investigación proveedores
TRANSCRIPT
Discos duros que existen en el mercado
Discos duros internos.
Tipos de discos duros
Los discos duros pueden ser clasificados por diferentes tipologías o clases, vamos a ver de forma breve un resumen general de los diferentes tipos de clasificación:
Clasificación por su ubicación interna o externa
Esta clasificación sólo nos proporcionará información sobre la ubicación del disco, es decir, si el mismo se encuentra dentro de la carcasa del ordenador o bien fuera de la misma, conectándose al PC mediante un cable USB o FireWire.
Dentro de los discos duros externos tenemos los discos FireWire, USB y los nuevos SATA.
Clasificación por tamaño del disco duro
Esta clasificación atiende únicamente a al tamaño del disco duro, desde los primeros discos duros comerciales que comenzaron a llegar al mercado y cuyo tamaño era de 5,25 pulgadas a los más modernos de 1,8 pulgadas contenidos en dispositivos MP3 y ordenadores PORTÁTILES de última generación.
Los discos duros con los que suelen ir equipados los ordenadores de escritorio o de sobremesa son discos duros de 3,5" pulgadas, son los más
utilizados y por tanto los más económicos, existiendo en la actualidad modelos que ya se acercan a 1 >Terabyte< de capacidad
Clasificación por el tipo de controladora de datos
La interface es el tipo de comunicación que realiza la controladora del disco con la placa base o bus de datos del ordenador.
La controladora de datos para discos duros internos más común en la actualidad es la SATA o serial ATA, anteriormente ATA a secas, sus diferencias con la antigua ATA, también denominada IDE es que SATA es mucho más rápida en la transferencia de datos, con una velocidad de transferencia muy cercana a los discos duros profesionales SCSI.
El tipo de controladora SCSI se encuentra reservada a servidores de datos pues la tecnología que emplean es superior a costa de ser mucho más costosa y disponer de menor capacidad por disco, un disco duro SCSI de 100 Gb. valdrá más caro que un disco duro SATA de 250 Gb. no obstante la velocidad de transferencia de información y sobre todo la fiabilidad del disco duro SCSI y de la controladora SCSI es muy superior. Por este mismo motivo hace ya algunos años, aproximadamente hasta el año 2000 los ordenadores Apple Mac equipaban siempre discos duros SCSI pues eran máquinas bastante exclusivas, hoy en día los Mac han reducido su precio, entre otras cosas reduciendo o equiparando la calidad de sus componentes por la de los ordenadores PC de fabricantes como HP, Compaq, Dell, etc. y se han popularizado hasta tal punto que en territorios como
USA ya está alcanzando una cuota de mercado superior al 15%.
Clasificación por tipo de ordenador
En la actualidad se venden más ordenadores PORTÁTILES que ordenadores de sobremesa, por eso también existe la clasificación por el tipo de ordenador, es algo muy común encontrar ofertas de empresas de informática donde ofrecen: "Disco duro para portátil" los discos duros para portátil difieren de los discos duros normales básicamente en su tamaño aunque también en su diseño interior pues están preparados para sufrir más golpes debido a la movilidad de los equipos que lo contiene.
En el disco duro es donde los ordenadores portátiles suelen tener su talón de Aquiles, pues si juntamos su movilidad, todo lo que se mueve sufre golpes, y su reducido tamaño incapaz en muchas ocasiones de ventilar el interior del ordenador tenemos un cóctel explosivo.
La escasa ventilación de un PORTÁTIL hará que el disco duro sufra numerosos >cambios térmicos< y exceso de calor en sus circuitos, factores de alto riesgo para la conservación de los datos del disco duro.
También podemos clasificar dentro de este grupo los discos duros de servidor que suelen ser discos duros normales, bien SCSI o SATA pero con la peculiaridad de que se encuentran conectados a complejas tarjetas >RAID< cuya función es la de replicar los datos de forma automática de forma que al escribir un archivo o documento en él dicha información se duplica, triplica o cuatriplica en la
matriz o array de discos duros que contenga el servidor.
Características De Un Disco Duro
Las características que se deben tener en cuenta en un disco duro son:
§ Tiempo medio de acceso: Tiempo medio que tarda la aguja en situarse en la pista y el sector deseado; es la suma del Tiempo medio de búsqueda (situarse en la pista), Tiempo de lectura/escritura y la Latencia media (situarse en el sector).
§ Tiempo medio de búsqueda: Tiempo medio que tarda la aguja en situarse en la pista deseada; es la mitad del tiempo empleado por la aguja en ir desde la pista más periférica hasta la más central del disco.
§ Tiempo de lectura/escritura: Tiempo medio que tarda el disco en leer o escribir nueva información: Depende de la cantidad de información que se quiere leer o escribir, el tamaño de bloque, el número de cabezales, el tiempo por vuelta y la cantidad de sectores por pista.
§ Latencia media: Tiempo medio que tarda la aguja en situarse en el sector deseado; es la mitad del tiempo empleado en una rotación completa del
disco.
§ Velocidad de rotación: Revoluciones por minuto de los platos. A mayor velocidad de rotación, menor latencia media.
§ Tasa de transferencia: Velocidad a la que puede transferir la información a la COMPUTADORA una vez la aguja está situada en la pista y sector correctos. Puede ser velocidad sostenida o de pico.
Otras características son:
§ Caché de pista: Es una memoria tipo Flash dentro del disco duro.
§ Interfaz: Medio de comunicación entre el disco duro y la COMPUTADORA. Puede ser IDE/ATA, SCSI, SATA, USB, FireWire, Serial Attached SCSI
§ Landz: Zona sobre las que aparcan las cabezas una vez se apaga la COMPUTADORA
Existen 4 tipos de discos duros
Disco duro SAS Disco duro SCSI
Disco duro IDE, ATA y PATA Disco duro SATA y SATA 2
SAS: Son muy socorridos para el uso en servidores, pueden conectarse hasta con 6 ó 7 metros de distancia y de ahí depender hasta 24 computadoras.
SCSI: Es un interfaz muy pequeño y requiere de un controlador para que opere.IDE, ATA y PATA Cada tipo de disco duro significa
IDE: Es la abreviatura de componente electrónico integrado.
ATA: Es la abreviatura de tecnología avanzada de contacto.
PATA: Es la abreviatura de tecnología paralela avanzada.
SATA: Su significado es tecnología avanzada de contacto. Y se caracteriza por funcionar a una velocidad aproximada de 150 megabytes por segundo.
SATA 2: Este dispositivo es de mejor capacidad porque funciona hasta con 300 megabytes por segundo, lo que se traduce que su tiempo de respuesta es excelente. DISCO DURO SATA 2 La diferencia con el SATA es que trabaja a 300Megabytes/segundo.
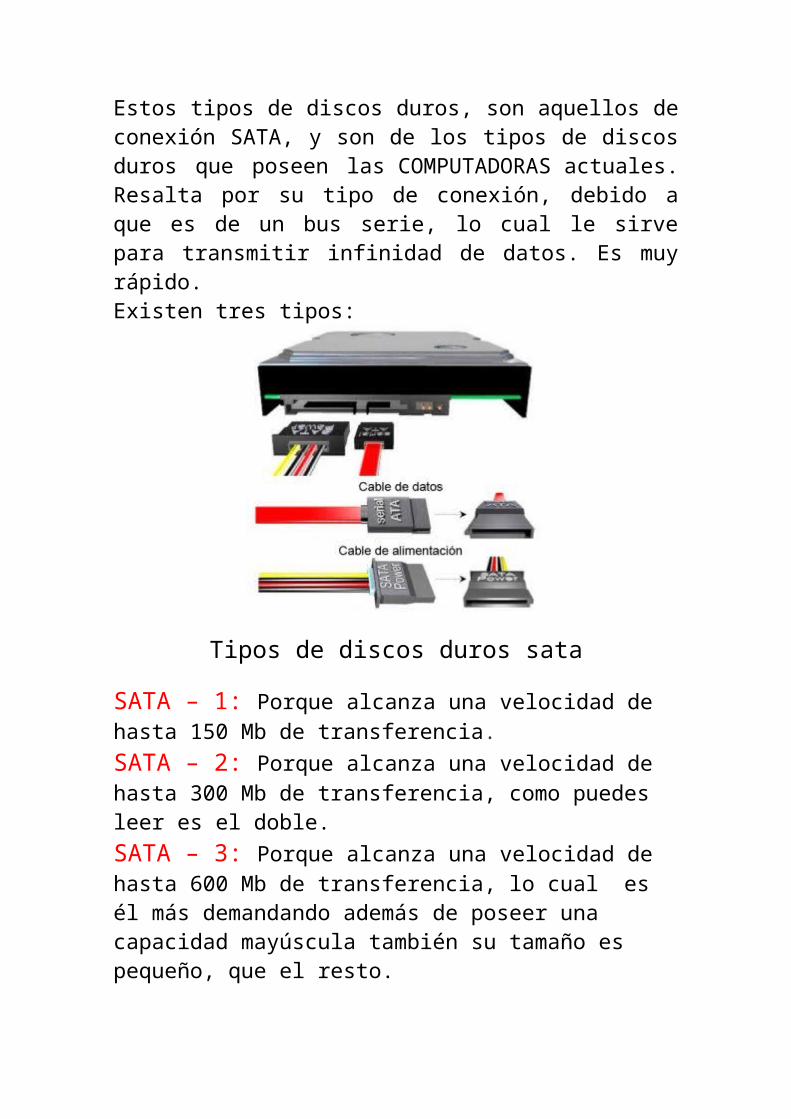
Los tipos de discos duros por sus tipos de conexiones son:Discos duros para COMPUTADORA de escritorio SATA:(Sus siglas se debe a que significa “Serial ATA”).-Estos tipos de discos duros, son aquellos de conexión SATA, y son de los tipos de discos duros que poseen las COMPUTADORAS actuales. Resalta por su tipo de conexión, debido a que es de un bus serie, lo cual le sirve para transmitir infinidad de datos. Es muy rápido.Existen tres tipos:
Tipos de discos duros sata
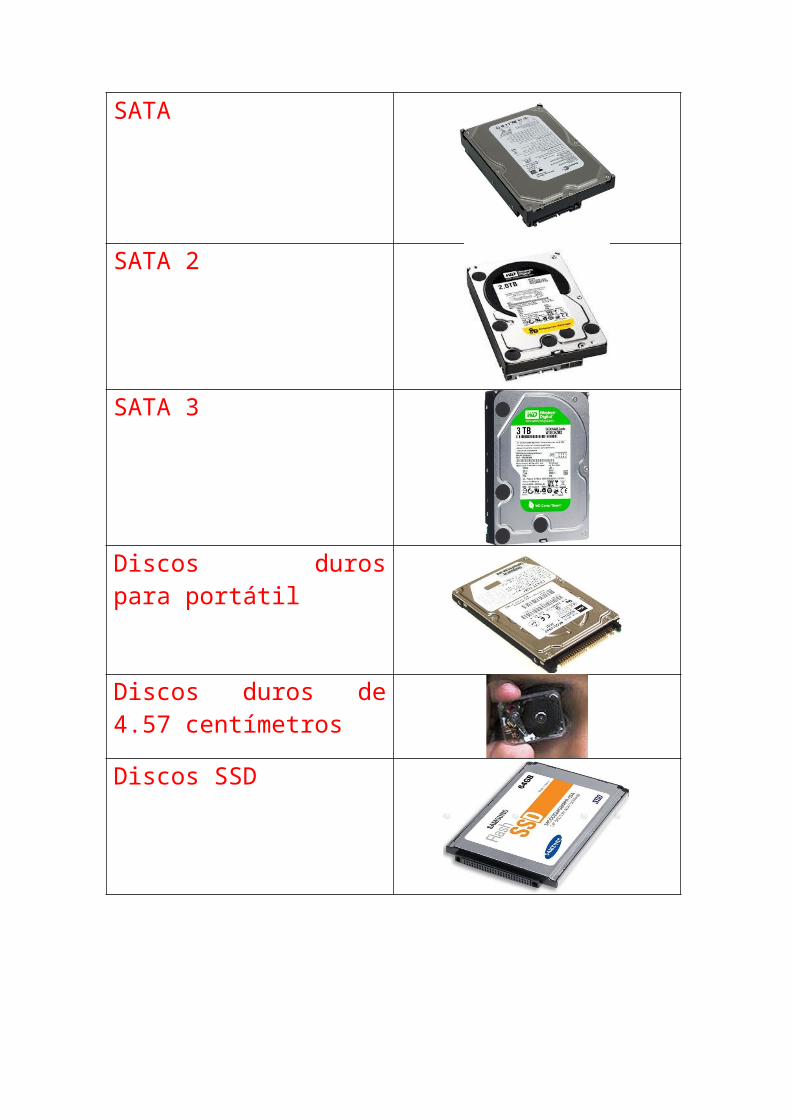
SATA – 1: Porque alcanza una velocidad de hasta 150 Mb de transferencia.SATA – 2: Porque alcanza una velocidad de hasta 300 Mb de transferencia, como puedes leer es el doble.SATA – 3: Porque alcanza una velocidad de hasta 600 Mb de transferencia, lo cual es él más demandando además de poseer una capacidad mayúscula también su tamaño es pequeño, que el resto.
Discos duros para portátil: Estos tipos de discos duros, se distinguen por su tamaño pequeño debido al poco espacio que poseen los equipos de cómputo portátil. Su tamaño varia de 2.5 pulgadas hasta de uno de 3.5 pulgadas. La desventaja de estos tipos de discos duros es que no tienen tanta capacidad como los de computadora de escritorio. Y se requiere el uso de dispositivos de almacenaje externos.
Discos duros de 4.57 centímetros: La ventaja de estos discos duros es que soy más pequeños que aquellos discos de pc´s portátil, también tienen mayor capacidad de almacenaje. La desventaja es que su fabricación es más costosa, produce ruido, vibra y se calienta. Por lo cual, las personas prefieren mejor almacenar sus datos o información en memorias externas.Discos SSD: También conocidos como discos de estado sólido, estos artefactos de almacenaje, son realmente memorias flash que se conectan a la tarjeta madre mediante el cable o entrada sata. Poseen una excelente rapidez que el estándar SATA trabajando muy bien hasta con 3 Gbpd – gigabits por segundo. En la actualidad los discos SSD pueden funcionar hasta con 6 Gbps, son silenciosas no consumen tanta carga de energía, y es excelente para aquellos usuarios fanáticos de juegos, rinde mucho.
Nombre ImagenSAS
SCSI
IDE
ATA
PATA
SATA
SATA 2

SATA 3
Discos duros para portátil
Discos duros de 4.57 centímetros
Discos SSD
Disco duro externoUn disco duro externo, es un dispositivo de almacenamiento magnético, capaz de guardar grandes volúmenes de información, pero que no se encuentra montado dentro del gabinete de la computadora, sino que es posible conectarlo y utilizarlo externamente por medio de un cable hacia el puerto USB , puerto FireWire, puerto de red LAN RJ45, conector eSata o inclusive vía inalámbrica como en el caso de la red inalámbrica WirelessG, el disco
permanece girando todo el tiempo que se encuentra encendido.
Figura 2. Ejemplo de un disco duro externo, marca Simpletech®, modelo Pininfarina, capacidad para 500 GB.
Tipos de discos duros externos
Hay 4 tipos básicos de discos duros externos:
Figura 3. Disco duro externo marca Iomega®, modelo eGo, capacidad
para 160 GB.
1. Discos duros externos portátiles.
Son discos duros con un tamaño reducido, del orden de las 2.5 pulgadas de diámetro (2.5") y un diseño que permite transportarlos fácilmente de un lugar a otro, por lo que cuenta con características de protección contra golpes y sacudidas, no debiendo descartarse que también los hay de tamaño 3.5".
Los conectores de datos con que cuenta pueden ser USB 2.0/ USB 3.0, eSata o ambos dependiendo el modelo. Las capacidades actuales de almacenamiento fluctúan entre 60 Gigabytes (GB) hasta 2
Terabytes (TB).
Figura 4. Disco duro externo marca Seagate®, modelo Free Agent
Desktop, capacidad para 250 GB.
2. Discos duros externos de escritorio.
Son discos duros con un tamaño considerable en comparación con el portátil, es decir 3.5 pulgadas de diámetro (3.5") y externamente pueden ser mayores, por lo que cuenta con una base que permite colocarlo de manera segura en una superficie plana. Los conectores de datos con que cuenta pueden ser USB 2.0/USB 3.0, e SATA, FireWire, LAN RJ45 1 Gb, WirelessG o una combinación entre los anteriores dependiendo el modelo. Las capacidades actuales de almacenamiento fluctúan entre 80 GB hasta 12 Terabytes (TB) con soporte RAID para redes de almacenamiento (NAS - Network Área Storage).
Figura 5. Mini disco duro externo, marca Adata®, modelo MiniCube,
capacidad para 16 GB.
3. Mini Discos duros externos.
Son discos duros con un tamaño sumamente pequeño (4.5 cm. x 5 cm.), que permiten ser usados de manera similar a una memoria USB, pero con una capacidad superior de almacenamiento.
El conector de datos con que cuenta es un USB. Las capacidades actuales de almacenamiento fluctúan entre 16 GB hasta 32 Gigabytes. Se alimenta eléctricamente por medio del puerto USB de la computadora.
Estos dispositivos no lograron la popularidad que alcanzaron las memorias USB, por lo que su comercialización no fue exitosa, actualmente es difícil encontrar estos dispositivos en el mercado.
Figura 6. Gabinete externo (case) para montar un disco duro de 2.5",
marca Transcend® , modelo StoreJet 2.5.
4. Convertidor de disco duro interno a externo.
No es propiamente un disco duro externo, sino un gabinete metálico (Case), listo para ser armado, que permite reconocer un disco duro IDE o un disco duro SATA / SATA II como externo, y de esta manera poder transportarlo de un lugar a otro.
El tipo de conector que utiliza para conectarse a la computadora es un USB y se alimenta eléctricamente por medio de un convertidor que se coloca directamente a la corriente del enchufe de pared. La capacidad está en función del disco duro de 3.5" ó 2.5" elegido para montar en
el case (desde 10 Megabytes (MB) hasta 2 Terabytes (TB).
Clases de tarjetas madres
La motherboard, también conocida bajo el nombre de mainboard o placa madre, es una de las partes esenciales de una computadora. Es utilizada para que los distintos dispositivos puedan comunicarse entre sí.
La placa madre puede ser clasificada según sus factores de forma en:
Motherboards Moderna: estos son los que se usan actualmente. La mayoría de estas surge a partir de la adaptación de motherboards previas.
1. ATX: estos son los sistemas estándares, son los diseños más utilizados hoy en día, además son muy flexibles. Este tipo de formato fue introducido a partir de mediados de la década de los noventa. Surge con el fin de mejorar problemas del formato Baby AT. Detrás de esta placa es colocado un pequeño ventilador para evitar que se generen accidentes relacionados con las altas temperaturas.
2. Micro ATX: estas placas son muy pequeñas como bien lo indica su nombre. Por su tamaño generalmente se le adhieren muchos puertos de
USB y de WIFI. Además suelen ser bastante económicos.
3.Flex ATX: estos formatos de placa también son de dimensiones muy pequeñas y resultan aún más económicas que las anteriores. Estas placas comenzaron a ser utilizadas a fines de la década de los noventa. Estas son totalmente compatibles con los sistemas de ATX.
4. WTX: es utilizado con servidores de un tamaño no muy grande y además resultan muy eficaces. Fue presentada a fines de los noventa. Estas placas están hechas para evitar que se caliente el CPU, eliminando el calor. Por otro lado estos formatos son diseñados para que la placa madre sea protegida de las ondas electromagnéticas.
5. NLX: estas tarjeta suelen ser utilizadas en oficinas, son muy prácticas a la hora de realizar el mantenimiento y controles necesarios. Comenzaron a ser utilizadas en el año 1996. Surge con el objetivo de mejorar el formato de su placa antecesora, la LPX. Para ello se le colocó una placa extra, con el fin de poder conectarla a los periféricos.
Antiguos: estas son las motherboards originarias, que ya han sido remplazadas por nuevas tecnologías, más eficaces, es por ello que se han dejado de utilizar.
1.LPX: las siglas LP hacen referencia al bajo nivel, es por ello que estaban hechas de tal manera que se le pudiera adherir tarjetas de expansión. Estos formatos pueden ser poco prácticos ya que no resultan compatibles con otras tarjetas del mismo diseño, es esta una de las razones por la cual no suelen ser recomendadas estas placas.Este tipo de tarjetas se caracteriza por que las
placas que se le adhieran son colocadas de manera perpendicular a la principal.
2. AT normal: este formato surgió dada la necesidad de una mayor capacidad de memoria en las placas. A lo largo de los años este formato ha sufrido modificaciones para poder explotar al máximo sus capacidades. Estas pueden ser colocadas en lugar las Baby AT, pero es posible colocar las Baby AT en el lugar de las normales.
3. Baby AT: su nombre se debe a que sus dimensiones menores a la placa AT. Estas fueron las primeras placas de uso masivo en computadoras personales. Comenzaron a ser utilizadas a mediado de la década de los ochenta. Fue en estándar de placas madre durante diez años, hasta la aparición de las placas ATX.
Clases de memorias RAM VRAM: Son las siglas de Video RAM, una memoria
especial utilizada por los adaptadores de video. A diferencia de la tradicional memoria RAM, la VRAM puede ser accedida por dos dispositivos diferentes de manera simultánea, es decir que mientras el monitor accede a la VRAM, un procesador gráfico puede suministrar nuevos datos. La VRAM desarrolla un mejor rendimiento gráfico, pero su valor es más costoso que la de una memoria RAM tradicional.
