Roland E. Larson, Robert P. Hostetler. Cálculo y geometría analítica,tomo 1 y 2. McGraw-Hill, 6a edición, 1999.
213