fl mecanica de fluidos alonso samano
TRANSCRIPT
1
MECÁNICA DE FLUIDOS
D. ALFONSO SAMANO
MIHIR SEN
SARA L. MOYA
2
PRÓLOGO
Estos apuntes comenzaron a escribirse en 1975 cuando DAS y MS trabajaban en la
Facultad de Ingeniería de la Universidad Nacional Autónoma de México. Hace poco SLM le
agregó unos capítulos más e hizo una revisión completa. Aunque todavía le falta mucho por
hacer pensamos que aún en esta forma pueda ser útil para los estudantes que llevan y profesores
que imparten la materia. Seguiremos haciéndole cambios, por lo que agradecemos las
sugerencias de los lectores.
D. Alfonso Sámano, Energia y Ecologia, México
Mihir Sen, Universidad de Notre Dame, EE.UU.
Sara L. Moya, Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET), México
3
MECÁNICA DE FLUIDOS
1. INTRODUCCIÓN 1
2. CINEMÁTICA DE LOS FLUIDOS 23
3. ECUACIONES DE MOVIMIENTO 47
4. TEOREMAS ESPECIALES 63
5. ESTÁTICA DE FLUIDOS 75
6. FLUJOS POTENCIALES 99
7. FLUJOS VISCOSOS INCOMPRESIBLES 128
8. FLUJOS COMPRESIBLES 166
APÉNDICES
BIBLIOGRAFÍA
4
CAPITULO 1. INTRODUCCIÓN
1.1 Aplicaciones 3
1.2 Definiciones 3
1.3 Propiedades del flujo 4
1.4 Propiedades del fluido 7
1.5 Análisis dimensional 10
1.6 Sistemas de unidades 15
Problemas 16
5
INTRODUCCIÓN
1.1.- Aplicaciones.
El flujo de fluidos es un fenómeno común a la vida diaria. El estudio de su mecanismo es
esencialmente impulsado por entender la física involucrada, así como su control en diversas
aplicaciones de ingeniería. La astrofísica, meteorología, oceanografía, aerodinámica,
hidrodinámica, lubricación, ingeniería marina, turbomaquinaria, ingenieria de yacimientos e
ingeniería de la combustión, son algunos de los campos donde la mecánica de fluidos se emplea.
En este texto se tratarán las bases de la mecánica que son comunes a estas disciplinas.
Habrá algunos ejemplos específicos no con el objeto de dar recetas para problemas en la práctica,
sino con el objeto de mostrar los principios generales y su manejo.
1.2.- Definiciones
El continuo.- La materia consiste de moléculas en constante movimiento y colisión. Sin
embargo, en la aproximación al continuo, se ignora la existencia de la estructura molecular y se
considera una distribución continua de materia. Este punto de vista es válido si:
La longitud de la trayectoria libre promedio (Λ) de la molécula es mucho más pequeña
que la dimensión de longitud (l) menor considerada en el problema físico. En otras palabras, el
número de Knudsen ( definido como Λ / l ) deberá ser mucho más pequeño que la unidad, para
que la hipótesis del continuo sea válida.
Fluido.- Se define fluido como una sustancia que sufre una deformación continua cuando
se le aplica un esfuerzo cortante muy pequeño. En cambio, cuando se le aplica la acción de un
esfuerzo cortante pequeño a un sólido elástico no se deforma continuamente, sino que asume una
configuración determinada fija. Esta distinción entre un sólido y un fluido es muy simplificada
porque existen ciertos materiales que exhiben ambas características.
6
Líquidos y gases.- Los fluidos se clasifican en líquidos y gases. Las fuerzas
intermoleculares son mayores en los primeros, por lo que, al variar la presión o la temperatura
los gases cambian fácilmente su volumen. La compresibilidad puede usarse para distinguir los
líquidos de los gases; los gases son mucho más compresibles que los líquidos. Desde el punto de
vista de la dinámica, no importa si el fluido es líquido o gas. Las leyes que se aplican son las
mismas, pero en ocasiones, dependiendo del fluido que se trate, es posible despreciar algunos
efectos y simplificar su estudio. Frecuentemente, líquidos tales como el agua pueden considerarse
incomprensibles.
1.3.- Propiedades del flujo.
En esta sección se definen algunas propiedades dinámicas y termodinámicas que
interesan en el estudio del movimiento del fluido. Estas propiedades pueden representar un
campo en el fluido, es decir, pueden tener una distribución espacial en el fluido, o bien de
partícula a partícula cuando el fluido se considere de esta manera. El campo puede ser una
variable escalar, vectorial o tensorial. El cálculo de estos campos en una situación determinada es
un problema representativo de la mecánica de fluidos.
Temperatura (T).- Es un escalar que representa la actividad interna (escala
microscópica) de una sustancia. Este concepto está ligado al transporte de energía en forma de
calor. Dos regiones en contacto térmico que se encuentran a la misma temperatura no tienen
transporte de calor entre ellas. Esta es la condición de equilibrio térmico que establece la ley cero
de la termodinámica.
Velocidad ( )r
U .- Es un vector que representa la dirección, sentido y magnitud de la
rapidez de movimiento del fluido. El caso especial donde la velocidad es cero en todo el espacio
considerado se estudia en la estática de los fluidos.
7
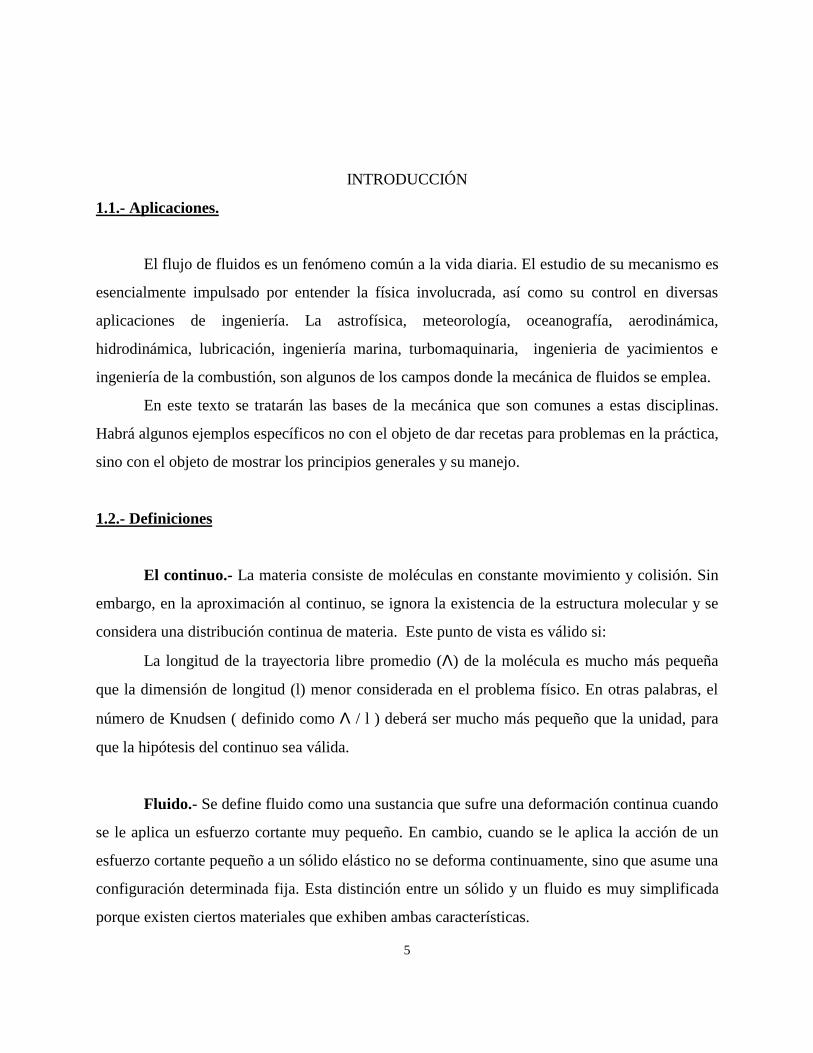
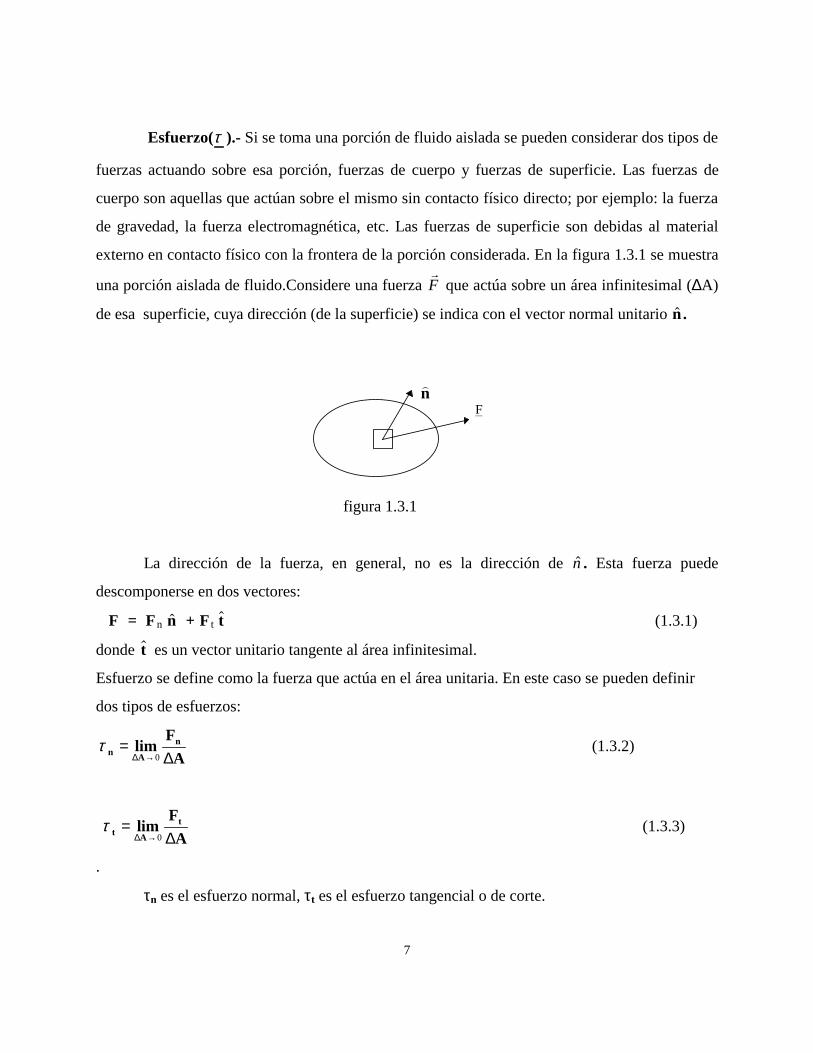
Esfuerzo(τ ).- Si se toma una porción de fluido aislada se pueden considerar dos tipos de
fuerzas actuando sobre esa porción, fuerzas de cuerpo y fuerzas de superficie. Las fuerzas de
cuerpo son aquellas que actúan sobre el mismo sin contacto físico directo; por ejemplo: la fuerza
de gravedad, la fuerza electromagnética, etc. Las fuerzas de superficie son debidas al material
externo en contacto físico con la frontera de la porción considerada. En la figura 1.3.1 se muestra
una porción aislada de fluido.Considere una fuerza rF que actúa sobre un área infinitesimal (∆A)
de esa superficie, cuya dirección (de la superficie) se indica con el vector normal unitario $n.
)nF
figura 1.3.1
La dirección de la fuerza, en general, no es la dirección de $n . Esta fuerza puede
descomponerse en dos vectores:
F = Fn $n + F t $t (1.3.1)
donde $t es un vector unitario tangente al área infinitesimal.
Esfuerzo se define como la fuerza que actúa en el área unitaria. En este caso se pueden definir
dos tipos de esfuerzos:
τ n A
nlimF
A=
→∆ ∆0 (1.3.2)
τ t A
tlimF
A=
→∆ ∆0 (1.3.3)
.
τn es el esfuerzo normal, τt es el esfuerzo tangencial o de corte.
8
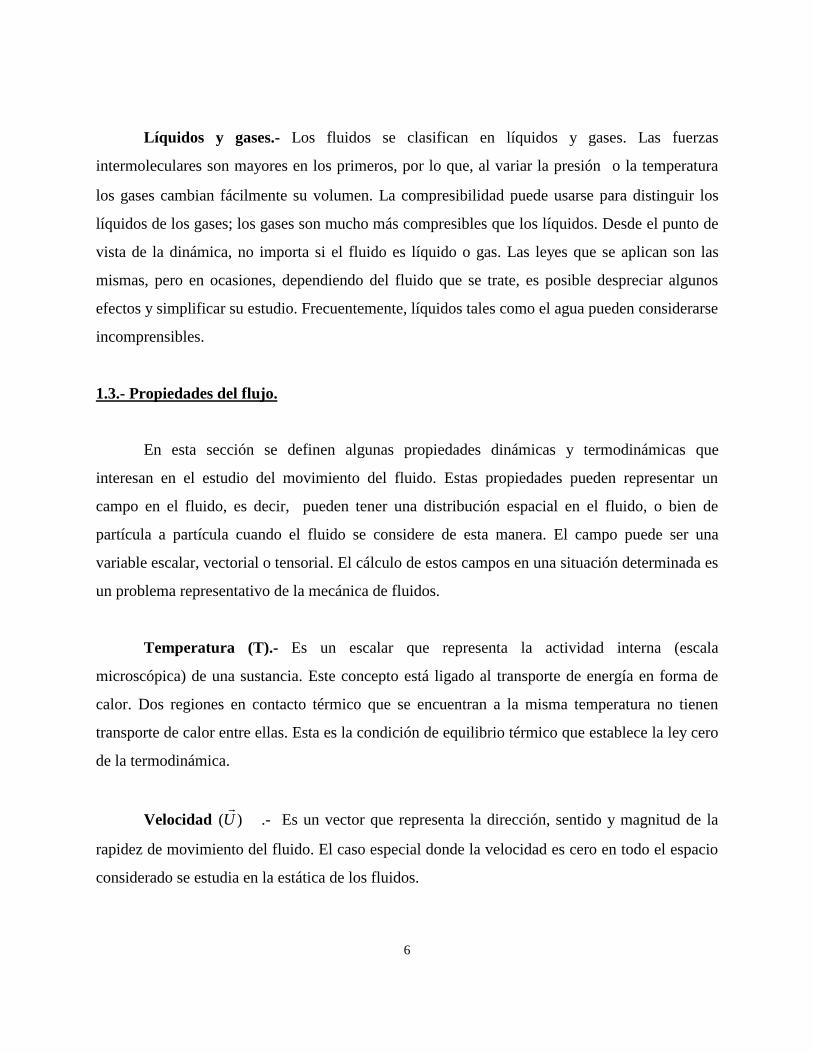
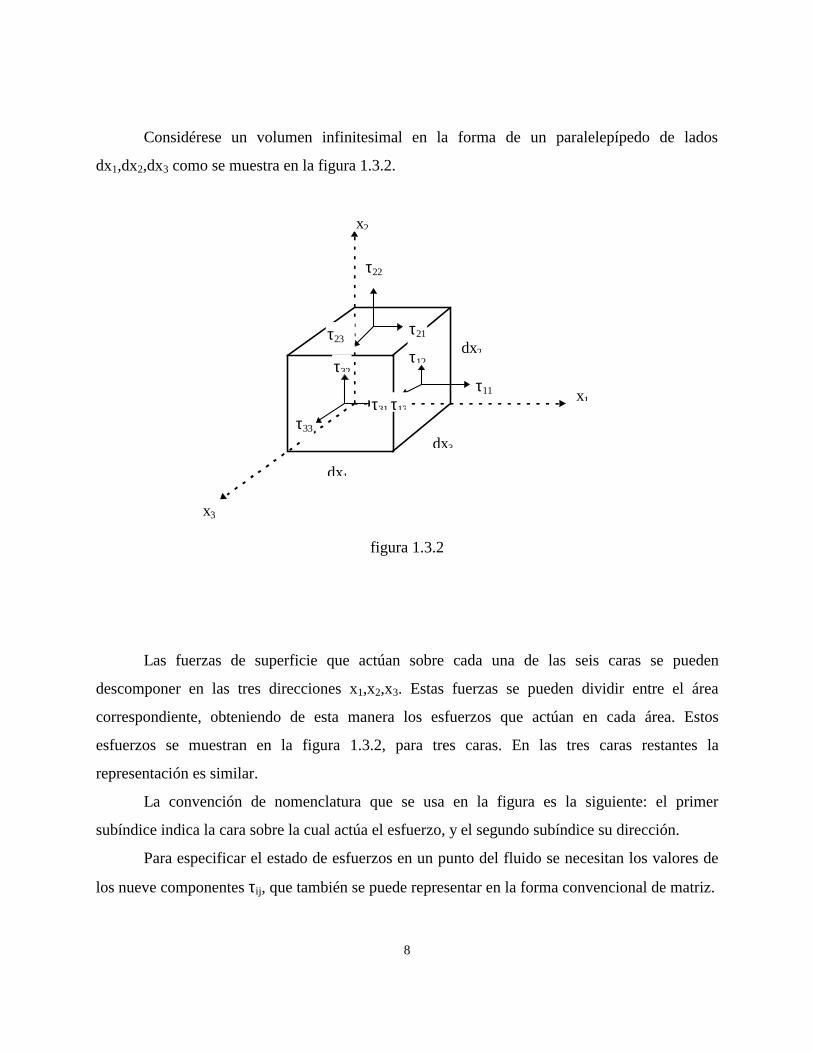
Considérese un volumen infinitesimal en la forma de un paralelepípedo de lados
dx1,dx2,dx3 como se muestra en la figura 1.3.2.
x2
x1
x3
dx1
dx3
dx2
τ21
τ12
τ13
τ33
τ11
τ22
τ32
τ31
τ23
figura 1.3.2
Las fuerzas de superficie que actúan sobre cada una de las seis caras se pueden
descomponer en las tres direcciones x1,x2,x3. Estas fuerzas se pueden dividir entre el área
correspondiente, obteniendo de esta manera los esfuerzos que actúan en cada área. Estos
esfuerzos se muestran en la figura 1.3.2, para tres caras. En las tres caras restantes la
representación es similar.
La convención de nomenclatura que se usa en la figura es la siguiente: el primer
subíndice indica la cara sobre la cual actúa el esfuerzo, y el segundo subíndice su dirección.
Para especificar el estado de esfuerzos en un punto del fluido se necesitan los valores de
los nueve componentes τij, que también se puede representar en la forma convencional de matriz.
9
≈=
ττ τ ττ τ ττ τ τ
11 12 13
21 22 23
31 32 33
Los términos diagonales representan esfuerzos normales, los restantes, esfuerzos tangenciales.
1.4 Propiedades del fluido.
Las siguientes son algunas de las propiedades de los fluidos. Los
valores de éstas pueden depender de otras variables como: temperatura, presión, etc.
Densidad. La densidad (ρ ) de un fluido es su masa por unidad de volumen. Si ∆m es la masa de
una porción de fluido dentro de un cubo de lado ∆l, entonces el fluido tiene densidad
( )ρε
=
→lim
m
ll∆
∆∆ 3 (1.4.1)
donde ε es muy pequeña, pero de acuerdo con la consideración hecha en el continuo, es mucho
más grande que la longitud de la trayectoria libre promedio de la partícula.
Volumen específico. El volumen específico(νs ) de un fluido es su volumen por unidad de masa,
o sea el recíproco de la densidad
νs = 1 / ρ (1.4.2)
Peso específico. El peso especifico ( γ) es el peso por unidad de volumen del fluido
γ = ρg (1.4.3)
donde g es la aceleración debida a la gravedad.
Tensión superficial. Cuando se hacen burbujas de jabón con un popote y se desea aumentar el
tamaño de la burbuja, es necesario soplar más fuerte, lo que implica desarrollar un trabajo para
aumentar el tamaño de la misma. En otras palabras, la energía se almacena en la superficie de la
burbuja, a causa de las fuerzas intermoleculares.

10
El mismo efecto se observa si tenemos una película de jabón entre los alambres, como se
muestra en la figura
FL
alambre móvil
figura 1.4.1
Si se desea mantener un área de la película de jabón se necesita una fuerza . Esta fuerza
representa la tensión superficial. El coeficiente de tensión superficial ( σ ) se define como
σ = F / 2L (1.4.4)
En este caso se tienen dos interfases entre la solución de jabón y el aire. Por esta razón se
necesita una fuerza F/2 para cada superficie.
El valor de σ depende principalmente de la naturaleza de los fluidos que presentan
interfase. Si se desea aumentar el área de la película se desplaza el alambre móvil una distancia
l, lo que implica un trabajo de magnitud F·l. Esta energía se almacena en las superficies.
Compresibilidad. Es el efecto de cambio de volumen con la variación de presión (p).
Este proceso de cambio de volumen puede ser isotérmico, isoentrópico o cualquier otro.
Entonces el módulo de elasticidad volumétrico (βc ) se puede definir de varias maneras.
Para un proceso isoentrópico :
β υ ∂δυc s
s
p= − (1.4.5)
Con la ayuda de (1.4.2) se obtiene
β ρ∂∂ρc
p= (1.4.6)
Dilatación volumétrica. Es el efecto de cambio de volumen con la variación de temperatura (T)
a presión constante. El coeficiente de dilatación volumétrica (βD ) se define
βυ
∂ υ∂ ρ
δρδD
s
s1 1= = −lT T
(1.4.7)

11
donde la presión se mantiene constante.
Calor específico. Se define como el calor necesario para aumentar la temperatura de una masa
unitaria un grado. Este proceso puede realizarse a volumen constante o a presión constante lo que
conduce a dos valores de calor específico: calor específico a presión constante (Cp) y calor
específico a volumen constante(Cv).
Viscosidad. En la práctica se observa que algunos fluidos se mueven con mayor facilidad que
otros. Esto se debe a fuerzas de rozamiento internas en el fluido. Este efecto se conoce como
viscosidad.
Una de las formas de cuantificar el efecto de la viscosidad consiste en considerar el flujo
mostrado en la figura 1.4.2
h
x
F
Uo
y
figura 1.4.2
El fluido se encuentra entre dos placas paralelas horizontales muy grandes, sin cambio de
presión en la dirección x. La placa superior se mueve con respecto a la inferior con una velocidad
baja (Uo). Para muchos fluidos se observa que la velocidad del fluido en cada punto sólo tiene
componente x, y que la variación con y es lineal como se muestra en la figura 1.4.2. La
velocidad del fluido que está en contacto con las placas tienen la misma velocidad que éstas.
Se necesita una fuerza F para mantener la placa superior en movimiento uniforme. Esto es
debido a que hay que vencer las fuerzas de rozamiento internas en el fluido.
Si A representa el área de una placa, se define el coeficiente de viscosidad dinámica (µ )
como
12
µ =F A
U ho
/
/ (1.4.8)
El coeficiente de viscosidad cinemática (ν ) se define
ν = µ / ρ (1.4.9)
Los fluidos que se comportan de la manera descrita anteriormente se llaman fluidos newtonianos.
1.5 Análisis dimensional
Todas las variables físicas se miden como múltiplos de ciertas cantidades llamadas
unidades. Algunas unidades se expresan en términos de otras. Se pueden encontrar ciertas
unidades, cuya combinación permite expresar todas las demás unidades de las variables físicas.
Un ejemplo que satisface esta condición son las unidades de masa, longitud, tiempo y
temperatura; otro ejemplo puede ser, las unidades de fuerza, longitud, tiempo y temperatura. La
dimensión es el tipo de variable que puede medirse. En el primer ejemplo las dimensiones
fundamentales son masa, longitud, tiempo y temperatura.
Los dos sistemas de dimensiones fundamentales más convencionales son,por un lado
M, L t, T
que representa: masa, longitud, tiempo y temperatura
y F,L t, T
que representa: fuerza, longitud, tiempo y temperatura.
Las dimensiones de otras variables físicas pueden expresarse en términos de las dimensiones
fundamentales.
Cantidad Dimensiones
M,L,t,T F,L,t,T
Masa M F t+2 L-1

13
Longitud
Tiempo
Temperatura
Velocidad
Aceleración
Fuerza
Esfuerzo o presión
Densidad
Peso específico
Viscosidad dinámica
Viscosidad cinemática
Módulo de elasticidad volumétrica
Coeficiente de dilatación volumétrica
L
t
T
Lt-1
Lt-2
MLt -2
ML -1t-2
ML -3
ML -2t-2
ML -1t-1
L2t-1
ML -1t-2
T-1
L
t
T
Lt-1
Lt-2
F
FL-2
Ft2 L--4
FL-3
Ft L--2
L2t-1
FL--2
T-1
Tabla 1.5.1
La mayor parte de las ecuaciones en las ciencias naturales son dimensionalmente homogéneas.
De ésta manera se puede utilizar la ecuación misma para determinar la dimensión de uno de los
parámetros si se conocen las dimensiones de los otros.
Grupos adimensionales. Se pueden combinar las variables físicas de tal forma que resulta
un grupo adimensional; por ejemplo1
ρµUL ML Lt L
ML tM L t
= =
− −
− −
1 3 1
1 10 0 0( )( )( )
( )
Este grupo, llamado número de Reynolds, no tiene dimensiones.
Teorema π de Buckingham
Si n es el número de variables en el problema y r el número de dimensiones fundamentales
involucradas en estas variables, entonces es posible encontrar n-r grupos adimensionales
1 NOTA: Por convención, cuando se encierra una o más váriables entre paréntesis cuadrados, se indican sus dimensiones.
14
independientes. Se mostrará la manera de encontrar estos grupos adimensionales con el siguiente
ejemplo.
En mecánica de fluidos sin transmisión de calor, las siguientes variables pueden ser
importantes: presión (p), longitud (l), coeficiente de viscosidad dinámica( µ), tensión superficial (
σ), velocidad del sonido ( a), aceleración de gravedad (g), densidad (ρ ) y velocidad (U).
Se desea encontrar los grupos adimensionales. El número de variables es 8. Las
dimensiones de las variables en el sistema M,L,t,T son:
[p] = ML -1t-2
[l]=L
[µ ]= ML -1t-1
[σ ]= Mt-2
[a]= Lt-1
[g]= Lt-2
[ρ ]= ML -3
[U]= Lt -1
como se puede observar el número de dimensiones involucradas es r = 3. Aplicando el teorema π
de Buckingham se tiene: n-r = 8-3 = 5 grupos adimensionales.
Si π es un número adimensional, se puede representar
π µ σ ρα α α α α α βα α =p a g U1 2 3 4 5 6 7 81
sustituyendo las dimensiones de las variables, se tiene
[π]= [ML -1t-2]α1 [L] α2 [ML -1t-1]α
3 [Mt -2]α4 [Lt -1]α5 [Lt -2]α
6 [ML -3]α7 [Lt -1]α8
=M L tα α α α α α α α α α α α α α α α α1 3 4 7 1 2 3 5 6 7 8 1 3 4 5 6 83 2 2 2+ + + − + − + + − + − − − − − −
Pero π no tiene dimensiones, entonces
α1 +α3 +α4 +α7 = 0
-α1 +α2 -α3 + α5 + α6 -3α7 + α8 = 0
15
-2α1 -α3 -2 α4 -α5 -2α6 -α8 = 0
El anterior es un sistema de tres ecuaciones y ocho incógnitas, por lo que se pueden
expresar tres de las incógnitas en función de las cinco restantes. Por ejemplo
α7 = -α1 -α3 -α4
α2 = -α3 -α4 + α6
α8 = -2α1 -α3 -2 α4 -α5 -2α6
sustituyendo estos valores en la ecuación de π se tiene
π µ σ ρ
ρµ
ρσ
ρ
α α α α α α α α α α α α α α α α
α α α α α
=
− − + − − − − − − − −p l a g U
p
U l U lU
a
U U
1 3 4 6 3 4 5 6 1 3 4 1 3 4 5 6
1 3 4 5 6
2 2 2
2 2 2 =lg
Debido a que se consideró π sin dimensiones y los exponentes α1,α2,...,α8 son números
sin dimensiones, los grupos entre paréntesis son adimensionales.
Los grupos que se encontraron en el ejemplo tienen nombre asignado en la mecánica de
los fluidos.
Número de Euler = p / ρU2
Número de Reynolds = lρU / µ
Número de Weber = ρU2l / σ
Número de Mach = U / a
Número de Froude = U2 / lg
Si en vez de despejar α2, α7, y α8 se despejan otros tres, se obtienen cinco grupos
adimensionales diferentes, pero estos grupos son combinación de los primeros. Si se usa el
sistema F,L,t,T el resultado es el mismo.
Similitud. Muchas veces para estudiar un fenómeno experimentalmente es necesario
reproducirlo en el laboratorio en una escala diferente. Por ejemplo, cuando se desea estudiar los
problemas que se presentan en una presa, es más fácil construir un modelo en el laboratorio que
estudiar en el prototipo. En ocasiones el modelo sirve para diseñar el prototipo que aun no se ha
16
construido. Para diseñar un avión se construye un modelo y se prueba en un túnel de viento. En la
construcción de modelos es necesario relacionar los parámetros de éstos con el prototipo por
medio de los grupos adimensionales. Cada grupo adimensional relevante debe tener el mismo
valor en el modelo y en el prototipo. Muchas veces no es posible cumplir con todos los grupos
adimensionales relevantes, en este caso se escogen los más importantes. Por ejemplo, en
problemas donde el efecto viscoso sea muy importante, se debe escoger el número de Reynolds,
donde el efecto de compresibilidad sea predominante, el número de Mach escala mejor al
fenómeno.
En la misma forma, los resultados de las pruebas en el modelo se transforman en
información aplicable al prototipo.
Esta similitud entre modelo y prototipo puede ser:
a) geométrica: flujos con fronteras de la misma geometría pero escala diferente.
b) cinemática: flujos donde existe semejanza en el movimiento
c) dinámica: flujos donde existe correspondencia en la distribución de esfuerzos
1.6 Sistemas de unidades
Existen varios sistemas de unidades de uso común para expresar las cantidades físicas. La
construcción de estos sistemas es arbitraria: se definen unidades fundamentales y a partir de estas
se obtienen las unidades derivadas con las relaciones fisicas correspondientes.
Por ejemplo, si se escogen metros (m) y segundos (s) como unidades fundamentales de
longitud y tiempo respectivamente, la unidad de velocidad queda definida en m/s. Pero también
se pueden utilizar múltiplos de unidades, por ejemplo, la velocidad en kilómetros por hora
(km/h).
Los sistemas comunes en ingeniería son:
a) fuerza en kilogramo fuerza (kgf), longitud en metros (m), tiempo en segundos (s) y
temperatura en grados Kelvin (K). En este sistema la masa es una unidad derivada que se obtiene
a partir de la ecuación de la segunda ley de Newton para una partícula expresada como F=ma.
La unidad derivada es entonces kgfs2/m, denominada como Unidad Técnica de Masa (UTM)

17
b) masa en kilogramo masa (kgm), longitud en metros (m), tiempo en segundos (s) y temperatura
en grados Kelvin (K). La fuerza es una unidad derivada y la ecuación de la segunda ley de
Newton para una partícula toma la misma forma del caso anterior. La fuerza tiene las unidades
fundamentales kgmm/s2, que en conjunto es la unidad derivada denominada Newton (N).
c) masa en kilogramo masa (kgm), fuerza en kilogramo fuerza (kgf), longitud en metros (m) y
temperatura en grados Kelvin (K). En este caso la ecuación de la segunda ley de Newton para una
partícula no toma la misma forma debido a que no presentaría consistencia dimensional. Hay que
definir una constante de proporcionalidad con dimensiones (gc), es decir,
F = ma / gc
donde gc=9.81 kgm m / s2kgf
En los sistemas anteriores gc es unitario, de donde se obtiene que 1 kgf= 9.81 kgmm/seg2= 9.81N
Problemas
1.1. Dado el campo de velocidad
U~
(x,y,z,t) = (xz2+y) î - (yz2) $j +(2xy-3t) k^
obtenga el vector de velocidad en el punto (1,3,2), en el instante t=1 y la magnitud de la
velocidad.
[ U~
(1,3,2,1)=7 î -12$j +3k^
; U~
=√202]
1.2 La distribución de las fuerzas de cuerpo por unidad de masa para el cubo en la figura p.1.2
está dada por B~
=6x î +6k^
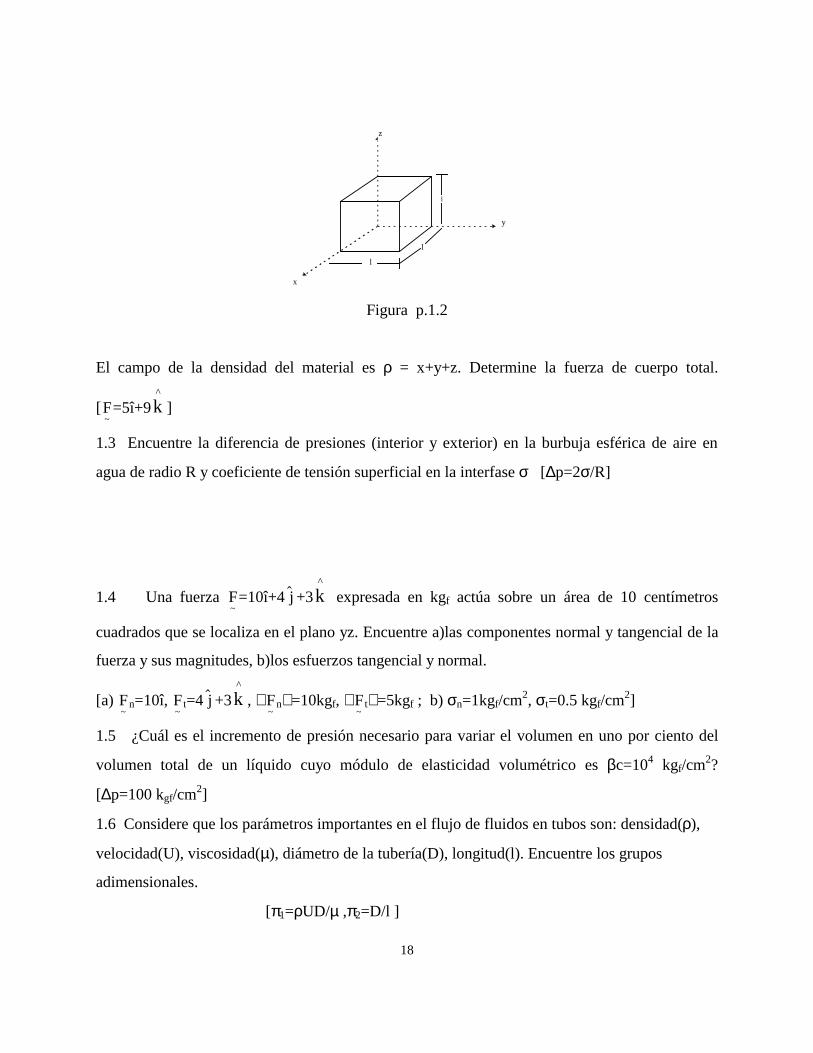
18
z
y
x
l
l
l
Figura p.1.2
El campo de la densidad del material es ρ = x+y+z. Determine la fuerza de cuerpo total.
[F~=5î+9k
^
]
1.3 Encuentre la diferencia de presiones (interior y exterior) en la burbuja esférica de aire en
agua de radio R y coeficiente de tensión superficial en la interfase σ [∆p=2σ/R]
1.4 Una fuerza F~=10î+4$j +3k
^
expresada en kgf actúa sobre un área de 10 centímetros
cuadrados que se localiza en el plano yz. Encuentre a)las componentes normal y tangencial de la
fuerza y sus magnitudes, b)los esfuerzos tangencial y normal.
[a) F~
n=10î, F~
t=4$j +3k^
, F~
n=10kgf, F~
t=5kgf ; b) σn=1kgf/cm2, σt=0.5 kgf/cm2]
1.5 ¿Cuál es el incremento de presión necesario para variar el volumen en uno por ciento del
volumen total de un líquido cuyo módulo de elasticidad volumétrico es βc=104 kgf/cm2?
[∆p=100 kgf/cm2]
1.6 Considere que los parámetros importantes en el flujo de fluidos en tubos son: densidad(ρ),
velocidad(U), viscosidad(µ), diámetro de la tubería(D), longitud(l). Encuentre los grupos
adimensionales.
[π1=ρUD/µ ,π2=D/l ]
19
1.7 Se desea construir el modelo de un río en el cual se considera el número de Froude como el
grupo adimensional más importante. El río tiene una profundidad media de 2m, y la velocidad
media del flujo es de 0.3m/s. Si se quiere construir el modelo con una profundidad de 5 cm,
encuentre la velocidad media del flujo en el mismo. [U=0.047m/s].
1.8 Encontrar las unidades en que se pueden expresar:µ,ν,σ,βc,βD

20
CAPITULO 2. CINEMÁTICA DE LOS FLUIDOS
2.1 Descripción Lagrangiana y Euleriana 192.2 Volumen de control y sistema 192.3 Derivada material 192.4 Teorema de Reynolds 212.5 Líneas de flujo 232.6 Circulación y Vorticidad 262.7 Tubos de Corriente y Tubos de Vórtice 262.8 Gradiente de Velocidad 282.9 Sistemas inerciales y no inerciales 31
Problemas 34
21
CINEMÁTICA DE LOS FLUIDOS
Se estudiará el movimiento de los fluidos sin importar la causa que lo origina. Sedescribirá la herramienta necesaria para describir este movimiento.
2.1. Descripción Lagrangiana y Euleriana
Existen básicamente dos formas de describir el movimiento de un fluido. La primeramanera llamada Lagrangiana consiste en fijar la atención sobre una porción muy pequeña delfluido en movimiento. Por ejemplo, en el instante t=0 consideramos la partícula que ocupa laposición r
~0. Nos interesa seguir esta partícula con movimiento constante, la cual ocupa un lugar
r~
en un tiempo t. El vector de posición r~
depende de qué partícula se haya elegido y que tiempo
haya transcurrido, o sea r~
= r~
(r~
0,t). Si se tiene el valor de rr para todo r0 y todo t, se tiene una
descripción completa del flujo.
En la descripción llamada Euleriana fijamos la atención en un punto (x,y,z) en el espacio.Nos interesa conocer las características del flujo como velocidad, densidad, temperatura, etc. delas partículas que pasen por este punto como función del tiempo. (Nótese que no se estásiguiendo una partícula como en la descripción Lagrangiana). Si se hace lo mismo para todos lospuntos del espacio que ocupa el flujo, se tiene una descripción completa del flujo.
2.2. Volumen de Control y Sistema
Para aplicar las leyes físicas al flujo de un fluido es necesario definir los conceptos deVolumen de Control y de Sistema.
Se entiende por volumen de control una región fija en el espacio donde puede existir flujode fluido a través de sus fronteras. Por esta razón, en diferentes instantes, se pueden tenerdiferentes partículas en el interior del volumen del control.
Sistema se refiere a un conjunto de partículas en el cual permanecen siempre las mismas.Es decir, se está observando siempre una cantidad fija de materia.
2.3 Derivada material
El cambio con el tiempo de una variable de campo en un flujo se puede expresar en formaLagrangiana y Euleriana. La rapidez de cambio siguiendo una partícula ( punto de vistaLagrangiano ) se llama derivada material (o total o sustancial) y se escribe D/Dt. Las letrasmayúsculas se usan para enfatizar que se trata de una descripción lagrangiana.
Considérese una variable de campo α , que en una especificación Euleriana tiene la formaα=α(x,y,z,t). Siguiendo una partícula, el cambio de α en un tiempo δt es (Dα/Dt)δt.
En este tiempo δt la partícula se ha movido una distancia δx, δy , δz en las direcciones x,y, z , respectivamente.
22
Desde el punto de vista Euleriano, el cambio de α es
∂α∂
δ∂α∂
δ∂α∂
δ∂α∂
δt
tx
xy
yz
z+ + +
El cambio en ambas descripciones es el mismo por lo queD
Dtt
tt
xx
yy
zz
αδ
∂α∂
δ∂α∂
δ∂α∂
δ∂α∂
δ= + + +
de dondeD
Dt t x
x
t y
y
t z
z
t
α ∂α∂
∂α∂
δδ
∂α∂
δδ
∂α∂
δδ
= + + +
Para δt muy pequeño, δx/δt, δy/δt, δz/δt tienden a las velocidades de la partícula en lasdirecciones x,y,z , que son u, v, w respectivamente. Entonces
D
Dt t xu
yv
zw
α ∂α∂
∂α∂
∂α∂
∂α∂
= + + + (2.3.1)
En notación indicial (en este texto, la notación indicial implica el uso de coordenadascartesianas):
D
Dt tu
xii
α ∂α∂
∂α∂
= + (2.3.2)
y en notación vectorialD
Dt
α ∂α∂
α= + ⋅ ∇t
U~
( ) (2.3.3)
En las ecuaciones anteriores el primer término de la derecha significa la rapidez decambio α en un punto (derivada local). Los otros términos representan el cambio convectivo de α, es decir, el cambio a consecuencia del movimiento del fluido.
α es una variable de campo que puede ser escalar, vector o tensor. En el caso especialdonde α es la velocidad U
~
D U U
tU U~ ~
~ ~Dt= + ⋅ ∇
∂
∂( )
donde el lado izquierdo representa la aceleración de la partícula.
-------------------------------------------------------

23
Nota: La forma r
U ⋅ ∇ sólo es válida en notación cartesiana. Las otras formas se encuentran en el apéndice. Además U~
⋅∇ es una abreviación
del operador ux
vy
wz
∂∂
∂∂
∂∂
+ + . Nótese que U~
⋅∇ ≠ ∇⋅ U~
.
2.4 Teorema de Reynolds.El teorema de transporte de Reynolds relaciona, la derivada Lagrangiana de una integral
de volumen de un sistema, con una integral en derivadas Eulerianas.Consideremos un sistema en dos instantes de tiempo t y t+δt. Sea α alguna propiedad por
unidad de volumen. El sistema puede tener un cambio de volumen y posición como se muestraen la figura 2.4.1.
s(t)
V(t)
U~
tiempo t
V(t+δt)
s(t+δt)
tiempo t + δt
)n
figura 2.4.1
La cantidad total de la propiedad α en el sistema en el instante t es
α ( )( )
t dVV t
∫y la cantidad de α en el instante t+δt es
α δδ
( )( )
t t dVV t t
++∫
La derivada material de la cantidad total de α en el sistema se puede expresar
D
Dt(t)dV lím
1
t(t t)dV (t)dV
t 0V(t V(t)V(t)
αδ
α δ αδ
δ
= + −
→
+∫ ∫∫
t)
(2.4.1)
que se obtiene de la definición de derivada
D
Dt(t)dV lím
1
t (t t)dV
1
t(t t)dV (t)dV
t 0V(t) V(t) V(t)V(t)
αδ
α δ δ α δδ
α δ αδ δ
= + − +
+ + −
→ +∫ ∫ ∫ ∫∫ ( )
( )
t t VV t t
(2.4.2)
En esta ecuación

24
lím1
t(t t)dV (t t)dV
t 0V(t t) V(t)
δ δδα δ α δ
→+
+ − +
∫ ∫ (2.4.3)
representa el integrando fijo con cambio de volumen como se muestra en la figura.U~
$n
figura 2.4.2y estas dos integrales se pueden reducir a
lím1
t(t t)dV
t 0V(t t) V(t)
δδ
δα δ
→+ −
+∫ (2.4.4)
Si consideramos que un elemento dS de la superficie del sistema tiene dos posicionesdiferentes en los dos instantes de tiempo considerados t y t+δt, el barrido de ésta superficie entrelos dos instantes conforma el elemento de volumen dV como se muestra en la figura
$n
U~
ds
figura 2.4.3
Si $n es el vector normal a la superficie y U~
representa la velocidad, U~
. $n será la
velocidad normal a la superficie. En el tiempo δt la superficie se mueve una distancia U~
. $n δt
normal a la misma. Por lo quedV= U
~. $n δtdS
La integral (2.4.4) se reduce a la integral sobre la superficie
lim t t U ndSt
s tδ
α δ→
+ ⋅∫0( )
( )
)
Tomando el límite se simplifica a
α ( ) $~
( )
t U ndSS t
⋅∫ (2.4.5)
Aplicando el teorema de Gauss (Apéndice A) esta integral toma la forma
∇ ⋅∫ ( )~
( )
α U dVV t
(2.4.6)
dos términos de la ecuación (2.4.2) pueden simplificarse como:

25
limt
t t dV t dV limt
t t t dVt
dVt
V t V tt
V tV tδ δδ
α δ αδ
α δ α∂α∂ → →
+ −
= + − =∫ ∫ ∫∫
0 0
1 1( ) ( ) [ ( ) ( )]
( ) ( ) ( )( )
(2.4.7)
Con estas simplificaciones ( 2.4.2) toma la forma
DDt
t dVt
U dVV t V t
α ∂α∂
α( ) ( )( ) ( )∫ ∫= + ∇ ⋅
r (2.4.8)
En notación indical
DDt
t dVt
u
xdV
V t
i
iV t
α ∂α∂
∂ α∂
( )( )
( ) ( )∫ ∫= +
(2.4.9)
2.5 Líneas de flujo
Existen tres tipos de líneas de flujo de uso común. Estas son: líneas de corriente, líneas detrayectoria y líneas de emisión.
Líneas de corriente.
Son líneas cuya tangente es en todos los puntos paralela al vector velocidad en uninstante. El flujo donde las líneas de corriente no cambian con el tiempo se llama flujopermanente. En este caso el campo de velocidad no depende del tiempo. Consideremos una líneade corriente con un elemento diferencial dS.
ds
P U~
figura 2.5.1
Este elemento tiene componentes dx, dy, dz en los ejes cartesianos x, y, z,respectivamente. Por la definición de línea de corriente, la velocidad
rU del flujo en el punto P es
paralela a la dirección de dS. Los componentes de r
U son u, v, w. El vector unitario en ladirección del elemento dS debe ser igual al vector unitario de
rU . De donde:
26
ds
dS
dx
dSi
dy
dSj
dz
dSk
U
U
u
Ui
v
Uj
w
Uk= + + = = + +$ $ $ $ $
r
r r r rr
Entoncesdx
d S
u
U
dy
d S
v
U
dz
d S
w
U
=
=
=
r
r
r
.
que implica
dx
u
dy
v
dz
w= = (2.5.1)
Esta es la ecuación de la línea de corriente en términos del campo de velocidad.
Una línea de corriente es entonces una curva imaginaria que conecta una serie de puntosen el espacio en un instante dado, de tal forma que todas las partículas que están sobre la curvaen ese instante tienen velocidades cuyos vectores son tangentes a la misma. De aquí las líneas decorriente indican la dirección del movimiento de las partículas que se encuentran a lo largo deellas, en el instante dado.
Líneas de trayectoria.
La línea de trayectoria es la que describe una partícula en el flujo. Si r~
indica la posición
de una partícula, su velocidad es
dr dt U x y z t/ ( , , , )=r
(2.5.2)
De la solución de esta ecuación se obtienen las ecuaciones paramétricas de las líneas detrayectoria.
Líneas de emisión.Si inyectamos continuamente un colorante en un punto en el flujo, la huella del colorante
en cualquier instante representa una línea de emisión. El humo que sale de una chimenea es unejemplo.