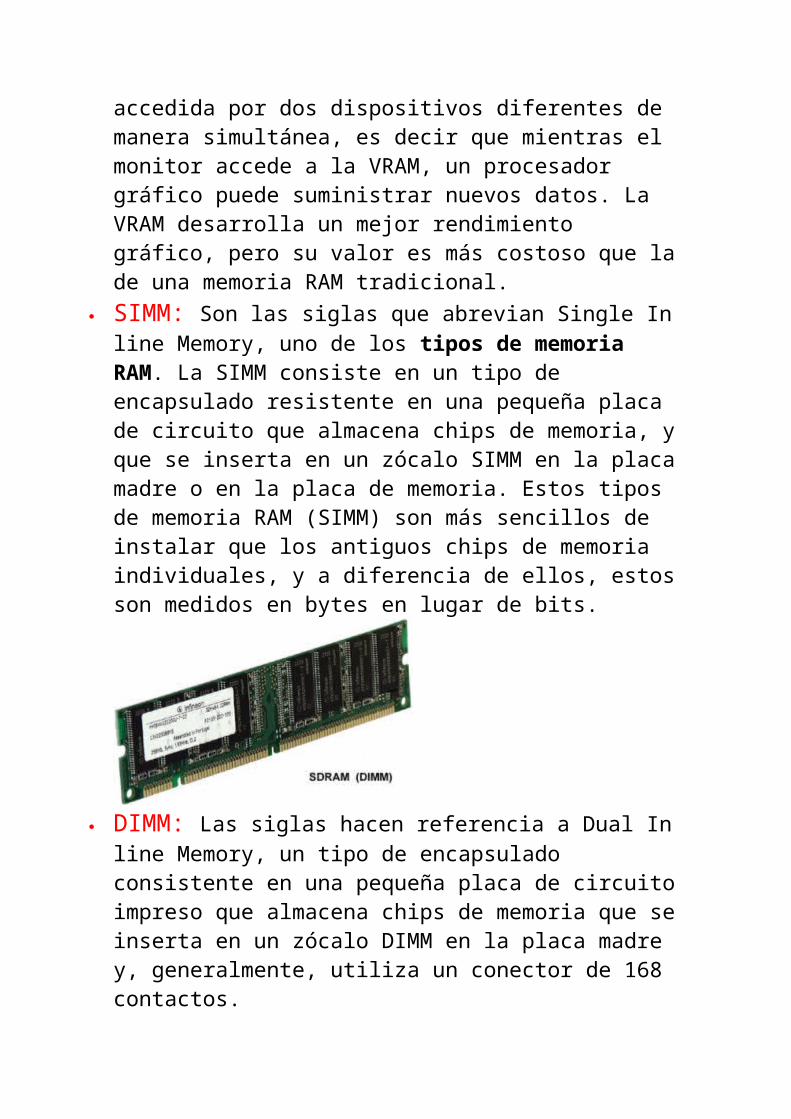
SIMM: Son las siglas que abrevian Single In line Memory, uno de los tipos de memoria RAM. La SIMM consiste en un tipo de encapsulado resistente en una pequeña placa de circuito que almacena chips de memoria, y que se inserta en un zócalo SIMM en la placa madre o en la placa de memoria. Estos tipos de memoria RAM (SIMM) son más sencillos de instalar que los antiguos chips de
memoria individuales, y a diferencia de ellos, estos son medidos en bytes en lugar de bits.
DIMM: Las siglas hacen referencia a Dual In line Memory, un tipo de encapsulado consistente en una pequeña placa de circuito impreso que almacena chips de memoria que se inserta en un zócalo DIMM en la placa madre y, generalmente, utiliza un conector de 168 contactos.
DIP: Dual In line Package. Un tipo de encapsulado consistente que almacena un chip de memoria en una caja rectangular con dos filas de pines de conexión en cada lado.
RAM Disk: Hace referencia a la memoria RAM que ha sido configurada para simular un disco duro. En estos tipos de memoria RAM se puede acceder a los ficheros de la misma manera en la que se acceden a los de un disco duro; sin embargo, los RAM Disk son miles de veces más rápidos que los discos duros y además son particularmente útiles para aplicaciones que precisan de frecuentes accesos a disco. El hecho de que estén constituidos por la RAM tradicional, ayuda a que los RAM Disk pierdan su contenido cada vez que la computadora es apagada. Para utilizar los RAM Disk es necesario copiar los ficheros desde un disco duro real al iniciar la sesión y copiarlos nuevamente al disco duro al finalizarla y apagar la computadora. Si por algún
motivo la alimentación eléctrica del ordenador falla, los datos que están almacenados en el RAM Disk se perderán. El sistema operativo DOS permite convertir la memoria extendida en un RAM Disk mediante el comando VDISK (siglas de Virtual Disk), otro de los tipos de memoria RAM Disks.
Memoria Caché o RAM Caché: Un caché es un sistema especial de almacenamiento de alta velocidad. Estos tipos de memoria RAM pueden ser un área reservada de la memoria principal o un dispositivo de almacenamiento de alta velocidad independiente. Las computadoras personales utilizan dos tipos de caché: memoria caché y caché de disco. La memoria caché es una parte de memoria RAM estática de alta velocidad (SRAM) más que la lenta y económica RAM dinámica (DRAM) utilizada como memoria principal. Además, la memoria caché es altamente efectiva, ya que los programas pueden acceder una y otra vez a los mismos datos o instrucciones. Gracias a estos tipos de memoria RAM, guardando dichos datos en la SRAM, la computadora evita tener que acceder una y otra vez a la DRAM.
El caché de disco trabaja sobre los mismos principios que la memoria caché, pero en vez de utilizar la SRAM de alta velocidad, utiliza la tradicional memoria principal. Los datos más recientes del disco duro a los que se ha accedido se almacenan en un buffer de memoria y cuando el programa necesita acceder a ciertos datos del disco lo primero que comprueba es la caché del disco, para corroborar si los datos ya están alojados allí. La caché de disco puede mejorar el rendimiento de las aplicaciones, ya que acceder a un byte de datos RAM es más rápido que acceder a un byte del disco duro.
SRAM: La Static Random Access Memory es uno de los tipos de memoria RAM más fiable y rápida que la tradicional DRAM (Dynamic RAM). El término estática de esta memoria proviene del hecho que necesita ser refrescada menos cantidad de veces que la RAMdinámica. Las memorias RAM estáticas no precisan circuitos de refresco como las memorias RAM dinámicas, pero necesitan más espacio y utilizan una mayor cantidad de energía. Debido a su alta velocidad, estos tipos de memoria RAM (SRAM) son utilizados como memoria caché.
DRAM: Son las siglas de Dynamic RAM; uno de los tipos de memoria RAM de gran capacidad que necesita ser refrescada constantemente, ya que si no se realiza dicho proceso pierde todo su contenido. Estos tipos de memoria RAM utilizan un transistor y un condensador para representar un bit. En este caso, los condensadores deber ser
energizados cientos de veces por segundo para mantener las cargas.
SDRAM: Son las siglas que definen a la Synchronous DRAM, uno de los tipos de memoria RAM más dinámicas. La SRAM es 20% más rápida que la RAM EDO, ya que entrelaza dos o más matrices de memoria interna, es decir que mientras se está accediendo a una matriz, la siguiente se está preparando para el acceso.
FPM: Fast Page Mode o memoria en modo paginado. Este es el diseño más común de chips de la RAM dinámica. En estos tipos de memoria RAM, el acceso a los bits de memoria se realiza mediante coordenadas, fila y columna. Antes de la creación del FPM, el acceso a los bits se realizaba pulsando la fila y columna de las líneas seleccionas, pero con el modo página la fila se selecciona una vez para todas las columnas dentro de la fila, otorgando como resultado un rápido acceso.
EDO: Extended Data Output es un chip de RAM dinámica que mejora alrededor de un 10% el rendimiento del modo de memoria Fast Page. Sin embargo, si el controlador de memoria no se encuentra diseñado para los más rápidos chips EDO, el rendimiento es el mismo que el modo Fast Page. La principal función de EDO es eliminar los datos de espera manteniendo activo el buffer de salida hasta que comience el próximo ciclo. BEDO (Burst EDO) es un tipo más rápido de EDO que mejora la velocidad utilizando un contador de dirección y un estado “pipeline” que solapa las operaciones.
PB SRAM: Son las siglas de Pipeline Burst SRAM. Se denomina “pipeline” a una categoría de técnicas que proporcionan un acceso simultáneo o paralelo dentro de la computadora; y se refiere a las operaciones de solapamiento movilizando datos o instrucciones dentro de una “tubería” conceptual con todas las fases del “pipe” procesando de manera simultánea. En el caso de los procesadores vectoriales, pueden procesarse simultáneamente varios de operaciones de coma flotante. Estos tipos de memoria RAM (PB SRAM) trabajan de esta manera y se mueven en velocidad de 4 y 8 nanosegundos.Estos son los tipos de memoria RAM conocidos y utilizados hasta la actualidad.Referencias:http://www.info-ab.uclm.es/labelec/solar/Memoria/Tipos%20de%20Memoria%20RAM.htmhttp://www.informaticamoderna.com/Memoria_RAM.ht
Clases de procesadores Procesadores dedicados.Para desarrollar una tarea muy especifica. Ejecutando un único algoritmo de forma óptima.Procesadores de propósito general.Está capacitado para ejecutar una serie de instrucciones sean E/S (entrada/salida), lógicas, aritméticas, etc. Almacenando y listando una colección de instrucciones en una memoria secundaria (programa) de tal forma que el procesador de modo secuencial lleve a cabo cada una de ellas.
CISC.Complex Instruction Set Computing. Posee un número grande y longitud variable de instrucciones, alto porcentaje de ciclos por instrucción, operaciones de microcódigo, baja optimización en el uso de registros.RISC.Reduced Instruction Set Computing. Posee un número bajo y longitud fija de instrucciones, bajo porcentaje de ciclos por instrucción, no tiene operaciones de microcódigo, muchos registros de propósito general, compilador optimizado. Su arquitectura permite un cierto grado de paralelismo en su ejecución.Power PC.Diseñados para rendir al igual que los mejores CISC y RISC, pero mejorando sus errores. Tiene un conjunto de instrucciones distinto a estos procesadores, pero puede emular sus características para ejecutar los programas escritos para ellos. Usados en computadores tipo Estaciones de Trabajo y en equipos de medio rango.SIMD.Single instruction, multiple data. Tiene una organización única de instrucción y datos múltiples. Manipula instrucciones de vector mediante múltiples unidades funcionales que responden a una instrucción común.Microprocesadores.Son de uso general, requieren dispositivos externos de memoria y de comunicación con el exterior (E/S).Microcontroladores.Integran memorias y elementos de entrada/salida junto al microprocesador.ASIC.
Application-Specific Integrates Circuits. Integra en un solo chip los elementos analógicos y digitales necesarios para efectuar una determinada función.DSP.Digital Signal Processors. Procesadores de alta velocidad y poca memoria, muy eficientes para efectuar algoritmos de procesado de la señal.Procesadores Neuronales, transputers.Están equipados con elementos que facilitan su comunicación de forma que puede distribuirse fácilmente una función entre varios de ellos.Procesador convencional.Ejecuta las instrucciones en forma de serie es decir, una detrás de otra.Procesador con paralelismo interno.Externamente ejecuta las instrucciones como si fuera un procesador convencional en serie, pero internamente puede efectuar operaciones en paralelo.Procesador con paralelismo externo.Se presenta en los sistemas que incluyen varios procesadores como los servidores, los mainframes y los supercomputadores.Multiprocesador.Se acostumbra a usar la arquitectura de multiprocesador con memoria común en los servidores. Cada uno de estos procesadores incluyen una memoria caché de grandes dimensiones para reducir el trafico con la memoria común.
INTEL Característica AMD Característica
Intel 8086
Utiliza un bus externo de 8
bits, tiene velocidad de
OpteronTM Tiene seis núcleos que brindan una
mayor
4,77 MHz versatilidad, optimización de cargas de
trabajoPentium
MMXTiene un juego
de 57 instrucciones
Turión Caché L1 64 + 64 KB y caché L2
512 o 1024 KB
Frecuencias de reloj:
1600, 1800, 2000, 2200, 2400 MHz
Socket 754, HyperTransp
ort (800 MHz, HT800)
Pentium Pro
Ejecutaba sistemas
operativos de 16 bits, tenía
memoria caché de 256 KB, iba desde los 133 MHz hasta los 200
MHz
Phenom Tiene frecuencia
de 2600 MHz caché L2 4 * 512 KB L3 de 2 MB
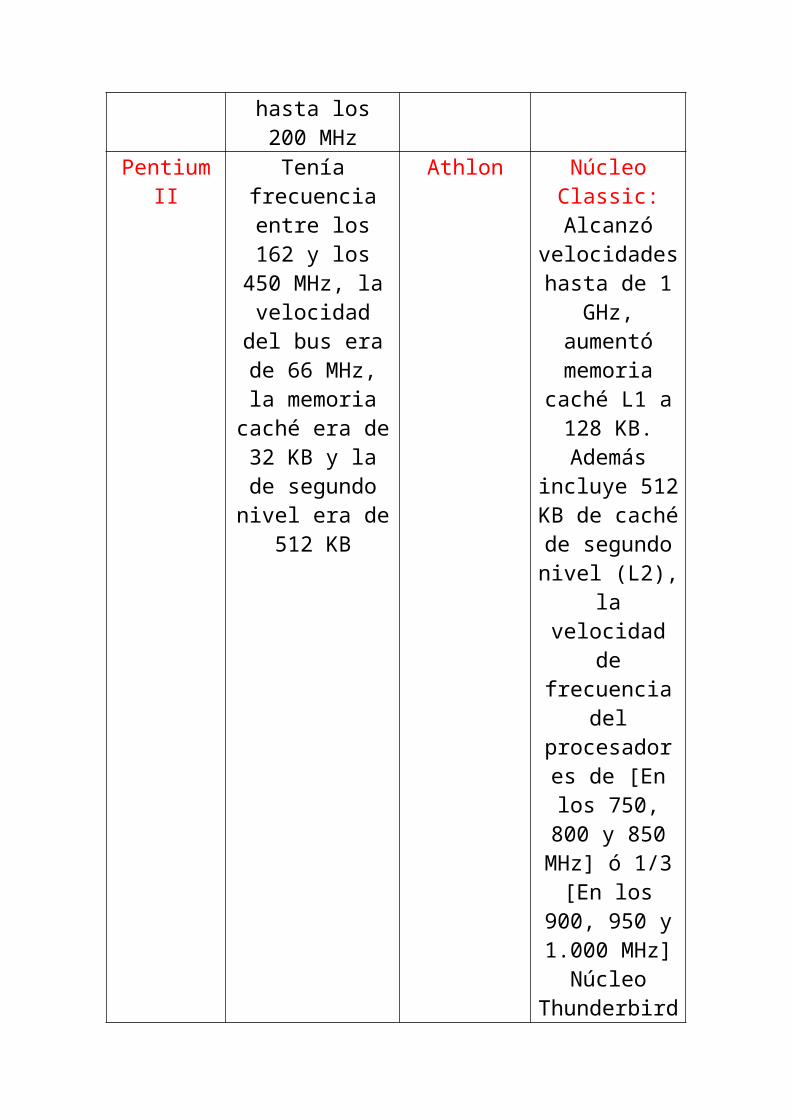
Pentium II
Tenía frecuencia
entre los 162 y los 450 MHz,
la velocidad del bus era de
66 MHz, la memoria
caché era de
Athlon Núcleo Classic: Alcanzó
velocidades hasta de 1
GHz, aumentó memoria
caché L1 a
32 KB y la de segundo nivel era de 512 KB
128 KB. Además
incluye 512 KB de caché de segundo nivel (L2), la velocidad de frecuencia
del procesador
es de [En los 750, 800 y 850 MHz] ó 1/3 [En los 900, 950 y 1.000 MHz]
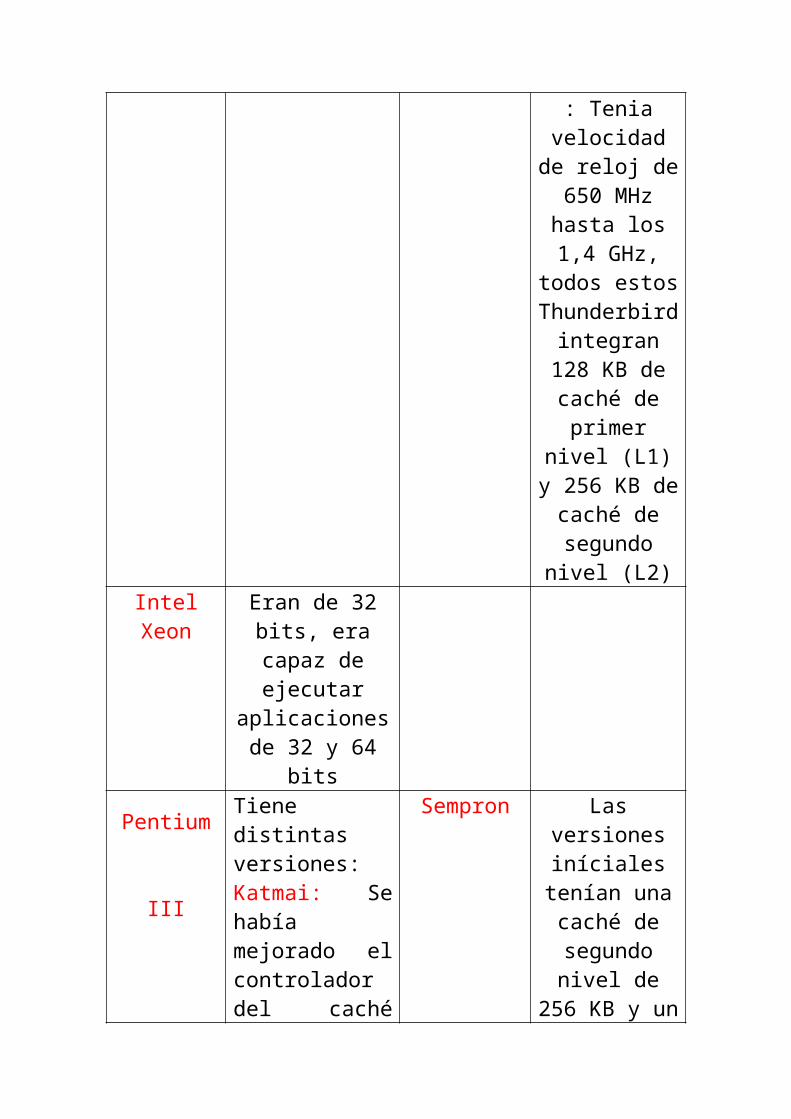
Núcleo Thunderbird:
Tenia velocidad de reloj de 650 MHz hasta
los 1,4 GHz, todos estos Thunderbird integran 128 KB de caché
de primer nivel (L1) y 256 KB de caché de segundo nivel (L2)
Intel Xeon
Eran de 32 bits, era capaz
de ejecutar aplicaciones
de 32 y 64 bits
Pentium
III
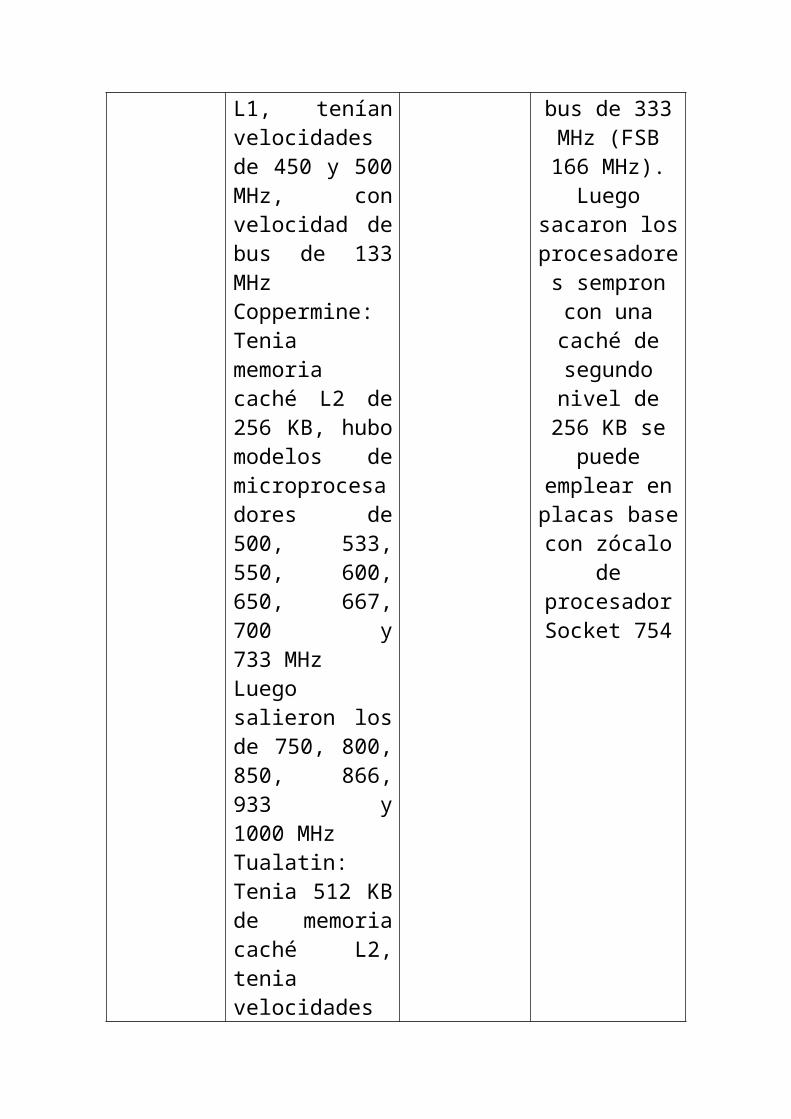
Tiene distintas versiones:Katmai: Se había mejorado el controlador del caché L1, tenían velocidades de 450 y 500 MHz, con velocidad de bus de 133 MHzCoppermine: Tenia memoria caché L2 de 256 KB, hubo modelos de microprocesadores de 500, 533, 550, 600, 650, 667, 700 y 733 MHz Luego salieron los de 750, 800, 850, 866, 933 y 1000 MHzTualatin: Tenia 512 KB de memoria caché L2, tenia velocidades
Sempron Las versiones iníciales
tenían una caché de segundo
nivel de 256 KB y un bus de 333 MHz
(FSB 166 MHz). Luego sacaron los procesadores sempron con una caché de segundo
nivel de 256 KB se puede emplear en placas base con zócalo
de procesador Socket 754
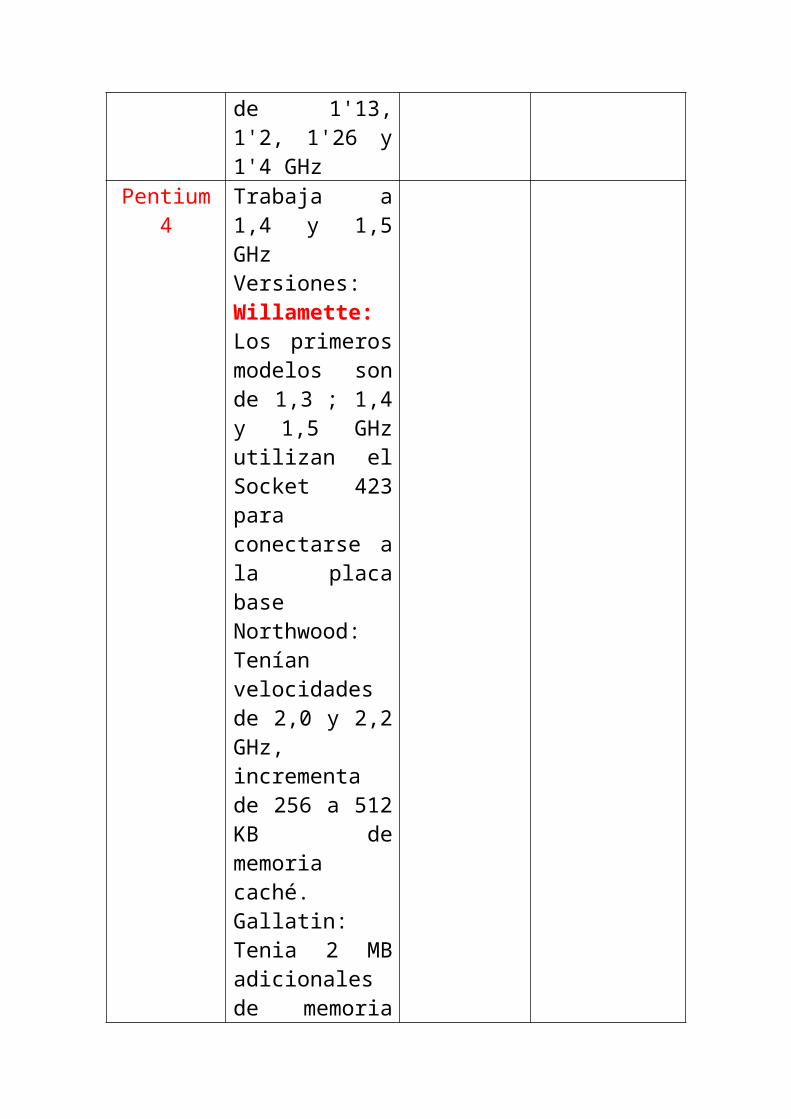
de 1'13, 1'2, 1'26 y 1'4 GHz
Pentium 4
Trabaja a 1,4 y 1,5 GHzVersiones:Willamette: Los primeros modelos son de 1,3 ; 1,4 y 1,5 GHz utilizan el Socket 423 para conectarse a la placa baseNorthwood: Tenían velocidades de 2,0 y 2,2 GHz, incrementa de 256 a 512 KB de memoria caché.Gallatin: Tenia 2 MB adicionales de memoria caché L3 Poseía un FSB de 800 MHz, poseen una velocidad de reloj 3.73 GHzPrescott: éstos poseen 1Mb o 2Mb de caché
L2 y 16Kb de caché L1 (el doble que los Northwood), se cambió el tipo de zócalo, funcionaba con una velocidad de 2,6 GHzCedar Mill: procesaba 64 bits
Pentium M
Tenía arquitectura x86 tenía velocidad de reloj de 1,73 GHzVersiones:Banias: memoria caché L2 de 1 MB van de 1,5 GHz a 1,7 GHz, el chipset se llama “Odem”. Es de 400MHz y el caché L2 es de 1MB.Dothan: Tenía como propósito doblar el tamaño del caché del L2 a

2 MB, viene con dos interacciones una primera de 400MHz de FSB y L2 de 2MB, La segunda tiene un FSB de 533MHz y un mayor consumo de energía. []
Pentium D
Su fabricación fue inicialmente de 90 nanomometros.Existen 5 variantes de Pentium D:
Pentium D 805, a 2,66 GHz (el único Pentium D con FSB de 533 MHz)
Pentium D 820, a 2,8 GHz con FSB de 800 MHz
Pentium D 830, a 3,0 GHz con FSB de 800 MHz
Pentium D 840, a 3,2 GHz con FSB de 800 MHz
Pentium D Extreme Edition, a 3,2 GHz, con HyperThreading(*) y FSB de 800 MHz
Pentium Dual Core
Fue diseñado para trabajar en equipos portátiles y de escritorio, las versiones de portátiles poseen una memoria caché L2 de 1 MB y trabaja con un bus de 533 MHz, 667 MHz y 800 MHzMientras que
las versiones de escritorio poseen una memoria caché L2 de 1 ó 2 MB y trabajan con un bus de 800 MHz ó 1066 MHz
Al Pentium D Posteriormente se añadieron otras once generaciones:
Pentium D 915, a 2,8 GHz con FSB de 800 MHz Pentium D 920, a 2,8 GHz con FSB de 800 MHz Pentium D 925, a 3,0 GHz con FSB de 800 MHz Pentium D 930, a 3,0 GHz con FSB de 800 MHz Pentium D 935, a 3,2 GHz con FSB de 800 MHz Pentium D 940, a 3,2 GHz con FSB de 800 MHz Pentium D 945, a 3,4 GHz con FSB de 800 MHz Pentium D 950, a 3,4 Ghz con FSB de 800 MHz Pentium D 960, a 3,6 Ghz con FSB de 800 MHz Pentium D 955 Extreme Edition, a 3,466 con
HyperThreading(*), un FSB de 1066 MHz y una caché de 2 MB L2 en cada nucleo.
