escuela de formaciÓn tecnolÓgica construcciÓn de …
TRANSCRIPT
ESCUELA POLITÉCNICA NACIONAL
ESCUELA DE FORMACIÓN TECNOLÓGICA
CONSTRUCCIÓN DE UN MÓDULO DIDÁCTICO PARA CONTROL DE VELOCIDAD DE UN MOTOR DE
CORRIENTE CONTÍNUA MEDIANTE EL USO DE UN MICROCONTROLADOR DOTADO DE OSCILADOR
INTERNO
PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE TECNÓLOGO ELECTROMECÁNICO
Diego Vinicio Sánchez Proaño Franklin Olmedo Ocampo Jiménez
Director: Ing. Alcívar Costales
Quito, 30 – 09 -- 06
2
DECLARACIÓN
Nosotros, Diego Sánchez y Franklin Ocampo, declaram os bajo juramento que el trabajo
aquí descrito es completamente de nuestra autoría, que no ha sido previamente presentado
para ningún grado o calificación profesional; y, qu e hemos consultado a las referencias
bibliográficas que se incluyen en este documento.
A través de la presente declaración cedemos nuestro s derechos de propiedad intelectual
correspondientes de este trabajo, a la Escuela Poli técnica Nacional, según lo establecido
por la Ley de Propiedad Intelectual, por su Reglame nto y por la normatividad institucional
vigente.
________________ ____________________
Diego Sánchez Frank lin Ocampo

3
CERTIFICACIÓN
Certifico que el presente trabajo fue desarrollado por Diego Sánchez y Franklin Ocampo
bajo mi supervisión.
.________________________
Ing. Alcívar Costales
Director de Proyecto
4
ÍNDICE
CONTENIDO Pág
CAPÍTULO 1
1. Bases Fundamentales
Introducción 1
1.1. La Conversión AC- DC 1
1.2. El Microcontrolador 4
1.2.1. Arquitectura Interna 6
1.2.1.1. El Procesador 6
1.2.1.2. Memoria del Programa 8
1.2.1.2.1. ROM con Máscara 8
1.2.1.2.2. EPROM 9
1.2.1.2.3. OTP 9
1.2.1.2.4. EEPROM 9
1.2.1.2.5 FLASH 10
1.2.1.2.6 Memoria de Datos 10
1.2.1.2.7. Líneas de entrada y salida para periféricos 12
1.2.1.2.8. Recursos auxiliares 12
1.3. El Motor de corriente continúa 14
1.3.1. Torque y Fuerza Electromagnéticos 16
1.3.2. Fuerza Contraelectromotriz 18
1.3.3. Potencia Desarrollada 20
1.3.4. Características del motor 23
1.4 Breve descripción de los elementos utilizados 24
1.4.1. Resistencias 24
1.4.2. Diodos 26
1.4.3. Optoacopladores 28
1.4.4. Regulador de voltaje 30
1.4.5. TRIAC 31
1.4.6. Relevadores 32
1.4.7. Transistores 33
5
1.4.8. Transformadores 33
1.4.9. Condensadores 36
1.4.10. Pulsadores 37
CAPÍTULO 2
2. Diseño del módulo
Introducción 38
2.1. El hardware del módulo 40
2.1.1. Entradas 40
2.1.2. Salidas a los actuadores y señalización 44
2.1.3. Freno dinámico 49
2.2. El software del módulo 54
CAPÍTULO 3
3.1. Resultados, Conclusiones y Recomendaciones 64
3.1.1. Pruebas al vacío 64
3.1.2. Pruebas con carga 64
3.2. Conclusiones y Recomendaciones 65
BIBLIOGRAFÍA 69
ANEXOS 70
6
RESUMEN
Tradicionalmente dentro de la Escuela se ha tenido siempre la facilidad de contar
con buenos profesores que utilizan todos los medios disponibles para poder de
una manera lo mas pragmática posible explicar al alumnado todo lo referente a
los temas tratados.
A pesar de sus evidentes esfuerzos por lograr esto, muchas de las ocasiones la
falta de algunos de estos elementos de no muy elevada dificultad para
conseguirlos, tienden en parte a limitar el avance del conocimiento en las
instalaciones de la Escuela, por lo que hemos decidido conjuntamente con
nuestro ingeniero Director de Tesis el iniciar con la implementación del pequeño
módulo didáctico que hemos estado diseñando a lo largo de los meses pasados
para de esta manera paliar en principio a pequeña escala con el problema
descrito inicialmente.
Contando con este pequeño equipo dentro de las instalaciones de la Escuela,
veremos en gran manera –o por lo menos a partir de ahora-, podremos observar
que le enseñanza de los temas tratados se beneficiará gracias a la
implementación de módulos como este que a pesar de no ser del tipo industrial o
comercial, contienen la aplicación práctica de muchos de los temas que hemos
podido recibir a lo largo de nuestro paso por la Escuela.
Es así que aplicando nuestros conocimientos referentes a la Electricidad,
Máquinas Eléctricas, Instalaciones Eléctricas, Circuitos Digitales, Electrónica
General, Electrónica de Potencia, Control y Automatismos Industriales II, se han
conjugado para conseguir de esta forma plasmar el módulo didáctico que
presentamos.
Nuestro módulo, además de ser el inicio de la solución a una problemática de la
Escuela en general, se ha concebido teniendo en cuenta los conocimientos que
nos han sido entregados en las materias enlistadas anteriormente, y por lo tanto,
poniendo al alcance del resto del nuevo alumnado la aplicación práctica de todos
aquellos conocimientos y la posibilidad de plasmarlos en dispositivos reales que
7
pueden contribuir, con un poco mas de esfuerzo e investigación, junto a un mayor
desarrollo, a encontrar soluciones prácticas para la industria de hoy en día.
Nuestro diseño parte de buscar una aplicación de lo aprendido en el curso de
Automatismos Industriales, curso en el cual se trató el tema de
microcontroladores por vez primera para los alumnos de la Carrera de Tecnología
Electromecánica, y es así como iniciamos nuestro diseño basándonos en el
PIC16f628a, el cual viene dotado de varias características que resultan ser muy
útiles y que describiremos oportunamente.
Se ha utilizado prácticamente todos los pines de los pórticos a y b tanto para el
censado de señales como para permitir la actuación de los dispositivos que
cumplen con su respectivo cometido.
Debe recordarse que las velocidades que se conseguirá son fijas, en número de
tres solamente, se cuenta igualmente con un dispositivo incorporado para facilitar
el frenado del motor y la inversión de giro. La implementación de algunas partes, -
una minoría en realidad, como la inversión de giro por ejemplo-, se da gracias a la
presencia de dispositivos electromecánicos como relés, pero cumpliendo con la
variación de velocidad gracias a disparos comandados por el microcontrolador y
sus respectivos dispositivos semiconductores, de mayor tendencia a uso en estos
días por la gran cantidad de prestaciones que estos tienen comparativamente
hablando al compararlos con los tradicionales medios puramente
electromecánicos.
Al momento de energizar se activa el freno regenerativo, debe escogerse
primeramente la velocidad y luego el sentido de giro deseados, y el módulo está
programado para no permitir que se cambie de sentido de giro bruscamente,
obligando al usuario a frenar el motor primeramente para luego proceder al
cambio de giro, entre otras prestaciones.
8
INTRODUCCIÓN
A través del desarrollo de este módulo didáctico estamos seguros de estar
haciendo una contribución significativa para las instalaciones de la Escuela, y
conociendo acerca de la necesidad de poner en práctica los conocimientos
adquiridos presentamos este proyecto de titulación.
Existen en el mercado dispositivos de control analógico a través de componentes
electromecánicos, como los equipados con resistencias de arranque y otros, pero
que están tendiendo a desaparecer debido a la gran novedad en optimización de
recursos que significa el implementar los mismos por medio de componentes del
tipo de semiconductores. Los dispositivos corrientes tienen desventajas como la
pérdida de potencia por aumento de temperatura, puede ser relativamente poco
exacto, consta en muchos de los casos de componentes demasiado costosos, de
difícil y en ocasiones especializada reparación y mantenimiento, el cual debe
proporcionársele de manera contínua y apreciable.
Reducimos en gran manera estos inconvenientes cuando implementamos nuestro
módulo, porque al dotarle de un microcontrolador se reducen muy
considerablemente el tamaño y el costo de las partes, mejoramos la confiabilidad,
y el rendimiento de este control, por esto podemos sin temor a exageración ni
equivocación que este módulo tiene una potencialidad considerable ya que puede
tomarse como base para posteriores estudios y desarrollarse en el futuro con
otras características de funcionamiento o agregar inclusive nuevas funciones de
control, como el control mas exacto de corriente, y vigilancia de otras funciones de
control como aumento desmesurado de temperatura en el equipo sometido a
prueba o incluso llegar al punto de elaborar un banco de pruebas para motores
eléctricos en el que se pueda detectar fallas del tipo eléctrico y posiblemente
hasta mecánico.
Para el módulo, el cual constituye, por llamarlo de alguna manera, un pequeño
PLC con salidas tanto de contactos mecánicos como semiconductores, y que es
capaz, a través de sus salidas de semiconductores de proporcionar órdenes de
muy alta velocidad, del orden de los microsegundos, que es el tiempo que toma
9
un microcontrolador para ejecutar una orden dependiendo del tipo de oscilador
con el que se le haya dotado. Así, en el módulo que hemos propuesto, iniciamos a
partir de la alimentación monofásica fija proporcionada por la Empresa Eléctrica
Quito, y, pasando por un puente rectificador dividimos esta alimentación en dos
ramificaciones, la primera de estas dos derivaciones se dirige hasta un sensor de
cruce por cero del tipo de diodo zener, el cual que proporcionará la señal para que
el microcontrolador luego de él pueda tener esta pauta para retardar el disparo de
los triacs que alimentan por la segunda derivación al motor con la energía
dosificada que éste requiere para poder funcionar dentro de los parámetros que
hemos establecido previamente.
Debe recordarse que el censado de la señal para proporcionársela al
microcontrolador se realiza de manera indirecta, esto es a través de un
optoacoplador, y la salida de la señal que este proporciona a los TRIACs se logra
de la misma manera para así impedir que cualquier daño que pudiera sobrevenirle
a la parte de fuerza del módulo esté absolutamente impedida de causar cualquier
tipo de daño permanente en la parte de la tarjeta de control y específicamente en
el microcontrolador y su programa, logrando mediante esto protegerlos.
Recordamos igualmente que para nuestro módulo utilizamos diferentes voltajes
en diferentes etapas del mismo, partiendo desde la señal TTL 0 lógico y 1 lógico,
es decir de 0 y de 5 voltios, luego de 12 voltios para la alimentación de las
bobinas de los relés, y por lo tanto de las salidas por contactos, y también de 100
a 110 voltios de corriente contínua rectificada no filtrada para conducirla a través
de los TRIACs y llevarla hasta el motor.
10
CAPÍTULO 1
BASES FUNDAMENTALES
11
CAPÍTULO 1
1. BASES FUNDAMENTALES
INTRODUCCIÓN
Para poder iniciar el desarrollo de este proyecto se vuelve necesario el describir
ciertos componentes que serán utilizados a lo largo del mismo, y por lo tanto se
presentarán las características de los que se utilizarán para aprovecharlas
adecuadamente.
LA CONVERSIÓN AC – DC
Existen varios métodos a través de los cuales es posible convertir la señal de
voltaje alterno de 60 hertzios que entrega la Empresa Eléctrica Quito en una señal
de voltaje contínua pulsante.
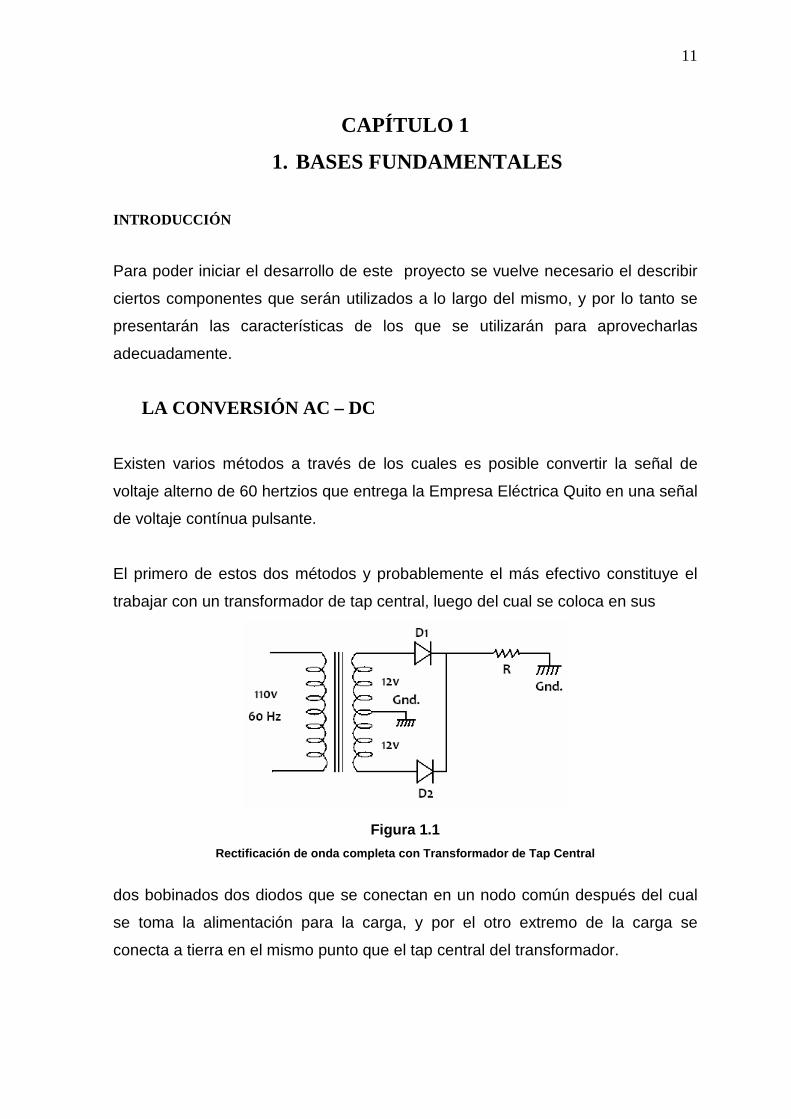
El primero de estos dos métodos y probablemente el más efectivo constituye el
trabajar con un transformador de tap central, luego del cual se coloca en sus
Figura 1.1
Rectificación de onda completa con Transformador de Tap Central
dos bobinados dos diodos que se conectan en un nodo común después del cual
se toma la alimentación para la carga, y por el otro extremo de la carga se
conecta a tierra en el mismo punto que el tap central del transformador.
12
Este tipo de rectificación que se observa en la figura número uno, tiene una
excelente ventaja, debido a que la caída de voltaje que se da por el paso de
corriente a través de los diodos se atenúa en comparación con la segunda forma
de rectificación de la señal de voltaje alterno, pero por otro lado en ocasiones, por
supuesto dependiendo de la potencia que el transformador necesite entregar al
circuito, el aspecto negativo de este tipo de rectificación presenta el inconveniente
de que un transformador de tap central suele costar un poco más que uno
corriente sin taps.
El segundo método de rectificación es el mayormente utilizado, y consta de un
transformador corriente pero sin tap central, cuyos terminales se conectan a un
arreglo de puente de diodos comercial que puede encontrarse en el mercado, y se
obtiene corriente contínua pulsante.
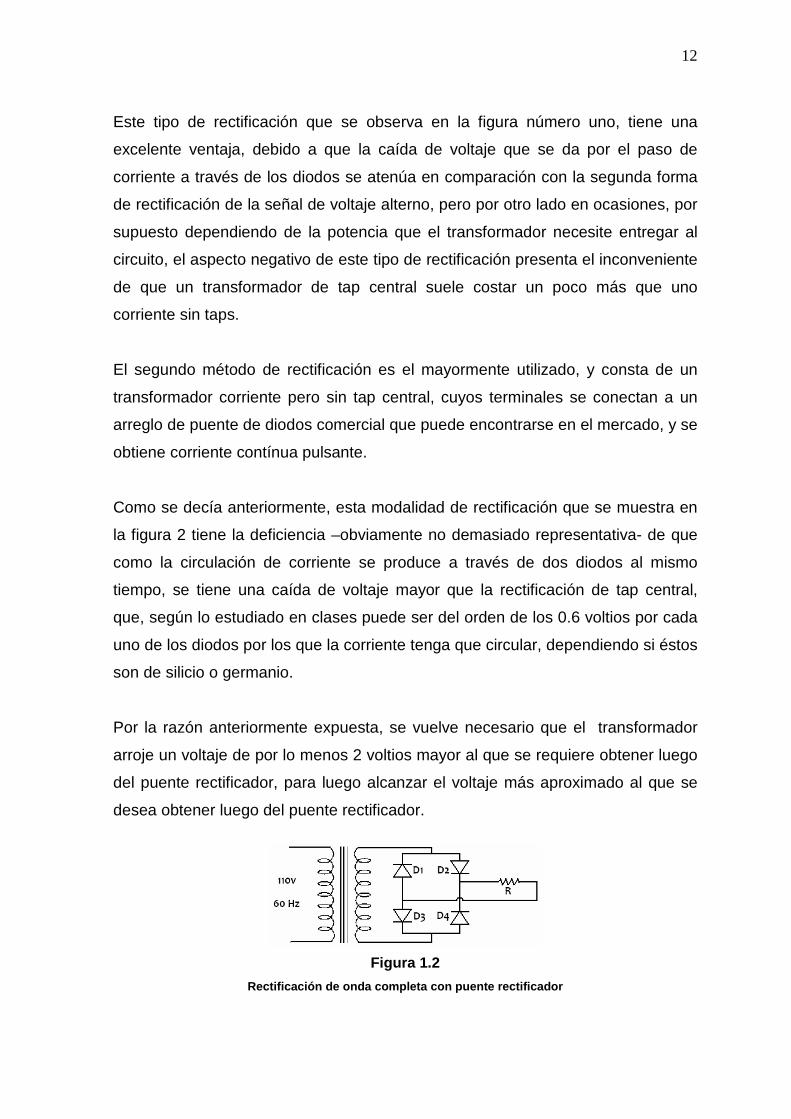
Como se decía anteriormente, esta modalidad de rectificación que se muestra en
la figura 2 tiene la deficiencia –obviamente no demasiado representativa- de que
como la circulación de corriente se produce a través de dos diodos al mismo
tiempo, se tiene una caída de voltaje mayor que la rectificación de tap central,
que, según lo estudiado en clases puede ser del orden de los 0.6 voltios por cada
uno de los diodos por los que la corriente tenga que circular, dependiendo si éstos
son de silicio o germanio.
Por la razón anteriormente expuesta, se vuelve necesario que el transformador
arroje un voltaje de por lo menos 2 voltios mayor al que se requiere obtener luego
del puente rectificador, para luego alcanzar el voltaje más aproximado al que se
desea obtener luego del puente rectificador.
Figura 1.2
Rectificación de onda completa con puente rectifica dor
13
Por otro lado, para poder trabajar con la máxima seguridad posible, no se puede
bajo ningún concepto exponer al microcontrolador, que es extremadamente
sensible a cualquier tipo de sobrevoltaje, porque sería un daño fulminante que
podría con facilidad averiarlo seriamente, por esta razón, el circuito de
alimentación de corriente contínua que se ha implementado dentro del módulo
didáctico se ha trabajado como se explica a continuación:
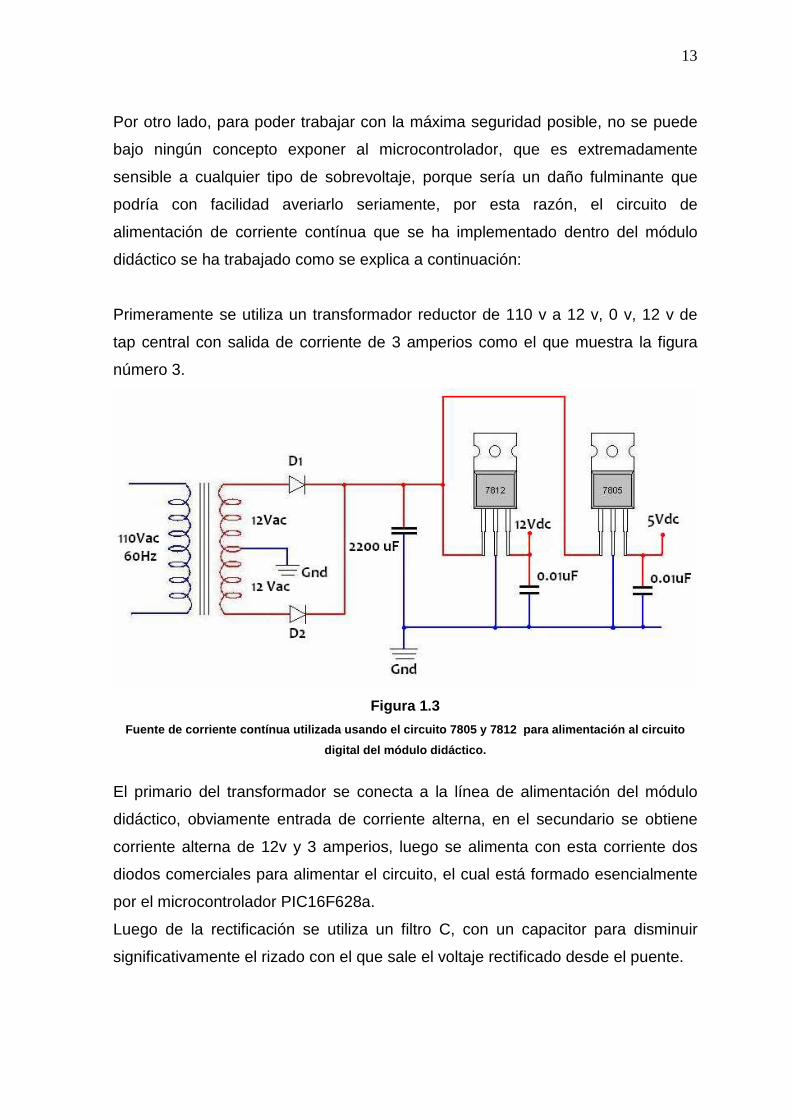
Primeramente se utiliza un transformador reductor de 110 v a 12 v, 0 v, 12 v de
tap central con salida de corriente de 3 amperios como el que muestra la figura
número 3.
Figura 1.3
Fuente de corriente contínua utilizada usando el ci rcuito 7805 y 7812 para alimentación al circuito
digital del módulo didáctico.
El primario del transformador se conecta a la línea de alimentación del módulo
didáctico, obviamente entrada de corriente alterna, en el secundario se obtiene
corriente alterna de 12v y 3 amperios, luego se alimenta con esta corriente dos
diodos comerciales para alimentar el circuito, el cual está formado esencialmente
por el microcontrolador PIC16F628a.
Luego de la rectificación se utiliza un filtro C, con un capacitor para disminuir
significativamente el rizado con el que sale el voltaje rectificado desde el puente.
14
Una vez que se ha pasado por la etapa de rectificación y filtrado, se alimenta con
este voltaje al integrado 7812, el cual puede arrojar 12 voltios de corriente
contínua pura, que es una señal que se puede utilizar para alimentar los
relevadores, y con el 7805 se alimenta el circuito integrado conformado
principalmente por el microcontrolador escogido para el proyecto didáctico.
1.2. EL MICROCONTROLADOR
En la actualidad existen varias empresas que se encuentran fabricando
microcontroladores, y fabrican una gran cantidad de modelos que facilitan la
implementación de proyectos con microcontroladores. Una de estas empresas es
la Microchip Technology, la cual lidera las ventas de este dispositivo, debido a ser
barato, amplia gama de modelos, el lenguaje de programación es relativamente
sencillo, por lo que en nuestra universidad y muchas más del mundo lo estudian a
profundidad.
Un microcontrolador tiene la apariencia exterior de cualquier otro circuito
integrado corriente, con la diferencia de que las funciones que es capaz de
desempeñar pueden asignársele, es decir se lo puede programar según la
necesidad del usuario para que ejecute las órdenes que se han grabado
previamente en su memoria.
Para poder avanzar de la mejor manera en este punto se hace necesario estar en
capacidad de poder responder satisfactoriamente ¿qué es un microcontrolador?
