mec´anica de s´olidos - u-cursos · ejemplos y ejercicios para esta´tica de estructuras . . . ....
TRANSCRIPT

Mecanica de Solidos
Roger A. Bustamante Plaza

Indice general
1. Introduccion 5
2. Introduccion a la estatica de estructuras y mecanismos 102.1. Motivacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2. Definiciones y conceptos basicos . . . . . . . . . . . . . . . . . . . 11
2.2.1. Ecuaciones de equilibrio. Introduccion . . . . . . . . . . . 112.2.2. Tipos de fuerzas. Momento Puro . . . . . . . . . . . . . . 13
2.3. Fuerzas equivalentes y calculo de reacciones . . . . . . . . . . . . 252.3.1. Fuerzas distribuıdas . . . . . . . . . . . . . . . . . . . . . 292.3.2. Apoyos y reacciones . . . . . . . . . . . . . . . . . . . . . 372.3.3. Ecuaciones de equilibrio . . . . . . . . . . . . . . . . . . . 42
2.4. Ejemplos y ejercicios para estatica de estructuras . . . . . . . . 49
3. Esfuerzo y deformacion 603.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.2. Fuerzas internas en vigas . . . . . . . . . . . . . . . . . . . . . . 61
3.2.1. Fuerzas internas en vigas para vigas sometidas a cargasdistribuıdas . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.2.2. Ejemplos y ejercicios . . . . . . . . . . . . . . . . . . . . . 803.3. Esfuerzos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.3.1. Esfuerzos axial y de corte . . . . . . . . . . . . . . . . . . 863.3.2. Principio de Saint Venant . . . . . . . . . . . . . . . . . . 883.3.3. Esfuerzos caso general . . . . . . . . . . . . . . . . . . . . 893.3.4. Esfuerzos caso bidimensional. Ecuaciones de equilibrio . 92
3.4. Deformacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 973.4.1. Deformacion axial y de corte . . . . . . . . . . . . . . . . 973.4.2. Deformacion problema bidimensional . . . . . . . . . . . 99
3.5. Relacion esfuerzos-deformaciones. Comportamiento mecanico delmaterial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1023.5.1. Modulo de elasticidad y coeficiente de Poisson. Ensayo
uniaxial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1033.5.2. Ecuaciones constitutivas. Caso general lineal elastico . . 1083.5.3. Relacion entre el modulo de corte, el modulo de elasticidad
y el coeficiente de Poisson . . . . . . . . . . . . . . . . . 112
1

3.6. Deformaciones termicas . . . . . . . . . . . . . . . . . . . . . . . 1143.7. Ejemplos y ejercicios para problemas con deformaciones y fuerzas
axiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1163.7.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . 1163.7.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4. Torsion 1264.1. Torsion en eje de seccion circular . . . . . . . . . . . . . . . . . . 1264.2. Torsion en eje de seccion rectangular . . . . . . . . . . . . . . . 1324.3. Torsion en eje de seccion delgada abierta . . . . . . . . . . . . . . 1334.4. Torsion en eje de seccion delgada cerrada . . . . . . . . . . . . . 1354.5. Ejemplos y ejercicios de torsion . . . . . . . . . . . . . . . . . . . 139
4.5.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . 1394.5.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
5. Flexion y deflexion en vigas 1485.1. Flexion en vigas . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.1.1. Eje neutro, segundo momento de inercia y esfuerzos . . . 1495.1.2. Deformacion y deflexion . . . . . . . . . . . . . . . . . . 1515.1.3. Observaciones adicionales . . . . . . . . . . . . . . . . . . 1555.1.4. Ejemplo de problema con esfuerzos por flexion . . . . . . 1605.1.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
5.2. Deflexion en vigas . . . . . . . . . . . . . . . . . . . . . . . . . . 1685.2.1. Resumen de ecuaciones . . . . . . . . . . . . . . . . . . . 1685.2.2. Primer ejemplo . . . . . . . . . . . . . . . . . . . . . . . 1685.2.3. Distribuciones o funciones especiales . . . . . . . . . . . . 1705.2.4. Ejemplos con el uso de distribuciones . . . . . . . . . . . 1725.2.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
6. Corte en vigas 1846.1. Corte en vigas de seccion rectangular . . . . . . . . . . . . . . . . 1856.2. Corte en vigas de seccion arbitraria . . . . . . . . . . . . . . . . 1886.3. Corte en vigas de seccion delgada abierta . . . . . . . . . . . . . 1906.4. Centro de cortadura . . . . . . . . . . . . . . . . . . . . . . . . . 1956.5. Ejemplos para calculo de centros de cortadura . . . . . . . . . . . 1976.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
7. Energıa de deformacion 2087.1. Motivacion. Energıa especıfica . . . . . . . . . . . . . . . . . . . . 2087.2. Forma alternativa . . . . . . . . . . . . . . . . . . . . . . . . . . . 2127.3. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
8. Teorema de Castigliano 2178.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2198.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
2

9. Esfuerzos combinados: Esfuerzos normales y de corte maximos 2269.1. Esfuerzos normales y de corte maximo . . . . . . . . . . . . . . . 2279.2. Cırculo de Mohr . . . . . . . . . . . . . . . . . . . . . . . . . . . 2319.3. Problema con esfuerzos combinados . . . . . . . . . . . . . . . . 233
9.3.1. Fuerzas internas para el caso de una viga o barra empo-trada en un extremo y libre en el otro . . . . . . . . . . . 233
9.3.2. Ejemplo para un problema en donde se tiene flexion, tor-sion, corte y cargas axiales combinadas . . . . . . . . . . 235
10.Teorıa de falla: Criterios para la deformacion plastica 24410.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24410.2. Criterios de falla para deformacion plastica . . . . . . . . . . . . 246
10.2.1. Criterio del esfuerzo normal maximo . . . . . . . . . . . . 24710.2.2. Criterio del esfuerzo de corte maximo . . . . . . . . . . . 24910.2.3. Criterio de Von Mises . . . . . . . . . . . . . . . . . . . . 251
10.3. Ejercicios de esfuerzos combinados y teorıa de falla . . . . . . . . 256
11.Inestabilidad elastica: Pandeo en vigas y columnas 26111.1. Introduccion a la inestabilidad elastica . . . . . . . . . . . . . . . 26111.2. Pandeo en columnas . . . . . . . . . . . . . . . . . . . . . . . . . 267
11.2.1. Solucion para un caso particular . . . . . . . . . . . . . . 27011.2.2. Columna con deflexion inicial . . . . . . . . . . . . . . . . 27211.2.3. Columna cargada de forma excentrica . . . . . . . . . . . 274
11.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
12.Introduccion a la teorıa de la elasticidad lineal elastica 28112.1. Notacion. Notacion indicial. Vectores y tensores . . . . . . . . . . 281
12.1.1. Notacion indicial . . . . . . . . . . . . . . . . . . . . . . . 28212.1.2. Sımbolos especiales . . . . . . . . . . . . . . . . . . . . . 28512.1.3. Tensor de segundo orden: Definicion, Producto tensorial
y la doble contraccion . . . . . . . . . . . . . . . . . . . . 28712.1.4. Cambio de base para vectores . . . . . . . . . . . . . . . . 28812.1.5. Transformacion de las componentes de un tensor de se-
gundo orden . . . . . . . . . . . . . . . . . . . . . . . . . 28912.1.6. Operadores diferenciales en coordenadas Cartesianas . . . 290
12.2. Fuerzas y esfuerzos . . . . . . . . . . . . . . . . . . . . . . . . . . 29112.2.1. Tensor de esfuerzos . . . . . . . . . . . . . . . . . . . . . . 293
12.3. Ecuaciones de equilibrio de Cauchy . . . . . . . . . . . . . . . . . 29612.4. Esfuerzos principales . . . . . . . . . . . . . . . . . . . . . . . . . 298
12.4.1. Esfuerzo normal maximo . . . . . . . . . . . . . . . . . . 29812.4.2. Esfuerzo de corte maximo . . . . . . . . . . . . . . . . . . 303
12.5. Desplazamientos y deformaciones . . . . . . . . . . . . . . . . . . 30712.5.1. Desplazamientos . . . . . . . . . . . . . . . . . . . . . . . 30712.5.2. Deformacion . . . . . . . . . . . . . . . . . . . . . . . . . 30912.5.3. Ecuaciones de compatibilidad . . . . . . . . . . . . . . . . 313
12.6. Ecuaciones constitutivas . . . . . . . . . . . . . . . . . . . . . . . 317
3

12.6.1. Material monoclınico . . . . . . . . . . . . . . . . . . . . . 31912.6.2. Material ortotropico . . . . . . . . . . . . . . . . . . . . . 32012.6.3. Material transverso isotropico . . . . . . . . . . . . . . . . 32112.6.4. Material isotropico . . . . . . . . . . . . . . . . . . . . . . 32412.6.5. Forma practica de las ecuaciones constitutivas . . . . . . 326
12.7. Problema de valor de frontera . . . . . . . . . . . . . . . . . . . . 32912.7.1. Ecuaciones . . . . . . . . . . . . . . . . . . . . . . . . . . 32912.7.2. Condiciones de borde . . . . . . . . . . . . . . . . . . . . 33012.7.3. Ecuacion de Navier . . . . . . . . . . . . . . . . . . . . . . 33312.7.4. Ecuaciones en coordenadas Cartesianas . . . . . . . . . . 33412.7.5. Ecuaciones en coordenadas cilındricas . . . . . . . . . . . 33512.7.6. Ecuaciones en coordenadas esfericas . . . . . . . . . . . . 34412.7.7. Modelos simplificados en elasticidad . . . . . . . . . . . . 346
12.8. Algunos metodos de solucion exacta del problema de valor defrontera en elasticidad lineal . . . . . . . . . . . . . . . . . . . . . 34912.8.1. Potencial para el campo de desplazamiento . . . . . . . . 35012.8.2. Potencial para el campo de esfuerzos . . . . . . . . . . . . 357
12.9. Solucion de algunos problemas de valor de frontera en elasticidadlineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36312.9.1. Tubo cilındrico bajo el efecto de presion interna y traccion
axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36312.9.2. Esfera inflada bajo el efecto de presion interna (problema
propuesto) . . . . . . . . . . . . . . . . . . . . . . . . . . . 36512.9.3. Una revision del problema de torsion en ejes de seccion
circular . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36612.9.4. Problemas simples de placas y vigas con el uso del poten-
cial de esfuezos de Airy . . . . . . . . . . . . . . . . . . . 36912.9.5. Placa plana con agujero circular bajo el efecto de una
traccion uniforme aplicada lejos . . . . . . . . . . . . . . . 37412.9.6. Medio semi-infinito bajo el efecto de una carga puntual
(problema propuesto) . . . . . . . . . . . . . . . . . . . . 37912.9.7. Viga empotrada bajo el efecto de una carga uniforme (de-
formacion plana) . . . . . . . . . . . . . . . . . . . . . . . 38012.9.8. Viga empotrada bajo el efecto de una carga uniforme (caso
3D, problema propuesto) . . . . . . . . . . . . . . . . . . 39812.10.El problema de torsion en ejes de seccion arbitraria . . . . . . . 400
12.10.1.Revision del problema de torsion en un eje de seccion circular40312.10.2.Torsion en eje de seccion elıptica . . . . . . . . . . . . . . 40512.10.3.Torsion en eje de seccion rectangular . . . . . . . . . . . . 407
13.Fatiga 411
4

Capıtulo 1
Introduccion
Dos son las razones principales que motivan el estudio de la mecanica desolidos: primero, en el diseno de elementos de maquinas o de cualquier otro tipode estructura, es de vital importancia escoger los materiales y/o las dimensionesadecuadas para evitar cualquier tipo de ‘falla’1, y segundo, en el analisis defalla propiamente tal, es decir cuando una componente o cuerpo ha fallado,es necesario hacer un estudio de sus causa de manera tal de prevenir dichassituaciones en el futuro.
Siempre ha habido una necesidad de poder cuantificar o de saber de formaanticipada si una estructura puede o no resistir las fuerzas u otras cargas a lasque podrıa verse sometida. Originalmente los constructores usaban simplementela experiencia para determinar dimensiones y materiales para sus construcciones,con pruebas y errores acumulaban experiencia que les permitıa resolver casossimples y conocidos. Es claro que un metodo ası no podıa servir para el diseno denuevas estructuras, y una serie de conceptos fueron siendo elaborados de formalenta hasta llegar a teorıas (o deberıamos decir metodos) mas menos generalespara predecir el comportamiento de cuerpos simples como cilindros o vigas desecciones rectangulares. No fue sino hasta el trabajo fundamental de Cauchy enla teorıa de esfuerzos, en que se dispuso de herramientas generales para poderpredecir el comportamiento de cuerpos solidos bajo el efecto de distintas cargasexternas2.
Desde el momento en que conceptos como ‘fuerzas’, ‘esfuerzos’ y deforma-ciones fueron establecidos de forma mas menos clara a mediados del siglos XIX,distintos metodos han sido desarrollados para predecir (siguiendo ahora pro-cedimientos mas racionales) el comportamiento de un solido frente a cargas o
1La palabra ‘falla’ puede tener significados muy diversos, quizas la imagen mas simple quese viene a la mente es la rotura de una pieza o elemento; pero podrıamos tambien reconocercomo falla la formacion de deformacion plastica, la cual al producir cambios permanentes enla forma de un cuerpo, podrıa producir problemas en el funcionamiento de un mecanismo.
2Este trabajo de Cauchy, basado en otras investigaciones, en las leyes formuladas por Euler,quien a su vez tomo como punto de partida las bien conocidas investigaciones de Newton, esla piedra angular de todos los desarrollos posteriores, y es frecuente no encontrar referenciasclaras a la importancia de dicho trabajo en la literatura.
5
fuerzas externas. En un principio solo algunas geometrıas sencillas fueron trata-das bajo deformaciones o fuerzas simples. Es ası como se desarrollaron metodospara predecir el comportamiento de cilindros bajo torsion, vigas bajo flexion, obarras bajo el efecto de fuerzas de compresion o traccion. Esta es la base prin-cipal de los cursos y textos tradicionales en resistencia de materiales, es decir sehace una revision de algunos conceptos importantes, y el desarrollo de metodossimples que nos permitan predecir el comportamiento de algunos cuerpos degeometrıas sencillas.
Sin embargo, el trabajo de Cauchy nos lleva finalmente a un sistema deecuaciones en derivadas parciales, cuya solucion nos entregarıa (bajo ciertassimplificaciones) de forma mas precisa la forma como cuerpos (de geometrıasmas generales) se comportarıa bajo la accion de cualquier tipo de fuerzas ac-tuando sobre el. El desarrollo de estas ecuaciones en derivadas parciales ası comode metodos de solucion analıticas de las mismas es la parte central del area deestudios conocida como ‘elasticidad’.
Es claro que el numero de problemas para los cuales es posible encontrarsoluciones analıticas para un sistema de ecuaciones en derivadas parciales eslimitado, y por ese motivo desde ya varias decadas se han desarrollado metodosde solucion numerica de las mismas, entre los que cabe destacar el ‘metodo deelementos finitos’. Dicho metodo permite, con la potencia y versatilidad de loscomputadores actuales, resolver problemas mas cercanos a la realidad, en rela-cion al estudio del comportamiento de cuerpos solidos no solos frente a fuerzas,si no tambien frente a cambios de temperatura e incluso cargas electromagneti-cas3.
Existiendo metodos numericos y teniendo en cuenta la potencia cada vezmayor y el menor precio de los computadores, surge la duda del porque enun momento dado uno deberıa estar interesado en aprender los distintos topi-cos usualmente vistos en mecanica de solidos. La respuesta a esta preguntatiene que ver con las limitaciones de los metodos numericos mencionados an-teriormente. Lo usual cuando alguien conoce por primera vez los programascomerciales de elementos finitos en mecanica de solidos, es pensar que uno estaen condiciones de resolver cualquier tipo de problema con dichos metodos, endonde pudiese tener cuerpos con geometrıas tridimensionales muy complejas,posiblemente tambien interactuando con otros cuerpos (todos ellos bajo cargasexternas). Si bien es cierto los computadores son cada vez mas potentes, aun hoyen dıa es todavıa difıcil resolver problemas en tres dimensiones con geometrıasmuy complejas, por la cantidad de memoria y recursos computacionales queestos trabajos requieren. Peor es la situacion cuando uno desea modelar variascomponentes interactuando unas con otras, pues en dicho caso nos enfrentamos
3Respecto a los tipos de problemas que se pueden analizar, con los metodos clasicos enresistencia de materiales uno adquiere herramientas que posibilitan resolver sobre todo proble-mas en una dimension, por ejemplo problemas con ejes o vigas en donde la longitud sea muchomayor que el diametro u otra dimension en la seccion. Por otra parte, con los metodos analıti-cos estudiados en elasticidad, el tipo de problema normal que puede ser resuelto correspondena problemas planos (o mas general en donde se trabaja con dos dimensiones). Son los metodosnumericos los que se aproximan mejor a situaciones reales con cuerpo tridimensionales.
6

a problemas muy complejos que tienen que ver con la forma como los distin-tos cuerpos interactuan en sus superficies de contacto, que generalmente llevaa problemas no lineales muy difıciles de resolver. Lo que se quiere decir aquı,es que los metodos numericos y los programa comerciales basados en ellos, sibien de gran utilidad y de una importancia cada vez mayor en diseno, no sonuna panacea que puedan ser usados de forma apresurada en cualquier tipo deproblema que se nos presente. Hay siempre aproximaciones, y en muchos casosun buen metodo analıtico y simplificado no solo nos permite obtener buenosresultados para modelar de forma aproximada el comportamiento de un solido,sino tambien a un costo en cuanto a tiempo de solucion mucho menor, sin men-cionar que es mucho mas facil determinar el efecto de los distintos parametrosque influyen en un problema por medio del analisis de una expresion analıtica(por muchas simplificaciones que se hayan hecho para llegar a ellas) que tra-tar de obtener las mismas conclusiones estudiando una gran cantidad de datosnumericos expresados a traves de graficos y tablas.
Se ha tratado de justificar el porque de esta asignatura, quizas parezca algoextrano intentar hacer algo ası, pero es fundamental tener algunas ideas respectoal proposito final de algo antes de intentar hacerlo. Siempre es bueno saberporque deberıamos gastar tiempo y energıas en comprender conceptos y metodoscomo los desarrollados en este curso, y ojala tambien saber en que tipo deproblemas podrıamos usar dichos conocimientos.
El objetivo final de esta asignatura es entregar conceptos que nos permitanmodelar de forma aproximada el comportamiento de cuerpos solidos bajo elefecto en particular de fueras externas de superficie. El uso de dichos conoci-mientos se encuentra en particular en el area de diseno mecanico, en donde en elmomento de proponer el diseni de una estructura o mecanismo, nos interesa dardimensiones y/o tipo de materiales para las distintas piezas y partes, de formatal de evitar que estas fallen bajo condiciones normales de funcionamiento.
En concordancia con los objetivos anteriores, este texto esta dividido en lossiguientes capıtulos: Primero hay una introduccion a la estatica, en donde nosinteresa especialmente estudiar algunos metodos practicos para determinar deforma aproximada las ‘fuerzas de reaccion o contacto’ cuando varios cuerposinteractuan unos con otros. A continuacion se explora el concepto de las fuer-zas internas, partiendo con el caso simple en donde se estudia un modelo paradichas fuerzas aplicable al caso de vigas. El concepto de fuerzas internas esgeneralizado apareciendo el concepto del vector y del tensor de esfuerzos. Poste-riormente se estudia el concepto de deformacion y su conexion con los esfuerzosa partir de algo que conoceremos como las ecuaciones constitutivas. Varios pro-blemas simples son estudiados ahora, tales como el problema de torsion en ejes,el problema de flexion y de calculo de deflexion en vigas, ası como tambienel problema de calculo de esfuerzos de corte en vigas. Los cuerpos cuando sedeforman acumulan energıa elastica, y dicha energıa es usada en el metodo deCastigliano para determinar deformaciones producto de fuerzas o torques exter-nos. En el capıtulo siguiente los distintos metodos estudiados en los capıtulosanteriores ahora son usados para analizas problemas con geometrıas simples enlas que mas de un tipo de esfuerzo esta actuando sobre el cuerpo. En uno de los
7

capıtulos mas importantes se abordara el tema de falla en materiales, enfocadoespecialmente a fallas relacionadas con formacion de deformacion plastica en uncuerpo. Un modo adicionale de falla es estudiado tambien que corresponde a lafalla por inestabilidad en columnas esbeltas en compresion. Comprendiendo laimportancia de los metodos numericos de solucion en mecanica de solidos, variosconceptos de la elasticidad lineal son estudiados, que son generalizaciones de lascosas vistas en capıtulos anteriores. En el ultimo capıtulo se una introduccion ala fatiga como modo de falla.
Esta es una lista de referencias que pueden servir para complementar lostemas a tratar en este texto, y que tambien han servido de inspiracion y basepara varios capıtulos del mismo:
I. Shames, Engineering Mechanics: Statics 4ta Edicion, Prentice Hall, 1996
I. Shames, Introduction to Solid Mechanics, Prentice-Hall, 3era Edicion,1999
J. Gere y S. Timoshenko, Mechanics of Materials, 8va Edicion, CengageLearning, 2012
S. P. Timoshenko y J. N. Goodier, Theory of Elasticity, 3ra Edicion, MacGraw-Hill, 1970
A. S. Saada, Elasticity: Theory and Applications, 2da Edicion, J. RossPublishing, Inc. 2009.
N.I. Muskhelishvili Some Basic Problems of the Mathematical Theory ofElasticity, 1953.
Notacion
En el texto se usara la siguiente notacion:
a, b, ..., α, β, ..., : Escalares~F , ~f , ~w, ...., : Vectoresf ,g, ..., : Vectores en el Capıtulo 12F,G, ..., : Tensores de segundo orden en el Capıtulo 12C,S, ..., : Tensores de cuarto orden en el Capıtulo 12Fi o F1, F2, F3 o Fx, Fy, Fz : Componentes de un vectorA ,B, ..., : Cuerpos (su volumen en algunas ocasiones)
ı, , k o e1, e2, e3 : Vectores unitarios
En las figuras para facilitar su compresion, se usara en general el siguientecodigo de colores
Lıneas de color negro: Representan los contornos de un cuerpo.
Lıneas de color rojo: Fuerzas y momentos (torques) externos e internos.
8

Lıneas de color verde: Cotas, dimensiones para las figuras, flechas queindican vectores de posicion o desplazamiento.
Lıneas de color cafe: Muro, suelo, soportes u otras partes que interactuancon el cuerpo.
Los sımbolos, fuerzas, dimensiones, etc, se representan en color azul.
9

Capıtulo 2
Introduccion a la estatica deestructuras y mecanismos
2.1. Motivacion
Cuando se piensa en mecanismos o estructuras y se desea determinar si lasdistintas componentes que los forman pueden o no fallar, una manera simplifica-da de hacer el analisis es separar todas estas componentes o cuerpos y estudiarlospor separado. Esto requiere modelar de alguna forma simple y al mismo tiem-po realista la interaccion de las distintas piezas o componentes. Esto se puedehacer si dicha interaccion se modela como fuerzas de interaccion o bien a travesde restricciones al desplazamiento de esa parte de las superficies de contacto,debido a la interaccion con el medio o con otros cuerpos.
Es evidente que un modelo basado en fuerzas y/o restricciones para la inter-accion es solo una aproximacion. Sabemos que si un cuerpo sufre fuerzas y de-formaciones por la interaccion superficial con otro, este cuerpo tambien influiraen la forma como las otras componentes se deforman y comportan, o sea, enuna mejor aproximacion estas fuerzas de interaccion en realidad serıan funcionde la misma deformacion que causan. Tales modelos son en general no-lineales,y por tanto provocan grandes problemas al intentar resolverlos.
En este capıtulo abordaremos el problema de determinar las fuerzas de reac-cion en las distintas componentes de un mecanismo, haciendo una serie de su-puestos cuyo objetivo es obtener metodos simples, rapidos, directos y claros enrelacion a los resultados obtenidos.
Antes de analizar en detalle si un cuerpo va a fallar o no, o como un cuerpose deforma o comporta bajo la accion de fuerzas externas, es natural primerodeterminar de la forma mas precisa posible dichas fuerzas, y ese es el objetivode este primer capıtulo.
10

2.2. Definiciones y conceptos basicos
En este capıtulo la primera simplificacion que se hara es asumir que el cuerpoes rıgido, en particular para efecto de determinar algo que conoceremos como las‘reacciones’. Considerese la Figura 2.1, en donde se ve un esquema simplificadode una viga (vista de forma lateral) sometida a una fuerza ~F , la cual ademasestarıa interactuando en este caso con el suelo. La interaccion solo ocurre en losextremos derecho e izquierdo, y el medio mediante el cual la viga esta interac-tuando se dibuja por medio de sımbolos estandarizados (que aparecen dibujadosen color cafe), cuyo significado preciso estudiaremos mas adelante.
~F
~A ~B
Figura 2.1: Cuerpo rıgido y fuerzas de reaccion.
En la Figura 2.1 podemos ver que los soportes (las figuras en color cafe)van a generar fuerzas de reaccion, que hemos asumido como fuerzas puntuales yque hemos simbolizado como ~A y ~B. El asumir que un cuerpo es rıgido implicaespecialmente que dichas fuerzas no dependen de la forma como el cuerpo sedeforma bajo la accion de estas fuerzas1
2.2.1. Ecuaciones de equilibrio. Introduccion
En este primer capıtulo, en donde estamos asumiendo que los cuerpos sonrıgidos, las reacciones con el entorno se obtendran mediante el uso de las ecuacio-nes de equilibrio. De ahora en adelante asumiremos que los fenomenos dinamicosno seran tomados en cuenta en nuestros calculos, es decir asumiremos o trabaja-remos solo con cuerpos o mecanismos en equilibrio estatico2, luego las ecuacionesque deben ser satisfechas son
∑~Fuerzas = ~0, (2.1)
∑~Momentos = ~0, (2.2)
1Es evidente que asumir que un cuerpo es rıgido es solo una aproximacion de un caso real,en donde sabemos que la interaccion de un cuerpo con otros provoca deformaciones, que a suvez influyen siempre en dicha interaccion. Sin embargo, el supuesto en realidad es muy util, yentrega en la mayor parte de los problemas reales muy buenas aproximaciones.
2Hay muchos problemas en los que la aceleracion juega un papel importante en la formacomo un cuerpo se deforma y comporta, pero dichos topicos se encuentran fuera de los alcancesde este curso, y son parte de otros cursos avanzados en dinamica de mecanismo y en vibracionesmecanicas.
11

es decir suma de fuerzas ~Fuerzas y suma de momentos (o torques3) ~Mmomentos
debe ser igual a cero (vector). Las dos ecuaciones (2.1), (2.2) en realidad formanun sistema de 3 ecuaciones escalares cada una (en problemas tridimensionales),o sea en total tendrıamos 6 ecuaciones que se podrıan usar para obtener lasreacciones o interacciones que mencionamos anteriormente.
No todos los problemas en los que estemos interesados en determinar reac-ciones son suceptibles de ser resueltos de manera unica a traves del uso de (2.1)y (2.2). Existen casos en los que el numero de fuerzas de reaccion o interacciones muy elevado y las 6 ecuaciones en (2.1) y (2.2) no son suficientes para obte-nerlas. En problemas tridimensionales el caso clasico que se puede mencionar esmostrado en la Figura 2.2.
~F
~F
~A
~A ~B~B
~C
~C
~D
Figura 2.2: Problema estaticamente determinado y problema hiperestatico.
En la figura del lado izquierdo se tiene un esquema de un taburete o bancode tres patas. Se asume no hay roce y que en el punto C hay un pasadorque impedirıa el movimiento del taburete a lo largo y ancho del suelo. En unproblema como este se puede demostrar que las reacciones ~A, ~B y ~C se puedenencontrar todas solo por medio del uso de (2.1) y (2.2), bajo el supuesto que eltaburete es un cuerpo rıgido.
Por otra parte, en la figura del lado derecho tenemos un esquema tıpico deuna mesa con cuatro patas, tambien apoyadas en un suelo, el que podemos enuna primera aproximacion asumir que no presenta roce. Nuevamente en C puedehaber un pasador que impedirıa el movimiento a lo largo y ancho del suelo (dadoque no hay roce). En un problema de esta naturaleza, en donde ahora tenemos
que encontrar 4 fuerzas de reaccion, ~A, ~B, ~C y ~D, se puede demostrar que lasecuaciones de equilibrio (2.1), (2.2) no son suficientes para encontrar de formaunica dichas fuerzas de reaccion4.
3A lo largo de este texto usaremos la palabra momento en lugar de torque, salvo en elcaso del fenomeno de torsion (Capıtulo 4) en donde se usara la palabra torque para ese tipoespecıfico de fenomeno.
4El hecho que no se pueda encontrar todas las fuerzas de reaccion en un problema como el
12

Un problema como el mostrado en el lado izquierdo de la Figura 2.2 es de-nominado un problema ‘estaticamente determinado’, en tanto que un problemacomo el mostrado en el lado derecho de la Figura 2.2 es conocido como unproblema ‘estaticamente indeterminado’ o ‘hiperestatico’.
2.2.2. Tipos de fuerzas. Momento Puro
Tal como se ha indicado en la Seccion 2.2.1, la interaccion de distintos cuer-pos que componen una estructura o mecanismo se puede modelar de formasimplificada asumiendo que esta interaccion ocurre a traves de fuerzas de con-tacto o bien a traves de restricciones al desplazamiento. Partamos estudiandoprimero las fuerzas, para esto se necesitan algunas definiciones.
Las fuerzas se clasificaran en dos tipos:
Fuerzas de superficie: son las fuerzas que requieren del contacto directo de lasuperficie de un cuerpo sobre otro para actuar. Se clasifican (o deberıamosdecir se pueden modelar) de dos formas, como fuerzas puntuales, en puntosespecıficos en los cuales el cuerpo esta interactuando con el medio, tal comose muestra en la Figura 2.3. O bien como una distribucion de fuerzas de
~F
Interaccion con loque lo rodea
Figura 2.3: Fuerzas de superficie concentradas.
superficie, como la que se producirıa en el contacto de dos cuerpos A y B
mostrados en la Figura 2.4. En el lado derecho de dicha figura podemosver un acercamiento a la zona del cuerpo B que estaba en contacto conA ; esa interaccion ha sido representada por medio de una distribucionde fuerza ~f , que en un problema tridimensional serıa fuerza por unidadde area, en tanto en un modelo bidimensional serıa fuerza por unidad delongitud.
mostrado en la Figura 2.2 (derecha) tiene una curiosa implicancia desde el punto de vista delo que uno observa en la realidad. Cualquier persona que haya construıdo una mesa o taburetecon tres patas reconocera que nunca esta muestra alguna pata coja, es decir las tres patas seasientan de manera mas menos perfecta en el piso. Por otra parte, no importa cuan precisosea la fabricacion de una mesa con cuatro patas, siempre una pata estara coja, y para lograrque las cuatro patas esten todas tocando el suelo, se requiere deformar estas. En consecuencialas fuerzas de reaccion no podrıan encontrarse asumiendo que el cuerpo es rıgido, en este casolas fuerzas dependerıan de la deformacion.
13

~fA
BB
Figura 2.4: Fuerzas de superficie distribuıdas.
Fuerzas de cuerpo: son aquellas fuerzas que actuan a distancia y no necesitanel contacto directo; ejemplo de las mismas son la fuerza de gravedad y lasfuerzas debido a la aplicacion de campos electromagneticos.
Las fuerzas generan momentos (o torques) y estas cantidades tiene un papelimportante en la determinacion de las reacciones o interacciones, de modo queahora se repasara aquı dichos conceptos. Primero necesitamos algunas definicio-nes. En la Figura 2.5 tenemos un sistema de coordenadas Cartesianas x1, x2, x3,
~rP
~rQ
~ρPQ
x1
x2
x3
e1 e2
e3
P
Q
Figura 2.5: Vectores de interes.
en donde se pueden apreciar los tres vectores unitarios de la base e1, e2, e3,y se tiene dos puntos P , Q. Los vectores que indican las posiciones de dichospuntos se denotaran como ~rP y ~rQ, respectivamente, en tanto que el vector queva desde P a Q se denotara como ~ρPQ.
Vector momento de una fuerza
Considerese la Figura 2.6, en donde se tiene un cuerpo bajo la accion deuna fuerza ~F aplicada en el punto P . Se define el vector momento de la fuerza
14

~MA ~F
A P
Figura 2.6: Vector momento de una fuerza.
respecto al punto A como~MA = ~ρAP × ~F . (2.3)
Se puede apreciar de la definicion que el vector ~MA es perpendicular al planoformado por los vectores ~ρAP y ~F , y debido a lo anterior existe la siguientepropiedad para el vector ~MA. En la Figura 2.7 se tiene una vista superior de laFigura 2.6, es decir aquı se esta viendo el plano formado por los vectores ~ρAP y~F y el vector ~MA estarıa apuntando hacia fuera de la figura. La lınea que pasa
~F
~MA
~ρAPd
P
β
A
Recta colineal con ~F
Figura 2.7: Vector momento de una fuerza. Vista superior.
por P y tiene la direccion del vector ~F es llamada la ‘lınea de accion de la fuerza~F ’. La distancia entre el punto A y dicha lınea de accion es d y el angulo entreel vector ~ρAP y esta lınea de accion lo denotamos como β. Se sabe que
‖ ~MA‖= ‖~ρAP × ~F‖= ‖~ρAP‖‖ ~F‖sinβ = d‖ ~F‖, (2.4)
luego la magnitud de ~MA no cambiarıa si movemos el punto de aplicacion de lafuerza ~F a lo largo de su lınea de accion; es mas, la direccion de dicho vectortampoco cambiarıa al mover ~F a lo largo de su lınea de accion, pues dicha lınease encuentra siempre en el plano formado por los vectores originales ~ρAP y ~F .
15

Vector momento de una fuerza respecto a un eje
Consideremos la situacion en la cual un eje gira impulsado por algun tipo defuerza aplicado en el. Un esquema se dicho eje se muestra en la Figura 2.8. Aquı
M
~F
FR F//
dP
F⊥
eje
Figura 2.8: Vector momento de una fuerza respecto a un eje.
se tiene un esquema muy simplificado de un eje (la lınea larga negra central),el que gira en dos apoyos, los cuales son mostrados como dos lıneas paralelasen ambos extremos del eje. El eje en realidad puede tener una forma irregular,pero lo importante es notar que gira respecto a esos dos apoyos mostrados ahı.
En algun punto P a una distancia d del eje se aplica una fuerza sobre el5 ~F .Ahora, esta fuerza ~F se puede descomponer de la siguiente forma
~F = ~FR + ~F// + ~F⊥, (2.5)
donde ~FR serıa la componente en la direccion radial de la fuerza ~F , en tantoque ~F// serıa la componente de la fuerza en la direccion del eje, y finalmente~F⊥ serıa la componente normal a las otras dos, que llamaremos la componentetangencial.
La pregunta es: ¿De estas tres componentes de la fuerza, cual es la unicaimportante en relacion al momento que genera en el eje desde el punto de vistade su funcionamiento? Podemos ver que las tres componentes generan algun tipode momento, pero de las tres, la unica que genera un momento cuya direccionva en la direccion del eje es ~F⊥. El momento generado por ~F⊥ es simbolizadocon las flechas rojas puestas en el extremo inferior del esquema del eje.
Si reconocemos entonces que ~F⊥ es la componente importante para efectosde calcular momento en el eje, dicho momento estarıa dado simplemente por6
M = dF⊥. (2.6)
5La fuerza es esta aplicando en alguna parte del eje, pero como lo estamos mostrando deforma muy simplificada, no se muestra de forma grafica en donde realmente se esta aplicandodicha fuerza.
6Para denotar la norma de un vector usaremos dos notaciones: en algunas ocasiones lanorma del vector ~A se denotara como se hace usualmente ‖ ~A‖ y a veces se usara una notacionmucho mas simplificada A.
16

Vector momento puro
Considerse la Figura 2.9 en donde se tiene un cuerpo sometido dos fuerzasde magnitud F con igual direccion, apuntando en sentido contrario, y separadaspor una distancia d. En este caso el equilibrio de fuerzas (Ecuacion (2.1)) es
~F
~F
~C
d
Figura 2.9: Vector momento puro.
satisfecho de forma automatica (si bien no hay equilibrio al momento).El momento (tambien llamado ‘par de fuerzas’) que generan estas dos fuerzas
~F se denotara como ~C y es llamado un momento puro, debido a que el cuerposolo siente el efecto de este ~C, dado que (2.1) es satisfecha de forma automatica.La norma se este vector se puede calcular como
‖ ~C‖= d‖ ~F‖. (2.7)
En principio vamos a ubicar a este vector justo en medio de los puntos deaplicacion de las fuerzas ~F , es decir a una distancia d/2 de cada una de ellas.
Consideremos la Figura 2.10, en donde tenemos el mismo cuerpo en doscasos adicionales, en donde se sigue aplicando las mismas fuerzas ~F , siempreseparadas una distancia d, pero con direcciones diferentes a las originalmentemostradas en la Figura 2.9. Imaginemos que los pares de fuerzas ~F empiezan
~F~F~F
~F
~C~C
dd
Figura 2.10: Vector momento puro. Situaciones en las que son equivalentes.
a rotar, simpre manteniendose en el plano original en el que estaban. Podemosapreciar que en este caso C = dF va a tener el mismo valor que en la Figura2.9, y si las fuerzas ~F estan simpre en el mismo plano, entonces la direccion y
17

orientacion de ~C va a ser siempre la misma, o sea podemos ver que el mismo ~Cse puede obtener de muchas formas distintas.
En la Figura 2.11 se muestran los sımbolos que se usaran para representarel vector momento puro. Normalmente en problemas planos se usara una flechacircular, y en problemas tridimensionales se usara una flecha doble, la correspon-dencia entre estas dos formas de representacion se muestra en la misma Figura2.11.
Figura 2.11: Vector momento puro. Representaciones.
Teorema 1 Para cuerpos rıgidos el vector momento puro es un vector ‘libre’es decir su punto de aplicacion se puede cambiar y el efecto que genera sobre elcuerpo es el mismo.
Demostracion La demostracion de este teorema la haremos de dos formas,primero entregaremos una demostracion mas general para problemas tridimen-sionales y posteriormente para el caso particular de problemas planos.
Considerese la Figura 2.12 en donde tenemos dos puntos A, B en dondese esta aplicando dos fuerzas ~F con la misma magnitud y direccion pero consentidos opuestos. Estas fuerzas van a generar un momento puro sobre el cuerpo,
x y
z
O
~rA
~rB
A
B~F
~F
~r′A
~r′B
x′y′
z′
O′
~ρBA
Figura 2.12: Vector momento puro. Demostracion que es invariante.
el cual se puede ubicar en principio a media distancia entre los puntos A y
18

B. Hay varias formas de calcular dicho momento puro, si se escoge el sistemacoordenado x, y, z con origen O, el momento puro ~C se puede calcular como
~C = ~ρBA︸︷︷︸~rA−~rB
× ~F , (2.8)
en donde ~F en este caso corresponde a la fuerza aplicada en A. Podemos verque en la expresion anterior el vector ~ρBA ha sido definido usando los vectoresposicion de A y B respecto a la referencia O. Pero
~ρBA × ~F = (~rA − ~rB)× ~F = (~r′A − ~r′B)× ~F = ~C′, (2.9)
luego ~C = ~C′, es decir el vector momento puro calculado desde las dos referenciases el mismo. Ahora como un cambio de referencia es en realidad equivalente amantener al vector fijo y mover en su lugar al cuerpo y por tanto esto significarıaque el cambiar de posicion el punto de aplicacion de ~C no afecta la formacomo este vector actua sobre el cuerpo rıgido, con lo que la demostracion se hafinalizado7.
Como resultado de la demostracion anterior para momentos puros tendremossituaciones como las mostradas en la Figura 2.13.
~C~C
Figura 2.13: Vector momento puro: Traslacion a un punto distinto del cuerpo
La demostracion basada en la Figura 2.12 si bien es bastante general, de to-das formas no apela mucho a la intuicion de lo que uno esperarıa en un problemacomo este. Por dicho motivo aquı se agrega una segunda forma de demostrareste teorema, valida eso sı en este caso solo para problemas bidimensionales.
Como paso previo considerese la siguiente observacion basada en lo que semuestra en la Figura 2.14. En dicha figura tenemos dos sistemas de fuerzasparalelas (caso plano), en un caso de magnitud F y separadas una distancia d,y en el otro caso de magnitud 2F y separadas una distancia d/2. De (2.7) esfacil ver que la magnitud del vector momento puro en un caso serıa dF y en elsegundo caso serıa 2Fd/2 = dF , es decir en ambos casos obtendrıamos la mismamagnitud para este vector, y ademas podrıamos ubicar este vector en el mismopunto central entre estas dos fuerzas.
Teniendo presente la observacion anterior, consideremos ahora la Figura 2.15,en la parte superior tenemos un cuerpo el que esta sometido a dos fuerzas
7Es relativamente claro que para el caso de cuerpos deformables cambiar de posicion elpunto de aplicacion de ~C no genera los mismos ‘efectos’, pues de forma intuitiva se puede verque la deformacion no serıa igual. A pesar de esto en varios problemas con cuerpos deformablesseguiremos usando este teorema, claro esta solo como una aproximacion.
19

F
F
2F
2F
d
d/2
Figura 2.14: Vector momento puro: Distintas formas de calculo
opuestas de magnitud F separadas una distancia d, y que por tanto generan unmomento puro C = dF . Imaginemos ahora que deseamos mover este momentopuro a un punto ubicado hacia la derecha a una distancia L del punto originalde aplicacion de C.
La traslacion se puede hacer de la siguiente forma. En la segundo cuerpomostrado en la Figura 2.15 dibujamos a una distancia L de las fuerzas originalesdos pares de fuerzas opuestas F , tal como se aprecia en el lado derecho delsegundo cuerpo. Podemos ver que en realidad aquı la suma nos da cero.
Sin embargo, si juntamos ahora cada una de las fuerzas del lado izquierdocon un par de las fuerzas opuestas en el lado derecho, tal como se muestracon lıneas punteadas en el segundo cuerpo de la Figura 2.15, tendremos que seforman momento puros y opuesto de magnitud FL, los cuales se ubican a unadistancia d entre ellos, tal como lo muestra el tercer cuerpo de la Figura 2.15.
En este tercer cuerpo mostrado en la Figura 2.15 tenemos ahora dos mo-mentos puros y opuestos de magnitud FL, y ademas ahora tenemos dos fuerzasde magnitud F separadas una distancia d en el extremo izquierdo.
Lo que se hace ahora es hacer F tender a infinito y d tender a cero, deforma tal que la multiplicacion dF = C se mantenga constante, recordando loque se habıa discutido respecto a la Figura 2.14. En ese caso podemos ver quelos dos momentos puros FL al final se aplicarıan en el mismo punto, y que altener sentidos opuestos, esto significa que se anulan y por tanto nos queda elcuerpo con el momento puro C ahora aplicado en la derecha, a una distancia Ldel punto original de aplicacion, con lo que hemos terminado esta demostraciongrafica
20

C
C
F
F
F
F
F
F
F
F
F
F
d
d
d d
d
L
L
L
L
FLFL
Figura 2.15: Vector momento puro. Traslacion a un punto distinto del cuerpo(caso 2D).
21

Ejemplos de calculo del momento causado por una fuerza
1. Calcule el momento causado por ~F respecto al punto O para la ruedamostrada en la Figura 2.16.
O x
~F P
~ρOP
y
Figura 2.16: Vector momento. Ejemplo de calculo.
En este problema tenemos que ~F = (Fx, Fy) y que ~ρOP = (0, r) para elsistema de coordenadas mostrado en la figura, en donde r serıa el radiode la rueda. De la definicion (2.3) tenemos
~MO = ~ρOP × ~F =
∣∣∣∣∣∣
ı k0 r 0Fx Fy 0
∣∣∣∣∣∣,
por lo que~MO = −Fxrk. (2.10)
O sea como ya sabemos, en un problema plano los momentos solo tienecomponente en la direccion normal al plano. Del resultado anterior ademaspodemos ver que la unica componente importante de ~F para el calculo delmomento es la que es normal al vector ~ρOP .
2. Determine el momento de la fuerza de 100lbf con respecto a los puntos Ay B mostrados en la Figura 2.17
Usaremos la definicion (2.3), en este caso primero necesitamos expresar lafuerza como vector, de la figura vemos que el vector fuerza se encuentraen el interior de un cubo de dimensiones 8×4×4, luego podemos expresarla fuerza aplicada en ese punto ~F como (el punto de aplicacion de ~F lopodemos llamar P )
~F = 100
(8√
82 + 2 ∗ 42ı +
4√82 + 2 ∗ 42
− 4√82 + 2 ∗ 42
k
),
simplificando tenemos
~F =100√96
(8ı + 4− 44). (2.11)
22

x
y
z
AB
Barra pegadaa la pared en A
10
8
8
4
4
4
100
Figura 2.17: Vector momento. Ejemplo de calculo (dimensiones en pies).
Para calcular el momento hace falta el vector que va desde el punto res-pecto al que se quiere calcular dicho momento al punto en donde se aplicala fuerza, y de la figura podemos ver que
~ρAP = 10ı + 4j − 8k, ~ρBP = 4j − 8k. (2.12)
Luego los momentos se calculan simplemente con los productos cruz
~MA = ~ρAP × ~F , ~MB = ~ρBP × ~F , (2.13)
usando (2.11) y (2.12). Se deja como ejercicio realizar dicho calculo.
3. Calcular el momento causado por ~F respecto a D como se muestra en laFigura 2.18 para dos casos: En que la fuerza se aplique en P y que seaplique en Q, respectivamente.
En este problema verificaremos directamente el principio enunciado conla Figura 2.7. Para ambos casos en que ~F se aplique en P y Q tenemos~F = F ı.
En el caso del momento calculado respecto al punto P , necesitamos elvector que va desde el origen del sistema (que llamaremos O) al punto enquestion ~ρOP y se tiene que ~ρOP = r, por lo que
~MO = ~ρOP × ~F =
∣∣∣∣∣∣
ı k0 r 0F 0 0
∣∣∣∣∣∣= −Frk.
23

~F~F Q P
t r
x
yLınea paralela a x
Figura 2.18: Vector momento. Ejemplo de calculo.
En el caso del momento calculado respecto al punto Q usamos el vector~ρOQ = −tı + r, luego tenemos
~MO = ~ρOQ × ~F =
∣∣∣∣∣∣
ı k−t r 0F 0 0
∣∣∣∣∣∣= −Frk,
que es igual al resultado anterior, confirmando el hecho mencionado ante-riormente respecto a la Figura 2.7, en donde indicamos que si se mueve lafuerza a lo largo de su lınea de accion, el momento que esta fuerza hace esel mismo. En la Figura 2.18 podemos ver que los puntos P y Q se ubicanambos en la lınea de accion de ~F .
24

2.3. Fuerzas equivalentes y calculo de reacciones
Nuestro proposito en esta seccion es desarrollar metodos que nos permitanreducir el numero de fuerzas actuando en un cuerpo, de modo que se tenga unsistema ‘equivalente’ de fuerzas mas simple que genere el mismo ‘efecto’ sobreel cuerpo. Para entender esto considerese la Figura 2.19. En el lado izquierdo
~F1~F2
~Fn
~f
~C1
~C2
~FT~Ct
Figura 2.19: Sistema de fuerzas equivalentes. Figura de la izquierda muestra lasituacion inicial, la figura de la derecha mostrarıa la situacion final ‘equivalente’.
tenemos un cuerpo bajo estudio en su situacion inicial con un cierto numero defuerzas puntuales, de fuerzas distribuıdas y de momentos puros actuando sobreel. La idea de esta seccion es desarrollar algunos metodos que nos permitanreemplazar el sistema de fuerzas y momento puros original, por uno mas simple,que sea equivalente, en el sentido que el ‘efecto’ que sienta el cuerpo sea elmismo. El sistema equivalente es mostrado de forma esquematica en el ladoderecho de la Figura 2.19.
Ahora veremos varios casos particulares:
Si un conjunto de fuerza actua en un punto, tal como lo vemos en el ladoizquierdo de la Figura 2.20, la fuerza equivalente total es simplemente lasuma de las fuerzas, como se ve en el lado derecho de la misma figura parael mismo punto.
~F1
~F2
~F3 ~Fi
~Fn ~FT =∑n
i=1~Fi
Figura 2.20: Sistema de fuerzas equivalentes. Fuerzas aplicadas en un punto.
25

Para un cuerpo rıgido la fuerza se puede trasladar a lo largo de su lıneade accion y el cuerpo sentirıa el mismo ‘efecto’, tal como se muestra en laFigura 2.21.
~F
~F
El momento que se genera enestos casos respecto acualquier punto es el mismo
Figura 2.21: Sistema de fuerzas equivalentes. Fuerzas se puede mover a lo largode su lınea de accion.
Ya habiamos comentado este hecho importante en el contexto de la Figura2.18. Al mover la fuerza a lo largo de su lınea de accion, el momento queesta genera es el mismo para cualquier punto, y como el cuerpo es rıgido,no importarıa si la deformacion no fuese la misma, como si ocurrirıa concuerpos deformables.
En la Figura 2.22 en la parte superior izquierda tenemos un cuerpo conuna fuerza ~F aplicada en un punto A. Lo que nos interesa ahora es ver cualserıa un sistema de fuerzas y/o momentos puros equivalentes si quisieramosmover esa fuerza de A a B. El resultado que mostraremos ahora en realidadya fue usado en el contexto de la demostracion que se hizo respecto a queel momento puro era un vector libre (Figura 2.15), pero de todas formasrepetiremos el metodo aquı.
Para trasladar la fuerza al punto B se dibuja en dicho punto dos fuerzasiguales pero opuestas con la misma direccion que la original, tal como semuestra en la Figura 2.22 parte superior derecha.
La fuerza original ~F en A puede usarse para formar un momento purojunto con la fuerza − ~F aplicada en B. Luego tal como se muestra en laFigura 2.22 parte inferior central, tendremos la fuerza ~F ahora aplicadaen B mas un vector momento puro ~C, que proviene del calculo anterior.
Ejercicio : En la Figura 2.23, ¿cual es el sistema de fuerzas y/o momentosequivalentes en el punto A?
26

~F
~F
~F
~F~F
A
AA
B
BB
d
Forman un par de fuerza que
generan un momento puro ~Cde magnitud C = dF
C
Aquı la suma en B es cero
Figura 2.22: Sistema de fuerzas equivalentes. Fuerza que se mueve a una posicionparalela a su lınea de accion.
27

7
~F
A
P
x
y
z
8’
8’
8’
7’
7’
Figura 2.23: Ejemplo de sistema de fuerzas equivalentes.
28

2.3.1. Fuerzas distribuıdas
Al inicio de esta seccion se clasificaron las fuerzas de contacto en fuerzaspuntuales y distribuıdas (ver Figura 2.4). Es claro que en problemas ‘reales’ lasfuerzas distribuıdas son una mucho mejor representacion de las interaccionesreales entre cuerpos. Considerese por ejemplo la Figura 2.24. En el lado izquierdo
~f
Rueda
Piso
Fuerza por unidad de area
Figura 2.24: Ejemplo de fuerzas distribuıdas de superficie.
se tiene un esquema de la parte frontal de un auto, en particular de la rueday del piso en la que esta esta apoyada. Sabemos que las ruedas sufren algo dedeformacion (debido al peso del auto) y que por tanto el contacto con el pisoocurre en un area de tamano finito, tal como se muestra en el lado derecho dela misma figura. Luego la interaccion del piso sobre la rueda se puede modelarcomo una fuerza distribuıda ~f por unidad de area.
Otro tipo de fuerza distribuıda corresponde a las fuerzas de cuerpo. Porejemplo la fuerza debido a la gravedad se puede considerar como una fuerza porunidad de volumen, tal como se muestra en la Figura 2.25.
d~f
Fuerza por unidad de volumen
d~f = −~gρdv
Figura 2.25: Ejemplo de fuerzas distribuıdas de volumen.
29

Densidad de lınea
En este texto nos concentraremos en particular en fuerzas por unidad delongitud, llamadas tambien por unidad de lınea, las cuales tienen unidades enel sistema internacional N/m, tal como se muestra en la Figura 2.27. Nuestrointeres ahora es encontrar una fuerza puntual ‘equivalente’ que pueda reempla-zar estas distribuciones de lınea ~w, para ello necesitaremos algunos resultadospreliminares concernientes al momento causado por una fuerza.
En la Figura 2.26 (lado izquierdo) tenemos (para un problema plano) un
esquema con una fuerza ~F en donde interesa determinar el momento causadorespecto al punto A. En dicho caso (en donde los vectores son ortogonales) se
AA
BB
~ρAB~ρAB
~F~F F⊥
F//
Figura 2.26: Calculo simplificado del momento en problemas planos.
cumple que‖~ρAB × ~F‖= ρABF. (2.14)
Es facil demostrar para un problema mas general como el mostrado en el ladoderecho de la Figura 2.26 se tendra
‖~ρAB × ~F‖= ρABF⊥. (2.15)
El sentido del momento para problemas planos esta apuntando fuera o haciadentro de la pizarra.
Concentremonos ahora en el esquema mostrado en la Figura 2.27, del resul-tado anterior, para efectos del momento, la componente tangencial de la fuerzano es importante, de modo que aquı asumiremos que ~w solo tiene componenteen la direccion del eje y.
x
y
OViga
~w
Figura 2.27: Fuerzas distribuıdas. Fuerza por unidad de lınea.
La fuerza esta siendo aplicada, por ejemplo, a una viga de longitud L, ypara un diferencial de longitud la magnitud de la fuerza actuando sobre dicho
30

elemento df se puede calcular como
df = w(x) dx. (2.16)
Ahora bien, queremos reemplazar la fuerza8 w(x) por una fuerza puntualequivalente (o resultante) que llamaremos FR. Una primera condicion que esnatural pedir es que FR sea igual a la fuerza total que w(x) estarıa generandosobre la viga, o sea
FR =
∫ L
o
w(x) dx. (2.17)
Ahora necesitamos ver donde aplicar esta fuerza resultante, y para ello ahorapodemos pedir que el momento causado por FR respecto a cualquier punto seael mismo que causarıa w(x). Calcularemos el momento respecto al punto Omostrado en la Figura 2.27 (extremo izquierdo de la viga). Debemos recordar quesi el momento es cero respecto a un punto, lo es respecto a cualquier otro, comoconsecuencia de (2.9). Para calcular el momento causado por w consideremos laFigura auxiliar 2.28. Podemos ver en este caso que la fuerza en un diferencial
x
dx
w dx
Figura 2.28: Fuerzas distribuıdas. Momento causado por la fuerza.
dx serıa w(x) dx y que el momento causado respecto al extremo derecho (dadoque la fuerza serıa ortogonal respecto al vector posicion) serıa xw(x) dx, por lo
que el momento total es∫ Loxw(x) dx. Ahora bien, asumamos que la fuerza FR
se aplica a una distancia x desde el extremo izquierdo de la viga, el momentocausado por FR serıa igual a xFR, luego imponemos la condicion
∫ L
o
xw(x) dx = xFR,
y de (2.17) tenemos9
x =
∫ Loxw(x) dx
∫ Low(x) dx
. (2.18)
Veamos dos ejemplo simples de aplicacion de estos resultados.
8Como ~w solo tiene componente en y de ahora en adelante en general usaremos el sımbolow para hablar de estas fuerzas distribuıdas, a menos que de manera explıcita esta pueda tenerlas dos componentes en el caso plano en las direcciones x e y.
9Notese la similitud de esta expresion con las ecuaciones que se derivan usualmente en elcalculo de centro de masa para distribuciones lineales de densidad.
31

Distribucion constante: En este caso tal como se muestra en la Figura 2.29consideramos el caso w(x) = wo constante. De (2.17) en este caso tenemos
x
y
L
w = wo
Figura 2.29: Fuerzas distribuıdas. Distribucion constante.
FR =
∫ L
0
wo dx = woL,
∫ L
0
xwo dx = woL2
2, (2.19)
luego de (2.18)
x =wo
L2
2
woL=L
2, (2.20)
y por tanto la fuerza equivalente se aplica en la mitad de la zona en la quese esta aplicando wo, tal como se muestra en la Figura 2.30.
L/2
wL
Figura 2.30: Fuerzas distribuıdas. Fuerza equivalente a una distribucion cons-tante.
Distribucion lineal: En este problema se considera una distribucion de fuer-za por unidad de longitud lineal con un valor maximo en un extremo iguala wo, tal como se muestra en la Figura 2.31. En este caso se tiene
w(x) =x
Lwo,
y de (2.17) se llega a
FR =
∫ L
0
x
Lwo dx =
woL
2, (2.21)
32

x
y
L
wo
Figura 2.31: Fuerzas distribuıdas: Distribucion lineal
que no es otra cosa que el area del triangulo que forma esta distribucionlineal.
Por otra parte ∫ L
0
x2
Lw0 dx =
woL2
3,
luego de (2.18) tenemos
x =wo
L2
3
woL2
=2L
3, (2.22)
o sea la resultante se aplica a dos tercios de la distancia desde el inicio dela distribucion lineal original, tal como se muestra en la Figura 2.32.
2L/3
FR = woL/2
Figura 2.32: Fuerzas distribuıdas. Fuerza equivalente a una distribucion lineal.
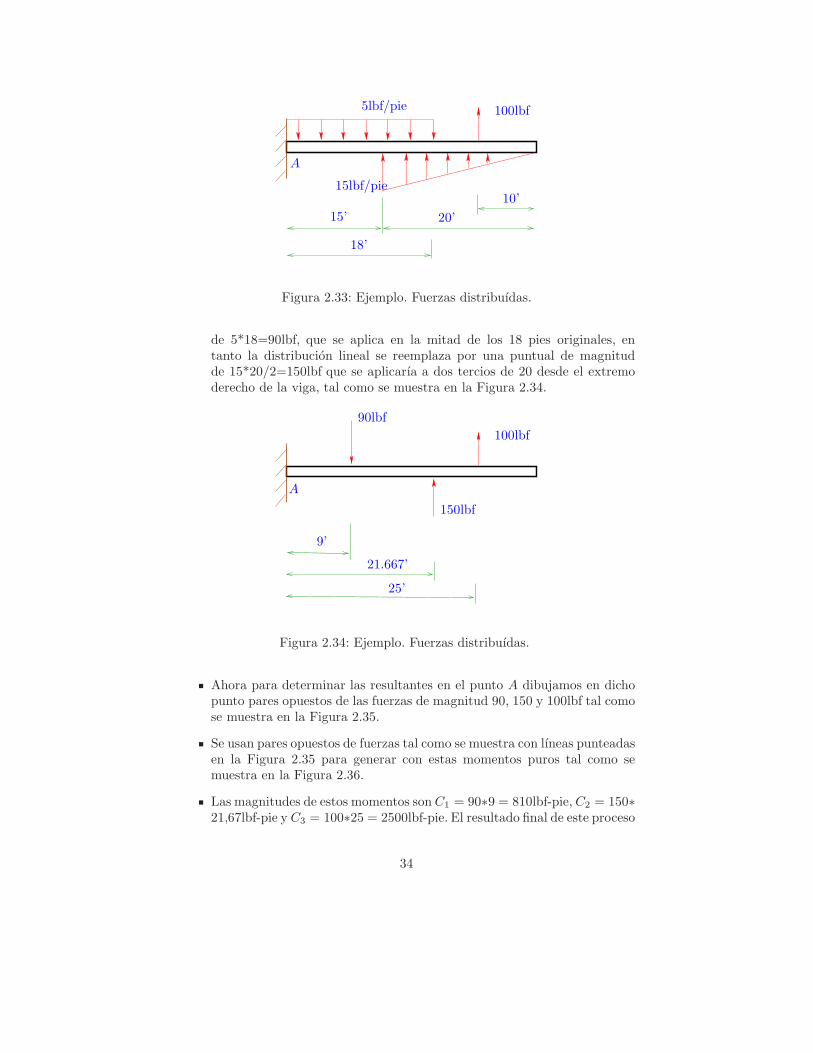
Ejemplo: Para el sistema de fuerzas mostrado en la Figura 2.33 determinela fuerza y momentos resultantes en el punto A y tambien determine el sistemade fuerzas y momentos mas simple que sea equivalente a las fuerzas originales.Las unidades de longitud son ‘pie’ y las de fuerza estan en libras-fuerza.
Usando los resultados mostrados en (2.20) y (2.22) vamos primero a re-emplazar las distribuciones de fuerza por unidad de lınea por fuerzas pun-tuales. La fuerza uniforme de 5lbf/pie se reemplazarıa por una puntual
33
A
5lbf/pie 100lbf
15lbf/pie
15’ 20’
10’
18’
Figura 2.33: Ejemplo. Fuerzas distribuıdas.
de 5*18=90lbf, que se aplica en la mitad de los 18 pies originales, entanto la distribucion lineal se reemplaza por una puntual de magnitudde 15*20/2=150lbf que se aplicarıa a dos tercios de 20 desde el extremoderecho de la viga, tal como se muestra en la Figura 2.34.
A
90lbf
100lbf
150lbf
9’
21.667’
25’
Figura 2.34: Ejemplo. Fuerzas distribuıdas.
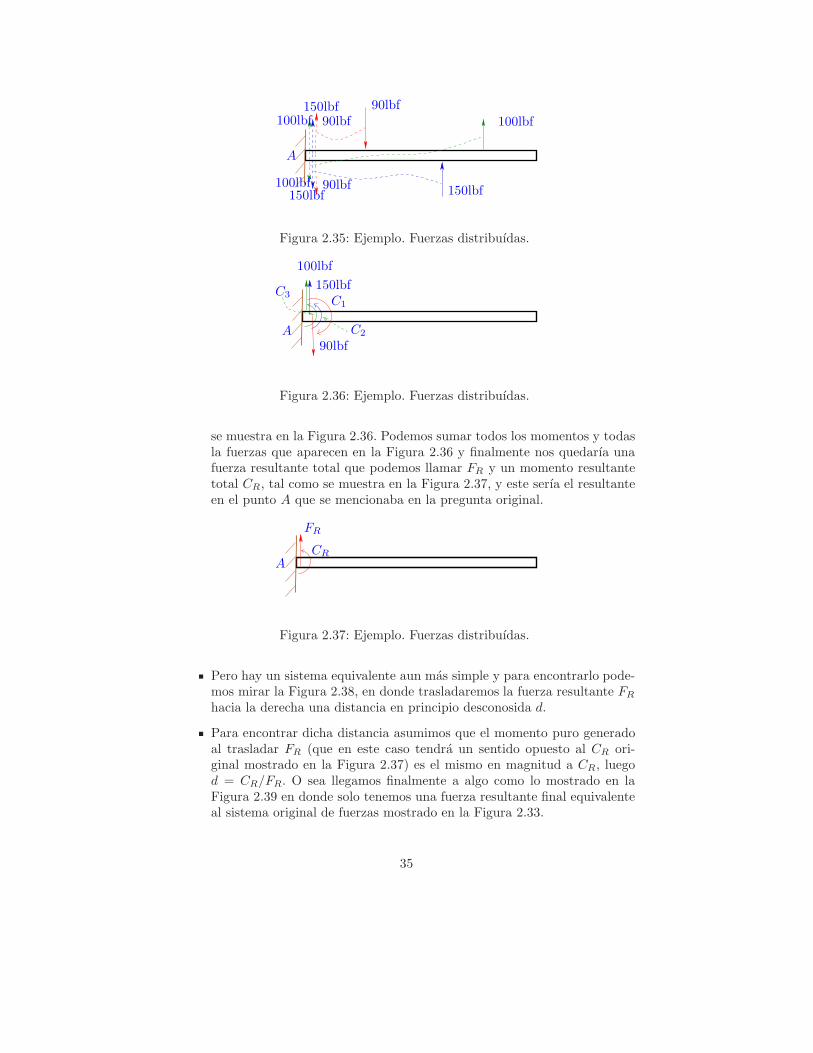
Ahora para determinar las resultantes en el punto A dibujamos en dichopunto pares opuestos de las fuerzas de magnitud 90, 150 y 100lbf tal comose muestra en la Figura 2.35.
Se usan pares opuestos de fuerzas tal como se muestra con lıneas punteadasen la Figura 2.35 para generar con estas momentos puros tal como semuestra en la Figura 2.36.
Las magnitudes de estos momentos son C1 = 90∗9 = 810lbf-pie, C2 = 150∗21,67lbf-pie y C3 = 100∗25 = 2500lbf-pie. El resultado final de este proceso
34
A
90lbf
90lbf90lbf
100lbf
100lbf 100lbf
150lbf
150lbf
150lbf
Figura 2.35: Ejemplo. Fuerzas distribuıdas.
A90lbf
100lbf
150lbfC1
C2
C3
Figura 2.36: Ejemplo. Fuerzas distribuıdas.
se muestra en la Figura 2.36. Podemos sumar todos los momentos y todasla fuerzas que aparecen en la Figura 2.36 y finalmente nos quedarıa unafuerza resultante total que podemos llamar FR y un momento resultantetotal CR, tal como se muestra en la Figura 2.37, y este serıa el resultanteen el punto A que se mencionaba en la pregunta original.
ACR
FR
Figura 2.37: Ejemplo. Fuerzas distribuıdas.
Pero hay un sistema equivalente aun mas simple y para encontrarlo pode-mos mirar la Figura 2.38, en donde trasladaremos la fuerza resultante FRhacia la derecha una distancia en principio desconosida d.
Para encontrar dicha distancia asumimos que el momento puro generadoal trasladar FR (que en este caso tendra un sentido opuesto al CR ori-ginal mostrado en la Figura 2.37) es el mismo en magnitud a CR, luegod = CR/FR. O sea llegamos finalmente a algo como lo mostrado en laFigura 2.39 en donde solo tenemos una fuerza resultante final equivalenteal sistema original de fuerzas mostrado en la Figura 2.33.
35

ACR
FR
FRFR
d
Figura 2.38: Fuerzas distribuıdas: Ejemplo
FR
A
Figura 2.39: Ejemplo. Fuerzas distribuıdas.
36

2.3.2. Apoyos y reacciones
En las figuras mostradas en las secciones anteriores pudimos apreciar es-quemas de vigas en cuyos extremos se incluıan algunos sımbolos que indicamosrepresentaban algun tipo de interaccion con otros cuerpos o con el medio. Hemosdiscutido en detalle acerca de la interaccion de varios cuerpos que, por ejemplo,forman un mecanismo, y que dicha interaccion se puede modelar a traves defuerzas y/o de restricciones a los posibles desplazamiento que esas superficiesde interaccion pueden presentar. En el caso de vigas modelaremos estas inter-acciones de forma simplificada a traves de ‘apoyos’, que generaran fuerzas dereaccion puntuales de magnitud apropiada para lograr dichas restricciones a losdesplazamientos.
Pasador: Este tipo de apoyo se representara de la forma como se muestra enla Figura 2.40, en donde tenemos el extremo de una viga y dos formasequivalentes para representar este apoyo.
x
y
Figura 2.40: Apoyos tipo Pasador.
Se asumira que un apoyo tipo pasador impide el desplazamiento (del puntoen donde este se aplica) tanto en la direccion x como en la direccion y. Porotra parte no impide movimientos angulares para ese extremo de la viga,o sea la viga es libre de rotar en cualquier direccion. Por este motivo eltipo de ‘reaccion’ que este tipo de apoyo generara consistira de una fuerzapuntual ~R, que para el caso plano tiene dos componentes Rx, Ry, tal comose muestra en la Figura 2.41
Rx
Ry~R
Figura 2.41: Pasador. Fuerzas de reaccion.
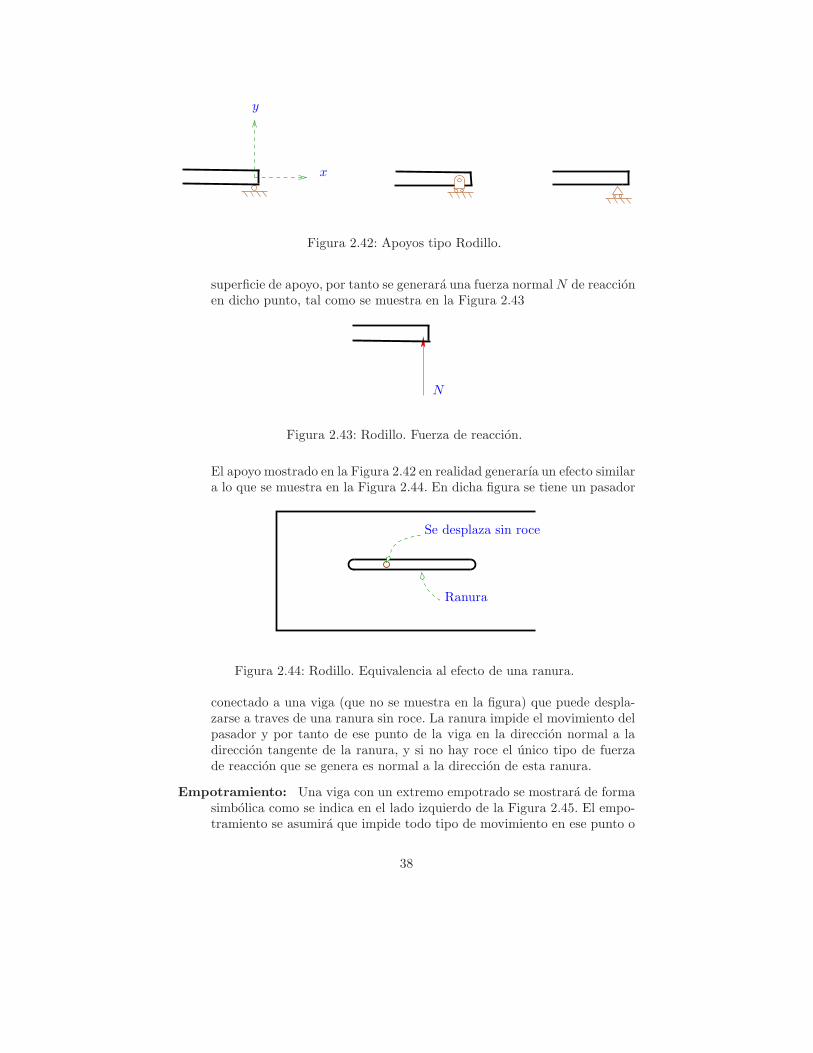
Rodillo: Un apoyo tipo rodillo se simbolizara de tres formas equivalentes comose muestra en la Figura 2.42.
Un apoyo de esta naturaleza colocado en el extremo de una viga se asu-mira que impide el movimiento de ese punto en la direccion normal a la
37
x
y
Figura 2.42: Apoyos tipo Rodillo.
superficie de apoyo, por tanto se generara una fuerza normalN de reaccionen dicho punto, tal como se muestra en la Figura 2.43
N
Figura 2.43: Rodillo. Fuerza de reaccion.
El apoyo mostrado en la Figura 2.42 en realidad generarıa un efecto similara lo que se muestra en la Figura 2.44. En dicha figura se tiene un pasador
Se desplaza sin roce
Ranura
Figura 2.44: Rodillo. Equivalencia al efecto de una ranura.
conectado a una viga (que no se muestra en la figura) que puede despla-zarse a traves de una ranura sin roce. La ranura impide el movimiento delpasador y por tanto de ese punto de la viga en la direccion normal a ladireccion tangente de la ranura, y si no hay roce el unico tipo de fuerzade reaccion que se genera es normal a la direccion de esta ranura.
Empotramiento: Una viga con un extremo empotrado se mostrara de formasimbolica como se indica en el lado izquierdo de la Figura 2.45. El empo-tramiento se asumira que impide todo tipo de movimiento en ese punto o
38

No permite desplazamientoen x, y y no permiterotacion
~R
Rx
Ry
Mzx
y
z
Figura 2.45: Apoyos tipo empotramiento.
extremo de la viga, es decir no se puede mover ni en la direccion x, y (yeventualmente z), ni tampoco puede girar libremente en dicho punto.
En el lado derecho de la Figura 2.45 tendrıamos los tipos de fuerzas ymomentos de reaccion que este apoyo generarıa sobre la viga en ese punto.Tenemos una fuerza puntual ~R con dos componentes (en el caso plano)Rx y Ry, mas un momento puro de reaccion que denotamos Mz para elcaso plano.
Rotula 3D: Este es un apoyo que aparece en problemas tridimensionales, cu-yo esquema se muestra en el lado izquierdo de la Figura 2.46. En esa figura
Rx
Ry
Rz
Figura 2.46: Apoyos tipo rotula 3D.
podemos ver una barra unida (pegada) a una esfera, la cual esta parcial-mente inserta en una cavidad de forma esferica (el soporte dibujado encolor cafe). Un apoyo de este tipo no permitirıa ningun tipo de desplaza-miento pero por otra parte permitirıa cualquier tipo de rotacion, como lomuestran las flechas verdes. El tipo de reacciones que este apoyo generarıasi no hay roce se muestra en el lado derecho de la figura y consistirıa enuna fuerza puntual con tres componentes (3D) Rx, Ry, Rz.
Dos barras conectadas por un pasador: Un caso adicional, que en reali-dad es una extension del apoyo tipo pasador visto anteriormente, corres-ponde al problema de dos o mas barras unidas a traves de un pasador.
39

Como ejemplo veamos la Figura 2.47, en donde podemos apreciar dosbarras o vigas unidas en un extremo por un pasador.
Pasador
Figura 2.47: Pasador conectando dos barras.
La pregunta, desde el punto de vista de las reacciones, es: ¿Que simpli-ficacion se podrıa hacer en ese caso? Para ello podemos apreciar la vistaampliada de la zona de interaccion mostrada en la Figura 2.48, en dondetenemos diagramas de los extremos de las barras y un diagrama adicionaldel pasador.
RxRx
Ry
Ry
R′x
R′x
R′y
R′y
Figura 2.48: Pasador conectando dos barras. Fuerzas de interaccion.
Si asumimos no hay roce, de la discucion del apoyo tipo pasador, la reac-cion que el pasador generarıa sobre cada barra serıa solo una fuerza pun-tual con dos componentes, por lo tanto en el caso de la barra del ladoizquierdo el efecto del pasador sobre esa barra se manifestarıa por mediode Rx y Ry, en tanto que en la barra del lado derecho se manifestarıa pormedio de reacciones R′
x y R′y. Por accion y reaccion las mismas fuerzas
actuarıan sobre el pasador mostrado en el medio, y como estamos en uncaso de equilibrio estatico tenemos pare este pasador que se debe cumplir
∑Fx = 0 ⇒ Rx = R′
x y∑
Fy = 0 ⇒ Ry = R′y, (2.23)
o sea en este caso el pasador simplemente ‘transmitirıa’ la fuerza de unabarra a la otra10.
10En el caso de tres barras unidas en un punto por un pasador, si ademas hay una fuer-
40

za externa actuando en dicho punto, entonces esta conclusion no es valida, y necesitamoshacer diagramas de cuerpo libre de cada una de las barras y el pasador, pudiendo hacer lasimplificacion adicional que la fuerza externa se estarıa aplicando solo en el pasador.
41
2.3.3. Ecuaciones de equilibrio
En la Seccion 2.2.1 (y tambien en la Seccion 2.3) hemos mencionado las ecua-ciones de equilibrio. Hemos indicado en extenso que en este texto en su mayorparte nos preocuparemos solo de problemas estaticos, es decir como supuestoconsideraremos que cualquier efecto que pueda tener la velocidad o aceleracionen el comportamiento de un solido no se tomara en cuenta. Ahora bien, en laseccion anterior hemos definidos algunos tipos de ‘apoyos’ que no son otra cosaque modelos de interaccion entre cuerpos que pueden componer un mecanismo.Dichos apoyos generan restricciones al desplazamiento y de manera indirectageneran ‘fuerzas de reaccion’. Deberıa ser claro, al menos de manera intuitiva,que en el comportamiento mecanico de un cuerpo no solo serıan importantes lasfuerzas o momentos externo sino tambien estas fuerzas de reaccion o interac-cion. En esta seccion (la ultima de este capıtulo de estatica) veremos metodossimplificados para calcular dichas reacciones.
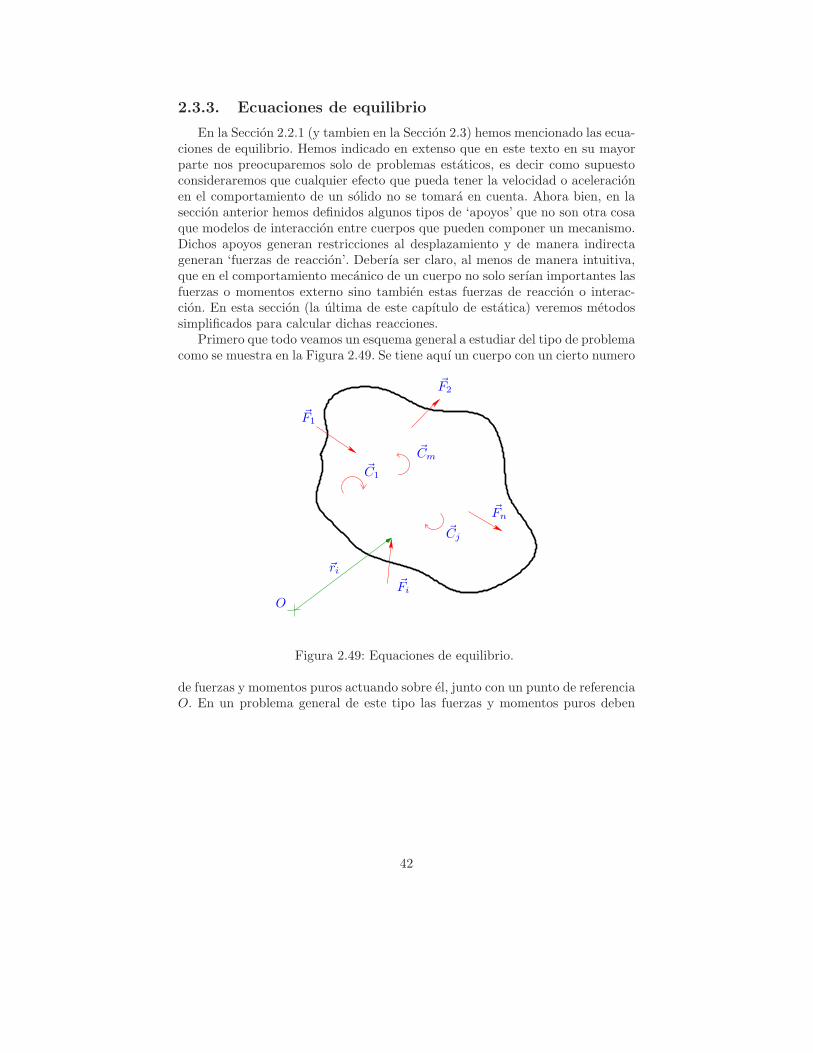
Primero que todo veamos un esquema general a estudiar del tipo de problemacomo se muestra en la Figura 2.49. Se tiene aquı un cuerpo con un cierto numero
O
~F1
~F2
~Fi
~Fn
~C1
~Cj
~Cm
~ri
Figura 2.49: Equaciones de equilibrio.
de fuerzas y momentos puros actuando sobre el, junto con un punto de referenciaO. En un problema general de este tipo las fuerzas y momentos puros deben
42

satisfacer las ecuaciones de equilibrio11
∑
i
~Fi = ~0, (2.24)
∑
j
~Mj = ~0 ⇔∑
i
~ri × ~Fi +∑
j
~Cj = ~0. (2.25)
Estas ecuaciones son bien conocidas en fısica y nada nuevo se ha mostra-do. Considerando ambas en problemas tridimensionales tenemos 6 ecuacionesescalares. Lo que nos interesa ahora es ver como resolverlas de forma rapida ypractica, para ello veamos el siguiente listado de casos especiales:
Fuerzas coplanares (caso plano): En un problema de este tipo se asumiraque todas las fuerzas (tanto externas como de interaccion) pertenecen aun plano (por ejemplo el plano x−y), y que todos los momentos puros solotienen componente en z, tal como se muestra en la Figura 2.50. Tenemos
x
~F1
~F2
y ~C1
~Fn~Cj
Figura 2.50: Equaciones de equilibrio. Caso plano.
entonces que las fuerzas son de la forma ~F = Fx ı + Fy y que los momen-
tos puros son como ~C = Cz k, luego de (2.24), (2.25) solo tenemos tresecuaciones que satisfacer
∑Fx = 0, (2.26)
∑Fy = 0, (2.27)
∑Mz = 0. (2.28)
Fuerzas paralelas: En este caso como ejemplo podemos asumir que todas lasfuerzas aplicadas en un cuerpo tienen la direccion del eje z, tal como semuestra en la Figura 2.51. Las fuerzas externas entonces tiene la forma
11La ecuacion (2.25) en realidad es equivalente a tomar todas las fuerzas sobre el cuerpo ymoverlas a un punto comun para sumarlas en dicho punto. El proceso de mover estas fuerzasgeneran los momentos mostrados en el primer termino de la segunda equacion en (2.25).
43

x
~F1~F2
y~Fi
~Fn
z
Figura 2.51: Equaciones de equilibrio. Fuerzas paralelas.
~F = Fz k y los momentos puros (que no aparecen dibujados en la Figura
2.51) tendrıan la forma ~C = Cx ı + Cy , luego en un problema de estanaturaleza de (2.24), (2.25) tenemos que resolver solo tres ecuaciones
∑Fz = 0, (2.29)
∑Mx = 0, (2.30)
∑My = 0. (2.31)
Fuerzas concurrentes: Si en un cuerpo todas las fuerzas (o sus lıneas deaccion) pasan por un solo punto tal como se muestra en la Figura 2.52, ysi no se aplica ningun momento puro externo, entonces de (2.24), (2.25)solo debemos resolver ∑
~Fi = ~0, (2.32)
es decir aquı no es necesario verificar el equilibrio al momento.
~F1
~F2
~Fi
~Fn
Figura 2.52: Equaciones de equilibrio. Fuerzas concurrentes.
Cuerpo bajo la accion de una sola fuerza: En la Figura 2.53 se muestraun cuerpo bajo la accion de una sola fuerza. Esquemas de esta forma sehan usado y mostrado en secciones anteriores, sin embargo en estaticadesde el punto de vista riguroso no estamos considerando aceleracion, ypor tanto es necesario que
∑ ~Fi = ~0, y cuando hay solo una fuerza aplicada
sobre un cuerpo, esto de manera inmediata implica que ~F = ~0, o sea en
44

~F
Figura 2.53: Equaciones de equilibrio. Cuerpo bajo la accion de una sola fuerza.
estatica no es posible tener solo una fuerza aplicada sobre un cuerpo paraque este este en equilibrio.
Cuerpo bajo la accion de solo dos fuerzas: Este es un caso muy impor-tante, el resultado mostrado aquı se aplica en la mayor parte de los ejem-plos y ejercicios mostrados en la Seccion 2.4. Considerese la Figura 2.54en donde tenemos un cuerpo bajo la accion de dos fuerzas. Estas fuerzas
~FA
~FB
~ρABA
B
Figura 2.54: Equaciones de equilibrio. Cuerpo bajo la accion de dos fuerzas.
pueden ser fuerzas externas o fuerzas externas de reaccion o interaccioncon otros cuerpos. Tenemos pues una fuerza ~FA aplicada en un punto Ay una fuerza ~FB aplicada en un punto B. Asumiremos que los puntos A,B son diferentes, pues en otro caso estarıamos en la situacion de fuerzasconcurrentes visto en un punto anterior.
En este caso especial las ecuaciones (2.24) deben tambien ser satisfechas,luego (2.24) implica que
~FA + ~FB = ~0,
de modo que, por ejemplo, ~FA = − ~FB. O sea las fuerzas deben ser igualespero opuestas en sentido.
Por otra parte de (2.25) tenemos que∑
~Mj = ~0, que en este caso en dondehay solo fuerzas y no hay momento puro externo aplicado, de (2.25) esequivalente (si se calcula por ejemplo respecto al punto A) a
~ρAB × ~FB = ~0,
45

pues respecto a A la fuerza ~FA no hace momento. Ahora bien, la ecuacionanterior nos dice finalmente que para que haya equilibrio al momento lafuerza ~FB deberıa ser paralela a ~ρAB, y como tenıamos que ~FA = − ~FBesto finalmente implica que:
Para que un cuerpo con solo dos fuerzas aplicadas sobre el este en equili-brio las fuerzas deben ser de igual magnitud, direccion y sentido opuesto,y su direccion debe ser la misma direccion del vector que une los puntosde aplicacion.
Tenemos dos casos posibles entonces, tal como se muestra en al Figura2.55.
~F
~F
~F
~FAA
BB
Figura 2.55: Cuerpo bajo la accion de dos fuerzas. Dos situaciones posibles.
Cuerpo bajo la accion de solo tres fuerzas: En este problema tenemos dossub-casos que detallaremos a continuacion.
Cuerpo bajo la accion de tres fuerzas y dos de ellas concurrentes.
En la Figura 2.56 tenemos una esquema de un cuerpo bajo la ac-cion de tres fuerzas ~FA, ~FB y ~FC . Asumimos, por ejemplo, que ~FAy ~FB (sus lıneas de accion) se intersectan en un punto comun quellamaremos O.
~FA~FB
O
~FC
C
Figura 2.56: Equaciones de equilibrio. Cuerpo bajo la accion de tres fuerzas.
Como ~FA y ~FB (sus lıneas de accion) coinciden en un punto, pode-mos trasladar estas fuerzas a dicho punto, y esto es posible pues almoverlas a lo largo de sus lıneas de accion el efecto de cada una deestas fuerzas en cuerpo rıgidos es el mismo. Finalmente en O suma-
46

mos estas dos fuerzas de modo que tenemos una situacion como lamostrada en la Figura 2.57.
~FA + ~FB
~FB
~FA
O
~FC
C
~ρCO
Figura 2.57: Cuerpo bajo la accion de tres fuerzas. Dos fuerzas concurrentes.
Como ahora en la Figura 2.57 tenemos solo dos fuerzas actuando so-bre el cuerpo, ~FA+ ~FB en O y ~FC en C, podemos aplicar el principiovisto en el punto anterior para un cuerpo con dos fuerzas, de dondeconcluımos que ~FC debe necesariamente tener la direccion del vectorque va desde C a O, en consecuencia ~FC (su lınea de accion) tambienpasarıa por el punto O y tenemos que :
Cuando un cuerpo este sometido solo a tres fuerzas, con dos de ellas(sus lıneas de accion) concurrentes a un punto, la tercera fuerza tam-bien (su lınea de accion) intersecta dicho punto.
Es decir en un caso como este tenemos algo como lo que se muestraen la Figura 2.58.
~FB
~FA
O
~FCC
Figura 2.58: Cuerpo bajo la accion de tres fuerzas. Caso mas general.
Cuerpo bajo la accion de tres fuerzas y dos de ellas paralelas.
En este caso nuevamente tenemos un cuerpo sobre el que actuantres fuerzas ~FA, ~FB y ~FC en los puntos A, B, C, respectivamente.Asumimos ahora, por ejemplo, que ~FA y ~FB son paralelas, tal comose muestra en la Figura 2.59.
Bajo al accion de estas tres fuerzas el cuerpo debe estar en equilibrio,o sea (2.24) y (2.25) deben ser satisfechas. En el caso particular de
47

~FB
~FA
x~FC
C
y
Figura 2.59: Cuerpo bajo la accion de tres fuerzas. Dos fuerzas paralelas.
(2.25) esto implicarıa que
∑Fx = 0,
∑Fy = 0.
Ahora bien, la ecuacion (2.24) debe ser valida para cualquier sistemade coordenadas, no solo para el sistema x− y mostrado en la Figura2.59, luego en lugar de resolver (2.24) con ese sistema podemos esco-ger un sistema de coordenadas alternativo x′−y′ tal como se muestraen la Figura 2.60. En dicha figura escogemos ahora la direccion del
~FB
~FA
x′ ~FC
C
y′
Figura 2.60: Dos fuerzas paralelas. Sistema alternativo de ejes coordenados.
eje y′ de forma que sea paralelo a las fuerzas ~FA y ~FB . En este sis-tema alternativo de coordenadas las fuerzas ~FA y ~FB solo tendrıancomponente en y′ en tanto que ~FC tendrıa tanto una componenteen x′ como en y′, o sea ~FC = FCx′
ı′ + FCy′′, luego en particular de
(2.24) para este sistema de coordenadas tenemos que
∑Fx′ = 0 ⇔ FCx′
= 0,
o sea ~FC solo deberıa tener componente en y′, luego tenemos que:
Si un cuerpo esta sometido solo a tres fuerzas y dos de ellas sonparalelas, la tercera fuerza tambien es paralela.
48

2.4. Ejemplos y ejercicios para estatica de es-tructuras
En esta seccion se resolveran algunos problemas en donde estemos interesa-dos en determinar fuerzas de reaccion o interaccion, algunos ejercicios aparecenal final de la seccion.
1. Para la viga doblada mostrada en la Figura 2.61 determine las fuerzas dereaccion en los apoyos A, B. La viga esta siendo sometida a una fuerzauniforme w = 50N/m.
A ~w
L
a
b
B
Figura 2.61: Ejemplo de calculo de reacciones.
Datos: L = 4m, a = 2m, b = 1,5m.
Solucion: Si se hace un diagrama de cuerpo libre de la viga, es decir si sedibuja solo la viga reemplazando los apoyos por las fuerzas de reaccionque estos generarıan, tenemos un esquema como el mostrado en la Figura2.62. El apoyo tipo pasador en A se reemplaza por una fuerza puntual
A~F
Rx
Ry
x
y
~FB
~ρAF
~ρAB
θ
Figura 2.62: Ejemplo de calculo de reacciones.
49

con dos componentes Rx, Ry en tanto que el apoyo tipo rodillo en B sereemplazarıa por una fuerza normal, en este caso a la superficie en dondeeste rodillo se ubica, esta fuerza la denotamos como ~FB y su direccion θes conocida donde θ = arctan(2/1,5).
En la Figura 2.62 la fuerza uniforme por unidad de lınea ~w ha sido reem-plazada por una puntual equivalente ~F y de (2.19)1 ‖ ~F‖= 50 ∗ 2,5N justoen la mitad de la zona de aplicacion de ~w.
Tenemos pues tres incognitas para este problema, en A nos interesa co-nocer Rx, Ry y en C queremos conocer la magnitud de ~FB (puesto quesu direccion es ya conocida). Si observamos bien este es un problema defuerzas coplanares por tanto usaremos
∑Fx = 0,
∑Fy = 0,
∑Mz = 0 (2.33)
para encontrar estas incognitas. Podemos ver tenemos tres incognitas ytres ecuaciones. Un problema de este tipo es llamado un problema estati-camente determinado.
Para resolver este sistema de ecuaciones de la Figura 2.62 podemos verque
~FB = FB cos θı + FB sin θ, ~F = −F cos θı− F sin θ, (2.34)
de modo que (2.33)1, (2.33)2 queda como
Rx + FB cos θ − F cos θ = 0, Ry + FB sin θ − F sin θ = 0. (2.35)
Respecto a (2.33)3, haremos el balance de momento respecto al punto A,de la Figura 2.62 es facil ver que
~ρAF = 5ı− 0,75 ~ρAB = 6i− 1,5.
Y (2.33)3 queda como
~ρAF × ~F + ~ρAB × ~FB = ~0,
que usando las expresiones anteriores para ~ρAF y ~ρAB, despues de algunasmanipulaciones, nos queda como
k(−5F sin θ − 0,75F cos θ) + k(6FB sin θ + 1,5FB cos θ) = ~0.
Como esta ecuacion vectorial solo tiene una componente (en z lo que estacorrecto para problemas de fuerzas coplanares), esta ecuacion es equiva-lente finalmente a
−F (5 sin θ + 0,75 cos θ) + FB(6 sin θ + 1,5 cos θ) = 0. (2.36)
En (2.36) conocemos F y θ por lo que podemos despejar FB . Este valorpara FB se puede reemplazar en el sistema de dos ecuaciones (2.35) paradespejar Rx y Ry
50

Apriete
L
a b
c1
23
4
F
F
Figura 2.63: Ejemplo de calculo de reacciones.
2. Para la llave mostrada en la Figura 2.63 calcule la fuerza de apriete si seaplica una fuerza F = 50lbf.
Datos: L = 10, a = 1, b = 1/2, c = 1/2 (las dimensiones estan en pulga-das).
Solucion: En la Figura 2.63 indentificamos con un numero las piezas opartes mas importantes de la llave y a continuacion se dibujan diagramasde cuerpo libre para cada una de estas partes.
En relacion a barra 2, de la Figura 2.63 podemos notar que esta conectadapor medio de pasadores solo a dos puntos, luego estamos en la situacionde un cuerpo sometido solo a dos fuerzas (en los pasadores) y por tantodichas fuerzas deben ser igual y tener la direccion del vector que une dichospasadores como se muestra en la Figura 2.64.
B
B θ
Figura 2.64: Ejemplo de calculo de reacciones. Diagrama de cuerpo libre de 2.
La fuerza sobre la barra 2 se asume de magnitud (por el momento des-conocida) B, el angulo θ es conocido e igual a θ = arctan[c/(a + b)]. Elsentido de B todavıa no se conoce, hemos asumido que esta en ‘traccion’,pero de los resultados numericos el signo de B nos dira si ese supuesto es
51

correcto o no.
Con el resultado anterior ahora nos preocupamos de la barra 1 como semuestra en la Figura 2.65. Ya sabemos la direccion de la fuerza B y luego
B~ρAB
A
Ax
Ay
F
Figura 2.65: Ejemplo de calculo de reacciones. Diagrama de cuerpo libre de 1.
por accion y reaccion la dibujamos en la barra 1 en el sentido opuesto perocon la misma direccion θ.
Ademas en la barra 1 tenemos la fuerza externa F y la fuerza en el pasadorque se conecta con el cuerpo 3. El cuerpo 3 esta sometido a mas de dosfuerzas, de modo que no sabemos la direccion de dichas reacciones, ypor tanto el efecto del cuerpo 3 sobre la barra 1 en ese pasador se debemanifestar en general por medio de una fuerza que llamaremos ~A con doscomponentes Ax, Ay. No conocemos el sentido de estas reacciones, perolos calculos con las ecuaciones de equilibrio nos deberıan indicar esto.
En el problema mostrado en la Figura 2.65 tenemos tres incognitas Ax, Ayy B, luego este es un problema plano, por tanto tenemos tres ecuaciones deequilibrio (2.26)-(2.28) para obtenerlas, lo que hacemos ahora. Partimoscon el equilibrio al momento escogiendo el punto A, luego12
∑AMz = 0
es equivalente a
~ρAB × (−B cos θı−B sin θ)− 50 ∗ 9k = ~0,
donde ~ρAB = bı + c. Despues de algunas manipulaciones esta ecuacionnos da
B =450
b sin θ − c cos θ. (2.37)
De (2.26) tenemos∑Fx = 0 para la barra 1 es equivalente a
Ax −B cos θ = 0,
de donde tenemosAx = B cos θ, (2.38)
12De ahora en adelante el subındice en la suma indicara el punto respecto al cual se estahaciendo el equilibrio al momento agular.
52

como B se conoce de (2.37) ahora tenemos Ax. No necesitamos determinarAy por motivos veremos ahora a continuacion.
Ahora nos concentramos en el cuerpo 3 cuyo diagrama de cuerpo libre semuestra en la Figura 2.66. Se asume que entre el cuerpo 3 y 4 no hay
P
Sin roce
Ax
Ax
Ay
Ay
Figura 2.66: Ejemplo de calculo de reacciones. Diagrama de cuerpo libre de 3.
roce, y debido a que la barra 1 y la barra inferior son simetricas tantoen forma como en relacion a las fuerzas que se aplican, vemos entoncesque no hay interaccion entre 3 y 4, y por tanto las unicas fuerzas que seaplican sobre 3 vienen del cuerpo 1 y la fuerza de apriete que llamamos P .Sobre 3 tenemos Ax y Ay por accion y reaccion, que por simetrıa actuanen el pasador superior e inferior de la misma forma.
De∑Fx = 0 aplicada al cuerpo 3 nos da
P − 2Ax = 0 ⇒ P =900 cos θ
b sin θ − c cos θ. (2.39)
3. Para la Figura 2.67 determine la fuerza en E que se produce como funcionde P , no hay roce en todo el sistema y tampoco se considera el peso delas distintas componentes.
Datos: a = 4, b = 7, c = 3, d = 2, e = 2 12 y f = 5, las dimensiones estan
en pulgadas.
Solucion: Una forma simple de resolver el problema es partiendo con eldiagrama de cuerpo libre del cuerpo 1, que se muestra en la Figura 2.68.En ese figura podemos ver la fuerza externa P , y las fuerzas de interaccionen B y C. En C el cuerpo 1 esta interactuando con la barra 2, pero labarra dos solo esta bajo el efecto de dos fuerzas en los pasadores C y D,de modo que estas fuerzas en C y D son iguales y sus direcciones siguenla lınea que va de C a D, luego la fuerza en C proveniente de la barra 2actuando sobre el cuerpo 1 tiene una direccion conocida, pero su magnituddebe todavıa calcularse.
En la Figura 2.68 tenemos la direccion de la fuerza C con angulo θ =arctan(d/e) = 51,34◦. El cuerpo 3 esta sometido a fuerzas en tres puntos,
53

E
a b
c
1
2
3
e
P
f
A
B
C
D
d
Figura 2.67: Ejemplo de calculo de reacciones.
θLınea de accion de fuerza en C
By
BxP
C
Figura 2.68: Ejemplo de calculo de reacciones. Diagrama cuerpo libre 1.
en A, B y E, y por ese motivo la fuerza que se transmite a traves delpasador en B tiene en general dos componentes que no se conocen.
Este nuevamente es un problema plano, luego tenemos solo tres ecuacio-nes de equilibrio para determinar Bx, By y C en la Figura 2.68, y porconveniencia partimos con (2.28), de modo que si ~ρBC = (f −e)ı− (c−d)tenemos
∑
B
Mz = 0 ⇔ −Pbk + C(− cos θı + sin θ)× ~ρBC = ~0,
de donde podemos obtener C en funcion de P . Queda como ejercicio re-solver la ecuacion anterior.
Conociendo C ahora podemos obtener Bx y By de resolver (2.26), (2.27),
54

de donde tenemos
Bx = C cos θ, By = P − C sin θ.
Conociendo ahora Bx y By ahora hacemos un diagrama de cuerpo libre de3 tal como se muestra en la Figura 2.69. En el diagrama de cuerpo libre
E
By
Bx
Ax
Ay
Figura 2.69: Ejemplo de calculo de reacciones. Diagrama cuerpo libre 3.
de 3 tenemos la fuerza E (que es la que se quiere calcular), las fuerzas enB que ya se conocen, y las componentes de la fuerza en el pasador A, quedenotamos como Ax y Ay.
Para obtener E podemos simplemente usar (2.28) haciendo equilibrio demomento respecto al punto A, en cuyo caso tenemos
∑
A
Mz = 0 ⇔ Bxc = Ea,
luego E = Bxc/a y hemos resuelto el problema.
4. Para el mecanismo mostrado en la Figura 2.70 dibuje los diagramas decuerpo libre de cada una de las partes del sistema. Desprecie el peso ysustituya la carga distribuıda por su resultante.
5. En el elevador de automoviles de la Figura 2.71 los vehıculos suben a laplataforma y despues se alzan las ruedas traseras. Si la carga debido a estases de 6kN, encuentre la fuerza en el cilindro hidraulico AB. Desprecie elpeso de la plataforma. El miembro BCD es una palanca acodada a 90◦
articulada en C a la rampa.
6. El bastidor de la Figura 2.72 se usa para soportar cables de alta tension(en C, F e I tenemos un pesoW por los cables). ¿Que valor tiene la fuerzaaxial en el elemento HJ?
Datos: b = 1m, α = 30◦, W = 1000Kgf.
55

A C
D
E
B
a b
~w
Cable
Polea
Peso
Figura 2.70: Ejemplo de calculo de reacciones.
Parte trasera auto
800mm 300mm
60◦400mm
150mmO
A
B
C
D
No hay roce
Figura 2.71: Rampa para auto.
7. Para el mecanismo mostrado en la Figura 2.73 determine las fuerzas sobreel elemento ABC. Solo considere la fuerza externa wo y no el peso de lasbarras. El elementoDCG se conecta por medio de un pasador a una ranuraen G (no hay roce). Las dimensiones estan en metros y wo = 5kN/m.
56
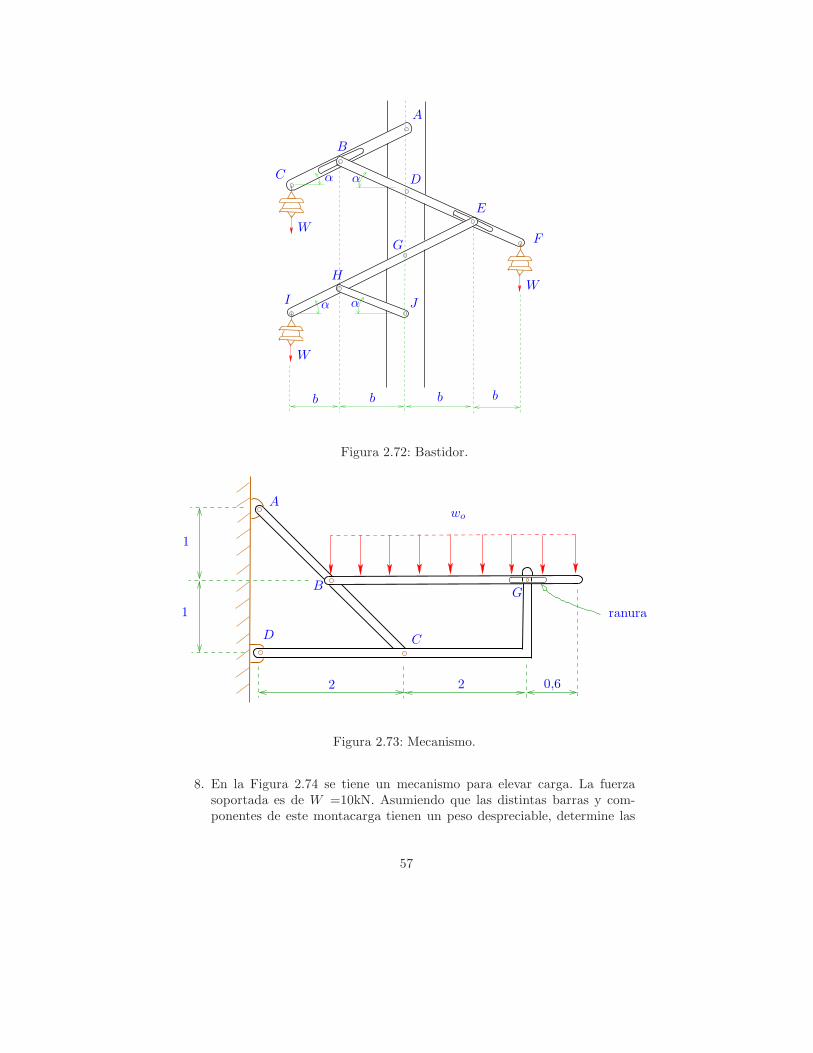
A
B
C D
E
FG
H
I Jα α
αα
W
W
W
bbbb
Figura 2.72: Bastidor.
A
B
CD
G
wo
1
1
22 0,6
ranura
Figura 2.73: Mecanismo.
8. En la Figura 2.74 se tiene un mecanismo para elevar carga. La fuerzasoportada es de W =10kN. Asumiendo que las distintas barras y com-ponentes de este montacarga tienen un peso despreciable, determine las
57
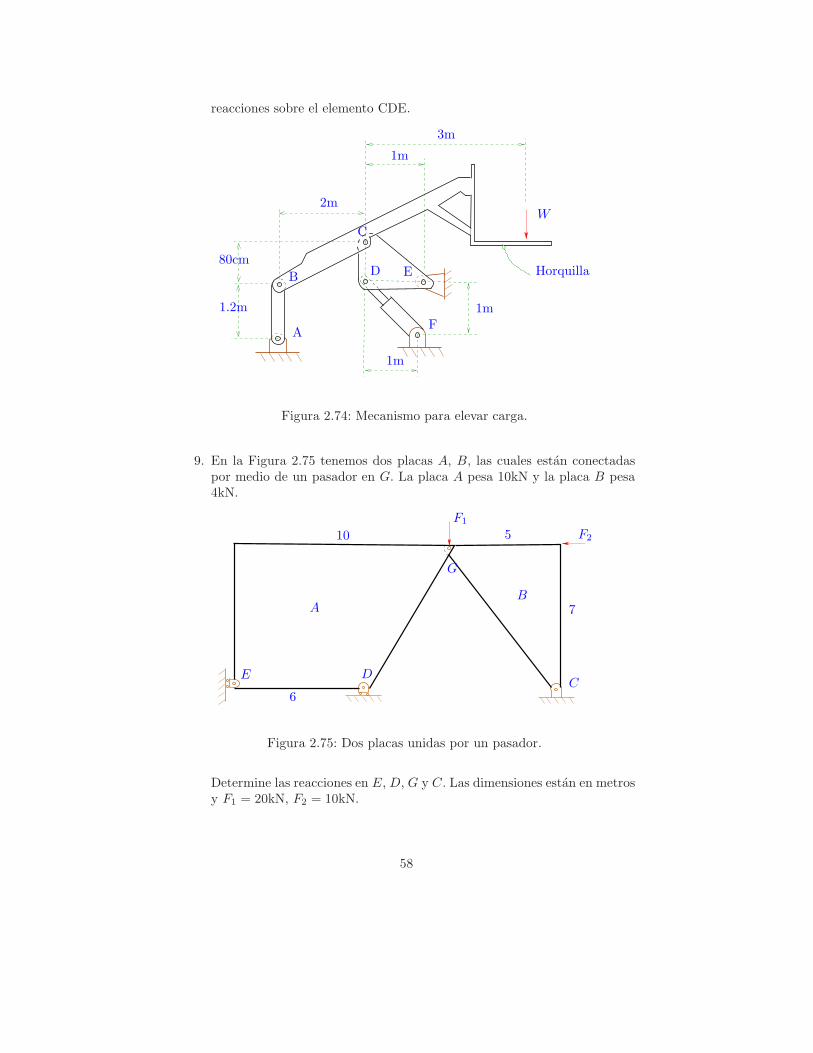
reacciones sobre el elemento CDE.
A
B
C
D E
F
W
Horquilla
3m
1m
2m
80cm
1.2m 1m
1m
Figura 2.74: Mecanismo para elevar carga.
9. En la Figura 2.75 tenemos dos placas A, B, las cuales estan conectadaspor medio de un pasador en G. La placa A pesa 10kN y la placa B pesa4kN.
AB
CD
F1
F2
G
E
6
7
510
Figura 2.75: Dos placas unidas por un pasador.
Determine las reacciones en E, D, G y C. Las dimensiones estan en metrosy F1 = 20kN, F2 = 10kN.
58

