guia de robotica educativa - 2010
DESCRIPTION
Ciclo : II MAESTRÍA EN EDUCACIÓN MENCIÓN EN INFORMÁTICA APLICADA A LA EDUCACIÓN Elaborado por : D. Jaime Sánchez Ortega 2010-III Dr. JULIO VILLAR CASTILLO Dr. Carlos Oyola Rodríguez GERENTE GENERAL D. Jaime Sánchez Ortega Coordinador TI VICERRECTOR Decano Rector de la Universidad Elegido por la Asamblea Universitaria Período 2004 - 2009 2 Por: Mgr. Jaime Sánchez Ortega™ Educación y Humanidades / Postgrado Manual de Instrucción 3 ANTECEDENTES PRIMERA PARTE: PLAN DE TRABAJO DEL CURSO 4TRANSCRIPT
Facultad de Educación
MAESTRÍA EN EDUCACIÓN MENCIÓN EN INFORMÁTICA APLICADA A LA
EDUCACIÓN
ROBÓTICA EDUCATIVA
Ciclo : II
Elaborado por : D. Jaime Sánchez Ortega
2010-III

AUTORIDADES
Dr. LUIS CERVANTES LIÑANRector de la Universidad
Elegido por la Asamblea UniversitariaPeríodo 2004 - 2009
Dr. ANTENOR CASTRO URBINAVICERRECTOR
Dr. JULIO VILLAR CASTILLOGERENTE GENERAL
Facultad de Educación
Dr. Carlos Oyola RodríguezDecano
D. Jaime Sánchez OrtegaCoordinador TI
2
Facultad de EducaciónEducación y Humanidades / Postgrado
ROBOTICA EDUCATIVA
Manual de Instrucción
Por: Mgr. Jaime Sánchez Ortega™
3

PRIMERA PARTE: PLAN DE TRABAJO DEL CURSO
ANTECEDENTES
Actualmente existe la preocupación sobre las condiciones que deben
tener las instituciones educativas para brindar a los estudiantes la preparación
adecuada para el mundo tecnológico al que se enfrentan. Los responsables del
currículo, tienen la obligación de establecer en las instituciones ambientes
enriquecidos, apoyados por la tecnología.
Existen realmente pocas instituciones que están tomando en serio los
nuevos tiempos de cambio y están transformando sus prácticas educativas aún de
manera aislada. Sin embargo, aún cuando las condiciones están disponibles para
hacerlo en todos los niveles, es en las Universidades en donde deberán surgir
programas integrales y ser las promotoras de las nuevas formas de crear, obtener,
transformar y distribuir el conocimiento. (Fernández, 2000).
Se pretende poner sobre aviso las tecnologías en la enseñanza dejando a
un lado las cuestiones más próximas a la tecnología en si misma.
Los análisis prospectivos sobre la Tecnología Educativa y sobre la
utilización didáctica de las nuevas tecnologías de la información, constituyen una
de las líneas más frecuentes de trabajo de investigación en nuestro campo.
A nivel institucional en nuestra Universidad, estamos en un proceso para
cumplir con el propósito señalado, la Facultad de Educación ha asumido la misión
de lograr una formación profesional científica, tecnológica y humanística.
Constituye nuestro compromiso formar líderes con capacidad de formular
propuestas innovadoras que impulsen la creación de una nueva realidad
universitaria, a base de los siguientes aprendizajes: aprender a ser, aprender a
conocer, aprender a hacer y aprender a convivir. [www.uigv.edu.pe].
A nivel nacional, las universidades tienen un rol que cumplir en el sistema
escolar, que se perfila desde la difusión de las redes informáticas (Educación e
informática).
4