Pentium D 965 Extreme Edition, a 3,73GHz con HyperThreading (*), un FSB de 1066 MHz FSB y cache de 2 MB L2 en cada núcleo.
Las variantes del Pentium Dual Core son:
Pentium Dual-Core E2140, a 1.6 GHz con 1 MB de caché L2 y bus de 800 MHz
Pentium Dual-Core E2160, a 1.8 GHz con 1 MB de caché L2 y bus de 800 MHz
Pentium Dual-Core E2180, a 2.0 GHz con 1 MB de caché L2 y bus de 800 MHz
Pentium Dual-Core E2200, a 2.2 GHz con 1 MB de caché L2 y bus de 800 MHz
Pentium Dual-Core E2220, a 2.4 GHz con 1 MB de caché L2 y bus de 800 MHz
Pentium Dual-Core E5200, a 2.5 GHz con 2 MB de caché L2 y bus de 800 MHz
Pentium Dual-Core E5300, a 2.6 GHz con 2 MB de caché L2 y bus de 800 MHz (la SPEC SLGTL trae soporte para Intel VT)
Pentium Dual-Core E5400, a 2.7 GHz con 2 MB de caché L2 y bus de 800 MHz (la SPEC SLGTK trae soporte para Intel VT)
Pentium Dual-Core E6300, a 2.8 GHz con 2 MB de caché L2, bus de 1066 MHz y con soporte para Intel VT
Clases de zócalos
Los diferentes micros no se conectan de igual manera a las placas:
Socket, con mecanismo ZIF (Zero Insertion Force). En ellas el procesador se inserta y se retire sin necesidad de ejercer alguna presión sobre él. Al levantar la palanquita que hay al lado se libera el microprocesador, siendo extremadamente sencilla su extracción. Estos zócalos aseguran la actualización del microprocesador. Antiguamente existía la variedad LIF (Low Insertion Force), que carecía de dicha palanca.
Slot A / Slot 1 /Slot 2. Existieron durante una generación importante de PCs (entre 1997 y 2000 aproximadamente) reemplazando a los sockets. Es donde se conectan respectivamente los primeros procesadores Athlon de AMD / los procesadores Pentium II y primeros Pentium III
y los procesadores Xeon de Intel dedicados a servidores de red. Todos ellos son cada vez más obsoletos. El modo de insertarlos es a similar a una tarjeta gráfica o de sonido, ayudándonos de dos guías de plástico insertadas en la placa base.
En las placas base más antiguas el micro iba soldado, de forma que no podía actualizarse. Hoy día esto no se ve en lo referente a los microprocesadores de PC.
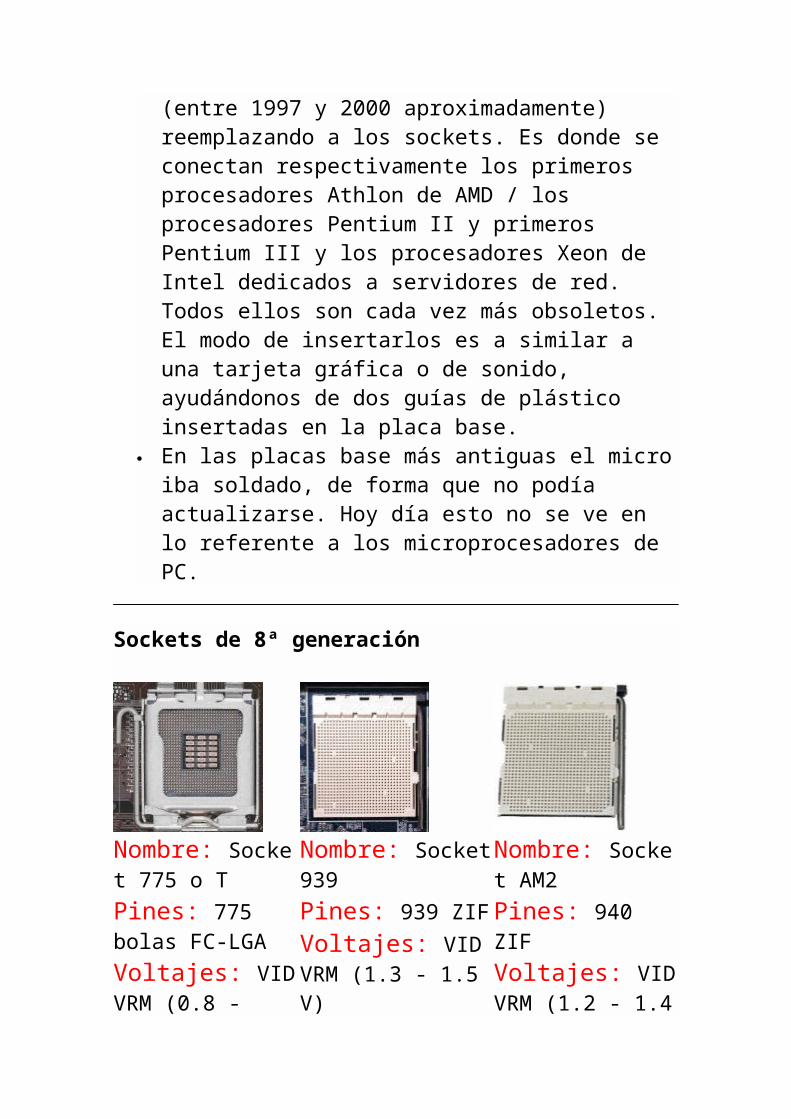
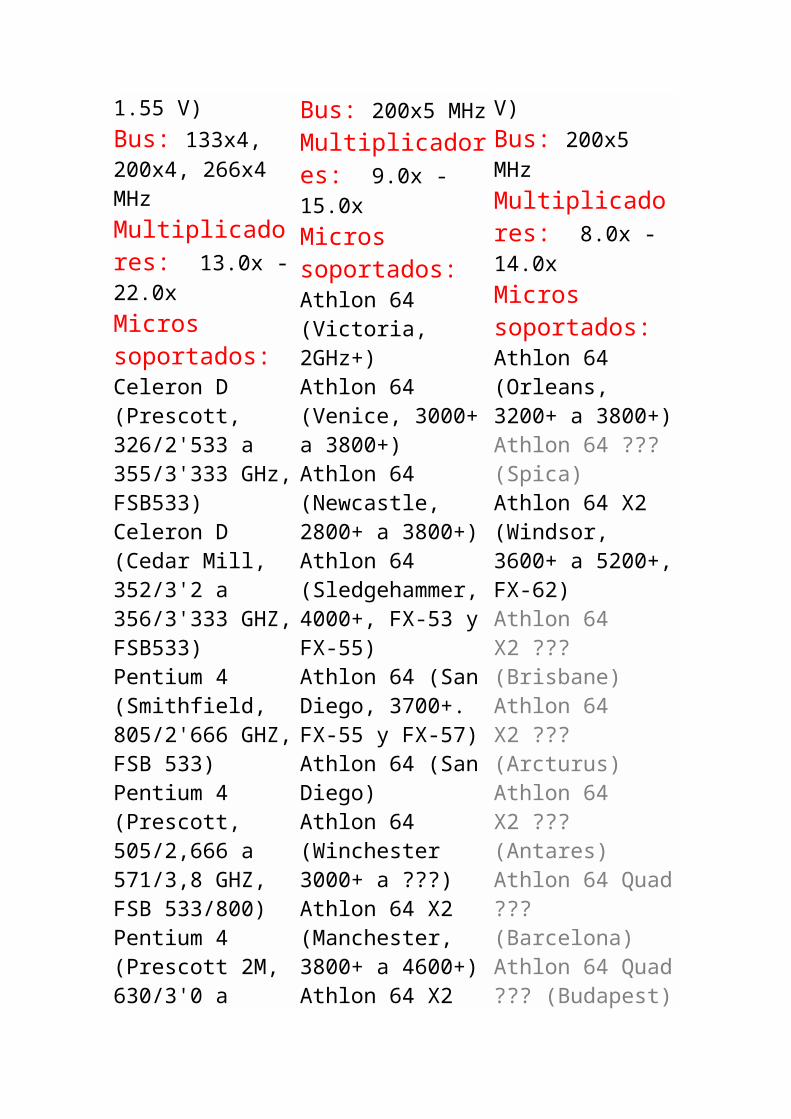
Sockets de 8ª generación
Nombre: Socket 775 o TPines: 775 bolas FC-LGAVoltajes: VID VRM (0.8 - 1.55 V)Bus: 133x4, 200x4, 266x4 MHzMultiplicadores: 13.0x - 22.0xMicros soportados:Celeron D (Prescott, 326/2'533 a
Nombre: Socket 939Pines: 939 ZIFVoltajes: VID VRM (1.3 - 1.5 V)Bus: 200x5 MHzMultiplicadores: 9.0x - 15.0xMicros soportados:Athlon 64 (Victoria, 2GHz+)Athlon 64 (Venice, 3000+ a 3800+)Athlon 64 (Newcastle,
Nombre: Socket AM2Pines: 940 ZIFVoltajes: VID VRM (1.2 - 1.4 V)Bus: 200x5 MHzMultiplicadores: 8.0x - 14.0xMicros soportados:Athlon 64 (Orleans, 3200+ a 3800+)Athlon 64 ??? (Spica)Athlon 64 X2 (Windsor, 3600+
355/3'333 GHz, FSB533)Celeron D (Cedar Mill, 352/3'2 a 356/3'333 GHZ, FSB533)Pentium 4 (Smithfield, 805/2'666 GHZ, FSB 533)Pentium 4 (Prescott, 505/2,666 a 571/3,8 GHZ, FSB 533/800)Pentium 4 (Prescott 2M, 630/3'0 a 672/3,8 GHZ, FSB 533/800)Pentium 4 (Cedar Mill, 631/3'0 a 661/3'6 GHz, FSB 800)Pentium D (Presler, 915/2'8 a 960/3'6 GHZ, FSB 800)Intel Pentium Extreme (Smithfield, 840, 3'2 GHz)Pentium 4 Extreme (Gallatin, 3'4 - 3'46 GHz)
2800+ a 3800+)Athlon 64 (Sledgehammer, 4000+, FX-53 y FX-55)Athlon 64 (San Diego, 3700+. FX-55 y FX-57)Athlon 64 (San Diego)Athlon 64 (Winchester 3000+ a ???)Athlon 64 X2 (Manchester, 3800+ a 4600+)Athlon 64 X2 (Toledo, 4400+ a 5000+ y FX-60)Athlon 64 X2 (Kimono)Opteron (Venus, 144-154)Opteron (Denmark, 165-185)Sempron (Palermo, 3000+ a 3500+)
Notas: los núcleos X2 Manchester, Toledo y Denmark son dobles (doble core).
a 5200+, FX-62)Athlon 64 X2 ??? (Brisbane)Athlon 64 X2 ??? (Arcturus)Athlon 64 X2 ??? (Antares)Athlon 64 Quad ??? (Barcelona)Athlon 64 Quad ??? (Budapest)Athlon 64 Quad ??? (Altair)Opteron (Santa Ana, 1210 a 1216)Sempron64 (Manila, 2800+ a 3600+)Athlon 64 ??? (Sparta)
Notas:- Los núcleos Windsor y Santa Ana son dobles (doble core).- Los Windsor traen entre 256 y 1024 Kb de caché, comparar modelos
Pentium 4 Extreme (Prescott, 3.73 GHz)Intel Pentium Extreme (Presler, 965/3073 GHz)
Core 2 Duo (Allendale, E6300/1'866 a E6400/2133 GHz, FSB 1066)Core 2 Duro (Conroe, E6600/2'4 a E6700/2'666 GHz, FSB 1066)Core 2 Extreme (Conroe XE, X6800EE/2'933 GHZ)Core 2 ??? (Millville, Yorkfield, Bloomfield)Core 2 Duo ??? (Wolfdale, Ridgefield)Core 2 Extreme ??? (Kentsfield, cuatro cores)
Notas: los núcleos Presler, Allendale y
Conroe son dobles (doble core).
