estimación de cargas dinámicas de camiones pesados que circulan
TRANSCRIPT
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE
CIRCULAN POR UN PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCÓN
MÓNICA ARRUBLA TOVAR
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERÍA
INGENIERÍA CIVIL
BOGOTÁ D.C.
2013
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 2
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE
CIRCULAN POR UN PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCÓN
MÓNICA ARRUBLA TOVAR
Tesis para optar por el título de Magister en Ingeniería Civil
ASESOR
Ing. EDGAR EDUARDO MUÑOZ DÍAZ
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERÍA
INGENIERÍA CIVIL
BOGOTÁ D.C.
2013
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 3
CONTENIDO
INTRODUCCIÓN ........................................................................................................................... 13
1. PLANTEAMIENTO DEL PROBLEMA Y JUSTIFICACIÓN .......................................... 16
2. MARCO TEORICO ............................................................................................................... 19
2.1 SISTEMAS DE PESAJE ..................................................................................................... 19
2.1.1 PESAJE ESTÁTICO ................................................................................................... 19
2.1.2 PESAJE DINÁMICO .................................................................................................. 19
2.2 ALGORITMO GENETICO ................................................................................................. 21
2.2.1 ALGORITMO GENETICO EN MATLAB ................................................................ 23
2.3 ÚLTIMOS DESARROLLOS Y APLICACIONES DEL SISTEMA BWIM ...................... 25
2.3.1 EXPERIENCIA EN ESTADOS UNIDOS.................................................................. 27
2.3.2 EXPERIENCIA EN ESLOVENIA ............................................................................. 28
2.3.3 EXPERIENCIA EN JAPÓN ....................................................................................... 28
2.3.4 EXPERIENCIA EN COLOMBIA .............................................................................. 28
2.3.5 EXPERIENCIA EN MÉXICO .................................................................................... 30
2.4 ANÁLISIS DE SEÑALES ................................................................................................... 31
2.4.1 FILTROS ..................................................................................................................... 31
2.4.1.1 FILTROS PASA ALTO ............................................................................................ 32
2.4.1.2 FILTROS PASA BAJO ............................................................................................ 32
2.4.1.1 FILTROS PASA BANDA ........................................................................................ 34
2.4.2 TRANSFORMADA DE FOURIER ............................................................................ 34
2.4.3 ESPECTRO DE POTENCIA ...................................................................................... 35
3. METODOLOGÍA ................................................................................................................... 37
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 4
3.1 METODOLOGIA PROPUESTA ........................................................................................ 37
3.2 METODOLOGIA APLICADA ........................................................................................... 39
3.2.1 RECOPILACIÓN DE INFORMACIÓN EXISTENTE .............................................. 39
3.2.2 CARACTERISTICAS GENERALES DEL PUENTE GUAMO ............................... 40
3.3 FASE DE CAMPO .............................................................................................................. 42
3.3.1 DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE INSTRUMENTACIÓN DEL
PUENTE ................................................................................................................................... 42
3.3.2 ESTUDIO EXPERIMENTAL .................................................................................... 50
3.4 FASE DE OFICINA ............................................................................................................ 53
3.4.1 CONSTRUCCIÓN DEL MODELO ESTRUCTURAL DEL TABLERO DEL
PUENTE EN SAP ..................................................................................................................... 53
3.4.2 CONSTRUCCIÓN DEL MODELO ESTRUCTURAL DEL TABLERO DEL
PUENTE EN MATLAB ........................................................................................................... 57
4. PROCESAMIENTO DE DATOS .......................................................................................... 61
4.1 REGISTROS DE ACELERACIÓN Y ESPECTROS ANALIZADOS ............................... 63
4.2 CALIBRACIÓN DEL MODELO ESTRUCTURAL EN SAP 2000 .................................. 79
4.3 ALGORITMO GENETICO ................................................................................................. 87
4.3.1 TAMAÑO DE LA POBLACIÓN ............................................................................... 87
4.3.2 PARÁMETROS DEL ALGORITMO ........................................................................ 87
4.3.3 CRITERIOS DE PARADA ......................................................................................... 88
4.3.4 OPERADORES GENÉTICOS .................................................................................... 89
4.3.4.1 ALGORITMO RANK ............................................................................................... 89
4.3.4.2 ALGORITMO STOCHASTIC UNIFORM .............................................................. 90
4.3.4.3 CROSSOVER FRACTION ...................................................................................... 90
4.4 RESULTADOS ALGORITMO GENETICO .................................................................... 100
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 5
5. ANALISIS DE RESULTADOS ........................................................................................... 101
5.1 ACELERACIÓNES Y FRECUENCIAS POR TIPO DE CAMIÓN ................................. 101
5.2 ACELERACIONES Y FRECUENCIAS ENTRE TIPOS DE CAMIONES ..................... 105
5.3 FRECUENCIAS MEDIDAS - COMPARACIÓN DE METODOS ................................. 108
5.4 COMPARACIÓN DE FRECUENCIAS (MEDIDAS Y ESTIMADAS) .......................... 110
5.4.1 PESO SIN VALOR DE IMPACTO .......................................................................... 110
5.4.2 PESOS CON VALOR DE IMPACTO ...................................................................... 111
5.5 CARGAS POR EJES OBTENIDAS POR MEDIO DEL ALGORITMO GENÉTICO .... 113
6. CONCLUSIONES ................................................................................................................. 122
7. TRABAJOS FUTUROS ....................................................................................................... 124
8. REFERENCIAS BIBLIOGRÁFICAS ................................................................................ 125
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 6
LISTA DE FIGURAS
Figura 2-1 Sistema de pesaje en movimiento WIM (weigh in motion) .............................. 20
Figura 2-2 Instrumentación sistema CULWAY .................................................................. 26
Figura 2-3 Prototipo a escala del puente Puerto Salgar, con su respectivo sistema de
instrumentación .................................................................................................................... 29
Figura 2-4 Instalación de los LVDT que permiten medir deformaciones verticales por el
paso del tráfico sobre el puente ............................................................................................ 30
Figura 3-1 Organigrama para el caso en estudio. ................................................................ 37
Figura 3-2 Localización de la zona...................................................................................... 40
Figura 3-3 Ubicación del puente Guamo y estación de pesaje en la via ............................. 41
Figura 3-4 Puente Guamo vía Bogota-Villavicencio .......................................................... 41
Figura 3-5 Instrumentación puente Guamo ......................................................................... 42
Figura 3-6 Materiales utilizados – Sistema de conteo de trafico (a) Cables
Piezoelectéctricos, (b) Cinta poket, (c) Loop inductivo, (d) Sikaflex 1a, (e) Computador
Portatil, (f) Sistema TRS ...................................................................................................... 43
Figura 3-7 Señalización utilizada ........................................................................................ 44
Figura 3-8 Demarcación del carril ....................................................................................... 45
Figura 3-9 Corte y limpieza del pavimento ......................................................................... 46
Figura 3-10 Instalación del loop y sellado del carril (a) Instalación Loop, (b) Cinta
protectora, (c) Aislante de humedad, (d) Sellado de corte ................................................... 46
Figura 3-11 Instalación de los cables piezoelectricos ......................................................... 47
Figura 3-12 Materiales utilizados – Instrumentación con acelerometros ............................ 49
Figura 3-13 Instrumentación utilizada ................................................................................. 50
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 7
Figura 3-14 Porcentaje por cátegoria de camiones .............................................................. 52
Figura 3-15 Sistema implementado ..................................................................................... 53
Figura 3-16 Modelo tridimensional ..................................................................................... 53
Figura 3-17 Sección Viga en I (a) Viga Exterior, (b) Viga Interior .................................... 54
Figura 3-18 Sección de la losa ............................................................................................. 55
Figura 3-19 Sección de la Riostra........................................................................................ 55
Figura 3-20 Condicion de apoyo ......................................................................................... 56
Figura 3-21 Matriz de rigidez local de cada elemento ........................................................ 58
Figura 3-22 Ensamblaje matriz local de rigidez (a) Ecuación matriz global (b) Matriz de
transformación ...................................................................................................................... 59
Figura 3-23 Matriz de masa de cada elemento .................................................................... 59
Figura 3-24 Modelo estructural del puente (a) Tablero del puente en Matlab, (b) Tablero
del puente en Sap .................................................................................................................. 60
Figura 4-1 Registro de aceleraciones del Puente sin carga (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 64
Figura 4-2 Espectros del monitoreo del puente sin carga (a) Espectro de Fourier, (b)
Espectro de Potencia ............................................................................................................. 64
Figura 4-3 Espectrograma puente sin carga. ....................................................................... 65
Figura 4-4 Registro de aceleraciones camion C2 -W máx (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 65
Figura 4-5 Espectros del monitoreo del camion C2 - W máx (a) Espectro de Fourier, (b)
Espectro de Potencia ............................................................................................................. 66
Figura 4-6 Espectrograma camión C2 - W máx. ................................................................. 66

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 8
Figura 4-7 Registro de aceleraciones camion C2 - W mín (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 67
Figura 4-8 Espectros del monitoreo del camion C2 - W mín (a) Espectro de Fourier, (b)
Espectro de Potencia ............................................................................................................. 67
Figura 4-9 Espectrograma camión C2 - W mín. .................................................................. 68
Figura 4-10 Registro de aceleraciones camion C3 - W máx (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 68
Figura 4-11 Espectros del monitoreo del camion C3 - W máx (a) Espectro de Fourier, (b)
Espectro de Potencia ............................................................................................................. 69
Figura 4-12 Espectrograma camión C3 - W máx. ............................................................... 69
Figura 4-13 Registro de aceleraciones camion C3 - W mín (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 70
Figura 4-14 Espectros del monitoreo del camion C3 - W mín (a) Espectro de Fourier, (b)
Espectro de Potencia ............................................................................................................. 70
Figura 4-15 Espectrograma Camión C3 - W mín. ............................................................... 71
Figura 4-16 Registro de aceleración camion C3-S2 - W máx (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 71
Figura 4-17 Espectros del monitoreo del camion C3-S2 - W máx (a) Espectro de Fourier,
(b) Espectro de Potencia. ...................................................................................................... 72
Figura 4-18 Espectrograma Camión C3-S2 - W máx.......................................................... 72
Figura 4-19 Registro de aceleración camion C3-S2 - W mín (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 73
Figura 4-20 Espectros del monitoreo del camion C3-S2 - W mín (a) Espectro de Fourier,
(b) Espectro de Potencia. ...................................................................................................... 73
Figura 4-21 Espectrograma Camión C3-S2 - W mín. ......................................................... 74

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 9
Figura 4-22 Registro de aceleración camion C3-S3 - W máx (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 74
Figura 4-23 Espectros del monitoreo del camion C3-S3 - W máx (a) Espectro de Fourier,
(b) Espectro de Potencia. ...................................................................................................... 75
Figura 4-24 Espectrograma camión C3-S3 - W máx. ......................................................... 75
Figura 4-25 Espectro de Fourier camion C3-S3 - W mín (a) Señal sin filtrar, (b) Señal
filtrada ................................................................................................................................... 76
Figura 4-26 Espectros del monitoreo del camión C3-S3 - W mín (a) Espectro de Fourier,
(b) Espectro de Potencia. ...................................................................................................... 76
Figura 4-27 Espectrograma camión C3-S3 - W mín. .......................................................... 77
Figura 4-28 Modos de vibracion del modelo analitico sin tráfico . ..................................... 79
Figura 4-29 Valor de expectativa – algoritmo Rank. .......................................................... 89
Figura 4-30 Reproducción caso 1 –Elite Count................................................................... 90
Figura 4-31 Reproducción caso 2 – Algoritmo Scattered. .................................................. 91
Figura 4-32 Mutación – algoritmo Adaptive Feasible. ....................................................... 91
Figura 4-33 Gráfica de convergencia camión C3-S3-Mín. ................................................. 92
Figura 4-34 Gráfica de convergencia camión C3-S3-Máx. ................................................. 93
Figura 4-35 Gráfica de convergencia camión C3-S2-Mín. ................................................. 94
Figura 4-36 Gráfica de convergencia camión C3-S2-Máx. ................................................. 95
Figura 4-37 Gráfica de convergencia camión C3-Mín. ....................................................... 96
Figura 4-38 Gráfica de convergencia camión C3-Máx. ...................................................... 97
Figura 4-39 Gráfica de convergencia camión C2-Mín. ....................................................... 98
Figura 4-40 Gráfica de convergencia camión C2-Máx. ...................................................... 99
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 10
Figura 5-1 Peso vs Aceleración velocidad variable (a) Camión C2, (b) Camión C3, (c)
Camión C3-S2, (d) Camión C3-S3 ..................................................................................... 103
Figura 5-2 Peso vs Aceleración Velocidad Constante (a) Camión C2, (b) Camión C3, (c)
Camión C3-S2, (d) Camión C3-S3 ..................................................................................... 104
Figura 5-3 Peso vs Frecuencia Velocidad variable ........................................................... 105
Figura 5-4 Comparación entre tipos de camiones Peso vs Aceleración ............................ 107
Figura 5-5 Frecuencias medidas para los diferentes tipos de camión (a) Frecuencias pico 1,
(b) Frecuencias pico 2......................................................................................................... 107
Figura 5-6 Respuesta del puente con carga dinamica (a) Aceleración, (b) Espectograma
tiempo – frecuencia, (c) Espectro de Fourier, (d) Espectro de potencia. ........................... 109
Figura 5-7 Comparación de Frecuencias Medidas y Estimadas (Peso sin impacto). ........ 111
Figura 5-8 Comparación de Frecuencias medidas y estimadas (Peso + Impacto) ............ 113
Figura 5-9 % de Error pesos máximos y mínimos CCDSP ............................................... 114
Figura 5-10 % de Error pesos máximos y mínimos ASSTHO ......................................... 114
Figura 5-11 Incertidumbre de pesos en comparación con las frecuencias ........................ 115
Figura 5-12 Comparación de Pesos Legales con Pesos Algoritmo (a) Camión C3S3
máximo, (b) Camión C3-S3 mínimo ................................................................................. 119
Figura 5-13 Comparación de Pesos Legales con Pesos Algoritmo (a) Camión C3-S2
máximo, (b) Camión C3-S2 mínimo .................................................................................. 120
Figura 5-14 Comparación de Pesos Legales con Pesos Algoritmo (a) Camión C3 máximo,
(b) Camión C3 mínimo ....................................................................................................... 120
Figura 5-15 Comparación de Pesos Legales con Pesos AlgoritmoC2 (a) Camion C2
máximo, (b) Camión C2 mínimo ........................................................................................ 121

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 11
LISTA DE TABLAS
Tabla 3-1 Datos obtenidos con el sistema TRS ................................................................... 48
Tabla 4-1 Registros de pesos camión C2............................................................................. 61
Tabla 4-2 Registros de pesos camión C3............................................................................. 62
Tabla 4-3 Registros de pesos camión C3-S2 ....................................................................... 62
Tabla 4-4 Registros de pesos camión C3-S3 ....................................................................... 63
Tabla 4-5 Frecuencias medidas – Espectro de Fourier y Espectro de Potencia .................. 78
Tabla 4-6 Variación de Módulo de Elasticidad ................................................................... 80
Tabla 4-7 Calibración del modelo estructural en Sap 2000................................................. 80
Tabla 4-8 Distancias entre ejes y pesos por ejes ................................................................. 81
Tabla 4-9 Frecuencias producidas por diferentes camiones en el modelo estructural
calibrado ............................................................................................................................... 84
Tabla 4-10 Pesos con valor de impacto camión C2 ............................................................ 84
Tabla 4-11 Pesos con valor de impacto camión C3 ............................................................ 85
Tabla 4-12 Pesos con valor de impacto camión C3-S2 ....................................................... 85
Tabla 4-13 Pesos con valor de impacto camión C3-S3 ....................................................... 86
Tabla 4-14 Frecuencia pesos con factor de impacto............................................................ 86
Tabla 4-15 Pesos por eje algoritmo Camión C3-S3 Peso Minimo. ..................................... 92
Tabla 4-16 Pesos por eje algoritmo Camión C3-S3 Peso Máximo. .................................... 93
Tabla 4-17 Pesos por eje algoritmo Camión C3-S2 Peso Mínimo. ..................................... 94
Tabla 4-18 Pesos por eje algoritmo Camión C3-S2 Peso Máximo. ..................................... 95
Tabla 4-19 Pesos por eje algoritmo Camión C3 Peso Mínimo. .......................................... 96
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 12
Tabla 4-20 Pesos por eje algoritmo Camión C3 Peso Máximo. .......................................... 97
Tabla 4-21 Pesos por eje algoritmo Camión C2 Peso Mínimo. .......................................... 98
Tabla 4-22 Pesos por eje algoritmo Camión C2 Peso Máximo. .......................................... 99
Tabla 5-1 Valores representativos por tipo de camión Aceleración – Frecuencia. ........... 102
Tabla 5-2 Valores representativos para todos los tipos de camión Aceleración – Frecuencia
............................................................................................................................................ 106
Tabla 5-3 Porcentaje de Error entre frecuencias medidas y estimadas (Peso sin impacto)
............................................................................................................................................ 110
Tabla 5-4 Porcentaje de Error entre frecuencias medidas y estimadas (Peso + Impacto)
CCDSP ............................................................................................................................... 112
Tabla 5-5 Porcentaje de Error entre frecuencias medidas y estimadas (Peso + Impacto)
LRFD .................................................................................................................................. 112
Tabla 5-6 Comparación Pesos legales – Pesos algoritmo C3S3 Máx. .............................. 115
Tabla 5-7 Comparación Pesos legales – Pesos algoritmo C3-S3 Min. ............................. 116
Tabla 5-8 Comparación Pesos legales – Pesos algoritmo C3-S2 Máx. ............................. 116
Tabla 5-9 Comparación Pesos legales – Pesos algoritmo C3S2 Min. ............................... 117
Tabla 5-10 Comparación Pesos legales – Pesos algoritmo C3 Máx. ................................ 117
Tabla 5-11 Comparación Pesos legales – Pesos algoritmo C3 Min. ................................. 118
Tabla 5-12 Comparación Pesos legales – Pesos algoritmo C2 Máx. ................................ 118
Tabla 5-13 Comparación Pesos legales – Pesos algoritmo C2 Min. ................................. 119
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 13
INTRODUCCIÓN
El presente trabajo está orientado a estimar las cargas totales y por eje de los camiones que
circulan por un puente instrumentado a través de acelerómetros y un sistema de medición
de tráfico, implementando un algoritmo genético identificando nuevos modos de vibración
y sus correspondientes frecuencias determinadas experimentalmente.
Los procedimientos que se resumen en este documento se basan en el estudio realizado por
el grupo de investigación de estructuras de la Pontificia Universidad Javeriana
“Determinación de cargas dinámicas de camiones pesados que transitan en un puente
basado en algoritmos genéticos e instrumentación”, cambiando la instrumentación utilizada
con LVDTs, usados para obtener los desplazamientos verticales por acelerómetros ubicados
sobre la estructura. Tomando medidas de aceleración en el puente a partir de las cuales se
obtendrán las frecuencias, y por medio de las frecuencias y un modelo matemático
determinar las cargas de los vehículos que transitan sobre el puente.
Para este caso en particular se realizó un estudio sobre un puente simplemente apoyado
localizado en una zona de alta fluencia vehicular, donde el tránsito de camiones pesados es
común y a pocos metros del puente se encuentra un sistema de pesaje estático.
La instrumentación de este puente se basó en la ubicación de acelerómetros sobre la
estructura, seleccionando los camiones pesados que transitan por el puente y analizando la
variación de las frecuencias obtenidas con el paso de los vehículos.
En el desarrollo de la estimación de cargas que circulan por un puente se encuentran
muchas variables que intervienen en su determinación, así como para la determinación de la
frecuencia generada por el paso de los vehículos sobre la estructura.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 14
En la etapa de diseño de cualquier estructura, se estiman unos valores de cargas: muertas,
vivas, superpuestas, entre otras; que al final intervienen en el correcto funcionamiento de la
misma, pero que en la vida útil de la estructura estas cargas de diseño están sujetas a
cambios en su modo de operar, como es el caso de las cargas vivas de carácter dinámico
que circulan por un puente. Adicionalmente, el control que se ejerce sobre las diferentes
vías del país se encuentra con algunas limitaciones, ya que no siempre es posible obtener el
peso de todos los vehículos que circulan por la vía; por cierres temporales que presenta la
estación.
Por lo tanto, es necesario encontrar nuevas metodologías para estimar los pesos de los
vehículos de una manera rápida, sin intervenciones de tráfico y con una instrumentación
viable económicamente.
Para este trabajo se determinaron las cargas dinámicas de los vehículos que circulan por el
puente, la influencia que presenta la amplitud del registro de aceleración con la magnitud
de la carga, y se identificaron las velocidades a la que pasaron los vehículos por el puente.
Finalmente, los pesos obtenidos por medio del algoritmo genético se compararon con los
registros medidos en la estación de pesaje estático y con las cargas legales de nuestro país.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 15
OBJETIVOS
Objetivo General
Implementar un algoritmo genético para determinar las cargas dinámicas producidas
por camiones pesados que circulan por un puente instrumentado.
Objetivos Específicos
Desarrollar el modelo analítico computacional de la superestructura del puente
seleccionado, para la determinación de las frecuencias verticales.
Calibrar el modelo analítico computacional concebido de la superestructura del
puente seleccionado.
Calibrar el algoritmo genético desarrollado para el sistema de pesaje en movimiento
de las cargas empleando el puente instrumentado y el modelo computacional
calibrado.
Realizar comparaciones analíticas de las cargas dinámicas reales obtenidas
mediante este algoritmo genético, con relación a las cargas legales en nuestro País y
las cargas medidas en la estación de pesaje.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 16
1. PLANTEAMIENTO DEL PROBLEMA Y JUSTIFICACIÓN
Los puentes de la Red Vial Nacional de Colombia son estructuras esenciales de la
infraestructura vial del país; en general antiguas con deficiencias en mantenimiento durante
su vida útil, por lo cual son vulnerables, y que presentan condiciones de deterioro que
afectan su operación. Una de las razones del deterioro de estas estructuras es el sobrepeso
de los camiones que circulan por las vías troncales y transversales de la Red Vial Nacional,
lo que acelera los fenómenos de daños y disminuye apreciablemente su durabilidad.
El aumento de estas cargas ha sido detectado por parte del Instituto Nacional de Vías
(INVIAS) a través de controles realizados en estaciones de pesaje fijas y móviles,
encontrándose sobrepesos de los camiones entre el 1% y el 10% en la estaciones fijas y del
4% y el 16% en estaciones móviles, con respecto a las cargas legales del país. Los daños
en los puentes causados por este sobrepeso obligan al país a invertir recursos adicionales
para su rehabilitación, los cuales se podrían evitar si fuera mejorado el sistema de control
de pesos en las vías por parte del Estado y las Concesiones. Una de las líneas de
investigación del grupo de “Estructuras” de la Pontificia Universidad Javeriana, realizó la
evaluación del puente Puerto Salgar (localizado en la carretera Honda – Río Ermitaño),
Colombia, y por medio de su instrumentación, se encontró que los camiones que circulan
por este puente presentan en forma aproximada un sobrepeso que varía entre el 10 y el 15%
y se comprobó que la carga de diseño C40-95 del Código Colombiano de Diseño Sísmico
de Puentes (CCDSP), no representa en forma suficiente, la carga real de los camiones que
transitan por esta estructura.
Los puentes nuevos y existentes de la Red Vial Nacional de Colombia se diseñan y revisan
empleando el camión de diseño C40-95 del Código Colombiano de Diseño Sísmico de
Puentes (CCDSP). La carga del camión C40-95 fue determinada por la Asociación
Colombiana de Ingeniería Sísmica (AIS) y fue ratificada por la Universidad Nacional de
Colombia (sede Bogotá) en el año de 1997 en el estudio: Definición de las cargas de diseño
para puentes en Colombia.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 17
Actualmente, el control y estudio de las cargas de los tracto camiones que circulan por la
Red Vial Nacional de Colombia se realiza a través de sistemas de pesajes estáticos y en
movimiento, que son administrados por parte del INVIAS, el Instituto Nacional de
Concesiones (INCO) y las Concesiones. Por lo tanto, teniendo en cuenta que las cargas del
código colombiano de puentes son tomadas del código de la ASSTHO (Asociación
Americana de Funcionarios de Carreteras Estatales y Transporte); se tiene la necesidad de
estudiar si las cargas de diseño son las correctas y que influencia tienen estas en las fallas
de las vías nacionales de nuestro país.
En diferentes estudios realizados por el grupo de estructuras, entre los que se encuentra
“Causas del colapso de algunos puentes en Colombia”. (Muñoz, 2002). En dicho estudio se
mostró que el colapso parcial o total de algunos de los puentes vehiculares de la Red Vial
Nacional pudo haber sido ocasionado por la sobrecarga. Por lo anteriormente expuesto, las
obras de infraestructura vial, nuevas y existentes, deben tener planes muy claros de
mantenimiento que certifiquen su funcionamiento adecuado, estabilidad y vida útil (entre
ellos, el control de pesos de los tracto camiones que circulan por las carreteras principales).
De acuerdo con lo anterior, es de suma importancia que se complementen los sistemas de
control de pesaje convencionales que actualmente funcionan en el país e implementar
nuevos sistemas en este sentido, con mayores alcances, mayor cobertura y que tengan un
costo relativamente bajo, de tal forma que se consideren económicamente viables
consecuentes con el presupuesto asignado por la Nación para esta actividad. Basados en
esta necesidad, se propone un sistema de pesaje en movimiento que determine las cargas
dinámicas (peso bruto, pesos por eje, tipo de camión, conteo, etc.) debidas a los camiones
que circulan por un puente, a través de instrumentación y el desarrollo de un algoritmo
genético.
Adicionalmente en uno de los trabajos de grado de la Universidad Javeriana (Pino, 2006),
se encontró que es prioritario para el país un estudio que permita determinar la carga viva
(especifica) para la revisión de puentes existentes, de tal forma que sea parte fundamental
de una futura norma Colombiana. De acuerdo con esto se investigó en este trabajo el
número, la localización y las características de las estaciones de pesajes existentes de la