El Ministerio de Educación inició la consolidación del Programa Estratégico
Huascarán, con el lanzamiento oficial del Portal Pedagógico y el Centro de
Conocimiento Intercultural, dos recursos multimedia que contribuirán a mejorar la
calidad educativa de los alumnos, mediante el aprovechamiento de las
Tecnologías de la Información y Comunicación.(www.huascaran.edu.pe)
FundamentaciónEntender el concepto y evaluar las ventajas de utilizar la tecnología. Así
mismo conocer las herramientas de diseño disponibles en el mercado para la
construcción de medios de información. Planificar los medios de tecnología al
alcance de las Instituciones Educativas.
Objetivo General
1. Contribuir a la formación profesional de los futuros educadores
propiciando el conocimiento sobre las nuevas herramientas tecnológicas,
para aplicarlo en las actividades educativas.
Objetivos Específicos1. Identificar las posibilidades que presenta la digitalización del video y audio,
su tratamiento y edición, tanto en formato análogo como digital.
2. Analizar y evaluar las diversas estrategias didácticas en el uso de software
educativo.
3. Identificar y comprender el uso de diversos medios tecnológicos.
4. Discutir y analizar las diversas alternativas pedagógicas en el uso de la
informática.
5. Utilizar herramientas adecuadas con el objetivo de diseñar y producir
recursos multimedia con sus alumnos.
6. Crear un video-clip como resultado de todo lo aprendido.
5
Metodología
La metodología del curso se basa en los siguientes elementos complementarios:
Reuniones presénciales.
Lectura de artículos en Internet.
Prácticas en Internet.
Tutoría telemática.
Realización de las prácticas propuestas.
Prácticas a realizar durante el curso.Tercera Semana:
Sexta Semana:
Novena Semana: examen parcial
Décimo Segunda Semana:
Décimo Cuarta Semana:
Materiales - Recursos TI:
Libro Base: Dr. Domingo Gallego,”El Ordenador como Recurso Didáctico”,
UNED, Madrid, 2002.
Metodología del Dr. Ramón Gonzalo UNED – España. / Dr. Nibaldo Gatica RED
Enlace. CHILE.
Separata del curso.
Consultas telemáticas:
e-mail: [email protected] : 975360-552
6
Evaluación de esta asignatura
Algunos puntos sencillos y concretos:
a) Crear
Recuerde que nos encontramos dentro de la temática Crear con Ordenador. Si quedase claro que no ha habido situación creativa suspendíamos todos: el autor de estas líneas a la cabeza. O sea: que hay que evidenciar que nos hemos enfrascado en una empresa que ha funcionado con ciertos niveles de búsqueda.
b) El cuaderno
Elemento esencial de nuestra evaluación es el varias veces mencionado cuaderno donde el alumno de UNED va anotando el intento de cada día: desde las primeras sorpresas en la lectura, pasando por la búsqueda de colaboradores hasta...(Buff...!). Lo malo es que el cuaderno no demuestra que se haya construido ( a no ser que se peguen fotos) y que haya funcionado, por eso se piensa en:
c) Documentos complementarios de evaluación
El vídeo demuestra que se ha construido y que funciona. Es bastante poderoso en este sentido ( para “documentar” un escrito).
Las fotos demuestran que se ha construido, pero no que haya funcionado. Una buena foto podría llegar a demostrar el funcionamiento.
Los dibujos demuestran que se ha ideado.
Está claro que cada uno recurre a lo que desea demostrar. Lo malo es si se quiere demostrar el funcionamiento, pero no se dispone de vídeo. Existe un complemento que permite “ver” funcionar a los dibujos:
Yo he construido mi máquina. La tengo colocada sobre una mesa. Todo a punto. Dejo una grabadora un poco camuflada entre los dispositivos. Invito a unos niños pequeños a verla funcionar. Mejor si se trata de clima familiar distendido. Lo ven, se impresionan un poco, luego ven el mono, o la jirafa, o el semáforo. Ríen, comentan. Lo ponemos en marcha. Como es lógico no funciona y ellos: “¡Oye que la jirafa no se mueve!”. Ríen...
Ha sido suficiente: Esa grabación junto con los dibujos permiten “ver” la máquina y su funcionamiento. Puede ser una idea.
El volumen de trabajo en cada caso es una decisión personal.
7
Otros detalles
Los programas de la controladora son de uso restringido, por deseo de su autor.
Se puede usar para este trabajo cualquier tipo de tarjeta de control. Cada vez que R. Gonzalo ha prometido devolver un material no lo ha
cumplido, por eso ya no lo promete. Las grabaciones en vídeo o audio, (que documentan los trabajos de
control) pueden durar cinco minutos como máximo. Si son más largas cuesta atenderlas.
Como creador de la idea del lector de pantalla, tengo (R Gonzalo) cierto interés y compromiso en que si la adopta no le falle. Pida ayuda sin límite. Le haremos funcionar.
Si cree en los valores educativos del juguete, todo lo dicho respecto a dispositivos o máquinas vale para el juguete. “En el juguete interaccionan los intereses y expectativas del niño y del educador” (Guía curso doctorado 2003. UNED)
Puede dar por terminado su trabajo en “Crear” cuando considere que le ha dedicado suficiente tiempo, aunque no funcione. Pero... no es fácil. Empezar a construir es peligroso. Cuando una máquina (juguete) nace (y nace cuando hemos formado varias piezas) es ella la que le agarra, y es ella la que no suelta nunca.
8