27
Resolviendo para un instante dado la ecuación (2.5.2), para las partículas que han pasadopor r0
~
se obtiene la ecuación de la línea de emisión.
El método para determinar las ecuaciones de las líneas de flujo se muestra en el siguienteejemplo.
Ejemplo: Dado el campo de velocidad bidimensional: r
U xi y t j= − +$ ( ) $ calcule las ecuacionesde a) la línea de corriente en t=0 que pasa por (1,1); b) la línea de trayectoria de la partícula quetiene la posición (1,1) en t=0; c) la línea de emisión cuando t=0 de las partículas que pasaron por(1,1).
a) dx
x
dy
y t= −
+( )
de (2.5.1) la solución es
ln x = -ln(y+t) + ln c ó x(y+t) = cpara (1,1) y t = 0 tenemos c = 1
De dondex(y+t)=1es la ecuación de la línea de corriente.
b) De (2.5.2) se establece
dx
dtx= ,
dy
dty t= − +( )
La solución es
x = c1et
y=c2e-t + t-1 ( i )
para (1,1) y t=0; c1 = 1 y c2 = 2
De donde las ecuaciones paramétricas de la línea de trayectoria sonx= et
y= 2e-t + t-1Eliminando t se obtiene la ecuación de esta línea
yx
x= + −2
1ln

28
c) Las ecuaciones (i) representan la posición de una partícula. Consideremos la posición de laspartículas que han pasado por (1,1) cuando t=ζ ( ζ es una variable y depende de cada partícula).Sustituyendo estas condiciones en las ecuaciones (i) se obtiene c1= e-ζ; c2 = ( 2-ζ) eζ
Las ecuaciones paramétricas de las líneas de emisión para un tiempo t sonx = et-ζ
y = (2-ζ)eζ-t + t-1
Para t = 0, tienen la formax = e-ζ
y = (2-ζ)eζ -1
Eliminando t se obtiene la ecuación de la línea de emisión
yx
x=
+−
21
ln
Puede observarse que las tres líneas de flujo son distintas. Para un caso de flujo permanente, lasecuaciones para las tres líneas de flujo serían iguales.
2.6 Circulación y vorticidadLa circulación contenida en una curva cerrada dentro del flujo se define como la inte

29
30
En al figura 2.7.1.a se muestra un segmento de tubo de corriente en las secciones 1 y 2. En lafigura 2.7.1.b se muestra de forma similar un tubo de vórtice.
2.8 Gradiente de velocidad.Un elemento de fluido en un flujo puede sufrir: traslación, rotación, cambio de forma
lineal y angular.En un flujo donde el vector velocidad es igual en todos los puntos (flujo uniforme) sólo
existe traslación del elemento. Pero en un flujo no uniforme existe además rotación y cambio deforma lineal y angular. A esto se le llama gradiente de velocidad. Entonces, el tensor de gradientede velocidad (D, Dij) queda definido
31
Du
xi ji
j
=∂∂ (2.8.1)
o bien
D U= ∇r
(2.8.2)
Cualquier tensor puede descomponerse en la parte simétrica y la parte antisimetrica. Por lo cual
Du
x
u
x
u
x
u
xiji
j
j
i
i
j
j
i
= +
+ −
1
2
1
2
δ∂
∂∂
∂∂
∂∂
(2.8.3)
[ ] [ ]D U U U UT T= ∇ + ∇ + ∇ − ∇1
2
1
2
r r r r( ) ( ) (2.8.4)
de donde ( )∇r
U T representa el tensor transpuesto de ∇r
U .Llamemos
eu
x
u
x
u
x
u
xiji
j
j
iij
i
j
j
i
= +
= −
∂∂
∂∂
∂∂
∂∂
; Ω (2.8.5)
o bien
[ ] [ ]e U U U UT T= ∇ + ∇ ∇ − ∇r r r r
( ) ( ) ; =Ω (2.8.6)
que implica
D ei j i j i j
1
2
1
2+ Ω ; D e= +
≈
1
2
1
2Ω (2.8.7)
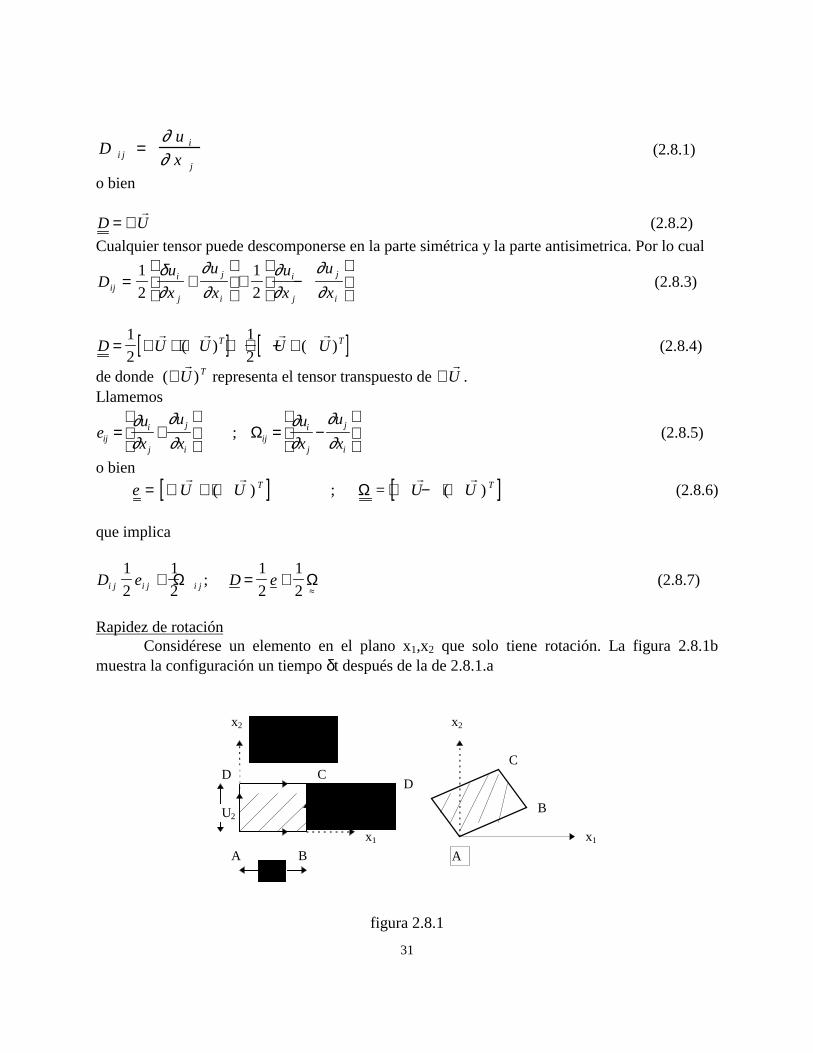
Rapidez de rotaciónConsidérese un elemento en el plano x1,x2 que solo tiene rotación. La figura 2.8.1b
muestra la configuración un tiempo δt después de la de 2.8.1.a
U2
x2 x2
x1 x1
DD C
C
A A
B
Bδ x1
UU
xx1
1
22+
∂∂
δ
UU
xx2
2
11+
∂∂
δ
figura 2.8.1
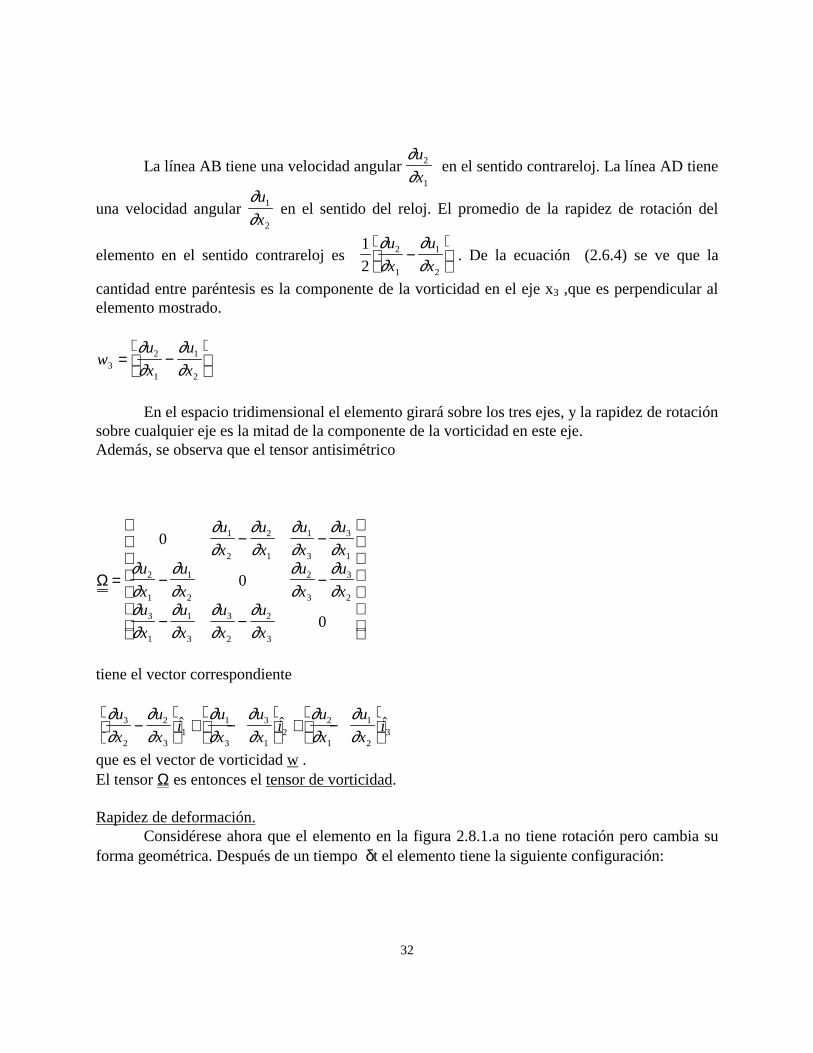
32
La línea AB tiene una velocidad angular ∂∂u
x2
1
en el sentido contrareloj. La línea AD tiene
una velocidad angular ∂∂
u
x1
2
en el sentido del reloj. El promedio de la rapidez de rotación del
elemento en el sentido contrareloj es 1
22
1
1
2
∂∂
∂∂
u
x
u
x−
. De la ecuación (2.6.4) se ve que la
cantidad entre paréntesis es la componente de la vorticidad en el eje x3 ,que es perpendicular alelemento mostrado.
wu
x
u
x32
1
1
2
= −
∂∂
∂∂
En el espacio tridimensional el elemento girará sobre los tres ejes, y la rapidez de rotaciónsobre cualquier eje es la mitad de la componente de la vorticidad en este eje.Además, se observa que el tensor antisimétrico
Ω =
− −
− −
− −
0
0
0
1
2
2
1
1
3
3
1
2
1
1
2
2
3
3
2
3
1
1
3
3
2
2
3
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
u
x
u
x
u
x
u
xu
x
u
x
u
x
u
xu
x
u
x
u
x
u
x
tiene el vector correspondiente
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
u
x
u
xi
u
x
u
xi
u
x
u
xi3
2
2
31
1
3
3
12
2
1
1
23−
+ −
+ −
$ $ $
que es el vector de vorticidad w .El tensor Ω es entonces el tensor de vorticidad.
Rapidez de deformación.Considérese ahora que el elemento en la figura 2.8.1.a no tiene rotación pero cambia su
forma geométrica. Después de un tiempo δt el elemento tiene la siguiente configuración:

33
x2
x1
CD
B
A
θ2
θ1
figura 2.8.2
De la figura
d
dt
u
x
d
dt
u
x
θ ∂∂
θ ∂∂
1 2
1
2 1
2
= = y
La suma representa la rapidez de cambio de forma del elemento ∂∂
∂∂
u
x
u
x2
1
1
2
+
en este plano.
En un espacio tridimensional, los elementos del tensor e≈
representan la rapidez de cambio de
forma o la rapidez de corte de un elemento tridimensional:
e
u
x
u
x
u
x
u
x
u
xu
x
u
x
u
x
u
x
u
xu
x
u
x
u
x
u
x
u
x
=
+ +
+ +
+ +
2
2
2
1
1
1
2
2
1
1
3
3
1
2
1
1
2
2
2
2
3
3
2
3
1
1
3
3
2
2
3
3
3
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
Los términos diagonales representan el cambio de forma lineal. El resto, el cambio deforma angular. El tensor e se llama tensor de rapidez de deformación.
2.9 Sistemas inerciales y no inerciales.A veces se miden las variables de campo con respecto a un sistema de coordenadas en
movimiento. Estas variables tienen relación con respecto a otro sistema fijo. En este últimosistema, la segunda ley de Newton para una partícula:
r rF mdU dt= / , es válida. Esto puede servir
para definir el sistema fijo también llamado inercial. Las variables de campo escalares son

34
invariantes con respecto al sistema escogido. A continuación se analizará la transformación deotras variables.
Considérese un sistema inercial SI y otro sistema no inercial SN. El origen de SN tieneposición r0 y velocidad
rU 0 con respecto a SI y sus ejes de coordenadas tienen una velocidad
angular rΩ con respecto a SI. Los subíndices I y N se refieren a las variables medidas en los
sistemas inercial y no inercial respectivamente. La posición de un punto queda determinada por
rI = r0+ rN (2.9.1)En coordenadas cartesianasr x iN iN iN= $ (2.9.2)
La derivada con respecto al tiempo de (2. 9.1)es:
d
dtr
d
dtr
d
dtrI N
~ ~ ~
= +0 (2.9.3)
De (2.9.2):
d
dtr
dx
dti x
di
dtNiN
iN iNiN
~
$$
=
+
(2.9.4)
$iiN son las bases del sistema SN, que por el movimiento de los ejes tienen derivadas con respectoal tiempo. En la figura 2.9.1 se muestran las posiciones del vector $iiN en un instante t y otro t +δt.
Ωδt δ $iiN
($ )iiN t t+δ
($ )iiN t
figura 2.9.1
En la figura 2.9.1 el vector diferencia δ δ$ $i x i tiiN iN=
rΩ
de dondedi
dtx iiN
iN
$$=
rΩ (2.9.5)
entoncesdr
dtU x r
N
N N= +r r
Ω (2.9.6)
y de (2.9.3)r r r rU U U x rI N N= + +0 Ω (2.9.7)

35
Derivando con respecto al tiempo (2.9.7) se obtiene la aceleración
d
dtU
d
dtU
d
dtU
d
dtr
dr
dtI N NN
r r r r= + + × + ×0
ΩΩ (2.9.8)
Pero rU u iN iN iN= $
De manera similar que en (2.9.6)
dU dt a x UN N N
r r r r/ = + Ω (2.9.9)
utilizando (2.9.6) y (2.9.9) en (2.9.8) se tiene
r r r r r r rr
a a a x U x x rd
dtx rI N N N N= + + + +
0 2Ω Ω Ω
Ω ( ) (2.9.10)
donde adU
dt00=r
En esta ecuación se observa que la aceleración (raI ) medida en SI no es igual a la
aceleración ra N medida en SN. El termino 2
r rΩ x U N se llama la aceleración de Coriolis y el
término r rΩ Ω x x rN( ) la aceleración centrípeta.
Para un flujo de un fluido, la aceleración de una partícula corresponde a la derivadamaterial y se puede escribir
D
DtU a
D
DtU U r
d
dtrI N N N N
r r r r r r r rr
r= + + × + × × + ×0 2Ω Ω ΩΩ
( ) (2.9.11)

36
Problemas
2.1 Obtenga la forma de la derivada material en coordenadas cilíndricas
2.2 Calcule la aceleración de una partícula en el punto (1,3,2) y t=1 del flujo del problema 1.1;
R = [ ]28 12 15$ $ $i j k+ + .
2.3 Considere el flujo bidimensional definido por r
U x t i yj= + +( )$ $1 2 . Determine a) en el eltiempo t=0, la línea de corriente que pasa por (1,1); b) La línea de la trayectoria de partícula quepasa por (1,1) en t=0; c) la línea de emisión en el tiempo t=0 de las partículas que pasaron por(1,1). Dibuje las tres líneas.R = [a) x=y; b) x=y1+lny; c) x=y1-lny ]
2.4 Muestre que en coordenadas polares las líneas de corriente son la solución dedr/µr=rdθ/µθ
2.5 En el flujo plano: µr=U0cosθ(1-a2/r2) ; uθ= -U0senθ(1+a2/r2). Encuentre la línea de corrienteque pasa por (r,θ )=(2a, π/2)
R = r
r a a2 2
2
3−=
senθ
2.6 Considere el flujo bidimensional r
U x i x y j= + + +( )$ ( ) $1Determine : las líneas de flujo que pasan por (1,1).R = [y=(x3+5)/(3(1+x))]
2.7 Calcule el vector vorticidad del flujo en el problema 1.1 en el punto (1,3,2)

37
R = [ ]14 2$ $ $i j k− +
2.8 Para un flujo laminar entre dos placas paralelas estacionarias, la velocidad del fluido estádada por [ ]
rU U z b i= −0
21 ( / ) $ .
x
z
--perfil de velocidadb
Encuentre y grafique la distribución de vorticidad.
R = −
U
z
bj0 2
2 $
2.9 Para el flujo r
U x y z i x y j x y z k= + + + + + − −( )$ ( ) $ ( ) $2 3 6 2 2 4Determine: a)El campo de vorticidad; b) la circulación alrededor de un cuadrado con vértices en(0,0,0),(1,0,0),(1,1,0) y (0,1,0); c)
R = [ ]a i j k b) $ $ $; )− + − −2 5 2 2
2.10 Para el flujo del problema 2.9 encuentre a) el tensor de vorticidad, b) el tensor de rapidez dedeformación, c) el tensor de gradiente de velocidad.
R = a) ) )
0 2 5
2 0 2
5 2 0
4 4 7
4 4 2
7 2 8
2 3 6
1 2 0
1 2 4
−− −
−− −
− −
; b ; c
2.11 En el flujo del problema 2.8 encuentre las componentes del tensor de rapidez dedeformación que existen. R = [e13=e31= -Uo2z/b2]
2.12 Verifique que el flujo del problema 2.5 es irrotacional para r>a.
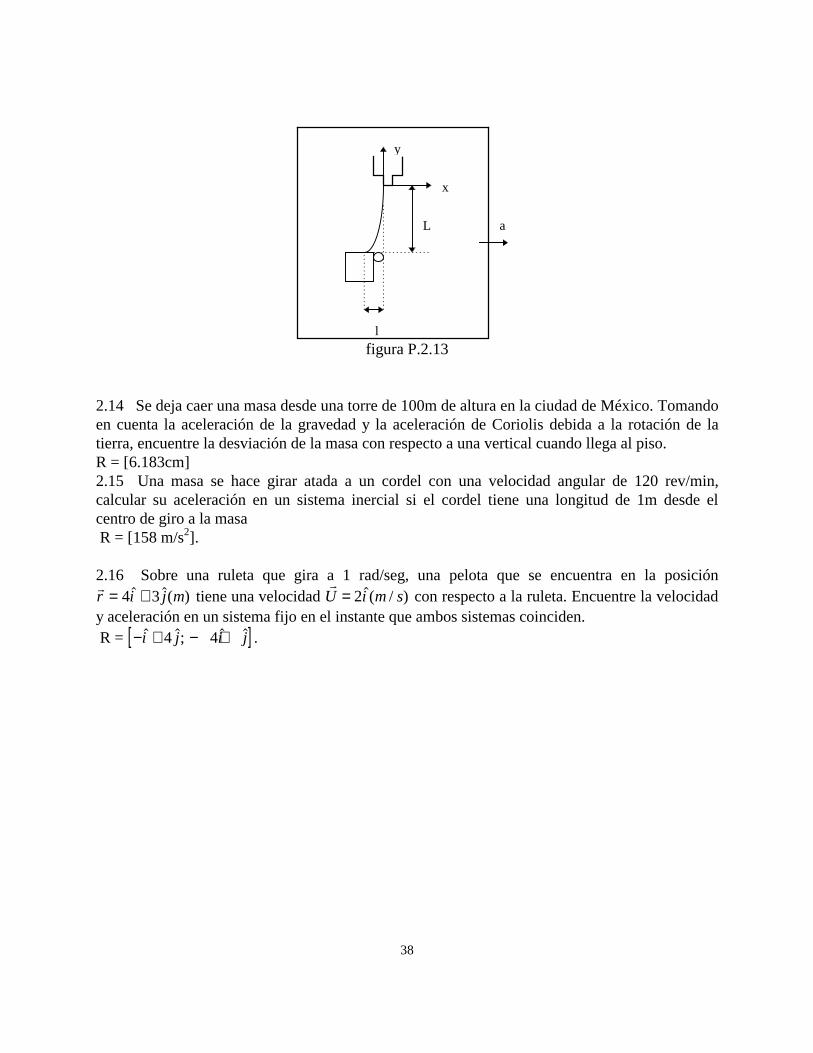
2.13 Viviendo en un sistema de referencia el cual es casi inercial estamos acostumbrados asostener nuestro vaso mas o menos directamente debajo de la botella invertida mientras se sirvela cerveza. Para una separación vertical dada (L), ¿ donde debe poner su vaso cuando viaja en untren acelerado (a)?
[l=aL/g]
38
y
x
L
l
a
figura P.2.13
2.14 Se deja caer una masa desde una torre de 100m de altura en la ciudad de México. Tomandoen cuenta la aceleración de la gravedad y la aceleración de Coriolis debida a la rotación de latierra, encuentre la desviación de la masa con respecto a una vertical cuando llega al piso.R = [6.183cm]2.15 Una masa se hace girar atada a un cordel con una velocidad angular de 120 rev/min,calcular su aceleración en un sistema inercial si el cordel tiene una longitud de 1m desde elcentro de giro a la masa R = [158 m/s2].
2.16 Sobre una ruleta que gira a 1 rad/seg, una pelota que se encuentra en la posiciónrr i j m= +4 3$ $( ) tiene una velocidad
rU i m s= 2$( / ) con respecto a la ruleta. Encuentre la velocidad
y aceleración en un sistema fijo en el instante que ambos sistemas coinciden. R = [ ]− + − +$ $; $ $i j i j4 4 .
39
CAPITULO 3. ECUACIONES DE MOVIMIENTO
• 3.1 Conservación de masa 38• 3.2 Conservación de momentum 39• 3.3 Conservación de energía 42• 3.4 Ecuaciones constitutivas 45• 3.5 Ecuaciones de movimiento de un fluido newtoniano 49
40
ECUACIONES DE MOVIMIENTO
3.1 Conservación de masa
La masa no se crea ni se destruye, sino que se conserva. Este principio es uno de losbásicos en el estudio del movimiento de los fluidos. Se desarrollará este concepto en forma deecuaciones diferenciales e integrales.
Considérese un volumen de control de forma arbitraria en el flujo. Por el principio deconservación de masa , la suma de la rapidez de variación de la masa dentro del volumen y lasalida neta de masa a través de la superficie del volumen es cero.
dA
n
U
Fig. 3.1.1
Por lo tanto la forma integral es
∫∫ ⋅+AV
dAnUdVt
0 = ˆ
rρρ
∂∂
(3.1.1)
Transformando la segunda integral con el teorema de la divergencia de Gauss, eintroduciendo la derivada dentro de la primera integral (el volumen V es independiente deltiempo)
( ) 0
=
⋅∇+∫ dVU
tV
rρ
∂ρ∂
(3.1.2)
Como el volumen V es arbitrario esta ecuación es válida para cualquier volumen. Estoimplica que el integrando es cero.
( )∂ ρ∂
ρ
tU+ ∇ ⋅ =r
0 (3.1.3)
41
Esta es la forma diferencial de la conservación de masa. A estas ecuaciones (diferencial eintegral) se les llama ecuaciones de continuidad.
En notación indicial la ecuación (3.1.3) es
( )∂ ρ∂
∂∂
ρ
t xu
jj+ = 0 (3.1.4)
Desarrollando (3.1.3) y (3.1.4) y utilizando la derivada material la ecuación decontinuidad se puede escribir
D
D tU
ρρ+ ∇ ⋅ =
r0 (3.1.5)
0
=+j
j
x
u
tD
D
∂∂
ρρ (3.1.6)
Para un flujo incompresible (ρ = cte) la ecuación de continuidad se simplifica a
∇ ⋅ =r
U 0 (3.1.7)
∂∂
u
xj
j
= 0 (3.1.8)
3.2 Conservación de momentum (cantidad de movimiento ).
Momentum lineal
Esta es la consideración de la segunda ley de Newton: la suma de las fuerzas sobre unapartícula es igual a la rapidez de variación de su momentum lineal. En el estudio de medioscontinuos este concepto Lagrangiano se transforma a una forma Euleriana para facilitar sumanejo.
Considérese un sistema con un campo de velocidad r
U , fuerzas de cuerpo por unidad demasa
rf y superficiales por unidad de área representadas por el vector
rP. Aplicando la segunda
ley de Newton a este sistema:
42
∫∫∫ +=
VAV
dVfdAPdVUtD
D
rrrρρ (3.2.1)
∫∫∫ +=
V
i
A
i
V
i dVfdAPdVutD
D
ρρ (3.2.2)
El vector rP está relacionado con el tensor de esfuerzos τ definido en la sección 1.3. De
la Figura 1.3.2 se observa que la componente total en la dirección 1, P1, es la suma de las fuerzasen la dirección 1 en las caras 1,2 y 3. Entonces P1 = τ11 n1 + τ21 n2 + τ31 n3.Generalizando:
rP n= τ $ (3.2.3)
rP ji j1 = τ η (3.2.4)
Se puede simplificar la forma integral de la ecuación (3.2.1) y (3.2.2), aplicando elteorema de Reynolds en el lado izquierdo y (3.2.3) ó (3.2.4) en la primera integral del ladoderecho
( ) ( ) ∫ ∫∫ +=
⋅∇+
A VV
dVfdAndVUUUt
ˆ
rrrrρτρρ
∂∂
(3.2.5)
( ) ( ) ∫ ∫∫ +=
+
A V
ijji
V
kik
i dVfdAndVuux
ut
ρτρ∂
∂ρ∂∂
(3.2.6)
Aplicando el teorema de Gauss a la primera integral del lado derecho
( ) ( ) ∫ ∫∫ +⋅∇=
⋅∇+
V V
dVfdVdVUUUt
rrrrρτρρ
∂∂
(3.2.7)
( ) ( ) ∫ ∫∫ +=
+
V V
ijij
V
kik
i dVfdVx
dVuux
ut
ρτ∂
∂ρ∂
∂ρ∂∂
(3.2.8)

43
Debido a que el volumen V es arbitrario:
( ) ( ) fUUUt
rrrr
ρτρρ
∂∂ +⋅∇=⋅∇+ (3.2.9)
( ) ( ) ijij
kik
i fx
uux
ut
ρτ∂
∂ρ∂
∂ρ∂∂ +=+ (3.2.10)
O bien
( ) ( ) ( ) ( ) fUUUUt
UUt
rrrrrrr
ρτρρρ
∂∂
∂∂ρ +⋅∇=∇⋅+⋅∇++ (3.2.11)
( ) ( ) ( ) ( ) ijij
ik
kkk
iii fx
ux
uux
ut
uut
ρτ∂
∂∂
∂ρρ∂
∂ρ∂∂
∂∂ρ +=+++ (3.2.12)
El segundo y tercer término es un múltiplo de la ecuación de continuidad (3.1.3) y (3.1.4)Entonces
( ) ( ) fUUUt
rrrr
ρτρ
∂∂ρ +⋅∇=∇⋅+ (3.2.13)
( ) ( ) ijij
ik
ki fx
ux
ut
ρτ∂
∂∂
∂ρµ∂∂ρ +=+ (3.2.14)
Esta es la forma diferencial de la conservación de momentum. Usando la derivadamaterial
ftD
UD rr
ρτρ +⋅∇= (3.2.15)
ijij
i fxtD
uD
ρτ∂
∂ρ += (3.2.16)
Esta expresión muestra el balance entre la aceleración por unidad de volumen del ladoizquierdo y las fuerzas de superficie y las de cuerpo respectivamente del lado derecho.
44
Momentum angular.
La conservación del momentum angular implica que la suma de los momentos de lasfuerzas que actúan sobre un sistema es igual a la rapidez de cambio del momentum angular. Estarelación es útil en algunos problemas que involucran rotación del fluido, por ejemplo,turbomaquinaria.
El momento del momentum lineal (momentum angular) con respecto al origen delelemento de masaρ dV del sistema es ρ
r rr UdV× , donde
rr es el vector de posición de este
elemento. La fuerza rPdA sobre un elemento de la superficie del sistema tiene un momento
r rr PdA× y la fuerza de cuerpo sobre el elemento de masa ρdV del sistema tiene un momentoρ r rr fdV× . Según la conservación de momentum angular para todo el sistema es
∫∫∫ ×+×=×
VAV
dVfrdAPrdVUrtD
D
rrrrrr ρρ (3.2.17)
∫∫∫ +=
V
jiijk
A
jiijk
V
jiijk dVfrdAPrdVrtD
D
ρεεµρε (3.2.18)
sustituyendo rP de (3.2.3) y (3.2.4)
∫∫∫ ×+×=×
VAV
dVfrdAnrdVUrtD
D ˆ
rrrrr ρτρ (3.2.19)
∫∫∫ +=
V
jiijk
A
lljiijk
V
jiijk dVfrdAnrdVurtD
D
ρετερε (3.2.20)
Esta es la forma integral de la ecuación de momentum angular. La forma diferencialcorrespondiente muestra que el tensor de esfuerzo τ es simétrico.
3.3 Conservación de energía.
La primera ley de la termodinámica establece la conservación de la energía. Si seconsidera un sistema, el cambio de energía del sistema es la suma de la entrada de energía enforma de calor y de trabajo.
45
La energía del sistema comprende la energía interna y la energía cinética.La energía interna por unidad de masa es e. Considerando un elemento de volumen dV
del sistema, ρedV es su energía interna y 1/2ρ r r
U UdV⋅ su energía cinética.Considerando un elemento de superficie del sistema dA,
rq ndA⋅ $ representa la rapidez de
salida de calor, donde rq es el vector de flujo de calor.
El trabajo se efectúa por las fuerzas de cuerpo y las fuerzas de superficie. El vector rPdA
representa la fuerza de superficie sobre el elemento dA y r r
U PdA⋅ la rapidez con la que realizaeste trabajo. El vector ρ
rfdV es la fuerza de cuerpo sobre el elemento dV y
r rU fdV⋅ ρ la rapidez
del trabajo realizado por la fuerza del cuerpo.
Entonces, considerando la rapidez del cambio de energía del sistema
∫ ∫∫∫ ⋅−⋅+⋅=
⋅+
V AAV
dAnqdVfUdAPUdVUUeDt
D ˆ
2
1 rrrrrrr
ρρρ (3.3.1)
∫ ∫∫∫ −+=
+
V A
iiii
A
ii
V
ii dAnqdVfudAPudVuueDt
D
2
1 ρρρ (3.3.2)
donde por convención el vector qr se toma positivo hacia afuera con respecto al sistema.
Sustituyendo rP de (3.2.3) y (3.2.4) y utilizando el teorema de Reynolds
∫ ∫∫∫ ⋅−⋅+⋅=
⋅+⋅∇+
⋅+
V AAV
dAnqdVfUdAnUdVUUUeUUet
ˆ ˆ 2
1
2
1
rrrrrrrrr
ρτρρρρ∂∂
(3.3.3)
∫ ∫∫∫ −+=
++
+
V A
iiii
A
kkii
V
kiik
ii dAnqdVfudAnkudVuuuex
uuet
2
1
2
1
ρρρ
∂∂ρρ
∂∂
(3.3.4)
Utilizando el teorema de Gauss
( ) ∫ ∫∫∫ ⋅∇−⋅+⋅⋅∇=
⋅+⋅∇+
⋅+
V VVV
dVqdVfUdVUdVUUUeUUet
2
1
2
1
rrrrrrrrr
ρτρρρρ∂∂
(3.3.5)

46
dVqx
dVfudVux
dVuuuex
uuet
i
V
i
V
ii
V
kiik
V
kiik
ii
2
1
2
1
∫∫∫∫ −+=
++
+
∂∂ρτ
∂∂ρρ
∂∂ρρ
∂∂
(3.3.6)
Puesto que V es un volumen arbitrario se establece
qfUUUUUeUUet
rrrrrrrrr⋅∇−⋅+⋅⋅∇=
⋅+⋅∇+
⋅+ )(
2
1
2
1
ρτρρρρ
∂∂ (3.3.7)
ii
iiikik
kiik
ii qx
fuux
uuuex
uuet
2
1
2
1
∂∂ρτ
∂∂ρρ
∂∂ρρ
∂∂ −+=
⋅++
+ (3.3.8)
Resolviendo las expresiones anteriores
( ) ( )
( ) ( ) ( ) ( ) qfUUUUUUeU
Ut
UUUt
eUUt
et
rrrrrrrrr
rrrrrr
⋅∇−⋅+∇⋅+⋅∇⋅=
⋅∇⋅+∇⋅
+
⋅∇+⋅+
⋅∇++
⋅+
2
1
2
1
2
1
ρττρρ
ρρ∂∂ρρ
∂∂
∂∂ρ
∂∂ρ
(3.3.9)
( ) ( )
ii
iiik
kikik
iiik
kk
k
kk
iikk
ii
qx
fuuxx
uuux
uex
u
uxt
uuuxt
euut
et
2
1
2
1
2
1
∂∂ρ
∂∂ττ
∂∂
∂∂ρ
∂∂ρ
ρ∂
∂ρ∂∂ρ
∂∂ρ
∂∂
∂∂ρ
∂∂ρ
−++=
+
+
++
++
+
(3.3.10)
Por continuidad (ecs. 3.1.3 y 3.1.4):
( ) ( ) ( ) ( ) qfUUUUUUeUUt
Uet
rrrrrrrrrrr⋅∇−⋅+∇+⋅∇⋅=∇⋅⋅+∇⋅+⋅+ :
ρττρρ
∂∂ρ
∂∂ρ (3.3.11)
ii
iiik
kiikiik
iik
kik
kii qx
fuuxx
uux
uuex
uut
uet
∂
∂ρ∂
∂ττ∂
∂∂
∂ρ∂∂ρ
∂∂ρ
∂∂ρ −++=+++ (3.3.12)
Esta es la ecuación de conservación de energía total. Sin embargo, la conservación de laenergía mecánica se obtiene multiplicando escalarmente las ecuaciones (3.2.13) y (3.2.14) por lavelocidad
rU
( ) fUUUUUUt
Urrrrrrrr
)(
ρτρ∂∂ρ ⋅+⋅∇⋅=∇⋅⋅+⋅ (3.3.13)

47
iikik
iik
kiii fux
uux
uuut
u
)(
ρτ∂
∂∂
∂ρ∂∂ρ +=+ (3.3.14)
Restando estas ecuaciones a las anteriores
( ) ( ) qUeUet
rrr⋅∇−∇=∇⋅+ :
τρ
∂∂ρ (3.3.15)
ii
ik
ikk
k qx
ux
ex
uet
∂
∂∂
∂τ∂
∂ρ∂∂ρ −=+ (3.3.16)
Esta es la forma diferencial de la conservación de energía interna. Usando la derivadamaterial:
( ) qUtD
De rr⋅∇−∇= :
τρ (3.3.17)
ii
ik
ki qx
uxtD
De
∂∂
∂∂τρ −= (3.3.18)
El lado izquierdo representa la rapidez de cambio de energía interna, el primer términodel lado derecho la acción del esfuerzo sobre la deformación y el último término el efecto de latransmisión de calor.
3.4 Ecuaciones constitutivas.
Hasta ahora se tienen las ecuaciones de conservación, pero no se ha especificado de quematerial se trata. Según el material que se estudie el comportamiento será diferente. Lasecuaciones anteriores son aplicables en general, pero para aplicarlas a un problema específico,habrá que introducir la información relacionada con la naturaleza del material en estudio. Estarelación que se busca es la ecuación constitutiva del material.
Las ecuaciones (3.1.4), (3.2.14) y (3.3.16) constituyen un sistema de cinco ecuacionesescalares con las variables incógnitas: ρ, ui (tres componentes), τij (nueve elementos), e, qi (trescomponentes). La fuerza de cuerpo fi depende de factores externos del material, y se estima deacuerdo con el fenómeno físico que produce dicha fuerza.
Si se pueden escribir τij y qi en términos de las otras variables incógnitas, se tendrá unsistema determinado.