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 18
Red Vial Nacional, encontrándose que es necesario complementar apreciablemente las
existentes e instalar nuevas, de tal forma que se tenga mayor cobertura que permita un
control eficiente de los pesos de los tracto camiones en el país.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 19
2. MARCO TEORICO
En el mundo existen dos (2) sistemas de pesaje, estático y en movimiento, los cuales se
rigen por las especificaciones internacionales de la norma ASTME 1318-02 y cuyos
fundamentos principales se resumen a continuación.
2.1 SISTEMAS DE PESAJE
2.1.1 PESAJE ESTÁTICO
Se cree que en 1741, se detecta la necesidad de pesar los vehículos pesados que transitan
por las vías principales; cuando el Gobierno del Reino Unido incluyó la ley Turnpike, la
cual decía que los vehículos debían pagar por el uso de las carreteras según su peso
(Quilligan, 2003). El pesaje estático consiste en tomar el peso de un vehículo detenido, ya
sea por ejes o su peso total. Hoy en día los principales tipos de pesaje estático que se
encuentran en uso son: plataformas fijas y escalas portátiles de ruedas. El de plataforma
fija consiste en soportar el peso de un camión por medio de un número de células de carga
y un indicador de peso y el de escala portátil de ruedas se ha desarrollado para permitir la
medición de cargas de las ruedas, siendo el eje de cada rueda medido individualmente.
2.1.2 PESAJE DINÁMICO
Con respecto al pesaje dinámico hay tres modalidades que se explican a continuación:
a. Pesaje en movimiento WIM (weigh in motion)
Es un proceso que consiste en medir las fuerzas estáticas y dinámicas de los ejes de un
vehículo en movimiento (Quilligan, 2003). Es capaz de medir tráfico a una velocidad
normal sin necesidad de detener el vehículo, permite almacenamiento de datos del peso de
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 20
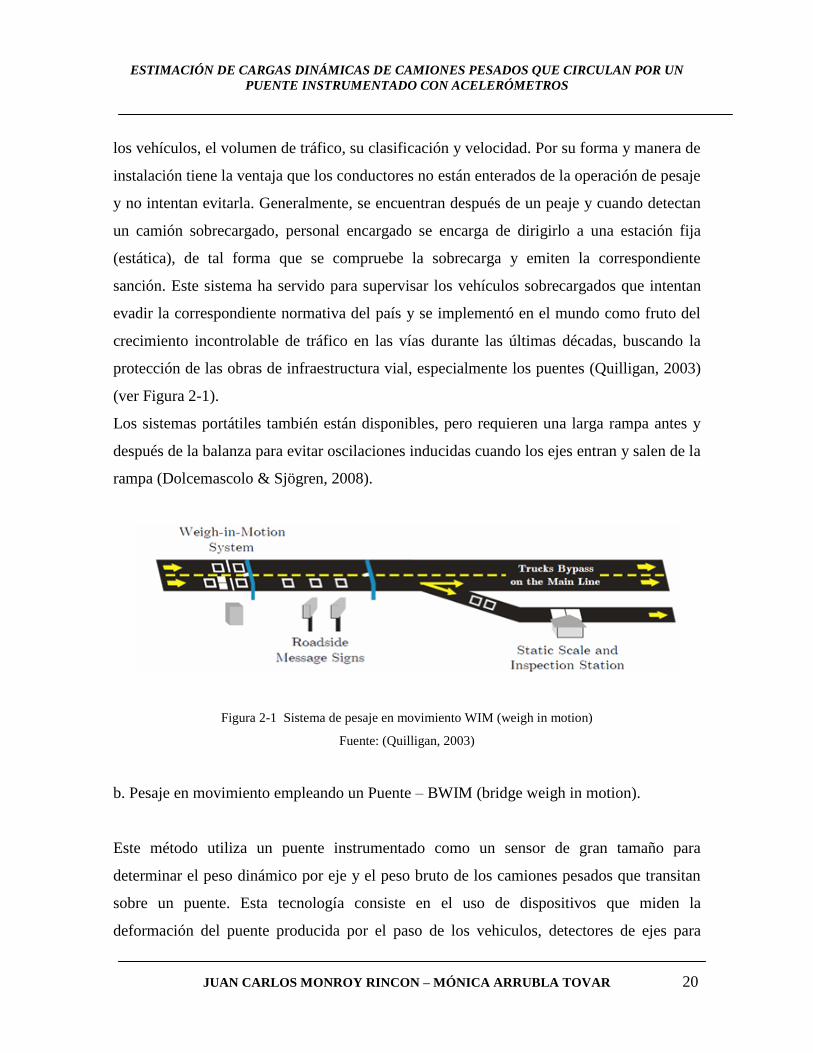
los vehículos, el volumen de tráfico, su clasificación y velocidad. Por su forma y manera de
instalación tiene la ventaja que los conductores no están enterados de la operación de pesaje
y no intentan evitarla. Generalmente, se encuentran después de un peaje y cuando detectan
un camión sobrecargado, personal encargado se encarga de dirigirlo a una estación fija
(estática), de tal forma que se compruebe la sobrecarga y emiten la correspondiente
sanción. Este sistema ha servido para supervisar los vehículos sobrecargados que intentan
evadir la correspondiente normativa del país y se implementó en el mundo como fruto del
crecimiento incontrolable de tráfico en las vías durante las últimas décadas, buscando la
protección de las obras de infraestructura vial, especialmente los puentes (Quilligan, 2003)
(ver Figura 2-1).
Los sistemas portátiles también están disponibles, pero requieren una larga rampa antes y
después de la balanza para evitar oscilaciones inducidas cuando los ejes entran y salen de la
rampa (Dolcemascolo & Sjögren, 2008).
Figura 2-1 Sistema de pesaje en movimiento WIM (weigh in motion)
Fuente: (Quilligan, 2003)
b. Pesaje en movimiento empleando un Puente – BWIM (bridge weigh in motion).
Este método utiliza un puente instrumentado como un sensor de gran tamaño para
determinar el peso dinámico por eje y el peso bruto de los camiones pesados que transitan
sobre un puente. Esta tecnología consiste en el uso de dispositivos que miden la
deformación del puente producida por el paso de los vehiculos, detectores de ejes para
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 21
recoger información sobre la velocidad del vehículo y la distancia entre ejes, y el equipo de
adquisición de datos. La información proporcionada por los sensores de detectores de eje se
convierte en peso de los ejes a través de la aplicación de un algoritmo (Quilligan, 2003).
Este sistema proporciona la información sobre factor de impacto, el factor de distribución
lateral y los registros de esfuerzos que se utilizan para el análisis adicional del puente.
Pueden adecuarse para tener las mismas aplicaciones del sistema WIM, con diferente
confiabilidad y precisión, tales como: portátil, instalación rápida, fácil mantenimiento y
facilidades económicas.
c. Pesaje en movimiento empleando un Puente – SiWIM
SiWIM es un sistema B-WIM que fue desarrollado en ZAG, Ljubljana, el cual consiste en
pavimento libre de sensores de ejes, estos sistemas son cada vez más precisos ya que no
están en contacto con los neumáticos, y resultan muy durables (O’Brien, Znidaric, & Ojio,
2008).
Ahora está disponible como un sistema B-WIM comercial, después de usar el algoritmo de
Moisés para la obtención de peso de los ejes, SiWIM pasa los resultados a un algoritmo de
optimización, que se ha demostrado que aumenta la exactitud de los resultados (Znidaric et
al. 1998).
2.2 ALGORITMO GENETICO
Los algoritmos geneticos son metodos que se usan para resolver problemas de busqueda y
optimización. Estan basados en el proceso genetico de los organismos vivos. A lo largo de
las generaciones, las poblaciones evolucionan en la naturaleza de acorde con los principios
de la selección natural y la supervivencia de los mas fuertes, postulados por Darwin en
1859.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 22
Por imitación de este proceso, los algoritmos geneticos son capaces de ir creando
soluciones para problemas del mundo real. La evolución de dichas soluciones hacia valores
optimos del problema depende de una adecuada codificación de las mismas (Goldberg
1989).
El algoritmo B-WIM se basa en el hecho de que una carga en movimiento a lo largo de un
puente creará deformaciones en proporción al producto del valor de la línea de influencia y
la magnitud de la carga del eje (Quilligan, 2003).
Los algoritmos tradicionales usados para el B-WIM tienen algunas limitaciones cuando el
sistema estructural no sigue un patrón periódico oscilante entorno a la respuesta estática, tal
como lo supuso (Moses, 1979).
Estas fuentes son bastantes inexactas y están relacionadas con la excitación de las fuerzas
dinámicas que produce la rueda del camión en contacto con el puente (Ryall, Parke, &
Harding, 2000).
Las investigaciones de estos algoritmos se han centrado en el desarrollo de algoritmos en el
dominio del tiempo (Dempsey et al. 1998, O'Connor 1987), estos algoritmos tratan de
corregir la desviación del valor estático que por el paso del camión podría incidir en la
deformación del puente que se mida.
Aportes más recientes (González, 2001), han incluido un enfoque diferente para el cálculo
de la línea de influencia en el dominio de la frecuencia, un algoritmo dinámico que tiene en
cuenta la dinámica del puente y un algoritmo dinámico de sensor múltiple (MS- B WIM).
Pero se observó que el enfoque estático tiene limitaciones debido a la dependencia de las
ecuaciones que relacionan la carga aplicada a la deformación medida; por lo tanto las
ecuaciones sólo se pueden resolver para un número limitado de ejes.
González y O’Brien sugieren que esta limitación se puede superar generalmente mediante
el uso de una gran cantidad de sensores y la aplicación de una técnica de optimización
(González 2001), (González y O’Brien, 2002).
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 23
2.2.1 ALGORITMO GENETICO EN MATLAB
Matlab es una herramienta computacional sofisticada la cual incluye dentro de su base gran
variedad de paquetes de optimización (Moler, 2010), esta herramienta (“Toolbox”) se
conoce en el programa como algoritmo genético (ga). El algoritmo genético es una
metodología desarrollada para dar solución a problemas donde es necesario realizar
procesos de optimización cuyas funciones objetivo tienen muchos mínimos locales o se
desconoce la forma de la función objetivo.
Modifica repetidamente una población de soluciones individuales. En cada paso, selecciona
individuos aleatoriamente de la población (padres), siguiendo reglas previamente
establecidas dentro del algoritmo y los emplea para generar una nueva población (hijos), y
así sucesivamente para crear nuevas generaciones de resultados. En cada generación que
produce el algoritmo la población va evolucionando hacia una solución óptima. Se puede
emplear un algoritmo genético para resolver una variedad de problemas de optimización
que no son muy adecuadas para los algoritmos clásicos de optimización, incluyendo
problemas en los que la función objetivo es discontinua, no diferenciable, estocástico o una
no – linealidad alta (Inc, 2007).
El algoritmo emplea tres tipos principales de normas en cada paso para crear la próxima
generación de la población actual (Inc, 2007):
- Reglas de selección empleadas para elegir los individuos, los cuales se conocen
como “padres”.
- Normas aleatorias de combinación entre los “padres” de la población, con el fin de
dar origen a una nueva generación de datos “hijos”.
- Reglas de mutación donde un gen del hijo se extrae y se coloca un nuevo gen.
El algoritmo genético difiere de una optimización clásica (Inc, 2007):
- En una optimización clásica se genera un único punto para cada iteración y la
secuencia de puntos se aproxima a una solución óptima; mientras que el algoritmo
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 24
genético genera una población de puntos para cada iteración y el mejor punto en la
población se aproxima a una solución óptima, no siempre se asegura que el
algoritmo encuentre el mínimo global de la función.
- En una optimización clásica se selecciona el siguiente punto de la secuencia
mediante un cálculo determinístico, mientras que el algoritmo genético selecciona la
siguiente población combinando las características de los individuos reproduciendo
o mutando los genes de los padres, de esta forma realiza una búsqueda en varios
puntos de la función simultáneamente y determinando probabilísticamente cuales
son las características que se deben preservar para las siguientes generaciones.
Dentro del desarrollo del algoritmo genético es importante establecer los siguientes
parámetros:
Función Objetivo: La función objetivo a implementar corresponde a la minimización del
error cuadrático de la diferencia entre las frecuencias experimentales y el evaluado por el
algoritmo, esta función se conoce como Fitness Function. Para emplear las funciones
globales del Toolbox de Optimización, la función debe aceptar un vector cuya longitud es
el número de variables independientes, y debe devolver un escalar.
Número de variables: Es la longitud del vector de entrada de la función objetivo que
corresponde al número de variables que quiero evaluar en el problema. Cabe anotar que a
medida que el número de variables aumente la complejidad como la dimensionalidad del
problema está aumentando.
Opciones: Dentro del código del algoritmo genético se pueden crear las respectivas
limitaciones que presente el modelo.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 25
2.3 ÚLTIMOS DESARROLLOS Y APLICACIONES DEL SISTEMA BWIM
El uso de puentes como sistema de pesaje en movimiento (BWIM), fue desarrollado y
utilizado en la década de los 70 en los Estados Unidos. Moses en 1979 introdujo un
algoritmo genético para determinar la carga móvil sobre un puente instrumentado el cual se
basa en una minimización simple de la suma de los cuadrados de las diferencias entre las
mediciones en el puente y las deformaciones teóricas correspondientes. El sistema de
(BWIN) descrito por Moses fue el primero de su clase y en la actualidad está en uso en los
EE.UU. y otros países (Moses 1979).
En los años 80, se desarrolló el sistema B-WIM denominado AXWAY en Australia, el cual
se basó en el mismo concepto de la línea de influencia con un componente significativo
dinámico. Las líneas de influencia que se utilizan en prácticamente todos los sistemas B-
WIM, describen el comportamiento estático del puente bajo una carga móvil (Quilligan,
2003).
En 1986 se desarrolló este sistema con mayor eficacia usando alcantarillas, lo cual se
denominó CULWAY (Peter, 1986), este sistema fue concebido y probado por las
carreteras principales de Australia occidental. Una de las principales ventajas del uso de
alcantarillas es que estas no parecen vibrar cuando el vehículo pasa sobre ellas. Ellas están
totalmente restringidas y amortiguadas por el terraplén y el pavimento circundante.
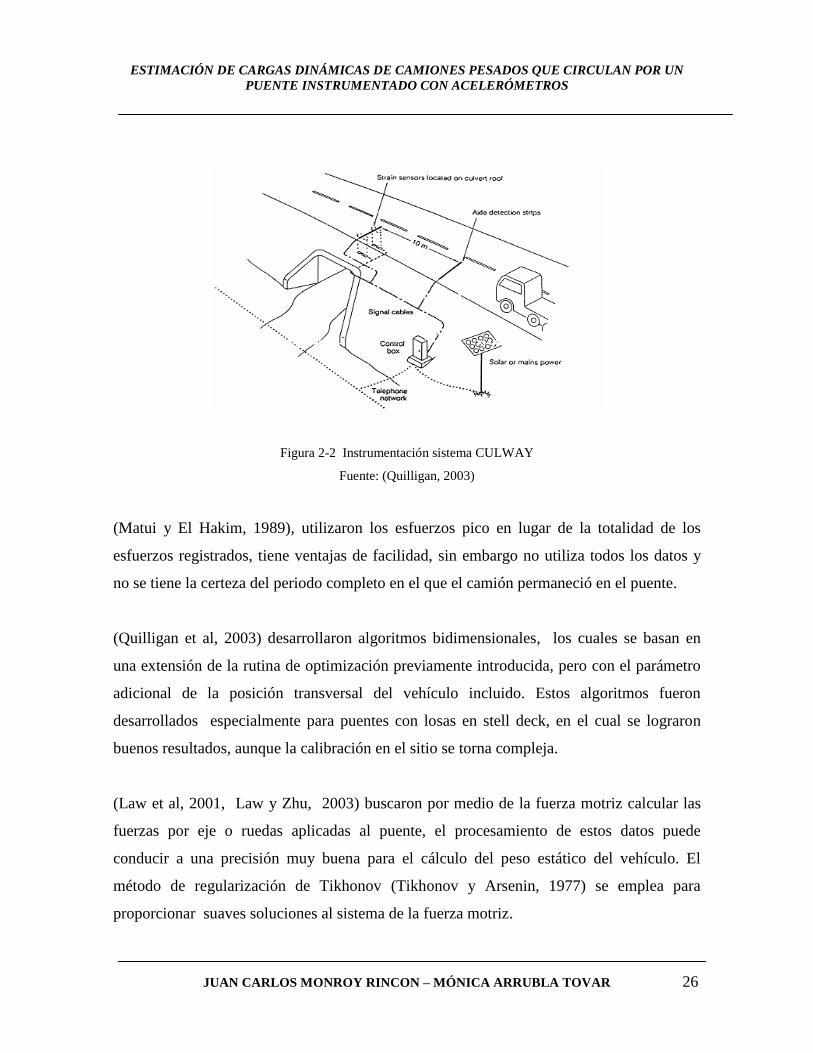
El sistema consta de dos detectores de ejes sobre la superficie de la carretera, uno se ubica a
9,8 m antes de la alcantarilla, y el otro a 0,2 m del centro de la alcantarilla. Cuando el
primer eje del vehículo acciona el primer detector de eje, el sistema mide la deformación de
referencia en la alcantarilla. Cada vez que se activa el detector de ejes el sistema vuelve a
medir la deformación, que es proporcional a la carga por eje. Actualmente, se encuentra
más de 200 sistemas en funcionamiento, sus principales características son su robustez,
bajo costo y precisión aceptable. En la figura 3.2 se muestra el esquema del sistema
CULWAY.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 26
Figura 2-2 Instrumentación sistema CULWAY
Fuente: (Quilligan, 2003)
(Matui y El Hakim, 1989), utilizaron los esfuerzos pico en lugar de la totalidad de los
esfuerzos registrados, tiene ventajas de facilidad, sin embargo no utiliza todos los datos y
no se tiene la certeza del periodo completo en el que el camión permaneció en el puente.
(Quilligan et al, 2003) desarrollaron algoritmos bidimensionales, los cuales se basan en
una extensión de la rutina de optimización previamente introducida, pero con el parámetro
adicional de la posición transversal del vehículo incluido. Estos algoritmos fueron
desarrollados especialmente para puentes con losas en stell deck, en el cual se lograron
buenos resultados, aunque la calibración en el sitio se torna compleja.
(Law et al, 2001, Law y Zhu, 2003) buscaron por medio de la fuerza motriz calcular las
fuerzas por eje o ruedas aplicadas al puente, el procesamiento de estos datos puede
conducir a una precisión muy buena para el cálculo del peso estático del vehículo. El
método de regularización de Tikhonov (Tikhonov y Arsenin, 1977) se emplea para
proporcionar suaves soluciones al sistema de la fuerza motriz.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 27
La teoría de la fuerza motriz se ha centrado en modelos unidimensionales para representar
la dinámica del puente.
(Zhu y Law, 2001, 2003) realizaron el modelo de un puente en el cual las fuerzas motrices
fueron idealizadas como un grupo de dos fuerzas en movimiento que representan dos ejes
individuales o un grupo de cuatro fuerzas en movimiento representando cada carga de la
rueda.
(González et al, 2008) resolvieron el problema de la fuerza motriz de primer orden
mediante la regularización de Tikhonov a un modelo de un puente de placa ortotrópica para
lo cual discretizan el puente mediante un modelo de elementos finitos. La solución del
problema se baso en una reducción de mínimos cuadrados entre la diferencia de las
deformaciones medidas y las obtenidas a través de formulación teórica.
(Rowley, 2008), desarrollo un algoritmo el cual valido mediante un modelo de elementos
finitos de un puente en tres dimensiones teniendo en cuenta la interacción que se presenta
entre el puente y el vehículo.
A continuación se presentan experiencias adelantadas en algunos países.
2.3.1 EXPERIENCIA EN ESTADOS UNIDOS
En los EE.UU. se han tenido experiencias con el uso del sistema BWIM, una de las más
recientes fue las pruebas de campo que se realizaron en un puente ubicado sobre la
autopista I-78 en el estado de Alabama, en esas pruebas se uso un algoritmo para la
identificación de cargas por eje de vehículos pesados en las carreteras. (Zhao & Uddin,
2010), los resultados obtenidos de la instrumentación del puente resultaron favorables,
dejando evidencia que la comparación entre la línea de influencia teórica calculada y la
obtenida con el algoritmo propuesto son bastantes similares, concluyendo que esta
metodología permite representar el comportamiento real del puente y proporciona un
registro de datos confiables para ser usados en el seguimiento de puentes existentes.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 28
2.3.2 EXPERIENCIA EN ESLOVENIA
En Eslovenia se utilizan 6 sistemas SiWIM para cubrir 30 sitios en la red principal de
carreteras y 5 localidades en las autopistas. (O’Brien et al., 2008).
(Zndaric et al, 2008), desarrollaron un método directo de medición del factor de
amplificación dinámica para todos los eventos de carga en un puente en Eslovenia. Los
resultados obtenidos del sistema SiWIM confirmaron la metodología desarrollada por el
mismo proyecto (O’Brien et al. 2009). Investigaciones adelantadas por otros autores, los
cuales mostraron que los valores del factor de amplificación disminuyen considerablemente
con el aumento del peso de los vehículos en el puente.
Como conclusión de estos estudios se obtuvo que el uso de un sistema B-WIM para la
medición directa del factor de amplificación dinámica pueda optimizar considerablemente
los resultados de la evaluación de un puente.
2.3.3 EXPERIENCIA EN JAPÓN
El primer sistema WIM en Japón fue implementado en la década de 1970 en una autopista.
El desarrollo y la instalación del sistema WIM se activó hasta la década de 1990. Hoy en
día, la construcción de la red de carreteras está casi terminada, y la sobrecarga de los
vehículos comerciales se ha convertido en uno de los temas importantes (O’Brien et al.,
2008). Sin embargo no fue hasta la década de los 80 que se dio inicio a la implementación
del sistema B-WIM en el Japón.
2.3.4 EXPERIENCIA EN COLOMBIA
El sistema B-WIM no se ha implementado oficialmente en Colombia, ni por INVIAS,
INCO, o algunas de las concesiones. Sin embargo, se han realizado diferentes
investigaciones iniciales por parte de la Pontificia Universidad Javeriana. Una de ellas fue

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 29
el estudio de un prototipo a escala del puente Puerto Salgar, ubicado en la vía Honda Rio
Ermitaño; constituyéndose en la primera experiencia nacional en este tema. El estudio
consistió en simulaciones numéricas y pruebas a nivel de laboratorio, para las simulaciones
se desarrollo un algoritmo genético, además se realizo la instrumentación del modelo como
se observa en la Figura 2-3. Los resultados obtenidos fueron la base para la implementación
de nuevos proyectos (Acevedo, A. et al., 2006).
Figura 2-3 Prototipo a escala del puente Puerto Salgar, con su respectivo sistema de instrumentación
Fuente:(Edgar Muñoz, Gómez, Núñez, & Florez, 2011)
Otro de los estudios, fue la instrumentación del puente Boquerón ubicado en la vía
Bogotá-Villavicencio (E. Muñoz, Gómez, Núñez, & Florez, 2011). Este estudio consistió
en la instrumentación del puente a cuatro (4) de las cinco vigas preesforzadas del puente, a
las que se les instalo los LVDTs, que permitieron medir los desplazamientos verticales, los
cuales están sincronizados con el sistema de medición del tráfico que consistió en la
instalación de dos (2) “Loop” inductivos y cuatro (4) piezoeléctricos en cada calzada (E.
Muñoz, Et al 2011). La Figura 2-4 muestra la instrumentación realizada en el puente.
Elementos instrumentados con
Strain gages, para determinar
fuerzas internas.
Sensores de contacto para
Determinar velocidad y separación
de los carros
Sensores de contacto para
Determinar velocidad y separación
de los carros
Elementos instrumentados con
Strain gages, para determinar
fuerzas internas.
Sensores de contacto para
Determinar velocidad y separación
de los carros
Sensores de contacto para
Determinar velocidad y separación
de los carros
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 30
Figura 2-4 Instalación de los LVDT que permiten medir deformaciones verticales por el paso del tráfico
sobre el puente
Fuente: (Edgar Muñoz et al., 2011)
Por medio del sistema implementado se logró determinar con una buena precisión, el peso
total en movimiento de cualquier tipo de camión que transita, por cada carril en función del
desplazamiento promedio de las cuatro vigas (E. Muñoz et al., 2011).
2.3.5 EXPERIENCIA EN MÉXICO
En el 2008 la Universidad Autónoma del Estado de México realizó un estudio experimental
en dos puentes, los cuales se instrumentaron con el propósito de medir la respuesta en ellos
debido a las cargas dinámicas aplicadas. Se colocaron acelerómetros en distintos puntos
longitudinalmente (en el centro, en el cuarto y en el tercio de la luz), uno de los puentes se
instrumentó con 7 acelerómetros y el otro con 5. Las pruebas se realizaron con vehículos
pasando a distintas velocidades y pasando solo un vehículo. El procedimiento para el
procesamiento de las señales registradas fue el siguiente:
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 31
Se eliminó el ruido de la señal mediante un filtro pasa-banda seleccionando adecuadamente
los límites, se integraron las aceleraciones obtenidas para obtener una estimación de las
velocidades, posteriormente se integran las velocidades filtradas para obtener una
estimación de los desplazamientos.
El estudio concluyo, que la amplificación dinámica de la carga viva en puentes, es un
problema complejo que depende de distintas variables, como son: las características
dinámicas del puente, las cuales dependen de su geometría, masa y propiedades de los
materiales y las características de la carga viva (peso y velocidad), así mismo, se apreció
una contribución importante de las condiciones mecánicas de los vehículos (suspensión y
amortiguamiento) (Valdés & De la Colina, 2013).
2.4 ANÁLISIS DE SEÑALES
Los conceptos de señales y sistemas aparecen en una variedad muy amplia de campos, las
ideas y técnicas asociadas con estos conceptos juegan un papel muy importante en áreas tan
diversas de la ciencia y tecnología como comunicaciones, aeronáutica y astronáutica,
diseño de circuitos, acústica, sismología, ingeniería biomédica, sistemas de generación y
distribución de energía, control de procesos químicos y procesamiento de voz. Las señales
son funciones de una o más variables independientes y contienen información acerca de la
naturaleza o comportamiento de algún fenómeno.
2.4.1 FILTROS
Un filtro digital es un sistema que dependiendo de las variaciones de las señales de entrada
en el tiempo y amplitud, ejecuta un procesamiento matemático sobre la señal; este
procedimiento se lleva a cabo generalmente mediante el uso de la Transformada de Fourier;
obteniéndose la señal de salida.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 32
Los filtros digitales tienen como entrada y salida una señal análoga o digital. La señal de
salida puede cambiar en amplitud, frecuencia o fase dependiendo de las características del
filtro digital.
El filtrado digital es parte del procesado de la señal digital. Se le da la denominación de
digital más por su funcionamiento interno que por su dependencia del tipo de señal a filtrar.
Se usa para mitigar o ampliar algunas frecuencias. El procesamiento interno y la entrada del
filtro son digitales, por lo que puede ser necesario una conversión análoga-digital o digital-
análoga, para el uso de filtros digitales con señales analógicas (Papoulis, 1985).
Existen varios tipos de filtros:
- Filtros pasa alto.
- Filtros pasa bajo.
- Filtros pasa banda.
2.4.1.1 FILTROS PASA ALTO
Un filtro paso alto es un tipo de filtro electrónico cuya respuesta en frecuencia atenúa las
componentes de baja frecuencia pero no las de alta, éstas incluso pueden amplificarse en
los filtros activos. La alta o baja frecuencia es un término relativo que dependerá del diseño
y de la aplicación (Papoulis, 1985).
2.4.1.2 FILTROS PASA BAJO
Un filtro pasa bajo corresponde a un filtro caracterizado por permitir el paso de las
frecuencias más bajas y atenuar las frecuencias más altas. El filtro requiere de dos
terminales de entrada y dos de salida, también denominada bipuerto, así todas las
frecuencias se pueden presentar a la entrada, pero a la salida solo estarán presentes las que
permita pasar el filtro.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 33
De la teoría se obtiene que los filtros están caracterizados por las Funciones de
Transferencia, así cualquier configuración de elementos activos o pasivos que consigan
cierta función de transferencia serán considerados como un filtro.
En particular la función de transferencia de un filtro pasa bajo de primer orden corresponde
a:
(2-1)
Donde la constante es sólo una ponderación correspondiente a la ganancia del filtro, y la
real importancia reside en la forma de la función de transferencia la cual determina el
comportamiento del filtro (Papoulis, 1985)
(2-2)
En la función de transferencia anterior corresponde a la frecuencia de corte propia del
filtro, aquel valor de frecuencia para el cual la amplitud de la señal de entrada se atenúa (3
dB). De forma análoga al caso de primer orden, los filtros de pasa bajo de mayor orden
también se caracterizan por su función de transferencia, por ejemplo la función de
transferencia de un filtro paso bajo de segundo orden corresponde a:
(2-3)
Donde es la frecuencia natural del filtro y es la relación de amortiguamiento de este
(Papoulis, 1985).
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 34
2.4.1.1 FILTROS PASA BANDA
Un filtro pasa banda es un tipo de filtro electrónico que deja pasar un determinado rango de
frecuencias de una señal y atenúa el paso del resto.
2.4.2 TRANSFORMADA DE FOURIER
Cualquier función periódica f(t) con periodo T, que sea continúa por tramos e integrable
sobre cualquier intervalo, puede representarse mediante la serie de Fourier exponencial
compleja:
(2-4)
La consistencia de la representación de una función periódica en forma de serie de Fourier
se basa en que dicha función queda definida mediante la especificación de los coeficientes c
de dicha serie. Pues bien, puede demostrarse así mismo que cualquier función f(t) no
periódica también puede representarse de un modo análogo de la forma:
(2-5)
Siendo esta expresión la representación de Fourier de una función no periódica, similar a la
serie de Fourier de la función periódica 2-4. F( ) recibe el nombre de Integral de Fourier
o Transformada de Fourier de la función f(t) y puede expresarse como:

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 35
En virtud de ello, cualquier función no periódica dada tiene dos modos equivalentes de
representación: en el dominio del tiempo f(t) y otro en el dominio de la frecuencia F . La
representación gráfica de F en función de la frecuencia angular se denomina espectro
de Magnitud de la función f(t) y permite describirla en el domino de la frecuencia, es decir
representa la composición de frecuencias de la superposición de diversas funciones simples,
de igual forma, que la representación de f(t) frente a z define dicha función en el dominio
del tiempo. La ecuación 2-4 permite transformar la función f(t), en el dominio del tiempo,
en su equivalente F , en el dominio de la frecuencia, (Hardy & Rogosinski, 1956).
2.4.3 ESPECTRO DE POTENCIA
El espectro de potencia (PS) se define como la Transformada de Fourier de la función de
autocorrelación.
(2-5)
Donde rx x (n), la función de autocorrelación, se define como
(2-6)
El PS permite determinar la distribución de la potencia de una señal a lo largo de un
intervalo de frecuencias. El Espectro de Potencia puede ser evaluado aplicando la
Transformada de Fourier sobre la señal entera; sin embargo, el promedio de espectros se
(2-4)
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 36
emplea, particularmente cuando la forma de onda disponible (señal truncada) es sólo una
muestra de una señal de mayor longitud, caso bastante común en el análisis de bioseñales.
En estas situaciones la evaluación del Espectro de Potencia se convierte en un proceso de
estimación que contribuye a mejorar las propiedades estadísticas de los resultados.
Cuando el Espectro de Potencia se calcula vía Transformada de Fourier y posteriormente se
promedia, se conoce como periodograma, (Echeverry, Guarnizo Lemus, & Orozco G.,
2007)
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 37
3. METODOLOGÍA
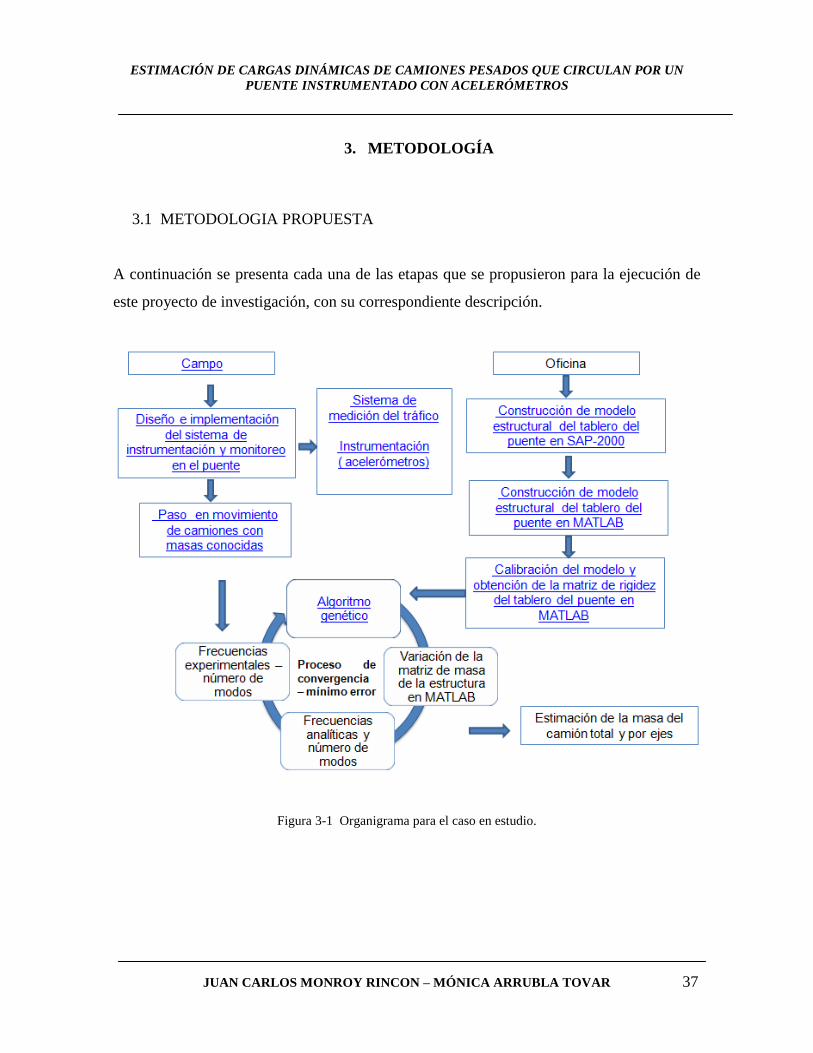
3.1 METODOLOGIA PROPUESTA
A continuación se presenta cada una de las etapas que se propusieron para la ejecución de
este proyecto de investigación, con su correspondiente descripción.
Figura 3-1 Organigrama para el caso en estudio.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 38
a. Recopilación de información existente
Consiste en recopilar y evaluar la información técnica existente del puente seleccionado
(Puente Guamo vía Bogotá - Villavicencio), por intermedio del Instituto Nacional de Vías y
las empresas consultoras relacionadas. Incluye planos de diseño, construcción o
rehabilitación, información histórica y actual del tráfico, estudios anteriores de
rehabilitación, y el levantamiento geométrico detallado de la superestructura.
b. Instalación e Instrumentación del sistema electrónico
La instrumentación del puente consiste en dos tipos de instalación: Sistema de tráfico y
acelerómetros, el sistema de tráfico consiste en la instalación de los cables piezoeléctricos
los cuales permitirán suministrar los datos de velocidad y distancia entre ejes de los
camiones que circulan por dicho puente. los acelerómetros se ubican en un costado a lo
largo del carril a intervenir con la respectiva tarjeta de adquisición y computador, para la
toma de registros de aceleración que sirven para la estimación de las frecuencias verticales
del tablero del puente.
c. Desarrollo del modelo estructural
Para esta etapa se empleará el programa estructural SAP 2000 o similar, con el cual se
construirá el modelo de la superestructura del puente tipo parrilla o elementos finitos.
d. Desarrollo y calibración del modelo estructural
Para la calibración del modelo estructural del puente seleccionado se realizan pruebas con
camiones (C2, C3, C-2 S-2, C-3 S-3) circulando sobre el puente instrumentado a distintas
velocidades, a los cuales se les conoce su peso y geometría.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 39
e. Desarrollo y validación del algoritmo genético
Consiste en implementar un algoritmo genético para la determinación de las cargas
dinámicas que circulan sobre el puente seleccionado, considerándolo inicialmente como un
problema inverso, basados en los siguientes parámetros con los cuales se realiza su
validación: Concurrencia entre las frecuencias verticales medidas con respecto a las
obtenidas analíticamente del modelo estructural calibrado. De esta forma se estima el peso
del camión que produce las frecuencias verticales medidas.
f. Comparaciones de las cargas obtenidas respecto a las cargas de Diseño C-40-95
De acuerdo con las cargas que obtendremos como resultado del desarrollo del algoritmo
genético, se compararan dichas cargas, con las establecidas en el Código Colombiano de
Diseño Sísmico de Puentes, y de esta forma determinar la confiabilidad de estimar la carga
viva que circula sobre el puente.
3.2 METODOLOGIA APLICADA
A continuación se presenta cada una de las etapas que se realizaron para la ejecución de
este proyecto de investigación, el cual incluyo dos fases esenciales, fase de campo y fase de
oficina las cuales se realizaron paralelamente durante el desarrollo del proyecto.
3.2.1 RECOPILACIÓN DE INFORMACIÓN EXISTENTE
Consistió en recopilar y evaluar toda la información técnica existente del puente Guamo vía
Bogotá - Villavicencio, dicho puente fue seleccionado por cumplir con los requisitos
necesarios para implementar el sistema de pesaje en movimiento; ser una estructura de una
sola luz, localizado en vía principal y donde no exista curva horizontal. El cual fue
aprobado por la concesión COVIANDES.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 40
3.2.2 CARACTERISTICAS GENERALES DEL PUENTE GUAMO
3.2.2.1 UBICACIÓN
Se encuentra situado en el oriente del Departamento de Cundinamarca municipio de
Cáqueza, sobre la cordillera oriental de Colombia; limita con los municipios de Fosca, Une,
Chipaque, Ubaque y Quetame. Se localiza en la abscisa K22+990 (Bilpor (2005), INVIAS
(2005) y COVIANDES (2005)) en la vía Bogotá – Villavicencio. Ver Figura 3-2.
Localización de Cáqueza en
Colombia.
Localización de Cáqueza en
Cundinamarca
Figura 3-2 Localización de la zona
Fuente: www.caqueza.cundinamarca.gov.co
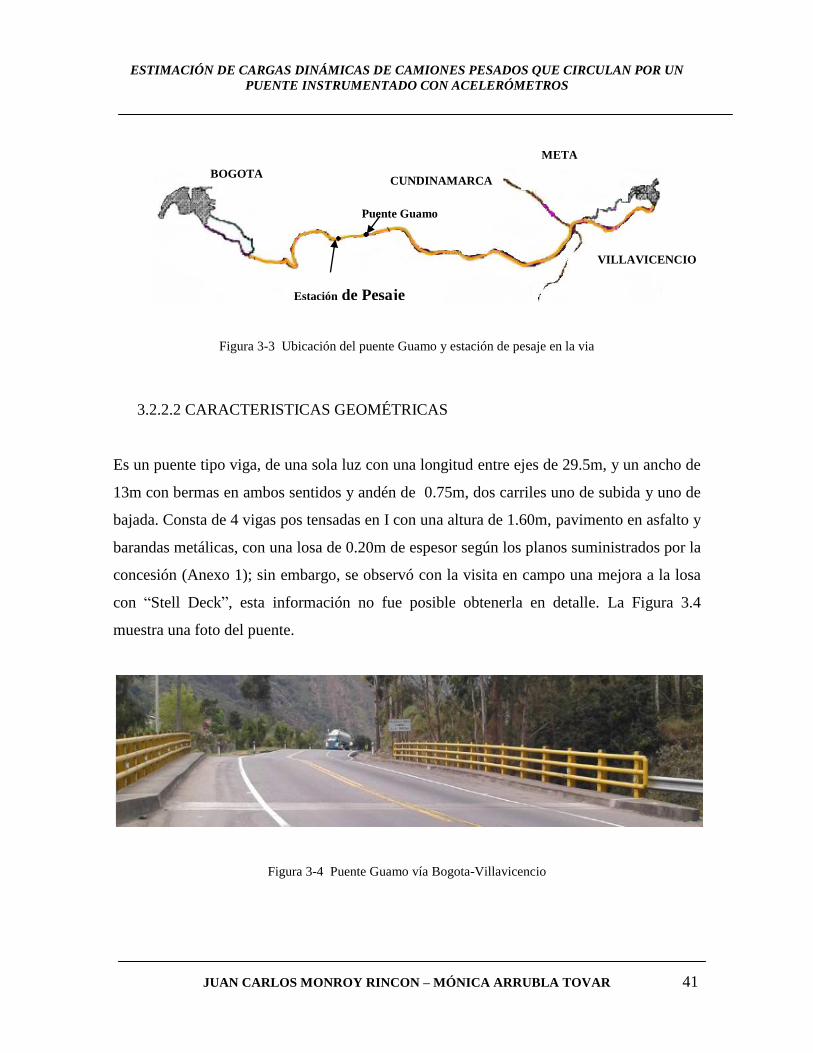
Este puente pertenece a la Concesión de COVIANDES S.A y fue seleccionado para
nuestra investigación debido a que a pocos metros está ubicada la Estación de pesaje Alto
de la cruz (PR 22+400), además, de cumplir con ser una estructura de una sola luz, sin
curva horizontal. La Figura 3-3 muestra un esquema con la ubicación del puente.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 41
Figura 3-3 Ubicación del puente Guamo y estación de pesaje en la via
3.2.2.2 CARACTERISTICAS GEOMÉTRICAS
Es un puente tipo viga, de una sola luz con una longitud entre ejes de 29.5m, y un ancho de
13m con bermas en ambos sentidos y andén de 0.75m, dos carriles uno de subida y uno de
bajada. Consta de 4 vigas pos tensadas en I con una altura de 1.60m, pavimento en asfalto y
barandas metálicas, con una losa de 0.20m de espesor según los planos suministrados por la
concesión (Anexo 1); sin embargo, se observó con la visita en campo una mejora a la losa
con “Stell Deck”, esta información no fue posible obtenerla en detalle. La Figura 3.4
muestra una foto del puente.
Figura 3-4 Puente Guamo vía Bogota-Villavicencio
BOGOTA CUNDINAMARCA
META
VILLAVICENCIO
Puente Guamo
Estación de Pesaje
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 42
3.3 FASE DE CAMPO
A continuación se detallan las actividades adelantadas en las visitas realizadas al puente.
3.3.1 DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE INSTRUMENTACIÓN
DEL PUENTE
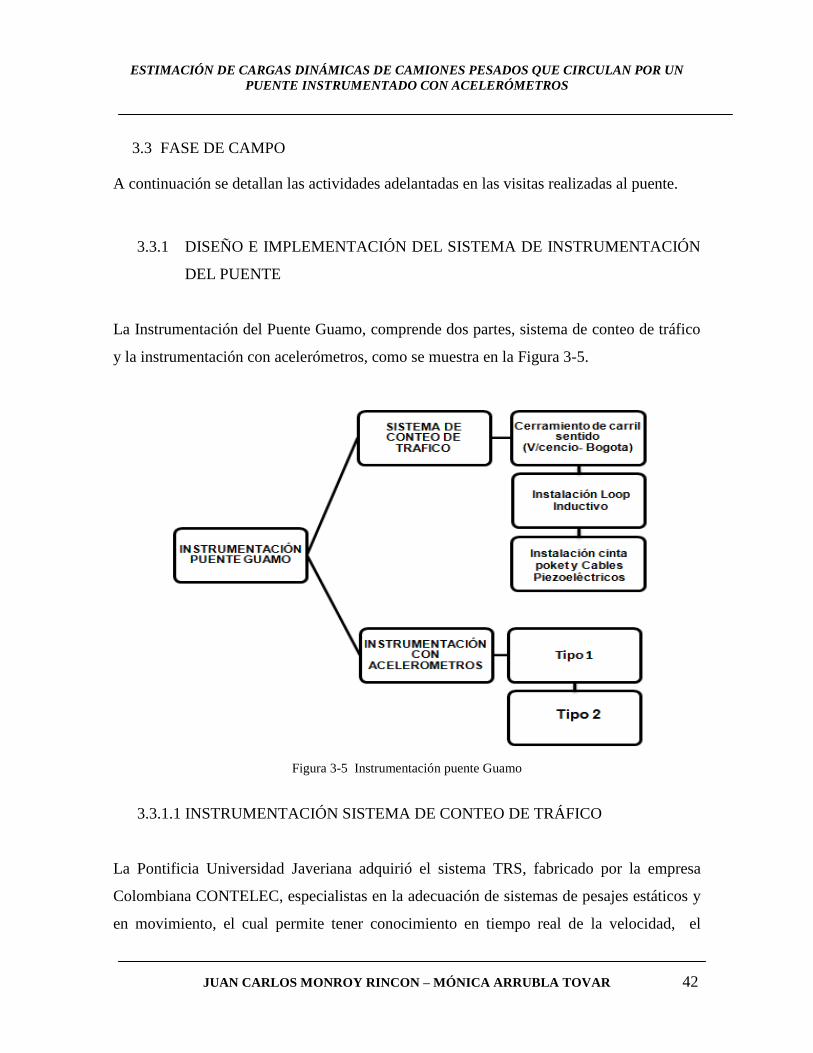
La Instrumentación del Puente Guamo, comprende dos partes, sistema de conteo de tráfico
y la instrumentación con acelerómetros, como se muestra en la Figura 3-5.
Figura 3-5 Instrumentación puente Guamo
3.3.1.1 INSTRUMENTACIÓN SISTEMA DE CONTEO DE TRÁFICO
La Pontificia Universidad Javeriana adquirió el sistema TRS, fabricado por la empresa
Colombiana CONTELEC, especialistas en la adecuación de sistemas de pesajes estáticos y
en movimiento, el cual permite tener conocimiento en tiempo real de la velocidad, el