Materiales legosPrincipios de programación con Software de Control
(Robot Lab Vs Control Lab)
9

INTRODUCCIÓN
La finalidad de este trabajo es lograr mediante esta investigación que se adopten nuevas estrategias de enseñanza-aprendizaje explotando el espontáneo interés que suscita el juego en los alumnos, y mediante ella se puedan generar actividades curriculares. Y aún más, como organizar el juego de manera tal que propicie aprendizajes integradores, promueva los trabajos en grupo, estimule la creatividad y forje espíritus abiertos a la innovación.
En nuestra opinión el camino más fácil para comenzar a experimentar con
robots es construir máquinas LEGO con sensores, motores de salidas y dispositivos de control. Esto se puede hacer con los sistemas LEGO Dacta, LEGO CodePílot, LEGO Cybermaster y LEGO MindStorms. Aquí veremos el sistema LEGO MindStorms. Este sistema consiste en un gran ladrillo LEGO con funciones de unidad de control, sensores LEGO (por ejemplo sensores de luz y de contacto) y motores LEGO. Es posible utilizar también otros sensores LEGO, como lo son el de temperatura y el angular. Utilizando estos componentes no es sólo posible construir tradicionales robots LEGO, sino que también darles funcionalidad. La unidad de control contiene baterías, así que puede ser autónomo sin conexión a un ordenador anfitrión. 1
La unidad de control tiene tres entradas, en las que pueden ser conectados los sensores, y tres salidas para los motores. Los conectores mantienen el diseño tradicional de LEGO, y de este modo son muy sencillos de usar realizando las conexiones del mismo modo que se coloca un ladrillo LEGO uno encima del otro. Esto permite al alumno construir un robot con la morfología elegida por el/ella misma, y modificar la morfología durante el proyecto. Durante la experimentación el niño puede usar el conocimiento adquirido para modificar el robot (utilizando diferentes sensores, colocando los motores en distintas posiciones, modificando la transmisión ... ).
Los robots LEGO MindStorms se programa utilizando un lenguaje de programación gráfico (el uso del lenguaje es muy parecido a colocar las piezas de un puzzle), y puede ser utilizado por niños de hasta aproximadamente 11 años de edad. Para proyectos más avanzados, es posible diseñar programas de control más avanzados para robots utilizando compiladores de Windows tales como Visual Basic, Visual C++, y Visual Java++. Cuando el programa de control ha sido compilado en el PC, puede ser bajado a la construcción LEGO por medio de una comunicación por infrarrojos, A partir de este momento el robot funciona autónomamente.
1 LEGO Dacta. Sistemas Inicial RobotLab. 1ra. Edición. DK- 7190 Billund: Lego Group, 1999.
10
Debemos de considerar el uso de estas técnicas de programación que permitan lograr: Mayor atención y concentración en los alumnos tanto grupal como individual, permitiendo el uso de un lenguaje de programación icnográfica, llegando a generar nuevas funciones, como: recursión (FOR), de condición(If -Else) simples o anidadas el While, etc. Aplicarlo con los alumnos de la secundaria que presentaban dificultades cuando se deseaba desarrollar aplicaciones primero con el control Lab, que es software que permite controlar y manipular en forma lógica los materiales concreto de lego y los Ladrillos programables, que utiliza un software llamado Robot Lab2.
De allí, que el Robot Lab. es una actividad lúdica, siendo parte central de las actividades. El juego es el vector del aprendizaje, el disparador del interés y mediante él se generan actividades curriculares más atractivas e interesantes.
El objetivo de este problema es la explicación de cómo contribuye el material lego (lúdico informático) en el aprendizaje de una lógica Matemática que influya en el desarrollo de aplicaciones, que es un ambiente visual, orientado a objetos, cuya programación es iconográfica, permitiendo interactuar con interfases denominado (RCX o ladrillo programable) estos, traen una bandeja con múltiples fichas de lego y contienen un manual de construcción. La programación parte de un proyecto trasversal que permite desarrollarlo con dos o mas áreas del colegio, los criterios de evaluación se pueden trabajar en forma individual por áreas o grupal, es importante realizar el proceso de investigación del tema, observación del material del Robot Lab – Control Lab, modelamiento (diseño del proyecto), construcción que cumpla con los principios de mecánica simple(Engranajes, Ruedas – Ejes, Palancas, Poleas), programación(están sujeto a los retos y actividades que se van a realizar antes, durante y después del proyecto), es fundamental como el docente juega un papel importante de facilitador y estratega, para que los equipos superen con éxito sus problemas planteados por el docente. Estos ladrillos programables denominados RCX, pueden almacenar hasta 5 programas en forma paralela, permitiendo superar los retos planteados. Esta organización, consiste en asignar roles y funciones a cada integrante del grupo, superado el problema del algoritmo para su respectiva programación, se hace necesario analizar la funcionabilidad del robot, si cumple o no el reto.
Siempre se halla presente las ciencias exactas ya que el aprendizaje de esta contribuye en la formación de la mentalidad del alumno. Ella lo adiestra a formar conclusiones, pensamientos claros, desarrolla la imaginación, cultiva el espíritu ordenado y la unidad de trabajo.
2 LEGO Dacta. Sistemas Inicial RobotLab. 1ra. Edición. DK- 7190 Billund: Lego Group, 1999.
11