Para esto, en buenas cuentas y sin temor a equivocaciones podemos afirmar que
un microcontrolador es un computador que se ha metido dentro de un circuito
integrado. Por la idea anterior se puede igualmente afirmar que son
computadores muy pequeños y baratos, por lo que se usan para controlar muchos
dispositivos comunes, por lo que en ocasiones se halla incrustado dentro de los
mismos, como es el caso de los celulares, el teclado, el ratón del computador,
como son pequeños también sirven solo para una sola tarea a la vez y tienen una
potencia limitada.
15
En este siglo la introducción de los microcontroladores en todos los artefactos
industriales como el nuestro e incluso del hogar requerirá una gran cantidad de
profesionales preparados para efectuar esta tarea.
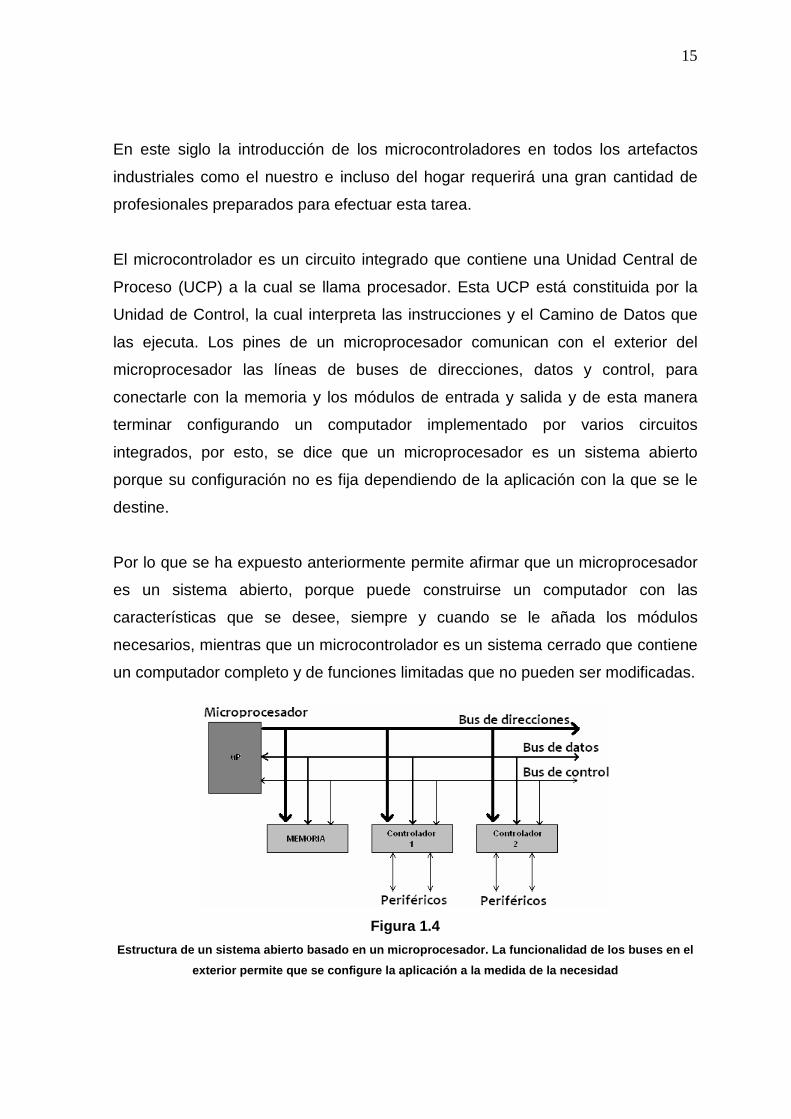
El microcontrolador es un circuito integrado que contiene una Unidad Central de
Proceso (UCP) a la cual se llama procesador. Esta UCP está constituida por la
Unidad de Control, la cual interpreta las instrucciones y el Camino de Datos que
las ejecuta. Los pines de un microprocesador comunican con el exterior del
microprocesador las líneas de buses de direcciones, datos y control, para
conectarle con la memoria y los módulos de entrada y salida y de esta manera
terminar configurando un computador implementado por varios circuitos
integrados, por esto, se dice que un microprocesador es un sistema abierto
porque su configuración no es fija dependiendo de la aplicación con la que se le
destine.
Por lo que se ha expuesto anteriormente permite afirmar que un microprocesador
es un sistema abierto, porque puede construirse un computador con las
características que se desee, siempre y cuando se le añada los módulos
necesarios, mientras que un microcontrolador es un sistema cerrado que contiene
un computador completo y de funciones limitadas que no pueden ser modificadas.
Figura 1.4
Estructura de un sistema abierto basado en un microp rocesador. La funcionalidad de los buses en el
exterior permite que se configure la aplicación a l a medida de la necesidad
16
1.2.1. ARQUITECTURA INTERNA
El microcontrolador posee todas las características de un computador, incluso
sus mismas partes componentes, pero con ciertas características fijas que no
pueden alterarse, aún así, se puede enlistar algunas de sus partes principales,
entre las cuales se cuentan las siguientes:
1. Procesador
2. Memoria no volátil para contener el programa
3. Memoria de lectura y escritura para guardar los datos
4. Líneas de entrada y salida para los controles periféricos, como:
a) Comunicación Paralelo
b) Comunicación Serie
c) Diversos pórticos de comunicación como USB, bus, etc.
5. Recursos Auxiliares:
a) Circuito de Reloj
b) Temporizadores
c) Perro guardián (watchdog)
d) Conversores analógico – digital y digital – analógico
e) Comparadores analógicos
f) Protección ante fallos de alimentación
g) Estado de reposo o bajo consumo.
Y se continúa indicando algunas características generales acerca de cada una de
las partes que se ha enlistado anteriormente:
1.2.1.1. El Procesador
Cuando se habla del procesador, la literatura existente coincide que para fines
prácticos se tiene que hablar acerca de las arquitecturas existentes para el
procesador, y es así como se ha llegado al empleo de procesadores de
arquitectura Harvard, la cual se utiliza en los microprocesadores modernos y la
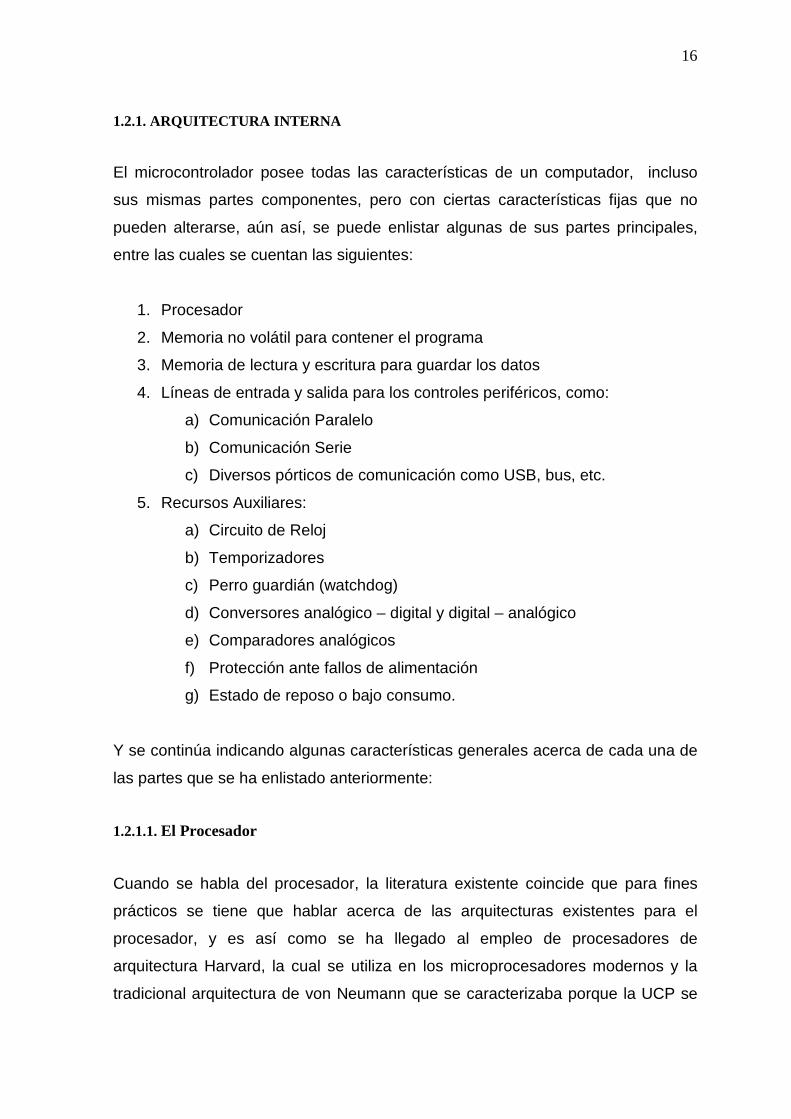
tradicional arquitectura de von Neumann que se caracterizaba porque la UCP se
17
conectaba con una memoria única, en la que se encontraban tanto los datos
como las instrucciones a través de un sistema de buses de comunicación, tal
como se puede apreciar en la ilustración de la figura número 1.5.
Figura 1.5
Esquema de la arquitectura tradicional de von Neuman n usada anteriormente
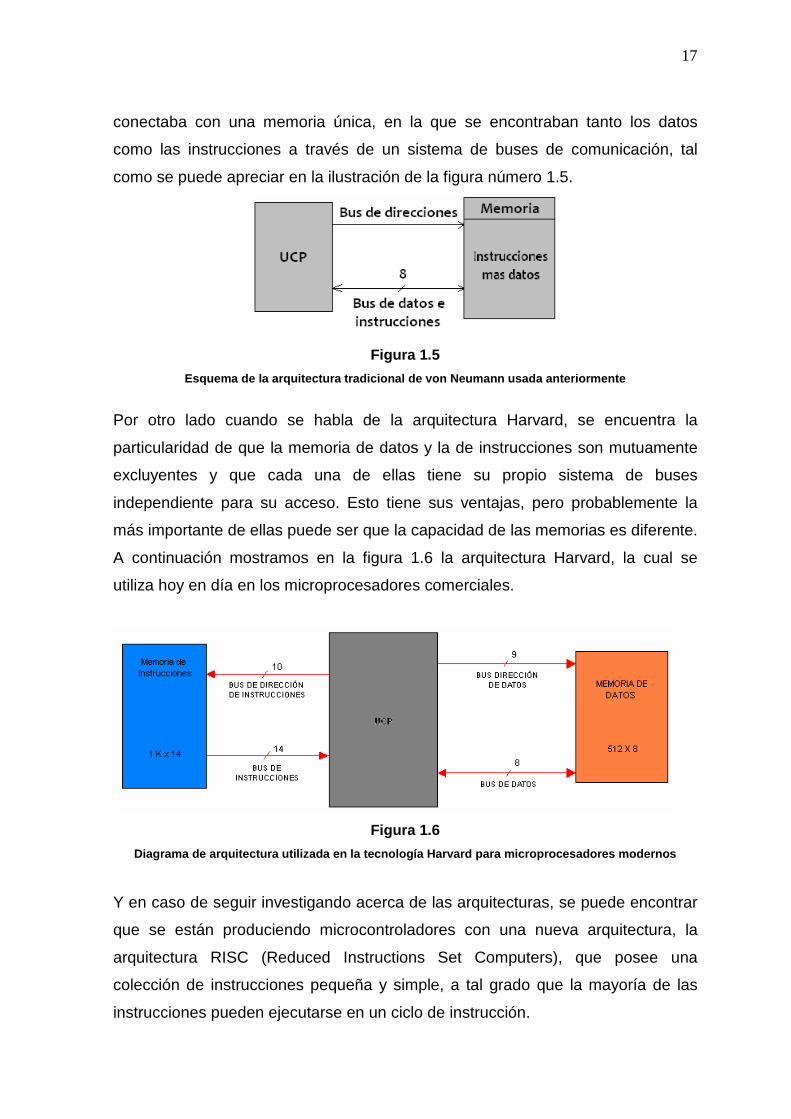
Por otro lado cuando se habla de la arquitectura Harvard, se encuentra la
particularidad de que la memoria de datos y la de instrucciones son mutuamente
excluyentes y que cada una de ellas tiene su propio sistema de buses
independiente para su acceso. Esto tiene sus ventajas, pero probablemente la
más importante de ellas puede ser que la capacidad de las memorias es diferente.
A continuación mostramos en la figura 1.6 la arquitectura Harvard, la cual se
utiliza hoy en día en los microprocesadores comerciales.
Figura 1.6
Diagrama de arquitectura utilizada en la tecnología Harvard para microprocesadores modernos
Y en caso de seguir investigando acerca de las arquitecturas, se puede encontrar
que se están produciendo microcontroladores con una nueva arquitectura, la
arquitectura RISC (Reduced Instructions Set Computers), que posee una
colección de instrucciones pequeña y simple, a tal grado que la mayoría de las
instrucciones pueden ejecutarse en un ciclo de instrucción.
18
Y a esto se añade que también se está generando la tendencia a segmentar el
procesador, lo que tiene por objeto que cada segmento del mismo atienda a una
instrucción, este método se llama en las fuentes bibliográficas paralelismo
implícito.
Tanto el paralelismo implícito, la arquitectura Harvard, y el computador RISC
logran que los microcontroladores modernos logren alcanzar velocidades de
trabajo de microsegundos.
1.2.1.2. Memoria para el Programa
El microcontrolador está diseñado para que en su memoria de programa se
almacenen todas las instrucciones del programa que se ha cargado previamente
para el control, pero en el microcontrolador no existe posibilidad de añadirle
memorias externas de ampliación.
Una vez que se ha cargado el programa, las instrucciones del mismo no cambian,
por lo cual podemos afirmar que el programa es fijo una vez cargado en el
dispositivo, por esto, el programa debe estar grabado de manera permanente.
Para soportar esta función en los microcontroladores se utilizan las siguientes
versiones de memoria diferentes:
1.2.1.2.1. ROM con máscara
Cuando se trabaja con este tipo de memoria, el programa se graba en el chip
durante el proceso de fabricación mediante el uso de “máscaras”. Pero por
supuesto, este tipo de memoria y de grabación del programa es muy costosa, así
como el instrumental implicado para su elaboración, por lo que solamente se
utiliza cuando se necesitan grandes lotes de producción.
1.2.1.2.2. EPROM
19
Para grabar esta memoria se necesita un dispositivo físico que se controla desde
una computadora personal, este conjunto toma el nombre de grabador. Para el
uso de este tipo de memoria, se utilizan microcontroladores que tienen en la
superficie de su cápsula una pequeña ventana de cristal, que se utiliza para
someter al chip de la memoria a luz ultravioleta para lograr borrarla y grabarla
nuevamente, su costo por unidad es elevado igualmente.
1.2.1.2.3. OTP ( Memoria programable una vez)
Si el usuario trabaja con este tipo de memorias, solamente la podrá utilizar una
vez, de la misma manera que la memoria EPROM, es decir con el conjunto
grabador de computadora y el dispositivo grabador, pero a diferencia de la
anterior, no se puede borrar. Tiene un precio bajo, y la grabación es relativamente
sencilla, por esto, se utiliza este tipo de memorias para prototipos finales y series
de producción cortas.
1.2.1.2.4. EEPROM
La grabación de este tipo de memorias se logra de la misma manera que las
memorias OTP y EPROM, pero borrarlas es más sencillo que las anteriores,
porque se necesita también el conjunto grabador, es decir computadora y el
quemador de microcontroladores, es decir puede borrarse eléctricamente. Sobre
el mismo zócalo del grabador puede ser programada y borrada tantas veces como
se requiera, por esto, este tipo de memoria es ideal para la enseñanza de
microcontroladores así como para utilizarla en la creación de nuevos proyectos,
tiene por lo menos 1 k de palabras de memoria EEPROM para contener
instrucciones y también tiene algunos bytes de memoria de datos para evitar que
cuando se desconecta la alimentación se pueda perder la información.
Teóricamente se puede grabar y borrar un millón de veces, pero la tecnología de
fabricación tiene algunos problemas para alcanzar estas capacidades ideales, y el
tiempo de escritura de las instrucciones es relativamente grande y con elevado
consumo de energía, estos inconvenientes pueden achicarse, tanto es así que
20
una quemadura de memoria toma nada más unos cuantos segundos, y en
muchos programas computacionales existe la opción de programación a bajo
voltaje, como es nuestro caso.
1.2.1.2.5 Flash
Esta memoria es de tipo no volátil, de bajo consumo, se puede escribir en el
zócalo grabador de la misma manera que las EPROM, pero a diferencia de éstas,
tienen mayora capacidad. En este tipo de memoria sí se puede garantizar 1000
ciclos de grabación y borrado.
También son las más recomendables y usadas cuando a través de la vida útil del
producto se vuelve necesario modificar ligera o profundamente el programa
original en función de la vida útil del dispositivo o maquinaria controlada, como por
ejemplo el desgaste, los cambios de piezas o adecuación de las no existentes,
como sucede en el caso de vehículos.
Como se ve, tiene múltiples ventajas, superiores incluso a las de las memorias
EEPROM, por lo que las están sustituyendo. Por esta razón, MICROCHIP, por
ejemplo, presenta en el mercado dos microcontroladores prácticamente iguales,
que solamente se diferencian en que la memoria del programa de uno de ellos es
de tipo EEPROM y la del otro es de tipo FLASH, se trata del PIC16C84 y el
PIC16F84, respectivamente, aunque como en nuestro caso, tienden a utilizarse
en su mayoría los microcontroladores dotados con la memoria FLASH.
1.2.1.2.6. Memoria de Datos
Una vez que se ha grabado el programa en el microcontrolador y se lo ejecuta, los
datos que recibe y por lo tanto maneja, están variando continuamente, esto es lo
que obliga a que la memoria que los contiene deba ser de lectura y escritura, por
lo que la memoria RAM estática (SRAM) es la más adecuada aunque sea volátil.
En este tipo de memoria es donde residen los registro específicos (SFR) con 24
posiciones de tamaño byte, aunque dos de ellas no son operativas, y los registros
de propósito general (GPR) de 68 posiciones.
21
Pero por lo general, los microcontroladores también disponen de una memoria de
lectura y escritura no volátil, del tipo EEPROM, de tal forma que, si en un
momento dado la energía se corta, el corte no producirá una pérdida de la
información contenida al interior del microcontrolador. La memoria EEPROM es
de 64 bytes donde, opcionalmente, se pueden almacenar datos que se necesita
que no se pierdan.
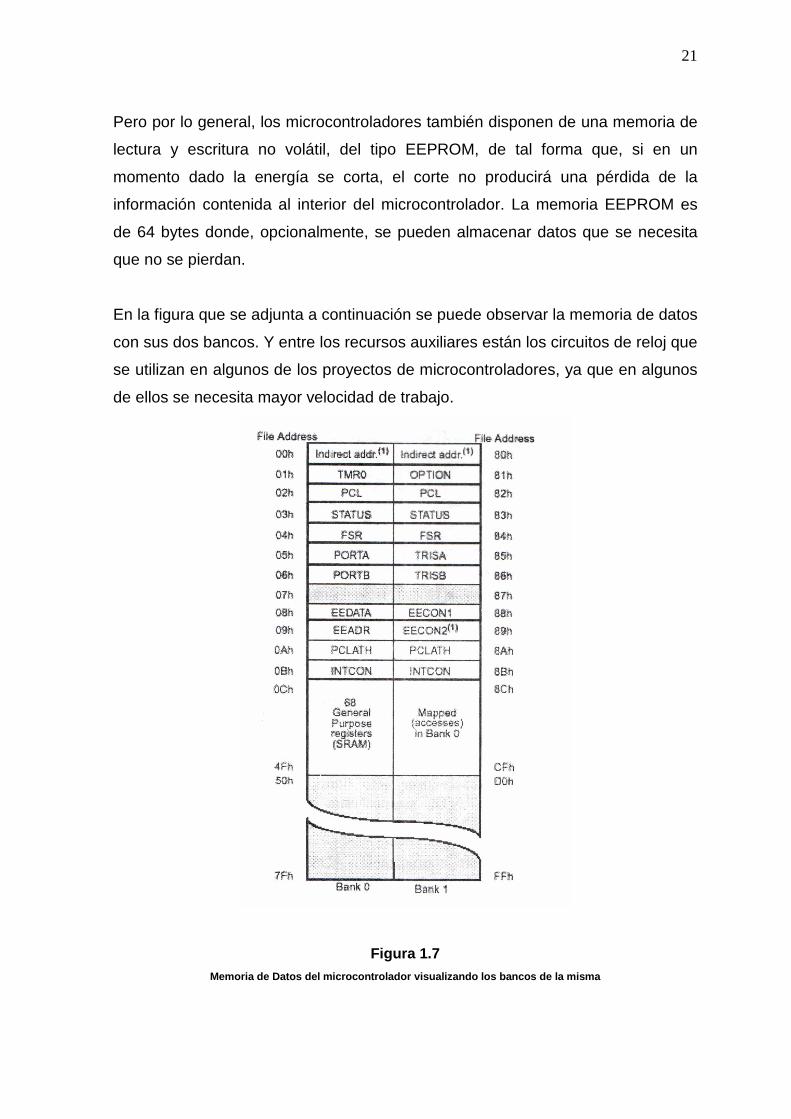
En la figura que se adjunta a continuación se puede observar la memoria de datos
con sus dos bancos. Y entre los recursos auxiliares están los circuitos de reloj que
se utilizan en algunos de los proyectos de microcontroladores, ya que en algunos
de ellos se necesita mayor velocidad de trabajo.
Figura 1.7 Memoria de Datos del microcontrolador visualizando los bancos de la misma
22
1.2.1.2.7. Líneas de entrada y salida para controladores periféricos
En el caso del microcontrolador PIC16F628a que se usa, se tiene la opción de
prescindir de los pines para conexión a cristal oscilador y el reset externo, por lo
que a más de los dos pines de alimentación, se cuenta con pines que servirán
para soportar la comunicación con los periféricos externos que gobernará.
Las líneas de entrada – salida que se adaptan con los periféricos manejan la
información en paralelo y se agrupan en conjuntos de ocho, los cuales reciben el
nombre de pórticos. Hay modelos que soportan la comunicación en serie; otros
disponen de conjuntos de líneas que implementan pórticos de comunicación como
el USB, etc.,.
1.2.1.2.8. Recursos Auxiliares
Dependiendo de las aplicaciones para las que se oriente el fabricante, cada
modelo de microcontrolador tiene incorporados una gran diversidad de
complementos que aumentan la potencia y la flexibilidad del dispositivo. Entre los
recursos más comunes a los modelos comerciales que se encuentran con
facilidad se tienen los siguientes:
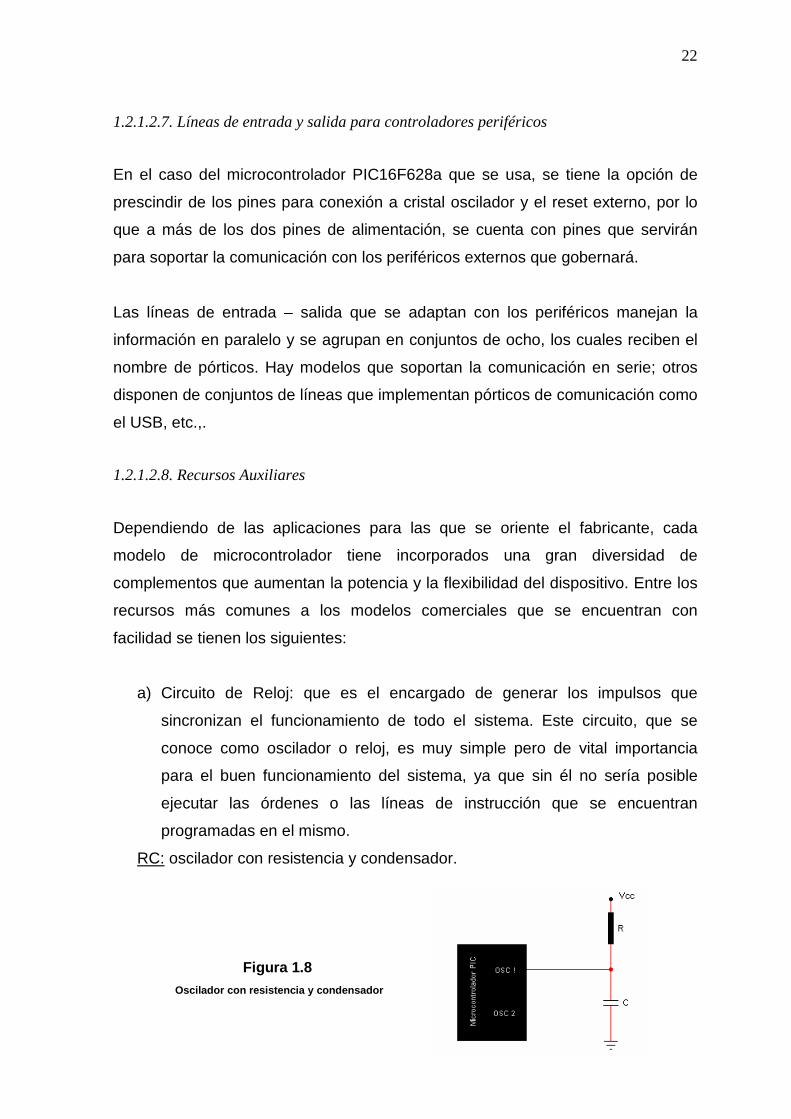
a) Circuito de Reloj: que es el encargado de generar los impulsos que
sincronizan el funcionamiento de todo el sistema. Este circuito, que se
conoce como oscilador o reloj, es muy simple pero de vital importancia
para el buen funcionamiento del sistema, ya que sin él no sería posible
ejecutar las órdenes o las líneas de instrucción que se encuentran
programadas en el mismo.