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 43
número de ejes y la distancia entre ejes de los diferentes tipos de vehículos que circulan por
el carril instrumentado.
Materiales
En la instrumentación se utilizaron dos (2) cables piezo eléctricos, ocho (8) metros de cinta
poket, 30 metros de cable Loop, dos (2) frascos de sellante Loop sikaflex 1a, y el equipo
de conteo de tráfico el cual consiste en una fuente de voltaje regulada de 12V 3 Amp, (2)
dos tarjetas interface para detección del Loop, una (1) tarjeta interface para detección de 4
sensores Piezoeléctricos, una (1) tarjeta interface digital con puerto de comunicaciones, una
(1) caja de conexiones con borneras, conectores y protección AC y una (1) UPS de 750 VA
regulada, adicionalmente viene con un software de captura y administración de
información. (Ver figura 3-6).
(a) Cables Piezoeléctricos (b) Cinta poket (c) Loop inductivo
(d) Sikaflex 1a (e) Computador Portátil (f) Sistema TRS
Figura 3-6 Materiales utilizados – Sistema de conteo de trafico (a) Cables Piezoelectéctricos, (b) Cinta poket,
(c) Loop inductivo, (d) Sikaflex 1a, (e) Computador Portatil, (f) Sistema TRS
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 44
Procedimiento de la Instalación del Sistema de Conteo de Tráfico
La empresa CONTELEC, fue la encargada de realizar los cortes del pavimento e instalar
(1) un loop inductivo y (2) dos cables piezoeléctricos tal como se describe a continuación.
a. Cerramiento del carril a intervenir (Sentido Bogotá – Villavicencio)
La Concesión COVIANDES S.A, fue la encargada de suministrar lo requerido para el
cierre del carril, dispuso la señalización, el personal capacitado y la iluminación.
Para evitar traumatismos en la vía, teniendo en cuenta que es una carretera principal, el
cierre del carril se realizó en la noche durante 6 horas. Iniciando el cerramiento a partir de
las (10 pm) diez de la noche del día 22 de febrero de 2012, hasta las (4 am) cuatro de la
mañana del día 23 de febrero de 2012, tiempo en el cual se llevó a cabo el procedimiento,
(ver Figura 3-7)
Figura 3-7 Señalización utilizada
b. Corte del pavimento - carril a intervenir (Sentido Bogotá – Villavicencio)
Inicialmente se realizó la demarcación de la vía con tiza, dibujando un polígono con (8)
ocho lados, cuyas dimensiones fueron 2.10x2.10m, se realiza en forma de polígono para
que el loop inductivo tenga más agarre y no se desprenda fácilmente.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 45
Para que la demarcación sea muy precisa se sitúa en cada una de las líneas del polígono un
alambre y con pintura se repasa, luego se retira dicho alambre quedando perfectamente
marcado el paso que debe seguir la cortadora, (ver Figura 3-8)
Figura 3-8 Demarcación del carril
La cortadora sigue la marcación y debe ir a una profundidad de 5cm, esta profundidad se
verifico con un clavo, la medida debe ser muy precisa.
Finalmente se realiza la limpieza del carril, aplicando abundante agua hasta que deje de
salir el polvillo y se seca, es importante que la superficie quede muy seca, como se muestra
en la Figura 3-9.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 46
Figura 3-9 Corte y limpieza del pavimento
c. Instalación Loop Inductivo
El Loop se introduce en la abertura pasándolo varias veces, finalmente se instala un
aislante de humedad y se realiza el sellado con sikaflex 1a (ver Figura 3-10)
(a) Instalación Loop (b) Cinta protectora
(c) Aislante de humedad (d) Sellado del corte
Figura 3-10 Instalación del loop y sellado del carril (a) Instalación Loop, (b) Cinta protectora, (c) Aislante de
humedad, (d) Sellado de corte
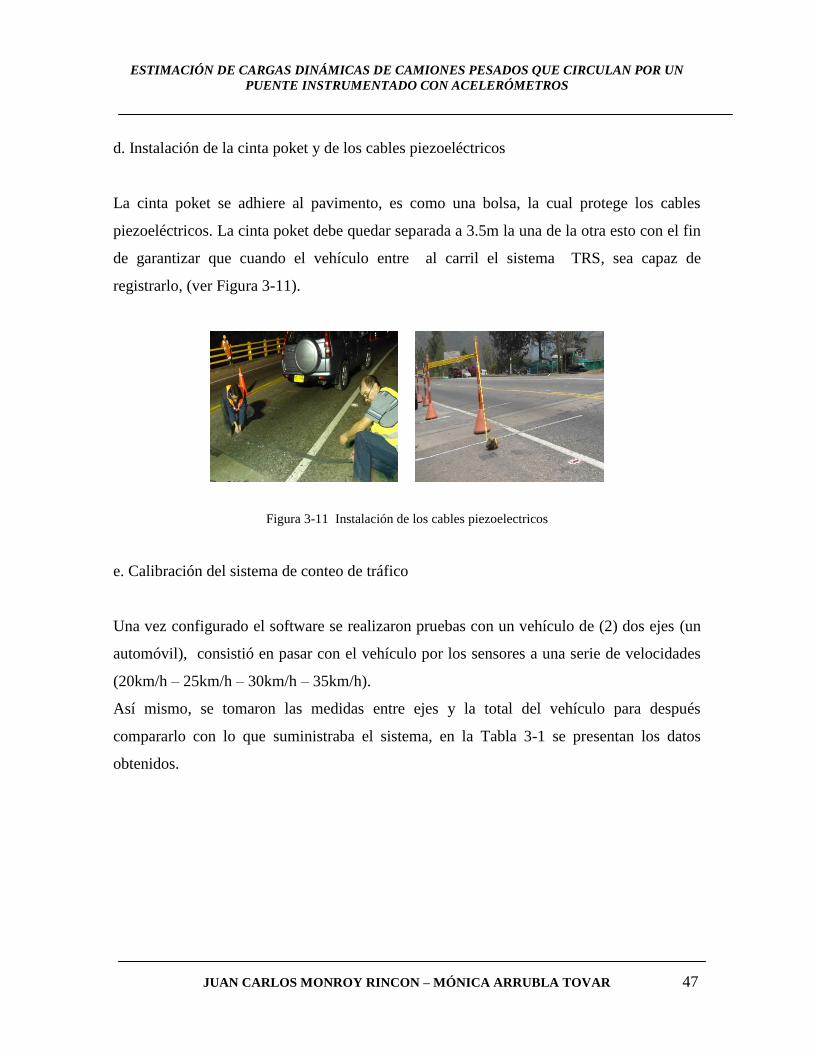
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 47
d. Instalación de la cinta poket y de los cables piezoeléctricos
La cinta poket se adhiere al pavimento, es como una bolsa, la cual protege los cables
piezoeléctricos. La cinta poket debe quedar separada a 3.5m la una de la otra esto con el fin
de garantizar que cuando el vehículo entre al carril el sistema TRS, sea capaz de
registrarlo, (ver Figura 3-11).
Figura 3-11 Instalación de los cables piezoelectricos
e. Calibración del sistema de conteo de tráfico
Una vez configurado el software se realizaron pruebas con un vehículo de (2) dos ejes (un
automóvil), consistió en pasar con el vehículo por los sensores a una serie de velocidades
(20km/h – 25km/h – 30km/h – 35km/h).
Así mismo, se tomaron las medidas entre ejes y la total del vehículo para después
compararlo con lo que suministraba el sistema, en la Tabla 3-1 se presentan los datos
obtenidos.
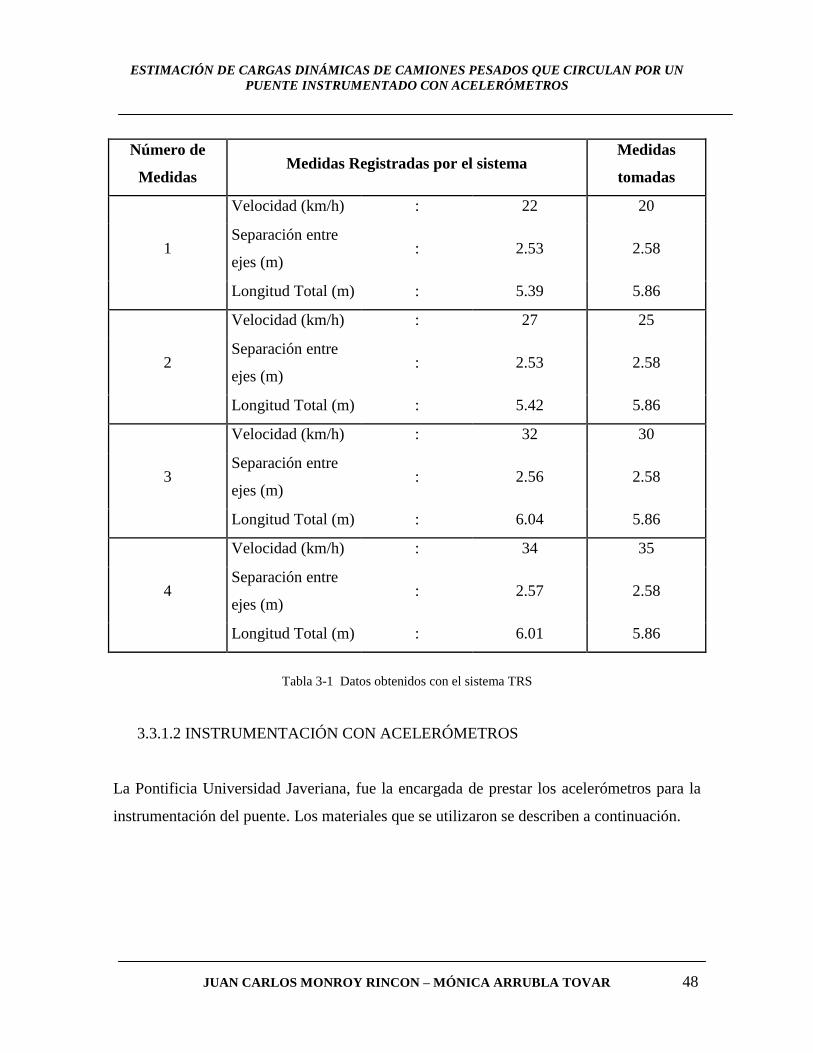
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 48
Número de
Medidas Medidas Registradas por el sistema
Medidas
tomadas
1
Velocidad (km/h) : 22 20
Separación entre
ejes (m) : 2.53 2.58
Longitud Total (m) : 5.39 5.86
2
Velocidad (km/h) : 27 25
Separación entre
ejes (m) : 2.53 2.58
Longitud Total (m) : 5.42 5.86
3
Velocidad (km/h) : 32 30
Separación entre
ejes (m) : 2.56 2.58
Longitud Total (m) : 6.04 5.86
4
Velocidad (km/h) : 34 35
Separación entre
ejes (m) : 2.57 2.58
Longitud Total (m) : 6.01 5.86
Tabla 3-1 Datos obtenidos con el sistema TRS
3.3.1.2 INSTRUMENTACIÓN CON ACELERÓMETROS
La Pontificia Universidad Javeriana, fue la encargada de prestar los acelerómetros para la
instrumentación del puente. Los materiales que se utilizaron se describen a continuación.
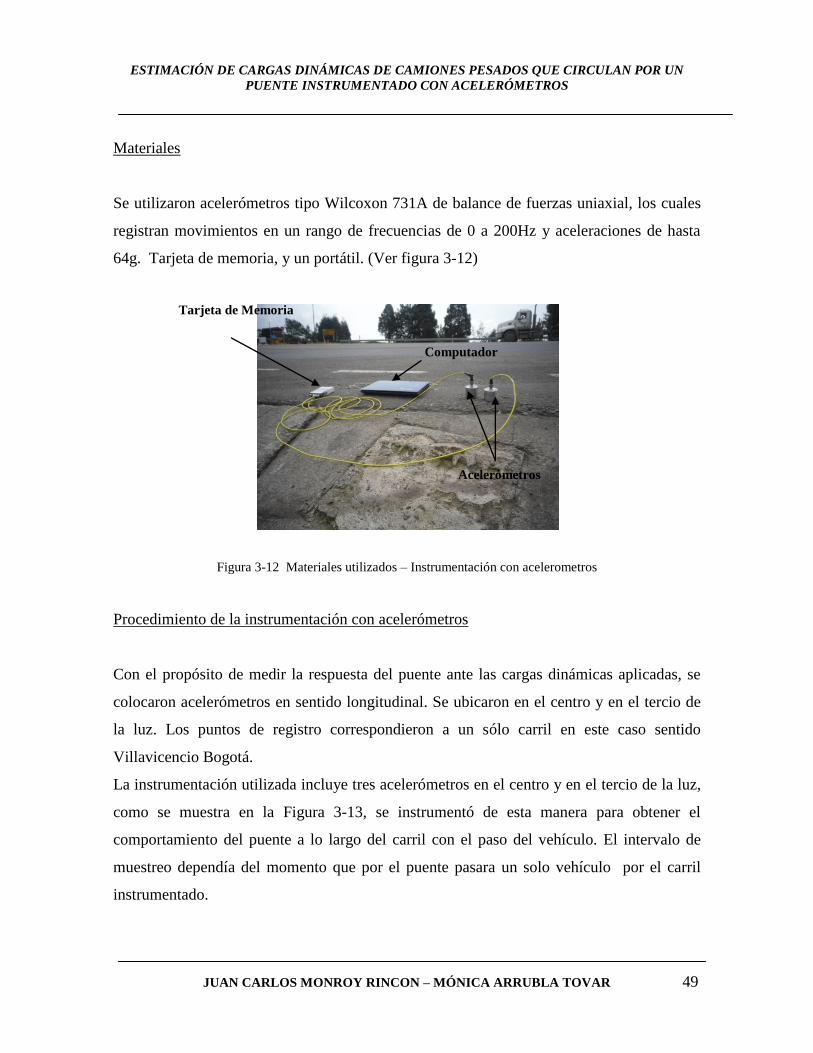
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 49
Materiales
Se utilizaron acelerómetros tipo Wilcoxon 731A de balance de fuerzas uniaxial, los cuales
registran movimientos en un rango de frecuencias de 0 a 200Hz y aceleraciones de hasta
64g. Tarjeta de memoria, y un portátil. (Ver figura 3-12)
Figura 3-12 Materiales utilizados – Instrumentación con acelerometros
Procedimiento de la instrumentación con acelerómetros
Con el propósito de medir la respuesta del puente ante las cargas dinámicas aplicadas, se
colocaron acelerómetros en sentido longitudinal. Se ubicaron en el centro y en el tercio de
la luz. Los puntos de registro correspondieron a un sólo carril en este caso sentido
Villavicencio Bogotá.
La instrumentación utilizada incluye tres acelerómetros en el centro y en el tercio de la luz,
como se muestra en la Figura 3-13, se instrumentó de esta manera para obtener el
comportamiento del puente a lo largo del carril con el paso del vehículo. El intervalo de
muestreo dependía del momento que por el puente pasara un solo vehículo por el carril
instrumentado.
Tarjeta de Memoria
Computador
Acelerómetros

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 50
Figura 3-13 Instrumentación utilizada
3.3.2 ESTUDIO EXPERIMENTAL
3.3.2.1 CONDICIONES Y LIMITACIONES DEL ESTUDIO
Debido a limitaciones económicas solo se instrumentó un carril, el sentido Villavicencio –
Bogotá, esta selección dependió de un análisis preliminar que se realizó en el puente, en el
cual se determinó que este sentido ofrecía más camiones cargados que el otro, además, nos
favorecía que la báscula estuviera después del puente para tomar exclusivamente el registro
del peso del camión al cual se le había obtenido la señal.
Para el buen funcionamiento del sistema de conteo de tráfico, se presentan las siguientes
limitaciones:
Pisar los dos sensores piezoeléctricos con todos sus ejes y también deben ser bien
identificados por el sensor Loop. Con el simple hecho de que un eje no pise uno de
los sensores la clasificación será fallida.
El sistema se basa en los tiempos entre pisadas de los ejes a los sensores
piezoeléctricos, con base en estos tiempos se hace todos los cálculos para dar la
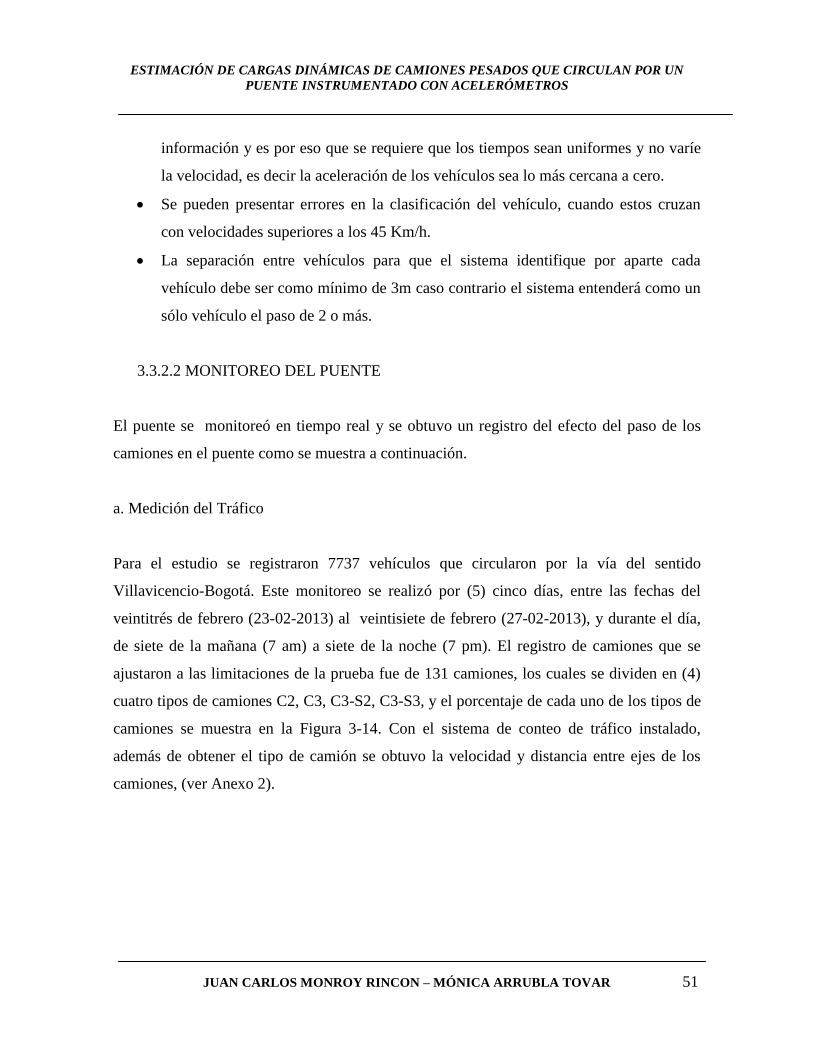
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 51
información y es por eso que se requiere que los tiempos sean uniformes y no varíe
la velocidad, es decir la aceleración de los vehículos sea lo más cercana a cero.
Se pueden presentar errores en la clasificación del vehículo, cuando estos cruzan
con velocidades superiores a los 45 Km/h.
La separación entre vehículos para que el sistema identifique por aparte cada
vehículo debe ser como mínimo de 3m caso contrario el sistema entenderá como un
sólo vehículo el paso de 2 o más.
3.3.2.2 MONITOREO DEL PUENTE
El puente se monitoreó en tiempo real y se obtuvo un registro del efecto del paso de los
camiones en el puente como se muestra a continuación.
a. Medición del Tráfico
Para el estudio se registraron 7737 vehículos que circularon por la vía del sentido
Villavicencio-Bogotá. Este monitoreo se realizó por (5) cinco días, entre las fechas del
veintitrés de febrero (23-02-2013) al veintisiete de febrero (27-02-2013), y durante el día,
de siete de la mañana (7 am) a siete de la noche (7 pm). El registro de camiones que se
ajustaron a las limitaciones de la prueba fue de 131 camiones, los cuales se dividen en (4)
cuatro tipos de camiones C2, C3, C3-S2, C3-S3, y el porcentaje de cada uno de los tipos de
camiones se muestra en la Figura 3-14. Con el sistema de conteo de tráfico instalado,
además de obtener el tipo de camión se obtuvo la velocidad y distancia entre ejes de los
camiones, (ver Anexo 2).
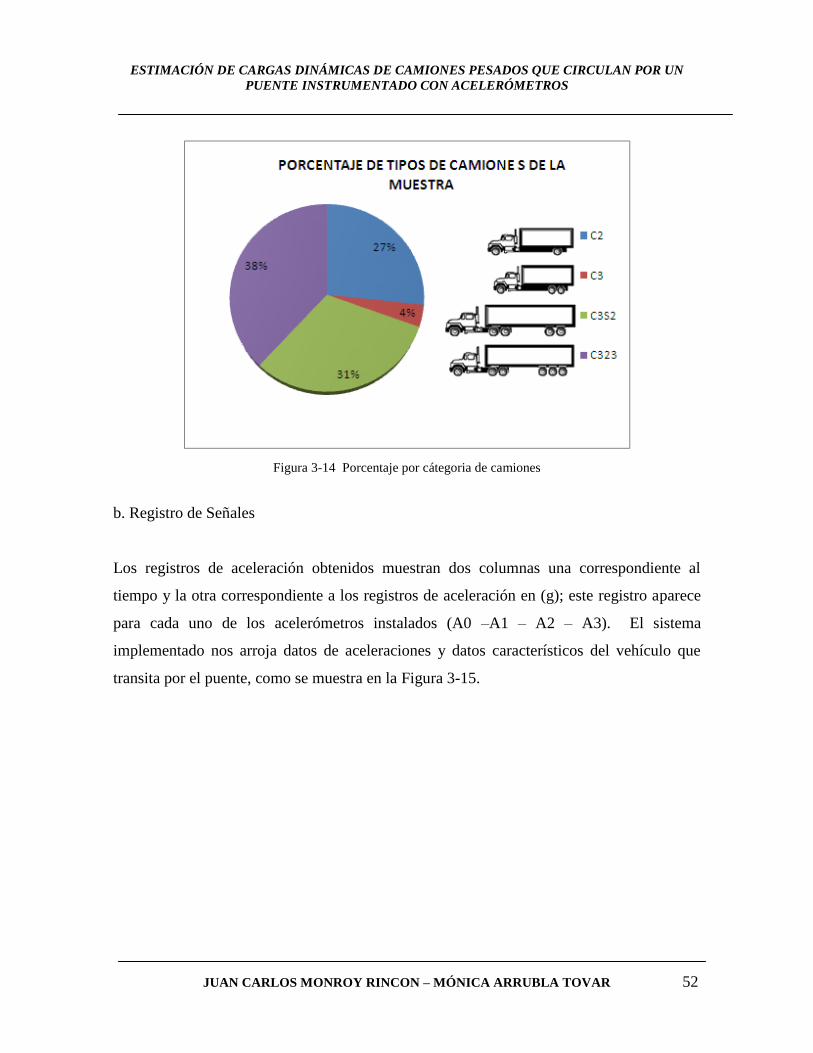
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 52
Figura 3-14 Porcentaje por cátegoria de camiones
b. Registro de Señales
Los registros de aceleración obtenidos muestran dos columnas una correspondiente al
tiempo y la otra correspondiente a los registros de aceleración en (g); este registro aparece
para cada uno de los acelerómetros instalados (A0 –A1 – A2 – A3). El sistema
implementado nos arroja datos de aceleraciones y datos característicos del vehículo que
transita por el puente, como se muestra en la Figura 3-15.
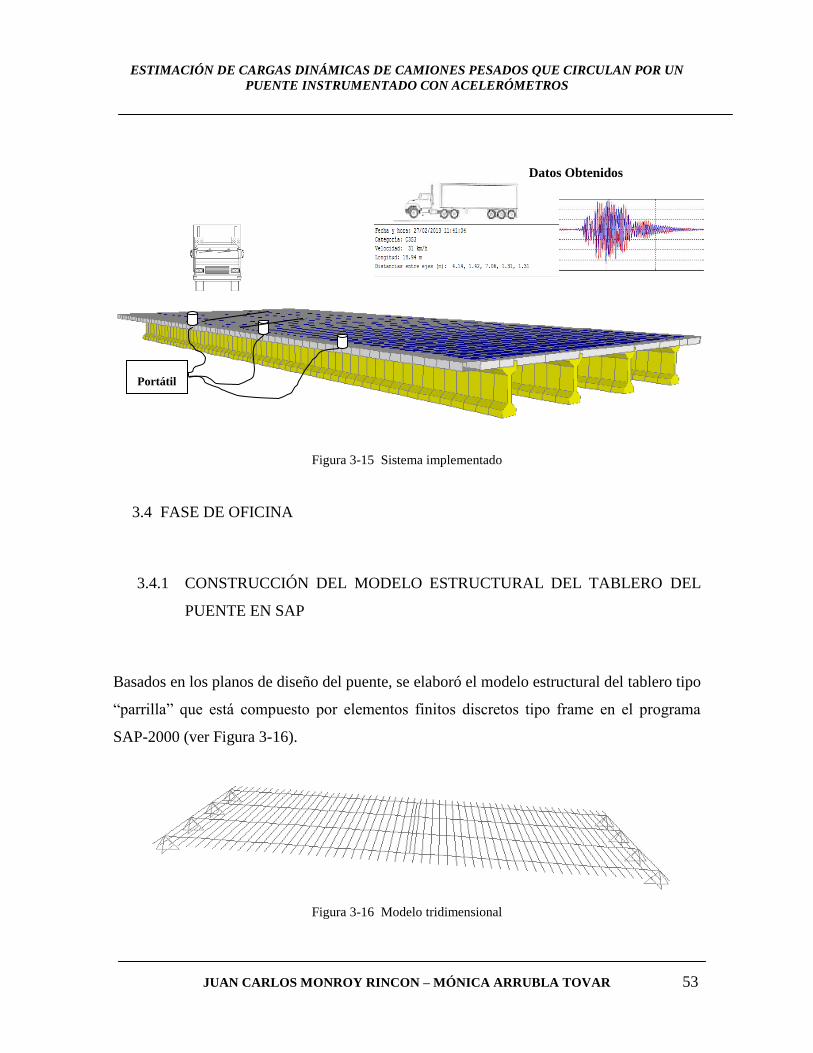
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 53
Figura 3-15 Sistema implementado
3.4 FASE DE OFICINA
3.4.1 CONSTRUCCIÓN DEL MODELO ESTRUCTURAL DEL TABLERO DEL
PUENTE EN SAP
Basados en los planos de diseño del puente, se elaboró el modelo estructural del tablero tipo
“parrilla” que está compuesto por elementos finitos discretos tipo frame en el programa
SAP-2000 (ver Figura 3-16).
Figura 3-16 Modelo tridimensional
Portátil
Datos Obtenidos
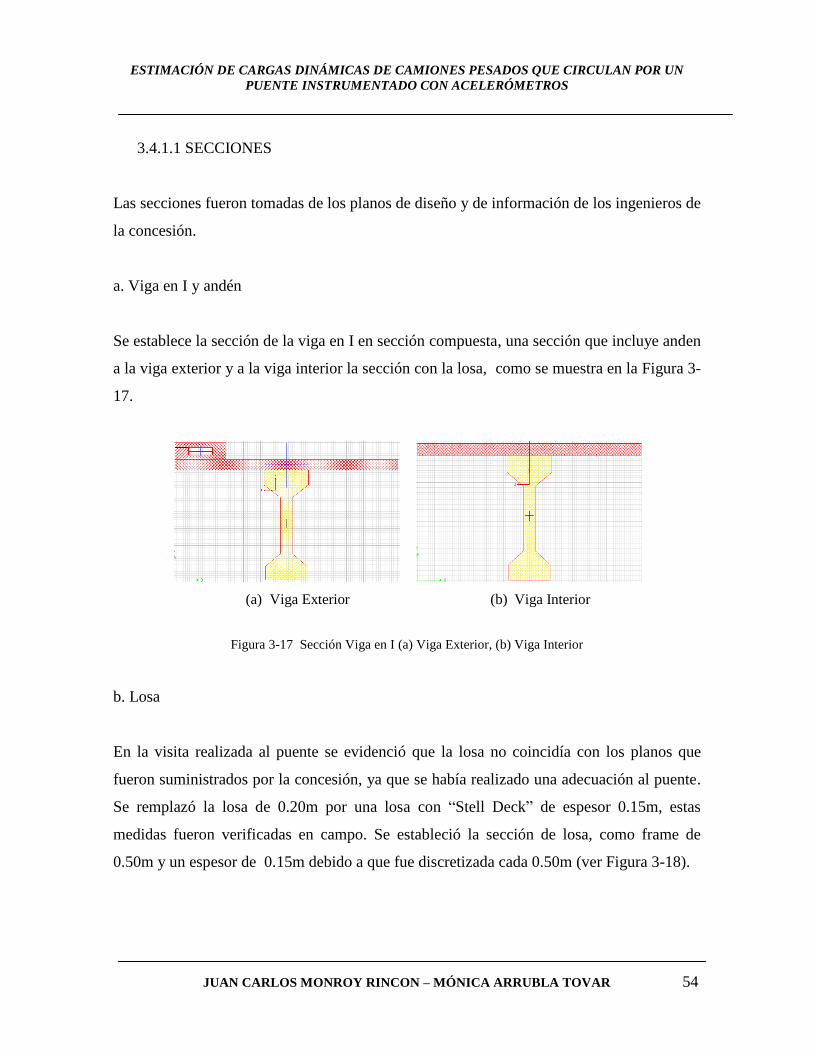
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 54
3.4.1.1 SECCIONES
Las secciones fueron tomadas de los planos de diseño y de información de los ingenieros de
la concesión.
a. Viga en I y andén
Se establece la sección de la viga en I en sección compuesta, una sección que incluye anden
a la viga exterior y a la viga interior la sección con la losa, como se muestra en la Figura 3-
17.
(a) Viga Exterior (b) Viga Interior
Figura 3-17 Sección Viga en I (a) Viga Exterior, (b) Viga Interior
b. Losa
En la visita realizada al puente se evidenció que la losa no coincidía con los planos que
fueron suministrados por la concesión, ya que se había realizado una adecuación al puente.
Se remplazó la losa de 0.20m por una losa con “Stell Deck” de espesor 0.15m, estas
medidas fueron verificadas en campo. Se estableció la sección de losa, como frame de
0.50m y un espesor de 0.15m debido a que fue discretizada cada 0.50m (ver Figura 3-18).

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 55
Figura 3-18 Sección de la losa
c. Riostra
La riostra empleada se baso en los lineamientos que se indicaban en los planos de diseño,
cuyas medidas son de 4.40m de altura por un ancho de 0.25m. (ver Figura 3-19)
Figura 3-19 Sección de la Riostra
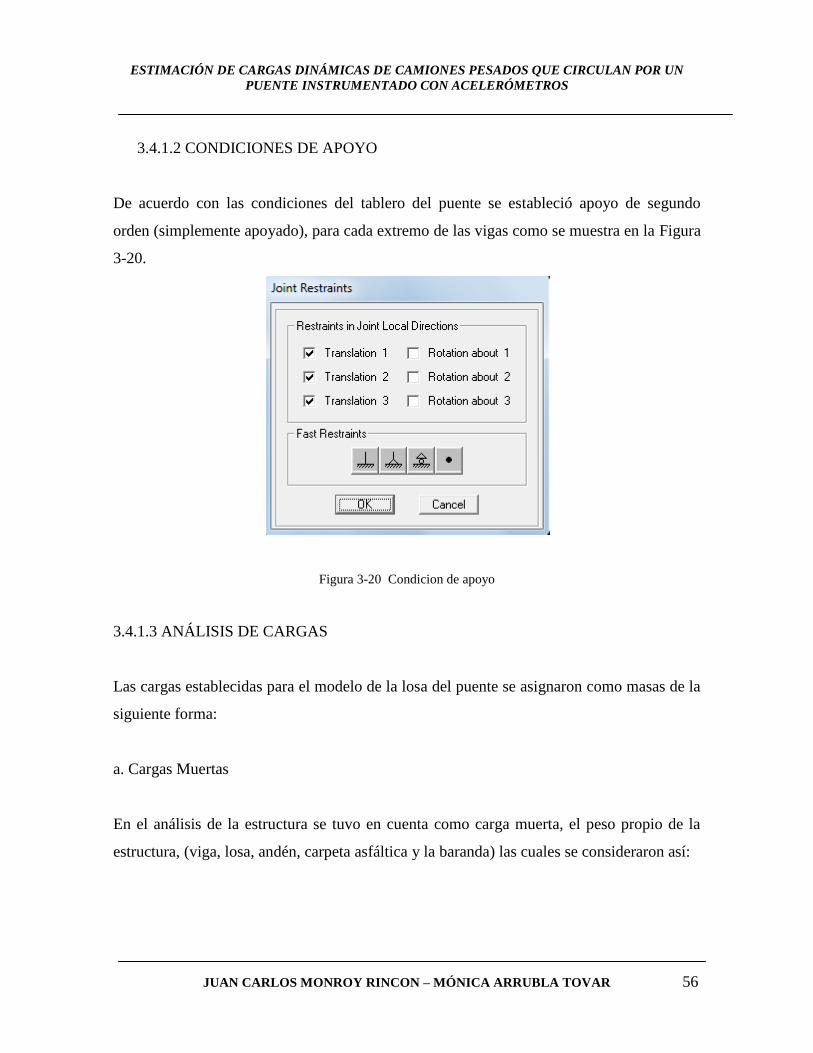
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 56
3.4.1.2 CONDICIONES DE APOYO
De acuerdo con las condiciones del tablero del puente se estableció apoyo de segundo
orden (simplemente apoyado), para cada extremo de las vigas como se muestra en la Figura
3-20.
Figura 3-20 Condicion de apoyo
3.4.1.3 ANÁLISIS DE CARGAS
Las cargas establecidas para el modelo de la losa del puente se asignaron como masas de la
siguiente forma:
a. Cargas Muertas
En el análisis de la estructura se tuvo en cuenta como carga muerta, el peso propio de la
estructura, (viga, losa, andén, carpeta asfáltica y la baranda) las cuales se consideraron así:

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 57
Carpeta asfáltica:
El espesor de la carpeta asfáltica se obtuvo de las medidas que se realizaron en campo e=
0.04m, y se cargó a las vigas por área aferente así:
Vigas Exteriores Vigas Interiores
:
:
epavimento : 0.04m epavimento : 0.04m
:
:
Longitud aferente : 2.50m Longitud aferente : 3.25m
Peso del Pavimento :
Peso del Pavimento :
Estas cargas se asignaron como carga distribuida en los elementos tipo “frame” del modelo
en Sap-2000.
Baranda:
Se estableció un peso de
, y se asigno a las vigas como carga distribuida en frame.
3.4.2 CONSTRUCCIÓN DEL MODELO ESTRUCTURAL DEL TABLERO DEL
PUENTE EN MATLAB
Para la elaboración del modelo estructural en Matlab es importante desarrollar una
metodología que permita extraer de un modelo previo realizado en SAP 2000 la siguiente
información (ver Anexo 3).
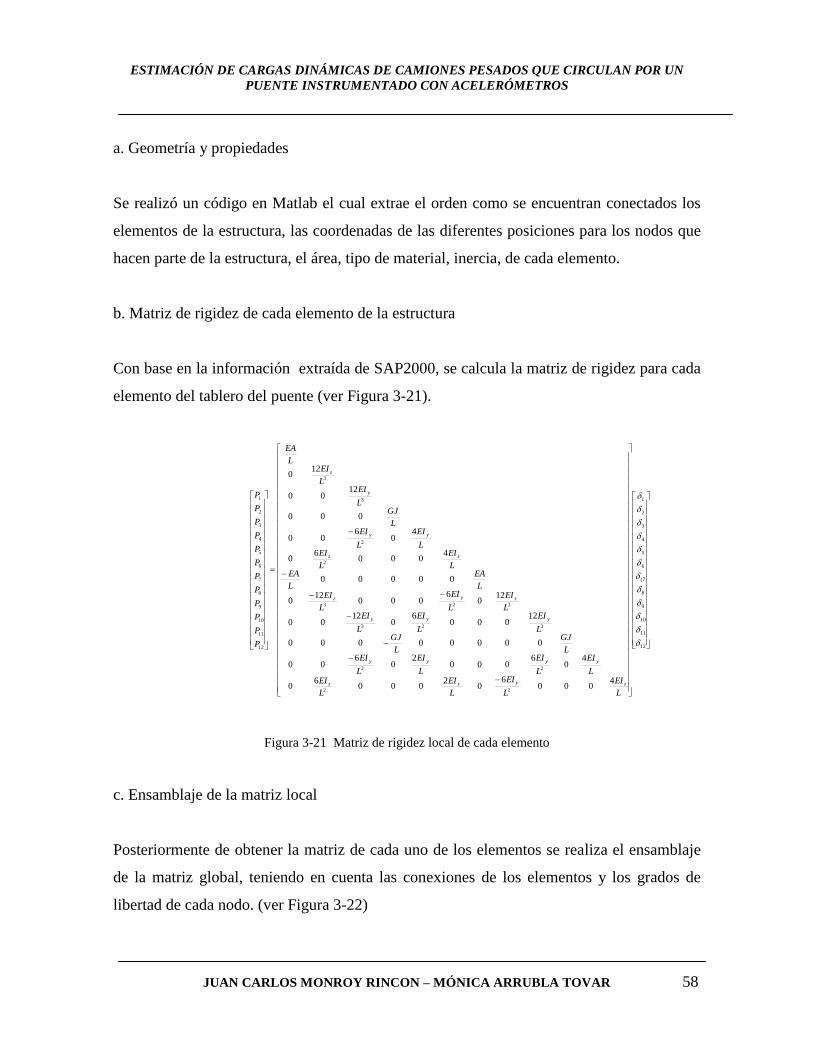
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 58
a. Geometría y propiedades
Se realizó un código en Matlab el cual extrae el orden como se encuentran conectados los
elementos de la estructura, las coordenadas de las diferentes posiciones para los nodos que
hacen parte de la estructura, el área, tipo de material, inercia, de cada elemento.
b. Matriz de rigidez de cada elemento de la estructura
Con base en la información extraída de SAP2000, se calcula la matriz de rigidez para cada
elemento del tablero del puente (ver Figura 3-21).
12
11
10
9
8
7(
6
5
4
3
2
1
22
22
323
323
2
2
3
3
12
11
10
9
8
7
6
5
4
3
2
1
4000
60
2000
60
40
6000
20
600
00000000
12000
60
1200
120
6000
120
00000
4000
60
40
600
000
1200
120
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
GJ
L
GJL
EI
L
EI
L
EIL
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EIL
EI
L
EIL
GJL
EIL
EIL
EA
P
P
P
P
P
P
P
P
P
P
P
P
zyzz
yyyy
yyy
zyz
zz
yy
y
z
Figura 3-21 Matriz de rigidez local de cada elemento
c. Ensamblaje de la matriz local
Posteriormente de obtener la matriz de cada uno de los elementos se realiza el ensamblaje
de la matriz global, teniendo en cuenta las conexiones de los elementos y los grados de
libertad de cada nodo. (ver Figura 3-22)
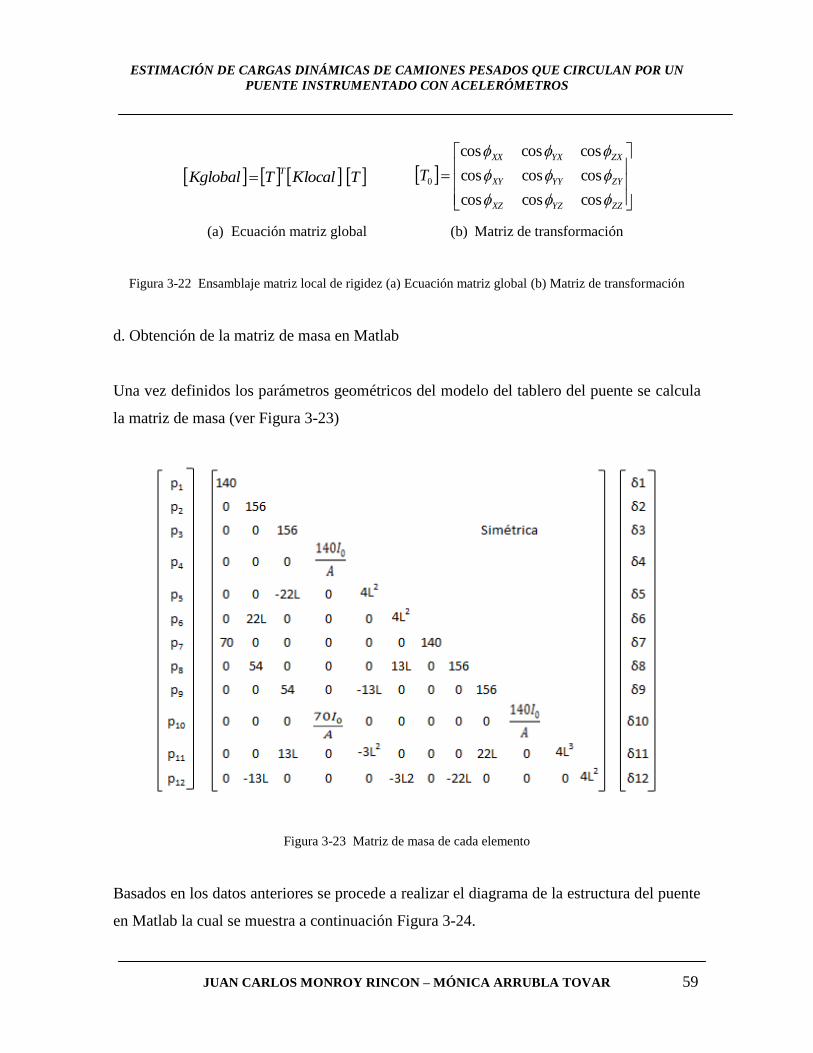
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 59
TlocalKTKglobalT
ZZYZXZ
ZYYYXY
ZXYXXX
T
coscoscos
coscoscos
coscoscos
0
(a) Ecuación matriz global (b) Matriz de transformación
Figura 3-22 Ensamblaje matriz local de rigidez (a) Ecuación matriz global (b) Matriz de transformación
d. Obtención de la matriz de masa en Matlab
Una vez definidos los parámetros geométricos del modelo del tablero del puente se calcula
la matriz de masa (ver Figura 3-23)
Figura 3-23 Matriz de masa de cada elemento
Basados en los datos anteriores se procede a realizar el diagrama de la estructura del puente
en Matlab la cual se muestra a continuación Figura 3-24.
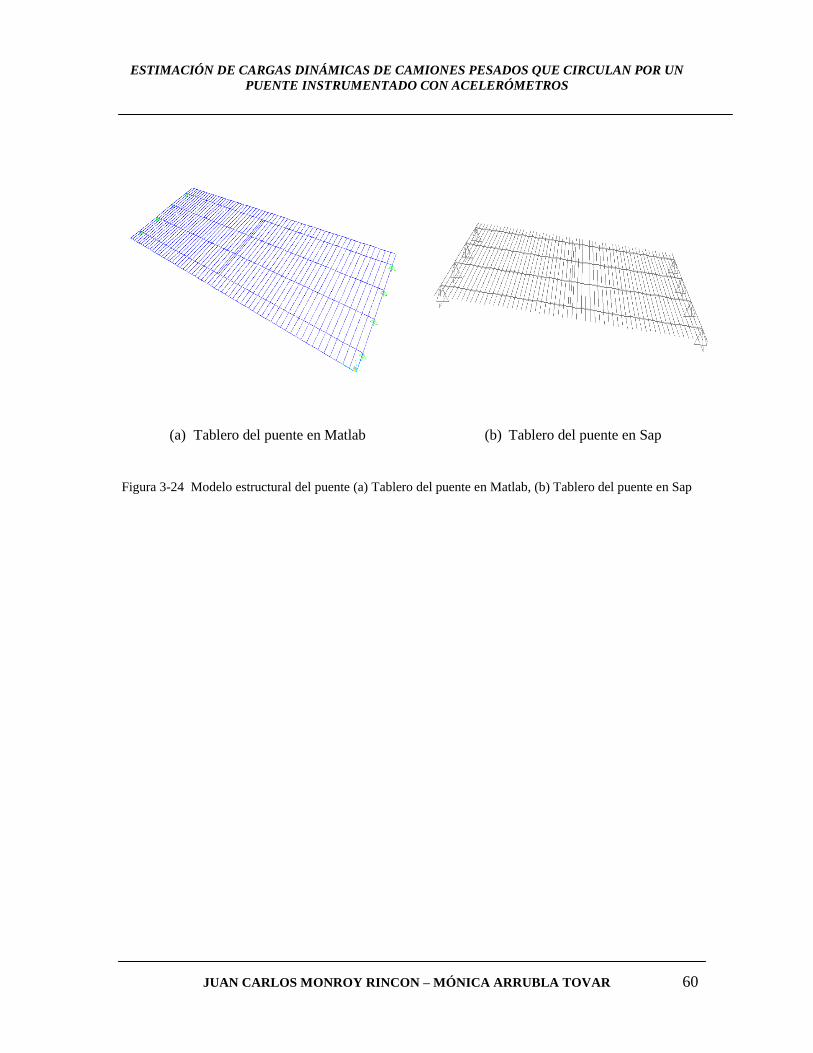
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 60
(a) Tablero del puente en Matlab (b) Tablero del puente en Sap
Figura 3-24 Modelo estructural del puente (a) Tablero del puente en Matlab, (b) Tablero del puente en Sap
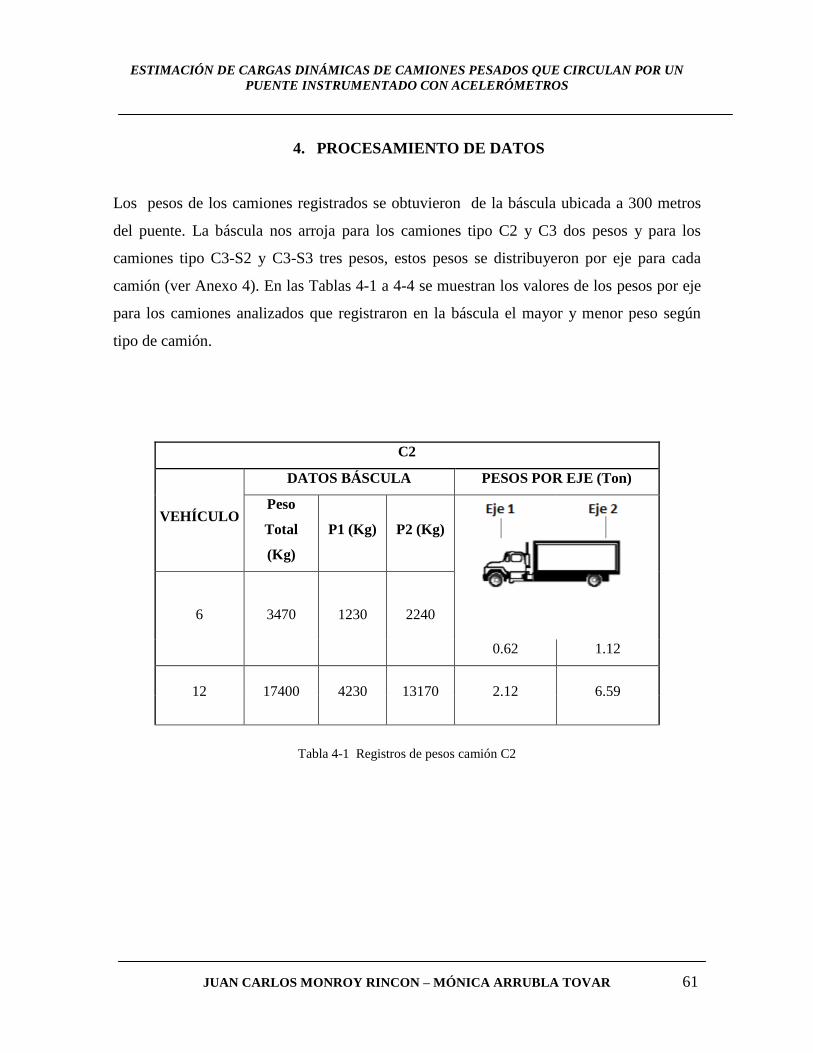
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 61
4. PROCESAMIENTO DE DATOS
Los pesos de los camiones registrados se obtuvieron de la báscula ubicada a 300 metros
del puente. La báscula nos arroja para los camiones tipo C2 y C3 dos pesos y para los
camiones tipo C3-S2 y C3-S3 tres pesos, estos pesos se distribuyeron por eje para cada
camión (ver Anexo 4). En las Tablas 4-1 a 4-4 se muestran los valores de los pesos por eje
para los camiones analizados que registraron en la báscula el mayor y menor peso según
tipo de camión.
C2
VEHÍCULO
DATOS BÁSCULA PESOS POR EJE (Ton)
Peso
Total
(Kg)
P1 (Kg) P2 (Kg)
6 3470 1230 2240
0.62 1.12
12 17400 4230 13170 2.12 6.59
Tabla 4-1 Registros de pesos camión C2
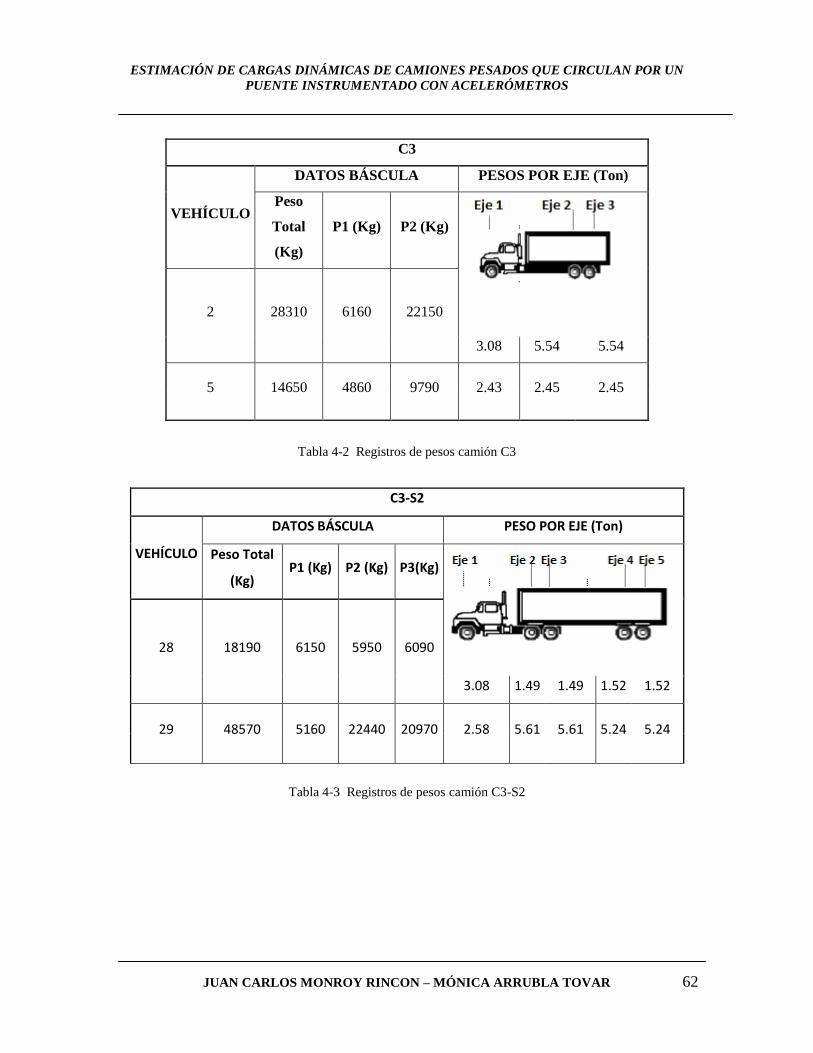
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 62
C3
VEHÍCULO
DATOS BÁSCULA PESOS POR EJE (Ton)
Peso
Total
(Kg)
P1 (Kg) P2 (Kg)
2 28310 6160 22150
3.08 5.54 5.54
5 14650 4860 9790 2.43 2.45 2.45
Tabla 4-2 Registros de pesos camión C3
C3-S2
VEHÍCULO
DATOS BÁSCULA PESO POR EJE (Ton)
Peso Total
(Kg) P1 (Kg) P2 (Kg) P3(Kg)
28 18190 6150 5950 6090
3.08 1.49 1.49 1.52 1.52
29 48570 5160 22440 20970 2.58 5.61 5.61 5.24 5.24
Tabla 4-3 Registros de pesos camión C3-S2
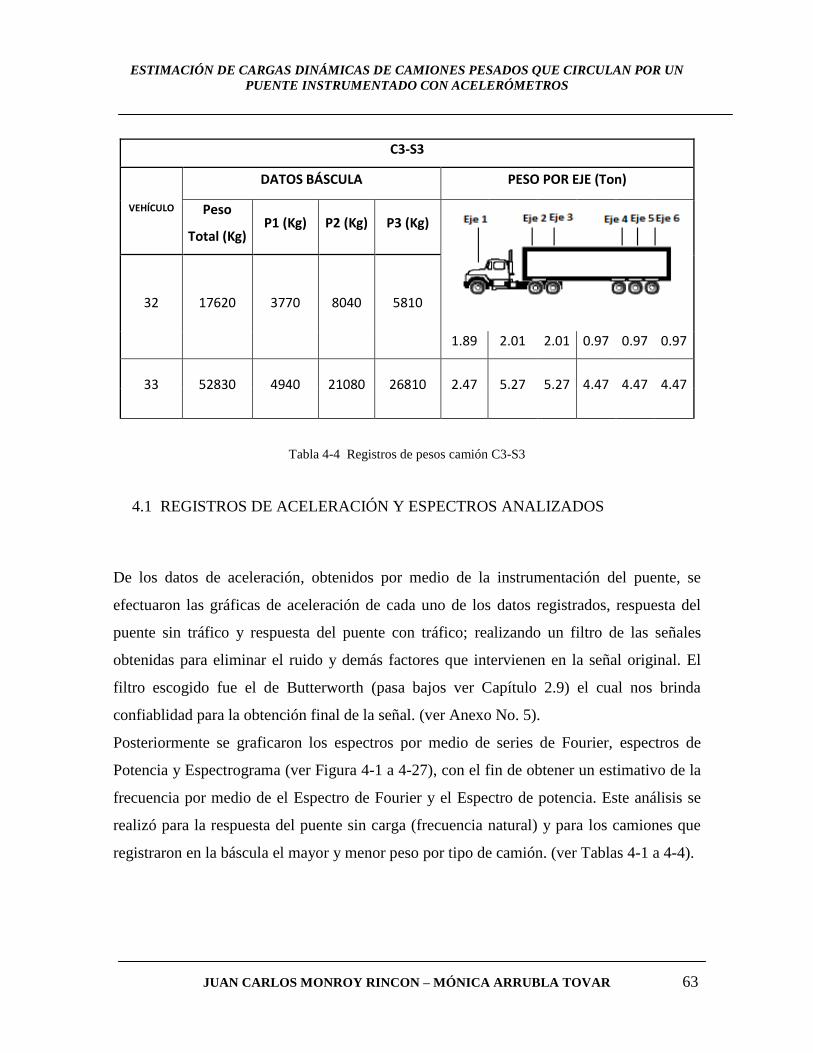
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 63
C3-S3
VEHÍCULO
DATOS BÁSCULA PESO POR EJE (Ton)
Peso
Total (Kg) P1 (Kg) P2 (Kg) P3 (Kg)
32 17620 3770 8040 5810
1.89 2.01 2.01 0.97 0.97 0.97
33 52830 4940 21080 26810 2.47 5.27 5.27 4.47 4.47 4.47
Tabla 4-4 Registros de pesos camión C3-S3
4.1 REGISTROS DE ACELERACIÓN Y ESPECTROS ANALIZADOS
De los datos de aceleración, obtenidos por medio de la instrumentación del puente, se
efectuaron las gráficas de aceleración de cada uno de los datos registrados, respuesta del
puente sin tráfico y respuesta del puente con tráfico; realizando un filtro de las señales
obtenidas para eliminar el ruido y demás factores que intervienen en la señal original. El
filtro escogido fue el de Butterworth (pasa bajos ver Capítulo 2.9) el cual nos brinda
confiablidad para la obtención final de la señal. (ver Anexo No. 5).
Posteriormente se graficaron los espectros por medio de series de Fourier, espectros de
Potencia y Espectrograma (ver Figura 4-1 a 4-27), con el fin de obtener un estimativo de la
frecuencia por medio de el Espectro de Fourier y el Espectro de potencia. Este análisis se
realizó para la respuesta del puente sin carga (frecuencia natural) y para los camiones que
registraron en la báscula el mayor y menor peso por tipo de camión. (ver Tablas 4-1 a 4-4).
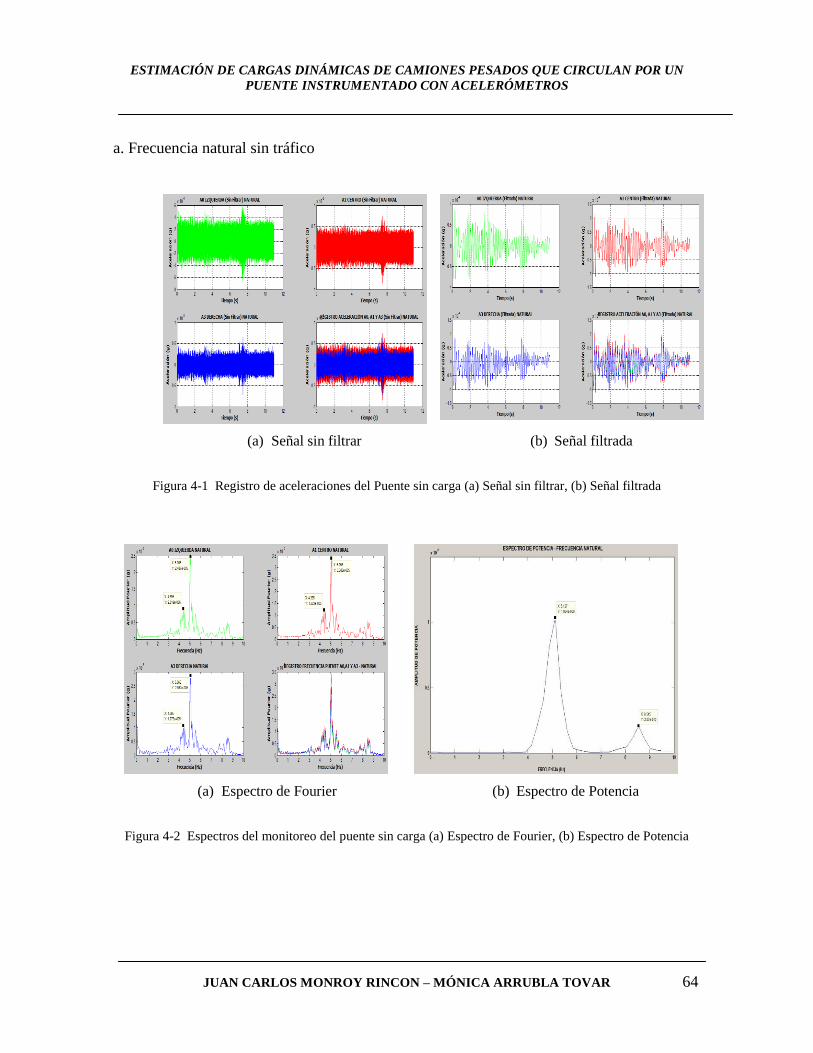
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 64
a. Frecuencia natural sin tráfico
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-1 Registro de aceleraciones del Puente sin carga (a) Señal sin filtrar, (b) Señal filtrada
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-2 Espectros del monitoreo del puente sin carga (a) Espectro de Fourier, (b) Espectro de Potencia

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 65
Figura 4-3 Espectrograma puente sin carga.
b. Frecuencias producidas por el camión Tipo C2 - W máx.
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-4 Registro de aceleraciones camion C2 -W máx (a) Señal sin filtrar, (b) Señal filtrada
5.12

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 66
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-5 Espectros del monitoreo del camion C2 - W máx (a) Espectro de Fourier, (b) Espectro de Potencia
Figura 4-6 Espectrograma camión C2 - W máx.
4.80 Hz
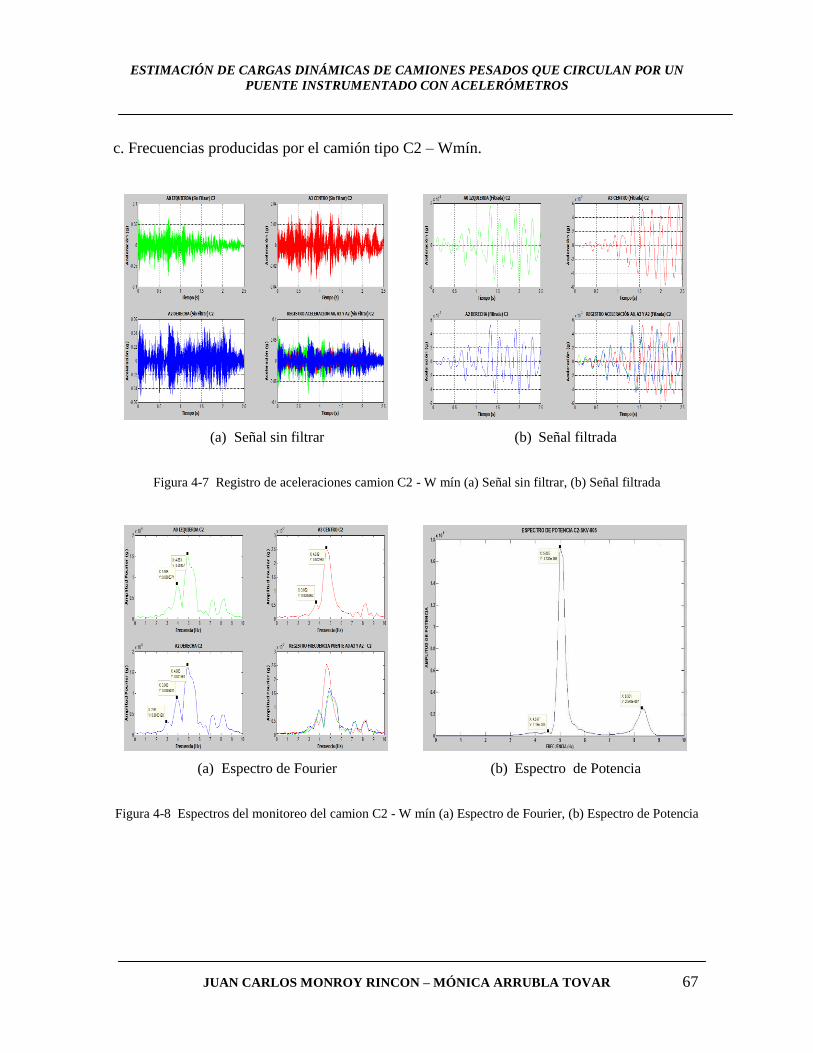
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 67
c. Frecuencias producidas por el camión tipo C2 – Wmín.
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-7 Registro de aceleraciones camion C2 - W mín (a) Señal sin filtrar, (b) Señal filtrada
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-8 Espectros del monitoreo del camion C2 - W mín (a) Espectro de Fourier, (b) Espectro de Potencia
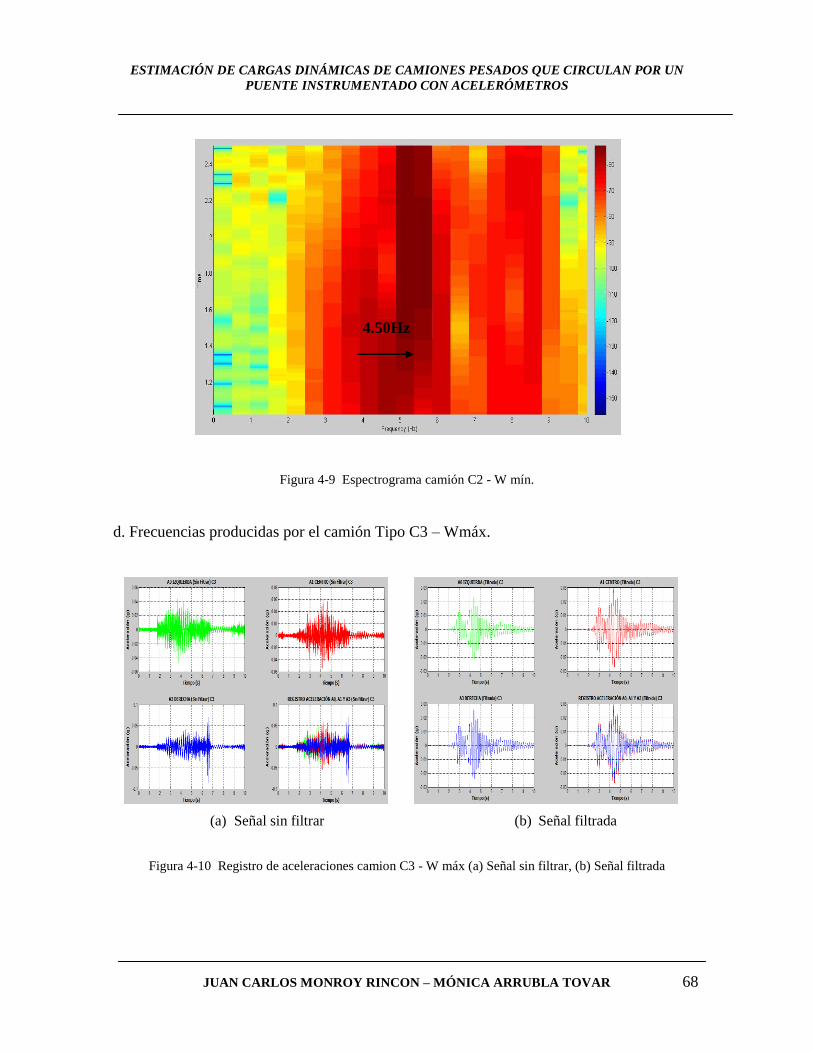
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 68
Figura 4-9 Espectrograma camión C2 - W mín.
d. Frecuencias producidas por el camión Tipo C3 – Wmáx.
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-10 Registro de aceleraciones camion C3 - W máx (a) Señal sin filtrar, (b) Señal filtrada
4.50Hz
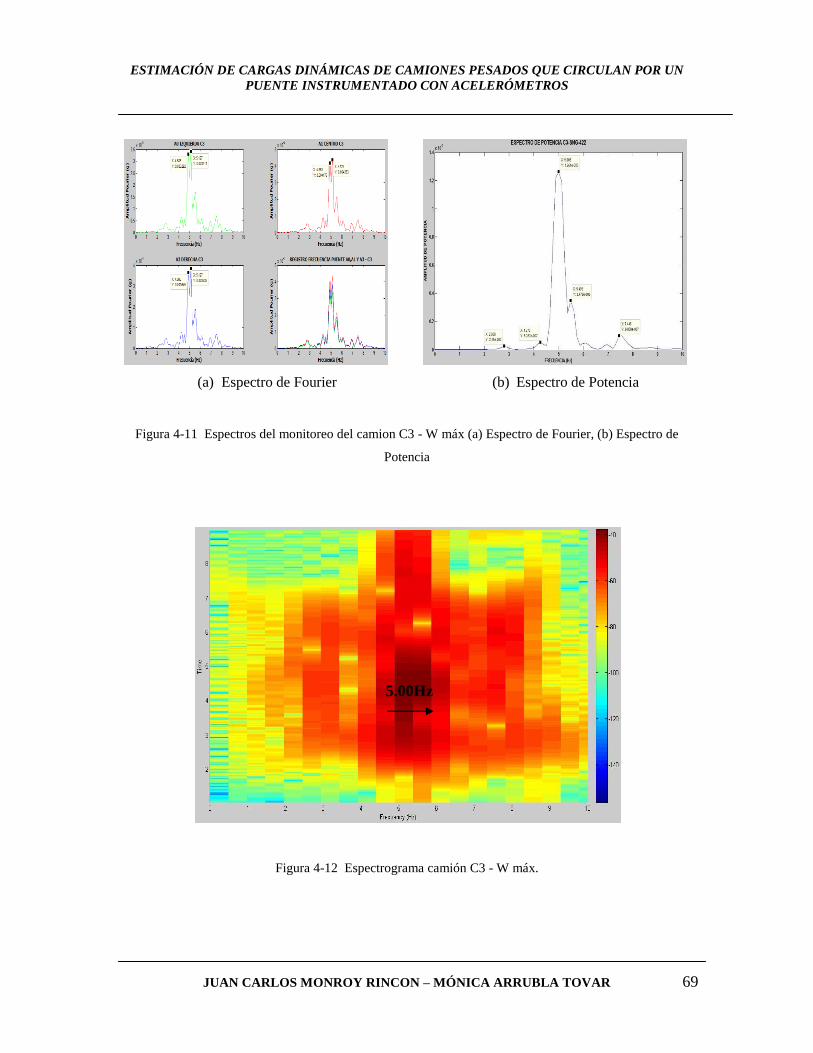
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 69
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-11 Espectros del monitoreo del camion C3 - W máx (a) Espectro de Fourier, (b) Espectro de
Potencia
Figura 4-12 Espectrograma camión C3 - W máx.
5.00Hz
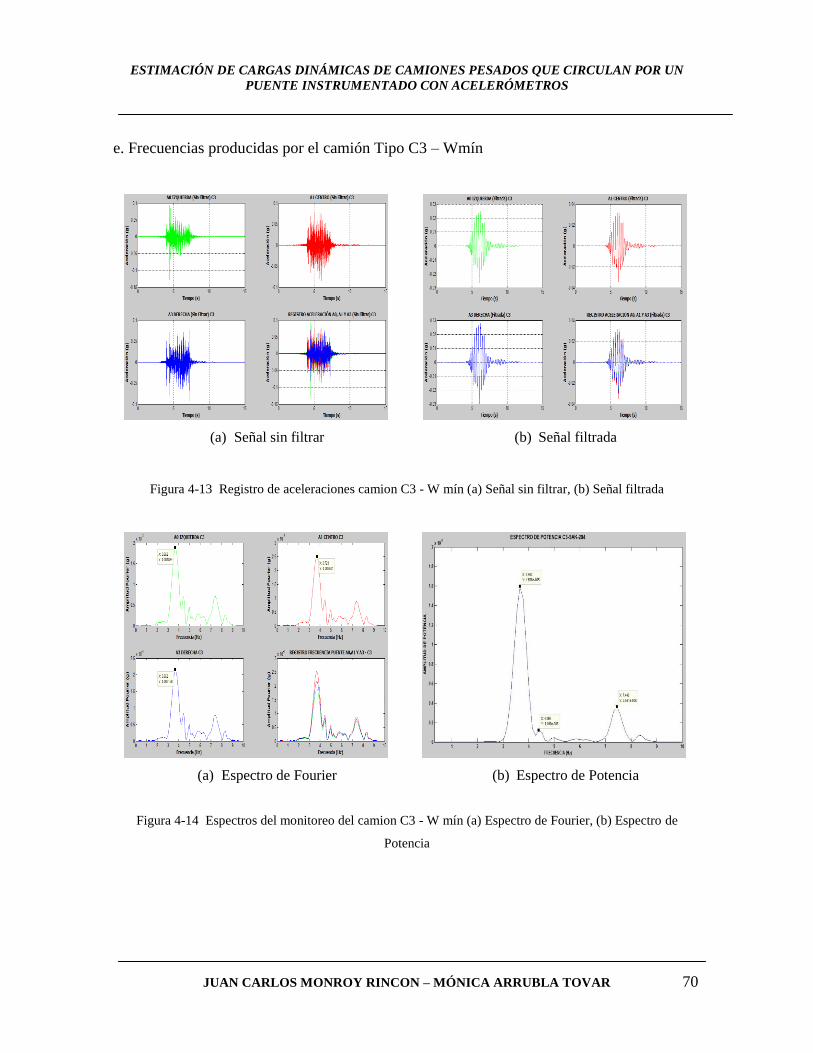
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 70
e. Frecuencias producidas por el camión Tipo C3 – Wmín
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-13 Registro de aceleraciones camion C3 - W mín (a) Señal sin filtrar, (b) Señal filtrada
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-14 Espectros del monitoreo del camion C3 - W mín (a) Espectro de Fourier, (b) Espectro de
Potencia
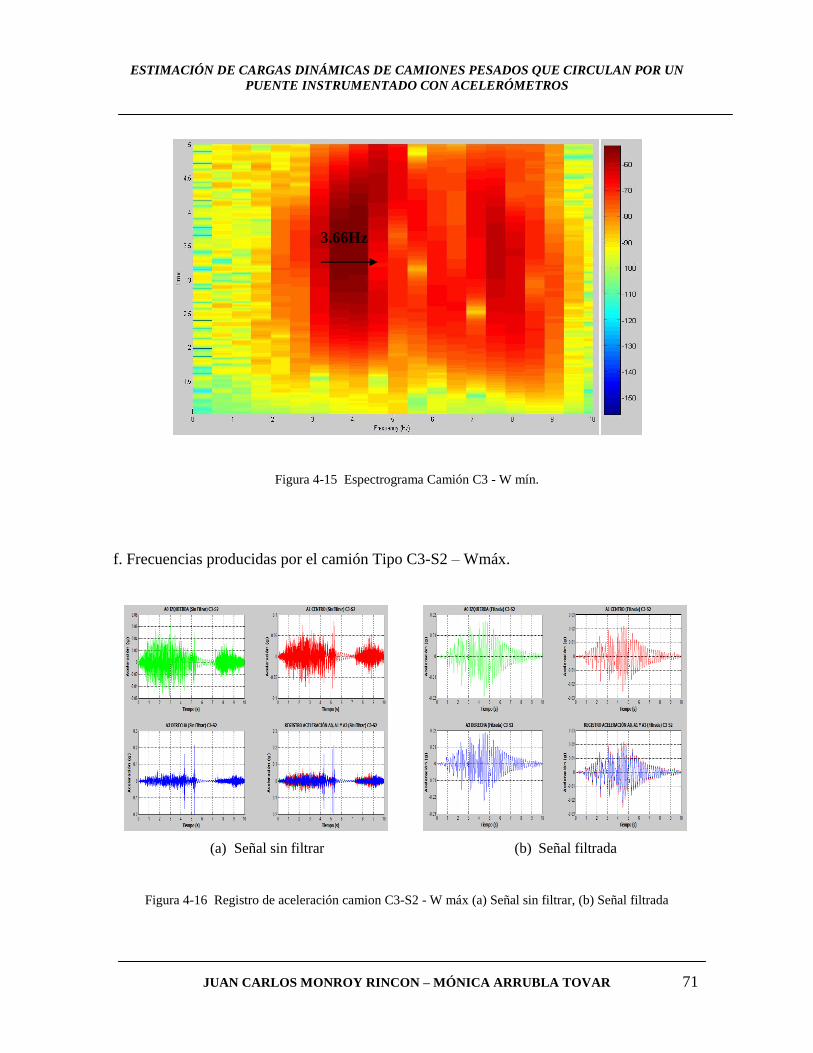
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 71
Figura 4-15 Espectrograma Camión C3 - W mín.
f. Frecuencias producidas por el camión Tipo C3-S2 – Wmáx.
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-16 Registro de aceleración camion C3-S2 - W máx (a) Señal sin filtrar, (b) Señal filtrada
3.66Hz