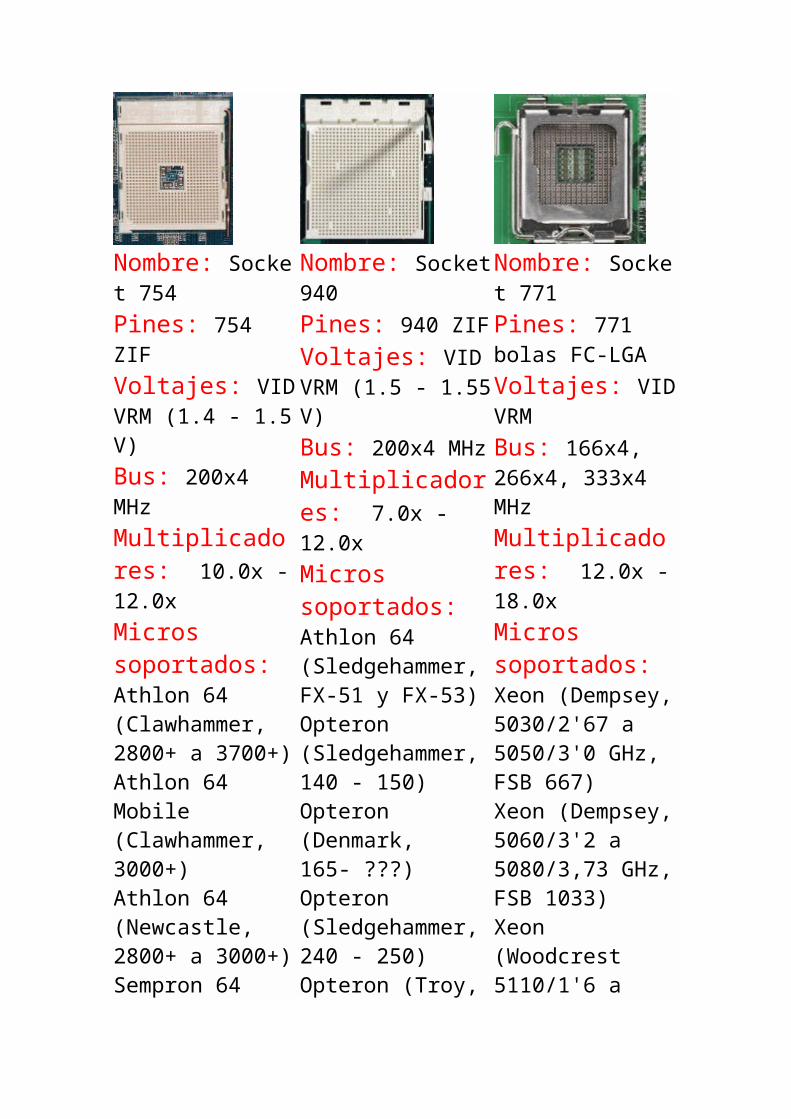
Nombre: Socket 754Pines: 754 ZIFVoltajes: VID VRM (1.4 - 1.5 V)Bus: 200x4 MHzMultiplicadores: 10.0x - 12.0xMicros soportados:Athlon 64 (Clawhammer, 2800+ a 3700+)Athlon 64 Mobile (Clawhammer, 3000+)Athlon 64 (Newcastle, 2800+ a 3000+)Sempron 64 (Paris, 2600+ a 3300+)Sempron 64 (Palermo, 2600+ a 3400+)
Nombre: Socket 940Pines: 940 ZIFVoltajes: VID VRM (1.5 - 1.55 V)Bus: 200x4 MHzMultiplicadores: 7.0x - 12.0xMicros soportados:Athlon 64 (Sledgehammer, FX-51 y FX-53)Opteron (Sledgehammer, 140 - 150)Opteron (Denmark, 165- ???)Opteron (Sledgehammer, 240 - 250)Opteron (Troy, 246 - 254)
Nombre: Socket 771Pines: 771 bolas FC-LGAVoltajes: VID VRM Bus: 166x4, 266x4, 333x4 MHzMultiplicadores: 12.0x - 18.0xMicros soportados:Xeon (Dempsey, 5030/2'67 a 5050/3'0 GHz, FSB 667)Xeon (Dempsey, 5060/3'2 a 5080/3,73 GHz, FSB 1033)Xeon (Woodcrest 5110/1'6 a 5120/1'866 GHz, FSB 1066)
Opteron (Italy, 265 - 285)Opteron (Sledgehammer, 840 - 850)Opteron (Athens, 850)Opteron (Egypt, 865 - 880)
Xeon (Woodcrest 5130/2'0 a 5160/3'0 GHz, FSB 1333)
Notas: el núcleo Woodcrest es doble (doble core)
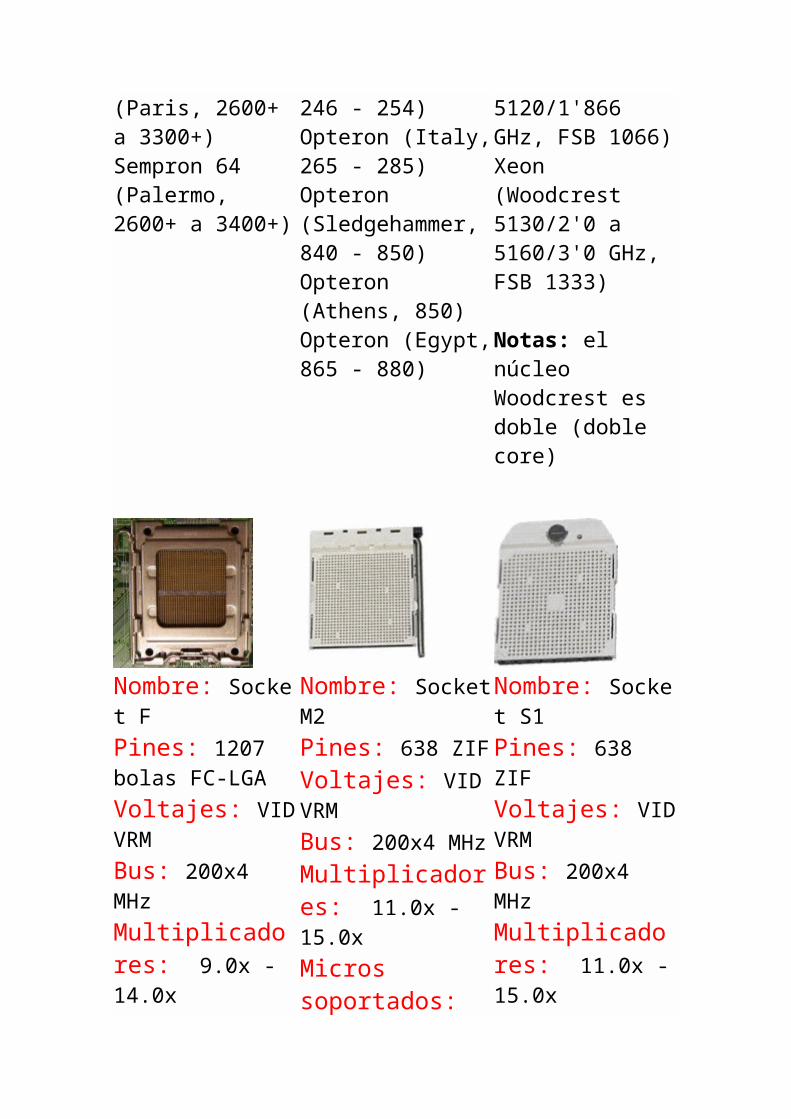
Nombre: Socket FPines: 1207 bolas FC-LGAVoltajes: VID VRM Bus: 200x4 MHzMultiplicadores: 9.0x - 14.0xMicros soportados:Opteron (Santa Rosa, 2210~22220 SE)Opteron (Santa Rosa, 8212~8220 SE)Opteron ??? (Deerhound)
Nombre: Socket M2Pines: 638 ZIFVoltajes: VID VRM Bus: 200x4 MHzMultiplicadores: 11.0x - 15.0xMicros soportados:Opteron 1xx
Nombre: Socket S1Pines: 638 ZIFVoltajes: VID VRM Bus: 200x4 MHzMultiplicadores: 11.0x - 15.0xMicros soportados:Athlon 64 Mobile
Opteron ??? (Shanghai)Opteron ??? (Greyhound)Opteron ??? (Zamora)Opteron ??? (Cadiz)
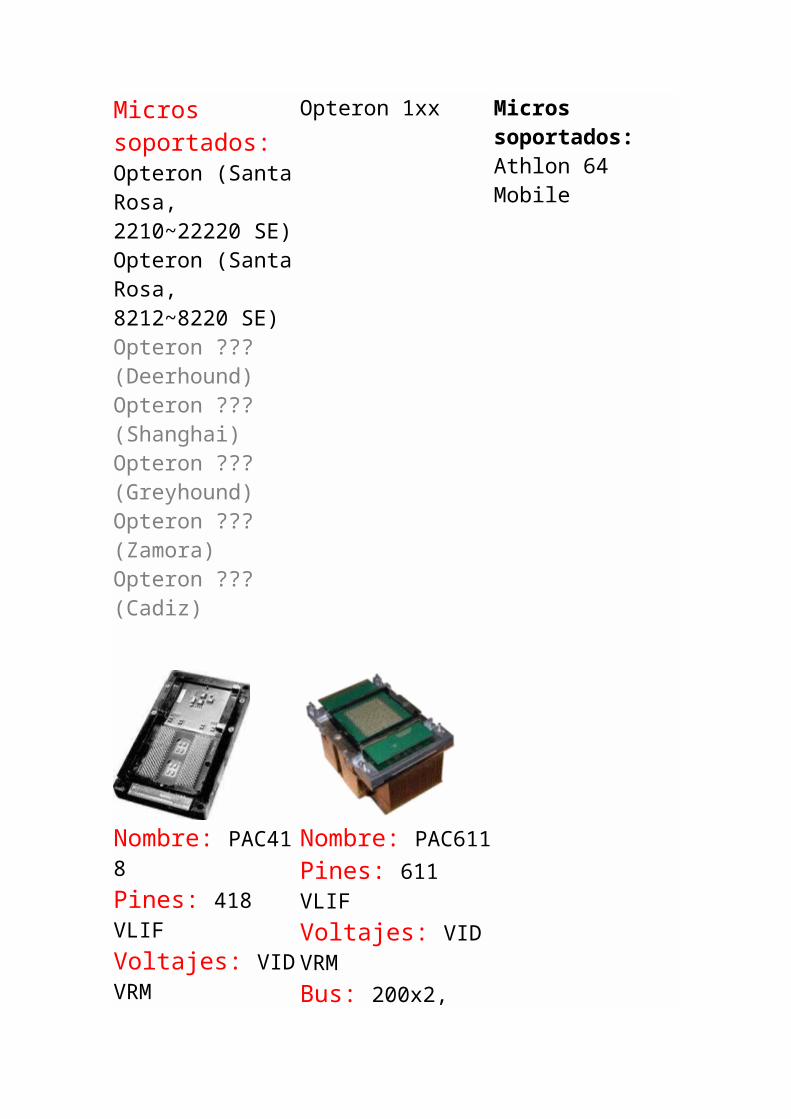
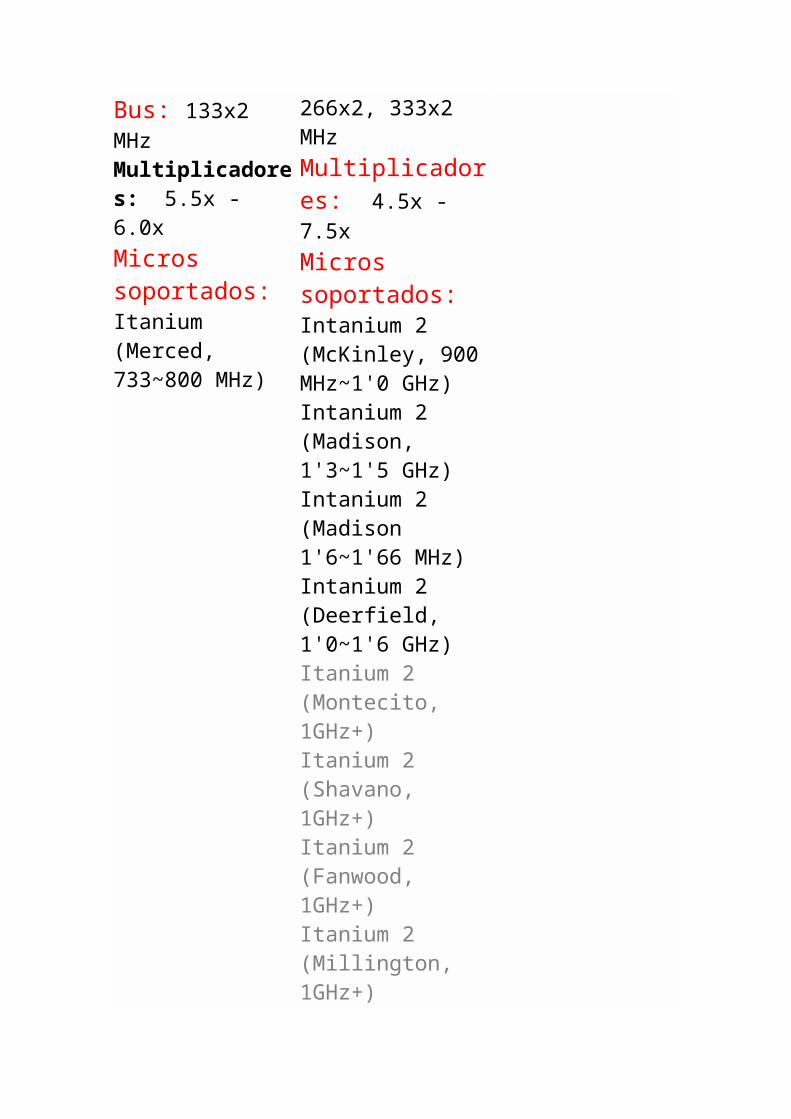
Nombre: PAC418Pines: 418 VLIFVoltajes: VID VRM Bus: 133x2 MHzMultiplicadores: 5.5x - 6.0xMicros soportados:Itanium (Merced, 733~800 MHz)
Nombre: PAC611Pines: 611 VLIFVoltajes: VID VRM Bus: 200x2, 266x2, 333x2 MHzMultiplicadores: 4.5x - 7.5xMicros soportados:Intanium 2 (McKinley, 900 MHz~1'0 GHz)Intanium 2 (Madison, 1'3~1'5 GHz)Intanium 2 (Madison
1'6~1'66 MHz)Intanium 2 (Deerfield, 1'0~1'6 GHz)Itanium 2 (Montecito, 1GHz+)Itanium 2 (Shavano, 1GHz+)Itanium 2 (Fanwood, 1GHz+)Itanium 2 (Millington, 1GHz+)Itanium 2 (Montvale, 1GHz+)
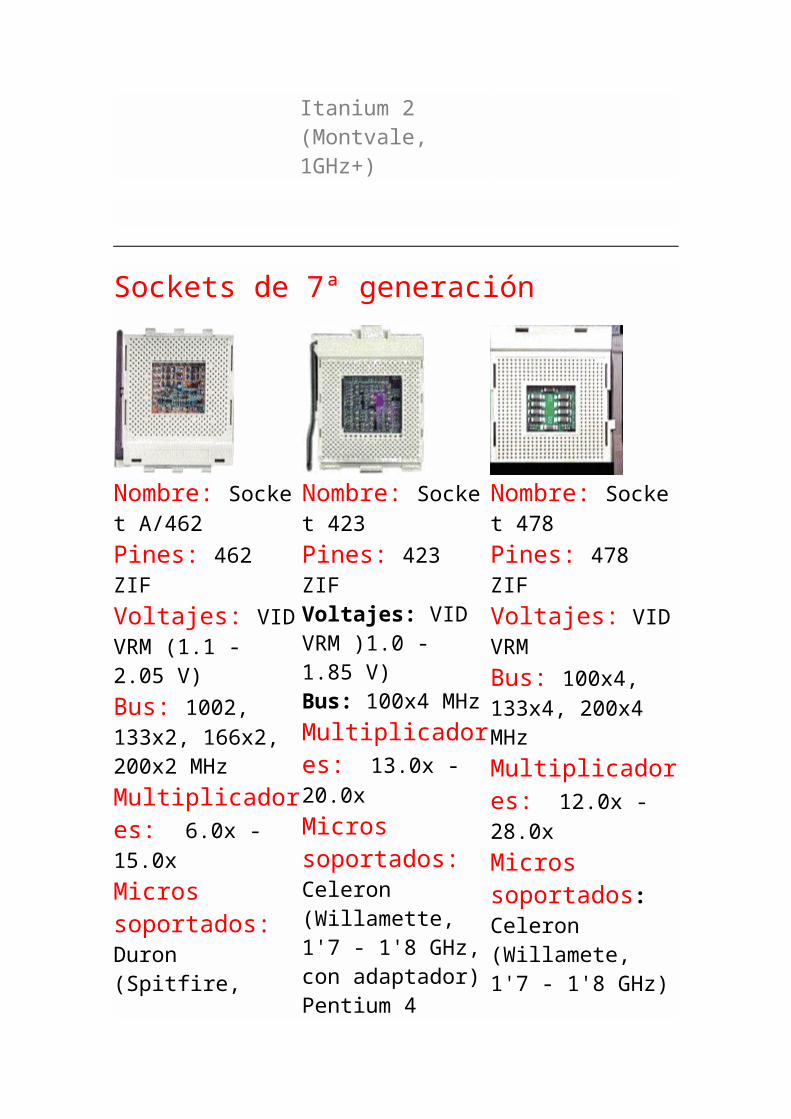
Sockets de 7ª generación
Nombre: Socket A/462Pines: 462 ZIFVoltajes: VID VRM (1.1 - 2.05 V)
Nombre: Socket 423Pines: 423 ZIFVoltajes: VID VRM )1.0 - 1.85 V)
Nombre: Socket 478Pines: 478 ZIFVoltajes: VID VRMBus: 100x4,
Bus: 1002, 133x2, 166x2, 200x2 MHzMultiplicadores: 6.0x - 15.0xMicros soportados:Duron (Spitfire, 600-950 MHz),Duron (Morgan, 1 - 1'3 GHz)Duron (Appaloosa, 1'33 GHz)Duron (Applebred, 1'4 - 1'8 GHz)Athlon (Thunderbird 650 MHz - 1'4 GHz)Atlon 4 Mobile (Palomino)Athlon XP (Palomino, 1500+ a 2100+)Athlon XP (Thoroughbred A, 2200+)Athlon XP (Thoroughbred B, 1600+ a 2800+)Athlon XP (Barton, 2500+ a 3200+)Athlon MP (Palomino, 1 GHz
Bus: 100x4 MHzMultiplicadores: 13.0x - 20.0xMicros soportados:Celeron (Willamette, 1'7 - 1'8 GHz, con adaptador)Pentium 4 (Willamette, 0'18 micras, 1,3 - 2 GHz)Pentium 4 (Northwood, 0'13 micras, 1,6A - 2,0A GHz, con adaptador)
Adaptadores soportados:New Wave NW 478Powerleap PL-P4/WPowerleap PL-P4/N
Notas: memoria RAMBUS
133x4, 200x4 MHzMultiplicadores: 12.0x - 28.0xMicros soportados:Celeron (Willamete, 1'7 - 1'8 GHz)Celeron (Northwood 1'6 - 2'8 GHz)Celeron D (Prescott 310/2'333 Ghz - 340/'2933 GHz)Penitum 4 (Willamette 1'4 - 2'0 GHz)Pentium 4 (Northwood 1'6A - 3'4C)Penitum 4 (Prescott, 2,26A - 3,4E GHz)Pentium 4 Extreme Edition (Gallatin, 3'2 - 3'4 GHz)Pentium M (Banias, 600 MHz - 1'7 GHz, con adaptador)Pentium M (Dothan, 600 MHz - 2'26 GHz, con adaptador)
a 2100+)Athlon MP (Thoroughbred, 2000+ a 2600+)Athlon MP (Barton, 2800+)1 GHz a 2100+)Sempron (Thoroughbred 2200+ a 2300+)Athlon Sempron (Thorton 2000+ a 2400+)Athlon Sempron (Barton)Geode NX (667, 100 y 1400 MHz)Notas: todos los micros mencionados son de AMD
Adaptadores soportados:Asus CT-479 (adaptador)
Notas: Similares en soporte de micros al Socket 423, pero visiblemente mucho más pequeño
Nombre: Socket 603/604Pines: 603/604 ZIFVoltajes: VID VRM (1.1 - 1.85 v)Micros soportados:Xeon (Foster, 1.4GHz~2.0GHz)Xeon LV (Prestonia, 1.6GHz~2.0GHz)Xeon (Prestonia,
Nombre: Socket 479Pines: 478 ZIFVoltajes: VID VRMBus: 100x4, 133x4 MHzMultiplicadores
1.8GHz~3.06GHz)Xeon (Gallatin, 1.5 GHz~3.0 GHz)Xeon (Nocona, 2.8 GHz~3.6 GHz) Xeon (Irwindale, 2.8 GHz~3.8 GHz) Xeon DP (Paxville DP, 2.8 GHz~???)Xeon MP (Foster MP, 1.4GHz - 1.6GHz)Xeon MP (Gallatin, 1.5GHz~3.0 GHz)Xeon MP (Potomac, 2.83 GHZ~???)Xeon 7020~??? (Paxville MP)Xeon 7110N~??? (Tulsa)Xeon (Sossaman)
Notas: El socket 604 es la versión para Hyperthreading del 603
: 12x - 28xMicros soportados:Celeron M (Dothan, 380/1'6 a 390/1'7 GHz)Celeron M (Yonah, 410/1'466 a 430/1'733 GHz)Pentium M (Dothan 735/1'7 a 770/2'133 GHz)Core Solo (Yonah, 1'833 GHz)Core Duo (Yonah, T2300/1,667 a T2600/2'166 GHz)Core 2 Duo (Merom, T550/1'667 a T7600/2'333 GHz)
Sockets de 6ª generación
Nombre: Socket 8Pines: 387 LIF y
Nombre: Slot 1Pines: 242 SECC, SECC2 y
Nombre: Slot 2Pines: 330 SECC
387 ZIFVoltajes: VID VRM (2.1 - 3.5 V)Bus: 60, 66, 75 MHzMultiplicadores: 2.0x - 8.0xMicros soportados:Pentium Pro (150-200 MHz)Pentium II OverDrive (300-333 MHz)
Adaptadores soportados:Evergreen AcceleraPCIPowerLeap PL-Pro/IIPowerLeap PL-Renaissance/ATPowerLeap PL-Renaissance/PCI
Nota: El pentium Pro sentó la bases de los micros actuales.