48
Se busca entonces, dos ecuaciones constitutivas que relacionen
τ ij= τij(ρ, ui, e) (3.4.1)
qi = qi(ρ, ui, e) (3.4.2)
Un material polar es aquel en el que existen momentos de cuerpo (por ejemplo losmomentos por unidad de volumen causados por ciertos efectos magnéticos ). En un material nopolar, la derivación de Ec. 3.2.20 es válida, en donde se obtiene que el tensor de esfuerzo essimétrico.
Según el postulado de estado en termodinámica, es posible establecer para algunassustancias las relaciones
p= p(ρ, T) (3.4.3)
e= e(ρ,T) (3.4.4)
Estas relaciones dependen del fluido que se trate. Para el caso especial de un gas perfecto(3.3.3) toma la forma
p= RTρ (3.4.5)
y (3.4.4)
∫=
T
T
v dTCe
0
(3.4.6)
donde R es la constante del gas, T0 una temperatura de referencia y p la presión.
En general, las ecuaciones constitutivas (3.4.1) y (3.4.2) se pueden expresar como funciónde la temperatura
τij= τij(ρ, ui, T) (3.4.7)
qi= qi(ρ, ui, T) (3.4.8)

49
Ecuación de Fourier
Si qi es debido sólo a la conducción, la ecuación de Fourier estableceq=-k∇T (3.4.9)
qi=-k∂T/∂xi (3.4.10)
donde k es el coeficiente de transmisión de calor por conducción. El signo menos es debido a queel flujo de calor es en sentido contrario al crecimiento de la temperatura.
Fluido ideal
Un fluido ideal es aquel en el cual el tensor de esfuerzos es isotrópico. τij es un múltiplode ji δ que es el único tensor isotrópico de segundo orden. Por lo tanto
τ δ = − p (3.4.11)
jiji p δτ −= (3.4.12)
donde δ es el tensor identidad y p es la presión en el fluido y el signo negativo indica que la
presión es un esfuerzo normal (de compresión).
La ecuación de conservación de momentum se reduce a
( ) ( ) fpUUUt
rrrr
ρρ
∂∂ρ +−∇=∇⋅+ (3.4.13)
( ) ( ) ii
ik
ki fx
pu
xuu
t
ρ
∂∂
∂∂ρ
∂∂ρ +−=+ (3.4.14)
A estas ecuaciones se les llama ecuaciones de Euler. La de energía interna se reduce a
( ) qUpeUet
rrr⋅∇−⋅∇−=∇⋅+ ρ
∂∂ρ
(3.4.15)
ii
iik
k qxx
pex
uet ∂
∂µ∂
∂∂
∂ρ∂∂ρ −−=+ (3.4.16)

50
Fluido Newtoniano
En un fluido viscoso además de los esfuerzos normales existen esfuerzos cortantesdebidos a la viscosidad. La ecuación constitutiva para el fluido newtoniano toma la forma
( ) )( TUUUprrv
∇+∇+⋅∇+−= µδλδτ (3.4.17)
+++−=
i
j
j
i
k
kjiji x
u
x
u
x
up
ij ∂
∂∂∂µ
∂∂δλδτ (3.4.18)
Esta ecuación constitutiva satisface las siguientes restricciones: a) cuando el fluido estáen reposo el esfuerzo es debido solamente a la presión ejercida por él mismo; b) τij estálinealmente relacionado con eij y no depende de la rotación Ωij; y c) El fluido es isotrópico.
En la ecuación constitutiva λ y µ son coeficientes de viscosidad y son propiedades delfluido.
Para el flujo unidimensional referido en la sección 1.4, donde r
U = u(y)$i , el tensor deesfuerzo es
−
−
−
=
p
pdy
udy
up
00
0
0
∂µ
∂µ
τ (3.4.19)
El valor del elemento τ12 permite calcular el coeficiente de viscosidad µ. El coeficiente deviscosidad λ es difícil de determinar. La siguiente consideración simplifica el problema y permiteponer el valor de λ en función de µ. La suma de los esfuerzos normales es:
( ) Uptr
r⋅∇++−= 2 33 µλτ (3.4.20)
τii=-3p+(3λ+2µ) i
i
x
u
∂∂
(3.4.21)
Si se considera que el promedio de los esfuerzos normales 1/3τii no depende de laviscosidad

51
3λ+2µ=0 (3.4.22)
Un fluido que satisface esta relación se llama fluido de Stokes e incluye gasesmonoatómicos. Esta relación se aproxima al comportamiento de otros gases.
Para un fluido incompresible usando la ecuación de continuidad (3.1.7) y (3.1.8) laecuación constitutiva se reduce a
( )( ) T
UUprr
∇+∇+−= µδτ (3.4.23)
++−=
i
j
j
iijij x
u
x
up
∂∂
∂∂µδτ (3.4.24)
Se observa que la relación es independiente del valor de λ.
Fluidos no newtonianos.
Los fluidos que no cumplen con la ecuación constitutiva newtoniana (3.4.17) y ( (3.4.18)se llaman fluidos no newtonianos. La mayoría de los fluidos que se encuentran comunmente sonno newtonianos , por ejemplo: la sangre, la pintura, etc. Cada uno de estos fluidos tienen supropia ecuación constitutiva que se determina experimentalmente.
3.5 Ecuaciones de movimiento de un fluido newtoniano.
Aunque en la naturaleza la mayoría de los fluidos son no newtonianos, el casonewtoniano es el más sencillo de los fluidos viscosos. Además su estudio se justifica debido aque en muchos fenómenos que interesan en ingeniería se trata con aire o agua, cuyocomportamiento es newtoniano.
Sustituyendo la ecuación constitutiva (3.4.17) y (3.4.18) en las ecuaciones demovimiento,se obtiene:
Conservación de masa
( ) 0
=⋅∇+ Ut
rρ
∂ρ∂
( ) 0
=+ ii
ut
ρµ∂
∂∂
ρ∂

52
Conservación de momentum (ecuaciones de Navier-Stokes)
( ) ( )( )[ ] fUUUpUUt
U T rrrrrrr
) (
ρµλρ∂∂ρ +∇+∇∇+⋅∇∇+−∇=∇⋅+ (3.5.1)
ii
j
j
i
jk
k
iik
ik
i fx
u
x
u
xx
u
xx
p
x
uu
t
u
ρ∂∂
∂∂µ
∂∂
∂∂λ
∂∂
∂∂
∂∂ρ
∂∂ρ +
++
+−=+ (3.5.2)
Conservación de energía. Empleando además la ecuación de Fourier (3.4.9) y (3.4.10)
( ) ( ) ( )( )( )[ ] ( )TkUUUUUpeUt
e T ∇⋅∇+∇∇+∇+⋅∇+⋅∇−=∇⋅+rrrrrr
:
2 µλρ∂∂ρ (3.5.3)
+
++
+−=+
iii
j
i
j
j
i
k
k
ki
k
kk x
Tk
xx
u
x
u
x
u
x
u
x
up
x
eu
t
e
2
∂∂
∂∂
∂∂
∂∂
∂∂µ
∂∂λ
∂∂
∂∂ρ
∂∂ρ (3.5.4)
Estas ecuaciones junto con las relaciones p=p(ρ, T) y e=e(ρ, T) forman un sistema desiete ecuaciones escalares con las siete incógnitas: ρ. uI (tres), p, e y T.
Función de disipación
En las ecuaciones (3.5.3) y (3.5.4) los términos de viscosidad
( )[ ] UUUuU T rrrr∇∇+∇+⋅∇=Φ :)()( 2λ (3.5.5)
++
=Φ
i
j
i
j
j
i
k
k
x
u
x
u
x
u
x
u
2
∂∂
∂∂
∂∂µ
∂∂λ (3.5.6)
representan la rapidez de disipación de energía por unidad de volumen debido a los efectosviscosos. El escalar Φ se llama la función de disipación.
Condiciones de frontera
Para resolver estas ecuaciones diferenciales parciales se necesitan establecer lascondiciones de frontera .
53
Las condiciones de frontera mas usuales para la velocidad son:
a) La condición de no resbalamiento que implica que el fluido tiene la misma velocidadde la frontera que confina el flujo.
b) Para un flujo no confinado, la velocidad del fluido muy lejos de la región deperturbación del flujo es la velocidad de la corriente libre.
Cuando se incluyen efectos térmicos es necesario especificar la temperatura en lasfronteras o bien el flujo de calor.
Condiciones iniciales.
En el caso de flujo no permanente se necesitan especificar las condiciones iniciales (t=0) delfluido, tales como la distribución de velocidad y temperatura.
54
CAPITULO 4. TEOREMAS ESPECIALES
4.1 Teorema de Helmholtz 534.2 Teorema de Kelvin 544.3 Ecuación de vorticidad 564.4 Ecuación de Bernoulli 564.5 Ecuación de Crocco 59
55
TEOREMAS ESPECIALESLas ecuaciones de movimiento del capítulo 3 son generales. Sin embargo, existen formas
especiales de estas ecuaciones y en algunos casos, formas simplificadas que son más másprácticas de manejar.
4.1 Teorema de HelmholtzLa definición del vector vorticidadr rω = ∇ × U
permite establecer
∇ ⋅ = ∇rω 0
que indica que el vector rω es solenoidal.
Entonces, para un volumen V arbitrario
∇ ⋅ =∫ rωdV
V
0
Usando el teorema de Gauss, la integral anterior se convierte en una integral sobre lasuperficie que encierra el volumen V.
r )ω ⋅ =∫ ndAA
0 (4.1.2)
A1
A2
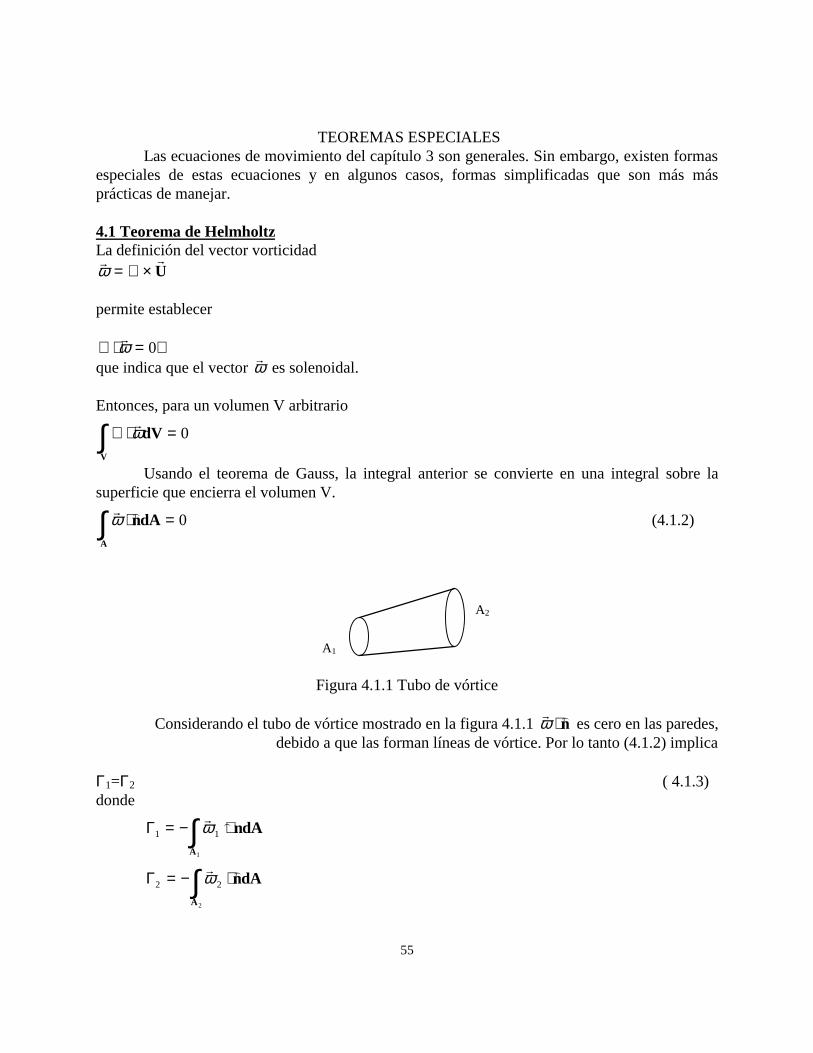
Figura 4.1.1 Tubo de vórtice
Considerando el tubo de vórtice mostrado en la figura 4.1.1 r )ω ⋅ n es cero en las paredes,
debido a que las forman líneas de vórtice. Por lo tanto (4.1.2) implica
Γ1=Γ2 ( 4.1.3)donde
Γ1 1
1
= − ⋅∫ r )ω ndAA
Γ2 2
2
= − ⋅∫ r )ω ndAA

56
Si r rω ω1 2 y representan el promedio de vorticidad sobre las áreas A1 y A2
respectivamente, (4.1.3) se puede escribir
r rω ω1 1 2 2A A= (4.1.4)
Este resultado es válido para cualquier tipo de fluido y significa que los tubos de vórticeson cerrados(como los anillos de humo) o terminan en alguna frontera.
4.2 Teorema de Kelvin.Este teorema se desarrolla para un fluido no viscoso y un campo conservativo de fuerzas
de cuerpo
fG
xii
=∂∂
(4.2.1)
donde G es el potencial del campo conservativo.Considérese una curva material C (formado por partículas). la rapidez de cambio de
circulación siguiendo esta curva es
DDt
DDt
u dx
DuDt
dx uD dx
Dt
i i
C
ii i
i
C
Γ =
= +
∫
∫ ( )
(4.2.2)
donde la derivada material se intercambia con la integral porque esta se hace sobre una curvamaterial.
dxi son los componentes del elemento dlr
de la curva C y son funcióm del tiempo debidoa que el elemento dl
r cambia de tamaño y su dirección. Además, la rapidez de cambio dxi es la
diferencia de velocidad en los extremos de dlr
en esa dirección. Por esto
D dx
Dtdui
i
( )= (4.2.3)
La ecuación de movimiento para este fluido es
DuDt x
Gx
i
i i
= − +1
ρ∂ρ∂
∂∂
(4.2.4)
57
sustituyendo (4.2.3) y (4.2.4) en (4.2.2), se tiene
DDt
px
dxGx
dx u dx
dpdG d u u
ii
ii i i
C
ii i
C
Γ = − + +
= − + +
∫
∫
1
1
2
ρ∂∂
∂∂
ρ ( )
donde dp y dG representan la variación espacial de p y G respectivamente. La integral sobre una
trayectoria cerrada dφ =∫ 0, donde φ es cualquier cantidad escalar. Por lo que
DDt
dp
C
Γ = −∫ ρ (4.2.5)
Caso a) Flujo incompresibleSi la densidad ρ es constante, (4.2.5) se reduce a
DDt
dpC
Γ = − ∫1
ρ
Y por la razón antes expuesta
D
Dt
Γ= 0
Caso b) Flujo barotrópicoPara un flujo barotrópico p es una función explícita de ρ.
P=P(ρ)
Entonces (4.2.5) se escribe
[ ]DDt
pd d p
C C
Γ = − = −∫ ∫( )(ln )
ρρ
ρ ρ
Por la misma razónD
Dt
Γ= 0
Entonces, el teorema de Kelvin establece que para un fluido incompresible o barotrópico;además no viscoso y con campo de fuerzas conservativo, la circulación alrededor de una curvamaterial no varía con el tiempo, aunque ésta cambie su forma.

58
4.3 Ecuación de vorticidadPara un fluido incompresible, en un campo de fuerzas conservativo, las ecuaciones de
Navier-Stokes toman la forma
ρ ∂∂
ρ µr
r r rUt
U U P U+ ⋅ ∇ = −∇ + ∇( ) 2 (4.3.1)
Usando la identidad de la sección A.4 del apéndice A, la ecuación se escribe
ρ ∂∂
ρ ρ µr r
r r rUt
UU U P U+ ∇ − × ∇ × = −∇ + ∇
2
2
2( )
Tomando el rotacional de esta ecuación y empleando la definición de vorticidad
ρ ∂ω∂
ρ ω µ ωr r r
tU− ∇ × × = ∇( ) 2 (4.3.2)
donde se considera que los operadores diferenciales son intercambiables y que elrotacional de un gradiente es cero. De la identidad de la sección A.4 del apéndice A.
∇ × × = ∇ ⋅ − ∇ ⋅ − ⋅ ∇ + ⋅ ∇( ) ( ) ( ) ( ) ( )r r r r r r r r r rU U U U Uω ω ω ω ω
= − ⋅ ∇ + ⋅ ∇( ) ( )r r r rU Uω ω
Por la condición de incompresibilidad y que el vector rw es solenoidal. la ecuación
(4.3.2) toma entonces la forma
ρ ω ρ ∂ω∂
ρ ω ρ ω µ ωDDt t
U Ur r r r r r r
= + ⋅ ∇ = ⋅ ∇ + ∇( ) ( ) 2 (4.3.3)
Esta ecuación de vorticidad establece que la rapidez de cambio de la vorticidad de un elementode fluido depende del gradiente de velocidad y de su difusión por efectos viscosos.
4.4 Ecuación de Bernoulli.Considérese un fluido no viscoso y fuerzas de cuerpo conservativas. Bajo estas
consideraciones, en casos específicos las ecuaciones de cantidad tienen una integral sencilla paraun instante de tiempo dado. A esta integral se le llama ecuación de Bernoulli. Las ecuaciones deEuler (3.4.13) toman la forma
∂∂
ωρ
r rr rU
t
UU p G+ ∇
− × = − ∇ + ∇
2
2
1 (4.4.1)
Tomando el producto escalar del termino de presión con elemento arbitrario drr
y usando larelación

59
dr dxx
dyy
dzz
d⋅ ∇ = + + =∂
∂∂
∂∂∂
(4.4.2)
de donde d es un operador diferencial en espacio, se tiene
dr PdP
ddP
⋅ ∇ = = ∫1
ρ ρ ρ (4.4.3)
donde la integral se hace en el espacio para un instante dado. Usando (4.4.2) nuevamente.
dr P drdPr r⋅ ∇ = ⋅ ∇
∫1
ρ ρ
Como drr
es arbitrario
⋅ ∇ = ∇∫1
ρ ρp
dp (4.4.4)
sustituyendo en (4.4.1)
∂∂ ρ
ωr r
r rUt
dp UG U+ ∇ + −
= ×∫2
2 (4.4.5)
La integración espacial de esta ecuación es fácil para los siguientes casos.
Flujo permanente. La ecuación (4.4.5) se reduce a
∇ + −
= ×∫ dp UG U
ρω
rr r
2
2 (4.4.6)
El producto escalar de rU con esta ecuación es
rr
Udp U
G⋅ ∇ + −
=∫ ρ
2
20
donde el vector r rU × ω es un vector normal a
r r r rU U U y ⋅ ⋅ =ω 0 . La ecuación anterior
representa la derivada material para flujo permanente, o sea
DDt
dp UG
ρ+ −
=∫r 2
20 (4.4.7)
Esto implica que la cantidad entre paréntesis es constante siguiendo la trayectoria de unapartícula o bien
60
dP UG B
ρ+ − =∫
r 2
2 (4.4.8)
a lo largo de una línea de flujo.
Flujo irrotacional. En este caso el vector vorticidad es cero
r rω = ∇ × =U 0
Usando la identidad del apéndice A- 4∇×∇φ = 0
se ve que el vector velocidad puede expresarse en términos de un escalar φ llamadopotencial de velocidad.rU = ∇φ (4.4.9)
(cualquier múltiplo de φ satisface la identidad por lo que en ocasiones aparece rU = −∇φ ).
La ecuación (4.4.5) toma la forma
∇ + +∇
− =∫( )∂φ∂ ρ
φ t
dPG
2
20 (4.4.10)
Esto implica que la cantidad entre paréntesis es constante en el espacio pero puede variarcon el tiempo o sea
∂∂ ρU
t
dPG B t+ +
∇φ− =∫
2
2( ) (4.4.11)
Para incluir B(t) en el lado izquierdo se define
φ φ’ ( )= − ∫B t dt
de donde∂φ∂
∂φ∂
’( )
t tB t= −
Y la ecuación (4.4.11) toma la forma
∂φ∂ ρ
’
t
dPG+ +
∇φ− =∫
2
20 (4.4.12)
para todo el espacio.
De la relación ∇φ′=∇φ se ve que la relación (4.4.9) no se altera.

61
En general la ecuación de Bernoulli no es una ecuación de energía. Es la integral(parcial,en un instante dado) de la ecuación de momentum. Sin embargo para flujos permanentese isoentrópicos es idéntica ala ecuación de energía.4.5 Ecuación de Crocco.
Esta ecuación relaciona la vorticidad de un flujo con la entropia del fluido. Considerandoun flujo permanente, no viscoso, sin fuerzas de cuerpo, las ecuaciones de Euler se puedenescribir
∇ − × = − ∇( )
rr rUU p
2
2
1ωρ
(4.5.1)
La identidad del apéndice C.3 esTds=dh-1/ρdP
Usando la relación (4.4.2) donde φ es ahora una diferencial total porque se trata de unflujo permanente, la identidad se escribe
dr T s dr h pr r⋅ ∇ = ⋅ ∇ − ∇( ) ( )1 ρ
Por la arbitrariedad del vector drr
se tieneT∇=∇h-1/ρ∇P (4.5.2)
Sustituyendo esta relación en (4.5.1) obtenemos la ecuación de Crocco
∇ + = ∇ + ×( )hU
T s U
rr r
2
2ω (4.5.3)
Flujo isoentrópico. La ecuación de energía (3.4.15) para este caso se reduce a
ρ DDt
e U= −∇ ⋅r
(4.5.4)
De la definición de entalpíah= e+p/ρ
DhDt
DeDt
pdp dp= − +
ρ ρ2
1
Sustituyendo en (4.5.4)

62
ρρ
ρ ρDhDt
DpDt
p DDt
U= − + ∇ ⋅
r
Por continuidad (ecuación 3.1.5)
ρDh
Dt
DP
Dt= (4.5.5)
Tomando el producto escalar con la ecuación de Euler
ρ DUDt
p
r
= −∇
se tiene
ρ DDt
U U p1
2
2r r
= − ⋅ ∇ (4.5.6)
La suma de (4.5.5) y (4.5.6) es
ρ DDt
hU Dp
DtU p( )+ = − ⋅ ∇
rr
2
2 = 0 (para flujo permanente)
(4.5.7)
La cantidad
h hU
0
2
2= +
r
(4.5.8)
se llama entalpía de estancamiento y es constante a lo largo de una línea de flujo.DhDt
0 0=
h0 puede tener valores diferentes para cada línea de flujoLa ecuación de Crocco (4.5.3) se escribe∇ = ∇ + ×h T s U0
r rω
El gradiente de h0 solo tiene componentes perpendiculares a las líneas de flujo, tambiénr rU × ω . Esto implica que la entropía varía en las direcciones normales a la línea de flujo.

63
Si ) ) )t ,n y b representan los vectores unitarios en la dirección tangente, normal y binormal
a la línea de flujo como se muestra en la figura.n
t
b
figura 4.5.1 Línea de flujola ecuación (4.5.9) tiene componentes
0 0
0
0
=
= −
= −
∂∂
∂∂
ω
∂∂
∂∂
ω
hn
Tsn
U
hb
Tsb
U
b
n
r
r
(4.5.10)
respectivamente.
Si la entropía y la entalpía son constantes en todo el espacio el flujo es irrotacional.

64
CAPITULO 5. ESTÁTICA DE FLUIDOS
5.1 Presión hidrostática 635.2 Fluidos con autogravitacion 655.3 Fuerzas sobre superficies sumergidas 675.4 Flotación 695.5 Tensión superficial 735.6 Equilibrio con aceleración uniforme 78
65
.ESTÁTICA DE FLUIDOS
En este capítulo se estudiará el comportamiento de los fluidos en reposo (hidrostática)
5.1 Presión hidrostática.Para un fluido en reposo y considerando un sistema de coordenadas fijo al fluido, la
velocidad U del fluido es cero. En este caso la ecuación de continuidad (3.1.3), las ecuaciones deconservación de momentum (3.5.1) y la de conservación de energía (3.5.3) se reducen a
(5.1.3) ).(
(5.1.2)
(5.1.1) 0
Tkt
e
fpt
∇∇=
=∇
=
∂∂ρ
ρ∂∂ρ
r
La primera ecuación denota que la densidad no varía con el tiempo, la segunda, que elcambio de presión es a causa de las fuerzas de cuerpo y la tercera, que la rapidez del cambio deenergía interna es a causa de la transmisión de calor por conducción. La ecuación (5.1.2) es laúnica que involucra presión. Para determinar la distribución de presión hidrostática se necesita lasolución de ésta.
Campo gravitacional unidimensional.Si la fuerza de cuerpo esr
f gk= − $ (5.1.4)
donde $k es un vector unitario y sustituyendo en (5.1.2) se tiene
siendo la presión constante en las otras direcciones.Si se conoce la variación de la densidad se puede integrar la ecuación. Algunos ejemplos
son:a) densidad y gravedad constantes. La integral esp=- ρgz +p0
donde p0 es la presión en z = 0.
b) atmósfera isotérmica de gas perfecto. En este casop= ρRT0
donde RT0 es constante. Sustituyendo en (5.1.5)
pgdz
dp −= )5.1.5(
dzRT
g
p
dp
0
−=

66
cuya integral para gravedad constante es
La distribución de densidad es entoncesz
RTo
g
eRT
p −=
0
0ρ
c) atmósfera politrópica de gas perfecto. En este casop= kρn
yp= ρRTdonde k y n son constantes.
De (5.1.5) se obtienedp
p
gdz
k
p pn
n p
gz
k
p
k
n
n p
gz
k
Tp
R
k
p
n
n p
gz
k
n n
n
n n
n
n
n
n
n n
n
n
n
n n
1 1
0
0
1 1
1
0
1
0
1 1
1
1
0
0
1
0
1 1
11 1
11 1
11 1
= −
= −−
=
−
−
=
−
−
−
−
−
−
−
Integrando
entonces la densidad es
y la temperatura
ρ
Campo gravitacional con simetría esféricaConsiderando una atmósfera alrededor de un planeta de radio Rp y masa Mp, la
aceleración de gravedad a una distancia r del centro del planeta es
zRT
g
epp 00
−
=
2r
GMpg = Para r > RP

67
donde G es la constante gravitacional.La ecuación (5.1.2) en coordenadas esféricas se simplifica para este caso
Si se considera una atmósfera isotérmica de gas perfecto la ecuación anterior toma laforma
−−=
−=
rRpRTo
GMppp
ndoInte
r
dr
RTo
GMp
p
dp
11exp
gra
0
2
donde po es la presión en r = Rp.
5.2 Fluidos con autogravitaciónConsidérese un fluido con simetría esférica y densidad ρ(r). Para la fuerza sobre un
elemento de fluido a una distancia r1, del origen, se establece que:
i) no depende de la masa del fluido para r > r1
ii) toda la masa para r < r1 se puede considerar concentrada en el origen
Con estas consideraciones, la fuerza por unidad de masa del fluido debida a la gravitacióndel mismo fluido es
f rG
rr r dr
r
( ) ( )= ∫42 1 1
21
0
πρ (5.2.1)
actuando hacia el origen.Sustituyendo en la ecuación (5.1.2) en coordenadas esféricas, la componente radial es
dp
drr
G
rr r dr
r= − ∫ρ
πρ( ) ( )
42 1 1
210 (5.2.2)
Derivando con respecto a r y reordenandod p
dr
dp
dr
dp
dr r
dp
drG
2
221 2
4 0− + + =ρ
π ρ (5.2.3)
Esta es una ecuación no lineal de segundo orden con dos incógnitas, p y ρ. Para resolverlase necesita una relación entre P y ρ. Un caso especial es la relación politrópicap=kρn
Sustituyendo en la ecuación diferencial (5.2.3) se obtiene
2r
GMp
dr
dp ρ−=

68
0421 2
2
2
2
2
=++
− n
n
p
k
G
dr
dp
rdr
dp
nPdr
pd π (5.2.4)
Las condiciones de frontera apropiadas son:
i) 00
=
=rdr
dp
por la simetría de la presión con respecto al origen
ii) p(0) es finita
Para algunos valores de n existen soluciones en forma cerrada. Por ejemplo, para n=1.2
042
6
5 3
5
3
5
2
2
2
=++
− p
k
G
dr
dp
rdr
dp
Pdr
pd π
la solución es
3
23/5
3
2
0
0
9
21
−
=
rk
Gp
pp
π
donde p0 es la presión en el origen. La solución puede verificarse por sustitución. Para ladensidad se tiene
2/5
25/4
0
0
9
21
−
=
rk
Gρπ
ρρ
donde ρ0=(P0/k)5/6
La masa total es
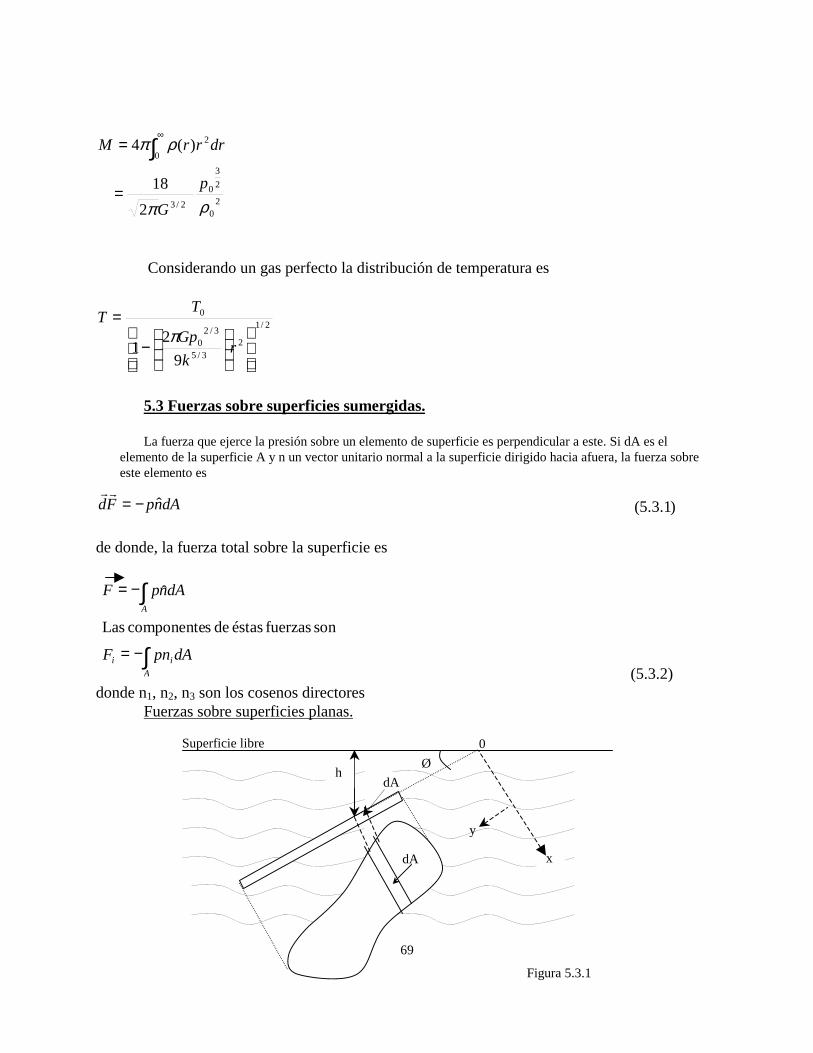
69
20
2
3
0
2/3
0
2
2
18
)(4
ρπ
ρπ
p
G
drrrM
=
= ∫∞
Considerando un gas perfecto la distribución de temperatura es
2/1
23/5
3/20
0
9
21
−
=
rk
Gp
TT
π
5.3 Fuerzas sobre superficies sumergidas.
La fuerza que ejerce la presión sobre un elemento de superficie es perpendicular a este. Si dA es elelemento de la superficie A y n un vector unitario normal a la superficie dirigido hacia afuera, la fuerza sobreeste elemento es
de donde, la fuerza total sobre la superficie es
∫
∫
−=
−=
A
ii
A
dApnF
dAnpF
sonfuerzaséstasdescomponenteLas
ˆ
(5.3.2)donde n1, n2, n3 son los cosenos directores
Fuerzas sobre superficies planas.
dA
Ø
dA
)1.3.5(
y
xdA
Superficie libre 0
Figura 5.3.1
dAnpFd ˆ−=rr
dA
h

70
La figura muestra una superficie plana sumergida en un fluido de densidad constante. La presiónsobre el elemento de área dA es
dF = pdA
Si se considera la presión en la superficie libre como cero, la presión a una profundidad hesp= ρgh
En términos de yp=ρgysenθy la fuerza sobre el área sumergida es
sen ∫=A
ydAgF θρ (5.3.3)
Las coordenadas del centroide son
x
xdA
A
y
ydA
A
cA
cA
=
=
∫
∫
entonces, la fuerza total toma la formaF= ρgsenθ ycA= pcAdonde pc es la presión en el centroide.
El centro de presión es el punto (x´,y´) donde la fuerza total F causa un momentoequivalente al de la distribución de fuerzas hidrostáticas. Tomando momentos con respecto alorigen 0 (figura 5.3.1)

71
Fy g y dA
Fx g xy dA
Ixx y dA
Ixy xydA
se tiene
xIxy
y A
yIxx
y A
A
A
A
A
c
c
′ =
′ =
=
=
′ =
′ =
∫
∫
∫
∫
ρ θ
ρ θ
sen
sen
2
2
(5.3.4)
(5.3.5)
Usando las definiciones de momento de inercia Ixx y producto de inercia Ixy
(5.3.6)
(5.3.7)
Si se trabaja con coordenadas ξ, η que pasan por el centroide del área y paralelas a x, y,el momento y el producto de inercia en estas nuevas coordenadas sonIξξ=Ixx-Ayc
2
Iξη=Ixy-Ax cyc
dedonde
(5.3.9)
(5.3.8)
Ay
Iyy
Ay
Ixx
cc
cc
ξξ
ξη
+=′
+=′
Se puede observar que el centro de presiones siempre es más profundo que el centroide.
5.4 FlotaciónLeyes de flotación.Cuando un cuerpo se encuentra sumergido en un fluido experimenta una fuerza llamada
de flotación. Considérese el cuerpo de la figura 5.4.1 en un campo vertical de gravedad y en unfluido de densidad constante.
PidA
z
y
PsdA
Superficie Libre
g
x

72
figura 5.4.1
Si las presiones en las superficies superior e inferior son ps y pi, la fuerza total sobre unprisma de sección dA como el mostrado en la figura 5.4.1 es
dF=(pi-ps)dA
con dirección ascendente. Si hs y hi son las distancias desde la superficie libre hasta un puntosobre las superficies superior e inferior del cuerpo respectivamente,dF= ρg(hi-hs)dA
La fuerza de flotación total es
F g h h d A g Vi s= − =∫ρ ρ( ) (5 .4 .1 )
donde V es el volumen del cuerpo, ρgV representa el peso del fluido desplazado por el cuerpo.Este es el principio de Arquímedes.
El momento causado por la presión hidrostática es equivalente al momento de la fuerzatotal de flotación actuando sobre el centro de flotación
(5.4.3)
(5.4.2)
)(
V
ydV
V
xdVx
xdVgdAhhxgFx si
∫
∫∫ ∫
=′
=−=′ ρρ
De aquí se concluye que la fuerza de flotación pasa por el centroide del volumendesplazado por el cuerpo.
Estabilidad.Se dice que un cuerpo está en equilibrio estable si ante cualquier desplazamiento pequeño
aparecen fuerzas que tienden a restablecer la posición inicial.En el caso de un cuerpo completamente sumergido en un fluido es condición necesaria y
suficiente para que el equilibrio sea estable, que el centro de gravedad del cuerpo esté por debajodel centro de flotación. Por ejemplo, el caso de un globo como el que se muestra en la figura5.4.2 es estable.
De manera similar
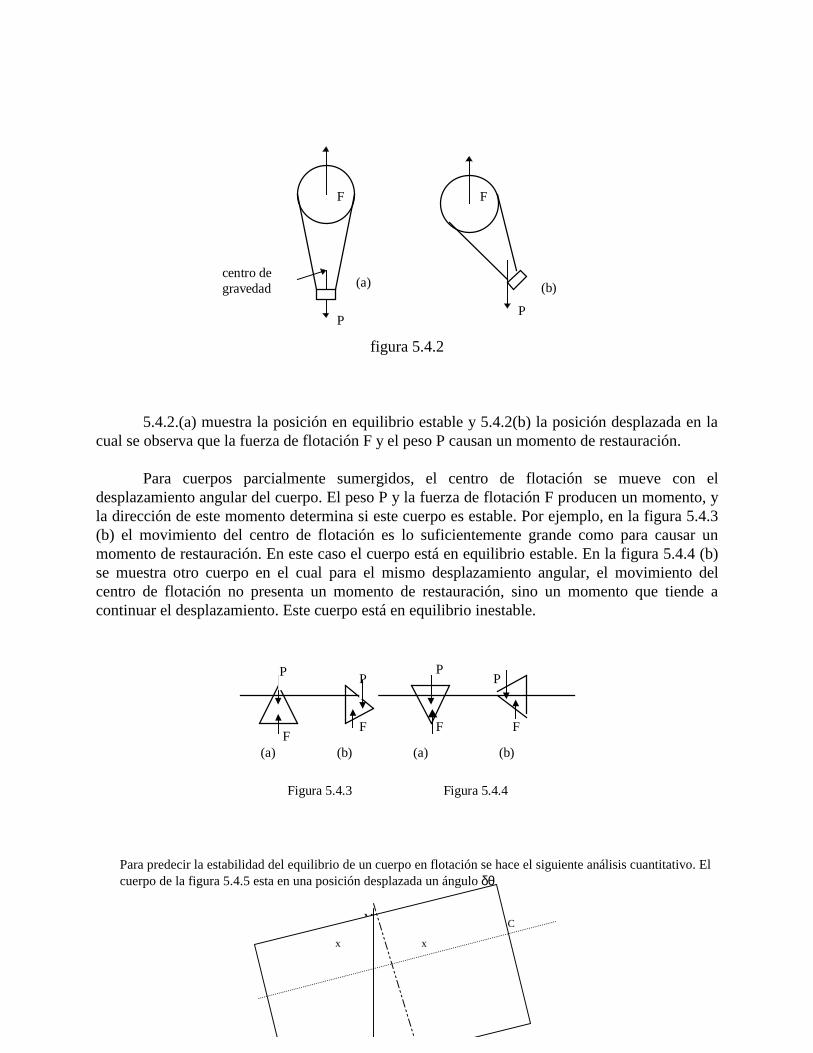
73
F F
PP
(a) (b)centro degravedad
figura 5.4.2
5.4.2.(a) muestra la posición en equilibrio estable y 5.4.2(b) la posición desplazada en lacual se observa que la fuerza de flotación F y el peso P causan un momento de restauración.
Para cuerpos parcialmente sumergidos, el centro de flotación se mueve con eldesplazamiento angular del cuerpo. El peso P y la fuerza de flotación F producen un momento, yla dirección de este momento determina si este cuerpo es estable. Por ejemplo, en la figura 5.4.3(b) el movimiento del centro de flotación es lo suficientemente grande como para causar unmomento de restauración. En este caso el cuerpo está en equilibrio estable. En la figura 5.4.4 (b)se muestra otro cuerpo en el cual para el mismo desplazamiento angular, el movimiento delcentro de flotación no presenta un momento de restauración, sino un momento que tiende acontinuar el desplazamiento. Este cuerpo está en equilibrio inestable.
(a) (b) (a) (b)
Figura 5.4.3 Figura 5.4.4
PP
PP
FFFF
Para predecir la estabilidad del equilibrio de un cuerpo en flotación se hace el siguiente análisis cuantitativo. Elcuerpo de la figura 5.4.5 esta en una posición desplazada un ángulo δθ
MC
x x
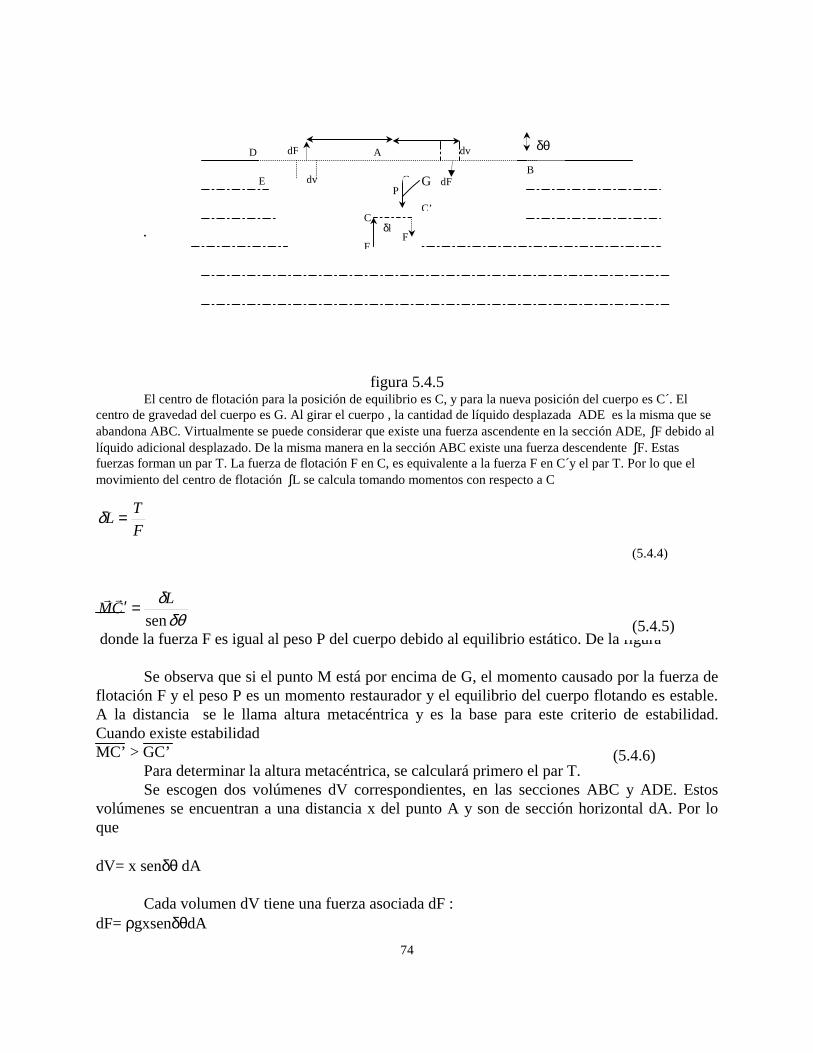
74
.
figura 5.4.5El centro de flotación para la posición de equilibrio es C, y para la nueva posición del cuerpo es C´. El
centro de gravedad del cuerpo es G. Al girar el cuerpo , la cantidad de líquido desplazada ADE es la misma que seabandona ABC. Virtualmente se puede considerar que existe una fuerza ascendente en la sección ADE, ∫F debido allíquido adicional desplazado. De la misma manera en la sección ABC existe una fuerza descendente ∫F. Estasfuerzas forman un par T. La fuerza de flotación F en C, es equivalente a la fuerza F en C´y el par T. Por lo que elmovimiento del centro de flotación ∫L se calcula tomando momentos con respecto a C
donde la fuerza F es igual al peso P del cuerpo debido al equilibrio estático. De la figura
Se observa que si el punto M está por encima de G, el momento causado por la fuerza deflotación F y el peso P es un momento restaurador y el equilibrio del cuerpo flotando es estable.A la distancia se le llama altura metacéntrica y es la base para este criterio de estabilidad.Cuando existe estabilidadMC’ > GC’
Para determinar la altura metacéntrica, se calculará primero el par T.Se escogen dos volúmenes dV correspondientes, en las secciones ABC y ADE. Estos
volúmenes se encuentran a una distancia x del punto A y son de sección horizontal dA. Por loque
dV= x senδθ dA
Cada volumen dV tiene una fuerza asociada dF :dF= ρgxsenδθdA
GB
E
D δθdF
dFdv
dv
P
A
F
TL =δ
(5.4.5)
(5.4.6)
δθδ
sen
LCM =′rr
(5.4.4)
δlC
FF
C’
G