DESCRIPCIÓN DEL MATERIAL LEGO
FICHA DE EVALUACIÓN
12
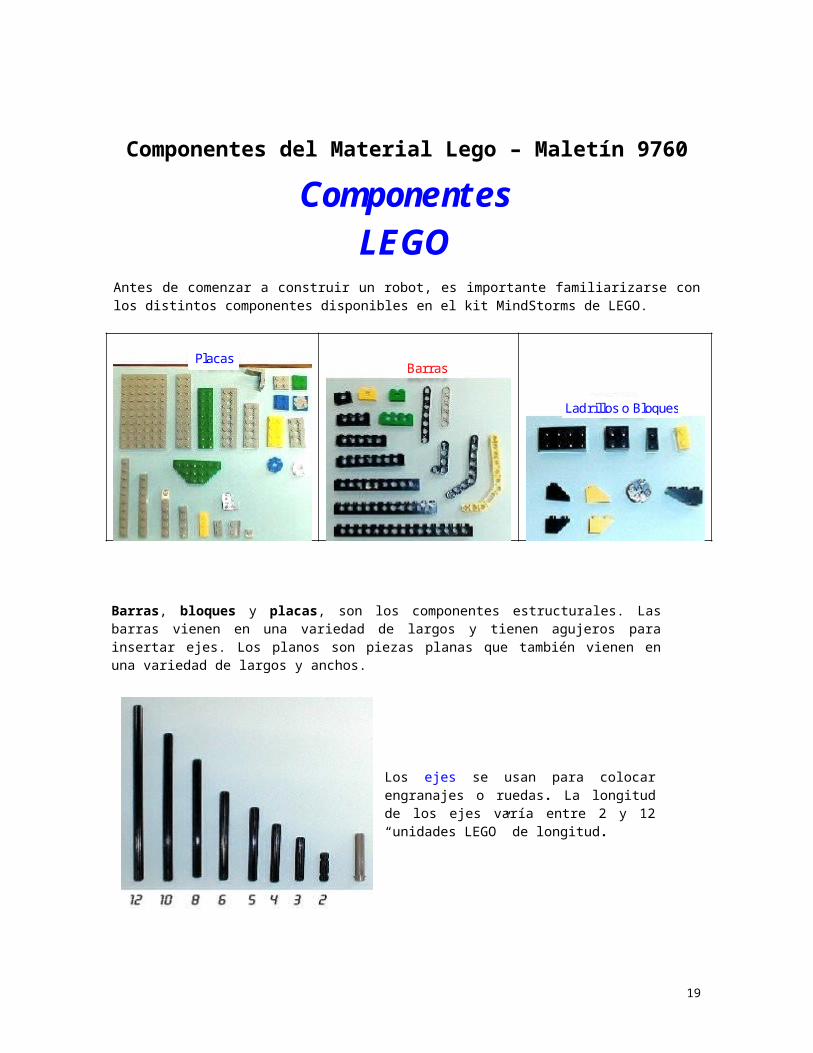
Componentes del Material Lego – Maletín 9760 Componentes
LEGO Antes de comenzar a construir un robot, es importante familiarizarse con los distintos componentes disponibles en el kit MindStorms de LEGO.
Placas Barras
Ladrillos o Bloques
Barras, bloques y placas, son los componentes estructurales. Las barras vienen en una variedad de largos y tienen agujeros para insertar ejes. Los planos son piezas planas que también vienen en una variedad de largos y anchos.
Los ejes se usan para colocar engranajes o ruedas. La longitud de los ejes varía entre 2 y 12 “unidades LEGO” de longitud.
13