SEPPVoltajes: VID VRM (1.3 - 3.3 V)Bus: 60, 66, 68, 75, 83, 100, 102, 112, 124, 133 MHzMultiplicadores: 3.5x - 11.5xMicros soportados:Celeron (Covington, 266-300 MHZ)Celeron (Mendocino, 300A, 433 MHz)Celeron (Mendocino PGA, 300A, 533 MHz, con adaptador)Celeron (Coppermine-128 (500A MHz - 1'1 GHz, con adaptador)Pentium II (Klamath, 233-300 MHZ)Pentium II (Deschutes, 266-450 MHZ)Pentium III (Katmai, 450-600B MHZ)Pentium III
Voltajes: VID VRM (1.3 - 3.3 V)Bus: 100, 133 MHzMultiplicadores: 4.0x - 7.0xMicros soportados:Pentium II Xeon (Drake, 400-450 MHz)Pentium III Xeon (Tanner, 500-550 MHZ)Pentium III Xeon (Cascades, 600 MHz - 1 GHZ)
(Coopermine, 533EB MHz - 1'13 GHZ)
Adaptadores soportados:Evergreen PerformaNew Wave NW Slot-TPowerLeap PL/PIIPowerLeap PL-iP3PowerLeap PL-iP3/TVarios adaptadores "Slotket"
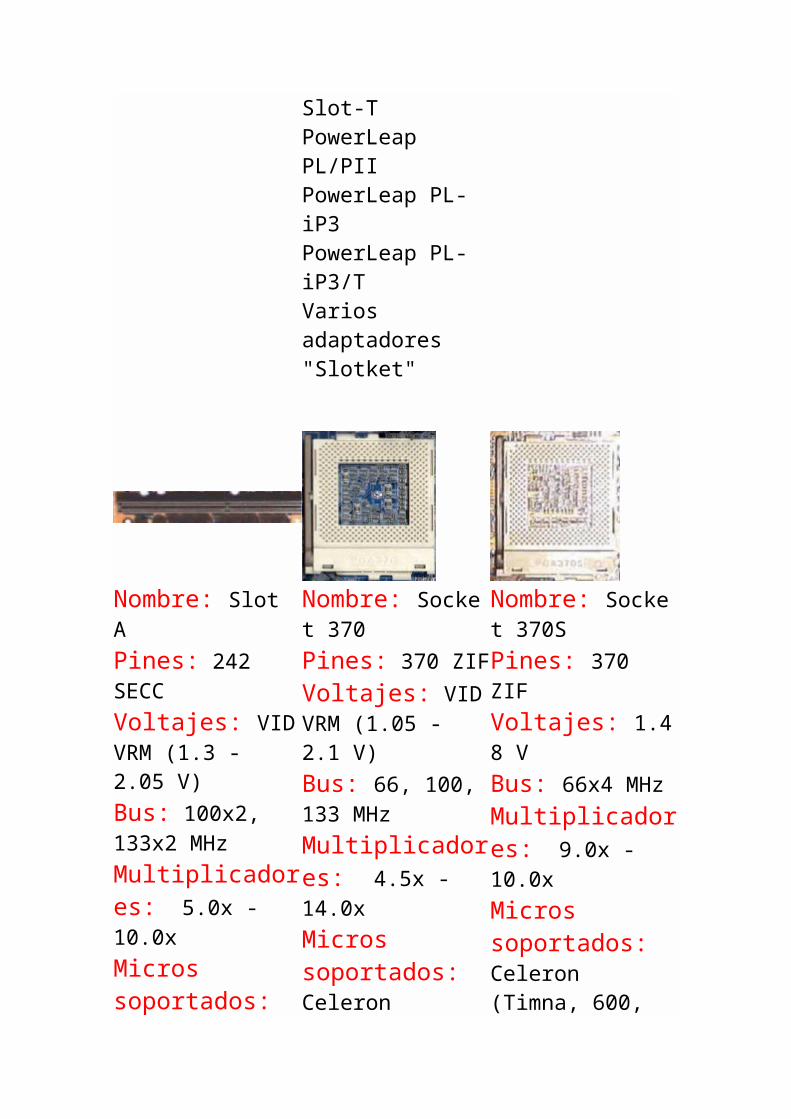
Nombre: Slot APines: 242 SECCVoltajes: VID VRM (1.3 - 2.05 V)Bus: 100x2, 133x2 MHzMultiplicadores: 5.0x - 10.0xMicros soportados:
Nombre: Socket 370Pines: 370 ZIFVoltajes: VID VRM (1.05 - 2.1 V)Bus: 66, 100, 133 MHzMultiplicadores: 4.5x - 14.0xMicros
Nombre: Socket 370SPines: 370 ZIFVoltajes: 1.48 VBus: 66x4 MHzMultiplicadores: 9.0x - 10.0xMicros soportados:Celeron (Timna, 600, 667 MHz)
Athlon (K7, 500-700 MHZ)Athlon (K75, 550 MHz - 1 GHZ)Athlon (Thunderbird, 650 MHz- 1 GHZ)Notas: Diseñado a partir del EV6 del DEC Alpha
soportados:Celeron (Mendocino, 300A - 533 MHz)Celeron (Coppermine (500A MHz - 1'1 GHz)Celeron (Tualatin, 900A MHz - 1'4 GHZ)Pentium III (Coopermine, 500E MHz - 1'13 GHZ)Pentium III (Coopermine-T, 866 MHz - 1'13 GHZ)Pentium III (Tualatin, 1'0B - 1'33 GHZ)Pentium III-S (Tualatin, 700 - 1'4 GHZ)Cyrix III (Samuel, 533, 667 MHz)Via C3 (Samuel 2, 733A - 800A MHz)Via C3 (Ezra, 800A - 866A MhZ)Via C3 (Ezra-T 800T MHZ - 1'0T GHz)Via C3
(Nehemiah, 1 - 1'4 GHz)Via C3 (Esther)
Adaptadores soportados:New Wave NW 370TPowerLeap PL Neo-S370
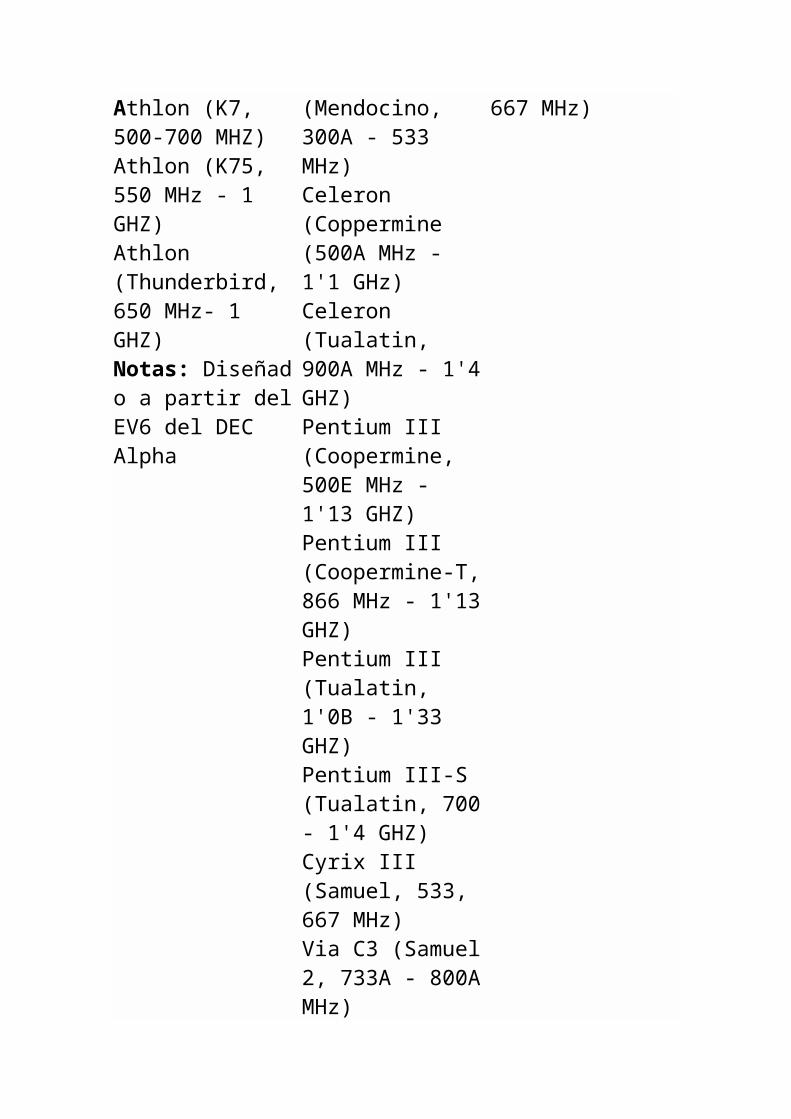
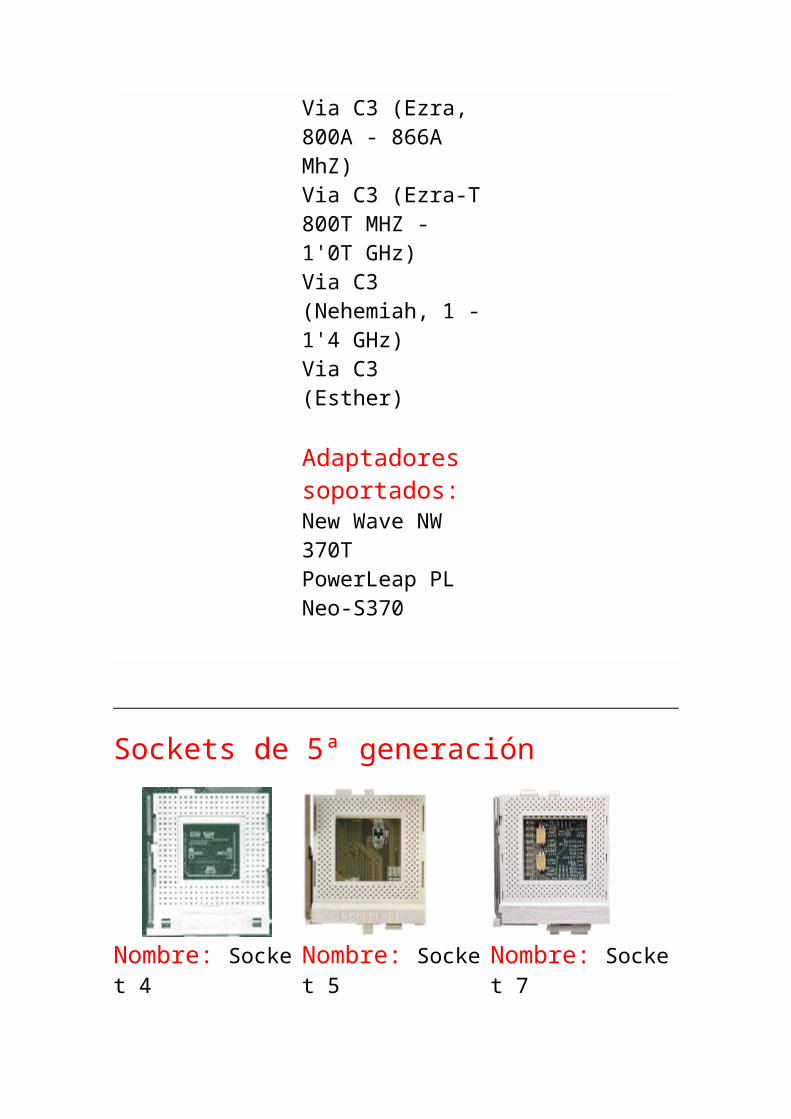
Sockets de 5ª generación
Nombre: Socket 4Pines: 273 LIF y 273 ZIFVoltajes: 5 VBus: 60, 66 MHzMultiplicadores: 1xMicros soportados:Pentium (60~66 MHz)Pentium OverDrive
Nombre: Socket 5Pines: 296 LIF, 296 ZIF, 320 LIF y 320 ZIFVoltajes: STD, VR, VREBus: 50, 60, 66 MHzMultiplicadores: 1'5x, 2xMicros soportados:Pentium P45C
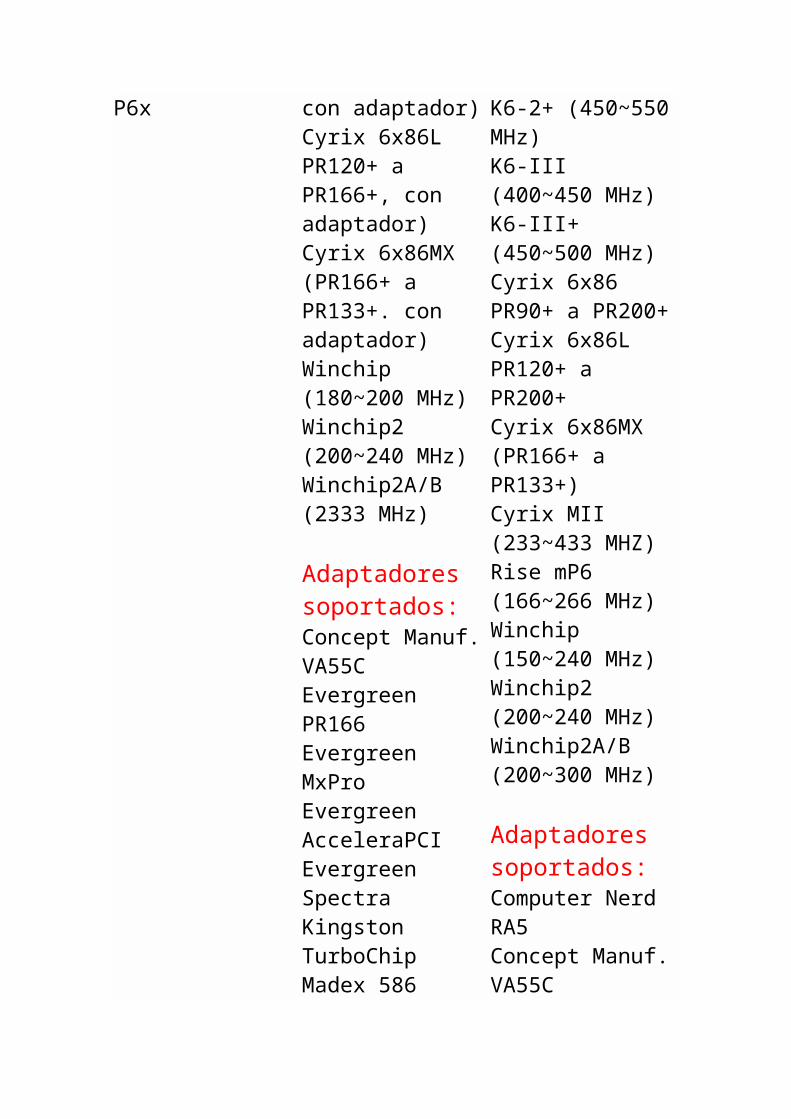
Nombre: Socket 7Pines: 296 LIF y 321 ZIFVoltajes: Split, STD, VR, VRE, VRT (2.5 - 3.3 V)Bus: 40, 50, 55, 60, 62, 66, 68, 75, 83, 90, 95, 100, 102, 112, 124Multiplicadores: 1.5x - 6.0x
(120~133 Mhz)
Adaptadores soportados:Computer Nerd RA3Evergreen AcceleraPCIPowerLeap PL/54CPowerLeap PL/54CMMXPowerLeap PL-Renaissance/ATPowerLeap PL-Renaissance/PCITrinity Works P6x
(75~133 MHz)Pentium MMX P55C (166~266 MHz, con adaptadorPentium OverDrive (125~166 MHz)Pentium MMX OverDrive (125~180 MHz)AMD K5 (PR75 a P133)AMD K6 (166~300 Mhz, con adaptador)AMD K6-2 (266~400 MHz, con adaptador)Cyrix 6x86L PR120+ a PR166+, con adaptador)Cyrix 6x86MX (PR166+ a PR133+. con adaptador)Winchip (180~200 MHz)Winchip2 (200~240 MHz)Winchip2A/B (2333 MHz)
Adaptadores soportados:Concept Manuf.
Micros soportados:Pentium P45C (75~200 MHz)Pentium MMX P55C (166~266 MHz)Pentium OverDrive (P125~166 MHz)AMD K5 (75~200 MHz)K6 (166~300 MHz)K6-2 (266~570 MHz)K6-2+ (450~550 MHz)K6-III (400~450 MHz)K6-III+ (450~500 MHz)Cyrix 6x86 PR90+ a PR200+Cyrix 6x86L PR120+ a PR200+Cyrix 6x86MX (PR166+ a PR133+)Cyrix MII (233~433 MHZ)Rise mP6 (166~266 MHz)Winchip (150~240 MHz)Winchip2
VA55CEvergreen PR166Evergreen MxProEvergreen AcceleraPCIEvergreen SpectraKingston TurboChipMadex 586PNY QuickChip 200PNY QuickChip-3D 200PowerLeap PL/OD54CPowerLeap PL-ProMMXPowerLeap PL/K6-IIIPowerLeap PL-Renaissance/ATPowerLeap PL-Renaissance/PCITrinity Works P7x
(200~240 MHz)Winchip2A/B (200~300 MHz)
Adaptadores soportados:Computer Nerd RA5Concept Manuf. VA55CEvergreen PR166Evergreen MxProEvergreen AcceleraPCIEvergreen SpectraKingston TurboChipMadex 586PNY QuickChip-3D 200PowerLeap PL/OD54CPowerLeap PL/ProMMXPowerLeap PL/K6-IIIPowerLeap PL-Renaissance/ATPowerLeap PL-Renaissance/PCINotas: A las versiones superiores a 100 MHz de FSB se les llamó "Socket Super 7"
Nombre: Socket NextGenPines: 463 ZIFVoltajes: 4VBus: 35, 37.5, 42, 46.5, 51, 55.5 MHzMultiplicadores: 2xMicros soportados:NexGen Nx586 (75~120 MHz)
Sockets de 4ª generación
-
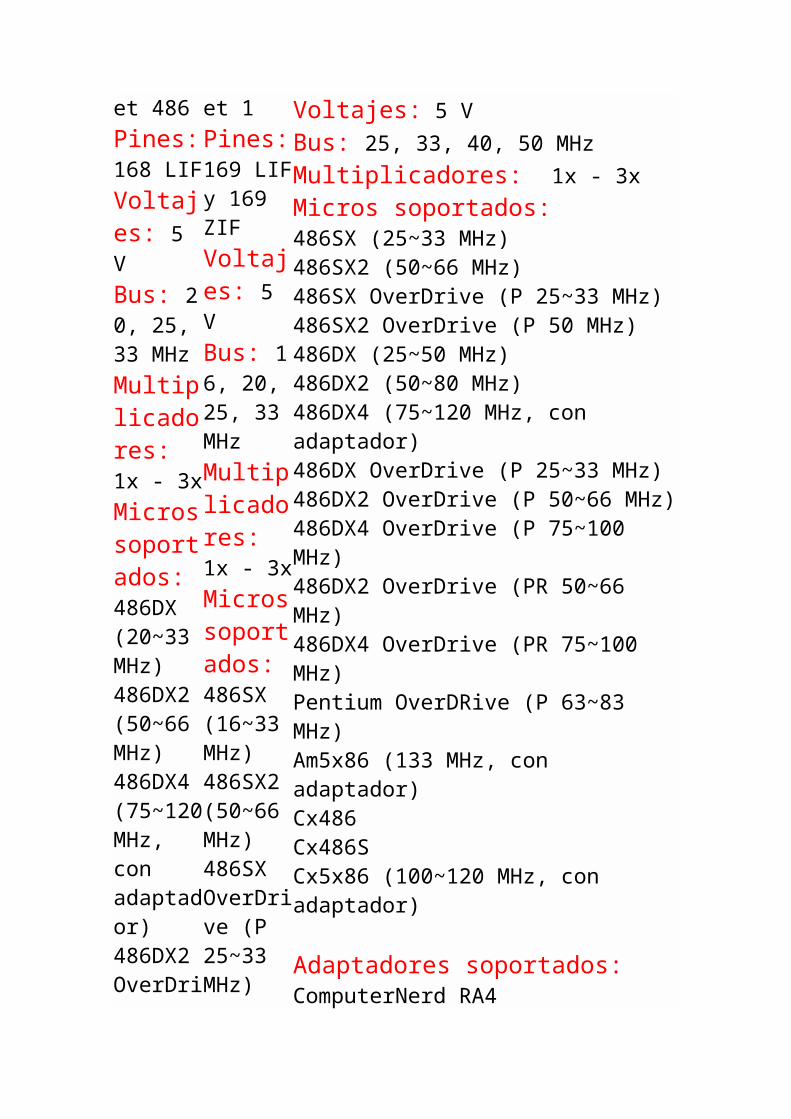
Nombre: Socket 486Pines: 168 LIFVoltaje
Nombre: Socket 1Pines: 169 LIF y 169
Nombre: Socket 2Pines: 238 LIF y 238 ZIFVoltajes: 5 VBus: 25, 33, 40, 50 MHzMultiplicadores: 1x - 3xMicros soportados:
s: 5 VBus: 20, 25, 33 MHzMultiplicadores: 1x - 3xMicros soportados:486DX (20~33 MHz)486DX2 (50~66 MHz)486DX4 (75~120 MHz, con adaptador)486DX2 OverDrive (PR 50~66)486DX4 OverDrive (PR 75~100)Am5x86 133, con adaptad
ZIFVoltajes: 5 VBus: 16, 20, 25, 33 MHzMultiplicadores: 1x - 3xMicros soportados:486SX (16~33 MHz)486SX2 (50~66 MHz)486SX OverDrive (P 25~33 MHz)486SX2 OverDrive (P 50 MHz)486DX (20~33 MHz)486DX2 (50~66 MHz)486DX4 (75~12
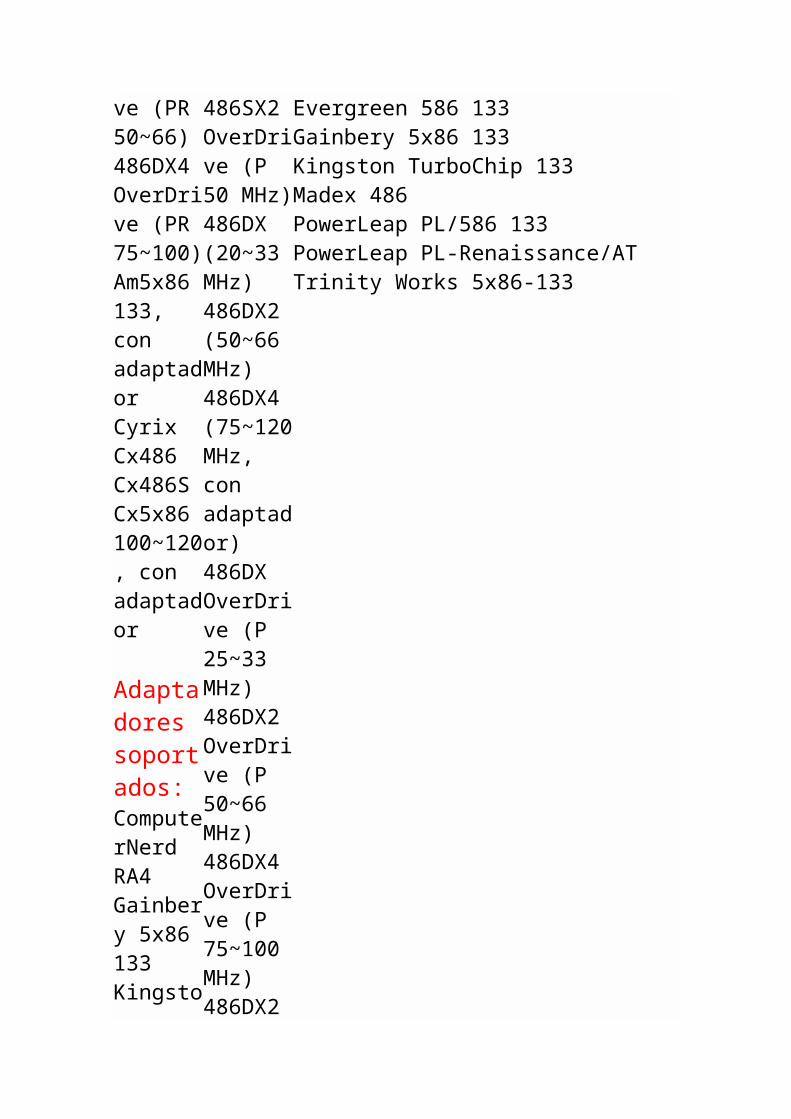
486SX (25~33 MHz)486SX2 (50~66 MHz)486SX OverDrive (P 25~33 MHz)486SX2 OverDrive (P 50 MHz)486DX (25~50 MHz)486DX2 (50~80 MHz)486DX4 (75~120 MHz, con adaptador)486DX OverDrive (P 25~33 MHz)486DX2 OverDrive (P 50~66 MHz)486DX4 OverDrive (P 75~100 MHz)486DX2 OverDrive (PR 50~66 MHz)486DX4 OverDrive (PR 75~100 MHz)Pentium OverDRive (P 63~83 MHz)Am5x86 (133 MHz, con adaptador)Cx486Cx486SCx5x86 (100~120 MHz, con adaptador)
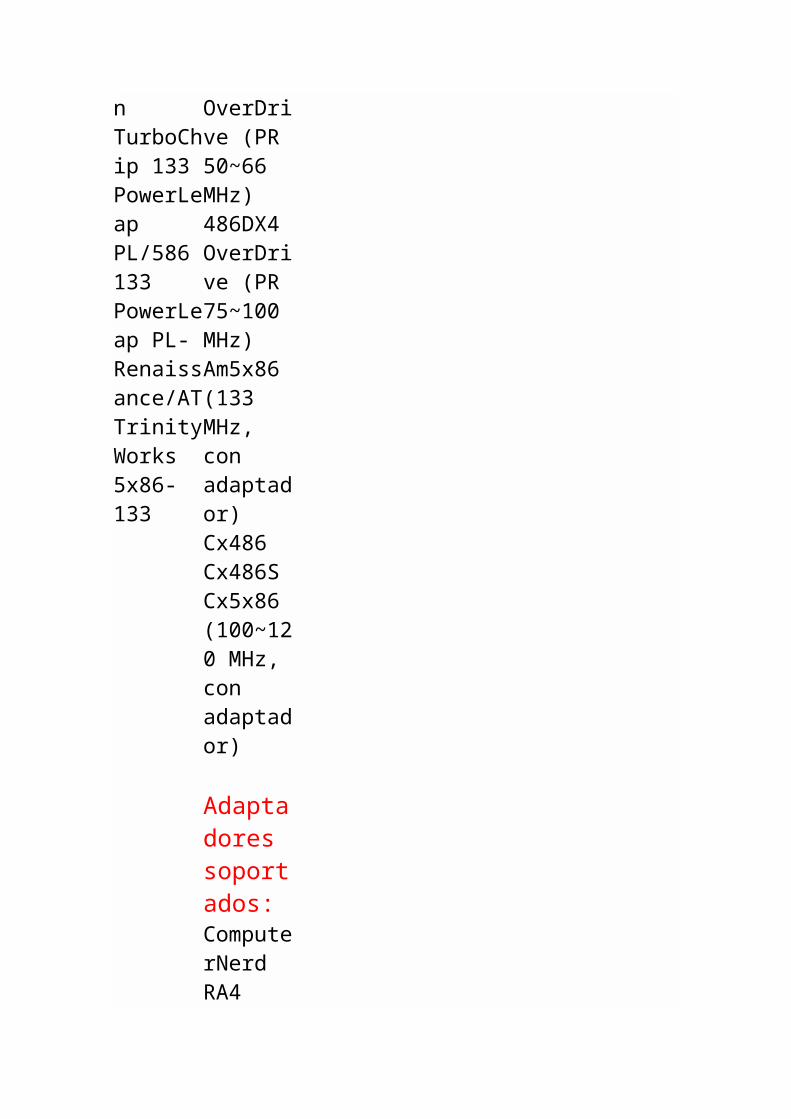
Adaptadores soportados:ComputerNerd RA4Evergreen 586 133Gainbery 5x86 133Kingston TurboChip 133Madex 486PowerLeap PL/586 133PowerLeap PL-Renaissance/ATTrinity Works 5x86-133
orCyrix Cx486Cx486SCx5x86 100~120, con adaptador
Adaptadores soportados:ComputerNerd RA4Gainbery 5x86 133Kingston TurboChip 133PowerLeap PL/586 133PowerLeap PL-Renaissance/ATTrinity Works 5x86-133
0 MHz, con adaptador)486DX OverDrive (P 25~33 MHz)486DX2 OverDrive (P 50~66 MHz)486DX4 OverDrive (P 75~100 MHz)486DX2 OverDrive (PR 50~66 MHz)486DX4 OverDrive (PR 75~100 MHz)Am5x86 (133 MHz, con adaptador)Cx486Cx486S

Cx5x86 (100~120 MHz, con adaptador)
Adaptadores soportados:ComputerNerd RA4Evergreen 586 133Gainbery 5x86 133Kingston TurboChip 133Madex 486PowerLeap PL/586 133PowerLeap PL-Renaissance/ATTrinity Works 5x86-
133
-
Nombre: Socket 3Pines: 237 LIF y 237 ZIFVoltajes: 3.3 / 5 VBus: 25, 33, 40, 50 MHzMultiplicadores: 1x - 3xMicros soportados:486SX (25~33 MHz)486SX2 (50~66 MHz)486SX OverDrive (P
Nombre: Socket 6Pines: 235 ZIFVoltajes: 3.3 / 3.45 VMicros soportados: 486DX4 75-120 MHzNotas: No disponible comercialmente
25~33 MHz)486SX2 OverDrive (P 50 MHz)486DX (25~50 MHz)486DX2 (50~80 MHz)486DX4 (75~120 MHz)486DX OverDrive (P 25~33 MHz)486DX2 OverDrive (P 50~66 MHz)486DX4 OverDrive (P 75~100 MHz)486DX2 OverDrive (PR 50~66 MHz)486DX4 OverDri
ve (PR 75~100 MHz)Pentium OverDRive (P 63~83 MHz)Am5x86 (133 MHz)Cx486Cx486SCx5x86 (100~120 MHz)
Adaptadores soportados:ComputerNerd RA4Evergreen 586 133Gainbery 5x86 133Kingston TurboChip 133Madex 486PowerL
eap PL/586 133PowerLeap PL-Renaissance/ATPowerLeap PL-Renaissance/PCITrinity Works 5x86-133
Siglas:
LIF: Low Insertion Force (sin palanca) PGA: Pin grid array SECC: Single Edge Contract Cartridge SEPP: Single Edge Processor Package SPGA: Staggered Pin Grid Array VID VRM: Voltage ID Voltage Regulator Module
(el voltaje de la CPU se puede variar en la BIOS) VLIF: Very Low Insertion Force ZIF: Zero Insertion Force (con palanca)
Clases de fuentes de poder
Hay 2 tipos de fuentes utilizados en las computadoras, la primera liga es la más antigua y la segunda la más reciente:
1. Fuente de poder AT.
2. Fuente de poder ATX.
AT
AT son las siglas de ("Advanced Technology") ó tecnología avanzada, que se refiere a un estándar de dispositivos introducidos al mercado a inicios de los años 80´s que reemplazo a una tecnología denominada XT ("eXtended Technology") o tecnología extendida.
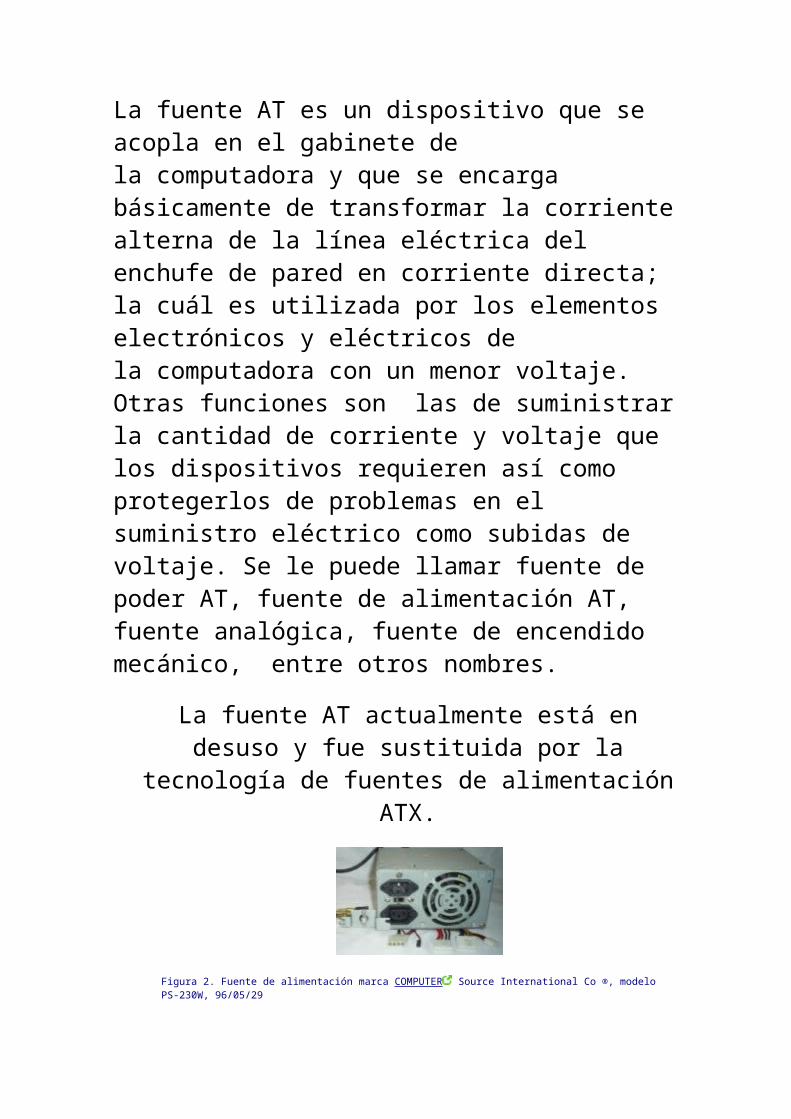
La fuente AT es un dispositivo que se acopla en el gabinete de la computadora y que se encarga básicamente de transformar la corriente alterna de la línea eléctrica del enchufe de pared en corriente directa; la cuál es utilizada por los elementos electrónicos y eléctricos de la computadora con un menor voltaje. Otras funciones son las de suministrar la cantidad de corriente y voltaje que los dispositivos requieren así como protegerlos de problemas en el suministro eléctrico como subidas de voltaje. Se le puede llamar fuente de poder AT, fuente de alimentación AT, fuente analógica, fuente de encendido mecánico, entre otros nombres.
La fuente AT actualmente está en desuso y fue sustituida por la tecnología de fuentes
de alimentación ATX.
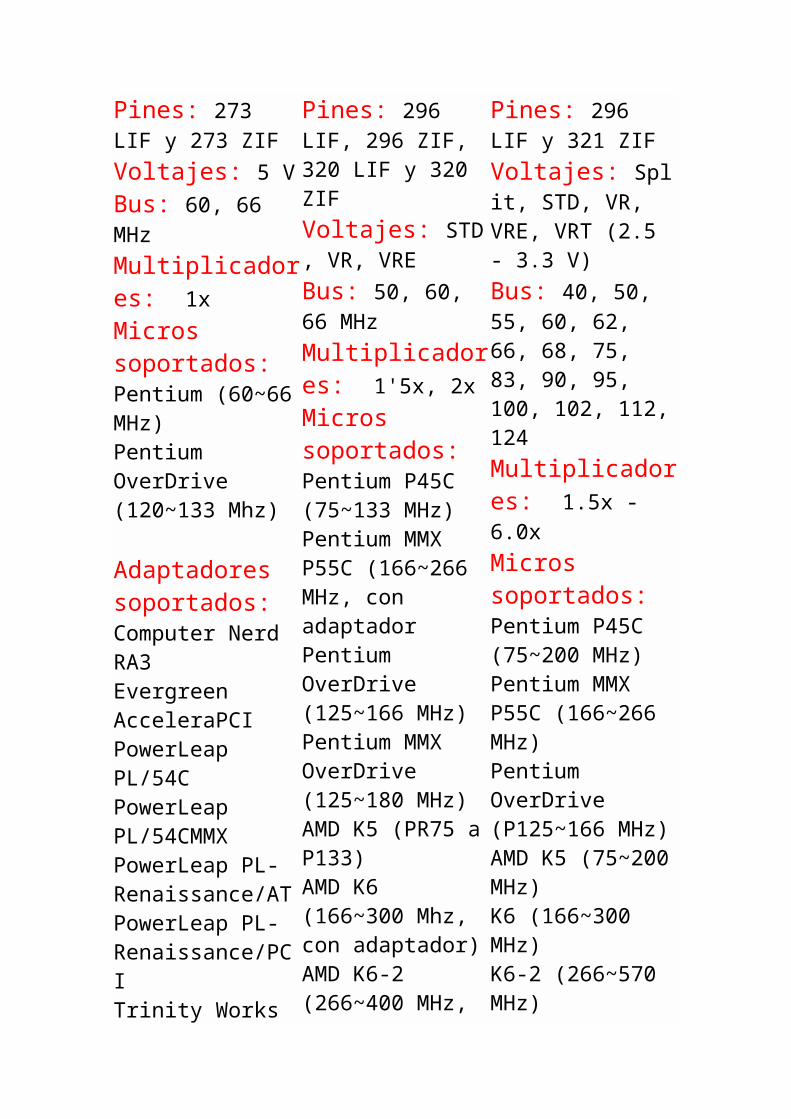
Figura 2. Fuente de alimentación marca COMPUTER Source International Co ®, modelo PS-230W, 96/05/29
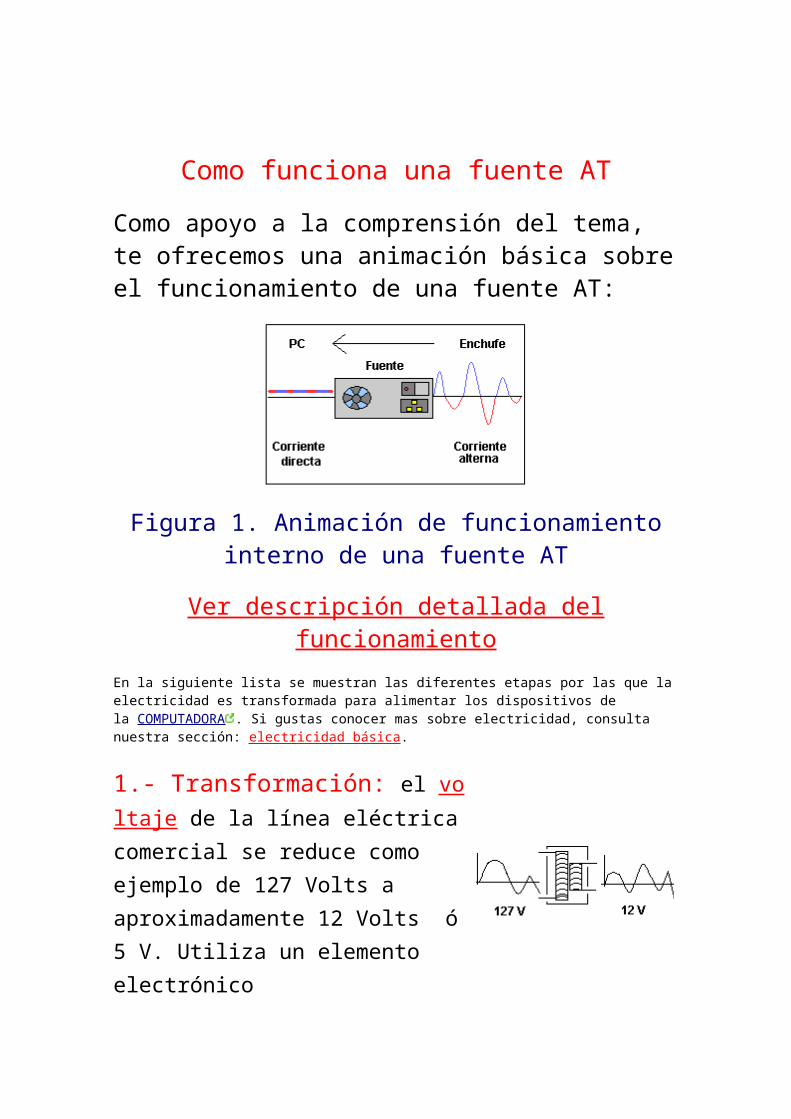
Como funciona una fuente AT
Como apoyo a la comprensión del tema, te ofrecemos una animación básica sobre el funcionamiento de una fuente AT:
Figura 1. Animación de funcionamiento interno de una fuente AT
Ver descripción detallada del funcionamiento
En la siguiente lista se muestran las diferentes etapas por las que la electricidad es transformada para alimentar los dispositivos de la COMPUTADORA . Si gustas conocer mas sobre electricidad, consulta nuestra sección: electricidad básica.
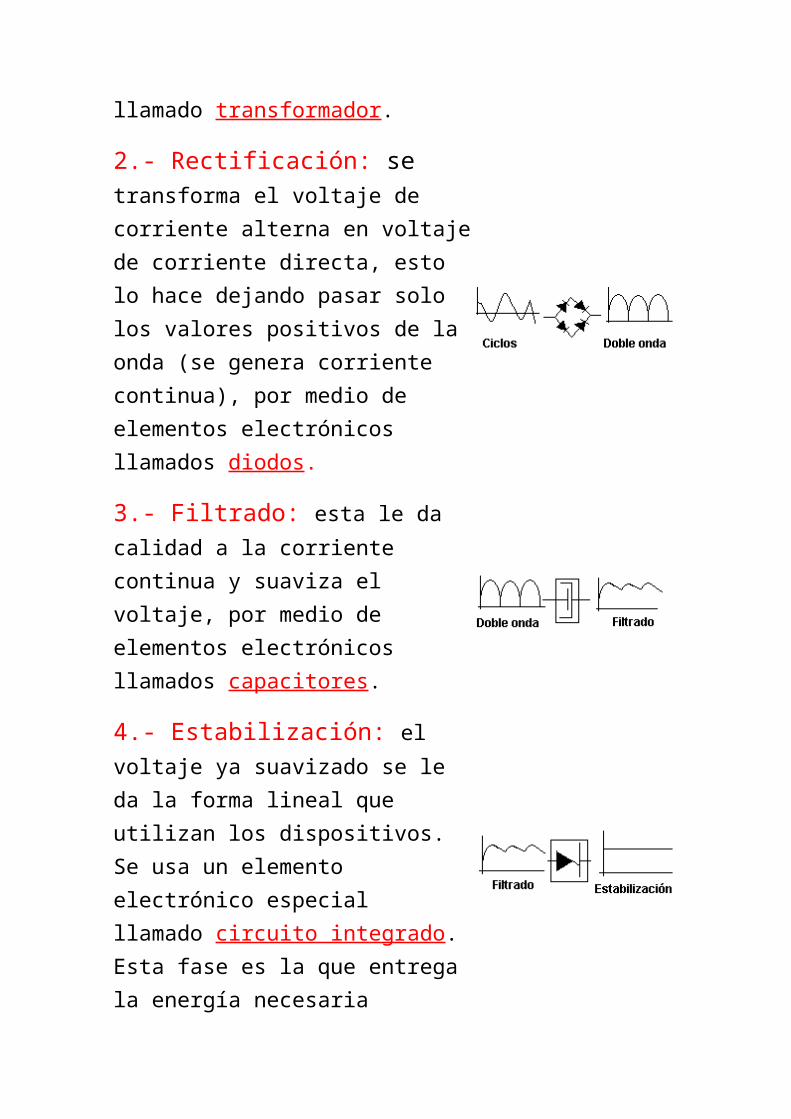
1.- Transformación: el voltaje de la línea eléctrica comercial se reduce como ejemplo de 127 Volts a aproximadamente 12 Volts ó 5 V. Utiliza un elemento electrónico
llamado transformador.
2.- Rectificación: se transforma el voltaje de corriente alterna en voltaje de corriente directa, esto lo hace dejando pasar solo los valores positivos de la onda (se genera corriente continua), por medio de elementos electrónicos llamados diodos.
3.- Filtrado: esta le da calidad a la corriente continua y suaviza el voltaje, por medio de elementos electrónicos llamados capacitores.
4.- Estabilización: el voltaje ya suavizado se le da la forma lineal que utilizan los dispositivos. Se usa un elemento electrónico especial llamado circuito integrado. Esta fase es la que entrega la energía necesaria la computadora.
Características generales de la fuente AT
Para su encendido y apagado, cuenta con un interruptor mecánico.
Algunos modelos integraban un conector de tres terminales para alimentar

adicionalmente al monitor CRT desde la misma fuente.
Este tipo de fuentes se integran desde equipos tan antiguos con microprocesador Intel® 8026 hasta equipos con microprocesador Intel® Pentium MMX.
Es una fuente ahorradora de electricidad, ya que no se queda en modo "Stand by" ó en estado de espera; esto porque al oprimir el interruptor se corta totalmente el suministro.
Es una fuente segura, ya que al oprimir el botón de encendido se interrumpe la electricidad dentro de los circuitos, evitando problemas de cortos al manipular su interior.
Aunque si el usuario manipula directamente el interruptor para realizar alguna modificación, corre el riesgo de choque eléctrico, ya que esa parte trabaja directamente con la electricidad de la red eléctrica doméstica.