10. En la Figura 2.76 se muestra una parte de una maquina llamada ‘desto-conadora’ (usada para cortar partes de troncos pegados al suelo). Su pesoes de 3000N y el centro de gravedad esta ubicado en G. En la posicionpresentada el miembro CE esta horizontal y los dientes de la sierra cir-cular estan a ras de suelo. Si la magnitud de la fuerza F ejercida por eldisco de la sierra sobre el tronco es de 500N, determine la fuerza P sobreel cilındro hidraulico y la magnitud de la fuerza que soporta el pasador C.Todas las dimensiones estan en milımetros. En la parte inferior derecha sepresenta un detalle de la forma como actua la fuerza F sobre el tronco.
A
A
B
C
E D
H
G
Maquina
Rueda
Sierra
Tronco
Cilındrohidraulico
F
450 1000 200 600 1000
600
700
800
25◦
Figura 2.76: Maquina destoconadora.
59

Capıtulo 3
Esfuerzo y deformacion
3.1. Introduccion
Sabemos que las fuerzas no solo pueden generar movimiento en un cuerposino que ademas pueden deformarlo. Este capıtulo es el mas importante de estecurso, pues en el entregaremos los conceptos y supuestos basicos para modelarel fenomeno de deformacion.
Si pensamos de forma detenida respecto de como podrıamos modelar ladeformacion causada por fuerzas externas, quizas en un primer intento traba-jarıamos con algun cuerpo de geometrıa simple, como por ejemplo una vigaempotrada en un extremo y con una fuerza externa en el otro; luego podrıamos,por ejemplo, estudiar la deflexion (el desplazamiento vertical de la viga) comofuncion de la fuerza externa, y a partir de dichas observaciones experimenta-les proponer algun tipo de ley o relacion entre ambas cantidades. Este fue elesquema seguido por mucho tiempo antes de los trabajos de Euler y de Cauchy.
Es claro que el metodo anterior solo servirıa para problemas especıficos, ynada nos podrıa decir para casos generales con cuerpos de geometrıas arbitrariasy fuerzas generales aplicados sobre ellos. La teorıa mostrada aquı es el productode muchas investigaciones, respaldadas por diversos resultados experimentales,sin embargo como toda teorıa siempre es posible extenderla o eventualmentereemplazarla por algo mas general y ‘mejor’.
Este capıtulo esta basado en cuatro conceptos fundamentales:
Las fuerzas externas.
Las fuerzas internas (esfuerzos).
Las deformaciones.
Los desplazamientos.
Las ecuaciones constitutivas.
60

Los desplazamientos son las cantidades que realmente se pueden medir de formadirecta en un experimento, basta establecer una referencia y a partir es esta sepuede determinar facilmente los desplazamientos que sufren los puntos de uncuerpo bajo la accion de una fuerza externa. En general en solidos solo podemosver los desplazamientos en la superficie, en el interior solo a traves de la teorıapodemos determinar de forma indirecta dichos desplazamientos.
Un cuerpo puede rotar como cuerpo rıgido o solo desplazarse sin cambio ensu ‘forma’. En ambos casos podemos ver que la fuerza solo cambiarıa la posiciondel cuerpo completo y/o solo lo rotarıa. No nos interesaremos por ese tipo deproblemas, en su lugar nos preocupara cuando un cuerpo bajo la accion defuerzas externas sufre un cambio en su forma, en otras palabras cuando puntosen el mismo cuerpo sufren un cambio relativo de posicion. Este cambio relativonos servira para introducir el concepto de deformacion, que no es otra cosa queuna medida de cuanto se distorsiona o cambia la forma de un cuerpo bajo laaccion de fuerzas externas.
Se vera que las fuerzas externas no se relacionan de forma directa con lasdeformaciones. Es necesario primero definir algo que conoceremos como fuerzasinternas (esfuerzos), los cuales se generan por la accion de las fuerzas externas,pero que estan ahora relacionados de forma directa a la deformacion en el interiorde un cuerpo. El concepto de fuerza en realidad no se puede definir, solo podemosa partir de el proponer otras definiciones y teorıas, pero las fuerzas propiamentetal no se pueden definir1.
Todos los conceptos anteriores son generales, en el sentido que se puedenaplicar a cualquier tipo de material (en nuestro caso un solido). Sin embargoes bien sabido que cuerpos de la misma forma inicial pero hechos de materialesdistintos se comportan (deforman) de forma diferente. Esta diferencia la intro-duciremos por medio de las ‘ecuaciones constitutivas’, que seran relaciones entrelos esfuerzos (fuerzas internas) y las deformaciones.
3.2. Fuerzas internas en vigas
Consideremos un cuerpo sometido a fuerzas externas y con algunos apoyosaplicados en su superficie tal como se muestra en la Figura 3.1. Este cuerpoesta en equilibrio, es decir incluyendo las fuerzas de interaccion por los apoyostenemos que ∑
i
~Fi = ~0,∑
j
~Mj = ~0.
Imaginemos que el cuerpo sufre un corte como el que se muestra en la Figura3.2, de modo que ahora tenemos dos cuerpos. Es necesario indicar ahora queeste corte es un corte imaginario, es decir no es un corte real el que se esta
1En fısica no existen realmente definiciones de lo que son las fuerzas, solo de los efectosque estas generan. Ya hemos visto en el capıtulo anterior que las fuerzas se usaban para, deforma simplificada, estudiar la interaccion de un cuerpo con su entorno o con otros cuerposen un mecanismo. En mecanica racional se dice que las fuerzas son un concepto ‘primitivo’.
61

haciendo, solo se esta asumiendo que sucederıa si de manera repentina el cuerpofuese separado en dos partes.
~F1
~F2
~F3
~Fi
~Fj
Figura 3.1: Cuerpo bajo la accion de fuerzas externas.
~F1
~F2
~F3
~Fi
~Fj
Figura 3.2: Cuerpo con corte imaginario y distribucion de fuerzas internas en lazona de corte.
Ahora establecemos un principio que es la base de todos los capıtulos pos-teriores:
Si un cuerpo, como el mostrado en la Figura 3.1, esta sometido a fuerzas ex-ternas y esta en equilibrio, cualquier parte de el que se extraiga por medio deun corte imaginario debera tambien estar en equilibrio, es decir para cada partepor separado
∑i~Fi = ~0,
∑j~Mj = ~0 tambien deben ser satisfechas.
Este es un principio, es decir no lo probaremos sino que simplemente lo asu-miremos como cierto y a partir de esto (que se podrıa considerar como axioma)desarrollaremos nuestra teorıa.
Si el principio es valido, luego es posible ver que si tomamos la parte delcuerpo en el lado derecho despues del corte (Figura 3.2), solo con el efecto delas fuerzas externas que quedan sobre el (y de los soportes) no es posible engeneral que el cuerpo este en equilibrio. Hace falta algo mas, y esto extra se
62
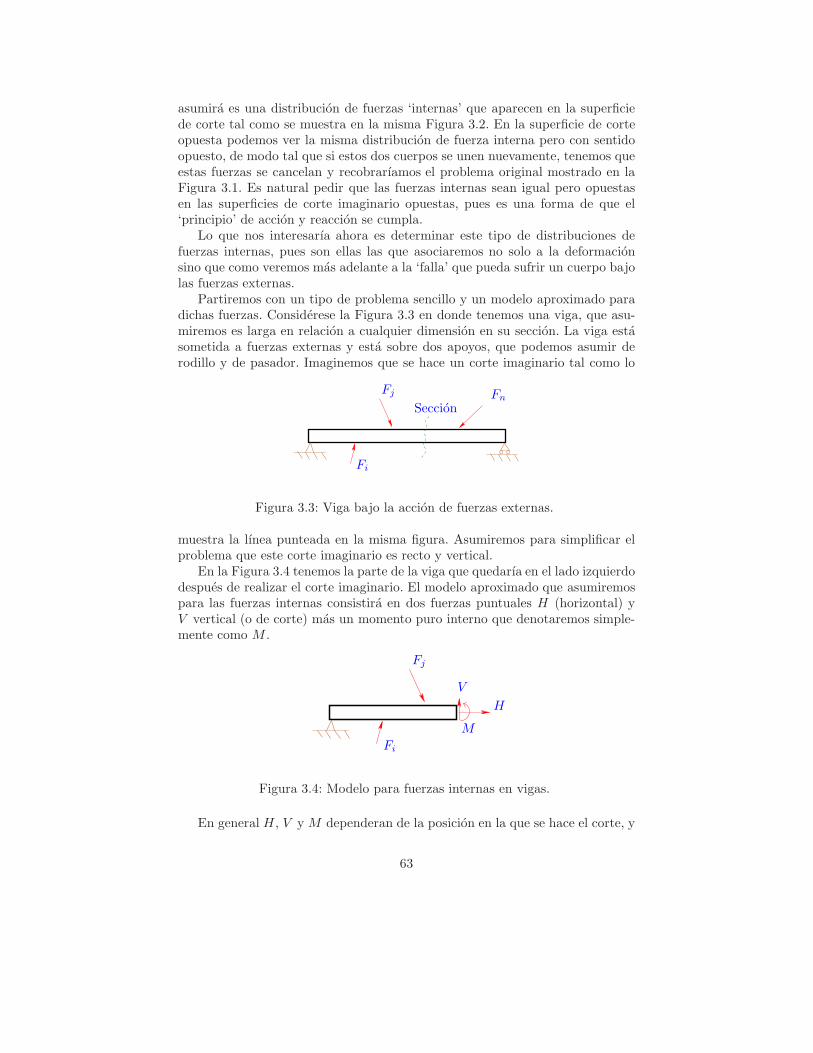
asumira es una distribucion de fuerzas ‘internas’ que aparecen en la superficiede corte tal como se muestra en la misma Figura 3.2. En la superficie de corteopuesta podemos ver la misma distribucion de fuerza interna pero con sentidoopuesto, de modo tal que si estos dos cuerpos se unen nuevamente, tenemos queestas fuerzas se cancelan y recobrarıamos el problema original mostrado en laFigura 3.1. Es natural pedir que las fuerzas internas sean igual pero opuestasen las superficies de corte imaginario opuestas, pues es una forma de que el‘principio’ de accion y reaccion se cumpla.
Lo que nos interesarıa ahora es determinar este tipo de distribuciones defuerzas internas, pues son ellas las que asociaremos no solo a la deformacionsino que como veremos mas adelante a la ‘falla’ que pueda sufrir un cuerpo bajolas fuerzas externas.
Partiremos con un tipo de problema sencillo y un modelo aproximado paradichas fuerzas. Considerese la Figura 3.3 en donde tenemos una viga, que asu-miremos es larga en relacion a cualquier dimension en su seccion. La viga estasometida a fuerzas externas y esta sobre dos apoyos, que podemos asumir derodillo y de pasador. Imaginemos que se hace un corte imaginario tal como lo
FnSeccion
Fi
Fj
Figura 3.3: Viga bajo la accion de fuerzas externas.
muestra la lınea punteada en la misma figura. Asumiremos para simplificar elproblema que este corte imaginario es recto y vertical.
En la Figura 3.4 tenemos la parte de la viga que quedarıa en el lado izquierdodespues de realizar el corte imaginario. El modelo aproximado que asumiremospara las fuerzas internas consistira en dos fuerzas puntuales H (horizontal) yV vertical (o de corte) mas un momento puro interno que denotaremos simple-mente como M .
V
H
M
Fi
Fj
Figura 3.4: Modelo para fuerzas internas en vigas.
En general H , V y M dependeran de la posicion en la que se hace el corte, y
63

en los ejemplos que se muestran a continuacion veremos como determinar estascantidades.
1. Para la viga de la Figura 3.5 que esta sometida solo a una fuerza puntualP determine H , V y M y grafique en funcion de la posicion a la que sehace el corte.
P
L
L/2
Figura 3.5: Ejemplo de calculo para fuerzas internas en vigas.
En la Figura 3.6 tenemos un diagrama de cuerpo libre de la viga completaen donde el efecto de los apoyos (queda como ejercicio) se manifiesta comofuerzas puntuales de magnitud P/2.
P
x
x
y
P/2P/2
Figura 3.6: Ejemplo de calculo para fuerzas internas en vigas. Cortes necesariospara calcular dichas fuerzas.
Vamos a escoger dos ‘zonas’ en las que se realizara el corte imaginariocomo se muestra con lıneas segmentadas en la misma figura. La distanciaa la que se realizara este corte sera x.
En el primer caso asumiremos que 0 < x < L/2 tal como se muestra en laFigura 3.7, como el corte imaginario se hace en ese intervalo, al dibujar eldiagrama de cuerpo libre de este trozo de viga, solo incluımos la fuerza enal apoyo derecho P/2 y las cargas internas que aparecen allı dibujadas.
Siguiendo el principio, si la viga completa estaba en equilibrio, tambienel trozo mostrado en la Figura 3.7 debe estar en equilibrio, de modo que
64

V
x
M
H
P/2
O
Figura 3.7: Ejemplo de calculo para fuerzas internas en vigas. Primer corte.
para esa figura tenemos
∑Fx = 0 ⇒ H = 0,
∑Fy = 0 ⇒ V = −P
2(3.1)
y ∑
O
Mz = 0 ⇒ M =P
2x, (3.2)
en donde en esta ultima ecuacion el balance de momento se realiza respectoal punto O (como lo indica el subındice en la suma) que se muestra en ellado derecho de la Figura 3.7.
Ahora procedemos a estudiar el caso en el que el corte se realiza L/2 <x < L. Es necesario hacer notar que el corte se realiza en un punto en eseintervalo, pero la viga se considera o dibuja desde el origen en el extremoizquierdo. En la Figura 3.8 tenemos una representacion de la parte de laviga que queda si se hace un corte imaginario entre L/2 y L, podemosver que ahora es necesario agregar al diagrama de cuerpo libre no solo lafuerza P/2 en el extremo izquierdo sino ademas la fuerza externa originalP aplicada en L/2, junto con las cargas internas.
V
x
M
H
P/2
O
L/2 P
Figura 3.8: Ejemplo de calculo para fuerzas internas en vigas. Segundo corte.
La parte de la viga mostrada en la Figura 3.8 debe tambien estar en
65

equilibrio si el principio es cierto, de modo que
∑Fx = 0 ⇒ H = 0, (3.3)
∑Fy = 0 ⇔ P
2+ V − P = 0 ⇒ V =
P
2, (3.4)
y
∑
O
Mz = 0 ⇔ M + P
(x− L
2
)=P
2x⇒M =
P
2(L− x). (3.5)
En la Figura 3.9 tenemos representaciones esquematicas de V como fun-cion de la distancia de corte x usando (3.1)2 y (3.4), y deM como funcionde x de (3.2) y (3.5). Podemos observar en particular que M(x→ 0) = 0
V
xx
M
LL
P/2
−P/2
L/2L/2
PL
Figura 3.9: Ejemplo de fuerzas internas en vigas. Grafico de V y M .
y que M(x → L) = 0, lo que es correcto, pues en esos extremos tenemossoportes tipo pasador y tipo rodillo, los cuales no impiden el giro de laviga en esos extremos, por tanto no generan momento de reaccion, luegoel momento interno en esos puntos debe ser cero.
2. Para la viga mostrada en la Figura 3.10 determine y grafique las distri-buciones de cargas internas. La viga esta sosteniendo a un peso P en suextremo derecho.
En la Figura 3.11 tenemos un diagrama de cuerpo libre de la viga completa.En el punto A solo tendrıamos una fuerza vertical, pues como no hay fuerzaexterna horizontal, entonces no se genera una reaccion en esa direccion enese soporte. Vamos a asumir que A es positiva hacia abajo tal como semuestra en esa figura. En el punto B se genera una reaccion vertical yasumimos que es positiva hacia arriba.
La viga completa debe estar en equilibrio por lo que
∑Fy = 0 ⇔ −A+B = P
66

A
L
l
B
P
Figura 3.10: Ejemplo de fuerzas internas en vigas.
A
x
y
B P
Figura 3.11: Ejemplo de fuerzas internas en vigas. Diagrama de cuerpo libre dela viga completa.
y ∑
A
Mz = 0 ⇔ BL = P (L+ l),
de donde tenemos que
A =Pl
L, B =
P (L+ l)
L. (3.6)
Por la forma como estan siendo aplicadas las fuerzas externas vamos aconsiderar dos zonas para los cortes imaginarios, primero con cortes hechopara 0 < x < L y despues para L < x < L+ l.
En la Figura 3.12 tenemos un esquema de la porcion de viga que queda(desde el extremo izquierdo) si el corte se hace 0 < x < L. En ese casolas unicas fuerzas que aparecen son A y las cargas internas. Como no hayfuerza externa horizontal no dibujamos H en este esquema.
Nuevamente asumimos que esta porcion de viga debe estar en equilibrio,de modo que tenemos
∑Fy = 0 ⇒ V = A,
∑
O
Mz = 0 ⇒ M = −Ax. (3.7)
En la Figura 3.13 tenemos ahora la parte que queda en la izquierda de laviga si se hace el corte entre L < x < L+ l. En este caso debemos dibujar
67

A x
V
MO
Figura 3.12: Ejemplo de fuerzas internas en vigas. Primer corte.
A
xx− LB
O
V
M
Figura 3.13: Ejemplo de fuerzas internas en vigas. Segundo corte.
no solo las fuerzas A y las cargas internas V , M sino ademas la fuerza B.Asumiendo ahora que esta parte de la viga que queda despues del cortedebe tambien estar en equilibrio tenemos
∑Fy = 0 ⇒ V = A−B,
∑
O
Mz = 0 ⇒ M = −Ax+B(x−L).
(3.8)
Usando (3.6) en (3.7) y (3.8) tenemos las funciones V y M cuyos graficosse muestran en la Figura 3.14. En la figura del lado derecho en donde
−P
xx
PlL
MV
LL
L+ lL+ l
−Pl
Figura 3.14: Ejemplo de fuerzas internas en vigas. Diagramas para V y M .
tenemos M(x) podemos ver que M no es igual a cero en x = L aunquetenemos ahı un soporte tipo rodillo. Esto es debido a que en ese punto no
68

estamos al final de la viga, es decir si bien no hay reaccion del rodillo tipomomento, si tenemos material a los lados derecho e izquierdo de modo queel momento puede ser distinto de cero y se balancearıa por ambos lados.En la misma figura podemos ver queM = 0 en x = L+l, lo que es correctopues si bien en ese extremo tenemos un cable atado que transmite el pesoP , no hay nada que genere (en el caso ideal) momento puro en se punto.
69

3. La viga mostrada en la Figura 3.15 esta sometida a una fuerza unifor-me wo = P
a en su zona central. Determine las distribuciones de fuerzasinternas.
wo
a
L/2
L
Figura 3.15: Ejemplo de fuerzas internas en vigas.
En la Figura 3.16 tenemos un diagrama de cuerpo libre de toda la viga, enlos extremos izquierdos y derecho de la viga tenemos solo fuerzas puntualesverticales que llamamos A y B, no hay fuerza horizontal en el soportedel extremo izquierdo puesto que no hay fuerza horizontal externa sobrela viga. En este diagrama la fuerza wo se reemplaza por su equivalente
woa = P
BL/2A
Figura 3.16: Ejemplo de fuerzas internas en vigas. Diagrama de cuerpo libre dela viga completa y fuerza equivalente.
puntual woa = P .
La viga completa debe estar en equilibrio de modo que∑
Fy = 0 ⇒ A+B = woa,∑
A
Mz = 0 ⇒ B =woa
2, (3.9)
de modo que A = woa2 .
Para hacer los calculos de V (x) yM(x) debemos considerar la Figura 3.15no la Figura 3.16. Esto es debido a que los cortes imaginarios afectan laforma de la fuerza equivalente puntuales, de modo que hacer los cortesimaginarios desde la Figuras 3.15 y 3.16 no es en general equivalente.
De la Figura 3.15 vemos que es necesario considerar tres zonas de corte,desde el extremo izquierdo x entre 0 < x < 1
2 (L − a), 12 (L − a) < x <
12 (L + a) y 1
2 (L+ a) < x < L.
70
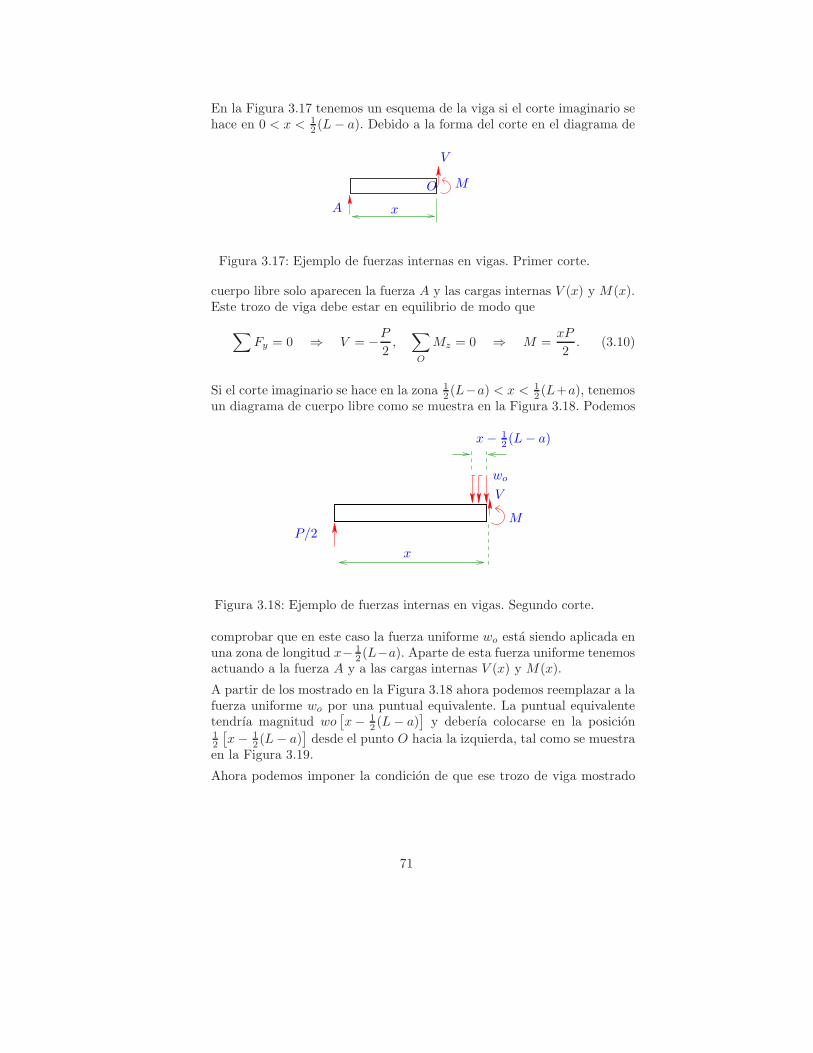
En la Figura 3.17 tenemos un esquema de la viga si el corte imaginario sehace en 0 < x < 1
2 (L− a). Debido a la forma del corte en el diagrama de
A x
V
MO
Figura 3.17: Ejemplo de fuerzas internas en vigas. Primer corte.
cuerpo libre solo aparecen la fuerza A y las cargas internas V (x) y M(x).Este trozo de viga debe estar en equilibrio de modo que
∑Fy = 0 ⇒ V = −P
2,∑
O
Mz = 0 ⇒ M =xP
2. (3.10)
Si el corte imaginario se hace en la zona 12 (L−a) < x < 1
2 (L+a), tenemosun diagrama de cuerpo libre como se muestra en la Figura 3.18. Podemos
P/2
x
V
M
wo
x− 12 (L− a)
Figura 3.18: Ejemplo de fuerzas internas en vigas. Segundo corte.
comprobar que en este caso la fuerza uniforme wo esta siendo aplicada enuna zona de longitud x− 1
2 (L−a). Aparte de esta fuerza uniforme tenemosactuando a la fuerza A y a las cargas internas V (x) y M(x).
A partir de los mostrado en la Figura 3.18 ahora podemos reemplazar a lafuerza uniforme wo por una puntual equivalente. La puntual equivalentetendrıa magnitud wo
[x− 1
2 (L− a)]y deberıa colocarse en la posicion
12
[x− 1
2 (L− a)]desde el punto O hacia la izquierda, tal como se muestra
en la Figura 3.19.
Ahora podemos imponer la condicion de que ese trozo de viga mostrado
71

P/2
x
V
MO
wo[x− 1
2 (L− a)]
12
[x− 1
2 (L− a)]
Figura 3.19: Ejemplo de fuerzas internas en vigas. Segundo corte y fuerza equi-valente.
en la Figura 3.19 este en equilibrio (con A = P/2) de modo que
∑Fy = 0 ⇒ V = −P
2+ wo
[x− 1
2(L− a)
],
= P
{−1
2+
1
a
[x− 1
2(L− a)
]}, (3.11)
∑
O
Mz = 0 ⇒ M =Px
2− wo
[x− 1
2(L− a)
]1
2
[x− 1
2(L− a)
],
=Px
2− P
2a
[x− 1
2(L− a)
]2. (3.12)
Finalmente si se hace el corte en la zona 12 (L + a) < x < L tenemos un
diagrama de cuerpo libre como el mostrado en la Figura 3.20, en dondeen particular podemos apreciar el hecho que ahora si reemplazamos desdeel inicio la fuerza distribuıda wo por una puntual P . Esto es debido a que
P/2x
V
MO
P
x− L/2
Figura 3.20: Ejemplo de fuerzas internas en vigas. Tercer corte.
ahora wo esta siendo aplicada en toda la zona a.
El trozo de viga debe estar en equilibrio de modo que
∑Fy = 0 ⇒ V = P − P
2=P
2, (3.13)
72

y
∑
O
Mz = 0 ⇒ M =Px
2− P
(x− L
2
)=P
2(L− x). (3.14)
De (3.10)1, (3.11) y (3.13) vemos que el comportamiento de V (x) es cons-tante en el primer tramo, es lineal en el segundo y constante en el ter-cero. Es facil probar tambien que es una funcion continua en x = L−a
2 y
x = L+a2 , tambien es cero en x = L
2 . En la Figura 3.21 (lazo izquierdo)tenemos un grafico aproximado del comportamiento de esta funcion. En
V
P/2
−P/2
LLL−a2
L−a2
L2
L2
M
L+a2
L+a2
xx
Figura 3.21: Ejemplo de fuerzas internas en vigas. Diagramas para V y M .
la misma Figura (lado derecho) tenemos el comportamiento de M(x). De(3.10)2, (3.12) y (3.14) vemos que M(x) es una funcion lineal en el primertramo, es cuadratica en el segundo y lineal nuevamente en el tercer tramo,siendo tambien continua en x = L−a
2 y x = L+a2 (estando su maximo
ademas en x = L2 ).
Una ultima observacion para este problema, podemos ver que si a → 0el producto awo permanece constante e igual a P , luego en este caso elproblema mostrado en la Figura 3.15 se transforma en el mostrado en laFigura 3.5, en tanto que los resultados mostrados en la Figura 3.21 setransformarıan en los mostrados en la Figura 3.9.
4. En la Figura 3.22 tenemos una viga sometida a dos fuerzas iguales peroopuestas de magnitud P ubicadas a una distancia a una de otra. DetermineV (x) y M(x) para este problema.
5. En la Figura 3.23 tenemos una viga sometida a varias fuerzas. Una fuerzadistribuıda constante de magnitud wo = 30N/m, una fuerza distribuıda
73

P
Pa
L/2
L
Figura 3.22: Ejemplo de fuerzas internas en vigas.
lineal en el extremo izquierdo y una puntual F = 10N. Calcule V (x) yM(x).
a b c
wo∆wo
F
Figura 3.23: Ejemplo de fuerzas internas en vigas.
Otros datos: a = 4m, b = 6m, c = 4m y ∆wo =10N/m.
6. Para la viga mostrada en la Figura 3.24 determine las posiciones y losvalores maximos de V (x) y M(x).
Datos: F = 10T, a = 7m, b = 4m, c = 4m wo =1T/m. Las fuerzas estanen toneladas-fuerza T.
74

a b c
wo
FF
Figura 3.24: Ejemplo de fuerzas internas en vigas.
75

3.2.1. Fuerzas internas en vigas para vigas sometidas acargas distribuıdas
En el problema mostrado en la Figure 3.15 habıamos considerado un ejemplode problema en donde tenıamos una carga uniforme actuado en una parte deuna viga. Ahora veremos un metodo mas general para obtener las distribucionesde cargas internas V (x) y M(x), para problemas en los que tenemos fuerzasdistribuıdas, para ello consideremos la viga mostrada en la Figura 3.25 en dondetenemos algun tipo de fuerza distribuıda w(x) actuando sobre ella 2.
��������
����
������
������
����
����
���
���
����
����
����
����
����
����
����
����
���
���
���
���
����
���
���
������������
w(x)
dx
x
Figura 3.25: Viga sometida a una carga distribuıda.
De la viga extraemos un trozo diferencial de largo dx, el cual es mostrado deforma ampliada en la Figura 3.26. El trozo diferencial se ha extraıdo mediante
w(x)
dx
V
M
V + dVdx dx
M + dMdx dx
O
Figura 3.26: Elemento de longitud diferencial de una viga sometida a una cargadistribuıda.
dos cortes imaginarios a los lados derecho e izquierdo, de modo que debemosdibujar cargas internas a ambos lados del diferencial. En el lado derecho sedibuja la fuerza de corte y el momento interno con los sentidos usuales, en tantopor medio del uso del ‘principio’ de accion y reaccion para la viga (ver la Figura3.27) en el corte del lado izquierdo debemos dibujarlas en el sentido contrario.
Para la Figura 3.26 tenemos el trozo diferencial bajo la accion de w(x), enel corte del lado izquierdo tenemos V y M , en tanto en el lado derecho por
2Nuevamente hacemos enfasis en que para hacer el calculo de las cargas internas no se debereemplazar las fuerzas distribuıdas por las puntuales equivalentes. El reemplazo solo se puedehacer para facilitar el calculo de las reacciones en los soportes.
76

VVM
M
Figura 3.27: Accion y reaccion en las cargas internas para una viga.
medio de una aproximacion con series de Taylor3 (al primer termino) tenemosactuando V + dV
dx dx y M + dMdx dx.
Es razonable asumir que si tanto la viga completa como partes que se ex-traigan de ellas estan en equilibrio, entonces tambien lo deberıa estar el trozodiferencial de la Figura 3.26, luego se debe cumplir4
∑Fy = 0 ⇒
(V +
dV
dxdx
)− V − w(x)dx = 0,
de donde es facil obtenerdV
dx= w(x). (3.15)
Por otra parte tambien debe cumplirse 5
∑
O
Mz = 0 ⇒ −M +
(M +
dM
dxdx
)+ V dx+ w(x)dx
dx
2= 0,
de donde si se desprecian terminos de orden dx2 se llega a
dM
dx= −V (x). (3.16)
Las ecuaciones diferenciales (3.15), (3.16) nos permiten obtener V (x) yM(x)conociendo w(x). Para una solucion completa del problema son necesarias con-diciones de borde, las cuales se deben discutir para cada problema en particular.
En la Figura 3.28 tenemos un ejemplo en el que haremos uso de (3.15) y(3.16). Para la viga completa de
∑Fy = 0 y
∑Mz = 0 se obtiene A = B = woL
2 .
3En diversas secciones de este texto se hara uso de aproximaciones con series de Taylorpara obtener expresiones aproximadas para las diversas variables en un problema. Por ejemploen la Figura 3.26 si en el lado izquierdo el valor de V es V (x), es decir evaluado en x, en ellado derecho tendrıamos que V deberıa calcularse como V (x+ dx), pero
V (x+ dx) = V (x) +dV
dxdx+ ...
luego se obtiene la siguiente aproximacion V (x+ dx) ≈ V (x) + dVdx
dx.4La fuerza distribuıda w actuando en el trozo diferencial causarıa una fuerza total de
w(x)dx, resultado aproximado que es valido si el trozo es muy corto.5El momento causado por la distribucion w en el trozo de viga respecto al punto O en la
Figura 3.26 se puede aproximar como w(x)dx dx2, puesto que la fuerza total se aproximo como
w(x)dx y se puede asumir tambien como aproximacion, que esta fuerza total es aplicada enel centro del trozo diferencial, a una distancia dx
2del punto O.
77
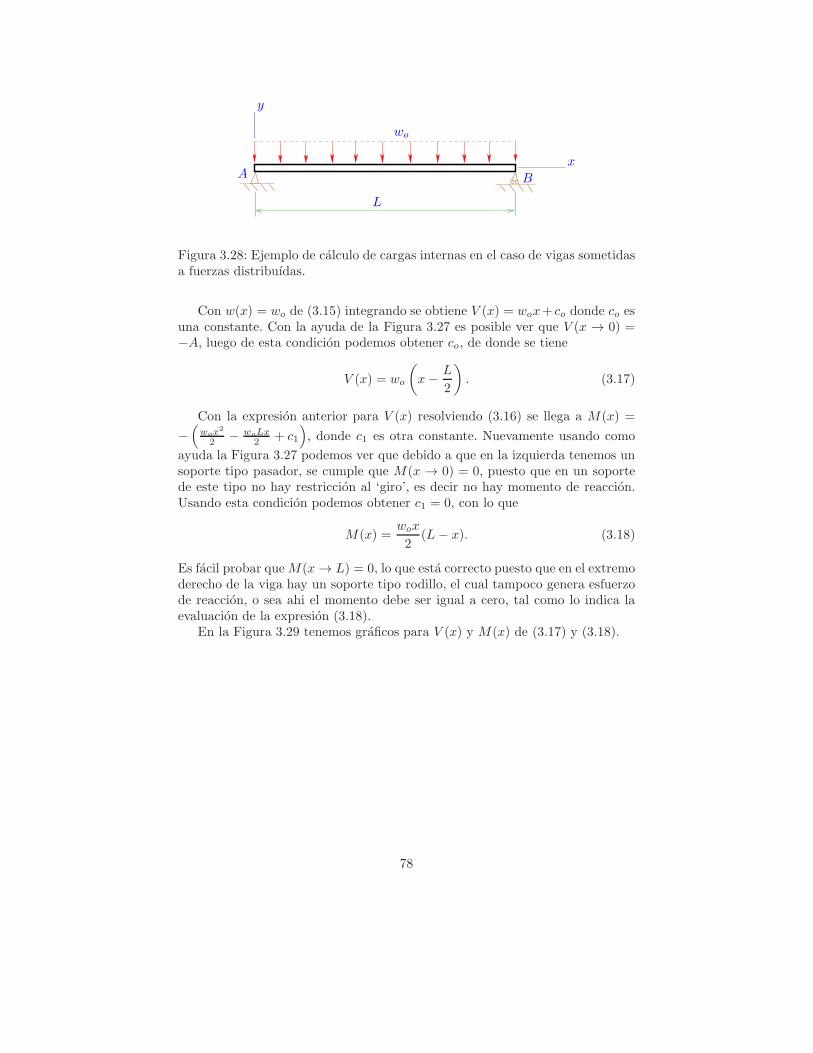
A B
wo
x
y
L
Figura 3.28: Ejemplo de calculo de cargas internas en el caso de vigas sometidasa fuerzas distribuıdas.
Con w(x) = wo de (3.15) integrando se obtiene V (x) = wox+ co donde co esuna constante. Con la ayuda de la Figura 3.27 es posible ver que V (x → 0) =−A, luego de esta condicion podemos obtener co, de donde se tiene
V (x) = wo
(x− L
2
). (3.17)
Con la expresion anterior para V (x) resolviendo (3.16) se llega a M(x) =
−(wox
2
2 − woLx2 + c1
), donde c1 es otra constante. Nuevamente usando como
ayuda la Figura 3.27 podemos ver que debido a que en la izquierda tenemos unsoporte tipo pasador, se cumple que M(x → 0) = 0, puesto que en un soportede este tipo no hay restriccion al ‘giro’, es decir no hay momento de reaccion.Usando esta condicion podemos obtener c1 = 0, con lo que
M(x) =wox
2(L − x). (3.18)
Es facil probar queM(x→ L) = 0, lo que esta correcto puesto que en el extremoderecho de la viga hay un soporte tipo rodillo, el cual tampoco genera esfuerzode reaccion, o sea ahi el momento debe ser igual a cero, tal como lo indica laevaluacion de la expresion (3.18).
En la Figura 3.29 tenemos graficos para V (x) y M(x) de (3.17) y (3.18).
78

00 xx LLL2
L2
woL2
−woL2
M
wo(L2
)2V
Figura 3.29: Ejemplo de calculo de cargas internas en el caso de vigas sometidasa fuerzas distribuıdas. Graficos para V y M .
79
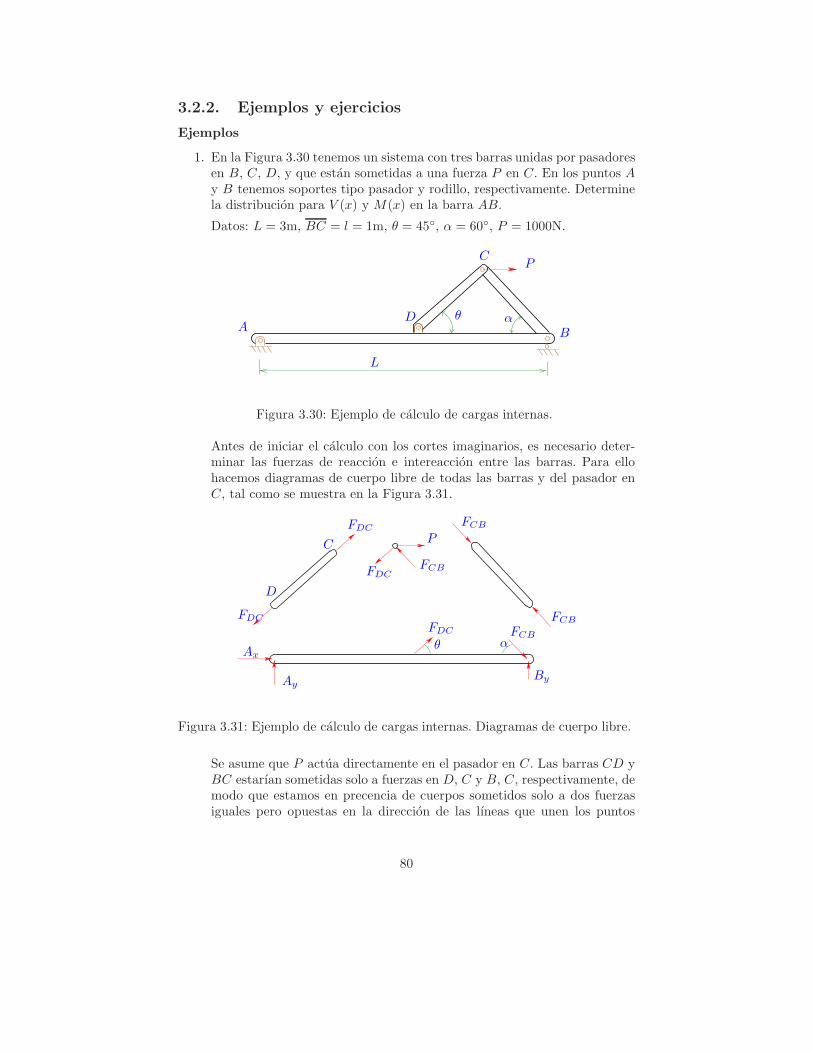
3.2.2. Ejemplos y ejercicios
Ejemplos
1. En la Figura 3.30 tenemos un sistema con tres barras unidas por pasadoresen B, C, D, y que estan sometidas a una fuerza P en C. En los puntos Ay B tenemos soportes tipo pasador y rodillo, respectivamente. Determinela distribucion para V (x) y M(x) en la barra AB.
Datos: L = 3m, BC = l = 1m, θ = 45◦, α = 60◦, P = 1000N.
A B
C
D
L
P
θ α
Figura 3.30: Ejemplo de calculo de cargas internas.
Antes de iniciar el calculo con los cortes imaginarios, es necesario deter-minar las fuerzas de reaccion e intereaccion entre las barras. Para ellohacemos diagramas de cuerpo libre de todas las barras y del pasador enC, tal como se muestra en la Figura 3.31.
Ax
Ay
FDC
FDC
FDCFDC
FCB
FCB
FCB
FCBθ α
P
D
C
By
Figura 3.31: Ejemplo de calculo de cargas internas. Diagramas de cuerpo libre.
Se asume que P actua directamente en el pasador en C. Las barras CD yBC estarıan sometidas solo a fuerzas en D, C y B, C, respectivamente, demodo que estamos en precencia de cuerpos sometidos solo a dos fuerzasiguales pero opuestas en la direccion de las lıneas que unen los puntos
80

CD y BC, respectivamente. Estas fuerzas se denotan como FDC y FCB,respectivamente.
El pasador en C recibe la fuerza P y tambien las fuerzas de reaccion FDCy FCB.
Finalmente la barra AB esta sometida a las fuerzas FDC y FCB, y a lasreacciones en A y B.
Haciendo equilibrio de fuerzas en el pasador C tenemos
∑Fx = 0 ⇒ P − FCB cosα− FDC cos θ = 0,
∑Fy = 0 ⇒ FCB sinα− FDC sin θ = 0.
De la segunda ecuacion tenemos que FCB = FDCsin θsinα de modo que usando
la primera ecuacion se llega a
FDC = 896,575N FCB = 732,05N. (3.19)
Haciendo ahora equilibrio en la barra AB se tiene
∑Fx = 0 ⇒ Ax = FDC cos θ + FCB cosα = −P = −1000N,
∑Fy = 0 ⇒ Ay +By = −FDC sin θ + FCB sinα = 0,
y ∑
A
Mz = 0 ⇒ 3By = 3 sinαFCB − 1,633975 sinθFDC ,
de donde tenemos
Ax = −1000N Ay = −288,6745N. (3.20)
Con (3.19) y (3.20) ahora podemos proceder a realizar los cortes imagi-narios en AB, para ellos vemos el esquema de esta barra mostrado en laFigura 3.31, de donde vemos que necesitamos estudiar dos zonas para loscortes, zona AD, zona DB.
Si el corte se hace en la zona AD, donde 0 < x < 1,633975m se tiene undiagrama de cuerpo libre como el mostrado en la Figura 3.32. Luego
Ax
Ay
Q
VM
H
x
Figura 3.32: Ejemplo de calculo de cargas internas. Primer tramo.
81

∑Fx = 0 ⇒ H = −Ax = 1000N, (3.21)
∑Fy = 0 ⇒ V = −Ay = 288,6745N, (3.22)
∑
Q
Mz = 0 ⇒ M = Ayx = 288,6745xNm. (3.23)
En el segundo tramo DB donde 1,633975 < x < 3 tenemos un diagramacomo el mostrado en la Figura 3.33. Se tiene luego
Ax
Ay
Q
VM
H
x
FDC
x− a
θ
Figura 3.33: Ejemplo de calculo de cargas internas. Segundo tramo.
∑Fx = 0 ⇒ H = −FDC cos θ −Ax = 366,02573N = FCB cosβ, (3.24)
∑Fy = 0 ⇒ V = −Ay − FDC sin θ = 2− 375,2997N, (3.25)
∑
Q
Mz = 0 ⇒ M = Ayx+ FDC cos θ(x − a), (3.26)
con a = 1,633975m.
82
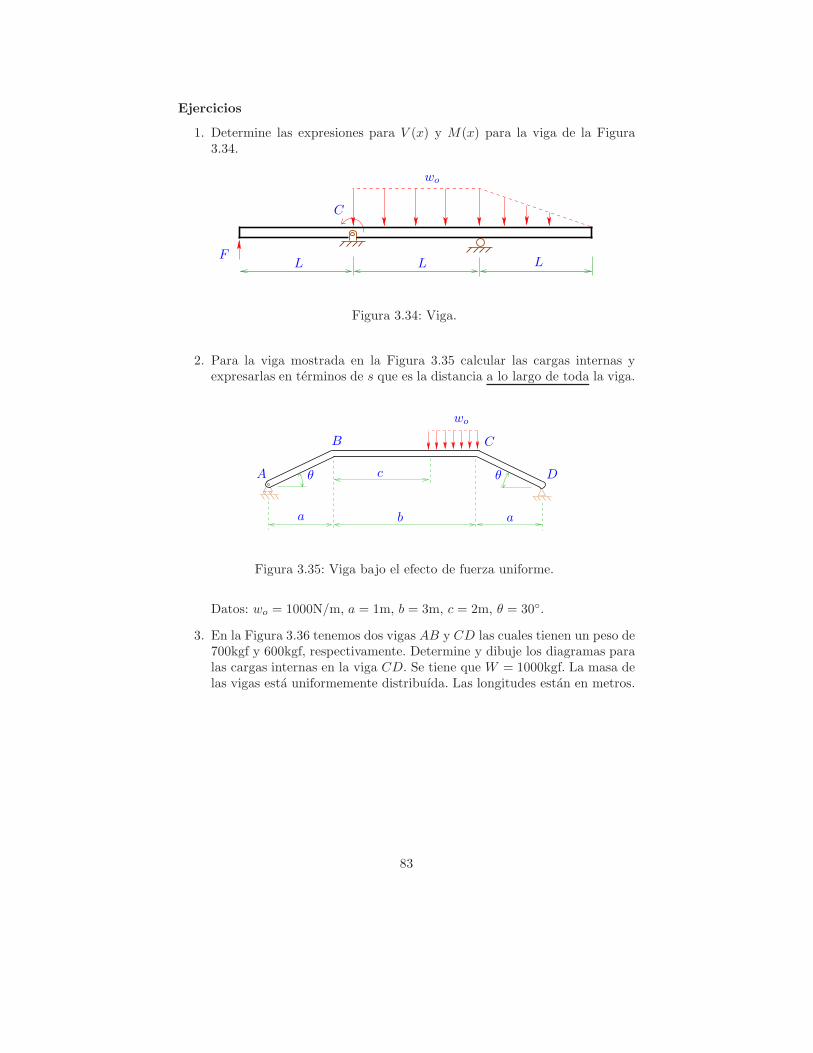
Ejercicios
1. Determine las expresiones para V (x) y M(x) para la viga de la Figura3.34.
FLLL
C
wo
Figura 3.34: Viga.
2. Para la viga mostrada en la Figura 3.35 calcular las cargas internas yexpresarlas en terminos de s que es la distancia a lo largo de toda la viga.
A
B C
D
aa b
c
wo
θθ
Figura 3.35: Viga bajo el efecto de fuerza uniforme.
Datos: wo = 1000N/m, a = 1m, b = 3m, c = 2m, θ = 30◦.
3. En la Figura 3.36 tenemos dos vigas AB y CD las cuales tienen un peso de700kgf y 600kgf, respectivamente. Determine y dibuje los diagramas paralas cargas internas en la viga CD. Se tiene que W = 1000kgf. La masa delas vigas esta uniformemente distribuıda. Las longitudes estan en metros.
83

������������
������������
���������������
�����������������������
����
��������
��������
��������
��������
������������
����
��������
A B
CD
0,5
3
2
W
Figura 3.36: Vigas.
84

3.3. Esfuerzos
El concepto de fuerzas o cargas internas ahora lo generalizaremos al casode cuerpos tridimensionales no solo para vigas como en la seccion anterior. Eneste contexto aparece el concepto del ‘esfuerzos’, que han sido mencionadosen ocasiones anteriores. Considerese el esquema mostrado en la Figura 3.37en donde tenemos un cuerpo de alguna forma arbitraria sometido a ciertasfuerzas externas y atravesado por un plano que nos servira para hacer un corteimaginario.
~f
~F1
~F2
Figura 3.37: Cuerpo bajo cargas externas y con un plano de corte imaginario.
Cualquier parte que se obtenga del cuerpo a partir de ese corte imaginariodebe estar tambien en equilibrio si el cuerpo original lo estaba, luego si consi-deramos la parte izquierda del cuerpo que queda despues del corte, tendrıamosalgo como lo mostrado en la Figura 3.38. En la superficie de corte mostrada en
~f
~R
~F2
~σ
Figura 3.38: Cuerpo con un corte imaginario.
dicha figura se debe generar algun tipo de distribucion de fuerzas internas, demodo tal que esta porcion de cuerpo pueda estar en equilibrio. Esta distribucionse puede asumir en un caso general como una densidad de fuerza por unidadde area ~σ. A este vector lo llamaremos el vector de esfuerzos6, y en algunasocasiones tambien se denota como ~f o ~t, en este texto usaremos esta ultimanotacion en algunas secciones. Las unidades de ~σ en el sistema internacional esel Pascal (Pa), o sea N/m2.
6En algunos textos es llamado tambien el vector de tensiones.
85

En la Figura 3.38 podemos notar que ~σ en general es variable (su magnitudy direccion) a lo largo y ancho de la superficie de corte.
Ahora en las secciones siguientes vamos clasificar al vector esfuerzos en dostipos, dependiendo de la forma que este actue respecto a la superficie de corteimaginario.
3.3.1. Esfuerzos axial y de corte
Un tipo de vector esfuerzo muy importante es el que se produce, por ejemplo,en un cilindro o barra sometida a una fuerza axial, tal como se muestra en laFigura 3.39. En dicha figura tenemos en este caso un cilindro de area transversal
FF
Figura 3.39: Barra bajo carga axial.
A sometido a una fuerza axial F . Un plano de corte imaginario se muestra enla misma figura, y en particular asumimos que dicho plano es perpendicular ala direccion axial que define el cilindro.
En la Figura 3.40 tenemos la porcion izquierda del cilindro que queda despuesde hacer el corte imaginario. En este esquema vemos esta parte del cilindro bajo
��������
��������F A σ
Figura 3.40: Barra bajo carga axial con corte imaginario.
el efecto de F (en el lado izquierdo) y de una distribucion ~σ en la superficie decorte.
Asumamos ahora que ~σ es aproximadamente uniforme en la seccion y queademas su direccion en todas partes es axial, luego en vez de hablar de ~σ solonecesitamos hablar de su magnitud σ.
Como la porcion de cilindro mostrada en la Figura 3.40 debe estar en equi-librio, la suma de fuerzas en el sentido axial debe ser cero, y como σ es unadistribucion uniforme de fuerzas por unidad de area se tiene que
F = Aσ
de donde tenemos que
σ =F
A. (3.27)
86

A este tipo de vector esfuerzo, que tiene una direccion normal a la super-ficie de corte imaginario, se le denomina esfuerzo axial, y tenemos la siguienteclasificacion
Si σ > 0 se dice que se esta en traccion,
Si σ < 0 se dice que se esta en compresion.
Veamos ahora otro tipo de vector de esfuerzo, para ello consideremos laFigura 3.41 en donde tenemos un esquema de tres placas planas pegadas conareas de contacto A. Cada placa tiene un numero, 1, 2 y 3. Imaginemos que
1
A
2
3
P
P2P
Pegados
Figura 3.41: Tres placas pegadas bajo fuerzas externas.
separamos la placa 2 de las otras.El sistema original estaba en equilibrio, como podemos apreciar del balance
de fuerzas en el sentido horizontal, luego al extraer la placa 2, esta tambiendebe estar en equilibrio, y para ello en las superficies de corte imaginario (lassuperficies de contacto con 1 y 3) asumimos se genera una distribucion de vectoresfuerzo, tal como se muestra en la Figura 3.42. De manera adicional vamos a
τ
2
2P
Figura 3.42: Una de las placas bajo cargas de corte.
asumir que dicha distribucion de vector esfuerzo es horizontal y uniforme (ensu magnitud y direccion) en la superficie de corte imaginario.
De la Figura 3.42 podemos ver que para que la placa 2 este en equilibriola distribucion de esfuerzo debe ser tangencial a la superficie de corte. A este
87

tipo de vector de esfuerzo lo denotamos como τ y lo denominaremos esfuerzode corte.
Del equilibrio de fuerzas en el sentido horizontal de la Figura 3.42 tenemosque
2P = 2Aτ,
de modo que
τ =P
A. (3.28)
Podemos ver de (3.27) y (3.28) que si bien las expresiones para σ y τ sonmuy similares, la naturaleza de estos esfuerzos es bastante distinta, por la formacomo estos actuan tal como se muestra en las Figuras 3.40 y 3.42.
3.3.2. Principio de Saint Venant
Para la distribucion de esfuerzos mostrada en la Figura 3.40 asumimos que σera aproximadamente uniforme en la superficie de corte imaginario del cilindro.Vamos ahora a intentar estudiar ese supuesto particular en mas detalle, y paraello consideremos una placa plana sometida a fuerzas puntuales en sus extremosde magnitud F como se muestra en la Figura 3.43.
FF
A
A
B
B
C
C
Figura 3.43: Placa bajo traccion y tres zonas de corte imaginario.
Imaginemos ahora que proponemos tres superficies de corte imaginarioA−A,B−B y C−C como se muestran en la misma Figura 3.43, y que dichas superficiesde corte se asumen a una distancia cada vez mayor del extremo izquierdo de laplaca.
La placa original esta en equilibrio, de modo que cualquier parte de ella quese extraiga con alguno de los cortes imaginarios mencionados anteriormente,debe tambien estar en equilibrio, y si consideramos la porcion que queda en ellado izquierdo, tenemos tres posibilidades como se muestra en la Figura 3.44.
Si el corte A − A se hace muy cerca del borde de la placa, es razonableasumir que en dicho caso la distribucion de σ no va a ser uniforme, sino masbien probablemente se concentrara en la zona central, de modo de ser capaz decontrarrestar el efecto local de la fuerza puntual F .
Sin embargo para un corte mas lejano de F , como es el corte B − B, pro-bablemente la distribucion para σ sea mas menos uniforme. Finalmente, en unasuperficie ‘suficientemente’ alejada de F como es la superficie de corte C − C,
88

FFF
A
A
B
B
C
C
σσσ
Figura 3.44: Placa bajo traccion y tres zonas de corte imaginario.
es razonable asumir que σ es practicamente uniforme en la manera como actuaen dicha superficie.
El principio que permite realizar los supuestos anteriores es llamado ‘el prin-cipio de Saint-Venant’, y la base de este (que no estudiaremos en detalle aquı)es que en el interior de un cuerpo sometido, por ejemplo, a una fuerza puntualF , ‘lejos’ de la zona de aplicacion de la fuerza, el cuerpo sentirıa lo mismo si seaplicara una fuerza equivalente uniforme.
3.3.3. Esfuerzos caso general
En (3.27) y (3.28) hemos clasificado los esfuerzos en dos tipos, basandonosen problemas sencillos; ahora retomaremos el tema desde un punto de vista masgeneral, y para ellos nuevamente consideramos un cuerpo en equilibrio sometidoa un cierto numero de fuerzas externas, tal como se muestra en la Figura 3.45.
~F3
~F1
~F2
Figura 3.45: Cuerpo bajo cargas externas y con un plano (y − z) de corte ima-ginario.
Consideremos un corte imaginario en el plano y− z, tal como se muestra enla Figura 3.46. Aquı tenemos nuevamente una distribucion de vector esfuerzo,que ahora denotamos como ~t.
Tomemos un diferencial de area (en el plano y − z) y estudiemos la formadel vector esfuerzos para ese pequeno diferencial. Para ello observemos la Figura3.47 en donde tenemos una vista ampliada de este diferencial. Como la superficiedel diferencial es muy pequena, solo basta estudiar ~t en un punto del mismo.
89

~F3
x
~F2y
z
Diferencial de area
~t
Figura 3.46: Cuerpo bajo cargas externas y con un plano (y − z) de corte ima-ginario. Distribucion de fuerzas internas en la superficie de corte.
τxy
xτxz
y
z
τxx
~t
Figura 3.47: Fuerzas internas para un diferencial de area en un corte imaginario.
Para el sistema de coordenadas de la figura podemos ver que ~t va a tener trescomponentes (que aparecen dibujadas allı) que denotamos como:
τxx : Componente de ~t en la direccion x,
τxy : Componente de ~t en la direccion y,
τxz : Componente de ~t en la direccion z.
Podemos ver que en un caso general ~t tendrıa una componente de esfuerzonormal y dos de esfuerzo de corte, luego
~t = τxx ı + τxy + τxzk.
Para la Figura 3.45 podemos alternativamente hacer cortes en los planosx−z e y−z, los cuales pueden pasar por el mismo punto en donde hemos hechoel analisis anterior, luego en vez de una superficie diferencial a traves de estostres cortes podrıamos extraer un cubo diferencial, tal como se muestra en laFigura 3.48.
En este cubo, debido a los cortes imaginarios, en cada una de sus carastenemos un vector de esfuerzos ~t, que nuevamente para cada cara va a tener
90

τxy
τyy
τxz
τyxτyz
τxxτzz τzx
τzy
Figura 3.48: Cubo diferencial con las componentes del tensor de esfuerzos.
tres componentes, una normal y dos en corte, tal como se muestra en la mismaFigura 3.48.
El cubo diferencial mostrado en la Figura 3.48 es una representacion de algoque conoceremos como el estado de esfuerzos en un punto. Este cubo es unarepresentacion aproximada de lo que sucede en una porcion de material muypequena alrededor de un punto cualquiera en el interior del cuerpo.
Vamos a definir el ‘tensor de esfuerzos’ T˜como la matriz7
T˜=
τxx τxy τxzτyx τyy τyzτzx τzy τzz
. (3.29)
El significado de la notacion τij es el siguiente: el primer ındice i indica elplano (la normal que lo atraviesa) en que la componente del vector esfuerzoactua, en tanto que el segundo ındice j indica la direccion de dicha componente,ası, por ejemplo, τxz indica la componente que actua en el plano con normalcon eje x en la direccion del eje z.
Las componentes τii son llamadas las componentes normales del esfuerzo, yen algunas ocasiones τxx, τyy y τzz son denotadas como σx, σy y σz, respectiva-mente.
Las componentes τij con i 6= j son llamadas las componentes en corte deltensor de esfuerzos.
7Una vez establecido un sistema de coordenadas, es posible apreciar que las componentesde T
˜no cambian para superficies de corte imaginario distintas, es decir las componentes de
T˜
serıan invariantes frente a los cortes imaginarios.Esto puede parecer un poco extrano si se considera que las componentes del tensor esfuerzosfueron obtenidas a traves de un proceso con varios cortes imaginarios; pero debemos recordarque dichos cortes eran en planos bastante precisos, es decir en el plano x−y, x− z, y− z. Hayuna relacion entre T
˜y el vector de esfuerzos para planos con otras orientaciones que veremos
en la seccion siguiente.Finalmente, el concepto del tensor de esfuerzos es muy importante no solo en mecanica desolidos sino tambien en mecanica de fluidos. Si bien lo hemos mostrado aquı como una simplematriz, en realidad desde el punto de vista matematico es un objeto mas complejo, cuyaspropiedades no estudiaremos en detalle en estos primeros capıtulos. En el Capıtulo 12 re-estudiaremos algunos conceptos desde un punto de vista un poco mas general.
91

3.3.4. Esfuerzos caso bidimensional. Ecuaciones de equili-brio
La Figura 3.48 nos mostraba el tensor de esfuerzos en el caso tridimensional.En la mayor parte de este texto trabajaremos con el caso plano.
Ahora bien, hemos usado el supuesto que si un cuerpo esta en equilibrio,cualquier parte que se saque de el debe tambien estar en equilibrio, y eso debeser valido para el cubo diferencial tambien.
En general las distribuciones de esfuerzos τij van a ser inhomogeneas, esdecir van a depender de la posicion, o sea τij = τij(x, y, z), luego para un cua-drado diferencial (caso plano) como el mostrado en la Figura 3.49 vamos a teneresfuerzos distintos para caras opuestas y separadas del cuadrado diferencial.
τxy(x, y + dy/2)
τyy(x+ dx/2, y)
τxx(x+ dx, y + dy/2)
τyx(x+ dx/2, y)
τxy(x+ dx, y + dy/2)
τxx(x, y + dy/2)
τyy(x+ dx/2, y + dy)
τyx(x+ dx/2, y + dy)
x
x
y
y
dx
dyO
Figura 3.49: Cuadrado diferencial con las componentes del tensor de esfuerzosen el caso plano.
Consideremos las siguientes aproximaciones en base a series de Taylor (en
92

torno al punto (x, y)):
τxx(x, y + dy/2) ≈ τxx +∂τxx∂y
dy
2, (3.30)
τxy(x, y + dy/2) ≈ τxy +∂τxy∂y
dy
2, (3.31)
τyy(x+ dx/2, y) ≈ τyy +∂τyy∂x
dx
2, (3.32)
τyx(x+ dx/2, y) ≈ τyx +∂τyx∂x
dx
2, (3.33)
τxx(x + dx, y + dy/2) ≈ τxx +∂τxx∂x
dx+∂τxx∂y
dy
2, (3.34)
τxy(x + dx, y + dy/2) ≈ τxy +∂τxy∂x
dx+∂τxy∂y
dy
2, (3.35)
τyy(x + dx/2, y + dy) ≈ τyy +∂τyy∂x
dx
2+∂τyy∂y
dy, (3.36)
τyx(x + dx/2, y + dy) ≈ τyx +∂τyx∂x
dx
2+∂τyx∂y
dy. (3.37)
El elemento diferencial mostrado en la Figura 3.49 debe estar en equilibrio,de modo que se debe cumplir que la suma de fuerzas en el sentido del eje x ydel eje y, y la suma de momentos respecto al eje z debe ser cero.
Realizemos la suma de fuerzas en el sentido del eje8 x
−τxx(x, y + dy/2)dy − τyx(x+ dx/2, y)dx+ τxx(x+ dx, y + dy/2)dy
+τyx(x+ dx/2, y + dy)dx = 0,
que mediante el uso de (3.30)-(3.37) queda como
−(τxx +
∂τxx∂y
dy
2
)dy −
(τyx +
∂τyx∂x
dx
2
)dx+
(τxx +
∂τxx∂x
dx+∂τxx∂y
dy
2
)dy
+
(τyx +
∂τyx∂x
dx
2+∂τyx∂y
dy
)dx = 0,
que despues de algunas manipulaciones nos da ∂τxx
∂x dxdy +∂τyx∂y dydx = 0, lo
cual eliminando el factor comun dxdy queda como
∂τxx∂x
+∂τyx∂y
= 0. (3.38)
Si realizamos la suma de fuerzas en el sentido del eje y, siguiendo un proce-dimiento similar se puede obtener
∂τxy∂x
+∂τyy∂y
= 0. (3.39)
8Para hacer la suma de fuerzas se debe multiplicar cada componente del esfuerzo en laFigura 3.49 por el area en la cual actua. Por ejemplo en el caso del esfuerzo τxx(x + dx, y +dy/2) que se aplica en la cara vertical del lado izquierdo, el area serıa dy multiplicada porla profundidad, que asumimos unitaria, o sea simplemente es el esfuerzo multiplicado por lalongitud del lado en el que esta siendo aplicado. Por ejemplo en el caso de τyy(x + dx/2, y)aplicada en la cara inferior del diferencial mostrado en la Figura 3.49 el area serıa dx por 1.
93

En relacion al equilibrio de momento respecto al eje z, de la Figura 3.49,haciendo el momento respecto al punto O se tiene
τxy(x, y + dy/2)dydx
2− τyx(x+ dx/2, y)dx
dy
2+ τxy(x + dx, y + dy/2)dy
dx
2
−τyx(x+ dx/2, y + dy)dxdy
2= 0, (3.40)
y usando (3.30)-(3.37) tenemos(τxy +
∂τxy∂y
dy
2
)dy
dx
2−(τyx +
∂τyx∂x
dx
2
)dx
dy
2+
(τxy +
∂τxy∂x
dx+∂τxy∂y
dy
2
)dy
dx
2
−(τyx +
∂τyx∂x
dx
2+∂τyx∂y
dy
)dx
dy
2= 0,
y despreciando los terminos que estan siendo multiplicados por dx2dy y dxdy2
en relacion a los que estan siendo multiplicados por dxdy, despues de algunasmanipulaciones se tiene
τxy = τyx, (3.41)
o sea el tensor de esfuerzos es simetrico. Usando este resultado en (3.38), (3.39)se obtiene:
∂τxx∂x
+∂τxy∂y
= 0, (3.42)
∂τxy∂x
+∂τyy∂y
= 0. (3.43)
Las ecuaciones (3.42), (3.43) son llamadas las ecuaciones de equilibrio. Siguiendoun procedimiento similar para el caso tridimensional se tiene9
∂τxx∂x
+∂τxy∂y
+∂τxz∂z
= 0, (3.44)
∂τxy∂x
+∂τyy∂y
+∂τxz∂z
= 0, (3.45)
∂τxz∂x
+∂τyz∂y
+∂τzz∂z
= 0. (3.46)
Ahora deduciremos una relacion entre el vector de esfuerzos ~t y el tensorde esfuerzos T
˜para el caso bidimensional. Para ellos veamos la Figura 3.50 en
donde tenemos, por ejemplo, una placa sometida a algunas fuerzas externas ycon algunas restricciones el desplazamiento. La placa esta en equilibrio y enconsecuencia un diferencial, como el que se muestra en dicha figura, tambiendebe estar en equilibrio. Imaginemos ahora que el cuadrado diferencial sufre uncorte adicional en este caso en el sentido diagonal, con un angulo θ, tal como semuestra tambien en la Figura 3.51.
9No trabajaremos en general de forma directa con las ecuaciones de equilibrio, salvo enel Capıtulo 6, sin embargo es necesario hacer notar que estas ecuaciones son unos de losresultados mas importantes de la mecanica de solidos clasica. Estas son las ecuaciones que seresuelven, por ejemplo, por medio de metodos computacionales.
94
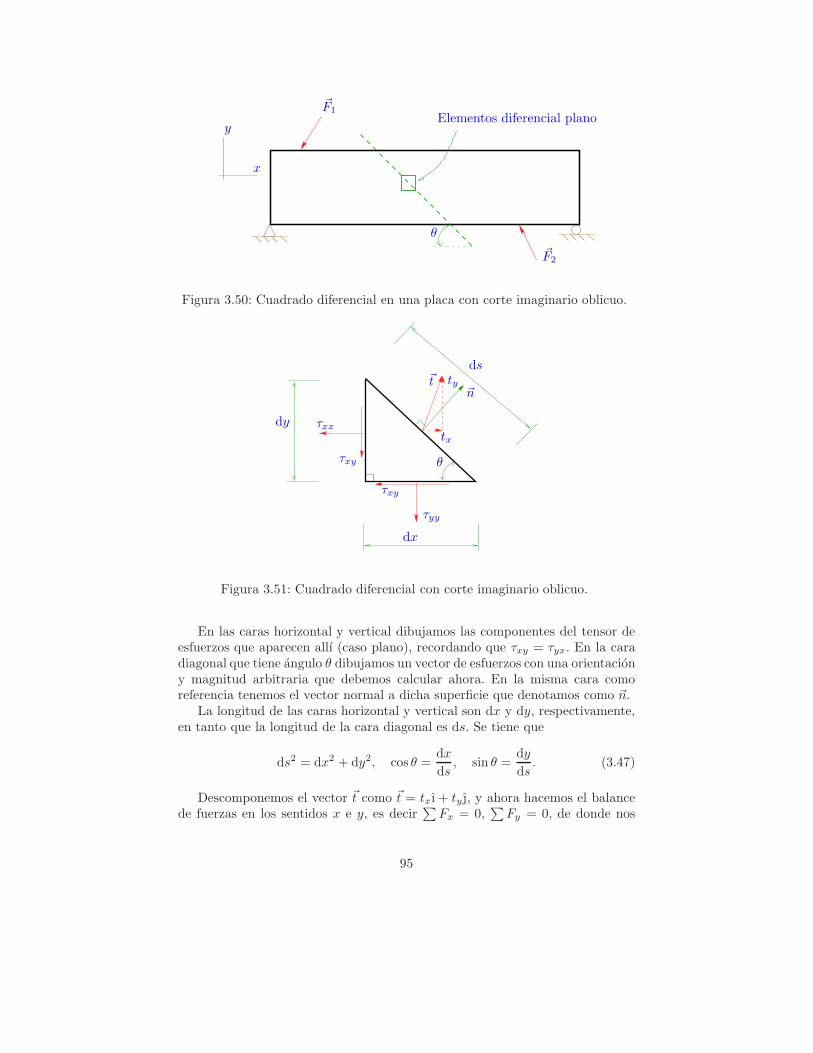
x
y
~F1
~F2
Elementos diferencial plano
θ
Figura 3.50: Cuadrado diferencial en una placa con corte imaginario oblicuo.
dx
dy τxx
τxy
τxy
τyy
θ
~n~t
tx
ty
ds
Figura 3.51: Cuadrado diferencial con corte imaginario oblicuo.
En las caras horizontal y vertical dibujamos las componentes del tensor deesfuerzos que aparecen allı (caso plano), recordando que τxy = τyx. En la caradiagonal que tiene angulo θ dibujamos un vector de esfuerzos con una orientaciony magnitud arbitraria que debemos calcular ahora. En la misma cara comoreferencia tenemos el vector normal a dicha superficie que denotamos como ~n.
La longitud de las caras horizontal y vertical son dx y dy, respectivamente,en tanto que la longitud de la cara diagonal es ds. Se tiene que
ds2 = dx2 + dy2, cos θ =dx
ds, sin θ =
dy
ds. (3.47)
Descomponemos el vector ~t como ~t = tx ı + ty , y ahora hacemos el balancede fuerzas en los sentidos x e y, es decir
∑Fx = 0,
∑Fy = 0, de donde nos
95

queda, respectivamente
txds− τxxdy − τxydx = 0,
tyds− τyydx− τxydy = 0,
y como de (3.47)2 tenemos dx = ds cos θ, dy = ds sin θ, nos queda como
txds− τxxds sin θ − τxyds cos θ = 0,
tyds− τyyds cos θ − τxyds sin θ = 0,
que despues de algunas manipulaciones (eliminando el factor comun ds) nos da
(txty
)
︸ ︷︷ ︸~t
=
(τxx τxyτxy τyy
)
︸ ︷︷ ︸T˜
(sin θcos θ
)
︸ ︷︷ ︸~n
. (3.48)
Es facil apreciar de la Figura 3.51 que ~n = sin θı + cos θ, luego la relacionanterior se puede escribir como
~t = T˜~n, (3.49)
que es la relacion general entre el vector de esfuerzos y el tensor de esfuerzosno solo para problemas planos, sino tambien se puede probar para problemastridimensionales.
96
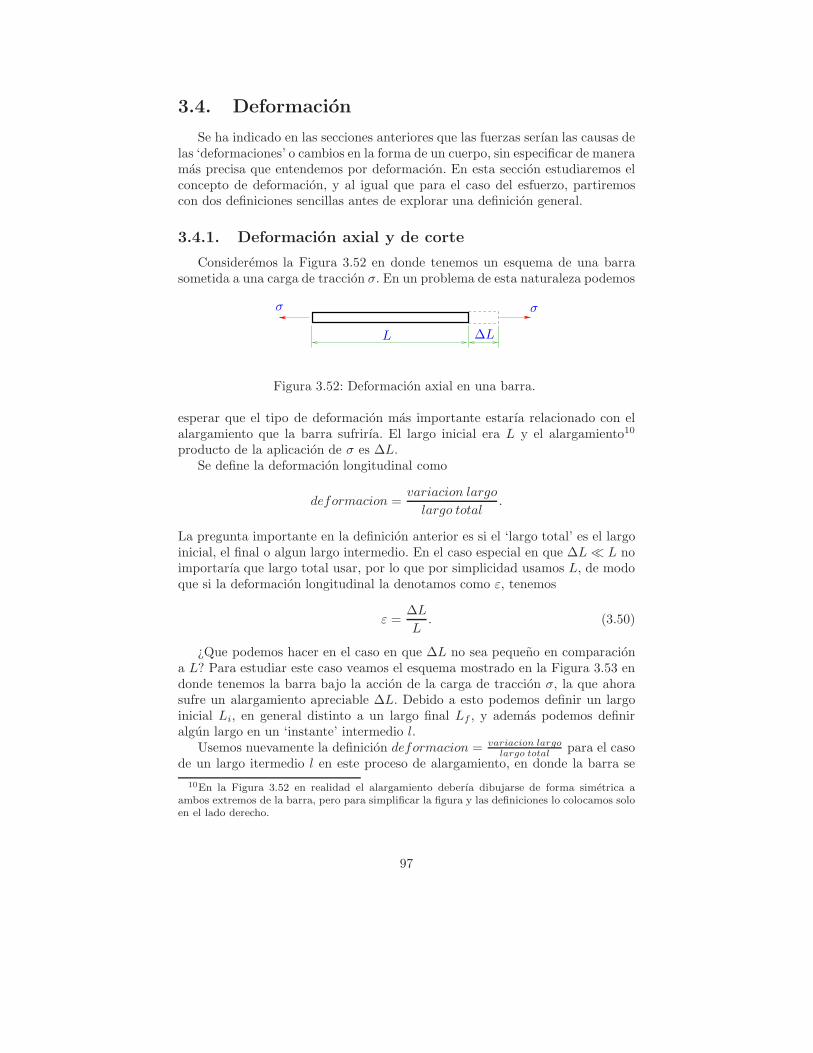
3.4. Deformacion
Se ha indicado en las secciones anteriores que las fuerzas serıan las causas delas ‘deformaciones’ o cambios en la forma de un cuerpo, sin especificar de maneramas precisa que entendemos por deformacion. En esta seccion estudiaremos elconcepto de deformacion, y al igual que para el caso del esfuerzo, partiremoscon dos definiciones sencillas antes de explorar una definicion general.
3.4.1. Deformacion axial y de corte
Consideremos la Figura 3.52 en donde tenemos un esquema de una barrasometida a una carga de traccion σ. En un problema de esta naturaleza podemos
L ∆L
σσ
Figura 3.52: Deformacion axial en una barra.
esperar que el tipo de deformacion mas importante estarıa relacionado con elalargamiento que la barra sufrirıa. El largo inicial era L y el alargamiento10
producto de la aplicacion de σ es ∆L.Se define la deformacion longitudinal como
deformacion =variacion largo
largo total.
La pregunta importante en la definicion anterior es si el ‘largo total’ es el largoinicial, el final o algun largo intermedio. En el caso especial en que ∆L≪ L noimportarıa que largo total usar, por lo que por simplicidad usamos L, de modoque si la deformacion longitudinal la denotamos como ε, tenemos
ε =∆L
L. (3.50)
¿Que podemos hacer en el caso en que ∆L no sea pequeno en comparaciona L? Para estudiar este caso veamos el esquema mostrado en la Figura 3.53 endonde tenemos la barra bajo la accion de la carga de traccion σ, la que ahorasufre un alargamiento apreciable ∆L. Debido a esto podemos definir un largoinicial Li, en general distinto a un largo final Lf , y ademas podemos definiralgun largo en un ‘instante’ intermedio l.
Usemos nuevamente la definicion deformacion = variacion largolargo total para el caso
de un largo itermedio l en este proceso de alargamiento, en donde la barra se
10En la Figura 3.52 en realidad el alargamiento deberıa dibujarse de forma simetrica aambos extremos de la barra, pero para simplificar la figura y las definiciones lo colocamos soloen el lado derecho.
97

Li
∆L
σσ
l
Lf
dl
Figura 3.53: Deformacion axial en una barra caso ∆L no es pequeno.
alargarıa en un diferencial dl, luego el ‘incremento’ en la deformacion dε sepodrıa calcular como
dε =dl
l,
luego integrando entre el ‘instante’ inicial y final se llega a
εfinal − εinicial = ln(Lf )− ln(Li).
Si inicialmente la barra no presentaba ninguna deformacion se tiene que εinicial =0, y si definimos ε = εfinal, se llega a
ε = ln
(LfLi
)= ln
(1 +
∆L
Li
), (3.51)
que es la definicion correcta para la deformacion longitudinal en un problemade grandes deformaciones.
De manera similar a lo que se hizo para los esfuerzos11, ahora estudiamosel caso de deformaciones de ‘corte’. Para esto veamos el esquema mostrado enla Figura 3.54, en donde tenemos un bloque pegado al piso, bajo el efecto ensu cara superior de un esfuerzo de corte τ . La forma inicial del bloque estadibujada con lıneas llenas, en tanto que dada la carga externa τ , podrıamosasumir que su forma final aproximada es la que se muestra con lıneas segmen-tadas, es decir se producirıa un cambio de angulo γ. Si γ es pequeno las caraslaterales no sufriran una curvatura apreciable, y podemos asumir que quedanaproximadamente rectas como aparece en la figura.
El angulo γ (en radianes) es definido como la ‘deformacion en corte’ y de laFigura 3.54 tenemos
tan γ =∆L
B,
luego si γ es pequeno entonces γ ≈ tan γ de modo que
γ ≈ ∆L
B. (3.52)
11De manera intuitiva podemos ver la relacion directa que habrıa entre los esfuerzos normalesy las deformaciones longitudinales. Un segundo tipo de deformacion se puede asociar a losesfuerzos de corte.
98

B
∆L
γ
τ
Figura 3.54: Deformacion por corte en un bloque pegado al piso.
3.4.2. Deformacion problema bidimensional
Para un caso general bidimensional incorporaremos las dos definiciones dedeformacion dadas anteriormente, para ello veamos el esquema mostrado en laFigura 3.55, en donde tenemos en el lado izquierdo un cuerpo bajo la accion dealgunas fuerzas externas y tambien con algunas restricciones al desplazamiento.En esa figura tenemos un pequeno elemento diferencial de forma rectangular.
~F1 ~F2
x
y
Cuadrado diferencial
P Q
RS
dx
dy P ′ Q′
R′S′
Figura 3.55: Deformacion y campo de desplazamientos problema bidimensional.
La forma inicial del cuerpo se dibuja con lıneas llenas, en tanto una vez que elcuerpo se deforma se dibuja con lıneas segmentadas, y lo mismo ocurre con elcuadrado diferencial.
En el lado derecho de la Figura 3.55 tenemos un esquema ampliado delmismo elemento diferencial. Debido a que el elemento se asume muy pequeno yque se asume ademas que las deformaciones son pequenas, las caras del cuadradopueden sufrir acortamiento, alargamiento, cambio de angulo, pero permanecenmas menos rectas tal como se muestra en la figura.
99

Se define el campo de desplazamiento como el campo vectorial que para cadapunto (x, y) nos indica cuanto se mueve dicho punto al deformarse y moverseel cuerpo producto de las fuerzas externas. Denotaremos al campo de desplaza-mientos como ~w y en un problema bidimensional tenemos
~w(x, y) = u(x, y)ı + v(x, y), (3.53)
en donde vemos que u(x, y) y v(x, y) serıan las componentes horizontales yverticales del desplazamiento.
En la Figura 3.56 mostramos ahora al cuadrado diferencial en su situacioninicial PQRS y final P ′Q′R′S′ con deformaciones relativamente grandes parafacilitar la comprencion de las siguientes expresiones. Usando la definicion delcampo de desplazamiento anterior y usando aproximaciones con series de Tayloral primer termino para los desplazamientos para los puntos Q y S tenemos lasaproximaciones mostradas en esta figura.
P
S R
Q
dx
dy
u
v
u+ ∂u∂xdx
v + ∂v∂xdx
φ1
φ2∂v∂xdx
P ′
S′
Q′
R′
v + ∂v∂ydy
∂v∂ydy + dy
u+ ∂u∂y dy
∂u∂y dy
∂u∂xdx+ dx
Figura 3.56: Significado del tensor de deformacion en el caso infinitesimal plano.
Podemos apreciar que de PQRS a P ′Q′R′S′ el cubo podrıa sufrir cambiosen sus longitudes y tambien en los angulos interiores, que originalmente eran de90◦ y que ahora podrıan ser otros angulos mayores o menores a 90◦. Como elcuadrado diferencial es por definicion muy pequeno, y como asumimos que lossegementos rectos, como por ejemplo, PQ, PS, etc. permanecen aproximada-mente rectos al deformarse el cuadrado, con las aproximaciones y observaciones
100

anteriores ahora procedemos a definir algunos ‘tipos’ de deformaciones para es-te problema bidimensional. La ‘deformacion longitudinal’ la vamos a definir denuevo simplemente como el cambio del largo de cada lado del cuadrado partidopor su largo inicial, asi que tenemos
deformacion longitudinal direccion x =Cambio largo PQ
Largo inicial PQ, (3.54)
y como de la Figura 3.56 tenemos que
Largo inicial PQ = dx, (3.55)
Largo final PQ =
√(dx+
∂u
∂xdx
)2
+
(∂v
∂xdx
)2
, (3.56)
luego
deformacion longitudinal direccion x =
√(dx+ ∂u
∂xdx)2
+(∂v∂xdx
)2 − dx
dx,
=
√(1 +
∂u
∂x
)2
+
(∂v
∂x
)2
− 1,
=
√
1 + 2∂u
∂x+
(∂u
∂x
)2
+
(∂v
∂x
)2
− 1. (3.57)
La condicion |∇~w| ≪ 1 implica que las deformaciones son pequenas, luego si
esto es cierto se tiene que∣∣∂u∂x
∣∣,∣∣∣∂v∂y∣∣∣ tambien son pequenos y lo terminos
(∂u∂x
)2
y(∂v∂x
)2se desprecian respecto a 1 + 2∂u∂x por lo que en (3.57) tenemos que
deformacion longitudinal direccion x ≈√1 + 2
∂u
∂x− 1. (3.58)
Pero para (1 + a)m si a es pequeno respecto a 1, por medio de una serie deTaylor tenemos la aproximacion (1+a)m ≈ 1+ma, luego usando este resultado
en (3.58) se llega a√
1 + 2∂u1
∂x1≈ 1 + ∂u1
∂x1, por lo que
deformacion longitudinal direccion x = εxx ≈ ∂u
∂x. (3.59)
El mismo procedimiento se puede repetir para la cara PS y se llegarıa a
deformacion longitudinal direccion y = εyy =Cambio largo PS
Largo inicial PS≈ ∂v
∂y. (3.60)
La deformacion en corte se asocia a cambios en el angulo que sufrirıa, porejemplo, un bloque por efecto de la aplicacion de un esfuerzo de corte en sucara superior. Vamos a usar esa misma definicion aquı, respecto al angulo que
101

usaremos la pregunta a partir de la Figura 3.56 es: ¿Cual angulo deberiamosusar, φ1, φ2 u otro diferente que se pueda definir? Trabajaremos con el promediode modo que definimos
deformacion en corte =1
2(φ1 + φ2). (3.61)
Como se ha asumido que las deformaciones son pequenas, entonces φ1 y φ2(medidos en radianes) tambien son pequenos y la siguiente aproximacion esvalida
φ1 ≈ tan(φ1), φ2 ≈ tan(φ2),
luego
deformacion en corte ≈ 1
2[tan(φ1) + tan(φ2)]. (3.62)
Pero de la Figura 3.56 tenemos que
tanφ1 =∂v∂xdx
dx+ ∂u∂xdx
=∂v∂x
1 + ∂u∂x
,
pero como ∂u∂x ≪ 1 se llega a
tan(φ1) ≈∂v
∂x, (3.63)
y de manera similar se puede demostrar que
tan(φ2) ≈∂u
∂y, (3.64)
por lo que usando (3.63) y (3.64) en (3.62) tenemos que
deformacion en corte = εxy ≈ 1
2
(∂v
∂x+∂u
∂y
). (3.65)
En resumen
εxx =∂u
∂x, εyy =
∂v
∂y, εxy =
1
2
(∂v
∂x+∂u
∂y
). (3.66)
Se puede definir el tensor (simetrico) de deformacion (2D) ε˜como
ε˜=
(εxx εxyεxy εyy
). (3.67)
3.5. Relacion esfuerzos-deformaciones. Compor-tamiento mecanico del material
Todos los conceptos vistos en las secciones anteriores son aplicables a cual-quier tipo de material solido siempre y cuando las deformaciones (y desplaza-mientos) sean pequenas(os). No ha habido distincion entre el comportamiento
102

de, por ejemplo, un cuerpo hecho de acero o cobre. Sin embargo, se sabe deobservaciones experimentales que dos cuerpos de la misma forma inicial, bajolas mismas cargas externas y restricciones a los desplazamientos, pero hechos dedos materiales distintos, se van a comportar de una forma diferente. Este hechofundamental lo incorporaremos a nuestros modelos en esta seccion.
3.5.1. Modulo de elasticidad y coeficiente de Poisson. En-sayo uniaxial
Partamos con un problema simple como el que se muestra en el esquema dela Figura 3.57, en donde tenemos un cilindro sometido a una fuerza axial F ,que sufrira, debido a esta fuerza, una deformacion longitudinal. El largo inicial
L
F
Fz
D
Figura 3.57: Esquema de ensayo uniaxial de traccion.
es L, y el cambio en dicho largo se mide con el esquema de instrumento en ellado derecho de la barra.
El diametro inicial del cilindro se asume que es D, y se sabe que muchosmateriales al ser deformados intentan mantener su volumen, de modo que si Lcrece D probablemente disminuya. Podemos tener por tanto tambien un ins-trumento (como se muestra esquematicamente en el lado izquierdo del cilindro)que mida el cambio en el diametro.
Sea A el area de la seccion transversal, por el principio de Saint Venant lejosdel punto de apliacion de F tenemos
σ =F
A. (3.68)
Si el cambio de largo del cilindro ∆L es pequeno
ε =∆L
L, (3.69)
103

con L como largo inicial.Respecto a (3.68) la pregunta es: ¿Cual diametro deberıamos usar para cal-
cular A, el inicial o el final? Si el volumen intenta preservarse entonces si L րse tiene que D ց, luego el area inicial Aini sera en general mayor que el areafinal o ‘real’ Areal, de modo que tendrıamos dos definiciones alternativas parael esfuerzo de (3.68).
Se define el esfuerzo ‘real’ σreal y el esfuerzo de ingenierıa σing como
σreal =F
Areal, σing =
F
Aing, (3.70)
donde Areal =πD2
final
4 y Aing =πD2
inicial
4 . Si las deformaciones son pequenas, nohay mucha diferencia entre estas dos definiciones, y como es mas facil trabajarcon el area inicial; en geneal se usa el esfuerzo de ingenierıa.
En la Figura 3.58 tenemos un esquema de un grafico experimental tıpico quese obtendrıa a partir del experimento del esquema mostrado en la Figura 3.57,para, por ejemplo, un material ductil tal como una cero con bajo contenido decarbono.
Las caracterısticas de la curva las detallamos en la siguiente lista:
El grafico se hace con el esfuerzo de ingenierıa σing para σ.
En general de distinguen dos zonas de comportamiento, elastico y plastico.En la zona de comportamiento elastico cualquier deformacion ‘no es per-manente’ en el sentido de que si se retiran las fuerzas externas, el cuerporecobra su forma inicial12.
En la zona de comportamiento elastico la relacion entre los esfuerzos ylas deformaciones es aproximadamente lineal para muchos materiales. Lapendiente de la recta en esta zona se llama ‘modulo de elasticidad’ y sedenota como E. En esta zona tenemos la ley de Hooke
σ = Eε. (3.71)
Este pendiente dependera del tipo de material.
El lımite entre la zona de comportamiento elastico y la zona de comporta-miento plastico ocurre a un nivel especıfico de esfuerzo llamado esfuerzosde fluencia (yielding), que es distinto para cada material. Lo denotaremoscomo σy y en ocasiones tambien como σo.
Si se pasa el lımite elastico, como lo muestra, por ejemplo, la punta deflecha azul, y se retira la carga externa, nos devolvemos por la lınea pun-teada, en donde la pendiente es aproximadamente similar a E. En estazona (la lınea punteada) tenemos comportamiento elastico. El lımite de
12Esta no es la definicion mas precisa de un material elastico. Una definicion mas general esla que indica que un material elastico es aquel que ‘no disipa energıa de forma interna cuandose deforma’.
104

ε
σ
Rotura
σy
Lımite defluencia
Pendiente E
Elastico Plastico
Deformacion plastica permanente
Figura 3.58: Esquema mostrando un resultado tıpico para un ensayo unixial detraccion.
fluencia aumenta (endurecimiento por deformacion), y si σ = 0 tenemosε 6= 0, es decir hay deformacion residual (deformacion plastica residual opermanente).
Si se aumenta mucho el nivel de esfuerzo el material eventualmente serompe.
A continuacion algunas observaciones adicionales respecto al grafico mos-trado en la Figura 3.58. Para la zona de comportamiento plastico, si solo hayfuerzas crecientes, es decir fuerzas cuya mangitud aumenta en el tiempo, hayvarios modelos simplificados para el comportamiento. En la Figura 3.59 tenemosalgunos ejemplos de modelos para el comportamiento en la zona plastica (queen general es nolineal):
El modelo mas simple es conocido como el ‘modulo tangente’, en dondeen el punto σy, se toma una lınea tangente a la curva de la zona plastica,y si la pendiente de dicha lınea es Ep, se tiene entonces σ = σy + Epεp,donde εp serıa la parte plastica de la deformacion total.
105

ε
σ
Modulo tangente
σy
Lımite defluencia
Potencia
Elastico Plastico
Poli-lınea
Curva original
Figura 3.59: Esquema de ensayo unixial de traccion. Comportamiento plastico.
Un modelo mas preciso y usado con frecuencia en modelacion numericade deformacion plastica es el de la ‘poli-lınea’, en donde la curva esfuerzo-deformacion se divide en un numero finito de lıneas, en donde en cada unade ellas tenemos una pendiente conocida. Ası el comportamiento para cadatramo serıa simplemente la pendiente multiplicada por la deformacionplastica del tramo mas el esfuerzo al inicio del tramo.
El modelo mas preciso es conocido como el de la ‘potencia’, en donde lacurva se aproxima como cεnp , en donde c, n son constantes. En este casoσ = σy + cεnp .
No todos lo materiales muestran un comportamiento lineal en la zona elasti-ca, un ejemplo comun corresponde al caucho. Para un cilindro de caucho so-metido a un esfuerzo axial, la curva esfuerzo-deformacion normalmente es dela forma como se muestra en la Figura 3.60. En un rango amplio el caucho secomporta de forma aproximadamente elastica, sin embargo no hay, en general,una zona en donde el esfuerzo se pueda obtener como una constante por la de-
106
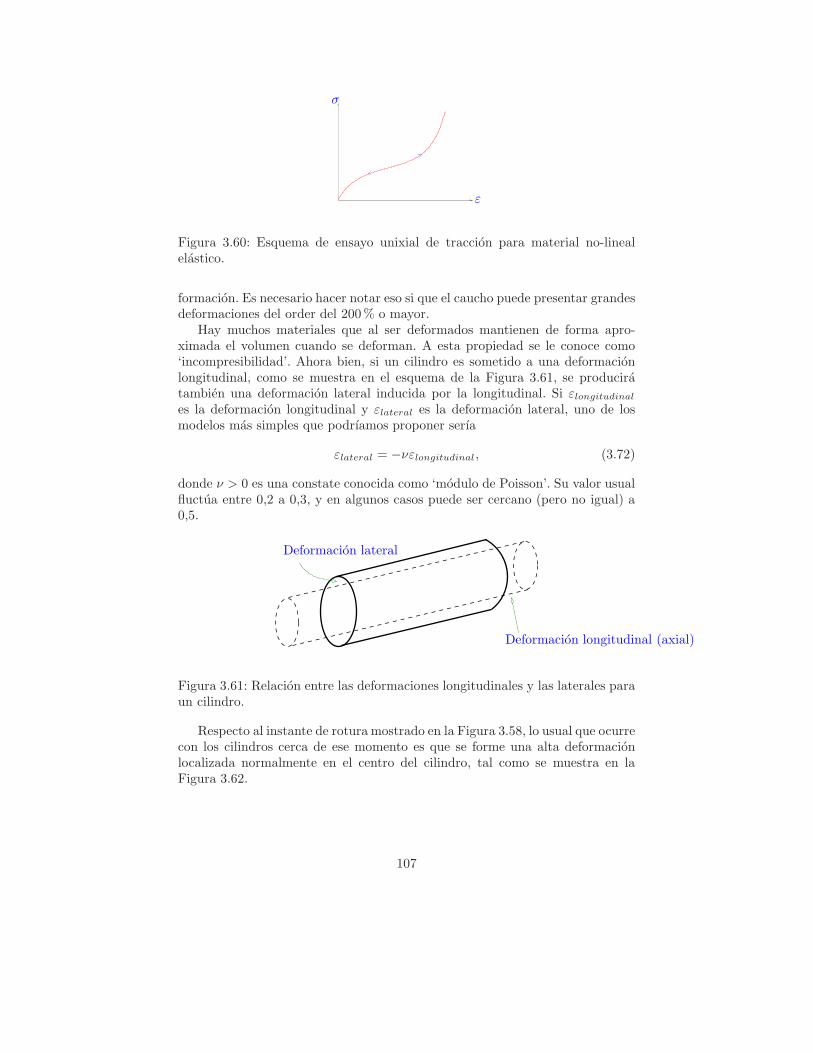
ε
σ
Figura 3.60: Esquema de ensayo unixial de traccion para material no-linealelastico.
formacion. Es necesario hacer notar eso si que el caucho puede presentar grandesdeformaciones del order del 200% o mayor.
Hay muchos materiales que al ser deformados mantienen de forma apro-ximada el volumen cuando se deforman. A esta propiedad se le conoce como‘incompresibilidad’. Ahora bien, si un cilindro es sometido a una deformacionlongitudinal, como se muestra en el esquema de la Figura 3.61, se produciratambien una deformacion lateral inducida por la longitudinal. Si εlongitudinales la deformacion longitudinal y εlateral es la deformacion lateral, uno de losmodelos mas simples que podrıamos proponer serıa
εlateral = −νεlongitudinal, (3.72)
donde ν > 0 es una constate conocida como ‘modulo de Poisson’. Su valor usualfluctua entre 0,2 a 0,3, y en algunos casos puede ser cercano (pero no igual) a0,5.
Deformacion lateral
Deformacion longitudinal (axial)
Figura 3.61: Relacion entre las deformaciones longitudinales y las laterales paraun cilindro.
Respecto al instante de rotura mostrado en la Figura 3.58, lo usual que ocurrecon los cilindros cerca de ese momento es que se forme una alta deformacionlocalizada normalmente en el centro del cilindro, tal como se muestra en laFigura 3.62.
107

Figura 3.62: Esquema de una barra rota debido a una carga axial alta.
3.5.2. Ecuaciones constitutivas. Caso general lineal elasti-co
Es relativamente facil realizar el experimento mostrado en la Figura 3.57.De la seccion anterior tenemos en particular el modelo σ = Eε. Sin embargo lapregunta es que como podemos usar esa informacion para proponer relacionesentre los esfuerzos y las deformaciones para casos generales en donde tenemoscuerpo bi y tridimensionales.
Si T˜
y ε˜son los tensores de esfuerzos y deformacion (considerando por el
momento grandes deformaciones), respectivamente, una de las relaciones cons-titutivas mas generales que se podrıa proponer podrıa tener la forma
g˜(T˜, ε˜) = 0
˜,
en donde g˜serıa alguna relacion tensorial en general nolineal.
Un caso particular de la relacion anterior serıa una ecuacion constitutiva dela forma
ε˜= f˜(T˜),
es decir las deformaciones serıan funciones en general nolineales de los esfuerzos.Un caso particular del modelo anterior, que es el que estudiaremos en este
curso, es asumir que la funcion en realidad es aproximadamente lineal (para elcaso ahora de pequenas deformaciones), es decir las componentes del tensor dedeformaciones se obtendrıan como13
εij =3∑
k=1
3∑
l=1
Dijklτkl, (3.73)
de donde si existe la inversa tenemos
τij =
3∑
k=1
3∑
l=1
Cijklεkl, (3.74)
13En estas expresiones los ındices van de 1 a 3, donde 1 serıa x, 2 serıa y, 3 serıa finalmentez.
108

donde Dijkl y Cijkl son constantes del material.Es el modelo (3.73) el que consideraremos aquı, pero partiremos usando lo
que conocemos del caso del ensayo uniaxial en el cilindro; para ello necesitamosdiscutir algunos conceptos en la siguiente lista:
Un material para el cual la ecuacion constitutiva es de la forma (3.73) esconocido como un material lineal.
Un material homogeneo es aquel en el que las propiedades mecanicas nodependen de la posicion en el cuerpo, o sea en el caso de un materialinhomogeneo14 tendrıamos, por ejemplo, Cijkl = Cijkl(x, y, z).Un material es anisotropico, si para un cuerpo dado, al cambiar la orien-tacion de las fuerzas externas, el comportamiento mecanico del materiales diferente. Un caso especial de material anistropico es el conocido comomaterial ‘transverso-isotropico’. Consideremos el esquema mostrado en laFigura 3.63 en donde tenemos una placa de madera sometida a dos tiposde fuerzas, en la direccion de las fibras de la madera y en una direccionnormal a las fibras.
Figura 3.63: Esquema de una plancha de madera mostrando la caracterıstica deun material transverso-isotropico.
Es bien sabido que el comportamiento mecanico de una plancha de maderano es el mismo si se aplica una fuerza en la direccion de la fibra, pues en esecaso el material es capaz de ‘resistir’ mayores cargas antes de ‘fallar’. Aquıtenemos pues un ejemplo clasico en donde el comportamiento es distintoen relacion a la orientacion de las fuerzas externas aplicadas.
Un material es llamado isotropico si su comportamiento mecanico es elmismo independiente de la direccion de las fuerzas externas, un caso tıpicoes el acero normalizado.
En este texto consideraremos solo materiales homogeneos, lineales e isotropi-cos. De (3.71) y (3.72) se tenıa
σ = Eε, εlateral = −νεlongitudinal.14Todos los materiales reales son inhomogeneos, pero como es difıcil hacer experimentos con
cilindros extraıdos en distintas partes de un cuerpo, en general, como manera de simplificarlos estudios, se asume que los materiales son homogeneous, y es este el supuesto que usaremosde ahora en adelante en este texto.
109

Tomemos, por ejemplo, la deformacion longitudinal en la direccion x; en estadireccion tendrıamos deformacion debido directamente a τxx usando (3.71), y demanera indirecta causada por τyy y τzz a traves de (3.72). Luego, si calculamoscada una de estas deformaciones longitudinales en x por separado tendrıamos
ε′xx =τxxE, ε′′xx = −νεyy = −ν τyy
E, ε′′′xx = −νεyy = −ν τzz
E. (3.75)
Si asumimos que los esfuerzos de corte no afectan o causan deformaciones longi-tudinales, y si asumimos que la deformacion ‘total’ longitudinal en la direccionx es la suma15 de las deformaciones (3.75), tenemos
εxx = ε′xx + ε′′xx + ε′′′xx =1
E[τxx − ν(τzz + τyy)], (3.76)
e igualmente en las direcciones y, z
εyy =1
E[τyy − ν(τxx + τzz)], (3.77)
εzz =1
E[τzz − ν(τxx + τyy)]. (3.78)
¿Que tipo de relacion se puede proponer entre los esfuerzos de corte y las de-formaciones? En el caso lineal considerando pequenas deformaciones el siguienteexperimento puede servir para responder a esta pregunta. En la Figura 3.64 te-nemos un esquema de experimento usado para explorar las relaciones para losesfuerzos de corte. En la Figura tenemos un tubo cilındrico sometido a torsion,
Elemento diferencial
Figura 3.64: Tubo bajo la accion de un momento angular.
se demostrara en el Capıtulo 4 que en un problema de esta naturaleza, para unelemento diferencial como el mostrado en la figura, los tipos de esfuerzos masimportantes que se generan son los de corte, tal como se muestra en la mismafigura en la vista ampliada del elemento en la parte inferior.
15Si las deformaciones son pequenas, es posible aplicar el principio (en realidad aproxima-cion) llamada de superposicion, en donde la deformacion total en una direccion serıa simple-mente la suma de las deformaciones debido a distintas causas en esa direccion.
110

El ‘angulo total’ de torsion ϑ se define (ver Figura 3.54) en el caso tridimen-sional como
ϑxy = 2εxy, ϑxz = 2εxz, ϑyz = 2εyz. (3.79)
Para el experimento mostrado en la Figura 3.64 se ha obtenido la siguienterelacion lineal entre el esfuerzo de corte τ y la deformacion de corte ϑ
ϑ =1
Gτ, (3.80)
donde G es una constante que depende de cada material y es llamada modulode cizalladura o de corte.
Si no hay interaccion entre los distintos esfuerzos de corte y los esfuerzosaxiales, se asume entonces
ϑxy =τxyG, ϑxz =
τxzG, ϑyz =
τyzG, (3.81)
y de (3.79) tenemos
εxy =τxy2G
, εxz =τxz2G
, εyz =τyz2G
. (3.82)
Hasta el momento tenemos tres constantes E, ν y G, sin embargo estasconstantes no son independientes, en la Seccion 3.5.3 se obtiene la relacion
G =E
2(1 + ν). (3.83)
De (3.76)-(3.78) y (3.82) como resumen tenemos
εxx =1
E[τxx − ν(τzz + τyy)], (3.84)
εyy =1
E[τyy − ν(τxx + τzz)], (3.85)
εzz =1
E[τzz − ν(τxx + τyy)], (3.86)
εxy =τxy2G
, (3.87)
εxz =τxz2G
, (3.88)
εyz =τyz2G
. (3.89)
Si se usa (3.83) y se obtiene la inversa de (3.84)-(3.89) se llega a
τxx =E
(1 + ν)(1 − 2ν)[(1− ν)εxx + ν(εyy + εzz)], (3.90)
τyy =E
(1 + ν)(1 − 2ν)[(1− ν)εyy + ν(εxx + εzz)], (3.91)
τzz =E
(1 + ν)(1 − 2ν)[(1− ν)εzz + ν(εxx + εyy)], (3.92)
τxy = 2Gεxy, τyz = 2Gεyz, τxz = 2Gεxz. (3.93)
De las relaciones anteriores podemos ver porque ν debe ser tal que ν 6= 0,5.
111

3.5.3. Relacion entre el modulo de corte, el modulo deelasticidad y el coeficiente de Poisson
En esta seccion demostraremos la relacion (3.83). Para ello considerese laFigura 3.65 en donde originalmente tenemos una placa plana sometida en suscaras derecha e izquierda a un esfuerzo uniforme de compresion σy = −σ, yen sus caras superior e inferior a un esfuerzo de traccion uniforme σz = σ.Asumase que hay un cuadrado diferencial en el centro de la placa, que esta
τ τ
ττ
A
B
O45◦ y
z
σy
σz
Figura 3.65: Placa con carga biaxial.
rotado en 45◦ respecto al eje y. En un problema de esta naturaleza, para estecuadrado diferencial con esa orientacion, en la Seccion 9.2 se puede demostrarque el unico tipo de esfuerzo que el cuadrado siente en sus caras son esfuerzosde corte τ , tal como se puede ver en la misma Figura 3.65.
Debido a estos esfuerzos de corte τ , es posible apreciar que el tipo de defor-macion que el elemento sufrirıa es como se muestra en la Figura 3.66. En estafigura tenemos el cuadrado en su forma inicial con lıneas llenas y en su formafinal con lıneas segmentadas. Como solo hay esfuezos de corte solo se producedeformacion de corte ϑ = 2εyz en el cuadrado, y se puede demostrar que
α =π
4+ϑ
2. (3.94)
PeroOB
OA= tan
(π
4+ϑ
2
). (3.95)
112

l
A
B
Oα
Figura 3.66: Elemento diferencial en una placa con carga biaxial.
Si se analiza la figura original, en las direcciones y, z habrıa deformacion lon-gitudinal por contraccion y alargamiento respectivamente. Si l es la longituddiagonal en las direcciones y, z, por la definicion de deformacion longitudinal(3.50) se tiene
OB = l + lεzz, OA = l + lεyy, (3.96)
luego usando (3.96) en (3.95), usando tambien la formula para la tangente dela suma de dos angulos, asumiendo que ϑ es pequeno, de modo que tanϑ ≈ ϑ,se llega a
1 + εzz1 + εyy
=tan
(π4
)+ tan
(ϑ2
)
1− tan(π4
)tan
(ϑ2
) ≈ 1 + ϑ2
1− ϑ2
. (3.97)
De (3.85), (3.86) tenıamos que
εzz =σzE
− νσyE
=(1 + ν)σ
E, εyy =
σyE
− νσzE
= − (1 + ν)σ
E. (3.98)
De la Seccion 9.2 se puede demostrar para este problema que
τ =1
2(σz − σy) = σ. (3.99)
Usando (3.99) y (3.98) en (3.97) se tiene
1 + (1+ν)E τ
1− (1−ν)E τ
=1 + ϑ
2
1− ϑ2
,
de donde despues de algunas manipulaciones se llega a 2(1+ν)E τ = ϑ, o sea
τ =E
2(1 + ν)ϑ. (3.100)
Comparando con (3.80) se llega a la relacion (3.83)
G =E
2(1 + ν).
113

3.6. Deformaciones termicas
Un ultimo tipo de deformaciones que estudiaremos en esta seccion estanasociadas a cambios de temperatura. Consideremos la Figura 3.67, en dondetenemos una barra que en un momento dado es sometida a un aumento detemperatura. Una observacion valida para casi todos los materiales nos dice que
L
∆L2
∆L2
Figura 3.67: Barra bajo el efecto de un aumento de temperatura.
ante un aumento de temperatura el volumen del cuerpo aumenta, es decir laforma final de la barra se mostrarıa con lıneas segmentadas en la misma figura.Una disminucion de la temperatura producirıa una contraccion del cuerpo.
Vamos asumir que siD es el diametro del cilindro y L es su longitud, entoncesD ≪ L. Uno de los modelos mas simples que se podrıan proponer para esteproblema serıa un modelo lineal de la forma
εT = α∆T, (3.101)
donde ∆T es el aumento o disminucion de la temperatura y α es una constantellamado el coeficiente de expansion termica, en tanto que εT es la deformaciontermica (es una deformacion longitudinal).
Usando el principio de superposicion para las deformaciones, asumiendo queel cambio de temperatura solo producirıa cambio de volumen, o sea solo afectarıaa las deformaciones longitudinales y no a las de corte, de (3.101) en (3.84)-(3.89)tenemos
εxx =1
E[τxx − ν(τzz + τyy)] + α∆T, (3.102)
εyy =1
E[τyy − ν(τxx + τzz)] + α∆T, (3.103)
εzz =1
E[τzz − ν(τxx + τyy)] + α∆T, (3.104)
εxy =τxy2G
, εxz =τxz2G
, εyz =τyz2G
. (3.105)
donde se ha asumido que el material se deforma termicamente de la mismamanera en todas las direcciones (material isotropico). Podemos ver que τij ,i 6= j no cambian con el efecto de la temperatura.
114