Las golillas se colocan en los ejes para mantenerlos en su lugar. Las semi golillas, que también son pequeñas poleas, tienen más fricción que la golilla completa y proveen una mejor sujeción
Semi Golilla Golilla Entera
Los Conectores de Fricción permiten conectar barras; se insertan en los agujeros de las barras a conectar.
Hay una variedad de perfiles y codos de soporte. Permiten inter conectar ejes y conectores de fricción.
El kit contiene una variedad de ruedas de distinto tamaño. También hay un par de orugas de tanque.
14
El kit trae una variedad de engranajes.
Las correas y poleas son otro medio de transferir movimiento rotacional.
Los sensores permiten al robot adquirir información sobre el entorno en el cual se encuentra.
Los motores son los que mueven al robot.
15
El RCX (Robotic Command eXplorer) es el cerebro de su robot. Contiene un microprocesador que lee sensores, controla los motores, y ejecuta sus programas. El RCX tiene 3 puertos de entrada para sensors (1,2 y 3) y tres puertos de salida para motores (A, B y C).
Botón RUN
Receptor I nf rarojo
16
Ficha de evaluación
Nombre del Estudiante____________________________________
Profesor________________________________________________
Título del curso _____________________________Fecha _______
Periodo de evaluación_____________________________________
Evaluación de Hábitos de Trabajo 1° 2° 3°
1 Pone toda su atención y sigue las instrucciones.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
2 Llega preparado y trabaja durante todo el periodo de clase.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
3 Trabaja bien con un mínimo de supervisión.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
4 Trabaja a toda potencia, muestra su máximo esfuerzo.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
5 Trabaja cooperativamente como parte de un grupo.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
6 Hace un buen uso del tiempo y/o de los materiales.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
7 Demuestra iniciativa y motivación.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
8 Tiene una actitud positiva y de colaboración.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
9 Llega a tiempo a la clase.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
10 Participa diariamente en el programa de limpieza.Siempre (10) (9) Usualmente (8) (7) A Veces (6) (5) Raramente (4) Nunca (0)
Puntos por Hábitos de trabajo.Comentarios
17

