ix congreso nacional del color - rua:...
TRANSCRIPT

IX CONGRESO NACIONAL
DEL COLOR ALICANTE 2010
Alicante, 29 y 30 de Junio, 1 y 2 de Julio de 2010
Universidad de Alicante
PUBLICACIONES UNIVERSIDAD DE ALICANTE w
ww.
sri.u
a.es
/con
gres
os/c
olor
10
C O M I T É E S P A Ñ O L D E C O L O RS O C I E D A D E S P A Ñ O L A D E Ó P T I C A
SEDOPTICA

Publicaciones de la Universidad de AlicanteCampus de San Vicente s/n
03690 San Vicente del [email protected]
http://publicaciones.ua.esTeléfono: 965903480
Fax: 965909445
© Varios autores, 2010© de la presente edición: Universidad de Alicante
ISBN: 978-84-9717-144-1
Diseño de portada: candelaInk
Este libro ha sido debidamente examinado y valorado por evaluadores ajenos a la Universidad de Alicante, con el fin de garantizar la calidad científica del mismo.
Reservados todos los derechos. Cualquier forma de reproducción, distribución, comunicaciónpública o transformación de esta obra sólo puede ser realizada con la autorización de sus titulares,
salvo excepción prevista por la ley. Diríjase a CEDRO (Centro Español de Derechos Reprográficos,www.cedro.org) si necesita fotocopiar o escanear algún fragmento de esta obra.

IX CNC -Libro de Actas-
El IX Congreso Nacional de Color cuenta con el apoyo de las siguientes entidades:
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010
IX Congreso Nacional de Color
Alicante,
29 y 30 de Junio, 1 y 2 de Julio
Universidad de Alicante
Departamento de Óptica, Farmacología y Anatomía Facultad de Ciencias
Instituto Universitario de Física Aplicada a las Ciencias y las Tecnologías (IUFACyT)
Universidad de Alicante
IX CNC -Libro de Actas-
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010 COMITÉ ORGANIZADOR Presidente Francisco M. Martínez Verdú Universidad de Alicante Vicepresidente I
Vicepresidente II Secretaria Científica
Secretaria Administrativa Secretaria Técnica
Tesorero Vocal
Vocal
Vocal
Vocal Vocal
Eduardo Gilabert Pérez Joaquín Campos Acosta Esther Perales Romero Olimpia Mas Martínez
Sabrina Dal Pont
Valentín Viqueira Pérez Elísabet Chorro Calderón Verónica Marchante Bárbara Micó Vicent
Elena Marchante
Ernesto R. Baena Murillo
Universidad Politécnica de Valencia
IFA-CSIC Universidad de Alicante Universidad de Alicante Universidad de Alicante Universidad de Alicante Universidad de Alicante Universidad de Alicante Universidad de Alicante Universidad de Alicante Universidad de Alicante
COMITÉ CIENTÍFICO Natividad Alcón Gargallo Joaquín Campos Acosta
Pascual Capilla Perea Ángela García Codoner Eduardo Gilabert Pérez
José Mª González Cuasante
Francisco José Heredia Mira
Enrique Hita Villaverde Luís Jiménez del Barco Jaldo
Julio Antonio Lillo Jover
Francisco M. Martínez Verdú
Manuel Melgosa Latorre Ángel Ignacio Negueruela
Susana Otero Belmar
Jaume Pujol Ramo Javier Romero Mora
Mª Isabel Suero López
Meritxell Vilaseca Ricart
Instituto de Óptica, Color e Imagen, AIDO Instituto de Física Aplicada CSIC
Universidad de Valencia
Universidad Politécnica de Valencia Universidad Politécnica de Valencia Universidad Complutense de Madrid
Universidad de Sevilla
Universidad de Granada Universidad de Granada Universidad Complutense de Madrid Universidad de Alicante Universidad de Granada Universidad de Zaragoza
Instituto de Óptica, Color e Imagen, AIDO
Universidad Politécnica de Cataluña Universidad de Granada
Universidad de Extremadura
Universidad Politécnica de Cataluña IX CNC -Libro de Actas-

263
VIABILIDAD DEL USO DE ALGORITMOS DE CLUSTERING EN LA RECUPERACIÓN ESPECTRAL A PARTIR DE RESPUESTAS DE UN
CONJUNTO DE SENSORES.
Eva M. Valero1, Natalia Lyubova2, Juan L. Nieves1, Javier Hernández Andrés1
1. Departamento de Óptica, Facultad de Ciencias, Universidad de Granada, 18071 Granada 2. Estudiante de máster Erasmus Mundus CIMET. Universidad de Joensuu (Finlandia).