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 72
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-17 Espectros del monitoreo del camion C3-S2 - W máx (a) Espectro de Fourier, (b) Espectro de
Potencia.
Figura 4-18 Espectrograma Camión C3-S2 - W máx.
5.00Hz
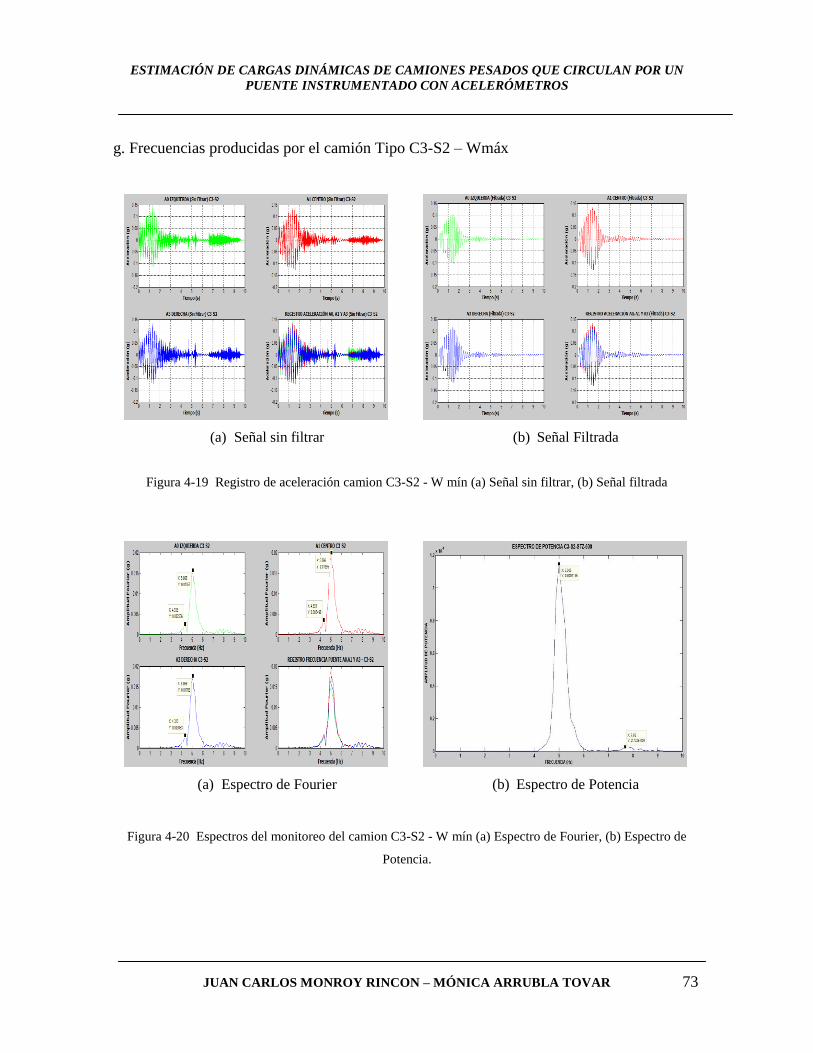
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 73
g. Frecuencias producidas por el camión Tipo C3-S2 – Wmáx
(a) Señal sin filtrar (b) Señal Filtrada
Figura 4-19 Registro de aceleración camion C3-S2 - W mín (a) Señal sin filtrar, (b) Señal filtrada
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-20 Espectros del monitoreo del camion C3-S2 - W mín (a) Espectro de Fourier, (b) Espectro de
Potencia.
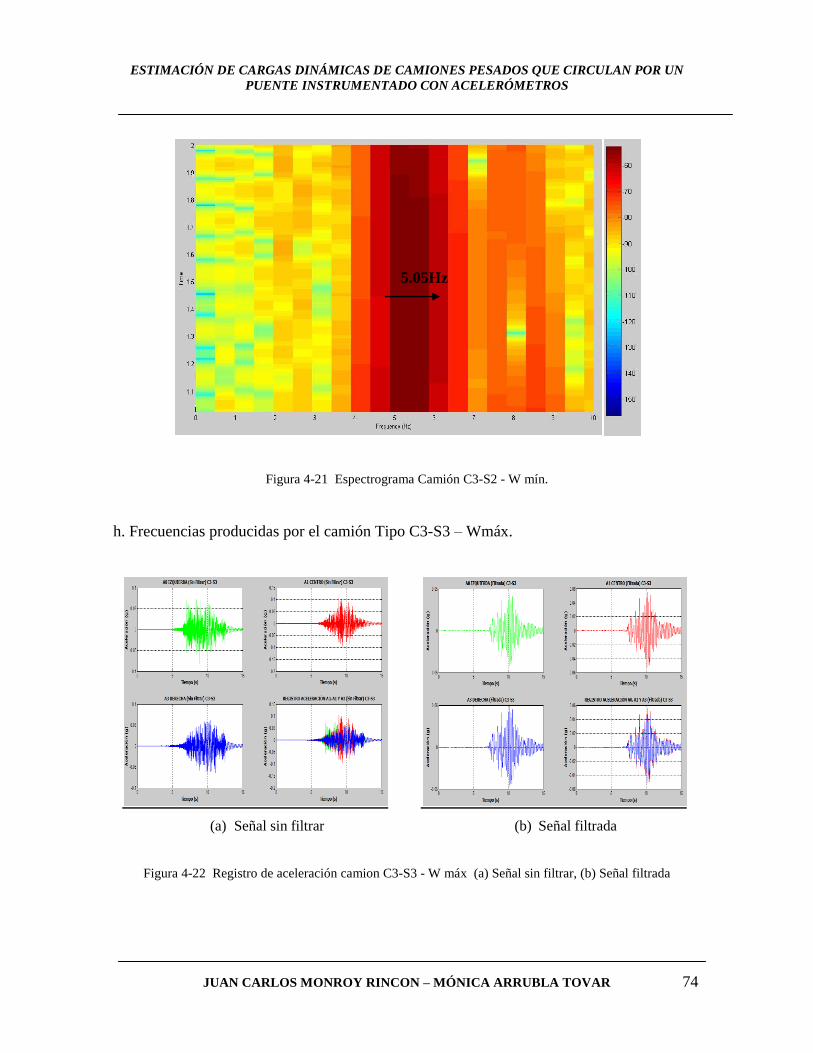
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 74
Figura 4-21 Espectrograma Camión C3-S2 - W mín.
h. Frecuencias producidas por el camión Tipo C3-S3 – Wmáx.
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-22 Registro de aceleración camion C3-S3 - W máx (a) Señal sin filtrar, (b) Señal filtrada
5.05Hz
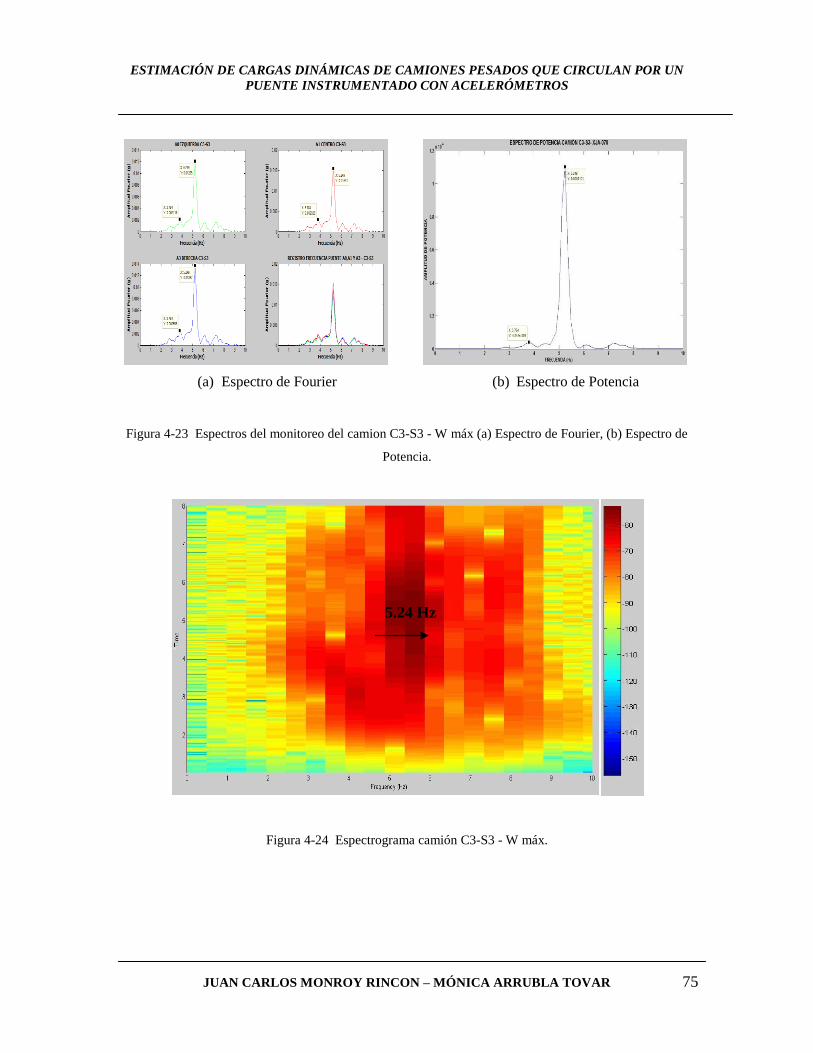
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 75
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-23 Espectros del monitoreo del camion C3-S3 - W máx (a) Espectro de Fourier, (b) Espectro de
Potencia.
Figura 4-24 Espectrograma camión C3-S3 - W máx.
5.24 Hz
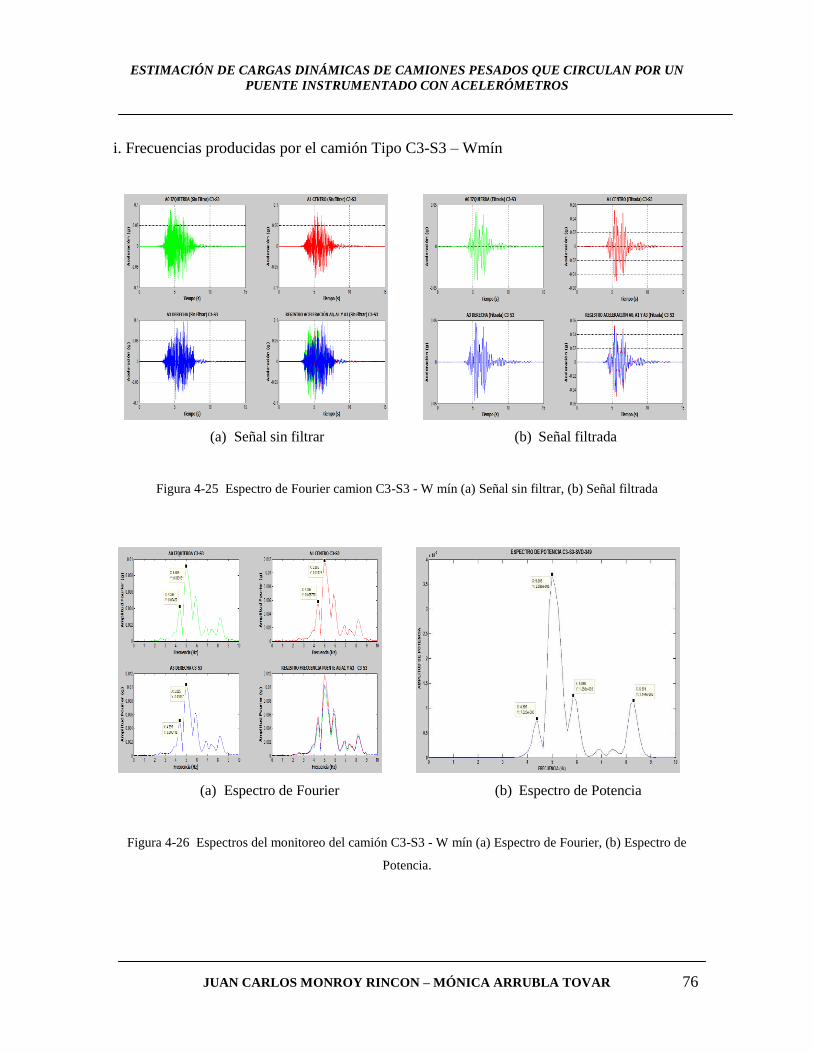
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 76
i. Frecuencias producidas por el camión Tipo C3-S3 – Wmín
(a) Señal sin filtrar (b) Señal filtrada
Figura 4-25 Espectro de Fourier camion C3-S3 - W mín (a) Señal sin filtrar, (b) Señal filtrada
(a) Espectro de Fourier (b) Espectro de Potencia
Figura 4-26 Espectros del monitoreo del camión C3-S3 - W mín (a) Espectro de Fourier, (b) Espectro de
Potencia.
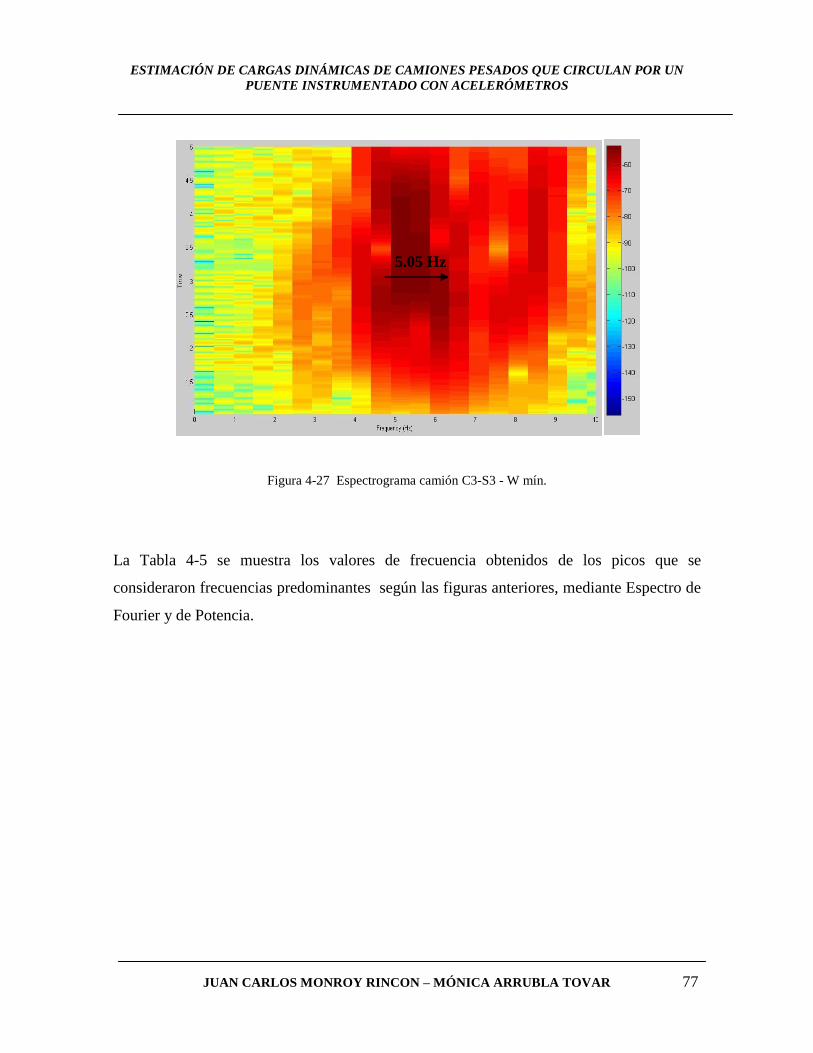
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 77
Figura 4-27 Espectrograma camión C3-S3 - W mín.
La Tabla 4-5 se muestra los valores de frecuencia obtenidos de los picos que se
consideraron frecuencias predominantes según las figuras anteriores, mediante Espectro de
Fourier y de Potencia.
5.05 Hz
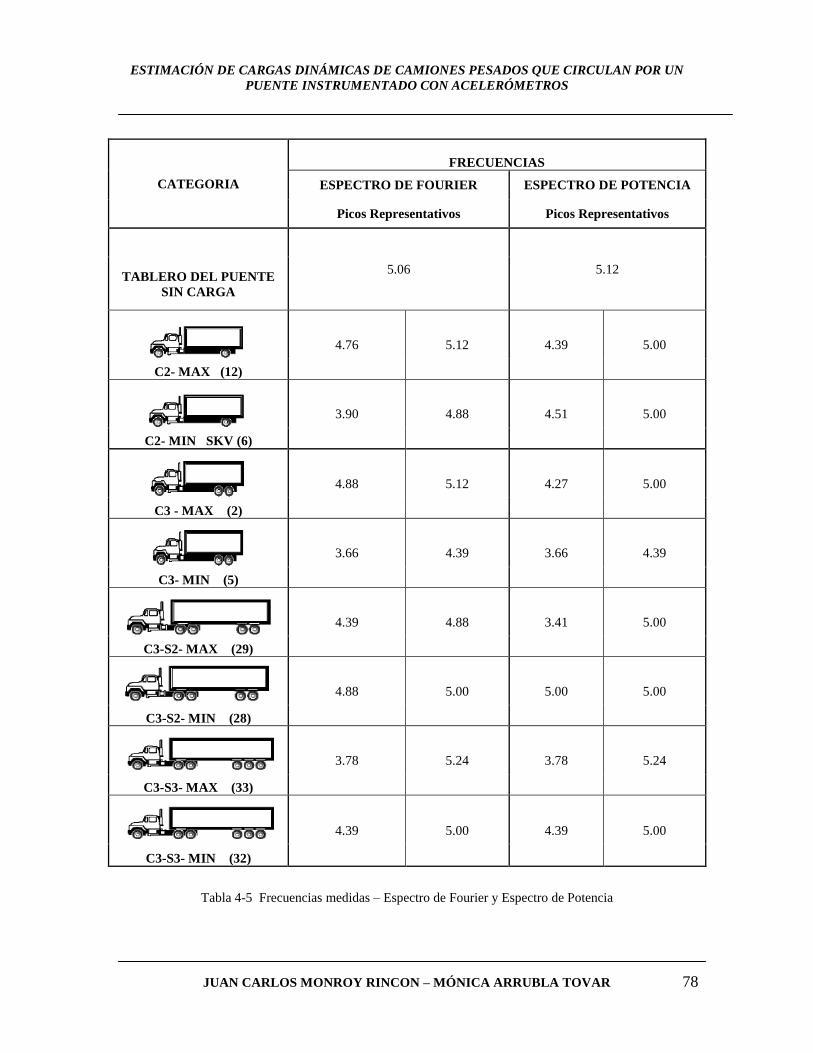
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 78
CATEGORIA
FRECUENCIAS
ESPECTRO DE FOURIER ESPECTRO DE POTENCIA
Picos Representativos Picos Representativos
5.06 5.12 TABLERO DEL PUENTE
SIN CARGA
4.76 5.12 4.39 5.00
C2- MAX (12)
3.90 4.88 4.51 5.00
C2- MIN SKV (6)
4.88 5.12 4.27 5.00
C3 - MAX (2)
3.66 4.39 3.66 4.39
C3- MIN (5)
4.39 4.88 3.41 5.00
C3-S2- MAX (29)
4.88 5.00 5.00 5.00
C3-S2- MIN (28)
3.78 5.24 3.78 5.24
C3-S3- MAX (33)
4.39 5.00 4.39 5.00
C3-S3- MIN (32)
Tabla 4-5 Frecuencias medidas – Espectro de Fourier y Espectro de Potencia

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 79
4.2 CALIBRACIÓN DEL MODELO ESTRUCTURAL EN SAP 2000
Una vez obtenidos los valores de frecuencia experimentales del tablero del puente, y
utilizando el modelo tridimensional se obtuvieron los valores de frecuencia analíticos; este
modelo fue calibrado para disminuir el error entre las frecuencias experimentales y las
analíticas. El procedimiento de calibración del modelo consistió en modificar el módulo de
elasticidad del concreto del tablero del puente del cual se tiene alta incertidumbre, debido a
que no se realizó ningún tipo de prueba para obtener la resistencia de los concretos, ya que
esta actividad no estaba incluida dentro del alcance del proyecto. Se realizó un proceso
iterativo o de convergencia a través del algoritmo genético hasta alcanzar resultados con un
margen de error aceptable (ver Tablas 4 -6 y 4-7).
En la Figura 4-28 se presentan las principales formas de vibración observadas en el modelo
matemático sin incluir tráfico, los cuales coinciden con los valores de los picos presentados
en la Figura 4-2 y la Tabla 4-5.
(a) Modo de vibración 1: Flexión (b) Modo de vibración 2: Torsión
Figura 4-28 Modos de vibracion del modelo analitico sin tráfico .

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 80
No. de
Iteraciones
Módulo de
Elasticidad
Losa
(KN/m2)
Módulo de
Elasticidad
Viga
(KN/m2)
Frecuencia (Hz)
Frecuencia
Experimental
FFT(Hz)
Frecuencia
Experimental
Espectro de
Potencia (Hz)
Modo 1 Modo 2 Picos
representativos
Picos
representativos
1 230727.11 252748.88 3.17 3.66 4.39 5.06 5.12
2 283971.83 311075.55 3.52 4.06 4.39 5.06 5.12
3 325384.39 356440.74 3.76 4.35 4.39 5.06 5.12
4 38454518 42124815 4.09 4.76 4.39 5.06 5.12
5 51845926 51845926 4.60 5.185 4.39 5.06 5.12
Tabla 4-6 Variación de Módulo de Elasticidad
No. de
Iteraciones
Módulo de
Elasticidad
Losa (KN/m2)
Módulo de
Elasticidad
Viga (KN/m2)
% Error FFT % Error
Espectro de
Potencia Modo 1 Modo 2
1 23072711 25274888 27.79% 27.67% 28.52%
2 28397183 31107555 19.82% 19.76% 20.70%
3 32538439 35644074 14.35% 14.03% 15.04%
4 38454518 42124815 6.83% 5.93% 7.03%
5 51845926 51845926 4.78% 2.47% 10.16%
Tabla 4-7 Calibración del modelo estructural en Sap 2000
La Tabla 4-7 muestra que el modulo de elasticidad que se indica en la fila 5, es el que nos
da el menor error entre las frecuencias medidas y las estimadas, se compararon las
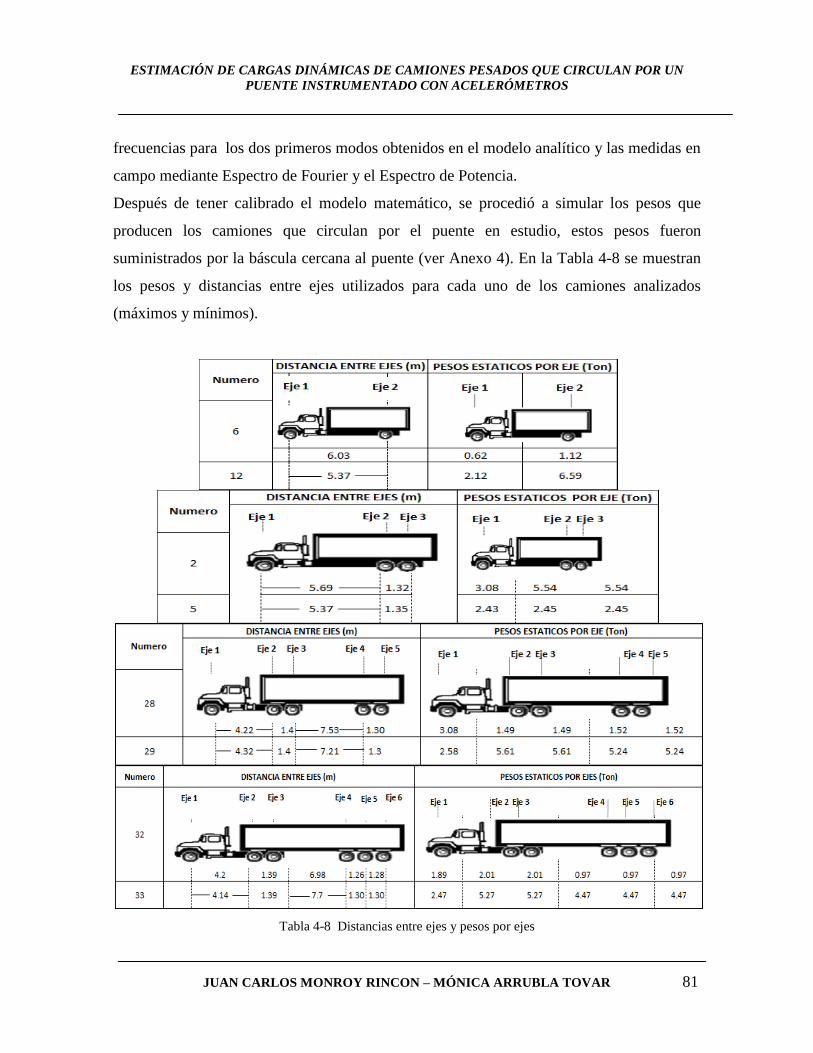
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 81
frecuencias para los dos primeros modos obtenidos en el modelo analítico y las medidas en
campo mediante Espectro de Fourier y el Espectro de Potencia.
Después de tener calibrado el modelo matemático, se procedió a simular los pesos que
producen los camiones que circulan por el puente en estudio, estos pesos fueron
suministrados por la báscula cercana al puente (ver Anexo 4). En la Tabla 4-8 se muestran
los pesos y distancias entre ejes utilizados para cada uno de los camiones analizados
(máximos y mínimos).
Tabla 4-8 Distancias entre ejes y pesos por ejes

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 82
Se modeló cada uno de los camiones analizados (máximos y mínimos), ubicando el camión
en el carril instrumentado en campo, situando las cargas de cada llanta en diferentes
posiciones. Obteniendo que cuando el camión se ubica en el centro del tablero del puente
las frecuencias estimadas son aproximadas a las medidas.
En la Tabla 4-9 se muestran las frecuencias estimadas mediante el modelo matemático en
Sap 2000, después de simular el peso del vehículo.
CAMIÓN / MODELACIÓN
FRECUENCIA (Hz)
DATOS DE SAP
Modo 1 - Flexión Modo 2 - Torsión
(12) - C2
4.33
4.99
(6) - C2
4.56
5.13
(2) - C3
4.17
4.95
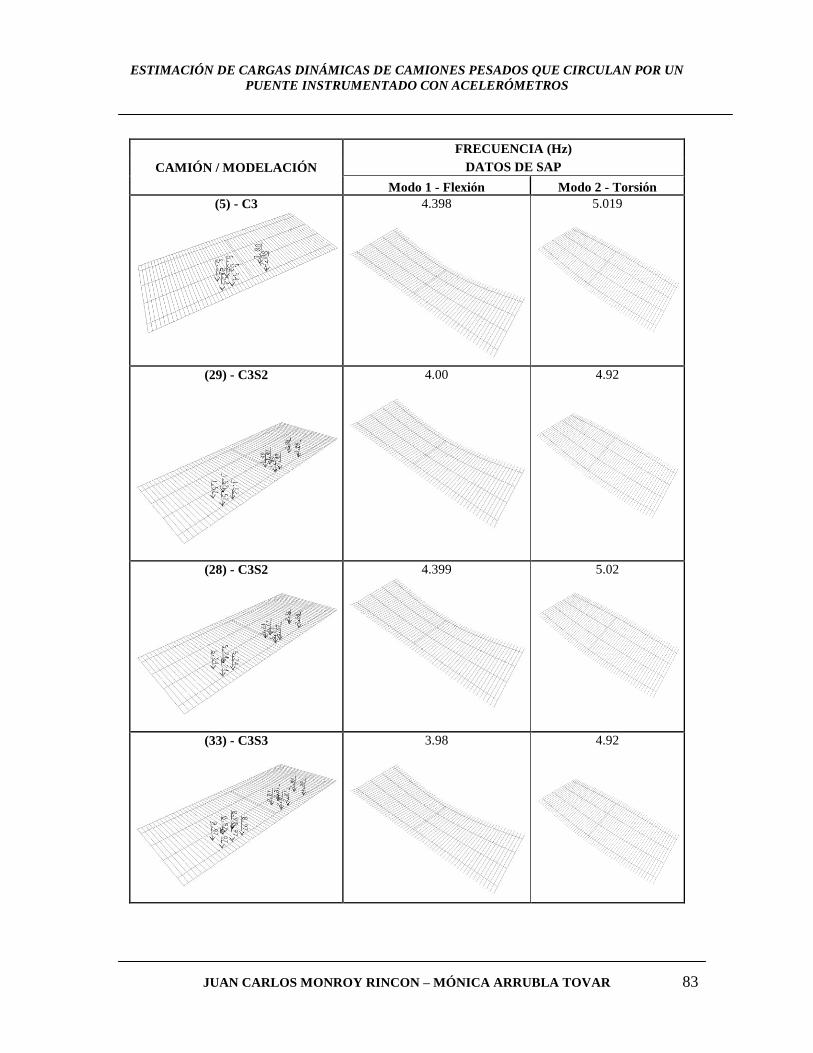
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 83
CAMIÓN / MODELACIÓN
FRECUENCIA (Hz)
DATOS DE SAP
Modo 1 - Flexión Modo 2 - Torsión
(5) - C3
4.398
5.019
(29) - C3S2
4.00
4.92
(28) - C3S2
4.399
5.02
(33) - C3S3
3.98
4.92

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 84
CAMIÓN / MODELACIÓN
FRECUENCIA (Hz)
DATOS DE SAP
Modo 1 - Flexión Modo 2 - Torsión
(32) - C3S3
4.40
5.02
Tabla 4-9 Frecuencias producidas por diferentes camiones en el modelo estructural calibrado
El impacto que produce un camión sobre el puente depende de muchos factores tales como:
velocidad del camión, amortiguamiento del camión, rugosidad del pavimento, estado de la
junta de dilatación, estado del terraplén de acceso, geometría del puente, etc. Para esta
investigación se estimó en forma aproximada dicho impacto, ya que no se incluyó en esta
tesis su evaluación detallada. Consistió en utilizar el impacto de la normas CCDSP (
Instituto Nacional de Vías, 1995) y ASSTHO LRFD (Officials, 2005), pero con valores
proporcionalmente a la velocidad de diseño 60 Km/h. Para el CCDSP el impacto depende
de la luz del puente y para ASSTHO LRFD es del 33%. A las cargas estáticas mostradas en
las Tablas 4-1 a 4-4, se les aplicó dicho factor ver Tablas 4-10 a 4-13.
C2
VEHÍCULO VELOCIDAD
(Km/h)
PESOS POR
EJE (Ton) CCDSP (Ton) ASSTHO (Ton)
Eje 1 Eje 2 Eje 1 Eje 2 Eje 1 Eje 2
6 28 0,62 1,12 0,73 1,23 0,77 1,27
12 16 2,12 6,59 2,18 6,65 2,21 6,68
Tabla 4-10 Pesos con valor de impacto camión C2