Estructura y Programación Iconográfica
“RobotLab”
18
Robot Lab
Es un software de control cuya representación es iconográfica, basado en LabView™3, empresa líder en el desarrollo de software para la medición y control; desarrollado por Nacional Instruments. Está representado en un ladrillo programable RCX que contiene 3 puertos de entrada con números (1,2,3) que se utiliza para los sensores y tres puertos de salidas letras (A, B, C). 4
Código RCX
Diseñado para no programadores (niños) Bloques básicos que se conectan Visual: intuitivo, fácil Muy limitado No es software libre
Figura Nro. 1 Diagrama del código RCX
Pros y contras de código RCXUsa el firmware de LEGO / Si hay variables (Sección del investigador)
Es interpretado. / visuamente, muy bueno para empezar / Es fácil, para hacer
cosas complejas. Presentamos a continuación la estructuras de programación por
componentes: Sensores
3 www.lego.com/dacta/4 LEGO Dacta. Sistemas Inicial RobotLab. 1ra. Edición. DK- 7190 Billund: Lego Group, 1999.
19

Programación por Sensores de Luz
Los sensores de luz pueden ser programados para detectar un nivel de luz específico entre 0 (oscuro) y 100 (iluminado). El icono de la derecha le dice al programa que debe esperar hasta que el detector de luz detecte un nivel de luz por encima de un determinado umbral, en este caso, 50.
El icono a la izquierda, le dice al programa que debe esperar hasta que el sensor de luz ha detectado un nivel de luz por debajo de un umbral que, en este caso, es de 50.
Los sensores de luz también pueden ser programados en un modo relativo. Este icono le dice al programa que espere hasta que el nivel de luz des un 5% superior al nivel actual de luz.
Este icono le dice al programa que espere hasta que el nivel de luz sea un 5% menor que el nivel actual.
Existe una bifurcación basada en el uso del sensor de luz. Este programa enciende el motor A si el nivel de luz es mayor que 60 (rama superior) y enciende el motor C si el nivel de luz es menor o igual a 60 (rama inferior).
Umbral del nivel de luz
Recuerde que toda bifurcación necesita de un icono fusión al final de la decisión.
20

Programación con condicionales
A menudo en un programa se necesita tomar una decisión basada en los datos que entregan los sensores o en el tiempo. Estas decisiones se denominan enunciados condicionales. En RoboLab se les denomina bifurcaciones. Por ejemplo, el icono a la derecha es una bifurcación basada en el estado de un sensor de contacto; hay dos estados posibles, presionado o liberado.
Toda bifurcación necesita una fusión al final de las dos distintas ramas de decisión.
Su programa puede hacer distintas cosas dependiendo de si el sensor de contacto es o no presionado. En el ejemplo a la derecha, si el sensor es presionado, el motor A parte y el motor C se detiene (rama inferior); si el sensor no es presionado, el motor C parte y el motor A se detiene (rama superior).
Otras bifurcaciones se basan en el uso de otros sensores. Por ejemplo, ésta es la bifurcación basada en el sensor de luz. El programa seguirá la rama superior si el sensor de luz lee un valor superior a 55 ó, seguirá la rama inferior si el sensor de luz lee un valor igual o menor a 55.
La bifurcación basada en el sensor de rotación, toma una decisión a partir del número de cuentas del sensor de rotación.
La bifurcación basada en el reloj, toma una decisión según el tiempo transcurrido.
21

La bifurcación basada en el uso del contenedor, toma una decisión en consideración del valor almacenado en el contenedor.
Control de flujos (Sentencia FOR)
Se puede controlar el número de veces que un programa realiza una tarea o, donde irá a continuación, usando los iconos de control de flujo.
I nicio del ciclo FOR Fin del ciclo FOR
Número de ciclos FOR
El icono de lazo FOR, controla el número de veces que el programa hace una cosa específica. Por ejemplo, este programa usa un lazo FOR para mover un motor por un segundo, lo desconecta y espera por un Segundo. Hace esto en 3 ocasiones. Los lazos FOR son útiles pues evitan escribir el mismo trozo de código varias veces.
Tierra Roja Salto Rojo
Los iconos de SALTO, permiten saltar (atrás o adelante) a una ubicación específica en el programa.
Por ejemplo, este programa hace lo mismo que el programa anterior, solo que enciende y apaga el motor para siempre. Esto se debe al SALTO rojo que sigue volviendo al terreno rojo para siempre.
22