Resumen: El campo de las imágenes multiespectrales o hiperespectrales está registrando una considerable actividad en los últimos años. Los algoritmos de Clustering se han aplicado en este contexto con el fin principalmente de clasificar materiales u objetos incluidos en las escenas multiespectrales (ya sean provenientes de sistemas de captura de imágenes mediante satélite o imágenes aéreas, donde es especialmente interesante obtener una relación de áreas pertenecientes a una determinada clase). En nuestro estudio, presentamos algunos datos que apoyan la viabilidad de aplicar los algoritmos de clustering para simplificar el problema de recuperar la información espectral (caracterizada por al menos 30 datos por cada píxel de la imagen) a partir de unos pocos valores de respuesta de un sistema de sensores obtenidos con una cámara digital convencional de sensor CCD. Hemos utilizado tres algoritmos diferentes de clustering, trabajando con respuestas de sensores simuladas, con o sin la inclusión de un nivel elevado de ruido en el sistema de captura. Como parámetro adicional, hemos trabajado con sistemas formados por tres o seis sensores. En el caso de seis sensores, éstos fueron el resultado de simular la introducción de un filtro coloreado delante del objetivo de la cámara digital, con el fin de aumentar el número de sensores sin complicar excesivamente el sistema de captura. Hemos estudiado la influencia sobre la calidad de las señales espectrales recuperadas del ruido introducido, el número de sensores, el número de clases empleadas en el proceso de clustering, y el tipo de algoritmo utilizado. Palabras clave: Imágenes multiespectrales, clustering, recuperación de información espectral
INTRODUCCIÓN
Las técnicas de imagen espectrales tienen gran aplicación actualmente, puesto que presentan la ventaja fundamental de poder acceder a la información espectral para cada píxel de la escena [1-2]. La obtención de imágenes hiperespectrales supone habitualmente el uso de 30 o más filtros de ancho de banda espectral reducido correspondientes a diferentes longitudes de onda de pico o bandas. Así, la radiancia o reflectancia espectral de cada pixel puede ser obtenida de una forma bastante precisa [3]. Algunos de los sistemas de captura incluyen un filtro sintonizable de cristal líquido o LCTF como forma de selección de las bandas espectrales, acoplado a una cámara monocromo [2]. Como alternativa, hay otros sistemas que pretenden reducir el número de imágenes capturadas utilizando un número reducido de filtros coloreados acoplados a cámaras color RGB, y esto supone que después hay que estimar la información espectral a partir de los valores de respuesta de los sensores del sistema de captura. La recuperación espectral es en este caso un problema sin solución única a priori, puesto que la señal espectral que queremos obtener tiene mayor dimensión que el número de sensores utilizado. Así que la forma usual de proceder para muchos algoritmos de recuperación, como los métodos de reconstrucción directa, o de pseudoinversa directa, o los basados en algoritmos de auto-aprendizaje [2, 4-6] es utilizar un conjunto de señales espectrales como entrenamiento para obtener la relación entre funciones espectrales y respuestas de sensores. En el llamado “método de pseudoinversa directo” [6], el
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010

264
proceso de recuperación supone el cálculo de una matriz D de estimación a partir de un conjunto de respuestas de sensores para las cuales se conoce la radiancia o reflectancia espectral, como se muestra en la ecuación (1):
D t tS ρ += (Ec. 1)
donde ρt representa las respuestas de sensores y St las señales espectrales para el conjunto de entrenamiento. El signo + indica pseudoinversión. Una vez calculada, la matriz D puede utilizarse para estimar funciones espectrales a partir de respuestas de sensores, como se muestra en la ecuación (2):
S Dρ= (Ec. 2)
El número de respuestas de sensores puede aumentarse utilizando filtros coloreados colocados delante del objetivo de la cámara, lo que mejora la recuperación en ciertos casos [5,6]. El método de pseudo-inversa directo se ha aplicado también para la optimización de sensores en un sistema de medida de distribuciones espectrales de luz-día con 3-5 sensores [8], mostrando buenos resultados en comparación con otros métodos.
Recientemente, se han aplicado técnicas de clustering para mejorar la clasificación de objetos en imágenes hiperespectrales obtenidas por satelite[9-10] y también en el contexto de recuperación espectral para escenas naturales, con el fin de subdividir los datos de respuesta de sensores previamente a calcular la matriz de recuperación para cada clase [11].