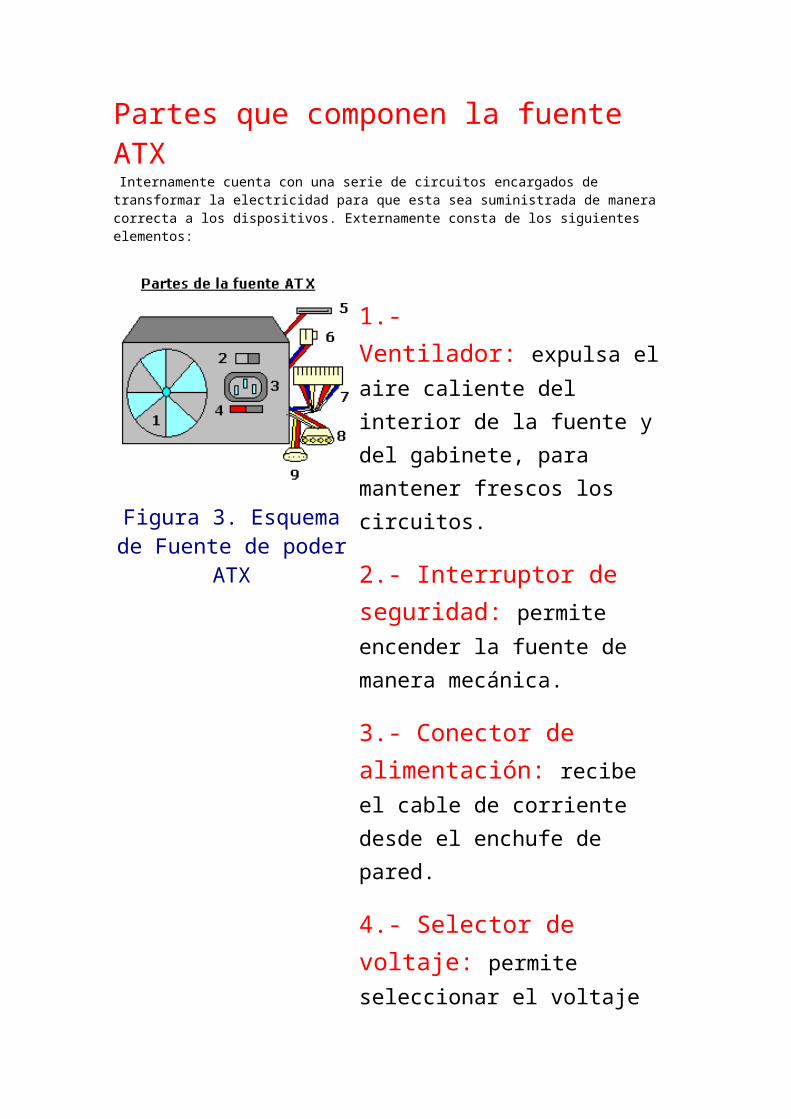
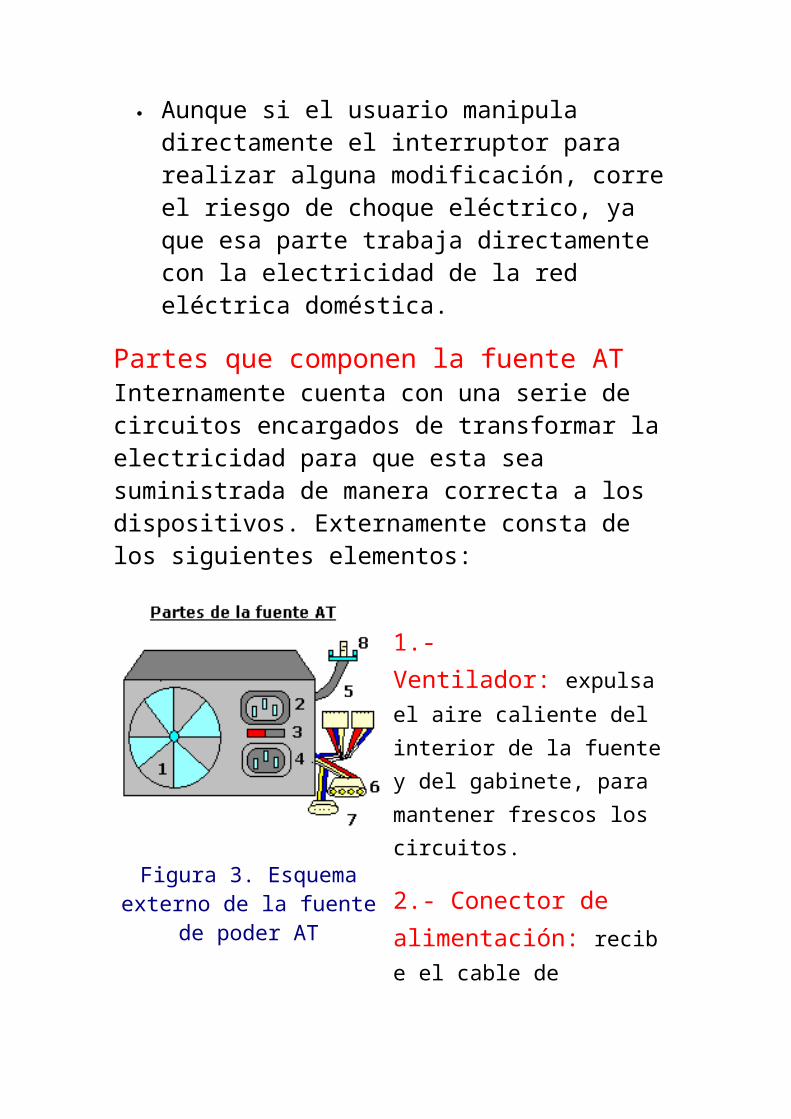
Partes que componen la fuente ATInternamente cuenta con una serie de circuitos encargados de transformar la electricidad para que esta sea suministrada de manera correcta a los dispositivos. Externamente consta de los siguientes elementos:

Figura 3. Esquema externo de la fuente de
poder AT
1.- Ventilador: expulsa el aire caliente del interior de la fuente y del gabinete, para mantener frescos los circuitos.
2.- Conector de alimentación: recibe el cable de corriente desde el enchufe de pared.
3.- Selector de voltaje: permite seleccionar el voltaje de 127V ó 240V.
4.- Conector de suministro a otros dispositivos: permite alimentar cierto tipo de monitores CRT.
5.- Conector AT: alimenta de electricidad a la tarjeta principal.
6.- Conector de 4 terminales MOLEX: utilizado para alimentar los discos
duros y las unidades ópticas.
7.- Conector de 4 terminales para BERG: alimenta las disqueteras.
8.- Interruptor manual: permite encender la fuente de manera mecánica.
Partes y funciones externas de la fuente de
poder AT.
Conectores de la fuente AT
Para alimentarse, tiene un conector de 3 contactos, este a su vez recibe alimentación desde la red eléctrica comercial.
Figura 4. Conector macho integrado de tres terminales para alimentar la fuente AT.
Figura 5. Esquema del
conector macho.
1.- Fase (127 Volts)
2.-Tierra Física.
3.- Neutro.
Terminales del
conector para
alimentar la fuente
AT.
Figura 6. Conector hembra del cable con tres terminales hacia la clavija de 3 patas.
Figura 7. Clavija del cable para conectar al enchufe de pared de 3
terminales.
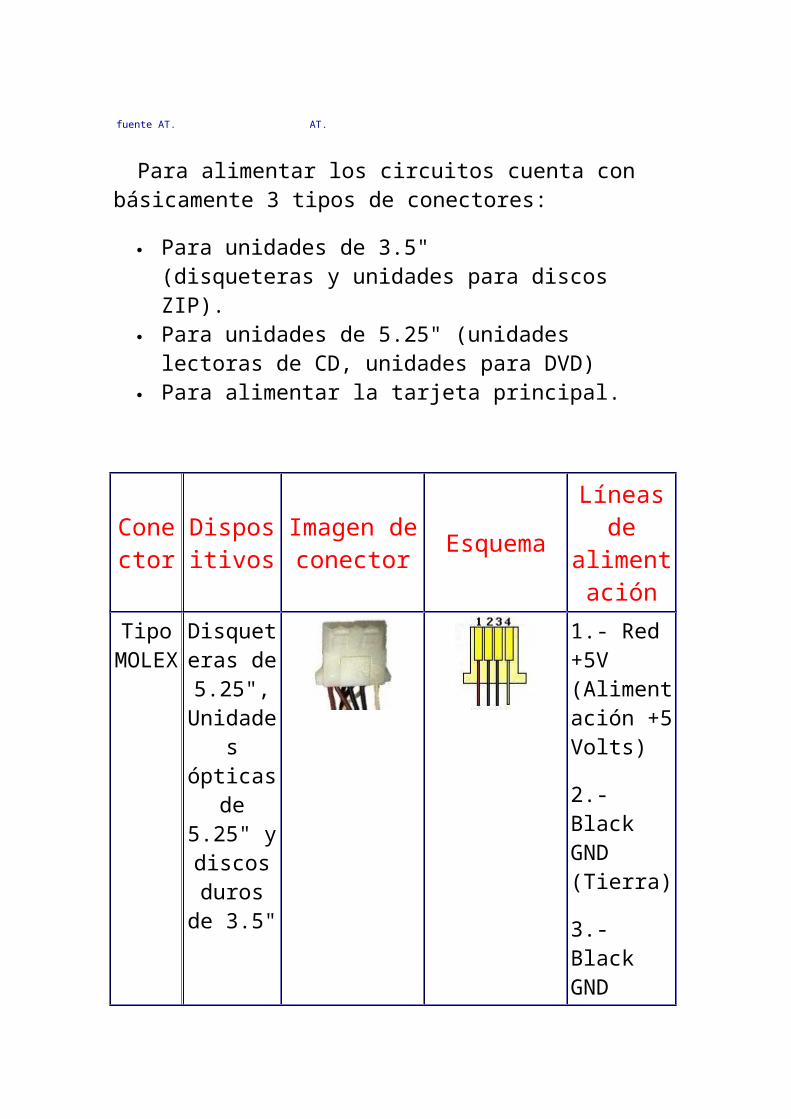
Para alimentar los circuitos cuenta con básicamente 3 tipos de conectores:
Para unidades de 3.5" (disqueteras y unidades para discos ZIP).
Para unidades de 5.25" (unidades lectoras de CD, unidades para DVD)
Para alimentar la tarjeta principal.
Conector
Dispositivos
Imagen de conector
Esquema
Líneas de
alimentación
Tipo MOLE
X
Disqueteras de 5.25",
Unidades
ópticas de 5.25" y discos duros
de 3.5"
1.- Red +5V (Alimentación +5 Volts)
2.- Black GND (Tierra)
3.- Black GND (Tierra)
4.- Yellow +12V (Alimentación + 12Volts)
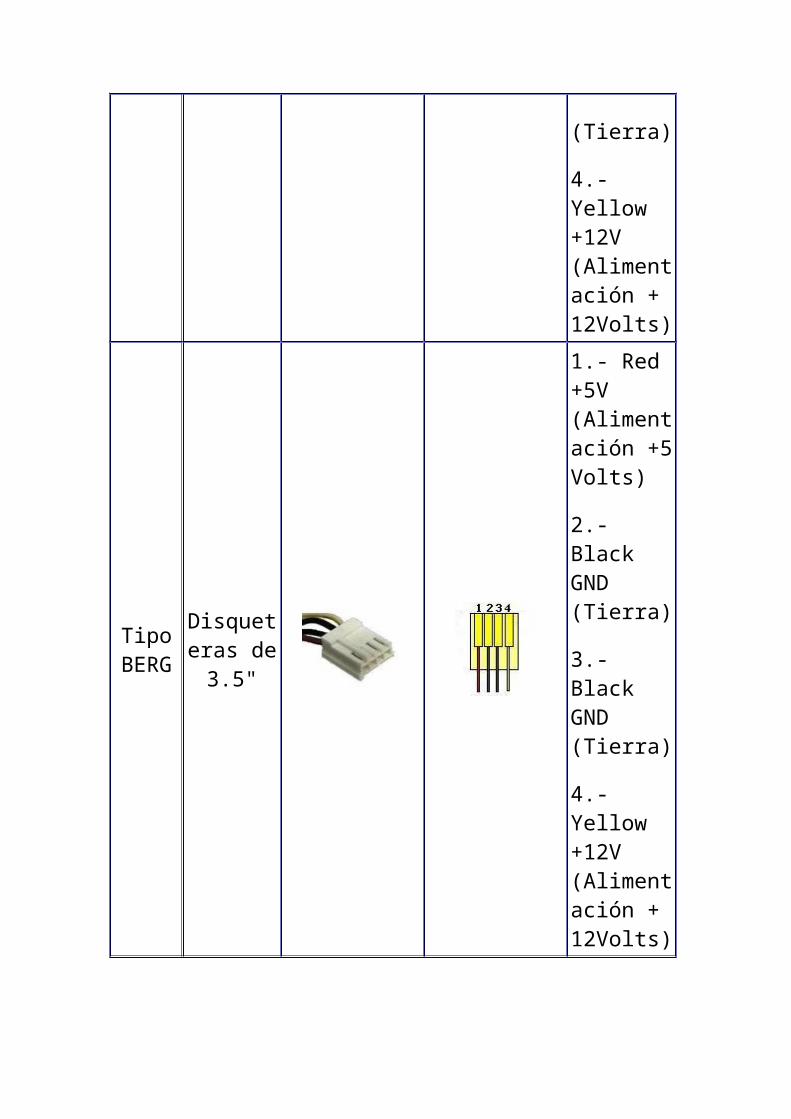
Tipo BERG
Disqueteras de
3.5"
1.- Red +5V (Alimentación +5 Volts)
2.- Black GND (Tierra)
3.- Black GND (Tierra)
4.- Yellow +12V (Alimentación + 12Volts)
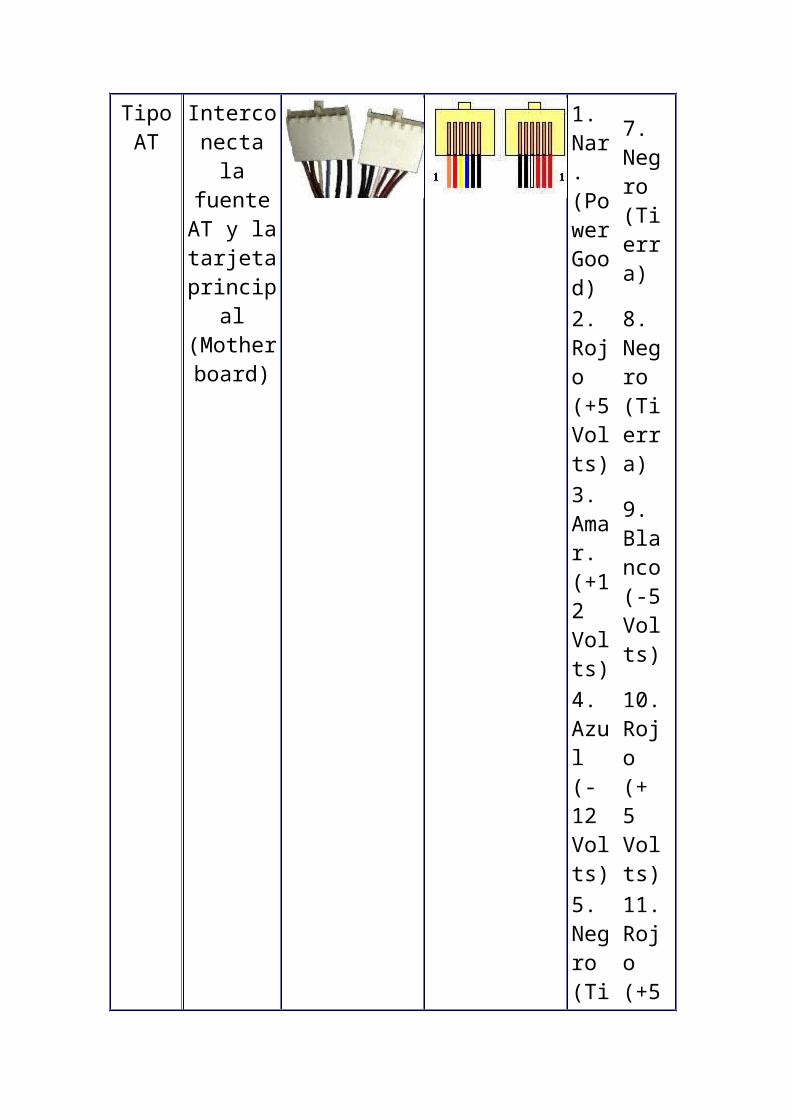
Tipo AT
Interconecta la fuente AT y la tarjeta
principal (Motherboard)
1. Nar. (Power Good)
7. Negro (Tierra)
2. Rojo (+5 Volts)
8. Negro (Tierra)
3. Amar. (+12 Volt
9. Blanco (-5 Volts)
s)4. Azul (-12 Volts)
10. Rojo (+ 5 Volts)
5. Negro (Tierra)
11. Rojo (+5 Volts)
6. Negro (Tierra)
12. Rojo (+5 Volts)
Potencia de la fuente ATLas fuentes AT comerciales manejan potencias eléctricas de 250 W, 300 W, 350 W y 400 W. Repasando algunos términos de electricidad, recordemos que la electricidad no es otra cosa mas que electrones circulando a través de un medio conductor. La potencia eléctrica de una fuente AT se mide en Watts (W) y esta variable está en función de otros dos factores:
El voltaje: es la fuerza con la que son impulsados los electrones a través de la línea eléctrica. Se mide en Volts (V)
Ejemplo: si una fuente AT indica que es de 250 W entonces:
Potencia eléctrica = Voltaje X Corriente , W
y varía acorde a la región.
La corriente: es la cantidad de electrones que circulan por un punto en específico del cable cada segundo. Su unidad de medida es el Ampere (A).
= V X A
Sabemos que el voltaje es de 127 V y tenemos los Watts, solo despejamos la corriente.
A = W / V , A = 250 W / 127 V , A = 1.9
Entonces lo que interesa es la cantidad de corriente que puede suministrar la fuente, porque a mayor cantidad de corriente, habrá mayor potencia y podrá alimentar una mayor cantidad de dispositivos. En este caso es de 1.9 Amperes.
Usos específicos de la fuente AT
Se utilizan para suministrar la energía eléctrica necesaria para el correcto funcionamiento de los dispositivos, encontrándose en gabinetes horizontales, gabinetes mini torre y torres duplicadoras. Dependiendo la cantidad de dispositivos a alimentar, deberá ser mayor la capacidad de la fuente. Actualmente es difícil encontrar fuentes de alimentación AT nuevas, así como equipos modernos que las utilicen.
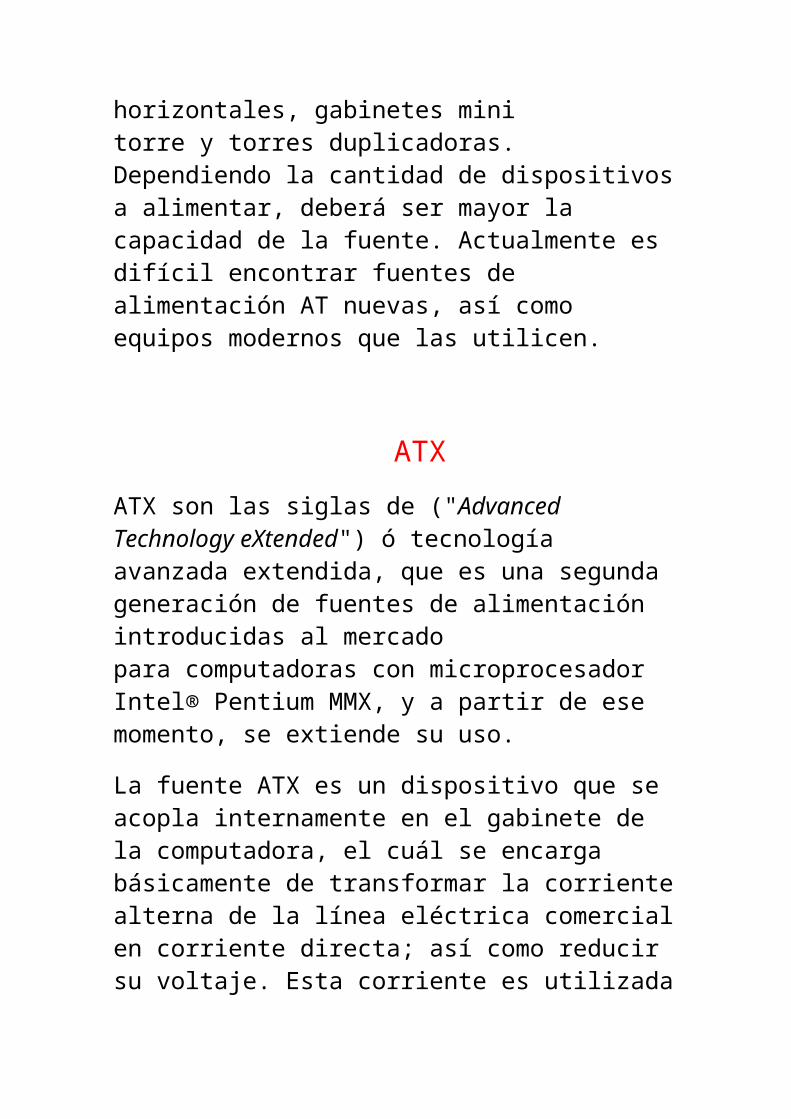
ATX
ATX son las siglas de ("Advanced Technology eXtended") ó tecnología avanzada extendida, que es una segunda generación de fuentes de alimentación introducidas al mercado para computadoras con microprocesador Intel® Pentium MMX, y a partir de ese momento, se extiende su uso.
La fuente ATX es un dispositivo que se acopla internamente en el gabinete de la computadora, el cuál se encarga básicamente de transformar la corriente alterna de la línea eléctrica comercial en corriente directa; así como reducir su voltaje. Esta corriente es utilizada por los elementos electrónicos y eléctricos de la computadora. Otras funciones son las de suministrar la cantidad de corriente y voltaje que los dispositivos requieren así como protegerlos de problemas en el suministro eléctrico como subidas de voltaje. A la fuente ATX se le puede llamar fuente de poder ATX, fuente de alimentación ATX, fuente digital, fuente de encendido digital, fuentes de pulsador, entre otros nombres.
ATX es el estándar actual de fuentes que sustituyeron a las fuentes de alimentación AT.
Figura 2. Imagen de una fuente de poder ATX, marca Okia®, modelo Broadway para 400 Watts, con interruptor mecánico trasero y
encendido digital.
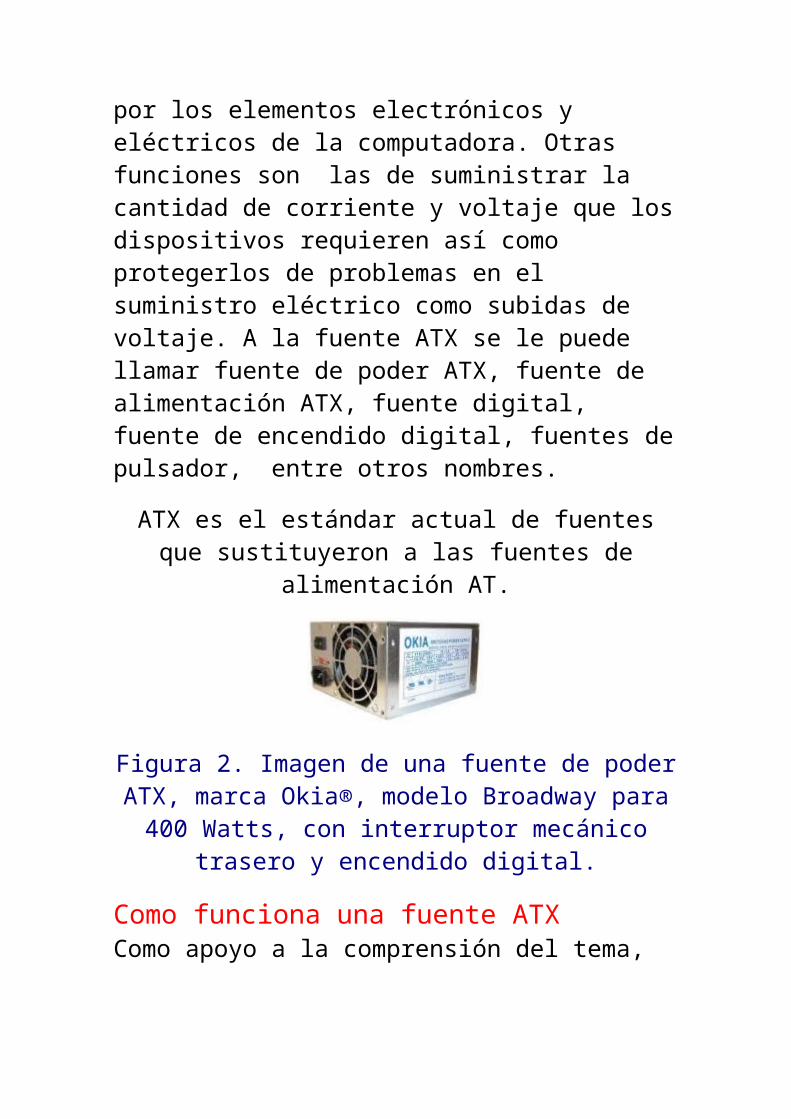
Como funciona una fuente ATXComo apoyo a la comprensión del tema, te ofrecemos una animación básica sobre el funcionamiento de una fuente ATX:
Figura 1. Animación de funcionamiento interno de una fuente ATX
Ver descripción detallada del funcionamiento
En la siguiente lista se muestran las diferentes etapas por las que la electricidad es transformada para alimentar los dispositivos de la computadora. Si gustas conocer más sobre electricidad, consulta nuestra sección: electricidad básica.