Programación con motores
Programación con tiempos(Timer)
El reloj interno del RCX puede usarse como otra entrada para controlar el programa. Estos se denominan relojes. Se pueden tener 3 relojes distintos en un programa, rojos, amarillos y azules.
Puesta a Cero del Reloj Una forma de usar un reloj es pedirle al programa que espere una cierta cantidad de tiempo antes de continuar. Es importante resetear el reloj antes de comenzar. El tiempo se dá en décimas de segundos (en RoboLab), de manera que 2 segundos se escriben como el número 20. Este programa coloca en cero el reloj rojo, espera 2 segundos y después enciende el motor A.
La bifurcación reloj (cuyo icono se muestra a la izquierda), puede usarse para hacer cosas distintas dependiendo de la cantidad de tiempo que ha pasado. Este programa espera hasta que el sensor de contacto ha sido presionado.
Tono Creciente
Tono Descendiente
Fusión de la Bif urcación
I nicio de la Bif urcación
Si el sensor de contacto es presionado 3 segundos o antes después de comenzar el programa (recuerde que 3 segundos se escribe como 30), se escuchará que el RCX produce un sonido decreciente. Al contrario, si han pasado más de 3 segundos, y se acciona el sensor de contacto, se escuchará un sonido creciente. Recuerde siempre que una bifurcación necesita de una fusión al final de la decisión.
Se puede conocer el valor de un reloj usando los íconos de valor del reloj. Esto es útil si se desea almacenar el valor del reloj en un contenedor.
23

Programación con sensor de ángulo / rotación
El sensor de rotación es un sensor que mide la rotación de un eje. Cuando el eje gira, el sensor de rotación mide esa rotación. Hay 16 cuentas en un giro completo del eje. El número de cuentas es lo que el RCX mide como una entrada.
(Habrá una animación acá).
Cuando un eje deja de rotar, el sensor de rotación deja de contar. Si el eje vuelve a girar, el sensor comienza a contar donde quedó antes. Si el eje rota en la dirección opuesta, el sensor cuenta hacia atrás. Es importante que, al inicio del programa, se vuelva a cero (resetee) el sensor de rotación.
Los sensores de rotación son muy útiles para medir y controlar la distancia recorrida por un robot. Midiendo el giro de la rueda y conociendo el perímetro de la misma, es posible medir la distancia recorrida. También se puede usar el sensor de rotación para medir la velocidad angular. Para ello se cuenta el número de revoluciones del eje en un intervalo de tiempo, y se puede usar esto para calcular el número de vueltas por segundo del eje.
Si un sensor de rotación tiene 16 cuentas en una revolución, ¿cuántos grados recorre el eje para una cuenta del sensor? Haga clic acá para la respuesta.
Ver También: Sensores, Programación: Sensor de Rotación, Servo Motor
24

Programación con Sensor de Tacto
El sensor de contacto es un sensor que detecta el contacto con objetos en el ambiente del robot.. El sensor de contacto le avisa al RCX si el botón está apretado o no.
El sensor de contacto actúa como un interruptor normal. Al apretar el botón, éste cierra un circuito eléctrico y permite el flujo de corriente a través del sensor. EL RCX detecta este flujo de corriente y así se entera que el botón ha sido presionado. Al soltar el botón, el circuito se abre y cesa el flujo de corriente. La imagen a la izquierda muestra la forma correcta de conectar el cable al sensor de contacto.
Esta imagen muestra la forma incorrecta de conectar el sensor de contacto. Los cables no tienen polaridad pero, note que el conector debe estar en la orilla cercana al botón amarillo y no en la orilla opuesta, como ocurre en esta imagen.
Para divertirse: Haga una lista de cosas que usted cree que su robot podría hacer si le agrega un sensor de contacto.
Ver También: Sensores, Programación: Sensor de Contacto
25