En el caso particular de esfuerzo plano τzz = 0 y τxz = τyz = 0, y de(3.102)-(3.105) tenemos
τxx =E
1− ν2(εxx + νεyy)−
Eα
1− ν∆T, (3.106)
τyy =E
1− ν2(εyy + νεxx)−
Eα
1− ν∆T, (3.107)
τxy = 2Gεxy. (3.108)
115

3.7. Ejemplos y ejercicios para problemas condeformaciones y fuerzas axiales
3.7.1. Ejemplos
1. La barra circular de la Figura 3.68 (lado izquierdo) cuelga bajo la accionde su propio peso. El peso especıfico es constante para el cuerpo. Si la
L
D
z
z
P
σT
L− z
Figura 3.68: Barra bajo el efecto de su propio peso.
deformacion normal en cualquier seccion es 1/E veces el esfuerzo normalen la misma direccion. ¿Que desplazamiento experimenta la barra (puntoA) como consecuencia de la accion del peso? ¿Que deflexion experimentauna seccion arbitraria z?
Solucion: En el lado derecho de la Figura 3.68 tenemos la barra con uncorte imaginario a una distancia arbitraria z desde el origen en la partesuperior.
Ahora calculamos la fuerza interna que se producirıa en esa zona de corte.Si g es la constante de gravedad y ρ es la densidad especıfica, el pesoespecıfico gρ es constante y el peso de la seccion inferior es
P = gρ(L− z)A,
donde A es el area de la seccion del cilindro.
Si se asume que el esfuerzo interno (axial de traccion) σ es uniforme,tenemos
σ = gρ(L− z). (3.109)
De la expresion anterior podemos ver que σ es maximo para z = 0, o seael maximo se produce en la conexion con el techo, que es razonable pueses en donde soporta el mayor peso. El mınimo se producirıa en z → L.
Si se extrae una seccion muy delgada (de largo inicial diferencial dz) auna distancia z del origen, la seccion estarıa bajo el efecto de un esfuerzo
116

dz
σT
σT
Figura 3.69: Elemento diferencial de la barra bajo el efecto de su propio peso.
uniforme σ dado por (3.109), como resultado un diagrama de cuerpo librepara la seccion serıa como el esquema mostrado en la Figura 3.69.
Para la seccion delgada la deformacion longitudinal serıa dε y tenemos
dε =∆(dz)
dz. (3.110)
Por otro lado de la ley de Hooke (3.71) tenemos
dε =σ
E, (3.111)
luego de (3.110) y (3.111) tenemos
σ
Edz = ∆(dz).
Integrando se tiene∫ L0
σEdz =
∫ L0∆(dz) = ∆
(∫ L0dz)= ∆L, y de (3.109)
se tiene ∫ L
0
gρ
E(L − z)dz = ∆L,
y como resultado se obtiene
∆L =gρL2
2E. (3.112)
2. En la Figura 3.70 tenemos dos barras de seccion transversal de lado d, queestan sostenidas entre dos pareder rıgidas. El cuerpo A tiene un modulo
A BF 2F
aa 2a2a
Figura 3.70: Barra bajo la accion de dos fuerzas.
117

de elasticidad de E, mientras que el cuerpo B es de 2E. Fuerzas F y2F se aplican en la forma indicada en la figura. ¿Que fuerzas ejercen lasparedes sobre las barras? ¿Que desplazamiento experimenta la superficiede separacion entre los cuerpos?
Solucion: Sean A, B e I las fuerzas se reaccion que se generan sobre A ,B y la interface entre las barras16, en la Figura 3.71 tenemos diagramasde cuerpo libre de las dos barras por separado. El sentido de estas fuerzas
A BF 2F
II
A B
Figura 3.71: Barra bajo la accion de dos fuerzas. Diagramas de cuerpo libre.
todavıa no se conoce, pero los resultados del problema nos indicara si estano no correctos.
El cuerpo A debe estar en equilibrio de modo que
A+ F = I, (3.113)
y lo mismo sucede con el cuerpo B de donde se tiene que
I = 2F −B. (3.114)
Vamos ahora a realizar algunos cortes imaginarios sobre las barras. En elcaso de A se hace un corte (por la izquierda) un poco antes del punto deaplicacion de F , y un corte un poco despues del punto de aplicacion de F ,como resultado el cuerpo A se divide en dos cuerpos que llamamos 1 y 2,tal como aparecen en el lado izquierdo de la Figura 3.72. Como la parte 1
AA B B
F 2F
II II
AB
1 2 3 4
Figura 3.72: Diagramas de cuerpo libre.
tiene el corte antes de F , de la Figura 3.71 tenemos que este cuerpo solo
16Para simplificar el problema estas fuerzas de interaccion se asumen puntuales.
118

esta sometido a la fuerza A de compresion. Respecto al cuerpo 2 como elcorte se hizo un poco despues de F , de la Figura 3.71 este cuerpo estarıasometido solo a una fuerza de compresion I.
Tambien hacemos cortes imaginarios en el cuerpo B, en particular con-sideramos un corte un poco antes (por el lado izquierdo) del punto deaplicacion de 2F y otro corte un poco despues del punto de aplicacion de2F , como consecuencia el cuerpo B es divido en dos cuerpos llamados 3 y4 como se puede apreciar en el lado derecho de la Figura 3.72. El cuerpo3 estarıa solo sometido a una fuerza de compresion I (ver la Figura 3.71)y el cuerpo 4 a una fuerza de traccion B.
De (3.113) y (3.114) tenemos
A = I − F, B = 2F − I. (3.115)
De (3.115) vemos que no tenemos suficientes ecuaciones para encontrarlas reacciones A, B, I, hace falta una ecuacion adicional, la que se puedeobtener de la siguiente observacion:
El largo o distancia total entre las paredes se mantiene constante pues lasparedes son rıgidas.
La consecuencia de esta observacion es que la suma de todos los alar-gamientos debe ser igual a la suma de todos los acortamientos, en esteproblema las longitudes de 1 y 2 son a y de 3 y 4 son 2a (ver Figura 3.70)y si ∆l1, ∆l2, ∆l3 y ∆l4 son los cambios en las longitudes de 1, 2, 3 y 4,como 1, 2 y 3 estan en compresion y 4 en traccion, tendrıamos
∆l4 = ∆l1 +∆l2 +∆l3. (3.116)
Calculemos ahora los cambios en las longitudes ∆li, i = 1, 2, 3, 4, para ellopara cada seccion i de la Figura 3.72 vamos a asumir que se aplica deforma aproximada el principio de Saint Venant, luego de la ley de Hooke(3.71) para 1 tenemos
ε1 =∆l1a
≈ σ1E
=A
d21
E,
donde se ha usado el hecho que el area de la seccion transversal es d2. Dela ecuacion anterior tenemos
∆l1 =Aa
d2E, (3.117)
y siguiendo un procedimiento similar para 2, 3 y 4 tenemos tambien
∆l2 =Ia
d2E, ∆l3 =
I2a
d22E, ∆l4 =
B2a
d22E. (3.118)
Reemplazando (3.117), (3.118) en (3.116) despues de algunas simplifica-ciones se llega a
A+ 2I = B, (3.119)
119

que es la ecuacion extra (que se obtuvo con el uso de la relacion esfuerzo-deformacion) que necesitabamos para solucionar de forma completa elproblema. Reemplazando (3.119) en (3.115) se llega a una ecuacion paraI de donde tenemos
I =3
4F, (3.120)
por lo que se tiene
A = −F4, B =
5
4F. (3.121)
Vemos que A serıa negativo lo que contradice el sentido que se le habıadado a esa fuerza en los diagramas de cuerpo libre de la Figura 3.71, demodo que debemos solucionar todo de nuevo pero ahora vamos a asumirque A tiene el sentido contrario al que aparece en la Figura 3.71. La unicaimplicancia de esto si se observa bien es que 1 se alargarıa en vez deacortarse y todos los calculos para ∆li se mantiene, tambien la ecuacion(3.115)1 se debe cambiar, en ese caso tendrıamos
A = F − I, (3.122)
en tanto que la ecuacion (3.115)2 se mantendrıa.
Como ahora 1 y 4 se alargan y 2, 3 se acortan, tenemos la condicion
∆l4 +∆l1 = ∆l2 +∆l3, (3.123)
que usando (3.117) y (3.118) nos da la condicion
B +A = 2I, (3.124)
y con el uso de esta ecuacion y (3.122) y (3.115)2 se llega a
I =3
4F, A =
F
4, B =
5
4F, (3.125)
y como ahora son positivos hemos solucionado la primera parte del pro-blema.
Para ver el movimiento de la interface podemos analizar el alargamientoo acortamiento del cuerpo A . De los resultados anteriores, en particularcon ∆l1 (alargamiento) y ∆l2 (acortamiento) tenemos que su movimientoserıa
∆l1 −∆l2 =Fa
4d2E− 3Fa
4d2E= − 1aF
2d2E, (3.126)
de donde tenemos que la interface se moverıa hacia la izquierda en 3aF8d2E .
3. La viga rıgida AB de la Figura 3.73 esta soportada por una barra deacero y otra de aluminio. Una carga P se aplica en A haciendo que ABse deflecte hacia abajo. A continuacion el tornillo en B se ajusta de talforma que la viga quede de nuevo horizontal. ¿Que tanto debe descenderel tornillo desde su posicion inicial para lograrlo?
120

����
������
����
����
����
����
�����
�����
�����
�����
����������������������������������������������������������
a b cP
TornilloBarra de acero
Barra de aluminio
A = 1pulg2
L = 3pie
E = 30 ∗ 106 lbpulg2
A = 2pulg2
L = 5pie
E = 12 ∗ 106 lbpulg2
Figura 3.73: Tres barras unidas a viga rıgida.
Datos: P = 15000lbf, a = 5pie, b = 5pie, c = 8pie (1 pie=12 pulgadas)
Solucion: Vamos a sumir que hay pequenas deformaciones, que el tornilloes rıgido y por tanto al aplicar la fuerza P la viga AB rotarıa rıgidamenterespecto al punto B.
En la Figura 3.74 tenemos un diagrama de cuerpo libre de la viga ABen donde podemos ver la fuerza P , la fuerza de interaccion con la barrade acero Fac y la fuerza de interaccion con la barra de aluminio Fal.No se ha incluıdo la fuerza de raccion en B (que en general tendrıa dos
����
����
����
����
�����
�����
����
����
����������������������������������������������������������a b cP
A B∆φ
Fac Fal
Figura 3.74: Tres barras unidas a viga rıgida. Diagrama de cuerpo libre.
componentes) pues no es necesaria para el siguiente balance.
Si se hace balance de momentos respecto al punto B, es decir∑
BMz = 0y si ∆φ es pequeno tendrıamos
(a+ b + c)P − (b+ c)Fac − cFal = 0. (3.127)
Si la barra AB rota rıgidamente respecto al punto B, de la Figura 3.74
121

podemos ver que podemos definir un angulo de ‘rotacion’ que denomina-remos ∆φ. De la conocida relacion para un arco arco = angulo ∗ radiopodemos calcular los alargamientos de las barras de acero ∆lac y aluminio∆lal como
∆lac = (b+ c)∆φ, ∆lal = c∆φ. (3.128)
Si lac, εac, Aac y Eac son la longitud, la deformacion longitudinal, el areade la seccion transversal y el modulo de elasticidad de la barra de acero, ysi lal, εal, Aal y Eal las respectivas cantidades para la barra de aluminio,de la ley de Hooke (3.71) tenemos εac = Fac
Aac
1Eac
y εal =Fal
Aal
1Eal
. Como
εac =∆lac
lacy εal =
∆lal
lal, finalmente esto nos da las relaciones
∆laclac
=FacAac
1
Eac,
∆lallal
=FalAal
1
Eal,
y con el uso de (3.128) se llega a
Fac =(b + c)∆φAacEac
lac, Fal =
c∆φAalEallal
. (3.129)
Reemplazando (3.129) en (3.127) se obtiene la ecuacion
(a+ b + c)P =(b + c)2∆φAacEac
lac+c2∆φAalEal
lal, (3.130)
que es la ecuacion que nos permitirıa encontrar, por ejemplo, ∆φ. Paralos datos de este problema de la ecuacion anterior se llega a
∆φ = 1,352 ∗ 10−4rad. (3.131)
Respecto a cuanto deberıa descender el tornillo en B, por la forma simpli-ficada en que hemos resuelto el problema es facil ver que dicha distanciaserıa el desplazamiento vertical en A, que es simplemente (a + b + c)∆φ,que en este problema nos da 0,0292pulgadas.
122

3.7.2. Ejercicios
1. Una placa de espesor constante e esta empotrada en sus dos extremos aparedes rıgidas y esta sometida a una fuerza puntual P como la muestra laFigura 3.75. Determine las reacciones causadas en las paredes. El modulode elasticidad del material de la barra es E.
A a
L/2L/2
P
Figura 3.75: Placa en traccion.
2. La barra rıgida ABCD de peso W de la Figura 3.76 esta suspendida portres alambres de acero de modulo de elasticidad E. Cada alambre tieneun diametro d. Determine los esfuerzos producidos en cada uno de losalambres.
A B C D
P W
bb 2b
LAlambre
Alambre
Barra rıgida
Figura 3.76: Barra sostenida por tres alambres.
Datos: W = 10000N, P = 5000N, d = 0,5cm, L = 1m, b = 50cm, E =190GPa
3. Las barras BC, BD, BG y BH de la Figura 3.77 estan unidas por unpasador en B y sometidas a una fuerza F = 20kN. Determine el despla-
123

zamiento en B. Determine la maxima fuerza F que se puede aplicar paraque ninguna de las barras alcanze el esfuerzo de fluencia trabajando conun factor de seguridad FS = 1,5. Asuma que la barra BH no muestrapandeo.
G
B
C
D
H
F
L1
L2
θθ
Figura 3.77: Barras y pasador.
Datos:
Modulo de elasticidad para todas las barras E = 210GPa,
Esfuerzo de fluencia para todas las barras σo = 200MPa,
L1 = 2m, L2 = 1m, θ = 60◦,
Area de la seccion transversal para todas las barras A = 8cm2.
4. Las dos barras pegadas de la Figura 3.78, cuya seccion transversal es dearea A, estan pegadas a dos muros rıgidos. A la temperatura ambienteinicial las barras estan libres de esfuerzos. La barra (1) tiene un coeficientede expansion termica α1 y un modulo de elasticidad E1, en tanto que labarra (2) tiene un coeficiente de expansion termica α2 con modulo E2;tanto α como E se asumen aproximadamente constantes en funcion de latemperatura para las dos barras. Asuma ahora que ambas barras sufrenun aumento uniforme de temperatura ∆T . Determine la fuerza que lasparedes ejercen sobre las barras en este caso, ası como el desplazamientode la interface entre las barras.
5. La barra de acero AD mostrada en la Figura 3.79 tiene un area transversalde 0.4[in2] y esta cargada por fuerzas P1 = 2700[lbf], P2 = 1800[lbf] yP3 = 1300[lbf]. Las longitudes de los segmentos de la barra son a = 60[in],b = 24[in] y c = 36[in].
124

L1 L2
(1) (2)
Figura 3.78: Barras bajo el efecto de un aumento de la temperatura.
a) Suponga que el modulo de elasticidad es E = 30 ∗ 106[lbf/in2] ycalcule el cambio de longitud δ de la barra. ¿Se alarga o se acorta labarra?
b) ¿Que cantidad P debe aumentarse la carga P3 para que el extremoD de la barra no se mueva cuando se aplican las cargas?
A B C D
a b c
P1 P2 P3
Figura 3.79: Barra AD.
125
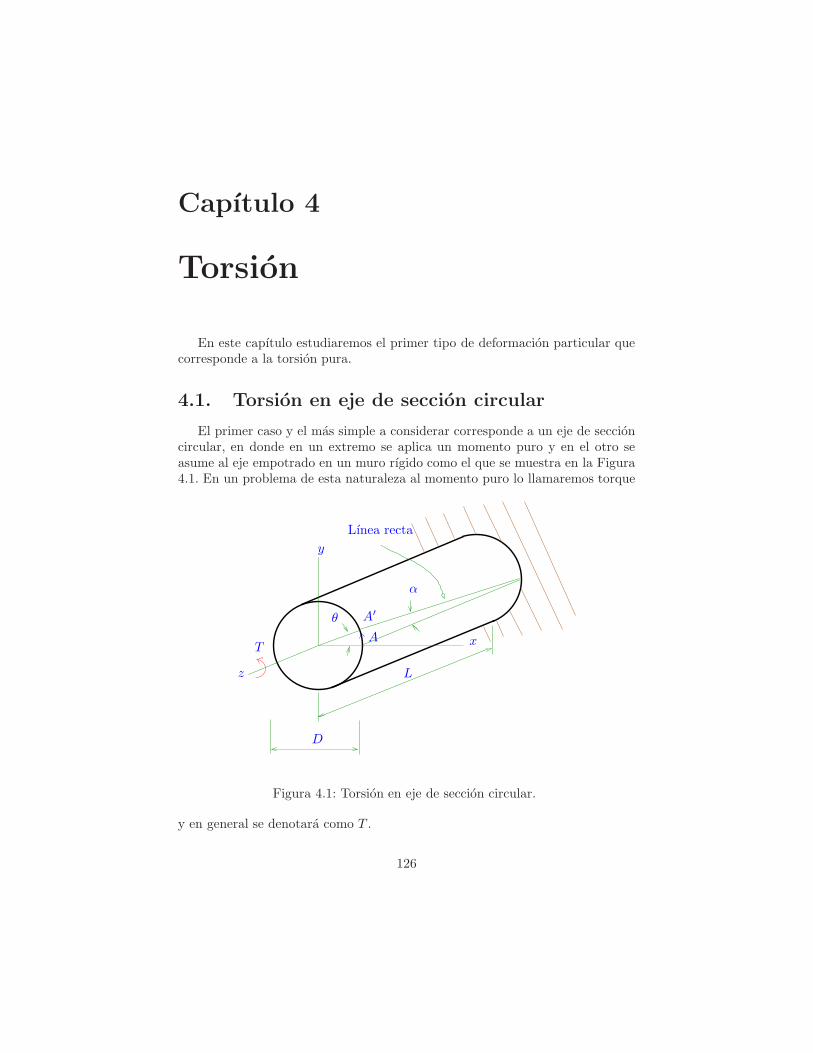
Capıtulo 4
Torsion
En este capıtulo estudiaremos el primer tipo de deformacion particular quecorresponde a la torsion pura.
4.1. Torsion en eje de seccion circular
El primer caso y el mas simple a considerar corresponde a un eje de seccioncircular, en donde en un extremo se aplica un momento puro y en el otro seasume al eje empotrado en un muro rıgido como el que se muestra en la Figura4.1. En un problema de esta naturaleza al momento puro lo llamaremos torque
x
y
z
D
L
θ
α
AT
Lınea recta
A′
Figura 4.1: Torsion en eje de seccion circular.
y en general se denotara como T .
126

En la Figura 4.1 tenemos un sistema de coordenadas Cartesiano, imaginemosque antes de ser deformado por T , se marca un punto A en el contorno. No esdificil ver que cuando se aplica T y el cilindro se deforma, el punto A se moverahacia arriba ‘girando’ pegado a la superficie del cilindro hasta el punto A′, comose puede ver en la misma figura.
Imaginemos que se dibujan dos lıneas rectas en el cilindro antes de ser defor-mado. La primera lınea va desde el centro del cilindro al punto A y la segundalınea es horizontal, va desde el muro al punto A. Ahora vamos a discutir endetalle las simplificaciones que haremos para modelar la deformacion de esteeje.
Primero que todo vamos a asumir que las lıneas rectas mencionadas ante-riormente permanecen rectas cuando el cilindro se deforma. Esta es una apro-ximacion razonable si la deformacion se asume ‘pequena’.
Como las lıneas se asumen rectas cuando se deforma el eje, se pueden definirdos angulos, θ y α como aparecen en la Figura 4.1. Asumir que la deformaciones pequena significara en particular que α es pequeno como lo demostraremosdespues.
Imaginemos que se dibujan dos cortes imaginarios en el eje, tal como semuestra en la Figura 4.2. Antes de ser deformado se dibujan dos puntos A y B
A′B
A
Estos dos planospermanecen paralelos
T
Figura 4.2: Torsion en eje de seccion circular. Dos secciones permanecen para-lelas.
en una lınea horizontal. Vamos a asumir que al ser deformado el eje, estas dossecciones circulares (y cualquier otra seccion) mantienen la forma circular y nosolo eso, vamos a asumir que el diametro no cambia de forma significativa, y quepor tanto la deformacion se puede ver como dos discos rıgidos (muy delgados enla direccion z) rotando uno respecto al otro; luego la deformacion total del ejese podrıa considerar como pequenos ‘giros’ relativos de una cantidad infinita dediscos rıgidos de espesor muy pequeno.
De manera adicional se asumira ademas que los planos en donde se ubicanA y B, que originalmente son paralelos, seguiran siendo paralelos al momentode producirse la deformacion.
Teniendo presente los supuesto anteriores consideremos ahora la Figura 4.3.En esta figura dibujamos nuevamente las dos lıneas que definen los angulos θ
127

τ
ττ
τ
Arco
Corte imaginario
θ
α
T
Figura 4.3: Torsion en eje de seccion circular. Esfuerzos de corte por torsion.
y α, y procedemos ahora a dibujar en el manto del eje un cuadrado diferencialmuy pequeno (con lıneas negras antes de ser deformado) como se muestra en lamisma figura.
Teniendo presente los supuestos respecto a la forma como se deforman dosplanos paralelos, no es difıcil apreciar que la forma final del cuadrado diferencialserıa como se muestran en la Figura 4.3 con lıneas cafe.
En la Figura 4.4 tenemos una vista frontal ampliada del cuadrado diferencialantes de deformarse ABCD y cuando se ha deformado A′B′C′D′. Lo que vemos
τ
τ
τ
τ
A
A
B
B
CC
DD
α
Figura 4.4: Torsion en eje de seccion circular. Esfuerzos de corte por torsion enun elemento diferencial en el manto del cilındro.
en esta figura y en la figura anterior es que los angulos interiores del cuadradocambian su magnitud, y por tanto lo que estamos presenciando es en particular
128

una deformacion en corte para el cuadrado diferencial. Vamos a asumir queno hay cambios de longitudes apreciables y por tanto no habran deformacioneslongitudinales en el cuadrado diferencial. De las Figuras 4.4 y de la ecuacion(3.79) podemos identificar ϑ = α, luego de (3.80) tenıamos
τ = Gα. (4.1)
De la Figura 4.1 vemos que el arco determinado con θ serıa rθ, con r un radioarbitrario 0 ≤ r ≤ D/2. Si α es pequeno el mismo arco se puede calcularaproximadamente como Lα, de modo que
rθ = Lα,
y podemos ver que si r → 0 entonces α → 0 y que si r ր entonces α ր, demodo que la mayor deformacion en corte se producirıa en el manto o la parteexterior del eje para r = D/2. De la expresion anterior se tiene
α =rθ
L, (4.2)
de modo que en (4.1) se llega a
τ =Gθ
Lr. (4.3)
Se puede ver entonces que τ varıa linealmente con r, que tiene su valor maximoen r = D/2 y si θ ր esto implica que τ ր, lo que serıa correcto pues significaque a mayor angulo de torsion mayores esfuerzos son requeridos para lograrlos.Finalmente si L ր luego τ ց, o sea un eje de mayor largo requerirıa menoresesfuerzos para ‘torserse’.
Del analisis que aparece en las Figuras 4.3 y 4.4 se tiene que sobre unasuperficie de corte en el eje, la distribucion de esfuerzo de corte serıa como semuestra en la Figura 4.5. En toda la superficie de corte τ estarıa a 90◦ respecto
Figura 4.5: Torsion en eje de seccion circular. Distribucion para los esfuerzos decorte en una seccion obtenida por corte imaginario.
a una lınea radial, y en todas partes su valor esta dado por (4.3).Cuando se hace un corte imaginario, en un lado se tendrıa el torque total
T (ver Figura 4.3) y en el otro lado tendrıamos una distribucion de esfuerzo de
129

corte como se ve en la Figura 4.5. En la Figura 4.6 tenemos una nueva vista dela superficie con distribucion de esfuerzo de corte, en particular hemos dibujadouno de esos esfuerzos sobre un elemento diferencial de area. Para la parte del
��������
τ
D
dA
drdξ
Figura 4.6: Torsion en eje de seccion circular. Esfuerzos de corte por torsion enun elemento diferencial.
cilindro extraıda con el corte debe haber equilibrio de modo que si la fuerza porτ es τ dA y el torque respecto al centro por tanto es rτ dA, entonces1
T =
∫
Area seccion
rτ dA,
=
∫ D/2
0
∫ 2π
0
Gθ
Lr3 dξ dr, (4.4)
de donde finalmente se obtiene
T =Gθ
L
πD4
32. (4.5)
Se define el momento polar de inercia J como
J =πD4
32, (4.6)
luego (4.5) queda como
T =Gθ
LJ. (4.7)
De (4.7) tenemos GθL = T
J , luego en (4.3) se tiene2
τ =Tr
J, (4.8)
1En estas expresiones hay que tener mucho cuidado de no confundir el angulo de torsion θcon el angulo del sistema polar ξ. Este ultimo se usa simplemente para realizar la integral desuperficie.
2En la solucion para el esfuerzo de corte (4.8) podemos ver que τ al final no depende de ladeformacion ni del tipo de material, solo de T , D y la posicion radial r. Esto puede resultarcurioso, pues en los pasos anteriores se habia usado la deformacion en corte α para obteneralgunas relaciones entre las distintas variables del problema. En este problema el uso de la
130

y el esfuerzo de corte maximo en r = D/2 serıa igual a
τmax =TD
2J. (4.9)
Hay dos subcasos especiales para el caso del eje de seccion circular quetratamos ahora. En el primero consideramos el caso adicional en que se estatrabajando con un tubo de diametros D1 (interior) y D2 (exterior), tal como semuestra en la Figura 4.7.
D1
D2
Figura 4.7: Torsion en eje tubular de seccion circular.
Es facil ver que en este caso el analisis anterior es casi el mismo, lo unico quecambiarıa serıan los lımites de la integral en la direccion radial en (4.4), donde
se tendrıa T =∫ D2/2
D1/2
∫ 2π
0GθL r
3 dξ dr, de donde se llegarıa a T = GθL J , donde en
este casoJ =
π
32(D4
2 −D41). (4.10)
Otro caso distinto corresponde a dos ejes concentricos hechos de mate-riales distintos, como se ilustra en la Figura 4.8. En esta figura se tiene uneje 1 de seccion circular de material con constante G1 y de diametro D1.Perfectamente pegado a el tenemos un eje tubular de diametro interior D1 ydiametro exterior D2 con constante G2.
No es tan sencillo extender las expresiones anteriores para este problema,pues al estar trabajando con dos materiales, se podrıa dar el caso de algunadiscontinuidad en los esfuerzos.
deformacion fue simplemente un paso itermedio para obtener finalmente (4.8).En mecanica de solidos hay algunos problemas especiales en donde las deformaciones noaparecen de manera directa en las expresiones para los esfuerzos, siendo el problema de torsionen un eje de seccion circular uno de dichos cases, sin embargo en general los esfuerzos (sudistribucion) si van depender fuertemente de las propiedades del material y la deformaciones.
131

D1
D2
1
2 ττ
Figura 4.8: Torsion en eje tubo de seccion circular. Esfuerzos de corte.
Sin embargo de la Figura 4.8 y de la Figura 4.3 vemos que el tipo de es-fuerzos τ que se generan, si se dibujan sobre cubos diferenciales, al acercarnosa la interface entre 1 y 2, pueden perfectamente mostrar discontinuidades, puesaparecerıan en los costados de los cubos, no en la posible cara en la interface.La consecuencia de las observaciones anteriores es que en analogıa con (4.4)
tendrıamos T =∫D/20
∫ 2π
0G(r)θL r3 dξ dr donde ahora G dependerıa del radio, en
particular G = G1 si r ≤ D1/2 y G = G2 si D1/2 ≤ r ≤ D2/2, luego
T =2πθ
L
(∫ D1/2
0
G1r3 dr +
∫ D2/2
D1/2
G2r3 dr
),
=2πθ
L
[G1
D41
64+G2
64(D4
2 −D41)
]. (4.11)
4.2. Torsion en eje de seccion rectangular
En el caso de un eje de seccion rectangular de lados a, b con b ≤ a, lassiguientes expresiones son validas3
T =θG
LJ, τmax =
T
κ1ab2, J = κ2ab
3, (4.12)
donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 4.1
3Originalmente con secciones no circulares se intento seguir el mismo procedimiento quepara el caso de ejes circulares vistos en la Seccion 4.1. Sin embargo la evidencia experimental,en particular respecto a los lugares o puntos en donde ocurrıa el maximo esfuerzo, refutabanlas expresiones teoricas encontradas de esta manera.Fue Saint Venant quien propuso el metodo correcto de analisis para el caso de torsion ensecciones no circulares. No daremos detalles del metodo aquı, pues para ello es necesario usarherramientas de la teorıa de la elasticidad lineal, que escapan de los objetivos de este curso.Las formulas (4.12) son aproximaciones numericas de soluciones con series de Fourier de eseproblema.
132

a/b 1 1.5 2 4 10 ∞κ1 0,208 0,231 0,246 0,282 0,312 1/3κ2 0,141 0,296 0,229 0,281 0,312 1/3
Cuadro 4.1: Valores para las constantes κ1 y κ2 en (4.12).
En (4.12)2 tenemos el valor maximo para el esfuerzo de corte, el que seproducirıa en la mitad de la superficie con menor espesor, tal como se muestraen la Figura 4.8.
a
b
a/2Localizacion delesfuerzo maximo
Figura 4.9: Torsion en eje de seccion rectangular. Localizacion del maximo es-fuerzo de corte.
4.3. Torsion en eje de seccion delgada abierta
Aquı veremos un problema en donde aplicaremos (4.12). Nos interesa estu-diar el caso de vigas o ejes con secciones de pared delgada y ‘abierta’, en dondeen la Figura 4.10 tenemos algunos ejemplos de dichas secciones o perfiles.
Figura 4.10: Ejemplos de secciones delgadas abiertas.
Vamos a plantear la teorıa para este tipo de problemas basados en un ejemploespecıfico que se muestra en la Figura 4.11. En dicha figura tenemos un perfilcuya seccion la hemos dividido en tres partes. Cada una de estas partes es unrectangulo, donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 4.1tenemos κ1 = 1/3 y κ2 = 1/3.
El siguiente supuesto es importante: vamos a asumir que el angulo θ detorsion es el mismo para 1, 2 y 3. La justificacion serıa que al rotar por la
133

����������������������
������������������������������
������������������������������
��������������������������������
a1
b1
a2
b3
a3
b2 T
T
Figura 4.11: Torsion en eje de seccion delgada abierta.
deformacion la seccion completa, el angulo de torsion deberıa ser el mismo,pues de otra forma la seccion se separarıa.
Otra observacion importante:
El torque total T debera ser igual a la suma de los torques causado en cadauno de los rectangulos en los que hemos dividido la seccion4.
Para cada uno de los rectangulos tenemos
Ti = GθJiL, Ji =
aib3i
3, i = 1, 2, 3. (4.13)
Luego de las observaciones anteriores
T = T1 + T2 + T3 =Gθ
L(J1 + J2 + J3). (4.14)
De este ejemplo podemos inferir que en un caso general con n seccionesrectangulares tendrıamos
T =Gθ
L
n∑
i=1
Ji, (4.15)
y se puede definir un momento polar total JT como JT =∑ni=1 Ji.
4La justificacion de este supuesto u observacion se puede buscar en (4.4), en donde enterminos mas generales se tendrıa que T deberıa calcularse como algun tipo de integral desuperficie sobre la seccion. Pero la integral sobre las tres superficie serıa simplemente la sumade las integrales sobre cada una de esas superficies y cada una de esas integrales se podrıainterpretar como un torque actuando solo en esa parte.Puede parecer un poco extrano separar T en T1, T2 y T3, pero del Capıtulo 2 se vio (al menospara cuerpos rıgidos) que el vector momento puro (el torque) es un vector libre, luego podemostener perfectamente Ti, i = 1, 2, 3, y luego ‘mover’ estos Ti a un punto comun para determinarun T total.
134

Respecto a los esfuerzos de corte maximo, vamos a tener distintos valorespara cada una de las partes rectangulares como
τmaxi=
Tiκ1aib2i
=G θJi
L13aib
2i
=
Gθaib3i
3Laib2i3
=GθbiL
, i = 1, 2, 3. (4.16)
Pero
T =GθJTL
⇒ θ =TL
GJT, (4.17)
luego en (4.16) tendrıamos
τmaxi=G
L
TL
GJTbi =
TbiJT
, i = 1, 2, 3. (4.18)
Luego el maximo entre entre estos τmaxisera aquel con b mayor, es decir
τmax =Tbmax∑ni=1
aib3i3
, (4.19)
y aparece en el centro de la periferia de esa parte de la seccion.
4.4. Torsion en eje de seccion delgada cerrada
Ahora trataremos el ultimo caso especial que corresponde a un eje de pareddelgada cerrada. Antes de iniciar el analisis de este caso, es necesario hacer unaobservacion respecto a los esfuerzos de corte en una viga o eje de pared delgada.En un caso como este asumiremos que la direccion de los esfuerzos de corte sigueel perfil de la pared delgada, tal como se muestra como en la Figura 4.12.
Figura 4.12: Distribucion aproximada de esfuerzos para una seccion delgada.
Consideremos el eje mostrado en la Figura 4.13 en donde tenemos una vistatridimensional de un eje cerrado de pared delgada. Por simplicidad la parte exte-rior del eje se asume totalmente plana, es decir tiene la forma de un rectangulo,sin embargo la parte interior es irregular, es decir el espesor si bien pequeno, esvariable en el contorno.
135

t1t1 τ1τ1
τ1τ1
τ2 τ2τ2τ2
t2t2
ldl
dl
Vista frontal Vista lateralVista tridimensional
T
Figura 4.13: Torsion en eje de seccion delgada cerrada.
Extraigamos una parte de la pared del eje, que se dibuja en la figura tridi-mensional con lıneas de color cafe. Tenemos una vista frontal del eje y otra vistalateral en la misma Figura 4.13. En estas vistas es posible apreciar la forma deesta parte o elemento que se ha extraıdo de la pared del eje.
El elemento puede tener una longitud finita en la direccion del contorno dela pared, pero en la direccion axial (que hemos denominado l) este elementotiene una longitud infinitesimal dl.
De la observacion concerniente a la Figura 4.12, tenemos que la distribucionde esfuerzos de corte sigue la forma del contorno de la pared, como se ve en lavista frontal en la Figura 4.13. En el punto 1 tenemos un esfuerzo de corte τ1 yun espesor de pared t1, en el punto 2 tenemos τ2 y t2. Como en la direccion l lalongitud del elemento es diferencial, por equilibrio a la rotacion en las caras enla direccion del eje l se deben generar componentes del esfuerzo de corte, comose aprecia en la vista lateral.
El elemento debe estar en equilibrio, de modo que en particular esto implicaque
∑Fl = 0, luego de la Figura 4.13 tenemos que
τ1t1 dl − τ2t2 dl = 0,
de donde se tiene queτ1t1 = τ2t2. (4.20)
Como la igualdad anterior es valida para cualquier par de puntos en el contornode la pared del eje, se cumple que
τ1t1 = τ2t2 = τ3t3 = ... = τiti = Q = constante. (4.21)
El resultado anterior es valido para cualquier forma de la pared de la viga,luego considerese la Figura 4.14 en donde tenemos una vista frontal de un ejede una pared de forma mucho mas arbitraria. En esta figura vemos el centro
136

τ
ds
rr
ξ dξ
dξ
ds⊥
d~sd~s
O
Figura 4.14: Torsion en eje de seccion delgada cerrada. Caso general.
respecto al cual el eje sufre la torsion y a partir de el tenemos el vector ~r que nosda la posicion de cualquier punto en el contorno de la pared, tenemos tambienel vector tangente d~s y su longitud que llamamos simplemente ds.
Si se escoge un elemento de longitud infinitesimal en la direccion del con-torno, la fuerza d~f que aparece sobre el elemento diferencial serıa igual a
d~f = τt d~s = Q d~s, (4.22)
donde ahora t = t(s) es el espesor de la pared, que en general va a depender de
la posicion en el contorno. El diferencial de torque causado por d~f respecto alcentro del eje, si se usa (2.3), serıa
d~T = ~r × d~f = ~r ×Q d~s, (4.23)
de modo que el torque total (como vector) serıa simplemente (hay que recordarque Q es constante) la integral de contorno
~T = Q
∮~r × d~s. (4.24)
Pero en el esquema auxiliar del lado derecho de la Figura 4.14 podemos ver queel modulo del vector ~r × d~s estarıa dado por
‖~r × d~s‖= r ds⊥ = 2dA, (4.25)
donde dA serıa el area diferencial achurada en esa figura. Como resultado de loscalculos anteriores se tiene que
T = ‖~T‖= Q
∮‖~r × d~s‖= 2Q
∮dA. (4.26)
137
Se define
A =
∮dA, (4.27)
que es llamada el area promedio, pues es el area de la seccion calculada hastala mitad de la pared en todo su contorno.
Usando (4.27) en (4.26) se llega a
T = 2QA, (4.28)
y de (4.21), (4.28) se obtiene una expresion para el esfuerzo de corte en cualquierpunto del contorno como
τ =T
2At, (4.29)
de modo que el maximo esfuerzo de corte se obtendrıa como
τmax =T
2Atmin. (4.30)
138
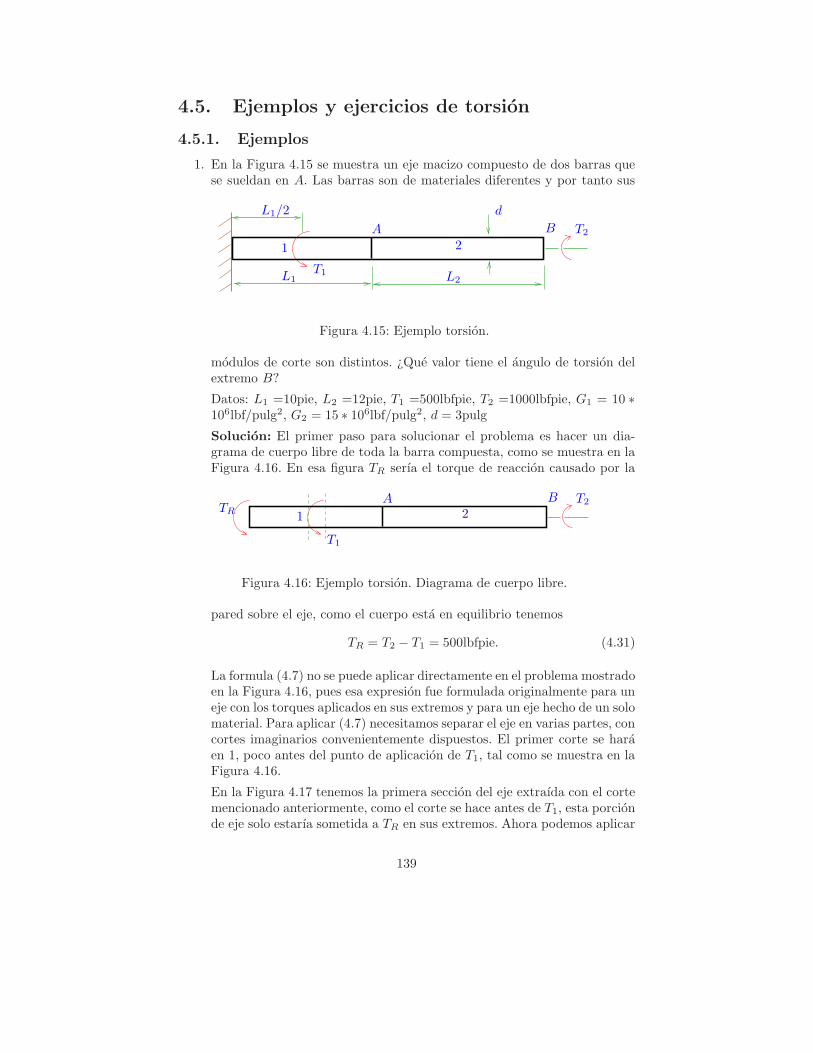
4.5. Ejemplos y ejercicios de torsion
4.5.1. Ejemplos
1. En la Figura 4.15 se muestra un eje macizo compuesto de dos barras quese sueldan en A. Las barras son de materiales diferentes y por tanto sus
1 2
L1 L2
A B
L1/2 d
T1
T2
Figura 4.15: Ejemplo torsion.
modulos de corte son distintos. ¿Que valor tiene el angulo de torsion delextremo B?
Datos: L1 =10pie, L2 =12pie, T1 =500lbfpie, T2 =1000lbfpie, G1 = 10 ∗106lbf/pulg2, G2 = 15 ∗ 106lbf/pulg2, d = 3pulg
Solucion: El primer paso para solucionar el problema es hacer un dia-grama de cuerpo libre de toda la barra compuesta, como se muestra en laFigura 4.16. En esa figura TR serıa el torque de reaccion causado por la
1 2TRA B
T1
T2
Figura 4.16: Ejemplo torsion. Diagrama de cuerpo libre.
pared sobre el eje, como el cuerpo esta en equilibrio tenemos
TR = T2 − T1 = 500lbfpie. (4.31)
La formula (4.7) no se puede aplicar directamente en el problema mostradoen la Figura 4.16, pues esa expresion fue formulada originalmente para uneje con los torques aplicados en sus extremos y para un eje hecho de un solomaterial. Para aplicar (4.7) necesitamos separar el eje en varias partes, concortes imaginarios convenientemente dispuestos. El primer corte se haraen 1, poco antes del punto de aplicacion de T1, tal como se muestra en laFigura 4.16.
En la Figura 4.17 tenemos la primera seccion del eje extraıda con el cortemencionado anteriormente, como el corte se hace antes de T1, esta porcionde eje solo estarıa sometida a TR en sus extremos. Ahora podemos aplicar
139

Fijo Rota
TRTR
θ
Figura 4.17: Ejemplo torsion. Diagrama de cuerpo libre de la primera seccion.
(4.7) y para θ (el angulo de torsion en este tramo) tendrıamos
θ =32TRL1/2
πG1d4= 4,527 ∗ 10−3rad. (4.32)
En la Figura 4.18 tenemos un diagrama de cuerpo libre del tramo restantede eje despues de hacer un corte un poco despues del punto de aplicacionde T1 (ver Figura 4.16). En este caso es posible ver que para este tramo
A BT2 T2
Figura 4.18: Ejemplo torsion. Diagrama de cuerpo libre de la segunda seccioncompleta.
de eje solo tendrıamos T2 aplicado en sus extremos.
Como en la Figura 4.18 tendrıamos un tramo de eje hecho con dos mate-riales, para aplicar (4.7) debemos separarlo en dos partes. El primer tramose esta division adicional se puede ver en la Figura 4.19. Usando (4.7) para
T2T2
θ
Figura 4.19: Ejemplo torsion. Diagrama de cuerpo libre de la segunda seccion,primera parte.
calcular el cambio de angulo relativo θ serıa
θ =32T2L1/2
πG1d4= 9,05 ∗ 10−3rad. (4.33)
En la Figura 4.20 tenemos una representacion del ultimo tramo con elmaterial 2. Usando (4.7) tenemos el cambio de angulo relativo como
140

θBT2 T2
Figura 4.20: Ejemplo torsion. Diagrama de cuerpo libre de la segunda seccion,segunda parte.
θ =32T2L2
πG2d4= 0,0145rad. (4.34)
Luego el angulo de torsion total en B serıa simplemente la suma de (4.32),(4.33) y (4.34) con lo que
θB = 4,527 ∗ 10−3 + 9,05 ∗ 10−3 + 0,0145 = 0,028rad, (4.35)
y su sentido es el de T2.
2. El eje A de la Figura 4.21 transmite un torque T de 1000lbfpie con unavelocidad angular wA de 50rpm. El diametro del eje A esDA = 6 pulgadas.
T
B
A D1
D2
Figura 4.21: Ejemplo torsion. Ejes conectados por engranajes.
Si el valor del esfuerzo cortante maximo del eje A es igual para el eje B,¿que diametro debe tener este eje?
Datos: D1 = 2pies, D2 = 1pie.
Solucion: Este un problema un poco distinto a los tıpicos problemas deestatica que se han visto hasta ahora, pues aquı tenemos velocidades angu-lares. Sin embargo, vamos a asumir que no hay ningun tipo de aceleracion,y por tanto se puede tratar como un problema ‘cuasi-estatico’.
Vamos a asumir que la ‘potencia’ se transmite sin perdidas desde A a B,luego si PotA y PotB son las potencias en dichos ejes, tenemos
PotA = PotB ⇒ TAwA = TBwB. (4.36)
Pero para los engranajes tenemos la igualdad de velocidad tangencial enel punto de contacto de modo que
D1wA = D2wB, (4.37)
141

por lo que en (4.36) se llega a
TB =D2
D1TA. (4.38)
Por otro lado, si TA es el torque que siente el eje A, de (4.9) su esfuerzode corte maximo serıa
τmaxA=TAJA
DA
2=
TAπD4
A
32
DA
2=
16TAπD3
A
, (4.39)
en tanto que para el eje B tendrıamos
τmaxB=
16TBπD3
B
. (4.40)
Como en el enunciado del problema se dice que el diametro de B debe sertal que el esfuerzo de corte maximo sea el mismo que en A, de (4.39) seobtiene
TB =D3B
D3A
TA, (4.41)
luego junto con (4.38) esta ecuacion es satisfecha si
DB = DA3
√D2
D1= 7,56pulg. (4.42)
3. En la Figura 4.22 tenemos una vista en corte de un eje de acero de diametroD1 = 6 pulgadas y un eje tubular de aluminio con un diametro interiorD2 = 12 pulgadas y espesor de pared t = 2pulgadas. Estos ejes estanfijos a placas rıgidas y mediante ellas se aplica al sistema un torque Tde 5000lbfpie. ¿Que valor tienen los esfuerzos maximos producidos por latorsion en cada material?
Datos: L = 10pies, Modulo de corte del acero Gac = 15 ∗ 106lbf/pulg2,Modulo de corte del aluminio Gal = 10 ∗ 106lbf/pulg2.Solucion: En la Figura 4.22 podemos apreciar que si tanto el eje de acerocomo el de aluminio estan ambos pegados a las placas rıgidas, entonces elangulo de torsion para ambos ejes deberıa ser el mismo.
El torque T se aplicarıa en un lado de la placa rıgida, en tanto en el otrolado tendrıamos los torques producto de la interaccion con el eje de aceroTac y con el eje de aluminio Tal. Luego para que la placa rıgida este enequilibrio se necesitarıa que
T = Tac + Tal. (4.43)
Sea θ el angulo de torsion comun a ambos ejes, de (??) y (4.10) se tieneque
Tac =GacLθJac, Tal =
GalLθJal, (4.44)
142
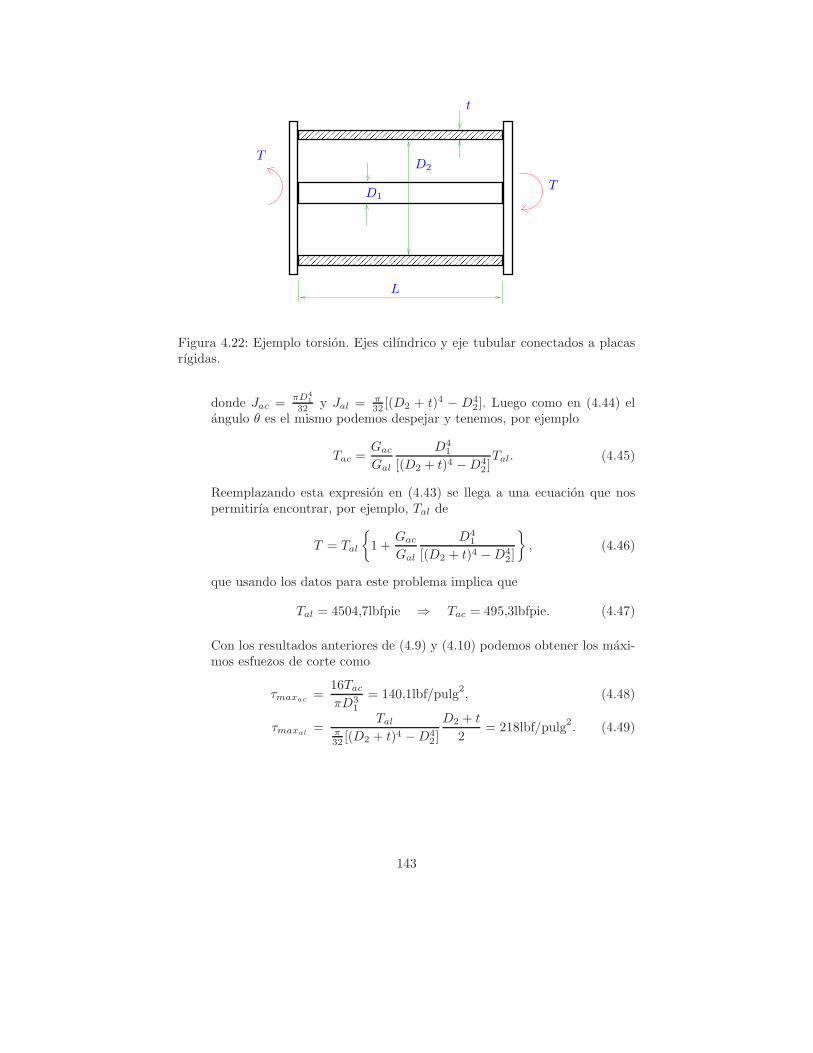
������������������������������������������
������������������������������������������������������������������������������������
T
T
t
L
D1
D2
Figura 4.22: Ejemplo torsion. Ejes cilındrico y eje tubular conectados a placasrıgidas.
donde Jac =πD4
1
32 y Jal =π32 [(D2 + t)4 − D4
2]. Luego como en (4.44) elangulo θ es el mismo podemos despejar y tenemos, por ejemplo
Tac =GacGal
D41
[(D2 + t)4 −D42 ]Tal. (4.45)
Reemplazando esta expresion en (4.43) se llega a una ecuacion que nospermitirıa encontrar, por ejemplo, Tal de
T = Tal
{1 +
GacGal
D41
[(D2 + t)4 −D42]
}, (4.46)
que usando los datos para este problema implica que
Tal = 4504,7lbfpie ⇒ Tac = 495,3lbfpie. (4.47)
Con los resultados anteriores de (4.9) y (4.10) podemos obtener los maxi-mos esfuezos de corte como
τmaxac=
16TacπD3
1
= 140,1lbf/pulg2, (4.48)
τmaxal=
Talπ32 [(D2 + t)4 −D4
2]
D2 + t
2= 218lbf/pulg
2. (4.49)
143

4.5.2. Ejercicios
1. Un tubo circular hueco A se ajusta sobre el extremo de una barra circularsolida B como se muestra en la Figura 4.23 en la parte superior. En uninicio, un agujero a traves de la barra B forma un angulo β con una lıneaque pasa por dos agujeros en la barra A tal como se muestra en la Figura1 en la parte inferior en donde tenemos una vista ampliada de la secciondel tubo y el cilindro en el punto de conexion.
Se hace girar la barra B hasta alinear los agujeros y se pasa un pasadorpor ellos. Cuando la barra B se libera y el sistema retoma el equilibrio:¿Cual es el maximo esfuerzo de corte en A y B?
������������������������������������������������������������������������
����������������������������������
��������
A Bd
D
LL
β
Tubo A Cilindro B
Agujero
Agujero
Figura 4.23: Tubo y cilindro.
2. En la Figura 4.24 tenemos un cilindro de acero que esta parcialmenteinserto en un tubo de aluminio. En esa zona de longitud l el cilindro y eltubo estan perfectamente pegados. En los extremos del conjunto se aplicantorques iguales pero opuestos de magnitud T .
a) Determine T para que el angulo de torsion entre los extremos seaigual a 7◦.
b) Determine el maximo valor para T para que el esfuerzo de corte enel tubo no sea mayor a τ = 30MPa.
c) Determine el maximo valor para T para que el esfuerzo de corte enel cilindro no sea mayor a τ = 60MPa.
144

TT
AceroAluminio
Lac
Lal
l
dac
dal
Figura 4.24: Tubo y cilindro.
Datos l = 20cm
Acero: Gac = 75GPa, Lac = 90cm, dac = 7cm
Aluminio: Gal = 27GPa, Lal = 70cm, dal = 10cm.
3. En la Figura 4.25 se tiene un cilindro conico de diametros D, d que estapegado a un cilindro recto de diametro d. Ambos estan empotrados a pare-des rıgidas. Los cilindros estan hechos de materiales distintos con modulosde corte G1, G2, respectivamente. Determine las reacciones en las paredesy el maximo esfuerzo de corte por torsion.
D d1 2Ta
Tb
LL
L/2
Figura 4.25: Cilındros pegados a paredes rıgidas.
Datos:
D = 10[cm], d = 6[cm], L = 40[cm], Ta = 500[Nm], Tb = 300[Nm],
G1 = 50[GPa], G2 = 60[GPa].
4. En la Figura 4.26 tenemos dos ejes de diametros d1 y d2, respectivamente,los cuales estan conectados por medio de engranajes de diametros D1, D2.
145
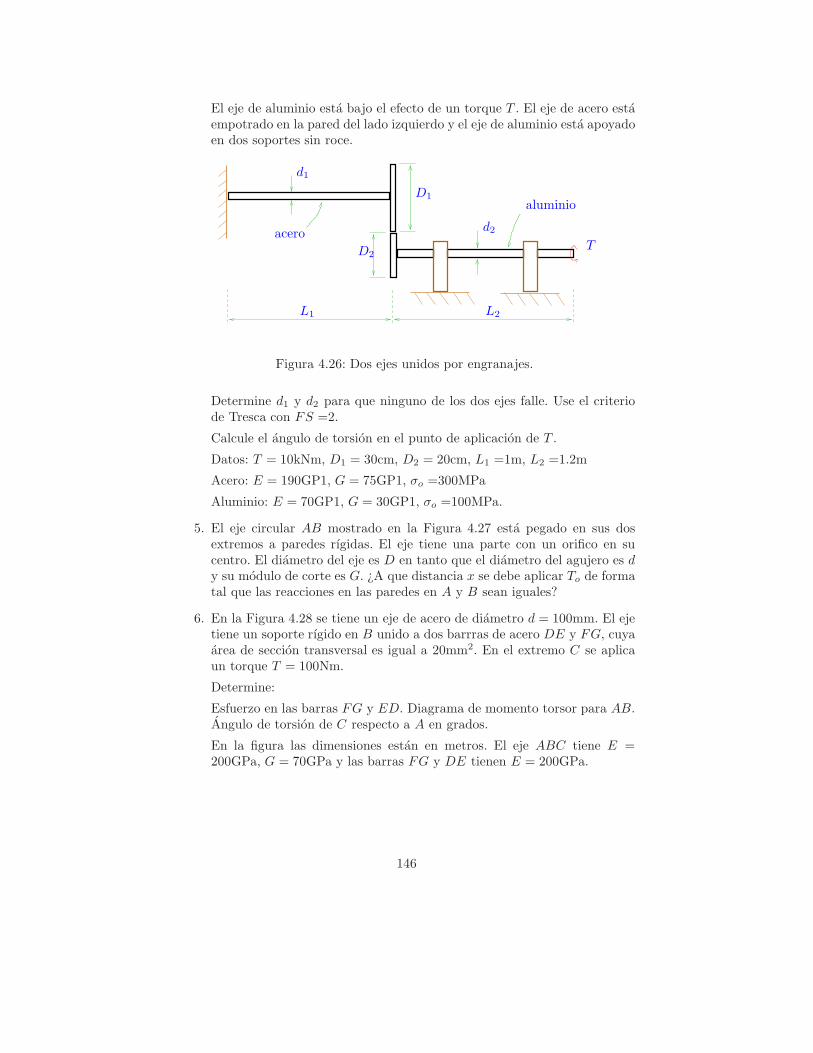
El eje de aluminio esta bajo el efecto de un torque T . El eje de acero estaempotrado en la pared del lado izquierdo y el eje de aluminio esta apoyadoen dos soportes sin roce.
d1
d2
D1
D2
acero
aluminio
L1 L2
T
Figura 4.26: Dos ejes unidos por engranajes.
Determine d1 y d2 para que ninguno de los dos ejes falle. Use el criteriode Tresca con FS =2.
Calcule el angulo de torsion en el punto de aplicacion de T .
Datos: T = 10kNm, D1 = 30cm, D2 = 20cm, L1 =1m, L2 =1.2m
Acero: E = 190GP1, G = 75GP1, σo =300MPa
Aluminio: E = 70GP1, G = 30GP1, σo =100MPa.
5. El eje circular AB mostrado en la Figura 4.27 esta pegado en sus dosextremos a paredes rıgidas. El eje tiene una parte con un orifico en sucentro. El diametro del eje es D en tanto que el diametro del agujero es dy su modulo de corte es G. ¿A que distancia x se debe aplicar To de formatal que las reacciones en las paredes en A y B sean iguales?
6. En la Figura 4.28 se tiene un eje de acero de diametro d = 100mm. El ejetiene un soporte rıgido en B unido a dos barrras de acero DE y FG, cuyaarea de seccion transversal es igual a 20mm2. En el extremo C se aplicaun torque T = 100Nm.
Determine:
Esfuerzo en las barras FG y ED. Diagrama de momento torsor para AB.Angulo de torsion de C respecto a A en grados.
En la figura las dimensiones estan en metros. El eje ABC tiene E =200GPa, G = 70GPa y las barras FG y DE tienen E = 200GPa.
146
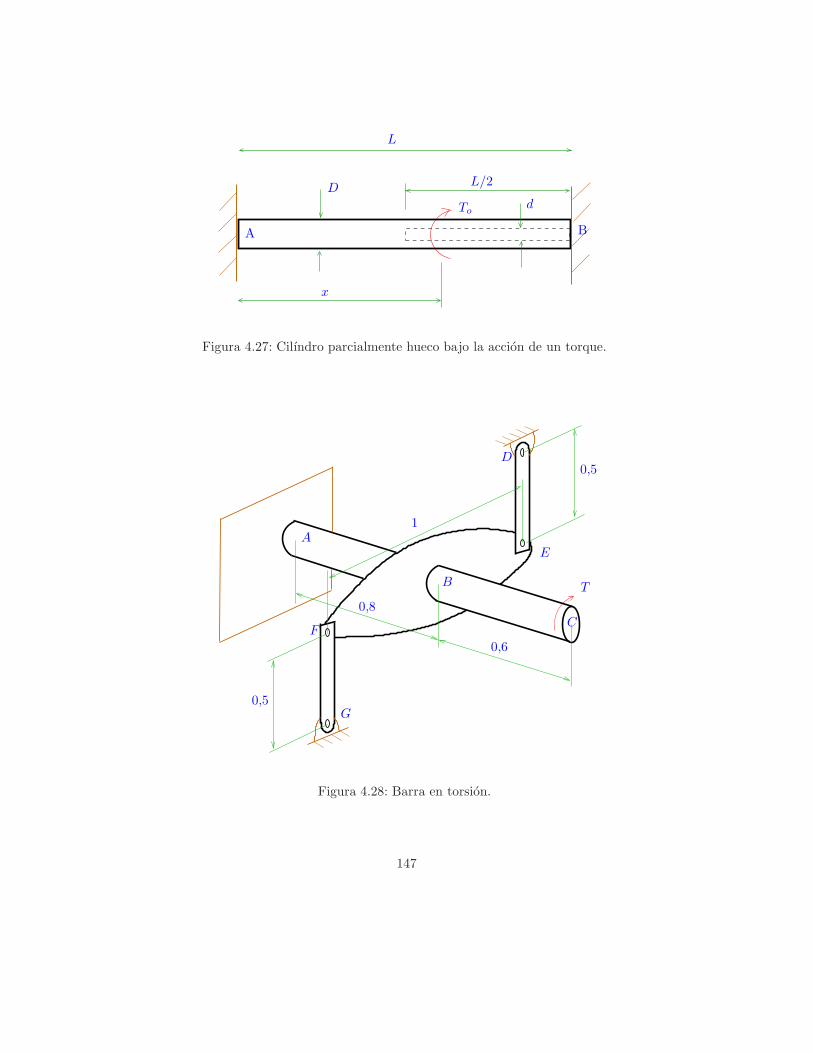
x
To
L
L/2Dd
A B
Figura 4.27: Cilındro parcialmente hueco bajo la accion de un torque.
A
B
C0,8
0,6
0,5
0,5
1
D
E
F
G
T
Figura 4.28: Barra en torsion.
147

Capıtulo 5
Flexion y deflexion en vigas
Este es un segundo tipo especial de problema que estudiaremos en dondeconsideraremos en particular el problema de una viga sometida a algun tipode fuerza o densidad de fuerza que genere momento interno M . El tipo dedeformacion y en particular el tipo de esfuerzos que se generan aquı son esfuerzosnormales cuyas magnitudes pueden ser muy altas. Consideremos el problemamostrado en la Figura 5.1. Aquı tenemos una viga en el plano x − y en cuyos
���������������
���������������z
M Mx
y
Acortamiento
Alargamiento
Seccion
Figura 5.1: Viga bajo flexion.
extremos se estan aplicando momentos puros M que tienen orientacion en ladireccion del eje z. Es facil apreciar que para una viga bajo estas cargas en laparte superior se va a producir un acortamiento en tanto que en la parte inferiorse producirıa un alargamiento de la misma, dando lugar a la clasica forma curvade una viga bajo este tipo de cargas.
En la siguiente seccion estudiaremos en particular como determinar de formaaproximada los esfuerzos en un problema de este tipo, en tanto que en la Seccion5.2 veremos metodos para determinar las deformaciones (deflexiones).
148

5.1. Flexion en vigas
5.1.1. Eje neutro, segundo momento de inercia y esfuerzos
Vamos a obtener una aproximacion para los esfuerzos en un problema comoel mostrado en la Figura 5.1, para ellos primero vamos a asumir que
σy ≈ 0, σz ≈ 0, τyz ≈ 0. (5.1)
El esfuerzo mas importante sera σx, para comprender esto, es necesario ver laFigura 5.1, en donde tenemos alargamiento y acortamiento en x.
Respecto a la forma que deberıa tener esta funcion σx = σx(y), hay varias
posibilidades que cumplen con σx
{> 0 si y < 0< 0 si y > 0
, la mas simple de todas
serıa una aproximacion lineal1
σx = coy, (5.2)
tal como se muestra en la Figura 5.2. En esta figura tenemos un vista lateral
dA
Vista de la seccion Vista lateral
y
Figura 5.2: Viga bajo flexion. Modelo para la distribucion de los esfuerzos.
de la viga con un corte imaginario en donde vemos la distribucion lineal deesfuerzo (cargas internas) y otra vista frontal de la seccion donde se muestra undiferencial de area dA.
Para esa parte de la viga que queda despues del corte imaginario, se debecumplir el equilibrio estatico, en particular
∑Fx = 0, luego como solo hay
momento puro M y fuerzas debido a σx como se muestra en la Figura 5.2,tenemos que
∑Fx = 0 es equivalente a2
∫
A
σx dA = 0, (5.3)
y de (5.2) con co constante esto implica que co∫Ay dA = 0, que se cumple si y
solo si ∫
A
y dA = 0. (5.4)
1Otras posibilidades podrıan ser por ejemplo σx = coyn con n impar.2Como σx = σx(y), este esfuerzo es constante en z, luego para obtener fuerzas a partir
de el, es solo necesario integrar en el area A de la seccion usando dA como se muestra en laFigura 5.2.
149

Ni en la ecuacion (5.2) ni en la Figura 5.2 habıamos indicado el origen deleje para y. La ecuacion (5.4) nos da dicha posicion de modo tal que se cumplede forma automatica
∑Fx = 0. Esta posicion especial para el origen del eje
y es llamada ‘eje neutro’ (o centro de area), y un correcto calculo del mismoes fundamental para los pasos posteriores. Mostraremos ahora un metodo maspractico basado en (5.4) para determinar la posicion de este eje3.
Sea y la posicion del eje neutro medida desde la base de la seccion, tal comose muestra en la Figura 5.3. Consideremos el sistema de coordenadas auxiliar
y
y′Eje neutroy
Figura 5.3: Viga bajo flexion. Metodo de calculo de eje neutro.
y′ = y+ y desde la base de la seccion tambien y calculemos la integral∫A y
′ dAde donde tenemos
∫
A
y′ dA =
∫
A
(y + y) dA = y
∫
A
dA+
∫
A
y dA = yA,
en donde hemos usado la propiedad (5.4). De la ecuacion anterior obtenemos
y =
∫A y
′ dA
A, (5.5)
que es una expresion practica para calcular la posicion del eje neutro desde labase de la seccion que es conocida.
No solo necesitamos∑Fx = 0 para el equilibrio, ademas se necesita sea
satisfecha∑Mz = 0. Respecto a los momentos, tenemos el momento puro M
(en un extremo de la seccion de viga) y el momento causado por la distribucionσx. Vamos a hacer el equilibrio de momento respecto al eje neutro, luego de la
3Si bien en la Figura 5.2 el eje es en realidad un punto, en la vista frontal vemos que esuna lınea en la direccion z.El significado del eje neutro no solo corresponde a la posicion del origen para que
∑Fx = 0,
sino tambien es el punto en donde σx = 0, y de la relacion lineal entre esfuerzos y deformacio-nes, ese punto tambien es en donde no hay ni alargamiento ni acortamiento. Vamos a hablaren mas detalle de estas propiedades despues.
150

Figura 5.2 tenemos que∑
eje neutroMz = 0 es equivalente a4
−M =
∫
A
yσx dA = co
∫
A
y2 dA. (5.6)
Definamos el segundo momento de inercia5 (no confundir con el segundomomento polar de inercia) como
Iz =
∫
A
y2 dA. (5.7)
De la definicion (5.7) y (5.6) tenemos que
co = −MIz, (5.8)
luego en (5.2) se llega6
σx = −MIzy. (5.9)
La formula (5.9) es en realidad util y general7 no solo para el problemamostrado en la Figura 5.1, sino para cualquier distribucion de momento internoM =M(x), el cual se obtiene con los metodos vistos en la Seccion 3.2.
5.1.2. Deformacion y deflexion
Hemos determinado una distribucion aproximada para los esfuerzos y ahoradeterminaremos expresiones para las deformaciones. Para esto veamos la Figura5.4 en donde tenemos nuevamente la viga con momentos puntuales aplicados enlos extremos. La viga sufrira la deformacion descrita en la Figura 5.1. Asumamosahora que realizamos varios cortes imaginarios y que dibujamos cada uno deestos trozos cuando se ha deformado la viga. Como solo se esta aplicando M enla figura original, cada uno de los trozos imaginarios solo estarıa sometido a Men sus extremos como cargas internas.
Teniendo en mente las consideraciones anteriores, veamos ahora la Figura 5.5en donde tenemos dos trozos adyacentes deformados. Ambos trozos pueden tenerla misma longitud inicial y debemos recordar que estan sometidos a los mismosmomentos M en los extremos. La pregunta es: ¿Como deberıan deformarselas superficies de corte imaginario? Tenemos varias posibles alternativas. En la
4El signo (-) que aparece en esta ecuacion tiene como motivacion que en (5.2) necesitamosuna constante negativa.
5Es necesario hacer notar que en este definicion la integral se calcula teniendo como origenahora el eje neutro, determinado anteriormente en (5.5).
6Aquı al igual que en el problema de torsion (4.8) tenemos nuevamente un tipo de solucionque no dependerıa del tipo particular de material a considerar, pues en el calculo de M engeneral (salvo en problemas hiperestaticos) no interviene el tipo de material, en tanto que Izes solo una propiedad de area.
7Esto no es difıcil de demostrar a partir de un elemento diferencial, pero por brevedad nolo haremos aquı.
151

y
x
MMMMM
M M
Figura 5.4: Viga bajo flexion. Deformaciones admisibles.
Figura 5.5: Viga bajo flexion. Deformaciones admisibles.
figura del lado derecho podrıamos asumir que las superficies son convexas (lıneade color celeste). Sin embargo para que despues de deformarse los trozos seancompatibles, es necesario que el otro trozo tenga una superficie concava. Peroesto no es posible, puesto que la deformacion de ambos trozos deberıa ser similar,debido a que el material es el mismo, la longitud es la misma (lınea morada en lafigura del lado izquierdo), la seccion es la misma y las cargas externas son iguales.Como conclusion, ni superficies convexas ni concavas permiten compatibilidadde la forma final de la viga, y la unica posibilidad es tener superficies rectas,como se aprecia con las lıneas de color cafe en la Figura 5.5.
Como conclusion de las observaciones anteriores, si se trazan lıneas exten-diendo las superficies rectas, esta lıneas pueden intersectarse en un punto O,llamado el centro de curvatura, como se aprecia en la Figura 5.6. En dicha fi-gura podemos ver que a partir de dicho punto O es posible trazar los arcos quedescriben la forma deformada del trozo, en cuya parte superior hay acortamien-to, en el eje neutro no hay cambio de longitud, en tanto que en la parte inferiorhabrıa alargamiento.
Con los resultados anteriores es posible ahora proceder a determinar la ‘de-formacion’. Para ello veamos la Figura 5.7 en donde nuevamente tenemos eltrozo de longitud diferencial deformado. La longitud del trozo diferencial (me-dido en la lınea del eje neutro) es dx, luego el angulo que se produce entre lasextensiones de las dos lıneas que define el centro de curvatura sera muy pequenoy lo denotaremos como dθ. Si se trazan dos lıneas verticales es facil ver que los
152

OTodas las lıneas coinciden aquı
Acortamiento
Alargamiento
Lınea neutra
Figura 5.6: Centro de curvatura.
dθ
dθ2
dθ2
y
dx
Superficie (lınea) neutra
Figura 5.7: Calculo de deformacion.
angulos que se forma a cada lado son dθ/2 como se ve en la misma figura. Desdeel eje neutro hacia arriba y hacia abajo se define la distancia y.
De (5.9) se tenıa σx = −MyIz
, y si no se consideran σy ni σz de (3.84) se tiene
εxx = − M
EIzy. (5.10)
Pero por definicion la deformacion longitudinal se calcula como ε = ∆ll y en
nuestro caso en la direccion x serıa εxx = ∆(dx)dx , pues el largo inicial del trozo
diferencial es dx. Respecto a ∆(dx), de la Figura 5.7 se tiene que hacia arriba, a
153
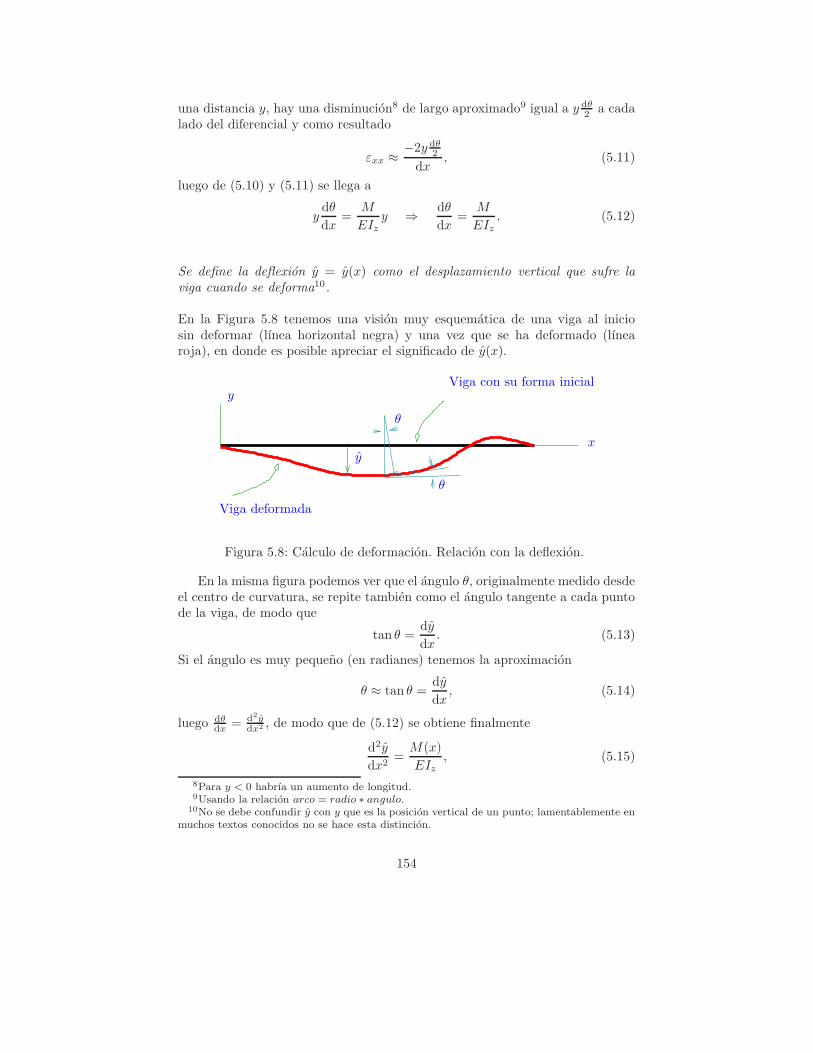
una distancia y, hay una disminucion8 de largo aproximado9 igual a y dθ2 a cada
lado del diferencial y como resultado
εxx ≈ −2y dθ2
dx, (5.11)
luego de (5.10) y (5.11) se llega a
ydθ
dx=
M
EIzy ⇒ dθ
dx=
M
EIz. (5.12)
Se define la deflexion y = y(x) como el desplazamiento vertical que sufre laviga cuando se deforma10.
En la Figura 5.8 tenemos una vision muy esquematica de una viga al iniciosin deformar (lınea horizontal negra) y una vez que se ha deformado (lınearoja), en donde es posible apreciar el significado de y(x).
y
θ
θ
y
x
Viga con su forma inicial
Viga deformada
Figura 5.8: Calculo de deformacion. Relacion con la deflexion.
En la misma figura podemos ver que el angulo θ, originalmente medido desdeel centro de curvatura, se repite tambien como el angulo tangente a cada puntode la viga, de modo que
tan θ =dy
dx. (5.13)
Si el angulo es muy pequeno (en radianes) tenemos la aproximacion
θ ≈ tan θ =dy
dx, (5.14)
luego dθdx = d2y
dx2 , de modo que de (5.12) se obtiene finalmente
d2y
dx2=M(x)
EIz, (5.15)
8Para y < 0 habrıa un aumento de longitud.9Usando la relacion arco = radio ∗ angulo.
10No se debe confundir y con y que es la posicion vertical de un punto; lamentablemente enmuchos textos conocidos no se hace esta distincion.
154
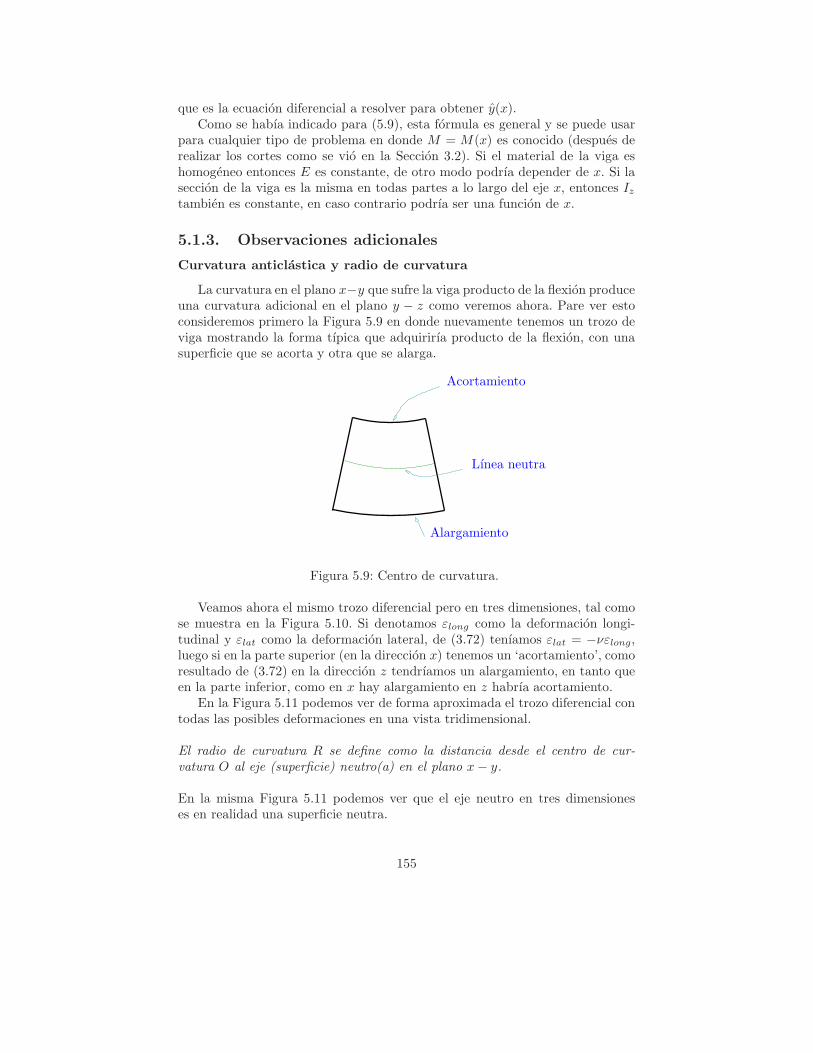
que es la ecuacion diferencial a resolver para obtener y(x).Como se habıa indicado para (5.9), esta formula es general y se puede usar
para cualquier tipo de problema en donde M = M(x) es conocido (despues derealizar los cortes como se vio en la Seccion 3.2). Si el material de la viga eshomogeneo entonces E es constante, de otro modo podrıa depender de x. Si laseccion de la viga es la misma en todas partes a lo largo del eje x, entonces Iztambien es constante, en caso contrario podrıa ser una funcion de x.
5.1.3. Observaciones adicionales
Curvatura anticlastica y radio de curvatura
La curvatura en el plano x−y que sufre la viga producto de la flexion produceuna curvatura adicional en el plano y − z como veremos ahora. Pare ver estoconsideremos primero la Figura 5.9 en donde nuevamente tenemos un trozo deviga mostrando la forma tıpica que adquirirıa producto de la flexion, con unasuperficie que se acorta y otra que se alarga.
Acortamiento
Alargamiento
Lınea neutra
Figura 5.9: Centro de curvatura.
Veamos ahora el mismo trozo diferencial pero en tres dimensiones, tal comose muestra en la Figura 5.10. Si denotamos εlong como la deformacion longi-tudinal y εlat como la deformacion lateral, de (3.72) tenıamos εlat = −νεlong,luego si en la parte superior (en la direccion x) tenemos un ‘acortamiento’, comoresultado de (3.72) en la direccion z tendrıamos un alargamiento, en tanto queen la parte inferior, como en x hay alargamiento en z habrıa acortamiento.
En la Figura 5.11 podemos ver de forma aproximada el trozo diferencial contodas las posibles deformaciones en una vista tridimensional.
El radio de curvatura R se define como la distancia desde el centro de cur-vatura O al eje (superficie) neutro(a) en el plano x− y.
En la misma Figura 5.11 podemos ver que el eje neutro en tres dimensioneses en realidad una superficie neutra.
155

Acortamiento
Alargamiento
εlong < 0 ⇒ εlat > 0
εlong > 0 ⇒ εlat < 0
Figura 5.10: Curvatura anticlastica.
O
R
x
y
zRν
Figura 5.11: Curvatura anticlastica.
De las consideraciones anteriores podemos ver tambien que en el plano y− zhay un radio de curvatura adicional y se puede demostrar que este es igual aR/ν.
Relacion entre el radio de curvatura y la deformacion
En la Figura 5.12 tenemos un trozo de viga de largo inicial pequeno ∆x (nonecesariamente infinitesimal) en el plano x − y. Podemos apreciar el radio de
156

O
R
∆x
y
∆x′
Eje neutro
∆φ
Figura 5.12: Radio de curvatura.
curvatura R, el angulo ∆φ que define dicho radio y una distancia y desde eleje neutro. Por la definicion del eje neutro cuando y = 0 tenemos que el largo∆x no cambia cuando se deforma el trozo de viga, en tanto que, por ejemplo,cuando y > 0, como se muestra en la figura, tenemos el largo ∆x′ < ∆x.
De la misma Figura 5.12 tenemos que
∆φ =∆x
R=
∆x′
R− y⇒ ∆x′ −∆x = − y
R∆x. (5.16)
Por la definicion de la deformacion longitudinal en x (ver (3.50)) de (5.16)tenemos
εxx =∆x′ −∆x
∆x= − y
R, (5.17)
por otra parte de (5.10) tenıamos εxx = − MEIz
y, luego de (5.17) se llega a
R =EIzM
. (5.18)
Como en general M = M(x), de la expresion anterior vemos que R = R(x), osea el radio de curvatura cambia con la posicion.
Se define la curvatura11 κ como
κ =1
R. (5.19)
11De la definicion de R podemos ver que si en un punto de la viga deformada la deformaciones ‘grande’ entonces R deberıa ser pequeno, luego esto implica que |κ| serıa grande. Es lacurvatura la que se usa como indicador de cuanto se ha deformado localmente una viga, y eneste texto asumiremos que |κ| es pequeno siempre.
157
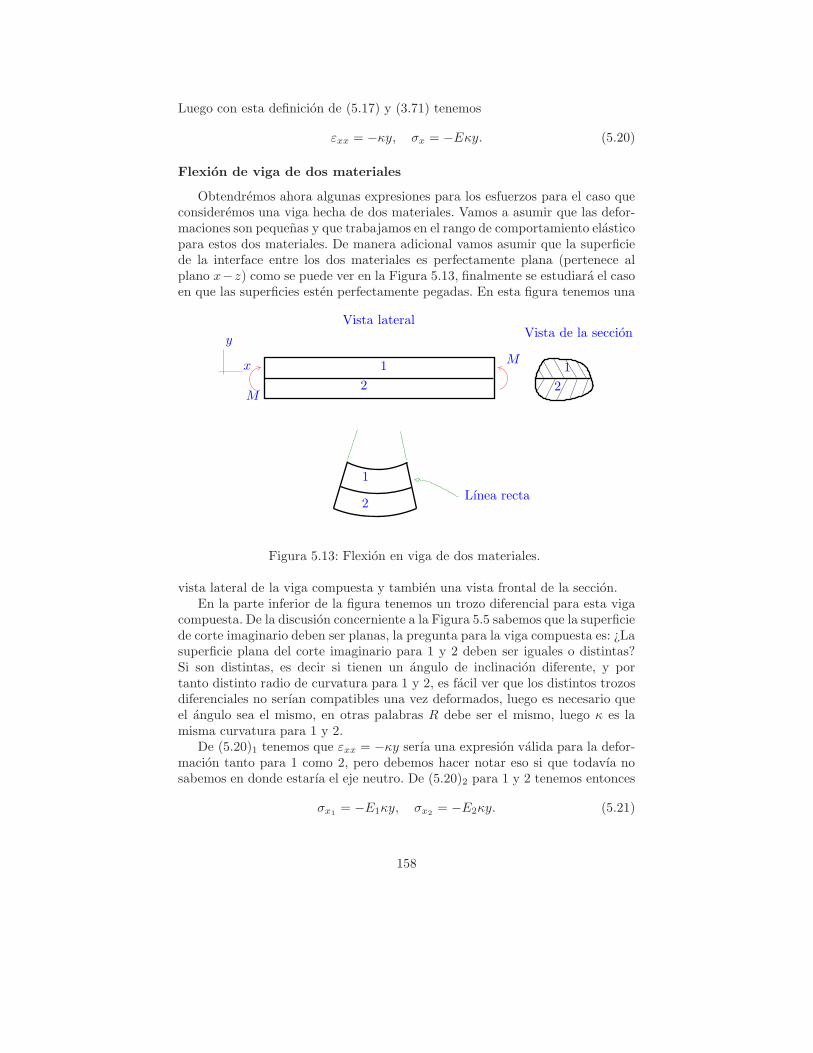
Luego con esta definicion de (5.17) y (3.71) tenemos
εxx = −κy, σx = −Eκy. (5.20)
Flexion de viga de dos materiales
Obtendremos ahora algunas expresiones para los esfuerzos para el caso queconsideremos una viga hecha de dos materiales. Vamos a asumir que las defor-maciones son pequenas y que trabajamos en el rango de comportamiento elasticopara estos dos materiales. De manera adicional vamos asumir que la superficiede la interface entre los dos materiales es perfectamente plana (pertenece alplano x−z) como se puede ver en la Figura 5.13, finalmente se estudiara el casoen que las superficies esten perfectamente pegadas. En esta figura tenemos una
1
11
2
22
x
y
M
M
Vista lateralVista de la seccion
Lınea recta
Figura 5.13: Flexion en viga de dos materiales.
vista lateral de la viga compuesta y tambien una vista frontal de la seccion.En la parte inferior de la figura tenemos un trozo diferencial para esta viga
compuesta. De la discusion concerniente a la Figura 5.5 sabemos que la superficiede corte imaginario deben ser planas, la pregunta para la viga compuesta es: ¿Lasuperficie plana del corte imaginario para 1 y 2 deben ser iguales o distintas?Si son distintas, es decir si tienen un angulo de inclinacion diferente, y portanto distinto radio de curvatura para 1 y 2, es facil ver que los distintos trozosdiferenciales no serıan compatibles una vez deformados, luego es necesario queel angulo sea el mismo, en otras palabras R debe ser el mismo, luego κ es lamisma curvatura para 1 y 2.
De (5.20)1 tenemos que εxx = −κy serıa una expresion valida para la defor-macion tanto para 1 como 2, pero debemos hacer notar eso si que todavıa nosabemos en donde estarıa el eje neutro. De (5.20)2 para 1 y 2 tenemos entonces
σx1 = −E1κy, σx2 = −E2κy. (5.21)
158

Una pregunta interesante respecto a las expresiones anteriores es: ¿Es continuoσx en la interface? si no lo es ¿como es posible que sea discontinuo?
Para un corte imaginario respecto a las cargas internas en un extremotendrıamos M y en el otro tendrıamos σx dado por (5.21). Si la viga completaestaba en equilibrio el trozo tambien deberıa estarlo, de modo que
∑Fx = 0
debe cumplirse y como resultado
∫
A1
σx1 dA+
∫
A2
σx2 dA = 0,
⇔∫
A1
E1y dA+
∫
A2
E2y dA = 0,
⇔ E1
∫
A1
y dA+ E2
∫
A2
y dA = 0. (5.22)
La ecuacion (5.22) nos permite encontrar la posicion del eje neutro para laseccion compuesta (ver (5.4) para la viga hecha de un material). Siguiendoun metodo similar al mostrado para llegar a (5.5) de (5.22) se puede obtenerla forma alternativa para obtener la posicion del eje neutro y desde la parteinferior de 2
y =E1
∫A1y′ dA+ E2
∫A2y′ dA
E1A1 + E2A2. (5.23)
Respecto al equilibrio al momentum angular de∑Mz = 0 y de (5.21) tene-
mos
M = −∫
A1
σx1y dA−∫
A2
σx2y dA,
= κ
(E1
∫
A1
y2 dA+ E2
∫
A2
y2 dA
). (5.24)
Si se define12 I1 =∫A1y2 dA y I2 =
∫A2y2 dA, de (5.24) se llega a
M = κ(E1I1 + E2I2), (5.25)
por lo que
κ =M
E1I1 + E2I2, (5.26)
luego en (5.21) finalmente se obtiene
σx1 = − E1My
(E1I1 + E2I2), σx2 = − E2My
(E1I1 + E2I2). (5.27)
12Es necesario hacer notar aquı que los segundos momentos de area I1 y I2 estan siendodefinidos o calculados respecto al eje neutro de la seccion completa calculado en (5.23).
159
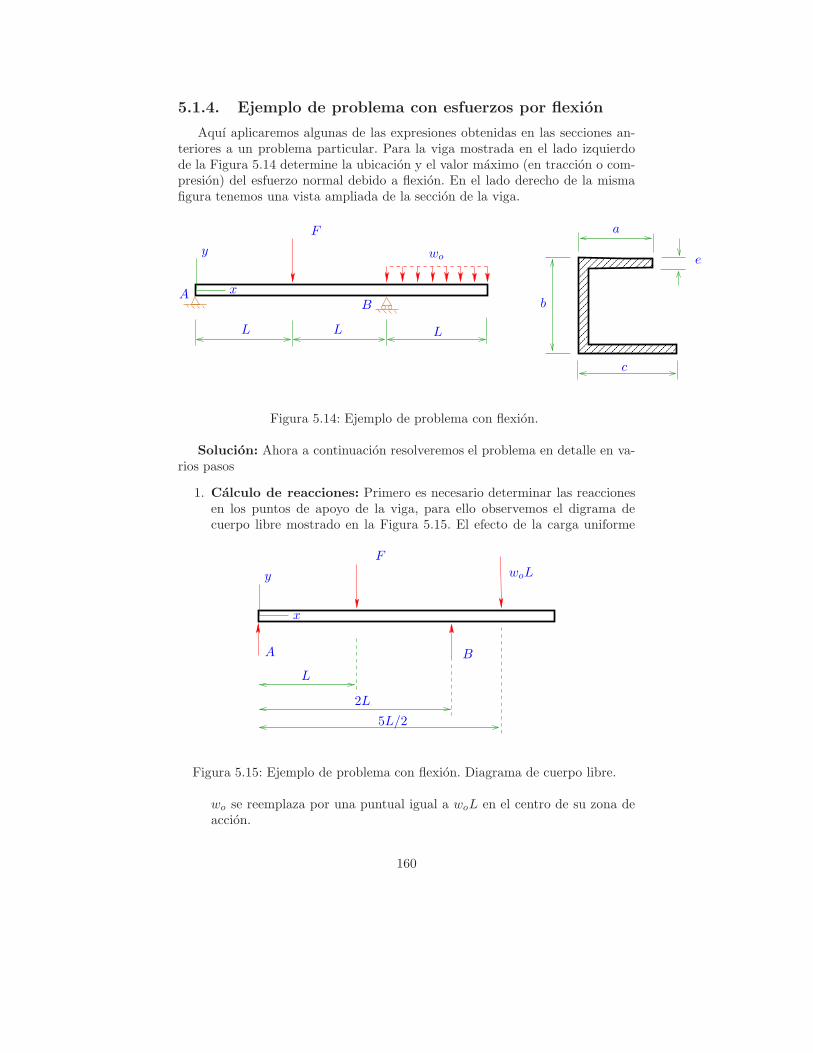
5.1.4. Ejemplo de problema con esfuerzos por flexion
Aquı aplicaremos algunas de las expresiones obtenidas en las secciones an-teriores a un problema particular. Para la viga mostrada en el lado izquierdode la Figura 5.14 determine la ubicacion y el valor maximo (en traccion o com-presion) del esfuerzo normal debido a flexion. En el lado derecho de la mismafigura tenemos una vista ampliada de la seccion de la viga.
������������������������������������������������������������������������
������������������������������������������������������������������������
LLL
F
x
y
AB
a
b
c
ewo
Figura 5.14: Ejemplo de problema con flexion.
Solucion: Ahora a continuacion resolveremos el problema en detalle en va-rios pasos
1. Calculo de reacciones: Primero es necesario determinar las reaccionesen los puntos de apoyo de la viga, para ello observemos el digrama decuerpo libre mostrado en la Figura 5.15. El efecto de la carga uniforme
L
F
x
y
A B
2L
5L/2
woL
Figura 5.15: Ejemplo de problema con flexion. Diagrama de cuerpo libre.
wo se reemplaza por una puntual igual a woL en el centro de su zona deaccion.
160

De la misma figura vemos que para efecto del calculo de las reacciones elproblema es estaticamente determinado.
De∑
AMz = 0 tenemos que 2LB − LF − woL5L2 = 0 de donde tenemos
B =1
2
(F +
5
2woL
). (5.28)
La ecuacion∑Fx = 0 se satisface simplemente si Ax = 0. Respecto a∑
Fy = 0 es igual a Ay +B = F + woL, y usando (5.28) se tiene
Ay =1
2
(F − woL
2
). (5.29)
2. Determinacion deM : Para determinar σx por flexion es necesario deter-minar la distribucionM =M(x), de la Figura 5.14 vemos que es necesarioconsiderar tres zonas de corte.
Para un corte hecho entre 0 < x < L tenemos la Figura 5.16.
Q M
x
V
A
Figura 5.16: Cargas internas. Primer corte.
De∑
QMz = 0 se llega aM = Ayx. (5.30)
El segundo corte se debe hacer en L < x < 2L tenemos la Figura 5.17.
Q M
x
V
A
F
x− L
Figura 5.17: Cargas internas. Segundo corte.
161

De∑
QMz = 0 despues de algunas manipulaciones se obtiene
M = (Ay − F )x + FL. (5.31)
Para el ultimo tramo se considera 2L < x < 3L y se tiene un diagrama decuerpo libre como el mostrado en la Figura 5.18.
Q M
x
V
A
F
x− L
B
wo
x− 2L
Figura 5.18: Cargas internas. Tercer corte.
La densidad de fuerza uniforme wo actuando en la zona de largo x − 2Lse puede reemplazar por una fuerza puntual igual a wo(x − 2L) tal comose muestra en la Figura 5.19.
Q M
x
V
A
F
x− L
B
wo(x − 2L)
x− 2L
x2 − L
Figura 5.19: Cargas internas. Tercer corte, fuerzas equivalentes.
162

Haciendo∑
QMz = 0 se tiene que
M = Ayx− F (x − L) +B(x− 2L)− wo(x− 2L)(x2− L
). (5.32)
De (5.28), (5.29) y (5.32) es facil ver que M(3L) = 0.
De (5.30), (5.31) y (5.32) se puede obtener la forma aproximada para lafuncion M(x) en 0 < x < 3L como se muestra en la Figura 5.20.
Lx
2L 3L
M
Figura 5.20: Grafico para el momento interno en la viga.
3. Calculo de las propiedades de area. Calculo de eje neutro: Parala seccion mostrada en el lado derecho de la Figura 5.14 vamos a calcularlas propiedades de area de la siguiente forma.
Vamos a descomponer la seccion en formas simples, en este caso en tresrectangulos como se muestra en la Figura 5.22. Primero calculemos el ejeneutro de una seccion rectangular como se muestra en la Figura 5.21. Para
����������
a
b
y′
dy′
Figura 5.21: Propiedades de area para seccion rectangular. Eje neutro.
esta figura tenemos dA = a dy′, luego usando (5.5) tenemos
y =
∫ b0 y
′a dy′
ab=
ab2
2
ab=b
2, (5.33)
163

o sea como esperabamos el eje neutro se ubica en la mitad de la seccionmedido desde la base.
Ahora respecto a la seccion de nuestro problema mostrada en la Figura5.22, la hemos separado en tres secciones o partes. Es posible mostrar que
a
b
c
e
1
2
3
Figura 5.22: Propiedades de area para seccion completa. Eje neutro
en este caso el eje neutro de la seccion completa ytot se puede calcularcomo13
ytot =y1A1 + y2A2 + y3A3
A1 +A2 +A3, (5.35)
donde yi, i = 1, 2, 3 son los ejes neutros de cada una de las secciones desdela base comun de la seccion completa y Ai son las areas de cada una deestas secciones.
De la Figura 5.14 es posible ver que
ytot =e2
2 (c− e) + b2
2 e+(b− e
2
)e(a− e)
e(c− e) + eb+ e(a− e). (5.36)
13La demostracion no es difıcil si primero se parte con una seccion dividida en dos partes.Para ello se puede considerar (5.23) con E1 = E2 de donde se llega a
y =
∫A1
y′ dA+∫A2
y′ dA
A1 + A2.
Pero
y1A1 =
∫
A1
y′ dA, y2A2 =
∫
A2
y′ dA,
donde y1 y y2 son los ejes neutros calculados desde la base comun de la seccion completa.Como resultado
y =y1A1 + y2A1
A1 + A2.
En un caso general donde el area de una seccion se dividiese en n partes tendrıamos
y =
∑ni=1 yiAi∑ni=1Ai
. (5.34)
164

4. Calculo de propiedades de area. Segundo momento de area: Ennuestro caso de la Figura 5.22 tenemos tres areas Ai con A1∪A2∪A3 = Adonde A serıa el area total y Ai ∩ Aj = Ø si i 6= j, luego usando lapropiedad
∫
A1∪A2∪A3=A
f(y) dA =
3∑
i=1
∫
Ai
f(y) dA,
para el segundo momento de area de la seccion completa tendrıamos
Iztot =
∫
A
y2 dA =
3∑
i=1
∫
Ai
y2 dA = Iz1 + Iz2 + Iz3 , (5.37)
en donde y ahora se define con un origen en el punto ytot de (5.35), entanto que
Izi =
∫
Ai
y2 dA, i = 1, 2, 3 (5.38)
serıan los segundos momentos de area de cada una de las secciones porseparado respecto al eje neutro.
Calculemos Iz para una seccion rectangular respecto a su propio eje neutro.De (5.7) y (5.33) tenemos, usando como apoyo la Figura 5.23, que
Iz =
∫
A
y2 dA = 2
∫ b/2
0
y2a dy =ab3
12. (5.39)
����������
a
by
dy
yEje neutro
Figura 5.23: Propiedades de area para seccion rectangular. Segundo momentode area.
Calculemos la misma integral respecto a un eje paralelo separado unadistancia δ respecto al eje neutro, a esta integral lo denominaremos Iz ,luego tenemos
Iz =
∫
A
(y + δ)2 dA =
∫
A
y2 dA+ 2δ
∫
A
y dA
︸ ︷︷ ︸=0
+δ2∫
A
dA
︸ ︷︷ ︸=A
,
165

en donde se ha usado la propiedad (5.4), luego como resultado final
Iz = Iz + δ2A. (5.40)
O sea el segundo momento de inercia respecto a un punto distinto al ejeneutro es el momento de inercia calculado respecto a su propio eje mas ladistancia al cuadrado por el area de la seccion.
Para nuestro problema de las Figuras 5.22 y 5.14 y de (5.39) tenemos que
Iz1 = (c− e)e3
12, Iz2 =
eb3
12, Iz3 = (a− e)
e3
12, (5.41)
pero de (5.40) y (5.35) tenemos que
Iz1 = Iz1 + e(c− e)(ytot −
e
2
)2, (5.42)
Iz2 = Iz2 + eb
(b
2− ytot
)2
, (5.43)
Iz3 = Iz3 + e(a− e)(b− e
2− ytot
)2, (5.44)
y de (5.37) tenemos que14
Iztot = Iz1 + Iz2 + Iz3 . (5.46)
5. Calculo del maximo para el esfuerzo normal por flexion: Con todoslos resultados anteriores ahora finalmente vamos a responder la preguntainicial.
Primero de la Figura (5.20) vamos a obtener el maximo (absoluto) paraM(x), a este maximo lo llamaremos Mmax y se ubicarıa en algun puntoxmax. Este valor puede ser positivo o negativo, luego de (5.9) y (5.46)tenemos
σxmax= −Mmax
Iztotymax, (5.47)
en donde de la Figura 5.14 tenemos tambien que determinar la maximadistancia desde el eje neutro a los extremos de la seccion. Es posible verque si a < c tenemos que ytot < b/2 de modo que ymax = b− ytot, o sea elmaximo se producirıa en la parte superior de la aleta 3.
14Es posible ver que en un caso general en donde la seccion se ha descompuesto en n partestendrıamos
Iztot =n∑
i=1
Izi . (5.45)
166
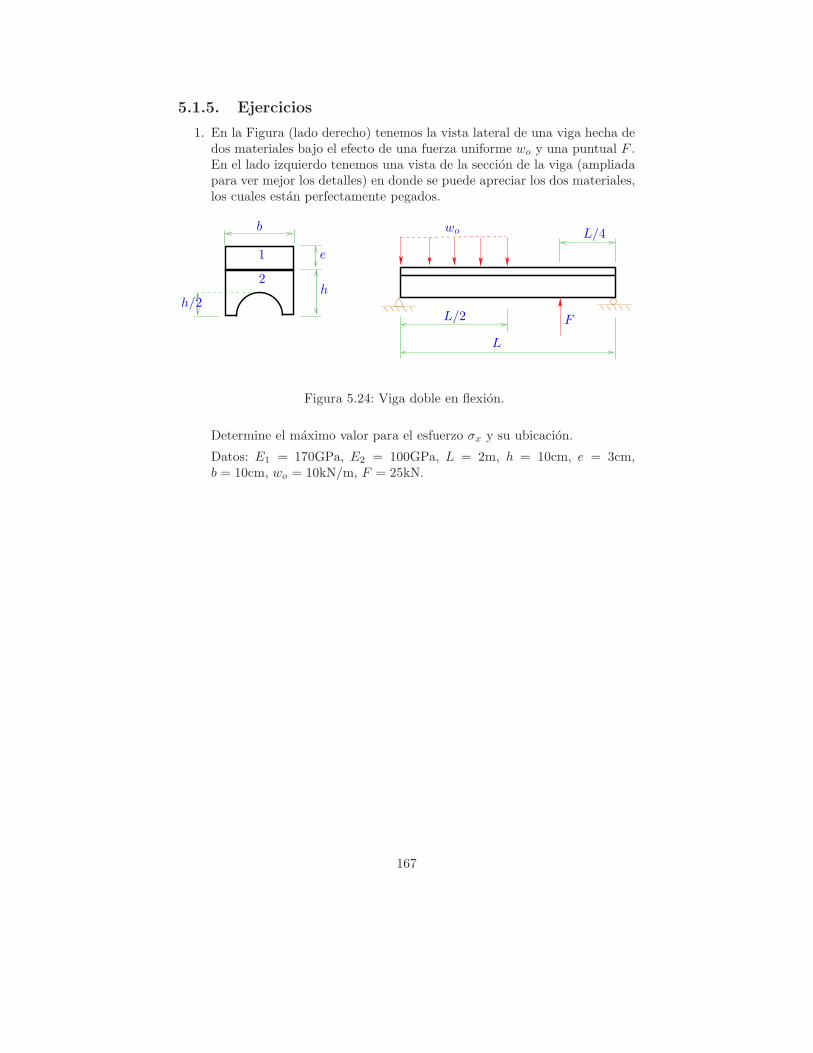
5.1.5. Ejercicios
1. En la Figura (lado derecho) tenemos la vista lateral de una viga hecha dedos materiales bajo el efecto de una fuerza uniforme wo y una puntual F .En el lado izquierdo tenemos una vista de la seccion de la viga (ampliadapara ver mejor los detalles) en donde se puede apreciar los dos materiales,los cuales estan perfectamente pegados.
L
L/2
wo
F
L/4
h
e
b
h/2
1
2
Figura 5.24: Viga doble en flexion.
Determine el maximo valor para el esfuerzo σx y su ubicacion.
Datos: E1 = 170GPa, E2 = 100GPa, L = 2m, h = 10cm, e = 3cm,b = 10cm, wo = 10kN/m, F = 25kN.
167

5.2. Deflexion en vigas
5.2.1. Resumen de ecuaciones
Para una viga bajo la accion de una carga distribuıda w(x) de (3.15) y (3.16)tenıamos las relaciones
dV
dx= w(x),
dM
dx= −V (x) ⇒ d2M
dx2= −w(x), (5.48)
en tanto de (5.14) y (5.12) tenıamos
θ ≈ dy
dx,
dθ
dx=
M
EIz, (5.49)
luego de (5.48) y (5.49) esto implica que
d2y
dx2=
M
EIz⇒ d3y
dx3= − V
EIz⇒ d4y
dx4= −w(x)
EIz, (5.50)
donde
w(x) : es la carga aplicada (apuntando hacia abajo se considera positiva),
V (x) : es la fuerza interna de corte,
M(x) : es el momento interno de corte,
θ(x) : es el angulo de deflexion,
y(x) : es la deflexion de la viga.
Es la ecuacion (5.50)3 la que resolveremos para obtener y(x) conociendow(x), E e Iz .
5.2.2. Primer ejemplo
En esta seccion vamos a intentar resolver un primer ejemplo de forma directausando (5.50)3, para ello consideremos la viga mostrada en la Figura 5.25, lacual esta sometida a una carga uniforme wo en solo una parte de su longitud.Se asume que E e Iz son constantes y conocidos. Determine la deflexion y.
A B
L/2L/2
C
x
y1 2
wo
Figura 5.25: Ejemplo de calculo de deflexiones sin el uso de distribuciones.
168