75
El par debido a estas fuerzas esdT=2ρgx2 senδθdA
Integrando
T g x dAL
= ∫2 2
0ρ δθsen
donde L= AC=AE. Considerando el momento de inercia I de la sección horizontal del cuerpo, alnivel de la superficie libre,
Por lo que
Sustituyendo (5.4.7) en (5.4.4) y usando F=P
La que para ángulos pequeños se reduce a
(5.4.10)CGPgI
=CG-CM=GM
(5.4.9)P
rgICM
rrrrrrrr
rr
′−′′
=′
ρ
Sutituyendo (5.4.8) en (5.4.5)
∫=L
dAxI0
22 (5.4.7)
IgsenT δθρ=
P
IgsenL
δθρδ =
δθδθρ sen
P
gICM =′rr
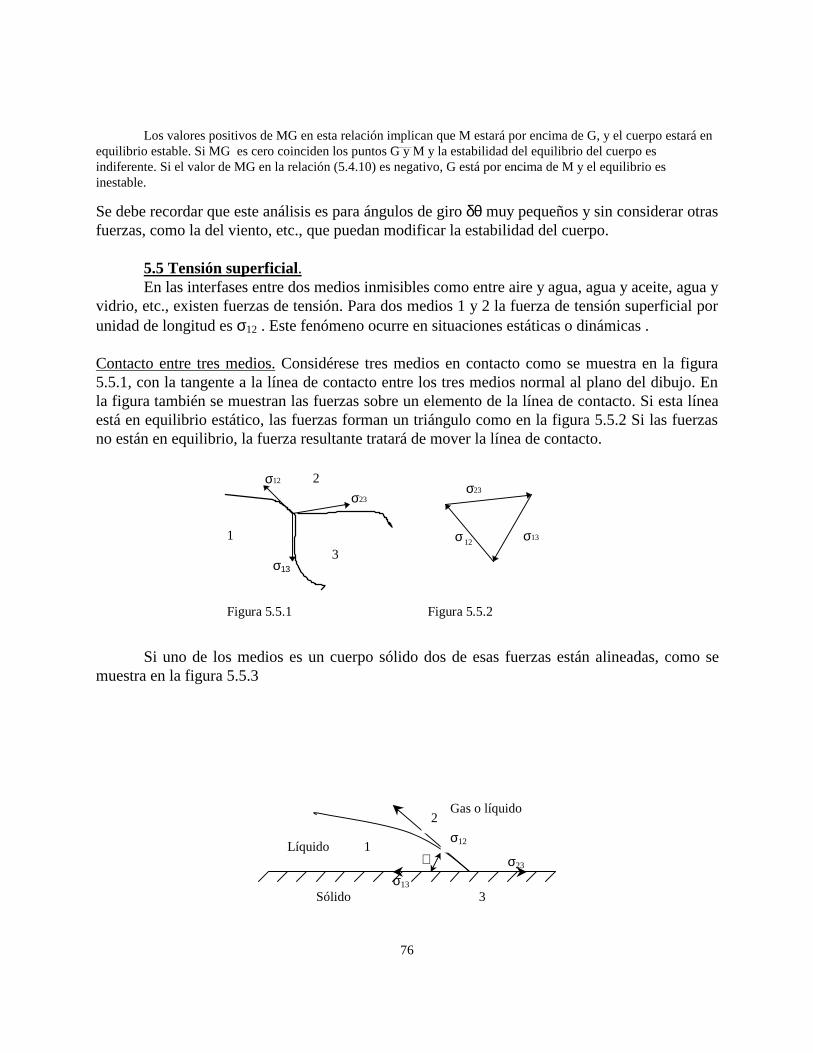
76
Los valores positivos de MG en esta relación implican que M estará por encima de G, y el cuerpo estará enequilibrio estable. Si MG es cero coinciden los puntos G y M y la estabilidad del equilibrio del cuerpo esindiferente. Si el valor de MG en la relación (5.4.10) es negativo, G está por encima de M y el equilibrio esinestable.
Se debe recordar que este análisis es para ángulos de giro δθ muy pequeños y sin considerar otrasfuerzas, como la del viento, etc., que puedan modificar la estabilidad del cuerpo.
5.5 Tensión superficial.En las interfases entre dos medios inmisibles como entre aire y agua, agua y aceite, agua y
vidrio, etc., existen fuerzas de tensión. Para dos medios 1 y 2 la fuerza de tensión superficial porunidad de longitud es σ12 . Este fenómeno ocurre en situaciones estáticas o dinámicas .
Contacto entre tres medios. Considérese tres medios en contacto como se muestra en la figura5.5.1, con la tangente a la línea de contacto entre los tres medios normal al plano del dibujo. Enla figura también se muestran las fuerzas sobre un elemento de la línea de contacto. Si esta líneaestá en equilibrio estático, las fuerzas forman un triángulo como en la figura 5.5.2 Si las fuerzasno están en equilibrio, la fuerza resultante tratará de mover la línea de contacto.
σ23σ12
σ23
σ13σ 12
σ13
1
2
3
Figura 5.5.1 Figura 5.5.2
Si uno de los medios es un cuerpo sólido dos de esas fuerzas están alineadas, como semuestra en la figura 5.5.3
∝ σ23
σ13
Gas o líquido
Líquido
Sólido
σ121
2
3
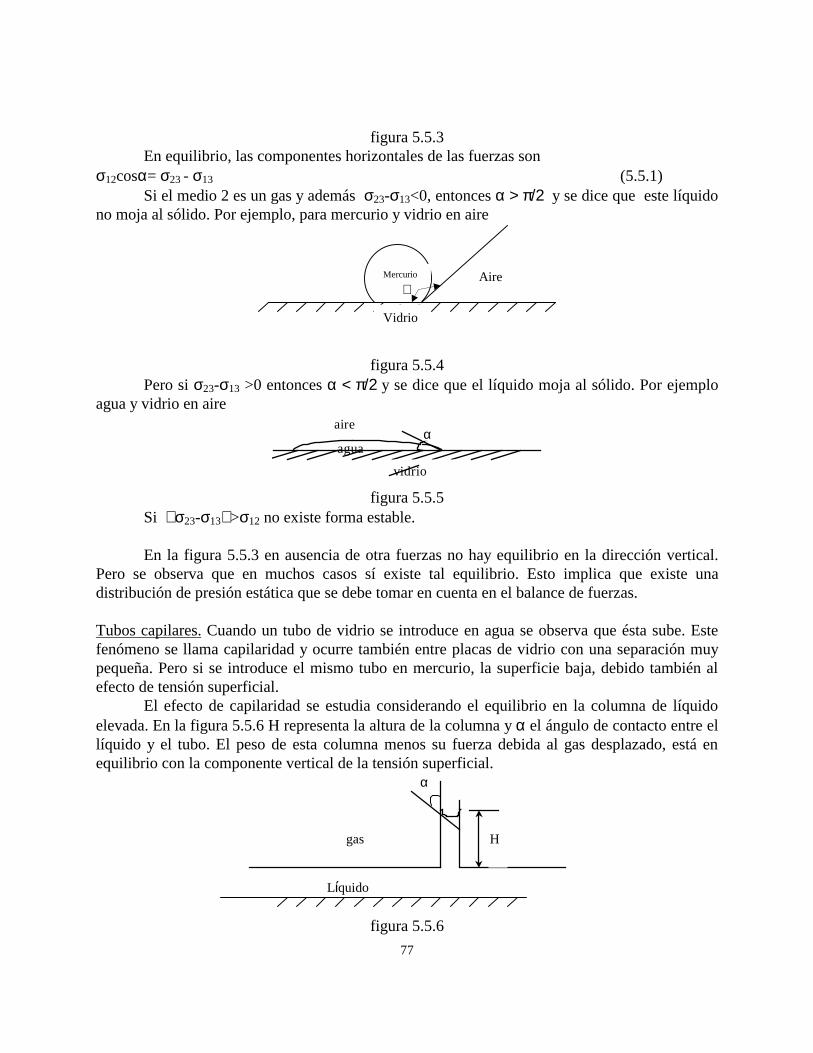
77
figura 5.5.3En equilibrio, las componentes horizontales de las fuerzas son
σ12cosα= σ23 - σ13 (5.5.1)Si el medio 2 es un gas y además σ23-σ13<0, entonces α > π/2 y se dice que este líquido
no moja al sólido. Por ejemplo, para mercurio y vidrio en aire
figura 5.5.4Pero si σ23-σ13 >0 entonces α < π/2 y se dice que el líquido moja al sólido. Por ejemplo
agua y vidrio en aire
vidrio
aire
aguaα
figura 5.5.5Si σ23-σ13>σ12 no existe forma estable.
En la figura 5.5.3 en ausencia de otra fuerzas no hay equilibrio en la dirección vertical.Pero se observa que en muchos casos sí existe tal equilibrio. Esto implica que existe unadistribución de presión estática que se debe tomar en cuenta en el balance de fuerzas.
Tubos capilares. Cuando un tubo de vidrio se introduce en agua se observa que ésta sube. Estefenómeno se llama capilaridad y ocurre también entre placas de vidrio con una separación muypequeña. Pero si se introduce el mismo tubo en mercurio, la superficie baja, debido también alefecto de tensión superficial.
El efecto de capilaridad se estudia considerando el equilibrio en la columna de líquidoelevada. En la figura 5.5.6 H representa la altura de la columna y α el ángulo de contacto entre ellíquido y el tubo. El peso de esta columna menos su fuerza debida al gas desplazado, está enequilibrio con la componente vertical de la tensión superficial.
gas
Ltquido
α
H
figura 5.5.6
∝ Aire
Vidrio
∝Mercurio
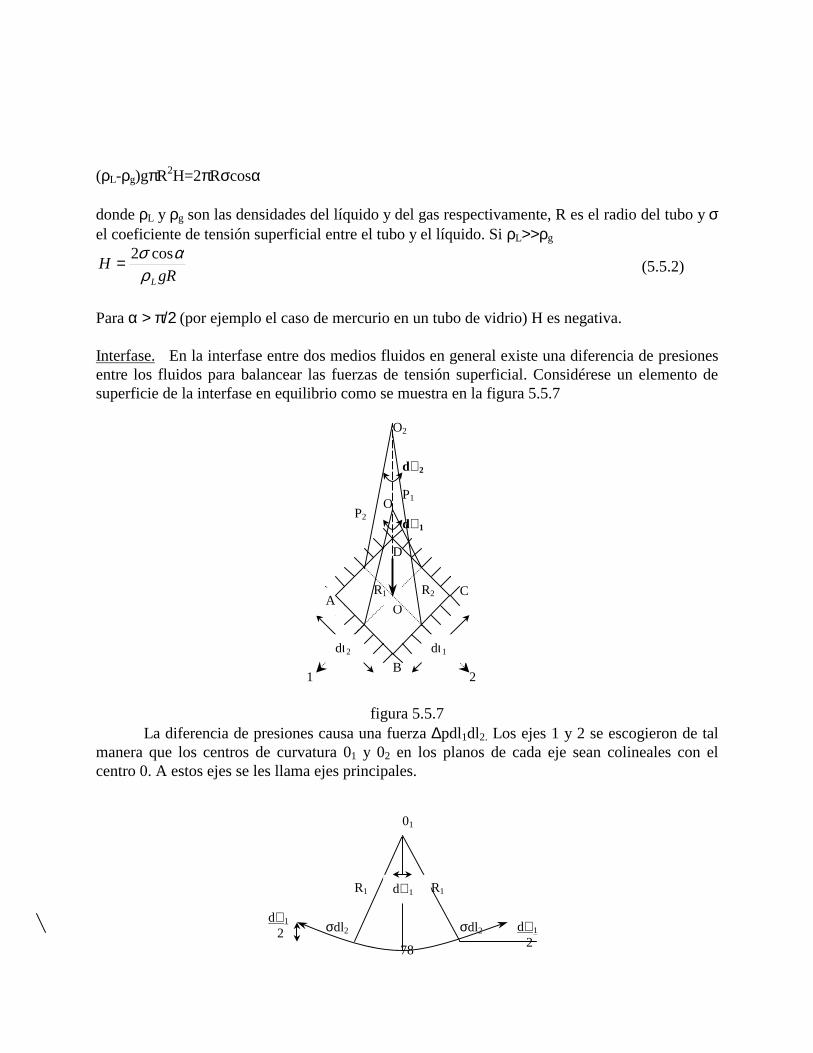
78
(ρL-ρg)gπR2H=2πRσcosα
donde ρL y ρg son las densidades del líquido y del gas respectivamente, R es el radio del tubo y σel coeficiente de tensión superficial entre el tubo y el líquido. Si ρL>>ρg
Para α > π/2 (por ejemplo el caso de mercurio en un tubo de vidrio) H es negativa.
Interfase. En la interfase entre dos medios fluidos en general existe una diferencia de presionesentre los fluidos para balancear las fuerzas de tensión superficial. Considérese un elemento desuperficie de la interfase en equilibrio como se muestra en la figura 5.5.7
figura 5.5.7La diferencia de presiones causa una fuerza ∆pdl1dl2. Los ejes 1 y 2 se escogieron de tal
manera que los centros de curvatura 01 y 02 en los planos de cada eje sean colineales con elcentro 0. A estos ejes se les llama ejes principales.
σdl2
O2
d∝2
d∝1
21
σdl2 d∝1
2
O1
O
D
gRH
Lρασ cos2= (5.5.2)
P1
P2
R1 R2A
B
C
dι2 dι1
R1
01
R1d∝1
d∝1
2

79
figura 5.5.8Las componentes verticales de las fuerzas actuando sobre los lados AB y CD (figura
5.5.8) son
dF dld
dl d dldl
R2 21
2 1 21
1
22
=
= =σ
ασ α σsen
donde se ha considerado el ángulo dα1 muy pequeño.De manera similardF1=σdl1dl2/R2
La suma de dF1 y dF2 se balancean con la fuerza debida a la presión para que existaequilibrio. De donde∆p=σ(1/R1 + 1/R2) (5.5.3)
R1 y R2 son los radios de curvatura en los planos de los ejes principales. Pero se puede mostrarque para otro sistema de ejes ortogonales x,y en la interfase los nuevos radios de curvatura Rx y
Ry satisfacen la igualdad
por lo cual
Interfase bidimensional de pendiente pequeña. Si la interfase es bidimensional, uno de los radiosde curvatura es infinito, por lo que∆p=σ/R
Si a la interfase le asignamos una función η(x) que la describa, entonces, el radio decurvatura se puede escribir
( )[ ]1
12 3 2R
x
x=
′′
+ ′
η
η
( )
( )/ (5.5.5)
21
1111
RRRR yx
+=+
+=∆
yx RRp
11σ (5.5.4)
η(x)
dl1
80
Expandiendo la ecuación (5.5.5)
Para pendientes η´(x) muy pequeñas
Por ejemplo, se considera el caso de un líquido que presenta una superficie libre en unrecipiente grande como se muestra en la figura
ggas
líquido
y
x
η(x)
figura 5.5.10en el líquido
donde ρ es la densidad del líquido. Integrandop=p0-ρgydonde p0 es la presión en y=0.
En la superficie y=η(x)p(η)=p0-ρgη (5.5.7)
si la presión en el gas es p0
p0-p(η)=ση′′ (5.5.8)
x
( )xR
η ′′=1
gy
P ρ−=∂∂
Interfase
Figura 5.5.9
( ) ( )( ) ( )
−′
+
+′−= ...)(2
12
3
2
3
2
31
1 42 xxxR
M ηηη (5.5.6)
81
donde se ha usado la aproximación de pendiente muy pequeñaSustituyendo (5.5.7) en (5.5.8)
La solución de esta esη(x)=Aekx+Be-kx (5.5.10)
donde k=(ρg/σ)½
aplicando las condiciones de frontera:
η′(x)=0 cuando x→∞se tiene
5.6 Equilibrio con aceleración uniforme.
Si se tiene un fluido de densidad constante con aceleración, sin deformación, o sea comoun cuerpo rígido, el problema se puede resolver desde un punto de vista estático.
Sin deformación, no hay fuerzas viscosas y las ecuaciones de Navier-Stokes se reducen a
1
fPtD
UD rr
+∇−=ρ
(5.6.1)
Si r
U (x,y,z,t) describe el movimiento como un cuerpo rígido, entonces
),,,( tzyxaDt
UD rr
= es la aceleración del mismo; (5.6.1) toma la forma
∇p=ρ[f-a] (5.6.2)esta forma es muy similar (5.1.2), y significa que los métodos de hidrostática son aplicables aeste problema.
Por ejemplo, considérese un recipiente cilíndrico vertical, girando a una velocidad ω. Elrecipiente tiene un líquido de densidad constante, el cual antes de girar tenia una profundidad h.Se supone que ha transcurrido el tiempo suficiente para que todo el fluido gire como un sólido.
0=−′′σ
ηρη g (5.5.9)
( ) kxeK
x −
−
= απη
2
1
( )2
0παη −=′

82
Figura 5.6.1
(5.6.2) para este problema en coordenadas cilíndricas, es
La función p(r,z) es la solución de
dp=ρω2rdr - ρgdz
Para la superficie libre la presión es constante y z=η(r), entonces
0=ρω2rdr - ρgdη
o bien,
La solución de esta ecuación es
la constante C se evalúa considerando que el volumen girando es igual al volumen antes de girarπR2h.
que da como resultado:
η(r)
z
g
ω=0
R
h
g
r
dr
d 2ωη =
( ) cg
rr +=
2
22ωη
rr
p
gz
p
2ρω
ρ
=∂∂
−=∂∂
dzz
pdr
r
pdp
∂∂+
∂∂=
∫=R
drrrhR0
2 )(2 ηππ
ω=0

83
C hR
g= −
ω 2 2
4
la superficie libre,es entonces
)2
(2
)(2
22 R
rg
hr −+= ωη
84
CAPITULO 6. FLUJOS POTENCIALES
6.1 Conceptos y definiciones 82 6.2 Flujos sencillos 86 6.3 Flujos compuestos 89 6.4 Flujos axisimetricos 98
Problemas 102

85
FLUJOS POTENCIALES.
6.1 Conceptos y definiciones.
Para un fluido no viscoso e incompresible, las ecuaciones de continuidad y conservaciónde momentum son
∇ ⋅ =
+ ⋅ ∇ = − ∇ +
r
rr r r
U
U U p f
0
1
(6.1.1)
U
t (6.1.2)
∂∂ ρ
( )
La condición de frontera de no resbalamiento no se puede cumplir debido a la falta deviscosidad. Así sólo se considera la condición de que no existe flujo a través de las fronteras. Poresto la frontera es una línea de corriente del flujo.
Si existe un flujo irrotacional el teorema de Kelvin garantiza que en este caso el flujoseguirá siendo irrotacional. Bajo estas condiciones el vector ω de vorticidad será cero en todo elespacio en todo tiempo:
r rω = ∇ × =U 0
Usando la identidad del apéndice A.4
∇ × ∇ =φ 0
implica que
U = ∇φ (6.1.3)
donde φ es un escalar llamado potencial de velocidad. Sustituyendo en (6.1.1), se tiene laecuación de Laplace:
∇2φ=0 (6.1.4) La ecuación (6.1.2) tiene la integral
∂φ∂ ρ
φ φt
PG+ + ∇ ⋅ ∇ − =1
20 (6.1.5)
que es la ecuación de Bernoulli para todo el espacio.
86
Flujo bidimensional. Para flujo bidimensional (6.1.3) es, en coordenadas cartesianas
ux
= ∂φ∂
(6.1.6)
vy
= ∂φ∂
y en coordenadas polares
urr = ∂φ
∂ (6.1.7)
urθ
∂φ∂θ
= 1
La ecuación (6.1.4) toma la forma (cartesiana)
∂ φ∂
∂ φ∂
2
2
2
20
x y+ = (6.1.8)
y en coordenadas cilíndricas
1 10
2
2
2r rr
r r
∂∂
∂φ∂
∂ φ∂θ
+ = (6.1.9)
La ecuación (6.1.1) en coordenadas cartesianas es∂∂
∂∂
ux
vy
+ = 0 (6.1.10)
y en forma polar
( )∂∂
∂∂θ
θ
rru
ur + = 0 (6.1.11)
Se observa que si se define un escalar ψ, tal que
uy
=∂ψ∂
(6.1.12)
vx
= −∂ψ∂
la ecuación (6.1.10) se satisface íntegramente.
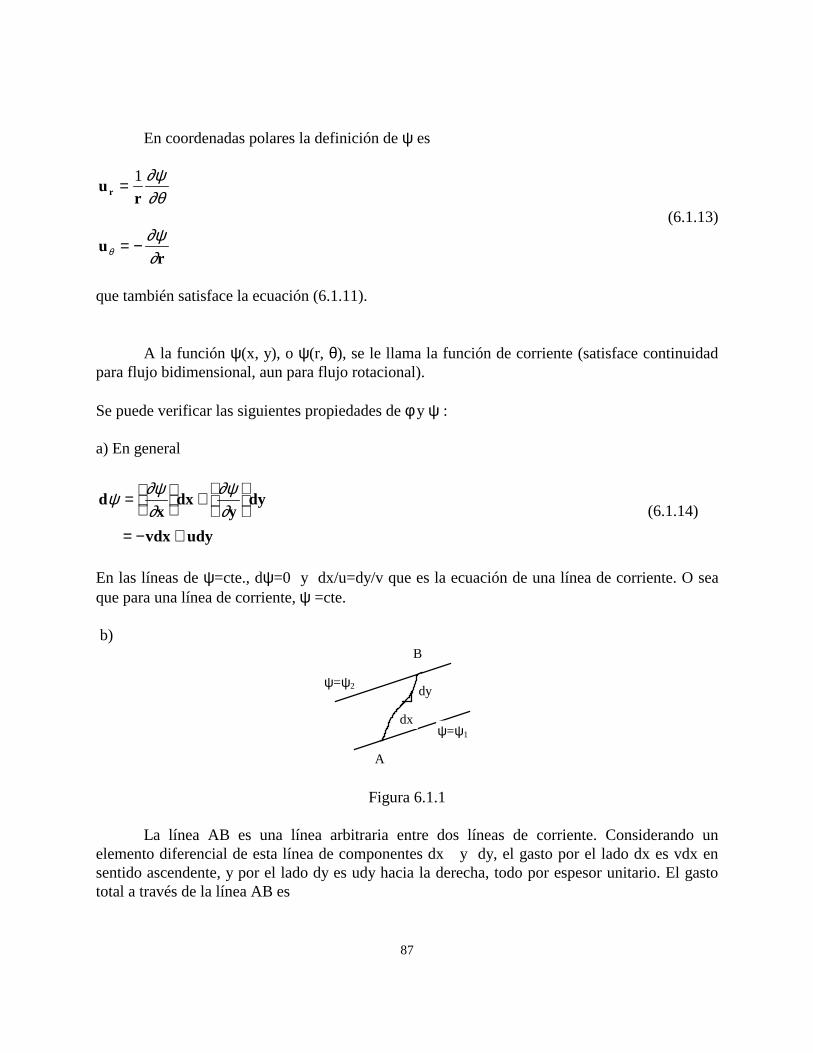
87
En coordenadas polares la definición de ψ es
urr = 1 ∂ψ
∂θ (6.1.13)
urθ
∂ψ∂
= −
que también satisface la ecuación (6.1.11).
A la función ψ(x, y), o ψ(r, θ), se le llama la función de corriente (satisface continuidadpara flujo bidimensional, aun para flujo rotacional).
Se puede verificar las siguientes propiedades de φ y ψ :
a) En general
dx
dxy
dy
vdx udy
ψ ∂ψ∂
∂ψ∂
=
+
= − +
(6.1.14)
En las líneas de ψ=cte., dψ=0 y dx/u=dy/v que es la ecuación de una línea de corriente. O seaque para una línea de corriente, ψ =cte.
b)B
A
ψ=ψ1
ψ=ψ2 dy
dx
Figura 6.1.1
La línea AB es una línea arbitraria entre dos líneas de corriente. Considerando unelemento diferencial de esta línea de componentes dx y dy, el gasto por el lado dx es vdx ensentido ascendente, y por el lado dy es udy hacia la derecha, todo por espesor unitario. El gastototal a través de la línea AB es

88
Q udy vdxA
B
A
B
= −
= −
∫∫
∫
De (6.1.14)
Q = d (6.1.15)A
B
ψ ψ ψ2 1
O sea , el gasto por espesor unitario entre dos líneas de corriente es igual a la diferencia de losvalores ψ .
c) También
dx
dxy
dy udx vdyφ ∂φ∂
∂φ∂
= + = − +
y para una línea φ = cte, dφ = 0 , y
dydx
uv
= −φ
Pero de (6.1.4) las líneas de ψ=cte tienen la pendiente:
dydx
uv
=ψ
y
dydx
dydx
= −φ ψ
1
lo que indica que las líneas φ=cte (equipotenciales) son ortogonales a las líneas de ψ=cte (líneasde corriente).
d) De (6.1.6) y (6.1.12) en coordenadas cartesianas:
∂φ∂
∂ψ∂x y
=
(6.1.16)∂φ∂
∂ψ∂y x
= −

89
Estas relaciones entre φ y ψ son las condiciones de Cauchy-Riemann. En coordenadascilíndricas estas condiciones son
∂φ∂
∂ψ∂φr r
= 1
(6.1.17)1
r r∂φ∂θ
∂ψ∂
= −
e) La condición de irrotacionalidad para flujos bidimensionales es
∂∂
∂∂
vx
uy
− = 0 (6.1.18)
Sustituyendo las ecuaciones (6.1.12) se tiene
∂ ψ∂
∂ ψ∂
2
2
2
20
x y+ = (6.1.19)
Esto indica que la función de corriente también es una función armónica (como φ ).
6.2 Flujos sencillos.
Es posible proponer potenciales de velocidad o funciones de corriente que satisfagan laecuación de Laplace. Algunos de los flujos mas útiles se discutirán a continuación.
Flujo uniforme.
Siψ α α= − +U x y0 ( sen cos ) (6.2.1)
las líneas de ψ constante son líneas rectas paralelas e inclinadas un ángulo α con respecto al ejex.
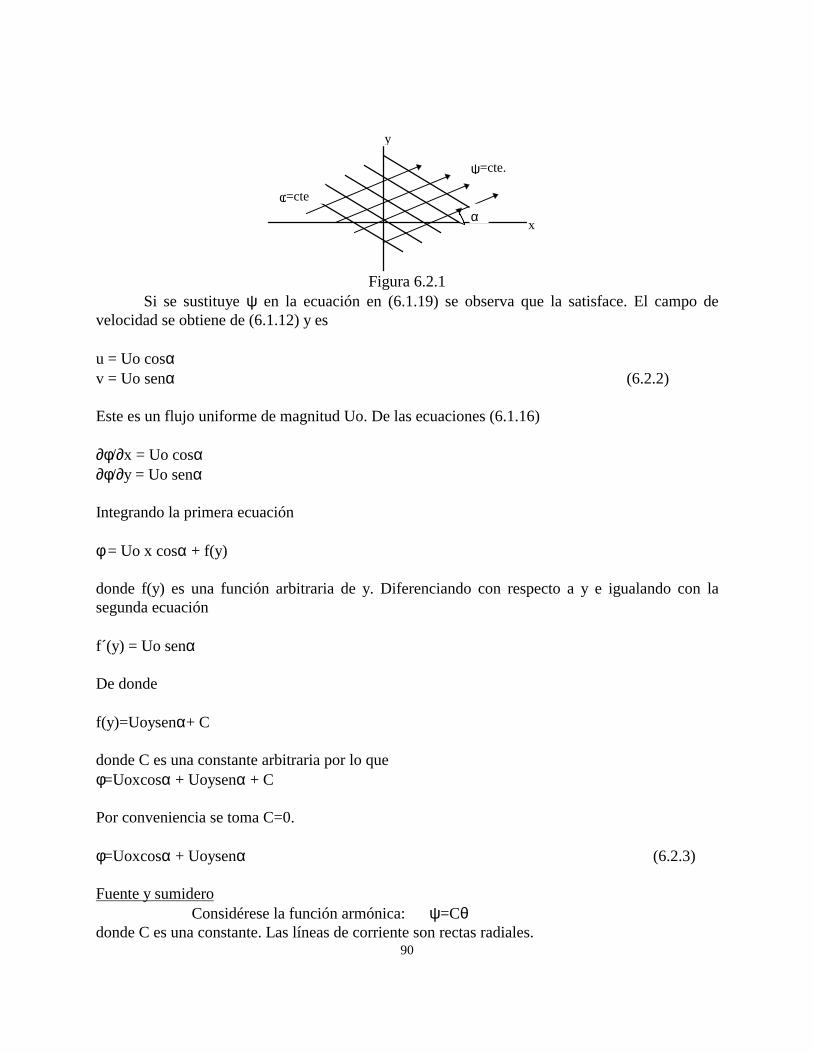
90
ψ=cte.
φ=cte
αx
y
Figura 6.2.1Si se sustituye ψ en la ecuación en (6.1.19) se observa que la satisface. El campo de
velocidad se obtiene de (6.1.12) y es
u = Uo cosαv = Uo senα (6.2.2)
Este es un flujo uniforme de magnitud Uo. De las ecuaciones (6.1.16)
∂φ/∂x = Uo cosα∂φ/∂y = Uo senα
Integrando la primera ecuación
φ = Uo x cosα + f(y)
donde f(y) es una función arbitraria de y. Diferenciando con respecto a y e igualando con lasegunda ecuación
f´(y) = Uo senα
De donde
f(y)=Uoysenα+ C
donde C es una constante arbitraria por lo queφ=Uoxcosα + Uoysenα + C
Por conveniencia se toma C=0.
φ=Uoxcosα + Uoysenα (6.2.3)
Fuente y sumideroConsidérese la función armónica: ψ=Cθ
donde C es una constante. Las líneas de corriente son rectas radiales.
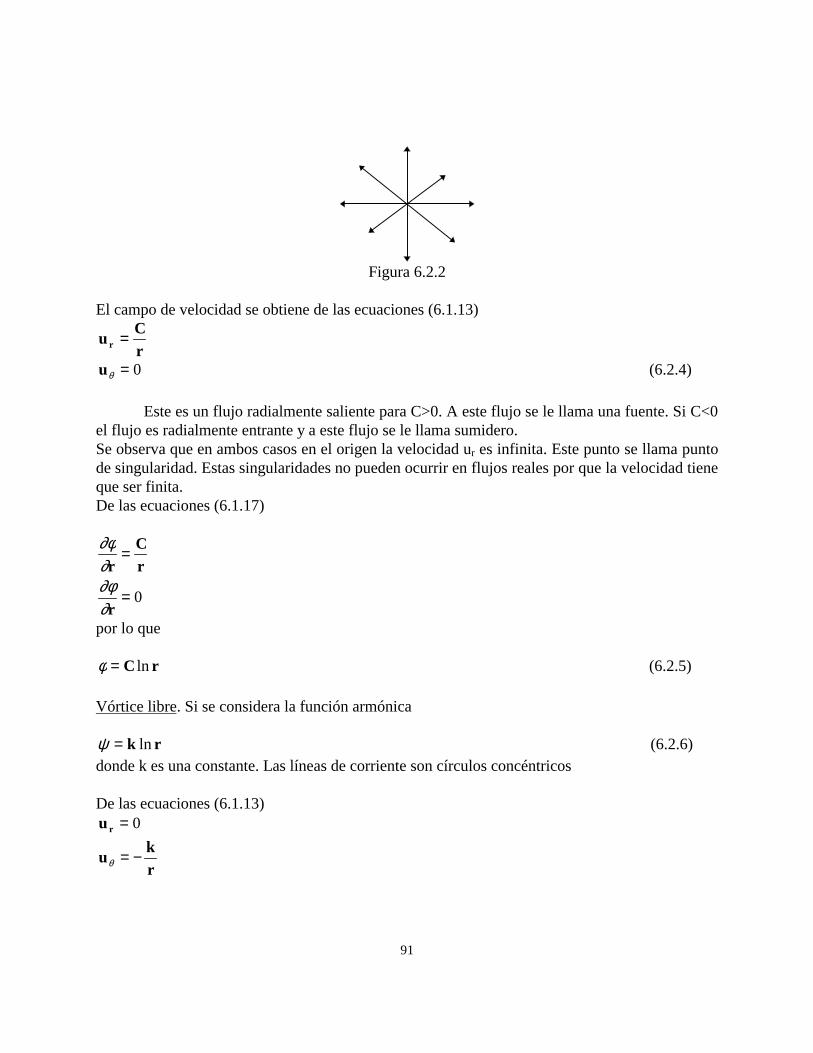
91
Figura 6.2.2
El campo de velocidad se obtiene de las ecuaciones (6.1.13)
uCrr =
uθ = 0 (6.2.4)
Este es un flujo radialmente saliente para C>0. A este flujo se le llama una fuente. Si C<0el flujo es radialmente entrante y a este flujo se le llama sumidero.Se observa que en ambos casos en el origen la velocidad ur es infinita. Este punto se llama puntode singularidad. Estas singularidades no pueden ocurrir en flujos reales por que la velocidad tieneque ser finita.De las ecuaciones (6.1.17)
∂φ∂∂φ∂
rCr
r
=
= 0
por lo que
φ = C rln (6.2.5)
Vórtice libre. Si se considera la función armónica
ψ = k rln (6.2.6)donde k es una constante. Las líneas de corriente son círculos concéntricos
De las ecuaciones (6.1.13)u
ukr
r =
= −
0
θ
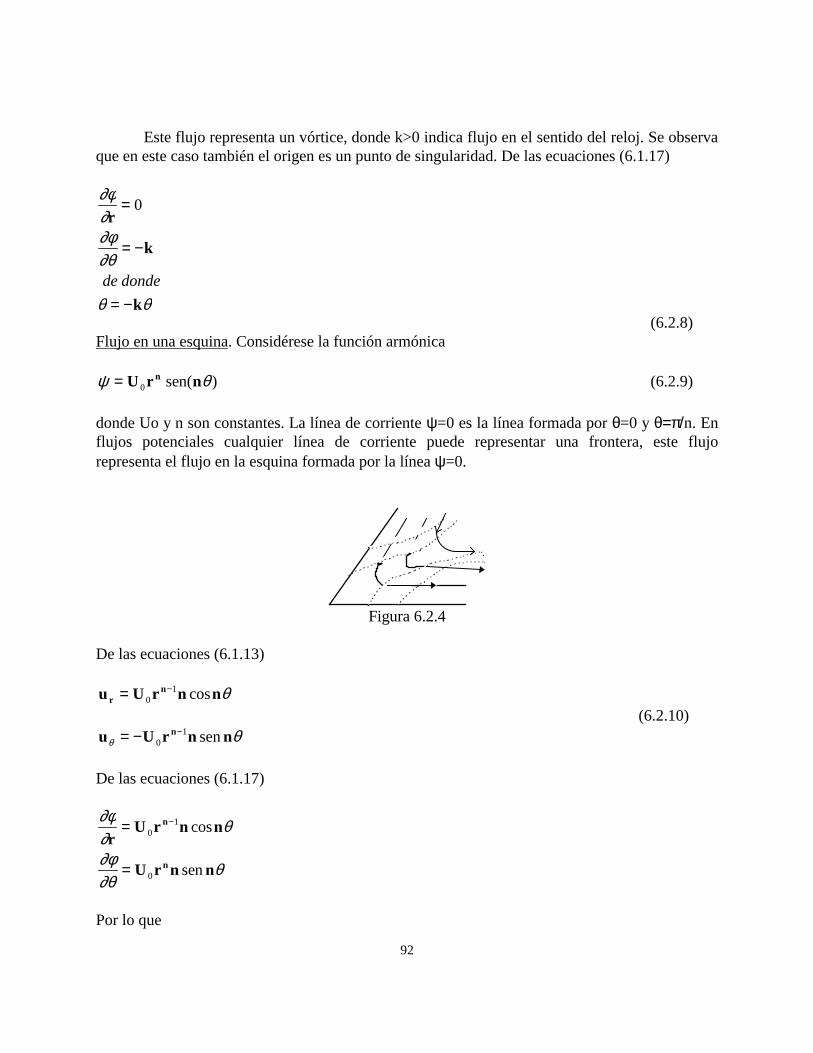
92
Este flujo representa un vórtice, donde k>0 indica flujo en el sentido del reloj. Se observaque en este caso también el origen es un punto de singularidad. De las ecuaciones (6.1.17)
∂φ∂∂φ∂θ
θ θ
r
k
k
=
= −
= −
0
de donde
(6.2.8)Flujo en una esquina. Considérese la función armónica
ψ θ= U r nn0 sen( ) (6.2.9)
donde Uo y n son constantes. La línea de corriente ψ=0 es la línea formada por θ=0 y θ=π/n. Enflujos potenciales cualquier línea de corriente puede representar una frontera, este flujorepresenta el flujo en la esquina formada por la línea ψ=0.
Figura 6.2.4
De las ecuaciones (6.1.13)
u U r n nrn= −
01 cos θ
(6.2.10)u U r n nn
θ θ= − −0
1 sen
De las ecuaciones (6.1.17)
∂φ∂
θ
∂φ∂θ
θ
rU r n n
U r n n
n
n
=
=
−0
1
0
cos
sen
Por lo que

93
φ θ= U r nn0 cos (6.2.11)
En la figura 6.2.4 se muestra el flujo interno a una esquina, aunque tanto ψ como φ sonvalidas también en la región externa, que es el flujo exterior a la esquina.
6.3 Flujos compuestos.
ψ y φ satisfacen la ecuación de Laplace. Esta ecuación es lineal, por lo que lacombinación lineal de varias soluciones de ψ o de φ es también una solución. A continuación setrataran de algunos flujos útiles que se obtienen por la combinación de los flujos ya discutidos.Doblete. Considérese un sumidero en el punto (x,y)= (a,0) y una fuente de igual magnitud en(-a, 0).
r2
r r1
X(-a,0)fuente
(a, 0)sumidero
P(x, y)y
Figura 6.3.1
El valor de φ en el punto P es la suma de φ debido al sumidero y φ debido a la fuente.Usando la constante C para la fuente y -C para el sumidero.
φ = −C r r(ln ln )2 1
peror r a ra
r r a ra12 2 2
22 2 2
2
2
= + −= + +
cos
cos
θθ
entonces
[ ]φ θ θ
θ θ
θ θ
= + + − + −
= + ++
− + −+
= ++
− −+
Cr a ra r a ra
Cr a
ra
r ar a
ra
r a
C ra
r a
ra
r a
22 2
21
21
2
21
21
2
2 2 2 2
2 22 2
2 22 2
2 2 2 2
ln( cos ) ln( cos )
ln ( )cos
ln ( )cos
lncos
lncos
Usando la expansión

94
ln( ) ...12 3 4
2 3 4
+ = − + − +x xx x x
para x≤1
Cuando a → 0
lncos cos cos cos
...
lncos cos cos cos
...
12 2 1
2
2 1
3
2
12 2 1
2
2 1
3
2
2 2 2 2 2 2
2
2 2
3
2 2 2 2 2 2
2
2 2
3
++
=+
−+
++
−
−+
= −+
−+
−+
−
rar a
rar a
rar a
rar a
ra
r a
ra
r a
ra
r a
ra
r a
θ θ θ θ
θ θ θ θ
entonces
φ θ θ=+
++
+
Cra
r a
ra
r a
2 1
3
22 2 2 2
3cos cos
...
Si se fija el valor de C cuando a → 0, entonces φ=0 en el limite. En este caso la fuente y elsumidero se anulan y no existe flujo, pero si se varia C de tal forma que
aC= ½ µ (constante)cuando a→0, entonces en el limite.
φ θ= ur
cos (6.3.1)
El campo de velocidad es
uu
rr = − cosθ2
(6.3.2)
uu
rθθ= − sen
2
el cual tiene singularidad en r=0.
De las ecuaciones (6.1.17)∂ψ∂θ
θ
∂ψ∂
θ
= −
=
ur
ru
r
cos
sen2
y
ψ θ= − ur
sen (6.3.3)
En coordenadas cartesianas donde
95
r y
r x
r x y
sen
cos
θθ
==
= +2 2 2
(6.3.3) tiene la forma
ψ = −+uy
x y2 2
La línea de corriente ψ=ψ1 (constante) es
x yu
y2 2
1
0+ + =ψ
Esta línea es una circunferencia con centro en el eje y.
Y
Figura 6.3.2
Flujo alrededor de un cilindro sin circulación. Considérese un flujo uniforme (α=0) y un dobleteen el origen. Este flujo compuesto tiene
φ θ= +U xu
r0
cos
(6.3.4)
ψ θ= −U yu
r0
sen
que se obtienen de (6.2.1), (6.2.3), (6.3.1) y 96.3.3).
La línea de corriente para ψ=0 esta dada por
U yu
r
U rur
0
0
0
0
− =
−
=
sen
sen
θ
θ
y en forma polar
La solución de esta ecuación son las líneas θ=0 y θ=π y el circulo de radio (u/Uo)1/2 concentro en el origen: Llamaremos a= (u/Uo)1/2 , y ψ tiene la forma

96
ψ θ= −
U r
a
r0
2
21sen (6.3.5)
φ θ= +
U r
a
r0
2
21cos (6.3.6)
Figura 6.3.3Cualquier línea de corriente puede considerarse como una frontera debido a que no existe
flujo normal a línea y esta es la condición de frontera no viscosa. En este caso si se toma lacircunferencia de radio a como la frontera, el flujo fuera de este circulo representa el flujoalrededor de un cilindro normal a este. Se observa que ahora la singularidad está dentro delcilindro, y por esto fuera de la región de flujo.
De (6.1.7) o (6.1.13) el campo d velocidad es
u Uarr = −
0
2
21cosθ
u Ua
rθ θ= − +
0
2
21sen (6.3.7)
para r muy grande.u U
u Ur =
=0
0
cos
sen
θθθ
que en coordenadas cartesianas sonu=Uov=0
Esto indica que el flujo muy alejado del cilindro (corriente libre) es un flujo uniforme enla dirección x de velocidad Uo.
En la superficie del cilindro, r=a, las velocidades sonur=0uθ=-2Uorsenθ (6.3.8)
En los puntos θ=0 y θ=π del cilindro las velocidades sonur=0uθ=0A estos puntos se les llama punto de estancamiento.