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 85
C3
VEHÍCULO VELOCIDAD
(Km/h)
PESOS POR EJE
(Ton) CCDSP (Ton) ASSTHO (Ton)
Eje 1 Eje 2 Eje 3 Eje 1 Eje 2 Eje 3 Eje 1 Eje 2 Eje 3
2 28 3,08 5,54 5,54 3,19 5,65 5,65 3,23 5,69 5,69
5 42 2,43 2,45 2,45 2,59 2,61 2,61 2,66 2,68 2,68
Tabla 4-11 Pesos con valor de impacto camión C3
C3-S2
VEHÍCULO VELOCIDAD
(Km/h)
PESO POR EJE (Ton) CCDSP (Ton)
Eje 1 Eje 2 Eje 3 Eje 4 Eje 5 Eje 1 Eje 2 Eje 3 Eje 4 Eje 5
28 27 3,08 1,49 1,49 1,52 1,52 3,18 1,59 1,59 1,62 1,62
29 31 2,58 5,61 5,61 5,24 5,24 2,70 5,73 5,73 5,36 5,36
C3-S2
VEHÍCULO VELOCIDAD
(Km/h)
ASSTHO (Ton)
Eje 1 Eje 2 Eje 3 Eje 4 Eje 5
28 27 3,23 1,64 1,64 1,67 1,67
29 31 2,75 5,78 5,78 5,41 5,41
Tabla 4-12 Pesos con valor de impacto camión C3-S2
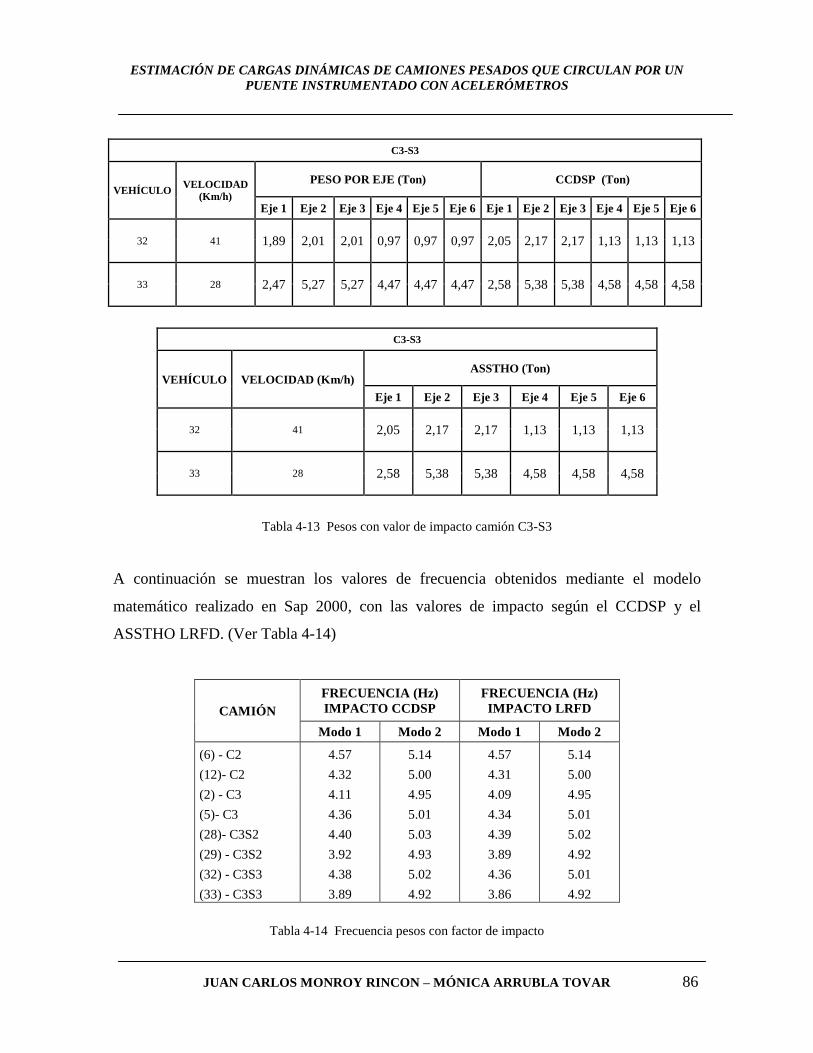
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 86
C3-S3
VEHÍCULO VELOCIDAD
(Km/h)
PESO POR EJE (Ton) CCDSP (Ton)
Eje 1 Eje 2 Eje 3 Eje 4 Eje 5 Eje 6 Eje 1 Eje 2 Eje 3 Eje 4 Eje 5 Eje 6
32 41 1,89 2,01 2,01 0,97 0,97 0,97 2,05 2,17 2,17 1,13 1,13 1,13
33 28 2,47 5,27 5,27 4,47 4,47 4,47 2,58 5,38 5,38 4,58 4,58 4,58
C3-S3
VEHÍCULO VELOCIDAD (Km/h) ASSTHO (Ton)
Eje 1 Eje 2 Eje 3 Eje 4 Eje 5 Eje 6
32 41 2,05 2,17 2,17 1,13 1,13 1,13
33 28 2,58 5,38 5,38 4,58 4,58 4,58
Tabla 4-13 Pesos con valor de impacto camión C3-S3
A continuación se muestran los valores de frecuencia obtenidos mediante el modelo
matemático realizado en Sap 2000, con las valores de impacto según el CCDSP y el
ASSTHO LRFD. (Ver Tabla 4-14)
CAMIÓN
FRECUENCIA (Hz)
IMPACTO CCDSP
FRECUENCIA (Hz)
IMPACTO LRFD
Modo 1 Modo 2 Modo 1 Modo 2
(6) - C2 4.57 5.14 4.57 5.14
(12)- C2 4.32 5.00 4.31 5.00
(2) - C3 4.11 4.95 4.09 4.95
(5)- C3 4.36 5.01 4.34 5.01
(28)- C3S2 4.40 5.03 4.39 5.02
(29) - C3S2 3.92 4.93 3.89 4.92
(32) - C3S3 4.38 5.02 4.36 5.01
(33) - C3S3 3.89 4.92 3.86 4.92
Tabla 4-14 Frecuencia pesos con factor de impacto
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 87
4.3 ALGORITMO GENETICO
El algoritmo genético se definió mediante el Toolbox del programa matemático Matlab
siguiendo los siguientes pasos (Ver Anexo 7):
Se definió la función objetivo a minimizar (@MatrizGen2).La función objetivo a
implementar corresponde a la minimización del error cuadrático de la diferencia
entre los modos experimentales (frecuencias esperadas) y el evaluado por el
algoritmo (frecuencias obtenidas).
[phi,frec]=eig(k,ma);
Val=sqrt(diag(frec));
Wval = Val(1:12)
error = sum((wesp(1:12) - Val(1:12)).^2)
Donde ma es la matriz de masas, k es la matriz de rigidez de la estructura y wesp son los
valores de frecuencias medidos en campo (frecuencias esperadas).
4.3.1 TAMAÑO DE LA POBLACIÓN
En este caso la población es de 100 individuos, por lo tanto, para cada generación se evalúa
esta cantidad.
4.3.2 PARÁMETROS DEL ALGORITMO
Dentro del algoritmo genético se establecieron los siguientes parámetros:
a. Población Inicial: 100
b. Numero de variables: Depende del tipo de camión, camión C2 son 4 variables, C3
son 6 variables, C3-S2 con 10 variables y C3-S3 son 12 variables.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 88
c. Restricciones: están relacionadas con los valores de masas que se obtuvieron como
resultado de la estación de pesaje estático, por lo tanto, para cada tipo de camión
existe un valor máximo y un valor mínimo de peso por eje.
d. Número de individuos mínimo de la generación de padres hacia la nueva generación
dos (2) (“Elite Count” – lo cual me está indicando cuantos individuos pasan a la
siguiente generación).
e. “Feasible Population”: Significa que genera una población inicial aleatoriamente
teniendo en cuenta las restricciones en cuanto a los límites y a las restricciones
lineales.
4.3.3 CRITERIOS DE PARADA
Dentro del Toolbox de algoritmo genético de Matlab existen varios criterios de parada, para
nuestro caso en particular se emplearon los siguientes:
a. “Generations”: Este criterio indica cuantas generaciones (hijos) el usuario establece
como valor máximo para que el algoritmo pare el proceso, en este caso se estableció
como máximo un valor de 50 generaciones.
b. “Time Limit”: En este caso se estableció un valor de 1000 segundos por corrida.
c. “Tolerance”: En este criterio se establece el porcentaje de error mínimo o igual para
que el proceso frene, en este caso el valor de tolerancia que estableció el usuario es ≤
3.
d. “Stall Generations”: Dentro de cada corrida que se está realizando para cada
generación también se establece un valor máximo de corridas internas, en este caso
se estableció un valor de 10.
e. “Stall Time Limit”: Igualmente que en el caso anterior, para cada corrida interna se
establece un límite de tiempo, en este caso se estableció un valor de 100 segundos.
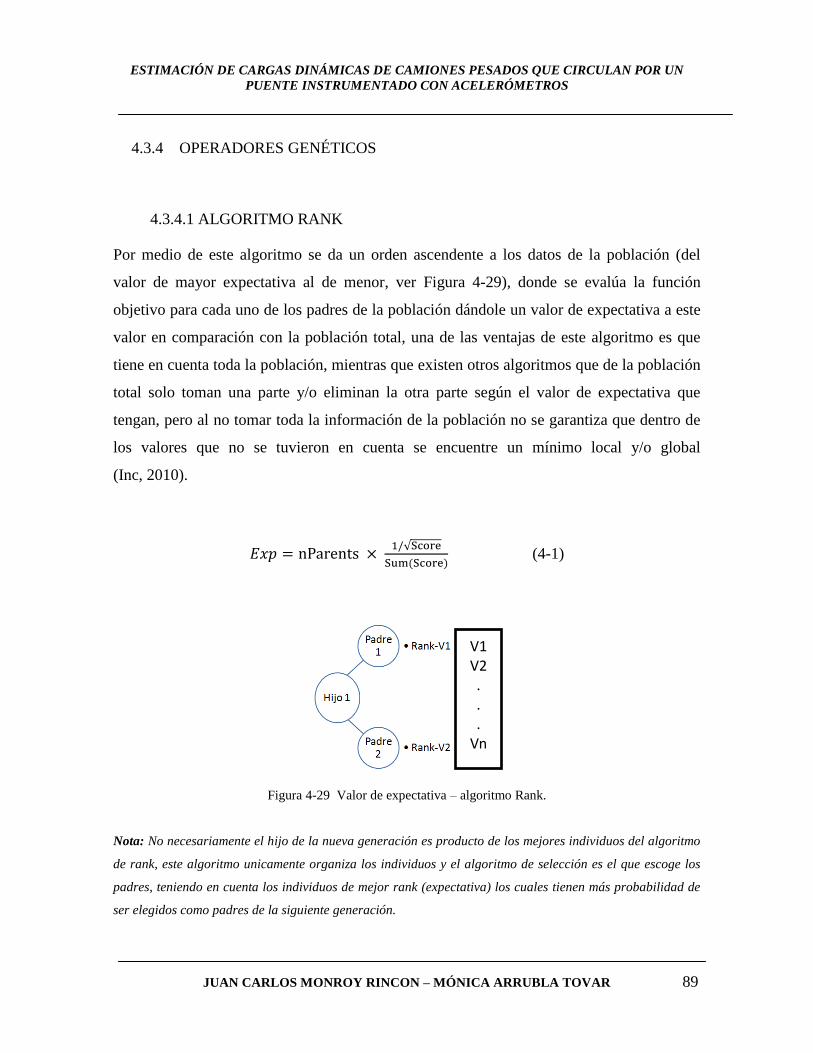
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 89
4.3.4 OPERADORES GENÉTICOS
4.3.4.1 ALGORITMO RANK
Por medio de este algoritmo se da un orden ascendente a los datos de la población (del
valor de mayor expectativa al de menor, ver Figura 4-29), donde se evalúa la función
objetivo para cada uno de los padres de la población dándole un valor de expectativa a este
valor en comparación con la población total, una de las ventajas de este algoritmo es que
tiene en cuenta toda la población, mientras que existen otros algoritmos que de la población
total solo toman una parte y/o eliminan la otra parte según el valor de expectativa que
tengan, pero al no tomar toda la información de la población no se garantiza que dentro de
los valores que no se tuvieron en cuenta se encuentre un mínimo local y/o global
(Inc, 2010).
(4-1)
Figura 4-29 Valor de expectativa – algoritmo Rank.
Nota: No necesariamente el hijo de la nueva generación es producto de los mejores individuos del algoritmo
de rank, este algoritmo unicamente organiza los individuos y el algoritmo de selección es el que escoge los
padres, teniendo en cuenta los individuos de mejor rank (expectativa) los cuales tienen más probabilidad de
ser elegidos como padres de la siguiente generación.
V1
V2
.
.
. Vn
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 90
4.3.4.2 ALGORITMO STOCHASTIC UNIFORM
Con base en el orden que se generó anteriormente por medio del algoritmo Rank, se
procede a realizar un proceso de selección para saber cuáles van hacer los padres para la
siguiente generación, en este paso se le asigna una probabilidad a cada individuo de
acuerdo a su desempeño dentro de toda la población, en ese orden de ideas los individuos
que se encuentren en las primeras posiciones según el orden del algoritmo de Rank tendrán
mayores probabilidades de ser escogidos como los padres de los individuos de la siguiente
generación, de esta forma se asegura que la siguiente generación tenga un desempeño mejor
que la anterior.
4.3.4.3 CROSSOVER FRACTION
Una vez se han seleccionado los padres de la población que van a dar origen a la nueva
generación, existen tres maneras de que se realice el proceso de reproducción, donde (ver
Figura 4-30 a 4-32):
a. En el primer caso la nueva generación tomará las características y/o genes del padre
para reproducirlas en el hijo.
Figura 4-30 Reproducción caso 1 –Elite Count
b. En el segundo caso de la pareja de padres se tomará una parte de uno y otra parte del
otro para la nueva generación.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 91
Figura 4-31 Reproducción caso 2 – Algoritmo Scattered.
c. En el tercer caso se realiza un proceso de mutación, donde un gen del hijo se extrae y
se coloca un nuevo gen.
Figura 4-32 Mutación – algoritmo Adaptive Feasible.
Este proceso de reproducción se realiza por medio del algoritmo Scattered, adicionalmente
dentro de esta herramienta se define un porcentaje para la reproducción del 80% y un
porcentaje para la mutación del 20%; estos valores de porcentajes son como resultados de
previos análisis que se han realizado a diferentes poblaciones donde se establecieron estos
valores como recomendables.
Para el proceso de mutación se emplea el algoritmo Adaptive Feasible, donde los
parámetros del algoritmo son:
d. Dirección: para realizar el proceso de mutación el algoritmo indica que dirección
pueden tomar los valores, números superiores o números inferiores al valor actual.
e. Paso: Este es un valor en porcentaje que establece que tan lejos van a estar los
valores que se van a tomar, para este caso indica un porcentaje del ±20%.
En las Tablas 4.15 a 4-22 se muestra los resultados de peso que nos arroja el algoritmo
para cada tipo de camión, se tomaron los máximos y mínimos de los pesos.
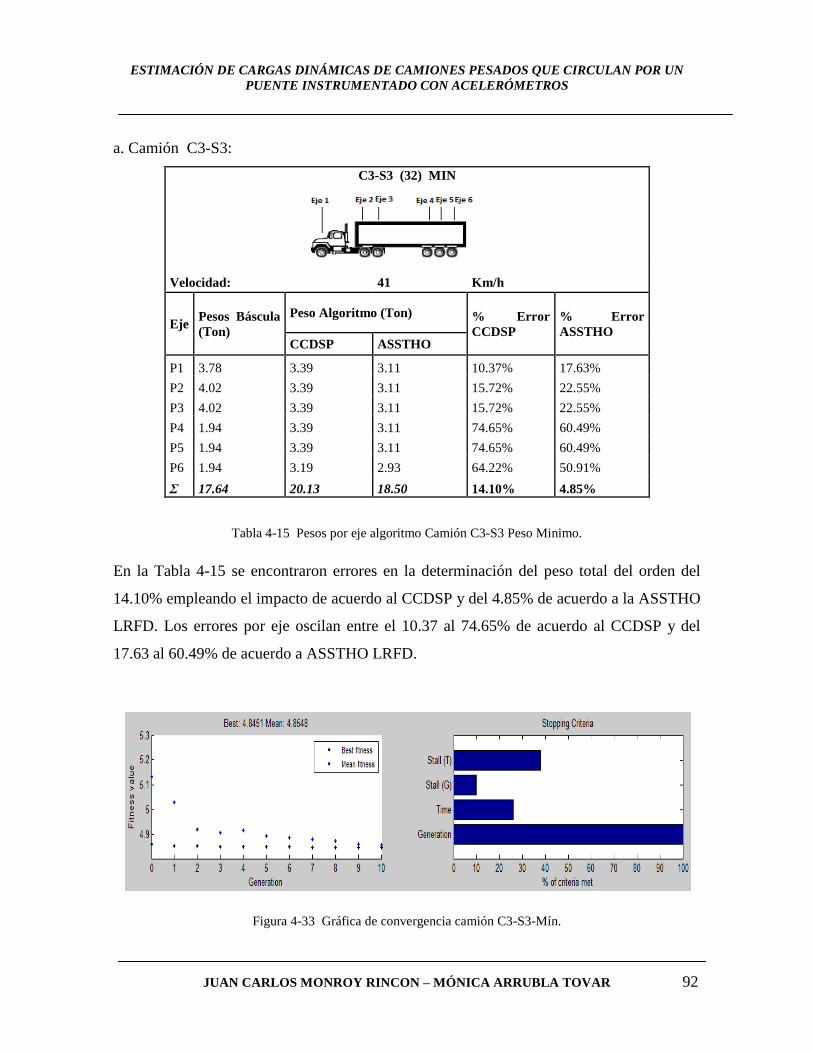
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 92
a. Camión C3-S3:
C3-S3 (32) MIN
Velocidad:
41
Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 3.78 3.39 3.11 10.37% 17.63%
P2 4.02 3.39 3.11 15.72% 22.55%
P3 4.02 3.39 3.11 15.72% 22.55%
P4 1.94 3.39 3.11 74.65% 60.49%
P5 1.94 3.39 3.11 74.65% 60.49%
P6 1.94 3.19 2.93 64.22% 50.91%
Σ 17.64 20.13 18.50 14.10% 4.85%
Tabla 4-15 Pesos por eje algoritmo Camión C3-S3 Peso Minimo.
En la Tabla 4-15 se encontraron errores en la determinación del peso total del orden del
14.10% empleando el impacto de acuerdo al CCDSP y del 4.85% de acuerdo a la ASSTHO
LRFD. Los errores por eje oscilan entre el 10.37 al 74.65% de acuerdo al CCDSP y del
17.63 al 60.49% de acuerdo a ASSTHO LRFD.
Figura 4-33 Gráfica de convergencia camión C3-S3-Mín.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 93
C3-S3 (33) MAX
Velocidad: 28 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 4.94 3.39 3.11 31.41% 36.97%
P2 10.54 3.97 3.65 62.29% 65.35%
P3 10.54 4.48 4.11 57.54% 60.98%
P4 8.94 7.81 7.18 12.59% 19.68%
P5 8.94 7.30 6.71 18.29% 24.92%
P6 8.94 3.99 3.66 55.42% 59.03%
Σ 52.84 30.94 28.43 41.44% 46.19%
Tabla 4-16 Pesos por eje algoritmo Camión C3-S3 Peso Máximo.
En la Tabla 4-17 se encontraron errores en la determinación del peso total del orden del
41.44% empleando el impacto de acuerdo al CCDSP y del 46.19% de acuerdo a la
ASSTHO LRFD. Los errores por eje oscilan entre el 12.59 al 62.29% de acuerdo al
CCDSP y del 19.68 al 65.35% de acuerdo a ASSTHO LRFD.
Figura 4-34 Gráfica de convergencia camión C3-S3-Máx.
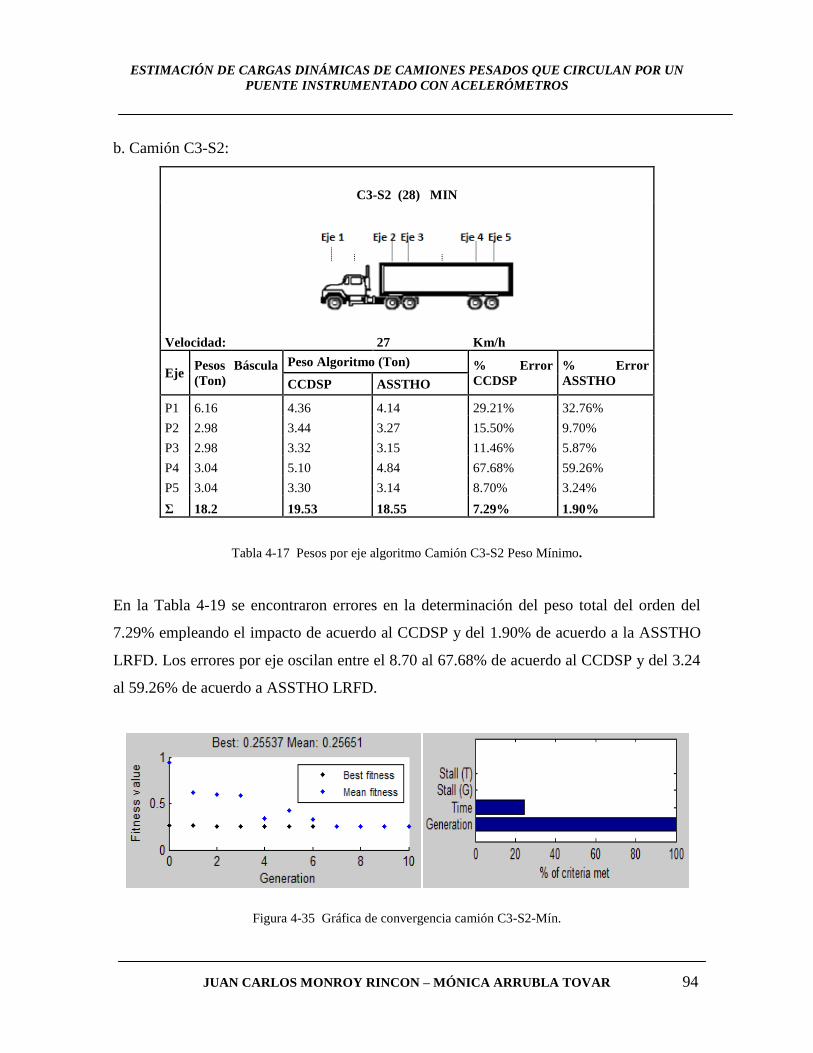
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 94
b. Camión C3-S2:
C3-S2 (28) MIN
Velocidad: 27 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 6.16 4.36 4.14 29.21% 32.76%
P2 2.98 3.44 3.27 15.50% 9.70%
P3 2.98 3.32 3.15 11.46% 5.87%
P4 3.04 5.10 4.84 67.68% 59.26%
P5 3.04 3.30 3.14 8.70% 3.24%
Σ 18.2 19.53 18.55 7.29% 1.90%
Tabla 4-17 Pesos por eje algoritmo Camión C3-S2 Peso Mínimo.
En la Tabla 4-19 se encontraron errores en la determinación del peso total del orden del
7.29% empleando el impacto de acuerdo al CCDSP y del 1.90% de acuerdo a la ASSTHO
LRFD. Los errores por eje oscilan entre el 8.70 al 67.68% de acuerdo al CCDSP y del 3.24
al 59.26% de acuerdo a ASSTHO LRFD.
Figura 4-35 Gráfica de convergencia camión C3-S2-Mín.
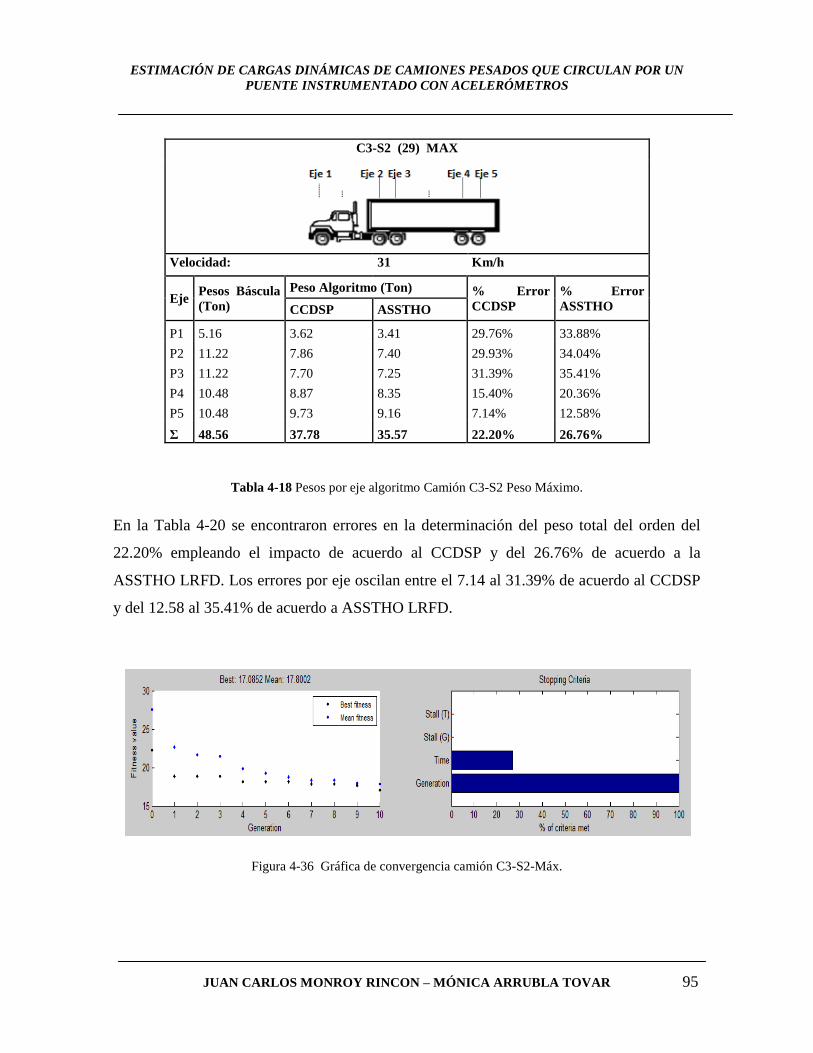
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 95
C3-S2 (29) MAX
Velocidad: 31 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 5.16 3.62 3.41 29.76% 33.88%
P2 11.22 7.86 7.40 29.93% 34.04%
P3 11.22 7.70 7.25 31.39% 35.41%
P4 10.48 8.87 8.35 15.40% 20.36%
P5 10.48 9.73 9.16 7.14% 12.58%
Σ 48.56 37.78 35.57 22.20% 26.76%
Tabla 4-18 Pesos por eje algoritmo Camión C3-S2 Peso Máximo.
En la Tabla 4-20 se encontraron errores en la determinación del peso total del orden del
22.20% empleando el impacto de acuerdo al CCDSP y del 26.76% de acuerdo a la
ASSTHO LRFD. Los errores por eje oscilan entre el 7.14 al 31.39% de acuerdo al CCDSP
y del 12.58 al 35.41% de acuerdo a ASSTHO LRFD.
Figura 4-36 Gráfica de convergencia camión C3-S2-Máx.
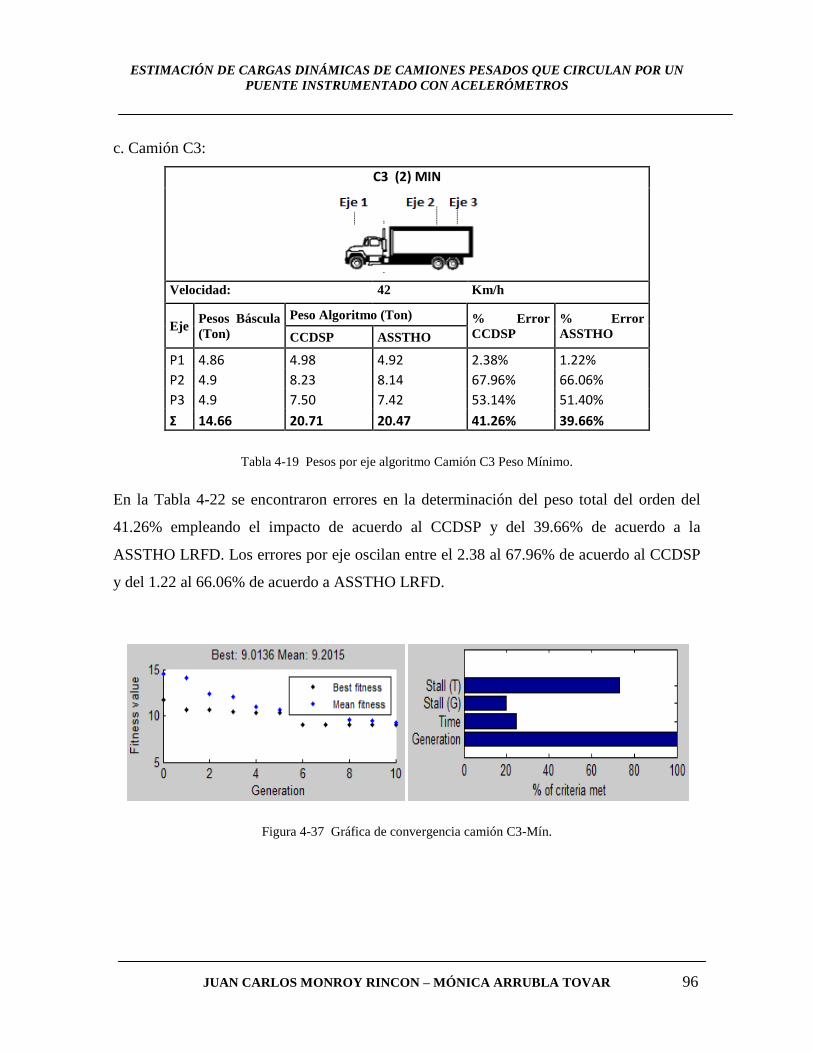
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 96
c. Camión C3:
C3 (2) MIN
Velocidad: 42 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 4.86 4.98 4.92 2.38% 1.22% P2 4.9 8.23 8.14 67.96% 66.06% P3 4.9 7.50 7.42 53.14% 51.40%
Σ 14.66 20.71 20.47 41.26% 39.66%
Tabla 4-19 Pesos por eje algoritmo Camión C3 Peso Mínimo.
En la Tabla 4-22 se encontraron errores en la determinación del peso total del orden del
41.26% empleando el impacto de acuerdo al CCDSP y del 39.66% de acuerdo a la
ASSTHO LRFD. Los errores por eje oscilan entre el 2.38 al 67.96% de acuerdo al CCDSP
y del 1.22 al 66.06% de acuerdo a ASSTHO LRFD.
Figura 4-37 Gráfica de convergencia camión C3-Mín.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 97
C3 (5) MAX
Velocidad: 28 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 6.16 4.80 4.46 22.12% 27.63%
P2 11.08 6.22 5.78 43.87% 47.84%
P3 11.08 9.36 8.69 15.57% 21.54%
Σ 28.32 20.37 18.93 28.06% 33.15%
Tabla 4-20 Pesos por eje algoritmo Camión C3 Peso Máximo.
En la Tabla 4-24 se encontraron errores en la determinación del peso total del orden del
28.06% empleando el impacto de acuerdo al CCDSP y del 33.15% de acuerdo a la
ASSTHO LRFD. Los errores por eje oscilan entre el 15.57 al 43.87% de acuerdo al
CCDSP y del 21.54 al 47.84% de acuerdo a ASSTHO LRFD.
Figura 4-38 Gráfica de convergencia camión C3-Máx.
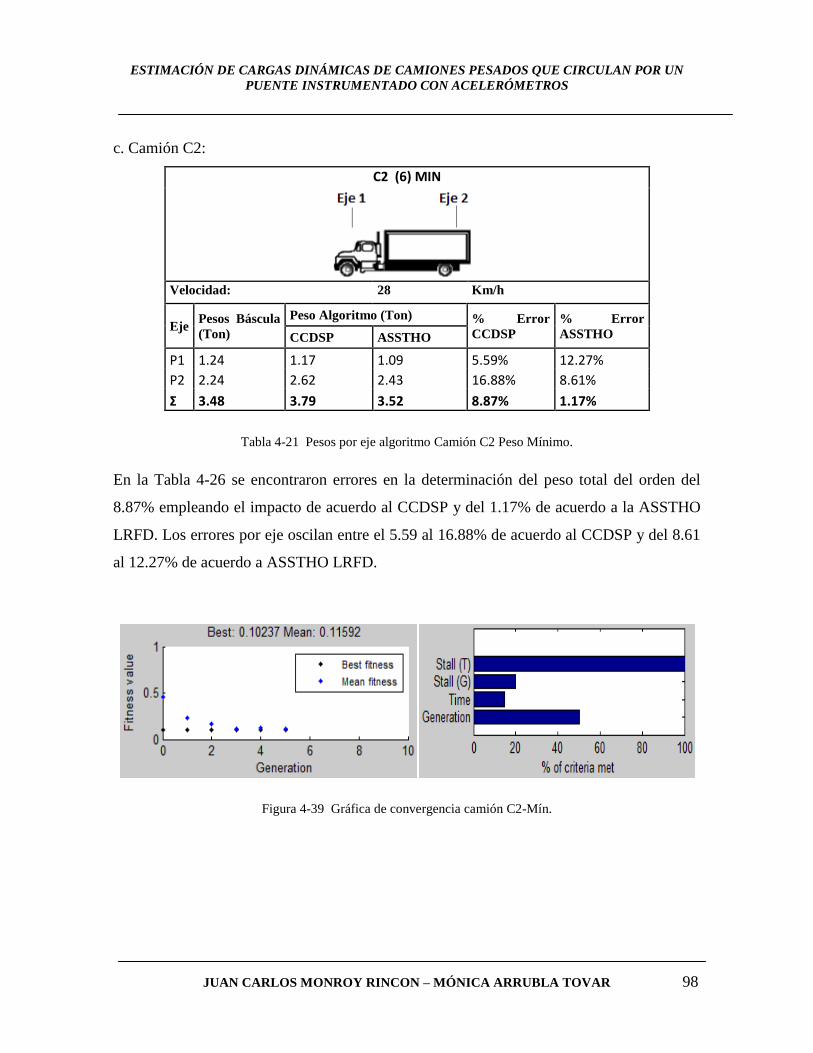
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 98
c. Camión C2:
C2 (6) MIN
Velocidad: 28 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 1.24 1.17 1.09 5.59% 12.27% P2 2.24 2.62 2.43 16.88% 8.61%
Σ 3.48 3.79 3.52 8.87% 1.17%
Tabla 4-21 Pesos por eje algoritmo Camión C2 Peso Mínimo.
En la Tabla 4-26 se encontraron errores en la determinación del peso total del orden del
8.87% empleando el impacto de acuerdo al CCDSP y del 1.17% de acuerdo a la ASSTHO
LRFD. Los errores por eje oscilan entre el 5.59 al 16.88% de acuerdo al CCDSP y del 8.61
al 12.27% de acuerdo a ASSTHO LRFD.
Figura 4-39 Gráfica de convergencia camión C2-Mín.
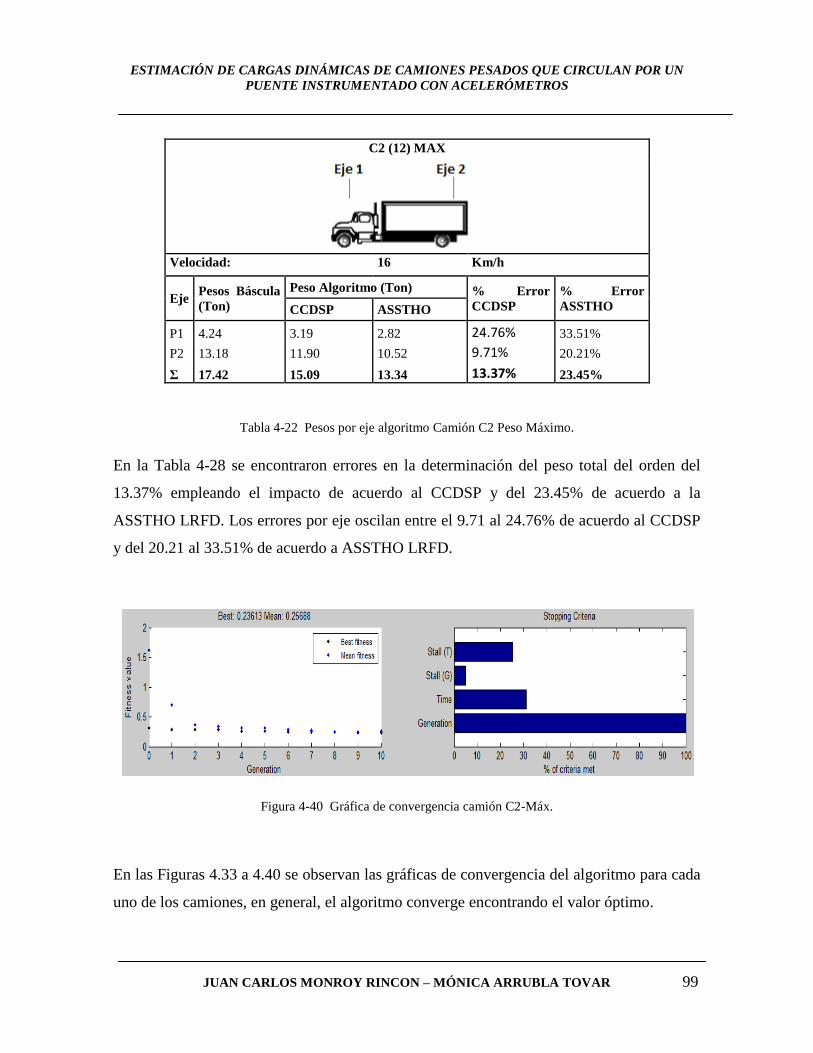
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 99
C2 (12) MAX
Velocidad: 16 Km/h
Eje Pesos Báscula
(Ton)
Peso Algoritmo (Ton) % Error
CCDSP
% Error
ASSTHO CCDSP ASSTHO
P1 4.24 3.19 2.82 24.76% 33.51%
P2 13.18 11.90 10.52 9.71% 20.21%
Σ 17.42 15.09 13.34 13.37% 23.45%
Tabla 4-22 Pesos por eje algoritmo Camión C2 Peso Máximo.
En la Tabla 4-28 se encontraron errores en la determinación del peso total del orden del
13.37% empleando el impacto de acuerdo al CCDSP y del 23.45% de acuerdo a la
ASSTHO LRFD. Los errores por eje oscilan entre el 9.71 al 24.76% de acuerdo al CCDSP
y del 20.21 al 33.51% de acuerdo a ASSTHO LRFD.
Figura 4-40 Gráfica de convergencia camión C2-Máx.
En las Figuras 4.33 a 4.40 se observan las gráficas de convergencia del algoritmo para cada
uno de los camiones, en general, el algoritmo converge encontrando el valor óptimo.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 100
4.4 RESULTADOS ALGORITMO GENETICO
Durante el proceso de convergencia se observa que para los camiones C2 y C3 el algoritmo
converge más rápido en comparación que los camiones C3S2 y C3S3 (ver Figuras 4.33 a
4.40), esto se debe a que las variables que manejan los camiones C2 y C3 son 4 y 6
respectivamente, mientras que para los camiones C3S2 y C3S3 son 10 y 12
respectivamente; por lo tanto, entre mayor es el número de variables mayor es el proceso
para que el algoritmo converja. Adicionalmente, es importante realizar un análisis de
sensibilidad e incertidumbre de los resultados que se obtienen por medio del algoritmo, con
el fin de garantizar que los resultados son los más óptimos.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 101
5. ANALISIS DE RESULTADOS
5.1 ACELERACIÓNES Y FRECUENCIAS POR TIPO DE CAMIÓN
La Tabla 5-1 presenta los valores más representativos de los datos obtenidos en campo para
los tipos de camiones analizados. Según los datos encontrados en dicha tabla, al comparar
las aceleraciones máximas y mínimas que generan los camiones al pasar por el puente, se
observa que a mayor peso mayor aceleración, sin embargo, en la Figura 5-1 no se evidencia
claramente esta tendencia debido a que se graficaron todos los camiones sin tener en cuenta
la velocidad a la que pasaron, y dicho parámetro afecta el valor de aceleración que genera
el camión al puente, como se muestra en la Figura 5-2.
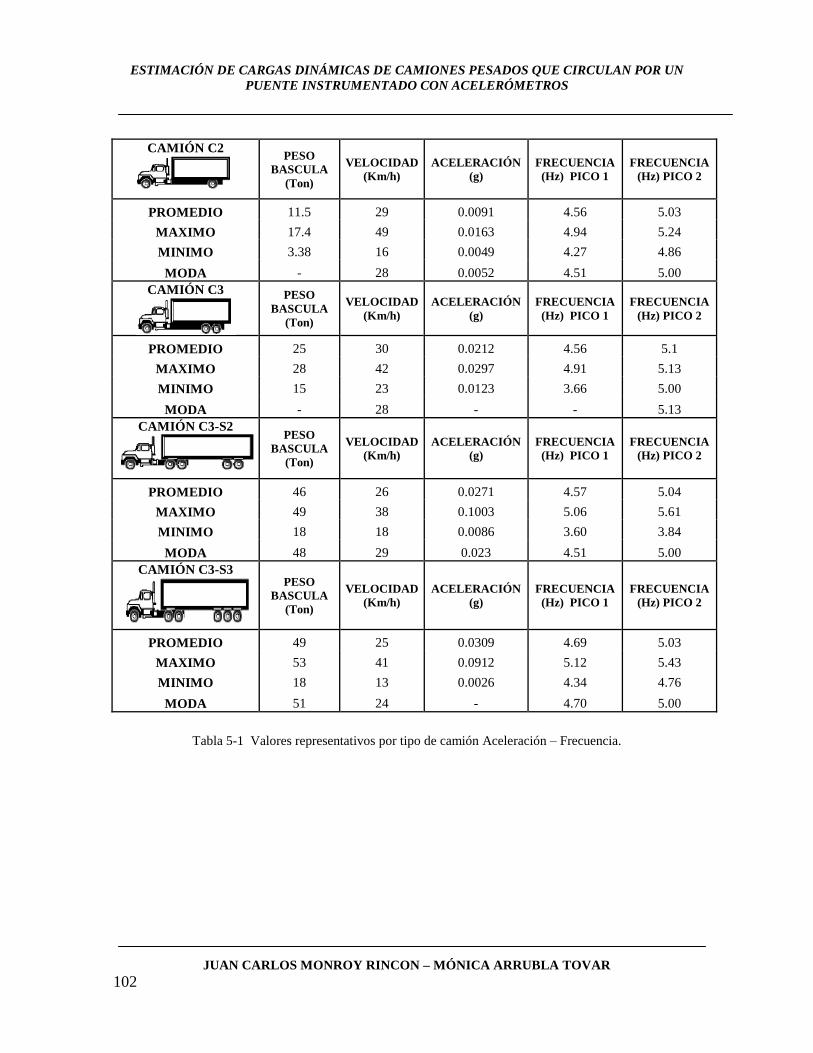
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 102
CAMIÓN C2
PESO
BASCULA
(Ton)
VELOCIDAD
(Km/h)
ACELERACIÓN
(g)
FRECUENCIA
(Hz) PICO 1
FRECUENCIA
(Hz) PICO 2
PROMEDIO 11.5 29 0.0091 4.56 5.03
MAXIMO 17.4 49 0.0163 4.94 5.24
MINIMO 3.38 16 0.0049 4.27 4.86
MODA - 28 0.0052 4.51 5.00
CAMIÓN C3
PESO
BASCULA
(Ton)
VELOCIDAD
(Km/h)
ACELERACIÓN
(g)
FRECUENCIA
(Hz) PICO 1
FRECUENCIA
(Hz) PICO 2
PROMEDIO 25 30 0.0212 4.56 5.1
MAXIMO 28 42 0.0297 4.91 5.13
MINIMO 15 23 0.0123 3.66 5.00
MODA - 28 - - 5.13
CAMIÓN C3-S2
PESO
BASCULA
(Ton)
VELOCIDAD
(Km/h)
ACELERACIÓN
(g)
FRECUENCIA
(Hz) PICO 1
FRECUENCIA
(Hz) PICO 2
PROMEDIO 46 26 0.0271 4.57 5.04
MAXIMO 49 38 0.1003 5.06 5.61
MINIMO 18 18 0.0086 3.60 3.84
MODA 48 29 0.023 4.51 5.00
CAMIÓN C3-S3
PESO
BASCULA
(Ton)
VELOCIDAD
(Km/h)
ACELERACIÓN
(g)
FRECUENCIA
(Hz) PICO 1
FRECUENCIA
(Hz) PICO 2
PROMEDIO 49 25 0.0309 4.69 5.03
MAXIMO 53 41 0.0912 5.12 5.43
MINIMO 18 13 0.0026 4.34 4.76
MODA 51 24 - 4.70 5.00
Tabla 5-1 Valores representativos por tipo de camión Aceleración – Frecuencia.
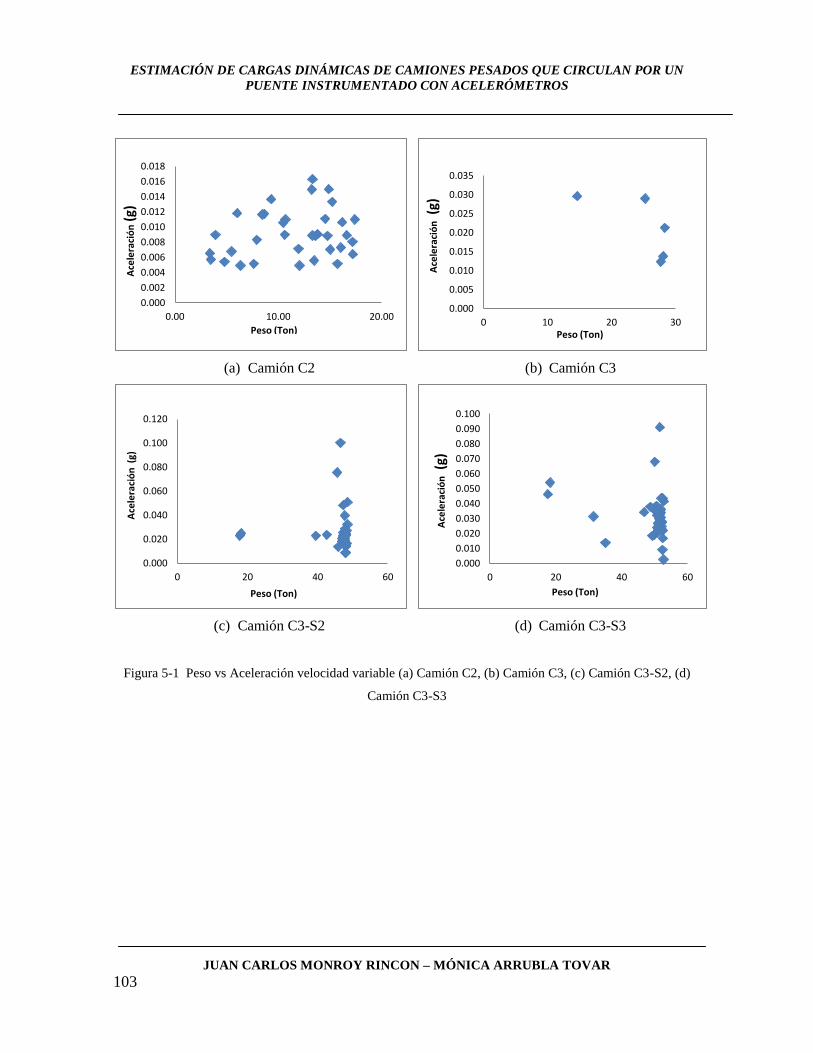
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 103
(a) Camión C2 (b) Camión C3
(c) Camión C3-S2 (d) Camión C3-S3
Figura 5-1 Peso vs Aceleración velocidad variable (a) Camión C2, (b) Camión C3, (c) Camión C3-S2, (d)
Camión C3-S3
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0.018
0.00 10.00 20.00
Peso (Ton)
Ace
lera
ció
n (
g)
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0 10 20 30 Peso (Ton)
Ace
lera
ció
n (
g)
0.000
0.020
0.040
0.060
0.080
0.100
0.120
0 20 40 60
Ace
lera
ció
n (
g)
Peso (Ton)
0.000
0.010
0.020
0.030
0.040
0.050
0.060
0.070
0.080
0.090
0.100
0 20 40 60
Ace
lera
ció
n (
g)
Peso (Ton)
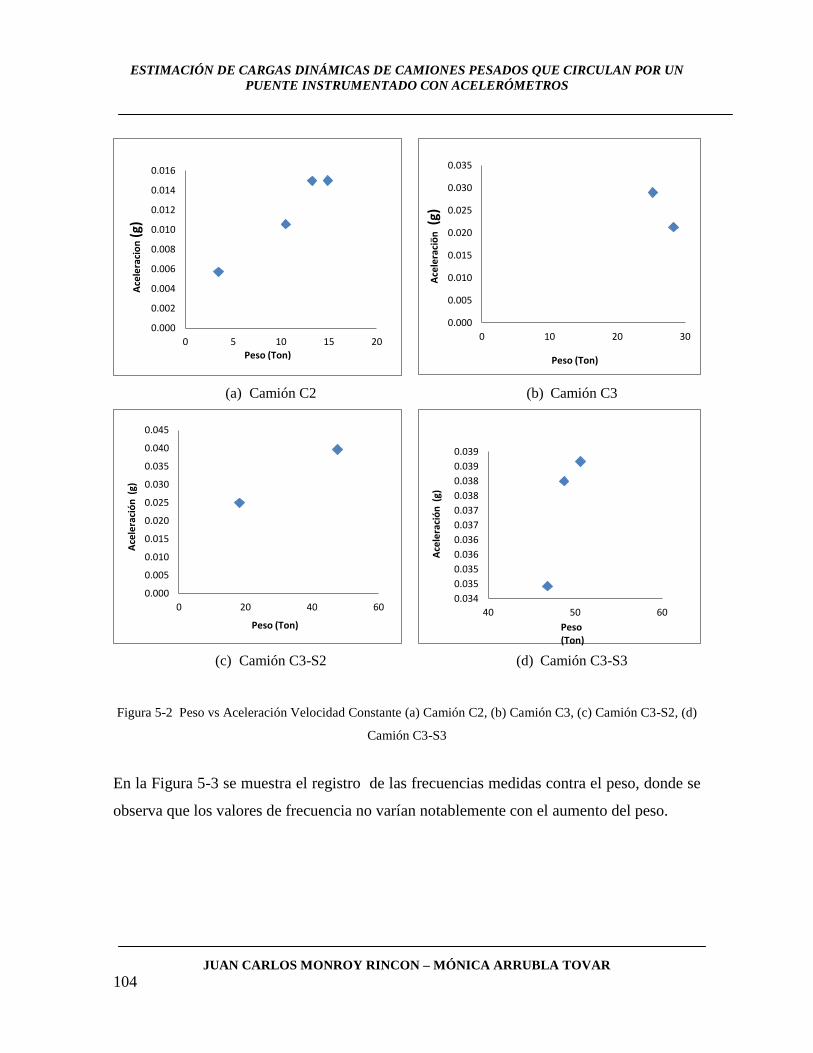
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 104
(a) Camión C2 (b) Camión C3
(c) Camión C3-S2 (d) Camión C3-S3
Figura 5-2 Peso vs Aceleración Velocidad Constante (a) Camión C2, (b) Camión C3, (c) Camión C3-S2, (d)
Camión C3-S3
En la Figura 5-3 se muestra el registro de las frecuencias medidas contra el peso, donde se
observa que los valores de frecuencia no varían notablemente con el aumento del peso.
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0 5 10 15 20
Peso (Ton)
Ace
lera
cio
n (
g)
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0 10 20 30
Peso (Ton)
Ace
lera
ciö
n (
g)
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.045
0 20 40 60
Ace
lera
ció
n (
g)
Peso (Ton)
0.034
0.035
0.035
0.036
0.036
0.037
0.037
0.038
0.038
0.039
0.039
40 50 60
Ace
lera
ció
n (
g)
Peso (Ton)
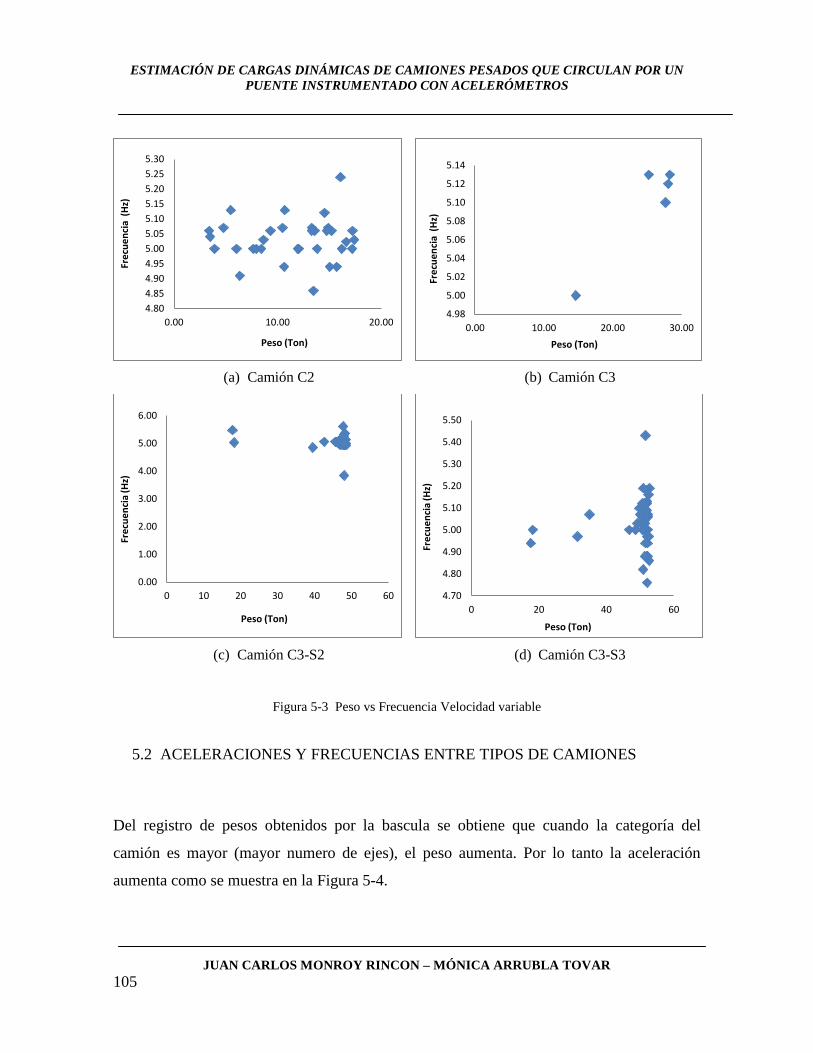
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 105
(a) Camión C2 (b) Camión C3
(c) Camión C3-S2 (d) Camión C3-S3
Figura 5-3 Peso vs Frecuencia Velocidad variable
5.2 ACELERACIONES Y FRECUENCIAS ENTRE TIPOS DE CAMIONES
Del registro de pesos obtenidos por la bascula se obtiene que cuando la categoría del
camión es mayor (mayor numero de ejes), el peso aumenta. Por lo tanto la aceleración
aumenta como se muestra en la Figura 5-4.
4.80
4.85
4.90
4.95
5.00
5.05
5.10
5.15
5.20
5.25
5.30
0.00 10.00 20.00
Peso (Ton)
Fre
cue
nci
a (
Hz)
4.98
5.00
5.02
5.04
5.06
5.08
5.10
5.12
5.14
0.00 10.00 20.00 30.00
Peso (Ton)
Fre
cue
nci
a (
Hz)
0.00
1.00
2.00
3.00
4.00
5.00
6.00
0 10 20 30 40 50 60
Peso (Ton)
Fre
cue
nci
a (H
z)
4.70
4.80
4.90
5.00
5.10
5.20
5.30
5.40
5.50
0 20 40 60
Peso (Ton)
Fre
cue
nci
a (H
z)