Vamos a usar (5.50)3 para obtener la deflexion, luego debido a la forma dela carga externa tendrıamos que resolver
d4y
dx4= − 1
EIz
{0, 0 < x < L/2w0, L/2 < x < L
.
Si definimos y−(x) = y(x) si 0 < x < L/2 y y+(x) = y(x) si L/2 < x < L, elproblema anterior consiste en resolver dos ecuaciones
d4y−
dx4= 0 si 0 < x < L/2,
d4y+
dx4= − wo
EIzsi L/2 < x < L, (5.51)
con condiciones de borde y compatibilidad que discutiremos despues.Las soluciones de estas ecuaciones son
y−(x) = α0 + α1x+ α2x2 + α3x
3, (5.52)
y+(x) = β0 + β1x+ β2x2 + β3x
3 − 1
24
woEIz
x4, (5.53)
donde αi, βi, i = 0, 1, 2, 3 son constantes.Ahora discutiremos en mas detalle las condiciones de borde y compatibilidad.
Debido a la presencia de los apoyos en A y B de la Figura 5.25 podemos verque
y−(0) = 0, y+(L) = 0. (5.54)
Ademas estos apoyos no generan oposicion a la rotacion, luego el momentointerno en esos puntos es cero, de modo que
d2y−
dx2
∣∣∣∣x=0
= 0,d2y+
dx2
∣∣∣∣x=L
= 0. (5.55)
Para el punto C de la Figura 5.25 vamos a asumir que las siguientes condicionesde compatibilidad deben se cumplidas
y−(L/2) = y+(L/2),dy−
dx
∣∣∣∣x=L/2
=d2y+
dx2
∣∣∣∣x=L/2
, (5.56)
d2y−
dx2
∣∣∣∣x=L/2
=d2y+
dx2
∣∣∣∣x=L/2
,d3y−
dx3
∣∣∣∣x=L/2
=d3y−
dx3
∣∣∣∣x=L/2
. (5.57)
Ahora explicaremos el significado de estas condiciones de compatiblidad:
La condicion (5.56)1 significarıa simplemente que la viga al deformarseseguirıa siendo continua, es decir no se rompe.
La condicion (5.56)2 implicarıa que el angulo θ serıa continuo, lo quees correcto, puesto que si no lo es, estarıamos en presencia de una vigacontinua pero mostrando una ‘esquina’ aguda, lo que es contrario a lossupuestos usados aquı, en el sentido de que las deformaciones se asumieronpequenas.
169

De un analisis directo por medio de cortes imaginarios es posible ver queen este problema M(x) es una funcion continua, en particular en el puntox = L/2, de modo que de (5.50)1 eso implicarıa la condicion (5.57)1.
Finalmente, del mismo analisis con los cortes imaginarios es tambien po-sible probar que V (x) es continua15, luego de (5.50)2 eso implicarıa lacondicion (5.57)2.
Las 8 condiciones de borde y compatibilidad (5.54)-(5.57) servirıan paraencontrar las 8 constantes αi, βi, i = 0, 1, 2, 3, lo que requerirıa resolver unsistema de 8 ecuaciones algebraicas lineales, que en general no es muy practico.El problema principal de esta forma de solucionar (5.50)2 es que debimos dividirla ecuacion original en dos partes, surgiendo las 4 condiciones de compatibilidad(5.56), (5.57). En la siguiente seccion estudiaremos de manera breve un tipo masgeneral de funcion, llamadas distribuciones o funciones generalizadas, que nospermitira solucionar este tipo de problemas de una forma mas practica.
5.2.3. Distribuciones o funciones especiales
Consideremos la Figura 5.26 en donde tenemos la representacion grafica deuna funcion que llamaremos g(x) y que tiene una valor constante igual a 1/e enuna zona de largo e alrededor de un punto x = a. La integral de esta funcion
x0 x1a
1e
x
y
a− e2a+ e
2
Figura 5.26: Aproximacion para la distribucion de Dirac.
en un intervalo que contiene a este punto es igual a∫ x1
x0
g(x) dx =
∫ a+e/2
a−e/2
1
edx =
1
ee = 1 si x0 ≤ a− e
2, x1 ≥ a+
e
2. (5.58)
Si F es una constante, es facil demostrar que∫ x1
x0
Fg(x) dx = F. (5.59)
15Veremos mas adelante que V (x) no es continua cuando aparecen fuerzas externas pun-tuales.
170

Tenemos que (5.58) y (5.59) se cumplen para cualquier e, en particular parae → 0. Para ese caso particular la funcion g(x) la denotamos como δ(x − a)donde16 δ es llamada la ‘funcion’ delta de Dirac17.
Es posible ver de la Figura 5.26 que Fδ(x − a) vendrıa a representar unadensidad de fuerza F actuando en una zona muy pequena alrededor de a, yde (5.59), (2.17) tenemos que
∫ x1
x0Fδ(x − a) dx = F , o sea la fuerza puntual
equivalente serıa igual a F , o estarıa actuando en el punto a en el lımite e→ 0.Calculemos ahora la integral indefinida de δ(x−a), de su definicion tenemos
∫δ(x− a) dx =
∫ x
0
δ(ξ − a) dξ =
{0, si x < a− e
2 ,1, si x ≥ a+ e
2
,
para e→ 0. Si definimos la funcion escalon unitario r(x − a) como
r(x− a) =
{0, si x < a,1, si x ≥ a
(5.60)
tenemos que ∫δ(x− a) dx = r(x − a). (5.61)
En la Figura 5.27 tenemos una representacion grafica de esta funcion.
a
1
x
y
Figura 5.27: Distribucion escalon unitario.
Vamos ahora a mostrar otros resultados utiles∫r(x − a) dx =
∫ x
0
r(ξ − a) dξ =
{0, si x < a,∫ xa 1 dξ, si x ≥ a
,
=
{0, si x < a,(x− a), si x ≥ a
= (x− a)r(x − a). (5.62)
16Hay varias otras formas alternativas para definir esta funcion delta de Dirac, por ejemplo,a traves del uso de una funcion Gausiana, pero no veremos esto en detalle en este texto.
17En realidad δ(x−a) no es una funcion en el sentido usual de la palabra, pues en particularno se puede evaluar de forma directa en x = a, pero la propiedad (5.58) es siempre valida, ypor tanto se define en realidad como distribucion o funcion generalizada.
171

Los siguientes resultados se pueden obtener de la misma forma
∫(x− a)r(x − a) dx =
1
2(x− a)2r(x − a), (5.63)
∫1
2(x− a)2r(x − a) dx =
1
6(x− a)3r(x − a). (5.64)
5.2.4. Ejemplos con el uso de distribuciones
En esta seccion resolveremos (5.50)3 usando las distribuciones y resultadosdefinidos y mostrados en la seccion anterior.
1. Resolveremos primero el problema mostrado en la Seccion 5.2.2. De laFigura 5.25 y de las definiciones anteriores de (5.50)3 usando la funcionescalon unitario tenemos que resolver
d4y
dx4= − wo
EIzr(x − L/2), (5.65)
luego integrando dos veces usando (5.62), (5.63) tenemos
d2y
dx2= − wo
2EIz(x− L/2)2r(x − L/2) + α3x+ α2, (5.66)
e integrando dos veces mas se obtiene finalmente
y(x) = − wo24EIz
(x−L/2)4r(x−L/2)+α3
6x3 +
α2
2x2 +α1x+α0. (5.67)
Ahora tenemos una sola solucion y 4 constantes, que se pueden encontrarde las 4 condiciones de borde (5.54), (5.55)
y(0) = 0, y(L) = 0,d2y
dx2
∣∣∣∣0
= 0,d2y
dx2
∣∣∣∣L
= 0. (5.68)
Usando (5.68)3 se tiene que α2 = 0 y usando (5.68)1 se tiene que α0 = 0.Por otra parte de (5.68)4 tenemos que α3 = woL
8EIz, y finalmente con (5.68)2
y los resultados anteriores se tiene α1 =(18 − 1
384
)woL
3
EIz, de modo que
tenemos la solucion completa del problema.
2. Para la viga mostrada en la Figura 5.28, la cual esta sometida a una fuerzapuntual y esta empotrada en su extremo izquierdo, determine la deflexiony(x).
Solucion: La fuerza puntual F se puede representar como distribucion dela forma Fδ(x− a), luego de (5.50)3 tenemos que resolver
d4y
dx4= − F
EIzδ(x− a),
172

a
F
x
y
L
B
Figura 5.28: Ejemplo de calculo de deflexiones.
y con el uso de (5.61), (5.62) integrando dos veces tenemos
d2y
dx2= − F
EIz(x− a)r(x − a) + α3x+ α2. (5.69)
Luego
dy
dx= − F
2EIz(x− a)2r(x− a) +
α3
2x2 + α2x+ α1, (5.70)
de modo que finalmente se llega a
y(x) = − F
6EIz(x− a)3r(x − a) +
α3
6x3 +
α2
2x2 + α1x+ α0. (5.71)
Respecto a las condiciones de borde en este problema, en el apoyo del ladoderecho tenemos
y(L) = 0,d2y
dx2
∣∣∣∣L
= 0, (5.72)
en donde esta ultima condicion significa simplemente que el tipo de apoyode rodillo deja a la viga libre de rotar en ese punto, o sea que el momentointerno ahı serıa cero y de (5.50)1 se obtendrıa dicha condicion.
Respecto al extremo izquierdo, como este esta empotrado tenemos lascondiciones
y(0) = 0,dy
dx
∣∣∣∣0
= 0, (5.73)
donde esta ultima condicion viene de (5.49)1, en donde para un puntoempotrado la viga se asume no podrıa sufrir rotacion, de modo que θ = 0.Notese que en este extremo izquierdo el momento interno en x = 0 noes necesariamente cero y que en realidad tendrıa el valor (es necesarioestudiar en detalle el signo) del momento puro de reaccion de la paredsobre la viga en ese punto.
173

El uso de (5.70) en (5.73)2 implicarıa que α1 = 0 y de (5.71) en (5.73)1implicarıa que α0 = 0. Por otra parte de (5.70) y (5.71) en (5.72) tenemosque
− F
EIz(L− a) + α3L+ α2 = 0, − F
6EIz(L− a)3 +
α3
6L3 +
α2
2L2 = 0,
de donde se puede facilmente despejar α2 y α3.
3. Para la viga mostrada en la Figura 5.29 use la deflexion para determinarlas reacciones de los soportes A, B y C sobre la viga.
a1F1
x
y
L1
BA C
a2
L2
F2
Figura 5.29: Ejemplo de calculo de deflexiones.
Solucion: Para entender la pregunta primero es necesario hacer un dia-grama de cuerpo libre de toda la viga, tal como se muestra en la Figura5.30.
F1
BA C
F2
Figura 5.30: Ejemplo de calculo de deflexiones. Diagrama de cuerpo libre.
Este es un problema plano en donde solo tenemos fuerzas en el sentidovertical y, luego solo tenemos dos ecuaciones para encontrar las incognitasA, B y C
∑Fy = 0 ⇔ A+B + C = F1 + F2, (5.74)
∑
A
Mz = 0 ⇔ BL1 + C(L1 + L2) = F1a1 + F2(L1 + a2). (5.75)
174
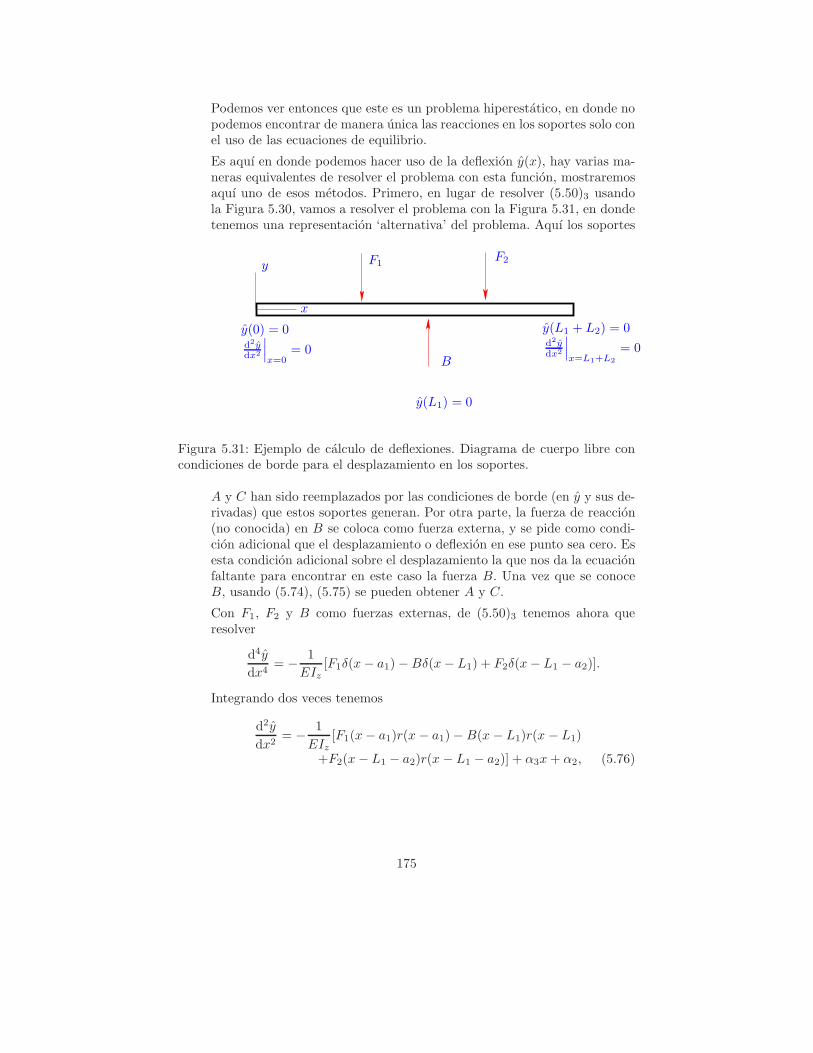
Podemos ver entonces que este es un problema hiperestatico, en donde nopodemos encontrar de manera unica las reacciones en los soportes solo conel uso de las ecuaciones de equilibrio.
Es aquı en donde podemos hacer uso de la deflexion y(x), hay varias ma-neras equivalentes de resolver el problema con esta funcion, mostraremosaquı uno de esos metodos. Primero, en lugar de resolver (5.50)3 usandola Figura 5.30, vamos a resolver el problema con la Figura 5.31, en dondetenemos una representacion ‘alternativa’ del problema. Aquı los soportes
F1
B
y(0) = 0d2ydx2
∣∣∣x=0
= 0
y(L1 + L2) = 0d2ydx2
∣∣∣x=L1+L2
= 0
F2
y(L1) = 0
x
y
Figura 5.31: Ejemplo de calculo de deflexiones. Diagrama de cuerpo libre concondiciones de borde para el desplazamiento en los soportes.
A y C han sido reemplazados por las condiciones de borde (en y y sus de-rivadas) que estos soportes generan. Por otra parte, la fuerza de reaccion(no conocida) en B se coloca como fuerza externa, y se pide como condi-cion adicional que el desplazamiento o deflexion en ese punto sea cero. Esesta condicion adicional sobre el desplazamiento la que nos da la ecuacionfaltante para encontrar en este caso la fuerza B. Una vez que se conoceB, usando (5.74), (5.75) se pueden obtener A y C.
Con F1, F2 y B como fuerzas externas, de (5.50)3 tenemos ahora queresolver
d4y
dx4= − 1
EIz[F1δ(x− a1)−Bδ(x− L1) + F2δ(x− L1 − a2)].
Integrando dos veces tenemos
d2y
dx2= − 1
EIz[F1(x− a1)r(x − a1)−B(x − L1)r(x − L1)
+F2(x− L1 − a2)r(x − L1 − a2)] + α3x+ α2, (5.76)
175

e integrando dos veces mas se llega finalmente a
y(x) = − 1
6EIz[F1(x− a1)
3r(x − a1)−B(x − L1)3r(x − L1)
+F2(x − L1 − a2)3r(x− L1 − a2)] +
α3
6x3 +
α2
2x2
+α1x+ α0, (5.77)
Usando las condiciones de borde mostradas en A y C en la Figura 5.31
con (5.76) y (5.77) tenemos que de y(0) = 0, d2ydx2
∣∣∣0= 0 y d2y
dx2
∣∣∣L1+L2
= 0
se obtiene que
α0 = 0, α2 = 0, α3 =1
EIz(L1 + L2)[F1(L1+L2−a1)−BL2+F2(L2−a2)],
en tanto que de y(L1 + L2) = 0 obtendrıamos otra ecuacion, en este casopara α1, que al igual que α3, tambien dependerıa entre otras variables deB.
Con estos valores de αi, i = 0, 1, 2, 3 reemplazando en (5.77) y usandoy(L1) = 0 tendrıamos finalmente una ecuacion algebraica lineal para ob-tener B.
4. Para la viga empotrada en sus dos extremos mostrada en la Figura 5.32use la deflexion para determinar las reacciones en A y B.
F
BA
a
L
x
y
Figura 5.32: Ejemplo de calculo de deflexiones.
Solucion: Este problema es muy similar al anterior, en el sentido que esun problema hiperestatico que requiere el uso de la deflexion y(x) para de-terminar de manera unica todas las reacciones. Para ver esto consideremosel diagrama de cuerpo libre de toda la viga mostrado en la Figura 5.33.
En A y B debido al empotramiento y a que las cargas externas solo tienencomponente en el sentido vertical, tenemos dos reacciones: una fuerza yun momento de reaccion. La viga debe estar en equilibrio luego
∑Fy = 0 A+B = F, (5.78)
∑
A
Mz = 0 BL+MB = Fa+MA. (5.79)
176

F
BA
a
L
MA MB
Figura 5.33: Ejemplo de calculo de deflexiones. Diagrama de cuerpo libre
Tenemos entonces 2 ecuaciones y 4 incognitas A, MA, B y MB.
La forma de solucionar este problema es mucho mas simple que el casoanterior. Para ello vamos a obtener y(x) resolviendo (5.50)3 con condi-ciones de borde adecuadas, para luego con la solucion y (5.50)1 obtener,por ejemplo, M evaluado en x = 0 y x = L, con lo que MA y MB serıanconocidos y por tanto de (5.78), (5.79) obtendrıamos A y B.
En este problema, de la Figura 5.32 y de (5.50)3 tenemos que resolver
d4y
dx4= − F
EIzδ(x− a).
Integrando tres veces tenemos
dy
dx= − F
2EIz(x− a)2r(x− a) +
α3
2x2 + α2x+ α1, (5.80)
de donde se obtiene
y(x) = − F
6EIz(x− a)3r(x − a) +
α3
6x3 +
α2
2x2 + α1x+ α0. (5.81)
Respecto a las condiciones de borde, como en A y B la viga esta empotradade (5.49)1 esto implica que
y(0) = 0, y(L) = 0,dy
dx
∣∣∣∣0
= 0,dy
dx
∣∣∣∣L
= 0, (5.82)
luego de (5.80) y (5.81) tenemos
α0 = 0, α1 = 0, α2 =F
2EIz
(L − a)2
L− α3
L
2, (5.83)
y
α3 = − 2F
EIz(L − a)3 +
3F
EIzL(L− a)2. (5.84)
De (5.50)1 tenemos que M(x) = EIzd2ydx2 . Para encontrar la relacion entre
el momento interno y los momentos de reaccion MA y MB veamos laFigura 5.34.
177

MA
BA
(a)
VVV
MMM
dd
(b)
MB
Figura 5.34: Ejemplo de calculo de deflexiones. Condiciones de borde en losextremos.
En esta figura tenemos en el lado izquierdo un corte imaginario hechomuy cerca del punto x = 0. En dicho corte imaginario vemos en un lado elmomento internoM y en el otro el momento de reaccionMA. Podemos ver
que cuando la distancia d es tal que d→ 0 tenemos que MA = EIzd2ydx2
∣∣∣0.
Por otro lado en la parte derecha de la figura tenemos otro corte imaginariocerca del punto x = L. En un lado tenemos el resto de la viga y en el otrotenemos el extremo cercano a x = L. Por accion y reaccion en el lado queesta cercano a x = L el momento interno apunta en el sentido opuesto asu definicion usual, de modo que por la orientacion que le habiamos dado
a MB tenemos MB = EIzd2ydx2
∣∣∣L.
De (5.81), (5.50)1 y de las observaciones anteriores tenemos que
MA = α2EIz , MB = −F (L− a) + EIzα3L+ EIzα2, (5.85)
donde α2 y α3 ya se habıan calculado en (5.83), (5.84), de modo que ahoraconocemos completamenteMA yMB y de (5.78), (5.79) podemos despejar
B =1
L(Fa−MB −MA), A = F −B. (5.86)
5. La viga mostrada en la Figura 5.35 esta sometida a un momento puro C enun punto a una distancia a del extremo izquierdo de la misma. Determinela deflexion y(x) para este problema.
Solucion: En este problema no podemos resolver (5.50)3 para toda la vigacomo habıamos hecho para los problemas anteriores. Del diagrama parael momento interno M(x) es posible ver que esta funcion en realidad esdiscontinua, y por lo tanto la segunda y las derivadas de order mayor sontambien funciones discontinuas en x = a, por lo que si queremos obtener ladeflexion usando (5.50)3, tenemos que resolver esta ecuacion por tramos,tal como lo habıamos hecho en la Seccion 5.2.2.
178

x
B
A
(a)
y
L
C
Figura 5.35: Ejemplo de calculo de deflexiones.
Vamos a demostrar primero que M(x) es discontinuo, para ello calculare-mos las reacciones en A y B. De
∑AMz = 0 y
∑Fy = 0 tenemos
A =C
L, B = −C
L. (5.87)
Si hacemos un primer corte en el tramo 0 < x < a, como el mostrado enla Figura 5.36, de
∑Mz = 0 obtenemos
M = Ax =Cx
L. (5.88)
x
M
A V
Figura 5.36: Ejemplo de calculo de deflexiones. Primer corte.
Si hacemos un segundo corte imaginario para el tramo a < x < L tenemosun diagrama de cuerpo libre como el mostrado en la Figura 5.37 y de∑Mz = 0 obtenemos
M = Ax− C = C( xL
− 1). (5.89)
Con (5.88) y (5.89) es posible ver que el comportamiento de M(x) esdiscontinuo en x = a tal como se muestra en la Figura 5.38.
En vez de usar (5.50)3 para obtener y(x), como ya conocemos M(x) po-demos en su lugar usar (5.50)1 para obtener la deflexion. La ventaja es
179

x
M
A
V
x− a
C
Figura 5.37: Ejemplo de calculo de deflexiones. Segundo corte.
x
M
a L
CaL
C(aL − 1
)
Figura 5.38: Diagrama para M(x).
que son menos las constantes que se deben obtener con las condiciones deborde y compatibilidad. De (5.50)1, (5.88) y (5.89) debemos solucionar
d2y
dx2=
1
EIz
{CxL , si 0 < x < aC(xL − 1
), si a < x < L
.
Al igual que en la Seccion 5.2.2 podemos definir y−(x) como y(x) para0 < x < a y y+(x) como y(x) para a < x < L, luego debemos resolver
d2y−
dx2=
1
EIz
Cx
L,
d2y+
dx2=
1
EIzC( xL
− 1).
Integrando una vez tenemos
dy−
dx=
1
2EIz
Cx2
L+ α1,
dy+
dx=
L
2EIzC( xL
− 1)2
+ β1 (5.90)
de donde obtenemos finalmente
y−(x) =1
6EIz
Cx3
L+ α1x+ α0, y+(x) =
L
6EIzC( xL
− 1)3
+ β1x+ β0.
(5.91)
180

Tenemos 4 constantes que buscar α0, α1, β0 y β1. De la Figura 5.35 tene-mos las condiciones de borde para los apoyos18 A y B
y−(0) = 0, y+(L) = 0, (5.92)
y como condicion de compatibilidad en x = a tenemos
y−(a) = y+(a),dy−
dx
∣∣∣∣a
=dy+
dx
∣∣∣∣a
, (5.93)
luego de (5.90) y (5.91) con (5.92) y (5.93) podemos obtener las 4 cons-tantes, lo que se deja como ejercicio para el lector.
18Notense que no consideramos la condicion momento igual a cero en dichos puntos (rela-cionados con la segunda derivada), puesto que esta condicion ya se cumple conM(x) de (5.88)y (5.89). Esto ocurre porque en este problema como paso previo debimos calcular el momentointerno, no como en los problemas anteriores en donde M(x) es una cantidad que aparecıa demanera implıcita en los calculos.
181

5.2.5. Ejercicios
1. La viga ACB de la Figura 5.39 (lado izquierdo) cuelga de dos resortes.Los resortes tienen rigideces k1, k2. La seccion de la viga se muestra en ellado derecho de la figura en forma ampliada.
a) Determine las propiedades de area de la viga.
b) ¿Cual es el desplazamiento hacia abajo del punto C cuando se aplicaP?
c) ¿Cual es el maximo esfuerzo normal por flexion en la viga y dondese ubica este esfuerzo?
(Se debe despreciar el peso de la viga)
A BC
L/2L/2
P
k1 k2h
b
r
Figura 5.39: Viga sujeta a resortes.
Datos:
L = 6m, k1 = 300kN/m, k2 = 170kN/m, E = 190GPa,
h = 10cm, b = 15cm, r = 5cm, P = 5000N.
2. La viga de la Figura 5.40 se encuentra apoyada en tres soportes flexibles,donde estos tres soportes se pueden modelar como resortes de constantek = 1000[N/mm]. La viga esta bajo la accion de una fuerza uniformew0 = 1000N/m y su seccion se muestra en el lado derecho de la figura (deforma ampliada). Determine las reacciones en los soportes.
Datos:
L = 1[m], a = 5[cm], d = 3[cm], b = 8[cm], h = 9[cm], E = 190[GPa].
3. La Figura 5.41 muestra dos vigas de seccion circular y largo L las cualesestan empotradas en sus extremos izquierdos. La viga inferior esta some-tida a una fuerza puntual P y esta conectada a traves de un cable dediametro dc a una polea rıgida, la que esta pegada a la viga superior.Determine la fuerza que se transmitirıa a traves del cable a la polea. Lasvigas y el cable tiene un modulo de Young de E, en tanto que las dos vigastiene ademas un modulo de corte G.
182

����������������
����������������
A B
LL
C
w0
a
b
dh
Vista ampliada seccion
Figura 5.40: Viga con tres soportes.
L
Hd
dD
Polea
Cable
P
Figura 5.41: Dos vigas cilındricas unidas por un cable.
Datos: L =3m, H =1.6m, D = 30cm, d = 10cm, E = 210GPa, G =70GPa, dc =0.8cm.
183

Capıtulo 6
Corte en vigas
En el capıtulo anterior hemos estudiado en detalle el fenomeno de flexion ydeflexion en vigas, en donde en particular desarrollamos metodos aproximadospara obtener distribuciones de esfuerzos normales debido a la presencia de mo-mentos internosM(x) en una viga unidimensional. En ese capıtulo despreciamosotras componentes del tensor de esfuerzos.
En este capıtulo volveremos al problema de la viga bajo la accion de fuer-zas externas, tal como se muestra en el lado izquierdo de la Figura 6.1, peroahora nos interesaremos en un fenomeno adicional que ocurre en este tipo deproblemas, que es la presencia de esfuerzos de corte.
xM
(a)
FV
(b)
Provocadistribucion deesfuerzo de corte
Provocacompresiony traccion
y
Figura 6.1: (a) Viga bajo el efecto de una fuerza externa. (b) Detalle que muestraun corte imaginario con las cargas internas V yM y los ‘efectos’ que estas cargasgenerarıan.
En la Figura 6.1 en el lado derecho tenemos un esquema que nos muestraun corte imaginario con los dos tipos de cargas mas importantes a considerar1.
1En la Figura 6.1 en la vista del corte imaginario deberıamos agregar tambien la fuerzahorizontal H, sin embargo por simplicidad no la incluımos. Esta fuerza es importante al
184

El momento interno M ya lo hemos asociado a los esfuerzos normales σx porflexion (ver Ecuacion (5.9) y Figura 6.2), lo que exploraremos ahora en estecapıtulo son los esfuerzos que la fuerza interna de corte V podrıa generar.
σx Causado por M
Figura 6.2: Distribucion de esfuerzo normal causado por M .
6.1. Corte en vigas de seccion rectangular
Por simplicidad comenzaremos estudiando uno de los casos mas simples quecorresponde a una viga de seccion rectangular, tal como se muestra en las Fi-guras 6.3 y 6.4. En la Figura 6.3 tenemos una vista lateral de la viga completa
x
y
w(x)
Figura 6.3: Viga bajo la accion de una fuerza externa.
bajo la accion de algun tipo de carga arbitraria w(x). Debemos poner especialatencion a la disposicion de los ejes coordenados x, y. En la Figura 6.4 tenemos
���������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������
z
y
b
h
Figura 6.4: Seccion rectangular.
momento de determinar esfuerzos normales uniformes por traccion/compresion pura. En elCapıtulo 9 veremos esquemas con vigas considerando todas las cargas internas.
185

una vista ampliada de la seccion de la viga, la cual tiene lados b, h, en el planoy − z.
Consideremos ahora las ecuaciones de equilibrio para el caso plano (3.42),(3.43)
∂τxx∂x
+∂τxy∂y
= 0,
∂τxy∂x
+∂τyy∂y
= 0,
las cuales si se usa la notacion σx = τxx, σy = τyy quedan como
∂σx∂x
+∂τxy∂y
= 0, (6.1)
∂τxy∂x
+∂σy∂y
= 0. (6.2)
Vamos a solucionar de forma aproximada (6.1) y (6.2). Lo primero que ha-remos es asumir que σy ≈ 0. Por otra parte de la teorıa de flexion (ver (5.9))tenıamos que
σx = −M(x)
Izy,
por lo que∂σx∂x
= −dM
dx
y
Iz. (6.3)
Reemplazando (6.3) en (6.1) tenemos que
∂τxy∂y
=dM
dx
y
Iz. (6.4)
Pero de (3.16) tenıamos dMdx = −V (x), como resultado de la ecuacion anterior
obtenemos∂τxy∂y
= −V (x)y
Iz, (6.5)
por lo que si integramos en y se llega a2
τxy = −V (x)
2Izy2 + co. (6.6)
Podemos ver que (6.6) solo serıa solucion de (6.1), y que (6.2) en general noes satisfecha, por ese motivo se indico previamente que aquı buscarıamos solouna solucion aproximada de (6.1) y (6.2).
Para encontrar co haremos uso de la Figura 6.5. En dicha figura (lado izquierdo
2La Ecuacion (6.1) es en realidad una ecuacion en derivadas parciales, de modo que co engeneral no serıa una constante, sino mas bien una funcion de x, es decir co = co(x).
186
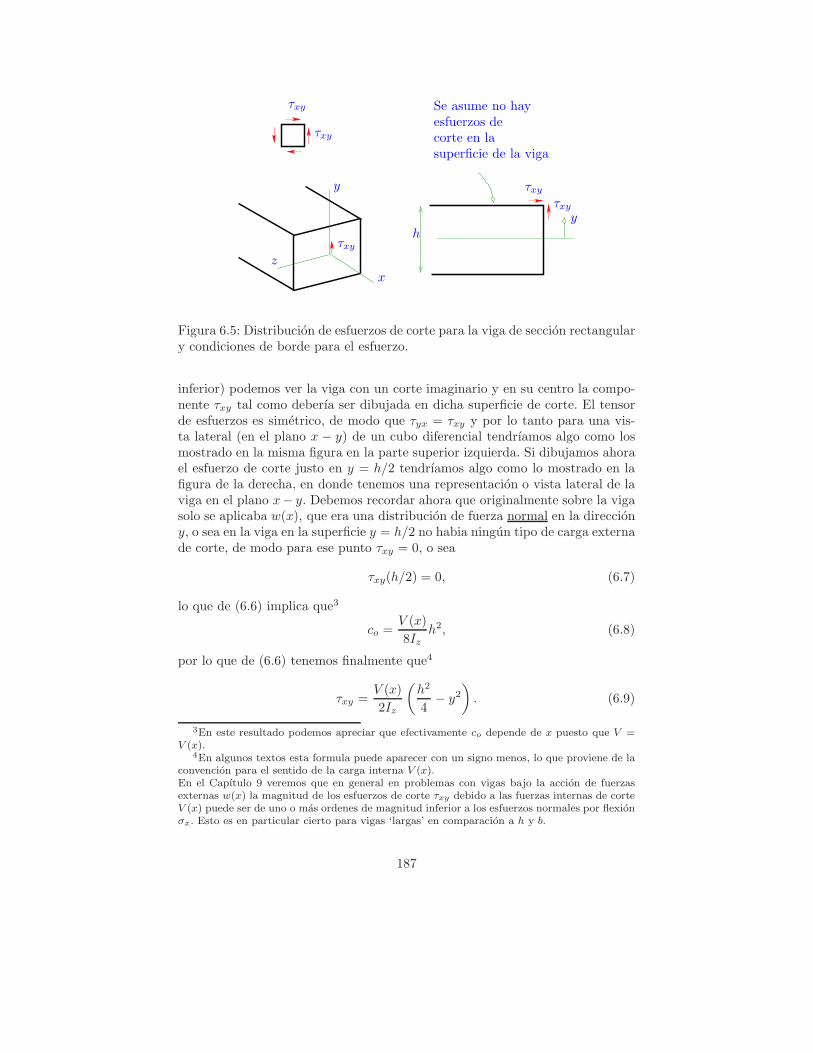
z
y
y
x
h
τxyτxy
τxy
τxy
τxy
Se asume no hayesfuerzos decorte en lasuperficie de la viga
Figura 6.5: Distribucion de esfuerzos de corte para la viga de seccion rectangulary condiciones de borde para el esfuerzo.
inferior) podemos ver la viga con un corte imaginario y en su centro la compo-nente τxy tal como deberıa ser dibujada en dicha superficie de corte. El tensorde esfuerzos es simetrico, de modo que τyx = τxy y por lo tanto para una vis-ta lateral (en el plano x − y) de un cubo diferencial tendrıamos algo como losmostrado en la misma figura en la parte superior izquierda. Si dibujamos ahorael esfuerzo de corte justo en y = h/2 tendrıamos algo como lo mostrado en lafigura de la derecha, en donde tenemos una representacion o vista lateral de laviga en el plano x− y. Debemos recordar ahora que originalmente sobre la vigasolo se aplicaba w(x), que era una distribucion de fuerza normal en la direcciony, o sea en la viga en la superficie y = h/2 no habia ningun tipo de carga externade corte, de modo para ese punto τxy = 0, o sea
τxy(h/2) = 0, (6.7)
lo que de (6.6) implica que3
co =V (x)
8Izh2, (6.8)
por lo que de (6.6) tenemos finalmente que4
τxy =V (x)
2Iz
(h2
4− y2
). (6.9)
3En este resultado podemos apreciar que efectivamente co depende de x puesto que V =V (x).
4En algunos textos esta formula puede aparecer con un signo menos, lo que proviene de laconvencion para el sentido de la carga interna V (x).En el Capıtulo 9 veremos que en general en problemas con vigas bajo la accion de fuerzasexternas w(x) la magnitud de los esfuerzos de corte τxy debido a las fuerzas internas de corteV (x) puede ser de uno o mas ordenes de magnitud inferior a los esfuerzos normales por flexionσx. Esto es en particular cierto para vigas ‘largas’ en comparacion a h y b.
187

Podemos verificar que τxy(−h/2) = 0, lo que es correcto puesto que en lasuperficie inferior y = −h/2 tampoco hay carga externa de corte.
Finalmente debemos recordar de (5.39) que para este tipo de seccion Iz =bh3
12 , por lo que ahora conocemos de manera completa la distribucion de esfuerzode corte debido a la carga interna de corte para la viga de seccion rectangular.
6.2. Corte en vigas de seccion arbitraria
De la seccion anterior tenemos ahora mas menos una idea del tipo de esfuer-zos que V (x) puede generar. En esta seccion estudiaremos el caso de una vigabajo la accion de una fuerza w(x) y de seccion totalmente arbitraria, para elloconsideremos el esquema mostrado en la Figura 6.6 y las siguiente observaciones.
xyy
dx
M M + dM
ξξc
σx = MIzξ
σx = (M+dM)Iz
ξ
Eje neutro
t
τxy
τxy
dξ
dAVista lateral Vista frontal
Figura 6.6: Modelo para determinar de forma aproximada la distribucion deesfuerzos de corte en una viga de seccion arbitraria.
En el lado izquierdo de esta figura tenemos una vista lateral de la viga(solo una parte de ella) en el plano x− y. En el lado derecho tenemos unavista frontal de la viga, en donde vemos la seccion de la misma en el planoy − z.
En esta figura observemos el elemento diferencial de largo dx (en el ejex) que se aprecia en la vista del lado izquierdo. Este elemento diferencialesta limitado en su parte inferior (en el plano y − z) por la posicion y, entanto en su parte superior por la altura c.
Es importante hacer notar que de calculos previos ya se ha determinado
188
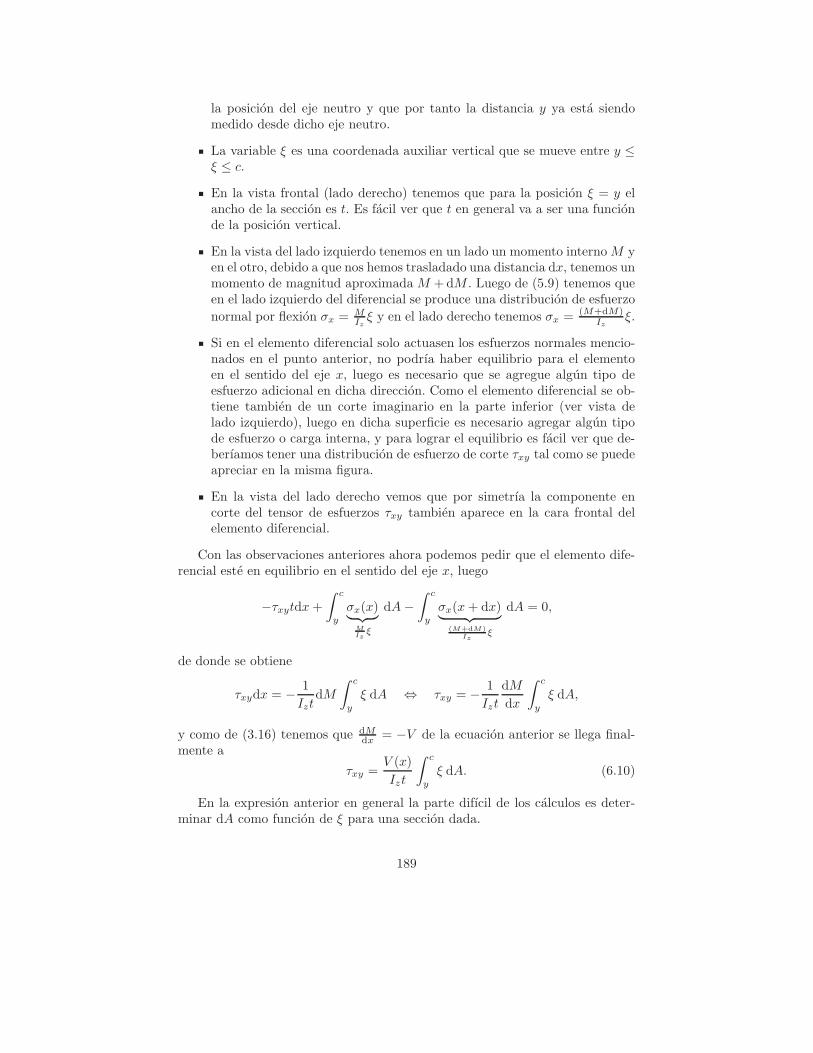
la posicion del eje neutro y que por tanto la distancia y ya esta siendomedido desde dicho eje neutro.
La variable ξ es una coordenada auxiliar vertical que se mueve entre y ≤ξ ≤ c.
En la vista frontal (lado derecho) tenemos que para la posicion ξ = y elancho de la seccion es t. Es facil ver que t en general va a ser una funcionde la posicion vertical.
En la vista del lado izquierdo tenemos en un lado un momento internoM yen el otro, debido a que nos hemos trasladado una distancia dx, tenemos unmomento de magnitud aproximadaM +dM . Luego de (5.9) tenemos queen el lado izquierdo del diferencial se produce una distribucion de esfuerzo
normal por flexion σx = MIzξ y en el lado derecho tenemos σx = (M+dM)
Izξ.
Si en el elemento diferencial solo actuasen los esfuerzos normales mencio-nados en el punto anterior, no podrıa haber equilibrio para el elementoen el sentido del eje x, luego es necesario que se agregue algun tipo deesfuerzo adicional en dicha direccion. Como el elemento diferencial se ob-tiene tambien de un corte imaginario en la parte inferior (ver vista delado izquierdo), luego en dicha superficie es necesario agregar algun tipode esfuerzo o carga interna, y para lograr el equilibrio es facil ver que de-berıamos tener una distribucion de esfuerzo de corte τxy tal como se puedeapreciar en la misma figura.
En la vista del lado derecho vemos que por simetrıa la componente encorte del tensor de esfuerzos τxy tambien aparece en la cara frontal delelemento diferencial.
Con las observaciones anteriores ahora podemos pedir que el elemento dife-rencial este en equilibrio en el sentido del eje x, luego
−τxytdx+
∫ c
y
σx(x)︸ ︷︷ ︸MIzξ
dA−∫ c
y
σx(x+ dx)︸ ︷︷ ︸(M+dM)
Izξ
dA = 0,
de donde se obtiene
τxydx = − 1
IztdM
∫ c
y
ξ dA ⇔ τxy = − 1
Izt
dM
dx
∫ c
y
ξ dA,
y como de (3.16) tenemos que dMdx = −V de la ecuacion anterior se llega final-
mente a
τxy =V (x)
Izt
∫ c
y
ξ dA. (6.10)
En la expresion anterior en general la parte difıcil de los calculos es deter-minar dA como funcion de ξ para una seccion dada.
189

6.3. Corte en vigas de seccion delgada abierta
En esta seccion nos interesa aplicar (6.10) a un caso especial de viga endonde tenemos una seccion ‘delgada abierta’. Para ilustrar esto consideremosun ejemplo especıfico tal como se muestra en la Figura 6.7. En dicha figura
l
hy
t1t2
Aleta
Nervio
Figura 6.7: Ejemplo de seccion delgada abierta.
tenemos la vista de la seccion de una viga doble T, tambien llamada perfil H.Nos interesa ahora determinar τxy para esta seccion, lo que haremos en dos
partes:
Asumamos V es conocido, por otra parte Iz es facil de determinar de (5.7).La parte clave es calcular
∫ cy ξ dA, luego como el eje neutro en este caso
pasa por la mitad, en un primer paso, para la ‘aleta superior’ asumamosque
h
2− t1 ≤ y ≤ h
2.
Como c = h/2, para ese rango para y, de la figura podemos apreciar que
dA = l dξ,
por lo que ∫ c
y
ξ dA =
∫ h/2
y
ξl dξ =l
2
(h2
4− y2
).
Para h2 − t1 ≤ y ≤ h
2 se tiene que
t = l,
y como resultado de (6.10) se llega a
τxy =V (x)
2Iz
(h2
4− y2
). (6.11)
190

En esta segunda parte para el ‘nervio’ vamos a asumir que
0 ≤ y ≤ h
2− t1.
En este punto debemos recordar que en (6.10) c siempre es el mismo, esdecir en este caso c = h/2. Si 0 ≤ y ≤ h
2 − t1 vamos a tener que dA va aser igual a
dA =
{t2 dξ si 0 ≤ ξ < h
2 − t1l dξ si h
2 − t1 ≤ ξ ≤ h2
,
luego
∫ c
y
ξ dA =
∫ h/2
y
ξ dA =
∫ h/2−t1
y
ξ dA︸︷︷︸t2 dξ
+
∫ h/2
h/2−t1ξ dA︸︷︷︸
l dξ
,
que despues de algunas manipulaciones nos da
∫ c
y
ξ dA =t22
[(h
2− t1
)2
− y2
]+l
2
[h2
4−(h
2− t1
)2].
Para 0 ≤ y ≤ h2−t1 de la figura se puede ver que t = t2, luego del resultado
anterior y de (6.10) tenemos finalmente que
τxy =V (x)
Izt2
{t22
[(h
2− t1
)2
− y2
]+l
2
[h2
4−(h
2− t1
)2]}
. (6.12)
Es facil ver que para la ‘aleta inferior’ las expresiones para τxy son similaresa (6.11).
De (6.11) y (6.12) tenemos entonces
τxy =
V (x)Izt2
{t22
[(h2 − t1
)2 − y2]+ l
2
[h2
4 −(h2 − t1
)2]}si 0 ≤ y ≤ h
2 − t1V (x)2Iz
(h2
4 − y2)
si h2 − t1 ≤ y ≤ h
2
.
(6.13)En el caso de un eje de seccion delgada tenemos que t1, t2 ≪ l, h y un graficoaproximado para τxy(y) se muestra en la Figura 6.8. En dicha figura podemosapreciar que la magnitud de los esfuerzos de corte en las aletas serıa despreciablerespecto a lo que sucede en el nervio.
Si bien es cierto de los resultados anteriores podemos concluir que no esimportante calcular τxy en las aletas de la viga, mostraremos ahora que endichas aletas otro tipo de esfuerzo de corte asociado a V puede aparecer.
En la Figura 6.9 (lado izquierdo) tenemos una vista tridimensional de laviga doble T. Imaginemos que se extrae un trozo diferencial de la aleta superior,cuya figura ampliada se muestra en el lado derecho. El trozo tiene una longitudinfinitesimal dx en la direccion x, pero en el sentido del eje z su longitud puedeser variable y finita.
191

0
h/2h/2− t1
τxy
y
Figura 6.8: Grafico aproximado para la distribucion del esfuerzo de corte en laseccion de la viga doble T.
Eje neutro
Trozo diferencial
ydx
t
σx
σx +∂σx
∂x dxτxs
Figura 6.9: Esfuerzo de corte para viga doble T.
Para las caras del trozo diferencial en el plano y − z tendrıamos el efectode los esfuerzos normales por flexion. En un lado tendrıamos σx(x) asociado aM(x) y en el otro tendrıamos σx(x + dx) ≈ σx + ∂σx
∂x dx asociado a M + dM .Si se hace suma de fuerzas en el sentido del eje x se puede ver que el trozodiferencial no estarıa en equilibrio, de modo que se hace necesario considearalgun otro tipo de fuerza interna. En este punto es necesario notar que hay otrasuperficie de corte imaginario para extraer el trozo diferencial. Esta superficiese ubica en el plano x− y, en donde procedemos a dibujar un esfuerzo de corteque denominamos5 τxs.
5En principio podrıamos denominar a este esfuerzo τxz por el plano y el sentido en el queactua, pero considerando que estos resultados seran generalizados en los parrafos siguientes,vamos a usar una notacion mas general τxs, en donde s va a ser considerado algun tipo decoordenada auxiliar.
192

Haciendo ahora el equilibrio en x, si t es el espesor de la aleta, tenemos
∑Fx = 0 ⇔ −τxst dx+
∫
A
σx dA−∫
A
σx +∂σx∂x
dx dA = 0.
Pero de (5.9) tenemos que σx = MIzy y σx + ∂σx
∂x dx = 1Iz(M + dM)y, de modo
que reemplazando en el balance de fuerzas anterior, despues de algunas mani-pulaciones, considerando (3.16) obtenemos
τxs = − 1
Izt
dM
dx
∫
A
y dA =V (x)
Izt
∫
A
y dA. (6.14)
Los significados de A e y los veremos con mas precision a continuacion.En la Figura 6.10 tenemos una vista frontal de la viga doble T, en donde
podemos apreciar la aleta superior. La coordenada auxiliar s tambien se puede
hy
t
s
s
Figura 6.10: Calculo de esfuerzo de corte para viga doble T.
usar como largo variable para el trozo diferencial. Si la aleta es muy delgada, ladistancia y se medirıa desde el eje neutro a la mitad de la seccion de la aleta.El area A que aparece en (6.14) serıa el area achurada en este figura.
En este problema y es constante y en el caso que t≪ h esta dado por
y =h
2− t
2≈ h
2.
Como dA = t da tenemos que
∫
A
y dA ≈ tsh
2,
por lo que de (6.14) se llega a
τxs ≈V (x)
Izsh
2. (6.15)
Este es un tipo de esfuerzo de corte es distinto a (6.11), pero tambien escausado por V (x). Podemos ver que si s = 0 tenemos que τxs = 0, lo que es
193

correcto, pues en ese borde no hay esfuerzo de corte, debido a que no hay cargasexternas de corte aplicadas en ninguna de las superficies de la viga.
Podemos ver que (6.10) y (6.14) son muy similares en su forma, si es necesariohacer notar que la naturaleza de los esfuerzos es distinta. En (6.14) se habiausado la notacion τxs, y en el siguiente ejemplo se justificara esa notacion.
En la Figura 6.11 (vista superior izquierda) tenemos una vista tridimensionalde una viga de seccion arbitraria abierta de pared delgada. En dicha figura con
z
y
t
s = 0
dxτxs
σx
σx +∂σx
∂x dx
Figura 6.11: Distribucion general de esfuerzos de corte para una viga de secciondelgada abierta arbitraria.
lıneas punteadas dibujamos un elemento diferencial de longitud dx en el eje xy de longitud arbitraria en el contorno del perfil.
En la misma figura en la vista superior derecha tenemos una representacionampliada de dicho elemento diferencial, en donde podemos apreciar en amboslados los esfuerzos normales por flexion σx y σx+
∂σx
∂x dx. Debido a que solo conestos esfuerzos actuando en el diferencial no habrıa equilibrio en el sentido deleje x, en la otra superficie del corte imaginario se debe incluir un esfuerzo decorte que llamamos τxs. Por la orientacion arbitraria del contorno de la paredde la seccion, utilizamos la coordenada s para movernos a lo largo de este.Debido a la simetrıa del tensor de esfuerzos en la cara frontal, tambien tenemosuna distribucion de esfuerzos de corte τxs, los que son mostrados de maneraesquematica en la figura inferior central.
De∑Fx = 0, siguiendo un procedimiento similar a los casos anteriores, se
puede llegar a
τxs =V (x)
Izt
∫
A
y dA, (6.16)
que es una expresion identica a (6.14). Sin embargo, en este caso mas generalhay algunas observaciones importantes:
194

Se establece una coordenada s que se mueve a lo largo de seccion de laviga, en donde en el extremo s = 0, tal como se muestra en la Figura 6.12.
Eje neutro y = y(s)
t
A
τxss = 0s
Figura 6.12: Calculo de esfuerzos de corte para una viga de seccion delgadaabierta arbitraria.
En (6.16) y no es en general constante, y va a depender de s, es decir y = y(s)como se puede apreciar en la misma Figura 6.12.
El espesor t se refiere al espesor de la pared en el punto exacto en donde interesacalcular τxs, es decir en el punto s como se ve en la figura.
Se asume que previamente se ha calculado ya el eje neutro y que desde allı semide y(s).
El area A corresponde a toda la region achurada.
Finalmente podemos ver que τxs para paredes delgadas seguira de forma apro-ximada la forma de la pared.
6.4. Centro de cortadura
Con los resultados mostrados en las Secciones 6.2, 6.3 ahora podemos explo-rar un problema adicional que ocurre en vigas sometidas a flexion. Imaginemosque tenemos una viga empotrada en un extremo y con una fuerza puntual enel extremo libre, tal como se muestra en la Figura 6.13, en donde tenemos unavista lateral (por ejemplo en el plano x− y) y una vista frontal de la seccion dela viga (en el plano y − z), que podrıa ser un perfil C.
Este es el esquema tıpico de problema que hemos visto y estudiado hastaeste momento. Hay una pregunta importante que no se ha hecho la cual es:¿En que posicion a lo largo del eje z deberıa colocarse esta fuerza puntual? Lapregunta no es trivial, pues en la Figura 6.14 tenemos vistas tridimensionalesdel problema en donde la fuerza F se aplica en distintas posiciones en z. Si lafuerza se aplicase muy hacia la derecha, intuitivamente vemos que no solo seproducirıa una flexion, sino tambien una torsion como la mostrada en la figura
195

��������������������
��������������������
Vista lateralF
Vista frontal
Figura 6.13: Viga empotrada bajo el efecto de una fuerza puntual. Calculo decentro de cortadura.
(a)
F
FF
(b) (c)
Figura 6.14: Viga empotrada bajo el efecto de una fuerza puntual. Efecto decolocar esta fuerza en distintas posiciones en la seccion.
(a). Si la fuerza, por otro lado, se aplicase muy hacia la izquierda (quizas pormedio de una placa adicional pegada a la viga), la torsion se podrıa producirhacia el otro lado, como se muestra en la figura (c). O sea, de manera intuitivapodemos pensar que existe una posicion intermedia, para la cual se producirıaflexion sin torsion, como se muestra de manera esquematica en la figura (b). Elsiguiente principio nos ayudara a encontrar dicho punto:
Para evitar flexion con torsion, la fuerza cortante aplicada debe tener una lıneade accion tal que produce un momento de torsion, con respecto a cualquier ejeparalelo al eje geometrico de la viga, igual pero opuesto al resultante, con res-pecto al mismo eje, de la distribucion del esfuerzo cortante calculado bajo elsupuesto de estar la viga sometida a flexion unicamente.
En los ejemplos mostrados en la siguiente seccion haremos uso de este prin-cipio y veremos en mayor detalle su significado desde el punto de vista fısico.
196

6.5. Ejemplos para calculo de centros de corta-dura
1. Para el perfil C mostrado en la Figura 6.15 determine el valor de la distan-cia e requerida para que se induzca flexion sin torsion en todas las seccionesde la viga. En la Figura 6.18 tenemos las dimensiones de la seccion de laviga.
�������������������������
�������������������������
L
F
F
x
y
z
e
O
Figura 6.15: Viga empotrada bajo el efecto de una fuerza puntual y determina-cion del centro de cortadura.
Solucion: Como paso previo a la determinacion de e debemos calcularV (x), para ello debemos notar que en el punto de empotramiento tendre-mos una fuerza de reaccion de F y un momento de reaccion igual a FL. Sise hace un corte imaginario a una distancia x del extremo izquierdo con0 < x < L, tendremos un diagrama de cuerpo libre como el mostrado enla Figura 6.16.
M
F x
V
FL
Figura 6.16: Viga empotrada bajo el efecto de una fuerza puntual y determina-cion del centro de cortadura. Corte imaginario para determinacion de momentointerno y de fuerza interna de corte.
Es facil apreciar entonces que
V (x) = −F. (6.17)
De las secciones anteriores sabemos que los esfuerzos de corte asociadosa V en una viga de pared delgada siguen la direccion de la pared. Consi-deremos la Figura 6.17, en donde tenemos una vista tridimensional de laviga cerca de la zona de aplicacion de la fuerza F .
Asumamos que hacemos un corte imaginario muy cerca del punto de apli-cacion de la fuerza. Es facil apreciar que el sentido de los esfuerzos de corte
197

Distribucion deesfuerzospor V
F
Distribucion paralos esfuerzosen la caraopuesta
Figura 6.17: Seccion de la viga y calculo para la distribucion de esfuerzos decorte. Distribucion de esfuerzos de corte y principio de accion y reaccion paraun corte imaginario cerca del punto de aplicacion de la fuerza externa.
τxs serıa como el mostrado en la superficie de corte superior, en tanto quepor accion y reaccion en la cara opuesta el esfuezos de corte tendrıa elsentido mostrado en ‘lonja’ restante en donde se ubica F .
Observemos ahora esa ‘lonja’ o porcion de viga. Por un lado F generarıaun torque en el sentido positivo del eje z, en tanto que τxs generarıa untorque en el sentido opuesto. Luego lo que buscamos ahora es la distanciae para que dichos torques se anulen y la viga solo sufra flexion sin torsion,que es lo que nos decıa el principio en la Seccion 6.4.
z
y
O
b
h
F
e
sds
t1
dA
B
1
2
3
Figura 6.18: Seccion de la viga y calculo para la distribucion de esfuerzos decorte.
Consideremos la Figura 6.18 en donde tenemos una vista frontal de la
198

seccion en donde haremos el equilibrio de momentos. En un lado vemosla accion de la fuerza F y tambien podemos apreciar la distribucion deesfuerzo τxs que genera un momento en el sentido contrario.
La seccion la hemos dividido en tres partes, numeradas de 1 a 3. El ejez ya se ha ubicado en la posicion del eje neutro, que en este caso pasasimplemente por h/2.
Para hacer el equilibrio de momento se puede escoger cualquier punto en elespacio, pero si escogemos el punto B en la figura, podemos darnos cuentaque ni la distribucion en 2 ni 3 generan momento en dicho punto, y comoconsecuencia solo nos interesarıa el momento generado por τxs.
Para un diferencial de area dA en 1, la fuerza causada por τxs serıa iguala τxs dA, y si el espesor de la pared de la seccion es t1 (muy pequeno)tenemos que el momento causado por τxs dA respecto a B serıa igual a
(h− t1)τxs dA,
en donde dA = t1 ds.
De las expresiones anteriores tenemos que∑MB = 0 quedarıa como6
Fe ≈ −∫ b
0
(h− t1)τxs t1ds. (6.18)
Ahora procedemos a calcular τxs, para ello de (6.16) recordamos que τxs =VIzt
∫y dA. De la Figura 6.18 recordando el significado de y vemos que en
este caso si t1 es pequeno entonces
y =h− t1
2,
en tanto que t = t1. De la Figura 6.19 tenemos que dA ≈ t1 ds. De lasconsideraciones anteriores y (6.16) tenemos
τxs(s) =V
Izt1
∫ s
0
(h− t1
2
)t1 dξ,
de donde obtenemos
τxs(s) =V
2Iz(h− t1)s. (6.19)
6Es necesario explicar la prescencia del signo (-) en (6.18). La ecuacion (6.16) nos entregaτxs para la cara superior mostrada en la Figura 6.17, sin embargo en la Figura 6.18 y en lasexpresiones mostradas aquı para el balance de momento necesitamos τxs para la cara opuestasegun el corte, es decir necesitarıamos el ‘negativo’ de la expresion (6.16). El signo menospuede incluirse antes o despues de hacer los calculos para τxs.Respecto al sımbolo de aproximacion ≈ en (6.18), este sımbolo aparece debido a que en estrictorigor la integral deberıa hacerse sobre la superficie 1 como integral de superficie, pero debidoa que t1 ≪ h, se reemplaza (de forma aproximada) la integral de superficie por una integralde lınea.
199

������������������������
s
t1
t2 y
Figura 6.19: Seccion de la viga y calculo para la distribucion de esfuerzos decorte. Zona de interes para el calculo de los esfuerzos de corte.
Es posible apreciar que para s = 0 tenemos que τxs = 0, lo que es correctopara el borde de la aleta.
En este problema de (6.17) tenemos que V = −F por lo que
τxs(s) =−F2Iz
(h− t1)s. (6.20)
Reemplazando en (6.18) se tiene
Fe =
∫ b
0
F
2Iz(h− t1)
2st1 ds,
de donde obtenemos finalmente
e =(h− t1)
2t12Iz
b2
2, (6.21)
en donde en particular podemos ver que e no depende de manera directade la fuerza externa F .
Un paso adicional es determinar Iz para esta seccion. Del metodo mostradoen (5.37) se puede mostrar que
Iz =(b− t2)
6t31 +
t12(b− t2)(h− t1)
2 +t2h
3
12. (6.22)
2. Determine el punto de aplicacion de la fuerza para que solo se produzcaflexion sin torsion en la viga mostrada en la Figura 6.20. Se debe asumirque t≪ h, b, r.
Solucion: En el lado izquierdo de la Figura 6.20 tenemos una vista decostado de la viga, en tanto que en el lado derecho tenemos una vista(ampliada) de la seccion de la misma.
El primer paso para solucionar este problema es obtener V (x), para elloprimero observamos que para la viga completa el diagrama de cuerpo libredeberıa ser como se muestra en la Figura 6.21.
Si se hace el calculo de V (x) siguiendo el metodo usual tenemos
V (x) =
{−F/2 x < L/2F/2 x > L/2
.
200
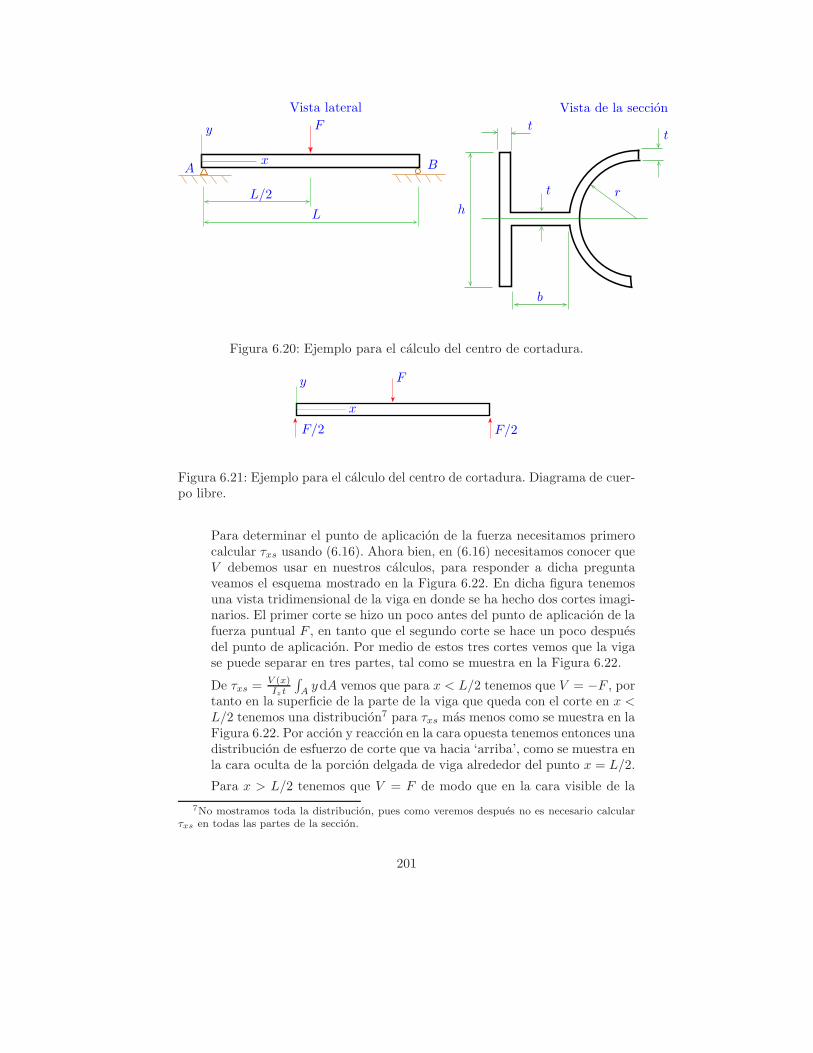
A B
L
L/2
x
y F
Vista lateral
b
h
t
tt
r
Vista de la seccion
Figura 6.20: Ejemplo para el calculo del centro de cortadura.
F/2F/2
x
y F
Figura 6.21: Ejemplo para el calculo del centro de cortadura. Diagrama de cuer-po libre.
Para determinar el punto de aplicacion de la fuerza necesitamos primerocalcular τxs usando (6.16). Ahora bien, en (6.16) necesitamos conocer queV debemos usar en nuestros calculos, para responder a dicha preguntaveamos el esquema mostrado en la Figura 6.22. En dicha figura tenemosuna vista tridimensional de la viga en donde se ha hecho dos cortes imagi-narios. El primer corte se hizo un poco antes del punto de aplicacion de lafuerza puntual F , en tanto que el segundo corte se hace un poco despuesdel punto de aplicacion. Por medio de estos tres cortes vemos que la vigase puede separar en tres partes, tal como se muestra en la Figura 6.22.
De τxs =V (x)Izt
∫A ydA vemos que para x < L/2 tenemos que V = −F , por
tanto en la superficie de la parte de la viga que queda con el corte en x <L/2 tenemos una distribucion7 para τxs mas menos como se muestra en laFigura 6.22. Por accion y reaccion en la cara opuesta tenemos entonces unadistribucion de esfuerzo de corte que va hacia ‘arriba’, como se muestra enla cara oculta de la porcion delgada de viga alrededor del punto x = L/2.
Para x > L/2 tenemos que V = F de modo que en la cara visible de la
7No mostramos toda la distribucion, pues como veremos despues no es necesario calcularτxs en todas las partes de la seccion.
201
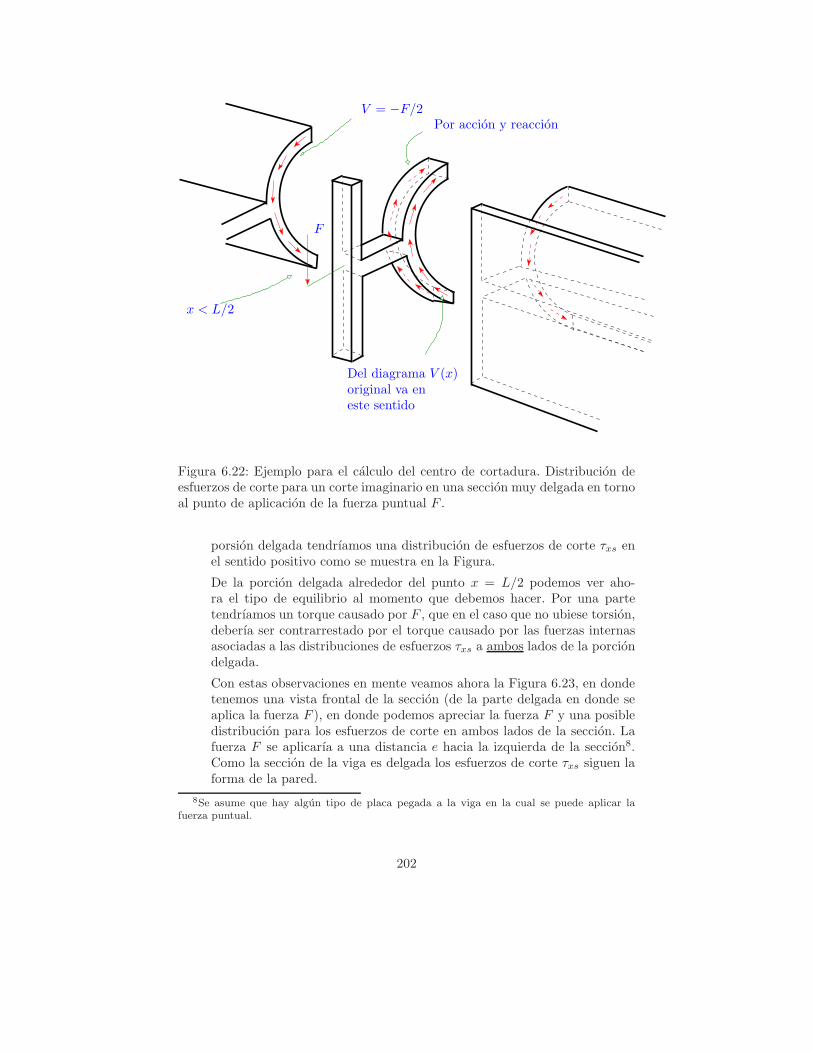
F
x < L/2
V = −F/2Por accion y reaccion
Del diagrama V (x)original va eneste sentido
Figura 6.22: Ejemplo para el calculo del centro de cortadura. Distribucion deesfuerzos de corte para un corte imaginario en una seccion muy delgada en tornoal punto de aplicacion de la fuerza puntual F .
porsion delgada tendrıamos una distribucion de esfuerzos de corte τxs enel sentido positivo como se muestra en la Figura.
De la porcion delgada alrededor del punto x = L/2 podemos ver aho-ra el tipo de equilibrio al momento que debemos hacer. Por una partetendrıamos un torque causado por F , que en el caso que no ubiese torsion,deberıa ser contrarrestado por el torque causado por las fuerzas internasasociadas a las distribuciones de esfuerzos τxs a ambos lados de la porciondelgada.
Con estas observaciones en mente veamos ahora la Figura 6.23, en dondetenemos una vista frontal de la seccion (de la parte delgada en donde seaplica la fuerza F ), en donde podemos apreciar la fuerza F y una posibledistribucion para los esfuerzos de corte en ambos lados de la seccion. Lafuerza F se aplicarıa a una distancia e hacia la izquierda de la seccion8.Como la seccion de la viga es delgada los esfuerzos de corte τxs siguen laforma de la pared.
8Se asume que hay algun tipo de placa pegada a la viga en la cual se puede aplicar lafuerza puntual.
202
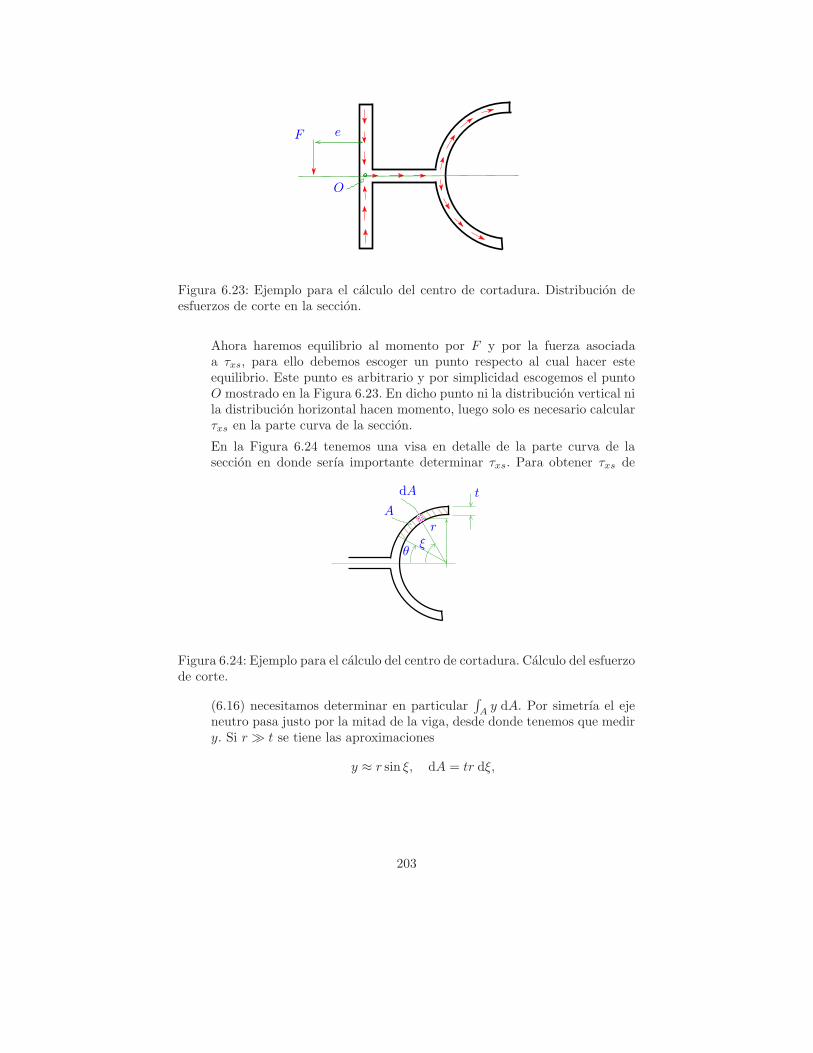
O
eF
Figura 6.23: Ejemplo para el calculo del centro de cortadura. Distribucion deesfuerzos de corte en la seccion.
Ahora haremos equilibrio al momento por F y por la fuerza asociadaa τxs, para ello debemos escoger un punto respecto al cual hacer esteequilibrio. Este punto es arbitrario y por simplicidad escogemos el puntoO mostrado en la Figura 6.23. En dicho punto ni la distribucion vertical nila distribucion horizontal hacen momento, luego solo es necesario calcularτxs en la parte curva de la seccion.
En la Figura 6.24 tenemos una visa en detalle de la parte curva de laseccion en donde serıa importante determinar τxs. Para obtener τxs de
��������
θξr
t
A
dA
Figura 6.24: Ejemplo para el calculo del centro de cortadura. Calculo del esfuerzode corte.
(6.16) necesitamos determinar en particular∫A y dA. Por simetrıa el eje
neutro pasa justo por la mitad de la viga, desde donde tenemos que mediry. Si r ≫ t se tiene las aproximaciones
y ≈ r sin ξ, dA = tr dξ,
203

luego9
∫
A
y dA =
∫ π/2
θ
tr2 sin ξ dξ,
= tr2 cos θ,
por lo que de (6.16) tenemos
τxs ≈V
Izr2 cos θ. (6.23)
Esta es la distribucion aproximada para el esfuerzo de corte en uno de loslados de la seccion.
Si denotamos Tcorte como el torque causado por τxs en el lado en queV = F/2 si buscamos e de manera tal que haya flexion sin torsion, de∑
OMx = 0 tenemos queFe = 2Tcorte, (6.24)
donde el factor 2 proviene del hecho que la distribucion τxs aparece aambos lados de la cara de la seccion.
Necesitamos ahora calcular Tcorte, para ello consideremos la Figura 6.25,en donde tenemos un esquema de la forma como actua τxs en la partecurva de la seccion mas algunos diagramas que nos ayudaran en el calculodel torque.
O
1
2
3
r
θθ
r sin θ
b
r(1 − cos θ)
τxsτxs
τxs sin θ
τxs cos θ
Figura 6.25: Ejemplo para el calculo del centro de cortadura. Calculo del mo-mento causado por distribucion de esfuerzo de corte.
La fuerza causada por τxs serıa (magnitud) τxs dA = τxstr dθ, en tantoque sus componentes en x e y serıan
τxs sin θtr dθ, τxs cos θtr dθ,
9En esta expresion el parametro para τxs no lo denotamos como s sino como θ.
204

respectivamente, tal como se muestra en el esquema del lado derecho dela figura.
De las observaciones anteriores, apoyandonos en el esquema mostrado enla Figura 6.25, se puede probar que
Tcorte ≈∫ π/2
−π/2r sin θτxs sin θtr dθ +
∫ π/2
−π/2τxs cos θ[b+ r(1 − cos θ)]tr dθ,
= tr2∫ π/2
−π/2τxs︸︷︷︸
VIzr2 cos θ
sin2 θ dθ + tr
∫ π/2
−π/2τxs︸︷︷︸
VIzr2 cos θ
cos θ[b+ r(1 − cos θ)]dθ,
=V tr4
Iz
2
3+V tr3
Iz
[(b+ r)
π
2− 4
3r
]. (6.25)
Usando (6.25) en (6.24) despues de algunas manipulaciones se llega a
e =2
3
tr4
Iz+tr3
Iz
[(b+ r)
π
2− 4
3r
]. (6.26)
Falta calcular Iz , de la Figura 6.25 tenemos que
Iz = Iz1 + Iz2 + Iz3 ,
donde Izi , i = 1, 2, 3 son los segundos momentos de inercia de las partes ien las que se ha dividido la seccion. Es facil ver de (5.39) que
Iz1 =th3
12, Iz2 =
bt3
12,
en tanto que Iz3 =∫Ay2 dA, luego de forma aproximada se puede tomar
y = r sin θ, dA = rt dθ por lo que
Iz3 ≈∫ π/2
−π/2r3t sin2 θ dθ = r3t
π
2,
por lo que
Iz ≈th3
12+bt3
12+ r3t
π
2. (6.27)
205
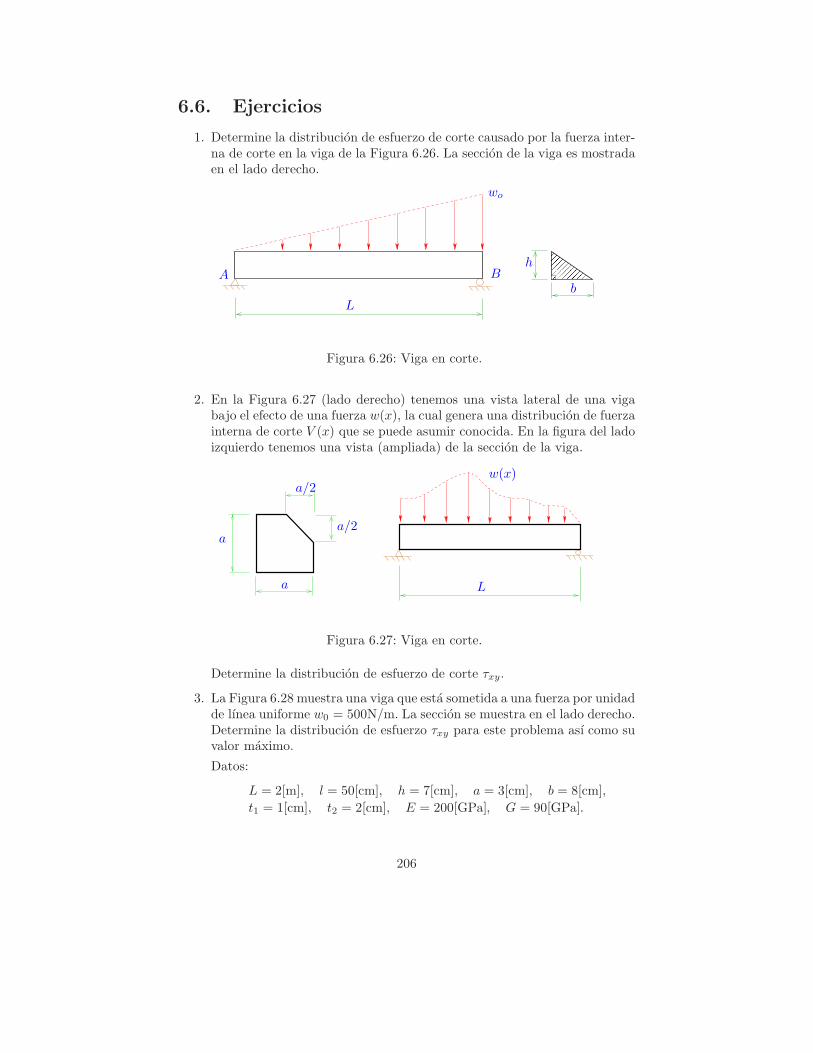
6.6. Ejercicios
1. Determine la distribucion de esfuerzo de corte causado por la fuerza inter-na de corte en la viga de la Figura 6.26. La seccion de la viga es mostradaen el lado derecho.
��������������������
��������������������
����
����
������
������
���
���
����������������
����
����
���
���
������������������������������������������������������
A B
L
wo
h
b
Figura 6.26: Viga en corte.
2. En la Figura 6.27 (lado derecho) tenemos una vista lateral de una vigabajo el efecto de una fuerza w(x), la cual genera una distribucion de fuerzainterna de corte V (x) que se puede asumir conocida. En la figura del ladoizquierdo tenemos una vista (ampliada) de la seccion de la viga.
a
a
a/2
a/2
L
w(x)
Figura 6.27: Viga en corte.
Determine la distribucion de esfuerzo de corte τxy.
3. La Figura 6.28 muestra una viga que esta sometida a una fuerza por unidadde lınea uniforme w0 = 500N/m. La seccion se muestra en el lado derecho.Determine la distribucion de esfuerzo τxy para este problema ası como suvalor maximo.
Datos:
L = 2[m], l = 50[cm], h = 7[cm], a = 3[cm], b = 8[cm],
t1 = 1[cm], t2 = 2[cm], E = 200[GPa], G = 90[GPa].
206

������������������������������������������
������������������������������������������
A B
L l
w0
a
b
t1 t2
h
Vista ampliada seccion
x
y
Figura 6.28: Viga bajo fuerza uniforme.
207

Capıtulo 7
Energıa de deformacion
7.1. Motivacion. Energıa especıfica
Es un hecho conocido que cuando un resorte de constante k se somete a unafuerza F de compresion o traccion, tal como se muestra en la Figura 7.1, endonde ∆L = kF , el resorte acumulara energıa elastica. Si el resorte se asume
k
k
L
∆L
F
Figura 7.1: Resorte que se deforma y la energıa elastica.
como perfectamente elastico, dicha energıa se puede recuperar de manera com-pleta, como por ejemplo, por medio de trabajo mecanico hecho por el resortehacia el medio ‘ambiente’.
La misma idea se puede extrapolar al caso de un cuerpo elastico continuo,que es la base de nuestro analisis en este texto. El cuerpo al deformarse tambienacumulara energıa elastica, y si se asume que no hay disipacion (que es la basede la definicion de un cuerpo elastico), la energıa se puede recuperar de formacompleta como trabajo mecanico.
En el caso de un cuerpo continuo basta determinar la energıa de deforma-cion en un cubo diferencial como el mostrado en la Figura 7.2, bajo la accionde las distintas componentes del tensor de esfuerzos. Una vez determinada laenergıa acumulada en el cubo, se puede obtener la energıa total para el cuerpopor medio de una integral de volumen.
208

x
y
z
dx
dy
dz
σx
σy
σz
τxyτxy
τxzτxz
τyz
τyz
Figura 7.2: Cubo diferencial bajo el efecto de las componentes del tensor deesfuezos.
En este capıtulo nos interesaremos en determinar la energıa elastica acumuladapor un cuerpo bajo la accion de fuerzas externas, con dos propositos en mente.Primero, en el capıtulo siguiente usaremos estas expresiones para la enegıa, paradesarrollar un metodo alternativo para determinar las deformaciones o despla-zamiento en un cuerpo bajo la accion de fuerzas externas, dicho metodo se basaen el teorema de Castigliano. Una segunda aplicacion del concepto de energıade deformacion proviene de la teorıa del lımite de comportamiento elastico, enparticular de la teorıa de Von Mises, la cual esta basada en una descomposicionde la energıa, y el uso de una parte de la energıa elastica para establecer unlımite de transicion entre el comportamiento elastico y el plastico para proble-mas tridimensionales.
El cuerpo es elastico, de modo que la energıa acumulada se asume igual altrabajo hecho por las cargas externas en el cubo. Calcularemos pues el trabajomecanico debido a las distintas componentes del tensor de esfuerzos mostradasen la Figura 7.2. Usaremos el principio de superposicion, en donde el traba-jo total se asumira como la suma del trabajo hecho por cada componente deltensor de esfuerzos por separado. Partiremos pues con el trabajo hecho por lacomponente σx.
En la Figura 7.3 tenemos una representacion del cubo diferencial solo bajoel efecto de σx, con su forma inicial y su forma deformada. De la figura podemosver que la ‘fuerza’ y el ‘desplazamiento’ que sufre la cara en donde se aplica sepueden calcular como
Fuerza = σx dydz︸ ︷︷ ︸dA
, Desplazamiento = εxx dx. (7.1)
Estamos trabajando en el rango de comportamiento elastico, y ademas asu-mimos que el comportamiento es lineal, de modo que la relacion entre σx y εxxes una lınea recta con origen en cero. Como consecuencia el grafico para σxdydzen funcion de εxx dx serıa como se muestra en la Figura 7.4.
209
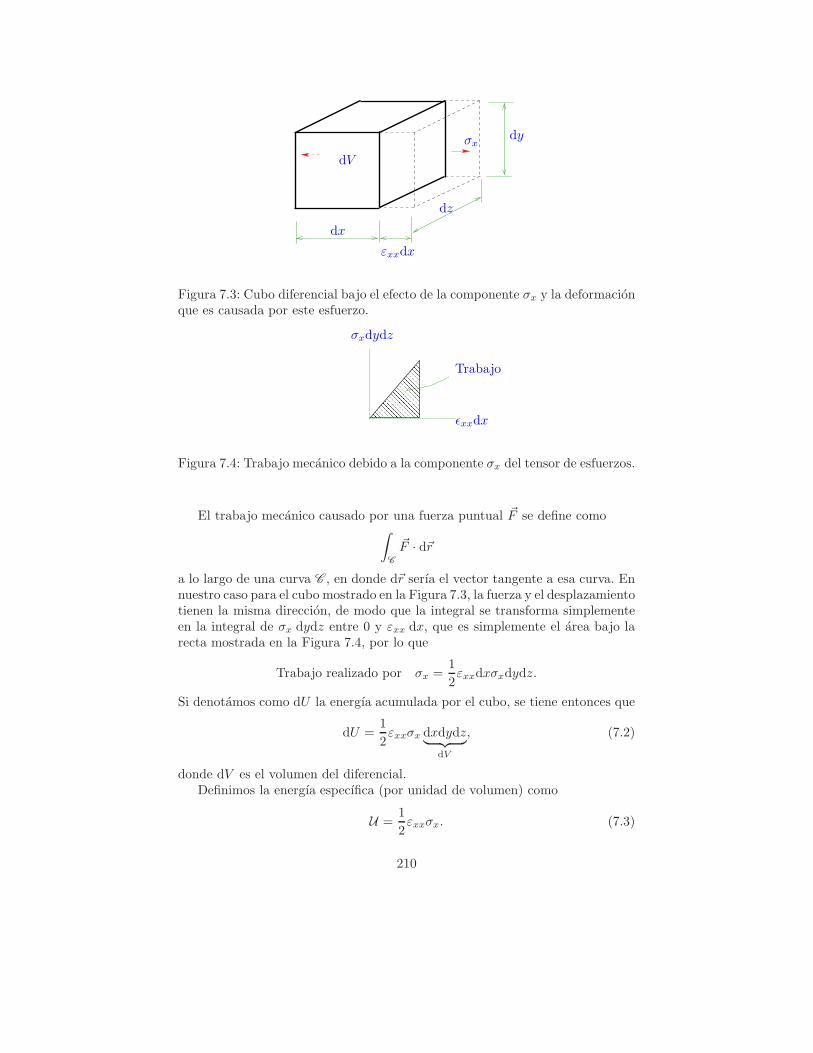
dV
εxxdx
dx
dy
dz
σx
Figura 7.3: Cubo diferencial bajo el efecto de la componente σx y la deformacionque es causada por este esfuerzo.
�������������������������������������������������
������������������������������������������������� Trabajo
ǫxxdx
σxdydz
Figura 7.4: Trabajo mecanico debido a la componente σx del tensor de esfuerzos.
El trabajo mecanico causado por una fuerza puntual ~F se define como∫
C
~F · d~r
a lo largo de una curva C , en donde d~r serıa el vector tangente a esa curva. Ennuestro caso para el cubo mostrado en la Figura 7.3, la fuerza y el desplazamientotienen la misma direccion, de modo que la integral se transforma simplementeen la integral de σx dydz entre 0 y εxx dx, que es simplemente el area bajo larecta mostrada en la Figura 7.4, por lo que
Trabajo realizado por σx =1
2εxxdxσxdydz.
Si denotamos como dU la energıa acumulada por el cubo, se tiene entonces que
dU =1
2εxxσx dxdydz︸ ︷︷ ︸
dV
, (7.2)
donde dV es el volumen del diferencial.Definimos la energıa especıfica (por unidad de volumen) como
U =1
2εxxσx. (7.3)
210

De las expresiones anteriores es facil ver que si en lugar de determinar laenergıa elastica debido a σx, se hace respecto a σy o σz , las expresiones tendrıanla misma forma que (7.3), intercambiando los ındices por y o z, respectivamente.
Determinaremos ahora la energıa acumulada por el mismo cubo, pero ahorasometido solo a una componente de esfuerzo de corte, por ejemplo τxy, tal comose muestra en la Figura 7.5.
x
y
z
dx
dy
dz
ϑxy
τxyϑxydx
Figura 7.5: Cubo diferencial bajo el efecto de la componente τxy del tensoresfuerzos y efecto sobre la deformacion.
De (3.80) hay una relacion directa y lineal entre τxy y ϑxy, de modo que antela aplicacion de solo τxy, el cubo diferencial solo sufrirıa una deformacion encorte, como se muestra con lıneas segmentadas en la Figura 7.5. Como se asumepequenas deformaciones, el desplazamiento vertical serıa aproximadamente elarco descrito por el angulo ϑxy, tal como se muestra en la misma figura. Tenemospues
Fuerza = τxydydz, Desplazamiento = ϑxydx. (7.4)
Estamos trabajando en el rango elastico con un modelo lineal, se sabe queτxy y ϑxy se relacionan a traves de la constante G, luego siguiendo un argumentosimilar al usado con la Figura 7.4, tenemos que
Trabajo realizado por τxy =1
2ϑxydxτxydydz,
de forma tal que
dU =1
2ϑxyτxydxdydz, (7.5)
y la energıa especıfica es
U =1
2ϑxyτxy. (7.6)
Las expresiones para la energıa especıfica en el caso que se aplicase τxz o τyzen lugar de τxy, tiene una forma similar cambiando los subındices respectivos.
Vamos ahora a usar el principio de superposicion mencionado en un parrafoanterior, asumiendo ademas que en todo este proceso de deformacion y acumu-lacion de energıa no hay ‘efectos cruzados’ o ‘acoplados’, es decir la deformacion
211

longitudinal no tendrıa efectos sobre la deformacion en corte y viceversa. Luego,con estos supuestos la energıa especıfica total serıa simplemente la suma de lasenergıas especıficas debido a las distintas componentes del tensor de esfuerzos,de forma tal que
U =1
2(εxxσx + εyyσy + εzzσz + ϑxyτxy + ϑxzτxz + ϑyzτyz). (7.7)
La energıa total acumulada por el cuerpo, si el volumen del mismo es V ,serıa
UT =
∫
V
U dV. (7.8)
7.2. Forma alternativa
La expresion para la energıa especıfica (7.7) se puede reescribir de maneraalternativa solo en terminos de las deformaciones o de los esfuerzos usando(3.84)-(3.89) o (3.90)-(3.93). En el caso de que estuviesemos interesados en re-escribirla solo en terminos de las componentes del tensor de esfuerzos, de (3.84)-(3.89) tenemos que usar
εxx =1
E[σx − ν(σz + σy)],
εyy =1
E[σy − ν(σx + σz)],
εzz =1
E[σz − ν(σx + σy)],
εxy =τxy2G
,
εxz =τxz2G
,
εyz =τyz2G
.
Reemplazando en (7.7) despues de algunas manipulaciones tendrıamos
U =1
2E(σ2x + σ2
y + σ2z)−
ν
E(σxσy + σxσz + σyσz) +
1
2G(τ2xy + τ2xz + τ2yz). (7.9)
7.3. Ejemplos
En esta seccion mostraremos varios ejemplos simples en donde calcularemosla energıa elastica total acumulada por un cuerpo:
1. Extension uniforme de una barra bajo traccion. En la Figura 7.6tenemos una barra de seccion arbitraria de area A sometida a una fuerzade traccion P .
En un problema de esta naturaleza se asume que la unica componentedel esfuerzo que es importante es σx, y por el principio de Saint Venant
212

���������
���������
x
yA
P
L
Figura 7.6: Energıa acumulada por barra bajo el efecto de una fuerza de traccion.
tenemos que es igual a
σx =P
A.
De (7.9) tenemos entonces que
U =1
2E
P 2
A2,
por lo que de (7.8) se llega a
UT =
∫
V
U dV =
∫
V
1
2E
P 2
A2dxdydz =
∫ L
0
1
2E
P 2
Adx. (7.10)
Si E y A no dependen de x se obtiene
UT =P 2L
2EA. (7.11)
2. Viga bajo flexion. En este caso consideremos una viga como la mostradaen la Figura 7.7 sometida a un par de momentos M en los extremos. En
������������
������������
x
yA
M M
L
Figura 7.7: Energıa acumulada por barra bajo el efecto de un momento.
un caso mas general M se puede tambien pensar en el momento internocausado por otras cargas sobre la viga. En las siguientes expresiones noconsideraremos el efecto de la deformacion por corte.
En un problema de este tipo entonces la unica componente importante delesfuerzo es (5.9)
σx = −M(x)
Izy,
213

de modo que de (7.9) tenemos que
U =1
2E
M(x)2y2
I2z,
y como resultado de (7.8)
UT =
∫
V
1
2E
M(x)2
I2zy2 dV =
∫
V
1
2E
M(x)2
I2zy2 dxdydz,
pero M e Iz solo podrıan depender de x, en tanto que tambien se asumeque E no depende de y o z, luego la ultima integral anterior queda como
UT =
∫ L
0
1
2E
M(x)2
I2z
∫
A
y2 dydz︸ ︷︷ ︸dA
dx,
pero de (5.7) tenemos que por definicion Iz =∫A y
2 dA, de modo que
UT =
∫ L
0
1
2E
M(x)2
Izdx. (7.12)
3. Eje de seccion circular bajo torsion: En este problema consideremosla Figura 7.8, en donde tenemos un eje de seccion circular de area A bajoel efecto de torques opuesto aplicados en sus extremos.
������������
������������
x
AT T
L
Figura 7.8: Energıa acumulada por un eje bajo torsion.
Podemos usar un sistema de coordenadas cilındrico con x como eje axial,r como distancia radial y ξ coordenada angular.
En un problema de esta naturaleza el esfuerzo de corte esta dado por (4.8)
τ =Tr
J.
En un sistema cilındrico este esfuerzo de corte serıa la componente τxξ, ysi asumimos que es la unica componente importante para el problema, de(7.9) tenemos
U =1
2G
T 2r2
J2,
214

luego en (7.8) se llega a
UT =
∫
V
1
2G
T 2r2
J2dV =
∫ L
0
∫
A
1
2G
T 2r2
J2dAdx.
Como T no depende de la posicion en la seccion, y se asume que G y Jtampoco dependen de dicha posicion, se llega a
UT =
∫ L
0
[T 2
2GJ2
(∫
A
r2 dA
)]dx,
y como por definicion (4.4) tenemos que J =∫Ar2 dA, se llega finalmente
a
UT =
∫ L
0
T 2
2GJdx. (7.13)
4. Viga de seccion rectangular en cortadura: Aquı calcularemos laenergıa acumulada por una viga considerando solo el fenomenos de es-fuerzo de corte por fuerza interna de corte, aplicado solo a una viga deseccion rectangular tal como se muestra en la Figura 7.9.
����������������
������������������������x
A
y
zVV
dA
b
h
Figura 7.9: Energıa acumulada por una viga de seccion rectangular bajo corte.
En una viga de seccion rectangular solo considerando el esfuerzo de cortepor fuerza interna de corte, de (6.9) la unica componente importante deltensor de esfuerzos es
τxy =V (x)
2Iz
(h2
4− y2
),
por lo que de (7.9) tenemos
U =1
2Gτ2xy =
1
2G
V (x)2
4I2z
(h2
4− y2
)2
,
y de (7.8) obtenemos
UT =
∫
V
1
2G
V (x)2
4I2z
(h2
4− y2
)2
dV =
∫ L
0
∫
A
1
2G
V (x)2
4I2z
(h2
4− y2
)2
dAdx.
215

De la figura podemos ver que dA = b dy. Como ni V (x), Iz ni G depen-derıan de y tenemos
UT =
∫ L
0
[1
2G
V (x)2b
4I2z
(∫ h/2
−h/2
(h2
4− y2
)2
dy
)]dx,
y como∫ h/2−h/2
(h2
4 − y2)2
dy = h5
30 , usando Iz =bh3
12 , finalmente se obtiene
UT =3
5
∫ L
0
V (x)2
GAdx, (7.14)
donde A = bh.
216

Capıtulo 8
Teorema de Castigliano
En este capıtulo usaremos las expresiones para la energıa elastica acumu-lada por un cuerpo para desarrollar un metodo alternativo para determinardeformaciones (desplazamientos) en un cuerpo debido a la aplicacion de fuerzasexternas.
Considerese la Figura 8.1, en donde tenemos una representacion esquematicade un cuerpo en equilibrio estatico sometido a un conjunto de fuerzas puntuales.
F1
F2
Fi Fn
Figura 8.1: Cuerpo sometido a un conjunto de fuerzas puntuales.
Sea UT la energıa total acumulada por el cuerpo debido a todas las cargasexternas, del capıtulo anterior podemos ver que
UT = UT (F1, F2, ..., Fi, ..., Fn), (8.1)
es decir UT es funcion de todas estas fuerzas externas.Asumamos ahora que la fuerza Fi sufre un incremento muy pequeno en su
magnitud dFi, luego usando una aproximacion con series de Taylor tenemos
UT (F1, F2, ..., Fi + dFi, ..., Fn) ≈ UT (F1, F2, ..., Fi, ..., Fn) +∂UT∂Fi
dFi, (8.2)
217

donde ∂UT
∂Fiesta siendo evaluado con (F1, F2, ..., Fi, ..., Fn).
En un cuerpo elastico la energıa acumulada por el cuerpo es igual al trabajoexterno hecho sobre el, de modo que el trabajo inicial (antes de incrementar Fi)es igual a UT (F1, F2, ..., Fi, ..., Fn). Por otra parte, si Fi se incrementa en dFi,podemos calcular el incremento en el trabajo de la siguiente forma. En la Figura8.2 tenemos el mismo cuerpo mostrado anteriormente, en donde en particularpodemos apreciar la fuerza Fi, la que en ese punto de aplicacion genera undesplazamiento δi. Si la fuerza se incrementa en dFi el incremento en trabajo
F1
F2
Fi
dFi
Fn
δi
Figura 8.2: Cuerpo sometido a un conjunto de fuerzas puntuales. Deformacionen el punto de aplicacion de Fi.
mecanico1 es aproximadamente igual a2
δidFi.
El trabajo final total al incrementar la fuerza es entonces igual a
UT (F1, F2, ..., Fi, ..., Fn)︸ ︷︷ ︸Trabajo inicial
+δidFi. (8.3)
Como el trabajo final es igual a la energıa UT (F1, F2, ..., Fi + dFi, ..., Fn)(debido a que el cuerpo es elastico) de (8.2) y (8.3) tenemos
∂UT∂Fi
dFi = δidFi,
de donde finalmente obtenemos
δi =∂UT∂Fi
. (8.4)
1Hay que recordar que por definicion el trabajo es igual a fuerza por distancia.2En realidad al aplicar Fi + dFi el desplazamiento δi tambien deberıa aumentar, en este
caso en dδi, pero ahora si se calcula el incremento en el trabajo tendremos δidFi mas dδidFi
que es de segundo orden en el diferencial y por tanto se desprecia.
218

Esta es la forma basica del teorema de Castigliano.En el caso en que ademas se apliquen m momentos puros Cj tenemos que la
energıa total UT deberıa escribirse como
UT = UT (F1, F2, ..., Fi, ..., Fn, C1, C2, ..., Cj , ..., Cm). (8.5)
Si θj es el angulo de rotacion que se produce en j (en donde se aplica Cj)siguiendo un metodo similar al mostrado anteriormente se puede deducir que
θj =∂UT∂Cj
. (8.6)
8.1. Ejemplos
1. En la Figura 8.3 tenemos una viga con una fuerza puntual F aplicada ensu centro. Determinaremos los desplazamientos que se producen en dichopunto causados por flexion y corte (de forma separada).
F
L/2L
Figura 8.3: Ejemplo del uso del teorema de Castigliano. Viga bajo la accion deuna carga puntual.
a) Flexion: En este primer caso solo consideramos la flexion en la acu-mulacion de energıa elastica UT . De (7.12) tenıamos que
UTf=
∫ L
0
1
2EIzM(x)2 dx, (8.7)
en donde el subındice f significa energıa por flexion.
De la Figura 8.3 es facil comprobar que
M(x) =
{F2 x x < L
2 ,F2 (L− x) x > L
2 .(8.8)
El desplazamiento en F debido solo a flexion lo denotaremos comoδflexion y de (8.4) se tiene que
δflexion =∂UTf
∂F. (8.9)
219

Usando (8.7) en (8.9) se llega a
δflexion =
∫ L
0
1
2EIz2M(x)
∂M
∂Fdx =
1
EIz
∫ L
0
M(x)∂M
∂Fdx, (8.10)
en donde se ha asumido que E, Iz no dependen de x.
De (8.8) tenemos que
∂M
∂F=
{x2 x < L
2 ,L−x2 x > L
2 .(8.11)
Usando (8.8) y (8.11) en (8.10) se llega finalmente a
∫ L
0
M(x)∂M
∂Fdx =
∫ L/2
0
F
4x2 dx+
∫ L
L/2
F
4(L− x)2 dx =
FL3
48,
por lo que tenemos
δflexion =1
EIz
FL3
48. (8.12)
b) Corte: En el caso que solo consideremos energıa de deformacioncausada por fuerzas internas de corte (para una viga de seccion rec-tangular) de (7.14) tenemos
UTc=
3
5
∫ L
0
V (x)2
GAdx, (8.13)
donde el subındice c significa energıa por fuerza de corte interna.
De (8.4) tenemos que
δcorte =∂UTc
∂F, (8.14)
donde δcorte serıa el desplazamiento en el punto de aplicacion de lafuerza puntual F solo considerando corte.
Tenemos que∂UTc
∂F=
6
5
1
GA
∫ L
0
V (x)∂V
∂Fdx, (8.15)
donde se ha asumido que A, G no dependen de la posicion x a lolargo de la viga.
En el problema mostrado en la Figura 8.3 es facil ver que
V (x) =
{−F
2 x < L2 ,
F2 x > L
2 ,(8.16)
de modo que∂V
∂F=
{− 1
2 x < L2 ,
12 x > L
2 .(8.17)
220

Usando (8.16) y (8.17) tenemos que
∫ L
0
V (x)∂V
∂Fdx =
∫ L/2
0
F
4dx+
∫ L
L/2
F
4dx =
FL
4,
de modo que en (8.14) tenemos
δcorte =3FL
10GA. (8.18)
c) Desplazamiento total: Calcularemos ahora el desplazamiento totalδtotal en el punto de aplicacion de F , para ello usaremos el principiode superposicion. Para una viga de seccion rectangular se tiene Iz =bh3
12 = Ah2
12 , de (8.12) y (8.18) obtenemos
δtotal = δflexion + δcorte =1
EAh2
12
FL3
48+
3
10
FL
GA. (8.19)
Para la mayorıa de los aceros tenemos que ν ≈ 0,25 luego comoG = E
2(1+ν) , se tiene que G ≈ 12,5E, por lo que en (8.19) se obtiene
δtotal =1
EAh2FL3
4+
7,5
10
FL
EA=FL
EA
[1
4
(L
h
)2
+7,5
10
]. (8.20)
En el caso en que L ≫ h, del resultado anterior podemos apreciarque δflexion ≫ δcorte, por lo que en vigas ‘largas’ el efecto del corte enel desplazamiento se puede despreciar frente al desplazamiento porla flexion.
2. La viga de la Figura 8.4, que tiene seccion rectangular, esta empotrada ensu extremo izquierdo y bajo la accion de una fuerza uniforme por unidadde largo wo. Usando el teorema de Castigliano estamos interesados endeterminar el desplazamiento vertical en el punto P .
wo
xL
P
Q
Figura 8.4: Ejemplo del uso del teorema de Castigliano. Viga bajo la accion deuna distribucion uniforme de fuerza.
El teorema de Castigliano (8.4) solo es aplicable para determinar desplaza-mientos en puntos en donde se esten aplicando fuerzas puntuales. Si bien
221

es cierto que la viga de la figura acumula energıa elastica, no podemos usarel teorema de manera directa en ella para determinar el desplazamientoen P . Para usar (8.4) primero vamos a asumir que en P se esta aplicandouna fuerza puntual Q. Determinaremos la energıa elastica total debido awo y Q, y con esta energıa calcularemos el desplazamiento en P , parafinalmente hacer Q = 0, con lo que se recuperara el problema original.
Consideremos un sistema de coordenadas x que parte desde el extremoderecho y se mueve hacia la izquierda. Asumase que a una distancia x sehace un corte imaginario, en este caso es facil demostrar que la fuerza decorte y el momento interno son iguales a
V (x) = wox+Q, M(x) = −wox2
2−Qx, (8.21)
por lo que∂V
∂Q= 1,
∂M
∂Q= −x. (8.22)
Usando (8.21) y (8.22) por el principio de superposicion y (8.10), (8.15)tenemos que el desplazamiento total en P considerando Q y wo es igual a
δtotal =
∫ L
0
1
EIz
(wox
3
2+Qx2
)dx+
6
5GA
∫ L
0
wox+Q dx,
=1
EIz
(woL
4
8+QL3
3
)+
6
5GA
(woL
2
2+QL
). (8.23)
En el problema original solo tenıamos wo aplicado sobre la viga de modoque ahora hacemos Q = 0 y del resultado anterior llegamos a que
δtotal =woL
4
8EIz+
3woL2
5GA. (8.24)
222

8.2. Ejercicios
1. En la Figura 8.5 se tiene una viga para la cual I = 4 ∗ 10−6m4 y E =190GPa. La viga esta empotrada en A, en tanto que en B esta sobre unsoporte simple. En el extremo derecho de la viga se aplica un momentoM0 = 500Nm. La viga tambien esta sometida a una fuerza uniforme w0 =1000N/m. Usando el teorema de Castigliano determine las reacciones enA y B. Se tiene L = 2m.
LLL
A B
M0
w0
Figura 8.5: Problema calculo de reacciones en viga.
2. La viga de seccion rectangular ABC de la Figura 8.6 esta bajo el efecto deuna carga vertical P en C y esta empotrada en A. La seccion se muestraen la parte inferior de la figura.
���������
���������
h
b
ed
P
A
B C
Figura 8.6: Viga doblada.
Usando Castigliano:
Determine la deflexion vertical δy en C
Determine la deflexion horizontal δx en C.
Determine el angulo de rotacion en C
223

3. En la Figura 8.7 tenemos dos vigas 1 y 2. La viga 1 esta sostenida porapoyos simples en tanto que la viga 2 esta empotrada en un extremo ybajo la accion de una fuerza uniforme wo. Ambas vigas estan unidas porun cable. Usando Castigliano determine la deflexion en el punto A.
a
a
1
2wo L
A
cable
Figura 8.7: Dos vigas unidas por un cable.
Datos:
Viga 1 a = 1m, E =200GPa, I1 = 10−6m4
Viga 2 L = 3m, E =200GPa, I2 = 2 ∗ 10−6m4, wo = 10kN/m
Cable diametro 1cm, largo 50cm, E = 180GPa.
4. En la Figura 8.8 se tiene una viga para la cual I = y E =. La vigaesta empotrada en A, en tanto que en B esta sobre un soporte simple.En el extremo derecho de la viga se aplica un momento M0 =. La vigatambien esta sometida a una fuerza uniforme w0 =. Usando el teorema deCastigliano determine las reacciones en A y B. Se tiene L = 2m.
LLL
A B
M0
w0
Figura 8.8: Viga bajo varias cargas.
224