RC: oscilador con resistencia y condensador.
Figura 1.8 Oscilador con resistencia y condensador
23
Y según las recomendaciones de Microchip, los valores de R pueden ser de entre
5k y 100k, y C superior a 20pF.
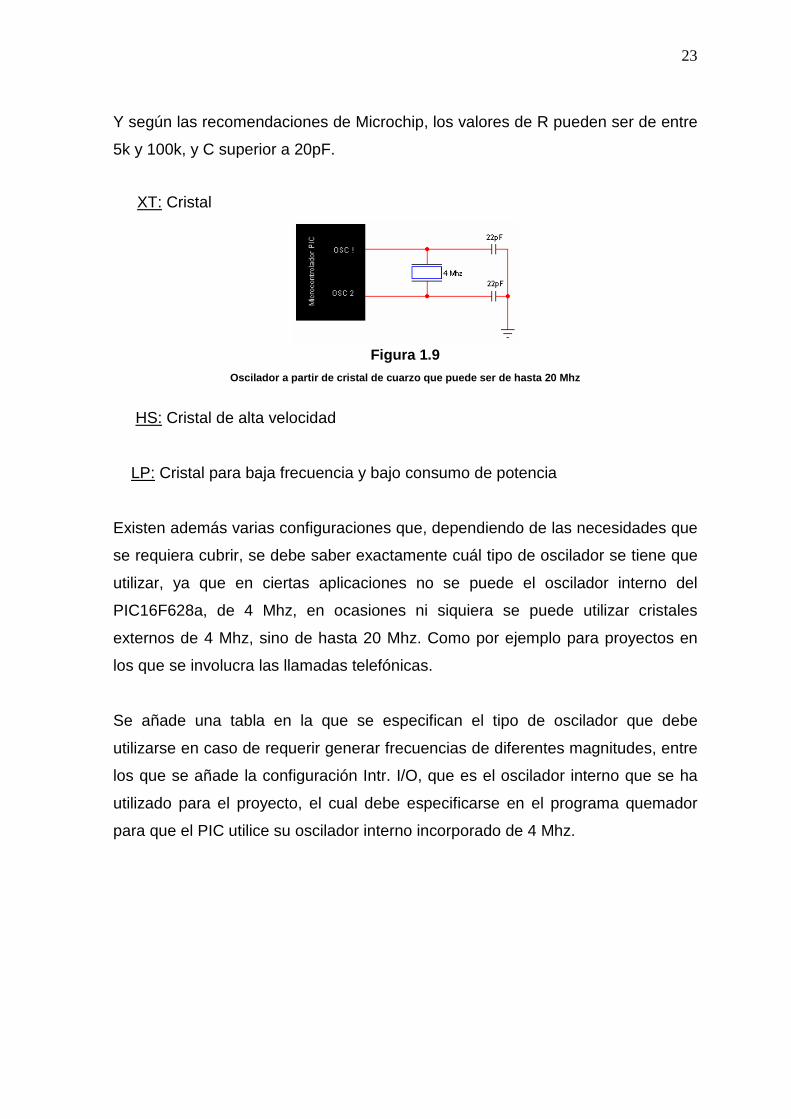
XT: Cristal
Figura 1.9 Oscilador a partir de cristal de cuarzo que puede s er de hasta 20 Mhz
HS: Cristal de alta velocidad
LP: Cristal para baja frecuencia y bajo consumo de potencia
Existen además varias configuraciones que, dependiendo de las necesidades que
se requiera cubrir, se debe saber exactamente cuál tipo de oscilador se tiene que
utilizar, ya que en ciertas aplicaciones no se puede el oscilador interno del
PIC16F628a, de 4 Mhz, en ocasiones ni siquiera se puede utilizar cristales
externos de 4 Mhz, sino de hasta 20 Mhz. Como por ejemplo para proyectos en
los que se involucra las llamadas telefónicas.
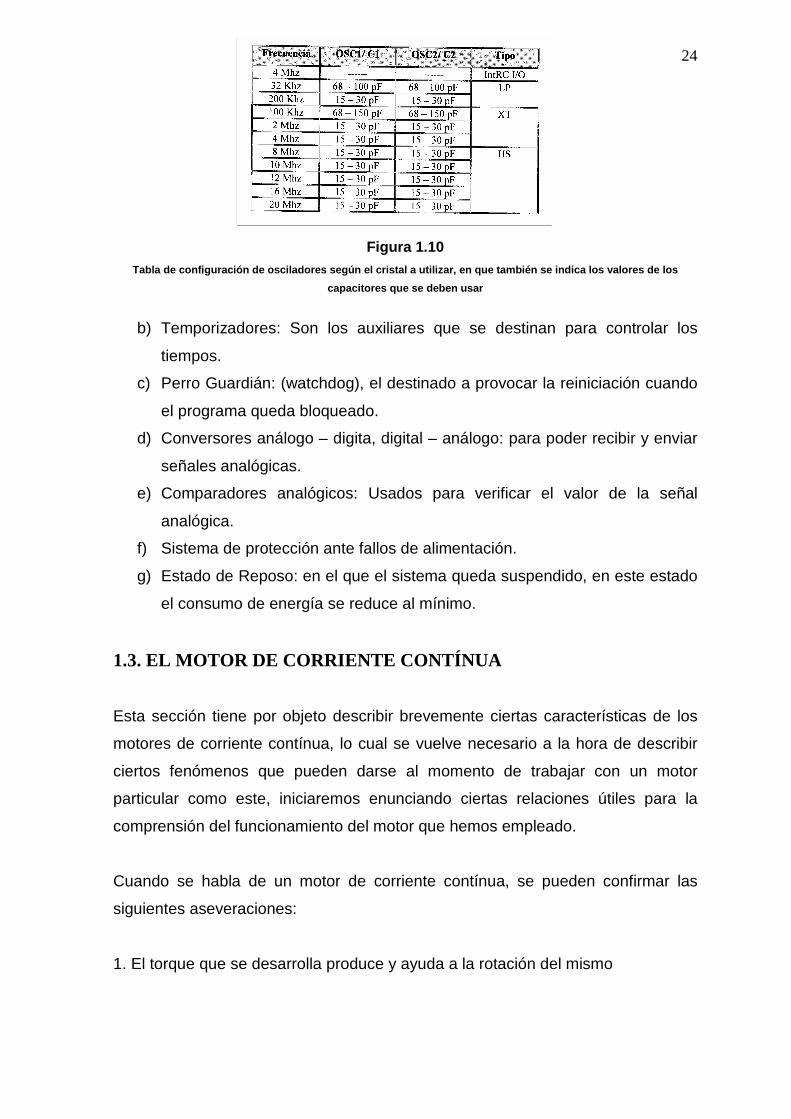
Se añade una tabla en la que se especifican el tipo de oscilador que debe
utilizarse en caso de requerir generar frecuencias de diferentes magnitudes, entre
los que se añade la configuración Intr. I/O, que es el oscilador interno que se ha
utilizado para el proyecto, el cual debe especificarse en el programa quemador
para que el PIC utilice su oscilador interno incorporado de 4 Mhz.
24
Figura 1.10 Tabla de configuración de osciladores según el cris tal a utilizar, en que también se indica los valore s de los
capacitores que se deben usar
b) Temporizadores: Son los auxiliares que se destinan para controlar los
tiempos.
c) Perro Guardián: (watchdog), el destinado a provocar la reiniciación cuando
el programa queda bloqueado.
d) Conversores análogo – digita, digital – análogo: para poder recibir y enviar
señales analógicas.
e) Comparadores analógicos: Usados para verificar el valor de la señal
analógica.
f) Sistema de protección ante fallos de alimentación.
g) Estado de Reposo: en el que el sistema queda suspendido, en este estado
el consumo de energía se reduce al mínimo.
1.3. EL MOTOR DE CORRIENTE CONTÍNUA
Esta sección tiene por objeto describir brevemente ciertas características de los
motores de corriente contínua, lo cual se vuelve necesario a la hora de describir
ciertos fenómenos que pueden darse al momento de trabajar con un motor
particular como este, iniciaremos enunciando ciertas relaciones útiles para la
comprensión del funcionamiento del motor que hemos empleado.
Cuando se habla de un motor de corriente contínua, se pueden confirmar las
siguientes aseveraciones:
1. El torque que se desarrolla produce y ayuda a la rotación del mismo

25
2. El voltaje que se genera en los conductores portadores de corriente, que es la
fuerza contraelectromotriz, se opone a la corriente de armadura, lo cual se debe a
la Ley de Lenz.
3. Se puede expresar la fuerza contraelectromotriz mediante la ecuación:
EC = Va – IaRa
Donde, debemos recordar que la fuerza contraelectromotriz es menor que el
voltaje aplicado que origina el flujo de la corriente de armadura Ia.
Debe recordarse que esta ecuación puede escribirse en función de cualquiera de
las variables, como la corriente, el voltaje aplicado o la resistencia de armadura.
Otra de las ecuaciones necesarias para poder comprender el funcionamiento de
un motor de corriente contínua es la relación correspondiente a la fuerza, la cual
se expresa de la forma:
F = B I L
También llamada la Ley de Biot-Savart, ecuación en la que se demuestra la
relación entre B (densidad de flujo magnético en webers por metro cuadrado o
teslas), I (corriente en amperios) y L (longitud activa de conductor en metros).
Y por último, también es necesario conocer hacia qué lado girará nuestro motor
desde el momento que está energizado, para lo cual utilizamos la regla de la
mano izquierda.
Las ecuaciones que hemos escrito anteriormente son aplicables universalmente
para toda clase de motores de corriente contínua que se utilizan en el mercado.
26
1.3.1. TORQUE Y FUERZA ELECTROMAGNÉTICOS
No hace falta elaborar un gran estudio para llegar a la conclusión de que no es lo
mismo hablar de torque y de fuerza, aunque el un término sí tiene que ver con el
otro.
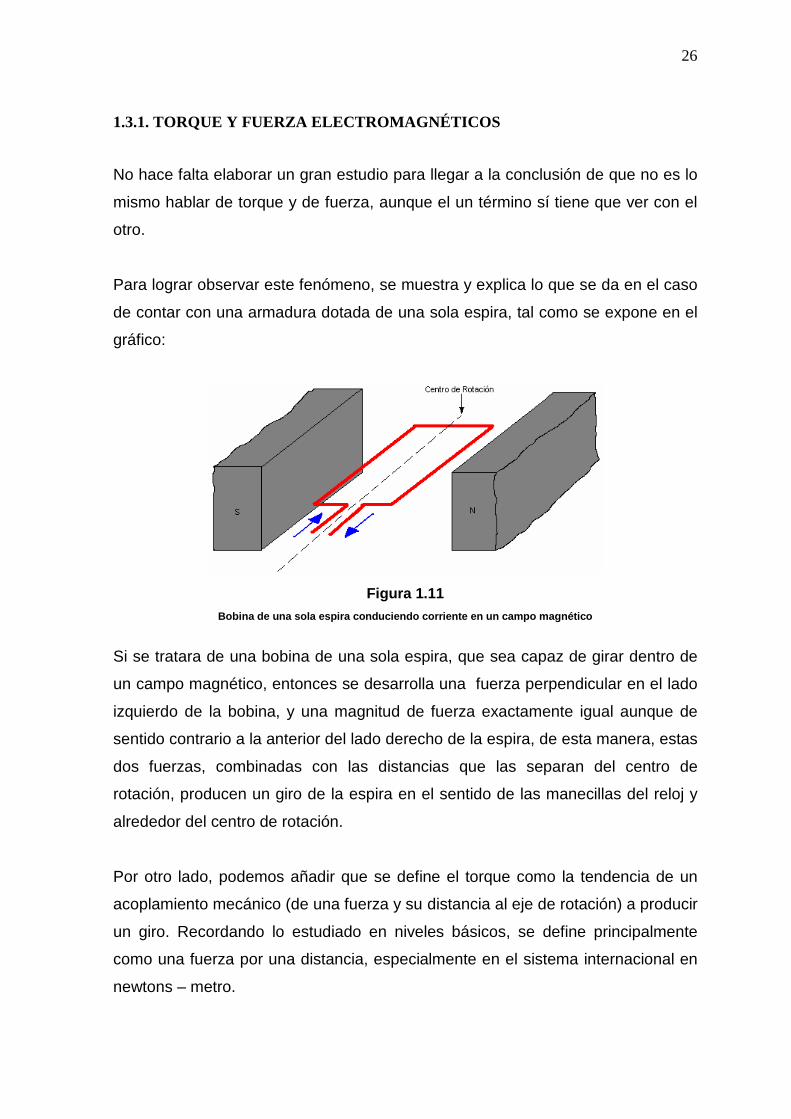
Para lograr observar este fenómeno, se muestra y explica lo que se da en el caso
de contar con una armadura dotada de una sola espira, tal como se expone en el
gráfico:
Figura 1.11 Bobina de una sola espira conduciendo corriente en un campo magnético
Si se tratara de una bobina de una sola espira, que sea capaz de girar dentro de
un campo magnético, entonces se desarrolla una fuerza perpendicular en el lado
izquierdo de la bobina, y una magnitud de fuerza exactamente igual aunque de
sentido contrario a la anterior del lado derecho de la espira, de esta manera, estas
dos fuerzas, combinadas con las distancias que las separan del centro de
rotación, producen un giro de la espira en el sentido de las manecillas del reloj y
alrededor del centro de rotación.
Por otro lado, podemos añadir que se define el torque como la tendencia de un
acoplamiento mecánico (de una fuerza y su distancia al eje de rotación) a producir
un giro. Recordando lo estudiado en niveles básicos, se define principalmente
como una fuerza por una distancia, especialmente en el sistema internacional en
newtons – metro.
27
Un detalle digno de ser mencionado es la necesidad de obtener una conmutación
para de esta manera lograr invertir la corriente en un conductor cuando se mueve
bajo un polo de polaridad invertida, debido a que los conductores que se
encuentran en la región interpolar, es decir exactamente en la parte central que
separa los dos polos norte y sur, no son capaces de generar ningún torque útil, y
los conductores que están conmutando pierden poco torque.
Pero por supuesto, lo anterior es aplicable a este caso particular en que la región
interpolar es de un tamaño considerable, lo cual en el campo no se encontrará,
sobre todo cuando se esté tratando con motores para uso industrial en los que el
porcentaje de armadura (o rotor) que no se encuentre sumergido dentro del
campo magnético generado sea verdaderamente pequeña, por esto, para tener
en cuenta este detalle y aunarlo con los anteriores, al momento de encontrar una
expresión del torque desarrollado por un motor, se tiene la expresión matemática
que se describe a continuación:
T = B Ia L Z r x %S.A.
a.
Que es la ecuación utilizada para cuantificar el torque generado por un motor de
corriente contínua, en donde B es la densidad de flujo en testlas o weber por
metro cuadrado, Ia es la corriente de armadura, L es la longitud activa, es decir
sumergida dentro del campo magnético de conductor en metros, Z es el número
de conductores activos de la armadura, r es la distancia radial al eje de rotación,
dada en metros, a es el número de trayectorias en el devanado de armadura, que
depende de que sea imbricado u ondulado, y por último %S.A. es el porcentaje de
superficie de armadura que cubren los polos y por lo tanto se encuentra bajo la
influencia de las líneas de flujo magnético.
Debe anotarse ciertos detalles a la hora de encontrar literatura referente a los
motores eléctricos, entre los cuales se puede anotar los siguientes: El torque
electromagnético que se describió anteriormente ayuda a la rotación o está en la
misma dirección de ésta. Otro detalle que debe tenerse en cuenta es que el
28
torque es una función del flujo y de la corriente de armadura, por lo tanto es
independiente de la velocidad de un motor, la velocidad sí depende del torque,
pero no al revés, por esto no pueden usarse torque y velocidad como sinónimos,
porque si se bloquea el rotor de un motor, la velocidad desaparece pero existe
torque para poder detenerlo.
El torque desarrollado se origina en los conductores de la armadura, es decir
internamente, pero debe tenerse en cuenta que no es equivalente al torque
disponible en el eje, ya que una parte del desarrollado es ligeramente mayor al del
eje debido a que algo del desarrollado disminuye por razón de la existencia de
pérdidas rotacionales específicas debidas a los rodamientos y se consumen en
los mismos.
1.3.2. FUERZA CONTRAELECTROMOTRIZ
Este fenómeno debe tenerse muy en cuenta, ya que tiene mucha importancia a la
hora de poner en funcionamiento el mecanismo. Para resumirlo de una manera
sencilla se puede decir que la fuerza contraelectromotriz de un motor se da
debido a que tal como en un generador aparecen tanto el efecto generador como
el efecto motor, también cuando se trabaja con un motor aparecen
simultáneamente tanto el efecto motor como el efecto generador, es decir, se
tiene que se aplican tanto la regla de la mano derecha como la regla de la mano
izquierda, y recordando un poco la ecuación que se había anotado anteriormente
tenemos:
EC = Va – IaRa
Donde se puede apreciar que los principales limitantes de la corriente de
armadura son en primer lugar la resistencia de la armadura, y en segundo lugar la
fuerza contraelectromotriz.
Resulta sencillo caer en cuenta que la fuerza contraelectromotriz del motor en
ningún momento puede igualarse al voltaje aplicado a los terminales del motor,
porque la dirección en la que viaja la corriente determina la dirección de rotación,
29
y que es precisamente ésta rotación la que crea la fuerza contraelectromotriz. Por
esto, para poder limitar la magnitud de la corriente que pasa por los conductores
del bobinado de armadura el motor cuenta con la fuerza contraelectromotriz
primeramente y en segundo lugar la resistencia de armadura junto con la caída de
voltaje debida a las escobillas.
Si se incluye la fuerza contraelectromotriz de un motor, a mas la caída de voltaje
en las escobillas simbolizado por CE se tiene:
Ec = Va – (IaRa + CE)
Y conociendo que la velocidad de un motor es también una función de la fuerza
contraelectromotriz según la expresión que sigue:
Ec = K Øω
Sabiendo que Ø es el flujo en webers, ω es la velocidad del motor en radianes por
segundo, K es la representación de los factores que se mantienen constantes
dentro del motor, como son: la longitud activa de cada conductor de armadura, el
número de conductores de armadura, la distancia radial al eje de rotación, el
número de trayectorias en el devanado de armadura, y el porcentaje de superficie
de la armadura que está sumergido dentro del campo magnético.
Entonces, al combinar las dos ecuaciones anteriores, se puede escribir una sola
ecuación en la que se expresen ambas simultáneamente tal como sigue:
ω. = Va – ( IaRa + CE )
kØ
Es a esta ecuación a la que se llama la ecuación fundamental de la velocidad del
motor de corriente contínua, porque permite predecir el desempeño de estos
motores.
30
Por ejemplo, si disminuyera el flujo magnético, el motor se desbocará, es decir se
“embalará” debido a perder el flujo de campo, porque si el denominador de la
ecuación tiende a cero, la velocidad de motor tiende al infinito. Si no cambiara la
corriente de armadura ni el flujo magnético de campo, pero se aumenta el voltaje
aplicado a los terminales de la armadura, aumentará la velocidad en la misma
proporción. Por otro lado si se mantienen constantes el flujo magnético y el voltaje
de armadura, pero se aumenta la corriente debido a que se ha incrementado la
carga por ejemplo, la velocidad del motor disminuirá al igual que la fuerza
contraelectromotriz.
1.3.3. POTENCIA DESARROLLADA
Por todo lo que se ha dicho antes, es realmente sencillo notar que a plena carga,
la fuerza contraelectromotriz es menor que la electromotriz si la carga fuera menor
que la plena, y dependiendo del tamaño del motor puede ser del 80% del voltaje
de armadura en motores pequeños, llegando hasta el 95% en motores grandes.
Si se lograra determinar la relación que hay entre la fuerza contraelectromotriz y
el voltaje de armadura, podríamos también la potencia mecánica que desarrolla la
armadura.
Sabemos, por tanto, que la caída de voltaje en la armadura se puede escribir:
Ia Ra = Va – Ec
Pero si a ambos lados de esta ecuación se multiplica por Ia debido a que estamos
conectando el motor a la fuente de voltaje, y despejando EcIa, obtendremos lo
siguiente:
Ec Ia = VaIa – I²aRa
Si se analiza la ecuación anterior, decimos que al suministrar VaIa al motor, una
parte de esta energía suministrada se pierde en algunas de las partes como la
resistencia del bobinado de la armadura, a ésta precisamente se le llama la
pérdida debida al cobre de la armadura Ia²Ra o sea, cuadrado de la corriente de
31
armadura multiplicada por la resistencia del bobinado del motor, se tiene una
potencia constante EcIa que es la que necesita la armadura para producción de
torque desarrollado o interno.
Para obtener la relación entre potencia desarrollada y potencia suministrada al
motor se escribe como sigue:
Potencia desarrollada = EcIa
Potencia suministrada V aIa.
Pero como a ambos lados de esta expresión se tiene la corriente de armadura Ia,
entonces nuestra ecuación puede fácilmente reducirse a:
Potencia desarrollada = Ec
Potencia suministrada = V a.
Por lo que ahora ya se tiene la expresión que ayudará a identificar cuál sería el
funcionamiento más óptimo posible para motores, porque mientras mayor es el
porcentaje de fuerza contraelectromotriz con respecto al voltaje a través de la
armadura, mayor será la eficiencia del motor.
Entonces puede resumirse que si aumenta la corriente de armadura y el torque de
carga del motor, entonces disminuye la fuerza contraelectromotriz, disminuye la
velocidad, y aumenta la potencia desarrollada por la armadura del motor. Mientras
que si disminuye la corriente de campo y por lo tanto el flujo de campo generado
por esta fuerza magnetomotriz, esto se traduce en un aumento de velocidad.
Cuando se trabaja con motores derivación (también llamados como shunt
o motores paralelo) se debe tener cuidado de nunca dejar sin alimentación de
corriente de campo, lo cual ocasionaría un desbocamiento (o embalamiento) del
motor y éste se autodestruiría por la fuerza centrífuga que se generaría
desalojando de las ranuras del rotor al bobinado del mismo, pero se trabaja
siempre, primero, con conductores limitados en cuanto a su corriente en lo que se
refiere al motor, segundo, las protecciones de los mismos actúan evitando muy
32
alta corriente que podría destruir los conductores del motor, y la fuente de
contínua es limitada, e incapaz de suministrar corriente infinita.