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 106
En la Tabla 5-2 se observa numéricamente lo dicho anteriormente, el camión C3-S2 registra
una aceleración promedio de 0.0271, muy cercano al valor promedio de aceleración que se
registra para los camiones C3-S3. En la Figura 5-4 se observa que el peso de los camiones
tipos C3-S2 y C3-S3 son muy cercanos luego los valores de aceleración se mantienen en el
mismo rango para los tipos de camión. Adicionalmente se observa que hay valores de
aceleración que comparte los tres tipos de camión, esto se debe a la velocidad con la que
pasa el camión por el puente a mayor velocidad con la que pasa el camión, mayor es el
registro de aceleración que le genera al tablero del puente.
También se puede observar en la Tabla 5-2 que a mayor registro de aceleración mayor
frecuencia.
TIPO DE CAMIÓN C2 C3 C3-S2 C3-S3
ACELERACIÓN (g) 0.0091 0.0212 0.0271 0.309
FRECUENCIA (Hz)
PICO 1 4.56 4.56 4.57 4.69
FRECUENCIA (Hz)
PICO 2 5.03 5.03 5.04 5.10
Tabla 5-2 Valores representativos para todos los tipos de camión Aceleración – Frecuencia
La Figura 5-5 muestra los valores obtenidos de frecuencia por el Espectro de Fourier, para
cada tipo de camión. La Figura 5-5 (a) representa los valores del primer pico (primer modo
de vibración), en la que se observa que dichos valores varían en unos rangos, más amplios
que los mostrados en la Figura 5-5 (b) que representa el segundo pico (segundo modo de
vibración), en la que se observa una tendencia lineal en un valor de frecuencia de 5Hz.
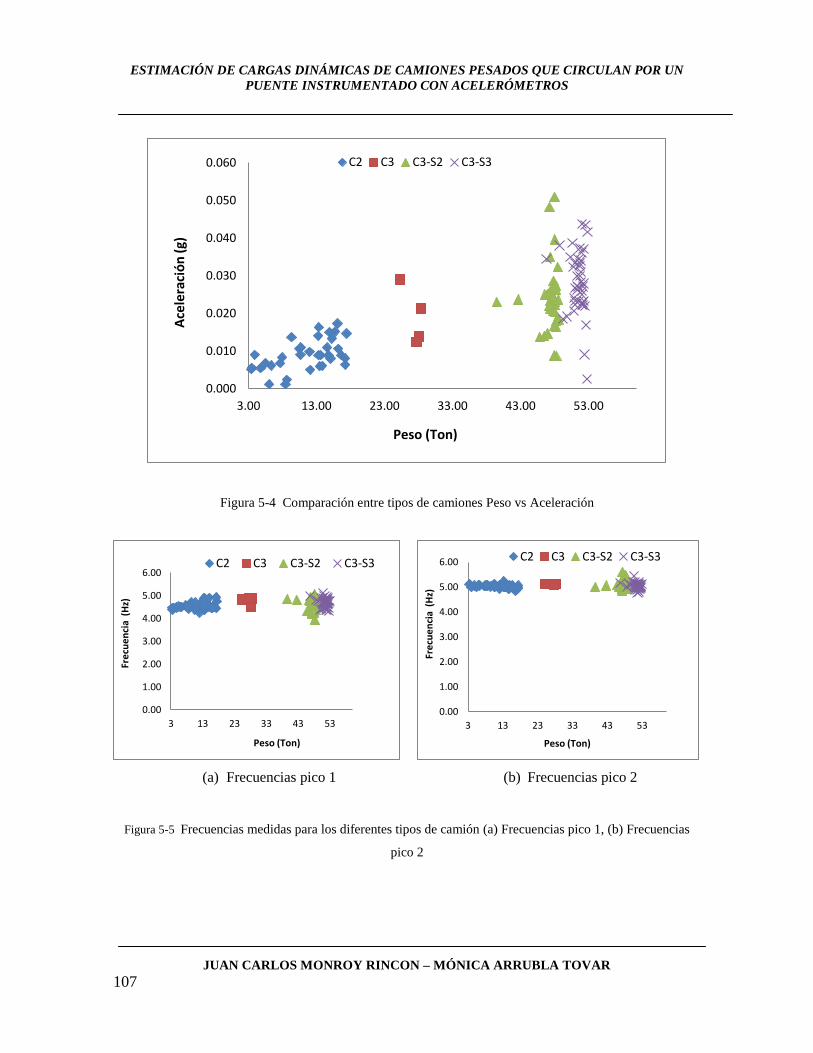
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 107
Figura 5-4 Comparación entre tipos de camiones Peso vs Aceleración
(a) Frecuencias pico 1 (b) Frecuencias pico 2
Figura 5-5 Frecuencias medidas para los diferentes tipos de camión (a) Frecuencias pico 1, (b) Frecuencias
pico 2
0.000
0.010
0.020
0.030
0.040
0.050
0.060
3.00 13.00 23.00 33.00 43.00 53.00
C2 C3 C3-S2 C3-S3
Peso (Ton)
Ace
lera
ció
n (
g)
0.00
1.00
2.00
3.00
4.00
5.00
6.00
3 13 23 33 43 53
C2 C3 C3-S2 C3-S3
Peso (Ton)
Fre
cue
nci
a (
Hz)
0.00
1.00
2.00
3.00
4.00
5.00
6.00
3 13 23 33 43 53
C2 C3 C3-S2 C3-S3
Peso (Ton)
Fre
cue
nci
a (
Hz)
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 108
5.3 FRECUENCIAS MEDIDAS - COMPARACIÓN DE METODOS
De cada tipo de camión se escogió el registro de peso de la báscula máximo y mínimo
como se muestra en las Tablas 4-1 a 4-4, y el puente en su estado natural sin carga. Se
obtuvo la frecuencia medida en campo por dos metodologías Espectro de Fourier y
Espectro de Potencia.
La Figura 5-6(a) muestra la respuesta de aceleración medida en el centro de la luz del
puente con los acelerómetros ubicados como se mencionó en la Figura 3-13. Los dos picos
mostrados en las Figuras 5-6 (c) y (d), evidencian la participación importante de
frecuencias de 3.78Hz y 5.24Hz. El espectrograma muestra la importancia de las
frecuencias mediante la intensidad de colores. Se observa que la frecuencia de 3.78Hz tiene
participación durante los momentos iniciales en que el camión pasa por el puente, y la
frecuencia de 5.24 se presenta durante el paso del camión en el puente. Es necesario
realizar una investigación adicional para asociar cada una de las frecuencias importantes
(picos del Espectro) a los diferentes modos de vibración de la estructura.
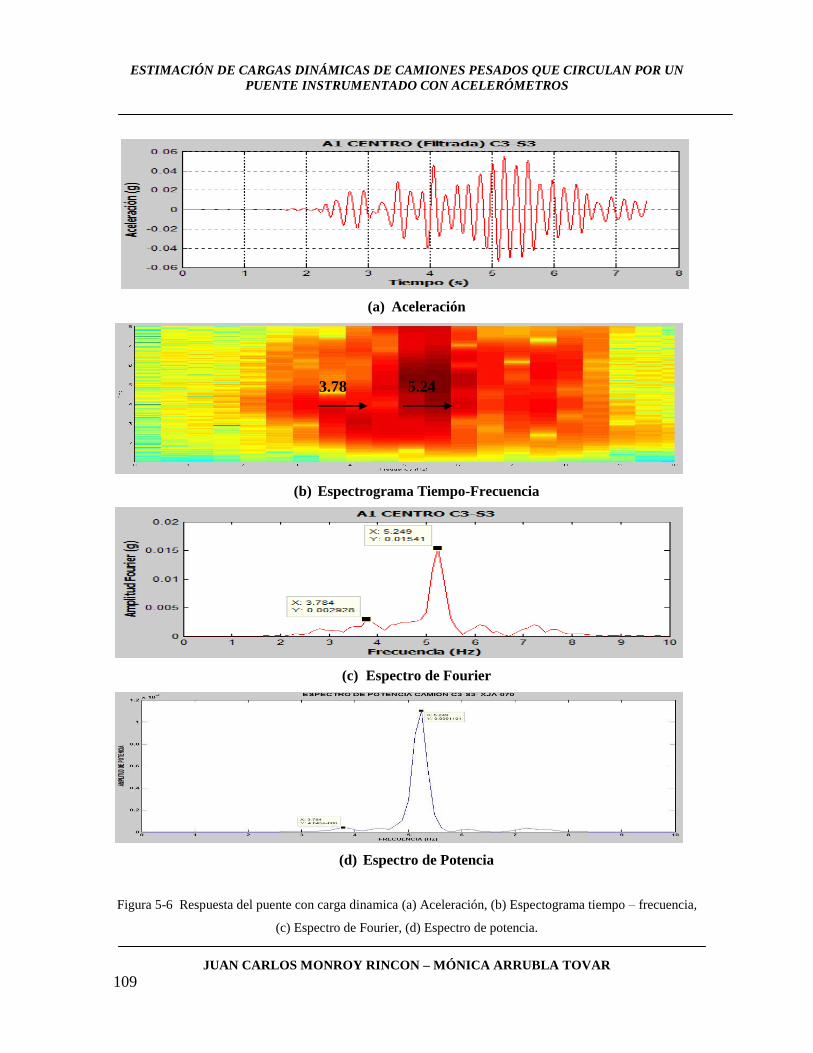
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 109
(a) Aceleración
(b) Espectrograma Tiempo-Frecuencia
(c) Espectro de Fourier
(d) Espectro de Potencia
Figura 5-6 Respuesta del puente con carga dinamica (a) Aceleración, (b) Espectograma tiempo – frecuencia,
(c) Espectro de Fourier, (d) Espectro de potencia.
3.78 5.24
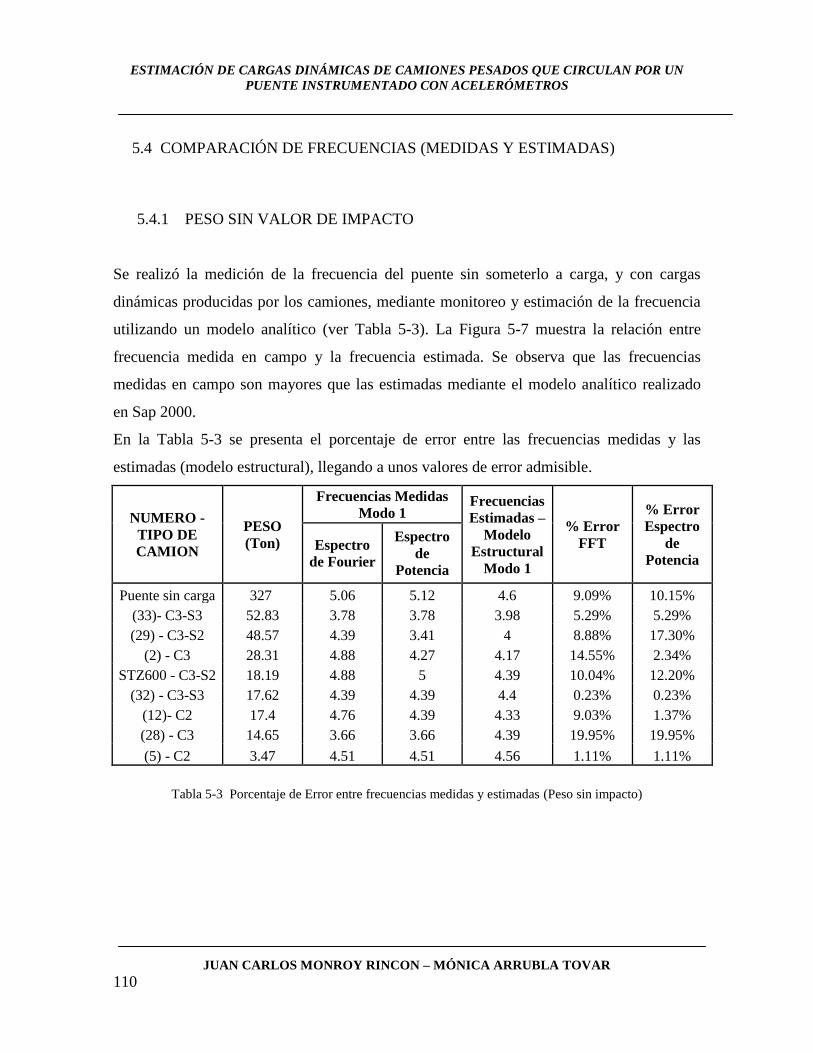
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 110
5.4 COMPARACIÓN DE FRECUENCIAS (MEDIDAS Y ESTIMADAS)
5.4.1 PESO SIN VALOR DE IMPACTO
Se realizó la medición de la frecuencia del puente sin someterlo a carga, y con cargas
dinámicas producidas por los camiones, mediante monitoreo y estimación de la frecuencia
utilizando un modelo analítico (ver Tabla 5-3). La Figura 5-7 muestra la relación entre
frecuencia medida en campo y la frecuencia estimada. Se observa que las frecuencias
medidas en campo son mayores que las estimadas mediante el modelo analítico realizado
en Sap 2000.
En la Tabla 5-3 se presenta el porcentaje de error entre las frecuencias medidas y las
estimadas (modelo estructural), llegando a unos valores de error admisible.
NUMERO -
TIPO DE
CAMION
PESO
(Ton)
Frecuencias Medidas
Modo 1 Frecuencias
Estimadas –
Modelo
Estructural
Modo 1
% Error
FFT
% Error
Espectro
de
Potencia Espectro
de Fourier
Espectro
de
Potencia
Puente sin carga 327 5.06 5.12 4.6 9.09% 10.15%
(33)- C3-S3 52.83 3.78 3.78 3.98 5.29% 5.29%
(29) - C3-S2 48.57 4.39 3.41 4 8.88% 17.30%
(2) - C3 28.31 4.88 4.27 4.17 14.55% 2.34%
STZ600 - C3-S2 18.19 4.88 5 4.39 10.04% 12.20%
(32) - C3-S3 17.62 4.39 4.39 4.4 0.23% 0.23%
(12)- C2 17.4 4.76 4.39 4.33 9.03% 1.37%
(28) - C3 14.65 3.66 3.66 4.39 19.95% 19.95%
(5) - C2 3.47 4.51 4.51 4.56 1.11% 1.11%
Tabla 5-3 Porcentaje de Error entre frecuencias medidas y estimadas (Peso sin impacto)
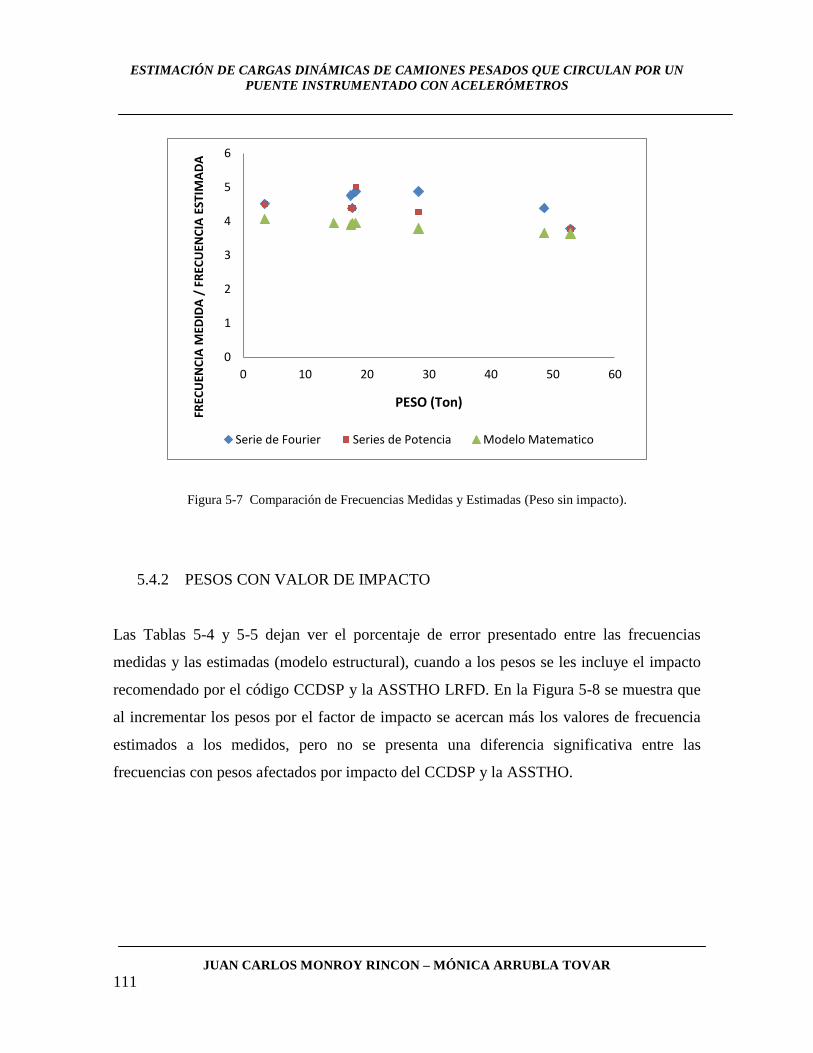
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 111
Figura 5-7 Comparación de Frecuencias Medidas y Estimadas (Peso sin impacto).
5.4.2 PESOS CON VALOR DE IMPACTO
Las Tablas 5-4 y 5-5 dejan ver el porcentaje de error presentado entre las frecuencias
medidas y las estimadas (modelo estructural), cuando a los pesos se les incluye el impacto
recomendado por el código CCDSP y la ASSTHO LRFD. En la Figura 5-8 se muestra que
al incrementar los pesos por el factor de impacto se acercan más los valores de frecuencia
estimados a los medidos, pero no se presenta una diferencia significativa entre las
frecuencias con pesos afectados por impacto del CCDSP y la ASSTHO.
0
1
2
3
4
5
6
0 10 20 30 40 50 60
Serie de Fourier Series de Potencia Modelo Matematico
FREC
UEN
CIA
MED
IDA
/ F
REC
UEN
CIA
EST
IMA
DA
PESO (Ton)
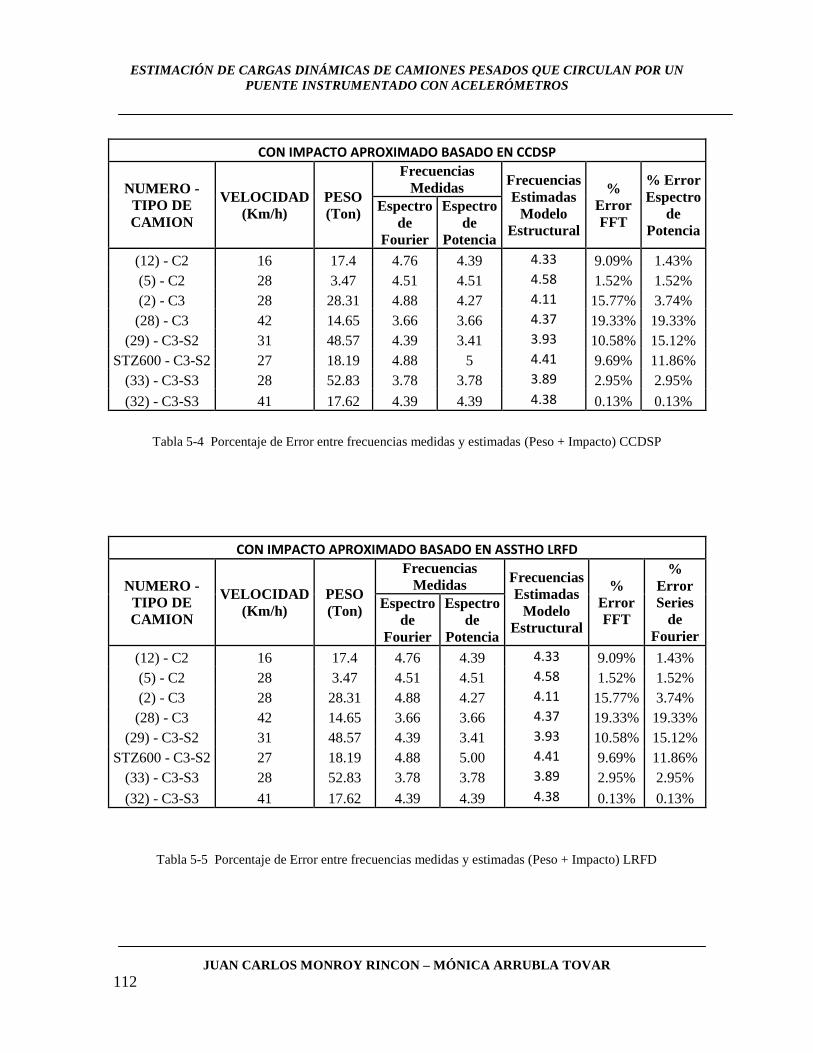
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 112
CON IMPACTO APROXIMADO BASADO EN CCDSP
NUMERO -
TIPO DE
CAMION
VELOCIDAD
(Km/h) PESO
(Ton)
Frecuencias
Medidas Frecuencias
Estimadas
Modelo
Estructural
%
Error
FFT
% Error
Espectro
de
Potencia
Espectro
de
Fourier
Espectro
de
Potencia
(12) - C2 16 17.4 4.76 4.39 4.33 9.09% 1.43%
(5) - C2 28 3.47 4.51 4.51 4.58 1.52% 1.52%
(2) - C3 28 28.31 4.88 4.27 4.11 15.77% 3.74%
(28) - C3 42 14.65 3.66 3.66 4.37 19.33% 19.33%
(29) - C3-S2 31 48.57 4.39 3.41 3.93 10.58% 15.12%
STZ600 - C3-S2 27 18.19 4.88 5 4.41 9.69% 11.86%
(33) - C3-S3 28 52.83 3.78 3.78 3.89 2.95% 2.95%
(32) - C3-S3 41 17.62 4.39 4.39 4.38 0.13% 0.13%
Tabla 5-4 Porcentaje de Error entre frecuencias medidas y estimadas (Peso + Impacto) CCDSP
CON IMPACTO APROXIMADO BASADO EN ASSTHO LRFD
NUMERO -
TIPO DE
CAMION
VELOCIDAD
(Km/h) PESO
(Ton)
Frecuencias
Medidas Frecuencias
Estimadas
Modelo
Estructural
%
Error
FFT
%
Error
Series
de
Fourier
Espectro
de
Fourier
Espectro
de
Potencia
(12) - C2 16 17.4 4.76 4.39 4.33 9.09% 1.43%
(5) - C2 28 3.47 4.51 4.51 4.58 1.52% 1.52%
(2) - C3 28 28.31 4.88 4.27 4.11 15.77% 3.74%
(28) - C3 42 14.65 3.66 3.66 4.37 19.33% 19.33%
(29) - C3-S2 31 48.57 4.39 3.41 3.93 10.58% 15.12%
STZ600 - C3-S2 27 18.19 4.88 5.00 4.41 9.69% 11.86%
(33) - C3-S3 28 52.83 3.78 3.78 3.89 2.95% 2.95%
(32) - C3-S3 41 17.62 4.39 4.39 4.38 0.13% 0.13%
Tabla 5-5 Porcentaje de Error entre frecuencias medidas y estimadas (Peso + Impacto) LRFD
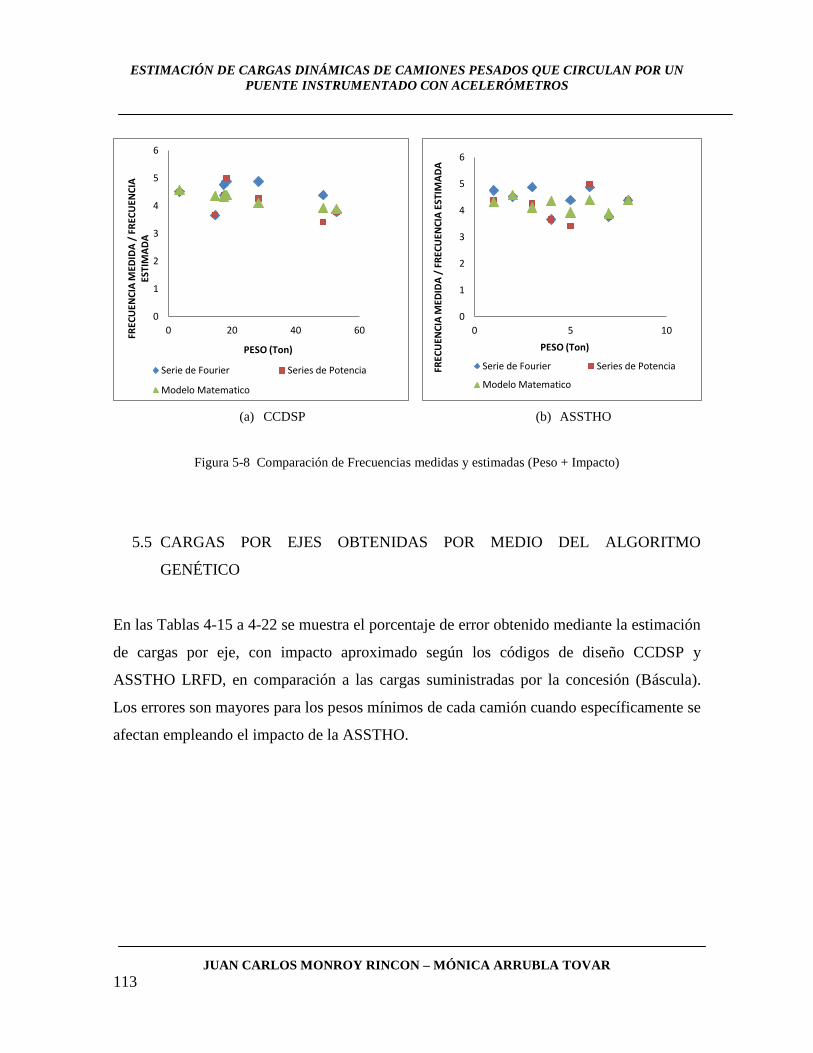
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 113
(a) CCDSP (b) ASSTHO
Figura 5-8 Comparación de Frecuencias medidas y estimadas (Peso + Impacto)
5.5 CARGAS POR EJES OBTENIDAS POR MEDIO DEL ALGORITMO
GENÉTICO
En las Tablas 4-15 a 4-22 se muestra el porcentaje de error obtenido mediante la estimación
de cargas por eje, con impacto aproximado según los códigos de diseño CCDSP y
ASSTHO LRFD, en comparación a las cargas suministradas por la concesión (Báscula).
Los errores son mayores para los pesos mínimos de cada camión cuando específicamente se
afectan empleando el impacto de la ASSTHO.
0
1
2
3
4
5
6
0 20 40 60
Serie de Fourier Series de Potencia
Modelo Matematico
FREC
UEN
CIA
MED
IDA
/ F
REC
UEN
CIA
ES
TIM
AD
A
PESO (Ton)
0
1
2
3
4
5
6
0 5 10
Serie de Fourier Series de Potencia
Modelo Matematico
FREC
UEN
CIA
MED
IDA
/ F
REC
UEN
CIA
EST
IMA
DA
PESO (Ton)