5. En la Figura 8.9 se tiene una viga de longitud L sometida a una fuerzauniforme wo y una fuerza puntual P . Si se conoce el producto EI, usandoel teorema de Castigliano determine el valor de la fuerza P de modo queen el punto B el desplazamiento vertical de la viga sea cero.
AB C
LL/2
L/4
P
wo
Figura 8.9: Viga sometida a fuerzas uniforme y puntual.
6. Una viga ABC como la mostrada en la Figura 8.10 esta empotrada en Ay en B esta sobre un resorte3 de constante k. Una carga concentrada Pse aplica en C. Determine el desplazamiento hacia abajo δc del punto C.Resuelva el problema usando el teorema de Castigliano.
a
P
L
A B C
k
Seccion
h
b
e
Figura 8.10: Viga apoyada en resorte.
Datos: P = 1kN, L = 2m, a = 60cm, E = 200GPa, b = 8cm, h = 7cm,e = 5mm, k = 5kN/m.
3El resorte inicialmente no esta ni estirado ni comprimido.
225
Capıtulo 9
Esfuerzos combinados:Esfuerzos normales y decorte maximos
En todos los capıtulos anteriores hemos estudiado metodos ‘simples’ parael calculo de los esfuerzos y las deformaciones en situaciones sencillas, talescomo barras sometidas a traccion o compresion, ejes sometidos a torsion, vigassometidas a flexion y tambien considerando esfuerzos de corte. En cada unode estos capıtulos hemos estudiado distintos tipos de esfuerzos por separado,indicando en particular que las soluciones obtenidas aquı pueden considerarsecomo soluciones de problemas unidimensionales.
En este capıtulo veremos un metodo en el cual, con los resultados anterio-res, ahora estudiaremos problemas en donde tenemos varios tipos de esfuerzosy deformaciones actuando en un cuerpo. La base de este metodo sera el princi-pio de superposicion, mediante el cual un cuerpo sometido al mismo tiempo atorsion, flexion y fuerzas axiales en distintos planos, puede ser tratado de formaseparada para cada fenomeno, para despues calcular un tensor de esfuerzos to-tal simplemente sumando cada uno de los esfuerzos calculados previamente deforma separada. Esta es una forma aproximada de resolver problemas en 2 y 3dimensiones.
Primero haremos un repaso de algunos puntos importantes de la teorıa dela elasticidad que hemos visto en secciones anteriores.
En la Figura 9.1 tenemos una representacion de un cuadrado diferencial (pro-blema plano) con las tres componentes independientes del tensor de esfuerzos.Dichas componentes tiene que satisfacer las ecuaciones de equilibrio (sin fuerzasde cuerpo en el caso estatico)
∂σx∂x
+∂τxy∂y
= 0, (9.1)
∂τxy∂x
+∂σy∂y
= 0. (9.2)
226
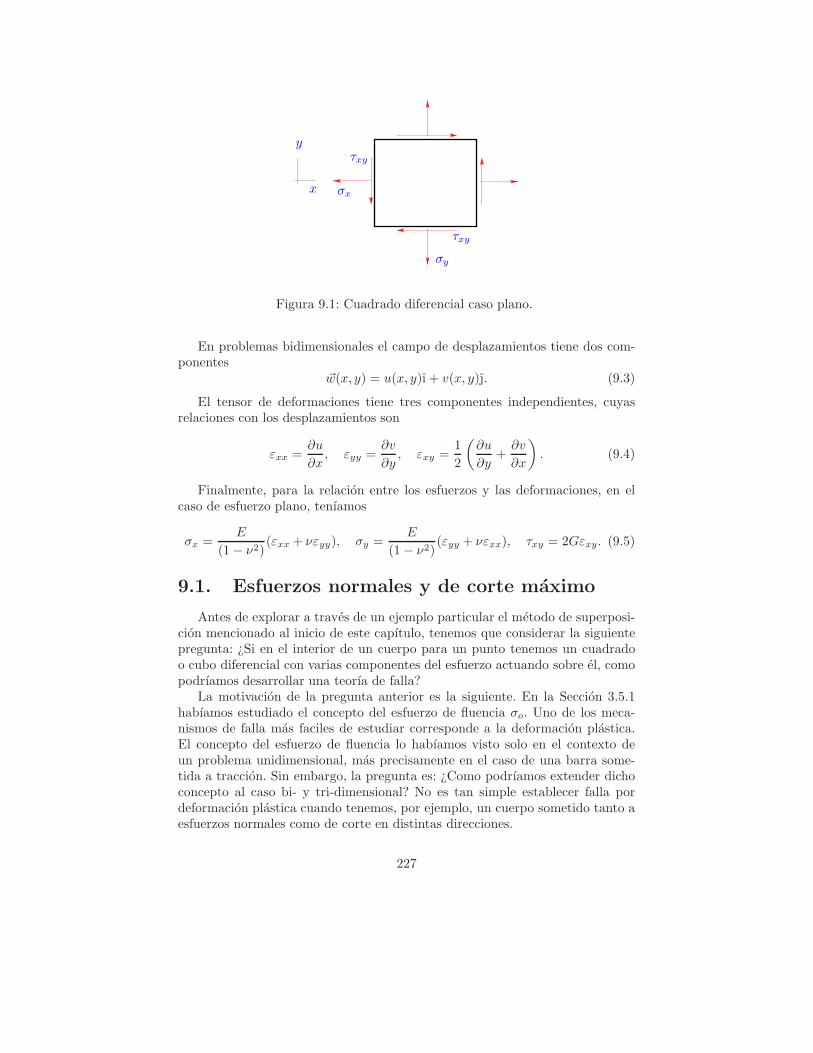
y
x σx
σy
τxy
τxy
Figura 9.1: Cuadrado diferencial caso plano.
En problemas bidimensionales el campo de desplazamientos tiene dos com-ponentes
~w(x, y) = u(x, y)ı + v(x, y). (9.3)
El tensor de deformaciones tiene tres componentes independientes, cuyasrelaciones con los desplazamientos son
εxx =∂u
∂x, εyy =
∂v
∂y, εxy =
1
2
(∂u
∂y+∂v
∂x
). (9.4)
Finalmente, para la relacion entre los esfuerzos y las deformaciones, en elcaso de esfuerzo plano, tenıamos
σx =E
(1− ν2)(εxx + νεyy), σy =
E
(1− ν2)(εyy + νεxx), τxy = 2Gεxy. (9.5)
9.1. Esfuerzos normales y de corte maximo
Antes de explorar a traves de un ejemplo particular el metodo de superposi-cion mencionado al inicio de este capıtulo, tenemos que considerar la siguientepregunta: ¿Si en el interior de un cuerpo para un punto tenemos un cuadradoo cubo diferencial con varias componentes del esfuerzo actuando sobre el, comopodrıamos desarrollar una teorıa de falla?
La motivacion de la pregunta anterior es la siguiente. En la Seccion 3.5.1habıamos estudiado el concepto del esfuerzo de fluencia σo. Uno de los meca-nismos de falla mas faciles de estudiar corresponde a la deformacion plastica.El concepto del esfuerzo de fluencia lo habıamos visto solo en el contexto deun problema unidimensional, mas precisamente en el caso de una barra some-tida a traccion. Sin embargo, la pregunta es: ¿Como podrıamos extender dichoconcepto al caso bi- y tri-dimensional? No es tan simple establecer falla pordeformacion plastica cuando tenemos, por ejemplo, un cuerpo sometido tanto aesfuerzos normales como de corte en distintas direcciones.
227

Con esa motivacion en mente, y considerando que en este capıtulo estudia-remos casos en donde tenemos varios tipos de esfuerzos actuando en un punto,es que desarrollaremos una teorıa que nos servira para dar respuesta a las pre-guntas anteriores.
Consideremos el esquema mostrado en el lado izquierdo en la Figura 9.2, endonde tenemos un cuerpo sometido a distintas cargas externas. En el interior
F1F1F1
F2
RR
PPP
Corte 1
Corte 1
Corte 2
Corte 2
Figura 9.2: Fuerzas internas en un cuerpo y su distribucion para distintos cortesimaginarios.
del cuerpo elijamos un punto arbitrario P , y realicemos dos cortes imaginariosque pasan por dicho punto, pero con distinta orientacion.
En los esquemas mostrados en el centro y en el lado derecho de la figuratenemos la porcion que queda al hacer el corte imaginario. Es facil apreciarque para los dos cortes la distribucion de fuerzas internas en general van a serdistintas, en particular en el punto de interes P .
Imaginemos que el punto P se encuentra en realidad en el interior de uncuadrado diferencial, y que dicho cuadrado (en realidad rectangulo) tambien esafectado por el corte imaginario, tal como se muestra en la Figura 9.3. En lascaras vertical y horizontal tenemos actuando sobre el cuadrado diferencial lascomponetes σx, σy, τxy del tensor de esfuerzos (caso plano), en tanto que en lasuperficie oblicua (la superficie de corte imaginario) tenemos actuando el vectorde esfuerzos ~t. Como el cuadrado diferencial cortado y todas sus superficies seasumen muy pequenas, solo se dibuja un vector esfuerzos en cada cara. En lafigura el vector ~n es el vector unitario normal a la superficie. Notese que engeneral ~t y ~n no necesariamente estan alineados.
El vector ~t se puede descomponer de varias formas (ver Seccion 3.3.4), aquıen particular nos interesa determinar sus componentes normal a la superficiede corte imaginario σn (componente normal), y su componente tangencial τ(componente en corte).
Mostraremos ahora que para valores fijos de σx, σy y τxy las componentes σny τ van a variar, o si se quiere, van a depender de θ. Una pregunta interesantees: ¿Cuales son los valores de θ para los cuales σn y τ son maximos? El motivode esta pregunta tiene que ver justamente con una ‘teorıa de falla’ como laenunciamos al inicio de esta seccion. En el caso bidimensional, un posible criterio
228

x
y
dx
dyσx
σy
ds
θ
θθθ
~n
~t
σnττxy
τxy
Figura 9.3: Cuadrado diferencial con corte oblicuo.
de falla podrıa estar asociado a valores para σn y/o τ superiores a cierto lımite.Veremos en detalle esto en la Seccion 10.2.
Con la motivacion anterior observemos nuevamente la Figura 9.3 y realize-mos el balance de fuerzas para el elemento diferencial en las direcciones normaly tangencial, el esquema del lado derecho nos ayudara en el balance. Si hacemossuma de fuerzas en el sentido normal n tendremos1
∑Fn = 0 ⇒ σnds−σy cos θdx− τxy sin θdx−σx sin θdy− τxy cos θdy = 0,
luego dividiendo por ds tenemos
σn − σy cos θdx
ds− τxy sin θ
dx
ds− σx sin θ
dy
ds− τxy cos θ
dy
ds= 0.
Pero por definicion de la figura vemos que
dx
ds= cos θ,
dy
ds= sin θ, (9.6)
por lo que reemplazando en el balance de fuerzas, despues de algunas manipu-laciones, obtenemos
σn =1
2(σx + σy) +
1
2(σy − σx) cos(2θ) + τxy sin(2θ). (9.7)
Podemos apreciar ahora que efectivamente σn = σn(θ). Lo que nos interesaahora es determinar para cuales θ esta componente del vector de esfuerzos es
1Para obtener fuerzas a partir de las componentes del tensor y del vector de esfuerzosdebemos multiplicar por el area en las que estas componentes actuan (pues en las caras delelemento diferencial se asumen constantes), que en este caso corresponde a las longitudes delos lados multiplicados por la ‘profundidad’ del elemento, que por simplicidad se puede asumirunitaria.
229
maxima (mınima), para ello buscamos las soluciones de dσn
dθ = 0. De la expresionanterior tenemos que resolver la ecuacion
−(σy − σx) sin(2θ) + 2τxy cos(2θ) = 0, (9.8)
cuya solucion, que llamaremos θn, se puede obtener de
tan(2θn) =2τxy
σy − σx. (9.9)
La ecuacion anterior tiene dos soluciones, y se puede probar que una de ellas nosdara un maximo para σn y la otra nos dara un mınimo para esa componente.
Para el balance de fuerzas en el sentido tangencial, nuevamente de la Figura9.3 podemos ver que
∑Ftan = 0 ⇒ τds−σy sin θdx+ τxy cos θdx− τxy sin θdy+σx cos θdy = 0,
y dividiendo por ds y usando (9.6), despues de algunas manipulaciones se llegaa
τ =1
2(σy − σx) sin(2θ)− τxy cos(2θ). (9.10)
Tambien nos interesa buscar θ para que τ = τ(θ) sea maximo (mınimo). Dedτdθ = 0, usando el resultado anterior, vemos que dichos valores se obtienen alresolver
(σy − σx) cos(2θ) + 2τxy sin(2θ) = 0, (9.11)
cuya solucion, que llamaremos θτ , es
tan(2θτ ) =σx − σy2τxy
. (9.12)
La ecuacion anterior tiene dos soluciones, para una de ellas obtendrıamos unvalor maximo, y para la otra un valor igual en magnitud pero con signo negativo,es decir un mınimo.
De (9.9) y (9.12) podemos apreciar que
tan(2θn +
π
2
)= tan(2θτ ), (9.13)
o sea θn y θτ estan separados por π/4.Usando (9.9) en (9.7) y (9.12) en (9.10) se puede demostrar que los valores
maximos (mınimos) para σn y τ , que llamaremos σnmy τm, estan dados por
σnm=σx + σy
2±
√(σy − σx
2
)2
+ τ2xy, (9.14)
τm = ±
√(σy − σx
2
)2
+ τ2xy. (9.15)
230

Imaginemos que σn y τ son en realidad coordenadas en un ‘espacio de esfuer-zos’, en donde σn serıa la coordenada horizontal y τ la vertical. En otras palabrascualquier vector de esfuerzos ~t se podrıa representar en este espacio (caso bidi-mensional) como un punto. Es facil comprobar que las soluciones (9.14)-(9.15)vienen a ser cierto puntos especıficos en la circunferencia dada por la siguienteecuacion parametrica en dicho espacio
[σn −
(σx − σy
2
)]2+ τ2 =
(σy − σx
2
)2
+ τ2xy. (9.16)
Se puede verificar que esta ecuacion se cumple para cualquier θ para σn y τdados por (9.7) y (9.10).
9.2. Cırculo de Mohr
La ecuacion para la circunferencia descrita en (9.16) nos permitirıa encontrarlos esfuerzos normales y de corte maximos o mınimos de manera grafica. Parahacer esto considerese el cuadrado diferencial con los esfuerzos mostrados en laFigura 9.4.
(L)
(K)
σx
σy
τxy
τxy
Figura 9.4: Circulo de Mohr. Cuadrado diferencial con esfuerzos caso plano.
Ahora consideremos el espacio con ejes σn y τ , es decir el espacio en dondecada cara del cuadrado diferencial con sus dos componentes del esfuerzo sepuede representar en un punto en dicho espacio. Se pueden escoger dos carasarbitrarias de dicho cuadrado que esten a noventa grados, llamaremos a la carasuperior el punto (L) con coordenadas σy , τxy y la cara lateral derecha (K)con coordenadas σx, τxy. Vamos a asumir que los esfuerzos de corte que tienenorientacion en el sentido de las manecillas del reloj son positivos.
En la Figura 9.5 tenemos el espacio σn − τ , construiremos algo que llamare-mos el ‘cırculo de Mohr’ de la siguiente forma:
Asumamos que para este ejemplo σx > σy > 0. Ubiquemos el punto (K)en la figura, en donde como en este caso τxy < 0 tenemos que colocardicho punto en el sector negativo para τ .
231

σn
τ
σxσy
τxy
−τxy
ab
c
d
(L)
(K)
O
2θ
Figura 9.5: Cırculo de Mohr.
Ubiquemos el punto (L) el cual podemos apreciar se ubica en el eje positivopara τ .
Trazemos una lınea recta desde (L) a (K). Dicha lınea corta al eje σn enel punto O, ademas se puede ver que el punto O corta a la lınea justo enla mitad.
En el punto O ubicaremos la punta de un compas, y la punta del lapiz seubica en el punto (L) o en el punto (K).
Se traza ahora un cırculo con centro en O. Se pueden distinguir cuatropuntos importantes: a, b, c y d.
Notemos que este cırculo no es mas que la representacion grafica de (9.16).Cualquier par de punto σn, τ a lo largo de la circunferencia viene a repre-sentar el mismo estado de esfuerzos en el punto, pero visto en un sistemade coordenadas rotada respecto al sistema original. La rotacion del siste-ma de coordenadas es equivalente a realizar un corte imaginario oblicuocon angulo θ como se habıa mostrado en la seccion anterior.
El punto a viene a representar el valor maximo del esfuerzo normal σnm,
que se puede obtener de forma grafica y cuyo valor es aproximadamenteel entregado por (9.14). El punto b serıa el valor mınimo (con signo) delesfuerzo normal. Los puntos d y e vendrıan a entregar los valores maximosy minimos para el esfuerzo de corte τm (ver Ecuacion 9.15).
232

El angulo real entre el punto (K) y el punto (L) es de 90◦, luego en elplano σn − τ podemos apreciar que el angulo entre dicho planos es 180◦,o sea todo angulo real en el plano de los esfuezos es multiplicado por dos.
De la observacion anterior tenemos que el angulo que debe ‘rotar’ el siste-ma de coordenadas desde K−L, para obtener el maximo esfuerzo normal,es de 2θ como aparece en la figura. Se aprecia tambien que el angulo entreel punto de esfuerzo normal maximo y de corte maximo es 45◦, tal comose habıa discutido en la seccion anterior.
Hay varios casos interesantes que se pueden estudiar con el uso del cırculode Mohr, por ejemplo, los casos: σx = σy = σ y τxy = 0, y σy = −σx = σ yτxy = 0.
9.3. Problema con esfuerzos combinados
En esta seccion usaremos los resultados mostrados en todos los capıtulosanteriores, en donde estudiamos el fenomeno de esfuerzo axial, esfuerzo de corteen torsion, esfuerzo normal y de corte en flexion, para estudiar problemas bi-dimensionales y tridimensionales para los esfuerzos en un cuerpo. Tal como seindico en la introduccion, la base del metodo es el principio de superposicion,en donde cada fenomeno se estudia por separado, para despues al final obtenerun ‘estado de esfuerzos total’ mediante una simple suma.
Para determinar los esfuerzos, como paso previo sera necesario calcular lascargas internas, en general tendremos que:
Fuerza interna H generara σi de traccion o compresion.
El momento interno M generara σi de traccion o compresion.
El torque T generara τij de corte.
La fuerza de corte V generara un esfuerzo τij de corte.
En un problema general, las cargas internas H, M , T y V deben ser cal-culadas con el metodo de los cortes, en donde, por ejemplo, para una viga, sehace un corte imaginario a una cierta distancia, para luego hacer el equilibriode fuerzas y momentos en las distintas direcciones que pueden ser de interespara un problema completamente tridimensional.
En la siguiente seccion veremos un caso muy particular simplificado.
9.3.1. Fuerzas internas para el caso de una viga o barraempotrada en un extremo y libre en el otro
El metodo a presentar en esta seccion solo es valido para barras o vigasempotradas en un extremo, y no se puede usar en otro tipo de problemas.
233
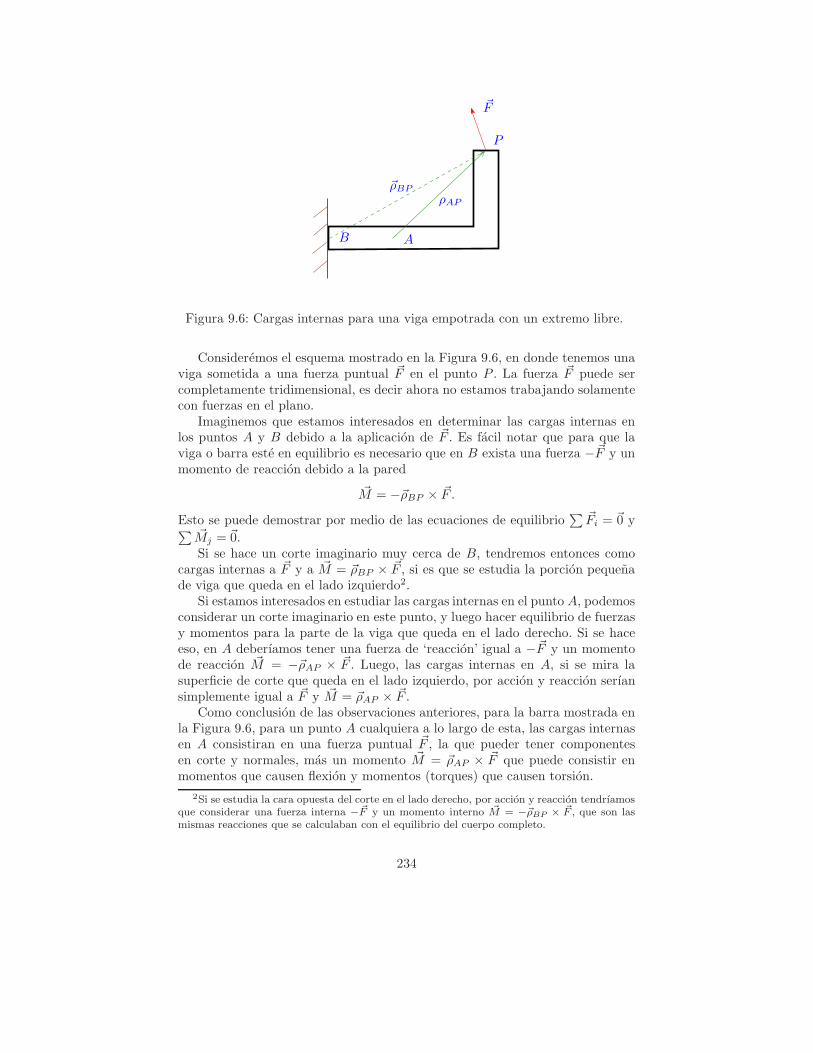
~F
AB
P
~ρBPρAP
Figura 9.6: Cargas internas para una viga empotrada con un extremo libre.
Consideremos el esquema mostrado en la Figura 9.6, en donde tenemos unaviga sometida a una fuerza puntual ~F en el punto P . La fuerza ~F puede sercompletamente tridimensional, es decir ahora no estamos trabajando solamentecon fuerzas en el plano.
Imaginemos que estamos interesados en determinar las cargas internas enlos puntos A y B debido a la aplicacion de ~F . Es facil notar que para que laviga o barra este en equilibrio es necesario que en B exista una fuerza − ~F y unmomento de reaccion debido a la pared
~M = −~ρBP × ~F .
Esto se puede demostrar por medio de las ecuaciones de equilibrio∑ ~Fi = ~0 y∑ ~Mj = ~0.
Si se hace un corte imaginario muy cerca de B, tendremos entonces comocargas internas a ~F y a ~M = ~ρBP × ~F , si es que se estudia la porcion pequenade viga que queda en el lado izquierdo2.
Si estamos interesados en estudiar las cargas internas en el punto A, podemosconsiderar un corte imaginario en este punto, y luego hacer equilibrio de fuerzasy momentos para la parte de la viga que queda en el lado derecho. Si se haceeso, en A deberıamos tener una fuerza de ‘reaccion’ igual a − ~F y un momentode reaccion ~M = −~ρAP × ~F . Luego, las cargas internas en A, si se mira lasuperficie de corte que queda en el lado izquierdo, por accion y reaccion serıansimplemente igual a ~F y ~M = ~ρAP × ~F .
Como conclusion de las observaciones anteriores, para la barra mostrada enla Figura 9.6, para un punto A cualquiera a lo largo de esta, las cargas internasen A consistiran en una fuerza puntual ~F , la que pueder tener componentesen corte y normales, mas un momento ~M = ~ρAP × ~F que puede consistir enmomentos que causen flexion y momentos (torques) que causen torsion.
2Si se estudia la cara opuesta del corte en el lado derecho, por accion y reaccion tendrıamosque considerar una fuerza interna −~F y un momento interno ~M = −~ρBP × ~F , que son lasmismas reacciones que se calculaban con el equilibrio del cuerpo completo.
234

En el caso general mostrado en el lado izquierdo de la Figura 9.7 para unpunto A cualquiera, para un corte imaginario en dicho punto tendremos unafuerza total puntual ~FT y un momento interno total ~MT , que se pueden calcularcomo
~FT = ~F1 + ~F2 + ~F3 + ..., ~MT = ~ρA1 × ~F1 + ~ρA2 × ~F2 + ~ρA3 × ~F3 + ... (9.17)
Para el momento interno tambien podemos agregar momento puros si es nece-sario.
~F1
~F2
~F3
AA
~ρA1 ~FT
~MT
~ρA2
~ρA3
Figura 9.7: Cargas internas para una viga empotrada con un extremo libresometida a varias fuerzas externas.
Es necesario volver a recalcar que (9.17) solo puede ser usado en problemas endonde tenemos una viga empotrada en un extremo y libre en el otro. Este metodono puede ser usado en otros problemas mas generales, en donde podrıamos teneruna viga sostenida por varios apoyos.
9.3.2. Ejemplo para un problema en donde se tiene fle-xion, torsion, corte y cargas axiales combinadas
En esta seccion nos interesa el problema mostrado en la Figura 9.8. En dichafigura tenemos una barra maciza de seccion circular empotrada en la base y conun extremo libre. En dicho extremo se esta aplicando una fuerza de 13kN conuna direccion que se puede obtener de la geometrıa. El diametro de la barra esde 60mm.
Nos interesa determinar el ‘estado de esfuerzos’ para el punto H . Resolvere-mos este problema en varios pasos a continuacion:
1. No usaremos directamente (9.17) en este caso, sino un metodo mas largopero mas pedagogico. De la Figura 9.8 podemos encontrar las componentesde la fuerza 13kN, en particular vemos que ~F = Fy ı+Fzk = −12−5kkN,tal como se muestra en la Figura 9.9
2. Comenzaremos con la componente de 12kN en la direccion del eje y. ‘Mo-veremos’ esta componente de su punto inicial de aplicacion al centro de la
235
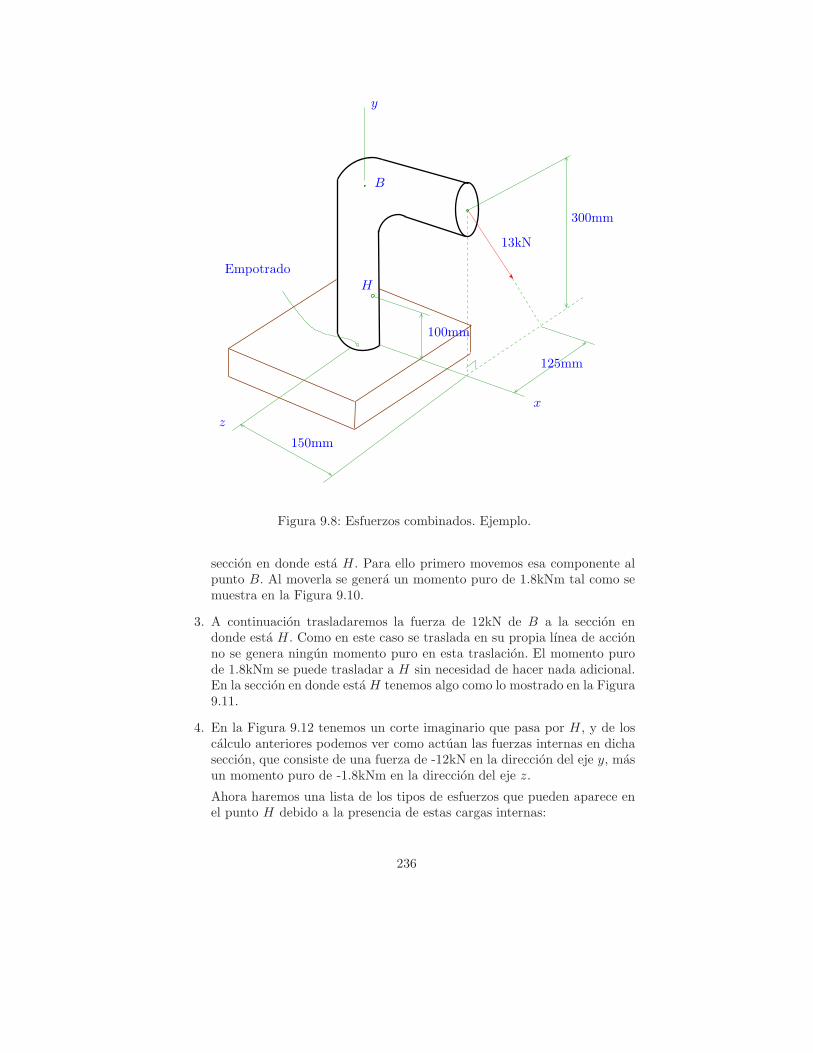
x
y
z
H
B
Empotrado
13kN
300mm
100mm
125mm
150mm
Figura 9.8: Esfuerzos combinados. Ejemplo.
seccion en donde esta H . Para ello primero movemos esa componente alpunto B. Al moverla se genera un momento puro de 1.8kNm tal como semuestra en la Figura 9.10.
3. A continuacion trasladaremos la fuerza de 12kN de B a la seccion endonde esta H . Como en este caso se traslada en su propia lınea de accionno se genera ningun momento puro en esta traslacion. El momento purode 1.8kNm se puede trasladar a H sin necesidad de hacer nada adicional.En la seccion en donde esta H tenemos algo como lo mostrado en la Figura9.11.
4. En la Figura 9.12 tenemos un corte imaginario que pasa por H , y de loscalculo anteriores podemos ver como actuan las fuerzas internas en dichaseccion, que consiste de una fuerza de -12kN en la direccion del eje y, masun momento puro de -1.8kNm en la direccion del eje z.
Ahora haremos una lista de los tipos de esfuerzos que pueden aparece enel punto H debido a la presencia de estas cargas internas:
236

x
5kN
12kNH
B
13kN
125mm
Figura 9.9: Esfuerzos combinados. Descomposicion de la fuerza externa.
1.8kNm
12kN
12kNH
Figura 9.10: Esfuerzos combinados. Traslacion de la componente Fy .
En el punto H tenemos un esfuerzo normal aproximadamente unifor-me de compresion en el sentido del eje y debido a la fuerza internade -12kN.
En este punto tendrıamos tambien un esfuerzo normal de compresioncausado por flexion asociada al momento puro en x de magnitud1.8kNm.
En el puntoH no habrıa esfuerzo de corte ‘asociado’ a flexion, esto nosolo porque no hay fuerza interna de corte, pero ademas para dichopunto el eje z serıa el eje neutro, tal como se muestra en la Figura9.13 en donde tenemos una vista superior del corte imaginario.
5. Ahora procedemos a determinar los distintos esfuerzos mencionados ante-riormente.
El esfuerzo de compresion uniforme debido a 12kN en la direccion del
237

1.8kNm
1.8kNm
12kN
12kN
H
Figura 9.11: Esfuerzos combinados. Traslacion de la componente Fy .
x
y
z
H
-1.8kNmk
-12Nm
Figura 9.12: Esfuerzos combinados. Cargas internas para un corte imaginarioen la zona de interes.
d
x
z
Eje neutro
Figura 9.13: Esfuerzos combinados. Seccion de la barra y propiedades de area.
eje y simplemente se calcula como
σy = −12
A
kN
m2,
238

donde A es el area de la seccion y es igual a A = 2,827 ∗ 10−3m2, porlo que
σy = −4,2448MPa. (9.18)
Para el caso del esfuerzo de compresion por flexion usarıamos la ex-presion (5.9), o sea σy = −Mxx
Iz, en donde el signo negativo (compre-
sion) ya se ha incorporado.
Para una seccion circular, como la mostrada en la Figura 9.13, tene-mos que
Iz = 2
∫x2 dA,
en donde el factor 2 proviene de la simetrıa que posee esta seccion y
dA = 2z dx con z =√
d2
4 − x2, donde d es el diametro de la seccion.
Por lo tanto
Iz = 4
∫ d/2
0
(√d2
4− x2
)x2 dx =
π
4
(d
2
)4
. (9.19)
En nuestro caso con d =60mm tenemos
Iz = 6,3617 ∗ 10−7m4, (9.20)
por lo que si x = d/2
σy = −1,8 ∗ 103 ∗ 0,03/(6,3617 ∗ 10−7) = −84,88MPa. (9.21)
6. Ahora procederemos a desplazar la componente de fuerza de -5kN queactua en la direccion del eje z. Para ello observemos la Figura 9.14, endonde vemos esta componente que se traslada de su punto original alpunto B. En la traslacion se genera un torque puro igual a 0.75kNm en ladireccion del eje y.
7. A continuacion llevamos la fuerza de -5kN de B a la seccion en donde seencuentra el punto H . En la Figura 9.15 podemos ver la traslacion y comoesta genera un nuevo momento puro igual a -1kNm en la direccion del ejex.
8. En la Figura 9.16 tenemos un corte imaginario que contiene al punto Hmostrando las distintas cargas internas actuando en esa seccion.
Ahora discutimos los tipos de esfuerzos que estas cargas internas puedengenerar:
En el punto H tendremos esfuerzo de corte debido a la torsion por0.75kNm.
En este mismo punto habrıa esfuerzo de corte debido a la fuerza decorte de 5kN. Debido a la posicion de H este esfuerzo de corte enefecto serıa maximo para este fenomeno.
239

0.75kNm
5kN
5kN
H
B
Figura 9.14: Esfuerzos combinados. Traslacion de la componente Fz .
0.75kNm
0.75kNm
5kN
5kN
H
B
1kNm
Figura 9.15: Esfuerzos combinados. Traslacion de la componente Fz .
En H no habrıa esfuerzo de compresion o traccion por flexion debidoa el momento de 1kNm en la direccion del eje x, pues el punto Hse encuentra en el eje x, que en este caso serıa el eje neutro para laflexion causada por 1kNm.
9. Ahora calcularemos los esfuerzos mencionados en el punto anterior:
El esfuerzo de corte por torsion se debe calcular usando (4.8), pero
240

0.75kNm5kN
H1kNm
Figura 9.16: Esfuerzos combinados. Cargas internas para un corte imaginarioen la zona de interes.
primero debemos identificar este esfuerzo de corte para el sistema decoordenadas de la figura. Por el tipo de deformacion que causarıa eltorque en la seccion (plano atravesado por y, esfuerzo de corte en ladireccion z) tenemos que este esfuerzo serıa τyz y serıa ademas nega-tivo, luego en magnitud tenemos (el signo lo incorporamos depues)
τyz =Tr
J.
En este caso usamos r = d/2 = 0,03m y de (4.6) tenemos J = π32d
4 =1,2723 ∗ 10−6m4. Luego
τyz = −0,75 ∗ 103 ∗ 0,031,2723 ∗ 10−6
= −17,6839MPa. (9.22)
Respecto al esfuerzo de corte debido al corte puro, debemos usar laexpresion (6.10) para vigas de secciones arbitrarias. Primero, por elsentido que tiene la fuerza de corte es facil ver que el esfuerzo decorte que se genera aquı es τyz igual que en el caso anterior (ademascon signo negativo). Luego de (6.10) tenemos que calcular (el signolo agregamos despues)
τyz =V
Ixt
∫ d/2
z
ξ dA. (9.23)
Notese que en (9.23) hemos usado Ix por la orientacion que tienenlos ejes en este problema.
De la Figura 9.17 podemos ver el significado de las distintas variablesy expresiones que aparecen en (9.23) para este problema. En parti-
cular podemos ver que dA = 2x dξ, que x =√
d2
4 − ξ2, y que para el
punto H tenemos t = d, z = 0. La fuerza de corte serıa V = −5kN .
Consideremos la integral
∫ d/2
0
ξ dA =
∫ d/2
0
2
(√d2
4− ξ2
)ξ dξ =
2
3
(d
2
)3
, (9.24)
241

��������������������
d
z
Eje neutro
Hξ
dA
xx
Figura 9.17: Esfuerzos combinados. Seccion de la barra y propiedades de areapara el calculo de los esfuerzos de corte por fuerza de corte interna.
y en nuestro caso tenemos 23
(d2
)3= 0,000018m3.
Usando los resultados y observaciones anteriores en (9.23) se llega a(incluyendo ahora el signo)
τyz = − 5 ∗ 103 ∗ 0,0000186,3617 ∗ 10−7 ∗ 0,06 = −2,3579MPa. (9.25)
10. De (9.18), (9.21), (9.22) y (9.25) vemos que todos los esfuerzos estan (o sise quiere actuan) en el plano y − z. Podemos apreciar tambien como losesfuerzos normales debido a flexion son mucho mayores en magnitud a losesfuerzos normales debido a cargas normales, y que lo mismo sucede con losesfuerzos de corte debido a torsion si se comparan con los esfuerzos de cortedebido a corte puro. En general en problemas de esfuerzos combinadostendremos este tipo de resultados.
Ahora usaremos el principio de superposicion, en donde basicamente paraun cuadrado diferencial como el mostrado en la Figura 9.18, tenemos quesumar los esfuerzos normales en las distintas direcciones, y lo mismo ha-cemos con los de corte. En el caso de los esfuerzos normales solo tenemosσy y de (9.18), (9.21) tenemos
σytotal= −4,2448− 84,88 = −89,1248MPa. (9.26)
En el caso de los esfuerzos de corte solo tenemos τyz y de (9.22), (9.25) sellega a
τyztotal= −17,6839− 2,3579MPa. (9.27)
Luego el ‘estado de esfuerzos’ total para el cuadrado diferencial serıa algocomo lo mostrado en la Figura 9.18. En la figura no aparece el signonegativo para los esfuerzos debido a que este ya ha sido incorporado conel sentido dado a las flechas.
242

σy = 89,12MPay
zτyz = 20,04MPa
τyz = 20,04MPa
Figura 9.18: Esfuerzos combinados. Representacion para los esfuerzos en el puntode interes en un cuadrado diferencial.
11. Un ultimo paso que podemos hacer es calcular los esfuerzos normales y decorte maximo. Se puede usar para ello (9.14), (9.15) o el cırculo de Mohr.Aquı usaremos3 (9.14) y (9.15), de donde tenemos que
σnm=
{4,2995MPa,−93,4243MPa,
(9.28)
yτm = ±48,8619MPa. (9.29)
3El uso de (9.14) y (9.15) esta restringido solo a problema planos como es el caso delejemplo mostrado aquı. En nuestro ejemplo debemos cambiar algunos subındices, en este casox por z.
243

Capıtulo 10
Teorıa de falla: Criteriospara la deformacion plastica
10.1. Introduccion
¿Cuando se dira que una componente o pieza de un mecanismo falla? Sonmuchos los posibles fenomenos que un solido puede sufrir que podrıan conside-rarse como causal de falla, como por ejemplo:
Formacion de deformacion plastica: Esto debido a que cuando un cuer-po se deforma plasticamente su forma cambia de manera permanente, yese cambio permanente podrıa, en algunos casos, causar problemas en elfuncionamiento de un mecanismo.
Exceso de deformacion elastica: En algunas ocasiones un cuerpo (en par-ticular cuerpos de gran tamano) pueden sufrir grandes ‘desplazamientos’elasticos debido a las cargas externas. No necesariamente se producirıandeformaciones plasticas, pero este exceso de ‘deformacion’ elastica puedeen algunas ocasiones tambien provocar problemas en el funcionamiento deun mecanismo.
Rotura: Es el caso clasico de falla que viene a la mente cuando se piensaen falla de una componente. La rotura de una pieza esta ligada al compor-tamiento de las grietas que esta pueda tener. Las grietas tienen dos fasesde comportamiento
• Fase estable: en donde la grieta puede crecer con una velocidad ‘baja’medible.
• Fase inestable: que ocurre cuando las grietas superan un cierto ta-mano mınimo y que se caracteriza por un crecimiento de la grieta auna velocidad muy alta, que casi no se puede medir. La falla aquıocurre de forma catastrofica.
244

Cambio en las propiedades del material: En algunas ocasiones, productode la temperatura, del ataque de agentes quımicos u otras causas, las pro-piedades del material pueden cambiar (y pueden en realidad ‘debilitarse’).Fenomenos tıpicos que se pueden mencionar son
• Corrosion.
• Endurecimiento (por deformacion o cambios bruscos en la tempera-tura).
• Cambios debido a radiacion nuclear.
• Difusion de hidrogeno: que ocurre en estanques que almacenan es-te elemento, el cual puede atravesar las paredes por pequenos in-tersticios, para combinarse en algunas ocasiones con los atomos delmaterial de las paredes, en general causando un material de peorespropiedades mecanicas.
De la lista anterior podemos apreciar que el concepto de ‘falla’ es bastanteamplio.
Respecto a las ‘causas’ de los fenomenos de falla mencionados anteriormente,podemos considerar la siguiente lista:
Cargas (fuerza externas) altas: Es quizas la causa mas facil de estudiar yla que se puede incorporar de forma mas simple en el diseno para evitarla.
Cargas cıclicas: Las cargas cıclicas, cuya magnitud y signo pueden cambiaren funcion del tiempo, si se aplican por periodos largos de tiempo, auncuando las magnitudes sean pequenas, pueden causar falla, en particularasociadas a grietas y rotura. Esto se estudiara en el Capıtulo 13.
Cargas que se mantienen por periodos muy largos de tiempo: En algu-nas estructuras metalicas, que pueden estar sometidas a temperaturasmoderadamente altas, bajo la aplicacion de fuerzas externas que no nece-sariamente son altas, pero aplicadas en periodos muy largos de tiempo, sepuede observar un fenomeno llamada ‘creep’ en donde se puede apreciarun lento ‘fluir’ del solido (deformacion inelastica), que en esas escalas detiempo se comporta como un fluido.
Cambio brusco de temperatura: Un cambio brusco de la temperatura, enparticular si no es uniforme en el cuerpo, puede causar altos ‘esfuerzostermicos’, los que en ciertas ocasiones provocan rotura por grietas o de-formacion plastica. Los cambios bruscos de temperatura tambien puedencausar cambios en la microestructura del material.
Aplicacion de una temperatura muy baja: Una temperatura muy bajapuede causar problemas en algunos materiales. El acero, por ejemplo, atemperatura normal puede ‘absorber’ una cierta cantidad de energıa porimpacto antes de romperse, la cual en el caso de la aplicacion de unatemperatura muy baja, puede disminuir de manera apreciable. Es decir
245

bajo una cierta temperatura el acero puede comportarse de una formafragil, lo que darıa lugar a fallas por rotura si el material recibe un impacto.
O sea no solo hay muchos tipos de ‘fallas’ distintos a la rotura, sino tambienpuede haber un sinumero de causas para dichas fallas. Debe quedar claro ahoraque este es un tema muy profundo que por brevedad no se estudiara de formacompleta en este texto.
En este capıtulo nos concentraremos en la falla por deformacion plastica, yen particular causada por cargas altas.
10.2. Criterios de falla para deformacion plasti-
ca
En la Seccion 3.5.1 vimos en detalle la curva que relaciona los esfuerzos y lasdeformaciones para el caso de un cilındro sometido a una tension uniaxial. Parauna acero de bajo o mediano carbono la curva tiene una forma como la presen-tada en la Figura 10.1. El cambio o la transicion del comportamiento elastico al
σ
ǫ
σo
Elastica Plastica
E
Figura 10.1: Curva esfuerzo-deformacion para un acero bajo carbono.
plastico ocurrirıa cuando el esfuerzo σ supera el valor lımite σo llamado esfuerzode fluencia.
La gran pregunta ahora es: ¿Que debemos hacer en el caso en el que uncuerpo este sometido a un estado general de esfuerzos, es decir cuando en unpunto en un cuerpo tengamos distintos tipos de esfuerzos axiales y de corteactuando al mismo tiempo?
La respuesta a esta pregunta no es sencilla, pues trasladar un resultado quese obtuvo en un problema esencialmente unidimensional a aplicaciones en 2 o3 dimensiones no es directo o sencillo. Por ese motivo se han propuesto variasteorıas diferentes, tres de las cuales mostramos aquı.
246

10.2.1. Criterio del esfuerzo normal maximo
El material fallara cuando el maximo esfuerzo principal normal1 (en 2D o3D) sea igual al maximo esfuerzo normal en el instante de falla de un ensayode tension uniaxial.
Ahora traduciremos el estamento anterior. Para una barra bajo una carga unia-xial como la que se muestra en la Figura 10.2 tenemos que el esfuerzo en elinstante de falla es σ = σo. Por otra parte si σn1 , σn2 y σn3 son los esfuerzos
������������
P
P
A
Figura 10.2: Barra bajo tension uniaxial.
principales para un cuerpo hecho del mismo material, del enunciado de la teorıa
1En la Seccion 9.1 vimos en detalle el significado y el metodo de calculo de los esfuerzosnormales maximos y mınimos. En este texto no se estudiara en detalle el caso 3D. Para elcaso 3D, en donde el tensor de esfuerzos tendrıa la forma
T˜=
σx τxy τxzτxy σy τyzτxz τyz σz
,
se puede desarrollar un metodo de calculo de los esfuerzos normales maximos y mınimos paraeste caso, basados en la solucion de
det(T˜− σnI
˜) = 0,
en donde I˜es la matriz de identidad en 3D. La solucion del problema del valor propio anterior
nos da tres valores σn1 , σn2 y σn3 , uno de los cuales es el maximo esfuerzo normal (conside-rando signo), uno es un valor intermedio y uno es el mınimo esfuerzo normal.Cada uno de estos valores tiene asociado un vector propio, y se puede demostrar que si elsistema de coordenadas original se rota para quedar alienado con estos tres vectories unitariosortogonales, entonces el tensor T
˜(sus componentes) se transforman para quedar como
T˜=
σn1 0 00 σn2 00 0 σn3
.
En el caso 2D por medio de las expresiones (9.14) o del cırculo de Mohr estabamos hacien-do basicamente lo mismo, es decir estabamos ‘rotando’ el sistema de coordenadas para que
de
(σx τxyτxy σy
)se pueda obtener
(σn1 00 σn2
), en donde vemos los dos valores (maximo y
mınimo) para σn que se obtienen de (9.14).
247

tenemos que el material no falla cuando2
σ1 < σo, σ2 < σo, σ3 < σo. (10.1)
En un espacio en donde las coordenadas fuesen los esfuerzos principales, laregion delimitada por (10.1) serıa o tendrıa la forma de un cubo, tal como sepuede apreciar en la Figura 10.3. Es decir si para un punto en un cuerpo T
˜es
σ1
σo
σo
σo
σ2
σ3
Figura 10.3: Lımite de la zona de comportamiento elastico en la teorıa del es-fuerzo normal maximo.
tal que sus esfuerzos principales (como punto) se encuentran dentro del cubo,entonces el material no fallara (zona de no falla) en ese punto por deformacionplastica.
En los resultados anteriores hemos asumido que el material puede fallar de lamisma forma en traccion y compresion, pero hay muchos ejemplos de materialesque fallan con distintos lımites para esos dos fenomenos. En dicho caso paraσi < 0 tendrıamos que delimitar la zona de no falla con valores para el esfuerzoσo differentes cuando son en compresion.
En el caso bidimensional, como solo tenemos σ1 y σ2, la region anterior setransforma simplemente en un cuadrado, tal como el que se muestra en la Figura10.4.
En general queremos evitar trabajar muy cerca del lımite de falla, y por esemotivo la zona segura se define por medio de un esfuerzo admisible σadm que sedefine como
σadm =σoFS
, (10.2)
en donde FS es conocido como el factor de seguridad y es tal que FS ≥ 1.Este factor en problemas normales de diseno puede tomar los valores 1.5, 2 omayores, dependiendo de cuan crıtico sea evitar la falla en una aplicacion.
El criterio del esfuerzo normal maximo se aplica y funciona bien para ma-teriales ‘fragiles’ tales como: roca, vidrio, fierro fundido, ceramica, ladrillos re-fractarios, etc. En estos materiales cuando fallan se puede apreciar superficiesde falla con normales orientadas en la direccion del maximo esfuerzo normal.
2Eliminaremos el subındice n de la notacion para los esfuerzos principales por simplicidad.
248

���������������������������������������������������������������������������������
���������������������������������������������������������������������������������
σ1
σo
σo
σ2
σadm
σadm−σadm
−σadm
−σo
−σo
Lımite
Lımite practico
Zona segura
Figura 10.4: Lımite de la zona de comportamiento elastico en la teorıa del es-fuerzo normal maximo caso bidimensional.
10.2.2. Criterio del esfuerzo de corte maximo
El material fallara cuando el maximo esfuerzo de corte3 en 2D o 3D seaigual al maximo esfuerzo de corte en el instante de falla para un ensayo unia-xial sobre una probeta del mismo material.
Para una probeta como la mostrada en la Figura 10.2, en un elemento dife-rencial en su interior tendrıamos un estado de esfuerzos como el mostrado enla Figura 10.5 en el lado izquierdo. Es decir tendrıamos solamente un esfuerzonormal y de (9.15) se llega a que para ese ensayo uniaxial en el instante de fallaτo =
σo
2 . La misma conclusion se obtiene de la aplicacion del cırculo de Mohr aeste problema, como se muestra en el lado derecho de la Figura 10.5.
De las observaciones anteriores tenemos que no hay falla si
τm < τo ⇔ σmax − σmin2
<σo2. (10.3)
3En (9.15) hemos visto como determinar este esfuerzo de corte maximo en 2D, se tenıa
τ =
√(σy−σx
2
)2+ τ2xy. Si se trabaja con los esfuerzos principales σ1, σ2, como en dicho
sistema de coordenadas no hay corte, tenemos
τ =
√(σn1 − σn2
2
)2
= ±
(σn1 − σn2
2
).
En el caso 3D, cuyos detalles no mostraremos aquı, se tienen tres valores para los esfuerzos
maximos de corte, que se calculan como τ =σni
−σnj
2con i 6= j. Entre estos tres valores se
escoge el maximo, de donde tendrıamos
τm =σmax − σmin
2.
249

A
A
BB
σo
σo
σo
σ
τ
τmax = σo
2
Figura 10.5: Esfuerzo de corte maximo en un ensayo uniaxial. Cırculo de Mohr.
Veamos ahora la forma que tendrıa la zona en la que el material no falla parael caso bidimensional. En dicho problema tenemos solo dos esfuerzos principalesσ1, σ2. Consideremos el plano con ejes dados por los esfuerzos principales mos-trado en la Figura 10.6. Dividamos el espacio de acuerdo a los posibles signos
σ1
σo
σo
σ2III
−σo
−σo
Lımite
III
Zona segura
IV
Figura 10.6: Lımite de la zona de comportamiento elastico en la teorıa del es-fuerzo de corte maximo.
de σ1 y σ2 en cuatro partes, que denominamos I, II, III y IV.En la zona II tenemos que σ1 < 0 y σ2 > 0 por lo que (10.3) implica que
justo en el lımite de falla tenemos que se debe cumplir que
σ2 − σ12
=σ02
⇒ σ2 = σo + σ1. (10.4)
Es decir, si expresamos, por ejemplo, σ2 como funcion de σ1, la relacion entreestos esfuerzos en el lımite de falla es una lınea recta, tal como se ve para II en
250

la Figura 10.6. Lo mismo se puede obtener para la zona IV. Respecto a las zonasI y III el criterio anterior nos da una zona sin lımites, lo que no es razonable,y una manera de complementar esto es asumiendo de forma adicional que paralas zonas I y III el criterio del esfuerzo normal maximo deberıa ser valido, conlo que tenemos lımites como los mostrados en la misma Figura 10.6.
Podemos apreciar de las Figuras 10.4 y 10.6 que la zona de no falla parael caso del criterio del esfuerzo normal maximo, es mas grande que la que seobtendrıa con el criterio del esfuerzo de corte maximo. Debemos recordar eso sique el rango de aplicacion o el tipo de materiales en las que estas dos teorıas seaplica es distinto.
Aquı tambien se puede usar el concepto del esfuerzo admisible σadm =σo/FS, con el cual se puede establecer la zona ‘segura’ en la que no se pro-ducirıa falla, tal como se muestra en la Figura 10.7.
���������������������������������������������������������������������������������
���������������������������������������������������������������������������������
σ1
σo
σo
σ2
σadm
σadm−σo
−σo
Zona segura
Figura 10.7: Lımite de la zona de comportamiento elastico en la teorıa del es-fuerzo de corte maximo con zona admisible.
Los materiales para los cuales este criterio da buenas predicciones son ma-teriales ‘ductiles’, tales como el acero de bajo carbono y el cobre.
Debido a que el angulo para el cual tenemos el maximo esfuerzo de cortetiene una diferencia de 45◦ con la direccion del maximo esfuerzo normal, paraun cilındro o placa sometida a traccion que sean hechos de materiales ductiles,las superficies de falla presentan una inclinacion angular respecto a la direccionde la carga axial externa.
10.2.3. Criterio de Von Mises
El material fallara en 2D o 3D si su ‘energıa de distorsion’ por unidad devolumen en el instante de falla es igual a la energıa en ese instante en un ensayouniaxial usando una probeta del mismo material.
251

La aplicacion de este criterio (que es muy popular en diseno mecanico) es sobretodo para materiales ductiles.
La energıa de distorsion la definiremos a partir de la expresion para la energıaespecıfica (7.9) en donde tenıamos
U =1
2E(σ2x + σ2
y + σ2z)−
ν
E(σxσy + σxσz + σyσz) +
1
2G(τ2xy + τ2xz + τ2yz).
En lugar de trabajar con el tensor de esfuerzos en el sistema de coordenadasoriginal, trabajaremos con el tensor de esfuerzos rotado, de forma tal de tenerlos esfuerzos principales σi, i = 1, 2, 3. En este caso para U tendrıamos
U =1
2E(σ2
1 + σ22 + σ2
3)−ν
E(σ1σ2 + σ1σ3 + σ2σ3). (10.5)
Esta energıa especıfica (su valor) es exactamente la misma que (7.9), pues de-bemos recordar que al calcular los esfuerzos principales (normales maximos ymınimos) tenemos el mismo estado de esfuerzos visto en un sistema de coorde-nadas rotado respecto al original. La energıa deberıa ser invariante respecto acambios en las coordenadas (por ser una funcion escalar).
Consideremos el cuadrado o cubo diferencial mostrado en la Figura 10.8, endonde tenemos que se aplica solo un esfuerzo uniforme (de traccion o compre-sion) igual en todas las caras. Distintas observaciones experimentales indicarıan
σ
σ
σ
σ
Figura 10.8: Cubo bajo el efecto de esfuerzos ‘hidrostaticos’.
que cambios volumetricos, como los que se observan de forma esquematica en es-te figura, no producirıan deformaciones plasticas, independiente de la magnitudde σ.
Vamos a descomponer la energıa de deformacion en dos partes, una de ellasasociada a la parte ‘uniforme’ de los esfuerzos y la otra asociada a la parterestante de los esfuerzos. Para ello consideremos la siguiente descomposicion delos esfuerzos principales
σ1 = σ + S1, (10.6)
σ2 = σ + S2, (10.7)
σ3 = σ + S3, (10.8)
252

donde definimos el ‘esfuerzo hidrostatico’ σ como
σ =σ1 + σ2 + σ3
3, (10.9)
que como podemos ver es una especie de promedio de los esfuerzos principales.Respecto a Si, i = 1, 2, 3, estos son llamados las componentes del ‘esfuerzo
deviatorico’ y de (10.6)-(10.9) se tiene que
S1 =2σ1 − σ2 − σ3
3, (10.10)
S2 =2σ2 − σ1 − σ3
3, (10.11)
S3 =2σ3 − σ1 − σ2
3. (10.12)
La energıa total se descompondra como
U = UH + UD, (10.13)
donde UH serıa la parte de la energıa acumulada debido a σ y UD serıa la energıade distorsion.
Calcularemos UH evaluando U con σ en (10.5), que despues de algunas ma-nipulaciones nos da
UH =(1− 2ν)
6E(σ2
1 + σ22 + σ2
3 + 2σ1σ2 + 2σ1σ3 + 2σ2σ3). (10.14)
De (10.13) tenemos UD = U − UH y de (10.5) y (10.14) despues de variasmanipulaciones se obtiene
UD =
(1 + ν
3E
)(σ2
1 + σ22 + σ2
3 − σ1σ2 − σ1σ3 − σ2σ3). (10.15)
Se define el ‘esfuerzo de Von Mises’4 σVM como
σVM =√σ21 + σ2
2 + σ23 − σ1σ2 − σ1σ3 − σ2σ3, (10.16)
de modo que de (10.15) tenemos
UD =
(1 + ν
3E
)σ2VM . (10.17)
Volviendo al parrafo inicial de esta seccion para un ensayo uniaxial la fallase produce cuando σ = σo, en cuyo caso de (10.16) y (10.17) tenemos que laenergıa de distorsion en el instante de falla sera igual a
UDfalla1D=
(1 + ν
3E
)σ2o . (10.18)
4Podemos ver en esta seccion que el ‘esfuerzo de Von Mises’ en realidad es una simpledefinicion, que se obtuvo de expresiones asociadas a la energıa de deformacion. Si bien escierto este ‘esfuerzo’ tiene unidades de fuerza por unidad de area, no es un esfuerzo real, enel sentido visto en la Seccion 3.3.3, y por tanto no se puede asociar a el, por ejemplo, unadireccion como vector.
253

Luego el criterio nos dice que UDfalla2D,3D= UDfalla1D
, por lo que de (10.18),
(10.16) y (10.17) tenemos que
(1 + ν
3E
)σ2o =
(1 + ν
3E
)(σ2
1 + σ22 + σ2
3 − σ1σ2 − σ1σ3 − σ2σ3),
de donde se obtiene el criterio para el lımite de falla
σ21 + σ2
2 + σ23 − σ1σ2 − σ1σ3 − σ2σ3 = σ2
o . (10.19)
O sea el material falla siσ2VM = σ2
o . (10.20)
Veamos la forma que tiene el lımite de la zona segura para el caso 2D, de(10.19) tenemos
σ21 + σ2
2 − σ1σ2 = σ2o , (10.21)
que desde el punto de vista geometrico es o representa una elipse rotada, como lamostrada en la Figura 10.9, en donde tenemos ademas la representacion graficadel criterio del esfuerzo de corte maximo.
σ1
σ2
σo
σo−σo
−σo
Zona de no falla
Tresca o corte maximo
Von Mises
Figura 10.9: Lımite de zonas de comportamiento elastico con los criterios decorte maximo y de Von Mises.
En la Figura 10.10 tenemos una representacion grafica de los tres criteriosvistos en este capıtulo.
254

σ1
σ2
σo
σo−σo
−σo
Esfuerzo normal maximoTresca o corte maximo
Von Mises
Figura 10.10: Lımite de zonas de comportamiento elastico con los criterios delesfuerzo normal maximo (lınea verde), corte maximo (Tresca) (lınea azul) y deVon Mises (lınea negra).
255
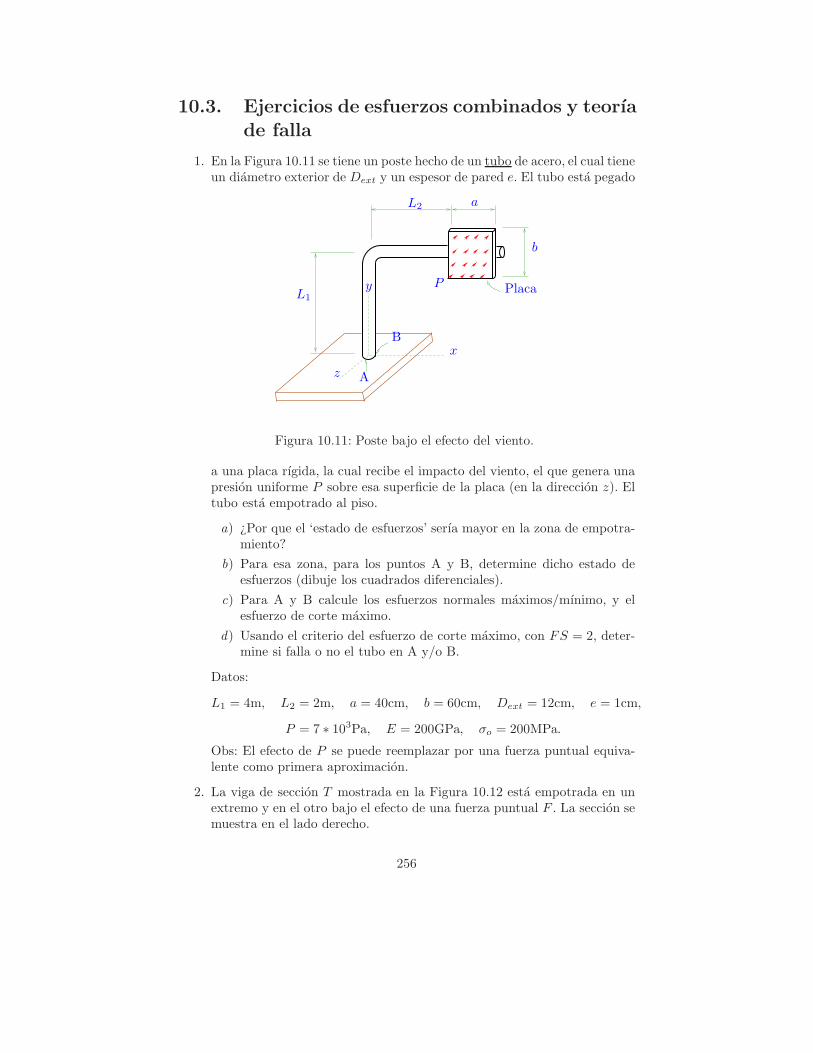
10.3. Ejercicios de esfuerzos combinados y teorıade falla
1. En la Figura 10.11 se tiene un poste hecho de un tubo de acero, el cual tieneun diametro exterior de Dext y un espesor de pared e. El tubo esta pegado
L1
L2 a
b
P
x
y
z A
B
Placa
Figura 10.11: Poste bajo el efecto del viento.
a una placa rıgida, la cual recibe el impacto del viento, el que genera unapresion uniforme P sobre esa superficie de la placa (en la direccion z). Eltubo esta empotrado al piso.
a) ¿Por que el ‘estado de esfuerzos’ serıa mayor en la zona de empotra-miento?
b) Para esa zona, para los puntos A y B, determine dicho estado deesfuerzos (dibuje los cuadrados diferenciales).
c) Para A y B calcule los esfuerzos normales maximos/mınimo, y elesfuerzo de corte maximo.
d) Usando el criterio del esfuerzo de corte maximo, con FS = 2, deter-mine si falla o no el tubo en A y/o B.
Datos:
L1 = 4m, L2 = 2m, a = 40cm, b = 60cm, Dext = 12cm, e = 1cm,
P = 7 ∗ 103Pa, E = 200GPa, σo = 200MPa.
Obs: El efecto de P se puede reemplazar por una fuerza puntual equiva-lente como primera aproximacion.
2. La viga de seccion T mostrada en la Figura 10.12 esta empotrada en unextremo y en el otro bajo el efecto de una fuerza puntual F . La seccion semuestra en el lado derecho.
256

PSfrag
h
b/2b/2
e
e
x
F
AA
BBCC
L
y
yθ
Figura 10.12: Viga T empotrada.
Para esta viga determine los estados de esfuerzos en los puntos A, B yC y tambien los esfuerzos principales. ¿Cual es la carga maxima F quese puede aplicar para que no falle en cualquiera de estos tres puntos si laviga esta hecha de un acero de bajo carbono con σo = 340MPa usando elcriterio de Von Mises y un factor de seguridad FS = 2,5?
Datos: L = 2m, h = 20cm, b = 15cm, e = 1cm, θ = 50◦.
3. El tubo de la Figura 10.13 esta empotrado a la pared y bajo el efecto deuna fuerza puntual F en el otro extremo.
a
b
c
x
F
A
B
y
z
Figura 10.13: Tubo empotrado.
El tubo tiene un diametro exterior d y un espesor e = d/10. Para lospuntos A y B determine los estados de esfuerzos. Determine d de formatal que el tubo no falle en dichos puntos considerando la teorıa de VonMises y con un factor de seguridad FS = 2,5.
Datos: F = 15kN, a = 50cm, b = 70cm, c = 1m, E = 190GPa, G =70GPa, σo =250MPa.
4. En la Figura 10.14 se tiene un eje que impulsa dos poleas. El eje recibeun torque T de un motor que no se muestra en esta figura. El eje estasobre dos soportes con rodamientos en los que podemos asumir no hay
257

roce apreciable. En la posicion mostrada en la figura para simplificar loscalculos se puede asumir que todo el sistema esta en equilibrio.
PSfrag
A B −B
C
50cm
30cm
30cm
25cm
Tx
yy
z
z
450N
80N
100N500N
30oD
(1)
(2)
Poleadiametro12cm
Poleadiametro30cm
Apoyo con rodamiento
Apoyo con rodamiento
motor transmite T
Figura 10.14: Eje con poleas.
Idique los tipos de esfuerzos que generan cada una de las fuerzas omomentos internos en (1), (2) que se muestran en vista frontal en lafigura superior derecha para la seccion B −B del eje. Si el diametrodel eje es D = 3cm, determine y grafique en cuadrados diferencialeslos estados de esfuerzos para los puntos (1), (2).
Si se trabaja con un acero de bajo carbono para el eje con σo =100MPa, usando el criterio de Von Mises, determine los factores deseguridad para los puntos (1) y (2), respectivamente.
5. La viga de la Figura 10.15 tiene una seccion rectangular de lados a, b. Enel plano x − y la viga esta sometida a una fuerza distribuıda lineal (convalor maximo de 2000N/m), en tanto en el plano x − z esta sometida auna fuerza distribuıda uniforme de 2500N/m mas una puntual de 3000N.La figura superior izquierda muestra la viga en una vista en el plano x− yen tanto en la figura inferior izquierda tenemos una vista de la viga en elplano x− z.
Para un corte imaginario hecho a una distancia de 1.5m desde el extremoizquierdo determine los estados de esfuerzos para los puntos (1) y (2). Lospuntos (1) y (2) se muestran en la vista tridimensional del lado derecho de
258

x
x
x
y
y
z
z
a
b
a/2
b/2
(1)
(2)
2000N/m
2500N/m
3m
1.5m
1m
3000N
Figura 10.15: Viga.
la figura para la zona de corte imaginario. Dibuje en un cubo diferenciallas componentes de los esfuerzos determinadas en dichos puntos.
Datos:
a = 5cm, b = 12cm, E = 100GPa, G = 40GPa.
6. La barra de seccion cuadrada de lado d = 20cm de la Figura 10.16 selevanta por medio de una fuerza F . La barra tiene un peso especıficow0 = 7,83 ∗ 103[Kgf/m3].
a) Calcule las fuerzas internas y momento interno H(x), V (x) y M(x)para la barra.
b) Determine los esfuerzos en B (en el centro de la barra y en la super-ficie inferior, respectivamente)
El punto A esta fijo. Datos: L = 5[m], θ = 40grados
7. La prensa C mostrada en la Figura 10.17 esta hecha de acero. Determinela fuerza de sujecion permisible P que la prensa puede ejercer si se deseaun factor de seguridad de 4.
Considere dimensiones en cm y σo = 300MPa
259

A
B
F
L/2 L/2
L/4
θ
x
y
Figura 10.16: Barra bajo su peso.
25
A
A
14
8
3
4Vista seccion A−A
Figura 10.17: Prensa C.
260
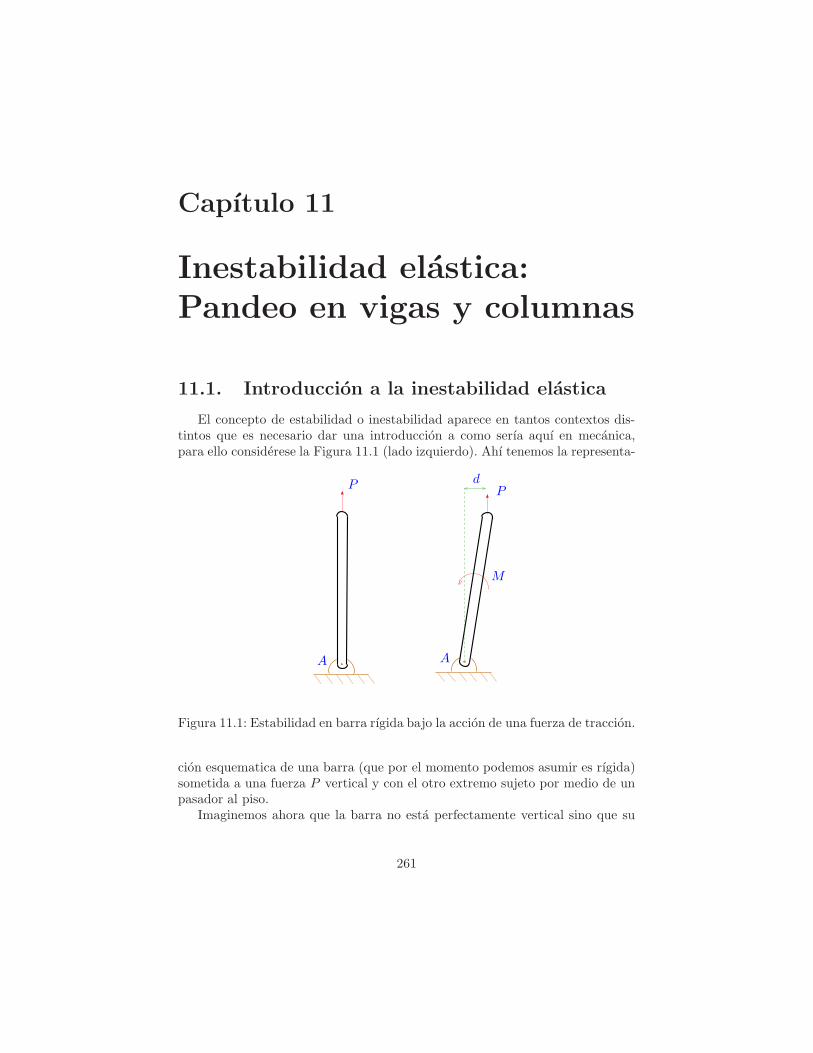
Capıtulo 11
Inestabilidad elastica:Pandeo en vigas y columnas
11.1. Introduccion a la inestabilidad elastica
El concepto de estabilidad o inestabilidad aparece en tantos contextos dis-tintos que es necesario dar una introduccion a como serıa aquı en mecanica,para ello considerese la Figura 11.1 (lado izquierdo). Ahı tenemos la representa-
PP d
AA
M
Figura 11.1: Estabilidad en barra rıgida bajo la accion de una fuerza de traccion.
cion esquematica de una barra (que por el momento podemos asumir es rıgida)sometida a una fuerza P vertical y con el otro extremo sujeto por medio de unpasador al piso.
Imaginemos ahora que la barra no esta perfectamente vertical sino que su
261

posicion superior esta desplazada en una distancia d de la lınea vertical, talcomo se muestra en el lado derecho de la figura. Debido a la nueva posicion sepuede apreciar que se producirıa un momento puroM = dP respecto al punto Aactuando sobre la barra. Este momento harıa que la barra volviese a su posicioninicial totalmente vertical.
En el caso anterior, la posicion de ‘equilibrio’ original de la viga (el esquemadel lado izquierdo) se puede considerar como ‘estable’, debido a que un des-plazamiento a partir de esa posicion lo que hace es generar un momento querestituirıa a la viga a su posicion inicial.
Veamos un caso opuesto como el mostrado en la Figura 11.2. En el lado
PP d
AA
M
Figura 11.2: Inestabilidad en barra rıgida bajo la accion de una fuerza de com-presion.
izquierdo tenemos la misma barra pero ahora con una fuerza de compresion Pactuando sobre ella.
Si se desplaza el punto de aplicacion de la fuerza en una distancia d, tenemosque nuevamente se generara un momento M = dP , como se muestra en ellado derecho de la figura, pero en este caso el momento harıa que la barrade desplazase mas desde la posicion inicial, es decir aumentarıa d con lo queaumentarıa M , con lo que finalmente se tendrıa un ‘colapso’ de la barra.
En la situacion anterior tendrıamos que la posicion original vertical serıa unequilibrio ‘inestable’.
En la Figura 11.3 tenemos tres esquemas que nos permiten ver los conceptosde estabilidad e inestabilidad en otro contexto. En la figura del lado izquierdotenemos un cilındro puesto en una superficie concava. La posicion de equilibrioestarıa justo en el centro de dicha superficie, y es facil apreciar que si el cilindroes sacado de dicha posicion, debido a la fuerza de gravedad y a la forma dela superficie, el cilindro volvera a su posicion original1. Un equilibrio que tieneestas caracterısticas se denomina equilibrio estable.
1En realidad empezara a oscilar alrededor de dicha posicion.
262

(a) (b) (c)
Figura 11.3: Cilindro rıgido en tres superficies distintas: (a) En equilibrio estable.(b) En equilibrio neutro. (c) En equilibrio inestable.
En la figura del lado derecho tenemos el mismo cilindro pero en este casosobre una superficie convexa. Si el cilindro es sacado de su posicion de equilibrio(que se encuentra nuevamente en la mitad), la fuerza de gravedad y la forma dela superficie haran que en cada instante el cilindro se aleje mas de la posicionde equilibrio original. Un equilibrio de esta naturaleza es llamado equilibrioinestable.
En la figura del centro tenemos una situacion diferente, aquı si el cilindro essacado de su posicion de equilibrio, quedara en la nueva posicion sin moversemas, luego un problema de este tipo es llamado de equilibrio neutro.
Ya hemos visto dos situationes diferentes en las que el concepto de equilibriose asociarıa con la posibilidad que tiene un cuerpo de volver a su posicion inicialo no. En principio las propiedades de estos estados de equilibrio dependerıan dela geometrıa y/o del entorno en donde se ubica el cuerpo. Ahora veremos que elconcepto de equilibrio para la barra mostrada en la Figura 11.2 puede ser mascomplejo y depender entre otras cosas de la magnitud de la ‘fuerza’ externa.
En la Figura 11.4 tenemos la misma barra mostrada en la Figura 11.2 peroahora en el extremo superior se colocan dos resortes horizontales de constantek.
AA
kk B
LL
PP d
Figura 11.4: Inestabilidad y estabilidad en barra rıgida bajo la accion de unafuerza de compresion y conectada a resortes laterales.
263

Si el extremo superior se desvıa de la posicion de equilibrio en una distanciad, se creara una fuerza debido al resorte Fres. Si aumenta d eso implicarıaque aumentarıa Fres tambien. La condicion de equilibrio basada en el balancede momentos respecto al punto A equivaldrıa a decir que el momento por Pdeberıa ser igual al momento causado por Fres en ambos lados de la barra. Elmomento causado por P es igual a dP , en tanto que el momento causado porFres serıa aproximadamente igual a 2FresL = 2kdL, la aproximacion viene delhecho de que al desplazarse d en la parte superior tenemos primero una rotacionde Fres y segundo un cambio de la distancia vertical al punto A, pero si d seasume pequeno ambos efectos se pueden despreciar. Luego para el equilibriotenemos
dP ≈ 2kdL,
de donde se tienePcr = 2kL. (11.1)
A la fuerza P resultante del equilibrio la hemos llamado Pcr por las siguientesrazones. Si P < Pcr el momento causado por el resorte serıa mayor que elmomento causado por P , por lo que la barra volverıa a su posicion de equilibriooriginal vertical. Por otra parte si P > Pcr el momento causado por P vencerıala resistencia causada por el resorte, con lo que la barra se alejarıa cada vez masdel equilibrio. O sea Pcr es un valor ‘crıtico’ para la fuerza externa, en el sentidoque si se supera ese valor, estarıamos en una situacion de equilibrio inestable, demodo que Pcr serıa el lımite que separarıa el rango de comportamiento establedel inestable.
El concepto de la carga crıtica Pcr puede surgir en otro contexto, para elloobservemos la Figura 11.5 en donde tenemos nuevamente la barra con los resor-tes mostrada en la Figura 11.4, pero ahora se agrega una fuerza horizontal F enel extremo superior en B. Debido a F la posicion vertical ya no es la posicionde equilibrio (a partir de la cual deberıamos agregar alguna perturbacion), estaposicion debemos determinarla como paso previo por medio de un balance demomentos respecto, por ejemplo, al punto A. El momento causado por F serıaaproximadamente FL, el momento causado por P serıa xoP , donde xo serıala nueva posicion de equilibrio, y el momento causado por los resortes serıaaproximadamente igual a 2kxoL, luego para el balance tenemos
FL+ xoP ≈ 2kxoL,
de donde obtenemos
xo =FL
2kL− P=
F
2k=
1(1− P
2kL
) . (11.2)
Aquı vemos que si P = 2kL entonces xo → ∞, en tanto que si P < 2kL seestarıa con un xo estable. ¿Que se puede decir respecto a la situacion P > 2kL.
En el problema anterior el concepto de carga crıtica Pcr = 2kL surgio en uncontexto totalmente distinto al estudiado para la Figura 11.4.
264

AA
kk B
LL
PP xo
FF
Figura 11.5: Inestabilidad y estabilidad en barra rıgida bajo la accion de unafuerza de compresion conectada a resortes laterales y bajo una fuerza horizontal.
Tipos de inestabilidades en cuerpos elasticos
En el analisis de los problemas anteriores vimos los conceptos de estabili-dad y de inestabilidad en varios casos relacionados con cuerpos rıgidos. Paracuerpos elasticos se pueden generar tambien varios tipos de inestabilidades, lasque dependeran, entre otros factores, de la geometrıa del cuerpo, de las cargasexternas, de las propiedades mecanicas del material y de las restricciones aldesplazamiento que se puedan imponer. Deberıa ser claro que en cuerpos elasti-cos puede ser mucho mas difıcil establecer estos lımites entre comportamientoestable e inestable.
A continuacion se muestra una lista breve y simple de los tipos de inestabi-lidades elasticas que se pueden producir en un cuerpo:
1. Pandeo por compresion de una columna. En la Figura 11.6 tenemos unacolumna elastica bajo el efecto de una fuerza de compresion. Si dejamosde lado la posible rotacion rıgida que podrıa sufrir la columna en esteproblema, podemos apreciar un posible comportamiento inestable en ellado derecho, que es denominado pandeo.
2. Vuelco lateral de una viga alta y delgada. Como se muestra en la Figura11.7, aquı tenemos una viga de seccion rectangular muy alta en relaciona su espesor, la cual esta empotrada en un extremo y libre en el otro, endonde se aplica una fuerza vertical P . Un problema de esta naturaleza sepodrıa estudiar considerando solo flexion (si la fuerza se aplica en la mitadde la seccion), sin embargo debido a la geometrıa de la viga, una desvia-cion pequena del punto de aplicacion de la fuerza causarıa un momento(asociado a los esfuerzos de corte) que harıa a la viga rotar en ese puntoy producir una inestabilidad como se muestra en la figura.
265

PP
Figura 11.6: Pandeo por compresion de columna.
P
P
Figura 11.7: Vuelco lateral de viga alta y delgada.
3. Pandeo de un tubo cilındrico sometido a torsion. En la Figura 11.8 te-
T
T
Figura 11.8: Pandeo de tubo cilındrico de pared delgada sometido a torsion.
266

nemos un tubo cilındrico de pared delgada sometido a un torque externo(mostrado con flechas rojas). Es bien sabido que en una geometrıa de es-ta naturaleza bajo torques superiores a un cierto valor crıtico se puedeproducir la formacion de irregularidades (o depresiones) en la pared, lascuales pueden causar eventualmente un colapso o inestabilidad en el tubo.
4. Inestabilidad por compresion en un tubo. En la Figura 11.9 tenemos un
P
P
Figura 11.9: Pandeo por compresion de tubo de pared delgada.
tubo de pared delagada. Puede ser cilındrico o tener otra seccion. Es biensabido que tubos de esta naturaleza pueden soportar altas cargas de com-presion, pero que sobre ciertos lımites para estas cargas se producen, deforma repentina, deformaciones irregulares en la pared, que generan uncolapso inmediato de la estructura.
De todos los casos anteriores en este texto estudiaremos solo el pandeo decolumnas.
11.2. Pandeo en columnas
Estudiaremos en esta seccion en detalle el caso de una columna que en unmomento dado puede desarrollar o mostrar una inestabilidad por pandeo.
En la Figura 11.10 tenemos una columna o viga sometida a una fuerza decompresion P en B, a una fuerza uniforme actuando a lo largo w(x) y finalmentecon un apoyo tipo pasador en el punto A. Podemos apreciar que a diferencia delproblema de flexion, aquı se asume que w(x) es positivo si apunta en la direccionde y > 0.
Extraigamos un elemento diferencial de la viga de longitud dx. En la Figura11.11 tenemos una vista ampliada del diferencial. En el soporte tipo pasadordel lado izquierdo se producira una reaccion en x de magnitud P , luego paracualquier corte imaginario, como las superficies laterales del diferencial de la
267

��
Px
y
dx
w(x)
A B
Figura 11.10: Esquema para deducir las ecuaciones viga-columna.
P
PdyO
dx
w(x)
M
V M + dMdx dx
V + dVdx dx
Figura 11.11: Elemento diferencial de viga.
figura, tenemos como carga interna horizontal H = P . En el lado izquierdo deldiferencial tenemos las cargas internas M y V , en tanto que en el lado derechousando una aproximacion con series de Taylor hasta el primer termino tenemosM + dM
dx dx y V + dVdx dx. Observamos tambien la aplicacion de w(x) en esa
pequena zona.El elemento diferencial mostrado en la Figura 11.11 esta deformado, en par-
ticular se muestra su desplazamiento vertical (la diferencia de desplazamientoentre las caras laterales) dy. Tambien podrıamos tener un desplazamiento hori-zontal pero no lo consideraremos aquı.
Haremos equilibrio para el diferencial, partiendo con las fuerzas tenemos
∑Fy = 0 ⇒ dV
dx= −w(x). (11.3)
268

Si hacemos equilibrio de momentos respecto al punto O tenemos2
∑
O
Mz = 0 ⇒ M+dM
dxdx−M+V
dx
2+
(V +
dV
dxdx
)dx
2+Pdy+wdx(kdx) = 0,
y simplificando algunas expresiones se obtiene
dM
dxdx+ V dx+
dV
dxdx
dx
2+ Pdy + wdx(kdx) = 0.
Despreciando los terminos de orden (dx)2 en relacion a los de orden dx y pos-teriormente dividiendo toda la ecuacion por dx se llega a
dM
dx+ V + P
dy
dx= 0. (11.4)
De (5.15) tenıamos que M = EIzd2ydx2 , que en el presente problema tambien se
considera valida3, luego en (11.4) tenemos
EIzd3y
dx3+ V + P
dy
dx= 0. (11.5)
Vamos a derivar la ecuacion anterior (para por medio del uso de (11.3) reem-plazar V por w) luego tenemos
EIzd4y
dx4+
dV
dx+ P
d2y
dx2= 0.
Usando (11.3) y dividiendo toda la ecuacion por EIz se llega a
d4y
dx4+
P
EIz
d2y
dx2=w(x)
EIz. (11.6)
2El punto O se encuentra a media distancia (en la direccion x) en el diferencial, y de allıproviene las expresiones para los momentos causados por las fuerzas de corte en el diferencial.En relacion al momento causado por w(x), como es una distribucion de forma arbitraria ygeneral, podemos asumir que la fuerza puntual equivalente serıa aproximadamente igual awdx, en tanto que su punto de aplicacion podrıa estar a una distancia kdx (con 0 < k < 1/2)del punto O, y de allı proviene la expresion para el momento causado por esta densidad defuerza por unidad de largo.
3La expresion M = EIzd2y
dx2 se obtuvo en la Seccion 5.1.2 en el contexto del calculo dedeformacion en una viga en flexion. De las figuras anteriores, ası como de las figuras mostradasen la Seccion 5.1.2, podemos apreciar que el tipo de deformacion en los elementos diferencialesson casi exactamente iguales. La unica diferencia en nuestro caso es que ademas debido a lafuerza P podrıamos tener una compresion del diferencial, sin embargo, ya se ha mencionadoque no se tomara en cuenta esa deformacion en esta seccion.
Hay otra considerancion adicional, la expresion M = EIzd2 y
dx2 se obtuvo tambien por mediodel uso de (5.9) y (3.71), es decir, asumiendo una distribucion de esfuezo normal por flexion yde la ecuacion constitutiva. En nuestro caso actual, para el diferencial mostrado en la Figura11.11, tendrıamos tambien una componente uniforme en y de compresion para el esfuerzonormal en la direccion x, que deberıa agregarse en (3.71), pero tampoco se considerara estacomponente adicional para el esfuerzo. Hay dos motivos para esto, primero el fenomeno quenos interesa estudiar aquı no es tanto la deformacion, sino mas bien la posible existencia deun tipo de inestabilidad, y segundo, ya en la Seccion 9.3 se ha visto que en general los esfuezosnormales por flexion son muy superiores en magnitud a los esfuerzos normales por carga axial,de manera tal que estas cargas axiales (sus esfuerzos) se puede despreciar.
269

Esta es la ecuacion cuya solucion usaremos para establecer algun tipo de criteriopara predecir el pandeo. Se puede comparar esta ecuacion con (5.50)3.
11.2.1. Solucion para un caso particular
Aquı nos interesa estudiar el caso en que w(x) = 0, es decir cuando la vigasolo esta sometida a una fuerza de compresion. En este caso de (11.6) tenemosque resolver
d4y
dx4+
P
EIz
d2y
dx2= 0. (11.7)
Un esquema del problema que nos interesarıa estudiar se muestra en la Figura11.12.
P
y
x
A B
Figura 11.12: Viga (columna) bajo la accion solo de una fuerza de compresionaxial.
La solucion general de (11.7) es
y(x) = c1 sin
(√P
EIzx
)+ c2 cos
(√P
EIzx
)+ c3x+ c4, (11.8)
donde ci, i = 1, 2, 3, 4 son constantes.En este problema usaremos tambien la expresion para la segunda derivada
de la solucion y de (11.8) tenemos
d2y
dx2= −c1
P
EIzsin
(√P
EIzx
)− c2
P
EIzcos
(√P
EIzx
). (11.9)
Una solucion completa del problema requiere de 4 condiciones de borde paray. De la Figura 11.12 podemos ver que
y(0) = 0, y(L) = 0. (11.10)
Dos condiciones adicionales se pueden obtener recordando que tenemos que
M = EIzd2ydx2 y que por los tipos de soportes que tenemos en A y B se tiene que
M(0) = 0 y M(L) = 0, por lo que
d2y
dx2
∣∣∣∣x=0
= 0,d2y
dx2
∣∣∣∣x=L
= 0. (11.11)
270

Usemos primero (11.11)1, de (11.9) tenemos que
d2y
dx2
∣∣∣∣x=0
= 0 ⇒ − P
EIzc2 = 0 ⇒ c2 = 0. (11.12)
De (11.10)1 y (11.8) con (11.12) se llega a
y(0) = 0 ⇒ c2 + c4 = 0 ⇒ c4 = 0. (11.13)
Por otra parte de (11.10)2 y (11.8) usando los resultados anteriores tenemosque
y(L) = 0 ⇒ c1 sin
(√P
EIzL
)+ c3L = 0. (11.14)
En tanto que de (11.11)2 se tiene que
d2y
dx2
∣∣∣∣x=L
= 0 ⇒ −c1P
EIzsin
(√P
EIzL
)= 0, (11.15)
lo que implica que de (11.14) se debe cumplir
c3 = 0. (11.16)
Tenemos pues que c2 = 0, c3 = 0 y c4 = 0 en tanto que se debe cumplir(11.15). La ecuacion (11.15) se puede satisfacer de varias formas diferentes,podrıa ser satisfecha si P = 0 o c1 = 0, pero ambos casos nos darıa la solucion
trivial y(x) = 0. Una solucion no trivial es buscar aquellos√
PEIz
L para los
cuales
sin
(√P
EIzL
)= 0. (11.17)
Una solucion no trivial de la ecuacion anterior es√
P
EIzL = nπ n ∈ N. (11.18)
Nos interesa en particular situaciones en las que la carga externa es tal que larelacion anterior es valida, luego de (11.18) podemos definir una carga ‘critica’(para cada n) que denotaremos como Pcrn como
Pcrn =n2π2EIz
L2. (11.19)
¿Por que si P = Pcrn se podrıa tener una situacion de inestabilidad? Larespuesta se puede ver de la siguiente forma. Si P = Pcrn tenemos que (11.15)es satisfecha, luego una solucion no trivial para (11.7) serıa
y(x) = c1 sin
(√PcrnEIz
x
), (11.20)
271
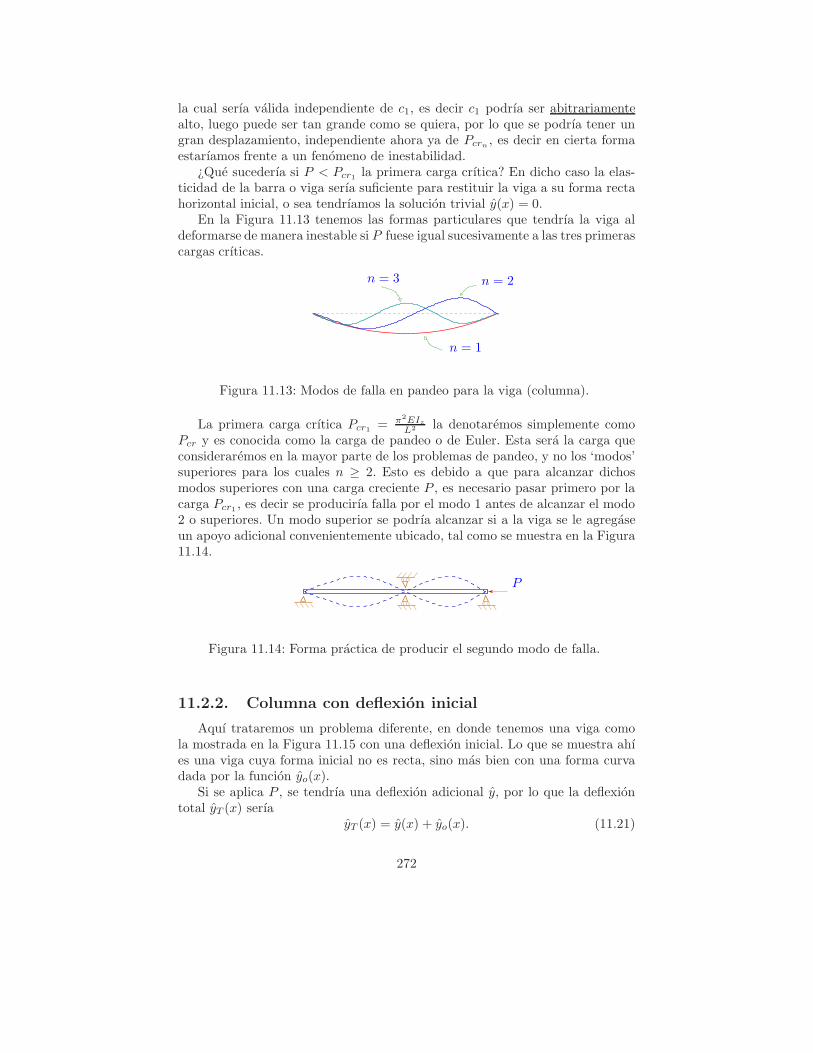
la cual serıa valida independiente de c1, es decir c1 podrıa ser abitrariamentealto, luego puede ser tan grande como se quiera, por lo que se podrıa tener ungran desplazamiento, independiente ahora ya de Pcrn , es decir en cierta formaestarıamos frente a un fenomeno de inestabilidad.
¿Que sucederıa si P < Pcr1 la primera carga crıtica? En dicho caso la elas-ticidad de la barra o viga serıa suficiente para restituir la viga a su forma rectahorizontal inicial, o sea tendrıamos la solucion trivial y(x) = 0.
En la Figura 11.13 tenemos las formas particulares que tendrıa la viga aldeformarse de manera inestable si P fuese igual sucesivamente a las tres primerascargas crıticas.
n = 1
n = 2n = 3
Figura 11.13: Modos de falla en pandeo para la viga (columna).
La primera carga crıtica Pcr1 = π2EIzL2 la denotaremos simplemente como
Pcr y es conocida como la carga de pandeo o de Euler. Esta sera la carga queconsideraremos en la mayor parte de los problemas de pandeo, y no los ‘modos’superiores para los cuales n ≥ 2. Esto es debido a que para alcanzar dichosmodos superiores con una carga creciente P , es necesario pasar primero por lacarga Pcr1 , es decir se producirıa falla por el modo 1 antes de alcanzar el modo2 o superiores. Un modo superior se podrıa alcanzar si a la viga se le agregaseun apoyo adicional convenientemente ubicado, tal como se muestra en la Figura11.14.
P
Figura 11.14: Forma practica de producir el segundo modo de falla.
11.2.2. Columna con deflexion inicial
Aquı trataremos un problema diferente, en donde tenemos una viga comola mostrada en la Figura 11.15 con una deflexion inicial. Lo que se muestra ahıes una viga cuya forma inicial no es recta, sino mas bien con una forma curvadada por la funcion yo(x).
Si se aplica P , se tendrıa una deflexion adicional y, por lo que la deflexiontotal yT (x) serıa
yT (x) = y(x) + yo(x). (11.21)
272

P x
y
yo(x)
y(x)
Figura 11.15: Columna con deflexion inicial yo(x).
No podemos usar directamente (11.6) aquı. Debemos deducir o encontrarotra ecuacion. Si se extrae un diferencial de la viga mostrada en la Figura 11.15y se siguen los mismo pasos con los que se obtuvo (11.6) se llegarıa a4
dM
dx+ V + P
dyTdx
= 0. (11.22)
Reemplazando (11.21) en (11.22) y reordenando se llega a
dM
dx+ V + P
dy
dx= −P dyo
dx,
y derivando una vez se tiene
d2M
dx2+
dV
dx+ P
d2y
d2x= −P d2yo
d2x. (11.23)
Pero de (11.3) (que tambien se puede probar es valida en el presente caso) comoen nuestro problema w(x) = 0 tenemos que dV
dx = 0. Por otra parte de (5.15)
tenemos que5 M = EIzd2ydx2 , luego de (11.23) despues de algunas manipulaciones
finalmente se obtiene
d4y
dx4+
P
EIz
d2y
dx2= − P
EIz
d2yodx2
. (11.24)
Un ejemplo para la deflexion inicial
Consideremos una deflexion inicial de la forma
yo(x) = δo sin(πxL
), (11.25)
4En el caso de (11.22) la diferencia esta en P dyTdx
, en donde aparece la derivada de ladeflexion total. Si se observa bien, este termino provenıa del momento respecto a O (en laFigura 11.11), en donde el momento causado por P ahora serıa PdyT .
5Para (11.23) tenemos que M = EIzd2y
dx2 , lo que proviene del mismo tipo de analisis parala deformacion que se habia visto en la Seccion 5.1.2 en flexion, y que se habıa mencionadoen (11.4) para el problema de pandeo en la viga recta. En nuestro caso en (11.23), hemosasumido que M solo dependerıa de la segunda derivada de y(x) y no en la segunda derivadade yT , debido a que es solo y(x) la parte de la deflexion que estarıa relacionada directamentecon la deformacion por flexion, es decir solo y(x) esta relacionado con los esfuerzos normalespor flexion, mediante los cuales se encontro (5.15).
273

reemplazando en (11.24) tenemos que resolver
d4y
dx4+
P
EIz
d2y
dx2= −Pδo
EIz
π2
L2sin(πxL
). (11.26)
La solucion de esta ecuacion tiene dos partes, una solucion homogenea yh(x) yuna particular yp(x). Para la solucion particular podemos asumir que es de laforma
yp(x) = C sin(πxL
), (11.27)
la que si se reemplaza en (11.26) nos da que
C =Pδo
EIzπ2
L2 − P. (11.28)
Respecto a la solucion homogenea, esta esta dada por (11.8), o sea
yh(x) = c1 sin
(√P
EIzx
)+ c2 cos
(√P
EIzx
)+ c3x+ c4,
por lo que la solucion total de (11.26) y(x) = yh(x) + yp(x) es igual a
y(x) = c1 sin
(√P
EIzx
)+ c2 cos
(√P
EIzx
)+ c3x+ c4 +
PδoEIzπ2
L2 − Psin(πxL
).
(11.29)
De (11.29) podemos ver que si P = Pcr = EIzπ2
L2 tendrıamos que C → ∞lo que se puede considerar como pandeo, pero que en este problema aparece deuna condicion diferente.
Queda como ejercicio determinar las constantes ci, i = 1, 2, 3, 4 usando lascondiciones de borde adecuadas para una viga como la mostrada en la Figura11.15. Es de interes en particular ver si hay alguna ‘otra fuente’ de inestabilidadque se puede estudiar con la solucion completa al conocer ci.
11.2.3. Columna cargada de forma excentrica
En este ultimo caso especial nos interesa estudiar el problema de una co-lumna o barra en la cual la fuerza de compresion P esta colocada de formaexcentrica respecto a la lınea que define la columna, tal como se puede apreciaren la Figura 11.16.
No usaremos aquı (11.7) o la metodologıa usada en las secciones anteriorespara encontrar la ecuacion del problema. El metodo a presentar a continuaciones diferente, y para ello consideremos un corte imaginario hecho sobre un puntox en la columna mostrada en la Figura 11.16, de modo que en la Figura 11.17tenemos la porcion que queda en el lado izquierdo, que se muestra rotada en90◦. En esta parte de la columna, que se ha mostrado deformada, podemos veren el lado izquierdo la carga externa P , y en la superficie de corte el momento
274

P
P x
y
L
e
Figura 11.16: Columna cargada de forma excentrica.
P
P
x
y(x)
e
M
Figura 11.17: Columna cargada de forma excentrica. Corte imaginario.
interno M y la fuerza interna horizontal H = P (no se muestra la fuerza decorte que en este problema no interesa).
A partir de la lınea horizontal que define a la viga en la situacion inicial alpunto de aplicacion de la fuerza externa P en el extremo izquierdo, tenemos queP esta separado por una distancia y(x) + e de la lınea horizontal. Si hacemosequilibrio de momentos para esta porcion de viga tenemos que
M(x) = −P (e+ y(x)). (11.30)
Aquı nuevamente (5.15) es valida, por lo que M(x) = EIzd2ydx2 , luego para
(11.30) despues de algunas manipulaciones tenemos
d2y
dx2= − P
EIz(e+ y(x)),
de donde se obtiened2y
dx2+
P
EIzy = − P
EIze. (11.31)
275

La solucion de (11.31) consta de dos partes, una homogenea y una particular,y la solucion total tiene la forma
y(x) = c1 sin
(√P
EIzx
)+ c2 cos
(√P
EIzx
)− e, (11.32)
donde c1, c2 son constantes.Solo se necesitan dos condiciones de borde aquı y que son
y(0) = 0, y(L) = 0. (11.33)
Usando (11.32), (11.33) obtenemos finalmente
c1 =e[1− cos
(√PEIz
L)]
sin(√
PEIz
L) , c2 = e. (11.34)
En (11.34)1 vemos que si√
PEIz
L = nπ, n ∈ N estarıamos en una situacion
en la cual c1 → ∞, lo que se puede clasificar como un tipo de inestabilidad.
276

11.3. Ejercicios
1. Encuentra las cargas crıticas para los dos problemas mostrados en la Fi-gura 11.18.
PP
LL
Figura 11.18: Columnas bajo compresion.
2. En la Figura 11.19 se tiene una columna bajo la accion de una fuerza P yun momento MB. La seccion de la viga es mostrada en el lado derecho de
L
A B
MB
Px
yy
z
a
b
Figura 11.19: Columna.
la Figura 11.19 (en forma ampliada). La seccion tiene un espesor uniformee. Si la viga tiene un modulo de elasticidad E, determine la carga crıticaPcr.
3. Una barra maciza de acero como la que se muestra en la Figura 11.20 tieneun diametro de 30mm y actua como separador en el sistema mostrado endicha figura. Asuma que los cables son inextensibles. Considerando un
277

factor de seguridad 1.7 determine la fuerza maxima que puede soportar elsistema. Se tiene E = 190GPa.
FF
450mm 900mm
500mm
500mmBarra separadora
Cable
Cable
Figura 11.20: Separador con cables.
4. La columna rectangular de la Figura 11.21 con dimensiones transversalesb y h esta soportada por pasadores en los extremos A y C. A mitad dela altura, la columna esta restringida en el plano de la figura pero puededeflexionarse perpendicularmente en el plano de la figura. Determine larazon h/b tal que la carga crıtica sea la misma para pandeo en los dosplanos principales de la columna.
������������
������������
P
B
C
A
L/2
L/2
XX
b
b
h
Seccion X −X
Figura 11.21: Viga bajo pandeo.
278

5. Una armadura articulada en sus puntos A, B y C esta compuesta pordos barras del mismo material y con identicas secciones transversales. Elangulo de la carga P puede variar entre 0 y 90◦. La barra AB mide L, lasbarras tiene el mismo valor para Iz.
A
B
C
P θ
β
Figura 11.22: Dos barras bajo el efecto de pandeo.
Determine P para evitar pandeo con un FS = 2. ¿Cual es θ para que Psea maximo?
6. La Figura 3(a) es la vista isometrica de una estructura de un molino eolicode gran tamano. Al disenar surge la duda de como disponer la veleta (quesirve para que la estructura ‘siga’ al viento). Se desea tener la maximaarea de la veleta, siempre y cuando no ocurra pandeo. Si la estructurase modela como lo muestra la Figura 3(b), con d la distancia horizontalconstante entre el eje de la estructura y la veleta, y a la altura de laveleta por determinar, encuentre el maximo valor de a para que no ocurrapandeo.
Considere que solo la veleta compuesta de acero con ρ = 7900 kg/m3 yespesor de 2 mm contribuye peso. La seccion transversal del eje verticales un tubo con diametro exterior φe e interior φi.
Datos: h=30 m, d=50 cm, L=1m, φi=34mm, φe=38mm, E = 210GPa.
279

(a) Vista isometrica.
������������������������������������������
������������������������������������������
g
h
L
d a
A
B C
D
Veleta
(b) Vista 2D.
Figura 11.23: Veleta.
280

Capıtulo 12
Introduccion a la teorıa dela elasticidad lineal elastica
Tal como se indico en la introduccion de este texto, hoy en dıa hay una seriede metodos numericos y programas comerciales que permiten estudiar el esta-do de esfuerzos y las deformaciones tanto en problemas bidimensionales comoen casos en que consideremos cuerpos tridimencionales de geometrıa comple-ja. Dichos programas lo que hacen es determinar soluciones aproximadas delproblema de valor de frontera en mecanica de solidos, y han sido en particularutiles y exitosos en el caso de cuerpos que presentan pequenas deformacionesy comportamiento lineal. Es importante pues conocer cual es el problema devalor de frontera que se debe solucionar en elasticidad lineal, como una for-ma de ser capaces de entender mejor que se puede obtener con dichos metodoscomputacionales, ası como ser capaces de ver las limitantes de estos metodos.
En este capıtulo repasaremos varios conceptos vistos anteriormente, talescomo el concepto del esfuerzo, de las deformaciones, las ecuaciones constitutivas,las ecuaciones de equilibrio para el caso general 3D y estudiaremos algunosmetodos de solucion exacta de problemas de valor de frontera. La diferencia esque aquı estudiaremos estos temas en el caso general tridimensional y haciendouso mas intensivo de las herramientas del calculo vectorial.
12.1. Notacion. Notacion indicial. Vectores y ten-
sores
La notacion usada en este capıtulo difiere de la usada en los capıtulos ante-riores y es como sigue:
Escalares: Los escalares los denotaremos de forma preferente con letrasGriegas.
Vectores: Los vectores los denotaremos en general con letras Latinas minuscu-
281

las en negritas, como por ejemplo u, v, etc. Sus componente las deno-taremos con un ındice, es decir, por ejemplo, ui, i = 1, 2, 3 representarıauna de las tres componentes del vector u.
Los tensores de segundo orden los denotaremos en general con letras Lati-nas mayusculas en negritas, como por ejemplo T,M, etc. Sus componenteslas denotaremos con dos subındices, por ejemplo Tij , i, j = 1, 2, 3 serıa unade las 9 componentes del tensor T.
Los tensores de cuarto orden los denotaremos con letras cursivas en negri-tas, como por ejemplo1 C serıa el tensor de cuarto orden con componentesCijkl .
Los volumenes de los cuerpos en donde se estudiaran deformaciones, fuer-zas, etc. se denotaran con letras cursivas de un formato diferente al ante-rior, como por ejemplo B, A .
Las superficies (bordes) de los volumenes de los cuerpos se denotaran como∂B, ∂A .
Los vectores unitarios (base Cartesiana) seran denotada como {e1, e2, e3}.
12.1.1. Notacion indicial
Considerese el sistema de ecuaciones lineales
A11x1 +A12x2 + ...+A1nxn = b1,
A21x1 +A22x2 + ...+A2nxn = b2,...
Am1x1 +Am2x2 + ...+Amnxn = bm,
que se puede escribir en la forma equivalente
n∑
j=1
Aijxj = bi, i = 1, 2, ...,m
En este capıtulo la suma anterior u otras similares las representaremos como
Aijxj = bi. (12.1)
Cuando en una expresion hay una repeticion (de dos veces) de un ındice, seasumira que dicha repeticion indica que hay suma en ese ındice, y para nuestrocaso la suma ira de 1 a 3. El ındice que se repite se llamara ındice mudo, en
1La notacion usada en el pizarron y en los cuadernos es diferente, cambiando el formatoen negritas con el uso de una tilde, como por ejemplo u
˜por u, T
˜por T y C
˜por C.
282

tanto que el otro ındice se llamara ındice libre.
Otro ejemplo:
u = u1e1 + u2e2 + u3e3,
=
3∑
i=1
uiei,
= uiei
En (12.1) tenemos repeticion del ındice j, que nos indica suma en j de 1 a3, en tanto i serıa un ındice libre, que tambien puede tomar alternativamentelos valores 1, 2 o 3.
Veamos mas ejemplos:
Sea ui = Bijvj , como se repite el ındice j entonces ui =∑3
j=1Bijvj , luegopara i = 1, 2, 3 tendrıamos, respectivamente:
u1 = B11v1 +B12v2 +B13v3,
u2 = B21v1 +B22v2 +B23v3,
u3 = B31v1 +B32v2 +B23v3,
que es equivalente a
u1u2u3
=
B11 B12 B13
B21 B22 B23
B31 B32 B33
v1v2v3
⇔ u = Bv.
ConsideremosAij = BjkCkj . (12.2)
La interpretacion de la expresion anterior serıa
Aij =
3∑
j=1
BikCkj , i, j = 1, 2, 3
que si desarrollamos componente a componente nos quedarıa como
A11 = B11C11 +B12C21 +B13C31,
A12 = B11C12 +B12C22 +B13C32,
A13 = B11C13 +B12C23 +B13C33,
A21 = B21C11 +B22C21 +B23C31,
A22 = B21C12 +B22C22 +B23C32,
A23 = B21C13 +B22C23 +B23C33,
A31 = B31C11 +B32C21 +B33C31,
A32 = B31C12 +B32C22 +B33C32,
A33 = B31C13 +B32C23 +B33C33.
283
Estas son 9 ecuaciones, y se puede observar que se pueden escribir de laforma alternativa
A11 A12 A13
A21 A22 A23
A31 A32 A33
=
B11 B12 B13
B21 B22 B23
B31 B32 B33
C11 C12 C13
C21 C22 C23
C31 C32 C33
,
es decir (12.2) vendrıa a representar en notacion indicial la ecuacion ma-tricial A = BC.
Seaai(bi + ci), (12.3)
vemos que la ecuacion anterior es equivalente a
aibi + aici,
que es igual a
a1b1 + a2b2 + a3b3 + a1c1 + a2c2 + a3c3,
o sea serıa igual a a · (b + c), donde · serıa el producto punto entre dosvectores.
Sea yi = Aijxj y zi = Bijdj tenemos que determinar yizi.
Aquı es necesario hacer la observacion que si un ındice se repite mas dedos veces entonces la expresion no tendrıa sentido desde el punto de vistade suma. Por otra parte, si un ındice es mudo, el ındice se puede cambiarpor otra letra y el resultado serıa el mismo.
Luego al hacer la multiplicacion yizi debemos notar que en ambas de-finiciones tenemos el ındice j repetido, por lo que se tendrıa AijxjBijdj ,lo que no tendrıa sentido desde el punto de vista de una suma. Pero comoen la expresion para zi el ındice j es mudo, lo cambiamos por k y nos quedazi = Bikdk dando el mismo resultado inicial, luego yizi nos quedarıa
AijxjBikdk,
en donde podemos apreciar que habrıa suma en j y tambien en k de 1 a3.
La expresion anterior representa el producto (Ax) · (Bd).
Veamos el caso Aijxici. Aquı vemos que el ındice i se repite tres veces demodo que en esta expresion no se puede decir que hay suma en i.
La expresion Aii, en donde para un solo tensor tenemos una repeticion deındice, es equivalente a
Aii = A11 +A22 +A33.
284