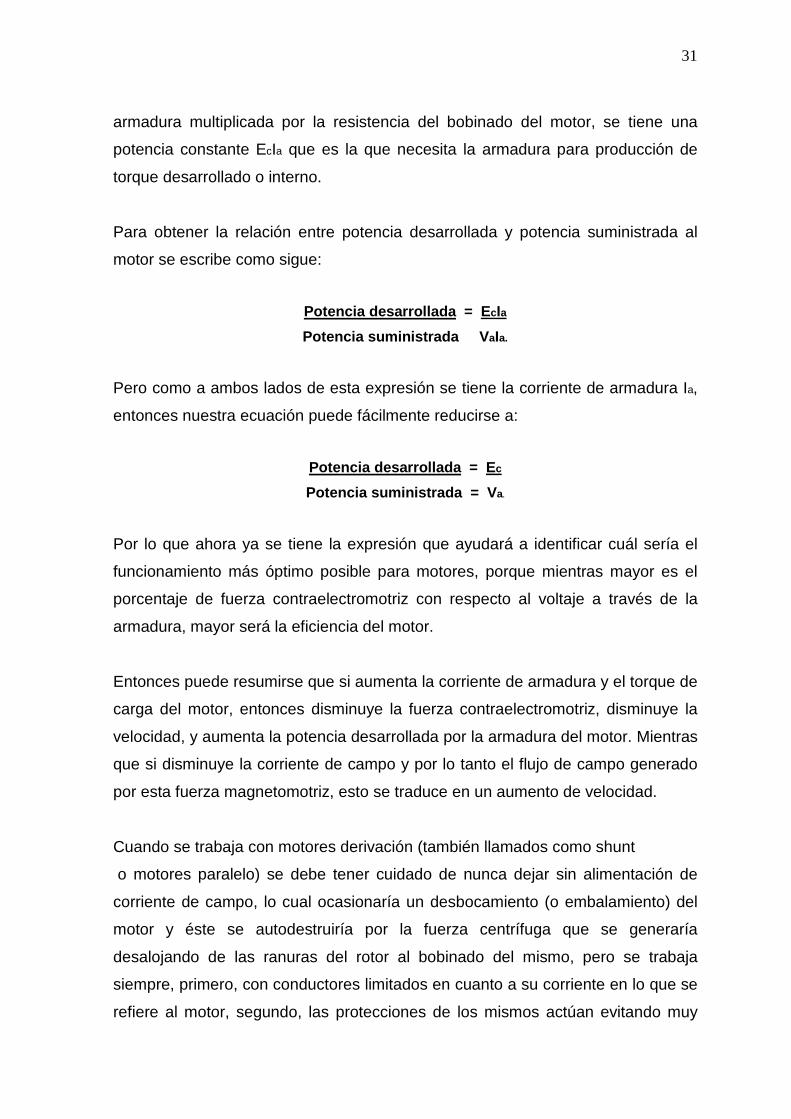
En los motores serie, las corrientes de armadura y del campo en serie son las
mismas, por lo que el flujo producido por el campo es proporcional a la corriente Ia
de armadura. Y, ya que el flujo es función de la corriente de armadura, la
ecuación que describe el comportamiento del torque quedaría:
T = K’’I² a
Y por otro lado, debe observarse la siguiente gráfica, que es la representación del
torque en función o versus la corriente de armadura:
Figura 1.12 Figura que muestra la comparación entre el torque d el motor y la corriente de armadura en los motores de
corriente contínua
Donde se ha colocado una comparación cualitativa entre los diferentes tipos de
motores de corriente contínua comerciales, y donde se puede observar el
comportamiento del torque en función de la corriente de armadura.
33
Usando la definición de saturación del hierro, lo cual significa que llega un punto
en el que no importa cuánto más aumente la corriente que excita la magnetización
de un núcleo de hierro, los dominios magnéticos de este núcleo no pueden
orientarse más de lo que la corriente de saturación lo hicieron.
Y es precisamente esta corriente la que origina una curva de magnetización en
los núcleos magnéticos de todas las máquinas eléctricas, la cual para el caso de
un motor serie origina la curva de la gráfica que se presenta antes, en donde se
puede observar que mientras el núcleo del campo magnético no se sature, es
decir en la parte lineal de la curva de magnetización, la relación entre el torque del
motor y la corriente de armadura es exponencial, se debe notar que para el caso
de un motor serie, cuando trabaja a plena carga, el torque que desarrolla en
comparación con un motor shunt o paralelo es bastante mayor según muestra la
ecuación incluída en la propia figura, ya que el torque es una relación que trabaja
con el cuadrado de la corriente en el caso de un motor serie.
1.3.4. CARACTERÍSTICAS DEL MOTOR
Para el caso del motor utilizado, se tienen las siguientes características:
STYLE
AC- DC
100 – 120 volts
0 – 60 cycles
200 watts
N.C.R. fuse
3 amps
N.C.R. Co.
DAYTON OHIO
Que son datos que se han tomado de la placa del motor, de lo que se desprende
que es un motor que puede trabajar en el rango comprendido entre los 100 a los
120 voltios tanto de corriente alterna como de corriente continua, en caso de
trabajar con corriente alterna, puede hacerlo hasta 60 ciclos, su potencia de salida
34
es de 200 vatios, la circulación de corriente en funcionamiento normal es de 3
amperios, fabricado en la casa “DAYTON”, estado de OHIO, Estados Unidos.
1.4. BREVE DESCRIPCIÓN DE LOS ELEMENTOS UTILIZADOS
1.4.1. RESISTENCIAS
Se define brevemente a una resistencia eléctrica como la característica de ciertos
dispositivos eléctricos y electrónicos que tienen de dificultar el paso de corriente
eléctrica, esta característica se mide en ohmios, es directamente proporcional a la
longitud de un conductor e inversamente proporcional a su sección y a su
resistencia específica o resistividad.
Para el módulo didáctico se ha utilizado principalmente seis resistencias, es decir
resistencias de seis magnitudes, la primera de ellas, en la etapa de censado para
cruce por cero, una resistencia de potencia de cierto grado de disipación, de 5
vatios, 10 kiloohmios, cuyo funcionamiento en el circuito se explicará más
adelante.
Figura 1.13 Resistencia utilizada para el sensor de cruce por c ero
La segunda de ellas es utilizada para activar las entradas de los pórticos
programados para trabajar con bajas activas del microcontrolador, su magnitud es
de 4700 ohmios, conectadas como se ha dicho antes entre la fuente de corriente
contínua de 5 voltios y el respectivo terminal de entrada del microcontrolador.
La tercera de ellas es utilizada al igual que las anteriores en más de una ocasión
principalmente para fines de señalización, utilizada en serie con un diodo emisor
de luz entre la salida alta de 5 voltios y tierra, y su magnitud es de 330 ohmios.
35
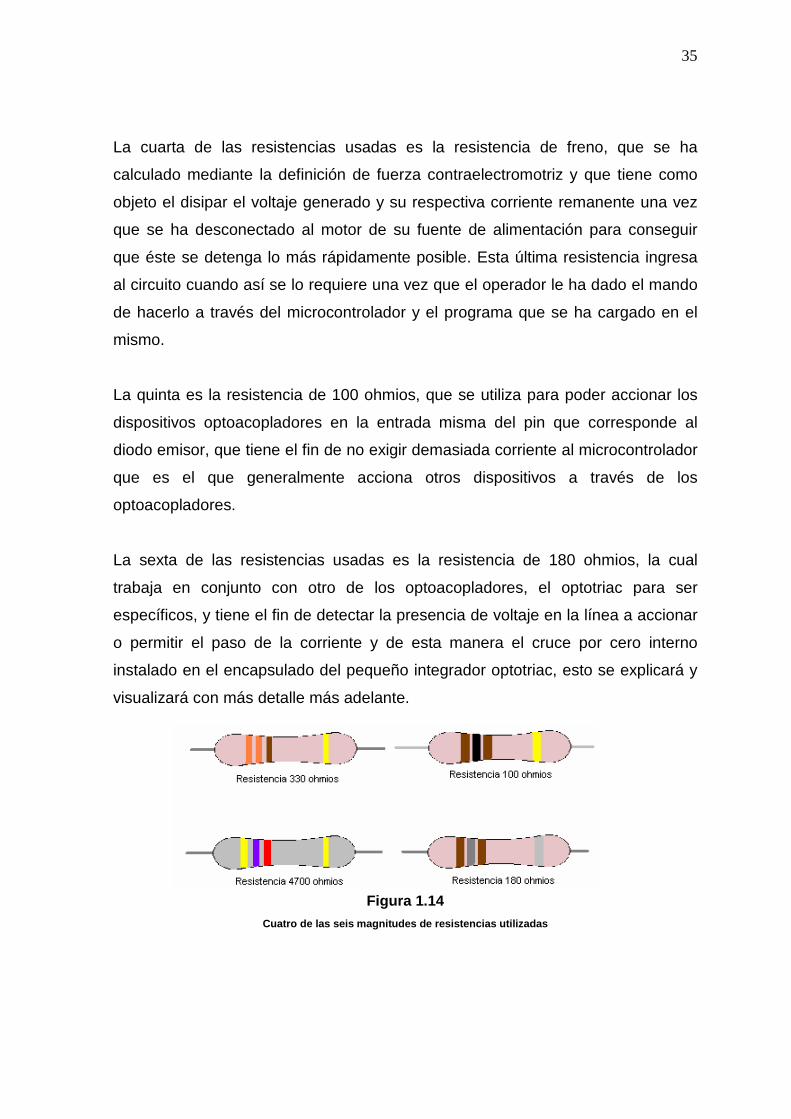
La cuarta de las resistencias usadas es la resistencia de freno, que se ha
calculado mediante la definición de fuerza contraelectromotriz y que tiene como
objeto el disipar el voltaje generado y su respectiva corriente remanente una vez
que se ha desconectado al motor de su fuente de alimentación para conseguir
que éste se detenga lo más rápidamente posible. Esta última resistencia ingresa
al circuito cuando así se lo requiere una vez que el operador le ha dado el mando
de hacerlo a través del microcontrolador y el programa que se ha cargado en el
mismo.
La quinta es la resistencia de 100 ohmios, que se utiliza para poder accionar los
dispositivos optoacopladores en la entrada misma del pin que corresponde al
diodo emisor, que tiene el fin de no exigir demasiada corriente al microcontrolador
que es el que generalmente acciona otros dispositivos a través de los
optoacopladores.
La sexta de las resistencias usadas es la resistencia de 180 ohmios, la cual
trabaja en conjunto con otro de los optoacopladores, el optotriac para ser
específicos, y tiene el fin de detectar la presencia de voltaje en la línea a accionar
o permitir el paso de la corriente y de esta manera el cruce por cero interno
instalado en el encapsulado del pequeño integrador optotriac, esto se explicará y
visualizará con más detalle más adelante.
Figura 1.14 Cuatro de las seis magnitudes de resistencias utili zadas
36
1.4.2. DIODOS
Los diodos son los más sencillos de los dispositivos semiconductores, pero es
esencial en los circuitos electrónicos. Es un dispositivo de dos terminales,
idealmente debería conducir o permitir el paso de la corriente eléctrica en
solamente un sentido, actuando como un cortocircuito en el sentido en que
permite el paso de corriente, pero como circuito abierto cuando la corriente intenta
circular en sentido contrario al permitido.
Los materiales usados para los diodos son dos usualmente, el silicio y el
germanio, los cuales ante un incremento de temperatura, disminuyen su
resistencia, es decir tienen, - a diferencia de los elementos conductores- un
coeficiente de temperatura negativo.
En el modulo se ha utilizado los diodos a la entrada misma de alimentación, la
primera de ellas como ya se mostró anteriormente se utiliza como un arreglo de
puente de diodos a la salida del transformador de alimentación para proporcionar
corriente continua a los circuitos lógicos digitales.
La segunda de ellas es un segundo arreglo de puente de diodos que proporciona
la alimentación al motor serie de corriente continua, por lo que se trata de un
puente de diodos de mayor potencia que el de la fuente anterior, y que también
proporciona señal para el detector de cruce por cero. También esta parte se
explicará con mayor detalle más adelante y puede ser observada en el anexo
número uno, en el que se muestra el circuito con su diseño final.
Se utiliza igualmente un diodo zener, el diodo zener es un diodo similar al diodo
semiconductor, pero éste tiene ciertas particularidades, por ejemplo una de ellas
es que se comercializa con un dato de voltaje adicional, y puede utilizarse para
estabilizar ciertas medidas de voltaje.
Lo anterior significa que cuando se polariza inversamente y bajo ciertos
parámetros, puede comportarse como una pequeña fuente de corriente continua,
37
y bajo cierto rango se comporta como un diodo común, con su respectivo
impedimento al paso de la corriente o permitiéndola si se lo polariza directamente.
Hemos utilizado uno de estos dispositivos en la etapa del cruce por cero, y nos
sirve para poder enviar la señal del cruce por cero de la señal recién rectificada
del puente de diodos y reducida por la resistencia acoplada hasta el optotransistor
que envía la señal baja activa con la que el microcontrolador trabaja para poder
hacer correr el tiempo de retraso con que disparará los semiconductores que
alimentan la carga.
También se ha dotado de cierto número de diodos semiconductores conectados
en paralelo con las bobinas de los relevadores del puente “H” de inversión de
polaridad de la armadura del motor para proteger de contracorrientes que
pudieran averiar seriamente al microcontrolador, ya que el accionamiento de los
mismos no es optoacoplado, ya que los optoacopladores optotransistores no son
capaces de trabajar con la cantidad de corriente que se requiere para el
accionamiento de las bobinas.
Lo anterior también se detallará más adelante junto con el gráfico que se ha
añadido en el primer anexo y ciertas otras especificaciones que se muestran en el
anexo 4 donde se encuentran las características de algunos de los dispositivos
que hemos empleado.
Figura 1.15 Diodos utilizados: diodos semiconductor; emisor de luz , zener
38
1.4.3. OPTOACOPLADORES
Los optoaisladores u optoacopladores son otros de los dispositivos que se han
utilizado para el funcionamiento del módulo.
Un optoacoplador es un dispositivo que incorpora muchas características que
resultan prácticas, sobretodo a la hora de trabajar con circuitos incluyen una etapa
de control junto con una de potencia.
Los optoacopladores son pequeños dispositivos que contienen encapsulado un
diodo emisor de luz infrarroja y un fotodetector de silicio que puede ser un
transistor, en el cual el diodo infrarrojo actúa como base además de la que viene
añadida en el mismo encapsulado. Otra opción es que en lugar de tener un
transistor se tenga un SCR, o inclusive un TRIAC, lo cual sucede en este caso.
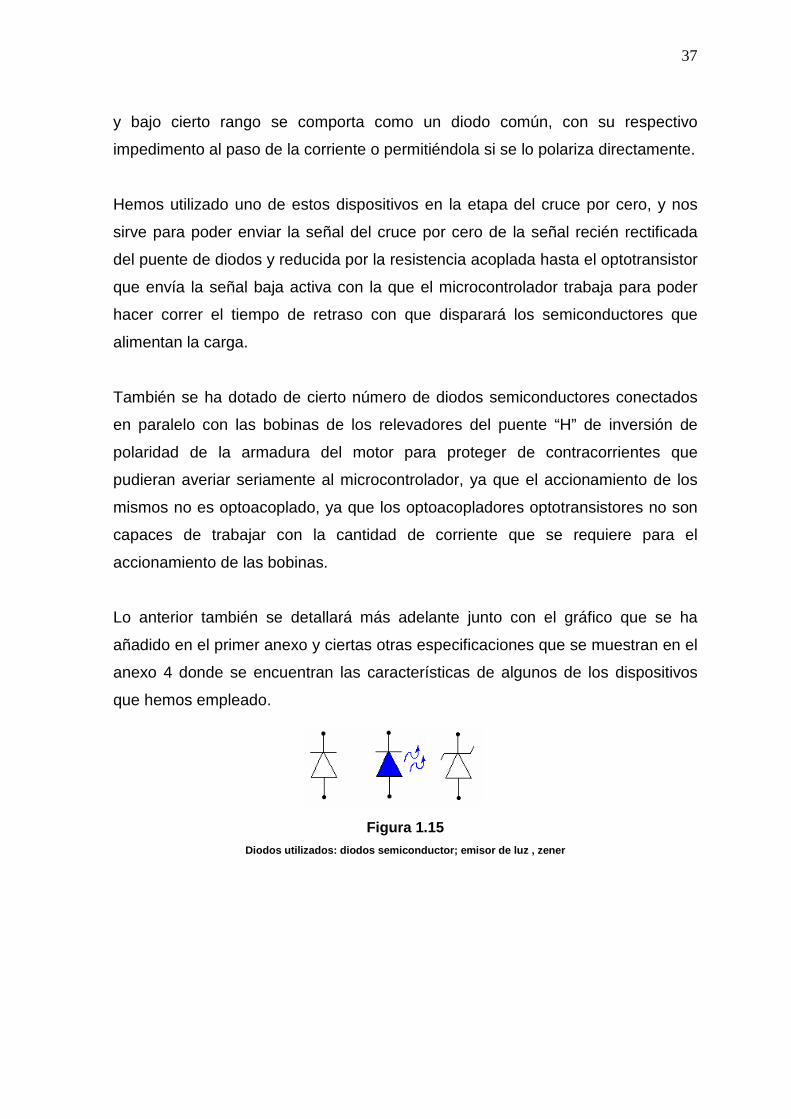
Para este caso se ha utilizado dos optoacopladores, el primero de ellos es el
dispositivo A 4N35, que corresponde a un optotransistor u optoTBJ, el cual tiene
internamente la disposición de pines que se bosqueja a continuación:
Figura 1.16 Diagrama de pines del optotransistor A 4N35
El optotransistor A 4N35 funciona en el momento en que se ha inyectado una
corriente reducida producto de un voltaje de 5v a través de una resistencia en
serie con el ánodo, de 100 ohmios, tal como se había dicho anteriormente, y esto
39
permite que la corriente del colector circule a partir del mismo en el pin 5 hasta el
emisor del pin 4.
Es digno de ser tomado en cuenta que el pin 6 del encapsulado posee otra base,
pero ésta es propia del transistor, y puede trabajar exactamente de la misma
manera en que lo hace el diodo emisor ubicado entre los pines 1 y 2.
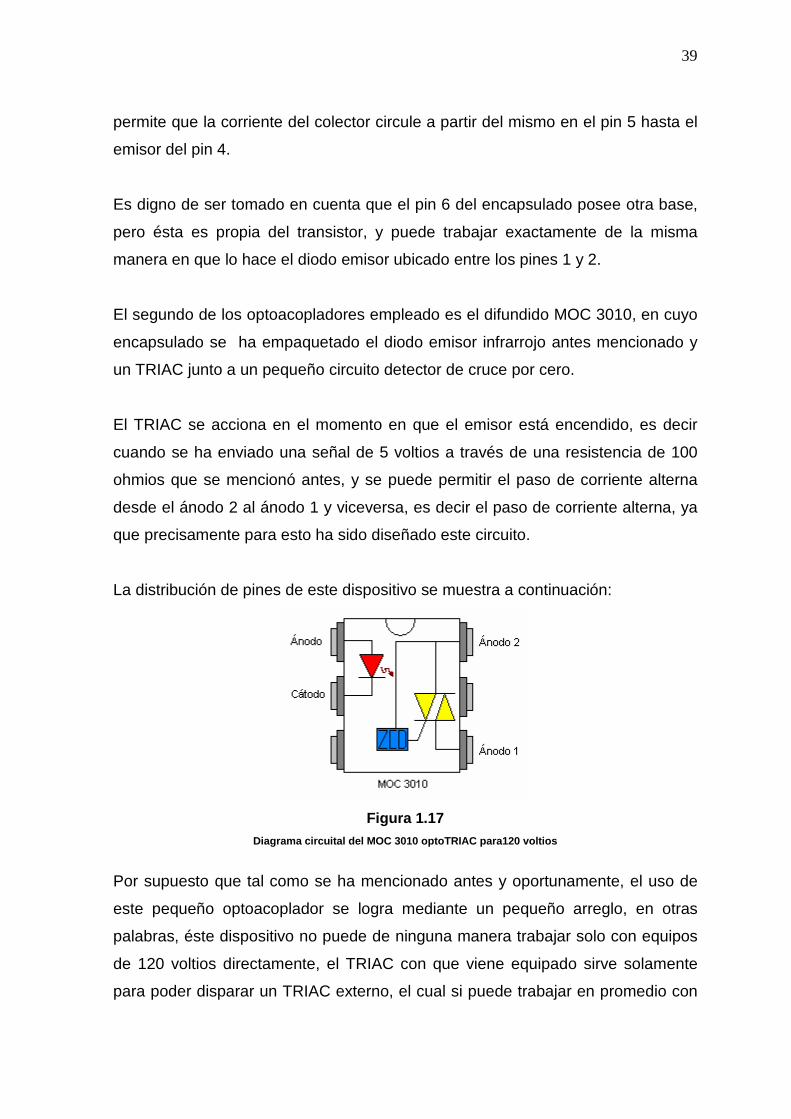
El segundo de los optoacopladores empleado es el difundido MOC 3010, en cuyo
encapsulado se ha empaquetado el diodo emisor infrarrojo antes mencionado y
un TRIAC junto a un pequeño circuito detector de cruce por cero.
El TRIAC se acciona en el momento en que el emisor está encendido, es decir
cuando se ha enviado una señal de 5 voltios a través de una resistencia de 100
ohmios que se mencionó antes, y se puede permitir el paso de corriente alterna
desde el ánodo 2 al ánodo 1 y viceversa, es decir el paso de corriente alterna, ya
que precisamente para esto ha sido diseñado este circuito.
La distribución de pines de este dispositivo se muestra a continuación:
Figura 1.17 Diagrama circuital del MOC 3010 optoTRIAC para120 v oltios
Por supuesto que tal como se ha mencionado antes y oportunamente, el uso de
este pequeño optoacoplador se logra mediante un pequeño arreglo, en otras
palabras, éste dispositivo no puede de ninguna manera trabajar solo con equipos
de 120 voltios directamente, el TRIAC con que viene equipado sirve solamente
para poder disparar un TRIAC externo, el cual si puede trabajar en promedio con
40
un máximo de 10 amperios continuamente si se le ha equipado con la ventilación
mínima requerida. El arreglo para los disparos de los TRIACS externos se
detallará más adelante, se recomienda también revisar el anexo 3, en el que se
ha presentado el datasheet del MOC 3010.
1.4.4. REGULADORES DE VOLTAJE
Hablaremos brevemente de algunos detalles acerca del regulador de voltaje
usado en el módulo didáctico.
El regulador de voltaje es un circuito integrado de tres terminales. Este tipo de
regulador es muy utilizado, internamente tiene la circuitería de la fuente de
referencia, un amplificador comparador, un dispositivo de control y la protección
de sobrecarga. Ofrece una regulación de voltaje positivo, porque los hay también
de negativo fijo o voltaje regulable.
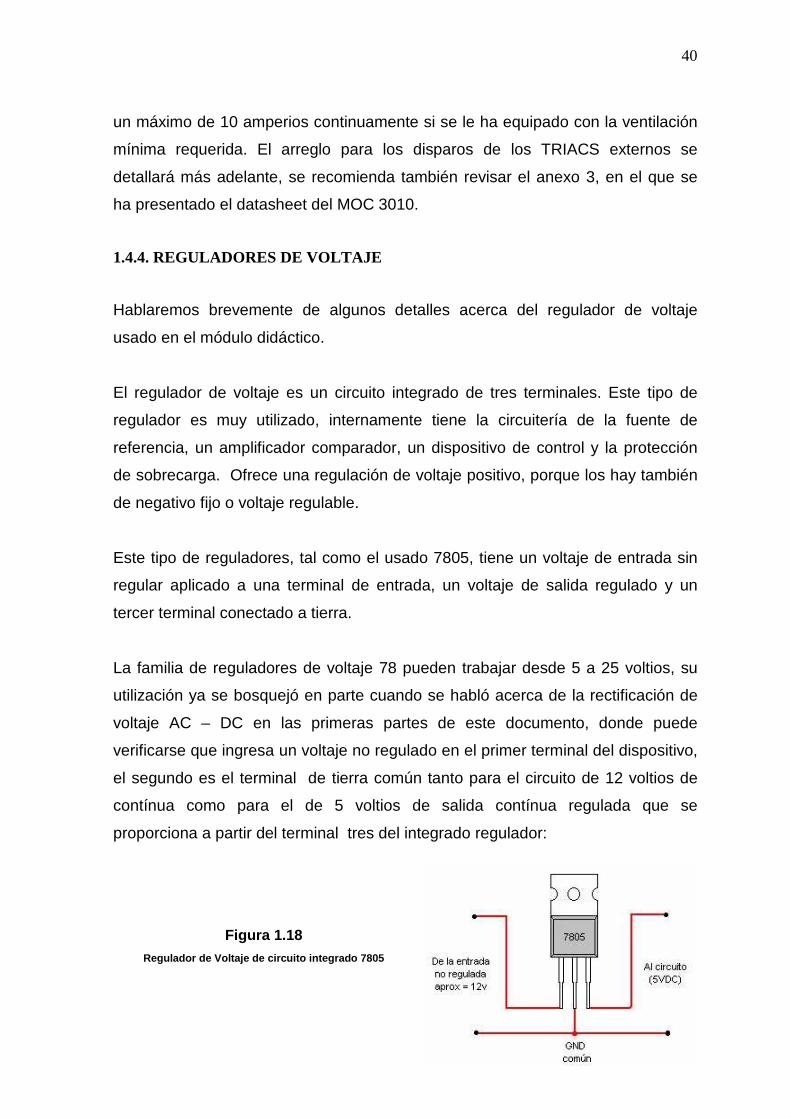
Este tipo de reguladores, tal como el usado 7805, tiene un voltaje de entrada sin
regular aplicado a una terminal de entrada, un voltaje de salida regulado y un
tercer terminal conectado a tierra.