97
De la ecuación (6.1.5) para flujo permanente y sin fuerzas de cuerpo, se tiene el campo depresión, si P0 es la presión en un punto muy alejado del cilindro.
p p Uar
ar
ar
ar
= − −
+
0 0
22
2
2
22
2
2
4
41 2 2 4 2/ senρ θ (6.3.9)
En la superficie del cilindro, r=a, se tiene
p p Ur a= = − −0 02 21
24 1ρ θ( sen ) (6.3.10)
Esta presión actuando sobre la superficie del cilindro, tiene una fuerza resultante. Lacomponente de esta fuerza en la dirección de la corriente libre se llama fuerza de arrastre y lacomponente normal a esta se llama fuerza de sustentación
Figura 6.3.4Considérese un elemento de área del cilindro de radio a y longitud L mostrado en la
figura 6.3.4. El área de este elemento es
dA=Ladθ
y la fuerza sobre este elemento es
dF p U Lad= − −
0 0
2 21
24 1ρ θ θ( sen )
que tiene dirección radial. Las componentes en x,y son
dF p U La dx = − − −
0 0
2 21
24 1ρ θ θ θ( sen ) cos
dF p U La dy = − − −
0 0
2 21
24 1ρ θ θ θ( sen ) sen
La fuerza total será la integral sobre toda la superficie. La fuerza en la dirección x será lade arrastre (FA) y es
a

98
F Lap U d
La p d U d U d
A = −− −
= − − +
=
∫
∫ ∫ ∫
0 02 2
0
2
0 02
0
22
02
0
2
0
2
1
24 1
21
2
0
ρ θ θ θ
θ θ ρ θ θ θ ρ θ θ
π
π π π
( sen ) cos
cos sen cos cos
La fuerza en la dirección y será la de sustentación (Fs) y es
F La p d U d U dS = − − + =∫ ∫∫[ sen sen sen ]0 02 3
0
2
02
0
2
0
2
21
20θ θ ρ θ θ ρ θ θ
π ππ
En un flujo potencial no existen fuerzas sobre un cilindro. Esto es contradictorio con laexperiencia, donde se observa que existe una fuerza de arrastre en un cilindro inmerso en un flujouniforme. Esta contradicción es la paradoja de D’Alember. La discrepancia entre esta teoría y lapractica se debe a efectos viscosos que no se han considerado.En el caso del cilindro el flujo potencial es simétrico con respecto a ambos ejes. Pero para otroscuerpos donde el flujo es asimétrico con respecto a cualquiera de los ejes, existirá una fuerzaresultante.
Flujo alrededor de un cilindro con circulación.
Considérese un flujo compuesto por un flujo uniforme, un doblete y un vórtice libre.
El potencial de velocidad y la función de corriente son
φ θ θ= + −U xu
rk0
cos (6.3.11)
ψ θ= − +U yu
rk r0
senln (6.3.12)
En coordenadas polares
ψ θ= −
+U rur
k r0 sen ln
ru
Ua= =
0
, se tiene
ψ = k aln =constanter=a es entonces una línea de corriente.
El potencial de velocidad y la función de corriente toman la forma

99
φ θ θ= +
−U r
a
rk0
2
21 cos (6.3.13)
ψ θ= −
+U r
a
rk r0
2
21 sen ln (6.3.14)
Tomando la línea de corriente con ψ=klna como una frontera, se tiene un flujo alrededorde un cilindro.
De (6.1.7) o (6.1.13) se tiene el campo de velocidad
u Ua
rr = −
0
2
21cosθ
u Ua
r
krθ θ= − +
−0
2
21sen (6.3.15)
Para r muy grande,el flujo uniforme Uo. En la superficie del cilindro, r=a, las velocidades sonur=0
u Uka0 02= − −senθ (6.3.16)
Para estas velocidades en la superficie, la circulación sobre la superficie del cilindro es
Γ
Γ
= − +
= −
∫a Uka
d
k
2
2
00
2
senθ θ
π
π
El signo menos indica que la circulación es en el sentido de las manecillas del reloj.
Sustituyendo este resultado en 6.3.13 y 6.3.14 se tiene
φ θπ
θ= +
+U r
a
r0
2
21
2cos
Γ (6.3.18)
ψ θπ
= −
+U r
a
rr0
2
21
2sen ln
Γ (6.3.19)
Los puntos de estancamiento( donde la velocidad es cero) del flujo, en la superficie delcilindro satisfacen
− +220U
aesenθπΓ
de donde
θπe U a
=
arcsen
Γ4 0
(6.3.20)
Considérense los siguientes casos:a) Γ=0Este caso se reduce al flujo alrededor de un cilindro sin circulación como en la figura 6.6.3
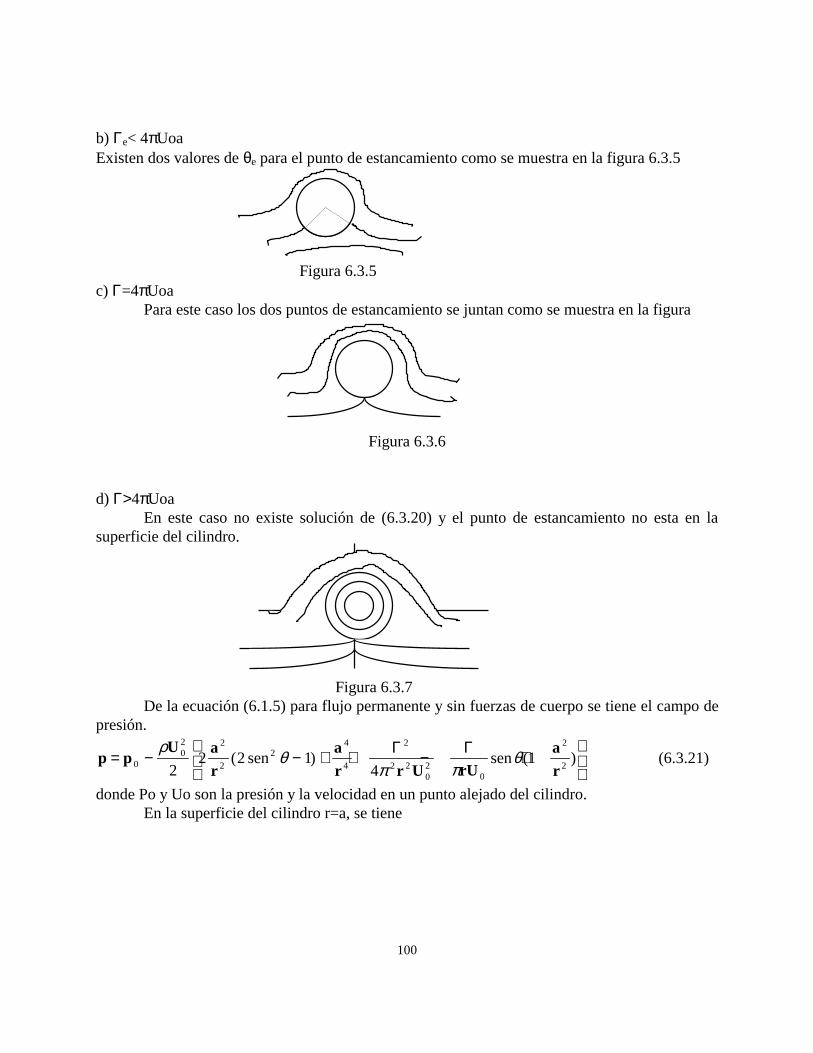
100
b) Γe< 4πUoaExisten dos valores de θe para el punto de estancamiento como se muestra en la figura 6.3.5
Figura 6.3.5c) Γ=4πUoa
Para este caso los dos puntos de estancamiento se juntan como se muestra en la figura
Figura 6.3.6
d) Γ>4πUoaEn este caso no existe solución de (6.3.20) y el punto de estancamiento no esta en la
superficie del cilindro.
Figura 6.3.7De la ecuación (6.1.5) para flujo permanente y sin fuerzas de cuerpo se tiene el campo de
presión.
p pU a
r
a
r r U rUa
r= − − + + − +
0
02 2
22
4
4
2
2 202
0
2
222 2 1
41
ρθ
π πθ( sen ) sen ( )
Γ Γ (6.3.21)
donde Po y Uo son la presión y la velocidad en un punto alejado del cilindro.En la superficie del cilindro r=a, se tiene
101
p pU
r U rU
aL pU
r U rUd
aL pU
r U rU
r a= = − − + −
= − − − + −
=
= − − − + −
∫
002
22
2 202
0
002
22
2 202
00
2
002
22
2 202
0
24 1
4
2
24 1
4
20
24 1
4
2
ρθ
π πθ
ρθ
π πθ θ θ
ρθ
π πθ θ
π
sen sen
sen sen cos
sen sen sen
Γ Γ
Γ Γ
Γ Γ
(6.3.22)
La fuerza de arrastre es
F
y la fuerza de sustentacion es
F
A
A d
U Ld
U L
θ
ρπ
θ θ
ρ
π
π
0
2
0 2
0
2
0
∫∫= −
= −
Γ
Γ
sen
(6.3.23)
En las figuras 6.3.5 , 6.3.6 y 6.3.7 la dirección de la circulación es tal que Γ es negativa.La fuerza de sustentación es positiva, o sea ascendente. El hecho de que la circulación alrededorde en flujo potencial produzca una sustentación es importante para el estudio de alas. A laecuación 6.3.23 se le llama ley de Kutta- Joukowski. La sección de las alas de los aviones son detal forma que produzcan una circulación alrededor de esta sección la cual da una fuerza quesostiene el avión. En el caso del cilindro con circulación se produce ésta debido a la rotación delcilindro. Por efectos viscosos la superficie del cilindro tiende a arrastrar el fluido produciendo lacirculación. En el caso de alas, los efectos de los flujos reales y la geometría de la mismaproducen la circulación necesaria sin movimiento giratorio del ala.
Es necesario aclarar que aunque el flujo tiene una circulación alrededor de una curva queincluya al cilindro, el flujo es potencial. El rotacional del vector velocidad es
ω ∂∂
∂∂θθ= ∇ × = −
Ue
r rru uz
r( ) ( )
Sustituyendo (6.3.15), se tiene
ω θ θ θ= − + + −
=
e
rU U
a
rU
a
rz
0 0
2
2 0
2
21 0sen sen sen
fuera del origen. lo cual verifica que el flujo es potencial.
6.4 Flujos axisiméricos.En esta sección se estudiaran flujos potenciales en tres dimensiones con simetría con
respecto a un eje. Para flujo irrotacionalϖ = ∇ × =
rU 0
De donde se puede definir

102
rU = ∇φ (6.4.1)
donde φ es el potencial de velocidad. Sustituyendo en la ecuación para flujos incompresibles(6.1.1), se tiene la ecuación de Laplace
∇2φ=0
la cual en coordenadas esféricas es
∇ =
+ +2
22
21 1
11
2 21
2
2
1 1 1φ
∂∂
∂φ∂ θ
∂∂θ
θ∂φ∂θ θ
∂ φ∂θr r
rr r rsen
(sen )sen
Si no existe variación de φ con respecto a θz el flujo es axisimetrico y la ecuación sereduce
∂∂
∂φ∂ θ
∂∂θ
θ ∂φ∂θr
rr
2 10
+ =sen
(sen ) (6.4.2)
donde por conveniencia se ha escrito θ en vez de θ1 . En estas coordenadas, (6.4.1) tienelas componentes
urr = ∂φ
∂(6.4.3)
urθ
∂φ∂θ
= 1
Entonces la ecuación de continuidad (6.1.1) para estas coordenadas es1 1
02
2
r rr u ur
∂∂ θ
∂∂θ
θ θ( )sen
(sen+ = (6.4.4)
Si se define
urr
S= 12 senθ
∂ψ∂θ
(6.4.5)
ur r
Sθ θ
∂ψ∂
= −12 sen
la ecuación (6.4.2) se satisface. A ψs se le llama la función de corriente de Stokes. Si sesustituye (6.4.5) en la condición de irrotacionalidad

103
r r) ) )
ωθ
∂ ∂ ∂ ∂θ ∂ ∂θ
∂ ψ∂
θ ∂∂θ θ
∂ψ∂θ
θ θ
θ
= ∇ × = =
+
=
Ur
e e e
r
u ru
r
r
r
s s
1
0
0
10
21
1 2
2
2
1 2
1
sen/ / /
sensen
se reduce a
r 2
(6.4.6)
La función de corriente de Stokes satisface esta ecuación (que no es la ecuación deLaplace).
La línea ψs constante es una línea de corriente que se demuestra de la siguiente manera.Para una línea de corriente
dx/u=dy/v
Si x es el eje de simetría, entoncesx=rcosθ u=urcosθ-uθsenθy=rsenθ v=ursenθ-uθcosθ
La ecuación de la línea de corriente es− +
−= +
+
=
= +
r d dru u
r d dru u
d u dr
rdr d
r r
s s
sen cos
cos sen
cos sen
sen cos
θ θ θθ θ
θ θ θθ θ
θψ
ψ ∂ψ∂
∂ψ∂θ
θ
θ θ
θ
que se reduce a
ru
La derivada total de es
d
r
s
s
(6.4.7)
Sustituyendo (6.4.5) en la ecuación anterior para ψs constante , se tiene
0=-urrsenθdr+r2senθurdθ
que se reduce a (6.4.7), lo que indica que la línea de ψs constante es una línea decorriente.Flujos sencillos.
A continuación se trata con algunas funciones φ y ψs que satisfacen (6.4.2) y (6.4.6)
Flujo uniforme. Sea la función armónica
φ θ= U r0 cos

104
El campo de velocidad, de las ecuaciones 6.4.3, esu U rr = 0 cosθu U rθ θ= − 0 sen
De 6.4.5 se obtiene
ψ θS
U r= 0
22
2sen
Fuente y sumidero. Dada la función armónicaφ=- m/rdonde m es constante, el campo de velocidad esur=m/r2
uθ=0y la función de corriente de Stokes esψs=-mcosθm positiva representa una fuente y m negativa representa un sumidero.
Flujos compuestos.Las ecuaciones (6.4.2) y (6.4.6) son lineales, por lo que la combinación lineal de las
soluciones de φ y ψs es también una solución.
Doblete.
Considérese una fuente en el punto (a, π) y un sumidero de igual magnitud en (a,0). Elpotencial de velocidad del flujo resultante es
φ=-m(1/r1-1/r2) = m (r1-r2)/r1 r2
Para a<<r r1-r2 ≈ 2acosθde dondeφ=m2acosθ/r1r2
Cuando a→0, pero que el valor ma sea constante( u/2 )φ=ucosθ/r2
P(r,θ)
θ2θθ1
fuente(a, π)
sumidero(a, 0)
0
r1
r2
105
El campo de velocidad esur=-2ucosθ/r3
que representa el flujo debido a un doblete en el origen. La función de corriente de Stokesesψs=-usen2θ/r
Flujo alrededor de una esfera. Considérese un flujo compuesto de un flujo uniforme y un dobleteen el origen. En este flujoψs=(Uor2/2 -u/r)sen2θ
La línea de corriente ψs=0 corresponde a(Uor2/2 -u/r)sen2θ=0
cuya solución es θ=0, θ=π or=(2u/Uo)1/3
Si se considera esta línea de corriente como una frontera el flujo representa el flujoalrededor de una esfera. Llamando
a=(2u/Uo)1/3
ψ=(Uo/2)r2sen2θ(1-a2/r2)
y el campo de velocidad esur=Uocosθ(1-a2/r2)uθ=-Uosenθ(1+a3/2r3)
y el potencial de velocidad esφ=Uorcosθ(1+a3/2r3)
Problemas
6.1 Encontrar el potencial de la velocidad de un flujo generado por una línea desumideros de intensidad uniforme. Determinar la distribución de presiones y los puntos deestancamiento (componentes de velocidad cero).
6.2 Demuestre que las líneas de corriente y las de trayectoria coinciden para el flujo
Ux
tii=
+1
6.3 Demostrar que el potencial de velocidad φ y la función de corriente de los siguientesflujos satisfacen la ecuación de Laplace:

106
a) Flujo rectilíneo bidimensionalb) Flujo fuentec) Doblete
6.4 El potencial de velocidad para un flujo tridimensional con simetría axial es
φ θ= c
r 2cos
en donde c es una constante. Obtener la correspondiente función de corriente.
6.5 Investigue el flujo correspondiente al potencial:
( )φ = − + −k x y z2 2 22
Encuentre la distribución de presiones y los puntos de estancamiento.
107
CAPITULO 7 FLUJOS VISCOSOS INCOMPRESIBLES
7.1 Soluciones exactas 1047.2 Flujo de Couette 1047.3 Flujo de Poiseville 1077.4 Flujo entre cilindros giratorios 1107.5 Primer problema de Stokes 1137.6 Segundo problema de Stokes 1187.7 Capa límite 1227.8 Ecuaciones de la capa límite 1247.9 Solución de Blasius 1257.10 Método de integral de momentum 1307.11 Separación de la capa límite 134
108
CAPITULO 7 FLUJOS VISCOSOS INCOMPRESIBLES
En este capitulo se discutirá el flujo de fluidos incompresibles con viscosidadnewtoniana. Las ecuaciones para este caso son:
0=⋅∇ Ur
(7.1)
( ) fUpUUrrrr
r
t
U 2 ρµρ∂∂ρ +∇+−∇=∇⋅+
(7.2)
Estas cuatro ecuaciones escalares para las cuatro variables escalares u,v,w y p son casosespeciales de la ecuación de continuidad (3.1.5) y las ecuaciones de conservación de momentum(3.5.1) para fluidos incompresibles. Estas ecuaciones más las condiciones de frontera paracualquier problema constituyen un sistema cerrado.
Debido a la no linealidad de ( )UUrr
∇⋅ en Ur
de la ecuación (7.2) este sistema deecuaciones en general no tiene una solución analítica. En algunos casos particulares es posibleobtener la solución analítica. En otros casos se necesitan hacer simplificaciones o algunasaproximaciones para obtener soluciones analíticas, por ejemplo, en un flujo con bajo numero deReynolds donde es posible despreciar el término no lineal. Para números de Reynolds más altos,una aproximación es dividir el flujo en dos regiones, una capa viscosa cerca de la frontera delflujo y el resto, de flujo no viscoso.
7.1 Soluciones exactas.
Para algunos problemas específicos, el término no lineal es idénticamente cero y lasecuaciones tienen soluciones analíticas o exactas. A continuación se describen algunos de estosproblemas.
7.2 Flujo de Couette.
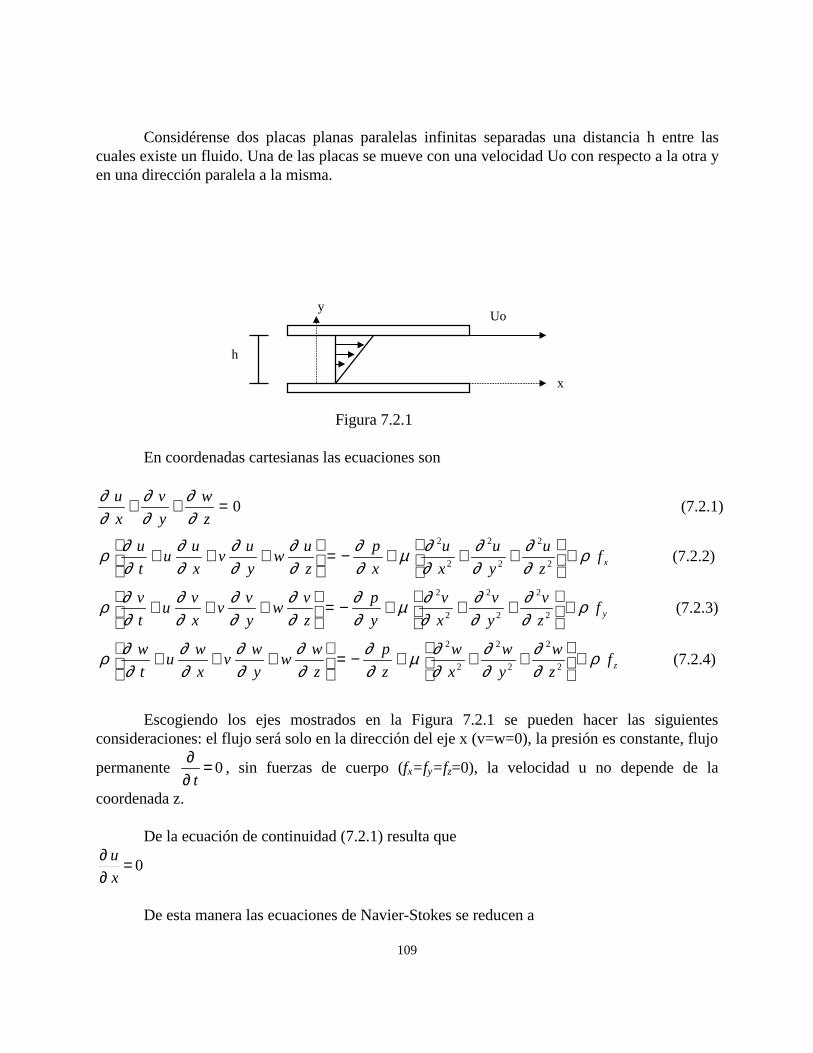
109
Considérense dos placas planas paralelas infinitas separadas una distancia h entre lascuales existe un fluido. Una de las placas se mueve con una velocidad Uo con respecto a la otra yen una dirección paralela a la misma.
Figura 7.2.1
En coordenadas cartesianas las ecuaciones son
(7.2.4)
(7.2.3)
(7.2.2)
(7.2.1) 0
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
z
y
x
fz
w
y
w
x
w
z
p
z
ww
y
wv
x
wu
t
w
fz
v
y
v
x
v
y
p
z
vw
y
vv
x
vu
t
v
fz
u
y
u
x
u
x
p
z
uw
y
uv
x
uu
t
u
z
w
y
v
x
u
ρ∂∂
∂∂
∂∂µ
∂∂
∂∂
∂∂
∂∂
∂∂ρ
ρ∂∂
∂∂
∂∂µ
∂∂
∂∂
∂∂
∂∂
∂∂ρ
ρ∂∂
∂∂
∂∂µ
∂∂
∂∂
∂∂
∂∂
∂∂ρ
∂∂
∂∂
∂∂
+
+++−=
+++
+
+++−=
+++
+
+++−=
+++
=++
Escogiendo los ejes mostrados en la Figura 7.2.1 se pueden hacer las siguientesconsideraciones: el flujo será solo en la dirección del eje x (v=w=0), la presión es constante, flujo
permanente 0
=∂∂t
, sin fuerzas de cuerpo (fx=fy=fz=0), la velocidad u no depende de la
coordenada z.
De la ecuación de continuidad (7.2.1) resulta que
0
=∂∂
x
u
De esta manera las ecuaciones de Navier-Stokes se reducen a
h
y
x
Uo

110
2
2
0
yd
ud=
(7.2.5)
donde la derivada total sustituye la derivada parcial, porque u es solo función de y.Integrando dos veces
1
C
yd
ud =
(7.2.6)
21 CyCu += (7.2.7)
Las constantes C1 y C2 se determinan de las condiciones de frontera. Para este problemason:
a) u=U0 en y=h
b) u=0 en y=0 por la condición de no resbalamiento.
Sustituyendo estas condiciones en la solución (7.2.7)
Uo=C1h+C2
0=0+C2
de donde
h
UC 0
1 =
02 =C
El campo de velocidades es entonces
h
yUu 0=
v=w=0
El tensor de esfuerzos según (3.4.19) es

111
−
−
−
=
p
ph
Uh
Up
00
0
0
0
0
µ
µ
τ
Se observa que τ es independiente de la posición.
7.3 Flujo de Poiseville.
Considérese un tubo infinito de sección circular de radio ro a través del cual se mueve unfluido. El movimiento del fluido se debe a la acción de la variación de la presión a lo largo deleje longitudinal z.
Para este caso es conveniente considerar las ecuaciones en coordenadas cilíndricas. Elfluido se mueve en el sentido longitudinal (uθ= ur =0), y uz por simetría no depende de θ. El flujoes permanente y sin fuerzas de cuerpo.
La ecuación de continuidad se reduce a
0
=
∂∂
z
uz
y las ecuaciones de Navier-Stokes a
r
p
0
∂∂=
θ
0∂∂= p
∂∂
∂∂
+
∂∂−=
r
ur
rrz
p z
1
0 µ
La presión varia sólo con la coordenada z y la velocidad uz con r. La ecuación anterior se puedeescribir con derivadas totales.

112
+−=
rd
udr
rd
d
zd
pdr z
0 µ
(7.3.1)
+−=
rd
udr
rd
d
zd
pdr z
0 µ
Integrando con respecto a r
rd
udr
zd
PdrC z
2
2
1 µ+
−=
de donde
r
C
zd
Pdr
rd
ud z
2
1
µµ+
=
y la segunda integral es
( ) 21
2
ln
4Cr
C
zd
Pdruz +
+
=
µµ(7.3.2)
Para r=0, uz es infinita, excepto si se escoge C1=0. En las paredes (r=ro), uz=0, por lacondición de no resbalamiento, por lo que
−=
zd
PdrC
4
20
2 µ
El campo de velocidad es
( )220
4
1rr
zd
Pduz −
−=
µ (7.3.3)
0== θuur
uz>0 con la disminución de presión a lo largo de z.
ro
r
z

113
Figura 7.3.1
La velocidad máxima (uz)max ocurre en el centro del tubo.
( ) 20
4
1r
zd
PdU maxz
−=
µ
(7.3.4)
Se define la velocidad media zu como aquella velocidad uniforme sobre la seccióntransversal del tubo que produce el mismo gasto Q.
∫== 0
0
20 2
r
zz drururQ ππ
de donde
∫ −−= or
oo
z drrrrdz
dP
ru
0
322
)(2
1
µ
8
20
dz
dPr
µ−= (7.3.5)
maxzu )(2
1=
La caída de presión ∆P a lo largo del tubo por una longitud L es
2
8
o
z
r
uLP=
µ∆
En términos del diámetro del tubo D
32 2D
uLP=
zµ∆ (7.3.6)

114
Si se expresa ∆P en términos de un factor de rozamiento f
2
2zu
D
LP=f ρ∆
entonces, comparando con (7.3.6)
Re
64=f
donde el número de Reynolds es
µρ zuD
Re =
7.4 Flujo entre cilindros giratorios.
Considérense dos cilindros concéntricos infinitos de radios r1 y r2 (r2>r1), girando avelocidades angulares ω1 y ω2 respectivamente.
w2
r1
Figura 7.4.1
Usando coordenadas cilíndricas la única componente de la velocidad es la velocidadtangencial uθ (ur=uz=0) y es independiente del eje z. El flujo es permanente, sin fuerzas de cuerpoy por simetría la presión no varia con θ .
La ecuación de continuidad se reduce a
0
=
∂∂
θθu
y las ecuaciones de Navier- Stokes a

115
r
p
r
u
2
∂∂−=− θρ
(7.4.1)
−
∂∂
∂∂=
2
1 0
r
u
r
ur
rrθθµ (7.4.2)
z
P
0
∂∂−=
La presión p y la velocidad uθ son sólo función de r, y las derivadas se pueden escribircomo derivadas totales
rd
pd
r
u
2
=θρ
(7.4.3)
r
u
rd
udr
rd
d θθ =
(7.4.4)
La ecuación (7.4.4) se puede escribir también en la forma
0 2
2
=
+
r
u
rd
d
rd
ud θθ
Integrando
1
C
r
u
rd
ud=+ θθ
o biendrrCdrudur 1=+ θθ
cuya integral es
221
2 Cr
CUr +=θ
de donde
r
Cr
Cu 21
2+
=θ (7.4.5)
Las condiciones de frontera son:

116
a) 11rwu =θ cuando 1rr =
b) 22rwu =θ cuando 2rr = por la condición de no resbalamiento. Utilizando estas condiciones
en (7.4.5) se obtiene
1
21
111
2 r
Cr
Crw +
=
2
22
122
2 r
Cr
Crw +
=
de donde
−−
=2
22
1
222
211
1 2rr
rwrwC
−−
−=2
22
1
2122
212 rr
wwrrC
y el campo de velocidades es
−−−
−−=
22
21
212
22
12
22
1
222
211
rr
ww
r
rrr
rr
rwrwuθ
(7.4.6)
0== zr uu
La variación de presión se obtiene de la integración de (7.4.3)
∫ += 2
Cdrr
up θρ (7.4.7)
Sustituyendo (7.4.6) en la integral anterior e integrando resulta la ecuación (7.4.8)
( ) ( )( ) ( ) 4
ln 22)(
)( 2
42
412
122
121
22
2212
22
21
222
121
22
2222
12
2
Cr
rrrrrrr
rrr
rrrp +
−−−−−−
−= ωωωωωωωωρ
La constante de integración C se calcula si se conoce el valor de la presión en un punto.

117
El esfuerzo cortante sobre el cilindro interior es
1 1
rrrd
ud
=
= θµτ
−−
+
−−
=2
22
1
21222
22
1
222
211
1 rr
wwr
rr
rwrwµτ
El par por unidad de longitud sobre el cilindro interior es
−−
+
−−
=2
22
1
21222
22
1
222
211
11 2rr
wwr
rr
rwrwrM µπ
7.5 Primer problema de Stokes.
Considere una placa infinita en un fluido inicialmente en reposo. En el instante t = 0 laplaca comienza a moverse sobre su mismo plano con una velocidad constante U0
y
t4 > t3 > t2 > t1 > 0
x 0
U0 U0(t > 0)
Figura 7.5.1
El flujo será solo en la dirección de x (v=w=0), la presión es constante, sin fuerzas decuerpo (fx=fy=fz=0) y la velocidad u solo depende del tiempo t y de la coordenada y. Lasecuaciones de movimiento se reducen a
2
2
y
u
t
u
∂∂=
∂∂ µρ (7.5.1)

118
Un método de solución de este tipo de ecuaciones es por similaridad. En este método seescoge una variable de similaridad η(y, t) de tal manera que la ecuación diferencial parcial u(x,y)se convierte en una ecuación diferencial ordinaria de u(η).
Para especificar el método se escogerá η de una forma general
η=yαtβ (7.5.2)
donde α y β son constantes.
La solución de la ecuación es
u = u (η) (7.5.3)
Entonces las derivadas son
( ) ( )ηηη ’
u
tu
tt
u
∂∂=
∂∂=
∂∂
( ) ( )ηηη ’
u
yu
yy
u
∂∂=
∂∂=
∂∂
( ) 1 ’
−=∂∂ βα βη tyu
t
u
( ) ( ) ( )ηααηα βααβ ’1 ’’
222222
2
utyuyty
u −− −+=∂∂
( ) ( )ηηη ’’
’
uy
uy ∂
∂=∂∂
sustituyendo en (7.5.1) y simplificando se tiene
( ) ( ) ( ) ( )ηααηαηβ αβ ’ 1 ’’’ 1 2
2
uuytut
y
v−+=
(7.5.4)
donde se escribió
ρµ=v

119
α y β se escogen de tal forma que la ecuación quede sólo en función de la variable independienteη. Existen varias posibilidades para esto, pero los valores
α=1
21−=β
proporcionan la forma más sencilla o la ecuación diferencial ordinaria que resulta de (7.5.4). Estaes
( ) ( )0
2
’’’ =+
v
uu
ηηη (7.5.5)
donde
21t
y=η
Esta ecuación se puede escribir
( )( ) ( )[ ]η
ηηη
’ln ’
’’u
d
d
u
u =
( )[ ]v
ud
d
2’ln
ηηη
−=
Integrando se tiene
( ) 1
2
ln4
’ln Cv
u +−= ηη
o bien
( ) ( ) 2411 ’ ηη veCu −=
cuya integral es

120
∫ += −η ην ηη
0 2)4/1(
1
2
)( CdeCu
Entonces la solución de (7.5.1) es
C = t)u(y, 2
/
0
4
1
1
2
Cdety
+∫−
ηη
ν (7.5.6)
Las condiciones de frontera son
a) u(0, t)= Uo para t>0
b) u(y, 0)=0 para y>0
( ) ( ) ( )[ ]tuutu ,0 ,0 ηη ==
( ) ( ) ( )[ ]0, 0, yuuyu ηη ==
Sustituyendo la condición a) en (7.5.6) se obtiene
C2= U0
La condición inicial b) da
Uodety
+∫−
ξξ
ν/
0
4
1
1
2
C =0
Haciendo cambio de variable
2
1= ξ
νς
(7.5.7)
2C
0
1 2
ςν ς de
Uo
∫∞ −
=
La integral

121
2
0
2 πςς =∫∞ − de
de donde
νπUo−=1C
El campo de velocidad en términos de ζ
2
-1Uo= t)u(y, 2
0
2
∫ − ς
πν ς det
y
(7.5.8)
La integral
)(2
2
0
2
xerfdet
y
=∫ − ςπ
ν ς
es una función de x llamada función de error normalizada. Esta función se puede encontrartabulada en los manuales de matemáticas. De esta manera la ecuación se puede escribir
( )( )
−=
210 2
1ty, vt
yerfUu (7.5.9)
En la figura 7.5.1 se muestran perfiles de velocidad para diferentes tiempos, quecorresponden a la ecuación (7.5.9). Se observa que la velocidad u varía de su valor máximo Uoen la placa hasta el valor cero alejado de la placa de una manera asintótica. En la medida quetranscurre el tiempo el efecto del movimiento de la placa se nota en una región mayor. Laecuación (7.5.1) es una ecuación de difusión de la velocidad u (momentum por unidad de masa)en la coordenada y con el tiempo.
La ecuación de vorticidad (4.3.3) en este caso toma la forma
2
2
y
w
t
w zz
∂∂
=∂
∂ µρ

122
de donde wz es la única componente de la vorticidad. Esta ecuación es también una ecuación dedifusión de wz. La solución de ésta se puede obtener de (7.5.8). Por la definición de vorticidad(2.6.4)
x
v
y
uwz
∂∂−
∂∂=
y
u
∂∂=
debido a que v=0. Derivando (7.5.8)
ωπν
νz
y
tUo
te= −
−2
4 (7.5.10)
La ventaja de escribir las ecuaciones en función de la variable de similaridad es que losperfiles de velocidad mostrados en la figura 7.5.1 y los correspondientes a la ecuación (7.5.10) sereducen a una sola curva en ambos casos. Por ejemplo los perfiles de velocidad tienen la forma
Figura 7.5.2
donde la ordenada es
µUo
y/(2(νt)1/2)

123
( ) 21 2 vt
y
en vez de y.
Se puede encontrar una región donde el efecto de la placa es notorio. El espesor de estaregión se nota de la figura 7.5.2 y es del orden de (νt)1/2. La relación exacta entre este espesor y(νt)1/2 depende de la definición precisa de esta región.
7. 6 Segundo problema de Stokes.
Considere una placa infinita oscilando en su mismo plano en un fluido.
Uo cos nt
x
y
Figura 7.6.1

124
Por las mismas consideraciones del problema anterior la ecuación que describe el flujo es
2
2
y
uv
t
u
∂∂=
∂∂
(7.6.1)
Otro método de solución para este tipo de ecuaciones es el método de separación devariables. Se propone la solución u como un producto de una función solo de t con otra funciónsolo de y. Sea
( ) ( ) ( )tTyYtyu , =
Sustituyendo en (7.6.1) y ordenando
2
2
1
1
yd
Yd
Yv
td
Td
T
=
En esta ecuación el lado izquierdo es una función únicamente de t y el lado derecho otrafunción de y. Para que se cumpla la igualdad cada lado debe ser igual a una misma constantepuesto que y y t son variables independientes. De esta manera se tienen dos ecuaciones
ktd
Td
T=
1
kyd
Yd
Yv =
2
2
1
donde k es una constante. Ordenando se tiene
0
=− kTtd
Td (7.6.3)
0 2
2
=−v
Yk
yd
Yd (7.6.4)
Estas dos ecuaciones ordinarias se pueden resolver para T(t) y Y(y), y el producto debecumplir con las condiciones de frontera para u , que para este caso son

125
a) u=Uo cos nt para y = 0;
donde la constante n es la frecuencia de oscilación de la placa.
b) u finita para y → ∞.
Con respecto al valor de k, se puede mostrar que para valores reales y cero, la ecuación nosatisface las condiciones de frontera. Se pueden tener los siguientes casos:
i) k=0
Las soluciones de (7.6.3) y (7.6.4) son
T(t)=C1
Y(y)= C2 y+C3
Por (7.6.2) la solución de u es
u(y, t)=C1 (C2 y+C3)
Esta forma de la solución no puede cumplir con la condición de frontera a)
ii) k real y diferente de cero
Las soluciones de (7.6.3) y (7.6.4) son
kteCtT 1)( =
yk
yk
eCeCyY νν−
+= 32)(
+
− yk
yk
kt eCeCeu(y,t)=C νν321
Esta solución es una exponencial en el tiempo y no es compatible con la oscilación que senecesita según la condición de frontera a).
iii) k imaginaria
Tomando k=iλ donde λ es real y positiva, las soluciones de (7.6.3) y (7.6.4) son

126
tieCtT λ1)( =
yi
yi
eCeCyY νλ
νλ −
+= 32)(
además
tieCtT λ1)( =
yi
yi
eCeCyY νλ
νλ
−+= 32)(
+
− yi
yi
ti eCeCeu(y,t)=Cλλ
λ321
Para que se cumpla la condición de frontera b)
A=0
La condición de frontera a), también se puede escribir como u=eint para y=0; donde, porconvención se considera solo la parte real de la función eint. Sustituyendo esta condición defrontera se tiene
Uo eint= B eiλt
de donde
B=Uo
λ=n
Entonces, el campo de velocidad es
2
cos=t)u(y, 2
−
−yntUoe
y
νλν
λ
(7.6.5)
v = w = 0
127
La solución representa una oscilación del fluido con la misma frecuencia que laexcitación de la placa. La amplitud es máxima en la placa y disminuye de una maneraexponencial. El ángulo de fase también varia de una manera lineal con y. El perfil de velocidadespara un instante se muestra en la figura 7.6.1. El efecto notorio del movimiento de la placa selocaliza en una región cuyo espesor es del orden de ν
n como se ve en la ecuación (7.6.5).
7.7 Capa límite.
En los problemas de flujos viscosos anteriores se obtuvieron soluciones exactas, pero engeneral no siempre es posible lograr esto. Para flujos con números de Reynolds más o menosaltos, se acostumbra usar la técnica propuesta por Prandtl. En esta aproximación se considera queel flujo cerca de una frontera se puede dividir en dos regiones:
a) próximo al cuerpo los efectos viscosos son importantes y hay que considerar el términoviscoso. A esta región se le llama capa límite.
b) fuera de la capa límite el gradiente de la velocidad es pequeño y aunque el coeficientede viscosidad sea el mismo, el término viscoso es despreciable. Por esta razón esta región sepuede considerar como no viscosa.
Determinar donde termina una región y comienza la otra depende de la definición precisaque se emplee para esto. Además en algunos casos, debido a la geometría del flujo no existe laregión no viscosa, como por ejemplo los flujos internos de Poiseville y Couette.
Las formas más comunes de definir el espesor de la capa límite son las siguientes:
i) espesor de la capa límite δ.
El espesor δ se define como la distancia de la frontera al punto donde la velocidad es0.99 de la velocidad en la región no viscosa (llamada corriente libre). En ocasiones se usa otroporcentaje en lugar de 0.99 (como por ejemplo 0.95).
ii) espesor de desplazamiento δ*.
En la figura 7.7.1.a se muestra el perfil de velocidades de un flujo viscoso cercano a unafrontera. La figura 7.7.1.b muestra un flujo hipotético en el cual la velocidad es cero para 0<y<δ*, y para y≥δ∗ el flujo es uniforme y su velocidad es la de la corriente libre Uo.