TransformarEkk = AimAjmAij (12.4)
en notacion directa es decir en notacion en negritas.
La traza de un tensor se define como
trA = A11 +A22 +A33 =
3∑
k=1
Akk = Akk.
La transpuesta de un tensor se denota como AT, es decir si Aij son lascomponentes de A, entonces Aji serıan las componentes de AT.
Luego para (12.4) se tiene Ekk ⇔ trE, por otra parte AimAjm ⇔ AAT
(esto se deja como ejercicio). Para un tensor C y D tenemos CijDkj es
equivalente a CDT, por tanto CijDij serıa equivalente a tr(CDT). LuegoEkk = AimAjmAij serıa equivalente a
trE = tr[(AAT)AT].
Sustituir Aij = BikCkj en φ = AmkCmk.
Al reemplazar tenemos que tener cuidado de que los ındices se debenrepetir solo una vez, luego en lugar de usar BikCkj usamos Aij = BinCnjconsiderando que k y n son ındices mudos, luego para φ tenemos
φ = BmnCnkCmk,
que en notacion directa queda como
φ = tr(ACT) ⇔ φ = tr(BCCT).
Cuando un ındice se repite y no queremos que se interprete como suma secoloca una lınea bajo los ındices, por ejemplo:
uivi =
u1v1 si i = 1u2v2 si i = 2u3v3 si i = 3
,
es decir aquı no hay suma.
12.1.2. Sımbolos especiales
Delta de Kronecker:
δij =
{1 i = j0 i 6= j
. (12.5)
285

Tensor de Identidad: El tensor de identidad de segundo orden se denotaracomo I y se tiene que
I =
1 0 00 1 00 0 1
,
y en notacion indicial el tensor de identidad es simplemente el Delta deKronecker es decir
I ⇔ δij .
Considerese el siguiente producto Ariδij , que serıa igual a
Ar1δ1j +Ar2δ2j +Ar3δ3j =
Ar1 si j = 1Ar2 si j = 2Ar3 si j = 3
,
que serıa equivalente a Arj .
Otro ejemplo es δijvivj = vivi.
La regla es entonces: Si el ındice de un vector o tensor se repite con elındice del Delta de Kronecker, entonces se reemplaza dicho ındice por elındice libre del Delta de Kronecker.
Sımbolo de la permutacion: Se define
ǫijk =
1 i, j, k Orden cıclico0 i, j, k Se repite un ındice−1 i, j, k Orden anticıclico
. (12.6)
Notacion para derivadas parciales:
∂φ
∂xi= φ,i. (12.7)
Coordenadas: Reemplazaremos los sımbolos para las coordenadas x, y, z porx1, x2, x3 y los vectores unitarios ı, , k por e
˜i, i = 1, 2, 3.
Producto punto: En notacion indicial se tiene
u · v ⇔ uivi.
Producto cruz o vectorial: En notacion indicial se tiene
u× v = ǫijkuivjek. (12.8)
Norma de in vector: La norma de un vector se denotara de manera alterna-tiva como ‖u‖ o como |u|, y en notacion indicial quedarıa como
‖u‖= √uiui.
286

12.1.3. Tensor de segundo orden: Definicion, Producto ten-sorial y la doble contraccion
Un tensor de segundo orden se puede definir como una transformacion linealque toma un vector y lo transforma en otro vector. Sea E el espacio de losvectores, si u ∈ E y si A es un tensor de segundo orden, entonces Au ∈ E.
Sean u,v,w ∈ E, se define el producto ⊗ como
(u⊗ v)w = (v ·w)u ∀u,v,w. (12.9)
De la definicion anterior es posible ver entonces que
u1u2u3
⊗
u1u2u3
=
u1v1 u1v2 u1v3u2v1 u2v2 u2v3u3v1 u3v2 u3v3
,
o seau⊗ v ⇔ uivj .
Finalmente tenemos que si u = uiei y v = vjej entonces
u⊗ v = uivjei ⊗ ej .
De las expresiones anteriores podemos ver que tal como {ei} es la base devectores unitarios para el espacio vectorial tenemos que {ei ⊗ ej} serıa la basepara el espacio de tensores de segundo orden.
Sean los vectores de la base ei, ej y el vector unitario arbitrario n, usando(12.9) tenemos que
(ei ⊗ ej)n = (ej · n)ei,pero
ej · n = ej · (n1e1 + n2e2 + n3e3) = nj ,
puesto que {ei} es una base ortogonal, luego
(ei ⊗ ej)n = njei,
⇒ Tij(ei ⊗ ej)n = Tijnjei,
⇔ (Tijei ⊗ ej)n = Tijnjei,
pero Tijnj serıa la componente i del vector Tn y por tanto Tijnjei serıa simple-mente la representacion de dicho vector en la base {ei}, luego de la expresionanterior tenemos
(Tijei ⊗ ej)n = Tn,
que tiene que ser valido para cualquier n unitario por lo que se obtiene finalmentela representacion para un tensor de segundo orden
T = Tijei ⊗ ej , (12.10)
luego T ∈ E× E.La doble contraccion, que se denota como : se define para dos tensores como:
A : B = tr(ABT) = AijBij . (12.11)
287

12.1.4. Cambio de base para vectores
Un mismo vector v (caso plano) se puede escribir en dos sistemas de coor-denadas x− y e x′ − y′, tal como se muestra en la Figura 12.1, es decir
v = v1e1 + v2e2 = v′1e′1 + v′2e
′2.
x
y
x′y′
v
v1
v2
v′1
v′2
Figura 12.1: Vector y la influencia de un cambio del sistema de coordenadas ensus componentes.
Teniendo la idea del caso 2D veamos ahora el caso 3D, donde sean {ei} y {e′i}dos bases de vectores unitarios para el mismo espacio vectorial E. Escribamoslos vectores e′i en el sistema {ei}, tenemos
e′1 = Q11e1 +Q12e2 +Q13e3, (12.12)
e′2 = Q21e1 +Q22e2 +Q23e3, (12.13)
e′3 = Q31e1 +Q32e2 +Q33e3, (12.14)
donde Qij = cos(x′i, xj) es decir como el coseno del angulo entre los ejes2 x′i yxj .
La base {e′i} es ortonormal, luego
e′i · e′k = δik. (12.15)
De (12.12)-(12.14) tenemos e′i = Qijej , luego de (12.15) se tiene que
(Qijej) · (Qklel) = δik ⇔ QijQkl(ej · el) = δik,
pero {ei} tambien es una base ortonormal, luego ej · el = δjl, por lo que laecuacion anterior nos queda como QijQklδjl = δik, lo que nos da finalmente
QijQkj = δik ⇔ QQT = I, (12.16)
o sea la matriz con componentes Qij es ortogonal.
2En algunos textos se define como cos(xi, x′j).
288

De manera similar se puede probar que
QijQik = δjk ⇔ QTQ = I. (12.17)
Sea v ∈ E, se tiene v = viei y v = v′ie′i, luego
viei = v′je′j ⇔ viei = v′jQjkek,
⇔ viei · el = v′jQjkek · el ⇔ viδil = v′jQjkδkl,
de donde se obtienevl = v′jQjl (12.18)
usando Qjkδkl = Qjl.De (12.18) se puede obtener una relacion adicional, para ello multipliquemos
los dos lados de (12.18) por Qkl, nos queda
vlQkl = v′jQjlQkl,
pero de (12.16) QjlQkl = δjk, luego la ecuacion anterior queda como vlQkl =v′jδjk que es equivalente a
v′k = vlQkl. (12.19)
12.1.5. Transformacion de las componentes de un tensorde segundo orden
Sean nuevamente {ei} y {e′i} dos bases de vectores unitarios, y sea T untensor de segundo orden. Sean n ∈ E y t = Tn ∈ E, sean ti, Tij y nj lascomponentes de estos vectores y del tensor en la base {ei}, y sean t′i, T
′ij y n′
j
las componentes de los mismos vectores y del mismo tensor en la base {e′i}. Dela relacion
t = Tn (12.20)
tenemos en notacion indicial
ti = Tijnj t′i = T ′ijn
′j . (12.21)
Pero de (12.19) tenemos que t′i = Qiptp y n′j = Qjknk, luego en (12.21)2 se
obtieneQiptp = T ′
ijQjknk, (12.22)
pero de (12.21)1 tenemos que tp = Tpmnm, por lo que (12.22) queda como
QipTpmnm = T ′ijQjknk
y multiplicando la ecuacion anterior por ambos lados por Qir se llega a
QirQipTpmnm = QirT′ijQjknk
y de (12.17) considerando que QirQip = δrp tenemos entonces
δrpTpmnm = QirQjkT′ijnk ⇔ Trmnm = QirQjkT
′ijnk.
289

Pero en la ultima ecuacion los ındicesm, k son mudos, luego cambiando el ındicek por m en el lado derecho de la segundo ecuacion se tiene
Trmnm = QirQjmT′ijnm
que serıa valida para cualquier nm, por lo que se obtiene finalmente
Trm = QirQjmT′ij , (12.23)
y de una manera similar se puede probar que
T ′ij = QipQjnTpn. (12.24)
12.1.6. Operadores diferenciales en coordenadas Cartesia-nas
El operador gradiente
El operador gradiente se denotara como ∇, sean
φ = φ(x) = φ(x1, x2, x3) Campo escalar,
v = v(x) = v(x1, x2, x3) Campo vectorial,
T = T(x) = T(x1, x2, x3) Campo tensorial,
luego el operador gradiente nos queda como
∇φ =∂φ
∂x⇔ ∂φ
∂x1e1 +
∂φ
∂x2e2 +
∂φ
∂x3e3,
∇v =∂v
∂x⇔ ∂vi
∂xjei ⊗ ej , (12.25)
∇T =∂T
∂x⇔ ∂Tij
∂xkei ⊗ ej ⊗ ek. (12.26)
Operador divergencia
El operador divergencia se denotara como ∇· o como div, luego para uncampo vectorial v y para un campo tensorial T el operador divergencia sedefinirıa como:
divv =∂vi∂xi
=∂v1∂x1
+∂v2∂x2
+∂v3∂x3
, (12.27)
divT =∂Tij∂xi
ej . (12.28)
Teorema de la divergencia
El teorema de la divergencia en su forma usual (considerando su notacionusual tambien) tiene la forma:
∫
∂B
~f · ~n da =
∫
B
div ~f dV.
290

Considerando la nueva notacion tenemos que
∫
∂B
f · n da ⇔∫
∂B
fini da
luego el teorema de la divergencia aplicado a un campo vectorial queda como
∫
∂B
f · n da =
∫
B
divf dV ⇔∫
∂B
fini da =
∫
B
fi,i dV. (12.29)
En el caso de un campo tensorial de segundo orden tenemos
∫
∂B
Tn da ⇔∫
∂B
Tijnj da,
luego el teorema de la divergencia aplicado a un tensor de segundo orden que-darıa como
∫
∂B
Tn da =
∫
B
divTT dV ⇔∫
∂B
Tijnj da =
∫
B
Tij,j dV, (12.30)
en donde se define divT como Tij,i, motivo por el cual en la expresion anterioraparece la transpuesta del tensor T.
12.2. Fuerzas y esfuerzos
En la Seccion 2.2.2 hablamos en detalle de las fuerzas externas la cuales lasclasificamos en fuerzas de superficie t y fuerzas de cuerpo b. En la Secciones3.2 y 3.3 tambien hablamos de las fuerzas internas, y como estas se podıanrepresentar por medio de un campo vectorial que ahora denotamos como t, quetiene unidades de fuerza por area. Como habıamos visto en la Seccion 3.3 estevector debe depender no solo de la posicion x en el cuerpo, sino ademas demanera especial en el vector normal n, que era el vector normal a la superficie otambien se podrıa identificar como el vector normal a un punto de una superficiede corte imaginario; esta es la hipotesis de Cauchy:
t = t(x,n). (12.31)
Veamos nuevamente la justificacion de esta hipotesis: En la Figura 12.2 tenemosdos cuerpos A y B en contacto debido a un agente externo que es mostradopor medio de la flecha azul en A . El concepto de fuerza de superficie t surgeante la necesidad de estudiar de manera separada (para simplificar el proble-ma original) el comportamiento de, por ejemplo, el cuerpo B, para lo cual el‘efecto’ de A sobre B se manifestarıa de manera simplificada por medio de unafuerza de contacto por unidad de superficie t causada por A sobre B como sepuede apreciar en la Figura 12.2 (derecha). La fuerza t llamada tambien vectorde esfuerzos, en principio podrıa depender del tiempo t, y en general tambiendeberıa depender de la posicion x a lo largo y ancho de la superficie de contacto.
291

A
BB
tn
Figura 12.2: Dos cuerpos en contacto y el concepto de fuerza de superficie.
Notese que en general el vector t no va a tener la misma direccion que el vectorunitario normal a la superficie n como se puede apreciar en la misma figura.
El concepto de vector de esfuerzos se puede extender ahora para considerarlas cargas internas en un cuerpo. La idea es que tal como la interaccion de B
con otros cuerpos se puede modelar por medio de t, la interaccion de las partes‘internas’ de B. Considerese la Figura 12.3, en donde se tiene un cuerpo B bajola accion de fuerzas externas que por simplicidad no se muestran aquı. El cuerpo
P
P
P
B
B
B
C1
C1
C2
C2
t
t
n
n
Figura 12.3: Cuerpo con cortes imaginarios. Vector de esfuerzos como modelode carga interna.
B estarıa en equilibrio. Imaginemos ahora se hace dos cortes imaginarios C1 yC2 tal como se discutio en el Capıtulo 3. La hipotesis de Cauchy es que si soncortes imaginarios, cada parte que se extrae deberıa tambien estar en equilibrio,
292

lo que se logra si y solo si en cada superficie de corte aparece una distribucion decarga t. Ahora, para un mismo punto P hay infinidad de cortes que pasan pordicho punto, y para cada uno de esos cortes la distribucion para t serıa diferente,lo que implica que para ese punto t no solo deberıa depender del tiempo t y dela posicion x, sino tambien de la forma del corte imaginario, y el parametro massimple de usar para incorporar la ‘forma’ del corte serıa, por ejemplo, incluir elvector normal n como variable para determinar t como aparece en (12.31).
La primera ley del movimiento de Euler (en el caso cuasi-estatico) es:
∫
∂B
t da+
∫
B
ρb dV = 0, (12.32)
donde el termino∫∂B
t da serıa la suma de las fuerzas de superficie actuandoen la superficie ∂B de un cuerpo B y
∫Bρb dV serıa la suma de las fuerzas de
cuerpo considerando la densidad de fuerzas de cuerpo b por unidad de masa,donde ρ es la densidad de masa. La primera ley del movimiento de Euler expresaen una forma general para cuerpos continuos que la suma de fuerzas sobre uncuerpo, considerando las fuerzas debido a reacciones por apoyos, debe ser cero.
La segunda ley del movimiento de Euler (en el caso cuasi-estatico) es:
∫
∂B
(x− xo)× t da+
∫
B
(x− xo)× ρb dV = 0, (12.33)
donde∫∂B
(x − xo) × t da serıa la suma de momentos (torques) debido a lasfuerzas de superficie y
∫B(x−xo)× ρb dV serıa la suma de momentos debido a
las fuerzas de cuerpo. Esta segunda ley indica entonces que la suma de momentosdebido tanto a las fuerzas externas como a las provenientes de los apoyos debeser cero.
En fısica se ensena que la accion y reaccion serıa un principio, es decir seasumirıa como cierto sin demostrarlo, sin embargo se puede obtener este ‘prin-cipio’ a partir de la primera ley del movimiento de Euler. No se hara esto aquıpor brevedad. Accion y reaccion usando nuestra notacion basicamente quedarıacomo:
t(x, t,−n) = −t(x, t,n), (12.34)
y la forma grafica de esta ecuacion se muestra en la Figura 12.4.
12.2.1. Tensor de esfuerzos
Consideremos un cuerpo B sometido a fuerzas externas (que no se muestranpara simplificar la figura), al cual se le extrae un elemento diferencial como elmostrado de forma ampliada en el lado derecho de la Figura 12.5. El elementodiferencial no es un cubo sino un tetrahedro con tres caras o superficies. Eltetrahedro tiene un volumen C , una superficie principal S con normal n, y tressuperficies Si con normales ei i = 1, 2, 3.
En cada cara del tetrahedro tenemos un vector de esfuerzos, que se asumeconstante en dicha cara debido a que las caras se asumen como muy pequenas.
293

A
A
B
B x
x
x
tn
−t−n
Figura 12.4: Accion y reaccion.
h
B
n
x
xt(x,n)
t(x,−e1)
t(x,−e2)
t(x,−e3)
1
2
3
C S S1S2
S3
Figura 12.5: Fuerzas internas en un cuerpo y su relacion con el ‘tensor’ deesfuerzos.
En la cara principal tenemos t(x,n), en la cara con normal ni tenemos losvectores t(x,−ei), i = 1, 2, 3.
Aplicando la primera ley del movimiento de Euler (12.32) al tetrahedro C
tenemos ∫
∂C
t da+
∫
C
ρb dV = 0. (12.35)
Para∫∂C
t da tenemos∫
∂C
tda =
∫
S
t(x,n)da+
∫
S1
t(x,−e1)da+
∫
S2
t(x,−e2)da+
∫
S3
t(x,−e3)da.
(12.36)Pero para un tetahedro pequeno tenemos que∫
S
t(x,n) da ≈ S t(x,n),
∫
Si
t(x,−ei) da ≈ Sit(x,−ei), i = 1, 2, 3,
(12.37)
294

donde de (12.34) se cumple que t(x,−ei) = −t(x, ei).Para
∫Cρb dV se tiene la aproximacion
∫
C
ρb dV ≈ 1
3ρbhS , (12.38)
donde 13hS serıa el volumen del tetahedro.
Usando todos estos resultados y aproximaciones en (12.35) se obtiene:
S t(x,n) −3∑
i=1
Sit(x, ei) +1
3ρbhS = 0. (12.39)
Pero el area Si se puede obtener como la ‘proyeccion’ de S en la direccion i, osea
Si = S n · ei = S ni, (12.40)
donde ni, i = 1, 2, 3 es la componente de n en la direccion i.Como resultado en (12.39) tenemos
S t(x,n) − S
3∑
i=1
nit(x, ei) +1
3ρbhS = 0,
luego eliminando el factor comun S se obtiene
t(x,n) −3∑
i=1
nit(x, ei) +1
3ρbh = 0,
y tomando el lımite h → 0 el tetahedro efectivamente se transformarıa en elpunto x. Luego como en ese caso 1
3ρbh → 0 finalmente de la primera ley demovimiento de Euler se obtiene:
t(x,n) =
3∑
i=1
t(x, ei)ni. (12.41)
Cada vector t(x, ei) tiene 3 componentes en las direcciones 1, 2, 3. Sea3
Tji = tj(x, ei), (12.42)
luego de (12.41) se tendrıa
ti(t,n) = Tjini ⇔ t = Tn, (12.43)
donde T se conoce como el tensor de esfuerzos de Cauchy, definido como4
T =
T11 T12 T13T21 T22 T23T31 T32 T33
, (12.44)
295
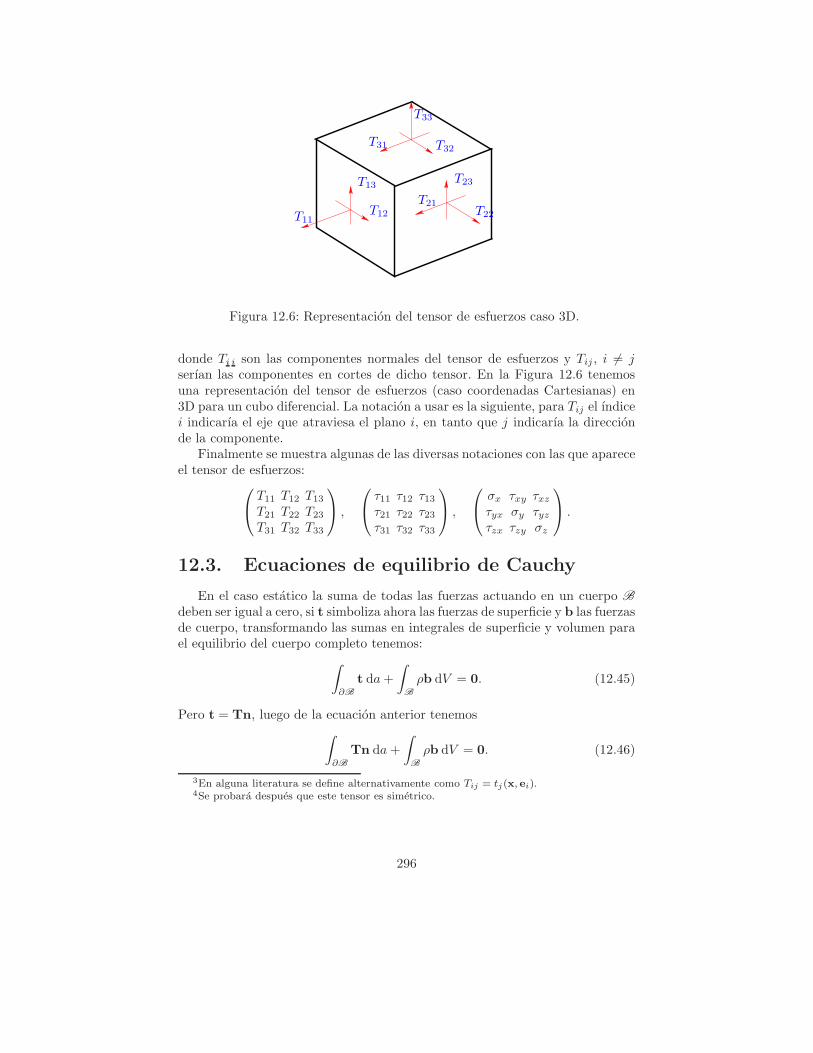
T11T12
T13T21
T22
T23
T31 T32
T33
Figura 12.6: Representacion del tensor de esfuerzos caso 3D.
donde Ti i son las componentes normales del tensor de esfuerzos y Tij , i 6= jserıan las componentes en cortes de dicho tensor. En la Figura 12.6 tenemosuna representacion del tensor de esfuerzos (caso coordenadas Cartesianas) en3D para un cubo diferencial. La notacion a usar es la siguiente, para Tij el ındicei indicarıa el eje que atraviesa el plano i, en tanto que j indicarıa la direccionde la componente.
Finalmente se muestra algunas de las diversas notaciones con las que apareceel tensor de esfuerzos:
T11 T12 T13T21 T22 T23T31 T32 T33
,
τ11 τ12 τ13τ21 τ22 τ23τ31 τ32 τ33
,
σx τxy τxzτyx σy τyzτzx τzy σz
.
12.3. Ecuaciones de equilibrio de Cauchy
En el caso estatico la suma de todas las fuerzas actuando en un cuerpo B
deben ser igual a cero, si t simboliza ahora las fuerzas de superficie y b las fuerzasde cuerpo, transformando las sumas en integrales de superficie y volumen parael equilibrio del cuerpo completo tenemos:
∫
∂B
t da+
∫
B
ρb dV = 0. (12.45)
Pero t = Tn, luego de la ecuacion anterior tenemos
∫
∂B
Tn da+
∫
B
ρb dV = 0. (12.46)
3En alguna literatura se define alternativamente como Tij = tj(x, ei).4Se probara despues que este tensor es simetrico.
296

Pero por el uso del teorema de la divergencia se tiene que∫∂B
Tnda =∫
BdivTTdV ,
luego (12.35) quedarıa como
∫
B
divTT + ρb dV = 0,
que tiene que ser satisfecha para cualquier volumen B, que da como resultado:
divTT + ρb = 0, (12.47)
que es conocida como la ecuacion de equilibrio o primera ley del movimiento deCauchy.
Se estudiara ahora la segunda ley del movimiento de Euler (12.33) medianteel uso de (12.43). La segunda ley tenıa la forma
∫
∂B
(x− xo)× t da+
∫
B
(x− xo)× ρb dV = 0,
y mediante el uso de (12.8) quedarıa como
∫
∂B
ǫijk(xi − xoi)tjek da+
∫
B
ǫijk(xi − xoi)ρbjek dV = 0, (12.48)
pero de (12.43) se tiene que tj = Tjmnm, luego∫∂B
ǫijk(xi−xoi)tjekdamedianteel uso del teorema de la divergencia (12.30) queda como5:
∫
∂B
ǫijk(xi − xoi)tjmnm da ek =
∫
B
∂
∂xm[ǫijk(xi − xoi)tjm] dV ek,
=
∫
B
ǫijk[δimTjm + (xi − xoi)Tjm,m]dV ek, (12.49)
luego usando (12.49) en (12.48) considerando que δimTjm = Tji se obtiene:
∫
B
ǫijkTji + ǫijk[(xi − xoi)(Tjm,m + ρbj)]dV ek = 0,
que considerando (12.47) (que en notacion indicial quedarıa como Tjm,m+ρbj =0) queda finalmente como
∫
B
ǫijkTji dV ek = 0.
Esta ecuacion debe ser satisfecha para cualquier cuerpo B por lo que se debecumplir que
ǫijkTjiek = 0. (12.50)
5Notese que en (12.49) dado que los vectores unitarios ek son constantes, se pueden extraerde las integrales.
297

Para k = 1, 2, 3 tenemos:
k = 1 ⇒ ǫ321T23 + ǫ231T32 = 0 ⇒ T23 = T32,
k = 2 ⇒ ǫ132T31 + ǫ312T13 = 0 ⇒ T31 = T13,
k = 3 ⇒ ǫ123T21 + ǫ213T12 = 0 ⇒ T21 = T12,
es decirTij = Tji ⇔ T = TT, (12.51)
o sea el tensor de esfuerzos es simetrico.
12.4. Esfuerzos principales
12.4.1. Esfuerzo normal maximo
En la Seccion 10.2 se hablo de los esfuerzos normales maximos y mınimosy de los esfuerzos de corte maximo para problemas tridimensionales, pero sinindicar como estos se podıan obtener. En esta seccion veremos con algun detalleeste tema.
De la Figura 12.5 tenıamos en la superficie S el vector de esfuerzos t(x,n)y el vector normal n. En general estos vectores no estaran alineados. El vectort(x,n) lo vamos a descomponer en dos partes, una normal a la superficie, esdecir en la direccion de n, que denotaremos como σn, y otra parte tangencial ala superficie que denotaremos como τ , tal como se puede apreciar en la Figura12.7.
σ
12
3
n
τ
t(x,n)
Figura 12.7: Descomposicion del vector de esfuerzos en una parte normal y otratangencial.
La componente σn la podemos obtener simplemente como
σn = t(x,n) · n. (12.52)
298

La pregunta ahora es: ¿Cual deberıa ser n de forma tal de que σn sea maximo,y cuales serıan los valores de σn en dicho caso? Esta pregunta es similar a la quese hizo en la Seccion 9.1 cuando en el problema plano preguntabamos lo mismopara el angulo θ del corte imaginario oblicuo.
De (12.43) tenemos que t(x,n) = Tn, de modo que en (12.52) tenemos que
σn = (Tn) · n, (12.53)
que en notacion indicial es igual a
σn = Tijnjni. (12.54)
Es esta funcion la que debemos maximizar (minımizar) en terminos de nk, recor-dando que n debe ser unitario, que implica decir que ‖n‖= 1, que es equivalentea agregar la restriccion
njnj = 1. (12.55)
Para maximizar (minımizar) (12.54) con (12.55) tenemos que usar multi-plicadores de Lagrange, de modo que ahora buscamos maximizar la funcion Hdefinida como
H(n1, n2, n3) = Tijnjni + λ(njnj − 1), (12.56)
donde λ es el multiplicador.Los maximos, mınimos o punto de inflexion se buscan de ∂H
∂nk= 0, k = 1, 2, 3,
y de (12.56) tenemos que esto es equivalente a solucionar
Tij(δjkni + njδik) + 2λnjδjk = 0, k = 1, 2, 3, (12.57)
en donde se ha usado el resultado ∂nm
∂np= δmp. Se puede demostrar (y se deja
como ejercicio) que Tijδjkni = Tikni, Tijnjδik = Tkjnj y njδjk = nk, de modoque de (12.57) tenemos
Tikni + Tkjnj + 2λnk = 0, k = 1, 2, 3.
Pero en la expresion anterior i, j son ındices mudos, de modo que en particularreemplazamos en el segundo termino j por i y tenemos por tanto
Tikni + Tkini + 2λnk = 0, k = 1, 2, 3.
Como el tensor de esfuerzos es simetrico entonces Tik = Tki y reemplazando ysimplificando se llega a
Tkini + λnk = 0, k = 1, 2, 3, (12.58)
que es equivalente a decir que
Tn+ λn = 0.
Si definimos σ = −λ la ecuacion anterior queda como
(T− σI)n = 0, (12.59)
299

en donde I es la matriz de identidad. Este problema es uno de valor propio, estaecuacion tiene soluciones no triviales si
det(T− σI) = 0, (12.60)
de donde se obtiene la ecuacion cubica para σ
σ3 − I1σ2 + I2σ − I3 = 0, (12.61)
donde
I1 = trT = T11 + T22 + T33, (12.62)
I2 =1
2[(trT)2 − trT2] = T11T22 + T11T33 + T22T33 − T 2
12 − T 213 − T 2
23,(12.63)
I3 = detT = T11T22T33 + 2T12T13T23 − T 213T22 − T11T
223 − T 2
12T33, (12.64)
en donde Ii i = 1, 2, 3 son llamados los invariantes de T y trT es la traza deltensor T.
La ecuacion (12.60) tiene tres posibles soluciones y dado que T es simetricoestas tres soluciones son reales. Estos tres valores, que denotamos como σi,i = 1, 2, 3, son precisamente los valores principales del tensor de esfuerzos T.Uno de estos valores, que podemos llamar σ1, sera el maximo (considerando elsigno), otro σ2 sera un valor intermedio y σ3 el valor mınimo para los esfuerzosprincipales, es decir σ1 ≥ σ2 ≥ σ3.
Para cada σi de (12.59) tendremos un vector propio n, que lo podemos
denotar comoin y que se calcularıa de
(T − σiI)in= 0, no hay suma en i. (12.65)
Los tres vectoresin, i = 1, 2, 3 formarıan una base ortonormal, luego si alinea-
mos los ejes coordenados respecto a estos vectoresin, las componentes de T se
transformarıan como
T11 T12 T13T21 T22 T23T31 T32 T33
→
σ1 0 00 σ2 00 0 σ3
,
es decir la matriz con diagonal σi, i = 1, 2, 3 no es mas que el mismo tensorT, pero escrito en un sistema de coordenadas alternativo, en donde los ejes
se han alineado con los vectoresin. Notese en particular que en este sistema
de coordenadas el tensor de esfuerzos solo tiene componente normal y no haycomponentes en corte. Comparese estos resultados y conceptos con los vistos enla Seccion 9.1.
300

Ejemplo de calculo de esfuerzos principales y direcciones principales
Sea
10 4 04 10 −50 −5 −3
, de (12.62)-(12.64) se tiene que I1 = 17, I2 = −1 e
I3 = −502, luego resolviendo (12.61) se llega a
σ1 = 14,765 σ2 = 7,05448 σ3 = −4,81952.
Para encontrar1n,
2n y
3n asociados a σ1, σ2 y σ3 se resuelve (T − σiI)
in= 0
como sigue:
Caso σ1 = 14,765: Reemplazando en (12.65) se tiene
−4,765 4 04 −4,765 −50 −5 −17,765
1n11n21n3
=
000
.
Estas tres ecuaciones lineales para1nj , j = 1, 2, 3 son linealmente dependientes,
de manera tal que se escogen dos de estas ecuaciones (dos pares cualquiera),como por ejemplo:
−4,7651n1 +4
1n2= 0,
−51n2 −17,765
1n3= 0,
de donde se obtiene1n1= 0,83945
1n2 y
1n3= −0,28145
1n2. Por otra parte
1n debe
ser unitario de maneral tal que(1n1
)2+(1n2
)2+(1n3
)2= 1, que usando los
resultados anteriores queda como
(1n2
)2(0,839452 + 1 + 0,281452) = 1,
de donde se tiene que1n2= 0,7487 y
1n1= 0,628508;
1n3= −0,21073 o sea
1n=
0,6285080,7487
−0,21073
.
Caso σ2 = 7,05448: Reemplazando en (12.65) se tiene
2,94552 4 0
4 2,94552 −50 −5 −10,05448
2n12n22n3
=
000
.
301

Se escogen dos de estas ecuaciones:
2,945522n1 +4
2n2= 0,
−52n2 −10,95448
2n3= 0,
de donde se obtiene2n1= −1,35799
2n2 y
2n3= −0,49729
2n2. Por otra parte se
tiene que(2n1
)2+(2n2
)2+(2n3
)2= 1, que usando los resultados anteriores
queda como (2n2
)2(1,357992 + 1 + 0,497292) = 1,
de donde se tiene que2n2= 0,568748 y
2n1= −0,77235;
2n3= −0,28283 o sea
2n=
0,568748−0,77235−0,218283
.
Caso σ3 = −4,81952: Reemplazando en (12.65) se tiene
14,81952 4 04 14,81952 −50 −5 1,81952
3n13n23n3
=
000
.
Se escogen dos de estas ecuaciones:
14,819523n1 +4
3n2= 0,
−53n2 +1,81952
3n3= 0,
de donde se obtiene3n1= −0,26991
3n2 y
3n3= 2,74797
3n2. Por otra parte se tiene
que(3n1
)2+(3n2
)2+(3n3
)2= 1, que usando los resultados anteriores queda
como (3n2
)2(0,269912 + 1 + 2,747972) = 1,
de donde se tiene que3n2= 0,34052 y
3n1= −9,19094× 10−2;
3n3= 0,935735 o sea
3n=
−9,19094× 10−2
0,340520,935735
.
Matriz ortogonal: Es facil verificar quein · jn= 0 si i 6= j, o sea {kn} formarıa
una base ortonormal. Sea la matriz Q definida como
Q =
1n1
1n2
1n3
2n1
2n2
2n3
3n1
3n2
3n3
. (12.66)
302

Nuevamente es facil verificar que QQT = QTQ = I. En nuestro caso tenemosque
Q =
0,628508 0,7487 −0,21073−0,77235 0,568748 −0,28283
−9,19094× 10−2 0,34052 0,935735
,
y se puede probar que QTQ ≈ I.Este Q y sus componentes en realidad vienen a representar una transforma-
cion de coordenadas para T, o sea por medio de Q se estarıa viendo el mismotensor de esfuerzos en un sistema de coordenadas en el cual los ejes se alinean
con los vectores { in}. Veamos si se cumple esto, de (12.24) se tenıa que
T ′ij = QipQjmTpm ⇔ T′ = QTQT ≈
14,765 0 0
0 7,05442 00 0 −4,81953
,
o sea con este cambio de coordenadas las componentes de T son tales que solotenemos componentes normales o axiales para los esfuerzos y no hay componen-tes en corte: El tensor de esfuerzos es el mismo pero solo esta siendo visto enun sistema de coordenadas diferente. En general se tiene
QTQT =
σ1 0 00 σ2 00 0 σ3
,
como se puede apreciar en la Figura 12.8.
12.4.2. Esfuerzo de corte maximo
Lo que nos interesarıa hacer ahora es maximizar τ de la descomposicionde t(x,n) vista al inicio de esta seccion. Es facil ver ahora que con esto ob-tendrıamos el maximo esfuerzo de corte. La forma como es la descomposiciones
τ2 = ‖t‖2−σ2n. (12.67)
Ahora en vez de usar el T original para calcular t(x,n) usaremos el que se
produce al alinear el sistema de ejes coordenados con los vectoresin, en cuyo
caso T =
σ1 0 00 σ2 00 0 σ3
, y de (12.43) tenemos
t(x,n) =
σ1 0 00 σ2 00 0 σ3
n1
n2
n3
=
σ1n1
σ2n2
σ3n3
, (12.68)
de modo que‖t(x,n)‖2= σ2
1n21 + σ2
2n22 + σ2
3n23. (12.69)
303

T11
T12T12
T13
T13
σ1
T22
T23
T23
σ2
σ3
T33
1n
2n
3n
x1 x2
x3
Figura 12.8: Significado de los esfuerzos principales como representacion deltensor de esfuerzos en un sistema de coordenadas rotado.
Por otra parte de (12.53) tenıamos que σn = t(x,n) · n = (Tn) · n y usando Ten el sistema de coordenadas rotado se llega a
σn =
σ1n1
σ2n2
σ3n3
·
n1
n2
n3
= σ1n
21 + σ2n
22 + σ3n
23. (12.70)
Usando (12.69) y (12.70) en (12.67) tenemos
τ2 = σ21n
21 + σ2
2n22 + σ2
3n23 − (σ1n
21 + σ2n
22 + σ3n
23)
2, (12.71)
que es la funcion que ahora queremos maximizar en nk, k = 1, 2, 3.Nuevamente hay que considerar la restriccion que indica que n es unitario,
o sea nknk = 1, luego usando el multiplicador de Lagrange γ tenemos quemaximizar (mınimizar) la funcion
R(n1, n2, n3) = τ2 + γ(n21 + n2
2 + n23 − 1). (12.72)
que es equivalente a
R = σ21n
21 + σ2
2n22 + σ2
3n23 − (σ1n
21 + σ2n
22 + σ3n
23)
2 + γ(n21 + n2
2 + n23 − 1).
304

Para obtener el maximo se calcula ∂R∂ni
y se hacen igual a cero, luego:
∂R
∂n1= 0 ⇔ n1[σ
21 − 2σ1(σ1n
21 + σ2n
22 + σ3n
23) + γ] = 0, (12.73)
∂R
∂n2= 0 ⇔ n2[σ
22 − 2σ2(σ1n
21 + σ2n
22 + σ3n
23) + γ] = 0, (12.74)
∂R
∂n3= 0 ⇔ n3[σ
23 − 2σ3(σ1n
21 + σ2n
22 + σ3n
23) + γ] = 0. (12.75)
Solucion:
(a) Caso n1 6= 0
De (12.73) en este caso se tiene que
γ = 2σ1(σ1n21 + σ2n
22 + σ3n
23)− σ2
1 , (12.76)
y reemplazando (12.74), (12.75) estan quedan como
n2(σ1 − σ2)[(2n21 − 1)σ1 + (2n2
2 − 1)σ2 + 2n23σ3] = 0, (12.77)
n3(σ1 − σ3)[(2n21 − 1)σ1 + 2n2
2σ2 + (2n23 − 1)σ3] = 0. (12.78)
Primera solucion: La primera solucion de (12.77), (12.78) serıa
n1 = ± 1√2, n2 = 0, n3 = ± 1√
2, (12.79)
y de (12.76),(12.71) se tiene que
γ = σ1σ3, τ = ±1
2(σ1 − σ3). (12.80)
Segunda solucion: La segunda solucion de (12.77), (12.78) serıa
n1 = ± 1√2, n2 = ± 1√
2, n3 = 0, (12.81)
y de (12.76),(12.71) se tiene que
γ = σ1σ2, τ = ±1
2(σ1 − σ2). (12.82)
(b) Caso n2 6= 0
De (12.74) en este caso se tiene que
γ = 2σ2(σ1n21 + σ2n
22 + σ3n
23)− σ2
2 , (12.83)
y (12.73), (12.75) quedan como
n1(σ2 − σ1)[(2n21 − 1)σ1 + (2n2
2 − 1)σ2 + 2n23σ3] = 0, (12.84)
n3(σ2 − σ3)[2n21σ1 + (2n2
2 − 1)σ2 + (2n23 − 1)σ3] = 0. (12.85)
305

Primera solucion: De (12.84), (12.85) la primera solucion serıa
n1 = ± 1√2, n2 = ± 1√
2, n3 = 0, (12.86)
y de (12.83), (12.71) se tiene que
γ = σ1σ2, τ = ±1
2(σ1 − σ2). (12.87)
Segunda solucion: La segunda solucion de (12.84), (12.85) serıa
n1 = 0, n2 = ± 1√2, n3 = ± 1√
2, (12.88)
y de (12.83), (12.71) se tiene que
γ = σ2σ3, τ = ±1
2(σ2 − σ3). (12.89)
(c) Caso n3 6= 0
De (12.75) en este caso se tiene que
γ = 2σ3(σ1n21 + σ2n
22 + σ3n
23)− σ2
3 , (12.90)
y (12.73), (12.74) quedan como
n1(σ3 − σ1)[(2n21 − 1)σ1 + 2n2
2σ2 + (2n23 − 1)σ3] = 0, (12.91)
n2(σ3 − σ2)[2n21σ1 + (2n2
2 − 1)σ2 + (2n23 − 1)σ3] = 0. (12.92)
Primera solucion: La primera solucion de (12.91), (12.92) serıa
n1 = ± 1√2, n2 = 0, n3 = ± 1√
2, (12.93)
y de (12.90), (12.71) se tiene que
γ = σ1σ3, τ = ±1
2(σ1 − σ3). (12.94)
Segunda solucion: La segunda solucion de (12.91), (12.92) serıa
n1 = 0, n2 = ± 1√2, n3 = ± 1√
2, (12.95)
y de (12.90), (12.71) se tiene que
γ = σ2σ3, τ = ±1
2(σ2 − σ3). (12.96)
306
En resumen se obtiene:
1n=
± 1√
2
0± 1√
2
, τ = ±1
2(σ1 − σ3), (12.97)
2n=
± 1√
2
± 1√2
0
, τ = ±1
2(σ1 − σ2), (12.98)
3n=
0
± 1√2
± 1√2
, τ = ±1
2(σ2 − σ3), (12.99)
luego
τmax =1
2(σmax − σmin), (12.100)
y el angulo que formarıa la direccion respecto a la cual aparece este esfuerzo decorte maximo serıa de 45◦ respecto a la direccion del esfuerzo normal maximo.
12.5. Desplazamientos y deformaciones
Las fuerzas externas generan cartas internas, las que se relacionaran en laseccion siguiente con las deformaciones. Lo que se observa directamente son losdesplazamientos, en particular los desplazamientos en la superficie del cuerpo.
12.5.1. Desplazamientos
En coordenadas Cartesianas el campo de desplazamientos u tiene la forma
u = u1e1 + u2e2 + u3e3 = uiei, (12.101)
donde ui = ui(x1, x2, x3) o u = u(x).El campo de desplazamientos indica cuanto se mueve cada punto de un
cuerpo cuando se deforma y/o mueve por la accion de fuerzas externas.
u =
Movimiento de cuerpo rıgido:
{Desplazamiento rıgidoRotacion rıgida
Movimiento relativo entre las partıculas del cuerpo
Lo que se puede relacionar con el fenomeno de falla serıa o estarıa contectadocon los desplazamientos relativos entre las partıculas de un cuerpo.
Ejemplos para campos de desplazamientos
1. Consideremos el caso en que u es tal que u1 = 3, u2 y u3 = 0, en dichocaso el cuerpo sufrirıa un desplazamiento como el que se muestra en laFigura 12.9.
307
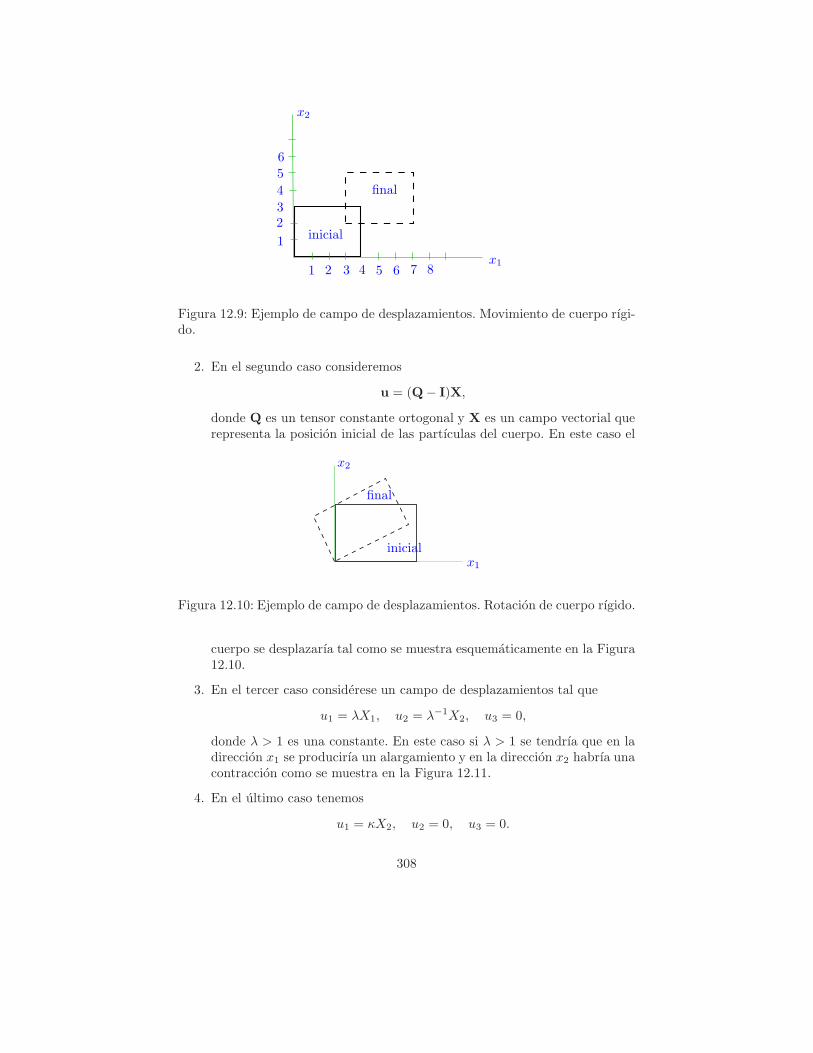
inicial
final
1
1
2
2
3
3
4
4
5
5
6
6
7 8x1
x2
Figura 12.9: Ejemplo de campo de desplazamientos. Movimiento de cuerpo rıgi-do.
2. En el segundo caso consideremos
u = (Q− I)X,
donde Q es un tensor constante ortogonal y X es un campo vectorial querepresenta la posicion inicial de las partıculas del cuerpo. En este caso el
inicial
final
x1
x2
Figura 12.10: Ejemplo de campo de desplazamientos. Rotacion de cuerpo rıgido.
cuerpo se desplazarıa tal como se muestra esquematicamente en la Figura12.10.
3. En el tercer caso considerese un campo de desplazamientos tal que
u1 = λX1, u2 = λ−1X2, u3 = 0,
donde λ > 1 es una constante. En este caso si λ > 1 se tendrıa que en ladireccion x1 se producirıa un alargamiento y en la direccion x2 habrıa unacontraccion como se muestra en la Figura 12.11.
4. En el ultimo caso tenemos
u1 = κX2, u2 = 0, u3 = 0.
308

inicial
final
x1
x2
Figura 12.11: Ejemplo de campo de desplazamientos. Extension en x1 y con-traccion en x2.
En este caso se producirıa una deformacion tipo de corte como se muestra
inicial
final
x1
x2
Figura 12.12: Ejemplo de campo de desplazamientos. Deformacion en corte enla direccion x1.
en la Figura 12.12.
Los dos supuestos importantes para la teorıa de la elasticidad lineal son:
‖u‖ es pequeno (en comparacion con alguna longitud caracterıstica delcuerpo) o sea los desplazamientos son pequenos.
‖∇u‖ es pequeno, tal como se vera despues implicarıa que las deformacio-nes son pequenas.
12.5.2. Deformacion
De muchas observaciones experimentales se ha concluıdo que los movimientosde cuerpo rıgido, como los mostrados en las Figuras 12.9, 12.10 no se asociarıancon fenomenos de falla. El tipo de desplazamiento que importa es aquel quecambia la forma de un cuerpo. En la Figura 12.13 tenemos una representacionesquematica de un cuerpo al inicio sin deformacion. Al aplicarse las fuerzas(que no se muestran en la figura) un elemento diferencial (el rectangulo verde)se deformarıa como se muestra en la figura de la derecha (final). El elemento
309
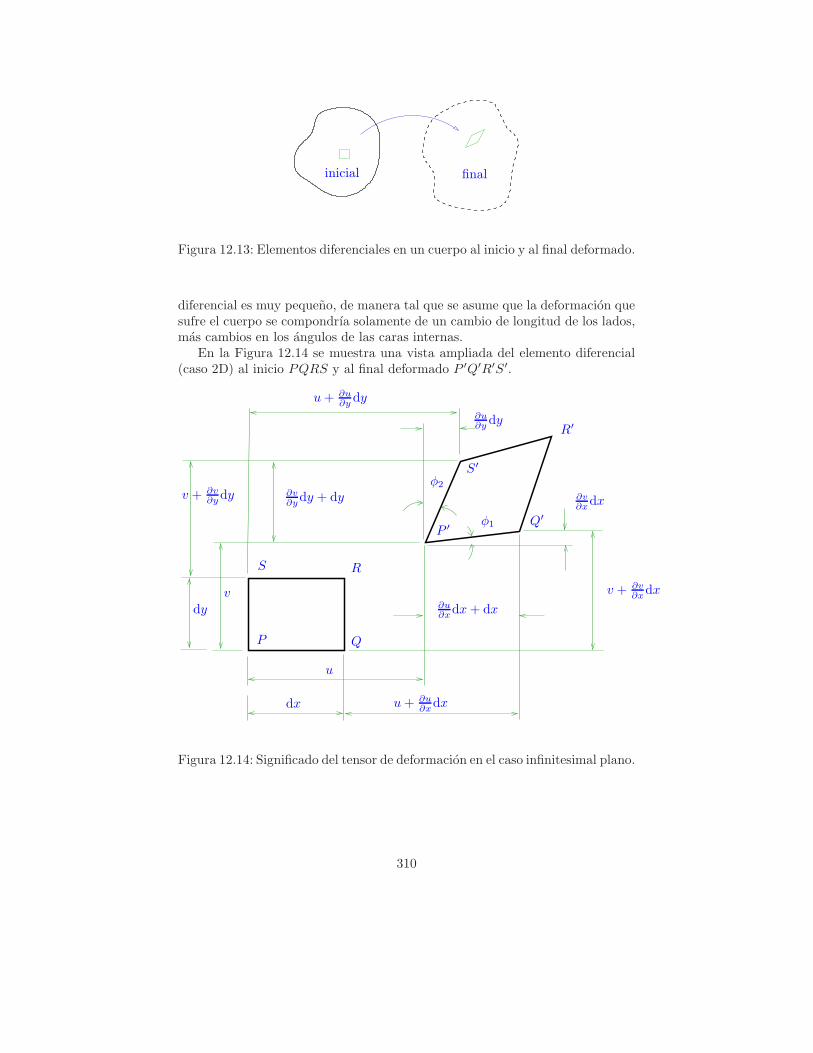
inicial final
Figura 12.13: Elementos diferenciales en un cuerpo al inicio y al final deformado.
diferencial es muy pequeno, de manera tal que se asume que la deformacion quesufre el cuerpo se compondrıa solamente de un cambio de longitud de los lados,mas cambios en los angulos de las caras internas.
En la Figura 12.14 se muestra una vista ampliada del elemento diferencial(caso 2D) al inicio PQRS y al final deformado P ′Q′R′S′.
P
S R
Q
dx
dy
u
v
u+ ∂u∂xdx
v + ∂v∂xdx
φ1
φ2∂v∂xdx
P ′
S′
Q′
R′
v + ∂v∂ydy
∂v∂ydy + dy
u+ ∂u∂y dy
∂u∂y dy
∂u∂xdx+ dx
Figura 12.14: Significado del tensor de deformacion en el caso infinitesimal plano.
310

Se define la deformacion longitudinal ε11 en la direccion 1 como:
ε11 =Cambio longitud PQ
Largo inicial PQ=P ′Q′ − PQ
PQ, (12.102)
pero PQ = dx1 y
P ′Q′ =
√[u1 +
∂u1∂x1
dx1 + dx1 − u1
]2+
[u2 +
∂u2∂x1
dx1 − u2
]2,
=
√[∂u1∂x1
dx1 + dx1
]2+
[∂u2∂x1
dx1
]2,
= dx1
√[∂u1∂x1
+ 1
]2+
[∂u2∂x1
]2, (12.103)
de modo que reemplazando en (12.102) se obtiene
ε11 =dx1
√[∂u1
∂x1+ 1]2
+[∂u2
∂x1
]2− dx1
dx1,
=
√[∂u1∂x1
+ 1
]2+
[∂u2∂x1
]2− 1,
=
√
1 + 2∂u1∂x1
+
(∂u1∂x1
)2
+
(∂u2∂x1
)2
− 1, (12.104)
pero se pueden despreciar los terminos(∂u1
∂x1
)2+(∂u2
∂x1
)2respecto a 1+ 2∂u1
∂x1si
‖∇u‖ es pequeno.Sea a≪ 1 y sea (1+ a)m, de una aproximacion por series de Taylor se tiene
(1 + a)m ≈ 1 +ma. (12.105)
Identificando en (12.104) a a con 2∂u1
∂x1y m con 1/2 de (12.105) se obtiene:
ε11 ≈√1 + 2
∂u1∂x1
− 1 ≈ 1 +1
22∂u1∂x1
− 1 =∂u1∂x1
,
o sea
ε11 =∂u1∂x1
. (12.106)
Igualmente se puede definir la deformacion longitudinal en la direccion x2como
ε22 =Cambio longitud PS
Largo inicial PS=P ′S′ − PS
PS, (12.107)
y siguiendo un procedimiento similar al caso anterior se puede probar que
ε22 ≈ ∂u2∂x2
. (12.108)
311

La deformacion en corte se define como un cambio de angulo. En nuestrocaso de la Figura 12.14 la definimos como:
ε12 =1
2(φ1 + φ2) = ε21. (12.109)
Si φ1 y φ2 son muy pequenos (en radianes) se tiene que φ1 ≈ tan(φ1) y φ2 ≈tan(φ2), y de la Figura 12.14 tenemos
tanφ1 =
∂u2
∂x1dx1
∂u1
∂x1dx1 + dx1
=
∂u2
∂x1
∂u1
∂x1+ 1
, (12.110)
pero de (12.105) se tiene que(∂u1
∂x1+ 1)−1
≈ 1− ∂u1
∂x1, luego
tanφ1 ≈ ∂u2∂x1
(1− ∂u1
∂x1
)=∂u2∂x1
− ∂u1∂x1
∂u2∂x1
≈ ∂u2∂x1
,
o sea
tanφ1 =∂u2∂x1
. (12.111)
Igualmente
tanφ2 =∂u1
∂x2dx2
∂u2
∂x2dx2 + dx2
=∂u1
∂x2
∂u2
∂x2+ 1
≈ ∂u1∂x2
, (12.112)
luego de (12.111), (12.112) en (12.109) se tiene
ε12 =1
2
(∂u1∂x2
+∂u2∂x1
). (12.113)
Para un caso 3D se puede demostrar que
ε11 =∂u1∂x1
, ε22 =∂u2∂x2
, ε33 =∂u3∂x3
, (12.114)
ε12 =1
2
(∂u1∂x2
+∂u2∂x1
), ε13 =
1
2
(∂u1∂x3
+∂u3∂x1
), ε23 =
1
2
(∂u2∂x3
+∂u3∂x2
), (12.115)
o sea en notacion indicial tenemos
εij =1
2
(∂ui∂xj
+∂uj∂xj
), (12.116)
que es equivalente a
ε =1
2
[∇u+ (∇u)T
]. (12.117)
Se tiene que εij son las componentes del tensor de deformaciones
ε =
ε11 ε12 ε13ε12 ε22 ε23ε13 ε23 ε33
, (12.118)
312

12.5.3. Ecuaciones de compatibilidad
Imaginemos que conocemos εij y que a partir de 12
(∂ui
∂xj+
∂uj
∂xj
)= εij que-
remos ahora encontrar ui, i = 1, 2, 3; en ese caso tendrıamos 6 ecuaciones y 3incognitas u1, u2 y u3. En general no se obtendran soluciones unicas para ui.Para un punto x, si u tiene mas de un valor esto implicarıa que al deformarseel cuerpo se dividirıa. Para evitar el fenomeno anterior se buscan ecuaciones de‘compatibilidad’ para que hayan soluciones unicas.
Las ecuaciones de compatilidad se usan, por ejemplo, para el estudio delefecto de esfuerzos termicos y tambien en el desarrollo de metodos de solucionbasados en ‘potenciales’ de esfuerzos.
Sea
p =1
2
(∂u3∂x2
− ∂u2∂x3
), (12.119)
q =1
2
(∂u1∂x3
− ∂u3∂x1
), (12.120)
r =1
2
(∂u2∂x1
− ∂u1∂x2
). (12.121)
Estudiemos la ‘compatibilidad’ para u1. Sea u1 evaluado en un punto x y enotro punto muy cercano x+ dx. Por medio de una serie de Taylor se tiene:
u1(x + dx) ≈ u1(x) +∂u1∂x
· dx ⇒ du1 =∂u1∂x
· dx, (12.122)
donde du1 = u1(x+ dx)− u1(x).Sean dos punto x(0) y x(1), luego de (12.122) se tiene
∫x(1)
x(0)
du1 =
∫
C
∂u1∂x
· dx,
donde C es una curva que va desde x(0) a x(1). Integrando en el lado izquierdotenemos
u1(x(1)) = u1(x
(0)) +
∫
C
∂u1∂x1
dx1 +∂u1∂x2
dx2 +∂u1∂x3
dx3. (12.123)
Pero de (12.114), (12.115), (12.120) y (12.121) ∂u1
∂x1= ε11,
∂u1
∂x2= ε12 − r y
∂u1
∂x3= ε13 − q, luego en (12.123) se obtiene
u1(x(1)) = u1(x
(0))+
∫
C
(ε11dx1+ε12dx2+ε13dx3)+
∫
C
(qdx3−rdx2). (12.124)
Consideremos la integral de lınea∫
C(q dx3 − r dx2), dado que x(1) = x
(1)i ei es
constante, se cumple que
−dx2 = d(x(1)2 − x2), −dx3 = d(x
(1)3 − x3),
313

luego∫
C
(q dx3 − r dx2) =
∫
C
[r d(x(1)2 − x2)− q d(x
(1)3 − x3)],
=[r(x
(1)2 − x2)− q(x
(1)3 − x3)
]∣∣∣x(1)
x(0)
−∫
C
(x(1)2 − x2) dr − (x
(1)3 − x3) dq,
= q(0)(x(1)3 − x
(0)3 )− r(0)(x
(1)2 − x
(0)2 )
−∫
C
(x(1)2 − x2) dr − (x
(1)3 − x3) dq, (12.125)
donde para∫
C[r d(x
(1)2 − x2) − q d(x
(1)3 − x3)] se reconoce primero que C
es una curva que va de x(0) a x(1), transformandose entonces en la integral∫x(1)
x(0) [r d(x
(1)2 −x2)− q d(x(1)3 −x3)], la cual se transforma mediante el uso de in-
tegracion por partes6. Adicionalmente se tiene que q(0) y r(0) serıan las funcionesq y r evaluadas en x(0).
Pero
dr =∂r
∂x1dx1 +
∂r
∂x2dx2 +
∂r
∂x3dx3, (12.126)
dq =∂q
∂x1dx1 +
∂q
∂x2dx2 +
∂q
∂x3dx3. (12.127)
Usando (12.126), (12.127) en (12.125) y ese resultado en (12.124) se obtiene:
u1(x(1)) = u1(x
(0)) + q(0)(x(1)3 − x
(0)3 )− r(0)(x
(1)2 − x
(0)2 )
+
∫
C
(ε11 dx1 + ε12 dx2 + ε13 dx3)
−∫
C
[(x
(1)2 − x2)
(∂r
∂x1dx1 +
∂r
∂x2dx2 +
∂r
∂x3dx3
)
−(x(1)3 − x3)
(∂q
∂x1dx1 +
∂q
∂x2dx2 +
∂q
∂x3dx3
)],
= u1(x(0)) + q(0)(x
(1)3 − x
(0)3 )− r(0)(x
(1)2 − x
(0)2 )
+
∫
C
(U1 dx1 + U2 dx2 + U3 dx3), (12.128)
donde se ha definido:
U1 = ε11 − (x(1)2 − x2)
∂r
∂x1− (x
(1)3 − x3)
∂q
∂x1, (12.129)
U2 = ε12 − (x(1)2 − x2)
∂r
∂x2− (x
(1)3 − x3)
∂q
∂x2, (12.130)
U3 = ε13 − (x(1)2 − x2)
∂r
∂x3− (x
(1)3 − x3)
∂q
∂x3. (12.131)
6Se usa∫ b
af dg = fg|ba −
∫ b
ag df .
314

Pero de (12.120), (12.121) y (12.114), (12.115) se puede probar que
∂r
∂x1=
1
2
(∂2u2∂x21
− ∂2u1∂x1∂x2
)=∂ε12∂x1
− ∂ε11∂x2
, (12.132)
∂r
∂x2=∂ε22∂x1
− ∂ε12∂x2
, (12.133)
∂r
∂x3=∂ε23∂x1
− ∂ε13∂x2
, (12.134)
y
∂q
∂x1=
1
2
(∂2u1∂x1∂x3
− ∂2u3∂x21
)=∂ε11∂x3
− ∂ε13∂x1
, (12.135)
∂q
∂x2=∂ε12∂x3
− ∂ε23∂x1
, (12.136)
∂q
∂x3=∂ε13∂x3
− ∂ε33∂x1
. (12.137)
En (12.128) para que u1(x(1)) sea continuo para cualquier x(1) la integral de
lınea sobre C debe ser independiente de C , o sea
∮
Q
U · dx = 0, (12.138)
donde Q es una curva cerrada, U = (U1, U2, U3)T y dx = (dx1, dx2, dx3)
T. Peropor el teorema de Stokes tenemos
∮
Q
U · dx =
∫
P
(∇×U) · da, (12.139)
donde P es una superficie abierta con borde Q y da = n da, donde n es lanormal unitaria a da.
Luego para que (12.138) sea satisfecha de (12.139) se tiene que cumplir que
∇×U = 0 (12.140)
que es equivalente a pedir que
(∂U3
∂x2− ∂U2
∂x3
)e1 +
(∂U1
∂x3− ∂U3
∂x1
)e2 +
(∂U2
∂x1− ∂U1
∂x2
)e3 = 0,
de donde se obtienen las siguientes condiciones:
∂U3
∂x2=∂U2
∂x3,
∂U1
∂x3=∂U3
∂x1,
∂U2
∂x1=∂U1
∂x2. (12.141)
315

Pero de (12.129)-(12.131), (12.120), (12.121) tenemos que
∂U3
∂x2=∂ε13∂x2
+∂r
∂x3︸︷︷︸∂ε23∂x1
− ∂ε13∂x2
−(x(1)2 − x2)
∂
∂x2
(∂r
∂x3
)
︸ ︷︷ ︸∂2ε23
∂x1∂x2− ∂2ε13
∂x22
+(x(1)3 − x3)
∂
∂x2
(∂q
∂x3
)
︸ ︷︷ ︸∂2ε13
∂x2∂x3− ∂2ε33
∂x1∂x3
(12.142)
∂U2
∂x3=∂ε12∂x3
− (x(1)2 − x2)
∂
∂x3
(∂r
∂x2
)
︸ ︷︷ ︸∂2ε22
∂x1∂x3− ∂2ε12
∂x2∂x3
− ∂q
∂x2︸︷︷︸∂ε23∂x1
− ∂ε12∂x3
+(x(1)3 − x3)
∂
∂x3
(∂q
∂x2
)
︸ ︷︷ ︸∂2ε12∂x2
3
− ∂2ε23∂x1∂x3
.(12.143)
Luego usando (12.142), (12.143) para (12.141)1 tenemos
∂ε13∂x2
+∂ε23∂x1
− ∂ε13∂x2
− (x(1)2 − x2)
(∂2ε23∂x1∂x2
− ∂2ε13∂x22
)+ (x
(1)3 − x3)
(∂2ε13∂x2∂x3
− ∂2ε33∂x1∂x3
)
=∂ε12∂x3
− (x(1)2 − x2)
(∂2ε22∂x1∂x3
− ∂2ε12∂x2∂x3
)+∂ε23∂x1
− ∂ε12∂x3
+ (x(1)3 − x3)
(∂2ε12∂x23
− ∂2ε23∂x1∂x3
),
que deberıa se valida para cualquier x2, x(1)2 , x3 y x
(1)3 , por lo que se debe
cumplir:
∂2ε23∂x1∂x2
− ∂2ε13∂x22
=∂2ε22∂x1∂x3
− ∂2ε12∂x2∂x3
, (12.144)
∂2ε13∂x2∂x3
− ∂2ε33∂x1∂x3
=∂2ε12∂x23
− ∂2ε23∂x1∂x3
. (12.145)
Tambien de (12.129)-(12.131) y (12.120), (12.121) tenemos que
∂U1
∂x3=∂ε11∂x3
− (x(1)2 − x2)
∂
∂x3
(∂r
∂x1
)
︸ ︷︷ ︸∂2ε12
∂x1∂x3− ∂2ε11
∂x2∂x3
− ∂q
∂x1︸︷︷︸∂ε13∂x1
− ∂ε11∂x3
+(x(1)3 − x3)
∂
∂x3
(∂q
∂x1
)
︸ ︷︷ ︸∂2ε11∂x2
3− ∂2ε13
∂x1∂x3
(12.146)
∂U3
∂x1=∂ε13∂x1
− (x(1)2 − x2)
∂
∂x1
(∂r
∂x3
)
︸ ︷︷ ︸∂2ε23∂x2
1
− ∂2ε13∂x1∂x2
+(x(1)3 − x3)
∂
∂x1
(∂q
∂x3
)
︸ ︷︷ ︸∂2ε13
∂x1∂x3− ∂2ε33
∂x21
, (12.147)
luego usando (12.146), (12.147) en (12.141)2 se llega a
∂ε11∂x3
− (x(1)1 − x2)
(∂2ε12∂x1∂x3
− ∂2ε11∂x2∂x3
)+∂ε13∂x1
− ∂ε11∂x3
+ (x(1)3 − x3)
(∂2ε11∂x21
− ∂2ε13∂x1∂x3
)
=∂ε13∂x1
− (x(1)2 − x2)
(∂2ε23∂x21
− ∂2ε13∂x1∂x2
)+ (x
(1)3 − x3)
(∂2ε13∂x1∂x3
− ∂2ε33∂x21
),
que debe ser satisfecha para cualquier x2, x(1)2 , x3 y x
(1)3 , lo que se cumple si y
316
solo si:
∂2ε12∂x1∂x3
− ∂2ε11∂x2∂x3
=∂2ε23∂x21
− ∂2ε13∂x1∂x2
, (12.148)
∂2ε11∂x23
− ∂2ε13∂x1∂x3
=∂2ε13∂x1∂x3
− ∂2ε33∂x21
. (12.149)
Finalmente de (12.129)-(12.131) y (12.120), (12.121) se tiene
∂U2
∂x1=∂ε12∂x1
− (x(1)2 − x2)
∂
∂x1
(∂r
∂x2
)
︸ ︷︷ ︸∂2ε22∂x2
1− ∂2ε12
∂x1∂x2
+(x(1)3 − x3)
∂
∂x1
(∂q
∂x2
)
︸ ︷︷ ︸∂2ε12
∂x1∂x3− ∂2ε23
∂x21
(12.150)
∂U1
∂x2=∂ε11∂x2
+∂r
∂x1︸︷︷︸∂ε12∂x1
− ∂ε11∂x2
−(x(1)2 − x2)
∂
∂x2
(∂r
∂x1
)
︸ ︷︷ ︸∂2ε12
∂x1∂x2− ∂2ε11
∂x22
+(x(1)3 − x3)
∂
∂x3
(∂q
∂x1
)
︸ ︷︷ ︸∂2ε11
∂x2∂x3− ∂2ε13
∂x21
, (12.151)
y reemplazando (12.150), (12.151) en (12.141)3 se obtiene
∂ε12∂x1
− (x(1)2 − x2)
(∂2ε22∂x21
− ∂2ε12∂x1∂x2
)+ (x
(1)3 − x3)
(∂2ε12∂x1∂x3
− ∂2ε23∂x21
)
=∂ε11∂x2
+∂ε12∂x1
− ∂ε11∂x2
− (x(1)2 − x2)
(∂2ε12∂x1∂x2
− ∂2ε11∂x22
)+ (x
(1)3 − x3)
(∂2ε11∂x2∂x3
− ∂2ε13∂x21
),
que nuevamente debe ser satisfecha para cualquier x(1)2 , x2, x
(1)3 y x3, que se
cumple si y solo si
∂2ε22∂x21
− ∂2ε12∂x1∂x2
=∂2ε12∂x1∂x2
− ∂2ε11∂x22
, (12.152)
∂2ε12∂x1∂x3
− ∂2ε23∂x21
=∂2ε11∂x2∂x3
− ∂2ε13∂x21
. (12.153)
Las ecuaciones (12.144), (12.145), (12.148), (12.149), (12.152) y (12.153)son llamadas las ecuaciones de compatibilidad para las componentes de εij . Si-guiendo un procedimiento similar con u2 y u3 se puede probar que se obtienenecuaciones de compatibilidad iguales a las encontradas aquı (en realidad lineal-mente dependientes de las econtradas aquı). Si εij satisface (12.144), (12.145),(12.148), (12.149), (12.152) y (12.153) entonces si se calcula ul de (12.116), ulserıa continuo, l = 1, 2, 3.
12.6. Ecuaciones constitutivas
En este capıtulo solo se considerara materiales que pueden ser modeladospor medio de ecuaciones lineales del tipo:
Tij = Cijklεkl, (12.154)
317

donde el tensor de cuarto orden C con componentes Cijkl es constante7.Se cumplen las siguientes simetrıas para Cijkl:
Cijkl = Cjikl = Cijlk, Cijkl = Cklij , (12.155)
en donde las tres primeras condiciones de simetrıa vienen de la simertıas paraTij y εkl, en tanto que Cijkl = Cklij proviene de consideraciones asociadas a laenergıa elastica acumulada por un cuerpo, que no se discutiran aquı.
Considerese la notacion alternativa para los esfuerzos y el campo de defor-maciones:
σ =
T11T22T33T12T13T23
, ǫ =
ε11ε22ε332ε122ε132ε23
, (12.156)
luego con esta notacion la ecuacion (12.154) se puede escribir como
σ = C ǫ, (12.157)
donde la matriz C se define como
C =
C1111 C1122 C1133 C1112 C1113 C1123C1122 C2222 C2233 C2212 C2213 C2223C1133 C2233 C3333 C3312 C3313 C3323C1112 C2212 C3312 C1212 C1213 C1223C1113 C2213 C3313 C1213 C1313 C1323C1123 C2223 C3323 C1223 C1323 C2323
. (12.158)
En (12.158) tenemos 21 constantes de material. Se pueden reducir si se usa elconcepto de simetrıa de material. Si para ciertas direcciones el comportamien-to de un material es el mismo, ese conjunto de direcciones se conoce como elconjunto de simetrıas del material. El caso particular de un material isotropicoes aquel en donde el comportamiento es el mismo independiente de cualquierorientacion de la fuerza. Consideremos la Figura 12.15, en donde se muestraesquematicamente esto. En la Figura 12.16 tendrıamos el resultado posible parael caso de un cuerpo isotropico.
La rotacion de una fuerza se puede modelar tambien al tener la fuerza quietay al rotar el cuerpo, es decir por medio del uso de Qmn. Como el comportamientodel material se caracteriza por medio de Cijkl, luego si para un Qmn la distribu-cion de esfuerzos es la misma, eso es equivalente a pedir que Cijkl es igual bajoel efecto de dicha transformacion, o sea si
C′ijkl = QimQjnQkpQlqCmnpq, (12.159)
donde Qij = cos(x′i, xj). Luego para un grupo de simetrıa Qmn se tiene queC′ijkl es igual a Cmnpq. Veamos varios casos en las siguientes secciones.
7El tensor C serıa constante en terminos de la deformacion, pero eventualmente podrıadepender cada una de sus componentes en la posicion x. Si las propiedades mecanicas dependende la posicion el material se dice no-homogeneo, en tanto si no dependen de la posicion se diceque el material es homogeneo.
318

ff
f
f
ff
(1) (2) (3)
Figura 12.15: Cuerpo sometido a cargas con diferentes orientaciones.
σ (1) (2)
(3)
ε
Figura 12.16: Cuerpo sometido a cargas con diferentes orientaciones. Resultadosexperimentales.
12.6.1. Material monoclınico
Sea el caso en que un sistema de coordenadas {xi} se transforma en {x′i}segun se muestra en la Figura 12.17. Asumamos que para dicha transformacionlas componentes de C se mantienen iguales. Para esa transformacion se tieneque
Q11 = 1, Q12 = 0, Q13 = 0, Q21 = 0, Q22 = 1, (12.160)
Q23 = 0, Q31 = 0, Q32 = 0, Q33 = −1. (12.161)
319

x1
x′1 x2
x′2
x′3
x3
π
Figura 12.17: Simetrıa respecto al plano x1 − x2.
Luego se quiere
C1111 = C′1111 = Q1mQ1nQ1pQ1qCmnpq = C1111,
C1122 = C′1122 = Q1mQ1nQ2pQ2qCmnpq = C1122,
C1133 = C′1133 = Q1mQ1nQ3pQ3qCmnpq = C1133,
C1112 = C′1112 = Q1mQ1nQ1pQ2qCmnpq = C1112,
C1113 = C′1113 = Q1mQ1nQ1pQ3qCmnpq = −C1113,
C1123 = C′1123 = Q1mQ1nQ2pQ3qCmnpq = −C1123,
lo que es cierto si y solo si C1113 = 0 y C1123 = 0.Siguiendo este metodo se puede demostrar que
C2213 = C2223 = C1213 = C1223 = C3313 = C3323 = 0.
Luego la matriz C tiene la siguiente forma:
C =
C1111 C1122 C1133 C1112 0 0C1122 C2222 C2233 C2212 0 0C1133 C2233 C3333 C3312 0 0C1112 C2212 C3312 C1212 0 00 0 0 0 C1313 C13230 0 0 0 C1323 C2323
, (12.162)
donde ahora tenemos 13 constantes de material.
12.6.2. Material ortotropico
Considerese la Figura 12.18 en donde se tiene una transformacion en dosplanos. Si un material es simetrico respecto a estos dos planos (por ejemplo 1 y3) se dice que un material es ortotropico8. Para este caso Q tiene las siguientes
8Una definicion un poco mas general es indicar que el material es ortotropico si tenemosdos ‘familias’ de fibras en donde el comportamiento es diferente al resto del material.
320

x1
x′1
x2
x′2x′3
x3
Figura 12.18: Simetrıas respecto a los planos x1 − x2 y x2 − x3
componentes:
Q11 = −1, Q12 = 0, Q13 = 0, Q21 = 0, Q22 = 1, (12.163)
Q23 = 0, Q31 = 0, Q32 = 0, Q33 = −1. (12.164)
Luego si para este Q se tiene que Cijkl = C′ijkl, se tiene, por ejemplo:
C1111 = C′1111 = Q1mQ1nQ1pQ1qCmnpq = C1111,
C1122 = C′1122 = Q1mQ1nQ2pQ2qCmnpq = C1122,
C1133 = C′1133 = Q1mQ1nQ3pQ3qCmnpq = C1133,
C1112 = C′1112 = Q1mQ1nQ1pQ2qCmnpq = −C1112.
Esta ultima relacion se cumple si y solo si C1112 = 0. De igual forma se puedeprobar que C3312 = 0, C1323 = 0 y C2212 = 0, de modo que la matriz C es de laforma:
C =
C1111 C1122 C1133 0 0 0C1122 C2222 C2233 0 0 0C1133 C2233 C3333 0 0 00 0 0 C1212 0 00 0 0 0 C1313 00 0 0 0 0 C2323
, (12.165)
donde ahora tenemos solo 9 constantes.
12.6.3. Material transverso isotropico
En la Figura 12.19 tenemos una transformacion de coordenadas en un anguloθ arbitrario alrededor del eje 3. Si un material tiene una direccion preferente (eneste caso 3) en donde el comportamiento es diferente al resto de las direcciones,se dice que es un material transverso isotropico.
Para este caso Q tiene las siguientes componentes:
Q11 = cos θ, Q12 = − sin θ, Q13 = 0, Q21 = sin θ, (12.166)
Q22 = cos θ, Q23 = 0, Q31 = 0, Q32 = 0, Q33 = 1. (12.167)
321
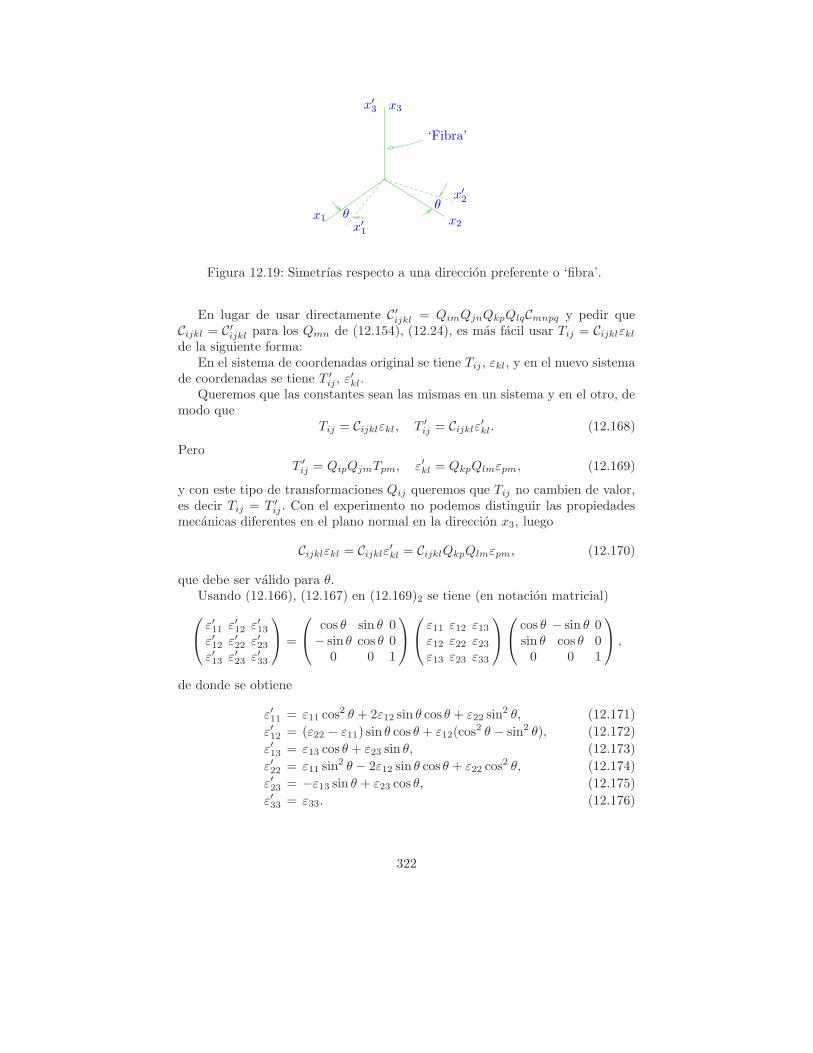
x1x′1
x2
x′2
x′3 x3
‘Fibra’
θθ
Figura 12.19: Simetrıas respecto a una direccion preferente o ‘fibra’.
En lugar de usar directamente C′ijkl = QimQjnQkpQlqCmnpq y pedir que
Cijkl = C′ijkl para los Qmn de (12.154), (12.24), es mas facil usar Tij = Cijklεkl
de la siguiente forma:En el sistema de coordenadas original se tiene Tij , εkl, y en el nuevo sistema
de coordenadas se tiene T ′ij , ε
′kl.
Queremos que las constantes sean las mismas en un sistema y en el otro, demodo que
Tij = Cijklεkl, T ′ij = Cijklε′kl. (12.168)
PeroT ′ij = QipQjmTpm, ε′kl = QkpQlmεpm, (12.169)
y con este tipo de transformaciones Qij queremos que Tij no cambien de valor,es decir Tij = T ′
ij . Con el experimento no podemos distinguir las propiedadesmecanicas diferentes en el plano normal en la direccion x3, luego
Cijklεkl = Cijklε′kl = CijklQkpQlmεpm, (12.170)
que debe ser valido para θ.Usando (12.166), (12.167) en (12.169)2 se tiene (en notacion matricial)
ε′11 ε
′12 ε
′13
ε′12 ε′22 ε
′23
ε′13 ε′23 ε
′33
=
cos θ sin θ 0− sin θ cos θ 0
0 0 1
ε11 ε12 ε13ε12 ε22 ε23ε13 ε23 ε33
cos θ − sin θ 0sin θ cos θ 00 0 1
,
de donde se obtiene
ε′11 = ε11 cos2 θ + 2ε12 sin θ cos θ + ε22 sin
2 θ, (12.171)
ε′12 = (ε22 − ε11) sin θ cos θ + ε12(cos2 θ − sin2 θ), (12.172)
ε′13 = ε13 cos θ + ε23 sin θ, (12.173)
ε′22 = ε11 sin2 θ − 2ε12 sin θ cos θ + ε22 cos
2 θ, (12.174)
ε′23 = −ε13 sin θ + ε23 cos θ, (12.175)
ε′33 = ε33. (12.176)
322

Si, por ejemplo, T33 = T ′33 se tiene
C3311ε11 + C3322ε22 + C3333ε33 + C33122ε12 + C33132ε13 + C33232ε23= C3311ε′11 + C3322ε′22 + C3333ε′33 + C33122ε′12 + C33132ε′13 + C33232ε′23,
que de (12.171), (12.176) queda como:
C3311ε11 + C3322ε22 + C3333ε33 + C33122ε12 + C33132ε13 + C33232ε23= C3311(ε11 cos2 θ + 2ε12 sin θ cos θ + ε22 sin
2 θ) + C3322(ε11 cos2 θ−2ε12 sin θ cos θ + ε22 cos
2 θ) + C3333ε33 + C33122[(ε22 − ε11) sin θ cos θ
+ε12(cos2 θ − sin2 θ)] + C33132(ε13 cos θ + ε23 sin θ) + C33232(−ε12 sin θ
+ε23 cos θ), (12.177)
que debe ser satisfecha para cualquier εij , luego se requiere, por ejemplo, quelos terminos que estan multiplicando a ε11 deben ser cero, luego
C3311 = C3311 cos2 θ + C3322 sin2 θ − 2C3312 sin θ cos θ,que es satisfecha si y solo si
C3312 = 0, C3311 = C3322. (12.178)
En el caso de los terminos que estan multiplicando a ε22 se tiene
C3322 = C3311 sin2 θ + C3322 cos2 θ + 2C3312 sin θ cos θ,que es satisfecha de manera automatica. Lo mismo sucede con ε33.
En el caso de los terminos que estan multiplicando ε12 se tiene
2C3312 = (C3311 − C3322)2 sin θ cos θ + 2C3312(cos2 θ − sin2 θ),
que se cumple de manera automatica tambien.Para el caso de los terminos que multiplican a ε13 se tiene
2C3313 = 2C3313 cos θ − 2C3323 sin θ,que es satisfecha si y solo si
C3313 = 0, C3323 = 0. (12.179)
Finalmente para el caso de los terminos que multiplican a ε23 se tiene
2C3323 = 2C3313 sin θ + 2C3323 cos θ,es satisfecha de manera automatica.
Siguiente el mismo procedimiento para T11, T22, T12, T13, T23 se deberıallegar a
C =
C1111 C1122 C1133 0 0 0C1122 C1111 C1133 0 0 0C1133 C1133 C3333 0 0 00 0 0 1
2 (C1111 − C1122) 0 00 0 0 0 C1313 00 0 0 0 0 C1313
, (12.180)
donde ahora tenemos solo 5 constantes independientes.
323

12.6.4. Material isotropico
Consideremos el efecto que tiene en las componentes de C al aplicar dostransformaciones consecutivas como las mostradas en la Figura 12.20. Un ma-
x1x′1
x2
x′2x′2
x′3x′3 x3 ψ
ψ
θθ
x′′1
x′′2
x′′3
Figura 12.20: Simetrıas respecto a dos direcciones.
terial para el cual las componentes Cijkl no cambian para esta transformacionse llama material isotropico. Las dos rotaciones θ, ψ tienen como efecto, desdeel punto de vista practico, que el material muestre el mismo comportamiento(iguales Cijkl) para cualquier direccion en el espacio 3D en la cual se carge.
La nueva transformacion de {x′i} a {x′′i } da origen a las siguientes compo-nentes para Qij :
Q11 = 1, Q12 = 0, Q13 = 0, Q21 = 0, Q22 = cosψ, (12.181)
Q23 = cos(π2− ψ
)= sinψ, Q33 = cosψ, Q31 = 0, (12.182)
Q32 = cos(π2+ ψ
)= − sinψ. (12.183)
Se sigue el mismo procedimiento mostrado en la seccion anterior para reducirCijkl, considerando que T ′
ij = Cijklε′kl y que T ′′ij = Cijklε′′kl, y que se quiere que
T ′ij = T ′′
ij para esta transformacion, en donde se usa como base los Cijkl del casotransverso isotropico.
Recordando que ε′′ij = Qikε′klQjl de (12.181)-(12.183) se tiene que
ε′′11 ε
′′12 ε
′′13
ε′′12 ε′′22 ε
′′23
ε′′13 ε′′23 ε
′′33
=
1 0 00 cosψ sinψ0 − sinψ cosψ
ε′11 ε
′12 ε
′13
ε′12 ε′22 ε
′23
ε′13 ε′23 ε
′33
1 0 00 cosψ − sinψ0 sinψ cosψ
,
324

de donde se obtiene:
ε′′11 = ε′11, (12.184)
ε′′12 = ε′12 cosψ + ε′13 sinψ, (12.185)
ε′′13 = −ε′12 sinψ + ε′13 cosψ, (12.186)
ε′′22 = ε′22 cos2 ψ + 2 sinψ cosψε′23 + sin2 ψε′23, (12.187)
ε′′23 = (ε′33 − ε′22) sinψ cosψ + ε′23(cos2 ψ − sin2 ψ), (12.188)
ε′′33 = ε′22 sin2 ψ − 2ε′23 sinψ cosψ + ε′33 cos
2 ψ. (12.189)
Consideremos el caso i = 1, j = 1 en T ′ij y T
′′ij , luego T
′ij = Tij” es equivalente
aCijklε′kl = Cijklε′′kl, (12.190)
y se tiene
C1111ε′11 + C1122ε′22 + C1133ε′33 = C1111ε′′11 + C1122ε′′22 + C1133ε′′33,
y de (12.184)-(12.189) queda como
C1111ε′11 + C1122ε′22 + C1133ε′33 = C1111ε′11 + C1122(ε′22 cos2 ψ+2 sinψ cosψε′23 + sin2 ψε′33) + C1133(ε′22 sin2 ψ − 2ε′23 sinψ cosψ
+ε′33 cos2 ψ). (12.191)
Esto debe ser satisfecho para cualquier ε′ij , luego para el caso de ε′22 se cumplesi
C1122 = C1122 cos2 ψ + C1133 sin2 ψ,que se cumple si y solo si
C1133 = C1122. (12.192)
En el caso de los terminos multiplicando a ε′33 se tiene
C1133 = C1122 sin2 ψ + C1133 cos2 ψ,
que se cumple de manera automatica.Para el caso de los terminos multiplicando a ε′23 se tiene
0 = C11222 sinψ cosψ − C11332 sinψ cosψ,
que se cumple de manera automatica tambien.Si se sigue con otros valores para i, j se llegarıa finalmente a que C tiene la
siguiente forma
C =
C1111 C1122 C1122 0 0 0C1122 C1111 C1122 0 0 0C1122 C1122 C1111 0 0 00 0 0 1
2 (C1111 − C1122) 0 00 0 0 0 1
2 (C1111 − C1122) 00 0 0 0 0 1
2 (C1111 − C1122)
,
(12.193)y esta es la matriz para el caso de materiales isotropicos, en donde solo hay dosconstantes de material.
325

12.6.5. Forma practica de las ecuaciones constitutivas
En esta seccion se mostrara algunas formas mas usuales o conocidas paralas ecuaciones constitutivas para diferentes simetrıas de material.
Material isotropico
En (12.193) defınase las constantes λ, µ (conocidas como modulos de Lame)como
λ = C1122, µ =1
2(C1111 − C1122), (12.194)
de donde se tiene que C1111 = λ + 2µ. Usando estas definiciones en (12.193) yen (12.157) tenemos
T11T22T33T12T13T23
=
λ+ 2µ λ λ 0 0 0λ λ+ 2µ λ 0 0 0λ λ λ+ 2µ 0 0 00 0 0 µ 0 00 0 0 0 µ 00 0 0 0 0 µ
ε11ε22ε332ε122ε132ε23
, (12.195)
de donde se obtiene
T11 = (λ+ 2µ)ε11 + λε22 + λε33,
T22 = λε11 + (λ+ 2µ)ε22 + λε33,
T33 = λε11 + λε22 + (λ+ 2µ)ε33,
T12 = 2µε12,
T13 = 2µε13,
T23 = 2µε23,
que se puede escribir de manera compacta en notacion indicial como
Tij = 2µεij + λεkkδij , (12.196)
y que tambien se puede escribir como
T = 2µε+ λtr(ε)I. (12.197)
Si se toma la traza de la ecuacion (12.197) se tiene
trT = 2µtrε+ 3λtrε,
en donde se ha usado el hecho que trI = 3. Luego esto implica que
trε =1
(2µ+ 3λ)trT, (12.198)
y reemplazando esto en (12.197) se llega a que
T = 2µε+λ
(2µ+ 3λ)tr(T)I,
326

de donde se obtiene
ε =1
2µT− λ
2µ(2µ+ 3λ)tr(T)I. (12.199)
Considerese un estado de esfuerzos hidrostatico el cual por definicion tienela forma
T = σI. (12.200)
De (12.199) es facil ver que ε serıa de la forma
ε =ε
3I, con ε =
3σ
2µ+ 3λ, (12.201)
de donde se define
κ =3λ+ 2µ
3, (12.202)
que se conoce en ingles como Bulk modulus.En la Seccion 3.5.2 se obtuvieron ecuaciones constitutivas para solidos isotropi-
cos usando el principio de la superposicion, y tomando como base las expresionesε = σ
E y εlateral = −νεlongitudinal, donde E era el modulo de elasticidad y ν elcoeficiento o modulo de Poisson. En la Seccion 3.5.2 se obtenıa
ε11 =T11E
− ν
E(T22 + T33), (12.203)
ε22 =T22E
− ν
E(T11 + T33), (12.204)
ε33 =T33E
− ν
E(T11 + T22), (12.205)
ε12 =T122G
, ε13 =T132G
, ε23 =T232G
, (12.206)
donde G serıa el modulo de corte. De (12.199) tenemos, por ejemplo, que:
ε11 =1
2µT11 −
λ
2µ(2µ+ 3λ)(T11 + T22 + T33), ε12 =
T122µ
,
y de (12.203)-(12.206) podemos obtener las relaciones
µ = G, (12.207)
y1
2µ
[1− λ
(2µ+ 3λ)
]=
1
E,
λ
2µ(2µ+ 3λ)=ν
E,
de donde se tiene
λ =Eν
(1 + ν)(1− 2ν), µ =
E
2(1 + ν). (12.208)
327
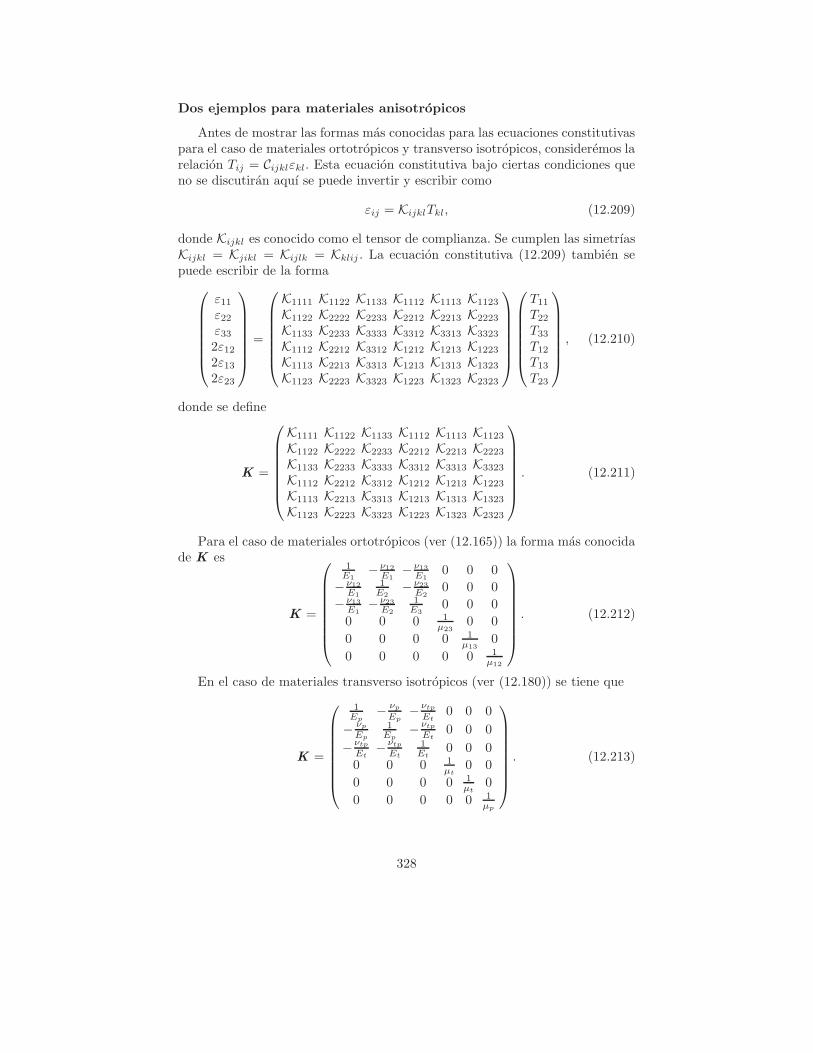
Dos ejemplos para materiales anisotropicos
Antes de mostrar las formas mas conocidas para las ecuaciones constitutivaspara el caso de materiales ortotropicos y transverso isotropicos, consideremos larelacion Tij = Cijklεkl. Esta ecuacion constitutiva bajo ciertas condiciones queno se discutiran aquı se puede invertir y escribir como
εij = KijklTkl, (12.209)
donde Kijkl es conocido como el tensor de complianza. Se cumplen las simetrıasKijkl = Kjikl = Kijlk = Kklij . La ecuacion constitutiva (12.209) tambien sepuede escribir de la forma
ε11ε22ε332ε122ε132ε23
=
K1111 K1122 K1133 K1112 K1113 K1123
K1122 K2222 K2233 K2212 K2213 K2223
K1133 K2233 K3333 K3312 K3313 K3323
K1112 K2212 K3312 K1212 K1213 K1223
K1113 K2213 K3313 K1213 K1313 K1323
K1123 K2223 K3323 K1223 K1323 K2323
T11T22T33T12T13T23
, (12.210)
donde se define
K =
K1111 K1122 K1133 K1112 K1113 K1123
K1122 K2222 K2233 K2212 K2213 K2223
K1133 K2233 K3333 K3312 K3313 K3323
K1112 K2212 K3312 K1212 K1213 K1223
K1113 K2213 K3313 K1213 K1313 K1323
K1123 K2223 K3323 K1223 K1323 K2323
. (12.211)
Para el caso de materiales ortotropicos (ver (12.165)) la forma mas conocidade K es
K =
1E1
− ν12E1
− ν13E1
0 0 0
− ν12E1
1E2
− ν23E2
0 0 0
− ν13E1
− ν23E2
1E3
0 0 0
0 0 0 1µ23
0 0
0 0 0 0 1µ13
0
0 0 0 0 0 1µ12
. (12.212)
En el caso de materiales transverso isotropicos (ver (12.180)) se tiene que
K =
1Ep
− νpEp
− νtpEt
0 0 0
− νpEp
1Ep
− νtpEt
0 0 0
− νtpEt
− νtpEt
1Et
0 0 0
0 0 0 1µt
0 0
0 0 0 0 1µt
0
0 0 0 0 0 1µp
. (12.213)
328

12.7. Problema de valor de frontera
Esta seccion es importante, pues aquı resumiremos las diversas cosas vistasen las secciones anteriores y se vera que tipo de problema es necesario resol-ver para obtener los campos de desplazamientos y esfuerzos dado un cuerpode cierta geometrıa inicial bajo diversas cargas externas y restricciones a susdesplazamientos. Solo estudiaremos de ahora en adelante el caso de cuerposisotropicos.
12.7.1. Ecuaciones
De (12.47) tenıamos la ecuacion de equilibrio de Cauchy y de la segunda leyde movimiento de Euler (12.51):
divTT + ρb = 0, T = TT,
de donde se tiene finalmente
divT+ ρb = 0 ⇔ ∂Tij∂xj
+ ρbi = 0, i = 1, 2, 3.
La relacion esfuerzo-deformacion para el caso de materiales isotropicos era(12.197):
T = 2µε+ λtr(ε)I ⇔ Tij = 2µεij + λεkkδij .
En (12.117) se habia encontrado la relacion cinematica entre desplazamientosy deformaciones:
ε =1
2
[∇u+ (∇u)T
]⇔ εij =
1
2
(∂ui∂xj
+∂uj∂xi
).
En resumen, en notacion indicial tenemos9:
∂Tij∂xj
+ ρbi = 0 3 Ecuaciones, Tij 6 componentes,(12.214)
Tij = 2µεij + λεkkδij 6 Ecuaciones, εij 6 componentes,(12.215)
εij =1
2
(∂ui∂xj
+∂uj∂xi
)6 Ecuaciones, ui 3 componentes, (12.216)
es decir en total tendrıamos 15 ecuaciones para encontrar 15 incognitas, demanera tal que el sistema se llama en Ingles ‘well possed’.
9En general se asume que bi = 0, a menos que se trabaje con grandes estructuras en dondelas cargas de cuerpo por peso (gravedad) sean importantes. Otro tipo de problema en donde b
puede ser importante es en el caso de materiales piezoelectricos o magneto-activos, en dondeaparece un b asociado a dichos campos magneticos y/o electricos.
329
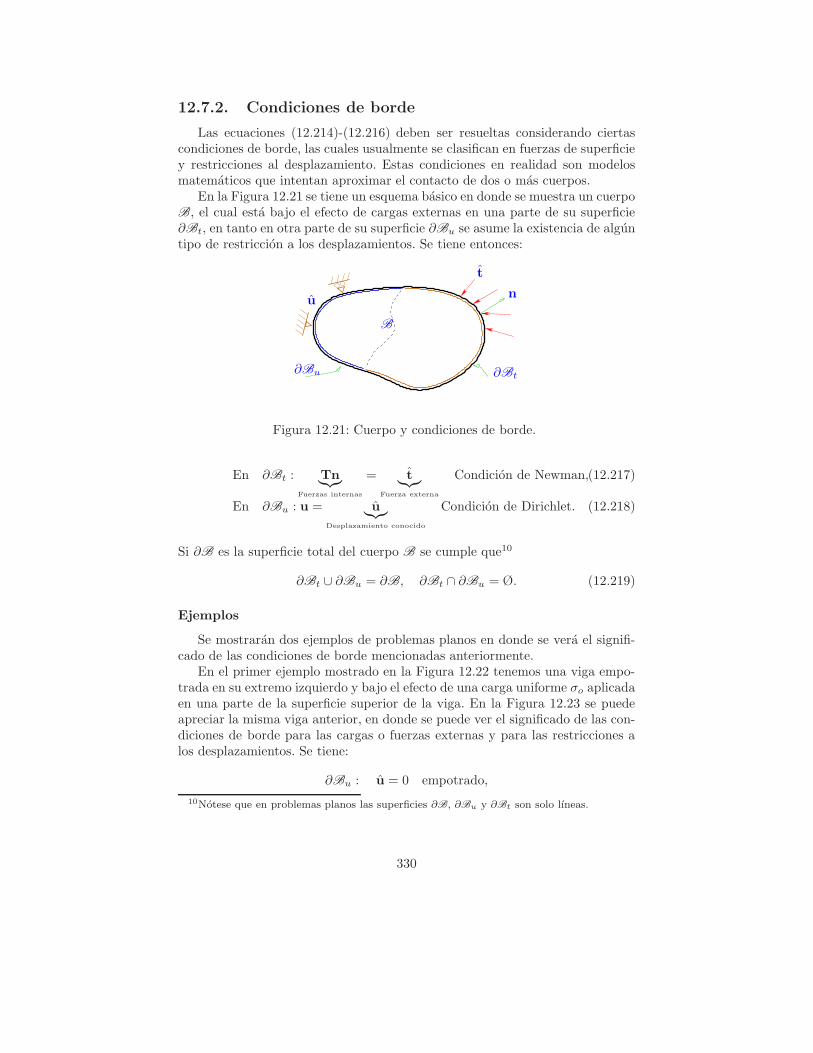
12.7.2. Condiciones de borde
Las ecuaciones (12.214)-(12.216) deben ser resueltas considerando ciertascondiciones de borde, las cuales usualmente se clasifican en fuerzas de superficiey restricciones al desplazamiento. Estas condiciones en realidad son modelosmatematicos que intentan aproximar el contacto de dos o mas cuerpos.
En la Figura 12.21 se tiene un esquema basico en donde se muestra un cuerpoB, el cual esta bajo el efecto de cargas externas en una parte de su superficie∂Bt, en tanto en otra parte de su superficie ∂Bu se asume la existencia de alguntipo de restriccion a los desplazamientos. Se tiene entonces:
B
∂Bu ∂Bt
t
un
Figura 12.21: Cuerpo y condiciones de borde.
En ∂Bt : Tn︸︷︷︸Fuerzas internas
= t︸︷︷︸Fuerza externa
Condicion de Newman,(12.217)
En ∂Bu : u = u︸︷︷︸Desplazamiento conocido
Condicion de Dirichlet. (12.218)
Si ∂B es la superficie total del cuerpo B se cumple que10
∂Bt ∪ ∂Bu = ∂B, ∂Bt ∩ ∂Bu = Ø. (12.219)
Ejemplos
Se mostraran dos ejemplos de problemas planos en donde se vera el signifi-cado de las condiciones de borde mencionadas anteriormente.
En el primer ejemplo mostrado en la Figura 12.22 tenemos una viga empo-trada en su extremo izquierdo y bajo el efecto de una carga uniforme σo aplicadaen una parte de la superficie superior de la viga. En la Figura 12.23 se puedeapreciar la misma viga anterior, en donde se puede ver el significado de las con-diciones de borde para las cargas o fuerzas externas y para las restricciones alos desplazamientos. Se tiene:
∂Bu : u = 0 empotrado,
10Notese que en problemas planos las superficies ∂B, ∂Bu y ∂Bt son solo lıneas.
330

σo
Figura 12.22: Viga empotrada.
∂Bu
∂Bt1
∂Bt3
∂Bt2
∂Bt4
1
2
Figura 12.23: Viga empotrada. Descomposicion de la superficie del cuerpo deacuerdo a las condiciones de borde.
por otra parte ∂Bt = ∂Bt1 ∪ ∂Bt2 ∪ ∂Bt3 ∪ ∂Bt4 , donde
∂Bt1 : t = 0, n = − = −e2,
∂Bt2 : t = 0, n = e1,
∂Bt3 : t = −σoe2, n = e2,
∂Bt4 : t = 0, n = e2.
En la Figura 12.24 tenemos un segundo ejemplo, en donde se tiene unaplaca plana con un agujero circular en el centro, bajo el efecto de una traccionexterna aplicada lejos del agujero y uniforme. En la Figura 12.25 se tiene lamisma placa ahora mostrando los tipos de condiciones de borde de acuerdo a(12.217), (12.218). En este caso la superficie ∂B serıa igual a ∂Bt. Se tiene
∂Bt1 : t = σ∞e2, n = e2,
∂Bt2 : t = 0, n = e1,
∂Bt3 : t = −σ∞e2, n = −e2,
∂Bt4 : t = 0, n = −e1,
∂Bt5 : t = 0, n es normal al agujero.
Si el agujero se ubica justo en el centro de la placa y las cargas externas sonuniformes, cuando se estudia este problema en elementos finitos, es usual reducirel costo computacional considerando no la placa completa, sino un cuarto de ella,tal como se muestra en la Figura 12.26.
La justificacion de esto viene del hecho de que tanto el campo de desplaza-mientos como el de esfuerzos tienen ciertas simetrıas respecto a los ejes 1 y 2.
331

σ∞
σ∞
Figura 12.24: Placa plana con agujero bajo traccion uniforme lejos.
∂Bt1
∂Bt2
∂Bt3
∂Bt5
∂Bt4
Figura 12.25: Placa plana con agujero bajo traccion uniforme lejos. Descompo-sicion de la superficie del cuerpo de acuerdo a las condiciones de borde.
En este caso se tiene tanto superficies en donde se conocen las cargas externas
332