El objetivo principal de este estudio es obtener datos adicionales y más completos para apoyar los resultados previos que indican que los algoritmos de clustering pueden mejorar la recuperación espectral. Utilizaremos datos de respuesta de sensores calculados, con o sin ruido aditivo en el sistema. También, veremos si la introducción de un filtro coloreado mejora las reconstrucciones, así como la influencia del número de clases utilizadas y del tipo de algoritmo empleado. Así que presentaremos resultados para cuatro condiciones de captura diferentes: sin ruido y sin filtro, sin ruido y con filtro, con ruido y sin filtro, y finalmente con ruido y con filtro.
MÉTODO
1) Cálculo de las respuestas simuladas con y sin ruido. Para el cálculo de las respuestas de sensores, hemos utilizado un conjunto de datos de
reflectancia espectral procedentes de imágenes hiperespectrales obtenidas de una base de datos pública de alta resolución espectral [3] para escenas naturales. Las curvas de responsividad utilizadas corresponden a una cámara digital RGB comercial (modelo Retiga 1300, QImaging Corp., Canadá), con 12-bits de resolución por canal. Para las condiciones que incluyen ruido, se añadió éste introduciendo un nivel de ruido aditivo del 5% de la varianza, que correspondería a un nivel elevado de ruido térmico y de captura (shot noise). El término de ruido se introdujo como se muestra en la ecuación (3):
n Nρ ρ= + (Ec. 3)
donde ρn representa las respuestas de sensores con ruido, y N es un vector columna con tres o seis valores, según corresponde a las condiciones sin filtro o con filtro[7]. Hemos utilizado un total de 228010 reflectancias para el conjunto de entrenamiento, y 37210 reflectancias para el conjunto test mediante el cual evaluamos la calidad de las reconstrucciones. Ambos conjuntos no presentan reflectancias en común.
Una vez calculadas las respuestas de sensores para ambos conjuntos, hemos realizado la estimación de reflectancias utilizando todos los datos, según se explica en la introducción. Esta recuperación global servirá como referencia para ver si el clustering introduce alguna mejora en el proceso.
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010
265
2) Algoritmos de clustering e indices de calidad. Una vez calculadas las respuestas de sensores para cada condición de captura, hemos
aplicado tres algoritmos de clustering diferentes (standard k-means [12], Fuzzy-C means o FCC [12] y Gaussian Mixture Model o GMM [13]) con valores de inicialización aleatorios y diferente número de clases (2, 4, 8, 16 y 32 clases). Entonces, hemos calculado la matriz de estimación D para cada clase, y obtenido las reflectancias recuperadas para el conjunto test, que había sido previamente clasificado de acuerdo a los resultados del algoritmo de clustering. Para el k-means, hemos realizado cinco veces el proceso, debido a la conocida dependencia de los resultados con los valores de inicialización para este algoritmo. Como resultado, hemos seleccionado el de mejor calidad de los cinco obtenidos, de acuerdo a los índices de separación de Xie y Beni [12].
Hemos utilizado tres índices de calidad para analizar los resultados de la recuperación: dos que estudian fundamentalmente la calidad espectral de las señales recuperadas (Goodness-of-Fit-Coefficient o GFC, definido como el coseno del ángulo que forman las dos señales en el espacio de representación multidimensional, y el conocido RMSE o error cuadrático medio); el índice de calidad adicional es colorimétrico (diferencia de color CIELAB ∆E*ab). El resultado de calidad global para un determinado algoritmo y número de clases es el resultado de realizar un promedio pesado en función del número de miembros de cada clase.