128
δ*
yyUoUo
u(y)
a) b)
Figura 7.7.1
Si en ambos casos el déficit de gasto con respecto a la corriente libre Uo es el mismo, ladistancia δ∗ es el espesor de desplazamiento. O sea , las áreas sombreadas son iguales. De talmanera
∫∫ =−∞ *
0 0
0 0 )(δ
dyUdyuU
*0= δU
de donde
1
0 0
* ∫∞
−= dy
U
uδ (7.7.1)
iii) espesor de momentum θ.
Supóngase en la figura 7.7.1.b, que la región de velocidad cero se extiende hasta unadistancia θ. Si el déficit de flujo de momentum en ambos casos con respecto a la corriente libreUo es el mismo, la distancia θ es el espesor de momentum. De esta forma
( ) ∫∫ =−∞ θ
ρρ
0
20
0 dyUdyuUou
θρ 20 = U
de donde
1=
0 00
∫∞
− dy
U
u
U
uθ (7.7.2)

129
7.8 Ecuaciones de la capa límite.
Considérese una frontera plana (o un pequeño segmento de una frontera curva) en unflujo. Por efectos viscosos existe una capa límite. En la figura, la distancia entre la línea punteaday la frontera representa el espesor de la capa límite δ.
Figura 7.8.1
la capa límite comienza en x = 0, donde δ = 0. O sea, es el lugar donde el flujo encuentra lafrontera y los efectos viscosos empiezan a sentirse. Corriente abajo la capa límite se desarrolla yel espesor δ crece con x.
Las ecuaciones de movimiento para un flujo bidimensional, permanente, incompresible ysin fuerzas de cuerpo son:
0
u
=+yx
u
∂∂
∂∂
(7.8.1)
1
2
2
2
2
y
u
x
u
x
p
y
uv
x
uu
∂∂ν
∂∂ν
∂∂
ρ∂∂
∂∂ ++−=+ (7.8.2)
u
u
1
u
u 2
2
2
2
yxy
p
yv
xu
∂∂ν
∂∂ν
∂∂
ρ∂∂
∂∂ ++−=+ (7.8.3)
Se considera una sección de la capa límite suficientemente alejada de x=0. En estasección la distancia x es muy grande comparado con δ, y el flujo es casi unidimensional. Por loque
y
Uo
δ
x

130
u >> u (7.8.4)
La derivada x∂
∂es del orden de
1
x y la derivada
y∂∂
del orden
1
δ, entonces
xy ∂
∂∂∂ >> (7.8.5)
Empleando estas aproximaciones las ecuaciones de movimiento se simplifican. Seobserva que cada término de (7.8.3) excepto el de presión es mucho más pequeño que sucorrespondiente a (7.8.2). Entonces estos términos en (7.8.3) son despreciables en este conjuntode ecuaciones. A esta aproximación corresponde
0
=y
p
∂∂
(7.8.6)
O sea, que la presión es casi constante a lo ancho de la capa límite. Y la presión es sólofunción de x, determinada por el flujo externo no viscoso.
La ecuación de continuidad (7.8.1) indica que las desigualdades (7.8.4) y (7.8.5) son de lamisma magnitud. Esto asegura que los términos de la izquierda de la ecuación (7.8.2) son del
mismo orden. En el lado derecho se desprecia 2
2
x
u
∂∂
con respecto a 2
2
y
u
∂
∂. Respecto al término
de presión se ignora su variación, puesto que depende del flujo externo. Las ecuaciones sereducen a
0
u
=+yx
u
∂∂
∂∂
1
2
2
y
u
x
p
y
uv
x
uu
∂∂ν
∂∂
ρ∂∂
∂∂ +−=+ (7.8.7)
Estas ecuaciones de la capa límite se llaman también las ecuaciones de Prandtl.
7.9 Solución de Blasius.
La solución de Blasius se refiere a un flujo unidimensional uniforme sobre una placaplana. Si el flujo se extiende hasta el infinito sobre la placa, la presión es independiente de x. Lasecuaciones de movimiento tienen la forma

131
0
=+y
u
x
u
∂∂
∂∂
2
2
y
u
y
uu
x
uu
∂∂ν
∂∂
∂∂ =+
Las condiciones de frontera correspondientes son
a) u= u= 0 para y=0
b) u =U0 para y → ∞
Las dos ecuaciones se reducen a una sola empleando la función de corriente que se define
yu
∂∂ Ψ=
xv
∂∂ Ψ−=
La ecuación de continuidad se satisface idénticamente y la segunda ecuación a
3
3
2
22
yyxyxy ∂ψ∂ν
∂ψ∂
∂ψ∂
∂∂ψ∂
∂ψ∂ =− (7.9.1)
Esta ecuación diferencial parcial se reduce a una ecuación diferencial ordinariaempleando la variable de similaridad:
0
U
x
y
νη = (7.9.2)
y la solución
)( U=)(= 0 ηνψ fxx,y (7.9.3)
Las derivadas presentes en (7.9.1) son las siguientes

132
fx
Uf
x
U
x00
2
1
2
1
νην∂
ψ∂ +′−=
’’2
02
fx
U
yxη
∂∂ψ∂ −=
fUy
′=
0∂ψ∂
fx
UU
y′′=
0
02
2
ν∂ψ∂
fx
U
y′′′=
20
3
3
ν∂ψ∂
Sustituyendo en (7.9.1)
fx
Uf
vx
UUof
x
vUf
x
vUf
x
U-fU o ′′′=′′
+′−−
′′′
20000
0 21
21
2
ηη
que se simplifica a
f´´´+ ½ ff´´=0 (7.9.4)
ecuación diferencial ordinaria no lineal.
Las condiciones de frontera se transforman de la siguiente manera
a) cuando y=0, η =0. Además
0’
0 ==
∂∂= fU
yu
ψ ⇒ f ' = 0
de donde
f´(0)=0
También

133
0
2
1
2
1
00 =+′−=−= fx
Uf
x
U
xv
νην∂
ψ∂ ⇒ ρ = 0
por lo que
f(0)=0b) Cuando y → ∞, η → ∞. Y de u= U0 f´= U0, se obtiene
f´(η)=1 cuando η → ∞
La ecuación (7.9.4) es diferencial ordinaria pero no lineal. Esta se puede resolver conmétodos numéricos. La solución se muestra gráficamente en la figura 7.9.1
Figura 7.9.1
La velocidad u en términos de esta solución f(η) esu= U0 f ’(η)
El perfil de velocidades correspondiente a esta solución aparece en la figura 7.9.2 En lafigura también se muestran algunas mediciones experimentales que indican buena aproximacióncon los resultados teóricos
f(η)
η=y(Uo/xν)1/2
5
5 10.0
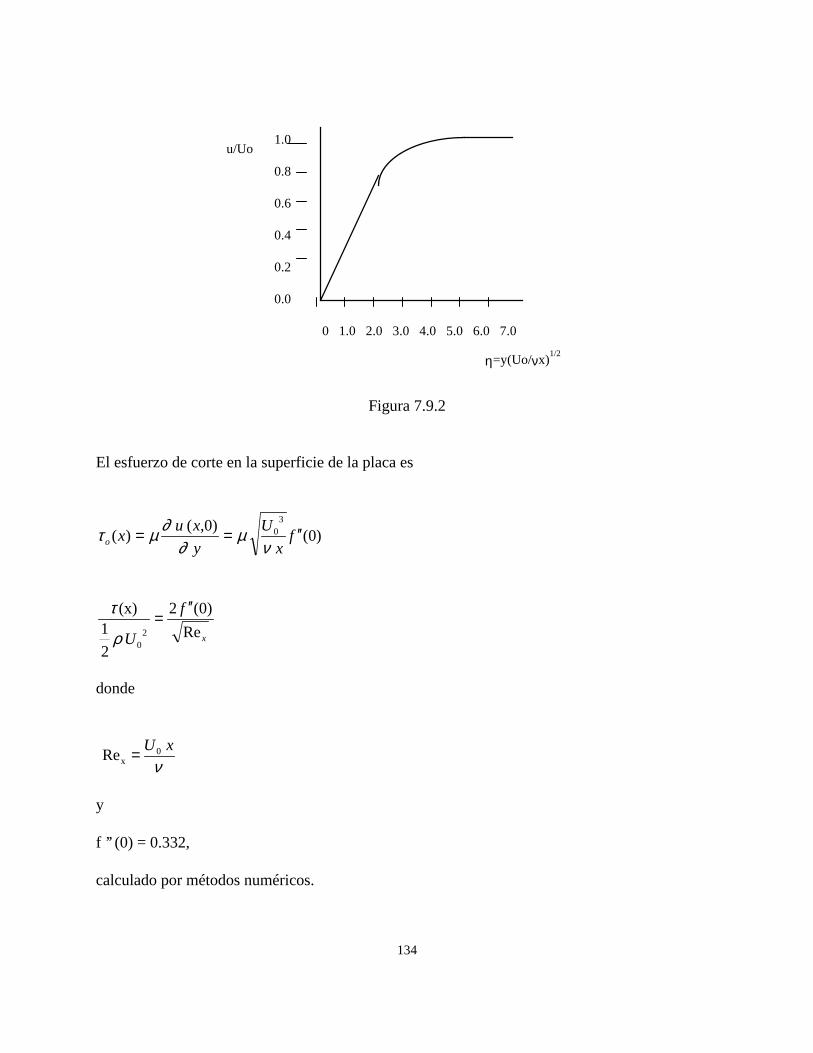
134
0 1.0 2.0 3.0 4.0 5.0 6.0 7.0
1.0
0.8
0.6
0.4
0.2
0.0
u/Uo
η=y(Uo/νx)1/2
Figura 7.9.2
El esfuerzo de corte en la superficie de la placa es
)0(
)0,( )(
30 fx
U
y
xuxo ′′==
νµ
∂∂µτ
x
f
U Re
)0(2
2
1(x)
20
′′=
ρ
τ
donde
νxU
Re 0x =
y
f ’’ (0) = 0.332,
calculado por métodos numéricos.

135
La fuerza de arrastre por unidad de ancho hasta x=L en la placa, es
∫=
L
oA dxxF
0
)(τ
( )0 2= 3
0 fv
LU ′′µ
De la solución graficada en la figura 7.9.2 se observa que u = 0.99U0 cuando η = 5; sustituyendoen (7.9.2) y arreglando se tiene
( ) 21 Re 0.5 −= xx
δ
Sustituyendo la solución numérica de u en (7.7.1) y (7.7.2) se obtiene
( ) 21 Re 72.1 −∗
= xx
δ
( ) 21 Re 664.0 −= xx
θ
Estos resultados muestran que
δ = 2.9δ∗
δ = 7.5θ
Se nota también que el espesor de la capa límite crece con x1/2.
7.10 Método de la integral de momentum.
Este método debido a Von Karman aplicado a una placa plana proporciona resultadosaproximados. Las ecuaciones de la capa límite para una placa plana son

136
0
u
=+yx
u
∂∂
∂∂
u
2
2
y
u
y
u
x
uu
∂∂ν
∂∂
∂∂ =+
El término x
uu
∂∂
se puede transformar en
x
uuu
x x
uu
)( 2
∂∂
∂∂
∂∂ −=
yuu
x
u )(
= 2
∂∂
∂∂ +
utilizando la ecuación de continuidad.
La ecuación de conservación de momentum es
2
22
u
u )(
y
u
y
u
yuu
x ∂∂ν
∂∂
∂∂
∂∂ =++
o bien
2
22
)u (
)(
y
uu
yu
x ∂∂ν
∂∂
∂∂ =+
Integrando esta ecuación de y=0 a y=δ.
u )(
0
0
2
0
δδδ
∂∂ν
∂∂
y
uudyu
x=+∫ (7.10.1)
Usando las condiciones de frontera
( )δδ,u 00
xUvu =

137
Considerando que el gradiente de la velocidad en y=δ es prácticamente nulo y que elesfuerzo en la placa es τo, se tiene
µτ
δ0
0
−=∂∂
y
u
Integrando la ecuación de continuidad desde y = 0 a y = δ :
∫ =+δ δ
∂∂
0 00
vdy
x
u
de donde
( ) ∫δ
∂∂δ
0
u -= , dy
xxv
Ahora la ecuación (7.10.1) se reduce a
( )
0
0
02
ρτ
∂∂
∂∂
δδ
odyx
uUdyu
x−=− ∫∫ (7.10.2)
La regla de Leibnitz establece
( ) ( ) ( ) ( )xd
dx
dx
dxfdy
x
yxfdyyxf
xd
d xx
x ,f-,
, ,
)(
(x)
)(
)(
ααββ∂
∂β
α
β
α ∫∫ +=
Aplicándola a este caso
( )xd
dUdyu
xdyu
xd
do
0
22
0
2 δ∂∂δδ
∫∫ +=
0 0
0 xd
dUdy
x
udyu
xd
d δ∂∂δδ
∫∫ +=
Sustituyendo en (7.10.2)

138
0
0 02
ρτδδ
odyuxd
dUdyu
xd
d −=− ∫∫
o bien
)(
0
0 ρτ
δ
odyuUuxd
d =−∫ (7.10.3)
Esta es la ecuación de la integral de momentum. Físicamente representa que el cambio demomentum de la capa límite es la fuerza de arrastre sobre la placa. Para encontrar el espesor de lacapa límite se utiliza esta ecuación de la siguiente manera.
Se propone un perfil de velocidad en la capa límite de la forma
2
210
++=
δδy
ay
aaU
uo
Esta forma debe satisfacer las siguientes condiciones
u(x,0)=0
u(x,δ)=U0
( )0
, =
∂∂
y
xu δ
de donde
0=a0
1=a0+a1+a2
0=a1+2a2
y
a0=0
a1=2

139
a2=-1
El perfil de velocidad es entonces
2
0
2
−=
δδyy
U
u
En (7.10.3) la integral del lado izquierdo es
∫ =−
δ
δ
0
200
15
2 )( UdyuUu
Además
δµ
∂∂µτ 0
0
2 U
y
u
y
o ===
Sustituyendo en (7.10.3)
δδ 02
0 2 15
2
UvU
xd
d =
o bien
0
15 U
dxvd =δδ
Integrando, con la condición δ = 0, cuando x = 0, se tiene
21
0
30
=
U
xvδ
En forma adimensional
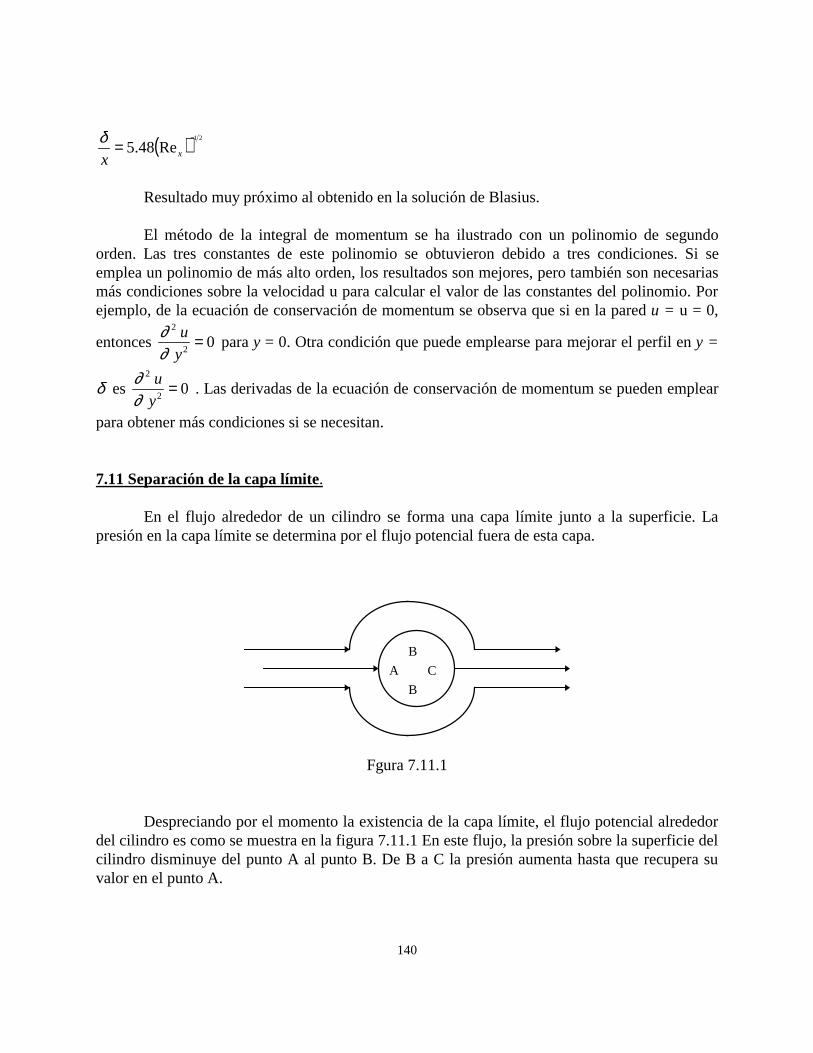
140
( ) 21
Re48.5−
= xx
δ
Resultado muy próximo al obtenido en la solución de Blasius.
El método de la integral de momentum se ha ilustrado con un polinomio de segundoorden. Las tres constantes de este polinomio se obtuvieron debido a tres condiciones. Si seemplea un polinomio de más alto orden, los resultados son mejores, pero también son necesariasmás condiciones sobre la velocidad u para calcular el valor de las constantes del polinomio. Porejemplo, de la ecuación de conservación de momentum se observa que si en la pared u = u = 0,
entonces 0
2
2
=y
u
∂∂
para y = 0. Otra condición que puede emplearse para mejorar el perfil en y =
δ es 0
2
2
=y
u
∂∂
. Las derivadas de la ecuación de conservación de momentum se pueden emplear
para obtener más condiciones si se necesitan.
7.11 Separación de la capa límite.
En el flujo alrededor de un cilindro se forma una capa límite junto a la superficie. Lapresión en la capa límite se determina por el flujo potencial fuera de esta capa.
B
CA
B
Fgura 7.11.1
Despreciando por el momento la existencia de la capa límite, el flujo potencial alrededordel cilindro es como se muestra en la figura 7.11.1 En este flujo, la presión sobre la superficie delcilindro disminuye del punto A al punto B. De B a C la presión aumenta hasta que recupera suvalor en el punto A.
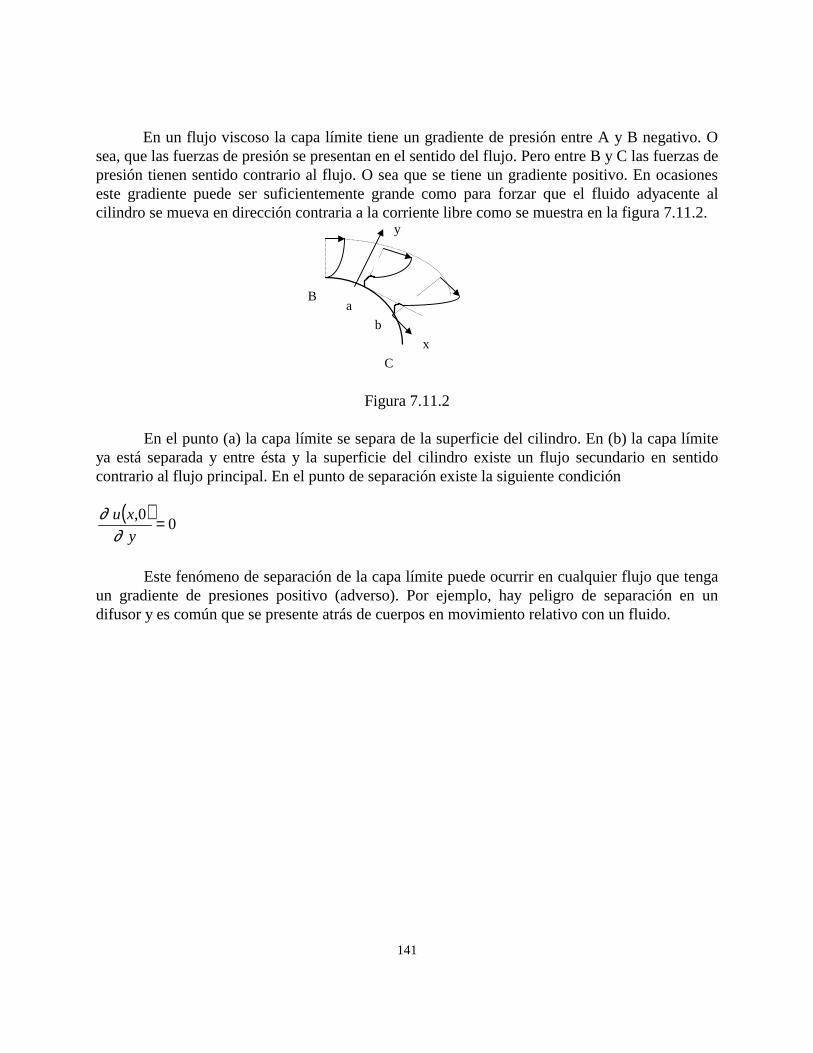
141
En un flujo viscoso la capa límite tiene un gradiente de presión entre A y B negativo. Osea, que las fuerzas de presión se presentan en el sentido del flujo. Pero entre B y C las fuerzas depresión tienen sentido contrario al flujo. O sea que se tiene un gradiente positivo. En ocasioneseste gradiente puede ser suficientemente grande como para forzar que el fluido adyacente alcilindro se mueva en dirección contraria a la corriente libre como se muestra en la figura 7.11.2.
Figura 7.11.2
En el punto (a) la capa límite se separa de la superficie del cilindro. En (b) la capa límiteya está separada y entre ésta y la superficie del cilindro existe un flujo secundario en sentidocontrario al flujo principal. En el punto de separación existe la siguiente condición
( ) 0
0, =
y
xu
∂∂
Este fenómeno de separación de la capa límite puede ocurrir en cualquier flujo que tengaun gradiente de presiones positivo (adverso). Por ejemplo, hay peligro de separación en undifusor y es común que se presente atrás de cuerpos en movimiento relativo con un fluido.
B
C
a
b
x
y
142
CAPITULO 8. FLUJOS COMPRESIBLES
8.1 Ondas acústicas 137

143
FLUJOS COMPRESIBLES.
En los capítulos anteriores se ha tratado con fluidos incompresibles. Sin embargo, existenalgunos fenómenos que se deben a la compresibilidad del fluido. Aquí se estudiarán estosfenómenos, para lo cual se consideran estos efectos en las ecuaciones de movimiento.
Con el objeto de simplificar las ecuaciones en ocasiones se despreciará la viscosidad delfluido. Bajo estas condiciones y despreciando las fuerzas de cuerpo,las ecuaciones para este casoson:
∂ρ∂
ρt
U+ ∇ ⋅ =( ) 0 (8.1)
ρ ∂∂
ρ ρr
r rUt
U U+ ⋅ ∇ = −∇( ) (8.2)
ρ ∂∂
ρ ρet
U e U k T+ ⋅ ∇ = − ∇ ⋅ + ∇ ⋅ ∇( ) ( )r r
(8.3)
Es necesario introducir la ecuación de conservación de energía debido a que con (8.1) y(8.2) se tienen cuatro ecuaciones escalares y cinco incógnitas escalares.
Físicamente, por la compresibilidad del fluido se tienen variaciones de temperatura. Estolo toma 4en cuenta la ecuación de energía. Estas ecuaciones junto con
p p T= ( , )ρ (8.4) e e T= ( , )ρ (8.5)
forman un sistema cerrado de siete ecuaciones escalares y siete incógnitas escalares.
En la ecuación de conservación de la energía se considera que la interacción de calorentre el medio ambiente y el fluido es por conducción.
Para el caso de un gas perfecto, las ecuaciones (8.4) y (8.5) toman la forma:
P RT= ρ (8.6)e c Tv= (8.7)
Donde R es la constante del gas y cv es el calor específico a volumen constante que setomará invariable.
8.1 Ondas acústicas.

144
Si se le dá al fluido un disturbio pequeño en la presión este se propaga en el espacio enforma de ondas. Estas fluctuaciones de presión en un punto causanfluctuaciones correspondientes de velocidad, densidad y temperatura, relacionadas por lasecuaciones de movimiento.En el caso unidimensional no viscoso las ecuaciones (8.1) y (8.2) toman la forma
∂ρ∂
∂∂
ρt x
u+ =( ) 0 (8.1.1)
∂∂
∂∂ ρ
∂ρ∂
ut
uux x
+ = − 1 (8.1.2)
Para flujo barotrópico:p p= ρ( )
de donde∂∂ ρ
∂ρ∂
px
dpd x
=
y la ecuación (8.1.2) se puede escribir∂∂
∂∂ ρ ρ
∂ρ∂
ut
uux
dpd x
+ + =10 (8.1.3)
A un fluido en reposo con densidad ρ 0 , presión p0, uniformes, se le perturba u’ envelocidad, ρ ’ en densidad y p’ en presión. Entonces, la velocidad, la presión y la densidad sonu u
p p p
= ′= + ′= + ′
0
0ρ ρ ρ
`Sustituyendo en (8.1.1) y (8.1.3)
∂ρ∂
∂ρ∂
ρ ρ ∂∂
′ + ′′ + + ′ ′ =
tu
pux
( )0 0 (8.1.4)
∂∂
∂∂ ρ ρ ρ
∂ρ∂
′ + ′ ′ ++ ′
′ =ut
uux
dpd x
10
0
(8.1.5)
Haciendo la expansión de 1
0ρ ρ+ ′ y de
dpdρ
se tiene

145
( ) ( )
1 11
2
0 0 0 0
2
0
0
2
20
0
2 3
30
ρ ρ ρρρ
ρρ
ρ ρρ ρ
ρρ ρ
ρ
+ ′= − ′ + ′
+
=
+ −
+
−
+
...
!...
dpd
dpd
d p
d
d p
d
Donde el subíndice cero se refiere a las condiciones en reposo. Puesto que lasfluctuaciones son muy pequeños los términos cuadráticos, cúbicos, etc., de estas sondespreciables con respecto a las fluctuaciones. Este proceso de linealización reduce (8.1.4) y(8.1.9) a
∂ρ∂
ρ ∂∂
′ + ′ =t
ux0 0 (8.1.6)
∂∂ ρ ρ
∂ρ∂
′ +
′=u
tdpd x
10
0 0
(8.1.7)
Derivando (8.1.6) con respecto a t y (8.1.7) con respecto a x, se tiene
∂ ρ∂
ρ ∂∂ ∂
∂∂ ∂ ρ ρ
∂ ρ∂
2
2 0
2
2
0
2
2
0
10
′ + ′ =
′ +′
′ =
tu
x t
ux t
dpd x
Eliminando u’ de ambas ecuaciones
∂ ρ∂
∂ ρ∂
2
2 02
2
2
′ = ′t
ax
(8.1.8)
donde
adtd0
0
=
ρ
(8.1.9)
La solución de (8.1.8) es de la forma
( ) ( ) ( )′ = − + +ρ x t f x a t g x a t, 0 0 (8.1.10)
Donde f y g son funciones arbitrarias. La solución se puede verificar sustituyendo en(8.1.8). Considérese la primera parte de la solución f (x-a0t). El valor de esta función es constantepara

146
x-a0 t = c
que representa una linea recta en el plano x-t, con pendiente 1
0a
Figura 8.1.1
En la figura 8.1.1 se muestra esta linea para c = c1. Las posiciones en las cuales( )′ =ρ f c1 depende del tiempo. Para t = t1 esta posición es x1 y para t = t2 es x2. O sea que el
punto donde ′ρ es constante se desplaza con velocidad a0 en el sentido positivo de x. Esta es unaonda de ′ρ .De la misma forma g (x + a0 t) representa una onda de ′ρ que se desplaza con velocidad a0 en elsentido negativo de x.Por esta razón a la ecuación (8.1.8) se le llama ecuación de onda.
Eliminando ′ρ entre (8.1.6) y (8.1.7) se tiene
∂∂
∂∂
2
2 02
2
′ = ′u
ta
u
x (8.1.11)
Esto indica que la perturbación de la velocidad u’ se propaga también en forma de onda.Y puesto que se consideró el flujo como barotrópico, la presión es únicamente una función de ladensidad y la presión se propaga en forma de onda. La velocidad de propagación de estas ondases la velocidad acústica a0, que se puede calcular de (8.1.9).
Caso 1. LíquidoConsidérese un volumen V de líquido cuyo módulo de compresibilidad es K, entonces:
t
t2
t1
x1 x2
x
c = c1
c1
147
kdpdVV
= −
por lo tantodpd
kρ ρ
=
y la velocidad acústica es:
ak
00
=ρ
(8.1.12)
para agua a 15° C
a0 = 1430 m/seg.
Caso 2. Gas perfecto en un proceso isoentrópico.La consideración de proceso isoentrópico es posible debido a que las fluctuaciones en la
ondas acústicas son tan rápidas que la transmición de calor es despreciable y que desde elprincipio se ha despreciado la disipación viscosa de energía.En estas condicionesp
cργ =
Donde c es una constante y γ es la relación de calores específicos. Derivandodpd
c
p
RT
ργρ
γρ
γ
γ=
=
=
−1
Usando la ecuación de estado (8.6), la velocidad acústica es:
ap
00
0
= γρ
(8.1.13)
= γRT0 (8.1.14)
Para aire a 270 C
148
a0=348 m/seg
La velocidad acústica no necesariamente es constante en un fluido, sino depende de laspropiedades en cada punto del fluido.
Se calculó la velocidad acústica para un fluido en reposo. Sin embargo, el análisis para lavelocidad acústica en un fluido en movimiento uniforme, es el mismo sobre un marco dereferencia que se mueve con el fluido. La velocidad acústica es la calculada anteriormente, perorelativa al flujo. La velocidad del flujo en un punto comparada con la velocidad acústica en elmismo punto, se define como número de Mach (M). O sea:
MUa
=0
(8.1.15)
Donde U es la magnitud de la velocidad es el punto considerado.
De la definición de módulo de compresibilidad k s4e nota que para fluidosincompresibles, k tiende a ser infinito. De (8.1.12) se observa que la velocidad acústica tambiéntiende a infinito, y en (8.1.15) el número de Mach acero. Sin embargo,como no existen fluidosperfectamente incompresibles el número de Mach solamente podrá ser pequeño. Entonces elnúmero de Mach es un índic de la importancia de la compresibilidad en un flujo. Para númerosde Mach hsata 0.2 ó 0.3, dependiendo de la presición que se requiera, el flujo se puede tomarcomo incompresible.
Para números de Mach más altos que los mencionados anteriormente, los efectos de lacompresibilidad son importantes. estos flujos compresibles se dividen en dos grupos:
i) Flujos subsónicos (M<1)
El flujo donde el número de Mach es menor que uno en todas partes, es flujo subsónico.

149
150
CAPITULO 9. MODELACION MATEMATICA DEL TRANSPORTE DE MASA Y ENERGIA ENYACIMIENTOS GEOTERMICOS (MEDIO ROCA-FLUIDO).Error! Bookmark not defined.
9.1 Introducción.
9.2 Ecuaciones gobernantes del transporte de masa y energía en los yacimientos geotérmicos.
9.3 Métodos numéricos para la solución de las ecuaciones gobernantes.
9.4 Aplicación del método numérico de Diferencias Finitas Integradas (DFI) para la solución de lasecuaciones gobernantes.
9.5 Referencias.
MODELACION MATEMATICA DEL TRANSPORTE DE MASA Y ENERGIA EN YACIMIENTOSGEOTERMICOS (MEDIO ROCA-FLUIDO).
9.1 Introducción
La modelación del transporte de masa y energía en los yacimientos geotérmicos es una herramienta muypoderosa en el área de ingeniería de yacimientos. Permite establecer y/o reforzar modelos conceptuales de diversostipos de yacimientos y decidir estrategias de exploración y explotación de los mismos. La ingeniería de yacimientoses considerada como un enlace entre los trabajos de exploración geológica y la utilización de los fluidos producidos;incluye desde mediciones durante la perforación de pozos, hasta el cálculo del potencial del campo y la predicciónde su comportamiento bajo diferentes estrategias de explotación. Al inicio de la explotación de un campogeotérmico, la información es escasa y el comportamiento se trata de predecir en base a modelos simplificados.Conforme se va incrementando el número de pozos, la información es mayor y las predicciones más precisas alconsiderar modelos más completos. No obstante, la modelación de un campo geotérmico es complicada. Esto acausa de las continuas transiciones de fase líquido-vapor, de la presencia de sales y de gases no condensables en elagua geotérmica y a que el medio rocoso es esencialmente fracturado, entre otros aspectos.
Dada la complejidad de la modelación de un campo geotérmico, los simuladores numéricos geotérmicos se handividido prácticamente en dos clases. Una comprende la simulación del transporte de masa y energía en el medioroca-fluido de los yacimientos geotérmicos (in-situ) resolviendo las ecuaciones gobernantes para el transporte defluidos en un medio poroso (Bear, 1972). El efecto de pozo en estos simuladores de yacimiento es únicamente através de un término fuente/sumidero en las ecuaciones gobernantes. La otra clase de simuladores geotérmicoscomprende la simulación del transporte de masa y energía en el pozo mismo (e.g. Gunn y Freeston, 1991)considerando el efecto del yacimiento (medio roca-fluido) a través de un índice de productividad dependiente de laspropiedades del yacimiento. Sustanciales avances se han obtenido en las dos clases de simuladores geotérmicos auncuando todavía queda mucho por hacer, principalmente en lo que respecta al tratamiento de las fracturas en losyacimientos, y en lo que respecta a los mapas y correlaciones empleados para la modelación del flujo geotérmico enlos pozos (Hadgu, 1989). Estos mapas de patrones de flujo y las correlaciones para obtener la caída de presión enlos pozos geotérmicos son, por lo general, rigurosamente válidos para sistemas agua-aire, a falta de suficienteinformación experimental para sistemas geotérmicos. En la actualidad, se está dedicando gran esfuerzo en acoplarlos mejores simuladores geotérmicos de ambas clases (e.g. Hadgu et al., 1993; Murray y Gunn, 1993), deyacimiento y de pozo, para obtener simuladores acoplados yacimiento-pozo que representen mejor el transporte demasa y energía en el medio roca-fluido-pozo de los campos geotérmicos.
Mucho del conocimiento adquirido hasta el presente acerca del comportamiento general de los camposgeotérmicos ha sido en base a modelos numéricos de medios porosos homogéneos. En este contexto, algunos de lostrabajos numéricos más importantes publicados en la literatura especializada son los de Narasimhan y Witherspoon,1976; Grant, 1977; Faust y Mercer, 1979; Zyvoloski y O'Sullivan, 1980; Atkinson et al., 1980; Bodvarsson, 1984;O'Sullivan et al., 1985; McKibbin y Pruess, 1988 y 1989; entre otros. Dichos trabajos, en su mayoría, se abocan alestudio de campos geotérmicos reales como los de Wairakei, Ohaaki y Broadlands en Nueva Zelanda, y Bagnore yLarderello en Italia. Comprenden problemas complejos de flujos multifásicos, geometrías regulares e irregulares ycampos con muchos años de producción.
desarrollado por Barenblatt et al. (1960) y por Warren y Root (1963). En esta aproximación, un medio porosofracturado es particionado en dos medios continuos con flujos cuasi-estacionarios, uno constituído de pequeñosporos en la matriz rocosa (porosidad primaria) y el otro constituído de una red de fracturas y fisuras interconectadas(porosidad secundaria). El flujo en cada uno de estos medios continuos se supone gobernado por la ley de Darcy(Bear, 1972). Se supone además que el flujo global ocurre principalmente a través de la red de fracturas coninteracción local entre fractura y matriz porosa. Warren y Root aplicaron este método para casos de flujos de fasesimple e isotérmicos en yacimientos petroleros.
A diferencia de los yacimientos petroleros, en los yacimientos geotérmicos la transferencia de energía en forma decalor es intrínseca y no puede suponerse como un sistema isotérmico. El flujo de calor y masa es bifásico, acopladoy el período de flujo transitorio entre fractura y matriz porosa puede ser muy largo. Pruess y Narasimhan (1982a,b)adaptaron el método de doble porosidad de Warren y Root a condiciones geotérmicas dando lugar al método MINC(Multiple INteracting Continuum). El método supone que el flujo global en el yacimiento geotérmico ocurreprincipalmente a través del medio continuo de fracturas interconectadas y que las variaciones en las condicionestermodinámicas son menos pronunciadas en la dirección de una fractura que perpendicular a ella. Una descripcióndetallada se encuentra en Pruess (1983). No obstante que el método MINC ha sido aplicado exitosamente (Lippmanet al., 1985; Bodvarsson y Gaulke, 1987; Pruess et al., 1990; Suárez, 1995; entre otros) a problemas de flujosimultáneo de calor y fluido, para fluidos multicomponentes y multifásicos, etc., existe poca informacióncuantitativa disponible respecto a su rango de validez y la aproximación que puede obtenerse para diferentes tiposde sistemas de flujo.
La principal dificultad en la modelación de procesos térmicos en medios fracturados, es que pueden ocurrirfuertes variaciones en las condiciones termodinámicas entre fractura y matriz porosa a distancias relativamentecortas. Las perturbaciones térmicas o hidrológicas a las que está sometido un yacimiento geotérmico tenderán apropagarse rápidamente a través de las fracturas pero lentamente en la matriz porosa. Si la velocidad de cambio enlas condiciones termodinámicas causada por las perturbaciones externas es suficientemente lenta y el equilibrioentre fractura y matriz suficientemente rápido, sólo entonces, la fractura y la matriz porosa permanecerán encondiciones de equilibrio termodinámico local. En esta circunstancia y cuando el espaciamiento entre fracturas espequeño en comparación al tamaño del yacimiento, la roca fracturada puede tratarse como un "medio continuoefectivo" o "medio poroso equivalente" con parámetros físicos en términos de las propiedades de la matriz porosa yde la red de fracturas interconectadas (Rybach y Muffler, 1981; Pruess et al., 1990). La viabilidad de laaproximación de un medio continuo efectivo (Pruess et al., 1988) dependerá de la naturaleza de la perturbaciónexterna, de las propiedades del medio poroso fracturado, y de las escalas de observación de espacio y tiempo. Esuna aproximación que requiere evaluarse cuidadosamente para un caso particular de circunstancias y condiciones.
9.2 Ecuaciones gobernantes.
Las ecuaciones generales que gobiernan el transporte de masa, cantidad de movimiento y energía de una mezclaroca-líquido-vapor-gas son complejas. No obtante algunas hipótesis son válidas para la mayoría de los yacimientos

monofásicos (Moya et al., 1987). Sin embargo, no es adecuada para flujos geotérmicos, a causa de las constantestransiciones de fase.
La transferencia de energía se lleva a cabo principalmente mediante el movimiento del fluido (convecciónforzada) y mediante conducción a través del medio roca-fluido. El mecanismo convectivo predomina y es elcausante de la no linealidad de la ecuación de conservación de la energía. No obstante, existen algunos sistemasgeotérmicos con régimen conductivo predominante como los acuíferos de baja temperatura y de baja entalpía(incluyendo yacimientos geopresurizados) y los sistemas denominados de roca seca caliente.
Considerando los mecanismos físicos mencionados, las ecuaciones gobernantes que se describen a continuaciónson las generalmente empleadas en la modelación de yacimientos geotérmicos. Se establecen para un medio roca-fluido en equilibrio termodinámico local, constituído por roca porosa homogénea y por un flujo bifásico de aguacon sales y gases no condensables.
La integración es sobre un subdominio Vn (volumen de control) limitado por una superficie cerrada τn . La ecuaciónestablece que la acumulación de masa (o energía) M en el volumen de control, es la suma de los flujos de masa (oenergía) a través de la superficie cerrada y de las fuentes/sumideros de masa (o energía) q presentes en el volumende control. M denota masa para k=1,...,NK componentes (H2O, CO2, NaCl, etc.), o energía por unidad de volumenpara k=NK+1. La masa total M de cada componente se obtiene sumando las contribuciones de las fases líquida yvapor:
con β=1 para la fase líquida y β=2 para la fase gaseosa (vapor y gas). φ es la porosidad del medio rocoso, Sβ lasaturación (fracción volumétrica) de la fase β, ρβ la densidad de la fase β y Xβ
(k) la fracción másica de lacomponente k presente en la fase β.
Similarmente, el término de acumulación de energía en forma de calor en un sistema multifásico es:
donde uβ denota la energía interna específica de la fase β y ρR y CR la densidad y el calor específico del materialrocoso, respectivamente.
dVq + dnF = dVMDtD )(
V)()(
V nnn
κκτ
κ τ ∫•∫∫rr
(1)
XS = M )(2
1=
)( κβββ
β
κ ρφ ∑ (2)
TC)-(1 + uS = M RR
2
1=
1)+(NK ρφρφ ββββ∑ (3)

siendo K la permeabilidad absoluta dependiente principalmente de la porosidad, Krβ la permeabilidad relativa decada fase β dependiente de la saturación de las fases y de la temperatura T, la viscosidad dinámica µβ en generaldepende de la presión y temperatura. El vector g→ denota la aceleración gravitacional y Pß la presión de la fase ß.La ley de Darcy (Bear, 1972) en su forma original fue obtenida empíricamente para el flujo isotérmico de agua através de arena (Darcy, 1856), tiene una forma similar a la ley de Fourier para la conducción del calor o a la ley deFick para la difusión de masa. Ha sido extendida a materiales no isotrópicos introduciendo un tensor depermeabilidades. Asimismo se ha modificado para incluir efectos inerciales, turbulentos y efectos viscosos de granescala.
La diferencia entre las presiones P de las fases líquida y vapor es equivalente a la presión capilar (Pl-Pv≡Pc). Enun proceso en ebullición, la presión capilar tiene el efecto de disminuir la presión de vapor (Torrance, 1983) y esimportante en materiales con poros muy pequeños. Suponer equilibrio mecánico (Pl=Pv) es suponer que la presióncapilar es despreciable. Para sistemas bifásicos de alta temperatura la presión capilar es menor de 1 bar y es, portanto, insignificante en comparación con los cambios de presión inducidos por la producción o inyección.
El flujo de energía en forma de calor contiene componentes conductiva y convectiva:
donde K es la conductividad térmica equivalente del medio roca-fluido, y hß=uß+P/ρß es la entalpía específica de lafase ß.
La densidad (ρR) porosidad (φ), permeabilidad (K ), calor específico (CR) y la conductividad térmica (k), sonpropiedades termofísicas de la roca que deben estipularse para poder resolver el sistema de ecuaciones planteado.Cuanto más sofisticado es un modelo matemático, mayor es la necesidad de una caracterización espacial y temporalde la roca geotérmica. Existen diferentes metodologías experimentales para la determinación de las propiedadestermofísicas de un medio rocoso. En particular, el Departamento de Geotermia del Instituto de InvestigacionesEléctricas cuenta con un simulador físico de yacimientos geotérmicos (Contreras y Garfias, 1988) que permiteobtener las propiedades bajo condiciones de temperatura, presión, esfuerzo y saturación prevalecientes en losyacimientos. Algunas correlaciones para la determinación de estas propiedades y de las propiedades de transportecomo viscosidad (µ), permeabilidad relativa (Krß) y conductividad térmica efectiva (K) pueden encontrarse enMoya et al., (1995), como función de P y T. Un modelo de solubilidad del CO2 en agua para condicionesgeotérmicas puede encontrarse en Moya e Iglesias (1992).
9.3 Métodos numéricos para la solución de las ecuaciones gobernantes.
Las ecuaciones gobernantes del transporte de masa y energía en el sistema roca fluido de los yacimientos
Fh+T-=F 1)+(NKββ
β∑Κ∆ (6)

regulares e irregulares. En combinación con el método Newton-Raphson para manejar las no linealidades de lasecuaciones y de un algoritmo numérico eficiente para invertir las matrices dispersas generadas, el método DFI hasido la base de los simuladores geotérmicos desarrollados en el Laboratorio de Lawrence Berkeley, California(Pruess, 1988). Entre estos se encuentran los simuladores SHAFT79 (Pruess y Schroeder, 1980) en el que seconsidera agua pura bifásica como el fluido geotérmico y TOUGH2 (Pruess, 1991) en el que se considerandiferentes sistemas binarios y ternarios.
El método de Diferencias Finitas Integrales (DFI) fue introducido en 1953 (Narasimhan y Witherspoon, 1976)por MacNeal (1953) para resolver problemas de valores a la frontera. Tyson-Weber (1964) y Cooley (1971) loemplearon en problemas de flujo subterráneo; Dusinberre (1961) y Edwards (1972) en algunos problemas detransferencia de calor. En 1976, Narasimhan y Witherspoon describieron por primera vez el método como unaherramienta muy poderosa para estudiar el movimiento de fluidos en medios porosos. Pruess (1988) lo emplea en elanálisis del transporte de masa y energía en yacimientos geotérmicos y desde entonces se ha demostrado sucapacidad para modelar flujo multifásico y efectos por cambios de fase. Una descripción detallada del método DFIpuede encontrarse en Suárezy de la Torre, 1991).
9.4 Aplicación del método de Diferencias Finitas Integrales (DFI) a sistemas geotérmicos.
El método numérico DFI puede aplicarse, entre otros problemas, al flujo simultáneo de fluido y calor enyacimientos geotérmicos. Aplicando DFI a la ecuación gobernante (1), la discretización espacial se hace porintroducción de promedios volumétricos apropiados. La forma discreta resultante es:
donde M denota masa o energía y Mn es el valor promedio de M sobre Vn. La integral de superficie se expresacomo una suma discreta de valores medios de los flujos normales atravesando el segmento de superficie Anm:
el flujo másico (ley de Darcy) se expresa en términos de los valores medios de los parámetros en los elementos Vn yVm, esta es:
MV=MdV nnV n∫ (7)
FA=ndF nmnm
mn ∑•∫ ττ (8)
]gP-P[]k
[K=Fm,n,r ρ
ρ ββββ(9)