∂Bt1
∂Bt2
∂Bt3
∂Bu1
∂Bu2
1
2
Figura 12.26: Placa plana con agujero bajo traccion uniforme lejos. Descompo-sicion de la superficie del cuerpo de acuerdo a las condiciones de borde. Modelocuarto de placa.
como superficies en donde se conocen los desplazamientos:
∂Bt1 : t = σ∞e2, n = e2,
∂Bt2 : t = 0, n = e1,
∂Bt5 : t = 0, n Es normal al agujero,
∂Bu1 : u = u2e2, No se puede desplazar en direccion 1, libre en direccion 2,
∂Bu2 : u = u1e1, No se puede desplazar en direccion 2, libre en direccion 1.
12.7.3. Ecuacion de Navier
Vamos ahora a reducir el problema (12.214)-(12.216), en este caso escribien-do todo en terminos de las componentes del campo de desplazamiento. Si sereemplaza (12.216) en (12.215) se obtiene
Tij = 2µ1
2
(∂ui∂xj
+∂uj∂xi
)+ λ
(∂u1∂x1
+∂u2∂x2
+∂u3∂x3
)
︸ ︷︷ ︸∂uk∂xk
δij ,
luego∂Tij∂xj
= µ
(∂2ui∂xj∂xj
+∂2uj∂xi∂xj
)+ λ
∂2uk∂xk∂xj
δij︸ ︷︷ ︸
∂2uk∂xk∂xi
,
pero como j y k son ındices mudos en la expresion anterior se tiene que
∂Tij∂xj
= (µ+ λ)∂2uj∂xi∂xj
+ µ∂2ui∂xj∂xj
,
333

luego reemplazando esta expresion en (12.214) se obtiene finalmente:
(µ+ λ)∂2uj∂xi∂xj
+ µ∂2ui∂xj∂xj
+ ρbi = 0, i = 1, 2, 3. (12.220)
Este es un sistema de tres ecuaciones diferenciales parciales lineales de segundoorden en general acopladas y de cuya solucion se puede obtener las tres compo-nentes del campo de desplazamientos u1 = u1(x1, x2, x3), u2 = u2(x1, x2, x3) yu3 = u3(x1, x2, x3). Estas son llamadas las ecuaciones de Navier.
Se puede probar que esta ecuacion se puede escribir como:
(µ+ λ)∇(∇ · u) + µ∇ · (∇u) + ρb = 0. (12.221)
12.7.4. Ecuaciones en coordenadas Cartesianas
En el caso de usar coordenadas Cartesianas usualmente la notacion (x1, x2, x3)para indicar la posicion se cambia por (x, y, z). En la Figura 12.27 se tiene unarepresentacion del estado de esfuerzos para un elemento diferencial. Se ha cam-
Txx
Txy
Txy
Txz Txz
Tyz
Tyz
Tzz
Tyy
Figura 12.27: Elemento diferencial para representar el estado de esfuerzos en elcaso del uso de coordenadas Cartesianas.
biado la notacion Tij por Txx, Tyy, Tzz para las componentes normales delesfuerzo y por Txy, Txz y Tyz para las componentes en corte.
Las ecuaciones de equilibrio de Cauchy (12.214) quedarıan como:
∂Txx∂x
+∂Txy∂y
+∂Txz∂z
+ ρbx = 0, (12.222)
∂Txy∂x
+∂Tyy∂y
+∂Tyz∂z
+ ρby = 0, (12.223)
∂Txz∂x
+∂Tyz∂y
+∂Tzz∂z
+ ρbz = 0, (12.224)
334

donde bx, by y bz son las componentes del vector fuerza de cuerpo.El tensor de deformacion tiene la forma
ε =
εxx εxy εxzεxy εyy εyzεxz εyz εzz
. (12.225)
La relacion desplazamiento-deformacion (12.216), usando la notacion (u, v, w)para (u1, u2, u3) quedarıa como:
εxx =∂u
∂x, εyy =
∂v
∂y, εzz =
∂w
∂z, (12.226)
εxy =1
2
(∂u
∂y+∂v
∂x
), εxz =
1
2
(∂u
∂z+∂w
∂x
), εyz =
1
2
(∂w
∂y+∂v
∂z
). (12.227)
12.7.5. Ecuaciones en coordenadas cilındricas
Consideremos en esta seccion el caso en que la posicion de un punto se ex-presan por medio de coordenadas cilındricas, en donde (x1, x2, x3) se transformaen (r, θ, z) para la posicion radial (respecto a un eje dado), angular y axial.
En este caso el tensor de esfuerzos T tiene la representacion dada en laFigura 12.28. Notese en particular la orientacion de los esfuerzos, que en realidaddepende de como se definen los ejes y que caras del elemento se estan mirando.El uso de este tipo de coordenadas se encuentra en particular en el modelo de
Tθθ
Tθz
Tθz
TrθTrθ
Trz
Trz
Trr
Tzz
dz
drdθ
Figura 12.28: Elemento diferencial para representar el estado de esfuerzos en elcaso del uso de coordenadas cilındricas.
estanques, tuberıas de seccion circular y para problemas planos en el estudio
335

de los esfuerzos para placas con agujeros circulares y tambien en problemas deplacas con grietas.
A contiuacion se deduciran las ecuaciones de equlibrio y las relaciones des-plazamiento - deformacion para este sistema de coordenadas, considerando ohaciendo uso del elemento infinitesimal mostrado en las Figuras 12.30, 12.31.Es necesario hacer notar que no es obligatorio realizar la demostracion de es-tas expresiones para cada sistema de coordenadas particular que se use, puestoque basta considerar, por ejemplo, (12.47) y (12.116) con los operadores dife-renciales convenientemente definitos en el sistema de coordenadas particular.Mostraremos las ecuaciones a partir de los elementos diferenciales como modode complementar las cosas vistas en la Seccion 12.5.2 en donde se obtuvieronvarias cosas para el caso plano con coordenadas Cartesianas.
Ecuaciones de equilibrio en coordenadas cilındricas
En la Figura 12.29 tenemos diferentes vistas del elemento diferencial mos-trado en la Figura 12.28, en los planos r − z, θ − z y r − θ.
En cada cara de este elemento diferencial, para los distintos planos, podemosver las diferentes componentes del tensor de esfuerzos, evaluados en r, θ, z, r+dr,θ+ dθ y z + dz, en donde se ha hecho uso de una expansion en Taylor para lasexpresiones evaluadas en xi + dxi (ver, por ejemplo, la Seccion 3.3.4).
Balance de fuerzas en la direccion radial: Considerese la suma de fuerzasen la direccion del eje r, teniendo cuidado de las areas para determinar las fuerzascon los esfuerzos de las Figuras 12.28, 12.29, luego
∑Fr = 0 es equivalente a
−Trrrdθdz +(Trr +
∂Trr∂r
dr
)(r + dr)dθdz − Trzrdθdz +
(Trz +
∂Trz∂z
dz
)rdθdr
−Trθdrdz cos(dθ
2
)
︸ ︷︷ ︸≈1
+
(Trθ +
∂Trθ∂θ
dθ
)drdz cos
(dθ
2
)− Tθθdrdz sin
(dθ
2
)
︸ ︷︷ ︸≈ dθ
2
−(Tθθ +
∂Tθθ∂θ
dθ
)drdz sin
(dθ
2
)+ ρbrdr rdθdz = 0,
donde br es la componente radial de las fuerzas de cuerpo. La ecuacion anteriorqueda como
−Trrrdθdz + Trrrdθdz + Trrrdθdz +∂Trr∂r
dr rdθdz +∂Trr∂r
dr2 rdθdz − Trzrdθdz + Trzrdθdz
+∂Trz∂z
dr rdθdz − Trθdrdz + Trθdrdz +∂Trθ∂θ
drdθdz − Tθθdrdθ
2dz − Tθθdr
dθ
2dz
−∂Tθθ∂θ
drdθ2
2dz + ρbrdr rdθdz = 0.
Despues de despreciar los terminos multiplicados por dr2dθdz, drdθ2dz, divi-diendo por dr rdθdz, asumiendo que r 6= 0, simplificando algunas cosas, de la
336

Tθθ
Tθθ
Tθz
Tθz
Trθ
Trθ
Trz
Trz
Trr
Trr
TzzTzz
dz
dr
dθ
rz
θ
Trr +∂Trr
∂r dr
Trr +∂Trr
∂r dr
Tzz +∂Tzz
∂z dzTzz +∂Tzz
∂z dz
Trz +∂Trz
∂r dr
Trz +∂Trz
∂z dz
Tθθ +∂Tθθ
∂θ dθ
Tθθ +∂Tθθ
∂θ dθ
Tθz +∂Tθz
∂θ dθ
Tθz +∂Tθz
∂z dz
Trθ +∂Trθ
∂θ dθ
Trθ +∂Trθ
∂r dr
(r − z) (θ − z)
(r − θ)
Figura 12.29: Elemento diferencial para representar el estado de esfuerzos en elcaso del uso de coordenadas cilındricas. Estado de esfuerzos en diferentes planospara el espacio (r, θ, z).
ecuacion anterior se llega a:
∂Trr∂r
+1
r
∂Trθ∂θ
+∂Trz∂z
+1
r(Trr − Tθθ) + ρbr = 0. (12.228)
337

Balance de fuerzas en la direccion angular: De la Figura 12.29 para elbalance
∑Fθ = 0 se tiene que es equivalente a:
−Tθθdrdz cos(dθ
2
)+
(Tθθ +
∂Tθθ∂θ
dθ
)drdz cos
(dθ
2
)+ Trθdrdz sin
(dθ
2
)
+
(Trθ +
∂Trθ∂θ
dθ
)drdz sin
(dθ
2
)− Trθrdθdz +
(Trθ +
∂Trθ∂r
dr
)(r + dr)dθdz
−Tθzrdθdr +(Tθz +
∂Tθz∂z
dz
)rdθdr + ρbθdr rdθdz = 0,
que queda como
−Tθθdrdz + Tθθdrdz +∂Tθθ∂θ
drdθdz + Trθdrdθ
2dz + Trθdr
dθ
2dz +
∂Trθ∂θ
drdθ2
2dz
−Trθrdθdz + Trθrdθdz + Trθdrdθdz +∂Trθ∂r
dr rdθdz +∂Trθ∂r
dr2dθdz − Tθzrdθdr
+Tθzrdθdr +∂Tθz∂z
dr rdθdz + ρbθdr rdθdz = 0,
dividiendo por dr rdθdz y despreciando los terminos multiplicados por drdθ2dzy dr2dθdz se obtiene
∂Trθ∂r
+1
r
∂Tθθ∂θ
+∂Tθz∂z
+ 2Trθr
+ ρbθ = 0. (12.229)
Balance de fuerzas en el sentido del eje axial: Consideremos la Figura12.29 y la suma
∑Fz = 0, se tiene:
−Tzzrdθdr +(Tzz +
∂Tzz∂z
dz
)− Tzzrdθdr +
(Trz +
∂Trz∂r
dr
)(r + dr)dθdz
−Tθzdrdz +(Tθz +
∂Tθz∂θ
dθ
)drdz + ρbzdr rdθdz = 0,
que queda como
−Tzzrdθdr + Tzzrdθdr +∂Tzz∂z
dr rdθdz − Trzrdθdz + Trzrdθdz + Trzdrdθdz
+∂Trz∂z
dr rdθdz +∂Trz∂r
dr2dθdz − Tθzdrdz + Tθzdrdz +∂Tθz∂θ
drdθdz
+ρbzdr rdθdz = 0,
que depues de dividir por dr rdθdz despreciando los terminos multiplicados pordiferenciales de tercer orden queda como
∂Trz∂r
+1
r
∂Tθz∂θ
+∂Tzz∂z
+Trzr
+ ρbz = 0. (12.230)
338
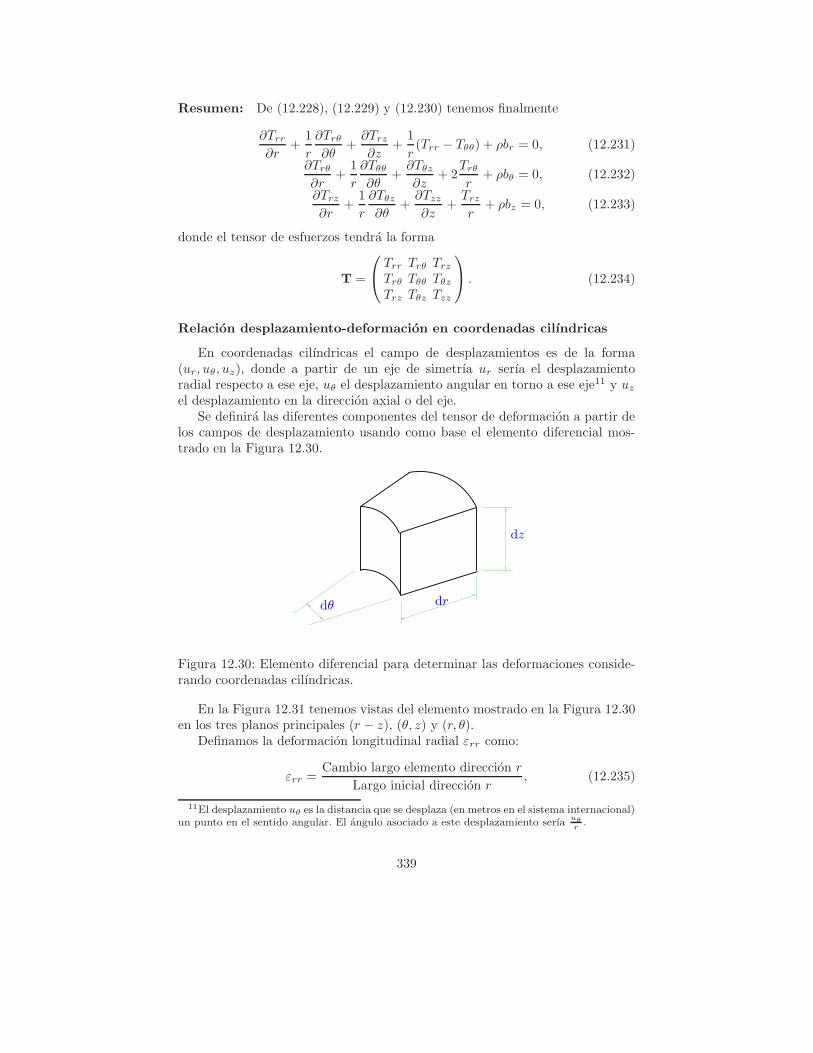
Resumen: De (12.228), (12.229) y (12.230) tenemos finalmente
∂Trr∂r
+1
r
∂Trθ∂θ
+∂Trz∂z
+1
r(Trr − Tθθ) + ρbr = 0, (12.231)
∂Trθ∂r
+1
r
∂Tθθ∂θ
+∂Tθz∂z
+ 2Trθr
+ ρbθ = 0, (12.232)
∂Trz∂r
+1
r
∂Tθz∂θ
+∂Tzz∂z
+Trzr
+ ρbz = 0, (12.233)
donde el tensor de esfuerzos tendra la forma
T =
Trr Trθ TrzTrθ Tθθ TθzTrz Tθz Tzz
. (12.234)
Relacion desplazamiento-deformacion en coordenadas cilındricas
En coordenadas cilındricas el campo de desplazamientos es de la forma(ur, uθ, uz), donde a partir de un eje de simetrıa ur serıa el desplazamientoradial respecto a ese eje, uθ el desplazamiento angular en torno a ese eje11 y uzel desplazamiento en la direccion axial o del eje.
Se definira las diferentes componentes del tensor de deformacion a partir delos campos de desplazamiento usando como base el elemento diferencial mos-trado en la Figura 12.30.
dz
drdθ
Figura 12.30: Elemento diferencial para determinar las deformaciones conside-rando coordenadas cilındricas.
En la Figura 12.31 tenemos vistas del elemento mostrado en la Figura 12.30en los tres planos principales (r − z), (θ, z) y (r, θ).
Definamos la deformacion longitudinal radial εrr como:
εrr =Cambio largo elemento direccion r
Largo inicial direccion r, (12.235)
11El desplazamiento uθ es la distancia que se desplaza (en metros en el sistema internacional)un punto en el sentido angular. El angulo asociado a este desplazamiento serıa uθ
r.
339
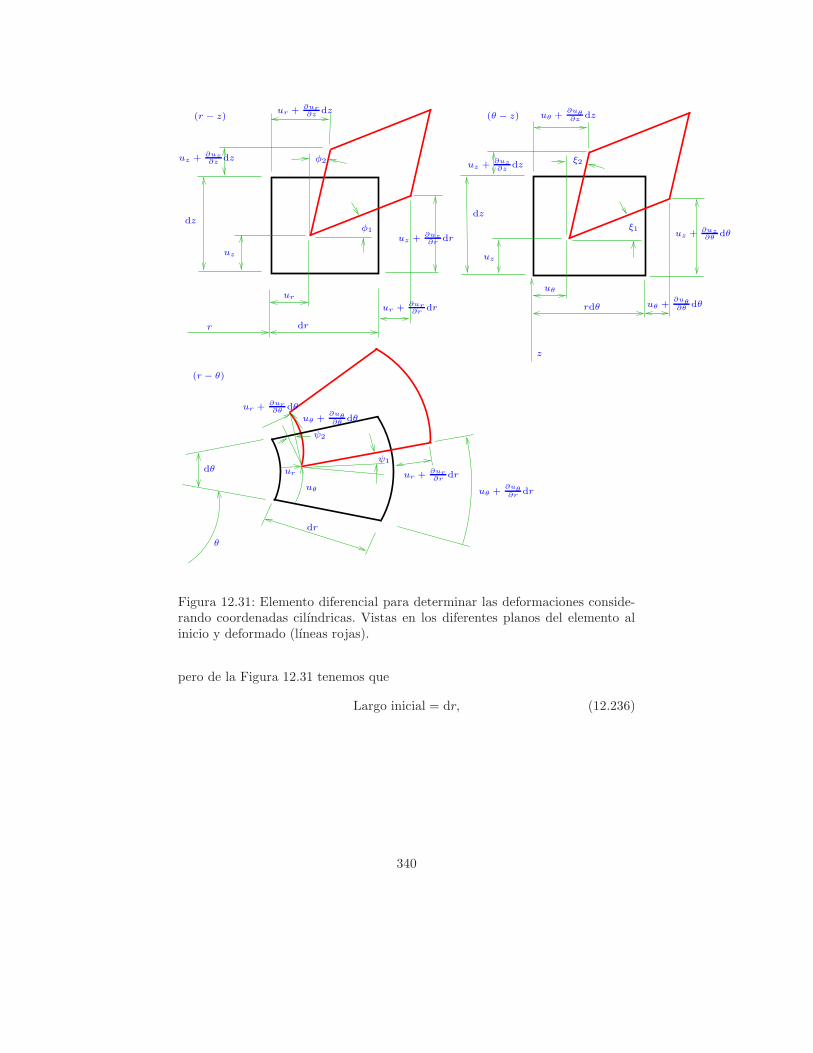
(r − z)
dr
dr
dθ
r
ur
ur
ur + ∂ur∂r
dr
ur + ∂ur∂r
dr
uzuz
dzdz
uz + ∂uz∂r
drφ1
φ2uz + ∂uz
∂zdz
uz + ∂uz∂z
dz
ur + ∂ur∂z
dz
uθ
uθ
rdθ
z
(θ − z)
uθ +∂uθ∂θ
dθ
uθ +∂uθ∂θ
dθ
uz + ∂uz∂θ
dθξ1
ξ2
uθ +∂uθ∂z
dz
ψ1
ψ2
uθ +∂uθ∂r
dr
ur + ∂ur∂θ
dθ
θ
(r − θ)
Figura 12.31: Elemento diferencial para determinar las deformaciones conside-rando coordenadas cilındricas. Vistas en los diferentes planos del elemento alinicio y deformado (lıneas rojas).
pero de la Figura 12.31 tenemos que
Largo inicial = dr, (12.236)
340

y
Largo final =
[(ur +
∂ur∂r
dr + dr − ur
)2
+
(uz +
∂uz∂r
dr − uz
)2]1/2
,
=
[dr2 + 2
∂ur∂r
dr2 +
(∂ur∂r
)2
dr2 +
(∂uz∂r
)2
dr2
]1/2,
= dr
[1 + 2
∂ur∂r
+
(∂ur∂r
)2
+
(∂uz∂r
)2]1/2
,
≈ dr
(1 + 2
∂ur∂r
)1/2
,
≈ dr
(1 +
∂ur∂r
), (12.237)
luego de (12.236) y (12.237) en (12.235) tenemos
εrr =dr + dr ∂ur
∂r − dr
dr=∂ur∂r
. (12.238)
Definamos la deformacion longitudinal en el sentido angular εθθ como:
εθθ =Cambio largo elemento direccion θ
Largo inicial direccion θ, (12.239)
pero de la Figura 12.31 tenemos
Largo inicial = r dθ, (12.240)
y
Largo final = (r + ur)
[1
r
(uθ +
∂uθ∂θ
dθ
)+ dθ − uθ
r
],
=∂uθ∂θ
dθ + r dθ +urr
∂uθ∂θ
dθ + urdθ,
≈ ∂uθ∂θ
dθ + urdθ + r dθ, (12.241)
donde se ha despreciado el termino ur
r∂uθ
∂θ dθ pues es de orden δ2. Luego de(12.240) y (12.241) en (12.239) se tiene
εθθ ≈∂uθ
∂θ dθ + urdθ + r dθ − r dθ
r dθ=
1
r
∂uθ∂θ
+urr. (12.242)
En el caso de la deformacion longitudinal en el sentido axial, esta se definecomo
εzz =Cambio largo elemento direccion z
Largo inicial direccion z, (12.243)
341
que siguiendo una metodologıa similar a los dos casos anteriores, usando laFigura 12.31, se puede demostrar que
εzz =∂uz∂z
. (12.244)
En el caso de las componentes en corte de la deformacion tenemos que
εrz =1
2(φ1 + φ2) ≈
1
2(tan φ1 + tanφ2), (12.245)
que es valido si los angulos (en radianes) son pequenos. De la Figura 12.31 secumple que
tanφ1 ≈ uz +∂uz
∂r dr − uz
dr=∂uz∂r
, tanφ2 ≈ ur +∂ur
∂z dz − ur
dz=∂ur∂z(12.246)
por lo que (12.245) queda como
εrz =1
2
(∂uz∂r
+∂ur∂z
). (12.247)
Se define la deformacion en corte εrθ como (ver Figura 12.31)
εrθ =1
2(ψ1 + ψ2), (12.248)
pero
ψ1 =uθ +
∂uθ
∂r dr − uθ
dr− uθ
r, (12.249)
donde el termino −uθ
r viene de restarle al angulo la rotacion rıgida del elementos(ver Figura 12.31 plano (r− θ)), y la division por dr en el primer termino vienedel hecho de transformar las cantidades en angulos, tomando el arco y dividiendopor el radio, en ese caso del movimiento angular solo del lado del elemento. Parael angulo ψ2 se tiene
ψ2 ≈ tanψ2 ≈ ur +∂ur
∂θ dθ − ur
r dθ=
1
r
∂ur∂θ
. (12.250)
Luego usando (12.249) y (12.250) en (12.248) se llega a
εrθ =1
2
(∂uθ∂r
− uθr
+1
r
∂ur∂θ
). (12.251)
Finalmente se define la deformacion en corte εθz como
εθz =1
2(ξ1 + ξ2), (12.252)
pero de la Figura 12.31 se tiene que
ξ1 ≈ tan ξ1 =uz +
∂uz
∂θ dθ − uz
r dθ=
1
r
∂uz∂θ
, (12.253)
ξ2 ≈ tan ξ2 =uθ +
∂uθ
∂z dz − uθ
dz=∂uθ∂z
, (12.254)
342

luego de (12.252) se obtiene
εθz =1
2
(∂uθ∂z
+1
r
∂uz∂θ
). (12.255)
En resumen de los resultados anteriores se tiene:
εrr =∂ur∂r
, εθθ =1
r
∂uθ∂θ
+urr, εzz =
∂uz∂z
, (12.256)
εrz =1
2
(∂uz∂r
+∂ur∂z
), εrθ =
1
2
(∂uθ∂r
− uθr
+1
r
∂ur∂θ
), (12.257)
εθz =1
2
(∂uθ∂z
+1
r
∂uz∂θ
), (12.258)
y el tensor de deformacion ε tiene la forma:
ε =
εrr εrθ εrzεrθ εθθ εθzεrz εθz εzz
. (12.259)
El operador ∇ en coordenadas cilındricas
Considerese la transformacion de coordenadas de Cartesianas en cilındricas
x1 = r cos θ, x2 = r sin θ, x3 = z. (12.260)
De la regla de la cadena para la derivada se tiene que
∂
∂xi( ) =
∂
∂r( )
∂r
∂xi+
∂
∂θ( )
∂θ
∂xi. (12.261)
Usando esto en (12.260) se obtiene
1 =∂r
∂x1cos θ − r
∂θ
∂x1sin θ, 0 =
∂r
∂x1sin θ − r
∂θ
∂x1cos θ,
que se puede escribir como
(cos θ −r sin θsin θ r cos θ
)( ∂r∂x1∂θ∂x1
)=
(10
),
de donde se puede obetener ∂r∂x1
= cos θ y ∂θ∂x1
= − sin θr . Con un procedimiento
similar se pueden obtener las derivadas en x2 de r y θ. Luego para (12.261)tenemos:
∂
∂x1( ) = cos θ
∂
∂r( )− sin θ
r
∂
∂θ( ), (12.262)
∂
∂x2( ) = sin θ
∂
∂r( ) +
cos θ
r
∂
∂θ( ), (12.263)
343

y es facil demostrar que∂
∂x3( ) =
∂
∂z( ). (12.264)
En coordenadas Cartesianas el operador ∇ tenıa la forma
∇ =∂
∂x1e1 +
∂
∂x2e2 +
∂
∂x3e3. (12.265)
Peroer = cos θe1 + sin θe2, eθ = − sin θe1 + cos θe2, (12.266)
de donde se puede obtener
e1 = cos θer − sin θeθ, e2 = sin θer + cos θeθ, (12.267)
tambien se tiene quee3 = ez. (12.268)
Luego con el uso de (12.262)-(12.264) y (12.267) en (12.265) se tiene que
∇ =
(cos θ
∂
∂r( )− sin θ
r
∂
∂θ( )
)(cos θer − sin θeθ)
(sin θ
∂
∂r( ) +
cos θ
r
∂
∂θ
)(sin θer + cos θeθ) +
∂
∂z( )ez,
y despues de algunas manipulaciones se llega a
∇ =∂
∂r( )er +
1
r
∂
∂θ( )eθ +
∂
∂z( )ez. (12.269)
12.7.6. Ecuaciones en coordenadas esfericas
En un sistema de coordenadas esferico la posicion de un punto esta dada por(r, θ, φ) tal como se muestra en la Figura 12.32. En dicha figura se pueden verlas componentes del tensor de esfuerzos para ese sistema de coordenadas. Dichotensor de esfuerzos tiene la forma
T =
Trr Trθ TrφTrθ Tθθ TθφTrφ Tθφ Tφφ
. (12.270)
El uso de este sistema de coordenadas esta el modelamiento del comportamientomecanico de estanques de forma esferica y en el caso de la biomecanica consi-derando un modelo nolineal elastico en el estudio de aneurismas.
Siguiendo un procedimiento similar al caso de las coordenadas cilındricas sepuede obtener las ecuaciones de equilibrio para (12.214) como:
∂Trr∂r
+1
r
∂Trφ∂φ
+1
r sinφ
∂Trθ∂θ
+cos θ
r sin θTrφ +
1
r(2Trr − Tφφ − Tθθ) + ρbr = 0, (12.271)
∂Trθ∂r
+1
r
∂Tθφ∂φ
+1
r sinφ
∂Tθθ∂θ
+3
rTrθ +
2 cosφ
r sinφTθφ + ρbθ = 0, (12.272)
∂Trφ∂r
+1
r
∂Tφφ∂φ
+1
r sinφ
∂Tθφ∂θ
+3
rTrφ +
cosφ
r sinφ(Tφφ − Tθθ) + ρbφ = 0. (12.273)
344
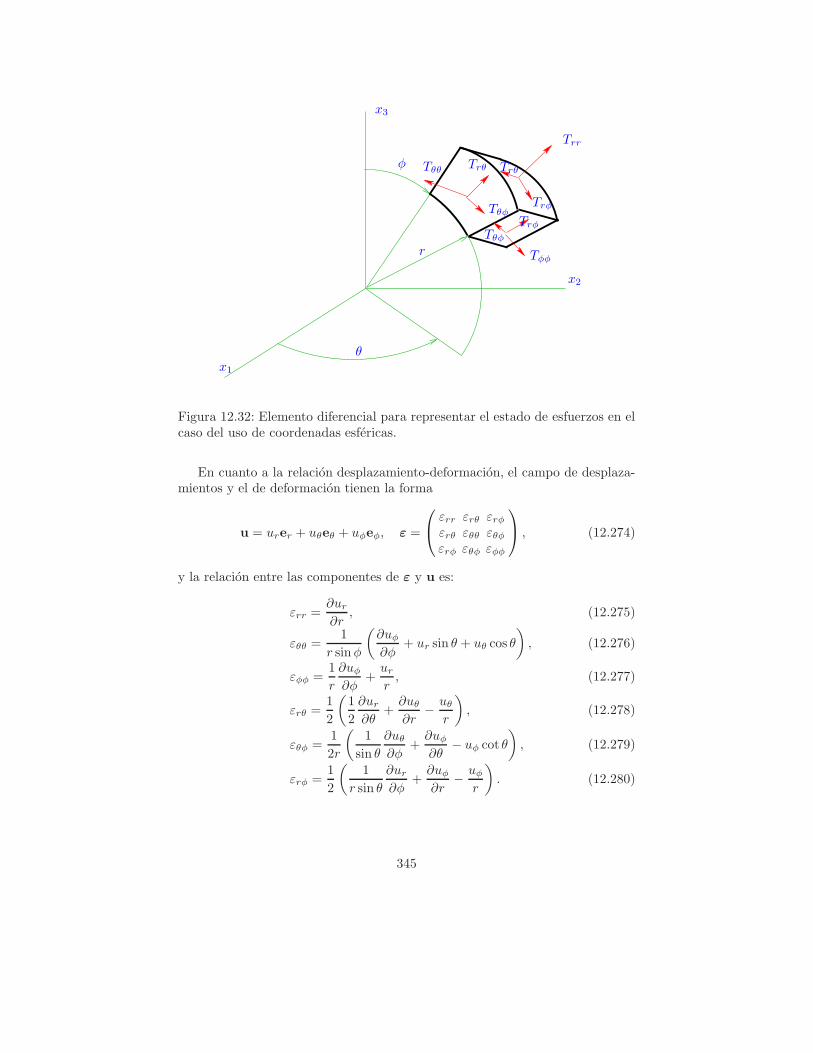
Tθθ
Tθφ
Tθφ
TrθTrθ
Trφ
Trφ
Trr
Tφφ
x1
x2
x3
r
φ
θ
Figura 12.32: Elemento diferencial para representar el estado de esfuerzos en elcaso del uso de coordenadas esfericas.
En cuanto a la relacion desplazamiento-deformacion, el campo de desplaza-mientos y el de deformacion tienen la forma
u = urer + uθeθ + uφeφ, ε =
εrr εrθ εrφεrθ εθθ εθφεrφ εθφ εφφ
, (12.274)
y la relacion entre las componentes de ε y u es:
εrr =∂ur∂r
, (12.275)
εθθ =1
r sinφ
(∂uφ∂φ
+ ur sin θ + uθ cos θ
), (12.276)
εφφ =1
r
∂uφ∂φ
+urr, (12.277)
εrθ =1
2
(1
2
∂ur∂θ
+∂uθ∂r
− uθr
), (12.278)
εθφ =1
2r
(1
sin θ
∂uθ∂φ
+∂uφ∂θ
− uφ cot θ
), (12.279)
εrφ =1
2
(1
r sin θ
∂ur∂φ
+∂uφ∂r
− uφr
). (12.280)
345

12.7.7. Modelos simplificados en elasticidad
En muchos problemas puede resultar mas practico hacer algunas simplifica-ciones respecto a las deformaciones que sufren los cuerpos, de modo de podertrabajar con modelos bidimensionales en lugar del problema completo en tresdimensiones. En las siguientes secciones veremos tres casos importantes.
Esfuerzo plano
Asumamos que en un problema solo hay fuerzas y esfuerzos en el plano x−yy no hay ninguna componente en z. De manera adicional se asume que el cuerpodonde se estan aplicando las fuerzas es plano (esta en el plano x − y) y muydelgado (en la direccion z), como consecuencia la deformacion lateral (en z) serıadespreciable. El elemento diferencial de la Figura 12.33 nos muestra el estadode esfuerzos bajo este supuesto.
x
y
zTxx
Txy
Txy
Tyy
Figura 12.33: Elemento diferencial para analisis de esfuerzo plano.
Con la serie de supuestos anteriores se tiene que
Tzz = Txz = Tyz = 0, (12.281)
y de (12.203)-(12.206) tenemos que
εxx =1
E(Txx − νTyy), (12.282)
εyy =1
E(Tyy − νTxx), (12.283)
εzz = − ν
E(Txx + Tyy), (12.284)
y calculando la inversa del sistema anterior tenemos
Txx =E
1− ν2(εxx + νεyy), (12.285)
Tyy =E
1− ν2(εyy + νεxx), (12.286)
Txy = 2Gεxy. (12.287)
La deformacion (alargamiento o acortamiento) en la direccion z es despre-ciable pero se puede calcular de (12.284). Por otra parte εxz = 0 y εyz = 0 secumple siempre, o sea cuando el cuerpo se deforma se mantiene plano.
346

Deformacion plana
Para introducir el siguiente modelo bidimensional es necesario considerarprimero la Figura 12.34, en donde tenemos, por ejemplo, una representacionesquematica de un muro de una presa. Se asume que la forma del estanque en el
x
y
z
Fi
Fj
Fn
‘Seccion’
Figura 12.34: Ejemplo de cuerpo para analisis de deformacion plana.
plano x−y es la misma (o se repite) en la direccion del eje z. En la direccion deleje z se asume que este muro es muy largo. En cada plano x− y en la direcciondel eje z el muro esta bajo el efecto del mismo sistema de fuerzas externas, osea para cualquier seccion (en la direccion del eje z) que se extraiga del muro elsistema de fuerzas es el mismo.
Imaginemos que se extrae del muro una seccion o ‘lonja’ como se muestracon lıneas punteadas en la Figura 12.34. Esta seccion se muestra en la Figura12.35.
z
Figura 12.35: Elemento diferencial para analisis de deformacion plana.
Como el muro es ‘infinito’ en la direccion del eje z, la seccion no se puededesplazar (expandir o contraer) en la direccion dicho eje, pues el resto del muro aambos lados (como es infinito) se lo impedirıa, luego se tiene como consecuencia
εzz = 0. (12.288)
347

Por otra parte, debido a que la forma es la misma en z, y las fuerzas son lasmismas en la direccion del eje z (las fuerzas solo tienen componente en el planox− y), se tiene tambien
εxz = εyz = 0. (12.289)
Si se reemplaza (12.288), (12.289) en (12.195) se tiene
Txx =E
(1 + ν)(1 − 2ν)[(1 − ν)εxx + νεyy], (12.290)
Tyy =E
(1 + ν)(1 − 2ν)[(1 − ν)εyy + νεxx], (12.291)
Tzz =Eν
(1 + ν)(1 − 2ν)(εxx + εyy), (12.292)
Txy =E
2(1 + ν)εxy, Tyz = 0, Txz = 0. (12.293)
De (12.292) podemos apreciar que Tzz no es cero, o sea si bien cada secciones plana εzz = 0, esto no implica necesariamente que el esfuerzo normal en esadireccion es cero. De hecho puede ocurrir que en algunos problemas este esfuerzopuede alcanzar valores muy altos.
Simetrıa axial
Este es uno de los tipos de simetrıas mas utiles en mecanica de solidos.Para introducir este tipo de simetrıa es necesario partir con un ejemplo como elmostrado en la Figura 12.36, en donde tenemos un esquema de un estanque otuberıa de seccion circular, sometido a una presion interna P . En la figura vemosun sistema de coordenadas cilındricas r, θ, z y un pequeno elemento diferencialde la pared.
En un problema de esta naturaleza, con este tipo de geometrıas (u otrassimilares de seccion circular), con este tipo de fuerzas actuando sobre, en estecaso, el estanque o tubo, es posible ver que el estanque conservarıa su formacircular una vez aplicada las fuerzas. Conservar la forma circular significarıaconservar la ‘simetrıa axial’, y se habla de simetrıa axial porque la figura seobtiene por medio de una revolucion de una seccion respecto al eje axial z.
En la Figura 12.37 tenemos una vista ampliada del elemento diferencialmostrado con lıneas punteadas en la Figura 12.36. El cubo diferencial se muestraen su forma inicial (lınea llena) y en una posible situacion final (deformada) enlınea segmentada. Podemos ver en la Figura 12.38 una vista superior del cubodiferencial, y podemos apreciar el tipo de deformacion que podrıa sufrir el cubo.Vemos que solo se produce expancion pero no corte en esta vista superior.
En el cubo diferencial de la Figura 12.37 tenemos las componentes del tensorde esfuerzos en el sistema cilındrico. Debido a los tipos de deformacion posible enun problema de este tipo solo las componentes Tθθ, Trr, Tzz y Trz son distintosde cero.
348

r θ
z
P
Figura 12.36: Estanque con presion interna.
drdθ
dzTθθTrr
Tzz
Trz
Trz
Figura 12.37: Elemento diferencial para problema con simetrıa axial.
12.8. Algunos metodos de solucion exacta delproblema de valor de frontera en elastici-
dad lineal
En Resistencia de Materiales se estudian problemas en donde se obtienensoluciones muy simplificadas para los esfuerzos en solidos elasticos. En particularestas soluciones no son utiles en el caso de cuerpos con cambios bruscos en su
349

r
θ
Figura 12.38: Elemento diferencial para problema con simetrıa axial. Vista su-perior mostrando las deformaciones admisibles.
geometrıa cuando se tienen distribuciones de esfuezos no uniformes.Los metodos numericos de solucion han reemplazado a las soluciones exactas,
pero estos metodos numericos son metodos aproximados (por ejemplo elementosfinitos), la pregunta es: ¿Con que comparamos estas soluciones numericas?
Hay problemas practicos que se repiten con frecuencia en diseno, como porejemplo el estudio de estanques de pared gruesa de forma cilındrica o esferica,placas planas con agujeros, etc. En lugar de solucionar con, por ejemplo, elemen-tos finitos para cada nueva aplicacion con las geometrıas anteriores, basta tenerla solucion analıtica para cada problema y usarla en cada nueva aplicacion.
En esta seccion no se vera en detalle todos los metodos de solucion exactadel problema de valor de frontera (12.214)-(12.216), ni todas las demostracionesasociadas a ellos, en particular no se veran teoremas de existencia y unicidad.
12.8.1. Potencial para el campo de desplazamiento
En el caso bidimensional la ecuacion de Navier (12.220) nos queda:
(µ+ λ)
(∂2u1∂x21
+∂2u2∂x1∂x2
)+ µ
(∂2u1∂x21
+∂2u1∂x22
)= 0, (12.294)
(µ+ λ)
(∂2u1∂x1∂x2
+∂2u2∂x22
)+ µ
(∂2u2∂x21
+∂2u2∂x22
)= 0. (12.295)
Estas son dos ecuaciones parciales lineales para encontrar u1(x1, x2) y u2(x1, x2).El metodo de separacion de variables no se puede aplicar de manera directa paraeste problema.
Consideremos las siguientes identidades donde φ es un campo escalar y ψ es
350
un campo vectorial:
divcurlψ = ∇ · (∇×ψ) = 0, (12.296)
curlgradφ = ∇× (∇φ) = 0, (12.297)
curlcurlψ = ∇× (∇×ψ) = ∇(∇ ·ψ)−∇2ψ, (12.298)
divgradφ = ∇ · (∇φ) = ∇2φ, (12.299)
divLaplψ = ∇ · (∇2ψ) = ∇2(∇ · ψ) = Lapldivψ, (12.300)
Laplgradφ = ∇2(∇φ) = ∇(∇2φ) = gradLaplφ, (12.301)
Lapl(ψ · x) = ∇2(ψ · x) = 2∇ · ψ +∇ · ∇2ψ, (12.302)
div(φψ) = φ∇ ·ψ + (∇φ) ·ψ, (12.303)
Lapl(φx) = 2∇φ+ x∇2φ. (12.304)
Si ψ es tal que ∇ ·ψ = 0 se dice que ψ es un campo solenoidal.
Si ψ es tal que ∇×ψ = 0 se dice ψ es un campo irrotacional.
Si ψ es irrotacional implica que existe φ tal que
ψ = ∇φ. (12.305)
Sea un campo vectorial E conocido tal que ∇ · E y ∇× E existen y no soncero, son finitos y si |x| → ∞ se hace cero. Entonces existen U irrotacional y Vsolenoidal tal que
E = U+V. (12.306)
Pero si U es tal que ∇×U = 0 entonces
U = ∇φ. (12.307)
Si V es tal que ∇ ·V = 0 entonces
∇ = ∇×ψ, (12.308)
luego en (12.306) se tieneE = ∇φ+∇×ψ, (12.309)
luego∇ ·E = ∇2φ, (12.310)
y ∇×E = ∇× (∇×ψ) = ∇(∇ ·ψ)−∇2ψ; luego si se asume que divψ = 0 seobtiene
∇×E = −∇2ψ. (12.311)
Se puede demostrar que las ecuaciones (12.310), (12.311) siempre tienen solu-cion.
351

Caso ecuacion de Navier
La ecuacion de Navier (12.221) tenıa la forma
(µ+ λ)∇(∇ · u) + µ∇2u+ ρb = 0. (12.312)
Asumamos que b = 0, asumamos ademas que u se puede escribir como (ver(12.309)):
u = ∇φ+∇×ψ, (12.313)
luego se cumple que∇ · u = ∇2φ. (12.314)
Por otra parte usando (12.298) se tiene que
∇2u = ∇ · (∇u) = ∇(∇ · u)−∇× (∇× u), (12.315)
por lo que de (12.313) se obtiene
∇2u = ∇[∇ · (∇φ+∇×ψ)]−∇× [∇× (∇φ +∇×ψ)],= ∇(∇2φ) −∇× [∇× (∇×ψ)],= ∇(∇2φ) −∇× [∇( ∇ · ψ︸ ︷︷ ︸
Se asume = 0
)−∇2ψ]. (12.316)
Luego (12.312) quedarıa como
(µ+ λ)∇(∇2φ) + µ[∇(∇2φ) +∇× (∇2ψ)] = 0,
que se puede simplificar a
(2µ+ λ)∇(∇2φ) + µ∇× (∇2ψ) = 0. (12.317)
Si φ y ψ satisfacen esta ecuacion entonces u expresado como (12.313) es solucionde la ecuacion de Navier sin fuerzas de cuerpo.
Veamos algunos ejemplos simples de solucion para (12.317):
Sean∇2φ = Constante, ψ = 0, (12.318)
esta es conocida como el potencial de Lame y de (12.313) se tiene
u = ∇φ. (12.319)
Proponer φ tal que ∇2φ = Constante no es difıcil, pero el problemaes encontrar dicha funcion tal que satisfaga las condiciones de borde deun problema en particular. Una solucion para el problema anterior serıaexpresar φ por medio de una seria de Fourier donde para obtener lascondiciones de borde deseadas para u se ajustarıan las constantes de laserie.
352

Un ejemplo de solucion de (12.318)1 en dos dimensiones serıa
φ = A(x21 − x22) + 2Bx1x2,
de donde se tiene que
∇2φ =∂2φ
∂x21+∂2φ
∂x22= 2A− 2A = 0 = constante.
Otro ejemplo de solucion de (12.318)1 serıa
φ = C logr
K,
donde r =√x21 + x22.
Se tiene que
∂2φ
∂x21= − C
Kr2
(∂r
∂x1
)2
+C
Kr
∂2r
∂x21,
pero ∂r∂x1
= x1
r y ∂2r∂x2
1= −x2
1
r3 + 1r , luego eso implica que
∂2φ
∂x21= −2Cx21
Kr4+
C
Kr2,
y una expresion similar se puede encontrar para ∂2φ∂x2
2, y finalmente se puede
probar que
∂2φ
∂x21+∂2φ
∂x22= − 2C
Kr4(x21 + x22)︸ ︷︷ ︸
=r2
+2C
Kr2= 0.
Vector de Galerkin para el campo de desplazamientos
Consideremos nuevamente la ecuacion de Navier sin fuerzas de cuerpo
(µ+ λ)∇(∇ · u) + µ∇2u = 0, (12.320)
que en notacion indicial es equivalente a
(µ+ λ)∂2uk∂xi∂xk
+ µ∂2ui
∂xk∂xk= 0, i = 1, 2, 3. (12.321)
Se puede demostrar (se deja como ejercicio) que esta ecuacion es equivalente a
∂2uk∂xi∂xk
+ (1− 2ν)∂2ui
∂xk∂xk= 0, (12.322)
donde
ν =λ
2(λ+ µ). (12.323)
353

Consideremos la siguiente posible representacion para el campo de despla-zamiento (en notacion indicial)
2µui = C∂2Vi∂xj∂xj
− ∂2Vj∂xi∂xj
, (12.324)
donde C es una constante por determinar.De (12.324) se tiene que
2µ∂2ui
∂xk∂xk= C
∂4Vi∂xj∂xj∂xk∂xk
− ∂4Vj∂xi∂xj∂xk∂xk
, (12.325)
2µ∂2uk∂xi∂xk
= C∂4Vk
∂xj∂xj∂xi∂xk− ∂4Vj∂xk∂xj∂xi∂xk
, (12.326)
luego reemplazando en la ecuacion de Navier (12.324) tenemos
C∂4Vk
∂xj∂xj∂xi∂xk− ∂4Vj∂xk∂xj∂xi∂xk
+ (1 + 2ν)C∂4Vi
∂xj∂xj∂xk∂xk
− ∂4Vj∂xi∂xj∂xk∂xk
= 0. (12.327)
Pero en la expresion anterior los ındices j, k son mudos y solo el ındice i esindependiente, de modo que si V es suficientemente continuo se tiene que
∂4Vk∂xj∂xj∂xi∂xk
=∂4Vj
∂xk∂xj∂xi∂xk=
∂4Vj∂xi∂xj∂xk∂xk
.
Usando esto en (12.327) y juntando terminos semejantes se llega a
[C − 1− (1− 2ν)]∂4Vk
∂xj∂xj∂xi∂xk+ (1− 2ν)C
∂4Vi∂xj∂xj∂xk∂xk
= 0. (12.328)
Si queremos que C − 1 − (1 − 2ν) = 0 eso se cumple si C = 2(1 − ν), luego laecuacion de Navier es satisfecha si V satisface
∂4Vi∂xj∂xj∂xk∂xk
= 0 ⇔ ∇2∇2V = 0 ⇔ Vi,jjkk = 0, (12.329)
que es una especia de ecuacion bi-armonica para cada componente Vi de V.Reemplazando C = 2(1− ν) en (12.324) tenemos la representacion:
2µui = 2(1− ν)∂2Vi∂xj∂xj
− ∂2Vj∂xi∂xj
, (12.330)
⇔ 2µu = 2(1− ν)∇2V −∇(∇ ·V). (12.331)
354
Vector de Galerkin para el campo de desplazamientos: Caso especialpara problemas axil-simetricos
Como primer paso en este caso especial asumimos que V = V3e3, donde lacondicion (12.329) es equivalente a:
∇2∇2V3 = 0. (12.332)
De (12.324) tenemos
2µu1 = − ∂2V3∂x1∂x3
, 2µu2 = − ∂2V3∂x2∂x3
, (12.333)
2µu3 = 2(1− ν)
(∂2V3∂x21
+∂2V3∂x22
+∂2V3∂x23
)− ∂2V3
∂x23. (12.334)
Estas expresiones en coordenadas cilındricas quedarıan como
2µur = − ∂2Vz∂r∂z
, 2µuθ = −1
r
∂2Vz∂θ∂z
, (12.335)
2µuz = 2(1− ν)∇2Vz −∂2Vz∂z2
, (12.336)
y en relacion al termino ∇2Vz en (12.336) de (12.269) tenemos
∇2Vz =∂2Vz∂r2
+1
r
∂Vz∂r
+1
r2∂2Vz∂θ2
+∂2Vz∂z2
. (12.337)
Usando (12.337) en (12.336) y (12.335), (12.336) en (12.256)-(12.258) se obtienepara las componentes del tensor de deforamcion
εrr =∂ur∂r
= − 1
2µ
∂2Vz∂r2∂z
, (12.338)
εθθ =1
r
∂uθ∂θ
+urr
=1
r
∂
∂θ
(− 1
2µr
∂2Vz∂θ∂z
)+
1
r
(− 1
2µ
∂2Vz∂r∂z
),
= − 1
2µr
(1
r
∂2Vz∂θ2∂z
+∂2Vz∂r∂z
), (12.339)
εzz =∂uz∂z
=1
2µ
∂
∂z
[2(1− ν)
(∂2Vz∂r2
+1
r
∂Vz∂r
+1
r2∂2Vz∂θ2
+∂2Vz∂z2
)− ∂2Vz
∂z2
],
=(1 − ν)
µ
(∂3Vz∂r2∂z
+1
r
∂2Vz∂r∂z
+1
r2∂3Vz∂θ2∂z
+∂2Vz∂z2
)− ∂2Vz
∂z3, (12.340)
y para las componentes en corte
εrθ =1
2
(∂uθ∂r
− uθr
+1
r
∂ur∂θ
),
=1
2
[∂
∂r
(− 1
2µr
∂2Vz∂θ∂z
)− 1
r
(− 1
2µr
∂2Vz∂θ∂z
)+
1
r
∂
∂θ
(− 1
2µr
∂2Vz∂r∂z
)],
=1
2µr
(1
r
∂2Vz∂θ∂z
− ∂3Vz∂r∂θ∂z
), (12.341)
355

εrz =1
2
(∂uz∂r
+∂ur∂z
),
=1
2
{∂
∂r
[1
2µ
(2(1− ν)
(∂2Vz∂r2
+1
r
∂Vz∂r
+1
r2∂2Vz∂θ2
+∂2Vz∂z2
)− ∂2Vz
∂z2
)]
+∂
∂z
(− 1
2µ
∂2Vz∂r∂z
)},
=1
4µ
[2(1− ν)
(∂3Vz∂r3
− 1
r2∂Vz∂r
+1
r
∂2Vz∂r2
− 2
r3∂2Vz∂θ2
+1
r2∂3Vz∂r∂θ2
+∂3Vz∂r∂z2
)− ∂3Vz∂r∂z2
], (12.342)
y
εθz =1
2
(∂uθ∂z
+1
r
∂uz∂θ
),
=1
2
{∂
∂z
(− 1
2µr
∂2Vz∂θ∂z
)+
1
r
∂
∂θ
[1
2µ
(2(1− ν)
(∂2Vz∂r2
+1
r
∂Vz∂r
+1
r2∂2Vz∂θ2
+∂2Vz∂z2
)− ∂2Vz
∂z2
)]},
=1
4µ
[−1
r
∂3Vz∂θ∂z2
+2(1− ν)
r
(∂3Vz∂r2∂θ
+1
r
∂2Vz∂r∂θ
+1
r2∂3Vz∂θ3
+∂3Vz∂θ∂z2
)
−1
r
∂3Vz∂θ∂z2
]. (12.343)
Usando (12.338)-(12.343) en (12.197) T = 2µε+λtr(ε)I se obtiene Trr, Tθθ,Tzz, Trθ, Trz y Tθz.
Un caso de interes para problemas axil-simetricos es
Vz = Vz(r, z), (12.344)
que en este caso especial es conocida como la funcion de esfuerzos de Love.De (12.335)-(12.343) para este caso simplificado tenemos:
2µur = −∂2Vz∂∂z
, uθ = 0, (12.345)
2µuz = 2(1− ν)
(∂2Vz∂r2
+1
r
∂Vz∂r
+∂2Vz∂z2
)− ∂2Vz
∂z2, (12.346)
y
εrr = − 1
2µ
∂3Vz∂r2∂z
, εθθ = − 1
2µr
∂3Vz∂r2∂z
, (12.347)
εzz =(1− ν)
µ
(∂2Vz∂r2∂z
+1
r
∂2Vz∂r∂z
+∂3Vz∂z3
)− ∂3Vz
∂z3, (12.348)
εrθ = 0, (12.349)
εrz =1
2µ
[2(1− ν)
(∂3Vz∂r3
− 1
r2∂Vz∂r
+1
r
∂2Vz∂r2
+∂3Vz∂r∂z2
)− ∂3Vz∂r∂z2
], (12.350)
εθz = 0, (12.351)
356

y de (12.197) se obtienen las componentes del tensor de esfuerzos
Trr = 2µεrr + λ(εrr + εθθ + εzz), (12.352)
Tθθ = 2µεθθ + λ(εrr + εθθ + εzz), (12.353)
Tzz = 2µεzz + λ(εrr + εθθ + εzz), (12.354)
Trθ = 0, Trz = 2µεrz, Tθz = 0. (12.355)
12.8.2. Potencial para el campo de esfuerzos
Potencial para el problema de esfuerzos caso plano en coordenadasCartesianas
En el caso que no hay fuerzas de cuerpo las ecuaciones de equilibrio (12.215)son:
∂Txx∂x
+∂Txy∂y
= 0,∂Txy∂x
+∂Tyy∂y
= 0. (12.356)
Sea la funcion escalar Φ = Φ(x, y) tal que
Txx =∂2Φ
∂y2, Tyy =
∂2Φ
∂x2, Txy = − ∂2Φ
∂x∂y, (12.357)
reemplazando en (12.356)1 tenemos
∂3Φ
∂y2∂x− ∂3Φ
∂x∂y2= 0,
o sea (12.356)1 es satisfecha de manera automatica si Φ es suficientemente suave.Se puede demostrar lo mismo con (12.356)2. La funcion Φ es conocida como lafuncion de esfuerzos de Airy.
Sea (12.357) valida, luego consideremos las ecuaciones constitutivas para elcaso lineal elastico isotropico (12.203)-(12.206):
εxx =(1− ν)
ETxx −
ν
E(Tyy + Tzz), (12.358)
εyy =(1− ν)
ETyy −
ν
E(Txx + Tzz), (12.359)
εzz =(1− ν)
ETzz −
ν
E(Txx + Tyy), (12.360)
εxy =(1 + ν)
ETxy, εxz = 0, εyz = 0, (12.361)
εzz = − ν
E(Txx + Tyy), (12.362)
luego usando (12.357) en (12.358), (12.359), (12.361)1 (asumiendo que Tzz = 0,
357

Txz = Tyz = 0) se obtiene
εxx =(1 + ν)
E
∂2Φ
∂y2− ν
E
(∂2Φ
∂x2+∂2Φ
∂y2
), (12.363)
εyy =(1 + ν)
E
∂2Φ
∂x2− ν
E
(∂2Φ
∂x2+∂2Φ
∂y2
), (12.364)
εxy = − (1 + ν)
E
∂2Φ
∂x∂y. (12.365)
Las tres componentes del tensor de deformacion (12.363)-(12.365) se deben aso-ciar con las dos componentes del campo de desplazamientos en 2D por mediode (12.216)
∂u1∂x
= ε11 = εxx,∂u2∂y
= ε22 = εyy,1
2
(∂u1∂y
+∂u2∂x
)= ε12 = εxy.
(12.366)O sea tendrıamos 3 ecuaciones para dos incognitas u1, u2, que pueden encontrar-se de (12.366) si y solo si las componentes del tensor de deformacion satisfacenlas ecuaciones de compatibilidad (12.144), (12.145), (12.148), (12.149), (12.152)y (12.153). En este caso la ecuacion de compatilidad a considerar es (12.152):
∂2εxx∂y2
+∂2εyy∂x2
= 2∂2εxx∂x∂y
, (12.367)
pero reemplazando (12.363)-(12.365) en (12.367) tenemos
(1 + ν)
E
∂2Φ
∂y4− ν
E
(∂4Φ
∂x2∂y2+∂2Φ
∂y4
)+
(1 + ν)
E
∂2Φ
∂x4− ν
E
(∂2Φ
∂x4
+∂4Φ
∂x2∂y2
)= − 2
E(1 + ν)
∂4Φ
∂x2∂y2,
⇔ 1
E
∂2Φ
∂y4+
1
E
∂2Φ
∂x4− 2ν
E
∂4Φ
∂x2∂y2= − 2
E(1 + ν)
∂4Φ
∂x2∂y2,
⇔ 1
E
(∂4Φ
∂x4+ 2
∂4Φ
∂x2∂y2+∂4Φ
∂x4
)= 0,
⇔ ∇2∇2Φ = 0, (12.368)
que es conocida como la ecuacion bi-armonica, donde en el caso plano ∇2 =∂2
∂x2 + ∂2
∂y2 .
Debido a que de (12.357) y (12.362) en general εzz 6= 0, es necesario tambien
satisfacer la ecuacion de compatibilidad (12.149) ∂2εzz∂x2 = 0, pero en general no
se considera esta ecuacion debido a que para el problema de esfuerzo plano elcuerpo es muy delgado y por tanto esta deformacion no serıa importante.
358

Potencial para el esfuerzo para el caso tridimensional en coordenadasCartesianas
Para el caso 3D sin fuerzas de cuerpo, sea a un tensor de segundo ordensimetrico, tal que las componentes del tensor de esfuerzos T se definen como:
Tij = ǫiklǫjmnakm,ln = ǫiklǫjmn∂2akm∂xl∂xn
. (12.369)
El tensor de esfuerzos dado por (12.369) es solucion de la ecuacion de equilibrio
Tij,j = 0 ⇔ ∂Tij∂xj
= 0.
Veamos si (12.369) es realmente solucion de las ecuaciones de equilibrio, paraello calculemos, por ejemplo, T11. De (12.369) se tiene que12
T11 = ǫ1klǫ1mnakm,ln = ǫ123ǫ1mna2m,3n + ǫ132ǫ1mna3m,2n,
= ǫ123ǫ123a22,33 + ǫ123ǫ132a23,32 + ǫ132ǫ123a32,23+ǫ132ǫ132a33,22,
= a22,33 + a33,22 − 2a23,23, (12.370)
en donde se ha usado el hecho que aij = aji y que para aij suficientemente suaveaij,kl = aij,lk.
De manera similar se puede probar que
T22 = a33,11 + a11,33 − 2a13,13, (12.371)
T33 = a11,22 + a22,11 − 2a12,12, (12.372)
T12 = a23,13 + a13,23 − a33,12 − a12,33, (12.373)
T13 = a12,23 + a23,12 − a22,13 − a13,22, (12.374)
T23 = a13,12 + a12,13 − a11,23 − a23,11. (12.375)
Veamos ahora si la primera de las ecuaciones de equilibrio∂T1j
∂xj= 0 es o no
satisfecha. Usando (12.370), (12.373) y (12.374) tenemos que
∂T11∂x1
+∂T12∂x2
+∂T13∂x3
= a22,331 + a33,221 − 2a23,123 + a23,123 + a13,223 − a33,122
−a12,233 + a12,233 + a23,123 − a22,133 − a13,223 = 0,
en donde se ha asumido nuevamente a aij suficientemente suave para el inter-cambio de los ındices asociados a las derivadas parciales.
De una manera similar se puede probar que∂T2j
∂xj= 0 y
∂T3j
∂xj= 0 son tambien
satisfechas.Usando (12.369) en (12.199) εij =
(1+ν)E Tij − ν
ETkkδij , y luego reemplazan-do en las 6 ecuaciones de compatibilidad (12.144), (12.145), (12.148), (12.149),(12.152) y (12.153) para εij obtendrıamos finalmente 6 ecuaciones en derivadas
12Es necesario recordar las propiedades de ǫijk de la Seccion 12.1.2.
359

parciales lineales acopladas de cuarto orden para las 6 componentes indepen-dientes de a.
En comparacion con las 3 ecuaciones de Navier (12.220) que son de segun-do orden para las componentes del campo de desplazamientos, en el caso 3D noserıa tan conveniente trabajar con el potencial para los esfuerzos, debido a quetenemos que resolver mas ecuaciones y que ademas son de orden mayor.
Potencial de esfuerzos para el caso de esfuerzo plano y usando coor-denadas polares
En el caso plano considerando coordenadas cilındricas de (12.231)-(12.233)si Tzz = Trz = Tθz = 0 las ecuaciones de equilibrio serıan:
∂Trr∂r
+1
r
∂Trθ∂θ
+1
r(Trr − Tθθ) = 0, (12.376)
∂Trθ∂r
+1
r
∂Tθθ∂θ
+2
rTrθ = 0. (12.377)
Sea la funcion escalar Φ = Φ(r, θ) tal que las componentes del tensor de esfuerzosestan dadas como:
Trr =1
r
∂Φ
∂r+
1
r2∂2Φ
∂θ2, Tθθ =
∂2Φ
∂r2, Trθ = − ∂
∂r
(1
r
∂Φ
∂θ
). (12.378)
Los esfuerzos expresados de esta forma son solucion de (12.376), (12.377). Veri-fiquemos si (12.376) es efectivamente satisfecha. De (12.378) en (12.376) se tieneque
∂Trr∂r
+1
r
∂Trθ∂θ
+1
r(Trr − Tθθ) =
∂
∂r
(1
r
∂Φ
∂r+
1
r2∂2Φ
∂θ2
)− 1
r
∂2
∂θ∂r
(1
r
∂Φ
∂θ
)
+1
r
(1
r
∂Φ
∂r+
1
r2∂2Φ
∂θ2− ∂2Φ
∂r2
),
= − 1
r2∂Φ
∂r+
1
r
∂2Φ
∂r2− 2
r3∂2Φ
∂θ2+
1
r2∂2Φ
∂r∂θ2
−(− 1
r2∂2Φ
∂θ2+
1
r
∂3Φ
∂r∂θ2
)+
1
r2∂Φ
∂r+
1
r3∂2Φ
∂θ2
−1
r
∂2Φ
∂r2= 0,
o sea (12.376) es satisfecha.De manera similar a los casos mencionados anteriormente, de (12.199) se
obtienen las componentes del tensor de deformacion en coordenadas polares enterminos de Φ, y para que se pueda asociar a dichas deformaciones un campode desplazamientos continuo es necesario que las ecuaciones de compatibilidadsean satisfechas. En coordenadas cilındricas las ecuaciones de compatibilidad
360
(12.144), (12.145), (12.148), (12.149), (12.152) y (12.153) tienen la forma:
∂2εθθ∂r2
+1
r2∂2εrr∂θ2
+2
r
∂εθθ∂r
− 1
r
∂εrr∂r
= 2
(1
r
∂2εrθ∂r∂θ
+1
r2∂εrθ∂θ
), (12.379)
∂2εθθ∂z2
+1
r2∂2εzz∂θ2
+1
r
∂εzz∂r
= 2
(1
r
∂2εθz∂z∂θ
+1
r
∂εzr∂z
), (12.380)
∂2εzz∂r2
+∂2εrr∂z2
= 2∂2εrz∂r∂z
, (12.381)
1
r
∂2εzz∂r∂θ
− 1
r2∂εzz∂θ
=∂
∂z
(1
r
∂εzr∂θ
+∂εθz∂r
− ∂εrθ∂z
)− ∂
∂z
(εθzr
), (12.382)
1
r
∂2εrr∂θ∂z
=∂
∂r
(1
r
∂εzr∂θ
− ∂εθz∂r
+∂εrθ∂z
)− ∂
∂r
(εθzr
)+
2
r
∂εrθ∂z
, (12.383)
∂2εθθ∂r∂z
− 1
r
∂εrr∂z
+1
r
∂εθθ∂z
=1
r
∂
∂θ
(−1
r
∂εzr∂θ
+∂εθz∂r
+∂εrθ∂z
)+
1
r
∂
∂θ
(εθzr
). (12.384)
En este caso particular se tiene que
εrr = εrr(r, θ), εθθ = εθθ(r, θ), εrθ = εrθ(r, θ), (12.385)
εrz = εθz = 0, εzz = εzz(r, θ). (12.386)
Esta ultima componente del tensor de deformacion no es cero, pero si es muypequena dado que se asume que el cuerpo es plano y muy delgado.
Considerando (12.378) (con Trz = Tθz = Tzz = 0), (12.199) de las ecuaciones(12.379)-(12.384) quedarıa (12.379), en tanto que (12.380), (12.381) y (12.382)se reducirıan, respectivamente a:
1
r2∂2εzz∂θ2
+1
r
∂εzz∂r
= 0,∂2εzz∂r2
= 0,1
r
∂2εzz∂r∂θ
= 0, − 1
r2∂εzz∂θ
= 0. (12.387)
En general como aproximacion no se considera solucionar estas ecuaciones dadoque se asume que εzz y sus derivadas son muy pequenas.
Usando las expresiones para Trr, Tθθ, Trθ en funcion de Φ(r, θ) en ε =(1+ν)E T − ν
E (trT)I y reemplazando estas componentes de la deformacion en(12.379) se obtiene:
∇2∇2Φ = 0, (12.388)
donde en este caso (ver (12.269)) ∇2 = ∂2
∂r2 +1r∂∂r +
1r2
∂2
∂θ2 . La ecuacion (12.388)es equivalente a
∂4Φ
∂r4+
1
r3∂Φ
∂r− 1
r2∂2Φ
∂r2+
2
r
∂3Φ
∂r3+
4
r4∂2Φ
∂θ2− 2
r3∂3Φ
∂r∂θ2
+2
r2∂4Φ
∂r2∂θ2+
1
r4∂4Φ
∂θ4= 0. (12.389)
Ejercicio: Potencial de esfuerzos para el caso de problemas axil-simetri-cos
Como se vio en la Seccion 12.7.7, para el problema axil-simetrico se consideralas coordenadas cilındricas (r, θ, z) y se asume que los esfuerzos y deformaciones
361

solo dependen de (r, z), ademas para un cuerpo de seccion circular las cargasexternas son tales que conserva su seccion circular al deformase, luego
Trr = Trr(r, z), Tθθ = Tθ,θ(r, z), Tzz = Tzz(r, z), (12.390)
Trz = Trz(r, z), Trθ = Tθz = 0. (12.391)
Considerando (12.390), (12.391), de (12.231)-(12.233) las ecuaciones de equili-brio para el problema axil-simetrico son:
∂Trr∂r
+∂Trz∂z
+1
r(Trr − Tθθ) = 0, (12.392)
∂Trz∂r
+∂Tzz∂z
+Trzr
= 0. (12.393)
Sea la funcion escalar Φ = Φ(r, z) tal que
Trr =∂
∂z
(ν∇2Φ− ∂2Φ
∂r2
), (12.394)
Tθθ =∂
∂z
(ν∇2Φ− 1
r
∂Φ
∂r
), (12.395)
Tzz =∂
∂z
[(2− ν)∇2Φ− ∂2Φ
∂z2
], (12.396)
Trz =∂
∂r
[(1− ν)∇2Φ− ∂2Φ
∂z2
], (12.397)
donde el operador ∇2 se define en este caso como ∇2 = ∂2
∂r2 + 1r∂∂r +
∂2
∂z2 .
Verifique si la funcion Φ definida en (12.394)-(12.397) es o no solucion delas ecuaciones de equilibrio (sin fuerzas de cuerpo) (12.392), (12.393).
Considerando el estado de esfuerzos (12.394)-(12.397) y la ecuacion consti-tutiva para un material lineal elastico isotropico estudie si las componentesde la deformacion tienen o no la siguiente forma:
εrr = εrr(r, z), εθθ = εθθ(r, z), εzz = εzz(r, z),
εrz = εrz(r, z), εrθ = εθz = 0,
Considerando las expresiones para las componentes del tensor de defor-macion del punto anterior, de la forma general para las ecuaciones decompatibilidad en coordenadas cilındricas (12.379)-(12.384), obtenga laforma simplificada para dichas ecuaciones de compatibilidad en el casoaxil-simetrico.
El proposito de las ecuaciones de compatibilidad es asegurar cierta sua-vidad en las componentes de u si ε es dada como funcion de Φ. Desde elpunto de vista practico eso implica pedir, por ejemplo, que derivadas del
tipo ∂2ui
∂xj∂xksean iguales a ∂2ui
∂xk∂xjsi j 6= k. Considerando el comentario an-
terior, estudie en detalle cuales de las ecuaciones de compatibilidad para elcaso axil-simetrico obtenidas por Ud. en el punto anterior son equivalentesy cuales son independientes.
362
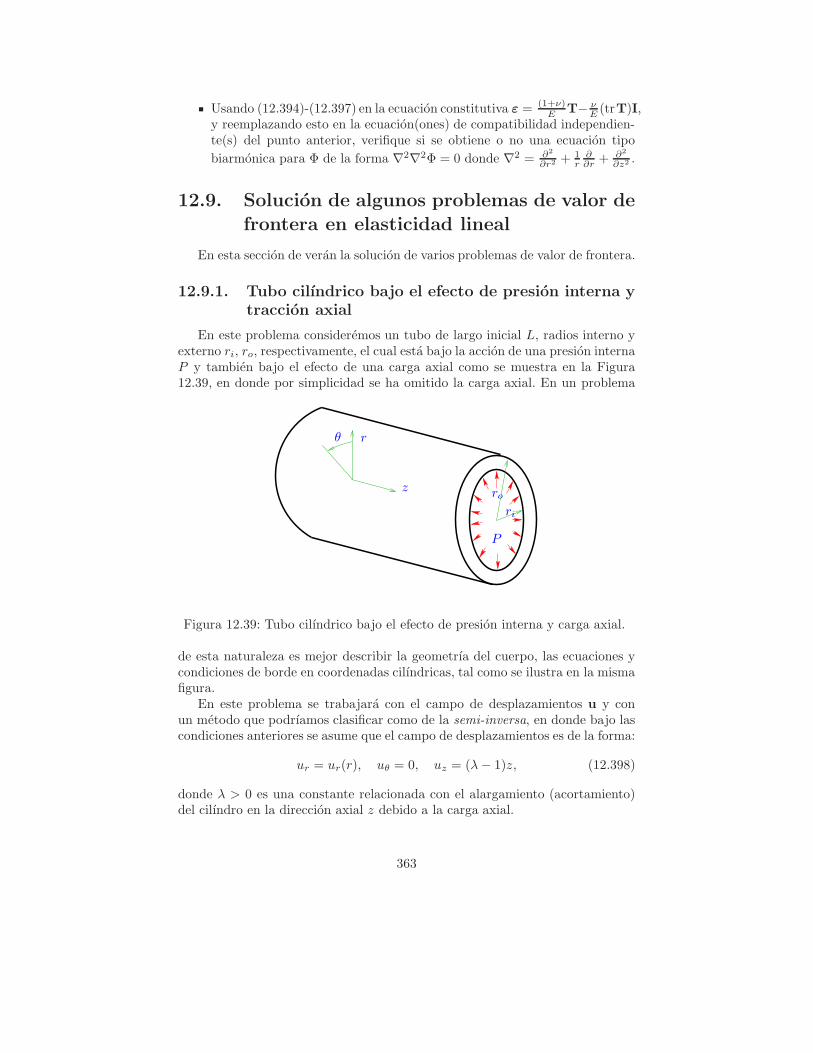
Usando (12.394)-(12.397) en la ecuacion constitutiva ε = (1+ν)E T− ν
E (trT)I,y reemplazando esto en la ecuacion(ones) de compatibilidad independien-te(s) del punto anterior, verifique si se obtiene o no una ecuacion tipo
biarmonica para Φ de la forma ∇2∇2Φ = 0 donde ∇2 = ∂2
∂r2 + 1r∂∂r +
∂2
∂z2 .
12.9. Solucion de algunos problemas de valor de
frontera en elasticidad lineal
En esta seccion de veran la solucion de varios problemas de valor de frontera.
12.9.1. Tubo cilındrico bajo el efecto de presion interna ytraccion axial
En este problema consideremos un tubo de largo inicial L, radios interno yexterno ri, ro, respectivamente, el cual esta bajo la accion de una presion internaP y tambien bajo el efecto de una carga axial como se muestra en la Figura12.39, en donde por simplicidad se ha omitido la carga axial. En un problema
rθ
z
P
ri
ro
Figura 12.39: Tubo cilındrico bajo el efecto de presion interna y carga axial.
de esta naturaleza es mejor describir la geometrıa del cuerpo, las ecuaciones ycondiciones de borde en coordenadas cilındricas, tal como se ilustra en la mismafigura.
En este problema se trabajara con el campo de desplazamientos u y conun metodo que podrıamos clasificar como de la semi-inversa, en donde bajo lascondiciones anteriores se asume que el campo de desplazamientos es de la forma:
ur = ur(r), uθ = 0, uz = (λ− 1)z, (12.398)
donde λ > 0 es una constante relacionada con el alargamiento (acortamiento)del cilındro en la direccion axial z debido a la carga axial.
363

Usando (12.398) en (12.256)-(12.258) se tiene que las componentes del tensorde deformacion son de la forma:
εrr =durdr
, εθθ =urr, εzz = λz − 1, (12.399)
donde εrθ = εrz = εθz = 0. Usando estas componentes en la ecuacion constitu-tiva (12.215) se obtiene las componentes del tensor de esfuerzos:
Trr = 2µεrr + λ(εrr + εθθ + εzz), (12.400)
Tθθ = 2µεθθ + λ(εrr + εθθ + εzz), (12.401)
Tzz = 2µεzz + λ(εrr + εθθ + εzz), (12.402)
y Trθ = Trz = Tθz = 0. Debido a que εrr y εθθ solo dependen de r y que εzz esconstante, de las ecuaciones de equilibrio (12.231)-(12.233) la unica que quedaes
dTrrdr
+1
r(Trr − Tθθ) = 0. (12.403)
Usando (12.399) en (12.400)-(12.402) y esto en (12.403) se tiene la ecuacion
d
dr
[2µ
durdr
+ λ
(durdr
+urr
+ λz − 1
)]+
2µ
r
(durdr
− urr
)= 0,
⇔ (2µ+ λ)d2urdr2
+ λd
dr
(urr
)+
2µ
r
durdr
− 2µ
r2ur = 0,
⇔ (2µ+ λ)d2urdr2
+ (2µ+ λ)1
r
durdr
− (2µ+ λ)urr2
= 0,
⇔ d2urdr2
+1
r
durdr
− urr2
= 0,
⇔ d2urdr2
+d
dr
(urr
)= 0. (12.404)
Integrando la ecuacion una vez en r tenemos
durdr
+urr
= C0, (12.405)
donde C0 es una constante por determinar con las condiciones de borde. Lasolucion de esta ecuacion tiene dos partes, una particular uPr (r) y una homogeneauHr (r), o sea
ur(r) = uHr (r) + uPr (r). (12.406)
Por simple inspeccion de se tiene que
uPr (r) =C0
2r. (12.407)
Por otra parte uHr tiene que satisfacer
duHrdr
+uHrr
= 0, (12.408)
364

cuya solucion es
uHr (r) =C1
r, (12.409)
donde C1 es otra constante. Si se define C0 = C0
2 , de (12.407) y (12.409) en(12.406) se obtiene la solucion
ur(r) = C0r +C1
r. (12.410)
Para encontrar las constantes C0 y C1 usaremos el hecho que Trr(ri) = −Py Trr(ro) = 0, es decir el esfuerzo radial es igual a la presion interna aplicada enr = ri y en la superficie exterior del tubo no hay carga externa. Usando (12.410)en (12.399) se tiene que
εrr = C0 −C1
r2, εθθ = C0 +
C1
r2,
y usando esto en (12.400) se obtiene
Trr(r) = 2µ
(C0 −
C1
r2
)+ λ (2C0 + λz − 1) , (12.411)
luego las condiciones de borde Trr(ri) = −P y Trr(ro) = 0 quedan como:
2µ
(C0 −
C1
r2i
)+ λ (2C0 + λz − 1) = −P,
2µ
(C0 −
C1
r2o
)+ λ (2C0 + λz − 1) = 0,
y resolviendo para C0, C1 se obtiene
C0 =(r2i − r2o)λ(1 − λz)− Pr2i
2(r2i − r2o)(λ + µ), C1 =
Pr2i r2o
2µ(r2o − r2i ). (12.412)
Ejercicio:Usando (12.412) obtenga tambien Tθθ(r) y Tzz(r) de (12.401), (12.402).Considere un tubo de acero de ciertas dimensiones y propiedades mecanicas da-das por Ud., y grafique en r las tres componentes del esfuerzo y estudie cual deellas es en general la mas importante o de mayor magnitud (en valor absoluto).Estudie tambien el caso en el que ro − ri es muy pequeno, el cual viene a repre-sentar el problema del inflado de una membrana cilındrica sometida a presioninterna. En los casos anteriores considere tres situaciones para λz : 0,98; 1; 1,02.
12.9.2. Esfera inflada bajo el efecto de presion interna(problema propuesto)
Considere la esfera hueca13 mostrada en la Figura 12.40.
13Este es un problema propuesto, es decir es tarea del alumno completar los paso indicadosy obtener la solucion del problema de valor de frontera.
365
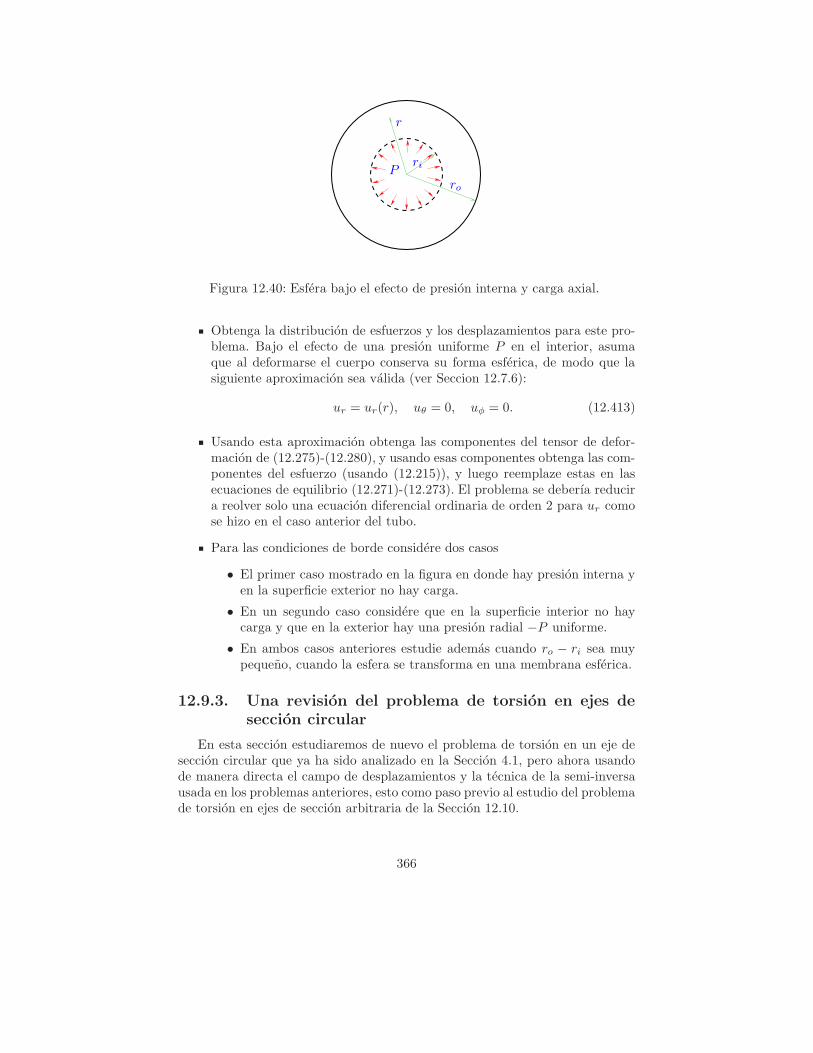
r
Pri
ro
Figura 12.40: Esfera bajo el efecto de presion interna y carga axial.
Obtenga la distribucion de esfuerzos y los desplazamientos para este pro-blema. Bajo el efecto de una presion uniforme P en el interior, asumaque al deformarse el cuerpo conserva su forma esferica, de modo que lasiguiente aproximacion sea valida (ver Seccion 12.7.6):
ur = ur(r), uθ = 0, uφ = 0. (12.413)
Usando esta aproximacion obtenga las componentes del tensor de defor-macion de (12.275)-(12.280), y usando esas componentes obtenga las com-ponentes del esfuerzo (usando (12.215)), y luego reemplaze estas en lasecuaciones de equilibrio (12.271)-(12.273). El problema se deberıa reducira reolver solo una ecuacion diferencial ordinaria de orden 2 para ur comose hizo en el caso anterior del tubo.
Para las condiciones de borde considere dos casos
• El primer caso mostrado en la figura en donde hay presion interna yen la superficie exterior no hay carga.
• En un segundo caso considere que en la superficie interior no haycarga y que en la exterior hay una presion radial −P uniforme.
• En ambos casos anteriores estudie ademas cuando ro − ri sea muypequeno, cuando la esfera se transforma en una membrana esferica.
12.9.3. Una revision del problema de torsion en ejes deseccion circular
En esta seccion estudiaremos de nuevo el problema de torsion en un eje deseccion circular que ya ha sido analizado en la Seccion 4.1, pero ahora usandode manera directa el campo de desplazamientos y la tecnica de la semi-inversausada en los problemas anteriores, esto como paso previo al estudio del problemade torsion en ejes de seccion arbitraria de la Seccion 12.10.
366
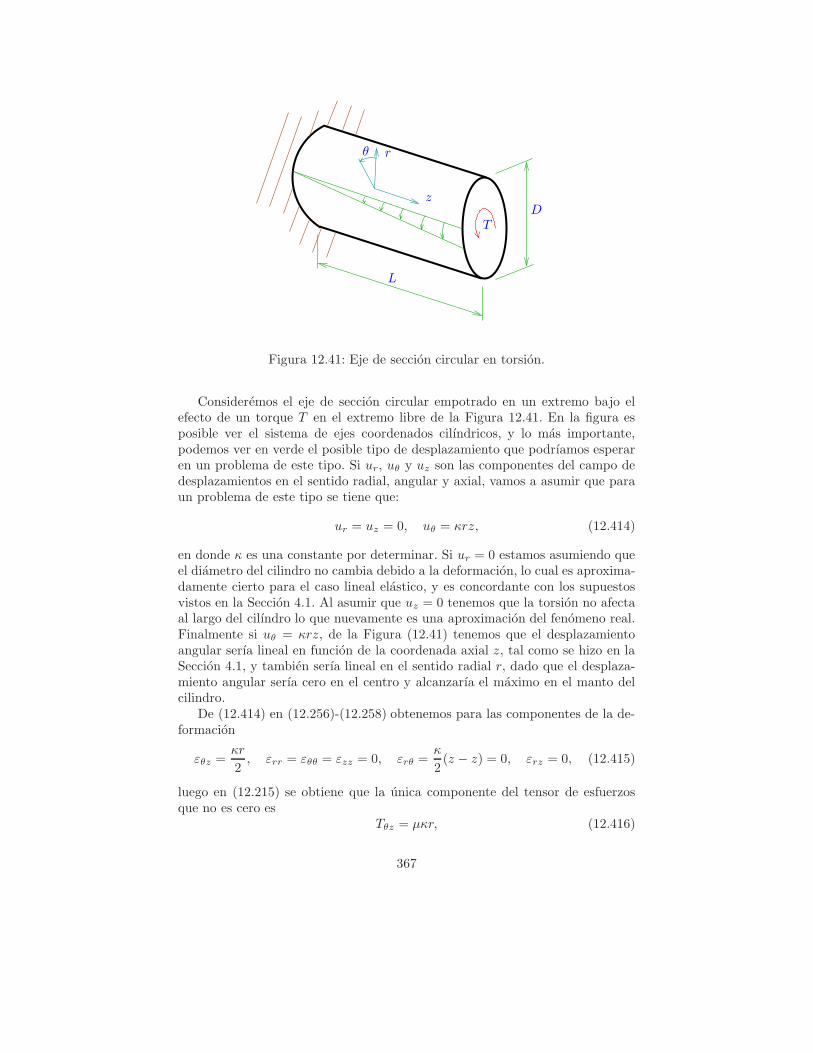
L
r
z
θ
TD
Figura 12.41: Eje de seccion circular en torsion.
Consideremos el eje de seccion circular empotrado en un extremo bajo elefecto de un torque T en el extremo libre de la Figura 12.41. En la figura esposible ver el sistema de ejes coordenados cilındricos, y lo mas importante,podemos ver en verde el posible tipo de desplazamiento que podrıamos esperaren un problema de este tipo. Si ur, uθ y uz son las componentes del campo dedesplazamientos en el sentido radial, angular y axial, vamos a asumir que paraun problema de este tipo se tiene que:
ur = uz = 0, uθ = κrz, (12.414)
en donde κ es una constante por determinar. Si ur = 0 estamos asumiendo queel diametro del cilindro no cambia debido a la deformacion, lo cual es aproxima-damente cierto para el caso lineal elastico, y es concordante con los supuestosvistos en la Seccion 4.1. Al asumir que uz = 0 tenemos que la torsion no afectaal largo del cilındro lo que nuevamente es una aproximacion del fenomeno real.Finalmente si uθ = κrz, de la Figura (12.41) tenemos que el desplazamientoangular serıa lineal en funcion de la coordenada axial z, tal como se hizo en laSeccion 4.1, y tambien serıa lineal en el sentido radial r, dado que el desplaza-miento angular serıa cero en el centro y alcanzarıa el maximo en el manto delcilindro.
De (12.414) en (12.256)-(12.258) obtenemos para las componentes de la de-formacion
εθz =κr
2, εrr = εθθ = εzz = 0, εrθ =
κ
2(z − z) = 0, εrz = 0, (12.415)
luego en (12.215) se obtiene que la unica componente del tensor de esfuerzosque no es cero es
Tθz = µκr, (12.416)
367

luego se tiene que las ecuaciones de equilibrio (12.231)-(12.233) son satisfechaspues ∂Tθz
∂θ = 0 y ∂Tθz
∂z = 0.Recordando la discucion hecha en la Seccion 4.1, es posible demostrar que
T =
∫
Aseccion
Tθz dA =
∫ D/2
0
∫ 2π
0
rTθzr dξ dr =
∫ D/2
0
2πµκr3 dr = µκD4π
32,
(12.417)
y si se define nuevamente J = D4π32 de (12.417) se obtiene κ = T
µJ que es igual14
a (4.7), y reemplazando en (12.414)3 se tiene
uθ(r) =T
µJrz. (12.418)
En la Seccion 12.10 se trabajara con la torsion para secciones arbitrarias,luego para ese tipo de problemas es mejor trabajar en coordenadas Cartesianas.En el plano x− y (o x1 −x2), que dependiendo de la orientacion se puede hacerigual al plano r−θ, se tiene que el desplazamiento total de un punto deberıa serel mismo al usar el campo de desplazamientos expresados en ambos sistemas decoordenadas, o sea √
u21 + u22 =√u2θ + u2r. (12.419)
Es posible probar que el campo de desplazamientos (12.414) se puede escribiren coordenadas Cartesianas como:
u1 = −κzy, u2 = κzx, u3 = 0, (12.420)
que cumple con (12.419) pues ur = 0 y r2 = x2+y2. Usando (12.420) en (12.216)se tiene las componentes del tensor de deformacion
ε12 =1
2
(∂u1∂y
+∂u2∂x
)=
1
2(−κz + κz) = 0, (12.421)
ε13 =1
2
(∂u1∂z
+∂u3∂x
)= −κy
2, (12.422)
ε23 =1
2
(∂u2∂z
+∂u3∂y
)= −κx
2, (12.423)
y εii = 0 en donde no hay suma en i. Reemplazando (12.422), (12.423) en(12.215) se tiene las componentes del tensor de esfuerzos que no son cero
T13 = −µκy, T23 = µκx. (12.424)
Es posible probar, como se debe esperar, que si el problema se re-escribe encoordenadas Cartesianas, entonces (12.214) son satisfechas de forma automatica(sin fuerzas de cuerpo).
En relacion al calculo del torque total T en terminos de los esfuerzos, en laFigura 12.42 tenemos una vista frontal del cilindro, en donde es posible ver enun elemento diferencial las dos componentes del tensor de esfuezos (12.424). De
14Intercambiando el sımbolo θ por κ y G por µ.
368

x
x
yy
T13
T23
Figura 12.42: Eje de seccion circular en torsion. Vista frontal de la seccion yesfuerzos de corte en coordenadas Cartesianas.
esta figura es posible ver entonces que el torque T se calcularıa como
T =
∫
Aseccion
(xT23 − yT13) dA. (12.425)
12.9.4. Problemas simples de placas y vigas con el uso delpotencial de esfuezos de Airy
En esta seccion se resolvera dos problemas para una placa rectangular, usan-do para ello el potencial de esfuerzos en el caso plano en coordenadas Cartesianas(12.357), (12.368). La ecuacion biarmonica (12.368) era:
∂4Φ
∂x4+ 2
∂4Φ
∂x2∂y2+∂4Φ
∂y4= 0. (12.426)
Placa plana: Una solucion de la ecuacion biarmonica con polinomios
Para resolver (12.426) supongamos que Φ es de la forma:
Φ(x, y) = α0 + α1x+ α2y + α3x2 + α4y
2 + α5xy + α6x3 + α7y
3 + α8x2y
+α9xy2 + α10x
4 + α11y4 + α12xy
3 + α13x3y + α14x
2y2, (12.427)
luego reemplazando en (12.426) se tiene
24α10 + 8α14 + 24α11 = 0,
369

que si se quiere que se cumpla ∀ x, y se debe cumplir, por ejemplo, que
α14 = −3α10 − 3α11. (12.428)
Luego si se define Φ como:
Φ(x, y) = α0 + α1x+ α2y + α3x2 + α4y
2 + α5xy + α6x3 + α7y
3
+α8x2y + α9xy
2 + α10x4 + α11y
4 + α12xy3 + α13x
3y
−3(α10 + α11)x2y2, (12.429)
es una solucion de (12.426) para cualquier valor de αi, i = 0, 1, ..., 13.De (12.357) se tiene las expresiones para los esfuerzos:
T11 = 2[6α10x2 − 3(α10 + α11)y
2 + α3 + 3(α13y + α6)x + α8y], (12.430)
T22 = 2[6α11y2 − 3(α10 + α11)x
3 + α4 + 3α7y + (3α12y + α9)x], (12.431)
T12 = 12(α10 + α11)xy − 3α12y2 − 3α13x
2 − 2α8x− 2α9y. (12.432)
En relacion a los valores para las constantes αi, i = 0, 1, ..., 10, algunas deestas constantes se pueden encontrar considerando las condiciones de borde,para lo cual consideremos la placa rectangular mostrada en la Figura 12.43. Se
x
y
(1)
(2)
(3)
L
H(4)
Figura 12.43: Placa plana a estudiar por medio de potencial de esfuerzos deAiry.
asume condicion para la traccion (12.217) en todo el borde de la placa.En la Figura 12.43 los bordes tienen una numeracion, luego para el borde
(1) se tiene que n = −e2, de modo que Tn = −(T12e1 + T22e2), luego si en (1)se tiene que y = 0, de t(1) = Tn se tiene:
t(1) =
(3α13x
2 + 2α8x2[3(α10 + α11)x
2 − α4 − α9x]
).
En el borde (2) se tiene n = e1, luego Tn = T11e1 + T12e2. En (2) se tienex = L luego de t(2) = Tn se obtiene:
t(2) =
(2[6α10L
2 − 3(α10 + α11)y2 + α3 + 3(α13y + α6)L + α8y]
12(α10 + α11)Ly − 3α12y2 − 2α13L
2 − 2α8L− 2α9y
).
370

Se puede repetir el mismo procedimiento para los bordes (3) y (4) en donden = e2 y n = −e1. Se deja como ejercicio calcular t(3) y t(4) en dichos bordes.
Las condiciones de borde anteriores son tales que se aplicarıan cargas entodos los bordes de la placa. Se puede apreciar que en cada borde se podriatener distribuciones de tipo cuadratico para las cargas externas, en donde sepuede ajustar las constantes αi.
Placa plana: Una solucion de la ecuacion bi-armonica con el uso deseries
Consideremos nuevamente la ecuacion (12.426), y asumamos una posiblesolucion de esta ecuacion de la forma:
Φ(x, y) = ϕ(y) +
∞∑
n=1
ϕn(y) cos(nπxL
)+ ψn(y) sin
(nπxL
), (12.433)
donde ϕn(y) y ψn(y) son funciones por determinar. Definamos ζn = 2nπL luego
∂4Φ
∂x4=
∞∑
n=1
ζ4n [ϕn(y) cos (ζnx) + ψn(y) sin (ζnx)] , (12.434)
∂4Φ
∂y4=
d4ϕ
dy4+
∞∑
n=1
[d4ϕndy4
cos (ζnx) +d4ψndy4
sin (ζnx)
], (12.435)
d4ϕ
dx2dy2= −
∞∑
n=1
ζ2n
[d2ϕndy2
cos (ζnx) +d2ψndy2
sin (ζnx)
], (12.436)
luego reemplazando en (12.426) y pidiendo que el resultado sea satisfecho deforma independiente para cada cos(ζny) y sin(ζny) se obtiene las ecuacionesdiferenciales ordinarias para ϕ, ϕn y ψn:
d4ϕ
dy4= 0, (12.437)
d4ϕndy4
− 2ζ2nd2ϕndy2
+ ζ4nϕn = 0, (12.438)
d4ψndy4
− 2ζ2nd2ψndy2
+ ζ4nψn = 0. (12.439)
La solucion de (12.437) es
ϕ(y) = α0 + α1y + α2y2
2+ α3
y3
6, (12.440)
donde αi, i = 0, 1, 2, 3 son constantes. Las soluciones de (12.438) y (12.439) son
ϕn(y) = β1n cosh(ζny) + β2n sinh(ζny) + β3ny cosh(ζny) + β4ny sinh(ζny), (12.441)
ψn(y) = γ1n cosh(ζny) + γ2n sinh(ζny) + γ3ny cosh(ζny) + γ4ny sinh(ζny), (12.442)
donde βin , γin , i = 1, 2, 3, 4, n = 1, 2, 3, ... son constantes.
371
Usando (12.440)-(12.442) en (12.357) se tiene
T11 =∂2Φ
∂y2= α2 + α3y +
∞∑
n=1
{[(β1nζ2n + β3nyζ2n + 2β4nζn) cosh(ζny)
+(β2nζ2n + β3nζ
2n + β4nyζ
2n) sinh(ζny)] cos(ζnx) + [(γ1nζ
2n
+γ3nyζ2n + 2γ4nζn) cosh(ζny) + (γ2nζ
2n + 2γ3nζn
+γ4nyζ2n) sinh(ζny)] sin(ζnx)}, (12.443)
T22 =∂2Φ
∂x2= −
∞∑
n=1
ζ2n{[(β1n + β3ny) cosh(ζny) + (β2n
+β4n) sinh(ζny)] cos(ζnx) + [(γ1n + γ3ny) cosh(ζny)
+(γ2n + γ4ny) sinh(ζny)] sin(ζnx)}, (12.444)
T12 =∂4Φ
∂x2∂y2=
∞∑
n=1
ζn{−[(β1nζn + β3nyζn + β4n) sinh(ζny)
+(β2nζn + β3n + β4nyζn) cosh(ζny)] sin(ζnx)
+[(γ1nζn + γ3nyζn + γ4n) sinh(ζny)
+(γ2nζn + γ3n + γ4nyζn) cosh(ζny)] cos(ζnx)}. (12.445)
Tomando como base la misma placa mostrada en la Figura 12.43, para elborde (1) se tiene que n = −e2, por lo que Tn = −(T12e1 + T22e2). Por otraparte asumamos que la carga aplicada en (1) t(1) se escribe como serie de Fourier
t(1) =
{t(1)10
+
∞∑
n=1
[t(1)c1n
cos(ζnx) + t(1)s1n
sin(ζnx)]}
e1
+
{t(1)20
+
∞∑
n=1
[t(1)c2n
cos(ζnx) + t(1)s2n
sin(ζnx)]}
e2. (12.446)
La parte constante de t(1) que es t(1)10
e1 + t(1)20
e2 da origen a una distribucion
de esfuerzos uniforme (es decir igual ∀ x, y) igual a T12 = −t(1)10, T22 = −t(1)20
que satisface de manera automatica las ecuaciones de equilibrio (12.356) y quetambien genera un campo de desplazamientos uniforme por medio de (12.216),luego esta parte de la carga externa no se analiza en este problema. Tomandoen consideracion solo la parte no-uniforme en (12.446) de (12.444), (12.445) setiene para este borde (1) (igualando componente a componente para n de 1 ainfinito y evaluando (12.444), (12.445) en y = 0):
−β1n = t(1)c1n
, −γ1n = t(1)s1n
, −γ2nζn + γ3n = t(1)c2n
, −β2nζn − β3n = t(1)s2n
,(12.447)
de donde se pueden obtener algunas de las constantes de la solucion (12.441),(12.442) en termicos de la carga externa t(1).
Estudiemos ahora el borde (3) de la placa de la Figura 12.43. Se tiene quen = e2, luego Tn = T12e1 + T22e2 donde T12 y T22 se obtienen de (12.444),(12.445) evaluando en y = H . Sea la carga externa aplicada en (3) t(3) expresada
372

como serie de Fourier:
t(3) =
{t(3)10
+
∞∑
n=1
[t(3)c3n
cos(ζnx) + t(3)s3n
sin(ζnx)]}
e1
+
{t(3)20
+
∞∑
n=1
[t(3)c2n
cos(ζnx) + t(3)s2n
sin(ζnx)]}
e2, (12.448)
luego dejando de lado la parte constante t(3)10
e1 + t(3)20
e2 que genera una distri-bucion de esfuerzo interno uniforme, que se puede superponer a la mencionadapara el borde (1), se tiene de (12.448) y de (12.444), (12.445) evaluados en y = Hque para cada n para el borde (3)
ζn[(−β1nζn + β3nHζn + β4n) sinh(ζnH) + (β2nζn + β3n
+β4nHζn) cosh(ζnH)] = t(3)s1n
, (12.449)
ζn[(γ1nζn + γ3nHζn + γ4n) sinh(ζnH) + (γ2nζn + γ3n
+γ4nHζn) cosh(ζnH)] = t(3)c1n
, (12.450)
−ζ2n[(β1n + β3nH) cosh(ζnH) + (β2n + β4nH) sinh(ζnH) = t(3)c2n
, (12.451)
−ζ2n[(γ1n + γ3nH) cosh(ζnH) + (γ2n + γ4nH) sinh(ζnH) = t(3)s2n
,(12.452)
de donde se pueden obtener mas de las constantes de la solucion (12.441),(12.442) en terminos de la carga externa t(3).
En relacion a los bordes (2) y (4) se tiene que n = ±e1 respectivamente,
luego si t(2) = t(2)1 e1 + t
(2)2 e2 y t(4) = t
(4)1 e1 + t
(4)2 e2 se tiene que:
t(2)1 = T11(L, y) = α2 + α3y +
∞∑
n=1
[(β1nζ2n + β3nyζ
2n + 2β4nζn) cosh(ζny)
+(β2nζ2n + 2β3nζn + β4nyζ
2n) sinh(ζny)], (12.453)
t(2)2 = T12(L, y) =
∞∑
n=1
ζn[(γ1nζn + γ3nyζn + γ4n) sinh(ζny)
+(γ2nζn + γ3n + γ4nyζn) cosh(ζny)], (12.454)
y
t(4)1 = −T11(0, y) = −{α2 + α3y +
∞∑
n=1
[(β1nζ2n + β3nyζ
2n + 2β4nζn) cosh(ζny)
+(β2nζ2n + 2β3nζn + β4nyζ
2n) sinh(ζny)]}, (12.455)
t(4)2 = −T12(0, y) = −
∞∑
n=1
ζn[(γ1nζn + γ3nyζn + γ4n) sinh(ζny)
+(γ2nζn + γ3n + γ4nyζn) cosh(ζny)]. (12.456)
En relacion a estas condiciones en los bordes (2) y (4), podemos apreciar quehay series en terminos de funciones coseno y seno hiperbolicas, las cuales si biense puede demostrar forman una base linealmente independiente, no formarıan
373

una base ortogonal, luego si se asume se aplica cargas externas conocidas en (2)y (4), para poder repetir el procedimiento usado en los bordes (1) y (3), necesi-tarıamos expresar dichas cargas en terminos de series con esa base no-ortogonal,que hace los caculos muy engorrosos. Otro procedimiento serıa expresar las se-ries en los lados derecho de (12.453), (12.456) a su vez como series de Fourier,eso se hara para el problema a mostrar en la Seccion 12.9.7. Respecto a (12.453)-(12.456) otra alternativa que consideraremos aqui es la siguiente:
Supongamos que algunas de las constantes de la solucion (12.441), (12.442) seencuentran al resolver (12.447), (12.449)-(12.452). El resto de las constantesse asumen conocidas y por tanto de (12.453)-(12.456) tendrıamos las expresio-nes para t(2) y t(4) tal que este estado de esfuerzos cumple con la ecuacion decompatibilidad; en otras palabras, asumimos como dato externo t(1) y t(3), y pormedio de (12.453)-(12.456) ajustamos t(2) y t(4) para que la solucion sea posibley satisfaga las diversas ecuaciones del problema.
12.9.5. Placa plana con agujero circular bajo el efecto deuna traccion uniforme aplicada lejos
En esta seccion estudiaremos el problema de determinar el campo de es-fuerzos en una placa plana con un agujero de radio a sometida a una traccionuniforme externa σ∞ aplicada ‘lejos’ del agujero como se muestra en la Figura12.44. En la figura aparece un radio b que sirve para establecer de manera masprecisa el hecho que la carga se aplica ‘lejos’.
La primera aproximacion para resolver el problema: La presencia del agujerosignifica un cambio en el campo de esfuerzos cerca del agujero, pero asumiremosque lejos de dicho agujero el campo de esfuerzos es aproximadamente el de unaplaca en traccion sin ningun agujero, es decir a una distancia b en coordenadasCartesianas se tiene (en 2D)
T =
(0 00 σ∞
). (12.457)
Ahora vamos a expresar dicho campo de esfuerzos ‘lejos’ en coordenadas polaresque es un caso especial de las cilındricas estudiadas en la Seccion 12.7.5. Para elloconsideremos la Figura 12.45, en donde se tiene el sistema Cartesiano original 1-2, y el sistema cilındrico, que aquı denotamos como 1′−2′. El sistema 1′−2′ estarotado en un angulo θ respecto al sistema 1-2, donde θ es el angulo del sistemapolar. Luego de la Figura 12.45 podemos identificar a la coordenada 1′ con lacomponente normal radial para el tensor de esfuerzos (en coordenadas polares),en tanto que la coordenada 2′ estarıa asociada con la componente angular deltensor de esfuerzos. Sea el tensor de esfuerzos en el sistema polar T′, luego setiene
T′ =
(σr τrθτrθ σθ
). (12.458)
De la Figura 12.45 podemos obtener las componentes de Qij para la rotacionde un sistema de coordenadas (ver Seccion 12.1.5), de (12.12)-(12.14) se tiene
374

x
y
σ∞
σ∞
a
θb r
Figura 12.44: Placa plana con agujero bajo el efecto de una traccion uniformeaplicada lejos.
1
2
1′2′
θ
Figura 12.45: Transformacion del tensor de esfuerzos del sistema Cartesiano alpolar.
en este caso que
Q11 = cos θ, Q12 = sin θ, Q21 = − sin θ, Q22 = cos θ. (12.459)
La relacion (12.24) se puede escribir como T′ = QTQT, donde Q serıa la matriz
375

con componentes Qij . Usando (12.459) y recordando (12.457) se tiene(σr τrθτrθ σθ
)=
(cos θ − sin θsin θ cos θ
)(0 00 σ∞
)(cos θ sin θ− sin θ cos θ
),
de donde se obtiene
σr = σ∞ sin2 θ =σ∞2
[1− cos(2θ)], (12.460)
τrθ = −σ∞ sin θ cos θ = −σ∞2
sin(2θ), (12.461)
σθ = σ∞ cos2 θ =σ∞2
[cos(2θ) + 1], (12.462)
que serıa el campo de esfuerzos en coordenadas polares lejos del agujero.Considerando los resultados mostrados para los esfuerzos lejos en (12.460)-
(12.462), veamos ahora el metodo de solucion del problema de valor de fronterausando el potencial de esfuerzos de Airy Φ en coordenadas polares. De (12.378)tenemos las componentes del esfuerzo (usando la nueva notacion para las com-ponentes del tensor de esfuerzos):
σr =1
r
∂Φ
∂r+
1
r2∂2Φ
∂θ2, σθ =
∂2Φ
∂r2, τrθ = − ∂
∂r
(1
r
∂Φ
∂θ
). (12.463)
El potencial Φ = Φ(r, θ) es solucion del problema de valor de frontera y produceo se puede asociar a un campo de desplazamientos continuos si satisface laecuacion bi-armonica (12.388):
∇2∇2Φ = 0 ⇔(∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂θ2
)(∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂θ2
)Φ = 0.
(12.464)Antes de ver como solucionar (12.464) estudiemos las condiciones de borde parael problema. En la superficie del agujero no hay cargas ni restricciones al de-plazamiento de modo que Tn = 0, y como en coordenadas polares n = −er (elvector unitario en coordenadas polares) luego eso significa que
σr(a, θ) = 0, τrθ(a, θ) = 0. (12.465)
Lejos en b se cumplirıa (12.460)-(12.462) para cualquier θ.Considerando estas condiciones de borde, en particular (12.460)-(12.462),
vamos a asumir que (12.464) se resuelve con el siguiente potencial de esfuerzos
Φ(r, θ) = ψ(r) + ϕ(r) cos(2θ), (12.466)
donde ψ(r) y ϕ(r) son funciones por determinar. En relacion a las condicionesde borde que ambas funciones tienen que satisfacer, de (12.460)-(12.462) se tieneque
σr(r, θ) =1
r
dψ
dr+
(1
r
dϕ
dr− 4ϕ
r2
)cos(2θ), (12.467)
τrθ(r, θ) =2
r
dϕ
drsin(2θ), (12.468)
σθ(r, θ) =d2ϕ
dr2cos(2θ), (12.469)
376

luego de (12.467), (12.460) y (12.465)1 se supondra para ψ que
dψ
dr(a) = 0,
1
b
dψ
dr(b) =
σ∞2, (12.470)
en tanto que de (12.467) y (12.465)1 para ϕ en r = a se pedira que
dϕ
dr(a)− 4ϕ(a)
a= 0,
dϕ
dr(a) = 0,
que es equivalente a pedir que
ϕ(a) = 0,dϕ
dr(a) = 0. (12.471)
Por otra parte de (12.467), (12.468), (12.460) y (12.461) para ϕ en el border = b se requerira que
1
b
dϕ
dr(b)− 4ϕ(b)
b2= −σ∞
2,
2
b
dϕ
dr(b) = −σ∞
2. (12.472)
Algunos comentarios adicionales en relacion a las condiciones de borde seagregaran despues de resolver el problema. En cuanto a hacer bmuy ‘grande’, esose tiene que considerar al tener la solucion final para ψ, ϕ, y se hara considerandoel lımite b
a → ∞. Resolvamos (12.464) de manera separada para ψ y ϕ. En elcaso de ψ dado que depende solo de r la equation (12.464) para esa funcionqueda como
(d2
dr2+
1
r
d
dr
)(d2
dr2+
1
r
d
dr
)ψ = 0,
⇔ d4ψ
dr4+
2
r
d3ψ
dr3− 1
r2d2ψ
dr2+
1
r3dψ
dr= 0. (12.473)
Buscamos ahora una solucion de (12.473) suponiendo que ψ se puede expresarcomo
ψ(r) = Crn, (12.474)
donde C y n son constantes. Reemplazando esto en (12.473) se llega a la ecuacionalgebraica para n
n[(n− 1)(n− 2)(n− 3) + 2(n− 1)(n− 2)− (n− 1) + 1] = 0, (12.475)
que tiene dos raıces de multiplicidad 2 cada una: n = 0 y n = 2, luego la solucionpara ψ es de la forma
ψ(r) = C1 ln r +C2
2r2 +
C3r2
2
(ln r − 1
2
)+ C4, (12.476)
donde Ci, i = 1, 2, 3, 4 son constantes. Reemplazando ψ en (12.467) tenemosque τrθ = 0 y que σr esta dado por
σr(r) =C1
r2+ C2 + C3
(ln r − 1
2
)+C3
2. (12.477)
377