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 114
Figura 5-9 % de Error pesos máximos y mínimos CCDSP
Figura 5-10 % de Error pesos máximos y mínimos ASSTHO
En la Figura 5-11 se muestra que las frecuencias del puente producidas por las cargas
dinámicas se acercan al valor de la frecuencia del puente sin carga; pero con el aumento del
peso de los vehículos se alejan de la frecuencia natural. Por lo tanto, entre más liviano es el
peso del camión la diferencia entre frecuencias disminuye afectando la estimación de pesos
por medio del algoritmo genético.
0
1
2
0% 20% 40% 60%
C3 S3 C3S2 C3 C2
CAMIONES MINIMOS
% ERROR
CAMIONES MÁXIMOS
0
1
2
0% 20% 40% 60%
C3 S3 C3S2 C3 C2
CAMIONES MINIMOS
% ERROR
CAMIONES MÁXIMOS
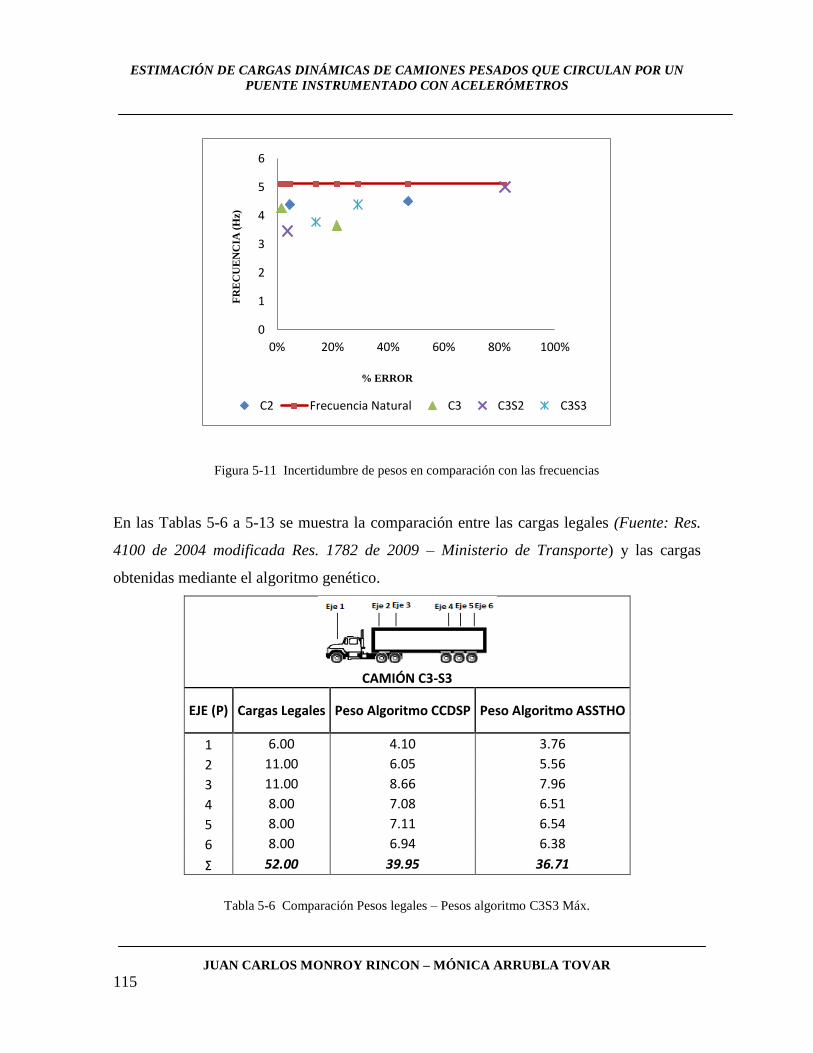
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 115
Figura 5-11 Incertidumbre de pesos en comparación con las frecuencias
En las Tablas 5-6 a 5-13 se muestra la comparación entre las cargas legales (Fuente: Res.
4100 de 2004 modificada Res. 1782 de 2009 – Ministerio de Transporte) y las cargas
obtenidas mediante el algoritmo genético.
CAMIÓN C3-S3
EJE (P) Cargas Legales Peso Algoritmo CCDSP Peso Algoritmo ASSTHO
1 6.00 4.10 3.76
2 11.00 6.05 5.56
3 11.00 8.66 7.96
4 8.00 7.08 6.51
5 8.00 7.11 6.54
6 8.00 6.94 6.38
Σ 52.00 39.95 36.71
Tabla 5-6 Comparación Pesos legales – Pesos algoritmo C3S3 Máx.
0
1
2
3
4
5
6
0% 20% 40% 60% 80% 100%
C2 Frecuencia Natural C3 C3S2 C3S3
FR
EC
UE
NC
IA (
Hz)
% ERROR
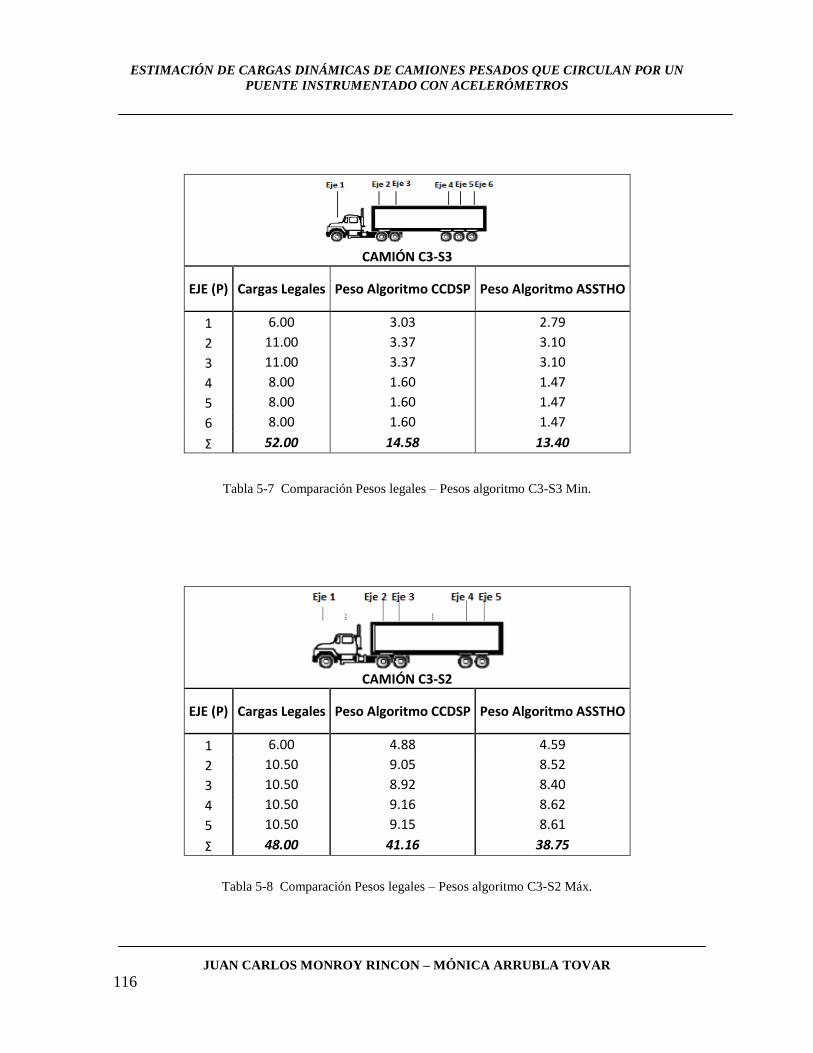
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 116
CAMIÓN C3-S3
EJE (P) Cargas Legales Peso Algoritmo CCDSP Peso Algoritmo ASSTHO
1 6.00 3.03 2.79
2 11.00 3.37 3.10
3 11.00 3.37 3.10
4 8.00 1.60 1.47
5 8.00 1.60 1.47
6 8.00 1.60 1.47
Σ 52.00 14.58 13.40
Tabla 5-7 Comparación Pesos legales – Pesos algoritmo C3-S3 Min.
CAMIÓN C3-S2
EJE (P) Cargas Legales Peso Algoritmo CCDSP Peso Algoritmo ASSTHO
1 6.00 4.88 4.59
2 10.50 9.05 8.52
3 10.50 8.92 8.40
4 10.50 9.16 8.62
5 10.50 9.15 8.61
Σ 48.00 41.16 38.75
Tabla 5-8 Comparación Pesos legales – Pesos algoritmo C3-S2 Máx.
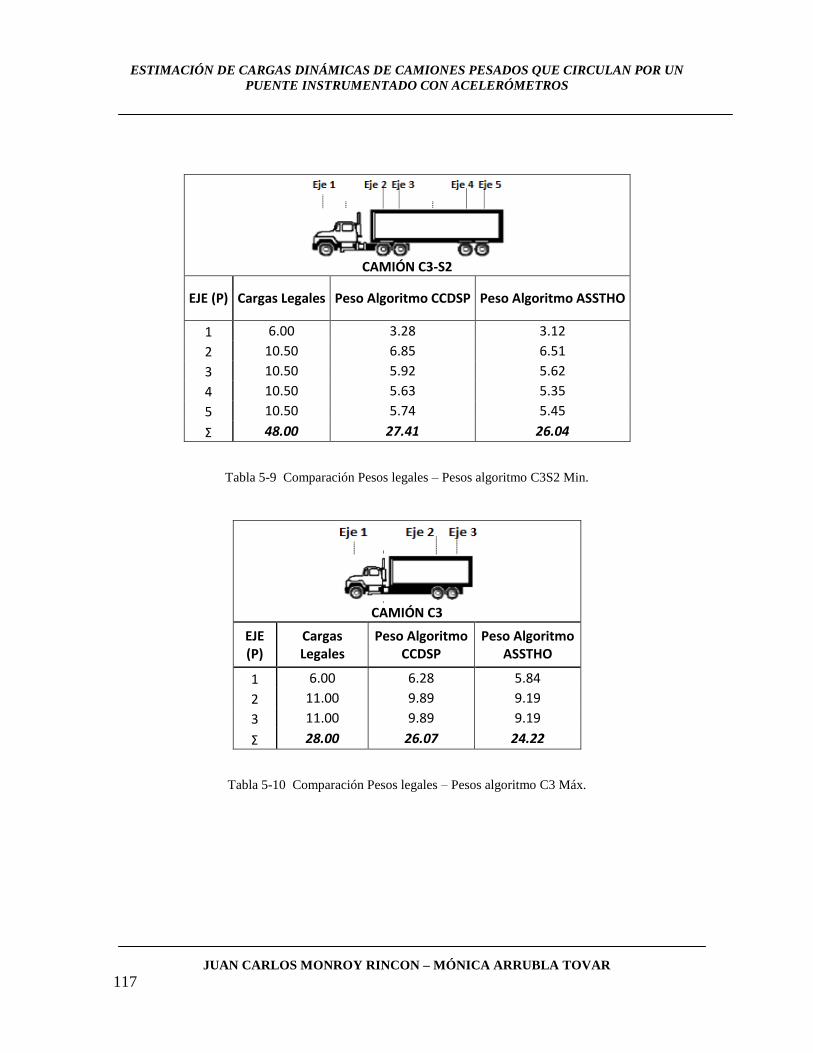
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 117
CAMIÓN C3-S2
EJE (P) Cargas Legales Peso Algoritmo CCDSP Peso Algoritmo ASSTHO
1 6.00 3.28 3.12
2 10.50 6.85 6.51
3 10.50 5.92 5.62
4 10.50 5.63 5.35
5 10.50 5.74 5.45
Σ 48.00 27.41 26.04
Tabla 5-9 Comparación Pesos legales – Pesos algoritmo C3S2 Min.
CAMIÓN C3
EJE (P)
Cargas Legales
Peso Algoritmo CCDSP
Peso Algoritmo ASSTHO
1 6.00 6.28 5.84
2 11.00 9.89 9.19
3 11.00 9.89 9.19
Σ 28.00 26.07 24.22
Tabla 5-10 Comparación Pesos legales – Pesos algoritmo C3 Máx.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 118
CAMIÓN C3
EJE (P)
Cargas Legales
Peso Algoritmo CCDSP
Peso Algoritmo ASSTHO
1 6.00 4.28 4.23
2 11.00 5.05 4.99
3 11.00 5.05 4.99
Σ 28.00 14.38 14.22
Tabla 5-11 Comparación Pesos legales – Pesos algoritmo C3 Min.
CAMIÓN C2
EJE (P)
Cargas Legales
Peso Algoritmo CCDSP
Peso Algoritmo ASSTHO
1 6.00 5.73 5.06
2 11.00 9.59 8.48
Σ 17.00 15.32 13.54
Tabla 5-12 Comparación Pesos legales – Pesos algoritmo C2 Máx.
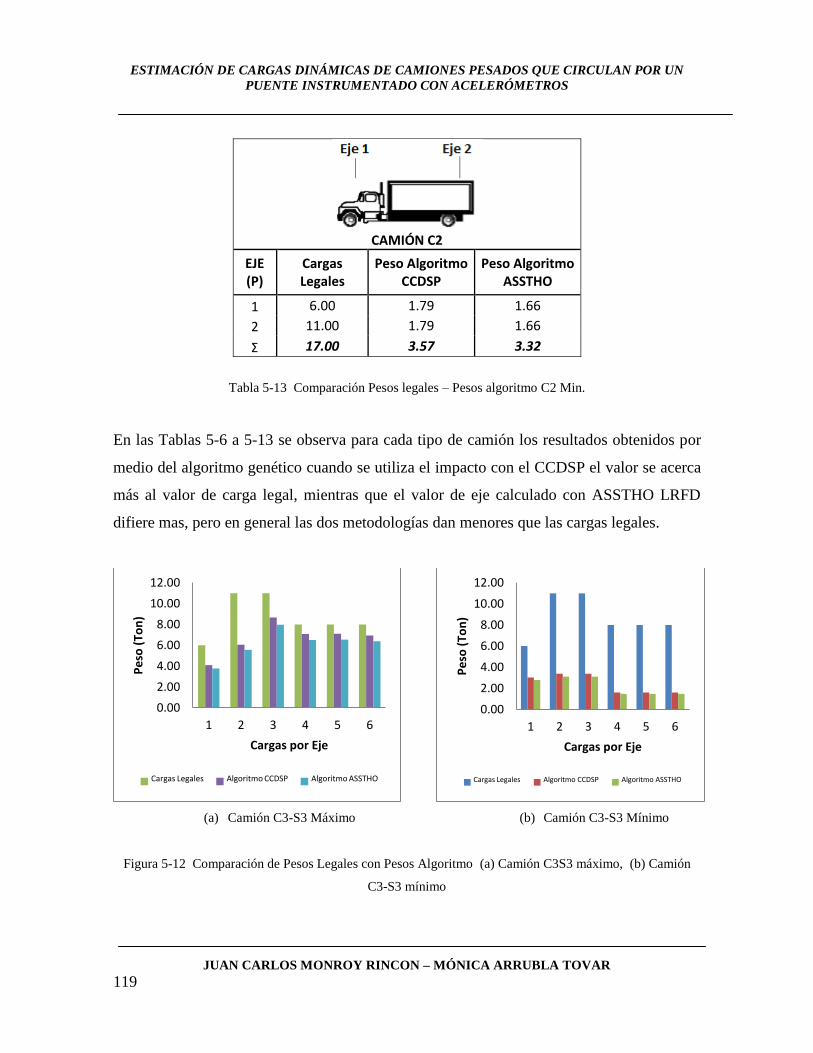
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 119
CAMIÓN C2
EJE (P)
Cargas Legales
Peso Algoritmo CCDSP
Peso Algoritmo ASSTHO
1 6.00 1.79 1.66
2 11.00 1.79 1.66
Σ 17.00 3.57 3.32
Tabla 5-13 Comparación Pesos legales – Pesos algoritmo C2 Min.
En las Tablas 5-6 a 5-13 se observa para cada tipo de camión los resultados obtenidos por
medio del algoritmo genético cuando se utiliza el impacto con el CCDSP el valor se acerca
más al valor de carga legal, mientras que el valor de eje calculado con ASSTHO LRFD
difiere mas, pero en general las dos metodologías dan menores que las cargas legales.
(a) Camión C3-S3 Máximo (b) Camión C3-S3 Mínimo
Figura 5-12 Comparación de Pesos Legales con Pesos Algoritmo (a) Camión C3S3 máximo, (b) Camión
C3-S3 mínimo
0.00
2.00
4.00
6.00
8.00
10.00
12.00
1 2 3 4 5 6
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP Algoritmo ASSTHO
0.00
2.00
4.00
6.00
8.00
10.00
12.00
1 2 3 4 5 6
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP Algoritmo ASSTHO
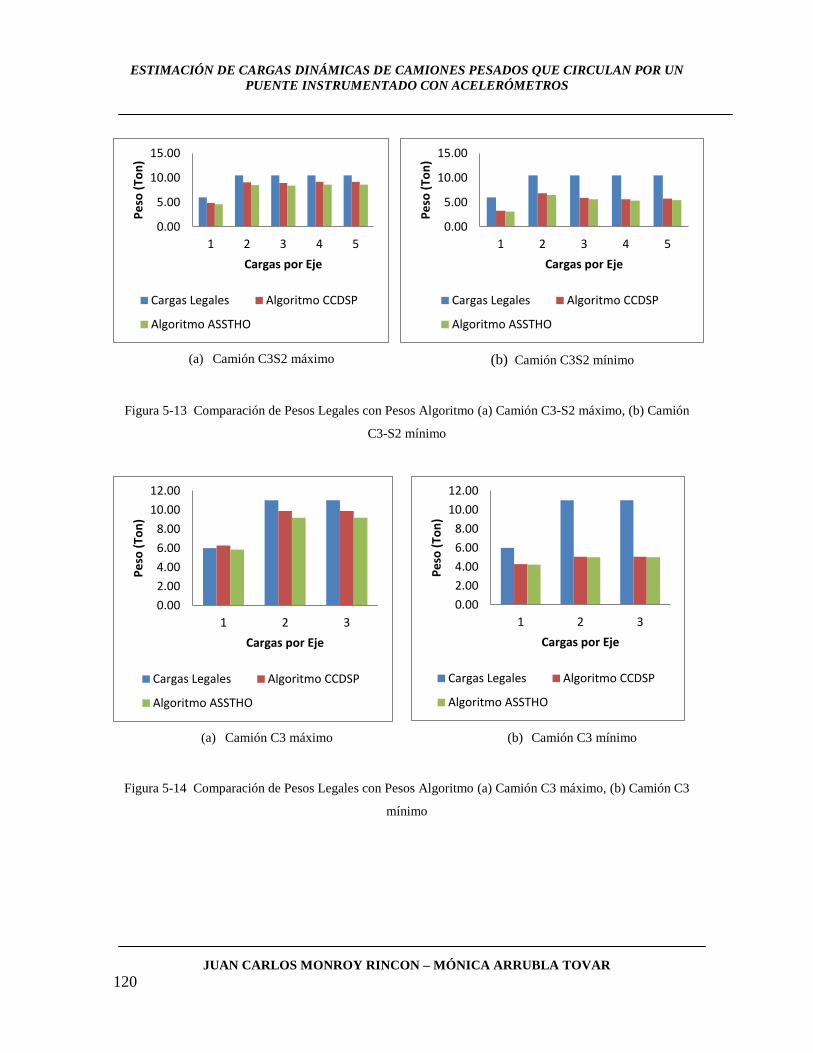
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 120
(a) Camión C3S2 máximo (b) Camión C3S2 mínimo
Figura 5-13 Comparación de Pesos Legales con Pesos Algoritmo (a) Camión C3-S2 máximo, (b) Camión
C3-S2 mínimo
(a) Camión C3 máximo (b) Camión C3 mínimo
Figura 5-14 Comparación de Pesos Legales con Pesos Algoritmo (a) Camión C3 máximo, (b) Camión C3
mínimo
0.00
5.00
10.00
15.00
1 2 3 4 5
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP
Algoritmo ASSTHO
0.00
5.00
10.00
15.00
1 2 3 4 5
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP
Algoritmo ASSTHO
0.00
2.00
4.00
6.00
8.00
10.00
12.00
1 2 3
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP
Algoritmo ASSTHO
0.00
2.00
4.00
6.00
8.00
10.00
12.00
1 2 3
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP
Algoritmo ASSTHO

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 121
(a) Camión C2máximo (b) Camión C2 mínimo
Figura 5-15 Comparación de Pesos Legales con Pesos AlgoritmoC2 (a) Camion C2 máximo, (b) Camión C2
mínimo
0.00
2.00
4.00
6.00
8.00
10.00
12.00
1 2
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP
Algoritmo ASSTHO
0.00
2.00
4.00
6.00
8.00
10.00
12.00
1 2
Pe
so (
Ton
)
Cargas por Eje
Cargas Legales Algoritmo CCDSP
Algoritmo ASSTHO
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 122
6. CONCLUSIONES
Se elaboró el modelo estructural de la superestructura del puente Guamo en el programa
MATLAB, tipo parrilla o entramado compuesto por elementos finitos discretos tipo
“frame”, logrando un nivel de calibración basado en dos (2) frecuencias predominantes de
vibración sin cargas producida por el tráfico obtenidas experimentalmente a través de la
transformada de Fourier y el Espectro de potencia con un porcentaje de error que varía
entre 5% y el 10% respectivamente. Dicha calibración se basó en la variación del módulo
de elasticidad de las vigas y la losa, del cual no se tenía información experimental porque
no hacia parte del alcance de la tesis.
Se implementó un algoritmo genético en el programa MATLAB, apoyado en diferentes
funciones predeterminadas de dicho programa, que permite estimar las cargas dinámicas
producidas por los camiones pesados que circulan por el puente instrumentado, basados en
la matriz de rigidez calibrada de la superestructura del puente y en la variación de la matriz
de masa. La función objetivo de dicho algoritmo se basó en la identificación de los nuevos
modos de vibración y sus correspondientes frecuencias determinadas experimentalmente,
que se generan cada vez que circulan por un puente en un solo carril diferentes camiones
pesados.
Se encontró que el cálculo de los pesos totales estimados por medio del algoritmo genético
desarrollado en la presente tesis incluyendo el impacto del CCDSP, presentan un error para
los vehículos C3-S3 (14% – 40%) y C3-S2 (7% al 23%), y para los vehículos C3 (28%-
40%) y C2 entre el (8% al 14%). Esto se debió a que se tiene menos incertidumbre dentro
del algoritmo genético para los camiones con menos cantidad de ejes que los camiones con
mayor cantidad de ejes, adicionalmente, es necesario realizar más pruebas para los
diferentes vehículos C3S3, C3S2, C3 Y C2.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 123
Igualmente se determinó que hay mayores errores en la estimación de los pesos por eje que
en la determinación del peso total, lo cual se debe a la incertidumbre que genera los
diferentes aspectos en esta investigación, tales como: la precisión del valor de impacto y las
variables relacionadas para su determinación (velocidad, amortiguamiento del camión, etc),
considerar la masa como una carga puntual y no distribuida que depende de la presión de
las llantas, entre otras.
Finalmente, estos resultados representan un primer aporte relevante para este tema de
investigación, cumpliendo con el objetivo principal de este trabajo de tesis y
constituyéndose en una prueba piloto, a través de la cual se pueden apoyar nuevos trabajos
en esta área profundizando en diferentes aspectos, especialmente los relacionados con la
determinación del impacto, la identificación modal, nuevos sistemas de monitoreo, entre
otros.
Se realizaron comparaciones analíticas de las cargas dinámicas reales obtenidas mediante
este algoritmo genético y las cargas legales en nuestro País, encontrándose que las cargas
estimadas en esta investigación durante solamente una semana no superan los límites
establecidos oficialmente. Sin embargo para tener más mayor seguridad de estos resultados
es necesario en un próximo trabajo hacer más monitoreo y solucionar los diferentes
aspectos mencionados anteriormente.

ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 124
7. TRABAJOS FUTUROS
Realizar un estudio detallado del impacto, teniendo en cuenta variables como: rugosidad
del pavimento, amortiguamiento de cada vehículo, velocidad y comportamiento dinámico
del camión, etc.
Instrumentar los camiones para evaluar su comportamiento dinámico, para modelos
estructurales más completos.
Realizar un análisis profundo para la identificación modal del tablero del puente,
adicionalmente, las cargas ejercidas por los vehículos en realidad no son puntuales sino que
se encuentran distribuidas en un área (huella de la llanta).
Instrumentar el puente para identificar no solamente la distancia entre ejes de los camiones
y su velocidad, sino también su ubicación en sentido transversal.
Optimizar el algoritmo incluyendo nuevos escenarios de la ubicación de las cargas en el
espacio, entre otros.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 125
8. REFERENCIAS BIBLIOGRÁFICAS
Acevedo A.M y Martínez L.A (2006), "Diseño de algoritmos para la determinación
indirecta de las cargas dinámicas de los carros que actúan sobre un prototipo
instrumentado del puente puerto Salgar", Trabajo de grado, Director: Edgar
Muñoz, Pontificia Universidad Javeriana, Departamento de Ingeniería Civil.
Cunagin, W., Mickler, W.A. and Wright, C., (1997). ‘Evasion of Weight-
Enforcement Stations by Trucks’. Transportation Research Record, 1570, 181-190.
D.E. Goldberg, "Computer-aided Gas Pipeline Operation Using Genetic Algorithm
and Rule Learning" , Doctoral Disertation, University of Michigan, Disertation
Abstracts International, Vol. 44, no.10, (1983).
D.E. Goldberg, "Genetic Algorithms in Search, Optimization and Machine
Learning", Addison-Wesley Publishing Company, Inc., (1989).
Dolcemascolo, V., & Sjögren, L. (n.d.). Bridge weigh in motion. In B. Jacob & E.
O’Brien (Eds.), International Conference on Heavy Vehicles HVParis 2008 (pp.
323–331).
Echeverry, J. D., Guarnizo Lemus, C., & Orozco G., Á. Á. (2007). Análisis de la
densidad espectral de potencia en registros mer. Scientia et Technica, 3(35).
Gonzalez, A. and Obrien, E.J. (2001), ‘The Development of a Dynamic Bridge
Weigh-in-Motion Algorithm’, pre-proceedings of 2nd European Conference on
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 126
Weigh-in-Motion of Road Vehicles, Eds. E.J. OBrien & B. Jacob, Lisbon, European
Commission, Luxembourg, pp. 445-452.
Gonzalez, A., Rowley, C. and OBrien, E.J. (2008), ‘A general solution to the
identification of moving vehicle forces on a bridge’, International Journal for
Numerical Methods in Engineering, in press.
Hardy, G. H., & Rogosinski, W. (1956). Fourier series. University Press.
Instituto Nacional de Vías (1995). Código colombiano de diseño sísmico de
puentes. Asociación Colombiana de Ingeniería Sísmica
Inc, M. (2007). MATLAB: Optimization Toolbox 3 : User’s Guide. The MathWorks.
Law, S.S., Zhu, X.Q. (2000), ‘Study on different beam models on moving force
identification’, Journal of sound and vibration, 234(4), pp. 661-679.
Leming S.K. and Stalford, H.L. (2003), Bridge Weigh-In-Motion System using
superposition of Dynamic Truck/Static Bridge Interaction, in Proceedings of the
American Control Conference, Denver, Colorado.
Matui S., El-Hakim A. (1989), Estimation of Axle Loads of Vehicle by Crack
Opening of RC Slab, Journal of Structural Engineering, JSCE, pp.407-418, 1989
(in Japanese)
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 127
Moler, C. B. (2010). Numerical Computing with MATLAB. SIAM.
Moses, F., (1979), ‘Weigh-in-Motion System using Instrumented Bridges’. ASCE
Transportation Engineering Journal, 105, TE3, 233-249.
Muñoz E.E. (2001), "Estudio de las causas del colapso de algunos puentes de
Colombia". Revista Ingeniería y Universidad, Pontificia Universidad Javeriana,
Bogotá, Colombia.
Muñoz E. (2011), "Algoritmo Genético para la determinación de cargas dinámicas
de camiones pesados que circulen en un puente instrumentado.". Pontificia
Universidad Javeriana, Trabajo de Investigación.
Officials, A. A. of S. H. and T. (2005). AASHTO LRFD bridge design specifications:
customary U.S. Units. American Association of State Highway and Transportation
Officials.
O’Brien, E.J., Gonzalez, A, Zindaric, A. and McNulty, P., 2002. ‘Testing of a Bridge
Weigh-in-Motion System in Cold Environmental Conditions’ Proceedings of the 3rd
Conference on Weigh-in-Motion, Orlando, Florida, 13-15 May.
Papoulis, A. (1985). Sistemas digitales y analógicos, transformadas de Fourier,
estimación espectral. Marcombo.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 128
Peters, R.J., (1986). ‘CULWAY – an Unmanned and Undetectable Highway Speed
Vehicle Weighing System’. Proceedings 13th Australian Road Research Board
Conference, Adelaide, Australia. Victoria: ARRB, 13(6), 70-83.
Pino L. A. (2006), "Propuesta para la elaboración de norma para la evaluación de
superestructura de puentes de carretera existentes en Colombia", Trabajo de
grado, Pontificia Universidad Javeriana, Departamento de Ingeniería Civil.
Quilligan, M., Karoumi, R. and OBrien, E.J. (2003), ‘Development and Testing of a
2-Dimensional Multi-Vehicle Bridge-WIM Algorithm’, 3rd International Conference
on Weigh-in-Motion (ICWIM3), Eds. B. McCall & E. OBrien, Orlando, pp. 199-208.
Rowley, C., Gonzalez, A., OBrien, E.J., Znidaric, A. (2008), ‘Comparison of
Conventional and Regularized Bridge Weigh-in-Motion Algorithms’, 5th
International Conference on Weigh-in-Motion (ICWIM5), Eds. B. Jacob, E.J.
OBrien, A. OConnor, M. Bouteldja, LCPC Publications, Paris.
Ryall, M. J., Parke, G. A. R., & Harding, J. E. (2000). Bridge Management 4:
Inspection, Maintenance, Assessment and Repair. Thomas Telford.
Tikhonov, A.N., Arsenin, V.Y. (1977), Solutions of ill-posed problems. New York:
John Wiley.
ESTIMACIÓN DE CARGAS DINÁMICAS DE CAMIONES PESADOS QUE CIRCULAN POR UN
PUENTE INSTRUMENTADO CON ACELERÓMETROS
JUAN CARLOS MONROY RINCON – MÓNICA ARRUBLA TOVAR 129
Valdés, J., & De la Colina, J. (2013). Análisis de la Amplificación Dinámica de la
Carga Viva en Puentes con Base en Pruebas Experimentales. Revista
Tecnológica-ESPOL, 21(1).
Zhu, X.Q., Law, S.S. (2001), ‘Identification of moving loads on an orthotropic plate’,
Journal of vibration and acoustics, 123, pp.238-244.
Zhu, X.Q., Law, S.S. (2003), ‘Time domain identification of moving loads on bridge
deck’, Journal of vibration and acoustics, 125, pp. 187-198.
Znidaric, A., Lavric, I., Kalin, J. (2008), Measurements of bridge dynamics with a
bridge weigh-in-motion system’, 5th International Conference on Weigh-in-Motion
(ICWIM5), Eds. B. Jacob, E.J. OBrien, A. OConnor, M. Bouteldja, ISTE/Hermes,
London.