La familia de reguladores de voltaje 78 pueden trabajar desde 5 a 25 voltios, su
utilización ya se bosquejó en parte cuando se habló acerca de la rectificación de
voltaje AC – DC en las primeras partes de este documento, donde puede
verificarse que ingresa un voltaje no regulado en el primer terminal del dispositivo,
el segundo es el terminal de tierra común tanto para el circuito de 12 voltios de
contínua como para el de 5 voltios de salida contínua regulada que se
proporciona a partir del terminal tres del integrado regulador:
Figura 1.18 Regulador de Voltaje de circuito integrado 7805
41
También se ha utilizado un regulador de voltaje 7812 para poder alimentar las
bobinas de ciertos relevadores que requieren este tipo de voltaje para accionarse.
Su implementación se logra de la misma manera que se muestra en la figura 18
con regulador de voltaje de 5 voltios, pero lógicamente su salida es del orden de
los 12 voltios de corriente continua.
1.4.5. TRIAC
Tal como se había dicho el momento de la propuesta del trabajo, se usarán
semiconductores en lugar de los tradicionales reóstatos para optimizar la corriente
utilizada, ni desperdiciar la tan preciada energía, por esto, se trabaja con los
triacs, para poder ajustar el ángulo de disparo y por lo tanto la cantidad de energía
suministrada.
Los triacs son dispositivos con posibilidad de control de paso de corriente
bilateral, o, dicho de otra manera, en cualquiera de las dos direcciones,
especialmente adecuado para corriente alterna.
En el módulo didáctico se ha trabajado con triacs para la dosificación de la
corriente entregada, por supuesto, sus disparos dependen en primer lugar del
usuario y la cantidad de potencia que este requiera entregar a la carga, la cual se
controlará por medio del programa cargado en el microcontrolador, el cual a
través de los optotriacs disparará a los triacs propiamente dichos, aislando así el
delicado control digital de la riesgosa etapa de potencia.
Como ya se ha mencionado anteriormente, se ha tenido que investigar cuál es la
correcta disposición de trabajo en la que tienen que configurarse el TRIAC
conjuntamente con el optotriac, pero estos detalles se indican oportunamente más
adelante, cuando se hable acerca del hardware del módulo y la disposición de los
elementos.

42
1.4.6. RELEVADORES
Se ha utilizado relevadores, también llamados relés, la razón de hacerlo es
precisamente porque con el diseño del módulo didáctico se ha logrado el objetivo
principal de evitar el desperdicio de energía al que se llega cuando se usa
arrancadores a base de reóstatos que desperdician la energía a la hora de variar
el voltaje de alimentación del motor, pero para este caso, al trabajar con una
carga no muy representativa o si cabe “derrochadora”, es evidente la necesidad
de dotar al equipo de este pequeño arreglo ya que en esta parte en que se utiliza
un relevador que es la de inversión de giro, prácticamente no existe mejor manera
de asegurar que no vaya a haber ningún tipo de inconveniente en lo relacionado
con el accidental accionamiento de uno u otro par de contactos.
Los relés usados no son un significativo sinónimo de pérdida de energía, y no se
los reemplazó con un puente “H” de triacs ya que para este caso los relés son
más seguros ya que, o solamente permiten la una polaridad o la otra e incluso
ninguna, pero jamás permitirán dos a la vez, lo cual puede ser peligroso al
convertirse en cortocircuito franco que dañaría toda la instalación no aislada
aunque sí protegida.
Por otro lado, el uso de puentes de inversión de polaridad con semiconductores
requieren de cuidados bastante significativos desde su misma etapa de diseño, lo
cual para la programación del microcontrolador no representa ningún tipo de
dificultad, porque de hecho se intentó elaborar este paso en un pequeño prototipo
anterior, pero la particularidad de que no es posible trabajar con SCRs que
permitan ser optoaislados puede convertirse en un real inconveniente.
Se ha usado por esto relés de bobinas de 12 voltios, cuyos contactos son
capaces de trabajar con 10 amperios tanto para la inversión de giro como para la
conexión del circuito de frenado dinámico a través de la resistencia de freno que
ha sido convenientemente instalada.
43
1.4.7. TRANSISTORES
La cantidad de literatura existente en lo referente al transistor bipolar de juntura es
realmente sorprendente, en todas las fuentes bibliográficas es sencillo
encontrarse con mucha información, pero siendo esta una tesis dedicada a los
automatismos, la característica más sobresaliente de este dispositivo que se
aprovechará es la de interruptor.
Bajo esta característica, en el momento de administrarle una corriente a la base
de un transistor bipolar de juntura (TBJ), la cual puede deberse precisamente a un
voltaje pequeño, como los 5 voltios del microcontrolador por ejemplo, y que pase
a través de una resistencia de 4700 ohmios que impida que el microcontrolador
sea exageradamente exigido, se logra conducción desde el colector hasta el
emisor , lo cual fácilmente puede ayudar a la hora de accionar dispositivos
pequeños de corriente continua como lo son los relés.
Esta configuración se muestra también más adelante, en la que se aprovecha
esta especial característica del TBJ, además de en el anexo 1.
Figura 1.19 Transistor Bipolar de Juntura (TBJ)
1.4.8. TRANSFORMADORES
Un transformador es un dispositivo electromagnético de conversión de energía, el
cual trabaja de acuerdo al principio de la inductancia mutua entre dos o más
44
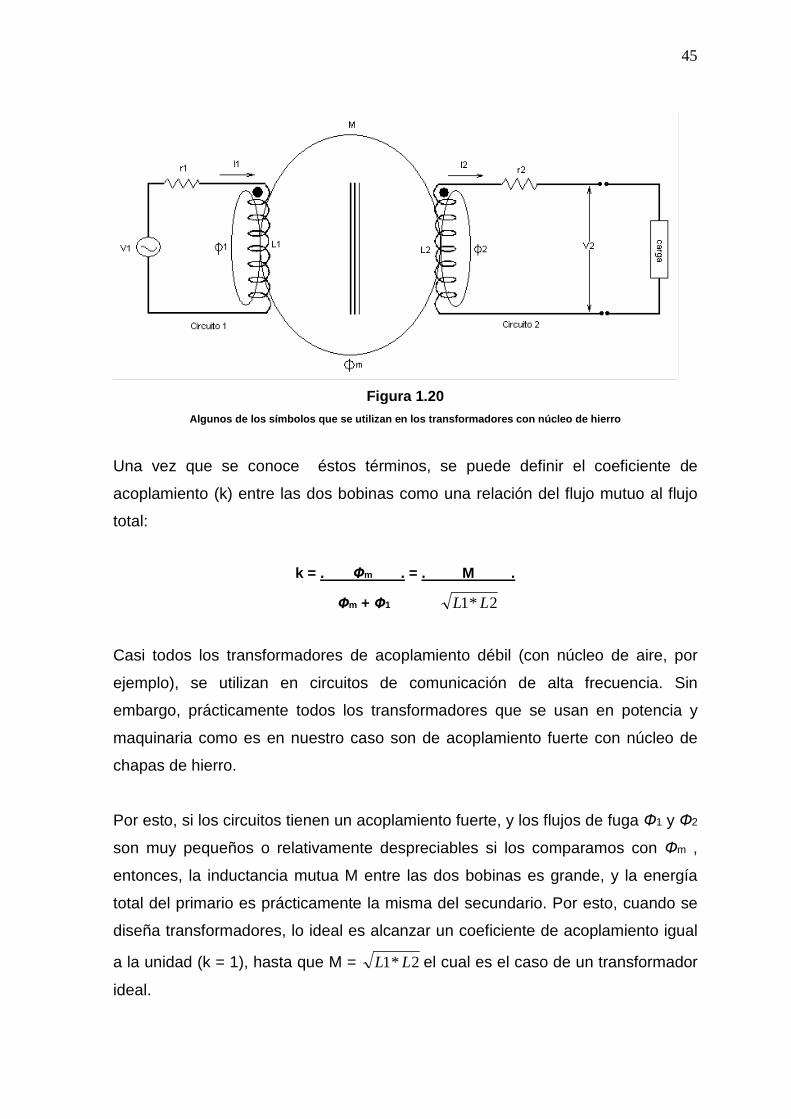
bobinas o circuitos acoplados magnéticamente, más no físicamente, es decir, no
hay conducción eléctrica entre ellos.
Como puede verse en la figura que se muestra en las líneas inferiores, al primer
bobinado, llamado primario, se alimenta con voltaje alterno. El primario recibe
energía de la fuente de corriente alterna. Se produce un acoplamiento magnético
entre los dos circuitos y se transfiere energía desde el circuito 1 al circuito 2. Si las
dos bobinas o circuitos se devanan sobre un núcleo común de hierro, se produce
un acoplamiento fuerte, lo cual significa que casi toda la energía que recibe el
primario desde la fuente se transfiere por acción del transformador al secundario.
Suele también utilizarse la convención del punto, el cual representa el positivo
instantáneo en ése terminal de la bobina. Igualmente el punto colocado en la otra
bobina (del secundario o circuito que recibe la energía), representa también el
positivo instantáneo que se genera gracias al flujo magnético.
Por otro lado, el flujo magnético que enlaza a las dos bobinas, no toma en cuenta
al flujo que se fuga de la bobina 1 y el de fuga de la bobina 2.
También se define a M como la inductancia mutua (que es una medida de
acoplamiento magnético) entre dos bobinas o circuitos, que se produce por el flujo
mutuo, del cual se trató anteriormente.
L1 y L2 son, respectivamente las inductancias del circuito primario y la inductancia
del secundario, ambas medidas en henrios.
45
Figura 1.20 Algunos de los símbolos que se utilizan en los tran sformadores con núcleo de hierro
Una vez que se conoce éstos términos, se puede definir el coeficiente de
acoplamiento (k) entre las dos bobinas como una relación del flujo mutuo al flujo
total:
k = . Фm . = . M .
Фm + Ф1 2*1 LL
Casi todos los transformadores de acoplamiento débil (con núcleo de aire, por
ejemplo), se utilizan en circuitos de comunicación de alta frecuencia. Sin
embargo, prácticamente todos los transformadores que se usan en potencia y
maquinaria como es en nuestro caso son de acoplamiento fuerte con núcleo de
chapas de hierro.
Por esto, si los circuitos tienen un acoplamiento fuerte, y los flujos de fuga Ф1 y Ф2
son muy pequeños o relativamente despreciables si los comparamos con Фm ,
entonces, la inductancia mutua M entre las dos bobinas es grande, y la energía
total del primario es prácticamente la misma del secundario. Por esto, cuando se
diseña transformadores, lo ideal es alcanzar un coeficiente de acoplamiento igual
a la unidad (k = 1), hasta que M = 2*1 LL el cual es el caso de un transformador
ideal.
46
Las relaciones principales que se tratan en un transformador ideal son las
siguientes:
a=2
1
N
N=
2
1
E
E=
2
1
V
V=
1
2
I
I
Las cuales, por supuesto, se cumplen en caso de un transformador ideal, en
donde “a” representa la relación de transformación, la cual se puede determinar
con el número de vueltas del primario (N1) dividido para el número de vueltas del
secundario (N2) o voltaje aplicado en el primario (V1) dividido para el voltaje
generado en el secundario (V2), o corriente del secundario (I2) dividido para
corriente del primario (I1). Consideración que, como se dijo antes, se hacen para
el transformador ideal, es decir, que la energía íntegra del primario se transfiere
sin ninguna pérdida hasta el secundario, sin pérdidas de flujo magnético de
ningún tipo.
Para este caso se ha utilizado un transformador, que está instalado para
proporcionar la alimentación del circuito digital (véase la figura 3) y también para
la alimentación de los relés.
Es un transformador de 110 voltios de entrada y secundario de 12 v , 0 v , 12 v, es
decir, un transformador de tap central. Éste lógicamente también logra aislar de
manera efectiva el circuito de control de la toma de fuerza.
1.4.9. CONDENSADORES
Los condensadores o capacitores son dispositivos eléctricos que mediante el
arreglo de dos placas o superficies enfrentadas mantienen el voltaje almacenando
energía en forma de campo eléctrico.
Están emplazados en nuestro proyecto en varios sitios, el primero de ellos, es un
capacitor electrolítico de 2200 microfaradios, instalado a la salida del arreglo de
47
diodos del transformador de tap central, que trabaja como filtro para mantener
constante el voltaje a la salida del rectificador de onda completa.
Otros de ellos están a las salidas del regulador de voltaje de 5 voltios, son
capacitores cerámicos de 0.01 microfaradios, que contribuyen a la eliminación de
cualquier tipo de oscilación de éstas señales de voltaje.
1.4.10. PULSADORES
Los pulsadores son elementos electromecánicos que ayudan a proporcionar la
orden a ser recibida por el microcontrolador, tiene como misión el abrir o cerrar un
circuito eléctrico permitiendo o no la circulación de corriente.
También se han usado en el módulo. Están colocados en el pórtico de entrada del
microcontrolador (en la mayoría de los terminales del pórtico a), y su activación
comanda el accionamiento de marcha o paro, el sentido de giro, o las velocidades
del motor, sumando en total seis pulsadores.

48
FOTOGRAFIAS DEL MODULOS DE PRUEBA.
a) Calibrando el voltaje de salida, circuito de con trol armado en el Project
board y el circuito de fuerza en una base de madera
b) Acercamiento del circuito de control, se está pr obando las salidas a
relevadores con diodos emisores de luz
c) Acercamiento del motor adosado a la base de prue bas con su bornera
provisional
49
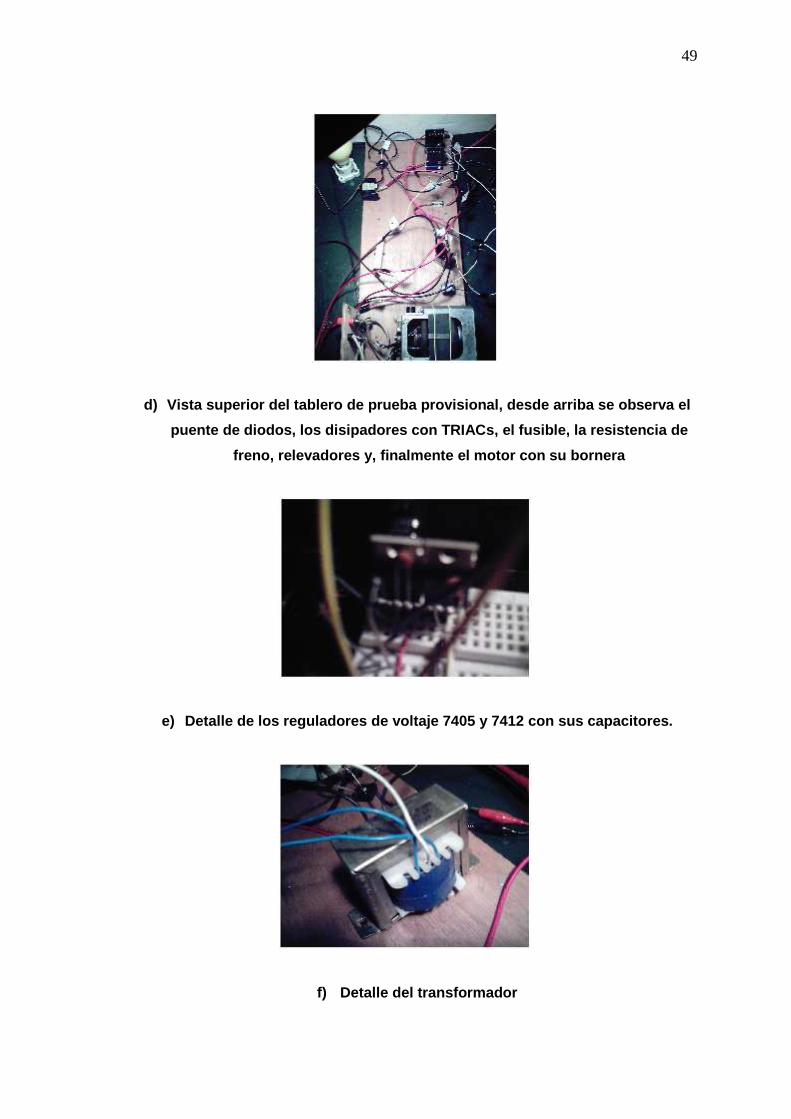
d) Vista superior del tablero de prueba provisional , desde arriba se observa el
puente de diodos, los disipadores con TRIACs, el fu sible, la resistencia de
freno, relevadores y, finalmente el motor con su bo rnera
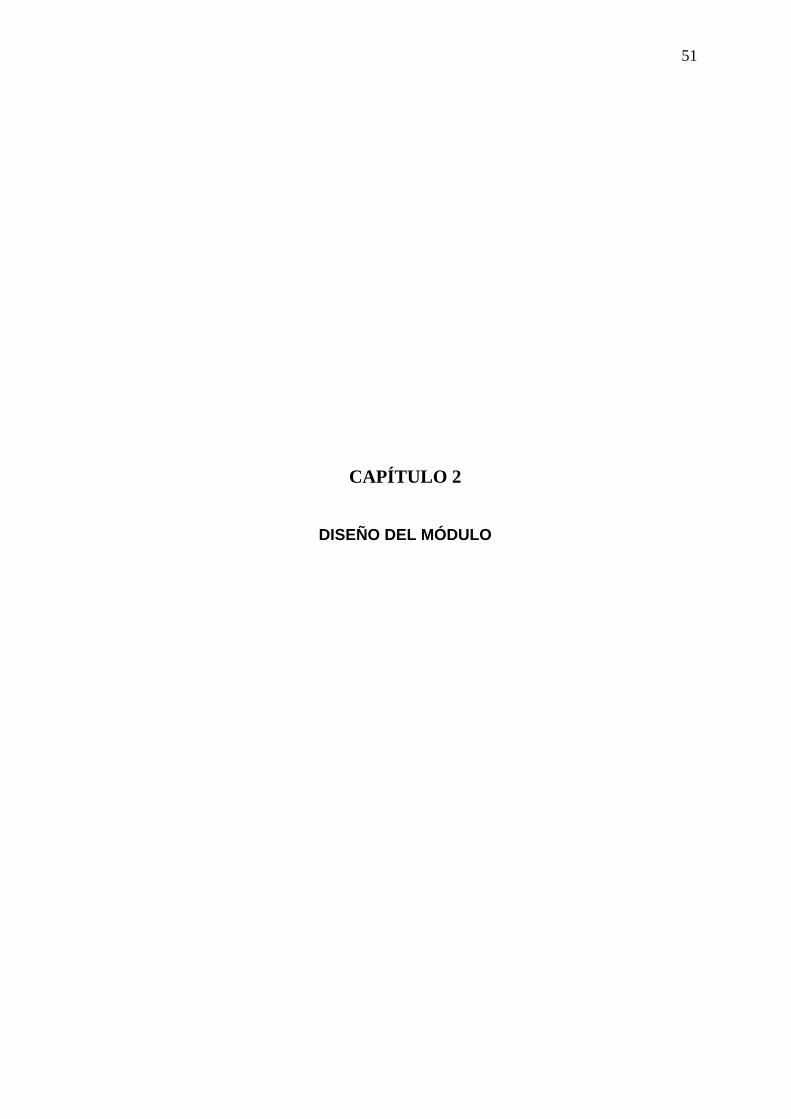
e) Detalle de los reguladores de voltaje 7405 y 741 2 con sus capacitores.
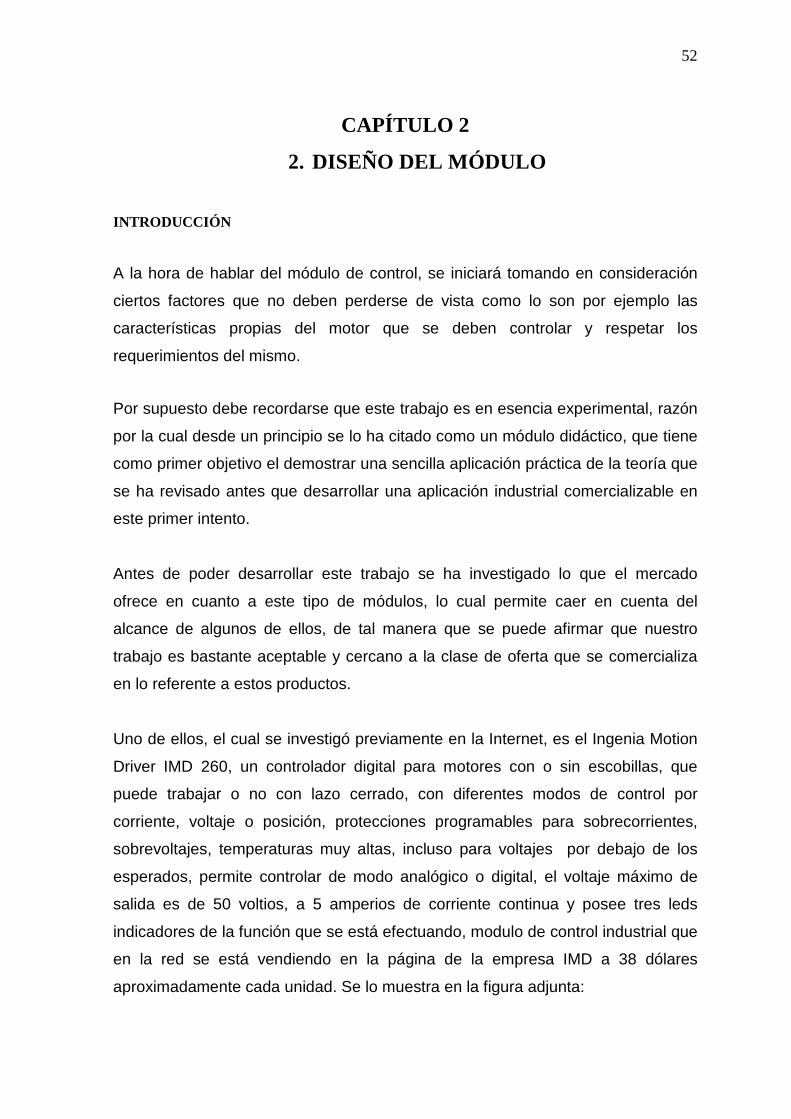
f) Detalle del transformador

50
g) TRIACs adosados a dos disipadores en el tablero de prueba para calibración
51
CAPÍTULO 2
DISEÑO DEL MÓDULO
52
CAPÍTULO 2
2. DISEÑO DEL MÓDULO
INTRODUCCIÓN
A la hora de hablar del módulo de control, se iniciará tomando en consideración
ciertos factores que no deben perderse de vista como lo son por ejemplo las
características propias del motor que se deben controlar y respetar los
requerimientos del mismo.
Por supuesto debe recordarse que este trabajo es en esencia experimental, razón
por la cual desde un principio se lo ha citado como un módulo didáctico, que tiene
como primer objetivo el demostrar una sencilla aplicación práctica de la teoría que
se ha revisado antes que desarrollar una aplicación industrial comercializable en
este primer intento.
Antes de poder desarrollar este trabajo se ha investigado lo que el mercado
ofrece en cuanto a este tipo de módulos, lo cual permite caer en cuenta del
alcance de algunos de ellos, de tal manera que se puede afirmar que nuestro
trabajo es bastante aceptable y cercano a la clase de oferta que se comercializa
en lo referente a estos productos.