RESULTADOS
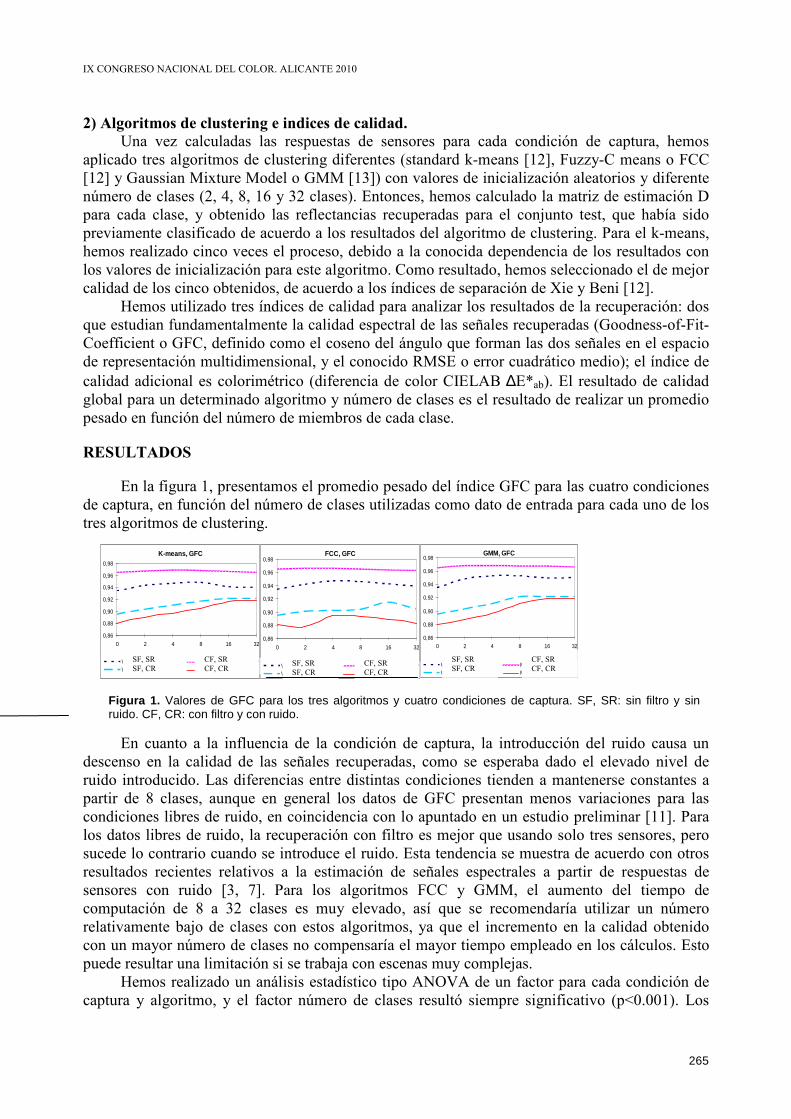
En la figura 1, presentamos el promedio pesado del índice GFC para las cuatro condiciones de captura, en función del número de clases utilizadas como dato de entrada para cada uno de los tres algoritmos de clustering.
En cuanto a la influencia de la condición de captura, la introducción del ruido causa un descenso en la calidad de las señales recuperadas, como se esperaba dado el elevado nivel de ruido introducido. Las diferencias entre distintas condiciones tienden a mantenerse constantes a partir de 8 clases, aunque en general los datos de GFC presentan menos variaciones para las condiciones libres de ruido, en coincidencia con lo apuntado en un estudio preliminar [11]. Para los datos libres de ruido, la recuperación con filtro es mejor que usando solo tres sensores, pero sucede lo contrario cuando se introduce el ruido. Esta tendencia se muestra de acuerdo con otros resultados recientes relativos a la estimación de señales espectrales a partir de respuestas de sensores con ruido [3, 7]. Para los algoritmos FCC y GMM, el aumento del tiempo de computación de 8 a 32 clases es muy elevado, así que se recomendaría utilizar un número relativamente bajo de clases con estos algoritmos, ya que el incremento en la calidad obtenido con un mayor número de clases no compensaría el mayor tiempo empleado en los cálculos. Esto puede resultar una limitación si se trabaja con escenas muy complejas.
Hemos realizado un análisis estadístico tipo ANOVA de un factor para cada condición de captura y algoritmo, y el factor número de clases resultó siempre significativo (p<0.001). Los
FCC, GFC
0,86
0,88
0,90
0,92
0,94
0,96
0,98
0 2 4 8 16 32
Number of classesWithout filter, non-noisy Magenta filter, non-noisyWithout filter, noisy Magenta filter, noisy
K-means, GFC
0,86
0,88
0,90
0,92
0,94
0,96
0,98
0 2 4 8 16 32
Number of classesWithout filter, non-noisy Magenta filter, non-noisyWithout filter, noisy Magenta filter, noisy
GMM, GFC
0,86
0,88
0,90
0,92
0,94
0,96
0,98
0 2 4 8 16 32
Number of classesWithout filter, non-noisy Magenta filter, non-noisyWithout filter, noisy Magenta filter, noisy
SF, SR SF, CR
CF, SR CF, CR
SF, SR SF, CR
CF, SR CF, CR
SF, SR SF, CR
CF, SR CF, CR
Figura 1. Valores de GFC para los tres algoritmos y cuatro condiciones de captura. SF, SR: sin filtro y sin ruido. CF, CR: con filtro y con ruido.
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010
266
datos de los restantes indices de calidad (RMSE y ∆E*ab) se correlacionan bien con los mostrados para GFC.