La constante C4 en (12.476) no tiene influencia en la solucion para los esfuer-zos15, en cuando a C3 supondremos es igual a 0, pues en caso contrario cuando rsea muy grande C3 ln r serıa muy grande tambien y no se alcanzarıa un compor-tamiento constante (en coordenadas Cartesianas) para el esfuerzo. Luego, dadoque ahora σr(r) =
C1
r2 + C2, considerando las condiciones de borde (12.470) setiene
C1
a2+ C2 = 0,
C1
b2+ C2 =
σ∞2,
cuya solucion es
C1 =σ∞2
a2b2
(a2 − b2)=σ∞2
a2(a2
b2 − 1) , C2 = −C1
a2.
Considerando ahora el lımite ba → ∞, que basicamente indica que estamos
asumiendo una placa muy grande en comparacion con el tamano del agujero, seobtiene
C1 = −σ∞a2
2, C2 =
σ∞2. (12.478)
Obtengamos una solucion para ϕ(r) ahora, reemplazando ϕ(r) cos(2θ) en(12.464). Si se hace eso, es posible probar (se deja como ejercicio) que (12.464)se transforma en la ecuacion
(d2
dr2+
1
r
d
dr− 4
r2
)(d2
dr2+
1
r
d
dr− 4
r2
)ϕ(r) = 0. (12.479)
Nuevamente resolvamos (12.479) asumiendo que ϕ(r) es de la forma
ϕ(r) = Drm, (12.480)
donde D y m son constantes. Reemplazando en (12.479) y requiriendo que seasolucion para cualquier a ≤ r se obtiene la siguiente ecuacion algebraica para m
[(m− 2)(m− 3)m− 6][m(m− 1)m− 4] = 0, (12.481)
que tiene las soluciones m = 0, m = 4, m = ±2, de modo que tenemos
ϕ(r) = D0 +D1r2 +
D2
r2+D3r
4. (12.482)
Esta funcion debe satisfacer 4 condiciones de borde (12.471), (12.472), de modoque no haremos ninguna constante igual a cero, sino hasta depues de despejarlasy finalmente hacer el lımite b
a → ∞.
Ejercicio: Reemplace ϕ(r) de (12.482) en (12.471) y (12.472), y obtenga lasconstantes Di, i = 0, 1, 2, 3, luego haga el lımite b
a → ∞. Obtenga la solucion
15Aunque si lo podrıa tener al momento de determinar los desplazamientos de (12.216),pero eso no lo estudiaremos aquı.
378

final para σr, σθ y τrθ de (12.463), (12.465) usando ψ y ϕ. Compare con la solu-cion mostrada en §35 del libro ‘Theory of Elasticity’, S.P.Timoshenko and J.N.Goodier (third edt.). Verifique que σθ(a, 0) = 3σ∞, es decir que el agujero gene-ra una concentracion de esfuerzos igual a 3 veces el esfuerzo uniforme aplicadolejos, independiente del material (bajo la condicion de que sea isotropico elasticolineal). Finalmente, con σr, σθ y τrθ de (12.203), (12.206), (12.256), (12.258)obtenga expresiones para ur(r, θ) y uθ(r, θ), notando que estas expresiones noson unicas pues siempre se le puede superponer a estos desplazamientos un mo-vimiento de cuerpo rıgido sin afectar por tanto las distribuciones de esfuerzos.
12.9.6. Medio semi-infinito bajo el efecto de una cargapuntual (problema propuesto)
La solucion completa de este problema requiere varios pasos previos queestan fuera de los alcances de este curso. Considerese la Figura 12.46, donde setiene una representacion de un plano semi-infinito, bajo el efecto de una cargapuntual vertical P . La solucion del problema (cuyos detalles no los veremos
P
θr
Figura 12.46: Plano semi-infinito bajo el efecto de una carga puntual.
aquı) en coordenadas polares es de la forma
Φ(r, θ) = Crθ sin θ, (12.483)
con C constante.
Verifique si (12.483) es solucion de (12.464).
De (12.463) determine los esfuerzos asociados a (12.483). ¿Son simetricosrespecto a θ = 0?
Determine la constante C de la siguiente forma. Extraigase con un corteimaginario a una distancia r, como se muestra en la Figura 12.46, unaporsion del espacio semi-infinito incluyendo la carga P . En la superficiede corte imaginario se tiene la distribucion de esfuerzos16 σr, τrθ. Integrelas componentes vertical y horizontal (en un sistema Cartesiano) de Tn
16No se incluye σθ, pues de Tn se tiene que n para ese corte solo tiene componente radial.
379

en r dθ a lo largo de la curva del corte imaginario. La resultante en elsentido vertical por equilibrio debe ser igual a P . Notese tambien que porequilibrio global la resultante horizontal debe ser igual a cero.
¿Cuales deberıan ser las condiciones de borde en θ = ±π/2 para r > 0?¿Se cumplen dichas condiciones de borde para los esfuerzos calculados con(12.483)?
Estudie el comportamiento de las componentes del esfuerzo cuando r → 0.Lo que deberıa verse es que las componentes del esfuerzo van a infinitocuando r → 0.
De (12.203)-(12.206) determine las componentes del tensor de deforma-cion y de (12.256)-(12.258) calcule las componentes del vector de des-plazamientos. ¿Como se comportan cuando r → 0? Se deberıa ver queestas componentes tambien van a infinito, lo que es una contradiccion conla teorıa de la elasticidad lineal, pues desde el inicio hemos asumido pe-quenas deformaciones y desplazamientos, ademas de un comportamientoelastico. Luego los resultados asociados a (12.483) se dice solo son validospara el solido semi-infinito menos una pequena medialuna de radio r = rδalrededor de r = 0. Asuma que el material falla, por ejemplo, de acuerdoal criterio de Von Mises. Sean E, ν y σo (esfuerzo de fluencia del material)conocidos, determine el tamano de rδ en funcion de P para este problema.
12.9.7. Viga empotrada bajo el efecto de una carga uni-forme (deformacion plana)
Todos los problemas tratados en las secciones anteriores, si se analizan concuidado desde el punto de vista conceptual, son problemas en los que solo seconsidero de manera directa condiciones de borde para el esfuerzo (12.217). Lamayor parte de los problemas simples que se pueden ver en la literatura son deese tipo, salvo las soluciones que se obtienen por medio de los potenciales dedesplazamiento.
En la presente seccion estudiaremos un problema de condicion de fronteramixto, en donde tenemos condiciones de borde para los desplazamientos y lasfuerzas externas. En la Figura 12.47 tenemos un problema tıpico estudiado enlos capıtulos anteriores, en donde hay una viga empotrada con una carga uni-forme sobre ella y un extremo libre. Vamos a resolver el problema de valor defrontera para esta viga trabajando directamente con la ecuacion de Navier casobidimensional, es decir asumiendo que el campo de desplazamiento solo tienedos componentes u = u1(x, y)e1 + u2(x, y)e2, luego de (12.220) tenemos queresolver:
(µ+ λ)
(∂2u1∂x2
+∂2u2∂x∂y
)+ µ
(∂2u1∂x2
+∂2u1∂y2
)= 0, (12.484)
(µ+ λ)
(∂2u1∂x∂y
+∂2u2∂y2
)+ µ
(∂2u2∂x2
+∂2u2∂y2
)= 0. (12.485)
380

L
x
y
H
wo
(1)(2)
(3)(4)
Figura 12.47: Viga empotrada bajo el efecto de carga uniforme.
Estas dos ecuaciones diferenciales parciales acopladas no se pueden resolver porsimple separacion de variables, motivo por el cual se han desarrollado meto-dos especiales como los mostrados en la Seccion 12.8.1. Resolveremos (12.484)-(12.485) por medio se series de Fourier. Sea
ζn =2πn
H, ξm =
2πm
L, (12.486)
supongamos soluciones para u1 y u2 de la forma:
u1(x, y) = Γ0(x) +
∞∑
n=1
[Γn(x) cos(ζny) + ∆n(x) sin(ζny)]
+Θ0(y) +
∞∑
m=1
[Θm(y) cos(ξmx) + Λm(y) sin(ξmx)], (12.487)
u2(x, y) = Πo(x) +
∞∑
n=1
[Πn(x) cos(ζny) + Υn(x) sin(ζny)]
+Φ0(y) +
∞∑
m=1
[Φm(y) cos(ξmx) + Ψm(y) sin(ξmx)], (12.488)
donde las funciones Γ0(x), Γn(x), ∆n(x), Π0(x), Πn(x), Υn(x), n = 1, 2, 3, ...,Θ0(y), Θm(y), Λm(y), Φ0(y), Φm(y), Ψm(y), m = 1, 2, 3, ... son funciones abuscar.
Calcularemos las primeras y segundas derivadas de u1 y u2 para reemplazaren (12.484), (12.485) y para determinar las componentes de la deformacion,
381

tenemos:
∂u1∂x
= Γ′0(x) +
∞∑
n=1
[Γ′n(x) cos(ζny) + ∆′
n(x) sin(ζny)]
+∞∑
m=1
ξm[−Θm(y) sin(ξmx) + Λm(y) cos(ξmx)], (12.489)
∂u1∂y
=∞∑
n=1
ζn[−Γn(x) sin(ζny) + ∆n(x) cos(ζny)]
+Θ0(y) +∞∑
m=1
[Θm(y) cos(ξmx) + Λm(y) sin(ξmx)], (12.490)
donde se ha definido ( )′ = ddx y ˙( ) = d
dy . Igualmente
∂u2∂x
= Π′o(x) +
∞∑
n=1
[Π′n(x) cos(ζny) + Υ′
n(x) sin(ζny)]
+
∞∑
m=1
ξm[−Φm(y) sin(ξmx) + Ψm(y) cos(ξmx)], (12.491)
∂u2∂y
=
∞∑
n=1
ζn[−Πn(x) sin(ζny) + Υn(x) cos(ζny)]
+Φ0(y) +
∞∑
m=1
[Φm(y) cos(ξmx) + Ψm(y) sin(ξmx)], (12.492)
y para las segundas derivadas se tiene
∂2u1∂x2
= Γ′′0(x) +
∞∑
n=1
[Γ′′n(x) cos(ζny) + ∆′′
n(x) sin(ζny)]
−∞∑
m=1
ξ2m[Θm(y) cos(ξmx) + Λm(y) sin(ξmx)], (12.493)
∂2u1∂y2
= −∞∑
n=1
ζ2n[Γn(x) cos(ζny) + ∆n(x) sin(ζny)]
+Θ0(y) +
∞∑
m=1
[Θm(y) cos(ξmx) + Λm(y) sin(ξmx)], (12.494)
382

∂2u2∂x2
= Π′′o(x) +
∞∑
n=1
[Π′′n(x) cos(ζny) + Υ′′
n(x) sin(ζny)]
−∞∑
m=1
ξ2m[Φm(y) cos(ξmx) + Ψm(y) sin(ξmx)], (12.495)
∂2u2∂y2
= −∞∑
n=1
ζ2n[Πn(x) cos(ζny) + Υn(x) sin(ζny)]
+Φ0(y) +
∞∑
m=1
[Φm(y) cos(ξmx) + Ψm(y) sin(ξmx)], (12.496)
∂2u1∂x∂y
=
∞∑
n=1
ζn[−Γ′n(x) sin(ζny) + ∆′
n(x) cos(ζny)]
+
∞∑
m=1
ξm[−Θm(y) sin(ξmx) + Λm(y) cos(ξmx)], (12.497)
∂2u2∂x∂y
=
∞∑
n=1
ζn[−Π′n(x) sin(ζny) + Υ′
n(x) cos(ζny)]
+
∞∑
m=1
ξm[−Φm(y) sin(ξmx) + Ψm(y) cos(ξmx)]. (12.498)
Usando (12.493)-(12.498) en (12.484), (12.485) y requiriendo que el resultadosea valido para cualquier17 m, n se obtiene el sistema de ecuaciones diferencialesordinarias acopladas:
Γ′′0(x) = 0, (12.499)
(2µ+ λ)Γ′′n(x) + (µ+ λ)ζnΥ
′n(x) − µζ2nΓn(x) = 0, (12.500)
(2µ+ λ)∆′′n(x) − (µ+ λ)ζnΠ
′n(x)− µζ2n∆n(x) = 0, (12.501)
−(2µ+ λ)ξ2mΘ(y) + (µ+ λ)ξmΨm(y) + µΘm(y) = 0, (12.502)
Φ0(y) = 0, (12.503)
−(2µ+ λ)ξ2mΛ(y)− (µ+ λ)ξmΦm(y) + µΛm(y) = 0, (12.504)
(µ+ λ)ζn∆′n(x)− (2µ+ λ)ζ2nΠn(x) + µΠ′′
n(x) = 0, (12.505)
Π′′0(x) = 0, (12.506)
−(µ+ λ)ζnΓ′n(x) − (2µ+ λ)ζ2nΥn + µΥ′′
n(x) = 0, (12.507)
(µ+ λ)ξmΛm(y) + (2µ+ λ)Φm(y)− µξ2mΦm(y) = 0, (12.508)
Φ0(y) = 0, (12.509)
−(µ+ λ)ξmΘm(y) + (2µ+ λ)Ψm(y)− µξ2mΨm(y) = 0. (12.510)
La solucion de (12.499), (12.506) se tiene
Γ0(x) = γ01 + γ02x, Π0(x) = η01 + η02x, (12.511)
17Considerando que cos(ξmx), sin(ξmx), cos(ζny) y sin(ζny) forman una base ortogonalpara la funciones definidas en 0 ≤ x ≤ L, 0 ≤ y ≤ H, respectivamente.
383

donde γ01 , γ02 , η01 y η02 son constantes.Solucionaremos ahora (12.500), (12.507) para lo cual asumamos que
Γn(x) = γnecnx, Υn(x) = νne
cnx, (12.512)
donde γn, νn y cn, νn son constantes. Reemplazando en (12.500), (12.507) sepuede obtener
((2µ+ λ)c2n − µζn (µ+ λ)ζncn−(µ+ λ)ζncn −(2µ+ λ)c2n + µζn
)(γnνn
)ecnx =
(00
), (12.513)
que solo tiene una solucion no trivial si el determinante de la matrix de 2× 2 esigual a cero, o sea si
[(2µ+ λ)c2n − µζn][µc2n − (2µ+ λ)ζ2n] + (µ+ λ)2ζ2nc
2n = 0, (12.514)
que tiene dos raıces de multiplicidad 2 para cn
cn = ±ζn. (12.515)
Reemplazando cn = ζn en (12.513) se puede obtener νn en funcion de γn como
νn = −γn, (12.516)
y usando cn = −ζn en (12.513) se tiene
νn = γn. (12.517)
Considerando el hecho que la raıces para cn son de multiplicidad 2, que lasecuaciones son lineales y usando (12.516), (12.517) tenemos las soluciones:
Γn(x) = γ1neζnx + γ2nxe
ζnx + γ3ne−ζnx + γ4nxe
−ζnx, (12.518)
Υn(x) = −γ1neζnx − γ2nxeζnx + γ3ne
−ζnx + γ4nxe−ζnx, (12.519)
donde γin , i = 1, 2, 3, 4, n = 1, 2, 3, .. son constantes por determinar.Resolvamos ahora (12.501) y (12.505), asumiendo nuevamente que ∆n(x) =
δnecnx y Πn(x) = ϑne
cnx. Si se reemplaza en (12.501), (12.505) se obtienen unaecuacion igual a (12.513), en este caso para δn, ϑn y cn, obteniendose para cn lasmismas dos soluciones cada una de multiplicidad 2: cn = ±ζn; luego es posibleprobar nuevamente que para cn = ζn tenemos ϑn = −δn y para cn = −ζntenemos ϑn = δn, por lo que se obtiene las soluciones:
∆n(x) = δ1neζnx + δ2nxe
ζnx + δ3ne−ζnx + δ4nxe
−ζnx, (12.520)
Πn(x) = −δ1neζnx − δ2nxeζnx + δ3ne
−ζnx + δ4nxe−ζnx, (12.521)
donde δin , i = 1, 2, 3, 4, n = 1, 2, 3, ... son constantes por determinar.Resolvamos (12.502), (12.510), asumiendo que Θm(y) = θme
cmy y Ψm(y) =ψme
cmy. Reemplazando en (12.502), (12.510) se obtiene(−(2µ+ λ)ξ2m + µc2m (µ+ λ)ξmcm
−(µ+ λ)ξmcm (2µ+ λ)c2m − µξm
)(θnψn
)ecmy =
(00
), (12.522)
384

luego para que este sistema tenga soluciones no triviales se necesita que el de-terminante de la matrix sea igual a cero que es igual a la ecuacion
[(2µ+ λ)c2m − µξm][µc2m − (2µ+ λ)ξ2m] + (µ+ λ)2ξ2mc2m = 0, (12.523)
que tiene las dos soluciones de multiplicidad 2
cm = ±ξm. (12.524)
Reemplazando cm = ξm en (12.522) resolviendo para ψm en funcion de θmobteniendose que para cm = ξm se tiene que ψm = −θm y para cm = −ξm setiene que ψm = θm, por lo que la solucion de (12.502) y (12.510) es
Θm(y) = θ1meξmy + θ21ye
ξmy + θ3me−ξmy + θ4mye
−ξmy, (12.525)
Ψm(y) = −θ1meξmy − θ21yeξmy + θ3me
−ξmy + θ4mye−ξmy. (12.526)
donde θim , i = 1, 2, 3, 4, m = 1, 2, 3, ... son constantes por determinar.Siguiendo un procedimiento similar para (12.504), (12.508) que por brevedad
no se mostrara aquı, se puede demostrar que
Λm(y) = χ1meξmy + χ21ye
ξmy + χ3me−ξmy + χ4mye
−ξmy, (12.527)
Φm(y) = −χ1meξmy − χ21ye
ξmy + χ3me−ξmy + χ4mye
−ξmy, (12.528)
donde χim , i = 1, 2, 3, 4, m = 1, 2, 3, ... son constantes por determinar.Finalmente para (12.503), (12.509) tenemos las soluciones:
Θ0(y) = θ01 + θ02y, Φ0(y) = φ01 + φ02y. (12.529)
Para encontrar las constantes de las soluciones (12.511), (12.518)-(12.521),(12.525)-(12.529) es necesario tener el campo de desplazamientos, el de de-formaciones y con las deformaciones calcular los esfuerzos usando (12.215), yusar todas estas componentes en las condiciones de borde para el problema.De (12.487), (12.488) y los resultados anteriores para las dos componentes delcampo de desplazamientos tenemos:
u1(x, y) = γ01 + γ02x+
∞∑
n=1
[(γ1neζnx + γ2nxe
ζnx + γ3ne−ζnx +
+γ4nxe−ζnx) cos(ζny) + (δ1ne
ζnx + δ2nxeζnx + δ3ne
−ζnx +
+δ4nxe−ζnx) sin(ζny)] + θ01 + θ02y +
∞∑
m=1
[(θ1meξmy
+θ2myeξmy + θ3me
−ξmy + θ4mye−ξmy) cos(ξmx)
+(χ1meξmy + χ2mye
ξmy + χ3me−ξmy + χ4mye
−ξmy) sin(ξmx)], (12.530)
u2(x, y) = η01 + η02x+
∞∑
n=1
[(−δ1neζnx − δ2nxeζnx + δ3ne
−ζnx
+δ4nxe−ζnx) cos(ζny) + (−γ1neζnx − γ2nxe
ζnx + γ3ne−ζnx
+γ4nxe−ζnx) sin(ζny)] + φ01 + φ02y +
∞∑
m=1
[(−χ1meξmy − χ2mye
ξmy
+χ3me−ξmy + χ4mye
ξmy) cos(ξmx) + (−θ1meξmy − θ2myeξmy
+θ3me−ξmy + θ4mye
ξmy) sin(ξmx)], (12.531)
385

en tanto que de (12.216) las componentes del tensor de deformacion quedancomo:
ε11 =∂u1∂x1
= γ02 +
∞∑
n=1
[(γ1nζneζnx + γ2ne
ζnx + γ2nζnxeζnx − γ3nζne
−ζnx
+γ4ne−ζnx − γ4nζnxe
−ζnx) cos(ζny) + (δ1nζneζnx + δ2ne
ζnx
+δ2nζnxeζnx − δ3nζne
−ζnx + δ4ne−ζnx − δ4nζnxe
−ζnx) sin(ζny)
+
∞∑
m=1
ξm[−(θ1meξmy + θ2mye
ξmy + θ3me−ξmy + θ4mye
−ξmy) sin(ξmx)
+(χ1meξmy + χ2mye
ξmy + χ3me−ξmy + χ4mye
−ξmy) cos(ξmx)], (12.532)
ε22 =∂u2∂x2
=
∞∑
n=1
ζn[−(−δ1neζnx − δ2nxeζnx + δ3ne
−ζnx + δ4nxe−ζnx) sin(ζny)
+(−γ1neζnx − γ2nxeζnx + γ3ne
−ζnx + γ4nxe−ζnx) cos(ζny)] + φ02
+
∞∑
m=1
[(−χ1mξmeξmy − χ2me
ξmy − χ2mξmyeξmy − χ3mξme
−ξmy
+χ4me−ξmy − χ4mξmye
ξmy) cos(χmx) + (−θ1mξmeξmy − θ2meξmy
−θ2mξmyeξmy − θ3mξme−ξmy + θ4me
−ξmy − θ4mξmyeξmy) sin(χmx)], (12.533)
y
ε12 =1
2
(∂u1∂y
+∂u2∂x
)=
1
2
{ ∞∑
n=1
ζn[−(γ1neζnx + γ2nxe
ζnx + γ3ne−ζnx
+γ4nxe−ζnx) sin(ζny) + ζn(δ1ne
ζnx + δ2nxeζnx + δ3ne
−ζnx
+δ4nxe−ζnx) cos(ζny)] + θ02 +
∞∑
m=1
[(θ1mξmeξmy + θ2me
ξmy
+θ2mξmyeξmy − θ3mξme
−ξmy + θ4me−ξmy − θ4mξmye
−ξmy) cos(ξmx)
+(χ1mξmeξmy + χ2me
ξmy + χ2mξmyeξmy − χ3mξme
−ξmy + χ4me−ξmy
−χ4mξmye−ξmy) sin(ξmx)] + η02 +
∞∑
n=1
[(−δ1nζneζnx − δ2neζnx
−δ2nζnxeζnx − δ3nζne−ζnx + δ4ne
−ζnx − δ4nζnxe−ζnx) cos(ζny)
+(−γ1nζneζnx − γ2neζnx − γ2nζnxe
ζnx − γ3nζne−ζnx + γ4ne
−ζnx
−γ4nζnxe−ζnx) sin(ζny)] +∞∑
m=1
ξm[−(−χ1meξmy − χ1mye
ξmy
+χ3me−ξmy + χ4mye
−ξmy) sin(ξmx) + (−θ1meξmy − θ2myeξmy + θ3me
−ξmy
+θ4mye−ξmy) cos(ξmx)]
}, (12.534)
luego usando estas componentes de la deformacion en (12.215) podemos obte-ner las componentes del tensor de esfuerzos. Antes de hacer eso es conveniente
386

discutir respecto a las condiciones de borde que se usaran para encontrar lasdiversas constantes que aparecen en las solucion (12.530), (12.531).
Veamos la Figura 12.47 considerando el sistema de coordenadas y dimensio-nes que aparecen allı tenemos:
Borde (1): En este borde donde x = 0, 0 ≤ y ≤ H la viga esta empotradalo que significa que las dos componentes del campo de desplazamientosdeben ser igual a cero, es decir
u1(0, y) = 0, u2(0, y) = 0. (12.535)
Borde (2): En este borde donde y = 0, 0 ≤ x ≤ L tenemos una condicion librede cargas y de restricciones a los desplazamientos, es decirTn = 0 para eseborde, luego si n = −e2 para ese borde, se tiene que Tn = −T12e1−T22e2por lo que
T12(x, 0) = 0, T22(x, 0) = 0. (12.536)
Borde (3): En este borde donde x = L, 0 ≤ x ≤ L tambien hay una condicionlibre de cargas y de restricciones en los deplazamientos, luego como paraeste caso n = e1, se tiene que Tn = 0 serıa equivalente a
T11(L, y) = 0, T12(L, y) = 0. (12.537)
Borde (4): En este borde donde y = H , 0 ≤ x ≤ L tenemos una condicion decarga externa, es decir Tn = t para ese borde, luego si n = −e2 para eseborde y18 t = −w(x)e2 , se tiene que Tn = T12e1 + T22e2 por lo que
T12(x, 0) = 0, T22(x, 0) = −w(x). (12.538)
Veamos el borde (1) y la condicion (12.535)1 para u1 de (12.530) tenemosque es equivalente a
u1(x, 0) = γ01 +
∞∑
n=1
[(γ1n + γ3n) cos(ζny) + (δ1n + δ3n) sin(ζny)]
+θ01 + θ02y +
∞∑
m=1
(θ1meξmy + θ2mye
ξmy + θ3me−ξmy
+θ4mye−ξmy) = 0, (12.539)
y para u2 de (12.535)2 y (12.531) se tiene
u2(0, y) = η01 +∞∑
n=1
[(δ4n − δ1n) cos(ζny) + (γ3n − γ1n) sin(ζny)]
+φ01 + φ02y +
∞∑
m=1
(−χ1meξmy − χ2mye
ξmy
+χ3me−ξmy + χ4mye
−ξmy) = 0. (12.540)
18Veremos primero el caso general en donde w = w(x), y al final de discutira el casow(x) = −wo constante.
387

En relacion al borde (2), de (12.534), (12.536)1 y (12.287) para T12 tenemos
T12(x, 0) = 0 ⇔ ε12(x, 0) = 0,
⇔∞∑
n=1
ζn(δ1neζnx + δ2nxe
ζnx + δ3ne−ζnx + δ4nxe
−ζnx) + θ02
+
∞∑
m=1
[(θ1mξm + θ2m − θ3mξm + θ4m) cos(ξmx) + [(χ1mξm
+χ2m − χ3mξm + χ4m) sin(ξmx)] + η02 +
∞∑
n=1
(−δ1nζneζnx
−δ2neζnx − δ2nζnxeζnx − δ3nζne
−ζnx + δ4ne−ζnx − δ4nζnxe
−ζnx)
+
∞∑
m=1
ξm[−(χ3m − χ1m) sin(ξmx) + (θ3m − θ1m) cos(ξmx)] = 0, (12.541)
en tanto de (12.536)2, (12.532), (12.533) y (12.215) (ver tambien (12.286)) paraT22 la condicion queda como
T22(x, 0) = 0 ⇔ (2µ+ λ)ε22(x, 0) + λε11(x, 0) = 0,
⇔ (2µ+ λ){ ∞∑
n=1
(−γ1neζnx − γ2nxeζnx + γ3ne
−ζnx + γ4nxe−ζnx)
+φ02 +∞∑
m=1
[(−χ1mξm − χ2m − χ3mξm + χ4m) cos(ξmx)
+(−θ1mξm − θ2m − θ3mξm + θ4m) sin(ξmx)]}+ λ{γ02 +
∞∑
n=1
(γ1nζneζnx
γ2neζnx + γ2nζnxe
ζnx − γ3nζne−ζnx + γ4ne
−ζnx − γ4nζnxe−ζnx)
}= 0. (12.542)
Para el borde (3) de (12.534), (12.537)2 y (12.252) para T12 tenemos queT12(L, y) = 0 serıa equivalente a ε12(L, y) = 0 que queda como
∞∑
n=1
[−ζn(γ1neζnL + γ2nLeζnL + γ3ne
−ζnL + γ4nLe−ζnL) sin(ζny)
+ζn(δ1neζnL + δ2nLe
ζnL + δ3ne−ζnL + δ4nLe
−ζnL) cos(ζny)]
+θ02 +
∞∑
m=1
(θ1mξmeξmy + θ2me
ξmy + θ2mξmyeξmy − θ3mξme
−ξmy
+θ4me−ξmy − θ4mξmye
−ξmy) + η02 +
∞∑
n=1
[(−δ1nζneζnL − δ2neζnL
−δ2nζnLeζnL − δ3nζne−ζnL + δ4ne
−ζnL − δ4nζnLe−ζnL) cos(ζny)
+(−γ1nζneζnL − γ2neζnL − γ2nζnLe
ζnL − γ3nζne−ζnL + γ4ne
−ζnL
−γ4nζnLe−ζnL) sin(ζny)] +∞∑
m=1
ξm(−θ1meξmy − θ2myeξmy + θ3me
−ξmy
+θ4mye−ξmy) = 0, (12.543)
388

por otra parte para el borde (3) en el caso de la condicion para T11 de (12.537)1y (12.215) (ver (12.285)) tenemos que es equivalente a (2µ + λ)ε11(L, y) +λε22(L, y) = 0, que de (12.532), (12.533) es igual a
(2µ+ λ){γ02 +
∞∑
n=1
[(γ1nζneζnL + γ2ne
ζnL + γ2nζnLeζnL − γ3nζne
−ζnL
+γ4ne−ζnL − γ4nζnLe
−ζnL) cos(ζny) + (δ1nζneζnL + δ2ne
ζnL + δ2nζnLeζnL
−δ3nζne−ζnL + δ4ne−ζnL − δ4nζnLe
−ζnL) sin(ζny)] +∞∑
m=1
ξm(χ1meξmy
+χ2myeξmy + χ3me
−ξmy + χ4mye−ξmy)
}+ λ
{ ∞∑
n=1
ζn[−(−δ1neζnL
−δ2nLeζnL + δ3ne−ζnL + δ4nLe
−ζnL) sin(ζny) + (−γ1neζnL − γ2nLeζnL
+γ3ne−ζnL + γ4nLe
−ζnL) cos(ζny)] + φ02 +∞∑
m=1
(−χ1mξmeξmy − χ2me
ξmy
−χ2mξmyeξmy − χ3mξme
−ξmy + χ4me−ξmy − χ4mξmye
−ξmy)}= 0, (12.544)
Finalmente para el borde (4), para T12 de (12.534) tenemos que la condicion(12.538)1 es equivalente a ε12(x,H) = 0, y de (12.287) eso implica que
∞∑
n=1
ζn(δ1neζnx + δ2nxe
ζnx + δ3ne−ζnx + δ4nxe
−ζnx) + θ02 +
∞∑
m=1
[(θ1mξmeξmH
+θ2meξmH + θ2mξmHe
ξmH − θ3mξme−ξmH + θ4me
−ξmH − θ4mξmHe−ξmH) cos(ξmx)
+(χ1mξmeξmH + χ2me
ξmH + χ2mξmHeξmH − χ3mξme
−ξmH + χ4me−ξmH
−χ4mξmHe−ξmH) sin(ξmx)] + η02 +
∞∑
n=1
(−δ1nζneζnx − δ2neζnx − δ2nζnxe
ζnx
−δ3nζne−ζnx + δ4ne−ζnx − δ4nζnxe
−ζnx) +
∞∑
m=1
ξm[−(−χ1meξmH − χ2mHe
ξmH
+χ3me−ξmH + χ4mHe
−ξmH) sin(ξmx) + (−θ1meξmH − θ2mHeξmH + θ3me
−ξmH
+θ4mHe−ξmH) cos(ξmx)] = 0, (12.545)
y para T22 en el borde (4) de (12.538)2 y (12.215) tenemos que es equivalentea (2µ+ λ)ε22(x,H) + λε11(x,H) = −w(x), luego de (12.532), (12.533) se llega
389

finalmente a la ecuacion
(2µ+ λ){ ∞∑
n=1
ζn(−γ1neζnx − γ2nxeζnx + γ3ne
−ζnx + γ4nxe−ζnx) + φ02
+∞∑
m=1
[(−χ1mξmeξmH − χ2me
ξmH − χ2mξmHeξmH − χ3mξme
−ξmH
+χ1me−ξmH − χ4mξmHe
−ξmH) cos(ξmx) + (−θ1mξmeξmH − θ2meξmH
−θ2mξmHeξmH − θ3mξme−ξmH + θ1me
−ξmH − θ4mξmHe−ξmH) sin(ξmx)]
}
+λ{γ02 +
∞∑
n=1
(γ1nζneζnx + γ2ne
ζnx + γ2nζnxeζnx − γ3nζne
−ζnx + γ4ne−ζnx
−γ4nζnxe−ζnx) +∞∑
m=1
ξm[−(θ1meξmH + θ2mHe
ξmH + θ3me−ξmH
+θ4mHe−ξmH) sin(ξmx) + (χ1me
ξmH + χ2mHeξmH + χ3me
−ξmH
+χ4mHe−ξmH) cos(ξmx)]
}= −w(x). (12.546)
En una serie de Fourier en terminos de una base de funciones ortogonal{fi(x)}, cuando se produce una suma del tipo
∑∞i=1 aifi(x) = 0, esto se cumple
si y solo si ai = 0, i = 1, 2, 3, .... Ahora bien, si se observa, por ejemplo, (12.539),vemos una serie de Fourier pero ademas vemos una serie en terminos de lasfunciones eξmy, yeξmy, etc., las cuales si bien son linealmente independientes,no son ortogonales, por lo que no podemos usar el argumento anterior paraencontrar las constantes que aparecen en, por ejemplo, (12.539). Para poderhacer esto vamos a expresar primero en (12.539) la suma
∑∞m=1(θ1me
ξmy +θ2mye
ξmy + θ3me−ξmy + θ4mye
−ξmy) como series de Fourier. Para una funcionf(y) en el intervalo 0 ≤ y ≤ H la representacion en series de Fourier coseno yseno es:
f(y) = a0 +∞∑
n=1
an cos
(2πny
H
)+ bn sin
(2πny
H
), (12.547)
donde
a0 =2
H
∫ H
0
f(y) dy, (12.548)
an =2
H
∫ H
0
f(y) cos
(2πny
H
)dy, (12.549)
bn =2
H
∫ H
0
f(y) sin
(2πny
H
)dy, (12.550)
luego para la funcion∑∞m=1(θ1me
ξmy + θ2myeξmy + θ3me
−ξmy + θ4mye−ξmy) en
el tramo 0 ≤ y ≤ H se tiene que los coeficientes de la serie de Fourier estan
390

dados por19:
a0 =2
H
∫ H
0
[ ∞∑
m=1
(θ1meξmy + θ2mye
ξmy + θ3me−ξmy + θ4mye
−ξmy)
]dy,
=2
H
∞∑
m=1
∫ H
0
(θ1meξmy + θ2mye
ξmy + θ3me−ξmy + θ4mye
−ξmy) dy,
=2
H
∞∑
m=1
{θ1m
(eξmH − 1
)+θ2mξ2m
[1 + eξmH(1−Hξm)
]
+θ3m(1− e−ξmH
)+θ4mξ2m
[1− e−ξmH(1 +Hξm)
]}, (12.551)
y para an, bn de (12.549), (12.550) se puede demostrar que
an =2
H
∞∑
m=1
{θ1m
[−ξm + eHξm(ξm cos(Hζn) + ζn sin(Hζn))
ζ2n + ξ2m
]
+θ2m[ξ2m − ζ2n + eHξm
((ξ2m(Hξm − 1) + ζ2n(1 +Hξm)) cos(Hζn)
+ζn(H(ζ2n + ξ2m)− 2ξm) sin(Hζn))]
(ζ2n + ξ2m)−2
+θ3m
[ξm − e−Hξm(ζn sin(Hζn)− ξm cos(Hζn))
ζ2n + ξ2m
]
+θ4m[(ξ2m − ζ2n + e−Hξm((ζ2n(1−Hξm)− ξ2m(Hξm + 1)) cos(Hζn)
+ζn(H(ζ2n + ξ2m) + 2ξm))]
(ζ2n + ξ2m)−2
}, (12.552)
y
bn =2
H
∞∑
m=1
{θ1m
[ζn + eHξm(ξm sin(Hζn)− ζn cos(Hζn))
ζ2n + ξ2m
]
+θ2m[−2ζnξm + eHξm
(−ζn(H(ζ2n + ξ2m)− 2ξm) cos(Hζn)
+(ξ2m(Hξm − 1) + ζ2n(1 +Hξm)) sin(Hζn))]
(ζ2n + ξ2m)−2
+θ3m
[ζn − e−Hξm(ξm sin(Hζn) + ζn cos(Hζn))
ζ2n + ξ2m
]
+θ4m[2ζnξm + e−Hξm
(−ζn(H(ζ2n + ξ2m) + 2ξm) cos(Hζn)
(−ξ2m(Hξm + 1) + ζ2n(1 −Hξm)) sin(Hζn))]
(ζ2n + ξ2m)−2
}. (12.553)
Las ecuaciones (12.551)-(12.553) se pueden escribir de una manera mas resumidadefiniendo las siguientes constantes
ι01m =2(eξmH − 1
)
H, ι02m =
2[1 + eξmH(1−Hξm)
]
ξ2mH, (12.554)
ι03m =2(1− e−ξmH
)
H, ι04m =
2[1− e−ξmH(1 +Hξm)
]
ξ2mH, (12.555)
19En las expresiones (12.551)-(12.553) estamos asumiendo que la suma a infinito se puedeintercambiar con las integrales, lo que es posible si las sumas son convergentes, lo que se asumeaquı sin demostrarlo.
391

ιan1m =2[−ξm + eHξm(ξm cos(Hζn) + ζn sin(Hζn))
]
H (ζ2n + ξ2m), (12.556)
ιan2m = 2[ξ2m − ζ2n + eHξm
((ξ2m(Hξm − 1) + ζ2n(1 +Hξm)) cos(Hζn)
+ζn(H(ζ2n + ξ2m)− 2ξm) sin(Hζn))]
[H(ζ2n + ξ2m)−2], (12.557)
ιan3m =2[ξm − e−Hξm(ζn sin(Hζn)− ξm cos(Hζn))
]
H−1 (ζ2n + ξ2m), (12.558)
ιan4m = 2[2ζnξm + e−Hξm
(−ζn(H(ζ2n + ξ2m) + 2ξm) cos(Hζn)
(−ξ2m(Hξm + 1) + ζ2n(1−Hξm)) sin(Hζn))]
[H−1(ζ2n + ξ2m)−2],(12.559)
y
ιbn1m =2[ζn + eHξm(ξm sin(Hζn)− ζn cos(Hζn))
]
H (ζ2n + ξ2m), (12.560)
ιbn2m = 2[−2ζnξm + eHξm
(−ζn(H(ζ2n + ξ2m)− 2ξm) cos(Hζn)
+(ξ2m(Hξm − 1) + ζ2n(1 +Hξm)) sin(Hζn))]
[H−1(ζ2n + ξ2m)−2],(12.561)
ιbn3m =2[ζn − e−Hξm(ξm sin(Hζn) + ζn cos(Hζn))
]
H (ζ2n + ξ2m), (12.562)
ιbn4m = 2[2ζnξm + e−Hξm
(−ζn(H(ζ2n + ξ2m) + 2ξm) cos(Hζn)
(−ξ2m(Hξm + 1) + ζ2n(1−Hξm)) sin(Hζn))]
[H−1(ζ2n + ξ2m)−2],(12.563)
luego usando estas definiciones en (12.551)-(12.553) se tiene que
a0 =
∞∑
m=1
(θ1m ι01m + θ2mι
02m + θ3mι
03m + θ4m ι
04m), (12.564)
an =
∞∑
m=1
(θ1m ιan1m
+ θ2mιan2m
+ θ3mιan3m
+ θ4m ιan4m
), (12.565)
bn =
∞∑
m=1
(θ1m ιbn1m
+ θ2mιbn2m
+ θ3mιbn3m
+ θ4m ιbn4m
), (12.566)
de modo que
∞∑
m=1
(θ1meξmy + θ2mye
ξmy + θ3me−ξmy + θ4mye
−ξmy)
= a0 +
∞∑
n=1
an cos (ζny) + bn sin (ζny)
=
∞∑
m=1
(θ1mι01m + θ2mι
02m + θ3mι
03m + θ4mι
04m)
+∞∑
n=1
{[ ∞∑
m=1
(θ1mιan1m
+ θ2mιan2m
+ θ3mιan3m
+ θ4mιan4m
)
]cos(ζny)
+
[ ∞∑
m=1
(θ1mιbn1m
+ θ2mιbn2m
+ θ3m ιbn3m
+ θ4mιbn4m
)
]sin(ζny)
}. (12.567)
392

Para el caso de reescribir las condiciones de borde (12.539), (12.540) se ne-cesitan series de Fourier en el intervalo 0 ≤ y ≤ H para las funciones θ02y yφ02y, y se puede demostrar que
θ02y = θ02H −∞∑
n=1
2θ02ζn
sin(ζny), φ02y = φ02H −∞∑
n=1
2φ02ζn
sin(ζny). (12.568)
Finalmente dos aproximaciones: para efectos de encontrar las distintas cons-tantes que aparecen en (12.487)-(12.488) y tambien para, por ejemplo, graficarla soluciones, las series a infinito se deben aproximar por series finitas (asumien-do que estas tienen buenas propiedades de convergencia), luego se asumira que∑∞m=1 ≈∑M
m=1 y∑∞
n=1 ≈∑Nn=1.
Reemplazando (12.567), (12.568)1, pidiendo que la ecuacion resultante seasatisfecha para cualquier 0 ≤ y ≤ H , considerando que 1, cos(ζny) y sin(ζny)forman una base ortogonal de funciones, esto se cumple si y solo si20
γ01 + θ01 + θ02H +
M∑
m=1
(θ1m ι01m + θ2m ι
02m + θ3mι
03m + θ4m ι
04m) = 0, (12.569)
γ1n + γ3n +
M∑
m=1
(θ1m ιan1m
+ θ2mιan2m
+ θ3mιan3m
+ θ4mιan4m
) = 0, (12.570)
−2θ02ζn
+ δ1n + δ2n +
M∑
m=1
(θ1m ιbn1m
+ θ2mιbn2m
+ θ3mιbn3m
+ θ4mιbn4m
) = 0,(12.571)
en donde estas dos ultimas ecuaciones se tienen que cumplir para n = 1, 2, 3, ..., N .Si se reemplaza (12.567), (12.568)2 en (12.540) siguiendo los mismos argu-
mentos anteriores, esa ecuacion se va a satisfacer para cualquier 0 ≤ y ≤ H si ysolo si21
η01 + φ01 + φ02H +
M∑
m=1
(−χ1m ι01m − χ2mι
02m + χ3m ι
03m + χ4mι
04m) = 0, (12.572)
δ1n − δ4n +M∑
m=1
(−χ1mιan1m
− χ2m ιan2m
+ χ3mιan3m
+ χ4m ιan4m
) = 0, (12.573)
−2φ02ζn
+ γ1n − γ3n +
M∑
m=1
(−χ1mιbn1m
− χ2mιbn2m
+ χ3m ιbn3m
+ χ4mιbn4m
) = 0. (12.574)
Veamos la condicion de borde T12(L, y) = 0 en el borde (3), de (12.541)
20Se deja como ejercicio reemplazar (12.567) y (12.568) en (12.539) para obtener (12.569)-(12.571), y lo mismo para (12.540) de donde se obtiene (12.572)-(12.574).
21En el caso de (12.540) es necesario primero expresar la funcion∑
∞
m=1(−χ1meξmy −
χ2myeξmy + χ3me
−ξmy + χ4mye−ξmy como una seria de Fourier, tal como se hizo para
(12.567) en (12.539). Es posible probar que la serie tiene una forma muy similar a la mostrada
en (12.567), con los mismos coeficientes ι0mj, ιan
mje ιbnmj
, y solo es necesario intercambiar θ1m ,
θ2m , θ3m y θ4m por −χ1m , −χ2m , χ3m y χ4m , respectivamente.
393

simplificando un poco tenemos que es equivalente a
∞∑
n=1
{[− (2ζnγ1n + γ2n + 2γ2nζnL)e
ζnL − (2ζnγ3n − γ4n
+2γ4nζnL)e−ζnL
]sin(ζny) +
[− δ2ne
ζnL + δ4ne−ζnL
]cos(ζny)
}
+θ02 + η02 +∞∑
m=1
[θ2me
ξmy + θ4me−ξmy] = 0, (12.575)
y si se escribe∑∞
m=1
[θ2me
ξmy + θ4me−ξmy
]como una serie de Fourier como se
hizo en el caso anterior en (12.539), (12.540) queda como
N∑
n=1
{[− (2ζnγ1n + γ2n + 2γ2nζnL)e
ζnL − (2ζnγ3n − γ4n
+2γ4nζnL)e−ζnL
]sin(ζny) +
[− δ2ne
ζnL + δ4ne−ζnL
]cos(ζny)
}+ θ02
+η02 +
M∑
m=1
{θ2mι
01m + θ4mι
0m3
+
N∑
n=1
[(θ2mι
an1m
+ θ4mιan3m
) cos(ζny)
+(θ2m ιbn1m
+ θ4mιbn3m
) sin(ζny)]}
= 0, (12.576)
que es satisfecha para cualquier 0 ≤ y ≤ H si y solo si
θ02 + η02 +
M∑
m=1
(θ2m ι
01m + θ4mι
0m3
)= 0, (12.577)
−δ2neζnL + δ4ne−ζnL +
M∑
m=1
(θ2m ι
an1m
+ θ4mιanm3
)= 0, (12.578)
−(2ζnγ1n + γ2n + 2γ2nζnL)eζnL − (2ζnγ3n − γ4n + 2γ4nζnL)e
−ζnL
+M∑
m=1
(θ2mι
bn1m
+ θ4m ιbnm3
)= 0. (12.579)
En relacion a (12.544) para T11(L, y) = 0 despues de algunas simplificaciones
394

y reordenando terminos se tiene
(2µ+ λ)γ02 + λφ02 +
∞∑
n=1
{(2µ+ λ)
[(γ1nζn + γ2n(1 + ζnL))e
ζnL
+(γ4n(1− ζnL)− γ3n)e−ζnL]+ λ
[(−γ1nζn − γ2nLζn)e
ζnL + (γ3nζn
+γ4nLζn)e−ζnL]} cos(ζny) +
∞∑
n=1
{(2µ+ λ)
[(δ1nζn + δ2n(1 + ζnL))e
ζnL
+(−δ3nζn + δ4n(1− ζnL))e−ζnL]+ λ
[(δ1nζn + δ2nLζn)e
ζnL − (δ3nζn
+δ4nLζn)e−ζnL]} sin(ζny) +
∞∑
m=1
{[(2µ+ λ)ξmχ1m − λ(χ1mξm + χ2m)] eξmy
+ [(2µ+ λ)ξmχ1m − λχ2mξm] yeξmy + [(2µ+ λ)ξmχ3m + λ(χ4m − χ3mξm)] e−ξmy
+ [(2µ+ λ)ξmχ4m − λχ4mξm] ye−ξmy}= 0, (12.580)
y expandiendo en una serie de Fourier∑∞m=1
{[(2µ+ λ)ξmχ1m − λ(χ1mξm + χ2m)] eξmy+
[(2µ+ λ)ξmχ1m − λχ2mξm] yeξmy+[(2µ+ λ)ξmχ3m + λ(χ4m − χ3mξm)] e−ξmy+
[(2µ+ λ)ξmχ4m − λχ4mξm] ye−ξmy}como se hizo en (12.567) y en el caso ante-
rior (12.576), reemplazando en (12.580) y pidiendo que sea satisfecha para todo0 ≤ y ≤ H se tiene
(2µ+ λ)γ02 + λφ02 +
M∑
m=1
[(2µξmχ1m − λχ2m)ι01m + (2µξmχ1m + λξmχ1m
−λχ2mξm)ι02m + (2µξmχ3m + λχ4m)ι03m + 2µξmχ4mι04m
]= 0, (12.581)
(2µ+ λ){[γ1nζn + γ2n(1 + ζnL)]e
ζnL + [γ4n(1 − ζnL)− γ3nζn]e−ζnL}
+λ[−(γ1nζn + γ2nLζn)e
ζnL + (γ3nζn + γ4nLζn)e−ζnL]+
M∑
m=1
[(2µξmχ1m
−λχ2m)ιan1m + (2µξmχ1m + λξmχ1m − λχ2mξm)ιan2m + (2µξmχ3m
+λχ4m)ιan3m + 2µξmχ4m ιan4m
]= 0, (12.582)
(2µ+ λ){[δ1nζn + δ2n(1 + ζnL)]e
ζnL + [−δ3nζn + δ4n(1 − ζnL)]e−ζnL}
+λ[(δ1nζn + δ2nLζn)e
ζnL − (δ3nζn + δ4nLζn)e−ζnL]+
M∑
m=1
[(2µξmχ1m
−λχ2m)ιbn1m + (2µξmχ1m + λξmχ1m − λχ2mξm)ιbn2m + (2µξmχ3m
+λχ4m)ιbn3m + 2µξmχ4m ιbn4m
]= 0. (12.583)
Veamos ahora el borde (2), para T12(x, 0) = 0 de (12.541) despues de algunassimplificaciones se tiene que es equivalente a
∞∑
n=1
(−δ1nζneζnx + δ4ne
−ζnx)+ θ02 + η02 +
∞∑
m=1
[(θ2m + θ4m) cos(ξmx)
+(2χ1mξm + χ2m − 2χ3mξm + χ4m) sin(ξmx)] = 0. (12.584)
395

Se representara la funcion∑∞n=1
(−δ1nζneζnx + δ4ne
−ζnx)como una series de
Fourier en x para 0 ≤ x ≤ L. Si se hace esto, se llegan a expresiones muysimilares a las que se encontraron en (12.554)-(12.563), (12.567) apareciendocoeficientes ι0in , ι
amin
e ιbmin , i = 1, 2, 3, 4, que son identicos a (12.554)-(12.563)intercambiando n por m y H por L. Usanso esa expansion en series de Fourier,cuyos detalles no se muestran aqui, reemplazando en (12.584), pidiendo que esaecuacion sea satisfecha para cualquier 0 ≤ x ≤ L se obtiene:
θ02 + η02 +
N∑
n=1
(−δ2nι01n + δ4nι03n) = 0, (12.585)
θ2m + θ4m +
N∑
n=1
(−δ2nιam1n + δ4nιam3n
) = 0, (12.586)
2χ1mξm + χ2m − 2χ3mξm + χ4m +N∑
n=1
(−δ2nιbm1n + δ4nιbm3n
) = 0. (12.587)
En el caso de (12.536)2 de (12.542) usando una expansion en series de Fourier
para∑∞
n=1
(−γ1neζnx−γ2nxeζnx+γ3ne−ζnx+γ4nxe−ζnx
)y∑∞n=1
(γ1nζne
ζnx+
γ2neζnx + γ2nζnxe
ζnx − γ3nζne−ζnx + γ4ne
−ζnx − γ4nζnxe−ζnx
), despues de al-
gunas manipulaciones que no se muestran aquı, (12.542) es satisfecha si y solosi
(2µ+ λ)φ02 + λγ02 +
N∑
n=1
{[− (2µ+ λ)γ1n + λ(γ1nζn + γ2n)
]ι01n
+[− (2µ+ λ)γ2n + λγ2nζn
]ι02n +
[(2µ+ λ)γ3n + λ(γ4n − γ3nζn)
]ι03n
+[(2µ+ λ)γ4n − λγ4nζn
]ι04n
}= 0, (12.588)
(2µ+ λ)(−χ1mξm − χ2m − χ3mξm + χ4m) +N∑
n=1
{[− (2µ+ λ)γ1n + λ(γ1nζn
+γ4n)]ιam1n +
[− (2µ+ λ)γ2n + λγ2nζn
]ιam1n +
[(2µ+ λ)γ3n + λ(γ4n
−γ3nζn)]ιam3n +
[(2µ+ λ)γ4n − λγ4nζn
]ιam4n
}= 0, (12.589)
(2µ+ λ)(−θ1mξm − θ2m − θ3mξm + θ4m)− λξm(θ1m − θ3m) +
N∑
n=1
{[− (2µ+ λ)γ1n
+λ(γ1nζn + γ2n)]ιbm1n +
[− (2µ+ λ)γ2n + λγ2nζn
]ιbm2n +
[(2µ+ λ)γ3n
+λ(γ4n − γ3nζn)]ιbm3n +
[(2µ+ λ)γ4n − λγ4nζn
]ιbm4n
}= 0. (12.590)
En el caso de T12(x,H) = 0, considerando una representacion en series deFourier de las series sobre eζnx, xeζnx, e−ζnx y xe−ζnx como en el caso anterior,
396

reemplazando en (12.545) despues de algunas manipulaciones, pidiendo que secumpla para cada termino de la serie de Fourier, se obtiene las ecuaciones
θ02 + η02 +
∞∑
n=1
(−δ2nι01n + δ4nι03n) = 0, (12.591)
N∑
n=1
(−δ2nιam1n + δ4nιam3n
) + θ2meξmH + θ4me
−ξmH = 0, (12.592)
N∑
n=1
(−δ2nιbm1n + δ4nιbm3n
) + (2χ1mξm + χ2m + 2χ2mHξm)eξmH
+(−2χ3mξm + χ4m − 2χ4mξmH)e−ξmH = 0. (12.593)
Finalmente de (12.546) tenemos T22(x,H) = −w(x), reordenando terminosse tiene
(2µ+ λ)φ02 + λγ02 +
∞∑
n=1
{[−(2µ+ λ)ζnγ1n + λγ1nζn + λγ2n ]e
ζnx
+[−(2µ+ λ)ζnγ2n + λγ2nζn]xeζnx + [(2µ+ λ)ζnγ3n − λγ3nζn + λγ4n ]e
−ζnx
+[(2µ+ λ)ζnγ4n − λγ4nζn]xe−ζnx}+
∞∑
m=1
{[−(2µ+ λ)χ1mξm − (2µ+ λ)χ2m
−(2µ+ λ)χ2mξmH + λξmχ1m + λξmχ2mH ]eξmH + [−(2µ+ λ)χ3mξm+(2µ+ λ)χ4m − (2µ+ λ)χ4mξmH + λξmχ3m + λξmχ4mH ]e−ξmH
}cos(ξmx)
+
∞∑
m=1
{[−(2µ+ λ)θ1mξm − (2µ+ λ)θ2m − (2µ+ λ)θ2mξmH − ξmθ1mλ
−ξmθ2mHλ]eξmH + [−(2µ+ λ)θ3mξm + (2µ+ λ)θ4m − (2µ+ λ)θ4mξmH
−ξmθ3mλ− ξmθ4mHλ]e−ξmH} sin(ξmH) = w(x). (12.594)
Luego expresando la funcion∑∞
n=1
{[−(2µ + λ)ζnγ1n + λγ1nζn + λγ2n ]e
ζnx +
[−(2µ+λ)ζnγ2n +λγ2nζn]xeζnx+[(2µ+λ)ζnγ3n −λγ3nζn+λγ4n ]e−ζnx+[(2µ+
λ)ζnγ4n − λγ4nζn]xe−ζnx
}como una serie de Fourier en 0 ≤ x ≤ L de igual
forma que (12.584), y expresando w(x) tambien como una serie de Fourier,
en donde w(x) ≈ w0 +∑M
m=1 wcm cos(ξmx) + wsm sin(ξmx), reemplazando esto
en (12.594) y requiriendo que la ecuacion resultante sea valida para cualquier0 ≤ x ≤ L, despues de algunas simplificaciones se obtiene una que ecuacion que
397
es satisfecha si y solo si:
(2µ+ λ)φ02 + λγ02 +N∑
n=1
[(−2µζnγ1n + λγ2n)ι01n − 2µζnγ2nι
02n
+(2µζnγ3n + λγ4n)ι03n + 2µζnγ4nι
04n ] = −w0, (12.595)
N∑
n=1
[(−2µζnγ1n + λγ2n)ιam1n
− 2µζnγ2nιam2n
+ (2µζnγ3n + λγ4n)ιam3n
+2µζnγ4nιam4n
]− [2µχ1mξm + (2µ+ λ)χ2m + 2µχ2mξmH ]eξmH
+[−2µχ3mξm + (2µ+ λ)χ4m − 2µχ4mξmH ]e−ξmH = −wcm, (12.596)N∑
n=1
[(−2µζnγ1n + λγ2n)ιbm1n
− 2µζnγ2nιbm2n
+ (2µζnγ3n + λγ4n)ιbm3n
+2µζnγ4nιbm4n
]− [2(µ+ λ)θ1mξm + (2µ+ λ)θ2m + 2(µ+ λ)θ2mξmH ]eξmH
+[−2(µ+ λ)θ3mξm + (2µ+ λ)θ4m − 2(µ+ λ)θ4mξmH ]e−ξmH = wsm. (12.597)
Se debe usar (12.569)-(12.574), (12.577)-(12.579), (12.581)-(12.583), (12.585)-(12.587), (12.588)-(12.590), (12.591)-(12.593) y (12.595)-(12.597) para obtenerlas constantes γ01 , γ02 , θ01 , θ02 , η01 , η02 , φ01 , φ02 , γin , δin , θim y χim coni = 1, 2, 3, 4, n = 1, 2, 3, ..., N y m = 1, 2, 3, ...,M .
El caso particular w(x) = wo se puede estudiar facilmente de la soluciongeneral anterior.
Verifique si el sistema mencionado anteriormente esta bien determinadopara encontrar las incognitas γ01 , γ02 , θ01 , θ02 , η01 , η02 , φ01 , φ02 , γin , δin ,θim y χim con i = 1, 2, 3, 4, n = 1, 2, 3, ..., N y m = 1, 2, 3, ...,M ; en otraspalabras verifique que el numero de ecuaciones sea igual al numero deincognitas.
Considere dos casos L = 20H y L = 4H para H , σo, E y ν dados co-mo datos, y obtenga la solucion para las constantes de (12.569)-(12.574),(12.577)-(12.579), (12.581)-(12.583), (12.585)-(12.587), (12.588)-(12.590),(12.591)-(12.593) y (12.595)-(12.597). Determine en particular el esfuerzosT11(x, y) y compare con la solucion que se obtiene de la teorıa de flexionen vigas del Capıtulo 5.1. Compare tambien u2(x,H/2) con y(x) de lateorıa de deflexion de la Seccion 5.2.
Estudie el efecto que tiene en las soluciones trabajar con distintos valorespara M y N .
12.9.8. Viga empotrada bajo el efecto de una carga uni-forme (caso 3D, problema propuesto)
Repita el procedimiento mostrado en la Seccion 12.9.7 para el caso de unaviga modelada como cuerpo tridimensional como se muestra en la Figura 12.48.Obtenga soluciones en series de las tres ecuaciones de Navier (12.220), asumien-
398

L
x1
x2
x3
H
wo
B
Figura 12.48: Viga empotrada bajo el efecto de carga uniforme, caso 3D.
do que
ui(x1, x2, x3) = Γi0(x1, x2) +
∞∑
n=1
[Γin(x1, x2) cos
(2πn
Bx3
)
+∆in(x1, x2) sin
(2πn
Bx3
)]+Θi0(x1, x3)
+
∞∑
m=1
[Θim(x1, x3) cos
(2πm
Hx2
)
+Λim(x2, x3) sin
(2πm
Hx2
)]+Πi0(x2, x3)
+
∞∑
p=1
[Πip(x2, x3) cos
(2πp
Lx1
)
+Υim(x2, x3) sin
(2πp
Lx1
)], (12.598)
reemplaze en (12.220). Se deberıa obtener un sistema de ecuaciones diferencia-les parciales acopladas para las funciones Γin(x1, x2), ∆
in(x1, x2), Θ
im(x1, x3),
Λim(x2, x3), Πip(x2, x3) y Υim(x2, x3). Ese sistema a su vez se puede reducir a
un sistema de ecuaciones diferenciales ordinarias acopladas como en la Seccion12.9.7, asumiendo nuevamente expansiones en series de Fourier pero ahora pa-ra las funciones Γin(x1, x2), ∆
in(x1, x2), Θ
im(x1, x3), Λ
im(x2, x3), Π
ip(x2, x3) y
Υim(x2, x3).En relacion a la carga distribucion de carga de lınea w0 que aparece en la
Figura 12.48, para un caso general de carga lineal w se puede escribir como
w(x1, x3) = w(x1)δ(x3) o w(x1, x3) = w(x1)δ(x3 −B/2), (12.599)
399

respectivamente, dependiendo de donde se coloca el origen del sistema de coor-denadas para x3 y donde δ(x) serıa la distribucion o funcion generalizada deDirac. Es esta funcion w(x1, x3) la que se puede expandir en series de Fouriercomo se hizo en (12.594) para efectos de encontrar algunas de las constantes delas expansiones para el campo de desplazamientos.
12.10. El problema de torsion en ejes de seccion
arbitraria
En la Seccion 12.9.3 se re-estudio el problema de torsion para un eje deseccion circular del Capıtulo 4. En particular se obtuvo que el campo de des-plazamientos en coordenadas Cartesianas para ese problema era de la forma(12.420)
u1 = −κzy, u2 = κzx, u3 = 0. (12.600)
En particular es interesante notar que la solucion del problema de torsion estabasada en suponer que no hay desplazamiento axial en el eje z o eje 3. En el casode las secciones no circulares se puede comprobar de forma experimental queu3 en general no es igual a cero, y que aun en el regimen de pequenas deforma-ciones no es posible suponer u3 = 0. Considerando (12.600) y los comentariosanteriores, Saint-Venant propuso un metodo de solucion basado en el siguientesupuesto:
u1 = −κzy, u2 = κzx, u3 = κf(x, y), (12.601)
en donde f(x, y) es conocida como funcion ‘warping’ y como se demostrara ahoratiene un rol muy importante en la busqueda de soluciones en el caso de torsionde secciones arbitrarias.
Si se usa (12.601) en (12.216) se tiene ε11 = ε22 = ε33 = 0, ε12 = 12 (−κz +
κz) = 0 y
ε13 =κ
2
(∂f
∂x− y
), ε23 =
κ
2
(∂f
∂y+ x
), (12.602)
luego para un material elastico lineal isotropico (12.215) las unicas componentesdel tensor de esfuerzos que no son nulas son
T13 = 2µε13, T23 = 2µε23, (12.603)
o sea T13 = T13(x, y) y T23 = T23(x, y), luego las ecuaciones de equilibrio(12.214) (sin fuerzas de cuerpo) se reducen a
∂T13∂x
+∂T23∂y
= 0. (12.604)
Reemplazando (12.602) en (12.603) y esos resultados en (12.604) se obtienela ecuacion
∂
∂x
[2µκ
2
(∂f
∂x− y
)]+
∂
∂y
[2µκ
2
(∂f
∂y+ x
)]= 0,
400

y como κ, µ son constantes se transforma en
∂2f
∂x2+∂2f
∂y2= 0 ⇔ ∇2f = 0. (12.605)
En la Figura 12.49 se tiene una representacion esquematica de un eje C conseccion en el extremo libre A y manto ∂C .
En relacion a las condiciones de borde para f , de la Figura 12.49 podemosver que en el manto del eje no hay cargas externas, luego se debe cumplir para∂C
Tn = 0 ⇔
0 0 T130 0 T23T13 T23 0
n1
n2
0
=
000
⇔ T13n1 + T23n2 = 0.
(12.606)
n
A
1
2 3∂C
Figura 12.49: Eje seccion arbitraria.
En cuanto a la relacion de f con el torque total T de (12.425) se tenıa queT =
∫A(xT23 − yT13) dA que en nuestro caso de (12.602), (12.603) queda como
T =
∫
A
[xµκ
(∂f
∂y+ x
)− yµκ
(∂f
∂x− y
)]dA,
= µκ
∫
A
(x∂f
∂y− y
∂f
∂y+ x2 + y2
)dA. (12.607)
No resolveremos directamente (12.605), en su lugar el metodo usado comunmen-te es trabajar con (12.604). La ecuacion (12.604) tiene la solucion en funcion depotencial de esfuerzos ψ
T13 =∂ψ
∂y, T23 = −∂ψ
∂x. (12.608)
Es facil demostrar que (12.608) es solucion de (12.604) para ψ suficientementesuave.
Veamos ahora una condicion de compatibilidad para ψ. De (12.608), (12.602)y (12.603) se tiene que
∂ψ
∂y= µκ
(∂f
∂x− y
), −∂ψ
∂x= µκ
(∂f
∂y− x
), (12.609)
401

de donde se obtiene
∂2ψ
∂y2= µκ
(∂2f
∂x∂y− 1
), −∂
2ψ
∂x2= µκ
(∂2f
∂y∂x+ 1
),
por lo que si f es suficientemente suave se cumple
∂2ψ
∂x2+∂2ψ
∂y2= −2µκ ⇔ ∇2ψ = −2µκ. (12.610)
Respecto a la condicion de borde (12.606), veamos la Figura 12.50 en donde setiene una vista frontal del eje mostrado en la Figura 12.49. El borde ∂C de la
nta
1
2(x(s), y(s))A
∂C
Figura 12.50: Seccion y borde.
seccion A se puede describir por medio de las ecuaciones parametricas x = x(s),y = y(s). El vector tangente a ese borde ta se puede calcular como
ta =
(dx
ds,dy
ds
),
y como el vector normal es tal que n · ta = 0 se tiene que
n =1√
(dxds
)2+(
dyds
)2
(dy
ds,−dx
ds
), (12.611)
por lo que (12.606) queda como
T13dy
ds− T23
dx
ds= 0,
y de (12.608) esto es equivalente a
∂ψ
∂y
dy
ds+∂ψ
∂x
dx
ds= 0 ⇔ dψ
ds= 0 ⇔ ψ(s) = ψo
donde ψo es una constante. Supongamos que ψo = 0, luego para el borde ∂C lacondicion de borde para ψ es
ψ(s) = 0. (12.612)
402

Respecto a la relacion con el torque total T usando (12.608) en (12.425) setiene
T = −∫
A
(x∂ψ
∂x+ y
∂ψ
∂y
)dA = −
∫ ∫
A
(x∂ψ
∂x+ y
∂ψ
∂y
)dxdy, (12.613)
luego usando el teorema de Green22
T = −∫ ∫
A
(x∂ψ
∂x+ y
∂ψ
∂y
)dxdy =
∫ ∫
A
[− ∂
∂x(xψ) − ∂
∂y(yψ) + 2ψ
]dxdy,
=
∫
∂C
(−xψ dx+ yψ dy)
︸ ︷︷ ︸=0
+2
∫
A
ψ dA,
= 2
∫
A
ψ dA, (12.614)
donde se ha usado el hecho que ψ(s) = 0 en ∂C .En resumen de (12.610), (12.612) y (12.614) tenemos que resolver
∇2ψ = −2µκ en A , (12.615)
ψ = 0 en ∂C , (12.616)
T = 2
∫
A
ψ dA. (12.617)
12.10.1. Revision del problema de torsion en un eje deseccion circular
Resolvamos como ejemplo inicial nuevamente el problema de torsion en un ejede seccion circular, ahora trabajando con la funcion de esfuerzos ψ. El operador∇2 en coordenadas polares (intercambiando θ por ξ) esta dado por
∇2 =∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂ξ2, (12.618)
donde r2 = x2+y2. El elemento de area en (12.617) esta dado por dA = rdξdr.El area A esta definida por
A : 0 ≤ r ≤ D
2, 0 ≤ ξ ≤ 2π.
Hay varias formas de resolver (12.615): con series de Fourier, transformadas opor medio del metodo de la inversa, en donde se asume una solucion de ciertaforma de modo de simplificar (12.615). Usaremos el segundo metodo suponiendo
22El teorema de Green dice que∮∂K
(L dx +M dy) =∫ ∫
K
(∂M∂x
− ∂L∂y
)dxdy, para una
superficie plana K con borde ∂K .
403

que ψ(r, ξ) = ψ(r), reemplazando en (12.615) considerando (12.618) se tiene
d2ψ
dr2+
1
r
dψ
dr= −2µκ,
⇔ d
dr
(rdψ
dr
)= −2µκr,
⇒ rdψ
dr= −µκr2 + c1,
⇒ ψ(r) = −µκ2r2 + c1 ln r + c0, (12.619)
⇔ ψ(x, y) = −µκ2(x2 + y2) +
c12ln(x2 + y2) + c0, (12.620)
donde c0, c1 son constantes, luego de (12.608) se tiene
T13(x, y) =∂ψ
∂y= −µκy + c1y
x2 + y2, (12.621)
T23(x, y) = −∂ψ∂x
= µκx+c1x
x2 + y2. (12.622)
Pero si x2 + y2 → 0 esto implica, por ejemplo, que T13 → ∞ y lo mismo pasacon T23, lo que no ocurrirıa en la realidad, luego se supone c1 = 0. Se tiene queψ = 0 en ∂C que es equivalente a ψ(D/2) = 0, luego de (12.619) se tiene
c0 =µκD2
8, (12.623)
de modo que
ψ(r) =µκ
2
(D2
4− r2
). (12.624)
Reemplazando en (12.617) se tiene
T = 2
∫ D/2
0
∫ 2π
0
µκ
2
(D2
4− r2
)r dξdr =
πµκ
2
(D2
4
)2
= µκD4π
32, (12.625)
que es identido a la solucion (4.7) si se define J = D4π32 , luego T = µκJ y por
tanto κ = TµJ y de (12.608) se tiene
T13 = −TyJ, T23 =
Tx
J. (12.626)
Si se observa la Figura 12.51 se puede probar (se deja como ejercicio) que
τξz =√T 213 + T 2
23 =T
J
√x2 + y2 =
Tr
J, (12.627)
que es igual a (4.8).
404

T13
T13 τξzT23
T23
1
2
Figura 12.51: Eje de seccion circular. Esfuerzos en el sistema cartesiano y polar.
Ejercicios
Reemplaze (12.624) en (12.609) y de (12.601) obtenga las componentesdel desplazamiento u1, u1 y u3.
Obtenga el valor maximo para u3 y de T13, T23 y su ubicacion.
12.10.2. Torsion en eje de seccion elıptica
Vamos a resolver (12.615)-(12.617) para el caso de una seccion elıptica con-siderando nuevamente el metodo de la inversa23 en donde se supone que lasolucion para ψ es de la forma
ψ(x, y) = B
(x2
a2+y2
b2− 1
). (12.628)
La seccion se muestra en la Figura 12.52. Es facil probar que ψ(∂C ) = 0.
23Si se desea resolver (12.615)-(12.617) de una forma mas racional, considerando las condi-
ciones de borde ψ(s) = 0 para en este caso el borde elıptico x2
a2 + y2
b2= 1, en ese caso podrıa
ser util considerar el operador ∇2 en coordenadas elıpticas como
∇2F =2
d2[cosh(2φ) − cos(2ζ)]
(∂2F
∂φ2+∂2F
∂ζ2
),
dondex = d cosh φ cos ζ, y = d sinhφ sin ζ,
de donde se tiene quea = d coshφo, b = d sinhφo,
que son relaciones que sirven para encontrar d, φo en funcion de a, b.
405

a
bx
y
Figura 12.52: Eje de seccion elıptica.
Calculemos ∂2ψ∂x2 = 2B
a2 y ∂2ψ∂y2 = 2B
b2 , luego reemplazando en (12.615) se tiene
2B
(1
a2+
1
b2
)= −2µκ,
de donde se obtiene
B = −µκ a2b2
a2 + b2, (12.629)
luego de (12.628) se tiene
ψ = −µκ a2b2
a2 + b2
(x2
a2+y2
b2− 1
), (12.630)
y reemplazando esto en (12.617) se tiene
T = −2µκa2b2
a2 + b2
∫
A
(x2
a2+y2
b2− 1
)dA,
= −2µκa2b2
a2 + b2
∫ a
−a
∫ b√
1− x2
a2
−b√
1−x2
a2
(x2
a2+y2
b2− 1
)dy dx,
= 2µκa2b2
a2 + b2abπ
2,
= µκπa3b3
a2 + b2, (12.631)
de donde se puede despejar κ como
κ =T (a3 + b3)
µa3b3π. (12.632)
Ejercicios
Reemplace (12.630) en (12.609) y de (12.601) obtenga las componentesdel desplazamiento u1, u1 y u3.
Obtenga el valor maximo para u3, T13 y T23 y su ubicacion en la seccionelıptica.
406

12.10.3. Torsion en eje de seccion rectangular
El ultimo caso a estudiar es el mas interesante y corresponde al problema detorsion en un eje de seccion rectangular como el mostrado en la Figura 12.53.Este problema fue tratado de forma aproximada en la Seccion 4.2.
a
b x
y
Figura 12.53: Eje de seccion rectangular.
Considerese la ecuacion (12.615) que reescribimos aquı
∂2ψ
∂x2+∂2ψ
∂y2= −2µκ. (12.633)
Buscaremos la solucion ψ de (12.633) descomponiendola en una particular masuna homogenea
ψ(x, y) = ψP (x, y) + ψH(x, y). (12.634)
Por inspeccion la solucion particular de (12.633) puede ser de la forma ψP (x, y) =B(x2 + y2), luego reemplazando en (12.633) se tiene B = −µκ de modo que
ψP (x, y) = −µκ(x2 + y2). (12.635)
En relacion a ψH esta funcion debe satisfacer la ecuacion
∂2ψH∂x2
+∂2ψH∂y2
= 0. (12.636)
Respecto a las condiciones de borde se debe cumplir que
ψ(∂C ) = ψH(∂C ) + ψP (∂C ) = 0,
que de la Figura 12.53 es equivalente a
ψH
(±a2, y)= µκ
(a2
4+ y2
), ψH
(x,± b
2
)= µκ
(x2 +
b2
4
). (12.637)
Se busca una solucion para ψ que sea cero en todo el borde de la seccion rec-tangular, ademas se puede probar que dicha solucion, dada la simetrıa de la
407

geometrıa, de la ecuacion y de las condiciones de borde, debe ser simetrica res-pecto al eje x y al eje y (ver Figura 12.53), y es posible ver que efectivamenteψP es simetrica respecto a esos ejes, de modo que ψH tambien lo debe ser.
Como es usual en problemas de ecuaciones diferenciales parciales lineales concondiciones de borde no-homogeneas (ver (12.637)), vamos a suponer que ψH se
puede descomponer como ψH(x, y) = ψ(1)H (x, y)+ψ
(2)H (x, y) en donde se cumple
que
ψ(1)H
(±a2, y)= 0, ψ
(1)H
(x,± b
2
)= µκ
(x2 +
b2
4
), (12.638)
ψ(2)H
(±a2, y)= µκ
(a2
4+ y2
), ψ
(2)H
(x,± b
2
)= 0. (12.639)
Vamos a zuponer que la solucion para ψ(1)H (x, y) es de la forma ψ
(1)H (x, y) =∑∞
n=1 ψ(1)Hn
(x, y) donde24
ψ(1)Hn
(x, y) = gn(y) sin(πn
2
)cos(πnx
a
). (12.640)
Reemplazando en (12.636) se tiene la ecuacion diferencial ordinaria
d2gndy2
−(πna
)2gn = 0, (12.641)
cuya solucion esgn(y) = G1e
πnay +G2e
−πnay, (12.642)
donde G1 y G2 son constantes (que pueden depender de n) por lo que
ψ(1)H (x, y) =
∞∑
n=1
[(G1e
πnay +G2e
−πnay)sin(πn
2
)cos(πnx
a
)], (12.643)
luego de (12.638)2 se tiene
∞∑
n=1
[(G1e
±πnab +G2e
∓πnab)sin(πn
2
)cos(πnx
a
)]= µκ
(x2 +
b2
4
). (12.644)
Vamos ahora a expandir la funcion x2 + b2
4 en una serie cosenoidal de Fourier
como x2 + b2
4 =∑∞
n=1 an cos(πnxa
)en donde an estarıa dada por25
an =2
a
{4a3nπ cos
(nπ2
)+ a
[−8a2 + (a2 − b2)n2π2
]sin(nπ2
)}
2n3π3. (12.645)
24Si se intenta resolver por medio del metodo de separacion de variables (12.636) conside-
rando (12.638)1 se llegarıa a un tipo de solucion de la forma ψ(1)Hn
(x, y) = gn(y) sin(πnxa
), que
cumple con las condiciones de borde (12.638)1, pero que por otra parte no es simetrica y portanto no puede usarse para obtener (12.638)2 que se puede apreciar es una funcion simetricaen x. Por ese motivo se supone la forma (12.640), en donde se tiene que para x = ± a
2se tiene
que sin(πn2
)cos
(πn2
)= 0 ∀n.
25Ejercicio: Verificar si (12.645) es o no correcta.
408

Como sin(πn2
)es diferente de 0 solo para n impar, reemplazando n por 2n− 1
en (12.644) y (12.645) teniendo en cuenta la expansion en series cosenoidal de
Fourier de x2 + b2
4 de (12.644) se tiene26
[G1e
π(2n−1)a
b +G2e−π(2n−1)
ab]= µκ
[−8a2 + (a2 − b2)(2n− 1)2π2)]
(2n− 1)3π3,(12.646)
[G1e
−π(2n−1)a
b +G2eπ(2n−1)
ab]= µκ
[−8a2 + (a2 − b2)(2n− 1)2π2)]
(2n− 1)3π3,(12.647)
de donde se obtiene
G1 = G2 = κµGn, Gn = eba(2n−1)π [−8a2 + (a2 − b2)(1 − 2n)2π2][
1 + e2ba(2n−1)π
]n3π3
, (12.648)
En el caso de la funcion ψ(2)H (x, y) se puede suponer el mismo tipo de repre-
sentacion en series ψ(2)H (x, y) =
∑∞m=1 ψ
(2)Hm
(x, y), donde
ψ(2)Hm
(x, y) = fm(x) sin(πm
2
)cos(πmy
b
).
Reemplazando en (12.636) se obtiene una ecuacion para fm(x) similar a (12.642)
pero en terminos de x y m. Resolviendo y reemplazando en ψ(2)H despues de
algunas manipulaciones que por brevedad no se muestran aquı se obtiene
ψ(2)H (x, y) =
∞∑
m=1
[(M1e
πmbx +M2e
−πmbx)sin(πm
2
)cos(πmy
b
)], (12.649)
dondeM1 yM2 son constantes. Considerando las condiciones de borde (12.639)2,
siguiendo el mismo procedimiento de expandir en este caso la funcion a2
4 + y2
en una serie cosenoidal, reemplazando m por 2m − 1 de (12.639)2 se obtienendos ecuaciones para M1 y M2 cuya formas son similares a (12.646), (12.647)intercambiando a por b y m por n, de modo que realizando dichos intercambiosde (12.648) se obtiene
M1 =M2 = κµMm, Mm = eab(2m−1)π [−8b2 + (b2 − a2)(1− 2m)2π2][
1 + e2ab(2m−1)π
]m3π3
.
(12.650)Usando todos estos resultados tenemos finalmente para ψ de (12.634), (12.635),
(12.643) y (12.649) que
ψ(x, y) = −µκ{(x2 + y2) +
∞∑
n=1
[Gn
(e
π(2n−1)ya + e−
π(2n−1)ya
)(−1)n+1 cos
(π(2n− 1)x
x
)]
+∞∑
m=1
[Mm
(e
π(2m−1)xb + e−
π(2m−1)xb
)(−1)m+1 cos
(π(2m− 1)y
b
)]}. (12.651)
26Se ha usado el hecho que sin(
π(2n−1)2
)= (−1)n+1 y que cos
(π(2n−1)
2
)= 0.
409

Ejercicios:
Reemplace (12.651) en (12.617) y obtenga κ en funcion de T , µ, a y b.
Reemplace (12.651) en (12.608) y obtenga las expresiones para T13(x, y)y T23(x, y). Busque la ubicacion y la expresion para los esfuerzos de cortemaximo.
Usando (12.651) en (12.609) obtenga una expresion para u3(x, y) de (12.601)3.
Estudie el comportamiento de ψ, T13, T23 y u3 para un numero Q limitadode terminos en la series, para valores dados de a, a/b, µ y T . Grafiqueesas funciones y determine de manera aproximada el numero mınimo determinos Q en las distintas series para el cual el comportamiento de ψ,T13, T23 y u3 no varıan mucho27.
Verifique si la Tabla 4.1 y las expresiones (4.12) son o no aproximadamentecorrectas.
27Se puede considerar dicho numero Q como los terminos en la serie para la cual el errorrelativo al considerar Q+ 1 terminos es muy pequeno en comparacion con usar Q.
410
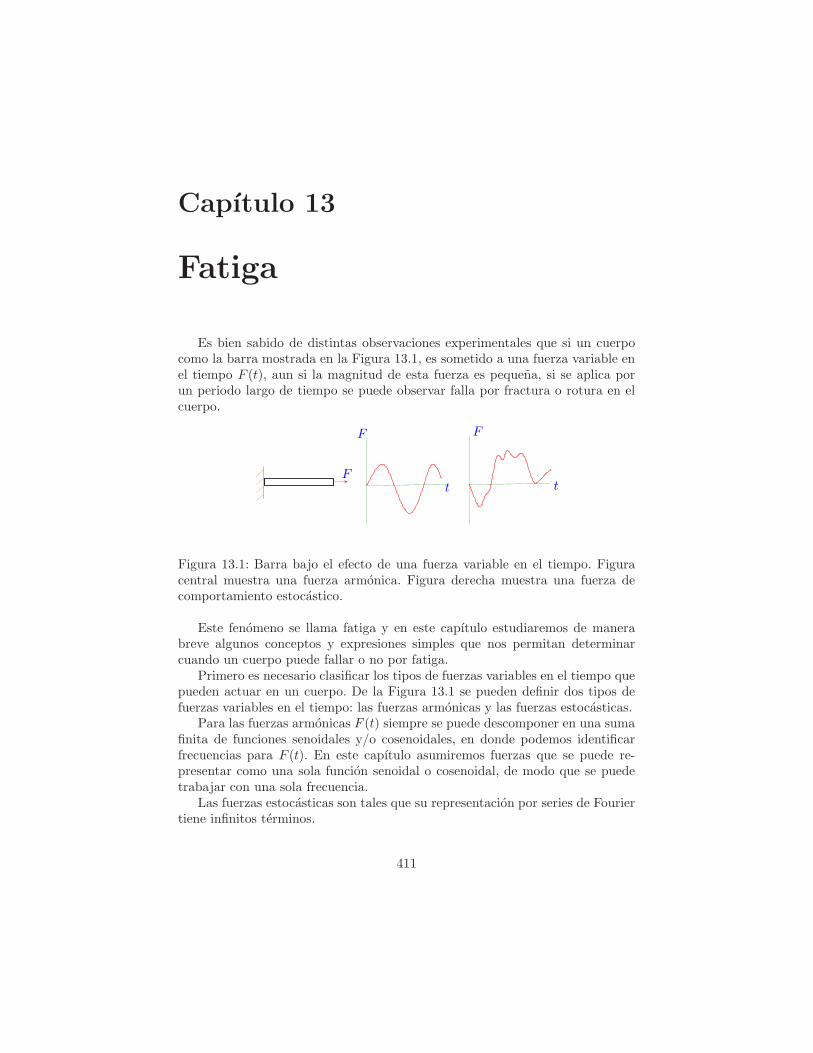
Capıtulo 13
Fatiga
Es bien sabido de distintas observaciones experimentales que si un cuerpocomo la barra mostrada en la Figura 13.1, es sometido a una fuerza variable enel tiempo F (t), aun si la magnitud de esta fuerza es pequena, si se aplica porun periodo largo de tiempo se puede observar falla por fractura o rotura en elcuerpo.
FF
Ftt
Figura 13.1: Barra bajo el efecto de una fuerza variable en el tiempo. Figuracentral muestra una fuerza armonica. Figura derecha muestra una fuerza decomportamiento estocastico.
Este fenomeno se llama fatiga y en este capıtulo estudiaremos de manerabreve algunos conceptos y expresiones simples que nos permitan determinarcuando un cuerpo puede fallar o no por fatiga.
Primero es necesario clasificar los tipos de fuerzas variables en el tiempo quepueden actuar en un cuerpo. De la Figura 13.1 se pueden definir dos tipos defuerzas variables en el tiempo: las fuerzas armonicas y las fuerzas estocasticas.
Para las fuerzas armonicas F (t) siempre se puede descomponer en una sumafinita de funciones senoidales y/o cosenoidales, en donde podemos identificarfrecuencias para F (t). En este capıtulo asumiremos fuerzas que se puede re-presentar como una sola funcion senoidal o cosenoidal, de modo que se puedetrabajar con una sola frecuencia.
Las fuerzas estocasticas son tales que su representacion por series de Fouriertiene infinitos terminos.
411
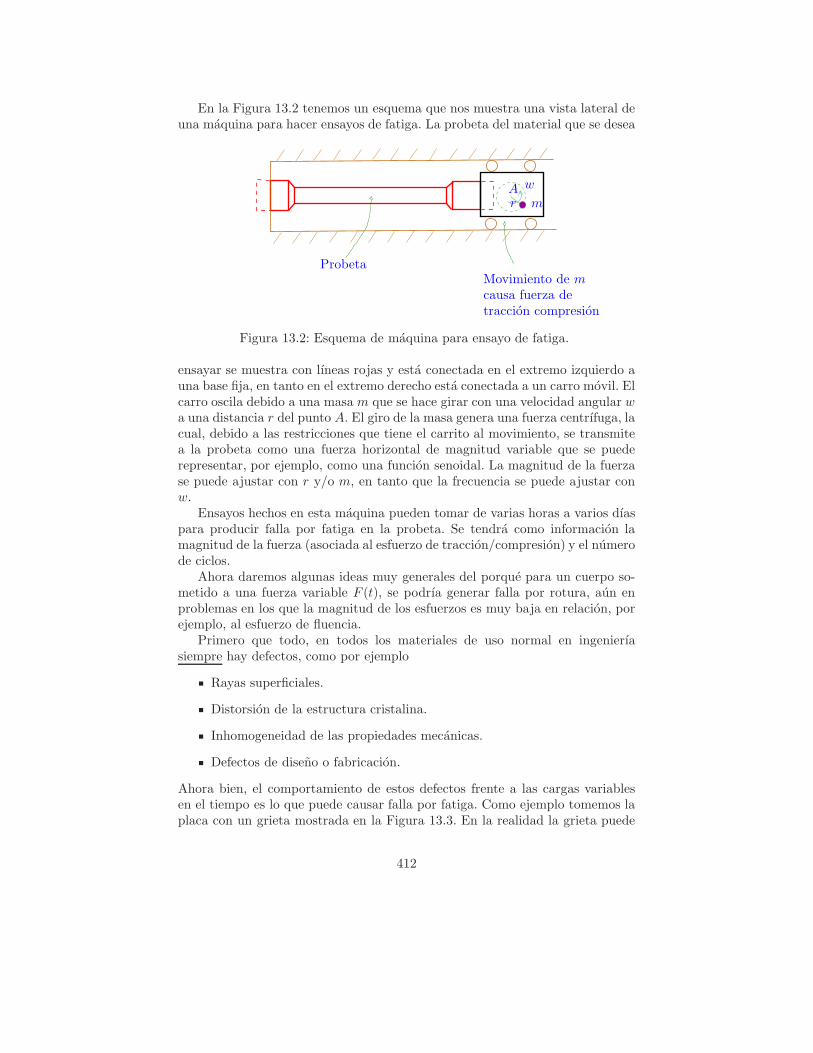
En la Figura 13.2 tenemos un esquema que nos muestra una vista lateral deuna maquina para hacer ensayos de fatiga. La probeta del material que se desea
ProbetaMovimiento de mcausa fuerza detraccion compresion
Ar m
w
Figura 13.2: Esquema de maquina para ensayo de fatiga.
ensayar se muestra con lıneas rojas y esta conectada en el extremo izquierdo auna base fija, en tanto en el extremo derecho esta conectada a un carro movil. Elcarro oscila debido a una masa m que se hace girar con una velocidad angular wa una distancia r del punto A. El giro de la masa genera una fuerza centrıfuga, lacual, debido a las restricciones que tiene el carrito al movimiento, se transmitea la probeta como una fuerza horizontal de magnitud variable que se puederepresentar, por ejemplo, como una funcion senoidal. La magnitud de la fuerzase puede ajustar con r y/o m, en tanto que la frecuencia se puede ajustar conw.
Ensayos hechos en esta maquina pueden tomar de varias horas a varios dıaspara producir falla por fatiga en la probeta. Se tendra como informacion lamagnitud de la fuerza (asociada al esfuerzo de traccion/compresion) y el numerode ciclos.
Ahora daremos algunas ideas muy generales del porque para un cuerpo so-metido a una fuerza variable F (t), se podrıa generar falla por rotura, aun enproblemas en los que la magnitud de los esfuerzos es muy baja en relacion, porejemplo, al esfuerzo de fluencia.
Primero que todo, en todos los materiales de uso normal en ingenierıasiempre hay defectos, como por ejemplo
Rayas superficiales.
Distorsion de la estructura cristalina.
Inhomogeneidad de las propiedades mecanicas.
Defectos de diseno o fabricacion.
Ahora bien, el comportamiento de estos defectos frente a las cargas variablesen el tiempo es lo que puede causar falla por fatiga. Como ejemplo tomemos laplaca con un grieta mostrada en la Figura 13.3. En la realidad la grieta puede
412
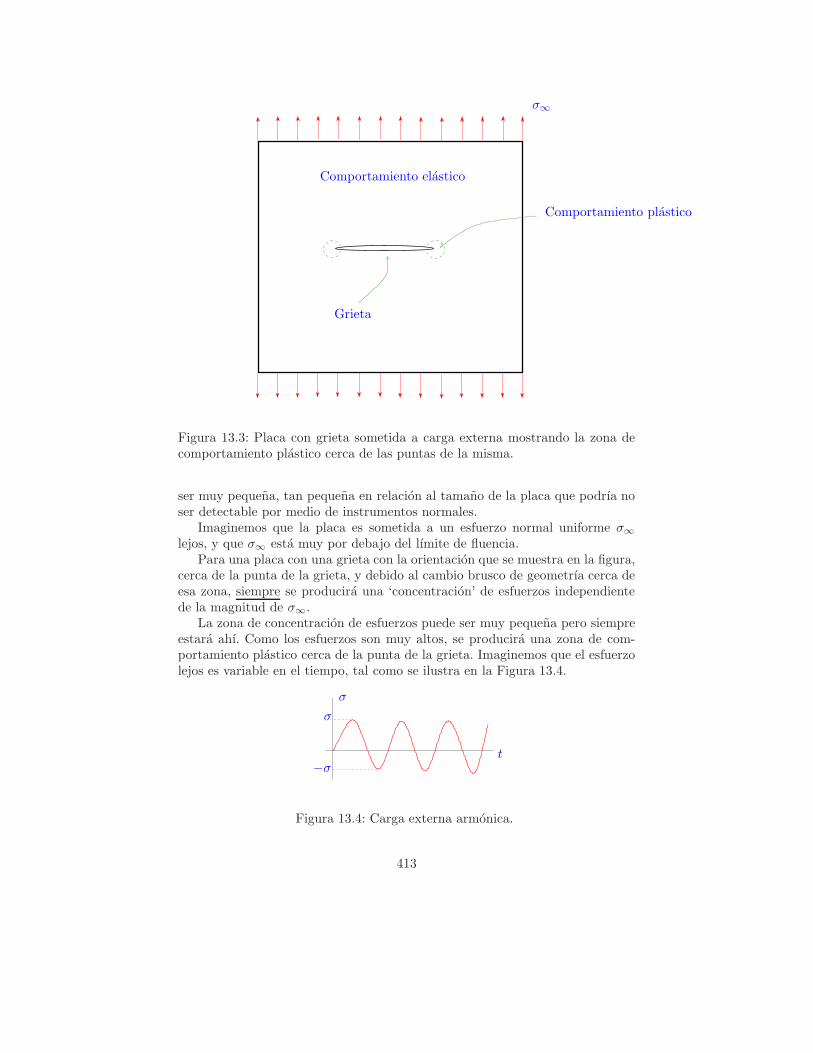
Comportamiento elastico
Comportamiento plastico
Grieta
σ∞
Figura 13.3: Placa con grieta sometida a carga externa mostrando la zona decomportamiento plastico cerca de las puntas de la misma.
ser muy pequena, tan pequena en relacion al tamano de la placa que podrıa noser detectable por medio de instrumentos normales.
Imaginemos que la placa es sometida a un esfuerzo normal uniforme σ∞lejos, y que σ∞ esta muy por debajo del lımite de fluencia.
Para una placa con una grieta con la orientacion que se muestra en la figura,cerca de la punta de la grieta, y debido al cambio brusco de geometrıa cerca deesa zona, siempre se producira una ‘concentracion’ de esfuerzos independientede la magnitud de σ∞.
La zona de concentracion de esfuerzos puede ser muy pequena pero siempreestara ahı. Como los esfuerzos son muy altos, se producira una zona de com-portamiento plastico cerca de la punta de la grieta. Imaginemos que el esfuerzolejos es variable en el tiempo, tal como se ilustra en la Figura 13.4.
σ
σ
−σt
Figura 13.4: Carga externa armonica.
413

Cuando un esfuerzo es variable en el tiempo y es tal que supera el lımite defluencia, para el grafico de comportamiento unidimensional tendrıamos curvas1
como las mostradas en la Figura 13.5. Aquı podemos ver que si se supera el
σ
ǫǫp
σu
Lımite elastico
Figura 13.5: Efecto de una carga cıclica sobre el comportamiento en la zonaplastica para el frente de una grieta.
esfuerzo de fluencia en el primer ciclo, una vez que σ disminuye de valor, quedauna deformacion residual a partir de la cual se parte en el siguiente ciclo. Ası encada ciclo vemos se acumula cada vez mas deformacion residual hasta llegar allımite de ruptura, en donde la punta de la grieta sufre un crecimiento a partirdel cual se repite el proceso anterior.
De las consideraciones anteriores podemos ver que la fatiga puede producirun crecimiento de las grietas u otros defectos similares, que creceran hasta al-canzar un tamano detectable. Si las grietas alcanzan un cierto tamano crıticoel crecimiento es inestable y entonces ocurre la rotura catastrofica. Las grietassolo pueden crecer bajo el efecto de cargas de traccion y en algunas ocasionestambien por cargas de corte2.
Si hacemos varios ensayos, por ejemplo usando la maquina mostrada enla Figura 13.2, y realizamos un grafico en donde se muestre la magnitud delesfuerzo variable σ en funcion del numero de ciclos que este esfuerzo producela rotura por fatiga n, para muchos materiales obtendrıamos un grafico como elmostrado en la Figura 13.6.
En dicho grafico podemos apreciar, por ejemplo, que si se aplica σ1 > σ2entonces, como es natural, uno esperarıa que el numero de ciclos para producirfalla por fatiga fuese menor, es decir n1 < n2.
En el caso que para σ = σu (el esfuerzo de rotura) es facil notar que la roturase producira con un solo ciclo, es decir en el lado izquierdo el grafico tiene un
1En realidad como la magnitud de σ en el rango negativo es igual al positivo, tendrıamosque extender la lıneas en la Figura 13.5 hacia abajo, es decir al rango σ < 0, pero porsimplicidad no lo hacemos.
2Las grietas tienen tres modos de propagacion, el modo I es el mas indentificable y serelaciona con el crecimiento (o la accion sobre la grieta) por traccion, como se muestra enla Figura 13.3. El modo II se asocia a cargas de cortes que pueden causar crecimiento pordeslizamiento. El modo III es corte antiplano.
414

σ
σ1
σ2S′n
nn1n2
Figura 13.6: Diagrama experimental para obtener la resistencia a la fatiga.
lımite.Para varios materiales se puede observar que hay un lımite para el esfuerzo
σ = S′n, para el cual el numero de ciclos para producir rotura tiende a infinito.
A este esfuerzo se le llama resistencia a la fatiga experimental. La lınea rojallena muestra la aproximacion, en tanto que la lınea roja punteada muestra latendencia real. Para el grafico normalmente se usa el logaritmo de n en lugarde n para ese eje horizontal.
Si no se dispone de datos obtenidos directamente de ensayos de fatiga, unaaproximacion para S′
n esS′n ≈ 0,5σu. (13.1)
Para diseno no se puede trabajar directamente con S′n, pues ya se ha indicado
que el fenomeno de fatiga depende no solo del material, sino tambien de lageometrıa y de la forma como el cuerpo esta siendo cargado. Por este motivo estan complejo obtener modelos con un buen grado de aproximacion para predecirfatiga en problemas de diseno. Ahora mostraremos un metodo simple, peroaproximado, en donde la resistencia a la fatiga en diseno, que denominaremosSn, se determina como
Sn = CsCLCkS′n, (13.2)
donde Cs, CL y Ck son constantes, en donde
Cs : Coeficiente de acabado superficial
Pulido espejo 1Pulido 0,9
Maquinado 0,8Laminado 0,7
(13.3)
CL : Coeficiente de tipo de cargaFlexion 1
Axial pura 0,9Torsion (material ductil) 0,8
(13.4)
Ck : Coeficiente del tipo de geometrıa 0,3 ≤ Ck ≤ 0,6 (13.5)
415
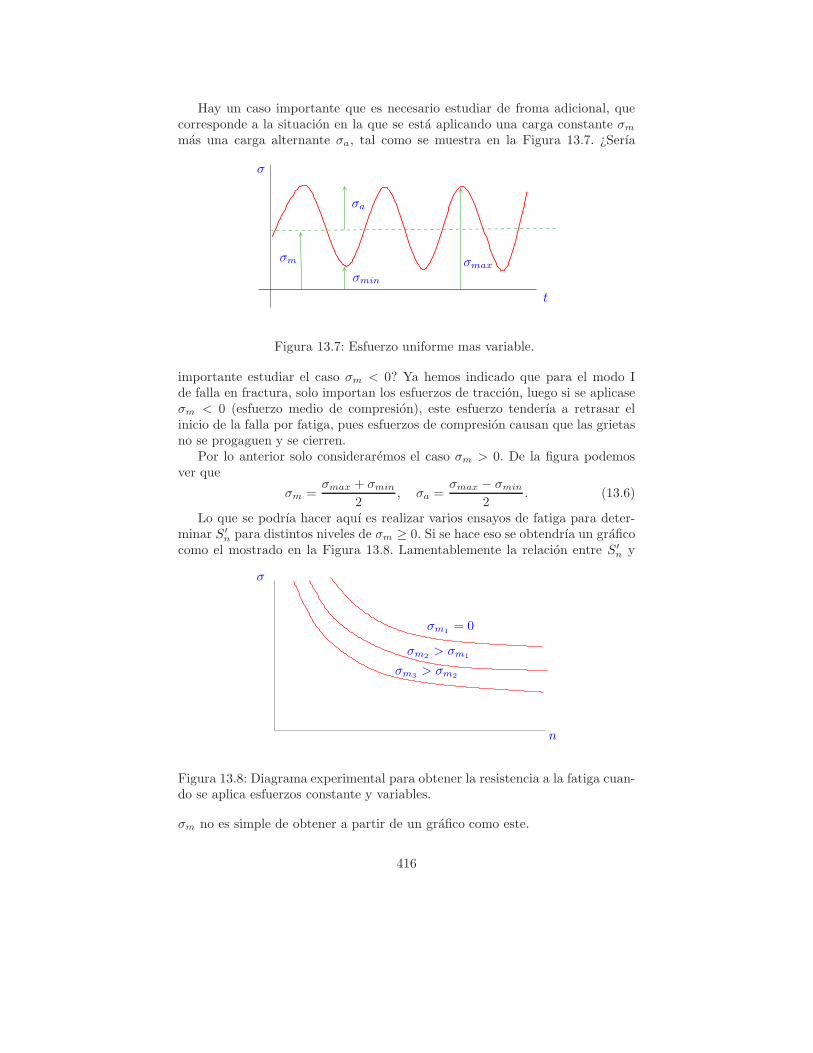
Hay un caso importante que es necesario estudiar de froma adicional, quecorresponde a la situacion en la que se esta aplicando una carga constante σmmas una carga alternante σa, tal como se muestra en la Figura 13.7. ¿Serıa
σ
t
σm
σa
σmin
σmax
Figura 13.7: Esfuerzo uniforme mas variable.
importante estudiar el caso σm < 0? Ya hemos indicado que para el modo Ide falla en fractura, solo importan los esfuerzos de traccion, luego si se aplicaseσm < 0 (esfuerzo medio de compresion), este esfuerzo tenderıa a retrasar elinicio de la falla por fatiga, pues esfuerzos de compresion causan que las grietasno se progaguen y se cierren.
Por lo anterior solo consideraremos el caso σm > 0. De la figura podemosver que
σm =σmax + σmin
2, σa =
σmax − σmin2
. (13.6)
Lo que se podrıa hacer aquı es realizar varios ensayos de fatiga para deter-minar S′
n para distintos niveles de σm ≥ 0. Si se hace eso se obtendrıa un graficocomo el mostrado en la Figura 13.8. Lamentablemente la relacion entre S′
n y
σ
σm1 = 0
σm2 > σm1
σm3 > σm2
n
Figura 13.8: Diagrama experimental para obtener la resistencia a la fatiga cuan-do se aplica esfuerzos constante y variables.
σm no es simple de obtener a partir de un grafico como este.
416

En su lugar se hace un grafico como el mostrado en la Figura 13.9, en dondeen un eje se tiene la parte alternante σa del esfuerzo, en tanto que en el otro ejese tiene la parte constante del mismo σm que producen falla por fatiga. Lo que se
σa
S′n
σmσy σu
Datos experimentales
Parabola de Gerber
Recta de Goodman
Recta de Soderberg
Figura 13.9: Diagrama experimental para obtener la resistencia a la fatiga cuan-do se aplica esfuerzos constante y variables.
hace aquı es realizar un ensayo de fatiga y para cada σm buscar σa (o viceversa),que produce la falla por fatiga. Los resultados experimentales quedarıan comouna nube de puntos como los mostrados en la figura.
Se sabe que si σm = 0 entonces para tener falla por fatiga se requiere σa = S′n.
Por otra parte si σa = 0, para tener falla se require simplemente σm = σu, talcomo se aprecia en la misma figura.
Hay varios modelos para obtener de forma aproximada la relacion entre σay σm en fatiga, tal como se ve en la figura. De estos modelos estudiaremos endetalle la ‘recta de Goodman’.
En dicha recta se asume una relacion lineal entre σa y σm, en donde se tieneuna recta que parte en el punto (0, S′
n) y llega a (σu, 0).Interesa determina algun tipo de factor de seguridad para evitar falla por
fatiga cuando se tenga aplicado una carga media mas una alternante, para elloobservemos la Figura 13.10 en donde tenemos solo la recta de Goodman.
Imaginemos que el esfuerzo medio σm es un dato fijo, es decir en general nolo podremos variar, en tanto que σa es un dato que puede ser variado3, luego elfactor de seguridad para la recta de Goodman FS podrıa ser definido como
FS =OP
σadm, (13.7)
3El esfuerzo alternante σa podrıa estar relacionado con el fecto de las vibraciones en unmaquina, las cuales se podrıan regular de alguna forma, en tanto que σm estarıa asociado alas cargas ‘estaticas’ actuando en el cuerpo, las cuales probablemente dependan del diseno delmecanismo, y por tanto sea mas difıcil variarlas.
417

σa
S′n
σm σm
P
σu
σadm
O
Figura 13.10: Factor de seguridad de Goodman.
en donde aquı OP serıa el valor del esfuerzo alternante que producirıa fallapor fatiga y σadm serıa el esfuerzo alternante admisible en nuestra aplicacionparticular.
Si se ve la figura se puede apreciar la igualdad de triangulos que se expresamatematicamente como
OP
σu − σm=S′n
σu,
obtenemos
OP =S′n
σu(σu − σm). (13.8)
Reemplazando en (13.7) se llega finalmente a
FS =S′n
σadm
(1− σm
σu
). (13.9)
La expresion anterior se puede usar de la siguiente forma. Si se conoce σuy S′
n, y si ademas queremos tener un factor de seguridad FS ≥ 1, de (13.9)podrıamos obtener σadm para la parte alternante del esfuerzo actuando en elcuerpo. Otra forma de usarla es que si se conoce σadm ≤ OP , de (13.9) podemosobtener el factor de seguridad FS de nuestro problema. Una aplicacion menoscomun es tener como datos FS, σadm y σm, y buscar un material (es decirbuscar σu y S′
n) para el cual de forma aproximada (13.9) se cumpla.
418