Uno de ellos, el cual se investigó previamente en la Internet, es el Ingenia Motion
Driver IMD 260, un controlador digital para motores con o sin escobillas, que
puede trabajar o no con lazo cerrado, con diferentes modos de control por
corriente, voltaje o posición, protecciones programables para sobrecorrientes,
sobrevoltajes, temperaturas muy altas, incluso para voltajes por debajo de los
esperados, permite controlar de modo analógico o digital, el voltaje máximo de
salida es de 50 voltios, a 5 amperios de corriente continua y posee tres leds
indicadores de la función que se está efectuando, modulo de control industrial que
en la red se está vendiendo en la página de la empresa IMD a 38 dólares
aproximadamente cada unidad. Se lo muestra en la figura adjunta:

53
Figura 2.1 Controlador de motores de la fábrica IMD
Otros modelos de similares características se venden en la Internet con precios
que oscilan entre los 23 y 35 dólares la unidad.
Como puede verse con claridad, este trabajo en comparación con aquellos
aunque no palidece del todo ya que se está trabajando con mayores voltajes de
alimentación que los de los módulos industriales, y aunque sus gamas de control
sí son superiores a las del prototipo, este bien puede servir como una práctica
base a partir de la cual en un futuro, otros estudiantes de la Politécnica puedan
profundizar este tema para desarrollarlo de un modo algo mas industrial, e incluso
se pudiera considerar la posibilidad de controlar mayores potencias cambiando
ciertos dispositivos como los TRIACs, con lo que su versatilidad sería realmente
importante.
En lo referente a este segundo capítulo, se ha decidido dividirlo en dos partes, la
primera de ellas está dedicada íntegramente a hablar acerca del hardware del
módulo, en el cual se darán algunos detalles referentes a la etapa de entradas de
señal que el microcontrolador procesará, es decir los comandos que requiere el
operario y las señales de cruce por cero, pasando luego a hablar de la disposición
física de la cual se ha dotado al microcontrolador especificando cuáles de sus
54
terminales son entradas y cuáles salidas, cómo se activan, qué activan y cómo lo
hacen, tratando también tópicos acerca de la señalización que tienen las salidas
juntamente con los actuadores que serán activados por las salidas del
microcontrolador.
La segunda parte habla acerca del software que se ha empleado en la
construcción del módulo, los paquetes computacionales utilizados, la
especificación de algunas de sus principales características, potencialidades y
comandos mínimos necesarios para poder trabajar con su lenguaje de
programación.
2.1. EL HARDWARE DEL MÓDULO
Esta primera parte tratará de cada una de las tres principales partes que
componen el módulo didáctico, iniciando con las entradas que proporcionan
información al microcontrolador, entre las cuales está el sensor de cruce por cero,
luego se hablará brevemente de los terminales asignados del microcontrolador, y
por último el funcionamiento de los actuadores y sus respectivos señalizadores.
2.1.1. ENTRADAS
Se ha escogido el sencillo nombre de entradas para esta parte porque se trata de
proporcionar la más cercana idea de los temas que en esta parte se desea tratar,
a la vez de que termine englobando los tipos de señal que se aplica al
microcontrolador.
En lo que se refiere a las entradas del microcontrolador, son de dos tipos
principalmente, por un lado se tiene las normales que le están diciendo al
microcontrolador si el usuario requiere un tipo de giro o el otro, o necesita detener
el motor o cambiar de velocidad.
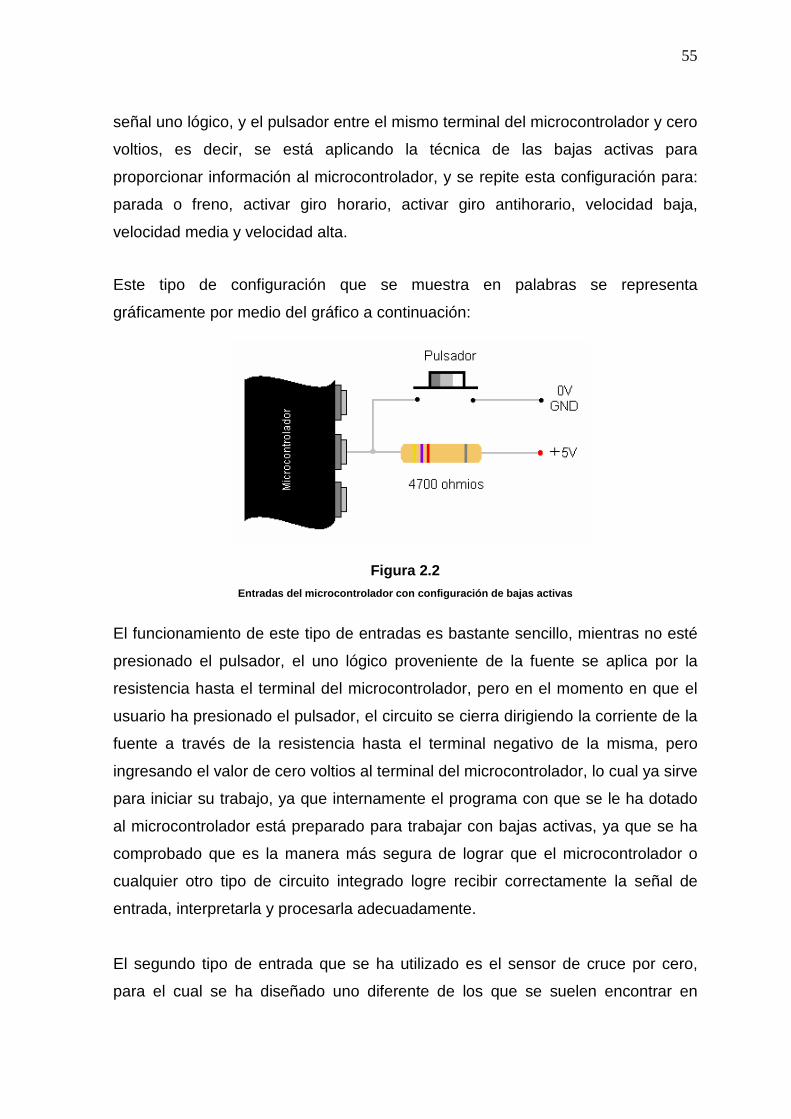
Estas entradas utilizan un pulsador sencillo y una resistencia de 4700 ohmios
conectada entre el terminal de entrada del microcontrolador y cinco voltios de la
55
señal uno lógico, y el pulsador entre el mismo terminal del microcontrolador y cero
voltios, es decir, se está aplicando la técnica de las bajas activas para
proporcionar información al microcontrolador, y se repite esta configuración para:
parada o freno, activar giro horario, activar giro antihorario, velocidad baja,
velocidad media y velocidad alta.
Este tipo de configuración que se muestra en palabras se representa
gráficamente por medio del gráfico a continuación:
Figura 2.2 Entradas del microcontrolador con configuración de bajas activas
El funcionamiento de este tipo de entradas es bastante sencillo, mientras no esté
presionado el pulsador, el uno lógico proveniente de la fuente se aplica por la
resistencia hasta el terminal del microcontrolador, pero en el momento en que el
usuario ha presionado el pulsador, el circuito se cierra dirigiendo la corriente de la
fuente a través de la resistencia hasta el terminal negativo de la misma, pero
ingresando el valor de cero voltios al terminal del microcontrolador, lo cual ya sirve
para iniciar su trabajo, ya que internamente el programa con que se le ha dotado
al microcontrolador está preparado para trabajar con bajas activas, ya que se ha
comprobado que es la manera más segura de lograr que el microcontrolador o
cualquier otro tipo de circuito integrado logre recibir correctamente la señal de
entrada, interpretarla y procesarla adecuadamente.
El segundo tipo de entrada que se ha utilizado es el sensor de cruce por cero,
para el cual se ha diseñado uno diferente de los que se suelen encontrar en
56
fuentes bibliográficas y que necesitan para su funcionamiento un amplificador
operacional.
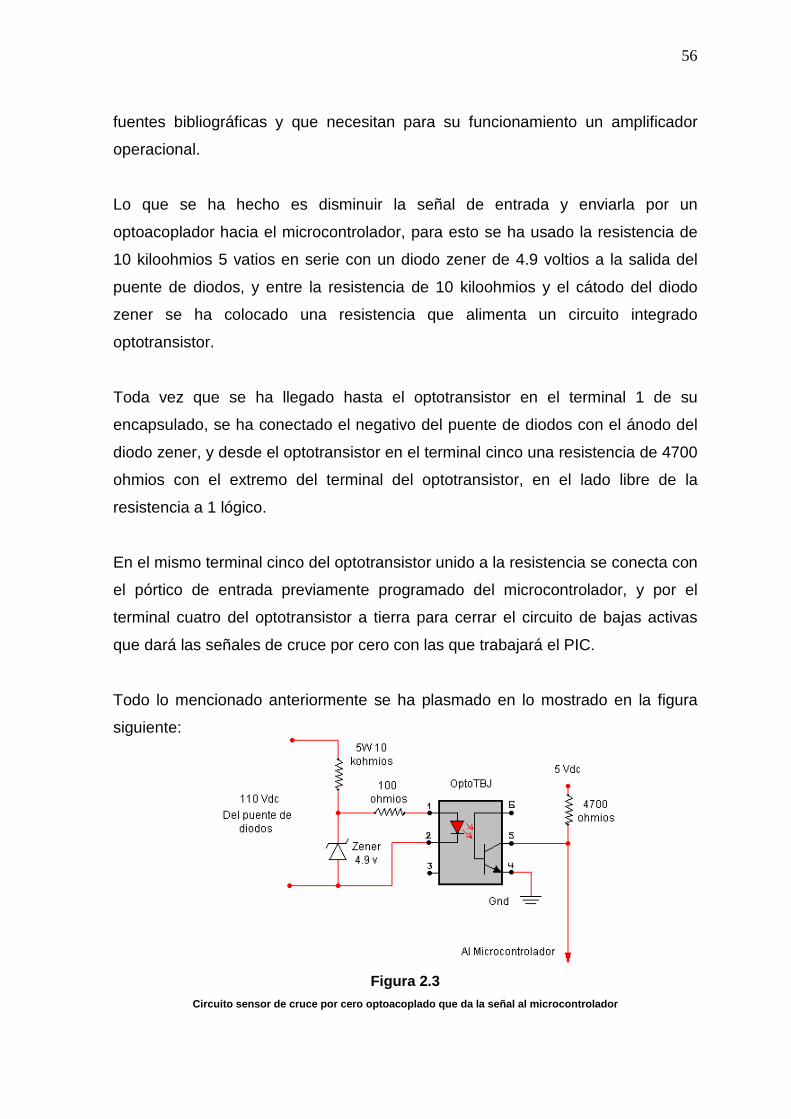
Lo que se ha hecho es disminuir la señal de entrada y enviarla por un
optoacoplador hacia el microcontrolador, para esto se ha usado la resistencia de
10 kiloohmios 5 vatios en serie con un diodo zener de 4.9 voltios a la salida del
puente de diodos, y entre la resistencia de 10 kiloohmios y el cátodo del diodo
zener se ha colocado una resistencia que alimenta un circuito integrado
optotransistor.
Toda vez que se ha llegado hasta el optotransistor en el terminal 1 de su
encapsulado, se ha conectado el negativo del puente de diodos con el ánodo del
diodo zener, y desde el optotransistor en el terminal cinco una resistencia de 4700
ohmios con el extremo del terminal del optotransistor, en el lado libre de la
resistencia a 1 lógico.
En el mismo terminal cinco del optotransistor unido a la resistencia se conecta con
el pórtico de entrada previamente programado del microcontrolador, y por el
terminal cuatro del optotransistor a tierra para cerrar el circuito de bajas activas
que dará las señales de cruce por cero con las que trabajará el PIC.
Todo lo mencionado anteriormente se ha plasmado en lo mostrado en la figura
siguiente:
Figura 2.3 Circuito sensor de cruce por cero optoacoplado que da la señal al microcontrolador
57
Su funcionamiento es como sigue:
Como se ha dicho, se toma la energía desde el arreglo del puente de diodos,
obteniendo 110 voltios en corriente contínua, y con la ayuda de la resistencia de 5
vatios, se reduce este voltaje a 5 voltios, aprovechando la característica propia del
diodo zener, y esta señal pequeña de voltaje que dicho sea de paso solamente se
da cuando la onda de voltaje es de la magnitud necesaria, enviamos la pequeña
corriente, solamente la que es capaz de soportar el optotransistor, de 20
miliamperios a través de la resistencia de 100 ohmios accionando el diodo emisor
encapsulado en el integrado y permitiendo de este modo el paso de corriente
desde la fuente a través de la resistencia de 4700 ohmios, el terminal cinco del
optotransistor, es decir el colector del transistor hasta el emisor del mismo en el
terminal número cuatro del integrado, con lo que se logra enviar la señal baja
activa desde el optotransistor hasta el microcontrolador solamente en el momento
en que la onda de voltaje de 110 voltios es lo suficientemente alta como para
señalar en el microcontrolador el comienzo del retrazo para el disparo de los
TRIACs.
Internamente también se ha dotado al programa del microcontrolador para que
interprete y trabaje con señales bajas activas. Más adelante se detallará hacia
qué terminales del microcontrolador se transmiten las señales tanto de control
como del sensor de cruce por cero y cuál de ellas no se utiliza.
Se utiliza el optotransistor porque brinda la seguridad de que a pesar de cualquier
falla o conexión errada que pudiera darse en el lado de potencia del circuito, éste
de ninguna manera será capaz de averiar el delicado microcontrolador o el
programa cargado en el mismo por lo relativamente complicado que pudiera
resultar el volver a colocar o programar este dispositivo, el cual si no se tiene el
cuidado necesario, solamente con minúsculas descargas electrostáticas puede
verse perjudicado, lo cual afectó por lo menos en dos ocasiones durante el
desarrollo, debido a no tener en cuenta las precauciones del caso.
58
2.1.2. SALIDAS A LOS ACTUADORES Y SEÑALIZACIÓN
Las salidas implementadas se inician en los pines del microcontrolador
designados previamente en el programa como tales, y tienen como fin el activar o
desactivar los elementos actuadores según los requerimientos que el usuario
tenga y de acuerdo con las restricciones y la lógica que se prioriza en el programa
instalado en el microcontrolador.
La señal que se obtiene a la salida del microcontrolador es del tipo TTL, es decir
todo el tiempo se está trabajando con una señal lógica de uno lógico y cero lógico,
correspondientes a valores de cinco voltios y cero voltios, y precisamente son de
ésta naturaleza las señales que se obtendrán en los pines de salida del
microcontrolador.
A lo largo de la implementación del módulo, se tiene esencialmente dos tipos de
salidas que se han diferenciado según el tipo de dispositivo que deben accionar.
El primer tipo de salidas son las que tienen como objetivo facilitar el disparo de los
TRIACs según el requerimiento que se ha demandado, y hay que decir de paso
que se ha utilizado TRIACs en lugar de SCRs porque resulta más familiar su
implementación además que para este caso particular, los disparos continuos son
necesarios ya que la corriente es continua pulsante rectificada sin filtro, algo
absolutamente necesario para que sea censada por el detector de cruce por cero
que se ha diseñado, y su implementación se ha desarrollado según lo que se
muestra en el gráfico a continuación:
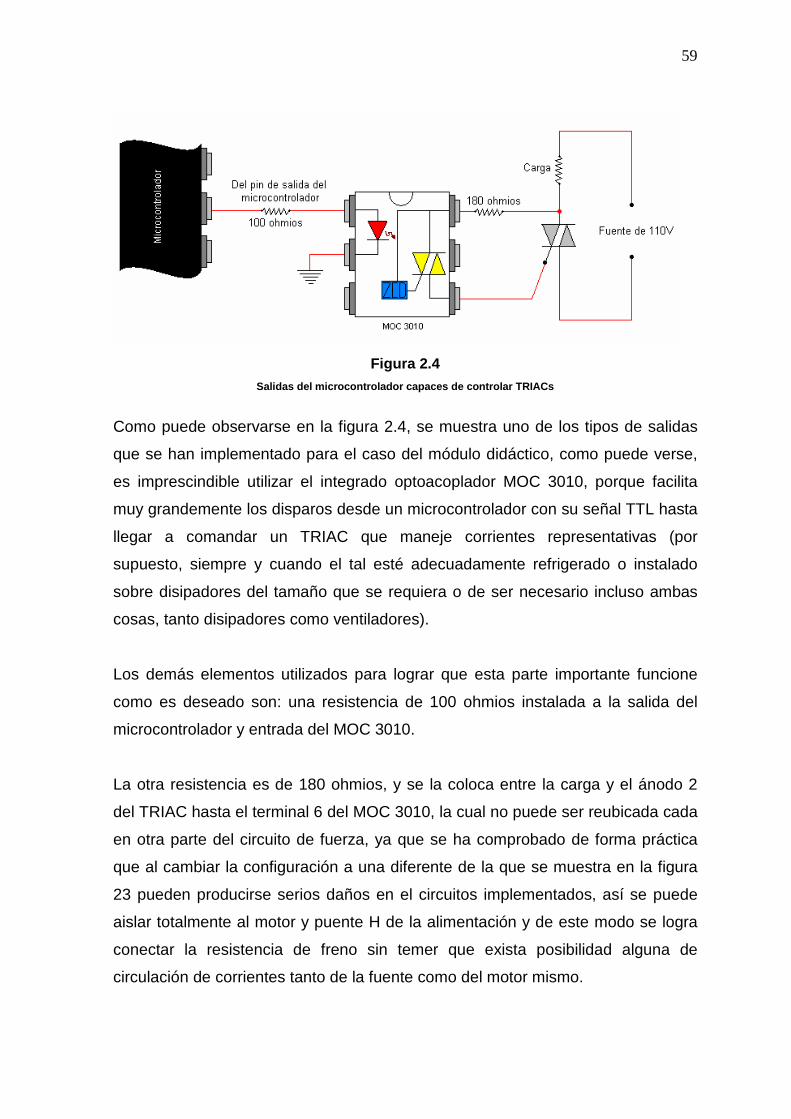
59
Figura 2.4 Salidas del microcontrolador capaces de controlar T RIACs
Como puede observarse en la figura 2.4, se muestra uno de los tipos de salidas
que se han implementado para el caso del módulo didáctico, como puede verse,
es imprescindible utilizar el integrado optoacoplador MOC 3010, porque facilita
muy grandemente los disparos desde un microcontrolador con su señal TTL hasta
llegar a comandar un TRIAC que maneje corrientes representativas (por
supuesto, siempre y cuando el tal esté adecuadamente refrigerado o instalado
sobre disipadores del tamaño que se requiera o de ser necesario incluso ambas
cosas, tanto disipadores como ventiladores).
Los demás elementos utilizados para lograr que esta parte importante funcione
como es deseado son: una resistencia de 100 ohmios instalada a la salida del
microcontrolador y entrada del MOC 3010.
La otra resistencia es de 180 ohmios, y se la coloca entre la carga y el ánodo 2
del TRIAC hasta el terminal 6 del MOC 3010, la cual no puede ser reubicada cada
en otra parte del circuito de fuerza, ya que se ha comprobado de forma práctica
que al cambiar la configuración a una diferente de la que se muestra en la figura
23 pueden producirse serios daños en el circuitos implementados, así se puede
aislar totalmente al motor y puente H de la alimentación y de este modo se logra
conectar la resistencia de freno sin temer que exista posibilidad alguna de
circulación de corrientes tanto de la fuente como del motor mismo.
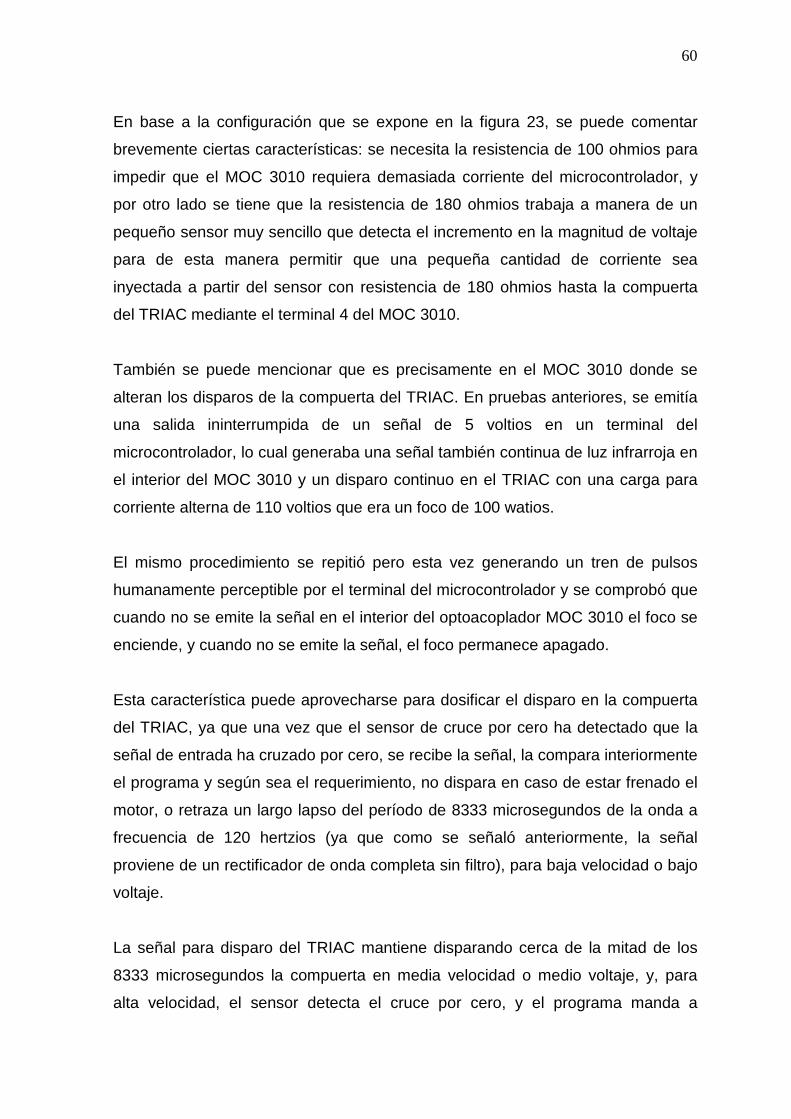
60
En base a la configuración que se expone en la figura 23, se puede comentar
brevemente ciertas características: se necesita la resistencia de 100 ohmios para
impedir que el MOC 3010 requiera demasiada corriente del microcontrolador, y
por otro lado se tiene que la resistencia de 180 ohmios trabaja a manera de un
pequeño sensor muy sencillo que detecta el incremento en la magnitud de voltaje
para de esta manera permitir que una pequeña cantidad de corriente sea
inyectada a partir del sensor con resistencia de 180 ohmios hasta la compuerta
del TRIAC mediante el terminal 4 del MOC 3010.
También se puede mencionar que es precisamente en el MOC 3010 donde se
alteran los disparos de la compuerta del TRIAC. En pruebas anteriores, se emitía
una salida ininterrumpida de un señal de 5 voltios en un terminal del
microcontrolador, lo cual generaba una señal también continua de luz infrarroja en
el interior del MOC 3010 y un disparo continuo en el TRIAC con una carga para
corriente alterna de 110 voltios que era un foco de 100 watios.
El mismo procedimiento se repitió pero esta vez generando un tren de pulsos
humanamente perceptible por el terminal del microcontrolador y se comprobó que
cuando no se emite la señal en el interior del optoacoplador MOC 3010 el foco se
enciende, y cuando no se emite la señal, el foco permanece apagado.
Esta característica puede aprovecharse para dosificar el disparo en la compuerta
del TRIAC, ya que una vez que el sensor de cruce por cero ha detectado que la
señal de entrada ha cruzado por cero, se recibe la señal, la compara interiormente
el programa y según sea el requerimiento, no dispara en caso de estar frenado el
motor, o retraza un largo lapso del período de 8333 microsegundos de la onda a
frecuencia de 120 hertzios (ya que como se señaló anteriormente, la señal
proviene de un rectificador de onda completa sin filtro), para baja velocidad o bajo
voltaje.