En cuanto al tipo de algoritmo utilizado, GMM y k-means ofrecen en general mejores resultados que FCC. El algoritmo GMM es mejor que cualquiera de los otros dos en las cuatro condiciones de captura, pero el incremento de tiempo de computación para un número elevado de clases hace que k-means sea más recomendable en general.
CONCLUSIONES
Hemos utilizado algoritmos de clasificación no supervisada sobre datos simulados de respuestas de sensores con o sin ruido, para verificar si la recuperación de señales espectrales a partir de dichos datos registraba alguna mejora. Hemos estudiado también la influencia del tipo de algoritmo utilizado y el número de clases. Los mejores resultados se obtienen con el algoritmo GMM, y la calidad de la recuperación varía relativamente poco a partir de 8 clases. En cuanto a la influencia del uso de filtros coloreados y la introducción de ruido en los datos, resulta clave, puesto que el aumentar el número de sensores en el sistema introduciendo un filtro ayuda sólo si se trata de datos libres de ruido (o posiblemente también para datos con nivel de ruido reducido). Las líneas de trabajo futuras se orientan hacia el uso de valores reales de respuesta de sensores y la aplicación de algoritmos adicionales de recuperación espectral que sean más robustos frente al ruido.
REFERENCIAS
[1] J.Y. Hardeberg, “Acquisition and Reproduction of Color Images: Colorimetric and Multispectral approaches”, (Dissertation.com). (Revised second edition of Ph.D. dissertation, Ecole Nationale Supérieure des Télécommunications, Paris, 1999), pg. 157-174 (2001).
[2] F.H. Imai, R.S. Berns, “Spectral estimation using trichromatic digital cameras”, in Proceedings of the International Symposium on Multispectral Imaging and Color Reproduction for Digital Archives (Society of Multispectral Imaging of Japan, Chiba, Japan), pg. 42-49 (1999).
[3] S.M.C. Nascimento, F.P. Ferreira, D.H. Foster. “Statistics of spatial cone-excitation ratios in natural scenes”. J Opt Soc Am A 19, 1484–1490 (2002).
[4] V. Cheung, S. Westland, C. Li, J. Hardeberg, D. Connah, “Characterization of trichromatic color cameras by using a new multispectral imaging technique,” J. Opt. Soc. Am. A 7, 1231–1240 (2005)
[5] J.L. Nieves, E.M. Valero, S.M.C. Nascimento, J. Hernandez-Andrés, J. Romero. Multispectral synthesis of daylight using a commercial digital CCD camera. Appl Opt 44, 5696–5703 (2005).
[6] E.M. Valero, J.L. Nieves, S.M.C. Nascimento, K. Amano,D.H. Foster. Recovering spectral data from natural scenes with an RGB camera and colored filters. Col. Res. & Appl. 32, 352-360 (2007).
[7] J.L. Nieves, E.M. Valero, C. Plata, J. Romero, S.M.C Nascimento. Influence of noise in recovering spectral data from natural scenes with an RGB digital camera, in Proceedings of the AIC Midterm Meeting, Hangzhou (China), pg. 342-345 (2007).
[8] M.A. López-Álvarez, J. Hernández-Andrés, E.M. Valero, J. Romero. “Selecting algorithms, sensors and linear bases for optimum spectral recovery of skylight”. J. Opt. Soc: Am. A, 24, 942-956 (2007).
[9] T.N. Tran, R. Wehrens, L.M.C. Buydens. Clustering multispectral images: a tutorial. Chemometrics and Intelligent Laboratory Systems 77, 3– 17 (2005).
[10] K. Venkatalakshmi, P.A. Praisy, R. Maragathavalli, M. Shalinie. Multispectral image clustering using enhanced genetic k-means algorithm. Information Technology Journal 6, 554-560 (2007).
[11] E.M. Valero, J. Nieves, C. Plata, J. Romero. Unsupervised classification algorithms applied to rgb data as a preprocessing step for reflectance estimation in natural scenes. In Proc. of CGIV 2008, Tarrassa (Spain), pg. 523-526 (2008).
[12] B. Balasko, J. Abonyi, B. Fail. Fuzzy Clustering and data analysis toolbox for use with Matlab. http://www.fmt.vein.hu/softcomp/ fclusttoolbox/FuzzyClusteringToolbox.pdf
[13] M.I. Schlesinger, V. Hlav. Ten lectures on statistical and structural pattern recognition. Kluwer Academic Publishers, 2002. http://cmp.felk.cvut.cz/cmp/software/stprtool/index.html
IX CONGRESO NACIONAL DEL COLOR. ALICANTE 2010