La discretización en tiempo es implícita, en forma de diferencias finitas de primer orden e involucrando lostérminos de flujo y de fuente/sumidero en el nivel de tiempo más reciente tk+1=tk + δt. Esto permite obtener(Peaceman, 1977) la estabilidad numérica necesaria para un cálculo eficiente de flujo multifásico. La discretizaciónen tiempo resulta en el siguiente grupo de ecuaciones algebraicas, acopladas, no lineales:
Para N bloques o número de elementos de volumen Vn de la malla numérica, las ecuaciones (11) representan unsistema de (NK+1)N ecuaciones algebraicas. El sistema es no lineal y acoplado. La no linealidad se presenta en laecuación de transferencia de energía por los cambios de orden de magnitud en los parámetros durante lastransiciones de fase y por las propiedades no lineales del material rocoso (como permeabilidades relativas ypresiones capilares). El acoplamiento es a consecuencia de la interdependencia de los flujos de masa y energía.Estas características hacen necesaria una solución simultánea de las ecuaciones de balance, teniendo en cuenta todoslos términos de acoplamiento. Para manejar las no linealidades es recomendable el empleo de la técnicaNewton/Raphson. Las variables desconocidas son las (NK+1)N variables primarias independientes las cualesdefinen completamente el estado termodinámico del sistema de flujo en el nivel de tiempo tk+1. Para cada elementode volumen existen NK+1 variables primarias, la elección de las cuales depende de las fases presentes de acuerdo ala siguiente tabla:
VARIABLES TERMODINAMICAS PRIMARIAS PARA UN SISTEMA H2O-CO2
Error! Bookmarknot defined.# defases
variable # 1 variable # 2 variable # 3
fase simpledos fases
P-presión (Pa) P (Pa) T-temperatura(°C)Sg-sat. de gas
X-frac.mas.CO2 T (°C)
El procedimiento iterativo Newton/Raphson es como se describe a continuación.
Denotando las variables primarias colectivamente como (xi: i=1,...,3N), expandiendo a primer orden losresiduales en el índice de iteración p y demandando que los residuales Rn
(k)k+1 en las ecuaciones (11) sean cero en el
q+FAV
1=
dtdM (k)
n(k)nmnm
mn
(k)n ∑ (10)
0=qV+FAV
t-M-MR
1+)k(nn
1+)k(nmnm
mn
)k(n
1+)k(n
1+)k(n
κκκκκ ∑∆≡ (11)
representando un sistema de (NK+1)N ecuaciones lineales acopladas para los incrementos (xi,p+1 - xi,p). Este sistemapuede resolverse con un algoritmo directo eficiente como el desarrollado por Duff (1977) que almacena únicamentecoeficientes de la matriz diferentes de cero. Todas las derivadas ∂Rn/∂xi en la matriz jacobiana pueden evaluarsenuméricamente. El criterio de convergencia establecido es:
si no se obtiene convergencia dentro de un cierto número de iteraciones globales, se reduce el tamaño de la etapa detiempo δt iniciándose un nuevo proceso de iteración.
La información geométrica requerida por la ecuación (11) consiste, por un lado, de los volúmenes Vn de cadaelemento de la malla numérica y por el otro, lo referente a intercaras entre elementos, es decir, áreas interfacialesAnm, distancias internodales Dnm y componentes gnm del vector de aceleración gravitacional. No existe referencia aun sistema global de coordenadas, o a la dimensionalidad de un problema particular. Las ecuaciones son válidastanto para geometrías regulares como para irregulares, en una, dos o tres dimensiones. La precisión de lassoluciones depende de la precisión con que los diversos parámetros interfaciales puedan expresarse en términos decondiciones medias en los elementos. Una condición suficiente para que esto sea posible es que exista equilibriotermodinámico aproximado en todos los elementos, en todos los tiempos (Pruess y Narasimhan, 1985). Para mallasregulares referidas a coordenadas globales (tales como r-z o x-y-z), el sistema de ecuaciones (11) es idéntico a unaformulación convencional de diferencias finitas (Peaceman, 1977).
εκ
κ
11+)k(1+pn,
1+)k(1+pn, |
M
R| ≤ (13)
11
Resumiendo, el método numérico descrito consiste en: a) DFI para la discretización espacial de las ecuacionesgobernantes; b) diferencias finitas de primer orden y una formulación implícita en tiempo para obtener estabilidadnumérica y tolerancia en la etapa de tiempo; c) solución simultánea de las ecuaciones así discretizadas e iteraciónNewton-Raphson para manejar las no linealidades; d) por último, inversión eficiente de las matrices originadas encada iteración Newton-Raphson.
Lo anterior constituye el soporte de los simuladores geotérmicos más conocidos como es el caso del simuladorSHAFT79 (Pruess y Schroeder, 1980) en el cual se considera agua pura bifásica, y el caso del simuladorMULKOM (Pruess, 1988) que involucra además la presencia de CO2 o de NaCl. SHAFT79 ha sido la herramientade numerosos estudios geotérmicos efectuados hasta la actualidad mientras que el MULKOM se encuentra aún enetapa de investigación. De MULKOM se deriva el simulador TOUGH2 (Pruess, 1991) el cual tiene la opción de unnuevo código (T2CG1, Moridis y Pruess, 1995) que permite una mayor eficiencia en la inversión de matrices y elmanejo de un mayor número de ecuaciones.
9.5 Referencias del Capítulo 9:
Ames W.F., 1977. Numerical methods for partial differential equations, Academic Press.
Atkinson P.G., Celati R., Corsi R., Kucuk F., 1980. Behavior of the Bagnore steam/CO2 geothermal reservoir, Italia;Society of Petroleum Engineers Journal, Agosto, 228-238.
Barenblatt G.E., Zheltov I.P., Kochina I.N., 1960. Basic concepts in the theory of homogeneous liquids in fissuredrocks, J. Appl. Math. (USSR), Vol.24, No.5, 1286-1303.
Bear J., 1972. Dynamics of fluids in porous media; Ed. Elsevier, New York.
Bodvarsson G.S., 1984. Numerical studies of enthalpy and CO2 transients in two-phase wells; GeothermalResources Council, TRANSACTIONS, Vol.8, 289-294.
Bodvarsson G.S. y Gaulke S., 1987. Effects of noncondensible gases on fluid recovery in fractured geothermalreservoirs; SPE Reservoir Engineering, Agosto, 335-342.
Bodvarsson G.S., Lippmann M.J., Pruess K., 1994. Modeling of geothermal systems; GRC Bulletin, April, 144-160.
Brownell D.H. Jr., Garg S.K., Pritchett J.W., 1977. Governing Equations for Geothermal Reservoirs; WaterResources Research, Vol. 13, No.6, 929-934.
Contreras E. y García A., 1996. Desarrollo e implantación de una metodología experimental para determinarsimultáneamente las propiedades térmicas de las rocas; Boletín IIE, julio/agosto,pp 164, y 169-177.
Cooley R., 1971. A finite difference method for variably saturated porous media: application to a single pumpingwell; Water Res. Research, Vol.7, No.6, 1607-1625.
Darcy H., 1856. Les Fontaines Publiques de la Ville de Dijon, Victor Dalmont, París.
Duff I.S., 1977. MA28- A set of fortran subroutines for sparse unsymmetric linear equations; Report AERE-R.8730,Computer Science and Systems Division, Harwell/Oxfordshire, Great Britain, 103 pp.
12
Dusinberre G., 1961. Heat transfer calculations by finite differences; International Textbooks, Scranton, Pa.
Edwards A., 1972. TRUMP: A computer program for transient and steady state temperature distributions inmultidimensional systems; Nat. B. of Std., Springfield, Va.
Faust CH. R., y J. W. Mercer, 1974. Mathematical modeling of geothermal system; 2nd. United NationsSymposium on the development and the uses of geothermal resources systems, 1635-1641.
Faust CH. R., y J. W. Mercer, 1979. Geothermal reservoir simulation 2: Numerical solutions techniques for liquidand vapor-dominated hydrothermal systems; Water Resources Research, Vol. 15, pp. 653-671.
Grant M.A., 1977. Broadlands- A gas-dominated geothermal field; Geothermics, Vol.6, 9-29.
Gunn C. y Freeston D., 1991. An integrated steady-state wellbore simulation and analysis package; Proc. 13th NewZealand Geothermal Workshop, 161-166.
Hadgu T., 1989. Vertical two-phase flow studies and modeling of flow in geothermal wells. Tesis de Doctorado,Universidad de Auckland, Nueva Zelandia, 384 pp.
Hadgu T., Zimmerman R.W., Bodvarsson G.S., 1993. Coupling of a reservoir simulator and a wellbore simulatorfor geothermal applications; Geothermal Resources Council TRANSACTIONS, Vol. 17, October, 499-505.
Levesley R.K., 1988. Elementos Finitos, introducción para ingenieros; Ed. Limusa.
Lippman M.J., Bodvarsson G.S., Gaulke S.W., 1985. Enthalpy transients in fractured two-phase geothermalreservoirs; Geothermal Resources Council, Transactions, Vol.9, Julio.
MacNeal R., 1953. An asymmetric finite difference network; Quart. Appl. Math., Vol.2, 295-310.
McKibbin R y Pruess K., 1988. On non-condensible gas concentrations and relative permeabilities in geothermalreservoirs with gas-liquid co- or counterflows, 10th New Zealand Geothermal Workshop, 347-354.
McKibbin R y Pruess K., 1989. Some effects of non-condensible gas in geothermal reservoirs with steam-watercounterflow; Geothermics, Vol. 18, No.3, 367-375.
Mercer J.W., Pinder G.F., Donaldson I.G., 1975. A Galerkin-finite element analysis of the hydrothermal system atWairakei, New Zealand; Journal of Geophysical Research, Vol.80, No.17, 2608-2621.
Moya S.L., e Iglesias E.R., 1992. Solubilidad del bióxido de carbono en agua en condiciones geotérmicas;Geofísica Internacional, Vol. 31, No. 3, 305-313.
Moya S.L., Ruiz J.N., Aragón A., Iglesias E., 1995. Modelo numérico en diferencias finitas para el transporte demasa y energía en yacimientos geotérmicos con bióxido de carbono; GEOTERMIA Revista Mexicana deGeoenergía, Vol. 11, No.1, Enero-Abril, 37-51.
Moridis G. y Pruess K., 1995. Flow and transport simulations using T2CG1, a package of conjugate gradient solversfor the TOUGH2 family of codes; LBL-36235, Universidad de California.
Murray L. y Gunn C., 1993. Toward integrating geothermal reservoir and wellbore simulation: TETRAD andWELLSIM; Proceedings 15th NZ Geothermal Workshop, 279-284.
Narasimhan T.N., Witherspoon P.A., 1976. An Integrated Finite Difference Method for analyzing fluid flow inporous media; Water Resources Research, Vol. 12, No. 1, 57-64.
13
O’Sullivan M.J., Bodvarsson G.S., Pruess K., Blackeley M.R., 1985. Fluid and heat flow in gas-rich geothermalreservoirs; SPEJ 12102, 215-226.
Peaceman D.W., 1977. Fundamentals of numerical reservoir simulation; Elsevier, Amsterdam.
Pruess K., Schroeder R.C., 1980. SHAFT79 Users’s Manual; REPORT LBL-10861, Lawrence BerkeleyLaboratory, Enero, 47 páginas.
Pruess K., Narasimhan T.N., 1982a. A practical method for modeling fluid and heat flow in fractured porous media,paper SPE-10509, Proc. Sixth SPE-Symposium on Reservoir Simulation, New Orleans, LA.
Pruess K., Narasimhan T.N., 1982b. On fluid reserves and the production of superheated steam from fractured,vapor-dominated geothermal reservoirs, Journal of Geophysical Research, Vol.87, No. B11, 9329-9339.
Pruess K., 1983. GMINC-A mesh generator for flow simulations in fractured reservoirs, Report LBL-15277,Lawrence Berkeley Laboratory, Berkeley, California.
Pruess K., y Narasimhan T.N., 1985. A practical method for modeling fluid and heat flow in fractured porousmedia; Society of Petroleum Engineers Journal, Vol.25, No.1, Febrero, 14-26.
Pruess K., 1987. TOUGH Users's Guide; REPORT LBL-20700, Lawrence Berkeley Laboratory, Junio, 78 páginas.
Pruess K., 1988. SHAFT, MULKOM, TOUGH: A set of numerical simulator for multi-phase fluid and heat flow,Geotermia, Rev. Mex. de Geoenergía, Vol. 4, pp. 185-202.
Pruess K., Wang J.S.Y. y Tsang Y.W., 1988. Effective continuum approximation for modeling fluid and heat flowin fractured porous tuff, Report. SAND 86-7000, Lawrence Berkeley Laboratory para Sandia National Laboratories.
Pruess K., Wang J.S.Y., Tsang Y.W., 1990. On thermohydrologic conditions near high-level nuclear wastesemplaced in partially saturated fractures tuff -2. Effective continuum approximation; Water Resources Research,Vol.26, No.6, Junio, 1249-1261.
Pruess K., 1991. TOUGH2-A general-purpose numerical simulator for multiphase fluid and heat flow; LBL-29400,Universidad de California.
Rybach L. y Muffler L.J.P., 1981. Geothermal systems: principles and case histories, John Wiley & Sons.
Suárez M.C., y De la Torre E., 1991. Diferencias finitas integrales: un "nuevo" método en la solución de problemasde transporte en medios continuos; UGM Reunión, 1-6.
Suárez M.C., 1995. Mecanismos de producción en sistemas hidrotermales fracturados con fallas conductivas;Memorias 3er. Congreso de la Asociación Geotérmica Mexicana, ISBN-968-6114-08-4, 152-167.
Torrance K.E., 1983. Boiling in porous media; ASME/JSME Thermal Engineering Joint Conference Proceedings,Vol. 2, pp. 593-606.
Warren J.E., Root P.J., 1963. The behavior of naturally fractured reservoirs; Society of Petroleum EngineersJournal, 245-255.
Zyvolosky G.A., y O'Sullivan M.J., 1980. Simulation of a gas-dominated, two-phase geothermal reservoir; Societyof Petroleum Engineers Journal, 52-58.

14
CAPITULO 10 MEDIOS POROSOS
15
9.1 INTRODUCCION
Muchos problemas prácticos de transferencia de calor por convecciónnatural pueden estudiarse como cavidades llenas de un fluido Newtonianosujetas a las condiciones de frontera correspondientes. Así, por ejemplo,la determinación de la transferencia de calor a través de un espacio deaire de tamaño y geometría conocidos es un problema que surgefrecuentemente en relación con el aislamiento térmico de construcciones.El problema fue formulado por Batchelor (1954) en la siguiente formabidimensional:
Un fluido de viscosidad cinemática v,conductividad térmica k, y con coeficiente deexpansión volumétrica β, llena una cavidadrectangular limitada por dos paredes verticalesseparadas una distancia L, y dos paredes horizontalesaisladas separadas una distancia H. Si las dosparedes verticales se mantienen a diferentestemperaturas T 1 y T 2, ¿Cuál es la velocidad detransferencia de calor a través del fluido desde unapared vertical a la otra?
Esta cavidad se representa de manera esquemática en la figura 1.
9.2 PARAMETROS ADIMENSIONALES
Para especificar el problema son necesarios tres parámetrosadimensionales. Los más convenientes son:
Número de Prandtl (parámetro de difusividad térmica):
(9.1)
Número de Rayleigh (parámetro de convección natural):
(9.2)
Razón de Aspecto:
RA = H / L (9.3)
Siendo k la difusividad térmica (= k/p 0Cp), g la aceleración de lagravedad y ∆T la diferencia de temperaturas T 1 - T 2. P 0 es la densidad delfluido a la temperatura de referencia T 0 y C p el calor específico.
k=Pr
ν
νβ k / L T g =a R 3∆
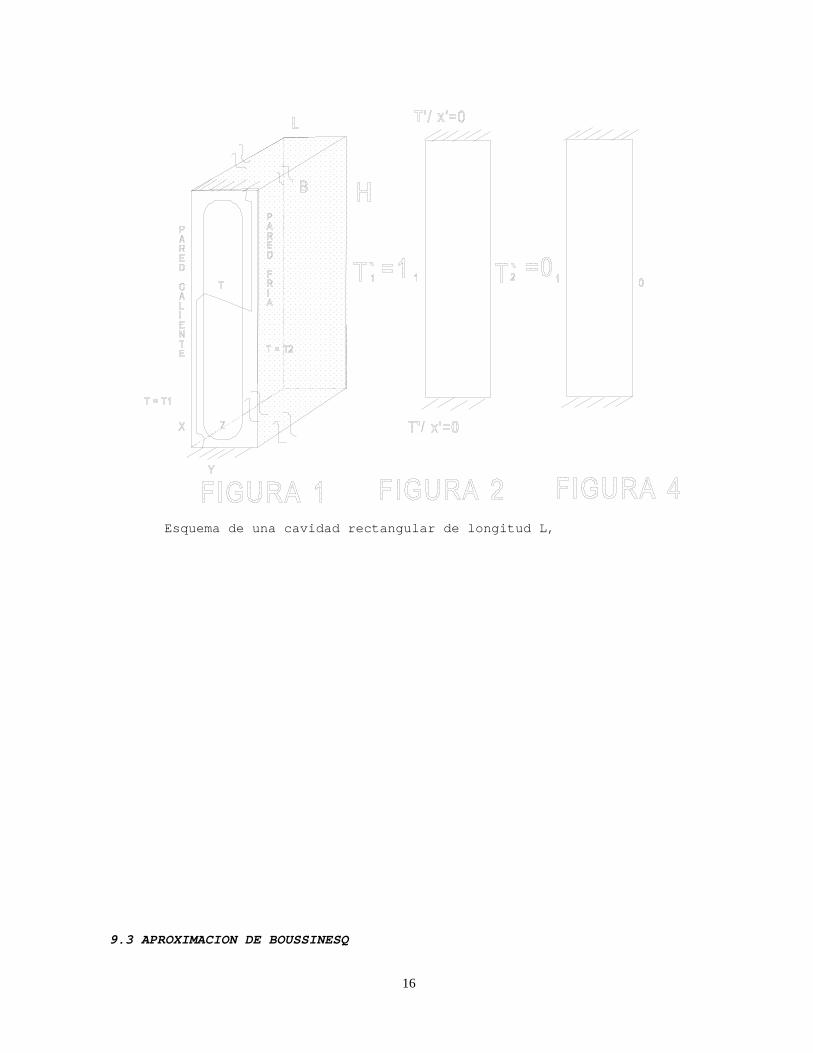
16
Esquema de una cavidad rectangular de longitud L,
9.3 APROXIMACION DE BOUSSINESQ
17
Como se observa, si v y k son constantes, Pr es función depropiedades físicas constantes y es por tanto constante para un fluidodado. Si la densidad también se considera constante excepto para efecto dela fuerza de gravedad, es común expresar esta variación como
(9.4)
Al hecho de considerar las propiedades físicas de la manera descritase le conoce como la aproximación de Boussinesq (Gray (1976)), e implicaesencialmente un fluido incomprensible con valores pequeños de (T 2 - T 1) /T1. El parámetro que cuantifica el fenómeno convectivo natural ( a causade la fuerza de gravedad) es el número de R a y es una medida de laaceleración del fluido a causa de la variación de densidad como función dela temperatura.
9.4 REGIMENES DE FLUJO
El patrón de líneas de corriente ψ (u= / y, v=- / x) e isotermasT de un fluido específico en una cavidad de ciertas dimensiones, es decirPr y h constantes, dependerá del valor de R a. La celda convectiva ψmostrada en la figura 1 es el patrón de flujo característico de laconvección natural en cavidades. La intensidad de la circulación del flujoaumenta con R a. McGregor y Emery (1969) reportaron los siguientesregímenes de flujo como función de R a : para R a < 10 3 se tiene un regimenconductivo en el cual el fluido está prácticamente sin movimiento y elmecanismo de transferencia de calor es la conducción. Para 10 3 < R a < 10 4 elregimen es intermedio y entre 10 4 < R a < 10 6 es de capa límite laminar. Esteúltimo regimen se caracteriza porque el calor se transfiere principalmentepor convección en las regiones adyacententes a las paredes verticales ymínimamente por conducción a través de la región central. Entre10 6 < R a < 10 7 se tiene un flujo de transición, y para R a > 10 7 un flujode capa límite turbulenta. Por otra parte, Elder (1965) y otrosinvestigadores coinciden en que cerca de R a = 10 5 pueden generarse flujossecundarios sobrepuestos al flujo básico.
9.5 NUMERO DE NUSSELT
El conocimiento de la rapidez de transferencia de calor en lasparedes verticales es de gran interés práctico. Esta transferencia seexpresa en términos del número de Nusselt N u que es un parámetroadimensional y se define como la razón de transferencias de calor porconvección y por conducción. Esto es
(9.5)
donde h es el coeficiente de transferencia de calor local (parauna cierta posición x en la pared) por convección. También es importanteconocer el valor medio de la transferencia de calor en toda la pared, este
se define como:
(9.6)
Si T', x' y y' son la temperatura y las coordenadas adimensionales,definidas como T'=( T- T 2) / (T 1 - T 2), x'= x / h, y'= y / L,respectivamente; Nu x puede expresarse como:
) ) T-(T-1 ( = 00 βρρ
khl
= u N x
dx uN H1
= uN xH
0∫

18
(9.7)
y
(9.8)
9.6 ECUACIONES GOBERNANTES
Entonces para evaluar Nu es necesario conocer el campo detemperaturas en la cavidad que a la vez depende del campo de velocidades ypresiones. El problema puede formularse matemáticamente en función de lasllamadas variables primarias: presión p, componente u del vector velocidaden la dirección x, y componente v del vector velocidad en dirección y. Obién, en función de las variables secundarias: función de corriente, ψ, yvorticidad, ξ.
Las ecuaciones que gobiernan el comportamiento del flujo en funciónde las variables p, u, v y T son las ecuaciones de conservación de lacantidad de movimiento (ecuaciones de Navier Stokes), la ecuación deconservación de la energía y la ecuación de continuidad (conservación demasa). Estas son:
Ecuación de la cantidadde movimiento endirección x
(9.9 )
Ecuación de la cantidad de movimiento en dirección y
(9.10)
Ecuación de la energía
(9.11)
Ecuación de continuidad
(9.12)
)y
T( - = u N 1 ,0 = yx ′′ ′∂
′∂
xd)y
T( - = u N 1 ,0 = y
1
0′
′∂′∂
∫ ′
) T - T ( g + )y
u +
x
u( +
xP1
- = yu
v + xu
u + tu
a2
2
2
2
0
βνρ ∂
∂∂∂
∂∂
∂∂
∂∂
∂∂
)y
v +
x
v( +
yp1
- = yv
v + xv
u + tv
2
2
2
2
0 ∂∂
∂∂
∂∂
∂∂
∂∂
∂∂ ν
ρ
)y
T +
x T
( = yT
v + xT
u + tT
2
2
2
2
∂∂
∂∂
∂∂
∂∂
∂∂ κ
0 = y
v +
x
u
∂∂
∂∂
19
Las ecuaciones (9.9)-(9.12) constituyen un sistema de ecuaciones nolineal y acoplado que sólo puede resolverse mediante técnicas numéricas yen forma iterativa. El acoplamiento de las ecuaciones es através de laaproximación de Boussinesq en el término de las fuerzas de cuerpo de laecuación (9.9).
Las ecuaciones de cantidad de movimiento (9.9) y (9.10) son unaaplicación de la segunda ley de Newton. Cada una de ellas establece que lafuerza de inercia (debida a la aceleración del fluido) es igual a la fuerzaneta externa que actúa sobre el fluido. El primer término es la aceleraciónlocal, mientras que el segundo y tercer términos constituyen la aceleraciónconvectiva y son términos no lineales (convección forzada). Los dosprimeros términos del lado derecho de la igualdad son las fuerzassuperficiales, motriz y viscosa, repectivamente. El término g β(T - T 0) esla fuerza de flotación pg/p 0 de acuerdo a la aproximación de Boussinesq,denota el fenómeno convectivo natural.
La ecuación (9.11) es una consecuencia de la primera ley de latermodinámica. El lado izquierdo representa la rapidez de cambio deenergia interna (transferencia convectiva) y el lado derecho representa larapidez a la cual se adiciona calor por conducción. En esta ecuación sedesprecia la disipación viscosa de acuerdo a la aproximación de Boussinesq.La disipación viscosa es importante para flujos muy viscosos moviéndose aaltas velocidades.
Por último, la ecuación (9.12) establece la conservación de masapara un fluido incompresible.
9.7 CONDICIONES DE FRONTERA
Para la solución de las ecuaciones gobernantes es necesarioespecificar el problema (Fig. 1) estableciendo las condiciones de fronteray las condiciones iniciales respectivas. Se considerará el caso del estado
permanente, es decir, el caso en que el comportamientodel flujo y de la transferencia de calor no cambian conrespecto al tiempo.
Las condiciones de frontera para el campo de velocidades son lascorrespondientes a no deslizamiento del fluido en las paredes, esto es:
u(0,y) = u (H,y) = u (x,0) = u (x,L) = 0 ( 9.13 )
v (0,y) = v (H,y) = v (x,0) = v (x,L) = 0 ( 9.14 )
Las condiciones de frontera para el campo de temperaturas corresponden ados paredes isotérmicas y dos paredes adiabáticas:
T(x,0) = T 1 ( 9.15 )
T (x,L) = T 2 ( 9.16 )
0 = tT
= tv
= tu
∂∂
∂∂
∂∂
0 = )x T
( = )x T
( H = x0 = x ∂∂
∂∂

20
( 9.17 )
las cuales representan cuatro condiciones de frontera (cuatro paredes) paracada una de las variables (u, v, T). Esto a causa de que las ecuaciones(9.9)-(9.10) involucran segundas derivadas en ambas direcciones, para cadauna de estas variables.
Las primeras derivadas de presión en las ecuaciones (9.9) y (9.10)requieren establecer sólo dos condiciones de frontera para esta variable,una en cada dirección. Sin embargo, no es sencillo establecerlasexplícitamente. Una alternativa es encontrar los valores de p en esasfronteras a partir de las mismas ecuaciones (9.9) y (9.10). Otra forma esaplicando la divergencia a estas ecuaciones y resolver la ecuación dePoisson correspondiente:
(9.18 )
e involucracontinuidad.
Esta ecuación permite encontrar p implícitamente al requerir cuatrocondiciones de frontera para su solución, dos en cada dirección.
Las ecuaciones (9.9) - (9.12), ó (9.11) - (9.12) y (9.18), en estadopermanente, junto con las condiciones de frontera (9.13) - (9.17), definenel comportamiento del flujo y constituyen un sistema de ecuacionesdiferenciales parciales no lineal y acoplado. Para resolver un sistema detales características es necesario el empleo de métodos numéricos que en sumayoria son de tipo iterativo. Entre los métodos numéricos más usados pararesolver ecuaciones diferenciales parciales se encuentran (Smith, 1985), elmétodo de diferencias finitas, el método del elemento finito, el de volumenfinito y más recientemente el de diferencias finitas integradas.
9.8 FORMULACION DEL PROBLEMA EN FUNCION DE VARIABLES SECUNDARIAS
La formulación del problema (Fig. 1) en función de las variablessecundarias función de corriente ψ y vorticidad ξ es de uso másgeneralizado por no involucrar condiciones de frontera sobre la presión quepueden generar inestabilidades numéricas. La formulación ψ, ξ se obtienederivando las ecuaciones (9.9) y (9.10) con respecto a -y y x,respectivamente y efectuando su diferencia, es decir, se obtiene aplicandoel rotacional a esas ecuaciones. El resultado es:
( 9.19 )
conocida como la ecuación detransporte de vorticidad en la cual va implícita la ecuación decontinuidad. La definición de ξ es
x T
g + )y
)v( +
y x (uv)
+ xSUP2
)u((- = )
y
p +
x p
( 1
2
22222
2
2
2
2
0 ∂′∂
∂∂
∂∂∂
∂∂
∂∂
∂∂ β
ρ
y T
g -)y
+
x
( = y
v +
x
u + t
2
2
2
2
∂′∂
∂∂
∂∂
∂∂
∂∂
∂∂ βξξνξξξ