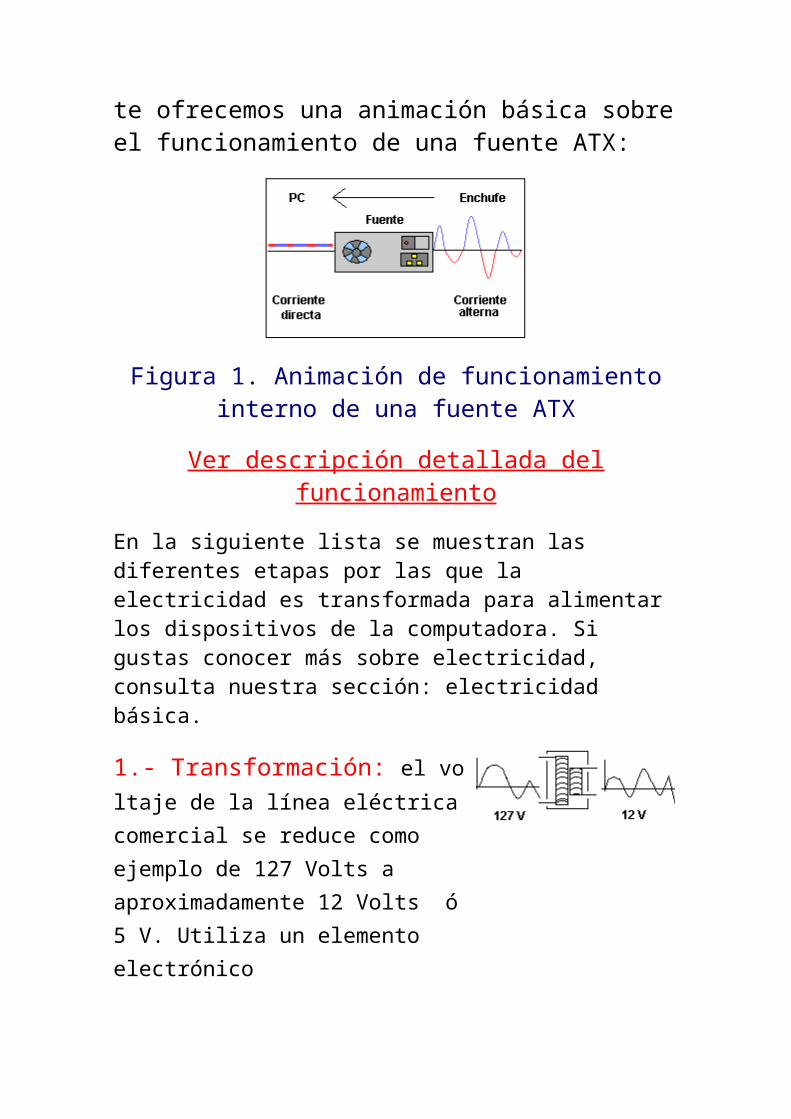
1.- Transformación: el voltaje de la línea eléctrica comercial se reduce como ejemplo de 127
Volts a aproximadamente 12 Volts ó 5 V. Utiliza un elemento electrónico llamado transformador.
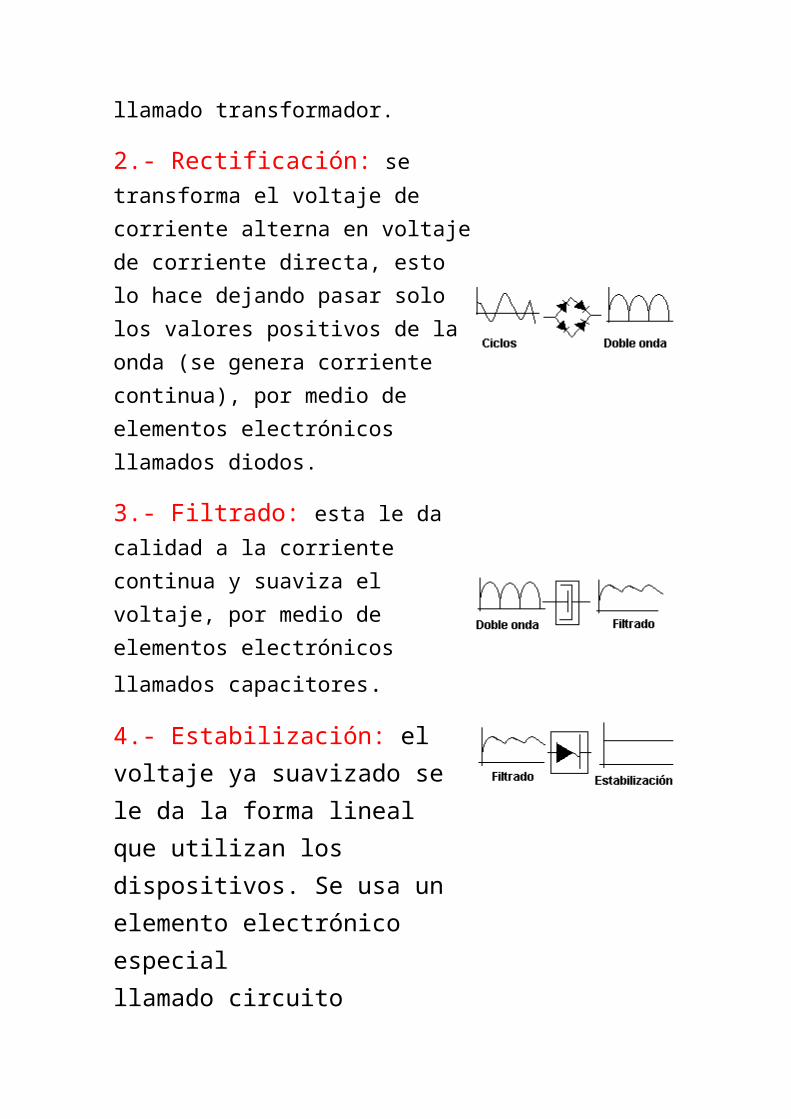
2.- Rectificación: se transforma el voltaje de corriente alterna en voltaje de corriente directa, esto lo hace dejando pasar solo los valores positivos de la onda (se genera corriente continua), por medio de elementos electrónicos llamados diodos.
3.- Filtrado: esta le da calidad a la corriente continua y suaviza el voltaje, por medio de elementos electrónicos
llamados capacitores.
4.- Estabilización: el voltaje ya suavizado se le da la forma lineal que utilizan los dispositivos. Se usa un elemento electrónico especial llamado circuito integrado. Esta fase es la que entrega la energía necesaria la computadora.
Características generales de la fuente ATX
Es de encendido digital, es decir, tiene un pulsador en lugar de un interruptor mecánico como sus antecesoras.
Algunos modelos integran un interruptor mecánico trasero para evitar consumo innecesario de energía eléctrico, evitando el estado de reposo "Stand By" durante la cual consumen cantidades mínimas de electricidad.
Este tipo de fuentes se integran desde los equipos con microprocesador Intel® Pentium MMX hasta los equipos con los más modernos microprocesadores.
El apagado de este tipo de fuentes puede ser manipulado con software.
Partes que componen la fuente ATX Internamente cuenta con una serie de circuitos encargados de transformar la electricidad para que esta sea suministrada de manera correcta a los dispositivos. Externamente consta de los siguientes elementos:
Figura 3. Esquema de Fuente de poder ATX
1.- Ventilador: expulsa el aire caliente del interior de la fuente y del gabinete, para mantener frescos los circuitos.
2.- Interruptor de seguridad: permite encender la fuente de
manera mecánica.
3.- Conector de alimentación: recibe el cable de corriente desde el enchufe de pared.
4.- Selector de voltaje: permite seleccionar el voltaje de 127V o 240V.
5.- Conector SATA: utilizado para alimentar los discos duros y las unidades ópticas tipos SATA.
6.- Conector de 4 terminales: utilizado para alimentar de manera directa al microprocesador.
7.- Conector ATX: alimenta de electricidad a la tarjeta principal.
8.- Conector de 4 terminales MOLEX: utilizado para alimentar los discos duros y las unidades ópticas.
9.- Conector de 4 terminales BERG: alimenta las disqueteras.
Partes externas de fuente ATX y sus funciones.
Conectores de la fuente ATX pinout
Para alimentarse, tiene un conector de 3 contactos, este a su vez recibe alimentación desde la red eléctrica doméstica.
Figura 4. Conector macho integrado de tres terminales para alimentar la fuente AT.
Figura 5. Esquema del
conector macho.
1.- Fase (127 Volts)
2.-Tierra Física.
3.- Neutro.
Terminales del
conector para
alimentar la fuente
AT.
Figura 6. Conector hembra del cable con tres terminales hacia la clavija de 3 patas.
Figura 7. Clavija del cable para conectar al enchufe de pared de 3
terminales.
+ Para alimentar cuenta con básicamente 4 tipos de conectores:
Para unidades de 3.5" (disqueteras y unidades para discos ZIP).
Para unidades de 5.25" (unidades lectoras de CD, unidades para DVD).
Para alimentar la tarjeta principal.
Para alimentar unidades SATA/SATA 2 (discos duros SATA y unidades para DVD SATA).
Conecto
r
Dispositivo
s
Imagen de
conectorEsquema
Líneas de
alimentación
Tipo MOLEX
Disqueteras
de 5.25", Unidades
ópticas de 5.25" ATAPI
y discos duros
de 3.5" IDE
1.- Red +5V (Alimentación +5 Volts)
2.- Black GND (Tierra)
3.- Black GND (Tierra)
4.- Yellow +12V (Alimentación + 12Volts)
Tipo BERG
Disqueteras
de 3.5"
1.- Red +5V (Alimentación +5 Volts)
2.- Black GND
(Tierra)
3.- Black GND (Tierra)
4.- Yellow +12V (Alimentación + 12Volts)
Tipo SATA
/ SATA
2
Discos duros 3.5"
SATA / SATA
2
1.- V33 (3.3 Volts)
9.- V5 (5 Volts)
2.- V33 (3.3 Volts)
10.- GND (tierra)
3.- V33 (3.3 Volts)
11.- Reserved (reservado)
4.- GND (tie
12.- GND (tierra)
rra)5.- GND (tierra)
13.- V12 (12 Volts)
6.- GND (tierra)
14.- V12 (12 Volts)
7.- V5 (5 Volts)
15.- V12 (12 Volts)
8.-V5 (5 Volts)
Conector ATX versión 1
(20 terminales + 4)
Interconecta
la fuente ATX
con la tarjeta princip
al (Motherboard
)
1. Naranja (+3.3V)
11. Naranja (+3.3V)
2. Naranja (+3.3V)
12. Azul (-12 V)
3. Negr
13. Neg

o (Tierra)
ro (Tierra)
4. Rojo (+5 Volts)
14. Verde (Power On)
5. Negro (Tierra)
15. Negro (Tierra)
6. Rojo (+5 Volts)
16. Negro (Tierra)
7. Negro (Tierra)
17. Negro (Tierra)
8. Gris (Power Good)
18. Blanco (-5V)
9. Purpura (+5VSB)
19. Rojo (+5 Volts)
10. 20.

Amarillo (+12V)
Rojo (+5 Volts)
1. Naranja (+3.3v)
3. Negro (Tierra)
2.Amarillo (+12V)
4. Rojo (+5V)
Conector ATX versión 2
(24 terminales
)
Interconecta
la fuente ATX y
la tarjeta princip
al (Motherboard
)
1. Naranja (+3.3V)
13. Naranja (+3.3V)
2. Naranja (+3.3V)
14. Azul (-12 V)
3. Negro (Tierra)
15. Negro (Tierra)
4. Rojo (+5 Volts)
16. Verde (Power On)
5. 17.
Negro (Tierra)
Negro (Tierra)
6. Rojo (+5 Volts)
18. Negro (Tierra)
7. Negro (Tierra)
19 Negro (Tierra)
8. Gris (Power Good)
20 Blanco (-5V)
9. Purpura (+5VSB)
21. Rojo (+5 Volts)
10. Amarillo (+12V)
22. Rojo (+5 Volts)
11. Amarillo (+12V)
23. Rojo (+5 Volts)
12. 24.
Naranja (+3.3V)
Negro (Tierra)
Conector para procesador de
4 terminales
Alimenta a los
procesadores moder
nos
1. Negro (Tierra)
3. Amarillo (+12V)
2. Negro (Tierra)
4. Amarillo (+12V)
Conector PCIe (6 y
8 terminales
)
Alimenta
directamente
las tarjetas de
video tipo PCIe
1.- Negro (Tierra)
5.- Amarillo (+12V)
2.- Negro (Tierra)
6.- Amarillo (+12V)
3.- Negro (Tierra)
7.- Amarillo (+12V)
4.- Negro (Tierra)
8.- Amarillo (+12V)
Fuentes SLI/Xfire
Las tecnologías SLI/X-Fire implementadas en las tarjetas de video, requieren un alto consumo de energía eléctrica, por lo que la MotherBoard ya no es un medio efectivo para transmitir la electricidad necesaria para alimentarlas, por ello se han integrado conexiones directas entre la fuente ATX y las tarjetas de video tipo PCI-E. Cabe mencionar que no es necesario el uso de fuentes especiales con estos conectores, ya que se han introducido al mercado adaptadores que permiten a cualquier fuente ATX, pueda alimentar las tarjetas de video mencionadas.
Fuentes ATX externas
Algunos equipos debido a su reducido tamaño, tienen la necesidad de recibir la alimentación por medio de fuentes externas tipo adaptador AC/DC, diseñado en específico para la marca y el modelo. Estas tienen un conector especial hacia el gabinete y por lo regular son muy resistentes, cable robusto y selladas, ya que están expuestas a líquidos, movimientos bruscos, caídas etc. Un ejemplo de ello es la fuente que alimenta los modelos de computadora de la serie GX620 / SX620 de la marca DELL®.
Potencia de la fuente ATXLas fuentes ATX comerciales manejan
potencia eléctrica de 300 Watts (W), 350 W,
400 W, 480 W, 500 W, 630 W, 1200 W y hasta 1350 W. Repasando algunos términos de
electricidad, recordemos que la electricidad no es otra cosa más que electrones circulando a través de un medio conductor. La potencia
eléctrica de una fuente ATX se mide en Watts (W) y esta variable está en función de otros
dos factores:
El voltaje: es la fuerza con la que son impulsados los electrones a través de la línea eléctrica comercial. Se mide en Volts (V) y en nuestro caso es de 127 V.
La corriente: es la cantidad de electrones que circulan por un punto en específico cada segundo. Su unidad de medida es el Ampere (A).
Ejemplo: si una fuente ATX indica que es de 400 W entonces:
Potencia eléctrica = Voltaje X Corriente , W =
V X A
Sabemos que el voltaje es de 127 V y tenemos los Watts, solo despejamos la corriente.
A = W / V , A = 400 W / 127 V , A = 3.4
Entonces lo que interesa es la cantidad de corriente que puede suministrar la fuente, porque a mayor cantidad de corriente, habrá mayor potencia y podrá alimentar una mayor cantidad de dispositivos. En este caso es de 3.4 Amperes.
Usos específicos
Se utilizan para suministrar la energía eléctrica necesaria para el correcto funcionamiento de los dispositivos, encontrándose en gabinetes horizontales, gabinetes mini torre y torres duplicadoras. Dependiendo la cantidad de dispositivos a alimentar, deberá ser mayor la capacidad de la fuente. Actualmente todos los equipos modernos incluyen una fuente de alimentación ATX, de igual modo los sistemas operativos son capaces de controlar las fuentes ATX (anteriormente al apagar el sistema desde el botón "Inicio" de Microsoft® Windows, se cerraba el sistema y se quedaba en pantalla un mensaje de apagar el sistema desde el botón mecánico del gabinete).
Clases de unidades ópticas
Unidad de CD-ROM o "lectora"
La unidad de CD-ROM permite utilizar discos ópticos de una mayor capacidad que los disquetes de 3,5 pulgadas: de 650 hasta 700 MB. Los CD-ROM se lo utiliza para distribuir sistemas operativos, aplicaciones, entre otras cosas más, y también permite leer los discos de audio.
Una característica en estas unidades es que viene incorporada una toma para auriculares y otra característica básica de las unidades de
CD-ROM es la velocidad de lectura que se expresa como un número seguido de una X (40x, 52x). Este número indica la velocidad de lectura en múltiplos de 128 kB/s. Así, una unidad de 52x lee información de 128 kB/s × 52 = 6,656 kB/s, es decir, a 6,5 MB/s.
Unidad de CD-RW o “grabadora"
Una CD-RW puede grabar y regrabar discos compactos. Las características básicas es su velocidad de lectura, de grabación y de regrabación. En los discos regrabables es normalmente menor que en los discos que sólo pueden ser grabados una vez. Las re grabadoras trabajan a 8X, 16X, 20X, 24X,etc., permiten grabar los 650, 700 o más megabytes (hasta 900 MB) de un disco compacto en pocos minutos.
Es habitual observar tres datos de velocidad que son: (a: velocidad de lectura; b: velocidad de grabación; c: velocidad de regrabación).
Unidad de DVD-ROM o "lectora de DVD"
Las unidades de DVD-ROM, pueden leer tanto discos DVD-ROM como CD-ROM. La diferencia de las unidades lectoras de CD-ROM en que el soporte empleado tiene hasta 17 GB de capacidad, y en la velocidad de lectura de los datos. Las conexiones de una unidad de DVD-ROM son similares a las de la unidad de CD-ROM.
La diferencia más destacable es que las unidades lectoras de discos DVD-ROM también pueden disponer de una salida de audio digital. Gracias a esta conexión es posible leer películas en formato DVD y escuchar seis canales de audio separados si disponemos de una buena tarjeta de sonido y un juego de altavoces apropiado
La velocidad se expresa con otro número de la x: 12x,16x... Pero ahora la x hace referencia a 1,32 MB/s. Así: 16x = 21,12 MB/s.
Unidad de DVD-RW o "grabadora de DVD"
Puede leer y grabar y regrabar imágenes, sonido y datos en discos de varios gigabytes de capacidad, de una capacidad de 650 MB a9 GB.
Blu-ray Disc
Blu-ray, también conocido como Blu-ray Disc o BD, es un formato de disco óptico de nueva generación (igual que el CD y el DVD). Su capacidad de almacenamiento llega a 50 GB a doble capa y a 25 GB a una capa, aunque los hay de mayor capacidad.
El disco Blu-ray hace uso de un rayo láser de color azul con una longitud de onda de 405 nanómetros, a diferencia del láser rojo utilizado en lectores de DVD, que tiene una longitud de onda de 650 nanómetros. Esto,
junto con otros avances tecnológicos, permite almacenar más información que el DVD.
Blu-ray obtiene su nombre del color azul del rayo láser (blu-ray significa ‘rayo azul’). La letra e de la palabra original blue fue eliminada debido a que, en algunos países, no se puede registrar para un nombre comercial una palabra común.
A pesar de que el tipo de láser empleado es diferente, los dispositivos Blu-ray pueden convertirse en compatibles con los discos CD y DVD mediante el uso de una unidad óptica compatible BD/DVD/CD.
El uso de la tecnología Blu-Ray para el almacenamiento de datos presenta una serie de ventajas frente a los formatos actuales. En primer lugar, gracias a una menor longitud de onda del láser azul, los discos admiten una mayor cantidad de datos, hasta cinco veces más que los dispositivos actuales. Un solo disco Blu-ray puede almacenar 25Gb. El GBW-H10N puede grabar datos a una velocidad de4X.
Disquetera o Floppy
La unidad de 3,5 pulgadas permite guardar información utilizando disquetes de 1,44 MB de capacidad. La capacidad de soporte es muy limitada si tenemos en cuenta las necesidades de las aplicaciones actuales se siguen
utilizando para intercambiar archivos pequeños, pues pueden borrarse y reescribirse cuantas veces se desee, aunque la transferencia de información es bastante lenta a comparación con otros dispositivos, como una flash memory.
La alimentación es mediante cables a partir de la fuente de alimentación del sistema. Y también va conectada mediante un cable a la placa base. Un diodo LED se ilumina junto a la ranura cuando la unidad está leyendo el disco.
El uso de este dispositivo es escaso, puesto que se ha vuelto obsoleto con los nuevos avances de la tecnología.
Bibliografía
1.discos duros: http://www.datosperdidos.com/tipos_de_disc
os_duros.html http://discosdurosjnz.blogspot.com/
http://partesdelacomputadora.info/tipos-de-discos-duros/
http://www.informaticamoderna.com/Discos_duros_externos.htm
2. Tarjeta madre:
http://www.tiposde.org/informatica/641-tipos-de- motherboard/
3. Memorias RAMhttp://partesdelacomputadora.info/tipos-de-
memoria-ram/#sthash.N6qm8WPE.dpuf
4. Procesadoreshttp://www.tiposde.com/informatica/procesado
res/tipos-de-procesadores.html http://culturacion.com/2009/11/tipos-de-
procesadores-el-cerebro-de-una-
computadora/n
5. Zócaloshttp://www.duiops.net/hardware/mi
cros/sockets.htm
6. Fuentes de poder http://www.informaticamoderna.co
m/Fuente_AT.htmhttp://
www.informaticamoderna.com/Fuente_ATX.htm
7. Unidades ópticashttp://rrdcris.blogcindario.com/2010/
06/00001-tipos-de-dispositivos-oacute-pticos.html