La señal para disparo del TRIAC mantiene disparando cerca de la mitad de los
8333 microsegundos la compuerta en media velocidad o medio voltaje, y, para
alta velocidad, el sensor detecta el cruce por cero, y el programa manda a
61
disparar la compuerta del TRIAC todo el tiempo sin ningún tipo de retrazo, es
decir disparando continuamente al elemento semiconductor y logrando la
velocidad máxima mediante el voltaje máximo.
Se tiene por otro lado otro tipo de salidas, las que comandan los relevadores del
“puente H” instalado para la inversión de giro y la conexión de la resistencia de
freno. Este tipo de salidas del microcontrolador se han implementado tal y como
muestra la figura que se muestra a continuación:
Figura 2.5 Salidas del microcontrolador capaces de controlar r elevadores de 12 VDC
En la configuración que se muestra en la figura 2.5 se muestra justamente la
segunda clase de salida que se ha usado en el hardware del módulo.
Se usa una resistencia de 4700 ohmios entre el terminal designado como salida
del microcontrolador y la base del transistor bipolar de juntura, desde la fuente de
12 voltios se alimenta la bobina del relevador, y por el otro terminal de la misma
se conecta con el colector del TBJ, luego de lo cual se conecta también a tierra el
emisor del mismo.
62
Aunque la salida del microcontrolador es a cinco voltios, se puede trabajar con el
TBJ conectado a la bobina de 12 voltios porque tanto la tierra de la fuente de 5
voltios del regulador 7805 como la del regulador 7812 son las mismas.
La señal del microcontrolador llega a la base del transistor bipolar de juntura con
una corriente disminuida debido a la presencia de la resistencia de 4700 ohmios,
y, como el transistor trabaja como interruptor controlado eléctricamente bajo esta
modalidad de “emisor común”, desde la fuente de 12 voltios empieza a circular la
corriente a través de la bobina del relevador, accionando los contactos
normalmente abiertos como normalmente cerrados, y “dándole tierra” al mismo
para facilitar la circulación de corriente.
Se nota también que se ha incorporado un diodo 1N4001 conectado en paralelo a
la bobina del relevador, esto se debe a que aunque podríamos no colocarlo, su
ausencia podría provocar serios daños en el microcontrolador porque no habría
facilidades para descargar las aunque pequeñas corrientes inducidas en el
bobinado del relevador, considerables cuando se está trabajando con elementos
de tecnología sensible incluso a la electricidad estática como lo es el
microcontrolador, en el cual una corriente inducida proveniente de la bobina del
relevador es potencialmente destructiva una vez que se lo ha desconectado.
Y en lo referente a la señalización, no ha sido necesario colocar señalizadores
muy avanzados, como pantallas de cristal líquido o displays de siete segmentos,
solamente se ha instalado diodos emisores de luz ya que la lógica que maneja el
módulo didáctico es verdaderamente sencilla.
La instalación efectuada para esta señalización se muestra en la figura 2.6 que se
muestra a continuación, en donde se puede apreciar que en serie con los diodos
emisores de luz se han conectado resistencias de 330 ohmios que igualmente
limitan la corriente que proporciona el microcontrolador, dado que el mismo, como
se ha recordado en clase no constituye una fuente de corriente.
63
Figura 2.6 Señalización con instalación de diodos emisores de luz
2.1.3. FRENO DINÁMICO
Por definición el frenado dinámico consiste en desconectar la armadura del motor
de CD el suministro y conectar sus terminales con una resistencia adecuada. Esta
carga eléctrica en la armadura tiende a detenerla, porque disipa energía en el
resistor de carga.
Cuando se desconecta el inducido de un motor de la fuente de energía, se
detiene al cabo de cierto tiempo, a pesar de la inercia de su carga y rotor, porque
el rotor ya no recibe energía, y actúan las pérdidas mecánicas.
Originalmente en este tipo de frenado se mantiene la excitación del motor, y debe
desconectarse el rotor de la fuente, los conductores del inducido actúan a modo
de generador dado que están sumergidos dentro de un campo magnético, y
presentan la tensión inducida. El movimiento del inducido es debido a la inercia
del motor y su carga conectada.
En el caso de trabajar con motores shunt, se continúa alimentando los bobinados
de campo, pero a los terminales del rotor se conecta le resistencia de freno que
disipará la energía que genera el rotor.
64
Pero por otro lado, dado que en este caso se trabaja con un motor serie con dos
bobinados de campo, es evidente que no es posible –al menos de una manera
práctica- lograr mantener alimentados únicamente los bobinados de campo sin
dejar de alimentar al rotor, por esta misma razón, se ha hecho un arreglo
mediante el cual se pueda aún así aplicar este procedimiento, el cual se explica
en las líneas siguientes:
1. El programa por sí solo reconoce que debe por orden del programa iniciar con
la rutina de frenado cuando se ha permitido el paso de energía habiendo
conectado el equipo a la fuente de alimentación y sin que el operario haya
escogido ninguna opción de trabajo.
2. Los semiconductores de alimentación en este punto también por orden del
programa no son disparados, impidiendo el paso de energía hasta el grupo de
inversión de giro, pero inmediatamente conectado desde un principio los
contactos que comunican el grupo de resistencias con el conjunto bobinados de
campo – rotor.
3. Una vez que el operario escogió la velocidad y sentido de giro, el equipo
inmediatamente desconecta al grupo de resistencias de freno.
4. Sólo a partir de este punto se habilita a los contactos debidos para que
permitan el sentido de giro seleccionado y a los semiconductores que permitan el
paso de energía según la dosis que de parte del operario se haya determinado.
También se describe a continuación la rutina que por parte del programa instalado
se comanda desde el microcontrolador para permitir el freno una vez que el motor
está ya trabajando, debe mencionarse que no importa en qué sentido esté girando
el motor, ni a qué velocidad, siempre se seguirá esta rutina comandada desde el
microcontrolador desde el momento en que se ha escogido la opción de freno:
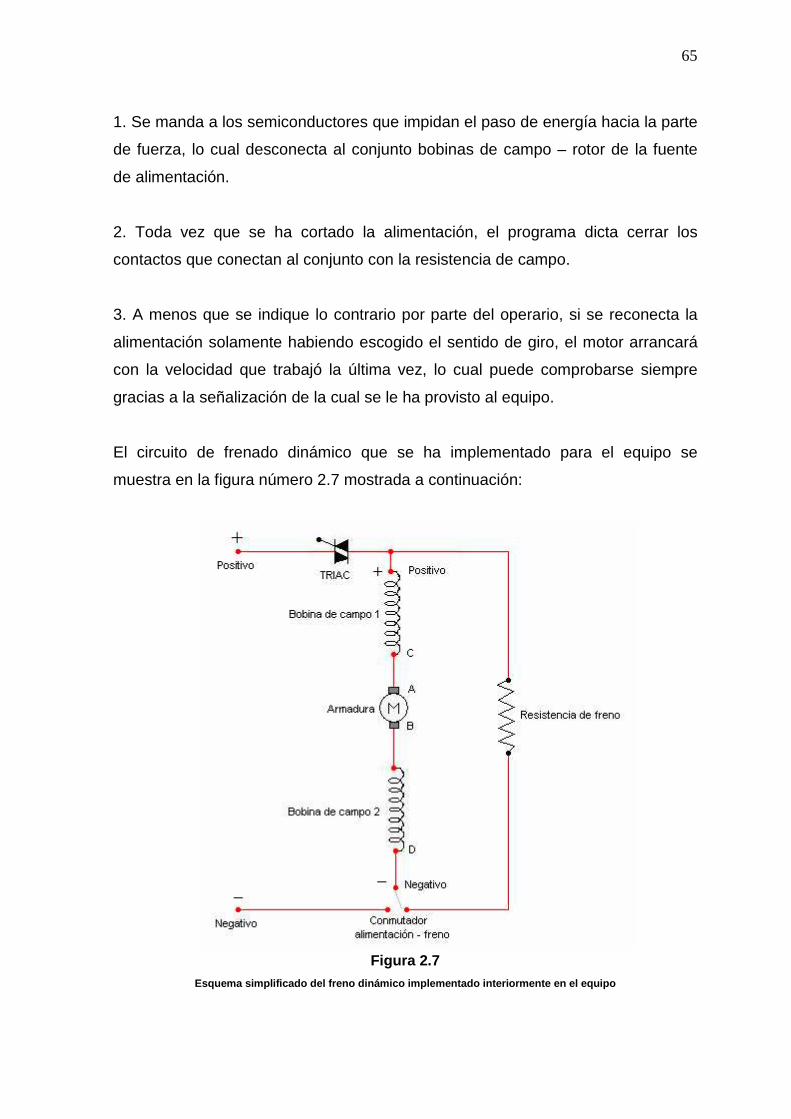
65
1. Se manda a los semiconductores que impidan el paso de energía hacia la parte
de fuerza, lo cual desconecta al conjunto bobinas de campo – rotor de la fuente
de alimentación.
2. Toda vez que se ha cortado la alimentación, el programa dicta cerrar los
contactos que conectan al conjunto con la resistencia de campo.
3. A menos que se indique lo contrario por parte del operario, si se reconecta la
alimentación solamente habiendo escogido el sentido de giro, el motor arrancará
con la velocidad que trabajó la última vez, lo cual puede comprobarse siempre
gracias a la señalización de la cual se le ha provisto al equipo.
El circuito de frenado dinámico que se ha implementado para el equipo se
muestra en la figura número 2.7 mostrada a continuación:
Figura 2.7 Esquema simplificado del freno dinámico implementad o interiormente en el equipo
66
En el freno implementado hay que adecuarse a trabajar con la disposición de este
motor específico, que como principal particularidad se observa que no se dispone
de un solo bobinado de campo, sino de dos, que representan a cada polo de la
máquina, por otro lado, con el conmutador, que no es más que un relevador, el
cual se observa en la parte inferior, se escoge funcionamiento o del freno o
funcionamiento normal del motor.
El freno dinámico para esta disposición se ha conectado de manera tal que sea
posible que tanto las corrientes inducidas de ambas bobinas de campo como la
del rotor se puedan disipar como conjunto en la resistencia de freno.
La determinación de la magnitud de la resistencia de freno se ha efectuado de la
manera siguiente:
En primer lugar la resistencia de armadura es de 12.4 ohmios, la resistencia del
bobinado de campo uno es 6.9 ohmios y la resistencia del bobinado de campo
dos es 6.6 ohmios, y, trabajando con los datos de la placa:
STYLE
AC- DC
100 – 120 volts
0 – 60 cycles
200 watts
N.C.R. fuse
3 amps
N.C.R. Co.
DAYTON OHIO
A la fuerza contraelectromotriz la determinaremos:
Voltaje aplicado = Corriente de armadura * Resisten cia total de las bobinas de campo +
fuerza contraelectromotriz
67
Entonces, para poder determinar la fuerza contraelectromotriz se despeja a partir
de la expresión anterior, con lo que se obtiene:
Fuerza Contraelectromotriz = Voltaje aplicado – Cor riente de armadura * Resistencia total de
las bobinas de campo
Y por cuestiones de simplicidad se nombrará las variables de la manera siguiente:
Fuerza contraelectromotriz = f.c.e.m.
Corriente de armadura = Ia
Resistencia total de las bobinas de campo = Rt
Voltaje aplicado = Vt
Con lo que se obtiene:
f.c.e.m. = V t – Ia * Rt
= 110 – 3 * 13.5
= 69.5 (voltios)
Potencia de salida = 200 (vatios)
Potencia de entrada = 300 (vatios)
Y, ya que en el freno dinámico la bibliografía considera como generador
estrictamente a la armadura nada más, se considerará a las bobinas del campo
serie como resistencias, cada una de aproximadamente siete ohmios, con lo que
la resistencia total para el freno será:
Voltaje generado por la armadura = Corriente generad a por la armadura * Resistencia de freno
Y al despejar se obtiene:
Resistencia de freno = Voltaje generado por la arma dura
. Corriente ge nerada en la armadura
Resistencia de freno = 69.5
. 3

68
Resistencia de freno = 23.17 ohmios
Potencia de la resistencia = V * I = 69.5 * 3 = 208 .50 vatios
Como primera observación, de los 23,17 ohmios se debe restar el valor de la
resistencia de ambos bobinados de campo serie, lo que da un valor de
aproximadamente 10 ohmios.
Ahora, como los tales no son valores comerciales, se ha escogido una resistencia
de 10 ohmios y 30 vatios, por otro lado, se conoce que el pasado es un cálculo
aceptable debido a que el freno dinámico trata de disminuir bastante la resistencia
para poder considerarla prácticamente un cortocircuito y de este modo convertir
en calor de modo efectivo el voltaje generado por la armadura, además de que la
potencia de 208 watios no sería disipada en forma de calor por un tiempo muy
grande, así que por ésta resistencia no circularán continuamente 3 amperios, o lo
harán por un período muy pequeño, que no afectará a la resistencia de freno
instalada.
2.2. EL SOFTWARE DEL MÓDULO
Al momento de tratar este tema se iniciará mencionando brevemente que existen
esencialmente dos lenguajes de comunicación con el microcontrolador como para
otros dispositivos, uno de ellos son los de bajo nivel y otro tipo son los de alto
nivel, pero cuando se escoge comunicarse con la máquina a través del uso de
lenguajes de bajo nivel, se produce un considerable ahorro de código en la
confección del programa, lo cual termina siendo muy valioso debido a la
capacidad de memoria, aunque últimamente ésta se expande cada vez y en
muchas de las ocasiones no es un problema insertar un programa extenso en el
microcontrolador.
Por esto, programas bien ensamblados en lenguaje de máquina de bajo nivel
como por ejemplo los confeccionados en Ensamblador optimizan el tamaño de la
memoria que ocupan y su ejecución es muy rápida, pero, el problema que suele
69
surgir en el Ensamblador es la poca potencia de las instrucciones que es capaz
de ejecutar el procesador, las que se maneja algo más directamente son las de
sumar, restar, hacer operaciones lógicas AND, OR, XOR, al igual que también
rotar un dato, moverlo de un sitio a otro y algo más, pero si se desea hacer una
multiplicación, uno debe confeccionar un programa que para conseguirlo repita las
sumas las veces que sean necesarias, por esto, el lenguaje Ensamblador es un
lenguaje de bajo nivel, que convierte las instrucciones en un código binario para
que el microprocesador sea capaz de interpretarlas y ejecutarlas.
Por otro lado, los lenguajes de alto nivel más empleados con microcontroladores
son el C y el BASIC, de los que existen varias empresas que comercializan varias
versiones de compiladores e intérpretes para muchas familias de
microcontroladores. En el caso de los PIC es muy buen el compilador de C PCM
de la empresa CCS y el intérprete PBASIC de PARALLAX.
También pueden encontrarse en nuestro medio varios otros paquetes de software
que facilitan la confección del programa, e incluso la simulación del mismo, uno
de ellos es el que se estudió en el laboratorio de microcontroladores, el práctico
PICSimulatorIDE de la empresa OSHONSOFT, el cual permite confeccionar el
programa en lenguaje BASIC, e incluso permite simular el programa junto a otros
dispositivos digitales tales como displays de 7 segmentos, pantallas LCD, leds y
tantos otros elementos esencialmente digitales que nos permiten comprobar el
correcto funcionamiento del programa que se elabora en una de las mismas
opciones que el paquete computacional posee para la ayuda del programador.
Muy utilizado es también el programador MPLAB, el cual a pesar de no haber sido
estudiado, ha tenido un impacto tan grande en la programación de los dispositivos
que al menos debemos mencionarlo brevemente.
A pesar de lo prácticos que son los dos programas computacionales anteriores, el
programa que se ha empleado para la ejecución, el diseño e implementación del
módulo es el Microcode Studio, la versión 2.2.1.1, el cual junto con MPLAB y
PICMicro son productos registrados de la Microchip Technology Inc.
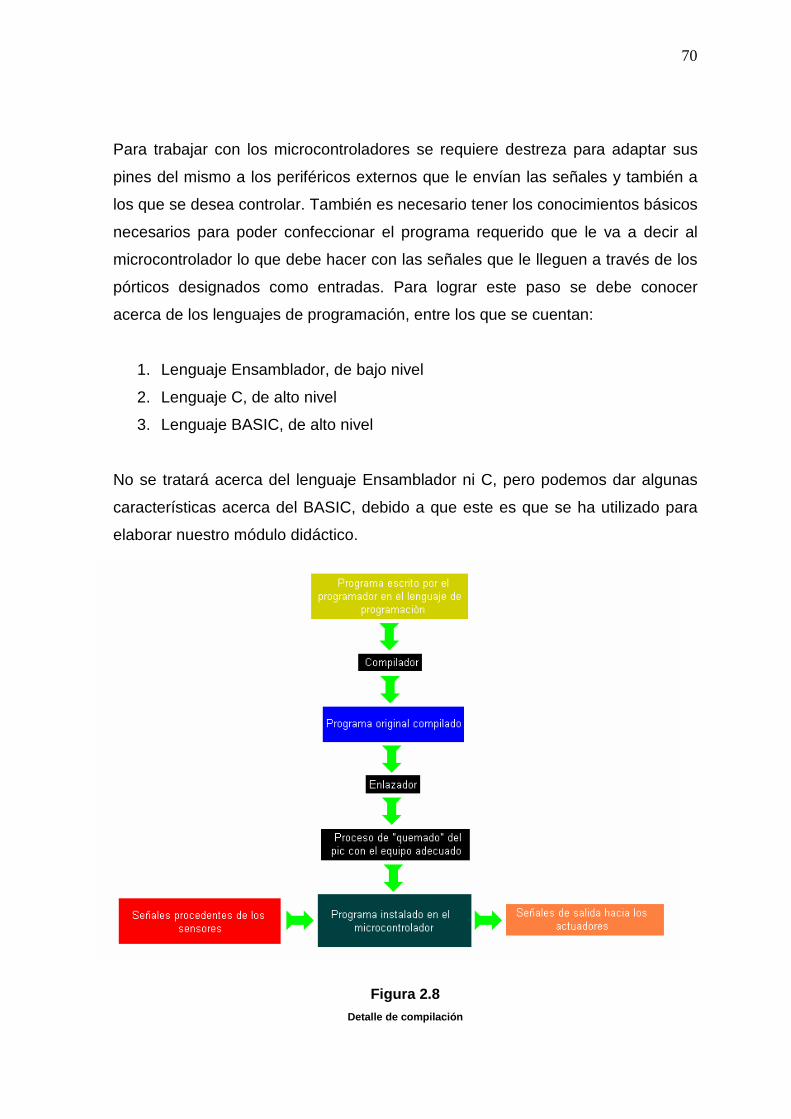
70
Para trabajar con los microcontroladores se requiere destreza para adaptar sus
pines del mismo a los periféricos externos que le envían las señales y también a
los que se desea controlar. También es necesario tener los conocimientos básicos
necesarios para poder confeccionar el programa requerido que le va a decir al
microcontrolador lo que debe hacer con las señales que le lleguen a través de los
pórticos designados como entradas. Para lograr este paso se debe conocer
acerca de los lenguajes de programación, entre los que se cuentan:
1. Lenguaje Ensamblador, de bajo nivel
2. Lenguaje C, de alto nivel
3. Lenguaje BASIC, de alto nivel
No se tratará acerca del lenguaje Ensamblador ni C, pero podemos dar algunas
características acerca del BASIC, debido a que este es que se ha utilizado para
elaborar nuestro módulo didáctico.
Figura 2.8 Detalle de compilación
71
Los lenguajes de alto nivel tienen instrucciones más potentes, siendo muy
sencillas son capaces de multiplicar, obtener la raíz cuadrada, realizan funciones
representativamente complicadas, pero cada una de estas instrucciones son
constituidas por pequeños programas mas elementales que logran lo
anteriormente expuesto, cada una de estas instrucciones de alto nivel son
realmente programas de bajo nivel, por esto, para que el procesador pueda
ejecutar las instrucciones de alto nivel es absolutamente necesario otro programa
que descomponga estas instrucciones de alto nivel en instrucciones de bajo nivel
que le sean correspondientes. El programa que logra esto se llama compilador.
Un compilador es un programa que precisamente se encarga de traducir un
programa confeccionado con instrucciones de alto nivel a otro equivalente con
instrucciones de bajo nivel. Hay una variante de estos programas que reciben el
nombre de intérpretes, que realizan esta tarea pero de instrucción en instrucción,
es decir, traducen una instrucción de alto nivel en su correspondiente de bajo
nivel que ejecuta el procesador y a continuación pasan a la siguiente.
Como es de dominio general, el elaborar un programa basado únicamente en las
instrucciones de tipo Ensamblador requiere obligatoriamente un profundo
conocimiento de la arquitectura interna del procesador, y esto se traduce en
conocimientos de electrónica, así como formación sólida en informática. Las
instrucciones de bajo nivel utilizan directamente los recursos que se han
encapsulado en el interior del procesador.
Como se fijó anteriormente, el lenguaje C es de tipo profesional, es un lenguaje
muy completo y potente, pero para poder manejarlo es necesario tener
conocimientos de informática. También es conveniente conocer la arquitectura
interna del procesador, y en muchos programas es también necesario combinarlo
con los elementos del lenguaje Ensamblador.
En el caso del lenguaje BASIC, el cual es un lenguaje de alto nivel, tiene
instrucciones potentes que se escriben en inglés, y su manejo no requiere que
necesariamente se conozca la arquitectura de los microcontroladores con los que
72
se está trabajando, ni de un conocimiento amplísimo de electrónica ni informática.
A continuación se muestra el programa cargado en el microcontrolador, con la
explicación de las instrucciones línea por línea:
cmcon = 7 ;digitalizamos el puerto a trisa.0 = 1 ;entrada de freno trisa.1 = 1 ;entrada de horario trisa.2 = 1 ;entrada de antihorario trisa.3 = 1 ;entrada de baja trisa.5 = 1 ;entrada de media trisa.6 = 1 ;entrada de alta trisa.7 = 1 ;entrada del sensor trisb.0 = 0 ;b.0 salida al disparador o trigger trisb.1 = 0 ;b.1 salida del freno trisb.2 = 0 ;b.2 salida horario trisb.4 = 0 ;b.4 salida antihorario trisb.5 = 0 ;b.5 salida alta trisb.6 = 0 ;b.6 salida media trisb.7 = 0 ;b.7 salida baja ;<<Declaración de variables velocidades>> sirio VAR BIT ;todas las variables VAR BIT solo tomarán valores de 0 ó 1.1 vega VAR BIT achernar VAR BIT canopus VAR BIT alfacent VAR BIT procion VAR BIT capella VAR BIT rigel VAR BIT betacent VAR BIT betelgeuse VAR BIT altair VAR BIT arturo VAR BIT ;<<Declaración de variables para el sentido de giro>> pyxis VAR BIT auriga VAR BIT aquila VAR BIT indus VAR BIT bootes VAR BIT delphinus VAR BIT microcopium VAR BIT
1 Las variables tipo bit desde “sirio” hasta “norma” (nombres que pueden ser escogidos indistintamente por parte del
programador, y que, en este caso se han escogido los nombres de las treinta estrellas mas luminosas), pueden
solamente almacenar valores de verdad verdaderos o falsos, es decir o uno o cero lógico, aunque también puede
almacenarse variables tipo byte y tipo word.