21
( 9.20 )
y, por definición de ψ
, ( 9.21 )
se obtiene:
( 9.22 )
que es la ecuación de Poissón para ψ.
La formulación ψ, ξ está constituída entonces por las ecuaciones(9.11), (9.19) y (9.22). Las condiciones de frontera correspondientes,considerando estado permanente, son
ψ ( o,y ) = ψ ( H,y ) = ψ ( x,o ) = ψ ( x,L ) = 0 ( 9.23)
T ( x,o ) = T1 ( 9.15)
T ( x,L ) = T2 ( 9.16)
( 9.17)
Las formulaciones u,v,P,T y ψ, ξ,T involucrancondiciones de frontera para P y ξ, respectivamente, que no se conocenexplícitamente. El tratamiento numérico de estas condiciones debe ser portanto riguroso para evitar errores apreciables en los resultados, tantodesde el punto de vista cualitativo, como cuantitativo.
Otra formulación importante en variables secundarias se obtienesustituyendo las ecuaciones (9.21) y (9.22) en la ecuación (9.19) enestado permanente, esto es
(9.24)
(9.25)
y sus condiciones de frontera son:
ψ ( o,y ) = ψ ( H,y ) = ψ ( x,o ) = ψ ( x,L ) = 0 (9.23)
(9.26)
)y
u -
x
v ( =
∂∂
∂∂ξ
x
- = v∂∂ψ
y y
= u∂∂ψ
ψψψξ - = )y
+
x
( - = 22
2
2
2
∇∂∂
∂∂
0 = )x T
( = )x T
(H = x0 = x ∂
∂∂∂
y
T g - =
y
x
-
x
y
422
∂∂
∇∂∂
∇∂∂
∂∂
∇∂∂ βψνψψψψ
T k = y
T
x
-
x
T
y
2∇∂∂
∂∂
∂∂
∂∂ ψψ
0 =)y
( =)
y
( =)x
( =)
x
(
L =y 0 =y H = x0 = x ∂∂
∂∂
∂∂
∂∂ ψψψψ
22
T ( x,0 ) = T1 (9.15)
T ( x,L ) = T2 (9.16)
(9.17)
La ventaja de escribir la ecuación (9.19) en términos de la funciónde corriente es que tanto ψ como sus derivadas normales están completamentedefinidas sobre las fronteras. No obstante, debe resolverse una ecuación decuarto orden por lo que esta formulación es poco usada.
9.9 GENERALIDADES DE LAS FORMULACIONES ADIMENSIONALES
Las formulaciones anteriores en forma adimensional permiten predecirel comportamiento del flujo y de la transferencia de calor en función delos valores de los parámetros RA, P r y Ra, es decir, en función dediferentes esbelteces de la cavidad, de diferentes fluidos y de diferentesgrados de intensidad del fenómeno convectivo natural. Asimismo, con elconocimiento del campo de temperaturas adimensional en cado caso, esposible conocer la transferencia de calor respectiva en las paredes de lacavidad (N u) empleando las ecuaciones (9.7) y (9.8).
Las soluciones en estado permanenete pueden obtenerse considerando
en cada una de las formulaciones correspondientes y aplicando susrespectivas condiciones de frontera adimensionales. Pero además, lassoluciones en estado permanente pueden obtenerse considerando los términostemporales y avanzando a través del tiempo hasta llegar al estadopermanente. En este caso, es necesario especificar además de lascondiciones de frontera adimensionales, las respectivas condicionesiniciales adimensionales, es decir, los valores de las variablesadimensionales cuando t' = 0. Es común establecer como condicionesiniciales las correspondientes a un flujo sin movimiento con transferenciade calor por conducción (régimen de flujo conductivo).
Ambas formas de obtener la solución permanente no presentan en laactualidad muchos problemas al tratarse numéricamente. La ventaja principalde la segunda alternativa ( ∂ (A) / ∂t' > 0; con A = u', v', T', ξ', ψ' ,ó ∇ 2 ψ') es su reducido tiempo de cómputo. Las ecuaciones de tipoelíptico ( ∂ (A) / ∂ t' = 0) requieren por lo regular de muchas iteracionesinternas que aumentan considerablemente el tiempo de cómputo. En las dosalternativas sin embargo, se involucran en las formulaciones completasrespectivas, las ecuaciones de Poisson para P' ó ψ' que son ecuacioneselípticas.
9.10 OTRAS CONDICIONES DE FRONTERA
0 =)x T
( =)x T
(H = x0 = x ∂
∂∂∂
0 = t
) ( =
t
=t T
= t v
= t u 2
′′∂′∇∂
′∂′∂
′∂′∂′
′∂′∂
′∂′∂ ψξ
23
Una condición de frontera más realista en la pared donde sesuministra calor es suponer un flujo de calor constante en vez de una paredisotérmica. En esta circunstancia se establece que el gradiente detemperatura en dirección normal a esa pared es constante.
Las pérdidas de calor por convección natural en colectores solaresplanos también pueden determinarse con cualesquiera de las formulaciones yaexplicadas, considerando cavidades rectangulares bidimensionalesinclinadas, con la pared inferior (placa obscura) a una temperatura máselevada que la pared opuesta (cubierta de vidrio) y las dos paredesrestantes térmicamente aisladas (Ramos et al., 1982).
Existen problemas de transferencia de calor convectiva que difierende los anteriores en las condiciones de frontera dinámicas. Uno de elloses el de la cavidad abierta en la parte superior, es decir, una cavidad sinpared horizontal superior. En esta superficie libre las condiciones defrontera son
ξ (H,y) = ψ (H,y) = 0 condición de superficie libre ( 9.26 )
Los problemas de transferencia de calor en tuberías o en canalesrequieren establecer los perfiles de velocidad a la entrada y salida de losductos que muchas veces se establecen como perfiles de flujo completamentedesarrollado, ya sea en régimen laminar o turbulento.
La competencia entre la convección natural y forzada en estructurasparecidas a chimeneas, con ventanas de captación del viento en la partesuperior para ventilación de viviendas, es un problema que requiere tambiénestablecer condiciones de frontera dinámicas. El problema puede modelarsecomo el flujo entre dos placas planas verticales (una de mayor longitud)bajo distintos parámetros de intensidad de viento y radiación solar (Moyaet al., 1982, Moya et al., 1983). Los perfiles de velocidad a la entrada(parte superior) y a la salida (parte inferior) son las condiciones defrontera dinámicas necesarias y estos perfiles pueden no serunidireccionales según sea la dirección e intensidad del viento y puedenpresentar reversibilidad del flujo según sea el calentamiento solar en lapared.
Otros problemas de convección natural pueden tratarse de manerasimilar empleando la formulación más conveniente y aplicando lascondiciones de frontera adecuadas.
9.11 CONVECCION EN UN MEDIO POROSO
La convección natural en un medio poroso es un problemaparticularmente simple de tratar numéricamente porque las condiciones defrontera dinámicas son las más sencillas posibles. Por otra parte, noexiste difusión de vorticidad ( ∇ 2 ξ = 0) y la no linealidad del sistema deecuaciones gobernantes se presenta sólo en los términos de convección decalor de la ecuación de conservación de la energía, ecuación (9.11). Lostérminos no lineales de las ecuaciones de cantidad de movimiento (9.9) y(9.10) son despreciables, ya que se considera que el fluido que satura elmedio poroso se mueve lentamente. Problemas prácticos de la convección enun medio poroso son el aislamiento de tanques almacenadores de energíatérmica solar y el aislamiento de construcciones.
La formulación matemática del problema físico puede establecersesuponiendo que el fluido y el material poroso se encuentran en equilibriotérmico local y que la ley de Darcy (Bear, 1972; Aziz y Kashef, 1987)
24
describe adecuadamente el movimiento del fluido. Según Burns (1977), la leyde Darcy es válida para flujos con números de Reynolds (basados sobre eldiámetro del poro) menores que 1. Por otra parte, aunque en un medio porosopueden existir fuertes gradientes de temperatura, se considera que laaproximación de Boussinesq es válida. Las ecuaciones de movimiento endirecciones x y y, la de conservación de la energía y la de continuidad,para un medio poroso sujeto a la aproximación de Boussinesq, son,
respectivamente:
( 9.27 )
( 9.28 )
( 9.11)
( 9.12 )
Donde K x y K y son las permeabilidades en las direcciones x y yrespectivamente. Para el caso isotrópico K x = K y = K. µ es laviscosidad dinámica y k la conductividad térmica efectiva del medio roca-fluido. Aplicando la divergencia a las ecuaciones de movimiento (9.27) Y(9.28) se obtiente la ecuación de Poisson para p aplicable a un medio
poroso. El resultado es
( 9.29 )
Las condiciones de frontera dinámicas son:
u ( 0,y ) = u ( H,y ) = 0 ( 9.30 )
v ( x,0 ) = v ( x,L ) = 0 ( 9.31 )
Las ecuaciones (9.11) y (9.29) junto con las condiciones de frontera(9.30) - (9.31) y (9.15) - (9.17) constituyen la formulación u,v,P,T.La formulación ψ se obtiene aplicando el rotacional a las ecuaciones de
movimiento (9.27) y (9.28), esto resulta
( 9.32 )
Las ecuaciones (9.32), (9.11) y (9.21) definenlos campos de ψ, T, u y v en el medio poroso, cuando se resuelven con suscorrepondientes condiciones de frontera.
Condiciones de frontera:
ψ ( 0,y ) = ψ ( H,y ) = ψ (x,0 ) = ψ( x,y ) = 0 ( 9.23 )
T ( x,0 ) = T1 ( 9.15 )
))T - (T g - x
P ( K- = u 00
x βρµ ∂
∂
)y
P (K - = v y
∂∂
µ
y
T +
x T
= y T
v + x T
u 2
2
2
2
∂∂
∂∂
∂∂
∂∂ κ
0 = y
v +
x
u
∂∂
∂∂
x T
g = p 2
∂∂
∇ β
y
T g
K = 2
∂∂
∇ βν
ψ
25
T ( x,L ) = T2 ( 9.16 )
( 9.17 )
Para un medio poroso el parámetro de convección natural se define:
Ra = K g β ( T 2 - T 1 ) L / kv ( 9.33 )
siendo K la permeabilidad absoluta del medio poroso.Si la cavidad o el medio poroso son calentados a flujo de calor
constante q (problema mixto), el número de Rayleigh puede definirse en basea una temperatura media de la pared caliente denotada como T m.
Problema mixto de la cavidad ( 9.34 )
Problema mixto del medio poroso ( 9.35 )
y en base al valor del flujo de calor constante q:
Problema mixto de la cavidad ( 9.36 )
Problema mixto del medio poroso ( 9.37 )
En su estudio de un medio poroso, Prasad y Kulacki (1982) usaron lasiguiente expresión para el número de Nusselt medio:
( 9.38 )
donde
( 9.39 )
Este valor del número de Nusselt es importante para propósitos dediseño debido a que proporciona de una manera directa la temperatura media,Tm , para cualquier flujo de calor aplicado. Prasad y Kulacki definieronla temperatura adimesional de la manera siguiente:
T’ = ( T - T1) / ( q L / k ) ( 9.40 )
donde
0 = )x T
( =)x T
(H = x0 = x ∂
∂∂∂
νβ k / L )T - T( g = R 32ma
νβ k / L )T - T( Kg = R 2ma
νβ 24* k / L q g = Ra
K k / L q Kg = Ra 2* νβ
T
1 = N
mu ′
26
( 9.41 )
Los problemas que se han descrito son algunos ejemplos de losmuchos problemas que se pueden estudiar en el campo de la convecciónnatural en cavidades y en medios porosos. Cada problema puede formularsede la manera más conveniente a partir de la ecuaciones de cantidad demovimiento, energía y continuidad y de las condiciones de fronteraadecuadas. Las tres formulaciones explicadas: variables primarias u,v,P,T;variables secundarias ψ, ξ,T; y la formulación ψ, T; son las formas másgenerales del tratamiento matemático de los problemas físicos. Talesformulaciones en forma adimensional ( u', v', P', T'; ψ', ξ', T'; ψ', T') permiten obtener resultados en función de los parámetros adimensionalesPr, R a y RA (e.g. Moya et al., 1987) y poder así reproducir los resultadosa diversas escalas (laboratorio, prototipo, planta, etc.). Los campos deT' obtenidos para cada caso permiten conocer las pérdidas o ganancias decalor en las paredes (Nu) y poder así eficientar el proceso de latransferencia de calor.
9.12 FORMULACION ADIMENSIONAL.
En esta sección las formulaciones se expresarán en formaadimensional y se describirá un método numérico simple para su solución. Seeligió la formulación ξ, ψ, T para todos los problemas por considerar quees más conveniente trabajar las condiciones de frontera en función de estasvariables que en función de las variables primitivas u, v, p y T. Enotras palabras, es más conveniente trabajar la vorticidad en las fronterasque trabajar la presión. Además, usando variables primitivas se puedentener inestabilidades convectivas al tratar de satisfacer la ecuación decontinuidad. Finalmente, el procedimiento iterativo basado en lasecuaciones de variables primitivas es menos satisfactorio en sucomportamiento de convergencia.
El sistema de ecuaciones (9.11), (9.19) y (9.22), las condiciones defrontera (9.15)-(9.17) y (9.23) y las ecuaciones auxiliares (9.21) y(9.23) pueden expresarse en forma adimensional considerando H y L; kH/L 2
y k/L; y kH/L y kH/L 3, como factores de escala para las longitudes enlas direcciones x y y; para las componentes de velocidad u y v; ypara la función de corriente ψ y vorticidad ξ; respectivamente. Para latemperatura se considera T' = ( T-T 2 ) / (T 1 - T 2). Las formasadimensionales :
)T - T( Lk
= q 1m
y
T +
x T
)HL
( = y T
v + x T
u 2
2
2
22
′∂′∂
′∂′∂
′∂′∂′
′∂′∂′
y T
)HL
( PRSUBa - y
+
x
HL
_ P = y
v +
x
u r2
2
2
22
r ′∂′∂
′∂′∂
′∂′∂
′∂′∂′
′∂′∂′ _
ξξξξ
y
u -
x
v )
HL
( = x
+
x
)
HL
(_ = 2
2
2
2
22
′∂′∂
′∂′∂
′∂′∂
′∂′∂′ _
ψψξ
27
que para la cavidad cuadradase reducen a
( I.9’ )
( I.17’)
( I.20’ )
donde
Ra = g β ( T1 - T2 ) L3 / k v , y ( I.2
)
Pr = v / k ( I.1)
las condiciones de frontera correspondientes (I.13) - (I.15) y (I.21) enforma adimensional son
T’ ( x’,0 ) = 1; para el problema mixto: ((∂ T’) / (∂ y’) )y’ = 0 = q’ (I.13’ )
T’ ( x’,1 ) = 0 ( I.14’)
( I.15’ )
ψ’ ( 0,y’ ) = ψ’ ( 1,y’ ) = ψ’ (x’,0) = ψ’ (x’,0 ) = 0 ( I.21’ )
La formulación anterior gobierna completamente el comportamientodel flujo. Como se observa, el sistema de ecuaciones (I.9'), (I.17'),y (I.20') es un sistema de ecuaciones parciales, no lineal y acoplado quedebe resolverse numéricamente; típicamente se suponen distribuciones deT', ξ', ψ', ξ', ψ', u' y v', y se hace la consideración linealizantede que ésas ecuaciones pueden trabajarse como ecuaciones que son sólofunción de T', ξ', y ψ', respectivamente.
Para ilustrar el método de solucioón de cada ecuación se considerarála aproximación en diferencias finitas de la ecuación de vorticidad.
La variable ξ' en cada punto de la malla se denota por ξ'(I,J). Seusa una malla con espaciamientos ∆x' y ∆y' en las diorecciones I y J,
y
= u y , ,
x
- = v
′∂′∂′
′∂′∂′ ψψ
y
T +
x T
= y T
v + x T
u 2
2
2
2
′∂′∂
′∂′∂
′∂′∂′
′∂′∂′
y T
PSUBr R - ]y
+
x
[ P = y
v +
x
u a2
2
2
2
r ′∂′∂
′∂′∂
′∂′∂
′∂′∂′
′∂′∂′ ξξξξ
y
u -
x
v =
x
+
x
=
2
2
2
2
′∂′∂
′∂′∂
′∂′∂
′∂′∂′ ψψξ
0 = )x T
( = )x T
(1 = x0 = x ′∂
′∂′∂′∂
′′
28
respectivamente. En todas las derivadas se usan diferencias centrales. Lanotación es
La aproximación dediferencias finitas para (I.17') puede entonces escribirse como
u’ δx ’ ξ’ + v’ δy ’ ξ’ = Pr δx ’ ξ’ + δy ’ ξ’ - Ra Pr δ y ’ T’
y en forma extensa
u’ ( I,J ) 1 / ( 2∆x’ ) ξ’ ( I + 1,J ) - ξ’ ( I - 1,J ) +
v’ ( I,J ) ( 1 / ( 2∆y’ ) ) ξ’ ( I, J +1 ) - ξ’ ( I,J - 1 ) =
Pr 1 / ( ∆x’2 ) ξ’ ( I + 1,J ) - 2 ξ’ ( I,J ) + ξ’ ( I - 1,J ) +
1 / ( 2∆y’2 ) ξ’ ( I,J + 1 ) - 2 ξ’ ( I,J ) + ξ’ ( I,J - 1 ) -
Ra Pr ( 1 / ( 2∆y’) ) T’ ( I,J + 1 ) - T’ ( I,J - 1 )
para visualizar mejor el procedimiento de solución podemos agrupar laecuación anterior de la siguiente manera:
_J)1, - I ( - ) J1,+I ( _ x 2
1 = x ξξξδ ′′
′∆′′
_ J)1, - I ( + ) JI, ( 2 - ) J1,+I ( _ x 1
= 2
2x ξξξξδ ′′′
′∆′′
+ ) J ,1 - I ( x 1
PSUBr - x 2
1 ) JI, ( u - _
2ξ ′
′∆′∆′ _
+ ) J ,I ( y
1 P 2 +
x 1
P 2 _ 2r2r ξ ′′∆′∆
_
= ) J ,1 + I ( x 1
PSUBr - x
1 ) J ,I ( u _
2ξ ′
′∆′∆′ _
+ ) 1 - J ,I ( y
1PSUBr +
y 1
) J ,I ( v _ 2 ξ ′′∆′∆
′ _
29
( I.17’’ )
equivalentemente
aI ξ’ (I -1, J) +
bI ξ’ (I , J) +
cI ξ’ (I + 1 , J) =
dI
donde aI , bI y cI son los coeficientes para cada I, y dI
engloba el lado derecho de la igualdad para ésa I. Debido a laconsideración linealizante todos los coeficientes y las temperaturs sonvalores conocidos. Los valores de vorticidad que se encuentran en el ladoizquierdo de la igualdad se toman como incógnitas mientras que los seencuentran en el lado derecho se toman como conocidos (ecuación implícita).
Se observa que los valores de velocidad desconocidos provienen delas derivadas con respecto a x' y, por el contrario, los que seconsideran conocidos provienen de las derivadas conrespecto a y', exceptoel valor del término central de la discretización de la segunda derivada eny' que se considera también como incógnita. El considerar este términocomo incógnita, permite la convergencia del método para L/H diferentes ala unidad.
Puesto que los valores de vorticidad incógnitas son para una J fijala solución puede encontrarse avanzando en la dirección de I (dirección x' ) a partir de dos valores conocidos en las fronteras (Fig.18).
Si ahora se supone que los valores de vorticidad incógnitas son paraun I fija la solución puede encontrarse en la dirección contraria, tambiéna partir de dos valores conocidos en las fronteras (Fig. 18).
+ ) 1 + J ,I ( y
1PSUBr +
y 1
) J ,I ( v - _ 2 ξ ′′∆′∆
′ _
) ) 1 - J ,I ( T - ) 1 + J ,I ( T ( y 2
1 P R - _ ra ′′
′∆_
30
El procedimiento se repite hasta que los dos campos de ξ’ (I,J)obtenidos en cada dirección sean los mismos. Se trata entonces de unmétodo de solución numerica iteractivo de direcciones alternadas y ademásimplícito puesto que se incluyen dos condiciones de frontera para calcularcada hilera o columna de valores de, en este caso, vorticidad. Lascondiciones de frontera se expresan en función de los componentes de lavelocidad usando diferencias de dos puntos hacia adelante, ó de tres puntoshacia adelante.
en x' = 0similarmente para x' = 1;
en y' = 0similarmente para y' = 1 .
Con éstos valores frontera se efectúaniteraciones hasta que los campos de vorticidad enel interior de la cavidad satisfagan algún criterio de convergencia. Losvalores frontera de vorticidad deben satisfacer el criterio de convergenciaglobal.
La ecuacion (I.17'') puede escribirse como
aI ξ' ( I - 1,J ) + b I ξ' ( I,J ) + c I ξ' ( I + 1,J ) = d I (I.17'' )
asimismo las ecuaciones (I.9') y (I.20') en forma de diferencias finitaspueden simplificarse a formas equivalentes.
Si el número de * distingue los coeficientes de cada euación discreta, elistema de ecuaciones (I.17'), (I.9') y (I.20') puede expresarse como
a*
I ξ' ( I - 1,J ) + b *
I ξ' ( I,J ) + C *
I ξ' ( I + 1,J ) = d *
I ( I.17'')
a**
I T' ( I - 1,J ) + b **
I T' ( I,J ) + C **
I T' ( I + 1,J ) = d **
I ( I.9'' )
a***
I ψ' ( I - 1,J ) + b ***
I ψ' ( I,J ) + C ***
I ψ' ( I + 1,J ) = d ***
I ( I.17'')
Los valores frontera para T' y ψ' son valores fijos. Lascondiciones de frontera para el flujo de calor (tambièn fijas se expresarona partir de expansiones en series de Taylor que se incluyen en los términosde difución de calor, ∂2 T' / ∂x 12 y/o ∂2 T' / ∂y 12 según el problema.Entonces los valores de ( ∂T / ∂x' ) en las fronteras se inclñiuyenimplícitamente en d I **. Si IQ es el número de puntos de la malla en ladirección I, los sistemas de ecuaciones de (I.17''), (I.9'') ó (I.20'')para I = 2, IQ -1, cada uno en forma de matriz, puede escribirsecomo
J ,3 ( v - ) J ,2 ( v 4 _ x 2
1=) J ,1 ( ′′
′∆′ξ
3 ,I ( u - ) 2 ,I ( u 4 _ y 2
1 - =) 1 ,I ( ′′
′∆′ξ
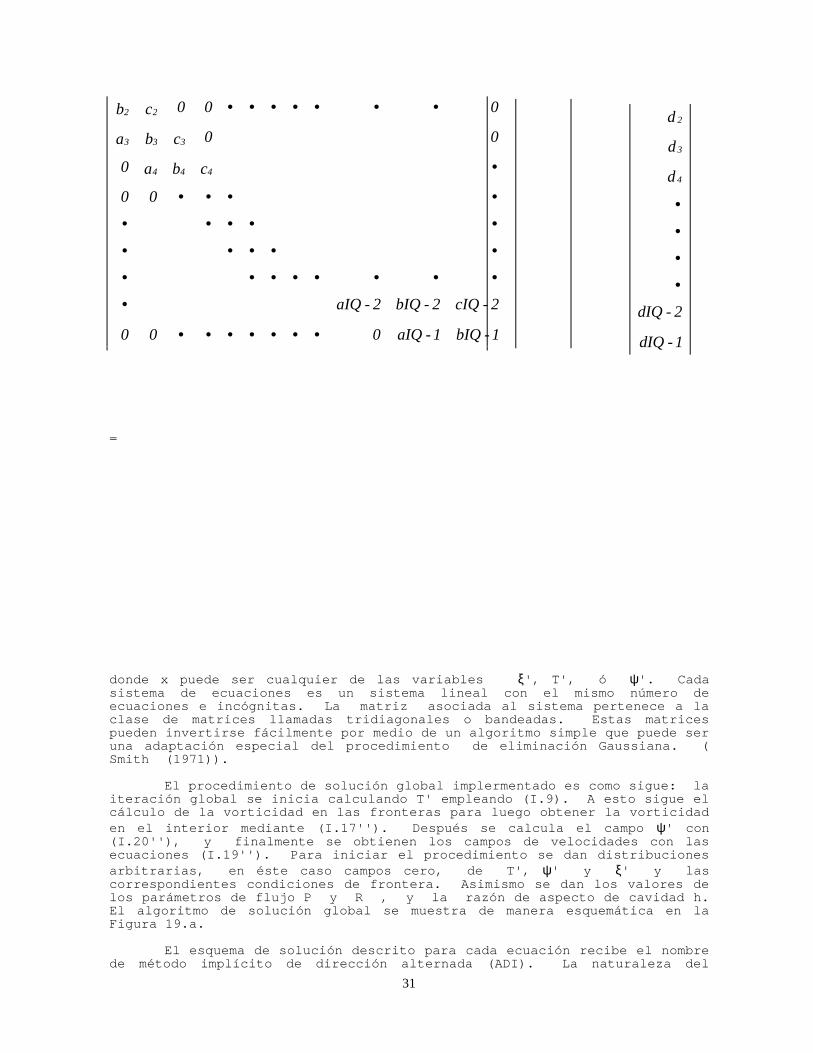
31
=
donde x puede ser cualquier de las variables ξ', T', ó ψ'. Cadasistema de ecuaciones es un sistema lineal con el mismo número deecuaciones e incógnitas. La matriz asociada al sistema pertenece a laclase de matrices llamadas tridiagonales o bandeadas. Estas matricespueden invertirse fácilmente por medio de un algoritmo simple que puede seruna adaptación especial del procedimiento de eliminación Gaussiana. (Smith (1971)).
El procedimiento de solución global implermentado es como sigue: laiteración global se inicia calculando T' empleando (I.9). A esto sigue elcálculo de la vorticidad en las fronteras para luego obtener la vorticidaden el interior mediante (I.17''). Después se calcula el campo ψ' con(I.20''), y finalmente se obtienen los campos de velocidades con lasecuaciones (I.19''). Para iniciar el procedimiento se dan distribucionesarbitrarias, en éste caso campos cero, de T', ψ' y ξ' y lascorrespondientes condiciones de frontera. Asimismo se dan los valores delos parámetros de flujo P y R , y la razón de aspecto de cavidad h.El algoritmo de solución global se muestra de manera esquemática en laFigura 19.a.
El esquema de solución descrito para cada ecuación recibe el nombrede método implícito de dirección alternada (ADI). La naturaleza del
1-bIQ1-aIQ000
2-cIQ2-bIQ2-aIQ
00
cba0
0 0cba
000cb
444
333
22
•••••••
•
••••••••
•••••
•••••
••••
•
•••••••
1-dIQ
2-dIQ
d
d
d
4
3
2
•
•
•
•
32
esquema, debido a Peaceman y Rachford (discutido por Widlund (1967)), esla responsable de la estabilidad del método numérico. Existen muchassofisticaciones del ADI, todas ellas encaminadas a aumentar la eficienciaen términos del número de operaciones requeridas para cada etapa (cadaecuación) y por consiguiente disminuir el tiempo de cómputo. Sin embargo,la calidad de los resultados con cualquiera de los métodos ADI es más omenos la misma. El tratamiento numérico de las condiciones de frontera yel algoritmo de solución global son lo que pueden producir algunasdiscrepancias en los valores obtenidos, por ejemplo las diferencias entrelos resultados de Wilkes y Churchill (1966) y de Mac Gregor y Emery (1969).
La forma usada de diferencia central de tres puntos para lostérminos de convección, hace que el error de truncamiento sea del orden0( ∆x') 2 + 0( ∆y') 2. Cuando ∆x' y ∆y' son pequeños, estos errores detruncamiento pueden despreciarse.
Con ésto en consideración y la naturaleza implícita del método seevitaq el falso transporte de difusión y convección, Torrance (1968), porlo que los resultados pueden interpretarse con realidad (comportaminetocualitativo). Sin embargo, la forma discreta de los términos deconvección del presente método impiden conservación: ciertas diferenciasentre la rapidez de adición de calor y la rapidez del calor removido; yexisten sobre todo para problemas con condiciones de frontera para flujo decalor. Para el caso de condiciones de frontera isotérmicas, la simetríadel calentamiento tiende a enmascarar la no-conservación.
Por otra parte, la solución iterativa de la ecuación de Poisson(I.20'') se resuelve usualmente con un método de sobre-relajación sucesiva(SOR), ejemplo, Wilkes y Churchill (1966), ó con el método deextrapolación de Liebmann como hiciera Elder (1966), ó con el recientementeestablecido método de reducción cíclica, como lo hicieran Kublbeck,Merker y Straub (1980). A decir de los autores éstos métodos son muyràpidos y eficientes.
III.2 FORMULACION DEL PROBLEMA MIXTO DEL MEDIO POROSO(Figura 8)
Las ecuaciones (I.9) y (I.31) y las condiciones de frontera(I.14), (I.15) y (I.21), constituyen la formulación dimensional delproblema. La correspondiente formulación adimensional se obtieneintroduciendo los mismos factores de escala de los problemas anteriores.
El resultado es
( I.31' )
( I.9' )
( I.19')
y T
R = y
+ x
a2
2
2
2
′∂′∂
′∂′∂
′∂′∂ ψψ
y
T +
x T
= y T
v + x T
u 2
2
2
2
′∂′∂
′∂′∂
′∂′∂′
′∂′∂′
y
= uy ,
x
- = v
′∂′∂′
′∂′∂′ ψψ
condiciones de frontera
ψ’ ( 0,y’ ) = ψ’ ( 1,y’ ) = ψ’ ( x’,0 ) = ψ’ ( x’,1 ) = 0 (I.21’ )
T’ ( x’ , 1 ) = 0 ( I.14’ )
( I.15’ )
Las ecuaciones anteriores gobiernan el comportamiento del flujo en unmedio poroso en función de R a. El sistema de ecuaciones también es no linealy acoplado, pero en este caso la no linealidad se encuentra sólo en lostérminos de convección forzada del calor. La solución al sistema se obtieneentonces empleado métodos numéricos. Se empleó el mismo método implícitode dirección alternada usado en los problemas anteriores. El algoritmo desolución global se muestra en la Figura 19.b. Este problema es mucho massencillo de tratar numericamente que los dos problemas formulados en lasubsección III.1. Lo anterior se debe a que las condiciones de frontera sonde las mas simples posibles ya que noexiste difusión de vorticidad, ademas deque la no-linealidad se presenta solamente en la ecuación de energia. Elder(1966) antes de obtener su solución numerica para el problema de condicionesisotermicas (Figura 4) probo su algoritmo numerico en el problema de un medioporoso. Esto le permitio demostrar la validez de su metodo y plicarloposteriormente para construir un program versatil para resolver grupos deecuaciones diferenciales parciales no lineales y elipticos.
q = ) y
T ( 0 = y
′′∂′∂
′
0 = ) x T
( = ) x T
(1 = x0 = x ′∂
′∂′∂′∂
′′
1
APENDICE AVECTORES
A.1 Identidades (ágebre de vectores) A1
A.2 Sistemas de coordenadas A1
A.3 Operadores diferenciales A2
A.4 Identidades A3
A.5 Teoremas integrales A3
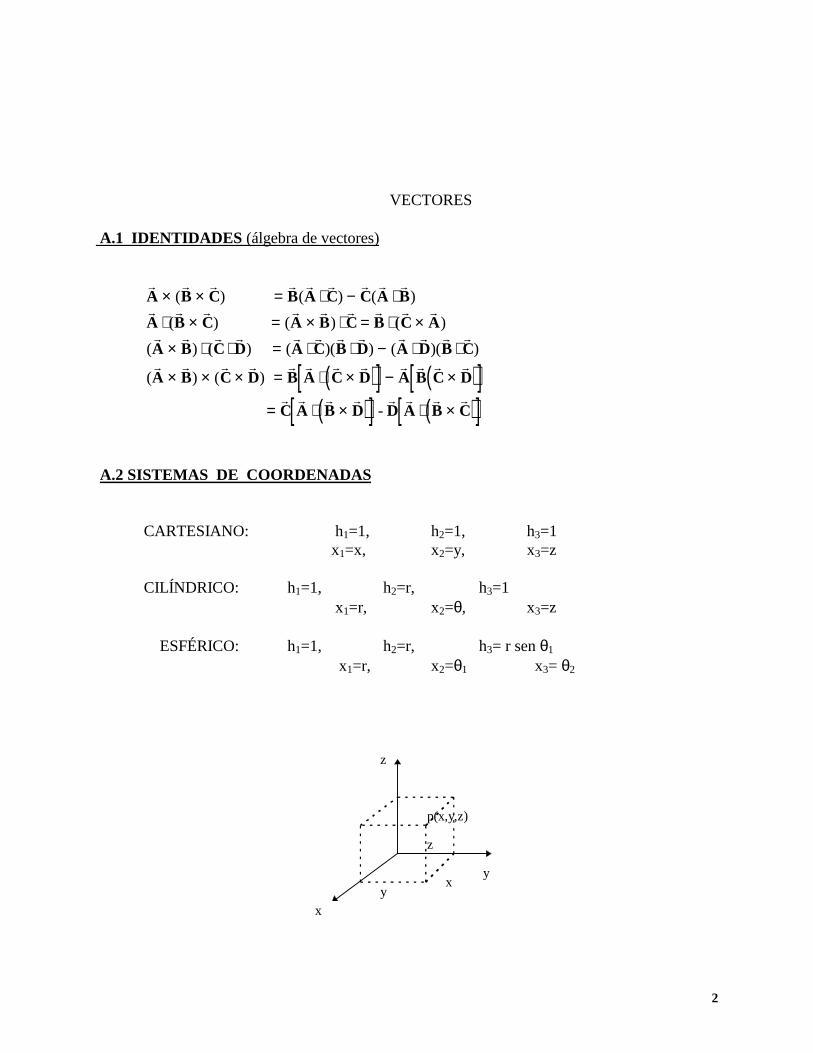
2
VECTORES
A.1 IDENTIDADES (álgebra de vectores)
( )[ ] ( )[ ]( )[ ] ( )[ ]
r r r r r r r r r
r r r r r r r r r
r r r r r r r r r r r r
r r r r r r r r r r r r
r r r r r r r r
A B C B A C C A B
A B C A B C B C A
A B C D A C B D A D B C
A B C D B A C D A B C D
C A B D D A B C
× × = ⋅ − ⋅
⋅ × = × ⋅ = ⋅ ×
× ⋅ ⋅ = ⋅ ⋅ − ⋅ ⋅
× × × = ⋅ × − ×
= ⋅ × ⋅ ×
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( )( )
( ) ( )
-
A.2 SISTEMAS DE COORDENADAS
CARTESIANO: h1=1, h2=1, h3=1 x1=x, x2=y, x3=z
CILÍNDRICO: h1=1, h2=r, h3=1 x1=r, x2=θ, x3=z
ESFÉRICO: h1=1, h2=r, h3= r sen θ1
x1=r, x2=θ1 x3= θ2
z
x
y
y
z
x
p(x,y,z)
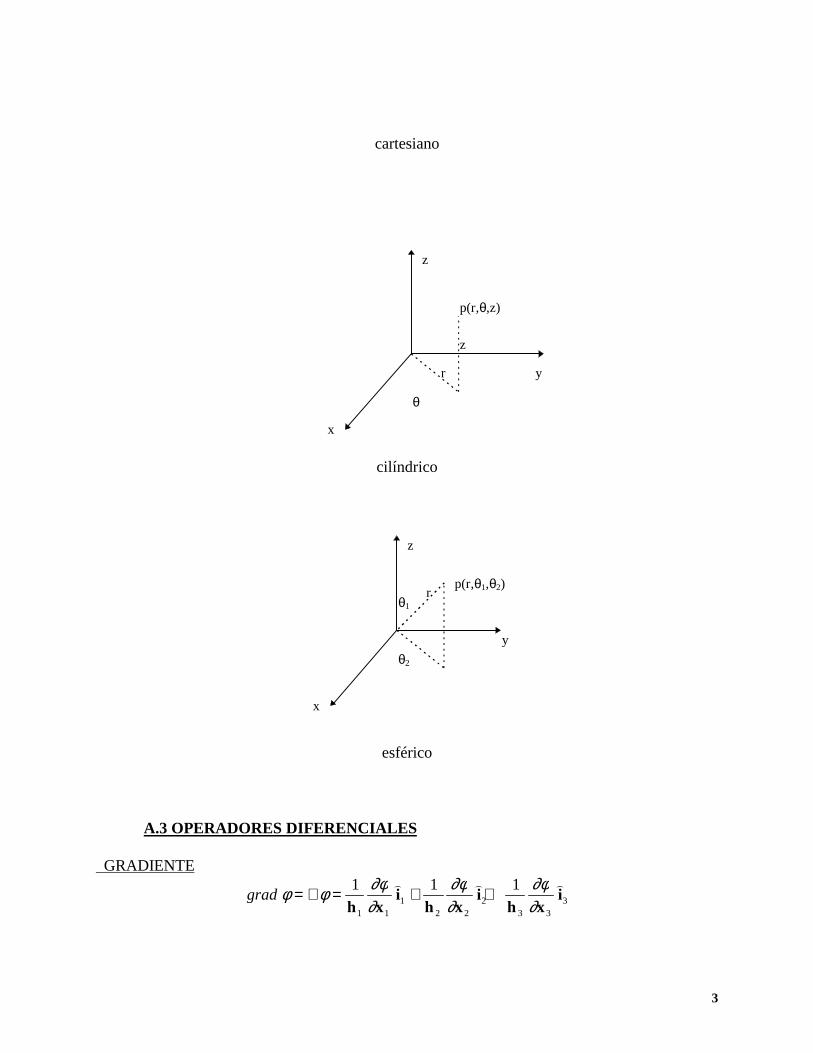
3
cartesiano
x
y
z
p(r,θ,z)
z
r
θ
cilíndrico
x
y
z
p(r,θ1,θ2)
θ2
rθ1
esférico
A.3 OPERADORES DIFERENCIALES
GRADIENTE
grad φ φ ∂φ∂
∂φ∂
∂φ∂
= ∇ = + +1 1 1
1 11
2 22
3 33h x
ih x
ih x
i) ) )

4
DIVERGENCIA
div r rA A
h h h xh h A
xh h A
xh h A= ∇ ⋅ = + +
1
1 2 3 12 3 1
21 3 2
31 2 3
∂∂
∂∂
∂∂
( ) ( ( )
ROTACIONAL
rot
r r
) ) )
r r r
A Ah h h
h i h i h i
x x x
h A h A h A
= ∇ ⋅ = 1
1 2 3
1 1 2 2 3 3
1 2 3
1 2 3
∂∂
∂∂
∂∂
LAPLACIANO
∇ = ∇ ⋅ ∇ =
+
+
=
+
2
1 2 3 1
2 3
1 1 2
3 1
2 2 3
1 2
3 3
1
1 1
φ φ ∂∂
∂φ∂
∂∂
∂φ∂
∂∂
∂φ∂
∂∂
∂φ∂
∂∂θ
∂φ∂θ
( )h h h x
h h
h x x
h h
h x x
h h
h x
r rr
r r
DERIVADA MATERIAL
DDt t
U
h x
U
h x
U
h x= + + +∂
∂∂
∂∂
∂∂
∂1
1 1
2
2 2
3
3 3
Donde la velocidad es rU U U U= ( , , )1 2 3
A.4 IDENTIDADES (Cálculo vectorial)
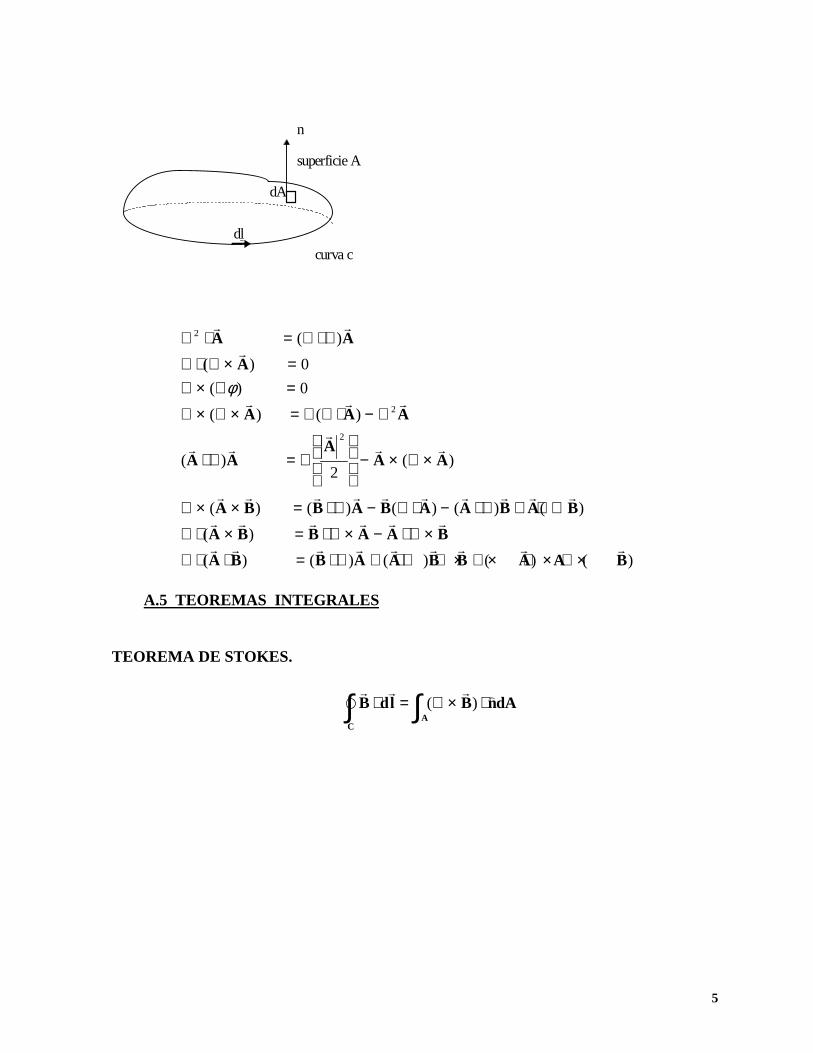
5
curva c
dl
dA
superficie A
n
∇ ⋅ = ∇ ⋅ ∇
∇ ⋅ ∇ × =∇ × ∇ =
∇ × ∇ × = ∇ ∇ ⋅ − ∇
⋅ ∇ = ∇
− × ∇ ×
∇ × × = ⋅ ∇ − ∇ ⋅ − ⋅ ∇ + ∇ ⋅
∇ ⋅ × = ⋅ ∇ × − ⋅ ∇ ×
∇ ⋅ ⋅ =
2
2
2
0
0
2
r r
r
r r r
r rr
r r
r r r r r r r r r r
r r r r r r
r r
A A
A
A A A
A AA
A A
A B B A B A A B A B
A B B A A B
A B
( )
( )
( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( )
( )
( ) (
φ
r r r r r r rB A A B B A A B⋅ ∇ + ⋅ ∇ + × ∇ × + × ∇ ×) ( ) ( ) ( )
A.5 TEOREMAS INTEGRALES
TEOREMA DE STOKES.
r r r )B dl B ndAA
C
⋅ = ∇ × ⋅∫∫ ( )
6
TEOREMA DE DIVERGENCIA DE GAUSS.
∇ ⋅ = ⋅∫∫r r )BdV B ndA
AV
La superficie A encierra el volumen V. TEOREMA DE GREEN.
∇ ⋅ ∇ = ∇ ⋅ −∇
= ∇ ⋅ − ∇
∫∫∫∫∫
φ ψ φ ψ φ ψ
ψ φ ψ φ
dV ndAdV
ndA dV
vAV
VA
)
)
2
2
TEOREMA DEL GRADIENTE.
∇ = ∫∫ φ φdV ndAAV
)
7
APENDICE B
ECUACIONES DE MOVIMIENTO
B.1 ECUACION DE CONTINUIDAD
B.2 ECUACIONES DE NAVIER-STOKES
B.3 ECUACION DE ENERGIA

8
ECUACIONES DE MOVIMIENTO
Las siguientes ecuaciones son para un fluido incompresible y coeficiente de viscosidadconstante. El vector velocidad será expresado en forma
cartesiana rU u v w= ( , , )
cilíndrica rU c z= ( , , )ν ν νθ
esférica rU r= ( , , )ν ν νθ 0
B.1 Ecuación de Continuidad
cartesiana ∂∂
∂ν∂
∂∂
ux y
wz
+ + = 0
cilíndrica 1 1
0r r
rr zr z
∂∂
ν ∂∂θ
ν ∂∂
νθ( ) ( ) ( )+ + =
esférica 1 1 1
02
11
1 21 2r r
rr rr
∂∂
νθ
∂∂θ
ν θθ
∂∂θ
νθ θ( )sen
( sen )sen
( )+ + =
B.2 Ecuaciones de Navier - Stokes.
cartesianaDDt t
ux y
wz
x y z
DuDt
px
mu u fx
DvDt
py
mu fy
DDt
pz
mu w fz
= + + +
∇ = + +
= − + ∇ +
= − + ∇ +
= − + ∇ +
∂∂
∂∂
ν ∂∂
∂∂
∂∂
∂∂
∂∂
ρ ∂∂
ρ ∂∂
ν
ρ ω ∂∂
22
2
2
2
2
2
2
2
2

9
cilíndricaDDt t r r z
r r r r z
D
Dt rpr r r
fr
D
Dt r rp
r
u
rf
D
Dtpz
fz
r z
rr
r
r r
zz
= + + +
∇ = + + +
−
= − + ∇ − −
+
+
= − + ∇ + −
+
= − + ∇ +
∂∂
ν ∂∂
ν ∂∂θ
ν ∂∂
∂∂
∂∂
∂∂θ
∂∂
ρ ν ν ∂∂
µ ν ν ∂ν∂θ
ρν ν ν ∂
∂θµ ν ∂
∂θν
ρ ν ∂∂
µ ν
θ
θ θ
θ θθ
θθ
22
2 2
2
2
2
2
22
2 2
22 2
2
1 1
2
1 2
esférica
DDt t r r r
r rr
r r r
D
Dt rpr r r r r
fr
D
Dt
r
r rr
r
r
= + + +
∇ =
+
+
−+
= − + ∇ − − − −
+
+−
∂∂
ν ∂∂
ν ∂∂θ
νθ
∂∂θ
∂∂
∂∂ θ
∂∂θ
θ ∂∂θ θ
∂∂θ
ρ ν ν ν ∂∂
µ ν ν ∂ν∂θ
ν θθ
∂ν∂θ
ρν ν ν
θ θ
θ θ θ θ
θ θ
1 2
1 1 1 2
1 1
1 1 2
22
22
1 11
12 2
1
2
2
2 2
22 2
1
1
2 21 2
1 1 1
2 2 2 2
sen
sensen
sen
cot
sen
ν θ ∂∂θ
µν ∂ν
∂θν
θθ
θ∂ν∂θ
θ
ρν ν ν ν ν θ
θ∂
∂θµ
νν
θ
θ∂ν∂θ
θθ
∂ν∂θ
θθ
θ
θ
θ θ θ θθ
θ
θ
2
1
1
2
2 2 1 2
2
2
1
21
1
22
12 2
1
12 2
1 2
1
1
1 2
22 2
1
2 21 2
12 2
1 2
1
2
2
1
2 2
cot sen
cos
sen
cot
sen
sen
sen
cos
sen
r rp r r
r
f
D
Dt r r rp r
r r
r
r
r
= +∇ + − −
+
+ +
= − +
∇ − +
+
+ fθ 2
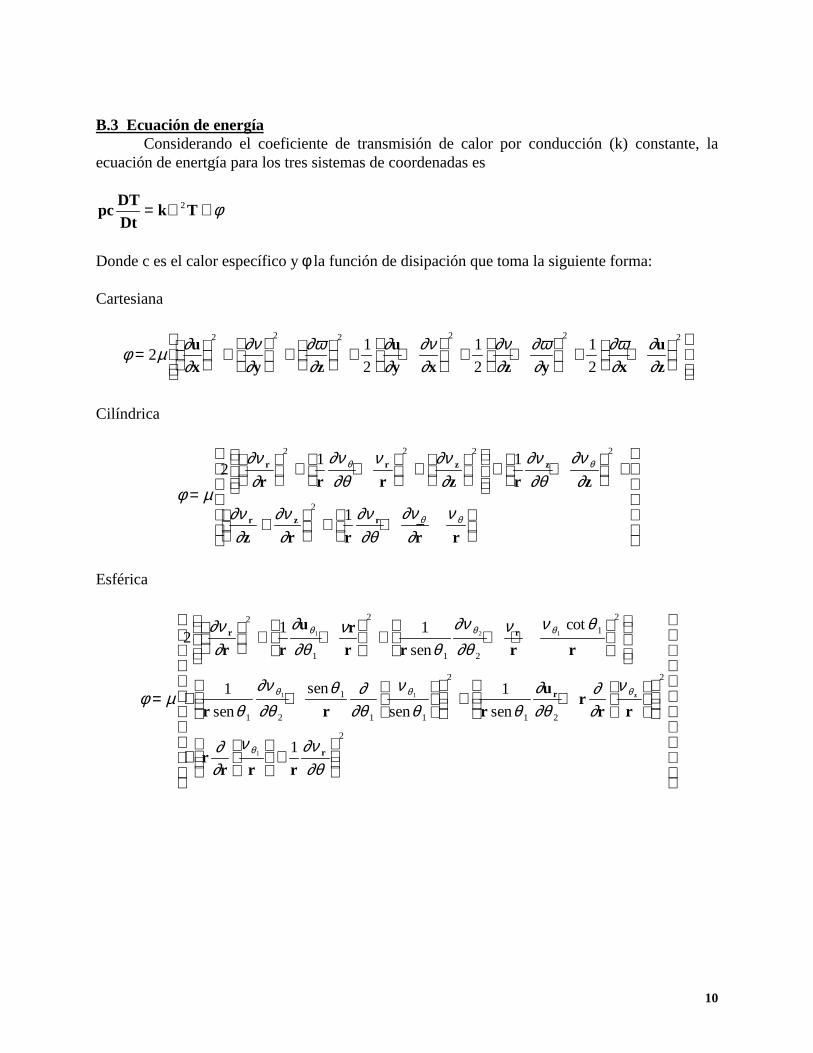
10
B.3 Ecuación de energíaConsiderando el coeficiente de transmisión de calor por conducción (k) constante, la
ecuación de enertgía para los tres sistemas de coordenadas es
pcDTDt
k T= ∇ +2 φ
Donde c es el calor específico y φ la función de disipación que toma la siguiente forma:
Cartesiana
φ µ ∂∂
∂ν∂
∂ω∂
∂∂
∂ν∂
∂ν∂
∂ω∂
∂ω∂
∂∂
=
+
+
+ +
+ +
+ +
21
2
1
2
1
2
2 2 2 2 2 2ux y z
uy x z y x
uz
Cilíndrica
φ µ
∂ν∂
∂ν∂θ
ν ∂ν∂
∂ν∂θ
∂ν∂
∂ν∂
∂ν∂
∂ν∂θ
∂ν∂
ν
θ θ
θ θ
=
+ +
+
+ +
+
+
+ + −
21 1
1
2 2 2 2
2
r r z z
r z r
r r r z r z
z r r r r
Esférica
φ µ
∂ν∂
∂∂θ
νθ
∂ν∂θ
ν ν θ
θ∂ν∂θ
θ ∂∂θ
νθ θ
∂∂θ
∂∂
ν
∂∂
ν ∂ν∂θ
θ θ θ
θ θ θ
θ
=
+ +
+ + +
+ +
+ +
+
+
21 1
1 1
1
2
1
2
1 2
1
2
1 2
1
1 1
2
1 2
2
1 2 1
1 1
1
r r
r
r
r r
u rr r r r
r r r
ur
r r
rr r r
z
sen
cot
sen
sen
sen sen2
11
APENDICE C
TERMODINAMICA
C.1 POSTULADOS
C.2 DEFINICIONES
C.3
C.4 GAS PERFECTO

12
TERMODINAMICA
C.1 Postulados
1a. Ley de la Termodinámica.
∆ ∆ ∆e e e q wc p+ + = +
Donde e es la energía interna, ec la energía cinética,ep la energía potencial, q el calor queentra al sistema, y w el trabajo que se hace sobre el sistema, todos por unidad de masa.
2a. Ley de la Termodinámica.
Tds dq≥
Donde T es la temperatura y s la entropía por unidad de masa. Si la entrada de calor esen un proceso reversible.Tds dq=
C.2 Definiciones.
Entalpía
h ep= +ρ
Calores específicos
CphT p
=
∂∂
CveT V
=
∂∂
C.3
13
Tds dep
d
Tds dh dp
= −
= −
ρρ
ρ
2
1
C.4 Gas Perfecto.
Ecuación de estado
P RT= ρ
Relaciones
de CvdT
dh CpdT
CpCvCp Cv R
S Cv T R
pcte
==
=
− == −
=
γ
ρ
ρ γ
ln ln
. para un proceso isoentropico
14
APENDICE DFACTORES DE CONVERSION
LONGITUD
1 Amstrong = 10-10 m.1 micrón = 10-6 m.
AREA
1 Hectárea = 104 m2 .
VOLUMEN
1litro = 10-3 m3.
MASA
1 UTM = 1 kgf seg2/m.1 UTM = 9.806 kgm .
FUERZA
1 kgf = 9.806 New.1 New. = 1 kgm m/seg2.
PRESION
1 atm. = 1.033 kgf / cm2.1 bar = 105 New/m2.1 torr = 1.332 x 102 New./ m2.1 cm. de Hg. = 1.333 x 103 New./ m2.1 cm de H2O = 9.806 x 101 New./ m2.
ENERGIA
1 caloría = 4.186 Joule.1 Joule = 1 New. x m.
POTENCIA
1 HP = 76 kgf m/ seg.
15
1 watt = 1 Joule / seg.1 HP = 745.7 watts.
16
BIBLIOGRAFIA
* Aris R. Vectors, Tensors and the equations of fluid mechanics. Prentice- Hall.1962.
* Batchelor, G.K. An introduction to fluid Dynamics, Cambridge Univ. Press. 1970.
* Bradssaw, P. Experimental fluid Mechanics.
* Campbell R>G> Foundations of fluid flows theory. Addison-Wesley. 1973.
* Courant , R. y Friedrichs, K.O. Supersonic Flow and Shock Wares. Interscience.1948
* Currie, I.G. Fundamental Mechanics of Fluids. Mc. Graw-Hill . 1974.
* J.Daily, J.W. y Harleman D.R.F. Fluid Dynamics . Addison-Wesley. 19966.
* Daugherty, R.L. y Ingersoll A.C. Mechanics with Engineering Aplicatons. Mc. Graw-Hill . 1954.
* Durand W.F. Aerodynamic Theory. Sprnger, 1934.
* Fox J.A. An Introduction to Engineering Fluid Mechanics. Mc. Graw-Hill.1974.
* Fox R.W. y Mc. Donald A.T. Introduction to Fluid Mechanics. John Wiley.1973.
* Goldstein, S. Modern Developments in Fluid Dinamics. Dover Ed.Vol. I y II.1965.
* Greenspon, H. The Teory of Rotating Fluids. Cambridg Univ. Press. 1968.
* J. Hansen A.G. Mecánica e Fluidos. Limusa-Wiley.1971.
* Hinze J.O. Turbulence. Mc-Graw-Hill. 1965.
* J. Hunghes W.F. Dinámica de los Fluidos. Mc.Graw-Hill.1970.
* Jeans J. H. The Dynamical Theory of Gases. Dover De. 1954.
* John, J.E.A. y Haberman W. Introduction to Fluid Mechanics. Prentice-Hall.1971.
* Kaplan s. Fluid Mechanics. Academic Press. 1967.
17
* Kanfmann W. Fluid Mechanics. Mc Graw-Hill.1963.
* Kinsman B. Wird Wares. Prentice-Hall.1965.
* Knudsen, J.G. y Katz, D.L.Fluid Dynamics and Heat Transfer. Mc-Graw Hill.1958.
* Kuethe, A.M. y Schetzer J.D.Fundations of Aerodynamics. John Wiley.1950.
* Lamb H. Hydrodynamics. Dover De. 1945.
* Landon L.D. y Lifshitz E.M. Fluid Mechanics . Perjamon press.1959.
* Liepman H.W. y Roshko. Elements of Gasdynamics. John Wiley.1957.
* Lin C.C. Hydrodynamic Instability. Cambridge Univ. Press.
* Mataix C. Mecánica de Fluidos y Máquinas Hidráulicas. Harper & Row.1970.
* Meyer R.E. Introduction to Mathematical Fluid Dynamics. Wiley-Interscience.1971.
* Milne-Thompson L.M. Theoretical Hydrodynamics. MacMillan.1950.
* Pao R.F. Fluid Mechanics. John Wiley.1961.
* Phillips O.M. Dynamics of the Opper Ocean. cambridge Univ. Press
* Prandtl L. Fluid Dynamics. Hafner.1952.
* Prandtl L. y Tietjens O.G. Fundamentals of Hydro- and Aero-Mechanics. Dover Ed. 1957.
* Robertson J.M. Hydrodynamics in Theory and Aplication. Prentice-Hall.1965.
* Ronse H. Elementary Mechanics of Fluids.John Wiley.1946.
* Shames I.H. Mecánica de Fluidos. Mc.Graw-Hill .1962.
* Shapiro A.H. The Dynamics and Thermodynamics of Compressive Fluid Flow Vols.I y II .Ronald Press. 1953.
* Stoker J.J. Water Waves. Interscience.1957.

18
* Streeter V.L. y Wylie E.B. Fluid Mechanics. Mc.Graw-Hill.1975.
* Swanson W.M. Fluid Mechanics. Holt.
* Thwaites B. Incompressible Aerodynamics. Oxford. 1960.
* Vallentine H.R. Applied Hydrodynamics. Buherworths.1959.
* Van Dyke M. Perturbation Methods in Fluid Mechanics. Academic Press. 1964.
* Vennord, J.K. Elementary Fluid Mechanics. John Wiley.1954.
* Yih, C.S. Fluid Mechanics. Mc.Graw-Hill.1969.