73
telescopium VAR BIT pavo VAR BIT opus VAR BIT ara VAR BIT norma VAR BIT ;<<Circuitos lógicos>> ;iniciamos la lectura de datos tanatos2: ;iniciamos la rutina principal tanatos ;<<Sentidos de giro>> ;iniciamos la discriminación pyxis = NOT porta.1 ;porta.1 entrada horario auriga = NOT porta.2 ;porta.2 entrada antihorario aquila = portb.2 OR pyxis ;portb.2 salida horario indus = portb.4 OR auriga ;portb.4 salida antihorario portb.2 = delphinus AND aquila AND porta.0 ;portb.2 salida horario bootes = NOT portb.2 portb.4 = porta.0 AND indus AND bootes ;portb.4 salida antihorario delphinus = NOT portb.4 portb.1 = bootes AND delphinus ;portb.1 salida de freno ;<<Velocidades>> sirio = NOT porta.3 ;porta.3 entrada de baja vega = NOT porta.5 ;porta.5 entrada de media achernar = NOT porta.6 ;porta.6 entrada de alta canopus = portb.7 OR sirio ;portb.7 salida baja capella = portb.6 OR vega ;portb.6 salida media betelgeuse = portb.5 OR achernar ;portb.5 salida alta alfacent = NOT canopus rigel = NOT capella altair = NOT betelgeuse portb.7 = altair AND rigel AND arturo AND betacent procion = NOT portb.7 portb.6 = procion AND alfacent AND arturo AND altair betacent = NOT portb.6 portb.5 = procion AND alfacent AND rigel AND betacent arturo = NOT portb.5 ;<<Sentidos y velocidades>> ;parte de sentidos y velocidades microcopium = portb.2 AND portb.7 telescopium = portb.2 AND portb.6 pavo = portb.2 AND portb.5 opus = portb.4 AND portb.7 ara = portb.4 AND portb.6 norma = portb.4 AND portb.5 IF portb.1 = 1 THEN achtung ;si b.1 = 1, envía a rutina achtung IF microcopium = 1 THEN horbaja ;si microcopium = 1, envía a rutina horbaja IF telescopium = 1 THEN hormedia ;si telescopium = 1, envía a rutina hormedia 2 La rutina principal “tanatos” es en realidad un programa desarrollado mediante compuertas lógicas que trabaja también como programa antirrobote, el diseño de éstos dos diagramas circuitales se muestra en la figura 28
74
IF pavo = 1 THEN horalta ;si pavo = 1, envía a rutina horalta IF opus = 1 THEN antibaja ;si opus = 1, envía a rutina antibaja IF ara = 1 THEN antimedia ;si ara = 1, envía a rutina antimedia IF norma = 1 THEN antialta ;si norma = 1, envía a rutina antialta GOTO tanatos ;regresa a la rutina principal tanatos achtung: ;inicia la rutina de freno achtung LOW portb.0 ;apaga el trigger LOW portb.2 ;apaga el horario1 HIGH portb.1 ;enciende freno LOW portb.4 ;apaga antihorario GOTO tanatos ;regresa a la rutina principal tanatos horbaja: ;inicia la rutina horario en baja LOW portb.4 ;apaga antihorario LOW portb.1 ;apaga freno HIGH portb.2 ;enciende horario1 IF porta.7 = 0 THEN ;si sensor es cero LOW portb.0 ;apaga el disparador PAUSEUS 4500 ;espera 4500 microsegundos HIGH portb.0 ;enciende el disparador PAUSEUS 3500 ;espera 3500 microsegundos LOW portb.0 ;apaga el disparador ELSE ;si sensor es uno LOW portb.0 ;apaga el trigger o disparador ENDIF ;sale de la última rutina if GOTO tanatos ;envía a la rutina principal tanatos hormedia: ;inicia la rutina horaria en media velocidad LOW portb.4 ;apaga antihorario LOW portb.1 ;apaga freno HIGH portb.2 ;prende horario IF porta.7 = 0 THEN ;si sensor es cero LOW portb.0 ;apaga el disparador PAUSEUS 900 ;espera 900 microsegundos HIGH portb.0 ;enciende el disparador PAUSEUS 7100 ;espera 7100 microsegundos LOW portb.0 ;apaga el disparador ELSE ;si sensor es uno LOW portb.0 ;apaga el trigger o disparador ENDIF ;sale de la última rutina if GOTO tanatos ;envía a la rutina principal tanatos horalta: ;inicia la rutina horaria alta LOW portb.4 ;apaga el antihorario LOW portb.1 ;apaga el freno HIGH portb.2 ;prende horario IF porta.7 = 0 THEN ;si el sensor es cero LOW portb.0 ;apaga el disparador HIGH portb.0 ;enciende el disparador ELSE ;si el sensor es uno LOW portb.0 ;apaga el disparador HIGH portb.0 ;enciende el disparador
75
ENDIF ;sale de la última rutina if GOTO tanatos ;envía a la rutina principal tanatos antibaja: ;inicia la rutina antihoraria baja LOW portb.2 ;apaga el horario LOW portb.1 ;apaga el freno HIGH portb.4 ;prende el antihorario IF porta.7 = 0 THEN ;si sensor = 0 LOW portb.0 ;apaga el disparador PAUSEUS 4500 ;espera 4500 microsegundos HIGH portb.0 ;enciende el disparador PAUSEUS 3500 ;espera 3500 microsegundos LOW portb.0 ;apaga el disparador ELSE ;si sensor = 1 LOW portb.0 ;apaga el trigger ENDIF ;sale de la última rutina if GOTO tanatos ;envía a la rutina principal tanatos antimedia: ;inicia la rutina antihoraria media LOW portb.2 ;apaga el horario LOW portb.1 ;apaga el freno HIGH portb.4 ;prende el antihorario IF porta.7 = 0 THEN ;si sensor = 0 LOW portb.0 ;apaga el disparador PAUSEUS 900 ;espera 900 microsegundos HIGH portb.0 ;enciende el disparador PAUSEUS 7100 ;espera 7100 microsegundos LOW portb.0 ;apaga el disparador ELSE ;si sensor = 1 LOW portb.0 ;apaga el disparador ENDIF ;sale de la última rutina if GOTO tanatos ;envía a la rutina principal tanatos antialta: ;inicia la rutina antihoraria alta LOW portb.2 ;apaga horario LOW portb.1 ;apaga freno HIGH portb.4 ;prende antihorario IF porta.7 = 0 THEN ;si sensor = 0 LOW portb.0 ;apaga el disparador HIGH portb.0 ;enciende el disparador ELSE ;si sensor = 1 LOW portb.0 ;apaga el disparador HIGH portb.0 ;enciende el disparador ENDIF ;sale de la última rutina if GOTO tanatos ;envía a la rutina principal tanatos END ;fin del programa.
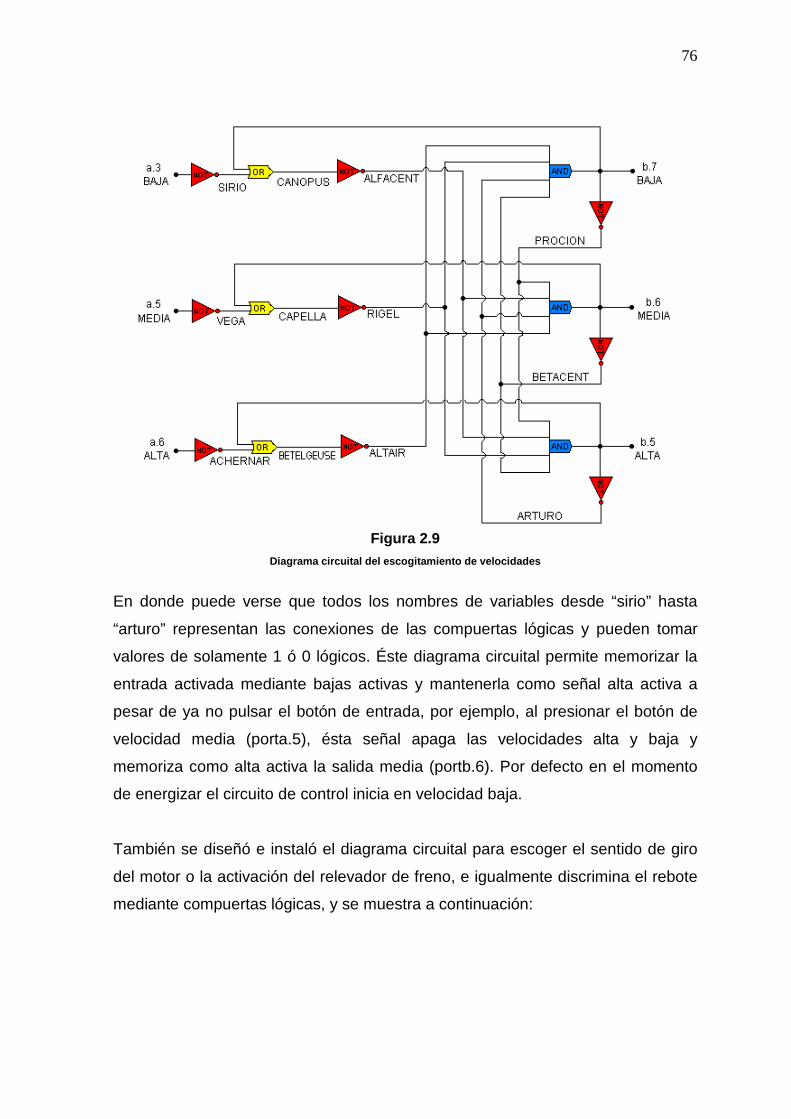
76
Figura 2.9 Diagrama circuital del escogitamiento de velocidade s
En donde puede verse que todos los nombres de variables desde “sirio” hasta
“arturo” representan las conexiones de las compuertas lógicas y pueden tomar
valores de solamente 1 ó 0 lógicos. Éste diagrama circuital permite memorizar la
entrada activada mediante bajas activas y mantenerla como señal alta activa a
pesar de ya no pulsar el botón de entrada, por ejemplo, al presionar el botón de
velocidad media (porta.5), ésta señal apaga las velocidades alta y baja y
memoriza como alta activa la salida media (portb.6). Por defecto en el momento
de energizar el circuito de control inicia en velocidad baja.
También se diseñó e instaló el diagrama circuital para escoger el sentido de giro
del motor o la activación del relevador de freno, e igualmente discrimina el rebote
mediante compuertas lógicas, y se muestra a continuación:
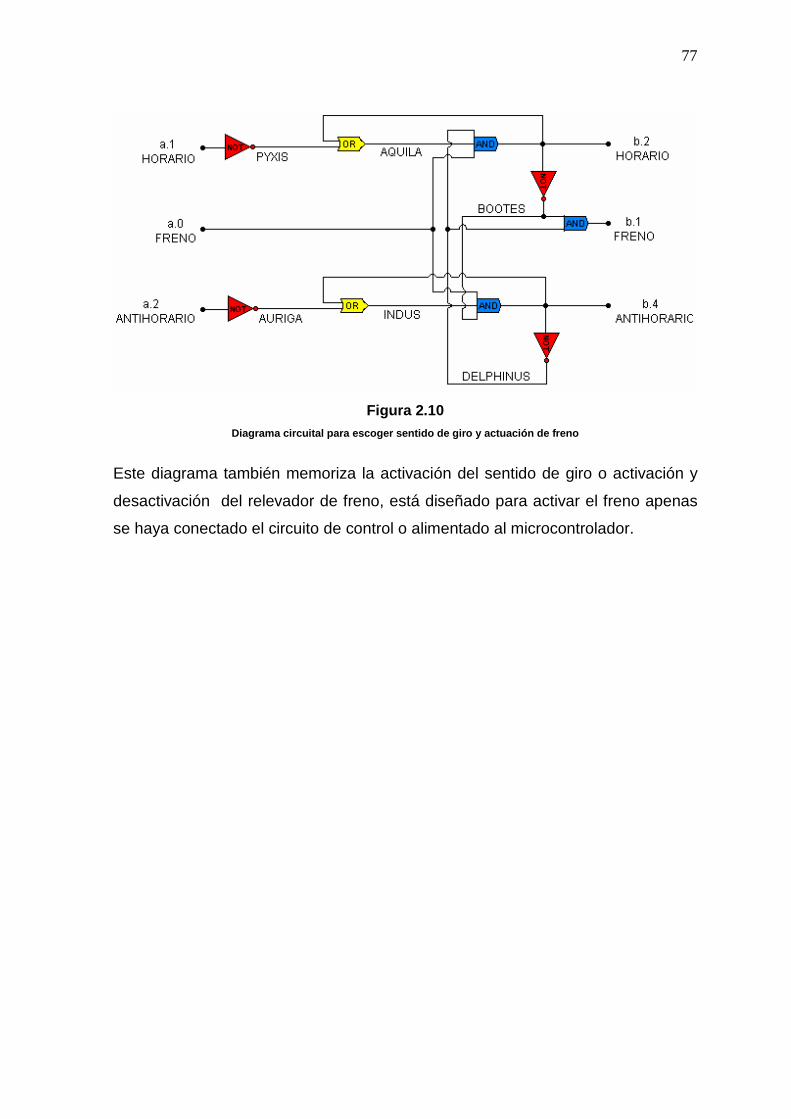
77
Figura 2.10 Diagrama circuital para escoger sentido de giro y a ctuación de freno
Este diagrama también memoriza la activación del sentido de giro o activación y
desactivación del relevador de freno, está diseñado para activar el freno apenas
se haya conectado el circuito de control o alimentado al microcontrolador.
78
CAPÍTULO 3
RESULTADOS OBTENIDOS CON EL EQUIPO SOMETIDO A PRUEB A

79
CAPÍTULO 3
3. RESULTADOS, CONCLUSIONES, RECOMENDACIONES
Y ANEXOS
3.1. PRUEBAS AL VACÍO
Los resultados obtenidos con el equipo al vacío (medido en los terminales positivo
y negativo) se presentan a continuación:
Giro Velocidad Voltaje
Horario Baja 9
Media 33
Alta 97
Antihorario Baja 9
Media 32
Alta 97
Donde debe puntualizarse que un daño mecánico en los bocines del motor
dificulta el trabajo normal en este sentido de giro, lo cual se debe a que cuando se
lo consiguió siempre trabajó solamente en el un sentido de giro, y aunque se
hicieron trabajos de mantenimiento eléctrico y mecánico, el problema
evidentemente disminuyó pero persiste, calentando demasiado rápido y en
demasía al motor, por esto, esta modificación tiene el propósito de una vez que se
ha conseguido variar la velocidad del motor, -que es el objetivo de este trabajo-,
preservar su integridad no exigiendo demasiado de parte del motor y evitar
exponerlo innecesariamente a un daño en los bocines
3.2. PRUEBAS CON CARGA
Los resultados de las pruebas con el equipo sometido a prueba con el motor
conectado se muestran a continuación:
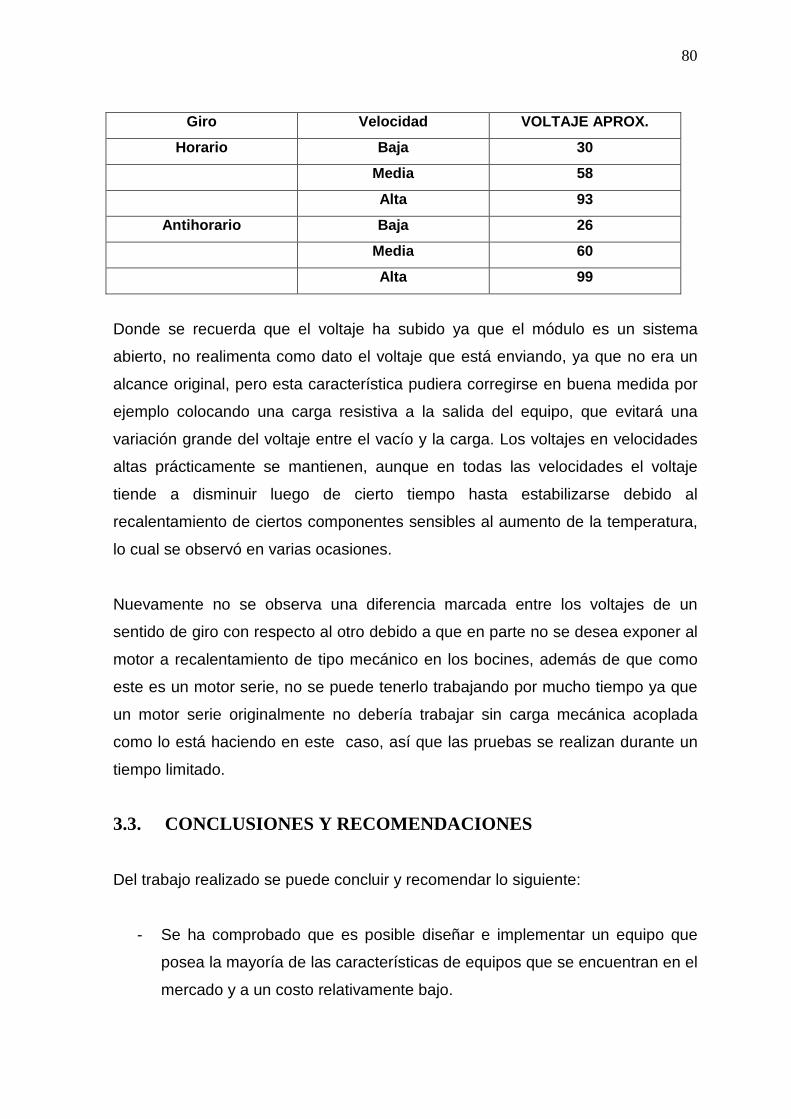
80
Giro Velocidad VOLTAJE APROX.
Horario Baja 30
Media 58
Alta 93
Antihorario Baja 26
Media 60
Alta 99
Donde se recuerda que el voltaje ha subido ya que el módulo es un sistema
abierto, no realimenta como dato el voltaje que está enviando, ya que no era un
alcance original, pero esta característica pudiera corregirse en buena medida por
ejemplo colocando una carga resistiva a la salida del equipo, que evitará una
variación grande del voltaje entre el vacío y la carga. Los voltajes en velocidades
altas prácticamente se mantienen, aunque en todas las velocidades el voltaje
tiende a disminuir luego de cierto tiempo hasta estabilizarse debido al
recalentamiento de ciertos componentes sensibles al aumento de la temperatura,
lo cual se observó en varias ocasiones.
Nuevamente no se observa una diferencia marcada entre los voltajes de un
sentido de giro con respecto al otro debido a que en parte no se desea exponer al
motor a recalentamiento de tipo mecánico en los bocines, además de que como
este es un motor serie, no se puede tenerlo trabajando por mucho tiempo ya que
un motor serie originalmente no debería trabajar sin carga mecánica acoplada
como lo está haciendo en este caso, así que las pruebas se realizan durante un
tiempo limitado.
3.3. CONCLUSIONES Y RECOMENDACIONES
Del trabajo realizado se puede concluir y recomendar lo siguiente:
- Se ha comprobado que es posible diseñar e implementar un equipo que
posea la mayoría de las características de equipos que se encuentran en el
mercado y a un costo relativamente bajo.
81
- Se ha implementado un circuito disparador con un microcontrolador
programable y no con los circuitos analógicos corrientes, lo que comprueba
la practicidad del trabajo de este dispositivo.
- La manipulación de los componentes de control debe efectuarse con
mucho cuidado, debido a que algunos de ellos, por ser de lógicos y
digitales, además de utilizar tecnología CMOS, son muy delicados y
propensos a sufrir daños fácilmente, además de que puede afectarles la
electricidad estática.
- No se ha utilizado un circuito integrado con amplificador operacional, si
bien es lo recomendable para hacerlo trabajar como detector de cruce por
cero, pero se ha conseguido mediante este diseño el mismo cometido
debido a que su velocidad de trabajo es la que cumple con las expectativas
propuestas.
- En paralelo con las bobinas de los relevadores se recomienda siempre
colocar un diodo corriente para que su trabajo no se vea perjudicado por
las corrientes que pueden generarse en las bobinas y además entorpecer
el trabajo del microcontrolador. Si no se los coloca, el microcontrolador
tiende a resetearse, lo cual, de no ser por la activación del watchdog en el
momento de la grabación, causaría daños considerables.
- En paralelo con el motor se recomienda siempre colocar un diodo de 6
amperios o más capacidad de corriente, y con el cátodo al terminal positivo
de la fuente, justamente debido a que la calibración del equipo puede no
ser efectiva o completamente inútil debido a la existencia de las dos
bobinas y su corriente generada harán imperceptible el cambio de
velocidad si no se los ha instalado.
- Se recomienda accionar primeramente los interruptores de control y
general antes que el de fuerza, ya que de lo contrario el motor al momento
82
de encender el módulo puede accionarse por un período corto luego del
cual se apaga, lo cual lógicamente no es deseable, pero se da debido a
que cuando se acciona el módulo, ya transcurre algún tiempo hasta que el
programa identifique que la situación inicial en que debería arrancar que es
el de activar el freno e impedir el disparo de los TRIACs. Para el apagado
también se debe desactivar primeramente la parte de fuerza
preferiblemente.
- La potencialidad del módulo didáctico puede seguir siendo explotada, ya
que se puede lograr en el futuro comunicación con una computadora y
efectuar precisamente este control desde la misma.
- En lo referente a los costos incurridos para conseguir los diferentes
elementos, en su mayoría no han sido demasiado excesivos, y por lo tanto
están al alcance de las posibilidades económicas normales.
- La energía que se consume por parte del módulo en su mayoría se debe a
la alimentación requerida para el motor, siendo relativamente constante la
consumida por la parte de control del módulo.
- Se concluye que si se desea trabajar con motores de mayores consumos o
potencias, sería necesario alterar solamente los semiconductores para
lograr disparar unos de mayor capacidad de conducción de corriente, pero
no sería necesario alterar el programa o la parte de control.
- El control por parte del usuario es verdaderamente sencillo, se efectúa sin
ningún tipo de complicaciones para el operario.
- Debido a la continua circulación de corriente por medio de los
semiconductores, éstos estarán aumentando su temperatura luego de
cierto tiempo de trabajo, por eso es necesario alojarlos en una estructura
disipadora de calor.
83
- En el caso de trabajar con varios elementos semiconductores de potencia,
y de necesitar refrigerarlos, no alojarlos nunca sobre un mismo disipador.
- Se necesita implementar un arreglo tal que asegure la entrada de altas
activas o bajas activas, aunque lo generalmente más utilizado es activar las
entradas del microcontrolador con señales bajas activas, pero la
implementación de altas activas puede efectuarse de manera práctica
mediante el circuito apropiado.
- Se debe tener en cuenta que puede sensarse las tres fases de un sistema
trifásico y de esta manera implementarse un equipo que sirva de fuente
con alimentación trifásica.
- Se recomienda revisar los contactos del relevador de selección de control
de giro periódicamente.
- En paralelo con la entrada de alimentación del microcontrolador se coloca
un capacitor de 0.1 microfaradios para evitar que alguno de los armónicos
que pueden generarse en el sistema pueda de modo alguno afectar el
funcionamiento del microcontrolador provocando que éste se resetee
continuamente.
RUTEADO PLACA DE CONTROL
84
ANEXOS
85
- Anexo 2 : Páginas seleccionadas del datasheet del P IC16f628a
- Anexo 3 : Páginas seleccionadas del datasheet del M OC 3010

86
- Anexo 4 : ECG semiconductores utilizados
87
BIBLIOGRAFÍA
- BOYLESTAD, Robert L. ; NASHELSKY, Louis, “ELECTRÓNICA TEORÍA
DE CIRCUITOS”, sexta edición, págs 10- 17, 38 – 42, 89 – 96, 634 – 636,
311, 864 – 874, 895 - 897
88
- ANGULO, José, “MICROCONTROLADORES PIC, DISEÑO PRÁCTICO
DE APLICACIONES”, págs 4 – 9, 44 – 53.
- PÉREZ, Ángel, “LA AMENAZA DE LOS ARMÓNICOS Y SUS
SOLUCIONES” , págs 11 – 17.
- RASHID, “ELECTRÒNICA DE POTENCIA”, págs 498, 499, 534 – 536.
- KOSOW, Irving, “CONTROL DE MÀQUINAS”, págs 141 – 145
- SAINZ FEITO, Javier, “MÁQUINAS ELÉCTRICAS”, págs: 414 – 417
- HUSEYIN, Hiziroglu, “MÁQUINAS ELÉCTRICAS Y
TRANSFORMADORES” págs 389 – 392.
- MCPHERSON, George, “INTRODUCCIÓN A MÁQUINAS ELÉCTRICAS”,
págs 372 – 377.
- CASTAÑO, ROBBY, VARGAS, GONZÁLES, “CURSO PRÁCTICO SOBRE
MICROCONTROLADORES”.
- KOSOW, Irving, L. “MÁQUINAS ELÉCTRICAS Y TRANSFORMADORES”,
segunda edición, págs: 109, 110, 115, 117, 120, 121, 545 - 563.
- EDMINISTER, Joseph, “COLECCIÓN SCHAUM’S”
- REYES, Carlos, “APRENDA RÁPIDAMENTE A PROGRAMAR
MICROCONTROLADORES PIC”, Primera edición.
- REYES, Carlos, “MICROCONTROLADORES PIC”, segunda edición.
- CORRALES, Santiago, “ELECTRÓNICA PRÁCTICA CON
MICROCONTROLADORES PIC”